INTRODUCTION : MISE EN SITUATION - Free
19
Evaluation siège 406 – Etude de F17 Page 1 / 17 INTRODUCTION : Certaines versions du coupé Peugeot 406 proposent des automatismes intégrés à l’habitacle : ordinateur de bord rétroviseur électrique siège électrique C’est l’automatisme siège électrique que nous allons étudier dans ce dossier : nous le nommerons « siège 406 ». MISE EN SITUATION : Ce siège 406, en option, a été conçu pour optimiser le confort du conducteur. Le siège a été dessiné en tenant compte de la morphologie humaine et des contraintes ergonomiques liées à son utilisation. Son utilisation est la suivante (extrait du guide d’utilisation du coupé Peugeot 406) : Réglages électriques du siège conducteur : A- Réglage longitudinal (glissières) : Poussez la commande vers l’avant (AV) ou vers l’arrière (AR) pour faire coulisser le siège. B- Réglage de l’inclinaison de l’assise (site) : Basculez la partie avant de la commande vers le haut (MONT) ou vers le bas (DESC) pour basculer l’avant du siège vers le haut ou vers le bas. C- Réglage en hauteur (rehausse) : Basculez la partie arrière de la commande vers le haut (MONT) ou vers le bas (DESC) pour monter l’assise ou la descendre. D- Réglage de l’inclinaison du dossier (dossier): Basculez la commande vers l’avant (AV) ou vers l’arrière (AR) pour incliner le dossier vers l’avant ou vers l’arrière. E- Basculement du dossier (manuel) : Pour accéder aux places arrière, tirez la commande et basculez le dossier vers l’avant. Tant que vous maintenez le dossier basculé, le siège avance automatiquement en grande vitesse et permet de libérer l’accès aux places arrière. Lors de la remise en place du dossier vers l’arrière, le siège reprend automatiquement en grande vitesse ses réglages.
Transcript of INTRODUCTION : MISE EN SITUATION - Free

Evaluation siège 406 – Etude de F17 Page 1 / 17
INTRODUCTION : Certaines versions du coupé Peugeot 406 proposent des automatismes intégrés à
l’habitacle : ordinateur de bord rétroviseur électrique siège électrique
C’est l’automatisme siège électrique que nous allons étudier dans ce dossier : nous le nommerons « siège 406 ».
MISE EN SITUATION : Ce siège 406, en option, a été conçu pour optimiser le confort du conducteur. Le siège a
été dessiné en tenant compte de la morphologie humaine et des contraintes ergonomiques liées à son utilisation.
Son utilisation est la suivante (extrait du guide d’utilisation du coupé Peugeot 406) :
Réglages électriques du siège conducteur :
A- Réglage longitudinal (glissières) : Poussez la commande vers l’avant (AV)
ou vers l’arrière (AR) pour faire coulisser le siège.
B- Réglage de l’inclinaison de l’assise (site) :
Basculez la partie avant de la commande vers le haut (MONT) ou vers le bas (DESC) pour basculer l’avant du siège vers le haut ou vers le bas.
C- Réglage en hauteur (rehausse) :
Basculez la partie arrière de la commande vers le haut (MONT) ou vers le bas (DESC) pour monter l’assise ou la descendre.
D- Réglage de l’inclinaison du dossier
(dossier): Basculez la commande vers l’avant
(AV) ou vers l’arrière (AR) pour incliner le dossier vers l’avant ou vers l’arrière.
E- Basculement du dossier (manuel) : Pour accéder aux places arrière, tirez la commande et basculez le dossier vers l’avant. Tant que vous maintenez le dossier basculé, le siège avance automatiquement en grande vitesse et
permet de libérer l’accès aux places arrière. Lors de la remise en place du dossier vers l’arrière, le siège reprend automatiquement en grande vitesse ses réglages.
Evaluation siège 406 – Etude de F17 Page 2 / 17
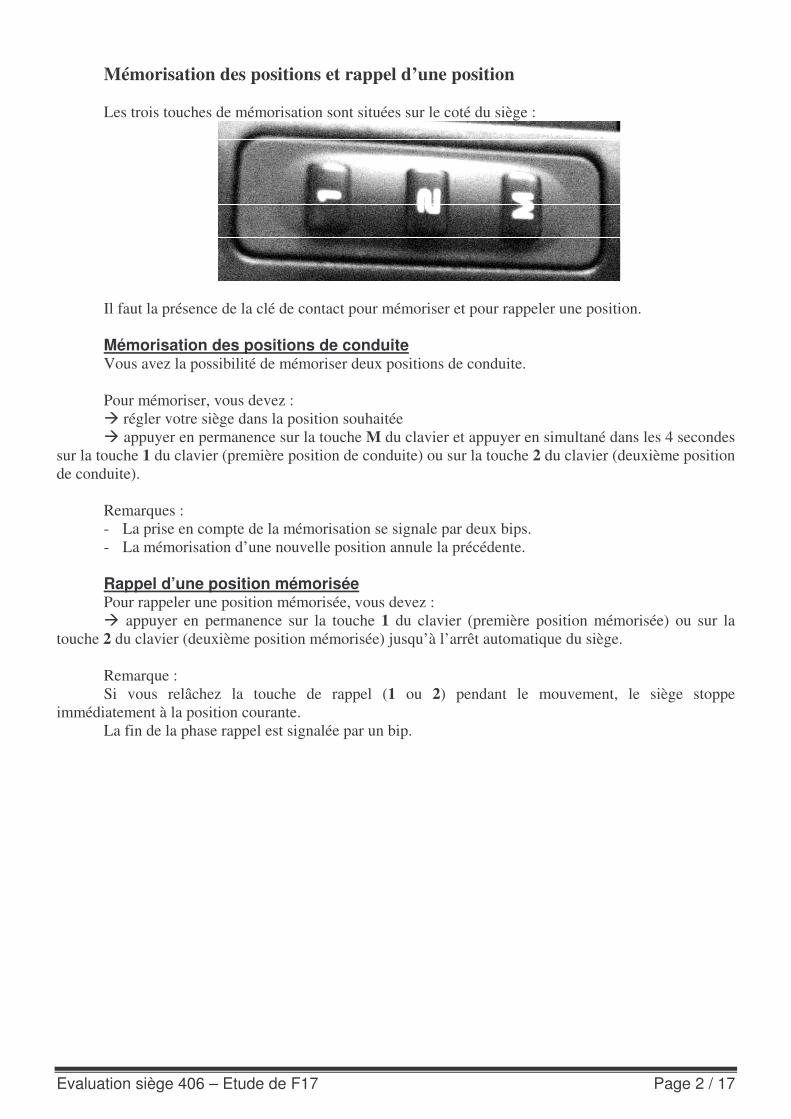
Mémorisation des positions et rappel d’une position Les trois touches de mémorisation sont situées sur le coté du siège :
Il faut la présence de la clé de contact pour mémoriser et pour rappeler une position. Mémorisation des positions de conduite Vous avez la possibilité de mémoriser deux positions de conduite. Pour mémoriser, vous devez : régler votre siège dans la position souhaitée appuyer en permanence sur la touche M du clavier et appuyer en simultané dans les 4 secondes
sur la touche 1 du clavier (première position de conduite) ou sur la touche 2 du clavier (deuxième position de conduite).
Remarques : - La prise en compte de la mémorisation se signale par deux bips. - La mémorisation d’une nouvelle position annule la précédente. Rappel d’une position mémorisée Pour rappeler une position mémorisée, vous devez : appuyer en permanence sur la touche 1 du clavier (première position mémorisée) ou sur la
touche 2 du clavier (deuxième position mémorisée) jusqu’à l’arrêt automatique du siège. Remarque : Si vous relâchez la touche de rappel (1 ou 2) pendant le mouvement, le siège stoppe
immédiatement à la position courante. La fin de la phase rappel est signalée par un bip.
Evaluation siège 406 – Etude de F17 Page 3 / 17
PRESENTATION DE LA FONCTION F17 «Adapter en puissance» : Le siège est mis en mouvement grâce à 5 moteurs à courant continu. Les commandes des moteurs sont des différences de potentiels analogiques permettant de commander les moteurs conformément aux réglages demandés. +12V : commande du moteur dans le sens positif (AV, MONT), -12V : commande du moteur dans le sens négatif (AR, DESC), 0V : arrêt du moteur.
Notation pour le tout le dossier : L’indication MVT renvoie d’une manière générale aux 4 déplacements du siège à savoir GLI,
REHA, SITE et DOS. - On parlera de MVT pour parler d’un des signaux des quatre mouvements que sont GLI pour glissière, REHA pour rehausse, SITE pour site et DOS pour dossier.
Ex : POS_MVT désigne les 4 signaux POS_GLI, POS_DOS, … - On utilisera SENS pour citer un des deux sens de chaque mouvement, à savoir AV pour avant ou
AR pour arrière et MONT pour montée ou DESC pour descente. Exemple : les signaux POS_GLI_SENS sont les signaux POS_GLI_AV et POS_GLI_AR.
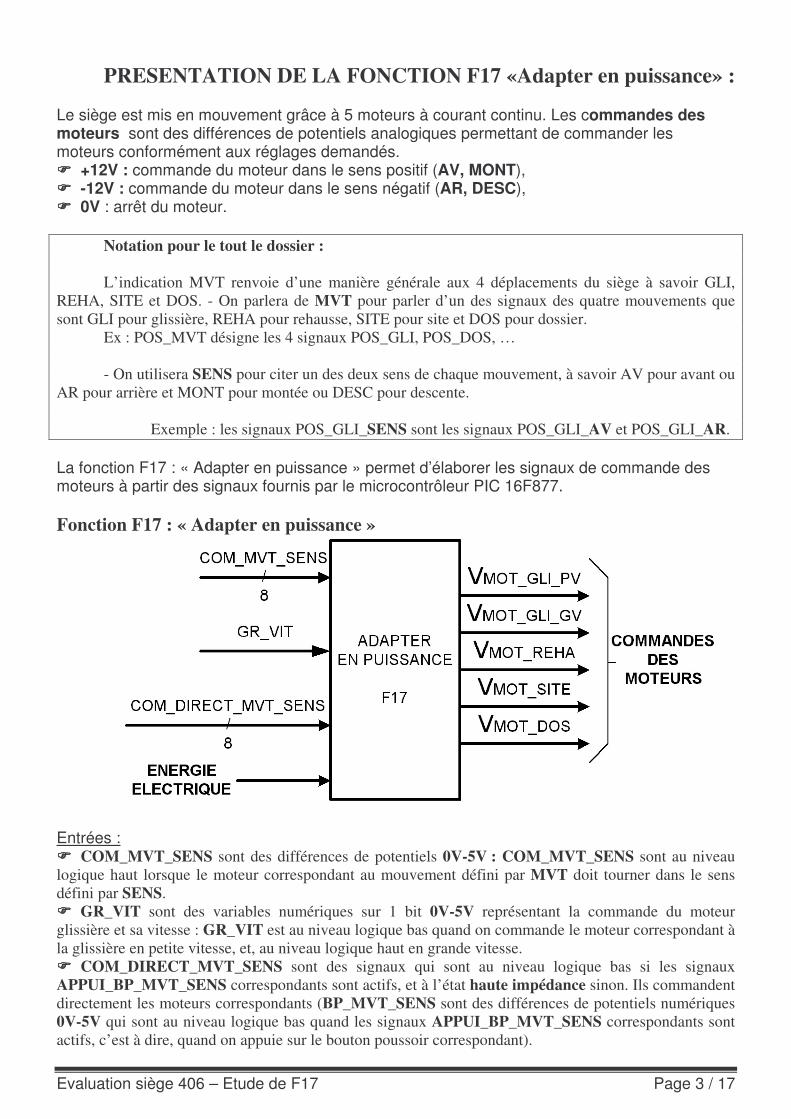
La fonction F17 : « Adapter en puissance » permet d’élaborer les signaux de commande des moteurs à partir des signaux fournis par le microcontrôleur PIC 16F877. Fonction F17 : « Adapter en puissance »
Entrées : COM_MVT_SENS sont des différences de potentiels 0V-5V : COM_MVT_SENS sont au niveau logique haut lorsque le moteur correspondant au mouvement défini par MVT doit tourner dans le sens défini par SENS. GR_VIT sont des variables numériques sur 1 bit 0V-5V représentant la commande du moteur glissière et sa vitesse : GR_VIT est au niveau logique bas quand on commande le moteur correspondant à la glissière en petite vitesse, et, au niveau logique haut en grande vitesse. COM_DIRECT_MVT_SENS sont des signaux qui sont au niveau logique bas si les signaux APPUI_BP_MVT_SENS correspondants sont actifs, et à l’état haute impédance sinon. Ils commandent directement les moteurs correspondants (BP_MVT_SENS sont des différences de potentiels numériques 0V-5V qui sont au niveau logique bas quand les signaux APPUI_BP_MVT_SENS correspondants sont actifs, c’est à dire, quand on appuie sur le bouton poussoir correspondant).
Evaluation siège 406 – Etude de F17 Page 4 / 17
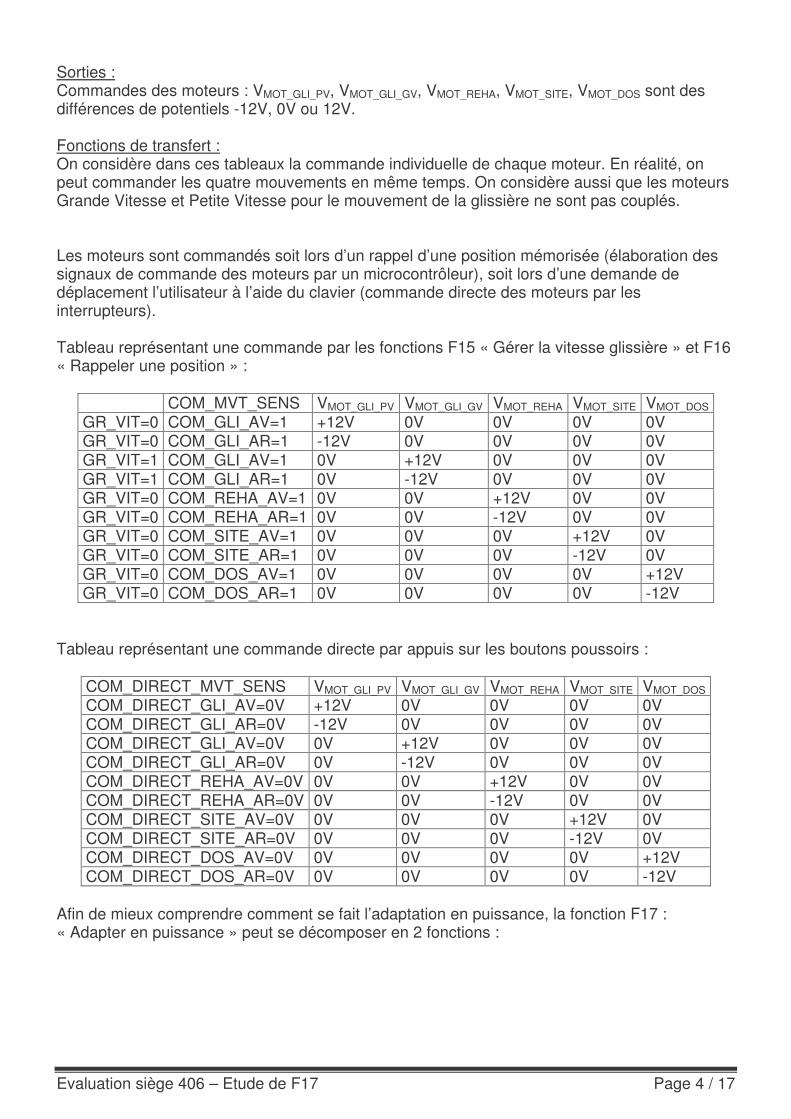
Sorties : Commandes des moteurs : VMOT_GLI_PV, VMOT_GLI_GV, VMOT_REHA, VMOT_SITE, VMOT_DOS sont des différences de potentiels -12V, 0V ou 12V. Fonctions de transfert : On considère dans ces tableaux la commande individuelle de chaque moteur. En réalité, on peut commander les quatre mouvements en même temps. On considère aussi que les moteurs Grande Vitesse et Petite Vitesse pour le mouvement de la glissière ne sont pas couplés. Les moteurs sont commandés soit lors d’un rappel d’une position mémorisée (élaboration des signaux de commande des moteurs par un microcontrôleur), soit lors d’une demande de déplacement l’utilisateur à l’aide du clavier (commande directe des moteurs par les interrupteurs). Tableau représentant une commande par les fonctions F15 « Gérer la vitesse glissière » et F16 « Rappeler une position » :
COM_MVT_SENS VMOT_GLI_PV VMOT_GLI_GV VMOT_REHA VMOT_SITE VMOT_DOS GR_VIT=0 COM_GLI_AV=1 +12V 0V 0V 0V 0V GR_VIT=0 COM_GLI_AR=1 -12V 0V 0V 0V 0V GR_VIT=1 COM_GLI_AV=1 0V +12V 0V 0V 0V GR_VIT=1 COM_GLI_AR=1 0V -12V 0V 0V 0V GR_VIT=0 COM_REHA_AV=1 0V 0V +12V 0V 0V GR_VIT=0 COM_REHA_AR=1 0V 0V -12V 0V 0V GR_VIT=0 COM_SITE_AV=1 0V 0V 0V +12V 0V GR_VIT=0 COM_SITE_AR=1 0V 0V 0V -12V 0V GR_VIT=0 COM_DOS_AV=1 0V 0V 0V 0V +12V GR_VIT=0 COM_DOS_AR=1 0V 0V 0V 0V -12V
Tableau représentant une commande directe par appuis sur les boutons poussoirs :
COM_DIRECT_MVT_SENS VMOT_GLI_PV VMOT_GLI_GV VMOT_REHA VMOT_SITE VMOT_DOS COM_DIRECT_GLI_AV=0V +12V 0V 0V 0V 0V COM_DIRECT_GLI_AR=0V -12V 0V 0V 0V 0V COM_DIRECT_GLI_AV=0V 0V +12V 0V 0V 0V COM_DIRECT_GLI_AR=0V 0V -12V 0V 0V 0V COM_DIRECT_REHA_AV=0V 0V 0V +12V 0V 0V COM_DIRECT_REHA_AR=0V 0V 0V -12V 0V 0V COM_DIRECT_SITE_AV=0V 0V 0V 0V +12V 0V COM_DIRECT_SITE_AR=0V 0V 0V 0V -12V 0V COM_DIRECT_DOS_AV=0V 0V 0V 0V 0V +12V COM_DIRECT_DOS_AR=0V 0V 0V 0V 0V -12V
Afin de mieux comprendre comment se fait l’adaptation en puissance, la fonction F17 : « Adapter en puissance » peut se décomposer en 2 fonctions :

Evaluation siège 406 – Etude de F17 Page 5 / 17
Fonction F171 : « Amplifier en puissance » Entrées : COM_MVT_SENS GR_VIT Energie électrique Sortie : COM_MVT_SENS_AMPL différences de potentiels analogiques 0V-12V GR_VIT_AMPL différences de potentiels analogiques 0V-12V Fonction de transfert : Lorsque les différences de potentiels COM_MVT_SENS sont égales à 0V alors les différences de potentiels COM_MVT_SENS_AMPL correspondantes sont égales à 12V. Lorsque les différences de potentiels COM_MVT_SENS sont égales à 5V alors les différences de potentiels COM_MVT_SENS_AMPL correspondantes sont égales à 0V. Le fonctionnement est identique avec les signaux GR_VIT et GR_VIT_AMPL.
Fonction F172 : « Distribuer l’énergie » Entrées : COM_MVT_SENS_AMPL COM_DIRECT_MVT_SENS Energie électrique Sortie : Commandes des moteurs : VMOT_GLI_PV, VMOT_GLI_GV, VMOT_REHA, VMOT_SITE, VMOT_DOS sont des différences de potentiels –12V, 0V et 12V. Fonction de transfert : Lorsqu’ aucune commande n’est active, alors les signaux de commande des moteurs sont à 0V. Lorsque les commandes COM_MVT_AV_AMPL (ou MONT) ou COM_DIRECT_MVT_AV (ou MONT) sont égales à 0V, les différences de potentiels de commande des moteurs correspondantes sont égales à +12V. Lorsque les commandes COM_MVT_AR_AMPL (ou DESC) ou COM_DIRECT_MVT_AR (ou DESC) sont égales à 0V, les différences de potentiels de commande des moteurs correspondantes sont égales à -12V.
Evaluation siège 406 – Etude de F17 Page 6 / 17
Étude structurelle de F17 « Adapter en puissance » 1 Rappel fonctionnel
Question1 Définir les entrées COM_MVT_SENS et GR_VIT. de F17 « Adapter en puissance ».
Question2 Donner les valeurs de la différence de potentiel de commande d’un des moteurs équivalente à : -l’arrêt, -mise en rotation dans le sens positif (AV,MONT), -mise en rotation dans le sens négatif (AR, DESC). 2 Étude structurelle de F171 « Amplifier en puissance » Étude de la documentation du relais :
Question3 Identifier sur le schéma structurel de F17 « Adapter en puissance » du document réponse 1 page 9/17 la fonction F171 « Amplifier en puissance » en l’encadrant et en la nommant.
Question4 La référence des relais est RP710012. A l’aide de la fiche ressource sur les relais et de la documentation technique des relais RP710012 :
Déterminer le courant maximal pouvant circuler à travers les contacts. Déterminer la valeur de l’alimentation de l’enroulement. Justifier vos réponses.
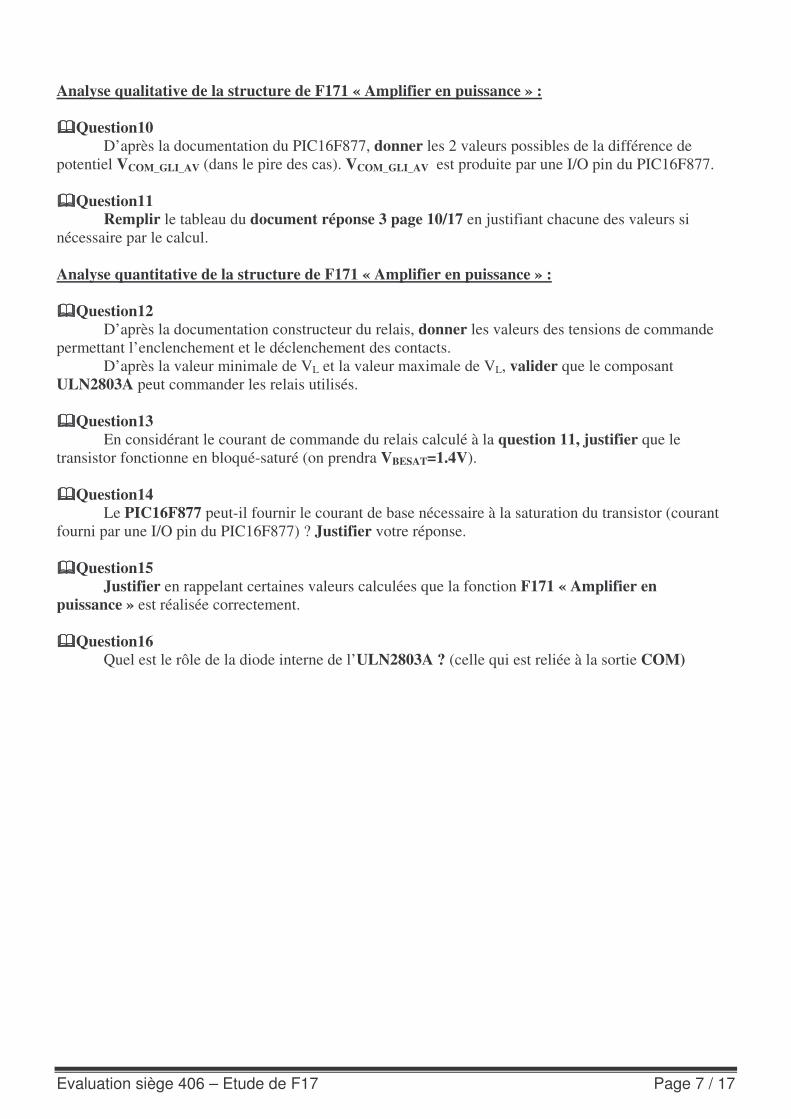
Question5 Dessiner sur le document réponse 2 page 10/17 ce modèle équivalent de l’enroulement du relais en précisant la valeur de RL.
Question6 D’après les caractéristiques électriques du relais fournies dans la documentation constructeur et de la fiche ressource sur les relais, donner la valeur du courant nominal IL permettant de commander les relais. Justifier.
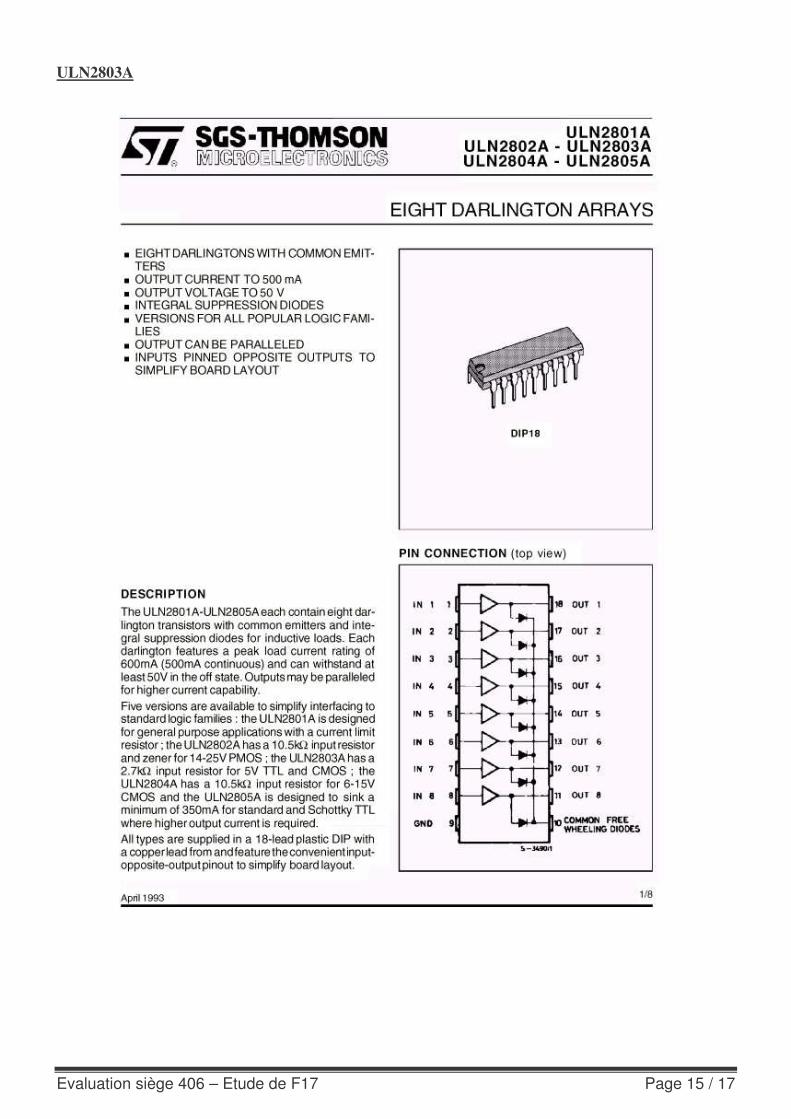
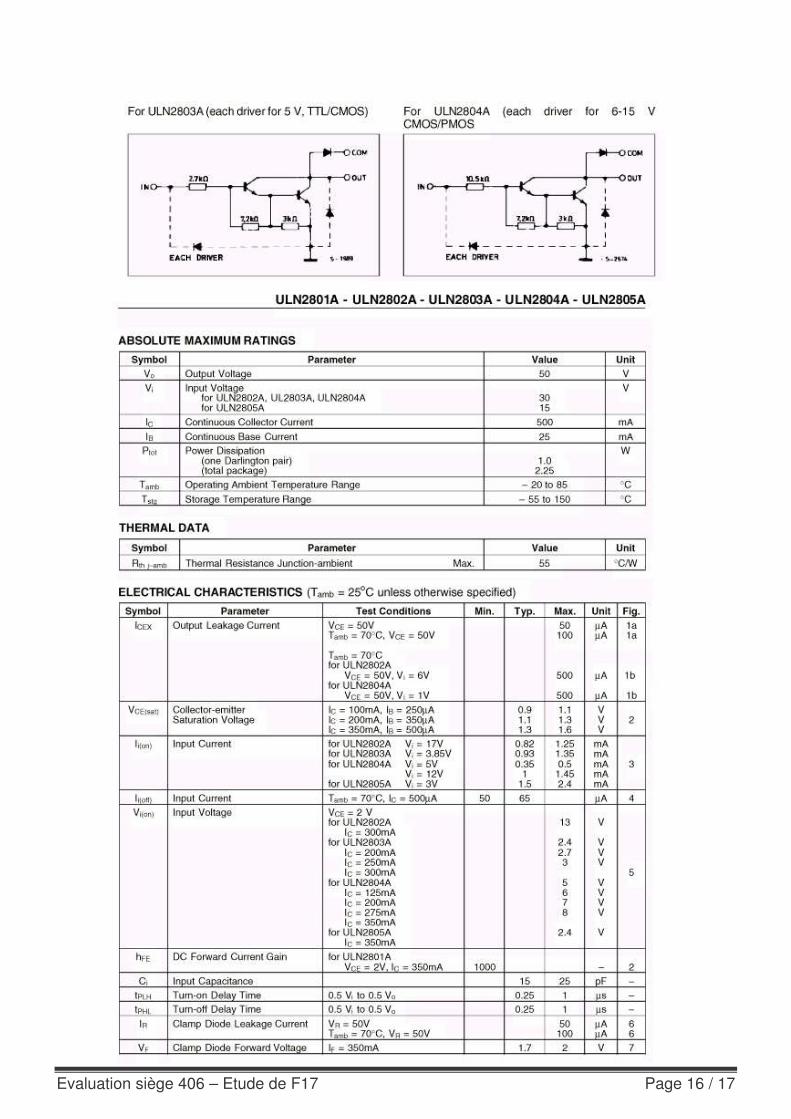
Question7 D’après la documentation constructeur du PIC16F877, justifier la nécessité d’amplifier en puissance les signaux issus du PIC16F877. Étude du circuit intégré ULN2803A : Question8 Donner la signification des symboles suivants : Question9 On considère que les diodes en pointillées et les résistances de 7,2 kΩΩΩΩ et 3 kΩΩΩΩ sont des circuits ouverts pour faciliter l’étude. Dessiner alors une partie du schéma interne du composant ULN2803A sur le document réponse 2 page 10/17.
Evaluation siège 406 – Etude de F17 Page 7 / 17
Analyse qualitative de la structure de F171 « Amplifier en puissance » : Question10 D’après la documentation du PIC16F877, donner les 2 valeurs possibles de la différence de potentiel VCOM_GLI_AV (dans le pire des cas). VCOM_GLI_AV est produite par une I/O pin du PIC16F877. Question11 Remplir le tableau du document réponse 3 page 10/17 en justifiant chacune des valeurs si nécessaire par le calcul. Analyse quantitative de la structure de F171 « Amplifier en puissance » : Question12 D’après la documentation constructeur du relais, donner les valeurs des tensions de commande permettant l’enclenchement et le déclenchement des contacts.
D’après la valeur minimale de VL et la valeur maximale de VL, valider que le composant ULN2803A peut commander les relais utilisés. Question13 En considérant le courant de commande du relais calculé à la question 11, justifier que le transistor fonctionne en bloqué-saturé (on prendra VBESAT=1.4V). Question14 Le PIC16F877 peut-il fournir le courant de base nécessaire à la saturation du transistor (courant fourni par une I/O pin du PIC16F877) ? Justifier votre réponse. Question15 Justifier en rappelant certaines valeurs calculées que la fonction F171 « Amplifier en puissance » est réalisée correctement. Question16 Quel est le rôle de la diode interne de l’ULN2803A ? (celle qui est reliée à la sortie COM)

Evaluation siège 406 – Etude de F17 Page 8 / 17
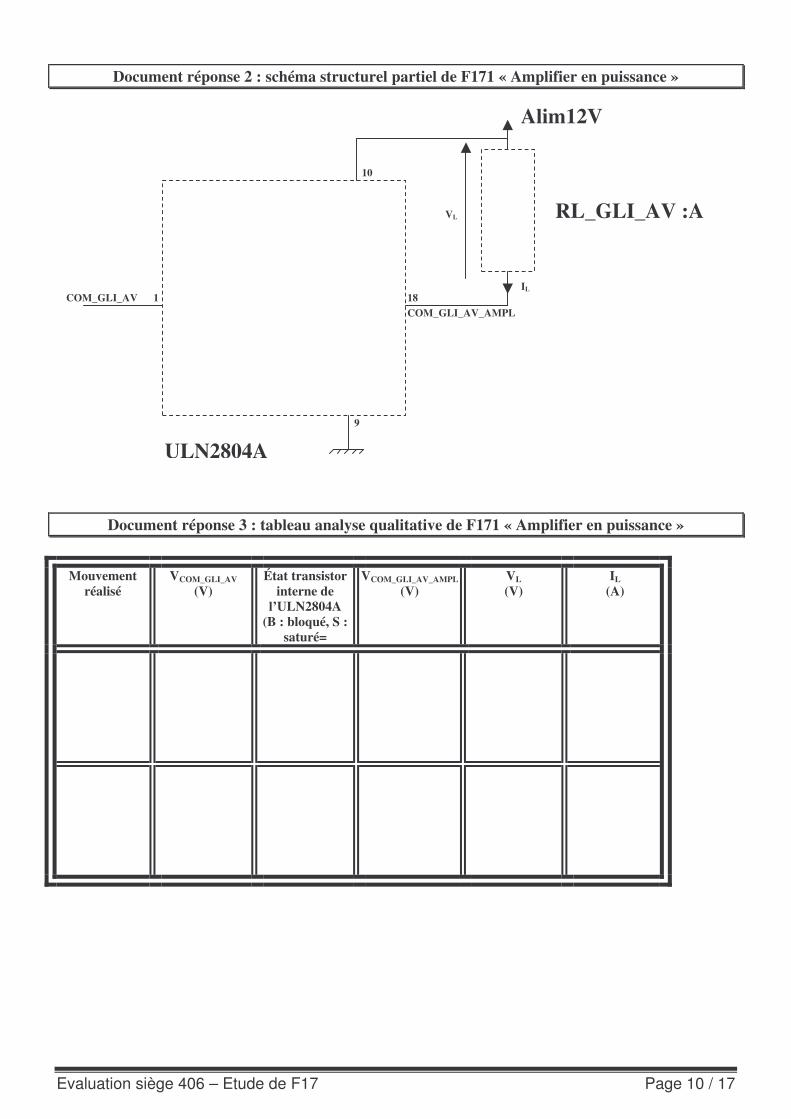
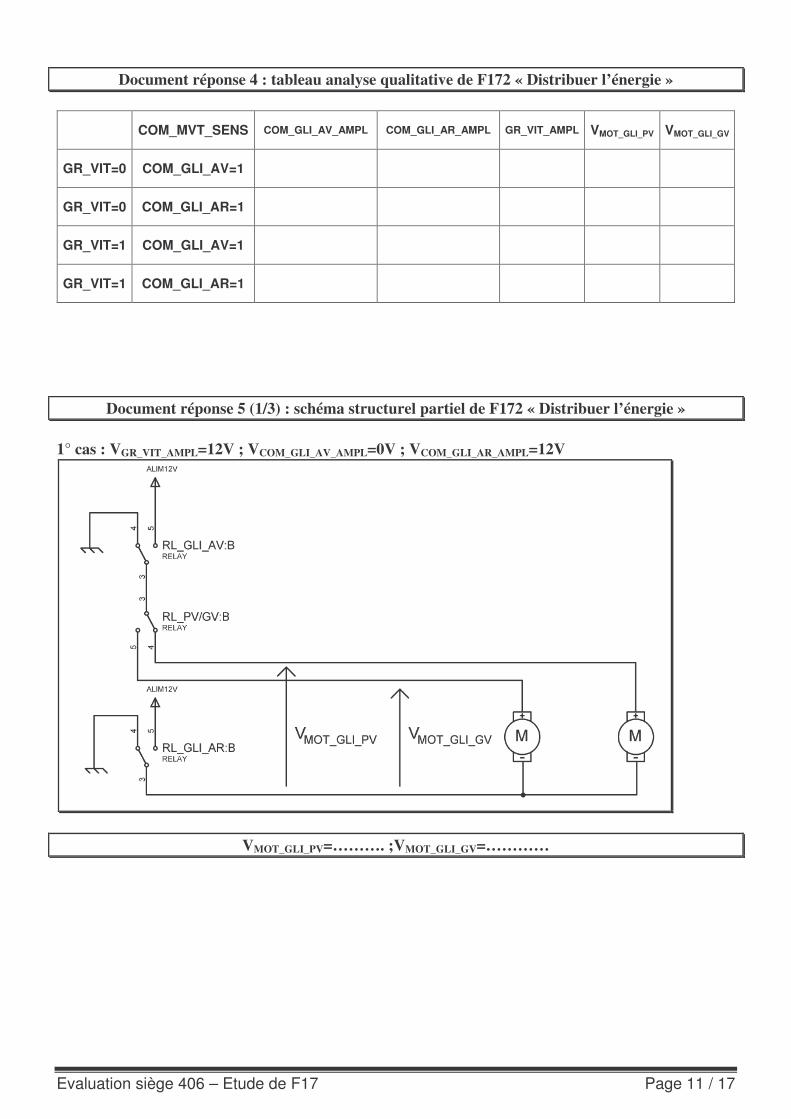
3 Étude structurelle de F172 « Distribuer l’énergie » Question17 A partir de la présentation fonctionnelle de F17, F171 et F172, remplir le tableau du document réponse 4 page 11/17 en précisant les valeurs des entrées et sorties de la fonction F172 « Distribuer l’énergie ». Question18 Identifier sur le schéma structurel de F17 « Adapter en puissance » du document réponse 1 page 9/17 la fonction F172 « Distribuer l’énergie » en l’encadrant et en la nommant. Dans la suite on s’intéressera au mouvement de la glissière. Question19 Dessiner sur le document réponse 5 pages 11/17 à 13/17 le parcours du courant pour les différents cas proposés. En déduire à chaque fois les valeurs de VMOT_GLI_PV et VMOT_GLI_GV. Question20 Justifier alors que la fonction F172 « Distribuer l’énergie » est réalisée en comparant avec l’analyse fonctionnelle. On donne Imotmax=8A. Question21 Valider que les relais peuvent supporter le courant maximum circulant dans le moteur.

Document réponse 1 : schéma structurel de F17 « Adapter en puissance »
Evaluation siège 406 – Etude de F17 Page 9 / 17
Evaluation siège 406 – Etude de F17 Page 10 / 17
Document réponse 2 : schéma structurel partiel de F171 « Amplifier en puissance »
Document réponse 3 : tableau analyse qualitative de F171 « Amplifier en puissance »
Mouvement réalisé
VCOM_GLI_AV (V)
État transistor interne de
l’ULN2804A (B : bloqué, S :
saturé=
VCOM_GLI_AV_AMPL (V)
VL (V)
IL (A)
Alim12V
RL_GLI_AV :A
COM_GLI_AV
ULN2804A
1
10
18
9
IL
VL
COM_GLI_AV_AMPL
Evaluation siège 406 – Etude de F17 Page 11 / 17
Document réponse 4 : tableau analyse qualitative de F172 « Distribuer l’énergie »
COM_MVT_SENS COM_GLI_AV_AMPL COM_GLI_AR_AMPL GR_VIT_AMPL VMOT_GLI_PV VMOT_GLI_GV
GR_VIT=0 COM_GLI_AV=1
GR_VIT=0 COM_GLI_AR=1
GR_VIT=1 COM_GLI_AV=1
GR_VIT=1 COM_GLI_AR=1
Document réponse 5 (1/3) : schéma structurel partiel de F172 « Distribuer l’énergie » 1° cas : VGR_VIT_AMPL=12V ; VCOM_GLI_AV_AMPL=0V ; VCOM_GLI_AR_AMPL=12V
VMOT_GLI_PV=………. ;VMOT_GLI_GV=…………
Evaluation siège 406 – Etude de F17 Page 12 / 17
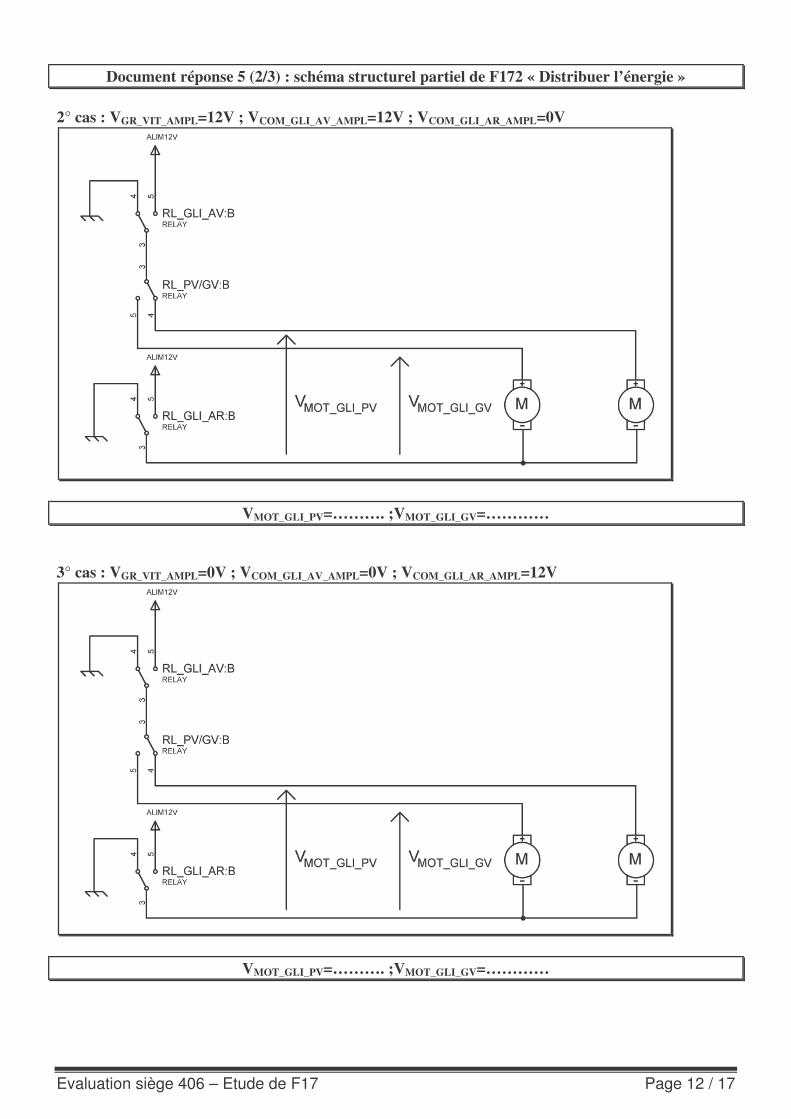
Document réponse 5 (2/3) : schéma structurel partiel de F172 « Distribuer l’énergie » 2° cas : VGR_VIT_AMPL=12V ; VCOM_GLI_AV_AMPL=12V ; VCOM_GLI_AR_AMPL=0V
VMOT_GLI_PV=………. ;VMOT_GLI_GV=…………
3° cas : VGR_VIT_AMPL=0V ; VCOM_GLI_AV_AMPL=0V ; VCOM_GLI_AR_AMPL=12V
VMOT_GLI_PV=………. ;VMOT_GLI_GV=…………

Evaluation siège 406 – Etude de F17 Page 13 / 17
Document réponse 5 (3/3) : schéma structurel partiel de F172 « Distribuer l’énergie » 4° cas : VGR_VIT_AMPL=0V ; VCOM_GLI_AV_AMPL=12V ; VCOM_GLI_AR_AMPL=0V
VMOT_GLI_PV=………. ;VMOT_GLI_GV=………… 5° cas : VGR_VIT_AMPL=12V ; VCOM_GLI_AV_AMPL=12V ; VCOM_GLI_AR_AMPL=12V
VMOT_GLI_PV=………. ;VMOT_GLI_GV=…………

Evaluation siège 406 – Etude de F17 Page 14 / 17
RELAIS RP710012
Evaluation siège 406 – Etude de F17 Page 15 / 17
ULN2803A
Evaluation siège 406 – Etude de F17 Page 16 / 17

Evaluation siège 406 – Etude de F17 Page 17 / 17
PIC16F877
FICHE RESSOURCE
LES RELAIS ÉLECTROMAGNÉTIQUES
Les relais PAGE 1 / 2
1. Présentation
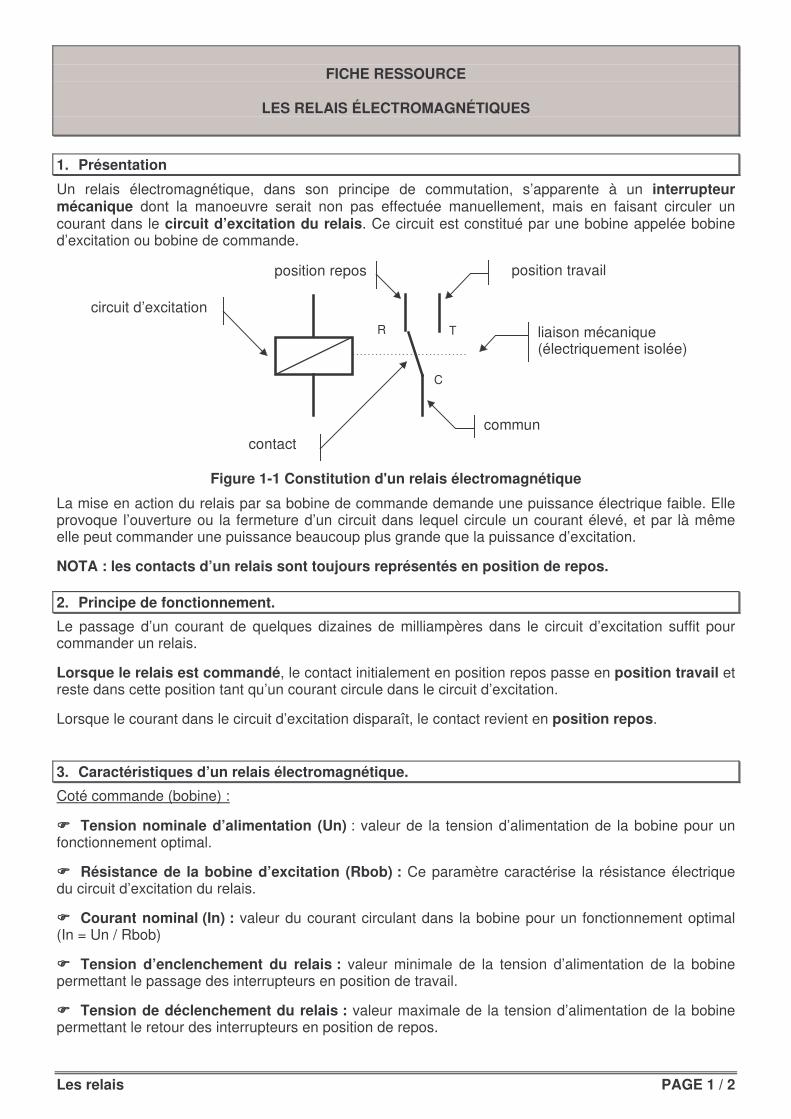
Un relais électromagnétique, dans son principe de commutation, s’apparente à un interrupteur mécanique dont la manoeuvre serait non pas effectuée manuellement, mais en faisant circuler un courant dans le circuit d’excitation du relais. Ce circuit est constitué par une bobine appelée bobine d’excitation ou bobine de commande.
position travail
commun
circuit d’excitation
position repos
contact
TR
C
liaison mécanique(électriquement isolée)
Figure 1-1 Constitution d'un relais électromagnétique
La mise en action du relais par sa bobine de commande demande une puissance électrique faible. Elle provoque l’ouverture ou la fermeture d’un circuit dans lequel circule un courant élevé, et par là même elle peut commander une puissance beaucoup plus grande que la puissance d’excitation.
NOTA : les contacts d’un relais sont toujours représentés en position de repos.
2. Principe de fonctionnement.
Le passage d’un courant de quelques dizaines de milliampères dans le circuit d’excitation suffit pour commander un relais.
Lorsque le relais est commandé, le contact initialement en position repos passe en position travail et reste dans cette position tant qu’un courant circule dans le circuit d’excitation.
Lorsque le courant dans le circuit d’excitation disparaît, le contact revient en position repos.
3. Caractéristiques d’un relais électromagnétique.
Coté commande (bobine) : Tension nominale d’alimentation (Un) : valeur de la tension d’alimentation de la bobine pour un fonctionnement optimal.
Résistance de la bobine d’excitation (Rbob) : Ce paramètre caractérise la résistance électrique du circuit d’excitation du relais.
Courant nominal (In) : valeur du courant circulant dans la bobine pour un fonctionnement optimal (In = Un / Rbob)
Tension d’enclenchement du relais : valeur minimale de la tension d’alimentation de la bobine permettant le passage des interrupteurs en position de travail.
Tension de déclenchement du relais : valeur maximale de la tension d’alimentation de la bobine permettant le retour des interrupteurs en position de repos.
Les relais PAGE 2 / 2
Coté interrupteurs commandés : Nature des contacts : On peut trouver plusieurs contacts dans un relais. Ces contacts peuvent être à ouverture (normalement fermé), à fermeture (normalement ouvert), inverseur ou temporisés. Intensité maximale du courant pouvant traverser les contacts Pouvoir de coupure : puissance maximale que l’interrupteur peut supporter Tension de service : tension aux bornes de l’interrupteur quand celui-ci est ouvert Nombre maximum de manœuvres possibles Résistances de contact des interrupteurs Temps de déclenchement ou d’enclenchement