Guide canadien de conception géométrique des routes
94
À : Usagers du Guide canadien de conception géométrique des routes (1999) DE : Association des transports du Canada SUJET : Décembre 2011 Mises à jour du Guide canadien de conception géométrique des routes Vous trouverez ci-joint 94 pages nouvelles et/ou révisées à insérer dans votre exemplaire du Guide canadien de conception géométrique des routes. Les révisions dans cette trousse affectent les chapitres suivants : Page titre – Partie 1 et 2 Chapitre 1.1 – Philosophie Chapitre 1.2 – Éléments de conception Chapitre 2.1 – Tracé en plan et configuration des voies Chapitre 2.2 – Éléments du profil en travers Chapitre 2.3 – Carrefours plans Chapitre 3.1 – Sécurité des abords de la route Pour mettre votre Guide à jour, suivez ces instructions : 1. Retirez la page titre de la partie 1 et la partie 2 et insérez les nouvelles pages titres. 2. Retirez les pages 1.1.4.3 – 1.1.4.4 et remplacez-les avec les nouvelles pages 1.1.4.3 -1.1.4.4. 3. Retirez les pages 1.2.i -1.2.ii et remplacez-les avec les nouvelles pages 1.2.i -1.2.ii. 4. Retirez les pages 1.2.5.1 – 1.2.5.10 et insérez les nouvelles pages 1.2.5.1 – 1.2.5.10. 5. Retirez les pages 1.2.R.1 – 1.2.R.2 et remplacez-les avec les nouvelles pages 1.2.R.1 – 1.2.R.2. 6. Retirez les pages 2.1.i – 2.1.vi et remplacez-les avec les nouvelles pages 2.1.i – 2.1.vi. 7. Retirez les pages 2.1.2.3 – 2.1.2.6 et remplacez-les avec les nouvelles pages 2.1.2.3 – 2.1.2.6. 8. Retirez les pages 2.1.2.15 - 2.1.2.16 et remplacez-les avec les nouvelles pages 2.1.2.15 – 2.1.2.16. 9. Retirez les pages 2.1.3.9 – 2.1.3.16 et remplacez-les avec les nouvelles pages 2.1.3.9 – 2.1.3.16. 10. Retirez les pages 2.1.R.1 – 2.1.R.2 et remplacez-les avec les nouvelles pages 2.1.R.1 – 2.1.R.2. 11. Retirez les pages 2.2.2.3 – 2.2.2.4 et remplacez-les avec les nouvelles pages 2.2.2.3 – 2.2.2.4. 12. Retirez les pages 2.2.4.3 -2.2.4.6 et remplacez-les avec les nouvelles pages 2.2.4.3 -2.2.4.6. 13. Retirez les pages 2.2.10.7 – 2.2.10.8 et remplacez-les avec les nouvelles pages 2.2.10.7 – 2.2.10.8
Transcript of Guide canadien de conception géométrique des routes

À : Usagers du Guide canadien de conception géométrique des routes (1999)
DE : Association des transports du Canada
SUJET : Décembre 2011 Mises à jour du Guide canadien de conception géométrique des routes
Vous trouverez ci-joint 94 pages nouvelles et/ou révisées à insérer dans votre exemplaire du Guide canadien de conception géométrique des routes. Les révisions dans cette trousse affectent les chapitres suivants : Page titre – Partie 1 et 2 Chapitre 1.1 – Philosophie Chapitre 1.2 – Éléments de conception Chapitre 2.1 – Tracé en plan et configuration des voies Chapitre 2.2 – Éléments du profil en travers Chapitre 2.3 – Carrefours plans Chapitre 3.1 – Sécurité des abords de la route Pour mettre votre Guide à jour, suivez ces instructions : 1. Retirez la page titre de la partie 1 et la partie 2 et insérez les nouvelles pages titres. 2. Retirez les pages 1.1.4.3 – 1.1.4.4 et remplacez-les avec les nouvelles pages 1.1.4.3 -1.1.4.4. 3. Retirez les pages 1.2.i -1.2.ii et remplacez-les avec les nouvelles pages 1.2.i -1.2.ii. 4. Retirez les pages 1.2.5.1 – 1.2.5.10 et insérez les nouvelles pages 1.2.5.1 – 1.2.5.10. 5. Retirez les pages 1.2.R.1 – 1.2.R.2 et remplacez-les avec les nouvelles pages 1.2.R.1 – 1.2.R.2. 6. Retirez les pages 2.1.i – 2.1.vi et remplacez-les avec les nouvelles pages 2.1.i – 2.1.vi. 7. Retirez les pages 2.1.2.3 – 2.1.2.6 et remplacez-les avec les nouvelles pages 2.1.2.3 – 2.1.2.6. 8. Retirez les pages 2.1.2.15 - 2.1.2.16 et remplacez-les avec les nouvelles pages 2.1.2.15 – 2.1.2.16. 9. Retirez les pages 2.1.3.9 – 2.1.3.16 et remplacez-les avec les nouvelles pages 2.1.3.9 – 2.1.3.16. 10. Retirez les pages 2.1.R.1 – 2.1.R.2 et remplacez-les avec les nouvelles pages 2.1.R.1 – 2.1.R.2. 11. Retirez les pages 2.2.2.3 – 2.2.2.4 et remplacez-les avec les nouvelles pages 2.2.2.3 – 2.2.2.4. 12. Retirez les pages 2.2.4.3 -2.2.4.6 et remplacez-les avec les nouvelles pages 2.2.4.3 -2.2.4.6. 13. Retirez les pages 2.2.10.7 – 2.2.10.8 et remplacez-les avec les nouvelles pages 2.2.10.7 – 2.2.10.8
-2-
14. Retirez pages 2.2.R.1 – 2.2.R.2 et remplacez-les avec les nouvelles pages 2.2.R.1 – 2.2.R.2. 15. Retirez pages 2.3.i – 2.3.vi et remplacez-les avec les nouvelles pages 2.3.i – 2.3.vi. 16. Retirez page 2.3.2.15 – 2.3.2.16 et remplacez-les avec les nouvelles pages 2.3.2.15 – 2.3.2.16. 17. Retirez pages 2.3.3.3 – 2.3.3.18 et remplacez-les avec les nouvelles pages 2.3.3.3 – 2.3.3.20. 18. Retirez pages 2.3.12.1 – 2.3.12.6 et remplacez-les avec les nouvelles pages
2.3.12.1 – 2.3.12.6. 19. Retirez pages 2.3.R.1 – 2.3.R.2 et remplacez-les avec les nouvelles pages 2.3.R.1 – 2.3.R.2. 20. Retirez pages 3.1.6.3 – 3.1.6.6 et remplacez-les avec les nouvelles pages 3.1.6.3 – 3.1.6.6. 21. Retirez pages 3.1.R.1 – 3.1.R.2 et remplacez-les avec les nouvelles pages 3.1.R.1 – 3.1.R.2.
Merci de votre collaboration. Si vous avez des questions, n’hésitez pas à communiquer avec le secrétariat de l’ATC.
Guide canadiende conceptiongéométriquedes routesPartie 1
Association destransports du Canada
Septembre 1999Mis à jour en décembre 2011
Association québécoisedu transport et des routes
Debi
Typewritten Text
Debi
Typewritten Text

Décembre 2007
L’ATC est une association d’envergure nationale dont la mission est de promouvoir la sécurité, lasûreté, l’efficience, l’efficacité et le respect de l’environnement dans le cadre de la prestation deservices financièrement durables de transport, le tout à l’appui des objectifs sociaux et économiquesdu Canada. L’ATC est une tribune neutre de collecte et d’échange d’idées, d’informations et deconnaissances à l’appui de l’élaboration de lignes directrices techniques et de bonnes pratiques.À l’échelle du pays, l’Association s’intéresse principalement au secteur routier et à ses liens etinterrelations stratégiques avec les autres composantes du réseau de transport. En milieu urbain,l’Association s’intéresse non seulement au transport des personnes et des marchandises, maisencore à la prestation de services à la collectivité et aux incidences de toutes ces activités surles modèles d’aménagement du territoire.
The Transportation Association of Canada is a national association with a mission to promote theprovision of safe, secure, efficient, effective and environmentally and financially sustainabletransportation services in support of Canada’s social and economic goals. The association is aneutral forum for gathering or exchanging ideas, information and knowledge on technical guidelinesand best practices. In Canada as a whole, TAC has a primary focus on roadways and theirstrategic linkages and inter-relationships with other components of the transportation system. Inurban areas, TAC’s primary focus is on the movement of people, goods and services and itsrelationship with land use patterns.
Tous droits réservés © 2004Association des transports du Canada2323, boulevard Saint-Laurent, Ottawa, Canada K1G 4J8Tél. : (613) 736-1350 - Téléc. : (613) 736-1395www.tac-atc.ca
En français : ISBN 1-55187-157-2En anglais : ISBN 1-55187-131-9
Traduction - mars 2004par l’Association québécoise du transport et des routes533, rue Ontario Est, bureau 206, Montréal (Québec) H2L 1N8Tél. : (514) 523-6444 - Téléc. : (514) 523-2666www.aqtr.qc.ca
Guide canadien de conception géométrique des routes
Décembre 2011 Page 1.1.4.3
grées plus facilement aux travaux. Tout commedans le cas de l’ingénierie de la valeur, un auditindépendant s’avérera moins nécessaire si on atenu compte et traité de tous les aspects de lasécurité dans le processus de conception.
1.1.4.5 La méthode évolutive
Les versions précédentes de ce guide faisaientappel aux notions de « normes » minimales etsouhaitables. Cette méthode sous-entendait parseuil une mesure du « caractère adéquat » dela conception, bien que les concepteurs aientété encouragés à faire preuve de leur jugementprofessionnel en utilisant les « normes » commelignes directrices.
À certains égards, ce guide n’est pas différentdes versions précédentes. Il a pour but de fourniraux concepteurs un cadre de référence qui favo-rise l’efficacité de la conception et de la cons-truction, l’économie ainsi que la cohérence etla sécurité pour l’usager de la route. Toutefois,pour atteindre ces objectifs, ce guide laisse decôté les « normes » et introduit la nouvelle notionde domaine de définition. L’objectif est d‘offriraux concepteurs une plus grande possibilitéd’exercer leur jugement critique en matièred’ingénierie – à l’aide de meilleures données surlesquelles ils peuvent baser ce jugement.
Ce changement d’approche a aussi pour butd’offrir aux concepteurs une plus grandesouplesse pour considérer les enjeux deconception spécifiques aux milieux restreints,inusités ou sensibles. De plus, cette plus grandesouplesse offre aux concepteurs les moyensd’incorporer plus aisément dans leur démarchede conception les principes du processus deconception émergent connu sous le nom deConception axée sur le contexte (CAC) ouSolutions adaptées au contexte (SAC).
Le processus CAC/SAC n’est pas unetechnique de conception en tant que tel. C’estplutôt un processus de conception axée sur lacollaboration où, avant même le début destravaux de conception, des activités deconsultation publique peuvent être employéespour aider à définir les aspects fonctionnels, lanature et le caractère d’une route du point devue de tous les intervenants concernés. Une foisle consensus établi sur la vision fondamentaledu projet, le processus de conception peut allerde l’avant. Voilà l’essence du processus CAC/SAC.
Les lignes directrices et les domaines dedéfinition qui se trouvent dans ce guide sontbasés sur les dimensions et la performanceactuelles et prévues des véhicules, sur lecomportement et l’habileté du conducteur et surles technologies actuelles. Cependant, le lecteurne trouvera pas dans cette section du guide desconseils pratiques visant à l’appuyer dansl’application des principes de conception fondéesur un processus CAC/SAC. Néanmoins, au gréde l’évolution de la connaissance dans cesdomaines, on prévoit revoir et mettre à jourpériodiquement les lignes directrices qui endécoulent. Ainsi, des applications heuristiquesévoluées y seront incorporées en réponse à desenjeux spécifiques de conception etcomporteront des règles générales quisupporteront les principes de conception fondéesur un processus de type CAC/SAC. Leschangements dans les domaines de définition,dans ce document et ceux à venir, ou lesdifférences entre ceux-ci et les « normes »précédentes ne signifient pas que les routesconçues selon les « normes » précédentes sontnécessairement inappropriées. Plutôt, on peuts’attendre à ce que le nouveau cadre deconception et la nouvelle démarche permettrontd’en arriver à des projets de nouvellesinfrastructures ainsi qu’à des projets de réfectionet de reconstruction d‘infrastructures existantesqui refléteront davantage l’évolution des connais-sances, de même que l’évolution de la vision etdes attentes de la société sur le rôle desinfrastructures routières dans nos collectivitésurbaines et rurales.
Il faudrait noter que l’adoption graduelle de di-mensions basées, par exemple, sur les statis-tiques de collisions, ou sur l’adoption d’uneapproche de conception plus souple fondée surun processus CAC/SAC, peuvent ne pas avoirles mêmes marges de sécurité théoriques dansla plupart des conditions d’exploitation puisqueles « normes » traditionnelles sont basées surles lois de la physique. Toutefois, elles serontplus réalistes et peuvent mener à des projetsde route qui sont moins coûteux à construire,voire même livrer des routes qui répondent mieuxaux besoins des collectivités et des intervenants.
Ce guide met davantage l’accent sur le rôle duconcepteur dans le processus de conception. Ilexige une analyse plus explicite des effets deschoix proposés en matière de sécurité routièreet, lorsque possible, suggère une façon de faire

Philosophie
Page 1.1.4.4 Décembre 2011
de telles analyses. Ce guide en exige plus de lapart du concepteur sur le plan des compétences,des connaissances et du jugement profes-sionnel. Il met l’accent sur la responsabilité duconcepteur d’informer de façon appropriée et
complète des conséquences possibles de leursdécisions, ceux qui sont responsables despolitiques qui touchent tous les aspects de larentabilité d’un projet.

Guide canadien de conception géométrique des routes
Page 1.2.iDécembre 2011
1.2 ÉLÉMENTS DE CONCEPTION
1.2.1 INTRODUCTION ................................................................................................ 1.2.1.1
1.2.2 LES FACTEURS HUMAINS ............................................................................... 1.2.2.11.2.2.1 Attentes.. ........................................................................................................................ 1.2.2.11.2.2.2 Réaction ...........................................................................................................1.2.2.11.2.2.3 Influence sur la conception ............................................................................................ 1.2.2.2
1.2.3 LA VITESSE ........................................................................................................ 1.2.3.11.2.3.1 Introduction ..................................................................................................................... 1.2.3.11.2.3.2 Vitesse souhaitée .......................................................................................................... 1.2.3.11.2.3.3 Vitesse de base ............................................................................................................. 1.2.3.21.2.3.4 Vitesse pratiquée ........................................................................................................... 1.2.3.31.2.3.5 Vitesse de marche ......................................................................................................... 1.2.3.31.2.3.6 Vitesse affichée .............................................................................................................. 1.2.3.41.2.3.7 Limites de la méthode fondée sur la vitesse de base ................................................... 1.2.3.51.2.3.8 Domaine conceptuel : sélection des vitesses de base................................................. 1.2.3.7
1.2.4 VÉHICULES TYPES ........................................................................................... 1.2.4.11.2.4.1 Introduction ..................................................................................................................... 1.2.4.11.2.4.2 Les catégories de véhicules .......................................................................................... 1.2.4.11.2.4.3 Caractéristiques des véhicules ...................................................................................... 1.2.4.21.2.4.4 Mouvement de virage des véhicules types...........................................................1.2.4.101.2.4.5 Le choix d’un véhicule type pour la conception....................................................1.2.4.10
1.2.5 DISTANCE DE VISIBILITÉ ................................................................................. 1.2.5.11.2.5.1 Critères utilisés dans le calcul de la distance de visibilité ........................................... 1.2.5.11.2.5.2 Distance de visibilité d’arrêt ........................................................................................... 1.2.5.21.2.5.3 Distance de visibilité de dépassement .......................................................................... 1.2.5.51.2.5.4 Distance de visibilité d’anticipation ................................................................................ 1.2.5.8
RÉFÉRENCES BIBLIOGRAPHIQUES .......................................................................... 1.2.R.1
Éléments de conception
Page 1.2.ii Décembre 2011
TABLEAUXTableau 1.2.2.1 Domaine de définition des temps de perception-réaction ............................. 1.2.2.2Tableau 1.2.4.1 Dimensions des voitures particulières ........................................................... 1.2.4.2Tableau 1.2.4.2 Dimensions des véhicules utilitaires ............................................................. 1.2.4.2Tableau 1.2.4.3 Dimensions des autobus ............................................................................... 1.2.4.3Tableau 1.2.4.4 Rayon de braquage minimal de camions typiques pour un virage de 180° .. 1.2.4.3Tableau 1.2.5.1 Domaine de définition : hauteur d’objets ....................................................... 1.2.5.2Tableau 1.2.5.2 Coefficient de frottement pour revêtements humides .................................... 1.2.5.3Tableau 1.2.5.3 Distance de visibilité d’arrêt pour les voitures particulières et les camions
ayant des systèmes de freinage antiblocage ............................................... 1.2.5.4Tableau 1.2.5.4 Distances de visibilité d’arrêt pour les camions munis de freins
conventionnels ............................................................................................... 1.2.5.5Tableau 1.2.5.5 Distance minimale de visibilité de dépassement .......................................... 1.2.5.6Tableau 1.2.5.6 Distance minimale de visibilité de dépassement – selon la méthode de
« marquage » fondée sur le Manuel canadien de la signalisation routière .. 1.2.5.7Tableau 1.2.5.7 Distance de visibilité d’anticipation................................................................ 1.2.5.9
FIGURES
Figure 1.2.4.1 Dimensions d’une voiture particulière (P) ...................................................... 1.2.4.4Figure 1.2.4.2 Dimensions d’un camion léger à unité simple (LSU) .................................... 1.2.4.5Figure 1.2.4.3 Dimensions d’un camion moyen à unité simple (MSU) ................................ 1.2.4.5Figure 1.2.4.4 Dimensions d’un camion lourd à unité simple (HSU) ................................... 1.2.4.6Figure 1.2.4.5 Dimensions d’un tracteur semi-remorque WB-19 ......................................... 1.2.4.6Figure 1.2.4.6 Dimensions d’un tracteur semi-remorque WB-20 ......................................... 1.2.4.7Figure 1.2.4.7 Dimensions d’un train double de type A (ATD) .............................................. 1.2.4.7Figure 1.2.4.8 Dimensions d’un train double de type B (ATD) ............................................. 1.2.4.8Figure 1.2.4.9 Dimensions d’un autobus standard d’une seule unité (B-12) ....................... 1.2.4.8Figure 1.2.4.10 Dimensions d’un autobus articulé (A-BUS) .................................................. 1.2.4.9Figure 1.2.4.11 Dimensions d’un autobus interurbain (I-BUS) ............................................... 1.2.4.9Figure 1.2.5.1 Éléments de la distance de visibilité de dépassement ................................. 1.2.5.6Figure 1.2.5.2 Distance de visibilité de dépassement requise pour les voitures
particulières et les camions par rapport aux critères de l’AASHTO............. 1.2.5.7
Guide canadien de conception géométrique des routes
Page 1.2.5.1Décembre 2011
1.2.5 DISTANCE DE VISIBILITÉ
La capacité de voir loin devant soi est d’uneimportance capitale pour l’utilisation sécuritaireet efficace d’un véhicule. Or, le niveau d’expé-rience, l’habileté et la formation des conducteursde véhicules motorisés varie considérablement.Il faut donc prévoir une distance de visibilitésuffisante pour permettre à tous les conducteurs,peu importe la compétence et la formation,d’arrêter ou d’éviter les obstacles sur la chausséeet d’effectuer des virages en toute sécurité.
Il existe différentes mesures de distance devisibilité que le concepteur utilisera selon lescirconstances : distance de visibilité d’arrêt, dis-tance de visibilité de dépassement et distancede visibilité d’anticipation. Ces distances sontdécrites en détail dans des sections ultérieuresde ce chapitre. On traite de la distance de visibilitéau carrefour dans le chapitre 2.3.
Pour bon nombre de projets, une de ces distancesde visibilité dominera et le concepteur n’aura àsatisfaire qu’un seul critère. Dans d’autres cas,comme dans le cas d’un profil en long, le concep-teur doit optimiser le projet afin d’atteindre unéquilibre satisfaisant entre les possibilités dedépassement par endroits et les distances devisibilité d’arrêt ailleurs. Là où un carrefour se situeinévitablement sur la crête d’une courbe, leconcepteur doit parfois prendre en considérationl’interaction entre la distance de visibilité d’arrêt,la distance de visibilité d’anticipation et la distancede visibilité au carrefour dans le but d’en arriver àun projet convenable.
1.2.5.1 Critères utilisés dans lecalcul de la distance devisibilité
Le concepteur doit selon le cas tenir compte deplusieurs variables au moment de déterminer ladistance de visibilité nécessaire; ce sont :
• temps de perception-réaction (voir la sous-section 1.2.2.2),
• hauteur de l’œil du conducteur (voir la sous-section 1.2.4.3),
• vitesse pratiquée du véhicule (voir sous-section 1.2.3.4),
• hauteur d’objet,
• coefficient de frottement de la chaussée.
Ces deux dernières variables sont abordées ci-dessous.
Hauteur d’objet
Dans le calcul de la distance de visibilité, leconcepteur doit prendre en considération le typed’objet, susceptible d’être rencontré sur lachaussée, qu’un conducteur devra éviter soit ens’arrêtant soit en le contournant. En raison desvariations possibles, le choix de la hauteur del’objet a beaucoup plus d’impact sur les exi-gences en matière de distance de visibilité que,par exemple, la hauteur de l’œil du conducteur1.
Au cours des dernières décennies, des hauteursd’objet allant de zéro à 1,67 m ont été proposéeset utilisées dans diverses situations1. Une hauteurnulle a été justifiée en ce qui a trait aux marquessur la chaussée et au ravinement de la chaussée.Dans le passé, on a utilisé des hau-teurs devéhicule passant de 1,7 m à 1,3 m, la hauteurdiminuant avec le temps pour tenir compte desvoitures particulières conçues de plus en plusbasses. Depuis quelques années, une hauteurde 0,38 m a été utilisée comme valeur prudentede la hauteur d’un feu de position arrière devéhicule (pour la nuit) ou d’un feu de freinage.Des hauteurs de 0,10 m à 0,15 m ont été retenuesà divers moments pour représenter un « objet »sur la chaussée. On considère généralement quel’objet en question peut être une roche, un arbretombé, des débris de construction ou même unepersonne. Il a été démontré2 que la fréquence descollisions de véhicules qui frappent des objetsde moins de 0,15 m de hauteur est très basse.
L’habileté des conducteurs à distinguer à bonnedistance un objet qui est très petit ou un objetduquel ils ne peuvent voir qu’une petite partie estun autre élément dont il faut tenir compte. Il estsuggéré3 qu’un conducteur doit être capable devoir au moins le premier 0,15 m du dessus d’unobjet pour pouvoir en distinguer la présence àdistance. De plus, si cet objet n’est pas trèslarge (p. ex. une roche), un conducteur peut trèsbien être capable de l’éviter plutôt que d’arrêter,notamment sur une route à faible débit. Éviterl’obstacle peut ne pas être possible s’il s’agitd’un arbre, mais dans plusieurs régions du pays,le risque est faible soit parce qu’il n’y a pasd’arbre, soit parce que les administrations localesn’en tolèrent pas à proximité de la chaussée.Dans les régions où circulent des grumiers, leconcepteur devrait considérer la possibilité degrumes tombées sur la chaussée.
Éléments de conception
Page 1.2.5.2 Décembre 2011
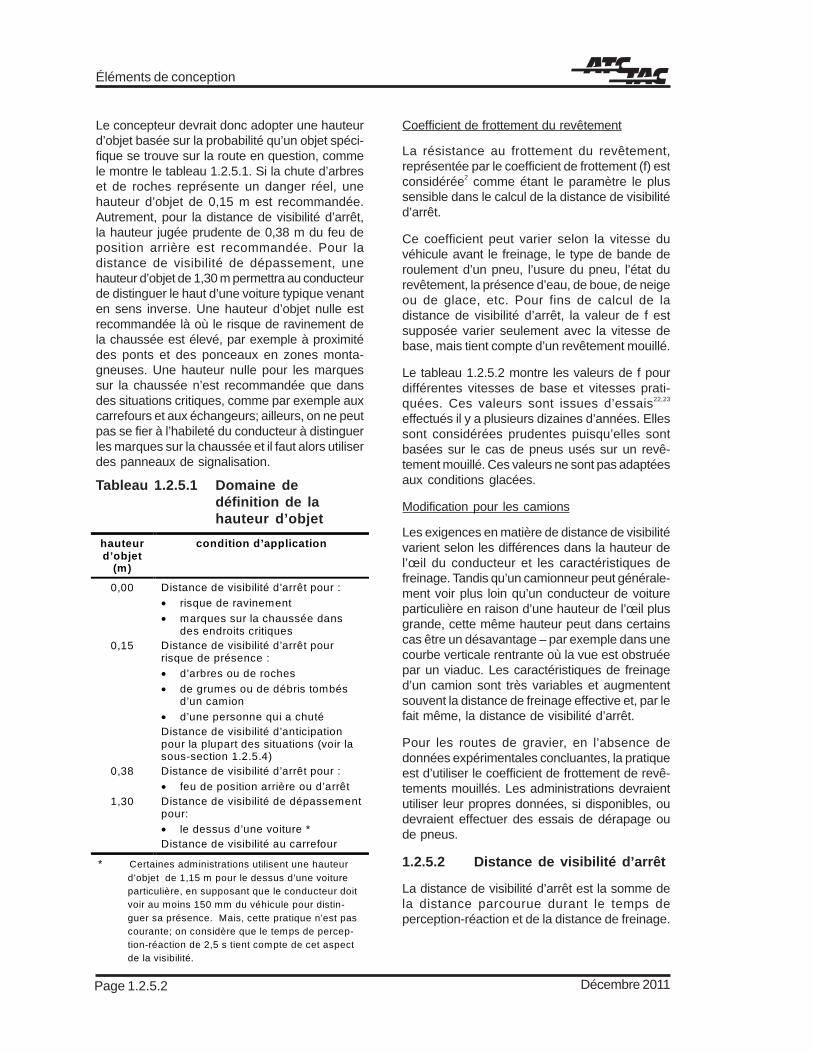
Le concepteur devrait donc adopter une hauteurd’objet basée sur la probabilité qu’un objet spéci-fique se trouve sur la route en question, commele montre le tableau 1.2.5.1. Si la chute d’arbreset de roches représente un danger réel, unehauteur d’objet de 0,15 m est recommandée.Autrement, pour la distance de visibilité d’arrêt,la hauteur jugée prudente de 0,38 m du feu deposition arrière est recommandée. Pour ladistance de visibilité de dépassement, unehauteur d’objet de 1,30 m permettra au conducteurde distinguer le haut d’une voiture typique venanten sens inverse. Une hauteur d’objet nulle estrecommandée là où le risque de ravinement dela chaussée est élevé, par exemple à proximitédes ponts et des ponceaux en zones monta-gneuses. Une hauteur nulle pour les marquessur la chaussée n’est recommandée que dansdes situations critiques, comme par exemple auxcarrefours et aux échangeurs; ailleurs, on ne peutpas se fier à l’habileté du conducteur à distinguerles marques sur la chaussée et il faut alors utiliserdes panneaux de signalisation.
Coefficient de frottement du revêtement
La résistance au frottement du revêtement,représentée par le coefficient de frottement (f) estconsidérée2 comme étant le paramètre le plussensible dans le calcul de la distance de visibilitéd’arrêt.
Ce coefficient peut varier selon la vitesse duvéhicule avant le freinage, le type de bande deroulement d’un pneu, l’usure du pneu, l’état durevêtement, la présence d’eau, de boue, de neigeou de glace, etc. Pour fins de calcul de ladistance de visibilité d’arrêt, la valeur de f estsupposée varier seulement avec la vitesse debase, mais tient compte d’un revêtement mouillé.
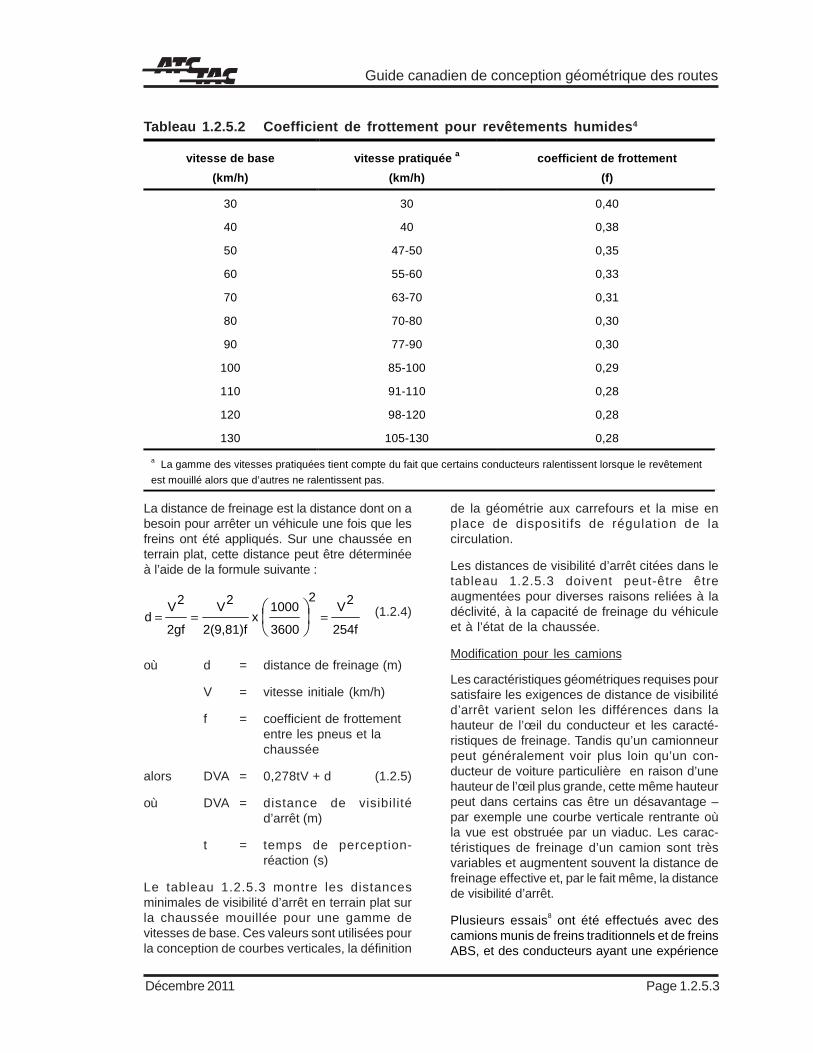
Le tableau 1.2.5.2 montre les valeurs de f pourdifférentes vitesses de base et vitesses prati-quées. Ces valeurs sont issues d’essais22,23
effectués il y a plusieurs dizaines d’années. Ellessont considérées prudentes puisqu’elles sontbasées sur le cas de pneus usés sur un revê-tement mouillé. Ces valeurs ne sont pas adaptéesaux conditions glacées.
Modification pour les camions
Les exigences en matière de distance de visibilitévarient selon les différences dans la hauteur del’œil du conducteur et les caractéristiques defreinage. Tandis qu’un camionneur peut générale-ment voir plus loin qu’un conducteur de voitureparticulière en raison d’une hauteur de l’œil plusgrande, cette même hauteur peut dans certainscas être un désavantage – par exemple dans unecourbe verticale rentrante où la vue est obstruéepar un viaduc. Les caractéristiques de freinaged’un camion sont très variables et augmententsouvent la distance de freinage effective et, par lefait même, la distance de visibilité d’arrêt.
Pour les routes de gravier, en l’absence dedonnées expérimentales concluantes, la pratiqueest d’utiliser le coefficient de frottement de revê-tements mouillés. Les administrations devraientutiliser leur propres données, si disponibles, oudevraient effectuer des essais de dérapage oude pneus.
1.2.5.2 Distance de visibilité d’arrêt
La distance de visibilité d’arrêt est la somme dela distance parcourue durant le temps deperception-réaction et de la distance de freinage.
Tableau 1.2.5.1 Domaine dedéfinition de lahauteur d’objet
hauteur d’objet
(m)
condition d’application
0,00 Distance de visibilité d’arrêt pour : • risque de ravinement • marques sur la chaussée dans
des endroits critiques 0,15 Distance de visibilité d’arrêt pour
risque de présence : • d’arbres ou de roches • de grumes ou de débris tombés
d’un camion • d’une personne qui a chuté Distance de visibilité d’anticipation pour la plupart des situations (voir la sous-section 1.2.5.4)
0,38 Distance de visibilité d’arrêt pour : • feu de position arrière ou d’arrêt
1,30 Distance de visibilité de dépassement pour: • le dessus d’une voiture * Distance de visibilité au carrefour
* Certaines administrations utilisent une hauteur d’objet de 1,15 m pour le dessus d’une voiture particulière, en supposant que le conducteur doit voir au moins 150 mm du véhicule pour distin- guer sa présence. Mais, cette pratique n’est pas courante; on considère que le temps de percep- tion-réaction de 2,5 s tient compte de cet aspect de la visibilité.
Guide canadien de conception géométrique des routes
Page 1.2.5.3Décembre 2011
Tableau 1.2.5.2 Coefficient de frottement pour revêtements humides4
La distance de freinage est la distance dont on abesoin pour arrêter un véhicule une fois que lesfreins ont été appliqués. Sur une chaussée enterrain plat, cette distance peut être déterminéeà l’aide de la formule suivante :
(1.2.4)
où d = distance de freinage (m)
V = vitesse initiale (km/h)
f = coefficient de frottemententre les pneus et lachaussée
alors DVA = 0,278tV + d (1.2.5)
où DVA = distance de visibilitéd’arrêt (m)
t = temps de perception-réaction (s)
Le tableau 1.2.5.3 montre les distancesminimales de visibilité d’arrêt en terrain plat surla chaussée mouillée pour une gamme devitesses de base. Ces valeurs sont utilisées pourla conception de courbes verticales, la définition
de la géométrie aux carrefours et la mise enplace de dispositifs de régulation de lacirculation.
Les distances de visibilité d’arrêt citées dans letableau 1.2.5.3 doivent peut-être êtreaugmentées pour diverses raisons reliées à ladéclivité, à la capacité de freinage du véhiculeet à l’état de la chaussée.
Modification pour les camions
Les caractéristiques géométriques requises poursatisfaire les exigences de distance de visibilitéd’arrêt varient selon les différences dans lahauteur de l’œil du conducteur et les caracté-ristiques de freinage. Tandis qu’un camionneurpeut généralement voir plus loin qu’un con-ducteur de voiture particulière en raison d’unehauteur de l’œil plus grande, cette même hauteurpeut dans certains cas être un désavantage –par exemple une courbe verticale rentrante oùla vue est obstruée par un viaduc. Les carac-téristiques de freinage d’un camion sont trèsvariables et augmentent souvent la distance defreinage effective et, par le fait même, la distancede visibilité d’arrêt.
Plusieurs essais8 ont été effectués avec descamions munis de freins traditionnels et de freinsABS, et des conducteurs ayant une expérience
vitesse de base (km/h)
vitesse pratiquée a (km/h)
coefficient de frottement (f)
30 30 0,40
40 40 0,38
50 47-50 0,35
60 55-60 0,33
70 63-70 0,31
80 70-80 0,30
90 77-90 0,30
100 85-100 0,29
110 91-110 0,28
120 98-120 0,28
130 105-130 0,28
a La gamme des vitesses pratiquées tient compte du fait que certains conducteurs ralentissent lorsque le revêtement est mouillé alors que d’autres ne ralentissent pas.
254f
2V2
3600
1000x
2(9,81)f
2V
2gf
2Vd ===

Éléments de conception
Page 1.2.5.4 Décembre 2011
Tableau 1.2.5.3 Distance de visibilité d’arrêt pour les voitures particulières4 etles camions ayant des systèmes de freinage antiblocage8
perception-réaction vitesse de base
vitesse pratiquée
supposée* temps distance
coefficient de
frottement
distance de freinage
distance de visibilité d’arrêt
(arrondie)
(km/h) (km/h) (s) (m) (m) (m)
40 40 2,5 27,8 0,38 16,6 45
50 47 - 50 2,5 32,7 - 34,7 0,35 24,8 - 28,1 60 - 65
60 55 - 60 2,5 38,2 - 41,7 0,33 36,1 - 42,9 75 - 85
70 63 - 70 2,5 43,7 - 48,6 0,31 50,4 - 62,2 95 - 110
80 70 - 80 2,5 48,6 - 55,5 0,30 64,2 - 83,9 115 - 140
90 77 - 90 2,5 53,5 - 62,5 0,30 77,7 - 106,2 130 - 170
100 85 - 100 2,5 59,0 - 69,4 0,29 98,0 - 135,6 160 - 210
110 91 - 110 2,5 63,2 - 76,4 0,28 116,3 - 170,0 180 - 250
120 98 - 120 2,5 68,0 - 83,3 0,28 134,9 - 202,3 200 - 290
130 105-130 2,5 72,9 - 90,3 0,28 155,0 - 237,6 230 - 330
* La gamme des vitesses pratiquées supposées s’étend de la vitesse de marche moyenne en conditions de faibles débits à la vitesse de base.
variée des situations de freinage d’urgence. Il aété démontré que l’utilisation des freins ABSréduit invariablement les distances de freinageen atténuant les différences de comportementdes conducteurs et en permettant de tirer profitd’une plus grande partie du frottement disponible.En fait, les résultats ont démontré que lesdistances de visibilité d’arrêt du tableau 1.2.5.3seraient appropriées pour les camions si les freinsABS étaient d’usage courant.
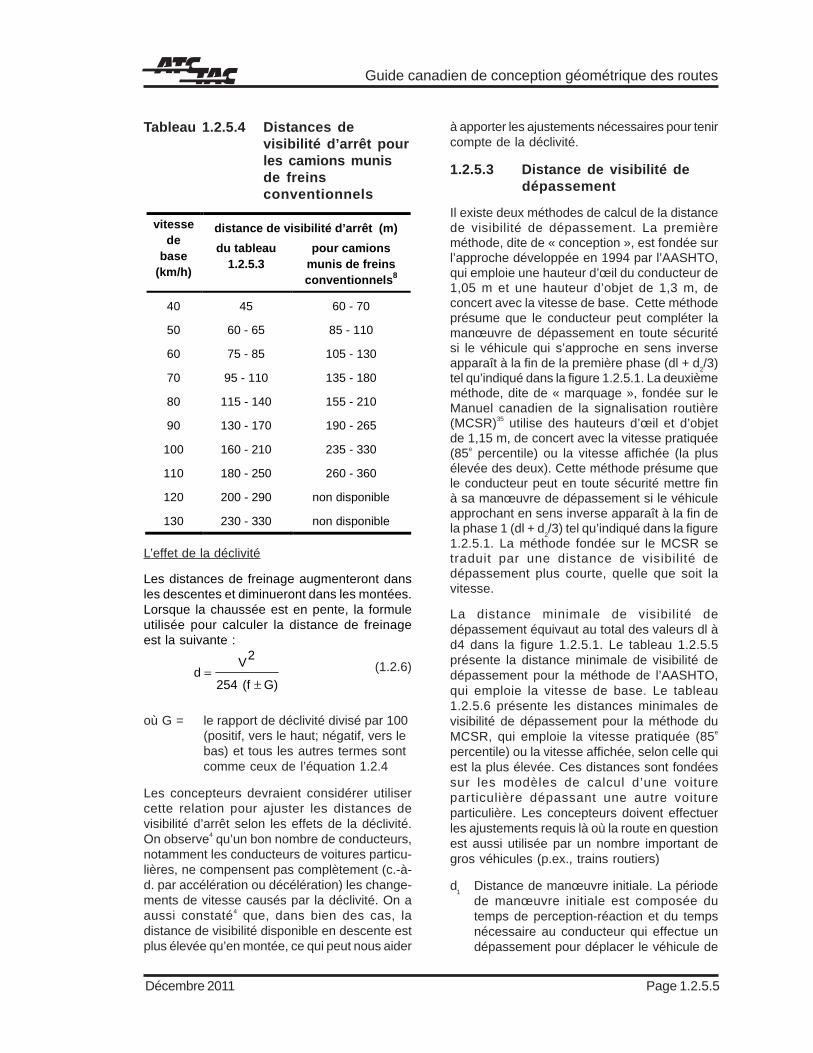
Le tableau 1.2.5.4 montre les distances devisibilité d’arrêt pour les camions avec des freinstraditionnels et les compare aux distances devisibilité d’arrêt données dans le tableau 1.2.5.3.
L’augmentation des distances de visibilité pourles camions avec freins traditionnels (c.-à-d. lamajeure partie de la flotte actuelle) est généra-lement compensée par la hauteur plus grande
de l’œil du conducteur utilisée pour les calculsde courbes verticales. Toutefois, il faudraitutiliser des distances de visibilité plus grandeslà où la hauteur de l’œil du conducteur n’estpas un avantage, comme dans les courbes hori-zontales ou à l’approche d’un carrefour signa-lisé.
À l’intérieur des courbes horizontales, la visibi-lité peut être restreinte par des arbustes, desarbres, des talus ou des bâtiments. Bien quela hauteur de l’œil des camionneurs soit plusgrande, la distance de visibilité requise pourles camions peut ne pas être compensée parcette plus grande hauteur de l’œil à moins quele haut des obstacles demeure sous la lignede visée du conducteur.
Guide canadien de conception géométrique des routes
Page 1.2.5.5Décembre 2011
à apporter les ajustements nécessaires pour tenircompte de la déclivité.
1.2.5.3 Distance de visibilité dedépassement
Il existe deux méthodes de calcul de la distancede visibilité de dépassement. La premièreméthode, dite de « conception », est fondée surl’approche développée en 1994 par l’AASHTO,qui emploie une hauteur d’œil du conducteur de1,05 m et une hauteur d’objet de 1,3 m, deconcert avec la vitesse de base. Cette méthodeprésume que le conducteur peut compléter lamanœuvre de dépassement en toute sécuritési le véhicule qui s’approche en sens inverseapparaît à la fin de la première phase (dl + d2/3)tel qu’indiqué dans la figure 1.2.5.1. La deuxièmeméthode, dite de « marquage », fondée sur leManuel canadien de la signalisation routière(MCSR)35 utilise des hauteurs d’œil et d’objetde 1,15 m, de concert avec la vitesse pratiquée(85e percentile) ou la vitesse affichée (la plusélevée des deux). Cette méthode présume quele conducteur peut en toute sécurité mettre finà sa manœuvre de dépassement si le véhiculeapprochant en sens inverse apparaît à la fin dela phase 1 (dl + d
2/3) tel qu’indiqué dans la figure
1.2.5.1. La méthode fondée sur le MCSR setraduit par une distance de visibilité dedépassement plus courte, quelle que soit lavitesse.
La distance minimale de visibilité dedépassement équivaut au total des valeurs dl àd4 dans la figure 1.2.5.1. Le tableau 1.2.5.5présente la distance minimale de visibilité dedépassement pour la méthode de l’AASHTO,qui emploie la vitesse de base. Le tableau1.2.5.6 présente les distances minimales devisibilité de dépassement pour la méthode duMCSR, qui emploie la vitesse pratiquée (85e
percentile) ou la vitesse affichée, selon celle quiest la plus élevée. Ces distances sont fondéessur les modèles de calcul d’une voitureparticulière dépassant une autre voitureparticulière. Les concepteurs doivent effectuerles ajustements requis là où la route en questionest aussi utilisée par un nombre important degros véhicules (p.ex., trains routiers)
d1 Distance de manœuvre initiale. La périodede manœuvre initiale est composée dutemps de perception-réaction et du tempsnécessaire au conducteur qui effectue undépassement pour déplacer le véhicule de
L’effet de la déclivité
Les distances de freinage augmenteront dansles descentes et diminueront dans les montées.Lorsque la chaussée est en pente, la formuleutilisée pour calculer la distance de freinageest la suivante :
(1.2.6)
où G = le rapport de déclivité divisé par 100(positif, vers le haut; négatif, vers lebas) et tous les autres termes sontcomme ceux de l’équation 1.2.4
Les concepteurs devraient considérer utilisercette relation pour ajuster les distances devisibilité d’arrêt selon les effets de la déclivité.On observe4 qu’un bon nombre de conducteurs,notamment les conducteurs de voitures particu-lières, ne compensent pas complètement (c.-à-d. par accélération ou décélération) les change-ments de vitesse causés par la déclivité. On aaussi constaté4 que, dans bien des cas, ladistance de visibilité disponible en descente estplus élevée qu’en montée, ce qui peut nous aider
Tableau 1.2.5.4 Distances devisibilité d’arrêt pourles camions munisde freinsconventionnels
distance de visibilité d’arrêt (m) vitesse de
base (km/h)
du tableau 1.2.5.3
pour camions munis de freins conventionnels8
40 45 60 - 70
50 60 - 65 85 - 110
60 75 - 85 105 - 130
70 95 - 110 135 - 180
80 115 - 140 155 - 210
90 130 - 170 190 - 265
100 160 - 210 235 - 330
110 180 - 250 260 - 360
120 200 - 290 non disponible
130 230 - 330 non disponible
G)(f254
2Vd
±=

Éléments de conception
Page 1.2.5.6 Décembre 2011
sa position en file jusqu’au point d’empié-tement sur la voie de circulation opposée
d2
Distance parcourue sur la voie de circulationopposée
d3
Longueur de dégagement. La distance entrele véhicule qui dépasse, à la fin de lamanœuvre, et le véhicule qui s’approche ensens inverse. Les distances observéesvarient de 30 à 90 m
d4 Distance parcourue par un véhicule quis’approche en sens inverse après avoir étérepéré par le véhicule qui dépasse. Onsuppose que le véhicule qui s’approche ensens inverse se déplace à la même vitesseque le véhicule qui dépasse, donc cettedistance est égale aux deux tiers de d2.
Le calcul de la distance de visibilité dedépassement repose sur certaines hypothèsesà propos du comportement des conducteurs :
• le conducteur qui se fait dépasser roule àune vitesse constante
• le conducteur qui entend dépasser a ralentiet serre de près le véhicule à dépasser aumoment où il gagne la zone de dépas-sement
• le conducteur qui entend dépasser a besoind’un bref instant pour voir si la zone dedépassement est dégagée et pour amorcerla manœuvre
Figure 1.2.5.1 Éléments de la distance de visibilité de dépassement21
Tableau 1.2.5.5 Distance minimale devisibilité dedépassement21 –Méthode deconception del’AASHTO
vitesses supposées (km/h)
vitesse de base (km/h) véhicule
dépassé véhicule
qui dépasse
distance de visibilité de
dépassement minimale (m)
(arrondie)
30 29 44 220
40 36 51 290
50 44 59 350
60 51 66 410
70 59 74 490
80 65 80 550
90 73 88 610
100 79 94 680
110 85 100 730
120 91 106 800
130 97 112 860
apparition du véhicule en sens opposé lorsque le véhicule qui dépasse atteint le point A
d1
d1 1/3 d2
2/3 d2
d2 d3 d4
A B
véhicule qui dépasse
première phase
seconde phase
123123d1
123123d1
123123
d2
123123d3
123123d4
1212d2
121212d2

Guide canadien de conception géométrique des routes
Page 1.2.5.7Décembre 2011
• le conducteur qui dépasse ne quitte sa voiequ’au dernier instant et y retourne rapide-ment tout en faisant face à la circulation ensens inverse. Pendant cette manœuvre, ilaccélère jusqu’à une vitesse supérieure de15 km/h à celle du véhicule qui se faitdépasser
• une distance convenable doit séparer levéhicule qui dépasse et le véhicule quis’approche en sens inverse.
La distance minimale de visibilité dedépassement correspond à la somme de d
1 à
d4. Le tableau 1.2.5.5 montre les distancesminimales de visibilité pour diverses vitesses debase.
Les distances minimales de visibilité dedépassement selon la méthode de l’AASHTO(« conception ») découlent d’études de terrainréalisées de 1938 à 1941.21 L’origine des valeursemployées dans la méthode du MSCR(« marquage ») est incertaine, mais découlevraisemblablement de la politique sur les zonesd’interdiction des dépassements de l’AASHTO,qui remonte à 1940. Cette politique représente
Figure 1.2.5.2 Distance de visibilité de dépassement requise pour les voituresparticulières et les camions5 par rapport aux critères de l’AASHTO
Tableau 1.2.5.6 – Distance minimale devisibilité dedépassement35 –selon la méthode de« marquage » fondéesur le Manuelcanadien de lasignalisation routière
Vitesse pratiquée Distance minimaleou vitesse affichée de visibilité de
(km/h) (la plus dépassement (m)élevée des deux) (arrondie)
50 16060 20070 24080 27590 330
100 400110 475120 565
Éléments de conception
Page 1.2.5.8 Décembre 2011
un compromis subjectif entre différents types demanœuvres de dépassement, et ne représentepas une situation de dépassement particulièreou précise37. Des études plus récentes 4,37 ontdémontré que les valeurs employées parl’AASHTO sont généralement assezconservatrices en ce qui a trait aux conducteurset aux véhicules d’aujourd’hui. Cela étant dit,l’AASHTO n’a pas jugé utile de réduire sesdistances minimales de visibilité dedépassement prescrites.
Il a été suggéré5 que la distance de visibilité dedépassement requise va en augmentant pour lescas suivants : une voiture particulière qui endépasse une autre, une voiture particulière quidépasse un camion, un camion qui dépasse unevoiture particulière et un camion qui dépasse unautre camion. Cependant, on suggère égalementque toutes ces distances requises sont moinsgrandes que celles données comme distancesminimales par l’AASHTO (tableau 1.2.5.5). Lafigure 1.2.5.2 qui reprend les résultats derecherches sur modèle5 montre une compa-raison de ces exigences. Lors de la présentationde ces résultats, les auteurs ont formulé le com-mentaire suivant :
« ni (leurs) modèles ni les modèles actuelsde l’AASHTO... n’ont démontré de relationdirecte à la sécurité des manœuvres dedépassement sur une route à deux voies. Ilfaut faire la démonstration de telles relationsà la sécurité avant d’envisager raisonna-blement tout changement des critères de…dépassement ».
On a constaté dans une analyse des résultats6
de recherche que les collisions qui se sontproduites en raison d’une manœuvre dedépassement s’élevaient à seulement 2% detoutes les collisions sur des chaussées à deuxvoies en milieu rural. Toutefois, la proportion descollisions mortelles et des collisions invalidantess’élevait à presque 6 %. Les constatations4 del’AASHTO suggèrent que de nombreuxconducteurs peuvent éviter des manœuvres dedépassement sur des routes à deux voies,particulièrement où des camions sont impliqués.Toutefois, les conducteurs qui refusent dedépasser un autre véhicule, même si la distancede visibilité est adéquate, peuvent contrarierd’autres conducteurs plus confiants qui peuventalors tenter des manœuvres de dépassementdangereuses.
Compte tenu du manque général de donnéescorrélées entre la distance de visibilité dedépassement et le nombre de collisions, leconcepteur devrait chercher à introduire desvoies de dépassement (voir le chapitre 2.1) surles routes à deux voies, surtout là où lesaccidents de terrain limitent la distance devisibilité. Un rapport6 sur la revue et l’évaluation7
de résultats de recherches a conclu quel’aménagement de voies de dépassement et devoies pour véhicules lents contribuent à uneréduction de 25 % des taux de collisions parrapport à des tronçons à deux voies sans pareiltraitement. De tels aménagements fournissentaussi des occasions de dépasser en plus grandesécurité aux conducteurs qui ne se sentent pasà l’aise d’empiéter sur la voie de circulation ensens inverse ainsi qu’aux conducteurs contrariéspar ceux qui manquent d’assurance, enparticulier lorsque la nature du terrain ou le débitde circulation limite les occasions de dépas-sement.
1.2.5.4 Distance de visibilitéd’anticipation
La distance de visibilité d’arrêt permet auxconducteurs compétents et alertes de parvenirrapidement à un arrêt dans des circonstancesordinaires. Cette distance est généralementinsuffisante lorsque les conducteurs doiventprendre des décisions complexes, lorsquel’information est difficile à trouver, lorsquel’information est inhabituelle ou lorsque desmanœuvres inhabituelles sont requises. Limiterla distance de visibilité à la distance de visibilitéd’arrêt peut avoir comme conséquenced’empêcher les conducteurs d’effectuer desmanœuvres inhabituelles, des manœuvresd’évitement. Dans le même ordre d’idées, ladistance de visibilité d’arrêt peut être insuffisantepour permettre aux conducteurs de reconnaîtreles indications de danger et de décider de lafaçon de réagir. Parce que la distance de visibilitéd’anticipation permet au conducteur de manœu-vrer son véhicule ou de modifier sa vitessepratiquée plutôt que de s’arrêter, cette distancede visibilité d’anticipation est beaucoup plusgrande que la distance de visibilité d’arrêt pourune vitesse de base donnée.
Les concepteurs devraient utiliser la distancede visibilité d’anticipation là où l’information risqued’être perçue de façon erronée, là où il faut
Guide canadien de conception géométrique des routes
Page 1.2.5.9Décembre 2011
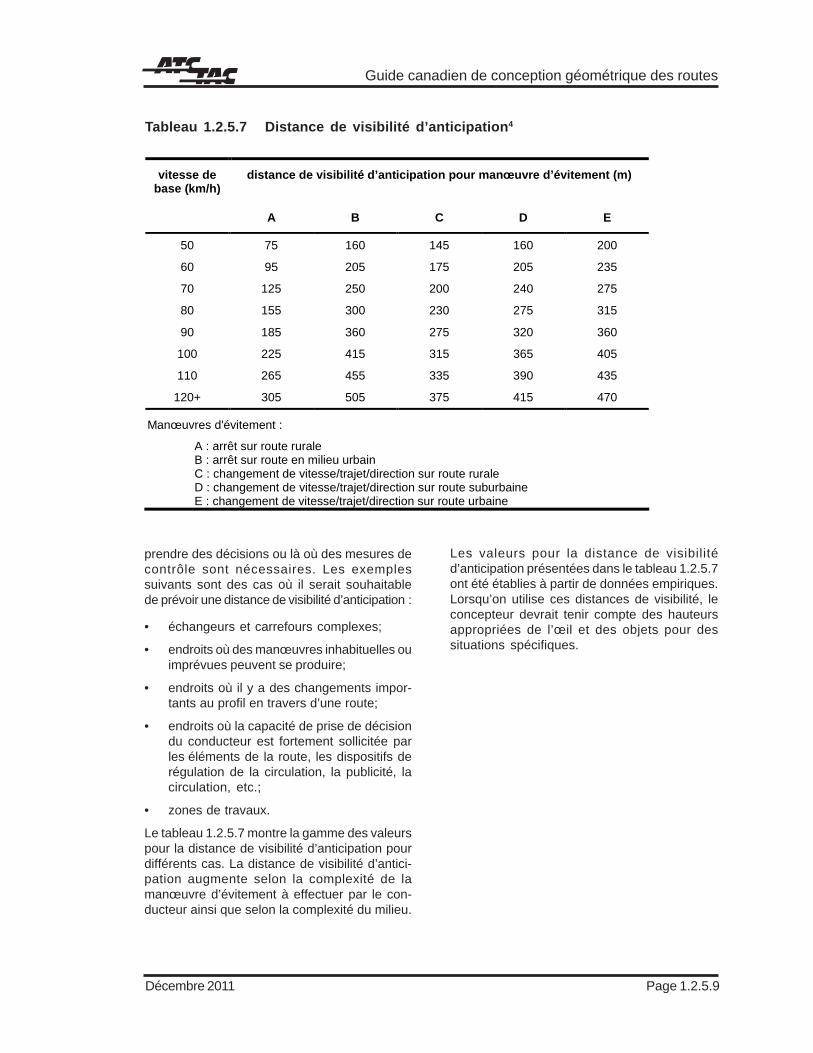
Tableau 1.2.5.7 Distance de visibilité d’anticipation4
vitesse de base (km/h)
distance de visibilité d’anticipation pour manœuvre d’évitement (m)
A B C D E
50 75 160 145 160 200
60 95 205 175 205 235
70 125 250 200 240 275
80 155 300 230 275 315
90 185 360 275 320 360
100 225 415 315 365 405
110 265 455 335 390 435
120+ 305 505 375 415 470
Manœuvres d'évitement :
A : arrêt sur route rurale B : arrêt sur route en milieu urbain C : changement de vitesse/trajet/direction sur route rurale D : changement de vitesse/trajet/direction sur route suburbaine E : changement de vitesse/trajet/direction sur route urbaine
prendre des décisions ou là où des mesures decontrôle sont nécessaires. Les exemplessuivants sont des cas où il serait souhaitablede prévoir une distance de visibilité d’anticipation :
• échangeurs et carrefours complexes;
• endroits où des manœuvres inhabituelles ouimprévues peuvent se produire;
• endroits où il y a des changements impor-tants au profil en travers d’une route;
• endroits où la capacité de prise de décisiondu conducteur est fortement sollicitée parles éléments de la route, les dispositifs derégulation de la circulation, la publicité, lacirculation, etc.;
• zones de travaux.
Le tableau 1.2.5.7 montre la gamme des valeurspour la distance de visibilité d’anticipation pourdifférents cas. La distance de visibilité d’antici-pation augmente selon la complexité de lamanœuvre d’évitement à effectuer par le con-ducteur ainsi que selon la complexité du milieu.
Les valeurs pour la distance de visibilitéd’anticipation présentées dans le tableau 1.2.5.7ont été établies à partir de données empiriques.Lorsqu’on utilise ces distances de visibilité, leconcepteur devrait tenir compte des hauteursappropriées de l’œil et des objets pour dessituations spécifiques.

Éléments de conception
Page 1.2.5.10 Décembre 2011
Guide canadien de conception géométrique des routes
Page 1.2.R.1Décembre 2011
RÉFÉRENCESBIBLIOGRAPHIQUES
1. HALL, J.W. et D.S TURNER. « StoppingSight Distance: Can We See Where WeNow Stand? », Transportation ResearchRecord 1208, TRB, National ResearchCouncil, Washington, D.C., 1989.
2. WOODS, D.L. « Sensitivity Analysis of theFactors Affecting Roadway Vertical CurveDesign », présenté au 68e congrès annueldu TRB, janvier 1989.
3. Conception routière : normes, ouvragesroutiers, Ministère des Transports duQuébec, 1995.
4. A Policy on Geometric Design of Highwaysand Streets, AASHTO, Washington, D.C.,2001.
5. HARWOOD, D.W. et J.C. GLENNON.« Passing Sight Distance for PassengerCars and Trucks », Transportation ResearchRecord 1208, TRB, National ResearchCouncil, Washington, D.C., 1989.
6. SANDERSON, R.W. « The Need for Cost-Effective Guidelines to Enhance TruckSafety », présenté au congrès del’Association des transports du Canada,1996.
7. Passing Manoeuvres and Passing Lanes:Design, Operational & Safety Evaluations,ADI Limited pour la direction Sécurité deTransports Canada, Ottawa, Ontario, 1989(pas publié).
8. HARWOOD, D.W., J.M. MASON, W.D.GLAUZ, B.T. KULAKOWSKI et K.FITZPATRICK. Truck Characteristics for Usein Roadway Design and Operation, FHWA-rd-89-226 et 227, 1990.
9. LAMM, R., E.M. CHOUEIRI, J.C.HAYWARD, et A. PALURI. « PossibleDesign Procedure to Promote DesignConsistency in Highway Geometric Designon Two-Lane Rural Roads », TransportationResearch Record 1195, TRB, NationalResearch Council, Washington, D.C., 1988.
10. LAMM, R., R. HEGER, et O. EBERHARD,« Operating Speed and Relation DesignBackgrounds - Important Issues to beRegarded in Modern Highway AlignmentDesign », présenté au congrès mondial de
la Fédération routière internationale, Toronto,ON, 1997.
11. ALEXANDER, G.J. et H. LUNENFELD, H.Driver Expectancy in Highway Design andTraffic Operations, Rapport no. FHWA-TO-86-1, Federal Highway Administration, USDepartment of Transportation, Washington,D.C., 1986.
12. Design Vehicle Dimensions for Use inGeometric Design, par Lea Associates pourl’Association des transports du Canada,Ottawa, ON, 1996.
13. FITZPATRICK, K., B. SHAMBURGER, et D.FAMBRO, « Design Speed, OperatingSpeed and Posted Speed Survey »,présenté à l’assemblée du TransportationResearch Board, Washington, D.C., 1996.
14. KRAMMES, R.A., K. FITZPATRICK, J.D.BLASCHKE, et D. FAMBRO. Speed -Understanding Design, Operating andPosted Speed, Rapport no. 1465-1, TexasTransportation Institute, 1996.
15. GARBER, N.J. et R. GADIRAJU. « FactorsAffecting Speed Variance and its Influenceon Accidents », dans le TransportationResearch Record 1213, TRB, NationalResearch Council, Washington, D.C., 1989.
16. GAMBARD, J.M. et G. LOUAH. Vitessespratiquées et géométrie de la route, SETRA,1986.
17. OGDEN, K.W. Safer Roads - A Guide toRoad Safety Engineering, AshgatePublishing Co., Brookfield, VT, 1996.
18. OLSON, P. Forensic Aspects of DriverPerception and Response, Lawyers &Judges Publishing Company, Inc., Tucson,AZ, 1996.
19. Highway Capacity Manual, Rapport spécial209. Transportation Research Board,National Research Council, Washington,DC, 1994.
20. KRAMMES, R.A., R.Q. BRACKETT, M.A.SHAFER, J.L. OTTESEN, I.B.ANDERSON, K.L. FINK, K.M. COLLINS,O.J. PENDLETON et C.J. MESSER.Horizontal Alignment Design Consistencyfor Rural Two Lane Highways, FHWA-RD-94-034, 1993.
Éléments de conception
Page 1.2.R.2 Décembre 2011
21. PRISK, C.W. Passing Practices on RuralHighways, Proceedings of the HighwayResearch Board, Vol. 21, 1941, dans APolicy on Geometric Design of Highways andStreets, AASHTO, Washington, D.C.,1994.
22. SHELBUME, T.E. et R.L. SHEPPE. SkidResistance Measurements of VirginiaPavements, Research Report No. 5-B.Highway Research Board, April 1948, dansA Policy on Geometric Design of Highwaysand Streets, AASHTO, Washington, D.C.,1994.
23. MOYER, R.A. et J.W. SHUPE. Roughnesssand Skid Resistance Measurements ofPavements in California, Bulletin 37,Highway Research Board, August 1951,dans A Policy on Geometric Design ofHighways and Streets, AASHTO,Washington, D.C., 1994.
24. Safety, Speed and Speed Management: ACanadian Review. IBI Group pour TransportsCanada, 1997.
25. PARKER, M.R. Effects of Raising andLowering Speed Limits on Selected RoadwaySections, FHWA-RD-92-084, Washington,D.C, 1997.
26. Synthesis of Safety Research Related toSpeed and Speed Management, FHWA-RD-98-154, Washington, D.C., 1998.
27. Managing Speed: Review of Current Practicefor Setting and Enforcing Speed Limits,Rapport spécial 254, TRB, NationalResearch Council, Washington, D.C., 1998.
28. Canadian Guide to 3R/4R. TransportationAssociation of Canada, Ottawa, 2001.
29. Highway Safety Design and OperationsGuide. ASSHTO, Washington, D.C., 1997.
30. Context Sensitive Highway Design. ASCE,1999.
31. Thinking Beyond the Pavement. AASHTO,1998.
32. Flexibility in Highway Design. FederalHighway Administration. Washington, D.C.,1997.
33. KASSOFF, H., Contextual Highway Design:Time to be Mainstreamed. ITE Journal,December 2001.
34. Beyond the Green Book. TransportationResearch Board. Washington, D.C., 1987.
35. ASSOCIATION DES TRANSPORTS DUCANADA. Manuel canadien de lasignalisation routière. ATC, février 2008.
36. INTUS ROAD SAFETY ENGINEERING INC.,AU NOM DE TRANSPORTS CANADA.Passing Sight Distance Design and MarkingStudy. Project No. T8080-04-0338, 2006.
37. TRANSPORTATION RESEARCH BOARD.National Cooperative Highway ProgramReport 605, “Passing Sight DistanceCriteria”, TRB, Washington, D.C., 2008.

Guide canadien de conception géométrique des routes
Page 2.1.iDécembre 2011
2.1 TRACÉ EN PLAN ET CONFIGURATION DES VOIES
2.1.1 INTRODUCTION ................................................................................................ 2.1.1.1
2.1.2 TRACÉ EN PLAN................................................................................................ 2.1.2.12.1.2.1 Généralité ....................................................................................................................... 2.1.2.12.1.2.2 Courbes circulaires ........................................................................................................ 2.1.2.22.1.2.3 Spirales........................................................................................................... 2.1.2.202.1.2.4 Gradation du dévers ..................................................................................................... 2.1.2.252.1.2.5 Élargissement du revêtement dans les courbes ......................................................... 2.1.2.292.1.2.6 Tracé en plan : règles heuristiques additionnelles d’application du domaine
de définition .................................................................................................................. 2.1.2.362.1.2.7 Évaluation explicite de la sécurité ............................................................................... 2.1.2.44
2.1.3 PROFIL EN LONG ............................................................................................. 2.1.3.12.1.3.1 Aperçu.... ........................................................................................................................ 2.1.3.12.1.3.2 Déclivités ...........................................................................................................2.1.3.12.1.3.3 Courbes verticales .......................................................................................................... 2.1.3.42.1.3.4 Distance de visibilité sous les structures ...................................................................... 2.1.3.92.1.3.5 Profil en long : règles heuristiques additionnelles d’application du domaine
de définition .................................................................................................................. 2.1.3.102.1.3.6 Examen formel des aspects de sécurité ..................................................................... 2.1.3.14
2.1.4 COORDINATION ET ESTHÉTIQUE ................................................................... 2.1.4.12.1.4.1 Introduction ..................................................................................................................... 2.1.4.12.1.4.2 Coordination du tracé : fondement technique................................................................ 2.1.4.12.1.4.3 Coordination du tracé : règles heuristiques d’application du domaine de définition .... 2.1.4.22.1.4.4 Coordination du tracé : meilleures pratiques ................................................................. 2.1.4.3
2.1.5 PENTE TRANSVERSALE ................................................................................... 2.1.5.12.1.5.1 Introduction ..................................................................................................................... 2.1.5.12.1.5.2 Pente transversale et circulation : règles heuristiques d’application ............................ 2.1.5.12.1.5.3 Pentes transversales et drainage .................................................................................. 2.1.5.22.1.5.4 Agencements de pentes transversales : règles heuristiques d’application ................. 2.1.5.32.1.5.5 Changements de pente transversale : règles heuristiques d’application ..................... 2.1.5.6
2.1.6 VOIES DE BASE ET ÉQUILIBRE DES VOIES .................................................. 2.1.6.12.1.6.1 Voies de base ................................................................................................................ 2.1.6.12.1.6.2 Équilibre des voies ......................................................................................................... 2.1.6.22.1.6.3 Coordination entre équilibre des voies et voies de base ............................................... 2.1.6.22.1.6.4 Système express-collecteur : meilleures pratiques ...................................................... 2.1.6.5
2.1.7 CONTINUITÉ DES VOIES ET DU PARCOURS ET ENTRECROISEMENT ....... 2.1.7.12.1.7.1 Continuité des voies ....................................................................................................... 2.1.7.12.1.7.2 Continuité du parcours ................................................................................................... 2.1.7.12.1.7.3 Entrecroisement ............................................................................................................. 2.1.7.4
2.1.8 VOIES POUR VÉHICULES LENTS .................................................................... 2.1.8.12.1.8.1 Introduction ..................................................................................................................... 2.1.8.12.1.8.2 Pentes et circulation : fondement technique ................................................................. 2.1.8.12.1.8.3 Meilleures pratiques : critères de justification ............................................................... 2.1.8.32.1.8.4 Règles heuristiques d’application .................................................................................. 2.1.8.82.1.8.5 Évaluation explicite de la sécurité ................................................................................. 2.1.8.9
Tracé en plan et configuration des voies
Page 2.1.ii Décembre 2011
2.1.9 VOIES DE DÉPASSEMENT ............................................................................... 2.1.9.12.1.9.1 Introduction ..................................................................................................................... 2.1.9.12.1.9.2 Fondement technique .................................................................................................... 2.1.9.12.1.9.3 Meilleures pratiques : critères de justification ............................................................... 2.1.9.22.1.9.4 Règles heuristiques d’application .................................................................................. 2.1.9.3
2.1.10 VOIES DE SECOURS ......................................................................................2.1.10.12.1.10.1 Introduction ................................................................................................................... 2.1.10.12.1.10.2 Meilleures pratiques : critères de justification ............................................................. 2.1.10.32.1.10.3 Catégories : meilleures pratiques ................................................................................ 2.1.10.42.1.10.4 Emplacement : meilleures pratiques ........................................................................... 2.1.10.52.1.10.5 Règles heuristiques d’application ................................................................................ 2.1.10.62.1.10.6 Détails du lit d’arrêt : éléments de conception ............................................................ 2.1.10.72.1.10.7 Signalisation, démarcation, éclairage et entretien ...................................................... 2.1.10.92.1.10.8 Évaluation explicite de la sécurité ............................................................................... 2.1.10.9
RÉFÉRENCES BIBLIOGRAHIQUES ............................................................................ 2.1.R.1

Guide canadien de conception géométrique des routes
Page 2.1.iiiDécembre 2011
TABLEAUXTableau 2.1.2.1 Frottement latéral maximal pour les routes en milieu rural et à vitesse
élevée en milieu urbain .................................................................................. 2.1.2.7Tableau 2.1.2.2 Frottement latéral maximal sur les routes à vitesse réduite en milieu
urbain .............................................................................................................. 2.1.2.7Tableau 2.1.2.3 Rayons minimaux pour des valeurs limitatives de e et f de routes rurales
et de routes urbaines à vitesse élevée .......................................................... 2.1.2.8Tableau 2.1.2.4 Rayons minimaux pour les projets en milieu urbain ..................................... 2.1.2.9Tableau 2.1.2.5 Dévers et paramètres de spirale, emax. = 0,04 m/m ..................................... 2.1.2.12Tableau 2.1.2.6 Dévers et paramètres de spirale, emax. = 0,06 m/m ...................................... 2.1.2.13Tableau 2.1.2.7 Dévers et paramètres de spirale, emax. = 0,08 m/m ..................................... 2.1.2.14Tableau 2.1.2.8 Dévers pour route en milieu urbain, emax. = 0,04 m/m ................................. 2.1.2.18Tableau 2.1.2.9 Dévers pour route en milieu urbain, emax. = 0,06 m/m ................................. 2.1.2.19Tableau 2.1.2.10 Distance de visibilité d’arrêt dans les courbes de rayon minimal ............... 2.1.2.20Tableau 2.1.2.11 Pente relative maximale entre le bord extérieur du revêtement et l’axe
d’une chaussée à deux voies ...................................................................... 2.1.2.23Tableau 2.1.2.12 Longueur de gradation du dévers en courbe pour des routes bombées
à deux voies ................................................................................................. 2.1.2.26Tableau 2.1.2.13 Longueur de gradation du dévers en courbe de routes urbaines
bombées à chaussée unique à quatre voies ou de routes urbainessans bombement................................................................................2.1.2.26
Tableau 2.1.2.14 Élargissement du revêtement dans les courbes pour les camions lourdsde type SU ................................................................................................... 2.1.2.33
Tableau 2.1.2.15 Élargissement de la chaussée dans les courbes pour lessemi-remorques WB-20 ............................................................................... 2.1.2.33
Tableau 2.1.2.16 Élargissement de la chaussée dans les courbes pour les trains routiersde type B ...................................................................................................... 2.1.2.34
Tableau 2.1.2.17 Dégagement latéral requis dans les courbes de rayon minimum .............. 2.1.2.43Tableau 2.1.3.1 Déclivités maximales ..................................................................................... 2.1.3.2Tableau 2.1.3.2 Les valeurs de K pour assurer la distance de visibilité d’arrêt dans
les courbes verticales saillantes ................................................................... 2.1.3.6Tableau 2.1.3.3 Les valeurs de K pour assurer la distance de visibilité de dépassement
dans les courbes verticales saillantes .......................................................... 2.1.3.7Tableau 2.1.3.4 Les valeurs de K pour assurer la distance de visibilité d’arrêt dans
les courbes verticales rentrantes ................................................................... 2.1.3.9Tableau 2.1.5.1 Pente transversale du revêtement pour resurfaçage ..................................... 2.1.5.5Tableau 2.1.5.2 Pente transversale relative entre le bord extérieur du revêtement et
l’axe d’une route à deux voies ....................................................................... 2.1.5.6Tableau 2.1.5.3 Valeurs de base pour le taux de changement de la pente transversale
pour une bretelle d’une seule voie ................................................................. 2.1.5.6Tableau 2.1.8.1 Longueur de pente pour une réduction de 15 km/h ...................................... 2.1.8.7Tableau 2.1.9.1 Espacement habituel des voies de dépassement ........................................ 2.1.9.4Tableau 2.1.10.1 Valeur de la force de frottement ................................................................... 2.1.10.2
Tracé en plan et configuration des voies
Page 2.1.iv Décembre 2011
FIGURESFigure 2.1.2.1 Dynamique de véhicule dans une courbe circulaire ...................................... 2.1.2.3Figure 2.1.2.2 Moment de capotage dans une courbe ......................................................... 2.1.2.5Figure 2.1.2.3 Répartition du dévers et du frottement latéral ............................................. 2.1.2.10Figure 2.1.2.4 Rapports entre la vitesse, le rayon et le dévers sur les routes à vitesse
réduite en milieu urbain ................................................................................ 2.1.2.15Figure 2.1.2.5 Autre méthode pour la répartition du dévers sur les routes à vitesse
réduite en milieu urbain ................................................................................ 2.1.2.16Figure 2.1.2.6 Forces de frottement lors du freinage dans une courbe en plan ................ 2.1.2.17Figure 2.1.2.7 Fondement des valeurs des paramètres de spirale .................................... 2.1.2.22Figure 2.1.2.8 Trois méthodes de gradation du dévers pour les routes bombées à
deux voies .................................................................................................... 2.1.2.28Figure 2.1.2.9 Trois méthodes de gradation du dévers pour les routes à chaussées
séparées ....................................................................................................... 2.1.2.30Figure 2.1.2.10 Éléments de la largeur de revêtement requise en courbe et formules
connexes ...................................................................................................... 2.1.2.32Figure 2.1.2.11 Dégagement latéral pour les valeurs supérieures de distance de
visibilité d’arrêt ............................................................................................. 2.1.2.40Figure 2.1.2.12 Dégagement latéral pour les valeurs inférieures de distance de
visibilité d’arrêt ............................................................................................. 2.1.2.41Figure 2.1.2.13 Dégagement latéral pour la distance de visibilité de dépassement ........... 2.1.2.42Figure 2.1.3.1 Distance de visibilité dans une courbe verticale saillante ............................. 2.1.3.5Figure 2.1.3.2 Distances de visibilité d’arrêt dans les courbes verticales rentrantes .......... 2.1.3.8Figure 2.1.3.3 Distance de visibilité sous les structure ........................................................ 2.1.3.9Figure 2 1.3.4 Dégagement de l’espace aérien .................................................................. 2.1.3.15Figure 2.1.4.1 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.........................................................................................2.1.4.4Figure 2.1.4.2 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.........................................................................................2.1.4.5Figure 2.1.4.3 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.........................................................................................2.1.4.6Figure 2.1.4.4 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.........................................................................................2.1.4.7Figure 2.1.4.5 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.........................................................................................2.1.4.8Figure 2.1.4.6 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.........................................................................................2.1.4.9Figure 2.1.4.7 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.......................................................................................2.1.4.10Figure 2.1.4.8 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.......................................................................................2.1.4.11Figure 2.1.4.9 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.......................................................................................2.1.4.12Figure 2.1.4.10 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.......................................................................................2.1.4.13Figure 2.1.4.11 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.......................................................................................2.1.4.14Figure 2.1.4.12 Exemples de bonne et de mauvaise coordination d’alignement et
d’esthétique.......................................................................................2.1.4.15Figure 2.1.5.1 Déclivité faussée et pentes transversales ..................................................... 2.1.5.3Figure 2.1.5.2 Agencements de pentes transversales pour différentes classes
de routes ........................................................................................................ 2.1.5.4Figure 2.1.5.3 Différence algébrique maximale de la pente transversale de voies de
circulation adjacentes .................................................................................... 2.1.5.7

Guide canadien de conception géométrique des routes
Page 2.1.vDécembre 2011
Figure 2.1.6.1 Schéma du nombre de voies de base ........................................................... 2.1.6.1Figure 2.1.6.2 Exemples d’équilibre des voies ..................................................................... 2.1.6.3Figure 2.1.6.3 Coordination de l’équilibre des voies et des voies de base .......................... 2.1.6.4Figure 2.1.6.4 Système express-collecteur typique ............................................................. 2.1.6.6Figure 2.1.7.1 Exemples de la continuité des voies ............................................................. 2.1.7.2Figure 2.1.7.2 Illustration de la continuité de l’itinéraire ....................................................... 2.1.7.3Figure 2.1.7.3 Types de zones d’entrecroisement ................................................................ 2.1.7.5Figure 2.1.7.4 Solutions à l’entrecroisement indésirable ..................................................... 2.1.7.6Figure 2.1.7.5 Calcul de la longueur d’entrecroisement ....................................................... 2.1.7.7Figure 2.1.8.1 Taux de collisions pour les camions ............................................................. 2.1.8.2Figure 2.1.8.2 Courbes de performance de camions, 120 g/W, décélération et
accélération .................................................................................................... 2.1.8.4Figure 2.1.8.3 Courbes de performance de camions, 180 g/W, décélération et
accélération .................................................................................................... 2.1.8.5Figure 2.1.8.4 Courbes de performance de camions, 200 g/W, décélération et
accélération .................................................................................................... 2.1.8.6Figure 2.1.8.5 Chevauchement des voies pour véhicules lents sur le dessus de
courbes verticales saillantes ....................................................................... 2.1.8.10Figure 2.1.8.6 Exemple de conception d’une voie pour véhicules lents ............................ 2.1.8.11Figure 2.1.9.1 Aménagement typique d’une voie de dépassement ..................................... 2.1.9.2Figure 2.1.9.2 Résultat typique d’un calcul du pourcentage de véhicules qui circulent
en pelotons et de la corrélation avec le niveau de service ............................ 2.1.9.4Figure 2.1.9.3 Options d’aménagement de voies de dépassement ..................................... 2.1.9.6Figure 2.1.10.1 Forces agissant sur un véhicule en mouvement ......................................... 2.1.10.2Figure 2.1.10.2 Catégories de base de rampes de détresse ............................................... 2.1.10.4Figure 2.1.10.3 Aménagement typique d’une rampe de détresse ....................................... 2.1.10.8Figure 2.1.10.4 Profil en travers typique d’une rampe de détresse ...................................... 2.1.10.8

Tracé en plan et configuration des voies
Page 2.1.vi Décembre 2011
Guide canadien de conception géométrique des routes
Décembre 2011 Page 2.1.2.3
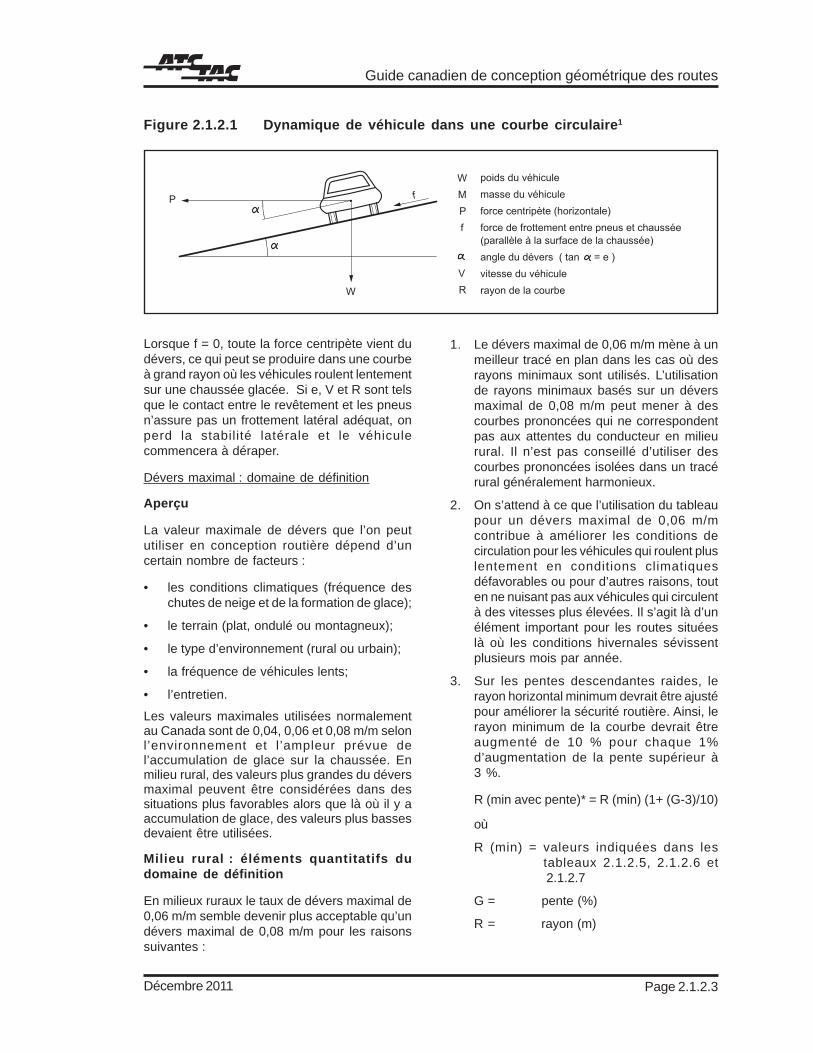
Lorsque f = 0, toute la force centripète vient dudévers, ce qui peut se produire dans une courbeà grand rayon où les véhicules roulent lentementsur une chaussée glacée. Si e, V et R sont telsque le contact entre le revêtement et les pneusn’assure pas un frottement latéral adéquat, onperd la stabilité latérale et le véhiculecommencera à déraper.
Dévers maximal : domaine de définition
Aperçu
La valeur maximale de dévers que l’on peututiliser en conception routière dépend d’uncertain nombre de facteurs :
• les conditions climatiques (fréquence deschutes de neige et de la formation de glace);
• le terrain (plat, ondulé ou montagneux);
• le type d’environnement (rural ou urbain);
• la fréquence de véhicules lents;
• l’entretien.
Les valeurs maximales utilisées normalementau Canada sont de 0,04, 0,06 et 0,08 m/m selonl’environnement et l’ampleur prévue del’accumulation de glace sur la chaussée. Enmilieu rural, des valeurs plus grandes du déversmaximal peuvent être considérées dans dessituations plus favorables alors que là où il y aaccumulation de glace, des valeurs plus bassesdevaient être utilisées.
Milieu rural : éléments quantitatifs dudomaine de définition
En milieux ruraux le taux de dévers maximal de0,06 m/m semble devenir plus acceptable qu’undévers maximal de 0,08 m/m pour les raisonssuivantes :
1. Le dévers maximal de 0,06 m/m mène à unmeilleur tracé en plan dans les cas où desrayons minimaux sont utilisés. L’utilisationde rayons minimaux basés sur un déversmaximal de 0,08 m/m peut mener à descourbes prononcées qui ne correspondentpas aux attentes du conducteur en milieurural. Il n’est pas conseillé d’utiliser descourbes prononcées isolées dans un tracérural généralement harmonieux.
2. On s’attend à ce que l’utilisation du tableaupour un dévers maximal de 0,06 m/mcontribue à améliorer les conditions decirculation pour les véhicules qui roulent pluslentement en conditions climatiquesdéfavorables ou pour d’autres raisons, touten ne nuisant pas aux véhicules qui circulentà des vitesses plus élevées. Il s’agit là d’unélément important pour les routes situéeslà où les conditions hivernales sévissentplusieurs mois par année.
3. Sur les pentes descendantes raides, lerayon horizontal minimum devrait être ajustépour améliorer la sécurité routière. Ainsi, lerayon minimum de la courbe devrait êtreaugmenté de 10 % pour chaque 1%d’augmentation de la pente supérieur à3 %.
R (min avec pente)* = R (min) (1+ (G-3)/10)
où
R (min) = valeurs indiquées dans les tableaux 2.1.2.5, 2.1.2.6 et 2.1.2.7
G = pente (%)
R = rayon (m)
Figure 2.1.2.1 Dynamique de véhicule dans une courbe circulaire1
Tracé en plan et aménagement des voies
Décembre 2011Page 2.1.2.4
Exemple : Vitesse de base = 100 km/h; e=0.06;G=6% e = dévers de la chaussée (m/m)
R (min) = 440 m (Tableau 2.1.2.6)
R (min)* = 440(1+(6-3)/10) = 572 m ou570 m (arrondi aux fins de conception)
Milieu urbain : éléments quantitatifs dudomaine de définition
En milieu urbain, les valeurs de dévers maximalvarient de 0,02 m/m à 0,08 m/m. Les valeursqui sont couramment utilisées pour le déversmaximal sont :
1. locales – généralement, le bombementnormal;
2. collectrices – dévers occasionnel avec untaux maximal de 0,02 ou 0,04 m/m;
3. artères secondaires – 0,04 à 0,06 m/m;4. artères principales – 0,06 m/m;5. routes express et autoroutes – 0,06 à
0,08 m/m;6. bretelles de raccordement – 0,06 à
0,08m/m.
Milieu urbain : règles heuristiques d’appli-cation du domaine de définition
1. Les valeurs maximales sont généralementmoins élevées en milieu urbain puisque lesvéhicules qui circulent à vitesse réduite ouqui démarrent pourraient déraper si le déversest plus important. Le dévers maximal enmilieu urbain est normalement de0,06 m/m.
2. Un dévers maximal de 0,04 m/m peut aussiêtre utilisé pour un réseau routier en milieuurbain. Ce dévers est approprié là oùs’attend à la formation de glace sur lachaussée et à l’interruption de l’écoulementde la circulation.
3. Les valeurs de dévers maximal de 0,04 et0,06 m/m sont généralement applicablespour la conception de nouvelles routes quise trouvent au niveau le plus élevé dusystème de classification et où il y a peuou pas de contraintes physiques.
4. Généralement, le dévers n’est pas utilisésur les locales.
5. Sur les collectrices, l’utilisation du déversest rare, généralement là où il estavantageux pour une meilleure harmoni-
sation avec le relief du terrain adjacent. Ledévers maximal dans ces cas-là se situeentre 0,02 (bombement inversé) et0,04 m/m.
6. Certaines administrations utilisent desvaleurs de dévers plus élevés pour lesbretelles d’autoroutes urbaines que pour lesautres routes en milieu urbain afin d’assurerune sécurité accrue dans ces bretelles,notamment dans les bretelles de sortie, oùl’on a tendance à conduire trop vite plussouvent et où le risque de dérapage estmoindre puisque l’entretien y est meilleur.
7. Les dévers qui dépassent 0,04 m/m ne sontpas recommandés là où la courbe passe àtravers la zone d’un carrefour existant ouprojeté. Dans le cas de projets de réha-bilitation en milieu urbain, il est souventdifficile ou pas souhaitable de prévoir undévers en raison des contraintes physiques.Le concepteur doit alors évaluer avec soinles relations entre la vitesse de base, lacourbure, la pente transversale et lefrottement latéral afin de choisir la meilleuresolution.
8. Les valeurs maximales du dévers découlentsouvent des politiques des administrationset peuvent varier d’une administration àl’autre selon les conditions locales. Parexemple, certaines administrations utilisentun dévers maximal de 0,08 m/m pour lesroutes de classe supérieure comme lesroutes express. Afin d’assurer une certaineharmonie dans toute région où plusieursorganismes se partagent la responsabilitédes routes, il est souhaitable de maintenirun dévers maximal uniforme. En choisis-sant le dévers maximal, on devra donc seréférer aux valeurs utilisées par les autresadministrations routières de la région.
Frottement latéral : fondement technique
Le coefficient de frottement latéral, f, est lerapport de la force de frottement latéral et de lacomposante du poids du véhicule perpendi-culaire à la chaussée. Le véhicule subit à lahauteur des pneus cette force qui exerce uneaction centripète engendrant l’accélérationradiale. La figure 2.1.2.1 illustre le frottementlatéral.
La limite supérieure du coefficient de frottementcorrespond aux conditions qui existent aumoment où le dérapage est sur le point de se
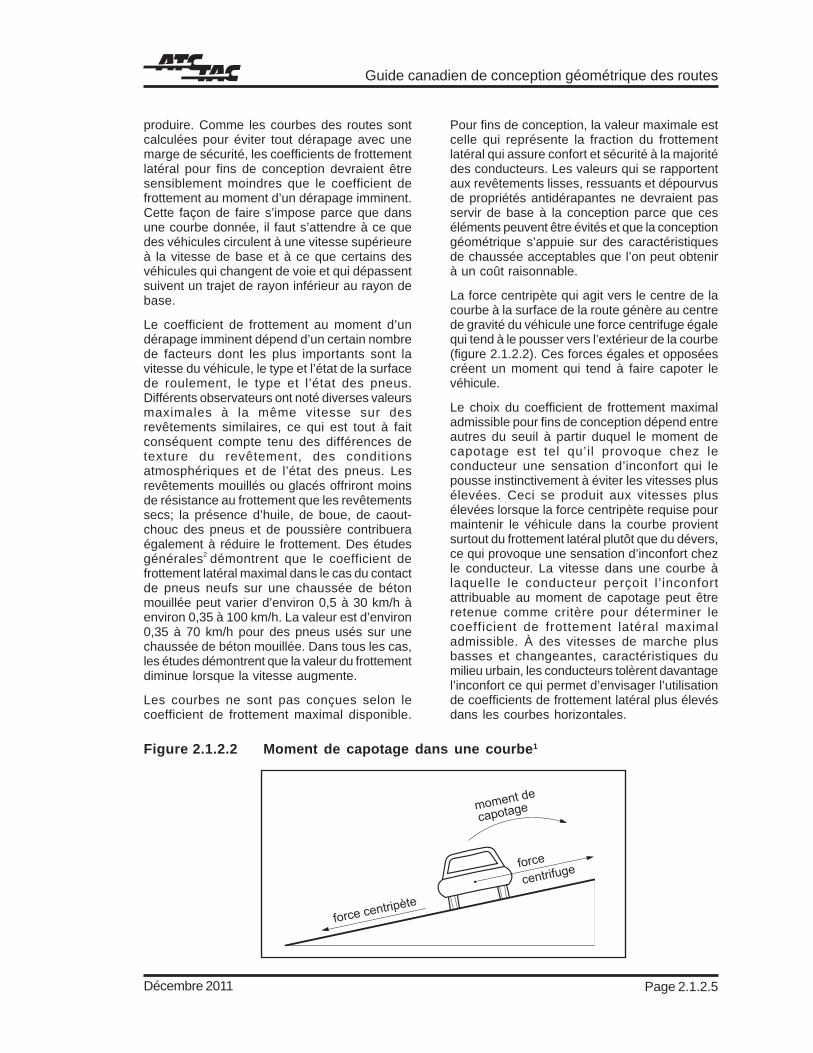
Guide canadien de conception géométrique des routes
Décembre 2011 Page 2.1.2.5
produire. Comme les courbes des routes sontcalculées pour éviter tout dérapage avec unemarge de sécurité, les coefficients de frottementlatéral pour fins de conception devraient êtresensiblement moindres que le coefficient defrottement au moment d’un dérapage imminent.Cette façon de faire s’impose parce que dansune courbe donnée, il faut s’attendre à ce quedes véhicules circulent à une vitesse supérieureà la vitesse de base et à ce que certains desvéhicules qui changent de voie et qui dépassentsuivent un trajet de rayon inférieur au rayon debase.
Le coefficient de frottement au moment d’undérapage imminent dépend d’un certain nombrede facteurs dont les plus importants sont lavitesse du véhicule, le type et l’état de la surfacede roulement, le type et l’état des pneus.Différents observateurs ont noté diverses valeursmaximales à la même vitesse sur desrevêtements similaires, ce qui est tout à faitconséquent compte tenu des différences detexture du revêtement, des conditionsatmosphériques et de l’état des pneus. Lesrevêtements mouillés ou glacés offriront moinsde résistance au frottement que les revêtementssecs; la présence d’huile, de boue, de caout-chouc des pneus et de poussière contribueraégalement à réduire le frottement. Des étudesgénérales2 démontrent que le coefficient defrottement latéral maximal dans le cas du contactde pneus neufs sur une chaussée de bétonmouillée peut varier d’environ 0,5 à 30 km/h àenviron 0,35 à 100 km/h. La valeur est d’environ0,35 à 70 km/h pour des pneus usés sur unechaussée de béton mouillée. Dans tous les cas,les études démontrent que la valeur du frottementdiminue lorsque la vitesse augmente.
Les courbes ne sont pas conçues selon lecoefficient de frottement maximal disponible.
Pour fins de conception, la valeur maximale estcelle qui représente la fraction du frottementlatéral qui assure confort et sécurité à la majoritédes conducteurs. Les valeurs qui se rapportentaux revêtements lisses, ressuants et dépourvusde propriétés antidérapantes ne devraient passervir de base à la conception parce que ceséléments peuvent être évités et que la conceptiongéométrique s’appuie sur des caractéristiquesde chaussée acceptables que l’on peut obtenirà un coût raisonnable.
La force centripète qui agit vers le centre de lacourbe à la surface de la route génère au centrede gravité du véhicule une force centrifuge égalequi tend à le pousser vers l’extérieur de la courbe(figure 2.1.2.2). Ces forces égales et opposéescréent un moment qui tend à faire capoter levéhicule.
Le choix du coefficient de frottement maximaladmissible pour fins de conception dépend entreautres du seuil à partir duquel le moment decapotage est tel qu’il provoque chez leconducteur une sensation d’inconfort qui lepousse instinctivement à éviter les vitesses plusélevées. Ceci se produit aux vitesses plusélevées lorsque la force centripète requise pourmaintenir le véhicule dans la courbe provientsurtout du frottement latéral plutôt que du dévers,ce qui provoque une sensation d’inconfort chezle conducteur. La vitesse dans une courbe àlaquelle le conducteur perçoit l’inconfortattribuable au moment de capotage peut êtreretenue comme critère pour déterminer lecoefficient de frottement latéral maximaladmissible. À des vitesses de marche plusbasses et changeantes, caractéristiques dumilieu urbain, les conducteurs tolèrent davantagel’inconfort ce qui permet d’envisager l’utilisationde coefficients de frottement latéral plus élevésdans les courbes horizontales.
Figure 2.1.2.2 Moment de capotage dans une courbe1

Tracé en plan et aménagement des voies
Page 2.1.2.6 Septembre 1999
L’inclinomètre à bille est largement utilisé parles groupes de recherche, les organismes locauxet par les ministères des transports comme outilde mesure normalisé du seuil d’inconfort pourdéterminer les vitesses maximales de sécuritédans les courbes. L’appareil est constitué d’unebille d’acier dans un tube de verre hermétique.Le déplacement de la bille dans le tube estamorti par un liquide. La simplicité de fabricationet d’utilisation de l’appareil en a fait un outillargement accepté pour l’établissement desvitesses de sécurité. Lorsque ce dispositif estmonté sur un véhicule en mouvement, la mesurede l’inclinomètre est toujours indicative de l’effetcombiné de l’angle d’inclinaison du véhicule, del’angle de la force centrifuge et de l’angle dudévers.
La force centrifuge produite lorsque le véhiculese déplace à vitesse constante dans une courbepousse la bille à un angle fixe correspondant. Ilfaut apporter une correction à la mesure pourtenir compte de la partie de la force qui découledu petit angle d’inclinaison du véhicule.
Les résultats d’une série de tests36 ont démontréque la vitesse de sécurité dans une courbecorrespondait à une mesure à l’inclinomètre àbille de 14° pour des vitesses égales ouinférieures à 30 km/h, de 12° pour des vitessesde 40 à 50 km/h et de 10° pour des vitesses de55 à 80 km/h. Ces mesures correspondent àdes coefficients de frottement latéral de 0,21,0,18 et 0,15 respectivement pour les anglesd‘inclinaison du véhicule à l’essai et offrent unemarge de sécurité suffisante pour éviter ledérapage.
D’autres tests2 concluent à la recommandationd’un coefficient de frottement latéral maximal de0,16 pour des vitesses allant jusqu’à 100 km/h.Quant aux vitesses plus élevées, le coefficientdevait être réduit progressivement. Des étudesde vitesse2 sur le Pennsylvania Turnpike ontdémontré que le coefficient de frottement latéralne devrait pas dépasser 0,10 pour des vitessesde base égales ou supérieures à 110 km/h.
Les résultats de recherches récentes35 suggèrentque les valeurs des mesures à l’inclinomètrementionnées ci-dessus devraient êtreaugmentées pour mieux refléter la dynamiquedes véhicules d’aujourd’hui et les améliorationstechnologiques des pneus. Des mesures àl’inclinomètre à bille de 20° pour des vitessesinférieures à 50 km/h, de 16° pour des vitesses
de 50 à 65 km/h et de 12° pour des vitessessupérieures à 65 km/h correspondraient mieuxaux vitesses moyennes dans les courbes. Il fautnoter que d’autres facteurs influent sur la vitessedes conducteurs et la limitent lorsque lefrottement est élevé : les embardées deviennentvisibles, l’angle de dérive augmente et les effortsde braquage pour éviter d’empiéter sur une autrevoie sont plus marqués. Dans de tellesconditions, le champ de vision se rétrécit ets’accompagne d’un effort de concentration deplus en plus soutenu qui est jugé indésirablepar la plupart des conducteurs. Ces facteurs sontplus manifestes sur les routes dégagées.
Si possible, il faut choisir des valeurs maximalesdu coefficient de frottement qui demeurentprudentes pour un revêtement sec et qui offrentune marge de sécurité suffisante lorsque lachaussée est mouillée. La nécessité de prévoirune surface antidérapante dans pareillesconditions ne peut être surestimée, car en plusde la force de frottement engendrée par lagéométrie de la route, il faut souvent tenir comptedes forces liées au freinage, aux changementssubits de voie et aux petits changements dedirection dans la voie proprement dite. Lors deces brèves manœuvres, on n’atteint pas immé-diatement le seuil d’inconfort et en conséquence,un frottement plus important peut s’avérernécessaire mais ne pas être perçu à temps pourque le conducteur réduise sa vitesse à un rythmeconfortable.
Frottement latéral : éléments quantitatifs dudomaine de définition1
Le tableau 2.1.2.1 présente les valeurs defrottement latéral retenues pour les routes ruraleset à vitesse élevée en milieu urbain.
On admet généralement que sur les routes àvitesse réduite en milieu urbain (30 à 60 km/h),le seuil d’inconfort des conducteurs est plusélevé et ils supportent un frottement latéral plusimportant que sur les routes rurales ou urbainesà vitesse élevée (> 70 km/h). La force centripètequi produit l’accélération radiale provient engrande partie du frottement latéral et les valeursretenues pour la conception de rues à bassevitesse en milieu urbain sont plus élevées quecelles retenues pour les routes rurales et àvitesse élevée en milieu urbain. Ces valeurs sontétablies selon le niveau tolérable d’inconfort etoffrent une marge de sécurité raisonnable pourprévenir le dérapage dans des conditions

Guide canadien de conception géométrique des routes
Décembre 2011 Page 2.1.2.15
Figure 2.1.2.4 Rapports entre la vitesse, le rayon et le dévers sur les routes àvitesse réduite (<70 km/h) en milieu urbain1
rayo
n de
cou
rbe
(m)
dévers (m/m)
f 0,21
f 0,31
f 0,25
Remarque - Les coefficients de frottement latéral sont des valeurs maximales pour des routesà vitesse réduite (<70 km/h) en milieu urbain.
f 0,18
f 0,17
f 0,18
-0,02 -0,01 0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08
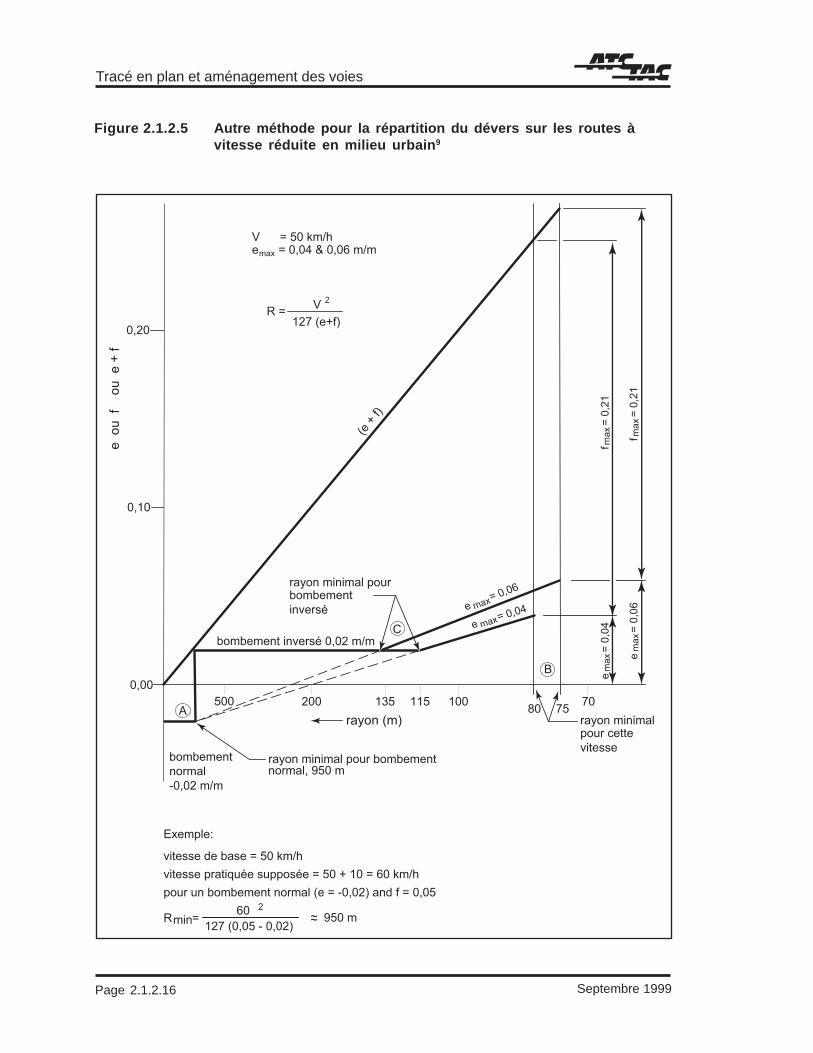
Tracé en plan et aménagement des voies
Septembre 1999Page 2.1.2.16
Figure 2.1.2.5 Autre méthode pour la répartition du dévers sur les routes àvitesse réduite en milieu urbain9
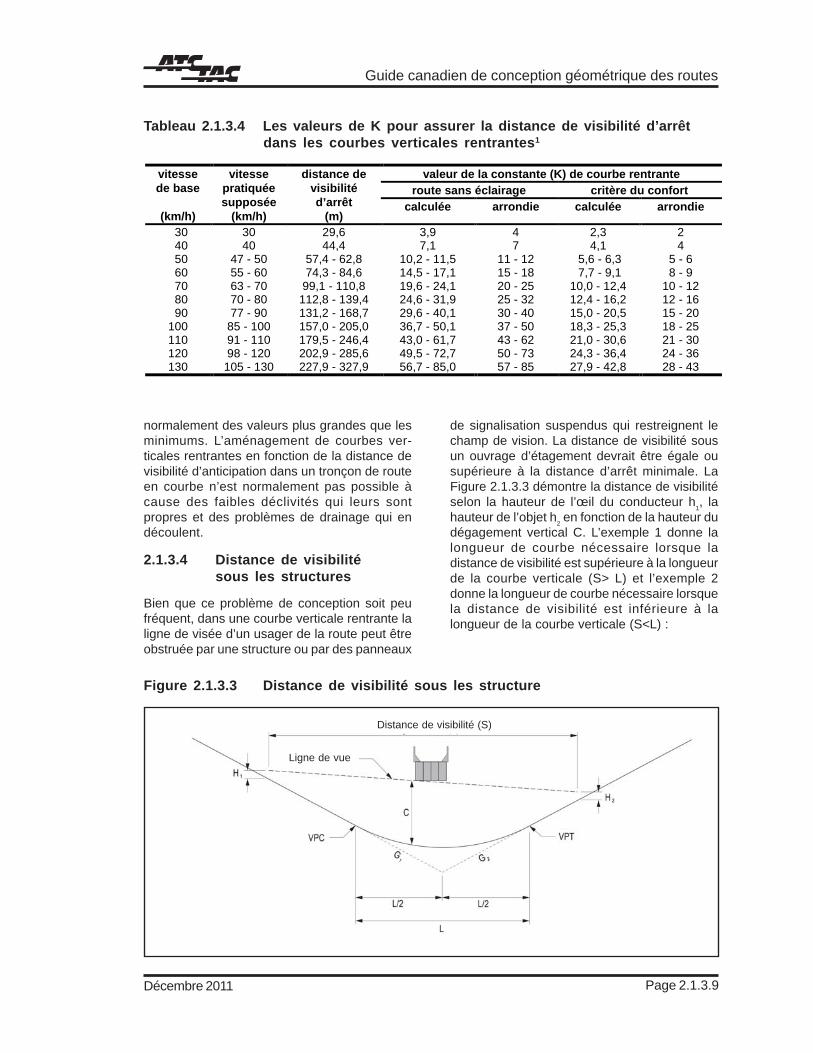
Guide canadien de conception géométrique des routes
Page 2.1.3.9Décembre 2011
normalement des valeurs plus grandes que lesminimums. L’aménagement de courbes ver-ticales rentrantes en fonction de la distance devisibilité d’anticipation dans un tronçon de routeen courbe n’est normalement pas possible àcause des faibles déclivités qui leurs sontpropres et des problèmes de drainage qui endécoulent.
2.1.3.4 Distance de visibilitésous les structures
Bien que ce problème de conception soit peufréquent, dans une courbe verticale rentrante laligne de visée d’un usager de la route peut êtreobstruée par une structure ou par des panneaux
de signalisation suspendus qui restreignent lechamp de vision. La distance de visibilité sousun ouvrage d’étagement devrait être égale ousupérieure à la distance d’arrêt minimale. LaFigure 2.1.3.3 démontre la distance de visibilitéselon la hauteur de l’œil du conducteur h1, lahauteur de l’objet h2 en fonction de la hauteur dudégagement vertical C. L’exemple 1 donne lalongueur de courbe nécessaire lorsque ladistance de visibilité est supérieure à la longueurde la courbe verticale (S> L) et l’exemple 2donne la longueur de courbe nécessaire lorsquela distance de visibilité est inférieure à lalongueur de la courbe verticale (S<L) :
Tableau 2.1.3.4 Les valeurs de K pour assurer la distance de visibilité d’arrêtdans les courbes verticales rentrantes1
valeur de la constante (K) de courbe rentrante route sans éclairage critère du confort
vitesse de base
(km/h)
vitesse pratiquée supposée
(km/h)
distance de visibilité d’arrêt
(m) calculée arrondie calculée arrondie
30 30 29,6 3,9 4 2,3 2 40 40 44,4 7,1 7 4,1 4 50 47 - 50 57,4 - 62,8 10,2 - 11,5 11 - 12 5,6 - 6,3 5 - 6 60 55 - 60 74,3 - 84,6 14,5 - 17,1 15 - 18 7,7 - 9,1 8 - 9 70 63 - 70 99,1 - 110,8 19,6 - 24,1 20 - 25 10,0 - 12,4 10 - 12 80 70 - 80 112,8 - 139,4 24,6 - 31,9 25 - 32 12,4 - 16,2 12 - 16 90 77 - 90 131,2 - 168,7 29,6 - 40,1 30 - 40 15,0 - 20,5 15 - 20 100 85 - 100 157,0 - 205,0 36,7 - 50,1 37 - 50 18,3 - 25,3 18 - 25 110 91 - 110 179,5 - 246,4 43,0 - 61,7 43 - 62 21,0 - 30,6 21 - 30 120 98 - 120 202,9 - 285,6 49,5 - 72,7 50 - 73 24,3 - 36,4 24 - 36 130 105 - 130 227,9 - 327,9 56,7 - 85,0 57 - 85 27,9 - 42,8 28 - 43
Figure 2.1.3.3 Distance de visibilité sous les structure
Distance de visibilité (S)
Ligne de vue
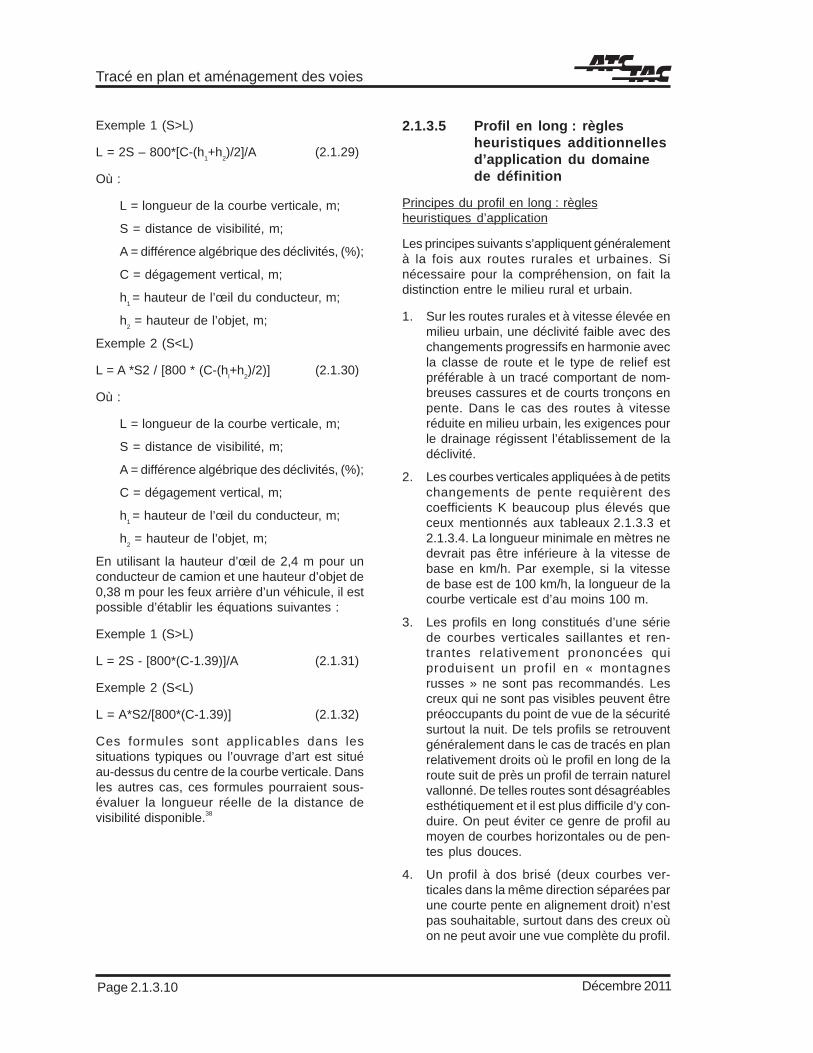
Tracé en plan et aménagement des voies
Page 2.1.3.10 Décembre 2011
Exemple 1 (S>L)
L = 2S – 800*[C-(h1+h
2)/2]/A (2.1.29)
Où :
L = longueur de la courbe verticale, m;
S = distance de visibilité, m;
A = différence algébrique des déclivités, (%);
C = dégagement vertical, m;
h1 = hauteur de l’œil du conducteur, m;
h2 = hauteur de l’objet, m;
Exemple 2 (S<L)
L = A *S2 / [800 * (C-(hl+h2)/2)] (2.1.30)
Où :
L = longueur de la courbe verticale, m;
S = distance de visibilité, m;
A = différence algébrique des déclivités, (%);
C = dégagement vertical, m;
h1 = hauteur de l’œil du conducteur, m;
h2 = hauteur de l’objet, m;
En utilisant la hauteur d’œil de 2,4 m pour unconducteur de camion et une hauteur d’objet de0,38 m pour les feux arrière d’un véhicule, il estpossible d’établir les équations suivantes :
Exemple 1 (S>L)
L = 2S - [800*(C-1.39)]/A (2.1.31)
Exemple 2 (S<L)
L = A*S2/[800*(C-1.39)] (2.1.32)
Ces formules sont applicables dans lessituations typiques ou l’ouvrage d’art est situéau-dessus du centre de la courbe verticale. Dansles autres cas, ces formules pourraient sous-évaluer la longueur réelle de la distance devisibilité disponible.38
2.1.3.5 Profil en long : règlesheuristiques additionnellesd’application du domainede définition
Principes du profil en long : règlesheuristiques d’application
Les principes suivants s’appliquent généralementà la fois aux routes rurales et urbaines. Sinécessaire pour la compréhension, on fait ladistinction entre le milieu rural et urbain.
1. Sur les routes rurales et à vitesse élevée enmilieu urbain, une déclivité faible avec deschangements progressifs en harmonie avecla classe de route et le type de relief estpréférable à un tracé comportant de nom-breuses cassures et de courts tronçons enpente. Dans le cas des routes à vitesseréduite en milieu urbain, les exigences pourle drainage régissent l’établissement de ladéclivité.
2. Les courbes verticales appliquées à de petitschangements de pente requièrent descoefficients K beaucoup plus élevés queceux mentionnés aux tableaux 2.1.3.3 et2.1.3.4. La longueur minimale en mètres nedevrait pas être inférieure à la vitesse debase en km/h. Par exemple, si la vitessede base est de 100 km/h, la longueur de lacourbe verticale est d’au moins 100 m.
3. Les profils en long constitués d’une sériede courbes verticales saillantes et ren-trantes relativement prononcées quiproduisent un profil en « montagnesrusses » ne sont pas recommandés. Lescreux qui ne sont pas visibles peuvent êtrepréoccupants du point de vue de la sécuritésurtout la nuit. De tels profils se retrouventgénéralement dans le cas de tracés en planrelativement droits où le profil en long de laroute suit de près un profil de terrain naturelvallonné. De telles routes sont désagréablesesthétiquement et il est plus difficile d’y con-duire. On peut éviter ce genre de profil aumoyen de courbes horizontales ou de pen-tes plus douces.
4. Un profil à dos brisé (deux courbes ver-ticales dans la même direction séparées parune courte pente en alignement droit) n’estpas souhaitable, surtout dans des creux oùon ne peut avoir une vue complète du profil.

Guide canadien de conception géométrique des routes
Page 2.1.3.11Décembre 2011
Cet effet est très visible sur les routes àchaussées séparées avec terre-plein centralouvert.
5. Dans la mesure où la distance de visibilitérequise est respectée, des courbes dont lavaleur de la constante K diffère (de courburedu même sens ou de sens opposé) peuventêtre aménagées l’une à la suite de l’autresans alignement droit entre les deux.
6. Un carrefour plan situé sur une route dontla pente va de modérée à élevée devraitidéalement avoir une déclivité réduite,idéalement moins de 3 %, sur toute sonétendue. Un tel changement de profil estpréférable pour les véhicules qui font unvirage ou qui s’arrêtent et permet de réduireles dangers possibles.
7. La déclivité longitudinale minimalesouhaitable des tronçons avec bordures estde 0,5 %. Dans les zones de gradation dudévers, il est parfois à toute fin pratiqueimpossible de respecter cette déclivitéminimale. Dans ce cas, le tronçon dedéclivité longitudinale inférieure à 0,5 %devrait être aussi court que possible. Lasous-section 2.1.3.2 fournit des rensei-gnements additionnels sur les déclivitésminimales et le drainage.
8. On doit accorder une attention particulièreà la gradation du dévers dans une courbeverticale afin de s’assurer du maintien de lacourbure minimale requise sur toute lalargeur du revêtement. Le profil du bord derevêtement opposé au bord utilisé pour larotation peut avoir une courbure plusprononcée à cause du changement du tauxde dévers requis pour la transition. Il fautdonc vérifier le profil des deux bords dechaussée et les ajuster pour maintenir lacourbure verticale minimale.
9. Dans le cas des profils onduleux, avec deslongueurs de pente descendante impor-tantes, il faut faire un examen attentif ducomportement des conducteurs. De telsprofils permettent aux camions lourds decirculer à des vitesses dans l’ensemble plusélevées qu’il n’est possible de le faire lors-qu’une pente montante n’est pas précédéed’une pente descendante. Cependant, cecipourrait être source d’excès de vitesse descamions et des conflits avec les autresvéhicules qui peuvent en résulter.
10. Dans de très longues pentes, il peut êtrepréférable de situer au bas de celles-ci lesegment dont la déclivité est la plus impor-tante et de réduire la déclivité près du hautde la montée ou d’interrompre les pentescontinues au moyen de courts segmentsde déclivité moindre au lieu de conserverune déclivité uniforme qui ne serait quelégèrement inférieure au maximum théo-rique. Cette disposition s’applique notam-ment dans le cas des routes et des rues àvitesse de base réduite.2
11. Pour assurer un profil régulier sur les routesà vitesse élevée, il faut un espacementminimal de 300 m entre les points d’inter-section verticaux.
12. L’aménagement d’un profil en long ne doitpas se faire isolément mais doit êtrecoordonné avec le tracé en plan. La section2.1.4 traite de cet aspect.
Drainage : règles heuristiques d’application
1. Là où il n’y a pas de bordure et où le drainagese fait au moyen de fossés, il n’y a pas delimite minimale à la déclivité ou de limitesupérieure aux courbes verticales.
2. Dans le cas de chaussées avec borduresoù l’écoulement de l’eau de pluie se fait dansles caniveaux jusqu’aux puisards, les exigen-ces en matière de drainage ont une influencesur le profil en long. La sous-section 2.1.3.2traite des déclivités minimales.
3. Le profil des conduites d’égout pluvial exis-tantes ou projetées est un point importantà considérer dans l’établissement de ladéclivité d’une route en milieu urbain. Lesconduites d’égout pluvial sont généralementenfouies à une profondeur minimale pour pré-venir le gel. Ces exigences sont à considérerdans l’établissement du niveau des puisards.
4. Les stations de pompage peuvent être uneautre solution là où le système d’égout plu-vial n’est pas suffisamment profond pour ledrainage des rues par gravité. Cependant,les stations de pompage ne sont généra-lement pas souhaitables à cause des coûtsélevés d’installation, d’exploitation et d’en-tretien. Les pannes d’une station de pom-page durant de fortes pluies peuvent aussiavoir un effet néfaste sur le réseau de rueset sur les propriétés riveraines.

Tracé en plan et aménagement des voies
Page 2.1.3.12 Décembre 2011
5. Dans les courbes saillantes et rentrantestrès douces, l’écoulement de l’eau de pluiepeut être assez lent pour que l’eau se répan-de dans la voie de circulation adjacente. Il ya un point au sommet d’une courbe verticaleoù la pente est nulle. Cependant, en général,le drainage des revêtements avec borduresse fait sans difficulté si la courbe est assezprononcée pour atteindre la pente minimalede 0,35 % à environ 15 m du sommet. Cecicorrespond à une valeur de la constante Kde 43. Lorsque la valeur de K d’une courbesaillante est plus grande que 43, desinstallations supplémentaires (par exemple,des puisards à intervalles plus courts) sontrequises pour assurer un drainage adéquatdu revêtement près du sommet de la courbe.
6. Ce principe s’applique aussi aux courbesrentrantes, c’est-à-dire qu’une déclivité mini-male de 0,35 % est atteinte en moins de15 m du point de pente nulle. Les courbesverticales rentrantes se retrouvent norma-lement dans des tronçons en remblai. Règlegénérale, les courbes rentrantes devraientêtre évitées dans les tronçons en déblai pouréviter des problèmes inhabituels et coûteuxde drainage.
7. L’aménagement du caniveau avec une penteplus prononcée pour assurer un meilleurdrainage est une pratique courante de con-ception et fait l’objet d’une description plusdétaillée à la sous-section 2.1.5.3.
8. Les longues spirales sur des pentes faiblessont également à éviter puisqu’elles peuventengendrer des surfaces planes où le drai-nage est inefficace.
9. Les ponts en courbe rentrante doivent êtreévités dans la mesure du possible puisqu’ilsont tendance à geler plus vite et que l’eaude pluie tend à s’accumuler dans ces cour-bes.
Neige : règles heuristiques d’application
1. L’accumulation de neige sur les chausséesdans les régions de fortes précipitations peutprésenter un grave danger pour la circulation.
2. Lorsque le vent dominant au cours d’unetempête est latéral, la neige a tendance às’accumuler dans les tronçons en déblai etdans d’autres endroits en dépression. Enpareil cas, on peut améliorer de beaucoupla situation en prévoyant un profil en remblai
plutôt qu’en déblai. Il est préférable de fixerle profil de 0,7 à 1,0 m au-dessus du terrainadjacent.
3. Lorsque ce n’est pas possible pour d’autresraisons, la pente du talus doit être réduite à7:1 ou moins pour éviter l’accumulation deneige; d’autres éléments du profil en traverscomme les arbres et autres obstaclespouvant servir d’écran devraient être con-sidérés.
4. Les routes avec terrain découvert du côtéau vent sont exposées aux rafales de neigequi peuvent rendre la visibilité nulle et menerà l’accumulation de gros bancs de neigedéblayée. Dans ces circonstances, on préfé-rera un autre tracé en plan qui abritera laroute. Les boisés et des éléments parti-culiers du relief peuvent servir d’écran. Uneétude au moyen de modèles à échelle ré-duite de l’accumulation de la neige peutservir à choisir le meilleur tracé.
Carrefours et voies d’accès : règlesheuristiques d’application
1. Les carrefours sont des endroits de conflitset de dangers potentiels. Idéalement, la dé-clivité des routes qui se croisent permet auxconducteurs de déterminer les manœuvresà faire pour traverser le carrefour en sécuritéet avec un minimum d’interférence entre lesvéhicules. À cet égard, des déclivités aussifaibles que possible sont préférables.
2. Aux carrefours, on doit éviter la combinaisonde déclivités qui rend difficile la maîtrise desvéhicules. Le profil en long au travers descarrefours doit tenir compte des arrêts etdes départs des véhicules et doit favoriserles principaux flux de circulation.
3. Il est souhaitable mais pas toujours possibled’éviter d’importants changements de dé-clivité aux intersections. Une distance devisibilité adéquate est requise le long desdeux routes et aux coins de celles-ci.
4. À tous les carrefours pourvus de panneauxd’arrêt ou « Cédez le passage », la déclivitéde la route secondaire devrait être la plusfaible possible là où les véhicules devronts’arrêter. Cependant, il est souhaitable deprévoir une déclivité minimale de 1 % pourpermettre la réduction de la pente trans-versale sans nuire au drainage. La réductionde la pente transversale d’une route à environ

Guide canadien de conception géométrique des routes
Page 2.1.3.13Décembre 2011
1 % est souvent utile pour éviter les change-ments abrupts de pente à l’intersection deschaussées. On traite de cet aspect plus endétail au chapitre 2.3. La chaussée aux car-refours contrôlés par feux de circulation ouqui pourraient l’être éventuellement est géné-ralement plate.
5. Bien des conducteurs sont incapables d’éva-luer l’augmentation ou la diminution des dis-tances d’arrêt ou d’accélération qui résultentde pentes raides. Leurs réactions et leur ju-gement habituels peuvent donc être faussésà un moment critique. Par conséquent, lesroutes qui se croisent auront dans la mesuredu possible une déclivité inférieure à 3 %.
6. La déclivité et les profils en travers des bran-ches d’un carrefour sont ajustés pour quela jonction soit régulière et le drainageadéquat. Normalement, la déclivité de laroute principale n’est pas modifiée aucarrefour et celle de la route qui la croiseest ajustée en conséquence. Il faut doncprévoir une transition entre le bombementde la chaussée de la route secondaire etun profil en travers incliné au point dejonction avec la route principale. La transitiond’une pente transversale à une autre estgraduelle.
7. Il faut éviter l’intersection d’une route secon-daire et d’une route à chaussées séparéesavec terre-plein étroit et courbe en dévers àcause de la difficulté d’ajuster les niveauxpour un croisement convenable. Les niveauxd’une chaussée de raccordement séparéesont établis de manière à assurer l’ajus-tement aux pentes transversales et auxdéclivités des branches du carrefour.
8. Le profil en long d’une nouvelle rue estnormalement établi en tenant compte de ladéclivité des voies d’accès existantes etpossibles dans l’avenir. Pour les rues loca-les, on accorde beaucoup d’importance àl’ajustement du profil de la rue de façon àassurer des déclivités souhaitables pour lesvoies d’accès. Pour les classes de rues plusélevées, on met davantage l’accent sur laconception des éléments de la chausséeavec moins d’importance accordée à la dé-clivité des voies d’accès. La pente trans-versale d’une chaussée est rarement adap-tée aux déclivités des voies d’accès, àmoins que cette voie d’accès desserve de
forts débits de circulation; en pareil cas, leslignes directrices pour les ajustements dela pente transversale applicables aux in-tersections peuvent être appropriées.
9. En cas de réhabilitation, l’ajustement despropriétés privées est souvent nécessairepour assurer un profil adéquat à la fois pourla rue et la voie d’accès.
Dégagement vertical : règles heuristiquesd’application
Routes
1. Les exigences à l’égard du dégagement ver-tical varient selon les provinces et les admi-nistrations locales.
2. Le dégagement vertical pour les routeslocales et les routes interdites aux camionspeut être inférieur à ce qui est requis pourle reste du réseau routier.
3. Le dégagement vertical minimal mesuréentre la surface de la chaussée et le des-sous de la structure s’applique à toute lalargeur de la route, incluant les accote-ments.
4. Le dégagement vertical minimal des pontsroutiers doit être de 5,0 m au-dessus desvoies de circulation et des accotements.
5. En définissant le profil de chaussée sousun pont, les concepteurs devraient consi-dérer une augmentation du dégagementvertical de 100 à 200 mm au-delà duminimum pour tenir compte de la poseéventuelle de nouvelles couches derevêtement.
6. Pour tenir compte des remorques avec delongs empattements, un dégagement verti-cal additionnel est à considérer lorsque l’onutilise des courbes verticales rentrantes mi-nimales pour les passages inférieurs auxétagements.
7. Dans le cas de routes où l’on refait la surfaceou qui sont reconstruites, le dégagementminimal sous un ouvrage d’art est de4,5 m. Lorsque le dégagement vertical sousun pont est au minimum et que la surfacede la chaussée doit être reconstruite, lasurface est normalement meulée etremplacée au lieu d’être recouverte.
Tracé en plan et aménagement des voies
Page 2.1.3.14 Décembre 2011
Chemins de fer
1. Le dégagement vertical minimal au-dessusde voies ferrées est de 6,858 m (22,5 pieds)mesuré à partir de la base du rail.
2. Le dégagement vertical minimal où l’onprévoit rehausser le niveau du ballast estde 7,163 m (23,5 pieds) mesuré entre labase du rail et le dessous de l’ouvrage d’art.
3. Dans tous les cas, il est de bonne pratiquede confirmer les exigences spécifiques ence qui a trait aux dégagements auprès descompagnies de chemin de fer de mêmequ’auprès des organisations fédérales etprovinciales appropriées avant de terminerla conception du projet.
Services publics aériens
1. Les exigences en ce qui a trait audégagement vertical sous des câbles desservices publics varient selon les différentesorganisations. Dans le cas des lignes detransmission électriques, le dégagementvarie selon la tension. Dans tous les cas,on devrait s’assurer des exigences enmatière de dégagement vertical auprès del’organisation concernée.
Passages supérieurs pour piétons
1. Normalement, le dégagement verticalminimal pour un passage supérieur pourpiétons est fixé à 5,3 m, soit 0,3 m de plusque le dégagement d’un passage supérieurpour véhicules le long de la même route.On réduit ainsi la probabilité que cet ouvraged’art soit frappé par une charge horsnormes, un aspect important compte tenude la légèreté relative de ce type d’ouvraged’art qui l’empêche généralementd’absorber un choc important et qui est doncplus susceptible de s’écrouler. Ledégagement vertical accru réduit laprobabilité de dommages à l’ouvrage d’artet améliore la sécurité des piétons quiutilisent le passage.
Voies cyclables et trottoirs
1. Pour les voies cyclables, le dégagementvertical minimal est de 2,5 m.
2. Il est souhaitable de prévoir jusqu’à 3,6 mde dégagement vertical pour assurer unprojet de meilleure qualité et permettrel’accès aux véhicules de service.
3. On prévoit normalement des dégagementsverticaux semblables pour les trottoirspuisque les cyclistes peuvent à l’occasionles utiliser même si ce n’est pas permis.
4. S’il peut être clairement établi que lescyclistes n’utiliseront pas le trottoir réservéaux piétons, on pourra utiliser les déga-gements minimaux selon les codes dubâtiment national ou des provinces.
5. Les chapitres 2.2, 3.3 et 3.4 donnent plusde renseignements sur le trottoir et les voiescyclables.
Cours d’eau
1. Dans le cas de ponts et de ponceaux àsemelle ouverte au-dessus de cours d’eaunon navigables, le dégagement vertical entrele point le plus bas du dessous de l’ouvraged’art et le niveau de base des hautes eauxsera suffisant pour empêcher tout dommageà l’ouvrage par l’écoulement de l’eau, lepassage des plaques de glace, les embâcleset les débris.
2. Pour les voies navigables, le dégagementdépend du type de bateaux qui utilisent lavoie navigable et doit être établi au cas parcas.
3. Les dégagements devaient également êtreconformes aux exigences de la Loi sur laprotection des eaux navigables.
Espace aérien
1. La figure 2.1.3.3 précise les dégagementsdes surfaces de limitation d’obstacles del’espace aérien.
2. Les poteaux d’éclairage doivent demeurersous la surface de limitation d’obstacles.
3. Les dimensions présentées ne servent qu’àla conception préliminaire. Les dimensionsspécifiques doivent être approuvées par lesreprésentants désignés de TransportsCanada.
2.1.3.6 Examen formel des aspectsde sécurité
Généralités
La conception du profil en long a une influenceimportante sur la sécurité là où les véhiculesdoivent s’arrêter et repartir fréquemment. Lespentes excessives aux carrefours et aux voies
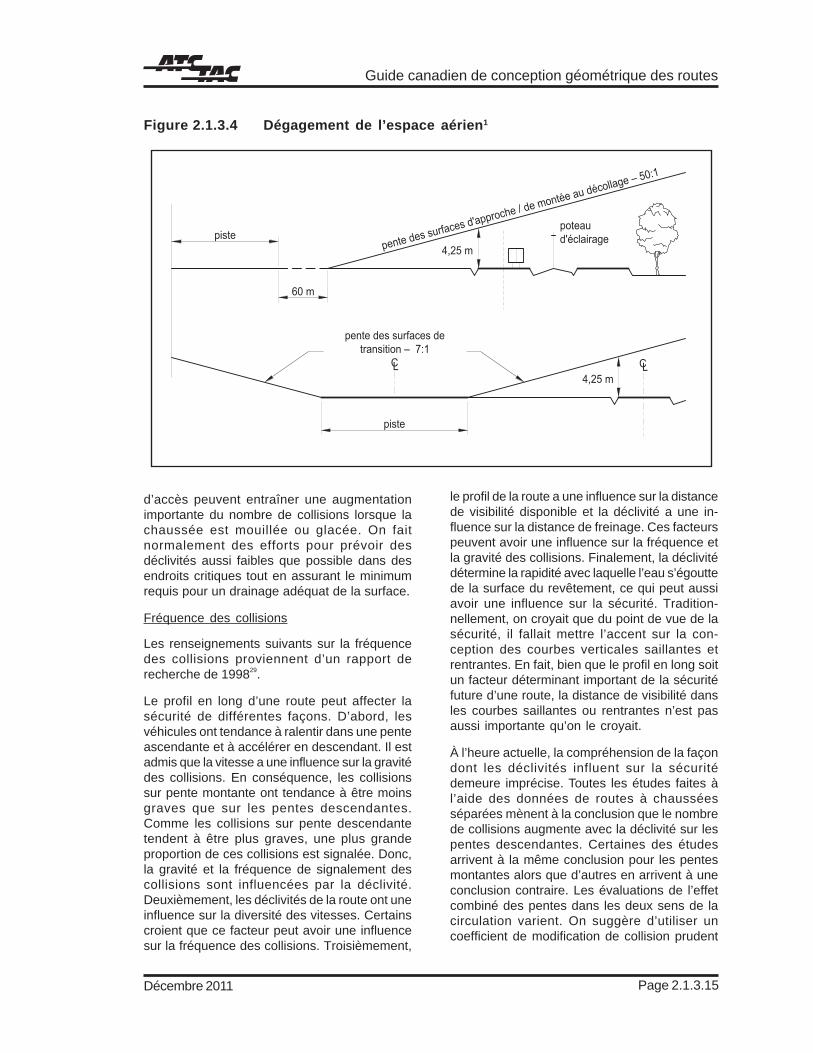
Guide canadien de conception géométrique des routes
Page 2.1.3.15Décembre 2011
d’accès peuvent entraîner une augmentationimportante du nombre de collisions lorsque lachaussée est mouillée ou glacée. On faitnormalement des efforts pour prévoir desdéclivités aussi faibles que possible dans desendroits critiques tout en assurant le minimumrequis pour un drainage adéquat de la surface.
Fréquence des collisions
Les renseignements suivants sur la fréquencedes collisions proviennent d’un rapport derecherche de 199829.
Le profil en long d’une route peut affecter lasécurité de différentes façons. D’abord, lesvéhicules ont tendance à ralentir dans une penteascendante et à accélérer en descendant. Il estadmis que la vitesse a une influence sur la gravitédes collisions. En conséquence, les collisionssur pente montante ont tendance à être moinsgraves que sur les pentes descendantes.Comme les collisions sur pente descendantetendent à être plus graves, une plus grandeproportion de ces collisions est signalée. Donc,la gravité et la fréquence de signalement descollisions sont influencées par la déclivité.Deuxièmement, les déclivités de la route ont uneinfluence sur la diversité des vitesses. Certainscroient que ce facteur peut avoir une influencesur la fréquence des collisions. Troisièmement,
Figure 2.1.3.4 Dégagement de l’espace aérien1
le profil de la route a une influence sur la distancede visibilité disponible et la déclivité a une in-fluence sur la distance de freinage. Ces facteurspeuvent avoir une influence sur la fréquence etla gravité des collisions. Finalement, la déclivitédétermine la rapidité avec laquelle l’eau s’égouttede la surface du revêtement, ce qui peut aussiavoir une influence sur la sécurité. Tradition-nellement, on croyait que du point de vue de lasécurité, il fallait mettre l’accent sur la con-ception des courbes verticales saillantes etrentrantes. En fait, bien que le profil en long soitun facteur déterminant important de la sécuritéfuture d’une route, la distance de visibilité dansles courbes saillantes ou rentrantes n’est pasaussi importante qu’on le croyait.
À l’heure actuelle, la compréhension de la façondont les déclivités influent sur la sécuritédemeure imprécise. Toutes les études faites àl’aide des données de routes à chausséesséparées mènent à la conclusion que le nombrede collisions augmente avec la déclivité sur lespentes descendantes. Certaines des étudesarrivent à la même conclusion pour les pentesmontantes alors que d’autres en arrivent à uneconclusion contraire. Les évaluations de l’effetcombiné des pentes dans les deux sens de lacirculation varient. On suggère d’utiliser uncoefficient de modification de collision prudent

Tracé en plan et aménagement des voies
Page 2.1.3.16 Décembre 2011
de 1,08 pour toutes les routes. C’est-à-dire, sila déclivité d’un tronçon de route est modifiéepar Δg, la fréquence des collisions sur ce tronçonchange par un facteur de 1, 08Δg. Ainsi, uneaugmentation de la déclivité de disons 2,0% à 2,5 % aurait comme effet d’augmenter lafréquence de collisions par un facteur de 1,080,5
= 1,04.
Les chercheurs tentaient de démontrer unedétérioration de la sécurité au sommet des cour-bes saillantes et ont découvert que pour desdistances de visibilité supérieures à environ100 m, il n’y a pas de raison de s’inquiéter àmoins qu’il n’y ait un carrefour ou autre élémentsemblable près du sommet de la courbe où ladistance de visibilité est limitée.
Dans la documentation technique, on laissesouvent entendre qu’il y a une interaction impor-tante entre la déclivité et la courbure. Il est vrai
que les pentes descendantes provoquent uneaugmentation des collisions à cause de l’aug-mentation de la vitesse et il est également vraique des courbes horizontales de petits rayonssont des facteurs causals de collision à causede la grande réduction de vitesse requise àl’entrée de la courbe. La documentation necontient pas de preuve à l’effet que lorsqu’il y acourbe horizontale dans une pente descendante,la fréquence de collisions augmente plus quece qui est attribuable à la somme des consé-quences de la pente descendante et de la cour-be horizontale. Il y a toutefois indication d’unnombre inhabituel de collisions lorsqu’une cour-be vers la droite suit une pente montante,nombre probablement attribuable aux limites dela distance de visibilité. Il y a également indi-cation d’un nombre inhabituel de véhicules quiquittent la route lorsqu’une courbe vers la gauchesuit une pente descendante.
Guide canadien de conception géométrique des routes
Page 2.1.R.1Décembre 2011
RÉFÉRENCESBIBLIOGRAPHIQUES
1. ATC. Geometric Design Guide for CanadianRoads, Ottawa, 1986.
2. AASHTO. A Policy on Geometric Design ofRoadways and Streets, Washington, D.C.,1994.
3. MINISTÈRE DES TRANSPORTS DEL’ONTARIO. Roadside Safety Manual, 1993.
4. MINISTÈRE DES TRANSPORTS DE LACOLOMBIE-BRITANNIQUE. RoadwayEngineering Design Manual, 1995.
5. NCHRP. Truck Escape Ramps, Synthesis178. TRB, Washington, D.C., 1992.
6. MINISTÈRE DES TRANSPORTS ET DESROUTES DE LA SASKATCHEWAN.Roadway Design Manual, 1998.
7. MINISTÈRE DES TRANSPORTS ET DESSERVICES PUBLICS DE L’ALBERTA.Alberta Roadway Geometric Design Guide,1995.
8. MINISTÈRE DES TRANSPORTS DEL’ONTARIO. Geometric Design Standardsfor Ontario Roadways, 1994.
9. ATC. Urban Supplement to the GeometricDesign Guide for Canadian Roads. Ottawa,1995.
10. ZEGEER, C.V. et autres. Safety Effects ofGeometric Improvements on HorizontalCurves, TRR 1356, TRB, Washington, D.C.,1992.
11. EEK, R.W. et S.K. LANG. Roadway DesignStandards to Accommodate Low ClearanceVehicles, TRR 1356, TRB, Washington,D.C., 1992.
12. SMITH et LAM. Coordination of Horizontaland Vertical Alignment with Regard toRoadway Aesthetics, TRR 1445, TRB,Washington, D.C., 1994.
13. TRB. Recent Developments in Rural RoadDesign in Australia, TRR 1055, TRB,Washington, D.C., 1986.
14. SANDERSON, R. W. « The Need for CostEffective Guidelines to Enhance TruckSafety », Compte rendu du congrès de 1996de l’ATC, Charlottetown, Î.-P.-É.
15. MAK ENGINEERING. Design Practise &Highway Aesthetics, Vancouver, C.-B.,1994.
16. MAK ENGINEERING. Relationship betweenMinimum Radius, Maximum Grade andSuperelevation, Vancouver, C.-B., 1995.
17. AUSTROADS. Guide to the GeometricDesign of Rural Roads, Australie, 1989.
18. ABDELWAHAB, W.E. et J. MORRALL.« Determination of the Need for and Locationof Truck Escape Ramps », Compte rendudu congrès de 1996 de l’ATC, Charlottetown,Î.-P.-É.
19. MINISTÈRE DES TRANSPORTS ET DESROUTES DE LA COLOMBIE-BRITAN-NIQUE. Slow Moving Vehicle Pullouts.Technical Bulletin DS97001, Victoria, B.C.,1997.
20. MINISTÈRE DES TRANSPORTS ET DESROUTES DE LA COLOMBIE-BRITAN-NIQUE. Climbing Lane Warrants & Design.Technical Bulletin DS97002, Victoria, B.C.,1997.
21. MINISTÈRE DES TRANSPORTS ET DESROUTES DE LA COLOMBIE-BRITAN-NIQUE. Passing Lane Warrants & Design.Technical Bulletin DS97003, 1997.
22. MORRALL J., E. MILLER JR., G.A. SMITH,J. FEUERSTEIN et F. YAZDEN. « Planningand Design of Passing Lanes UsingSimulation Model », Journal ofTransportation Engineering, Vol. 121,No. 1, ASCE, Reston, VA, 1995.
23. HARWOOD D.W. Relationship BetweenOperational and Safety Considerations inGeometric Design Improvements. TRR1512, TRB, Washington, D.C., 1995.
24. MORRALL J. « An Inventory of CanadianProcedures for the Determination of theNeed and Location of Passing Lanes andtheir Impact on the Level of Service on Two-Lane Highways », Compte rendu dutroisième symposium international sur lacapacité des routes, Direction des routes,Ministère des Transports, Danemark, 1998.
25. HARWOOD, D.W. et autres. TruckCharacteristics for Use in Roadway Designand Operations. FHWA-RD-89-226 et 227,Washington, D.C., 1990.
Tracé en plan et configuration des voies
Page 2.1.R.2 Décembre 2011
26. HARWOOD et ST. JOHN. Report No.FHWA-RD-85/028, Federal HighwayAdministration, Washington, D.C., 1985.
27. MINISTÈRE DES TRANSPORTS ET DESCOMMUNICATIONS DE L’ONTARIO.Development of Passing Lane Criteria,1975.
28. HAUER, E. « Literature Review andAnalysis on Collision Rates on HorizontalAlignment », Université de Toronto, 1998.
29. HAUER, E. « Literature Review andAnalysis on Collision Rates on VerticalAlignment », Université de Toronto, 1998.
30. HAUER, E. « Literature Review andAnalysis on Collision Rates for TruckClimbing and Passing Lanes », Universitéde Toronto, 1998.
31. MINISTÈRE DES TRANSPORTS ET DESCOMMUNICATIONS DE L’ONTARIO.Highway Geometrics (Horizontal), SI(Métrique), 1974.
32. HARWOOD, D.W., C. J. HOBAN et D.WARREN. « Effective Use of PassingLanes on Two-Lane Highways », TRB,Washington, D.C., 1988.
33. ATC, Metric Curve Tables, Ottawa, 1977.
34. ATC. Manuel canadien de la signalisationroutière. Ottawa, 1998.
35. CHOWDURY, M.A. et autres. « Evaluationof Criteria for Setting Advisory Speeds onCurves », TRB, Washington, D.C., 1998.
36. MOYER et BERRY [1940]. Dans AASHTO,A Policy on Geometric Design of Roadwaysand Streets, Washington, D.C., 1994.
37. GLENNON, J.C. « An Evaluation of DesignCriteria for Operating Trucks Safely onGrades », Highway Research Record 312,Texas Transportation Institute, Texas A&MUniversity, 1970.
38. S.M. EEAS, Improved Sight Distance Modelfor Sag Vertical Curves with Overpasses,88th TRB Annual Assembly, January 2009.

Guide canadien de conception géométrique des routes
Page 2.2.2.3Décembre 2011
9. Sur les autoroutes où la circulation descamions est interdite dans la voie du centre,la largeur de cette voie peut être de 3,5 m.
2.2.2.2 Évaluation explicite de lasécurité
Largeur de voie
Le rapport entre la sécurité et la largeur des voiesest double.
1. Plus les voies sont larges, plus l’écart entreles véhicules qui circulent dans des voiesadjacentes sera grand. Il constitue alors unespace libre plus grand pour tenir comptedes déviations de trajectoire aléatoires desvéhicules. Sur des routes par ailleurs iden-tiques, les conducteurs sur la route qui ales voies les plus larges peuvent être incitésà circuler plus vite et à suivre de plus prèsun véhicule qui précède.3
2. Une voie plus large peut offrir plus d’espacepour corriger lorsqu’on frôle la collision. Parexemple, un moment d’inattention peut faireen sorte qu’un véhicule s’engage sur unaccotement de gravier. Dans les mêmesconditions, si la voie de circulation est pluslarge et que l’accotement est revêtu, le brefmoment d’inattention du conducteur peutavoir des conséquences moins graves.
Bien qu’une grande quantité de donnéesempiriques à l’égard de la relation entre la largeurdes voies et la sécurité ait été accumulée aucours de plusieurs décennies, la majeure partiedes résultats de recherche disponibles concerneles routes rurales à deux voies. On n'en connaîtpas beaucoup sur les effets de la largeur desvoies de routes urbaines à voies multiples. Laprincipale difficulté des chercheurs dans l’éva-luation de la relation entre la largeur des voieset la sécurité découle du nombre de variablesdes données statistiques. Ces variables com-
prennent la largeur des voies, la largeur de l’acco-tement, la nature de la surface de l’accotement,la hauteur du bord du revêtement et d’autresfacteurs. En général, on conclut qu’une voie pluslarge assure une plus grande sécurité qu’unevoie plus étroite. Cependant, les données empi-riques indiquent qu’il y a peu d’avantages dupoint de vue de la sécurité à élargir les voies au-delà de 3,3 m et que l’élargissement au-delà de3,7 m peut nuire à la sécurité (sauf pour l’élargis-sement des voies dans les courbes et le reculminimal de la bordure).
La figure 2.2.2.1 montre la relation entre lenombre de collisions frontales et de véhiculesseuls et la largeur des voies pour le débit jour-nalier moyen annuel (DJMA) donné.
Pour illustrer l’utilisation de la figure 2.2.2.1, sup-posons que le concepteur souhaite déterminerl’effet d’utiliser une voie de 3,05 m au lieu de3,65 m pour une route rurale. Le DJMA de laroute est de 1500 véhicules par jour. Le coef-ficient de modification du nombre de collisionspour une voie de 3,65 m est de 1,00 alors que lemême coefficient pour une voie de 3,05 m estégal à 1,02 + (1,30 –1,02)(1500 - 400)/(2000 - 400), ou 1,21. Ceci signifie que le concepteurpeut s’attendre à 21 % de plus de collisions devéhicules seuls ou frontales si des voies de3,05 m au lieu de 3,65 m sont utilisées.
Bandes rugueuses médianes : meilleurespratiques 19, 20
Sur les routes rurales à deux voies et les routesmulti-voies urbaines et rurales, les bandesrugueuses médianes peuvent être un moyen àfaible coût de réduire le nombre de collisionsfrontales et de collisions latérales impliquant desvéhicules circulant en sens opposé. Se référerà la figure 2.2.4.2 pour les dimensions typiquesdes bandes rugueuses latérales.
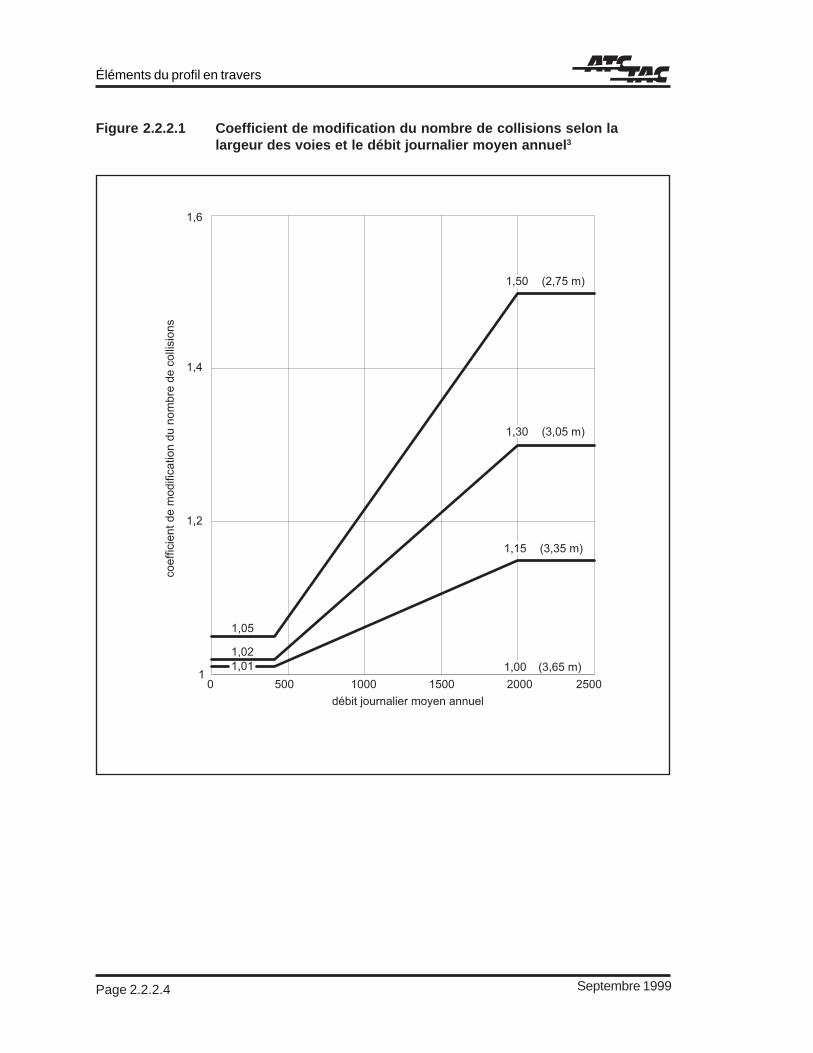
Éléments du profil en travers
Page 2.2.2.4 Septembre 1999
Figure 2.2.2.1 Coefficient de modification du nombre de collisions selon lalargeur des voies et le débit journalier moyen annuel3

Guide canadien de conception géométrique des routes
Page 2.2.4.3Décembre 2011
7. Les largeurs d’accotement sont norma-lement des multiples de 0,5 m
2.2.4.3 Revêtement desaccotements : meilleurespratiques
Démarcation entre l’accotement et la voie decirculation
Il est important de faire une nette distinctionentre les voies de circulation et les accotementspour ne pas encourager l’utilisation de cesderniers comme voies de circulation. La nuit eten période de mauvais temps, la possibilité pourle conducteur de faire la distinction entre lesvoies de circulation et l’accotement améliore lasécurité de la route. À cet égard, on peut aiderle conducteur de diverses façons :
1. L’utilisation d’un revêtement de couleur oude texture contrastante ou l’utilisation debandes rugueuses sur l’accotement. Parexemple, l’accotement peut être revêtu d’unmélange plus grossier que celui des voiesde circulation; si par mégarde un véhiculequitte la voie de circulation, la différence debruit des pneus alertera le conducteur.
2. Le marquage du bord du revêtement est unemesure importante et économique dedémarquer l’accotement, notamment dans lecas d’accotements en parti revêtus avec lemême matériau que la voie principale.
3. La pente transversale de l’accotement estparfois plus prononcée que celle de la voiede circulation adjacente, ce qui contribue àrenforcer la distinction entre les deux.
Revêtement de l’accotement
Dans le choix du revêtement de l’accotement, leconcepteur doit tenir compte des effets sur lasécurité, le drainage et les coûts d’entretien.L’accotement peut être aménagé de trois façons :revêtu, en gravier ou partiellement revêtu.
1. Les accotements de gravier assurent unenette démarcation entre le bord des voiesde circulation et l’accotement mais exigentplus d’entretien.
2. Les accotements revêtus ou stabilisés sontplus sûrs que les accotements non revêtusparce qu’ils offrent plus d’espace auxconducteurs pour maîtriser leur véhicule etmanœuvrer pour éviter les collisions ou en
réduire la gravité. Des accotements revêtusréduisent le risque qu’un véhicule qui quittela chaussée perde le contrôle dans le ma-tériau meuble de l’accotement.5
3. Une largeur de revêtement partiel d’acco-tement de 0,8 m assure une surface stableen cas de légers écarts de trajectoire desvéhicules.
4. Les avantages des accotements revêtus oustabilisés sont généralement plus importantsdans le cas de sections de route en courbeou en pente que dans le cas de sections enalignement droit en terrain plat.
Dénivellation au bord du revêtement
Les dénivellations au bord du revêtement sont àéviter, notamment à l’intérieur des courbes hori-zontales. Les camions sont particulièrementsujets au renversement au bord du revêtement,à cause de leur centre de gravité plus élevé ajoutéà la possibilité du déplacement du chargementet du plus grand décalage latéral en courbe desroues arrières du véhicule.
Bandes rugueuses sur accotement
L’installation de bandes rugueuses sur l’acco-tement constitue un moyen rentable de réduirele nombre de sorties de route. Elles servent àalerter un conducteur, par le son et par les vibra-tions, que son véhicule a quitté les voies de cir-culation.
1. On a démontré que des bandes rugueusescontinues sur les accotements asphaltés oudes bandes rugueuses intermittentes sur delongues sections d’accotement asphalté ouen béton contribuent à réduire le nombre desorties de route.6,19
2. Lorsque la conduite est très monotone, onpeut s’attendre à des réductions du nombrede sorties de route aussi élevées que 60 %.2,7
Sur les routes où l’on observe un débit élevéde cyclistes, les bandes rugueuses peuventaussi servir de tampon pour éloigner le cy-cliste de la ligne de rive, pourvu que l’acco-tement soit suffisamment large.
3. Une bande rugueuse est un motif en reliefou en empreinte dans la surface de l’acco-tement. La bande rugueuse en relief n’estpas aussi souhaitable que l’empreinte à cau-se du déneigement. Les bandes rugueusesen empreinte sont formées dans le revê-
Éléments du profil en travers
Page 2.2.4.4 Décembre 2011
tement de l’accotement. En été, le passagedes véhicules nettoie les bandes rugueusesen empreinte. En hiver, même recouvertede neige, les bandes rugueuses sur l’acco-tement assurent quand même une bonnevibration au passage des véhicules.8
4. Les bandes rugueuses peuvent être estam-pées au moyen d’un rouleau dans la surfacede l’accotement à la pose d’un nouveaurevêtement. Une autre façon est de creuserles bandes dans le revêtement déjà en place.Bien que le coût des bandes creusées soitplus élevé que celui des bandes estampées,les bandes creusées gardent généralementleur forme durant la construction.9 Les ban-des estampées imposent une contrainte ad-ditionnelle en rendant le cylindrage du revê-tement plus difficile. Les bandes rugueusescreusées ont tendance à produire un meil-leur grondement et plus de vibration pourles gros camions que celles qui sont estam-pées.8 Se référer à la figure 2.2.4.3 pour lesdimensions typiques des bandes rugueusesd’accotement.
2.2.4.4 Pentes transversales desaccotements : meilleurespratiques
La différence de pente transversale entre unaccotement et la voie de circulation adjacente estun facteur de sécurité important. Si la différenceest grande, les occupants d’un véhicule qui dévievers l’accotement seront soumis à un balan-cement inconfortable qui peut même faire perdrela maîtrise du véhicule au conducteur. En cons-tatant la différence, le conducteur peut aussi ra-lentir avant d’atteindre l’accotement le mettanten danger ainsi que les autres usagers de laroute. Un certain nombre de pratiques utilespeuvent aider le concepteur de route à réduire lapossibilité de telles situations.
1. La pente transversale des accotements destronçons de route en alignement droit peutêtre identique à celle de la voie adjacenteou plus prononcée d’au plus 0,03 m/m.
2. La pente transversale de l’accotement dessections de route que l’on redresse avantd’amorcer le dévers est normalement lamême que pour le tronçon en alignementdroit.
3. Dans les sections en dévers, la pente trans-versale de l’accotement à l’intérieur de lacourbe est normalement identique à cellede la voie de circulation adjacente. Du côtéextérieur, il y a deux pratiques courantes.Certaines administrations adaptent la pentede l’accotement à celle des voies de circu-lation alors que d’autres inclinent l’acco-tement vers l’extérieur pour empêcher leruissellement sur les voies.
4. Dans le dernier cas, il faut éviter une tropgrande différence de pente entre la voie decirculation et l’accotement pour minimiser lebalancement d’un véhicule qui s’engage surl’accotement et décourager les ralentis-sements avant de quitter les voies de cir-culation. À cet égard, certaines instancesont adopté une différence algébrique maxi-male de 0,08 m/m.
5. La figure 2.2.4.4 montre la pente trans-versale de l’accotement par rapport à lapente transversale des voies de circulation.
Le chapitre 2.1 donne des renseignementsadditionnels sur les pentes transversales.
2.2.4.5 Arrondi de talus :meilleures pratiques
L’arrondi de talus assure la transition entrel’accotement et le talus de pente constante. Ilassure le support latéral de l’accotement. Ilcontribue également à éviter que les roues devéhicules en perte de contrôle quittent le sol,assurant ainsi au conducteur une meilleuremaîtrise de la direction.
1. L’arrondi de talus est composé de matériauxgranulaires; si l’accotement est revêtu,l’arrondi est façonné après la mise en placeet le régalage du matériau de l’accotement.
2. L’arrondi de talus peut être stabilisé pouréviter l’érosion.
3. Un arrondi plus large convient aux routesdont la vitesse de base est élevée. Habi-tuellement, il faut prévoir des arrondis de1,0 m pour des vitesses de base supérieuresà 100 km/h et de 0,5 m pour des vitessesde moins de 100 km/h.
4. S‘il y a une glissière de sécurité, l’arrondiest normalement mesuré de l’arrière de laglissière comme le montre la figure 2.2.4.5.
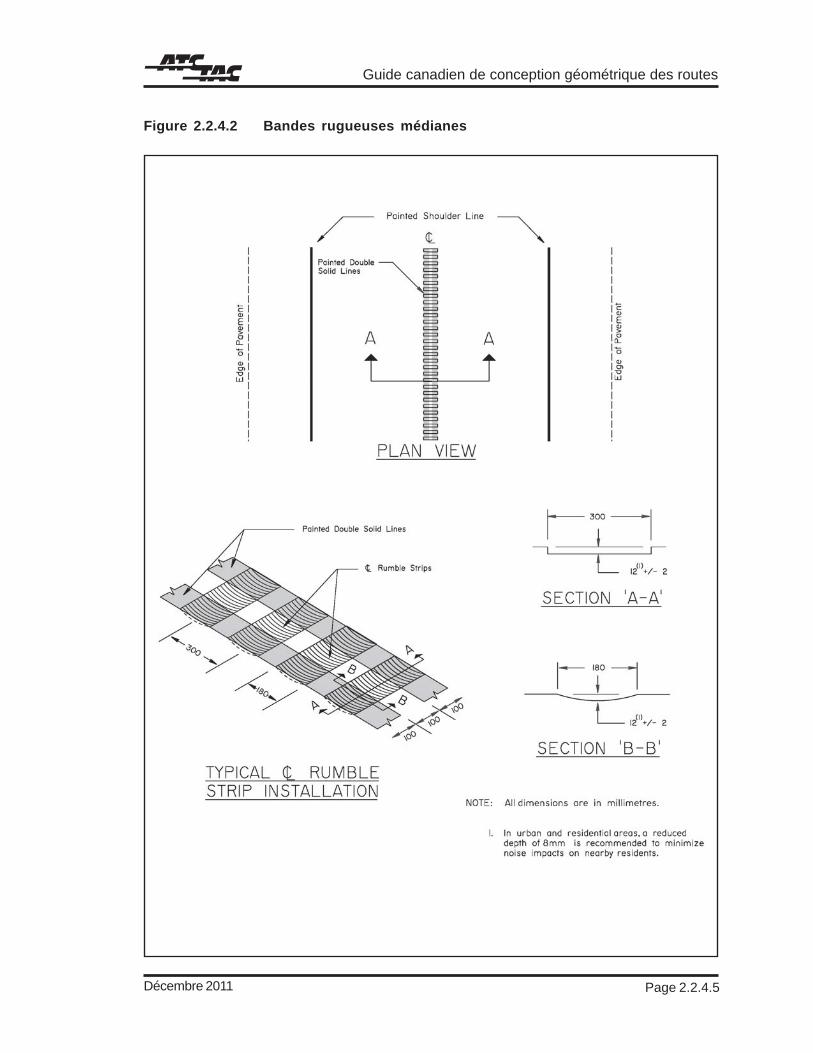
Guide canadien de conception géométrique des routes
Page 2.2.4.5Décembre 2011
Figure 2.2.4.2 Bandes rugueuses médianes
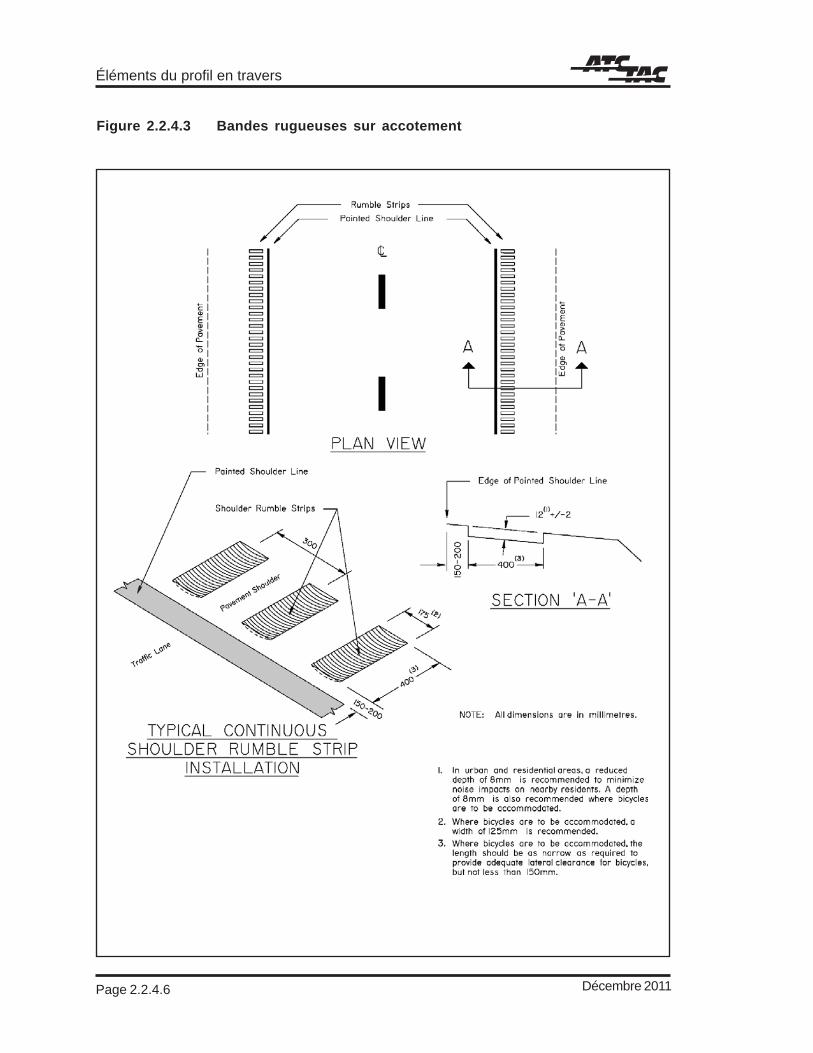
Éléments du profil en travers
Page 2.2.4.6 Décembre 2011
Figure 2.2.4.3 Bandes rugueuses sur accotement
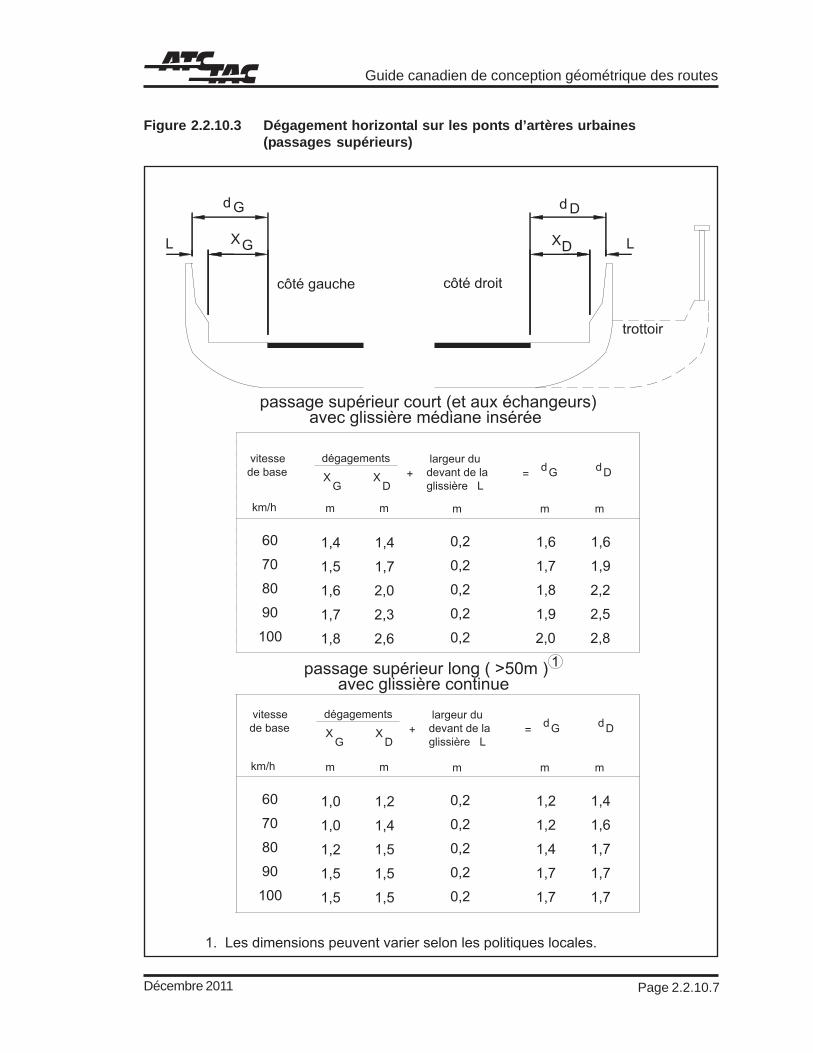
Guide canadien de conception géométrique des routes
Page 2.2.10.7Décembre 2011
Figure 2.2.10.3 Dégagement horizontal sur les ponts d’artères urbaines(passages supérieurs)

Éléments du profil en travers
Page 2.2.10.8 Décembre 2011
Figure 2.2.10.4 Dégagement horizontal sur les ponts d’autoroutes urbaines(passages supérieurs)
2,5 3,0 3,0 3,0 0,2 2,7 3,2 3,2 3,2
1,5 2,0 1,5 2,0 0,2 1,7 2,2 1,7 2,2

Guide canadien de conception géométrique des routes
Page 2.2.R.1Décembre 2011
RÉFÉRENCESBIBLIOGRAPHIQUES
1. « Human Factors Research in HighwaySafety », Transportation Research Circular414, Transportation Research Board,Washington, D.C., 1993.
2. « Highway Capacity Manual, Special Report209 », Transportation Research Board,National Research Council, Washington,D.C., 1985.
3. HAUER, E. Literature Review and Analysison Lane Widths, Université de Toronto,1998.
4. AASHTO, « A Policy on Geometric Designof Highways and Streets », Washington,D.C., 1994.
5. OGDEN, K.W. et R.A. PEARSON. « Roadand Traffic Factors in Truck Safety »,compte rendu du 16e congrès de l’AustralianRoad Research Board, Part 4.
6. HARWOOD, D.W. « Use of Rumble Stripsto Enhance Safety », Synthesis of HighwayPractice 191, Transportation ResearchBoard, Washington, D.C., 1993.
7. HICKEY JR., J.J. « Shoulder Rumble StripEffectiveness: Drift-Off-Road AccidentReductions on the Pennsylvania Turnpike »,Transportation Research Record No. 1573,Washington, D.C., 1997.
8. MINISTÈRE DES TRANSPORTS ET DESSERVICES PUBLICS DE L’ALBERTA. « AReview of Practices for Use of RumbleStrips on Alberta’s Rural Highways »,Technical Standards Branch, Edmonton,Alberta, 1998.
9. KHAN, A.M. et A. BACCHUS. « EconomicFeasibility and Related Issues of HighwayShoulder Rumble Strips », TransportationResearch Record 1498, Washington, D.C.,1995.
10. HAUER, E. Literature Review and Analysison Shoulder Widths, Université de Toronto,1998.
11. KNUIMAN, M.W., F.M. COUNCIL et D.W.REINFURT. « Association of Median Widthand Highway Accident Rates »,Transportation Research Record No. 1401,Washington, D.C., 1993.
12. ZEEGER, C.V. et F.M. COUNCIL. « SafetyEffectiveness of Highway Design Features- Volume III - Cross sections », FHWA-RD-91-06, Federal Highway Administration,novembre 1992.
13. ITE TECHNICAL COUNCIL COMMITTEE 5-5, Guidelines for Urban Major Street Design,Institute of Transportation Engineers, 1984.
14. ZEGEER, C.V. et M.R. PARKER. Cost-Effectiveness of Countermeasures for UtilityPole Accidents, Report No. FHWA/RD-83,Federal Highway Administration,Washington, D.C., September 1983.
15. TURNER, D.S. « Prediction of BridgeAccident Rates », Journal of TransportationEngineering, Vol. 110, No. 1, AmericanSociety of Civil Engineers, New York, NY,janvier 1984.
16. MAK, K.K. « Effect of Bridge Width onHighway Safety », State of the Art Report 6,Relationship Between Safety and KeyHighway Features, TransportationResearch Board, Washington, D.C., 1987.
17. OGDEN,K.W. Safer Roads: A Guide toRoad Safety Engineering, Avery Technical,1995.
18. HARWOOD, D.W. « Multi-lane DesignAlternatives For Improving SuburbanHighways » NCHRP Report 282,Transportation Research Board, NationalResearch Council, Washington, D.C., 1986.
19. ASSOCIATION DES TRANSPORTS DUCANADA. Best Practices for theImplementation of Shoulder and CentrelineRumble Strips, TAC, 2001.
20. TRANSPORTATION RESEARCH BOARD.National Cooperative Highway ResearchProgram Report 641, “Guidance for theDesign and Application of Shoulder andCentreline Rumble Strips”, TRB,Washington, D.C., 2009.

Éléments du profil en travers
Page 2.2.R.2 Septembre 1999
Guide canadiende conceptiongéométriquedes routesPartie 2
Association destransports du Canada
Septembre 1999Mis à jour en décembre 2011
Association québécoisedu transport et des routes

Décembre 2007
L’ATC est une association d’envergure nationale dont la mission est de promouvoir la sécurité, lasûreté, l’efficience, l’efficacité et le respect de l’environnement dans le cadre de la prestation deservices financièrement durables de transport, le tout à l’appui des objectifs sociaux et économiquesdu Canada. L’ATC est une tribune neutre de collecte et d’échange d’idées, d’informations et deconnaissances à l’appui de l’élaboration de lignes directrices techniques et de bonnes pratiques.À l’échelle du pays, l’Association s’intéresse principalement au secteur routier et à ses liens etinterrelations stratégiques avec les autres composantes du réseau de transport. En milieu urbain,l’Association s’intéresse non seulement au transport des personnes et des marchandises, maisencore à la prestation de services à la collectivité et aux incidences de toutes ces activités surles modèles d’aménagement du territoire.
The Transportation Association of Canada is a national association with a mission to promote theprovision of safe, secure, efficient, effective and environmentally and financially sustainabletransportation services in support of Canada’s social and economic goals. The association is aneutral forum for gathering or exchanging ideas, information and knowledge on technical guidelinesand best practices. In Canada as a whole, TAC has a primary focus on roadways and theirstrategic linkages and inter-relationships with other components of the transportation system. Inurban areas, TAC’s primary focus is on the movement of people, goods and services and itsrelationship with land use patterns.
Tous droits réservés © 2004Association des transports du Canada2323, boulevard Saint-Laurent, Ottawa, Canada K1G 4J8Tél. : (613) 736-1350 - Téléc. : (613) 736-1395www.tac-atc.ca
En français : ISBN 1-55187-157-2En anglais : ISBN 1-55187-131-9
Traduction - mars 2004par l’Association québécoise du transport et des routes533, rue Ontario Est, bureau 206, Montréal (Québec) H2L 1N8Tél. : (514) 523-6444 - Téléc. : (514) 523-2666www.aqtr.qc.ca
Guide canadien de conception géométrique des routes
Page 2.3.iDécembre 2011
2.3 CARREFOURS PLANS
2.3.1 INTRODUCTION ................................................................................................ 2.3.1.12.3.1.1 Généralités ..................................................................................................................... 2.3.1.12.3.1.2 Définitions ....................................................................................................................... 2.3.1.12.3.1.3 Éléments de conception ................................................................................................ 2.3.1.32.3.1.4 Manœuvres de la circulation et conflits ......................................................................... 2.3.1.42.3.1.5 Dispositifs de régulation de la circulation ...................................................................... 2.3.1.92.3.1.6 La sécurité ...................................................................................................................... 2.3.1.92.3.1.7 L’espacement des carrefours ....................................................................................... 2.3.1.112.3.1.8 Espacement et synchronisation des feux de circulation ............................................ 2.3.1.172.3.1.9 Option d’aménagement en secteur résidentiel urbain ................................................ 2.3.1.172.3.1.10 Nouvel aménagement et réaménagement de carrefour ............................................... 2.3.1.18
2.3.2 TRACÉ ............................................................................................................ 2.3.2.12.3.2.1 Vitesse de base ............................................................................................................. 2.3.2.12.3.2.2 Tracé en plan .................................................................................................................. 2.3.2.12.3.2.3 Profil en long et pente transversale ............................................................................... 2.3.2.42.3.2.4 Combinaison du profil en long et du tracé en plan ...................................................... 2.3.2.112.3.2.5 Réduction du dévers dans un carrefour ....................................................................... 2.3.2.132.3.2.6 Modification du tracé dans le cadre d’une réhabilitation ............................................. 2.3.2.16
2.3.3 DISTANCE DE VISIBILITÉ ................................................................................. 2.3.3.12.3.3.1 Généralités ..................................................................................................................... 2.3.3.12.3.3.2 Triangle de visibilité ........................................................................................................ 2.3.3.12.3.3.3 Distance de visibilité selon les dispositifs de réglementation de la circulation ............ 2.3.3.42.3.3.4 Distance de visibilité d’anticipation .............................................................................. 2.3.3.132.3.3.5 Résumé ...................................................................................................................... 2.3.3.132.3.3.6 Distance de visibilité aux ponts ................................................................................... 2.3.3.132.3.3.7 Distance de visibilité aux passages à niveau ferroviaires ........................................... 2.3.3.17
2.3.4 CARREFOURS SIMPLES .................................................................................. 2.3.4.12.3.4.1 Généralités ..................................................................................................................... 2.3.4.12.3.4.2 Véhicule type ................................................................................................................. 2.3.4.42.3.4.3 Rayons de coin .............................................................................................................. 2.3.4.42.3.4.4 Accotements aux carrefours simples .......................................................................... 2.3.4.10
2.3.5 CARREFOURS ÉVASÉS ET VOIES AUXILIAIRES ............................................ 2.3.5.12.3.5.1 Généralités et définitions ............................................................................................... 2.3.5.12.3.5.2 Lignes directrices pour l’utilisation de biseaux de raccordement et de biseaux de
voie auxiliaire .................................................................................................................. 2.3.5.22.3.5.3 Éléments de conception des biseaux de raccordement sans voie auxiliaire ............... 2.3.5.22.3.5.4 Éléments de conception des biseaux de raccordement avec voie auxiliaire ............... 2.3.5.42.3.5.5 Effet de la déclivité ......................................................................................................... 2.3.5.6
2.3.6 CANALISATION .................................................................................................. 2.3.6.12.3.6.1 Généralités et définitions ............................................................................................... 2.3.6.12.3.6.2 Principes de canalisation ............................................................................................... 2.3.6.22.3.6.3 Lignes directrices pour la canalisation .......................................................................... 2.3.6.32.3.6.4 Aménagements pour virage à droite .............................................................................. 2.3.6.32.3.6.5 Îlots de circulation .......................................................................................................... 2.3.6.5

Carrefours plans
Page 2.3.ii Décembre 2011
2.3.7 CHAUSSÉES DE RACCORDEMENT ................................................................ 2.3.7.12.3.7.1 Généralités ..................................................................................................................... 2.3.7.12.3.7.2 Rayons et courbure des chaussées de raccordement ................................................. 2.3.7.12.3.7.3 Largeur des chaussées de raccordement ..................................................................... 2.3.7.22.3.7.4 Voies de changement de vitesse et biseaux ................................................................. 2.3.7.42.3.7.5 Biseau de rabattement sur la route secondaire ............................................................ 2.3.7.42.3.7.6 Perte de voie pour une chaussée de raccordement à deux voies ................................ 2.3.7.4
2.3.8 VOIES DE VIRAGE À GAUCHE......................................................................... 2.3.8.12.3.8.1 Généralités et définitions ............................................................................................... 2.3.8.12.3.8.2 Lignes directrices pour la mise en place de voies de virage à gauche ........................ 2.3.8.12.3.8.3 Biseaux amont et aval ................................................................................................... 2.3.8.12.3.8.4 Voie de virage à gauche ................................................................................................. 2.3.8.32.3.8.5 Voies de virage à gauche pour routes à quatre et six voies ....................................... 2.3.8.132.3.8.6 Voies multiples pour virage à gauche .......................................................................... 2.3.8.152.3.8.7 Voie de virage à gauche insérée dans le terre-plein central ....................................... 2.3.8.232.3.8.8 Carrefours dans une courbe ......................................................................................... 2.3.8.27
2.3.9 TRANSITION D’UNE CHAUSSÉE À QUATRE VOIES À UNE CHAUSSÉEÀ DEUX VOIES AUX CARREFOURS ................................................................ 2.3.9.1
2.3.9.1 Chaussée unique ........................................................................................................... 2.3.9.12.3.9.2 Chaussées divisées ....................................................................................................... 2.3.9.1
2.3.10 ÉLARGISSEMENT À UN CARREFOUR MUNI DE FEUX DE CIRCULATION ... 2.3.10.1
2.3.11 OUVERTURE DU TERRE-PLEIN CENTRAL – DEMI-TOURS ET VÉHICULESD’URGENCE .................................................................................................... 2.3.11.1
2.3.11.1 Utilisation et fonction ................................................................................................... 2.3.11.12.3.11.2 Éléments de conception .............................................................................................. 2.3.11.12.3.11.3 Demi-tour ...................................................................................................................... 2.3.11.22.3.11.4 Traverses pour véhicules d’urgence ............................................................................. 2.3.11.3
2.3.12 CARREFOURS GIRATOIRES .......................................................................... 2.3.12.12.3.12.1 Introduction ................................................................................................................... 2.3.12.12.3.12.2 Caractéristiques des carrefours giratoires ................................................................... 2.3.12.12.3.12.3 Catégories de carrefours giratoires .............................................................................. 2.3.12.12.3.12.4 Gamme typique des paramètres géométriques .......................................................... 2.3.12.32.3.12.5 Emplacement et utilisation des carrefours giratoires .................................................. 2.3.12.32.3.12.6 Géométrie et capacité de la route ............................................................................... 2.3.12.42.3.12.7 Analyse de la sécurité ................................................................................................. 2.3.12.4
2.3.13 PASSAGES À NIVEAU DE CHEMIN DE FER ................................................. 2.3.13.12.3.13.1 Introduction ................................................................................................................... 2.3.13.12.3.13.2 Emplacement de nouveaux passages à niveau .......................................................... 2.3.13.12.3.13.3 Profil en long ................................................................................................................ 2.3.13.32.3.13.4 Tracé en plan ................................................................................................................ 2.3.13.32.3.13.5 Largeur du passage à niveau ....................................................................................... 2.3.13.32.3.13.6 Distance de visibilité aux passages à niveau .............................................................. 2.3.13.4
2.3.14 PASSAGE À NIVEAU POUR PIÉTONS ........................................................... 2.3.14.12.3.14.1 Passages aux carrefours ............................................................................................. 2.3.14.12.3.14.2 Adaptation aux personnes handicapées ..................................................................... 2.3.14.1

Guide canadien de conception géométrique des routes
Page 2.3.iiiDécembre 2011
RÉFÉRENCES BIBLIOGRAPHIQUES .......................................................................... 2.3.R.1
TABLEAUXTableau 2.3.1.1 Espacement souhaitable des carrefours munis de feux de
circulation (m) .............................................................................................. 2.3.1.17Tableau 2.3.2.1 Taux de variation du dévers dans les carrefours ......................................... 2.3.2.16Tableau 2.3.2.2 Compromis dans le cadre d’un projet de réhabilitation ............................... 2.3.2.18Tableau 2.3.3.1 Distance franchie en 3,0 s ............................................................................. 2.3.3.4Tableau 2.3.3.2 Facteurs de correction selon la déclivité ....................................................... 2.3.3.9Tableau 2.3.3.3 Espace requis aux carrefours à angle de 90° avec panneaux d’arrêt
sur l’axe secondaire ..................................................................................... 2.3.3.11Tableau 2.3.3.4 Tableau résumé de la distance de visibilité aux carrefours pour fins
de conception ............................................................................................... 2.3.3.15Tableau 2.3.3.5 Distance de visibilité pour le virage à gauche aux raccordements
de bretelles ................................................................................................... 2.3.3.15Tableau 2.3.4.1 Lignes directrices pour l’aménagement des accotements aux
carrefours simples en milieu rural ............................................................... 2.3.4.12Tableau 2.3.5.1 Biseaux de raccordement sans voie auxiliaire .............................................. 2.3.5.4Tableau 2.3.5.2 Aménagement d’un biseau de raccordement avec voie de décélération
parallèle .......................................................................................................... 2.3.5.5Tableau 2.3.5.3 Coefficient d’ajustement de la longueur pour décélération en fonction
de la déclivité ................................................................................................. 2.3.5.6Tableau 2.3.7.1 Largeur de conception des voies de raccordement aux carrefours .............. 2.3.7.4Tableau 2.3.8.1 Ratios et longueurs de rayon des biseaux de voie auxiliaire amont et
aval pour virage à gauche aux carrefours ...................................................... 2.3.8.2Tableau 2.3.8.2 Biseau de voie auxiliaire – en ligne droite ..................................................... 2.3.8.5Tableau 2.3.8.3 Biseau de raccordement – avec courbes en « S » ....................................... 2.3.8.5Tableau 2.3.9.1 Longueurs de voie parallèle et de biseau pour la transition entre une
chaussée unique à quatre voies et une chaussée unique à deux voies ...... 2.3.9.1Tableau 2.3.11.1 Largeur minimale du terre-plein pour demi-tours ......................................... 2.3.11.3Tableau 2.3.12.1 Catégories de carrefours giratoires.............................................................. 2.3.12.3Tableau 2.3.12.2 Valeurs typiques des paramètres géométriques ......................................... 2.3.12.3Tableau 2.3.12.3 Relations entre la géométrie et la capacité ................................................ 2.3.12.4Tableau 2.3.13.1 Différence admissible entre la déclivité de la chaussée et la pente
transversale de la voie ferrée ....................................................................... 2.3.13.3
FIGURESFigure 2.3.1.1 Types de carrefours ........................................................................................ 2.3.1.2Figure 2.3.1.2 Manœuvres de la circulation aux carrefours ................................................. 2.3.1.5Figure 2.3.1.3 Conflits aux carrefours et taux de collisions aux carrefours à trois et
quatre branches ............................................................................................. 2.3.1.7Figure 2.3.1.4 Zones de conflits aux carrefours ................................................................... 2.3.1.8Figure 2.3.1.5 Interdiction ou dissuasion des virages aux carrefours ................................ 2.3.1.10Figure 2.3.1.6 Espacement de carrefours de route transversale adjacents aux
échangeurs ................................................................................................... 2.3.1.13Figure 2.3.1.7 Espacement des carrefours et canalisation aux échangeurs en
losange ......................................................................................................... 2.3.1.14Figure 2.3.1.8 Espacement souhaitable des carrefours selon la longueur de cycle ......... 2.3.1.16Figure 2.3.1.9 Cadre d’analyse pour l’étude d’un carrefour ................................................ 2.3.1.20Figure 2.3.2.1 Exemples de réaménagement de carrefours ................................................ 2.3.2.3Figure 2.3.2.2 Profils en long de la route secondaire adaptés au profil en travers de la
route principale ............................................................................................... 2.3.2.5
Carrefours plans
Page 2.3.iv Décembre 2011
Figure 2.3.2.3 Profils en travers de chaussées, adaptation typique du profil en long de laroute secondaire ............................................................................................ 2.3.2.6
Figure 2.3.2.4 Profils en travers de chaussées, adaptation des pentes transversales ....... 2.3.2.7Figure 2.3.2.5 Modification de la pente transversale au croisement de deux routes de
la même classe.............................................................................................. 2.3.2.9Figure 2.3.2.6 Profils en travers de chaussée, adaptation typique du profil en long
et de la pente transversale au croisement de deux routes de lamême classe ............................................................................................... 2.3.2.10
Figure 2.3.2.7 Combinaison du tracé en plan et du profil en long à un carrefour .............. 2.3.2.12Figure 2.3.2.8 Influence de la géométrie sur le taux de collisions aux carrefours ............. 2.3.2.14Figure 2.3.2.9 Relation entre la vitesse, le rayon et le dévers aux carrefours ................... 2.3.2.15Figure 2.3.2.10 Décalages de l’axe d’une route à un carrefour ............................................ 2.3.2.19Figure 2.3.3.1 Triangle de visibilité dans le cas de véhicules en mouvement à l’approche
d’un carrefour ................................................................................................. 2.3.3.2Figure 2.3.3.2 Triangle de visibilité dans le cas de véhicules à l’arrêt à un carrefour .......... 2.3.3.3Figure 2.3.3.3 Courbes d’accélération (accélération de l’arrêt sur la route secondaire) ..... 2.3.3.7Figure 2.3.3.4 Distance de visibilité de virage pour un véhicule à l’arrêt .............................. 2.3.3.8Figure 2.3.3.5 Distance et triangle de visibilité aux carrefours en croix avec panneaux
d’arrêt sur l’axe secondaire ......................................................................... 2.3.3.12Figure 2.3.3.6 Distance de visibilité d’anticipation.............................................................. 2.3.3.14Figure 2.3.3.7 Mesure de la distance de visibilité à l’intersection d’une bretelle de
sortie adjacente à un passage supérieur .................................................... 2.3.3.16Figure 2.3.4.1 Carrefours simples ......................................................................................... 2.3.4.2Figure 2.3.4.2 Carrefours en « T » avec voies auxiliaires ..................................................... 2.3.4.3Figure 2.3.4.3 Carrefours en croix avec voies auxiliaires ..................................................... 2.3.4.5Figure 2.3.4.4 Géométrie du bord de la chaussée, courbe circulaire .................................. 2.3.4.6Figure 2.3.4.5 Géométrie du bord de la chaussée, courbe composée de deux
segments ....................................................................................................... 2.3.4.8Figure 2.3.4.6 Géométrie du bord de la chaussée, courbe composée de trois
segments ....................................................................................................... 2.3.4.9Figure 2.3.4.7 Transition des accotements aux carrefours simples avec voies
auxiliaires ..................................................................................................... 2.3.4.11Figure 2.3.4.8 Accotement de gravier aux carrefours simples ........................................... 2.3.4.11Figure 2.3.4.9 Accotement revêtu aux carrefours ............................................................... 2.3.4.13Figure 2.3.4.10 Accotement avec bordure et caniveau de béton aux carrefours ................. 2.3.4.13Figure 2.3.5.1 Aménagement d’un biseau de raccordement à un carrefour en « T » ......... 2.3.5.3Figure 2.3.5.2 Aménagement de biseaux de raccordement à un carrefour en croix ........... 2.3.5.3Figure 2.3.5.3 Aménagement d’un biseau de raccordement avec voie de décélération
parallèle. ......................................................................................................... 2.3.5.5Figure 2.3.6.1 Aménagements typiques pour virage à droite .............................................. 2.3.6.4Figure 2.3.6.2 Îlots déviateurs ............................................................................................... 2.3.6.6Figure 2.3.6.3 Îlots séparateurs ............................................................................................ 2.3.6.7Figure 2.3.6.4 Îlots de refuge ................................................................................................. 2.3.6.7Figure 2.3.6.5 Îlots séparateurs opposés ............................................................................. 2.3.6.8Figure 2.3.6.6 Îlots séparateurs décalés............................................................................... 2.3.6.8Figure 2.3.6.7 Îlots avec bordures – sans accotement ...................................................... 2.3.6.11Figure 2.3.6.8 Îlots avec bordures – au-delà de l’accotement ............................................ 2.3.6.12Figure 2.3.7.1 Chaussée de raccordement avec spirales .................................................... 2.3.7.3Figure 2.3.7.2 Biseau de rabattement à un carrefour avec canalisation, de la route
principale à la route secondaire ..................................................................... 2.3.7.5Figure 2.3.7.3 Perte de voie, chaussée de raccordement à deux voies .............................. 2.3.7.7Figure 2.3.8.1 Voie de virage à gauche, illustration de la terminologie ................................ 2.3.8.2Figure 2.3.8.2 Aménagement d’une voie de virage à gauche à un carrefour en « T » ......... 2.3.8.4Figure 2.3.8.3 Aménagement d’une voie de virage à gauche à un carrefour en croix ......... 2.3.8.5
Guide canadien de conception géométrique des routes
Page 2.3.vDécembre 2011
Figure 2.3.8.4 Voie de virage à gauche et biseau avec courbe en « S » ............................. 2.3.8.6Figure 2.3.8.5 Voies de virage à gauche dans les deux sens .............................................. 2.3.8.8
Figure 2.3.8.6 Aménagements de voie de virage à gauche sur des routes à quatre voiescontiguës, sans terre-plein central ................................................................ 2.3.8.9
Figure 2.3.8.7 Aménagements avec îlot séparateur surélevé............................................. 2.3.8.10Figure 2.3.8.8 Aménagement de la voie de virage, terre-plein central surélevé ................. 2.3.8.12Figure 2.3.8.9 Aménagement d’une voie d’évitement – alignement droit ........................... 2.3.8.13Figure 2.3.8.10 Voies de virage à gauche aménagées au moyen de marques sur la
chaussée, route à à quatre voies contiguës ............................................... 2.3.8.14Figure 2.3.8.11 Aménagement d’une voie de virage à gauche à un carrefour en « T »
d’une route à quatre voies contiguës ........................................................... 2.3.8.16Figure 2.3.8.12 Aménagement de voies de virage à gauche opposées à un carrefour en
croix d’une route à quatre voies contiguës .................................................. 2.3.8.16Figure 2.3.8.13 Pistes de virage dans le cas d’une double voie de virage à gauche ........... 2.3.8.17Figure 2.3.8.14 Agencements d’une double voie de virage à gauche .................................. 2.3.8.18Figure 2.3.8.15 Triple voie de virage à gauche ...................................................................... 2.3.8.21Figure 2.3.8.16 Aménagements types de voies de virage à gauche insérées dans le
terre-plein central ......................................................................................... 2.3.8.24Figure 2.3.8.17 Critère de justification du débit pour une voie de virage à gauche insérée
dans le terre-plein central ............................................................................ 2.3.8.26Figure 2.3.8.18 Carrefours dans une courbe ......................................................................... 2.3.8.28Figure 2.3.9.1 Transition entre une chaussée unique à quatre voies et une chaussée
unique à deux voies à un carrefour ................................................................ 2.3.9.1Figure 2.3.9.2 Transition entre profils en travers de quatre voies sur chaussées séparées
et de deux voies sur chaussée unique .......................................................... 2.3.9.2Figure 2.3.10.1 Élargissement à un carrefour muni de feux de circulation .......................... 2.3.10.2Figure 2.3.12.1 Éléments géométriques d’un carrefour giratoire ......................................... 2.3.12.2Figure 2.3.13.1 Restrictions à l’égard de la proximité de carrefours et d’entrées d’un
passage à niveau ......................................................................................... 2.3.13.2

Carrefours plans
Page 2.3.vi Décembre 2011
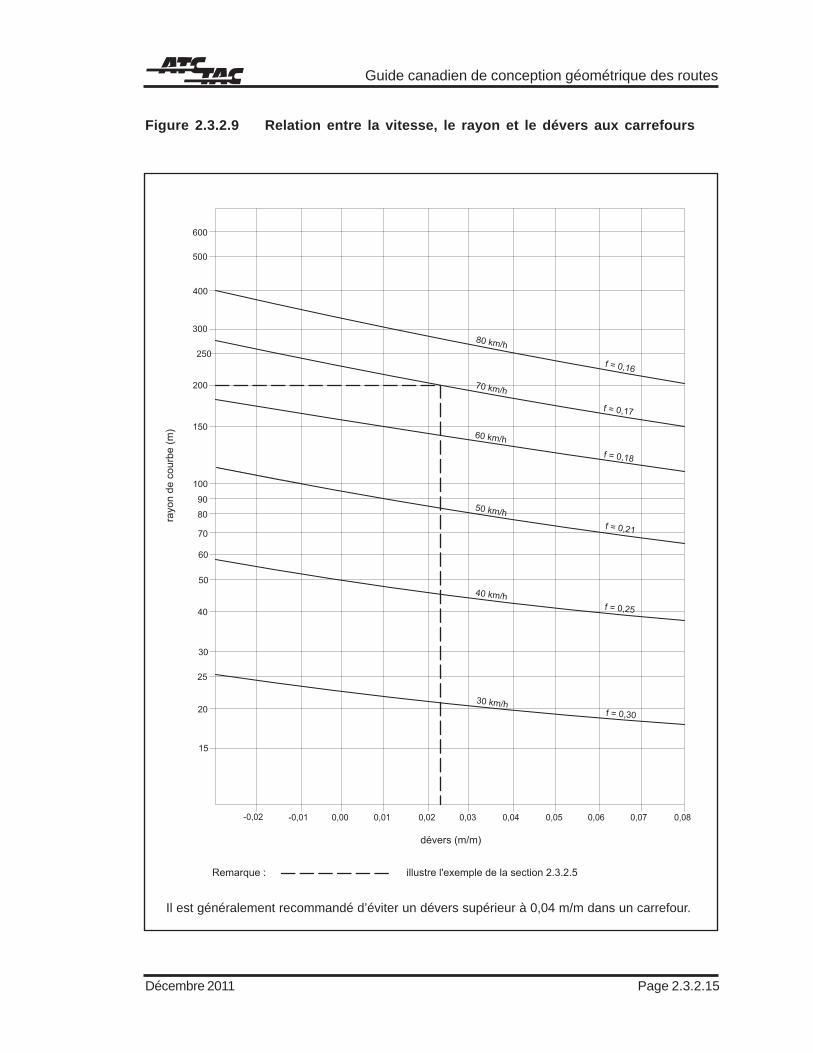
Guide canadien de conception géométrique des routes
Page 2.3.2.15Décembre 2011
Figure 2.3.2.9 Relation entre la vitesse, le rayon et le dévers aux carrefours
Il est généralement recommandé d’éviter un dévers supérieur à 0,04 m/m dans un carrefour.
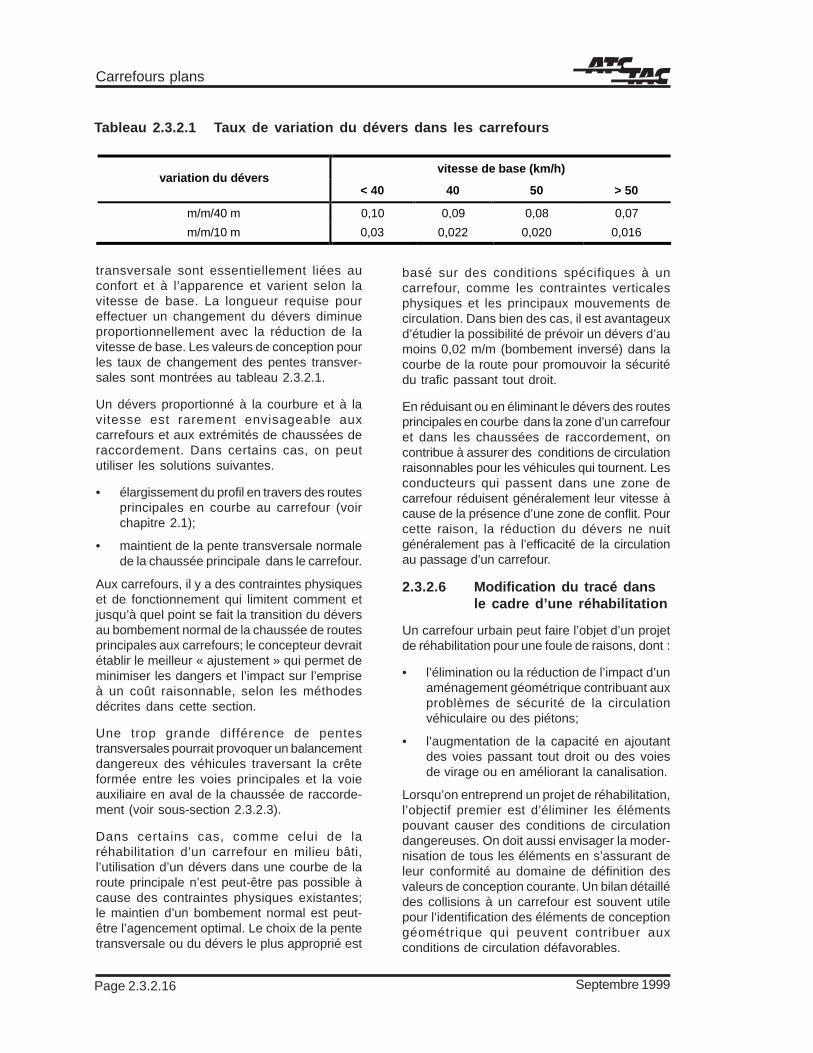
Carrefours plans
Page 2.3.2.16 Septembre 1999
transversale sont essentiellement liées auconfort et à l’apparence et varient selon lavitesse de base. La longueur requise poureffectuer un changement du dévers diminueproportionnellement avec la réduction de lavitesse de base. Les valeurs de conception pourles taux de changement des pentes transver-sales sont montrées au tableau 2.3.2.1.
Un dévers proportionné à la courbure et à lavitesse est rarement envisageable auxcarrefours et aux extrémités de chaussées deraccordement. Dans certains cas, on peututiliser les solutions suivantes.
• élargissement du profil en travers des routesprincipales en courbe au carrefour (voirchapitre 2.1);
• maintient de la pente transversale normalede la chaussée principale dans le carrefour.
Aux carrefours, il y a des contraintes physiqueset de fonctionnement qui limitent comment etjusqu’à quel point se fait la transition du déversau bombement normal de la chaussée de routesprincipales aux carrefours; le concepteur devraitétablir le meilleur « ajustement » qui permet deminimiser les dangers et l’impact sur l’empriseà un coût raisonnable, selon les méthodesdécrites dans cette section.
Une trop grande différence de pentestransversales pourrait provoquer un balancementdangereux des véhicules traversant la crêteformée entre les voies principales et la voieauxiliaire en aval de la chaussée de raccorde-ment (voir sous-section 2.3.2.3).
Dans certains cas, comme celui de laréhabilitation d’un carrefour en milieu bâti,l’utilisation d’un dévers dans une courbe de laroute principale n’est peut-être pas possible àcause des contraintes physiques existantes;le maintien d’un bombement normal est peut-être l’agencement optimal. Le choix de la pentetransversale ou du dévers le plus approprié est
basé sur des conditions spécifiques à uncarrefour, comme les contraintes verticalesphysiques et les principaux mouvements decirculation. Dans bien des cas, il est avantageuxd’étudier la possibilité de prévoir un dévers d’aumoins 0,02 m/m (bombement inversé) dans lacourbe de la route pour promouvoir la sécuritédu trafic passant tout droit.
En réduisant ou en éliminant le dévers des routesprincipales en courbe dans la zone d’un carrefouret dans les chaussées de raccordement, oncontribue à assurer des conditions de circulationraisonnables pour les véhicules qui tournent. Lesconducteurs qui passent dans une zone decarrefour réduisent généralement leur vitesse àcause de la présence d’une zone de conflit. Pourcette raison, la réduction du dévers ne nuitgénéralement pas à l’efficacité de la circulationau passage d’un carrefour.
2.3.2.6 Modification du tracé dansle cadre d’une réhabilitation
Un carrefour urbain peut faire l’objet d’un projetde réhabilitation pour une foule de raisons, dont :
• l’élimination ou la réduction de l’impact d’unaménagement géométrique contribuant auxproblèmes de sécurité de la circulationvéhiculaire ou des piétons;
• l’augmentation de la capacité en ajoutantdes voies passant tout droit ou des voiesde virage ou en améliorant la canalisation.
Lorsqu’on entreprend un projet de réhabilitation,l’objectif premier est d’éliminer les élémentspouvant causer des conditions de circulationdangereuses. On doit aussi envisager la moder-nisation de tous les éléments en s’assurant deleur conformité au domaine de définition desvaleurs de conception courante. Un bilan détaillédes collisions à un carrefour est souvent utilepour l’identification des éléments de conceptiongéométrique qui peuvent contribuer auxconditions de circulation défavorables.
Tableau 2.3.2.1 Taux de variation du dévers dans les carrefours
vitesse de base (km/h) variation du dévers
< 40 40 50 > 50
m/m/40 m 0,10 0,09 0,08 0,07 m/m/10 m 0,03 0,022 0,020 0,016

Guide canadien de conception géométrique des routes
Page 2.3.3.3Décembre 2011
Figure 2.3.3.2 Triangle de visibilité dans le cas de véhicules à l’arrêt à uncarrefour
1234567890123456789123456789012345678912345678901234567891234567890123456789
Superficie délimitée parAASHTO B-1 et B-2bD
1 = ligne B-2b de la figure 2.3.3.4
D2 = ligne B-1 de la figure 2.3.3.4
123456789012345678123456789012345678123456789012345678123456789012345678123456789012345678
Superficie délimitée parAASHTO B-2 et Cbdans la figure 2.3.3.4b
En milieu urbain, la distance “d” peut être modifiée pour tenir compte des obstructions visuelles.
Note: la distance de recul de la ligne de visée correspond typiquement à entre 4,4 m et5,4 m à partir de la bordure de la voie de circulation.

Carrefours plans
Page 2.3.3.4 Décembre 2011
calculs de triangle de visibilité servent àdéterminer la marge de recul des édifices auxcarrefours ou à déterminer si des obstructionscomme des zones de stationnement, desinstallations des services publics, des panneauxpublicitaires, des arbres ou des haies doiventêtre enlevées. Lorsque les obstructions nepeuvent pas être enlevées, une modification dela réglementation de la circulation peut s’avérernécessaire pour l’amélioration de la circulation.
2.3.3.3 Distance de visibilité selonles dispositifs deréglementation de lacirculation
Sans dispositif de réglementation
On retrouve habituellement les carrefours sansdispositif de réglementation en milieu urbain làoù la vitesse est réduite et les débits decirculation sont faibles, comme à l’intersectionde routes locales ou de ruelles publiques peuachalandées, où les conditions suivantesprévalent :
• le DJMA total d’un carrefour est de 1000 à1500 véhicules (c.-à-d. les véhicules desdeux routes qui se croisent);
• la vitesse de sécurité à l’approche (baséesur la distance de visibilité d’arrêt disponible)est environ égale ou supérieure à la plusfaible des deux vitesses, soit la vitesse au85e centile ou la vitesse affichée.
• les données sur les collisions indiquent qu’iln’y a pas plus de deux collisions à angledroit par année.1
En général, il est préférable d’assurer unesignalisation claire de la réglementation de lapriorité aux carrefours. Lorsqu’un carrefour n’estpas régi par des panneaux « Cédez lepassage », des panneaux d’arrêt ou des feuxde circulation, le conducteur à chaque entréedu carrefour devra au moins être capable depercevoir un conflit potentiel assez tôt pourpouvoir adapter la vitesse de son véhicule avantd’atteindre le carrefour, de façon à éviter une
collision. Le triangle de visibilité à l’approche d’uncarrefour est illustré à la figure 2.3.3.1, qui enmontre aussi les paramètres géométriques. Unepériode de 3,0 s, qui comprend un temps deperception/réaction de 2,0 s et un temps de1,0 s pour la décélération ou l’accélérationnécessaire afin d’éviter une collision, est lacondition limite pour assurer un triangle devisibilité approprié pour l’aménagement decarrefours sans dispositif de réglementation. Ladistance parcourue par les véhicules quis’approchent à leur vitesse supposée détermineles limites du triangle de visibilité. Le tableau2.3.3.1 donne les distances arrondies par-courues par les véhicules durant 3,0 s à diffé-rentes vitesses. Les carrefours sans dispositifde réglementation où les vitesses sont supé-rieures à celles présentées au tableau sontinhabituels autant en milieu urbain que rural.
Les carrefours avec triangles de visibilité auxapproches dont les dimensions correspondentà peu près à celles indiquées ne sont pasnécessairement exempts de collisions. Unconducteur qui n’est pas familier avec uncarrefour peut ne pas se rendre compte qu’il n’ya pas de dispositif de réglementation au carrefouret peut donc ne pas exercer la prudence voulue.Il existe aussi la possibilité de confusion quandle conducteur sur une route est confronté à unesuccession de véhicules sur la route trans-versale. Même lorsqu’il n’y a qu’un seul véhiculesur chacune des branches adjacentes d’uncarrefour, les deux véhicules peuvent commen-cer à ralentir et atteindre le carrefour en mêmetemps. Cependant, cette possibilité demeurefaible compte tenu des possibilités élevées dechangements de vitesse, du temps disponibleet de la diminution normale de la vitesse àl’approche d’un carrefour dans de telles condi-tions. De plus, un véhicule qui s’approche d’uncarrefour sans dispositif de réglementation doitcéder le passage aux véhicules qui s’approchentdu carrefour de la droite. Lorsque le triangleminimal décrit ci-dessus ne peut être assuré,des dispositifs de réglementation de la circulationdevraient être installés pour ralentir ou arrêter
vitesse (km/h) 15 20 25 30 35 40 45 50 55 60
distance arrondie (m) 15 15 20 25 30 35 40 40 45 50
Tableau 2.3.3.1 Distance franchie en 3,0 s
Guide canadien de conception géométrique des routes
Page 2.3.3.5Décembre 2011
les véhicules sur une des routes même si lesdeux routes sont peu achalandées.
Aux carrefours sans dispositif de réglementation,les conducteurs sur les deux routes devraientêtre capables de voir le carrefour et les véhiculessur la route transversale assez tôt pour pouvoirs’arrêter avant d’atteindre le carrefour. Lesdistances d’arrêt de sécurité pour la conceptiond’un carrefour sont les mêmes que cellesutilisées pour la conception de tout autre tronçonde route. Le chapitre 1.2 donne les directivesrelatives à la distance de visibilité d’arrêt.
On présume que les véhicules devront rarements’arrêter à un carrefour sans dispositif deréglementation. Cependant, si un véhicule devaits’y arrêter, les exigences en matière de distancede visibilité pour le départ seraient les mêmesque celles prévues pour la réglementation parpanneau d’arrêt.¹
Panneau « Cédez le passage »
Dans ce contexte d’aménagement, il y a unpanneau « Cédez le passage » sur la routesecondaire au croisement de la route principale.Les véhicules circulant sur une route secondaireoù il y a un panneau « Cédez le passage »s’approchent généralement du carrefour à vitesseréduite.
La réglementation au moyen de panneaux« Cédez le passage » convient davantage àl’intersection d’une route et d’une locale ou d’uneroute locale et d’une collectrice dans lesconditions suivantes :
• le DJMA des véhicules qui entrent dans lecarrefour est de 1500 à 3000 véhicules(c.-à-d. les véhicules des deux routes quise croisent);
• la vitesse à l’approche (selon la distancede visibilité d’arrêt disponible) est égale ousupérieure à 20 km/h;
• les données indiquent qu’il y a au moinstrois collisions à angle droit par année alorsqu’il n’y avait pas de dispositif de régle-mentation¹;
Le triangle de visibilité minimal aux approchesd’un carrefour régis par panneaux « Cédez lepassage » est établi en déterminant les pointssuivants:
• la distance de visibilité d’arrêt minimale àune vitesse réduite sur la route secondaireréglementée par signalisation;
• la distance de visibilité d’arrêt minimale surune route sans dispositif de réglementation.
Les vitesses proposées sur les branches decarrefour régies par panneaux « Cédez lepassage » :
• en milieu urbain – 20 km/h;
• en milieu rural – 30 à 40 km/h.
Encore une fois, il est préférable de prévoir ladistance de visibilité d’anticipation plutôt que ladistance de visibilité d’arrêt.
Voir le chapitre 1.2 pour les distances de visibilitéd’arrêt relatives à ces vitesses.¹
Pour tenir compte du cas où un véhicule sur laroute secondaire est obligé de s’arrêter, la lignede visée pour accéder à la route principale ou latraverser à partir de la route secondaire estétablie de la même manière que dans le cas dela réglementation d’un carrefour au moyen depanneaux d’arrêt, comme on le décrit ci-dessoussous la rubrique « Panneau d’arrêt ».
Panneau d’arrêt
Pour un véhicule à l’arrêt, la distance de visibilitéau départ est déterminée pour chacune des troismanœuvres de base pouvant survenir à uncarrefour. La figure 2.3.3.2. illustre les troismanœuvres possibles. Ces manœuvres sont :
• traverser la route qui croise en évitant lesvéhicules à la gauche et à la droite duvéhicule qui traverse, sans nuire auxvéhicules passant tout droit;
• effectuer un virage à gauche sur la routetransversale en évitant d’abord les véhiculesqui arrivent de la gauche, pour ensuiteaccélérer jusqu’à la vitesse de marchenormale des véhicules en provenance de ladroite, sans nuire au passage de lacirculation passant tout droit;
• effectuer un virage à droite sur la routetransversale en s’insérant dans le courantde circulation en provenance de la gauchede manière à ne pas nuire au courant decirculation principal.
Carrefours plans
Page 2.3.3.6 Décembre 2011
a) Distance de visibilité de traversée
La distance de visibilité de traversée est baséesur le temps qu’il faut au véhicule à l’arrêt pourdégager le carrefour et la distance parcouruesur la route principale par un véhicule circulantà la vitesse de base durant le même temps. Parconséquent, le temps de traversée dépend dutemps de perception et de réaction du conduc-teur qui traverse, des capacités d’accélérationdu véhicule, de la largeur de la route principale,de la longueur du véhicule qui traverse et de lavitesse du véhicule qui s’approche sur la routeprincipale.
La distance de visibilité minimale requise le longde la route principale est obtenue au moyen dela formule suivante :
( )3,6
tJVD += (2.3.1)
où :
D = distance minimale de visibilité detraversée le long de la routeprincipale, à partir du carrefour (m);
V = vitesse de base de la routeprincipale (km/h);
J = temps de perception et de réactiondu conducteur qui traverse (s);
t = temps nécessaire pour traverser laroute principale (s).
Le temps J est le temps nécessaire auconducteur pour regarder dans chaque sens lelong de la route principale, embrayer s’il y a lieuet se préparer à démarrer. Beaucoup deconducteurs effectuent certains de ces gestesen même temps et parfois, comme pour lechangement de vitesse, le geste peut être faitavant de regarder de part et d’autre sur la route.Même si la plupart des conducteurs peuventn’avoir besoin que d’une fraction de seconde,la valeur de J aux fins de conception devrait êtrereprésentative du temps nécessaire auxconducteurs plus lents. On suppose une valeurde 2,0 s à cet égard.11
La figure 2.3.3.310 illustre le temps t pour unefourchette de distances de traversée, s, aumoyen de courbes pour quatre véhicules types.
La distance de traversée est calculée au moyende l’expression suivante :
s = d + w + L (2.3.2)
où :
s = distance parcourue au cours del’accélération (m);
d = distance entre le bord de lachaussée le plus près et le devantdu véhicule arrêté (m), généra-lement supposée comme étant3,0 m;
w = la largeur de la chaussée le longdu trajet du véhicule qui traverse(m);
L = longueur hors-tout du véhicule quitraverse (m).
Des études empiriques du créneau minimalrequis par les conducteurs pour se mêler à uncourant de circulation ou le traverser à partird’une position arrêtée ont démontré que leconducteur moyen a besoin d’un créneau de sixsecondes (6 s) entre les véhicules d’un courantde circulation. Cette valeur varie selon lecomportement des conducteurs d’une régiondonnée et est vérifiée pour la région où seréalisera le projet. La valeur de (J + t) ne devraitpas être inférieure à 6 s. La distance de visibilitéde traversée est également illustrée par la ligneA de la figure 2.3.3.4.
Dans le cas de routes à chaussées séparées,les largeurs de terre-plein égales ou supérieuresà la longueur du véhicule (L) permettent detraverser la route en deux étapes. Le véhiculetraverse la première chaussée, s’arrête dansl’aire protégée par le terre-plein, puis attendl’occasion de traverser la seconde chaussée.Lorsque la largeur du terre-plein de routes àchaussées séparées est inférieure à L, elle doitêtre incluse dans la valeur de w.
On peut tenir compte de l’effet de la déclivitésur le temps d’accélération en multipliant parun facteur de correction le temps (t) déterminépour une chaussée à l’horizontale. Letableau 2.3.3.2 montre les ratios du tempsd’accélération selon différentes déclivités sur letemps d’accélération à l’horizontale. La valeur
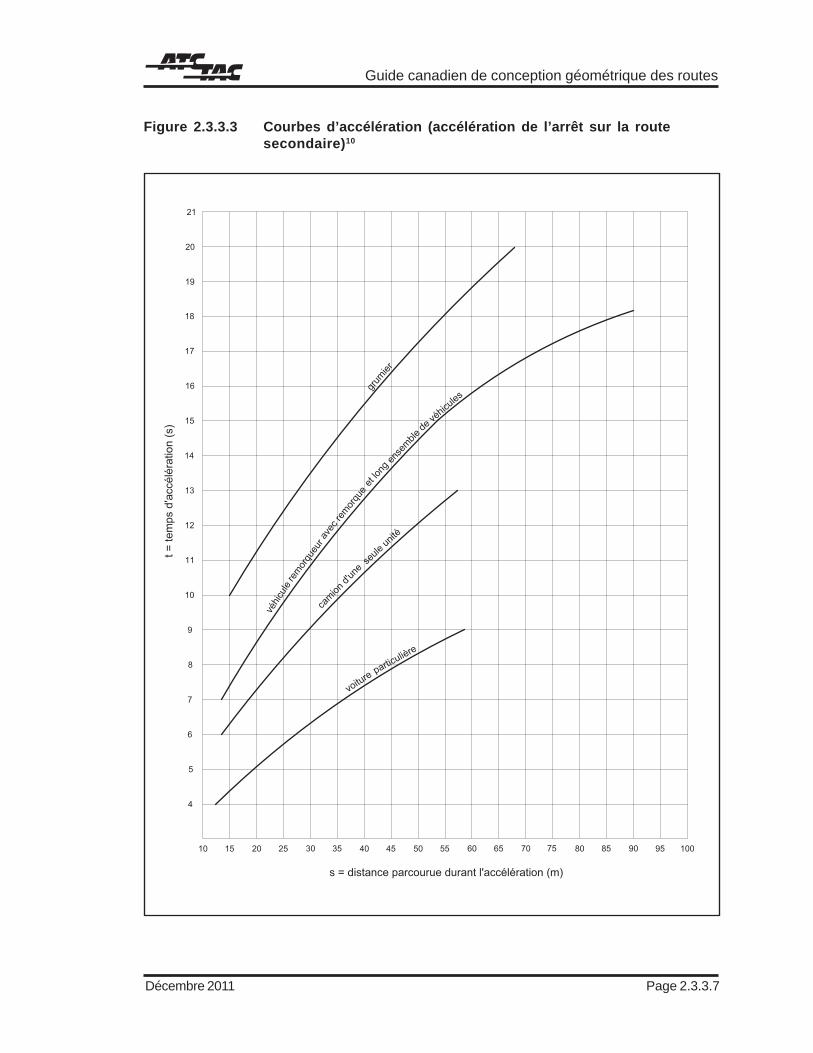
Guide canadien de conception géométrique des routes
Page 2.3.3.7Décembre 2011
Figure 2.3.3.3 Courbes d’accélération (accélération de l’arrêt sur la routesecondaire)10
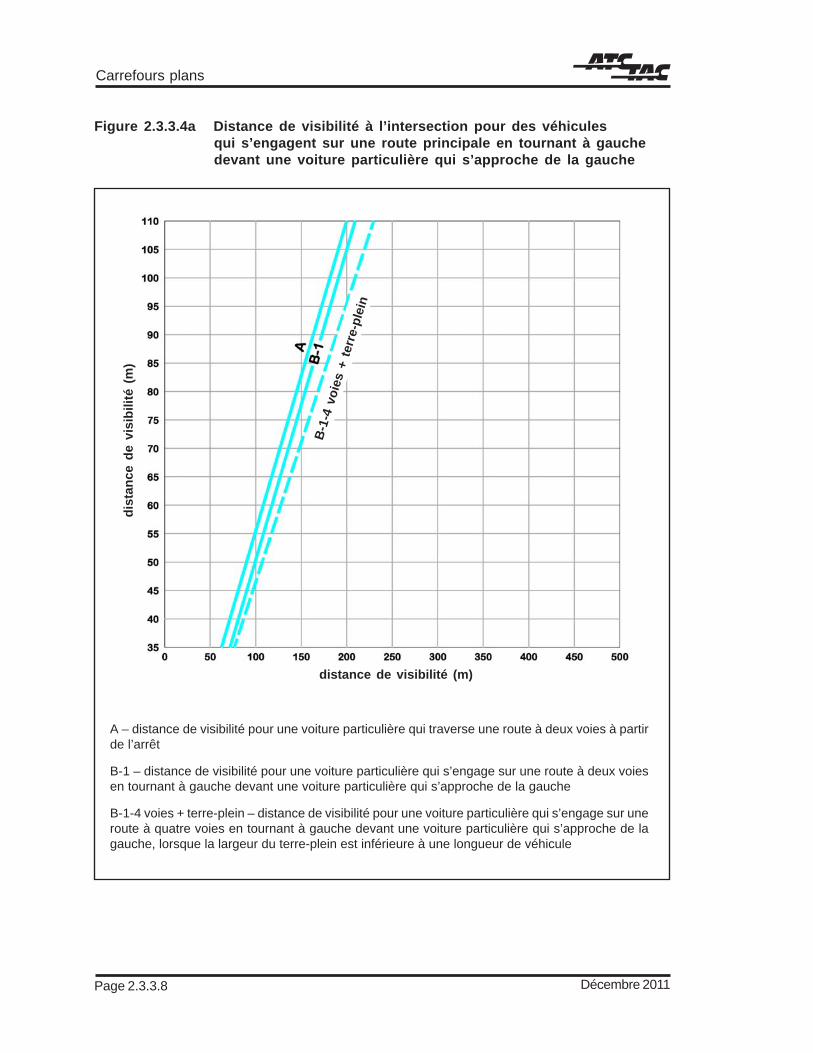
Carrefours plans
Page 2.3.3.8 Décembre 2011
Figure 2.3.3.4a Distance de visibilité à l’intersection pour des véhiculesqui s’engagent sur une route principale en tournant à gauchedevant une voiture particulière qui s’approche de la gauche
A – distance de visibilité pour une voiture particulière qui traverse une route à deux voies à partirde l’arrêt
B-1 – distance de visibilité pour une voiture particulière qui s’engage sur une route à deux voiesen tournant à gauche devant une voiture particulière qui s’approche de la gauche
B-1-4 voies + terre-plein – distance de visibilité pour une voiture particulière qui s’engage sur uneroute à quatre voies en tournant à gauche devant une voiture particulière qui s’approche de lagauche, lorsque la largeur du terre-plein est inférieure à une longueur de véhicule
12345671234567123456712345671234567123456712345671234567123456712345671234567123456712345671234567
123123123123123123123123123123123123123123123123
1234567890123456712345678901234567distance de visibilité (m)
dist
ance
de
visi
bilit
é (m
)
B-1-
4 vo
ies
+ te
rre-
plei
n
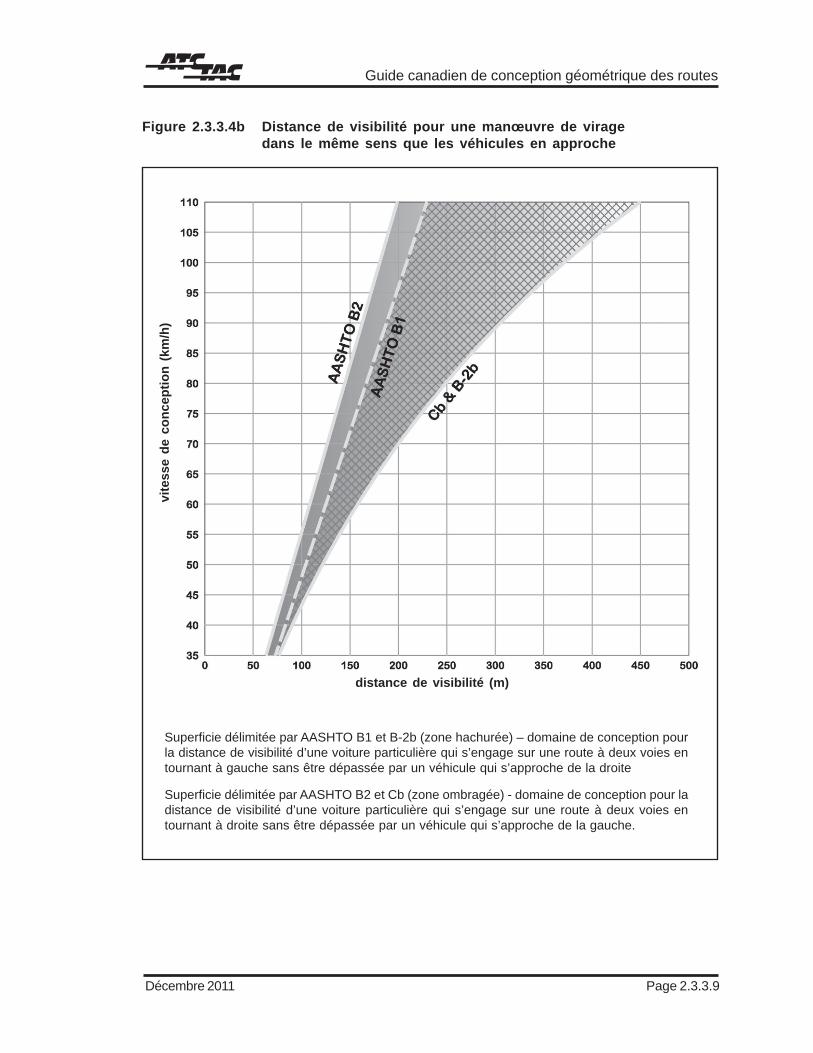
Guide canadien de conception géométrique des routes
Page 2.3.3.9Décembre 2011
Figure 2.3.3.4b Distance de visibilité pour une manœuvre de viragedans le même sens que les véhicules en approche
Superficie délimitée par AASHTO B1 et B-2b (zone hachurée) – domaine de conception pourla distance de visibilité d’une voiture particulière qui s’engage sur une route à deux voies entournant à gauche sans être dépassée par un véhicule qui s’approche de la droite
Superficie délimitée par AASHTO B2 et Cb (zone ombragée) - domaine de conception pour ladistance de visibilité d’une voiture particulière qui s’engage sur une route à deux voies entournant à droite sans être dépassée par un véhicule qui s’approche de la gauche.
12345678901234561234567890123456
12121212121212121212121212121212
distance de visibilité (m)
vite
sse
de c
once
ptio
n (k
m/h
)
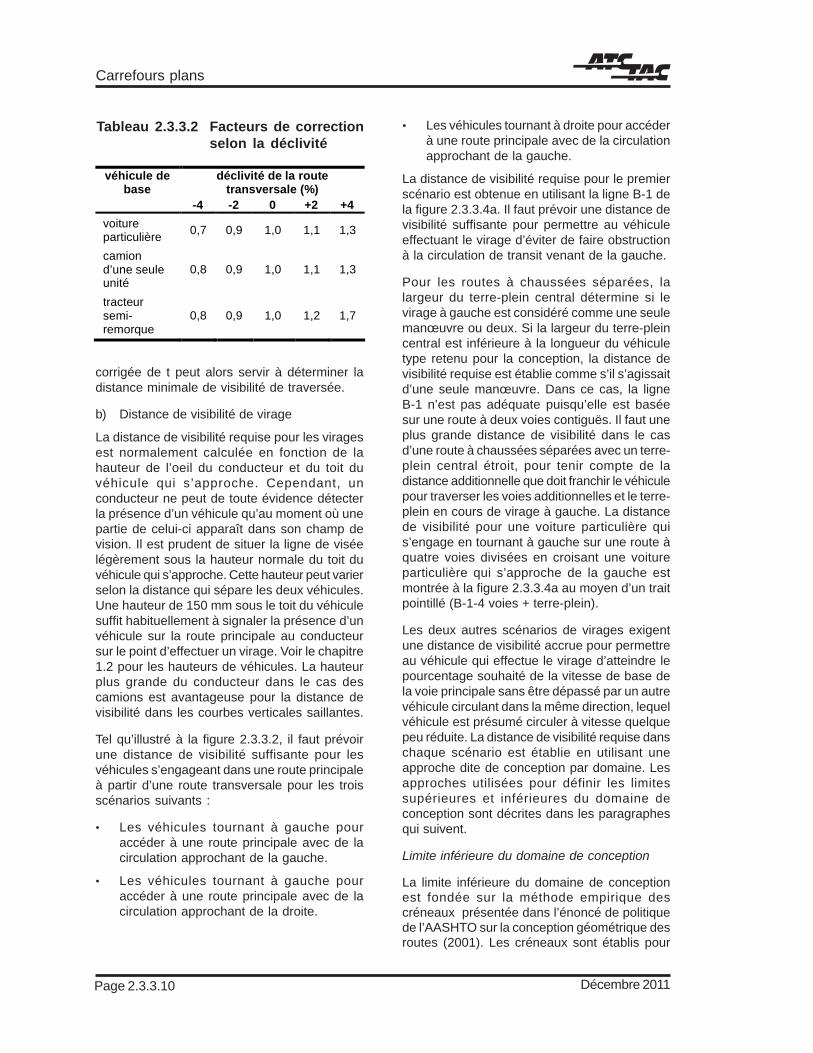
Carrefours plans
Page 2.3.3.10 Décembre 2011
corrigée de t peut alors servir à déterminer ladistance minimale de visibilité de traversée.
b) Distance de visibilité de virage
La distance de visibilité requise pour les viragesest normalement calculée en fonction de lahauteur de l’oeil du conducteur et du toit duvéhicule qui s’approche. Cependant, unconducteur ne peut de toute évidence détecterla présence d’un véhicule qu’au moment où unepartie de celui-ci apparaît dans son champ devision. Il est prudent de situer la ligne de viséelégèrement sous la hauteur normale du toit duvéhicule qui s’approche. Cette hauteur peut varierselon la distance qui sépare les deux véhicules.Une hauteur de 150 mm sous le toit du véhiculesuffit habituellement à signaler la présence d’unvéhicule sur la route principale au conducteursur le point d’effectuer un virage. Voir le chapitre1.2 pour les hauteurs de véhicules. La hauteurplus grande du conducteur dans le cas descamions est avantageuse pour la distance devisibilité dans les courbes verticales saillantes.
Tel qu’illustré à la figure 2.3.3.2, il faut prévoirune distance de visibilité suffisante pour lesvéhicules s’engageant dans une route principaleà partir d’une route transversale pour les troisscénarios suivants :
• Les véhicules tournant à gauche pouraccéder à une route principale avec de lacirculation approchant de la gauche.
• Les véhicules tournant à gauche pouraccéder à une route principale avec de lacirculation approchant de la droite.
• Les véhicules tournant à droite pour accéderà une route principale avec de la circulationapprochant de la gauche.
La distance de visibilité requise pour le premierscénario est obtenue en utilisant la ligne B-1 dela figure 2.3.3.4a. Il faut prévoir une distance devisibilité suffisante pour permettre au véhiculeeffectuant le virage d’éviter de faire obstructionà la circulation de transit venant de la gauche.
Pour les routes à chaussées séparées, lalargeur du terre-plein central détermine si levirage à gauche est considéré comme une seulemanœuvre ou deux. Si la largeur du terre-pleincentral est inférieure à la longueur du véhiculetype retenu pour la conception, la distance devisibilité requise est établie comme s’il s’agissaitd’une seule manœuvre. Dans ce cas, la ligneB-1 n’est pas adéquate puisqu’elle est baséesur une route à deux voies contiguës. Il faut uneplus grande distance de visibilité dans le casd’une route à chaussées séparées avec un terre-plein central étroit, pour tenir compte de ladistance additionnelle que doit franchir le véhiculepour traverser les voies additionnelles et le terre-plein en cours de virage à gauche. La distancede visibilité pour une voiture particulière quis’engage en tournant à gauche sur une route àquatre voies divisées en croisant une voitureparticulière qui s’approche de la gauche estmontrée à la figure 2.3.3.4a au moyen d’un traitpointillé (B-1-4 voies + terre-plein).
Les deux autres scénarios de virages exigentune distance de visibilité accrue pour permettreau véhicule qui effectue le virage d’atteindre lepourcentage souhaité de la vitesse de base dela voie principale sans être dépassé par un autrevéhicule circulant dans la même direction, lequelvéhicule est présumé circuler à vitesse quelquepeu réduite. La distance de visibilité requise danschaque scénario est établie en utilisant uneapproche dite de conception par domaine. Lesapproches utilisées pour définir les limitessupérieures et inférieures du domaine deconception sont décrites dans les paragraphesqui suivent.
Limite inférieure du domaine de conception
La limite inférieure du domaine de conceptionest fondée sur la méthode empirique descréneaux présentée dans l’énoncé de politiquede l’AASHTO sur la conception géométrique desroutes (2001). Les créneaux sont établis pour
déclivité de la route transversale (%)
véhicule de base
-4 -2 0 +2 +4 voiture particulière 0,7 0,9 1,0 1,1 1,3
camion d’une seule unité
0,8 0,9 1,0 1,1 1,3
tracteur semi-remorque
0,8 0,9 1,0 1,2 1,7
Tableau 2.3.3.2 Facteurs de correctionselon la déclivité

Guide canadien de conception géométrique des routes
Page 2.3.3.11Décembre 2011
faire en sorte que les véhicules circulant sur lavoie principale n’aient pas à réduire leur vitesseà moins de 70% de leur vitesse initiale. Lesobservations sur le terrain ont démontré que lesvaleurs indiquées au tableau 2.3.3.2a offrent lescréneaux pour respecter ce paramètre. Letableau 2.3.3.2a inclut également lesajustements à apporter à ces créneaux enfonction des dimensions des véhicules, dunombre de voies de circulation sur la routeprincipale et de la déclivité de la routetransversale.
En employant la valeur de créneau propre à lamanœuvre à effectuer, la distance de visibilitérequise sur la route principale (dans les deuxdirections) s’établit comme suit :
ISD = (Vmajor
x tg) / 3.6 (2.3.3)
où :
ISD = distance de visibilité à l’intersection
Vmajor = vitesse de base de la routeprincipale (km/h)
tg = créneau pour le véhicule tournant
de la route transversale à la routeprincipale (s)
La distance de visibilité requise pour une voitureparticulière tournant à gauche pour accéder àune route principale à deux voies sans êtredépassée par une voiture provenant de la droiteest représentée par la ligne AASHTO B1 dansla figure 2.3.3.4b. De même, la distance devisibilité requise pour une voiture particulièretournant à droite pour accéder à une routeprincipale à deux voies sans être dépassée parune voiture provenant de la gauche estreprésentée par la ligne AASHTO B2.
Limite supérieure du domaine de conception
La limite supérieure du domaine de conceptionest établie par une application plus théoriquede la méthode des créneaux , qui utilise desdistances de visibilité plus conservatrices.
Cette méthode présume que les véhiculescirculant sur la route principale ne devraient pasavoir à diminuer leur vitesse à moins de 85% dela vitesse de base, et qu’il faut maintenir uncréneau d’au moins deux secondes entre levéhicule qui tourne et le véhicule en approche.
Pour établir la distance de visibilité, la premièreétape consiste à définir la distance à parcourir
par le véhicule qui s’engage sur la route principalepour atteindre 85% de la vitesse de base decette route. Il faut ensuite définir la distanceparcourue par le véhicule en approche pendantce même temps en ajoutant deux secondes (enprésumant que le véhicule en approche roule à85% de la vitesse de base). Finalement, ladistance de visibilité requise correspond à ladifférence entre la distance parcourue par levéhicule en approche et la distance parcouruepar le véhicule qui s’engage sur la route principalepour atteindre 85% de la vitesse de base, à partirdu carrefour.
Selon cette méthode, la distance de visibilitérequise à l’intersection pour une voitureparticulière qui s’engage en tournant à gauchesur une route à deux voies sans être dépasséepar un véhicule approchant de la droite estreprésentée par la ligne B-2b de la figure2.3.3.4b. De même, la distance de visibilité àl’intersection pour une voiture particulière quis’engage en tournant à droite sur une route àdeux voies sans être dépassée par un véhiculeapprochant de la gauche est représentée par laligne Cb.
La limite supérieure du domaine de conceptiondevrait également être ajustée pour les véhiculestournant à gauche sur une route à chausséesséparées. Il est possible d’établir un ajustementen utilisant les créneaux ajustés du tableau2.3.3.2a (O,5s ou 0,7s) dans l’équation 2.3.3 eten ajoutant les résultats obtenus à la distancede visibilité calculée à partir de la ligne B-2b dela figure 2.3.3.4b.
Cette méthode présume que les véhiculescirculant sur la route principale ne devraient pasavoir à diminuer leur vitesse à moins de 85% dela vitesse de base, et qu’il faut maintenir uncréneau d’au moins deux secondes entre levéhicule qui tourne et le véhicule en approche.
Heuristique
Il revient au concepteur d’employer les distancesde visibilité adaptées au domaine de conception.Il est recommandé d’incorporer la limitesupérieure du domaine de conception lorsqueles caractéristiques du milieu rendent cettesolution faisable. Il faut également tenir compted’autres facteurs d’importance, y compris laclasse de la route et la croissance prévue dudébit. Il est souhaitable d’utiliser la distance devisibilité maximale pour les routes de niveausupérieur et les routes à débit élevé.

Carrefours plans
Page 2.3.3.12 Décembre 2011
Tableau 2.3.3.3 Espace requis aux carrefours à angle de 90° avec panneauxd’arrêt sur l’axe secondaire
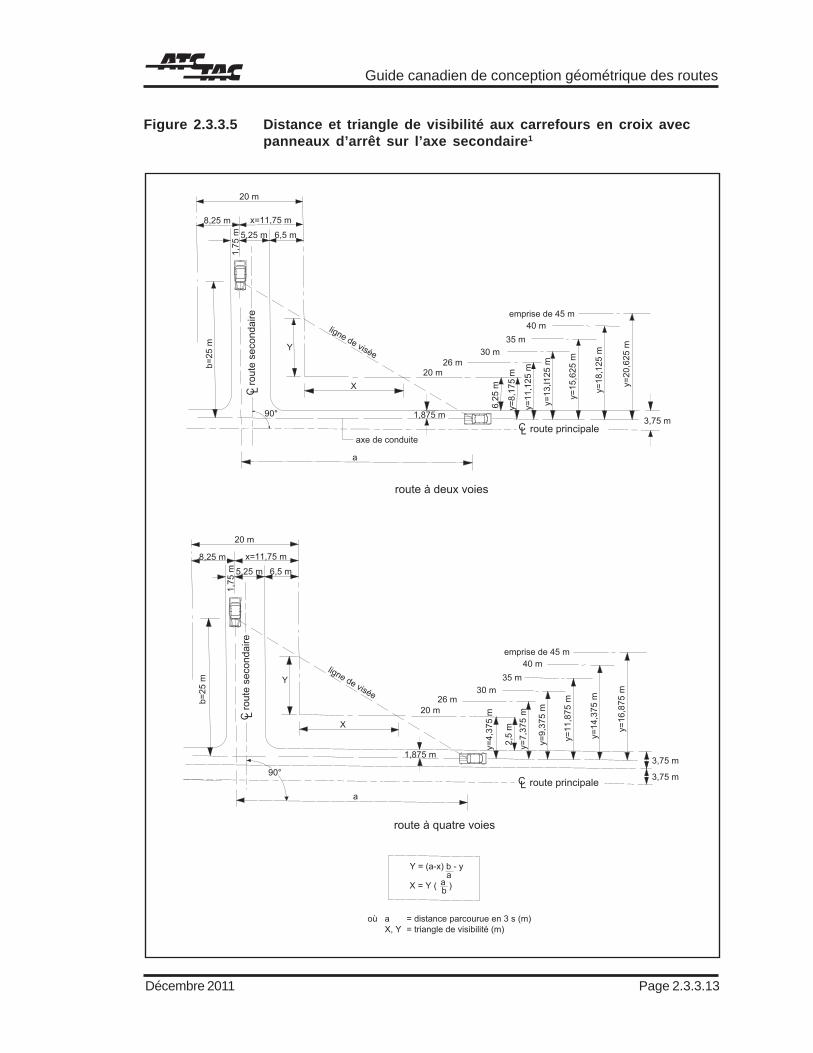
Guide canadien de conception géométrique des routes
Page 2.3.3.13Décembre 2011
Figure 2.3.3.5 Distance et triangle de visibilité aux carrefours en croix avecpanneaux d’arrêt sur l’axe secondaire1
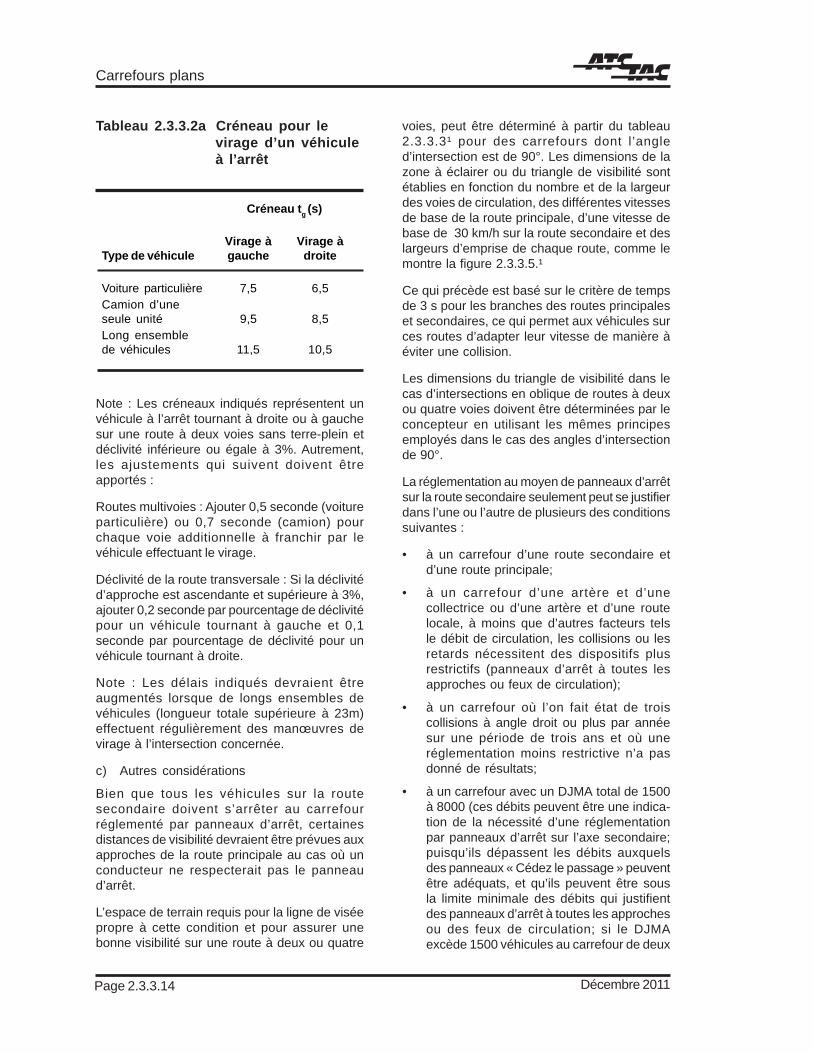
Carrefours plans
Page 2.3.3.14 Décembre 2011
Tableau 2.3.3.2a Créneau pour levirage d’un véhiculeà l’arrêt
Créneau tg (s)
Virage à Virage àType de véhicule gauche droite
Voiture particulière 7,5 6,5Camion d’uneseule unité 9,5 8,5Long ensemblede véhicules 11,5 10,5
Note : Les créneaux indiqués représentent unvéhicule à l’arrêt tournant à droite ou à gauchesur une route à deux voies sans terre-plein etdéclivité inférieure ou égale à 3%. Autrement,les ajustements qui suivent doivent êtreapportés :
Routes multivoies : Ajouter 0,5 seconde (voitureparticulière) ou 0,7 seconde (camion) pourchaque voie additionnelle à franchir par levéhicule effectuant le virage.
Déclivité de la route transversale : Si la déclivitéd’approche est ascendante et supérieure à 3%,ajouter 0,2 seconde par pourcentage de déclivitépour un véhicule tournant à gauche et 0,1seconde par pourcentage de déclivité pour unvéhicule tournant à droite.
Note : Les délais indiqués devraient êtreaugmentés lorsque de longs ensembles devéhicules (longueur totale supérieure à 23m)effectuent régulièrement des manœuvres devirage à l’intersection concernée.
c) Autres considérations
Bien que tous les véhicules sur la routesecondaire doivent s’arrêter au carrefourréglementé par panneaux d’arrêt, certainesdistances de visibilité devraient être prévues auxapproches de la route principale au cas où unconducteur ne respecterait pas le panneaud’arrêt.
L’espace de terrain requis pour la ligne de viséepropre à cette condition et pour assurer unebonne visibilité sur une route à deux ou quatre
voies, peut être déterminé à partir du tableau2.3.3.3¹ pour des carrefours dont l’angled’intersection est de 90°. Les dimensions de lazone à éclairer ou du triangle de visibilité sontétablies en fonction du nombre et de la largeurdes voies de circulation, des différentes vitessesde base de la route principale, d’une vitesse debase de 30 km/h sur la route secondaire et deslargeurs d’emprise de chaque route, comme lemontre la figure 2.3.3.5.¹
Ce qui précède est basé sur le critère de tempsde 3 s pour les branches des routes principaleset secondaires, ce qui permet aux véhicules surces routes d’adapter leur vitesse de manière àéviter une collision.
Les dimensions du triangle de visibilité dans lecas d’intersections en oblique de routes à deuxou quatre voies doivent être déterminées par leconcepteur en utilisant les mêmes principesemployés dans le cas des angles d’intersectionde 90°.
La réglementation au moyen de panneaux d’arrêtsur la route secondaire seulement peut se justifierdans l’une ou l’autre de plusieurs des conditionssuivantes :
• à un carrefour d’une route secondaire etd’une route principale;
• à un carrefour d’une artère et d’unecollectrice ou d’une artère et d’une routelocale, à moins que d’autres facteurs telsle débit de circulation, les collisions ou lesretards nécessitent des dispositifs plusrestrictifs (panneaux d’arrêt à toutes lesapproches ou feux de circulation);
• à un carrefour où l’on fait état de troiscollisions à angle droit ou plus par annéesur une période de trois ans et où uneréglementation moins restrictive n’a pasdonné de résultats;
• à un carrefour avec un DJMA total de 1500à 8000 (ces débits peuvent être une indica-tion de la nécessité d’une réglementationpar panneaux d’arrêt sur l’axe secondaire;puisqu’ils dépassent les débits auxquelsdes panneaux « Cédez le passage » peuventêtre adéquats, et qu’ils peuvent être sousla limite minimale des débits qui justifientdes panneaux d’arrêt à toutes les approchesou des feux de circulation; si le DJMAexcède 1500 véhicules au carrefour de deux
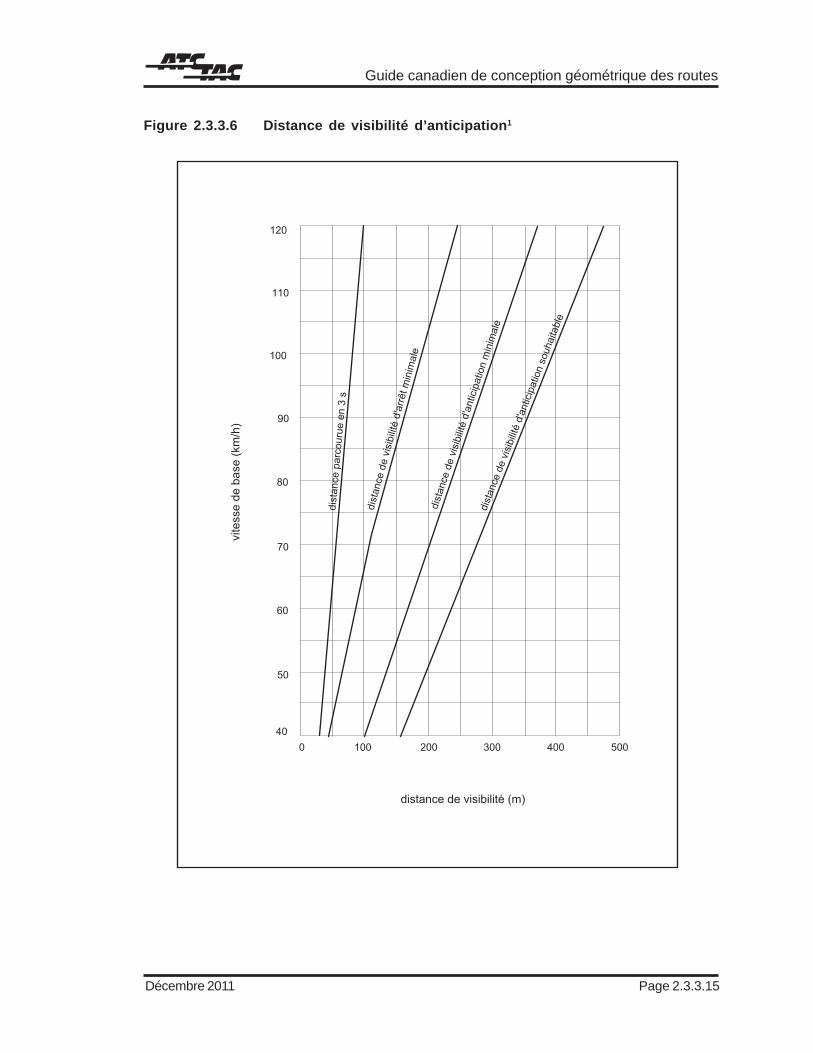
Guide canadien de conception géométrique des routes
Page 2.3.3.15Décembre 2011
Figure 2.3.3.6 Distance de visibilité d’anticipation1

Carrefours plans
Page 2.3.3.16 Décembre 2011
Tableau 2.3.3.5 Distance de visibilité pour le virage à gauche aux raccordementsde bretelles
Tableau 2.3.3.4 Tableau résumé de la distance de visibilité aux carrefours auxfins de conception
distance de visibilité à l’approche d’un carrefour route transversale sans
réglementation panneaux « cédez » panneaux d’arrêt feux de circulation
route secondaire
distance franchie en 3 s à la vitesse de base jusqu’à la distance de visibilité d’anticipation
Distance de visibilité d’arrêt (urbain, 20 km/h; rural, 30 ou 40 km/h) jusqu’à la distance de visibilité d’anticipation
distance franchie en 3 s à la vitesse de base jusqu’à la distance de visibilité d’anticipation
distance franchie en 3 s à la vitesse de base jusqu’à la distance de visibilité d’anticipation
route principale
distance franchie en 3 s à la vitesse de base jusqu’à la distance de visibilité d’anticipation
Distance de visibilité d’arrêt pour les vitesses de base jusqu’à la distance de visibilité d’anticipation
distance franchie en 3 s à la vitesse de base jusqu’à la distance de visibilité d’anticipation
distance franchie en 3 s à la vitesse de base jusqu’à la distance de visibilité d’anticipation
distance de visibilité au départ d’un carrefour route transversale sans
réglementation panneaux « Cédez » panneaux d’arrêt feux de circulation
route secondaire
règles des panneaux d’arrêt
règles des panneaux d’arrêt
règles des panneaux d’arrêt
règles de l’arrêt pour le virage à droite au feu rouge
route principale
règles des panneaux d’arrêt
règles de circulation libre règles de l’arrêt pour le virage à droite au feu rouge
distance de visibilité a (m) requise pour permettre au véhicule type de tourner à gauche et éviter le véhicule qui s’approche de la gauche
vitesse de base supposée sur la route secondaire
(km/h) voiture particulière camion d’une seule unité
véhicule remorqueur avec remorque
50 60 70 80 90
100
95 115 135 150 170 190
150 180 210 240 270 300
195 235 275 315 355 395
a Voir figure 2.3.3.7.
On vérifie la concordance à la fois des distances de visibilité définies au tableau 2.3.3.5 avec le profilen long de la route transversale et du triangle de visibilité horizontal. Le triangle de visibilité horizontalest affecté par l’obstruction visuelle créée par le garde-fou ou le parapet du pont. Les deux distancesde visibilité sont présentées à la figure 2.3.3.7.
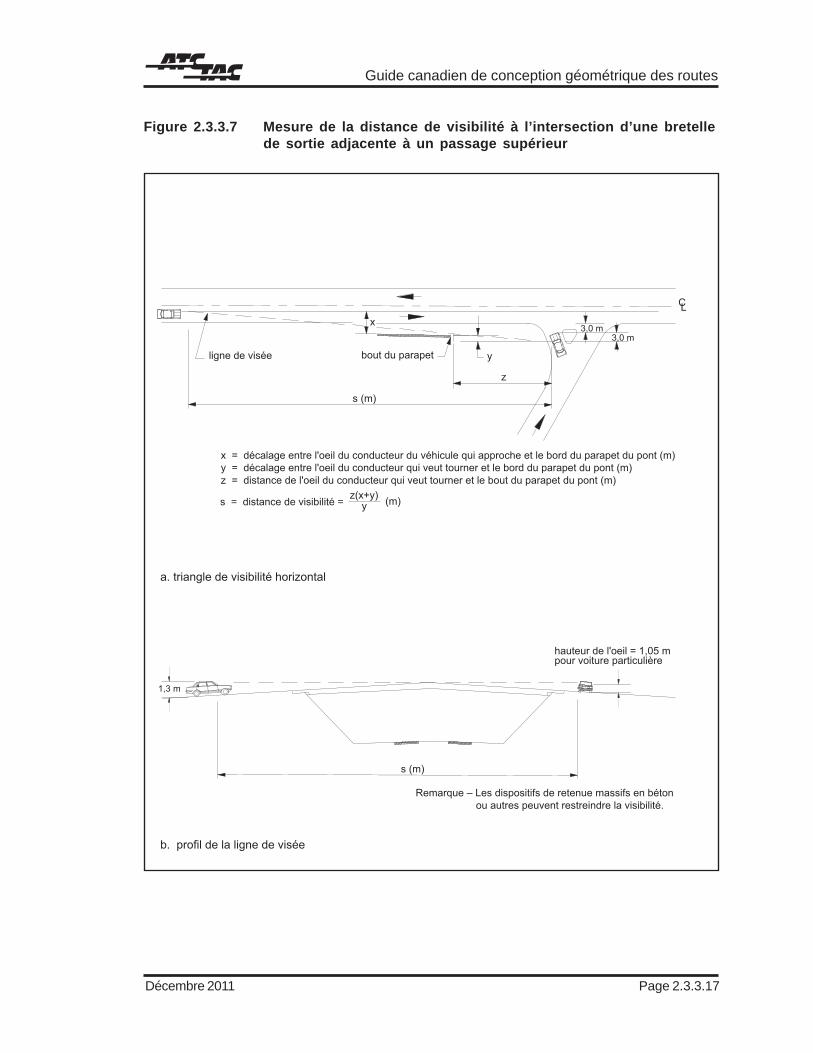
Guide canadien de conception géométrique des routes
Page 2.3.3.17Décembre 2011
Figure 2.3.3.7 Mesure de la distance de visibilité à l’intersection d’une bretellede sortie adjacente à un passage supérieur
Carrefours plans
Page 2.3.3.18 Décembre 2011
routes locales, la classification routièredevrait être réévaluée).
Feux de circulation
Les distances et les triangles de visibilité requisaux carrefours réglementés par des feux decirculation sont souvent déterminés de la mêmemanière que ceux qui sont requis pour laréglementation par panneaux d’arrêt. Puisqueles véhicules qui se croisent aux carrefoursmunis de feux de circulation y passent à desmoments distincts, théoriquement, la distancede visibilité qui tient compte de la circulationsur la route secondaire n’est pas une exigence.Cependant, en raison des nombreusespossibilités de fonctionnement des feux decirculation, on prévoit normalement au moins ladistance de visibilité requise pour laréglementation par panneaux d’arrêt. Lesconditions de fonctionnement des feux decirculation qui justifient cette pratique com-prennent : les pannes de feux de circulation,les cas d’infraction, les virages à droite permisau feu rouge et l’utilisation des feux rouges etjaunes clignotants.
Une exigence fondamentale pour tous lescarrefours réglementés par des feux decirculation est de s’assurer que les conducteurssoient capables de voir les feux suffisammenttôt pour poser le geste approprié (c.-à-d. ladistance de visibilité d’arrêt pour le feu rouge).
La distance de visibilité pour les virages à droiteau feu rouge d’un carrefour avec feux decirculation est la même que pour laréglementation par panneaux d’arrêt.
2.3.3.4 Distance de visibilitéd’anticipation
Normalement, la distance de visibilité d’arrêtminimale suffit aux conducteurs pour arrêter leurvéhicule. Cependant, cette distance est souventinadéquate lorsque les conducteurs doiventprendre des décisions rapidement, lorsquel’information est difficile à voir et à interpréter oulorsque des manœuvres inhabituelles s’avèrentnécessaires. Les conducteurs peuvent avoirbesoin d’une distance de visibilité plus grandeà des endroits critiques, comme là où diversessources d’information se font concurrence aucarrefour, là où le carrefour se situe sur lesommet d’une courbe verticale saillante ou au-
delà ou encore, là où il y a une courbe horizontaleprononcée à l’approche du carrefour.
Les distances de visibilité d’anticipationconstituent pour le concepteur des valeursappropriées de distance de visibilité à de telspoints critiques et servent de critèresd’évaluation de la pertinence des distances devisibilité à ces points. S’il n’est pas possible deprévoir ces distances en raison des courbeshorizontales ou verticales, on devra apporter uneattention particulière à l’utilisation de dispositifsde réglementation de la circulation pour avertird’avance des conditions à venir.
La figure 2.3.3.6 montre des valeurs établies pourla distance de visibilité d’anticipation.¹ Cesvaleurs tiennent compte des variations de lacomplexité des différents cas.
La distance de visibilité d’anticipation est baséesur le temps qui précède les manœuvres et letemps de manœuvre, le tout converti en distanceet vérifié de manière empirique. Le temps quiprécède la manœuvre est le temps requis pourqu’un conducteur perçoive une information liéeà un danger. Il est composé des temps de :
• détection et reconnaissance;
• décision et réaction.
Le temps de manœuvre est le temps nécessairepour accomplir une manœuvre de véhicule. Auxfins de conception, les valeurs calculées sontarrondies.
Pour mesurer la distance de visibilité d’antici-pation, on utilise habituellement une hauteur del’œil de 1,05 m et une hauteur de l’objet de0,38 m (hauteur minimum légale des feuxarrières). En certains endroits, selon lesconditions ambiantes anticipées, l’objet peutêtre la surface de la chaussée, auquel cas, lahauteur de l’objet devrait être de 0 m¹ (voirchapitre 1.2).
2.3.3.5 Résumé
Le tableau 2.3.3.4 résume l’exposé qui précèdesur la distance de visibilité aux carrefours dansles quatre cas suivants de réglementation : sansdispositif de réglementation, panneaux « Cédezle passage », panneaux d’arrêt et feux decirculation.
Guide canadien de conception géométrique des routes
Page 2.3.3.19Décembre 2011
2.3.3.6 Distance de visibilité auxponts
Lorsqu’un pont est situé près d’un carrefour plan,comme dans le cas d’un raccordement debretelle d’échangeur et d’une route transversaleà proximité d’un passage supérieur, il fauts’assurer de prévoir une distance de visibilitéadéquate, à cause de la possibilité d’uneobstruction visuelle que peut constituer leparapet du pont ou tout autre élément del’ouvrage. Généralement, le facteur critique auraccordement d’une bretelle est la distance devisibilité nécessaire aux véhicules qui tournentà gauche en provenance de la bretelle, pour éviterles véhicules arrivant de la gauche sur la routetransversale. S’il y a des feux de circulation aucarrefour, la distance de visibilité minimalecritique est celle qui est nécessaire auxvéhicules tournant à droite, en quittant la bretelle,pour éviter les véhicules s’approchant de lagauche. Cependant, comme on le mentionneprécédemment pour les carrefours avec feux decirculation, il est souhaitable de prévoir ladistance de visibilité pour les manœuvres devirage à gauche et de traversée associée à laréglementation par panneaux d’arrêt pour tenircompte de la possibilité de pannes ou deconditions analogues.
En utilisant le temps d’accélération requis pourparcourir ces distances, dérivés des graphiquesde la figure 2.3.3.310, et un temps de perception/réaction de 2,0 s, on peut calculer la distance devisibilité requise pour une manœuvre de départ.On suppose que les distances parcourues parles véhicules tournant à gauche de la bretelle pours’engager sur la route transversale1 avant dedégager la voie de circulation occupée par unvéhicule s’approchant de la gauche, sont d’environ18 m pour des voitures particulières, 28 m pourdes camions d’une seule unité et 37 m pour destracteurs semi-remorques. Les distances devisibilité requises pour ces trois types de véhiculeset un ensemble de vitesses d’approche sur laroute transversale sont données au tableau2.3.3.5.
On vérifie la concordance à la fois des distancesde visibilité définies au tableau 2.3.3.5 avec leprofil en long de la route transversale et dutriangle de visibilité horizontal. Le triangle devisibilité horizontal est affecté par l’obstructionvisuelle créée par le garde-fou ou le parapet du
pont. Les deux distances de visibilité sontprésentées à la figure 2.3.3.7.
Pour vérifier le profil en long, la hauteur présuméede l’œil du conducteur d’un véhicule qui tourneest de 1,05 m dans le cas d’une voitureparticulière et jusqu’à 2,4 m pour un gros camion(voir chapitre 1.2). Dans tous les cas, onsuppose que la hauteur de l’objet est de 1,3 m,soit la hauteur présumée d’une voitureparticulière. Lorsque des dispositifs de retenuemassifs en béton ou autres sont utilisés sur lesroutes transversales, notamment lorsque le tracéde la route transversale comprend une courbeverticale saillante, il faut tenir compte desrestrictions qui peuvent être imposées à la lignede visée lorsqu’on détermine la distance devisibilité disponible.
Pour vérifier le triangle de visibilité horizontal,l’emplacement du garde-fou ou du parapet duviaduc d’un passage supérieur est souvent unfacteur déterminant de la distance de visibilité.Dans le cas du raccordement d’une bretelleadjacent au viaduc d’un passage inférieur, lesculées ou les piliers d’un pont peuvent être lesfacteurs limitatifs. La distance de visibilité auraccordement des bretelles peut être amélioréeen augmentant le dégagement entre la chausséede la route transversale et les parapets du pont,les culées ou les piliers ou en augmentant ladistance entre l’intersection du raccordement dela bretelle et le viaduc. Lorsqu’on ne peut prévoirune distance suffisante, on peut envisagerl’installation de feux de circulation à l’intersectiondu raccordement de la bretelle pour améliorer lasécurité. Dans certains cas rares, des miroirspeuvent rassurer et contribuer à atténuer leproblème de perception d’un manque de distancede visibilité.
Pour les autres carrefours adjacents aux pontsd’étagement, les facteurs critiques de la distancede visibilité varient selon l’agencement du tracéde la route, la réglementation de la circulationet les patrons de circulation.
2.3.3.7 Distance de visibilité auxpassages à niveauferroviaires
Voir la section 2.3.13.

Carrefours plans
Page 2.3.3.20 Décembre 2011
Guide canadien de conception géométrique des routes
Page 2.3.12.1Décembre 2011
2.3.12 CARREFOURSGIRATOIRES
2.3.12.1 Introduction
Environ la moitié des collisions qui se produisentsur le réseau routier nord-américain ont lieu àdes carrefours;20 les conducteurs y sont confrontésà des mouvements tout droit, de virage à droiteet de virage à gauche et la capacité y estrestreinte. Les premiers efforts visant à accroîtrela sécurité des automobilistes à ces nœuds duréseau routier datent des années 30 et 40, avecla construction de ronds-points par plusieursadministrations. Cependant, en raison desdifférences dans l’aménagement, d’incohérencesdans l’attribution de la priorité de passage et del’absence d’uniformité de la signalisation, cesronds-points n’ont eu que peu d’impact sur lasécurité; de plus, ils avaient tendance à gênerl’écoulement de la circulation. 20
Le carrefour giratoire, qui est une variante durond-point original, peut dans certains cass’avérer être une solution à ces problèmes. EnEurope de l’Ouest et en Australie où l’on trouvefréquemment ce genre de carrefour, lesmodifications dans l’aménagement descarrefours giratoires en plus des changementsapportés à la réglementation sur la circulation,ont contribué à une nette amélioration de leursécurité et de leur capacité. Aujourd’hui,plusieurs ingénieurs en transport en Amériquedu Nord sont devenus partisans des carrefoursgiratoires comme moyen de réduire les collisionset d’améliorer l’écoulement de la circulation24.
2.3.12.2 Caractéristiques descarrefours giratoires
Les carrefours giratoires se distinguent despremiers ronds-points par leurs caractéristiquesde fonctionnement et d’aménagement. Lacaractéristique de fonctionnement la plusimportante repose sur le fait qu’un véhicule àl’entrée doit céder le passage aux véhicules quiy sont déjà engagés. La déflexion de la trajectoiredes véhicules à l’entrée et à la sortie est unecaractéristique importante de l’aménagement.Les angles d’entrée de 20 à 60 degrés, lespassages piétonniers en amont de la ligne de« Cédez le passage », l’absence destationnement dans le carrefour giratoire, les îlotsséparateurs qui contribuent à réduire la vitesseet décourager les virages à gauche et qui offrent
un refuge aux piétons à toutes les approches,sont d’autres caractéristiques d’aménagementimportantes.
La figure 2.3.12.1 présente certaines de cescaractéristiques importantes. La définition dechaque paramètre qui y apparaît est présentéeci-dessous :
D - Diamètre inscrit : le diamètre du plus grandcercle qui peut être inscrit dans les limitesd’un carrefour.
R - Rayon de l’entrée : le rayon de courbureminimal de la bordure du côté droit del’entrée.
E - Largeur de l’entrée : distance entre le pointA et la bordure du côté droit, mesurée lelong d’une ligne perpendiculaire à cettedernière.
V - Demi-largeur de la branche : distancemesurée perpendiculairement entre l’axe dela branche du carrefour et la bordure du côtédroit, en amont du début de l’évasement del’entrée.
∅ - Angle d’entrée : paramètre qui sert àcaractériser l’angle de conflit entre lescourants de circulation à l’entrée et sur lachaussée circulaire.
ll - Longueur réelle moyenne de l’évasement :longueur montrée à la figure 2.3.12.1.
La ligne GFlD est la projection de la bordure ducôté droit, parallèle à l’axe HA et à une distanceV de celle-ci, à partir de la branche du carrefourjusqu’à la ligne de « Cédez le passage ».
BA est la ligne le long de laquelle on mesure E(qui est donc perpendiculaire à la ligne GBJ),ce qui signifie que D se trouve à une distance(E - V) de B.
La ligne CFl est parallèle à BG (la bordure ducôté droit) et à une distance [E - V]/2 de cettedernière. Habituellement, la ligne CFl est donccourbe et sa longueur est mesurée le long de lacourbe pour obtenir ll.13
2.3.12.3 Catégories de carrefoursgiratoires
Les carrefours giratoires sont généralementclassés en fonction de leur diamètre extérieur(D). Le tableau 2.3.12.1 présente un résumé desgammes typiques des valeurs D pour les
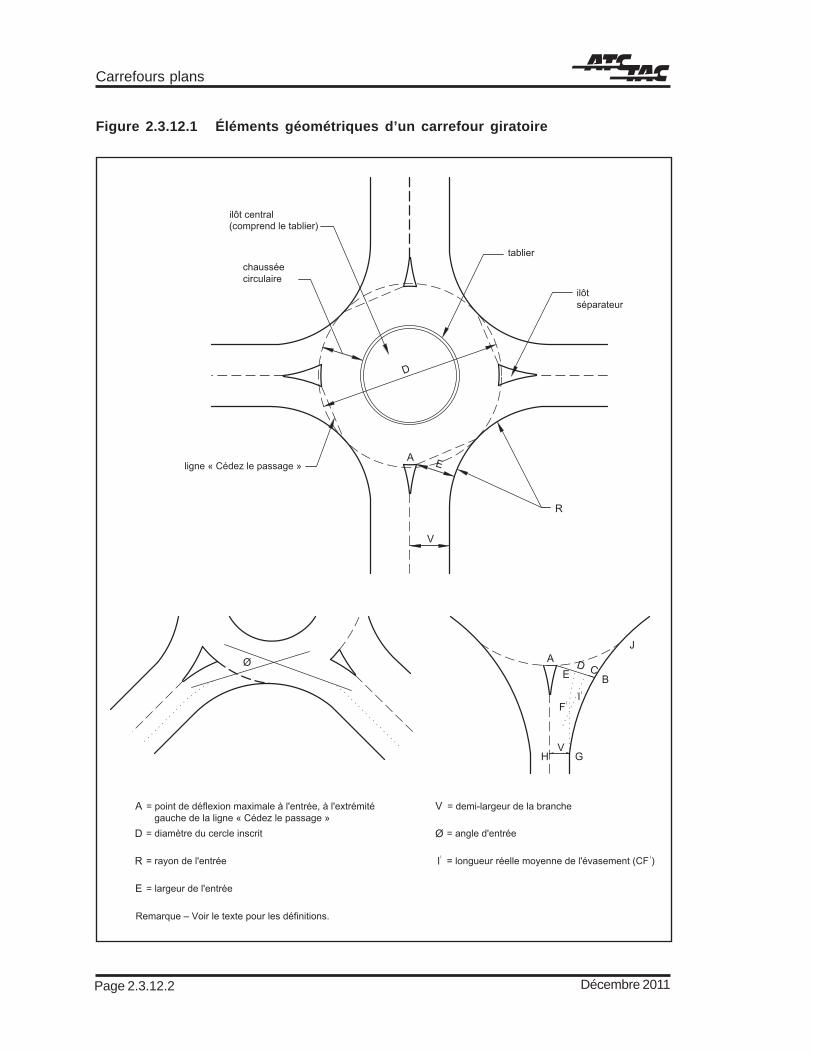
Carrefours plans
Page 2.3.12.2 Décembre 2011
Figure 2.3.12.1 Éléments géométriques d’un carrefour giratoire
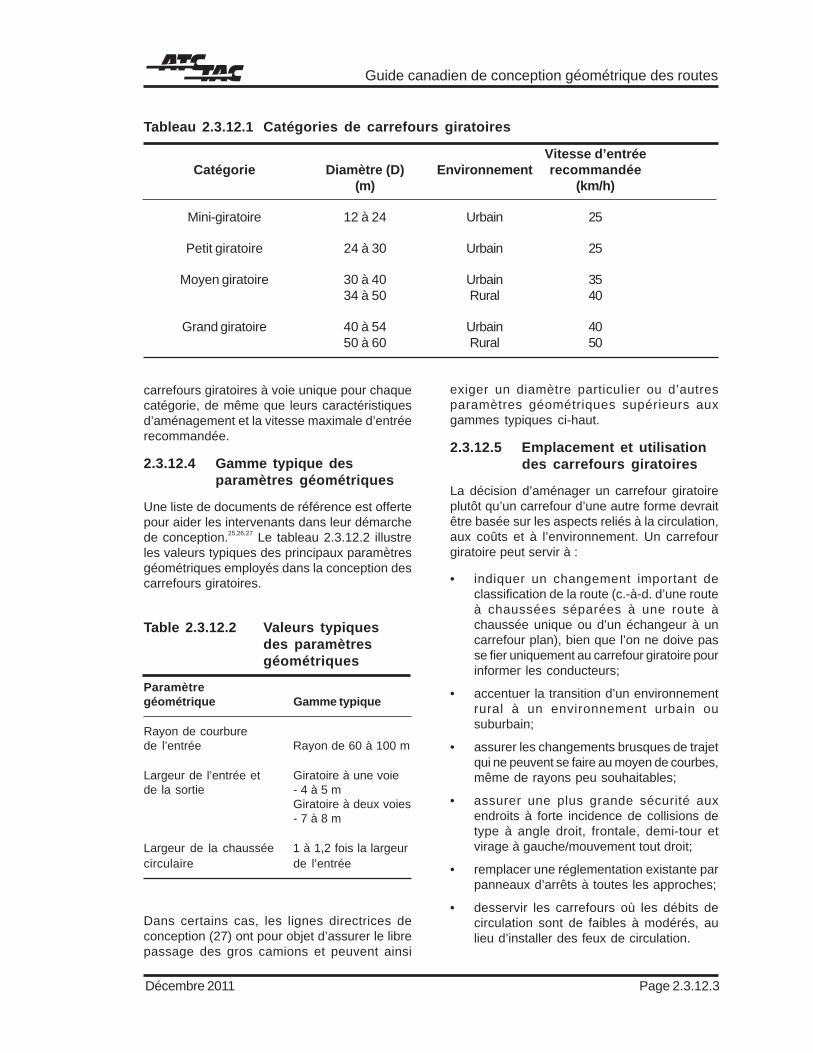
Guide canadien de conception géométrique des routes
Page 2.3.12.3Décembre 2011
carrefours giratoires à voie unique pour chaquecatégorie, de même que leurs caractéristiquesd’aménagement et la vitesse maximale d’entréerecommandée.
2.3.12.4 Gamme typique desparamètres géométriques
Une liste de documents de référence est offertepour aider les intervenants dans leur démarchede conception.25,26,27 Le tableau 2.3.12.2 illustreles valeurs typiques des principaux paramètresgéométriques employés dans la conception descarrefours giratoires.
Table 2.3.12.2 Valeurs typiquesdes paramètresgéométriques
Paramètregéométrique Gamme typique
Rayon de courburede l’entrée Rayon de 60 à 100 m
Largeur de l’entrée et Giratoire à une voiede la sortie - 4 à 5 m
Giratoire à deux voies- 7 à 8 m
Largeur de la chaussée 1 à 1,2 fois la largeurcirculaire de l’entrée
Dans certains cas, les lignes directrices deconception (27) ont pour objet d’assurer le librepassage des gros camions et peuvent ainsi
exiger un diamètre particulier ou d’autresparamètres géométriques supérieurs auxgammes typiques ci-haut.
2.3.12.5 Emplacement et utilisationdes carrefours giratoires
La décision d’aménager un carrefour giratoireplutôt qu’un carrefour d’une autre forme devraitêtre basée sur les aspects reliés à la circulation,aux coûts et à l’environnement. Un carrefourgiratoire peut servir à :
• indiquer un changement important declassification de la route (c.-à-d. d’une routeà chaussées séparées à une route àchaussée unique ou d’un échangeur à uncarrefour plan), bien que l’on ne doive passe fier uniquement au carrefour giratoire pourinformer les conducteurs;
• accentuer la transition d’un environnementrural à un environnement urbain ousuburbain;
• assurer les changements brusques de trajetqui ne peuvent se faire au moyen de courbes,même de rayons peu souhaitables;
• assurer une plus grande sécurité auxendroits à forte incidence de collisions detype à angle droit, frontale, demi-tour etvirage à gauche/mouvement tout droit;
• remplacer une réglementation existante parpanneaux d’arrêts à toutes les approches;
• desservir les carrefours où les débits decirculation sont de faibles à modérés, aulieu d’installer des feux de circulation.
Tableau 2.3.12.1 Catégories de carrefours giratoires
Vitesse d’entréeCatégorie Diamètre (D) Environnement recommandée
(m) (km/h)
Mini-giratoire 12 à 24 Urbain 25
Petit giratoire 24 à 30 Urbain 25
Moyen giratoire 30 à 40 Urbain 3534 à 50 Rural 40
Grand giratoire 40 à 54 Urbain 4050 à 60 Rural 50
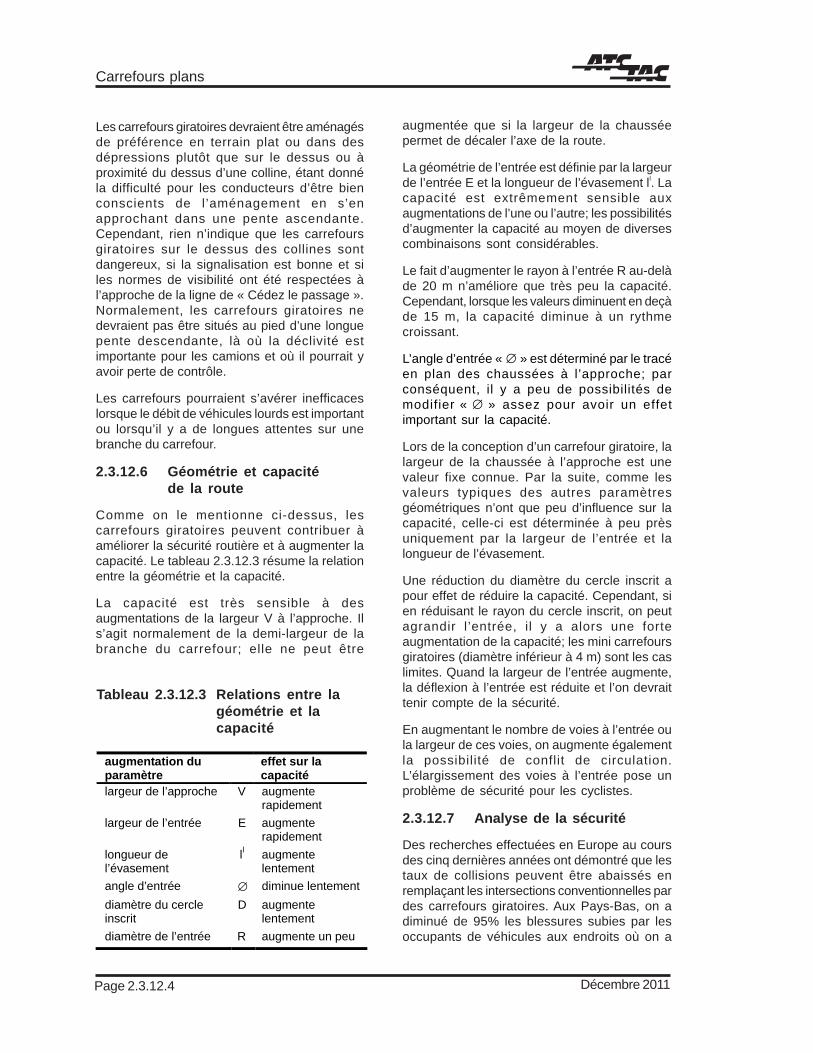
Carrefours plans
Page 2.3.12.4 Décembre 2011
Les carrefours giratoires devraient être aménagésde préférence en terrain plat ou dans desdépressions plutôt que sur le dessus ou àproximité du dessus d’une colline, étant donnéla difficulté pour les conducteurs d’être bienconscients de l’aménagement en s’enapprochant dans une pente ascendante.Cependant, rien n’indique que les carrefoursgiratoires sur le dessus des collines sontdangereux, si la signalisation est bonne et siles normes de visibilité ont été respectées àl’approche de la ligne de « Cédez le passage ».Normalement, les carrefours giratoires nedevraient pas être situés au pied d’une longuepente descendante, là où la déclivité estimportante pour les camions et où il pourrait yavoir perte de contrôle.
Les carrefours pourraient s’avérer inefficaceslorsque le débit de véhicules lourds est importantou lorsqu’il y a de longues attentes sur unebranche du carrefour.
2.3.12.6 Géométrie et capacitéde la route
Comme on le mentionne ci-dessus, lescarrefours giratoires peuvent contribuer àaméliorer la sécurité routière et à augmenter lacapacité. Le tableau 2.3.12.3 résume la relationentre la géométrie et la capacité.
La capacité est très sensible à desaugmentations de la largeur V à l’approche. Ils’agit normalement de la demi-largeur de labranche du carrefour; elle ne peut être
augmentée que si la largeur de la chausséepermet de décaler l’axe de la route.
La géométrie de l’entrée est définie par la largeurde l’entrée E et la longueur de l’évasement ll. Lacapacité est extrêmement sensible auxaugmentations de l’une ou l’autre; les possibilitésd’augmenter la capacité au moyen de diversescombinaisons sont considérables.
Le fait d’augmenter le rayon à l’entrée R au-delàde 20 m n’améliore que très peu la capacité.Cependant, lorsque les valeurs diminuent en deçàde 15 m, la capacité diminue à un rythmecroissant.
L’angle d’entrée « ∅ » est déterminé par le tracéen plan des chaussées à l’approche; parconséquent, il y a peu de possibilités demodifier « ∅ » assez pour avoir un effetimportant sur la capacité.
Lors de la conception d’un carrefour giratoire, lalargeur de la chaussée à l’approche est unevaleur fixe connue. Par la suite, comme lesvaleurs typiques des autres paramètresgéométriques n’ont que peu d’influence sur lacapacité, celle-ci est déterminée à peu prèsuniquement par la largeur de l’entrée et lalongueur de l’évasement.
Une réduction du diamètre du cercle inscrit apour effet de réduire la capacité. Cependant, sien réduisant le rayon du cercle inscrit, on peutagrandir l’entrée, il y a alors une forteaugmentation de la capacité; les mini carrefoursgiratoires (diamètre inférieur à 4 m) sont les caslimites. Quand la largeur de l’entrée augmente,la déflexion à l’entrée est réduite et l’on devraittenir compte de la sécurité.
En augmentant le nombre de voies à l’entrée oula largeur de ces voies, on augmente égalementla possibilité de conflit de circulation.L’élargissement des voies à l’entrée pose unproblème de sécurité pour les cyclistes.
2.3.12.7 Analyse de la sécurité
Des recherches effectuées en Europe au coursdes cinq dernières années ont démontré que lestaux de collisions peuvent être abaissés enremplaçant les intersections conventionnelles pardes carrefours giratoires. Aux Pays-Bas, on adiminué de 95% les blessures subies par lesoccupants de véhicules aux endroits où on a
augmentation du paramètre
effet sur la capacité
largeur de l’approche V augmente rapidement
largeur de l’entrée E augmente rapidement
longueur de l’évasement
ll augmente lentement
angle d’entrée ∅ diminue lentement diamètre du cercle inscrit
D augmente lentement
diamètre de l’entrée R augmente un peu
Tableau 2.3.12.3 Relations entre lagéométrie et lacapacité

Guide canadien de conception géométrique des routes
Page 2.3.12.5Décembre 2011
aménagé des carrefours giratoires.20 Sur desroutes interurbaines en France, le nombre moyende collisions occasionnant des blessures étaitde 4 par 100 millions de véhicules entrant dansun carrefour giratoire, comparé à 12 par 100millions de véhicules entrant dans un carrefourréglementé par panneaux d’arrêt ou panneaux« Cédez le passage ». La sécurité descarrefours giratoires aménagés en France surtouten milieux urbain et suburbain, incluant dessecteurs résidentiels, était généralementmeilleure que celle de carrefours avec feux decirculation.20 Les chercheurs ont noté que lesgrands carrefours giratoires avec de largesentrées et une circulation importante decyclistes semblent être moins sécuritaires qued’autres carrefours giratoires. En Allemagne, lenombre de collisions était de 1,24 par million devéhicules entrant dans de petits carrefoursgiratoires, comparé à 3,35 aux carrefourspourvus de feux de circulation et à 6,58 auxanciens ronds-points.20 En Norvège, une étudede grande envergure sur les collisions a aussirévélé que les carrefours giratoires sont plussécuritaires que les carrefours pourvus de feuxde circulation. Le nombre de collisions avecblessé était de 3 pour 100 millions de véhiculesentrant dans des carrefours giratoires à troisbranches et de 5 par 100 millions de véhiculesentrant dans un carrefour (en « T ») à troisbranches pourvus de feux de circulation; il y enavait 5 aux carrefours giratoires à quatrebranches et 10 aux carrefours (en croix) à quatrebranches (avec ou sans feux de circulation).20
Aux États-Unis, une étude récente confirme lesavantages des carrefours giratoires sur le plande la sécurité. Une étude de six carrefours enFloride, au Maryland et au Nevada a révélé quela transformation de carrefours en « T » (avecpanneaux d’arrêt ou feux de circulation) encarrefours giratoires a permis de réduire les tauxde collisions. 20 Selon l’étude, parrainée par la« Federal Highway Administration », la réductionétait importante statistiquement.
Compte tenu de l’apparition récente descarrefours giratoires en Amérique du Nord, lesadministrations routières n’ont pas euvéritablement l’occasion de réunir des donnéesempiriques sur les avantages de ces installationssur le plan de la sécurité. Heureusement, lessimilitudes entre les modèles de prédiction descollisions mis au point au Royaume-Uni pourles carrefours giratoires et ceux développés aux
États-Unis pour les carrefours en croix ont permisaux administrations de comparer théoriquementla sécurité des deux types de carrefour. Lesmodèles du Royaume-Uni et des États-Unisproposent tous les deux des estimations dunombre de collisions avec dommages autresqu’à la propriété. 20 De plus, les deux modèlesutilisent des méthodes de pointe d’analyse derégression (Poisson et binomiale négative) etdes échantillons suffisamment importants pourpouvoir établir une relation entre les collisionset des caractéristiques particulières de la route.Sur la base de telles similitudes, on pourraitconclure que les carrefours giratoires aux États-Unis offrent la possibilité d’améliorer la sécuritélorsqu’on les compare aux carrefoursconventionnels, tout comme on s’y attend auRoyaume-Uni.
Cependant, malgré qu’elles aient fait leurspreuves, on devrait faire très attention à ladéfinition de l’aménagement pour pouvoir profiterdes principaux avantages sur le plan de lasécurité. La vitesse excessive tant à l’entréequ’à l’intérieur du carrefour giratoire constitue leproblème de sécurité le plus courant. Lesfacteurs les plus importants qui contribuent àdes vitesses élevées à l’entrée et dans l’anneausont :
• une déflexion inadéquate à l’entrée;
• un angle d’entrée très prononcé qui favorisela rapidité des mouvements de convergenceavec les véhicules qui sont déjà dansl’anneau;
• une mauvaise visibilité en amont de la ligne« Cédez le passage »;
• des panneaux avancés de signalisationd’indication mal conçus ou mal placés;
• des panneaux de signalisation indiquantl’obligation de ralentir immédiatement quisont mal situés;
• plus de quatre entrées, ce qui se traduit parun aménagement étendu.
De plus, les éléments de sécurité suivants sontà considérer au moment de la préparation d’unplan d’aménagement :
1. Angle entre les branches : la possibilité decollisions à une entrée dépend à la fois desmouvements de circulation et de l’angle
Carrefours plans
Page 2.3.12.6 Décembre 2011
mesuré dans le sens contraire des aiguillesd’une montre entre l’alignement à l’approchede cette entrée et l’alignement à l’approchede l’entrée suivante. Il devrait y avoir un grandangle entre une entrée à fort débit et l’entréesuivante et un angle plus petit dans le casd’une entrée à faible débit pour réduire lerisque de collisions.
2. Déclivité : bien qu’il soit normal d’adoucirles déclivités à l’approche d’un carrefour àenviron 2% ou moins à l’entrée, des étudesréalisées à un nombre restreint de sites ontdémontré que l’effet bénéfique de cette façonde faire sur le plan des possibilités decollisions n’est que marginal.
3. Visibilité à gauche à l’entrée : cet élémenta relativement peu d’influence sur le risquede collision; il n’y a rien à gagner enaugmentant la visibilité au-delà du seuilrecommandé.
On devra faire attention au choix du type debordure pour l’aménagement d’un carrefourgiratoire. Il peut y avoir un problème de sécuritélorsque des bordures spéciales à profil élevésont utilisées autour d’un îlot central, étant donnéle danger qu’elles peuvent représenter pour lesvéhicules qui passent tout droit à l’entrée.
Des observations ont démontré que ces bordurespeuvent avoir pour conséquence la perte decontrôle ou le capotage des véhicules, à moinsque l’angle d’approche ne soit faible et que lesvitesses réelles des véhicules ne soient réduites.Lorsque des bordures à profil élevé doivent êtreutilisées sur des branches du carrefour, ellespeuvent être dangereuses pour les piétons eton devrait envisager l’installation de garde-fouspour canaliser les déplacements de piétons.
Des vitesses élevées sur la chaussée circulairesont sources de problèmes connexes auxentrées et s’observent normalement aux grandscarrefours giratoires où les voies de circulation
dans l’anneau sont excessivement longues oularges ou les deux. Cependant, ces problèmesà une entrée donnée peuvent également survenirà des carrefours giratoires plus petits à caused’une déflexion inadéquate aux entréesprécédentes. Habituellement, la solution à unproblème de vitesses élevées dans l’anneau doitêtre assez radicale, impliquant aux heures depointe la réglementation des entréesproblématiques au moyen de feux de circulation.Dans des cas extrêmes, il pourrait êtrenécessaire de convertir les carrefours giratoiresen anneau de raccordement où la chausséecirculaire est à deux sens et les entrées/sortiessont réglementées par des mini-carrefoursgiratoires, des carrefours giratoires normaux ouencore par des feux de circulation.
Si les problèmes aux entrées sont causés parune mauvaise visibilité vers la gauche, de bonsrésultats peuvent être obtenus en avançant laligne de « Cédez le passage » conjointementavec une réduction de la zone hachuréeadjacente ou un prolongement de l’îlotséparateur.
Il faudrait faire état d’une mise en garde - lesantécédents des carrefours giratoires en matièrede sécurité pour un groupe particulier d’usagersde la route sont mitigés. Les piétons quitraversent aux carrefours giratoires ontlongtemps été considérés comme étant aussien sécurité que ceux qui traversent auxcarrefours conventionnels, parce que la vitessey est moins élevée et que les îlots offrent unrefuge aux piétons. Cependant, plusieurs paysont noté des augmentations de collisionsimpliquant des cyclistes après l’installation decarrefours giratoires. D’autre part, aux Pays-Bas, on a signalé une diminution de 1,3 à 0,37blessure de cyclistes par année à 181 carrefoursconventionnels convertis en mini-carrefoursgiratoires. 20
Guide canadien de conception géométrique des routes
Page 2.3.R.1Septembre 1999
RÉFÉRENCESBIBLIOGRAPHIQUES
1. Geometric Design Standards for OntarioHighways, Ministère des transports del’Ontario, 1985.
2. Manual of Uniform Traffic Control Devicesfor Canada, Association des transports duCanada, 1998.
3. KUCIEMBA, S. R. et J.A. CIRILLO. SafetyEffectiveness of Highway Design Features,Volume V: Intersections, Publication No.FHWA-RD-91-078, US Department ofTransportation, Federation HighwayAdministration, novembre 1992.
4. Accident Facts, éditions de 1968 et 1988,National Safety Council, Chicago, IL, 1968et 1988.
5. NEUMAN, T. R., JACK E. LEISCH ANDASSOCIATES, Intersection ChannelizationDesign Guide, National Co-operativeHighway Research Board (Report 27a),National Research Council, Evanston,Illinois, novembre 1985.
6. JACK E. LEISCH & ASSOCIATES, Planningand Design Guide for At-Grade Intersection,1978.
7. HANNA, J. T., T. E. FLYNN et L. T. WEBB.Characteristics of Intersection Collisions inRural Municipalities, TransportationResearch Record 601, TransportationResearch Board, 1976.
8. DAVID, N. A. et J.R. NORMAN. MotorVehicle Collisions in Relation to Geometricand Traffic Features of HighwayIntersections: Vol. II – Research Report,Report No. FHWA-RD-76-129, FederalHighway Administration, juillet 1979.
9. PARKER, M. R. et autres. GeometricTreatments for Reducing Passing Collisionsat Rural Intersections on Two-LaneHighways: Vol. I – Final Report, Report No.FHWA/RD-83/074, Federal HighwayAdministration, septembre 1983.
10. Highway Geometric Design Guide,Ministère des Transports et des Servicespublics de l’Alberta, 1995.
11. A Policy on Geometric Design of Highwaysand Roadways, American Association ofState Highway and Transportation Officials(AASHTO), 1994.
12. HARWOOD, D.W. et autres. MedianIntersection Design, NCHRP Report 375,National Co-operative Highway ResearchProgram, Transportation Research Board,National Research Council, 1995.
13. Design Manual for Roads and Bridges, Vol.6, Section 2, Part 3, Geometric Design ofRoundabouts, Department Standard No. TD1693, Department of Transportation, U.K.,septembre 1993.
14. CROWN, R. B. et RODEL – An AlternativeApproach to Roundabout Design Highwayand Transportation, Vol. 34, No. 10, Journalof the Institute of Highways andTransportation, U.K., octobre 1987.
15. Guide for the Design of Roadway Lighting,Association des transports du Canada,1982.
16. Manuel sur les passages à niveau,Transports Canada, 1997.
17. Canadian Capacity Guide for SignalizedIntersections, 2nd Edition, Institute ofTransportation Engineers, juin 1995.
18. Traffic Control Signal Timing and CapacityAnalysis at Signalized Intersections,Ministère des Transports de l’Ontario,décembre 1989.
19. KENNETH ACKERET. « Criteria for theGeometric Design of Triple Left-TurnLanes », ITE Journal, Volume 64, No. 12,décembre 1994.
20. BARED, J. « Roundabouts Improving RoadSafety and Increasing Capacity », TR News,No. 191, Transportation Research Board,juillet- août 1997.
21. Canadian Guide to Neighbourhood TrafficCalming, Association des transports duCanada, 1998.
22. Highway Capacity Manual, Special Report209, Transportation Research Board,National Research Council, 1994.
23. Design Vehicle Dimensions for Use inGeometric Design, Association desTransports du Canada, 1997.

Carrefours plans
Page 2.3.R.2 Décembre 2011
24. TRANSPORTATION ASSOCIATION OFCanada. Synthesis of North AmericanRoundabout Practice, 2008
25. TRANSPORTATION RESEARCH BOARD.National Cooperative Highway ResearchProgram Report 672 “Roundabouts: AnInformational Guide, Second Edition” ; TRB,Washington, D.C., 2010
26. MINISTÈRE DES TRANSPORTS DUQUÉBEC. Le carrefour giratoire, un modede gestion différent, 2005.
27. MINISTÈRE DES TRANSPORTS DE LACOLOMBIE-BRITANNIQUE. Supplément auGuide de conception géométrique de l’ATC,2007.
Guide canadien de conception géométrique des routes
Page 3.1.6.3Décembre 2011
jumeler le comportement d’une glissière à desbesoins spécifiques.
3.1.6.2 Dispositifs de retenue :domaine de définition etexemples
Organisation et contenu de cette section
Les parties subséquentes de cette sectiontraitent de quatre types majeurs de dispositifsde retenue : glissières latérales, glissières mé-dianes, parapets de ponts et transitions derigidité et dispositifs d’extrémité. Les exposésrelatifs aux domaines de définition de chacunde ces types de dispositifs font l’objet d’unesous-section distincte; conformément auxméthodes de conception des dispositifs deretenue, ils abordent les sujets suivants :
• aperçu des technologies;
• domaine de définition : critères de justifi-cation;
• domaine de définition : critères de choix;
• domaine de définition : lignes directricespour la localisation.
Dans ce guide, le traitement des technologiesde dispositifs de retenue se limite à un exposégénéral des types génériques de dispositifs, demanière à clarifier les questions de conceptiond’ordre général. Les technologies de dispositifsde retenue sont constamment raffinées et misesau point. Les concepteurs devront se tenir à jouren ce qui a trait à la disponibilité et aux carac-téristiques de technologies spécifiques.
En plus des exposés sur les domaines de défini-tion, on présente également des exemples prati-ques d’application des principes de conception.
Aperçu des technologies
Pour pouvoir diriger et réorienter un véhicule quifrappe une glissière latérale, il faut trouver unbon compromis entre le besoin d’empêcher larupture de la glissière et la nécessité de protégerles occupants du véhicule. Les différentes tech-nologies qui existent à cet égard peuvent êtreregroupées en trois catégories distinctes :
1. Les systèmes flexibles qui subissent la dé-formation la plus importante mais qui assu-rent les taux de décélération les plus faibles.De tels systèmes sont utiles là où il y asuffisamment d’espace libre d’obstacles ou
de tout autre danger derrière la glissièredans la zone de déformation latérale prévue.Ces glissières sont habituellement consti-tuées de lisses montées sur poteau de faiblerésistance et conçues pour des déforma-tions de 3,2 à 3,7 m. Les concepteursdoivent se familiariser avec les caractéris-tiques spécifiques des technologieschoisies ou à considérer et préparer le projeten conséquence.
2. Les systèmes semi-rigides permettent deréduire la déformation latérale mais ontcomme conséquence des taux de décélé-ration plus élevés. De tels systèmes sont àconsidérer lorsqu’il y a des contrainteslatérales et où la déformation doit être res-treinte. Il s’agit habituellement d’un ensembleplus résistant de lisses montées sur po-teaux et ils sont conçus pour des déforma-tions de 0,5 à 1,7 m. Les concepteursdoivent se familiariser avec les caractéris-tiques spécifiques des technologies choi-sies ou à considérer et préparer le projet enconséquence.
3. Les systèmes rigides sont habituellementdes glissières continues en béton. Ces tech-nologies ne permettent pas de déformationlatérale mais ont comme conséquence lestaux de décélération les plus élevés. Cesglissières servent habituellement là où il ya peu d’espace pour la déformation ou là oùles conséquences d’une rupture de la glis-sière sont graves. Il existe de nombreusesformes pour ce type de glissière, incluantune version plus haute pour utilisation là oùle pourcentage de camions est élevé.
Le tableau 3.1.6.1 montre des exemples de cestechnologies de glissière latérale.
Critères de justification pour protection destalus
Les talus et les obstacles sont des dangers enbordure de route dont il faut se protéger aumoyen d’une glissière latérale. Dans le passé,les techniques servant à déterminer les besoinsde glissières latérales pour les talus se servaientgénéralement de la hauteur du talus et de sadéclivité comme paramètres clés de l’étude dejustification; elles comparaient essentiellementla gravité d’une collision avec une glissière avecla gravité de s’engager sur un talus.

Sécurité des abords de route
Page 3.1.6.4 Décembre 2011
Des nomogrammes de justification peuvent êtreélaborés en utilisant des techniques deprédiction de collisions et d’étude de rentabilitéqui prennent en considération à la fois laprobabilité d’un empiétement et de la rentabilitérelative de mesures de protection versus ne rienfaire. En général, de tels critères sont propres àchaque administration puisqu’ils doivent refléterles conditions locales, les coûts de collisionset les politiques qui leur sont propres. Desexemples d’abaques de justification sontprésentés dans la figure 3.1.6.1. Bienqu’employées par diverses autorités routières,ces exemples sont donnés à titre indicatif et nesont pas applicables à tous les types dedispositifs de retenue (p.ex., les glissières àcâbles) et ne devraient pas être utilisées pourtous les usages.
Tel que mentionné plus haut, la mise au pointde nouvelles techniques d’étude de rentabilitéoffre aux concepteurs une solution souhaitablepour l’évaluation du besoin de glissièreslatérales. Ces techniques représentent une amé-lioration considérable par comparaison à la mé-thode générale des nomogrammes puisqu’ellespermettent aux concepteurs de tenir compte desfacteurs spécifiques d’un site donné dans leurétude. Elles sont fortement recommandées auxconcepteurs qui sont soucieux d’une utilisationla plus efficace possible de leur budget d’amélio-ration des abords de route et de protection.
Critères de justification reliés à la présenced’obstacles en bordure de route
Les obstacles en bordure de route, qu’ils soientnaturels ou faits de main d’homme, peuvent êtrecatégorisés comme étant des terrains infranchis-sables ou des objets fixes; leurs caractéristiqueset leur présence définissent le besoin de protec-tion. Les critères de justification pour les mesu-res de protection devraient être établis au moyen
d’une analyse de rentabilité quantitative quitiendra compte des caractéristiques de l’obstacleet de la probabilité qu’il soit frappé.
Le tableau 3.1.6.2 offre un aperçu des types deterrains infranchissables et des obstacles quisont normalement pris en considération pour finsde protection. Ce tableau est présenté commeguide pour identifier les cas qui devraient fairel’objet d’une étude de la rentabilité d’une protec-tion mais ne remplace pas cette étude.
Il faut tenir compte d’un certain nombre de règlesheuristiques d’application lorsqu’on envisage laprotection d’obstacles en bordure de route.
1. La protection d’un terrain infranchissable oud’un obstacle aux abords de la route n’esthabituellement justifiée que lorsqu’il se trouvedans la zone de dégagement latéral et quepour des raisons de coûts, il ne peut êtreéliminé, déplacé ou fragilisé et qu’undispositif de retenue offre une améliorationen termes de sécurité par rapport àl’absence de protection.
2. Les statistiques de collisions au site à l’étude(ou à un site comparable) devraient êtreutilisées pour décider de l’installation ou nond’un dispositif de retenue dans des casdouteux.
3. En pratique, peu de poteaux de feux decirculation sont protégés.
Critères de justification reliés à la présence depiétons et de cyclistes
Dans certaines situations, une mesure deprotection physique pourrait être requise pourdes piétons et des cyclistes qui empruntent unerue ou une route principale ou qui se trouvent àproximité de telles infrastructures. À titred’exemples, notons : une glissière adjacente àune limite de propriété ou un terrain d’une école
Tableau 3.1.6.1 Exemples de technologies de glissières latérales
glissières flexibles glissières semi-rigides glissières rigides
3 câbles sur poteau de faible résistance lisse d’acier à double ondulation (poteau de faible résistance) lisse d’acier à triple ondulation (poteau de faible résistance) poutre à caisson (poteau de faible résistance)
lisse d’acier à double ondulation avec bloc d’écartement (poteau résistant) lisse d’acier à triple ondulation avec bloc d’écartement (poteau résistant) lisse d’acier modifiée à triple ondulation glissières qui reprennent leur forme automatiquement lisse de bois sur plaque d’acier
de béton de forme sécuritaire mur de maçonnerie

Guide canadien de conception géométrique des routes
Page 3.1.6.5Décembre 2011
Figure 3.1.6.1 Exemple d’abaque d’indices de nécessité en présencede talus20,21
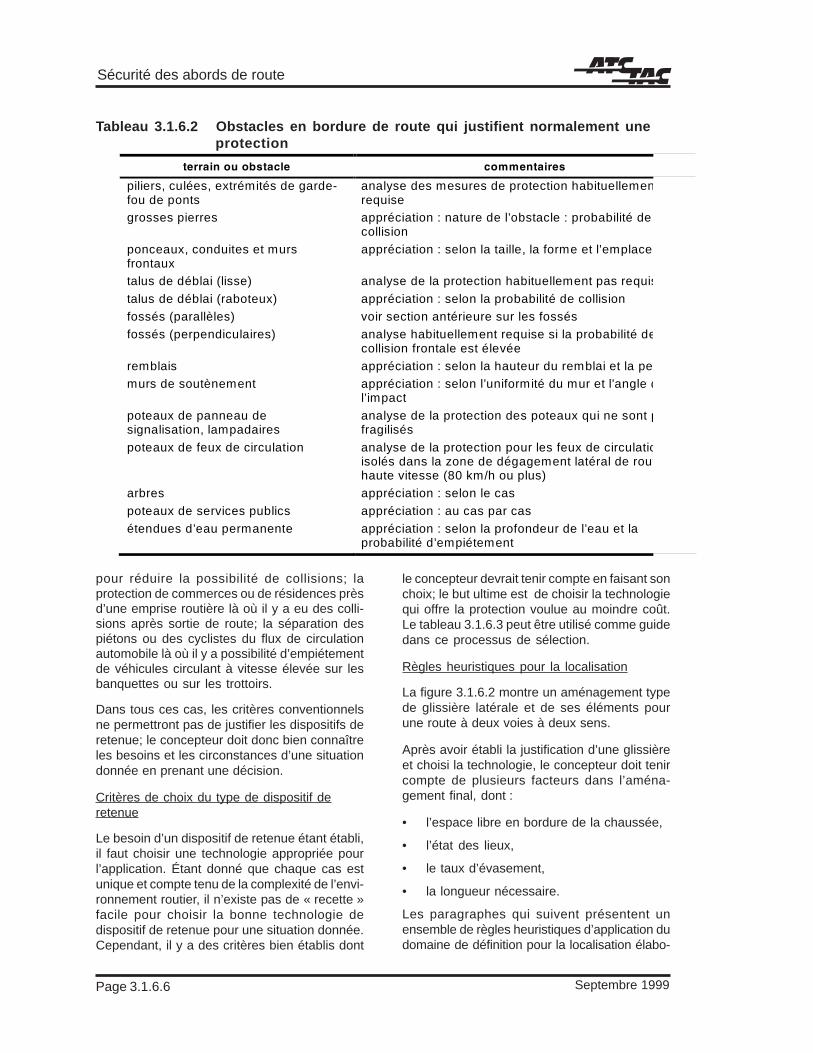
Sécurité des abords de route
Page 3.1.6.6 Décembre 2011
terrain ou obstacle commentaires
piliers, culées, extrémités de garde-fou de ponts
analyse des mesures de protection habituellemenrequise
grosses pierres appréciation : nature de l’obstacle : probabilité de collision
ponceaux, conduites et murs frontaux
appréciation : selon la taille, la forme et l’emplace
talus de déblai (lisse) analyse de la protection habituellement pas requistalus de déblai (raboteux) appréciation : selon la probabilité de collision fossés (parallèles) voir section antérieure sur les fossés fossés (perpendiculaires) analyse habituellement requise si la probabilité de
collision frontale est élevée remblais appréciation : selon la hauteur du remblai et la pemurs de soutènement appréciation : selon l’uniformité du mur et l’angle d
l’impact poteaux de panneau de signalisation, lampadaires
analyse de la protection des poteaux qui ne sont pfragilisés
poteaux de feux de circulation analyse de la protection pour les feux de circulatioisolés dans la zone de dégagement latéral de routhaute vitesse (80 km/h ou plus)
arbres appréciation : selon le cas poteaux de services publics appréciation : au cas par cas étendues d’eau permanente appréciation : selon la profondeur de l’eau et la
probabilité d’empiétement
Tableau 3.1.6.2 Obstacles en bordure de route qui justifient normalement uneprotection
pour réduire la possibilité de collisions; laprotection de commerces ou de résidences prèsd’une emprise routière là où il y a eu des colli-sions après sortie de route; la séparation despiétons ou des cyclistes du flux de circulationautomobile là où il y a possibilité d’empiétementde véhicules circulant à vitesse élevée sur lesbanquettes ou sur les trottoirs.
Dans tous ces cas, les critères conventionnelsne permettront pas de justifier les dispositifs deretenue; le concepteur doit donc bien connaîtreles besoins et les circonstances d’une situationdonnée en prenant une décision.
Critères de choix du type de dispositif deretenue
Le besoin d’un dispositif de retenue étant établi,il faut choisir une technologie appropriée pourl’application. Étant donné que chaque cas estunique et compte tenu de la complexité de l’envi-ronnement routier, il n’existe pas de « recette »facile pour choisir la bonne technologie dedispositif de retenue pour une situation donnée.Cependant, il y a des critères bien établis dont
le concepteur devrait tenir compte en faisant sonchoix; le but ultime est de choisir la technologiequi offre la protection voulue au moindre coût.Le tableau 3.1.6.3 peut être utilisé comme guidedans ce processus de sélection.
Règles heuristiques pour la localisation
La figure 3.1.6.2 montre un aménagement typede glissière latérale et de ses éléments pourune route à deux voies à deux sens.
Après avoir établi la justification d’une glissièreet choisi la technologie, le concepteur doit tenircompte de plusieurs facteurs dans l’aména-gement final, dont :
• l’espace libre en bordure de la chaussée,
• l’état des lieux,
• le taux d’évasement,
• la longueur nécessaire.
Les paragraphes qui suivent présentent unensemble de règles heuristiques d’application dudomaine de définition pour la localisation élabo-
Septembre 1999

Guide canadien de conception géométrique des routes
Page 3.1.R.1Décembre 2011
RÉFÉRENCESBIBLIOGRAPHIQUES
1. Final Report: Improving Roadway Safety:Current Issues, Roadway SafetyFoundation, Washington, D.C., février 1997.
2. SANDERSON, R. « Fixed Objects - TheNorth American Perspective »,communication présentée au symposium del’AQTR sur les objets fixes et la sécuritéroutière, mai 1996.
3. « Roadside Safety Issues », TransportationResearch Circular 435, TRB, Washington,D.C., 1995. P.8.
4. Roadside Design Guide, AmericanAssociation of State Highway andTransportation Officials, Washington, D.C.,1996.
5. TURNER, D.S. et J.W. HALL. « SeverityIndices for Roadside Features: A Synthesisof Highway Practice », NCHRP Synthesisof Highway Practice 202, TransportationResearch Board, Washington, D.C., 1994.
6. MAK, K.K., D.L. SICKING et K.ZIMMERMAN. « Roadside Safety AnalysisProgram (RSAP) - A Cost EffectivenessAnalysis Procedure », prépublication d’unecommunication présentée à la 77e
assemblée annuelle du TransportationResearch Board, Washington, D.C., 1998.
7. Highway Design and Operational PracticesRelated to Highway Safety, AmericanAssociation of State Highway andTransportation Officials. Washington, D.C.,1974.
8. Standard Specifications for StructuralSupports for Highway Signs, Luminaires,and Traffic Signals, American Associationof State Highway and TransportationOfficials, Washington, D.C., 1994.
9. Guide for Erecting Mailboxes on Highways,American Association of State Highway andTransportation Officials, Washington, D.C.1994.
10. Traffic Manual, Section 1-04: Nomenclature,CALTRANS, Sacramento, Calif., 1978.
11. RAY, M.H. et R. MCGINNIS. « Guardrail andMedian Barrier Crashworthiness », NCHRPSynthesis 244, Transportation ResearchBoard, Washington, D.C., 1997.
12. « Recommended Procedures for the SafetyPerformance Evaluation of HighwayFeatures », National Cooperative HighwayResearch Program (NCHRP) Report No.350, Transportation Research Board,Washington, D.C.,1993.
13. Roadside Safety Manual, Ministère desTransports de l’Ontario, Toronto, Ontario,1993.
14. Standard Specifications for HighwayBridges, American Association of StateHighway and Transportation Officials,Washington, D.C., 1996.
15. Guide Specifications for Bridge Railings,American Association of State Highway andTransportation Officials, Washington, D.C.,1989.
16. Design of Highway Bridges CAN/CSA-S6-88, Canadian Standards Association,Toronto, Ontario, 1988.
17. Prioritized Contract Content Guidelines,Ministère des Transports de l’Ontario, St.Catherines, Ontario, 1997.
18. RIGGS, J.L., W.F. RENTZ, A.L. KAHL etT.M. WEST, « Engineering Economics »,McGraw-Hill Ryerson Limited, Toronto,Ontario, 1986.
19. DELEUR, P., W. ABDELWAHAB et F.NAVIN, « Evaluating Roadside HazardsUsing Computer-Simulation Model », ASCE,Journal of Transportation Engineering, Vol.120, No. 2, mars / avril, 1994.
20. MINISTÈRE DES TRANSPORTS ET DEL’INFRASTRUCTURE DE LA NOUVELLE-ÉCOSSE. Roadside Barrier WarrantManual. 2003
21. MINISTÈRE DES TRANSPORTS ET DEL’INFRASTRUCTURE DE L’ALBERTA.Roadside Design Guide. Edmonton, Alberta,2007

Sécurité des abords de route
Page 3.1.R.2 Septembre 1999