LE MOTEUR LINEAIRE - get-couffignal.pagesperso...
4
LE MOTEUR LINEAIRE Un moteur linéaire est essentiellement un moteur électrique qui « a été déroulé » de sorte qu'au lieu de produire un couple (rotation), il produise une force linéaire sur sa longueur en installant un champ électromagnétique de déplacement.. Il demande donc beaucoup moins d’adaptations que les approches classiques où le mouvement linéaire est obtenu en couplant un moteur rotatif à une vis à bille ou à une crémaillère. Il y a donc moins de pièces en mouvement et donc moins d’inertie et de jeux. De ce fait, le moteur linéaire s’impose lorsque la vitesse et la précision importent vraiment. Le principe de fonctionnement de base d’un moteur linéaire est le même que pour un moteur rotatif. Les principaux éléments, bobines et aimants, sont simplement arrangés différemment pour produire une force et non un couple. Dans une étude de Pfenniger Aloïs sur les moteurs linéaires tubulaires, mais aussi de petites tailles, il a démontré le potentiel de ce type de moteur. On utilise généralement des moteurs linéaires à bobines mobiles pour de faibles courses (≤ 80mm). L’utilisation d’une bobine mobile plutôt que d'un aimant mobile se justifie lorsque la masse en mouvement doit être la plus faible possible pour des raisons dynamiques. L’inconvénient majeur est la très mauvaise dissipation de la chaleur produite par effet Joule. La conduction thermique est limitée par le chemin de très forte résistance thermique de l’interface mécanique entre la partie mobile et la partie fixe (guidage à coussin d'air ou guide avec circulation de billes). C’est donc par convection et radiation que l’échange thermique a lieu. Dans un premier temps, il est important de connaître la valeur du champ d'induction magnétique B d dans l'entrefer. En utilisant la figure ci-contre, on peut écrire les relations suivantes : En utilisant les grandeurs réelles du moteur, on obtient le rapport Ba/Ha. De la caractéristique B-H des aimants, on obtient un champ d'induction dans l'entrefer de La force réluctante est une force produite par le courant circulant dans la bobine sur lui-même. Cette force existe sans aimant. L'asymétrie du circuit provoque une force dont la direction est indépendante du signe du courant. En effet, une inversion du courant provoque une inversion du champ magnétique dans l'entrefer et donc une force dont le sens reste le même. La réluctance du circuit magnétique se décompose en plusieurs portions. Nous ferons l'hypothèse que la réluctance de la partie fer est négligeable par rapport à la réluctance de l'entrefer. On peut donc écrire une relation générale pour la distribution du champ d'induction dans l'entrefer: Exemple : Manipulateur entraîné par un moteur linéaire :
Transcript of LE MOTEUR LINEAIRE - get-couffignal.pagesperso...

LE MOTEUR LINEAIREUn moteur linéaire est essentiellement un moteur électrique qui « a été déroulé » de sorte qu'au lieu de produire un couple (rotation), il produise une force linéaire sur sa longueur en installant un champ électromagnétique de déplacement.. Il demande donc beaucoup moins d’adaptations que les approches classiques où le mouvement linéaire est obtenu en couplant un moteur rotatif à une vis à bille ou à une crémaillère. Il y a donc moins de pièces en mouvement et donc moins d’inertie et de jeux. De ce fait, le moteur linéaire s’impose lorsque la vitesse et la précision importent vraiment.Le principe de fonctionnement de base d’un moteur linéaire est le même que pour un moteur rotatif. Les principaux éléments, bobines et aimants, sont simplement arrangés différemment pour produire une force et non un couple. Dans une étude de Pfenniger Aloïs sur les moteurs linéaires tubulaires, mais aussi de petites tailles, il a démontré le potentiel de ce type de moteur.
On utilise généralement des moteurs linéaires à bobines mobiles pour de faibles courses (≤ 80mm). L’utilisation d’une bobine mobile plutôt que d'un aimant mobile se justifie lorsque la masse en mouvement doit être la plus faible possible pour des raisons dynamiques. L’inconvénient majeur est la très mauvaise dissipation de la chaleur produite par effet Joule. La conduction thermique est limitée par le chemin de très forte résistance thermique de l’interface mécanique entre la partie mobile et la partie fixe (guidage à coussin d'air ou guide avec circulation de billes). C’est donc par convection et radiation que l’échange thermique a lieu.
Dans un premier temps, il est important de connaître la valeur du champ d'induction magnétique B d dans l'entrefer. En utilisant la figure cicontre, on peut écrire les relations suivantes :
En utilisant les grandeurs réelles du moteur, on obtient le rapport Ba/Ha. De la caractéristique BH des aimants, on
obtient un champ d'induction dans l'entrefer de
La force réluctante est une force produite par le courant circulant dans la bobine sur luimême. Cette force existe sans aimant. L'asymétrie du circuit provoque une force dont la direction est indépendante du signe du courant. En effet, une inversion du courant provoque une inversion du champ magnétique dans l'entrefer et donc une force dont le sens reste le même.La réluctance du circuit magnétique se décompose en plusieurs portions. Nous ferons l'hypothèse que la réluctance de la partie fer est négligeable par rapport à la réluctance de l'entrefer. On peut donc écrire une relation générale pour la distribution du champ d'induction dans l'entrefer:
Exemple :Manipulateur entraîné par un moteur linéaire :

En remplaçant le système pneumatique de la décolleteuse mono broche par un moteur linéaire. Le moteur linéaire substitue les vérins avec pour fonction d'entraîner le bras du manipulateur emportepièce. Le bras actuel ne doit pas être modifié et le nouveau système doit s'intégrer dans le même encombrement.Les résultats montrent que Les analyses de rigidité et de fréquences propres montrent la supériorité du système avec moteur linéaire. Les essais en milieu industriel donnent des résultats satisfaisants. Cependant, les coûts de réalisation sont 1,5 fois plus élevés que ceux du système actuel.La solution d'un manipulateur actionné par moteur linéaire permet de programmer les déplacements. Cela réduit de beaucoup les temps de mises en train lors de changement de fabrication. La commande du moteur permet de varier la pente d'accélération et ainsi d'adapter la dynamique du manipulateur à la masse des pièces.
HSI, leader mondial des moteurs pas à pas utilisés comme actionneurs linéaires, complète sa gamme de moteurs à carcasse emboutie de 15 mm à 46 mm de diamètre avec une ligne de moteurs hybrides basée sur les mêmes concepts.Quatre configurations sont disponibles pour chaque diamètre:• Le type non captif – La vis sans fin doit être retenue à la rotation de façon à ce que le mouvement linéaire apparaisse.• Le type captif – La vis sans fin est fixée à un arbre cannelé qui est retenu à la rotation par une bague du même profil interne.• L’actionneur linéaire extérieur – le principe est similaire à un moteur rotatif pour lequel l’axe serait une vis sans fin de différentes longueurs et sur laquelle une noix retenue à la rotation se déplace le long de la vis sans fin.• Le moteur linéaire et rotatif combiné – est une solution unique qui combine un moteur linéaire et rotatif dans le même ensemble. Cet ensemble permet de générer un mouvement rotatif et linéaire indépendant de l’arbre du moteur.
Le moteur linéaire et rotatif combiné :Pour certaines applications, il est préférable d’avoir un moteur capable de produire alternativement des mouvements linéaires et rotatifs.Les mouvements linéaires et rotatifs peuvent être indépendants ou simultanés.Le mouvement linéaire et le mouvement rotatif nécessitent une commande électronique séparée. Si les deux mouvements ne sont pas simultanés, la même commande électronique peut servir aux deux mouvements.Ces moteurs ayant de nombreuses variantes sont fabriqués uniquement sur demande.
Les moteurs linéaires ANORAD :Accélération jusqu'à 10gVitesse de 1 micron/s jusqu'à plus de 5 m/sForce jusqu'à 9000 NRapport force/inertie : 30/1Pas de limite de coursePrécision jusqu'à 0,25 micron pour 25mmSans entretienExiste en version complètement intégrée avec embases, guidages, capteurs de déplacement etc..
Les moteurs linéaires tubulaires d’après Lineardrive :Ce type de moteur comprend essentiellement : un barreau magnétique d'une longueur appropriée à la course utile se comportant comme le stator du moteur. Il se compose de tranches d'aimants permanents, agencés dans un ordre particulier à l'intérieur d'un tube en acier inoxydable. Contrairement aux autres types de moteurs linéaires, la conception tubulaire permet d'optimiser les champs et de ne générer des efforts que dans la direction du déplacement. un bloc mobile se déplaçant sur le barreau magnétique et exerçant la force de poussée sur la charge à déplacer.C'est un simple solénoïde, enfilé sur le barreau magnétique et comprenant uniquement trois enroulements. Il n'y a pas de contact entre le bloc mobile et le barreau, le centrage de l'un par rapport à l'autre étant assuré par un guidage extérieur (1,7 mm de jeu admissible au diamètre). Un amplificateur de puissance permet de fournir le courant nécessaire aux bobines du bloc mobile. Les amplificateurs du constructeur se pilotent à partir d'un signal de consigne ± 10 V en mode couple, fourni par le servocontrôleur de l'utilisateur.Les signaux de retour nécessaires au contrôle de position et de vitesse du bloc mobile sont fournis par un codeur linéaire s'étendant sur toute la longueur de déplacement du barreau magnétique connecté directement au servocontrôleur.
Les moteurs linéaires Etel :
Les moteurs linéaires à simple et double excitation, à noyau sans ou avec fer, autorisent des vitesses de translation jusqu'à 10 m/s avec des accélérations jusqu'à 20 g.Des modèles existent sur coussin d'air (aircore) autorisant des accélérations jusqu'à 30 g.
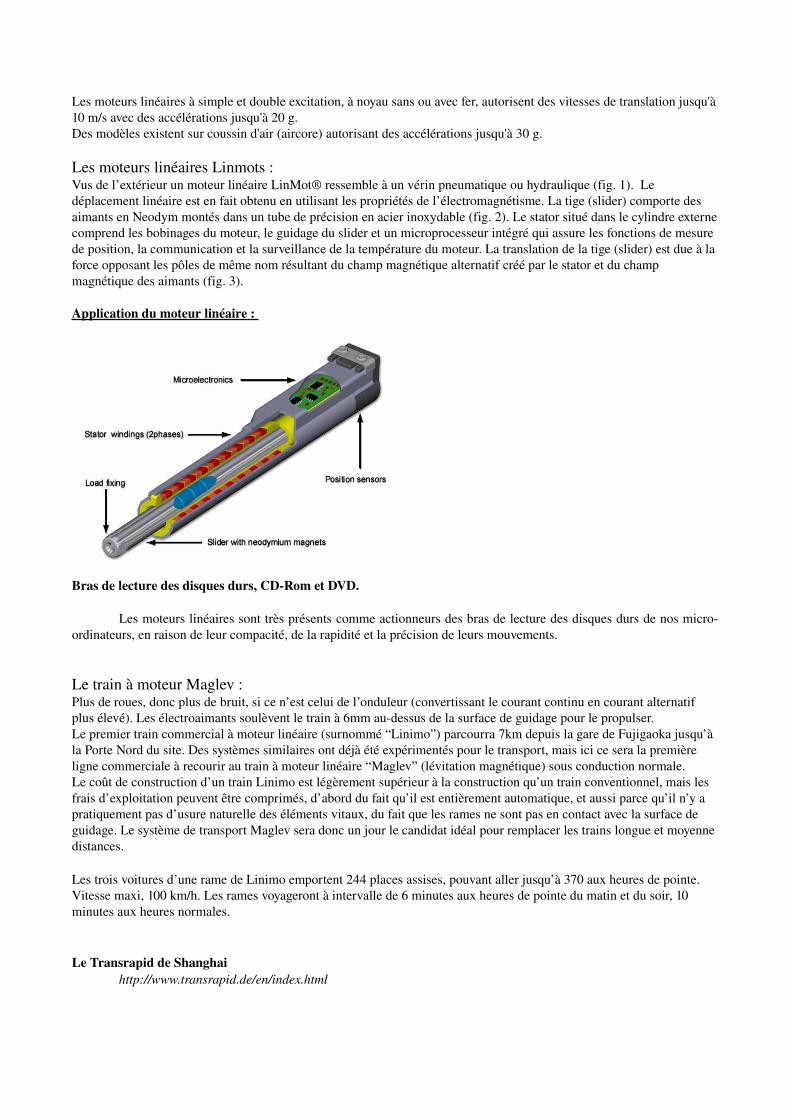
Les moteurs linéaires Linmots :Vus de l’extérieur un moteur linéaire LinMot® ressemble à un vérin pneumatique ou hydraulique (fig. 1). Le déplacement linéaire est en fait obtenu en utilisant les propriétés de l’électromagnétisme. La tige (slider) comporte des aimants en Neodym montés dans un tube de précision en acier inoxydable (fig. 2). Le stator situé dans le cylindre externe comprend les bobinages du moteur, le guidage du slider et un microprocesseur intégré qui assure les fonctions de mesure de position, la communication et la surveillance de la température du moteur. La translation de la tige (slider) est due à la force opposant les pôles de même nom résultant du champ magnétique alternatif créé par le stator et du champ magnétique des aimants (fig. 3).
Application du moteur linéaire :
Bras de lecture des disques durs, CDRom et DVD.
Les moteurs linéaires sont très présents comme actionneurs des bras de lecture des disques durs de nos microordinateurs, en raison de leur compacité, de la rapidité et la précision de leurs mouvements.
Le train à moteur Maglev :Plus de roues, donc plus de bruit, si ce n’est celui de l’onduleur (convertissant le courant continu en courant alternatif plus élevé). Les électroaimants soulèvent le train à 6mm audessus de la surface de guidage pour le propulser.Le premier train commercial à moteur linéaire (surnommé “Linimo”) parcourra 7km depuis la gare de Fujigaoka jusqu’à la Porte Nord du site. Des systèmes similaires ont déjà été expérimentés pour le transport, mais ici ce sera la première ligne commerciale à recourir au train à moteur linéaire “Maglev” (lévitation magnétique) sous conduction normale. Le coût de construction d’un train Linimo est légèrement supérieur à la construction qu’un train conventionnel, mais les frais d’exploitation peuvent être comprimés, d’abord du fait qu’il est entièrement automatique, et aussi parce qu’il n’y a pratiquement pas d’usure naturelle des éléments vitaux, du fait que les rames ne sont pas en contact avec la surface de guidage. Le système de transport Maglev sera donc un jour le candidat idéal pour remplacer les trains longue et moyenne distances.
Les trois voitures d’une rame de Linimo emportent 244 places assises, pouvant aller jusqu’à 370 aux heures de pointe. Vitesse maxi, 100 km/h. Les rames voyageront à intervalle de 6 minutes aux heures de pointe du matin et du soir, 10 minutes aux heures normales.
Le Transrapid de Shanghaihttp://www.transrapid.de/en/index.html

Le 31 décembre 2002, le Premier ministre chinois Zhu Rongji et le Chancelier allemand Gerhard Schröder ont inauguré la liaison par train à lévitation magnétique et à moteur linéaire, entre le centre économique de Shanghai et l'aéroport international de Pudong.
Figure 18a
Figure 18b
Le parcours de 30 km s'effectue actuellement en 8 minutes (vitesse moyenne = 225 km/h). La vitesse maximale d'exploitation a été fixée à 420 km/h.
De conception allemande (consortium SiemensThyssenKrupp) ce train propulsé par moteur linéaire comprend trois wagons (figure 18a) et sa lévitation magnétique est obtenue par aimants et bobinages classiques (figure 18b).
En revanche, les prototypes du Maglev japonais et du Swissmetro utilisent l'effet Meissner pour leur sustentation (l'effet Meissmer est la répulsion entre aimants et supraconducteurs en raison du comportement parfaitement diamagnétique des supraconducteurs).