MODELISATION DU FROTTEMENT EN PIED D’AUBE PAR UNE …
210
Num´ ero d’ordre : 2002-04 Ann´ ee 2002 M ´ EMOIRE DE TH ` ESE PR ´ ESENT ´ EE POUR OBTENIR LE TITRE DE DOCTEUR DE L’ ´ ECOLE CENTRALE DE LYON SP ´ ECIALIT ´ EM ´ ECANIQUE ´ ECOLE DOCTORALE DE M ´ ECANIQUE DE LYON (UCBL/INSA/ECL) PAR Samuel NACIVET Ing´ enieur de L’ ´ Ecole Centrale de Lyon MOD ´ ELISATION DU FROTTEMENT EN PIED D’AUBE PAR UNE APPROCHE FREQUENTIELLE Soutenue le 16 janvier 2002, devant le jury d’examen : B. Peseux, Professeur du LMM, ´ Ecole Centrale de Nantes Pr´ esident du jury Rapporteur J. Piranda, Professeur du LMARC, Universit´ e de Besan¸con Rapporteur L. J´ ez´ equel, Professeur du LTDS, ´ Ecole Centrale de Lyon Directeur de th` ese C. Pierre, Professeur, Universit´ e du Michigan, USA Examinateur F. Thouverez, Maˆ ıtre de conf´ erence du LTDS, ´ Ecole Centrale de Lyon Examinateur E. Seinturier, Responsable M´ ethodes de Conception, SNECMA Examinateur
Transcript of MODELISATION DU FROTTEMENT EN PIED D’AUBE PAR UNE …

Numero d’ordre : 2002-04 Annee 2002
MEMOIRE DE THESE
PRESENTEE POUR OBTENIR LE TITRE DE
DOCTEUR
DE
L’ECOLE CENTRALE DE LYON
SPECIALITE MECANIQUE
ECOLE DOCTORALE DE MECANIQUE DE LYON (UCBL/INSA/ECL)
PAR
Samuel NACIVET
Ingenieur de L’Ecole Centrale de Lyon
MODELISATION DU FROTTEMENT EN PIED D’AUBE
PAR UNE APPROCHE FREQUENTIELLE
Soutenue le 16 janvier 2002, devant le jury d’examen :
B. Peseux, Professeur du LMM, Ecole Centrale de Nantes President du juryRapporteur
J. Piranda, Professeur du LMARC, Universite de Besancon RapporteurL. Jezequel, Professeur du LTDS, Ecole Centrale de Lyon Directeur de theseC. Pierre, Professeur, Universite du Michigan, USA ExaminateurF. Thouverez, Maıtre de conference du LTDS, Ecole Centrale de Lyon ExaminateurE. Seinturier, Responsable Methodes de Conception, SNECMA Examinateur


A mes parents


Resume
Dans cette these, la dynamique de systemes amortis par frottement sec est etudiee en utilisantune loi de Coulomb pour modeliser les forces de frottement.
Une methode indirecte de prise en compte des contraintes est proposee. De plus, une nouvellemethode alternant le domaine frequentiel et le domaine temporel, la DLFT (Dynamic Lagrangianmixed Frequency-Time method), est definie pour determiner la reponse stationnaire du systemeen regime force. Les Lagrangiens Dynamiques sont une nouvelle formulation des Lagrangiens dansle domaine frequentiel. A noter que les Lagrangiens dynamiques peuvent aussi etre utilises dansle domaine temporel.
Cette nouvelle formulation est plus adaptee que les Lagrangiens augmentes dans le cadred’une methode d’optimisation afin d’estimer la reponse frequentielle d’un systeme non lineaire.L’utilisation des Lagrangiens dynamiques nous permet de determiner les forces non lineaires entreles noeuds du modele elements finis de la structure sans utiliser d’artifices tels que l’introductiond’une raideur de contact servant de penalite.
Une nouvelle reduction du systeme non lineaire est aussi proposee pour reduire les temps decalcul. De plus, une reduction adaptative du systeme a ete definie pour eviter les problemes demauvais conditionnement lorsque l’amortissement structural est faible.
Plusieurs modeles numeriques presentant des difficultes divers seront etudies. On s’interesserapar exemple au cas d’une poutre amortie par frottement sec avec un element flexible lorsque lefrottement se caracterise par un mouvement relatif 2D. On montrera egalement que la DLFTpermet de resoudre des systemes elements finis de grande taille tels que des roues aubageesdesaccordees. Un systeme avec jeu sera aussi etudie.
Un banc experimental a ete concu afin d’etudier les effets de l’amortissement par frottementsec sur le premier mode de resonance. La caracteristique principale de ce banc est de disposer depieds d’aube reels. Il a ete etudie numeriquement afin de valider la DLFT.
i

ii Resume

Abstract
This thesis considers the dynamics of structural systems with dry friction damping, usingCoulomb’s law for the friction force model.
An indirect method is proposed to impose constraints. Also, a new frequency-time domainmethod, the Dynamic Lagrangian mixed Frequency-Time method (DLFT), is defined to get thesteady-state forced response. The dynamic Lagrangians are a new formulation for Lagrangians infrequency domain. Note that dynamic Lagrangians may also be used in frequency domain.
This new formulation is more convenient than augmented Lagrangians when a nonlinear solveris used to get the frequential response in frequency domain. The use of dynamic Lagrangians allowone to solve for the nonlinear forces between two finite element nodes of the structure withoutusing artifacts such as a contact stiffness similar to a penalty coefficient. Hence the finite elementmodel does not have to be degraded at the contact interface.
Furthermore, a new reduction of the nonlinear system is proposed to decrease the requiredcomputation time. Also, an adaptative reduction is proposed to avoid ill-conditionning problemswhen structural damping is weak.
Several numerical systems with different difficulties are studied. For example, case of a friction-damped beam with a flexible element when the friction
A set of numerical examples is presented for a beam in contact with a flexible dry frictionelement, for frictional constraints that feature two-dimensional relative motion, for a large-scalesystem with many friction dampers, and for a simple system with a clearance.
A test rig is designed to study effects of dry friction damping on the first resonance mode. Themain feature of this rig is to lay out two blade’s attachments. The test rig was studied numericallyto validate the DLFT.
iii

iv Abstract

Remerciements
En premier lieu, je tiens a remercier le Professeur Louis JEZEQUEL de m’avoir propose cetravail de recherche en collaboration avec l’universite du Michigan (USA) et accueilli au sein deson laboratoire.
Je remercie egalement le Professeur Christophe PIERRE qui m’a accueilli au sein de son la-boratoire a l’universite du Michigan pendant un an et a suivi mes travaux. Je tiens egalement alui faire part de ma profonde gratitude pour l’aide qu’il m’a apporte dans la mise en forme dema premiere publication.
J’adresse aussi mes remerciements avec une mention speciale a Fabrice THOUVEREZ et Jean-Pierre LAINE pour le temps qu’ils m’ont consacre et leurs precieux conseils.
J’adresse un grand merci a Olivier DESSOMBZ pour sa disponibilite a repondre aux questionsinformatiques, a Bertrand HOUX et Bernard JEAN-PIERRE pour leur aide dans la conceptiondu banc experimental, a Ziegfried FOUVRY et Vincent FRIDRICI pour leurs conseils sur l’aspecttribologique du probleme.
Je remercie egalement la SNECMA sans qui cette recherche n’aurait pas pu se faire, et enparticulier l’equipe du service YLED a Villaroche.
Je tiens egalement a exprimer ma profonde gratitude a Damien CHARLEUX qui a acceptede lire ce memoire pour une derniere correction orthographique.
Enfin, je remercie tous mes amis thesards, mes amis du Michigan, mes amis de longue date,et tous les membres de ma famille bien sur.
v

vi Remerciements

Nomenclature
c : amortissement,k : raideur,eα : vecteur tangentiel a γ
(2)t en z a l’instant t,
f : frequence en Hertz ou force en un point pour une direction donnee,h(Y, t) : distance entre y ∈ Ω(1) et Ω(2),m : masse,mαβ : metriques pour la base convectee,mαβ : metriques pour la base duale,n : nombre,s : abscisse curviligne,u : deplacement en un point pour une direction donnee,v : vitesse en un point pour une direction donnee,E : module d’Young,Ec : energie cinetique,Ed : energie de deformation,EP : energie resultant de la precharge,Eα : vecteur tangentiel a Γ(2) en Z a t = 0,F : force en un point pour une direction donnee,F1 : premiere force seuil,F2 : deuxieme force seuil,H : valeur caracteristique de la durete du materiau,I : inertie d’une section,N : nombre de ddls,N i,j : fonction de forme associee aux noeuds i ∈ Ω(2) et j ∈ Ω(1),Nc : nombre de cycles,Nh : nombre d’harmoniques,P : precharge,S : surface,Sc : coefficient de securite,
vii

viii Nomenclature
T : periode ou temperature,W : travail,C : potentiel du systeme quadratique et des equations de contrainte,Q : potentiel du systeme quadratique,δ : symbole de Kronecker (ou operateur variationnel),ε : coefficient de penalite ou deformations,γ
(i)t : surface externe de Ω(i) a l’instant t,
µ : coefficient de frottement,ν : vecteur normal sortant par rapport a γ
(2)t en z a l’instant t,
ω : pulsation en rad/s,ρ : masse volumique,σ : contrainte,τ : contrainte de cisaillement,ζ : norme de la vitesse relative,∆T : precharge en temperature,Γ(i) : surface externe de Ω(i) a t = 0,Ω(i) : solide (i),Π : puissance,Ψ(i)
t : fonction de parametrisation pour la surface externe de Ω(i),f : force en un point ou fonction f(U),g : derivee premiere de la fonctionnelle,p : matrice des coefficients d’interpolation,q : vecteur des contributions modales,w : matrice des coefficients de Gauss (integration),u : deplacement en un point,v : vitesse en un point,y : position d’un point de Ω(1) a l’instant t,z : position d’un point de Ω(2) a l’instant t,z : point le plus proche sur γ
(2)t d’un point y de γ
(1)t ,
A : derivee de f(U),B : matrice approximee de G,C : matrice d’amortissement,F : vecteur force sur un ensemble de noeuds,G : matrice de flexibilite residuelle ou derivee seconde de la fonctionnelle,H : matrice approchee de G−1,I : matrice identite,J : Jacobien,K : matrice de raideur,M : matrice de masse,Q : vecteur des contributions modales et des ddls de jonction,

Nomenclature ix
R : erreur residuelle,S : matrice de souplesse,T : matrice de transformation de la base duale a la base de reference,U : vecteur des deplacements aux noeuds associe a l’equation du mouvement,V : vecteur des vitesses aux noeuds associe a l’equation du mouvement,W : vecteur des vitesses aux noeuds associe aux contraintes,X : vecteur des deplacements aux noeuds associe aux contraintes,Y : position d’un point de Ω(1) a t = 0,Z : position d’un point de Ω(2) a t = 0,Z : point le plus proche sur Γ(2) d’un point Y de Γ(1),η = (η1, η2) : parametrisation locale de γ
(1)t ,
λ : multiplicateurs de Lagrange,σ : vecteur des contraintes en un point,
τα : vecteur tangentiel a γ(2)t en z a l’instant t,
τα : vecteur dual associe a τα,ϕ(i) : Fonction Lagrangienne decrivant le mouvement de Ω(i),ξ = (ξ1, ξ2) : parametrisation locale de γ
(2)t ,
ξ : parametre correspondant a z,Λ : matrice de raideur dynamique,Ψ : matrice des deformations statiques,Φ : matrice des modes a interface fixe ou libre,(ex, ey) : base locale pour un element surfacique,x, y, z : coordonnees dans le repere cartesien,X,Y,Z : axes du repere cartesien,(τ1, τ2,ν) : base convectee,(τ1, τ2,ν) : base duale.
Operateurs :
L : un operateur quelconque,δ : operateur variationnel (ou symbole de Kronecker),∆ : operateur de difference finie,∆n : operateur de difference finie entre les pas de temps n et n − 1,∇ : gradient,
∇(2)t : gradient de deformation pour Ω(2).
Indices :

x Nomenclature
a : adhesion,c : contact,co : vecteur pour lequel les conditions de contrainte sont appliquees,d : dynamique,e : esclave,el : associe a l’element,ex : excitation,g : contribution du vecteur de contact generalise a la methode des Lagrangiens augmentes,h = i : associe a la ieme harmonique,in : ordre de l’interpolation,lab : labourage,lim : limite,ln : lineaire,m : maıtre,min : minimum,max : maximum,ne : nombre de noeuds par element,nl : non lineaire,p : penetration,r : reduit sur le deplacement relatif,red : reduit sur les ddls non lineaires,res : residuel,rs : rupture statique,s : statique,t : dependance temporelle,t = 0 : a l’instant t = 0,u : conditions de frontiere sur le deplacement,v : associe au volume,N : associe aux ddls dans la direction normale,P : associe a la precharge,R : relatif a l’aire de contact reelle,T : associe aux ddls dans la direction tangentielle,Ti : associe aux ddls dans la direction tangentielle τ i,α, β, γ : indices reduits pour les sommations,σ : conditions de frontiere sur les contraintes,∂u : derivation partielle par rapport a u.
Exposants :

Nomenclature xi
c : coefficients de Fourier pour les cosinus,cor : vecteur correctif,d : dans la base duale,h : discretisation de l’espace Lagrangien,norm : normalise,opt : vecteur qui resulte des variables de la methode d’optimisation,s : coefficients de Fourier pour les sinus,sc : surcharge locale,T : transposee,(i) : associe au corps (i).
Autres notations :
˜ : multi-harmoniques,ˆ : approximation,
Les vecteurs sont en gras,Les matrices sont en gras et soulignees.
Remarques :
D’autres notations peuvent etre employees tres ponctuellement dans une partie. On se refereraalors au texte pour obtenir les definitions.
On a defini arbitrairement Ω(1) corps esclave et Ω(2) corps maıtre.

xii Nomenclature

Table des matieres
Resume i
Abstract iii
Remerciements v
Nomenclature vii
Introduction 1
1 Modelisation du frottement sec en dynamique 51.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Contact normal pour des corps metalliques . . . . . . . . . . . . . . . . . . . . . . 61.3 Surfaces metalliques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.1 Lois classiques sur le frottement . . . . . . . . . . . . . . . . . . . . . . . . 71.3.2 Participation du premier harmonique pour la loi de Coulomb . . . . . . . . 91.3.3 Modele bilineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3.4 Participation du premier harmonique pour le modele bilineaire . . . . . . . 101.3.5 Theorie de Bowden et Tabor (adhesion-labourage) . . . . . . . . . . . . . . 11
1.4 Influence du frottement sur le mouvement . . . . . . . . . . . . . . . . . . . . . . . 131.4.1 Mouvement stick-slip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.4.2 Mouvement sprag-slip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5 Microglissement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.5.1 Modeles d’Iwan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.5.2 Modele continu de Menq et al. . . . . . . . . . . . . . . . . . . . . . . . . . 181.5.3 Microglissement dans les modeles elements finis . . . . . . . . . . . . . . . . 18
1.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2 Mise en equation d’un probleme de contact avec frottement 212.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.2 Modelisation d’une structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.2.1 Approche generale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.2.2 Methode des residus ponderes . . . . . . . . . . . . . . . . . . . . . . . . . . 23
xiii

xiv Table des matieres
2.2.3 Prise en compte de non linearites . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3 Mise en equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.1 Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.2 Definition de la base convectee . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.3 Definition de la base duale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.4 Contact avec des conditions de frottement . . . . . . . . . . . . . . . . . . . 26
2.3.5 Equations du mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.3.6 Forme matricielle des equations . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.4 Methodes de condensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4.1 Condensation de Guyan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.4.2 Methodes de synthese modale . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3 Approche du probleme de resolution en quasi-statique 43
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.2 Resolution de systemes non lineaires . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2.2 Methode de Newton et derivees . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2.3 Methodes quasi-Newtoniennes . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2.4 Methodes de Gauss-Newton et derivees . . . . . . . . . . . . . . . . . . . . 49
3.2.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.3 Contact avec frottement en quasi-statique (en temporel) . . . . . . . . . . . . . . . 52
3.3.1 Definition des contraintes associees au contact avec frottement . . . . . . . 52
3.3.2 Minimisation d’un probleme contraint . . . . . . . . . . . . . . . . . . . . . 53
3.3.3 Methodes duales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.3.4 Methodes de penalite, de la barriere et assimilees . . . . . . . . . . . . . . . 56
3.3.5 Processus de correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.3.6 Gestion des transitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.3.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.4 Grands deplacements dans les modeles elements finis . . . . . . . . . . . . . . . . . 63
3.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.4.2 Resultats avec des interpolations polynomiales . . . . . . . . . . . . . . . . 63
3.4.3 Interpolation hybride en deplacement-souplesse : contact ponctuel. . . . . . 69
3.4.4 Interpolation hybide en deplacement-souplesse : contact surfacique. . . . . . 77
3.4.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.5 Extension des resultats aux problemes dynamiques . . . . . . . . . . . . . . . . . . 81
3.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82

Table des matieres xv
4 Une nouvelle methode de resolution : la DLFT 83
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.2 Analyse theorique de la methode . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.2.1 Reduction sur les noeuds non lineaires . . . . . . . . . . . . . . . . . . . . . 86
4.2.2 Reduction sur le deplacement relatif . . . . . . . . . . . . . . . . . . . . . . 86
4.2.3 Reduction des ddls normaux . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.2.4 Formulation des Lagrangiens Dynamiques . . . . . . . . . . . . . . . . . . . 88
4.2.5 Processus de correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
4.3 Resultats numeriques de validation . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.3.1 Poutre et frotteur sans masse en 2D (dir. tang. et normale) et sans separation 90
4.3.2 Poutre et frotteur sans masse en 3D et sans separation . . . . . . . . . . . . 92
4.3.3 Poutre et frotteur avec masse et avec separation en 3D . . . . . . . . . . . . 96
4.3.4 Modeles de roue aubagee a 36 ou 108 poutres et desaccordage a 7% . . . . 98
4.4 Methode de continuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.4.1 Methode ”arclength” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.4.2 Resultats pour un systeme avec jeu (contact sans frottement) . . . . . . . . 105
4.5 Etude de structures a amortissement structural tres faible . . . . . . . . . . . . . . 106
4.5.1 Lagrangiens dynamiques avec penalisation sur la vitesse relative . . . . . . 106
4.5.2 Reduction adaptative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
4.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5 Conception et modelisation numerique du banc 115
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.2 Dimensionnement du banc en quasi-statique . . . . . . . . . . . . . . . . . . . . . . 116
5.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
5.2.2 Definition d’une configuration initiale . . . . . . . . . . . . . . . . . . . . . 117
5.2.3 Etude parametrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.2.4 Amelioration de la geometrie du banc . . . . . . . . . . . . . . . . . . . . . 123
5.2.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
5.3 Modelisation numerique et etude parametrique en dynamique . . . . . . . . . . . . 127
5.3.1 Discretisation des interfaces de contact . . . . . . . . . . . . . . . . . . . . . 128
5.3.2 Influence de l’amplitude de la force d’excitation . . . . . . . . . . . . . . . . 131
5.3.3 Influence du nombre d’harmoniques . . . . . . . . . . . . . . . . . . . . . . 131
5.3.4 Influence des deformations du socle . . . . . . . . . . . . . . . . . . . . . . . 132
5.4 Validation du dimensionnement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
5.4.1 Resultats dynamiques de dimensionnement . . . . . . . . . . . . . . . . . . 136
5.4.2 Calcul en fatigue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
5.4.3 Non linearites geometriques . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142

xvi Table des matieres
6 Resultats experimentaux 145
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1456.2 Recalage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
6.2.1 Recalage des modes libres du socle . . . . . . . . . . . . . . . . . . . . . . . 1466.2.2 Recalage des modes libres de la plaque-2P . . . . . . . . . . . . . . . . . . . 1486.2.3 Recalage de la structure assemblee . . . . . . . . . . . . . . . . . . . . . . . 148
6.3 Comparaison des resultats experimentaux et numeriques . . . . . . . . . . . . . . . 1506.3.1 Utilisation d’une graisse de roulement . . . . . . . . . . . . . . . . . . . . . 1516.3.2 Utilisation d’un vernis bisulfure . . . . . . . . . . . . . . . . . . . . . . . . . 154
6.4 Resultat de thermoelasticite sur un pied d’aube . . . . . . . . . . . . . . . . . . . . 1576.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Conclusions et perspectives 161
Bibliographie 165
Liste des figures 173
Liste des tableaux 179
Annexe A 181
Annexe B 185
Annexe C 189

Introduction
Le comportement vibratoire des roues aubagees (fig. 1) dans les moteurs d’avion est trescomplexe. Les aubes sont notamment sujettes au flottement, c’est a dire qu’elles vibrent dan-gereusement avec des amplitudes qui vont en augmentant. Industriellement, les techniques lesplus utilisees pour resoudre ce type de probleme consistent a modifier la forme des aubes afin dedeplacer les modes de resonance critiques en dehors de la plage de fonctionnement du moteur ou aamortir les vibrations avec des amortisseurs par frottement sec que nous nommerons ”frotteurs”par la suite et qui sont installes entre les aubes successives.
Ces amortisseurs introduisent un comportement dynamique hautement non lineaire de l’as-semblage des aubes. L’effet des frotteurs sur les aubes a deja donne lieu a de nombreuses etudes.Les non-linearites introduites dans le systeme par les contacts avec frottement rendent les calculstres longs. En particulier dans le cas d’un amortissement structural tres faible et d’une resolutionpar integration temporelle. Les chercheurs ont donc developpe des methodes de calcul plus ra-pides en utilisant les proprietes du systeme dans le domaine frequentiel [1, 2, 3, 4, 5]. Dans cesmethodes, le calcul des forces non lineaires doit cependant etre adapte au modele elements finis dela structure. En effet, le calcul necessite l’utilisation des caracteristiques mecaniques de l’interfacede l’un des corps afin d’introduire une raideur de penalisation necessaire au calcul de force decontact non lineaire. Ces methodes ne permettent donc pas une gestion simple des contacts avecfrottement pour un modele elements finis d’une structure quelconque composee de deux corps encontact.
Pour etre a meme de gerer tout type de contact, il existe d’autres methodes [6, 7, 8]. Onnotera en particulier les Lagrangiens Augmentes [8, 9, 10, 11] qui ont rencontre un vif succesdans l’etude des problemes de contact en temporel. Dans ce cas, le calcul des forces non lineairesutilise le resultat obtenu au pas de temps precedent. Lorsque deux noeuds en frottement dumodele elements finis se bloquent, on connaıt alors leurs positions. En frequentiel, on ne disposeplus de cette donnee, l’utilisation des Lagrangiens Augmentes ne peut donc pas se faire selon unschema classique.
L’objectif principal de cette these consiste a definir une methode qui presenterait les avan-tages des Lagrangiens Augmentes, mais qui serait utilisable en frequentiel. Une telle methodedevrait alors permettre d’etudier tres simplement des contacts plus compliques tels que ceux qui
1

2 Introduction
Fig. 1: Modele complet d’un etage rotor a 29 aubes pour un compresseur de moteur d’avion, Kruse et
Pierre [12].
interviennent au niveau des pieds d’aube. Dans ce type de contact, on doit s’attendre a du micro-glissement, a une repartition de la charge normale non uniforme et variable, et a des mouvementsrelatifs 3D non triviaux.
Le frottement est un phenomene mecanique complexe qui est sensible a de nombreux fac-teurs exterieurs [13]. Afin de mieux comprendre la phenomenologie et de justifier les differenteshypotheses simplificatrices que l’on realisera dans le cadre de notre etude, on cherchera a definirdans le premier chapitre ce qu’est le frottement et ce qu’il induit. On s’interessera notammentaux differents facteurs qui peuvent modifier le coefficient de frottement dans le cas des sur-faces metalliques. On insistera egalement sur les differentes methodes permettant de modelisernumeriquement le frottement, aussi bien le macroglissement que le microglissement. De plus, onexpliquera comment le frottement peut conduire le systeme a un comportement instable.

Introduction 3
Apres avoir introduit les notions de base, on s’interessera dans le deuxieme chapitre a la miseen equation d’un probleme quelconque de contact avec frottement [8]. Ces equations seront as-sociees a un modele elements finis de la structure et seront utilisees dans la resolution numerique.Des interpolations polynomiales seront introduites pour permettre l’etude du contact avec frot-tement entre des maillages non conformes. On etudiera egalement les techniques de condensationqui peuvent etre utilisees pour reduire la taille du systeme. Afin de resoudre le probleme nonlineaire pose, il est necessaire de developper des algorithmes adaptes lorsque un grand nombre deddls entre en jeu.
Dans le chapitre trois, on presentera les differentes methodes d’optimisation qui peuvent etreutilisees afin de resoudre un probleme de points fixes non lineaire et non contraint [14]. Ensuite,on expliquera comment imposer les contraintes liees au frottement et a la non penetration enfaisant le parallele entre l’approche classique et une nouvelle approche dite ”indirecte” que l’onpropose dans cette these. Pour finir, on appliquera les deux methodes qui semblent apporter leplus d’avantages pour un probleme quasi-statique avec des maillages non conformes. On montreraalors que les interpolations classiques utilisees pour gerer ce type de probleme peuvent introduired’importantes erreurs. Une nouvelle interpolation sera proposee pour ameliorer ces resultats.
La methode indirecte de prise en compte des contraintes proposee dans le chapitre trois seraetendue au domaine frequentiel dans le chapitre quatre. De plus, dans le cadre d’un maillageconforme et de petits deplacements par rapport a la taille des mailles, une nouvelle reductiondu systeme a resoudre sera definie en utilisant le deplacement relatif comme nouvelle inconnue.On proposera aussi une nouvelle formulation pour le calcul des Lagrangiens que l’on a baptiseles Lagrangiens Dynamiques. Plusieurs tests de validation sont proposes pour mettre en evidencel’efficacite de cette nouvelle methode.
Dans ce chapitre, on s’interessera egalement au probleme de continuation et aux structures tresfaiblement amorties pour lesquelles on proposera : une formulation des Lagrangiens dynamiquesavec une penalisation sur la vitesse relative et une reduction adaptative.
Les elements developpes au chapitre quatre ont ete rassembles pour former une nouvellemethode de resolution appelee DLFT : Dynamic Lagrangians mixed Frequency-Time method.Cette methode a pour objectif d’etudier les problemes de contact avec frottement complexes.
Au chapitre cinq, on presentera la conception d’un banc experimental qui se caracterise parla presence de pieds d’aube de soufflante. Le code de calcul ANSYS a ete utilise pour evaluer lesreponses quasi-statiques du banc lors de son dimensionnement. La programmation de la DLFT aensuite permis une estimation des reponses dynamiques.
Une etude parametrique nous permettra d’analyser le comportement du modele elements fi-nis de la structure. On s’interessera notamment a l’influence de parametres de calcul tels que leniveau de discretisation du maillage elements finis et le nombre d’harmoniques, et de parametres

4 Introduction
physiques tels que la precharge, le coefficient de frottement et l’amplitude de la force d’excitation.On etudiera egalement le comportement du banc en fatigue et on portera une attention parti-culiere sur la modelisation du microglissement.
Pour finir, le chapitre six rendra compte des resultats experimentaux obtenus. Le modeleelements finis a ete recale a partir de donnees mesurees experimentalement sur le banc. L’etudes’est concentree sur le premier mode de flexion en inserant une graisse de roulement ou un vernisbisulfure au niveau des interfaces de contact. On s’est particulierement interesse a l’amortissementajoute par frottement sec pendant les phases de microglissement et de macroglissement.

Chapitre 1
Modelisation du frottement sec en
dynamique
1.1 Introduction
Dans ce chapitre, on cherchera a mettre en evidence les differents phenomenes qui inter-viennent dans un processus de frottement en dynamique. L’article bibliographique de Oden etMartins [13] constitue une excellente reference sur le frottement. Ils y expliquent que de nombreuxfacteurs influencent la reponse d’un systeme forme de deux corps en frottement : les materiaux,les echelles de temps, la frequence des contacts, l’histoire du chargement, l’inertie, les effets ther-miques, la rugosite des interfaces de contact, l’usure et les fissures qui peuvent apparaıtre sur lesinterfaces de contact, la presence ou l’absence de lubrifiant...
Ainsi, le frottement rassemble un ensemble de phenomenes physiques et physico-chimiques.Cependant, il est tres difficile de prendre tout cela en compte et le frottement est bien souventmodelise par des lois tres simples. On s’interessera tout particulierement a la loi de Coulomb etau modele bilineaire qui sont frequemment utilises.
A noter que c’est principalement le contact entre deux corps metalliques qui nous interessera.La theorie de Bowden et Tabor [15] va nous permettre d’expliquer pourquoi le coefficient defrottement est en general assez grand dans le cas des metaux.
On remarquera egalement que le frottement peut entraıner des instabilites sous certainesconditions. On notera quatre mecanismes [13] : le stick-slip, le coefficient de frottement dynamiquevariable, le sprag-slip et le couplage de modes. Les deux premieres approches reposent sur desvariations du coefficient de frottement en fonction de la vitesse relative qui affectent la stabilitedu systeme. Dans les deux suivantes, c’est les contraintes cinematiques et le couplage modal quicreent les instabilites (le coefficient de frottement pouvant etre maintenu constant).
Pour finir, on s’interessera au microglissement et on expliquera comment modeliser un telcomportement.
5

6 Chapitre 1 : Modelisation du frottement sec en dynamique
Ω(1)
Ω(2)
Fig. 1.1: Schematisation du contact entre deux corps au niveau microscopique.
1.2 Contact normal pour des corps metalliques
Il est bien connu que les surfaces de contact ne sont jamais reellement planes, meme si ellessont polies a l’extreme. Au microscope, on peut observer que la surface est en fait formee de bosseset de creux. Les deviations par rapport au plan moyen sont appelees des asperites. Differentestechniques experimentales ont permis de mettre en evidence que la surface est une succession depics dont la hauteur peut varier entre 0.5µm et 50µm tandis que l’espacement des pics varie de0.5µm a 5mm. La pente des asperites est en general tres faible, de l’ordre de 5o a 10o. L’etat desurface va aussi dependre des interactions avec le milieu exterieur.
Cela signifie que pour deux corps presses l’un contre l’autre, la surface de contact reelle estbien inferieure a la surface de contact apparente (fig. 1.1). Par consequent, les pressions supporteesaux points de contact sont telles qu’elles sont comparables a la resistance des materiaux utilises.
Bowden et Tabor [15] suggerent que la pression est toujours suffisamment importante pourentraıner une deformation plastique des regions en contact jusqu’a ce que la surface de contactreelle SR soit a meme de supporter la charge appliquee fN . Archard [16] a montre que l’hy-pothese de deformation elastique des asperites etait compatible avec la loi d’Amontons. Ce quiavait alors remis en question le principe de deformation plastique des asperites. Lorsque desmateriaux de duretes comparables sont presses l’un contre l’autre, une protuberance peut sedeformer plastiquement lors de sa premiere rencontre avec l’autre surface. Cependant, la relaxa-tion va s’effectuer de facon elastique (fig. 1.2). Ensuite, si l’on impose de nouveau une charge, laprotuberance va se deformer de facon elastique jusqu’a atteindre une charge egale a celle de ladeformation plastique precedente avant de subir une nouvelle deformation plastique. Differentsmodeles ont ete developpes pour essayer de modeliser les surfaces de contact avec leurs asperiteset obtenir le resultat de proportionnalite entre la charge normale fN et la surface de contactreelle SR [16, 17, 18]. Ceci permet d’obtenir les resultats de la loi de Coulomb qui ont ete verifiesexperimentalement.
1.3 Surfaces metalliques
Rabinowicz [20] nous decrit les differentes couches qui se superposent a la surface des metauxdans un environnement industriel.
On s’interesse aux situations relativement frequentes ou l’apport de lubrifiant est impossible ouinterrompu accidentellement, et au cas ou le lubrifiant est chauffe en dessous de sa temperature

Chapitre 1 : Modelisation du frottement sec en dynamique 7
(chargement uniquement)Déformation plastique
Déformation élastique(chargement et
déplacement dans la
Pression moyenneà l’interface
direction normale
déchargement)
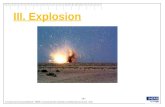
Fig. 1.2: Representation schematique d’une suite de chargement-dechargement sur une surface metallique.
Cette representation est basee sur les resultats experimentaux obtenus par Connolly [19], les deformations
plastiques interviennent experimentalement au niveau des asperites et a proximite des surfaces de contact.
30A°
3A°
100A°
10000A°
Couche de contaminants
Couche d’oxydes
Couche de gaz absorbés
Couche du métal durci
Métal
Fig. 1.3: Illustration schematique des films recouvrant les metaux [20].
d’efficacite effective (auquel cas on a essentiellement du frottement sec entre les metaux). Lesproprietes du frottement sont fortement affectees par la presence de differentes couches qui sesuperposent a la surface des metaux (fig. 1.3).
En procedant du coeur de la piece vers l’exterieur, on a tout d’abord la couche d’oxyda-tion qui resulte de la reaction avec l’oxygene de l’air (sauf pour les materiaux a faible potentield’oxydoreduction). Ensuite, on trouve une couche de gaz absorbe qui provient de l’atmosphere,principalement des molecules de vapeur d’eau et de l’oxygene. Pour finir, une couche de conta-minants qui se compose generalement de graisse ou d’huile. Dans ces conditions, le coefficientde frottement dynamique initial est generalement compris entre 0.1 et 0.3. Cependant, ce coeffi-cient de frottement va augmenter avec le temps au fur et a mesure que la couche graisseuse vas’amenuiser.
1.3.1 Lois classiques sur le frottement
En 1699, Amontons redecouvrait les deux lois de frottement de Leonard de Vinci : la force defrottement est proportionnelle a la charge normale et la taille des corps n’affecte pas le frottement.C’est en 1785 que Coulomb verifia experimentalement que la force de frottement etait propor-tionnelle a la force normale et fit la distinction entre force de frottement statique et dynamique

8 Chapitre 1 : Modelisation du frottement sec en dynamique
(les corps sont supposes rigides (voir fig. 1.4-a)).Oden et Martins [13] rapportent que les lois classiques sur le frottement qui resultent de
l’etude du frottement depuis ces debuts sont les suivantes :
1. La force de frottement est proportionnelle a la force normale du contact :
|fT | 6 µfN (1.1)
ou µ est le coefficient de frottement.
Souvent, on definit deux valeurs pour µ : le coefficient de frottement statique µs que l’onapplique pour detecter le debut du glissement, le coefficient de frottement dynamique µd
que l’on applique pendant le glissement.
2. Le coefficient de frottement est independant de l’aire apparente du contact.
3. Le coefficient de frottement statique est plus grand que le coefficient de frottement dyna-mique. Cette loi peut etre mise en evidence experimentalement en utilisant la methode duplan incline par exemple pour le calcul des coefficients de frottement µs et µd.
4. Le coefficient de frottement dynamique est independant de la vitesse de glissement. On saitmaintenant que cette hypothese est fausse. Cependant, comme le fait remarquer Rabinowicz[20], le coefficient de frottement dynamique peut etre suppose constant dans de nombreuxcas lorsque seule une plage reduite de vitesse est consideree.Wang et Shieh [21] ont etudie le cas d’un coefficient de frottement qui varie avec la vitesserelative dans le cas d’un systeme aube-frotteur. Ils ont montre que la difference pouvait etresignificative lorsque le mouvement stick-slip se produisait.
5. Lorsque le mouvement tangentiel intervient, la force de frottement est dans la direction dela vitesse relative des deux corps, mais dans un sens oppose :
fT = −µfNvr
‖ vr ‖ (1.2)
Cette loi a essentiellement ete confirmee par l’experience [20]. Dans le cas ou les proprietesdes interfaces de contact ont peu d’influence sur la direction de la force de la force instan-tanee, elle peut tout de meme varier autour de la direction supposee d’un angle de l’ordrede 1o dans la realite.
On notera que quelques ecarts associes a l’hypothese 1 ont deja ete remarquees dans differentescirconstances : une augmentation du coefficient de frottement dans le cas de faibles chargements,une diminution du coefficient de frottement dans le cas de forts chargements [15]. La loi d’Amon-tons correspond aux deux premieres hypotheses, la loi de Coulomb aux trois premieres.
Une representation graphique de la loi de Coulomb est donnee par la figure 1.4-b. On noterapour finir que le coefficient de frottement varie en fonction des proprietes des materiaux et del’etat de surface.

Chapitre 1 : Modelisation du frottement sec en dynamique 9
Elément de contact
Ω
Ω(1)
(2)
N
T
u
-
N
u
Tµ
s Nµ
d N
−µd N
−µs N
f
|f |
|f |
|f |
|f |
(a) (b)
Fig. 1.4: (a) Schematisation d’un element de contact. (b) Courbe force-deplacement pour le modele de
Coulomb.
u0−u0
f T
−
u
µ
µ |f |
|f |
N
N
f T
−
t
T,1s
µ
µ
|f |
|f |N
N
ωu=u sin( t)
(a) (b)
Fig. 1.5: (a) Comportement hysteretique de la loi de coulomb en presence de glissement pour le regime
stationnaire. (b) Evolution temporelle du frottement pour la loi de Coulomb.
1.3.2 Participation du premier harmonique pour la loi de Coulomb
Soit un deplacement impose u = usT,1sin(ωt) de periode T = 2π
ω avec usT,1 > 0.
En regime stationnaire, la force de frottement a un comportement hysteretique comme representesur la figure 1.5-a. Cette force est periodique de meme periode que us
T,1 (fig. 1.5-b).
La force fT etant periodique de periode T = 2πω , elle peut se decomposer sous la forme d’une
serie de Fourier :
fT =∞∑i=0
f cT,icos(iωt) + f s
T,isin(iωt) (1.3)
avec
f cT,i = 2
T
T∫0
fT cos(iωt)dt
f sT,i = 2
T
T∫0
fT sin(iωt)dt
On en deduit :
f cT,0 = 0
f cT,1 = −4µfN
π
f sT,1 = 0
(1.4)

10 Chapitre 1 : Modelisation du frottement sec en dynamique
Elément de contact bilinéaire
kΩ
Ω(2)
(1)
0
T
u
-
N
N
uu
N−
Tf
µd
dµ |f |
|f |
N
(a) (b)
Fig. 1.6: (a) Schematisation d’un element de contact bilineaire. (b) Courbe force-deplacement pour le
modele bilineaire.
D’ou, en generalisant pour tout signe de usT,1, on obtient :
fT,h=1(usT,1sin(ωt)) = −4µfN
πsgn(us
T,1)cos(ωt) (1.5)
L’indice h = 1 refere a l’approximation sur le premier harmonique.
On remarque que fT,h=1 est independant de l’amplitude de u et que l’amortissement visqueuxequivalent est egale a :
c =4µfN
πω|usT,1|
(1.6)
c decroit avec la frequence et l’amplitude du mouvement.
1.3.3 Modele bilineaire
Le modele bilineaire tel qu’il a ete defini par Ying [18] resulte de l’association d’un ressort deraideur kT et d’un element de contact en frottement sec pour lequel on utilise la loi de Coulomb(fig. 1.6-a). La superposition des lois de comportement du ressort et de l’element de frottementnous donne celui de ce nouveau modele (fig. 1.6-b). Ce qui peut s’ecrire mathematiquement sousla forme :
fT = ku |u| < u0
fT = ku0 |u| > u0
(1.7)
Le modele bilineaire n’est en fait qu’une extension du modele de Coulomb par l’ajout d’uneflexibilite. On notera que cette solution a l’avantage de lever la singularite en zero.
1.3.4 Participation du premier harmonique pour le modele bilineaire
Encore une fois, on impose le deplacement u = usT,1sin(ωt) de periode T = 2π
ω avec usT,1 > 0.
En regime stationnaire, la force de frottement a un comportement hysteretique que l’on peutrepresenter par la figure 1.7-a. Cette force est periodique de meme periode que u (fig. 1.7-b).

Chapitre 1 : Modelisation du frottement sec en dynamique 11
f T
−u0u0
−
u
µ
Nµ
|f |N
|f |
f T
−
t
T,1s ω
µ
µ
|f |
|f |
N
N
u=u sin( t)
(a) (b)
Fig. 1.7: (a) Comportement hysteretique du modele bilineaire en presence de glissement pour le regime
stationnaire. (b) Evolution temporelle du frottement pour le modele bilineaire.
De meme que precedemment, fT admet une decomposition en serie de Fourier. Comme l’amontre Philipps [22], les coefficients f c
T,0, f cT,1 et f s
T,1 sont donnes par :
f cT,0 = 0
f cT,1 = 4µfN
π
(µfNkus
T,1− 1)
f sT,1 =
kusT,1
π
(π2 − Θ +
(1 − 2µfN
kusT,1
)√1 −
(1 − 2µfN
kusT,1
)2) (1.8)
avec Θ = arcsin(1 − 2µfN
kusT,1
)+ 2π.
Pour que Θ soit correctement defini, on a suppose 0 < 2µfNkus
T,1< 1.
1.3.5 Theorie de Bowden et Tabor (adhesion-labourage)
Dans cette theorie, le frottement entre deux corps est essentiellement attribue a deux causes :la formation et le cisaillement de jonctions metalliques entre les asperites des surfaces, et ladeformation plastique de la surface la plus tendre par des asperites plus dures. Par consequent,le coefficient de frottement peut etre donne par la somme de deux composantes qui resultent deshypotheses formulees ci-dessus :
µ = µa + µlab (1.9)
ou µa resulte de l’adhesion et µlab du labourage.Bowden et Tabor [15] supposent que lorsque deux corps sont mis en contact, il se produit
des echanges de matiere entre les asperites en contact et une soudure locale. Pour un materiauplastique ideal, la pression au niveau du contact est saturee a une valeur H caracteristique de ladurete du materiau. L’interface de contact reelle est donc proportionnelle a la force de contactnormale :
SR = fN/H (1.10)
On en deduit donc µa :µa = τ/H (1.11)

12 Chapitre 1 : Modelisation du frottement sec en dynamique
Comme l’explique Georges [23], dans τ est cachee toute l’ignorance des mecanismes de rupturedes contacts. Ainsi, les lois de frottement d’Amontons sont verifiees : la force de contact estproportionnelle au chargement normal et independante de l’aire de contact apparente. Pour laplupart des materiaux, τ est de l’ordre de 0.2H, d’ou :
µa ' 0.2 (1.12)
Cependant, pour les metaux, le coefficient d’amortissement µ peut atteindre des valeurs del’ordre de l’unite. Pour expliquer cette difference, on doit prendre en compte la croissance de lajonction plastique due a la combinaison du chargement normal et tangentiel des asperites. Pourrepresenter cette situation, Bowden et Tabor proposent un critere de la forme :
σ2N,R + ασ2
T,R = H2 = ατ2 (1.13)
ou σN,R et σT,R sont respectivement les contraintes normales et tangentielles, c’est a dire lescontraintes moyennes reelles sur l’aire de contact reelle et α est une constante de l’ordre de 10.
Si une petite contrainte tangentielle est appliquee, d’autres ecoulements plastiques vont inter-venir. Bien que cette contrainte supplementaire soit dans la direction tangentielle, le mouvementplastique initial s’effectuera dans la direction normale et va conduire a une croissance de l’aire decontact reelle en raison de la forme des asperites. En augmentant σT,r, on va se rapprocher de ladirection tangente.Si SR,t=0 = fN/H est l’aire de contact initiale reelle due au chargement normal seul (σT,r = 0), ondeduit de l’equation (1.13) que la croissance de l’aire de contact reelle en fonction du chargementtangentiel est regie par :
1 + α
(fa
fN
)2
=(
SR
SR,t=0
)2
(1.14)
En pratique, pour des surfaces de contact dans l’air, la croissance des jonctions est limitee parl’existence d’une couche de contamination. Soit τi la contrainte de cisaillement critique de cesfilms d’interface :
τi = βτ (1.15)
avec β < 1.La croissance de la jonction se finit lorsque la contrainte tangentielle de l’interface atteint la valeurτi, c’est alors que le glissement intervient. De l’equation (1.13), on deduit que le glissement seproduit lorsque :
σ2N,R + ατ2
i = ατ2 (1.16)
Par consequent, la composante liee a l’adhesion du coefficient de frottement est donnee par :
µa =fa
fN=
SRτi
SRσN,R=
1α1/2(β−2 − 1)1/2
(1.17)
Pour β → 1, µa → ∞, ce qui correspond a des surfaces parfaitement propres de materiaux tresductiles ou la croissance de la jonction evolue indefiniment. Un tres faible niveau d’affaiblissement

Chapitre 1 : Modelisation du frottement sec en dynamique 13
de l’interface, par exemple β ' 0.95, reduit le coefficient de frottement a des valeurs raisonnables.Un tres fort niveau d’affaiblissement de l’interface (β < 0.2) conduit a une tres faible croissancedes jonctions. Cette situation correspond a la presence d’un bon lubrifiant ou d’un metal plustendre. Dans ce cas, on peut approximer µa par :
µa = β/α1/2 (1.18)
Soit, en utilisant (1.13) et (1.15) :µa = τi/H (1.19)
Ce qui est formellement analogue a l’equation (1.11).Comme le font remarquer Oden et Martins [13], cette theorie permet de donner quelques
explications sur les differentes lois de frottement. Ainsi, le coefficient de frottement statique estsouvent plus important que le coefficient de frottement dynamique du fait de la resistance desjonctions qui va augmenter avec le temps. La dependance faible du coefficient de frottement a lavitesse relative est une consequence de la deformation plastique du materiau isotrope soumis aucontact.
En ce qui concerne le coefficient de frottement associe au labourage, on peut l’estimer enutilisant une modelisation simplifiee de l’asperite la plus dure par une forme conique (Voir Bowdenet Tabor [15]). En supposant, que l’ecoulement plastique du metal est isotrope, le coefficient defrottement µlab est donne par : µlab = 2
π tan(θ). En raison de la faible pente des asperites, µlab
devrait varier entre 0.07 (θ = 5o) et 0.14 (θ = 10o).Bien que la theorie proposee par Bowden et Tabor [15] soit largement acceptee et permet
d’expliquer efficacement les lois de frottement de base, plusieurs critiques ont ete formulees et destheories alternatives ont ete proposees.
La critique principale provient du fait que la plupart des solides sont couverts par differentsfilms qui empechent un contact direct entre les solides. De plus, la formation des differentescouches d’absorption est tellement rapide dans l’air que les effets associes au glissement sontlents en comparaison. D’autres theories alternatives ont ete proposees par des auteurs qui se sontinteresses a l’evolution du coefficient de frottement durant un glissement prolonge et a l’interactionentre le coefficient de frottement et l’endommagement par l’usure des surfaces de contact.
Dans le cadre de notre etude, on neglige les effets de l’usure et des echauffements thermiques.Le probleme ne sera etudie que du point de vue de la theorie de l’elasticite. Cela ne signifiepourtant pas que l’on neglige totalement l’importance des phenomenes de plastification au niveaudes surfaces de contact. En fait, la plasticite est prise en compte par le coefficient de frottementqui comme le montre la theorie de Bowden et Tabor [15] peut varier de facon significative selonl’importance du phenomene.
1.4 Influence du frottement sur le mouvement
Le frottement est un phenomene qui peut donner lieu a des comportements dynamiquescomplexes. On notera en particulier l’existence sous certaines conditions d’instabilites de type

14 Chapitre 1 : Modelisation du frottement sec en dynamique
Rotor supposé indéformable
Plate−formeFrotteur idéalisé
Aube
µ
kT
X
Yµ
f cT T,1
T
ckk
m
ω=f cos( t)
(a) (b)
Fig. 1.8: (a) Aube de turbine avec frotteur idealise [24]. (b) Modele d’aube a 1 ddl.
stick-slip ou sprag-slip, ou encore de mecanismes derives tels que le coefficient de frottementdynamique variable ou le couplage de modes.
1.4.1 Mouvement stick-slip
Pour un systeme physique de deux corps en frottement, on observe frequemment une alter-nance entre des phases de blocage et de glissement.
On concoit facilement ce phenomene pour un probleme unidirectionnel dans le cas d’oscilla-tions forcees ou l’on impose des changements de sens de telle sorte que la force de frottementchange de signe. Par exemple, de nombreux articles ont etudie la reponse d’une aube de rotordans les moteurs d’avion [24, 25, 26, 27, 28]. Generalement, cette aube est soumise a une exci-tation harmonique a son extremite et a un frottement ponctuel de type Coulomb avec un autrecorps que l’on nomme frotteur et qui est simplement modelise par une raideur (figure 1.8-a et b).Dans ce type de probleme, les chercheurs visent a atteindre trois objectifs. Le premier consiste adevelopper des methodes de resolution rapides et precises lorsque l’excitation et la reponse sontT-periodiques [3, 1, 2, 4, 5]. Le second se traduit par l’adaptation des methodes pour la resolutionet l’etude de frotteurs plus complexes. Cette complexite peut se traduire par la prise en compte devariations pour la charge normale [29, 30], d’un mouvement relatif 2D [31, 32, 33], ou encore de lageometrie des frotteurs a arrete [34, 35]. On notera aussi que Yang et al [36] ont etudie un contactponctuel 3D entre les nageoires des aubes en decouplant le deplacement normal et le deplacementtangentiel. Le troisieme consiste simplement a etudier la performance de ces methodes sur dessystemes de grandes tailles en visant une application industrielle [5]. Dans ce domaine, les progresrealises sur les methodes de calcul et la puissance des ordinateurs sont encore bien insuffisants.En effet, les temps de calcul augmentent tres rapidement avec le nombre de points de frottement.
Pour ce type de probleme, les chercheurs utilisent en general une simple loi de Coulomb en

Chapitre 1 : Modelisation du frottement sec en dynamique 15
v
fk
c
u
N
m
0
Fig. 1.9: Systeme type dans lequel une instabilite stick-slip peut se manifester.
supposant que les coefficients de frottement statique et dynamique sont egaux. Pour la structureaube-frotteur, le mouvement stick-slip est utilise pour amortir les vibrations de l’aube.
Le mouvement stick-slip peut aussi apparaıtre dans des cas moins triviaux. L’exemple clas-sique est celui d’un systeme masse-ressort amorti ou non qui est presse par une force constantefN sur une base mobile dont la vitesse v0 est constante (fig. 1.9). Ce type de modelisation peutpar exemple representer une approche simplifiee d’un systeme de frein pour lequel l’experiencemontre qu’un mouvement stick-slip se produit dans certaines situations. La principale origine dece phenomene s’explique par le phenomene d’adhesion qui fait que le coefficient de frottementstatique µs est plus important que le coefficient de frottement dynamique µd. Plus rigoureuse-ment, on notera que µd chute tres rapidement pour de faibles vitesses. Ce sont ces variations ducoefficient de frottement qui entraınent dans certaines situations un mouvement qui alterne lesphases de blocage et de glissement. Ce phenomene est une source de vibration qui s’apparente aune oscillation de relaxation [13]. Dans la suite, on parlera d’une instabilite de type stick-slip.
Par exemple, on peut rencontrer ce type de comportement dans le broutement, lors du grin-cement de dentures d’engrenages...
L’hypothese qui consiste a prendre µs et µd constants est cependant trop restrictive dansce type de probleme. Gao et al. [37] montrent que la condition µs > µd est necessaire maispas suffisante pour generer un mouvement stick-slip. Le parametre dµd
dt joue lui aussi un roleimportant. Dans leur modele, Gao et al. [37] prennent en compte des coefficients de frottementvariables : le coefficient de frottement statique µs(t) et le coefficient de frottement dynamiquelinearise µd(vr) = µ0 + αvr (µ0 et α sont choisis constants et de facon arbitraire).
L’equation dynamique pour le frotteur s’ecrit :
md2u
dt2+ c
du
dt+ kx = fNµd(vr) (1.20)
avec vr = vr,t=0 − dxdt la vitesse relative entre la surface mobile et le corps, c l’amortissement
structural, k la raideur du ressort, ω la pulsation du systeme et fN la force normale.On note tout d’abord que le mouvement stick-slip n’est possible que si :
kvr,t=0
fN (1 + e−βt′)6 ∂µs
∂ts
∣∣∣∣ts−>0
(1.21)
avec t′ = 2πω .

16 Chapitre 1 : Modelisation du frottement sec en dynamique
O’ O’’
A Bv
f fTNP
θ
Fig. 1.10: Schema de principe d’un systeme type dans lequel le sprag-slip peut se manifester [38].
Il ressort de l’etude que le comportement du systeme peut se deduire de la comparaison entreun parametre β = c+αfN
2m et la pulsation ω. Ainsi, le mouvement stick-slip est obtenu pour β 6 −ω.Pour −ω < β < 0, une oscillation harmonique se superpose a un mouvement stick-slip. Si β = 0,les oscillations sont harmoniques. Pour 0 < β < ω, on obtient des oscillations amorties. Et enfin,si β > ω, on obtient un glissement pur.
1.4.2 Mouvement sprag-slip
Comme on l’a explique precedemment, le frottement peut etre a l’origine d’un mouvementvibratoire auto entretenu : le mouvement stick-slip genere par les variations du coefficient defrottement en est un exemple. Les chercheurs ont cependant montre que cette instabilite liee aufrottement n’etait pas la seule.
C’est en 1961 que Spurr [38] proposa la theorie du sprag-slip pour expliquer les bruits decrissement (squeal) dans les freins. Le crissement est une variation de haute frequence (plus de5kHz). Il s’agit de sons purs et stridents, c’est a dire quasi monochromatiques et de forte intensite[39]. L’idee consiste a dire que selon la configuration du systeme et la flexibilite de ces elements,les forces generees par le frottement peuvent amener des instabilites.
Pour mettre en evidence le phenomene du sprag-slip, on considere le systeme defini par lafigure (1.10). La barre rigide O′P qui peut pivoter autour de O′ est chargee en P par une forcefN contre une surface mobile AB. On note θ l’angle entre la poutre O′P et la surface mobile AB.En considerant les moments autour de O′, on en deduit une expression de la force de frottementfT :
fT =µfN
1 − µtan(θ)(1.22)
Par consequent, la force de frottement devient infinie lorsque µ = cotan(θ).
Depuis, de nombreuses etudes ont ete consacrees a cette instabilite et des modeles plus so-phistiques se basant sur celui du Sprag-Slip ont ete developpes pour decrire le phenomene decouplage de modes. On notera en particulier les travaux dedies a l’etude d’un ou deux pions surun disque flexible en rotation [40, 41, 42, 43].

Chapitre 1 : Modelisation du frottement sec en dynamique 17
1E
E2
Ei
En
1
2
i
n
S
S
S
S
f = SσT
f = Aσl 0 E 0 l E1 1
l Ei i l En n T
(a) (b)
Fig. 1.11: Modeles unidimensionnels presentes par Iwan.
1.5 Microglissement
Lorsque deux interfaces sont en contact et qu’elles frottent l’une sur l’autre, l’hypothese demacroglissement devient parfois inacceptable. En particulier si l’interface n’est jamais totalementen glissement. Dans ce cas, l’effet du microglissement doit etre pris en compte.
Pour cela, certains chercheurs ont propose des lois mathematiques permettant d’introduireune dissipation hysteretique [44], mais cette approche n’a ete que tres peu utilisee dans l’ana-lyse dynamique de systemes vibratoires avec des interfaces en frottement. D’autres auteurs sebasent sur une analyse plus physique du probleme en modelisant des joints pour representer lesinterfaces de contact. Certaines approches se basent sur l’assemblage d’elements bilineaires tandisque d’autres definissent des modeles continus. On presente dans la suite un exemple de chaquetype : les modeles d’Iwan [45] et le modele continu de Menq et al [46]. Ces modelisations et cellesdu meme type sont cependant difficiles a utiliser dans toutes les configurations. On expliqueradonc succinctement de quelle facon le microglissement peut etre pris en compte pour le modeleelements finis d’un systeme quelconque. Cette derniere methode est suffisamment generale pouretre utilisee dans la plupart des cas de figure.
1.5.1 Modeles d’Iwan
Les modeles introduits par Iwan [45] utilisent la loi de Coulomb pour decrire localement lecomportement d’une surface en contact avec un corps rigide. En fait, la modelisation de la surfacecomplete est simplement obtenue par un assemblage d’elements bilineaires. Differents assemblagesont ete proposes par Iwan : montage en parallele (fig. 1.11-a), en serie (fig. 1.11-b) ou par unecombinaison parallele-serie.
Pour ces assemblages, on notera que la regle de Masing peut s’appliquer. Cette regle stipuleque si un joint est uniquement compose d’elements lineaires et d’elements de frottement, lesproprietes du joint sont completement definies par la relation entre force et deformation dupremier chargement [18]. De plus, la pente sur la courbe force-deplacement represente la sommedes raideurs pour les elements bilineaires qui ne sont pas en glissement. Une reduction de la pentesignifie donc une augmentation du nombre d’elements de Coulomb en glissement.

18 Chapitre 1 : Modelisation du frottement sec en dynamique
β
L
Couche de cisaillement élasto−plastique : k, τ
fT
E, S
X p
τ = ku τmτ =
Lα(1− )α L
β fT
E, S
X p
(a) (b)
Fig. 1.12: Modele de microglissement de Menq [46] (a) a l’instant initial t = 0, (b) en glissement partiel.
1.5.2 Modele continu de Menq et al.
En 1986, Menq et al.[46] proposent un modele continu pour analyser la reponse dynamiqued’une structure amortie par frottement sec lorsque l’interface est soumise a une charge normaleimportante. Pour expliciter ce modele, on utilise un systeme idealise. Il consiste en une barreposee sur un support rigide qui est chargee normalement par une pression uniforme p et surlaquelle on exerce une force tangentielle fT (fig. 1.12).
D’un point de vue macroscopique et en accord avec la loi de Coulomb, la barre glissera desque l’amplitude de fT depassera la valeur critique µpL. Cependant, dans le cas ou la barre n’estpas rigide, le phenomene de microglissement apparaıt : une partie de la barre va glisser alors quel’autre restera collee. On suppose que chaque point est gouverne par la loi de Coulomb. La zonede glissement va alors s’etendre avec l’amplitude de fT . Menq et al ont suggere que la relationentre force et deplacement d’une asperite etait lineaire avant le glissement. Par consequent, ilsproposent que l’on modelise la liaison entre les deux interfaces par un ressort tant qu’elles sontsolidaires et par la loi de Coulomb lorsqu’elles glissent. Ce qui conduit aux proprietes des elementsbilineaires. Differentes evolutions de ce modele ont ete proposees par Csaba [47].
1.5.3 Microglissement dans les modeles elements finis
Les modeles continus de joints permettent d’obtenir une modelisation fine pour certainsproblemes, mais ils sont loin d’etre utilisables dans tous les cas. Pour utiliser ces modeles, ondoit connaıtre parfaitement le chargement normal de l’interface. Les etudes qui ont ete meneesutilisent generalement un chargement constant ou parabolique.
Pour des problemes dont on ne connaıt pas le profil du chargement, on doit a priori se limitera un modele elements finis de l’interface en utilisant un niveau de discretisation suffisamment fin.Dans le cas des pieds d’aube ou le profil du chargement normal sur les interfaces de contact varieau cours du temps, on est dans cette situation.

Chapitre 1 : Modelisation du frottement sec en dynamique 19
1.6 Conclusions
Dans l’etude du frottement, differents phenomenes entrent en jeu. Pour simplifier notre etude,on se placera dans le cas le plus simple en utilisant une loi de Coulomb avec des coefficientsde frottement statique et dynamique identiques. De ce fait, on neglige les instabilites de typestick-slip qui peuvent se produire du fait des variations du coefficient de frottement.
Dans la suite, le modele bilineaire ne sera plus etudie bien qu’il soit souvent utilise dans lalitterature en raison des simplifications qu’il apporte dans le calcul des forces non lineaires. Ilimpose des hypotheses au niveau des interfaces de contact qui ne permettent plus en generald’etudier directement les contacts avec frottement a partir du modele elements finis d’une struc-ture quelconque.
De plus, les asperites et les deformations plastiques ne seront pas modelisees. Le phenomened’adhesion est pris en compte indirectement grace au coefficient de frottement, mais le systemesera etudie dans le cadre de la theorie de l’elasticite.
Dans les roues aubagees des moteurs d’avions, une usure de type fretting intervient au niveaudes contacts avec frottement entre les pieds d’aube et le rotor. Ce mecanisme d’usure repose surl’abrasion de petites particules obtenues par adhesion et corrosion dans certains cas (pour l’acierpar exemple). Il intervient lorsque des oscillations de faible amplitude se produisent au niveaudes surfaces de contact en presence de frottement. Au cours du temps, l’usure modifie l’etat desurface, donc la rugosite, des zones en contact et ajoute des particules entre les deux corps, cequi constitue un troisieme corps. On en deduit que le coefficient de frottement va varier au courtdu temps en fonction de l’usure. De plus, l’usure due au fretting peut accelerer une usure enfatigue et creer des amorces de fissure, ce qui peut conduire a la rupture d’un pied d’aube parexemple. Dans le cadre de notre banc experimental, l’utilisation d’un lubrifiant va cependant nouspermettre de limiter cette usure.
Il faut aussi noter que les variations de temperature peuvent dans certains cas faire varier lecoefficient de frottement de facon significative. Cela ne sera pas pris en compte dans cette etude.
En ce qui concerne le microglissement, on utilisera le modele le plus simple qui consiste adefinir la loi de Coulomb entre deux points de la structure.On cherchera a verifier que nos hypotheses sont acceptables en comparant les resultats du modelenumerique a l’experience. On definira l’experience mise en oeuvre dans les chapitres cinq et six.

20 Chapitre 1 : Modelisation du frottement sec en dynamique

Chapitre 2
Mise en equation d’un probleme de
contact avec frottement
2.1 Introduction
Dans l’etude d’un systeme physique, la premiere etape consiste generalement a formuler locale-ment l’equation du mouvement des corps etudies et a exprimer mathematiquement les conditionsaux limites.
Duvaut et Lions [48] ont explique qu’un probleme de contact pouvait s’interpreter comme unsysteme physique contraint par une inegalite variationnelle. Pour ces inegalites variationnelles, onnote que la solution depend des contraintes physiques qui dependent elles-memes de la solutionrecherchee. Les conditions aux limites qui permettent de rendre compte de ce comportementont par consequent une structure mathematique bien differente de conditions aux limites plusclassiques telles que celles de Dirichlet ou de Neumann. La prise en compte du frottement ajoutea cela de nouvelles difficultes mathematiques [49].
Cette formulation differentielle du probleme ne peut cependant pas toujours etre resolue. Enfait, ce n’est possible que dans des cas tres simples. Pour des structures plus compliquees, on doitdiscretiser le probleme pour se ramener a un systeme de n equations a n inconnues en utilisantles methodes variationnelles par exemple.
En raison des difficultes introduites par le contact et le frottement, les chercheurs ont souventlimite leurs etudes a un corps elastique en frottement avec un corps rigide. On retiendra enparticulier Oden et Kikuchi [49] ainsi que Oden et Pires [50]. En 1993, Laursen et Simo [8] proposecependant une approche plus generale en etudiant le contact avec frottement entre deux corpsdeformables en 3D dans le cas de grands deplacements. On pourra aussi se reporter au memoirede these de Laursen [51]. La demarche proposee par Laursen et Simo a depuis ete reprise pardifferents chercheurs [52, 53]. D’autres chercheurs tels que Chaudhary et Bathe [54] avaient dejaproposes auparavant une approche 3D en utilisant une modelisation par elements finis. Mais leurapproche se limitait a de petits deplacements car il n’y avait pas de remise a jour de la base locale
21

22 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
qui sert a determiner les forces de contact. Pour les problemes 2D de contact avec frottement parcontre, Bathe et Chaudhary [6] proposaient deja une methode adaptee aux grands deplacementsen 1985 dans le cas d’interpolations lineaires. L’approche variationnelle proposee par Laursen etSimo [8] permet cependant une approche plus generale du probleme. Le sujet qui porte encore adiscussion aujourd’hui, c’est la definition de la base locale [55].
Dans ce chapitre, on expliquera dans une premiere partie la demarche a suivre pour modeliserune structure de facon succincte.
Dans la deuxieme partie, on developpera la mise en equation d’un probleme de contact avecfrottement en se basant sur la demarche de Laursen et Simo [8]. Cette partie se concluant parl’obtention d’une equation matricielle du probleme. Dans cette equation, on fait apparaıtre uneexpression originale des forces non lineaires. Cette expression permet de bien mettre en evidencele changement de base et les interpolations liees aux elements de contact.
Dans le cas d’une structure industrielle, le nombre d’inconnues peut cependant etre tres im-portant. Par consequent, il est souvent necessaire de reduire la taille du systeme pour permettreune resolution du probleme dans un temps raisonnable. Dans la troisieme partie, on s’interesseradonc aux methodes classiques de condensation pour clore ce chapitre sur la mise en equation duprobleme.
2.2 Modelisation d’une structure
2.2.1 Approche generale
On peut exprimer la dynamique d’une structure quelconque par son equation du mouvementsous forme locale et un ensemble de conditions aux limites. Dans les cas tres simples comme celuid’une poutre en flexion verifiant les hypotheses d’Euler-Bernouilli, cette formulation differentielleet continue du probleme se resout analytiquement. Dans le cas contraire, la demarche consiste adiscretiser le probleme pour se ramener a un systeme de n equations et n inconnues. Pour ce faire,trois approches sont envisageables selon la complexite de la structure et la precision souhaitee.
La premiere consiste en l’assemblage d’elements simples. Cette methode ne s’applique qu’auxstructures discretes, ce qui signifie qu’elles ne sont composees que d’elements simples tels que :barres, poutres, panneaux de cisaillement... Les treillis par exemple entrent dans cette categorie.On notera cependant que la resolution du probleme peut etre tres compliquee, surtout lorsquel’on doit lever des hyperstaticites.On peut aussi utiliser la methode pour certaines structures plus complexes telles que les coques.Pour cela, il est necessaire de discretiser la structure (avec la methode des elements finis parexemple) pour ramener le probleme au niveau d’un element.
La seconde approche se base sur la discretisation de la formulation differentielle par differencefinie. Cette methode est relativement simple a appliquer. Son utilisation pour des structurescomplexes peut cependant necessiter un nombre tres important de ddls si l’on desire une precisionacceptable.

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 23
Enfin, la troisieme utilise une discretisation de l’espace des solutions. On construit une basede fonctions cinematiquement admissibles (Φi) dans laquelle on exprime le deplacement au pointY (methode de Ritz) :
u =n∑
i=1
λiΦi(Y) (2.1)
Les coefficients λi sont alors choisis de facon a minimiser l’erreur au point Y : on applique lamethode des residus ponderes (voir la partie qui suit).
On peut cependant noter des a present qu’il est impossible de definir des fonctions admissiblesΦi sur des geometries complexes. D’ou, la discretisation en elements finis de la structure. Lesfonctions admissibles sont alors definies localement entre des points situes le plus souvent a lafrontiere des elements.
2.2.2 Methode des residus ponderes
Comme on l’a explique precedemment (Equ. 2.1), le deplacement est approxime par la methodede Ritz sous la forme d’une somme de fonctions cinematiquement admissibles ponderees.
Si l’on definit l’equation locale du mouvement sous la forme :
L(u) + fv = 0 (2.2)
Avec L un operateur, et fv les forces volumiques.On definit alors l’erreur residuelle au point Y par :
R = L(u) + fv (2.3)
Pour minimiser R, on choisit les λi de telle sorte que l’erreur ponderee soit nulle pour n fonctionsde ponderation independantes : ∫
ΩΦi(x, y, z)R dΩ = 0 (2.4)
Differentes variantes existent selon le choix des fonctions Φi. On notera la collocation parpoints, la collocation par sous-domaines, la methode de Galerkin et la methode des moindrescarres.D’autres variantes ajoutent une integration par parties pour integrer les conditions aux limitesdans le calcul : ce sont les methodes variationnelles.
2.2.3 Prise en compte de non linearites
Les non linearites peuvent intervenir dans une structure a differents niveaux. Elles peuventprovenir des forces d’excitation, des forces de contact (frottement, butees...) ou encore du com-portement du materiau. Pour les deux premiers cas, on peut directement integrer la non linearitedans l’equation matricielle du mouvement en calculant le vecteur des forces generalisees. Dansle cas ou l’on considere que le comportement du materiau n’est pas lineaire, c’est au niveau dutheoreme de conservation de l’energie que l’on doit prendre en compte la non linearite, ce quicomplique enormement l’obtention d’une equation du mouvement sous forme matricielle.
Dans notre cas, on etudiera uniquement une non linearite de type contact avec frottement.

24 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
Ω
Ω Γ
Γ ϕ
ϕ
γγ
R3
(2)
(2)
(1)
(1)
(2)
(2)
(1)
(1)
t
t
Y
Z
y
z
(Z,t)
(Y,t)
Fig. 2.1: Notations pour le probleme de contact avec frottement considere.
2.3 Mise en equation
Comme cela a deja ete explique dans l’introduction du chapitre, cette partie propose une miseen equation des problemes de contact avec frottement entre deux corps deformables dans le cadrede grands deplacements pour les noeuds de contact.
Dans ce chapitre, on souhaite conserver une approche suffisamment generale pour ne pasrestreindre trop rapidement l’etude au cas particulier des petits deplacements. En se basant surles travaux de Laursen et Simo [8], nous proposons de developper une representation Lagrangiennedu probleme. La representation Lagrangienne est la plus frequemment utilisee dans la litterature[8, 55]. Il existe cependant quelques approches qui considerent une representation Eulerienne, onnotera par exemple Benson [56].
Dans cette partie, on precisera les notations utilisees et les differents concepts que l’on seraamene a utiliser avant de mettre en oeuvre le principe d’Hamilton et d’en deduire l’equationmatricielle du systeme.
2.3.1 Notations
On considere deux solides Ω(1) et Ω(2). A l’instant t = 0 (etat non excite), un point est noteY dans Ω(1) et Z dans Ω(2). De plus, les surfaces externes sont notees Γ(1) pour le solide Ω(1) etΓ(2) pour Ω(2). Pour t 6= 0, un point est note y dans Ω(1) et z dans Ω(2). Les surfaces externessont notees γ
(1)t et γ
(2)t . Pour decrire les champs de deplacement autour de l’etat d’equilibre, on
utilise une representation Lagrangienne : u(1)(Y, t) pour Ω(1) et u(2)(Z, t) pour Ω(2). On note :

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 25
y = ϕ(1)(Y, t) = Y + u(1)(Y, t)z = ϕ(2)(Z, t) = Z + u(2)(Z, t)
(2.5)
De plus, on definit une parametrisation des nappes γ(i)t en definissant un ensemble A(i) ∈ R2
et une suite de fonctions de forme Ψ(i)t : A(i) −→ R3 indexees par le temps t de telle sorte que
γ(i)t = Ψ(i)
t (A(i)). Par exemple : ∀Z ∈ Γ(2), ∃ξ ∈ A(2) tel que Z = Ψt=0(ξ) et z = Ψ(2)t (ξ).
2.3.2 Definition de la base convectee
On definit ici une base attachee a z, ou z est le point z ∈ γ(2)t qui donne le minimum de la
distance separant le point y ∈ γ(1)t de γ
(2)t . La surface Γ(2) peut etre parametrisee dans un espace
A(2) ⊂ R2. Un point ξ ∈ A(2) est donne par ξ = (ξ1, ξ2). Les bases associees a Γ(2) et γ(2)t sont
definies a partir de derivees partielles :
Eα(ξ) = Ψ2t=0,∂ξα
= ∂Ψ2t=0(ξ)∂ξα
sur Γ(2) (2.6)
eα(ξ) = Ψ2t,∂ξα
= ∇(2)t (Ψ(2)
t=0(ξ))Eα(ξ) sur γ(2)t α = 1, 2 (2.7)
ou ∇(2)t est le gradient de deformation correspondant a u(2)
t . On definit ξ par le point correspon-dant a z dans A(2). On peut ainsi definir les deux premiers vecteurs de la base convectee :
τα = eα(ξ) (2.8)
Le dernier vecteur de cette base est simplement defini a partir du produit vectoriel des τα :
ν =τ1 ∧ τ 2
‖τ 1 ∧ τ 2‖ (2.9)
A noter que l’orientation de la surface γ(2)t est importante, on suppose donc que la pa-
rametrisation est telle que l’equation (2.9) donne l’expression de la normale sortante au corpsΩ(2).
2.3.3 Definition de la base duale
La base duale est simplement le dual de la base convectee. Cette base est plus commode quela base convectee qui n’est pas necessairement orthonormale et normee. Les vecteurs tangents dela base duale sont definis par :
τβ · τα = δβα (2.10)
Ainsi, si l’on exprime un vecteur χ tangent a γ(2)t dans la base duale, le poids de τα est la valeur
projetee de ce vecteur sur τα:
χ = χατα (2.11)
χ · τα = zα (2.12)

26 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
On definit aussi les metriques pour la base convectee :
mαβ = τα · τβ (2.13)
et les metriques inverses pour la base duale :
mαβ = τα · τβ (2.14)
De plus, le vecteur normal ν de la base convectee est aussi le vecteur normal de la base duale.D’ou, la base duale peut s’exprimer sous le forme : (ν, τ 1, τ 2).
2.3.4 Contact avec des conditions de frottement
Dans le cadre de nos hypotheses, le probleme de contact des deux corps peut etre ramene auprobleme du contact entre deux nappes Γ(1) et Γ(2), lesquelles sont respectivement les surfacesdes corps Ω(1) et Ω(2). Dans la suite, on definit une surface esclave Γ(1) et une surface maıtre Γ(2).Pour chaque point de la surface esclave, on explicitera les conditions de contact et de frottementavec la surface maıtre. Pour pouvoir exprimer les conditions de non penetration, on definit lafonction associee a la hauteur separant le point y = ϕ
(1)t de la nappe γ
(2)t :
h(Y, t) = sgn(h(Y, t))|h(Y, t)| (2.15)
ou|h(Y, t)| = min
Z∈Γ(2)‖ϕ(1)(Y, t) − ϕ(2)(Z, t)‖
et
sgn(h(Y, t)) =
−1 si ϕ(1) est admissible,
1 sinon.
Ainsi, il y a impenetrabilite des deux corps si h(Y, t) 6 0. La facon la plus simple d’exprimer lecontact est donnee par les conditions de Kuhn-Tucker :
σdc,N (Y, t) > 0
h(Y, t) 6 0 (2.16)
σdc,N (Y, t)h(Y, t) = 0
ou σdc,N est la contrainte de contact normale (pression de contact) au point Y dans la direction
−ν.Pour le frottement, on peut definir des conditions similaires en cinematique. Pour cela, on definitune fonction Φ = ‖σc,T‖ − µσc,N , laquelle determine les etats glissants et bloques, et la vitessetangentielle vT = −ζ
σc,T
‖σc,T‖ . Avec σT la contrainte tangentielle qui resulte du contact avec frot-tement. De meme que pour le contact, on peut alors exprimer les conditions sur le frottement

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 27
pour la loi de Coulomb :
Φ 6 0
ζ > 0 (2.17)
Φζ = 0
Ensuite, on doit definir la vitesse. Lorsque l’on suppose qu’il y a contact, on a h(Y, t) = 0 puisqueh(Y, t) = 0. Par consequent, on peut ecrire :
d
dt[ϕ(i)(1)
(Y, t) − ϕ(i)(2)(Z(Y, t), t)] = 0 (2.18)
Cette equation conduit a :
v(1)(Y, t) − v(2)(Z(Y, t), t) = ∇(2)t (Ψ(2)
t=0(ξ))d
dt[Z(Y, t)] (2.19)
On definit la vitesse relative dans la base convectee pour le cas du contact :
vr(Y, t) = ∇(2)t (Ψ(2)
t=0(ξ))d
dt[Z(Y, t)] = ˙ξα(Y, t)τα (2.20)
Puisque la base convectee n’est pas necessairement orthogonale et normee, il est commode d’ex-primer vr(Y, t) dans la base duale :
vdr (Y, t) = mαβ
˙ξβ(Y, t)τα (2.21)
On definit aussi la contrainte tangentielle du contact σdc,T sur le corps Ω(2) dans la reference
du corps Ω(1) (base duale attachee a Ω(1)). On notera que cette contrainte est de signe oppose aufrottement qui se definirait, en accord avec l’equation 2.19 de la vitesse relative, sur le corps Ω(1)
dans la reference du corps Ω(2) (base duale attachee a Ω(2)).On peut alors redefinir Φ et ζ par :
Φ = ‖σdc,T‖ − µσd
c,N (2.22)
vdr = ζ
σdc,T
‖σdc,T‖
(2.23)
On remarquera que les variables σdc,N et σd
c,T ne sont pas connues a priori.
2.3.5 Equations du mouvement
Formulation forte
En milieu continu, le probleme dynamique peut s’exprimer localement sous la forme :
ρ(i)0
∂2
∂t2u(i)
t = div(P (i)t ) + f (i)
v,t dans Ω(i)
P(i)t n(i)
0 = σ(i)σ,t sur Γ(i)
σ (2.24)
u(i)t = u(i)
u,t sur Γ(i)u

28 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
On definit maintenant les nouvelles variables introduites dans ce systeme. Tout d’abord, on noteP
(i)t le premier tenseur des contraintes de Piola-Kirchoff pour Ω(i) a l’instant t. Ensuite, on
represente les forces internes a Ω(i) a l’instant t par f (i)v,t. Pour finir, n(i)
0 definit le vecteur normalsortant dans la configuration de reference pour Ω(i).On remarquera que P
(i)t peut etre defini a partir d’une loi elastique ou non elastique. Dans cette
etude, on se limite au cas d’une loi elastique.
Formulation faible : principe d’Hamilton
Pour commencer, on notera que l’indice t sera omis dans la suite du chapitre.Le principe d’Hamilton pour le corps Ω(i) peut s’ecrire sous la forme :
δ
∫ t1
t0
(E(i)c − E
(i)d )dt +
∫ t1
t0
δW (i)dt = 0 (2.25)
ou [t0, t1] est choisi arbitrairement.On definit l’energie cinetique E
(i)c par :
E(i)c =
12
∫Ω(i)
ρ(i)u(i)2dΩ(i) (2.26)
De meme, l’energie de deformation E(i)d est donnee par :
E(i)d = −
∫Ω(i)
P(i)t · ∇[u(i)]dΩ(i) (2.27)
Enfin, le travail virtuel des forces δW (i) s’ecrit sous la forme :
δW (i) =∫
Ω(i)
δu(i)ρ(i)f (i)v dΩ(i) +
∫Γ(i)
δu(i)σ(i)c dΓ(i) +
∫Γ(i)
δu(i)f (i)exdΓ(i) (2.28)
Les differentes forces qui interviennent dans ces expressions sont les contraintes internes f (i)v , les
forces non lineaires de contact σ(i)c et les forces d’excitation f (i)
ex .Apres une integration par parties et en utilisant les conditions limites de frontiere, l’equation
(2.25) peut se mettre sous la forme :
∫ t1t0
∫Ω(i) ρ(i)u(i)δu(i)dΩ(i) +
∫Ω(i) Pt · ∇[δu(i)]dΩ(i) − ∫Ω(i) ρ(i)f (i)
v δu(i)dΩ(i)
− ∫Γ(i) σ(i)c δu(i)dΓ(i) − ∫Γ(i) f
(i)exδu(i)dΓ(i)
dt = 0 (2.29)
L’intervale de temps [t0, t1] etant arbitraire, on peut mettre cette equation sous la forme :
W(i)l (u(i), δu(i)) + W (i)
c (u(i), δu(i)) = 0 (2.30)
ou
W(i)l (u(i), δu(i)) =
∫Ω(i) ρ(i)u(i)δu(i)dΩ(i) +
∫Ω(i) Pt ·GRAD[δu(i)]dΩ(i) − ∫Ω(i) ρ(i)f (i)
v · δu(i)dΩ(i) −∫Γ(i) f
(i)exδu(i)dΓ(i)

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 29
W(i)c (u(i), δu(i)) =
∫Γ(i) σ
(i)c δu(i)dΓ(i)
On remarquera que le principe d’Hamilton est equivalent au principe des travaux virtuels lorsquel’on a pris les conditions limites de frontiere en compte.
L’equation variationnelle generale du systeme pour les deux corps deformables peut etre ecritesous la forme :
Wl(u, δu) + Wc(u, δu) = 0 (2.31)
ou Wl(u, δu) = W(1)l (u(1), δu(1)) + W
(2)l (u(2), δu(2)) definit la partie lineaire du probleme (les
equations du mouvement de chaque corps peuvent etre traitees separement).Wc(u, δu) = W
(1)c (u(1), δu(1))+W
(2)c (u(2), δu(2)) represente le travail virtuel des forces de contact.
Le champ de deplacement u a ete scinde en deux : le champ des deplacements u(1) pour les pointsdu solide Ω(1) et u(2) pour les points du solide Ω(2). On definit alors u en fonction de u(1) et u(2)
par :
u =(u(1),u(2)
)(2.32)
Le travail virtuel du contact peut etre represente par une integrale sur Γ(1). Pour chaque pointY ∈ Γ(1), on a un point Z ∈ Γ(2) tel que :
f (2)c [Z(Y)]dΓ(2) = −f (1)
c (Y)dΓ(1) (2.33)
Ainsi, Wc peut se mettre sous la forme :
Wc(u, δu) = −∫
Γ(1)
[σdNν − σd
Tατα][δu(Y) − δu
(Z(Y)
)]dΓ(1)
=∫
Γ(1)[σd
Nδh + σdTα
δξα]dΓ(1) (2.34)
2.3.6 Forme matricielle des equations
Le probleme variationnel decrit par l’equation (2.31) peut etre considere comme un problemelineaire : Wl(u, δu) = 0 auquel on ajoute la contrainte Wc(u, δu). De Wl(u, δu), on peut facilementdeduire les matrices de masse et de raideur et le vecteur des forces appliquees en utilisant unemethode par elements finis. Si des forces statiques sont appliquees, on doit realiser un calculstatique pour determiner la matrice de raideur dans le cas precharge. En effet, une prechargemodifie l’energie de deformation. Toutes ces operations peuvent etre realisees par un code decalcul par elements finis comme ANSYS par exemple. Pour le travail virtuel des forces de contactqui est donne par l’equation (2.34), quelques developpements sont necessaires.
Linearisation des cinematiques du contact
Pour approximer la formulation faible des equations en milieu continu, on introduit les fonc-tions tests δϕ(i)(i) ∈ U (i) pour chaque corps Ω(i). U (i) est l’ensemble de toutes les variations

30 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
admissibles δϕ(i) (continues et derivables) : Ω(i) −→ R3 satisfaisant la condition δϕ(i) = 0 surΓϕ. Les variations linearisees de h et ξ en X ∈ Γ(1) sont deduites des champs perturbes :
ϕ(1)ε = ϕ(1) + εδϕ(1)
ϕ(2)ε = ϕ(2) + εδϕ(2)
(2.35)
Ainsi, on definit la variation linearisee δβ(Y;ϕ(1),ϕ(2)) d’une fonction β(Y;ϕ(1),ϕ(2)) donneepour tout Y ∈ Γ(1) par :
δβ(Y;ϕ(1),ϕ(2)) =d
dε
∣∣∣∣ε=0
β(Y;ϕ(1)ε ,ϕ(2)
ε ) (2.36)
En utilisant l’equation (2.15), on calcule δh:
δh = δ−[ϕ(1)(X) − ϕ(2)(Y(X))] · ν
= δ‖ϕ(1)(Y) − ϕ(2)(Z(Y))‖sgn(h)=
sgn(h)|h| [ϕ(1)(Y) − ϕ(2)(Z(Y))] · [δϕ(1)(Y) − δϕ(2)(Z(Y)) − ταδξα]
= −ν · [δϕ(1)(Y) − δϕ(2)(Z(Y))] (2.37)
De plus, on deduit de l’equation (2.5) que :
δϕ(i) = δu(i) (2.38)
D’ou, l’equation (2.37) peut se mettre sous la forme :
δh = −ν · [δu(1)(Y) − δu(2)(Z(Y))] (2.39)
La quantite ξ ne peut pas etre ecrite explicitement en fonction de la deformation. C’est pourquoi lecalcul de δξα ne peut pas etre obtenu directement. Comme point de depart, on utilise l’expressionsuivante :
[ϕ(1)(Y) − ϕ(2)(Z(Y))] · τα = 0 (2.40)
La linearisation des variations de l’equation (2.40) donne :
δϕ(1)(Y) − δϕ(2)[Z(Y)] − τγδξγ · τα − hν · δϕ(2)∂ξα
[Z(Y )] + eα,β(ξ)δξβ = 0 (2.41)
Apres rearrangement et en utilisant l’equation (2.38), on obtient :
Aαβδξβ = δu(1)(Y) − δu(2)[Z(Y)] · τα − hν · δu(2)∂ξα
[Z(Y)] (2.42)
ouAαβ = mαβ + hν · eα,β(ξ) (2.43)
Dans le cas h = 0, et en utilisant la base duale, on peut mettre l’equation (2.42) sous la forme :
δξβ = τβ ·δϕ(1)(Y) − δϕ(2)[Z(Y)]
(2.44)

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 31
Discretisation spatiale de Wc
On introduit u(i)h et δu(i)h , les discretisations spatiales de u(i) et δu(i). Sur un element, u(1)h
el
s’exprime sous la forme :
u(1)h
el (η) =nne∑i=1
N i(η)u(1)i (2.45)
u(1)h
el est la fonction d’interpolation qui approche u(1) sur un element, et u(1)i est la valeur nodale
de u(1)h pour le noeud i. On definit aussi nne qui est le nombre de noeuds par element de surfaceet N i(η) qui est une fonction isoparametrique standard.Pour des elements de contact 2D, on utilise en general une interpolation lineaire [57, 58] ou uneinterpolation quadratique [59, 60]. Pour les elements de contact 3D, les publications etudient engeneral le cas de l’element carre a quatre noeuds car on utilise souvent des elements hexaedriquesa huit noeuds [54, 8, 55] dans le maillage des structures 3D.On procede de facon similaire pour l’interpolation de δu(1).
Le travail virtuel du contact de l’equation (2.34) dans l’espace discretise s’ecrit :
Wc(uh, δuh) =∫
Γ(1)h[σd,h
c,Nδhh + σd,hc,Tα
δξhα]dΓ(1)h
(2.46)
Cette expression peut etre reecrite sous la forme d’une somme d’integrales sur les n(1)el elements
de Γ(1)h:
Wc(uh, δuh) =n
(1)el∑
j=1
∫Γ
(1)hej
[σd,hc,Nδhh + σd,h
c,Tαδξh
α]dΓ(1)h
ej(2.47)
Chaque integrale de la somme peut etre evaluee par une methode de quadrature :
Wc(uh, δuh) ≈
n(1)el∑
j=1
nint∑k=1
wj,kdet(Jj)
[σd,hc,Nδhh + σd,h
c,Tαδξh
α]
=n
(1)el∑
j=1
nint∑k=1
wj,kdet(Jj)
δUk · σcd,k
(2.48)
ou δUk represente le vecteur des variations nodales pour le point de quadrature k et σd,kc le vecteur
residuel pour le point de quadrature k. De plus, wj,k definit le poids du point de quadrature k del’element j dans l’integration et Jj la Jacobienne qui relie les dimensions de l’element j de Γ(1) aun element isoparametrique standard.
Calcul des contraintes de contact σd,kc pour un point de quadrature k de Γ(1)
L’exposant k est supprime des notations dans cette partie. On considere un element de contactsurfacique pour lequel on utilise les notations de la figure (2.2).

32 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
1 2
0
4 3
eyex
Fig. 2.2: Representation et parametrisation de l’element isoparametrique standard a quatrenoeuds. Le noeud 0 represente le noeud esclave de l’element de contact.
Pour le vecteur des variations nodales δU, on pose la definition suivante :
δU =
δu(1)(Y)δu(2)(Z1)
...δu(2)(Z4)
(2.49)
On introduit aussi quelques vecteurs que l’on utilisera dans la suite :
N0 =
ν
−N1(ξ)ν...
−N4(ξ)ν
, Tα =
τα
−N1(ξ)τα
...−N4(ξ)τα
, Nα =
0−N1
∂ξα(ξ)ν
...−N4
∂ξα(ξ)ν
, (2.50)
et definit les vecteurs D1 et D2 que l’on utilise pour exprimer le vecteur des contraintes decontact :
D1 =
1det(A)
[A22(T1 + hN1) − A12(T2 + hN2)]
D2 =1
det(A)[A11(T2 + hN2) − A21(T1 + hN1)]
(2.51)
Le vecteur des contraintes de contact peut alors s’exprimer par :
σdc = σd
N ·N0 + σT1 · D1 + σdT2
·D2 (2.52)
Ce resultat est celui obtenu par Laursen et Simo [8]. En fait, des conditions de contact, on peutdeduire que :
σdT1
· h = 0 (2.53)
σdT2
· h = 0 (2.54)
D’ou, l’equation (2.64) peut etre ecrite sous une forme plus concise :
σc = pT · T · σdc (2.55)

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 33
avec
σdc =
[σd
N σdT1
σdT2
]Tle vecteur des contraintes de contact dans la base duale,
T =[
ν τ1 τ2
]la matrice de transformation de la base duale dans la base de reference,
p =[
I3 −N1(ξ)I3 −N2(ξ)I3 −N3(ξ)I3 −N4(ξ)I3]
la matrice des coefficients de l’in-terpolation (invariante pour toutes les bases),
I3 la matrice identite de rang 3.
Pour la fonction de forme N i(ξ), il y a plusieurs solutions en fonctions de la forme de l’element,du nombre de noeuds par element et de l’ordre d’interpolation (Voir annexe A). Pour l’elementcarre a quatre noeuds etudie dans cette partie, l’interpolation d’ordre zero est lineaire. L’approxi-mation uh de u est donnee par :
uh(ξ) =4∑
i=1
N i(ξ)ui (2.56)
ou
N i(ξ) =14(1 + ξ1ξ
i1)(1 + ξ2ξ
i2) i = 1, · · · , 4 (2.57)
Comme l’a fait remarquer Bittencourt et Creus [55], de nombreux auteurs, et en particulierLaursen et Simo [8], restent tres vagues sur la definition de la base locale et ne semblent pastenir compte du fait que l’element surfacique initial ne reste pas necessairement plan lors de ladeformation. C’est pour cette raison que Bittencourt et Creus [55] definissent un plan moyen afinde determiner s’il y a contact ou non et la position de ce contact.
Pourtant, cette approche resulte d’une mauvaise comprehension de la nature 3D de l’interpo-lation. En fait, lorsque Laursen et Simo [8] parlent d’une interpolation sur l’element surfaciquea quatre noeuds, cela laisse penser que l’on a une interpolation 2D alors qu’il s’agit bien d’uneinterpolation 3D. Il serait donc preferable d’expliquer que l’on utilise une interpolation lineairesur un cube a huit noeuds.
N i(ξ) =18(1 + ξ1ξ
i1)(1 + ξ2ξ
i2)(1 + ξ3ξ
i3) i = 1, · · · , 8 (2.58)
Sur ce cube, seule la facette en ξ3 = 1 ou l’on etudie le contact nous interesse si bien quel’interpolation sur la facette s’ecrit simplement :
N i(ξ) =14(1 + ξ1ξ
i1)(1 + ξ2ξ
i2) i = 1, · · · , 4 (2.59)
Il est important de noter que cette interpolation s’applique dans toutes les directions. C’est bience qui a ete fait par Laursen et Simo [8] sans l’expliquer en detail. Connaissant les deplacements

34 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
aux noeuds, les fonctions d’interpolation nous permettent de definir une fonction parametree dela position des points de l’interface :
z(ξ) =4∑
i=1
N i(ξ) (Zi + ui) (2.60)
A partir de cette fonction parametree, il est alors possible de definir les vecteurs tangents de labase convectee en tout point ξ :
e1 =∑4
i=1ξ1,i
4 (1 + ξ2ξ2,i) (Zi + ui)e2 =
∑4i=1
ξ2,i
4 (1 + ξ1ξ1,i) (Zi + ui)(2.61)
pour determiner le point projete z il est ensuite necessaire de resoudre le systeme :eT1 · (y0 − z(ξ)) = 0
eT2 · (y0 − z(ξ)) = 0
(2.62)
avec y0 la position du noeud esclave de γ(1)h
t dont on cherche le projete sur γ(2)h
t .On a donc un systeme de deux equations a deux inconnues que l’on peut resoudre en utilisant
une methode d’optimisation par exemple. Une fois que la position ξ a ete determinee, les vecteursde la base convectee et la hauteur sont simples a calculer. Cette procedure doit etre realisee achaque pas de temps. La definition d’un plan moyen comme cela a ete propose par Bittencourtet Creus [55] peut cependant etre utilisee dans l’hypothese ou les deformations de l’element sontfaibles dans la direction normale pour obtenir directement une solution approchee de ξ.
Generalisation
On definit le vecteur generalise du deplacement des noeuds de γ(1)het γ(2)h
par :
U =
Uln
Unl
(2.63)
avec Uln =
U(1)h
ln
U(2)h
ln
et Unl =
U(1)h
nl
U(2)h
nl
Cette definition de U est utilisee dans la suite. Le vecteur des forces de contact Fc peut etre ecritsous la forme :
Fc =
0
Fc,nl
(2.64)
La partie de Fc qui correspond aux ddls lineaires est nulle.Apres assemblage des elements, Fc,nl peut s’ecrire sous la forme :
Fc,nl = pTnl
·T · Fdc (2.65)
On definit alors le vecteur des forces de contact dans la base duale, ou la ieme ligne est la forceconcentree au noeud i :
Fdc = w
σdc,1...
σd
c,n(1)nl
(2.66)

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 35
Cette force est representative de la pression qui s’exerce sur une surface qui entoure le noeud etresulte de l’integration sur cette surface.
On notera que w est une matrice par blocs definie par diag(∑n
(1)el
j=1 wj,kdet(Jj)I3
)16k6n
(1)nl
qui
represente les coefficients de Gauss associes aux noeuds d’elements isoparametriques. n(i)nl est le
nombre de noeuds non lineaires sur γ(i).La matrice de transformation generalisee s’ecrit :
T = diag(Tj) (2.67)
avec Tj la matrice de transformation de la base convectee a la base de reference du noeud j deγ(1) en contact avec γ(2).La matrice des coefficients d’interpolation associee a la surface maıtre Γ(2) est definie par :
pTnl
=
I3∗n(1)
nl
P
(2.68)
avec P une matrice par bloc definie par (−N i,j(ξj)I3)16i6n
(1)nl ,16j6n
(2)nl
.
On remarquera que wj,k est nul si le noeud k n’appartient par a l’element de surface j de Γ(1).N i,j(ξj) est nul si le noeud i de γ(1) et le noeud j de γ(2) ne sont pas sur un meme element decontact surfacique.
Par consequent, l’equation (2.64) peut se mettre sous la forme :
Fc = pT ·T ·Fdc (2.69)
avec pT =
0
pTnl
Equation matricielle du mouvement
Ainsi, on obtient une equation de la forme :
MU + CU + KU + pTTFdc = Fex (2.70)
ou C est definie par :
C = αM + βK α, β = coefficients constants (2.71)
Il y a 3(n(1) + n(2)) equations et 3(n(1) + n(2) + n(1)nl ) inconnues. Il sera donc necessaire de definir
de nouvelles relations par la suite. On traitera cette question au chapitre trois.
2.4 Methodes de condensation
Si l’on cherche a determiner le comportement vibratoire d’un systeme avec une grande precision,le modele peut necessiter un nombre tres important de ddls. C’est generalement le cas dans les

36 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
etudes industrielles, et en particulier pour la SNECMA dans le cas d’une roue aubagee de moteurd’avion. Berthillier et al [61] nous donnent l’exemple du maillage d’un secteur qui comprend uneaube, une partie du rotor et un frotteur. Un secteur est defini de telle sorte qu’il soit possiblede construire un modele de la roue aubagee complet par symetrie cyclique. Pour le secteur re-tenu par Berthillier et al [61], on notera que le maillage comprenait 82000 ddls et que les rouesaubagees peuvent compter jusqu’a une centaine de secteurs. Une resolution directe de l’equationdifferentielle obtenue par la methode des elements finis n’est pas envisageable en raison des limi-tations imposees par l’informatique du point de vue de la memoire et des temps de calcul.
La seule solution consiste donc a diminuer tres largement l’ordre du systeme. A cet effet,differentes methodes ont ete elaborees par le passe qui se basent sur une sous-structuration dela structure. Cette demarche a plusieurs avantages. Il est ainsi possible de partitionner un projeten plusieurs sous-projets independants, modifier une sous-structure sans remettre en cause lereste du projet, et n’etudier qu’une seule sous-structure dans le cas d’un systeme ou plusieurssous-structures sont identiques.
Une sous-structure peut alors etre condensee en utilisant des techniques telles que Guyan [62],Craig & Bampton [63] ou Mac Neal [64], qui se basent sur des approches en formalisme dual ouprimal. Certains auteurs tels que Imbert [65] font une synthese sur ces differentes methodes. Onnotera aussi que des techniques hybrides ont aussi ete developpees par Jezequel [66].
2.4.1 Condensation de Guyan
On considere la reponse libre d’une structure. La formulation matricielle de l’equation dumouvement peut se mettre sous la forme :
KU = F avec F = ω2MU (2.72)
La methode de Guyan consiste a condenser les ddls qui ont peu d’influence sur la dynamique dusysteme (2.72). Pour cela, on classe les ddls en deux categories : les maıtres (indices m) et lesesclaves (indices e).Les ddls maıtres doivent etre choisis de telle sorte que les forces d’inertie correspondant aux ddlsesclaves puissent etre negligees. L’equation matricielle du systeme libre peut alors s’ecrire souscette forme : [
Kmm Kme
Kem Kee
][Um
Ue
]=
[Fm
Fe
]'[
Fm
0
](2.73)
On en deduit que le vecteur des deplacements U peut etre exprime a partir des ddls maıtres :
U = ΨUm (2.74)
avec
Ψ =
[I
−Kee−1Kem
](2.75)
Chaque colonne de Ψ correspond a une deformee statique de la structure pour un deplacementunitaire sur l’un des ddls maıtres et nul sur les autres. Ces modes statiques peuvent etre utilises

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 37
comme vecteurs de base dans une methode de Ritz pour definir le sous-espace des premiers modes.On peut ecrire les energies cinetiques et de deformation dans la nouvelle base generalisee a partirde la relation (2.74) :
* Energie cinetique :
Ec =12UTMU =
12UT
mMmmUm (2.76)
* Energie de deformation :
Ed =12UTKU =
12UT
mKmmUm (2.77)
Avec :
Mmm = ΨT · M · Ψ (2.78)
Kmm = ΨT ·K · Ψ (2.79)
Il est important de retenir que c’est le choix des ddls maıtres qui va conditionner la precision desresultats. L’hypothese principale a respecter est la suivante : les forces d’inertie des ddls esclavesdoivent etre negligeables par rapport a celles des ddls maıtres.
Cette methode pourrait aussi etre utilisee dans le cadre des techniques de sous-structuration.Pour cela, les ddls maıtres retenus pour une sous-structure sont les ddls de frontiere et certains ddlsinternes. Apres assemblage des matrices condensees, on peut reiterer une nouvelle condensationde Guyan [62] pour supprimer certains ddls qui ne sont pas essentiels a l’analyse dynamique dela structure (en particulier dans les ddls d’interface).
2.4.2 Methodes de synthese modale
Ces methodes sont associees a des methodes de Ritz dans lesquelles les vecteurs de baseretenus pour chaque sous-structure sont des modes de deformation statique et des modes propresavec differentes conditions limites.
Il existe deux sortes de modes statiques. Les modes statiques de liaison d’une part qui sont desmodes de deformation correspondant a des deplacements d’interface imposes. Les modes d’attached’autre part qui correspondent aux modes de deformation statique produits par des forces unitesimposees aux ddls de liaison.
Cependant, dans le cadre de la synthese modale par la methode des deplacements, on utiliseque les premiers. Les differentes techniques ne different alors que par le choix de la base modaleet de la procedure de couplage. Si l’on exclu les methodes hybrides, on peut les classer en troiscategories : les methodes a interface fixe, les methodes par superposition, les methodes a interfacelibre. Ces differents points sont discutes dans la suite.

38 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
Methodes a interface fixe
Ce type de methode est le plus souvent applique sous la forme de la variante introduite parCraig & Bampton [63]. En effet, celle-ci ne necessite pas une gestion particuliere des modes rigidespar rapport aux autres modes statiques.
Dans la structure, on distingue deux types de ddls : les ddls internes indices i et les ddlsd’interface (ou de jonction) indices j.L’equation du mouvement de la structure peut alors s’ecrire sous la forme :[
Mjj Mji
Mij Mii
][Uj
Ui
]+
[Kjj Kji
Kij Kii
][Uj
Ui
]=
[Fj
0
](2.80)
On approche le mouvement d’une sous-structure par la methode de Ritz sur la base des formespropres a interface fixe Φ et des modes statiques de liaison Ψ :
U = ΨUj + ΦQ =[
Ψ Φ] [ Uj
q
]︸ ︷︷ ︸
Q
(2.81)
Les modes normaux a interface fixe sont obtenus pour Uj = 0. Pour les modes statiques deliaison, on utilise l’equation d’equilibre :[
Kjj Kji
Kij Kii
] [Uj
Ui
]=
[Fj
0
](2.82)
On en deduit :
Ui = −K−1ii KijUj (2.83)
La position d’equilibre peut donc etre exprimee a partir des ddls d’interface :
U =
[I
−K−1ii Kij
]︸ ︷︷ ︸
Ψ
Uj (2.84)
On peut donc ecrire l’equation (2.81) sous la forme :
U =
[I 0
−K−1ii Kij Φi
]Q (2.85)
A partir de la matrice de transformation definie dans l’equation (2.81), on definit les matrices demasse et de raideur dans la nouvelle base a partir de la formulation des energies cinetique et dedeformation :
Ec =12UTMU =
12QTKQ (2.86)
Ed =12UTKU =
12QTKQ (2.87)

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 39
avec
K =
[ΨT
ΦT
][Kjj Kji
Kij Kii
] [Ψ Φ
](2.88)
M =
[ΨT
ΦT
][Mjj Mji
Mij Mii
] [Ψ Φ
](2.89)
Ce qui peut encore se mettre sous la forme :
K =
[Kjj − KjiK
−1ii Kij 0
0 ΦTi KiiΦi
](2.90)
M =
[Mjj Mjq
Mqj ΦTi MiiΦi
](2.91)
ou l’indice q correspond aux ddls internes condenses sur la base modale tronquee.On notera que les matrices ΦT
i KiiΦi et ΦTi MiiΦi sont diagonales.
De plus, le travail des forces exterieures peut s’exprimer sous la forme :
Wext = UTF = QTF (2.92)
avec : F =
[ΨT
ΦT
]F.
Pour un assemblage de plusieurs sous-structures, les energies s’ajoutent. On peut donc en deduirel’equation matricielle du mouvement pour le systeme complet. Le vecteur generalise du mouve-ment est alors construit a partir des differents ddls qui interviennent dans les differentes sous-structures.
Methode par substitution
Cette methode est particulierement bien adaptee a l’etude des structures qui peuvent sedecomposer en un element principal sur lequel sont connectes des composants secondaires (appelesbranches). Dans la litterature, on peut aussi la trouver sous l’appellation : technique des branches.Le principe de base de la methode est de definir le mouvement de la sous-structure principalea partir de ses modes propres a interface libre. A noter que la technique peut etre nettementamelioree en utilisant les modes propres avec interface chargee. La notion d’interface chargeeconsiste a ajouter les matrices de masse et de raideur obtenues pour les ddls d’interface des sous-structures secondaires aux ddls d’interface de la structure principale. La methode de Ritz permetalors d’ecrire le mouvement de la sous-structure principale sous la forme :
U1 = ΦT1 Q1 (2.93)
A noter cependant que l’analyse de la sous-structure principale n’est alors plus independantedes branches. En effet, l’equation du mouvement de la sous-structure principale va dependre desmatrices de masse et de raideur des sous-structures secondaires condensees a l’interface. Pour

40 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement
remedier a cela, on utilise souvent une sous-structure de reference pour le calcul de la sous-structure principale. Puis, pour prendre en compte les differences qui peuvent exister entre lasous-structure de reference et les sous-structures secondaires, on utilise differentes techniques deperturbation. La condensation de la sous-structure secondaire est generalement realisee par lamethode de Craig et Bampton [63].
Methodes a interfaces libres
La methode de Mac Neal [64] est la plus simple et la plus utilisee de ces methodes. On noteraqu’elle peut etre etendue par l’utilisation de modes propres avec conditions hybrides.
Dans ces methodes, on caracterise le mouvement de chaque sous-structure a partir de sesmodes propres a interface libre. Le mouvement d’une sous-structure est approxime par la methodede Ritz sur la base des formes propres a interface libre Φ :
U = Φq (2.94)
avec Φ une matrice contenant la base tronquee des modes propres a interfaces libres pour lasous-structure.
La troncature de la base modale peut conduire a des erreurs inacceptables sur le comportementdynamique de la structure. Aussi, Mac Neal propose de prendre en compte l’effet statique desmodes superieurs tronques par une correction de flexibilite residuelle. Definissons tout d’abord lamatrice de flexibilite dynamique pour un systeme d’ordre N :
G =N∑
k=1
ΦkΦTk
ω2k − ω2
(2.95)
Cette matrice est obtenue en cherchant une solution particuliere a l’equation du mouvement. Lareponse forcee peut alors s’ecrire sous la forme :
U0 = Φq0 + GF (2.96)
avec : Φq0 solution de l’equation homogene,GF solution particuliere
En general, cette solution a un cout numerique tres important. Aussi, on prefere generalementapprocher la solution. La methode de Ritz (equation (2.94)) nous donne une solution approcheede la reponse forcee :
U = Φq (2.97)
En fait, la solution exacte (equation (2.96)) peut etre decomposee en deux parties : l’une quidepend des m premiers modes, l’autre qui est fonction des modes d’ordre superieur.
U0 = U1 + U2 (2.98)
avec : U1 = Φ1q1 + G1F,U2 = Φ2q2 + G2F
Le premier terme U1 correspond exactement a U (equation (2.97)). On constate que la difference

Chapitre 2 : Mise en equation d’un probleme de contact avec frottement 41
entre la solution exacte et la solution approchee tient au terme U2. La methode de Mac Nealpreconise de prendre en compte l’effet statique de ce terme (approximation du 1er ordre). Del’equation (2.95), on deduit la matrice de flexibilite statique :
G0 =N∑
k=1
ΦkΦTk
ω2k
(2.99)
Pour le terme U2, c’est en fait la flexibilite residuelle qui intervient. Elle s’obtient en realisant ladifference entre la flexibilite statique et la somme des flexibilites effectives pour les modes retenus :
Gres = G0 −m∑
k=1
ΦkΦTk
ω2k
(2.100)
On peut ainsi ecrire la composante statique du terme U2 sous la forme : GresF.La relation de base pour chaque sous-structure peut donc s’ecrire sous la forme :
U = Φq + GresF (2.101)
avec Φq solution approchee de la reponse forcee sur la base des modes retenus,GresF terme de correction
Pour l’assemblage de deux sous-structures, on utilise deux relations de couplage a l’interface :
• compatibilite des deplacements :q1
j = q2j (2.102)
• equilibre des forces :F1
j + F2j = 0 (2.103)
2.5 Conclusions
Dans ce chapitre, on a tout d’abord formule l’approche variationnelle des problemes de contactavec frottement. Pour cela, on s’est appuye en grande partie sur les travaux de Laursen et Simo[8].
De cette formulation du probleme, on a ete en mesure d’etablir une equation matricielle duprobleme. On notera que dans l’expression des forces non lineaires, on a bien fait ressortir lesinterpolations et les bases duales.
Pour finir, on a explique pourquoi il etait souvent necessaire de reduire la taille des systemesa resoudre. Les methodes de condensation les plus classiques ont ete decrites succinctement.
Dans la suite de l’etude, on ne tiendra pas compte des condensations dans les explicationstheoriques pour simplifier la presentation. On notera cependant que les differentes methodes quiseront presentees peuvent etre appliquees a un systeme condense sans difficultes supplementaires.Une grande partie des exemples qui seront traites ont d’ailleurs ete condenses au prealable.

42 Chapitre 2 : Mise en equation d’un probleme de contact avec frottement

Chapitre 3
Approche du probleme de resolution
en quasi-statique
3.1 Introduction
Dans cette etude, on s’inscrit dans la suite des travaux realises par Guillen et Pierre [67] pourla SNECMA. Pour determiner la reponse stationnaire d’un systeme de contact avec frottementen dynamique, on souhaite conserver une methode qui alterne le domaine temporel et le domainefrequentiel. Les developpements recents ont montre que ces methodes permettaient d’obtenir detres bons resultats pour des systemes faiblement amortis.
Cependant, lorsque ce type de methode est utilise, il n’est plus possible d’etudier du contactavec frottement a partir de n’importe quelle representation elements finis de la structure. En fait,si l’on considere le cas de deux corps, les ddls appartenant a la surface de contact de l’un des corpsseront geres differemment du reste de la structure. On nomme As l’ensemble des ddls associes acette surface et Av l’ensemble des ddls composant le reste de la structure (pour les 2 corps). Lesmethodes qui alternent le domaine frequentiel et le domaine temporel determinent la solution duprobleme de facon iterative en deux sous-etapes. A une iteration i donnee, la premiere consistea estimer les deplacements sur l’ensemble des ddls de Av en frequentiel a partir des resultatsobtenus a l’iteration i − 1. Ainsi, les deplacements de la structure sont connus pour les ddls deAv sur une periode. Pour cela, on utilise des methodes de resolution qui determinent les zeros deproblemes non lineaires contraints tels que Newton-Raphson, Broyden, Powell ou des methodeshybrides. Dans la seconde etape, on determine a la fois les forces non lineaires et les deplacementsassocies aux ddls de l’ensemble As [67, 68].
Le traitement du probleme peut devenir tres complique si les equations du mouvement as-sociees aux ddls de As sont complexes. En general, les ddls associes a un noeud de As sur lasurface de contact ne sont relies qu’aux ddls associes a un noeud de Av. De plus, la masse etl’amortissement associes a chaque ddl de As ne sont generalement pas pris en compte. Dans lecas ou l’ensemble des ddls appartenant a un corps et l’ensemble des ddls appartenant a la surface
43

44 Chapitre 3 : Approche du probleme de resolution en quasi-statique
de contact sur ce meme corps sont confondues, quelques modeles plus compliques ont ete etudiesen introduisant des raideurs entre les differents ddls de l’ensemble As (les noeuds sont couples).Guillen et Pierre [67] puis Lagrange et Pierre [69] ont ainsi etudie l’effet du frottement sec defrotteurs sur les vibrations d’aubes lorsque le frotteur est modelise par plusieurs noeuds.
Dans le cadre de cette these, on souhaite supprimer la distinction entre les ddls de As etceux de Av. En fait, on voudrait que les deplacements de tous les ddls soient estimes par unemethode de resolution qui reste a definir lors de la premiere etape de l’iteration i. Dans ce cas,on supprimerait les restrictions liees a la definition du modele elements finis des corps en contact.La difficulte consiste alors a calculer les forces non lineaires dans la deuxieme etape lorsque lesdeplacements sont calcules en frequentiel.
Pour le calcul numerique des forces non lineaires, une solution pourrait consister a utiliserles methodes d’optimisation pour des problemes contraints. Malheureusement, les methodes exis-tantes ne permettent pas l’etude de problemes de contact dans le domaine frequentiel, mais dansle domaine temporel uniquement.A noter que le contact avec frottement introduit des inegalites variationnelles. Dans le cadredes methodes d’optimisation, differentes methodes existent pour transformer ces inegalites enegalites. Les plus courantes ont fait l’objet de nombreuses etudes : les multiplicateurs de Lagrange[6, 70, 71, 72], les methodes de penalite [52, 73, 7] et les Lagrangiens augmentes [8, 9, 10, 11].Certaines de ces methodes permettent de reduire la taille du systeme etudie en formulant lesforces non lineaires a partir des deplacements. Dans ce cas, les contraintes sur le frottement et lanon penetration sont verifiees approximativement avec une precision qui depend du choix d’uncoefficient de penalite. On notera en particulier la methode de penalite ou les Lagrangiens Aug-mentes. Ces formulations restent coherentes avec les multiplicateurs de Lagrange. De nombreuxarticles traitent de ce type de probleme dans le cadre de grandes deformations pour la methodedes elements finis [8, 6, 54, 57] ou des elements de frontiere [59, 74, 60].
Pour la resolution des deplacements, la methode que l’on cherche a developper se rapproche decelles qui alternent entre le domaine frequentiel et le domaine temporel. Pour le calcul des forcesnon lineaires, on cherchera a developper une formulation des Lagrangiens a partir de resultats surles deplacements obtenus en frequentiel. Par exemple, les Lagrangiens Augmentes seront definisen frequentiel par analogie avec la definition classique des Lagrangiens Augmentes. Pour ce faire,il nous faudra etre a meme d’ecrire les equations de contrainte en frequentiel. Et cela, sans savoira priori s’il y a contact ou non pour un element de contact a l’instant t de la periode, et si oui,s’il est glissant ou non. La nouvelle methode et tous les nouveaux aspects theoriques qui lui sontassocies seront developpes dans la partie suivante.
Dans ce chapitre, on expliquera plus en detail les differentes methodes d’optimisation que l’onpeut envisager pour resoudre des problemes non lineaires de points fixes.
Ensuite, on s’interessera aux methodes d’optimisation pour des problemes contraints en quasi-statique. Une nouvelle approche sera proposee pour le calcul des forces non lineaires.
On etudiera egalement des problemes de contact avec frottement en utilisant une representation

Chapitre 3 : Approche du probleme de resolution en quasi-statique 45
Ur,i,n
èmei élément de contact
U
U
Point de contact
Noeud esclave
nl,i,n
nl,i,n
(2)
(1)
Ω(1)
Ω(2)
Fig. 3.1: Element de contact noeud-point en 2D. Ici, le point de contact resulte d’une interpolationlineaire a partir de deux noeuds du corps maıtre Ω(1).
noeud-point pour modeliser le contact (figure 3.1). Dans un element de contact noeud-point, lenoeud correspond au noeud esclave et le point est defini par une interpolation a partir des noeudsesclaves. Les imprecisions liees aux interpolations polynomiales sur le deplacement seront misesen avant et on proposera une nouvelle solution pour ameliorer les resultats.
Enfin, on envisagera la possibilite d’etendre la methode aux problemes dynamiques avant deconclure.
3.2 Resolution de systemes non lineaires
3.2.1 Introduction
Dans cette partie, on limite la discussion au cas de systemes non lineaires bien definis (nequations et n inconnues), et non contraints. A partir des equations du mouvement, on peutecrire le probleme sous la forme :
Resoudre f(U) = 0 (3.1)
avec f(U) une fonction non lineaire de U.Pour resoudre un tel probleme, la methode de Newton-Raphson qui s’appuie sur une linearisationde la fonction f(U) est sans doute la plus repandue. Une autre approche bien connue consistea utiliser une fonction potentiel P(U). La fonction P(U) est alors definie de telle sorte que∇P(U) = f(U).
La methode de Newton est a la base de la plupart des methodes d’optimisation. Fletcher [14]expose dans le detail ces differentes methodes. Dans un premier temps, on abordera la methodede Newton et ses derivees. Ensuite, on expliquera l’approche quasi-Newtonienne et les methodesqui entrent dans cette categorie. Pour finir, on etudiera la methode de Gauss-Newton et cellesqui derivent de cette theorie.

46 Chapitre 3 : Approche du probleme de resolution en quasi-statique
3.2.2 Methode de Newton et derivees
Le probleme a resoudre s’ecrit sous la forme :
Minimiser J (U) (3.2)
avec J une fonctionnelle a minimiser.On approxime le probleme par un modele quadratique en introduisant un developpement deTaylor au second ordre :
J (Uk + δU) ' J k(δU) = J (Uk) + gk,TδU +12δUTGkδU (3.3)
ou gk et Gk definissent respectivement la derivee et la derivee seconde de J (U) par rapport aU en Uk. On notera aussi que les exposants k et T representent respectivement la keme iterationdans l’algorithme de resolution et la transposee.Dans ce modele, la matrice Gk est symetrique par definition, donc diagonalisable. Elle peuts’ecrire sous la forme LkDkLk,T avec L une matrice triangulaire inferieure et D une matricediagonale.La methode requiert donc les derivees d’ordre zero, un et deux de J (U) en Uk pour que J k
soit defini en tout point. De plus, le point δU qui minimise J k est unique si et seulement si lamatrice Gk est definie positive. La methode de Newton ne peut donc etre utilisee que dans cescirconstances. Dans ce cas, le δUk qui minimise J est definie par la condition :
∇J k(δUk) = 0 (3.4)
Le probleme peut donc s’ecrire sous la forme :Resoudre GkδUk = −gk pour δU = δUk
Poser Uk+1 = Uk + δUk(3.5)
La methode de Newton n’est pas generalisable a tous les problemes introduits par l’equation(3.1) car la matrice Gk n’est pas toujours definie positive. De plus, meme dans le cas ou Gk estdefinie positive, la convergence de l’algorithme n’est pas garantie car la suite J (Uk) ne decroıtpas forcement.Une solution consiste a ajouter une direction de recherche bien choisie. Pour cela, on introduitune nouvelle variable sk definie par :
sk = −Gk,−1δUk (3.6)
Le nouveau probleme s’ecrit alors sous la forme :
sk = −Gk,−1δUk
Trouver αk pour minimiser J (Uk + αsk)Poser Uk+1 = Uk + αksk
(3.7)

Chapitre 3 : Approche du probleme de resolution en quasi-statique 47
Dans le cas ou Gk et par consequent Gk,−1 sont definies positives, on a une methode de descente[14]. A noter cependant qu’il existe des cas ou l’utilisation d’une direction de recherche peutechouer.
Pour resoudre ce probleme, une nouvelle solution consiste a utiliser la methode de plus pro-fonde descente lorsque Gk n’est pas definie positive. Il serait alors possible de montrer en utilisantun critere sur l’angle que la convergence vers un point stationnaire est assuree. On n’explicitepas ici ce critere, mais on pourra se referer a Fletcher [14] pour plus de details. Une approchealternative consiste a modifier la direction de recherche de Newton en ajoutant un multiple de lamatrice identite a Gk et resoudre le systeme :
(Gk + ηI)sk = −gk (3.8)
A noter que η doit etre choisi de telle sorte que la matrice (Gk + ηI) soit definie positive.Cette methode est plus performante que la precedente car meme dans le cas ou la matrice Gk
n’est pas definie positive, l’information quadratique est utilisee pour la recherche de la solution.D’autres variantes ont ete proposees en remplacant la matrice identite par des matrices definiespositives.
3.2.3 Methodes quasi-Newtoniennes
Le principal defaut de la methode de Newton et de ces derivees, c’est que l’utilisateur doitprogrammer une fonction permettant le calcul de la derivee seconde Gk. Lorsque cela n’est paspossible mais que la derivee premiere gk est connue, la solution la plus simple consiste souvent acalculer Ak, la derivee de gk, par difference finie. Gk est alors definie par :
Gk =12(Ak + Ak,T) (3.9)
Ainsi, Gk est symetrique. A noter cependant qu’elle n’est pas necessairement definie positive.n operations de derivation sont necessaires et un systeme d’equations lineaire doit etre resolu achaque iteration. Cette procedure necessite donc un nombre important d’operations et le tempsde calcul necessaire augmente tres rapidement avec n.
La methode peut cependant etre interessante dans le cas de matrices creuses avec un nombreimportant d’inconnues lorsque le cout numerique de la difference finie peut etre fortement reduit.Le probleme du cout numerique peut aussi etre resolu en utilisant les methodes quasi-Newtoniennes.Ces methodes sont semblables aux methodes de Newton avec direction de recherche, sauf queGk,−1 est approchee par une matrice symetrique definie positive Hk qui est redefinie a chaqueiteration. Le probleme a resoudre s’ecrit alors sous la forme :
On pose sk = −Hkgk
Recherche le long de la direction sk donnant Uk+1 = Uk + αksk
Remise a jour de Hk pour obtenir Hk+1
(3.10)
La matrice H1 initiale peut etre choisie de facon arbitraire. En l’absence d’une meilleure estima-tion, on choisit souvent H1 = I. Ces methodes ont plusieurs avantages vis-a-vis de la methode de

48 Chapitre 3 : Approche du probleme de resolution en quasi-statique
Newton : seule la derivee premiere est necessaire, la matrice Hk qui est definie positive impliqueles proprietes de descente et le nombre d’operations a chaque iteration est de l’ordre de O(n2) aulieu de n3.
Pour la suite, on definit les deux differences suivantes :
δUk = αksk = Uk+1 − Uk
γk = gk+1 − gk(3.11)
A partir du developpement de Taylor (3.3), on deduit :
J (Uk + δUk) − J (Uk) = gkδUk +12δUk,TGkδUk + o(δUk,TδUk) (3.12)
D’ou, apres une derivation par rapport a δUk :
γk = GkδUk + o(‖ δUk ‖) (3.13)
δUk et γk peuvent seulement etre calcules apres la descente, si bien que Hk ne permet pas deles relier de facon exacte :
Hkγk ' δUk puisque Hk ' G−1 (3.14)
Par consequent, on definit Hk+1 de telle sorte que :
Hk+1γk = δUk (3.15)
Cette relation est parfois appelee la condition quasi-Newtonienne [14]. Differentes possibilitesexistent pour satisfaire cette condition. La plus simple consiste a ecrire :
Hk+1 = Hk + Ek (3.16)
avec Ek = auuT une matrice symetrique de rang 1.Pour satisfaire l’equation (3.15), on doit par consequent verifier :
Hkγk + auuTγk = δUk (3.17)
On en deduit que u doit etre proportionnel a δUk−Hkγk. En incluant les coefficients de propor-tionnalite dans la constante a, on peut tout simplement poser : u = δUk − Hkγk. La constantea doit alors verifier auTγk = 1. La formule permettant de calculer Hk+1 est alors simplementdonnee par :
Hk+1 = Hk +(δUk − Hkγk)(δUk − Hkγk)T
(δUk − Hkγk)T γk(3.18)
Cette formulation de rang 1 a ete introduite pour la premiere fois en 1969 par Broyden. Ellepresente cependant deux inconvenients, et cela meme lorsqu’elle est appliquee a une fonctionquadratique : la formule ne maintient pas la propriete de matrice definie positive pour Hk etle denominateur peut devenir nul. Une formule plus flexible est obtenue par une correction derang 2 :
Hk+1 = Hk + auuT + bvvT (3.19)

Chapitre 3 : Approche du probleme de resolution en quasi-statique 49
Sans entrer dans les details, deux formulations importantes ont ete proposees. La premiere atout d’abord ete proposee par Davidon, puis reprise pas Fletcher et Powell. On parle de la formuleDFP, elle s’ecrit sous la forme :
Hk+1DFP = Hk +
δUkδUk,T
δUk,Tγk+
Hkγkγk,THk
γk,THkγk(3.20)
La seconde a ete suggeree par Broyden, Fletcher, Goldfarb et Shanno, elle est connue sous le nomde formule BFGS :
Hk+1BFGS = Hk +
(1 +
γk,THkγk
δUk,Tγk
)δUkδUk,T
δUk,Tγk−(
δUkδUk,THk + HkγkδUk,T
δUk,Tγk
)(3.21)
En remplacant H−1 par B, cette equation peut encore se mettre sous la forme :
Bk+1BFGS = Bk +
γkγk,T
γk,TδUk+
BkδUkδUk,TBk
γk,TBkγk(3.22)
Les formules de Hk+1DFP et de Bk+1
BFGS sont dites duales.D’apres Fletcher [14], la methode BFGS apparaıt comme etant la meilleure methode quasi-
Newtonienne. A noter que l’on peut definir d’autres formules a partir de celles deja introduitesauparavant. Une famille de formules de rang 2 peut etre generee en utilisant un parametre α :
Hk+1α = (1 − α)Hk+1
DFP + αHBFGS (3.23)
On parle de la famille de Broyden. Cette famille inclue la DFP (α = 0), la BFGS (α = 1), maisaussi la formule de rang 1.
Il est important de noter que les methodes quasi-Newtoniennes peuvent aussi etre combineesa un algorithme a pas restreint (restricted step algorithm). Comme l’explique Fletcher [14], cettemethode peut etre utilisee pour toutes les methodes de type Newton.
3.2.4 Methodes de Gauss-Newton et derivees
Dans le cas general, la methode de Gauss-Newton est utilisee pour minimiser une fonctionnellequi se definie par une somme de termes au carre :
J (U) =m∑
i=1
fi(U)2 = fT f (3.24)
On parle souvent d’un probleme non lineaire par moindres carres. Une facon alternative de poserle probleme s’ecrit simplement:
fi(U) = 0, i = 1, 2, . . . ,m pour m > n (3.25)
Les derivees g et G de f(U) par rapport a U s’ecrivent :
g(U) = 2Af (3.26)

50 Chapitre 3 : Approche du probleme de resolution en quasi-statique
G(U) = 2AAT + 2m∑
i=1
fi∇2fi (3.27)
avec A(U) = ∇f1,∇f2, . . . ,∇fm.Puisque f(U) est minimisee au sens des moindres carres, les composantes fi du vecteur f sontsouvent faibles. Par consequent, on approche G(U) par :
G ' 2AAT (3.28)
Cette approximation conduit de la methode de Newton a la methode de Gauss-Newton :AkAk,TδU = −Akfk pour δU = δUk
Poser Uk+1 = Uk + δUk(3.29)
Pour la methode de Gauss-Newton avec une direction de recherche sk, sk est la solution duprobleme lineaire :
AkAk,Tsk = −Akfk (3.30)
Pour l’inversion de AkAk,T une decomposition QR est appliquee. La methode de Gauss-Newtonest generalement bien meilleure que la methode quasi-Newtonnienne BFGS. Cependant, Fletcher[14] nous donne differents exemples dans lesquels la methode echoue ou converge tres lentement.Une solution pour resoudre ce probleme consiste a utiliser un algorithme a pas restreint (restrictedstep algorithm). Les methodes de ce type determinent la correction δUk qui resout le systeme :(
AkAk,T + νI)
δUk = −Akfk ν ≥ 0 (3.31)
Cette solution n’est pas encore completement satisfaisante. Une solution consiste alors aameliorer l’approximation de Gk dans les methodes non lineaires par moindres carres. Differentessolutions existent, on notera par exemple la methode hybride FX proposee par Fletcher et Xuen 1986 qui est une methode hybride entre les methodes de Gauss-Newton et BFGS. Ce type demethode est une methode de plus profonde descente en utilisant une approximation de la matriceHessienne Gk que l’on note Bk et qui est definie en appliquant la BFGS a Bk−1. Initialement,B1 est definie par l’approximation de Gauss-Newton. Il existe cependant une petite differenceavec la methode BFGS, le vecteur γk est defini par :
γk = 2Ak+1Ak+1,TδUk + (Ak+1 − Ak)fk+1 (3.32)
Sans cette modification, la matrice Bk+1 ne serait pas necessairement definie positive. La methodehybride FX presente d’excellentes proprietes de convergence en comparaison de la methode deGauss-Newton ou de la methode BFGS. Une autre approche consiste a appliquer la methodehybride Powell [75] (Gauss Newton + methode quasi-Newtonienne de rang 1 + methode dog-leg). La methode dog-leg est un algorithme a pas restreint developpe par Powell [75] qui utiliseune combinaison des directions de recherche de Newton et de la plus profonde descente. C’est lasolution qui a ete retenue par Garbow et al [76] qui ont developpe minpack-1 en 1980.

Chapitre 3 : Approche du probleme de resolution en quasi-statique 51
La methode de Newton-Raphson ne s’applique que dans le cas de n equations a n inconnueset derive de la methode de Gauss-Newton qui traite du cas plus general de m equations a n
inconnues avec m > n.
La methode de Newton-Raphson consiste a lineariser f(U) de telle sorte que :
fkl (U) ' f(Uk) + Ak,TδU (3.33)
Le systeme a resoudre s’ecrit alors sous la forme :
Resoudre Ak,TδU = −fk pour δU = δUk
Poser Uk+1 = Uk + δUk(3.34)
Dans la methode de Newton-Raphson, le probleme se pose de la meme facon que dans lamethode de Newton en remplacant Gk par Ak,T. On notera cependant que la matrice Ak,T
est generalement non symetrique a la difference de la matrice Gk utilisee dans la methode deNewton.
Pour l’inversion de Ak,T on utilise une decomposition LU. On notera que L definit une matricetriangulaire inferieure et U une matrice triangulaire superieure. C’est la seule difference avec lamethode de Gauss-Newton dans le cas m = n pour laquelle on utilise une decomposition QR. Lamatrice Q est orthogonale et R est une matrice triangulaire superieure.
3.2.5 Conclusion
L’etude des methodes d’optimisation tend a montrer que les chercheurs s’orientent vers ledeveloppement de methodes hybrides complexes. Les methodes les plus evoluees conjuguent desalgorithmes a pas restreint (qui font intervenir la methode de Gauss-Newton et la methode deplus profonde descente) et les methodes quasi-Newtoniennes. Dans les methodes hybrides, on apresente la methode hybride de Powell et la methode hybride FX.
L’utilisation des methodes quasi-Newtoniennes dans la resolution des problemes de contactavec frottement n’est pas encore tres repandue. Quelques parutions recentes ont cependant montreque cette strategie constituait une methode tres efficace et robuste. On notera en particulier deuxarticles : Laursen et Maker [10] qui utilisent cette demarche en quasi-statique avec les LagrangiensAugmentes (pour des problemes contraints); Guillen et Pierre [5] qui cherchent les solutions sta-tionnaires d’un probleme dynamique en utilisant l’element de contact bilineaire avec une methodequi alterne les domaines frequentiel et temporel (probleme contraint). Les methodes hybrides dutype Powell ou FX apparaissent cependant comme les plus performantes aujourd’hui. De memeque Poudou [68], on a choisi d’utiliser la methode hybride Powell dont le code informatiquedeveloppe par Garbow et al. en fortran77 est libre de droits.

52 Chapitre 3 : Approche du probleme de resolution en quasi-statique
3.3 Contact avec frottement en quasi-statique (en temporel)
3.3.1 Definition des contraintes associees au contact avec frottement
A chaque element de contact, on peut associer des equations pour forcer les contraintes enfonction de l’etat dans lequel il se trouve a l’instant tn (n est l’indice relatif a la discretisationen temps). Pour cela, il faut distinguer differents cas. Si l’element de contact n’est pas actif, cequi signifie qu’il n’y a pas contact, il n’y a pas d’equations de contraintes supplementaires. S’il ya contact sans glissement, tous les ddls sont bloques en relatif, on associe donc une contrainte achaque ddl. S’il y a contact avec glissement, il n’y a qu’une seule equation supplementaire pourle ddl associe a la direction normale. La force de frottement se deduit alors de la loi de Coulomb.
Il existe differentes facons d’exprimer les equations supplementaires de comptabilite pourdefinir les contraintes sur le deplacement. On peut utiliser des conditions sur le deplacementrelatif, la vitesse relative (Laursen et Simo [8]) ou l’acceleration relative (Wosle et Pfeiffer [77]).La vitesse relative est souvent utilisee car elle doit tout simplement etre nulle pour les ddls d’unelement de contact qui deviennent solidaires et cree un amortissement numerique qui facilite laconvergence des calculs.
Pour debuter notre etude, on a pourtant prefere definir les conditions de contact par rap-port aux deplacements. Cette formulation est la seule a introduire de facon explicite dans lesequations de contraintes une variable supplementaire qui se deduit de l’historique du mouve-ment : le deplacement relatif. Dans le cadre de notre recherche, il nous paraıt important de ne pasnegliger cet element qui n’est pas apparent dans les autres formulations (la vitesse et l’accelerationrelatives sont nulles pour les ddls solidaires) et qui constitue pourtant une piste d’investigationinteressante.
En supposant l’etat d’un element de contact i connu, on peut definir des equations supplement-aires. S’il y a contact sans glissement, le deplacement relatif reste constant, on peut exprimer cettecondition sous la forme :
pi,n
Ui,n = Xr,i,n (3.35)
ou les indices r, i et n sont a rattacher respectivement au deplacement relatif, a l’element decontact et a l’instant tn. Par consequent, Xr,i,n est le deplacement relatif impose a l’instant tn
sur l’element de contact i. Xr,i,n depend de l’historique du mouvement. On rappelle que Ui,n estle vecteur des deplacements pour les noeuds de la structure. La matrice p
i,nest la matrice des
coefficients d’interpolation qui permet de definir l’element de contact i.S’il y a contact avec glissement, la distance separant les deux corps est nulle. Par consequent, ona :
pi,n
UN,i,n = Xr,N,i,n (3.36)
L’indice N refere a la direction normale.
On definit les Lagrangiens qui seront utilises par la suite :
λn = TnFdc,n (3.37)

Chapitre 3 : Approche du probleme de resolution en quasi-statique 53
ou l’exposant d refere a la base duale et Tn est la matrice permettant le passage de la base dualedans la base de reference.
Pour les ddls tangentiels, lorsque l’element de contact est glissant, on utilise la loi de Coulomb :
‖ λT,i,n ‖= µ|λN,i,n| (3.38)
et la vitesse relative Vr,i(X, tn) (Eq. 2.20) pour obtenir la direction de λT,i,n dans le plan tangent.
On notera que, par definition, les interpolations permettent de verifier l’equation d’equilibredes forces de contact sur chaque element de contact :
∑i
pj,i,nλi,n = 0 avec i = 1, . . . , Nnl (3.39)
ou l’indice j refere a une colonne de la matrice pTn
et Nnl est le nombre de ddls non lineaires.
Les equations definies ci-dessus traduisent une application forte des conditions de contact.Dans la suite du chapitre, on utilisera ces equations. Cependant, on notera que dans certains cas,cette formulation du probleme peut conduire a des resultats non satisfaisants lorsque l’on utilisedes elements de contact du type noeud-point. En particulier lorsqu’il existe de fortes surcontraintessur l’interface de contact. Pour resoudre cette difficulte, Blazquez et al. [58] proposent une formu-lation faible des equations de compatibilite en utilisant le principe des forces virtuelles (Principedes travaux virtuels ou le champ des efforts est un champ virtuel alors que le deplacement et lechamp des deformations correspondent aux inconnues du probleme) et de l’equilibre des forcesde contact en utilisant le principe des deplacements virtuels (Principe des travaux virtuels oule deplacement et le champ des deformations sont des champ virtuels compatibles alors que lechamp des efforts est l’inconnue du probleme). Cette demarche semble interessante, mais on necherchera pas a la mettre en oeuvre dans cette etude afin de ne pas y ajouter trop rapidementdes difficultes supplementaires.
Pour finir ce paragraphe, on notera que les passages dans la base duale, qui sont utilises pourdeterminer les vecteurs normaux (indices N) et les vecteurs tangents (indices T ), ne seront jamaisprecises dans la suite afin de ne pas alourdir la presentation.
3.3.2 Minimisation d’un probleme contraint
Le probleme que l’on cherche a resoudre est de la forme :
KUn + pTn
λn = Fex,n
pnUn = Xr,n pour les ddls bloques
Loi de Coulomb pour les ddls glissants
(3.40)
On rappelle que les conditions sur la loi de frottement et la non penetration s’appliquent dans labase duale bien que les equations aient ete exprimees dans la base de reference.

54 Chapitre 3 : Approche du probleme de resolution en quasi-statique
Dans le systeme (3.40), les equations de contraintes sont imposees en fonction de l’etat deselements de contact (bloque, glissant ou separe). Pour ce type d’approche qui correspond a lamethode classique, on parlera d’une methode directe de prise en compte des contraintes. Sup-posons maintenant que Xr,n soit defini pour tous les ddls contraints ou supposes contraints. Lenouveau probleme peut alors s’ecrire sous la forme :
KUn + pTnλn = Fex,n
pnUn = Xr,n pour tous les ddls contraints
(3.41)
A cela, on ajoute les conditions de Coulomb et de non penetration sur les forces non lineaires. Lesequations de contraintes definies par p
nUn −Xr,n = 0 ne sont donc plus directement associees a
l’etat des elements de contact. Cela constitue une nouvelle approche que l’on definit comme etantune methode indirecte de prise en compte des contraintes. Il est maintenant important de definirles inconnues du probleme. Xr,n n’est pas a proprement parler une nouvelle variable, mais unefonction non lineaire de Un et λn qui doit permettre de verifier les conditions de Coulomb et denon penetration sur les forces non lineaires a chaque iteration lors de la resolution numerique duprobleme en utilisant la methode hybride de Powell par exemple.Les inconnues du probleme sont donc Un et λn.Le systeme (3.41) peut etre resolu en considerant que les forces non lineaires ne sont pas connues(methodes duales) ou en approchant le probleme par une formulation des forces non lineaires apartir des deplacements Un et Xr,n (methodes de penalite et assimilees).
Dans le cas des methodes duales, on definit les forces non lineaires λn par :
λn = λmuln + λpen
n (3.42)
ou les exposants mul et pen definissent respectivement les multiplicateurs de Lagrange et unemethode de penalite.On notera que cette definition des forces non lineaires a ete proposee pour qu’il soit possibled’appliquer la methode indirecte de prise en compte des contraintes dans le cas des multiplicateursde Lagrange.Ainsi, on est a meme d’utiliser les methodes d’optimisation en definissant Un et λmul
n commeetant les inconnues du probleme. λpen
n est quant a lui defini par une methode de penalite :
λpenn = ε
(p
nUn − Xr,n
)(3.43)
avec ε le coefficient de penalite defini positif.A noter que pour la solution convergee, λpen
n est nulle compte tenu de l’equation (3.43) et de laseconde equation du systeme (3.41) que l’on doit verifier.L’expression de λn(λmul
n ,Un,Xr,n), qui se deduit des equations (3.42) et (3.43), peut etre scindeeen deux pour separer Xr,n des autres variables :
λn(λmuln ,Un,Xr,n) = λopt
n (λmuln ,Un) − λcor
n (Xr,n) (3.44)

Chapitre 3 : Approche du probleme de resolution en quasi-statique 55
avec λoptn une expression qui ne depend que des variables Un et λmul
n resolues par la methoded’optimisation ; λcor
n la correction apportee par Xr,n sur λn.Les expressions de λopt
n et λcorn sont simplement donnees par :
λoptn = λmul
n + εpnUn (3.45)
λcorn = εXr,n (3.46)
Pour les methodes de penalite et assimilees, Un est la seule inconnue a resoudre par unemethode d’optimisation et on utilise pour cela la premiere equation du systeme (3.41). Pour λn,on peut definir differentes expressions en fonction de Un et Xr,n. La plupart des expressionspeuvent etre scindees en deux pour separer les variables Un et Xr,n :
λn(Un,Xr,n) = λoptn (Un) − λcor
n (Xr,n) (3.47)
avec λoptn une expression qui ne depend que de Un et λcor
n la correction apportee par Xr,n surλn.A noter que de la meme facon que pour les methodes duales, on definira λcor
n par l’equation(3.46). Cette expression permet de definir tres simplement un schema de correction en 3D.
Dans la suite, on posera :
λn = λoptn − λcor
n (3.48)
λoptn sera nomme le vecteur force d’optimisation car il est entierement defini a partir des variables
calculees par la fonction d’optimisation et λcorn le vecteur force non lineaire correctif.
Dans la suite, on explicitera dans une premiere partie les systemes associes aux differentesmethodes duales. Dans une seconde partie, on s’interessera aux methodes de penalites et assimileespour lesquelles on explicitera la fonction λn. Pour finir, on introduira une methode de correctionpermettant de verifier les conditions de Coulomb et de non penetration pour les problemes 3D.C’est dans cette partie que l’on expliquera comment calculer λcor
n .
3.3.3 Methodes duales
Dans ces methodes, on introduit les multiplicateurs de Lagrange qui sont de nouvelles incon-nues utilisees pour resoudre le probleme sur le deplacement. Ces multiplicateurs sont en fait arattacher aux forces non lineaires du systeme dans la base de reference. On peut repertorier troismethodes dans cette categorie : multiplicateurs de Lagrange, Lagrangiens augmentes du point devue de la dualite et les Lagrangiens perturbes. On developpera chacune d’entre elles dans ce quisuit.
Les multiplicateurs de Lagrange
Le systeme a resoudre est donne par le systeme (3.41). λmuln est l’inconnue du probleme dans
la methode d’optimisation et on rappelle que λpenn est donne par l’equation (3.43).

56 Chapitre 3 : Approche du probleme de resolution en quasi-statique
Dans le cadre d’une prise en compte directe des conditions de contrainte, la methode des mul-tiplicateurs de Lagrange a ete utilisee par Chen et Tsaı [70] pour resoudre des problemes d’im-pact en 2D : contact avec frottement en elastodynamique. Chen et Tsaı [70] utilisent un schemad’integration temporel de Newmark et definissent une methode pour determiner les conditionsinitiales au moment de l’impact ou de la separation. Wosle et Pfeiffer [77] les utilisent aussi pourun systeme de plusieurs corps rigides en 3D lies par des contraintes unilaterales avec frottement.
Les Lagrangiens augmentes du point de vue de la dualite
Dans cette methode, on modifie le systeme (3.41) en introduisant une penalisation :KUn + pT
nλn + ε
(p
nUn − Xr,n
)= Fex,n
pnUn = Xr,n
(3.49)
L’equation (3.43) permet encore une fois de definir la correction a realiser sur λmuln .
Dans le cadre d’une methode directe de prise en compte des contraintes, la methode des La-grangiens augmentes du point de vue de la dualite a ete utilisee par Alart et Curnier [78] pourresoudre un probleme quasi-statique en utilisant une methode de Newton modifiee.
Les Lagrangiens perturbes
Encore une fois, le systeme (3.41) a resoudre doit etre legerement modifie en perturbant lesequations de contrainte :
KUn + pTn
λn = Fex,n
pnUn −Xr,n − ε′λn = 0
(3.50)
Cette methode est coherente avec la methode des multiplicateurs de Lagrange lorsque ε′ −→ 0.On ajoute a cela l’equation (3.43) qui permet de definir λpen
n .
3.3.4 Methodes de penalite, de la barriere et assimilees
Dans ces methodes, on cherche a remplacer le probleme initial par un probleme non contraint.L’avantage de ces methodes par rapport aux methodes duales, c’est de supprimer les inconnuesliees aux forces non lineaires.
Methode de penalite
Seule la premiere equation du systeme (3.41) est conservee :
KUn + pTn
λn = Fex,n (3.51)
Les forces non lineaires λn sont alors definies par :
λn = ε(p
nUn − Xr,n
)(3.52)

Chapitre 3 : Approche du probleme de resolution en quasi-statique 57
avec ε −→ 0.Les expressions de λopt
n et λcorn sont simplement donnees par :
λoptn = εpT
nUn (3.53)
λcorn = εXr,n (3.54)
Dans le cadre d’une methode directe de prise en compte des contraintes, cette methode a parexemple ete utilisee par Oden et Pires [73] pour resoudre un probleme de contact avec frottementen 2D.
Methode de la barriere
La methode de la barriere peut etre utilisee pour un contact normal. Dans la direction tan-gentielle, on doit conserver une methode de penalite parce qu’il n’y a pas de ”barriere” dans unetransition stick-slip. On definit la fonction q(Un) par :
q(Un) = pnUn − Xr,n (3.55)
Les forces non lineaires λn derivent d’un potentiel admissible :
C(Un) =1εN
BN + εTqTq (3.56)
avec BN,i = 1εN
1q2N,i
, εN et εT les coefficients de penalite dans les directions normale et tangentielle
respectivement.A noter que l’utilisation de plusieurs coefficients de penalite est aussi possible pour les autresmethodes presentees dans cette partie.
Dans une methode de penalite, la penetration est possible, ce n’est plus le cas avec unemethode de barriere. On remarquera que pour la methode de la barriere, il n’est pas possible descinder l’expression de λn en deux de facon a obtenir une partie ne dependant que de Un et uneautre ne dependant que de Xr,n. Il n’est donc pas possible dans ce cas d’appliquer la methodeindirecte de prise en compte des contraintes. On peut neanmoins imaginer une approche mixtedans laquelle on aurait une prise en compte directe des contraintes dans la direction normale etune prise en compte indirecte dans la direction tangentielle.
La methode des contraintes croisees de Zavarise et al. [79]
Dans ce paragraphe, on definit a nouveau q(Un) par l’equation (3.55). Un probleme approcheest construit en utilisant un potentiel admissible QN (Un) :
C(Un) = QN (Un) +12εTqT
TqT (3.57)
avec C(Un) le potentiel des forces non lineaires.Ce potentiel est defini dans le cas ou tous les elements de contact sont supposes bloques pour la

58 Chapitre 3 : Approche du probleme de resolution en quasi-statique
solution convergee. Dans ce cas, on remarquera que Xr,n est un vecteur suppose connu.Zavarise [79] nous donne une expression pour un QN (Un) dans le cas d’un element de contact :
QN (Un) = µ(eah − eaαh
)(3.58)
ou h est la distance entre les deux corps pour l’element de contact considere. On parlera de ladistance de separation de l’element de contact.Cette formulation peut facilement etre etendue au cas de plusieurs elements :
QN (Un) =n
(1)nl∑
i=1
µi
(eai|qN,i
| − eaiαi|qN,i|) (3.59)
Zavarise [79] nous donne une expression de la derivee de QN (Un) par rapport a la distancede separation qui permet d’obtenir une expression de λN,n. Pour comparer cette methode avecla methode de penalite, on realise une derivation par rapport a Un :
QN,∂Un(Un) =(µiaipT
i,n
(eai|qN,i
| − αieaiαi|qN,i
|) sgn(q
N,i
))16i6n
(1)nl
(3.60)
Ce qui peut aussi s’ecrire sous la forme :
QN,∂Un = pTn
λN,n (3.61)
avec λN,i,n = µiai
(eaiqN,i − αie
aiα|qN,i|) sgn(q
N,i).
L’avantage de cette methode, c’est qu’elle permet un traitement continu des contraintes im-posees par le contact. Il n’y a donc pas de differences pour traiter un cas ou la distance deseparation est nulle et un cas ou elle est non nulle. De plus, cette methode peut etre augmenteepour eviter le mauvais conditionnement des matrices. L’une des conclusions de Zavarise [79], c’estque cette methode est plus stable que la methode de penalite.On remarquera aussi que les methodes de penalite et de barriere sont des cas limites de cettemethode.Enfin, de meme que pour la methode de la barriere, cette methode ne permet pas d’envisager uneprise en compte indirecte des contraintes dans la direction normale.
Les Lagrangiens augmentes du point de vue de la penalite
On utilise la premiere equation du systeme (3.41) et une formulation iterative pour definir lesLagrangiens :
λj+1n = λj
n + ε(p
nUn − Xr,n
)(3.62)
ou j est une iteration de l’algorithme d’optimisation si l’on a une estimation analytique de la ma-trice Jacobienne, une iteration de resolution par l’algorithme de resolution dans le cas contraire.L’avantage des Lagrangiens augmentes tient au fait que les coefficients de penalite peuvent etrechoisis plus petits que dans le cas d’une methode de penalite et permettent ainsi une meilleure

Chapitre 3 : Approche du probleme de resolution en quasi-statique 59
+ −
i+1i
K
èmeitérationi dans l’algo. d’opt.
Stop Convergé ?
λ
Non
Oui
ε=
~λ
=
F
F
Conditions de
non pénétration
opt opt
ex,n−Initialisationu
ex,n,i
+ εK n,in,0 n,i
λcor
n,i
λ n,i
−−
U Un,in,i=
X n,i
n,iU
frottement et de
λ n,ip n,in,iUf( )
(1) (1) (1) (1)
T
Fig. 3.2: Implementation de l’approche indirecte de prise en compte des contraintes.
convergence. On evite ainsi le probleme bien connu pour la methode de penalite de mauvais condi-tionnement du systeme d’equations. Cette methode est couramment utilisee dans la litterature.On notera par exemple Laursen et Simo [8], Wriggers et Zavarise [11]. A noter cependant quelorsque la Jacobienne du probleme n’est pas connue et que l’on fait appel a des methodes telles quela difference finie ou les methodes quasi-Newtoniennes pour la calculer, λi
n doit rester constant.Dans ces conditions, la procedure iterative des Lagrangiens Augmentes doit se faire en dehors dela fonction d’optimisation, ce qui reduit l’efficacite des Lagrangiens Augmentes par rapport aucas ou l’on est capable de donner une expression linearisee de la Jacobienne.
Les Lagrangiens dynamiques
Les Lagrangiens dynamiques ont ete developpes par Nacivet et al. [80] pour etudier la dyna-mique d’un probleme de contact avec frottement pour le modele elements finis d’une structureen frequentiel. Cela constitue le chapitre quatre de ce memoire. Cette methode peut aussi etreutilisee pour un probleme quasi-statique en temporel lorsque des elements de contact noeud-pointsont utilises (le point resulte d’une interpolation). Dans ce cas, on utilise l’equation du mouvementassociee au corps esclave pour definir les Lagrangiens :
λn = F(1)ex,n − K(1)U(1)
n + ε(p
nUn − Xr,n
)(3.63)
On montrera dans la suite de ce chapitre que cette methode permet d’obtenir de bons resultats.
3.3.5 Processus de correction
Dans cette partie, on utilise l’equation (3.48) pour definir une procedure de correction 3Dpermettant d’appliquer les conditions de Coulomb et de non penetration. Un organigramme dela methode est presente sur la figure 3.2. Dans la suite, λcor
n sera resolu simplement en utilisant

60 Chapitre 3 : Approche du probleme de resolution en quasi-statique
les conditions de Coulomb et de non penetration. A ce propos, on notera que Xr,n nous permetde justifier notre approche theorique, mais qu’il n’est pas utile de le calculer. En effet, le calculde λcor
n qui est proportionnel a Xr,n est suffisant.Lorsque une penalisation sur le deplacement relatif est utilisee dans les Lagrangiens Dyna-
miques, l’expression de la force de correction λcorn est definie dans le domaine temporel par :
λcorn = λcor
n−1 + ∆nλcor (3.64)
ou ∆nλcor est la correction appliquee sur λoptn − λcor
n−1 pour verifier les contraintes sur les inter-faces. ∆n est un operateur de difference finie entre le neme et (n − 1)eme pas de temps.L’initialisation de λcor
n=−1 peut etre choisie comme suit :
λcorn=−1 = 0 (3.65)
Ensuite, on peut exprimer ∆nλcori pour le ieme element de contact afin d’assurer les conditions
de non penetration et de Coulomb.
Dans le cas de la separation des interfaces, on doit tout simplement imposer λcori,n = λopt
i,n pourobtenir λi,n = 0. Par consequent, ∆nλcor
i est donne par :
∆nλcori = λopt
i,n − λopti,n−1 (3.66)
Dans le cas des interfaces bloquees, la condition est aussi tres simple :
∆nλcori = 0 (3.67)
En utilisant l’equation (3.46), on deduit facilement que ∆nXr,i = 0.
Dans le cas des interfaces en glissement, quelques developpements supplementaires sont necess-aires.Dans la direction normale, on a encore la condition du cas bloque :
∆nλcorN,i = 0 (3.68)
ou N est l’indice relatif a la direction normale.Cependant, dans la direction tangentielle, on a besoin d’exprimer la force de contact qui estdonnee par :
λT,i,n = λoptT,i,n − λcor
T,i,n−1 − ∆nλcorT,i (3.69)
avec T l’indice relatif au plan (2D) ou a la direction (1D) tangentielle.La valeur quantifiee de ∆nλcor
T,i doit etre choisie de telle sorte que la force de contact tangentielleλT,i,n ait la meme orientation que la vitesse relative et une magnitude de µ|λN,i,n|, avec µ lecoefficient de frottement. Une approximation de Wr,n peut etre obtenue par difference finie :
Wr,n =Xr,n − Xr,n−1
∆nt(3.70)

Chapitre 3 : Approche du probleme de resolution en quasi-statique 61
t n−1
λx
λ y
λN,i,n
t n
∆nN,i,n−1λ
T,i,n−1
corλ
corλT,i,n−1
t λT,i
λT,i,n−1
λT,i,n
λT,i
λ
λT,i,n
T,i,n−1
opt
opt
opt
µ
µ
−
−
−
Fig. 3.3: Schematisation de la procedure de correction pour la force de contact tangentielle entre les pas
de temps n − 1 et n.
D’apres les equations (3.70) et (3.46), la vitesse relative Wr,n peut encore s’ecrire sous la forme :
Wr,n =∆nλcor
T
ε∆nt(3.71)
Quand l’element de contact i est en situation de glissement, les forces non lineaires tangentiellessont donnees par :
λT,i,n = µ|λN,i,n| Wr,i,n
‖ Wr,i,n ‖ (3.72)
ou ‖ . ‖ est la norme Euclidienne.Cela signifie que la force tangentielle pour l’element de contact i est alignee avec la vitesserelative Wr,i,n puisque la force tangentielle λT,i,n est definie comme etant l’opposee de la forcede frottement. En utilisant l’equation (3.71), l’equation (3.72) peut etre redefinie sous la forme :
λT,i,n = µ|λN,i,n|∆nλcor
T,i
‖ ∆nλcorT,i ‖
(3.73)
D’apres les equations (3.69) et (3.73), on peut determiner ∆nλcorT,i a partir de :
∆nλcorT,i =
‖ ∆nλcorT,i ‖
‖ ∆nλcorT,i ‖ +µ|λN,i,n|
(λopt
T,i,n − λcorT,i,n−1
)(3.74)
ou la norme de ∆nλcorT,i est :
‖ ∆nλcorT,i ‖=‖ λopt
T,i,n − λcorT,i,n−1 ‖ −µ|λN,i,n| (3.75)
Par consequent, ∆nλcorT,i a la meme orientation que λopt
T,i,n −λcorT,i,n−1. La procedure de correction
expliquee ci-dessus est representee sur la figure 3.3 pour le cas d’un deplacement relatif 2D.Dans la suite, les conditions de transition entre les differents etats (bloque, glissant, separe)
doivent encore etre definies.

62 Chapitre 3 : Approche du probleme de resolution en quasi-statique
3.3.6 Gestion des transitions
Pour la transition entre contact et separation, un test sur le signe de la force de contactnormale λN,i,n est suffisant. L’orientation normale de l’element de contact est donc importantedans ce cas.
Pour la transition entre l’etat bloque et l’etat glissant, on remarque que ∆nλcorT,i,n verifie :
∆nλcorT,i,n = 0 si ‖ λopt
T,i,n − λcorT,i,n−1 ‖< µ|λN,i,n|
∆nλcorT,i,n 6= 0 si ‖ λopt
T,i,n − λcorT,i,n−1 ‖> µ|λN,i,n|
D’apres l’equation (4.23), il vient naturellement que :
∆nλcorT,i,n = 0 si le ieme element de contact est bloque,
∆nλcorT,i,n 6= 0 si le ieme element de contact est glissant.
Par consequent, les transitions se deduisent de la violation de l’une des conditions suivantes :
‖ λoptT,i,n − λcor
T,i,n−1 ‖< µ|λN,i,n| si le ieme element de contact est bloque,‖ λopt
T,i,n − λcorT,i,n−1 ‖> µ|λN,i,n| si le ieme element de contact est glissant.
3.3.7 Conclusion
Il existe donc differentes methodes pour determiner les forces non lineaires en respectant lesequations de contraintes. Dans ces methodes, ce sont les multiplicateurs de Lagrange, la methodede penalite et les Lagrangiens Augmentes qui sont le plus souvent utilises dans la litteratureavec une prise en compte directe des contraintes. Mais les Lagrangiens Augmentes presententquelques avantages qui les rendent plus attractifs. En effet, le nombre d’inconnues est moinsimportant que dans le cas des multiplicateurs de Lagrange d’une part, et le coefficient de penaliteest moins grand que pour la methode de penalite d’autre part (ce qui permet d’eviter un mauvaisconditionnement des matrices et de faciliter la convergence du calcul). Cependant, comme on l’afait remarquer, lorsque la Jacobienne du systeme n’est pas connue de facon analytique, la remisea jour des forces non lineaires doit se faire en dehors de la procedure d’optimisation. Dans unetelle situation, on peut se demander si la methode des multiplicateurs de Lagrange n’est pas plusinteressante en definitive. La nouvelle methode des Lagrangiens Dynamiques proposee dans cetteetude permet quant a elle d’eviter cette remise a jour des forces non lineaires en dehors de laprocedure d’optimisation sans gerer les Lagrangiens comme des inconnues. On supprime ainsiles difficultes liees au calcul de la matrice Jacobienne par difference finie ou par des methodesquasi-Newtoniennes dans le cas des Lagrangiens Augmentes.
Dans la suite de ce chapitre, on a donc choisi de mettre en oeuvre les methodes des Lagrangiensaugmentes et des Lagrangiens dynamiques pour les comparer. L’utilisation des multiplicateurs deLagrange n’a pas ete approfondie car le nombre d’inconnues a resoudre par la methode d’optimi-sation reste un parametre qui influence fortement les temps de calcul.

Chapitre 3 : Approche du probleme de resolution en quasi-statique 63
3.4 Grands deplacements dans les modeles elements finis
3.4.1 Introduction
Dans un contact noeud-point, la difficulte consiste a definir une bonne interpolation. Dansun element de contact noeud-point, le point refere au resultat de l’interpolation. On pourrase reporter a l’annexe A pour un complement d’informations sur les methodes d’interpolation.L’interpolation lineaire n’est generalement pas suffisante et la plupart des chercheurs utilisentmaintenant une interpolation quadratique dans la litterature. D’apres nos essais numeriques, ilsemble cependant qu’un probleme persiste : dans certains cas, il existe des variations pendantla phase de glissement qui necessitent un maillage tres fin pour devenir negligeables. Pour desfonctions d’interpolation d’ordre superieur, on a constate apres programmation que les resultatsne s’amelioraient pas. On proposera dans cette partie une nouvelle solution d’interpolation pourles problemes quasi-statiques que l’on peut definir sous l’appellation : interpolation hybride endeplacement-souplesse.
Un premier programme en fortran90 a ete realise dans cette these pour resoudre les problemesde contact avec frottement en quasi-statique et dans le cadre de grands deplacements.
3.4.2 Resultats avec des interpolations polynomiales
Dans ce paragraphe, on cherchera a comparer la methode des Lagrangiens Augmentes a celledes Lagrangiens Dynamiques. Pour cela, on etudiera un probleme tres simple en utilisant desinterpolations lineaires pour definir les elements de contact.
On mettra aussi en avant les imprecisions introduites par les interpolations polynomiales surle deplacement, qu’elles soient lineaires ou quadratiques.
Dans les exemples traites, on s’interessera la plupart du temps a un regime stationnaire forceen quasi-statique avec de grands deplacements.
Cas d’une interpolation lineaire
Pour comparer la methode des Lagrangiens Augmentes avec celle des Lagrangiens Dyna-miques, on etudie un systeme tres simple represente par la figure 3.4-a. Il s’agit d’un contactponctuel entre deux corps deformables. Le premier (corps esclave) est simplement defini pardeux raideurs kT = 104N/m et kN = 1012N/m. Le second (corps maıtre) est un socle en acier(E = 210GPa) d’une longueur de 2m pour une hauteur de 0.1m et d’une largeur de 1m. Onsuppose le contact ponctuel dans le plan de representation de la figure 3.4-a, mais uniformementreparti sur la largeur du socle. A noter que la masse n’est pas prise en compte pour un problemeen quasi-statique.Le modele elements finis du socle est obtenu en realisant un maillage lineaire avec les elementsplane42 de ANSYS [81]. Comme represente sur la figure 3.4-a, il n’y a qu’une seule couched’elements plane42, mais le niveau de discretisation sur la longueur peut varier selon les casetudies. A noter la relation entre le nombre de noeuds a l’interface n
(2)nl et le nombre d’elements

64 Chapitre 3 : Approche du probleme de resolution en quasi-statique
ni
n3
n1
n2
fNfT
−1 0 1
numéro de l’élément
k
kN
T
(2)n noeuds à l’interfacenl
nel(2)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Temps t (s)
Dép
lace
men
t tan
gent
iel d
u no
eud
escl
ave
(m)
Lagrangiens Augmentés Lagrangiens Dynamiques
(a) (b)
Fig. 3.4: (a) Schema du modele elements finis lineaire. (b) Deplacement tangentiel du noeud esclave sur
une periode.
de maillage du socle n(2)el :
n(2)nl = n
(2)el + 1 (3.76)
Les forces exterieures sont appliquees sur le premier corps. Tout d’abord, on applique unecharge de FN = 5000N sur le noeud esclave pour le presser contre le socle. Ensuite, on exerceune excitation sinusoıdale d’amplitude FT = 3300N tangentiellement au socle. Le coefficient defrottement etant de µ = 0.1, cette force va permettre d’obtenir un mouvement d’une amplitudede l’ordre de 0.33m.
Dans le cas ou n(2)el = 10, on donne les resultats associes au noeud du second corps (noeud
esclave) et au point de contact sur le socle. Sur la figure 3.4-b, on a le deplacement du noeudesclave dans la direction tangentielle pour une periode. La figure 3.5-a represente le deplacementtangentiel du point de contact et la figure 3.5-b le deplacement normal (le deplacement normaldu noeud esclave est identique). Pour finir, on a reporte les forces de contact dans la directiontangentielle (3.6-a) et la direction normale (3.6-b).
Tous ces resultats ont ete calcules en utilisant la methode des Lagrangiens Augmentes d’unepart et la methode des Lagrangiens Dynamiques d’autre part. On note que la methode desLagrangiens Augmentes ne permet pas toujours d’obtenir une bonne convergence alors que pourcette exemple, la methode des Lagrangiens Dynamiques donne un excellent resultat. De plus, ona compare les temps de calcul pour les deux methodes avec differents niveaux de discretisation(table 3.1). On constate que la methode des Lagrangiens Dynamiques permet une convergence bienplus rapide que celle des Lagrangiens Augmentes. Dans notre programme, la matrice Jacobienneest determinee numeriquement, ce qui est particulierement desavantageux pour la methode desLagrangiens Augmentes. On utilise souvent une matrice Jacobienne calculee analytiquement par

Chapitre 3 : Approche du probleme de resolution en quasi-statique 65
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−8
−6
−4
−2
0
2
4
6
8
10x 10
−10
Temps t (s)
Dép
lace
men
t tan
gent
iel d
u po
int d
e co
ntac
t (m
)
Lagrangiens Augmentés Lagrangiens Dynamiques
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−4
−3.8
−3.6
−3.4
−3.2
−3
−2.8
x 10−9
Temps t (s)D
épla
cem
ent n
orm
al d
u po
int d
e co
ntac
t et d
u no
eud
escl
ave
(m)
Lagrangiens Augmentés Lagrangiens Dynamiques
(a) (b)
Fig. 3.5: (a) Deplacement tangentiel du point de contact sur le corps maıtre. (b) Deplacement normal
du point de contact.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−300
−200
−100
0
100
200
300
Temps t (s)
For
ce d
e co
ntac
t tan
gent
ielle
(N
)
Lagrangiens Augmentés Lagrangiens Dynamiques
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−2200
−2000
−1800
−1600
−1400
−1200
−1000
Temps t (s)
For
ce d
e co
ntac
t nor
mal
e (N
)
Lagrangiens Augmentés Lagrangiens Dynamiques
(a) (b)
Fig. 3.6: (a) Force de contact tangentielle. (b) Force de contact normale.

66 Chapitre 3 : Approche du probleme de resolution en quasi-statique
Nbre de noeuds Lagrangiens LagrangiensAugmentes (s) Dynamiques (s)
7 12.64 2.7711 22.09 4.5521 109.22 14.8841 558.60 62.9661 1525.12 172.6581 3256.20 490.65101 6504.08 661.42
Tab. 3.1: Temps de calcul CPU pour un maillage lineaire en utilisant la methode des Lagrangiens Aug-
mentes d’une part et celle des Lagrangiens Dynamiques d’autre part.
linearisation dans les problemes en quasi-statique, auquel cas les deux methodes donneraientpeut-etre des temps de calcul plus proches (cela n’a pas ete etudie). Cependant, l’objectif denotre etude sera par la suite de travailler en frequentiel pour un probleme en dynamique. Pour untel probleme, il est difficile d’obtenir une expression analytique du Jacobien approxime a priori.
En faisant varier le niveau de discretisation, on peut constater sur la figure 3.7-a qu’il influencefortement le resultat lors du calcul des forces de contact tangentielles. Il en est de meme dans ladirection normale que l’on n’a pas reportee.
On notera premierement que le niveau des forces de contact pendant les phases de glissementdiminue lorsque la taille des elements de contact diminue. Cela peut s’expliquer simplement enremarquant que la surface de contact supposee est directement liee a la taille d’un element decontact. Par consequent, plus l’element de contact est petit, plus le contact ”ponctuel” s’exerce surune petite surface. Le socle oppose alors une resistance moins importante a la pression exerceesur le second corps. Le second corps se deforme alors de facon plus importante et la force decontact normale est plus faible. Le niveau de la force de contact tangentielle etant directementlie a la force de contact normale lors de la phase de glissement, on comprend pourquoi le niveaudes forces de contact diminue.
Deuxiemement, on remarque d’importantes variations du niveau de force lorsque le point decontact traverse un element de contact. La figure 3.7-b nous donne la force de contact tangentiellesur l’element de contact 6 dans le cas ou n
(2)el = 10. On en profite pour faire remarquer une
excellente qualite du resultat dans la transition entre les differents elements de contact. Pourexpliquer l’origine de ces variations, on remarquera simplement qu’une interpolation lineaire nepermet pas d’obtenir une approximation precise de la deformee de l’element de contact. Enfait, la difficulte provient du fait que l’on force la position du contact a partir d’une relationd’interpolation sur les noeuds maıtres. L’interpolation lineaire introduit donc une erreur quidiminue lorsque l’on augmente le niveau de discretisation. Cela signifie qu’il est important demailler suffisamment fin si l’on veut obtenir une bonne description du contact. On peut aussi

Chapitre 3 : Approche du probleme de resolution en quasi-statique 67
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−300
−200
−100
0
100
200
300
Temps t (s)
For
ce d
e co
ntac
t tan
gent
ielle
(N
)
nni
=7 n
ni=11
nni
=21 n
ni=101
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−250
−200
−150
−100
−50
0
50
100
150
200
250
Temps t (s)
For
ce d
e co
ntac
t tan
gent
ielle
(N
)
(a) (b)
Fig. 3.7: (a) Force de contact tangentielle sur une periode pour le modele LL avec differents niveaux de
discretisation. (b) Force de contact tangentielle sur une periode pour le sixieme element de contact dans
le cas du modele LL.
envisager d’augmenter l’ordre du polynome d’interpolation. C’est ce que l’on se propose d’etudierdans le paragraphe qui suit.
Cas d’une interpolation quadratique
Le socle est maintenant maille a l’aide d’elements plane82 sous ANSYS [81] (fig. 3.8), ce quicorrespond a une interpolation quadratique. Comme dans le cas lineaire, on considere une seulecouche d’elements selon la hauteur et le niveau de discretisation selon la longueur est defini parle nombre de noeuds sur l’interface de contact n
(2)nl . A noter la relation entre le nombre de noeuds
a l’interface n(2)nl et le nombre d’elements dans le maillage du socle n
(2)el :
n(2)nl = 2n(2)
el + 1 (3.77)
Le second corps reste inchange par rapport au cas precedent.
Generalement, les elements de contact sont choisis de telle sorte que l’interpolation a l’interfacede contact soit coherente avec l’interpolation choisie pour mailler la structure. Dans le cas present,on choisit une interpolation quadratique pour etre en accord avec les elements quadratiquesplane82 de ANSYS [81]. Le resultat obtenu en jouant sur le niveau de discretisation est alorsdonne par la figure 3.9-a.
Si l’on compare ce resultat avec celui obtenu dans le cas lineaire (fig. 3.7-a), on constate quela precision s’ameliore legerement, mais pas de facon significative.
Bien que cela soit rarement considere dans la litterature, on notera qu’il n’est pas indispensablede prendre le meme type d’interpolation pour la structure et les interfaces de contact. La figure3.9-b represente les resultats dans le cas d’un maillage lineaire du socle a partir des elements

68 Chapitre 3 : Approche du probleme de resolution en quasi-statique
n1
n2
fT
fN k
k
T
N
numéro de l’élément
−1 0 1
ni
n noeuds à l’interfacenl
eln(2)
(2)
Fig. 3.8: Schema du modele elements finis quadratique.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−250
−200
−150
−100
−50
0
50
100
150
200
250
Temps t (s)
For
ce d
e co
ntac
t tan
gent
ielle
(N
)
nni
=7 n
ni=11
nni
=21 n
ni=101
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−250
−200
−150
−100
−50
0
50
100
150
200
250
Temps t (s)
For
ce d
e co
ntac
t tan
gent
ielle
(N
)
nni
=7 n
ni=11
nni
=21 n
ni=101
(a) (b)
Fig. 3.9: (a) Force de contact tangentielle pour le modele QQ avec differents niveaux de discretisation.
(b) Force de contact tangentielle pour le modele LQ avec differents niveaux de discretisation.

Chapitre 3 : Approche du probleme de resolution en quasi-statique 69
plane42 de ANSYS [81] et d’une interpolation quadratique sur les elements de contact en prenantles noeuds a l’interface de deux elements du socle pour generer un element de contact. Les resultatsrestent semblables aux precedents.
3.4.3 Interpolation hybride en deplacement-souplesse : contact ponctuel.
Introduction
Pour expliquer l’erreur intrinseque aux interpolations polynomiales sur le deplacement, onremarquera que la deformation reelle des elements de contact depend des forces de contact alorsque les interpolations classiques n’en tiennent pas compte. Dans cette partie, on se propose dereduire cette erreur en definissant une interpolation sur la souplesse. A noter que l’interpolationsur le deplacement est tout de meme conservee pour realiser les projections et determiner le pointdu corps maıtre qui est en contact avec le noeud du corps esclave. Le point de la surface esclaveetant connue, on cherche a determiner la position du noeud maıtre en appliquant localement surl’element de contact une interpolation sur la souplesse. Ainsi, on definit une interpolation hybrideen deplacement-souplesse qui autorise le noeud maıtre a penetrer l’interpolation en deplacementen accord avec une interpolation locale de la souplesse. La souplesse n’est que tres peu affecteepar les forces de contact a la difference du deplacement. Cela explique pourquoi on envisage uneamelioration des resultats en utilisant cette methode hybride.
Analyse theorique de la methode
La methode est presentee dans le cadre d’un contact ponctuel. Le contact surfacique seraenvisage dans la partie suivante. Dans le cas d’un systeme avec plusieurs contacts ponctuels, untravail de recherche supplementaire serait necessaire pour etudier de quelle facon on peut etendrecette methode.
En premier lieu, on definit l’interpolation sur le deplacement que l’on utilise dans l’algorithmepour determiner le point de contact sur la structure maıtre :
Uc =∑
k
αkUk (3.78)
ou Uk est le deplacement et αk le coefficient d’interpolation pour le keme noeud maıtre de l’elementde contact.A partir de l’equation du mouvement, il est possible de deduire Uk de la souplesse et des effortssupportes par le corps maıtre. En remplacant les Uk dans l’equation (3.78), on obtient alors unenouvelle expression de Uc. Si l’on separe dans cette expression le deplacement qui resulte de laforce de contact, on peut ecrire le deplacement au point de contact Uc sous la forme :
Uc = UF +∑
k
∑j
αkαjSkjFc (3.79)
avec UF la partie du deplacement associee aux forces autres que la force de contact. On ne precisepas son expression car on ne cherchera pas a le calculer. De plus, Fc est la force de contact aunoeud du corps esclave et Skj la souplesse liant le noeud k au noeud j du corps maıtre.

70 Chapitre 3 : Approche du probleme de resolution en quasi-statique
Maintenant, on definit une interpolation sur la souplesse du meme ordre que l’interpolationsur le deplacement. Cette nouvelle interpolation nous permet de definir une nouvelle expressionpour le deplacement du point de contact :
Uc =∑
k
αkSkkFc + UF (3.80)
Ainsi, on a simplement modifie localement le resultat de l’interpolation lineaire en utilisant uneinterpolation sur la souplesse pour definir la souplesse locale en tout point de l’element de contact.A noter que les termes de couplage sur l’element ont ete negliges.
A partir de l’equation (3.79), il est alors possible de supprimer UF dans l’equation (3.80).Pour cela, on definit Uc comme etant le deplacement Uc de l’interpolation lineaire plus unepenetration Up :
Uc = Uc + Up (3.81)
D’ou, Up peut se definir sous la forme :
Up = SpFc (3.82)
avec
Sp =∑
k
αkSkk −∑
k
∑j
αkαjSkj (3.83)
Ainsi, la position du point de contact Uc est obtenue par le calcul de Uc et Up. On note que lecalcul de Sp ne depend que des caracteristiques de l’element de contact.
Cette formule est interessante mais il n’est generalement pas possible de l’appliquer directe-ment dans un code de calcul. En effet, a chaque appel de la fonction f(U) (cette fonction est definiepar le schema 3.2) par la methode d’optimisation, il est necessaire de connaıtre Up pour calculerFc. Une solution consiste alors a remplacer Fc par une expression qui depend du deplacementet qui va converger vers la solution. On propose donc d’utiliser l’equation du mouvement pourremplacer la force de contact Fc par une force de contact approchee Fc = F(1)
ex − K(1)U(1) quela methode d’optimisation va faire converger vers la solution. Ainsi, l’expression finale de Up
devient :
Up = SpFc (3.84)
On remarquera que Up est nulle lorsque le noeud esclave est en contact avec un noeud maıtre.
L’organigramme donne par la figure 3.10 permet de comprendre l’enchaınement des calculspour determiner les forces non lineaires.
Pour finir, on notera que cette technique peut etre etendue en dynamique dans le cadre d’uneresolution frequentielle. Cependant, une difficulte supplementaire va venir s’ajouter dans ce cascar l’admittance sera connue dans le domaine frequentiel et les facteurs αk seront calcules dansle domaine temporel.

Chapitre 3 : Approche du probleme de resolution en quasi-statique 71
α k Σj
Σk
Skk Σk
α k α j Skj
Calcul des souplesses locales
S = −p
pCalcul de U^
cF (U )p SU = p
cex pλ(1) (1)(1)
=F −K U + (U −U −U −X )(1)
rε
Calcul des forces non linéaires
cCalcul de U
Σk
α k UkcU =
Calcul des coefficientsd’interpolation α k
^cF (U)
Estimation de la force de contact
ex(1) (1)
=F −K U(1)
pour l’élément de contactCalcul d’une base locale
Fig. 3.10: Schema sur l’enchaınement des calculs qui permet de determiner les forces non lineaires lors
d’une iteration de la methode d’optimisation.

72 Chapitre 3 : Approche du probleme de resolution en quasi-statique
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−200
−150
−100
−50
0
50
100
150
200
Temps t (s)
For
ce d
e co
ntac
t tan
gent
ielle
(N
)
nni
=7 n
ni=11
nni
=21 n
ni=101
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−150
−100
−50
0
50
100
150
Temps t (s)
For
ce d
e co
ntac
t tan
gent
ielle
(N
)
nni
=7 n
ni=11
nni
=21 n
ni=101
(a) (b)
Fig. 3.11: (a) Force de contact normale pour les modeles LLP et LQP avec differents niveaux de
discretisation. (b) Force de contact normale pour le modele QQP avec differents niveaux de discretisation.
Contact ponctuel avec frottement sur un socle
Pour commencer, on va definir des sigles associes a differentes interpolations que l’on utiliseradans la suite : LL, QQ, LQ, LLP , LQP , QQP . L signifie lineaire, Q quadratique et P penetration.Les premiere et deuxieme lettres sont a rattacher respectivement a l’ordre d’interpolation utilisepour le modele elements finis et a l’interface de contact du corps maıtre. La troisieme lettreP , lorsqu’elle est presente, signifie que l’on gere une penetration en accord avec la methoded’interpolation hybride en deplacement-souplesse.
Si l’on applique la methode d’interpolation hybride en deplacement-souplesse aux cas etudiesprecedemment et representes par les figures 3.4-a et 3.8, on obtient respectivement les resultatsdes figures 3.11-a et 3.11-b. On note que dans le cas d’une interpolation lineaire, le resultat estquasi-constant lors de la phase de glissement. En effet, en appliquant une interpolation hybrideen deplacement-souplesse, on cherche a reproduire au point de contact le comportement de lastructure comme si le contact s’effectuait sur un noeud. Lorsque le socle est discretise en lineairea partir des elements plane42 de ANSYS [81], la souplesse des noeuds de l’interface varie trespeu sauf sur les noeuds du bord (les variations sur la souplesse viennent des effets de bord). Parconsequent, le contact reste quasiment le meme sur toute la surface de l’element de contact tantque les effets de bord restent negligeables.
Dans le cas d’un maillage du socle a partir d’elements plane82 (quadratique), la souplessedes noeuds maıtres se situant au milieu des elements de contact n’est plus la meme que celle desautres noeuds de l’interface du socle, sans que cela resulte des effets de bord. En fait, cela provienttout simplement de l’approximation quadratique dans la discretisation du socle. Par consequent,les variations d’amplitude que l’on observe sur la force de contact tangentielle (fig. 3.11-b) lorsde la phase de glissement s’expliquent par les variations de la souplesse qui proviennent de la

Chapitre 3 : Approche du probleme de resolution en quasi-statique 73
Nbre de noeuds LL (s) LLP (s) LQ (s) LQP (s) QQ (s) QQP (s)
7 2.77 2.89 4.32 4.12 7.42 6.1911 4.55 5.40 7.09 8.30 12.39 10.8421 14.88 17.67 24.72 24.43 32.62 30.1641 62.96 66.20 106.40 95.23 109.52 108.9861 172.65 182.18 231.90 244.37 294.35 284.3981 490.77 376.30 462.09 485.43 563.29 522.61101 661.42 678.03 792.68 908.587 1108.76 955.59
Tab. 3.2: Temps de calcul CPU pour differents modeles elements finis en utilisant les Lagrangiens Dyna-
miques.
discretisation en elements finis et non pas par des erreurs qui resulteraient d’approximations surle contact. En comparant ce resultat avec ceux obtenus lors d’une simple interpolation QQ (fig.3.9-a), on note que l’amplitude des variations a tout de meme diminuee de facon non negligeable.
Ces resultats mettent en avant si besoin est que le contact n’est pas la seule source d’erreur.L’utilisation d’une interpolation hybride en deplacement-souplesse permet de reduire les erreursintroduites par la gestion du contact avec frottement pour un modele elements finis donne. Enaucun cas elle ne diminue les erreurs intrinseques au modele elements finis lui-meme.Il serait maintenant interessant de comparer les temps de calcul entre l’utilisation d’une interpo-lation en deplacement et l’utilisation d’une interpolation en deplacement-souplesse. La table 3.2compare les temps CPU en seconde pour les interpolations LL et LLP, LQ et LQP, QQ et QQP.Il ressort que les temps de calcul sont du meme ordre pour les deux types d’interpolation. Le coutsupplementaire engendre par les interpolations sur la souplesse est donc peu important. Pourles interpolations quadratiques sur l’element de contact, la convergence est meme frequemmentacceleree en raison d’une diminution du nombre d’iterations necessaire a la convergence.
Pour finir, on considere le modele LL et on applique les forces d’excitation suivantes sur lenoeud du second corps : FT = 0 et FN = 5 ·103 +104 ·sin(wt). Dans ce cas, on etudie un problemede contact avec separation et un jeu initial nul. La figure 3.12-a nous donne la force de contact surune periode, la figure 3.12-b les deplacements du noeud esclave et du point de contact (projete dunoeud esclave sur l’interface du corps maıtre). On constate avec cette exemple que le programmegere la separation des deux corps correctement.
Contact ponctuel sans frottement sur une poutre encastree-encastree
L’exemple de la poutre est interessant car on est a meme d’obtenir une estimation de ladeformee par une analyse RDM. Ce resultat theorique permettra de comparer l’efficacite dedifferentes interpolations dans la methode des elements finis.
Le resultat RDM pour la deformee d’une poutre bi-encastree et soumise a une charge concentree

74 Chapitre 3 : Approche du probleme de resolution en quasi-statique
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−5000
−4500
−4000
−3500
−3000
−2500
−2000
−1500
−1000
−500
0
Temps t (s)
For
ce d
e co
ntac
t nor
mal
e (N
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−12
−10
−8
−6
−4
−2
0
2
4
6x 10
−9
Temps t (s)
Dép
lace
men
t nor
mal
(m
)
Noeud esclave Point de contact
(a) (b)
Fig. 3.12: (a) Force de contact normale et (b) deplacements normaux du noeud esclave et de son projete
sur le corps maıtre dans le cas d’une excitation normale entraınant la separation des deux corps.
λN (fig. 3.13) nous est donne par Goulet et Boutin [82] :
y = −λNa2b2
3EIz l− la
6EIz∗ (1 − a
l)(2Ma + Mb + (Mb − Ma)
a
l) (3.85)
avec Ma et Mb les moments d’encastrement aux points A et B respectivement qui sont definispar :
Ma = −λNab2
l2(3.86)
Mb = −λNba2
l2(3.87)
De plus, E = 210GPa definit le module d’Young de la poutre et Iz = ab3
12 definit l’inertie d’unesection rectangulaire de la poutre par rapport a l’axe Z.
Pour definir completement la poutre, on donne aussi sa largeur a = 0.05m, sa hauteur b =0.05m et sa longueur l = 2m. Le second corps est defini par deux raideurs comme dans lesexemples traites precedemment : kT = 103N/m et kN = 107N/m (fig. 3.13).Encore une fois, l’excitation est appliquee sur le noeud de contact du second corps : une forcenormale FN = 103N et une force tangentielle FT = 550 · sin(ωt). Pour determiner la solutionRDM du probleme a chaque pas de temps, on utilise une methode d’optimisation non lineaire(programme hybride Powell) pour calculer la force de contact normale λN qui s’applique sur lapoutre. La position du point de contact est determinee par un calcul lineaire puisque le coefficientde frottement µ a ete pris egal a zero pour pouvoir obtenir les resultats RDM simplement.
Dans l’analyse par elements finis des poutres sur ANSYS, les elements poutres sont definis pardes polynomes d’Hermite a l’ordre 2. Ces polynomes permettent d’obtenir un excellent resultatdans l’interpolation de la deformee. Cependant, le programme que nous avons ecrit en fortran90

Chapitre 3 : Approche du probleme de resolution en quasi-statique 75
f
f
kk
T
N
TN
0 1−1
Zone dedébattement
Fig. 3.13: Schema du modele elements finis du systeme incluant la poutre encastree-encastree.
Nbre de noeuds H2 L (s) H2LP (s) H2Q (s) H2QP (s)
9 3.60 3.57 3.93 4.088
Tab. 3.3: Temps de calcul CPU pour les differents modeles elements finis du systeme poutre-noeud frottant.
pour resoudre des problemes de contact avec frottement en quasi-statique et dans le cadre degrands deplacements ne permet pas pour le moment de gerer les ddls de rotation. Par consequent,on introduit l’hypothese suivante : les forces de contact ne generent pas de couples aux noeuds.A noter que l’erreur introduite par cette hypothese diminuera lorsque le niveau de discretisationaugmentera. En negligeant les couples, on est a meme de reduire le systeme sur les ddls dedeplacement. C’est ce systeme reduit que l’on utilise dans notre code de calcul. On se limiteradonc aux interpolations lineaires et quadratiques pour les ddls de deplacement uniquement. Lesmodeles qui seront etudies dans la suite sont references par H2L, H2Q, H2LP et H2QP . H2 referea l’interpolation de la poutre par des polynomes d’Hermite a l’ordre 2 lors de la generation deson modele elements finis.Les modeles H2L et H2LP ont ete compares au resultat RDM sur la figure 3.14-a. Il ressortque l’interpolation hybride permet d’obtenir un meilleur resultat qu’une interpolation lineairesimple. Pour les modeles H2Q et H2QP , la figure 3.14-b montre que le resultat de l’interpolationquadratique hybride n’ameliore que tres legerement l’interpolation quadratique classique.
En fait, comme on peut le constater sur la figure 3.15-a l’interpolation quadratique hybriden’ameliore que tres peu l’interpolation lineaire hybride. Les importantes variations de la souplessele long de la poutre (fig. 3.15-b) expliquent cette difference car elles amplifient les erreurs lieesa l’interpolation de la souplesse . On rappelle que dans le cas du socle etudie precedemment, lessolutions des modeles LLP et LQP etaient identiques.
Les temps de calcul nous sont donnes par la table 3.3. On constate encore une fois qu’il ya peu de differences sur les temps de calcul : les interpolations lineaires sont environ 10% plusrapides que les interpolations quadratiques.

76 Chapitre 3 : Approche du probleme de resolution en quasi-statique
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−450
−400
−350
−300
−250
−200
Temps t (s)
For
ce d
e co
ntac
t nor
mal
e (N
)
H2L
H2LP
RDM
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−450
−400
−350
−300
−250
−200
Temps t (s)
For
ce d
e co
ntac
t nor
mal
e (N
)
H2Q
H2QP
RDM
(a) (b)
Fig. 3.14: (a) Force de contact normale appliquee sur la poutre au cours d’une periode pour le modele
H2L. (b) Force de contact normale appliquee sur la poutre au cours d’une periode pour le modele H2Q.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−450
−400
−350
−300
−250
−200
Temps t (s)
For
ce d
e co
ntac
t nor
mal
e (N
)
H2LP
H2QP
RDM
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
3
3.5
4x 10
−7
Abscisse (m)
Sou
ples
se (
m/N
)
Zone de débattement du frotteur
(a) (b)
Fig. 3.15: (a) Comparaison des methodes lineaire hybride et quadratique hybride dans le cas du systeme
poutre-noeud frottant. (b) Souplesse locale de la poutre en fonction de la position.

Chapitre 3 : Approche du probleme de resolution en quasi-statique 77
L’etude de cet exemple nous a montre que la methode d’interpolation hybride restait competitivepour des structures qui se caracterisent par de fortes variations sur la souplesse. On a aussi puconstater que la methode hybride n’ameliorait pas toujours de facon significative les resultatsd’une interpolation quadratique, mais qu’elles les amelioraient dans d’autres cas lorsque les va-riations de la souplesse sont faibles (voir l’exemple du socle etudie precedemment). A posteriori,la methode hybride va tout de meme dans le sens d’une amelioration des resultats.
3.4.4 Interpolation hybide en deplacement-souplesse : contact surfacique.
Dans un contact surfacique, l’equation (3.84) definie pour un contact ponctuel n’est plusvalable. En effet, la force de contact calculee aux noeuds maıtres d’un element de contact neresulte plus d’un seul element de contact. De plus, les interfaces ne sont pas necessairementdiscretisees avec le meme niveau de finesse. Dans la suite, on se place dans une situation ou lataille des mailles du corps esclave est quatre fois plus petite que celle des mailles du corps maıtre.On suppose egalement que le maillage est regulier au niveau des interfaces de contact afin de nepas trop compliquer le probleme dans cette premiere approche.
Afin d’adapter l’equation locale (3.84) au contact surfacique, on doit tout d’abord redefinirla souplesse sur le corps maıtre. En fait, on definit la souplesse sur le corps maıtre au point decontact avec tout noeud esclave en utilisant la souplesse interpolee comme dans le cas du contactponctuel et un rapport ri que l’on definit comme etant le rapport entre la surface d’integrationautour du point de contact sur le corps maıtre et la surface d’integration autour du noeud esclavei. Puisque notre maillage est regulier, on notera que ri = 4 (ou ri = 2.5 pour les noeuds de bord)si l’on neglige l’influence de la deformation des elements surfaciques : la deformation des elementssurfaciques est supposee faible par rapport a leur taille. L’expression de cette souplesse locale surle corps maıtre nous est alors donnee par :
S′p,i = ri · Sp,i (3.88)
S′p,i correspond a une estimation de la souplesse au point de contact pour le corps maıtre s’il etait
maille avec le meme niveau de discretisation que le corps esclave.Cette premiere modification n’est cependant pas suffisante. Comme on l’a fait remarquer prece-
demment, la force de contact calculee en un noeud du corps esclave ne depend plus necessairementd’un seul element de contact. La force calculee aux noeuds de la surface maıtre resulte d’uneintegration sur les elements de la surface dont ce noeud fait partie. Comme pour les souplesses,on va chercher a determiner la force de contact qui s’exerce sur les noeuds du corps maıtre sil’on considere la souplesse locale en ce noeud. En fait, on va deduire cette force par interpolationen utilisant les forces de contact associees aux noeuds du corps esclave. Sur la figure 3.16, onschematise l’obtention des forces de contact aux noeuds maıtres a partir de celles calculees pourles noeuds esclaves. Dans cette schematisation, une interpolation lineaire a ete utilisee.
Dans le cas d’un element de contact 2D et lineaire, on a 3 noeuds. Soit i le numero du noeudesclave associe a cette element. La force de contact approchee qui est associee a ce noeud esttoujours notee Fc,i et les forces de contact locales et interpolees pour les deux noeuds maıtres

78 Chapitre 3 : Approche du probleme de resolution en quasi-statique
Fc^
−
Fc^
Corps esclave
Corps maitre
(1)
(2)
Ω
Ω
Fig. 3.16: Schematisation du calcul des forces de contact locales.
sont definies respectivement par F′c,i et F′′
c,i. On introduit maintenant la notion de surchargelocale que l’on definit par :
Fscc,i = Fc,i − αi,1F′
c,i − αi,2F′′c,i (3.89)
ou αi,1 et αi,2 sont les coefficients d’interpolation associes aux noeuds maıtres de l’element decontact.On propose alors de remplacer la force de contact Fc,i dans le calcul de Up,i pour un contactponctuel (eq. (3.84)) par la surcharge locale Fsc
c,i :
Up,i = S′p,iF
scc,i (3.90)
On notera que cette nouvelle expression permet toujours de verifier le contact ponctuel puisquedans ce cas F′
c,i = F′′c,i = 0 (si le contact n’est pas sur l’un des noeuds du corps maıtre).
Dans le cas du contact surfacique, la prise en compte des couplages entre les noeuds maıtres del’element de contact qui sont utilises dans l’equation (3.84) cree cependant quelques problemes :la convergence du calcul devient beaucoup plus lente. D’ou, nous ne prendrons pas en compte lescouplages dans le calcul des souplesses locales, ce qui correspond a une hypothese simplificatricedans l’interpolation hybride. Par consequent, nous avons choisi de les negliger dans le calcul deUp,i (pour le contact surfacique). L’expression finale de Up,i est alors obtenue par :
Up,i = S′′p,iF
scc,i (3.91)
avecS′′
p,i =∑
k
αi,kS′i,kk − α2
i,kS′i,kk (3.92)
La figure 3.17 schematise le calcul des forces non lineaires lorsque l’on utilise l’interpolationhybride en deplacement-souplesse pour un contact surfacique.
On se propose maintenant d’etudier le cas de deux solides rectangulaires presses l’un contrel’autre comme cela est represente sur la figure 3.18-a. Le corps esclave est celui sur lequel on

Chapitre 3 : Approche du probleme de resolution en quasi-statique 79
de U0U
j α i,kd’interpolationCalcul des coefficients
Convergé ?Stop
j j+1
p,iS"U =p,i^F (U )jc,i
pCalcul de Uèmej itération de l’algo. d’opt.
élément de contact
Calcul d’une baselocale pour chaque
α i,k Uk,ic,iU =Σk
cCalcul de U
c,iF (U)^
Initialisation
Calcul de la surcharge
ilocale p,iS" = α i,k(1− )α i,k Si,kk
Oui
Non
ε cex pλ(1) (1)(1)
=F −K U + (U −U −U −X )(1)
r
Calcul des ri
Calcul des souplesses locales
Σk
r
Fig. 3.17: Schema du calcul des forces non lineaires lorsque l’on utilise l’interpolation hybride en
deplacement-souplesse dans un contact surfacique. L’indice i est associe au noeud esclave.
Interpolation lineaire (s) Interpolation lineaire hybride (s)
30.19 40.50
Tab. 3.4: Temps de calcul CPU pour un chargement progressif du cube sur le quadrilatere en 100 etapes .
applique la charge. La figure 3.18-b nous montre le maillage des deux corps, le rapport ri est dequatre. Ce modele elements finis nous a permis d’etudier l’interpolation LL et LLP. De plus, on arealise un calcul avec des elements de contact noeud-a-noeud en utilisant des mailles a l’interface decontact d’une taille identique a celles du corps esclave. Les resultats obtenus pour le deplacementnormal a l’interface et la force de contact normale sont respectivement representes par les figures3.19-a et 3.19-b. On constate que l’interpolation lineaire hybride permet une amelioration signifi-cative par rapport a l’interpolation lineaire. On notera en particulier le resultat de l’interpolationlineaire hybride au niveau des surcontraintes qui est tres proche de celui obtenu par le modelenoeud-a-noeud (le corps maıtre est maille avec la meme finesse que le corps esclave). En ce quiconcerne les temps de calcul, on constatera que l’interpolation lineaire hybride a ete de l’ordre de25% moins rapide qu’une interpolation lineaire classique (voir table 3.4).
3.4.5 Conclusion
Dans cette partie, on a propose une nouvelle methode d’interpolation qui semble d’ores etdeja donner de bons resultats. En particulier, on notera des ameliorations significatives sur laprecision pour un contact ponctuel ou un contact surfacique et les temps de calcul qui restent

80 Chapitre 3 : Approche du probleme de resolution en quasi-statique
0 10.5−0.5−1x
p
(a) (b)
Fig. 3.18: (a) Schematisation 2D d’un cube presse contre un quadrilatere. (b) Maillage du systeme cube-
quadrilatere.
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−1.5
−1.45
−1.4
−1.35
−1.3
−1.25
−1.2
−1.15
−1.1x 10
−5
x (m)
Dép
lace
men
t nor
mal
(m
)
Interp. lin. u Interp. lin. u−SNoeud−à−noeud
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8x 10
5
x (m)
For
ces
noda
les
norm
ales
(N
)
Interp. lin. u Interp. lin. u−SNoeud−à−noeud
(a) (b)
Fig. 3.19: (a) Deplacement normal de l’interface de contact. (b) Force normale sur l’interface de contact.

Chapitre 3 : Approche du probleme de resolution en quasi-statique 81
tout a fait raisonnables. Cependant, d’autres investigations seraient necessaires pour ameliorer lamethode.
Dans le cas du contact surfacique par exemple, on pourrait definir la base locale a partir dela surface esclave en utilisant des interpolations sur le deplacement des noeuds esclaves.
Un autre aspect qu’il serait interessant d’approfondir, c’est la possibilite de supprimer ladependance d’un contact ”ponctuel” a la taille de l’element de contact. Pour cela, on pourraitutiliser la souplesse interpolee en la multipliant par un coefficient de proportionnalite en rapportavec la surface de l’element de contact qui est reellement en contact. L’interet d’une telle methodeserait par exemple de reduire le niveau de discretisation du maillage du carter pour un moteurd’avion lorsque l’on etudie le contact entre l’extremite des aubes d’une roue aubagee et le carter.Dans ce cas, on sera amene a autoriser une penetration du noeud esclave en tout point de l’elementde contact, meme sur les noeuds.
3.5 Extension des resultats aux problemes dynamiques
Considerons tout d’abord un probleme de chocs. Pour des impacts courts, on utilise general-ement une methode explicite qui permet une resolution plus rapide que les methodes implicitessur de petites echelles de temps. Dans ce cas, la theorie que nous avons developpe n’a pas eteprevue, a priori, pour ce type de probleme.
Pour un probleme transitoire avec une echelle de temps plus importante, on utilise les methodesimplicites qui permettent d’utiliser des pas de charge plus grands que les methodes explicites.Dans ce cas, on pourrait tout a fait imaginer un integrateur utilisant une methode d’optimisationet/ou les Lagrangiens Dynamiques a chaque instant tn. Pour cela, il suffit de definir une matricede raideur dynamique a l’instant tn qui dependrait de l’historique du mouvement (en utilisant unedifference finie par exemple). Dans ces conditions, il serait aussi possible de reduire le systemesur les ddls non lineaires comme dans le cas quasi-statique. L’utilisation des Lagrangiens Dy-namiques semble donc possible. Il est cependant difficile d’affirmer sans approfondir la questionque les modifications apporteraient des ameliorations significatives par rapport aux integrateursimplicites existants.
Pour plus d’informations sur les methodes temporelles explicites et implicites, on pourra sereferer a Dokainsish et Subbaraj [83, 84].
Pour finir, on considere un probleme avec une excitation T-periodique dont on cherche lessolutions stationnaires. Pour un tel probleme, on utilise parfois un passage en frequentiel. Aune frequence donnee, le probleme est semblable a un probleme statique. La difference avec leprobleme quasi-statique que l’on a etudie precedemment, c’est que les variables qui entrent enjeu definissent le comportement du systeme sur une periode et non plus a un instant donne. Parconsequent, il est difficile de faire une hypothese sur l’etat de chaque element de contact commecela pouvait etre fait en temporel.
En generalisant l’utilisation de la variable Xr dans le cadre de la methode indirecte deprise en compte des contraintes, on parvient a supprimer ce probleme vis-a-vis des equations

82 Chapitre 3 : Approche du probleme de resolution en quasi-statique
de contraintes. On peut alors resoudre le systeme d’equations dans le domaine frequentiel enutilisant une methode d’optimisation avec les Lagrangiens Augmentes ou les Lagrangiens Dy-namiques par exemple pour le calcul des forces non lineaires. L’utilisation de telles methodesen frequentiel etait l’objet de notre recherche et sera developpee dans le chapitre suivant. Ony expliquera aussi plus en details la nouvelle formulation des Lagrangiens Dynamiques qui serautilisee pour definir les forces non lineaires. Comme on a pu le constater en quasi-statique, cettemethode est plus performante que les Lagrangiens Augmentes lorsque la matrice Jacobienne estcalculee par difference finie.
3.6 Conclusions
Dans ce chapitre, on a pris soin d’expliquer les differentes methodes d’optimisation qui per-mettent de minimiser un probleme non contraint. On a aussi presente differentes methodes pourintroduire des equations de contraintes (frottement et non penetration) dans le systeme.
On notera qu’une nouvelle approche a ete developpee dans ce chapitre pour resoudre lesproblemes de contact avec frottement. Pour cela, la variable Xr a ete consideree differemment.Dans les methodes existantes, cette variable etait redefinie pour un element de contact aux transi-tions de l’etat glissant a l’etat bloque et maintenue constante pendant sa phase de collement. Pourune phase de glissement, les corrections etaient appliquees sur les forces de contact. Cette methodene permettait donc pas de generaliser simplement l’approche aux problemes dynamiques dans ledomaine frequentiel car il n’etait pas possible de formuler des hypotheses sur l’etat des l’elementsde contact pour une periode du mouvement sans engendrer un grand nombre de possibilites.
Dans ce chapitre, on a cependant montre que l’utilisation de la variable Xr, qui n’est pasune inconnue a proprement parler, pouvait etre generalisee quelque soit l’etat de l’element decontact en exprimant les forces non lineaires par rapport aux deplacements Un et Xr,n. A cetteformulation, on associe un algorithme de resolution qui permet de determiner les deplacementsrelatifs Xr,n et les forces non lineaires λn simultanement en accord avec les conditions de laloi de frottement et de non penetration. Cette algorithme joue un role tres important dans laresolution, les hypotheses sur l’etat des elements de contact y sont definies indirectement. Commeon l’a explique dans la derniere partie de ce chapitre, cette approche indirecte doit permettre degeneraliser l’approche a un probleme dynamique en frequentiel. Ce sera l’objet du chapitre suivantdans lequel on proposera aussi une nouvelle formulation des forces non lineaires et une reductiondu nombre des inconnues.
Une nouvelle methode d’interpolation a aussi ete proposee pour ameliorer la precision descalculs dans le cadre de grands deplacements. Cette nouvelle methode necessite des investigationssupplementaires pour ameliorer l’approche theorique et proposer d’avantages d’exemples. Onnotera que les resultats deja obtenus sur la precision et les temps de calcul sont tout de memetres bons. De plus, la perspective de supprimer dans le futur la dependance d’un contact ponctuel ala taille de l’element de contact rend la methode d’interpolation hybride en deplacement-souplessetres attractive.

Chapitre 4
Une nouvelle methode de resolution :
la DLFT
4.1 Introduction
Dans l’etude des turbomachines, de considerables efforts ont ete consacres a la formulation demodeles predictifs pour decrire le comportement des aubes amorties par l’ajout d’amortisseurspar frottement sec. Differentes methodes ont ete developpees pour calculer la reponse stationnaired’un tel systeme soumis a une excitation periodique. Souvent, la reponse est obtenue par uneintegration temporelle des equations du mouvement. Cependant, cette methode peut entraınerun cout numerique tres important, en particulier pour des systemes avec un faible amortissement.
Les methodes frequentielles telles que la methode de la balance harmonique (HBM, Har-monic Balance Method) permettent une reduction significative du cout de calcul compare a lamethode numerique d’integration temporelle. La HBM et sa derivee, la HBM incrementale, ontfrequemment ete utilisees pour predire la reponse forcee de structures avec des frotteurs [1, 2, 3].Ces etudes etaient limitees a quelques elements de frottement unidirectionnels (generalement unseul) en regle generale. De plus, alors que la plupart des etudes etaient limitees a une seuleharmonique temporelle du mouvement, quelques chercheurs se sont interesses a la reponse multi-harmoniques bien que la methode devienne rapidement tres lourde a utiliser parce qu’elle necessiteun travail analytique important. En 1989, Cameron et Griffin [4] ont developpe une methode al-ternant les domaines frequentiel et temporel (AFT, Alternating Frequency/Time method) quievitait cette difficulte en evaluant les forces non lineaires dans le domaine temporel. De cettefacon, les conditions de Coulomb pouvaient etre appliquees facilement puisque les transitionsstick-slip sont controlees a chaque pas iteratif. Neanmoins, toutes ces methodes (HBM, IHBM,AFT) souffrent de problemes de convergence lorsque la methode de Newton-Raphson est retenuepour resoudre les equations non lineaires dans le domaine frequentiel.
Recemment, Guillen et Pierre [5] ont modifie la methode AFT en integrant exactement lesforces non lineaires dans le domaine temporel et en utilisant la methode de Broyden pour resoudre
83

84 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
les equations non lineaires, ce qui donne de meilleurs resultats. Leur methode permet une conver-gence rapide pour des systemes de grande taille avec plusieurs frotteurs unidimensionnels.
Dans la nouvelle methode que nous allons presenter dans la suite, on utilisera la methode deresolution de hybride Powell programmee par Garbow et al. du laboratoire national de Argonne(USA) (se referer a [75] pour plus de details sur la methode de Powell). Poudou [68] a obtenuune meilleure stabilite numerique avec cette methode lorsque les modeles de frotteurs deviennentplus complexes (Charge normale variable avec prise en compte de la separation par exemple).
Quand le probleme est resolu dans le domaine frequentiel, un element de contact est general-ement defini par un ensemble de ressorts lineaires et un element de frottement sec. En effet, onest dans ce cas incapable de resoudre le probleme si l’element de contact est seulement definipar un element de frottement sec. Par consequent, lorsque le modele du frotteur est suffisammentsimple, il est inclus dans la definition de l’element de contact. La plupart des etudes n’ont considerejusqu’a ce jour qu’une raideur unidirectionnelle dans la definition des elements de contact. Cesdernieres annees cependant, des etudes ont ete menees pour des problemes de contact avec frotte-ment dans le cas de mouvements 2D incluant un chargement normal variable et la separation [30],d’un mouvement tangentiel 2D [31, 32, 33] ou d’un mouvement 3D [36, 68] (incluant le charge-ment normal variable et la separation). Dans les modeles elements finis, le microglissement peutetre etudie en utilisant un ensemble d’elements de contact pour modeliser l’interface. Dans le do-maine frequentiel, les ressorts utilises dans la definition des elements de contact conduisent a unedegradation du modele de contact (generalement, une partie des couplages entre les elements decontact est negligee et l’element n’a pas de masse pour eviter des calculs trop couteux). Si les La-grangiens augmentes [8] etaient utilises, ces ressorts ne seraient plus necessaires. Par consequent,le modele elements finis de la structure pourrait etre utilise directement pour resoudre les forcesnon lineaires. Les Lagrangiens Augmentes sont tres populaires dans le domaine temporel, maisaucune methode ne permet de les utiliser dans le domaine frequentiel. Dans la suite, nous propo-sons la methode des Lagrangiens Dynamiques avec alternance entre les domaines frequentiel ettemporel (DLFT, Dynamic Lagrangian mixed Frequency-Time method) pour obtenir la reponseforcee en regime permanent. Cette methode n’utilise pas les Lagrangiens Augmentes bien que lamethode indirecte de prise en compte des contraintes developpee au chapitre trois le permette.En effet, les Lagrangiens Augmentes necessitent une remise a jour qui doit se faire en dehorsdu schema de resolution du systeme non lineaire pour eviter des erreurs dans le calcul du Jaco-bien par difference finie ou par une methode quasi-Newtonienne. Par consequent, pour eviter untemps de calcul tres important, le calcul des Lagrangiens Augmentes doit se baser sur les forcesnon lineaires obtenues a la frequence precedente. Ainsi, la methode de resolution du systemenon lineaire n’est appelee qu’une seule fois pour chaque frequence. Dans ce cas, les LagrangiensAugmentes donnent generalement de bons resultats mais la plage dans laquelle le coefficient depenalite peut etre choisi n’est pas tres large. Pour resoudre ces difficultes et ameliorer la conver-gence, on introduit les Lagrangiens Dynamiques qui sont bases sur les equations du mouvement.De plus, une reduction supplementaire de la taille du systeme est proposee.
Cette etude est limitee a une structure elastique, homogene et isotrope qui est soumise a de

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 85
faibles deformations periodiques autour d’un etat d’equilibre. De plus, les effets gyroscopiques sontnegliges et la loi de Coulomb est utilisee pour modeliser le frottement sec sans aucune considerationpour les mecanismes d’usure. Un ensemble d’exemples est presente pour des poutres en contactavec des elements de contact flexibles fixes au sol.
4.2 Analyse theorique de la methode
On considere une structure elastique quelconque ayant N degres de liberte (ddls). Pour cettestructure, on definit un element de contact comme un ensemble de deux noeuds entre lesquelsle contact avec frottement peut se produire. On definit les noeuds non lineaires comme etant lesnoeuds qui ont servi dans la definition des elements de contact et on parle de noeuds lineairespour les autres.
Pour une telle structure, l’equation du mouvement est donnee par :
MU + CU + KU + Fc = Fex (4.1)
ou la structure lineaire est definie par sa matrice de masse M, sa matrice de raideur K etsa matrice d’amortissement visqueux C. Les vecteurs U, U et U definissent respectivement ledeplacement, la vitesse et l’acceleration de la structure, Fex est le vecteur des forces externes(excitation periodique), et Fc represente les forces non lineaires dues au contact avec frottement.Dans la suite, tous les vecteurs sont en gras ainsi que les matrices qui sont en plus soulignees.
Maintenant, en supposant la reponse stationnaire periodique, on transforme ces equationsdans le domaine frequentiel. L’expansion de Fourier du deplacement U est definie par :
U(t) =Nh∑k=0
Uckcos(kωt) +
Nh∑k=1
Usksin(kωt) (4.2)
avec Nh le nombre d’harmoniques temporelles retenues.On introduit le vecteur multi-harmoniques pour le champ de deplacement dans le domainefrequentiel par :
U = [Uc0
TUc1
TUs1
T ...UcNh
T UsNh
T ]T (4.3)
Le tilde de surlignage refere au vecteur multi-harmoniques. Les vecteurs multi-harmoniques pourles forces non lineaires Fc et les forces externes Fex sont definis de la meme facon. Par consequent,l’equation (4.1) peut etre ecrite dans le domaine frequentiel sous la forme :
ΛU + Fc = Fex (4.4)
avec Λ =
[K 0
0 Λh
]et Λh,k =
[−(kω)2M + K kωC
−kωC −(kω)2M + K
], k = 1, ..., Nh
ou Λh est la matrice de raideur dynamique diagonale par blocs pour laquelle le keme bloc Λh,k
definit la matrice de la raideur dynamique associee a la keme harmonique.

86 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
Noeud de référence
Noeud observé
èmei élément de contact
U
U
U
nl,ref,i,n
r,i,n
nl,obs,i,n
Fig. 4.1: Deplacement relatif pour le ieme element de contact, au pas de temps tn.
4.2.1 Reduction sur les noeuds non lineaires
Puisque la force de contact est nulle pour les noeuds non lineaires, l’equation (4.4) peut etreorganisee en fonction des deplacements lineaires (indice ln) et non lineaires (indice nl) :[
Λln,ln Λln,nl
Λnl,ln Λnl,nl
]Uln
Unl
+
0
Fc,nl
=
Fex,ln
Fex,nl
(4.5)
Notez que Fc,ln est nul par definition.
L’equation (4.5) peut etre reduite simplement sur les ddls non lineaires :
ΛredUnl + Fc,nl = Fred (4.6)
ou Λred et Fred sont respectivement la matrice de la raideur dynamique reduite et le vecteur desforces externes reduit :
Λred = Λnl,nl − Λnl,lnΛ−1ln,lnΛln,nl (4.7)
Fred = Fex,nl − Λnl,lnΛ−1ln,lnFex,ln (4.8)
On s’est place dans le cas ou la matrice Λln,ln est inversible.L’equation (4.6) est un ensemble de Nnl(2Nh + 1) equations non lineaires, Nnl etant le nombrede ddls localises sur les interfaces de contact.Une fois que les deplacements des ddls non lineaires Unl sont connus, Uln peut etre resolusimplement comme suit :
Uln = Λ−1ln,ln
(Fex,ln − Λln,nlUnl
)(4.9)
4.2.2 Reduction sur le deplacement relatif
Le temps de calcul requis augmentant rapidement avec le nombre d’inconnues non lineaires,on propose une seconde reduction pour diviser par deux la taille du probleme non lineaire. Pourchaque element de contact defini precedemment comme un ensemble de deux noeuds, on choisit

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 87
arbitrairement un noeud pour etre la reference dans l’observation du mouvement de l’autre noeud.Ainsi, le deplacement relatif peut etre introduit par (voir fig. 4.1) :
Ur = Unl,obs − Unl,ref (4.10)
Les indices ref et obs sont respectivement utilises pour definir les noeuds references et observes.De plus, la ieme ligne de chaque vecteur est associee avec le ieme element de contact. On doit aussidefinir la matrice inverse de Λred par :
S = Λ−1red (4.11)
et le vecteur multi-harmoniques des multiplicateurs de Lagrange λ par :
λ = Fc,nl,obs = −Fc,nl,ref (4.12)
ou Fc,nl =
Fc,nl,obs
Fc,nl,ref
Les multiplicateurs de Lagrange peuvent etre decrits comme etant les forces de contact tangen-tielles dues au frottement et les forces de contact normales qui assurent qu’il n’y a pas penetration.En utilisant les equations (4.6), (4.11), et (4.12), le deplacement Unl est organise en fonction desnoeuds references et observes :
Unl,obs
Unl,ref
=
[Sobs,obs Sobs,ref
Sref ,obs Sref ,ref
](−
λ
−λ
+
Fred,obs
Fred,ref
)(4.13)
En utilisant les equations (4.10) et (4.13), une nouvelle relation est obtenue apres quelques ma-nipulations mathematiques simples :
ΛrUr + λ = Fr (4.14)
Avec Λr =[Sref ,ref + Sobs,obs − Sref ,obs − Sobs,ref
]−1
Fr = Λr
((Sobs,obs − Sref ,obs
)Fred,obs −
(Sref ,ref − Sobs,ref
)Fred,ref
)L’indice r definit le systeme reduit sur les deplacements relatifs des noeuds observes.Si Ur est resolu, λ est connu et λ permet de resoudre Unl simplement en utilisant l’equation(4.6).
4.2.3 Reduction des ddls normaux
Le temps de calcul est fortement conditionne par le nombre d’inconnues a resoudre par lamethode d’optimisation. Par consequent, si l’on etudie un probleme pour lequel on sait qu’il n’ya jamais separation, on peut definir un nouveau type d’element de contact pour lequel les ddlsnormaux sont condenses.
Dans le systeme a resoudre, on peut separer les ddls normaux des ddls tangentiels :[Λr,N,N Λr,N,T
Λr,T,N Λr,T,T
]Ur,N
Ur,T
+
λN
λT
=
Fr,N
Fr,T
(4.15)

88 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
Or, dans le cas ou il n’y a pas de separation, on a :
Ur,N = 0 (4.16)
Le systeme a resoudre peut alors se reduire a la seconde equation du systeme 4.15 :
Λr,T,TUr,T + λT = Fr,T (4.17)
Dans l’algorithme d’optimisation, on sera aussi amene a calculer les forces de contact normalesen utilisant tout simplement la relation :
λN = Fr,N −Λr,N,TUr,T (4.18)
Cette methode a ete testee et donne les resultats escomptes.
4.2.4 Formulation des Lagrangiens Dynamiques
Afin de resoudre l’equation (4.14), on utilise une methode de resolution pour les systemesnon lineaires (l’algorithme de resolution hybrid Powell par exemple) pour trouver les zeros de lafonction vectorielle non lineaire suivante :
f(Ur
)= ΛrUr + λ − Fr (4.19)
Pour le calcul du Jacobien par difference finie, la longueur de chaque pas est dimensionneeen interne par le programme hybrid Powell en fonction de l’inconnue associee. Cette procedureconduit a un probleme de convergence si l’inconnue associee est nulle (ce qui n’est pas rarelorsque l’on travaille avec le deplacement relatif). C’est pourquoi le programme hybrid Powell aete legerement modifie pour imposer un pas de longueur constante dans le calcul par differencefinie.
Pour verifier les conditions de non penetration et de frottement, on introduit un nouveauvecteur inconnu pour le deplacement relatif, Xr, tel que :
Xr = Ur (4.20)
lorsque la convergence est atteinte. Bien que l’introduction de ce vecteur semble redondante, ilest utilise de la facon suivante : Ur est le resultat de l’algorithme de resolution du systeme nonlineaire qui cherche une solution aux equations du mouvement (4.14) dans le domaine frequentiel,Xr est calcule dans le domaine temporel en fonction de Ur pour verifier la loi de Coulomb et lesconditions de non penetration au niveau des forces non lineaires λ. La convergence de la DLFTsera atteinte lorsque les deux equations (4.14) et (4.20) seront satisfaites.
Notre objectif est de programmer la fonction f(Ur
)qui est necessaire a hybrid Powell pour
resoudre f(Ur) = 0. Afin d’y parvenir, on a besoin d’exprimer λ. En utilisant les equations (4.14)et (4.20), on propose une nouvelle formulation pour λ que nous definissons comme etant lesLagrangiens Dynamiques :
λ = Fr − ΛrUr + ε(Ur − Xr
)(4.21)

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 89
ou ε est un coefficient de penalite choisi arbitrairement positif, et qui va influencer la vitesse deconvergence.
Les Lagrangiens Dynamiques pourraient aussi etre definis en utilisant les equations du mou-vement pour les noeuds observes de l’equation (4.6) sans faire de reduction. Notez que l’equation(4.21) assure que si l’une des equations (4.14) ou (4.20) est verifiee, il en est de meme pour l’autre.Algebriquement, la formulation des Lagrangiens Dynamiques permet d’obtenir le bon resultat,comme les multiplicateurs de Lagrange, sans considerer les forces non lineaires comme des incon-nues. La formulation des Lagrangiens Dynamiques est aussi plus interessante que la formulationdes Lagrangiens Augmentes dans le domaine frequentiel puisqu’il n’y a pas de problemes lies ala mise a jour. De plus, le coefficient de penalite peut etre choisi plus petit dans la premiereformulation que dans la seconde, ce qui permet une convergence plus rapide.
4.2.5 Processus de correction
Pour estimer λ, on utilise Ur qui est fourni par l’algorithme de resolution du systeme nonlineaire, mais on doit encore determiner Xr. On separe maintenant l’expression de λ dansl’equation (4.21) en deux parties. La premiere, λopt, sera appelee le vecteur force d’optimisa-tion :
λopt = Fr − ΛrUr + εUr (4.22)
λopt peut etre evalue dans le domaine frequentiel parce que Ur est donne dans ce domaine parhybrid Powell. La seconde, λcor, sera appelee le vecteur force non lineaire correctif :
λcor = εXr (4.23)
λcor n’est pas connu parce que Xr n’a pas encore ete estime. En utilisant les equations (4.21),(4.22) et (4.23), λ peut etre reformule comme suit :
λ = λopt − λcor (4.24)
En realisant une transformee de Fourier inverse, λ peut etre exprime dans le domaine temporel.L’equation (4.24) devient :
λn = λoptn − λcor
n (4.25)
ou n est l’indice associe au neme pas de temps.Un organigramme de l’algorithme de la DLFT est presente sur la figure 4.2.
Dans la suite, λcorn sera resolu simplement en utilisant les conditions de Coulomb et de non
penetration. Cependant, il est important de remarquer que Xr,n permet de justifier notre approchetheorique, mais qu’il n’est pas utile de le calculer dans le cas d’elements de contact noeud-a-noeud.Le calcul de λcor qui est proportionnel a Xr est suffisant.On applique alors la procedure de correction et la gestion des transitions qui ont ete definies auchapitre trois pour des problemes en quasi-statique a partir d’une relation identique a l’equation(4.25).

90 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
+ −
FFT
(FFT)−1
λ~
λ~ème
itérationi dans l’algo. d’opt.
λStop Convergé ?
λ
Non
Oui
r,0
ε=
~−= + ε~λ
λcor
~−= −
i+1i
i r,ir,iFr i
i
i
i
F
r,i+1
Conditions de
non pénétration
opt optU U~ ~Initialisation
U~
Xr,i
U~
U
U
~
~
frottement et de
r,i r,if( ) r,i
Λ r
Λ r
Fig. 4.2: Implementation de la DLFT.
4.3 Resultats numeriques de validation
Afin d’evaluer la validite et la precision de la DLFT, trois exemples numeriques sont etudies.Dans les deux premiers exemples, on compare notre methode avec une integration temporellerealisee sous ABAQUS [85] en utilisant la methode des multiplicateurs de Lagrange. Le systemeconsidere est une poutre avec un frotteur attache. Le mouvement relatif etudie au niveau del’element de contact est 1D dans le premier cas et 2D dans le second. Dans le troisieme exemple,les resultats sont obtenus a partir de la DLFT pour un systeme de grande taille constitue deplusieurs poutres et plusieurs frotteurs mono-dimensionnels.
4.3.1 Poutre et frotteur sans masse en 2D (dir. tang. et normale) et sans
separation
Dans le premier exemple, une poutre en acier avec un amortisseur par frottement sec positionneaux trois dixiemes de sa longueur est considere comme represente sur la figure 4.3-a. Les seuls ddlsretenus pour chaque noeud sont dans les directions X et Z. La section de la poutre dans le planXY est de 0.01m× 0.1m et sa longueur de 0.5m. La plate-forme ou le frotteur est positionne a lameme section dans le plan ZY que la poutre dans le plan XY mais sa longueur dans la directionX n’est que de 1mm. Le modele elements finis de la poutre est condense en utilisant la methodede synthese modale de Craig & Bampton [63] avec quatre ddls actifs et les deux premiers modespour les vibrations libres de la poutre pour laquelle les ddls actifs ont ete fixes. Les quatre ddlsactifs proviennent des deux noeuds retenus (ddls dans les directions X et Y pour chaque noeud),le premier au niveau du frotteur et le second a l’extremite libre de la poutre.
Un element de contact est defini entre la poutre et le frotteur pour lequel le premier ddl cor-respond a la direction tangentielle et le second a la direction normale. Le coefficient de frottement

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 91
FY
FX
X
YZ
M, K
k
k
T
N
FX
FN
(a) (b)
Fig. 4.3: (a) Geometrie de la poutre et du frotteur attache, (b) Schema de la poutre amortie par frot-
tement sec pour un modele de frotteur flexible 2D avec des raideurs unidirectionnelles dans les directions
tangentielle et normale.
est de µ = 0.1 et l’amortissement visqueux de ξ = 0.01. Le frotteur est defini par deux raideursunidirectionnelles : kT = 2.4 · 107N/m dans la direction X et kN = 2.4 · 103N/m dans la directionZ. Une precharge de FN = 1500N est appliquee sur le frotteur dans la direction Z. On notera queles ddls normaux ont ete maintenus comme etant des inconnues bien que les variations autourde la position d’equilibre soient tres faibles. Ceci est rendu necessaire par la definition meme deselements de contact sous ABAQUS.
Enfin, une excitation periodique FX = 50 · sin (ωt) est appliquee sur l’extremite libre de lapoutre (voir fig. 4.3-b).
Une comparaison entre les resultats obtenus pour la reponse stationnaire a la frequence def = 124Hz sur la figure 4.4-a, nous donne une excellente correlation entre la DLFT et l’integrationtemporelle.
D’autres frequences ont ete verifiees comme presente sur la figure 4.4-b et donnent aussiune excellente correlation. Aucun probleme de convergence n’a ete rencontre pour la DLFT etl’integration temporelle. Pour ces calculs, 21 harmoniques ont ete retenues dans notre methodeet cela semble suffisant pour representer la reponse precisement. Cependant, il est important deremarquer qu’il n’existe pas a priori de moyens simples pour choisir le nombre d’harmoniquesapproprie.
Il est difficile de comparer les temps de calcul entre la DLFT et ABAQUS. Cependant, pourse faire une idee, on va comparer le temps de calcul pour la frequence f = 124Hz dans le casou la DLFT est realisee directement avec une solution initiale nulle sur la periode (le calculn’est pas realise sur une plage de frequence). Ainsi, la DLFT ne sera pas avantagee par rapporta l’integration temporelle d’ABAQUS pour laquelle les conditions initiales sont prises a zero.

92 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
0 1 2 3 4 5 6 7 8
x 10−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5x 10
−5
Time t (s)
Am
plitu
de (
m)
Noeud du frotteur, DLFT (1024 pas/période) Noeud de la poutre, DLFT (1024 pas/période) Noeud du frotteur, int. temp. (1612 pas/période) Noeud de la poutre, int. temp. (1612 pas/période)
120 122 124 126 128 1300
0.5
1
1.5
2
2.5x 10
−5
Fréquence (Hz)
Am
plitu
de (
m)
DLFT (21H, 1024 pas/période) Int. temp. (1612 pas/période)
(a) (b)
Fig. 4.4: (a) Deplacements de la poutre au niveau du frotteur et du frotteur. Comparaison en utilisant
la DLFT et l’integration temporelle de ABAQUS. (b) Reponse frequentielle de la poutre au niveau du
frotteur.
De plus, l’integration temporelle sera realisee sur 30 periodes, ce qui permet d’obtenir la solutionavec une precision moyenne. Dans ces conditions, l’integration temporelle necessitait 342 secondes(avec l’ordinateur utilise pour ce calcul : Compact ES40) a comparer aux 0.45 secondes necessairesa la DLFT pour obtenir une bonne precision. Par consequent, la DLFT est au moins 760 foisplus rapide que l’integration temporelle. Dans ce cas, 260 evaluations de la matrice Jacobienne(par difference finie et par la methode quasi-Newtonienne d’ordre 1) etaient necessaires dans laDLFT. Si le calcul est realise sur une plage de frequence pour la DLFT, seules deux evaluationsde la matrice Jacobienne sont en general necessaires (pour le cas etudie) pour obtenir le resultata une frequence donnee, ce qui reduit le temps moyen du calcul de chaque frequence a 0.042s.
Pour finir, on notera que la precharge peut etre optimisee afin de reduire au maximum lareponse de la poutre. La demarche classique pour les roues aubagees des moteurs d’avion consis-tant a determiner la masse du frotteur qui permet d’obtenir cette precharge. La figure 4.5 donnel’influence de la precharge pour le systeme poutre-frotteur etudie dans ce paragraphe.
4.3.2 Poutre et frotteur sans masse en 3D et sans separation
La poutre presentee sur la figure 4.3-a est encore utilisee dans le second exemple. Le modeleelements finis de la poutre est condense en utilisant la methode de synthese modale de Craig& Bampton [63] en retenant six ddls actifs et les trois premiers modes de vibration libre de lapoutre fixee au niveau des ddls actifs. Les deux memes noeuds que dans le premier exemple sontretenus (3 ddls pour chacun). Une nouvelle raideur unidirectionnelle est ajoutee pour modeliserle frotteur dans la direction Y. La valeur de cette raideur est de 2.4 · 107N/m, la meme que cellequi est utilisee dans la direction X. Une comparaison pour la frequence f = 124Hz a ete realisee

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 93
20 40 60 80 100 120 1400
0.5
1
1.5
2
2.5
3x 10
−4
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
P=40N P=50N P=100N P=200N P=300N P=500N P=1500NP=5000N
Fig. 4.5: Reponse frequentielle de l’extremite de la poutre dans le systeme poutre-frotteur en fonction du
niveau de chargement P .
pour deux cas d’excitation. 21 harmoniques sont encore utilisees dans les calculs.
Sur la figure 4.6-a, les deplacements de la poutre au niveau du frotteur et du frotteur obtenuspar la DLFT sont compares dans le plan XY avec l’integration temporelle pour une excitationrectiligne (pas de dephasage entre les excitations dans les directions X et Y) : FX = 50 · sin (ωt)et FY = 500 · sin (ωt).
Les reponses en fonction du temps pour la poutre au niveau du frotteur et le frotteur lui-memesont donnees sur la figure 4.7-a pour la direction X et la figure 4.8-a pour la direction Y. D’autresfrequences ont ete verifiees comme montre sur la figure 4.9-a.
Sur la figure 4.6-b, on repete la comparaison dans le plan XY pour une excitation circulaireFX = 50 ·sin (ωt) et FY = 50 · cos (ωt). Les reponses en fonction du temps de la poutre au niveaudu frotteur et du frotteur lui meme sont donnees sur la figure 4.7-b pour la direction X et surla figure 4.8-b pour la direction Y. Quelques frequences supplementaires ont ete verifiees commepresente sur la figure 4.9-b.
Les deplacements dans la direction Z ne sont pas representes parce qu’ils sont faibles et nepresentent pas d’interet. Bien sur, aucune perte de contact n’intervient avec les excitations quiont ete imposees.
La correlation entre la DLFT et l’integration temporelle est plutot bonne meme si l’on peutremarquer quelques differences qui sont dues a la precision numerique. La comparaison dansle domaine temporel entre les resultats de la DLFT et l’integration temporelle montre qu’il ya de petites erreurs en terme d’amplitude (en particulier dans la direction Y pour l’excitationrectiligne) et de phase. Les reponses frequentielles (figs 4.8-b et 4.9-b) montrent que ces erreursse traduisent aussi par un decalage de la reponse frequentielle.
Neanmoins, il est difficile de conclure que la DLFT est plus precise que l’integration tempo-relle d’ABAQUS bien que l’on puisse le supposer. En effet, ABAQUS se base probablement sur

94 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
x 10−5
−4
−3
−2
−1
0
1
2
3
4
5x 10
−6
Axe des X (m)
Axe
des
Y (
m)
Noeud du frotteur, DLFT (1024 pas/période) Noeud de la poutre, DLFT (1024 pas/période) Noeud du frotteur, int. temp. (1612 pas/période) Noeud de la poutre, int. temp. (1612 pas/période)Début du glissement (phase i=1,2) Fin du glissement (phase i=1,2)
1
1
2
2 1
1 2
2
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
x 10−5
−8
−6
−4
−2
0
2
4
6
8x 10
−7
Axe des X (m)
Axe
des
Y (
m)
Noeud du frotteur, DLFT (1024 pas/période) Noeud de la poutre, DLFT (1024 pas/période) Noeud du frotteur, int. temp. (1612 pas/période) Noeud de la poutre, int. temp. (1612 pas/période)Début du glissement (phase i=1,2) Fin du glissement (phase i=1,2)
2
1
1
2
1
2
1
2
(a) (b)
Fig. 4.6: Mouvements de la poutre au niveau du frotteur et du frotteur dans le plan tangentiel. Dans le
cas (a), excitation rectiligne. Dans le cas (b), excitation circulaire.
0 1 2 3 4 5 6 7 8
x 10−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5x 10
−5
Temps t (s)
Am
plitu
de (
m)
Noeud du frotteur, DLFT (1024 pas/période) Noeud de la poutre, DLFT (1024 pas/période) Noeud du frotteur, int. temp. (1612 pas/période) Noeud de la poutre, int. temp. (1612 pas/période)
0 1 2 3 4 5 6 7 8 9
x 10−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5x 10
−5
Temps t (s)
Am
plitu
de (
m)
Noeud du frotteur, DLFT (1024 pas/période) Noeud de la poutre, DLFT (1024 pas/période) Noeud du frotteur, int. temp. (1612 pas/période) Noeud de la poutre, int. temp. (1612 pas/période)
(a) (b)
Fig. 4.7: Deplacements de la poutre au niveau du frotteur et du frotteur compares dans la direction X
en utilisant la DLFT et l’integration temporelle. Dans le cas (a), excitation rectiligne. Dans le cas (b),
excitation circulaire.

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 95
0 1 2 3 4 5 6 7 8 9
x 10−3
−4
−3
−2
−1
0
1
2
3
4x 10
−6
Temps t (s)
Am
plitu
de (
m)
Noeud du frotteur, DLFT (1024 pas/période) Noeud de la poutre, DLFT (1024 pas/période) Noeud du frotteur, int. temp. (1612 pas/période) Noeud de la poutre, int. temp. (1612 pas/période)
0 1 2 3 4 5 6 7 8 9
x 10−3
−8
−6
−4
−2
0
2
4
6
8x 10
−7
Temps t (s)
Am
plitu
de (
m)
Noeud du frotteur, DLFT (1024 pas/période) Noeud de la poutre, DLFT (1024 pas/période) Noeud du frotteur, int. temp. (1612 pas/période) Noeud de la poutre, int. temp. (1612 pas/période)
(a) (b)
Fig. 4.8: Deplacements de la poutre au niveau du frotteur et du frotteur compares dans la direction Y
en utilisant la DLFT et l’integration temporelle. Dans le cas (a), excitation rectiligne. Dans le cas (b),
excitation circulaire.
120 122 124 126 128 1300
0.5
1
1.5
2
2.5x 10
−5
Fréquence (Hz)
Am
plitu
de (
m)
DLFT (21H, 1024 pas/période) Int. temp. (1612 pas/période)
120 122 124 126 128 1300
0.5
1
1.5
2
2.5x 10
−5
Fréquence (Hz)
Am
plitu
de (
m)
DLFT (21H, 1024 pas/période) Int. temp. (1612 pas/période)
(a) (b)
Fig. 4.9: Amplitude de la poutre au niveau du frotteur. Dans le cas (a),excitation rectiligne. Dans le cas
(b), excitation circulaire.

96 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
la nullite de la vitesse relative pour detecter la transition d’une phase de glissement a une phasede blocage. Cela laisse supposer l’existence d’une approximation dans la detection de cette tran-sition et par consequent dans la solution du probleme. Dans la DLFT, aucune approximation dece type n’est realisee pour detecter les transitions, la precision est directement liee au pas de temps.
4.3.3 Poutre et frotteur avec masse et avec separation en 3D
Tout d’abord, il est important de remarquer que la DLFT permet d’imposer des contraintesentre differents noeuds du maillage elements finis de la structure sans restrictions liees a cemaillage dans la definition des elements de contact. Ainsi, l’etude d’un frotteur avec masse ousans masse se fait de la meme facon par exemple. Lorsque la loi de Coulomb et la condition denon penetration sont appliquees dans la DLFT, il n’y a jamais a mettre en oeuvre une integrationtemporelle. En effet, comme on l’a explique precedemment dans la theorie, on se base sur λopt,que l’on calcule en frequentiel a partir du deplacement des noeuds obtenus par la methode d’op-timisation, pour appliquer les corrections. C’est l’un des avantages indeniables de la DLFT surles approches classiques en frequentiel ou alternant frequentiel et temporel pour lesquelles uneintegration temporelle est necessaire pour l’etude d’un frotteur avec masse. Si en plus de lamasse, un amortissement tres faible etait pris en compte, l’integration devrait etre realisee sur denombreuses periodes. Dans le cas de la DLFT, on se contente generalement de 1.5 a 2 periodes.
Dans ce paragraphe, on va s’interesser a un frotteur ponctuel pour lequel la masse mfrotteur =0.2kg et l’amortissement structural ξfrotteur = 0.01 sont pris en compte. A noter que la prise encompte de l’amortissement structural est en general benefique car il facilite la convergence. Deplus, on va imposer une excitation harmonique Ffrotteur = 1502 · cos(ωt) sur le frotteur dans ladirection normale de facon a provoquer une separation dans la reponse stationnaire du systeme.Cette excitation n’est pas representative d’un phenomene reel mais permet d’ajouter simplementune difficulte dans le probleme a resoudre.
Sur la poutre, on applique l’excitation circulaire qui a deja ete definie au paragraphe precedent.A une frequence de 127Hz, on a represente la trajectoire du point de contact sur la poutre (fig.4.10-a) et du frotteur (fig. 4.10-b). Le frotteur ayant une masse, son deplacement tangentiel n’estplus proportionnel a la force de contact tangentielle qui est donnee par la figure 4.11-a. A noter quel’amplitude de la force d’excitation appliquee sur le frotteur n’est que tres legerement superieurea la precharge. En fait, la raideur normale qui lie le frotteur a l’encastrement etant tres faible, laconvergence devient difficile si la force engendre des niveaux de deplacement trop grands lors dela separation. Bien sur, si cette raideur etait plus importante, on pourrait augmenter le niveaude force. Il resulte que le temps de separation est tres court. La figure 4.11-b qui represente laforce de contact normale en donne d’ailleurs une preuve. Le deplacement normal du frotteur lorsde la separation est probablement tres mal represente pendant la phase de separation lorsque 21harmoniques seulement sont prises en compte.
Les figures 4.12-a et 4.12-b donnent respectivement la valeur des coefficients de Fourier associesaux cosinus et aux sinus pour la force de contact selon l’axe des X. Ce resultat semble montrer

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 97
−15 −10 −5 0 5
x 10−6
−2
−1
0
1
2
3
4
5
6
7x 10
−7
Déplacement tangentiel selon l’axe des X (m)
Dép
lace
men
t tan
gent
iel s
elon
l’ax
e de
s Y
(m
)
2.91 2.92 2.93 2.94 2.95 2.96 2.97 2.98 2.99
x 10−3
−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
x 10−6
Déplacement tangentiel selon l’axe des X (m)D
épla
cem
ent t
ange
ntie
l sel
on l’
axe
des
Y (
m)
la poutre sont solidairesZone ou le frotteur et
(a) (b)
Fig. 4.10: (a) Deplacement tangentiel du point de la poutre en contact avec le frotteur. (b) Deplacement
tangentiel du frotteur (m = 200g, 21 harm.).
−100 −50 0 50 100 150 200 250 300 350
−14
−12
−10
−8
−6
−4
−2
0
2
4
Force de contact tangentielle selon l’axe des X (N)
For
ce d
e co
ntac
t tan
gent
ielle
sel
on l’
axe
des
Y (
N)
0 1 2 3 4 5 6 7 8
x 10−3
−500
0
500
1000
1500
2000
2500
3000
3500
Temps t (s)
For
ce d
e co
ntac
t nor
mal
e (N
)
(a) (b)
Fig. 4.11: (a) Force de contact tangentielle. (b) Force de contact normale.

98 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
0 2 4 6 8 10 12 14 16 18 20 22−20
0
20
40
60
80
100
120
140
160
Numéro de l’harmonique
Am
plitu
de d
es c
osin
us
0 2 4 6 8 10 12 14 16 18 20 22−10
−5
0
5
10
15
20
25
30
35
Numéro de l’harmonique
Am
plitu
de d
es s
inus
(a) (b)
Fig. 4.12: (a) Participation des termes en cosinus de la serie de Fourier (21 harmoniques). (b) Partici-
pation des termes en sinus de la serie de Fourier (21 harmoniques).
que les dix premieres harmoniques repondent de facon non negligeable. De plus, il est interessantde constater que le terme constant (pour l’harmonique d’ordre zero) n’est pas nul. En fait, lechargement normal variable fait que la position autour de laquelle vibre le frotteur n’est pluscentree sur sa position de depart. C’est dans ce genre de situation qu’une penalisation sur ledeplacement relatif dans la formulation des Lagrangiens Dynamiques prend tout son sens car ellepermet de prendre en compte cette derive de la position d’equilibre. Dans le cas d’une penalisationsur la vitesse relative que nous etudierons plus loin dans le chapitre, ce n’est plus le cas.
Si l’on s’interesse maintenant a la reponse frequentielle du systeme, on peut constater surla figure 4.13-a que l’amplitude du mouvement du frotteur dans la direction tangentielle peutdevenir tres importante du fait de l’inertie de la masse.
Dans la direction normale (fig. 4.13-b), les amplitudes obtenues pour la poutre et le frotteursont tres similaires.Pour finir, on constate sur la figure 4.14 l’amortissement apporte par le frotteur quand il est enaction.
4.3.4 Modeles de roue aubagee a 36 ou 108 poutres et desaccordage a 7%
Dans le troisieme exemple, la reponse d’un systeme desaccorde de 36 poutres couplees (fig.4.15-a) soumis a une onde d’excitation tournante est tout d’abord consideree. L’ordre d’excita-tion moteur est de trois, ce qui correspond a un dephasage de π/6 pour les forces d’excitationharmoniques sur les poutres adjacentes. Le systeme de poutre est desaccorde de facon aleatoire de7%, ce qui signifie que les frequences de resonance naturelles de la poutre sont generees par unedistribution uniforme aleatoire avec une deviation standard de 7% pour simuler les differences quiproviennent des tolerances de fabrication. Chaque poutre est condensee en utilisant la methode

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 99
115 120 125 130 1350
1
2
3
4
5
x 10−5
Fréquence (Hz)
Max
imum
d’a
mpl
itude
dan
s la
dire
ctio
n ta
ngen
tielle
(m
)
Frotteur Poutre au point de contact Frotteur et poutre solidaires
115 120 125 130 135
3.1
3.2
3.3
3.4
3.5
3.6
3.7x 10
−6
Fréquence (Hz)M
axim
um d
’am
plitu
de d
ans
la d
irect
ion
norm
ale
(m)
Frotteur Poutre au point de contact Frotteur et poutre solidaires
(a) (b)
Fig. 4.13: (a) Reponse frequentielle dans la direction tangentielle du frotteur et de la poutre a la position
du frotteur. (b) Reponse frequentielle dans la direction normale du frotteur et de la poutre a la position
du frotteur.
115 120 125 130 1350
0.5
1
1.5
2
2.5
3
x 10−4
Fréquence (Hz)
Max
imum
d’a
mpl
itude
dan
s la
dire
ctio
n ta
ngen
tielle
(m
)
Extrêmité poutre Extrêmité poutre (frotteur solidaire)
Fig. 4.14: Reponse frequentielle dans le plan XY de l’extremite de la poutre.

100 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
−4
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
(a) (b)
Fig. 4.15: (a) Modele d’une roue aubagee avec 36 poutres, 36 frotteurs (connectes au sol) et 108 ddls.
(b) Deplacements de la poutre aux positions des frotteurs pour un systeme a 36 aubes desaccordees de 7%.
La raideur de couplage est de kc = 4500N/m et l’amortissement structural de ξ = 0.01. 21 harmoniques
ont ete utilisees dans ce calcul.
de synthese modale de Craig & Bampton [63] en retenant deux ddls actifs et le premier mode devibration libre de la poutre fixee au niveau des ddls actifs. Les matrices de masse et de raideurobtenues par une synthese modale sur le systeme poutre-frotteur defini par Berthillier et al. [86]sont donnees par Guillen [67] :
M =
6.67959 1.02115 0.6343
1.02115 1.22168 0.2321080.6343 0.232108 0.121809
(4.26)
K =
4.43203 · 106 −3.77514 · 105 0
−3.77514 · 105 6.9626 · 104 00 0 1.85323 · 105
(4.27)
Une raideur de couplage de 4500N est appliquee entre les extremites libres de deux poutresadjacentes. Il n’y a pas de couplages par le disque dans ce systeme particulier. Pour chaquefrotteur, un ddl est retenu. La raideur des frotteurs est de kT = 2.4 · 107N/m. La prechargenormale appliquee sur chaque frotteur est de 246N et l’amplitude de l’excitation sur l’extremitelibre de chaque poutre est de 20N . Pour finir, le coefficient de frottement utilise est de µ = 1.
La reponse en frequence du systeme au point de contact avec le frotteur est presentee surla figure 4.15-b, un amortissement visqueux de ξ = 0.01 a ete utilise pour les poutres et 21harmoniques ont ete retenues dans la DLFT. A noter toutefois que seules les harmoniques impairessont prises en compte dans le calcul puisque les harmoniques paires ne repondent pas lorsque lechargement normal reste constant. De plus, le terme constant de la decomposition en serie de

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 101
26 28 30 32 34 36 38 40 42 44 46 480
0.2
0.4
0.6
0.8
1
1.2x 10
−4
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
26 28 30 32 34 36 38 40 42 44 46 480
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8x 10
−3
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
(a) (b)
Fig. 4.16: Deplacements de la poutre (a) aux positions des frotteurs et (b) aux extremites des poutres
pour un systeme a 36 poutres desaccordees de 7%. La raideur de couplage est de kc = 4500N/m et l’amor-
tissement structural de ξ = 0.01. 21 harmoniques ont ete utilisees dans ce calcul.
Fourier qui est pris en compte dans notre approche a ete conserve. En fait, le traitement dece terme necessiterait quelques ameliorations dans le programme. En effet, il est actuellementgere comme une harmonique et entraıne la creation de nr inconnues associees a sin(0ωt) dans ladecomposition de Fourier qui ne servent a rien. De plus, il serait preferable de ne pas le prendreen compte dans un cas tel que celui-ci (charge normale constante) ou il est necessairement nul.Compte tenu du nombre de ddls non lineaires, du nombre d’harmoniques et du terme constant,le nombre d’inconnues a resoudre etait de 864.
Pour le resultat de la figure 4.15-b, on remarque qu’aucun probleme de convergence significatifn’a ete rencontre bien qu’un fort niveau de precision ait ete impose. On peut noter que dans laconfiguration de desaccordage choisie, il y a de grandes differences dans l’amplitude des pics deresonance des differentes aubes. Pour quelques frequences, le facteur entre les amplitudes despoutres peut atteindre jusqu’a dix bien que le systeme ne soit desaccorde que de 7%. Le facteurd’amplification pour l’aube au niveau du frotteur qui est defini comme etant le rapport entre lemaximum d’amplitude pour la reponse du systeme desaccorde et le maximum d’amplitude pourla reponse du systeme accorde est de 1.44. Cela signifie que l’energie peut etre fortement localiseesur quelques poutres pour de tels systemes.
Le resultat obtenu par la DLFT sur une roue aubagee a 36 aubes desaccordees montre qu’ilest possible d’etudier des systemes de grandes tailles. Cependant, on pourrait craindre une rapidedegradation des proprietes de convergence lorsque l’on augmente le nombre des inconnues.
On se propose maintenant de realiser un calcul avec le modele d’une roue aubagee de 108aubes. Les caracteristiques du nouveau probleme restent identiques a celles definies dans le casdes 36 aubes : aubes, frotteurs, raideur de couplage, desaccordage, ordre d’excitation moteur,

102 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
Nbre moyen d’appels Nbre moyen d’appelsau calcul de la matrice a f(Ur) avec la methode
Jacobienne par difference finie quasi-Newtonienne d’ordre 1
36 aubes 1.03 60108 aubes 1.05 99
Tab. 4.1: Proprietes de convergence de la DLFT pour des roues aubagees desaccordees de 36 aubes et 108
aubes.
amortissement visqueux, coefficient de frottement et nombre d’harmoniques retenues dans le cal-cul. On donne la reponse frequentielle des differentes aubes au point de contact avec le frotteur(4.16-a) et a l’extremite de l’aube (4.16-b).On peut donc constater que le calcul a relativement bien converge. Il serait maintenant interessantd’etudier dans quelle mesure la convergence de la DLFT a ete affectee lorsque le nombre d’incon-nues a ete multiplie par trois. Pour cela, on va comparer des quantites que l’on definira dans lasuite et qui sont moyennees sur l’ensemble des frequences pour lesquelles un calcul non lineairea ete realise. On note au passage que la reponse frequentielle a ete calculee en 400 points defrequence uniformement repartis sur une plage qui s’etend de 50rad/s a 350rad/s. Sur ces 400points, 241 ont necessite un traitement non lineaire et 159 un simple calcul lineaire (aucun elementde contact en glissement).
Pour comparer la convergence des deux calculs, on va utiliser deux criteres : le nombre moyend’appels au calcul par difference finie de la matrice Jacobienne et le nombre moyen d’appels ala fonction f(Ur) lors de l’utilisation de la methode quasi-Newtonienne d’ordre 1 pour remettrea jour le Jacobien. Les valeurs determinees pour le modele a 36 aubes d’une part et le modele a108 aubes d’autre part ont ete reportees sur la table 4.1. On peut constater que la convergences’est legerement degradee mais qu’elle reste remarquablement bonne et que l’on peut sans peineenvisager des systemes de tailles plus importantes. Par consequent, ce qui devrait nous limitermaintenant, ce sont les ressources informatiques : memoire et processeur.
En effet, les temps CPU necessaires augmentent tres rapidement avec la taille des modeles. Atitre indicatif, le temps de calcul CPU pour les cas a 36 aubes et 108 aubes etaient respectivementde 2h35mn et 2j14h12mn. Si l’on suppose que le temps de calcul est proportionnel a Nα
r , onaurait α ' 2.9. Par consequent, si l’on cherchait a resoudre un systeme a 216 aubes en conservantencore une fois les caracteristiques definies par celui a 36 aubes, c’est environ 20 jours CPU quiseraient necessaires avec les machines dont nous disposons. Pour ameliorer la DLFT, on pourraitcependant envisager de nouvelles voies d’investigation. Par exemple, on sait que le calcul dela matrice Jacobienne par difference finie coute cher en temps de calcul. On peut cependants’interroger sur la necessite de la recalculer pour chaque nouvelle frequence. Que se passerait-il sil’on se servait du Jacobien obtenu au pas de frequence precedent comme point de depart pour lamethode quasi-Newtonienne? Il n’est pas impossible que cette premiere estimation du Jacobiensoit suffisante dans la plupart des cas. De plus, on peut toujours chercher a ameliorer ce point

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 103
de depart en definissant un predicteur tangent. Nous n’avons pas eu le temps de tester cetteapproche, mais cela semble la meilleure facon de reduire encore le cout numerique simplementcompte tenu du fait qu’il sera difficile d’ameliorer de facon significative la vitesse de convergence.En ce qui concerne la memoire, 0.5Go (environ 0.2Go en memoire vive) ont ete necessaires pourla roue aubagee a 108 aubes.
Pour finir, on note qu’il existe quelques frequences pour lesquelles la precision demandeen’a pas ete atteinte : 3 pour le systeme a 36 aubes et 5 pour celui a 108 aubes. En general, leresultat reste suffisamment bon si bien que l’on a pas cherche a recalculer ces points. Cependant,il est probable que les problemes de convergence vont aller en s’amplifiant lorsque l’on cherchera aetudier des systemes avec des amortissements structuraux plus faibles que 0.01. D’autres solutionsseront envisagees dans la suite de ce chapitre au paragraphe ”Etude de structures a amortissementstructural tres faible” pour ameliorer la convergence lorsque l’amortissement structural diminue.
4.4 Methode de continuation
Dans les exemples traites jusqu’a present, les parametres choisis n’entraınaient pas de phenomenede saut. Cependant, dans les problemes non lineaires de contact avec frottement, il est bien connuque les effets d’assouplissement ou de durcissement peuvent conduire a ce phenomene. Un effetd’assouplissement se traduit par une diminution de la frequence propre. A l’inverse, un effet dedurcissement conduit a une augmentation de la frequence propre.
Le phenomene de saut indique l’existence d’etats multiples dans la reponse du systeme pourcertaines plages de frequence. Dans ces conditions, un simple balayage frequentiel ne permetplus de determiner toutes les solutions et peut conduire a des problemes numeriques de conver-gence lors du franchissement du saut. Pour resoudre cette difficulte, on utilise generalement desmethodes de continuation telles que les methodes ”arclength” ou ”pseudo-arclength” par exemple(voir Nayfeh [87]). Dans cette etude, on s’est toutefois limite a la methode ”arclength” qui est laplus frequemment utilisee dans la litterature. Elle a souvent ete employee dans l’etude du contactsans frottement entre le rotor et le stator [88, 89, 90]. Bien que cela soit plus rare, des problemesde contact avec frottement ont aussi ete etudies par Yang et al. [30] par exemple. En fait, lesmethodes de continuation s’appliquent de la meme facon pour un probleme de contact sans frot-tement ou avec frottement. Si les methodes de continuation n’ont ete que tres peu utilisees dansle cadre de problemes avec frottement, c’est parce que les etudes se limitaient la plupart du tempsa des modeles de frotteurs tres simples qui ne conduisaient pas au phenomene de saut dans lesconditions d’etude.
4.4.1 Methode ”arclength”
Dans la methode ”arclength”, on ne fixe plus la frequence propre de facon arbitraire. En fait,la frequence est maintenant definie comme une inconnue et on doit lui associer une equationsupplementaire. Pour cela, on utilise l’abscisse curviligne s sur la reponse frequentielle de la

104 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
premiere harmonique. Soit s0, une abscisse curviligne pour laquelle on a determine une solution.On cherche une solution du probleme en s = s0 + ds. L’increment ds peut etre relie a l’incrementdω sur la pulsation par :
(ds)2 =(
dω
ω0
)2
+ ‖ Unormh=1 − Unorm
h=1,0 ‖2 (4.28)
ω0 et Uh=1,0 sont respectivement la pulsation et le vecteur deplacement sur la premiere harmo-nique pour l’abscisse curviligne s0. L’indice 0 signifie dans cette partie que l’on se refere au pasen frequence precedent. On definit le vecteur normalise Unorm par :
Unormi =
Ui
Υj,k(4.29)
aveci = 1, . . . , Nnl (2Nh + 1))j est un ddl de l’element de contact auquel appartient i, j ∈ Ω(1), j a la meme direction que i
k est un ddl de l’element de contact auquel appartient i, k ∈ Ω(2), k a la meme direction que i
Υj,k =
√max
(|U c
j |, |U ck |)2
+ max(|U s
j |, |U sk |)2
Le vecteur normalise Unorm0 est defini de la meme facon.
On remarquera que le deplacement relatif n’a pas ete utilise pour la normalisation. En effet, ledeplacement relatif engendre une singularite lorsqu’il reste nul sur une periode complete.
Pour debuter, on realisera un premier calcul normalement sur la premiere frequence et c’estensuite seulement que l’on mettra en oeuvre la continuation.On notera que l’un des avantages de la methode ”arclength”, c’est qu’il existe toujours au moinsdeux solutions au probleme qui se trouve a une distance ds du point de depart. La difficulteconsiste cependant a eviter autant que possible qu’il y en ait plus de deux d’une part et que lasolution trouvee ne conduise pas le programme a rebrousser chemin d’autre part. Pour cela, onchoisit generalement un increment ds suffisamment petit et on utilise un predicteur tangent. Dansnotre cas, on a utilise un predicteur du premier ordre en utilisant les solutions obtenues en s0 eten s0 − ds. Ce predicteur est le plus simple existant et pourrait certainement etre ameliore.
L’integration de la continuation dans le code de calcul telle qu’elle a ete realisee necessiteraitencore quelques ameliorations. Il faudrait par exemple y ajouter une methode permettant d’adap-ter la longueur du pas aux difficultes a franchir. De plus, il est important de remarquer que lesreductions ajoutent un temps de calcul significatif. Actuellement, la reduction du systeme nonlineaire est remise a jour a chaque fois que la fonction f(Ur) dont on cherche les zeros est appeleepar la methode d’optimisation hybride Powell. Cependant, cette remise a jour n’est reellementutile que lorsque la frequence change. Or, cela n’est vrai qu’une seule fois dans le calcul de lamatrice Jacobienne par difference finie et les appels a la fonctions f(Ur) sont utilises a au moins90% pour cela. En ne realisant la remise a jour que lorsque cela est necessaire, on pourrait doncdiminuer de facon consequente le poids des reductions dans les calculs par continuation.

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 105
m
k
k2
1
jeu
c
Fig. 4.17: Schema du systeme avec jeu etudie.
10 15 20 25 30 35 40 450
1
2
3x 10
−5
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
DLFT, 3 harm. DLFT, 9 harm. DLFT, 21 harm. Intégration temporelle
10 15 20 25 30 35 40 450
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
−4
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
ξ=0.1 ξ=0.01
(a) (b)
Fig. 4.18: (a) Reponse en frequence de la structure avec jeu (contact sans frottement). (b) Influence de
l’amortissement structural sur la reponse en frequence.
4.4.2 Resultats pour un systeme avec jeu (contact sans frottement)
Afin de tester l’efficacite de notre methode en presence d’un jeu, nous avons choisi d’etudierle systeme defini par la figure 4.17. Les caracteristiques du probleme sont definies par : m = 50kg,k1 = 106N/m, k2 = 108N/m et ξ = 0.1. On applique sur la masse une force F = 10 ·cos(ωt) et oncherche a determiner les reponses stationnaires possibles du systeme pour differentes frequences.Un balayage frequentiel autour du premier pic de resonance a ete realise en prenant en compte 3, 9,puis 21 harmoniques (voir fig. 4.18-a). De plus, les resultats obtenus par integration temporelle surdifferentes frequences ont aussi ete reportes sur ce meme graphique. On constate que le resultatconverge rapidement puisque les resultats obtenus pour 9 et 21 harmoniques sont quasimentidentiques et concordent avec les resultats de l’integration temporelle.
En ce qui concerne le deplacement de la masse sur une periode, il est represente sur la figure4.19-a pour la frequence f = 25Hz et on constate encore une fois que les resultats obtenus avec

106 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
−2
−1
0
1
2
3x 10
−5
Temps t (s)
Dép
lace
men
t (m
)
DLFT, 3 harm. DLFT, 9 harm. DLFT, 21 harm. Intégration temporelle
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04−180
−160
−140
−120
−100
−80
−60
−40
−20
0
20
Temps t (s)
For
ce d
e co
ntac
t (N
)
DLFT, 3 harm. DLFT, 9 harm. DLFT, 21 harm.DLFT, 51 harm.
(a) (b)
Fig. 4.19: (a) Deplacement de la masse m sur une periode. (b) Force de contact sur une periode.
9 ou 21 harmoniques sont tres proches de celui obtenu par une integration temporelle.On peut ensuite comparer les estimations de la force de contact sur une periode (fig. 4.19-
b) en fonction du nombre d’harmoniques qui a ete pris en compte. Pour obtenir une bonneapproximation du pic, on remarque que 9 harmoniques ne sont plus suffisantes et qu’il en fautplus de 21 pour approcher avec precision les instants ou la force de contact est nulle.
De ces resultats, on deduit qu’il n’est pas necessaire pour le systeme etudie de decrire avecprecision la force de contact pour obtenir un bon resultat sur le deplacement.
On a aussi calcule la reponse frequentielle du systeme pour un amortissement structural deξ = 0.01 (voir fig. 4.18-b). Encore une fois, la DLFT a permis une convergence rapide et precise.A noter cependant que pour ξ = 0.001, le programme ne parvient plus a franchir le pic qui devienttres raide, il rebrousse chemin. Differentes ameliorations pourraient etre envisagees pour resoudrecette difficulte comme cela a ete suggere lors de la presentation de la methode arclength
Par exemple, on pourrait programmer un pas adaptatif ou ameliorer le predicteur tangent.Pour finir, on notera que les solutions trouvees ne sont pas necessairement stables et qu’une
etude de stabilite serait une suite logique pour un tel probleme. Cependant, l’etude de la stabilitene semble pas triviale lorsque les lagrangiens dynamiques reduits sur le deplacement relatif ontete utilises car on ne dispose plus d’une expression analytique des forces non lineaires en temporel.
4.5 Etude de structures a amortissement structural tres faible
4.5.1 Lagrangiens dynamiques avec penalisation sur la vitesse relative
Dans le domaine temporel, les Lagrangiens Augmentes sont souvent utilises avec une penalisationsur la vitesse relative parce que ce choix permet d’obtenir une meilleure convergence. Cette

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 107
methode est generalement utilisee pour trouver les forces non lineaires des elements de contactqui sont bloques. Notez que la position des noeuds bloquees est connue. Cela est important carune penalisation sur la vitesse relative ne permet pas de l’obtenir.
Dans le domaine frequentiel, on a besoin de connaıtre la position moyenne. En fait, les termesconstants de la transformee de Fourier ne peuvent pas etre obtenus par une penalisation sur lavitesse relative. Par consequent, ce type de penalisation ne peut etre utilise que pour des systemestres particuliers, lorsque les forces d’excitation ne conduisent pas a changer la position moyenne.Cela sera le cas si l’on utilise des elements de contact tangentiels unidirectionnels sans prechargedans la direction tangentielle et sans chargement normal variable.
Dans ce cas, une penalisation sur la vitesse relative peut parfois ameliorer la convergence parrapport a une penalisation sur le deplacement relatif lorsque l’amortissement visqueux est tresfaible.
Pour la solution convergee, on doit verifier :
Wr = Vr (4.30)
ou Wr et Vr sont respectivement les deplacements relatifs associes a Ur et Xr. En utilisant lesequations (4.14) et (4.30), l’expression des Lagrangiens Dynamiques avec une penalisation selonles vitesses relatives est donnee par :
λ = Fr − ΛrUr + ε(Vr − Wr
)(4.31)
ou ε est un coefficient de penalite positif.
On separe l’expression de λ (4.31) en deux parties :
λopt
= Fr − ΛrUr + εVr (4.32)
λcor
= εWr (4.33)
L’expression de λ en temporel est encore une fois donnee par l’equation (4.25). Cependant, lorsquela methode de penalite sur la vitesse relative est utilisee, une expression iterative de λcor
T,n n’est plusnecessaire. La force de contact tangentielle peut etre formulee directement en utilisant l’equation(4.25) :
λT,i,n = λoptT,i,n − λcor
T,i,n−1 (4.34)
Ainsi, pour le ieme element de contact, λcorT,i,n verifie :
λcorT,i,n = 0 si ‖ λopt
T,i,n ‖< µ|λN,i,n|λcor
T,i,n 6= 0 si ‖ λoptT,i,n ‖> µ|λN,i,n|
D’apres l’equation (4.33), il vient naturellement que :
λcorT,i,n = 0 si le ieme element de contact est bloque,
λcorT,i,n 6= 0 si le ieme element de contact est glissant.

108 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
Par consequent, les transitions se deduisent de la violation des conditions suivantes :
‖ λoptT,i,n ‖< µ|λN,i,n| si le ieme element de contact est bloque,
‖ λoptT,i,n ‖> µ|λN,i,n| si le ieme element de contact est glissant.
En utilisant l’equation (4.33), l’equation (3.72) peut se reformuler sous la forme :
λT,i,n = µ|λN,i,n|λcor
T,i,n
‖ λcorT,i,n ‖ (4.35)
D’apres les equations (4.34) et (4.35), λcorT,i,n peut etre defini par :
λcorT,i,n =
‖ λcorT,i,n ‖
µ|λN,i,n|+ ‖ λcorT,i,n ‖λopt
T,i,n (4.36)
ou la norme de λcorT,i,n est donnee par :
‖ λcorT,i,n ‖=‖ λopt
T,i,n ‖ −µ|λN,i,n| (4.37)
Si les Lagrangiens Dynamiques sont utilises avec une penalisation sur la vitesse relative, la cor-rection est directement applique sur λopt
T,i,n sans modifier l’orientation. Remarquez que, dans ledomaine frequentiel, les termes constants de λcor ne sont pas necessairement nuls. En fait, ondoit verifier la condition suivante pour les termes constant de la vitesse relative :
0h=0 = Wr,h=0 (4.38)
lorsque la solution convergee est atteinte.L’indice h = 0 signifie que l’on ne considere que les termes constants de la transformee de Fourier.
L’interet d’une penalisation sur la vitesse relative, c’est q’elle ajoute un amortissement fictif,ce qui va faciliter la convergence. Cet amortissement artificiel va tendre vers zero lorsque l’ons’approchera de la solution. Un autre avantage tient au fait qu’une seule periode est necessairepour appliquer les corrections lors du calcul (il n’y a pas de premier chargement).
Comme on l’a explique, une penalisation sur la vitesse relative ne permet pas a l’algorithmed’optimisation de determiner les termes constants de la transformee de Fourier. Il est importantde noter que l’hypothese qui consisterait a negliger la remise a jour des termes constants, lorsquecela est necessaire, est inacceptable car les equations de contraintes sur le deplacement ne seraitplus necessairement verifiees.
On peut cependant imaginer des approches alternatives, des penalisations mixtes par exemple.Dans la suite, on en propose une qui utilise une penalisation sur le deplacement relatif pour dirigerles calculs. Si un element de contact est glissant, les forces non lineaires tangentielles associees a cetelement sont calculees a partir des Lagrangiens Dynamiques avec une penalisation sur la vitesserelative. Notez que les transitions sont toujours controles par la penalisation sur le deplacementrelatif.
Ainsi, on peut introduire une penalisation sur la vitesse relative pour les ddls glissants. Cepen-dant, la convergence semble moins bonne que dans le cas d’une penalisation sur le deplacement

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 109
relatif. Cela provient probablement de la discontinuite que l’on cree dans le calcul des forces decontact.
Actuellement, aucune solution ne permet a notre connaissance d’appliquer une penalisationsur la vitesse relative pour les elements de contact bloques lorsque les termes constants de latransformee de Fourier doivent etre remis a jour.
Pour conclure cette partie, on remarquera que la penalisation sur le deplacement relatif est lameilleure des methodes proposees dans le contexte du domaine frequentiel. Une penalisation surla vitesse relative est trop restrictive et la penalisation mixte proposee precedemment ne permetpas d’ameliorer la convergence des calculs.
4.5.2 Reduction adaptative
La reduction adaptative consiste a choisir entre la reduction sur les ddls non lineaires et cellesur le deplacement relatif pour chaque harmonique afin de faciliter la convergence du calcul a unefrequence donnee.
En effet, lorsque l’amortissement structural est faible, on a constate que les reductions pou-vaient conduire a des matrices mal conditionnees a proximite des modes. De plus, lorsque denombreux modes ont des frequences de resonance tres proches, ce qui est le cas pour les rouesaubagees desaccordees, le plus grand terme de la matrice de raideur dynamique en valeur absoluepeut varier tres rapidement. Si l’on se place dans le cas d’un amortissement extreme ξ = 0 parexemple, la figure 4.20 montre les variations de ce terme en fonction de la frequence pour lesharmoniques impaires (ces harmoniques sont les seules a repondre lorsque le chargement normalreste constant).
Le principe de la reduction adaptative peut alors se definir comme suit. Premierement, onprend la reduction sur le deplacement relatif tant qu’elle donne des matrices suffisamment bienconditionnees en fonction de la frequence. Deuxiemement, si on traverse une plage de frequenceou cette reduction est mal conditionnee, on prend la reduction sur les ddls non lineaires si etseulement si celle-ci est mieux conditionnee.
En general, les blocs matriciels associes aux harmoniques ne sont pas tous mal conditionnes enmeme temps, si bien que l’on conserve un nombre de ddls qui n’est que tres legerement superieurau cas ou l’on reduit sur le deplacement relatif. Par contre, on evite une tres grande partie desproblemes de convergence. A noter que cette technique n’est interessante que si l’on consideredes amortissements tres faibles. Pour un amortissement de ξ = 0.01 par exemple, la matrice deraideur dynamique n’est pas trop mal conditionnee comme semble le montrer la figure 4.21 quirepresente encore une fois le plus grand terme de la matrice en valeur absolue.
En utilisant a la fois les Lagrangiens Dynamiques avec une penalisation sur la vitesse relativeet la reduction adaptative, on parvient a un resultat tout a fait remarquable puisque l’on a puresoudre le systeme a 36 poutres deja presente auparavant, a la seule difference que l’amortisse-ment visqueux etait de ξ = 0. Le resultat obtenu est donne par la figure 4.22.
La reduction adaptative pourrait aussi etre utilisee dans l’etude du phenomene de flottement.Differents auteurs [91, 92, 93, 94, 67] ont deja travaille sur le sujet en imposant un amortissement

110 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
34 36 38 40 42 440
1
2
harm
. n°1
30 35 40 450
2
4x 10
−3
harm
. n°3
42 44 46 480
2
4
harm
. n°5
30 32 34 36 380
2
4
harm
. n°7
26 28 300
1
2
3
harm
. n°9
46 47 480
2
4
6
harm
. n°1
1
39 40 410
10
20
harm
. n°1
3
33 34 35 360
2
4
6
8
harm
. n°1
5
29.5 30 30.5 31 31.50
5
10
harm
. n°1
7
26 27 28 290
2
4
harm
. n°1
9
30 35 40 450
0.1
0.2
harm
. n°2
1
30 35 40 450
0.1
0.2
harm
. n°2
3
Fig. 4.20: Representation graphique de la fonction max(|Λred,k,i,j (ω) |) pour chaque harmonique 2k −
1 (k = 1, . . . , 12) : en continu pour la reduction sur le deplacement relatif et en pointille pour la reduction
sur les ddls non lineaires. L’amortissement structural des poutres a ete suppose nul dans cet exemple.

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 111
30 35 40 450
2
4
harm
. n°1
30 35 40 450
0.2
0.4
harm
. n°3
30 35 40 450
0.5
1
1.5
harm
. n°5
30 35 40 450
0.5
1
1.5
harm
. n°7
30 35 40 450
0.5
1
1.5
harm
. n°9
30 35 40 450
2
4
6
harm
. n°1
1
30 35 40 450
2
4
6
harm
. n°1
3
30 35 40 450
2
4
6
harm
. n°1
5
30 35 40 450
2
4
6
harm
. n°1
7
30 35 40 450
2
4
6
harm
. n°1
9
30 35 40 450
2
4
harm
. n°2
1
30 35 40 450
1
2
harm
. n°2
3
Fig. 4.21: Representation graphique de la fonction max(|Λred,k,i,j (ω) |) pour chaque harmonique 2k −
1 (k = 1, . . . , 12) : en continu pour la reduction sur le deplacement relatif et en pointille pour la reduction
sur les ddls non lineaires. L’amortissement structural des poutres est de ξ = 0.01 dans cet exemple.

112 Chapitre 4 : Une nouvelle methode de resolution : la DLFT
25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
−4
Fréquence (Hz)
Am
plitu
de (
m)
Fig. 4.22: Deplacements de la poutre aux positions des frotteurs pour un systeme a 36 aubes desaccordees
de 7%. La raideur de couplage est de kc = 4500N/m et l’amortissement structural de ξ = 0. 21 harmoniques
ont ete utilisees dans ce calcul.
negatif sur une aube amortie par frottement sec. La reduction adaptative pourrait permettred’ameliorer la convergence des calculs et l’etude de systemes plus complexes tels que les rouesaubagees desaccordees.
4.6 Conclusions
Une nouvelle methode alternant les domaines frequentiel et temporel a ete proposee dansce chapitre pour obtenir la reponse stationnaire : the Dynamic Lagrangian mixed Frequency-Time method (DLFT). Cette methode utilise une nouvelle formulation pour les Lagrangiens dansle domaine frequentiel (les Lagrangiens Dynamiques) pour determiner les forces non lineairesdans les structures elastiques avec des contraintes de frottement. Cette formulation repose surles equations du mouvement et une penalisation sur le deplacement relatif aux interfaces defrottement. Le deplacement relatif est calcule de deux facons differentes. Premierement, Ur estobtenu par une methode de resolution des systemes non lineaires telle que celle programmee danshybride Powell et deuxiemement, Xr est determine en utilisant les conditions de Coulomb et denon penetration pour determiner l’etat (bloque, glissant, separe) aux interfaces.
De la meme facon, une penalisation sur la vitesse relative ou une penalisation mixte peutetre realisee dans la formulation des Lagrangiens Dynamiques (la methode reste valable pour lesLagrangiens augmentes). On a cependant mis en avant les restrictions de ces methodes par rapporta une penalisation sur le deplacement relatif lorsque l’on travaille dans le domaine frequentiel.
Avec quelques modifications simples, la formulation des Lagrangiens Dynamiques pourraitaussi etre utilisee pour resoudre les problemes dynamiques de contact entre les structures elastiqueset rigides.

Chapitre 4 : Une nouvelle methode de resolution : la DLFT 113
Une autre contribution theorique tient en la reduction par deux du nombre d’inconnues aresoudre en utilisant le deplacement relatif comme nouvelle variable du probleme.
De plus, la DLFT nous permet de supprimer les ressorts qui etaient utilises jusqu’a presentdans les methodes frequentielles ou alternant les domaines frequentiel et temporel. Par consequent,les modeles elements finis peuvent etre utilises sans degrader le modele elements finis des interfacesde contact.
Enfin, le cas general du mouvement 3D au niveau de l’interface de contact est simple aprogrammer.
Ainsi, la nouvelle methode conserve les avantages d’une procedure d’integration temporellequi utilise les multiplicateurs de Lagrange par exemple tout en permettant un calcul rapide etprecis de la reponse forcee en regime permanent. Remarquez aussi l’efficacite et la robustesse del’algorithme qui peut etre applique a des systemes de grande taille.
Cette methode qui permet une resolution sans un modele special pour l’interface de contactdevrait etre applicable dans le cas de structures complexes amorties par frottement sec telles queles pieds d’aube dans les roues aubagees.

114 Chapitre 4 : Une nouvelle methode de resolution : la DLFT

Chapitre 5
Conception et modelisation
numerique du banc
5.1 Introduction
Les developpements theoriques discutes dans la partie precedente ont permis de definir unenouvelle approche pour resoudre les problemes de contact avec frottement. Un code de calcul aete programme a partir de ces resultats.
L’objectif premier du banc experimental sera de valider ce code sur un probleme complexepresentant une difficulte representative de ce que l’on peut rencontrer dans l’aeronautique. Dansles roues aubagees, les frottements au niveau des pieds d’aube sont relativement difficiles a prendreen compte. En effet, la modelisation d’une interface de contact pour laquelle le chargement n’estpas uniforme et varie au cours du temps avec eventuellement une separation partielle n’est passimple. C’est ce type de contact que l’on va etudier dans la suite a l’aide du banc experimentalet du code numerique.
Le second objectif consistera a etudier la dynamique du banc. On cherchera en premier lieu asavoir si le frottement sec au niveau des pieds d’aube peut amortir de facon significative la reponsede la structure sur un mode de resonance. Si la reponse s’avere etre positive, on determinera sicet amortissement est important des l’enclenchement d’un certain niveau de microglissement ouen situation de macroglissement seulement.
Dans le cas de roues aubagees reelles, l’amortissement en pied d’aube peut s’averer interessantmeme lorsqu’il est tres faible. Des experiences realisees par la SNECMA ont montre que l’evolutiondu coefficient de frottement en pied d’aube pouvait jouer sur la stabilite de la reponse.
Le banc experimental que nous nous proposons d’etudier dans cette partie doit repondre a cesdeux objectifs. On definit schematiquement le banc (Fig. 5.1) par un socle et une piece specialeconstituee d’une plaque et de deux pieds d’aube simples en vis-a-vis que l’on nommera ”plaque-2P” (2P = 2 pieds).La plaque-2P sera usinee de telle sorte qu’elle ne puisse pas etre inseree dans le socle sans
115

116 Chapitre 5 : Conception et modelisation numerique du banc
Socle
pied d’aube
monobloc
plaque
Interface decontact AB
AB
Fig. 5.1: Schematisation du banc experimental.
avoir ete chauffee au prealable. De cette facon, on va assurer la precharge de la plaque-2P sansdispositif mecanique exterieur qui pourrait modifier la reponse du systeme. Afin qu’il soit possiblede demonter le banc, l’aube et le socle ne seront pas realises a partir du meme materiau.
Dans la suite, on se propose de dimensionner le banc experimental pour optimiser la reponseen glissement au niveau des pieds d’aubes et de limiter au maximum les surcontraintes localesqui pourraient deteriorer rapidement la structure lors de son utilisation. Ensuite, on s’interesseraa la modelisation numerique du banc experimental. L’influence de certains parametres tels que lenombre d’elements de contact, le nombre d’harmoniques et l’amplitude de la force d’excitationseront etudies. Enfin, on realisera differentes etudes de validation pour verifier que le banc, telqu’il a ete dimensionne, nous permettra de travailler dans des conditions ou les vibrations de laplaque-2P seront amorties par frottement sec de facon significative.
5.2 Dimensionnement du banc en quasi-statique
5.2.1 Introduction
L’objectif dans ce chapitre est de dimensionner le banc pour que l’on ait du microglissementsur le premier mode de flexion et de torsion lors des mesures experimentales. Il sera importantde verifier que la puissance necessaire a l’excitation est realisable experimentalement et que leslimites d’elasticite des materiaux utilises ne sont pas depassees.
En dynamique, si l’on applique la force d’excitation au centre de la plaque, la puissanceΠ a fournir est donnee par : fexuω. Avec fex l’amplitude de la force d’excitation necessaire al’obtention du deplacement u au centre de la plaque.

Chapitre 5 : Conception et modelisation numerique du banc 117
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Position normalisée sur l’interface de contact AB
Rép
artit
ion
des
cont
rain
tes
norm
ales
nor
mal
isée
s pa
r ra
ppor
t à la
moy
enne
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Position normalisée sur l’interface de contact AB
Rép
artit
ion
des
cont
rain
tes
norm
ales
nor
mal
isée
s pa
r ra
ppor
t à la
moy
enne
(a) (b)
Fig. 5.2: (a) Profil du chargement normal sur la largeur d’une surface de contact pour le 1er processus
de microglissement (α = 50o). (b) Profil du chargement normal sur la largeur d’une surface de contact
pour le 2eme processus de microglissement (α = 40o).
5.2.2 Definition d’une configuration initiale
L’annexe B donne les dimensions de la configuration utilisee pour l’etude en quasi-statique.Pour definir cette premiere configuration, quelques calculs ont ete realises sous ANSYS [81] afinde choisir grossierement une geometrie. Ces calculs ne sont pas reportes dans ce memoire.
Pour les materiaux, on a choisi de realiser le socle en acier et la plaque-2P en aluminium.Les proprietes thermiques de ces materiaux font que la plaque-2P se dilatera quasiment deux foisplus vite que le socle. Ainsi, il sera facile de desassembler le montage lorsque cela sera necessaire.Les proprietes classiques de l’acier sont donnees par : Eacier = 210GPa, νacier = 0.3, ρacier =7800kg/m3 et αacier = 13 · 10−6K−1. En ce qui concerne l’aluminium, on a : Ealu = 75GPa,νalu = 0.3, ρalu = 2700kg/m3 et αalu = 23.5 · 10−6K−1
Pour le coefficient de frottement, on sait qu’il varie de moins de 0.2 pour un pied d’aubelubrifie a plus de 0.5 apres disparition du lubrifiant . On s’est donc place dans un cas defavorableen choisissant un coefficient de frottement de µ = 0.5.
Definition des forces seuils
On definit une force seuil comme etant le niveau de force necessaire pour engendrer unprocessus de microglissement cyclique (pour le modele elements finis). On notera qu’il existedifferents processus de microglissement, l’etude en quasi-statique nous a permis d’en mettre deuxen evidence pour la configuration initiale. Le premier provient d’un allegement du chargementnormal et se propage de bas en haut (fig. 5.2-a). Le deuxieme intervient lorsque le pied est prochede se soulever et se propage ensuite du haut vers le bas (fig. 5.2-b).
On associe donc une force seuil a chacun de ces processus : F1 pour le premier et F2 pour le

118 Chapitre 5 : Conception et modelisation numerique du banc
0 1 2 3 4 5 6 7 8 9 106000
6050
6100
6150
6200
6250
6300
6350
6400
Ordre de la dichotomie
F1
0 10 20 30 40 50 60 70 80 90 1000
1000
2000
3000
4000
5000
6000
7000
Nombre d’éléments
F1
(a) (b)
Fig. 5.3: (a) Chargement progressif par dichotomie. (b) Influence du nombre d’elements.
second. A noter que le premier processus de microglissement semble plus efficace pour amortir lastructure par frottement sec que le second.
Precision du calcul sous ANSYS
Il est difficile d’obtenir une bonne precision sans un cout numerique important. Le resultatobtenu va principalement dependre du soin que l’on apportera a la definition d’un maillage suffi-samment fin et a la realisation d’un chargement progressif.
Pour generer un chargement progressif, on a opte pour une dichotomie : au pas i, le chargementsera de fi = 2i−1
2i fex. On parlera d’une dichotomie d’ordre n pour la suite de chargements f1 afn suivie pour finir du chargement fex. Cependant, on constate que ce n’est pas suffisant. Pourresoudre le probleme, on va de plus realiser un chargement progressif lineaire a chaque pas de ladichotomie. La realisation de chaque etape en deux sous-etapes suffit. On constate alors qu’unedichotomie d’ordre sept devrait etre suffisante (fig. 5.3-a).
Pour le maillage, on a tout d’abord construit un maillage de base. Ensuite, en jouant sur laprecision au niveau des interfaces de glissement de la plaque-2P (fig. 5.3-b), on a constate que lataille des elements avait un role non negligeable sur le niveau des forces seuils.Pour une surface de contact de largeur 0.5 cm, l’utilisation de 70 elements semble satisfaisante.Pour le maillage, on fixe donc la largeur des elements a 0.5
70 cm. Le maillage obtenu a ete valideen realisant un calcul beaucoup plus fin : le resultat n’a pas change de facon significative.
On notera que dans les calculs ANSYS, on a utilise une simple methode de penalite pour lecalcul des forces non lineaires.

Chapitre 5 : Conception et modelisation numerique du banc 119
30 35 40 45 50 55 60 65 700
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Angle α
Rap
port
F/P
F2/P
F1/P
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Amplitude de la précharge P
Rap
port
F1/
P
(a) (b)
Fig. 5.4: (a) Influence du parametre α. (b) Influence de la precharge P .
5.2.3 Etude parametrique
Dans ce qui suit, lorsque l’on fait varier un parametre, les autres sont maintenus constants.Sur les graphiques, on a reporte en ordonnee le rapport de la plus faible des deux forces seuilssur la precharge. Seuls les resultats obtenus pour les parametres influents ont ete reportes dansla suite.
Angle α
On a fait varier l’angle α de 30o a 70o (fig. 5.4-a). Sur le domaine angulaire balaye, deuxportions de courbe apparaissent : l’une est liee a F2 sur [30,42] et l’autre a F1 sur [42,70]. Onconstate que F1
P decroıt lorsque l’angle augmente et cela jusqu’a environ 62o, ensuite F1P se met a
croıtre. On explique cela par un phenomene de coincement : lorsque l’angle devient trop important,le pied se bloque plus facilement.A noter que cette courbe depend des autres parametres. En particulier du coefficient de frottementµ : une augmentation de µ va deplacer les portions de courbes F1
P et F2P vers le haut (F1
P etantcertainement plus sensible aux variations de µ que F2
P ), et l’extremum sur F1P vers la gauche.
Precharge P
Dans cette partie, on fait varier l’amplitude de la precharge (fig. 5.4-b). On constate que lacourbe F1
P croıt tres rapidement lorsque la precharge est faible. Pour une precharge importante,le rapport F1
P semble tendre lentement vers une valeur limite. Le parametre P est sans aucundoute l’un des parametres les plus interessants. En diminuant sa valeur, on peut reduire de faconsignificative F1 et les contraintes supportees par le systeme. Par exemple, en divisant la prechargepar 2, la force F1 sera reduite de plus de moitie.

120 Chapitre 5 : Conception et modelisation numerique du banc
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Coefficient de frottement µ
Rap
port
F1/
P
Fig. 5.5: Influence du parametre µ
Coefficient de frottement µ
L’influence du coefficient de frottement nous est donnee par la figure 5.5. La configurationinitiale a ete definie avec un coefficient de frottement de µ = 0.5 pour se placer dans un cas ou lalubrification n’est pas tres bien assuree. Sans lubrifiant, le coefficient de frottement pour une aubede soufflante en alliage de titane se situerait entre 0.5 et 1. Les calculs montrent qu’il est difficiled’obtenir un microglissement significatif avec un coefficient de frottement aussi fort. En reduisantle coefficient de frottement, on constate que l’on peut reduire la force seuil F1 facilement.
Dimensions de la plaque
Tout d’abord, on assimilera la plaque-2P a une poutre. Ainsi on pourra estimer approxima-tivement et de facon analytique l’influence des dimensions de la plaque sur l’amplitude de ladeformee statique de la plaque-2P et la premiere frequence de resonance. Ensuite, on verifiera siles tendances degagees se retrouvent dans le resultat ANSYS pour un calcul sur la plaque-2P.
Deformee statique d’une poutre non prechargee
La figure 5.6-a schematise la deformee statique d’une poutre encastree-encastree non prechargeeet les efforts qui entrent en jeux.L’equation des moments verifie alors :
EIu′′(x) = −12Fx +
14Fl sur [0,l] (5.1)
avec l la demi-longeur de la poutre et F la force statique appliquee au centre de la poutre. Deplus, l’encastrement en 0 nous donne deux conditions limites :
u(0) = 0

Chapitre 5 : Conception et modelisation numerique du banc 121
l0 2l
+F
F/2F/2
−Fl/4−Fl/4 u(x)F/2
P
F/2
−Fl/4
u(x)
(a) (b)
Fig. 5.6: (a) Deformee statique d’une poutre encastree-encastree. (b) Deformee statique d’une poutre
encastree-libre et prechargee.
u′(0) = 0
D’ou,
u′(x) = −14
Fx2
EI+
14
Flx
EI(5.2)
u(x) = − 112
Fx3
EI+
18
Flx2
EI(5.3)
avec b la largeur et h la hauteur d’une section de la poutre.Sur [l,2l], on obtient par symetrie : u(2l-x). L’amplitude du deplacement au centre de la poutreest alors donnee par :
u(l) =Fl3
2Ebh3(5.4)
Deformee statique d’une poutre prechargee
La figure 5.6-b schematise le quart de la poutre encastree et les efforts.Pour la deformation d’une poutre encastree-encastree et prechargee, on se ramene au cas d’unepoutre encastree-libre et prechargee ayant une longueur quatre fois moins importante. Si l’onnote u(x) l’amplitude du deplacement en x de la poutre encastree-encastree et ue−l(x) celle de lapoutre encastree-libre, on posera les relations suivantes :
* sur [0,l/2] : u(x) = ue−l(x)
* sur [l/2,l] : u(x) = 2ue−l
(l2
)− ue−l(l − x)
* sur [l,2l] : u(x) = ue−l(2l − x)
L’equation des moments verifie :
EIu′′(x) = −12Fx +
14Fl + u(x)P sur [0,l/2] (5.5)

122 Chapitre 5 : Conception et modelisation numerique du banc
avec P la precharge. De plus, l’encastrement en zero nous donne deux conditions limites :
u(0) = 0
u′(0) = 0
D’ou,
u(x) =(−u
(l
2
)+
Fl
4P
)ch
(√P
EIx
)− 1
2
√EI
P
F
Psh
(√P
EIx
)− 1
2F
P
(l
2− x
)+u
(l
2
)(5.6)
L’amplitude du deplacement a l’extremite libre de la poutre est alors donnee par :
u(l
2) =
12ν
(1 − th(γ)
γ
)(5.7)
avec ν = F l2P et γ =
√PEI
l2
D’ou, l’amplitude du deplacement au centre de la poutre encastree-encastree :
u(l) = ν ∗(
1 − th(γ)γ
)(5.8)
Frequence propre d’une poutre non prechargee
Energie cinetique :
Ec =12ρS
∫ 2l
0u2 dx = − 13
20160ω2ρSF 2l7
(EI)2(5.9)
Energie de deformation :
Ed =12EI
∫ 2l
0u′′2 dx =
F 2l3
48EI(5.10)
L’application de Rayleigh-Ritz nous donne l’expression de la frequence du premier mode propre :
f =12π
√42013
√EI
ρS
1l2
(5.11)
Frequence propre d’une poutre prechargee
Il faut ajouter a l’energie potentielle un terme resultant de la precharge :
EP =12
∫ 2l
0Pu′2 dx (5.12)
A partir de Rayleigh-Ritz, on en deduit alors la frequence de resonance :
f =12π
√42013
√EI
ρS
1l2
√1 +
110
Pl2
EI(5.13)

Chapitre 5 : Conception et modelisation numerique du banc 123
0 2 4 6 8 10 12 14 16 18 205500
5600
5700
5800
5900
6000
6100
6200
6300
6400
6500
6600
Demi−longueur de la plaque
For
ce F
1
−60 −40 −20 0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5
3
x 104
Variation de température ∆T
Pré
char
ge P
(a) (b)
Fig. 5.7: (a) Influence du parametre l (l = demi-longueur de la plaque). (b) Influence d’une variation
de temperature.
Influence du parametre l sur le microglissement
La figure 5.7-a nous donne l’influence de la longueur de la plaque (l correspond a la demi-longueur). La courbe F1 decroıt dans un premier temps pour croıtre par la suite et finale-ment decroıtre a nouveau. On peut expliquer cela par la souplesse qui dans le cas d’une poutreprechargee tend a evoluer proportionnellement a l3 pour les plaques courtes et a l pour les plaqueslongues (ce qui peut se deduire de l’equation (5.8) en realisant un developpement limite a l’ordre3). Pour une poutre prechargee, on a une phase transitoire ou la plaque passe d’une rigidite en1l3 a une rigidite en 1
l .
Sensibilite aux variations de temperature
Une fois la precharge imposee, la figure 5.7-b montre qu’une augmentation de temperatureentraıne une diminution du niveau de precharge environ deux fois moins rapidement que dansla phase de prechargement. En effet, dans ce dernier cas, le socle etait maintenu a temperaturefixe. Lorsque le socle se dilate avec la plaque-2P, il est normal que la precharge evolue moinsrapidement. En fait, la pente se deduit des coefficients de dilatation : − 23.5
23.5−13 ' −2.24.
5.2.4 Amelioration de la geometrie du banc
A l’etude parametrique realisee sur la configuration initiale, on peut ajouter quelques resultatsconcernant les frequences propres des premiers modes et des contraintes supportees par la struc-ture. Pour une precharge en temperature de ∆T = 60o C, on a :

124 Chapitre 5 : Conception et modelisation numerique du banc
Amplitude de la force seuil F1 : F1 ' 6280 NAmplitude du mouvement au centre de la plaque associee a F1 : u1 ' 2.4 cmContrainte de precharge dans la plaque : σP ' 103 MpaMaximum de contrainte lorsque l’on applique la force seuil F1 : σmax ' 713 MPaFrequence du 1er mode de flexion non precontraint : f ' 80 HzFrequence du 1er mode de torsion non precontraint : f ' 230 HzFrequence du 1er mode de flexion precontraint : f ' 315 HzFrequence du 1er mode de torsion precontraint : f ' 370 Hz
On constate que la limite d’elasticite a 0.2% de l’aluminium standard qui est d’environ 250MPa
sera largement depassee. De plus, l’amplitude du deplacement au centre de la plaque est tropimportante pour qu’aux frequences propres calculees, on puisse la realiser experimentalement. Laconfiguration initiale n’est donc pas satisfaisante.
L’etude parametrique de la configuration initiale va maintenant nous permettre de proposerquelques modifications sur les materiaux, la geometrie du banc et le coefficient de frottement. Cesmodifications auront pour but de faciliter l’apparition du microglissement, de reduire le niveaudes surcontraintes et de prendre en compte des considerations techniques telles que l’usinage parexemple.
En premier lieu, on remplacera l’aluminium standard par de l’aluminium 7075T6 qui estl’un des aluminiums les plus resistants et qui est souvent utilise dans l’aeronautique. Sa limited’elasticite a 0.2% est de l’ordre de 480MPa. Les caracteristiques moyennes de cet aluminium sontdonnees par : E7075T6 = 72GPa, ν7075T6 = 0.32, ρ7075T6 = 2800kg/m3 et α7075T6 = 23.5·10−6K−1.
Pour reduire les contraintes et le niveau de la force seuil F1 necessaire a l’obtention dumicroglissement dans le modele elements finis considere, la solution la plus simple consiste adiminuer la precharge en temperature. On propose de la diviser par deux a ∆T = 30oC aulieu des 60oC consideres auparavant. La figure 5.7-b nous montre cependant que l’experiencedevrait devenir plus sensible aux variations de temperature avec cette precharge. Lors des mesuresexperimentales, on prendra soin de travailler sur un intervalle de temps ou les temperaturesfluctuent peu. En fait, pour obtenir cette nouvelle precharge pour une temperature ambiante del’ordre de 20oC, on va diminuer d’une trentaine de microns la longueur de la plaque-2P.
De plus, la geometrie de la plaque-2P telle qu’elle a ete definie dans la configuration initiale estsoumise a de fortes surcontraintes lorsque la force seuil F1 est appliquee au centre de la plaquecomme le montre la figure 5.8. Celles-ci se concentrent aux jonctions pied-plaque et au centrede la plaque. Pour reduire le niveau de ces surcontraintes, on a choisi de modifier la geometriede la plaque-2P (voir annexe C). Tout en poursuivant cet objectif, on cherche un compromissur la longueur et l’epaisseur afin de minimiser au mieux les frequences propres et l’amplitudedu mouvement. Et cela sans oublier de favoriser l’effet levier sur le pied d’aube pour faciliter leglissement.
On modifie aussi l’angle α en l’augmentant a 55o afin d’ameliorer le resultat sans etre tropproche de la zone de coincement.
Pour diminuer le niveau des surcontraintes sur les interfaces de contact, on a aussi choisi

Chapitre 5 : Conception et modelisation numerique du banc 125
Fig. 5.8: Repartition des contraintes de Von Mises sur la plaque-2P
d’augmenter la largeur des surfaces de contact lf de 0.5cm a 1cm.
Si l’on se place maintenant d’un point de vue pratique, differents capteurs devrons etre po-sitionnes sur la plaque-2P lors de l’experimentation. Afin d’augmenter l’espace disponible entrela plaque et le socle, la geometrie du socle a ete redefinie (voir annexe C). Cela devrait de plusdiminuer l’amortissement aerodynamique que l’on suppose negligeable bien qu’il n’est pas etequantifie.
Le nouveau modele propose est represente sur la figure 5.9-a. La figure 5.9-b donne la geometriedu pied d’aube et definit les interfaces de contact AB et CD. Dans la suite, differents resultatsseront donnes par rapport a l’interface de contact AB. On reference la position sur cette interfaceentre 0 et 1 : 0 en A et 1 en B. Le changement d’epaisseur est maintenant tres progressif etl’epaisseur minimale de la plaque de 4mm.
Enfin, afin de faciliter l’usinage du socle en profondeur et permettre l’obtention d’une meilleureprecision, on a reduit la largeur des pieces de 10cm a 6cm. De plus, pour que le socle soit facilementmanipulable par l’experimentateur, on a reduit sa masse en prenant une largeur de 14cm.
Pour finir, on va redefinir le coefficient de frottement. Sur les roues aubagees, le coefficientde frottement varie de moins de 0.2 pour un pied lubrifie a plus de 0.5 apres disparition dulubrifiant. Dans la configuration initiale, on avait considere le cas d’une mauvaise lubrificationen prenant un coefficient de frottement de µ = 0.5, ce qui ne facilite pas le glissement. Dansla phase experimentale, on pense utiliser une graisse de roulement puis un vernis de glissementpour lubrifier. Afin d’obtenir un coefficient de frottement suffisamment faible, on prendra soin de

126 Chapitre 5 : Conception et modelisation numerique du banc
(a) (b)
Fig. 5.9: (a) Demi-coupe superieure du systeme plaque-2P - socle dans le plan Oxy. (b) Zoom sur l’un
des pieds de la structure
renouveler le lubrifiant regulierement. Par consequent, on va maintenant considerer un coefficientµ de 0.2.
Avec ce nouveau modele, on obtient les resultats ci-dessous :Amplitude de la force seuil F1 : F1 ' 744 NAmplitude du mouvement au centre de la plaque associee a F1 : u1 ' 1.1 mmContrainte de precharge dans la plaque : σP ' 84.6 MpaMaximum de contrainte lorsque l’on applique la force seuil F1 : σmax ' 105 MPaFrequence du 1er mode de flexion non precontraint : f ' 274 HzFrequence du 1er mode de torsion non precontraint : f ' 823 HzFrequence du 1er mode de flexion precontraint : f ' 387 HzFrequence du 1er mode de torsion precontraint : f ' 902 Hz
5.2.5 Conclusion
Pour conclure, on peut constater que de nombreuses modifications ont ete apportees a lageometrie de la structure. D’autres configurations avaient ete envisagees, mais c’est celle que l’ona propose au paragraphe precedent qui nous a donne les meilleurs resultats. Le dimensionnementa ete realise en quasi-statique en cherchant a reduire les contraintes et la force seuil F1 pourfaciliter le glissement des pieds d’aube.
Pour le moment, nous n’avons que tres peu d’informations sur la dynamique du probleme.Pourtant, c’est au probleme dynamique que l’on sera finalement confronte dans la phase experimen-

Chapitre 5 : Conception et modelisation numerique du banc 127
Fig. 5.10: Maillage du systeme dans le cas ou une interface est modelisee par 6 elements de contact.
tale. Par consequent, on cherchera dans la suite a etudier le comportement dynamique de lanouvelle configuration proposee pour le banc et a valider le dimensionnement en montrant quel’obtention du macroglissement sera possible dans les campagnes d’essais.
5.3 Modelisation numerique et etude parametrique en dynamique
Le banc doit etre etudie experimentalement et numeriquement. Par consequent, il est impor-tant de modeliser correctement le probleme. On suppose que les seules non linearites du systemeproviennent du contact avec frottement. On notera que les deux pieces qui composent le banc (laplaque-2P et le socle) ne sont etudiees que dans le cadre de la theorie de l’elasticite.
ANSYS a ete utilise pour generer le modele elements finis des deux pieces et les efforts resultantde la precharge en temperature. On notera qu’un nouveau modele doit etre genere a chaque foisque l’on modifie l’un des parametres suivant : le coefficient de frottement µ, la precharge entemperature ∆T , le nombre d’elements de contact, toute dimension ou un materiau. Ce memelogiciel a ete utilise pour condenser le systeme selon la methode de Guyan [62]. Ainsi, ANSYSnous donne les caracteristiques du systeme precharge : matrice de masse, matrice de raideur etvecteur de precharge a appliquer sur la plaque-2P.
Pour chaque modelisation de l’interface de contact par un nombre d’elements de contactdifferent, le systeme est maille de telle sorte que l’interface de contact ait un nombre de noeudsegal au nombre d’elements de contact. Ainsi, on a les memes conditions d’utilisation du modeledans le programme de la DLFT et dans ANSYS ou il a ete cree. Un exemple de maillage auniveau de l’une des interfaces du modele est donnee par la figure 5.10. On impose de nouveau laprecharge dans le programme de la DLFT en partant de l’etat initial non deforme pour obtenir

128 Chapitre 5 : Conception et modelisation numerique du banc
ts
te
γ
p
déformables2 corps
représentationpartielle du
socle
te
γ
d’un pied de la plaque-2Preprésentation partielle
ts
(a) (b)
Fig. 5.11: (a) Contact entre un corps large et un corps qui presente des angles vifs au niveau des aretes
qui limite l’interface de contact. (b) Contact entre la plaque-2P et le socle.
l’etat d’equilibre avant d’appliquer l’excitation sinusoıdale.Cependant, la plus grande difficulte consiste sans doute a modeliser l’interface de contact
pour laquelle les efforts normaux ne sont pas repartis uniformement. L’existence de surcontraintesnecessite une discretisation tres fine pour decrire avec precision le comportement local de l’inter-face. On montrera que, dans le cas du macroglissement, on peut en fait utiliser un nombre reduitd’elements de contact pour modeliser l’interface en obtenant une bonne precision sur la reponsede la plaque-2P.L’influence de differents parametres sur la precision des resultats sera aussi etudiee. On s’interesserapar exemple au niveau d’excitation et au nombre d’harmoniques.
5.3.1 Discretisation des interfaces de contact
Lorsque deux corps deformables sont presses l’un contre l’autre, la repartition des contraintesa l’interface de contact n’est pas uniforme. De nombreuses etudes statiques ont deja ete realiseessur ce sujet. La repartition des contraintes va dependre de la forme initiale des corps.
Dans certains cas, on doit s’attendre a de fortes surcontraintes sur les bords de l’interface decontact. Miniatt et al. [95] montrent que lorsque un solide presente un angle vif sur les aretesqui limitent l’interface de contact, on peut meme observer une singularite sur les contraintes apartir d’un angle γ superieur a 105o dans les cas sans frottement (fig. 5.11-a). Cette transitionintervient aux alentours de 95o dans les cas avec frottement. On definit γ comme l’angle entre latangente d’entree ~te dans la zone de contact et la tangente de sortie ~ts.
Dans le cas ou il n’y a pas d’arete mais un arrondi, ce qui correspond au contact que nousetudions entre la plaque-2P et le socle (fig. 5.11-b), on pourrait craindre des singularites puisquel’angle initial est de 180o. Cependant, il n’en est rien. Comme le montre Sinclair et al. [96] quietudient les contraintes de contact dans un pied d’aube soumis a une precharge, il n’y a pas de sin-gularites, mais des surcontraintes localisees sur les bords de l’interface de contact qui peuvent etretres importantes. Alexandrov et Romalis [97] demontrent que l’amplitude de ces surcontraintes

Chapitre 5 : Conception et modelisation numerique du banc 129
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
12
Rép
artit
ion
des
cont
rain
tes
norm
ales
nor
mal
isée
s pa
r ra
ppor
t à la
moy
enne
Position normalisée sur l’interface de contact
734 éléments de contact21 éléments de contact 11 éléments de contact 6 éléments de contact
280 285 290 295 300 305 310 315 320 325 3300
0.5
1
1.5
2
2.5
3
x 10−3
Fréquence (Hz)
Am
plitu
de (
m)
2 élém. de contact 6 élém. de contact 11 élém. de contact21 élém. de contact
(a) (b)
Fig. 5.12: (a) Repartition des contraintes normales sur l’interface de contact AB en fonction du nombre
d’elements de contact (µ = 0, ∆T = 30oC, ξ = 0.001, F = 40N , 5 harmoniques). (b) Influence du nombre
d’elements de contact par interface (ξ = 0.001, µ = 0.2, ∆T = 30oC, F = 40N et 5 harm.).
est a rattacher au rayon de courbure, plus le rayon sera faible, plus la surcontrainte sera impor-tante. Dans une etude statique, Sinclair et al. [96] ont montre qu’un grand nombre d’elementsde contact doivent etre pris en compte pour obtenir correctement les efforts qui s’appliquent al’interface.
Pour le calcul de precharge en statique, la figure 5.12-a nous montre qu’un faible nombred’elements de contact ne rend pas bien compte de la repartition des contraintes sur l’interface.Cependant, du point de vue macroscopique (au sens ou l’on considere l’interface dans son en-semble), le modele est tout a fait correct. Si l’on considere la force de contact sommee sur l’interfacepour les quatre cas representes, la difference est tres faible :
Nombre d’elements Force de contact normaleretenus sommee sur l’interface (N)
734 917321 910811 91106 9126
L’erreur est inferieure a 1%.On considere maintenant l’evolution de la force normale sommee sur l’interface lorsque une
excitation sinusoıdale d’amplitude 40N est appliquee au centre de la plaque-2P a une frequence def = 307.25Hz. Ce niveau de force est suffisant pour engendrer du macroglissement au niveau desinterfaces de contact. Dans un calcul en dynamique, la figure 5.12-b nous montre que l’influencedu nombre d’elements de contact n’est pas trop importante, l’erreur est de moins de 2% si l’on

130 Chapitre 5 : Conception et modelisation numerique du banc
0 0.5 1 1.5 2 2.5 3
x 10−3
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
11000
Temps (s)
For
ce d
e co
ntac
t nor
mal
e su
r l’i
nter
face
21 éléments de contact11 éléments de contact6 éléments de contact
0 1 2 3 4 5 6 7 80
0.5
1
1.5
2
2.5x 10
−3
Amplitude F de la force d’excitation
Max
imum
d’a
mpl
itude
sur
le s
pect
re (
m)
Cas nonlinéaire Cas linéaire (toujours adhérant)
(a) (b)
Fig. 5.13: (a) Force normale sommee sur l’interface AB en fonction du temps (ξ = 0.001, µ = 0.2,
∆T = 30oC, F = 40N et 5 harm.). (b) Courbe d’efficacite a faible amplitude d’excitation (ξ = 0.001,
µ = 0.2, ∆T = 30oC, 21 elements de contact par interface et 5 harm.).
exclue la courbe qui correspond a deux elements de contact par interface. Les differences peuvents’expliquer par le maillage de la structure qui est different lorsque l’on change le nombre d’elementsde contact a l’interface et par la separation partielle du pied qui ne peut pas etre prise en comptecorrectement avec un faible nombre d’elements de contact.
En observant la figure 5.13-a, on remarque aussi que la force normale sommee sur l’interfaceAB varie de facon assez significative au cours du temps (De l’ordre de 15%). Ceci s’expliquepar l’existence des deux liaisons pied d’aube-socle qui permettent d’imposer la precharge maisinduisent ces variations lors du mouvement de la plaque. Dans le cas d’une aube reelle, on peutpenser que ces variations seraient beaucoup plus faibles.
Dans le cas du macroglissement, on peut donc conclure qu’il suffit de prendre en comptequelques elements de contact pour bien representer le comportement du pied.
Dans le cas du microglissement, plus le nombre d’elements de contact sera important, plusles resultats seront precis. Cependant, le microglissement ne permet pas un amortissement de laplaque-2P aussi important que dans le cas du macroglissement. Lorsque l’interface est modeliseepar un ensemble d’elements de contact, chaque element est etudie d’un point de vue macrosco-pique. Cependant, il existe certains instants ou l’hypothese de macroglissement est incorrectecar l’element de contact devrait etre en microglissement. Pour limiter l’erreur, il faut qu’a toutinstant, le nombre d’elements sur l’interface qui necessiterait une etude du point de vue micro-scopique soit faible. Dans le cas du systeme etudie, avec le processus de propagation de la zone englissement, on peut supposer que seul 1 element de contact necessiterait une etude du point de vuemicroscopique a chaque instant (l’element n’etant pas necessairement le meme a tout instant).Par consequent, dans le cas ou 21 elements de contact sont utilises pour modeliser l’interface, on

Chapitre 5 : Conception et modelisation numerique du banc 131
s’attend a une erreur de 5% au plus. Pour verifier que 21 elements suffisent et que l’erreur surla repartition des contraintes n’entraıne pas une forte incertitude sur la reponse de la plaque-2P,on comparera la courbe d’efficacite (Amplitude max. sur le spectre en fonction de l’amplitude del’excitation) avec l’experience. La courbe d’efficacite obtenue en utilisant 21 elements de contactpour modeliser l’interface est donnee par la figure 5.13-b.
Certaines etudes proposent des modeles pour prendre en compte le microglissement au niveaude chaque element de contact [18]. Cependant, ces modeles admettent un chargement uniformesur l’element. Par consequent, le probleme reste pose lorsque l’on a des surcontraintes importanteset tres localisees, le nombre d’elements necessaire pour decrire avec precision la repartition desefforts normaux reste du meme ordre.
Bien que le chargement normal considere soit encore une fois constant, on notera que Quinn[98] est parvenu a un resultat interessant dans l’etude du microglissement d’un joint de type Iwan.Il montre qu’un nombre tres important d’elements de contact (entre 100 et 250) est necessairepour determiner avec precision la puissance dissipee. Par contre, il explique aussi qu’a partir de5 elements de contact seulement, on obtient finalement une tres bonne approximation du travaildes forces de frottement sur un cycle.
5.3.2 Influence de l’amplitude de la force d’excitation
Si l’on observe l’evolution de la repartition des contraintes pour l’interface AB sur une periodelorsqu’une excitation sinusoıdale de frequence f = 307.25Hz et d’amplitude 40N est imposee aucentre de la plaque-2P (Fig. 5.14), on constate une forte variation des surcontraintes. Ces va-riations de charge seraient certainement moins importantes dans le cas d’une aube reelle. Eneffet, c’est la plaque-2P qui, parce qu’elle est maintenue a ses deux extremites, genere des va-riations tres importantes sur les efforts. On peut aussi remarquer que dans le cas present, unepartie du pied perd contact avec le socle a certains instants. Considerons maintenant l’influencedu niveau de l’excitation sinusoıdale appliquee au centre de la plaque-2P. Sur la figure 5.15, lacourbe d’efficacite nous donne le maximum d’amplitude sur le spectre en fonction de l’amplitudede l’excitation. Plus la tangente a la courbe devient proche de l’horizontale, plus l’amortissementgagne en efficacite. Par consequent, on remarquera que le microglissement n’est pas tres efficacecompare au macroglissement, meme s’il permet tout de meme un leger amortissement. Pour fi-nir, lorsque l’amplitude devient suffisamment importante, on peut constater une distorsion descourbes. On a un effet d’assouplissement dans lequel il peut exister plusieurs solutions pour unefrequence donnee.
5.3.3 Influence du nombre d’harmoniques
Comme le montre la figure 5.16, 5 harmoniques permettent deja d’obtenir une tres bonneapproximation de la reponse meme si de petites differences apparaissent lorsque un plus grandnombre d’harmoniques est retenu. Cependant, lorsque l’on modifie un parametre tel que le coeffi-cient de frottement, on montrera dans la suite que le nombre d’harmoniques, lorsqu’il est maintenu

132 Chapitre 5 : Conception et modelisation numerique du banc
00.5
11.5
22.5
33.5
x 10−3
0
0.2
0.4
0.6
0.8
1−1
0
1
2
3
4
5
6
Temps (s)Position normalisée
Con
trai
ntes
nor
mal
isée
s da
ns la
dire
ctio
n no
rmal
e
Fig. 5.14: Contraintes normalisees dans la direction normale par rapport a la contrainte moyenne de
l’instant considere (f = 307.25Hz, ξ = 0.001, µ = 0.2, ∆T = 30oC, F = 40N , 21 elements de contact par
interface et 5 harm.).
fixe, peut devenir insuffisant. Il faut donc toujours rester tres prudent quant a la precision desresultats obtenus.
5.3.4 Influence des deformations du socle
La precharge de la plaque-2P entraıne une deformation du socle. Sur la figure 5.17-a, ona etudie la deformation de l’interface de contact AB (voir figure 5.9-b) dans le cas du bancexperimental tel qu’il a ete dimensionne et dans le cas ou le socle aurait ete epaissi de 10cm dechaque cote (dans la direction Ox). Le niveau de deformation a ete multiplie par 1000 pour rendrevisible le comportement de l’interface de contact du socle soumis a la precharge imposee par laplaque-2P. On se rend compte que la deformation n’est pas identique en tout point de l’interfaceet que celle-ci tend a pivoter (le deplacement est plus important au point A qu’au point B). Onnotera que dans ce paragraphe, les calculs statiques ont ete obtenus par ANSYS avec 734 elementsde contact actifs (du type contac48) pour modeliser une interface de contact dans le cas du bancexperimental et 673 dans le cas du socle epaissi.
D’apres la figure 5.17-b, on deduit que la deformation du socle tend a faire croıtre la surcon-trainte en B et decroıtre celle en A. Notons aussi que la precharge normale sommee sur l’interfaceva varier sensiblement avec la precharge. Elle est de 9173N dans le cas du banc experimentalet de 12372N dans celui du socle epaissi, cela pour un coefficient de frottement de µ = 0 etune precharge en temperature de ∆T = 30oC. Cette importante variation de la precharge estintrinseque a la methode utilisee pour la generer. Si l’on augmente la rigidite de l’un des corps,

Chapitre 5 : Conception et modelisation numerique du banc 133
280 290 300 310 320 3300
0.5
1
1.5
x 10−3
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
) F=4NF=2NF=1N
280 300 320
0.5
1
1.5
2
2.5
3x 10
−3
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
) F=60NF=40NF=20NF=10N
280 300 3202
3
4
5
6
7x 10
−3
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
) F=400NF=300NF=200NF=100N
0 100 200 300 4000
1
2
3
4
5
6
7x 10
−3
Amplitude F de la force d’excitation (N)
Max
imum
d’a
mpl
itude
sur
le s
pect
re (
m)
microglissement
macroglissement
Fig. 5.15: Influence de l’amplitude d’excitation F (ξ = 0.001, µ = 0.2, ∆T = 30oC, 6 elements de contact
par interface et 5 harm.).

134 Chapitre 5 : Conception et modelisation numerique du banc
270 280 290 300 310 320 330 3400
0.5
1
1.5
2
2.5
3x 10
−3
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
13 harm.9 harm. 5 harm. 1 harm.
Fig. 5.16: Influence du nombre d’harmoniques (ξ = 0.001, µ = 0.2, ∆T = 30oC, F = 40N et 11 elements
de contact par interface).
−0.04 −0.035 −0.03 −0.025 −0.02 −0.015 −0.010.19
0.195
0.2
0.205
0.21
0.215
Axe des X
Axe
des
Y
Surface de contact non préchargée Surface de contact préchargée (socle étudié) Surface de contact préchargée (socle épaissi)
Tangente à la surfacenon préchargée
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
12
Position normalisée sur l’interface de contact AB
Rép
artit
ion
des
cont
rain
tes
norm
ales
nor
mal
isée
s pa
r ra
ppor
t à la
moy
enne Surface de contact préchargée (socle étudié)
Surface de contact préchargée (socle épaissi)
(a) (b)
Fig. 5.17: (a) Deformation du socle amplifiee par 1000 (µ = 0, ∆T = 30oC). (b) Effets sur la repartition
des efforts en precharge (µ = 0, ∆T = 30oC)

Chapitre 5 : Conception et modelisation numerique du banc 135
270 280 290 300 310 320 330 3400
0.5
1
1.5
2
2.5
3
3.5x 10
−3
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
Surface de contact préchargée (socle étudié) Surface de contact préchargée (socle épaissi)
280 285 290 295 300 305 310 315 320 325 3300
0.5
1
1.5
2
2.5
3
x 10−3
Fréquence (Hz)
Am
plitu
de (
m)
Dynamique du socle négligée Dynamique du socle prise en compte
(a) (b)
Fig. 5.18: (a) Effets de la deformation statique du socle sur la reponse frequentielle (ξ = 0.001, µ = 0.2,
∆T = 30oC, F = 40N , 21 elements de contact par interface et 5 harm.). (b) Effets de la dynamique du
socle sur la reponse frequentielle (ξ = 0.001, µ = 0.2, ∆T = 30oC, F = 40N , 21 elements de contact par
interface et 5 harm.).
on augmente naturellement la precharge. C’est la raison principale pour expliquer la differenceentre les reponses frequentielles dans les deux cas (Fig. 5.18-a).On peut s’attendre au meme type de comportement pour les interfaces de contact d’un rotor.
Le niveau de deformation va dependre de la geometrie du systeme, des materiaux utilises et dela precharge imposee.
Pour finir, on peut aussi noter que la surcontrainte la plus importante se situe bien a l’endroitou le pied d’aube casse dans le cas d’une roue aubagee reelle. Ceci nous a ete confirme par lestribologes du LTDS qui travaillent sur le sujet pour la SNECMA. Du point de vue dynamiquemaintenant, on cherche a verifier si la dynamique du socle qui n’est pas en resonance mais esttout de meme excite par la plaque-2P joue un role significatif sur la reponse. Pour cela, on ajoutedes noeuds maıtres supplementaires pour modeliser le socle au moment de creer le super-elementpar la methode de Guyan [62]. La figure 5.18-b nous montre le resultat obtenu en utilisant cemodele et celui que l’on utilisait jusqu’a present. Il apparaıt que dans les conditions choisies,l’erreur est de l’ordre de 3.5%. Par consequent, l’erreur n’est pas tres importante. Cependant,etant donne qu’il n’est pas difficile de prendre en compte les mouvements du socle en ajoutantquelques noeuds maıtres dans la definition du super-element, on utilisera le nouveau modele pourla comparaison avec l’experience.

136 Chapitre 5 : Conception et modelisation numerique du banc
5.4 Validation du dimensionnement
Le dimensionnement du banc experimental est difficile car certains parametres comme laprecharge et le coefficient de frottement sont difficiles a controler.Par exemple, la precharge qui est imposee par dilatation va dependre des tolerances d’usinage etde la facon dont le refroidissement va s’effectuer. En ce qui concerne le coefficient de frottement,il va dependre de l’etat de surface, de la graisse (ou du vernis) utilisee, du profil du chargement...
Le dimensionnement du banc experimental s’est essentiellement base sur des calculs statiquesen cherchant a diminuer au maximum les surcontraintes locales et a faciliter le glissement au ni-veau des pieds d’aube. En debut de these, on ne disposait pas d’un code de calcul assez puissantpour etudier convenablement le comportement dynamique du banc sur une plage de frequence.Le code que l’on a developpe se base sur la DLFT et va nous permettre d’etudier de facon plusapprofondie le banc experimental. Les resultats restent previsionnels tant qu’ils n’ont pas ete va-lides par l’experience, mais ils doivent nous permettre de verifier qu’il sera bien possible d’utiliserle banc experimental avec un amortissement de la plaque-2P par frottement sec significatif.
Dans cette partie, on va tout d’abord etudier l’influence de la precharge et du coefficient defrottement sur la dynamique. Ensuite, on verifiera que le banc experimental respecte les conditionsen fatigue des materiaux pour eviter une rupture prematuree de la plaque-2P par exemple. Pourfinir, on analysera l’importance des non linearites geometriques (calcul en statique) qui ne sontpas prises en compte dans le nouveau programme.
5.4.1 Resultats dynamiques de dimensionnement
Il est important de verifier l’influence du frottement sec sur la reponse de la plaque-2P enregime force. Nous nous proposons d’etudier deux parametres qui vont jouer un role preponderantdans le comportement du banc experimental : le coefficient de frottement µ et la precharge entemperature ∆T .
La figure 5.19-a nous montre l’evolution de la reponse de la plaque-2P en fonction du coefficientde frottement µ pour une excitation sinusoıdale au centre de la plaque-2P d’amplitude 40N.
On peut noter que le maximum croıt tres vite avec le coefficient de frottement. De plus, on peutremarquer l’existence d’un leger decalage frequentiel. En fait, cela s’explique simplement : pourune precharge en temperature ∆T constante, la precharge effective en force depend du coefficientde frottement. On notera que le maximum d’efficacite est obtenu pour un coefficient de frottementproche de 0.1. Il faut cependant remarquer que cette valeur peut changer en fonction d’autresparametres tels que la precharge et l’amplitude de l’excitation qui agissent sur le chargementnormal de l’interface. En effet, le chargement normal et le coefficient de frottement conditionnentla loi de Coulomb.
Pour la courbe correspondant a µ = 0.01, on remarque que le calcul avec cinq harmoniquesdonne un resultat surprenant. Le calcul a bien converge, mais le nombre d’harmoniques pris encompte etait insuffisant comme nous le montre la figure 5.19-b. Ce resultat implique que le nombred’harmoniques ne peut pas etre fixe de facon definitive. A chaque fois que l’on modifie l’un des

Chapitre 5 : Conception et modelisation numerique du banc 137
270 280 290 300 310 320 330
0.5
1
1.5
2
2.5
3
3.5
4
4.5
x 10−3
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
µ=0.01µ=0.05µ=0.1 µ=0.2 µ=0.3 µ=0.4 µ=0.5
220 240 260 280 300 320 3400
0.5
1
1.5
2
2.5
3
3.5
4
4.5x 10
−3
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
5 harm. 11 harm.
(a) (b)
Fig. 5.19: (a) Influence du coefficient de frottement µ (ξ = 0.001, ∆T = 30oC, F = 40N , 6 elements de
contact par interface et 5 harm.). (b) Influence du nombre d’harmoniques pour le coefficient de frottement
µ = 0.01 (ξ = 0.001, ∆T = 30oC, F = 40N , 6 elem. par interface.)
parametres, l’hypothese sur le nombre d’harmoniques retenu est toujours remise en question.Dans ce cas precis, le µ choisi etait tres faible, ce qui a conduit a une reponse plus riche enharmoniques.
La figure 5.20 represente les reponses frequentielles pour differents chargements en temperature.On constate tout d’abord que la frequence de resonance varie sensiblement avec la precharge. Ce aquoi on pouvait s’attendre puisque la precharge rigidifie la plaque-2P. On note encore que plus laprecharge augmente, plus l’amplitude du pic en frequence augmente. Cela s’explique simplementpar l’influence de la precharge sur la loi de Coulomb, le macroglissement devient plus difficile aobtenir.
5.4.2 Calcul en fatigue
On s’interesse dans cette partie a une piece en alliage leger (aluminium 7075T6) soumise a uneprecharge en traction et sollicitee en flexion par une excitation sinusoıdale. Il est alors bien connuque la rupture de fatigue va intervenir pour un niveau de contrainte bien inferieur a la contraintede rupture statique Rm. Differents ouvrages traitent du probleme de fatigue, les informations quisuivent sont principalement basees sur celles donnees par Spinuler [99].
Il est admis que tout se passe comme s’il y avait superposition d’une contrainte moyenne σmoy
et d’une contrainte alternee d’amplitude σalt consideree comme dynamique. σmoy et σalt peuventetre definies localement a partir des contraintes minimale et maximale :

138 Chapitre 5 : Conception et modelisation numerique du banc
220 240 260 280 300 320 340 360 3800
0.5
1
1.5
2
2.5
3
3.5
4x 10
−3
Fréquence (Hz)
Am
plitu
de (
m)
∆ T=5°C ∆ T=10°C∆ T=15°C∆ T=30°C∆ T=45°C∆ T=60°C
Fig. 5.20: Influence de la precharge en temperature ∆T (ξ = 0.001, µ = 0.2, F = 40N , 6 elements de
contact par interface et 5 harm.)
σmoy =σmax + σmin
2(5.14)
σalt =σmax − σmin
2(5.15)
Dans un premier temps, on etudie le cas d’une piece dont la contrainte moyenne σmoy estnulle. Si une piece est soumise a une contrainte alternee d’amplitude σalt, elle casse apres unnombre de cycles Nc.La courbe de Wohler (Fig. 5.21) est frequemment utilisee pour modeliser les courbes d’endurance(logNc − σalt). Sur cette courbe, on peut distinguer trois domaines :
• Le domaine de fatigue oligocyclique pour lequel la rupture intervient apres un tres faiblenombre de cycles et une deformation plastique notable.
• Le domaine de fatigue limite pour lequel la rupture intervient au bout de Nc cycles, nombrequi croıt lorsque la contrainte decroıt.
• Le domaine de fatigue illimite pour lequel il n’y a theoriquement pas rupture quel que soitle nombre de cycles. La contrainte limite asymptotique σD est appelee limite d’endurance.
Pour la plupart des alliages d’aluminium, on constate cependant qu’il n’y a pas de limite d’endu-rance. Dans ce cas, une limite de fatigue conventionnelle est generalement prise pour 108 cycles(ou 5 · 108).En tracant le diagramme de Wohler avec deux echelles logarithmiques, le domaine de fatiguelimite est represente approximativement par une droite B-C (voir figure 5.21). La relation reliant

Chapitre 5 : Conception et modelisation numerique du banc 139
102
101
103
104
105
106
107
108
109
σa
Re
σD
N (log)
σD
1
(log)
Point d’évaluation depour les alliages légers
A B
C D
Fig. 5.21: Diagramme de Wohler conventionnel.
σNc a Nc est definie par: (σNc
σD
)p
=ND
Nc(5.16)
L’exposant p est caracteristique du materiau et des traitements qu’il a subis. D’apres Duprat[100], pour les alliages legers, on a approximativement :
p ' 4.5 (5.17)
Pour les materiaux ductiles, on dimensionne habituellement les pieces de telle sorte que la limiteelastique ne soit pas depassee. C’est ce que l’on appelle le diagramme de Wohler conventionnel(Fig. 5.21) . On distingue encore une fois trois domaines :
• Nc ≤ 104 calcul avec la limite elastique conventionnelle Rp0.2,
• 104 ≤ Nc ≤ 106 domaine de fatigue ,
• Nc ≥ 106 domaine de fatigue illimite en utilisant σD. On realise un hypothese pessimisteen situant le debut a 106.
On est donc capable de construire ce diagramme a partir de la limite d’endurance σD et del’exposant p. Il est important de noter que la limite d’endurance σD depend non seulement deσalt, mais aussi de σmoy.
La limite d’endurance peut etre representee graphiquement de differentes facons, mais lediagramme d’endurance de Haigh est certainement le plus pratique pour le dimensionnement caron y porte σmoy en abscisse et σalt en ordonnee. Plusieurs modelisations simples du domainelimite d’endurance existent (Fig. 5.22) :
• la droite de Soderberg entre la limite d’endurance alternee et la limite elastique,
• la droite de Goodman entre la limite d’endurance et la limite de rupture statique,

140 Chapitre 5 : Conception et modelisation numerique du banc
Re
Re Rm Rm
σD
σm
σa
Goodman
Soderberg
Polygone
k
Fig. 5.22: Limite de fatigue.
• le polygone limite definit a partir de la droite de Goodman et d’une droite a 45o passantpar la limite elastique (k = 1.6 a 2 pour des materiaux ayant une limite d’ecoulement bienmarquee, k = 1 pour les autres).
Seul le domaine de traction (σm > 0) est represente ici car c’est le cas qui nous interesse pour lebanc experimental. On notera cependant que le comportement est different dans le domaine decompression.Dans le domaine de traction, la droite de Soderberg est trop pessimiste et celle de Goodmandepasse la limite d’elasticite. Dans la suite, on utilisera donc le polygone limite avec le parametrek = 1.
Pour finir, il est important de noter que les caracteristiques des materiaux accessibles dans lalitterature sont obtenus a partir de mesures experimentales sur des eprouvettes normalisees. Enfonction de la piece etudiee, la limite d’endurance σD peut varier de facon significative. Differentsfacteurs peuvent intervenir tels que : la taille et la forme des pieces, l’etat de surface, le traitementde surface, la temperature, les defauts de fabrication... Les coefficients de securite Sc en usage enconstruction mecanique courante sont generalement :
• Sc=1.5 a 3 pour des ruptures de fatigue,
• Sc=1.2 a 2 pour la limite elastique,
• Sc=2 a 4 pour la rupture statique.
Compte tenu de la frequence de resonance pour le premier mode de flexion de la plaque-2Pqui est voisine de f = 310Hz, on dispose d’environ 54mn seulement pour realiser des experiencessi l’on suppose une duree de vie avant rupture de Nc = 106 (ce qui correspond a la limite entrele domaine de fatigue et le domaine de fatigue illimite). Compte tenu de la frequence elevee dupremier mode, il est donc important de travailler dans le domaine de fatigue illimite.

Chapitre 5 : Conception et modelisation numerique du banc 141
Dans la suite, on etudie le cas d’une precharge a ∆T = 30oC. La precharge devrait se situerdans cette plage si l’on considere les tolerances d’usinage.Dans un premier temps, considerons le cas de la plaque-2P prechargee en temperature d’un∆T = 30oC. Le coefficient de frottement µ qui, rappelons le, influe sur la precharge est pris egala 0.2.
On notera que les caracteristiques de l’aluminium 7075T6 non corrigees sont :
• Re,0.2 = 480MPa pour la limite elastique,
• Rrs = 540MPa pour la limite de rupture statique,
• σD = 162MPa pour la limite d’endurance.
Pour le diagramme de Wohler et le polygone limite, on utilisera ces valeurs divisees par le coeffi-cient de securite correspondant.Pour les coefficients de securite, on a choisi :
• Sc = 2 pour la limite elastique,
• Sc = 2 pour la rupture statique,
• Sc = 1.5 pour la limite d’endurance.
Maintenant, on s’interesse tout particulierement aux surcontraintes locales du banc sur laplaque-2P qui pourraient etre a l’origine d’une rupture de fatigue. Ce sont ces surcontraintes quientraınent le plus gros risque de rupture. La figure 5.23 nous donne le resultat d’un calcul ANSYSsur les contraintes de Von Mises pour le premier mode de deformation lorsque une precharge de∆T = 30oC. On note aussi la presence de surcontraintes au niveau des interfaces de contact surla figure 5.24).Supposons de plus que le mode repond avec une amplitude de umax = 2mm. D’apres la courbed’efficacite de la figure 5.15, on remarque que le niveau d’excitation sera suffisant pour amenerles pieds d’aube en macroglissement.Dans ces conditions, on determine σmoy et σalt :
σmoy = 49MPa
σalt = 83MPa
En utilisant le polygone limite, on deduit la contrainte alternee associee a σmoy = 49MPa a nepas depasser :
σlim = 88.5MPa
L’indice lim definit la limite d’endurance a ne pas franchir. Ce point de fonctionnement permetdonc de ne pas depasser les contraintes elastiques et la limite de fatigue. Ce qu’il fallait verifierpour etre a meme d’utiliser le banc dans ces conditions.A noter cependant que l’on est tout de meme tres proche de l’endurance limite σlim. Pendant laphase experimentale, on souhaite etre capable de provoquer le macroglissement des pieds d’aube.Par consequent, on cherchera a obtenir une precharge inferieure ou de l’ordre de ∆T = 30oC.

142 Chapitre 5 : Conception et modelisation numerique du banc
Fig. 5.23: Repartition des contraintes de Von Mises pour le premier mode de resonance normalise par
rapport a la masse (µ = 0.2 ,∆T = 30oC).
5.4.3 Non linearites geometriques
Le banc experimental doit nous permettre de valider les resultats obtenus numeriquement.Or, les non linearites geometriques liees au couplage des efforts plans et transversaux ne sontpas prises en compte dans le programme qui a ete developpe. L’ideal serait donc que l’effet desnon linearites geometriques soit negligeable. Cependant, comme on peut le constater sur la figure5.25, ce n’est rapidement plus le cas lorsque le deplacement impose au centre de la plaque-2Paugmente. On devrait fonctionner avec une amplitude modale qui ne depasse pas les 2mm. Onpeut donc affirmer que l’erreur provenant des non linearites geometriques sera inferieure a 3%.
5.5 Conclusions
Dans ce chapitre, on a concu un banc experimental qui dispose de deux pieds d’aube. Pourle dimensionnement, on s’est tout d’abord base sur des calculs en quasi-statique realises sousANSYS. Ensuite, lorsque cela a ete possible, on a utilise le programme de la DLFT avec unepenalisation sur le deplacement relatif pour verifier le comportement du banc en dynamique.Une etude parametrique nous a permis de tirer quelques enseignements sur le comportementdu modele etudie. Ainsi, le niveau de discretisation des interfaces de contact ne necessite pasd’etre tres fin lorsque la dynamique du systeme est etudiee. Cela est particulierement vrai lorsque

Chapitre 5 : Conception et modelisation numerique du banc 143
Fig. 5.24: Repartition des contraintes de Von Mises autour des interfaces de contact pour le premier mode
de resonance normalise par rapport a la masse (µ = 0.2 ,∆T = 30oC).
0 1 2 3 4 5 6
x 10−3
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
Force appliquée au centre de la plaque−2P (N)
Dép
lace
men
t u a
u ce
ntre
de
la p
laqu
e−2P
(m
)
sans non linéarités géom.avec non linéarités géom.
3.7mm
2mm
erreur à 2.6%
erreur à 10%
Fig. 5.25: Effets geometriques non-lineaires (µ = 0.2 ,∆T = 30oC).

144 Chapitre 5 : Conception et modelisation numerique du banc
les interfaces de contact sont en macroglissement. D’apres les resultats obtenus, il semble aussiqu’un soulevement partiel des pieds d’aube peut se produire. D’apres les resultats que nous avonsobtenus, ce comportement ne semble pas ajouter un amortissement significatif. Ensuite, on a puconstater un effet d’assouplissement en modifiant le coefficient de frottement, la precharge ou leniveau d’excitation. On notera que tous ces parametres ont une influence sur la loi de Coulomb.Enfin, les calculs ont montres que l’etude du premier mode de flexion ne necessitait pas forcementun grand nombre d’harmoniques. Cependant, en fonction des autres parametres, un nombre plusou moins important d’harmoniques sera necessaire.
Les calculs ont demontre qu’il etait possible de concevoir un banc experimental dans lequel lefrottement sur les pieds d’aube amortissait de facon significative les vibrations de la plaque (prin-cipalement pendant la phase de macroglissement). A noter toutefois que les tolerances d’usinagevont avoir une influence non negligeable sur la precharge que l’on obtiendra pour une temperatureambiante de l’ordre de 24oC.
Dans le chapitre suivant, on s’efforcera de rendre compte des resultats experimentaux obtenus.

Chapitre 6
Resultats experimentaux
6.1 Introduction
A partir des resultats de simulation realises dans le chapitre precedent, les dimensions dubanc ont ete selectionnees de telle sorte que le macroglissement soit possible au niveau des piedsd’aube. Bien entendu, des tolerances ont ete fixees pour la fabrication des pieces. L’usinageetait particulierement difficile. On notera d’une part le risque d’obtenir des pieces legerementvrillees, cela etant vrai pour la plaque-2P et le socle bien qu’il soit plus massif. D’autre part, ondemandait une forte precision sur la position des interfaces de contact de la plaque-2P et du socle.Cela impliquait une forte precision sur la longueur qui separe ces interfaces, celle pour la plaque-2P devant etre d’environ 30µm plus courte que celle du socle afin d’assurer une precharge partemperature correcte. Une tolerance de −10µm pour la plaque-2P et +10µm pour le socle avait eteproposee. Cependant, il n’etait pas possible d’appliquer les outils de metrologie pour controler ceslongueurs. L’entreprise prestataire a donc pris ses precautions sur ce point en ne garantissant pasexplicitement les tolerances, mais en proposant quatre passages avec une machine a commandenumerique en electro-erosion, ce qui normalement permet l’obtention de bons resultats.
Une fois les pieces usinees, nous avons verifie si la longueur etait correcte. Pour cela, nousavons insere la plaque-2P chauffee dans le socle refroidi afin de mesurer la precharge obtenue apartir de jauges qui avaient ete disposees sur la plaque-2P au prealable. Cette mesure nous adonne une precharge en temperature de l’ordre de ∆T ' 6.5oC alors que nous pensions obtenirautour de ∆T = 30oC. On est donc finalement assez loin du resultat souhaite au depart, maisla precharge n’est pas nulle et devrait tout de meme nous permettre de faire fonctionner le bancexperimental. De plus, la precharge etant bien inferieure a celle souhaitee en premier lieu, laplaque-2P ne risque pas la rupture en theorie.
Dans ce chapitre, on va tout d’abord realiser des mesures spectrales sur les pieces indivi-duellement puis sur l’ensemble afin de recaler le modele numerique sur l’experience. Ensuite, onetudiera les effets du frottement sur le pied d’aube vis-a-vis du comportement vibratoire de laplaque-2P. On ne s’interessera qu’au premier mode de flexion, mais on fera varier le coefficient
145

146 Chapitre 6 : Resultats experimentaux
de frottement en utilisant une graisse de roulement d’une part et du vernis bisulfure (MolykoteD-321R en Spray) qui est utilise par la SNECMA pour couvrir les interfaces de contact sur lespieds d’aubes d’autre part.
6.2 Recalage
Pour comparer les resultats numeriques aux resultats experimentaux, il est important d’es-timer au plus juste les caracteristiques mecaniques des pieces qui entrent en jeux dans le banctelles que la masse volumique, le module d’Young et le coefficient d’amortissement. En effet, lescaracteristiques dont on dispose dans la litterature et qui font reference dans les etudes theoriquessont des resultats moyens qui peuvent parfois varier jusqu’a 15% pour certains materiaux.
Dans cette partie, on se limite a la plus simple des methodes de recalage qui est tres rapide amettre en oeuvre et qui permet d’obtenir de bons resultats lorsque l’on s’interesse a un tres faiblenombre de modes en basse frequence. Tout d’abord, on pese chaque piece independamment et ondetermine la masse volumique a partir du volume de la piece. Apres avoir verifie les dimensionsqui peuvent l’etre et apporte les corrections sur ANSYS [81], on a utilise le volume estime a partirde ce logiciel. Ensuite, on mesure la reponse spectrale de chaque piece a l’excitation produite parun marteau de choc. Le module d’Young est estime de facon a recaler la frequence du premiermode calcule sur celle mesuree pour la piece. On cherchera aussi a recaler la premiere frequencepropre des deux pieces assemblees en ajoutant une petite masse au centre de la plaque-2P pourtenir compte de l’instrumentation. Pour finir, on identifiera le coefficient d’amortissement a partirde la reponse frequentielle autour du premier mode.
6.2.1 Recalage des modes libres du socle
Tout d’abord, la masse volumique a ete obtenue en suivant la procedure decrite precedemment.La masse du socle pesee etant de msocle = 26.9kg, on deduit de ANSYS la masse volumiqueρsocle = 7756kg/m3.
Pour mesurer la reponse spectrale du socle a l’excitation produite par le marteau de choc, onsuspend la piece avec des tendeurs afin de pouvoir la supposer libre de contraintes exterieures(fig. 6.1-a). Un accelerometre permet de mesurer les accelerations en un point de mesure apresl’excitation. Le signal est alors traite par l’ordinateur et on enregistre la reponse frequentielle surune plage suffisamment importante afin d’observer plusieurs des premiers modes. A noter que laposition des points de mesure et d’excitation peut modifier les resultats car tous les modes nerepondront pas necessairement. En fait, il faut eviter de se placer sur un noeud de vibration.
La reponse frequentielle qui a finalement ete obtenue est donnee par la figure 6.1-b. Afin derecaler le premier mode, le module d’Young du socle a ete fixe a Esocle = 198GPa afin d’obtenirpar le calcul des frequences de resonance comparables avec celles mesurees pour les premiers modescomme le montre la table 6.1. On notera une relativement bonne correlation des frequences surles cinq premiers modes.

Chapitre 6 : Resultats experimentaux 147
0 200 400 600 800 1000 1200 1400 1600−120
−100
−80
−60
−40
−20
0
20
40
60
80
fréquence (Hz)
Am
plitu
de (
dB)
(a) (b)
Fig. 6.1: (a) Photo du socle suspendu. (b) Reponse spectrale du socle.
Frequences Frequences ErreursMesurees (Hz) Recalees (Hz) relatives
1er mode de flexion sym. : 596.4 595.2 -0.2%1er mode de torsion anti-sym. : 964.7 933.7 -3.21%1er mode de flexion anti-sym. : 1093 1094.1 +0.1%2eme mode de flexion sym. : 1137.3 1133.3 -0.35%1er mode de torsion sym. : 1173.4 1151.1 -1.9%
Tab. 6.1: Frequences mesurees et calculees pour les cinq premiers modes propres du socle.

148 Chapitre 6 : Resultats experimentaux
0 100 200 300 400 500 600 700 800−100
−50
0
50
100
150
200
fréquence (Hz)
Am
plitu
de (
dB)
(a) (b)
Fig. 6.2: (a) Photo de la plaque-2P suspendue. (b) Reponse spectrale de la plaque-2P.
La reponse frequentielle nous a egalement permis de determiner l’amortissement visqueux dela structure. Pour cela, on pourrait utiliser la bande passante a −3dB ∆ω et la pulsation a laresonance ω0 :
ξ =∆ω
2 · ω0(6.1)
Cependant, pour obtenir une meilleure estimation, on a utilise une procedure d’identificationdisponible sous matlab qui minimise l’erreur par moindres carres. Le coefficient d’amortissementfinalement obtenu est de ξsocle = 9.5 · 10−4.
6.2.2 Recalage des modes libres de la plaque-2P
De meme que pour le socle, on determine les caracteristiques mecaniques de la plaque-2Pseule (fig. 6.2-a).
La masse de la plaque-2P est de mplaque−2P ' 719g, ce qui conduit a une masse volumiquede ρplaque−2P = 2880kg/m3 . La reponse frequentielle au marteau de choc nous est donnee parla figure 6.2-b et permet de determiner le module d’Young Eplaque−2P = 79GPa et le coefficientd’amortissement ξplaque−2P = 1.1 · 10−3. Une comparaison table 6.2 des frequences propres obte-nues pour les quatre premiers modes de resonance de la plaque-2P nous permet de montrer quele modele numerique n’est pas tres loin de la realite.
6.2.3 Recalage de la structure assemblee
Dans le cas ideal, l’utilisation des caracteristiques mecaniques determinees precedemmentdevrait nous permettre de simuler numeriquement les resultats mesures. En pratique, l’instru-mentation va introduire de la masse et de l’amortissement. Sur la plaque-2P ont ete disposes

Chapitre 6 : Resultats experimentaux 149
Frequences Frequences ErreursMesurees (Hz) Recalees (Hz) relatives
1er mode de flexion sym. : 95.4 95.3 -0.11%1er mode de torsion anti-sym. : 276.2 275.8 -0.14%1er mode de flexion anti-sym. : 419.5 412.3 -1.24%1er mode de torsion sym. : 769.7 769.3 -0.05%
Tab. 6.2: Frequences mesurees et calculees pour les cinq premiers modes propres de la plaque-2P.
Fig. 6.3: Photo du banc experimental avec le pot d’excitation.
differents capteurs : un accelerometre au centre qui pese environ 2g ; deux jauges unidirection-nelles disposees en vis-a-vis de chaque cote de la plaque a un endroit ou les contraintes sontmaximales lors de la mise en precharge, ces jauges servant a mesurer cette precharge ; deux ro-settes disposees en vis-a-vis de chaque cote de la plaque pour mesurer le maximum de contraintedynamique encaisse par la plaque-2P lors des mesures ; un capteur de force a ete dispose entrela plaque-2P et la tige du pot d’excitation afin de permettre l’asservissement du niveau de forcelors des experimentations. Tous ces capteurs sont relies aux differents appareils de mesure pardes cables qui vont vibrer et frotter les uns contre les autres. Lors des premieres mesures, on a puconstater que ces cables ajoutaient un amortissement significatif. Pour en attenuer les effets, on asupprime tout contact entre les cables et le plaque-2P (a l’exception des connexions par soudure)et on a entoure une partie des cables par de la mousse. Ainsi, on a reussi a reduire l’amortissementajoute, mais cela n’a pas ete suffisant pour le supprimer totalement. Par consequent, on a decided’estimer un coefficient d’amortissement pour chaque campagne de mesure a partir des resultatsexperimentaux. On reviendra sur ce point dans la suite. La photographie du banc experimental(fig. 6.3) donne un apercu du dispositif.
A noter que l’excitation a ete decentree (dans la longueur de la plaque-2P). Au chapitre

150 Chapitre 6 : Resultats experimentaux
Pot d’excitation
Pré−amplis
Ampli
VA
plaque−2P
de force
Accéléromètre
Ordinateur
Capteur
jaugesde contrainte
Ponts dejauge
Paragon
10
0 200 400 600 800 1000 1200 1400 1600−120
−100
−80
−60
−40
−20
0
20
40
60
80
fréquence (Hz)
Am
plitu
de (
dB)
Fig. 6.4: Schema de principe de la chaıne d’acquisition.
cinq, tous les calculs de conception avaient ete menes en la positionnant au centre. En fait, onesperait ainsi pouvoir reduire la taille du modele numerique par symetrie. Cependant, la puissancenecessaire pour exciter la plaque-2P au centre etait trop importante compte tenu des deplacementset des frequences. Par consequent, on a deplace le pot d’excitation pour le positionner en un pointou l’amplitude de vibration est moins importante.
De plus, on a determine une masse fictive a placer au centre de la plaque-2P sur le modelenumerique pour prendre en compte l’effet de la masse ajoute par l’instrumentation sur le premiermode. Cette masse a ete estimee a 16g en recalant la frequence de resonance du premier modepropre de la structure assemblee. Cette masse peut sembler relativement importante, mais onnotera que les cables blindes qui sont connectes aux jauges de deformation sont relativementlourds. Ces cables speciaux devaient supporter la temperature de chauffe de la plaque-2P avantl’assemblage.
6.3 Comparaison des resultats experimentaux et numeriques
Pour les essais experimentaux, la structure et le pot d’excitation sont suspendus. L’appareillageutilise pour l’acquisition des mesures est decrit sur le schema de principe de la figure 6.4.
Apres avoir dispose la plaque-2P dans le socle, on notera que les pieds d’aube sont en limitede glissement, lors des premiers cycles d’excitation, les pieds devraient par consequent glisseret entraıner une diminution de la precharge. Pour atteindre une position d’equilibre avant decommencer une campagne de mesure, on appliquera un balayage frequentiel autour de la premierefrequence de resonance en utilisant le niveau de force maximum que l’on souhaite utiliser durant lacampagne de mesure. Cette operation effectuee, on constate bien une diminution de la prechargesur la plaque-2P.

Chapitre 6 : Resultats experimentaux 151
260 265 270 275 280 285 2900
5
10
15
20
25
30
35
40
45
Fréquence (Hz)
Niv
eau
de fo
rce
(N)
Asserv. à 4N Asserv. à 16NAsserv. à 28NAsserv. à 40N
0 5 10 15 20 25 30 35 400
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01
Amplitude de l’excitation (N)
Coe
ffici
ent d
’am
ortis
sem
ent
Mes. exp. 1Rés. num. 1Mes. exp. 2Rés. num. 2Mes. exp. 3Rés. num. 3
(a) (b)
Fig. 6.5: (a) Asservissement de quelques niveaux de force pour la premiere campagne de mesure. (b)
Comparaison des resultats numeriques et experimentaux de trois campagnes de mesure pour les amortis-
sements.
Dans la suite, on presentera tout d’abord les resultats obtenus en utilisant une graisse deroulement a ete utilisee pour reduire le coefficient de frottement (Trois campagnes de mesuresont ete realisees successivement). Il ne nous est pas possible de communiquer la provenance ni lacomposition de cette graisse qui fait l’objet de recherches confidentielles. Ensuite, on remplacerala graisse par un vernis bisulfure (Molykote D-321R Spray) qui est utilise par la SNECMA pourproteger les interfaces de contact des pieds d’aube.
A noter que nous ne connaissons pas les coefficients de frottement µ de la graisse de roulementet du vernis bisulfure. Or, cette donnee est essentielle pour la simulation numerique. En fait,puisque c’est le seul parametre qui n’a pas ete determine a partir de resultats experimentaux, onle determinera de facon empirique a partir du code numerique lui-meme. On expliquera dans lasuite qu’il peut etre determine simplement lorsque le macroglissement est atteint.
6.3.1 Utilisation d’une graisse de roulement
Une campagne de mesure consiste a realiser une suite de balayages frequentiels autour dupremier mode de resonance en faisant varier le niveau de force. Pour la graisse de roulementutilisee, on a realise trois campagnes de mesure que l’on numerote de un a trois. Pour les deuxpremieres, on a commence a exciter la structure avec un niveau de force de 2N pour augmenterprogressivement jusqu’a 40N . Pour la troisieme, on a procede en sens inverse. On rappelle que lastructure est excite une fois a 40N avant de commencer une campagne de mesure. Le dispositifd’asservissement nous a permis de controler correctement le niveau de force sur la plage defrequence consideree comme le montre les quelques exemples de la figure 6.5-a pour la premierecampagne de mesure.

152 Chapitre 6 : Resultats experimentaux
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
−3
Amplitude de l’excitation (N)
Am
plitu
de à
la r
éson
ance
(m
)
Mes. exp. 1Rés. num. 1Mes. exp. 2Rés. num. 2Mes. exp. 3Rés. num. 3
265 270 275 280 285 2900
1
2
3
4
5
6
7
8
x 10−4
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
Rés. num., F=4N Rés. exp., F=4N Rés. num., F=16NRés. exp., F=16NRés. num., F=28NRés. exp., F=28NRés. num., F=40NRés. exp., F=40N
(a) (b)
Fig. 6.6: Comparaison des resultats numeriques et experimentaux de trois campagnes de mesure (a) pour
les courbes d’efficacite et (b) une partie des reponses frequentielles.
Pour determiner le coefficient d’amortissement structural ξ sans prendre en compte le frot-tement, on determine l’amortissement general de la structure a partir de toutes les reponsesfrequentielles mesurees et on extrapole approximativement le coefficient d’amortissement struc-tural. Comme le montre la figure 6.5-b, les points de mesure du coefficient d’amortissement sontrelativement imprecis pour de faibles niveaux d’excitation lorsqu’il n’y a pas de macroglissement.Sachant a partir des resultats numeriques que le coefficient d’amortissement evolue en generaltres peu pendant la phase de microglissement, on le choisit en moyennant les premieres valeursmesurees. Les coefficients d’amortissement structuraux qui ont ete retenus pour la simulationnumerique des trois campagnes de mesures sont dans l’ordre : ξ1 = 4.53 ·10−3, ξ2 = 3.943 ·10−3 etξ3 = 3.8 · 10−3. Ainsi, on constate que le coefficient d’amortissement n’est pas toujours le memeau cours du temps. On suppose que les points de fixation des cables (cables scotches sur le socle)ont pu se desserrer avec les vibrations et modifier l’amortissement, en particulier avec les fortsniveaux d’excitation.
Il nous reste a definir le coefficient de frottement. Pour cela, on va utiliser les courbes d’effica-cite que l’on a trace sur la figure 6.6-a. Le passage du microglissement au macroglissement peutetre observe par un brusque changement de pente. Dans la phase de macroglissement, l’amortisse-ment ajoute par le frottement devient tres vite dominant. Par consequent, on choisit le coefficientde frottement permettant d’obtenir approximativement les amplitudes a la resonance pour cettephase de macroglissement. Les coefficients de frottement ont ete determines pour les trois cam-pagnes de mesures et ont ete fixes respectivement a : µ1 = 0.285, µ2 = 0.325 et µ3 = 0.36. Lacomparaison des resultats numeriques aux resultats experimentaux montre une bonne correlationde l’amplitude a la resonance (fig. 6.5-a), du coefficient d’amortissement (fig. 6.5-b) et des reponsesfrequentielles (fig. 6.6-a).

Chapitre 6 : Resultats experimentaux 153
260 265 270 275 280 285 2900
5
10
15
20
25
30
35
40
Frequence (Hz)
cont
rain
tes
de V
on M
ises
(M
Pa)
Mes. exp. 1Mes. exp. 2Mes. exp. 3
(a) (b)
Fig. 6.7: (a) Contraintes alternees de Von Mises determinees a partir des mesures experimentales avec
un niveau d’excitation de 40N , et cela pour les 3 campagnes de mesures realisees avec une graisse de
roulement. (b) Schema de principe d’une rosette a 45o [101]
Un autre point important consiste a verifier que la contrainte dynamique n’a pas excede lalimite d’endurance σlim = 93.6MPa definie pour une contrainte moyenne de σmoy = 12.65MPa.Les coefficients de securite restent ceux definis au chapitre cinq. La figure 6.7-a nous donneles contraintes de Von Mises determinees a partir des mesures experimentales avec un niveaud’excitation de 40N pour les 3 campagnes de mesures.
On constate que pour le plus important niveau d’excitation utilise, le maximum de contraintealternee mesure n’est que de σalt ' 36MPa. Par consequent, on travaille largement en dessous del’endurance limite σlim ' 93.6 correspondant a ∆T ' 6.5oC. Si l’on travaille a une temperatureambiante superieure a 20oC et si le deplacement mesure au centre de la plaque-2P n’excede pas0.9mm, on peut donc envisager de supprimer les mesures associees aux rosettes sans craindre unerupture prematuree de la piece.
On rappelle les quelques resultats qui permettent de determiner les contraintes de Von Misesa partir de mesures experimentales obtenues sur une rosette de jauges a 45o. Soit εa, εb et εc lesdeformations mesurees selon les directions A, B et C comme represente sur la figure 6.7-b. Lescontraintes principales sont donnees par :
σ1 = E1−µ
εa+εc2 + 1√
2E
1+µ
√(εa + εb)2 + (εb − εc)2
σ2 = E1−µ
εa+εc2 − 1√
2E
1+µ
√(εa + εb)2 + (εb − εc)2
(6.2)
La contraintes de Von Mises σ0 sont alors donnees par la relation :
(σ1 − σ2)2 + (σ2)2 + (σ1)2 = 2σ20 (6.3)
Pour plus d’informations, on pourra se referer a Avril [101].

154 Chapitre 6 : Resultats experimentaux
Fig. 6.8: Resultats d’usure sur deux interfaces de contact distinctes apres utilisation du banc avec une
graisse de roulement.
Pour finir, on remarquera que le coefficient de frottement evolue rapidement au cours du temps.En fait, si l’on analyse les interfaces de contact des pieds d’aube (fig. 6.8), on constate des zonesd’usure par fretting. Pour qu’il y ait du fretting entre l’aluminium et l’acier, il est normalementnecessaire d’atteindre des coefficients de frottement de l’ordre de µ = 0.5. Par consequent, onpeut supposer que pendant l’utilisation du banc experimental, la graisse se repartit de faconnon uniforme sur les interfaces de contact. Par consequent, certaines zones expulsent la graisse.Ce phenomene est probablement facilite par le soulevement partiel du pied de contact que l’onavait mis en evidence dans le chapitre cinq. Dans ces conditions, non seulement le coefficientde frottement varie au cours du temps, mais il n’est pas uniforme sur toute la surface. Lesresultats obtenus semblent cependant montrer qu’un coefficient de frottement moyen fixe pourtoute l’interface de contact permet l’obtention de bons resultats pour le premier mode de flexion. Sil’amortissement par frottement sec avait ete plus important pendant la phase de microglissement,ca n’aurait probablement pas ete vrai.
6.3.2 Utilisation d’un vernis bisulfure
Les interfaces de contact de la plaque-2P ont ete degraissees et enduites d’un vernis bisulfure,le molykote D-321R sous forme de spray. De plus, les cables qui reliaient les rosettes aux pontsde jauges ont ete supprimees. En effet, compte tenu des essais deja realises, on a pu constaterque les niveaux d’excitation imposes entraınaient des niveaux de deformation dynamiques bienen dessous de la limite d’endurance illimitee.
La masse ajoutee au centre de la plaque-2P dans le modele elements finis pour tenir comptedes cables et des capteurs n’est alors plus que de m = 13g. Bien que l’on ait enleve six cables,la masse ne diminue que de 3g parce que l’amplitude des vibrations de la plaque-2P etait moinsimportante sur les rosettes que pour les autres jauges et l’accelerometre.
L’asservissement du niveau de force s’est deroule correctement comme le montre la figure6.9-a. On notera cependant qu’il a ete bien plus difficile a mettre en oeuvre que dans le cas de la

Chapitre 6 : Resultats experimentaux 155
275 280 285 2900
5
10
15
20
25
Fréquence (Hz)
Niv
eau
de fo
rce
(N)
Asserv. à 4N Asserv. à 14NAsserv. à 24N
0 5 10 15 20 250
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01
Amplitude de l’excitation (N)
Coe
ffici
ent d
’am
ortis
sem
ent
Mes. exp.Rés. num.
Fig. 6.9: (a) Asservissement de quelques niveaux de force dans le cas du vernis bisulfure. (b) Comparaison
des resultats numeriques et experimentaux dans le cas du vernis bisulfure pour les amortissements.
graisse de roulement, en particulier pendant la phase de microglissement. En fait, on a augmentele temps de mesure pour permettre au signal de se stabiliser et on a augmente le nombre decycles permettant de controler l’asservissement. Si l’on suit la procedure etablie dans le cas de lagraisse de roulement, on determine approximativement l’amortissement structural de la structurea partir des donnees experimentales : ξ = 2.8 · 10−3. Le coefficient de frottement a ete etabli defacon empirique a partir du programme, il a ete estime a µ = 0.18. Les figures 6.9-b et 6.10-aqui representent respectivement l’amortissement et l’efficacite permettent alors de penser que lacorrelation entre les resultats experimentaux et numeriques sont bons.
Pourtant, si l’on examine les reponses frequentielles sur la figure 6.10-b, on constate degrosses differences entre l’experimental et le numerique. De nombreux essais numeriques ontete realises pour determiner les parametres qui permettraient de faire correspondre les resultatsexperimentaux et numeriques au mieux. De ces calculs, il semble ressortir que l’amortissementstructural est bien plus faible que ce que l’on avait suppose au depart a partir des resultatsexperimentaux pour la phase de microglissement. On l’a estime a ξ = −0.5 · 10−3, ce qui n’estbien sur pas possible et revele un defaut de modelisation du probleme. De plus, le coefficientde frottement est probablement de l’ordre de µ = 0.18 pendant la phase de microglissement,mais il decroıt assez rapidement pendant la phase de macroglissement pour atteindre une valeurinferieure a µ = 0.14. Pour un niveau d’excitation de F = 20N , on obtient le resultat de la figure6.11-a si l’on considere un coefficient d’amortissement visqueux irrealiste de ξ = −0.5 · 10−3 et uncoefficient de frottement de µ = 0.14.
A noter que l’on a aussi verifie si le nombre d’harmoniques pouvait ameliorer le resultat. Unamortissement visqueux de ξ = 1.1 · 10−3 (amortissement de la plaque-2P libre) a ete utilise eton a retenu jusqu’a 21 harmoniques. La figure 6.11-b nous montre que les 5 harmoniques que l’onavait retenu auparavant n’etaient pas suffisants, mais que l’on ne s’est pas rapproche du resultatexperimental pour autant.

156 Chapitre 6 : Resultats experimentaux
0 5 10 15 20 25 300
1
2
3
4
5
6x 10
−4
Amplitude de l’excitation (N)
Am
plitu
de à
la r
éson
ance
(m
)
Mes. exp.Rés. num.
275 280 285 2900
1
2
3
4
5
6x 10
−4
Max
imum
d’a
mpl
itude
(m
)
Fréquence (Hz)
Rés. num., F=4N Rés. exp., F=4N Rés. num., F=14NRés. exp., F=14NRés. num., F=24NRés. exp., F=24N
Fig. 6.10: Comparaison des resultats numeriques et experimentaux (a) pour les courbes d’efficacite et
(b) une partie des reponses frequentielles.
275 280 285 2900
1
2
3
4
5
6x 10
−4
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
Res. num., F=20NRes. exp., F=20N
275 280 285 2900
2
4
x 10−4
Fréquence (Hz)
Max
imum
d’a
mpl
itude
(m
)
5 harm.11 harm.15 harm.21 harm.Res. exp.
Fig. 6.11: (a) Correlation entre l’experimental et le numerique pour le niveau de force F = 20N lorsque
l’on considere un coefficient d’amortissement visqueux irrealiste de ξ = −0.5 · 10−3 et un coefficient de
frottement de µ = 0.14. (b) Influence du nombre d’harmoniques dans le calcul numerique pour le cas avec
du vernis bisulfure (ξ = 1.1 · 10−3,µ = 0.14).

Chapitre 6 : Resultats experimentaux 157
Fig. 6.12: Resultats d’usure sur deux interfaces de contact distinctes apres utilisation avec du vernis
bisulfure.
On peut raisonnablement penser que le coefficient de frottement depend dans ce cas de lavitesse de glissement. Wang et Shieh [21] ont d’ailleurs montre pour un systeme aube-frotteurqu’un coefficient de frottement variable pouvait modifier les resultats de facon non negligeable.Dans l’etat d’avancement actuel de nos recherches et du code de calcul, nous n’avons pas d’autresexplications et nous ne sommes pas en mesure de le tester. Des investigations supplementairesseraient necessaires pour aller dans ce sens. En appliquant la loi de Coulomb avec µs = 0.18 etµd = 0.14, le passage de µs a µd est trop brutal et donne des resultats converges surprenants.La reponse a la resonance devient bien plus importante, mais il n’est pas sur que le resultat soitcorrect car un nombre important d’harmoniques semble necessaire. Pour bien faire, il faudraitmodeliser les variations du coefficient de frottement en fonction de la vitesse relative.
Pour finir, on a constate encore une fois une usure du revetement sur les interfaces de contact(fig. 6.12-a et b) qui se concentre sur les zones ou l’on avait deja observe du fretting lors de l’etudeexperimentale avec de la graisse de roulement.
6.4 Resultat de thermoelasticite sur un pied d’aube
Le principe de la thermoelasticite a ete decouvert il y a plus de 100 ans par Lord Kevin. Ceprincipe consiste a mesurer d’infimes variations de temperature dues a la dilatation du materiau.Pourtant, ce type de mesure n’est possible que depuis une dizaine d’annees avec le developpementdes cameras infrarouges. Le principal interet de cette technique est de permettre une mesure enun grand nombre de points du champ de contrainte.Dans le cadre restrictif de la thermoelasticite, on considere des materiaux elastiques isotropes ennegligeant toutes les sources de dissipation autres que la conduction thermique. Les equations quiregissent le systeme sont l’equation du mouvement :
ρ∂2ui
∂t2= σij,∂uj
+ fi (6.4)

158 Chapitre 6 : Resultats experimentaux
et l’equation de la chaleur :
ρcε∂T
∂t= r + kthermT∂u2
i+ 3KαT
∂εii
∂t(6.5)
avec T la temperature, ktherm la conductivite thermique et cε une constante associee a la for-mulation en deformation. Lorsque les phenomenes thermiques sont pris en compte, la loi decomportement elastique lineaire peut s’ecrire sous la forme :
σij = λεkkδij + 2µεij − 3KαTδij (6.6)
Dans cette partie, λ et µ representent les coefficients de Lame.Le terme
3KαT∂εii
∂t
represente l’effet thermoelastique que l’on cherche a determiner. L’effet thermoelastique resultede la dilatation ou de compression du materiau qui entraıne une variation de temperature del’ordre de 0.01 a 0.1 Kelvin.
On notera aussi que le terme 3KαTδij peut generalement etre neglige dans la loi de compor-tement lorsque le systeme n’est pas soumis a un chargement thermique significatif.
Lorsque l’on applique une excitation harmonique au systeme, l’effet thermoelastique est luiaussi harmonique. Par contre, ce n’est pas le cas pour la production volumique de chaleur (quicomprend aussi le rayonnement) r et la conduction thermique
kthermT∂u2i
qui sont decorrelees de l’excitation et peuvent etre filtrees par un simple filtrage frequentiel. Deplus, les phenomenes de conductions et de production de chaleur lies a l’effet thermoelastiquesont negliges. En effet, pour une frequence superieure a quelques Hertz, une particule elementairede materiau a un comportement quasi-adiabatique. On remarquera toutefois que le terme derayonnement r, considere comme negligeable, permet de mesurer les variations de temperature parl’intermediaire d’une camera infrarouge. Pour une pulsation ω, le comportement thermoelastiquedu systeme est donne par :
ρ∂2ui
∂t2 = σij,∂uj+ fi
σij = λεkkδij + 2µεij
∂T∂t = −3KαT
ρcε
∂εii∂t
(6.7)
La troisieme equation du systeme (6.7) donne alors une relation directe entre la temperature etla dilatation du materiau. On en deduit la relation suivante :
∆T =3Kα
ρcεT∆(Tr(ε)) (6.8)
Kε est une constante caracteristique du materiau qui est par exemple de Kε,acier = 19.5 pourl’acier et Kε,alu. = 2.08 pour l’aluminium.Pour plus d’informations sur la theorie et la mise en oeuvre technique, on pourra par exemple sereferer au travail de these de Humbert[102].

Chapitre 6 : Resultats experimentaux 159
Fig. 6.13: Mesure de thermoelasticite sur le cote d’un pied d’aube
Une mesure de thermoelasticite a ete realisee sur le pied d’aube afin de mesurer les deformationsdynamiques sur le cote d’un pied d’aube. Le resultat est donne par la figure 6.13 sur laquelle onpeut voir apparaıtre le profil du pied. Le resultat semble montrer que les contraintes ne sont pasidentiques sur les deux interfaces. A noter que cette mesure a ete realisee pour avoir un apercu dela repartition des contraintes sur le pied. Pour ameliorer la qualite des resultats, des dispositionsdevraient etre prises pour proteger l’appareil de mesure du bruit emis par le plaque-2P qui estune source parasite importante.
6.5 Conclusions
Tout d’abord, on note qu’il etait important de prendre en compte l’influence des cables et descapteurs dans le modele numerique en ajoutant une masse ponctuelle au centre de la plaque-2P(dans l’etude du premier mode de flexion) et en integrant l’amortissement structural ajoute. Lerecalage de la plaque-2P et du socle en libre n’etait pas suffisant.
Ensuite, on a mis en avant que l’on avait une excellente correlation des resultats numeriqueset experimentaux lorsque une graisse de roulement etait utilisee pour lubrifier les interfaces decontact. Par contre, on a aussi constate que le modele numerique du frottement tel qu’il existeaujourd’hui dans notre code de calcul pouvait etre mis en defaut. Lorsque du vernis bisulfure estutilise par exemple, les resultats semblent montrer que le coefficient de frottement depend de lavitesse relative.
Cela constitue sans nul doute une ouverture pour une prochaine etude. Le code de calculdevra integrer la possibilite de prendre en compte des lois de frottement plus compliquees que laloi de Coulomb. Mais cela introduit un autre probleme car il faudra etre capable de determinerl’evolution du coefficient de frottement avec la vitesse de glissement. Une methode d’identificationempirique a partir du programme semble plus difficile a mettre en oeuvre.
Pour finir, on constatera que le microglissement introduit bien de l’amortissement, mais qu’ilest tres faible par rapport a ce que l’on peut obtenir en macroglissement. L’energie dissipee par lescables de l’instrumentation etait plus importante que celle dissipee par le frottement sec pendant

160 Chapitre 6 : Resultats experimentaux
la phase de microglissement. On est donc tente de conclure que s’il existe une source de dissipationsignificative autre que du microglissement aux pieds d’aube, le frottement aux pieds d’aube peutetre neglige.

Conclusions et perspectives
L’objectif le plus ambitieux de cette these consistait a appliquer des methodes telles queles Lagrangiens Augmentes qui sont classiques en temporel dans le domaine frequentiel. Pour yparvenir, on a ete amene a definir une nouvelle methode pour imposer les contraintes que l’on abaptise ”methode indirecte de prise en compte des contraintes”. Dans cette methode, une nouvellevariable de dimension nr a ete definie sans pour autant augmenter la taille du systeme a resoudrepar la methode de resolution non lineaire. Cette variable permet d’imposer les contraintes defrottement et de non penetration a l’interieur de la procedure d’optimisation lorsque cette derniereimpose tous les deplacements aux noeuds.
Cette nouvelle methode permet l’utilisation de la plupart des techniques existantes pour im-poser les equations de contrainte dans le domaine frequentiel. On note toutefois des exceptionslorsqu’il n’est pas possible de scinder l’expression des forces non lineaires en deux afin de separerles variables a resoudre par la methode d’optimisation et celles qui sont determinees a partir descontraintes. Dans ces exceptions, on notera par exemple la methode de la ”barriere” et la methodede Zavarise [79].
La difficulte qui empechait jusqu’alors d’utiliser la plupart des methodes temporelles enfrequentiel ayant ete resolue, on a tente d’appliquer la methode des Lagrangiens Augmenteslorsque la matrice Jacobienne doit etre calculee par difference finie. Notre choix s’etait portesur les Lagrangiens Augmentes car ils sont frequemment utilises en temporel (le Jacobien etantdetermine analytiquement). En effet, ils permettent d’imposer les contraintes avec un fort niveaude precision sans considerer les Lagrangiens comme des inconnues. Malheureusement, lorsque leJacobien n’est pas connu de facon analytique, les Lagrangiens Augmentes doivent etre remis ajour en dehors de la procedure d’optimisation. Cela augmente le cout numerique si le coefficientde penalite est choisi trop petit et degrade la convergence si le coefficient de penalite est tropgrand. Le choix du coefficient de penalite devient alors assez delicat.
C’est pour resoudre ces difficultes que l’on a propose les Lagrangiens Dynamiques qui s’ap-puient sur l’equation du mouvement plutot qu’un processus iteratif. Cette nouvelle methode peutetre definie de differentes facons en utilisant par exemple une penalisation sur le deplacementrelatif, sur la vitesse relative, ou une formulation mixte. Comme on l’a explique au chapitre 4,la penalisation sur le deplacement relatif est tres souvent la plus performante dans le domaine
161

162 Conclusions et perspectives
frequentiel. Pour ameliorer les temps de calcul, on a aussi propose une nouvelle reduction sur ledeplacement relatif qui a permis de reduire le nombre d’inconnus par deux dans le cas d’elementsde contact noeud-a-noeud.Ces trois resultats ont ete regroupes pour definir la DLFT : Dynamic Lagrangians mixed Fre-quency Time method. Cette methode rassemble donc quelques unes des innovations proposeesdans cette these et a ete validee sur un ensemble de tests numeriques et experimentaux.
On notera la simplicite avec laquelle les Lagrangiens Dynamiques permettent de definir lesinterfaces de contact. De plus, la convergence de la DLFT reste excellente lorsque des systemesde grandes tailles sont etudies. Son integration dans un code de calcul par elements finis ne seraitpas tres compliquee a priori.
Nos investigations nous ont aussi amene a proposer d’autres innovations. Par exemple, lareduction adaptative qui permet d’eviter la plupart des problemes de convergence qui surviennentlorsque l’amortissement structural est tres faible.
On a aussi cherche a etendre nos resultats aux problemes pour lesquels on a de grandesdeformations. Pour cela, on s’est jusqu’a present limite a un probleme quasi-statique pour lequelon a defini des elements noeud-a-point. Ces elements utilisent le plus souvent une interpolationpolynomiale de l’interface a partir des resultats sur les noeuds du corps maıtre. On a cependantmis en evidence que les interpolations pouvaient generer d’importantes erreurs dans la resolutiondes problemes de contact. Dans le cadre d’un probleme en quasi-statique, on a donc commence adevelopper une interpolation hybride en deplacement-souplesse qui nous a deja permis d’obtenirdes premiers resultats forts interessants. Cependant, cette theorie necessite encore des approfon-dissements.
L’objectif final de la these consistait a appliquer la methode aux pieds d’aube en le validantexperimentalement. Pour cela, un banc a ete dimensionne en proposant un systeme de prechargeen temperature afin d’eviter au maximum les perturbations qui auraient pu etre introduites parun systeme de precharge mecanique. De plus, cette solution permet d’imposer des niveaux deprecharge importants assez facilement.
Une pre-etude a ete realisee a partir de ANSYS. Puis, des que la DLFT a ete operationnelle,une etude en dynamique a permis d’affiner le dimensionnement. ANSYS ne permettait pasd’etudier un tel probleme en dynamique sans un cout numerique tres important.
Une etude parametrique a finalement ete menee a partir de la DLFT avant de mettre enoeuvre le banc experimental. Cette etude parametrique a permis de mettre en avant differentsresultats interessants tels qu’un soulevement partiel du pied d’aube ou un effet d’assouplissementpour les faibles coefficients de frottement.
Les essais experimentaux ont finalement ete menes pour le premier mode de flexion. Les inter-faces de contact ont ete lubrifiees par une graisse de roulement dans un premier cas et un vernisbisulfure dans un deuxieme cas. Il ressort que les resultats experimentaux et numeriques sont tresproches dans le premier cas mais qu’un probleme surgit dans le deuxieme. A partir des calculsqui ont ete realises en utilisant la DLFT, on estime que la coefficient de frottement varie avec la

Conclusions et perspectives 163
vitesse de glissement dans le second cas, ce qui n’est pas pris en consideration dans notre modeleactuel.
Les resultats de cette etude sont donc nombreux et ouvrent de nouvelles perspectives, aussibien pour les problemes en quasi-statique qu’en dynamique.
En introduisant les Lagrangiens Dynamiques reduits sur le deplacement relatif en frequentiel,on a introduit une nouvelle categorie de methodes puisqu’il n’est pas possible de ramener l’ex-pression analytique des Lagrangiens en temporel. Cela ajoute une nouvelle difficulte pour uneetude de stabilite que nous ne savons pas resoudre pour le moment. Des investigations pourraientpar consequent etre menees dans ce sens.
Ensuite, la reduction des temps de calcul reste une preoccupation majeure. Pour aller dansce sens, on pourrait tout d’abord chercher a diminuer le nombre d’appels au calcul de la matriceJacobienne par difference finie. On estime qu’il est possible d’utiliser le Jacobien determine aupas de frequence precedent comme point de depart dans la methode quasi-Newtonienne. Si cettemethode donnait les resultats escomptes, on diminuerait les temps de calcul de 70 a 90%.
Toujours dans l’idee de reduire les temps de calcul, une demarche plus ambitieuse et probable-ment plus difficile a mettre en oeuvre consisterait a condenser les interfaces de contact. L’objectifserait alors de determiner une base sur laquelle ont pourrait projeter la solution sans perdre tropd’informations.
On pourrait aussi etudier l’effet de differents phenomenes sur la reponse d’une roue aubagee :le flottement en presence d’un amortissement par frottement sec en appliquant la reduction adap-tative pour favoriser la convergence (l’etude de ce probleme est aujourd’hui encore limite a depetites structures) ; un coefficient de frottement qui est fonction de la vitesse relative (les resultatsexperimentaux semblent montrer que c’est le cas pour le vernis bisulfure qui est utilise sur lesroues aubagees).
Pour finir, on remarquera que la methode indirecte de prise en compte des contraintes permetaujourd’hui d’envisager l’etude de grands deplacements ou de grandes deformations en frequentiel.L’amelioration de la precision des calculs dans l’etude des grandes deformations reste cependantun sujet de recherche d’actualite. Une methode d’interpolation hybride en deplacement-souplessea ete proposee dans ce memoire pour ameliorer les resultats des problemes en quasi-statique. Cettemethode pourra etre etendue, le moment venu, au domaine frequentiel sans grandes difficultes apriori.

164 Conclusions et perspectives

Bibliographie
[1] J.H. Wang et W.K. Chen. Investigation of the vibration of a blade with friction damperby HBM. Journal of Engineering for Gas Turbines and Power, 115:294–299, Avril 1993.Transaction of the ASME.
[2] S. Lau, Y. Cheung et S. Wu. Incremental harmonic balance method with multiple timescales for aperiodic vibration of nonlinear systems. Journal of Applied Mechanics, 50:871–876, 1983.
[3] C. Pierre, A. Ferri et E. Dowell. Multi-harmonic analysis of dry friction dampedsystems using an incremental harmonic balance method. Journal of Applied Mechanics,52(4):958–964, 1985.
[4] T. Cameron et J. Griffin. An alternating frequency/time domain method for calculatingthe steady-state response of nonlinear dynamic systems. Journal of Applied Mechanics,56:149–154, 1989.
[5] J. Guillen et C. Pierre. An efficient, hybrid, frequency-time domain method for thedynamics of large-scale dry-friction damped structural systems. Munich (Allemagne), Aout1998. IUTAM Symposium on Unilateral Multibody Dynamics.
[6] K.-J. Bathe et A.B. Chaudhary. A solution method for planar and axisymmetric contactproblems. International Journal for Numerical Methods in Engineering, 21:65–88, 1985.
[7] N.J. Carpenter, R.L. Taylor et M.G. Katona. Lagrange constraints for transientfinite element surface contact. International Journal for numerical methods in engineering,32:103–128, 1991.
[8] T.A. Laursen et J.C. Simo. A continuum-based finite element formulation for the implicitsolution of multibody, large deformation frictional contact problems. International Journalfor numerical methods in engineering, 36:3451–3485, 1993.
[9] J.-H. Heegaard et A. Curnier. An augmented lagrangian method for discrete large-slipcontact problems. International Journal for numerical Methods in Engineering, 36:569–593,1993.
165

166 Bibliographie
[10] T.A. Laursen et B.N. Maker. An augmented lagrangien quasi-newton solver for constrai-ned nonlinear finite element applications. International Journal for Numerical Methods inEngineering, 38:3571–3590, 1995.
[11] P. Wriggers et G. Zavarise. Application of augmented lagrangian techniques for non-linear constitutive laws in contact interfaces. Communications in numerical methods inengineering, 9:815–824, 1993.
[12] M.J. Kruse et C. Pierre. Dynamic response of an industrial turbomachinery rotor. LakeBuena Vista (Floride, USA), 1996. 32nd AIAA/ASME/ASCE/AHS/ASC Joint PropulsionConference and exhibit.
[13] J.T. Oden et J.A.C. Martins. Models and computational methods for dynamic frictionphenomena. Computer Methods in Applied Mechanics and Engineering, 52:527–634, 1985.
[14] R. Fletcher. Pratical Methods of Optimization. Wiley, New York (U.S.A.), 1987.
[15] F.P. Bowden et D. Tabor. The friction and lubrification of solids. Oxford UniversityPress, Ely House, London, 1971.
[16] J.F. Archard. Elastic deformation and the law of friction. In Proceedings of the RoyalSociety of London, Series A: Mathematical and Physical Sciences, volume 243, pages 190–205, 1957.
[17] J.A. Greenwood et J.B.P. Williamson. Contact of nominally flat surfaces. In Proceedingsof the Royal Society of London, Series A: Mathematical and Physical Sciences, volume 295,pages 300–319, 1966.
[18] R. Ying. The analysis and identification of friction joint parameters in the dynamic res-ponse of structures. Rapport de synthese, Imperial College, Londre (U.K.), Mars 1992.
[19] R. Connolly, R.E. Schofield et R.H. Thornley. The approach of machined surfaceswith particular reference to their hardness. In Advances in Machine Tool Design and Re-search 1967 Proceedings of the 8th International Sept 1967, pages 759–775, 1967.
[20] E. Rabinowicz. Friction and wear of materials. John Wiley & Sons, Inc., New York, 1965.
[21] J.H. Wang et L. Shieh. The influence of variable friction coefficient on the dynamicbehavior of a blade with a friction damper. Journal of Sound and Vibration, 149(1):137–145, 1991.
[22] M. Philipps. Modelisation de l’interface glissant entre deux ailettes de turbines B.P. dansun code de synthese modale. Rapport de fin d’etudes, Ecole Centrale de Lyon, 1987.
[23] J.-M. Georges. Frottement, usure et lubrification. Eyrolles, CNRS Editions, CollectionSciences et Techniques de l’Ingenieur, France, 2000.

Bibliographie 167
[24] J.H. Griffin. Friction damping of resonant stresses in gas turbine engine airfoils. Journalof Engineering for Power, 102:329–333, Avril 1980.
[25] W.E. Whiteman et A.A. Ferri. Analysis of beam-like structures with displacement-dependent friction forces: Part i: Single-degree-of-freedom model. In Design EngineeringTechnical Conferences, volume 3, pages 1093–1100. ASME, 1995.
[26] W.E. Whiteman et A.A. Ferri. Analysis of beam-like structures with displacement-dependent friction forces: Part ii: Multi-degree-of-freedom model. In Design EngineeringTechnical Conferences, volume 3, pages 1101–1108. ASME, 1995.
[27] K.Y. Sanliturk, M. Imregun et D.J. Ewins. Harmonic balance vibration analysis ofturbine bades with friction dampers. Journal of Engineering for Power, 119:96–103, Janvier1997.
[28] A.A. Ferri et B.S. Heck. Vibration analysis of dry friction damped turbine blades usingsingular perturbation theory. Journal of Engineering for Gas Turbines and Power, 120:588–595, Avril 1998.
[29] C.H. Menq, J.H. Griffin et J. Bielak. The influence of a variable variable normal loadon the forced vibration of a frictionnally damped structure. Journal of Engineering for GasTurbines and Power, 108:300–305, Avril 1986.
[30] B.D. Yang, M.L. Chu et C.H. Menq. Stick-slip-separation analysis and non-linear stiffnessand damping characterization of friction contacts having variable normal load. Journal ofSound and Vibration, 210(4):461–481, 1998.
[31] C.H. Menq, P. Chidamparam et J.H. Griffin. Friction damping of two-dimentionalmotion and its application in vibration control. Journal of Sound and Vibration, 144(3):427–447, 1991.
[32] K.Y. Sanliturk et D.J. Ewins. Modelling two-dimensional friction contact and its appli-cation using harmonic balance method. Journal of Sound and Vibration, 193(2):511–523,1996.
[33] C.H. Menq et B.D. Yang. non-linear spring resistance and frictional constraint havingtwo-dimentional motion. Journal of Applied Mechanics, 56:149–154, 1989.
[34] B.D. Yang et C.H. Menq. Characterization of contact kinematics and application to thedesign of wedge dampers in turbmachinery blading : part 1, stick-slip contact kinematics.Journal of Engineering for Gas Turbines and Power, 120:410–417, Avril 1998.
[35] B.D. Yang et C.H. Menq. Characterization of contact kinematics and application to thedesign of wedge dampers in turbmachinery blading : part 2, prediction of forced response andexperimental verification. Journal of Engineering for Gas Turbines and Power, 120:418–423, Avril 1998.

168 Bibliographie
[36] B.D. Yang et C.H. Menq. Characterization of 3d contact kinematics and prediction ofresonant response of structures having 3d frictional constraint. Journal of Sound and Vi-bration, 217(5):909–925, 1998.
[37] C. Gao, D. Kuhlman-Wilsdorf et D.D. Makel. The dynamic analysis of stick-slipmotion. Wear, 173:1–12, 1994.
[38] R.T. Spurr. A theory of brake squeal. In Proc Auto Div Instn Mech Engrs, volume 1,pages 33–41. Institution of Mechanical Engineers, 1961.
[39] F. Moirot. Etude de la stabilite d’un equilibre en presence de frottement de Coulomb.These doctorale, Ecole Polytechnique, Juillet 1998.
[40] P. Chambrette. Stabilite des systemes Dynamiques avec Frottement Sec : Application auCrissement des Freins a Disque. These de doctorat, Ecole Centrale de Lyon, 1991.
[41] S.W.E. Earles et M.N.M. Badi. Oscillatory instabilities generated in a double-pin and discundamped system: a mechanism of disc-brake squeal. In Proc Instn Mech Engrs, volume198C, pages 43–50, 1984.
[42] S.W.E. Earles et C.K. Lee. Instabilities arising from the frictional interaction of o pin-disk system resulting in noise generation. Journal of Engineering for Industry, pages 81–86,Fevrier 1976.
[43] S.W.E. Earles et P.W. Chambers. Disc brake squeal noise generation: predicting itsdependency on system parameters including damping. International Journal of VehicleDesign, 8, 1987.
[44] O. Vinogradov et I. Pivovarov. Vibrations of a system with non-linear hysteresis.Journal of Sound and Vibration, 111(1):145–152, 1986.
[45] W.D. Iwan. On a class of models for yielding behavior of continuous and composite systems.Journal of Applied Mechanics, 89:612–617, 1967.
[46] C.H. Menq, J. Bielak et J.H. Griffin. The influence of microslip on vibratory response,part i : a new microslip model. Journal of Sound and Vibration, 107(2):279–293, 1986.
[47] G. Csaba. Modelling microslip friction damping and its influence on turbine blade vibra-tions. Rapport de synthese, Universite de Linkoping, Suede, 1998.
[48] G. Duvaut et J.L. Lions. Les Inequations en Mecanique et en Physique. Dunod, Paris(France), 1972.
[49] J.T. Oden et N. Kikuchi. Finite element methods for constrained problems in elasticity.International Journal for numerical Methods in Engineering, 18:701–725, 1982.

Bibliographie 169
[50] J.T. Oden et E.B. Pires. Nonlocal and nonlinear friction laws and variational principlesfor contact problems in elasticity. Journal of Applied Mechanics, 50:67–77, 1983.
[51] T.A. Laursen. Formulation and Treatment of Frictional Contact Problems Using FiniteElement. Synthesis rapport, Stanford University, 1992.
[52] H. Parisch et CH. Lubbing. Three-dimensional large deformation contact with friction.International Journal for Numerical Methods in Engineering, 40:3359–3383, 1997.
[53] F. Armero et E. Petocz. A new dissipative time-stepping algorithm for frictional contactproblems: Formulation and analysis. Computers methods in applied mechanical and engi-neering, 179:151–178, 1999.
[54] A.B. Chaudhary et K.-J. Bathe. A solution method for static and dynamic analysis ofthree-dimensional contact problems with friction. Computers & Structures, 24(6):855–873,1986.
[55] E. Bittencourt et G.J. Creus. Finite element analysis of three-dimentional contact andimpact in large deformation problems. Computers and Structures, 69:219–234, 1998.
[56] D.J. Benson. A mixture theory for contact in multi-material eulerian formulations. Com-puters methods in applied mechanical and engineering, 140:59–86, 1997.
[57] J.K. Kodikara et I.D. Moore. A general interaction analysis for large deformations.International Journal for Numerical Methods in Engineering, 36:2863–2876, 1993.
[58] A. Blazquez, F. Paris et J. Canas. Interpretation of the problems found in applyingcontact conditions in node-to-point schemes with boundary element non-conforming discre-tizations. Engineering Analysis with boundary Elements, 21:361–375, 1998.
[59] O.A. Olukoko, A.A. Becker et R.T. Fenner. A new boundary element approach forcontact problems with friction. International Journal for Numerical Methods in Enginee-ring, 36:2625–2642, 1993.
[60] A.L. Iban, J.A. Garrido et I. Prieto. Contact algorithm for non-linear elastic problemswith large displacements and friction using the boundary element method. Computer me-thods in applied mechanical and engineering, 178:51–67, 1999.
[61] M. Berthillier, C. Dupont, P. Chanez et F. Saurat. Reponse forcee aeroelastique desaubes de turbomachines. Revue Francaise de Mecanique, 4, 1998.
[62] R.J. Guyan. Reduction of stiffness and mass matrices. AIAA Journal, 3(2):380, February1965.
[63] R.R. Craig et M.C.C. Bampton. Coupling of substructures for dynamic analysis. AIAAJournal, 6(7):1313–1319, 1968.

170 Bibliographie
[64] R.H. Mac Neal. A hybrid method of component mode synthesis. Computers & Structures,1:581–601, 1971.
[65] J.F. Imbert. Analyse des structures par elements finis. Cepadues editions, Toulouse(France), deuxieme edition edition, Decembre 1984.
[66] L. Jezequel. Synthese Modale : Theorie et Extensions. These de doctorat d’etat, UniversiteClaude Bernard, Nov 1985.
[67] J. Guillen. Studies of the dynamics of dry-friction-damped blade assemblies. Synthesisrapport, University of Michigan, Ann Arbor (Michigan, USA), 1999.
[68] O. Poudou. Modeling of friction damping in bladed disk assemblies. Rapport de find’etudes, Ecole Centrale de Nantes, 1999.
[69] T. Lagrange. A study of the dynamics of friction-damped blade assemblies: cyclic sym-metry and structure-like dampers. Rapport de master, Universite du Michigan, 1999.
[70] W.-H. Chen and P. Tsai. Finite element analysis of elastodynamic sliding contact problemswith friction. Computers & Structures, 22(6):925–938, 1986.
[71] A.L. Eterovic et K.J. Bathe. On the treatment of inequality constraints arising fromcontact conditions in finite element analysis. Computers & Structures, 40(2):203–209, 1991.
[72] Z.-H. Zhong et L. Nilsson. Lagrange multiplier approch for evaluation of friction inexplicit finite-element analysis. Communications in Numerical Methods in Engineering,10:249–255, 1994.
[73] J.T. Oden et E.B. Pires. Algorithms and numerical results for finite element approxi-mations of contact problems with non-classical friction laws. Computers & Structures,19:137–147, 1984.
[74] F. Paris, A. Blazquez et J. Canas. Contact problems with nonconforming discretizationsusing boundary element method. Computers & Structures, 57(5):829–839, 1995.
[75] M.J.D. Powell. A hybrid method for nonlinear equations. Gordon and Breach, Londres(GB), p. rabinowitz edition, 1970.
[76] B.S. Garbow, K.E. Hillstrom et J.J. More. User guide for minpack-1. National ArgonneLaboratory, 1980.
[77] M. Wosle et F. Pfeiffer. Dynamics of multibody systems containing dependent unilateralconstraints with friction. Journal of Vibration and Control, 2:161–192, 1996.
[78] P. Alart et A. Curnier. A mixed formulation for frictional contact problems prone tonewton like solution methods. Computers methods in applied mechanical and engineering,92:353–375, 1991.

Bibliographie 171
[79] G. Zavarise, P. Wriggers et B.A. Schrefler. A method for solving contact problems.International Journal for numerical methods in engineering, 42:473–498, 1998.
[80] S. Nacivet, C. Pierre, F. Thouverez et L. Jezequel. Analysis of periodic frictionalcontact in finite elements problems. Pittsburgh (USA), Septembre 2001. ASME DesignEngineering Technical Conferences. Proceedings of DETC’01 - CDROM - DETC2001/VIB-21734 (10 pages).
[81] ANSYS, aide en ligne, Version 5.5.
[82] J. Goulet et J.-P. Boutin. Resistance des materiaux. Dunod, Paris (France), huitiemeedition edition, 1998.
[83] M.A. Dokainish et K. Subbaraj. A survey of time-integration methods in computationalstructural dynamics - i. explicit methods. Computers & Structures, 32(6):1371–1386, 1989.
[84] M.A. Dokainish et K. Subbaraj. A survey of time-integration methods in computationalstructural dynamics - i. implicit methods. Computers & Structures, 32(6):1387–1401, 1989.
[85] ABAQUS Standard, User’s Manual, Volume II, Version 5.6. Karlsson & Sorensen Inc.,1996.
[86] M. Berthillier, C. Dupont, R. Mondal et J.J. Barrau. Bladed forced response analysiswith friction dampers. Journal of Engineering for Gas Turbines and Power, 120:468–474,Avril 1998.
[87] A.H. Nayfeh. Applied Nonlinear Dynamics: Analytical, Computational, and ExperimentalMethods. Wiley & Sons, New York (USA), wiley-interscience publication edition, 1995.
[88] S.L. Lau et W.-S. Zhang. Nonlinear vibrations of piecewise-linear systems by incrementalharmonic balance method. Journal of Applied Mechanics, 59:153–160, 1992.
[89] A.Y.T. Leung et T. Ge. Toeplitz jacobian matrix for nonlinear periodic vibration. Journalof Applied Mechanics, 62:709–717, 1995.
[90] G. Von Groll et D.J. Ewins. The harmonic balance method with arc-length continuationin rotor/stator contact problems. Journal of Sound and Vibration, 241(2):223–233, 2001.
[91] A. Sinha et J.H. Griffin. Effects of friction dampers on aerodynamically unstable rotorstages. AIAA Journal, 23(2):262–270, 1985.
[92] A. Sinha J.H. Griffin et R.E. Kielb. Influence of friction dampers on torsional bladeflutter. Journal of Engineering for Gas Turbines and Power, 108:313–318, Avril 1986.
[93] A. Sinha et J.H. Griffin. Friction damping of flutter in gas turbine engine airfoils. Journalof Aircraft, 20(4):372–376, Avril 1983.

172 Bibliographie
[94] W.E. Whiteman et A.A. Ferri. Suppression of bending-torsion flutter throughdisplacement-dependent dry friction damping. AIAA Journal, 37(1):79–83, Janvier 1999.
[95] E.C. Miniatt, A.M. Waas et W.J. Anderson. An experimental study of stress singula-rities at a sharp corner in a contact problem. Experimental Mechanics, 1990.
[96] G.B. Sinclair, N.G. Comier, J.H. Griffin et G. Meda. Contact stresses in dovetailattachments: finite element modeling. International Gas Turbine & Aeroengine Congress& Exhibition, 1999.
[97] V.M. Alexandrov et B.L. Romalis. Les problemes de contact dans les constructionsmecaniques.
[98] D.D. Quinn. Distributed friction and microslip in mechanical joints with varying degrees-of-freedom. Pittsburgh (USA), Septembre 2001. ASME Design Engineering Technical Confe-rences. Proceedings of DETC’01 - CDROM - DETC2001/VIB-21514 (7 pages).
[99] G. Spinuler. Conception des machines - Principes et applications - 3. Dimensionnement.Presses polytechniques et universitaires romandes.
[100] D. Duprat. Fatigue et mecanique de la rupture des pieces en alliage leger. Techniques del’ingenieur, traite Genie Mecanique.
[101] J. Avril. Encyclopedie d’analyse des contraintes. Vishay Micromesures, France, 1983.
[102] L. Humbert. Recalage des modeles elements finis a partir de mesures vibratoires. Thesedoctorale, Ecole Centrale de Lyon, Octobre 1999.
[103] P. Tong. Finite Element Method. Cambridge, Massachusetts Institute of Technology, USA,1977.

Liste des figures
1 Modele complet d’un etage rotor a 29 aubes pour un compresseur de moteur d’avion, Kruse
et Pierre [12]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1 Schematisation du contact entre deux corps au niveau microscopique. . . . . . . . . . . . 6
1.2 Representation schematique d’une suite de chargement-dechargement sur une surface metallique.
Cette representation est basee sur les resultats experimentaux obtenus par Connolly [19],
les deformations plastiques interviennent experimentalement au niveau des asperites et a
proximite des surfaces de contact. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Illustration schematique des films recouvrant les metaux [20]. . . . . . . . . . . . . . . . 7
1.4 (a) Schematisation d’un element de contact. (b) Courbe force-deplacement pour le modele
de Coulomb. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.5 (a) Comportement hysteretique de la loi de coulomb en presence de glissement pour le
regime stationnaire. (b) Evolution temporelle du frottement pour la loi de Coulomb. . . . 9
1.6 (a) Schematisation d’un element de contact bilineaire. (b) Courbe force-deplacement pour
le modele bilineaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.7 (a) Comportement hysteretique du modele bilineaire en presence de glissement pour le
regime stationnaire. (b) Evolution temporelle du frottement pour le modele bilineaire. . . . 11
1.8 (a) Aube de turbine avec frotteur idealise [24]. (b) Modele d’aube a 1 ddl. . . . . . . . . 14
1.9 Systeme type dans lequel une instabilite stick-slip peut se manifester. . . . . . . . . . . . 15
1.10 Schema de principe d’un systeme type dans lequel le sprag-slip peut se manifester [38]. . . 16
1.11 Modeles unidimensionnels presentes par Iwan. . . . . . . . . . . . . . . . . . . . . . . . 17
1.12 Modele de microglissement de Menq [46] (a) a l’instant initial t = 0, (b) en glissement
partiel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.1 Notations pour le probleme de contact avec frottement considere. . . . . . . . . . . 24
2.2 Representation et parametrisation de l’element isoparametrique standard a quatrenoeuds. Le noeud 0 represente le noeud esclave de l’element de contact. . . . . . . 32
3.1 Element de contact noeud-point en 2D. Ici, le point de contact resulte d’une inter-polation lineaire a partir de deux noeuds du corps maıtre Ω(1). . . . . . . . . . . . . 45
3.2 Implementation de l’approche indirecte de prise en compte des contraintes. . . . . . . . . 59
3.3 Schematisation de la procedure de correction pour la force de contact tangentielle entre les
pas de temps n − 1 et n. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
173

174 Liste des figures
3.4 (a) Schema du modele elements finis lineaire. (b) Deplacement tangentiel du noeud esclave
sur une periode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.5 (a) Deplacement tangentiel du point de contact sur le corps maıtre. (b) Deplacement
normal du point de contact. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.6 (a) Force de contact tangentielle. (b) Force de contact normale. . . . . . . . . . . . . . 65
3.7 (a) Force de contact tangentielle sur une periode pour le modele LL avec differents niveaux
de discretisation. (b) Force de contact tangentielle sur une periode pour le sixieme element
de contact dans le cas du modele LL. . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.8 Schema du modele elements finis quadratique. . . . . . . . . . . . . . . . . . . . . . . . 68
3.9 (a) Force de contact tangentielle pour le modele QQ avec differents niveaux de discretisation.
(b) Force de contact tangentielle pour le modele LQ avec differents niveaux de discretisation. 68
3.10 Schema sur l’enchaınement des calculs qui permet de determiner les forces non lineaires
lors d’une iteration de la methode d’optimisation. . . . . . . . . . . . . . . . . . . . . . 71
3.11 (a) Force de contact normale pour les modeles LLP et LQP avec differents niveaux de
discretisation. (b) Force de contact normale pour le modele QQP avec differents niveaux
de discretisation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.12 (a) Force de contact normale et (b) deplacements normaux du noeud esclave et de son
projete sur le corps maıtre dans le cas d’une excitation normale entraınant la separation
des deux corps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.13 Schema du modele elements finis du systeme incluant la poutre encastree-encastree. . . . . 75
3.14 (a) Force de contact normale appliquee sur la poutre au cours d’une periode pour le modele
H2L. (b) Force de contact normale appliquee sur la poutre au cours d’une periode pour le
modele H2Q. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.15 (a) Comparaison des methodes lineaire hybride et quadratique hybride dans le cas du
systeme poutre-noeud frottant. (b) Souplesse locale de la poutre en fonction de la posi-
tion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.16 Schematisation du calcul des forces de contact locales. . . . . . . . . . . . . . . . . . . . 78
3.17 Schema du calcul des forces non lineaires lorsque l’on utilise l’interpolation hybride en
deplacement-souplesse dans un contact surfacique. L’indice i est associe au noeud esclave. 79
3.18 (a) Schematisation 2D d’un cube presse contre un quadrilatere. (b) Maillage du systeme
cube-quadrilatere. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.19 (a) Deplacement normal de l’interface de contact. (b) Force normale sur l’interface de
contact. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.1 Deplacement relatif pour le ieme element de contact, au pas de temps tn. . . . . . . . . . 86
4.2 Implementation de la DLFT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.3 (a) Geometrie de la poutre et du frotteur attache, (b) Schema de la poutre amortie par
frottement sec pour un modele de frotteur flexible 2D avec des raideurs unidirectionnelles
dans les directions tangentielle et normale. . . . . . . . . . . . . . . . . . . . . . . . . . 91

Liste des figures 175
4.4 (a) Deplacements de la poutre au niveau du frotteur et du frotteur. Comparaison en uti-
lisant la DLFT et l’integration temporelle de ABAQUS. (b) Reponse frequentielle de la
poutre au niveau du frotteur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.5 Reponse frequentielle de l’extremite de la poutre dans le systeme poutre-frotteur en fonction
du niveau de chargement P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4.6 Mouvements de la poutre au niveau du frotteur et du frotteur dans le plan tangentiel. Dans
le cas (a), excitation rectiligne. Dans le cas (b), excitation circulaire. . . . . . . . . . . . 94
4.7 Deplacements de la poutre au niveau du frotteur et du frotteur compares dans la direction
X en utilisant la DLFT et l’integration temporelle. Dans le cas (a), excitation rectiligne.
Dans le cas (b), excitation circulaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
4.8 Deplacements de la poutre au niveau du frotteur et du frotteur compares dans la direction
Y en utilisant la DLFT et l’integration temporelle. Dans le cas (a), excitation rectiligne.
Dans le cas (b), excitation circulaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.9 Amplitude de la poutre au niveau du frotteur. Dans le cas (a),excitation rectiligne. Dans
le cas (b), excitation circulaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.10 (a) Deplacement tangentiel du point de la poutre en contact avec le frotteur. (b) Deplacement
tangentiel du frotteur (m = 200g, 21 harm.). . . . . . . . . . . . . . . . . . . . . . . . . 97
4.11 (a) Force de contact tangentielle. (b) Force de contact normale. . . . . . . . . . . . . . 97
4.12 (a) Participation des termes en cosinus de la serie de Fourier (21 harmoniques). (b)
Participation des termes en sinus de la serie de Fourier (21 harmoniques). . . . . . . . . 98
4.13 (a) Reponse frequentielle dans la direction tangentielle du frotteur et de la poutre a la
position du frotteur. (b) Reponse frequentielle dans la direction normale du frotteur et de
la poutre a la position du frotteur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
4.14 Reponse frequentielle dans le plan XY de l’extremite de la poutre. . . . . . . . . . . . . . 99
4.15 (a) Modele d’une roue aubagee avec 36 poutres, 36 frotteurs (connectes au sol) et 108
ddls. (b) Deplacements de la poutre aux positions des frotteurs pour un systeme a 36 aubes
desaccordees de 7%. La raideur de couplage est de kc = 4500N/m et l’amortissement
structural de ξ = 0.01. 21 harmoniques ont ete utilisees dans ce calcul. . . . . . . . . . . 100
4.16 Deplacements de la poutre (a) aux positions des frotteurs et (b) aux extremites des poutres
pour un systeme a 36 poutres desaccordees de 7%. La raideur de couplage est de kc =
4500N/m et l’amortissement structural de ξ = 0.01. 21 harmoniques ont ete utilisees dans
ce calcul. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.17 Schema du systeme avec jeu etudie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.18 (a) Reponse en frequence de la structure avec jeu (contact sans frottement). (b) Influence
de l’amortissement structural sur la reponse en frequence. . . . . . . . . . . . . . . . . . 105
4.19 (a) Deplacement de la masse m sur une periode. (b) Force de contact sur une periode. . . 106
4.20 Representation graphique de la fonction max(|Λred,k,i,j (ω) |) pour chaque harmonique
2k − 1 (k = 1, . . . , 12) : en continu pour la reduction sur le deplacement relatif et en poin-
tille pour la reduction sur les ddls non lineaires. L’amortissement structural des poutres a
ete suppose nul dans cet exemple. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110

176 Liste des figures
4.21 Representation graphique de la fonction max(|Λred,k,i,j (ω) |) pour chaque harmonique
2k − 1 (k = 1, . . . , 12) : en continu pour la reduction sur le deplacement relatif et en poin-
tille pour la reduction sur les ddls non lineaires. L’amortissement structural des poutres
est de ξ = 0.01 dans cet exemple. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1114.22 Deplacements de la poutre aux positions des frotteurs pour un systeme a 36 aubes desaccordees
de 7%. La raideur de couplage est de kc = 4500N/m et l’amortissement structural de ξ = 0.
21 harmoniques ont ete utilisees dans ce calcul. . . . . . . . . . . . . . . . . . . . . . . 112
5.1 Schematisation du banc experimental. . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
5.2 (a) Profil du chargement normal sur la largeur d’une surface de contact pour le 1er pro-
cessus de microglissement (α = 50o). (b) Profil du chargement normal sur la largeur d’une
surface de contact pour le 2eme processus de microglissement (α = 40o). . . . . . . . . . . 1175.3 (a) Chargement progressif par dichotomie. (b) Influence du nombre d’elements. . . . . . . 118
5.4 (a) Influence du parametre α. (b) Influence de la precharge P . . . . . . . . . . . . . 119
5.5 Influence du parametre µ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1205.6 (a) Deformee statique d’une poutre encastree-encastree. (b) Deformee statique d’une
poutre encastree-libre et prechargee. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.7 (a) Influence du parametre l (l = demi-longueur de la plaque). (b) Influence d’une varia-
tion de temperature. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
5.8 Repartition des contraintes de Von Mises sur la plaque-2P . . . . . . . . . . . . . . . . 1255.9 (a) Demi-coupe superieure du systeme plaque-2P - socle dans le plan Oxy. (b) Zoom sur
l’un des pieds de la structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
5.10 Maillage du systeme dans le cas ou une interface est modelisee par 6 elements de contact. 1275.11 (a) Contact entre un corps large et un corps qui presente des angles vifs au niveau des
aretes qui limite l’interface de contact. (b) Contact entre la plaque-2P et le socle. . . . . . 1285.12 (a) Repartition des contraintes normales sur l’interface de contact AB en fonction du
nombre d’elements de contact (µ = 0, ∆T = 30oC, ξ = 0.001, F = 40N , 5 harmoniques).
(b) Influence du nombre d’elements de contact par interface (ξ = 0.001, µ = 0.2, ∆T =
30oC, F = 40N et 5 harm.). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
5.13 (a) Force normale sommee sur l’interface AB en fonction du temps (ξ = 0.001, µ = 0.2,
∆T = 30oC, F = 40N et 5 harm.). (b) Courbe d’efficacite a faible amplitude d’excitation
(ξ = 0.001, µ = 0.2, ∆T = 30oC, 21 elements de contact par interface et 5 harm.). . . . . 1305.14 Contraintes normalisees dans la direction normale par rapport a la contrainte moyenne
de l’instant considere (f = 307.25Hz, ξ = 0.001, µ = 0.2, ∆T = 30oC, F = 40N , 21
elements de contact par interface et 5 harm.). . . . . . . . . . . . . . . . . . . . . . . . 132
5.15 Influence de l’amplitude d’excitation F (ξ = 0.001, µ = 0.2, ∆T = 30oC, 6 elements de
contact par interface et 5 harm.). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
5.16 Influence du nombre d’harmoniques (ξ = 0.001, µ = 0.2, ∆T = 30oC, F = 40N et 11
elements de contact par interface). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1345.17 (a) Deformation du socle amplifiee par 1000 (µ = 0, ∆T = 30oC). (b) Effets sur la
repartition des efforts en precharge (µ = 0, ∆T = 30oC) . . . . . . . . . . . . . . . . . 134

Liste des figures 177
5.18 (a) Effets de la deformation statique du socle sur la reponse frequentielle (ξ = 0.001,
µ = 0.2, ∆T = 30oC, F = 40N , 21 elements de contact par interface et 5 harm.).
(b) Effets de la dynamique du socle sur la reponse frequentielle (ξ = 0.001, µ = 0.2,
∆T = 30oC, F = 40N , 21 elements de contact par interface et 5 harm.). . . . . . . . . . 1355.19 (a) Influence du coefficient de frottement µ (ξ = 0.001, ∆T = 30oC, F = 40N , 6 elements
de contact par interface et 5 harm.). (b) Influence du nombre d’harmoniques pour le co-
efficient de frottement µ = 0.01 (ξ = 0.001, ∆T = 30oC, F = 40N , 6 elem. parinterface.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
5.20 Influence de la precharge en temperature ∆T (ξ = 0.001, µ = 0.2, F = 40N , 6 elements
de contact par interface et 5 harm.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
5.21 Diagramme de Wohler conventionnel. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1395.22 Limite de fatigue. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
5.23 Repartition des contraintes de Von Mises pour le premier mode de resonance normalise
par rapport a la masse (µ = 0.2 ,∆T = 30oC). . . . . . . . . . . . . . . . . . . . . . . . 142
5.24 Repartition des contraintes de Von Mises autour des interfaces de contact pour le premier
mode de resonance normalise par rapport a la masse (µ = 0.2 ,∆T = 30oC). . . . . . . . 1435.25 Effets geometriques non-lineaires (µ = 0.2 ,∆T = 30oC). . . . . . . . . . . . . . . . . . 143
6.1 (a) Photo du socle suspendu. (b) Reponse spectrale du socle. . . . . . . . . . . . . . . . 147
6.2 (a) Photo de la plaque-2P suspendue. (b) Reponse spectrale de la plaque-2P. . . . . . . . 1486.3 Photo du banc experimental avec le pot d’excitation. . . . . . . . . . . . . . . . . . . . . 149
6.4 Schema de principe de la chaıne d’acquisition. . . . . . . . . . . . . . . . . . . . . . . . 150
6.5 (a) Asservissement de quelques niveaux de force pour la premiere campagne de mesure.
(b) Comparaison des resultats numeriques et experimentaux de trois campagnes de mesure
pour les amortissements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1516.6 Comparaison des resultats numeriques et experimentaux de trois campagnes de mesure (a)
pour les courbes d’efficacite et (b) une partie des reponses frequentielles. . . . . . . . . . 152
6.7 (a) Contraintes alternees de Von Mises determinees a partir des mesures experimentales
avec un niveau d’excitation de 40N , et cela pour les 3 campagnes de mesures realisees avec
une graisse de roulement. (b) Schema de principe d’une rosette a 45o [101] . . . . . . . . 1536.8 Resultats d’usure sur deux interfaces de contact distinctes apres utilisation du banc avec
une graisse de roulement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1546.9 (a) Asservissement de quelques niveaux de force dans le cas du vernis bisulfure. (b) Com-
paraison des resultats numeriques et experimentaux dans le cas du vernis bisulfure pour
les amortissements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
6.10 Comparaison des resultats numeriques et experimentaux (a) pour les courbes d’efficacite
et (b) une partie des reponses frequentielles. . . . . . . . . . . . . . . . . . . . . . . . . 1566.11 (a) Correlation entre l’experimental et le numerique pour le niveau de force F = 20N
lorsque l’on considere un coefficient d’amortissement visqueux irrealiste de ξ = −0.5 ·10−3
et un coefficient de frottement de µ = 0.14. (b) Influence du nombre d’harmoniques dans
le calcul numerique pour le cas avec du vernis bisulfure (ξ = 1.1 · 10−3,µ = 0.14). . . . . . 156

178 Liste des figures
6.12 Resultats d’usure sur deux interfaces de contact distinctes apres utilisation avec du vernis
bisulfure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1576.13 Mesure de thermoelasticite sur le cote d’un pied d’aube . . . . . . . . . . . . . . . . . . 1592 (a) Demi-coupe de le plaque-2P dans le plan Oxy pour la configuration initiale. (b) Demi-
coupe du socle dans le plan Oxy pour la configuration initiale . . . . . . . . . . . . . . . 1863 (a) Demi-coupe de la plaque-2P dans le plan Oxy pour la configuration finale. (b) Demi-
coupe du socle dans le plan Oxy pour la configuration finale. . . . . . . . . . . . . . . . . 190

Liste des tableaux
3.1 Temps de calcul CPU pour un maillage lineaire en utilisant la methode des Lagrangiens
Augmentes d’une part et celle des Lagrangiens Dynamiques d’autre part. . . . . . . . . . 663.2 Temps de calcul CPU pour differents modeles elements finis en utilisant les Lagrangiens
Dynamiques. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 733.3 Temps de calcul CPU pour les differents modeles elements finis du systeme poutre-noeud
frottant. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 753.4 Temps de calcul CPU pour un chargement progressif du cube sur le quadrilatere en 100
etapes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 794.1 Proprietes de convergence de la DLFT pour des roues aubagees desaccordees de 36 aubes
et 108 aubes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1026.1 Frequences mesurees et calculees pour les cinq premiers modes propres du socle. . . . . . . 1476.2 Frequences mesurees et calculees pour les cinq premiers modes propres de la plaque-2P. . . 149
179

180 Liste des tableaux

Annexe A
Fonctions d’interpolation pour des elementsde contact 1-D et 2-D
Pour les fonctions de forme uh(ξ), il y a plusieurs solutions en fonction de la forme de l’element,le nombre de noeuds sur un element et l’ordre de l’interpolation.
Interpolation sur une dimension
Le schema d’interpolation general sur une dimension est donne par l’interpolation d’Hermite :
uh(ξ) =nne∑j=1
[HNin
0,j u(ξj) + HNin1,j u′(ξj) + · · · + HNin
Nin,ju(Nin)(ξj)
](9)
avec Hi,j est le polynome d’Hermite d’ordre i au point j. Hi,j s’exprime en fonction de u(ξ) etles Nin premieres derivees de u(ξ). Les polynomes de Hermite ont la propriete suivante :
dlHNinij
dξl(ξk) = δjkδil j, k = 0, 1, · · · , nne i, l = 0, 1, · · · , Nin (10)
Par consequent, c’est generalement un polynome de degre nne(Nin + 1) − 1.Dans le cas d’une interpolation 1D pour un systeme en frottement, seuls les ddls tangents
sont pris en compte. On doit alors prendre une interpolation d’ordre zero (Nin = 0).Pour l’interpolation d’ordre zero, uh peut s’ecrire sous la forme :
uh(ξ) =nne∑i=1
N i(ξ)u(ξi) (11)
ce qui est communement appele la formule d’interpolation de Lagrange. Les fonctions d’interpo-lation Lagrangiennes N i sont donnees par :
N i(ξ) =L(ξ)
(ξ − ξi)L′(ξi)(12)
avecL(ξ) = Πnne
i=1(ξ − ξi)
.Les fonctions Lagrangiennes satisfont l’equation (9) :
N i(ξk) = δik i, k = 1, 2, · · · , nne (13)
En general, l’equation (11) est un polynome de degre (nne − 1) qui peut etre compare a une seriede Taylor tronquee.
181

182 Annexe A
Maintenant, on va donner quelques exemples de fonctions d’interpolation pour differents elements.Pour nne = 2 (ξ1 = −1 et ξ2 = 1), on a une interpolation lineaire :
N1(ξ) =12(1 − ξ) (14)
N2(ξ) =12(1 + ξ) (15)
Pour nne = 3 (ξ1 = −1, ξ2 = 0 et ξ3 = 1), les polynomes d’Hermite sont quadratiques :
N1(ξ) = −12(1 − ξ)ξ (16)
N2(ξ) = (1 + ξ)(1 + ξ) (17)
N3(ξ) =12(1 + ξ)ξ (18)
Interpolation sur deux dimensions
Tout d’abord, considerons un element carre a quatre noeuds. Une expression de l’interpolationdu premier ordre uh peut etre donnee par :
uh(ξ1, ξ2) =2∑
i=1
2∑j=1
[H
(1)0,i (ξ)H(1)
0,j (ν)u(ξi1, ξ
j2) + H
(1)1,i (ξ)H(1)
0,j (ν)u∂ξ(ξi1, ξ
j2)
+H(1)0,i (ξ)H(1)
1,j (ν)u∂ν(ξi1, ξ
j2) + H
(1)1,i (ξ)H(1)
1,j (ν)u∂ξ,∂ν(ξi1, ξ
j2)]
(19)
Dans notre cas, on ne s’interesse qu’a l’interpolation d’ordre zero. Par consequent, on a :
uh(ξ, ν) =2∑
i=1
2∑j=1
[H
(1)0,i (ξ)H(1)
0,j (ν)u(ξi, νj)]
(20)
Pour l’element a quatre noeuds, les fonctions H sont lineaires. D’ou, uh(ξ, ν) peut etre reecritavec la formule d’interpolation de Lagrange :
uh(ξ1, ξ2) =4∑
i=1
N i(ξ1, ξ2)ui (21)
avecN i(ξ1, ξ2) =
14(1 + ξ1ξ
i1)(1 + ξ2ξ
i2) i = 1, · · · , 4 (22)
Si l’on considere maintenant un element carre a huit noeuds, uh(ξ1, ξ2) peut encore une foiss’ecrire a partir de le formule d’interpolation de Lagrange sous la forme :
uh(ξ1, ξ2) =8∑
i=1
N i(ξ1, ξ2)ui (23)
avec
N i(ξ, ν) =14(1 + ξ1ξ
i1)(1 + ξ2ξ
i2)(ξ1ξ
i1 + ξ2ξ
i2 − 1) i = 1, · · · , 4 (24)
N i(ξ, ν) =12(1 − ξ2
1)(1 + ξ2ξi2) i = 5, 7 (25)
N i(ξ, ν) =12(1 − ξ2
2)(1 + ξ1ξi1) i = 6, 8 (26)

Annexe A 183
On notera que les noeuds i = 1 a i = 4 sont les noeuds qui se trouvent aux coins de l’element.Dans ce cas, on a une interpolation quadratique.
Pour plus d’informations, le lecteur pourra se referer a l’ouvrage de Tong [103] par exemple.

184 Annexe A

Annexe B
Configuration initiale du banc
Les dimensions du socle et de la plaque-2P ont ete definies a deux temperatures de referencedistinctes :
Tref = Tunif pour le socle,
Tref = Tunif + ∆T pour l’aube.
Avec Tref la temperature de reference,Tunif la temperature ambiante,∆T la precharge en temperature.
Pour definir les dimensions, on a suppose Tunif = 20oC.Parametres pour definir la plaque-2P :
Demi-longueur de la plaque : Lp = 18.5 cmEpaisseur de la plaque : ep = 2 mmLargeur de la plaque (direction Oz) : lp = 10 cmLargeur de la zone frottante du pied : lP = 0.5 cmHauteur hP des pieds d’aube : hP = 1.5 cmEpaisseur eP des pieds d’aube : eP = 1.4 cmAngle d’inclinaison pour les zones frottantes : α = 50 o
Angle d’inclinaison a la jonction plaque-2P - pied d’aube : γ = 50 o
1er rayon des pieds d’aube : rP1 = 8 mm2eme rayon des pieds d’aube : rP2 = 3 mm3eme rayon des pieds d’aube : rP3 = 1 cm4eme rayon des pieds d’aube : rP4 = 0.5 cm5eme rayon des pieds d’aube : rP5 = 0.5 cm
La figure 2-a donne les cotations de la plaque-2P.Parametres supplementaires pour definir le socle :
Largeur du socle : ls = 20 cmLongueur de la zone frottante du socle : lf = 3.5 cmProjection de la partie inclinee de l’angle θ selon Oy : hs = 3 cm2eme angle d’inclinaison pour le socle : θ = 12 o
Largeur de la fente du socle : lj = 2 cmEpaisseur du socle dans une coupe selon le plan Oyz : es = 3 cm1er rayon du socle : rs1 = 1 cm2eme rayon du socle : rs2 = 1 cm3eme rayon du socle : rs3 = 1 cm
185

186 Annexe B
hP
eP
lP
Lp
ep
rP1
rP2
α
γ
r
P3
P5rP4
r
r s2
rs1
rs3
es
hs
l f
l j
Pp
Pj
L +
h +
0.5(
l −
e )
tg(
)
α
l s
α
θ
(a) (b)
Fig. 2: (a) Demi-coupe de le plaque-2P dans le plan Oxy pour la configuration initiale. (b) Demi-coupe
du socle dans le plan Oxy pour la configuration initiale

Annexe B 187
La figure 2-b donne les cotations du socle.Les dimensions du pied et le coefficient de frottement µ ont ete choisis sur la base des donnees
dont on disposait pour une aube de soufflante. La partie du pied dans le prolongement de laplaque-2P permet une meilleure transmission des efforts.

188 Annexe B

Annexe C
Configuration finale du banc
Parametres pour definir la plaque-2P :Demi-longueur de la plaque : Lp1 = 14 cmLongueur sur laquelle l’epaisseur est exactement de ep1 : Lp1 = 14 cmMinimum d’epaisseur sur la plaque : ep1 = 4 mmEpaisseur au centre de la plaque : ep2 = 1 cmLargeur de la plaque-2P (direction Oz) : lp = 6 cmLargeur de la zone frottante des pieds d’aube : lP = 1 cmHauteur hP des pieds d’aube : hP = 4.5 cmEpaisseur eP des pieds d’aube : eP = 1.4 cmAngle d’inclinaison pour les zones frottantes : α = 55 o
1er rayon pour les pieds d’aubes : rP1 = 8 mm2eme rayon pour les pieds d’aubes : rP2 = 3 mm3eme rayon pour les pieds d’aubes : rP3 = 2 cm1er rayon pour la plaque-2P : rp1 = 1 m2eme rayon pour la plaque-2P : rp2 = 1.2 m3eme rayon pour la plaque-2P : rp3 = 6 cm
La figure 3-a donne les cotations de la plaque-2P.Parametres supplementaires pour definir le socle :
Largeur du socle : ls = 14.5 cmLargeur de la zone frottante du socle : lf = 3 cmProjection de la partie inclinee de l’angle θ selon Oy : hs = 3 cm2eme angle d’inclinaison pour le socle : θ = 15 o
1ere largeur de fente du socle : lj1 = 2 cm2eme largeur de fente du socle : lj2 = 6 cmLongueur de la 2eme fente : Ls = 15 cmEpaisseur du socle dans une coupe selon le plan Oyz : es = 3.5 cm1er rayon du socle : rs1 = 1 cm2eme rayon du socle : rs2 = 1 cm3eme rayon du socle : rs3 = 1 cm4eme rayon du socle : rs4 = 0.5 cm5eme rayon du socle : rs5 = 1 cm
La figure 3-b donne les cotations du socle.
189

190 Annexe C
eP
rP2
rP1
lP
hP
rP3
e p1
e p2
r p1
rp2
Lp1
Lp3
Lp2
r p3
α
rs1
rs2
rs3
rs4
rs5
hs
Ls
l f
l j1
l j2
l s
p1P
j1L
+h
+0.
5(l
−e
)tg
(
)P
α
α
es
θ
(a) (b)
Fig. 3: (a) Demi-coupe de la plaque-2P dans le plan Oxy pour la configuration finale. (b) Demi-coupe
du socle dans le plan Oxy pour la configuration finale.