
L utilisation du Scanning Laser 3D pour la … · formation Modeling) est choisie et requiert de...
18
L’utilisation du Scanning Laser 3D pour la documentation as-built des projets BIM Ing. G. LAMAILLE Ing. J. LAHAYE Dr ir T. VANDENBERGH ECAM Bruxelles Cet article passe brièvement en revue l’état actuel de la technologie du scanning laser 3D topographique. Il s’intéresse plus particulièrement à son utilité en tant qu’outil de récolte d’informations as-built pour le BIM (Building Information Modeling) dans les secteurs de l’architecture, ingénierie, la construction et la gestion de bâtiments. Les nuages de points obtenus par scanning peuvent servir à créer le modèle BIM ("Scan- to-BIM"), mais aussi à l’améliorer et le contrôler dans le cas où il est préexistant ("Scan-vs-BIM"). L’efficacité et le rendement économique de ces processus ont été étudiés dans le travail de fin d’étude. Les conclusions de cette étude sont présentées dans l’article. Mots-clefs : BIM, Scanning Laser 3D, as-built, Scan-to-BIM, Scan-vs-BIM. This article will briefly review the state-of-the-art 3D laser scanning technology for topographical use. It particularly focusses on its use for collecting as-built infor- mation for BIM (Building Information Modeling) in the Architecture, Engineering, Construction and Facility Management industries. The point clouds obtained through scanning may help to create the BIM models ("Scan-to-BIM") and can also be used to control and adapt preexisting models ("Scan-vs-BIM"). Effectiveness and econo- mic efficiency of these processes were studied in the master’s thesis on this subject. The conclusions of this study are exposed in this article. Keywords : BIM, 3D Laser Scanning, as-built, Scan-to-BIM, Scan-vs-BIM. Revue Scientifique des Ingénieurs Industriels n o 30, 2016
Transcript of L utilisation du Scanning Laser 3D pour la … · formation Modeling) est choisie et requiert de...

Lrsquoutilisation du Scanning Laser 3D pour ladocumentation as-built des projets BIM
Ing G LAMAILLEIng J LAHAYEDr ir T VANDENBERGHECAM Bruxelles
Cet article passe briegravevement en revue lrsquoeacutetat actuel de la technologie du scanning laser3D topographique Il srsquointeacuteresse plus particuliegraverement agrave son utiliteacute en tant qursquooutil dereacutecolte drsquoinformations as-built pour le BIM (Building Information Modeling) dans lessecteurs de lrsquoarchitecture ingeacutenierie la construction et la gestion de bacirctiments Lesnuages de points obtenus par scanning peuvent servir agrave creacuteer le modegravele BIM (Scan-to-BIM) mais aussi agrave lrsquoameacuteliorer et le controcircler dans le cas ougrave il est preacuteexistant(Scan-vs-BIM) Lrsquoefficaciteacute et le rendement eacuteconomique de ces processus ont eacuteteacuteeacutetudieacutes dans le travail de fin drsquoeacutetude Les conclusions de cette eacutetude sont preacutesenteacuteesdans lrsquoarticle
Mots-clefs BIM Scanning Laser 3D as-built Scan-to-BIM Scan-vs-BIM
This article will briefly review the state-of-the-art 3D laser scanning technology fortopographical use It particularly focusses on its use for collecting as-built infor-mation for BIM (Building Information Modeling) in the Architecture EngineeringConstruction and Facility Management industries The point clouds obtained throughscanning may help to create the BIM models (Scan-to-BIM) and can also be usedto control and adapt preexisting models (Scan-vs-BIM) Effectiveness and econo-mic efficiency of these processes were studied in the masterrsquos thesis on this subjectThe conclusions of this study are exposed in this article
Keywords BIM 3D Laser Scanning as-built Scan-to-BIM Scan-vs-BIM
Revue Scientifique des Ingeacutenieurs Industriels no 30 2016
274
1 Introduction
Le scanning laser 3D a rencontreacute un deacuteveloppement technologique impressionnantau cours de la derniegravere deacutecennie ainsi qursquoun inteacuterecirct croissant dans plusieurs secteursdrsquoactiviteacute Crsquoest devenu une solution innovante pour des releveacutes as-built Il offre desavantages consideacuterables en termes de preacutecision niveau de deacutetail vitesse de releveacuteconfort et seacutecuriteacute du geacuteomegravetre Lrsquoopeacuterateur du scanner peut en un rien de tempscapturer lrsquoenvironnement complet en 3 dimensions y compris le moindre deacutetail Lescanning se veut ecirctre une alternative innovante pour les instruments et meacutethodes dereleveacutes topographiques classiques Neacuteanmoins pour plusieurs raisons son utilisationest loin drsquoecirctre reacutepandue chez les entrepreneurs et bureaux drsquoeacutetudes
Dans de nombreux projets de construction et agrave diffeacuterents stades de ceux-ci (avant-projet conception dimensionnement exeacutecution ) lrsquoapproche BIM (Building In-formation Modeling) est choisie et requiert de lrsquoinformation as-built De lrsquoinforma-tion fiable et complegravete ne peut pas toujours ecirctre reacutecolteacutee dans des plans as-builtlorsque ceux-ci existent Par ailleurs mener des releveacutes topographiques classiquesavec un haut niveau de deacutetail pour mettre en plan des structures est souvent une ac-tion coucircteuse laborieuse et longue
Une application speacutecifique du scanning laser 3D est lrsquoutilisation des nuages de pointspour construire un modegravele BIM A ce jour il nrsquoy a encore que tregraves peu drsquoinformationset drsquoexpertise concernant ce processus de modeacutelisation BIM Lrsquoobjectif principal dutravail de fin drsquoeacutetudes eacutetait drsquoidentifier clairement les beacuteneacutefices et lrsquoutiliteacute du scanningpour le BIM dans des projets de construction afin de guider et de faciliter lrsquoutilisationdes scanners La rentabiliteacute eacuteconomique de ces processus ainsi que la plus valueqursquoapporte leur inteacutegration dans des projets BIM ont eacutegalement eacuteteacute analyseacutes
2 Le scanning laser 3D
21 La technologie
Le scanning laser 3D fait appel agrave la technologie de mesurage avec un laser une tech-nique de mesurage dite active utilisant de la lumiegravere eacutemise par lrsquoinstrument lui-mecircme La lumiegravere eacutemise en lrsquooccurrence un faisceau laser concentreacute est reacutefleacutechiepar le premier objet qursquoelle rencontre et renvoyeacutee (en partie) vers lrsquoinstrument ougrave elleest capteacutee par un deacutetecteur Le transmetteur-reacutecepteur eacutegalement appeleacute teacuteleacutemegravetrelaser permet au scanner de calculer la distance De ce fait les scanners laser 3D font
275
partie des instruments LiDAR (Light Detection And Ranging) ou encore LADAR(LAser Detection And Ranging)
Deux technologies de mesurage sont principalement agrave distinguer parmi les instru-ments LADAR les instruments Time-of-Flight (temps de vol) et les instrumentsPhase-based (deacutecalage de phase) La premiegravere technologie mesure le temps entrelrsquoeacutemission et la reacuteception du signal laser et le convertit en distance connaissant lavitesse de la lumiegravere dans lrsquoair La technologie Phase-based quant agrave elle calcule ladistance agrave partir du deacutephasage qursquoil existe entre le signal sortant et entrant Chacunedes deux technologies preacutesente des avantages et des inconveacutenients en termes de preacute-cision rapiditeacute de mesure porteacutee et sensibiliteacute aux erreurs
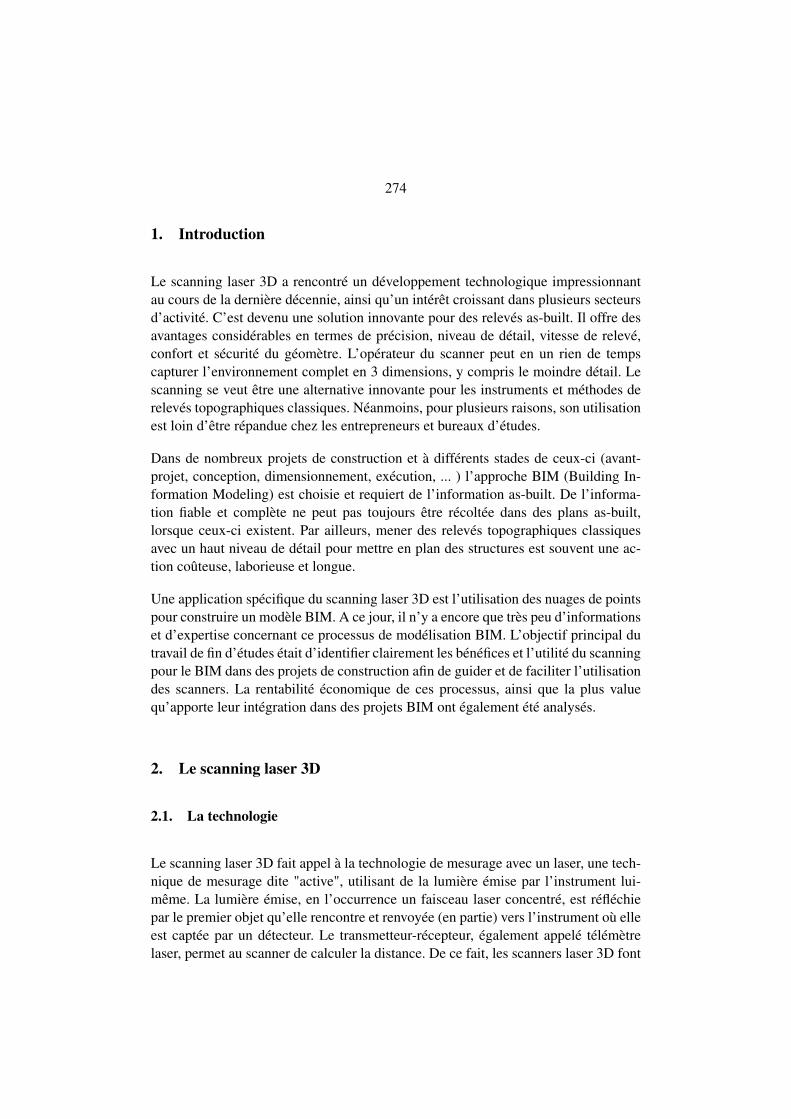
Figure 1 Rotation angulaire verticale et horizontale (Source [8])
Contrairement aux teacuteleacutemegravetres laser et aux stations totales par exemples qui ne me-surent qursquoun seul point preacutedeacutefini les scanners mesurent une eacutenorme quantiteacute depoints tout autour de lrsquoinstrument afin de construire un nuage de points Pour cefaire le faisceau laser est deacutevieacute dans toutes les directions voulues Certains instru-ments sont eacutequipeacutes de miroirs ou de prismes pour assurer la rotation du faisceaulaser Dans le cas drsquoun scanner statique (voir plus loin) le principe de balayagede lrsquoenvironnement agrave scanner peut ecirctre scheacutematiseacute comme agrave la figure 1 Ces rota-tions verticales et horizontales simultaneacutees permettent drsquoobtenir un nuage de pointsen 3D Les angles du faisceau sont mesureacutes agrave chaque instant afin que lrsquoinstrumentpuisse transformer ces donneacutees et la distance mesureacutee en un point avec des coordon-neacutees XYZ repreacutesenteacute dans un systegraveme drsquoaxes avec la position de lrsquoappareil commeorigine
276
Le reacutesultat final sortant drsquoun scan est alors un nuage de points tel qursquoillustreacute agrave lafigure 2 Ce nuage de points a eacuteteacute obtenu apregraves le scanning du Business Center ausiegravege de lrsquoentreprise BESIX (Bruxelles) dans le cadre du travail de fin drsquoeacutetudesLes diffeacuterences de couleur correspondent aux diffeacuterences drsquointensiteacute du signal retourcapteacute par le reacutecepteur pour chaque point mesureacute Cette intensiteacute varie en fonction dela distance de lrsquoinclinaison de la surface de sa reacuteflectiviteacute (mateacuteriau couleur etc) etde certaines conditions environnementales
Figure 2 Nuage de points du BESIX Business Center
22 Les instruments
Il existe plusieurs types drsquoinstruments de scanning 3D capables de livrer des nuagesde points Seuls ceux susceptibles drsquoecirctre utiles pour des applications avec le BIMseront eacutevoqueacutes ici Ces instruments diffegraverent principalement dans leur polyvalencevitesse drsquoacquisition de donneacutees preacutecision et mobiliteacute
Les scanners laser terrestres statiques (static TLS) sont les plus reacutepandus Ces instru-ments sont geacuteneacuteralement monteacutes sur un treacutepied et restent en place durant lrsquoexeacutecutiondu scan Ils scannent agrave 360gracircce au principe de rotation illustreacute agrave la figure 1 Ilsconviennent agrave de nombreuses applications et plusieurs fabricants proposent diffeacuterentsmodegraveles Les instruments les plus performants atteignent une preacutecision en dessous dumillimegravetre pour des points se situant agrave moins de 10m de lrsquoappareil et une preacutecision endessous du centimegravetre pour des points agrave 100m Certains ont une vitesse drsquoacquisition
277
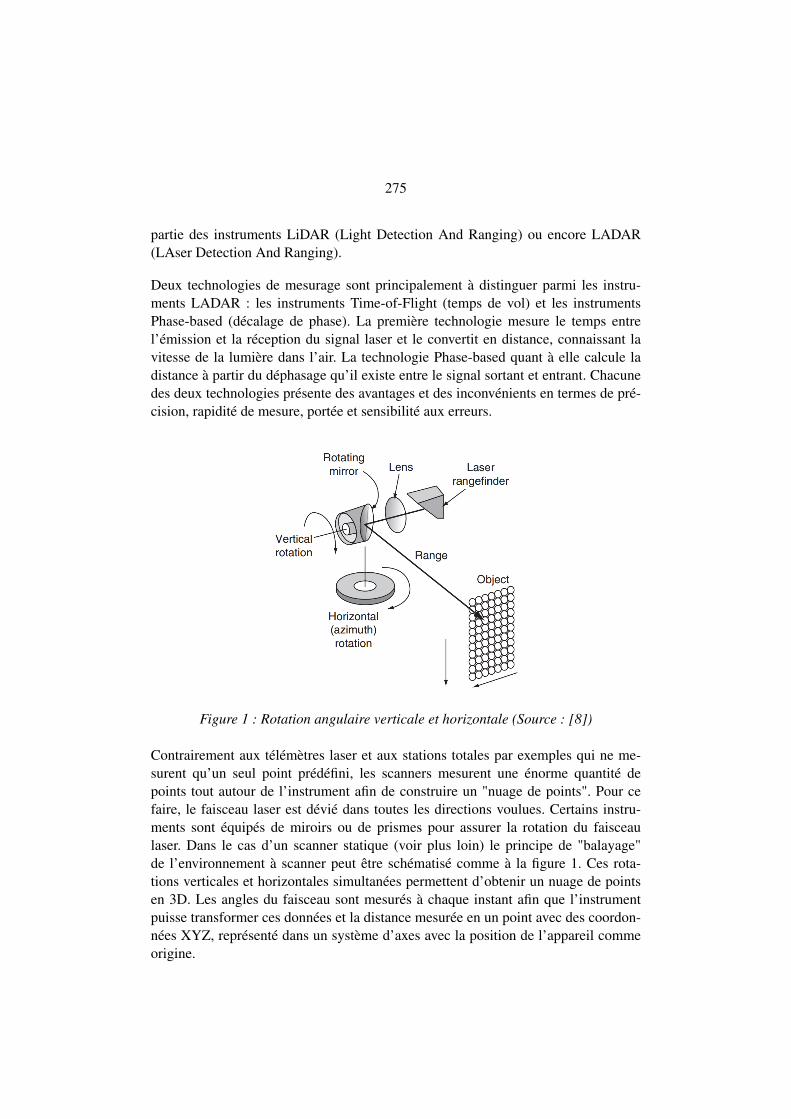
de donneacutees supeacuterieure agrave 1 millions de points par seconde ce qui reacutesulte en des nuagesde points extrecircmement denses et deacutetailleacutes De plus en plus de TLS sont eacutequipeacutes drsquounecameacutera ce qui permet de donner agrave chaque point sa couleur reacuteelle le reacutesultat est unnuage de points tregraves photo-reacutealiste qui facilite la visualisation et la compreacutehensiondes donneacutees Quelques exemples de static TLS sont illustreacutes agrave la figure 3
(a) Faro Focus 3D (b) Leica P20 (c) Riegl VZ-400
Figure 3 Scanners laser terrestres statiques (static TLS) 1
Certaines stations totales dernier cri sont eacutegalement pourvues drsquoune option scanningCependant ce nrsquoest pas la fonction principale de ces instruments mais plutocirct une op-tion compleacutementaire agrave la station totale permettant drsquoeffectuer des tacircches de scanningseacutelectives lorsque certaines zones de lrsquoenvironnement doivent ecirctre releveacutees en hautedeacutefinition et drsquoautres zones avec seulement quelques points singuliers
Dans le cas particulier de grands bacirctiments avec des sols reacuteguliers et lorsqursquounepreacutecision de 1-2 cm srsquoavegravere suffisante les scanners mobiles de type IMMS (IndoorMobile Mapping Systems) sont une solution qui offre un gain de temps consideacute-rable Ces appareils permettent de scanner jusqursquoagrave 10000 m2 de bacirctiment par jourCes instruments (exemples agrave la figure 4) sont pousseacutes par lrsquoopeacuterateur et scannent encontinu De cette maniegravere toute la surface de bacirctiment est releveacutee en une seule opeacute-ration contrairement au releveacute par TLS statique Lrsquoappareil est eacutequipeacute drsquoune centraleagrave inertie ou IMU (Inertial Measurement Unit) qui permet au systegraveme de connaicirctresa position en temps reacuteel afin de placer chaque point scanneacute au bon endroit dans lenuage
Des scanners portatifs ont reacutecemment eacuteteacute deacuteveloppeacutes (figure 5) Malgreacute une preacutecisionqui doit encore ecirctre prouveacutee et ameacutelioreacutee ces instruments rencontreront sans aucun
1 Sources httpwwwfarocom httpwwwleica-geosystemscom et httpwwwrieglcom
2 Sources httpwwwviametriscomfr et httpwwwapplanixcomsolutionslandtimmshtml
278
(a) Viametris iMMS (b) Trimble TIMMS
Figure 4 Indoor Mobile Mapping Systems (IMMS) 2
doute prochainement un inteacuterecirct grandissant Leurs plus grands avantages en plusde ceux que preacutesentent deacutejagrave les IMMS sont leur utilisation facile et ergonomiqueainsi que leur grande mobiliteacute Ces scanners portatifs sont nettement moins influenceacutesque les IMMS par les contraintes du terrain (sols irreacuteguliers zones peu accessiblesescaliers etc)
Figure 5 Le scanner 3D portatif ZEB1 3
3 Source httpwww3dlasermappingcomproductshandheld-mappin
279
Figure 6 Etapes chronologiques du scanning 3D
23 Le meacutethodologie de travail
Malgreacute le fait que les scanners sont devenus un outil polyvalent et convivial exeacute-cuter un releveacute 3D qualitatif impose un travail et une preacuteparation conseacutequente enamont et en aval de lrsquoopeacuteration de scanning afin drsquoobtenir des produits reacutepondant auxexigences Lrsquoutilisation adeacutequate de la technologie complexe neacutecessite une bonneconnaissance des instruments et de leurs limitations (sources drsquoerreurs) Un travailmeacuteticuleux et une bonne vue geacuteneacuterale du processus complet est indispensable Lameacutethodologie de travail preacutesenteacutee ci-apregraves a eacuteteacute eacutelaboreacutee dans le cadre du travail defin drsquoeacutetudes et srsquoapplique agrave la base pour lrsquoutilisation de scanners terrestres statiquesdans le domaine de la construction Neacuteanmoins la majoriteacute des eacutetapes et des pointsdrsquoattention restent applicables lors drsquoune utilisation drsquoun autre type de scanner
La figure 6 montre la chronologie des actions agrave effectuer lors des processus de scan-ning Il est important de noter que chaque prise de deacutecision dans une des eacutetapes auraune influence sur les autres eacutetapes du processus
280
Deux eacutetapes sont cruciales dans ce processus La premiegravere est la phase de preacutepara-tion et de planification du scanning (survey planning) Durant cette premiegravere eacutetapeil faut deacutefinir clairement les objectifs et exigences du projet de scanning (preacutecisionniveau de deacutetail toleacuterances dimensionnelles utiliteacute du produit agrave livrer etc) deacutefinirles produits finaux (nuages de points modegraveles plans coupes etc) avoir une bonneconnaissance du terrain choisir le mateacuteriel et la meacutethode de scanning adeacutequats eteacutelaborer un plan de scanning avec les diffeacuterents emplacements du scanner
La deuxiegraveme eacutetape qui neacutecessite une attention particuliegravere est la gestion des donneacuteeset en particulier le regroupement des diffeacuterents nuages de point en un seul nuage (dataregistration) Crsquoest sur cette manipulation que les erreurs peuvent vite srsquoaccumuler etengendrer des eacutecarts de mesures hors des toleacuterances initialement imposeacutees Plusieurstechniques de regroupement existent avec chacune leurs speacutecificiteacutes et preacutecision Lameacutethode de regroupement deacuteterminera en partie la meacutethode de scanning sur le terrainDans la plupart des cas un regroupement de haute preacutecision neacutecessitera une meacutethodede scanning plus laborieuse et lente (un nombre accru de scans utilisation de ciblesreacutesolution plus eacuteleveacutee etc)
3 Le BIM
31 Qursquoest-ce que le BIM
Le premier aspect agrave souligner lorsqursquoon parle du BIM est qursquoil ne srsquoagit pas simple-ment drsquoune technologie ou drsquoun logiciel CAD 3D Le BIM est un processus baseacute surun modegravele intelligent Le principal objectif du BIM est de favoriser la collaborationde toutes les parties prenantes drsquoun projet de construction afin de stimuler la produc-tiviteacute geacuteneacuterale Ideacutealement le BIM srsquoapplique au cycle de vie complet du projet ilsrsquoinstalle dans les premiegraveres phases drsquoavant-projet il reacuteduit les coucircts drsquoerreurs (quipeuvent repreacutesenter de 5 agrave 15 des coucircts de lrsquoentrepreneur) il aide agrave estimer rapi-dement et preacuteciseacutement les quantiteacutes crsquoest un support puissant pour geacuterer les phasesde construction et le planning de chantier il intervient dans la gestion des ressourceset il aide agrave atteindre les objectifs en termes de productiviteacute et de qualiteacute Une fois leprojet acheveacute le modegravele BIM sera utiliseacute pour la gestion du bacirctiment
Un modegravele BIM est baseacute sur une connexion de diffeacuterents objets qui outre leur formegeacuteomeacutetrique contiennent eacutegalement des informations et des paramegravetres concernantleur structure les mateacuteriaux leur position leurs relations avec drsquoautres objets la
4 Source httpwwwteklacom
281
Figure 7 Aspects et possibiliteacutes du BIM 4
phase de construction le coucirct le fournisseur etc Ce sont les informations seacuteman-tiques ou les meacuteta-donneacutees Le modegravele intelligent est inteacutegreacute avec un tas drsquoinfor-mations lieacutees au bacirctiment au projet et aux composants qui peuvent ecirctre partageacuteesfacilement avec tous les acteurs du projet
32 Qursquoapporte le BIM
De nombreux projets de construction ont agrave ce jour eacuteteacute meneacutes agrave bien avec et gracircce agravelrsquoapproche BIM Le processus apporte de nombreux avantages pour toutes les partiesprenantes parmi lesquels
bull La compreacutehension correcte du projet est favoriseacutee gracircce agrave lrsquoaccegraves degraves lrsquoavant-projet agrave un modegravele ergonomique et riche en informations ce qui permet agravelrsquoeacutequipe du projet de prendre des deacutecisions fondeacutees au plus tocirct Ces deacutecisionsauront un impact positif sur les coucircts et le planning Pour ce faire le processusBIM neacutecessite un plus grand effort durant la phase de conception que pour unprocessus classique (drafting-centric) tel qursquoillustreacute sur le graphe agrave la figure8
bull La coordination entre les diffeacuterents corps de meacutetier entrepreneurs sous-traitantsarchitectes bureaux drsquoeacutetudes fournisseurs et le maicirctre drsquooeuvre est sensible-ment ameacutelioreacutee
5 Source httpcenewscom la courbe BIM de Patrick MacLeamy
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
274
1 Introduction
Le scanning laser 3D a rencontreacute un deacuteveloppement technologique impressionnantau cours de la derniegravere deacutecennie ainsi qursquoun inteacuterecirct croissant dans plusieurs secteursdrsquoactiviteacute Crsquoest devenu une solution innovante pour des releveacutes as-built Il offre desavantages consideacuterables en termes de preacutecision niveau de deacutetail vitesse de releveacuteconfort et seacutecuriteacute du geacuteomegravetre Lrsquoopeacuterateur du scanner peut en un rien de tempscapturer lrsquoenvironnement complet en 3 dimensions y compris le moindre deacutetail Lescanning se veut ecirctre une alternative innovante pour les instruments et meacutethodes dereleveacutes topographiques classiques Neacuteanmoins pour plusieurs raisons son utilisationest loin drsquoecirctre reacutepandue chez les entrepreneurs et bureaux drsquoeacutetudes
Dans de nombreux projets de construction et agrave diffeacuterents stades de ceux-ci (avant-projet conception dimensionnement exeacutecution ) lrsquoapproche BIM (Building In-formation Modeling) est choisie et requiert de lrsquoinformation as-built De lrsquoinforma-tion fiable et complegravete ne peut pas toujours ecirctre reacutecolteacutee dans des plans as-builtlorsque ceux-ci existent Par ailleurs mener des releveacutes topographiques classiquesavec un haut niveau de deacutetail pour mettre en plan des structures est souvent une ac-tion coucircteuse laborieuse et longue
Une application speacutecifique du scanning laser 3D est lrsquoutilisation des nuages de pointspour construire un modegravele BIM A ce jour il nrsquoy a encore que tregraves peu drsquoinformationset drsquoexpertise concernant ce processus de modeacutelisation BIM Lrsquoobjectif principal dutravail de fin drsquoeacutetudes eacutetait drsquoidentifier clairement les beacuteneacutefices et lrsquoutiliteacute du scanningpour le BIM dans des projets de construction afin de guider et de faciliter lrsquoutilisationdes scanners La rentabiliteacute eacuteconomique de ces processus ainsi que la plus valueqursquoapporte leur inteacutegration dans des projets BIM ont eacutegalement eacuteteacute analyseacutes
2 Le scanning laser 3D
21 La technologie
Le scanning laser 3D fait appel agrave la technologie de mesurage avec un laser une tech-nique de mesurage dite active utilisant de la lumiegravere eacutemise par lrsquoinstrument lui-mecircme La lumiegravere eacutemise en lrsquooccurrence un faisceau laser concentreacute est reacutefleacutechiepar le premier objet qursquoelle rencontre et renvoyeacutee (en partie) vers lrsquoinstrument ougrave elleest capteacutee par un deacutetecteur Le transmetteur-reacutecepteur eacutegalement appeleacute teacuteleacutemegravetrelaser permet au scanner de calculer la distance De ce fait les scanners laser 3D font
275
partie des instruments LiDAR (Light Detection And Ranging) ou encore LADAR(LAser Detection And Ranging)
Deux technologies de mesurage sont principalement agrave distinguer parmi les instru-ments LADAR les instruments Time-of-Flight (temps de vol) et les instrumentsPhase-based (deacutecalage de phase) La premiegravere technologie mesure le temps entrelrsquoeacutemission et la reacuteception du signal laser et le convertit en distance connaissant lavitesse de la lumiegravere dans lrsquoair La technologie Phase-based quant agrave elle calcule ladistance agrave partir du deacutephasage qursquoil existe entre le signal sortant et entrant Chacunedes deux technologies preacutesente des avantages et des inconveacutenients en termes de preacute-cision rapiditeacute de mesure porteacutee et sensibiliteacute aux erreurs
Figure 1 Rotation angulaire verticale et horizontale (Source [8])
Contrairement aux teacuteleacutemegravetres laser et aux stations totales par exemples qui ne me-surent qursquoun seul point preacutedeacutefini les scanners mesurent une eacutenorme quantiteacute depoints tout autour de lrsquoinstrument afin de construire un nuage de points Pour cefaire le faisceau laser est deacutevieacute dans toutes les directions voulues Certains instru-ments sont eacutequipeacutes de miroirs ou de prismes pour assurer la rotation du faisceaulaser Dans le cas drsquoun scanner statique (voir plus loin) le principe de balayagede lrsquoenvironnement agrave scanner peut ecirctre scheacutematiseacute comme agrave la figure 1 Ces rota-tions verticales et horizontales simultaneacutees permettent drsquoobtenir un nuage de pointsen 3D Les angles du faisceau sont mesureacutes agrave chaque instant afin que lrsquoinstrumentpuisse transformer ces donneacutees et la distance mesureacutee en un point avec des coordon-neacutees XYZ repreacutesenteacute dans un systegraveme drsquoaxes avec la position de lrsquoappareil commeorigine
276
Le reacutesultat final sortant drsquoun scan est alors un nuage de points tel qursquoillustreacute agrave lafigure 2 Ce nuage de points a eacuteteacute obtenu apregraves le scanning du Business Center ausiegravege de lrsquoentreprise BESIX (Bruxelles) dans le cadre du travail de fin drsquoeacutetudesLes diffeacuterences de couleur correspondent aux diffeacuterences drsquointensiteacute du signal retourcapteacute par le reacutecepteur pour chaque point mesureacute Cette intensiteacute varie en fonction dela distance de lrsquoinclinaison de la surface de sa reacuteflectiviteacute (mateacuteriau couleur etc) etde certaines conditions environnementales
Figure 2 Nuage de points du BESIX Business Center
22 Les instruments
Il existe plusieurs types drsquoinstruments de scanning 3D capables de livrer des nuagesde points Seuls ceux susceptibles drsquoecirctre utiles pour des applications avec le BIMseront eacutevoqueacutes ici Ces instruments diffegraverent principalement dans leur polyvalencevitesse drsquoacquisition de donneacutees preacutecision et mobiliteacute
Les scanners laser terrestres statiques (static TLS) sont les plus reacutepandus Ces instru-ments sont geacuteneacuteralement monteacutes sur un treacutepied et restent en place durant lrsquoexeacutecutiondu scan Ils scannent agrave 360gracircce au principe de rotation illustreacute agrave la figure 1 Ilsconviennent agrave de nombreuses applications et plusieurs fabricants proposent diffeacuterentsmodegraveles Les instruments les plus performants atteignent une preacutecision en dessous dumillimegravetre pour des points se situant agrave moins de 10m de lrsquoappareil et une preacutecision endessous du centimegravetre pour des points agrave 100m Certains ont une vitesse drsquoacquisition
277
de donneacutees supeacuterieure agrave 1 millions de points par seconde ce qui reacutesulte en des nuagesde points extrecircmement denses et deacutetailleacutes De plus en plus de TLS sont eacutequipeacutes drsquounecameacutera ce qui permet de donner agrave chaque point sa couleur reacuteelle le reacutesultat est unnuage de points tregraves photo-reacutealiste qui facilite la visualisation et la compreacutehensiondes donneacutees Quelques exemples de static TLS sont illustreacutes agrave la figure 3
(a) Faro Focus 3D (b) Leica P20 (c) Riegl VZ-400
Figure 3 Scanners laser terrestres statiques (static TLS) 1
Certaines stations totales dernier cri sont eacutegalement pourvues drsquoune option scanningCependant ce nrsquoest pas la fonction principale de ces instruments mais plutocirct une op-tion compleacutementaire agrave la station totale permettant drsquoeffectuer des tacircches de scanningseacutelectives lorsque certaines zones de lrsquoenvironnement doivent ecirctre releveacutees en hautedeacutefinition et drsquoautres zones avec seulement quelques points singuliers
Dans le cas particulier de grands bacirctiments avec des sols reacuteguliers et lorsqursquounepreacutecision de 1-2 cm srsquoavegravere suffisante les scanners mobiles de type IMMS (IndoorMobile Mapping Systems) sont une solution qui offre un gain de temps consideacute-rable Ces appareils permettent de scanner jusqursquoagrave 10000 m2 de bacirctiment par jourCes instruments (exemples agrave la figure 4) sont pousseacutes par lrsquoopeacuterateur et scannent encontinu De cette maniegravere toute la surface de bacirctiment est releveacutee en une seule opeacute-ration contrairement au releveacute par TLS statique Lrsquoappareil est eacutequipeacute drsquoune centraleagrave inertie ou IMU (Inertial Measurement Unit) qui permet au systegraveme de connaicirctresa position en temps reacuteel afin de placer chaque point scanneacute au bon endroit dans lenuage
Des scanners portatifs ont reacutecemment eacuteteacute deacuteveloppeacutes (figure 5) Malgreacute une preacutecisionqui doit encore ecirctre prouveacutee et ameacutelioreacutee ces instruments rencontreront sans aucun
1 Sources httpwwwfarocom httpwwwleica-geosystemscom et httpwwwrieglcom
2 Sources httpwwwviametriscomfr et httpwwwapplanixcomsolutionslandtimmshtml
278
(a) Viametris iMMS (b) Trimble TIMMS
Figure 4 Indoor Mobile Mapping Systems (IMMS) 2
doute prochainement un inteacuterecirct grandissant Leurs plus grands avantages en plusde ceux que preacutesentent deacutejagrave les IMMS sont leur utilisation facile et ergonomiqueainsi que leur grande mobiliteacute Ces scanners portatifs sont nettement moins influenceacutesque les IMMS par les contraintes du terrain (sols irreacuteguliers zones peu accessiblesescaliers etc)
Figure 5 Le scanner 3D portatif ZEB1 3
3 Source httpwww3dlasermappingcomproductshandheld-mappin
279
Figure 6 Etapes chronologiques du scanning 3D
23 Le meacutethodologie de travail
Malgreacute le fait que les scanners sont devenus un outil polyvalent et convivial exeacute-cuter un releveacute 3D qualitatif impose un travail et une preacuteparation conseacutequente enamont et en aval de lrsquoopeacuteration de scanning afin drsquoobtenir des produits reacutepondant auxexigences Lrsquoutilisation adeacutequate de la technologie complexe neacutecessite une bonneconnaissance des instruments et de leurs limitations (sources drsquoerreurs) Un travailmeacuteticuleux et une bonne vue geacuteneacuterale du processus complet est indispensable Lameacutethodologie de travail preacutesenteacutee ci-apregraves a eacuteteacute eacutelaboreacutee dans le cadre du travail defin drsquoeacutetudes et srsquoapplique agrave la base pour lrsquoutilisation de scanners terrestres statiquesdans le domaine de la construction Neacuteanmoins la majoriteacute des eacutetapes et des pointsdrsquoattention restent applicables lors drsquoune utilisation drsquoun autre type de scanner
La figure 6 montre la chronologie des actions agrave effectuer lors des processus de scan-ning Il est important de noter que chaque prise de deacutecision dans une des eacutetapes auraune influence sur les autres eacutetapes du processus
280
Deux eacutetapes sont cruciales dans ce processus La premiegravere est la phase de preacutepara-tion et de planification du scanning (survey planning) Durant cette premiegravere eacutetapeil faut deacutefinir clairement les objectifs et exigences du projet de scanning (preacutecisionniveau de deacutetail toleacuterances dimensionnelles utiliteacute du produit agrave livrer etc) deacutefinirles produits finaux (nuages de points modegraveles plans coupes etc) avoir une bonneconnaissance du terrain choisir le mateacuteriel et la meacutethode de scanning adeacutequats eteacutelaborer un plan de scanning avec les diffeacuterents emplacements du scanner
La deuxiegraveme eacutetape qui neacutecessite une attention particuliegravere est la gestion des donneacuteeset en particulier le regroupement des diffeacuterents nuages de point en un seul nuage (dataregistration) Crsquoest sur cette manipulation que les erreurs peuvent vite srsquoaccumuler etengendrer des eacutecarts de mesures hors des toleacuterances initialement imposeacutees Plusieurstechniques de regroupement existent avec chacune leurs speacutecificiteacutes et preacutecision Lameacutethode de regroupement deacuteterminera en partie la meacutethode de scanning sur le terrainDans la plupart des cas un regroupement de haute preacutecision neacutecessitera une meacutethodede scanning plus laborieuse et lente (un nombre accru de scans utilisation de ciblesreacutesolution plus eacuteleveacutee etc)
3 Le BIM
31 Qursquoest-ce que le BIM
Le premier aspect agrave souligner lorsqursquoon parle du BIM est qursquoil ne srsquoagit pas simple-ment drsquoune technologie ou drsquoun logiciel CAD 3D Le BIM est un processus baseacute surun modegravele intelligent Le principal objectif du BIM est de favoriser la collaborationde toutes les parties prenantes drsquoun projet de construction afin de stimuler la produc-tiviteacute geacuteneacuterale Ideacutealement le BIM srsquoapplique au cycle de vie complet du projet ilsrsquoinstalle dans les premiegraveres phases drsquoavant-projet il reacuteduit les coucircts drsquoerreurs (quipeuvent repreacutesenter de 5 agrave 15 des coucircts de lrsquoentrepreneur) il aide agrave estimer rapi-dement et preacuteciseacutement les quantiteacutes crsquoest un support puissant pour geacuterer les phasesde construction et le planning de chantier il intervient dans la gestion des ressourceset il aide agrave atteindre les objectifs en termes de productiviteacute et de qualiteacute Une fois leprojet acheveacute le modegravele BIM sera utiliseacute pour la gestion du bacirctiment
Un modegravele BIM est baseacute sur une connexion de diffeacuterents objets qui outre leur formegeacuteomeacutetrique contiennent eacutegalement des informations et des paramegravetres concernantleur structure les mateacuteriaux leur position leurs relations avec drsquoautres objets la
4 Source httpwwwteklacom
281
Figure 7 Aspects et possibiliteacutes du BIM 4
phase de construction le coucirct le fournisseur etc Ce sont les informations seacuteman-tiques ou les meacuteta-donneacutees Le modegravele intelligent est inteacutegreacute avec un tas drsquoinfor-mations lieacutees au bacirctiment au projet et aux composants qui peuvent ecirctre partageacuteesfacilement avec tous les acteurs du projet
32 Qursquoapporte le BIM
De nombreux projets de construction ont agrave ce jour eacuteteacute meneacutes agrave bien avec et gracircce agravelrsquoapproche BIM Le processus apporte de nombreux avantages pour toutes les partiesprenantes parmi lesquels
bull La compreacutehension correcte du projet est favoriseacutee gracircce agrave lrsquoaccegraves degraves lrsquoavant-projet agrave un modegravele ergonomique et riche en informations ce qui permet agravelrsquoeacutequipe du projet de prendre des deacutecisions fondeacutees au plus tocirct Ces deacutecisionsauront un impact positif sur les coucircts et le planning Pour ce faire le processusBIM neacutecessite un plus grand effort durant la phase de conception que pour unprocessus classique (drafting-centric) tel qursquoillustreacute sur le graphe agrave la figure8
bull La coordination entre les diffeacuterents corps de meacutetier entrepreneurs sous-traitantsarchitectes bureaux drsquoeacutetudes fournisseurs et le maicirctre drsquooeuvre est sensible-ment ameacutelioreacutee
5 Source httpcenewscom la courbe BIM de Patrick MacLeamy
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
275
partie des instruments LiDAR (Light Detection And Ranging) ou encore LADAR(LAser Detection And Ranging)
Deux technologies de mesurage sont principalement agrave distinguer parmi les instru-ments LADAR les instruments Time-of-Flight (temps de vol) et les instrumentsPhase-based (deacutecalage de phase) La premiegravere technologie mesure le temps entrelrsquoeacutemission et la reacuteception du signal laser et le convertit en distance connaissant lavitesse de la lumiegravere dans lrsquoair La technologie Phase-based quant agrave elle calcule ladistance agrave partir du deacutephasage qursquoil existe entre le signal sortant et entrant Chacunedes deux technologies preacutesente des avantages et des inconveacutenients en termes de preacute-cision rapiditeacute de mesure porteacutee et sensibiliteacute aux erreurs
Figure 1 Rotation angulaire verticale et horizontale (Source [8])
Contrairement aux teacuteleacutemegravetres laser et aux stations totales par exemples qui ne me-surent qursquoun seul point preacutedeacutefini les scanners mesurent une eacutenorme quantiteacute depoints tout autour de lrsquoinstrument afin de construire un nuage de points Pour cefaire le faisceau laser est deacutevieacute dans toutes les directions voulues Certains instru-ments sont eacutequipeacutes de miroirs ou de prismes pour assurer la rotation du faisceaulaser Dans le cas drsquoun scanner statique (voir plus loin) le principe de balayagede lrsquoenvironnement agrave scanner peut ecirctre scheacutematiseacute comme agrave la figure 1 Ces rota-tions verticales et horizontales simultaneacutees permettent drsquoobtenir un nuage de pointsen 3D Les angles du faisceau sont mesureacutes agrave chaque instant afin que lrsquoinstrumentpuisse transformer ces donneacutees et la distance mesureacutee en un point avec des coordon-neacutees XYZ repreacutesenteacute dans un systegraveme drsquoaxes avec la position de lrsquoappareil commeorigine
276
Le reacutesultat final sortant drsquoun scan est alors un nuage de points tel qursquoillustreacute agrave lafigure 2 Ce nuage de points a eacuteteacute obtenu apregraves le scanning du Business Center ausiegravege de lrsquoentreprise BESIX (Bruxelles) dans le cadre du travail de fin drsquoeacutetudesLes diffeacuterences de couleur correspondent aux diffeacuterences drsquointensiteacute du signal retourcapteacute par le reacutecepteur pour chaque point mesureacute Cette intensiteacute varie en fonction dela distance de lrsquoinclinaison de la surface de sa reacuteflectiviteacute (mateacuteriau couleur etc) etde certaines conditions environnementales
Figure 2 Nuage de points du BESIX Business Center
22 Les instruments
Il existe plusieurs types drsquoinstruments de scanning 3D capables de livrer des nuagesde points Seuls ceux susceptibles drsquoecirctre utiles pour des applications avec le BIMseront eacutevoqueacutes ici Ces instruments diffegraverent principalement dans leur polyvalencevitesse drsquoacquisition de donneacutees preacutecision et mobiliteacute
Les scanners laser terrestres statiques (static TLS) sont les plus reacutepandus Ces instru-ments sont geacuteneacuteralement monteacutes sur un treacutepied et restent en place durant lrsquoexeacutecutiondu scan Ils scannent agrave 360gracircce au principe de rotation illustreacute agrave la figure 1 Ilsconviennent agrave de nombreuses applications et plusieurs fabricants proposent diffeacuterentsmodegraveles Les instruments les plus performants atteignent une preacutecision en dessous dumillimegravetre pour des points se situant agrave moins de 10m de lrsquoappareil et une preacutecision endessous du centimegravetre pour des points agrave 100m Certains ont une vitesse drsquoacquisition
277
de donneacutees supeacuterieure agrave 1 millions de points par seconde ce qui reacutesulte en des nuagesde points extrecircmement denses et deacutetailleacutes De plus en plus de TLS sont eacutequipeacutes drsquounecameacutera ce qui permet de donner agrave chaque point sa couleur reacuteelle le reacutesultat est unnuage de points tregraves photo-reacutealiste qui facilite la visualisation et la compreacutehensiondes donneacutees Quelques exemples de static TLS sont illustreacutes agrave la figure 3
(a) Faro Focus 3D (b) Leica P20 (c) Riegl VZ-400
Figure 3 Scanners laser terrestres statiques (static TLS) 1
Certaines stations totales dernier cri sont eacutegalement pourvues drsquoune option scanningCependant ce nrsquoest pas la fonction principale de ces instruments mais plutocirct une op-tion compleacutementaire agrave la station totale permettant drsquoeffectuer des tacircches de scanningseacutelectives lorsque certaines zones de lrsquoenvironnement doivent ecirctre releveacutees en hautedeacutefinition et drsquoautres zones avec seulement quelques points singuliers
Dans le cas particulier de grands bacirctiments avec des sols reacuteguliers et lorsqursquounepreacutecision de 1-2 cm srsquoavegravere suffisante les scanners mobiles de type IMMS (IndoorMobile Mapping Systems) sont une solution qui offre un gain de temps consideacute-rable Ces appareils permettent de scanner jusqursquoagrave 10000 m2 de bacirctiment par jourCes instruments (exemples agrave la figure 4) sont pousseacutes par lrsquoopeacuterateur et scannent encontinu De cette maniegravere toute la surface de bacirctiment est releveacutee en une seule opeacute-ration contrairement au releveacute par TLS statique Lrsquoappareil est eacutequipeacute drsquoune centraleagrave inertie ou IMU (Inertial Measurement Unit) qui permet au systegraveme de connaicirctresa position en temps reacuteel afin de placer chaque point scanneacute au bon endroit dans lenuage
Des scanners portatifs ont reacutecemment eacuteteacute deacuteveloppeacutes (figure 5) Malgreacute une preacutecisionqui doit encore ecirctre prouveacutee et ameacutelioreacutee ces instruments rencontreront sans aucun
1 Sources httpwwwfarocom httpwwwleica-geosystemscom et httpwwwrieglcom
2 Sources httpwwwviametriscomfr et httpwwwapplanixcomsolutionslandtimmshtml
278
(a) Viametris iMMS (b) Trimble TIMMS
Figure 4 Indoor Mobile Mapping Systems (IMMS) 2
doute prochainement un inteacuterecirct grandissant Leurs plus grands avantages en plusde ceux que preacutesentent deacutejagrave les IMMS sont leur utilisation facile et ergonomiqueainsi que leur grande mobiliteacute Ces scanners portatifs sont nettement moins influenceacutesque les IMMS par les contraintes du terrain (sols irreacuteguliers zones peu accessiblesescaliers etc)
Figure 5 Le scanner 3D portatif ZEB1 3
3 Source httpwww3dlasermappingcomproductshandheld-mappin
279
Figure 6 Etapes chronologiques du scanning 3D
23 Le meacutethodologie de travail
Malgreacute le fait que les scanners sont devenus un outil polyvalent et convivial exeacute-cuter un releveacute 3D qualitatif impose un travail et une preacuteparation conseacutequente enamont et en aval de lrsquoopeacuteration de scanning afin drsquoobtenir des produits reacutepondant auxexigences Lrsquoutilisation adeacutequate de la technologie complexe neacutecessite une bonneconnaissance des instruments et de leurs limitations (sources drsquoerreurs) Un travailmeacuteticuleux et une bonne vue geacuteneacuterale du processus complet est indispensable Lameacutethodologie de travail preacutesenteacutee ci-apregraves a eacuteteacute eacutelaboreacutee dans le cadre du travail defin drsquoeacutetudes et srsquoapplique agrave la base pour lrsquoutilisation de scanners terrestres statiquesdans le domaine de la construction Neacuteanmoins la majoriteacute des eacutetapes et des pointsdrsquoattention restent applicables lors drsquoune utilisation drsquoun autre type de scanner
La figure 6 montre la chronologie des actions agrave effectuer lors des processus de scan-ning Il est important de noter que chaque prise de deacutecision dans une des eacutetapes auraune influence sur les autres eacutetapes du processus
280
Deux eacutetapes sont cruciales dans ce processus La premiegravere est la phase de preacutepara-tion et de planification du scanning (survey planning) Durant cette premiegravere eacutetapeil faut deacutefinir clairement les objectifs et exigences du projet de scanning (preacutecisionniveau de deacutetail toleacuterances dimensionnelles utiliteacute du produit agrave livrer etc) deacutefinirles produits finaux (nuages de points modegraveles plans coupes etc) avoir une bonneconnaissance du terrain choisir le mateacuteriel et la meacutethode de scanning adeacutequats eteacutelaborer un plan de scanning avec les diffeacuterents emplacements du scanner
La deuxiegraveme eacutetape qui neacutecessite une attention particuliegravere est la gestion des donneacuteeset en particulier le regroupement des diffeacuterents nuages de point en un seul nuage (dataregistration) Crsquoest sur cette manipulation que les erreurs peuvent vite srsquoaccumuler etengendrer des eacutecarts de mesures hors des toleacuterances initialement imposeacutees Plusieurstechniques de regroupement existent avec chacune leurs speacutecificiteacutes et preacutecision Lameacutethode de regroupement deacuteterminera en partie la meacutethode de scanning sur le terrainDans la plupart des cas un regroupement de haute preacutecision neacutecessitera une meacutethodede scanning plus laborieuse et lente (un nombre accru de scans utilisation de ciblesreacutesolution plus eacuteleveacutee etc)
3 Le BIM
31 Qursquoest-ce que le BIM
Le premier aspect agrave souligner lorsqursquoon parle du BIM est qursquoil ne srsquoagit pas simple-ment drsquoune technologie ou drsquoun logiciel CAD 3D Le BIM est un processus baseacute surun modegravele intelligent Le principal objectif du BIM est de favoriser la collaborationde toutes les parties prenantes drsquoun projet de construction afin de stimuler la produc-tiviteacute geacuteneacuterale Ideacutealement le BIM srsquoapplique au cycle de vie complet du projet ilsrsquoinstalle dans les premiegraveres phases drsquoavant-projet il reacuteduit les coucircts drsquoerreurs (quipeuvent repreacutesenter de 5 agrave 15 des coucircts de lrsquoentrepreneur) il aide agrave estimer rapi-dement et preacuteciseacutement les quantiteacutes crsquoest un support puissant pour geacuterer les phasesde construction et le planning de chantier il intervient dans la gestion des ressourceset il aide agrave atteindre les objectifs en termes de productiviteacute et de qualiteacute Une fois leprojet acheveacute le modegravele BIM sera utiliseacute pour la gestion du bacirctiment
Un modegravele BIM est baseacute sur une connexion de diffeacuterents objets qui outre leur formegeacuteomeacutetrique contiennent eacutegalement des informations et des paramegravetres concernantleur structure les mateacuteriaux leur position leurs relations avec drsquoautres objets la
4 Source httpwwwteklacom
281
Figure 7 Aspects et possibiliteacutes du BIM 4
phase de construction le coucirct le fournisseur etc Ce sont les informations seacuteman-tiques ou les meacuteta-donneacutees Le modegravele intelligent est inteacutegreacute avec un tas drsquoinfor-mations lieacutees au bacirctiment au projet et aux composants qui peuvent ecirctre partageacuteesfacilement avec tous les acteurs du projet
32 Qursquoapporte le BIM
De nombreux projets de construction ont agrave ce jour eacuteteacute meneacutes agrave bien avec et gracircce agravelrsquoapproche BIM Le processus apporte de nombreux avantages pour toutes les partiesprenantes parmi lesquels
bull La compreacutehension correcte du projet est favoriseacutee gracircce agrave lrsquoaccegraves degraves lrsquoavant-projet agrave un modegravele ergonomique et riche en informations ce qui permet agravelrsquoeacutequipe du projet de prendre des deacutecisions fondeacutees au plus tocirct Ces deacutecisionsauront un impact positif sur les coucircts et le planning Pour ce faire le processusBIM neacutecessite un plus grand effort durant la phase de conception que pour unprocessus classique (drafting-centric) tel qursquoillustreacute sur le graphe agrave la figure8
bull La coordination entre les diffeacuterents corps de meacutetier entrepreneurs sous-traitantsarchitectes bureaux drsquoeacutetudes fournisseurs et le maicirctre drsquooeuvre est sensible-ment ameacutelioreacutee
5 Source httpcenewscom la courbe BIM de Patrick MacLeamy
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-

276
Le reacutesultat final sortant drsquoun scan est alors un nuage de points tel qursquoillustreacute agrave lafigure 2 Ce nuage de points a eacuteteacute obtenu apregraves le scanning du Business Center ausiegravege de lrsquoentreprise BESIX (Bruxelles) dans le cadre du travail de fin drsquoeacutetudesLes diffeacuterences de couleur correspondent aux diffeacuterences drsquointensiteacute du signal retourcapteacute par le reacutecepteur pour chaque point mesureacute Cette intensiteacute varie en fonction dela distance de lrsquoinclinaison de la surface de sa reacuteflectiviteacute (mateacuteriau couleur etc) etde certaines conditions environnementales
Figure 2 Nuage de points du BESIX Business Center
22 Les instruments
Il existe plusieurs types drsquoinstruments de scanning 3D capables de livrer des nuagesde points Seuls ceux susceptibles drsquoecirctre utiles pour des applications avec le BIMseront eacutevoqueacutes ici Ces instruments diffegraverent principalement dans leur polyvalencevitesse drsquoacquisition de donneacutees preacutecision et mobiliteacute
Les scanners laser terrestres statiques (static TLS) sont les plus reacutepandus Ces instru-ments sont geacuteneacuteralement monteacutes sur un treacutepied et restent en place durant lrsquoexeacutecutiondu scan Ils scannent agrave 360gracircce au principe de rotation illustreacute agrave la figure 1 Ilsconviennent agrave de nombreuses applications et plusieurs fabricants proposent diffeacuterentsmodegraveles Les instruments les plus performants atteignent une preacutecision en dessous dumillimegravetre pour des points se situant agrave moins de 10m de lrsquoappareil et une preacutecision endessous du centimegravetre pour des points agrave 100m Certains ont une vitesse drsquoacquisition
277
de donneacutees supeacuterieure agrave 1 millions de points par seconde ce qui reacutesulte en des nuagesde points extrecircmement denses et deacutetailleacutes De plus en plus de TLS sont eacutequipeacutes drsquounecameacutera ce qui permet de donner agrave chaque point sa couleur reacuteelle le reacutesultat est unnuage de points tregraves photo-reacutealiste qui facilite la visualisation et la compreacutehensiondes donneacutees Quelques exemples de static TLS sont illustreacutes agrave la figure 3
(a) Faro Focus 3D (b) Leica P20 (c) Riegl VZ-400
Figure 3 Scanners laser terrestres statiques (static TLS) 1
Certaines stations totales dernier cri sont eacutegalement pourvues drsquoune option scanningCependant ce nrsquoest pas la fonction principale de ces instruments mais plutocirct une op-tion compleacutementaire agrave la station totale permettant drsquoeffectuer des tacircches de scanningseacutelectives lorsque certaines zones de lrsquoenvironnement doivent ecirctre releveacutees en hautedeacutefinition et drsquoautres zones avec seulement quelques points singuliers
Dans le cas particulier de grands bacirctiments avec des sols reacuteguliers et lorsqursquounepreacutecision de 1-2 cm srsquoavegravere suffisante les scanners mobiles de type IMMS (IndoorMobile Mapping Systems) sont une solution qui offre un gain de temps consideacute-rable Ces appareils permettent de scanner jusqursquoagrave 10000 m2 de bacirctiment par jourCes instruments (exemples agrave la figure 4) sont pousseacutes par lrsquoopeacuterateur et scannent encontinu De cette maniegravere toute la surface de bacirctiment est releveacutee en une seule opeacute-ration contrairement au releveacute par TLS statique Lrsquoappareil est eacutequipeacute drsquoune centraleagrave inertie ou IMU (Inertial Measurement Unit) qui permet au systegraveme de connaicirctresa position en temps reacuteel afin de placer chaque point scanneacute au bon endroit dans lenuage
Des scanners portatifs ont reacutecemment eacuteteacute deacuteveloppeacutes (figure 5) Malgreacute une preacutecisionqui doit encore ecirctre prouveacutee et ameacutelioreacutee ces instruments rencontreront sans aucun
1 Sources httpwwwfarocom httpwwwleica-geosystemscom et httpwwwrieglcom
2 Sources httpwwwviametriscomfr et httpwwwapplanixcomsolutionslandtimmshtml
278
(a) Viametris iMMS (b) Trimble TIMMS
Figure 4 Indoor Mobile Mapping Systems (IMMS) 2
doute prochainement un inteacuterecirct grandissant Leurs plus grands avantages en plusde ceux que preacutesentent deacutejagrave les IMMS sont leur utilisation facile et ergonomiqueainsi que leur grande mobiliteacute Ces scanners portatifs sont nettement moins influenceacutesque les IMMS par les contraintes du terrain (sols irreacuteguliers zones peu accessiblesescaliers etc)
Figure 5 Le scanner 3D portatif ZEB1 3
3 Source httpwww3dlasermappingcomproductshandheld-mappin
279
Figure 6 Etapes chronologiques du scanning 3D
23 Le meacutethodologie de travail
Malgreacute le fait que les scanners sont devenus un outil polyvalent et convivial exeacute-cuter un releveacute 3D qualitatif impose un travail et une preacuteparation conseacutequente enamont et en aval de lrsquoopeacuteration de scanning afin drsquoobtenir des produits reacutepondant auxexigences Lrsquoutilisation adeacutequate de la technologie complexe neacutecessite une bonneconnaissance des instruments et de leurs limitations (sources drsquoerreurs) Un travailmeacuteticuleux et une bonne vue geacuteneacuterale du processus complet est indispensable Lameacutethodologie de travail preacutesenteacutee ci-apregraves a eacuteteacute eacutelaboreacutee dans le cadre du travail defin drsquoeacutetudes et srsquoapplique agrave la base pour lrsquoutilisation de scanners terrestres statiquesdans le domaine de la construction Neacuteanmoins la majoriteacute des eacutetapes et des pointsdrsquoattention restent applicables lors drsquoune utilisation drsquoun autre type de scanner
La figure 6 montre la chronologie des actions agrave effectuer lors des processus de scan-ning Il est important de noter que chaque prise de deacutecision dans une des eacutetapes auraune influence sur les autres eacutetapes du processus
280
Deux eacutetapes sont cruciales dans ce processus La premiegravere est la phase de preacutepara-tion et de planification du scanning (survey planning) Durant cette premiegravere eacutetapeil faut deacutefinir clairement les objectifs et exigences du projet de scanning (preacutecisionniveau de deacutetail toleacuterances dimensionnelles utiliteacute du produit agrave livrer etc) deacutefinirles produits finaux (nuages de points modegraveles plans coupes etc) avoir une bonneconnaissance du terrain choisir le mateacuteriel et la meacutethode de scanning adeacutequats eteacutelaborer un plan de scanning avec les diffeacuterents emplacements du scanner
La deuxiegraveme eacutetape qui neacutecessite une attention particuliegravere est la gestion des donneacuteeset en particulier le regroupement des diffeacuterents nuages de point en un seul nuage (dataregistration) Crsquoest sur cette manipulation que les erreurs peuvent vite srsquoaccumuler etengendrer des eacutecarts de mesures hors des toleacuterances initialement imposeacutees Plusieurstechniques de regroupement existent avec chacune leurs speacutecificiteacutes et preacutecision Lameacutethode de regroupement deacuteterminera en partie la meacutethode de scanning sur le terrainDans la plupart des cas un regroupement de haute preacutecision neacutecessitera une meacutethodede scanning plus laborieuse et lente (un nombre accru de scans utilisation de ciblesreacutesolution plus eacuteleveacutee etc)
3 Le BIM
31 Qursquoest-ce que le BIM
Le premier aspect agrave souligner lorsqursquoon parle du BIM est qursquoil ne srsquoagit pas simple-ment drsquoune technologie ou drsquoun logiciel CAD 3D Le BIM est un processus baseacute surun modegravele intelligent Le principal objectif du BIM est de favoriser la collaborationde toutes les parties prenantes drsquoun projet de construction afin de stimuler la produc-tiviteacute geacuteneacuterale Ideacutealement le BIM srsquoapplique au cycle de vie complet du projet ilsrsquoinstalle dans les premiegraveres phases drsquoavant-projet il reacuteduit les coucircts drsquoerreurs (quipeuvent repreacutesenter de 5 agrave 15 des coucircts de lrsquoentrepreneur) il aide agrave estimer rapi-dement et preacuteciseacutement les quantiteacutes crsquoest un support puissant pour geacuterer les phasesde construction et le planning de chantier il intervient dans la gestion des ressourceset il aide agrave atteindre les objectifs en termes de productiviteacute et de qualiteacute Une fois leprojet acheveacute le modegravele BIM sera utiliseacute pour la gestion du bacirctiment
Un modegravele BIM est baseacute sur une connexion de diffeacuterents objets qui outre leur formegeacuteomeacutetrique contiennent eacutegalement des informations et des paramegravetres concernantleur structure les mateacuteriaux leur position leurs relations avec drsquoautres objets la
4 Source httpwwwteklacom
281
Figure 7 Aspects et possibiliteacutes du BIM 4
phase de construction le coucirct le fournisseur etc Ce sont les informations seacuteman-tiques ou les meacuteta-donneacutees Le modegravele intelligent est inteacutegreacute avec un tas drsquoinfor-mations lieacutees au bacirctiment au projet et aux composants qui peuvent ecirctre partageacuteesfacilement avec tous les acteurs du projet
32 Qursquoapporte le BIM
De nombreux projets de construction ont agrave ce jour eacuteteacute meneacutes agrave bien avec et gracircce agravelrsquoapproche BIM Le processus apporte de nombreux avantages pour toutes les partiesprenantes parmi lesquels
bull La compreacutehension correcte du projet est favoriseacutee gracircce agrave lrsquoaccegraves degraves lrsquoavant-projet agrave un modegravele ergonomique et riche en informations ce qui permet agravelrsquoeacutequipe du projet de prendre des deacutecisions fondeacutees au plus tocirct Ces deacutecisionsauront un impact positif sur les coucircts et le planning Pour ce faire le processusBIM neacutecessite un plus grand effort durant la phase de conception que pour unprocessus classique (drafting-centric) tel qursquoillustreacute sur le graphe agrave la figure8
bull La coordination entre les diffeacuterents corps de meacutetier entrepreneurs sous-traitantsarchitectes bureaux drsquoeacutetudes fournisseurs et le maicirctre drsquooeuvre est sensible-ment ameacutelioreacutee
5 Source httpcenewscom la courbe BIM de Patrick MacLeamy
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
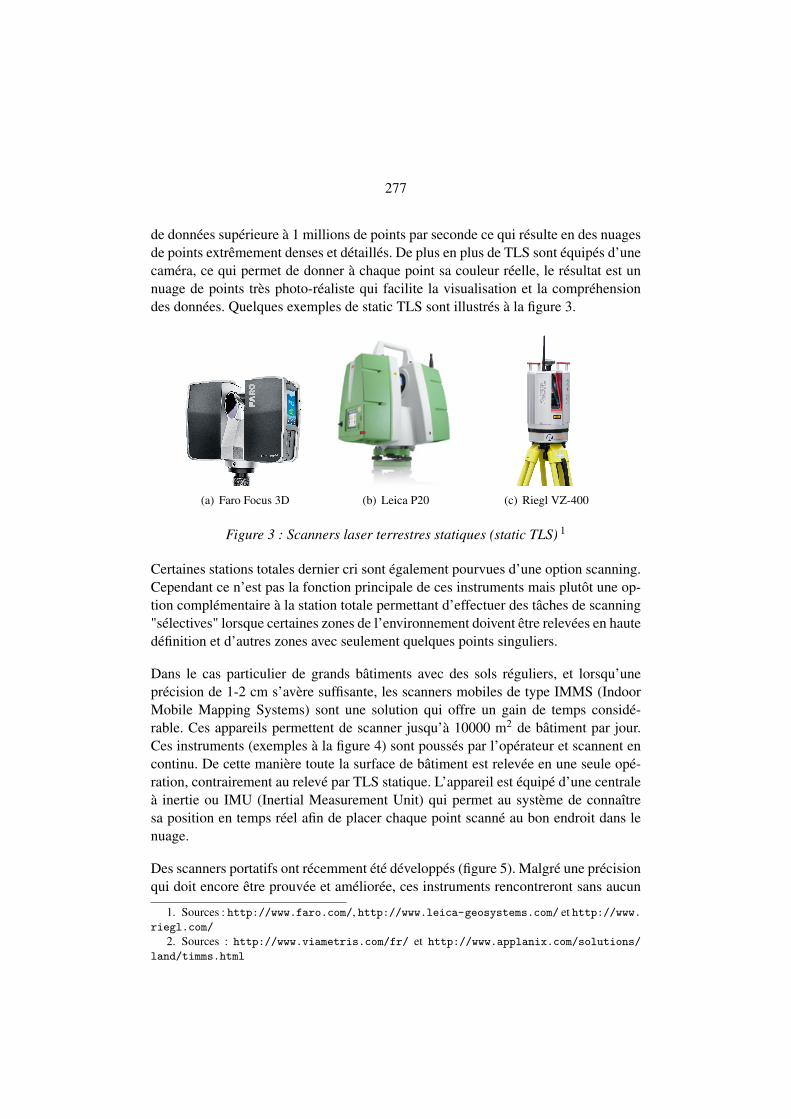
277
de donneacutees supeacuterieure agrave 1 millions de points par seconde ce qui reacutesulte en des nuagesde points extrecircmement denses et deacutetailleacutes De plus en plus de TLS sont eacutequipeacutes drsquounecameacutera ce qui permet de donner agrave chaque point sa couleur reacuteelle le reacutesultat est unnuage de points tregraves photo-reacutealiste qui facilite la visualisation et la compreacutehensiondes donneacutees Quelques exemples de static TLS sont illustreacutes agrave la figure 3
(a) Faro Focus 3D (b) Leica P20 (c) Riegl VZ-400
Figure 3 Scanners laser terrestres statiques (static TLS) 1
Certaines stations totales dernier cri sont eacutegalement pourvues drsquoune option scanningCependant ce nrsquoest pas la fonction principale de ces instruments mais plutocirct une op-tion compleacutementaire agrave la station totale permettant drsquoeffectuer des tacircches de scanningseacutelectives lorsque certaines zones de lrsquoenvironnement doivent ecirctre releveacutees en hautedeacutefinition et drsquoautres zones avec seulement quelques points singuliers
Dans le cas particulier de grands bacirctiments avec des sols reacuteguliers et lorsqursquounepreacutecision de 1-2 cm srsquoavegravere suffisante les scanners mobiles de type IMMS (IndoorMobile Mapping Systems) sont une solution qui offre un gain de temps consideacute-rable Ces appareils permettent de scanner jusqursquoagrave 10000 m2 de bacirctiment par jourCes instruments (exemples agrave la figure 4) sont pousseacutes par lrsquoopeacuterateur et scannent encontinu De cette maniegravere toute la surface de bacirctiment est releveacutee en une seule opeacute-ration contrairement au releveacute par TLS statique Lrsquoappareil est eacutequipeacute drsquoune centraleagrave inertie ou IMU (Inertial Measurement Unit) qui permet au systegraveme de connaicirctresa position en temps reacuteel afin de placer chaque point scanneacute au bon endroit dans lenuage
Des scanners portatifs ont reacutecemment eacuteteacute deacuteveloppeacutes (figure 5) Malgreacute une preacutecisionqui doit encore ecirctre prouveacutee et ameacutelioreacutee ces instruments rencontreront sans aucun
1 Sources httpwwwfarocom httpwwwleica-geosystemscom et httpwwwrieglcom
2 Sources httpwwwviametriscomfr et httpwwwapplanixcomsolutionslandtimmshtml
278
(a) Viametris iMMS (b) Trimble TIMMS
Figure 4 Indoor Mobile Mapping Systems (IMMS) 2
doute prochainement un inteacuterecirct grandissant Leurs plus grands avantages en plusde ceux que preacutesentent deacutejagrave les IMMS sont leur utilisation facile et ergonomiqueainsi que leur grande mobiliteacute Ces scanners portatifs sont nettement moins influenceacutesque les IMMS par les contraintes du terrain (sols irreacuteguliers zones peu accessiblesescaliers etc)
Figure 5 Le scanner 3D portatif ZEB1 3
3 Source httpwww3dlasermappingcomproductshandheld-mappin
279
Figure 6 Etapes chronologiques du scanning 3D
23 Le meacutethodologie de travail
Malgreacute le fait que les scanners sont devenus un outil polyvalent et convivial exeacute-cuter un releveacute 3D qualitatif impose un travail et une preacuteparation conseacutequente enamont et en aval de lrsquoopeacuteration de scanning afin drsquoobtenir des produits reacutepondant auxexigences Lrsquoutilisation adeacutequate de la technologie complexe neacutecessite une bonneconnaissance des instruments et de leurs limitations (sources drsquoerreurs) Un travailmeacuteticuleux et une bonne vue geacuteneacuterale du processus complet est indispensable Lameacutethodologie de travail preacutesenteacutee ci-apregraves a eacuteteacute eacutelaboreacutee dans le cadre du travail defin drsquoeacutetudes et srsquoapplique agrave la base pour lrsquoutilisation de scanners terrestres statiquesdans le domaine de la construction Neacuteanmoins la majoriteacute des eacutetapes et des pointsdrsquoattention restent applicables lors drsquoune utilisation drsquoun autre type de scanner
La figure 6 montre la chronologie des actions agrave effectuer lors des processus de scan-ning Il est important de noter que chaque prise de deacutecision dans une des eacutetapes auraune influence sur les autres eacutetapes du processus
280
Deux eacutetapes sont cruciales dans ce processus La premiegravere est la phase de preacutepara-tion et de planification du scanning (survey planning) Durant cette premiegravere eacutetapeil faut deacutefinir clairement les objectifs et exigences du projet de scanning (preacutecisionniveau de deacutetail toleacuterances dimensionnelles utiliteacute du produit agrave livrer etc) deacutefinirles produits finaux (nuages de points modegraveles plans coupes etc) avoir une bonneconnaissance du terrain choisir le mateacuteriel et la meacutethode de scanning adeacutequats eteacutelaborer un plan de scanning avec les diffeacuterents emplacements du scanner
La deuxiegraveme eacutetape qui neacutecessite une attention particuliegravere est la gestion des donneacuteeset en particulier le regroupement des diffeacuterents nuages de point en un seul nuage (dataregistration) Crsquoest sur cette manipulation que les erreurs peuvent vite srsquoaccumuler etengendrer des eacutecarts de mesures hors des toleacuterances initialement imposeacutees Plusieurstechniques de regroupement existent avec chacune leurs speacutecificiteacutes et preacutecision Lameacutethode de regroupement deacuteterminera en partie la meacutethode de scanning sur le terrainDans la plupart des cas un regroupement de haute preacutecision neacutecessitera une meacutethodede scanning plus laborieuse et lente (un nombre accru de scans utilisation de ciblesreacutesolution plus eacuteleveacutee etc)
3 Le BIM
31 Qursquoest-ce que le BIM
Le premier aspect agrave souligner lorsqursquoon parle du BIM est qursquoil ne srsquoagit pas simple-ment drsquoune technologie ou drsquoun logiciel CAD 3D Le BIM est un processus baseacute surun modegravele intelligent Le principal objectif du BIM est de favoriser la collaborationde toutes les parties prenantes drsquoun projet de construction afin de stimuler la produc-tiviteacute geacuteneacuterale Ideacutealement le BIM srsquoapplique au cycle de vie complet du projet ilsrsquoinstalle dans les premiegraveres phases drsquoavant-projet il reacuteduit les coucircts drsquoerreurs (quipeuvent repreacutesenter de 5 agrave 15 des coucircts de lrsquoentrepreneur) il aide agrave estimer rapi-dement et preacuteciseacutement les quantiteacutes crsquoest un support puissant pour geacuterer les phasesde construction et le planning de chantier il intervient dans la gestion des ressourceset il aide agrave atteindre les objectifs en termes de productiviteacute et de qualiteacute Une fois leprojet acheveacute le modegravele BIM sera utiliseacute pour la gestion du bacirctiment
Un modegravele BIM est baseacute sur une connexion de diffeacuterents objets qui outre leur formegeacuteomeacutetrique contiennent eacutegalement des informations et des paramegravetres concernantleur structure les mateacuteriaux leur position leurs relations avec drsquoautres objets la
4 Source httpwwwteklacom
281
Figure 7 Aspects et possibiliteacutes du BIM 4
phase de construction le coucirct le fournisseur etc Ce sont les informations seacuteman-tiques ou les meacuteta-donneacutees Le modegravele intelligent est inteacutegreacute avec un tas drsquoinfor-mations lieacutees au bacirctiment au projet et aux composants qui peuvent ecirctre partageacuteesfacilement avec tous les acteurs du projet
32 Qursquoapporte le BIM
De nombreux projets de construction ont agrave ce jour eacuteteacute meneacutes agrave bien avec et gracircce agravelrsquoapproche BIM Le processus apporte de nombreux avantages pour toutes les partiesprenantes parmi lesquels
bull La compreacutehension correcte du projet est favoriseacutee gracircce agrave lrsquoaccegraves degraves lrsquoavant-projet agrave un modegravele ergonomique et riche en informations ce qui permet agravelrsquoeacutequipe du projet de prendre des deacutecisions fondeacutees au plus tocirct Ces deacutecisionsauront un impact positif sur les coucircts et le planning Pour ce faire le processusBIM neacutecessite un plus grand effort durant la phase de conception que pour unprocessus classique (drafting-centric) tel qursquoillustreacute sur le graphe agrave la figure8
bull La coordination entre les diffeacuterents corps de meacutetier entrepreneurs sous-traitantsarchitectes bureaux drsquoeacutetudes fournisseurs et le maicirctre drsquooeuvre est sensible-ment ameacutelioreacutee
5 Source httpcenewscom la courbe BIM de Patrick MacLeamy
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
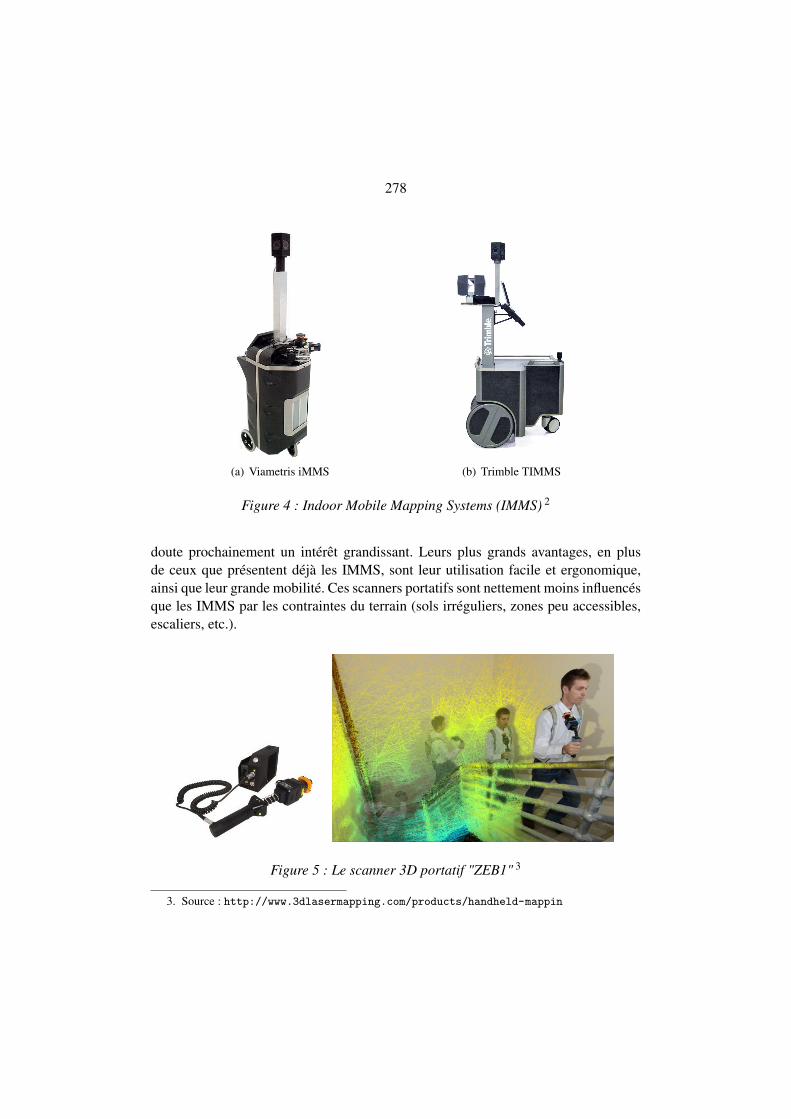
278
(a) Viametris iMMS (b) Trimble TIMMS
Figure 4 Indoor Mobile Mapping Systems (IMMS) 2
doute prochainement un inteacuterecirct grandissant Leurs plus grands avantages en plusde ceux que preacutesentent deacutejagrave les IMMS sont leur utilisation facile et ergonomiqueainsi que leur grande mobiliteacute Ces scanners portatifs sont nettement moins influenceacutesque les IMMS par les contraintes du terrain (sols irreacuteguliers zones peu accessiblesescaliers etc)
Figure 5 Le scanner 3D portatif ZEB1 3
3 Source httpwww3dlasermappingcomproductshandheld-mappin
279
Figure 6 Etapes chronologiques du scanning 3D
23 Le meacutethodologie de travail
Malgreacute le fait que les scanners sont devenus un outil polyvalent et convivial exeacute-cuter un releveacute 3D qualitatif impose un travail et une preacuteparation conseacutequente enamont et en aval de lrsquoopeacuteration de scanning afin drsquoobtenir des produits reacutepondant auxexigences Lrsquoutilisation adeacutequate de la technologie complexe neacutecessite une bonneconnaissance des instruments et de leurs limitations (sources drsquoerreurs) Un travailmeacuteticuleux et une bonne vue geacuteneacuterale du processus complet est indispensable Lameacutethodologie de travail preacutesenteacutee ci-apregraves a eacuteteacute eacutelaboreacutee dans le cadre du travail defin drsquoeacutetudes et srsquoapplique agrave la base pour lrsquoutilisation de scanners terrestres statiquesdans le domaine de la construction Neacuteanmoins la majoriteacute des eacutetapes et des pointsdrsquoattention restent applicables lors drsquoune utilisation drsquoun autre type de scanner
La figure 6 montre la chronologie des actions agrave effectuer lors des processus de scan-ning Il est important de noter que chaque prise de deacutecision dans une des eacutetapes auraune influence sur les autres eacutetapes du processus
280
Deux eacutetapes sont cruciales dans ce processus La premiegravere est la phase de preacutepara-tion et de planification du scanning (survey planning) Durant cette premiegravere eacutetapeil faut deacutefinir clairement les objectifs et exigences du projet de scanning (preacutecisionniveau de deacutetail toleacuterances dimensionnelles utiliteacute du produit agrave livrer etc) deacutefinirles produits finaux (nuages de points modegraveles plans coupes etc) avoir une bonneconnaissance du terrain choisir le mateacuteriel et la meacutethode de scanning adeacutequats eteacutelaborer un plan de scanning avec les diffeacuterents emplacements du scanner
La deuxiegraveme eacutetape qui neacutecessite une attention particuliegravere est la gestion des donneacuteeset en particulier le regroupement des diffeacuterents nuages de point en un seul nuage (dataregistration) Crsquoest sur cette manipulation que les erreurs peuvent vite srsquoaccumuler etengendrer des eacutecarts de mesures hors des toleacuterances initialement imposeacutees Plusieurstechniques de regroupement existent avec chacune leurs speacutecificiteacutes et preacutecision Lameacutethode de regroupement deacuteterminera en partie la meacutethode de scanning sur le terrainDans la plupart des cas un regroupement de haute preacutecision neacutecessitera une meacutethodede scanning plus laborieuse et lente (un nombre accru de scans utilisation de ciblesreacutesolution plus eacuteleveacutee etc)
3 Le BIM
31 Qursquoest-ce que le BIM
Le premier aspect agrave souligner lorsqursquoon parle du BIM est qursquoil ne srsquoagit pas simple-ment drsquoune technologie ou drsquoun logiciel CAD 3D Le BIM est un processus baseacute surun modegravele intelligent Le principal objectif du BIM est de favoriser la collaborationde toutes les parties prenantes drsquoun projet de construction afin de stimuler la produc-tiviteacute geacuteneacuterale Ideacutealement le BIM srsquoapplique au cycle de vie complet du projet ilsrsquoinstalle dans les premiegraveres phases drsquoavant-projet il reacuteduit les coucircts drsquoerreurs (quipeuvent repreacutesenter de 5 agrave 15 des coucircts de lrsquoentrepreneur) il aide agrave estimer rapi-dement et preacuteciseacutement les quantiteacutes crsquoest un support puissant pour geacuterer les phasesde construction et le planning de chantier il intervient dans la gestion des ressourceset il aide agrave atteindre les objectifs en termes de productiviteacute et de qualiteacute Une fois leprojet acheveacute le modegravele BIM sera utiliseacute pour la gestion du bacirctiment
Un modegravele BIM est baseacute sur une connexion de diffeacuterents objets qui outre leur formegeacuteomeacutetrique contiennent eacutegalement des informations et des paramegravetres concernantleur structure les mateacuteriaux leur position leurs relations avec drsquoautres objets la
4 Source httpwwwteklacom
281
Figure 7 Aspects et possibiliteacutes du BIM 4
phase de construction le coucirct le fournisseur etc Ce sont les informations seacuteman-tiques ou les meacuteta-donneacutees Le modegravele intelligent est inteacutegreacute avec un tas drsquoinfor-mations lieacutees au bacirctiment au projet et aux composants qui peuvent ecirctre partageacuteesfacilement avec tous les acteurs du projet
32 Qursquoapporte le BIM
De nombreux projets de construction ont agrave ce jour eacuteteacute meneacutes agrave bien avec et gracircce agravelrsquoapproche BIM Le processus apporte de nombreux avantages pour toutes les partiesprenantes parmi lesquels
bull La compreacutehension correcte du projet est favoriseacutee gracircce agrave lrsquoaccegraves degraves lrsquoavant-projet agrave un modegravele ergonomique et riche en informations ce qui permet agravelrsquoeacutequipe du projet de prendre des deacutecisions fondeacutees au plus tocirct Ces deacutecisionsauront un impact positif sur les coucircts et le planning Pour ce faire le processusBIM neacutecessite un plus grand effort durant la phase de conception que pour unprocessus classique (drafting-centric) tel qursquoillustreacute sur le graphe agrave la figure8
bull La coordination entre les diffeacuterents corps de meacutetier entrepreneurs sous-traitantsarchitectes bureaux drsquoeacutetudes fournisseurs et le maicirctre drsquooeuvre est sensible-ment ameacutelioreacutee
5 Source httpcenewscom la courbe BIM de Patrick MacLeamy
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
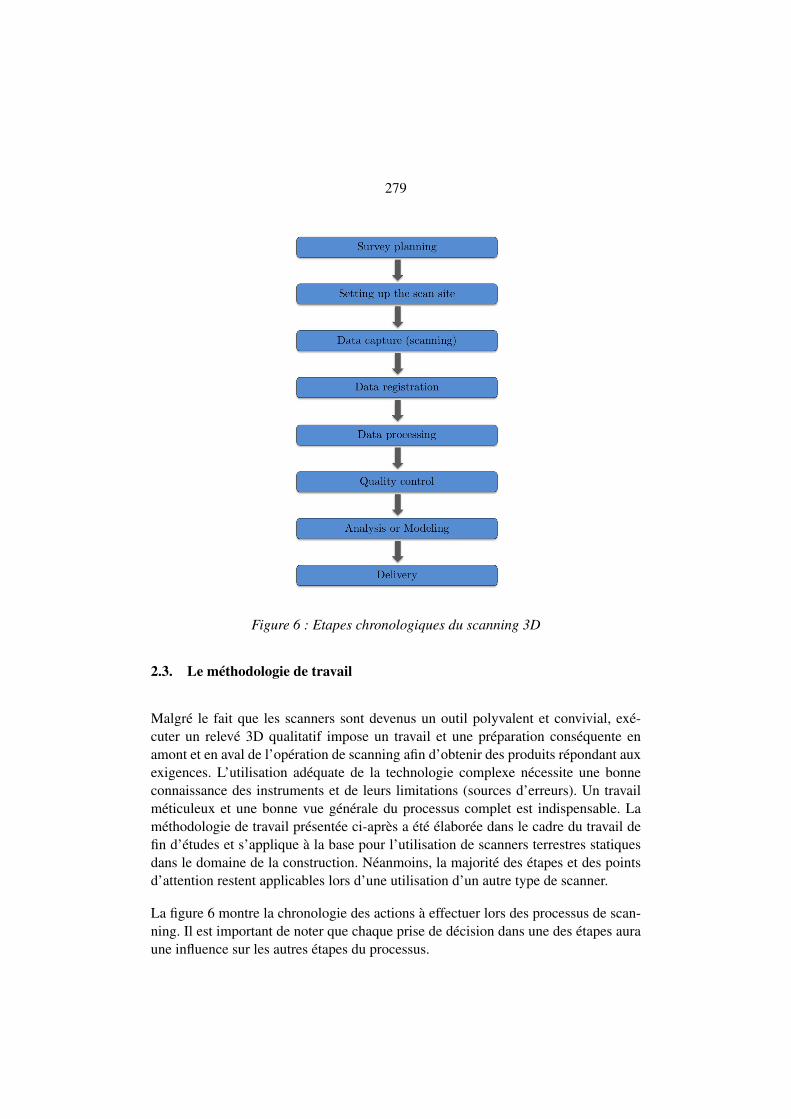
279
Figure 6 Etapes chronologiques du scanning 3D
23 Le meacutethodologie de travail
Malgreacute le fait que les scanners sont devenus un outil polyvalent et convivial exeacute-cuter un releveacute 3D qualitatif impose un travail et une preacuteparation conseacutequente enamont et en aval de lrsquoopeacuteration de scanning afin drsquoobtenir des produits reacutepondant auxexigences Lrsquoutilisation adeacutequate de la technologie complexe neacutecessite une bonneconnaissance des instruments et de leurs limitations (sources drsquoerreurs) Un travailmeacuteticuleux et une bonne vue geacuteneacuterale du processus complet est indispensable Lameacutethodologie de travail preacutesenteacutee ci-apregraves a eacuteteacute eacutelaboreacutee dans le cadre du travail defin drsquoeacutetudes et srsquoapplique agrave la base pour lrsquoutilisation de scanners terrestres statiquesdans le domaine de la construction Neacuteanmoins la majoriteacute des eacutetapes et des pointsdrsquoattention restent applicables lors drsquoune utilisation drsquoun autre type de scanner
La figure 6 montre la chronologie des actions agrave effectuer lors des processus de scan-ning Il est important de noter que chaque prise de deacutecision dans une des eacutetapes auraune influence sur les autres eacutetapes du processus
280
Deux eacutetapes sont cruciales dans ce processus La premiegravere est la phase de preacutepara-tion et de planification du scanning (survey planning) Durant cette premiegravere eacutetapeil faut deacutefinir clairement les objectifs et exigences du projet de scanning (preacutecisionniveau de deacutetail toleacuterances dimensionnelles utiliteacute du produit agrave livrer etc) deacutefinirles produits finaux (nuages de points modegraveles plans coupes etc) avoir une bonneconnaissance du terrain choisir le mateacuteriel et la meacutethode de scanning adeacutequats eteacutelaborer un plan de scanning avec les diffeacuterents emplacements du scanner
La deuxiegraveme eacutetape qui neacutecessite une attention particuliegravere est la gestion des donneacuteeset en particulier le regroupement des diffeacuterents nuages de point en un seul nuage (dataregistration) Crsquoest sur cette manipulation que les erreurs peuvent vite srsquoaccumuler etengendrer des eacutecarts de mesures hors des toleacuterances initialement imposeacutees Plusieurstechniques de regroupement existent avec chacune leurs speacutecificiteacutes et preacutecision Lameacutethode de regroupement deacuteterminera en partie la meacutethode de scanning sur le terrainDans la plupart des cas un regroupement de haute preacutecision neacutecessitera une meacutethodede scanning plus laborieuse et lente (un nombre accru de scans utilisation de ciblesreacutesolution plus eacuteleveacutee etc)
3 Le BIM
31 Qursquoest-ce que le BIM
Le premier aspect agrave souligner lorsqursquoon parle du BIM est qursquoil ne srsquoagit pas simple-ment drsquoune technologie ou drsquoun logiciel CAD 3D Le BIM est un processus baseacute surun modegravele intelligent Le principal objectif du BIM est de favoriser la collaborationde toutes les parties prenantes drsquoun projet de construction afin de stimuler la produc-tiviteacute geacuteneacuterale Ideacutealement le BIM srsquoapplique au cycle de vie complet du projet ilsrsquoinstalle dans les premiegraveres phases drsquoavant-projet il reacuteduit les coucircts drsquoerreurs (quipeuvent repreacutesenter de 5 agrave 15 des coucircts de lrsquoentrepreneur) il aide agrave estimer rapi-dement et preacuteciseacutement les quantiteacutes crsquoest un support puissant pour geacuterer les phasesde construction et le planning de chantier il intervient dans la gestion des ressourceset il aide agrave atteindre les objectifs en termes de productiviteacute et de qualiteacute Une fois leprojet acheveacute le modegravele BIM sera utiliseacute pour la gestion du bacirctiment
Un modegravele BIM est baseacute sur une connexion de diffeacuterents objets qui outre leur formegeacuteomeacutetrique contiennent eacutegalement des informations et des paramegravetres concernantleur structure les mateacuteriaux leur position leurs relations avec drsquoautres objets la
4 Source httpwwwteklacom
281
Figure 7 Aspects et possibiliteacutes du BIM 4
phase de construction le coucirct le fournisseur etc Ce sont les informations seacuteman-tiques ou les meacuteta-donneacutees Le modegravele intelligent est inteacutegreacute avec un tas drsquoinfor-mations lieacutees au bacirctiment au projet et aux composants qui peuvent ecirctre partageacuteesfacilement avec tous les acteurs du projet
32 Qursquoapporte le BIM
De nombreux projets de construction ont agrave ce jour eacuteteacute meneacutes agrave bien avec et gracircce agravelrsquoapproche BIM Le processus apporte de nombreux avantages pour toutes les partiesprenantes parmi lesquels
bull La compreacutehension correcte du projet est favoriseacutee gracircce agrave lrsquoaccegraves degraves lrsquoavant-projet agrave un modegravele ergonomique et riche en informations ce qui permet agravelrsquoeacutequipe du projet de prendre des deacutecisions fondeacutees au plus tocirct Ces deacutecisionsauront un impact positif sur les coucircts et le planning Pour ce faire le processusBIM neacutecessite un plus grand effort durant la phase de conception que pour unprocessus classique (drafting-centric) tel qursquoillustreacute sur le graphe agrave la figure8
bull La coordination entre les diffeacuterents corps de meacutetier entrepreneurs sous-traitantsarchitectes bureaux drsquoeacutetudes fournisseurs et le maicirctre drsquooeuvre est sensible-ment ameacutelioreacutee
5 Source httpcenewscom la courbe BIM de Patrick MacLeamy
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
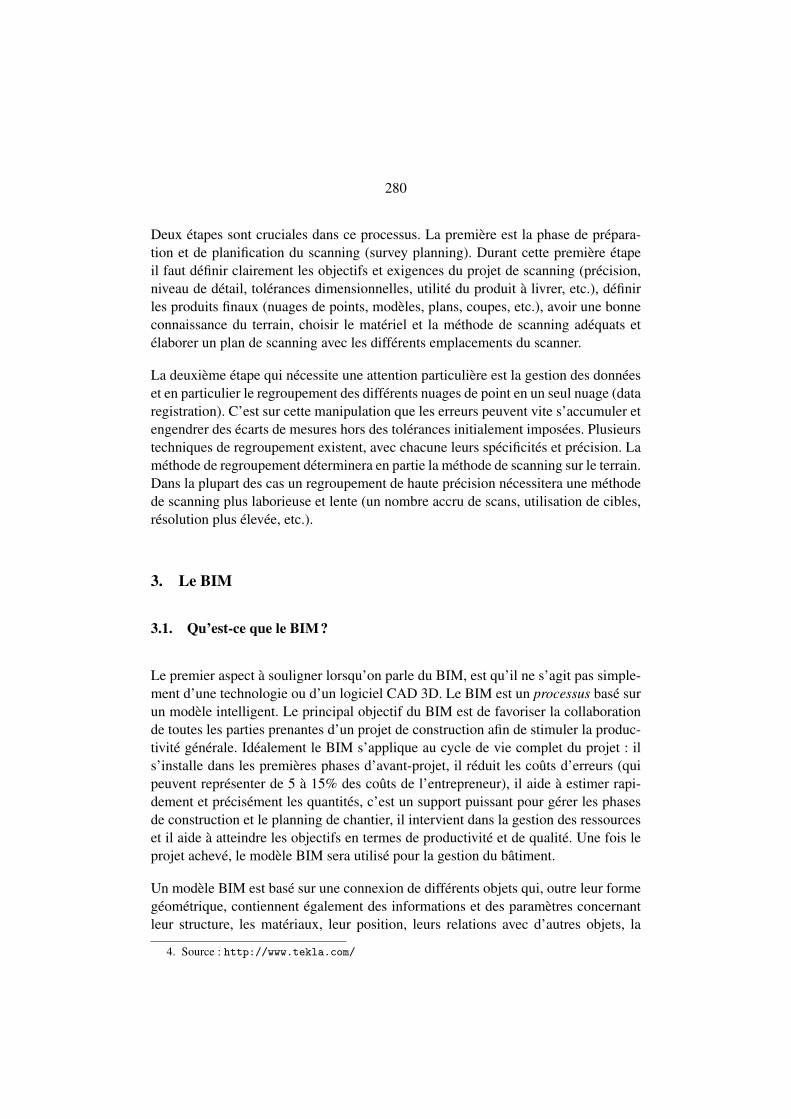
280
Deux eacutetapes sont cruciales dans ce processus La premiegravere est la phase de preacutepara-tion et de planification du scanning (survey planning) Durant cette premiegravere eacutetapeil faut deacutefinir clairement les objectifs et exigences du projet de scanning (preacutecisionniveau de deacutetail toleacuterances dimensionnelles utiliteacute du produit agrave livrer etc) deacutefinirles produits finaux (nuages de points modegraveles plans coupes etc) avoir une bonneconnaissance du terrain choisir le mateacuteriel et la meacutethode de scanning adeacutequats eteacutelaborer un plan de scanning avec les diffeacuterents emplacements du scanner
La deuxiegraveme eacutetape qui neacutecessite une attention particuliegravere est la gestion des donneacuteeset en particulier le regroupement des diffeacuterents nuages de point en un seul nuage (dataregistration) Crsquoest sur cette manipulation que les erreurs peuvent vite srsquoaccumuler etengendrer des eacutecarts de mesures hors des toleacuterances initialement imposeacutees Plusieurstechniques de regroupement existent avec chacune leurs speacutecificiteacutes et preacutecision Lameacutethode de regroupement deacuteterminera en partie la meacutethode de scanning sur le terrainDans la plupart des cas un regroupement de haute preacutecision neacutecessitera une meacutethodede scanning plus laborieuse et lente (un nombre accru de scans utilisation de ciblesreacutesolution plus eacuteleveacutee etc)
3 Le BIM
31 Qursquoest-ce que le BIM
Le premier aspect agrave souligner lorsqursquoon parle du BIM est qursquoil ne srsquoagit pas simple-ment drsquoune technologie ou drsquoun logiciel CAD 3D Le BIM est un processus baseacute surun modegravele intelligent Le principal objectif du BIM est de favoriser la collaborationde toutes les parties prenantes drsquoun projet de construction afin de stimuler la produc-tiviteacute geacuteneacuterale Ideacutealement le BIM srsquoapplique au cycle de vie complet du projet ilsrsquoinstalle dans les premiegraveres phases drsquoavant-projet il reacuteduit les coucircts drsquoerreurs (quipeuvent repreacutesenter de 5 agrave 15 des coucircts de lrsquoentrepreneur) il aide agrave estimer rapi-dement et preacuteciseacutement les quantiteacutes crsquoest un support puissant pour geacuterer les phasesde construction et le planning de chantier il intervient dans la gestion des ressourceset il aide agrave atteindre les objectifs en termes de productiviteacute et de qualiteacute Une fois leprojet acheveacute le modegravele BIM sera utiliseacute pour la gestion du bacirctiment
Un modegravele BIM est baseacute sur une connexion de diffeacuterents objets qui outre leur formegeacuteomeacutetrique contiennent eacutegalement des informations et des paramegravetres concernantleur structure les mateacuteriaux leur position leurs relations avec drsquoautres objets la
4 Source httpwwwteklacom
281
Figure 7 Aspects et possibiliteacutes du BIM 4
phase de construction le coucirct le fournisseur etc Ce sont les informations seacuteman-tiques ou les meacuteta-donneacutees Le modegravele intelligent est inteacutegreacute avec un tas drsquoinfor-mations lieacutees au bacirctiment au projet et aux composants qui peuvent ecirctre partageacuteesfacilement avec tous les acteurs du projet
32 Qursquoapporte le BIM
De nombreux projets de construction ont agrave ce jour eacuteteacute meneacutes agrave bien avec et gracircce agravelrsquoapproche BIM Le processus apporte de nombreux avantages pour toutes les partiesprenantes parmi lesquels
bull La compreacutehension correcte du projet est favoriseacutee gracircce agrave lrsquoaccegraves degraves lrsquoavant-projet agrave un modegravele ergonomique et riche en informations ce qui permet agravelrsquoeacutequipe du projet de prendre des deacutecisions fondeacutees au plus tocirct Ces deacutecisionsauront un impact positif sur les coucircts et le planning Pour ce faire le processusBIM neacutecessite un plus grand effort durant la phase de conception que pour unprocessus classique (drafting-centric) tel qursquoillustreacute sur le graphe agrave la figure8
bull La coordination entre les diffeacuterents corps de meacutetier entrepreneurs sous-traitantsarchitectes bureaux drsquoeacutetudes fournisseurs et le maicirctre drsquooeuvre est sensible-ment ameacutelioreacutee
5 Source httpcenewscom la courbe BIM de Patrick MacLeamy
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
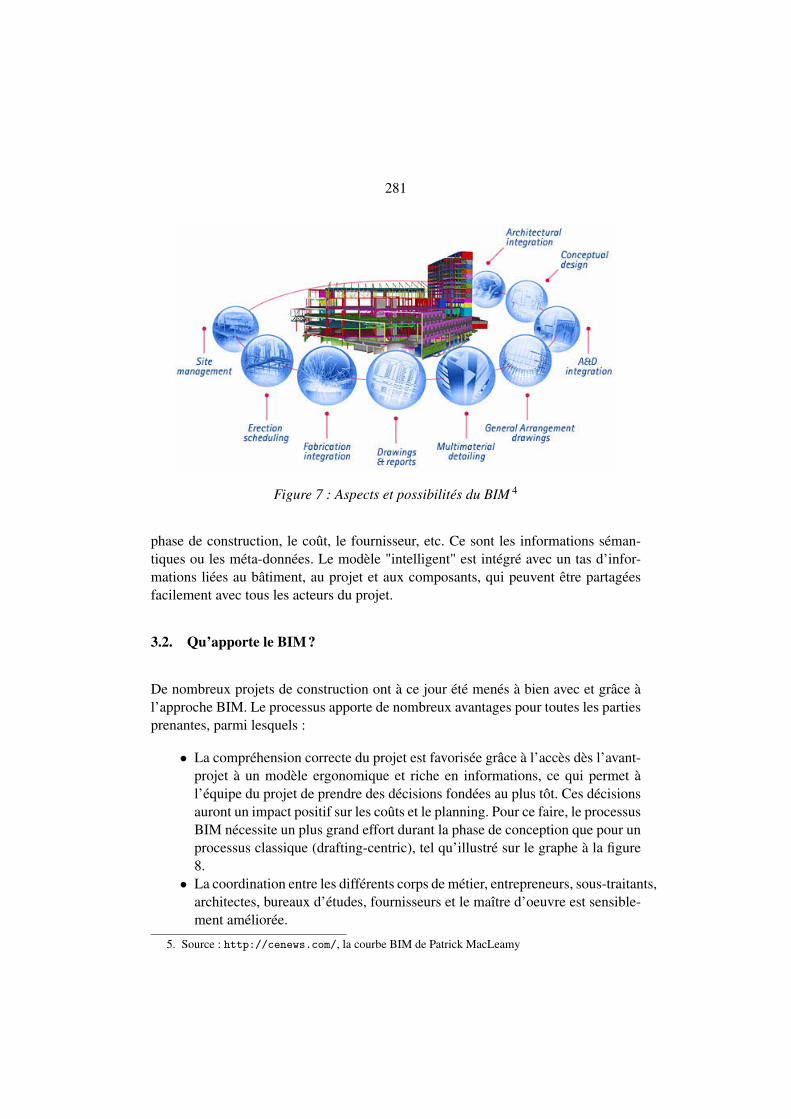
281
Figure 7 Aspects et possibiliteacutes du BIM 4
phase de construction le coucirct le fournisseur etc Ce sont les informations seacuteman-tiques ou les meacuteta-donneacutees Le modegravele intelligent est inteacutegreacute avec un tas drsquoinfor-mations lieacutees au bacirctiment au projet et aux composants qui peuvent ecirctre partageacuteesfacilement avec tous les acteurs du projet
32 Qursquoapporte le BIM
De nombreux projets de construction ont agrave ce jour eacuteteacute meneacutes agrave bien avec et gracircce agravelrsquoapproche BIM Le processus apporte de nombreux avantages pour toutes les partiesprenantes parmi lesquels
bull La compreacutehension correcte du projet est favoriseacutee gracircce agrave lrsquoaccegraves degraves lrsquoavant-projet agrave un modegravele ergonomique et riche en informations ce qui permet agravelrsquoeacutequipe du projet de prendre des deacutecisions fondeacutees au plus tocirct Ces deacutecisionsauront un impact positif sur les coucircts et le planning Pour ce faire le processusBIM neacutecessite un plus grand effort durant la phase de conception que pour unprocessus classique (drafting-centric) tel qursquoillustreacute sur le graphe agrave la figure8
bull La coordination entre les diffeacuterents corps de meacutetier entrepreneurs sous-traitantsarchitectes bureaux drsquoeacutetudes fournisseurs et le maicirctre drsquooeuvre est sensible-ment ameacutelioreacutee
5 Source httpcenewscom la courbe BIM de Patrick MacLeamy
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
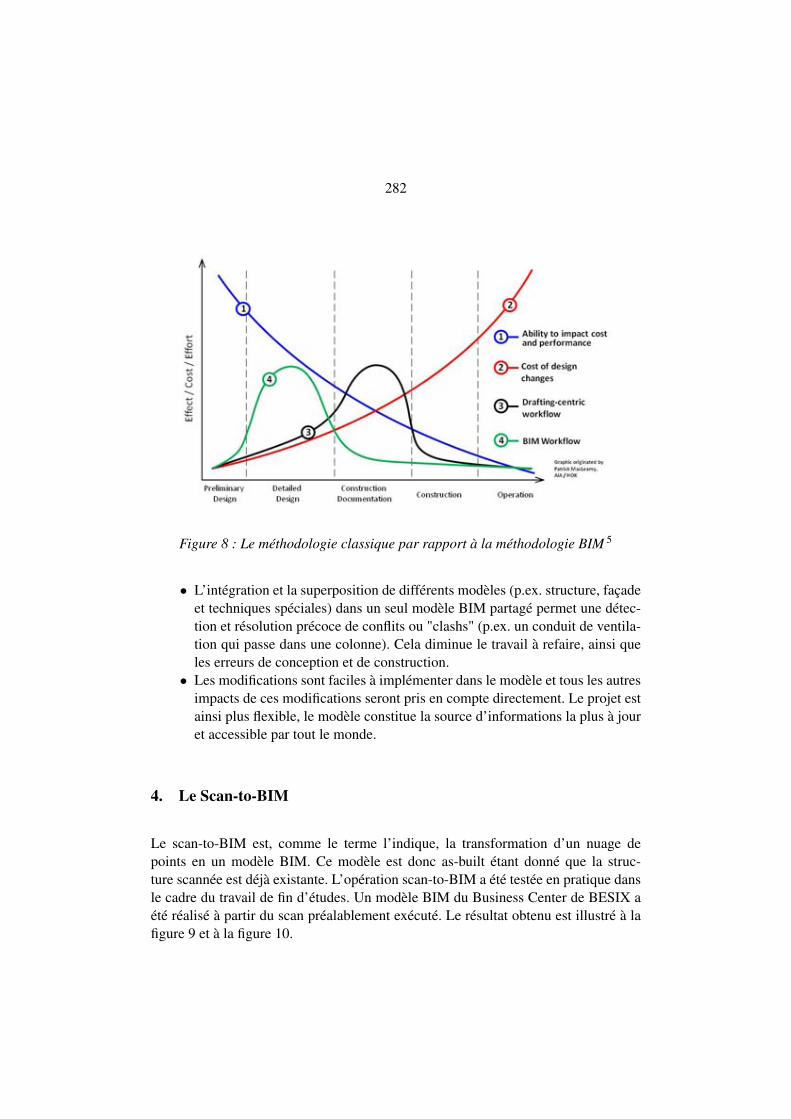
282
Figure 8 Le meacutethodologie classique par rapport agrave la meacutethodologie BIM 5
bull Lrsquointeacutegration et la superposition de diffeacuterents modegraveles (pex structure faccediladeet techniques speacuteciales) dans un seul modegravele BIM partageacute permet une deacutetec-tion et reacutesolution preacutecoce de conflits ou clashs (pex un conduit de ventila-tion qui passe dans une colonne) Cela diminue le travail agrave refaire ainsi queles erreurs de conception et de construction
bull Les modifications sont faciles agrave impleacutementer dans le modegravele et tous les autresimpacts de ces modifications seront pris en compte directement Le projet estainsi plus flexible le modegravele constitue la source drsquoinformations la plus agrave jouret accessible par tout le monde
4 Le Scan-to-BIM
Le scan-to-BIM est comme le terme lrsquoindique la transformation drsquoun nuage depoints en un modegravele BIM Ce modegravele est donc as-built eacutetant donneacute que la struc-ture scanneacutee est deacutejagrave existante Lrsquoopeacuteration scan-to-BIM a eacuteteacute testeacutee en pratique dansle cadre du travail de fin drsquoeacutetudes Un modegravele BIM du Business Center de BESIX aeacuteteacute reacutealiseacute agrave partir du scan preacutealablement exeacutecuteacute Le reacutesultat obtenu est illustreacute agrave lafigure 9 et agrave la figure 10
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
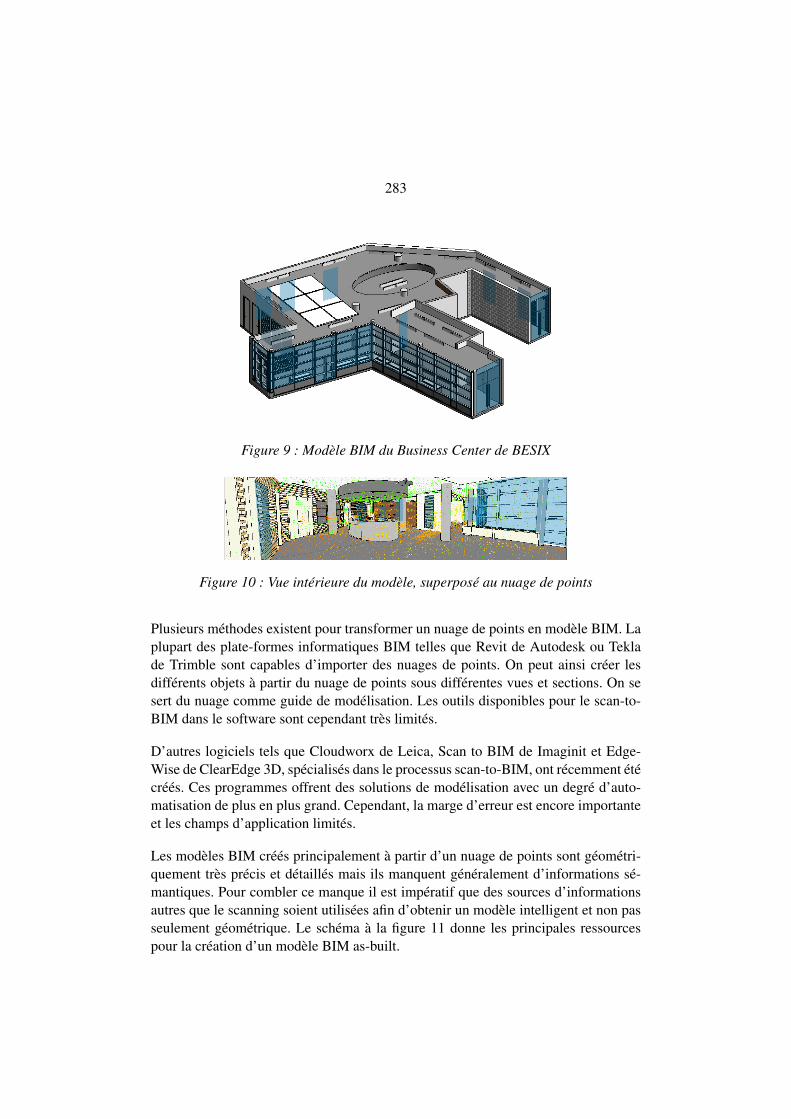
283
Figure 9 Modegravele BIM du Business Center de BESIX
Figure 10 Vue inteacuterieure du modegravele superposeacute au nuage de points
Plusieurs meacutethodes existent pour transformer un nuage de points en modegravele BIM Laplupart des plate-formes informatiques BIM telles que Revit de Autodesk ou Teklade Trimble sont capables drsquoimporter des nuages de points On peut ainsi creacuteer lesdiffeacuterents objets agrave partir du nuage de points sous diffeacuterentes vues et sections On sesert du nuage comme guide de modeacutelisation Les outils disponibles pour le scan-to-BIM dans le software sont cependant tregraves limiteacutes
Drsquoautres logiciels tels que Cloudworx de Leica Scan to BIM de Imaginit et Edge-Wise de ClearEdge 3D speacutecialiseacutes dans le processus scan-to-BIM ont reacutecemment eacuteteacutecreacuteeacutes Ces programmes offrent des solutions de modeacutelisation avec un degreacute drsquoauto-matisation de plus en plus grand Cependant la marge drsquoerreur est encore importanteet les champs drsquoapplication limiteacutes
Les modegraveles BIM creacuteeacutes principalement agrave partir drsquoun nuage de points sont geacuteomeacutetri-quement tregraves preacutecis et deacutetailleacutes mais ils manquent geacuteneacuteralement drsquoinformations seacute-mantiques Pour combler ce manque il est impeacuteratif que des sources drsquoinformationsautres que le scanning soient utiliseacutees afin drsquoobtenir un modegravele intelligent et non passeulement geacuteomeacutetrique Le scheacutema agrave la figure 11 donne les principales ressourcespour la creacuteation drsquoun modegravele BIM as-built
284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-

284
Figure 11 Ressources pour la creacuteation drsquoun modegravele BIM as-built
Concernant lrsquoeacutetude de cas de la modeacutelisation du Business Center un modegravele BIMpreacutecis et fiable a pu ecirctre obtenu Les diffeacuterentes veacuterifications dimensionnelles et lacomparaison avec les plans as-built existants ont montreacute que le BIM avait une preacuteci-sion de 9mm pour une preacutecision de 51mm des plans as-builts La preacutecision dimen-sionnelle du BIM ne reacutesulte pas drsquoune modeacutelisation impreacutecise des objets mais plutocirctdes deacuteviations entre la reacutealiteacute as-built et les objets BIM parfaits
5 Le Scan-vs-BIM
Le Scan-vs-BIM (Scan versus BIM) est une autre application qui combine lesatouts du scanning laser 3D et du BIM Le modegravele BIM de conception (preacuteexistant)est superposeacute au nuage de points as-built afin de faire du suivi de lrsquoeacutetat drsquoavancementde chantier ou drsquoassurer et de controcircler la compatibiliteacute de la conception (modegraveleBIM) avec la reacutealiteacute (scan) En pratique lrsquoeacutetat actuel du chantier est scanneacute par unopeacuterateur le logiciel informatique superpose par la suite les donneacutees du scanning etdu modegravele BIM Il deacutetecte dans le nuage de points la preacutesence drsquoobjets du BIM (pex un voile en beacuteton une colonne une poutre une conduite drsquoeau) La deacutetection desobjets preacutesents permet de calculer lrsquoeacutetat drsquoavancement du chantier et de le compareragrave ce qui est preacutevu au planning Ensuite le logiciel va controcircler la position et les di-
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
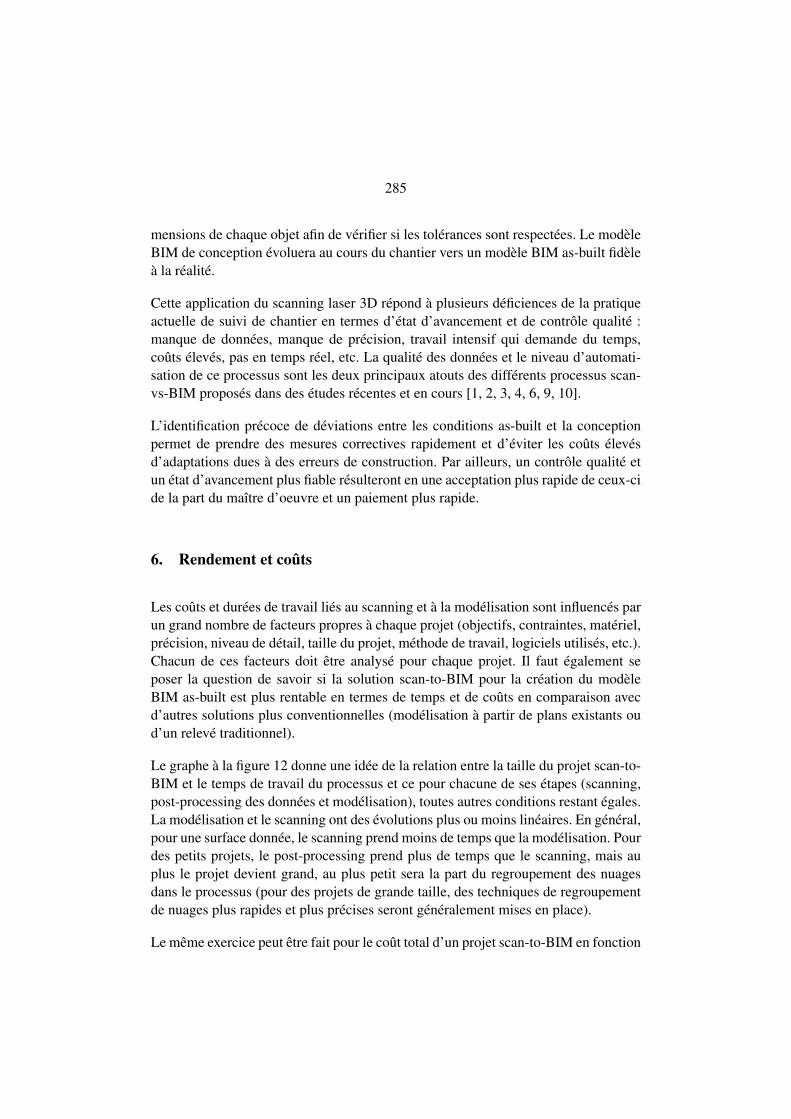
285
mensions de chaque objet afin de veacuterifier si les toleacuterances sont respecteacutees Le modegraveleBIM de conception eacutevoluera au cours du chantier vers un modegravele BIM as-built fidegraveleagrave la reacutealiteacute
Cette application du scanning laser 3D reacutepond agrave plusieurs deacuteficiences de la pratiqueactuelle de suivi de chantier en termes drsquoeacutetat drsquoavancement et de controcircle qualiteacute manque de donneacutees manque de preacutecision travail intensif qui demande du tempscoucircts eacuteleveacutes pas en temps reacuteel etc La qualiteacute des donneacutees et le niveau drsquoautomati-sation de ce processus sont les deux principaux atouts des diffeacuterents processus scan-vs-BIM proposeacutes dans des eacutetudes reacutecentes et en cours [1 2 3 4 6 9 10]
Lrsquoidentification preacutecoce de deacuteviations entre les conditions as-built et la conceptionpermet de prendre des mesures correctives rapidement et drsquoeacuteviter les coucircts eacuteleveacutesdrsquoadaptations dues agrave des erreurs de construction Par ailleurs un controcircle qualiteacute etun eacutetat drsquoavancement plus fiable reacutesulteront en une acceptation plus rapide de ceux-cide la part du maicirctre drsquooeuvre et un paiement plus rapide
6 Rendement et coucircts
Les coucircts et dureacutees de travail lieacutes au scanning et agrave la modeacutelisation sont influenceacutes parun grand nombre de facteurs propres agrave chaque projet (objectifs contraintes mateacuterielpreacutecision niveau de deacutetail taille du projet meacutethode de travail logiciels utiliseacutes etc)Chacun de ces facteurs doit ecirctre analyseacute pour chaque projet Il faut eacutegalement seposer la question de savoir si la solution scan-to-BIM pour la creacuteation du modegraveleBIM as-built est plus rentable en termes de temps et de coucircts en comparaison avecdrsquoautres solutions plus conventionnelles (modeacutelisation agrave partir de plans existants oudrsquoun releveacute traditionnel)
Le graphe agrave la figure 12 donne une ideacutee de la relation entre la taille du projet scan-to-BIM et le temps de travail du processus et ce pour chacune de ses eacutetapes (scanningpost-processing des donneacutees et modeacutelisation) toutes autres conditions restant eacutegalesLa modeacutelisation et le scanning ont des eacutevolutions plus ou moins lineacuteaires En geacuteneacuteralpour une surface donneacutee le scanning prend moins de temps que la modeacutelisation Pourdes petits projets le post-processing prend plus de temps que le scanning mais auplus le projet devient grand au plus petit sera la part du regroupement des nuagesdans le processus (pour des projets de grande taille des techniques de regroupementde nuages plus rapides et plus preacutecises seront geacuteneacuteralement mises en place)
Le mecircme exercice peut ecirctre fait pour le coucirct total drsquoun projet scan-to-BIM en fonction
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
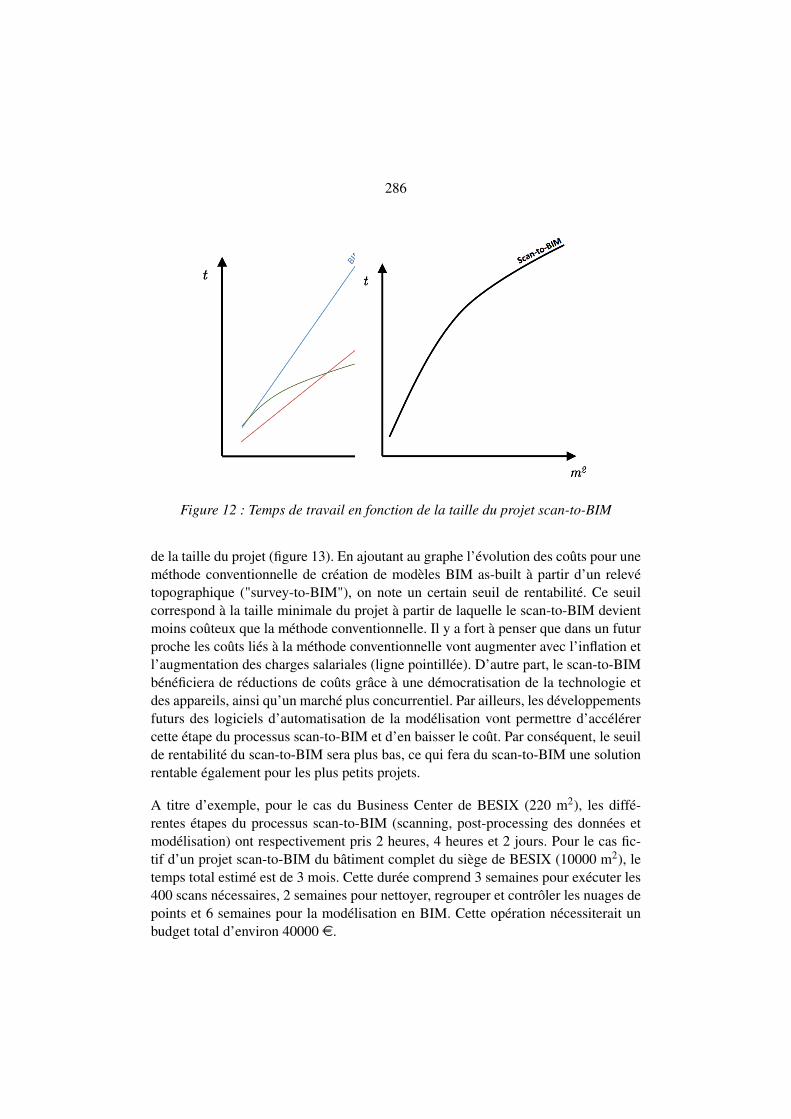
286
Figure 12 Temps de travail en fonction de la taille du projet scan-to-BIM
de la taille du projet (figure 13) En ajoutant au graphe lrsquoeacutevolution des coucircts pour unemeacutethode conventionnelle de creacuteation de modegraveles BIM as-built agrave partir drsquoun releveacutetopographique (survey-to-BIM) on note un certain seuil de rentabiliteacute Ce seuilcorrespond agrave la taille minimale du projet agrave partir de laquelle le scan-to-BIM devientmoins coucircteux que la meacutethode conventionnelle Il y a fort agrave penser que dans un futurproche les coucircts lieacutes agrave la meacutethode conventionnelle vont augmenter avec lrsquoinflation etlrsquoaugmentation des charges salariales (ligne pointilleacutee) Drsquoautre part le scan-to-BIMbeacuteneacuteficiera de reacuteductions de coucircts gracircce agrave une deacutemocratisation de la technologie etdes appareils ainsi qursquoun marcheacute plus concurrentiel Par ailleurs les deacuteveloppementsfuturs des logiciels drsquoautomatisation de la modeacutelisation vont permettre drsquoacceacuteleacuterercette eacutetape du processus scan-to-BIM et drsquoen baisser le coucirct Par conseacutequent le seuilde rentabiliteacute du scan-to-BIM sera plus bas ce qui fera du scan-to-BIM une solutionrentable eacutegalement pour les plus petits projets
A titre drsquoexemple pour le cas du Business Center de BESIX (220 m2) les diffeacute-rentes eacutetapes du processus scan-to-BIM (scanning post-processing des donneacutees etmodeacutelisation) ont respectivement pris 2 heures 4 heures et 2 jours Pour le cas fic-tif drsquoun projet scan-to-BIM du bacirctiment complet du siegravege de BESIX (10000 m2) letemps total estimeacute est de 3 mois Cette dureacutee comprend 3 semaines pour exeacutecuter les400 scans neacutecessaires 2 semaines pour nettoyer regrouper et controcircler les nuages depoints et 6 semaines pour la modeacutelisation en BIM Cette opeacuteration neacutecessiterait unbudget total drsquoenviron 40000 e
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
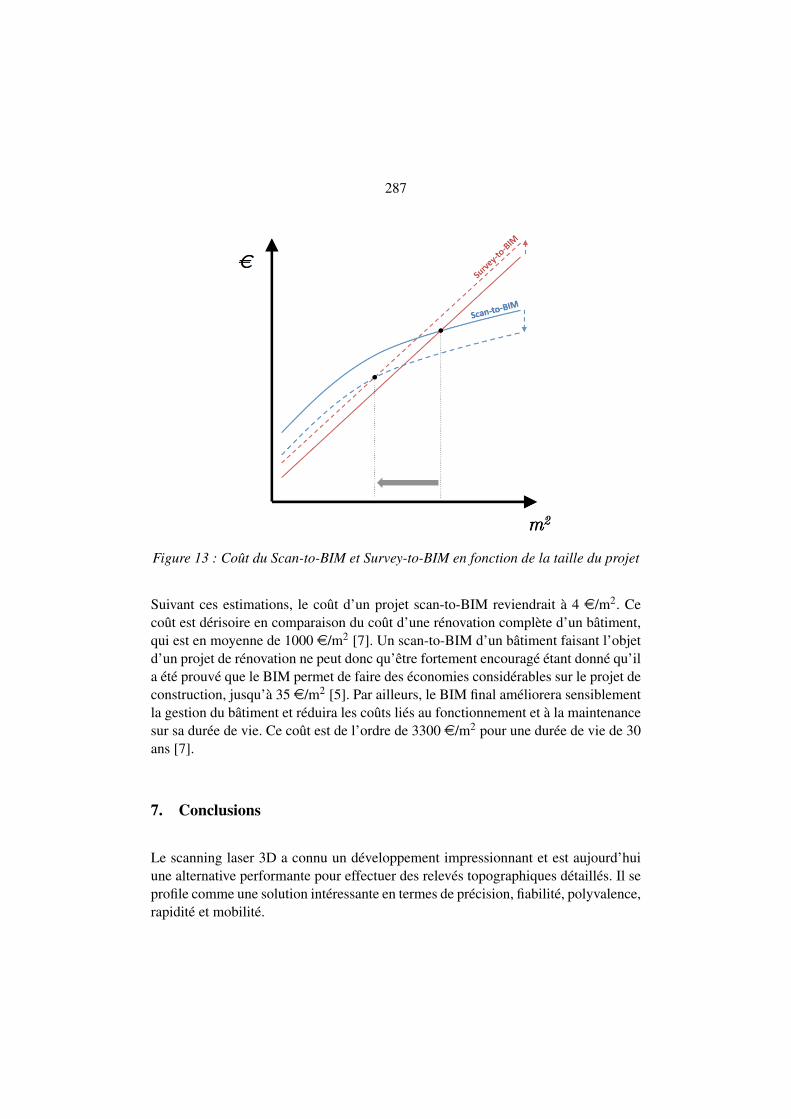
287
Figure 13 Coucirct du Scan-to-BIM et Survey-to-BIM en fonction de la taille du projet
Suivant ces estimations le coucirct drsquoun projet scan-to-BIM reviendrait agrave 4 em2 Cecoucirct est deacuterisoire en comparaison du coucirct drsquoune reacutenovation complegravete drsquoun bacirctimentqui est en moyenne de 1000 em2 [7] Un scan-to-BIM drsquoun bacirctiment faisant lrsquoobjetdrsquoun projet de reacutenovation ne peut donc qursquoecirctre fortement encourageacute eacutetant donneacute qursquoila eacuteteacute prouveacute que le BIM permet de faire des eacuteconomies consideacuterables sur le projet deconstruction jusqursquoagrave 35 em2 [5] Par ailleurs le BIM final ameacuteliorera sensiblementla gestion du bacirctiment et reacuteduira les coucircts lieacutes au fonctionnement et agrave la maintenancesur sa dureacutee de vie Ce coucirct est de lrsquoordre de 3300 em2 pour une dureacutee de vie de 30ans [7]
7 Conclusions
Le scanning laser 3D a connu un deacuteveloppement impressionnant et est aujourdrsquohuiune alternative performante pour effectuer des releveacutes topographiques deacutetailleacutes Il seprofile comme une solution inteacuteressante en termes de preacutecision fiabiliteacute polyvalencerapiditeacute et mobiliteacute
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
288
71 Lrsquoimportance de la meacutethodologie
Il est cependant important de prendre en compte les nombreuses sources drsquoerreurstelles que les conditions environnementales et les proprieacuteteacutes de surface qui influencentla preacutecision Une faible reacuteflectiviteacute ou un grand angle drsquoincidence vont augmenterles impreacutecisions de mesure et se traduire par un bruit important dans le nuage depoints Toutefois la preacutecision du scanning ne peut pas ecirctre eacutevalueacutee sur base seulementde sa preacutecision pour un point singulier La force du scanning est que la preacutecision etla fiabiliteacute sont assureacutees par la grande densiteacute de points La forme geacuteomeacutetrique drsquounobjet peut ecirctre deacuteduite agrave partir drsquoun releveacute en haute reacutesolution et non pas agrave partir dequelques points singuliers pour lesquels une erreur de mesure se reacutepercutera directe-ment sur le reacutesultat La grande quantiteacute de donneacutees fait aussi la faiblesse du scanningcar le traitement de ces donneacutees neacutecessite des outils informatiques tregraves performantset coucircteux
Lrsquoapplication drsquoune meacutethodologie de travail rigoureuse est donc primordiale elle vade pair avec une bonne connaissance de la technologie des instruments et des meacute-thodes
72 La reacutecolte de meta-donneacutees
Le scanning laser 3D est une technologie et un outil preacutecieux pour la modeacutelisationBIM as-built et principalement pour la reacutecolte drsquoinformations geacuteomeacutetriques de grandepreacutecision et avec un haut niveau de deacutetail Le reacutesultat obtenu par le scan-to-BIM semontre nettement plus fiable comme source drsquoinformation as-built que les plans as-built existants Le manque de meacuteta-donneacutees fournies par le scanning sur les objetsde lrsquoenvironnement as-built reste neacuteanmoins un inconveacutenient du scanning pour cetype drsquoapplication Il est donc primordial de reacutecolter ces meacuteta-donneacutees par drsquoautresmoyens que le scanning afin de rendre le modegravele BIM intelligent
Le niveau drsquoautomatisation de la modeacutelisation BIM est aujourdrsquohui encore tregraves basce qui fait du scan-to-BIM une opeacuteration tregraves laborieuse et intuitive De nombreuseseacutetudes dans le domaine acadeacutemique et professionnel sont en cours pour augmenter ledegreacute drsquoautomatisation en deacuteveloppant des algorithmes puissants pour la deacutetectionla reconnaissance et la creacuteation drsquoobjets BIM dans un nuage de points Par ailleurs laplupart des logiciels BIM sont avant tout des logiciels de conception et supposent desgeacuteomeacutetries drsquoobjets ideacutealiseacutees Il est donc parfois difficile de repreacutesenter les condi-tions as-built reacuteelles dans un modegravele BIM
289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-

289
Concernant le Scan-vs-BIM il nrsquoexiste agrave ce jour pas encore de logiciels speacutecifiquespour ce type drsquoapplication Cependant mecircme sans solution automatiseacutee ou logicielspeacutecifique il est tout agrave fait possible drsquoutiliser des nuages de points pour le suivi dechantier et le controcircle qualiteacute Le Scan-vs-BIM peut ecirctre tregraves utile pour veacuterifier etcertifier la conformiteacute des structures avec le modegravele de conception et en particulierpour des eacuteleacutements qui sont difficiles agrave controcircler (pex planeacuteiteacute drsquoune dalle tassementde fondations mise en charge et eacutepreuve drsquoun ouvrage drsquoart etc)
73 Le retour sur investissement
Suite aux estimations et analyses de coucircts il est clair qursquointeacutegrer lrsquoapproche Scan-to-BIM agrave des projets de reacutenovation nrsquoamegravene pas seulement une plus-value organisation-nelle mais eacutegalement eacuteconomique Le retour sur investissement est consideacuterable
Enfin il semble qursquoaujourdrsquohui un nombre tregraves limiteacute de projets Scan-to-BIM aienteacuteteacute meneacutes en Belgique Cette observation va de pair avec lrsquoimplantation relativementfaible du BIM en Belgique Lrsquoimplantation future de plus en plus importante du BIMdans les domaines de lrsquoarchitecture de la construction et de la gestion des bacirctimentsaugmentera sans aucun doute la neacutecessiteacute du Scan-to-BIM et du Scan-vs-BIM
Sources
[1] BOSCHEacute F Automated recognition of 3D CAD model objects in laser scansand calculation of as- built dimensions for dimensional compliance control inconstructionAdvanced Engineering Informatics 2010 p 107ndash118
[2] BOSCHEacute F amp GUENET E Automating surface flatness control using ter-restrial laser scanning and building information modelsAutomation in Construction 2014 p 212ndash226
[3] BOSCHEacute F ET AL The value of integrating Scan-to-BIM and Scan-vs-BIMtechniques for construction monitoring using laser scanning and BIM Thecase of cylindrical MEP componentsAutomation in Construction 2015 p 201ndash213
[4] KIM C SON H amp KIM C Automated construction progress measurementusing a 4D building information model and 3D dataAutomation in Construction 2013 p 75ndash82
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-
290
[5] MINISTEgraveRE FRANCcedilAIS DU LOGEMENT DE LEacuteGALITEacute DES TERRITOIRES ET
DE LA RURALITEacute Plan pour la Transition Numeacuterique du Bacirctiment [En ligne httpwwwterritoiresgouvfrIMGpdf250315_discours_bim_worldpdf] 2015
[6] NAVON R Research in automated measurement of project performance in-dicatorsAutomation in Construction 2007 p 176ndash188
[7] SCHIMSCHAR S ET AL Panorama of the European non-residential construc-tion sector [En ligne httpwwwleonardo- energyorgwhite-paperpanorama-european-non-residential-construction-sector]Ecofys Germany GmbH 2011
[8] SHAN J amp TOTH C Topographic Laser Ranging and Scanning Principlesand Processing CRC Press 2008
[9] SON H BOSCHEacute F amp KIM C As-built data acquisition and its use inproduction monitoring and automated layout of civil infrastructure A surveyAdvanced Engineering Informatics 2015
[10] TURKAN Y ET AL Automated progress tracking using 4D schedule and 3Dsensing technologiesAutomation in Construction 2012 p 414ndash421
[11] US GENERAL SERVICE ADMINISTRATION (GSA) BIM Guide For 3DImaging (GSA BIM Guide Series 03) [En ligne httpwwwgsagovgraphicspbsGSA_BIM_Guide_Series_03pdf] 2009
[12] VAN GENECHTEN B SANTANA QUINTERO M ET AL Theory and prac-tice on Terrestrial Laser Scanning Training material based on practical ap-plications 4e eacuted Universidad Politecnica de Valencia Editorial (ValenciaSpain) 2008
- Introduction
- Le scanning laser 3D
-
- La technologie
- Les instruments
- Le meacutethodologie de travail
-
- Le BIM
-
- Quest-ce que le BIM
- Quapporte le BIM
-
- Le Scan-to-BIM
- Le Scan-vs-BIM
- Rendement et coucircts
- Conclusions
-
- Limportance de la meacutethodologie
- La reacutecolte de meta-donneacutees
- Le retour sur investissement
-
- Sources
-


















