La dégradation des chemins forestiers : le pourquoi du...
39
La dégradation des chemins forestiers : le pourquoi du comment ! Patricia Girardin (UQAT), Osvaldo Valeria (UQAT) et François Girard (UdeM)
Transcript of La dégradation des chemins forestiers : le pourquoi du...

La dégradation des chemins forestiers : le pourquoi du comment !
Patricia Girardin (UQAT),Osvaldo Valeria (UQAT) et François Girard (UdeM)

Développer un outil d’analyse spatiale pour déterminer l’état actuel de la dégradation des
chemins forestiers au Québec
2

POURQUOI ?
3

4
Mise en contexte
4

5
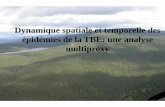
ROUTARD
ID 18205
No. chemin R-089
Année construction INC
Classification 03
Année classification 2010
Vitesse déplacement 50
Longueur 577,6
Mise en contexte
5

6
Mise en contexte
6

7
Mise en contexte
7

8
Mise en contexte
8

connaitre la dégradation des chemins forestiers ?
1) Bâtir une base de données adaptée
2) Fournir des outils essentiels pour tous les utilisateurs afin d’avoir l’information avant de se déplacer
3) Suivi / optimisation
POURQUOI
9

COMMENT ?
10

11

OBJECTIF 1 :
Développer des indices extraits des données LiDAR afin d’estimer la
dégradation des chemins forestiers
12

OBJECTIF 2 :
Construire une courbe de dégradation enfonction de la pente et la date d’entretien,
selon la classe fonctionnelle
13

La Tuque
Senneterre
La Doré
14

La Tuque
Senneterre
La Doré
Chibougamau
15

Les outils
Données terrain Dégradation observée
Données rUNI ©Confort au roulement
Indices de rugosité
Données LiDARIndice de topographie
Indices de rugosité
Indices de végétation
16

méthodes
Données terrain
3 variables
12 combinaisons x 6 à 7 réplicas x 3 secteurs
Total : 240 placettes
Temps (2) Pente (2) Classe (3)
17

0 m
50 m
40 m
25 m
10 m
18

0 m
50 m
40 m
25 m
10 m
Total (cm) dégradation / transect
19

0 m
50 m
40 m
25 m
10 m
Total (cm) dégradation / transect
Pourcentage de dégradation / placette20

21

méthodes
rUNI ©
22
Confort au roulement
Confort au roulement Indice de rugosité internationale (IRI) et son dérivé (rRCI)
IRI faible / rRCI élevé IRI élevé / rRCI faible
TéléphoneEnregistre les mouvements
verticaux du véhicule
Rival Solutions
22

méthodes
Données LiDAR
Y a-t-il une relation entre la dégradation observée et les indices LiDAR ?
23

INDICE DE POSITION TOPOGRAPHIQUE
(TPI)
-1 10
24

RÉSULTATS Dégradation observée

Dég
rad
ati
on
ob
serv
ée
Dernier entretien
0,0
0,2
0,4
0,6
0,8
19801970 1990 2000 2010 2020
26

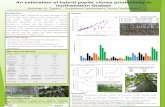
RÉSULTATS Confort au roulement

CONFORT AU ROULEMENT
Couverture totale : ~1925 km
28

RÉSULTATS Indices extraits de rUNI©

Faible Élevé Élevé Faible
0 10 20 30
Indice rugosité international (IRI) Indice dérivé de l’IRI (rRCI)
0 2,5 5,0 7,5
Comparaison des indicesD
égra
da
tio
n o
bse
rvée
0,0
0,2
0,4
0,6
0,8
30

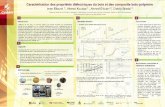
RÉSULTATS Indices extraits du LiDAR (TPI)

TPI moyen / placette (voisinage 1m)D
égra
da
tio
n o
bse
rvée
TPI moyen
0,6
0,0
0,2
0,4
-0,02 0,0 0,02 0,04 0,0632

-1 10
TPI (voisinage 1m)
-0,02 0,0 0,02 0,04 0,06
0,6
0,0
0,2
0,4
-0,03 à 0,06
**Une seule région**
33

-0,03 à 0,06
**Une seule région**
-1 10
TPI (voisinage 1m)
-0,02 0,0 0,02 0,04 0,06
0,6
0,0
0,2
0,4
34

AUGMENTER VOISINAGE ?
-1 10
-0,2 à 0,3
TPI 1m
TPI 2m
TPI 3m
-0,03 à 0,06
-0,1 à 0,15
0,5-0,5 -0,25 0,2535

En résuméDégradation observée
• Forte relation entre dégradation et dernier entretien
• Courbe de dégradation dans le temps par classe fonctionnelle
rUNI de Rival Solutions
• Cartographie de la dégradation
• Indices IRI et rRCI = forte relation avec la dégradation observée
• Nécessite déplacement sur le terrain
LiDAR
• Ajouter deux autres secteurs
• Augmenter encore le voisinage ? (couvrir surface roulement)
• Autres indices (rugosité et végétation) 36

En résuméDégradation observée
• Forte relation entre dégradation et dernier entretien
• Courbe de dégradation dans le temps par classe fonctionnelle
rUNI de Rival Solutions
• Cartographie de la dégradation
• Indices IRI et rRCI = forte relation avec la dégradation observée
• Nécessite déplacement sur le terrain
LiDAR
• Ajouter deux autres secteurs
• Augmenter encore le voisinage ? (couvrir surface roulement)
• Autres indices (rugosité et végétation) 37

En résuméDégradation observée
• Forte relation entre dégradation et dernier entretien
• Courbe de dégradation dans le temps par classe fonctionnelle
rUNI de Rival Solutions
• Cartographie de la dégradation
• Indices IRI et rRCI = forte relation avec la dégradation observée
• Nécessite déplacement sur le terrain
LiDAR
• Ajouter deux autres secteurs
• Augmenter encore le voisinage ? (couvrir surface roulement)
• Autres indices (rugosité et végétation) 38

39