
I- Pendule élastique horizontal 1- Equation différentielle ... · proportionnel à l'angle de...
6
Page | 1 CHIMIE / Unité :4 Evolution temporelle des systèmes mécaniques I- Pendule élastique horizontal - Disposons sur un banc à coussin d’air horizontal un solide (S) de masse m attaché à l’une des extrémités d’un ressort à spires non jointives de masse négligeable et de raideur k L’autre extrémité du ressort accrochée en un point fixe. - les frottements seront considérés comme négligeables. - Au repos, G, centre d’inertie de S, est en O, pris comme origine des abscisses sur l’axe horizontal Ox. - On écarte G de sa position d’équilibre suivant Ox d’une distance d vers la droite et sans vitesse initiale. 1- Equation différentielle du mouvement Le système étudié est le corps de masse m. Le référentiel L’origine O du repère est le centre d’inertie G du solide lorsque le ressort n’est pas déformé. L’axe Ox est parallèle au ressort et orienté dans le sens de l’étirement du ressort. L'axe Oy est vertical. (On n’a pas besoin du 3 axe Oz car il n'y a pas de force ni de mouvement selon cet axe.) Bilan des Forces extérieures * Poids P = m.g =-m.g.j * Réaction du plan R =R.j * Tension du ressort (force de rappel) = -k.x. (si le ressort est étiré ou comprimé) Appliquons le principe fondamental de Newton (Newton II) : + + =m. donc −. . + R. − k.. = m. La projection de cette relation vectorielle sur l’axe Ox nous conduit à : { −k..= m. −.+R = m. G effectue un mouvement rectiligne. L'accélération est donc parallèle à l'axe Ox donc =0 Alors l'équation différentielle du mouvement est : . = −k. + k .=0 C'est l'équation différentielle du mouvement. Remarque: L'accélération n'est donc pas constante. Elle dépend de la déformation x du ressort 2- Solution de l'équation différentielle du mouvement : Equation horaire x(t) (Elongation) L'étude mathématique de cette équation fournit comme solution : x(t)= X m . cos( 2. 0 .t +), où X m , 0 et sont des constantes. Expression de 0 période propre Dérivons : { x(t) = X m . cos( 2. 0 . t + ) d d t = −X m . 2. 0 . sin( 2. 0 . t + ) d 2 d 2 t =X m .( 2. 0 ) 2 . cos( 2. 0 . t + ) Remplaçons dans l'équation différentielle : −X m .( 2. 0 ) 2 . cos( 2. 0 . t + ) + k .X m . cos( 2. 0 . t + ) = 0 X m . cos( 0 . t + )(−( 2. 0 ) 2 + k )=0
Transcript of I- Pendule élastique horizontal 1- Equation différentielle ... · proportionnel à l'angle de...

Page | 1
CHIMIE / Unité :4
Evolution temporelle
des systèmes
mécaniques
I- Pendule élastique horizontal - Disposons sur un banc à coussin d’air horizontal un solide (S) de masse m attaché à l’une des extrémités d’un
ressort à spires non jointives de masse négligeable et de raideur k L’autre extrémité du ressort accrochée
en un point fixe.
- les frottements seront considérés comme négligeables.
- Au repos, G, centre d’inertie de S, est en O, pris comme
origine des abscisses sur l’axe horizontal Ox.
- On écarte G de sa position d’équilibre suivant Ox d’une
distance d vers la droite et sans vitesse initiale.
1- Equation différentielle du mouvement Le système étudié est le corps de masse m.
Le référentiel L’origine O du repère est le centre d’inertie G du solide lorsque
le ressort n’est pas déformé.
L’axe Ox est parallèle au ressort et orienté dans le sens de
l’étirement du ressort. L'axe
Oy est vertical. (On n’a pas besoin du 3 axe Oz car il n'y a pas
de force ni de mouvement selon cet axe.)
Bilan des Forces extérieures
* Poids P = m.g =-m.g.j
* Réaction du plan R =R.j
* Tension du ressort (force de rappel) �� = -k.x. 𝑖 (si le ressort est étiré ou comprimé) Appliquons le principe fondamental de Newton (Newton II) :
�� +�� +�� =m.𝒂𝑮 donc −𝒎.𝒈. 𝒋 + R. 𝒋 − k. 𝐱. 𝒊 = m.𝒂𝑮 La projection de cette relation vectorielle sur l’axe Ox nous conduit à :
{−k. 𝐱. = m. 𝒂𝒙
−𝒎.𝒈 + R = m. 𝒂𝒚
G effectue un mouvement rectiligne. L'accélération est donc parallèle à l'axe Ox donc 𝒂𝒚 = 0
Alors l'équation différentielle du mouvement est : 𝑚.𝐝𝟐𝒙
𝐝𝟐𝐭= −k. 𝑥
𝐝𝟐𝒙
𝐝𝟐𝐭+
k
𝑚. 𝑥 = 0
C'est l'équation différentielle du mouvement.
Remarque:
L'accélération n'est donc pas constante. Elle dépend de la déformation x du ressort
2- Solution de l'équation différentielle du mouvement : Equation horaire x(t) (Elongation)
L'étude mathématique de cette équation fournit comme solution : x(t)= Xm. cos(2.𝜋
𝑇0.t +𝜑),
où Xm, 𝑇0 et 𝜑 sont des constantes.
Expression de 𝑇0 période propre
Dérivons :
{
x(t) = Xm. cos(
2.𝜋
𝑇0. t + 𝜑)
d 𝑥
d t= −Xm.
2.𝜋
𝑇0. sin(
2.𝜋
𝑇0. t + 𝜑)
d2𝑥
d2t= Xm. (
2.𝜋
𝑇0)2. cos(
2.𝜋
𝑇0. t + 𝜑)
Remplaçons dans l'équation différentielle :
−Xm. (2. 𝜋
𝑇0)2. cos(
2. 𝜋
𝑇0. t + 𝜑) +
k
𝑚. Xm. cos(
2. 𝜋
𝑇0. t + 𝜑) = 0
Xm. cos(𝜔0. t + 𝜑)(−(2.𝜋
𝑇0)2 +
k
𝑚) = 0
Page | 2
Avec Xm. cos(𝜔0. t + 𝜑) ≠ 0 donc −(2.𝜋
𝑇0)2 +
k
𝑚=0 (
2.𝜋
𝑇0)2 =
k
𝑚
Comme l’oscillateur est libre, il oscille avec sa période propre T0, sa fréquence propre f0 et sa
pulsation propre 𝜔0.
La période propre est donnée par : 𝑇0 = 2. 𝜋.√𝑚
k
La fréquence propre est donnée par : 𝑓0 =1
2.𝜋. √
k
𝑚
La pulsation propre est donnée par : 𝜔0 = √k
𝑚
Détermination de l'amplitude Xm et de la phase initiale 𝜑
Nous déterminons ces constantes à l'aide des conditions initiales :
t = 0 abscisse initial x0 = d > 0
vitesse initiale v0x = 0
Remplaçons les conditions initiales dans les équations
{
Abscisse ∶ x(t) = Xm. cos(2. 𝜋
𝑇0. t + 𝜑)
𝑉𝑖𝑡𝑒𝑠𝑠𝑒 ∶ 𝑣𝑥 =d 𝑥
d t= −Xm.
2. 𝜋
𝑇0. sin(
2. 𝜋
𝑇0. t + 𝜑)
d = Xm. cos(𝜑)>0
0 = −Xm.2. 𝜋
𝑇0. sin(𝜑)
Finalement : Xm = d, alors = 0 .
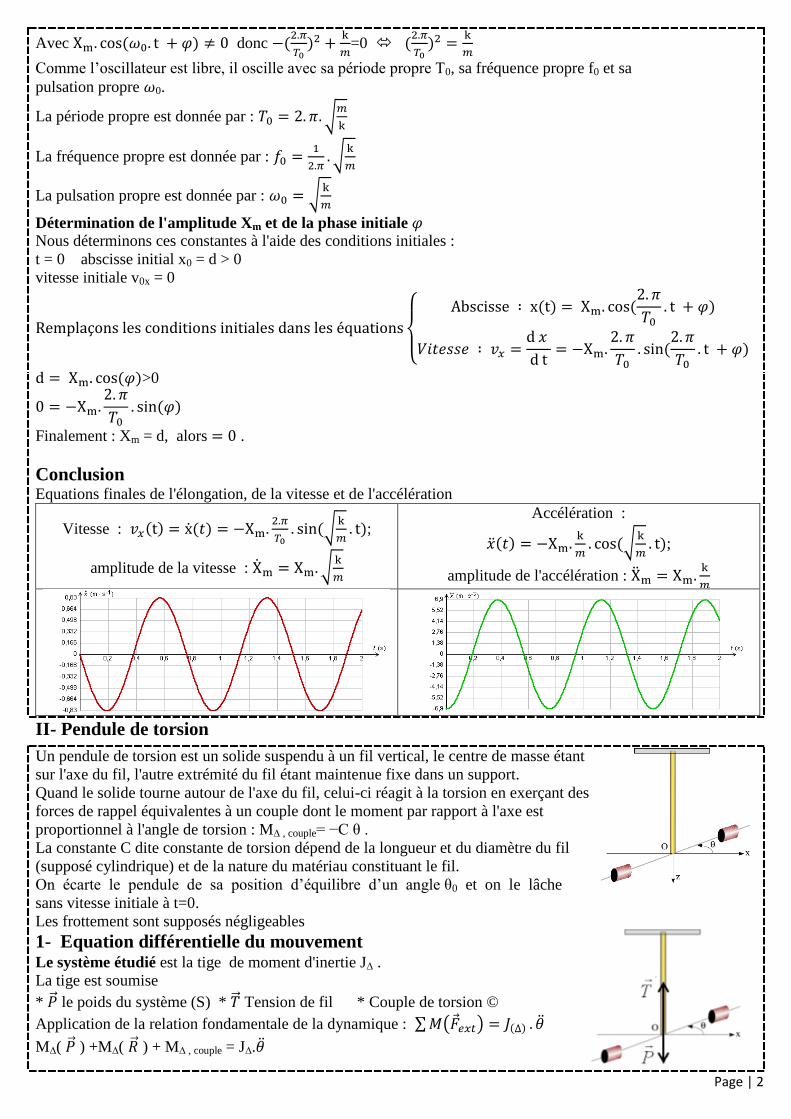
Conclusion Equations finales de l'élongation, de la vitesse et de l'accélération
Vitesse : 𝑣𝑥(t) = x(𝑡) = −Xm.2.𝜋
𝑇0. sin(√
k
𝑚. t);
amplitude de la vitesse : Xm = Xm. √k
𝑚
Accélération :
��(𝑡) = −Xm.k
𝑚. cos(√
k
𝑚. t);
amplitude de l'accélération : Xm = Xm.k
𝑚
II- Pendule de torsion
Un pendule de torsion est un solide suspendu à un fil vertical, le centre de masse étant
sur l'axe du fil, l'autre extrémité du fil étant maintenue fixe dans un support.
Quand le solide tourne autour de l'axe du fil, celui-ci réagit à la torsion en exerçant des
forces de rappel équivalentes à un couple dont le moment par rapport à l'axe est
proportionnel à l'angle de torsion : M∆ , couple= −C θ . La constante C dite constante de torsion dépend de la longueur et du diamètre du fil
(supposé cylindrique) et de la nature du matériau constituant le fil.
On écarte le pendule de sa position d’équilibre d’un angle θ0 et on le lâche
sans vitesse initiale à t=0.
Les frottement sont supposés négligeables
1- Equation différentielle du mouvement Le système étudié est la tige de moment d'inertie J .
La tige est soumise
* �� le poids du système (S) * �� Tension de fil * Couple de torsion ©
Application de la relation fondamentale de la dynamique : ∑𝑀(𝐹 𝑒𝑥𝑡) = 𝐽(∆) . ��
M∆( �� ) +M∆( �� ) + M∆ , couple = J∆.��

Page | 3
M∆( �� ) = 0 car la droite d’action de �� coupe l’axe (∆).
M∆( �� ) = 0 car la droite d’action de �� coupe l’axe (∆).
D'après le principe fondamental de la dynamique : ∑𝑀(𝐹 𝑒𝑥𝑡) = 𝐽(∆) . ��
Alors : −C θ=J.��
L'équation différentielle du mouvement de la tige est donc∶ �� +𝐶
𝐽∆. 𝜃 = 0
2- Solution de l'équation différentielle du mouvement : Equation horaire x(t)
L'étude mathématique de cette équation fournit comme solution : (t)= m. cos(2.𝜋
𝑇0.t +𝜑),
où m, 𝑇0 et 𝜑 sont des constantes.
Expression de 𝑇0 période propre
Dérivons :
{
(t) = m. cos(
2.𝜋
𝑇0. t + 𝜑)
d
d t= −m.
2.𝜋
𝑇0. sin(
2.𝜋
𝑇0. t + 𝜑)
d2
d2t= �� = m. (
2.𝜋
𝑇0)2. cos(
2.𝜋
𝑇0. t + 𝜑)
Remplaçons dans l'équation différentielle :
−m. (2. 𝜋
𝑇0)2. cos(
2. 𝜋
𝑇0. t + 𝜑) +
𝐶
𝐽∆. m. cos(
2. 𝜋
𝑇0. t + 𝜑) = 0
m. cos(𝜔0. t + 𝜑)(−(2.𝜋
𝑇0)2 +
k
𝑚) = 0
Avec m. cos(𝜔0. t + 𝜑) ≠ 0 donc −(2.𝜋
𝑇0)2 +
𝐶
𝐽∆=0 (
2.𝜋
𝑇0)2 =
𝐶
𝐽∆
Comme l’oscillateur est libre, il oscille avec sa période propre T0, sa fréquence propre f0 et sa
pulsation propre 𝜔0.
La période propre est donnée par : 𝑇0 = 2. 𝜋.√𝐽∆
𝐶
La fréquence propre est donnée par : 𝑓0 =1
2.𝜋. √
𝐶
𝐽∆
La pulsation propre est donnée par : 𝜔0 = √𝐶
𝐽∆
Détermination de l'amplitude m et de la phase initiale 𝜑
Nous déterminons ces constantes à l'aide des conditions initiales :
t = 0 abscisse initial = 0 > 0
vitesse angulaire initiale 0 = 0
Remplaçons les conditions initiales dans les équations
{
Abscisse ∶ (t) = m. cos(2. 𝜋
𝑇0. t + 𝜑)
𝑉𝑖𝑡𝑒𝑠𝑠𝑒 ∶ =d
d t= −m.
2. 𝜋
𝑇0. sin(
2. 𝜋
𝑇0. t + 𝜑)
d = m. cos(𝜑)>0
0 = −m.2. 𝜋
𝑇0. sin(𝜑)
Finalement : m = 0, alors 𝜑 = 0 .
Conclusion Equations finales de l'élongation, de la vitesse et de l'accélération
Ecart angulaire : (t) = m. cos(√𝐶
𝐽∆. t ); amplitude de l’élongation : m = 0
Vitesse angulaire : (t) = −m.2.𝜋
𝑇0. sin(√
𝐶
𝐽∆. t); amplitude de la vitesse : m = m. √
𝐶
𝐽∆
Accélération angulaire : (𝑡) = m.k
𝑚. cos(√
𝐶
𝐽∆. t); amplitude de l'accélération : m = m.
𝐶
𝐽∆

Page | 4
III- pendule pesant On considère un pendule pesant constitué d’un tige homogène AB. Ce système peut
tourner autour d’un axe horizontal (∆), son moment d’inertie par rapport à (∆) est J∆ et sa
masse est m .
Écarter de sa position d’équilibre d’un angle θm, puis libéré sans vitesse initiale , le
système (S) effectue un mouvement de va-et-vient autour de sa position d’équilibre .
Les frottement sont supposés négligeables et les positions du pendule sont repérées par
l’abscisse angulaire θ qui forme la tige avec la verticale passant par la position G0 du
centre d’inertie G du système .
1- Equation différentielle du mouvement Système étudié : (S)
Bilan des forces extérieur exercées sur (S) :
* �� le poids du système (S)
* �� force exercée par l’axe (∆) sur (S) ;
On étudie le mouvement du système dans un référentiel terrestre supposé Galiléen.
Application de la relation fondamentale de la dynamique : ∑𝑀(𝐹 𝑒𝑥𝑡) = 𝐽(∆) . ��
M∆( �� ) +M∆( �� ) = J∆.��
M∆( �� ) = 0 car la droite d’action de �� coupe l’axe (∆).
M∆( �� ) =-P.d où d est la distance entre la droite d’action de �� et l’axe (∆)
Dans la figure sin=𝑑
0𝐺 alors d=OG.sin donc M∆( �� ) = −m.g.OG.sinθ
Dans ce cas nous avons : −m.g. OG.sinθ = J∆.��
�� + 𝑚.𝑔.OG
𝐽∆.sinθ = 0
Pour des faibles oscillations (θ ⩽ 15°) on peut écrire l’approximation sinθ ≃ θ(rad) , dans ce cas l’équation
différentielle est : �� + 𝑚.𝑔.OG
𝐽∆. θ = 0
2- Solution de l'équation différentielle du mouvement : Equation horaire x(t)
L'étude mathématique de cette équation fournit comme solution : (t)= m. cos(2.𝜋
𝑇0.t +𝜑),
où m, 𝑇0 et 𝜑 sont des constantes.
Expression de 𝑇0 période propre
Dérivons :
{
(t) = m. cos(
2.𝜋
𝑇0. t + 𝜑)
d
d t= −m.
2.𝜋
𝑇0. sin(
2.𝜋
𝑇0. t + 𝜑)
d2
d2t= �� = m. (
2.𝜋
𝑇0)2. cos(
2.𝜋
𝑇0. t + 𝜑)
Remplaçons dans l'équation différentielle :
−m. (2. 𝜋
𝑇0)2. cos(
2. 𝜋
𝑇0. t + 𝜑) +
𝑚. 𝑔. OG
𝐽∆. m. cos(
2. 𝜋
𝑇0. t + 𝜑) = 0
m. cos(𝜔0. t + 𝜑)(−(2. 𝜋
𝑇0)2 +
k
𝑚) = 0
Avec m. cos(𝜔0. t + 𝜑) ≠ 0 donc −(2.𝜋
𝑇0)2 +
𝑚.𝑔.OG
𝐽∆=0 (
2.𝜋
𝑇0)2 =
𝑚.𝑔.OG
𝐽∆
Comme l’oscillateur est libre, il oscille avec sa période propre T0, sa fréquence propre f0 et sa
pulsation propre 𝜔0.
Détermination de l'amplitude m et de la phase initiale 𝜑
Nous déterminons ces constantes à l'aide des conditions initiales :
t = 0 abscisse initial = 0 > 0
vitesse angulaire initiale 0 = 0
Remplaçons les conditions initiales dans les équations
{
Abscisse ∶ (t) = m. cos(2. 𝜋
𝑇0. t + 𝜑)
𝑉𝑖𝑡𝑒𝑠𝑠𝑒 ∶ =d
d t= −m.
2. 𝜋
𝑇0. sin(
2. 𝜋
𝑇0. t + 𝜑)
Page | 5
d = m. cos(𝜑)>0
0 = −m.2. 𝜋
𝑇0. sin(𝜑)
Finalement : m = 0, alors 𝜑 = 0 .
Conclusion Equations finales de l'élongation, de la vitesse et de l'accélération
Ecart angulaire : (t) = m. cos(√𝑚.𝑔.OG
𝐽∆. t ); amplitude de l’élongation : m = 0
Vitesse angulaire : (t) = −m. √𝑚.𝑔.OG
𝐽∆. sin(√
𝑚.𝑔.OG
𝐽∆. t); amplitude de la vitesse : m = m. √
𝑚.𝑔.OG
𝐽∆
Accélération angulaire : (𝑡) = m.𝑚.𝑔.OG
𝐽∆. cos(√
𝑚.𝑔.OG
𝐽∆. t); amplitude de l'accélération : m = m.
𝑚.𝑔.OG
𝐽∆
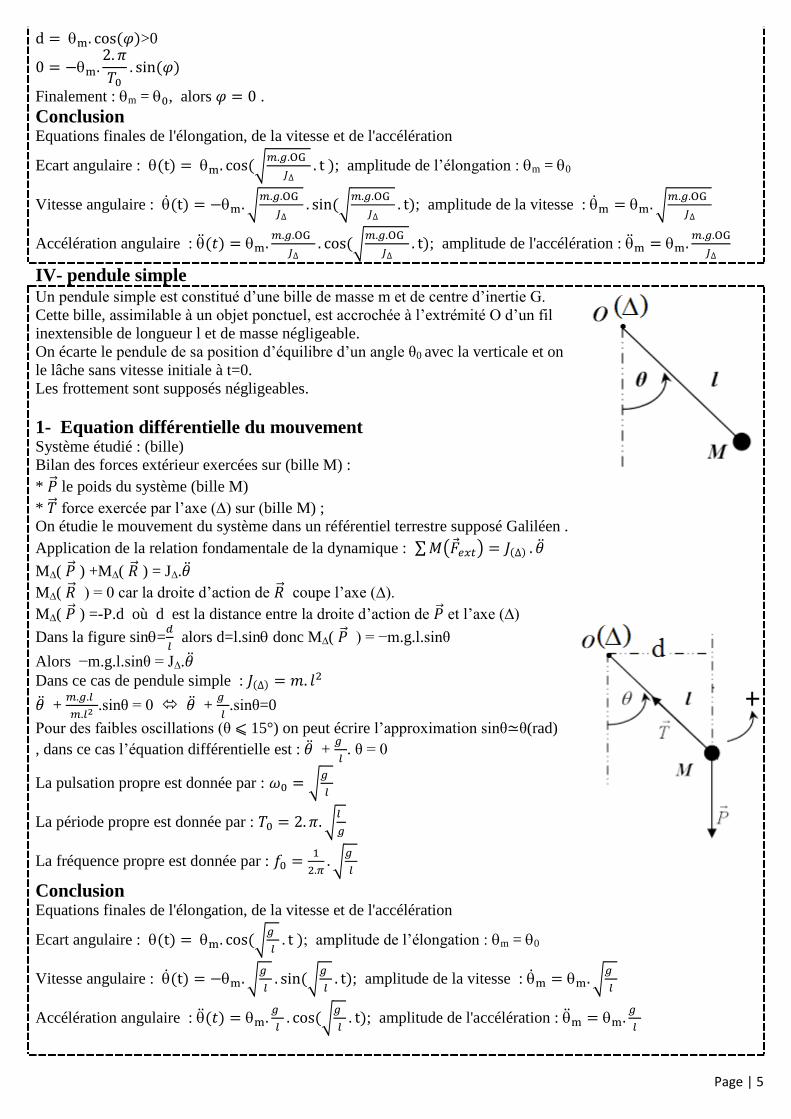
IV- pendule simple
Un pendule simple est constitué d’une bille de masse m et de centre d’inertie G.
Cette bille, assimilable à un objet ponctuel, est accrochée à l’extrémité O d’un fil
inextensible de longueur l et de masse négligeable.
On écarte le pendule de sa position d’équilibre d’un angle θ0 avec la verticale et on
le lâche sans vitesse initiale à t=0.
Les frottement sont supposés négligeables.
1- Equation différentielle du mouvement Système étudié : (bille)
Bilan des forces extérieur exercées sur (bille M) :
* �� le poids du système (bille M)
* �� force exercée par l’axe (∆) sur (bille M) ;
On étudie le mouvement du système dans un référentiel terrestre supposé Galiléen .
Application de la relation fondamentale de la dynamique : ∑𝑀(𝐹 𝑒𝑥𝑡) = 𝐽(∆) . ��
M∆( �� ) +M∆( �� ) = J∆.��
M∆( �� ) = 0 car la droite d’action de �� coupe l’axe (∆).
M∆( �� ) =-P.d où d est la distance entre la droite d’action de �� et l’axe (∆)
Dans la figure sin=𝑑
𝑙 alors d=l.sin donc M∆( �� ) = −m.g.l.sinθ
Alors −m.g.l.sinθ = J∆.��
Dans ce cas de pendule simple : 𝐽(∆) = 𝑚. 𝑙2
�� + 𝑚.𝑔.𝑙
𝑚.𝑙2.sinθ = 0 �� +
𝑔
𝑙.sinθ=0
Pour des faibles oscillations (θ ⩽ 15°) on peut écrire l’approximation sinθ≃θ(rad)
, dans ce cas l’équation différentielle est : �� + 𝑔
𝑙. θ = 0
La pulsation propre est donnée par : 𝜔0 = √𝑔
𝑙
La période propre est donnée par : 𝑇0 = 2. 𝜋.√𝑙
𝑔
La fréquence propre est donnée par : 𝑓0 =1
2.𝜋. √
𝑔
𝑙
Conclusion Equations finales de l'élongation, de la vitesse et de l'accélération
Ecart angulaire : (t) = m. cos(√𝑔
𝑙. t ); amplitude de l’élongation : m = 0
Vitesse angulaire : (t) = −m. √𝑔
𝑙. sin(√
𝑔
𝑙. t); amplitude de la vitesse : m = m. √
𝑔
𝑙
Accélération angulaire : (𝑡) = m.𝑔
𝑙. cos(√
𝑔
𝑙. t); amplitude de l'accélération : m = m.
𝑔
𝑙

Page | 6
T0
V- Oscillations forcées : Résonance
Montage
Observations :
* Le résonateur effectue des oscillations de même fréquence que celle de l'excitateur: il effectue des oscillations
forcées.
* L'amplitude A du résonateur dépend de la fréquence de l'excitateur et de l'intensité de l'amortissement.
* L'amplitude A passe par un maximum : c'est la résonance. La fréquence de résonance fR est pratiquement égale
à la fréquence propre f0 du résonateur.
Influence de l’amortissement sur la résonance d’élongation
L’amplitude du résonateur à la résonance d’élongation dépend de
l’amortissement des oscillations :
Plus l’amortissement est faible, plus l’amplitude des
oscillations est élevée : on parle de résonance aiguë.
Plus l’amortissement est élevé, plus l’amplitude des oscillations
est faible : on parle de résonance floue.
Remarque. :
Lors d’une résonance aiguë, si l’amplitude des oscillations dépasse la valeur maximale indiquée par le
constructeur, le système est détruit
















![Calcul des caractéristiques d’une poutre de sectio[] · 2.3.3 Exemple ... 3.4 Constante de torsion des sections circulaire et rectangulaire.....19 3.5 Le rayon de torsion efficace](https://static.fdocuments.fr/doc/165x107/5b3201687f8b9aae458b92c8/calcul-des-caracteristiques-dune-poutre-de-sectio-233-exemple-34.jpg)

