La surveillance d'infrastructures par photogrammétrie intelligente
Upload
josephe-lerouxCategory
view
123download
12
Introduction à la photogrammétrie
• Définition• Applications• Méthodes• Prise de vue aérienne• Analogique et analytique• Numérique• MNT Orthos
DIAS

Définition
• Photogrammétrie = photo + gram + métrie Tout ce qui a un lien géométrique avec dessin et mesures dans les images, sur
ligne, colonnes, radiométrie
=• localiser et restituer géométriquement de façon
précise des objets à partir d’images
Nota : tous les objets ne sont pas susceptibles d ’être décrits géométriquement.
• Technique sœur : Télédétection
DIAS

Applications
• Cartographie• Levés industriels et cadastraux• Hydrographie• Etude d ’impact et suivi de chantier• Urbanisme• Suivi environnemental• Agriculture• Défense• Relevé médical• Etc…
DIAS

Obtention des images
• satellites surtout en télédétection pour interpréter (Photo-interprétation)
• avions surtout pour cartographie et plans(Restitution, photo-identification)
• Au sol• Architecture, milieu industriel, etc …
DIAS

Quelques exemples
DIAS

Complémentarité techniquesaériennes
DIAS
Photos en STEREOavec options GPS et scanner-laser 3D
Points d’appui « terrain »
Plusieurs points de vues dans le sens du vol

Complémentarité techniques terrestres
DIAS
Points d’appuis topo images Scanner-laser 3D

Les images
• film : support photographique, négatif ou positif
• numérisée : depuis un film avec un scanner
• numérique : depuis un capteur numérique (caméra ou barrette)
• mais aussi lasergrammétrie, radargrammétrie …
Nota : Usages photogrammétriques•film sur appareils analogiques et analytiques•Image scannée ou numérique sur des stations numériques
DIAS

Géométrie de base
Echelle moyenne
p
H
a b
A B
1
E
ab
AB
p
H
DIAS

Variation d ’échelle en fonction de l ’altitude
1
Ec
de
DE
p
H Z
sd
SD
...
L ’échelle locale sur le cliché est proportionnelle à la
dénivelée Z
DIAS
D E
p
de
S
z
HH-Z
Déformations dans les images

Géométrie objet <> image
DIAS
… Donc on ne pourra pas utiliser une seule imagepour retrouver la 3D
Un objet 3D génère une image 2D ------------------>
Mais l’image 2D ne restitue que des directions dans l’espace -------->

Pour retrouver la 3D :
Faire intersecter deux rayons point par point :Deux images ayant reçu chacune 1
rayon lumineux provenant du même détail au sol permettront de retrouver sa position
DIAS
Base

Acquisition 3D de l’information géographique
• Les images satellitaires et aériennes• La caméra• La photographie
DIAS

Domaines spatial - aérien
Avions
12km
Terre3 km
Satellites
800 km
400 km
DIAS

Complémentarité spatial - aérien
chaque type de capteur sera fonction des applications
Programmation facile
Contraintes météo(couvert nuageux)
Résolution adaptable
Stéréoscopie inhérente
Capteurs satellitaires Capteurs aériens
Orbite fixe Disponibilité,
Résolution fixe Côut fixe/scène
DIAS

Les images satellitaires
• Satellites traditionnels– LANDSAT, SPOT, IRS, JERS,
SPIN-2/TERRA-SERVER
• Satellites plus récents– IKONOS 2, QUICKBIRD2
DIAS

• Multispectral, avec la meilleure résolution en mode panchromatique (gris),
• Numériques (anciens satellites russes avec films)
• Adaptées à la cartographie générale (courbure terrestre et projection cartographique directement prises en compte)
• Peu adaptées à la stéréoscopie
DIAS
Elles sont :

Traitements d ’images
• spectrals– Analyses en composantes principales
– Indices (NDVI, rapport de bandes) • radiométriques
– Etalement d ’histogramme– Egalisation d ’histogramme– Réduction du bruit
• géométriques– Filtrage– Fusion multi-capteurs
DIAS

Les images aériennes
•Principe = photographies à axe vertical–Images à peu près parallèles au sol –Options radiométriques : noir et blanc – couleur - infrarouge
DIAS

caméras numériques aériennes
• Capteurs à matrice – en N&B, RVB, IR
• Capteurs à barrettes– Multispectral
DIASign
Leica
zii

Source : Leica
2 géométries de prises de vues
DIASBarrettes Matrices
Fauchée 2.4 km
Pixel sur le CCD 6.5 x 6.5 m Taille image 228 mm x 228 mm
Emprise
2.4 km x 2.4 km
Distance focale 153 mmAngle de champ
sur la trace 64°
Angle de champ perspectif 90°
Pixel sol 20x20cm
Taille de l’échantillon au sol : GSD 20 cm Echelle photographie 1 : 10500

Mise en oeuvre
Barettes : 3 nappes
Vue devantVue nadirale
Vue arrière
Matrices : 2 images
Zone commune
DIAS

La caméra matricielle
Elle comprend un boitier qui relie – L'objectif– Le fond de chambre (comportant des repères dans le cas de films)
• Elle sera dite parfaite si• le point principal coïncide avec le centre du cliché• l'axe optique est perpendiculaire au fond de chambre• l'objectif peut être assimilé à un système optique centré
DIAS
Elle pourra être définie par :• Taille image et repères de fond de chambre • Distance f et orientation objectif-image• Déformations dues à l’objectif (distorsion)
f

Objet-image, via la caméra
DIAS
image positive
f (distance focale)
image
rayon lumineux
objetterrain
Image négative
objectif

Cas des CCD et films• Les images enregistrées sur matrices CCD sont indéformables,
• mais les films sensibles à l’environnement fluctuent géométriquement.
• Ils seront munis de « marques de fond de chambre » qui permettront de rectifier leur géométrie par rapport à un fichier d’étalonnage lors de leur utilisation.
• Le modèle général de rectification utilisé est une AFFINITE pouvant inclure :
DIAS
x’ Tx k.cos a -k’.sin a x
y‘ Ty k.sin a’ k’.cos a’ y= + x
x’ = ax + by + c
y’ = dx + ey + fexprimé par
Deux facteurs d’échelle en x et yDeux translations en x et yDeux rotations des axes x et y
Filmdéformé
Film rectifiéaffinitéFichier
d’étalonnage +

Utiliser en 3D une image 2D
• Il faudra connaître pour la caméra :
– sa géométrie interne : image, objectif, défauts– son géoréférencement externe : position et l ’orientation
dans le référentiel de travail
DIAS
Référentiel de travail (carto)
Système caméra

Reconstitution du faisceau
DIAS
x
y
m x,y ou c,l
Marque de fond de fond de chambre (Fr)fiducial marks (GB)
C (colonnes)
(Lignes) l
C = barycentre des marques de
fond de chambre
O = Origine de comptage des pixels
On repart des coordonnées images : X, y ou c,l seront mesurables dans un référentiel image

• La géométrie du faisceau objet peut être retrouvée sur l’image à partir de C et dépend de :
– la distance principale p – la position du point d'autocollimation PPA– la position du point principal de symétrie PPS– une loi de distorsion de l’objectif (on obtient m’ au lieu de m)
via la géométrie interne de la caméra
DIAS
m’
PPS
PPA p
NN’
8
m
diaphragme
ObjectifAxe optiqueC
NB : N et N’ = points principaux, et nodaux
Faisceau objet
Faisceau image
Plan imagevers M

pour obtenir les coordonnées faisceau
DIAS
Pour passer des coordonnées images 2D à des coordonnées faisceau 3D, d’origine S (confondu avec N),
on passera de C au PPA puis F, soit S en introduisant la 3e composante p normale au plan de l’image et en négligeant la distance N-N’
m’
PPS
p
NN’
vers M
m
diaphragme
Plan image
ObjectifAxe optique
S
PPA
C
F
F et Sconfondus

Passage des coordonnées images m (x y)aux coordonnées faisceau m’ (x’ y’z’)
DIAS
x’faisceau = ximage + xdr + dxPPA ; y’faisceau = yimage + ydr + dyPPA ; z’faisceau = -p
avec correction de distorsion
r
dr
ximage
yimage
PPS
m’
x’faisceau
y’faisceau
xdr
dyPPA
dxPPA
ydr
C
PPA
m
Rappel : pour les films, il faut ajouter la rectification d’affinité

La géométrie externe
DIAS
Terrain
S (XS,YS,ZS + R3 )
M (XM,YM,ZM)
m (x,y)
F(0,0)

Les éléments externes
Chaque image sera liée à son
sommet perspectif S qui possède 6 degrés de liberté
dans le système d'axes trirectangulaires objet DIAS
•3 translationsselon l'axe des x : dbxselon l'axe des y : dbyselon l'axe des z : dbz
•3 rotationsautour de 0x : Site autour de 0y :
Convergenceautour de 0z :
Déversement
S X
Y
Z

les inconnues
DIAS
Z
Y
XSystème de coordonnées terrain
Z
p y
x centre de perspective
S (X,Y,Z,,,)
Rayon lumineux
Objet M (X,Y,Z)
m (xi,yi)p
m’ Image négative
Image positive
6 inconnues de faisceau
permettent de repositionner le cliché dans l ’espace tel qu ’il était au moment de la prise de vue
• les coordonnées des sommets de prises de vues
• Les angles de rotation etautour des trois axes (passage du système terrain au système cliché)
3 inconnues de point• Les coordonnées X, Y et Z du point M dans le système terrain

3 techniques photogrammétriques
Analogique
Analytique
Numérique
• La stéréoscopie permet de voir l'objet photographié en 3 dimensions.
• La restitution permet de dessiner l’objet en 3 dimensions
DIAS

La technique analogique
Mécanique et optique On repositionne physiquement les clichés dans leur configuration de prise de vue
Dessin direct par crayon ou couteau
DIAS

Les parallaxes
• Parallaxe longitudinale = Xm1- Xm2
Elle permet de mesurer en profondeur :
les 2 rayons perspectifs coupent ce nouveau plan en M1' et M2' tels que M1'M2' est parallèle à l'axe des Y
matérialisera le relief du modèle
• Parallaxe transversale =Ym ’1- Ym ’2
Elle ne peut être fusionnée par notre cerveau.
servira à orienter les faisceaux tels qu’ils étaient lors de la prise de vues
DIAS

La mise en place du « modèle »
L'orientation interne consiste à passer de l’image au système faisceau
L'orientation relative consiste à retrouver l’orientation relative des clichés lors de la prise de vue : En annulant en six points caractéristiques du modèle, tous les rayons homologues se coupent.
L’orientation absolue consiste à recaler le modèle dans le système « terrain » en s’appuyant sur des points connus.
DIAS

Les 6 points de Von Grüber
Ce sont les points caractéristiques qui permettront d’orienter les clichés
DIAS

Comment ça marche :
– Orientation interne : passage de l’image au faisceau, plus prise en compte des déformations des films
OI_interne.ppt
– Orientation relative : formation d'un modèle stéréoscopique de l'objet photographié en repositionnant les 2 clichés l'un par rapport à l'autre.
OR_relative.ppt– Orientation absolue : mise à l'échelle et orientation du
modèle dans l'espace à l'aide de points identifiés sur les clichés, dont les XYZ terrain sont connus.
OR_absolue.ppt
DIAS

La technique analytique
Vrais clichéset écriture mathématique du passage cliché–terrain
DIAS

m = f (M) (x,y) = f (X,Y,Z)
Coordonnées dans l'espace Coordonnées dans l'espace à deux dimensions (le cliché) à trois dimension (le terrain)
La méthode analytique
Les translations et rotations mécaniques sont remplacés par des calculs
DIAS
M (X,Y,Z)
m (x, y)
TERRAIN
cliché

Caractéristiques principales
• Pas de contrainte mécanique
• Méthode précise (corrections fines, introduction de données externes)
• Traitement simultané des orientations relative et absolue possible.
DIAS

Equations Fondamentales en photogrammétrie
• Relations entre mesures et paramètres (inconnues)
• L ’approximation de la photographie à une perspective conique permet d ’exprimer deux conditions fondamentales sous forme d ’équations :
– l ’équation de colinéarité,
– l ’équation de coplanéïté
DIAS

Dans l’équation de colinéarité, tout doit être exprimé dans le même système faisceau.
Si SM est exprimé dans le système terrain, la condition devient :
avec R = matrice de rotation de passage du système terrain au système cliché
Condition de colinéaritéCondition de colinéarité
DIAS Sm k SM
.
Sm k R SM
.

Condition de coplanéïtéCondition de coplanéïté
• Equation de coplanéïté
• Rappel : Exprimer toutes les coordonnées dans le même système
S S S m S m sont coplanaires soit S S S m S m1 2 1 1 2 2 1 2 1 1 2 2 0
, , det , ,
DIAS

Aérotriangulation• Pour géoféférencer un couple d’images, il faut connaître 12 paramètres
(5 internes, 7 externes) à partir de points d'appui :– 2 connus en XY pour la mise à l'échelle– 3 connus en Z (non alignés) pour le basculement
• L'aérotriangulation est un calcul par faisceaux qui permet de calculer globalement les paramètres de toutes les images d’un bloc à partir de quelques points terrain fournis par la stéréopréparation
DIAS

Les inconnues
• Inconnues de faisceau – sommet S (X, Y, Z)
– composante de la rotation du terrain=>cliché • Inconnues de point
– coordonnées des points dans le système terrain et qui été mesurés sur les clichés
• Inconnues de systématismes le long de la bande– alti : courbure verticale z=k1 x2
– alti : la torsion (effet d'hélice) z=k2 xy
– plani : courbure horizontale y=k3 x2
• Inconnues de positionnement– enregistrement GPS des sommets de prise de vue
DIAS

par moindres carréspar moindres carrésC’est une méthode de résolution d ’un système de q
équations à n inconnues lorsque q>n
• Les équations sont de la forme f(x, p)=0– x représente les observations (les mesures),
– p représente le vecteur des paramètres (recherchés)
• Deux cas :– Equations linéaires : normalisation, résolution (Cholesky, Gauss)
– Equations non linéaires : linéarisation par changement d ’inconnues et utilisation d ’une solution approchée.
DIAS
LE CALCUL GLOBAL

La technique numérique
Images numériques ou numériséeset écriture mathématique du passage cliché–terrain
m = f (M) <==> (x,y) = f (X,Y,Z)
DIAS

Ecran de saisie stéréo. 3DEcran de saisie stéréo. 3D Ecran de contrôle 2DEcran de contrôle 2D
SourisSouris
ClavierClavier
Lunettes de vision stereoscopiqueLunettes de vision stereoscopique
Souris 3D, Souris 3D, 3D puck ou 3D puck ou manivellesmanivelles
adjustable adjustable table and table and monitor arms monitor arms
Cartes graphiquesCartes graphiques
Carte réseauCarte réseau
CPU et RAMCPU et RAM
Lecteur de disquettesLecteur de disquettes
CD-ROMCD-ROM
Disques dursDisques durs
Système d’archivesSystème d’archives
DIAS
Une station de restitution numérique

Organigramme de production
Points terrainmesurés au sol (avion)mesurés dans cartes
(satellite)
Aérotriangulation, spatiotriangulation Restitution photogrammétrique
Aérotriangulation, spatiotriangulation Restitution photogrammétrique
MNT, MNEOrthophotos
BD PLANI, BD TOPO
MNT, MNEOrthophotos
BD PLANI, BD TOPO
Produits dérivésProduits dérivés
Traitement géométriqueTraitement géométrique
UtilisateursUtilisateurs
BDG, SIGBDG, SIG
Numérique+orbitographie, attitudeArgentique
+position (GPS), cap
(scanner)
Numérique+postion (GPS) attitude
DIAS

– Appareil photographique numérique
– TopAero PC (triangulation)
– Poivilliers E (mesure 3D)
– Cumulus (laser 3D)
– Camnum (gestion des missions photos)
– Certains logiciels du commerce
DIAS
La chaîne ENSG

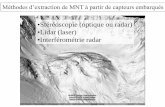
Des MNT semi-automatiques
30 km
20 km
DIAS

une ortho simple

Vraies orthos - comparaison

Vraies orthos – données externes requises

Vraie ortho – ce que l’on veut :

Animations 3D
DIAS