L1ECO—NOTESDUCOURSDEMATHSSEM.2 Introduction: … › ~manu › teaching › L1eco ›...
29
L1 ECO — NOTES DU COURS DE MATHS SEM. 2 Introduction : l’optimisation Voici un exemple typique de problème que nous allons tenter de résoudre : PB: comment trouver le rectangle qui a la plus grande aire, sachant qu’on souhaite l’entourrer d’une corde de 100 mètres de long ? De façon plus générale, on considère une fonction de plusieurs variables f (x 1 ,x 2 ,...,x N ), où les x i sont des paramètres modifiant la valeur de la fonction. (i) si on pense à f comme représentant un coût de production (d’un produit quelconque), on peut chercher à minimiser ce coût, et donc trouver les variables (x i ) optimales qui permettent d’obtenir le coût le plus petit possible. (ii) si par contre f représente le gain obtenu lors d’une vente, d’un jeu etc..., on va alors chercher à rendre ce gain maximal et on voudra aussi connaître les «meilleurs» paramètres pour cela. (iii) dans les deux cas, on parle d’un problème d’optimisation, qui consiste à chercher les valeurs extrèmes d’une fonction. BUT : trouver les extrema (maxima et minima) d’une fonction de plusieurs variables. Nous allons rencontrer deux types de problèmes, nécessitant des méthodes de résolution qui vont différer. (i) les extrema dits libres, pour lesquels les (x i ) ne sont soumis à aucune contrainte ; (ii) les extrema dits liés, où on impose certaines contraintes sur les variables. Evidemment, l’absence de contrainte sur les variables est une situation un peu idéalisée. Par exemple, si on pense au rendement d’un moteur thermique, l’absence de contrainte revient à supposer que l’on peut augmenter sa vitesse autant qu’on le souhaite, ce qui en pratique ne sera jamais le cas. Néanmoins, il nous faut d’abord bien étudier les problèmes sans contraintes avant de com- prendre comment prendre en compte certaines restrictions. Nous verrons plus loin qu’il y a en fait deux types de contraintes, les contraintes égalité, et les contraintes inégalité. La recherche d’extrema va aussi mettre en évidence des extrema locaux, c’est-à-dire que l’on a un point de maximum ou minimum dans un voisinage du point d’extremum. Ces extrema peuvent ensuite s’avérer globaux, comme nous le verrons. En pratique, on commencera toujours par déterminer les extrema locaux et ensuite, en les comparant, on cherchera les extrema absolu, ou globaux. 1
Transcript of L1ECO—NOTESDUCOURSDEMATHSSEM.2 Introduction: … › ~manu › teaching › L1eco ›...

L1 ECO — NOTES DU COURS DE MATHS SEM. 2
Introduction : l’optimisation
Voici un exemple typique de problème que nous allons tenter de résoudre :
PB: comment trouver le rectangle qui a la plus grande aire, sachant qu’on souhaite l’entourrerd’une corde de 100 mètres de long ?
De façon plus générale, on considère une fonction de plusieurs variables f(x1, x2, . . . , xN ), oùles xi sont des paramètres modifiant la valeur de la fonction.
(i) si on pense à f comme représentant un coût de production (d’un produit quelconque),on peut chercher à minimiser ce coût, et donc trouver les variables (xi) optimales quipermettent d’obtenir le coût le plus petit possible.
(ii) si par contre f représente le gain obtenu lors d’une vente, d’un jeu etc..., on va alorschercher à rendre ce gain maximal et on voudra aussi connaître les «meilleurs» paramètrespour cela.
(iii) dans les deux cas, on parle d’un problème d’optimisation, qui consiste à chercher les valeursextrèmes d’une fonction.
BUT : trouver les extrema (maxima et minima) d’une fonction de plusieurs variables. Nousallons rencontrer deux types de problèmes, nécessitant des méthodes de résolution qui vontdifférer.
(i) les extrema dits libres, pour lesquels les (xi) ne sont soumis à aucune contrainte ;
(ii) les extrema dits liés, où on impose certaines contraintes sur les variables. Evidemment,l’absence de contrainte sur les variables est une situation un peu idéalisée. Par exemple, sion pense au rendement d’un moteur thermique, l’absence de contrainte revient à supposerque l’on peut augmenter sa vitesse autant qu’on le souhaite, ce qui en pratique ne serajamais le cas.
Néanmoins, il nous faut d’abord bien étudier les problèmes sans contraintes avant de com-prendre comment prendre en compte certaines restrictions. Nous verrons plus loin qu’il y a enfait deux types de contraintes, les contraintes égalité, et les contraintes inégalité.
La recherche d’extrema va aussi mettre en évidence des extrema locaux, c’est-à-dire que l’ona un point de maximum ou minimum dans un voisinage du point d’extremum. Ces extremapeuvent ensuite s’avérer globaux, comme nous le verrons. En pratique, on commencera toujourspar déterminer les extrema locaux et ensuite, en les comparant, on cherchera les extrema absolu,ou globaux.
1

PLAN DU COURS
CH I. Optimisation 1-D
Cours 1 — Révision tableau de variation; graphe; tangente; croissances comparées.Cours 2 — Voisinages; DL; convexité.Cours 3 — Critères sur f et f ′′, extrema locaux vs globaux.
CH II. Calcul différentiel en 2-D
Cours 4 — Dérivées partielles; gradient; points critiques; hessienne.Cours 5 — Voisinages en 2-D; courbes de niveaux; représentation du gradient.Cours 6 — DL1 et DL2 à deux var; poly. homogènes de degré 1 et 2; règles (r, s, t).
CH III. Optimisation en 2-D
Cours 7 — Opti libre avec règles (r, s, t).Cours 8 — Lagrangien pour les contraintes égalité.Cours 9 — Contraintes inégalités.
2

CH. 1 — Optimisation en 1-D
Cours no1 — Révision tableau de variation ; graphes ; tangente à une courbe ; croissancescomparées.
L’objectif de ce premier cours est de réviser les notions de base concernant l’étude des fonc-tions numériques, avant d’aller plus loin dans les cours suivants.
(a) Rappels sur les tableau de variation et tracer les courbes représentatives.
Exemples traités en cours:
f(x) = x2 − 3x+ 4 ; g(x) = e−3x2; h(x) = 1/(2 + x) u(x) = x ln(x+ 1) .
(b) Equation de la tangente à une courbe.
Prop — Soit f : I → R une fonction dérivable sur I et x0 un point de I. La tangente àCf au point x0 est la droite d’équation
Tx0 : y = f(x0) + f ′(x0)(x− x0) .
Exemple: calcul et positionnement des tangentes à f, g, h, u ci-dessus au point x0 = 1 .
(c) Croissances comparées: xn, x1/2, ln(x), exp(x), ax.
Déf — pour f, g ≥ 0 on note f �x→x0
g lorsque limx→x0
f(x)/g(x) = 0.
On dit que f est négligeable devant g lorsque x tend vers x0 (x0 fini ou non).
Exemples: xe−x ; x1/2 ln(x) en x0 = 0 et x0 = +∞.
Exercice : relier chaque tableau de variation à la courbe qui lui correspond.
3

Cours no2 — Voisinages ; développements limités ; convexité.
Nous avons vu dans le cours précédent que l’étude des fonctions met en évidence des propriétésdites locales ou globales.
On dit qu’une propriétés est locale, si elle est vraie en un point x0, ou lorsqu’on zoome autourdu point x0, mais sans tenir compte de ce qui se passe loin de x0. On parlera par contre depropriété globale quand cette propriété prend en compte l’ensemble des points x0 de l’intervalled’étude considéré.
Exemple: dire que f est continue au point x0 est une propriété locale, alors que dire qu’elle estcontinue sur I est une propriété globale, signifiant qu’elle est continue en chaque point de I.
(a) Boule ouverte, voisinage.
Nous allons maintenant définir plus précisément la notion de propriété locale.
Def — on appelle boule ouverte centrée en un point x0 ∈ R tout intervalle de la formeB =]x0 − r, x0 + r[ avec r > 0. On dit qu’une propriété est vraie au voisinage de x0 s’ilexiste une telle boule ouverte B telle que la propriété soit vraie (au moins) sur B.
Exemple 1: soit x0 = 0 ∈ [−1; 1]. Déterminer toutes les boules ouvertes centrées en x0 quirestent incluses dans I. Même question si x0 = 1/2, et si x0 = 1.
Exemple 2: si f est une fonction continue sur un intervalle I et f(x0) > 0, alors f restestrictement positive au voisinage de x0. Qu’en est-il si on suppose seulement f(x0) ≥ 0 ?
Def — Soit I un intervalle de R. On dit que x0 est un point intérieur de I s’il existe uneboule ouverte B centrée en x0 qui reste incluse dans I.
En d’autre termes, un point intérieur est un point de I qui n’est pas l’une des deux bornesde I.
Exemple : I = [3,∞[, alors x0 = 4 est un point intérieur, mais pas x0 = 3.
(b) Développements limités.
C’est un exemple typique de propriété locale: un DL ne donne un renseignement qu’auvoisinage d’un point, mais on ne dit rien du comportement plus loin.
Thm — soit f : I → R une fonction de classe C1 et x0 ∈ I un point qui n’est pas sur lebord. Alors f admet un développement limité à l’ordre 1 au voisinage de x0:
f(x0 + h) = f(x0) + hf ′(x0) + reste(h) = P1(h) + reste1(h)
où reste1(h) est une fonction qui est négligeable devant h lorsque h tend vers 0. Mêmechose pour un DL à l’ordre 2, avec un nouveau reste:
f(x0 + h) = f(x0) + hf ′(x0) +1
2!f ′′(x0)h
2 + reste(h) = P2(h) + reste2(h)
4

Exemple : donner un DL à l’ordre 1 en x = 1 des fonctions f(x) = ex, g(x) = ln(2 + x),h(x) = 1/(1 + x3). Même question pour un DL à l’ordre 2 en x = 0.
Rem — (i) Ce reste a un sens mathématique bien précis (voir premier semestre) maisnous en resterons ici au simple fait qu’il est négligeable devant h (ou h2): reste1 � h,reste2 � h2 lorsque h→ 0.
(ii) Evidemment, on peut pousser le développement à l’aide de la formule de Taylor:
f(x0 + h) = f(x0) + hf ′(x0) +1
2!f ′′(x0)h
2 + · · ·+ 1
n!f (n)(x0)h
n + resten(h)
avec resten � Pn si ce polynôme est non nul.
(iii) Le développement limité donne l’équation de la tangente puisque l’on écrit:
f(x0 + h) = tangente(h) + reste(h) .
En particulier, connaître le signe du reste permet de connaître la position de la courbe Cfpar rapport à sa tangente (au-dessus ou en-dessous).
Exemple : Tracer la courbe représentative de la fonction f(x) = (x − 1)3 et placer sestangentes aux points x = 0 x = 1. Même question avec la fonction g(x) = (x − 1)2.Dans le cas de f , le positionement de la courbe par rapport à la tangente n’est valable quelocalement alors que pour g, il est global.
(c) Convéxité.
La convexité est une propriété qui concerne aussi bien les ensembles que les fonctions. C’estune notion fondamentale en économie, qui s’étend aux fonctions de plusieurs variables maisnous ne la verrons pour ce cours qu’en dimension 1.
Def — On dit d’un ensemble C qu’il est convexe si pour tous points A et B de C, lesegment [A,B] tout entier reste inclus dans C.Exemple : un disque est convexe mais pas un cercle ; un disque plus un point n’est pasconvexe ; une étoile n’est pas convexe ; un triangle est convexe s’il n’a pas d’angle obtus.
Def — Soit f : I → R une fonction. On dit que f est convexe sur I si son épigraphe estconvexe:
Epi (f) :={(x, y) : y ≥ f(x)
}.
Cela est équivalent à la propriété suivante: le graphe de f est en dessous de ses cordes,c’est-à-dire:
f(tx+ (1− t)y) ≤ tf(x) + (1− t)f(y) ,pour tout x, y ∈ I et t ∈ [0, 1].
L’inégalité ci-dessus ne fait que traduire le fait que le segment de droite [A,B] où A(x, f(x))et B(y, f(y)) est en dessous des points de la courbe (z, f(z)), où z = tx+(1− t)y parcourtle segment [x, y].
5

Il existe des caractérisation plus simples à vérifier mais qui nécessitent de savoir que lafonction f est suffisament dérivable:
Thm — (i) Si f est dérivable sur I, alors elle est convexe si et seulement si Cf est audessus de toutes ses tangentes.(ii) Si f est dérivable sur I, alors elle est convexe si et seulement si f ′ est croissante.(iii) Si f est deux fois dérivable, alors elle est convexe si et seulement si f ′′ ≥ 0 sur I.
Exemple : f(x) = ex, f(x) = lnx, f(x) = x2 sont les exemples typiques. Attentiontoutefois, sur l’exemple ci-dessous, f n’est pas dérivable en x0 !
Def — on dit que f est concave sur I si −f est convexe sur I. En particulier, c’est le cassi f ′′ ≤ 0 sur I.
Attention, une fonction peut être convexe sur un intervalle, et concave sur un autre, c’estpar exemple le cas pour f(x) = x3 ou g(x) = 1/x.
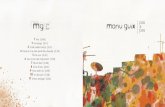
Pour résumer, voici à quoi ressemblent les fonctions convexes et concaves:
6

Cours no3 — Critères sur f ′ et f ′′; extrema locaux et globaux
Le but de ce cours est tout d’abord de bien différencier la notion d’extremum local etd’extremum global. Ensuite, revisiter la recherche d’extrema d’une fonction f à l’aide de critèressimples portant sur f ′ et f ′′, qui peuvent être exportés pour le cas de dimensions plus grandesque 1.
(a) Définitions.
Afin de bien poser le problème, voici quelques définitions.
Def — Soit f : I → R une fonction au moins continue. On dit que f admet un maximumglobal en x0 ∈ I si pour tout x ∈ I, f(x) ≤ f(x0).Def — Soit f : I → R une fonction au moins continue et x0 un point à l’intérieur de I.On dit que f admet un maximum local au point x0 si la propriété f(x) ≤ f(x0) est vraieau voisinage de x0.
Exemple : f(x) = x3 − x sur I = [−2; 2] déterminer les extrema locaux et globaux de f .
Rem — on peut avoir des extrema locaux qui sont globaux ou non, mais il est toujoursimportant de commencer par trier les extrema locaux avant de regarder le global.
(b) Condition du premier ordre.
Il s’agit de donner une condition nécessaire pour avoir un extremum en un point situé àl’intérieur de l’intervalle d’étude.
Thm — Soit f : I → R une fonction (au moins) dérivable sur I et x0 un point situé àl’intérieur de I. Si f admet un extremum local au point x0, alors nécessairement, x0 estun point critique: f ′(x0) = 0.
7

Rem — (i) Il s’agit donc d’une condition nécessaire qui permet de chercher les extremaparmi les points critiques; (ii) attention, il ne s’agit en aucune façon d’une conditionsuffisante: il ne suffit pas que f ′(x0) = 0 pour que l’on soit certain qu’il y a un maximumou un minimum en x0, cf. par exemple f(x) = x3. Il faut pour cela des conditions dusecond ordre, cf. plus loin.
Preuve intuitive — en un point de max x0, la tangente est nécessairement horizontale.En effet, si ce n’était pas le cas, la fonction aurait tendance à croître au voisinage de x0(ou décroître, selon le signe de f ′(x0)). Le fait que la tangente soit horizontale se traduitimmédiatement par f ′(x0) = 0.
Preuve exacte— on part du développement limité, en utilisant le fait que f(x0+h) ≥ f(x0)pour h suffisament proche de 0. Par exemple, dans le cas d’un maximum:
f(x0) ≥ f(x0 + h) = f(x0) + hf ′(x0) + reste(h) ,
ce qui donne hf ′(x0) + reste(h) ≥ 0. On divise par h > 0 et on fait tendre h vers 0 ce quidonne f ′(x0) ≥ 0 puisque reste(h) � h. Si maintenant on fait de même pour h < 0, onobtient l’autre inégalité et donc f ′(x0) = 0.
Ce résultat justifie le fait de chercher les points où f ′ s’annule lorsqu’on étudie une fonction.
(c) Conditions du second ordre.
Si on pousse le développement, on peut donner des conditions suffisante sur f ′′ pour qu’unpoint critique soit un min ou un max local:
Thm — Soit f : I → R deux fois dérivable et x0 un point critique à intérieur de I.(i) Si f ′′(x0) > 0, alors on a un minimum local au point x0.(ii) Si f ′′(x0) < 0, alors on a un maximum local au point x0.(iii) Si f ′′(x0) = 0, alors on ne peut rien dire a priori.
Preuve — On reprend le DL à l’ordre 2 en x0:
f(x0 + h) = f(x0) + hf ′(x0) +1
2!f ′′(x0)h
2 + reste(h) .
Comme f ′(x0) = 0, on a donc
f(x0 + h)− f(x0) =h2
2f ′′(x0) + reste(h)
et comme reste(h) � h2, on voit donc qu’en fonction du signe de f ′′(x0), on en déduit lesigne de f(x0 + h)− f(x0) pour h suffisament petit.
Rem — Evidemment, si f ′′(x0) = 0, c’est le signe du reste qui détermine si on a un pointde max ou min (ou ni l’un ni l’autre), et donc il faut poursuivre le développement limitépour savoir quel est le premier terme non nul, qui donnera le renseignement sur le signe def(x0 + h)− f(x0).
8

Exemple : f(x) = x2, g(x) = −x2, f(x) = x4, f(x) = −x4, f(x) = x3.
L’étude des points critiques permet donc en partie de se passer du tableau de variation, sion ne s’intéresse qu’aux extrema de f .
(d) Cas où f ′(x0) = f ′′(x0) = 0 .
Dans ce cas, il n’y a pas de règle générale puisque c’est le signe du reste qui donne lecomportement:
f(x0 + h) = f(x0) + reste2(h) .
On peut avoir les cas suivants: un max si le reste est localement négatif, un min s’il estlocalement positif, ou encore un point d’inflexion s’il change de signe, comme on le voit surles exemples suivants:
f(x) = x4 , g(x) = −x4 , h(x) = x3 .
En fait, ce qu’il faut faire dans un tel cas, c’est poursuivre le développement limité pourfaire apparaître le premier terme non nul dans la formule de Taylor.
Si ce premier terme est de la forme fn(x0)hn/n! avec n pair, alors on a un max ou un minselon le signe de la dérivée n-ième. Si c’est un terme de degré impair, alors le reste changestrictement de signe près de x0 et on n’a donc ni un max ni un min.
Def — on appelle point d’inflexion tout point x0 tel que la tangente traverse la courbeau point x0.
Ainsi, dans le cas où le premier terme non nul du développement de Taylor est un termed’ordre impair, on a nécessairement un point d’inflexion. Mais attention, on peut avoir despoints d’inflexion sans que ce soit un point critique ! cf. f(x) = e−1/x
2 , en x0 =√
2/3.
9

Thm — Soit f : I → R et x0 un point critique de f , à l’intérieur de I. Alors en x0 on asoit un max local, soit un min local, soit un point d’inflexion.
Preuve: puisque x0 est un point critique, la tangente Tx0 à Cf en x0 est horizontale. Soitlocalement la courbe Cf est au-dessus de Tx0 , on a alors un minimum, soit elle est endessous et on a un maximum, soit elle traverse la tangente (point d’inflexion).
(e) Extrema globaux.
Dans ce cours nous allons nous restreindre à deux cas seulement. Premier cas : I = [a, b].Deuxième cas: I = [a,∞[, ]−∞, a] ou encore I =]−∞,+∞[. Les autres cas (par exempleI =]a, b[) peuvent être traités également mais nécessitent l’introduction d’une notion plusgénérale que celle de maximum et minimum, chose que nous ne ferons pas ici.
1er cas : si I = [a, b], le principe est simple: on commence par chercher tous les extremalocaux situés à l’intérieur de l’intervalle d’étude, puis on compare les valeurs de f en cespoints, avec les valeurs de f au bord de I, c’est-à-dire en a et en b. Pour un min global,on prend la plus petite valeur obtenue et pour un max la plus grande:
maxx∈I
f(x) = max{f(x1), f(x2), . . . , f(xk), f(a), f(b)
},
où les (xi) sont les points de max local à l’intérieur de I. On a la même formule avec lesmin.
10

2ème cas : Dans le cas où I = [a,∞[, on étudie la limite ` = lim f(x) lorsque x → ∞ eton regarde
M := max{f(x1), . . . , f(xk), f(a)
}.
• Si M < `, alors c’est la limite en +∞ qui devrait l’emporter dans la recherche de max.Mais comme ce n’est pas une valeur atteinte par f , ce n’est pas un max. Donc dans ce cas,il n’y a pas de maximum. C’est typiquement le cas si ` = +∞.• Si M ≥ `, alors max
x∈If(x) =M car il y a des points où f est au moins égale à `.
Evidemment, on a le même genre de discussion sur le min, le tout étant de savoir si ` estplus petit ou pas que le min des valeurs intérieures et en x = a.
Exemple : f(x) = 1/x sur [1,∞[; f(x) = e−x sur ]−∞;∞[, sur [0, 2], sur [0,∞[.
11

CH. 2 — Calcul Différentiel en 2-D
Cours no4 — Dérivées partielles; gradient; point critique; Hessienne.
Notre but est de savoir reconnaître les minima et maxima des fonctions à deux variables.Une première idée consiste à étudier la fonction f en se restreignant aux axes x = x0 ou y = y0.Cela ne donne pas tous les renseignements possibles, mais fournit déjà une idée de ce qui peutse passer.
Exemple 1 — Soit f(x, y) = x2 + y2. On peut commencer par faire l’étude séparée de x 7→f(x, 0) = x2 et y 7→ f(0, y) = y2. Dans les deux cas on voit qu’on a un minimum, et il est facilede voir qu’en fait (0, 0) est le point de minimim global de f puisque f(x, y) ≥ f(0, 0) pour tout(x, y).
Exemple 2 — Soit f(x, y) = −x2 − y2. De la même façon, on voit que (0, 0) est le point demaximum global de f .
Exemple 3 — Soit f(x, y) = x2−y2. L’étude séparée de x 7→ f(x, 0) = x2 et y 7→ f(0, y) = −y2montre qu’on a un comportement complètement différent selon l’axe des x et celui des y: unminimum dans une direction, un maximum dans l’autre ! C’est ce qu’on appelle un point selle,en référence à la selle de cheval (ou aussi point col). Ce type de situation ne peut pas arriver endimension 1 car il n’y a qu’une seule direction.
Exemple 4 — Soit f(x, y) = xy. Cette fonction semble simple mais l’étude séparée de x 7→f(x, 0) = 0 et y 7→ f(0, y) = 0 ne montre rien de particulier. En fait, il faut réécrire cettefonction sous la forme f(x, y) = 1
2(x + y)2 − 12(x − y)
2 pour comprendre qu’il s’agit d’un pointselle: prendre les directions x = y et x = −y.
Le travail que nous allons faire ensuite consistera à être capable de distinguer les différentstype de points à travers des conditions sur les dérivées secondes. permettront de résoudre lesproblèmes d’optimisation à deux variables.
(a) Dérivées partielles L’idée précédente consistant à regarder séparément les directions peutêtre utilisée pour dériver. On considère donc f(x, y), une fonction définie sur A ⊂ R2 àvaleurs dans R.Def — on appelle dérivée partielle de f selon la coordonnée x au point (x0, y0) la quantité
limh→0
f(x0 + h, y0)− f(x0, y0)h
,
lorsqu’elle est définie. Lorsque c’est le cas, on la note
∂f
∂x(x0, y0) := lim
h→0
f(x0 + h, y0)− f(x0, y0)h
,
12

La fonction f admet aussi potentiellement une dérivée partielle par rapport à y:
∂f
∂y(x0, y0) := lim
k→0
f(x0, y0 + k)− f(x0, y0)k
.
Note: dans la suite, on gardera systématiquement les variables (h, k) pour dénoter lesincréments respectifs en x et y.
En pratique, lorsque la fonction f est régulière ces dérivées partielles sont toujours définieset on peut les calculer simplement en faisant une dérivée usuelle par rapport à l’une desvariables, les autres étant considérées comme des constantes. Ce calcul se généralise dureste sans difficulté à un nombre de variables plus grand.
Exemple : calculer les dérivées partielles des fonctions suivantes:
f(x1, x2) = (x1)2 − 3(x2) , g(x, y, z) = xy − z2 + exp(yz) .
La proposition suivante nous sera utile, elle est un l’équivalent du théorème de dérivationdes fonctions composées (on la démontrera plus tard):
Prop — Soit f : R2 → R une fonction régulière et t 7→ x(t), t 7→ y(t) deux fonctionsdérivables de R dans R. Alors la fonction g(t) = f
(x(t), y(t)
)est une fonction dérivable de
R dans R etg′(t) =
∂f
∂x
(x(t), y(t)
)· x′(t) + ∂f
∂y
(x(t), y(t)
)· y′(t) .
Exemple : Soit f(x, y) = x2+3y2 et x(t) = 2t, y(t) = et. Vérifier de deux façons différentesque g′(t) = 8t+ 6e2t.
(b) Gradient, points critiques
Def — on appelle gradient de f le vecteur de R2 qui a pour composantes les dérivéespartielles de la fonction f , calculées au point courant:
∇f(x, y) =(∂f
∂x(x, y) ,
∂f
∂y(x, y)
).
On le note aussi parfois−→∇f , ou encore
−→grad f pour rappeler que c’est un vecteur. Evidem-
ment, dans le cas d’une seule variable ce gradient se réduit à la dérivée de f .
N.B.: pour des raisons qui dépassent le cadre de ce cours (cf. L2), on notre en généralle gradient sous forme d’un vecteur colonne, mais ses composantes/coordonnées sont, dansun cas comme dans l’autre, les dérivées partielles.
Def — on appelle point critique un point où le gradient de f s’annule, ou autrement dit,un point où les deux dérivées partielles sont nulles simultanément.
Exemple : déterminer les points critiques de la fonction f(x, y) := x3 − x+ y2.
13

Dans la recherche d’extrema, on commencera par chercher les points critiques comme endimension un (voir plus loin). En dimension plus grande que 1, c’est donc le gradient quiva jouer le rôle de la dérivée première.
(c) Hessienne
L’idée est trouver un équivalent de la dérivée seconde pour des fonctions de plusieursvariables. Evidemment, on pense à redériver une seconde fois par rapport à x la dérivéepartielle ∂f/∂x, et de même par rapport à y. Cela nous donne deux dérivées partiellesseconde «naturelles»:
∂2f
∂x2=
∂
∂x
(∂f
∂x
),
∂2f
∂y2=
∂
∂y
(∂f
∂y
).
Mais il ne faut pas oublier les dérivées «croisées»:
∂2f
∂x∂y=
∂
∂x
(∂f
∂y
),
∂2f
∂y∂x=
∂
∂y
(∂f
∂x
).
Cela nous fait en tout 4 dérivées partielles secondes. On en aurait 9 (= 3×3) si nous avions3 variables (x, y, z). En réalité nous avons un théorème qui simplifie (un peu) la donne:
Thm (Schwartz) — Soit f : A ⊂ R2 → R une fonction régulière.
Alors les dérivées partielles «croisées» de f sont toujours égales:∂2f
∂x∂y=
∂2f
∂y∂x.
Ce théorème est admis, mais on peut le vérifier sur les exemples : f(x, y) := x2 − xy + y3,c’est d’ailleurs un bon moyen de vérifier ses calculs.
On représente ces dérivées secondes sous forme d’un tableau de nombre, appelé matriceHessienne de f :
Hess(f) :=
∂2f
∂x2∂2f
∂x∂y
∂2f
∂y∂x
∂2f
∂y2
On remarque que la façon de disposer les quantités dans la matrice est structurée:
x↓
y↓
x→ ∂2f
∂x2∂2f
∂x∂y
y → ∂2f
∂y∂x
∂2f
∂y2
Exemple : calculer la matrice Hessienne de la fonction f(x, y) := x2−4xy+3y2, on vérifieraque les dérivées croisées sont bien égales.
14

Cours no5 — Courbes de niveau; Voisinages en 2-D; Développements Limités
Dans tout ce cours, A ⊂ R2 désigne un ensemble dans le plan que l’on suppose borné, contenuà l’intérieur d’une courbe continue (pour simplifier).
(a) Courbes de niveau
Les courbes (ou lignes) de niveau sont les courbes que l’on remarque sur les cartes derandonnées, cartes routières etc. Une ligne de niveau relie les points qui sont à une mêmealtitude, ce qui permet de se faire une idée de la représentation en trois dimension d’unefonction à deux variable, à partir d’une carte dans le plan.
Def — Soit f : A→ R une fonction et λ un nombre réel quelconque. On appelle courbede niveau λ l’ensemble des points (x, y) dans le plan tels que f(x, y) = λ.
Exemple : pour f(x, y) = x2 + y2, les courbes de niveau sont des cercles de rayon√λ si
λ > 0. C’est un point si λ = 0 et il n’y en a pas si λ < 0. On a des courbes similaires pourf(x, y) = −x2 − y2 mais cette fois-ci, λ ≥ 0.
La situation pour f(x, y) = x2 − y2 est plus complexe: la ligne de niveau λ = 1 impliquede résoudre x2− y2 = 1, c’est à dire étudier la fonction y = g(x) = ±
√1 + x2. En fonction
de λ, cela nos donne une famille d’hyperboles et on obtient l’allure suivante:
15

Exercice : Tracer les courbes de niveau dans le plan pour la fonction f(x, y) = xy.
A l’aide des courbes de niveau, on peut représenter l’allure de la fonction lorsqu’on sedéplace le long d’une droite (ou d’une courbe) particulière, comme l’explique le dessinci-dessous à gauche:
Exercice : construire le profil d’une marche en ligne droite sur le relief ci-dessus à droite.
(b) Représentation du gradient
Le gradient donne la direction de plus grande pente dans le sens montant. Par exemple,dans le cas de f(x, y) = x2 + y2, on a ∇f(x, y) = (2x, 2y) et donc en tout point (x, y), laplus grande pente va dans la direction du vecteur (x, y), multipliée par 2.
Prop — Le gradient est orthogonal aux lignes de niveau, dirigé vers les lignes de niveauplus élevées.
Preuve : on choisit une ligne de niveau f(x, y) = λ et on suppose qu’on peut l’écrire sousla forme y = gλ(x) pour une certaine fonction gλ. Alors en particulier f(x, gλ(x)) = λ. Endérivant par rapport à x il vient
∂f
∂x(x, gλ(x)) +
∂f
∂y(x, gλ(x))g
′λ(x) = 0 ,
ou autrement dit ∇f(x, g(x)) · (1, g′λ(x)) = 0 . Or le vecteur de composantes (1, g′λ(x)) estle vecteur tangent à la courbe y = gλ(x) au point x, et donc le gradient de f est bienorthogonal à la courbe de niveau au point (x, gλ(x)).
Dans le cas d’un point selle, f(x, y) = x2 − y2 on obtient ∇f(x, y) = (2x,−2y) ce quicorrespond au dessin suivant:
16

(c) Voisinages, intérieur, bord en 2-D
Les définitions qui suivent étendent ce qu’on a vu en dimension 1 au cas de la dimension 2.
Def — (i) Soit (x0, y0) ∈ R2. On appelle boule ouverte centrée en (x0, y0) tout disquecentré en (x0, y0), de rayon r > 0.
(ii) Soit (x0, y0) ∈ R2. On dit qu’une propriété est vraie au voisinage de (x0, y0) s’il existeune boule ouverte centrée en (x0, y0) telle que la propriété est vraie au moins sur cetteboule.
(iii) Soit A ⊂ R2 et (x0, y0) ∈ R2. On dit que (x0, y0) est un point intérieur de A s’ilexiste une boule ouverte centrée en (x0, y0) qui est entièrement incluse dans A. On noteInt(A) l’ensemble des points intérieur de A.
On a en revanche deux nouvelles définitions, qui sont nécessaires pour donner un sens aubord de A. En dimension 1, identifier le bord est simple: on a deux bornes. En dimensionsupérieure, c’est plus délicat.
Def — (i) Soit A ⊂ R2. Le complémentaire de A est l’ensemble R2 \A. On définit alorsl’extérieur de A de la façon suivante: Ext(A) = Int(R2 \A).(ii) Soit A ⊂ R2, alors le bord de A noté ∂A est défini par le fait que
R2 = Ext(A) ∪ Int(A) ∪ ∂A .
Dire qu’un point est à l’extérieur de A signifie qu’on peut trouver une boule centrée en cepoint qui ne rencontre pas A. Les points du bord sont donc ceux qui ne sont ni à l’intérieur,ni à l’extérieur.
N.B.: dans les cas que nous allons étudier cette année, l’ensemble A aura systématique-ment certaines propriétés:(i) borné : il est tout entier inclus dans une boule de rayon r > 0 (peut-être très grandmais pas infini).(ii) fermé : il contient son bord (comme [a, b] en dim 1).
17

(iii) d’un seul tenant : il n’est pas constitué de plusieurs parties disjointes.(iv) régulier : en particulier on suppose que l’ensemble ∂A est une courbe régulière quel’on peut dessiner sans lever le crayon.
Dans tous les cas que nous allons traiter, on aura la propriété suivante:
Prop — Soit A ⊂ R2 vérifiant (iv). Alors (x0, y0) ∈ ∂A si et seulement si toute bouleouverte centrée en (x0, y0) rencontre à la fois Int(A) et Ext(A).
(d) Développement limité d’ordre 1
Thm — Soit f : A ⊂ R2 → R une fonction régulière et (x0, y0) un point à l’intérieur deA. Alors f admet un développement limité au point (x0, y0) sous la forme:
f(x0 + h, y0 + k) = f(x0, y0) +∂f
∂x(x0, y0) · h+
∂f
∂y(x0, y0) · k + reste1(h, k)
où reste1(h, k) est une quantité qui tend vers zero lorsque h et k tendent vers 0, plusrapidement que h et k (typiquement du h2, k3/2, hk etc...).
Ce développement limité est assez naturel, il tient compte des deux variations : une en x,une en y. D’un point de vue géométrique, on est en train d’approcher la surface z = f(x, y)par le plan tangent au point (x0, y0), dont le vecteur orthogonal est le gradient.
Rem — (i) si on ne fait pas de déplacement en y (i.e. k = 0), on retrouve un DL1 de fpar rapport à la variable x au point x0; (ii) en utilisant le gradient, on voit apparaître leproduit scalaire ∇f(x0, y0) · (h, k).Dans toute la suite, on va utiliser la notation suivante:
P(x0,y0)(h, k) =∂f
∂x(x0, y0) · h+
∂f
∂y(x0, y0) · k ,
18

ou plus simplement P(h, k), qui est un polynôme homogène de degré 1 en les deux variables(h, k). Ce polynôme est calculé au point (x0, y0), c’est pourquoi on le rappelle dans lanotation: ses coefficients changent en fonction du point de référence.
Def — Soit P un polynôme a deux variables (x, y). On dit que P est homogène de degrén si pour tout λ ∈ R, P (λx, λy) = λnP (x, y).
Exercice : calculer le DL à l’ordre 1 des fonctions ci-dessus, et le polynôme P(x0,y0) enfonction du point (x0, y0). Vérifier que le polynôme obtenu est bien homogène de degré 1.
(e) Développement limité d’ordre 2
Pour donner une formule similaire au développement limité d’ordre 2 pour une fonction àdeux variables, il faut utiliser non seulement les dérivées doubles, mais aussi les dérivéescroisées.
Thm — Soit f : A ⊂ R2 → R une fonction régulière et (x0, y0) un point à l’intérieur deA. Alors f admet un développement limité à l’ordre 2 au point (x0, y0) qui s’écrit:
f(x0 + h, y0 + k) = f(x0, y0)+∂f
∂x(x0, y0) · h+
∂f
∂y(x0, y0) · k
+1
2
(h2∂2f
∂x2(x0, y0) + k2
∂2f
∂y2(x0, y0) + 2hk
∂2f
∂x∂y(x0, y0)
)+reste2(h, k)
Pour comprendre cette formule, il faut penser que si on n’avait qu’une variable x, alorson n’aurait le terme (∂2f/∂x2) × h2/2, de même si on n’avait que y avec le terme en k2.Mais il faut aussi tenir compte des termes croisés qui s’additionnent en donnent le «2hk»,puisque les deux dérivées croisées sont égales.
On peut aussi remarquer la structure suivante pour comprendre les multiplications entreh, k et la Hessienne:
h↓
k↓
h→ ∂2f
∂x2∂2f
∂x∂y
k → ∂2f
∂y∂x
∂2f
∂y2
Ainsi, la dérivée seconde en x correspond au terme h×h, la dérivée ∂2f/∂x∂y sera multipliéepar h×k, et l’inverse pour l’autre dérivée croisée. Mais comme hk = kh et que les dérivéescroisées sont égales, on obtient au total une contribution égale à
2hk∂2f
∂x∂y.
19

Nous allons utiliser la notation suivante:(h2∂2f
∂x2(x0, y0) + k2
∂2f
∂y2(x0, y0) + 2hk
∂2f
∂x∂y(x0, y0)
)= Q(x0,y0)(h, k) ,
où plus simplement Q(h, k) lorsqu’il n’y a pas d’ambiguité. On appelle Q une formequadratique (car elle fait intervenir des carrés). Cette forme quadratique représente engros la dérivée seconde de f , calculée au point (x0, y0), que l’on applique au couple (h, k).Cette forme se calcule à partir de la matrice Hessienne, Hess(x0, y0).
Exercice : déterminer QHess(h, k) pour la fonction f(x, y) := x3 − 4xy2 en chaque pointcritique.
On voit donc que le développement limité à l’ordre 2 peut s’écrire sous la forme condenséesuivante:
f(x0 + h, y0 + k) = f(x0, y0) + P(h, k) +1
2Q(h, k) + reste2(h, k) ,
et on comprend bien que le signe deQ va jouer un rôle important dans la suite. On a obtenuun développement limité similaire au cas de la dimension 1 puisque P est un polynôme dedegré 1, Q de degré 2 qui correspondent respectivement aux termes hf ′(x0) et h2f ′′(x0):
f(x0 + h) = f(x0) + hf ′(x0)︸ ︷︷ ︸P(h)
+1
2h2f ′′(x0)︸ ︷︷ ︸Q(h)
+reste2(h) ,
20

Cours no6 — Signe des polynômes homogènes de degré 2; optimisation libre
Ce cours a pour but d’une part d’étudier le signe des polynômes de degré 2 (tout comme ons’intéressait au signe de f ′′(x0) en dimension 1), et d’autre part de donner ainsi des critères surles dérivées partielles premières et secondes pour avoir des extrema en dimension N = 2.
(a) Signe des polynômes homogènes de degré 2
On va s’intéresser ici au signe des polynômes Q(h, k), homogènes de degré 2. Pour plus delisibilité, on va revenir à des variables x, y et exprimer n’importe quel polynôme homogènede degré 2 sous la forme suivante:
Q(x, y) = rx2 + 2sxy + ty2 ,
où r, s, t sont trois réels (qui correspondent dans notre cas à des dérivées partielles secondes,mais cela n’aura pas d’importance pour la discussion qui suit).
Rem — Evidemment, Q(0, 0) = 0 mais comme Q(h, k) va jouer le rôle de f ′′(x0)h2,nous allons nous intéresser au signe de Q en dehors de (0, 0).
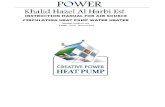
Nous allons rencontrer trois cas distincts:
(i) Q garde le même signe strict partout (sauf en (0, 0)), positif ou négatif.
(ii) Q garde un signe au sens large mais s’annule sur une droite passant par (0, 0).
(iii) Q change de signe strict.
Ces trois cas correspondent respectivement aux représentations suivantes (avec les courbesde niveau associées en dessous):
Rem — Dans le cas (ii) ci-dessus, on dit que Q est dégénérée. C’est ce cas qui vanous poser problème dans la recherche des extrema car il correspond au cas indéterminéf ′′(x0) = 0. Le pire cas” dégénéré est lorsque Q ≡ 0.
Voici quelques exemples typiques de polynômes homogènes de degré 2:Q1(x, y) = x2 + y2, (r, s, t) = (1, 0, 1), positifQ2(x, y) = −x2 − y2, (r, s, t) = (−1, 0,−1), negatifQ3(x, y) = x2 − y2, (r, s, t) = (1, 0,−1), change de signeQ4(x, y) = x2, (r, s, t) = (1, 0, 0), dégénéré.
Afin d’avoir des conditions suffisantes sur le triplet (r, s, t) pour distinguer les 3 types decas ci-dessus, on va factoriser Q(x, y).On suppose maintenant que Q n’est pas identiquement nulle, sinon on est dans un cas(très) dégénéré. Si maintenant r = t = 0, alors Q(x, y) = 2sxy et donc on est dans le
21

cas (iii). On peut donc supposer maintenant que par exemple r est non nul et on factorise:
Q(x, y) = r(x2 +
2s
rxy +
t
ry2)
= r
[(x+
s
ry)2− s2
r2y2 +
t
ry2]
= r
[(x+
s
ry)2
+(rt− s2
r2
)y2]
On voit alors que le signe de Q dépend d’une part de r, d’autre part de rt− s2 vont jouerun rôle important.
On retrouve alors les trois cas:(i) rt− s2 > 0 : on garde un signe strict partout sauf en (0, 0) ce signe est donné par r.(ii) rt− s2 = 0, alors Q est dégénérée.(iii) rt− s2 < 0, alors Q change de signe.
On remarque que si rt − s2 > 0, alors r et t ont même signe (et sont non nuls). Donc onpeut utiliser le critère sur r ou sur t. Le théorème suivant résume donc l’essentiel:
Thm — Soit un polynôme homogène de degré 2, Q(x, y), associé au triplet (r, s, t). Onsuppose que (r, s, t) 6= (0, 0, 0). On a alors les règles suivantes:
Si rt− s2 > 0, le polynôme garde un signe strict, donné par le signe de r (ou t).Si rt− s2 < 0, alors le polynôme change de signe (strictement).Si rt− s2 = 0, le polynôme garde un signe large mais s’annule au moins sur une droite.
Exemple : Déterminer le signe des polynômes suivant:xy − y2, −x2 − 3y2, x2 − 2xy + y2, x2 + xy + y2 .
(b) Conditions du premier ordre en dim N = 2.
En dimension 1, nous avons vu que si f admet un extremum local à l’intérieur d’un inter-valle, alors sa dérivée s’annule. En fait, le même résultat est valable dans R2:
Thm — Soit f : A ⊂ R2 → R et (x0, y0) un point intérieur à A. Si f admet un extremumlocal au point (x0, y0), alors ∇f(x0, y0) = (0, 0), i.e. (x0, y0) est un point critique de f .
Cela signifie que les deux dérivées partielles doivent nécessairement s’annuler en mêmetemps, et que le polynôme P(x0,y0) est identiquement nul. Ce théorème peut se démontrer dela même façon qu’en dimension 1, mais on peut aussi le prouver en remarquant que f admetun extremum local par rapport à chacune de ses variables, ce qui entraîne séparemmentque chaque dérivée partielle est nulle.
Exemple : Soit f(x, y) = (x− 1)2 +2y2. Vérifier que f admet un minimum au point (1, 0)puis vérifier que c’est bien un point critique de f , et que c’est le seul.
22

(c) Conditions du second ordre en dim N = 2.
Une fois que l’on a un point critique, on reprend le développement limité à l’ordre 2:
f(x0 + h, y0 + k) = f(x0, y0) + P(x0,y0)(h, k)︸ ︷︷ ︸=0
+1
2Q(x0,y0)(h, k) + reste2(h, k) .
C’est donc le signe de la forme quadratique qui va déterminer si on a un maximum, unminimum, ou autre chose, de même qu’en dimension 1 c’est le signe de la dérivée secondequi est important. Nous avons fait plus haut l’étude du signe des polynômes de degré 2,que l’on peut donc utiliser ainsi:
Thm — Soit f : A ⊂ R2 → R une fonction régulière et (x0, y0) un point critique àl’intérieur de A. Alors on a les critères suivants:
(i) Si rt− s2 > 0 et r (ou t > 0), alors Q(x0,y0) > 0, on a donc un minimum local;
(ii) Si rt− s2 > 0 et r (ou t < 0), alors Q(x0,y0) < 0 on a donc un maximum local;
(iii) Si rt− s2 < 0 alors c’est un point selle, ce n’est ni un minimum ni un maximum;
(iv) Si rt− s2 = 0, on ne peut pas conclure (il faudrait pousser le développement);
Les deux premiers cas correspondent exactement aux trois cas f ′′ > 0, f ′′ < 0 et le dernier,au cas f ′′ = 0 de la dimension 1. Mais un autre cas apparaît, le quatrième qui n’est pasprésent dans la théorie à une dimension.
La méthode générale pour faire l’étude des extrema locaux consiste donc à faire comme endimension un: recherche des points critiques puis conditions du second ordre pour conclure.Dans les cas indéterminés, il faudrait pousser le développement i.e. étudier le polynômed’ordre 3 ou 4 ... qui vient ensuite, ce qui devient nettement plus compliqué.
23

CH. 3 — Optimisation sous contrainte en 2-D
Cours no7 — Optimisation sous contraintes; paramétrisation du bord
(a) Position du problème.
Le problème général que nous considérons est le suivant:
« Trouver les extrema de f(x, y) sous la contrainte g(x, y) = 0 [ ou g(x) ≤ 0 ] »
Cela signifie que l’on cherche à maximiser ou minimiser la fonction f , en ne prenant encompte que les points (x, y) qui vérifient une certaine contrainte codée par la fonction g.
Exemple : on reprend le cas du champ rectangulaire entourré d’une corde de longueur` = 100 mètres, et on cherche le champ ayant l’aire la plus grande. La fonction f àmaximiser est ici f(x, y) = xy sous la contrainte g(x, y) = 0, où g(x, y) = x+ y− 50. Dansun premier temps on peut maximiser sans contraintes, puis il est naturel de ne chercherque les valeurs de x comprises entre 0 et `.
Bien évidemment, si on peut réécrire la contrainte g(x, y) = 0 sous une forme plus simpley = ϕ(x) (ou l’inverse), on peut se ramener à étudier une fonction d’une seule variable,ce que nous ferons dès que possible. Nous développerons une autre méthode plus généraleensuite (Lagrangien).
(b) Représentation géométrique des contraintes.
Dans les exemples que nous allons traiter, la condition g(x, y) ≤ 0 définira toujours unensemble A fermé borné tel que ∂A = {g(x, y) = 0}.
24

Ainsi, optimiser f sous la contrainte g(x, y) ≤ 0 revient à optimiser la fonction f dansl’ensemble A ⊂ R2, c’est-à-dire rechercher son max et min global dans A. De même,optimiser f sous la contrainte g(x, y) = 0 revient à optimiser f sur le bord ∂A.
Exemple : Chercher le max de f(x, y) = xy sous la contrainte g(x, y) := x2 + y2 ≤ 1.
La première question est de s’assurer que le max/min global existe, c’est l’objet du théorèmesuivant qui est admis:
Thm — Soit A ⊂ R2 un ensemble fermé borné et f une fonction continue de A dans R.Alors f admet un maximum global et un minimum global dans A.
(c) Types de contraintes.
Nous n’allons pas envisager tous les types possibles de contraintes, seulement nous restrein-dre à quelques cas précis où le bord ∂A est la réunion de plusieurs portions assez simplesà étudier. Ces portions regrouperont:
(i) des segments de droite, de la forme g(x, y) = αx+ βy + γ.(ii) des équations «simples»: g(x, y) = y − e−x, g(x, y) = y − x2 etc.(iii) des cercles / ellipses : g(x, y) = (x− x0)2 + (y − y0)2 − r2.Pour chaque portion, x et y varient dans des intervalles fermés bornés, du type [a, b].
Dans l’exemple ci-dessous, on a une portion P1 → P2 donnée par la droite y = x, uneportion P2 → P3 correspondant à y = 1/x, une portion P3 → P4 donnée par une droiteverticale x = 2, et enfin une portion P4 → P1 qui est un cercle centré en x = 1, de rayon 1.
Un tel exemple fait donc intervenir quatre fonctions contrainte:g1(x, y) = y − x, g2(x, y) = y − 1/x, g3(x, y) = x − 2, g4(x, y) = (x − 1)2 + y2 − 1.L’intersection des conditions gi ≤ donne bien l’ensemble grisé.
(d) Résolution dans le cas de contraintes explicites.
On dit qu’une contrainte g(x, y) = 0 est explicite si on peut l’écrire sous la forme y = ϕ(x)(ou l’inverse: x = ϕ(y)). Dans ce cas, étudier f sous la contrainte g(x, y) = 0 revient à
25

étudier la fonctionh(x) := f(x, ϕ(x)) .
L’avantage est de se ramener à une fonction d’une seule variable, pour laquelle nous savonsbien comment trouver les extrema.
Exemple : Trouver les extrema de f(x, y) = x2 + y2 sous la contrainte g(x, y) = y − 2x,avec x ∈ [−2, 2]. Commencer par faire une représentation graphique de la contrainte.
Cette méthode est valable si on a une réunion de tels contraintes explicites: on étudie lesfonctions hi(x) := f(x, ϕ(x)) sur chaque intervalle [ai, bi] à l’aide des critères sur h′ et h′′
puis on prend en compte tous les points qui sont des «coins» et comme en dimension 1, onne garde à la fin que la plus petite valeur (ou la plus grande).
Exemple : Trouver les extrema de f(x, y) = xy sur le bord du carré centré en (0, 0), decoté 2. On déterminera d’abord les contraintes à utiliser.
(e) Contraintes inégalités.
Dans le cas de contraintes inégalités, on commence par faire l’étude des points à l’intérieurde A (cf. cours précédent). Puis on fait l’étude sur le bord (on verra dans le cours suivantcomment faire si le bord contient une portion avec contrainte non explicite). Enfin on negarde que la plus petite valeur (ou la plus grande).
Exemple : reprendre l’exemple précédent, en optimisant pas seulement sur le bord maisdans le carré tout entier.
Exemple : optimiser f(x, y) = (x − 1)2 + (y − 1)2 dans le triangle passant par les points(0, 0), (1, 2), (2, 0).
26

Cours no8 — Utilisation du Lagrangien
Nous allons maintenant nous intéresser à la résolution du problème de minimisation souscontrainte égalité, dans le cas où la contrainte n’est pas facilement paramétrisable. Typiquement,g(x, y) = x2 + y2 − 1, ce qui revient à optimiser une fonction f sur le cercle de centre (0, 0), derayon 1.
Expliciter la contrainte amènerait à y = ±√1− x2, mais d’une part cette fonction fait ap-
paraître un problème dans la dérivée en x = ±1, d’autre part elle n’est pas si simple à étudier,encore que cela reste faisable. C’est évidemment beaucoup moins simple par exemple dans lecas g(x, y) = e−xy − x2 + y4 où l’on ne peut écrire y en fonction de x autrement que de manièreimplicite.
(a) Lagrangien.
Pour résoudre le problème, nous allons introduire une fonction intégrant à la fois f et g.
Déf — Etant donné une fonction f : R2 → R et une contrainte g(x, y) = 0 toutes deuxrégulières, on appelle Lagrangien la fonction de trois variables:
L(x, y, λ) := f(x, y) + λg(x, y) .
Même si l’utilisation du Lagrangien semble compliquer la donne puisqu’on utilise une vari-able de plus, c’est une quantité qui «encode» à la fois la fonction et la contrainte en uneseule quantité. On a alors un théorème important, admis:
Théorème — Soit f : R2 → R et g : R2 → R deux fonctions régulières (on suppose que gn’admet pas de points critiques). Si f admet un extremum sour contrainte g = 0 au point(x0, y0), alors ce point est un point critique du Lagrangien.
Cela signifie que pour trouver les extrema de f sous la contrainte g = 0, on va d’abordchercher les points critiques du Lagrangien, c’est à dire tous les points (x, y, λ) vérifiant lesystème
∂f
∂x(x, y, λ) = 0
∂f
∂y(x, y, λ) = 0
∂f
∂λ(x, y, λ) = 0
En particulier, on notera que la troisième équation n’est rien d’autre que la contrainteg(x, y) = 0.
Point important — même si le système fait intervenir la nouvelle variable λ, on necherche pas nécessairement à la calculer ici: ce qui nous intéresse, ce sont les solutions en(x, y). Une fois trouvé tous les points critiques du lagrangien, on évalue la fonction f ences différents points et on conclu en prenant le max et le min d’entre eux.
27

(b) Exemples d’utilisation
Exemple : trouver le maximum de f(x, y) = xy sous la contrainte g(x, y) = x+ y− 50: ondoit retrouver le résultat que l’on a obtenu par substitution.
Exemple : minimiser la fonction f(x, y) = xy sur le cercle x2 + y2 = 1. Pour cela onintroduit la fonction g(x, y) := x2 + y2 − 1. La calcul du Lagrangien conduit au système:
y + 2λx = 0
x+ 2λy = 0
x2 + y2 − 1 = 0
Comme on ne cherche pas nécessairement à déterminer λ, on peut simplifier les deuxpremières équations en les multipliant par y et par x respectivement et les soustraire, cequi donne y2 − x2 = 0. On a donc x = ±y et en utilisant la contrainte, cela founit quatrepoints avec des coordonnées ±
√2/2. En calculant f en chacun de ces points, on conclu
que le min de f vaut -1/2.
(c) Résolution générale du problème d’optimisation sous contraintes inégalité.
Le principe reste le même que celui déjà vu:
(i) On représente l’ensemble A := {g(x, y) ≤ 0} qui est associé à la (ou les) contrainte.Si c’est A qui est donné, on détermine les contraintes qui définissent le bord ∂A.
(ii) On cherche tous les points critiques situés à l’intérieur de A, pour lesquels on nes’occupe pas de la contrainte et on fait l’étude en ces points avec les critères sur laHessienne (optimisation libre).
(iii) On étudie les points sur le bord en le découpant en parties simples sur lesquelles onutilise soit une subsitution, soit le Lagrangien.
(iv) A la fin on prend le min de tous les min obtenus pour trouver le min global. Idempour le max global en prenant le max de tous les max obtenus.
Exemple : chercher les min et max de f(x, y) = x− x3 + y− y3 dans le quart de disque derayon 2 inclus dans le quadrant {x ≥ 0, y ≥ 0}.Indication: Pour l’étude au bord, on utilisera en partie le lagrangien f(x, y, λ) = f +λg cequi conduit au système
1− 3x2 + 2λx = 0
1− 3y2 + 2λy = 0
x2 + y2 − 1 = 0
pour lequel la résolution amène à x = y ou xy = 0.
28

Cours no9 — Problèmes
(a) Soit f(x) = (4− x)y − 1
2y2.
(i) Maximiser f sous les contraintes x, y ≥ 0, x+ y ≤ 4 et
(C1) : xy − 1− 1
2y2 = 0 .
(ii) Même question en en remplaçant la contrainte (C1) par
(C2.5) : xy − 2.5− 1
2y2 = 0 .
(iii) Même question avec la contrainte générale
(Ca) : xy − a−1
2y2 = 0
(on discutera en fonction des valeurs du paramètre a).
(b) Soit f(x, y) = e1−x + y2. Optimiser f dans le domaine A défini par:
A := {x ≥ 0, y ≥ 0, y ≤ e1−x − 1} .
(c) Soit f(x, y) = (x− 3)2(x− 1)2 − (y − 1)2 et A le domaine du plan défini par l’intersectiondu disque de rayon 4 avec le quadrant x, y ≥ 0. Optimiser f dans le domaine.
29