L’utilisation d’objets comme indicateurs du mouvement ...
27
Philippe Robert Rue de Lausanne 39 1201 Genève Cyril Rebetez Rue de Lausanne 39 1201 Genève Cours du Prof. M. Flückiger Assistante : M. Schaub L’utilisation d’objets comme indicateurs du mouvement propre est nécessaire au wayfinding lors de trajectoires rectilignes ou courbes. Cours de Psychogénèse des Perceptions Université de Genève 1.1.1.1 Session d’été 2002
Transcript of L’utilisation d’objets comme indicateurs du mouvement ...

Philippe Robert Rue de Lausanne 39 1201 Genève
L’utilisation d’objets comme indicateurs du mouvement propre est nécessaire au wayfinding
lors de trajectoires rectilignes ou courbes.
Cyril Rebetez Rue de Lausanne 391201 Genève
Cours du Prof. M. Flückiger
Assistante : M. Schaub
Cours de Psychogénèse des Perceptions
Université de Genève
1.1.1.1 Session d’été 2002

Résumé
Les recherches sur le wafinding ont mené à deux grands courants théoriques ; les tenants de
l’utilisation de la globalité du flux et les tenants de l’utilisation d’indices dans des zones
spécifiques. En nous inscrivant dans cette dernière perspective, nous tentons de montrer que seules
des objets placés dans des zones informatives peuvent être utilisés judicieusement pour permettre à
un observateur en mouvement d’éviter un obstacle se présentant sur sa trajectoire. De plus, nous
désirons montrer que ces indices restent informatifs quel que soit le type de trajectoire emprunté.
Les sujets auront pour tâche de déterminer si l’obstacle apparaissant devant eux se trouve sur leur
trajectoire et s’il est donc nécessaire de l’éviter. On mesure leur précision grâce à un seuil
différentiel. Les sujets seront confrontés à des trajectoires soit courbes soit rectilignes. Ils
disposeront ou non d’objets placés dans des zones informatives (IM, OD, DDLO), définies par
Cutting et ses collaborateurs. Dans le second cas de figure, les indices non informatifs (par exemple
situés en OA) resteraient porteurs d’informations selon les tenants de la seconde approche.
Nous nous attendons à ce que la condition non informative soit moins bien réussie que la condition
informative ; le type de trajectoire ne devrait avoir une influence que lorsque les indices ne sont pas
informatifs.
(213 mots)

Table des Matières
1 INTRODUCTION................................................................................................................................................... 1
1.1.1 De l’origine de la notion de Flux : ............................................................................................................. 1
1.1.2 Les flux........................................................................................................................................................ 2
1.1.3 Le déplacement de l’observateur et l’information contenue dans le flux ................................................... 2
1.2 A PROPOS DU WAYFINDING................................................................................................................................... 4
1.3 L’INFORMATION TIREE DU MOUVEMENT DES OBJETS ............................................................................................ 5
1.3.1 Principes du heading et de son jugement.................................................................................................... 5
1.3.2 Les indices basés sur le mouvement des objets. .......................................................................................... 7
L’IM et l’OD........................................................................................................................................................ 8
1.3.4 Le DDLO .................................................................................................................................................... 9
1.4 L’INFORMATION EXTRA-RETINIENNE .................................................................................................................. 10
1.4.1 Paradigmes utilisés et résultats ................................................................................................................ 11
1.4.2 L’ambiguïté du trajet ................................................................................................................................ 12
1.4.3 Dernières recherches ................................................................................................................................ 14
1.5 SYNTHESE ET HYPOTHESES ................................................................................................................................. 16
2 METHODOLOGIE .............................................................................................................................................. 17
2.1 POPULATION : ..................................................................................................................................................... 17
2.2 PLAN EXPERIMENTAL.......................................................................................................................................... 17
2.2.1 VI .............................................................................................................................................................. 17
2.2.2 VD............................................................................................................................................................. 17
2.2.3 VC ............................................................................................................................................................. 17
2.2.4 VN ............................................................................................................................................................. 18
2.2.5 Hypothèses opérationnelles ...................................................................................................................... 18
2.3 MATERIEL ........................................................................................................................................................... 19
2.4 PROCEDURE ........................................................................................................................................................ 19
3 RESULTATS ATTENDUS .................................................................................................................................. 20
4 DISCUSSION ET CONCLUSION ...................................................................................................................... 21
5 BIBLIOGRAPHIE................................................................................................................................................ 23

1 Introduction
Les être humains et la plupart des êtres vivants évoluent dans des environnements très encombrés et
propices à l’apparition d’obstacles inattendus. Il est donc vital de pouvoir trouver son chemin, sans
dommages, en évitant les embûches. Il en va de la sorte pour des trajets à la vitesse d’un piéton
mais encore, et à plus forte raison, pour des vitesses supérieures (en véhicule). Nous procédons à
l’identification et à l’évitement des obstacles souvent de façon à peine consciente. Comprendre
comment et par quels mécanismes notre système perceptif peut juger de notre trajectoire et
reconnaître les objets qui constituent des obstacles pour cette trajectoire est l’objectif de notre
recherche. Le système visuel joue évidemment un rôle prédominant ; les chercheurs qui se sont
intéressés aux conséquences du mouvement de l’observateur sur son système perceptif, ont parlé de
flux.
1.1.1 De l’origine de la notion de Flux :
Gibson est l’un des premiers à s’être intéressé à la notion de flux, et ses travaux sont restés très
influents dans ce domaine. Dans le cadre de son travail pour l’US Army Air Forces, ce chercheur
tenta de décrire quel étaient les indices visuels qu’utilisaient les pilotes de l’air pour atterrir. Il
formula ces indices en termes de gradients optiques produits par des configurations d’objets se
déplaçant sur une surface plane. Gibson s’est penché sur un gradient en particulier, celui de
déformation de la scène visuelle durant le mouvement de l’observateur (Gibson, 1950), gradient
qu’il baptisa « flux ». Il avait remarqué que l’image prise depuis le devant d’un avion est déformée
de manière systématique lorsqu’elle est projetée sur un écran plane. En traçant les vecteurs des
déplacements des objets sur l’image, on obtient un pattern du flux. Ce pattern représente le flux
optique comme un champ de vitesse à deux dimensions, dans lequel chaque vecteur correspond à
une vitesse optique et à une direction de déplacement d’un élément de l’environnement.
Gibson s’aperçut que ce flux était porteur d’informations sur le déplacement propre de
l’observateur. L’image, projetée devant des sujets naïfs, procurait une impression de déplacement
vers un point précis. Ce dernier, d’où semblent provenir tous les vecteurs du flux, est appelé focus
d’expansion (FOE), et spécifie le point vers lequel l’observateur se dirige.
Parmi les remarques émises par Gibson au sujet de ce flux, il mentionne qu’une poursuite oculaire
peut déformer le flux rétinien car celle-ci ajoute une constante au déplacement de chaque point dans
l’image. Cependant le gradient du déplacement rétinien reste inchangé, permettant tout de même à
l’observateur de connaître son mouvement. Ainsi, la direction de déplacement (le heading) peut être
1

déterminée par ce gradient malgré que l’œil effectue une rotation.
Le flux rétinien peut dès lors se révéler des plus utiles, en particulier
dans le contrôle de l’action ; il est l’un des exemples les mieux
décrits de la causalité circulaire entre la perception et l’action : le
flux est utilisé pour guider le mouvement et le mouvement résultant,
en retour, produit des changements dans le flux rétinien.
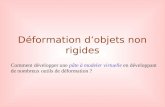
1.1.2 Les flux
N’importe quel déplacement curvi-linéaire d’un observateur peut
être décrit comme la somme d’une translation et d’une rotation,
depuis un point de référence arbitraire, par exemple l’œil lui-même,
(Whittaker 1944, cité dans Warren, 1998). Le pattern de flux
rétinien peut être représenté dans une projection sphérique qui
bouge avec l’œil. La composante translationnelle est proche du flux
optique, car elle se réfère au changement dans la structure d’une
zone optique depuis un point d’observation en mouvement qui n’est
pas affecté par la rotation de l’œil. A ce flux optique s’ajoute un flux
rotationnel, induit par le mouvement de rotation des yeux et de la tête. Ce qui est perçu sur la rétine
de l’observateur correspond au flux rétinien, somme du flux optique et du flux rotationnel. La figure
1.1 illustre parfaitement Les trois types de flux décrits ici.
Figure 1.1 Les flux A : optique,B : Rotationnel et C : rétinien(tiré de Warren 1998).
1.1.3 Le déplacement de l’observateur et l’information contenue dans le flux
Le heading, en cas de translation pure, est déterminé uniquement par l’excentricité et l’élévation du
FOE. Etant donné que la direction des vecteurs est indépendante de leur distance, le pattern du flux
permet de trouver le heading dans n’importe quel environnement. Comme Gibson (1950)
l’observait, même lorsque le FOE lui-même n’est pas visible, sa localisation est possible par la
triangulation de deux ou trois vecteurs du flux.
Dans le cas de la rotation pure (ce qui serait similaire à une rotation du monde autour de
l’observateur), la direction de mouvement des vecteurs s’effectue de manière parallèle. Dans ce cas,
la direction et la grandeur des vecteurs du flux sont indépendants de la distance du point de
fixation ; de la sorte, la rotation ne contient aucune information sur la structure de l’environnement.
Le pattern de flux rétinien spécifie l’axe et la vitesse de la rotation, qui constituent des informations
sur le déplacement de soi qui ne sont pas fournies dans le flux optique.
2

Lorsque l’observateur ne regarde pas dans la direction de son déplacement, les deux composantes
du flux rétinien sont présentes et rendent plus difficile l’extraction de ces différentes informations.
Deux approches générales ont été proposées pour régler le problème de la rotation : des théories
extra-rétiniennes et des théories liées au flux rétinien. Pour la première approche, la composante
rotationnelle du pattern du flux peut être déterminée à partir d’informations autres que celle
provenant de la rétine, comme des informations sur la rotation de l’œil et de la tête (Royden,
Crowell & Banks, 1994). Parmi ces informations, on pourrait retenir la copie efférente des muscles
extra-oculaires et de la nuque, les informations proprioceptives de la rotation de la tête et des yeux
ainsi que les informations vestibulaires de la rotation de la tête. La composante rotationnelle
pourrait ainsi être soustraite du flux rétinien pour retrouver la composante translationnelle et obtenir
le heading de façon immédiate.
Selon la seconde approche, le heading peut être déterminé directement dans le flux rétinien lui-
même. De nombreux modèles de traitement ont démontré qu’il était possible formellement de
retrouver le heading directement à partir des vecteurs de vitesse (Hildreth & Royden, 1998).
Plusieurs théories sont alors envisageables :
La rotation de l’observateur peut être estimée à partir d’éléments lointains de la scène visuelle, car
ceux-ci sont dominés par la composante rotationnelle (Perrone, 1992, cité dans Warren, 1998).
Cette rotation serait ensuite soustraite du pattern de flux pour retrouver la composante
translationnelle seule pertinente pour retrouver le heading.
Il a été également envisagé que la composante translationnelle soit directement extractible du flux
rétinien. Les modèles postulant cette hypothèse se basent sur la parallaxe de mouvements (les
éléments les plus proches se déplacent plus rapidement que les éléments lointains). La composante
translationnelle du flux dépend de la distance à laquelle se trouve l’objet, ce qui n’est pas le cas de
la composante rotationnelle. Le flux optique étant le seul affecté par la parallaxe de mouvement,
une différence entre deux vecteurs du flux rétinien est due uniquement à la translation. La parallaxe
s’approchant de zéro autour du FOE, il est donc possible d’identifier celui-ci, donc sa direction de
mouvement propre.
Les investigations dans ce domaine mènent les chercheurs à proposer toujours plus d’expériences
mettant toujours en jeu la capacité du sujet à trouver la direction de son déplacement dans des
environnements plus ou moins structurés et chargés en informations (Crowell & Banks, 1993 ;
Cutting, Springer, Braren & Johnson, 1992 ; Cutting, Vishton, Flückiger, Baumberger & Gerndt,
1997 ; Cutting, Wang, Flückiger & Baumberger, 1999 ; Li & Warren, 2000). Le paradigme le plus
3

souvent utilisé est une tâche dite de wayfinding : le sujet doit trouver quelle est sa direction de
mouvement au cours d’un déplacement simulé par une présentation informatique.
1.2 A Propos du wayfinding.
Se déplacer sans heurter d’éléments de l’environnement n’est une tâche aisée pour l’être humain.
Lorsqu’il se déplace, ce dernier doit changer fréquemment de direction, ce qui requiert à chaque
fois un certain temps. Cutting & al. (1992) montrent que ce temps est divisible en trois parties :
Le temps de réaction : il s’agit du temps nécessaire à l’individu pour remarquer qu’il va heurter un
obstacle et décider de changer de direction. Un temps de 500 ms est observé en laboratoire.
Cependant, dans la vie courante, lorsque l’attention du sujet n’est pas orientée, on parle plutôt de
1.5 voire même de 3 secondes. En fonction de la vitesse de déplacement du sujet cela nous mène à
une distance parcourue de 6 à 30 mètres ! Le temps de modulation du pas : Il s’agit du temps
nécessaire au pied initiant le virage pour être au sol et pouvoir faire pivoter le corps. En moyenne,
on compte un temps de 350 ms pour cette opération. Le temps de négociation du virage : Temps
pour effectivement réaliser le virage, tenant compte des contraintes physiques liées à la vitesse et à
la masse du corps.
Ainsi la distance nécessaire à la prise d’un virage varie entre 7.8 m à une vitesse de 2 m/s (course
lente) et 38.5 m à 10 m/s (sprint olympique). Ce qui veut dire que le sujet doit être capable de dire
38.5 m avant un obstacle s’il va le toucher ou s’il passera à côté. Le sujet doit donc être capable de
différencier deux chemins n’ayant que 0.75° d’écart entre-eux.
La question est alors de comprendre quels sont les mécanismes entrant en jeu pour que l’homme
parvienne à une telle performance. Pour y répondre, des auteurs (Crowell & Banks, 1993 ; Cutting
et al. 1992 ; Cutting et al. 1997 ; Cutting et al. 1999 ; Li & Warren, 2000 et bien d’autres…) ont
utilisé des simulations informatiques de déplacements dans un environnement composé d'objets
(arbres, cercles, forêts de points…). Une méthode de seuils différentiels est utilisée pour déterminer
la précision des sujets à trouver leur chemin dans les différentes conditions.
Nous allons maintenant explorer plus en profondeur les différentes approches théoriques qui se sont
attachées à décrire les informations nécessaires à une bonne performance de wayfinding. Les
différences une fois soulignées, nous pourrons appuyer l’une des approches grâce à une expérience
inédite.
4

1.3 L’information tirée du mouvement des objets
Pour décrire les points importants de cette approche, Cutting et al. (1999) ont formulé sept principes
qui, selon eux, sont à la base de la perception du heading par un observateur. Ces principes se
présentent comme des axiomes et mettent en lumière la base de la compréhension actuelle de ce
phénomène. Ils sont ici résumés et parfois augmentés de quelques autres références ayant permis
d’asseoir cette théorie du wayfinding.
1.3.1 Principes du heading et de son jugement
1. L’homme possède des yeux mobiles dans une tête mobile, en conséquence, les piétons
regardent rarement dans la direction dans laquelle ils se dirigent. Le piéton ne dirige
effectivement son regard dans une fourchette de 5° autour de son heading que pendant 10% du
temps (Wagner, Baird & Barbaresi, 1981, cité dans Cutting et al., 1999). Cependant ce principe
ne tient pas si la vitesse de l’observateur est supérieure à des vitesses atteignables à pied. Dans
ce cas, les sujets ont le regard beaucoup plus centré sur leur direction de mouvement. Les
auteurs expliquent cela par le fait qu’à de telles vitesses, les objets situés de côté se déplacent
trop vite pour que l’on puisse les poursuivre du regard. On pourrait ajouter que la vitesse de
l’observateur est alors telle qu’il doit être plus attentif à une éventuelle collision avec des objets
beaucoup plus lointains que ceux potentiellement « dangereux » à des vitesses normales. En
effet, si l’observateur se déplace à 60 km/h, il parcourra 50m pendant les 3 secondes qu’il lui
faut pour repérer si un obstacle se trouve dans la même direction que son mouvement. On
comprend donc que l’observateur garde le regard plus fixé sur son heading que lorsqu’il va
lentement : la scène visuelle change vite et les obstacles doivent être repérés lorsqu’ils sont
loins.
2. Le pattern de flux présent dans l’œil d’un piéton est un mélange du flux dû à la translation
et du flux dû à la rotation de l’œil (et de la tête) pendant la poursuite visuelle. On retrouve
bien les catégories de flux présentes déjà chez plusieurs auteurs que nous avons déjà décrites
(Gibson, 1979 ; Cutting et al., 1992). A savoir que le flux optique et le flux rotationnel sont
communément présents dans le flux rétinien.
3. Les piétons tirent leur direction de mouvement directement du flux rétinien, sans
décomposition des éléments rotationnels et translationnels. Cutting et al. (1999) soulignent
que beaucoup de littérature soutient l’inverse, à savoir que la décomposition est un fait avéré et
qu’elle est nécessaire pour tirer une information compréhensible du flux rétinien (comme nous
5

le verrons plus loin). Néanmoins Cutting et al. (1992) ont montré qu’une poursuite visuelle par
un piéton génère six patterns différents de flux. Au total on trouve trois flux de translation
(optiques) et trois flux de rotation (rotationnels). Le mouvement propre de l’observateur (et le
déplacement de son regard) crée un flux de chaque type. Il en va de même pour le rebond (le
mouvement régulier de haut en bas généré par le déplacement à pied), et le balancement
(mouvement de droite à gauche, d’un pied sur l’autre pendant le mouvement). En enlevant la
composante translationnelle du rebond ainsi que celle du balancement (les composants
oscillatoires), les résultats des sujets à des tâches de wayfinding sont moins bons. Ainsi les
chercheurs réfutent l’hypothèse de décomposition du flux rétinien, ne voyant pas comment un
tel schème obtiendrait de moins bonnes performances avec moins d’éléments à traiter.
4. Une poursuite oculaire permet au sujet d’avoir une bonne estimation nominale voire
ordinale (mais pas forcément absolue) de leur heading. Des réponses nominales
correspondent à une simple réponse « je me dirige à gauche/droite » par le sujet. Une réponse
nominale exige du sujet de dire s’il passe plus ou moins à gauche/droite d’une cible. Une
réponse absolue est le jugement précis de la distance (et du côté) à laquelle le sujet passe de la
cible. La plupart des approches traitant du Wayfinding ont utilisé un paradigme demandant une
réponse absolue aux sujets (Crowell & Banks 1993 ; Royden, Crowell & Banks, 1994). Une
différence semble cependant exister entre les capacités de réponses nominales et ordinales des
sujets pour des vitesses angulaires de la poursuite oculaire supérieures à 2 °/s (Cutting, Vishton
& Baren, 1995 ; Cutting & al., 1997). Cutting et al. (1997) réanalysent les résultats de Crowell
& Banks (1993), et en ajoutent de nouveaux en variant les angles entre le regard et le heading
(Gaze-Movement Angles, GMA). Ils proposent alors de ne pas interpréter l’information de
heading comme absolue et décroissante avec l’augmentation du GMA, mais plutôt comme
nominale et s’améliorant avec l’augmentation du GMA. De plus, il est possible d’obtenir une
précision ordinale avec une série de jugements nominaux ; il suffit au sujet d’effectuer plusieurs
poursuites oculaires de part et d’autre de la route (Cutting et al. 1999).
5. L’utilisation de l’information provenant du mouvement est complétée par d’autres
informations visuelles et extra-visuelles. Ainsi, des informations sur profondeur (disparité
binoculaire, occlusion…), ou de hauteur peuvent améliorer la perception du mouvement.
Comme on le verra plus loin, des indices de profondeurs peuvent même s’avérer nécessaires. De
même, des indices extra-visuels (mouvements oculaires, informations vestibulaires ou
kinesthésiques) aident la perception à être plus efficiente.
6

6. Les piétons utilisent des patterns de mouvements basés sur le mouvement d’objets bien
particuliers de l’environnement et du flux visuel.. Cutting (1996) a décrit ces patterns comme
des sources d’informations « locales » qu’il oppose au traitement « global », correspondant à de
larges parties du champ visuel. Ce principe est également controversé par la plupart des
approches « computationnelles » qui utilisent justement les mouvements du champ entier. Bien
que les travaux de Gibson aillent dans cette direction théorique (Gibson, 1979), celui-ci
travaillait à des vitesses rétiniennes très rapides. Un humain se déplaçant à une vitesse de piéton
se focalise sur des objets particuliers, sur leur mouvement relatif et sur leur profondeur ordinale,
et ce, à tout moment.
7. Les piétons utilisent plusieurs types de mouvements basés sur des objets pour trouver leur
direction de mouvement. On compte trois sources d’informations pertinentes provenant de tels
mouvements : le DDLO (direction de déplacement de l’objet le plus grand), l’IM (objets
s’approchant de la ligne du regard), et enfin l’OD (objets s’éloignant de la ligne de regard en
ralentissant) (Cutting, 1996) Nous reviendrons plus précisément sur ces différents indices.
Certains de ces principes sont très discutés, le n°3 par exemple est loin d’être accepté par
l’ensemble de la communauté scientifique (Warren, 1995; Warren, 1998; Li & Warren, 2000). Les
principes 4, 6 et 7 sont également controversés principalement par les mêmes auteurs pour des
raisons que nous verrons plus loin.
1.3.2 Les indices basés sur le mouvement des objets.
Cutting et al. (1992), évoquent le mouvement parallactique différentiel (Differential Motion
Parallax, DMP) comme indice pertinent pour déterminer la direction du mouvement propre. La
DMP reflète la particularité qu’ont les objets de se déplacer les uns par rapport aux autres lorsque le
sujet ne regarde pas dans la direction dans laquelle il se meut. En effet, dans ce cas, les objets plus
proches du sujet par rapport à son point de fixation se déplaceront dans le sens contraire de son
mouvement propre. Inversement, les objets plus lointains que le point de fixation se déplacent sur la
rétine du sujet dans le même sens que lui. De plus, et de manière générale, les objets proches se
déplacent plus vite que les objets lointains (c’est la parallaxe de mouvement). Un observateur en
mouvement pourrait ainsi déterminer son heading, toujours situé dans le sens opposé du flux le plus
rapide sur sa rétine.
7

Cutting et al. (1992) montrent que dans des situations où les règles de la DMP sont violées, on
observe une chute des performances par rapport aux items où ces règles sont respectées. Il considère
donc que les observateurs en déplacement utilisent la DMP et que cette dernière est un bon
prédicteur des performances dans une tâche de wayfinding. L’auteur s’oppose à la décomposition
du flux rétinien et clame que l’information pertinente au wayfinding est contenue dans le flux
rétinien et non dans le flux optique.
Un peu plus tard, les tenants de cette approche (Vishton & Cutting, 1995) découvrent que
l’information proviendrait des vecteurs de déplacement des objets du champ et non de leur vecteur
de vitesse. En effet la distance parcourue et le temps de déplacement semblent plus importants que
la vitesse à laquelle le mouvement est effectué pour obtenir une bonne performance. Néanmoins la
vitesse a son importance (peut être parce qu’elle cause indirectement un plus grand déplacement des
objets). De plus, la connaissance des positions relatives des objets en profondeur (à l’aide d’une
carte mentale) améliore les performances des sujets.
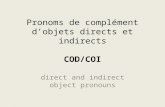
1.3.3 L’IM et l’OD
Cutting (1996), reprend des indices déjà présentés
auparavant (Cutting et al. 1992) lors de
l’investigation de la DMP et les remet sur le
devant de la scène. Ces indices : “l’Inward
Motion” (IM), “l’Outward Deceleration” (OD) et
“l’Outward Acceleration” (OA), sont en fait
diverses régions de l’espace, dans lesquelles le
déplacement dans le flux rétinien des objets y
étant disposés est particulier. La figure 1.2 (tirée
de Cutting, 1996) illustre les emplacements
relatifs de ces différentes zones. Les objets en IM
se déplacent dans la direction de la ligne du
Figure 1.2 Les zones décrites par Cutting (1996)regard, ils peuvent être situés devant ou derrière le point de fixation. Les objets en OD, s’éloignent
de la ligne du regard en ralentissant et peuvent également se trouver au-delà ou en deçà du point de
fixation. Enfin, les objets en OA qui s’éloignent de la ligne du regard en accélérant peuvent
également se situer à plusieurs profondeurs.
8

Cutting et al. (1992), Cutting (1996) montrent que certains de ces indices : l’IM et l’OD sont très
pertinents pour la réussite nominale au wayfinding. En effet, un objet en OD ou en IM situé au-delà
du point de fixation du sujet indiquera à coup sûr et avec précision la direction de heading de
l’observateur. Inversement, un objet en OD ou en IM situé moins loin que le point de fixation
signalera toujours le sens inverse du heading. L’avantage de ces deux indices est qu’ils sont d’une
part orthogonaux (un même objet ne peut se situer dans deux zones à la fois) et d’autre part,
parfaitement corrélés au heading : ils indiquent toujours la bonne direction (soit celle du heading
soit l’inverse selon que l’objet est situé derrière ou devant le point de fixation). C’est pourquoi on
parle d’invariants (Cutting et al. 1999; Cutting, Alliprandini & Wang, 2000). Cependant, pour
pouvoir utiliser ces indices, il est nécessaire d’avoir des connaissances sur les objets du champ
visuel, en particulier sur leur profondeur relative. En effet, il faut savoir si l’objet repéré comme se
déplaçant en IM est situé devant ou derrière le point de fixation pour savoir si le heading est dans le
sens inverse ou dans le même sens que celui de l’objet en question. Il en va de même pour les objets
en OD. Signalons encore que l’OD souffre de quelques restrictions quant à son utilisation, mais ces
circonstances ne semblent pas très fréquentes (Vishton & Cutting 1995; Cutting et al. 1999). Enfin,
accélérations et décélérations sont difficiles à détecter (par rapport à la vitesse) ; l’IM est donc plus
informatif, car il ne faut pas confondre les objets en OA de ceux en OD.
1.3.4 Le DDLO
Un autre indice explique encore mieux les capacités des sujets à trouver leur direction de
mouvement. Il s’agit de la direction de déplacement de l’objet le plus grand (Direction of
Displacement of the Largest Object, DDLO). On a pu montrer (Cutting 1996; Cutting et al. 1997;
Cutting et al. 1999), que la direction de mouvement se trouvait la plupart du temps dans la direction
inverse du DDLO. En effet, lorsqu’on regarde où l’on va (direction de heading), le mouvement
relatif des objets environnants varie selon 3 facteurs : le côté du chemin sur lequel ils se trouvent
(un objet situé à droite s’approche sur la droite, et inversement), la distance de l’obstacle (Un objet
deux fois plus lointain a une vitesse deux fois moindre), et l’angle entre la direction de l’objet et la
direction de mouvement (plus l’objet est écarté, plus il se déplace à l’horizontale).
Lorsqu’on regarde où l’on se dirige, le DDLO ne donne pas vraiment d’information car 50% des
objets viennent par la droite et 50% par la gauche (ceux-ci sont répartis aléatoirement). Par contre,
si on ne regarde pas où l’on va mais sur un point de fixation ex-centré (avec une poursuite oculaire
pendant le déplacement), il y a alors une plus grande probabilité que le DDLO soit à l’opposé du
heading. Plus l’angle GMA est grand, plus la probabilité que le DDLO se déplace ainsi est grande.
9

Cependant, le déplacement du DDLO n’est pas parfaitement corrélé avec le heading, c’est pourquoi
on parle d’un indice heuristique, dans le sens qu’il n’est pas fiable et précis dans tous les cas.
Cutting et al. (1999) comparent l’efficience théorique des sources d’informations basées sur les
objets (DDLO, IM, OD) par rapport à celles basées sur le champ. Il semble que celles basées sur les
objets soient plus performantes. Par contre, dans les 5° autour du vecteur de heading, ce sont les
informations basées sur le champ qui sont généralement les meilleures (mais le DDLO est toujours
supérieur). On observe néanmoins une forte corrélation entre les différents indices. Ce fait
s’explique car les environnements utilisés étaient très chargés en objets. L’abondance de source
d’information satisfaisait la majorité des indices, et tous donnaient une assez bonne réponse. Les
auteurs proposent alors d’utiliser des environnements plus épars pour mieux différentier les
résultats. De plus cette étude propose des résultats calculés (simulation), on connaît ainsi l’efficacité
propre des différents indices mais pas si l’homme les utilise réellement.
1.4 L’information extra-rétinienne
Dans sa présentation des différents modèles s’intéressant au heading, Warren (1998) distingue
plusieurs théories, notamment une approche « décompositionnelle » ; cette approche estime
nécessaire de discriminer composante rotationnelle et composante translationnelle, puisque seule
cette dernière contient réellement de l’information sur le heading. Le système visuel estimerait la
rotation, puis supprimerait celle-ci du champ de flux rétinien afin de ne garder que la composante
translationnelle (Perrone, 1992, cité dans Warren, 1998). Warren (1995 et 1998) classe l’approche
de Cutting et al. (1992), dans les modèles de ce type. Pour lui, cette approche trouve le heading en
déterminant la composante translationnelle directement du flux rétinien, mais cela suppose tout de
même une décomposition dans le sens que la composante rotationnelle est éliminée (sans toutefois
être clairement identifiée au préalable).
Le modèle de Warren, qu’il classe dans sa nomenclature sous le nom de « Extraretinal Model »
(Warren, 1998) prend également le parti d’une décomposition des deux sources de flux : selon lui,
l’humain pourrait estimer la rotation de l’œil en utilisant des informations extra-rétiniennes, comme
une copie efférente ou un feedback proprioceptif des muscles extra-oculaires ; cette rotation
pourrait être alors soustraite du flux rétinien. Un des avantages de cette approche est qu’elle
situerait le heading dans un système de référence centré sur le corps. En effet, Warren (1998) et Li
& Warren (2000) relèvent que la plupart des modèles procurent une direction de heading dans un
cadre de référence oculocentré (c’est-à-dire rétinien), et non dans un système de référence centré sur
10

le corps ou la tête. Gibson (1950) mentionnait que cela était suffisant pour percevoir un heading
relatif à des objets de la scène visuelle, défini comme l’angle visuel entre le heading et l’objet de
référence. D’un autre côté, ce système de référence est inadéquat pour percevoir un heading absolu
et par conséquent pour accomplir certaines tâches comme le pointage avec une main qui n’est pas
dans le champ visuel (Li & Warren, 2000). Les informations extra-rétiniennes sur la position de la
tête et des yeux pourraient alors être utilisées pour transformer une estimation de heading dans un
système oculo-centré à un heading dans un système de référence basé sur la totalité du corps.
1.4.1 Paradigmes utilisés et résultats
Le système visuel peut-il décomposer composante rotationnelle et translationnelle sans avoir
recours à des informations extra-rétiniennes ? On pouvait investiguer le rôle et l’importance de ces
informations grâce à un paradigme qui selon la condition fournissait des informations extra-
rétiniennes ou au contraire n’en procurait aucune. Deux conditions sont donc distinguées ; dans la
première (« actual rotation condition ») un pattern de flux est présenté et le point de fixation est
mouvant, donc induit un réel déplacement des yeux : ainsi le pattern de flux qui se projette sur la
rétine est produit par la somme de la translation et de la rotation réelle de l’œil. Dans la deuxième
(« simulated rotation condition »), le pattern de flux sur l’écran simule la somme des composantes
rotationnelle et translationnelle, mais le point de fixation reste stationnaire. Le pattern de flux sur la
rétine est donc le même dans les deux cas et seule l’information extra-rétiniennee est manipulée. Si
les jugements du trajet sont aussi précis dans une condition que dans l’autre, cela signifie que le
heading peut être perçu sur la base seule du flux rétinien. Warren & Hannon (1988) ne trouvent
aucune différence entre ces deux types de conditions, ce qui laisserait à penser que l’information est
directement extractible du flux rétinien sans passer par de l’information extra-rétiniennee. Il est
possible que cette absence de résultats soit imputable à la faible vitesse de rotation de l’œil (moins
de 1° /s). En effet, avec un paradigme similaire, l’étude de Royden, Banks & Crowell (1992)
montrent que les sujets font plus d’erreurs de heading en fonction de la vitesse de rotation de l’œil ;
pour une rotation de 5°/s, l’erreur de heading monte à 15°. Conformément à l’hypothèse de Warren
sur le rôle des informations extra-rétiniennes, ceci ne s’observe que dans la condition de rotation
simulée ; en rotation réelle, les jugements des sujets demeurent précis.
Van den Berg & Brenner (1994) ont quant à eux amené des preuves empiriques en faveur de
l’approche rétinienne ; les sujets obtiennent des headings relativement précis (2° d’erreur), même en
condition simulée. En outre, ils observent que la présence d’informations de profondeur semble
donner lieu à des jugements plus robustes au bruit..
11

Cutting et ses collègues (Cutting, 1996 ; Cutting & al. 1992 ; Vishton & Cutting, 1995) apportent
des résultats qui vont dans le sens de l’approche rétinienne. Toutefois, ceux-ci utilisent des tâches
de heading nominales, dans lesquelles les sujets doivent décider s’ils se dirigent à droite ou à
gauche de l’objet fixé (Warren, 1998). Une de leurs expériences (Cutting et al., 1997) montre des
erreurs significativement plus petites pour un dispositif avec des arbres que pour un dispositif
contenant des nuages de points. Ce résultat suggère qu’une structure plus complexe de la scène peut
permettre des jugements plus précis avec le flux rétinien.
1.4.2 L’ambiguïté du trajet
Les tenants des modèles du flux rétinien se sont généralement peu intéressés au type de trajet que le
sujet suivait, alors que celui-ci peut amener une nouvelle ambiguïté à résoudre pour le système
visuel. Comme énoncé précédemment, les mouvements des yeux et de la tête induisent une
composante rotationnelle et complexifient la perception de notre déplacement, mais le type de trajet
emprunté peut également rendre cette composante plus riche et plus complexe (Warren, 1998 ; Li &
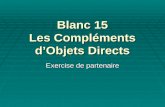
Warren 2000). En effet, le pattern de flux est ambigu suivant la trajectoire que l’on considère: le
même champ vectoriel peut être généré par un
trajet droit (T) avec rotation des yeux (R), ou par
un trajet courbe avec un radius ρ = T/R (en
considérant que la direction du regard demeure à
un angle constant par rapport à la tangente du
trajet), ou par diverses combinaisons de rapport
de rotation et de courbures de trajet. De la sorte,
le champ de flux de premier ordre (rétinien)
n’est pas suffisant pour désambiguïser des trajets
droits et courbes. De plus, les observateurs
rapportent souvent avoir vu des trajets courbes
dans des conditions qui simulaient une
composante rotationnelle ajouté à une rotation
translationnelle. Les schémas en figure 1.3 illustrent bien l’ambiguïté de ces deux types de
trajectoires au niveau de leurs patterns de flux rétinien.
Figure 1.3 (tirée de Warren, 1998) :l’ambiguïté de la trajectoire ; 1°) fluxgénéré par une courbe. 2°) Flux généré partranslation + rotation
12

L’approche extra-rétinienne peut résoudre cette ambiguïté de manière efficace : le système visuel
peut estimer la rotation de la tête et des yeux et ainsi la soustraire du champ de flux rétinien. Si le
flux rétinien restant ne contient qu’une composante translationnelle, l’observateur se trouve alors
sur un trajet droit, tandis que s’il subsiste une composante rotationnelle, cela signifie qu’il parcourt
un trajet courbe.
Un examen plus approfondi du pattern des flux peut toutefois produire en principe suffisamment
d’informations pour régler ce problème. Rieger (1983) et Tsai & Huang (1984) (cités dans Li &
Warren, 2000) ont montré que les trajets droits et courbes pouvaient être distingués par les
composantes accélératoires du flux. Cependant, la sensibilité humaine pour ces accélérations est
relativement faible, ce qui rend cette proposition peu plausible. Une deuxième solution utilise le fait
que les champs de vecteurs divergent en fonction du temps, de sorte qu’un trajet courbe génère un
champ de vecteur stationnaire (inchangé) tandis qu’une composante rotationnelle additionnée à une
composante translationnelle génèrent un champ déformé. Ces différences de vitesse restent par
ailleurs relativement faibles et seraient difficiles à discriminer lors de courts laps de temps.
Enfin, l’ambiguïté du trajet peut être résolue par des objets de référence qui sont attachés à la scène
et qui peuvent être suivi à travers le temps. On observe que notre propre déplacement est spécifié
par le changement de la structure de la perspective, la vue changeante d’objets, lorsque quelque l’on
se meut à travers un environnement. Cela peut être formalisé en termes de triangulation : une
configuration de trois repères peut déterminer la position de l’observateur et, à travers le temps, le
trajet de son déplacement propre. L’une des propositions vient de Vishton & Cutting (1995) qui
suggèrent que le système visuel utilise de l’information de profondeur pour créer une carte mentale
tridimensionnelle de la scène et connaître son déplacement à partir des distances et des
déplacements des repères.
En outre, la trajectoire peut induire des problèmes de mesure : on demande au sujet d’évaluer leur
heading mais le problème reste que, en cas de trajectoires courbes, le heading « tangentiel »
(relativement à la courbure) varie au cours du temps ; la réponse dépend donc du moment où le
sujet donne sa réponse. Royden (1994) montre que les erreurs de heading sont consistantes avec la
perception de la courbe perçue ; c’est pourquoi dans les études récentes de Li & Warren (2000), on
demande expressément aux sujets d’indiquer leur type de trajet futur.
Dans le cas de la rotation simulée, il est important de noter qu’il s’agit d’une situation de conflit.
D’un côté, le flux rétinien au cours du temps spécifie que l’observateur se trouve sur une trajectoire
directe par rapport à des objets de référence dans la scène visuelle, et que ses yeux ou sa tête sont
13

en train de bouger. D’un autre côté, l’information extra-rétinienne spécifie que le degré de rotation
des yeux et de la tête est de 0°. Puisque le point de heading se déplace en travers de l’écran,
l’observateur doit être sur une trajectoire courbe (dans un système de référence centré sur le corps).
1.4.3 Dernières recherches
Dans les recherches précédentes, l’information extra-rétinienne était dominante (c’est-à-dire que les
conditions de rotation réelle étaient mieux réussies que les conditions de rotation simulée) et le sujet
avait donc une impression de trajectoire courbe (en condition de rotation simulée). Cependant, il est
possible que le type de dispositif utilisé jusqu’alors n’ait pas fourni suffisamment d’informations au
système visuel pour déterminer le heading ou la trajectoire à partir du seul flux rétinien. Les
dispositifs précédents étaient relativement pauvres, et le nombre d’éléments en avant de la scène est
relativement réduit ; ainsi, la densité de parallaxe de mouvement n’était pas très importante.
C’est pourquoi dans leurs dernières expériences, Li & Warren (2000) manipulent le nombre et le
type d’éléments présents dans la scène visuelle. Dans une première expérience, ils créent deux
conditions de complexité de la scène, croisées avec les deux types de rotation étudiés (réelle et
simulée). Ils remarquent que, en cas de grande complexité structurale de la scène, on n’observe pas
de différences significatives entre les conditions de rotation simulée et réelle même pour des
rotations rapides des yeux. Selon ces auteurs, cela est essentiellement dû à la texture de sol très bien
structurée et à la profondeur virtuelle (120m de profondeur). Cependant lorsque les points
décomposant l’environnement étaient placés au hasard, on pouvait remarquer que lors de rotations
des yeux élevées (5°/s), les sujets font de plus grandes erreurs dans la condition simulée alors que
leurs jugements demeurent précis dans la condition de rotation réelle.
La perception du heading peut donc être influencée par des informations extra-rétiniennes. Cette
poursuite oculaire active permet au système visuel de compenser la rotation et de retrouver la
trajectoire dans un espace centré sur le corps. Cependant, les observateurs parviennent tout de
même à percevoir leur trajectoire sur la seule base du flux rétinien à condition qu’ils aient
suffisamment d’éléments informatifs. D’après Li & Warren (2000), les jugements de heading sont
précis en condition simulée s’il y a une parallaxe de mouvement importante et qu’il y a des objets
de référence.
Dans une autre expérience, les mêmes chercheurs se demandent si le sujet a besoin d’un point de
référence constant. On peut imaginer qu’il intègre une série de headings dans son déplacement
propre, lui permettant alors de résoudre l’ambiguïté de la trajectoire. Les résultats montrent qu’au
14

moins un objet de référence est nécessaire pour obtenir de bons jugements. L’ambiguïté du chemin
est résolue par rapport à des objets de référence ; On aurait donc bien affaire à une mise à jour des
différents headings perçus à travers le temps. Cela élimine la possibilité d’une solution par
triangulation à l’aide de trois repères (comme proposé par Vishton & Cutting, 1995).
Finalement, comme nous l’avons vu, le problème de la rotation ainsi que de l’ambiguïté de la
trajectoire peuvent être résolus sur la base du seul flux rétinien. Toutefois, ce modèle n’est pas
complètement en accord avec la théorie utilisant la DMP et les divers indices basés sur les objets.
Car bien qu’elle utilise également la parallaxe de mouvement (comme la plupart des modèles),
celle-ci se base plutôt sur des parallaxes de mouvement locales entre quelques objets de référence et
ne parlent pas de champs globaux de parallaxe de mouvement. Li & Warren (2000) proposent que
les observateurs font de leur mieux dans un dispositif où ne sont présents que quelques objets, mais
ils tireraient un meilleur parti d’une importante parallaxe de mouvement si elle était disponible.
En outre, Cutting et al. (1999) promeuvent des variables particulières de mouvement relativement à
un objet fixé (IM, OD, DDLO). D’après leurs opposants, ce sont des variables de second ordre,
pour lesquelles le système visuel a peu de sensibilité ; de plus, l’un de ces indices est
« probabiliste » (le DDLO) et tous dépendent d’informations auxiliaires sur la profondeur. En
outre, un point de fixation fixe n’est pas nécessaire ; on trouve des performances précises avec un
point de fixation mobile, tant que d’autres objets de référence restent présents. Enfin, alors que
Cutting et ses collègues attribuent les jugements de heading à un dispositif réaliste, il est fort
possible que les surfaces texturées qu’ils utilisent procurent suffisamment de parallaxe de
mouvement et que les objets de référence ne servent que de repères fixes dans l’environnement, ce
qui permet une mise à jour du heading au cours du temps.
En résumé, selon Li & Warren (2000), deux sortes d’informations optiques sont requises pour
déterminer le déplacement propre lorsqu’il y a rotation : la parallaxe de mouvement est utilisée pour
résoudre le problème de la rotation, et des objets de référence sont utilisés pour résoudre le
problème de l’ambiguïté de la trajectoire. L’information du flux rétinien et l’information extra-
rétinienne sont suffisantes pour percevoir le heading lors de rotation des yeux. Le premier fournit
une trajectoire relativement aux objets de la scène et le deuxième la trajectoire absolue par rapport à
un système de référence égocentré. Dans des circonstances normales, les deux sources sont
congruentes mais en cas de conflit, le flux rétinien tend à dominer.
15

1.5 Synthèse et hypothèses
Depuis Gibson, deux approches principales sont apparues pour expliquer les capacités de l’humain
à trouver son heading. La première, menée principalement par Cutting et ses collaborateurs, soutient
que l’information pertinente est contenue dans le mouvement de quelques objets précis du flux
visuel ; le DDLO est l’indice qui d’une part explique le plus de variance et d’autre part semble
utilisable dans le plus de situations. La connaissance de la profondeur relative des objets semble
importante et permet l’utilisation des deux autres indices, IM et OD (invariants).
Quant à la seconde approche, menée par Warren et ses collègues, elle a tout d’abord mis en avant le
rôle non négligeable des informations extra-rétiniennes. Bien qu’ils ne réfutent pas cette hypothèse,
leurs derniers travaux montrent que l’indice le plus important est la densité globale de la parallaxe
de mouvement de même que la présence de repères fixes dans l’environnement.
L’opposition principale réside donc dans la définition des indices utilisés : indices locaux (objets)
pour la première approche et indices globaux pour la seconde. Dans ce travail, nous adoptons une
perspective basée sur le mouvement des objets dans le champ visuel. On remarque, dans la revue de
la littérature, que les trajectoires courbes ont été peu étudiées par les tenants de cette approche. En
théorie, si les indices développés par ces chercheurs sont suffisamment riches en information, le
type de trajectoire ne devrait pas avoir une influence sur des performances de heading. De plus, si
des objets, toujours dans l’optique de cette approche, n’apportent aucune information (ne sont ni en
IM, ni en OD, et ne peuvent constituer des DDLO pertinents), la trajectoire aura un effet sur ces
performances. D’après les tenants de l’approche basée sur la densité globale de parallaxe de
mouvement, ces indices devraient tous constituer une source suffisante d’information pour
permettre une performance optimale dans toutes les conditions.
Notre expérience se propose donc de manipuler ces différents indices et trajectoires pour apporter
un coup de projecteur sur cette problématique encore très controversée.
16

2 Méthodologie
2.1 Population :
Pour cette expérience, nous préconisons de prendre une vingtaine de sujets. Des étudiants, ou des
« tout-venants » des deux sexes, âgés entre 20 et 40 ans. Il est nécessaire qu’ils aient tous une vision
normale ou corrigée, et aucun problème connu de perception.
2.2 Plan expérimental
2.2.1 VI
A. Trajectoire : 1. Rectiligne
2. Courbe (90° d’angle)
B. Placement des objets : 1. Informatifs
2. Non-informatifs
On aura toujours des objets (arbres) disposés de la même manière les uns par rapport aux autres
mais le point de fixation changera d’une séquence à l’autre de sorte, pour la condition informative,
que ceux-ci se dans des zones d’IM ou d’OD ou puissent faire l’objet de DDLO pertinents. Dans la
condition « objets non-informatifs » ceux-ci sont tous situés dans les zones d’OA définies par
Cutting (1996).
2.2.2 VD
Seuil différentiel de perception de la trajectoire (en °)
Il s’agit du plus petit angle nécessaire aux sujets pour remarquer que l’obstacle qui apparaît
sur leur route n’est pas un danger pour eux. On utilise une méthode constante avec des mesurants
situés à (1, 3, 5, 7 et 10°) autour du heading.
2.2.3 VC
1. La vitesse de déplacement des sujets est constante dans toutes les présentations (1 m/s).
17

2. Il n’y a jamais d’autres indices disponibles que les objets de la seconde VI (en particulier,
jamais de texture au sol).
3. Les obstacles apparaissent toujours 4 secondes avant un éventuel contact (donc toujours à une
distance de 4m du sujet en cas de contact), la séquence se termine toujours au plus tard 3
secondes après l’apparition de l’obstacle.
4. Le point de fixation du sujet est fixé au centre de l’écran et indiqué par une petite croix.
2.2.4 VN
1. L’ordre d’apparition des différents angles entre le heading et l’obstacle (les mesurants) est
aléatoire et se présente autant de fois sur la gauche de la direction de mouvement que sur la
droite.
2. La durée des séquences varie aléatoirement de façon à éviter un apprentissage du sujet quant au
moment d’apparition de l’obstacle (entre 7s et 10s).
3. La direction (gauche/droite) des trajectoires courbes sera équitablement représentée dans toutes
les séquences.
4. Le GMA de départ pourra prendre 5 modalités (0.5 ; 2 ; 5 ; 10 et 20°) réparties aléatoirement,
comme d’ailleurs le sens (gauche/droite) de celles-ci.
Nous avons donc un plan entièrement intra-sujets. On présentera 10 situations (dispositions
d’arbres) différentes pour chacune des 4 conditions expérimentales, avec chaque fois 5 mesurants à
présenter, ce qui nous mène à 200 présentations par sujets (d’après nos estimations, l’expérience
durera donc un peu plus de 30 min).
2.2.5 Hypothèses opérationnelles
Placement des objets : on attend un effet principal de cette variable ; les sujets obtiennent de moins
bons résultats (seuil différentiel plus élevé) dans la condition « non-informative » que dans la
condition « informative ».
Trajectoire : à nouveau, un effet principal est attendu ; la condition « courbe » est moins bien
réussie (seuil différentiel plus élevé) que la condition « rectiligne ». Toutefois, ce résultat est à
mettre en relation avec l’interaction.
18

Interaction : cette dernière devrait être significative : lorsque les objets sont « informatifs », aucune
différence ne devrait être observée entre les deux types de trajectoire ; par contre, pour des objets
non informatifs, les sujets devraient obtenir des performances bien inférieures (seuil différentiel
plus élevé) pour une trajectoire courbe que pour une trajectoire rectiligne.
2.3 Matériel
Un ordinateur suffisamment performant pour simuler une telle série de présentations, un écran
géant, ainsi qu’un projecteur et un bouton pour que le sujet puisse donner sa réponse suffiront
largement pour cette expérience.
Les 10 situations à créer sont simplement dix dispositions différentes de 6 arbres. Le plus important
est surtout la zone du champ visuel dans laquelle ces patterns seront placés dans les deux conditions
de la variable « objets ». Soyons clairs, la position relative des arbres est toujours la même (ce sont
les dix situations) c’est leur position par rapport au déplacement du sujet qui varie selon la seconde
VI. Les diverses situations sont en outre calculées pour que la hauteur virtuelle du regard se situe à
1.6m. De plus, toutes les séquences s’arrêtent 3s après l’apparition de l’obstacle (ou lorsque le sujet
a pressé sur le bouton).
L’obstacle sera un petit muret virtuel et bucolique de 50cm de haut et de 1m de large (de façon à ce
qu’il n’obstrue pas trop le champ visuel du sujet). Bien sûr on considérera l’angle entre l’obstacle et
le heading (les différents mesurants) entre la partie du muret la plus proche et le heading.
2.4 Procédure
Le sujet, bien décidé à faire avancer la science, est installé debout devant l’écran et reçoit un gros
bouton rouge en plus des explications sur la tâche qu’il aura à accomplir. Le sujet doit regarder
fixement la croix au centre de l’écran. Lorsque le muret apparaît, il doit presser sur le bouton s’il
pense qu’il va heurter celui-ci. Il est bien précisé au sujet qu’il doit être sûr de lui, et qu’il ne doit
pas aller le plus vite possible mais qu’il ne dispose que de trois secondes pour presser sur le bouton
s’il pense devoir réagir. Par contre, s’il ne pense pas que son déplacement est mis en danger par
l’obstacle, il doit simplement attendre la fin de la séquence.
Après 5 essais et l’assurance que le sujet a bien compris, l’expérience peut commencer. Une fois les
passations terminées, nous remercions le sujet, après avoir pris soin de lui faire remplir un petit
questionnaire. Ceci nous permettra, entre autres, de nous assurer que le sujet a bien perçu les
différentes catégories de trajectoires (rectilignes et courbes).
19

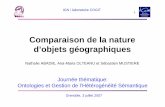
3 Résultats attendus
Comme indiqué dans nos hypothèses
opérationnelles, l’effet principal
attendu de la trajectoire montre de
moins bonnes performances (seuil
différentiel moyen plus élevé) lorsque
les trajectoires sont courbes que
lorsqu’elles sont rectilignes (c.f. figure
3.1).
Fig. 3.1 : Effet principal de la trajectoire
01234567
Rectiligne Courbe
TrajectoireSe
uil d
iffér
entie
l moy
en
(°)
Encore une fois, et toujours
conformément à nos hypothèses
opérationnelles, L’effet principal du
placement des objets est prévu
comme indiquant des performances
supérieures (seuil différentiel moyen
plus faible) lorsque les objets sont
informatifs que lorsqu’ils ne le sont
pas (c.f. figure 3.2)
Fig. 3.2 : Effet principal du placement des objets
0
2
4
6
8
10
Informatif Non-informatif
Placement des objets
Seui
l diff
éren
tiel m
oyen
(°
)
Au niveau de l’interaction, nous nous attendons à observer des performances comparables (et plutôt
bonnes) dans les deux types de
trajectoires lorsque les objets
sont placés de manière
informative. Par contre, avec
des objets non-informatifs, les
performances en terme de seuil
différentiel moyen seront
nettement moins bonnes (plus
élevés), et ce surtout dans le cas
d’une trajectoire courbe.
eui
Fig. 3.3 : Interaction entre le placement des objets et le type de trajectoire
0
2
46
8
10
Rectiligne Courbe
Trajectoire
Sl d
iffér
entie
l m
oyen
(°)
InformatifNon-informatif
20

4 Discussion et conclusion
Imaginons que nous ayons obtenu un tel pattern de résultats ! Nos résultats semblent conforter la
théorie de l’information tirée des objets. Ce n’est pas tant une globalité d’éléments en mouvement
mais plutôt quelques objets se déplaçant dans des zones spécifiques qui importent pour obtenir de
bonnes performances dans une tâche de Wayfinding. En effet, si la densité de parallaxe de
mouvement et les repères fixes étaient les facteurs nécessaires pour ce type de tâche, tous les sujets
seraient parvenus à des performances similaires quelle que soit la condition expérimentale (et à plus
forte raison dans les deux modalités de la variable « placement des objets »). En outre, toutes les
conditions simulaient la rotation des yeux ce que Warren (1998) nomme « simulated rotation
condition ». Contrairement aux données observées par Li et Warren (2000), nos résultats impliquent
que l’information extra-rétinienne n’est pas nécessaire pour trouver son heading, même lorsque la
simulation est (selon cet auteur) pauvre en informations (peu d’arbres et pas de texture au sol) ; il se
pourrait néanmoins que les sujets obtiennent de meilleures performances dans la condition
« placement d’objets non informatif , s’ils disposaient d’informations extra-rétiniennes.
Toutefois, il convient de remarquer quelques limites à notre expérience. Le paradigme que nous
avons utilisé peut être l’objet de critiques. En effet, cette « génération spontanée d’obstacles » n’a
jamais été utilisée auparavant et nous ne savons rien de sa fonctionnalité effective. Il se peut que
l’apparition de l’obstacle puisse engendrer quelques problèmes : une saccade oculaire réflexe peut
subvenir au moment de l’arrivée du muret ; effet par ailleurs mis en évidence par Theeuwes,
Kramer, Hahn, Irwin & Zelinsky (1999). La poursuite oculaire prévue ne serait donc pas maintenue
de façon continue jusqu’à la fin de la tâche. D’autre part, la séquence ne s’arrêtant pas au moment
de l’apparition du muret, il est fort possible que cet élément devienne à son tour pertinent pour le
heading lors des trois secondes restantes (il pourrait par exemple servir de DDLO). En effet, Warren
& Li (2000) montrent qu’un seul élément peut suffire pour déterminer sa trajectoire. Il serait peut-
être alors mieux d’arrêter la séquence au moment où surgit l’obstacle et de demander alors au sujet
si sa trajectoire l’aurait conduit jusqu’à celui-ci.
21

Cependant, notre paradigme nous semble plus naturel et donc plus proche des mécanismes
impliqués dans ce type de tâche. De plus, il nous est impossible d’utiliser une méthode
d’ajustement de la trajectoire; en effet, il faut que ces dernières soient prédéfinies et non décidées
par le sujet (pour que nous puissions les rendre courbes ou rectilignes). De même, si le sujet avait
l’opportunité d’ajuster sa direction de déplacement, nous n’aurions plus été capables d’assurer que
les objets soient toujours dans des zones soit informatives, soit non informatives Il serait
éventuellement concevable de modifier le paradigme en faisant apparaître un point que le sujet
devrait déplacer pour qu’il se trouve sur sa trajectoire. Cependant, il est rare, dans la vie réelle,
qu’on ait le contrôle de la position des obstacles dans l’environnement que la direction de notre
propre mouvement.
On peut aussi soulever le problème de l’arrêt de la séquence : il est difficile de juger à quel moment
précis le sujet va prendre sa décision. Peut-être donnerait-il sa réponse dans la seconde avant le
contact, pour mieux déterminer s’il doit oui ou non éviter l’obstacle. Par-là même, cela occulterait
certains des résultats. En même temps, à une seconde du contact, les réponses semblent trop
évidentes.
Cette expérience, si elle ne s’avère réalisable qu’avec certaines difficultés, n’en demeure pas moins
potentiellement révélatrice d’indices quant au fonctionnement de la perception du mouvement
propre.
22

5 Bibliographie
Crowell, J. A., & Banks, M. S. (1993). Perceiving heading with different retinal regions and types of optic flow. Perdception and Psychophysics, 53, 325-337.
Cutting, J. E. (1996). Wayfinding from multiple sources of local information in retinal flow. Journal of Experimental Psychology: Human Perception & Performance, 22, 1299-1313.
Cutting, J. E., Alliprandini P. M. Z., Wang, R. F. (2000). Seeking one’s heading through eye movements. Psychonomic Bulletin & Review, 7 (3), 490-498.
Cutting, J. E., Springer, K., Braren, P. A., & Johnson, S. H. (1992). Wayfinding on foot from information in retinal, not optical, flow. Journal of Experimental Psychology: General, 121, 41-72 & 129.
Cutting, J. E., Vishton, P. M., Braren, P. A. (1995). How we avoid collisions with stationary and moving objects. Psychological Review, 102, 627-651.
Cutting, J. E., Vishton, P. M., Flückiger, M., Baumberger, B., & Gerndt, J. (1997). Heading and path information from retinal flow in naturalistic environments. Perception and Psychophysics, 59, 426-441.
Cutting, J. E., Wang, R. F., Flückiger, M., & Baumberger, B. (1999). Human heading judgments and object-based motion information. Vision Research, 39, 1079-1105.
Gibson, J. J. (1950). Perception of the visual world. Boston: Houghton Mifflin.
Gibson, J. J. (1979). The ecological approach to visual perception. Boston: Houghton Mifflin.
Hildreth, E. C., & Royden, C. S. (1998). Computing observer motion from optical flow. In T. Watanabe (Ed.), High-level motion processing : computational, neurobiological, and psychophysical perspectives (pp. 269-293). Cambridge: MIT Press.
Li, L., Warren, W. H. (2000). Perception of heading during rotation : Sufficiency of dense motion parallax and reference objects. Vision Research, 40, 3873-3894.
Perrone, J. A. (1992). Model for the comutation of self-motion in biological systems. Journal of the Optical Society of America, A 9, 177-194.
Rieger, J. H. (1983). Information in optical flows induced by curved paths of observation. Journal of the Optical Society of America, 73, 339-344.
Royden, C. S. (1994). Analyses of misperceived observer motion during simulated eye rotations. Vision Research, 34, 3215-3222.
Royden, C. S., Banks, M. S., & Crowell, J. A. (1992). The perception of heading during eye movements. Nature, 360, 583-585.
Royden, C. S., Crowell, J. A., & Banks, M. S. (1994). Estimating heading during eye movements. Vision Research, 34, 3197-3214.
23

Theeuwes, J., Kramer, A. F., Hahn, S., Irwin, D. E., & Zelinsky, G. J. (1999). Influence of attentional capture on oculomotor control. Journal of Experimental Psychlogy : Human Perception and Performance, 25 (6), 1595-1608.
Tsai, R. Y., & Huang, T. S. (1984). Estimating three-dimensional motion parameters of rigid objects with curved surfaces. IEEE Transactions on Pattern Analyses of Machine Inteelligence, PAMI-6, 13-27.
Van den Berg, A. V., & Brenner, E. (1994). Why two eyes are better than one for judgments of heading. Nature, 371, 700-702.
Vishton, P. M., & Cutting, J. E. (1995). Wayfinding, displacements and mental maps: velocity fields are not typically used to determine one’s aimpoint. Journal of Experimental Psychology: Human Perception & Performance, 21, 978-995.
Warren, W. H. (1995). Self-Motion: Visual Perception and Visual Control. In W. Epstein & S. Rogers (Eds.), Perception of space and motion (pp. 263-325). San Diego: Academic Press.
Warren, W. H., & Hannon, D. J. (1988). Direction of self-motion is perceived from optical flow. Nature, 336, 162-163.
Warren, W. H. (1998). The state of flow. In T. Watanabe (Ed.), High-level motion processing : computational, neurobiological, and psychophysical perspectives (pp. 315-358). Cambridge: MIT Press.
24