
GUIDE D’UTILISATION DE LA ... -...
14
GUIDE D’UTILISATION DE LA SOUFFLERIE THERMIQUE ET DE SES COMPOSANTES Version 1 Par : Pascal Labrecque Faculté des sciences et de génie Département de génie électrique 4 mars 2014
Transcript of GUIDE D’UTILISATION DE LA ... -...
GUIDE D’UTILISATION DE LA SOUFFLERIE THERMIQUE ET DE SES
COMPOSANTES
Version 1
Par :
Pascal Labrecque
Faculté des sciences et de génie
Département de génie électrique
4 mars 2014
2
Table des matières
1 Introduction ........................................................................................................................................... 4
2 Description des composantes ................................................................................................................ 4
2.1 La soufflerie thermique ................................................................................................................. 5
2.1.1 Variables ............................................................................................................................... 5
2.2 Automate programmable............................................................................................................... 7
2.2.1 Logiciel RSLogix 5000 ......................................................................................................... 7
2.3 Interface de commande à l’aide de Simulink/Matlab ................................................................. 10
3 Démarrage de la soufflerie thermique ................................................................................................. 11
3.1 Téléchargement du programme de l’automate ............................................................................ 11
3.2 Branchements de la soufflerie thermique .................................................................................... 13
3.3 Communication OPC avec Matlab ............................................................................................. 14

3
Liste des tableaux
Tableau 1: Variables manipulées analogiques .............................................................................................. 6
Tableau 2: Variables mesurées analogiques ................................................................................................. 6
Tableau 3: Variables mesurées discrètes ...................................................................................................... 6
Liste des figures
Figure 1: Schéma fonctionnel de la soufflerie thermique et ses composantes .............................................. 4
Figure 2: Schéma de la soufflerie thermique ................................................................................................ 5
Figure 3: Modules de l’automate programmable et signaux d’entrée-sortie ................................................ 7
Figure 4: Environnement de développement RSLogix 5000 et son arbre fonctionnel ................................. 8
Figure 5: Références d’entrée et de sortie pour le FBD ................................................................................ 9
Figure 6: Barre d’outils FBD et bloc de fonction Scale ................................................................................ 9
Figure 7: Barre d’outils FBD et bloc de fonction FGEN .............................................................................. 9
Figure 8: Lecture et écriture des données à l’aide d’un serveur OPC dans Simulink ................................. 11
Figure 9: Contrôleur sélectionné dans la fenêtre « Who Active » .............................................................. 12
Figure 10: Chemin de communication ........................................................................................................ 12
Figure 11: Routine en mode exécuté........................................................................................................... 12
Figure 12: Fenêtre du « Controller Tags » .................................................................................................. 13
Figure 13: Panneau des branchements de la soufflerie ............................................................................... 14
4
1 Introduction
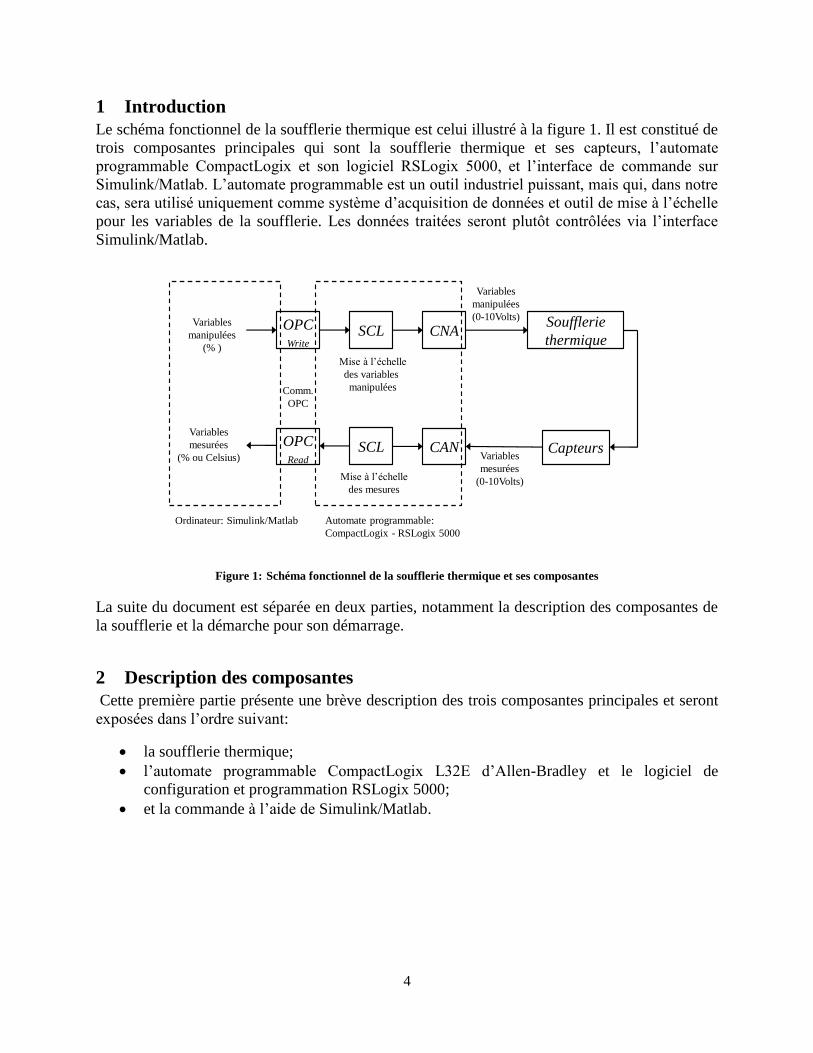
Le schéma fonctionnel de la soufflerie thermique est celui illustré à la figure 1. Il est constitué de
trois composantes principales qui sont la soufflerie thermique et ses capteurs, l’automate
programmable CompactLogix et son logiciel RSLogix 5000, et l’interface de commande sur
Simulink/Matlab. L’automate programmable est un outil industriel puissant, mais qui, dans notre
cas, sera utilisé uniquement comme système d’acquisition de données et outil de mise à l’échelle
pour les variables de la soufflerie. Les données traitées seront plutôt contrôlées via l’interface
Simulink/Matlab.
OPCRead
OPCWrite
SCL
SCL
CNA
CAN
Soufflerie
thermique
Mise à l’échelle
des variables
manipulées
Mise à l’échelle
des mesures
Ordinateur: Simulink/Matlab Automate programmable:
CompactLogix - RSLogix 5000
CapteursVariables
mesurées
(0-10Volts)
Variables
manipulées
(0-10Volts)
Variables
mesurées
(% ou Celsius)
Comm.
OPC
Variables
manipulées
(% )
Figure 1: Schéma fonctionnel de la soufflerie thermique et ses composantes
La suite du document est séparée en deux parties, notamment la description des composantes de
la soufflerie et la démarche pour son démarrage.
2 Description des composantes
Cette première partie présente une brève description des trois composantes principales et seront
exposées dans l’ordre suivant:
la soufflerie thermique;
l’automate programmable CompactLogix L32E d’Allen-Bradley et le logiciel de
configuration et programmation RSLogix 5000;
et la commande à l’aide de Simulink/Matlab.
5
2.1 La soufflerie thermique
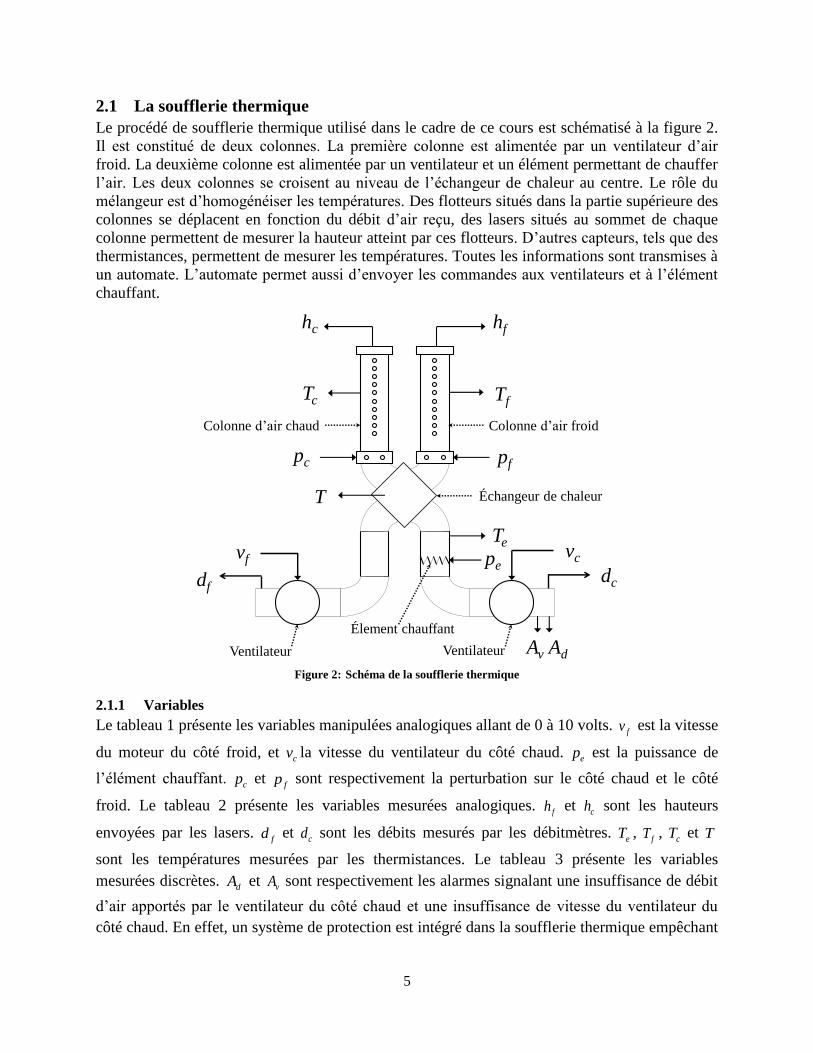
Le procédé de soufflerie thermique utilisé dans le cadre de ce cours est schématisé à la figure 2.
Il est constitué de deux colonnes. La première colonne est alimentée par un ventilateur d’air
froid. La deuxième colonne est alimentée par un ventilateur et un élément permettant de chauffer
l’air. Les deux colonnes se croisent au niveau de l’échangeur de chaleur au centre. Le rôle du
mélangeur est d’homogénéiser les températures. Des flotteurs situés dans la partie supérieure des
colonnes se déplacent en fonction du débit d’air reçu, des lasers situés au sommet de chaque
colonne permettent de mesurer la hauteur atteint par ces flotteurs. D’autres capteurs, tels que des
thermistances, permettent de mesurer les températures. Toutes les informations sont transmises à
un automate. L’automate permet aussi d’envoyer les commandes aux ventilateurs et à l’élément
chauffant.
vcpe
Te
Tc
hc hf
Tf
vf
T
dfdc
pfpc
AdAv
Colonne d’air froid
Élement chauffant
Échangeur de chaleur
VentilateurVentilateur
Colonne d’air chaud
Figure 2: Schéma de la soufflerie thermique
2.1.1 Variables
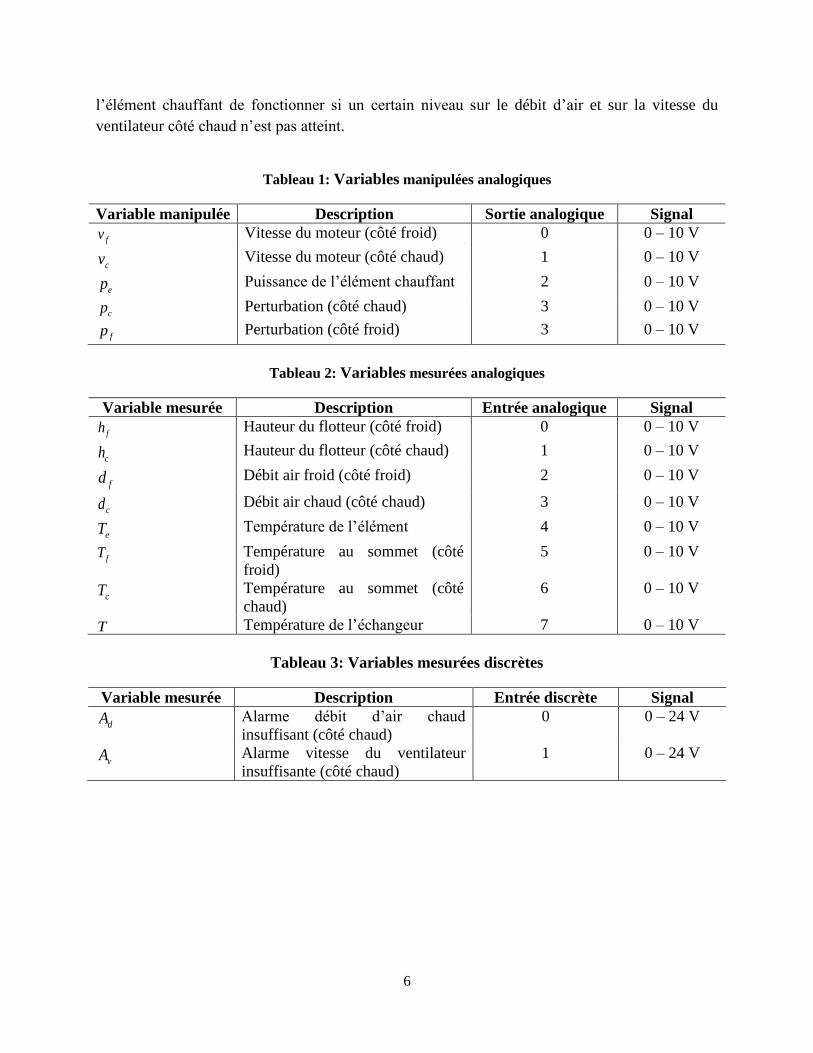
Le tableau 1 présente les variables manipulées analogiques allant de 0 à 10 volts. fv est la vitesse
du moteur du côté froid, et cv la vitesse du ventilateur du côté chaud.
ep est la puissance de
l’élément chauffant. cp et
fp sont respectivement la perturbation sur le côté chaud et le côté
froid. Le tableau 2 présente les variables mesurées analogiques. fh et
ch sont les hauteurs
envoyées par les lasers. fd et
cd sont les débits mesurés par les débitmètres. eT ,
fT , cT et T
sont les températures mesurées par les thermistances. Le tableau 3 présente les variables
mesurées discrètes. dA et
vA sont respectivement les alarmes signalant une insuffisance de débit
d’air apportés par le ventilateur du côté chaud et une insuffisance de vitesse du ventilateur du
côté chaud. En effet, un système de protection est intégré dans la soufflerie thermique empêchant
6
l’élément chauffant de fonctionner si un certain niveau sur le débit d’air et sur la vitesse du
ventilateur côté chaud n’est pas atteint.
Tableau 1: Variables manipulées analogiques
Variable manipulée Description Sortie analogique Signal
fv Vitesse du moteur (côté froid) 0 0 – 10 V
cv Vitesse du moteur (côté chaud) 1 0 – 10 V
ep Puissance de l’élément chauffant 2 0 – 10 V
cp Perturbation (côté chaud) 3 0 – 10 V
fp Perturbation (côté froid) 3 0 – 10 V
Tableau 2: Variables mesurées analogiques
Variable mesurée Description Entrée analogique Signal
fh Hauteur du flotteur (côté froid) 0 0 – 10 V
ch Hauteur du flotteur (côté chaud) 1 0 – 10 V
fd Débit air froid (côté froid) 2 0 – 10 V
cd Débit air chaud (côté chaud) 3 0 – 10 V
eT Température de l’élément 4 0 – 10 V
fT
Température au sommet (côté
froid)
5 0 – 10 V
cT
Température au sommet (côté
chaud)
6 0 – 10 V
T Température de l’échangeur 7 0 – 10 V
Tableau 3: Variables mesurées discrètes
Variable mesurée
Description
Entrée discrète Signal
dA
Alarme débit d’air chaud
insuffisant (côté chaud)
0 0 – 24 V
vA
Alarme vitesse du ventilateur
insuffisante (côté chaud)
1 0 – 24 V
7
2.2 Automate programmable
L’automate programmable, ou PLC (« Programmable Logic Controller »), est un dispositif
similaire à un ordinateur permettant d’automatiser un procédé industriel ou de commander des
machines. Il est constitué de plusieurs modules ayant des fonctions distinctes telles que
l’acquisition des signaux d’entrée, l’application des signaux de sortie, l’exécution des
algorithmes de commande et la communication. Cette approche modulaire permet d’adapter
l’automate selon divers types d’applications. Les principaux avantages à utiliser un automate au
lieu d’un ordinateur sont que celui-ci est conçu pour opérer dans des conditions industrielles
difficiles (vibrations, température, humidité, etc.), qu’il est facilement programmable dans un
langage simple et optimisé pour les opérations de logique et de contrôle et que les systèmes
d’acquisition des entrées-sorties sont intégrés.
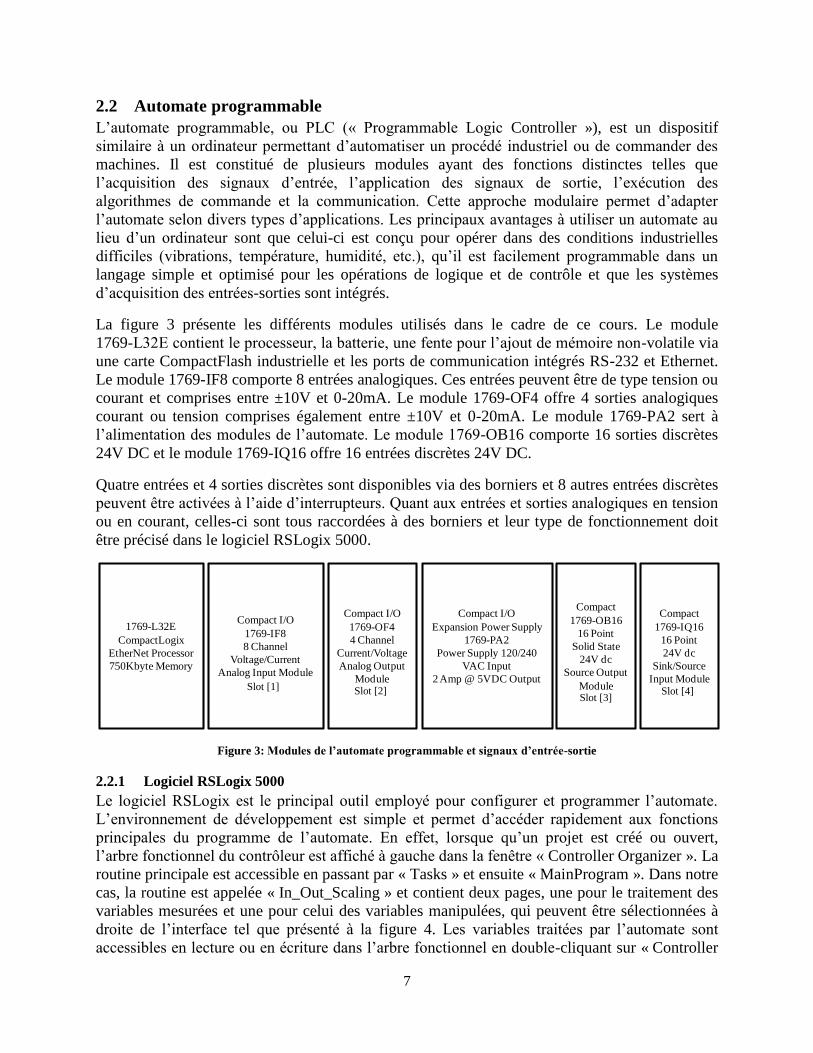
La figure 3 présente les différents modules utilisés dans le cadre de ce cours. Le module
1769-L32E contient le processeur, la batterie, une fente pour l’ajout de mémoire non-volatile via
une carte CompactFlash industrielle et les ports de communication intégrés RS-232 et Ethernet.
Le module 1769-IF8 comporte 8 entrées analogiques. Ces entrées peuvent être de type tension ou
courant et comprises entre ±10V et 0-20mA. Le module 1769-OF4 offre 4 sorties analogiques
courant ou tension comprises également entre ±10V et 0-20mA. Le module 1769-PA2 sert à
l’alimentation des modules de l’automate. Le module 1769-OB16 comporte 16 sorties discrètes
24V DC et le module 1769-IQ16 offre 16 entrées discrètes 24V DC.
Quatre entrées et 4 sorties discrètes sont disponibles via des borniers et 8 autres entrées discrètes
peuvent être activées à l’aide d’interrupteurs. Quant aux entrées et sorties analogiques en tension
ou en courant, celles-ci sont tous raccordées à des borniers et leur type de fonctionnement doit
être précisé dans le logiciel RSLogix 5000.
Figure 3: Modules de l’automate programmable et signaux d’entrée-sortie
2.2.1 Logiciel RSLogix 5000
Le logiciel RSLogix est le principal outil employé pour configurer et programmer l’automate.
L’environnement de développement est simple et permet d’accéder rapidement aux fonctions
principales du programme de l’automate. En effet, lorsque qu’un projet est créé ou ouvert,
l’arbre fonctionnel du contrôleur est affiché à gauche dans la fenêtre « Controller Organizer ». La
routine principale est accessible en passant par « Tasks » et ensuite « MainProgram ». Dans notre
cas, la routine est appelée « In_Out_Scaling » et contient deux pages, une pour le traitement des
variables mesurées et une pour celui des variables manipulées, qui peuvent être sélectionnées à
droite de l’interface tel que présenté à la figure 4. Les variables traitées par l’automate sont
accessibles en lecture ou en écriture dans l’arbre fonctionnel en double-cliquant sur « Controller
1769-L32E
CompactLogix
EtherNet Processor
750Kbyte Memory
Compact I/O
1769-IF8
8 Channel
Voltage/Current
Analog Input Module
Compact
1769-IQ16
16 Point
24V dc
Sink/Source
Input Module
Compact
1769-OB16
16 Point
Solid State
24V dc
Source Output
Module
Compact I/O
1769-OF4
4 Channel
Current/Voltage
Analog Output
Module
Compact I/O
Expansion Power Supply
1769-PA2
Power Supply 120/240
VAC Input
2 Amp @ 5VDC OutputSlot [1] Slot [2]
Slot [3] Slot [4]
8
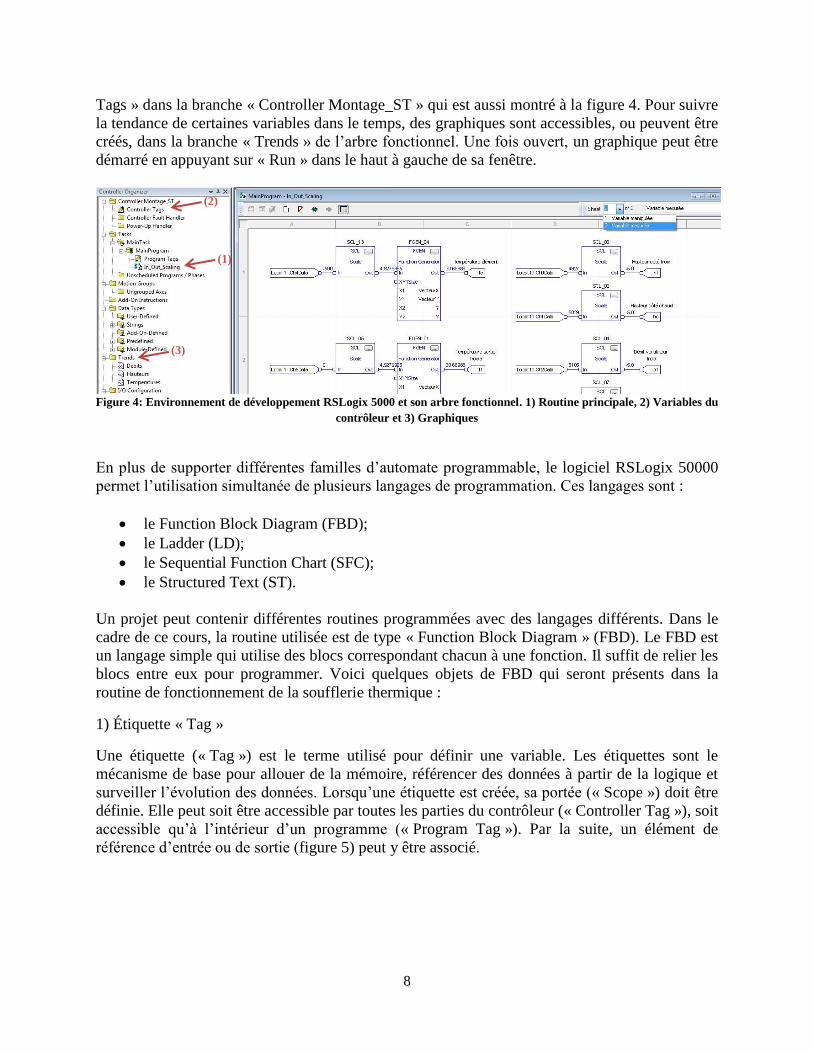
Tags » dans la branche « Controller Montage_ST » qui est aussi montré à la figure 4. Pour suivre
la tendance de certaines variables dans le temps, des graphiques sont accessibles, ou peuvent être
créés, dans la branche « Trends » de l’arbre fonctionnel. Une fois ouvert, un graphique peut être
démarré en appuyant sur « Run » dans le haut à gauche de sa fenêtre.
Figure 4: Environnement de développement RSLogix 5000 et son arbre fonctionnel. 1) Routine principale, 2) Variables du
contrôleur et 3) Graphiques
En plus de supporter différentes familles d’automate programmable, le logiciel RSLogix 50000
permet l’utilisation simultanée de plusieurs langages de programmation. Ces langages sont :
le Function Block Diagram (FBD);
le Ladder (LD);
le Sequential Function Chart (SFC);
le Structured Text (ST).
Un projet peut contenir différentes routines programmées avec des langages différents. Dans le
cadre de ce cours, la routine utilisée est de type « Function Block Diagram » (FBD). Le FBD est
un langage simple qui utilise des blocs correspondant chacun à une fonction. Il suffit de relier les
blocs entre eux pour programmer. Voici quelques objets de FBD qui seront présents dans la
routine de fonctionnement de la soufflerie thermique :
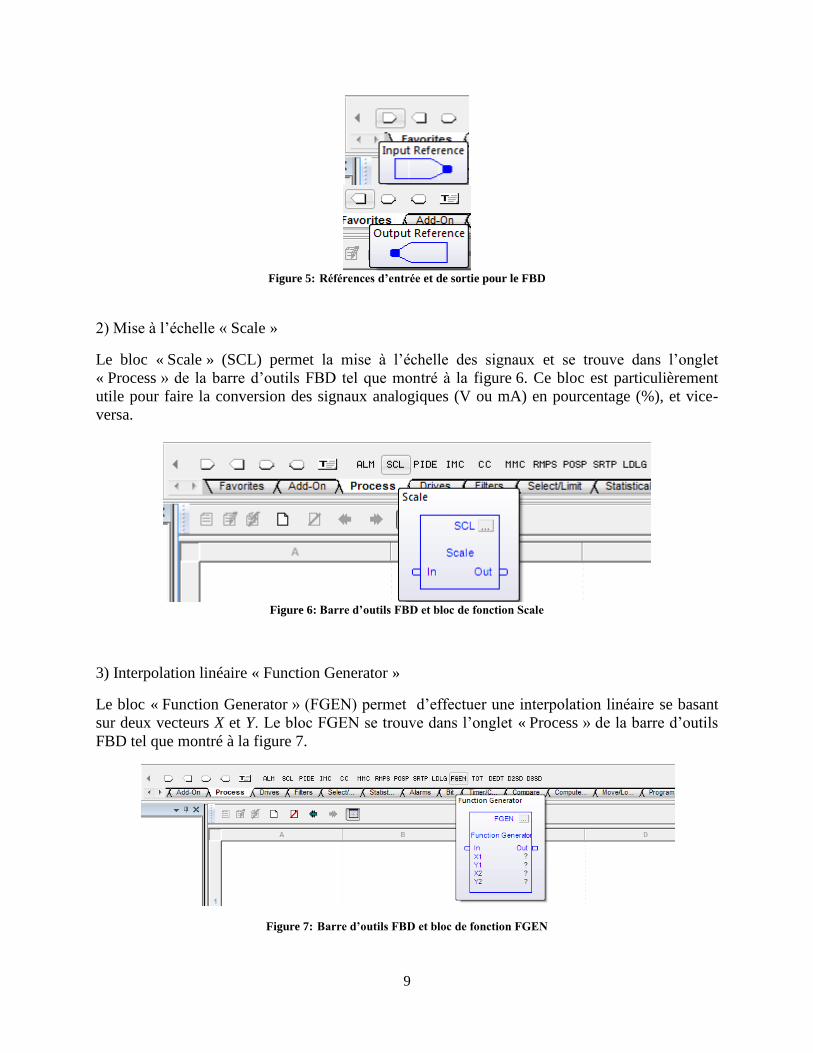
1) Étiquette « Tag »
Une étiquette (« Tag ») est le terme utilisé pour définir une variable. Les étiquettes sont le
mécanisme de base pour allouer de la mémoire, référencer des données à partir de la logique et
surveiller l’évolution des données. Lorsqu’une étiquette est créée, sa portée (« Scope ») doit être
définie. Elle peut soit être accessible par toutes les parties du contrôleur (« Controller Tag »), soit
accessible qu’à l’intérieur d’un programme (« Program Tag »). Par la suite, un élément de
référence d’entrée ou de sortie (figure 5) peut y être associé.
(1)
(2)
(3)
9
Figure 5: Références d’entrée et de sortie pour le FBD
2) Mise à l’échelle « Scale »
Le bloc « Scale » (SCL) permet la mise à l’échelle des signaux et se trouve dans l’onglet
« Process » de la barre d’outils FBD tel que montré à la figure 6. Ce bloc est particulièrement
utile pour faire la conversion des signaux analogiques (V ou mA) en pourcentage (%), et vice-
versa.
Figure 6: Barre d’outils FBD et bloc de fonction Scale
3) Interpolation linéaire « Function Generator »
Le bloc « Function Generator » (FGEN) permet d’effectuer une interpolation linéaire se basant
sur deux vecteurs X et Y. Le bloc FGEN se trouve dans l’onglet « Process » de la barre d’outils
FBD tel que montré à la figure 7.
Figure 7: Barre d’outils FBD et bloc de fonction FGEN
10
Dans le cas de la soufflerie thermique, ce bloc permet la mise à l’échelle (linéarisation) des
valeurs de température en fonction des caractéristiques non-linéaires des thermistances dans
RSLogix 5000.
2.3 Interface de commande à l’aide de Simulink/Matlab
Le contrôle des signaux se fera par le biais de Simulink en utilisant la spécification OPC (Object
Linking and Embedding (OLE) for Process Control). La spécification OPC a été introduite en
1996 pour standardiser les communications entre les dispositifs et logiciels de contrôle des divers
manufacturiers du domaine de l’automation. Avant l’introduction de ce standard, la plupart des
produits de différents fabricants étaient incompatibles entre eux. Avec OPC, les développeurs
n’ont plus qu’à créer leurs produits pour le standard OPC et, de cette façon, les produits
développés sont compatibles avec tous les dispositifs répondants au standard.
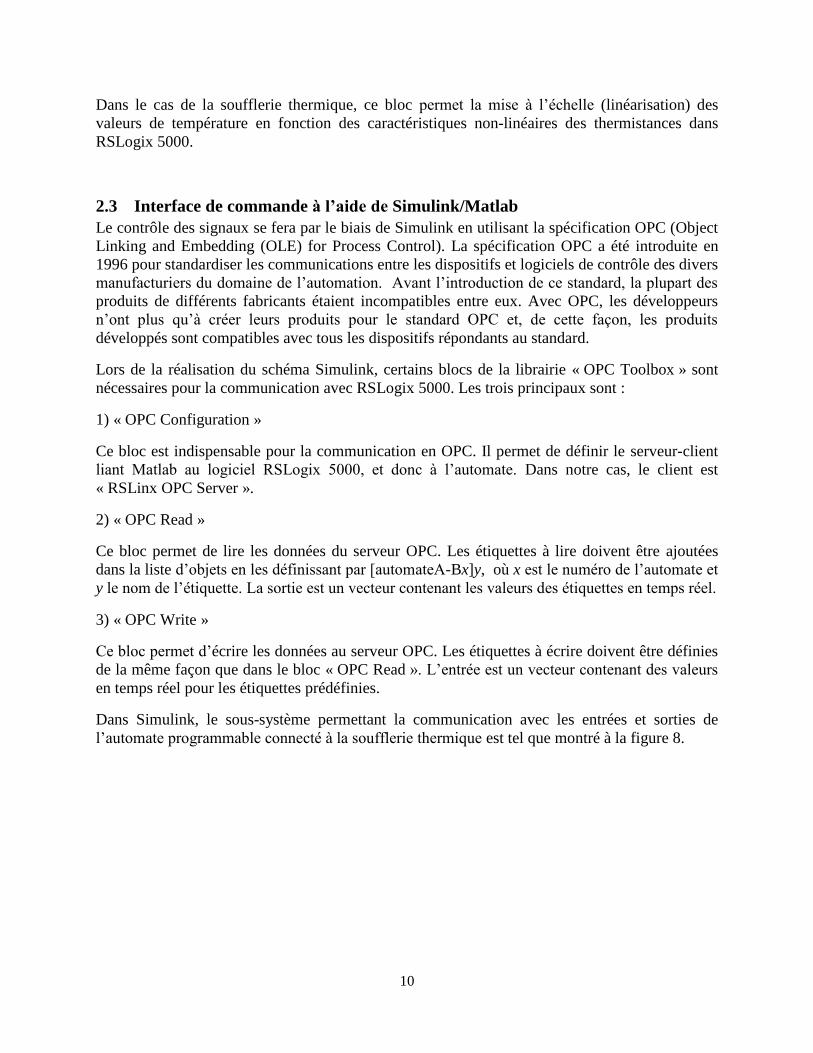
Lors de la réalisation du schéma Simulink, certains blocs de la librairie « OPC Toolbox » sont
nécessaires pour la communication avec RSLogix 5000. Les trois principaux sont :
1) « OPC Configuration »
Ce bloc est indispensable pour la communication en OPC. Il permet de définir le serveur-client
liant Matlab au logiciel RSLogix 5000, et donc à l’automate. Dans notre cas, le client est
« RSLinx OPC Server ».
2) « OPC Read »
Ce bloc permet de lire les données du serveur OPC. Les étiquettes à lire doivent être ajoutées
dans la liste d’objets en les définissant par [automateA-Bx]y, où x est le numéro de l’automate et
y le nom de l’étiquette. La sortie est un vecteur contenant les valeurs des étiquettes en temps réel.
3) « OPC Write »
Ce bloc permet d’écrire les données au serveur OPC. Les étiquettes à écrire doivent être définies
de la même façon que dans le bloc « OPC Read ». L’entrée est un vecteur contenant des valeurs
en temps réel pour les étiquettes prédéfinies.
Dans Simulink, le sous-système permettant la communication avec les entrées et sorties de
l’automate programmable connecté à la soufflerie thermique est tel que montré à la figure 8.
11
Figure 8: Lecture et écriture des données à l’aide d’un serveur OPC dans Simulink
3 Démarrage de la soufflerie thermique
Cette seconde partie du document présente les étapes à suivre afin d’opérer la soufflerie
thermique à l’aide de Simulink/Matlab et des fichiers fournis dans le cadre du cours :
Télécharger le programme de l’automate;
Effectuer les branchements de la soufflerie thermique;
Établir la communication OPC avec Simulink/Matlab.
3.1 Téléchargement du programme de l’automate
Pour commencer, l’automate doit être programmé de la façon suivante :
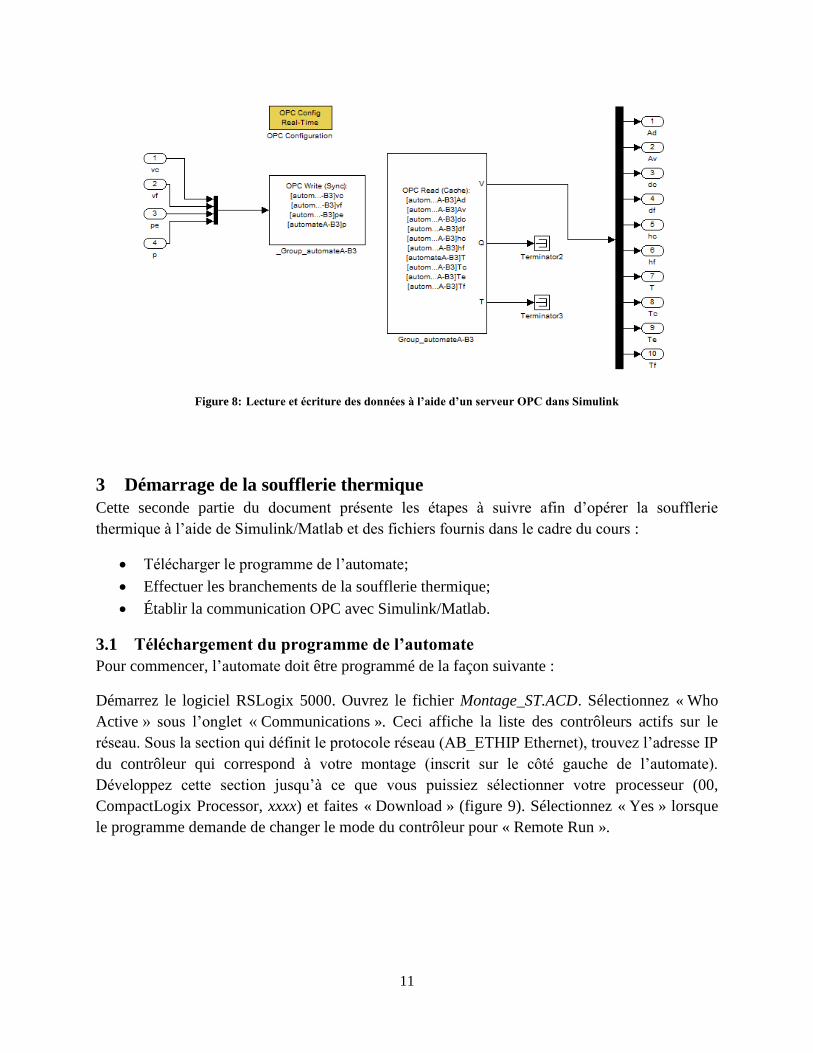
Démarrez le logiciel RSLogix 5000. Ouvrez le fichier Montage_ST.ACD. Sélectionnez « Who
Active » sous l’onglet « Communications ». Ceci affiche la liste des contrôleurs actifs sur le
réseau. Sous la section qui définit le protocole réseau (AB_ETHIP Ethernet), trouvez l’adresse IP
du contrôleur qui correspond à votre montage (inscrit sur le côté gauche de l’automate).
Développez cette section jusqu’à ce que vous puissiez sélectionner votre processeur (00,
CompactLogix Processor, xxxx) et faites « Download » (figure 9). Sélectionnez « Yes » lorsque
le programme demande de changer le mode du contrôleur pour « Remote Run ».
12
Figure 9: Contrôleur sélectionné dans la fenêtre « Who Active »
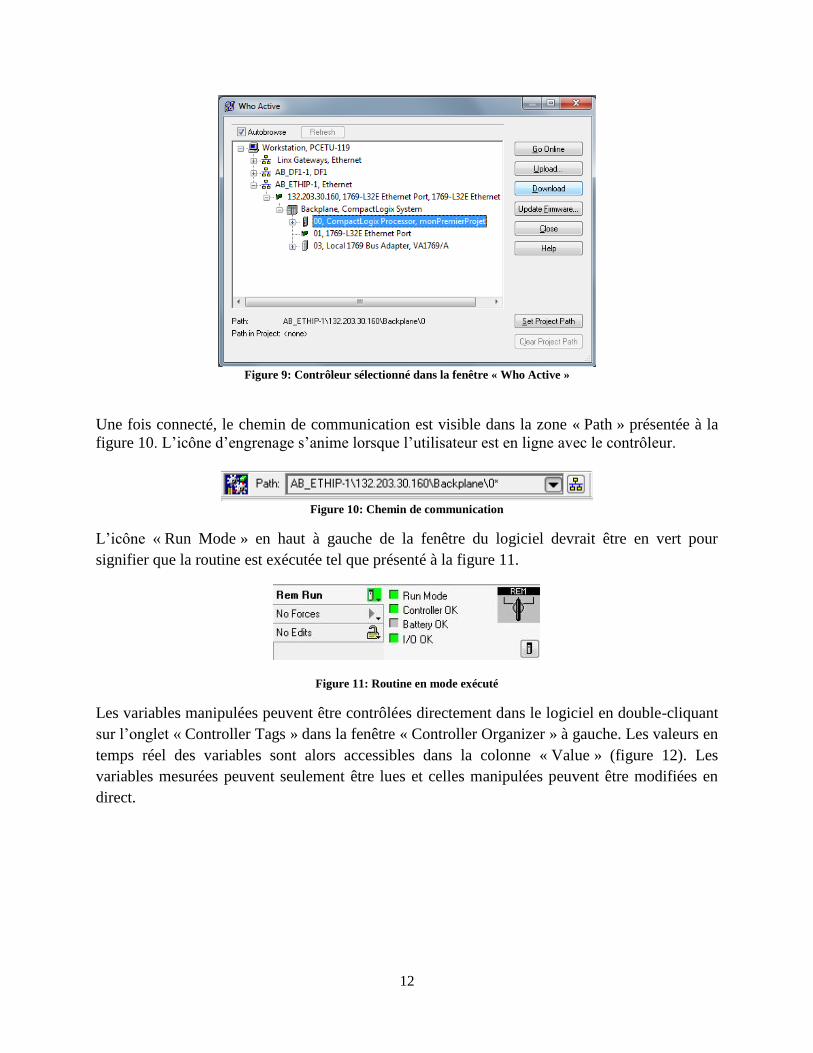
Une fois connecté, le chemin de communication est visible dans la zone « Path » présentée à la
figure 10. L’icône d’engrenage s’anime lorsque l’utilisateur est en ligne avec le contrôleur.
Figure 10: Chemin de communication
L’icône « Run Mode » en haut à gauche de la fenêtre du logiciel devrait être en vert pour
signifier que la routine est exécutée tel que présenté à la figure 11.
Figure 11: Routine en mode exécuté
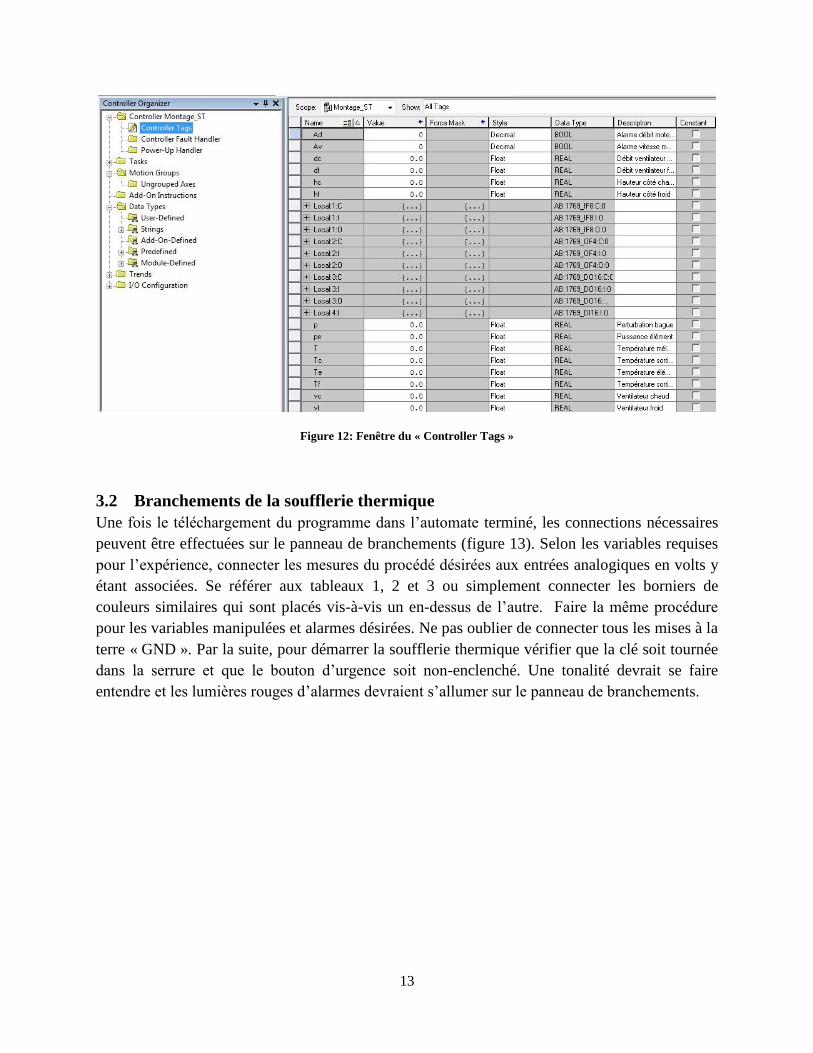
Les variables manipulées peuvent être contrôlées directement dans le logiciel en double-cliquant
sur l’onglet « Controller Tags » dans la fenêtre « Controller Organizer » à gauche. Les valeurs en
temps réel des variables sont alors accessibles dans la colonne « Value » (figure 12). Les
variables mesurées peuvent seulement être lues et celles manipulées peuvent être modifiées en
direct.
13
Figure 12: Fenêtre du « Controller Tags »
3.2 Branchements de la soufflerie thermique
Une fois le téléchargement du programme dans l’automate terminé, les connections nécessaires
peuvent être effectuées sur le panneau de branchements (figure 13). Selon les variables requises
pour l’expérience, connecter les mesures du procédé désirées aux entrées analogiques en volts y
étant associées. Se référer aux tableaux 1, 2 et 3 ou simplement connecter les borniers de
couleurs similaires qui sont placés vis-à-vis un en-dessus de l’autre. Faire la même procédure
pour les variables manipulées et alarmes désirées. Ne pas oublier de connecter tous les mises à la
terre « GND ». Par la suite, pour démarrer la soufflerie thermique vérifier que la clé soit tournée
dans la serrure et que le bouton d’urgence soit non-enclenché. Une tonalité devrait se faire
entendre et les lumières rouges d’alarmes devraient s’allumer sur le panneau de branchements.

14
Figure 13: Panneau des branchements de la soufflerie dans la partie supérieure (gris) et de l’automate dans la partie
inférieure (noir)
3.3 Communication OPC avec Matlab
Démarrez le logiciel Matlab. Ouvrez le modèle Simulink OPC_00_A_Bx.mdl où x correspond au
numéro de votre automate.
Pour démarrer la communication, sélectionnez « Start » dans l’onglet « Simulation » ou appuyer
sur « Ctrl+T ». La soufflerie thermique peut donc maintenant être contrôlée en temps réel avec
l’interface Simulink.


















