Institut des Sciences et de la Technologies · milieu fluide et de les illustrer sur des exemples...
129
République Algérienne Démocratique et Populaire Ministère de l’Enseignement Supérieur et de la Recherche Scientifique Centre Universitaire Ahmed Ben Yahia El-Wancharissi Tissemsilt Institut des Sciences et de la Technologies Polycopie de cours Préparé par : Dr. BAGHDAD Mohammed 2018 Mécanique Des Fluides II Domaine : Sciences et Technologie Filière : Génie Mécanique 3 ème Licence - Énergétique
Transcript of Institut des Sciences et de la Technologies · milieu fluide et de les illustrer sur des exemples...

République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieur et de la Recherche
Scientifique
Centre Universitaire Ahmed Ben Yahia El-Wancharissi
Tissemsilt
Institut des Sciences et de la Technologies
Polycopie de cours
Préparé par : Dr. BAGHDAD Mohammed
2018
Mécanique Des Fluides II
Domaine : Sciences et Technologie
Filière : Génie Mécanique
3ème Licence - Énergétique

Avant-propos
Les fluides sont présents partout. Pour s’en convaincre, il suffit de penser à l’air de
l’atmosphère, les eaux des rivières et des océans, les huiles de toute nature, le sang
dans les veines, . . . On note aussi que les fluides sont présents dans de très nombreux
secteurs industriels, tels que l’aéronautique, le transport maritime, le secteur
automobile, les industries pétrolières, chimiques ou nucléaires, le génie biomédical,
l’environnement, . . .
Depuis toujours les fluides ont été étudiés, et ils continuent de l’être au sein d’une
importante communauté scientifique internationale. Il reste encore beaucoup de
problèmes à comprendre, tant au niveau des fondements que des applications.
Ce document présente la suite de la mécanique des fluides I. Il s’adresse
principalement aux étudiants suivant une formation universitaire de niveau troisième
année Licence Génie Mécanique, spécialité énergétique. Il correspond au cours que
j’ai enseigné, au Centre Universitaire Ahmed Ben Yahia El-Wancharissi-Tissemsilt.
L’objectif essentiel est de présenter les lois et notions fondamentales valables pour un
milieu fluide et de les illustrer sur des exemples simples et des exercices avec
corrections. Dans le chapitre 1, on présente une petite bref historique sur la science en
mécanique des fluide, et on décrit quelques notion de base utiles à leur étude. Le
chapitre 2 est consacré à la statique des fluides. Après avoir introduit la notion de
pression, la loi fondamentale de la statique est formulée. Celle-ci, donnée d’une part
pour un volume de fluide et d’autre part en chaque point du milieu fluide, conduit
notamment à la définition de la poussée d’Archimède et à flottabilité et la stabilité
d’un corps flottant.
L’équation de Bernoulli est introduite au chapitre 3 pour attirer l’attention sur certains
des effets intéressants du mouvement des fluides élémentaires sur la distribution de la
pression dans un champ d’écoulement. Au chapitre 4, nous présentons les éléments
essentiels de la cinématique, notamment les descriptions mathématiques eulériennes et
lagrangiennes des phénomènes d’écoulement, et indiquons la relation vitale qui existe
entre les deux points de vue. Les chapitres 3 et 4 peuvent être inter-changés sans perte

de continuité pour les enseignants qui souhaitent examiner la cinématique en détail
avant la dynamique des fluides élémentaire.
Dans 5ème chapitre, nous passons d’abord en revue les concepts de dimensions et
d’unités et le principe fondamental d’homogénéité dimensionnelle. Nous décrivons
également un outil puissant pour les étudiants appelé analyse dimensionnelle, dans
lequel la combinaison de variables dimensionnelles et de variables non
dimensionnelles en paramètres non dimensionnels réduit le nombre de paramètres
indépendants nécessaires dans un problème. Nous discutons du concept de similitude
entre un modèle et un prototype. Enfin, nous appliquons cette technique à plusieurs
problèmes pratiques pour illustrer à la fois son utilité et ses limites.

Objectif
Ce manuscrit est destiné à être utilisé comme un manuel dans le cours de mécanique
des fluides II pour les étudiants en génie mécanique. Les étudiants sont supposés avoir
une formation suffisante en calcul, en physique, en mécanique et en thermodynamique.
Les objectifs de ce polycopie sont :
• Couvrir les principes de base et les équations de la mécanique des fluides
• Présenter de nombreux exemples d’ingénierie du monde réel pour donner aux
étudiants une idée de la façon dont la mécanique des fluides est appliquée dans la
pratique de l’ingénierie
• Développer une compréhension intuitive de la mécanique des fluides en mettant
l’accent sur la physique, et en fournissant des figures attrayantes et des aides visuelles
pour renforcer la physique.

Sommaire
Avant-Propos
Objectif
Sommaire
Chapitre 01 : Introduction et Notion de Base
1.1 Rappel Mathématique……………………………………………………... 02
1.2 Bref historique…………………………………………………………….. 03
1.3 Viscosité…………………………………………………………………… 05
1.4 Compressibilité des fluides………………………………………………… 07
1.5 Vitesse du son……………………………………………………………… 07
1.6 Expérience de Reynolds et régime d’écoulement…………………………. 09
Exercices résolusde chepitre 01…………………………………………………….. 11
Exercices proposés de chapitre 01…………………………………………………... 15
Chapitre 2 : Statique des fluides
2.1 Forces extérieures………………………………………………………….. 17
2.1.1 Forces à distance ou forces de champ……………………………………… 17
2.1.2 Forces de contact…………………………………………………………... 18
2.2 Pression…………………………………………………………………….. 18
2.2.1 Pression à un point…………………………………………………………. 18
2.2.2 Mesure de pression………………………………………………………… 22
2.3 Force hydrostatique sur une surface plane…………………………………. 23
2.4 Force hydrostatique sur une surface courbe………………………………... 27
2.5 Flottabilité et stabilité……………………………………………………… 28
2.5.1 Le principe d’Archimède…………………………………………………... 28
2.5.2 Stabilité…………………………………………………………………….. 30
Exercices résolus de chapitre 02…………………………………………………….. 33
Exercices proposés de chapitre 02…………………………………………………… 39
Chapitre 03 : Dynamique des fluides élémentaires –
L’équation de Bernoulli
3.1 Deuxième loi de Newton…………………………………………………... 41

3.2 Loi de Newton le long d’une ligne de courant……………………………… 44
3.3 Loi de Newton Normal à la ligne de courant………………………………. 47
3.4 Pression Statique, Dynamique et Totale……………………………………. 49
Exercices résolus de chapitre 03…………………………………………………….. 52
Exercices proposés de chapitre 03…………………………………………………… 58
Chapitre 4 : Cinématique des fluides
4.1 Description d’un champ de fluide…………………………………………. 60
4.1.1 Description de Lagrange…………………………………………………… 60
4.1.2 Description d’Euler………………………………………………………… 62
4.1.3 Description arbitraire de Lagrange-Euler (ALE)………………………….. 63
4.2 La dérivée particulaire ou matérielle……………………………………….. 63
4.3 Ecoulement stationnaire et instationnaire ………………………………….. 65
4.4 Mécanismes des phénomènes de transport…………………………………. 66
4.5 Ligne de courant, Trajectoires et Ligne d’émission………………………… 66
4.5.1 Ligne de courant…………………………………………………………… 66
4.5.2 Trajectoire………………………………………………………………….. 67
4.5.3 Ligne d’émission…………………………………………………………... 68
4.6 Le concept de flux………………………………………………………….. 69
4.6.1 Débit volumétrique et débit massique……………………………………… 69
4.6.2 Vitesse moyenne…………………………………………………………… 70
4.7 Translation, Taux de Déformation et Rotation……………………………... 70
4.8 Vorticité…………………………………………………………………….. 75
4.9 Equation de continuité……………………………………………………… 77
Exercices résolus de chapitre 03……………………………………………………... 80
Exercices proposés de chapitre 03…………………………………………………… 90
Chapitre 5 : Analyse dimensionnelle et Similitude
5.1 Analyse dimensionnelle……………………………………………………. 92
5.2 Théorème de Buckingham Pi……………………………………………….. 94
5.3 Détermination des termes Pi………………………………………………... 95
5.4 Nombres sans dimension communs en MDF………………………………. 100
5.5 Similitude…………………………………………………………………… 102
5.5.1 Similitude géométrique……………………………………………………... 103
5.5.2 Similitude cinématique……………………………………………………... 104

5.5.2 Similitude dynamique………………………………………………………. 105
Exercices résolus de chapitre 03……………………………………………………... 106
Exercices proposés de chapitre 03…………………………………………………… 118
Références……………………………………………………………………… 123

1
Chapitre 1
Introduction et Notion de Base
La Mécanique Des Fluides (MDF) traite l’étude de tous les fluides dans des situations statiques
et dynamiques. MDF est une branche de la mécanique continue qui traite les relations entre les
forces, les vitesses et les conditions statiques dans un fluide. Cette branche traite aussi d’autres
problèmes tels que la statique des fluides, la tension de surface, la circulation dans un espace
enfermé, stabilité de l’écoulement, interaction fluide-structure, etc…
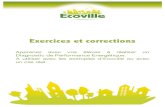
La mécanique des fluides implique de nombreux domaines qui n’ont pas de frontières claires
entre eux (laminaire-turbulent, compressible et incompressible, monophase-multiphasique). La
figure 1.1 schématisée les relations complexes entre les différentes branches dont une partie
seulement de celui-ci devrait être élaborées dans le même temps.
Figure 1.1. Schéma pour expliquer les relations des branches de la mécanique des fluides.

2
Un rappel mathématique pour l’étudiant a été présenté au début de ce chapitre ; ensuite, on
présente un petit historique sur début des sciences en mécaniques des fluides et leurs nécessités
dans la vie humaine. Les propriétés du fluide tel que la pression et la viscosité ont été détaillés
à la fin de chapitre avec l’éxpérience de Reynolds pour montrer le régime de l’écoulement a
travers le nombre de Reynolds. Le chapitre est contient des exercices résolus pour bien
comprendre les définitions des cours, ainsi que des exercices proposés aux étudiants
1.1 Rappel Mathématique
En coordonnées cartésiennes
Gradient , ,f f f
grad f fx y z
(1.1)
Divergence divyx z
FF FF F
x y z
(1.2)
Rotationnel rot
z y
x z x y z
y x x y z
F y F z i j k
F F F z F x
F x F y F F F
(1.3)
Laplacien 2 2 2
2
2 2 2
f f fF f
x y z
(1.4)
En coordonnées cylindriques
Gradient 1
, ,f f f
grad f fr r z
(1.5)
Divergence 1 1
divr z
ur u uF F
r r r z
(1.6)
Rotationnel
1
rot
1
z
z z
r
uu
r z
u uF F
z r
r u r u
r r
(1.7)
Laplacien
2 22
2 2 2
1 1f f fF f r
r r r r z
(1.8)

3
En coordonnées sphériques
Gradient 1 1
grad , ,sin
f f ff
r r r
(1.9)
Divergence
2
2
sin1 1 1div
sin sin
rr u u uA
r r r r
(1.10)
Rotationnel
1sin ,
sinrot
1 1 1,
sin
r r
AA
rA
A ArA rA
r r r r r
(1.11)
Laplacien 2
2
2 2 2 2 2
1 1 1sin
sin sin
f f fF r
r r r r r
(1.12)
Relations fondamentales
grad
0
0
div laplacien
div rot
rot rot grad div laplacien
rot grad
(1.13)
1.2 Bref historique
La nécessité d’avoir une certaine compréhension de la mécanique des fluides a commencé avec
la nécessité d’obtenir l’approvisionnement en eau. Par exemple, les gens ont réalisé des puits
doivent être vidés avec des dispositifs de pompage. Plus tard, une grande population a besoin
de résoudre les problèmes des eaux usées avec des systèmes d’évacuation. À un moment donné,
les gens ont réfléchi que l’eau peut être utilisée pour déplacer les choses et fournir de l’énergie.
Toutes les connaissances des anciens peuvent être résumées comme l’application des instincts,
à l’exception d’Archimède sur les principes de la flottabilité. Le premier progrès en mécanique
des fluides a été fait par Leonardo Da Vinci (1452-1519) qui a construit le premier barrage près
de Milan.
Après ses premiers travaux, les connaissances de la mécanique des fluides (hydraulique)
gagnèrent en vitesse grâce aux contributions de Galilée, Torricelli, Euler, Newton, Bernoulli et
D’Alembert. A ce stade, la théorie et les expériences ont quelque peu divergé. Ce fait a été
reconnu par D’Alembert qui a déclaré que « La théorie des fluides doit nécessairement être

4
basée sur l’expérience ». Par exemple, le concept de liquide idéal qui conduit au mouvement
sans résistance, est en conflit avec la réalité.
Au milieu du dix-neuvième siècle, Navier au niveau moléculaire et plus tard Stokes à partir
d’un point de vue continu a réussi de créer des équations gouvernantes de mouvement fluide
réel. Ainsi, créer une correspondance entre les deux écoles de pensée : expérimentale et
théorique. Les équations de Navier-Stokes, qui décrivent l’écoulement (ou même les équations
d’Euler), ont été considérées comme insolubles au milieu du dix-neuvième siècle en raison de
la grande complexité. Ce problème a conduit à deux conséquences. Les théoriciens ont essayé
de simplifier les équations et d’arriver à des solutions approchées représentant des cas
spécifiques. Des exemples de tels travaux sont le concept de vortex d’Hermann Von Helmholtz
(1858), le concept de flux circulatoire de Lanchester (1894) et la théorie de la circulation de
Kutta-Joukowski (1906).
À la fin du XXe siècle, la demande de connaissances scientifiques vigoureuses qui peuvent être
appliquées à divers liquides par opposition à la formule pour chaque fluide a été créée par
l’expansion de nombreuses industries. Cette demande couplée à de nouveaux concepts comme
les recherches théoriques et expérimentales de Reynolds, le développement de l’analyse
dimensionnelle par Rayleigh, et l’idée de Froude de l’utilisation de modèles modifient la
science de la mécanique des fluides. Le concept le plus radical qui influence la mécanique des
fluides est peut-être l’idée de Prandtl de la couche limite, qui est une combinaison de la
modélisation et de l’analyse dimensionnelle qui mène à la mécanique des fluides moderne. Par
conséquent, beaucoup appellent Prandtl le père de la mécanique des fluides moderne. Ce
concept conduit à une base mathématique pour de nombreuses approximations. Ainsi, Prandtl
et ses étudiants Blasius, von Karman, Meyer et Blasius et plusieurs autres personnes comme
Nikuradse, Rose, Taylor, Bhuckingham, Stanton, et bien d’autres, ont transformé la mécanique
des fluides à la science moderne d’aujourd’hui.
Alors que la compréhension des fondamentaux n’a pas beaucoup changé, après la Seconde
Guerre mondiale, la manière dont elle a été calculée a changé. Il existe de nombreux
programmes open source capables d’analyser de nombreuses situations de mécanique des
fluides. Aujourd’hui, de nombreux problèmes peuvent être analysés en utilisant les outils
numériques et fournir des résultats raisonnables. Dans de nombreux cas, ces programmes
peuvent capturer tous les paramètres appropriés et fournir une description adéquate de la
physique. Cependant, il existe de nombreux autres cas où l’analyse numérique ne peut fournir
aucun résultat significatif.

5
1.3 Viscosité
La viscosité est une mesure quantitative de la résistance d’un fluide à l’écoulement. Plus
précisément, il détermine la vitesse de déformation du fluide qui est déclenchée par une
contrainte de cisaillement appliquée. On peut facilement passer à travers l’air, qui a une très
faible viscosité. Le mouvement est plus difficile dans l’eau, qui a 50 fois plus visqueuses que
l’air. On trouve encore plus de résistance dans l’huile SAE 30, qui est 300 fois plus visqueuse
que l’eau. Essayez de faire glisser votre main à travers la glycérine, qui est cinq fois plus
visqueuse que l’huile SAE 30. Les fluides peuvent avoir une vaste gamme de viscosités.
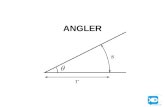
Considérons un élément fluide cisaillé dans un plan par une seule contrainte de cisaillement τ,
comme dans la Figure 1.2. L’angle de déformation de cisaillement δθ va croître continuellement
avec le temps tant que la contrainte τ est maintenue, la surface supérieure se déplaçant à la
vitesse δu plus grande que la plus basse. De tels fluides courants tels que l’eau, l’huile et l’air
montrent une relation linéaire entre le cisaillement appliqué et la vitesse de déformation :
t
(1.14)
À partir de la géométrie de la figure 1.2(a), nous voyons que : tanu t
y
Dans la limite des changements infinitésimaux, ceci devient une relation entre la vitesse de
déformation de cisaillement et le gradient de vitesse :
du
t dy
(1.15)
De l’équation (1.15), le cisaillement appliqué est également proportionnel au gradient de vitesse
pour les fluides linéaires courants. La constante de proportionnalité est le coefficient de
viscosité μ
du
t dy
(1.16)
L’équation (1.16) est dimensionnellement cohérente ; donc μ a des dimensions de contrainte-
temps [M/(LT)]. L’unité SI est exprimée en kg/m.s. Les fluides linéaires qui suivent équation
(1.16) sont appelés fluides newtoniens, d’après Newton, qui a d’abord postulé cette loi de
résistance en 1687.
On n’intéresse pas vraiment de l’angle de déformation θ(t) en mécanique des fluides, en on
concentrant sur la distribution de la vitesse u(y), comme sur la Figure 1.2(b). On va utiliser

6
l’Equation (1.16) pour dériver une équation différentielle pour trouver la distribution de la
vitesse u(y) et, plus généralement, V(x,y,z,t) dans un fluide visqueux. La figure 1.2(b) illustre
une couche de cisaillement, ou couche limite, près d’une paroi solide. La contrainte de
cisaillement est proportionnelle à la pente du profil de vitesse et est la plus grande à la paroi.
De plus, à la paroi, la vitesse u est nulle : c’est ce qu’on appelle la condition de non-glissement
et elle est caractéristique de tous les écoulements de fluide visqueux.
a.
b.
Figure 1.2. La contrainte de cisaillement provoque une déformation de cisaillement
continue dans un fluide : a. un élément fluide s’écoulant à une vitesse de δθ/δt ; b. la
distribution de cisaillement newtonien dans une couche limite près de paroi.
Le tableau 1.1 énumère la viscosité de quelques fluides à la pression et à la température
standard. Il y a une variation de six ordres de grandeur de l’hydrogène jusqu’à la glycérine. Il
y aura donc de grandes différences entre les fluides soumis aux mêmes contraintes appliquées.
Tableau 1.1 Viscosité dynamique et cinématique de quelques fluides à 1 atm. et 20 ºC.
Fluide μ
kg/(m.s)
Rapport
μ/μ(H2)
ρ
Kg/m3
ν
m2/s
Rapport
ν/ν(Hg)
Hydrogen 9.0 E-6 1.0 0.084 1.05 E-4 910
Air 1.8 E-5 2.1 1.20 1.50 E-5 130
Gasoline 2.9 E-4 33 680 4.22 E-7 3.7
Water 1.0 E-3 114 998 1.01 E-6 8.7
Ethyl alcibol 1.2 E-3 135 789 1.52 E-6 13
Mercury 1.5 E-3 170 13550 1.16 E-7 1.1
SAE 30 oil 0.29 33 000 891 3.25 E-4 2850
Glycerin 1.5 170 000 1260 1.18 E-3 10300
La viscosité varie largement avec la température et la pression. Cependant, la variation de
température a un effet opposé sur les viscosités des liquides et des gaz. La différence est due à
leur mécanisme fondamentalement différent créant des caractéristiques de viscosité. Dans les

7
gaz, les molécules sont rares et la cohésion est négligeable, alors que dans les liquides, les
molécules sont plus compactes et la cohésion est plus dominante.
La viscosité cinématique est une autre façon d’observer la viscosité. La raison de cette nouvelle
définition est que certaines données expérimentales sont données sous cette forme. Ces résultats
expliquent également mieux en utilisant la nouvelle définition. La viscosité cinématique
englobe à la fois les propriétés de viscosité et de densité d’un fluide. L’équation ci-dessus
montre que les dimensions sont en mètres carrés par seconde, [m2/s]. La viscosité cinématique
est définie comme :
(1.17)
1.4 Compressibilité des fluides
Lorsqu’on examine le comportement d’un fluide particulier, il convient de se demander dans
quelle mesure il est facile de modifier le volume (et donc la densité) d’une masse donnée en cas
de variation de pression. Autrement dit, dans quelle mesure le fluide est-il compressible? Une
propriété couramment utilisée pour caractériser la compressibilité, Ev, défini comme :
v
dpE
dV V (1.18)
où dp est la variation de pression différentielle nécessaire pour créer une variation de volume
différentielle, dV , d’un volume V , le signe négatif est inclus car une augmentation de la
pression entraînera une diminution de volume. Etant donné qu’une diminution de volume d’une
masse donnée, m V , entraînera une augmentation de la densité, Eq. 1.18 peut également
être exprimé par :
v
dpE
d (1.19)
Des pressions importantes sont nécessaires pour modifier le volume des liquides, nous
concluons que les liquides peuvent être considérés comme incompressibles pour la plupart des
applications d’ingénierie pratiques.
Lorsque les gaz sont comprimés (ou se détente), la relation entre pression et densité dépend de
la nature du processus. Si la compression ou la détente a lieu dans des conditions de température
constante (processus isothermique).
constantp
(1.20)
Si la compression ou la dilatation est sans frottement et qu’aucune chaleur n’est échangée avec

8
l’environnement (processus isentropique), alors
constantk
p
(1.21)
où k est le rapport entre la chaleur spécifique à pression constante, cp, et la chaleur spécifique à
volume constant, cv, avec R = cp-cv (R est la constante des gaz). Comme dans le cas de la loi des
gaz parfaits, la pression dans les deux équations (1.20) et (1.21) doivent être exprimés en
pression absolue.
Avec des équations explicites reliant la pression et la densité, le coeffecient de compressibilité
pour les gaz peut être déterminé en obtenant le dérivé dp/dρ de Eq. (1.20) ou (1.21) et en
substituant les résultats à l’équation (1.19). Il s’ensuit que pour un processus isothermique
vE p et pour un processus isentropique, vE k p .
1.5 Vitesse du son
Une autre conséquence importante de la compressibilité des fluides est que les perturbations
introduites à un moment donné dans le fluide se propagent à une vitesse finie. Par exemple, si
un fluide s’écoule dans une conduite et qu’une vanne à la sortie est soudainement fermée (une
perturbation localisée), l’effet de la fermeture de la vanne n’est pas ressenti instantanément en
amont. Il faut un temps fini pour que la pression créée par la fermeture de la vanne se propage
vers un emplacement en amont.
De même, un diaphragme de haut-parleur provoque une perturbation localisée lorsqu’il vibre
et le faible changement de pression créé par le mouvement du diaphragme se propage dans les
airs avec une vitesse finie. La vitesse à laquelle ces petites perturbations se propagent est
appelée vitesse acoustique ou vitesse du son, c. La vitesse du son est liée aux changements de
pression et de densité du fluide dans l’équation
dpc
d (1.22)
ou en termes de module de masse défini par Eq. 1.19
vEc
(1.23)
Comme la perturbation est faible, le transfert de chaleur est négligeable et le processus est
supposé être isentrope. Ainsi, la relation pression-densité utilisée dans l’équation 1.23 est celui
d’un processus isentropique.

9
Pour les gaz subissant un processus isentropique, vE k p de sorte que : k p
c
et en faisant usage de la loi des gaz parfaits, il s’ensuit que c kRT .
1.6 Expérience de Reynolds et régime d’écoulement
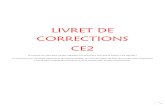
Un écoulement peut être de nature laminaire, turbulente ou transitoire. Cela devient une
classification très importante des flux et est mis en évidence de manière vivante par l’expérience
menée par Osborne Reynolds (1842-1912). Dans un écoulement à travers un tube de verre
(Figure 1.3), il a injecté un colorant pour observer la nature de l’écoulement. Lorsque les
vitesses étaient faibles, l’écoulement semblait suivre une trajectoire rectiligne (avec un léger
flou dû à la diffusion du colorant). Au fur et à mesure que la vitesse d’écoulement augmente, le
colorant fluctue et l’on observe des éclats intermittents. Lorsque la vitesse d’écoulement
augmente davantage, le colorant est flou et semble remplir tout le tuyau. Ce sont ce que nous
appelons des flux laminaires, transitoires et turbulents.
Figure 1.3. Expérience de Reynolds

10
Le nombre de Reynolds (Re) est un rapport sans dimension des forces d’inertie aux forces
visqueuses et est utilisé pour déterminer le type d’écoulement se produisant: laminaire ou
turbulent.
forcesd'inertie
Reforces visqueuses viscositédynamique vitesse distance surface
masse accélération
3 21 13
2 21Re
LVt t tt
VL L
L L LL VL VL
L L
où
ρ est la masse volumique du fluide [kg/m3], V est la vitesse de fluide par rapport au l’objet [m/s],
Dh est une dimension linéaire caractéristique (diamètre hydraulique) [m], t indique le temps [s],
μ est la viscosité dynamique du fluide [Pa·s, N·s/m2 ou kg/m·s], ν est la viscosité cinématique
(ν =μ/ρ) [m2/s].
Pour des formes telles que des carrés, des conduits rectangulaires ou annulaires où la hauteur
et la largeur sont comparables, la dimension caractéristique pour les situations d’écoulement
interne est considérée comme étant le diamètre hydraulique, Dh, défini comme suit :
4×surface 4
périmètre mouilléh
AD
P
où A est la section transversale et P le périmètre mouillé. Le périmètre mouillé d’un canal
correspond au périmètre total de toutes les parois du canal en contact avec le flux. Cela signifie
que la longueur du canal exposé à l’air n’est pas comprise dans le périmètre mouillé.

11
Exercices résolus
Chapitre 01
Exercice 1.1
La distribution des vitesses pour l’écoulement d’un fluide newtonien entre deux larges plaques
parallèles (Figure E1.1) est donnée par l’équation :
23
12
V yu
h
où V est la vitesse moyenne. Le fluide a une viscosité de 1,79×10−3 Pa s. Quand V = 0.6 m/s et
h = 0.5 cm. déterminer:
a. la contrainte de cisaillement agissant sur le mur du fond,
b. la contrainte de cisaillement agissant sur un plan parallèle aux murs et passant par la
ligne médiane (mi-plan).
Figure E1.1
Solution
Pour ce type d’écoulement parallèle, la contrainte de cisaillement est obtenue à partir de
l’équation du
dy
La distribution de vitesse u = u (y) est connue, la contrainte de cisaillement peut être déterminée
en tout point en évaluant le gradient de vitesse, du/dy :
2
3du Vy
dy h
a. le long de la paroi inférieure y = ‒h, de sorte que : 3du V
dy h

12
3
2
3 1.79 10 3 0.60.6444 N/m²
0.5 10paroibasse
V
h
Ce stress crée une traînée sur le mur. Comme la distribution des vitesses est symétrique, la
contrainte de cisaillement le long de la paroi supérieure aurait la même.
b. Le long du plan médian où y = 0, 0du
dy
et donc la contrainte de cisaillement est : 0mi plan
Nous voyons que le gradient de vitesse (et donc la contrainte de cisaillement) varie linéairement
avec y et, dans cet exemple, varie de 0 au centre du canal et 0.6444 N/m² aux murs. Pour le cas
plus général, la variation réelle dépendra de la nature de la distribution de vitesse.
Exercice 1.2
Un film d’huile de viscosité μ et l’épaisseur h˂˂R se situe entre une paroi pleine et un disque
circulaire, comme sur la Figure E1. 2. Le disque tourne régulièrement à la vitesse angulaire ω.
En notant que la vitesse et la contrainte de cisaillement varient avec le rayon r, trouvez une
formule pour le couple M nécessaire pour faire tourner le disque (Négliger la résistance d’air).
a.
b.
Figure E1.2. Vue de côté (a) et vue de dessus (b) du système.
Solution
Hypothèses : Profil de vitesse linéaire, écoulement laminaire, non-glissement.
La contrainte de cisaillement donnée par équation du
dy
En estimant la contrainte de cisaillement sur une bande circulaire de largeur dr et de surface
dA=2πr×dr sur la Figure 1.2b.

13
le moment dM sur l’origine causée par cette contrainte de cisaillement est : dM dF r
Intégrez sur tout le disque pour trouver le moment total M.
dF dA r
Au rayon r, la vitesse dans l’huile est tangentielle, variant de zéro à la paroi fixe (non-
glissement) à u=ωr à la surface du disque. La contrainte de cisaillement à cette position est donc
Cette contrainte de cisaillement est partout perpendiculaire au rayon d’origine (voir Figure
1.2b).
2
2
2
dM dA r dA r
r dr r
r dr
Le moment total sur l’axe du disque, provoqué par le cisaillement de cette bande circulaire,
peut être trouvé en intégrant :
2
0
2
0
3
2
2
2
3
R
R
M r dr
r dr
R
Exercice 1.3
Un avion à réaction vole à une vitesse de 880 km/h à une altitude de 10 km, où la température
est de ‒54.5 °C. Déterminez le rapport entre la vitesse de l’aéronef, V, et celle de la vitesse du
son, c, à l’altitude spécifiée. Supposons que k = 1,40.
Solution
La vitesse du son peut être calculée par :
1.4 287 54.5 273.15c kRT
296.40m/sc
Depuis la vitesse de l’air est :
880 1000244.444m/s
3600V
le rapport est :

14
244.44440.825
296.40
V
c
Ce rapport s’appelle le nombre de Mach, Ma. Si (Ma < 1) l’avion vole à des vitesses
subsoniques, alors que pour (Ma > 1), il vole à des vitesses supersoniques. Le nombre de Mach
est un paramètre important sans dimension utilisé dans l’étude du débit de gaz à haute vitesse
et sera examiné plus en détail aux future.

15
Exercices proposés
Chapitre 01
Exercice 1.4
Une plaque mince est séparée de deux plaques fixes par des liquides très visqueux 1 et 2 ,
respectivement, comme sur la figure E1.4. Les espacements des plaques h1 et h2 sont inégaux.
L’aire de contact est A entre la plaque centrale et chaque fluide.
Figure E1.4
(a) En supposant une distribution de vitesse linéaire dans chaque fluide, trouver la force F
requise pour tirer la plaque à la vitesse V.
(b) Existe-t-il une relation nécessaire entre les deux viscosités 1 et 2 ?
Exercice 1.5
Un bloc de poids W glisse le long d’un plan incliné tout en étant lubrifié par un mince film
d’huile, comme sur la figure. La surface de contact du film est A et son épaisseur est h. En
supposant une distribution de vitesse linéaire dans le film, trouver une expression pour la vitesse
« terminale » (accélération zéro) V du bloc.
Figure E1.5
Trouver la vitesse terminale du bloc si la masse du bloc est de 6 kg, A=35 cm2, θ=15° et le film
est une huile SAE 30 de 1 mm d’épaisseur à 20 °C.

16
Exercice 1.6
Une cloche hémisphèrique (rayon R, épaisseur e<< R, masse m) repose sur un plan horizontal.
Elle contient de l’eau jusqu’à une hauteur h. Un orifice pratiqué au sommet permet de maintenir
la pression atmosphèrique à l’interface eau/air. L’épaisseur de paroi e est suffisamment faible
pour considérer comme identiques les surfaces intérieure et extérieure de la cloche.
Montrer qu’il existe une hauteur critique he au delà de laquelle l’équilibre est rompu (la cloche
se soulève)
Application numérique : cloche en verre de densité d = 2,5 telle que e/R = 0.02
Figure E1.6

17
Chapitre 2
Statique des fluides
Dans ce chapitre, on abordera une catégorie importante de problèmes dans lesquels le fluide
est au repos. Dans ce cas, il n’y aura aucune contrainte de cisaillement dans le fluide et les
seules forces qui se développent à la surface des particules seront dues à la pression. Ainsi,
notre principale préoccupation est d’étudier la pression et sa variation dans un fluide ainsi que
l’effet de la pression sur les surfaces immergées. L’absence de contraintes de cisaillement
simplifie l’analyse et, comme nous le verrons, on permet d’obtenir des solutions relativement
simples à de nombreux problèmes pratiques importants.
2.1 Forces extérieures
Toute particule ou domaine fluide est soumis à deux types de forces extérieures, forces ou
actions à distance et actions de contact.
2.1.1 Forces à distance ou forces de champ
Il s’agit des forces qui se décroissent lentement avec la distance entre les éléments en
interaction et dont l’effet est appréciable pour les distances caractéristiques de l’écoulement
du fluide. Ces forces sont produises par des champs naturelles comme, le champ de la
pesanteur ( g ) ou les champs électromagnétiques. Les forces fictives induites par des
référentiels en accélération telle que la force de centrifuge sont aussi classées parmi les forces
à distance.
Ces forces sont proportionnelles aux volume de l’élément et agissent de la même manière sur
toutes les particules fluides d’un petit élément. On appelle toutes ces forces : forces de volume
(ou volumique) ou force de masse (ou massique).
La force totale à l’instance t s’exerçant sur un élément δV et centré en un point P dont le
vecteur position x est ,f x t V , ρ est la masse volumique du fluide et ,f x t est la force
massique.

18
La force de la pesanteur par unité de masses s’écrit f g où g est l’accélération due la
pesanteur. Les forces d’inertie telles que la force de Coriolis 2relative
v ou la force de
centrifuge 21
2r
sont des forces fictives; est le vecteur rotation. La force de Coriolis
est importante en météorologie et dans la circulation océanique.
Figure 2.1. Forces de pesanteur et de centrifuge s’exerçant sur un élément dV
2.1.2 Forces de contact
Ces forces ne se font apparaître que lors de contact direct entre les éléments et ne s’exercent
que sur la surface de contact. La force de pression p (contrainte normale à la surface) ou la
force de cisaillement (contrainte de cisaillement agissant parallèlement à la surface) sont des
exemples de forces de contact et sont exprimées en fonction de leur densité surfacique.
2.2 Pression
La pression est définie comme une force normale exercée par un fluide sur unité de surface.
On parle de pression lorsqu’on traite un gaz ou un liquide. La contrepartie de la pression dans
les solides est la contrainte normale. Puisque la pression est définie comme force par unité de
surface, on peut écrire :
p F S (2.1)
2.2.1 Pression à un point
La question qui se pose immédiatement est de savoir comment la pression varie en un point
avec l’orientation du plan passant par ce point. Pour répondre à cette question, considérons un
domaine fluide libre, illustré à la Figure 2.2, en retirant un petit élément d’un endroit

19
quelconque dans ce domaine fluide. En considérant qu’il n’y a pas de contraintes de
cisaillement, les seules forces externes agissant sur les surfaces sont dues à la pression
surfacique. Pour des raisons de simplicité, les forces dans la direction x ne sont pas
représentées et l’axe z est pris comme axe vertical, de sorte que le poids agit dans la direction
z négative. Pour que l’analyse soit la plus générale possible, on va permettre à l’élément fluide
d’avoir un mouvement accéléré avec l’hypothèse de contraintes de cisaillement nulles sera
toujours valable tant que l’élément fluide se déplacera comme un corps rigide; c’est-à-dire
qu’il n’y a pas de mouvement relatif entre les éléments adjacents.
Figure 2.2. Force sur un élément de fluide en forme arbitraire
Les équations de mouvement de la deuxième loi de Newton, dans les directions y et z, sont
respectivement :
sin2
y y s y
x y zF p x z p x s a
(2.2)
cos2 2
z z s z
x y z x y zF p x y p x s a
(2.3)
où ps, py et pz sont les pressions moyennes sur les faces, γ et ρ sont les propriétés de fluide.
cosy s et sinz s de sorte que les équations du mouvement peuvent être
réécrites comme :
2
2
y s y
z s z
yp p a
zp p a
(2.4)
Comme nous nous intéressons vraiment à ce qui se passe en un point, nous prenons la limite
comme δx, δy et δz approche zéro, et il en résulte que py = ps et pz = ps ou (py = pz = ps ).

20
L’angle a été choisi arbitrairement pour que l’on puisse conclure que la pression en un point
du fluide au repos ou en mouvement est indépendante de la direction tant qu’il n’y a pas de
contraintes de cisaillement. Ce résultat important est connu sous le nom de loi de Pascal
(1623–1662), un mathématicien français qui a apporté d’importantes contributions dans le
domaine de l’hydrostatique.
Conclusion
La pression en un point du fluide au repos ou en mouvement est indépendante de la direction
tant qu’il n’y a pas de contraintes de cisaillement.
Bien que nous ayons répondu à la question de savoir comment la pression varie en un point
avec la direction, nous sommes maintenant confrontés à une question tout aussi importante :
comment la pression dans un fluide sans contrainte de cisaillement varie-t-elle d’un point à
l’autre? Pour répondre à cette question, considérons un petit élément tridimensionnel de
fluide retiré d’une position arbitraire, comme illustré à la Figure 2.3. Il existe deux types de
forces agissant sur cet élément: les forces de surface dues à la pression et une force massique
égale au poids de l’élément. Les autres types de forces possibles, tels que ceux dus aux
champs magnétiques, ne seront pas pris en compte dans cet exemple.
Figure 2.3. Forces de surface et de volume agissant sur un petit élément fluide

21
Si la pression au centre de l’élément est désignée par p, la pression moyenne sur les
différentes faces peut être exprimée en termes de p et de ses dérivés, comme le montre la
Figure 2.3. Nous utilisons le développement de série Taylor au centre de élément pour
approcher les pressions à une courte distance et en négligeant les termes d’ordre supérieur qui
disparaîtront lorsque nous laisserons δx, δy et δz s’approcher de zéro. Pour simplifier, les
forces de surface dans la direction x ne sont pas représentées.
La force de surface résultante dans la direction y est :
2 2y
p y p yF p x z p x z
y y
(2.5)
y
pF x y z
y
(2.6)
De même, pour les directions x et z, les forces de surface résultantes sont :
x
pF x y z
x
z
pF x y z
z
(2.7)
La force de surface résultante agissant sur l’élément peut être exprimée sous forme
vectorielle :
s x y zF F i F j F k
s
p
p p pF i j k x y z
x y z
(2.8)
Le symbole est l’opérateur gradient. La résultante de force surfacique par unité de volume
peut être exprimée comme suit:
sFp
x y z
(2.9)
Le poids de l’élément est :
W k x y z k (2.10)
où le signe négatif indique que la force due au poids est descendante (dans la direction z
négative). La seconde loi de Newton, appliquée à l’élément fluide, peut être exprimée comme
suit :
F m a (2.11)
Où ƩδF représente la force résultante agissant sur l’élément, a est l’accélération de l’élément,
et δm est la masse de l’élément, qui peut être écrite comme suit ρ δx δy δz. Il en résulte que :

22
a
a
sF F W k m
p x y z x y z k x y z
ap k (2.12)
L’équation (2.12) est l’équation générale du mouvement pour un fluide dans lequel il n’y a
pas de contraintes de cisaillement. Pour le moment, cependant, nous limiterons notre attention
au cas particulier d’un fluide au repos.
0p k
ou sous forme de composant : 0 0p p p
x y z
Ces équations montrent que la pression ne dépend pas de x ou y. Ainsi, lorsque nous nous
déplaçons d’un point à un autre dans un plan horizontal (dans un plan parallèle au plan xy), la
pression ne change pas. Puisque p ne dépend que de z.
p
z
(2.13)
L’équation (2.13) est l’équation fondamentale pour les fluides au repos. Cette équation
indique que le gradient de pression dans la direction verticale est négatif ; c’est-à-dire que la
pression diminue à mesure que nous remontons dans un fluide au repos. Il n’y a aucune
exigence qui soit une constante. Ainsi, il est valable pour les fluides à poids spécifique
constant, tels que les liquides, ainsi que les fluides dont le poids spécifique peut varier avec
l’altitude, tels que l’air ou d’autres gaz. Cependant, procéder à l’intégration de l’équation
(2.13) il est nécessaire de préciser comment le poids spécifique varie avec z.
2.2.2 Mesure de pression
La pression étant une caractéristique très importante dans le domaine des fluides, il n’est pas
surprenant que de nombreux dispositifs et techniques soient utilisés dans ses mesures. L’unité
de pression pascal [Pa] est trop petite pour les pressions rencontrées en pratique, par
conséquent, ses multiples (kPa et MPa) sont couramment utilisés. Trois autres unités de
pression peuvent utiliser dans la pratique, sont atm., bar et kgf/cm2.
La pression en un point de fluide sera désignée soit comme une pression absolue, soit comme
une pression manométrique. La pression réelle à une position donnée est appelée pression
absolue et elle est mesurée par rapport au vide absolu.
Cependant, les appareils de mesure de pression sont calibrés pour lire zéro dans l’atmosphère
(Figure 2.4), et ils indiquent donc la différence entre la pression absolue et la pression

23
atmosphérique locale. Les pressions absolues, de jauge et de vide sont toutes des quantités
positives et sont liées les unes aux autres par :
jauge abs atmp p p (2.14)
vide atm absp p p (2.15)
Figure 2.4. Représentation graphique de pressions absolue, de jauge et de vide.
Dans les relations thermodynamiques et les tables, la pression absolue est presque toujours
utilisée. Tout au long de ce texte, la pression p désignera une pression absolue, sauf indication
contraire.
2.3 Force hydrostatique sur une surface plane
Lorsqu’une surface est immergée dans un fluide, des forces se développent sur la surface à
cause du fluide. La détermination de ces forces est importante dans la conception des
réservoirs de stockage, des navires, des barrages et des autres structures hydrauliques. Pour
les fluides au repos, nous savons que la force doit être perpendiculaire à la surface car aucune
contrainte de cisaillement n’est présente. Nous savons également que la pression variera
linéairement avec la profondeur si le fluide est incompressible.
Pour une surface horizontale, telle que le fond d’un réservoir rempli de liquide (Figure 2.5),
l’ordre de grandeur de la force résultante est simplement FR = p A, où p est la pression
uniforme sur le fond et A est l’aire du fond. Pour le réservoir ouvert indiqué, notez que si la
pression atmosphérique agit des deux côtés du fond, comme illustré, la force résultante sur le
fond est simplement due au liquide dans le réservoir. Comme la pression est constante et
uniformément répartie sur le fond, la force résultante agit à travers le centre de gravité de la
zone.

24
Figure 2.5. Pression et force hydrostatique résultante développées
au fond d’un réservoir ouvert
Pour le cas plus général où une plaque plane immergée est inclinée, comme illustré à la Figure
2.6, la détermination de la force résultante agissant sur la surface est plus complexe.
Pour le moment, on suppose que la surface du fluide est ouverte à l’atmosphère. Le plan dans
lequel la surface se trouve croiser la surface libre à 0 et faire un angle θ comme montre la
Figure 2.6. Le système de coordonnées x–y est défini de manière à ce que 0 soit l’origine et y
soit dirigé le long de la surface immergée. La plaque peut avoir une forme arbitraire.
Figure 2.6. Notation pour la force hydrostatique sur une surface
plane inclinée de forme arbitraire

25
Nous souhaitons déterminer la direction, l’emplacement et l’amplitude de la force résultante
agissant d’un côté de cette surface en raison du contact du liquide avec la plaque. À n’importe
quelle profondeur donnée, h, la force agissant sur dA (la surface différentielle) est dF = γ h dA
et est perpendiculaire à la surface. Ainsi, on peut trouver la grandeur de la force résultante en
intégrant ces forces différentielles sur toute la surface. Sous forme d’équation :
sinRA A
F hdA y dA
sinRA
F y dA (2.16)
L’intégrale apparaissant dans l’équation (2.16) est le moment statique de la surface A par
rapport à l’axe des x, donc on peut écrire :
cA
y dA y A (2.17)
où yc est la coordonnée barycentre du y mesurée à partir de l’axe des x. L’équation (2.17) peut
donc être écrite comme :
sinR cF A y
R cF h A (2.18)
où hc est la distance verticale de la surface du fluide au barycentre de la plaque. Notez que
l’amplitude de la force est indépendante de l’angle θ et ne dépend que du poids spécifique du
fluide, de la surface totale et de la profondeur du barycentre. En effet, l’équation (2.18)
indique que la grandeur de la force résultante est égale à la pression au barycentre multipliée
par la surface totale. Puisque toutes les forces différentielles additionnées pour obtenir FR sont
perpendiculaires à la surface, la résultante FR doit également être perpendiculaire à la surface.
Le moment de la force résultante doit être égal au moment de la force de pression distribuée,
ou
2sinR RA A
F y y df y dA
et, par conséquent, depuis sinR cF A y
2
AR
c
y dAy
y A
(2.19)
L’intégrale dans le numérateur est le moment d’inertie par rapport à un axe formé par
l’intersection du plan contenant la surface immergée et la surface libre, nous pouvons écrire :
xR
c
Iy
y A (2.20)

26
On peut utiliser le théorème des axes parallèles pour exprimer Ix comme :
2
x xc cI I A y (2.21)
où Ixc est le moment d’inertie de la plaque par rapport à un axe passant par son centre de
gravité et parallèle à l’axe des x. Ainsi,
xcR c
c
Iy y
y A (2.22)
L’équation 2.22 montre clairement que la force résultante ne traverse pas le barycentre mais
est toujours en dessous, car 2 0xc cI A y .
Pour la coordonnée xR, peut être déterminée de manière similaire en sommant les moments
autour de l’axe y,
sinR RA
F x xy dA
xyAR
c c
xy dA Ix
y A y A
(2.23)
où Ixy est le moment de l’inertie par rapport aux axes x et y. Encore une fois, en utilisant le
théorème d’axe parallèle, on peut écrire :
yc
R c
c
Ix x
y A (2.24)
Figure 2.7. Propriétés géométriques de certaines formes communes

27
2.4 Force hydrostatique sur une surface courbe
Les équations développées à la section 2.3 pour la magnitude et l’emplacement de la force
résultante agissant sur une surface immergée s’appliquent uniquement aux surfaces planes.
Cependant, de nombreuses surfaces d’intérêt (telles que celles associées aux barrages,
conduites et réservoirs) ne sont pas planes.
Par exemple, considérons la section incurvée BC du réservoir ouvert de la Figure 2.8. On
souhaite trouver la force de fluide résultante agissant sur cette section, qui a une longueur
unitaire perpendiculaire au plan du papier. On isole tout d’abord un volume de fluide délimité
par la surface d’intérêt, en l’occurrence la section BC, la surface plane horizontale AB et la
surface plane verticale AC. Le diagramme des corps libres pour ce volume est présenté à la
Figure 2.8b. La magnitude et l’emplacement des forces 1F et
2F peuvent être déterminés à
partir des relations entre les surfaces planes. Le poids W, est simplement le poids spécifique
du fluide multiplié par le volume clos et agit par le centre de gravité (CG) de la masse de
fluide contenue dans le volume. Les forces HF et
VF représentent les composantes de la force
que le réservoir exerce sur le fluide.
Figure 2.8. Force hydrostatique sur une surface courbe
Pour que ce système de forces soit en équilibre, la composante horizontale HF doit être égale
en magnitude et colinéaire à 2F , et la composante verticale VF égale en magnitude et
colinéaire à la résultante des forces verticales 1F et W.

28
2
1
H
V
F F
F F W
et la grandeur de la résultante est obtenue à partir de l’équation
2 2
R H VF F F (2.25)
La RF résultante passe par le point O, qui peut être localisé en faisant la somme des moments
autour d’un axe approprié. La force résultante du fluide agissant sur la surface courbe BC est
égale et opposée à celle obtenue à partir du diagramme à corps libre de la Figure 2.8b.
2.5 Flottabilité et stabilité
2.5.1 Le principe d’Archimède
Lorsqu’un corps immobile est complètement immergé dans un fluide ou flotte de manière à ce
qu’il ne soit que partiellement immergé, la force de fluide résultante agissant sur le corps
s’appelle la force de flottabilité. Il en résulte une force verticale nette ascendante, car la
pression augmente avec la profondeur et les forces de pression agissant de dessous sont plus
grandes que les forces de pression agissant d’en haut. Cette force peut être déterminée par une
approche similaire à celle utilisée dans la section précédente pour les forces sur des surfaces
courbes.
Considérons un corps de forme arbitraire, ayant un volume V qui est immergé dans un fluide
comme illustré à la Figure 2.9a. Nous enfermons le corps dans un parallélépipède et dessinons
un diagramme à corps libre du parallélépipède, le corps étant retiré, comme illustré à la Figure
2.9b. Notez que les forces 1F ,
2F , 3F et
4F sont simplement les forces exercées sur les
surfaces planes du parallélépipède (pour simplifier, les forces dans la direction x ne sont pas
représentées), W est le poids du volume de fluide ombré (parallélépipède moins le corps ), et
BF est la force que le corps exerce sur le fluide. Les forces sur les surfaces verticales, telles
que 3F et 4F , sont toutes égales et s’annulent.
L’équation d’intérêt d’équilibre est donc dans la direction z et peut être exprimée comme suit :
2 1BF F F W (2.26)
Si le poids spécifique du fluide est constant, alors
2 1 2 1F F h h A
où A est la surface horizontale de la surface supérieure (ou inférieure) du parallélépipède, et
équation (2.26) peut être écrit comme :

29
Figure 2.9. Force de flottabilité sur les corps immergés et flottants.
2 1 2 1BF h h A h h A V
En simplifiant, on arrive à l’expression souhaitée pour la force de poussée
BF V (2.26)
où γ est le poids spécifique du fluide et V le volume du corps. La direction de la force de
flottabilité, qui est la force du fluide sur le corps, est opposée à celle indiquée sur le
diagramme de corps libre. Par conséquent, la force de flottabilité a une grandeur égale au
poids du fluide déplacé par le corps et est dirigée verticalement vers le haut. Ce résultat est
communément appelé principe d’Archimède (287-212 av. J. C.), un mécanicien grec et
mathématicien qui a pour la première fois énoncé les idées de base associées à
l’hydrostatique.
L’emplacement de la ligne d’action de la force de flottabilité peut être déterminé en
additionnant les moments des forces indiquées sur le diagramme de corps libre de la Figure
2.9b par rapport à un axe convenable.

30
2.5.2 Stabilité
Un autre problème intéressant et important associé aux corps immergés ou flottants concerne
la stabilité des corps. Un corps est dit être dans une position d’équilibre stable si, lorsqu’il est
déplacé, il revient à sa position d’équilibre. À l’inverse, il se trouve dans une position
d’équilibre instable si, lorsqu’il est légèrement déplacé, il se déplace dans une nouvelle
position d’équilibre.
Les considérations de stabilité sont particulièrement importantes pour les corps immergés ou
flottants, car les centres de flottabilité et de gravité ne coïncident pas nécessairement. Une
petite rotation peut résulter en un couple en cours de rétablissement ou de renversement. Par
exemple, pour le corps complètement immergé représenté à la Figure 2.10, dont le centre de
gravité est situé sous le centre de la flottabilité, une rotation à partir de sa position d’équilibre
créera un couple de rappel formé par le poids W et la force de flottabilité FB, qui provoque la
rotation du corps dans sa position initiale. Ainsi, pour cette configuration, le corps est stable.
Il est à noter que tant que le centre de gravité sera situé au-dessous du centre de la flottabilité,
le corps est dans une position d’équilibre stable par rapport à de petites rotations.
Figure 2.10. stabilité d’un corps complètement immergé
(centre de gravité en dessous du centre de gravité)
Cependant, comme l’illustre la Figure 2.11, si le centre de gravité est au-dessus du centre de
la flottabilité, le couple résultant formé par le poids et la force de flottabilité fera basculer le
corps et le placer dans une nouvelle position d’équilibre. Ainsi, un corps complètement
submergé avec son centre de gravité au-dessus de son centre de flottabilité se trouve dans une
position d’équilibre instable.

31
Figure 2.11. Stabilité d’un corps complètement immergé
(centre de gravité au-dessus du barycentre)
Pour les corps flottants, le problème de stabilité est plus compliqué, car lorsque le corps
tourne, l’emplacement du centre de la flottabilité (qui passe par le centre de gravité du volume
déplacé) peut changer.
Considérons un corps flottant incliné d’un angle, comme indiqué la Figure 2.12. Le point G
est le centre de gravité du corps où le poids du corps W agit. Le point B est le centre de la
flottabilité (le centroïde du volume de fluide déplacé) où la force de flottabilité ascendante,
BF .
Lorsque le corps est incliné, le centre de la flottabilité se déplace dans une nouvelle position
B’, car la forme du volume déplacé change. Un nouveau point M peut être défini, appelé le
Métacentre. C’est le point où une ligne verticale tirée vers le haut à partir du nouveau centre
de flottabilité B’, du corps incliné coupe la ligne de symétrie du corps. La force de flottabilité,
BF agit maintenant par l’intermédiaire de c’.
On peut voir que W et BF donnent un moment qui fait pivoter le corps dans sa position
initiale. Par conséquent, on peut dire : si le métacentre M se situe au-dessus du centre de
gravité G, le corps est stable (la hauteur métacentrique MG est positive, MG > 0). Si le
métacentre M se situe sous le centre de gravité G, le corps est instable (la hauteur
métacentrique MG est négative, MG < 0).

32
Figure 2.12. Stabilité d’un flottante
La hauteur métacentrique MG est donnée par : MG MB GB où S
IMG GB
V
où I est le deuxième moment de l’aire de la section de plan du corps où il coupe la ligne de
flottaison, VS représente le volume immergé (c.-à-d. le volume de fluide déplacé) et GB la
distance entre le centre de gravité et le centre de la flottabilité.

33
Exercices résolus
Chapitre 02
Exercice 2.1
La porte circulaire de 4 m de diamètre de la Figure E2.1a est située dans la paroi inclinée d’un
grand réservoir contenant de l’eau (γ = 9.80 kN/m3). La porte est montée sur un puits le long
de son diamètre horizontal. Pour une profondeur d’eau de 10 m au-dessus du puits,
déterminez :
- La magnitude et l’emplacement de la force résultante exercée sur la porte par l’eau,
- Le moment qu’il faudrait appliquer à la tige pour ouvrir la porte.
Figure E2.1
Solution
1. Pour trouver l’amplitude de la force de l’eau, nous pouvons appliquer l’équation :
R cF h A et comme la distance verticale entre la surface du fluide et le centroïde de la zone

34
est de 10 m, il en résulte que:
3 3 2
3
9.80 10 N/m 10m 4 m
1230 10 N
RF
Pour localiser le point (centre de pression) par lequel RF agit, nous utilisons des équations :
xyc
R c
c
Ix x
y A et xc
R c
c
Iy y
y A
Pour le système de coordonnées illustré, Rx = 0 car la surface est symétrique et le centre de
pression doit être situé le long du diamètre A-A. Pour obtenir Ry , nous avons 4
4xc
RI
44 2 10
10 sin 60 4 sin 60
0.0866 11.55 11.6 m
Ry
et la distance (le long de la porte) sous le puits jusqu’au centre de pression est
Ry 0.0866mcy
Nous pouvons conclure de cette analyse que la force exercée sur la porte par l’eau a une
magnitude de 1,23 MN et agit par un point le long de son diamètre A-A à une distance de
0,0866 m (le long de la porte) sous le puits. La force est perpendiculaire à la surface de la
porte, comme indiqué.
2. Le moment requis pour ouvrir le portail peut être obtenu à l’aide de la figure E2.1c du
corps libre. W est le poids de la porte, nous pouvons résumer des moments : 0cM
et donc,
3 5
0
1230 10 0.0866 1.07 10 N×m
R R cM F y y W
Exercice 2.2
Un réservoir sous pression contient de l’huile (d = 0,9) et une plaque carrée de 0,6 m sur 0,6
m boulonnée sur le côté, comme l’illustre la Figure E2.2. Lorsque la jauge de pression située
sur le dessus du réservoir indique 50 kPa, quelles sont l’ordre de grandeur et l’emplacement
de la force résultante sur la plaque fixée? L’extérieur du réservoir est à la pression
atmosphérique

35
Figure E2.2
Solution
La répartition de la pression agissant sur la surface intérieure de la plaque est illustrée à la
figure.
La pression en un point donné de la plaque est due à la pression de l’air ps à la surface de
l’huile, et à la pression due à l’huile, qui varie linéairement avec la profondeur, comme
indiqué sur la figure. La force résultante sur la plaque (ayant une surface A) est due aux
composants F1 et F2, avec
1 1
3 3
3
50 10 0.9 9.81 10 2 0.36
24.4 10 N
sF p h A
et
2 12
3
3
2
0.60.9 9.81 10 0.36
2
0.954 10 N
h hF A
La magnitude de la force résultante, FR est donc
3
1 2 25.4 10 N 25.4kNRF F F

36
La position verticale de FR peut être obtenue en faisant la somme des moments autour d’un
axe passant par le point O de sorte que :
1 20.3 0.2R OF y F F
ou
3 3 325.4 10 24.4 10 0.3 0.954 10 0.2Oy
0.296mOy
Ainsi, la force agit à une distance de 0,296 m au-dessus du bas de la plaque le long de l’axe de
symétrie vertical.
Notez que la pression atmosphérique utilisée dans le calcul de la force était la pression
manométrique. La pression atmosphérique n’affecte pas la force résultante (magnitude ou
emplacement), car elle agit des deux côtés de la plaque, annulant ainsi son effet.
Exercice 2.3
Une bouée cylindrique solide contient deux parties, pin de densité dpin = 0.5 et une partié
inférieur de plomb avbec une densité dplomb = 11.3, comme indiqué la figure.
- Déterminez la position d’équilibre (c’est-à-dire la profondeur d’immersion) de la bouée
dans l’eau de mer (dmer = 1,03).
- Calculez la hauteur métacentrique et montrez que la bouée est stable.
Figure E2.3
Solution
Poids du fluide déplacé = Poids du corps
d = 0.15 + 4.88 mer plomb pinA d A d A d

37
1.03 = 0.15 11.3 + 4.88 0.5d A A A
où 2 4A D
Par consequent : d = 4,01 m
Pour trouvez le centre de gravité de la bouée complète en prenant des moments de poids
autour de la base (O):
0.15 11.3 0.15 2 4.88 0.5 4.88 2 0.15
0.15 11.3 4.88 0.5
1.56m
G
A AGO z
A A
Le centre de la flottabilité B sera à la moitié de la hauteur de la partie immergée du corps
(c’est-à-dire la moitié de la hauteur du volume déplacé).
2 2.005mBBO z d
4
23
2
64 5.8 10 m16
4S
D
I DMB
DV dd
La hauteur métacentrique 35.8 10 0.44 0.45mMG MB GB . MG > 0 donc
stable.
Maintenant, réfléchissez à la longueur de la section de pin de la bouée pour qu’elle devienne
instable. Si la bouée est stable lorsque MG > 0 et instable lorsque MG < 0, on peut dire que la
limite entre stabilité et instable est lorsque MG = 0. Dans ce cas, MB = GB. Si vous rencontrez
de nouveau le problème, définissez la longueur de la section de pin sur L (au lieu de 4,88 m)
et égalez MB = GB. [Réponse = 7,20 m].
Exercice 2.4 (Maintien de niveau dans un carburateur (Archimède))
Dans la cuve d’un carburateur, le niveau de carburant est maintenu constant grâce à l’action
d’un pointeau solidaire d’un flotteur. Le pointeau obture le conduit d’arrivée de carburant
quand le niveau de celui-ci est suffisant.
Calculer la hauteur de la partie immergée du flotteur sachant que :
La masse de l’ensemble flotteur pointeau etc est de 15 g,
La pression exercée par l’arrivée de carburant est négligeable.
Le flotteur est de forme cylindrique et sa base a un diamètre de 5 cm.
La masse volumique de l’essence est 710 kg/m3 .
(On pourra faire un bilan des forces qui maintiennent le système en équilibre.)

38
Pointeau
Schéma de principe
Axe de rotation
Flotteur
Carburant
Arrivée de
carburant
Figure E2.4
Solution
La relation fondamentale de la dynamique nous donne
F ma
Il n’y a pas de déplacement donc a=0
Les forces en présence sont le poids et la poussée
d’Archimède
0archP P
En projetant sur l’axe vertical
Poids
Parchi
0arch
arch
P P
P P
La poussée d’Archimède est égale au poids du volume de liquide déplacé donc
arch ess déplacé essP V g g S h m g
Avec
2
2
2
dS r
Donc 3
2
15.10 9,810,0107
0,05710 9,81
2
ess
m gh m
S g

39
Exercices proposés
Chapitre 02
Exercice 2.5
Un solide cylindrique, de section droite circulaire, homogène de section S, de hauteur H et de
masse volumique ρs est plongé dans un récipient contenant deux liquides non miscibles
superposés, de masses volumiques ρ1 et ρ2 constantes (Figure E2.5). La pression
atmosphérique est constante et est notée pa. Les notations h et d sont précisées sur la figure.
L’axe (O, z) vertical ascendant a son origine au niveau de l’interface séparant les deux fluides.
1. Calculer la pression dans les deux fluides.
2. Faire le bilan des efforts exercés sur le solide.
3. Calculer la résultante de ces efforts.
4. Le solide étant en équilibre, calculer ρs en fonction de ρ1, ρ2, h et H.
5. Retrouver le résultat de la question 4 en appliquant le théorème d’Archimède.
Figure E2.5. Solide immergé dans deux liquides
Exercice 2.6
On considère un barrage retenant l’eau d’un lac dont le niveau est h (Figure E2.6). La surface
libre est à la pression atmosphérique ap constante. Le but de l’exercice est de calculer la

40
résultante des efforts de pression s’exerçant sur le barrage, de calculer le moment résultant des
efforts de pression au point O et de démontrer qu’il existe un point P où le moment est nul. Le
barrage est une plaque plane rectangulaire S de largeur 2L et de hauteur (Figure E2.6), l’axe
(O, Z) étant sur la médiane du rectangle. L’axe (O, z) est vertical ascendant, g est l’intensité
de l’accélération de la pesanteur et ρ la masse volumique de l’eau. Le repère (O; x, y, z) est
orthonormé direct ; les axes (O, x) et (O, y) sont indiqués sur la figure E2.6. Les vecteurs xe ,
ye , ze et
Ze sont les vecteurs unitaires sur les axes (O, x), (O, y), (O, z) et (O, Z).
1. Déterminer la pression p en tout point de l’eau. On pose, dans toute la suite, e ap p p .
On appelle souvent ep la pression effective.
2. Calculer la résultante et le moment en O des efforts dus à la pression effective sur le
barrage dans le cas 2 .
3. Calculer la résultante et le moment en O des efforts dus à la pression effective sur le
barrage dans le cas général 0 2 .
4. Déterminer le centre de poussée.
Figure E2.6. Barrage rectangulaire plan

41
Chapitre 03
Dynamique des fluides élémentaires -
L’équation de Bernoulli
Dans ce chapitre, nous examinons de manière élémentaire quelques mouvements fluides
typiques de la dynamique des fluides 2. Pour comprendre les phénomènes intéressants associés
au mouvement des fluides, il faut considérer les lois fondamentales qui régissent le mouvement
des particules fluides. De telles considérations incluent les concepts de force et d’accélération.
Nous discuterons en détail l’utilisation de la seconde loi de Newton (F=m.a), telle qu’elle est
appliquée au mouvement des particules de fluide qui est «idéal» dans un certain sens. Nous
allons obtenir la célèbre équation de Bernoulli et l’appliquer à divers flux. Bien que cette
équation soit l’une des plus anciennes en mécanique des fluides et que les hypothèses
impliquées dans sa dérivation soient nombreuses, elle peut être utilisée efficacement pour
prédire et analyser une variété de situations d’écoulement.
Cependant, si l’équation est appliquée sans respecter ses restrictions, des erreurs graves peuvent
survenir.
Une compréhension approfondie de l’approche élémentaire de la dynamique des fluides
impliquée dans ce chapitre. Cela fournit également une bonne base pour le matériel dans les
chapitres suivants, où certaines des restrictions actuelles sont supprimées et où les résultats
«plus exacts» sont présentés.
3.1 Deuxième loi de Newton
On considère le mouvement des fluides non-visqueux (viscosité nulle), si la viscosité est nulle,
la conductivité thermique du fluide est également nulle et il ne peut y avoir de transfert de
chaleur (à l’exception du rayonnement).
En pratique, il n’y a pas de liquide non-visqueux , car chaque fluide supporte des contraintes de
cisaillement lorsqu’il est soumis à un taux de déformation. Pour de nombreuses situations
d’écoulement, les effets visqueux sont relativement faibles par rapport aux autres effets. En
première approximation pour de tels cas, il est souvent possible d’ignorer les effets visqueux.
Par exemple, les forces visqueuses développées dans l’eau courante peuvent souvent être de

42
plusieurs ordres de grandeur inférieures aux forces dues à d’autres influences, telles que la
gravité ou les différences de pression. Pour d’autres situations d’écoulement d’eau, cependant,
les effets visqueux peuvent être les plus importants. De même, les effets visqueux associés à
l’écoulement d’un gaz sont souvent négligeables, bien que dans certaines circonstances, ils
soient très importants.
Nous supposons que le mouvement du fluide est régi par les forces de pression et de gravité
uniquement et examinons la seconde loi de Newton telle qu’elle s’applique à une particule
fluide ;
(Force de pression nette sur une particule)+(force de gravité nette sur les particules)=
(masse de particules)×(accélération des particules)
Pour appliquer la seconde loi de Newton à un fluide ou à tout autre objet, nous devons définir
un système de coordonnées approprié pour décrire le mouvement. En général, le mouvement
sera tridimensionnel et instable, de sorte que trois coordonnées spatiales et le temps seront
nécessaires pour le décrire.
Dans ce chapitre, nous nous intéresserons au mouvement bidimensionnel tel que celui qui se
limite au plan x‒z, comme le montre la Figure 3.1. De toute évidence, nous pourrions choisir
de décrire le flux en termes de composantes de l’accélération et des forces dans les directions
des coordonnées x et z.
Pour les flux réguliers, chaque particule glisse le long de son chemin et son vecteur de vitesse
est partout tangent au chemin. Les lignes tangentes aux vecteurs de vitesse dans le champ de
flux sont appelées lignes de courant (détaille dans le chapitre suivant). Pour de nombreuses
Figure 3.1. a. Flux dans le plan x-z, b. Flux en termes de lignes de courant
et de coordonnées normales.

43
situations, il est plus facile de décrire le flux en fonction des lignes de courant, comme le montre
la Figure 3.1b. Le mouvement des particules est décrit en fonction de sa distance, s=s(t), le long
de la ligne de courant à partir d’une origine commode et du rayon de courbure local de la ligne
de courant R=R(s). La distance le long de la ligne de courant dépend de la vitesse de la particule
V=ds/dt, et du rayon courbure de la ligne de courant. s est la coordonnée le long de la ligne de
courant, n est la coordonnée normale à la ligne de courant, comme le montre la Figure 3.1b.
Pour appliquer la deuxième loi de Newton à une particule qui coule le long de sa ligne de
courant, nous devons écrire l’accélération de la particule en fonction des coordonnées de la
ligne de courant. Par définition, l’accélération est a=dV/dt. Pour un écoulement bidimensionnel
dans le plan x–z, l’accélération a deux composantes : une le long de la ligne de courant as,
l’accélération normale à la ligne de courant an.
La composante s de l’accélération est donnée par sa dV dt V s ds st V s V .
Et la composante normale de l’accélération (accélération centrifuge) est donnée en termes de
vitesse de particule et de rayon de courbure de son chemin 2
na V R où les deux V et R peuvent
varier le long de la ligne de courant.
Les composantes de l’accélération dans les directions s et n sont données par :
s
Va V
s
,
2
n
Va
R (3.1)
où R est le rayon de courbure local et s est la distance mesurée le long de la ligne de courant à
partir d’un point initial arbitraire. En général, il y a une accélération le long de la ligne (car la
vitesse de la particule change 0V s ) et l’accélération normale à la ligne (car la particule
ne coule pas en ligne droite R ). Pour produire cette accélération, il faut une force nette non
nulle à la particule fluide.
Pour déterminer les forces nécessaires à la production d’un flux donné, nous considérons le
diagramme du corps libre d’une petite particule fluide comme le montre la Figure 3.2. La
particule d’intérêt est retirée de son environnement et les réactions de l’environnement sur la
particule sont indiquées par les forces appropriées présentes F1, F2, etc.
Dans le cas présent, les forces importantes sont supposées être la gravité et la pression. D’autres
forces, telles que les forces visqueuses et les effets de tension superficielle, sont considérées
négligeables. L’accélération de la gravité, g, est supposée constante et agit verticalement, dans
la direction z négative, sous un angle θ par rapport à la normale à la ligne de courant.

44
Figure 3.2. Isolement d’une petite particule fluide dans un champ d’écoulement
3.2 Loi de Newton le long d’une ligne de courant
Considérons la petite particule fluide de taille δs par δn dans le plan de la figure et δy
perpendiculaire à la figure, comme le montre le diagramme du corps libre de la Figure 3.3. Les
vecteurs unitaires sont désignés par s et n respectivement. Pour un flux constant, la composante
s de la loi du Newton le long de la direction de la ligne de courant, peut être écrite comme suit:
s s
V VF m a mV V V
s s
(3.2)
où sF représente la somme des composantes de toutes les forces agissant sur la particule,
qui a une masse m V et l’accélération dans la direction s est V V s avec un volume
V s n y . L’équation 3.2 est valable pour les fluides compressibles et incompressibles.
La force de gravité (poids) sur la particule peut être écrite comme W V où g . Par
conséquent, la composante de la force de poids dans la direction de la ligne de courant est :
sin sinsW W V
Comme indiqué au chapitre 1, la pression n’est pas constante dans tout le fluide stationnaire
0p à cause du poids du fluide, de même, dans un fluide en circulation. En général, pour
un débit constant, ,p p s n , si la pression au centre de la particule indiquée à la Figure 3.3
est notée p, alors sa valeur moyenne sur les deux faces d’extrémité perpendiculaires à la ligne
de courant est p+δp et p-δp. Puisque la particule est «petite», nous pouvons utiliser le
développement de série de Taylor pour obtenir : 2
s
p sp
s

45
Figure 3.3. Diagramme du corps libre d’une particule fluide pour laquelle les forces
importantes sont celles dues à la pression et à la gravité.
δFps est la force de pression nette sur la particule dans la direction de la ligne de courant, il en
résulte que :
2ps s s sF p p n y p p n y p n y
p ps n y V
s s
Ainsi, la force nette agissant dans la direction de la ligne de courant sur la particule représentée
à la Figure 3.3 est donnée par :
sins s ps
pF W F V
s
(3.3)
En combinant les équations (3.2) et (3.3), on obtient l’équation suivante du mouvement suivant
la direction de la ligne de courant :
sin s
p VV a
s s
(3.4)
L’interprétation physique de l’équation (3.4) est qu’un changement de la vitesse des particules
de fluide est obtenu par la combinaison appropriée du gradient de pression et du poids des
particules le long de la ligne de courant. Pour les situations statiques fluides, cet équilibre entre
les forces de pression et de gravité est tel qu’aucun changement de vitesse des particules n’est

46
produit ̶le côté droit de l’équation (3.4) est nul et la particule reste stationnaire. Dans un fluide
en circulation, les forces de pression et de poids ne sont pas nécessairement équilibrées ̶ le
déséquilibre de force fournit l’accélération appropriée et, par conséquent, le mouvement des
particules.
L’équation (3.4) peut être réorganisée et intégrée comme suit. Premièrement, nous notons à
partir de la Figure 3.3 que le long de la ligne de courant sin dz ds . Aussi, nous pouvons
écrire 21
2V dV ds d V ds . Enfin, le long de la ligne de courant, la valeur de n est constante
0dn pour que dp p s ds p n dn p s ds . Par conséquent, le long de la
ligne de courant p s dp ds . Ces idées combinées avec équation (3.4) donne le résultat
suivant valide le long d’une ligne de courant :
21 ( )
2
dz dp d V
ds ds ds
Cela simplifie à :
210
2dp d V dz (le long d’une ligne de courant) (3.5)
qui peut être intégré pour donner :
21
2
dpV gz C
(le long d’une ligne de courant) (3.6)
où C est une constante d’intégration à déterminer par les conditions à un moment donné sur la
ligne de courant.
En général, il n’est pas possible d’intégrer le terme de pression car la densité ne peut pas être
constante et, par conséquent, ne peut pas être retirée sous le signe intégral. Pour réaliser cette
intégration, il faut savoir précisément comment la densité varie avec la pression. Ce n’est pas
toujours facile à déterminer. Par exemple, pour un gaz parfait, la densité, la pression et la
température sont liées selon la loi p RT et R est la constante de gaz. Pour savoir comment
la masse volumique varie avec la pression, il faut aussi connaître la variation de température.
Pour le moment, nous supposerons que la densité est constante (flux incompressible).
Avec l’hypothèse supplémentaire que la densité reste constante (hypothèse pour les liquides et
aussi pour les gaz si la vitesse n’est pas trop élevée), Equation 3.6 suppose la représentation
simple suivante pour un écoulement stationnaire, non-visqueux et incompressible.
21
2p V z C (le long d’une ligne de courant) (3.7)

47
3.3 Loi de Newton-Normal à la ligne de courant
Dans cette section, nous examinerons l’application de la seconde loi de Newton dans une
direction normale à la ligne de courant. Dans de nombreux flux, les lignes de courant sont
relativement droites, le flux est essentiellement unidimensionnel et les variations des
paramètres entre les lignes de courant (dans la direction normale) peuvent souvent être
négligées par rapport aux variations le long de la ligne de courant. Cependant, dans d’autres
situations, des informations précieuses peuvent être obtenues en considérant (F = m.a) comme
normal aux lignes de courant. Par exemple, la région de basse pression au centre d’une tornade
peut s’expliquer en appliquant la seconde loi de Newton sur les lignes de courant presque
circulaires.
Nous considérons à nouveau l’équilibre des forces sur la particule de fluide illustrée à la Figure
3.3. Cette fois, nous considérons les composants dans la direction normale, n, et écrivons la
deuxième loi de Newton dans cette direction comme :
2 2
n
mV V VF
R R
(3.8)
où nF représente la somme de composantes de toutes les forces agissant sur la particule.
Nous supposons que le flux est stable avec une accélération normale 2
na V R où R est le
rayon de courbure local des lignes de courant. Cette accélération est produite par le changement
de direction de la vitesse de la particule lorsqu’elle se déplace le long d’un chemin courbé.
Nous supposons encore que les seules forces importantes sont la pression et la gravité. La
composante du poids (force de gravité) dans la direction normale est :
cos cosnW W V
Si la pression au centre de la particule est p, alors ses valeurs en haut et en bas de la particule
sont np p et np p où 2np p n n . Ainsi, si la force de pression nette sur la
particule est dans la direction normale, il en résulte que :
2pn n n nF p p s y p p s y p s y
p ps n y V
n n
Par conséquent, la force nette agissant dans la direction normale sur la particule représentée sur
la Figure 3.3 est donnée par :
cosn n pn
pF W F V
n
(3.9)

48
En combinant les équations 3.8 et 3.9 et en utilisant le fait que le long d’une droite
perpendiculaire à la ligne de courant cos dz dn (voir figure 3.3) , on obtient l’équation
suivante du mouvement suivant la direction normale.
2dz p V
dn n R
(3.10)
Si on multiplie équation (3.10) par dn, utilisez le fait que p n dp dn , si s est constant et
s’intègre dans la ligne de courant (dans la direction n), nous obtenons :
2dp Vdn gz
R constante sur la ligne de courant (3.11)
Pour compléter les intégrations indiquées, il faut savoir comment la densité varie avec la
pression et comment la vitesse du fluide et le rayon de courbure varient avec n.
Pour un débit incompressible, la densité est constante et l’intégration impliquant le terme de
pression donne simplement p . Il nous reste cependant à intégrer le second terme dans
l’équation. 3.11. Sans connaître la dépendance n dans V=V(s, n) et R=R(s, n) et cette intégration
ne peut pas être complétée.
Ainsi, la forme finale pour un écoulement stationnaire, non-visqueux et incompressible est :
2Vp dn z
R constante sur la ligne de courant (3.12)
Dans les deux sections précédentes, nous avons développé les équations de base régissant le
mouvement des fluides sous un ensemble de restrictions assez rigoureux. Malgré les
nombreuses hypothèses imposées à ces flux, une variété de flux peut être facilement analysée
avec eux. Une interprétation physique des équations aidera à comprendre les processus
impliqués.
21
2p V z constante le long de la ligne de courant (3.13)
2Vp dn z
R constante sur la ligne de courant (3.14)
Les hypothèses de base suivantes ont été formulées pour obtenir ces équations , le débit est
stable et le fluide non-visqueux et incompressible. En pratique, aucune de ces hypothèses n’est
exacte.

49
3.4 Pression Statique, Dynamique et Totale
Un concept utile associé à l’équation de Bernoulli traite des pressions de la stagnation et
dynamiques. Ces pressions résultent de la conversion de l’énergie cinétique dans un fluide en
écoulement en une «augmentation de pression» lorsque le fluide est amené au repos. Dans cette
section, nous explorons divers résultats de ce processus. Chaque terme de l’équation de
Bernoulli (3.13), a les dimensions de la force par unité de surface [N/m2]. Le premier terme, p,
est la pression thermodynamique réelle du fluide. Pour mesurer sa valeur, il est possible de se
déplacer avec le fluide et d’être ainsi «statique» par rapport au fluide en mouvement. Par
conséquent, il est normalement appelé la pression statique. Une autre façon pour mesurer la
pression statique serait de percer un trou dans une surface plane et de fixer un tube
piézométrique comme indiqué par l’emplacement du point (3) sur la figure 3.4. La pression
dans le fluide en circulation en (1) est 1 3 1 3p h p , la même que si le fluide était statique,
nous savons que 3 4 3p h , puisque 3 1 4 3h h h , il s’ensuit que 1p h .
Figure 3.4. Mesure de la pression statique et de la pression de stagnation
Le troisième terme dans équation (3.13), z est appelée pression hydrostatique. Il ne s’agit pas
d’une pression mais représente le changement de pression possible en raison des variations
d’énergie potentielles du fluide résultant des changements d’hauteur.
Le second terme de l’équation de Bernoulli 2 2V est appelé pression dynamique. Son
interprétation peut être vue sur la Figure 3.4 en considérant la pression à l’extrémité d’un petit
tube inséré dans le flux et dirigée vers l’amont. Une fois que le mouvement transitoire initial
s’est éteint, le liquide remplit le tube jusqu’à une hauteur de H. Le fluide dans le tube, y compris

50
celui à son extrémité (2), sera stationnaire. C’est-à-dire que (V2=0) ou le point (2) est un point
de stagnation.
Si l’on applique l’équation de Bernoulli entre les points (1) et (2), en utilisant 2 0V et en
supposant que 1 2z z , on trouve que :
2
2 1 1
1
2p p V
Par conséquent, la pression au point de stagnation est supérieure à la pression statique, p1, d’une
quantité 2
11 2 V la pression dynamique.
On peut montrer qu’il existe un point de stagnation sur tout corps stationnaire placé dans un
fluide en circulation. Une partie du fluide circule au-dessus et d’autres sous l’objet. La ligne de
division (ou la surface pour les écoulements à deux dimensions) est appelée la ligne de courant
de stagnation et se termine au point de stagnation du corps. Pour les objets symétriques (comme
une sphère), le point de stagnation est clairement à la pointe ou à l’avant de l’objet, comme
indiqué sur la Figure 3.5a. Pour les objets non symétriques tels que l’avion représenté sur la
Figure 3.5b, l’emplacement du point de stagnation n’est pas toujours évident.
Figure 3.5. Points de stagnation sur les corps dans les fluides en circulation.
La somme de la pression statique et de la pression dynamique est appelée pression totale, Tp .
L’équation de Bernoulli est une déclaration selon laquelle la pression totale reste constante le
long d’une ligne de courant. C’est,
21
2Tp V z p constante (le long d’une ligne de courant) (3.15)
La connaissance des valeurs des pressions statiques et de stagnation dans un fluide implique
que la vitesse du fluide puisse être calculée. C’est le principe sur lequel repose le tube de Pitot-
statique [Pitot (1675–1771)]. Comme le montre la Figure 3.6, deux tubes concentriques sont
attachés à deux jauges de pression (ou une jauge différentielle) de sorte que les valeurs de 3p

51
et 4p (ou la différence) puissent être déterminées. Le tube central mesure la pression de
stagnation à son extrémité ouverte. Si les changements d’élévation sont négligeables,
2
3
1
2p p V
où p et V sont la pression et la vitesse du fluide en amont du point (2). Le tube externe est
constitué de plusieurs petits orifices à une distance appropriée de la pointe afin de mesurer la
pression statique. Si l’élévation entre (1) et (4) est négligeable, alors
4 1p p p
En combinant ces deux équations, nous voyons que : 2
3 4
1
2p p V
qui peut être réorganisé pour donner :
3 42V p p (3.16)
Figure 3.6. Tube Pitot-statique
La forme et la taille réelles des tubes de Pitot varient considérablement. Certains des types les
plus courants sont illustrés à la Figure 3.7.
Figure 3.7. Modèles de tubes Pitot

52
Exercices résolus
Chapitre 03
Exercice 3.1
Considérez l’écoulement non-visqueux, incompressible et stationnaire le long de la ligne de
flottaison horizontale A→B devant une sphère de rayon a, comme le montre la Figure E3.1a.
D’une théorie plus avancée de l’écoulement au-delà d’une sphère, la vitesse du fluide le long
de cette ligne de courant est :
3
0 31
aV V
x
a.
b.
c.
Figure E3.1
Déterminer la variation de pression le long de la ligne de courant à partir du point A très loin de
la sphère ( Ax et 0AV V ) au point B sur la sphère( Bx a et 0BV ) .

53
Solution
Puisque le flux est stable et non-visqueux, Equation 3.4 est valide. De plus, puisque la
rationalisation est horizontale, sin sin0 0 et l’équation du mouvement le long de la ligne
de courant se réduit à :
p VV
s s
Avec la variation de vitesse donnée le long de la ligne de courant, le terme d’accélération est
33 3 320
0 03 4 3 4
31 3 1
V aV V a a aV V V V
s x x x x x
où nous avons remplacé s par x puisque les deux coordonnées sont identiques (dans une
constante additive) le long de la ligne de courant A→B. Il en résulte que < 0V V s le long
de la ligne de courant. Le fluide ralentit de loin en avant de la sphère à une vitesse nulle sur le
bord d’attaque de la sphère x a .
Ainsi, selon l’équation 1, pour produire le mouvement donné, le gradient de pression le long de
la ligne de courant est :
3 2 3 3
0
4
3 1a V a xp
x x
Cette variation est indiquée à la Figure E3.1b. On voit que la pression augmente dans la
direction du flux >0p x d’un point A à un point B. Le gradient de pression maximal
2
00.61 V a apparaît juste légèrement en avant de la sphère 1.205x a . C’est le gradient
de pression qui ralentit le fluide de 0AV V à 0BV .
La distribution de pression le long de la ligne de courant peut être obtenue en intégrant équation
2 de p = 0 (jauge) en x à la pression p à l’emplacement x. Le résultat, représenté sur la
Figure E3.1c, est ;
63
2
02
a xap V
x
La pression en B, un point de stagnation depuis 0BV , est la pression la plus élevée le long de
la ligne de courant 2
0 2Bp V . Cet excès de pression sur le devant de la sphère (c’est-à-
dire >0Bp ) contribue à la force de traînée nette exercée sur la sphère. Notez que le gradient de
pression et la pression sont directement proportionnels à la densité du fluide, ce qui montre que
l’inertie du fluide est proportionnelle à sa masse.

54
Exercice 3.2
les Figure. E3.2 montre deux champs d’écoulements avec des lignes de courant circulaires. Les
distributions de vitesse sont :
1V r C r pour le cas (a) 2CV r
r pour le cas (b)
où C1 et C2 sont constants. Déterminez les distributions de pression, pour chacune, étant donné
que 0p p à 0r r .
Figure E3.2
Solution
Nous supposons que les écoulements sont instationnaire, non visqueux et incompressibles avec
les lignes de profil dans le plan horizontal 0dz dn . Les lignes de profil étant des cercles,
la coordonnée n pointe dans une direction opposée à celle de la coordonnée radiale
n r et le rayon de courbure est donné par R r . Par conséquent, équation (3.10)
devient :
2p V
r r
Dans le cas (a) cela donne : 2
1
pC r
r
alors que pour le cas (b) cela donne : 2
2
3
Cp
r r
Dans les deux cas, la pression augmente lorsque r augmente depuis >0p r . L’intégration
de ces équations par rapport à r, en partant d’une pression connue p = p0 à r = r0 à donne :
pour le cas (a) 2 2 2
1 0 0
1
2p C r r p
pour le cas (b) 2
2 02 2
0
1 1 1
2p C p
r r

55
Ces répartitions de pression sont illustrées à la Figure E3.3c. Les distributions de pression
nécessaires pour équilibrer les accélérations centrifuges dans les cas (a) et (b) ne sont pas les
mêmes car les distributions de vitesse sont différentes. En fait, dans le cas (a), la pression
augmente sans limite quand r , tandis que dans le cas (b), elle se rapproche d’une valeur
finie quand r , dans la mesure où les modèles de profil d’écoulement sont les mêmes
pour chaque cas.
Physiquement, le cas (a) représente une rotation de corps rigide (obtenue dans une boîte d’eau
sur une plaque tournante) et le cas (b) représente un vortex libre (approximation d’une tornade
ou du tourbillon d’eau).
Exercice 3.3
Considérez le débit d’eau de la seringue
montrée à la Figure E3.3. Une force
appliquée sur le piston produira une pression
supérieure à la pression atmosphérique au
point (1) de la seringue. L’eau s’écoule de
l’aiguille point (2), avec une vitesse
relativement élevée et atteint le point (3) au
sommet de sa trajectoire. Discutez de
l’énergie du fluide aux points (1), (2) et (3)
en utilisant l’équation de Bernoulli.
Figure E3.3
Solution
Si les hypothèses (flux constant, invisible, incompressible) de l’équation de Bernoulli sont
approximativement valables, il s’ensuit que le flux peut être expliqué en termes de partage de
l’énergie totale de l’eau. Selon équation 3.13 la somme des trois types d’énergie (cinétique,
potentielle et pression) doit rester constante. Le tableau suivant indique la magnitude relative
de chacune de ces énergies aux trois points indiqués sur la Figure.
Le mouvement entraîne un changement de la magnitude de chaque type d’énergie lorsque le
fluide circule d’un emplacement à un autre. Une autre façon de considérer ce flux est la
suivante. Le gradient de pression entre (1) et (2) produit une accélération pour éjecter l’eau de
l’aiguille. La gravité agissant sur la particule entre (2) et (3) provoque une décélération
provoquant l’arrêt momentané de l’eau au sommet de son vol.

56
Type d’énergie
Point Cinétique (ρV2/2) Potentiel (γz) Pression (p)
1 petit nul grand
2 grands petits nul
3 nul grand nul
Si les effets de frottement (visqueux) étaient importants, il y aurait une perte d’énergie entre (1)
et (3) et, pour cette raison, l’eau ne pourrait pas atteindre la hauteur indiquée dans la Figure.
Exercice 3.4
Considérez le flux constant, incompressible illustré à la Figure E3.4. De la section A à B, les
lignes de courant sont droites, tandis que de C à D elles suivent des trajectoires circulaires.
Décrivez la variation de pression entre les points (1) et (2) et les points (3) et (4).
Figure E3.4
Solution
Avec les hypothèses ci-dessus et le fait que R pour la partie de A à B, équation 3.14 devient
constantp z
La constante peut être déterminée en évaluant les variables connues aux deux emplacements en
utilisant 2 0p (jauge) 1 0z et 2 2 1z h pour obtenir :
1 2 2 1 2 2 1p p z z p h
Notez que puisque le rayon de courbure de la ligne de courant est infini, la variation de pression
dans la direction verticale est la même que si le fluide était immobile.

57
Cependant, si nous appliquons l’équation 3.14 entre les points (3) et (4) on obtient (en utilisant
dn dz )
4
3
2
4 4 3 3
z
z
Vp dz z p z
R
Avec 4 0p et 4 3 4 3z z h , cela devient
4
3
2
3 4 3
z
z
Vp h dz
R
Pour évaluer l’intégrale, il faut connaître la variation de V et R avec z. Même sans ces
informations détaillées, nous notons que l’intégrale a une valeur positive. Ainsi, la pression en
(3) est inférieure à la valeur hydrostatique 4 3h , d’une valeur égale à 4
3
2
z
z
V R dz . Cette
pression plus faible, provoquée par la ligne de courant courbe, est nécessaire pour accélérer le
fluide le long du trajet courbe.
Notez que nous n’avons pas appliqué l’équation de Bernoulli (équation (3.13)) sur les lignes de
courant allant de (1) à (2) ou (3) à (4). Nous avons plutôt utilisé l’équation. 3.14. Comme
indiqué à la section 3.8, l’application de l’équation de Bernoulli à travers les lignes de profil
peut entraîner de graves erreurs.

58
Exercices proposés
Chapitre 03
Exercice 3.5
L’eau coule au-dessus d’un déversoir triangulaire, comme le montre la figure E3.13. Sur la base
d’une analyse simple utilisant l’équation de Bernoulli, déterminez la dépendance du débit sur
la profondeur H. Si le débit est 0Q lorsque 0H H , estimer le débit lorsque la profondeur est
augmentée à 03H H .
Figure E3.5
Exercice 3.6
L’eau s’écoule autour du coude
bidimensionnel vertical avec des lignes
de courant circulaires et une vitesse
constante, comme illustré à la Figure
E3.6. Si la pression est de 40 kPa au point
(1), déterminez les pressions aux points
(2) et (3). Supposons que le profil de
vitesse soit uniforme comme indiqué.
Figure E3.6

59
Exercice 3.7
Pour connaître la vitesse d'écoulement de l'air à 20 °C (considéré comme un fluide parfait) dans
une cheminée de section 2,00 m², on utilise un tube de Pitot et on mesure une différence de
pression de 0,250 mbar entre les deux prises de pression.
1- Déterminer la vitesse de l'air dans la cheminée ;
2- Déterminer le débit-volume et le débit-masse de l'air dans la cheminée.
Données : Masse volumique de l'air à 20 °C : 1,205 kg/m3

60
Chapitre 4
Cinématique des fluides
Dans ce chapitre, nous aborderons divers aspects du mouvement d’un fluide sans nous
préoccuper des forces nécessaires pour produire le mouvement. Autrement dit, nous examinerons
la cinématique du mouvement (la vitesse et l’accélération du fluide), ainsi que la description et
la visualisation de son mouvement. Une grande variété d’informations utiles peut être obtenue à
partir d’une compréhension approfondie de la cinématique des fluides. Une telle compréhension
de la manière de décrire et d’observer le mouvement des fluides est une étape essentielle pour
une compréhension complète de la dynamique des fluides.
Il existe trois formules pour décrire le mouvement des fluides : Lagrangienne, Eulérienne et les
descriptions de Lagrange-Eulérien arbitraires. En outre, trois outils pour visualiser le mouvement
du fluide seront présentés : ligne de courant, les trajectoires et ligne d’émission. Ceux-ci sont
importants dans la dynamique des fluides théoriques, expérimentales et numériques pour
visualiser le mouvement des flux.
4.1 Description d’un champ de fluide
Un fluide peut être modélisé comme un ensemble nombreux de petites particules fluides qui
s’écoulent, se tournent et se déforment. Il s’agit d’un modèle simple qui s’avère utile pour
comprendre la physique des fluides. Par conséquent, un moyen de comprendre un fluide est de
décrire le mouvement des particules qui forment le fluide.
4.1.1 Description de Lagrange
Cette description consiste à suivre chaque particule fluide, par exemple, sous la forme d’une
équation pour le trajet de chaque particule fluide. Cette approche est habituellement utilisée dans
les particules solides, la mécanique rigide du corps et la déformation dans la mécanique
solide/structurelle. Dans la mécanique des fluides, cette description est particulièrement adaptée
aux flux multiphasiques, où la bulle et les particules solides peuvent être facilement suivies à
l’aide de la formulation Lagrangienne.

61
Mathématiquement, la description Lagrangienne fournit la position de chaque particule fluide x
à chaque instant instantané t. Comme un fluide contient un nombre infini de particules, chaque
particule est sélectionnée en spécifiant sa position x0 à l’instant t = 0,
0,x x t x (4.1)
Figure 4.1. Schéma explicatif de la description de Lagrange. Position de diverses particules
de fluide en fonction du temps.
Dans cette description, la vitesse et l’accélération d’une particule fluide est déterminée comme
dans la cinématique de corps rigides, où x = x (t, x0) représente la position de la même particule
avec le temps. Ainsi,
0
0
0
0
d ,,
d
d ,,
d
x t xv t x
t
v t xa t x
t
(4.2)
De même, pour d’autres propriétés fluides telles que l’évolution de la température, pour laquelle
la fonction (4.3) révèle la température T au temps t de la particule qui était initialement à x0.
0,T T t x (4.3)
Par exemple la description lagrangienne d’un écoulement bidimensionnel uniforme parallèle à
l’axe des x, avec la vitesse 0
Vv
se compose des équations
1 0 01
0
2 0 02
,,
,
x t x x Vtx t x
x t x x
ou 01
0
02
xx
x
est la position de la particule au temps t = 0.
L’accélération est en effet nulle, 0
0
0d ,,
0d
v t xa t x
t
Dans un écoulement rotationnel, le champ de vitesse d’une particule, initialement au point (x0,
0), décrivant un cercle centré à l’origine, avec une vitesse angulaire ω donnée par :
0 0
cos,
sin
tx t x x
t

62
Dans la formulation de Lagrange, la vitesse de la particule est simplement la dérivée temporelle
du vecteur de position, 0
sind
cosd
txv x
tt
et son acceleration, 2 2
0
cosd
sind
tva x x
tt
La particule est soumise à une accélération centripète vers le centre de rotation, du module rω2.
4.1.2 Description d’Euler
Bien que la mécanique des fluides utilise les deux descriptions lagrangienne et eulérienne, la
description eulérienne est la plus utilisée, car généralement elle donne des formulations plus
simples. En effet, dans la description eulérienne, le domaine fluide n’est pas suivi car il se
déforme, mais plutôt l’accent est mis sur un domaine spatial fixe, à travers lequel le fluide
s’écoule. Cette formulation consiste à donner le champ de vitesse v à chaque point spatial x et
chaque instant de temps t,
,v v x t (4.4)
Ainsi, cette description ne fournit pas d’informations sur le mouvement de chaque particule
individuelle, mais plutôt fournit des informations sur des points spatiaux fixes.
Figure 4.2. Schéma explicative de la description Eulérienne.
(Vitesses particulaires à chaque point spatial fixe pour un instant de temps donné)
Dans ce cas, l’accélération d’une particule fluide ne peut pas être calculée comme dérivée
partielle de la vitesse du fluide par rapport au temps, car v(x, t) représente la vitesse de
nombreuses particules différentes lorsqu’elles traversent le même point x. Par conséquent, pour
calculer l’accélération de la particule fluide, la dérivée substantielle ou matérielle est introduite
d dt .

63
d ,
,d
v x ta x t
t (4.5)
De même, la répartition de la température est représentée comme la fonction
,T T x t (4.6)
où x est la coordonnée spatiale et t time.
Le champ d’écoulement uniforme dans la description eulérienne serait simplement ,0
Vv x t
Dans un écoulement rotationnel, la description eulérienne ne donnerait pas la vitesse d’une seule
particule, mais la vitesse à chaque point spatial lorsque différentes particules passent.
, ,y
v x y tx
Dans ce cas, notez que l’accélération des particules n’est pas simplement la dérivée temporelle
(qui disparaît), mais est donnée par la dérivée particulaire, expliquée ci-dessous.
4.1.3 Description arbitraire de Lagrange-Euler (ALE)
Cette description trouve une application dans des outils informatiques modernes développés pour
l’analyse en ingénierie et en sciences. Il consiste à enregistrer des données à des points qui se
déplacent de manière arbitraire. Par exemple, dans un calcul numérique, les propriétés du fluide
sont calculées aux nœuds de maille. Si le maillage se déplace, on peut utiliser une formulation
arbitraire lagrangienne- eulérienne pour calculer les variables fluides aux nœuds de maille.
4.2 La dérivée particulaire ou matérielle
Dans la mécanique classique, les lois physiques sont formulées pour une matière, c’est-à-dire
pour une particule ou un ensemble de particules. C’est le cas de la formulation lagrangienne, où
l’accélération des particules peut être calculée directement comme 22d x dt .
Cependant, dans les formulations eulérien et ALE, les particules fluides ne sont plus suivies. Le
champ fluide est donné en tant que propriétés fluides à des points fixes ou arbitraires,
respectivement. Par conséquent, si l’évolution des propriétés des particules est souhaitée, on aura
besoin de transformations mathématiques spécifiques pour récupérer la dérivée suite à la
particule fluide.
Soit r(t) la position d’une particule dans un champ fluide,
, ,x y zr t r t r t r t (4.7)

64
Figure 4.3. Mouvement de la particule fluide
La vitesse de cette particule est :
dd d d, ,
d d d d
x
yx z
y
z
v tr tr t r t r t
v t v tt t t t
v t
(4.8)
Laissez un champ eulérien scalaire, tel qu’un composant de vitesse, une concentration ou une
température chimique, soit donné par c(x, y, z, t) où x, y, z sont des coordonnées spatiales. Si on
suit une particule fluide, les coordonnées spatiales ne sont pas arbitraires, mais sont données par
la position que la particule fluide occupe, c’est-à-dire la trajectoire des particules, r(t). Ainsi,
après une particule fluide,
, , ,x y zc c r t r t r t t (4.9)
La dérivée totale de c par rapport au temps (dc/dt), qui représente la variation de c dans le temps
suivant la particule fluide, peut être calculée par :
3
1
temporelconvectif
dd dd
d d d d
yx z
j
j j
rr rc c c c c
t t x t y t z t
c c c cu v w
t x y z
c cv
t x
(4.10)
Cette dérivée est appelée dérivée particulaire et représente la variation de c suite à une particule
fluide. Il est fait à partir du terme temporel et un terme convectif. Ce dernier représente le
transport d’une propriété dans le fluide en raison de son mouvement macroscopique.
Dérivée particulaire dans la description arbitraire de Lagrange-Euler est donnée pour les points
qui se déplacent à la vitesse vmaillage la dérivée substantielle de c(x, y, z) dans les coordonnées
cartésiennes par :
3
1
maillage
j j
j j
dc c cv v
dt t x
(4.11)

65
4.3 Ecoulement stationnaire et instationnaire (permanent
et non-permanent)
Dans la discussion précédente, nous avons supposé un écoulement stationnaire - la vitesse à un
point donné de l’espace ne varie pas avec le temps. En réalité, presque tous les écoulements sont
instables d’une certaine manière. C’est-à-dire que la vitesse varie avec le temps. Il n’est pas
difficile de croire que les flux instationnaires sont généralement plus difficiles à analyser (et à
expérimenter) que les flux stationnaires.
Un écoulement de fluide est stationnaire lorsque, dans la description eulérienne, aucune des
variables ne dépend du temps, c’est-à-dire, 0t . On dit qu’un écoulement de fluide est
instationnaire lorsqu’il n’est pas stationnaire.
Un écoulement stationnaire dans un tube de la Figure 4.4 avec une surface en coupe décroissante
entre x=0 et x=L étant donné par le champ de vitesse unidimensionnel suivant :
0
1, , 1 ,0,0
2x y z
xv v v v V
L
Figure 4.4. Accélération du fluide à l’intérieur d’un convergeant.
Puisque le flux de fluide est dans la direction x, (ay = az = 0). Même s’il n’y a pas de dépendance
au temps (∂vx/∂t = 0), la particule fluide connaît encore une accélération. En effet, comme la
section de la buse diminue dans la direction du flux, la vitesse augmentera.
Afin de calculer l’accélération, utilisons la définition de la dérivée particulaire (2.14) appliquée
au composant de la vitesse vx,
xva
t
x xx y
v vv v
x y
xz
vv
z
2
0 0 00
1 11 1
2 2 2 2
V V V xV
L L L L

66
4.4 Mécanismes des phénomènes de transport
Dans un fluide, il existe deux classes de phénomènes de transport : le transport par convection et
le transport par diffusion.
Le transport convectif est dû à la vitesse du fluide macroscopique. Le fluide, avec son
mouvement, entraîne les particules fluides et ses propriétés. Mathématiquement, le flux net par
convection est modélisé par le terme convectif du dérivé particulaire,
1 2 3
1 2 3
v v vv v v
x x x
La deuxième classe de phénomènes de transport est due au transport de diffusion ou au transport
moléculaire. Mathématiquement, dans le cas des coefficients constants, le bilan local net de
transport par diffusion autour d’une particule fluide est proportionnel au coefficient de diffusion
α et au Laplacien, et il contient des dérivées secondes.
2 2 2
2 2 2
1 2 3
c c cc
x x x
Ce phénomène de transport est dû au mouvement aléatoire (translationnel, vibratoire, etc...) des
molécules au niveau microscopique, ce qui tend à uniformiser les propriétés. Un trait important
du transport par diffusion est qu’il peut se produire à une vitesse macroscopique nulle.
Une autre caractéristique importante du transport diffusif est qu’il doit exister des variations des
propriétés des fluides. Si la variable fluide est constante, il n’y a pas de transport par diffusion
pour cette propriété.
4.5 Ligne de courant, Trajectoires et Ligne d’émission
Les champs de fluide peuvent être visualisés. Trois outils sont utilisés en laboratoire et en
dynamique des fluides computationnelle (CFD) pour visualiser un champ de vitesse : lignes de
courant, trajectoires et linge d’émission. Ils sont expliqués ensuite.
4.5.1 Ligne de courant
La ligne de courant est la ligne tangente du vecteur vitesse à chaque point. Les lignes de courant
indiquent la direction de la vitesse. Elles peuvent être visualisées en implantant des petites
particules bruyantes ou un colorant à l’intérieur du fluide et en observant leur orientation. Les
lignes de courant peuvent être obtenues en traçant des lignes tangentes aux particules. Ils sont un
objet plutôt mathématique.

67
Figure 4.5. La ligne de courant est tangente au vecteur de vitesse à chaque point.
Soit dl un différentiel de longueur le long d’une ligne de courant. Par définition de ligne de
courant, le petit élément de la courbe dl devrait être parallèle au vecteur de vitesse v=(u, v, w),
c’est-à-dire,
d
d d
d
det d d d 0
x u
l v y v
z w
i j k
x y z
u v w
(4.12)
Élargir le déterminant,
d d d
u v w
x y z (4.13)
Pour le cas bidimensionnel, la définition de dz=0 et w=0 dans les rendements déterminants
d d
u v
x y (4.14)
En coordonnées polaires, les longueurs infinitésimales le long des axes r et θ sont respectivement
dr et rdθ. Par conséquent, les lignes de courant sont la solution de :
d d
u v
r r (4.15)
avec u et v les composantes de vitesse dans les directions r et θ, respectivement.
4.5.2 Trajectoire
La trajectoire est le chemin suivi par une particule fluide. Par exemple, les marques de freinage
sur une route indiquent la position occupée par un pneu pendant que la roue était entraînée. Ils
représentent, par conséquent, la trajectoire du pneu. La même chose s’applique aux particules de
fluide.
Puisque la vitesse de la particule est connue à chaque point spatial, les coordonnées de trajectoire
x(t) peuvent être obtenues en intégrant l’équation du mouvement,

68
d d d
d d d
x y zu v w
t t t (4.16)
où (x, y, z) est la position de la particule en fonction du temps. En tant que condition aux limites,
nous aurons besoin de la position d’une particule à un moment donné. Ensuite, le temps variable
t peut être éliminé pour atteindre l’équation de la trajectoire sous forme explicite ou implicite.
Figure 4.6. Trajectoire, la particule fluide suit la ligne tracée.
4.5.3 Ligne d’émission
La ligne d’émission est la place géométrique occupée par les particules de fluide qui ont passé
par le même point aux temps précédents. Les lignes d’émission sont l’élément le plus facile à
observer dans la nature ou dans une installation expérimentale. La Figure 4.7 montre comment
se forme une ligne de d’émission et la différence entre avec une trajectoire.
Figure 4.7. Ligne d’émission (ligne continue) et trajectoires (lignes pointillées) des particules
de fumée d’une cheminée à des instants successifs.
Si le flux est stationnaire, alors les lignes de courant, les trajectoires et les lignes d’émission
coïncident. Ci-dessous, il est expliqué comment les lignes de courant, les trajectoires et les lignes
d’émission sont calculées.
Pour calculer les lignes d’émission d’un champ d’écoulement, il est d’abord nécessaire de

69
calculer les trajectoires. Le processus est très similaire à celui présenté ci-dessus, ne se
distinguant que par la manière dont les conditions aux limites sont imposées. Supposons qu’un
traceur soit injecté dans le champ d’écoulement au point (x0,y0). Ensuite, procédez en trois
étapes :
1. Intégrer l’équation du mouvement.
2. Calculer les constantes d’intégration, de sorte qu’au temps ξ < t la particule fluide était à
(x0,y0). Ici ξ est le paramètre qui désigne la particule, au moment où elle a traversé le point
d’injection. Ce que nous avons fait est d’obtenir toutes les trajectoires des particules qui ont été
injectées dans le champ d’écoulement avant l’instant t.
3. Éliminer ξ.
4.6 Le concept de flux
Le flux est une quantité utilisée pour mesurer la quantité d’une propriété transportée sur une
surface par unité de temps. C’est l’un des concepts les plus utilisés en mécanique des fluides.
4.6.1 Débit volumétrique et débit massique
La normale extérieure n en un point d’une surface fermée est le vecteur unitaire extérieur
orthogonal à la surface à ce point (Figure 4.8).
Le débit volumétrique Q est le volume de fluide qui traverse la surface par unité de temps, ses
dimensions sont [Q] = L3T−1 et ses unités dans le SI, m3/s.
ds
Q v n s (4.17)
Le flux de masse ṁ est la masse par unité de temps qui s’écoule sur une surface, ses dimensions
sont [ṁ] = MT−1 et ses unités SI, kg/s.
ds
m v n s (2.18)
Figure 4.8. Normal extérieur à la surface d’un volume et le flux sur une surface.

70
4.6.2 Vitesse moyenne
La vitesse moyenne ῡ est la vitesse qui multipliée par la section transversale donne le débit
volumétrique,
Qv
A (4.19)
Figure 4.9. Ecoulement laminaire entièrement développé ans tube à section constante.
4.7 Translation, Taux de Déformation et Rotation
Le mouvement d’un élément fluide dans l’espace présente trois caractéristiques distinctes, à
savoir : la translation, la rotation et la déformation. La translation et la rotation sans déformation
représentent des déplacements de corps rigides qui n’induisent aucune contrainte dans le corps.
La Figure 4.10 montre l’image d’une translation pure en l’absence de rotation et de déformation
d’un élément fluide dans un flux bidimensionnel décrit par un système de coordonnées cartésien
rectangulaire.
Figure 4.10. Elément de fluide en translation pure

71
Il n’y aura aucun changement dans la longueur des côtés ni dans les angles inclus faits par les
côtés de l’élément fluide. Les côtés sont déplacés parallèlement. Cela est possible lorsque les
vitesses d’écoulement u (la vitesse de la composante x) et v (la vitesse de la composante y) ne
sont ni une fonction de x ni de y, en d’autres termes, le champ d’écoulement est totalement
uniforme.
Considérons maintenant une situation dans laquelle une composante de la vitesse d’écoulement
devient la fonction d’une seule coordonnée d’espace le long de laquelle cette composante de
vitesse est définie, par exemple, si u = u (x) et v = v (y), l’élément fluide ABCD en cours de
translation subit une modification de ses dimensions linéaires sans modification de l’angle inclus
par les côtés, comme indiqué dans la Figure 4.11.
Figure 4.11. Élément fluide dans les trajectoires avec déformation linéaire continue
Le déplacement relatif du point B par rapport au point A par unité du temps dans la direction x
est u
xx
. De même, le déplacement relatif de D par rapport à A.
Par unité de temps dans la direction y est v
yy
. Puisque u n’est pas une fonction de y et que v
n’est pas une fonction de x, tous les points de l’élément linéaire AD se déplacent à la même
vitesse dans la direction x et tous les points de l’élément linéaire AB se déplacent à la même
vitesse dans la direction de y. Par conséquent, les côtés se déplacent parallèlement à leur position
initiale sans modifier l’angle inclus. Cette situation est appelée translation avec des déformations
linéaires. Les variations de longueur le long des axes de coordonnées par unité de temps par unité

72
de longueur d’origine sont définies comme les composantes de la déformation linéaire ou de la
vitesse de déformation dans les directions respectives. Par conséquent, la composante de la
vitesse de déformation linéaire dans la direction x.
xx
u
x
(4.20a)
composante de la vitesse de déformation linéaire dans la direction y
yy
v
y
(4.20b)
Considérons une autre situation, de nature plus générale, où les vitesses u et v deviennent des
fonctions de x et y, c.-à-d.
,
,
u u x y
v v x y
Dans ce cas (Figure 4.12), le point B a un déplacement relatif dans la direction y par rapport au
point A et, de même, le point D a un déplacement relatif dans la direction x par rapport au point
A. Par conséquent, l’angle inclus entre AB et AD change et l’élément fluide subit une déformation
angulaire continue ainsi que des déformations linéaires au cours de son mouvement. Le taux de
déformation angulaire xy est défini comme le taux de changement d’angle entre les segments
linéaires AB et AD qui étaient initialement perpendiculaires l’un à l’autre.
Figure 4.12. Élément fluide avec taux de déformation linéaire et angulaire

73
De la figure 4.12, xy
d d
dt dt
Encore de la géométrie
1
0lim tan
1t
vx t
vxd dtu x
x tx
1
0lim tan
1t
uy t
uyd dt
yvy t
y
Par conséquent,
d d v u
dt dt x y
Enfin, nous pouvons écrire
xy
v u
x y
(4.21)
Le déplacement transversal de B par rapport à A et le déplacement latéral de D par rapport à A
(Figure 4.16) peuvent être considérés comme les rotations des segments linéaires AB et AD
autour de A et amènent le concept de rotation dans un champ d’écoulement. La rotation en un
point est définie comme la moyenne arithmétique des vitesses angulaires de deux segments
linéaires perpendiculaires se rejoignant en ce point. Les vitesses angulaires de AB et AD autour
de A sont respectivement d
dt
et
d
dt
, mais dans le sens opposé. En considérant le sens
antihoraire comme positif, la rotation en A peut s’écrire ainsi:
1
2z
d d
dt dt
ou
1
2z
v u
x y
(4.22)
L’indice z dans représente la rotation autour de l’axe z.
Par conséquent, on observe que lorsque ,u u x y et ,v v x y , la rotation et la déformation
angulaire d’un élément fluide existent simultanément.
Dans un cas particulier, quand :

74
v u
x y
0xy (de l’équation 4.21) (4.23a)
et
z
v u
x y
(de l’équation 4.22) (4.23b)
Cela implique que les segments linéaires AB et AD se déplacent avec la même vitesse angulaire
(à la fois en amplitude et en direction) et que, par conséquent, l’angle inclus entre eux reste le
même et aucune déformation angulaire ne se produit. Cette situation est appelée rotation pure
(Figure 4.13a). Dans un autre cas particulier,
quand v u
x y
2 2xy
v u
x y
(de l’équation 4.21) (4.24a)
et
0z (de l’équation 4.22) (4.24b)
Cela implique que l’élément fluide présente un taux de déformation angulaire mais aucune
rotation autour de l’axe z (Figure 4.13b).
a.
b.
Figure 4.13. a. Elément fluide en rotation pure, b. Elément fluide à déformation angulaire en
absence de rotation

75
Dans un flux tridimensionnel, les composantes de la rotation sont définies comme suit :
1
2
1
2
1
2
z
y
z
w v
y z
u w
z x
v u
x y
(4.25)
Suivant les équations (3.23a) à (3.23c), la rotation dans un champ de flux peut être exprimée sous
forme vectorielle
1
2V
Lorsque les composantes de la rotation en tous les points d’un champ de flux deviennent nulles,
le flux est dit irrotationnel. Par conséquent, la condition nécessaire et suffisante pour qu’un
champ de flux soit irrotationnel est :
0V (4.26)
4.8 Vorticité
La vorticité dans sa forme la plus simple est défini comme un vecteur égal à deux fois le
vecteur de rotation ;
2 V (4.27)
Par conséquent, pour un flux irrotationnel, les composantes de vorticité sont également nulles.
Si une ligne imaginaire est tracée dans le fluide de sorte que la tangente à celle-ci à chaque point
se trouve dans la direction du vecteur de tourbillon W en ce point, la ligne est appelée ligne de
vortex. Par conséquent, l’équation générale de la ligne vortex peut être écrite ainsi :
0ds (4.28)
Dans un système de coordonnées cartésien rectangulaire, il devient :
x y z
dx dy dz
(4.29)
où,
2
2
2
x x
y y
z z
(4.30)

76
La vorticité est en réalité un tenseur antisymétrique et ses trois éléments distincts se transforment
comme les composants d’un vecteur en coordonnées cartésiennes. C’est la raison pour laquelle
les composantes de tourbillon peuvent être traitées comme des vecteurs.
Vorticité dans les coordonnées polaires, dans un système de coordonnées polaires à deux
dimensions (Figure 4.14), la vitesse angulaire du segment r peut être écrite ainsi :
0
limt
V V r r V t V
r t r
En outre, la vitesse angulaire du segment r devient
0
1lim
r r r r
t
V V V t V
r t r
Figure 4.14. Définition de la rotation dans un système de coordonnées polaires
Le terme supplémentaire résultant de la vitesse angulaire autour du centre O est V r .
Par conséquent, la composante de tourbillon z en coordonnées polaires est
12 r
z z
V VV
r r r
Par conséquent, dans un système de coordonnées polaires cylindriques tridimensionnelles, les
composantes de tourbillon peuvent être écrites comme suit:

77
1
1
rz
zr
r z
V VV
r r r
VV
r z
V V
z r
(4.31)
Dans un système de coordonnées polaires sphériques, les composantes du tourbillon sont définies
comme suit :
1 1cos
sin
1
sin
1
R
Rr
R
V V V
R R R
V VV
R R R
V V V
R R R
(4.32)
4.9 Equation de continuité
Une loi fondamentale de la mécanique est la conservation de la masse. Pour fixer les idées on
considère d’abord un fluide de densité ρ en écoulement à vitesse uniforme v à toute section S
d’un tube de courant ou d’une conduite à section variable.
Figure 4.14 Écoulement dans une conduite à section variable
La masse est nécessairement conservée, on conclu alors qu’à tout instant :
1 1 1 2 2 2v S v S (4.27)
Pour exprimer cette loi sous forme différentielle, on considère maintenant un volume V fixe dans
l’espace et enfermé par une surface dérivable S (Figure 4.15). Le débit massique de fluide entrant
dans V est :
Flux massiqueS
v dS

78
Figure 4.15 Volume de contrôle V fixe dans l’espace
Le signe négatif indiquant que dS est compté positivement vers l’extérieur de V, car dS n dS
où n est le vecteur normal unitaire extérieur à S.
Le taux d’accroissement de la masse dans V est : V
ddV
dt
et comme V est fixe dans l’espace on déduit que : V V
ddV dV
dt t
or, la conservation de la masse implique : V S
dV v dSt
soit
0V S
dV v n dSt
(4.28a)
L’équation (4.28) est l’équation de continuité sous forme intégrale et n est le vecteur unitaire
normal extérieur à S.
En utilisant le théorème de Gauss-Ostrogradsky (dit théorème de la divergence),
V S
v dV v n dS
L’équation (4.28a) s’´ecrit sous la forme :
0V
v dVt
(4.28b)
qui est valable quelque soit V. Ainsi, on tire l’équation de continuité sous forme différentielle :
0vt
ou 0v v
t
(4.28c)

79
Compte tenu de la dérivée matérielle d
vdt t
et de l’équation (4.28c), l’équation de
continuité prend la forme :
0d
vdt
(4.29)
On conclu alors que pour une particule à masse volumique constante lors de son mouvement
l’équation (3.3) se réduit à :
0v (4.30)
qui est l’équation de continuité pour un fluide (ou un écoulement) incompressible.

80
Exercices résolus
Chapitre 04
Exercice 4.1
Dans un écoulement 1D, la vitesse en un point est donnée dans le système Eulérien par : u=x+t.
Déterminer le déplacement d’une particule fluide qui a sa position initiale x0 à l’instant initial t0
dans le système lagrangien.
Solution
dxu x t
dt
La solution de l’équation ci-dessus est : 1tx Ae t
La constante A peut être déterminée par les conditions initiales :
0
0
0 00 0
11
t
t
x tx Ae t A
e
Par conséquent : 0
0 0 1 1t t
x x t e t
Cette dernière équation est la version lagrangienne de la particule fluide satisfaisant 0x x à
0t t .
Exercice 4.2
Un écoulement bidimensionnel est décrit dans le système lagrangien comme :
2
0 0
0
1kt kt
kt
x x e y e
y y e
Trouvez (a) l’équation de trajectoire de la particule et (b) les composantes de la vitesse dans le
système eulérien.
Solution
(a) La ligne de trajectoire de la particule est trouvée en éliminant t des équations décrivant son
mouvement comme suit :

81
0
kte y y
Par conséquent,
2 2
0 0 0 01x x y y y y y
qui donne finalement après un certain réarrangement
2 3
0 0 0 0 0x y y x y y y c’est l’équation requise de la trajectoire.
(b)
la composante de la vitesse sur x :
2
0 0
0 0
2 2
0 0
2
0
3
1
2
1 2
1
kt kt
kt
kt kt
kt
kt kt
dx du x e y e
dt dt
k x e k y
k x y e k y e
k x k y e
k x k y e e
la composante de la vitesse sur x :
0
0
kt
kt
dy dv y e
dt dt
y k e k y
Exercice 4.3
Soit un champ de vitesse 3 24 2 6 3V xy t i x j xt z k . Trouver l’accélération d’une
particule fluide à (2, 4, - 4) et le temps t = 3.
Solution
dV V
a V Vdt t
2 6V
i xt kt
3 2
2 2
2 4 2 3 2 2 2 3 2
4 2 6 3
18 3
4 2 6 72 18 36 12 3 6 3
V V u v w xy t i x j xt z kx y z
u i y x j t k v x i w k
y xy ty x i x x y tx t xyt t xt z k
Le champ d’accélération peut être exprimé par :

82
2 4 2 3 2 2 2 3 22 4 2 6 72 18 36 6 12 3 6 3a y xy ty x i x x y tx j xt t xyt t z xt k
Le vecteur d’accélération au point (2, 4, -4) et à l’instant t = 3 peut être déterminé en substituant
les valeurs de x, y, z et t dans l’équation
170 1296 572a i j k
Exercice 4.4
Les champs de vitesse et de densité dans un diffuseur sont donnés par : 2
0
x Lu u e et0
x Le
Trouver le taux de changement de densité en x = L.
Solution
Dans ce cas, le taux de changement de densité peut s’écrire comme suit :
2
0 0
2 00
30 0
0 x L x L
x L x L
x L
d uu
dt t x
u e ex
u e eL
ue
L
à x L , 30 0ud
edt L
Exercice 4.5 (Chute libre d’un fluide)
Soit un robinet, de section de sortie circulaire S, ouvert depuis longtemps suffisamment pour que
l’écoulement soit considéré permanent. L’eau, supposé être un fluide parfait et incompressible,
s’écoule verticalement vers le bas en chute libre. Soit un repère orthonormé tel que l’origine O est
au centre de la section de sortie du robinet et z l’axe vertical dirigé vers le bas et t est le temps.
L’accélération d’une particule d’eau à tout instant est dans ce cas : 0,0,a dv dt g g
On suppose que l’on connait à l’instant t = 0, la position de la particule 0 00,0,r z et sa vitesse
0 00,0,v v . Les vitesses et accélérations étant nulles selon les axes x et y, on ne s’intéresse
qu’à la composante en z.
1. Déterminer la vitesse du fluide en tout point de coordonnée z à l’aide une description
lagrangienne.

83
2. Déterminer la vitesse du fluide en tout point de coordonnée z à l’aide d’une description
eulérienne.
Solution
1. Lagrange se place sur une particule d’eau et l’intègre en fonction du temps :
0
0
0
0 0 0,
v t
v
dva g dv g dt v v g t
dt
v z t g t v z
0
2
0 0 0
0
2
0 0 0
1
2
1,
2
z t
z
dzv dz g t v dt z z g t v t
dt
z z t g t v t z
On connait alors la position de toute particule à l’instant t connaissant sa position z0 et sa vitesse
initiale v0.
On peut alors, éventuellement, exprimer la vitesse en fonction de la position.
2
0 0
10
2g t v t z z
2
0 0 02
0 0
214 >0
2
v v g z zv g z z t
g
2
0 0 0
0
2v v g z zv g v
g
On ne garde que la solution positive :
2
0 02v z v g z z
2. Euler pose un instrument de mesure fixe en un point de coordonnée z et mesure la vitesse du
fluide qui s’écoule :
x y z
dv v v v va g v v v
dt t x y z
Or
0v
t
on est en régime permanent, la vitesse en un point ne varie pas ;
0v
x
et 0
v
y
sur une même z, la vitesse est identique partout ;

84
zv v z , la vitesse n’a qu’une composante verticale qui ne dépond que de la hauteur z,
v dv
z dz
Ainsi
0 0
2
2 2 2
0 0
12 2
2
z z
z z
d vdvv g d v g dz v v g z z
dz dz
2
0 02v z v g z z
Exercice 4.6 (ligne de courant)
Calculer les lignes de courant pour le champ d’écoulement bidimensionnel instationnaire donné
par,
2 1
2 1
u x t
v y t
Spécifier pour le cas où la ligne traverse le point (x0, y0) à tout moment.
Solution
2 1 2 1
d d
x t y t
x y
En intégrant
1 ln 1 ln lnt y t x C
Ainsi,
1 1t ty C x
Pour déterminer la constante d’intégration C, les conditions du cas particulier sont imposées pour
tout t,
1 1
0 0
t ty C x
Et donc
1
0
1
0
t
t
yC
x
Enfin, en remplaçant la valeur de C
1
1
0 0
t
ty x
y x

85
Exercice 4.7 (Trajectoire).
Pour le champ d’écoulement de l’exemple ci-dessus, déterminer la trajectoire de la particule
fluide qui traverse le point (x0, y0), à t = 0.
Solution
Intégrer l’équation du mouvement,
d 2 1 d
d 2 1 d
x x t t
y y t t
Donne,
2
1
2
2
ln 1 ln
ln 1 ln
x t C
y t C
Ainsi,
2
2
1
1
1
2
t
t
x C e
y C e
Pour déterminer les constantes d’intégration C1, C2, les conditions du problème sont imposées,
2
2
0 1
0 1
0 1
0 2
x C e
y C e
ce qui implique,
1 0
2 0
C x e
C y e
Enfin, la trajectoire est donnée sous forme paramétrique à travers la combinaison de :
2
2
1 1
0
1 1
0
t
t
xe
x
ye
y
C’est une courbe valide en deux dimensions. Parfois, il est possible d’éliminer t et d’écrire la
même courbe sous forme explicite, c’est-à-dire comme y(x). Obtenir t de la première équation,
0ln 1 1x
xt
et en substituant dans le second,
2
0ln 1 2 1
0
xxy
ey
qui est l’équation de la trajectoire sous forme explicite.

86
Exercice 4.8 (ligne d’émission).
Dans le champ de flux de l’exemple précédent, déterminez la ligne ‘émission qui passe par x0,
y0.
Solution
Intégration de l’équation du mouvement
2
2
1
1
1
2
t
t
x C e
y C e
Maintenant, afin de déterminer les constantes d’intégration C1, C2, nous cherchons les
particules qui à l’instant ξ sont passées par x0, y0 :
2
2
1
1
1
2
x C e
y C e
2
2
1
1 0
1
2 0
C x e
C y e
Substitution
2 2
2 2
1 1
0
1 1
0
t
t
xe
x
ye
y
Le paramètre ξ représente les différentes particules qui forment la ligne d’émission. Pour chaque
ξ, la trajectoire d’une particule différente est atteinte. Comme ξ est varié, nous parcourons les
différentes particules qui forment la ligne d’émission.
Obtenir ξ de la première équation,
0
21 ln 1x
xt
et en substituant dans le second nous parcourons toutes les particules qui font la ligne de
d’émission,
2
2 2
01 1 ln 2
0
xx
t tye
y

87
Exercice 4.9
Le champ de vitesse dans un milieu fluide est donné par 23 2 2 3V xy i xy j zy t k .
Trouvez les grandeurs et les directions de (i) la vitesse de translation, (ii) la vitesse de rotation et
(iii) le tourbillon d’un élément fluide à (1, 2, 1) et à l’instant t = 3.
Solution
(i) Le vecteur vitesse de translation en (1, 2, 1) et en t = 3 peut être écrit ainsi :
3 1 4 2 1 2 2 1 2 3 3 12 4 13V i j k i j k
(ii) Le vecteur vitesse de rotation est trouvé comme
2 2
1 1
2 2
1
2
12 3 2 3 2 3 2 3
2
3
i j k
Vx y z
u v w
w v u w v ui j k
y z z x x y
zy t xy i xy zy t j xy xy ky z z x x y
z i y xy k
à 1,2,1 et t = 3,
4i k
(iii) La vorticité
2
2 8i k
Exercice 4.10 (Écoulement laminaire dans une conduite à section transversale circulaire)
La vitesse axiale laminaire développée dans un tube droit de section circulaire, de rayon R,
donne :
2
0 1r
v r VR
Ce flux est appelé flux Hagen-Poiseuille. Déterminer le débit volumétrique dans le tuyau et la
vitesse moyenne.
Solution

88
Prenons une section perpendiculaire à l’axe du tuyau, S. Le débit volumétrique est :
d dS S
Q v n S v r S
Puisque la vitesse est constante pour un rayon donné, nous pouvons prendre la différence
différentielle dS = 2πr dr. Substituer,
0
2
00
2 2
0 2
0
2 2
0 0
2 d
1 d
2 4
24 2
r R
r
R
R
Q v r r r
rV r r
R
r rV
R
R RV V
Observez que les dimensions de l’expression ci-dessus sont correctes.
La vitesse moyenne est :
0
2 2
VQv
R
qui est la moitié de la vitesse maximale au centre du tuyau.
Dans les phénomènes de transport, nous utiliserons fréquemment le flux de convection d’une
propriété fluide, qui représente la quantité de propriété transportée sur une surface par unité de
temps. Ce flux est calculé à partir de la propriété par unité de masse φ. En général, nous pouvons
définir le flux convectif d’une propriété fluide comme suit.
Exercice 4.11
Un fluide s’écoulant à débit volumique constant de Q à travers un tuyau divergent ayant des
diamètres d’entrée et de sortie de D1 et D2 respectivement et une longueur de L. En supposant
que la vitesse soit axiale et uniforme à toute section, cela montre que les accélérations à l’entrée
et la sortie du tuyau sont données par 2
2 1
2 5
1
32Q D D
L D
et
2
2 1
2 5
2
32Q D D
L D
respectivement.

89
Figure E4.11. Ecoulement à travers un conduit divergent
Solution
Le diamètre du conduit à une distance axiale x du plan d’entrée est donné par :
1 2 1x
xD D D D
L
Par conséquent, la vitesse de cette section peut être écrite ainsi :
1 2 1
4Qu
xD D D
L
L’accélération à cette section peut être écrite comme
2 1
2 3
1 2 1 1 2 1
2
2 1
5
2
1 2 1
4 8
32
ua u
x
D DQ Q
Lx xD D D D D D
L L
Q D D
xL D D D
L
C’est l’expression générale de l’accélération sur toute section située à une distance x de l’entrée
du tuyau. En substituant les valeurs de x = 0 (pour l’entrée) et de x = L (pour la sortie),
Accélération à l’entrée (x = 0) est : 2
2 1
2 5
1
32Q D D
L D
et, l’accélération à la sortie (x = L) est : 2
2 1
2 5
2
32Q D D
L D

90
Exercices proposés
Chapitre 04
Exercice 4.12
Un champ de vitesse défini en variable de Lagrange par : 2 2
x y zV y t e x t e z e
avec *R . Donner la vitesse U de cet écoulement en variable d’Euler
Exercice 4.13 (Description lagrangienne et eulérienne)
Un écoulement est décrit dans le formalisme Lagrangien par :
0( ) 1 x t x at 0 y t y b 0 z t z
a et b sont des paramètres constants, et 0 0 0, ,x y z sont des paramètres propres à chaque particule.
1. Ecrire les composantes u, v, et w du champ de vitesse du fluide dans le formalisme Eulérien.
2. Calculer la dérivée particulaire de ce champ de vitesse.
Exercice 4.14
Un écoulement est décrit dans le formalisme lagrangien par :
X(t) = X0(1 + at), Y(t) = Y0 + b, Z(t) = Z0.
a et b sont des paramètres constants, et (X0, Y0, Z0) sont des paramètres propres à chaque
particule.
1. Ecrire les composantes u, v, et w du champ de vitesse du fluide dans le formalisme eulérien.
2. Calculer la dérivée particulaire de ce champ de vitesse.
Exercice 4.15
On considère un écoulement plan stationnaire dont le tenseur gradient de vitesse est donné, dans
des axes orthonormés 1 et 2, par la matrice :
0
0i j
au u
b
a et b sont des constantes.
a) Calculer les composantes des tenseurs taux de rotation et de déformation ;

91
b) L’écoulement est-il incompressible ?
c) A quelle condition liant a et b l’écoulement est-il irrotationnel ?
d) Quels sont les champs de vitesse qui correspondent au gradient de vitesse proposé, les
constantes d’intégration étant prises nulles ?
e) Donner les équations du vecteur accélération en variables Eulériennes ;
f) Donner les équations des trajectoires et des lignes de courant ;
g) Quel mouvement particulier obtient –on si b=-a ?

92
Chapitre 5
Analyse dimensionnelle et Similitude
Bien que de nombreux problèmes impliquant la mécanique des fluides puissent être résolus en
utilisant les équations et les procédures analytiques décrites dans les chapitres précédents, il
reste un grand nombre de problèmes qui reposent sur des données obtenues expérimentalement
pour les résoudre. Dans ce chapitre, nous examinons certaines techniques et idées importantes
pour la planification et la réalisation d’expériences. Un objectif évident de toute expérience est
de rendre les résultats aussi largement applicables que possible. À cette fin, le concept de
similitude est souvent utilisé afin que les mesures effectuées sur un modèle en laboratoire
puissent être utilisées pour décrire le comportement d’autres systèmes similaires de taille réel.
Une étude en laboratoire utilisant des modèles est toutefois très coûteuse et, pour minimiser ce
coût, des paramètres sans dimension sont utilisés. En fait, ces paramètres sont également utilisés
dans les études numériques pour la même raison.
Les paramètres sans dimension sont obtenus à l’aide d’une méthode appelée analyse
dimensionnelle, à présenter en Section suivante. Il est basé sur l’idée d’homogénéité
dimensionnelle : tous les termes d’une équation doivent avoir les mêmes dimensions. En
utilisant simplement cette idée, nous pouvons minimiser le nombre de paramètres nécessaires
à une analyse expérimentale ou analytique.
5.1 Analyse dimensionnelle
Pour illustrer un problème typique de la mécanique des fluides nécessitant une expérimentation,
considérons un flux constant d’un fluide newtonien incompressible à travers un long tube
circulaire, horizontal et lisse. Une caractéristique importante de ce système est la perte de charge
par unité de longueur qui se développe le long du canal à la suite de frottements. Bien que cela
semble être un problème d’écoulement relativement simple, il ne peut pas être résolu de manière
analytique sans l’utilisation de données expérimentales.
La première étape de la planification d’une expérience visant à étudier ce problème consisterait
à déterminer les variables, qui affecteront la perte de charge p par unité de longueur, les

93
variables de ce problème sont : Diamètre de la conduite D, la masse volumique du fluide ρ, la
viscosité du fluide μ, et la vitesse moyenne V . Nous pouvons exprimer cette relation comme :
, , ,p f D V (5.1)
L’objectif des expériences à réaliser est de déterminer la nature de cette fonction f. Pour
effectuer les expériences de manière significative et systématique, il serait nécessaire de
modifier l’une des variables, telle que la vitesse, en gardant toutes les autres variables
constantes, et de mesurer la perte de charge correspondante. Cette série de tests produirait des
données pouvant être représentées graphiquement, comme illustré à la Figure 5.1.
Figure 5.1. Diagrammes de la chute de pression dans un tuyau en fonction
de plusieurs facteurs [10]
Il est à noter que ces courbes ne seront valables que pour la conduite spécifique et pour le fluide
utilisé dans les tests; cela ne donne pas la formulation générale que nous recherchons. Certaines
des expériences seraient difficiles à réaliser, par exemple, pour varier la masse volumique du
fluide et en conservant la viscosité inchangeable.

94
Il existe une approche beaucoup plus simple de ce problème qui éliminera les difficultés décrites
ci-dessus. Nous pouvons regrouper la liste de variables en deux combinaisons non
dimensionnelles appelées produits sans dimension de sorte que :
2
D p VD
V
(2.5)
Figure 5.2. Diagramme de chute de pression utilisant des paramètres sans dimension [10]
5.2 Théorème de Buckingham Pi
Une question fondamentale à laquelle nous devons répondre est de savoir combien de produits
sans dimension sont nécessaires pour remplacer la liste de variables d’origine. La réponse à
cette question est fournie par le théorème de base de l’analyse dimensionnelle qui stipule ce qui
suit :
Si une équation impliquant k variables est homogène sur le plan dimensionnel, elle peut être
réduite à une relation entre k-r produits sans dimension indépendants, où r est le nombre
minimal de dimensions de référence requises pour décrire les variables.
Les produits sans dimension sont souvent appelés «termes pi» et le théorème est appelé
théorème pi de Buckingham. Buckingham a utilisé le symbole pour représenter un produit
sans dimension. Le théorème pi est basé sur l’idée d’homogénéité dimensionnelle.
Essentiellement, nous supposons que pour toute équation physiquement significative
impliquant k variables, telle que : 1 2 3, ,....., ku f u u u
Les dimensions de la variable à gauche doivent être égales à celles de tout terme qui se trouve
à droite. Il s’ensuit que nous pouvons réorganiser l’équation en un ensemble de produits sans
dimension (termes pi) de sorte que : 1 2 3, ,....., k r
où 2 3, ,....., k r est une fonction de 2 à k r

95
Le nombre requis de termes pi est inférieur au nombre de variables d’origine par r, où r est
déterminé par le nombre minimal de dimensions de référence requis pour décrire la liste de
variables d’origine. Habituellement, les dimensions de référence requises pour décrire les
variables sont les dimensions de base M, L et T, on ajoute θ en cas de transfert de chaleur.
5.3 Détermination des termes Pi
Plusieurs méthodes peuvent être utilisées pour former les produits sans dimension, ou termes
pi, apparaissant dans une analyse dimensionnelle. Essentiellement, nous recherchons une
méthode qui nous permettra de former systématiquement les termes pi afin de nous assurer
qu’ils sont sans dimension et indépendants. Avec un peu de pratique, vous serez en mesure de
compléter facilement une analyse dimensionnelle de votre problème.
étape 1
Répertoriez toutes les variables impliquées dans le problème. Cette étape est la plus
difficile et il est bien sûr essentiel que toutes les variables pertinentes soient incluses.
Sinon, l’analyse dimensionnelle ne sera pas correcte! Nous utilisons le terme «variable»
pour inclure n’importe quelle quantité, y compris les constantes dimensionnelles et non
dimensionnelles, qui jouent un rôle dans le phénomène à l’étude.
La détermination des variables doit être réalisée par la connaissance du problème et des
lois physiques qui régissent le phénomène. Typiquement, les variables incluent celles qui
sont nécessaires pour décrire la géométrie du système (comme un diamètre de tube), pour
définir les propriétés du fluide (telles que la viscosité du fluide) et pour indiquer les effets
externes qui influencent le système (comme une chute de pression par unité de longueur).
Ces catégories générales de variables sont conçues comme de grandes catégories qui
devraient être utiles pour identifier les variables.
Il est important que toutes les variables soient indépendantes. Par exemple, si la masse
volumique ρ et du poids spécifique γ sont des variables importantes, nous pourrions
répertorier ρ, ou γ et g. Cependant, il serait incorrect d’utiliser les trois, puisque g ,
c’est-à-dire que γ, ρ et g ne sont pas indépendants.
étape 2
Exprimez chacune des variables en termes de dimensions de base. Pour le problème
typique de la mécanique des fluides, les dimensions de base seront M, L et T.

96
étape 3
Déterminez le nombre requis de termes pi. Ceci peut être réalisé au moyen du théorème
de Buckingham, qui indique que le nombre de termes de pi est égal à k r où k est le
nombre de variables dans le problème et r est le nombre de dimensions de référence (base)
requis pour décrire ces variables (qui est déterminé à l’étape 2).
étape 4
Sélectionnez un nombre de variables répétitives, où le nombre requis est égal au nombre
de dimensions de référence (base). Toutes les dimensions de référence requises doivent
être incluses dans le groupe de variables répétitives, et chaque variable répétée doit être
indépendante des autres dimensions (c. à d., les dimensions d’une variable répétée ne
peuvent pas être reproduites par une combinaison de produits de puissances de la
variables répétitives restantes). Cela signifie que les variables répétitives ne peuvent pas
être combinées pour former un produit sans dimension.
Pour tout problème donné, nous cherchons généralement à déterminer comment une
variable en particulier est influencée par les autres variables. Nous considérons cette
variable comme étant la variable dépendante et souhaitons qu’elle apparaisse dans un seul
terme pi. Par conséquent, ne choisissez pas la variable dépendante comme l’une des
variables répétitives, car les variables répétitives apparaîtront généralement dans plus
d’un terme pi.
étape 5
Former un terme pi en multipliant une des variables non répétées par le produit des
variables répétitives, chacune à un exposant qui rendra la combinaison sans dimension.
Essentiellement, chaque terme pi sera de la forme 31 2
1 2 3
ca b
iu u u u où iu est l’une des variables
non répétitives ; u1, u2 et u3 sont les variables répétitives; et les exposants, ai, bi et ci sont
déterminés pour que la combinaison soit sans dimension. Refaites cette action pour
chacune des variables non répétées restantes.
étape 6
Vérifiez tous les termes pi résultants pour vous assurer qu’ils sont sans dimension. Il est
facile de se tromper en formant les termes en pi.

97
Etape7
Exprimez la forme finale en tant que relation entre les termes pi et réfléchissez à ce qu’elle
signifie. Typiquement, la forme finale peut être écrite comme :
1 2 3, ,....., k r
Pour enrichir ces différentes étapes, nous examinerons à nouveau le problème abordé
précédemment dans ce chapitre, qui examinait le flux constant d’un fluide newtonien
incompressible à travers un long tuyau circulaire horizontal à paroi lisse. Nous nous intéressons
à la perte de charge par unité de longueur p . Selon l’étape 1, nous devons répertorier toutes
les variables pertinentes impliquées en fonction de la connaissance du problème. Dans ce
problème, nous supposons que
, , ,p f D V
où D est le diamètre du tuyau, ρ et μ sont la masse volumique et la viscosité du fluide,
respectivement, et V est la vitesse moyenne.
Ensuite (étape 2), nous exprimons toutes les variables en termes de dimensions de base. En
utilisant M, L et T comme dimensions de base.
-1 -2
-1
-3
-1 -1
ML T
LT
L
ML
ML T
p
V
D
Nous pouvons maintenant appliquer le théorème pi pour déterminer le nombre requis de termes
pi (étape 3). Un examen des dimensions des variables de l’étape 2 révèle que trois dimensions
de base sont nécessaires (M, L et T) pour décrire les variables. Puisqu’il y a cinq variables (k =
5) (n’oubliez pas de compter la variable dépendante p ) et trois dimensions de base (r = 3),
selon le théorème de pi, il faudra 5 3 ou deux termes de pi requis.
Les variables répétitives à utiliser pour former les termes pi (étape 4) doivent être sélectionnées
dans les listes D, ρ, μ et V. N’oubliez pas que nous ne voulons pas utiliser la variable dépendante
comme l’une des variables répétitives. Étant donné que trois dimensions de référence sont
nécessaires. Généralement, nous essaierions de choisir parmi les variables répétitives celles qui
sont les plus simples, dimensionnellement. Par exemple, si l’une des variables a la dimension

98
d’une longueur, choisissez-la comme une des variables récurrentes. Dans cet exemple, nous
utiliserons D, V et ρ comme variables répétitives. Notez que ceux-ci sont indépendants sur le
plan dimensionnel, puisque D est une longueur, V implique la longueur et le temps et ρ implique
la masse, la longueur et le temps. Cela signifie que nous ne pouvons pas former un produit sans
dimension à partir de cet ensemble.
Nous sommes maintenant prêts à former les deux termes en pi (étape 5). Généralement, nous
commençons par la variable dépendante et la combinons avec les variables répétitives pour
former le premier terme pi :
1
a b cp D V
Puisque cette combinaison doit être sans dimension, il s’ensuit que
0 0 0 1 2 1 3b ca
M L T ML T L LT ML
Les exposants a, b et c doivent être déterminés de telle sorte que l’exposant obtenu pour chacune
des dimensions de base M, L et T soit égal à zéro, nous pouvons écrire
1 0 pour M
3 4 0 pour L
2 0 pour T
c
a b c
b c
La solution de ce système d’équations algébriques donne les valeurs souhaitées pour a, b et c.
Il en résulte que 1, 2, 1a b c et, par conséquent,
1 2
p D
V
Le processus est maintenant répété pour les variables non répétées restantes (étape 6). Dans cet
exemple, il n’y a qu’une seule variable supplémentaire μ, de sorte que
2
a b cD V
Ou
0 0 0 1 1 1 3b ca
M L T ML T L LT ML
et donc,
1 0 pour M
3 4 0 pour L
1 2 0 pour T
c
a b c
b c
En résolvant ces équations simultanément, il en résulte que 1, 1, 1a b c , de sorte
que

99
2DV
À ce stade, arrêtez-vous et vérifiez que les termes de pi sont réellement sans dimension (étape
Enfin, nous pouvons exprimer le résultat de l’analyse dimensionnelle comme suit :
2
p D VD
V
Ce résultat indique que ce problème peut être étudié en deux termes pi, l’analyse dimensionnelle
ne fournira pas la forme de la fonction . Celle-ci ne peut être obtenue qu’à partir d’un
ensemble d’expériences appropriées.
Le tableau suivant regroupe l’emsemble des variable unilisé en méxcanique des fluide avec la
symbolisation, ses unités et leurs dimension.
Tableau 5.1. Symboles et dimensions des quantités d’intérêt à l’aide du système M, L, T
Quantité Symbole Unité Dimension
Longueur l m L
Masse m kg M
Temps t s T
Vitesse V m/s L/T
Accélération a m/s2 L/T2
Vitesse angulaire ω rd/s 1/s
Force F N ML/T2
Gravité g m/s2 L/T2
Débit volumique Q m3/s L3/T
Débit massique ṁ Kg/s M/T
Pression p Pa M/LT2
Contrainte τ N/m2 M/LT2
Masse volumique ρ Kg/m3 M/L3
Travail W J ML2/T2
Viscosité dynamique μ Pa.s M/LT
Viscosité cénimatique ν m2/s L2/T
Puissance P W ML2/T3
Flux de chaleur Q W/m2 ML2/T3
Tension superficielle σ N/m2 M/LT2

100
5.4 Nombres sans dimension communs en MDF
En haut du tableau 5.2, vous trouverez une liste de variables fréquemment rencontrées dans les
problèmes de mécanique des fluides. La liste n’est évidemment pas exhaustive, mais indique
un large éventail de variables susceptibles de se retrouver dans un problème typique.
Il est également souvent possible de fournir une interprétation physique aux groupes sans
dimension, ce qui peut être utile pour évaluer leur influence dans une application particulière.
Tableau 5.2. Quelque nombre adimensionnel rencontré en mécanique de fluide.
Paramètre Définition Explication Importance dans
mécanique de fluide
Nombre de Reynolds ReVD
Force d’inertie/force
visqueuse Toujours
Nombre de Mach V
Mac
Vitesse d’écoulement/
vitesse sonique
Écoulement compressible
nombre de Couchy
2
Cav
V
E
Nombre de Froude
2VFr
gL
Force d’inertie/force
gravitation Écoulement surface libre
Nombre d’Euler 2
pEu
V
forces de pression/
Force d’inertie
Aérodynamique
hydrodynamique
Nombre de Weber 2V L
WeY
Force d’inertie/tension
surfacique Écoulement surface libre
Rapport de capacité
thermique p vc c
Enthalpie/énergie
interne Transfert thermique
Rugosité
adimensionnelle L
Rugosité/longueur
caractéristique
Écoulement
turbulent/surface rugueuse
Coefficient de pression 20.5p
p pC
V
Pression
statique/pression
dynamique
Aérodynamique
hydrodynamique
Coefficient de
portance 20.5
L
LC
V A
Portance/force
dynamique
Aérodynamique
hydrodynamique
Coefficient de
frottement 20.5
D
DC
V A
Portance/force
dynamique
Aérodynamique
hydrodynamique

101
Nombre de Reynolds
Le nombre de Reynolds est sans aucun doute le paramètre le plus célèbre sans dimension de la
mécanique des fluides. Il est nommé en l’honneur d’Osborne Reynolds (1842-1912), un
ingénieur britannique qui a démontré pour la première fois que cette combinaison de variables
pouvait être utilisée comme critère pour distinguer les écoulements laminaire et turbulent.
Le nombre de Reynolds est une mesure du rapport de la force d’inertie à la force visqueuse.
Lorsque ces deux types de forces sont importants dans un problème donné, le nombre de
Reynolds jouera un rôle important. Cependant, si le nombre de Reynolds est très petit, cela
indique que les forces visqueuses sont dominantes dans le problème et qu’il est possible de
négliger les effets d’inertie. c’est-à-dire que la densité du fluide ne sera pas une variable
importante.
Nombre Froude
Le nombre de Froude se distingue des autres groupes sans dimension, en ce qu’il contient
l’accélération de la gravité g. L’accélération de la gravité devient une variable importante dans
un problème de dynamique des fluides dans lequel le poids du fluide est une force importante.
Comme discuté, le nombre de Froude est une mesure du rapport de la force d’inertie au poids
de l’élément. Il sera généralement important dans les problèmes impliquant des écoulements
avec des surfaces libres, car la gravité affecte principalement ce type d’écoulement. L’étude de
l’écoulement de l’eau autour des navires ou de l’écoulement dans les rivières ou les conduits
ouverts est un problème typique. Le numéro Froude est nommé en l’honneur de William Froude
(1810-1879), ingénieur civil, mathématicien et architecte naval britannique qui a été le premier
à utiliser le remorquage pour étudier la conception des navires.
Nombre d’Euler
Le nombre d’Euler peut être interprété comme une mesure du rapport des forces de pression
aux forces d’inertie, où p est une pression caractéristique dans le champ d’écoulement. Très
souvent, le nombre d’Euler est écrit en termes de différence de pression p , de sorte que
2Eu p V Cette combinaison exprimée par 20.5p V est également appelée coefficient
de pression. Une certaine forme du nombre d’Euler serait normalement utilisée dans les
problèmes dans lesquels la pression ou la différence de pression entre deux points est une
variable importante. Le numéro Euler est nommé en l’honneur de Leonhard Euler (1707-1783),
célèbre mathématicien suisse qui a été le pionnier des travaux sur le rapport entre pression et

102
écoulement. Pour les problèmes dans lesquels la cavitation est un problème, le groupe sans
dimension 20.5r vp p V est couramment utilisé, où vp est la pression de vapeur et
rp est
une pression de référence. Bien que ce groupe sans dimension ait la même forme que le nombre
d’Euler, il est généralement appelé nombre de cavitation.
Nombre de Cauchy et nombre de Mach
Le nombre de Couchy et le nomb re de mach sont des groupes sans dimension importants dans
les problèmes où la compressibilité des fluides est un facteur important. Le carré du nombre de
Mach est égal au nombre de Cauchy. Ainsi, l’un ou l’autre nombre (mais pas les deux) peut être
utilisé dans les problèmes dans lesquels la compressibilité d’un fluide est importante. Les deux
nombres peuvent être interprétés comme représentant un indice du rapport des forces d’inertie
aux forces de compressibilité. Lorsque le nombre de Mach est relativement petit (par exemple,
inférieur à 0,3), les forces d’inertie induites par le mouvement du fluide ne sont pas
suffisamment importantes pour entraîner un changement significatif de la densité du fluide et,
dans ce cas, la compressibilité du fluide peut être négligée. Le nombre de Mach est le paramètre
le plus couramment utilisé dans les problèmes d’écoulement compressible, en particulier dans
les domaines de la dynamique des gaz et de l’aérodynamique. Le numéro de Cauchy est nommé
en l’honneur Louis Cauchy (1789–1857), ingénieur français, mathématicien et
hydrodynamicien. Le nombre Mach est nommé en l’honneur d’Ernst Mach (1838-1916),
physicien et philosophe autrichien.
Nombre de Weber
Le nombre de Weber peut être important dans les problèmes dans lesquels il existe une interface
entre deux fluides. Dans cette situation, la tension superficielle peut jouer un rôle important
dans le phénomène d’intérêt. Le nombre de Weber peut être considéré comme un indice de la
force d’inertie par rapport à la force de tension superficielle agissant sur un élément fluide. Le
nombre de Weber porte le nom de Moritz Weber (1871–1951), professeur allemand de
mécanique navale, qui a contribué à formaliser l’utilisation générale de groupes sans dimension
communs comme base pour des études de similitude.
5.5 Similitude
Les modèles sont largement utilisés en mécanique des fluides. Les projets d’ingénierie
impliquant des grandes structures, des avions, des navires, des rivières, des ports, des barrages,

103
la pollution de l’air et de l’eau, etc., impliquent souvent l’utilisation de modèles. Un modèle est
une représentation d’un système physique qui peut être utilisé pour prédire le comportement du
système de la manière souhaitée. Le système physique pour lequel les prévisions doivent être
effectuées s’appelle le prototype. Nous nous intéresserons aux modèles physiques, c’est-à-dire
aux modèles qui ressemblent au prototype mais sont généralement de taille différente, peuvent
impliquer des fluides différents, et fonctionnent souvent dans des conditions différentes
(pressions, vitesses , etc.). Par conséquent, il est plus facile à manipuler en laboratoire et moins
onéreux à construire et à utiliser qu’un grand prototype (il convient de noter que les variables
ou les termes pi sans indice p font référence au prototype, alors que l’indice m sera utilisé pour
désigner le variables de modèle ou termes pi). Parfois, si le prototype est très petit, il peut être
avantageux d’avoir un modèle plus grand que le prototype afin de pouvoir d’étudier plus
facilement.
Une fois que les paramètres sans dimension ont été identifiés et qu’une étude sur un modèle a
été réalisée en laboratoire, la similitude nous permet de prédire le comportement d’un prototype
à partir des mesures effectuées sur le modèle. L’application de la similitude est basée sur trois
principes de similitude.
5.5.1 Similitude géométrique
La similitude géométrique concerne la dimension de longueur [L] et doit être garantie avant
tout test de modèle raisonnable. Une définition formelle est la suivante :
Un modèle et un prototype sont géométriquement similaires si et seulement si toutes les
dimensions du corps dans les trois coordonnées ont le même rapport d’échelle linéaire.
Notez que toutes les échelles de longueur doivent être identiques. C’est comme si vous aviez
pris une photo du prototype et que vous l’aviez réduite ou agrandie jusqu’à ce qu’elle
corresponde à la taille du modèle. Si le modèle doit être fabriqué au dixième de la taille du
prototype, sa longueur, sa largeur et sa hauteur doivent être au moins dix fois supérieures. Tous
les angles sont préservés dans la similitude géométrique. Toutes les directions d’écoulement
sont préservées. Les orientations du modèle et du prototype par rapport à l’environnement
doivent être identiques.
La Figure 5.4 illustre une aile prototype et un modèle au dixième. Les longueurs de modèle sont
toutes égales au dixième, mais son angle d’attaque par rapport au flux libre est le même pour le
modèle et le prototype.

104
Figure 5.3. Similitude géométrique entre un modèle et son prototype avec une echelle 1/10
5.5.2 Similitude cinématique
La similitude cinématique nécessite que le modèle et le prototype aient le même rapport
d’échelle de longueur et le même rapport d’échelle de temps. Le résultat est que le rapport
d’échelle de vitesse sera le même pour les deux
L’équivalence d’échelle de longueur implique simplement une similitude géométrique, mais
l’équivalence d’échelle de temps peut nécessiter des considérations dynamiques
supplémentaires telles que l’équivalence des nombres de Reynolds et de Mach.
Un cas particulier est l’écoulement incompressible sans frottement sans surface libre, comme
illustré à la Figure 5.4. Ces écoulements de fluide parfait sont cinématiquement similaires, avec
des échelles de longueur et de temps indépendantes, et aucun paramètre supplémentaire n’est
nécessaire.
Figure 5.4. Les écoulements à basse vitesse sans frottement sur un cylindre

105
Les écoulements sans friction avec une surface libre sont cinématiquement similaires si leurs
nombres de Froude sont égaux:
22pm
m p
m p
VVFr Fr
gL gL
Notez que le nombre de Froude ne contient que des dimensions de longueur et de temps et qu’il
s’agit donc d’un paramètre purement cinématique qui fixe la relation entre la longueur et le
temps.
5.5.2 Similitude dynamique
La similitude dynamique existe lorsque le modèle et le prototype ont le même rapport d’échelle
de longueur, le rapport d’échelle de temps et le rapport d’échelle de force (ou d’échelle de
masse). La similitude géométrique est une première exigence, sans cela, ne continuez pas. Il
existe alors une similitude dynamique, simultanée avec une similitude cinématique, si les
coefficients de force et de pression du modèle et du prototype sont identiques. Ceci est assuré
si :
1. Pour un écoulement compressible, le modèle et le prototype du nombre de Reynolds, du
nombre de Mach et du rapport chaleur spécifique sont également égaux.
2. Pour un flux incompressible
- Sans surface libre: les nombres de Reynolds du modèle et du prototype sont égaux.
- Avec une surface libre: le nombre de Reynolds pour le modèle et le prototype, le nombre de
Froude et (si nécessaire) le nombre de Weber et le nombre de cavitation sont égaux.

106
Exercices résolus
Chapitre 05
Exercice 5.1 (écoulement incompressible autour d’une sphère)
On conidère la résistance d’une sphère placée dans un écoulement uniforme comme montré sur
la figure E3.2. Dans ce cas les effets des force de gravité pourront être négligés devant les effets
inertiels. Les quantités physiques influençant la traînée T de cette sphère sont : le diamètre d de
la sphère, la vitesse U de l’écoulement autour de cette sphère, la masse volumique ρ et la
viscosité dynamique μ.
Trouver les nombres adimensionnels de ce problème.
Figure E5.1. Ecouloempent autour d’une sphère
Solution
Les variables de problème sont : T, d, U, ρ et μ
Les dimensions de variables : T[LMT-2], d [L], U [LT-1], ρ [ML-3] et μ [ML-1T-1]
Dans ce cas, n = 5, p = 3 et par conséquent, il y a (n-p)=(5-3)=2 groupement de son dimension.
On séléctionne ρ, U et d comme trois variables physique dimensiuonnellement indépandantes.
Le premier groupement adimensionnel formé avec T :

107
1 1 1
1 1 1
1 1 1 1 1
1
2 3 1
1 3 1 2
a b c
a b c
a b c a b
T U d
LMT L M LT L
L M T
Et done suivant les trois unités [M, L, T], on obtient :
1 1 1
1
1
: 1 3 0
: 1 0
: 2 0
L a b c
M a
T b
La résolution du système ci-dessus donne : 1 1 11; 2; 2a b c
D’où 1 2 2 D
TC
U d . Ce nombre représente en fait le coefficient de trainée pour un
écoulement autour d’un obstacle (sphère).
Loe deuxième groupement sans dimpension peut être déterminer par :
2 2 2
2 2 2
2 2 2 2 2
2
1 1 3 1
1 3 1 1
a b c
a b c
a b c a b
U d
ML T L M LT L
L M T
Et done uivant le trois unité [M, L, T], on obtient :
2 2 2
2
2
: 1 3 0
: 1 0
: 1 0
L a b c
M a
T b
La résolution du système ci-dessus donne : 2 2 21; 1; 1a b c
D’où 2
1
ReUd Ud
. Ce nombre représente l’inverse u nombre de Reynolds. Notre
analyse imensionnelle de l’écoulement autour d’une sphère a montré que le coefficient de
traînée dépond du nombre de Reynolds de l’écoulement : ReDC f
Exercice 5.2 (Agitateur)
On désire déterminer la hauteur de remontée H du liquide le long de la paroi au cours de la
formation d’un vortex dans une cuve de dissolution de pigments de peinture. Pour ce faire on
désire utiliser une maquette de petite taille. Les variables du problème sont les grandeurs
géométriques H, D, T et, auxquelles s’ajoutent N, la vitesse de rotation de l’agitateur, les

108
propriétés du fluide ρ (masse volumique) et μ (viscosité dynamique), ainsi que l’accélération
de la pesanteur g qui intervient dans ce genre de problème.
On utilisera la méthode de Buckingham pour faire apparaître le nombre de Reynolds d’agitation
et le nombre de Froude.
Figure E5.2
Solution
Les variables de problème sont : D, T, H, N, ρ, μ et g
Les dimensions de variables : D [L], T [L], H[L], N [T-1], ρ [ML-3], μ [ML-1T-1] et g[LT-2]
Dans ce cas, n = 7, p = 3 et par conséquent, il y a (n-p)=(7-3)=4 groupement de son dimension.
On choisit comme variable ondamentales D, N et ρ
1 1 1
1 11
1 1 1
1
1 3
1 3
a b c
b ca
a c b
T D N
L L T ML
L M T
1
T
D
2 2 2
2 22
2 2 2
2
1 3
1 3
a b c
b ca
a c b
H D N
L L T ML
L M T
2
H
D

109
3 3 3
3 33
3 3 3 3
3
1 1 1 3
1 3 1 1
a b c
b ca
a c c b
D N
ML T L T ML
L M T
3 2D N
4 4 4
4 44
4 4 4 4
4
1 1 3
1 3 1
a b c
b ca
a c c b
g D N
LT L T ML
L M T
4 2
g
D N
Exercice 5.3
On considère un corps en chute libre, laché avec une vitesse intiale 0v d’une hauteur h, et l’on
cherche le temps de chute t en fonction de h.
Solution
Les variables du problème sont h, , t (ne pas oublier de prendre la variable que l’on veut
calculer), la pesanteur g, et la masse du coprs m. on a donc (n = 5) ; leurs imensions sont :
h [L], [LT-1], H[L], t [T], m [M] et g[LT-2]
On a donc p = 3. Il aura (n-p)=(5-3)=2 groupes adimensionnels.
On choisi trois variables de base. Il ne faut pas choisir celle que l’on cherche à relier, à savoir t
et h. Les 3 restantes sont m, g et .
Les deux groupes s’écrivent done :
1 1 1
2 2 2
1 0
2 0
a b c
a b c
t m g v
h m g v
1 11
1 1 1 1 1
2 1
1
2 1
b ca
b c a b c
T M LT LT
L M T
On a donc le système
1
1 1
1 1
0
0
2 0
a
b c
b c
Et on a done : 1 1 10, 1, 1a b c
0v
0v
0v

110
1
0
gt
v
En suite la même méthode pour 2 . On a
2 22
2 2 2 2 2
2 1
2
1 2
b ca
b c a b c
L M LT LT
L M T
On a donc le système
2
2 2
2 2
0
1 0
2 0
a
b c
b c
D’où : 2 1 10, 1, 2a b c , soit finalement :
2
0
gh
v
On sait finalement que t s’exprimera en fonction de h sous la forme :
0 0
gt ghf
v v
On remarque que la masse m n’intervient pas dans le résultat, ce qui est bien connu en l’absence
de frottement. Notons que le fait de l’avoir incluse a priori ne fournit pas un résultat faux,
simplement cela nous a fait perdre du temps.
Voyons maintenant une appliçcation simple. Un industriel cherche à connaitre le temps de chute
d’un corps en fonction de la hauteur et de la vitesse initiale. Il y a deux paramètres à faire varier
et pour identifier une loi 0,t f h v , il faut raisonnablement au moins 5 valeurs pour chaque
paramètres ce qui fait 25 expériences.
Exercice 5.4
Un dirigeable a une longueur Lp, une vitesse Vp = 6 m/s dans l’air. On utilise un modèle réduit
de longueur Lm = Lp/30 et on fait des essais dans l’eau.
1. Déterminer la vitesse Vm
2. On mesure le frottement sur le modèle, soit Fm = 2700 N. Calculer le frottement sur le
prototype Fp.
3. Calculer la puissance mécanique nécessaire en kW pour motoriser le prototype.
On donne : ρair = 1.205 kg/m3 ; μair = 18×10-6 Poiseuille, ρeau = 998 kg/m3 ; μeau = 10-3 Poiseuille

111
Figure E5.1
Solution
1. On applique le pincipe de similitude dynamique entre le modèle et le prototype,
Re Rem p
m p
air p peau m m
eau air
LV LV
L VL V
Nous avons : 30m p
L L
30
30
12.074m/s
air p air p eaueau m
m
eau air eau air
V VVV
2. pour calculer la force, on applique l’égalité entre le coeficient de frattemeent :
2
2 2 2
30
24.15
m air p
p
eau mm p
F VF FF
V L V L V
N
3. La puissance
24.15 6 144.9 0.1449
P F V
W kW
Exercice 5.5
Dans plusieurs processus industriels un courant de liquide est passé sur un film des sphères
solides au fond d’un tube comme illustré à la figure. On peut observer lors de l’´ecoulement

112
d’un fluide incompressible le long d’un tube qu’à une certaine vitesse critique les particules se
mettent en mouvement le long du tube. On désire d’étudier la valeur de cette vitesse critique
Vc. On admet que Vc est une fonction du diamètre du tube D, du diamètre du particule Dp, la
masse volumique du liquide ρ, la viscosité dynamique du liquide μ, la densité de particules ρp
et l’accélération de la pesanteur g.
Figure E5.5
(1) En utilisant ρ, D et g comme grandeurs fondamentales, déterminer les paramètres sans
dimensions de ce problème.
(2) Répéter la question (1) en utilisant ρ, D et μ en tant que grandeurs fondamentales.
(3) Dans une expérience au laboratoire on utilise le même liquide et particules que pour le
prototype mais en réduisant les dimensions géométriques au moitié. Si les mesures au
laboratoire indiquent une vitesse critique de 1 m/s, calculer la vitesse critique du prototype pour
les deux cas (1) et (2). Que passe-t-il ?
(4) Revenons aux principes de similitudes et les paramètres sans dimensions du problème.
Quels sont ces principes et comment doit-on les appliquer pour résoudre ce problème de
similitude ? Calculer la vitesse critique du prototype pour obtenir une vitesse critique de 1 m/s
pour la maquette. Quelles sont dans ce cas les propriétés du liquide à utiliser au laboratoire ?
Solution
1.
On cherche , , , , ,c p pV f D D g
où n = 7 avec les dimensions sont :
1 3 3 2 1 1, , , , , ,c p pV LT ML ML D L D L g LT ML T
On a donc p = 3 et (le nombre de paramètres sans dimensions est n-p = 7-3 = 4
Les grandeurs fondamentales : ρ, D et g

113
1 1 1
1 11
1 1 1 1 2
1
1 3 2
1 3 1 2
a b c
c
a cb
a b c a c
V D g
LT ML L LT
L M T
*
1cV
gD
De la même, on trouve
2 3 4 3 2 1 2, ,
p pD
D D g
2.
Les grandeurs fondamentales : ρ, D et μ, on trouve :
**
1 1
cV
D
2 3 4 2 3 2, ,
p pD g
D D
3.
Calcul de cV en utilisant le même liquide et particules que pour le prototype mais en réduisant
les dimensions géométriques en moitié.
Avec g, ρ et μ fixées, il apparait que peut être déterminée en utilisant seulement les
expressions pour .
prototype maquette
On obtient selon la 1ère expression :
c c
prototype maquette
V V
gD gD
Ce qui conduit à :
2 1 2 m/sprototype
c cprototype maquettemaquette
DV V
D
Et selon la 2ème expression :
1
1 0.5 m/s2
c cprototype
prototype maquette
DV V
D
Il vient alors que nous avons obtenu deux résultats différents ce qui sgnifie que soit que les
principes de similitude ne s’applique à ce problème ou soit ils sont mal appliqués.
4.
cV

114
Une similitude complète entre un prototype et une maquette requiert :
- Une similitude géométrique
- Une similitude cinématique
- Une similitude dynamique
Reconsidérons maintenant ce qu’on vient d’en faire en 3. En utilisant le même fluide, (ρ et μ
fixées), avec g fixe, on n’a fait intervenir que la similitude géométrique mais, sans y parvenir
à la satisfaire :
* *
1 1cV gD D , ** * 1
1 1cV DD
Réexaminons aussi 3 :
*
3 3 2 1 2D g
d’où * 3 2
3 D
et
**
3 2 3 2
g
D ce qui conduit à ** 3
3 D
On observe alors qu’en admettant que g estr fixée, travailler avec le même fluide pour la
maquette et le prototype, au moins en ce qui conserne ce problème, conduit aux contradictions
pour les grandeurs géométriques : * 3 2
3 D et ** 3
3 D . Ceci implique que les grandeurs
géométriques doivent être maintenant fixe qui est en contradiction avec le principe de
similitude. Cela suggère d’utiliser alors un fluide différent pour la maquette.
Il se fait alors choisir les fluides tel que : 3 3prototype maquette
Pour le 1èr cas, on a donc :
3 2 1 2 3 2 1 2
prototype maquetteD g D g
Ce conduit à :
3 2
3 22maquette
prototypemaquette prototype prototype
D
D
Avec 2 m/sc prototypeV .
Pour le 2ème cas :
2 3 2 2 3 2
prototype maquette
g g
D D
D’où l’on tire

115
Comme dans le cas précédent. Alors, d’après **
1 , on doit avoir :
c c
prototype maquette
V D V D
Donc
c cprototype maquette
maquette
DV V
D
Soit
3 22maquette
c cprototype maquetteprototypeprototype prototype
DV V
D
D’où on obtient
2 m/sc prototypeV
Ce qui le même résultat obtenu pour le premier cas.
Exercice 5.6 (Procédé de séchage d’une surface mouillée)
Pendant le processus de séchage d’une fine couche de liquide sur une surface, le liquide
s’évapore et la vapeur est transportée dans l’air au-dessus de la surface, comme on peut le voir
sur la figure. Nous nous intéressons à connaître la dépendance du temps de séchage t sur le reste
des variables du problème (longueur L, épaisseur de la couche δ, pression de vapeur du liquide
Pv, vitesse de l’air U, viscosité μ et densité de l’air ρ).
Figure E5.6
1. Obtenir un ensemble de variables sans dimension liées au temps de séchage t avec le reste
des variables.
3 2
3 22maquette
prototypemaquette prototype prototype
D
D

116
2. Nous souhaitons mettre en place une expérience en laboratoire pour déterminer le temps de
séchage d’un terrain de football où Pv = 2 000 Pa, L = 100 m, δ = 0,01 m et U = 2 m/s.
Dans l’expérience, la viscosité et la densité de l’air seront les mêmes que celles du terrain de
football, mais L vaudra 20 m (nous n’avons pas de plus grand laboratoire disponible). Calculer
les valeurs de U, δ et Pv dans l’expérience de sorte que la similitude complète existe avec le
flux réel.
3. Si dans l’expérience le temps de séchage moyen est t = 10 min, calculer le temps de séchage
du terrain de football.
Solution
1.
Les variables du problème sont : , , , , , ,vt L P U
où n = 7 avec les dimensions sont :
2 1 1 1 3, , , , , ,vt T L L L P MLT U LT ML T ML
On a donc p = 3 et (le nombre de paramètres sans dimensions est n-p = 7-3 = 4
Les grandeurs fondamentales : ρ, U et L
1 1 1
1 1 1
1 1 1 2
1
3 1
3 1 1
a b c
a b c
a c a b
t U L
T ML LT L
L M T
1
tU
L
De la même, on trouve
2 3 42, ,vP
L U UL
Donc, on peut écrire :
2, ,vPtU
fL L U UL
2.
2000Pav prototypeP , 100m
prototypeL , 0.01m
prototype , 2m/s
prototypeU
20mmaquette
L

117
2 2
0.01 100 20 0.002m
prototype maquetteprototype maquette
maquette maquette
prototype
L L
LL
4 4
10m/s
prototype maquette
prototype maquette
maquette
prototype maquette
prototype
maquette
UL UL
ULU
L
UL
L
3 3 2 2
2
2
2
250000Pa
v v
prototype maquette
prototype maquette
vv maquette maquette
prototype
v prototype maquette
prototype
P P
U U
PP U
U
P U
U
3.
1 1
250min
prototype maquetteprototype maquette
prototypemaquette prototype
tU tU
L L
tU Lt
L U

118
Exercices Proposés
Chapitre 04
La série de ses exercices sont la fiche TD3 Mécanique des Fluides (Analyse dimensionnelle et
Similitude) à Université se Caen-Basse Normandie
Master 1 (2010 – 2011)
Analyse dimensionnelle
Exercice 5.7
La chute de pression Δp dans une conduite cylindrique dépend de la vitesse moyenne de
l’écoulement U, du diamètre D, de langueur L et de la rugosité ɛ de conduite ; elle dépend aussi
des propriétés de fluide. Etablir une relation donnant Δp en fonction des paramètres de
l’écoulement.
Exercice 5.8
Quels sont les paramètres sur lesquels la force de frottement F exercée par un fluide en
mouvement à la vitesse U sur une plaque plane, de longueur L et de largeur H ? L’écoulement
est supposé parallèle à L. Etablir une relation donnant F en fonction de ces paramètres.
Exercice 5.9
Soit une hélice de diamètre D en rotation à une vitesse angulaire ! dans un fluide en mouvement
à la vitesse U. Développer une expression adimensionnelle pour la force de poussé engendrée
par cette hélice.
Exercice 5.10
Dans un canal à fond horizontal, on désir étudier une caractéristique géométrique linéaire X
d’un ressaut formé par l’écoulement d’un liquide sous une vanne de hauteur a soumise à une
charge H, le tirant d’eau à l’aval ayant pour valeur y.

119
Figure E5.10
Etudier dimensionnellement le problème, en négligeant les force de viscosité et de tension
superficielle.
Exercice 5.11
On admet que la surélévation permanente h d’un lac due au vent dépend de la profondeur
moyenne H de ce lac, de sa longueur , du poids volumique de l’eau et la force tangentielle
due au vent. Donner une formule générale exprimant h.
Exercice 5.12
On s’intéresse aux ondes de gravité (respectivement capillaires) qui se produisent lors d’un
équilibre entre une force déstabilisant, l’inertie, et une force de rappel, la gravité
(respectivement la force de tension superficielle σ (N/m)). La vitesse de propagation d’onde
(célérité d’onde) de gravité, notée c, dépend en général de l’accélération de gravité g, de la
longueur d’onde λ, de la densité du liquide ρ et de l’amplitude a d’onde : , , ,c f g a . La
vitesse (ou célérité) d’onde de petite amplitude ne dépend pas de a et la relation se réduit à :
, ,c f g . En utilisant l’analyse dimensionnel déterminer cette relation.
Déterminer la relation correspondante pour les ondes capillaires.
Similitude
Exercice 2.13
Une maquette de digue, constituée par un empilement de blocs de béton de masse unitaire égale
à 1 kg, est soumis la houle produit dans un laboratoire. Cette maquette ne subit pas de
dommages tant que la hauteur H de la houle ne dépasse pas 0,30 m.

120
Figure E5.13
Quel devra être la masse minimale des bloc de même béton constituant la digue prototype pour
que celle-ci résiste à une houle géométriquement et hydrodynamiquement semblable, et
pouvant atteindre 6 m de hauteur.
Exercice 5.14
Un modèle réduit destiné à l’étude des marées a été construit en adoptant l’échelle de 1/500 en
plan et 1/80 en hauteur Quelle doit être, sur ce modèle, la durée d’une marée dont la période
serait, dans la nature, égale à 12h25 mn ?
Même question pour des échelles de 1/50000 en plan et 1/500 en hauteur.
Exercice 5.15
En régime laminaire, l’équation régissant les écoulements transitoires de gaz dans un conduit
de faible section peut se metter sous la forme
2 2 2
264
p D pC
t x
où p est la pression à l’instant t et au point d’abscisse x, D le diamètre du conduit, C une
constante dépendant de la forme de la section et μ la viscosité dynamique du gaz.
1. Trouver la relation qui doit lier les échelles de similitude :
1
2
x
x , 1
2
p
p , 1
2
t
t , 1
2
D
D
2. En déduire quelle serait l’influence d’une diminution de longueur de moitié et d’une
multiplication du diamètre par 3 sur le temps d’établissement d’une même pression d’un même
gaz. Que deviendrait ce temps s’il était initialement égal à 6 mois?

121
Exercice 5.16
AP fin de déterminer la puissance nécessaire pP pour motoriser un dirigeable de longueur Lp à
une vitesse Up = 6 m/s dans l’air (ρair = 1.205 kg/m3, μair = 1.8×10−5kg/m.s.), on utilise une
maquette de longueur Lm = Lp/30, à mettre en mouvement dans l’eau, ρeau = 1000 kg/m3, μeau =
1.0×10−3 kg/m.s.
1. Déterminer la vitesse de maquette Um.
2. Si la mesure de la force de frottement subie par la maquette donne Fm = 2700 N, estimer la
force de frottement Fp à laquelle le prototype serait subi.
3. Calculer pP .

122
Références Bibliographies
[1]. B. R. Munson, D. F. Young, T. H. Okiishi, Fundamentals of Fluid Mechanics,
Fourth Edition, John Wiley & Sons, Inc., 2002, NewYork.
[2]. G. Currie, Fundamental Mechanics of Fluids, Third Edition, Marcedle kkeirn,Inc.
2003, Newyork.
[3]. H. Yamaguchi, Engineering Fluid Mechanics, Springer, 2008
[4]. J. B. Evett, M. S. Liu, 2500 solved problems in Fluid mechanics and hydraulics,
Schaum’s solved problems series, McGraw-Hill, Inc., 1979
[5]. Genick Bar–Meir, Basics of Fluid Mechanics, 2011
[6]. S. K. Som, G. Biswas, Introduction Fluid mechanics and Fluid Machines,
Second Edition, Tata McGraw-Hill, NewDelhi, 2008
[7]. Y. A. Çengel, J. M. Cimbala, Fluid Mechanics, Fundamentals and Applications,
McGraw-Hill, Boston, 2006
[8]. M. C. Potter, D. C. Wiggert, Fluid Mechanics ,Schaum’s Outline Series McGraw-
Hill, 2008
[9]. F. M. White, Fluid Mechanics, Seventh Edition, McGraw-Hill, 2008
[10]. B. R. Munson, D. F. Young, T. H. Okiishi, W. W. Huebsch, Fundamentals of
Fluid Mechanics, Sixth Edition, John Wiley & Sons, Inc., 2009, NewYork.