Introduction à la théorie des systèmes dynamiques à …daniel.galvao.free.fr/Systemes dynamiques...
270
Retour Plein Ecran Fermer Sommaire Quitter Introduction à la théorie des systèmes dynamiques à temps discret Anna Désilles 24 septembre 2003
Transcript of Introduction à la théorie des systèmes dynamiques à …daniel.galvao.free.fr/Systemes dynamiques...

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Introduction à la théorie des systèmesdynamiques à temps discret
Anna Désilles
24 septembre 2003

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Table des matières
1 Notions générales de la théorie des systèmes dynamiques 51 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62 Le jeu de la vie : un jeu entre le simple et le complexe. . . . . . 7
2.1 Description du jeu . . . . . . . . . . . . . . . . . . . . 82.2 Observations. . . . . . . . . . . . . . . . . . . . . . . 9
3 Systèmes dynamiques à temps continu. . . . . . . . . . . . . . 114 Systèmes dynamiques à temps discret. . . . . . . . . . . . . . 14
4.1 Echantillonnage : passage de temps continu à temps discret164.2 Définitions . . . . . . . . . . . . . . . . . . . . . . . . 164.3 Notion de l’orbite d’un système. . . . . . . . . . . . . 20
5 Points fixes. Points périodiques. . . . . . . . . . . . . . . . . 236 Équivalence topologique des systèmes. . . . . . . . . . . . . . 307 Étude graphique des systèmes dynamiques. . . . . . . . . . . 32
7.1 Systèmes dynamiques discrets de dimension1 . . . . . 327.2 Systèmes dynamiques de dimension 2. Portraits de phases34
2 Systèmes dynamiques discrets d’ordre 1 de dimension 1 39

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1 Quelques rappels sur les propriétés des fonctions différentiables412 Stabilité des points fixes et des orbites périodiques. . . . . . . . 43
2.1 Stabilité des points fixes. Définitions. . . . . . . . . . . 432.2 Stabilité des orbites périodiques. Définitions.. . . . . . 472.3 Critère de stabilité . . . . . . . . . . . . . . . . . . . . 48
3 Attracteurs et sources. . . . . . . . . . . . . . . . . . . . . . 503.1 Points fixes. . . . . . . . . . . . . . . . . . . . . . . . 50
3.2 Situation indéterminée :
∣∣∣∣ d
dxf(xs)
∣∣∣∣ = 1 . . . . . . . . . 56
3.2.0.1 Attracteur ou source faible . . . . 563.2.0.2 Points fixes semi-stables. . . . . . 58
3.3 Orbites périodiques attracteurs et sources. . . . . . . . 614 Comportement global. Théorème de Sarkovsky. . . . . . . . . 66
4.0.0.3 Corollaire . . . . . . . . . . . . . . 69
3 Systèmes dynamiques discrets linéaires 711 Rappels sur les applications linéaires et les matrices dans l’es-
paceRm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 722 Systèmes dynamiques linéaires. . . . . . . . . . . . . . . . . . 793 Origine comme état d’équilibre attractif. . . . . . . . . . . . . 81
3.0.0.4 Quelques idées de la démonstration. 813.0.0.5 Preuve. . . . . . . . . . . . . . . . 82
4 Origine comme état d’équilibre répulsif. . . . . . . . . . . . . 834.0.0.6 Preuve. . . . . . . . . . . . . . . . 83
5 Les valeurs propres de la matrice du systèmeM et la géométriedes orbites. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 855.1 Décomposition spectrale de l’espace de phases. . . . . 85
5.1.1 Espace propre associé à une valeur propre réelle85

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
5.1.2 Espace propre associé à une paire de valeurspropres complexes conjuguées. . . . . . . . 87
5.1.3 Espace propre associé à une valeur propre devaleur absolue égale à 1. . . . . . . . . . . . 89
5.1.4 Actions conjointes. . . . . . . . . . . . . . . 906 Origine comme point selle. . . . . . . . . . . . . . . . . . . . 937 Les valeurs propres de valeur absolue égale à1 . . . . . . . . . 98
7.1 L’action de la matriceM dans le sous-espace invariantV1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
7.2 L’action de la matriceM dans le sous-espaceV−1 . . . . 1038 Action de la matriceM dans le sous-espaceVC . . . . . . . . . 105
4 Systèmes dynamiques discrets non-linéaires 1091 Première dérivée et linéarisation. . . . . . . . . . . . . . . . . 110
1.0.0.1 Notation. . . . . . . . . . . . . . . 1102 Étude locale des points fixes à l’aide du Jacobien. . . . . . . . 112
2.1 Point fixe attractif. . . . . . . . . . . . . . . . . . . . . 1132.2 Point fixe répulsif. . . . . . . . . . . . . . . . . . . . . 1142.3 Point-selle . . . . . . . . . . . . . . . . . . . . . . . .115
3 Étude des modèles démographiques.. . . . . . . . . . . . . . . 1183.1 Evolution d’une seule population. . . . . . . . . . . . 1183.2 Deux populations en compétition. . . . . . . . . . . . 125
5 Théorie des bifurcations 1311 Bifurcations des systèmes dynamiques de dimension 1. . . . . 132
1.1 Bifurcation de type noeud-col. . . . . . . . . . . . . . 1421.2 Bifurcation transcritique. . . . . . . . . . . . . . . . . 145

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1.3 Bifurcation de type fourche. . . . . . . . . . . . . . . 1481.4 Bifurcation de doublement de période. . . . . . . . . . 151
2 Systèmes dynamiques de dimension2 : bifurcation de Hopf. . . 156
6 Introduction à la théorie du chaos 1651 Du doublement de période à l’imprévisible. . . . . . . . . . . . 1662 Attracteurs des systèmes dynamiques. . . . . . . . . . . . . . 175
2.1 Points limites. Ensemble limite. Orbites apériodiques. . 1752.2 Noyau d’un système. Définition de l’attracteur.. . . . . 178
3 Définition du chaos. . . . . . . . . . . . . . . . . . . . . . . .1833.1 Un système transitif . . . . . . . . . . . . . . . . . . . 183
3.1.0.2 Démonstration. . . . . . . . . . . . 1843.2 Dépendance sensible des conditions initiales. . . . . . 185
4 Chaos et stabilité des orbites. . . . . . . . . . . . . . . . . . . 1904.0.0.3 Démonstration. . . . . . . . . . . . 191
5 Peut on mesurer le chaos ? Exposants du Lyapounov. . . . . . 195
7 Dynamique symbolique et chaos 1991 Représentations symboliques de systèmes dynamiques.. . . . . 2002 Dynamique de l’application de décalage sur l’ensembleΣN . . . 204
2.0.0.4 Preuve. . . . . . . . . . . . . . . . 2052.0.0.5 Preuve. . . . . . . . . . . . . . . . 2062.0.0.6 Preuve. . . . . . . . . . . . . . . . 208
3 Fonctions unimodales et théorie de pétrissage. . . . . . . . . . 2103.0.0.7 Preuve. . . . . . . . . . . . . . . . 2153.0.0.8 Preuve. . . . . . . . . . . . . . . . 2163.0.0.9 Preuve. . . . . . . . . . . . . . . . 218

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
4 Fonctions unimodales et théorie de pétrissage. . . . . . . . . . 220

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Chapitre 1
Notions générales de la théorie dessystèmes dynamiques

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1. Introduction
Le but de la théorie des systèmes dynamiques est de modéliser des processusqui évoluent dans le temps et d’étudier leur comportement. Cette étude doit per-mettre de prédire le comportement du système et de le réguler afin d’obtenir lesrésultats désirés. Pour élaborer un modèle il faut tout d’abord définir quelles sontles valeurs qui évoluent dans le temps, les états du système. Ensuite, il faut trou-ver des équations mathématiques qui décrivent leur évolution. Généralement, cesont des équations différentielles ( si le temps est considéré comme continu) ouen différences finies( si le temps du modèle est discret). Les paramètres du mo-dèle sont les coefficients de ces équations et les conditions initiales. Dans lescours qui suivront nous allons étudier essentiellement les systèmes dynamiquesen temps discret. Il est important de souligner cependant que toutes les notionsque nous allons évoquer ici sont également définies dans le cas des systèmes entemps continu et constituent la base des études appropriées.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
2. Le jeu de la vie : un jeu entre le simple et lecomplexe
Ce que l’on appelle "Jeu de la vie" n’est pas tout à fait un jeu, mais un di-vertissement mathématique inventé par le mathématicien Jhon Horton Conwayde l’université de Cambridge en 1970. Le jeu de Conway, inspiré des divertis-sements géométriques de Stanislas Ulam et des travaux de John von Neumannsur l’autoreproduction des machines, a eu un grand succès auprès de la com-munauté informatique et mathématique. En 1974, le Time Magazine évoquaitdes "millions de dollars d’heures de calcul perdues par les fanatiques du jeu".Aujourd’hui, même si on en parle plus dans la grande presse, il suscite encorebeaucoup d’intérêt aussi bien après des scientifiques que du grand public : il suf-fit d’utiliser un moteur de recherche sur Internet pour s’en assurer. Qu’y-t-il desi fascinant dans ce jeu ?
Du point de vu mathématique "Le jeu de la vie" est ce qu’on appelle unautomate cellulaire. Voici une citation à propos de ces objets :
"Les automates cellulaires sont des univers synthétiques, stylistiques,gouvernés par des règles simples, comme celles d’un jeu de société. Ilsont leur propre type de matière qui tourbillonne dans un espace et dansun temps qui leur sont propres. On peut en imaginer une incroyablevariété. On peut effectivement les construire et les regarder évoluer."
Cellular Automata - A new environnement for modeling parTommasoToffoli et Norman Margolus,The MIT Press, 1987.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Les automates cellulaires représentent un cas particulier de systèmes dyna-miques discrets. Sans que la théorie des automates fasse vraiment partie de cecours nous allons nous intéresser de plus près au "Jeu de la vie". Une obser-vation rapide des phénomènes qui s’y produisent nous permettra d’illustrer lesnotions fondamentales de la théorie des systèmes dynamiques et les questionsessentielles posées dans ce cours :
– Qu’est ce que l’évolution ?– Comment peut on la représenter, l’étudier ?– Peut on l’expliquer ?– En connaissant parfaitement les règles de l’évolution peut ontoutprévoir ?– Est ce que la complexité peut apparaître dans un univers régi par des règles
d’évolution simples et déterministes.
2.1. Description du jeu
L’univers du jeu est un plan infini quadrillé c’est-à-dire divisé en un nombreinfini de cases ou cellules contiguës, chacune dotée de deux états possibles :vivante ( visible ou "1") ou morte ( non visible ou état "0") ? Deux règles défi-nissent la naissance ou la mort d’une cellule :
1. une cellule peut "naître" si et seulement si elle entourée par trois cellulesvivantes ;
2. une cellule ne peut rester vivante que si elle a deux ou trois voisines vi-vantes.
On appelle"population" une configuration de cellules vivantes dans l’uni-vers. L’évolution d’une population est observée en applicant les deux règles sui-vantes de façon récurrente, en partant d’une quelconque configuration initiale.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
2.2. Observations
En choisissant une population de départ au hazard, on constate au bout desquelques premières itérations la formation de structures simples, invariantes ouanimées. En étudiant de près quelques unes de ces configurations particulières (on peut se servir d’un programme de simulation pour cela) on peut observer descomportements semblables à ce que nous appellerons plus tard états stationnairesou orbites périodiques d’un système dynamique.
Le fait qu’une population initiale se retrouve souvent réduite à un ensembled’états fixes ou répétitifs nous donne une première idée de la notion d’attracteurdans un système. Toutes ces configurations sont des exemples de ce que l’on peutcaractériser comme comportements simples d’un système. Pour nous simple serasouvent synonyme de "prévisible".
La particularité du jeu de la vie réside dans l’existence des structures spéci-fiques. Ainsi le "planeur" est une structure de cellules qui se retrouve identiqueà elle-même, à une translation près. Le "canon" est une structure qui "émet" des"planeurs" toutes les trente itérations. Enfin, le "mangeur" est un groupe de huitcellules capable d’absorber entièrement ou partiellement les objets de son voisi-nage tout en gardant sa propre structure.
Il est certainement impossible de décrire toutes les formes qui peuvent ap-paraître dans l’univers du jeu. On en connaît suffisamment aujourd’hui pour seposer la question : est ce que des structures complexes peuvent émerger du jeude la vie. D’une certaine façon cette question nous renvoie à l’étude de l’uni-versalité des capacités de traitement de l’information du système de Conway.Sans rentrer dans les détails de démonstration notons qu’il a été démontré quele modèle de Conway permet de construire une machine universelle de Turing.D’après la théorie de Turing, cela signifie, entre autres, que "toute machine ar-bitraire" peut apparaître dans le "jeu de la vie". Ainsi nous avons devant nous

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
un exemple simple de quelque chose de très compliqué : l’émergence des phéno-mènes nouveaux et complexes au cours d’une évolution, phénomènes inexistantsau départ et inexplicables par une simple déduction à partir des règles de l’évo-lution même.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Systèmes dynamiques à temps continu
Exemple1.1. Commençons par un exemple simple.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Systèmes dynamiques à temps continu
Exemple1.1. Commençons par un exemple simple. Supposons que nous cher-chons un modèle permettant d’étudier le mouvement d’un pendule de massemet de longueurl données.
@@
@@
@@
@@@}
l
m

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Systèmes dynamiques à temps continu
Exemple1.1. Commençons par un exemple simple. Supposons que nous cher-chons un modèle permettant d’étudier le mouvement d’un pendule de massemet de longueurl données. La position du pendule à tout moment du temps estcomplètement déterminée si l’on connaît l’angleθ(t).
@@
@@
@@
@@@}
l
m
θ(t)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Systèmes dynamiques à temps continu
Exemple1.1. Commençons par un exemple simple. Supposons que nous cher-chons un modèle permettant d’étudier le mouvement d’un pendule de massemet de longueurl données. La position du pendule à tout moment du temps estcomplètement déterminée si l’on connaît l’angleθ(t).
@@
@@
@@
@@@}
l
m
θ(t)
On peut donc choisir l’angle comme unique variable d’état de ce système.En utilisant les lois de Newton on peut facilement écrire l’équation différentiellepourθ(t) :

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Systèmes dynamiques à temps continu
Exemple1.1. Commençons par un exemple simple. Supposons que nous cher-chons un modèle permettant d’étudier le mouvement d’un pendule de massemet de longueurl données. La position du pendule à tout moment du temps estcomplètement déterminée si l’on connaît l’angleθ(t).
@@
@@
@@
@@@}
l
m
θ(t)
On peut donc choisir l’angle comme unique variable d’état de ce système.En utilisant les lois de Newton on peut facilement écrire l’équation différentiellepourθ(t) :
m · l · θ = −m · g · sin(θ)− k · l · θ,θ(0) = θ0
θ(0) = θ1

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Systèmes dynamiques à temps continu
Exemple1.1. Commençons par un exemple simple. Supposons que nous cher-chons un modèle permettant d’étudier le mouvement d’un pendule de massemet de longueurl données. La position du pendule à tout moment du temps estcomplètement déterminée si l’on connaît l’angleθ(t).
@@
@@
@@
@@@}
l
m
θ(t)
On peut donc choisir l’angle comme unique variable d’état de ce système.En utilisant les lois de Newton on peut facilement écrire l’équation différentiellepourθ(t) :
m · l · θ = −m · g · sin(θ)− k · l · θ,θ(0) = θ0
θ(0) = θ1
Nous avons donc construit le modèle de notre système.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Dans le cas général un système dynamique en temps continu peut être re-présenté par une équation différentielle. Selon l’équation, on distingue quelquestypes différents de systèmes.
– Systèmes autonomes
x = f(x), x(t0) = x0
– Systèmes non-autonomes
x = f(t, x), x(t0) = x0
– Systèmes avec plusieurs variables d’état (autonomes ou non-autonomes)
x1 = f1(t, x1, x2, . . . , xm), x1(t0) = x01
x2 = f2(t, x1, x2, . . . , xm), x2(t0) = x02
. . .
xm = fm(t, x1, x2, . . . , xm), xm(t0) = x0m
(1.1)
Pour ces systèmes on utilise souvent la notation vectorielle. Si l’on note
~x =
x1
x2
:xm
, ~f =
f1
f2
:fm

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
alors le système précédent s’écrit :
d
dt~x = ~f(t, ~x), ~x(t0) = ~x0
– Systèmes d’ordrer ≥ 2 avec plusieurs variables d’état (autonomes ounon-autonomes)
dr
dtr~x = ~f(t, ~x,
d
dt~x, . . . ,
dr−1
dtr−1~x)
~x(t0) = ~x0,d
dt~x(t0) = ~x1, . . . ,
dr−1
dtr−1~x(t0) = ~xr−1

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
4. Systèmes dynamiques à temps discret
Une modélisation discrète du temps peut être imposée soit par la naturemême du processus soit par le besoin de "discrétiser" un modèle à temps continupour le traiter numériquement. L’évolution du système est observée en choisis-sant certains moments du temps que nous allons supposeréquidistants. Danstous les cas le choix de l’unité de temps représente une partie importante de mo-délisation du système. Dans le modèle le temps sera donc noté par une variablen qui prend les valeurs entièresn = · · · − 2,−1, 0, 1, 2, . . . . Voici un exempleélémentaire d’un processus dynamique à temps discret.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.2.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.2. Supposons que nous avons une population de lapins qui au débutde notre expérience comptex(0) lapins. Nous savons qu’en une année la popula-tion augmente de10%. Notons parx(n) le nombre de lapins de la n-ème année.Nous voulons décrire l’évolution dex(n).

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.2. Supposons que nous avons une population de lapins qui au débutde notre expérience comptex(0) lapins. Nous savons qu’en une année la popula-tion augmente de10%. Notons parx(n) le nombre de lapins de la n-ème année.Nous voulons décrire l’évolution dex(n).
Après une année on obtientx(1) lapins
x(1) = x(0) + 0.1x(0) = 1.1x(0)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.2. Supposons que nous avons une population de lapins qui au débutde notre expérience comptex(0) lapins. Nous savons qu’en une année la popula-tion augmente de10%. Notons parx(n) le nombre de lapins de la n-ème année.Nous voulons décrire l’évolution dex(n).
Après une année on obtientx(1) lapins
x(1) = x(0) + 0.1x(0) = 1.1x(0)
x(2) = x(1) + 0.1x(1) = 1.1x(1)
Au cours de la deuxième année la quantité de lapins augmente de la même façon

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.2. Supposons que nous avons une population de lapins qui au débutde notre expérience comptex(0) lapins. Nous savons qu’en une année la popula-tion augmente de10%. Notons parx(n) le nombre de lapins de la n-ème année.Nous voulons décrire l’évolution dex(n).
Après une année on obtientx(1) lapins
x(1) = x(0) + 0.1x(0) = 1.1x(0)
x(2) = x(1) + 0.1x(1) = 1.1x(1)
. . .
Au cours de la deuxième année la quantité de lapins augmente de la même façonEn continuant

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.2. Supposons que nous avons une population de lapins qui au débutde notre expérience comptex(0) lapins. Nous savons qu’en une année la popula-tion augmente de10%. Notons parx(n) le nombre de lapins de la n-ème année.Nous voulons décrire l’évolution dex(n).
Après une année on obtientx(1) lapins
x(1) = x(0) + 0.1x(0) = 1.1x(0)
x(2) = x(1) + 0.1x(1) = 1.1x(1)
. . .
Au cours de la deuxième année la quantité de lapins augmente de la même façonEn continuant on trouve pour une année quelconque
x(n + 1) = x(n) + 0.1x(n) = 1.1x(n)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.2. Supposons que nous avons une population de lapins qui au débutde notre expérience comptex(0) lapins. Nous savons qu’en une année la popula-tion augmente de10%. Notons parx(n) le nombre de lapins de la n-ème année.Nous voulons décrire l’évolution dex(n).
Après une année on obtientx(1) lapins
x(1) = x(0) + 0.1x(0) = 1.1x(0)
x(2) = x(1) + 0.1x(1) = 1.1x(1)
. . .
Au cours de la deuxième année la quantité de lapins augmente de la même façonEn continuant on trouve pour une année quelconque
x(n + 1) = x(n) + 0.1x(n) = 1.1x(n)
Ainsi nous pouvons remarquer que pour chaque période de temps
x(n + 1) = p(x(n))
avecp(x) = 1.1x

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.2. Supposons que nous avons une population de lapins qui au débutde notre expérience comptex(0) lapins. Nous savons qu’en une année la popula-tion augmente de10%. Notons parx(n) le nombre de lapins de la n-ème année.Nous voulons décrire l’évolution dex(n).
Après une année on obtientx(1) lapins
x(1) = x(0) + 0.1x(0) = 1.1x(0)
x(2) = x(1) + 0.1x(1) = 1.1x(1)
. . .
Au cours de la deuxième année la quantité de lapins augmente de la même façonEn continuant on trouve pour une année quelconque
x(n + 1) = x(n) + 0.1x(n) = 1.1x(n)
Ainsi nous pouvons remarquer que pour chaque période de temps
x(n + 1) = p(x(n))
avecp(x) = 1.1x
Autrement dit, la dynamique de la population peut être décrite, comme dansl’exemple précédent, parl’itération d’une fonction p(x). En connaissant cettefonction nous pouvons reconstituer l’état du système a chaque moment du temps.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
4.1. Echantillonnage : passage de temps continu à temps dis-cret
Il existe plusieurs techniques de discrétisation ( échantillonnage) des sys-tèmes. Voici un exemple simple, souvent utilisé : la méthode d’Euler. Soit uneéquation différentielle d’ordre1 :
x = f(x)
Nous voulons étudier la trajectoire de cette équation seulement à des instantschoisis, équidistantstn = t0 + n · ∆t. Si la période d’échantillonnage∆t estchoisie assez petite, on peut approcher la dérivée dex(t) par la différence :
x ≈ x(tn)− x(tn+1)
∆t
Alors, le système dynamique à temps continu peut être approché par le systèmedynamique à temps discret suivant :
x(n + 1) = x(n) + ∆t · f(x(n))
4.2. Définitions
Dans le cas général un système dynamique discret est décrit par unsystèmed’équations aux différences finies, autrement dit, par unerécurrence. Il existe,comme dans le cas continu, plusieurs types de systèmes.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
– Systèmes dynamiques discrets (SDD) d’ordre 1 de dimension m
Définition 1.1. SoitD ∈ Rm un ensemble etf : D → D une fonctioncontinue et dérivable. On appelle " SDD d’ordre 1 en dimension m larécurrente suivante :
x(0) = x0 ∈ D, x(n + 1) = f(x(n)), n ≥ 0
On utilisera souvent la notation(f, D) pour désigner le système dyna-mique défini par une fonctionf sur l’ensembleD.
Quand le système a plusieurs variables d’état nous pouvons le représentersous forme vectorielle.Soit
~x(n) =
x1(n)x2(n)
:xm(n)
le vecteur des états du système. L’espace formé par ces états s’appelleespace de phasesdu système. Soit~f : Rm → Rm une applicationcontinue et dérivable.
~f(~x) =
f1(~x)f2(~x)
:fm(~x)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Alors le système(f, D) s’écrit sous la forme :
~x(0) = ~x0 ∈ D, ~x(n + 1) = ~f(~x(n)), n ≥ 0
– Systèmes dynamiques discrets non-autonomes
Si la fonction ~f est une fonction de l’état~x et de la variable du tempsnalors le système s’appelle non-autonome :
~x(0) = ~x0, ~x(n + 1) = ~f(n, ~x(n)), n ≥ 0
– Systèmes dynamiques discrets d’ordre supérieur
Ces systèmes sont décrits par des équations aux différences finies d’ordrer ≥ 2 autonomes ou non :
~x(n + r) = ~f(~x(n), ~x(n + 1), . . . , ~x(n + r − 1)), n ≥ 0 (1.2)
Il existe une procédure simple qui permet de transformer en un systèmed’ordre 1 tout système dynamique d’ordre supérieur. Pour cela il suffit dedéfinir un nouvel espace de phases formé des vecteurs de la forme :
~y(n) =
~x(n)
~x(n + 1)...
~x(n + r − 1)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
La dimension de cet espace seram(r − 1). Dans cet espace on définitl’applicationg : Rm(r−1) → Rm(r−1) d’après la formule :
~g(~y) =
~g1(~y)~g2(~y)
...~gr−1(~y)
~gk(~y) ==
yk·m+1
yk·m+2...
yk·m+m
, k = 1, . . . ,m− 2
~gr−1(~y) = ~f(~y)
Alors, l’équation (1.2) est équivalente à l’équation suivante pour~y(n) :
~y(n + 1) = ~g(~y(n))
Dans certains cas (surtout linéaires) cette transformation permet d’appli-quer aux systèmes d’ordre supérieur les mêmes méthodes d’analyse qu’auxsystèmes d’ordre 1.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
4.3. Notion de l’orbite d’un système
Nous allons étudier dans la suite seulement les systèmes d’ordre 1. Notre butsera de pouvoir décrire l’évolution des états du système en fonction des condi-tions initiales.
Nous aurons donc besoin d’introduire la notion detrajectoire ou orbite dusystème.
Soit unSDDd’ordre 1 défini par l’itération d’une fonctionf(x) :
x(0) = x0, x(n + 1) = f(x(n)), n ≥ 0 (1.3)
Définition 1.2. Étant donné le point initialx0, on appelleorbite ( outrajectoire ) du système (1.3) la suite
O(x0) = {x(0) = x0, x(1) = f(x(0)), . . . , x(n + 1) = f(x(n)), . . .}

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.3.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.3. Soit unSDD en dimension 1 défini par la fonctionf(x) = x2 surl’intervalle [0, +∞). Prenons pour condition initialex0 = 1/2. L’orbite corres-pondante est

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.3. Soit unSDD en dimension 1 défini par la fonctionf(x) = x2 surl’intervalle [0, +∞). Prenons pour condition initialex0 = 1/2. L’orbite corres-pondante est
x(0) = x0 = 1/2,
r0
r1
2
x(0)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.3. Soit unSDD en dimension 1 défini par la fonctionf(x) = x2 surl’intervalle [0, +∞). Prenons pour condition initialex0 = 1/2. L’orbite corres-pondante est
x(0) = x0 = 1/2,
x(1) = f(x(0)) = 1/4
r0
r1
2
x(0)r1
4
x(1)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.3. Soit unSDD en dimension 1 défini par la fonctionf(x) = x2 surl’intervalle [0, +∞). Prenons pour condition initialex0 = 1/2. L’orbite corres-pondante est
x(0) = x0 = 1/2,
x(1) = f(x(0)) = 1/4
x(2) = f(x(1)) = 1/16
r0
r1
2
x(0)r1
4
x(1)r1
16
x(2)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.3. Soit unSDD en dimension 1 défini par la fonctionf(x) = x2 surl’intervalle [0, +∞). Prenons pour condition initialex0 = 1/2. L’orbite corres-pondante est
x(0) = x0 = 1/2,
x(1) = f(x(0)) = 1/4
x(2) = f(x(1)) = 1/16
r0
r1
2
x(0)r1
4
x(1)r1
16
x(2)
Remarquons que
x(n) = f(x(n− 1)) = f (n)(x(0)) = (1/2)2n
→ 0 quand n →∞

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons un autre point initial,x0 = 2. Alors

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons un autre point initial,x0 = 2. Alors
x(0) = 2,
r0
x(0)r2

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons un autre point initial,x0 = 2. Alors
x(0) = 2,
x(1) = f(x(0)) = 4
r0
x(0)r2
r4
x(1)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons un autre point initial,x0 = 2. Alors
x(0) = 2,
x(1) = f(x(0)) = 4
x(2) = f(x(1)) = 16
r0
x(0)r2
r4
x(1) r16
x(2)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons un autre point initial,x0 = 2. Alors
x(0) = 2,
x(1) = f(x(0)) = 4
x(2) = f(x(1)) = 16
r0
x(0)r2
r4
x(1) r16
x(2)
Dans ce cas, quandn →∞ on a :
x(n) = f(x(n− 1)) = f (n)(x(0)) = 22n →∞

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons un autre point initial,x0 = 2. Alors
x(0) = 2,
x(1) = f(x(0)) = 4
x(2) = f(x(1)) = 16
r0
x(0)r2
r4
x(1) r16
x(2)
Dans ce cas, quandn →∞ on a :
x(n) = f(x(n− 1)) = f (n)(x(0)) = 22n →∞
Et enfin, si l’on choisit pour point initialx0 = 1

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons un autre point initial,x0 = 2. Alors
x(0) = 2,
x(1) = f(x(0)) = 4
x(2) = f(x(1)) = 16
r0
x(0)r2
r4
x(1) r16
x(2)
Dans ce cas, quandn →∞ on a :
x(n) = f(x(n− 1)) = f (n)(x(0)) = 22n →∞
Et enfin, si l’on choisit pour point initialx0 = 1 on voit que
O(x0) = {1, 1, x(n) = 12n
= 1, . . .}.
�
�
�
�On observe donc ici trois comportements différents du même systèmeen fonction du point initial choisi. Ainsi nous pouvons parler des pro-priétés d’un système, en décrivant toutes ses orbites possibles.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
5. Points fixes. Points périodiques
Nous allons considérer des systèmes dynamiques discrets d’ordre 1 de di-mensionm définis par des fonctionsf : Rm → Rm
x(n + 1) = f(x(n)), x(n) = (x1(n), x2(n), . . . , xm(n))′ ∈ Rm (1.4)
Définition 1.3. On appelle "point fixe " d’un système dynamique toutpointxs tel que
xs = F (xs)
Parfois, ces points sont appelés aussipoints stationnaires ou pointsd’équilibre .
Exemple1.4. Revenons au système de l’exemple1.3:
x(n + 1) = x2(n), x(0) = x0
On voit facilement que les pointsx = 1 estx = 0 sont lespoints fixesde cesystème, parce que12 = 1, et02 = 0
En général, on trouve lespoints fixesen résolvant l’équation :
f(x) = x

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
L’étude de ces points se ramène donc à la théorie despoints fixesdes fonctionsnumériques.
Définition 1.4. Une orbiteO(x0) s’appelle périodique s’il existe unp > 0 t.q.
x(n + p) = x(n), ∀n (1.5)
Une orbite est diteéventuellement périodiques’il existe unp > 0 etunN > 0 tels que l’égalité (1.5) est vérifiée pour toutn > N .Uneorbite périodiqueO(x0) est toujours une suite de points périodique.Tous ces points s’appellentpoint périodique de périodep du système.
Définition 1.5. Le plus petit nombrep qui vérifie (1.5) s’appelle"pé-riode fondamentale " de l’orbiteO(x0).
Dans la suite nous utiliserons souvent le terme abrégé "période" au lieu de"période fondamentale", sauf dans les cas où une confusion est possible.
Tous les points périodiques de périodep sont solutions de l’équation
f (p)(x) = x

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
où
f (p)(x) = f(f(f(f(. . . f︸ ︷︷ ︸ (x)) . . . )))
p fois
Remarque1.1. Revenons encore une fois aux notions de période et de périodefondamentale. La différence entre les deux est importante lorsqu’on cherche lessolutions de l’équation (1.6). Quand on dit qu’une orbite est de périodep (fon-damentale ou non) cela signifie que l’équation (1.5) est vérifiée :
x(n + p) = f (p)(x(n)) = x(n), ∀n
On en déduit facilement que
x(n + 2p) = x((n + p) + p) = x(n + p) = x(n), ∀n
Donc la même orbite est également de période2p, mais aussi de période3p etainsi de suite. Toute orbite de périodep est une orbite de toutes les périodes detype k · p où k est un nombre entier positif. Alors si un pointx0 est un pointpériodique de périodep et donc il est solution de l’équation (1.6) alors il estaussi solution de toutes les équations de type
f (k·p)(x) = x
En particulier, tout point fixe, étant point périodique de périodep = 1, est unpoint périodique de n’importe quelle période

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
La notion de période fondamentale permet d’éliminer les ambiguïtés liées àla recherche de points d’une certaine période. Par exemple, supposons qu’on re-cherche des points périodiques depériode fondamentalep = 6 dans le systèmedynamique défini par une fonctionf(x). Parmi les solutions de l’équation
f (6)(x) = x
se trouvent tous les points fixes du système, tous les points de période fonda-mentale3 (si le système en a) et tous les points de période fondamentale2 (si lesystème en a). En effet, on remarque que6 = 2 · 3. Si, après l’élimination de cessolutions éventuelles, l’équation admet encore d’autres solutions, ces dernières,et elles seules, représentent des points périodiques depériode fondamentale6.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.5.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.5. Considérons un système de dimension 1 défini par la fonction
f(x) = ax(1− x), x ∈ R (1.6)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.5. Considérons un système de dimension 1 défini par la fonction
f(x) = ax(1− x), x ∈ R (1.6)
Ici a est un paramètre que nous allons supposer dans l’intervallea ∈]0, 4[.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.5. Considérons un système de dimension 1 défini par la fonction
f(x) = ax(1− x), x ∈ R (1.6)
Ici a est un paramètre que nous allons supposer dans l’intervallea ∈]0, 4[.Regardons si ce système a des points périodiques depériode fondamentale2.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.5. Considérons un système de dimension 1 défini par la fonction
f(x) = ax(1− x), x ∈ R (1.6)
Ici a est un paramètre que nous allons supposer dans l’intervallea ∈]0, 4[.Regardons si ce système a des points périodiques depériode fondamentale2.Ces points doivent être solutions de l’équation :
f(f(x)) = x (1.7)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple1.5. Considérons un système de dimension 1 défini par la fonction
f(x) = ax(1− x), x ∈ R (1.6)
Ici a est un paramètre que nous allons supposer dans l’intervallea ∈]0, 4[.Regardons si ce système a des points périodiques depériode fondamentale2.Ces points doivent être solutions de l’équation :
f(f(x)) = x (1.7)
On doitexcluredès le départ lespoints fixes(c’est-à-dire, points de période1)qui sont solutions de l’équation
ax(1− x) = f(x) = x (1.8)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On en déduit quex 6= 0, x 6= 1− 1/a (1.9)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On en déduit quex 6= 0, x 6= 1− 1/a (1.9)
Passons à l’équation (1.7).
a2x(1− x)(1− ax(1− x)) = x

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On en déduit quex 6= 0, x 6= 1− 1/a (1.9)
Passons à l’équation (1.7).
a2x(1− x)(1− ax(1− x)) = x
Les points que nous recherchons sont donc racines d’un polynôme de degré 4 :
a3x4 − 2a3x3 + a2(1 + a)x2 − (a2 − 1)x = 0

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On en déduit quex 6= 0, x 6= 1− 1/a (1.9)
Passons à l’équation (1.7).
a2x(1− x)(1− ax(1− x)) = x
Les points que nous recherchons sont donc racines d’un polynôme de degré 4 :
a3x4 − 2a3x3 + a2(1 + a)x2 − (a2 − 1)x = 0
Nous connaissons déjà deux de ses racines : ce sont les deux points points fixes.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On en déduit quex 6= 0, x 6= 1− 1/a (1.9)
Passons à l’équation (1.7).
a2x(1− x)(1− ax(1− x)) = x
Les points que nous recherchons sont donc racines d’un polynôme de degré 4 :
a3x4 − 2a3x3 + a2(1 + a)x2 − (a2 − 1)x = 0
Nous connaissons déjà deux de ses racines : ce sont les deux points points fixes.Pour les éliminer et trouver plus facilement les deux autres racines nous allonsfactoriser ce polynôme en le divisant par le polynôme de l’équation :
a3x4−2a3x3+a2(1+a)x2−(a2−1)x = (ax2−(a−1)x)·(a2x2−(a2+a)x+a+1)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Donc les points périodiques que nous cherchons sont solutions réelles del’équation.
a2x2 − (a2 + a)x + a + 1 = 0

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Donc les points périodiques que nous cherchons sont solutions réelles del’équation.
a2x2 − (a2 + a)x + a + 1 = 0
Les racines de ce polynôme sont de la forme :
x12 =a + 1
2a± 1
2a
√(a− 3)(a + 1)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Donc les points périodiques que nous cherchons sont solutions réelles del’équation.
a2x2 − (a2 + a)x + a + 1 = 0
Les racines de ce polynôme sont de la forme :
x12 =a + 1
2a± 1
2a
√(a− 3)(a + 1)
Alors, sia > 0 il y a deux points périodiques distincts. Ils appartiennent doncà la mêmeorbite périodiquede période2.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Donc les points périodiques que nous cherchons sont solutions réelles del’équation.
a2x2 − (a2 + a)x + a + 1 = 0
Les racines de ce polynôme sont de la forme :
x12 =a + 1
2a± 1
2a
√(a− 3)(a + 1)
Alors, sia > 0 il y a deux points périodiques distincts. Ils appartiennent doncà la mêmeorbite périodiquede période2.
Si a < 3, il n’y pas de points périodiques.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Donc les points périodiques que nous cherchons sont solutions réelles del’équation.
a2x2 − (a2 + a)x + a + 1 = 0
Les racines de ce polynôme sont de la forme :
x12 =a + 1
2a± 1
2a
√(a− 3)(a + 1)
Alors, sia > 0 il y a deux points périodiques distincts. Ils appartiennent doncà la mêmeorbite périodiquede période2.
Si a < 3, il n’y pas de points périodiques.Enfin, sia = 3, il y a un seul point périodique, qui coïncide avec l’un des
points fixes.'
&
$
%
On peut observer dans cet exemple un phénomène très important dansla théorie des systèmes dynamiques : le changement des caractéris-tiques d’un système en fonction du choix de ses paramètres. Nous allonsétudier ce phénomène plus tard, dans les cours qui suivent.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
6. Équivalence topologique des systèmes
Nous allons définir dans cette section une notion d’équivalence entre deuxsystèmes, très importante pour l’étude des systèmes dynamiques, surtout descomportements complexes.
SoientD et E deux espaces métriques etf : D → D, g : E → E deuxapplications définissant surD etG respectivement deux systèmes dynamiques.
Définition 1.6. Soient(D, f) et (E, g) deux systèmes dynamiques. Ondit qu’ils sont topologiquement conjuguéss’il existe un homéomor-phisme ( une application continue et bijective)h : D → E tel que
h ◦ f = g ◦ h (1.10)
Remarque1.2. On peut détailler l’expression (1.10) de façon suivante : pourtoutx ∈ D
h(f(x)) = g(h(x))
Cette équivalence peut être représentée par le schéma suivant :
Df−→ Dyh
y h
Eg−→ E
ou
xf−→ f(x)yh
y h
h(x)σ−→ g(h(x))
Le théorème suivant montre importance de cette définition

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 1.1.Soient(D, f) et (E, g) deux systèmes dynamiques.Supposons qu’ils sont topologiquement conjugués par un homéomor-phismeh : D → E. Alors
(a) L’application h−1 : E → D vérifie aussi la définition et as-sure donc l’équivalence topologique entre les systèmes(D, f) et(E, g).
(b) h ◦ f (n) = g(n) ◦ h, pour toutn ∈ N(c) Si p ∈ D est un point périodique def de période fondamentalek
alors h(p) ∈ E est un point périodique deg de période fonda-mentalek.
Remarque1.3. L’application h : D → E correspond tout simplement àun changement de variables qui transformef en g. En effet, supposons que{x(n), n = 0, 1, . . .} est une orbite quelconque du système(D, f). Si l’on posepour toutn = 0, 1, . . .
y(n) = h(x(n))
on remarque facilement que
y(n + 1) = h(x(n + 1)) = h(f(x(n))) = g(h(x(n))) = g(y(n))
ce qui veut dire que la suite{y(n), n = 0, 1, . . .}, l’image de{x(n), n = 0, 1, . . .}parh, est une orbite du système(E, g).

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
7. Étude graphique des systèmes dynamiques
Nous allons parler dans cette section de moyens très simples de visualiserle comportement de certains systèmes. Ces représentations nous permettront demieux comprendre les phénomènes que nous allons étudier.
7.1. Systèmes dynamiques discrets de dimension1
Soit unSDDde dimension 1 défini par une fonction
f : R → R
x(0) = x0, x(n + 1) = f(x(n))
On peut visualiser sur le plan(x, y) l’évolution d’uneorbiteO(x0) en utili-sant le graphe de la fonctionf et la droitey = x.
Prenons par exemple la fonction
f(x) = 4.5x− 3.5x2
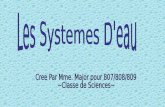
Nous allons représenter l’orbitequi commence dans le pointx0 = 0.2. Tra-çons d’abord le graphe de la fonctionf et la droitey = x (voir la figure7.1). Surle plan(x, y) l’ orbitecommence dans le point(x0, 0). Nous traçons maintenantune ligne verticale du point(x(0), 0) jusqu’au graphe de la fonctionf(x). Lepoint d’intersection est exactement le point(x(0), x(1)) avecx(1) = f(x(0)).
Ensuite, nous traçons une ligne horizontale à partir du point(x(0), x(1)) jus-qu’au point(x(1), x(1)) d’intersection avec la droitey = x.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−0.5 0 0.5 1 1.5−0.5
0
0.5
1
1.5
x
y
(x(0),0)
(x(0),x(1))
FIG. 1.1 – L’orbite du systèmex(n) = 4.5x(n)− 3.5x2(n) : premier pas
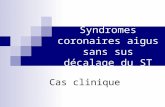
A partir de ce point nous traçons encore une ligne verticale vers le graphede la fonctionf(x) pour trouver le point suivantx(2) = f(x(1)) ( voir la figure1.2).
En continuant ainsi nous pouvons suivre l’évolution de l’orbitesur autant depoints que nous le voulons.
Cette représentation graphique des systèmes est particulièrement utile parcequ’elle permet de voir clairement lespoints fixes( ce sont les points d’intersec-tion du graphe de la fonctionf(x) et de la droitey = x). On peut aussi observerles différents comportements desorbites autour des points fixes, comme sur lesfigures1.3et1.4.
Dans les prochains cours nous allons nous servir des cette représentation

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−0.5 0 0.5 1 1.5−0.5
0
0.5
1
1.5
x
y
(x(0),0)
(x(0),x(1)) (x(1),x(1))
(x(1),x(2))
FIG. 1.2 – L’orbite du systèmex(n) = 4.5x(n)− 3.5x2(n) : deuxième pas
pour illustrer les différentes notions de la théorie des systèmes dynamiques endimension 1.
7.2. Systèmes dynamiques de dimension 2. Portraits de phases
Un système dynamique discret de dimension 2 est décrit par deux équations :
x1(n + 1) = f1(x1(n), x2(n))
x2(n + 1) = f2(x1(n), x2(n))
Pour étudier ces systèmes on utilise souvent des portraits de phases. Pour

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0.75 0.8 0.85 0.9 0.95 1 1.050.75
0.8
0.85
0.9
0.95
1
1.05
FIG. 1.3 – Systèmex(n+1) = x3(n)−x2(n)+1 : une orbite tends vers le pointfixe xs = 1
tracer le portrait de phases d’un système dynamique défini par l’application~f :R2 → R2
~f(x1, x2) =
(f1(x1, x2)f2(x1, x2)
)on choisit sur le plan une grille de points(x1, x2) assez dense et l’on trace danschaque point la direction du départ de l’orbitequi commence dans ce point. Cette
direction pour un point initial~x(0) =
(x1
x2
)est définie par le vecteur
~x(1)− ~x(0) = ~f(~x(0))− ~x(0)
Cela donne un aperçu (voir le figure1.5) de toutes les orbites possibles du sys-tème. Si l’on s’intéresse à uneorbite particulière, on peut la retrouver sur leportrait de phases, en suivant les directions du champ de vecteurs tracées à partirdu point initial de l’orbiteen question.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
FIG. 1.4 – Systèmex(n+1) = x3(n)−x2(n)+1 : une orbite s’éloigne du pointfixe xs = 1
0 0.2 0.4 0.6 0.8 1 1.2
0
0.2
0.4
0.6
0.8
1
1.2
x
y
FIG. 1.5 – Le portrait de phases d’un système dynamique non-linéaire
On peut observer à l’aide d’un portrait de phases les points fixes du système.Ce sont les points tels que~f(~x) = ~x. Donc, le vecteur de direction du portrait

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
de phases doit être nul dans unpoint fixe. Le comportement des orbites du sys-tème autour d’unpoint fixeest important. Le portrait de phases nous permet unepremière analyse qualitative de ce comportement. Sur la figure1.5 sont tracéesquelques orbites commençant dans des points proches des points fixes.
Sur un portrait de phases on peut également apercevoir des orbites pério-diques, si le système en a. Dans ce cas, on peut distinguer des courbes closesformées par un groupe de vecteurs de directions.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Chapitre 2
Systèmes dynamiques discretsd’ordre 1 de dimension 1
Nous allons étudier dans ce cours les propriétés fondamentales des SDD dedimension 1.
SoientD ∈ R et f : R → R une fonction numérique. Elle définit un SDD(D, f) de dimension 1 :
x(0) = x0, x(n + 1) = f(x(n)), n = 0, 1, 2, . . .
Nous allons décrire les propriétés d’un système dans deux contextes diffé-rents :comportement localetcomportement global.
En décrivant lespropriétés locales d’un système on s’intéresse surtout aucomportement des orbites autour des points fixes et des orbites périodiques.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Quelques exemples d’étude graphique que nous avons vus dans le cours pré-cédent montrent que certains points fixes "attirent" les orbites, d’autres les "re-poussent". Nous allons expliquer ici comment ces phénomènes sont liés aux pro-priétés de la fonctionf(x) qui définit le système.
Une autre question qui se pose est de savoir si un système donné possèdeun seulpoint fixe, ou plusieurs, ou s’il a des orbites périodiques et de quellespériodes. Il s’agit donc de décrire lecomportement globaldu système. Il setrouve que, au moins dans quelques cas relativement simples, la réponse peutêtre donnée.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1. Quelques rappels sur les propriétés des fonctionsdifférentiables
Théorème 2.1.Soit [a, b] ∈ R un intervalle et soitg : [a, b] → R unefonction différentiable sur[a, b]. Alors, il existe un pointc ∈ [a, b] t.q.
g(b)− g(a) = g′(c)(b− a)
Théorème 2.2.Soitg : [a, b] → R une fonction continue. Supposonsqueg est dérivable dans tous les points de l’intervalle[a, b] sauf éven-tuellement un nombre fini de points. Alors, pour tout couple de pointsx, y ∈ [a, b] il existe un pointc ∈ [x, y] t.q.
|g(x)− g(y)| = |g′(c)| · |x− y|
Les deux théorèmes qui suivent peuvent être utilisés pour analyser l’existencedespoints fixesdes systèmes.
Théorème 2.3.SoitI = [a, b] un intervalle fermé. Soitg : I → I unefonction continue. SiI ⊆ g(I) alors g a unpoint fixedans l’intervalleI.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 2.4.Soit g : [a, b] → R une fonction différentiable sur[a, b]. Supposons que
|g′(x)| < 1, ∀ x ∈ [a, b]
Alors la fonctiong(x) a un unique point fixexs t.q. g(xs) = xs dansl’intervalle [a, b].

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
2. Stabilité des points fixes et des orbites périodiques
2.1. Stabilité des points fixes. Définitions
La notion de stabilité est très importante pour l’étude du comportement dessystèmes autour de leurs points fixes. Cette notion est assez intuitive.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule.
BBBBBBB }

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule. La position du pendule est décrite par l’angleθ défini par rapport à la verticale.
BBBBBBB }θ

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule. La position du pendule est décrite par l’angleθ défini par rapport à la verticale. Le système a deux points fixes :θ1 = 0 etθ2 = π.
BBBBBBB }θ
×
×
θ = π
θ = 0

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule. La position du pendule est décrite par l’angleθ défini par rapport à la verticale. Le système a deux points fixes :θ1 = 0 etθ2 = π.
BBBBBBB }θ
×
×
θ = π
θ = 0
}Si le pendule se trouve dans l’état d’équilibre avecθ = θ1 = 0

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule. La position du pendule est décrite par l’angleθ défini par rapport à la verticale. Le système a deux points fixes :θ1 = 0 etθ2 = π.
BBBBBBB }θ
×
×
θ = π
θ = 0
}
BBBBBBB m
Si le pendule se trouve dans l’état d’équilibre avecθ = θ1 = 0 et il est écartéde cet état àθ0 par une petite perturbation,

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule. La position du pendule est décrite par l’angleθ défini par rapport à la verticale. Le système a deux points fixes :θ1 = 0 etθ2 = π.
BBBBBBB }θ
×
×
θ = π
θ = 0
}
BBBBBBB m
Si le pendule se trouve dans l’état d’équilibre avecθ = θ1 = 0 et il est écartéde cet état àθ0 par une petite perturbation, nous savons que le pendule va oscillerautour du point d’équilibre, sans jamais dépasser l’écart initialθ0.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule. La position du pendule est décrite par l’angleθ défini par rapport à la verticale. Le système a deux points fixes :θ1 = 0 etθ2 = π.
BBBBBBB }θ
×
×
θ = π
θ = 0
}
BBBBBBB m
Si le pendule se trouve dans l’état d’équilibre avecθ = θ1 = 0 et il est écartéde cet état àθ0 par une petite perturbation, nous savons que le pendule va oscillerautour du point d’équilibre, sans jamais dépasser l’écart initialθ0. Ainsi, touteorbite qui commence près du point stationnaireθ1 = 0 ne s’en éloigne pas. Cepoint est"stable".

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule. La position du pendule est décrite par l’angleθ défini par rapport à la verticale. Le système a deux points fixes :θ1 = 0 etθ2 = π.
BBBBBBB }θ
×
×
θ = π
θ = 0
}
BBBBBBB m
}
Si le pendule se trouve dans l’état d’équilibre avecθ = θ1 = 0 et il est écartéde cet état àθ0 par une petite perturbation, nous savons que le pendule va oscillerautour du point d’équilibre, sans jamais dépasser l’écart initialθ0. Ainsi, touteorbite qui commence près du point stationnaireθ1 = 0 ne s’en éloigne pas. Cepoint est"stable".
En revanche, quand le pendule se trouve à l’état d’équilibre avecθ = θ2 = π

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule. La position du pendule est décrite par l’angleθ défini par rapport à la verticale. Le système a deux points fixes :θ1 = 0 etθ2 = π.
BBBBBBB }θ
×
×
θ = π
θ = 0
}
BBBBBBB m
}
BB
BB
BBB
m
Si le pendule se trouve dans l’état d’équilibre avecθ = θ1 = 0 et il est écartéde cet état àθ0 par une petite perturbation, nous savons que le pendule va oscillerautour du point d’équilibre, sans jamais dépasser l’écart initialθ0. Ainsi, touteorbite qui commence près du point stationnaireθ1 = 0 ne s’en éloigne pas. Cepoint est"stable".
En revanche, quand le pendule se trouve à l’état d’équilibre avecθ = θ2 = πil suffit d’une toute petite perturbation

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Prenons l’exemple d’un pendule. La position du pendule est décrite par l’angleθ défini par rapport à la verticale. Le système a deux points fixes :θ1 = 0 etθ2 = π.
BBBBBBB }θ
×
×
θ = π
θ = 0
}
BBBBBBB m
}
BB
BB
BBB
mm
Si le pendule se trouve dans l’état d’équilibre avecθ = θ1 = 0 et il est écartéde cet état àθ0 par une petite perturbation, nous savons que le pendule va oscillerautour du point d’équilibre, sans jamais dépasser l’écart initialθ0. Ainsi, touteorbite qui commence près du point stationnaireθ1 = 0 ne s’en éloigne pas. Cepoint est"stable".
En revanche, quand le pendule se trouve à l’état d’équilibre avecθ = θ2 = πil suffit d’une toute petite perturbation pour que la force de gravitation l’entraînevers le bas. Ainsi, dans cet exemple, toute orbite qui commence près dupointfixe s’en éloigne. Ce point fixe est"instable".

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Passons maintenant au cas général. Soit un SDD d’ordre 1 de dimension 1défini par une fonctionf : D → D. Ici D = [a, b] ∈ R est un intervalle. Suppo-sons que ce système possède unpoint fixexs. Nous allons utiliser lesnotationssuivantes.
– Pour un nombre positifδ > 0 nous notons parUδ(x) le δ-voisinage dupointx :
Uδ(x) = {y : |y − x| < δ}
– Nous notons parf (n)(x) lan-ème itération d’une applicationf . Pour éviter
toute confusion, lan-ème dérivée sera toujours notée pardnf
dxn.
Définition 2.1. Un point fixexs s’appellestablesi
∀ε > 0 il existe un δ > 0 tel que
si |x0 − xs| < δ alors pour tout n > 0 |f (n)(x0)− xs| < ε
Autrement dit, toutes les orbites qui commencent près du pointxs res-tent dans un voisinage de ce point :
si x0 ∈ Uδ(xs) alors pour tout n > 0 f (n)(x0) ∈ Uε(x0)
Remarque2.1. Nous avons vu quelques exemples où toutes les orbites d’unsystème dynamique convergeaient vers un point fixe. Cette situation n’est qu’uncas particulier d’un point fixestable. Nous en parlerons plus tard dans ce même

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
cours. La définition même de stabilité n’impose pas cette convergence. Il existebien des situations quand les orbites restent près du point fixe sans converger.Voici un exemple.
Exemple2.1. Soit f(x) = 1 − x. Le seul point fixe estxs = 0.5. Remarquonsque pour tout autre pointx0 6= 0.5 l’orbite correspondante est périodique :
f(x0) = 1− x0, f(f(x0)) = x0
Aucune orbite ne converge donc vers le point fixe. Néanmoins, tous les élémentsd’une orbite restent à la même distance du pointxs = 0.5. C’est donc un pointfixe stable.
Définition 2.2. Un point fixe s’appelleinstable s’il existe unε > 0 telque∀r > 0 il existe unx0 ∈ Ur(xs) et il existe unn ∈ N tels que
|f (n)(x0)− xs| > ε
Cela signifie que pour tout voisinage du point fixexs il existe une orbitequi, en commençant dans ce voisinage s’éloigne du pointxs.
Remarque2.2. Remarquons qu’il suffit d’une seule orbite qui "diverge" pourqu’un point fixe soitinstable. Nous allons plus tard discuter le cas extrême d’in-stabilité quand toutes les orbites quittent le voisinage du point fixe.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple2.2. Considérons la fonctionf(x) = x + x3. Le SDD correspondant aun seul point fixexs = 0. On remarque facilement que six0 > 0 alorsx(0) <x(1) < · · · < x(n) < . . . et quex(n) → ∞ quandn → ∞. Si x0 < 0 alorsx(0) > x(1) > · · · > x(n) > et x(n) → −∞ quandn → ∞. Aucune orbite nereste près du point fixe. Il est doncinstable.
2.2. Stabilité des orbites périodiques. Définitions.
Rappelons qu’un pointxp est périodique de périoder si
f (r)(xp) = xp
Un point périodique de périoder est donc unpoint fixe de l’applicationf (r).L’orbite qui commence en un tel point est une suite périodique, elle n’a querpoints distincts. Chacun de cesr points est un point périodique de périoder.Une telle orbite s’appelleorbite périodique de périoder. On définit sa stabilitécomme suit.
Définition 2.3. Soit xp un point périodique de périoder d’un SDDdéfini par une fonctionf(x). L’ orbite périodiquecorrespondanteO(xp)s’appellestable ( instable)si chacun de ses points est un point fixestable (instable ) de l’applicationf (r).

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple2.3. Soit f(x) = 1 − x. Tout pointx 6= 0.5 est un point périodiquede période 2. Or l’applicationf (2)(x) = 1 − (1 − x)) ≡ x est l’applicationidentité. Tous les points sont des points fixesstables de cette application. Doncpour tout pointx 6= 0.5 l’orbite correspondanteO(x) = {x, 1−x} est uneorbitepériodiquestable.
2.3. Critère de stabilité
Nous savons déjà que la dynamique d’un système dépend des propriétés dela fonctionf(x) qui le définit. Notamment on peut dans beaucoup de cas établirl’existence des points fixes en étudiant la dérivée de la fonctionf . Il existe aussiun théorème qui permet de savoir très facilement si un point fixe donné eststable.
Théorème 2.5.SoitI = [a, b] un intervalle. Soitf : I → I une fonc-tion continue surI ayant un point fixexs ∈ I. S’il existe un voisinageUε(xs) ⊂ I tel que la fonctionf est dérivable sur ce voisinage et que
| d
dxf(x)| ≤ 1, ∀ x ∈ Uε(xs)
alors le pointxs eststable.
Un point estinstable si la dernière condition du théorème n’est pas vérifiéedans tout un voisinage dexs. Voici un exemple.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple2.4. Soit f(x) = x − x2. Le point fixe estxs = 0.d
dxf(x) = 1 − 2x.
On remarque que0 < f(x) < 1 et que si0 < x < 1 alors| d
dxf(x)| < 1. Ainsi
toute trajectoire qui commence dans l’intervalle(0, 1) tend vers le point fixe. Or
pourx < 0 la dérivée est supérieure à1 :d
dxf(x) > 1 etf(x) < 0. On en déduit
que les trajectoires avecx0 < 0 tendent vers−∞. Cette situation est illustrée surla figure2.3. On voit que le point fixexs = 0 n’est pas stable.
−0.5 0 0.5−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
x(0)=0.3
x(0)=−0.1
FIG. 2.1 – Étude graphique du systèmef(x) = x− x2

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Attracteurs et sources
3.1. Points fixes
Nous allons discuter ici deux cas extrêmes de stabilité et d’instabilité. Soitf : R → R une fonction etxs un point fixe du SDD correspondant.
Définition 2.4. Un point fixexs s’appelleattractif s’il existe unε > 0tel que
∀ x0 ∈ Uε(xs) x(n) = f (n)(x0) → xs, quand n →∞
Cette définition, bien qu’assez intuitive, n’est pas toujours facile à appliquer.Voici un critère.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 2.6.Soit I = [a, b] un intervalle. Soitf : I → I unefonction continue surI ayant un point fixexs ∈ I. Supposons qu’ilexiste unε > 0 tel que la fonctionf est dérivable sur tout le voisinageUε(xs) du pointxs et que la dérivée de la fonctionf est continue aupointxs.Alors le pointxs est attractif si et seulement si∣∣∣∣ d
dxf(xs)
∣∣∣∣ < 1.
Quand les hypothèses du théorème sont vérifiées nous pouvons facilementestimer la vitesse à laquelle les orbites convergent vers le point attractifxs. Le
fait que
∣∣∣∣ d
dxf(xs)
∣∣∣∣ < 1 et que la dérivée est continue enxs implique qu’il existe
unγ tel que
∣∣∣∣ d
dxf(xs)
∣∣∣∣ < γ < 1 et un voisinageUδ(xs) ∈ I tel que∣∣∣∣ d
dxf(x)
∣∣∣∣ < γ, ∀ x ∈ Uδ(xs)
Alors, en utilisant le théorème de la valeur moyenne2.2on trouve
|x(1)− xs| = |f(x0)− f(xs)| ≤ γ · |x0 − xs||x(2)− xs| = |f(x(1))− f(xs)| ≤ γ · |x(1)− xs| ≤ γ2 · |x0 − xs|
. . .
|x(n)− xs| = |f(xn−1)− f(xs)| ≤ γ · |xn−1 − xs| ≤ γn · |x0 − xs|(2.1)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On peut même en déduire une estimation de la convergencesans savoir préci-sément la valeur du point fixexs. Ceci peut être très utile pour des applicationsnumériques. Sachant que|x0 − xs| < |x0 − x(1)| + |x(1) − xs| on dérive de lapremière inégalité ci-dessus que
|x0 − xs| ≤1
1− γ· |x(1)− xs|
Et l’on obtient tout de suite :
|x(n)− xs| ≤γn
1− γ· |x(1)− x0|
Définition 2.5. Soit xs un point fixe du SDD défini par une fonctionf(x). On dit quexs estpoint répulsif appelé aussiun point répulsifs’il existe unε > 0 tel que
∀ x0 ∈ Uε(xs) il existe un n0 ∈ N tel que ∀ n > n0
|x(n)− xs| > ε
Toutes
les orbites qui commencent dans un certain voisinage d’un point répulsifxs lequittent au bout de quelque temps. Un point répulsif est évidemmentinstable.Comme dans le cas de point attractif il existe un critère simple qui permet devérifier si un point fixe est répulsif ou pas.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 2.7.Soit un système dynamique défini par une fonctionf(x)continue sur un intervalleI = [a, b]. Soitxs ∈ I un point fixedu sys-tème. Supposons qu’il existe un voisinageUε(xs) ⊂ I tel que la fonctionf(x) est dérivable sur ce voisinage et que sa dérivée est continue enxs.Alorsxs est un point répulsif si et seulement si
| d
dxf(xs)| > 1.
En utilisant les mêmes raisonnements que dans le cas d’un point attractif onpeut estimer la vitesse une orbite prenant l’origine près du point - sourcexs s’enéloigne. Soitr > 1 un nombre tel que
| d
dxf(xs)| > r > 1
Alors on trouve facilement que
|x(n)− xs| ≥ rn · |x0 − xs|.
Voici un exemple.
Exemple2.5. Considérons la fonction
f(x, a, b) = ax3 − bx
Quel que soit le choix des paramètresa et b le pointxs = 0 est unpoint fixedusystème.Il change de caractère selon le choix du paramètre b.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x(0)=0.6
FIG. 2.2 – Le point fixexs = 0 du systèmef(x) = ax3 − bx. a = 0.5, b =0.7, x(0) = 0.6
La dérivée de la fonctionf(x) est en effet
d
dxf(x) = 3ax2 − b
La fonction est dérivable dans tout un voisinage du point fixexs = 0. La dérivée,calculée au pointxs est égale à :
d
dxf(xs) = −b
Alors, d’après les théorèmes2.6et2.7si |b| > 1 xs est un point répulsif (commec’est illustré sur la figure2.2) et si|b| < 1 xs est un point attractif ( voir la figure2.3).

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−3 −2 −1 0 1 2 3−3
−2
−1
0
1
2
3
x
y
FIG. 2.3 – Le point fixexs = 0 du systèmef(x) = ax3 − bx. a = 0.1, b =1.4, x(0) = 0.2

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3.2. Situation indéterminée :
∣∣∣∣ d
dxf(xs)
∣∣∣∣ = 1
On peut observer que les théorèmes2.6 et 2.7 ne disent rien sur le compor-tement du système autour d’unpoint fixesi la dérivée de la fonctionf(x) dansce point est égale à± 1. On peut néanmoins caractériser ces points, si l’on aquelques informations sur la deuxième ( et éventuellement la troisième ) dérivéedef(x). Supposons quexs est un point fixe tel que la fonctionf(x) est dérivablesur tout un voisinage de ce point et que sa dérivée est continue enxs. Suppo-
sons ensuite que
∣∣∣∣ d
dxf(xs)
∣∣∣∣ = 1. Tout dépend du comportement de la dérivée au
voisinage dexs.
3.2.0.1. Attracteur ou source faible Si
∣∣∣∣ d
dxf(xs)
∣∣∣∣ = 1 et dans tous les
autres points d’un voisinage du point fixe on a
∣∣∣∣ d
dxf(x)
∣∣∣∣ < 1 (ou dans tous les
points d’un voisinage
∣∣∣∣ d
dxf(x)
∣∣∣∣ > 1) alors le pointxs s’appelleattracteur (
respectivement point répulsif) faible. Notons que cette définition signifie tout
simplement que la dérivéed
dxf(x) atteint un maximum local (cas d’attracteur
faible) ou un minimum local (cas de source faible) dans le pointxs. On peutobserver sur la figure2.4 l’étude graphique de ces deux situations.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
x
y
graph de df/dx (x)
xs=1
y=1
(a) xs est un point de minimum pourddxf(x)
0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
(b) doncxs est un point-source faible pourf(x)
,
0 0.5 1 1.5 2 2.5 3 3.5 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
y
graph de df/dx (x)
xs=2
y=1
(c) xs est un point de maximum pourddxf(x)
0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
(d) donc xs est un point-attracteur faiblepourf(x)
FIG. 2.4 – Le point fixe faiblement attractif ou répulsif

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3.2.0.2. Points fixes semi-stables On dit qu’unpoint fixexs estsemi-stable
à droite, s’il existe unδ > 0 tel que
∀ x : xs < x < xs + δ
∣∣∣∣ d
dxf(x)
∣∣∣∣ < 1
∀ x : xs − δ > x > xs
∣∣∣∣ d
dxf(x)
∣∣∣∣ > 1
à gauche, s’il existe unδ > 0 tel que
∀ x : xs < x < xs + δ
∣∣∣∣ d
dxf(x)
∣∣∣∣ > 1
∀ x : xs − δ > x > xs
∣∣∣∣ d
dxf(x)
∣∣∣∣ < 1
Cette définition signifie que la dérivéef ′(x) est strictement monotone enpassant par le pointxs. Si elle est décroissante comme dans le premier cas, lepoint xs est attractif pour les trajectoires qui commencent à droite et il repoussecelles qui commencent à gauche. Si la dérivée est strictement croissante au pointxs, comme dans le deuxième cas, la propriété d’attraction passe à gauche. Cesdeux situations sont illustrées sur la figure2.5
Le théorème suivant décrit toutes ces possibilités en termes de dérivées del’applicationf(x).

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 0.5 1 1.5 2 2.5 3 3.5 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
y
graph de df/dx (x)
xs=2
y=1
(a) La dérivéef ′(x) est décroissante enxs
1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
(b) xs est donc semi-stable à gauche
0 0.5 1 1.5 2 2.5 3 3.5 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
y
graph de df/dx (x)
xs=2
y=1
(c) La dérivéef ′(x) est croissante enxs
0 1 2 3 4 51
1.5
2
2.5
3
3.5
4
(d) xs est donc semi-stable à droite
FIG. 2.5 – Le point fixexs = 0 du systèmef(x) = ax3 − bx

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 2.8.SoientI = [a, b] un intervalle etf : I → I une fonctioncontinue et dérivable surI. Soitxs ∈ I un point fixe de l’applicationftel que ∣∣∣∣ d
dxf(x)
∣∣∣∣ = 1.
Supposons qu’il existe un voisinageUδ du pointxs tel que la secondedérivéef ′′ existe sur tout ce voisinage.
i Si f ′′(xs) > 0 ( f ′ est strictement croissante) alorsxs est un pointsemi-stable à gauche.
ii Si f ′′(xs) < 0 ( f ′ est strictement décroissante) alorsxs est un pointsemi-stable à droite.
iii Si f ′′(xs) = 0 ( f ′ a un point d’extremum local) et si la troisièmedérivée existe alors
iii.1 si f ′′′(xs) < 0 (maximum local)xs est un point attractiffaible ;
iii.2 si f ′′′(xs) > 0 (minimum local)xs est une source faible.
Remarque2.3. Les points-sources et les points semi-stables sont instables. Lespoints attractifs sont, de toute évidence,stables mais la réciproque n’est pasvraie. Rappelons qu’l existe bien des cas où les points fixes sontstables sans êtreattractifs. Il est important de souligner ici que l’existence de la première dérivéeau moins est nécessaire pour qu’un point fixe sont une source ou un attracteur.
Voici le tableau d’analyse qu résume ce qui a été dit ci-dessus.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
f ′(xs) f ′′(xs) f ′′′(xs) Caractéristique du point fixe|f ′(x)| > 1 Indifférent Indifférent Point source|f ′(x)| < 1 Indifférent Indifférent Point attractif|f(x)′| = 1 f ′′(xs) < 0 Indifférent Semi-stable à droite|f(x)′| = 1 f ′′(xs) > 0 Indifférent Semi-stable à gauche|f(x)′| = 1 f ′′(xs) = 0 f ′′′(xs) < 0 Attracteur faible|f(x)′| = 1 f ′′(xs) = 0 f ′′′(xs) > 0 Source faible
3.3. Orbites périodiques attracteurs et sources
Comme dans la définition de la stabilité nous utilisons ici le fait qu’un pointpériodiquexp de périoder est nécessairement un point fixe de l’applicationf (r)(x) :
f (r)(xp) = xp
Définition 2.6. Soit f : R → R une application définissant un SDDd’ordre 1. SoitO(x0) = {x(0) = x0, x(1), x(2), . . . , x(r − 1)} uneorbite périodique de périoder de ce système. On dit que cette orbiteestattractive ( ou répulsive) si chacun de ses points est un point fixeattractif ( respectivement un point répulsif ) de l’applicationf (r)(x).
Les règles élémentaires de calcul de dérivées des fonctions composées per-mettent d’établir un critère simple similaire aux théorèmes2.6et2.7. SoitO(x0) =

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
{x(0) = x0, x(1), x(2), . . . , x(r − 1)} uneorbite périodiquede périoder. Ensuivant la définition donnée ci-dessus, nous devons vérifier pour chaque pointx(i), i = 0, 1, . . . , r − 1 s’il est un point fixe attractif ( ou répulsif) de l’appli-cationf (r). Supposons que la fonctionf(x) admet une dérivée. La fonctionf (r)
est donc dérivable, elle aussi. Alors, d’après les théorèmes2.6et2.7 il nous faut
calculer la dérivéed
dxf (r)(x(i)). En appliquant la règle de chaîne on trouve :
d
dxf (r)(x(i)) =
d
dxf (r−1)(f(x(i))) · f ′(x(i)) =
d
dxf (r−1)(x(i + 1)) · f ′(x(i)) = · · · =
f ′(x(i)) · f ′(x(i + 1)) · · · · · f ′(x(r + i− 1))
Puisque l’orbite est périodique on a :
d
dxf (r)(x(i)) = f ′(x(0)) · f ′(x(1)) · · · · · f ′(x(r − 1)) =
r−1∏j=0
f ′(x(j)) (2.2)
Ainsi dans tous les points d’uneorbite périodique O(x0) la dérivée de l’ap-plication f (r)(x) est la même. Il suffit donc que les conditions d’un des théo-rèmes2.6et2.7soient vérifiées pour un seul point de l’orbite. D’où le théorèmesuivant.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 2.9. Soient I = [a, b] un intervalle etf : I → Iune fonction continue surI. Supposons que le SDD défini par lafonction f(x) possède uneorbite périodiqueO(x0) = {x(0) =x0, x(1), x(2), . . . , x(r − 1)} ⊂ I de périoder. Supposons en plusqu’autour de chaque point de l’orbitex(i) ∈ O(x0), i = 0, 1, . . . , r−1il existe un voisinageUδi
(x(i)) ⊂ I tel que la fonctionf(x) est déri-vable dans ce voisinage est que sa dérivée est continue enx(i).Alors
l’orbite O(x0) estattractive si et seulement si∣∣∣∣ d
dxf (r)(x0)
∣∣∣∣ =
∣∣∣∣∣r−1∏j=0
f ′(x(j))
∣∣∣∣∣ < 1
l’orbite O(x0) estrépulsive si et seulement si∣∣∣∣ d
dxf (r)(x0)
∣∣∣∣ =
∣∣∣∣∣r−1∏j=0
f ′(x(j))
∣∣∣∣∣ > 1
Le cas est indéterminé si∣∣∣∣ d
dxf (r)(x0)
∣∣∣∣ =
∣∣∣∣∣r−1∏j=0
f ′(x(j))
∣∣∣∣∣ = 1

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple2.6. Prenons le système déjà étudié dans le cours précédent (voir Cours1, exemple1.5) défini par la fonction
f(x) = ax(1− x)
Nous savons que quand3 < a < 4
le système possède uneorbite périodiquede période2. Les points de cette orbitesont
x0 =a + 1 +
√a2 − 2a− 3
2aetx1 =
a + 1−√
a2 − 2a− 3
2aPrenons d’aborda = 3.2. Alors
x0 =2.1 +
√0.21
3.2etx1 =
2.1−√
0.21
3.2
Appliquons le théorème2.9. La dérivée de la fonctionf(x) est
f ′(x) = a− 2ax = a(1− 2x)
Alorsd
dxf (2)(x0) = f ′(x0) · f ′(x1) ' 0.16
L’orbite O(x0) est doncattractive.Prenons maintenanta = 3.5. Les calculs similaires montrent que
x0 = 6/7, x1 = 3/7
et ∣∣∣∣ d
dxf (2)(x0)
∣∣∣∣ = |f ′(x0) · f ′(x1)| = 5/4 > 1
Dans ce cas, l’orbite est répulsive.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Nous allons observer dans d’autres exemples des phénomènes semblables dedépendance des systèmes dynamiques de leurs paramètres. Dans un des chapitressuivants nous allons étudier en détails lathéorie des bifurcationsqui permetd’analyser ces phénomènes.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
4. Comportement global. Théorème de Sarkovsky
Nous avons étudié les différents types de comportement des orbites d’un sys-tème dynamique autour de ses points fixes ou ses orbites périodiques. Il est im-portant souvent de savoir combien d’orbites périodiques et de quelles périodespeut avoir un système donné. Nous allons discuter dans cette section sur les pos-sibilités de répondre au moins partiellement à cette question.
Remarquons que même quand on s’intéresse aux points périodiques d’unepériode fondamentale donnéer la solution de l’équation
f (r)(x) = x
n’est pas évidente (analytiquement comme numériquement) , sir est élevé. Ilserait donc intéressant de trouver des critères plus ou moins généraux permettantd’analyser un système globalement. Voici un théorème remarquable qui donneune première approche au problème.
Théorème 2.10.Soit I = [a, b] un intervalle etf : I → I unefonction continue surI. Alors si le système dynamique correspondantpossède uneorbite périodiquede période3, il possède des orbites detoutes les périodes.
Remarque2.4. Rappelons que l’on appelle période fondamentale d’une orbitele plus petit nombre r tel quex(k + r) = x(k), ∀k = 0, 1, 2, . . . .

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Ce théorème n’est qu’un cas particulier d’un autre théorème, démontré parSarkovsky en 1964. Ce dernier est basé sur la définition d’un ordre particulierdes nombres naturels.
Nous utilisons dans la suite le signe "�" pour noter la relation d’ordre entredeux éléments quelconques :
m � n ⇐⇒ " m précède n"

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Définition 2.7. Ordre de Sarkovsky est défini comme suit :
3 � 5 � 7 � · · · � . . .
� 2 · 3 � 2 · 5 � 2 · 7 � . . .
� 22 · 3 � 22 · 5 � 22 · 7 � . . ....
� 2n · 3 � 2n · 5 � 2n · 7 � . . ....
� . . . 23 � 22 � 2 � 1.
On écrit les nombres naturels sous forme de lignes infinies organiséesde façon suivante. La première ligne commence par3 et comporte tousles nombres impairs en ordre croissant. La deuxième ligne s’obtient enmultipliant la première par2. Chaque ligne qui suit, sauf la dernière,s’écrit en multipliant la ligne précédente par2. Enfin, la dernière lignecomporte toutes les puissances de2 en ordre décroissant et se terminepar1.
Il n’est pas difficile de montrer que tous les nombres naturels sont pris encompte dans ce système et une seule fois. Tous les nombres impairs à partir de3sont en effet écrits dans la première ligne. Pour chaque nombre pair sa place estdéfinie de façon unique, en le divisant par2 jusqu’à retrouver un nombre impair.
Voici maintenant le théorème de Sarkovsky.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 2.11.Soitf une fonction continue. Supposons que le SDDcorrespondant possède uneorbite périodiquede périoden.Alors pour toutm tel quen � m ce système possède uneorbite pério-diquede périodem.
Ce théorème est en accord avec le précédent car le nombre3 précède tous lesnombres naturels dans l’ordre de Sarkovsky. On peut l’utiliser également pourles périodes impossibles pour un système.
4.0.0.3. Corollaire Si f est continue et sin est tel que le SDD correspondantn’a pas d’orbites périodiques de périoden alors il ne peut pas avoir d’orbites depériodem � n.
Exemple2.7. Soitf(x) = 3.2x(1− x). Sur les figures2.62.7et 2.8sont tracésles graphes def(x), f (2)(x) et def (4)(x). Sur la première image on voit deuxpoints fixes du système. Sur la deuxième image on voit les deux points fixes etuneorbite périodiquede période 2. Sur la troisième image, on retrouve les quatrepoints déjà repérés : deux points fixes et une orbite de période 2. Le système n’adonc pas d’orbite de période4. On peut en conclure, en utilisant le théorème deSarkovsky, que ce système n’a que des orbites de période 1 et 2.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
FIG. 2.6 – Le graphe def(x) = 3.2x(1− x)
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
FIG. 2.7 –f(x) = 3.2x(1− x). Le graphe def (2)(x)
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
FIG. 2.8 –f(x) = 3.2x(1− x). Le graphe def (4)(x)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Chapitre 3
Systèmes dynamiques discretslinéaires

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1. Rappels sur les applications linéaires et les ma-trices dans l’espaceRm
L’espaceRm est un espace vectoriel linéaire formé de vecteurs de la forme
~x =
x1
x2
:xm
, xi ∈ R, i = 1, 2, . . . ,m
avec les opérations de somme et de multiplication par un scalaire ( complexe, engénéral) :
~x + ~y =
x1 + y1
x2 + y2
:xm + ym
, λ · ~x =
λ · x1
λ · x2...
λ · xm
Soientk vecteurs~x1, x2, . . . , ~xk ∈ Rm. On appellecombinaison linéairede
ces vecteurs toute sommek∑
i=1
λi · ~xi
où les coefficientsλ1, λ2, . . . , λk sont des nombres complexes.On dit que les vecteurs~x1, ~x2, . . . , ~xk ∈ Rm sontlinéairement dépendants
s’il existek coefficientsλ1, λ2, . . . , λk tels que(i)∑k
i=1 |λi| 6= 0 et(ii)∑k
i=1 λi · ~xi = 0.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Dans le cas contraire on dit que les vecteurs~x1, ~x2, . . . , ~xk ∈ Rm sontlinéai-rement indépendants.
Soit V un espace vectoriel quelconque et~x1, ~x2, . . . , ~xk ∈ V une famillede vecteurs dans cet espace. On dit que ces vecteurs formentune basedansl’espace V s’ils sont linéairement indépendants et si tout autre vecteur~v ∈ Vest une combinaison linéaire des vecteurs~x1, ~x2, . . . , ~xk. On dit parfois dans cecas queV est uneenveloppe linéairedes vecteurs~x1, ~x2, . . . , ~xk. On le noteV = Lin{x1, x2, . . . , xk}. 1
Si dans un espace V il existe une base contenantr vecteurs, alors toutes lesautres bases possibles dans cet espace auront exactementr vecteurs. Le nombrede vecteurs dans une base s’appelledimensionde l’espace.
On appellebase canoniquedansRm l’ensemble de vecteurs{~ej}mj=1 où
~ej =
0...1...0
, j-ème position, j = 1, 2, . . . ,m
Rm est donc un espace de dimensionm.
Nous aurons besoin de munir cet espace de norme, de distance et de produitscalaire. La norme peut être définie de plusieurs façons. Voici quelques normes
1Dans la littérature anglo-saxonne on utilise souvent une autre notation pour une enveloppelinéaire :V = Span{x1, x2, . . . , xk}.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
usuelles :
‖~x‖∞ = maxi=1,m
|xi|
‖~x‖1 =∑
i=1,m
|xi|
‖~x‖2 =
√∑i=1,m
|xi|2
Toutes les normes dansRm sont équivalentes. Cela veut dire que, si‖·‖1 et‖·‖2
sont deux normes quelconques surRm, il existe deux constantes0 < c < C tellesque
c · ‖~x‖1 ≤ ‖~x‖2 ≤ C · ‖~x‖1∀~x ∈ Rm
Dans ce qui suit nous allons considérer l’espaceRm muni du produit scalaireeuclidien
〈~x, ~y〉 =m∑
i=1
xi · yi
La norme associée à ce produit scalaire est la norme‖ · ‖2 définie ci-dessus :
‖x‖2 = 〈x, x〉
Comme dans tout espace normé on peut définir dansRm une distance ( asso-ciée à la norme choisie) :
d(~x, ~y) = ‖~x− ~y‖

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Définition 3.1. Soit {~xn}∞n=1 une suite de vecteurs deRm muni d’unenorme‖ · ‖. On dit que cette suite converge vers un vecteur~x0 si
limn→∞
d(~x, ~x0) = limn→∞
‖~x− ~x0‖ = 0
Enfin, Rm est un espace de Hilbert avec le produit scalaire défini commesuit :
Il est important de remarquer que l’équivalence des normes dansRm im-plique qu’une suite convergente dans une norme‖ · ‖ quelconque, converge danstoute autre norme deRm.
Nous allons étudier dans cette section des applicationsf : Rm → Rm
f(x1, x2, . . . , xm) =
f1(x1, x2, . . . , xm)f2(x1, x2, . . . , xm)
:fm(x1, x2, . . . , xm)
Définition 3.2. Une applicationf : Rm → Rm est ditecontinue en unpoint~x0 ∈ Rm si pour toutε > 0 il existe unδ > 0 tel que
si ‖~x− ~x0‖ < ε alors ‖f(~x)− f(~x0)‖ < δ

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Définition 3.3. Une applicationf : Rm → Rm est ditelinéaire si∀~x, ~y ∈ Rm, ∀λ, µ ∈ C
f(λ~x + µ~y) = λf(~x) + µf(~y)
Une application linéaire est continue dans tous les points deRm. On peutassocier à toute application linéaire une matriceM telle que
∀~x ∈ Rm f(~x) = M · ~x
Soit {~ej}mj=1 la base canonique dansRm. On peut calculer les éléments de la
matriceM de façon suivante :
Mij = 〈f(~ej), ~ei〉
Ainsi l’étude des applications linéaires se ramène à l’étude des matrices. Nousallons nous intéresser ici surtout aux valeurs propres des matrices. Voici quelquesdéfinitions.
Définition 3.4. SoitA une matrice réellem×m. On dit qu’un nombrecomplexeλ ∈ C est unevaleur propre de la matriceA si l’équation
A~x = λ~x
admet au moins une solution non-triviale~x ∈ Rm \ {~0}. Cette solutions’appelle alorsvecteur propre correspondant à la valeur propreλ.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Toutes les valeurs propres{λ1, . . . , λk}, k ≤ m d’une matriceA sont desracines de son polynôme caractéristique
p(λ) = det(A− λ · I) =m∏
i=1
(λ− λi)mi
oùI est la matrice-identité. Le polynôme caractéristique est de degrém et a doncexactementm racines ( réelles ou complexes, comptées avec leurs multiplicités).La multiplicité d’une valeur propreλ en tant que racine de ce polynôme estappeléemultiplicité algébrique , notéema(λ). On doit la distinguer dela mul-tiplicité géométrique, notéemg(λ) qui est définie comme le nombre de vecteurspropres linéairement indépendants que l’on peut associer à la valeur propreλ. Defaçon générale, les deux multiplicités sont liées par l’inégalité :
mg ≤ ma
Si mg = ma = 1, la valeur propre s’appellesimple. Si mg = ma > 1, la valeurpropre s’appellesemi-simple.
L’ensemble Spec(A) de toutes les valeurs propres d’une matriceA s’appellespectrede cette matrice. On appellerayon spectrald’une matrice le nombre
ρ(A) = max{|λ| : λ ∈ Spec(A)}
L’ensemble de toutes les matrices carréesm×m est un espace vectoriel danslequel on peut introduire une norme de plusieurs façons. En particulier, si unenorme vectorielle‖ · ‖ est définie dans l’espaceRm on peut définirla normematricielle subordonnéecomme suit :
‖M‖ = supx 6=0
‖Mx‖‖x‖
= sup{‖Mx‖ : ‖x‖ = 1}

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Le rayon spectral a une propriété importante :
ρ(M) = limn→∞
n√‖Mn‖
Cette égalité est vraie quelles que soient la norme vectorielle et la norme matri-cielle subordonnée, grâce à l’équivalence des normes vectorielles dansRm.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
2. Systèmes dynamiques linéaires
Un système linéaire dansRm est de la forme
x(n + 1) = L(x(n)), x(0) = x0 (3.1)
où L : Rm → Rm est une application linéaire. SoitM la matricem ×m telleque
L(x) = Mx, ∀x ∈ Rm
Nous allons dans la suite utiliser la forme matricielle équivalente de l’équation(3.1)
x(n + 1) = Mx(n), x(0) = x0 (3.2)
Dans cette section nous allons étudier les points fixes ( appelés souvent "étatsstationnaires" ou encore "états d’équilibre") et les orbites périodiques des sys-tèmes linéaires et les critères de stabilité permettant de prédire le comportementdes orbites de ces systèmes autour des états d’équilibre.
Tout état stationnaire du système (3.2) doit être solution de l’équation :
Mx = x (3.3)
Par conséquence,0 est toujours un état stationnaire de tout système dynamiquelinéaire.L’équation (3.3) peut avoir d’autres solutions si et seulement si1 est unevaleur propre de la matriceM . Quant aux orbites périodiques nous verrons plustard dans ce même cours que leur existence nécessite la présence dans le spectredes valeurs propres complexes conjuguées de valeur absolue1. Nous allons étu-dier une par une les situations suivantes, classées en fonction des caractéristiquesdu spectre de la matrice M :

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1 ρ(M) < 1 ( Toutes les valeurs propres sont de valeur absolue inférieure à1 :∀λ ∈ Spec(M) |λ| < 1)
2 Toutes les valeurs propres sont de valeur absolue supérieure à1 : ∀λ ∈ Spec(M) |λ| >1
3 Certaines valeurs propres sont de valeur absolue strictement inférieure à1 etles autres strictement supérieure à1.
4 Il y a des valeurs propres de valeur absolue égale à1.
Nous commençons notre étude par les deux premiers cas, les plus simples.Notons que dans ces deux situations
1 6∈ Spec(M)
Cela implique donc immédiatement le fait que0 est l’unique état d’équilibred’un tel système.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Origine comme état d’équilibre attractif
Nous allons donner ici un critère de stabilité de l’origine comme état d’équi-libre d’un système linéaire. Ce critère nécessite la connaissance du rayon spectralde la matriceM du système. Il s’appuie notamment sur un fait de l’algèbre li-néaire concernant le rayon spectral.
Lemme 3.1. SoitM une matricem × m telle queρ(M) < 1. Alorson peut définir dansRm une norme vectorielle‖ · ‖n telle que la normematricielle subordonnée de la matriceM soit inférieure à1 :
‖M‖N < 1
3.0.0.4. Quelques idées de la démonstration . Ce lemme est une consé-quence du fait que :
ρ(M) = limn→∞
n√‖Mn‖
Cette limite est la même quelle que soit la norme matricielle. Étant donnée unenorme matricielle quelconque‖ · ‖, le fait queρ(M) < 1 implique qu’il existeun nombrep ∈ N tel que
‖Mp‖ < 1
Alors on définit la nouvelle norme vectorielle comme suit :
‖x‖N = ‖x‖+ ‖Mx‖ · · ·+ ‖Mp−1x‖

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Ensuite, on montre qu’en effet, la norme matricielle subordonnée de la matriceM est inférieure à1 :
‖M‖N = sup{‖Mx‖n | ‖x‖n = 1} < 1
Sans donner plus de détails de la preuve de ce lemme passons à son application.
Théorème 3.1.Soit un système dynamique linéaire dansRm avec unematriceM . Si toutes les valeurs propres de la matriceM ont la valeurabsolue inférieure à1 alors toutes les orbites du système convergentvers0 :
∀x0 ∈ Rm \ {0} limn→∞
‖x(n)‖ = 0
3.0.0.5. Preuve Puisque d’après l’énoncé du théorèmeρ(M) = max{|λ| :λ ∈ Spec(M)} < 1, nous pouvons appliquer le lemme3.1. Il existe donc unenorme vectorielle‖ · ‖N telle que la norme matricielle subordonnée de la matriceM soit inférieure à 1. Il résulte de la définition du SDD linéaire (3.2) que
x(n) = Mnx0
Alors
‖x(n)‖N = ‖Mnx0‖N ≤ ‖Mn‖N · ‖x0‖N ≤ (‖M‖N)n · ‖x0‖N
Puisque‖M‖N < 1 toute trajectoire converge vers zéro en norme vectorielle‖ · ‖N . Mais en vertu de l’équivalence des normes vectorielles dans l’espaceRm
cette convergence a lieu quelle que soit la norme vectorielle, y compris la normeusuelle, euclidienne.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
4. Origine comme état d’équilibre répulsif
Théorème 3.2.Soit un SDD dansRm avec une matriceM .Si toutes les valeurs propres deM sont de valeur absolue supérieure à1 alors toutes les orbites du système tendent vers l’infini :
∀x0 ∈ Rm ⊂ {0} ‖x(n)‖ → ∞, quandn →∞
4.0.0.6. Preuve Nous allons à nouveau appliquer le lemme3.1, cette fois enutilisant la matriceM−1. Nous savons en effet que toutes les valeurs propres dela matrice inverseM−1 sont les inverses des valeurs propres de la matriceM .Elles sont donc toutes de valeur absolue inférieure à1 :
∀µ ∈ Spec(M−1) ∃ λ ∈ Spec(M) tel que
µ =1
λ⇒ |µ| = 1
|λ|< 1
On en conclut queρ(M−1) < 1
En vertu du lemme3.1 il existe une norme vectorielle‖ · ‖N telle que
‖M−1‖N < 1

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Alors pour toutx ∈ Rm on peut estimer :
‖x‖N = ‖M−1 ·Mx‖N ≤ ‖M−1‖N · ‖Mx‖N
Il est donc évident qu’il existe unr =1
‖M−1‖N
> 1 tel que‖M ·x‖ ≥ ‖x‖, pour
tout vecteurx ∈ Rm. Alors pour toutn ∈ N et pour tout état initialx0 ∈ Rm
l’inégalité suivante est vérifiée :
‖Mn · x0‖N ≥ rn · ‖x0‖N
Et puisquer > 1, toutes les orbites tendent vers l’infini en norme vectorielle‖ · ‖N :
‖x(n)‖N = ‖Mn · x0‖N →∞, quand n →∞
Cette convergence a lieu aussi pour toutes les normes vectorielles. Le théorèmeest ainsi démontré.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
5. Les valeurs propres de la matrice du systèmeMet la géométrie des orbites
Nous venons de décrire les deux cas les plus simples de stabilité de l’originedans un système linéaire. Leur simplicité provient du fait que toutes les valeurspropres de la matriceM en question sont soit à l’intérieur (origine attracteur)soit à l’extérieur ( origine - source) du cercle unité dans le plan complexeC1 ={z ∈ C : |z| = 1}.
Les situations où on trouve dans le spectre des valeurs propres de valeurabsolue inférieure ainsi que de valeur absolue supérieure à1 sont plus complexeset propres aux systèmes définis dans les espaces de plusieurs dimensions. Pourbien comprendre la géométrie des orbites d’un tel système il nous faut étudieravec plus de profondeur les propriétés des matrices.
Nous discuterons dans cette section de la façon dont le spectre et les vec-teurs propres d’une matriceM définissent son action dans l’espaceRm.
5.1. Décomposition spectrale de l’espace de phases
5.1.1. Espace propre associé à une valeur propre réelle
Soitλ ∈ R une valeur propre d’une matriceM . Cela veut dire que l’équation
Mx = λx
admet une ou plusieurs solutions non-triviales. Du fait de la linéarité de l’appli-cationf(x) = Mx, l’ensemble de toutes les solutions possibles en réunion avec

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
{0} forme un sous-espace vectoriel linéaire de l’espaceRm. Ce sous-espace estappelésous-espace propre associé à la valeur propreλ et nous allons le noterparV (λ). La dimension de ce sous-espace s’appellemultiplicité géométriquede la valeur propre λ . Nous la notonsmg. On appellemultiplicité algébriquela valeurma de multiplicité deλ en tant que racine du polynôme caractéristiquep(λ) = det(M − λI). Dans le cas général,mg ≤ ma.
Les vecteurs propres~u et ~v d’une matrice correspondant à deux valeurspropres différentes sont linéairement indépendants.
Notons quele sous-espace propreV (λ) associé à une valeur propreλ ∈Spec(M) est invariant sous l’action de la matriceM :
M · V (λ) = V (λ)
Nous savons en effet queV (λ) est constitué des vecteurs propres, donc l’actionde la matrice sur chacun de ces vecteurs n’est rien d’autre que la multiplicationpar un scalaire :
Mu = λu ∈ V (λ)
Remarquons que∀n ∈ N Mnu = λnu ∈ V (λ)
Cela montre que l’évolution d’une orbite à partir d’une condition initiale si-tuée dans le sous-espaceV (λ) ( si λ est réel ou dansV (λ1, λ2) si λ1, λ2 sontcomplexes conjuguées) est complètement déterminée par le comportement de lasuite des nombresλ, λ2, λ3, . . . , λn, . . . .
Si |λ| < 1, l’orbite tend vers zéro :
‖Mnu‖ = |λ|n‖u‖ → 0
Dans ce cas on dit quele sous-espace propre correspondant à la valeur propreλ est stable.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Si |λ| > 1, l’orbite tend vers l’infini :
‖Mnu‖ = |λ|n‖u‖ → ∞
et l’on dit quele sous-espace correspondant est instable. On voit en effet quetoute orbite s’éloigne de l’origine avec une vitesse qui est déterminée par la va-leur absolue deλ.
5.1.2. Espace propre associé à une paire de valeurs propres complexesconjuguées
Dans le cas particulier où dans le spectre de la matriceM il y a deux va-leurs propres complexes conjuguées, de multiplicité géométriquemg, on peutleur associer un espace propre communV (λ1, λ2) de dimension2mg.
Supposons pour simplifier que les deux valeurs propres complexes conju-guées
λ1 = a + ib etλ2 = a− ib
sont de multiplicité géométrique1. On peut montrer qu’il existe dans ce cas deuxvecteurs réels linéairement indépendantsu etv tels que
M(u + iv) = (a + ib)(u + iv)
On déduit facilement en comparant les parties réelles et imaginaires que
Mu = au− bv, Mv = bu + av
Les vecteursu estv forment donc la base du sous-espace propreV (λ1, λ2) asso-cié au couple des valeurs propresλ1 etλ2.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Alors pour tout vecteur de ce sous-espacez = α · u + β · v l’action de lamatriceM s’exprime de la façon suivante :
Mz = αMu + βMv = (αa + βb)u + (−αb + βa)v ∈ V (λ1, λ2)
ce qui prouve queV (λ1, λ2) est invariant sous l’action de la matriceM .Vue dans la base{u, v} cette action est donc équivalente à l’action de la
matrice
P =
(a b−b a
)sur le vecteur
(αβ
). Soientr =
√a2 + b2 = |λ1| = |λ2| et θ = arg λ1. Alors
on peut écrire
λ1 = r · eiθ = r(cos θ + i sin θ), λ2 = r · eiθ = r(cos θ − i sin θ)
Alors la matriceP n’est autre qu’une matrice de rotation à l’angleθ avec unecontraction ( sir < 1) ou expansion ( sir < 1) :
P = r ·(
cos(θ) sin(θ)− sin(θ) cos(θ)
)Et pour tout moment de tempsn on a :
P n = rn ·(
cos(nθ) sin(nθ)− sin(nθ) cos(nθ)
)Cette observation est très importante. Elle nous apprend que c’est toujours la
présence des valeurs propres complexes conjuguées dans le spectre d’une matrice

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
M qui donne un caractère de rotation à ses orbites. Toutes ces considérations res-tent vraies dans le cas de valeurs propres complexes conjuguées de multiplicitégéométrique arbitrairemg. Dans cette situation le sous-espace propre associéV (λ1, λ2) est de dimension2mg. Ce sous-espace est, lui aussi, invariant sousl’action de la matriceM , ce qui implique que les orbites qui commencent parun vecteur deV (λ1, λ2) évoluent à l’intérieur de ce sous-espace. Deux facteursdéterminent l’évolution de ces orbites : l’argumentθ qui est l’angle de rotationà chaque itération et la valeur absoluer =
√a2 + b2 qui est responsable d’une
contraction ( sir < 1) ou une extension (sir > 1).Si r < 1, toutes les orbites qui commencent dans le sous-espaceV (λ1, λ2)
tendent vers zéro. On dit dans ce cas que le sous-espaceV (λ1, λ2) estun sous-espace propre stable.
Si r > 1 on dit qu’il est un sous-espace propre instablecar toutes lesorbites tendent vers l’infini.
5.1.3. Espace propre associé à une valeur propre de valeur absolue égaleà 1
Enfin, si|λ| = 1 on a‖Mnu‖ = ‖u‖, ∀n
l’orbite évolue sur la sphère de rayon‖u‖. Dans ce cas particulier on distinguetrois cas possibles :
1 λ = 1 est une valeur propre
2 λ = −1 est une valeur propre
3 Il y a deux valeurs propres complexes conjuguées de valeur absolue1.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Nous allons consacrer plus tard une section à l’étude détaillée du comporte-ment des orbites du système dans chacun de ces trois cas.
5.1.4. Actions conjointes
Supposons qu’une matriceM aitk ≤ m valeurs propres distinctesλ1, λ2, . . . , λk.Supposons pour simplicité que toutes les valeurs propres sont simples ou semi-simples de multiplicités respectivesmg(λi) = ma(λi) = mi, i = 1, 2, . . . , k.Puisque le polynôme caractéristique est de degrém nous avons :
m1 + m2 + · · ·+ mk = m (3.4)
Or, à chaque valeur propre réelleλi on peut associer un sous-espace propreVi de dimensionmg(λi) = mi. A chaque paire de valeurs propres complexesconjuguéesλi1 = λi2 on peut associer un sous-espace propre communVi1,i2 dedimension2mg(λi1) = 2mg(λi2). Rappelons que les vecteurs propres corres-pondant aux valeurs propres distinctes sont toujours linéairement indépendants.Nous avons donc tout un nombrel ≤ k de sous-espaces mutuellement disjointsV1, V2, . . . , Vl. Compte tenu de (3.4), la somme des dimensions de ces sous-espaces est égale àm, la dimension deRm. Ainsi, l’espaceRm se décomposeen somme directe de sous-espaces propres :
Rm = V1
⊕V2
⊕. . .⊕
Vl
Cela signifie que chaque vecteur~u ∈ Rm peut être représenté de façon uniquesous forme de somme dek composantes :
~u = ~u1 + ~u2 + · · ·+ ~ul

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
où chaque composante appartient à un sous-espace propre :~ui ∈ Vi, i =1, 2, . . . , l. L’action de la matriceM sur un vecteuru peut être considérée dupoint de vue de cette décomposition :
M · ~u = M~u1 + M~u2 + · · ·+ M~ul
etMn · ~u = Mn~u1 + Mn~u2 + · · ·+ Mn~ul, n = 2, 3, 4, . . .
L’orbiteO(~u) qui correspond à un vecteur arbitraire~u ∈ Rm se décompose doncen somme del orbites :O(~ui), i = 1, 2, . . . , l. Rappelons que tous les sous-espaces propres sont invariants sous l’action de la matriceM . Puisque chaquecomposante~ui appartient à un sous-espace propre~ui ∈ Vi l’orbite correspon-dante évolue dans ce même sous-espace :O(~ui) ⊂ Vi. Comme il a été dit ci-dessus, l’évolution de chaque orbite à l’intérieur d’un sous-espace propre dépendde la valeur absolue de la valeur propre correspondanteλi. Ainsi, nous pouvonsdiviser les valeurs propres de la matriceM en trois groupes selon leurs valeursabsolues et regrouper de la même façon les sous-espaces propres. Nous allonsnoter par
i VS le sous-espace qui réunit tous les sous-espaces propres correspondants auxvaleurs propres de valeur absolue inférieure à1. On l’appellesous-espacestable du système.
ii VI le sous-espace qui réunit tous les sous-espaces propres correspondants auxvaleurs propres de valeur absolue supérieure à1. On l’appellesous-espaceinstable du système.
iii VR le sous-espace qui réunit tous les sous-espaces propres correspondants auxvaleurs propres de valeur absolue égale à1.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
A l’intérieur deVS toutes les orbites tendent vers zéro, tandis qu’à l’intérieurde VI toutes les orbites tendent vers l’infini. Nous parlerons en détail du sous-espaceVR dans une section suivante.
Remarque3.1. Nous avons étudié en détail le cas le plus simple où toutes lesvaleurs propres de la matriceM étaient semi-simples ; dans ce cas les vecteurspropres forment une base dans l’espaceRm. Si une ou plusieurs valeurs propresne sont pas semi-simples, c’est-à-dire simg < ma la structure du système etle comportement des orbites reste le même et dépend essentiellement de la ré-partition de valeurs absolues des valeurs propres. Les raisonnements rigoureuxsont plus compliqués dans cette situation, mais l’idée est la même. A une valeurpropreλ ∈ Spec(M) qui n’est pas semi-simple, on peut associer un sous-espacede dimension égale à sa multiplicité algébriquema et qui est invariant par rap-port à l’action de la matriceM . Ce sous-espace est stable ou instable selon lavaleur absolue deλ.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
6. Origine comme point selle
Commençons par un exemple :
Exemple3.1. Soit
M =
(0.5 20 3
)Les valeurs propres de cette matrice sontλ1 = 0.5 et λ2 = 3. Les vecteurspropres correspondants sont
v1 =
(10
)v2 =
(45
)Puisquev1 est un vecteur propre, l’action de la matriceM sur tout vecteur de
la formev = α · v1 =
(α0
)donne :Mαv1 = αMv1 = αλ1v1. Et comme
|λ1| < 1, l’orbite d’un tel vecteur tend vers zéro :
Mn · (αv1) = α · λn1v1 → 0, quandn →∞
Le sous-espace formé par les vecteurs de ce type{α · v1 : α ∈ R} estle sous-espace propre associé à la valeur propreλ1. On remarque que toutes lesorbites qui commencent dans cet espace y restent et même plus, elles tendentvers zéro. On dit dans ce cas que c’est lesous-espace stabledu système.
Le même raisonnement appliqué aux vecteurs du sous-espace propre associéà la deuxième valeur propreλ2 qui est de valeur absolue supérieure à1 donne :
Mn · (αv2) = α · λn2v2 →∞, quandn →∞

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−3 −2 −1 0 1 2 3−3
−2
−1
0
1
2
3
sous−espace stable
Sous−espace instable
v1
v2
Portrait de phases d’un système linéaire avec un point selle
x
y
FIG. 3.1 – Portrait de phases de l’exemple3.1
Ainsi le sous-espace formé par les vecteurs{α · v2 : α ∈ R} s’appellele sous-espace instabledu système. Les orbites qui commencent dans ce sous-espace yrestent mais divergent.
Remarquons que les vecteursv1 etv2 sont linéairement indépendants ( parceque correspondent à deux valeurs propres différentes). Ils forment donc une basedans l’espaceRm. Alors tout état initial donnant naissance à une orbite du sys-tème se présente sous forme d’une combinaison linéaire des vecteursv1 etv2 :
x0 = α1 · v1 + α2 · v2
On en déduit que tous les éléments de l’orbite correspondante se décomposentaussi en deux parties :
x(n) = Mn · x0 = α1 · λn1 · v1 + α2λ
n2 · ·v2
L’évolution de chaque orbite est ainsi conditionnée par le comportement deλn
1 et deλn2 quandn →∞. En effet, puisqueλn
1 → 0, la composanteα1 · λn1 · v1

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
devient de plus en plus petite en norme et tend vers zéro. En même tempsλn2 →
∞ et la composante qui lui correspond devient dominante et tend vers l’infini aubout de quelque temps , sauf siα2 = 0. Ainsi l’orbite s’approche de plus en plusdu sous-espace instable et tend vers l’infini.
Définition 3.5. Soit le système dynamique linéaire défini dansRm parune matriceM . On dit que l’origine est un point selle de ce système si– 1 6∈ Spec(M) ;– il existe au moins une valeur propreλ telle que|λ| > 1 ;– il existe au moins une valeur propreλ telle que|λ| < 1 ;
Suppososn que l’origine est un point selle. Cela implique qu’il n’y a pas devaleurs propres de valeur absolue égale à1. Soit {λ1, . . . , λk} l’ensemble detoutes les valeurs propres de la matrice M. Alors, nous pouvons décomposerl’espaceRm en somme directe de deux sous-espaces :
Rm = VS ⊕ VI
Chaque vecteurx0 ∈ Rm est donc représenté sous forme de somme :
x0 = xS + xI , xS ∈ VS, xI ∈ VI
Alors l’orbite dex0 se décompose en deux orbites :O(xS) etO(xI) :
Mn · x0 = Mn · xS + Mn · xI , xS ∈ VS, xI ∈ VI

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On peut en conclure que si seulement la composante instablexI de la conditioninitiale x0 n’est pas nulle , l’orbite correspondante tend vers l’infini, en s’appro-chant du sous-espace instable.
Voici un exemple en trois dimensions que nous pouvons illustrer avec unportrait de phases.
Exemple3.2. Considérons la matrice
M =
1 0.2 0−0.2 1 1
0 −2 1
Les valeurs propres sontλ1 = 0.5 etλ2 = 1+0.2i, λ3 = 1−0.2i. Le vecteur
propre correspondant àλ1 est
v1 =
2−52.9
Le sous-espace propre correspondantV1 = {α · v1, α ∈ R} est stable. On
trouve ensuite facilement que le sous-espace propre correspondant aux valeursλ2 = 1 + 0.2i etλ3 = 1− 0.2i a pour base deux vecteurs :
v2 =
100
etv3 =
010
Dans l’espaceR3 le sous-espaceV2 = Lin{v2, v3} est le plan{(x, y, z) : z =
0}. Puisque|λ1| = |λ2| =√
(5), le sous-espaceV2 estle sous-espace instablede

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−5 −4 −3 −2 −1 0 1 2 3 4 5
−5−4
−3−2
−10
12
34
5−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
sous−espace instable
sous−espace stable
x
y
z
FIG. 3.2 – Portrait de phases de l’exemple3.2
ce système. Sur la figure3.2sont tracées deux orbites du système. On remarquequ’une trajectoire qui commence dans le planV2 y reste. Elle a la forme d’unespirale plate, due au fait que les valeurs propres correspondantes à ce sous-espacesont complexes conjuguées. Cette spirale diverge : la norme des points de l’orbitex(n) tend vers l’infini. Ceci s’explique par le fait que|λ1| = |λ2| =
√(5) > 1.
Un autre exemple d’orbite, avec une condition initiale arbitraire est égalementprésenté sur la figure3.2. Cette orbite a elle aussi une forme de spirale, qui s’ap-proche assez rapidement du planV2 dans lequel elle diverge. Ce comportementest du au fait que la troisième valeur propre est réelle et de valeur absolue infé-rieure à1. Seules les orbites dont la condition initiale se trouve sur la droiteV1,le sous-espace stable, n’ont pas de caractère rotatif et tendent vers zéro.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
7. Les valeurs propres de valeur absolue égale à1
La méthode de décomposition de l’espaceRm en somme directe de sous-espaces invariants correspondants aux valeurs propres de la matriceM va nouspermettre d’étudier l’influence des valeurs propres de module1 séparément desautres valeurs propres. Notons en effet les sous-espaces invariants suivants :
· V1 celui qui correspond àλ = 1
· V−1 celui qui correspond àλ = −1
· VC celui qui correspond àλ± = a± ib, a2 + b2 = 1
Alors, dans les notations de la section précédente
VR = V1
⊕V2
⊕VC
et doncRm = VS
⊕VI
⊕V1
⊕V2
⊕VC
Tout vecteur initial d’une orbitex0 ∈ Rm se décompose en somme :
x0 = x1 + x2 + xC + xS + xI , x1 ∈ V1, x2 ∈ V2, xC ∈ VC , xS ∈ VS, xI ∈ VI
(3.5)L’orbiteO(x0) se décompose alors en somme de cinq orbites chacune restant en-tièrement dans le sous-espace correspondant. Nous savons maintenant analyserles comportements des l’orbitesO(xS) ∈ VS etO(xI) ∈ VI . Il nous reste donc àétudier un par un les cas suivants :
1 λ = 1 est une valeur propre
2 λ = −1 est une valeur propre
3 Il y a deux valeurs propres complexes conjuguées de valeur absolue1.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
7.1. L’action de la matrice M dans le sous-espace invariantV1
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
x
y
0
sous−espace VR
sous−espace V1
v1
v2
FIG. 3.3 – Portrait de phases de l’exemple3.3
Dans le cas où1 est dans spectre de la matriceM le fait qu’il soit semi-simple s’avère important. Supposons en effet queλ = 1 est semi-simple demultiplicité mg = ma = k. Alors le sous-espace invariantV1 correspondantest de dimensionk est en plus, les vecteurs propresv1, . . . , vk forment une basedans ce sous-espace. Cela signifie que tout vecteurx0 ∈ V1 est une combinaisonlinéaire des vecteurs propres :
x0 = α1 · v1 + · · ·+ αk · vk
et on en conclut que
M · x0 = x0

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Alors, globalement, six0 ∈ Rm est une condition initiale arbitraire, ce sont lescomposantesxS et xI dans la décomposition (3.5) qui définissent le comporte-ment de l’orbite. Par exemple, sixI = 0 et xS 6= 0 l’orbite O(x0) tend versx1
qui est la projection dex0 sur le sous-espaceV1.
Exemple3.3. Considérons la matrice
M =
(0.5 0.20 1
)Les valeurs propres sontλ1 = 1 et λ2 = 0.5 et les vecteurs propres corres-
pondants sont
v1 =
(0.41
), v2 =
(10
)Donc,V1 = Lin(v1), VS = Lin(v2) et tout vecteurx0 ∈ R2 se décompose ensomme :
x0 = x1 + xS, oùx1 = α · v1 etxS = β · v2
L’action de la matriceM se présente alors sous la forme suivante :
Mx0 = Mx1 + MxR = x1 + 0.5xS
Mnx0 = x1 + (0.5)nxR → x1, quandn →∞
Sur la figure3.3 est représenté le portrait de phases de ce système. On voit lesdeux sous-espaces : les droites définies par les vecteursv1 etv2. Et l’on voit quetoute orbite converge vers la projection de son état initial sur le sous-espaceV1.
L’exemple suivant montre l’importance de l’hypothèse queλ = 1 est unevaleur propre semi-simple.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple3.4. Soit la matrice
M =
1 1 00 1 10 0 1/2
Le polynôme caractéristique de cette matrice est
p(l) = (1− λ)(1− λ)(1/2− λ)
La valeur propreλ1 = 0.5 est simple car sa multiplicité algébrique est1. Le
vecteur propre correspondant estv1 =
001
la deuxième valeur propreλ2 =
λ3 = 1 est de multiplicité algébrique2. Pour évaluer la multiplicité géométriqueon calcule son sous-espace propre en résolvant l’équationMx = x. On trouveque toutes les solutions sont de la forme
x =
α00
= α ·
100
oùα ∈ R est un nombre réel arbitraire. On en conclut que la dimension du sous-espace propre correspondant est1 est doncλ2 est une valeur propre semi-simple.
Prenons le vecteur
110
. On s’intéresse à son orbite :
Mx0 =
210
,
310
, . . . Mnx0 =
n + 110

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On voit facilement queMnx0 → ∞ quandn → ∞. Dans le cas oùλ = 1 n’estpas semi-simple il peut donc y avoir des orbites qui tendent vers l’infini même sitoutes les autres valeurs propres de la matriceM sont "stables".

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
7.2. L’action de la matrice M dans le sous-espaceV−1
.
Supposons queλ = −1 est une valeur propre semi-simple de la matriceM demultiplicité mg = ma = k. Le sous-espace invariantV−1 qui lui est associé estde dimensionk et les vecteurs propres correspondantsv1, . . . , vk y forment unebase. Remarquons que l’orbite de chacun de ces vecteurs propres est périodiquede période2 :
Mvj = −vj, m2vj = vj, j = 1, 2, . . . , k
Il en est de même pour toute orbite dont l’état initial est une combinaison linéairedes vecteursv1, . . . , vk et appartient donc au sous-espaceV−1. Comme dans lecas précédent, cette orbite périodique estattractivesi toutes les autres valeurspropres du système sont de valeur absolue inférieur à1. Si dans le spectre il ya des valeurs propres "instables" ( de valeur absolue supérieure à1) alors toutesles orbites tendent vers l’infini. Enfin, si la valeur propreλ = −1 n’est passemi-simple, nous avons la même incertitude sur l’évolution des orbites que celleévoquée dans la section précédente.
Exemple3.5. Soit la matrice
M =
−1 1 00 0.9 00 0 0.8
Les valeurs propres sontλ1 = −1 et λ2 = 0.9, λ3 = 0.8. Toutes les valeurs
propres sont simples. L’espaceR3 se décompose donc en somme directe de troissous-espaces propres, et chaque vecteurx0 peut être écrit sous la forme :
x0 = xλ1 + xλ2 + xλ3

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−5
0
5
−5 −4 −3 −2 −1 0 1 2 3 4 5
−5
−4
−3
−2
−1
0
1
2
3
4
5
x
y
z
z
x
y
sous−espace des orbites périodiques
FIG. 3.4 – Portrait de phases de l’exemple3.5
où en particulierxλ1 ∈ V−1 = (t, 0, 0), t ∈ R. Puisque|λ2| < 1, |λ3| < 1chaque orbite du systèmeO(x0) converge vers l’orbiteO(xλ1) ∈ V−1 qui estuneorbite périodiquede période2 :
O(xλ1) = {xλ1 ,−xλ1}
Ce phénomène est illustré sur la figure3.4.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
8. Action de la matrice M dans le sous-espaceVC
Nous avons observé dans les sections précédentes que la présence des valeurspropres complexes conjuguées donne le caractère rotatif aux orbites du système.Si la valeur absolue de ces valeurs propres est supérieure ou inférieure à 1 lesorbites correspondantes tendent vers zéro ou respectivement vers l’infini. Danscette section nous allons étudier le cas où le système possède une paire de valeurspropres complexes conjuguéesλ1 = a + ib et λ2 = a − ib de valeur absolueégale à 1 :a2 + b2 = 1. Supposons que ces valeurs propres sont simples. Alorsle sous-espace propreVC qui leur est associé est de dimension2. la base de cesous-espace est formée de deux vecteurs réels linéairement indépendantsu et vsolutions des équations
Mu = au− bv, Mv = bu + av
Soit θ = arg λ1. Alors λ1 = eiθ, λ2 = e−iθ Dans la base des vecteursu et vl’action de la matriceM est équivalente à celle de la matrice
P =
(cos(θ) sin(θ)− sin(θ) cos(θ)
)Il est évident queP n’est autre qu’une matrice de rotation à l’angleθ. Pour toutn ≥ 1
P n = ·(
cos(nθ) sin(nθ)− sin(nθ) cos(nθ)
)Supposons que
θ =p
q· π

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−10 −8 −6 −4 −2 0 2 4 6 8 10−10
−8
−6
−4
−2
0
2
4
6
8
10
x
y
0
O(x0)
O(y0)
O(z0)
FIG. 3.5 – Orbites périodiques
Alors en faisant2q rotations successives nous allons nous retourner au point
de départ, quel qu’il soit, carP q = P . Cela implique que quandθ =p
q· π toutes
les orbites qui commencent dans le sous-espace invariantVC sont périodiques de
période2q. Siθ
πest un nombre irrationnel, chaque orbite dansVC est dense sur
un ellipsoïde.Sur la figure3.5 sont tracées quelques orbites du système avec la matrice
suivante :
M =
( √2 −
√2
1/√
2 0
)Cette matrice a deux valeurs propres complexes conjuguées :λ1 =
1√2(1 + i)
etλ2 =1√
2(1− i). On trouve facilement quea =
1√2
= cos(π/4) etb =1√2
=
sin(π/4). Doncθ = π/4 et les orbites sont périodiques de période 8.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−10 −8 −6 −4 −2 0 2 4 6 8 10−10
−8
−6
−4
−2
0
2
4
6
8
10
FIG. 3.6 – Orbite apériodique :50points
−10 −8 −6 −4 −2 0 2 4 6 8 10−10
−8
−6
−4
−2
0
2
4
6
8
10
FIG. 3.7 – Orbite apériodique :150points
Sur la figure?? est présentée une orbite du système dont la matrice est la

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−10 −8 −6 −4 −2 0 2 4 6 8 10−10
−8
−6
−4
−2
0
2
4
6
8
10
FIG. 3.8 – Orbite apériodique :250points
suivante :
M =
(1/√
5 −2/√
5
2/√
2 1/√
5
)Cette matrice a deux valeurs propres :λ1 = 1√
5(1+2i)etλ2 = 1√
5(1−2i). L’angle
θ correspondant n’est pas en proportion rationnelle avec2π. Alors, toute orbitede ce système reste dans un ellipse et devient de plus en plus dense à mesure quele nombre d’itérations grandit. Commençons par un exemple simple.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Chapitre 4
Systèmes dynamiques discretsnon-linéaires
Une des principales conséquences de la linéarité est dans le fait que la matriceM d’un système linéaire détermine globalement sa stabilité et le comportementde ses orbites. Dans le cas des systèmes non-linéaires, rares sont ceux que l’onpeut caractériser comme étant globalement stables. L’étude de ces systèmes né-cessite le plus souvent une approchelocale, c’est-à-dire une analyse des orbitesdans de petits voisinages des points fixes. Cette approche a déjà été utilisée dansle cours sur les systèmes de dimension 1. Notamment, pour un système définipar une applicationf : R → R , nous avons établi le lien entre ses propriétéset la dérivée de la fonctionf . Il existe une généralisation de cette théorie dans lecas de systèmes dansRm.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1. Première dérivée et linéarisation
Définition 4.1. Soit une applicationf : Rm → Rm. Supposons qu’ellepossède toutes les dérivées partielles en un pointx0 ∈ Rm. On appelleJacobiende la fonctionf au pointx0 la matrice suivante :
J (x0) =
∂f1
∂x1(x0) . . . ∂f1
∂xm(x0)
......
...∂fm
∂x1(x0) . . . ∂fm
∂xm(x0)
1.0.0.1. Notation Nous allons noter dans la suite parUε(x0) un ε-voisinaged’un pointx0 :
Uε(xs) = {y ∈ Rm : ‖y − x0‖ < ε}
Le Jacobien représente l’approximation linéaire d’une fonctionf dans unpetit voisinage du pointx0. Il existe en effet unε > 0 tel que pour touth ∈ Rm :‖h‖ < ε
f(x0 + h) = f(x0) + J (x0) · h + o(‖h‖) (4.1)
où o(‖h‖) désigne les termes restants plus petits en norme que‖h‖. Cela signifieque
‖f(x0 + h)− f(x0)− J (x0) · h‖‖h‖
→ 0, quand‖h‖ → 0

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Donc, dans certaines considérations, nous pouvons négliger le terme restantdans l’égalité (4.1), sih est assez petit. Nous obtenons ainsil’approximation depremier ordre def :
f(x0 + h) ∼= f(x0) + J (x0) · h (4.2)
Du fait queJ (x0) est une matrice et la partie droite de (4.2) est donc linéaireenh, on appelle souvent cette expressionlinéarisation de la fonctionf au voi-sinage du pointx0. Cela nous permet de considérer les applications dérivablescomme "localement linéaires".

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
2. Étude locale des points fixes à l’aide du Jacobien
Comme dans tous les cours précédents nous nous intéressons au comporte-ment local des systèmes autour de leurs points fixes et nous nous posons ici lesmêmes questions. Sont ils stables ? Ces points, sont ils attracteurs ou sources ?Existe-t-il d’autres types de comportement ?
Supposons qu’un système
x(n + 1) = f(x(n)), x(0) = x0 (4.3)
possède un point fixexs ∈ Rm :
f(xs) = xs
et que la fonctionf est dérivable au pointxs. Supposons que le point initial d’uneorbite x0 est proche du point fixexs. Alors nous pouvons, au moins pour lespremières itérations, remplacer la fonctionf par son approximation du premierordre :
x(n + 1) = f(x(n)) = f(x(n)− xs + xs)
⇓x(n + 1) ≈ f(xs) + J (xs) · (x(n)− xs) = xs + J (xs) · (x(n)− xs)
⇓x(n + 1)− xs ≈ J (xs) · (x(n)− xs) (4.4)
Le dernier système approximatif est linéaire avec la matrice
M = J (xs)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
En notanty(n) = x(n)− xs on peut écrire :
y(n + 1) = J (xs) · y(n), y(0) = x0 − xs (4.5)
Le point fixey = 0 de ce dernier système correspond aupoint fixex = xs dusystème (4.4). Il est donc possible d’analyser le comportement des orbites dusystème (4.3) autour dupoint fixe xs, en étudiant les caractéristiques dupointfixe y = 0 du système linéaire (4.5). Nous pouvons donc utiliser les résultats ducours précédent et formuler des critères de stabilité en termes des valeurs propresdu Jacobien de l’applicationf .
2.1. Point fixe attractif
Définition 4.2. Soitxs unpoint fixed’un SDD dansRm
x(n + 1) = f(x(n)), x(0) = x0
On dit quexs est un point fixe attractif s’il existe unε > 0 tel que pourtout point initialx0 : ‖x0 − xs‖ < ε
limn→∞
x(n) = xs

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 4.1.SoientU ∈ Rm un ensemble ouvert etf : U → U uneapplication continue sur cet ensemble. Supposons que le système dyna-mique défini par la fonctionf possède unpoint fixexs ∈ U . Supposonsensuite qu’il existe un voisinageUε(xs) dupoint fixetel que la fonctionf est dérivable et que sa dérivéeJ (x) est continue sur ce voisinage,c’est-à-dire que pour toutδ > 0 il existe unγ > 0 tel que
‖x− y‖ < δ ⇒ ‖J (x)− J (y)‖ < γ
Alors, siρ(J (xs)) < 1
le pointxs est un point fixe attractif.
2.2. Point fixe répulsif
Définition 4.3. Soitxs unpoint fixed’un SDD dansRm
x(n + 1) = f(x(n)), x(0) = x0
On dit quexs est un point fixe répulsif s’il existe unε > 0 tel que pourtout point initialx0 : ‖x0 − xs‖ < ε il existe unn ∈ N tel que
‖x(n)− xs‖ > ε

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 4.2.SoientU ∈ Rm un ensemble ouvert etf : U → U uneapplication continue sur cet ensemble. Supposons que le système dyna-mique défini par la fonctionf possède unpoint fixexs ∈ U . Supposonsensuite qu’il existe un voisinageUε(xs) dupoint fixetel que la fonctionf est dérivable et que sa dérivéeJ (x) est continue sur ce voisinage,c’est-à-dire que pour toutδ > 0 il existe unγ > 0 tel que
‖x− y‖ < δ ⇒ ‖J (x)− J (y)‖ < γ
Alors, si toutes les valeurs propres de la matriceJ (xs) sont de valeurabsolue supérieure à1 le pointxs est un point fixe répulsif.
Remarque4.1. dans le cas d’un système linéaire si zéro est un point répulsiftoutes les orbites tendent nécessairement vers l’infini. Si le système est non-linéaire cela n’est pas toujours vrai. La propriété de répulsion estlocale. Noussavons en effet que toute orbite qui commence dans un voisinageUε(xs) le quitteaprès un nombre fini d’itérations. mais rien n’est connuà priori sur l’évolutiondes orbites en dehors de ce voisinage. Par exemple, elles peuvent être attirées pard’autres points fixes du système.
2.3. Point-selle
Nous avons observé dans le cours précédent un autre type de points fixesqui est absent dans les systèmes en dimension1 : points-selles. La géométriedes orbites dans ce cas est caractérisé par la présence d’un sous-espace linéaire

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
stable, dans lequel les orbites sont attirées par lepoint fixe, et d’un sous-espacelinéaire instable, dans lequel les orbites sont repoussées et tendent à l’infini. Lesorbites qui n’appartiennent ni au sous-espace stable ni au sous-espace instable,réunissent les deux propriétés. Elles peuvent d’abord suivre la direction dupointfixe, mais à un instant donné elle vont obligatoirement se détourner du point fixeet vont tendre vers l’infini, en s’approchant du sous-espace instable. Dans le casd’un système non-linéaire, tout est analogue mais plus complexe.
Définition 4.4. Soit xs un point fixe d’un système dynamique définipar une fonctionf : Rm → Rm. Supposons quef est dérivable aupointxs. On dit quexs estun point-sellesi dans le spectre du JacobienJ (xs) de la fonctionf une partie des valeurs propres sont de valeurabsolue inférieure à1 est les autres sont de valeur absolue supérieure à1.
Les orbites d’un système non-linéaire dans un voisinage d’un point-selle secomportentapproximativement comme les orbites du système linéaire gou-verné par la matriceJ (xs). Seulement les sous-espaces stableXS est instableXI de la matriceJ (xs) ne sont que des approximations linéaires de ce que l’onappellevariétés stableVS et instable VI du système non-linéaire. En voiciune définition rigoureuse. Supposons pour simplicité que l’applicationf a unpoint selle, xs = 0 et qu’elle est inversible. Notons parg l’application inverse :g = f−1.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Définition 4.5. On appellevariété stable l’ensembleVS de tous lesvecteurs initialesx0 tels que
f (n)(x0) → 0, quandn →∞
On appellevariété instable l’ensembleVI de tous les vecteurs initialesx0 tels que
g(n)(x0) → 0, quandn →∞
Les variétésVS et VI peuvent coïncider dans certains cas avec les sous-espaces stable et instable de la matriceJ (xs), mais en général, il est très difficilede les calculer analytiquement. Le comportement des systèmes possédant un ouplusieurs points selles peut être très complexe.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Étude des modèles démographiques.
Pour résumer les cours 2,3 et 4, nous avons choisi un exemple d’applicationde la théorie des systèmes dynamiques qui contient aussi bien des modèles endimension1 que des modèles multi-dimensionnels. Il s’agit des modèles d’évo-lution des populations d’animaux, étudiés en biologie. Nous allons les présenterici sous une forme simplifiée, sans rentrer dans les détails de la science biolo-gique.
3.1. Evolution d’une seule population
Supposons que nous avons une population d’animaux et notons para(n) lenombre d’espèces au moment de tempsn. Rappelons que le moment de tempsn signifie quen périodes de temps se sont écoulées. Le choix de la période detemps (une heure, un jour, un mois,...) dépend des conditions de l’expérience, desanimaux choisis etc. De même,a(n) ne représente pas nécessairement le nombreexacte d’animaux, mais le nombre d’unités. Par exemple, on peut compter lespoissons par milliers et dans ce cas laa(n) = 3.5 signifie qu’en réalité il y a3500 poissons.
Nous nous intéressons donc à l’évolution du nombre d’espèces dans la po-pulation en fonction du temps. Un modèle de "vie" d’une population doit nouspermettre de prédire son développement dans un environnement donné. Notremodèle doit donc prendre en compte les conditions de vie et les éventuellescontraintes imposées par le milieu dans lequel les animaux sont placés. Nousallons choisir ici des modèles très simples, juste pour illustrer les apports de lathéorie des systèmes dynamiques dans ce domaine.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Ce qui fait changer le nombre d’animaux c’est les naissances et les mortsde certaines espèces. L’hypothèse la plus simple consiste à dire que le nombrede naissances pendant une période de temps est proportionnel à la taille de lapopulation. Il est donc égalc · a(n), où c > 0 est le taux de naissances. Demême la mortalité est aussi proportionnelle au nombre d’animaux, et peut êtremodélisée parγ · a(n) , avecγ > 0 - le taux de mortalité. Alors, le changementde nombre d’animaux au cours d’une période de temps est décrit par la relation :
a(n + 1)− a(n) = (c− γ)a(n)
Ce qui donne le système dynamique suivant :
a(n + 1) = (1 + r)a(n), a(0) = a0
où r = c − γ estle taux de croissance. C’est un modèle linéaire, de dimension1. Toute orbite est une solution de la dernière équation :
a(0) = a0, a(n) = (1 + r)na(0), n = 1, 2, 3, . . .
Nous pouvons en tirer les conclusions suivantes. Si la mortalité est plus impor-tante que la nativitéγ > c alorsr < 0 est la suite de nombres(1 + r)n, n =1, 2, 3, . . . tend vers zéro. La population disparaît assez vite. Sir > 0 la popula-tion ne cesse de croître et sa croissance est même très rapide. Par exemple, en pre-nant un taux de croissance "raisonnable" et le nombre d’espèces initiala(0) = 50on trouve quea(5) ∼= 124, a(10) ∼= 310, a(25) ∼= 4770, a(50) ∼= 455022. Lenombre d’animaux tend très vite à l’infini.
Ce modèle ne semble pas correspondre à la réalité. Est il faux ? Oui et non.Dans la théorie des systèmes dynamiques est surtout dans les applications pra-tiques on distingue nettement deux types de considérations :à court terme et à

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
long terme. Il se trouve que les modèles les plus simples et donc les plus faciles àtraiter sont souvent très bien adaptées pour les études à court terme et deviennentcomplètement fausses quand il s’agit de faire des prévisions pour de longues pé-riodes de temps. C’est bien le cas de notre modèle. Où est le problème ? Nousavons supposé que le taux de croissance est constant, qu’il ne dépend pas del’environnement. Cela est une bonne approximation sur une période de tempsrelativement courte. Dans une étude globale il est absurde de supposer que la po-pulation en question croît sans cesse avec la même vitesse. En réalité plusieursfacteurs influencent le développement d’une population, dont les principaux sontl’espace de vie et les ressources de nourriture.
Il nous faut donc trouver un modèle plus réaliste, dans lequel le taux decroissance soit variable :r = r(n). Admettons les hypothèses suivantes. L’envi-ronnement ne peut supporter qu’un nombre limité d’animaux, disonsL. Quanda(n) > L il n’y a pas assez de nourriture et la mortalité va dominer la nativité.Le taux de croissance doit donc être négatifr(n) < 0 si a(n) > L.
Tant quea(n) < L la population croît et doncr(n) > 0. Nous supposonsenfin que tout au début, quand le nombre d’animaux est petit, les ressource sonten abondance et la population croît avec un taux proche de celui de croissancesans contraintes :r(n) ∼= r. Par contre, quand le nombre d’espèces grandit ets’approche de la limiteL, le taux de croissance diminue et devint nul quanda(n) = L.
La fonction la plus simple qui satisfait toutes ces exigences est la suivante :
r(n) = r(a(n)) = r ·(
1− a(n)
L
)Le nombrer s’appelletaux de croissance sans contraintes.Le nombreL s’ap-pellecapacité de l’environnement. L’équation d’évolution de la population de-

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
FIG. 4.1 – Quelques trajectoires du systèmex(n + 1) = x− x2
vient alors
a(n + 1)− a(n) = r ·(
1− a(n)
L
)a(n)
Après simplification nous trouvons le système dynamique qui modélise cettesituation :
a(n + 1) = (1 + r)a(n)− ba2(n) (4.6)
où b = r/L.Prenons un exemple numérique. Soitr = 1.2 et L = 8. On obtient alors
l’équation suivante :
a(0) = a0, a(n + 1) = 1.2a(n)− 0.025a2(n), n = 1, 2, 3, . . .
C’est un système non-linéaire, avec la fonction
f(a) = 1.2a− 0.025a2

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
FIG. 4.2 – Quelques trajectoires du systèmex(n + 1) = x− x2

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Sur la figure4.1sont représentées quelque trajectoires de ce système tracéesdans les coordonnées(n, a(n)). On peut remarquer que quelle que, soit la condi-tion initiale ( le nombre initial d’animaux), la population semble tendre versLet se stabiliser à ce niveau. Traçons ces trajectoires par la méthode d’étude gra-phique utilisée dans les cours précédents.
On remarque sur la figure4.2 que le système a deux points fixes : l’un àl’origine et l’autre près du pointx = L = 8. L’étude précise le confirme. Eneffet, les points fixes sont solutions de l’équation
f(a) = a
Cette équation a deux solutions :a1 = 0 et a2 = L = 8. On peut étudier lastabilité de ces deux points fixes en utilisant les théorèmes du cours 2. Pour cela,calculons la dérivée de la fonctionf du système :
f ′(a) = 1.2− 0.05a
Pour les points fixes on a :
f ′(a1) = 1.2, f ′(a2) = 0.8
Puisque|f ′(a1)| > 1 ce point fixe est répulsif. Pour nous cela signifie quemême avec un petit nombre d’animaux au départ, la population grandit et nemeurt pas. Quant au deuxième point fixe,x2 = L = 8, il est attractif, car|f ′(a2)| < 1. Cela confirme notre première analyse :quelle que soit la condi-tion initiale, la population évolue de telle façon qu’après un certain temps ellese stabilise à la quantité maximale supportable par l’environnement.
Remarquons que cela reste vraiquel que soit le choix des paramètres dumodèler etL. Il suffit d’effectuer les mêmes calculs que ci-dessus en prenant la

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
fonctionf(a) = (1 + r)a− ba2
de l’équation (4.6).Revenons encore un instant à l’exemple numérique. On peut aussi se deman-
der s’il y a des cycles périodiques dans notre système. Pour cela nous allonsutiliser le théorème de Sarkovski.
0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
(a) Le graphe def(x) = 1.2x−0.025x2
0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
(b) f (2)(x)
FIG. 4.3 – Etude du systèmef(x) = 1.2x− 0.025x2
Sur la figure4.3sont tracés les graphes de la fonctionf(x) et def(f(x)). Lepremier graphe (a) montre deux points fixes que nous avons déjà trouvés :a1 = 0eta2 = 8. Sur le deuxième graphe (b) nous retrouvons les mêmes points et il n’yen a pas d’autres. Cela signifie que le système n’a pas de points périodiques depériode fondamentale2. Rappelons que dans l’ordre de Srakovsky le nombre2précède juste1. Alors, d’après le théorème de Sarkovsky, le système ne possède

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
aucun point périodique sauf les deux points fixes.
3.2. Deux populations en compétition
Supposons que nous étudions deux espèces d’animauxa et b qui partagentdes ressources de nourriture et un espace de vie. Notons para(n) la populationde la première espèce et parb(n) celle de la deuxième au moment du tempsn.Rappelons que le modèle de croissance pour une espèce , disons,a(n) en absencede la deuxième est décrit par le système dynamique suivant :
a(n + 1) = a(n) + r(1− ca(n)) · a(n)
où r est le coefficient de croissance sans contraintes et1/c est la capacité del’environnement (ou la valeur d’équilibre). Supposons quec = 1. Alors nousavons l’équation
a(n + 1) = a(n) + r(1− a(n)) · a(n)
Introduisons dans la considération les espècesb. Elles doivent partager avec lesespècesa les même ressources. Quel sera l’impact de ce partage sur la croissancede l’espècea ? Il est logique de supposer que les ressources qui sont à dispositiondes espècesa vont diminuer d’une quantité proportionnelle au nombre d’espècesb, c’est-à-dire, decbb(n). L’équation de croissance devient alors :
a(n + 1) = a(n) + r(1− a(n)− cbb(n)) · a(n)
De la même façon on trouve l’équation pour la populationb :
b(n + 1) = b(n) + s(1− b(n)− caa(n)) · b(n)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Nous avons ainsi un système dynamique en deux dimensions :
a(n + 1) = a(n) + r(1− a(n)− cbb(n)) · a(n)
b(n + 1) = b(n) + s(1− a(n)− caa(n)) · b(n)
qui après une simplification devient :
a(n + 1) = (1 + r)a(n)− ra2(n)− cbra(n)b(n)
b(n + 1) = (1 + s)b(n)− sb2(n)− cara(n)) · b(n)
Prenons un exemple numérique. Supposons quer = s = 0.3 et ca = cb =0.5. Nous obtenons alos le système suivant :
a(n + 1) = 1.3a(n)− 0.3a2(n)− 0.15a(n)b(n)
b(n + 1) = 1.3b(n)− 0.3b2(n)− 0.15a(n)b(n)
C’est un système non-linéaire(a(n + 1)b(n + 1)
)=
(f(a(n), b(n))g(a(n), b(n))
)avec les fonctions
f(a, b) = 1.3a− 0.3a2 − 0.15ab
g(a, b) = 1.3b− 0.3b2 − 0.15ab
Commençons par trouver les points fixes de ce système. Pour cela nous de-vons résoudre l’équation (
ab
)=
(f(a, b)g(a, b)
)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 0.2 0.4 0.6 0.8 1 1.2
0
0.2
0.4
0.6
0.8
1
1.2
x
y
FIG. 4.4 – Le portrait de phases
ce qui donne : {a = 1.3a− 0.3a2 − 0.15abb = 1.3b− 0.3b2 − 0.15ab
Ce système d’équations admet4 solutions :(a1 = 0b1 = 0
),
(a2 = 0b2 = 1
),
(a3 = 1b3 = 0
),
(a4 = 2/3b4 = 2/3
)Sur la figure4.4on a représenté le portrait de phases du système.
Pour souligner la présence des points fixes nous avons tracé quelques orbites.Pour étudier la stabilité de ces points fixes calculons lejacobiendu système. Ontrouve rapidement :
J (a, b) =
(1.3− 0.6a− 0.15b −0.15a
−0.15b 1.3− 0.6b− 0.15a
)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Maintenant, point par point appliquons les théorèmes4.1, 4.2et la définition4.4.Le calcul dujacobienau point(0, 0) donne :
J (0, 0) =
(1.3 00 1.3
)C’est une matrice diagonale, elle a une valeur propre de multiplicité 2, égale à1.3. D’après le théorème4.2 le point fixe(0, 0) estrépulsif. Continuons avec lepoint (0, 1).
J (0, 1) =
(1.15 0−0.15 0.7
)les valeurs propres de cette matrice sontλ1 = 0.7 et λ2 = 1.15. On en déduit,d’après la définition4.4que(0, 1) est un point-selle. On obtient le même résul-tat pour le point fixe(1, 0). Et enfin, pour le point(2/3, 2/3) le jacobienest lesuivant :
J (2/3, 2/3) =
(0.8 −0.1−0.1 0.8
)Les valeurs propres sontλ1 = 0.7 etλ2 = 0.9. Et donc, d’après le théorème4.1c’est un point fixe attractif.
Quelle est l’interprétation de nos résultats ? le fait que le premier point fixe,(0, 0) est répulsif, montre que quelles que soient les quantité initiales d’animauxdes deux espèces, aucune ne meurt, les deux se développent, plus ou moins vite.Cela se voit très bien sur les trajectoires tracées sur la figure4.4. L’influencedes deux point-selles se traduit par le fait qu’au début d’évolution, c’est l’espècequi est plus nombreuse au départ, qui se développe plus vite. On remarque eneffet que certaines orbites sont attirées au début par l’un des deux points-sellesavant de se diriger vers le point fixe attractif(2/3, 2/3). En cas de conditionsinitiales égales, l’orbite suit une ligne droite et rejoint très vite le point d’équilibre

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
(2/3, 2/3). Et enfin, globalement, on voit que en partant de n’importe quellesconditions initiales l’évolution des deux espèces mène à un état d’équilibre, danslequel elle se stabilise.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Chapitre 5
Théorie des bifurcations
Dans les cours précédents nous avons pu remarquer que certains modèles desprocessus dynamiques contenaient un ou plusieurs paramètres. Nous avons tou-jours supposé que les paramètres étaient fixes. Cependant nous avons observédans quelques exemples étudiés que le changement des paramètres d’un systèmedynamique pouvait entraîner des changements qualitatifs importants de ses pro-priétés. Dans ce cours nous allons nous concentrer sur l’étude de ce phénomèneque nous appelleronsbifurcation . Ce cours sera notre premier pas vers l’étudedes comportements complexes des systèmes, vers la théorie du chaos.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1. Bifurcations des systèmes dynamiques de dimen-sion 1
Nous allons étudier ici des familles des systèmes dynamiques dépendant d’unparamètre réelλ ∈ R :
x(0) = x0, x(n + 1) = f(λ, x(n)), n = 1, 2, 3, . . .
Notre but dans ce cours est d’observer les changements éventuels de dynamiqued’un système en fonction des changements de ses paramètres. Intuitivement, lechangement de la dynamique signifie le changement du nombre des points fixesou de leur caractère (stabilité, attractivité, etc. ). Si au passage d’une valeur duparamètre un tel changement se produit on dit que le système passe par unpointde bifurcation.
Pour décrire ce phénomène plus rigoureusement nous allons recourir à lanotion debranche de points fixesqui permet de formaliser la dépendance despoints fixes et des points périodiques du paramètre du système. Nous avons définiun point fixe comme étant solution de l’équation
f(λ, x) = x
En présence d’un paramètreλ qui varie dans un intervalleI ∈ R toute solutionde cette équation esta priori une fonction deλ.
Définition 5.1. Nous allons appelerbranche de points fixestoute ap-plication continueγ : I → R qui vérifie la condition :
f(λ, γ(λ)) = γ(λ), ∀λ ∈ I

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On définit de la même façon lesbranches des points périodiques.
Exemple5.1. Considérons la famille des fonctions
f(λ, x) = λx(1− x), x ∈ [0, 1], λ ∈ [0, 4]
Nous avons déjà fait une analyse de ce système dans lecours 1. Il a deux pointsfixes :
x1 = 0, x2 =λ− 1
λ
Donc il a deux branches de points fixes. L’une est définie par l’application
γ1 : [0, 4] → R, γ1(λ) ≡ 0 est l’autre parγ2 : [0, 4] → R, γ2 =λ− 1
λ.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5−1
−0.5
0
0.5
1
1.5
a
les branches de points fixes
FIG. 5.1 – Les branches de points fixes du systèmef(λ, x) = λx(1− x)
Il est utile de représenter graphiquement l’information que nous pouvons ti-rer de cette analyse. On utilise pour celales diagrammes de bifurcations. Ontrace dans un plan les graphes de toutes les branches de points fixes et de points

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 0.5 1 1.5 2 2.5 3 3.5 4−1
−0.5
0
0.5
1
1.5
λ
FIG. 5.2 – Les branches de points fixes du systèmef(λ, x) = λx(1− x)
périodiques du système. Sur l’axe des abscisses on note les valeurs du paramètreλ. Sur la figure5.1sont représentées les branches de points fixes pour le systèmede l’exemple5.1.
Nous pouvons aussi représenter sur un diagramme des bifurcations le carac-tère attractif ou répulsif des points fixes. Revenons à l’exemple5.1. Pour étu-dier la stabilité des points fixes on calcule tout d’abord la dérivée de la fonctionf(λ, x) :
f ′x(λ, x) = λ− 2λx
Calculons la valeur de la dérivée dans les deux points fixes :
f ′x(λ, γ1(λ)) = f ′x(λ, 0) = λ
f ′x(λ, γ2(λ)) = f ′x(λ,λ− 1
λ) = 2− λ (5.1)
Quandλ < 1 nous avons :|f ′(λ, γ1(λ))| < 1 et donc le point fixeγ1(λ) estattractif. Quant au deuxième point fixe, il est répulsif car|f ′(λ, γ2(λ))| > 1.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Quandλ = λ0 = 1 les deux points fixes se trouvent dans la situation indéter-minée :|f ′(λ0, γ1(λ0))| = |f ′(λ0, γ2(λ0))| = 1.
Enfin, pour les valeurs1 < λ < 3 on remarque que le premier point fixe perdson attractivité et devient répulsif :|f ′(λ, γ1(λ))| > 1 tandis que le deuxièmedevient attractif :|f ′(λ, γ2(λ))| < 1.
Pour représenter ces effets sur lediagramme des bifurcations( voir figure5.2) nous traçons des flèches verticales orientées vers une branche de points fixessi elle attractive et partant de la branche si elle répulsive.
−5 −4 −3 −2 −1 0−5
−4.5
−4
−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
FIG. 5.3 – Systèmex(n + 1) = λx(n)(1 − x(n)), λ < 1 : l’origine attire lesorbites
On peut observer que lorsque le paramètreλ passe par la valeur1 les proprié-tés du système changent. Plus précisément c’est la stabilité des points fixes quichange. Sur la figure5.3on peut observer ce changement sur les orbites du sys-tème. Le pointλ0 = 1 estun point de bifurcation. Avant de donner une définitionrigoureuse, retournons nous encore une fois au système de l’exemple5.1.
Exemple5.2. Nous nous intéressons à présent aux orbites périodiques. Dans

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 0.2 0.4 0.6 0.8 1 1.20
0.1
0.2
0.3
0.4
0.5
0.6
FIG. 5.4 –λ > 1 : l’origine repousse les orbites

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
le cours 1 nous avons trouvé que quand1 < λ < 3 le système n’a pas depoints périodiques de période 2. En appliquantle théorème de Sarkovski, on peutaffirmer que pour ces valeurs de paramètreλ il n’y a aucun autre point périodiqueque les points fixes.
Quandλ > 3 il y a deux points périodiques de période2 :
0 0.5 1 1.5 2 2.5 3 3.5 4−0.5
0
0.5
1
λ
FIG. 5.5 – Le diagramme des bifurcations du systèmef(λ, x) = λx(1− x)
p1(λ) =λ + 1 +
√λ2 − 2λ− 3
2λ,
p2(λ) =λ + 1−
√λ2 − 2λ− 3
2λ

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Il existe donc deux branches de points périodiques
γ21 : [3, 4] → R, γ21(λ) =λ + 1 +
√λ2 − 2λ− 3
2λ
γ22 : [3, 4] → R, γ22(λ) =λ + 1−
√λ2 − 2λ− 3
2λ
Leurs courbes forment ensemble une parabole ouverte à droite avec le "sommet "dans le point(3, 2/3) situé sur le graphe de la branche de points fixesγ2(λ) ( voirfigure5.5). Nous observons qu’au passage du pointλ = λ1 = 3 la dynamiquedu système change aussi car deux nouveaux points périodiques apparaissent.
Passons maintenant à la définition formelle d’un point de bifurcation.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Définition 5.2. Soit une famille de SDD de dimension 1 dépendantd’un paramètre réelλ ∈ I
x(0) = x0, x(n + 1) = f(λ, x(n)), n = 1, 2, 3, . . .
Un point λ0 ∈ I s’appellepoint de bifurcation de cette famille desystèmes s’il existeau moins deux branches différentes de points pério-diquesqui se croisent en le pointλ0. Autrement dit, si le pointλ0 vérifieles conditions suivantes :
(i) ∃ γ1(λ) : I1 → R et ∃ γ2(λ) : I2 → R deux branches de pointspériodiques def tels que
γ1(λ0) = γ2(λ0)
(ii) I1 ∩ I2 6= {λ0} etγ1(λ) 6= γ2(λ) pour toutλ ∈ I1 ∩ I2 \ {λ0}
Nous avons vu dans les exemples ci-dessus que lorsqueλ0 est unDefPoint-Bifurc la dérivée de l’applicationf(x, λ) prise au point fixe correspondant estégale à1 ou à−1. Voici le théorème qui confirme cette observation.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 5.1.Soit f(λ, x) une famille de fonctions ayant des déri-vées partielles continues enx et enλ. Supposons qu’il existe un couple(λ0, x0) tel que
f(λ0, x0) = x0 et∂f
∂x(λ0, x0) 6= 1
Alors, il existe des intervalles ouvertsI 3 x0 etJ 3 λ0 et une applica-tion continueγ : J → I telle que
γ(λ0) = x0 et f(λ, γ(λ)) ≡ γ(λ), ∀ λ ∈ J
Autrement dit,γ(λ) est unebranche de points fixes. De plus, la famillef(λ, x) n’a pas d’autres points fixes quandλ ∈ J .
Ce théorème est bien évidemment applicable aux points périodiques de pé-riode fondamentalep, en remplaçantf(λ, x) parfp(λ, x). Il nous dit que la bi-furcation ne peut avoir lieu que si la dérivée est égale à1.
Il existe plusieurs types de bifurcation selon les propriétés des secondes dé-rivées de la famille des fonctionsf(λ, x). Nous allons présenter ces différentstypes de bifurcation par des exemples et donner des théorèmes qui les définissentrigoureusement.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Pour abréger les notations nous allons noter les dérivées partielles de façonsuivante :
∂f
∂λ= fλ,
∂f
∂x= fx
On notera aussi∂2f
∂x2= fxx

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1.1. Bifurcation de type noeud-col
Théorème 5.2. Soit une famille de fonctionsf(λ, x). Supposons qu’il existe un couple(λ0, x0) tel que lesystème
x(n + 1) = f(λ0, x(n))
a un point fixe enx0 :f(λ0, x0) = x0
et que∂f
∂x(λ0, x0) = 1
Supposons aussi quefλ(λ0, x0) 6= 0 et fxx(λ0, x0) 6= 0
On dit alors que le système subit au point λ0 une bifurcation de type noeud-col. Cela se traduit par lespropriétés suivantes des branches de points fixes autour de(λ0, x0).Il existe un voisinage du couple(λ0, x0)
V = {(λ, x) | λ ∈ J 3 λ0, x ∈ I 3 x0}
tel que
1. si fλ(λ0,x0) · fxx(λ0,x0) < 0 les assertions ci-dessus sont vérifiées :
1.1. il n’existe aucun point fixe dans le voisinageV quandλ < λ0
1.2. pourλ > λ0 il existe exactement deux branches de points fixesγ1(λ) > γ2(λ)
1.3. γ1(λ0) = γ2(λ0) = x0
1.4. La branche supérieureγ1 est attractive et la branche inférieureγ2 est répulsive.
2. si fλ(λ0,x0) · fxx(λ0,x0) > 0 les assertions ci-dessus sont vérifiées :
2.1. il n’existe aucun point fixe dans le voisinageV quandλ > λ0
2.2. pourλ < λ0 il existe exactement deux branches de points fixesγ1(λ) > γ2(λ)
2.3. γ1(λ0) = γ2(λ0) = x0
2.4. La branche supérieureγ1 est répulsive et la branche inférieureγ2 est attractive.
Sur le diagramme des bifurcations on observe dans ce cas une courbe de

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−2 −1 0 1 2 3 4−2
−1
0
1
2
3
4
λ
FIG. 5.6 – Le diagramme des bifurcations du systèmef(λ, x) = (x + λ2 −1)(x2 − 2x− λ) + x
points fixes continue tangente à la ligne droite verticaleλ = λ0. Voici un exemple.
Exemple5.3. Soit
f(x, λ) = (x + λ2 − 1)(x2 − 2x− λ) + x
Les points fixes sont solutions de l’équation :
(x + λ2 − 1)(x2 − 2x− λ) = 0
On trouve trois branches :
γ1(λ) = 1− λ2,
γ2(λ) = 1 +√
1 + λ, γ3(λ) = 1−√
1 + λ

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Les graphes de ces trois branches sont représentés sur la figure5.6. On remarqueque pour les valeurs de paramètreλ < −1 il n’y a qu’un seul point fixe,γ1(λ),qui est répulsif. Quandλ = −1 deux nouvelles branches apparaissent, tangentesà la ligneλ = −1. Le pointλ0 = −1 est unDefPointBifurcde type point-selle.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1.2. Bifurcation transcritique
Théorème 5.3. Soit une famille de fonctionsf(λ, x). Supposons qu’il existe un couple(λ0, x0) tel quele système
x(n + 1) = f(λ0, x(n))
a un point fixe enx0 :f(λ0, x0) = x0
et que∂f
∂x(λ0, x0) = 1
Supposons aussi que
fλ(λ0, x0) = 0, fxx(λ0, x0) 6= 0 et(f2
λx − fxx · fλλ
)|(λ0,x0) 6= 0
On dit alors que le système subit au point λ0 une bifurcation transcritique. Cela se traduit par lespropriétés suivantes des branches de points fixes autour de(λ0, x0).Il existe deux branches de points fixesγ1(λ) et γ2(λ) qui se croisent dans le pointλ0 : γ1(λ0) =γ2(λ0) = x0. Si fxx < 0 la branche supérieure est attractive et la branche inférieure est répulsive.Sifxx > 0 les propriétés de stabilité sont inversées.
Sur le diagramme de bifurcations cela se traduit par deux branches différentesde points fixes qui se croisent en un point et par le changement de stabilité desdeux branches au passage par le point d’intersection. L’exemple5.1 est un casde bifurcation transcritique ( voir le diagramme5.2). Voici un autre exemple.
Exemple5.4. Considérons la famille
f(λ, x) = x(1 + λ− x)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−3 −2 −1 0 1 2 3 4−3
−2
−1
0
1
2
3
4
λ
FIG. 5.7 – Le diagramme des bifurcations du systèmef(λ, x) = x(1 + λ− x)
Les points fixes sont solutions de l’équation
x(λ− x) = 0
Il y a donc deux branches de points fixesγ1(λ) ≡ 0 et γ2(λ) = λ. Les deuxbranches se croisent en le pointλ0 = 0.
Pour étudier la stabilité de ces branches on commence par calculer la dérivée :
fx(λ, x) = 1 + λ− 2x
Alors pour la première branche on a :
fx(λ, γ1(λ)) = 1 + λ

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On en déduit que si−2 < λ < 0 cette branche est attractive, si0 < λ elle estrépulsive. Au pointλ0 = 0 on a :fx(0, 0) = 1. Pour la deuxième branche ontrouve :
fx(λ, γ2(λ)) = 1− λ
Si λ < 0 cette branche est répulsive, si0 < λ < 2 elle est attractive. Au pointλ0 = 0 on a :fx(0, 0) = 1. C’est donc une bifurcation transcritique (voir lediagramme sur la figure5.7

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1.3. Bifurcation de type fourche
Théorème 5.4. Soit une famille de fonctionsf(λ, x). Supposons qu’il existe un couple(λ0, x0) tel que lesystème
x(n + 1) = f(λ0, x(n))
a un point fixe enx0 :f(λ0, x0) = x0
et quefx(λ0, x0) = 1
Supposons aussi que
fλ(λ0, x0) = fxx(λ0, x0) = 0, fλx(λ0, x0) 6= 0 etfxxx(λ0, x0) 6= 0
On dit alors que le système subit au point λ0 une bifurcation de type fourche. Cela se traduit par lespropriétés suivantes des branches de points fixes autour de(λ0, x0).Il existe un voisinage du couple(λ0, x0)
V = {(λ, x) | λ ∈ J 3 λ0, x ∈ I 3 x0}
tel que trois branches différentes de points fixes sont définies dans ce voisinage et se croisent dans le point(λ0, x0).Plus précisément il existe unebranche de points fixesγ1(λ) qui passe par le point(λ0, x0) de telle façonqu’elle est attractive pour les valeursλ < λ0 et répulsive pourλ > λ0, sifλx > 0. Sifλx < 0 ces propriétésde stabilité sont renversées par rapport au pointλ0.Il existe deux autres branchesγ2(λ) et γ3(λ) qui prennent origine au point(λ0, x0) et sont tangentes de laligne verticaleλ = λ0. Elles sont définies pourλ < λ0 si fλx · fxxx > 0 et pourλ > λ0 si fλx · fxxx < 0.(Ainsi dans le voisinageV il y a exactement trois point fixes pour chaque valeur deλ > λ0 si fλx · fxxx < 0).Les deux branchesγ2(λ) etγ3(λ) sont attractives siλ < λ0 etfλx < 0 ou siλ > λ0 etfλx > 0. Sinon ellessont répulsives.
L’interprétation graphique de ce type de bifurcation est donnée sur les figures

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
5.8, 5.9, 5.10et5.11.
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 10
0.5
1
1.5
2
2.5
3
3.5
4
λ
FIG. 5.8 – Bifurcations de type fourche :fλ,x > 0,fxxx < 0
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 10
0.5
1
1.5
2
2.5
3
3.5
4
λ
FIG. 5.9 – Bifurcations de type fourche :fλ,x < 0,fxxx > 0

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−4 −3 −2 −1 0 10
0.5
1
1.5
2
2.5
3
3.5
4
λ
FIG. 5.10 – Bifurcations de type fourche :fλx > 0, fxxx > 0
−4 −3 −2 −1 0 10
0.5
1
1.5
2
2.5
3
3.5
4
λ
FIG. 5.11 – Bifurcations de type fourche :fλx < 0, fxxx < 0
Exemple5.5. Soit la fonction
f(x) = x(1 + λ− x2)
Les points fixes sont solutions de l’équation :x(λ−x2) = 0, d’où trois branchesde points fixes autour du pointλ = λ0 = 0. Pourλ < 0 il n’a qu’une seule

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
branche :γ1(λ) ≡ 0. Pourλ > 0 il y deux autres branches qui apparaissent :
γ2(λ) =√
λ, γ3(λ) = −√
λ
Le calcul des dérivées permet d’étudier leur stabilité :
fx(0, 0) = 1, fλx(0, 0) = 1, fxxx(0, 0) = −1
C’est donc une bifurcation de type fourche avec le diagramme semblable à celuide la figure5.8.
1.4. Bifurcation de doublement de période
Nous avons observé au début de ce cours , dans l’exemple5.2un phénomènequi ne peut être classé comme appartenant à un des cas de bifurcations que nousvenons de décrire. Nous avons étudié la famille
f(λ, x) = λx(1− x)
pour des valeurs de paramètreλ ∈ [0, 4[. La particularité duDefPointBifurcλ0 = 3 est dans le fait que deux nouvelles branches de points périodiques depériode deux apparaissent dans ce point. Dans les types de bifurcation que nousavons évoqués jusqu’à présent il ne s’agissait que des branches de points fixes.Étudions de plus près la situation au point(3, 2/3). La dérivée de la fonctionfest la suivante :fx(λ, x) = λ − 2λx. Évaluée au point(3, 2/3) elle est égale à−1 :
fx(3, 2/3) = −1

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Nous ne pouvons donc appliquer aucun des théorèmes précédents dans cette si-tuation. Le théorème qui suit détermine les conditions sous lesquelles un pointde bifurcation(λ0, x0) oùfx(λ0, x0) = −1 entraîne l’apparition de points pério-diques.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 5.5. Soit une famille de fonctionsf(λ, x). Supposons qu’il existe un couple(λ0, x0) tel que lesystème
x(n + 1) = f(λ0, x(n))
a un point fixe enx0 :f(λ0, x0) = x0
et quefx(λ0, x0) = −1
Supposons aussi que
u(λ0, x0) = 2fλx(λ0, x0) + fλ(λ0, x0) · fxx(λ0, x0) 6= 0
et que
v(λ0, x0) =1
2f2
xx(λ0, x0) +1
3fxxx(λ0, x0) 6= 0
On dit alors que le système subit au point λ0 une bifurcation de dédoublement de période. Cela se traduitpar les propriétés suivantes des branches de points fixes autour de(λ0, x0).Il existe un voisinage du couple(λ0, x0)
V = {(λ, x) | λ ∈ J 3 λ0, x ∈ I 3 x0}
tel que trois branches différentes de points fixes sont définie dans ce voisinage et se croisent dans le point(λ0, x0).Il existe unebranche de points fixesγ1(λ) qui passe par le point(λ0, x0) de telle façon qu’elle est attractivepour les valeursλ < λ0 et répulsive pourλ > λ0, si u(λ0, x0) < 0. Si u(λ0, x0) > 0 les propriétés destabilité sont permutées.Il existe deux branches de points périodiques de période2 γ21(λ) et γ22(λ) qui prennent début au point(λ0, x0). Elles sont définies pourλ < λ0 si uv > 0 et pourλ > λ0 si uv < 0.L’orbite périodique qui bifurque estattractivesi elle coexiste avec un point fixe répulsif et vice versa.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple5.6. Considérons l’application
f(λ, x) = −(1 + λ)x− x3
L’origine x0 = 0 est toujours unpoint fixe, quelle que soit la valeur deλ.Calculons la dérivée def :
fx(λ, x) = −(1 + λ)− 3x2
Donc, quandx = 0 cela donne :fx(λ, 0) = −1 − λ. Ainsi, quandλ = λ0 = 0on a :fx(0, 0) = −1. On calcule facilement les valeursu(0, 0) etv(0, 0) définiesdans le théorème :
u(0, 0) = −2 < 0, v(0, 0) = −2 < 0
On a donc bien une bifurcation de doublement de période. Dans cet exemplesimple on peut aussi le vérifier par le calcul directe des points fixes et pointspériodiques. Le diagramme de bifurcation au voisinage de l’origine est présentésur la figure5.12.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−4 −3 −2 −1 0 1−3
−2
−1
0
1
2
3
λ
Orbite périodique
Point fixe
FIG. 5.12 – Le diagramme des bifurcations du systèmef(λ, x) = −(1+λ)x−x3
au voisinage du point(0, 0)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
2. Systèmes dynamiques de dimension2 : bifurca-tion de Hopf
Dans le cas de systèmes de dimensionm ≥ 2 les effets de bifurcations sontplus riches et plus complexes. On y retrouve tous les types de bifurcation quiexistent pour les systèmes de dimension1 mais aussi des types nouveaux. Sou-vent l’étude mathématique de ces phénomènes est très difficile. Dans ce coursnous allons considérer seulement un type de bifurcation, propre aux systèmesmultidimensionnels,bifurcation de Hopf .
Soit un SDD défini dans l’espaceR2 par une applicationf : R2 → R2 :
x(n + 1) = f(x(n)), x(n) =
(x1(n)x2(n)
), f(x) =
(f1(x)f2(x)
)Soit x0 sonpoint fixe. Rappelons que le comportement local des orbites du sys-tème autour de cepoint fixeest déterminé par les valeurs propres dujacobiendel’applicationf évalué au pointx0 (voir Cours 4) :
J (x0) =
(∂f1
∂x1
∂f1
∂x2∂f2
∂x1
∂f2
∂x2
)
Soit une boule de centrex0 et de rayonε assez petit :Uε(x0) = {x ∈ R2 :‖x − x0‖ < ε}. On peut approcher la fonctionf dans le voisinageUε(x0) parl’application linéaire suivante
f(x0 + ∆x) ∼= f(x0) + J (x0)∆x = x0 + J (x0)∆x, ‖∆x‖ < ε

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Ainsi la dynamique du système autour du pointx0 est approximativement lamême que celle de l’application linéaireJ (x0)∆x autour de l’origine. Cettedernière, nous le savons, est déterminée par les valeurs propres de la matriceJ(x0), en fonction de leur disposition dans le plan complexe par rapport au cercleunité :C1 = {z : |z| = 1}. Si les deux valeurs propresλ1 etλ2 sont à l’intérieurdu cercleC1, l’origine est attractif, si elles sont toutes les deux à l’extérieur,l’origine est répulsif. Quand l’une des deux se trouve à l’intérieur et l’autre àl’extérieur l’origine est un point selle. Et enfin les valeurs propres sont sur lecercle unité, alors le système possède uneorbite périodiqueou apériodique.
Après ce bref rappel, passons maintenant à l’étude d’une famille de systèmesdynamiques dans l’espaceR2 dépendant d’un paramètre réelλ
x(n + 1) = f(λ, x(n))
Comme pour les systèmes de dimension1 nous nous intéressons aux change-ments de dynamique en fonction du paramètreλ. Nous pouvons sans problèmesgénéraliser pour le cas multidimensionnel la notion debranche de points fixes:c’est une application continueγ(λ) : J → Rm telle que
f(λ, γ(λ)) ≡ γ(λ)
Nous avons montré ci-dessus en considérant des systèmes de dimension1 quela dynamique de système peut changer en passant par un pointλ0 si |fx(λ0, γ(λ0))| =1. DansRm cela correspond à la situation où lejacobiena des valeurs propressur le cercle unité.
Ainsi on va dire queλ0 est un point de bifurcation si le système défini dansRm par f(λ0, x) possède unpoint fixe x0 tel que lejacobiencorrespondant àce point a des valeurs propres de valeur absolue égale à1.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Une valeur propre réelle égale à1 provoque les mêmes types de bifurcationsque dans le cas de dimension1 : fourche, transcritique ou noeud-col. Un phéno-mène nouveau, inexistant en dimension1, peut arriver quand lejacobiena deuxvaleurs propres complexe conjuguées sur le cercle unité.
Supposons que le système possède unebranche de points fixesγ(λ) définiesur un intervalleI qui contient un pointλ0. Considérons lejacobiendu systèmeévalué dans les points fixes de la branche :J (λ, γ(λ)). Supposons que pourchaque valeur deλ ∈ I le jacobiena deux valeurs propres complexes conju-guées :
µ1(λ) = α(λ) · eiθ(λ) = α(λ)(cos(θ(λ)) + i sin(θ(λ)))
µ2(λ) = α(λ) · eiθ(λ) = α(λ)(cos(θ(λ))− i sin(θ(λ)))
(5.2)
Ici α(λ) = |µ1(λ)| = |µ2(λ)| et θ(λ) = arg µ1(λ). Soitλ0 ∈ I le point tel que
α(λ) < 1 ∀λ ∈ I : λ < λ0
α(λ0) = 1
α(λ) > 1 ∀λ ∈ I : λ > λ0
Cela veut dire que quand le paramètreλ passe par la valeurλ0 les deux valeurspropresµ1(λ) etµ2(λ) croisent le cercleC1. Supposons que
(i)d
dλα(λ0) > 0 ( les deux valeursµ1(λ) etµ2(λ) croisent le cercle unité avec
une vitesse non-nulle).
(ii) θ(λ0) = ω · π où ω est irrationnel ou rationnel :ω =2m
navecm et n
relativement premiers etn 6= 3, 4.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Alors on dit que le système subit au point(λ0, x0) une bifurcation de Hopf.Cette bifurcation a les propriétés suivantes :
1. pourλ < λ0 le point fixeγ(λ) estattractif et il n’y a pas d’autres points fixesou périodiques.
2. Pourλ > λ0 le point fixeγ(λ) devient répulsif et un cycle limite attractifapparaît. Ce cycle est uneorbite périodiquede période fondamentalen si
ω =2m
nou une courbe elliptique siω est irrationnel.
Exemple5.7. Nous prendrons pour exemple un modèle démographique, prochede ceux que nous avons déjà étudiés dans le cours précédent. Notamment nousallons étudier le célèbre modèle des prédateurs et proies. Soitx(n) la populationdes proies, des petits poissons, par exemple, ety(n) - celle des prédateurs, desrequins. Nous allons considérer en tant qu paramètre une intervention extérieurequi vient influencer le développement du système. Supposons par exemple queles hommes pêchent les petits poissons, en nombre proportionnel à la population.Ainsi, le facteur de la pêche sera représenté par−λx(n). Le modèle que nousallons considérer est le suivant :
x(n + 1) = x(n) + 0.1(6x(n)(1− x(n))− x(n)y(n)− λx(n))
y(n + 1) = y(n) + 0.1(−y(n) + 12x(n)y(n)) (5.3)
Commençons par rechercher les points fixes du système en fonction du para-mètreλ. Ils sont solutions du système d’équations :
6x(1− x)− xy − λx = 0
−y + 12xy = 0 (5.4)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
La résolution de ce système donne trois branches :
γ1(λ) =
(00
)
γ2(λ) =
(1− 1
6λ
0
)γ1(λ) =
(112
5.5− λ
)
0 0.05 0.1 0.15 0.2 0.25 0.30
1
2
3
4
5
6
7
8
9
10
FIG. 5.13 – λ = 0.4 : Le point fixe devient répulsif et un cycle limite attractifapparaît

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0.13 0.14 0.15 0.16 0.17 0.18 0.19 0.2 0.21
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
FIG. 5.14 – Les orbites du système pour une valeur deλ < λ0 = 0.5 Zoom
Pour étudier la stabilité de ces points fixes on calcule lejacobiendu système :
J =
(1.6− 1.2x− 0.1y − 0.1λ −0.1x
1.2y 0.9− 1.2x
)Ensuite, on doit étudier lejacobienplus en détail sur chacune des trois branchesde points stationnaires. Pourγ1(λ) on trouve :
J =
(1.6− 0.1λ 0
0 0.9
)C’est une matrice diagonale dont toutes les deux valeurs propres sont réelles.On trouve facilement que l’origine est une point attractif si6 < λ < 26 et un

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
point-selle sinon. L’évolution de ce point fixe ne peut pas provoquer l’effet debifurcation de Hopf. Passons àγ2(λ). Pour cette branche on trouve :
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.24
4.2
4.4
4.6
4.8
5
5.2
5.4
5.6
5.8
6
FIG. 5.15 –λ = 0.6 : Le point fixe est attractif
J =
(0.4 + 0.1λ −0.1 + 0.1λ/6
0 2.1− 0.2λ
)Comme dans le cas précédent les deux valeurs propres de cette matrice sontréelles quelle que soit la valeur du paramètreλ. Nous passons à la troisièmebranche. Lejacobiendans ce cas devient :
J =
(0.95 −0.1/12
1.2(5.5− λ) 1
)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0.07 0.075 0.08 0.085 0.09 0.0954.7
4.75
4.8
4.85
4.9
4.95
5
FIG. 5.16 – Les orbites du système pour une valeur deλ > λ0 = 0.5 λ = 0.6Zoom
Les valeurs propres sont :
µ± =1.95±
√0.04λ− 0.2175
2
Quandλ < 5.4375 l’expression sous la racine carrée est négative et nous avonsdonc deux valeurs propres complexe conjuguées qui évoluent quand le paramètreλ change. Calculons maintenant la valeur absolue de ces valeurs propres :
α(λ) = |µ±(λ)| = 1
4· 4(1.005− 0.01λ) = 1.005− 0.01λ
On voit facilement que quandλ = 0.5 la valeur absolue des deux valeurs propresest égale à1 - valeur critique. Quandλ > λ0 le point fixeγ3(λ) est attractif

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
car |µ±(λ)| < 1 ( voir figure 5.15). Quandλ passe parλ0 = 0.5 les deux va-
leurs propres croisent le cercle unité et avec une vitesse non-nulle :d
dλα(λ) =
−0.04 6= 0. On doit donc observer l’apparition d’un cycle limite attractif quandλ > λ0 (voir figure5.14).
Ces résultats montrent que la variation du paramètre peut changer radica-lement la dynamique du système. Si pourλ > 0.5 on sait que l’évolution desdeux espèces mène inévitablement vers un point d’équilibre, où les quantités desanimaux sont fixées, pourλ < λ0 c’est vers un cycle périodique que toutes lesorbites convergent.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Chapitre 6
Introduction à la théorie du chaos

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1. Du doublement de période à l’imprévisible
Dans cette section nous allons revenir encore une fois au système dynamique
x(n + 1) = λx(n)(1− x(n))
que nous avons déjà rencontré dans les cours précédents. Ce système, si simpledans sa définition, montre une gamme très large de propriétés et de comporte-ments, même très complexes. Il est bien connu par les physiciens, les biologistes,les économistes, par tous ceux qui ont affaire avec des comportements chaotiquesdes systèmes. On l’appelle souventéquation logistique. Il représente, en particu-lier, un modèle démographique simplifié.
Dans nos études précédentes nous avons toujours supposé que le paramètreλ variait dans l’intervalle[0, 4[. Et pourtant nous ne connaissons presque rien sursa dynamique quandλ > 3. dans cette section nous allons nous concentrer surl’étude de ce système quandλ s’approche de4.
Rappelons d’abord ce que nous connaissons déjà sur le système logistique.Quand0 < λ < 3 le système n’a que deuxpoints fixes:
x1(λ) = 0, x2(λ) = 1− 1
λ
Quandλ passe par la valeurλ0 = 1 le système subit une bifurcation transcritique.Pourλ < 1 le point fixex1 est attractif etx2 est répulsif. Par contre, quandλ > 1le pointx2 est attractif, etx1 répulsif.
Quandλ = λ1 = 3 le point fixe x2 perd son attractivité au profit d’uneorbite périodiquequi apparaît. C’est une bifurcation de doublement de période.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Cette nouvelleorbite périodiquereste elleattractivelongtemps, quandλ → 4 ?Considérons la fonction
g(λ, x) = f (2)(λ, x) = f(λ, f(λ, x)) = λ(λx(1− x))(1− λx(1− x))
Les points périodiques de l’applicationf(x)
p1(λ) =λ + 1 +
√λ2 − 2λ− 3
2λ,
p2(λ) =λ + 1−
√λ2 − 2λ− 3
2λ(6.1)
sont des points fixes deg(λ, x). Pour étudier leur stabilité on doit étudier la déri-vée deg évaluée dans ces points. Pour cela on utilise le théorème2.9du cours 2et notamment l’expression (2.2) de la dérivée def (2)(λ, x) dans les points d’uneorbite périodique. Rappelons-la ici :
d
dxf (2)(p1) =
d
dxf (2)(p2) = f ′(p1) · f ′(p2)
Puisque dans notre casf ′(x) = λ(1− 2x)
nous obtenons :
d
dxf (2)(λ, p1) =
d
dxf (2)(λ, p2) = λ2(1− 2p1)(1− 2p2)
Alors, compte tenu des formules (6.1) on trouve la valeur de cette dérivée enfonction du paramètreλ :
g′(λ, p1(λ)) = g′(λ, p2(λ)) = 4 + 2λ− λ2

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
2.5 3 3.5 40.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
λ
FIG. 6.1 – Le diagramme des bifurcations du systèmef(λ, x) = λx(1− x)
Nous savons que la stabilité des points fixes change quand|g′| = 1. Dansl’intervalle des valeurs deλ qui nous intéressent3 < λ < 4, il existe une seulevaleurλ2 = 1 +
√6 telle que
g′(λ2, p1(λ2)) = g′(λ2, p2(λ2)) = −1
L’applicationg(λ, x) = f (2)(λ, x) subit au pointλ2 une bifurcation de dou-blement de période et deux orbites périodiques de période deux apparaissent. Enrevenant au système initial, défini parf(λ, x) cela signifie que l’orbite pério-diquede période2 devient répulsive après le pointλ2
∼= 3.45 et une orbite depériode4 attractiveapparaît(voir diagramme de bifurcations sur la figure6.1. Onpeut le voir aussi en étudient directement la fonctionf (4)(λ, x). Sur la figure6.2est tracé la graphe de cette fonction pourλ = 3.5. On voit les 4 nouveauxpointsfixes, qui sont les points périodiques de période4 de notre système.
Si l’on s’intéresse ensuite à la stabilité de la nouvelle orbite de période4

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
FIG. 6.2 – Le graphe def (4)(λ, x) pourλ = 3.5
quandλ > λ2 on s’aperçoit qu’il existe un pointλ3∼= 3.54409 tel que cette
orbite devient répulsive et une une orbite de période8 attractiveapparaît. Cedoublement de période continue. On trouve une suite infinie de points de bifur-cation3 = λ1 < λ2 < λ3 < · · · < λn < . . . . A chaque pointλi une nouvellebifurcation de doublement de période se produit. Une orbite périodiqueattractivede période2i apparaît. Il est remarquable que la suite des pointsλi converge versun point
λ∞ = limi→∞
λi∼= 3.569946
Cette convergence suit approximativement la loi suivante :
λk ≈ λ∞ − c · α−k

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
où c = 2.6327, α = 4.669201 . . . . Il est remarquable que la même loi avec lamême constanteα a été découverte dans d’autres processus de doublement depériode. Cette constante est appeléeconstante de Feigenbaum.
Les calculs analytiques qui prouvent ces résultats sont assez complexes. Nousferons plutôt appel à une méthode numérique qui permet de visualiser toute lacascade des doublements de période qui ont lieu quandλ ∈ [0, 4]. Cette méthodeest basée sur un simple fait d’analyse numérique des fonctions quadratiques.
Théorème 6.1.Soitf(x) = ax2 + bx+ c une application quadratique.Si elle possède une orbite périodiqueattractivede période fondamen-tale quelconquep alors son point critiquex0 = − b
2aest attiré par cette
orbite.
Une des conséquences de ce théorème est qu’une application quadratiquene peut avoir qu’une seule orbite périodiqueattractive. Appliqué à la fonctionlogistique
f(λ, x) = λx(1− x)
ce théorème fournit une méthode simple d’investigation de l’évolution des or-bites périodiquesattractives en fonction du paramètreλ. Quelle que soit la valeurdu paramètre le point critique est
x0 =1
2
Alors, en vertu de théorème6.1pour chaque valeur deλ l’orbite de ce point
O(x0) = {f (n)(λ, x0), n = 1, 2, 3, . . .}

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
se rapproche inévitablement de l’orbiteattractivedu système, après un nombred’itérations assez grand. En pratique,100 itérations suffisent pour avoir unebonne approximation. Alors pour visualiser les orbites périodiques pour diffé-rentes valeurs du paramètreλ il suffit de tracer les orbites correspondantes dupoint x0 = 1/2. Nous les représentons dans un plan où sur l’axe des abscissesnous notons les valeurs deλ. Pour chaque valeur deλ nous traçons sur une ver-ticale les points de l’orbiteO(x0) sous la forme(λ, f (n)(λ, x0) en prenant lesitérations entre la100-ème et la500-ème. Ainsi on obtientle diagramme des or-bites périodiques du système en fonction du paramètreλ ( voir la figure 6.3).Sur cette figure on distingue nettement le premier doublement de période quandλ = 3, ensuite le deuxième, àλ ≈ 3.45 etc.
2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
FIG. 6.3 – Le diagramme des bifurcations du systèmef(λ, x) = λx(1− x)
Qu’est ce qui se passe quandλ∞ ≈ 3.57 ? On remarque que le diagramme
des orbites du point1
2devient par endroits très complexe ( voir6.4).
Pour certaines valeurs deλ on ne peut même pas dire quelle structure a l’en-

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3.6 3.65 3.7 3.75 3.8 3.85
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
FIG. 6.4 – Le diagramme des bifurcations du systèmef(λ, x) = λx(1− x)
semble de points limites de l’orbiteO(1
2. Est-ce toujours uneorbite périodique
de période très élevée, telle que ses points sont très serrées ? Ou c’est un inter-
valle tout entier qui est rempli par les itérations successives de1
2? On aperçoit
également des espaces vides, par exemple autour des pointsλ = 3.7 etλ = 3.82.Le diagramme agrandi autour du pointλ = 3.82 est donné sur les figures6.5et6.6. On distingue nettement une orbiteattractivede période3 ( Fig. 6.5 suivied’une nouvelle cascade de doublements de période (Fig.6.6).
En étudiant numériquement l’applicationf (3)(λ, x) on trouve qu’en effetpourλ > 3.8 le système possède uneorbite périodiquede période3. Qu’elle soitattractive ou non, ce fait est remarquable pour le système. D’après le théorèmede Sarkovsky, le système possède dans ce cas des orbites de toutes les périodes !
Est ce que cette complexité signifie un comportement chaotique ? Si oui,qu’est qui définit le chaos ? Le diagramme que nous avons tracé sur la figure6.2nous donne une idée.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3.83 3.84 3.85 3.86 3.87 3.880
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
FIG. 6.5 – Le diagramme de bifurcations agrandi
Ce diagramme représente en effet les ensembles qui attirent l’orbite du point1
2. Il est important de souligner ici que, pour chaque valeur deλ toutes les orbites
de ce système sont attirées par le même ensemble. Donc ce que nous voyonsc’estce que le système devient après un certain temps,quelle que soit la conditioninitiale. C’est l’attracteur du système. Nous allons définir cette notion dans lasection suivante. La structure de cet ensemble et le comportement des orbites àl’intérieur nous renseigne sur sonfutur à long terme. C’est là que nous devonschercher la première approche de la notion du chaos. Nous allons notammentdécouvrir dans les sections suivantes que le chaos est caractérisé, en particulier,par deux propriétés suivantes :
1 la structure géométrique de l’attracteur ;
2 le stabilité du mouvement du système à l’intérieur de l’attracteur

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3.842 3.844 3.846 3.848 3.85 3.852 3.854 3.856
0.4
0.45
0.5
0.55
0.6
FIG. 6.6 – Une nouvelle cascade des doublements de période

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
2. Attracteurs des systèmes dynamiques
2.1. Points limites. Ensemble limite. Orbites apériodiques
SoientD ∈ Rm un ensemble borné etf : D → D une fonction définie surcet ensemble. La paire(D, f) définit un système dynamique :
x(0) = x0, x(n + 1) = f(x(n))
Soientx0 ∈ D et O(x0) = {x(0) = x0, x(n) = fn(x0), n = 1, 2, 3, . . .}l’orbite correspondante.
Définition 6.1. Un point z ∈ D s’appellepoint limite de l’orbiteO(x0) = {x0, x(1), x(2), . . .} s’il existe une sous-suite{xnk
}∞k=1 ⊂O(x0) qui converge vers z :
‖xnk− z‖ → 0, quand k →∞
Ici (pour fixer les idées)‖ · ‖ est la norme usuelle deRr
‖x‖ =
√√√√ r∑i=1
|xi|2
Remarque6.1. Si x0 est un point fixe du système, alors tous les points del’orbite correspondante sont identiques :x(n) = x0, n > 0. Alors x0 est le

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
point limite unique de cette orbite ( à cause de la topologie implicite deRn).Si x0 est un point périodique de périodep, il n’y a quep points distincts dansl’orbite correspondante. Dans ce cas chacun de ces points est un point limite.
Définition 6.2. Soit x0 ∈ D et soitO(x0) l’orbite correspondante. Onappelleensemble limite de l’orbiteO(x0) l’ensemble de tous ses pointslimites. On utilise la notationL(O(x0)) ouL(x0).
Une
des propriétés fondamentales de l’ensemble limiteest son invariance par rapportà l’applicationf :
f(L(x0)) = L(x0) (6.2)
Il est important de souligner ici que dans l’expression ci-dessus il ne s’agit pasde l’égalité "point par point", mais de l’égalité en termes d’ensembles de points.
Définition 6.3. Une orbiteO(x0) s’appelle apériodique si sonen-semble limiteest infini.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Exemple6.1. Considérons le système dynamique défini par l’équation
x(n + 1) = 4x(n)(1− x(n))
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
FIG. 6.7 – L’orbite du systèmex(n) = 4.5x(n− 1)− 3.5x2(n− 1) : 50 points
Remarquons, qu’ici nous avons la même fonctionf(x) que dans l’exemple1.5définie par (1.6) aveca = 4. Posonsx0 = 0.3. Pour visualiser l’orbite corres-pondante nous allons tracer sur le plan(x, y) les points(x(n), x(n)). Le calculdes premiers50 points effectué avecScilab , donne l’image représentée surla figure6.7. Sur la figure6.8on voit les 250 premiers points de la même orbite.L’orbite semble "remplir" l’intervalle[0, 1]. Tout cet intervalle est l’ensemble despoints limites dans ce cas.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
FIG. 6.8 – L’orbite du systèmex(n) = 4.5x(n− 1)− 3.5x2(n− 1) : 250 points
2.2. Noyau d’un système. Définition de l’attracteur.
Puisque (6.3) est vrai quel que soit pointx0 ∈ Rm l’ensemble
K = ∪x∈DL(x)
est aussi invariant sous l’action def(x) :
f(K) = K
Sa fermetureK = K s’appellenoyau du système dynamiqueengendré parf .
Exemple6.2. Soit
f(x) =
{x2 si − 3 ≤ x ≤ 1
4√
x− 3 si1 < x ≤ 9

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−2 0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
FIG. 6.9 – Analyse graphique du système de l’exemple6.2f(x) : les points fixes
Le domaine de définition def estD = [−3, 9] et f : D → D. L’analyse gra-phique de ce système montre qu’il a troispoints fixes(voir la figure??, (a)) :x1 = 0, x2 = 1 etx3 = 9 dont deux attractifs :x1 etx3. Le graphe de la fonctionf 2(x) (voir la figure??, (b)) montre que le système n’a pas de points périodiquesde période2. Donc, d’après le théorème de Sarkovsky, les seuls points station-naires sont les troispoints fixes. Le noyau de ce système est la réunion de cestrois points :K = {0, 1, 9}.
L’ensembleK joue un rôle important dans l’étude de l’évolution d’un sys-tème. Il détermine en quelque sorte "le futur" du système. Ainsi l’étude de ladynamique à long terme peut se ramener à la considération du noyau, de sa géo-métrie, souvent très complexe. Les cas comme celui de l’exemple6.2 oùK est

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
−2 0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
FIG. 6.10 – Analyse graphique du système de l’exemple6.2 f 2(x) : les pointspériodiques
uneorbite périodiqueou l’ensemble despoints fixessont plus simples à étudier.Il existe néanmoins un grand nombre de systèmes dont le noyau a une structurebeaucoup plus complexe.
Une première approche de l’étude du noyau d’un système consiste à distin-guer ses "blocs". On appellebloc du noyauun sous-ensembleA ⊂ K tel que
1 f(A) = A
2 Il existe un nombre réel positifδ > 0 tel que(⋃x∈A
B(x, δ)
)⋂K = A

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Cette définition signifie queA est invariant par l’applicationf(x) et qu’il estisolé du reste du noyau.
On dit qu’un bloc du noyauA est un bloc élémentaire s’il ne contient pasd’autres blocs. Autrement dit un bloc élémentaire est indivisible.
Définition 6.4. SoitA un bloc élémentaire du noyau d’un système dy-namique. On l’appelleattracteur s’il existe unε > 0 tel que toutes lesorbites qui commencent à une distance inférieure àε deA sont attiréesparA.
Nous
pouvons formaliser cette définition en rappelant ici quelques définitions sur lesdistances.
Supposons qu’une distanced(x, y) est définie sur l’ensembleD. Soientx ∈D un point etE ⊂ D un sous-ensemble. On définit la distance entrex et Ecomme suit :
d(x, E) = infy∈E
d(x, y)
La distance entre deux sous-ensemblesE etG est déterminée comme suit :
d(E, G) = infy∈E, x∈G
d(x, y)
Alors d’après la définition6.4A est un attracteur si
∃ε > 0 tel que ∀x0 : d(x0, A) < 0 on ad(f (n)(x0), A) → 0, quandn →∞

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
SoitA un attracteur. On appellebassin d’attraction deA l’ensemble de tousles pointsx0 dont les orbites sont attirées parA, c’est-à-dire tels qued(f (n)(x0), A) →0 quandn →∞.
Exemple6.3. Le noyau du système de l’exemple6.2 comporte trois blocs élé-mentaires :A1 = {0}, A2 = {1}, A3 = {9}. L’étude de stabilité montre queles points fixesx1 = 0 et x3 = 9 sont attracteurs avec les bassins d’attractionrespectivement(−1, 1) et [−3, 1)∪ (1, 9], tandis que le pointx2 = 1 est répulsif.Ainsi, les blocsA1 etA3 sont des attracteurs du système.
L’attracteur joue un rôle important dans l’étude du comportement d’un sys-tème à long terme. Notamment, le système peut être considéré comme étant ré-duit à son attracteur, sachant que cet ensemble est invariant par rapport à l’actiondu système. Alors, si un système possède un attracteurA nous pouvons considé-rer, sans perdre de généralité, que son domaine de définition coïncide avec sonattracteur. En effet, si ce n’est pas le cas, tous les points qui se trouvent en dehorsde l’attracteurA y seront amenés au bout d’un nombre fini d’itérations.
Nous allons maintenant définir les propriétés d’un mouvement chaotiqued’un système sur son attracteur.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Définition du chaos
3.1. Un système transitif
Définition 6.5. SoientD un espace métrique etf : D → D. Ondit que l’applicationf est topologiquement transitive si pour toutepaire d’ensembles ouvertsU, V ∈ D il existe un élémentx0 ∈ U et unnombre natureln ∈ N tels quef (n) ∈ V .
On dit souvent qu’une applicationtopologiquement transitive"brasse bien"le domaine de sa définition. En effet, siU est un ensemble ouvert, alors danstout voisinage de tout point deD il y a une itération d’un des points deU . Cettedéfinition n’est pas toujours facile à vérifier en pratique. Voici un critère.
Théorème 6.2.Soitf : D → D une fonction. Supposons qu’il existeun pointx0 ∈ D tel que son orbite
O(x0) = {f (n)(x0), n = 1, 2, 3, . . .}
est dense dansD. Autrement dit, quel que soit l’ensemble ouvertU ∈ Dil contient au moins un point de l’orbiteO(x0). Alors f(x) esttopolo-giquement transitive.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3.1.0.2. Démonstration La preuve de ce théorème est très simple. Prenonsdeux ensembles ouvertsU, V ∈ D. Il faut montrer qu’il existe un pointx ∈ U etun numéro d’itérationn tels quef (n)(x) ∈ V .
Puisque l’orbite dex0 est dense, l’ensembleU contient au moins une itérationdu pointx0. Soitk tel quex = f (k)(x0) ∈ U . Il nous suffit maintenant de montrerqu’il existe un nombre positifn tel quef (k+n)(x0) ∈ V . Dans ce cas on aurait :
f (n)(x) = f (n)(f (k+n)(x0)) = f (k+n)(x0) ∈ V
Nous utilisons encore une fois la densité de l’orbiteO(x0). Puisque tout en-semble ouvert contient au moins un point de l’orbiteO(x0) on peut en déduirefacilement que tout ensemble ouvert en contient un nombre infini. Par consé-quent, l’ensembleV contient un nombre infini d’itérations du pointx0. Il y’en adonc au moins une qui soit postérieure àf (k)(x0) ce qui veut dire qu’il existe unnombre positifn > 0 tel quef (n+k)(x0) ∈ V . C’est ce qu’il fallait démontrer.�
Exemple6.4. Considérons l’application définie sur l’intervalleI = [0, 1]
f(x) = 2x− [2x]
Son graphe est représenté sur la figure6.11. Prenons deux intervallesI1 ∈ I etI2 ∈ I. On peut voir facilement, en examinant le graphe de la fonctionf(x) quela longueur de chaque intervalle est multiplié par deux sous l’action def(x).Alors, il existe bien une itérationn telle quef (n)(I1) = I. Donc,f (n)(I1)∩ I2 6=∅. Donc,f(x) esttopologiquement transitive.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
y=x
FIG. 6.11 – Le graphe de la fonctionf(x) de l’exemple6.4
3.2. Dépendance sensible des conditions initiales
Définition 6.6. On dit qu’une applicationf : D ∈ D exhibe unedépendance sensible des conditions initialess’il existe une constanteε > 0 telle que pour toutx ∈ D et pour toutδ > 0 il existe uny ∈ D etun nombren ∈ N tels que
d(x, y) < δ etd(f (n)(x), f (n)(y)) > ε
Cette

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
propriété caractérise la part de l’imprévisible dans le comportement d’un systèmedynamique. En effet, même si les conditions initiales de deux orbites sont trèsproches elles s’éloignent l’une de l’autre au bout de quelque temps. Cette pro-priété peut s’avérer très gênante et rend souvent les effets chaotiques indésirablesdans des systèmes. Par exemple le traitement numérique d’un tel système est dif-ficile car mêmes des erreurs minimes de calculs peuvent entraîner une déviationconsidérable des résultats numériques par rapport à la réalité.
Nous sommes prêts maintenant à donner une définition de système chaotique.cvl
Définition 6.7. Soit f une application. Supposons que le système dy-namique correspondant possède un attracteurA. On dit que ce systèmeestchaotique sur son attracteursi
1. f : A → A esttopologiquement transitive;
2. L’ensemble de points périodiques def est dense dansA ;
3 f a une dépendancesensibledes conditions initiales.
Le théorème suivant (assez récent, il date de 1992) montre que, mis à partquelques cas spécifiques, la troisième condition peut être exclue car elle est uneconséquence des deux premières.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 6.3.Soitf : A → A une application. Supposons que
1. f : A → A esttopologiquement transitive;
2. L’ensemble de points périodiques def est dense dansA ;
Alors si A contient un nombre infini de pointsle système dynamiquedéfini parf est chaotique surA.
Un autre théorème peut simplifier l’étude dans le cas où la fonctionf estcontinue.
Théorème 6.4.Si une applicationf : A → A est continue etto-pologiquement transitivealors ses points périodiques sont denses dansA.
Exemple6.5. Soit
f(x) =
{2x, 0 ≤ x < 1/2
2(1− x), 1/2 ≤ x ≤ 1
Cette fonction est continue surD = [0, 1]. Montrons qu’elletopologiquement
transitive. Pour cela prenons un intervalleI = [δ
2, δ] où 0 < δ < 1/2. La pre-
mière itération de cet intervalle est
f(I) = [δ, 2δ]

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Si 2δ < 1/2, la deuxième itération donne
f (2)(I) = [2δ, 22δ]
Enfin, il existe un nombren > 0 tel que
f (n)(I) = [2n−1δ, 2nδ] et2n−1δ <1
2< 2nδ
Alors, l’itération suivante sera
f (n+1)(I) = f
([2n−1δ,
1
2
]∪[1
2, 2nδ
])= [2nδ, 1] ∪ [2(1− 2nδ), 1]
Notre but est de montrer que l’on peut couvrir entièrement l’intervalle[0, 1] parun nombre fini d’itérations de l’intervalleI. Dans ce contexte, remarquons queles itérationsf (n)(I) etf (n+1) couvrent déjà une grande partie de l’intervalleI :
f (n)(I) ∪ f (n+1)(I) ⊃ [2n−1δ, 1]
Considérons l’itérationf (n+2)(I) :
f (n+2)(I) = [0, 2(1− 2nδ)] ∪ [0, f(2(1− 2nδ))]
Si 2(1 − 2nδ) < 1/2 et f(2(1 − 2nδ)) < 1/2 il existe bien un nombrel > 0 telque
2l(1− 2nδ) > 1/2
On applique ici le même raisonnement qu’au début de la démonstration. Celasignifie que
f (n+2+l)(I) = [0, 2l(1− 2nδ)] ∪ [0, f (l+1)(2(1− 2nδ))] ⊃ [0, 1/2]

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Nous avons ainsi montré qu’il existe une itération qui couvre la partie manquante[0, 2n−1δ]. Par conséquent quel que soit l’intervalleJ ∈ D et quel que soit0 <δ < 1/2 il existe un nombre naturelk tel que
f (k)(I) ∩ J 6= ∅Doncf(x) esttopologiquement transitive. Sachant qu’elle est continue, on peutappliquer le théorème6.4. Donc les points périodiques de cette application sontdenses dans l’intervalle[0, 1]. Et puisqueD a un nombre infini de points, cesystème est chaotique, en vertu du théorème6.3.
Pour terminer cette section voici un théorème intéressant sur le chaos dansdeux systèmestopologiquementconjugués.
Théorème 6.5.Soient(D, f) et (E, g) deux systèmes dynamiquestopologiquementconjugués. Cela signifie qu’il existe un homéomor-phismeh : D → E tel que
h ◦ f = g ◦ g
Alors
(i) les points périodiques def sont denses dansD si et seulement silespoints périodiques deg sont denses dansE ;
(ii) l’application f esttopologiquement transitivesurD si et seulementsi g l’est surE ;
(iii) f est chaotique surD si et seulement sig est chaotique surE.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
4. Chaos et stabilité des orbites
Nous avons défini dans la section précédente la notion de dépendancesen-sibledes conditions initiales comme une des caractéristiques principales de com-portement chaotique d’un système. Même si dans la plupart des cas nous pouvonsétablir le présence du chaos sans vérifier directement cette propriété, elle resteessentielle pour comprendre et pour "mesurer" ce phénomène.
Une des conséquences directes de la dépendancesensibledes conditions ini-tiales est l’instabilité de toutes les orbites du système sur l’attracteur. C’est lesujet de cette section.
Définition 6.8. Soit f : A → A une application. Une orbiteO(x0)s’appelle stable si pour toutε > 0 il existe unδ > 0 tel que pour touty0
tel qued(x0, y0) < δ on a
d(f (n)(x0)− f (n)(y0)) < ε
Une orbiteO(x0) s’appelle instable s’il existe uneε = ε(x0) tel quepour toutδ > 0 il existe uny0 et un numéron ∈ N tels que
d(x0, y0) < δ etd(f (n)(x0)− f (n)(y0)) > ε (6.3)
Remarque6.2. Notons que cette définition coïncide avec la définition de stabilitédonnée dans le cours2 pour lespoints fixeset les orbites périodiques.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
La relation entre le comportement chaotique et la stabilité des orbites estdonnée par le théorème suivant :
Théorème 6.6.La dépendancesensibledes conditions initiales im-plique l’instabilité de toutes les orbitessur l’attracteur du système.
4.0.0.3. Démonstration Pour prouver ce fait il suffit de comparer les deuxdéfinitions6.6et 6.8. La première est en effet plus restrictive : elle exige l’exis-tence d’une constanteε commune à tous lesx ∈ A telle que (6.3) est vérifié.�.
On en conclue que tout système chaotique est caractérisé par l’instabilitéde toutes ses orbites sur l’attracteur. Deux orbites quelconques ne peuvent serapprocher que pour un temps limité. Elles s’éloignent inévitablement l’une del’autre.
Cela nous mène à une réflexion importante à propos de l’origine du chaos.Nous allons montrer qu’un système dynamique linéaire ne peut pas engendrerun comportement chaotique.
Soit f : Rm → Rm un système dynamique linéaire. Il est donc défini parune matriceM m×m :
f(x) = M · x
Nous allons nous servir des résultats du cours3 sur les systèmes linéaires. Noussavons que la dynamique d’un système linéaire est entièrement définie par lesvaleurs propre de la matriceM .

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
• Si ρ(M) = max{|λ|, λ ∈ Spec(M)} < 1 alors l’origine est l’unique pointfixe du système. Il est attractif : toutes les orbites du système tendent vers0. Il n’y pas donc de chaos dans ce cas.
• Si toutes les valeurs propres sont de valeur absolue supérieure à1, alors l’ori-gine est l’unique point fixe du système et il est répulsif. Toutes les orbitestendent vers l’infini. Il n’a pas d’attracteur dans le système.
• Si dans le spectre il n’y a pas de valeurs propres situées sur le cercle unité alorsl’origine est l’unique point fixe, c’est point-selle. L’attracteur du systèmeest donc constitué d’un seul point :A = {0}. Son bassin d’attraction estle sous-espace propre correspondant à toutes les valeurs propres de valeurabsolue inférieure à1. dans ce cas le système n’est pas non plus chaotique.
• Si enfin dans le spectre il y a deux valeurs propres complexe-conjuguées si-tuées sur le cercle unité :λ1 = λ2 telles que|λ1| = |λ2| = 1. Soitα = arg(λ1). On a donc :
λ1 = cos α + i sin α, λ2 = cos α− i sin α
Ce cas représente le plus grand intérêt, parce que c’est le seul où l’attrac-teur du système n’est pas trivial. SoitVλ1,λ2 le sous-espace propre corres-pondant à ces deux valeurs propres. On a montré dans le cours3 que siαπ
= np
où n, p sont des nombres naturels réciproquement premiers, alorstoutes les orbites correspondant aux vecteurs du sous-espaceVλ1,λ2 sontpériodiques de périodep. Si α
πest un nombre irrationnel alors chaque or-
bite dansVλ1,λ2 est apériodique, dense dans un cercle. Ainsi, dans les deuxcas le sous-espaceVλ1,λ2 appartient au noyau du système. Il est attracteursi dans le spectre si dans le spectre de la matriceM il y a au moins unevaleur propre située à l’intérieur du cercle unité (|λ| < 1).

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Pour étudier la dynamique du système sur cet attracteur il suffit donc d’étu-dier de plus près les propriétés d’une rotation dans le planR2. Toute rota-tion à un angleα est définie par la matrice
M =cos α sin α− sin α cos α
La matriceM est unitaire :MT ·M = I et ‖M‖ = 1. De plus pour toutn ∈ N la matriceMn est de la forme :
Mn =cos nα sin nα− sin nα cos nα
Elle donc aussi unitaire. Cela implique en particulier queM préserve lanorme :∀x ∈ R2 : ‖Mn · x‖ = ‖x‖.Cela implique immédiatement que toutes les orbites du système défini parune telle matrice sont stables. On peut le deviner facilement car la rotationest une opération "rigide", c’est-à-dire, elle ne modifie pas les distances.
Soient en effet deux vecteurs arbitrairesx0, y0 ∈ R2. Notonsε = ‖x0 −y0‖. Alors pour toutn ∈ N nous avons :
‖x(n)− y(n)‖ = ‖Mnx0 −Mny0‖ = ‖Mn(x0 − y0‖ = ‖x0 − y0‖ = ε
Conclusion : deux orbites arbitraires restent toujours à la même distancequ’au début. Donc, toutes les orbites sont stables.
Ainsi, nous avons montré qu’un système dynamique linéaire ne peut en aucuncas être chaotique. Même dans les cas où un tel système possède des orbitesdenses sur un cercle ( une rotation avec l’angleα tel queα/π est irrationnel) cela

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
ne suffit pas pour générer un comportement chaotique. L’instabilité des orbitesest indissociable de la notion de chaos.
Par conséquence, l’existence du chaos exige la présence de termes non-linéairesdans la fonctionf(x) qui définit le système.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
5. Peut on mesurer le chaos ? Exposants du Lya-pounov
Peut on associer une mesure au comportement chaotique ? Cette question etles réponses que l’on peut y donner sont d’une grande importance. Parce que lebut de la théorie du chaos n’est pas de pouvoir donner une définition formelleà un phénomène très complexe. Le but est de pouvoir maîtriser ce phénomène.dans bien des situations le comportement chaotique est indésirable dans un sys-tème. On doit donc pouvoir le prédire et savoir comment l’éviter ou au moinsdiminuer ses méfaits. Dans d’autres situations on voudrait bien exploiter les pro-priétés des systèmes chaotiques ( application dans le codage, par exemple). Pourtout cela il faut bien pouvoir caractériser le chaos quantitativement.
La complexité et la diversité des effets que l’on peut observer dans un sys-tème chaotique incite à définir plusieurs caractéristiques. Une partie de défini-tions concernent la géométrie de l’attracteur. Très souvent, ces ensembles sontdifficiles à décrire. On cherche à les mesurer en définissant des dimensions spé-cifiques ( dimension de Hausdorf, dimension de corrélation etc).
Une autre caractéristique est liée plutôt à l’instabilité des orbites. Nous al-lons définir dans cette section la notion del’exposant de Lyapounovet montrercomment on s’en sert pour étudier des systèmes chaotiques et même détecter laprésence du chaos dans des systèmes.
Nous savons que dans les systèmes chaotiques mêmes les orbites partant despoints voisins s’éloignent. L’exposant de Lyapounov est la mesure de cette di-vergence ( voir la figure6.13).
Commençons par le cas de systèmes de dimension1. Soit f : I → I.La définition de l’exposant de Lyapounov est représentée graphiquement sur la

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
figure 6.13. On cherche à évaluer la distance exponentielle entre deux orbitesaprèsn itérations :
|f (n)(x0)− f (n)(x0 + ε)| ≈ enΛ(x0)
x0 x0 + ε
⇒n itérations
f (n)(x0) f (n)(x0 + ε)
εenΛ(x0)
FIG. 6.12 – L’exposant de LyapounovΛ(x0) : la mesure d’instabilité de l’orbiteO(x0).
En faisantε tendre vers zéro, on trouve :
enΛ(x0) ≈∣∣∣∣ d
dxf (n)(x0)
∣∣∣∣Sachant que
d
dxf (n)(x0) =
n−1∏i=0
f ′(x(i))
on définit l’exposant de Lyapounov comme suit :
Λ(x0) = limn→∞
1
n
n−1∑i=0
ln f ′(x(i))

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Par sa définition, l’exposant de Lyapounov caractérise la stabilité d’une orbiteO(x0). Si Λ(x0) > 0 l’orbite O(x0) est instable. SiΛ(x0 ≤ 0, elle est stable.
Il est possible de définir l’exposant de Lyapounov dans le cas des systèmesde dimension arbitraire,m > 1. Soitf : Rm → Rm une application telle que lesystème correspondant est chaotique. Pour chaquen ≥ 1 considérons lejacobiende l’applicationf (n) (notons leJ (n, x0) évalué en un pointx0. Tout comme dansle cas de dimension1 nous avons :
J (n, x0) =n−1∏i=0
J (x(i))
où x(i) = f (i)(x0) sont les points de l’orbiteO(x0) etJ (x) est lejacobiendel’applicationf(x). Notons
ρ(x0, n) = max{|λ|, λ ∈ Spec(J(n, x0))}
c’est le rayon spectral de la matriceJ (n, x0). Alors, l’exposant de Lyapounovest défini comme suit :
Λ(x0) = limn→∞
1
nln ρ(n, x0)
Dans la plupart des systèmes dynamiques rencontrés dans des applicationsl’exposant de Lyapounov a une propriété importante :Λ(x0) est constant pourpresque tous lesx0 ∈ D. Cela signifie que pour tous les pointsx0 à l’exceptiond’un ensemble de mesure nulle on a :
Λ(x0) = Λ

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Ainsi l’exposant de Lyapounov est une caractéristique globale, concernant presquetoutes les orbites du système. Donc siΛ > 0 toutes les orbites du système sontinstables, et cela est un pas vers la détection du chaos : le plus souvent un telsystème se trouve chaotique.
3.4 3.5 3.6 3.7 3.8 3.9 40
0.2
0.4
0.6
0.8
1
3.4 3.5 3.6 3.7 3.8 3.9 4
−2
−1
0
1
Chaos
Stabilité
FIG. 6.13 – Exposant de Lyapounov du système logistique en fonction du para-mètreλ.
Pour conclure ce cours, voici6.13l’étude de l’exposant de Lyapounov pourle système logistique.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Chapitre 7
Dynamique symbolique et chaos
Nous allons étudier dans cette section la représentation symbolique des sys-tèmes dynamiques et les méthodes d’investigation qui en résultent. Cette théoriequi peut paraître abstraite a beaucoup d’applications dans le domaine de codageet des automates finis. Ce cours présente quelques notions élémentaires de dy-namique symbolique. Nous allons nous intéresser surtout à l’interprétation descomportements chaotiques à l’aide de la dynamique symbolique.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
1. Représentations symboliques de systèmes dyna-miques.
Nous allons nous restreindre à des systèmes de dimension1 définis sur unintervalleI ∈ R. L’idée de départ de la dynamique symbolique consiste à "co-der" les orbites d’un système selon les positions de leurs points dans les zonesdifférentes de l’intervalleI. Soitf : I → I l’application qui définit un systèmedynamique sur l’intervalleI. Notons ce système par le couple(I, f). Divisonsl’intervalle I en un nombre fini de sous-intervalles mutuellement disjoints :
I = I1 ∪ I2 ∪ · · · ∪ IN , Ij ∩ Im = ∅, si j 6= m
On dit que l’on définit une partition sur l’intervalleI. A chaque intervalleIj
on peut associer un symboleaj et l’on peut noter cet intervalleIaj. L’ensemble
de tous les symboles correspondant à tous les intervalles de la partition s’appelle"alphabet".
AN = {a1, a2, . . . , aN}Prenons maintenant un point arbitrairex0 dansI. SoitO(x0) = {x0, f(x0), . . . , f
(n)(x0), . . .}l’orbite correspondante. On peut coder cette orbite par une suite de symboles del’alphabetAN selon l’ordre de passage par les intervallesIaj
. A chaque pointx(n) = f (n)(x0) de l’orbite on associe le symbolesn = ai qui représente lesous-intervalleIai
dans lequel se trouve le pointx(n) :
sn = ai, si x(n) ∈ Iai
Cette procédure permet d’associer à chaque pointx0 de l’intervalleI une suitede symbolesS(x0) = s0s1s2 . . . qui représente l’itinéraire de l’orbite de ce pointO(x0) par le système dynamique(I, f).

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Il est important que cette correspondance soit bijective. Il est évident qu’àchaque point de l’intervalleI on peut associer une seule suite. Mais notre construc-tion en elle même ne garantit pas qu’à deux points distincts correspondent deuxsuites différentes. Tout le problème est dans le choix de la partition de l’intervalleI qui n’est pas arbitraire et dépend essentiellement des propriétés de la fonctionf(x). La partition doit être "assez fine" pour que la correspondance soit bijective.
NotonsΣN l’ensemble de toutes les suites infinies que l’on peut former avecles symboles d’un alphabet finiAN
ΣN = {s = s1s2s3 . . . , sn ∈ AN , ∀n ∈ N}
Définition 7.1. Soit (I, f) un système dynamique. Supposons qu’unepartition est définie sur l’intervalleI et un alphabetAN lui correspond.On appelle une suites ∈ ΣN admissible pourf s’il existe unx0 ∈ Itel que la suites est la représentation symbolique de l’orbite correspon-dante :
s = S(x0)
On note l’ensemble de toutes les suites admissibles pourf parΣf . Gé-néralement,Σf est un sous-ensemble deΣN :
Σf ⊂ ΣN
Sur l’ensembleΣN on définit l’opération de déplacement (décalage)σ :ΣN → ΣN comme suit :
σ(s1s2s3s4 . . . ) = s2s3s4 . . .

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Soit (I, f) un système dynamique. SoitΣf l’ensemble de toutes les suitesadmissibles pourf . Supposons que la partition a été choisie de telle façon quela correspondance entre les points de l’intervalleI et les suites de l’ensembleΣf est bijective. Montrons quel’action de la fonction f sur I est équivalenteà l’opération de décalage surΣf . Soit en effetx ∈ I un point arbitraire etS(x) ∈ Σf la suite qui correspond a son orbite. Chaque symbolesn de cettesuite représente la position de lan-ème itérationx(n) = f (n)(x) du pointx parla fonctionf . Soit y = f(x). Alors l’orbite O(y) qui lui correspond coïncideavec celle du pointx à l’exception du pointx lui-même. Si la suiteS(x) est dela formeS(x) = s0s1s2s3 . . . alors
S(y) = s1s2s3s4 · · · = σ(S(x))
Alors, pour un système dynamique(I, f) on peut définir une représen-tation symbolique équivalente(Σf , σ) qui est un système dynamique définipar l’application de décalageσ sur l’ensemble des suites admissiblesΣf . Onpeut illustrer cette relation d’équivalence par le schéma suivant :
x ∈ If−→ y ∈ Iy y
S(x)σ−→ S(y)
Ainsi, pour beaucoup de systèmes leur étude peut être ramenée à la consi-dération de la dynamique de l’application de décalage sur un sous-ensemble deΣN .
Les propriétés fondamentales de l’application de décalage surΣN sont bienconnues. Nous en parlerons dans la section suivante. Toute la difficulté réside

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
dans le choix de la partition et la définition exacte de l’ensemble des suites ad-missiblesΣf . Il existe néanmoins des classes de fonctionsf(x) pour lesquellesles représentations symboliques sont relativement faciles à construire et à étu-dier. Une de ces classes s’appelle"fonctions unimodales"et il existe toute unethéorie dédiée à l’étude de leur dynamique symbolique qui s’appelle"théorie depétrissage".Nous allons présenter brièvement cette théorie à la fin de ce cours.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
2. Dynamique de l’application de décalage sur l’en-sembleΣN
Dans cette section nous allons décrire les propriétés fondamentales de l’ap-plication de décalage et de l’ensembleΣN . Il s’avère que pour beaucoup de sys-tèmes dynamiques leur ensemble de suites admissibles coïncide avec l’ensembleΣN tout entier. D’où l’intérêt de cette étude. Nous allons voir que malgré lasimplicité de sa définition le système dynamique(ΣN , σ) a une dynamique trèsriche. Notamment, il est chaotique.
Pour simplifier, nous allons considérer l’alphabet qui contient deux symbolesseulement :A2 = {0, 1} et donc l’ensembleΣ2 est constitué de toutes les suitesinfinies de0 et de1. Nous allons considérer les suites de l’ensembleΣ2 commeles points dans un espace. On peut introduire dans cet espace une distance.
Définition 7.2. Soients = s0s1s2s3 . . . et t = t0t1t2t3 . . . deux pointsde l’ensembleΣ2. On note la distance entres et t par d(s, t) et on ladéfinit de la façon suivante :
d(s, t) =∞∑i=0
|si − ti|2i
Sachant que|si − ti| est égale à0 ou à1 on trouve facilement que
0 ≤ d(s, t) ≤∞∑i=0
1
2i= 2

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
On prouve facilement qued(s, t) ainsi défini est bien une métrique et doncΣ2
muni ded(·, ·) est un espace métrique. Cette métrique a quelques propriétés spé-cifiques que nous résumons sous forme de lemme.
Lemme 7.1.Soients = s0s1s2 . . . et t = t0t1t2 . . . deux points deΣ2.Si lesn + 1 premiers éléments de ces deux suites coïncident alors
d(s, t) ≤ 1
2n
Si par contred(s, t) ≤ 1
2nalors lesn premiers éléments des suitess et
t coïncident.
Nous allons pouvoir maintenant découvrir les propriétés de l’application dedécalage.
Lemme 7.2.L’application de décalage est continue.
2.0.0.4. Preuve . Soit s ∈ Σ2 un point arbitraire deΣ2. Nous devons mon-trer que, quel que soitε > 0 il existe unδ > 0 tel que sid(s, t) < ε alors
d(σ(s), σ(t)) < ε. Pour cela choisissons unn ∈ N tel que1
2n< ε. Posons
δ =1
2n+2. Si d(s, t) < ε alors, d’après le lemme7.1 les n + 2 premiers élé-
ments des suitess et t coïncident. Donc, après le décalage les suitesσ(s) etσ(t)coïncident surn+1 premiers éléments. On applique le lemme7.1une deuxième
fois et l’on voit immédiatement qued(σ(s), σ(t)) <1
2n< ε. Ce lemme est
démontré.�

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 7.1.L’application de décalage a les propriétés suivantes :
(a) L’ensemble des points périodiques de l’application de décalage estdense dansΣ2.
(b) Pour chaquen ∈ N il y a 2n points périodiques de périoden.
(c) L’ensemble des points éventuellement périodiques qui ne sont paspériodiques est dense dansΣ2.
(d) Il existe un point s∗ ∈ Σ2 tel que son orbiteO(s∗) ={s∗, σ(s∗), σ2(s∗), . . .} est dense dansΣ2.
(e) L’ensemble des points qui ne sont ni périodiques ni éventuellementpériodiques est dense dansΣ2.
2.0.0.5. Preuve .
(a) Montrons tout d’abord que tout point périodique de période fondamentalekest une suite de symboles périodique de périodek. Soit s = s0s1s2s3 . . .un point périodique de périodek. Alors, pour toutn ∈ N on a :σn(σk(s)) =σn(s). Puisquen itérations successives de l’application de décalage "coupent"n premiers éléments de la suite nous pouvons écrire :
σn(σk(s)) = sn+ksn+k+1sn+k+2 · · · = σn(s) = snsn+1sn+2 . . .
On en déduit quesn+k = sn quel que soitn. Cela implique qu’unpoint sest un point périodique de périodek si et seulement sis est une répé-tition infinie d’une suite de k élémentss0s1 . . . sk−1.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Il est facile maintenant de montrer que les points périodiques sot densesdansΣ2. Soit en effett un point arbitraire dansΣ2. Montrons que, quel quesoit ε > 0, il existe toujours un point périodiques de l’applicationσ tel
qued(s, t) < ε. Choisissons unn ∈ N tel que1
2n< ε. Si t = t0t1t2t3 . . .
prenons lesn premiers éléments det et formons en une suites par répéti-tion infinie de ces éléments :s = t0t1t2t3 . . . tn. Par construction, la suites est un point périodique de périoden de l’application de décalage. Or lessuitess et t coïncident surn premiers points. Donc, d’après le lemme7.1
d(s, t) <1
2n< ε. L’assertion(a) est ainsi démontrée.
(b) La démonstration de ce point est facile, compte tenu de l’observation faiteci-dessus sur les points périodiques de l’application de décalage. Nous sa-vons en effet qu’une suites est un point périodique deσ si et seulementsi elle est elle-même périodique de périoden. Sachant qu’il y deux sym-boles dans l’alphabet, il existe donc2n suites différentess0s1 . . . sn−1 delongueurn. Cela prouve au’il y a2n points périodiques de périoden.
(c) Rappelons iciqu’un point s est éventuellement périodique de périodeks’il existe unN tel queσn+k(s) = σn(s) pour tout n ≥ N . Cela impliqueque sis est un point éventuellement périodique de périodek de l’applica-tion de décalage alors il existe unN tel que à partir deN -ème élément lasuites est périodique de périodek. Alors la preuve de l’assertion(c) duthéorème est essentiellement la même que celle de(a).
(d) La suites∗ qui commence par0 1 00 01 11 10 et qui contient toutes les suitespossibles de3 symboles (il y en a23 = 8), ensuite toutes les suites pos-sibles de longueur4 ( il y en a16) etc s’appelle suite de Morse. Montronsque l’orbite de cette suite est dense dansΣ2. Soitt ∈ Σ2 un point arbitraire

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
et soitε > 0. Choisissons unn ∈ N tel que1
2n< ε. Soientt0t1t2t3 . . . tn−1
lesn premiers éléments det. Puisque la suites∗ contient toutes les suitesfinies possibles de toutes les longueurs, il existe bien unN tel que
σN(s∗) = s∗Ns∗N+1s∗N+2 . . . s∗N+n−1 = t0t1t2t3 . . . tn−1
On en conclut aussitôt (lemme7.1) qued(σN(s∗), t) <1
2n< ε. Ce qui
prouve que l’orbite des∗ est dense dansΣ2.
(e) Puisque les points de l’orbite de la suite de MorseO(s∗) font partie de l’en-sembleA de tous les points qui ne sont pas périodiques ni éventuellementpériodiques, et que cette orbite est dense on en déduit que l’ensembleAest dense dansΣ2.
�
Toutes ces propriétés de l’application de décalage nous permettent d’établirle théorème suivant.
Théorème 7.2.Le système dynamique(Σ2, σ) est chaotique.
2.0.0.6. Preuve . Puisqu’il existe un points∗ dont l’orbite est dense dansΣ2, l’application de décalageσ est topologiquement transitive surΣ2 ( d’aprèsle théorème6.2du cours6). De plus l’ensemble des points périodiques de cetteapplication est dense dansΣ2 et Σ2 contient un nombre infini de points. Donc,en vertu du théorème6.3du cours6 l’applicationσ est chaotique surΣ2. �

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Ce fait étonnant peut être exploité pour prouver qu’un système est chaotique.Si en effet la représentation symbolique des orbites d’un système coïncide avectout l’ensembleΣ2 ce système est chaotique. Voici un exemple.
Exemple7.1. SoientI = [0, 1] etf : I → I, f(x) = 2x mod1. On peut aussiécrire la fonctionf(x) sous la forme :
f(x) =
{2x si x ∈ [0, 1/2]
2x− 1 si x ∈ [1/2, 1]
Pour construire la représentation symbolique de toutes les orbites de ce systèmedivisons l’intervalleI en deux parties :
I = I0 ∪ I1, I0 = [0, 1/2], I1 = [1/2, 1]
Soit x0 ∈ I un point etO(x0) = {x0, f(x0), . . . , f(n)(x0), . . .} l’orbite corres-
pondante. On associe à chaque pointx(n) = f (n)(x0) un des deux symboles del’alphabetA2 = {0, 1} selon la règle :
sn =
{0 si x ∈ I0 = [0, 1/2]1 si x ∈ I1 = [1/2, 1]
Alors on voit facilement que chaque suite ainsi composée coïncide avec la repré-sentation binaire du nombrex0. Quandx0 parcourt tout l’intervalleI = [0, 1] lasuiteS(x0) parcourt tout l’ensembleΣ2. Cette correspondance est évidemmentbijective. Donc la représentation symbolique du système(I, f) est le système(Σ2, σ) qui est chaotique. On peut en conclure que le système défini parf(x) surl’intervalle I est lui aussi chaotique. On a déjà étudié ce système dans le cours6. Il nous a fallu plus de temps pour prouver que ce système est chaotique, enutilisant seulement la définition.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
3. Fonctions unimodales et théorie de pétrissage
Nous présentons dans cette section la théorie de la dynamique symboliquedéveloppée pour un ensemble particulier de fonctions que l’on appelle "unimo-dales". Nous verrons que la fonction logistique est une fonction unimodale etnous pouvons appliquer les résultats de cette théorie pour étudier les phénomènesde comportement chaotique de la fonction logistique.
Définition 7.3. Soit I = [0, 1]. Une applicationf : I → I est diteunimodalesi
1. f(0) = f(1) = 0 ;
2. f(x) a un unique point critiquec ∈ I ( c’est-à-dire, un pointc telquef ′(c) = 0).
Toute fonction unimodale est croissante sur l’intervalle[0, c) et décroissantesur l’intervalle(c, 1]. La fonction logistiquef(λ, x) = λx(1− x) est unimodalequand0 < λ ≤ 4 aussi bien que la fonctiong(λ, x) = λ sin πx pour toutλ ∈(0, 1).
Pour décrire la dynamique d’une application unimodale on introduit un al-phabet de3 symboles :A3 = {0, 1, C}.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Définition 7.4. Soitx0 ∈ I. On définit l’itinéraire symbolique du pointx0 en associant à chaque point de l’orbitex(n) = f (n)(x0) le symbolesn selon la règle suivante :
sn =
0 si f (n)(x0) < c1 si f (n)(x0) > cC si f (n)(x0) = c
Il
existe un itinéraire particulier que nous allons étudier en détails car il permet decaractériser toute la dynamique du système.
Définition 7.5. La suiteK(f) = S(f(c)) qui représente l’itinéraire dupointf(c) s’appelle"suite de pétrissage".
Exemple7.2. Soitf(x) = 4x(1− x). C’est la fonction logistique, quandλ = 4.
Son point critique estc =1
2. Alors f(c) = 1 et f (n)(f(c)) = 0, ∀n > 0. Donc
la suite de pétrissage pour ce système est la suivante :
K(f) = 100000 . . .
où 0 signifie que le symbole0 est répété infiniment.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Nous allons maintenant introduire un ordre sur l’ensembleΣ3 de toutes lessuites formées des trois symboles de l’alphabetA3 = {C, 1, 0}.
Définition 7.6. Soients = s0s1s2 . . . et t = t0t1t2 . . . deux suites deΣ3. On dit que la divergence de ces deux suites est égale àn et on note
div(s, t) = n
si sj = tj pour tout0 ≤ j < n etsn 6= tn.
Définition 7.7. On note parτn(s) le nombre de1 dans lesn+1 premierssymboles de la suites0s1 . . . sn.
Ce nombre est important car il permet de suivre le signe de la dérivée def (n)(x). Notons quef ′(y) < 0 si y ∈ (c, 1]. D’après la règle de chaîne pour ladérivée def (n)(x) on a :
d
dxf (n)(x) =
n∏j=1
f ′(x(j))
Donc, le nombre de1 dans lesn+1 premiers symboles de l’itinéraire dex est égalau nombre de changements de signe dans le calcul du produit dans l’expressionprécédente.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Nous allons définir l’ordre sur les suitess ∈ Σ3 de façon récurrente. Oncommence par poser :O < C < 1.
Définition 7.8. Supposons que deux suitess et t sont telles que
div(s, t) = n
On dit que la suitet précèdes et on notet ≺ s si une des deux conditionsci-dessous est vérifiée :
(i) τn−1(s) est pair etsn < tn
(ii) τn−1(s) est impair etsn > tn
Exemple7.3. D’après la définition on trouve :
(0101 . . . ) ≺ (010C . . . ) ≺ (0100 . . . )
car ici la divergence entre les suites est3. Par contre
(110 . . . ) ≺ (11C . . . ) ≺ (110 . . . )
car la divergence dans ce cas est égale à2.
Cette définition, très abstraite à première vue, reflète pourtant bien l’ordredes pointsx ∈ I.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 7.3.Soitx, y ∈ I.
1. SiS(x) ≺ S(y) alorsx < y.
2. Six < y alorsS(x) � S(y)
Nous avons mentionné déjà qu’un des plus grands problèmes de la théoriede la dynamique symbolique était d’évaluer l’ensembleΣf de toutes les suitesadmissibles pour une fonctionf . Le théorème précédent et la géométrie parti-culière d’une fonction unimodale permettent de répondre ( en partie au moins )à cette question difficile. Nous savons en effet que la fonctionf a un maximumdans le pointc. Donc, pour tout pointx ∈ I et pour toutn ∈ N f (n)(x) < f(c).Alors, d’après le théorème précédent toute orbite admissibles ∈ Σf doit véri-fier : σn(s) � K(f), ∀n ≥ 1. Cette condition n’est pourtant pas suffisante. Voiciun exemple.
Exemple7.4. Soit f(x) = 4x(1 − x). Notons quec = 1/2, f(1/2) = 1 etf(1) = 0. Puisque0 est un point fixe de l’applicationf(x) la suite de pétrissagecorrespondant à ce système est la suivante :
K(f) = (1000 . . . )
Puisque l’antécédent de1 est le pointc, la seule suite qui peut être antécé-dent deK(f) par décalage est(C10000 . . . ). Donc toutes les suites de typet = (0 . . . 010000 . . . ) avec un nombre finin de 0 au début ne sont pas ad-missibles pourf . Et pourtant on a bienσj(t) ≺ K(f) pour tous lesj saufj = noùσn(t) = K(f)

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Voici le théorème qui donne la condition suffisante pour une suitet ∈ Σ3
d’être une suite admissible pour une fonction unimodalef(x).
Théorème 7.4.Supposons quef : I → I est une fonction unimodaleet quec n’est pas un point périodique. Alors sit est une suite telle que
σn(t) ≺ K(f), ∀n ≥ 1
il existe un pointx ∈ I tel queS(x) = t. Autrement dit,t ∈ Σf .
Nous allons pouvoir maintenant découvrir les propriétés de l’application dedécalage.
Lemme 7.3.L’application de décalage est continue.
3.0.0.7. Preuve . Soit s ∈ Σ2 un poit arbitraire deΣ2. Nous devons mon-trer que, quel que soitε > 0 il existe unδ > 0 tel que sid(s, t) < ε alors
d(σ(s), σ(t)) < ε. Pour cela choisissos unn ∈ N tel que1
2n< ε. Posons
δ =1
2n+2. Sid(s, t) < ε alors, d’après le lemme *** lesn+2 premiers éléments
des suitess et t coïncident. Donc, après le décalage les suitesσ(s) et σ(t) coïn-cident surn+1 premiers éléments. On applique le lemme *** une deuxième fois
et l’on voit immédiatement qued(σ(s), σ(t))1
2n< ε. Le lemme est démontré.�

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Théorème 7.5.L’application de décalage a les propriétés suivantes :
(a) L’ensemble des points pérodiques de l’applicationde décalage estdense dansΣ2.
(b) Pour chaquen ∈ N il y a 2n points périodiques de périoden.
(c) L’ense,ble des points éventuellement périodiques qui ne sont paspériodiques est dense dansΣ2.
(d) il existe un point s∗ ∈ Σ2 tel que son orbiteO(s∗) ={s∗, σ(s∗), σ2(s∗), . . .} est dense dansΣ2.
(e) L’ensemble des points qui ne sont ni périodiques ni éventuellementpériodiques est dense dansΣ2.
3.0.0.8. Preuve .
(a) Montrons tout d’abord que tout point périodique de période fondamentalekest une suite de symboles périodique de périodek. Soit s = s0s1s2s3 . . .un point périodique de périodek. Alors, pour toutn ∈ N on doit trouver :σn(σk(s)) = σn(s). Puisquen itérations successives de l’application dedécalage "coupent"n pre,iers éléments de la suite nous pouvons écrire :
σn(σk(s)) = sn+ksn+k+1sn+k+2 · · · = σn(s) = snsn+1sn+2 . . .
On en déduit quesn+k = sn quel que soitn. Cela i,plique qu’un pointsest un point périodique de périodek si et seulement sis est une répétiotioninfinie d’une suite dek élémentss0s1 . . . sk−1.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Il est facile maintenant de montrer que les points périodiques sot densesdansΣ2. Soit en effett un point arbitraire dansΣ2. Montrons que quelque soitε > 0 il existe toujours un point périodique de l’applicationσ tel
qued(s, t) < ε. Choisissons unn ∈ N tel que1
2n< ε. Si t = t0t1t2t3 . . .
prenons lesn premiers éléments det et formons en une suites par répétioninfinie de ces éléments :s = ¯t0t1t2t3 . . . tn. Par construcion, la suitesest un point périodique de périoden de l’application de décalage. Or lessuitess et t coïncident surn premiers points. Donc, d’après le lemme ***
d(s, t) <1
2n< ε. L’assertion(a) est ainsi démontrée.
(b) La démonstration de ce point est facile, compte tenu de l’observation faiteci-dessus sur les points périodiques de l’application de décalage. Nous as-vons en effet qu’une suites est un point périodique deσ si et seulementsi elle est elle-même périodique de périoden. Sachant qu’il y deux sym-boles dans l’alphabet, il existe donc2n suites différentess0s1 . . . sn−1 delongueurn. Cela prouve au’il y a2n points périodiques de périoden.
(c) Rappelons ici qu’un points est éventuellement périodique de périodek s’ilexiste unN tel queσn+k(s) = σn(s) pour toutn ≥ N . Cela implique quesi s est un point éventuellement périodique de périodek de l’application dedécalage alors il existe unN tel que à partir deN -ème élément la suitesest périodique de périodek. Alors la preuve de l’assertion(c) du théorèmeest essentiellement la même que celle de(q).
(d) La suites∗ aui commence par0 1 00 01 11 10 et qui contient toutes les suitespossibles de3 symboles (il y en a23 = 8, ensuite toutes les suites possiblesde longueur4 ( il y en a 16) etc s’appelle suite de Morse. Montrons quel’orbite de cette suites est dense dansΣ2. Soit t ∈ Σ2 un point arbitraire et

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
soit ε > 0. Choisissons unn ∈ N tel que1
2n< ε. Soientt0t1t2t3 . . . tn−1
lesn premiers éléments det. Puisaue la suites∗ contient toutes les suitesfinie possibles de toutes les longuers, l existe bien unN tel que
σN(s∗) = s∗Ns∗N+1s∗N+2 . . . s∗N+n−1 = t0t1t2t3 . . . tn−1
On en conclut aussi tôt qued(σN(s∗), t) <1
2n< ε. Ce qui prouve que
l’orbite des∗ est dense dansΣ2.
(e) Puisque les points de l’orbite de la suite de MorseO(s∗) font partie de l’en-sembleA de tous les points qui ne sont pas périodiques ni éventuellementpériodiques, et que cette orbite est dense on en conclut que l’ensembleAest dense dansΣ2.
�
Toutes ces propriétés de l’application de décalage nous permettent d’établirle théorème suivant.
Théorème 7.6.Le système dynamique(Σ2, σ) est chaotique.
3.0.0.9. Preuve . Puisqu’il existe un points∗ dont l’orbite est dense dansΣ2, l’application de décalageσ est topologiquement transitive surΣ2 ( d’aprèsle théorème *** du cours6). De plus l’ensemble des points périodiques de cetteapplication est dense dansΣ2. Donc, en vertu du théorème *** du cours6 l’ap-plicationσ est chaotique surΣ2. �

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
Ce fait étonnant peut être exploité pour prouver qu’un système est chaotique.Si en effet la représentation symbolique des orbites d’un système coïncide avectout l’ensembleΣ2 ce système est chaotique. Il est important de noter ici que lacondition d’avoir tout l’ensebleΣ2 est cruciale. La même application de décalagedéfinie sur un sous-ensemble deΣ2 peut ne pas être chaotique. Voici un exemple.
Exemple7.5. SoientI = [0, 1] etf : I → I, f(x) = 2x mod1. On peut auqiiécrire la fonctiof(x) sous la forme :
f(x) =
{2x si x ∈ [0, 1/2]
2x− 1 si x ∈ [1/2, 1]
Pour construire la représentation symolique de toutes les orbites de ce systèmedivisons l’intervalleI en deux parties :
I = I0 ∪ I1, I0 = [0, 1/2], I1 = [1/2, 1]
Soit x0 ∈ I un point etO(x0) = {x0, f(x0), . . . , f(n)(x0), . . .} l’orbite corres-
pondante. On associe à chaque pointx(n) = f (n)(x0) un des deux symboles del’alphabetA2 = {0, 1} selon la régle :
sn =
{0 si x ∈ I0 = [0, 1/2]1 si x ∈ I1 = [1/2, 1]
Alors on voit facilement que chaque suite ainsi composée coïncide avec la re-présentation binaire du nombrex0. Quandx0 parcourt tout l’intervalleI = [0, 1]la suiteS(x0 parcourt tout l’ensembleΣ2. Cette correspondance est évidemmentbijective. Donc la représentation symbolique du système(I, f) est le système(Σ2, σ) qui est chaotique. On peut en conclure que le système défini parf(x) surl’intervalle I est lui ausii chaotique. On a déjà étudié ce système dans le cours6. Il nous a fallu plus de temps pour prouver aue ce système est chaotique, enutilisant deulement la définition.

JJ J I II
Retour
Plein Ecran
Fermer
Sommaire
Quitter
4. Fonctions unimodales et théorie de pétrissage
Nous présentons dans cette section la théorie de la dynamique symboliquedéveloppée pour un enseb,le particulier de fonctions que l’on appelle "unimo-dales". Nous verrons que la fonction logistique est une fonctio unimodale et nouspouvons appliquer les résultats de cette théorie pour étudier les phénomène decomporte,ent chaotique de la fonction logistique.
Définition 7.9. Soit I = [0, 1]. Une appliactionf : I → I est diteunimodale si
1. f(0) = f(1) = 0 ;
2. f(x) a un unique point critiquec ∈ I ( c’est-à-dire, un pointc telquef ′(c) = 0.
Toute fonction unimodale est croissante sur l’intevalle[0, c) est décroissantesur l’intervalle(c, 1]. La fonction logistiquef(λ, x) = λx(1− x) est unimodalequand0 < λ ≤ 4 qussi bien que la fonctiong(λ, x) = λ sin πx pour toutλ ∈(0, 1).