Géométrie des massesstephane.genouel.free.fr/FT/3%20MP/12%20Cours%20-%20G%E9...12 Cours -...
14
12 Cours - Géométrie des masses CPGE MP 18/01/2014 Page 1 sur 14 Géométrie des masses Sommaire Géométrie des masses ....................................................................................................................1 1 Masse et inertie d’un système ............................................................................................................3 1.1 Notions d’inertie. ................................................................................................................................................ 3 1.2 Masse ................................................................................................................................................................. 3 1.3 Centre d'inertie – centre de gravité ...................................................................................................................... 4 1.4 Algorithme de calcul de la position du centre de gravité G d’un système matériel Σ ........................................... 4 1.5 Détermination de la position du centre de gravité G d’un système matériel Σ par la connaissance de volume , de surface ou de longueur : théorème de Guldin. .................................................................................................................. 6 2 Opérateur d’inertie et matrice d’inertie d’un solide...........................................................................7 2.1 Moment d’inertie ................................................................................................................................................ 7 2.2 Produit d’inertie.................................................................................................................................................. 7 2.3 Matrice d’inertie ................................................................................................................................................. 8 2.4 Base principale d’inertie – Base centrale d’inertie ............................................................................................... 8 2.5 Simplification par symétrie d’une matrice d’inertie............................................................................................. 9 2.6 Matrices centrales d’inertie de quelques solides élémentaires ............................................................................ 10 2.7 Transport et changement de base d’une matrice d’inertie .................................................................................. 11 2.8 Algorithme de calcul d’une matrice d’inertie d’un solide en une point A dans une base b ............................. 12 2.9 Moments d’inertie d’un solide par rapport à un axe quelconque ........................................................................ 14
Transcript of Géométrie des massesstephane.genouel.free.fr/FT/3%20MP/12%20Cours%20-%20G%E9...12 Cours -...

12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 1 sur 14
Géométrie des masses
Sommaire
Géométrie des masses .................................................................................................................... 1
1 Masse et inertie d’un système ............................................................................................................ 3
1.1 Notions d’inertie. ................................................................................................................................................ 3
1.2 Masse ................................................................................................................................................................. 3
1.3 Centre d'inertie – centre de gravité ...................................................................................................................... 4
1.4 Algorithme de calcul de la position du centre de gravité G d’un système matériel Σ ........................................... 4
1.5 Détermination de la position du centre de gravité G d’un système matériel Σ par la connaissance de volume , de
surface ou de longueur : théorème de Guldin. .................................................................................................................. 6
2 Opérateur d’inertie et matrice d’inertie d’un solide........................................................................... 7
2.1 Moment d’inertie ................................................................................................................................................ 7
2.2 Produit d’inertie.................................................................................................................................................. 7
2.3 Matrice d’inertie ................................................................................................................................................. 8
2.4 Base principale d’inertie – Base centrale d’inertie ............................................................................................... 8
2.5 Simplification par symétrie d’une matrice d’inertie............................................................................................. 9
2.6 Matrices centrales d’inertie de quelques solides élémentaires............................................................................ 10
2.7 Transport et changement de base d’une matrice d’inertie .................................................................................. 11
2.8 Algorithme de calcul d’une matrice d’inertie d’un solide en une point A dans une base b ............................. 12
2.9 Moments d’inertie d’un solide par rapport à un axe quelconque ........................................................................ 14
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 2 sur 14
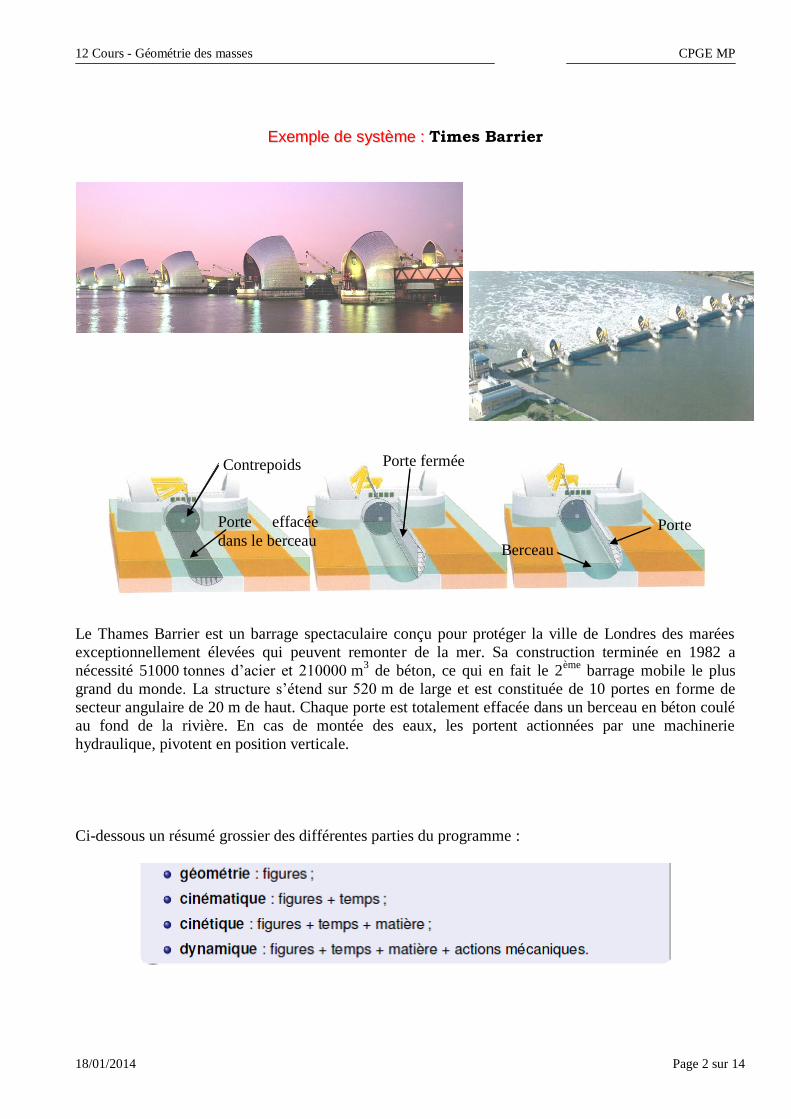
EExxeemmppllee ddee ssyyssttèèmmee :: Times Barrier
Le Thames Barrier est un barrage spectaculaire conçu pour protéger la ville de Londres des marées
exceptionnellement élevées qui peuvent remonter de la mer. Sa construction terminée en 1982 a
nécessité 51000 tonnes d’acier et 210000 m3 de béton, ce qui en fait le 2
ème barrage mobile le plus
grand du monde. La structure s’étend sur 520 m de large et est constituée de 10 portes en forme de
secteur angulaire de 20 m de haut. Chaque porte est totalement effacée dans un berceau en béton coulé
au fond de la rivière. En cas de montée des eaux, les portent actionnées par une machinerie
hydraulique, pivotent en position verticale.
Ci-dessous un résumé grossier des différentes parties du programme :
Porte fermée
Porte effacée
dans le berceau
Contrepoids
Porte
Berceau
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 3 sur 14
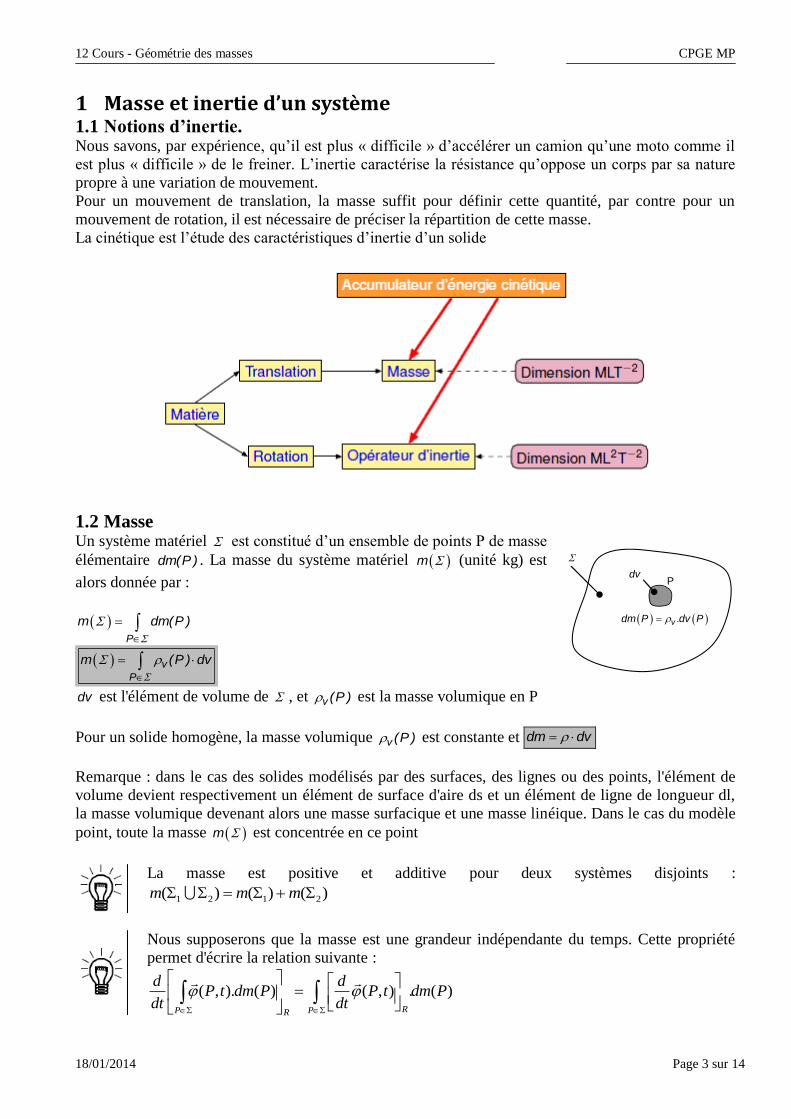
1 Masse et inertie d’un système 1.1 Notions d’inertie. Nous savons, par expérience, qu’il est plus « difficile » d’accélérer un camion qu’une moto comme il
est plus « difficile » de le freiner. L’inertie caractérise la résistance qu’oppose un corps par sa nature
propre à une variation de mouvement.
Pour un mouvement de translation, la masse suffit pour définir cette quantité, par contre pour un
mouvement de rotation, il est nécessaire de préciser la répartition de cette masse.
La cinétique est l’étude des caractéristiques d’inertie d’un solide
1.2 Masse Un système matériel est constitué d’un ensemble de points P de masse
élémentaire dm(P ) . La masse du système matériel m (unité kg) est
alors donnée par :
P
m dm(P )
v
P
m (P ) dv
dv est l'élément de volume de , et v (P ) est la masse volumique en P
Pour un solide homogène, la masse volumique v (P ) est constante et dm dv
Remarque : dans le cas des solides modélisés par des surfaces, des lignes ou des points, l'élément de
volume devient respectivement un élément de surface d'aire ds et un élément de ligne de longueur dl,
la masse volumique devenant alors une masse surfacique et une masse linéique. Dans le cas du modèle
point, toute la masse m est concentrée en ce point
La masse est positive et additive pour deux systèmes disjoints :
)()()( 2121 mmm
Nous supposerons que la masse est une grandeur indépendante du temps. Cette propriété
permet d'écrire la relation suivante :
)(.),()().,( PdmtPdt
dPdmtP
dt
d
P RRP
vdm P .dv P
P dv
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 4 sur 14
1.3 Centre d'inertie – centre de gravité
On appelle centre d’inertie le point GΣ qui vérifie la relation 0)(.
P
PdmPG . On peut alors écrire
0)(.
P
PdmOPOG → P
m .OG OP.dm(P )
(Cette relation est utilisée dans la pratique pour
rechercher GΣ).
Dans la pratique comme on fait l’hypothèse d’un champ de pesanteur constant en tout
point, le centre d’inertie GΣ est confondu avec le centre de gravité G.
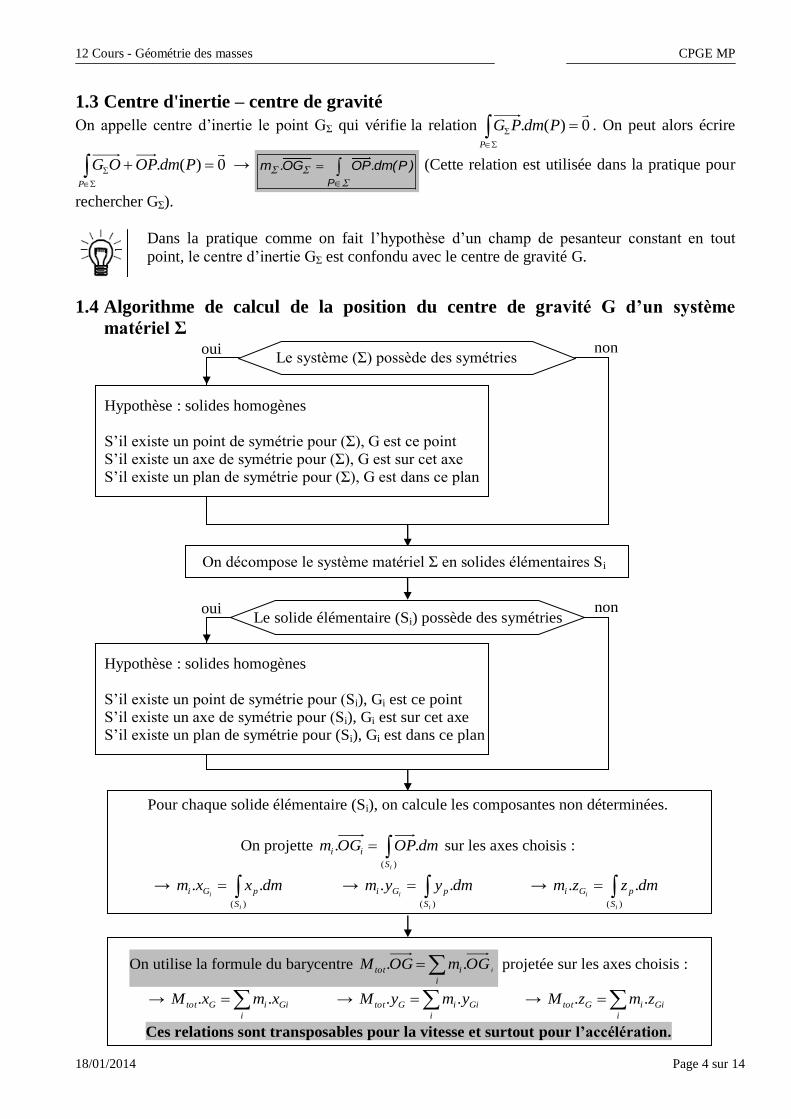
1.4 Algorithme de calcul de la position du centre de gravité G d’un système
matériel Σ
Le système (Σ) possède des symétries oui non
Hypothèse : solides homogènes
S’il existe un point de symétrie pour (Σ), G est ce point
S’il existe un axe de symétrie pour (Σ), G est sur cet axe
S’il existe un plan de symétrie pour (Σ), G est dans ce plan
On décompose le système matériel Σ en solides élémentaires Si
Le solide élémentaire (Si) possède des symétries oui non
Hypothèse : solides homogènes
S’il existe un point de symétrie pour (Si), Gi est ce point
S’il existe un axe de symétrie pour (Si), Gi est sur cet axe
S’il existe un plan de symétrie pour (Si), Gi est dans ce plan
Pour chaque solide élémentaire (Si), on calcule les composantes non déterminées.
On projette )(
..
iS
ii dmOPOGm sur les axes choisis :
→ )(
..
i
i
S
pGi dmxxm → )(
..
i
i
S
pGi dmyym → )(
..
i
i
S
pGi dmzzm
On utilise la formule du barycentre i
itot iOGmOGM .. projetée sur les axes choisis :
→ i
GiiGtot xmxM .. → i
GiiGtot ymyM .. → i
GiiGtot zmzM ..
Ces relations sont transposables pour la vitesse et surtout pour l’accélération.

12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 5 sur 14
Application : Recherche du centre de gravité sur une porte du Times Barrier
Longueur porte : L = 58m Rayon : R = 12,4m
Épaisseur tôle : e = 0,05m (considéré négligeable devant R)
Masse volumique porte : ρ = 7800 km/m3
α = π/3
α x
y
z
R
L
O
On cherche les coordonnées du centre de gravité G du système Σ par
rapport au point O tel que zzyyxxOG GGG
... .
Le système possède 2 plans de symétrie perpendiculaires, le centre de
gravité est sur la droite intersection des 2 plans de symétrie.
→ zG 2
L et xG = 0
On décompose le système en solides élémentaires (les solides élémentaires possèdent les deux mêmes
plans de symétrie identifiés précédemment).
α x
y
z
R
L
O
+
α x
y
z
R
L
O
α x
y
z
R L
O
Solide 1 ayant pour
centre de gravité G1
Solide 2 ayant pour
centre de gravité G2
Il y a un plan de symétrie
supplémentaire sur le solide
1.
→ Il y a 3 plans de symétrie
perpendiculaires le centre
de gravité de S1 est à :
cos.1 RyG
(si e est considéré comme
négligeable et on connait
déjà les coordonnées de G1
sur x
et z
).
Il n’y a pas de plan de symétrie supplémentaires pour le solide 2.
On utilise la définition )(
..
iS
ii dmOPOGm que l’on projette sur l’axe y
(On connait déjà les coordonnées de G2 sur x
et z
) :
dm
α
x
y
R
O
P
yP
)2(
22 ..S
pG dmyym avec
)..2.(..2 RLem et dRLedm ....
RdRyR G .cos....2 2
sin..2...2 2
2 RyR G
sin.2 RyG
On utilise enfin la formule du barycentre i
itot iOGmOGM .. que l’on projette sur l’axe y
:
i
iiGtot ymyM .. → 221121 ..).( GGG ymymymm avec )sin..2.(..1 RLem et )..2.(..2 RLem
sin
)cos1.(sin..
)sin..2.(..)..2.(..
sin.)...2.(..cos.).sin..2.(..
)(
..
21
2211
R
RLeRLe
RRLeRRLe
mm
ymymy GG
G
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 6 sur 14
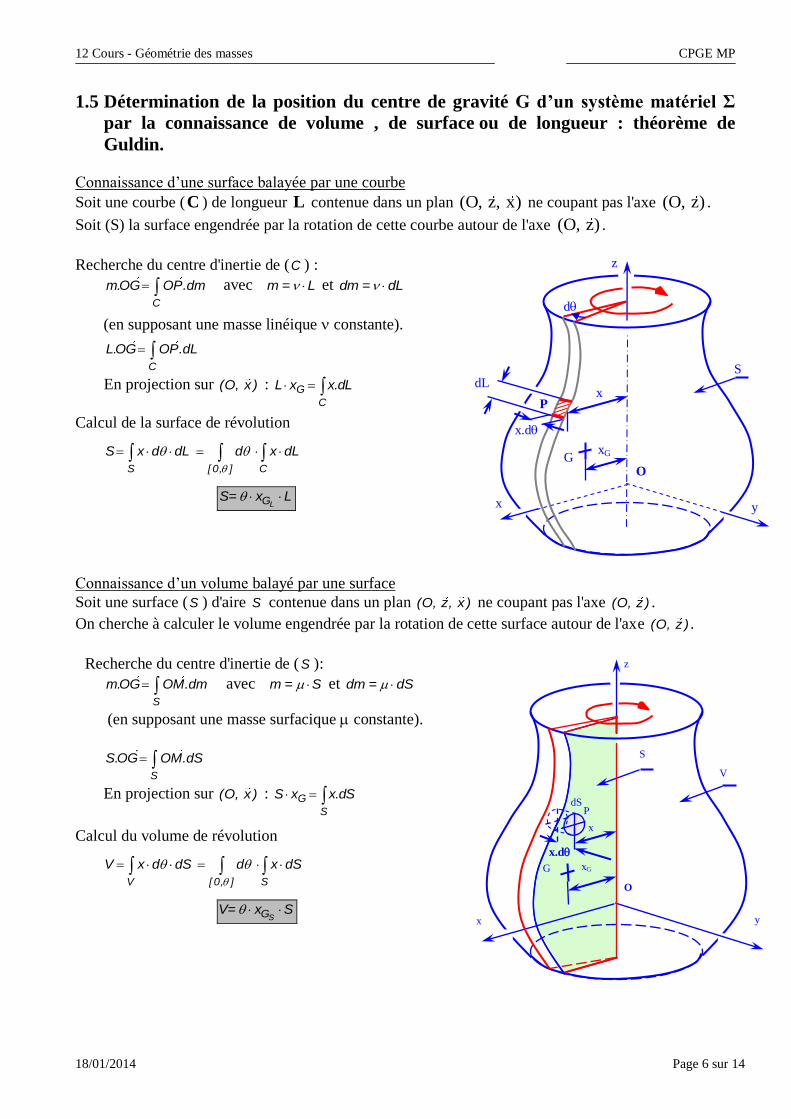
1.5 Détermination de la position du centre de gravité G d’un système matériel Σ
par la connaissance de volume , de surface ou de longueur : théorème de
Guldin. Connaissance d’une surface balayée par une courbe
Soit une courbe (C ) de longueur L contenue dans un plan (O, z, x) ne coupant pas l'axe (O, z) .
Soit (S) la surface engendrée par la rotation de cette courbe autour de l'axe (O, z) .
Recherche du centre d'inertie de (C ) :
C
m.OG OP.dm avec m = L et dm = dL
(en supposant une masse linéique constante).
C
L.OG OP.dL
En projection sur (O, x ) : G
C
L x x.dL
Calcul de la surface de révolution
S
S x d dL [ 0, ] C
d x dL
LGS= x L
Connaissance d’un volume balayé par une surface
Soit une surface (S ) d'aire S contenue dans un plan (O, z, x ) ne coupant pas l'axe (O, z ) .
On cherche à calculer le volume engendrée par la rotation de cette surface autour de l'axe (O, z ) .
Recherche du centre d'inertie de ( S ):
S
m.OG O M.dm avec m = S et dm = dS
(en supposant une masse surfacique constante).
S
S.OG O M.dS
En projection sur (O, x ) : G
S
S x x.dS
Calcul du volume de révolution
V
V x d dS [ 0, ] S
d x dS
SGV= x S
O
dL x
xG G
x y
z
S
P
x.d
d
O
dS
x
xG
P
G
z
y x
V S
x.d

12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 7 sur 14
2 Opérateur d’inertie et matrice d’inertie d’un solide La masse suffit pour caractériser l’inertie dans le cas d’un mouvement de translation.
La masse m ne permet pas à elle seule de caractériser la difficulté de mettre un solide en
mouvement de rotation ou de l’en empêcher…
On a besoin de connaître la façon dont cette masse est répartie sur le solide.
Les moments et produits d’inertie caractérisent cette répartition.
2.1 Moment d’inertie Le moment d’inertie par rapport à un point, caractérise la répartition de la masse autour du point.
Plus il est grand, plus la matière est éloignée du point, et plus il sera difficile de mettre le solide en
rotation autour de ce point.
Il en est de même pour des moments d’inertie par rapport à un axe ou un plan.
Moment d’inertie du solide par rapport à un point O : 2 2 2 2
OI ( ) r dm ( x y z ) dm
Unité : kg/m2
Moment d’inertie du solide par rapport à un axe : 2 2
(O,x )
2 2(O,y )
2 2(O,z )
I ( ) A ( y z ) dm
I ( ) B ( x z ) dm
I ( ) C ( x y ) dm
Moment d’inertie du solide par rapport à un plan : 2
(O,x,y )I ( ) z dm
2(O,x,z )I ( ) y dm
2(O,y,z )I ( ) x dm
Propriétés :
O (O,x,y ) (O,x,z ) (O,y,z ) (O,x ) (O,y ) (O,z )
1 1I ( ) I ( ) I ( ) I ( ) I ( ) I ( ) I ( ) A B C
2 2
2.2 Produit d’inertie Le produit d’inertie caractérise l’absence de symétrie dans la répartition des masses.
Ils vont créer des effets de « balourd » perpendiculaires à l’axe autour duquel on souhaite faire tourner
le solide.
Produit d’inertie du solide par rapport à un plan :
(O,y ,z )
(O,x,z )
(O,x,y )
P ( ) D y z dm
P ( ) E x z dm
P ( ) F x y dm
r
P ()
O
P
x
y
z
O
P(x,y,z)

12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 8 sur 14
2.3 Matrice d’inertie La matrice d’inertie du solide permet de caractériser la répartition de la matière d’un solide autour
d’un point (ici O) et dans une base donnée ( x,y,z) .
O
O b
A F E
I F B D
E D C
( )
( ) matrice d’inertie du solide en O dans une base b .
Au concours les calculs des éléments de la matrice d’inertie par les formules ci-dessus
ne donnent pas lieu à évaluation (ils sont donnés en fait). Seule la relation entre la forme
de la matrice d’inertie et la géométrie de la pièce est exigible.
Une matrice d’inertie dépend de la base et du point de calcul, il est donc important de
préciser ces données
2.4 Base principale d’inertie – Base centrale d’inertie Pour tout point O, la matrice d’inertie est symétrique. Il existe donc un système de trois vecteurs
propres orthogonaux deux à deux formant une base. Dans cette base, appelée base principale d’inertie
au point O, la matrice est diagonale (les produits d’inertie D, E, F sont nuls).
Dans la base b ),,( zyx
: O
O b
A F E
I S F B D
E D C
( )
( )
Dans la base principale d’inertie bP ),,( PPP zyx
au point O :
P
P
O P
PO b
A
I S B
C
( )
0 0
( ) 0 0
0 0
),( PxO
, ),( PyO
et ),( PzO
sont les axes principaux d’inertie de au point O.
AP, BP, CP sont les moments principaux d’inertie de () au point O. Ils sont de plus minima.
Si O est centre de gravité de S, alors ),( PxO
, ),( PyO
et ),( PzO
sont axes centraux
d’inertie de () et bP la base centrale de ().
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 9 sur 14
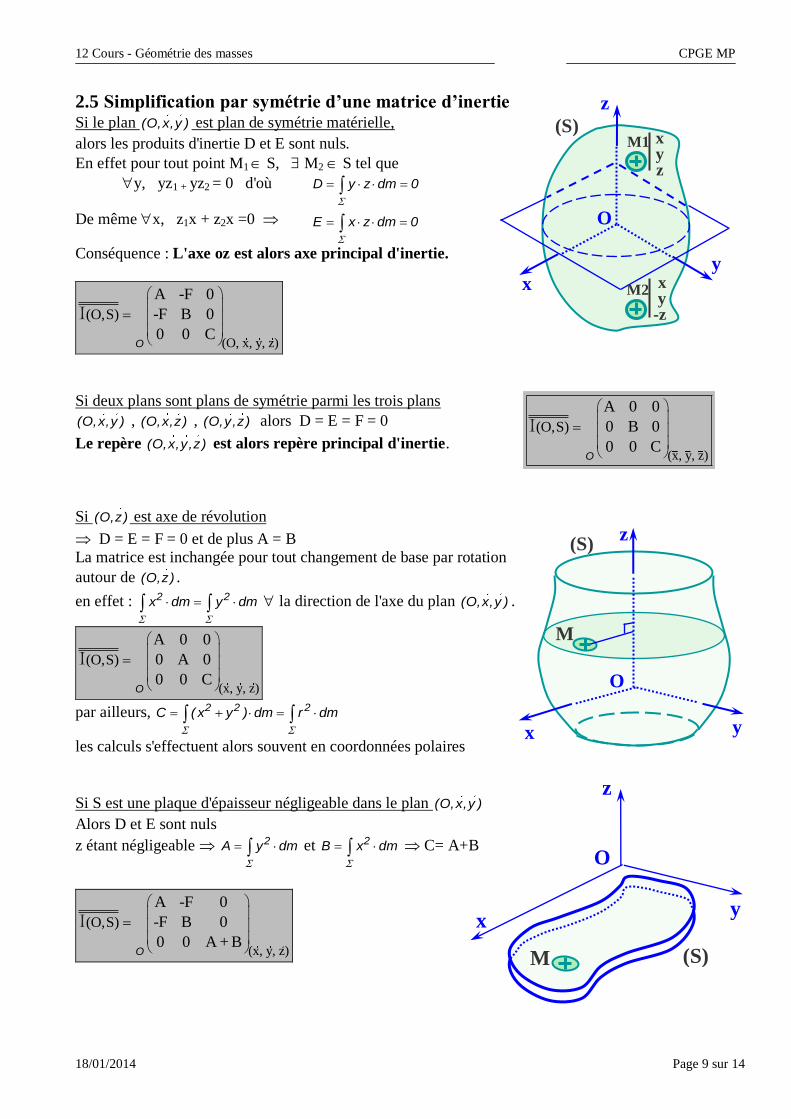
2.5 Simplification par symétrie d’une matrice d’inertie Si le plan (O,x,y ) est plan de symétrie matérielle,
alors les produits d'inertie D et E sont nuls.
En effet pour tout point M1 S, M2 S tel que
y, yz1 + yz2 = 0 d'où D y z dm 0
De même x, z1x + z2x =0 E x z dm 0
Conséquence : L'axe oz est alors axe principal d'inertie.
(O, x, y, z)
(O,S)
A -F 0
-F B 0
0 0 CO
I
Si deux plans sont plans de symétrie parmi les trois plans
(O,x,y ) , (O,x,z) , (O,y,z) alors D = E = F = 0
Le repère (O,x,y,z) est alors repère principal d'inertie. (x, y, z)
(O,S)
A 0 0
0 B 0
0 0 CO
I
Si (O,z) est axe de révolution
D = E = F = 0 et de plus A = B
La matrice est inchangée pour tout changement de base par rotation
autour de (O,z) .
en effet : 2 2x dm y dm
la direction de l'axe du plan (O,x,y ) .
(x, y, z)
(O,S)
A 0 0
0 A 0
0 0 CO
I
par ailleurs, 2 2 2C ( x y ) dm r dm
les calculs s'effectuent alors souvent en coordonnées polaires
Si S est une plaque d'épaisseur négligeable dans le plan (O,x,y )
Alors D et E sont nuls
z étant négligeable 2A y dm
et 2B x dm
C= A+B
(x, y, z)
(O,S)
A -F 0
-F B 0
0 0 A + BO
I
M2
O
(S)
x y
z
M1 x y z
x y -z
M
O
(S)
y
z
x
O
y x
M
z
(S)
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 10 sur 14
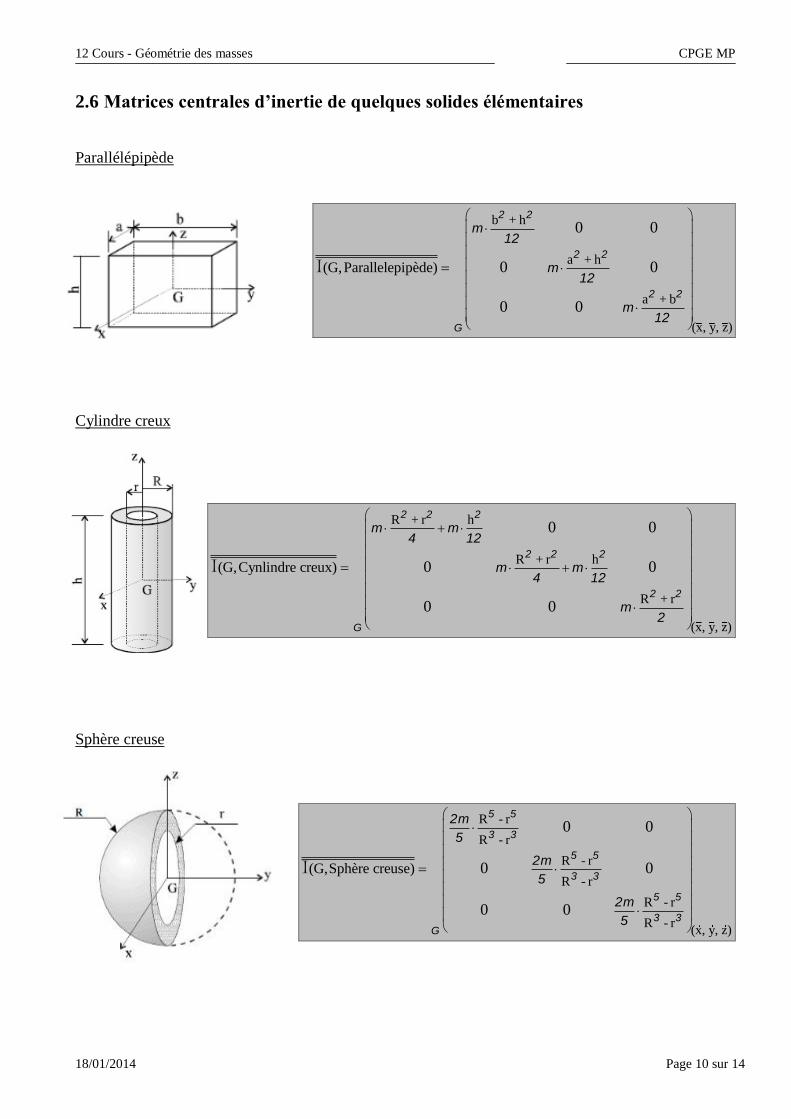
2.6 Matrices centrales d’inertie de quelques solides élémentaires
Parallélépipède
b + h
a + h
a + b
(x, y, z)
(G,Parallelepipède)
0 0
0 0
0 0
2 2
2 2
2 2
G
m12
m12
m12
I
Cylindre creux
R + r h
R + r h
R + r
(x, y, z)
(G,Cynlindre creux)
0 0
0 0
0 0
2 2 2
2 2 2
2 2
G
m m4 12
m m4 12
m2
I
Sphère creuse
R - r
R - r
R - r
R - r
R - r
R - r(x, y, z)
(G,Sphère creuse)
0 0
0 0
0 0
5 5
3 3
5 5
3 3
5 5
3 3
G
2m
5
2m
5
2m
5
I
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 11 sur 14
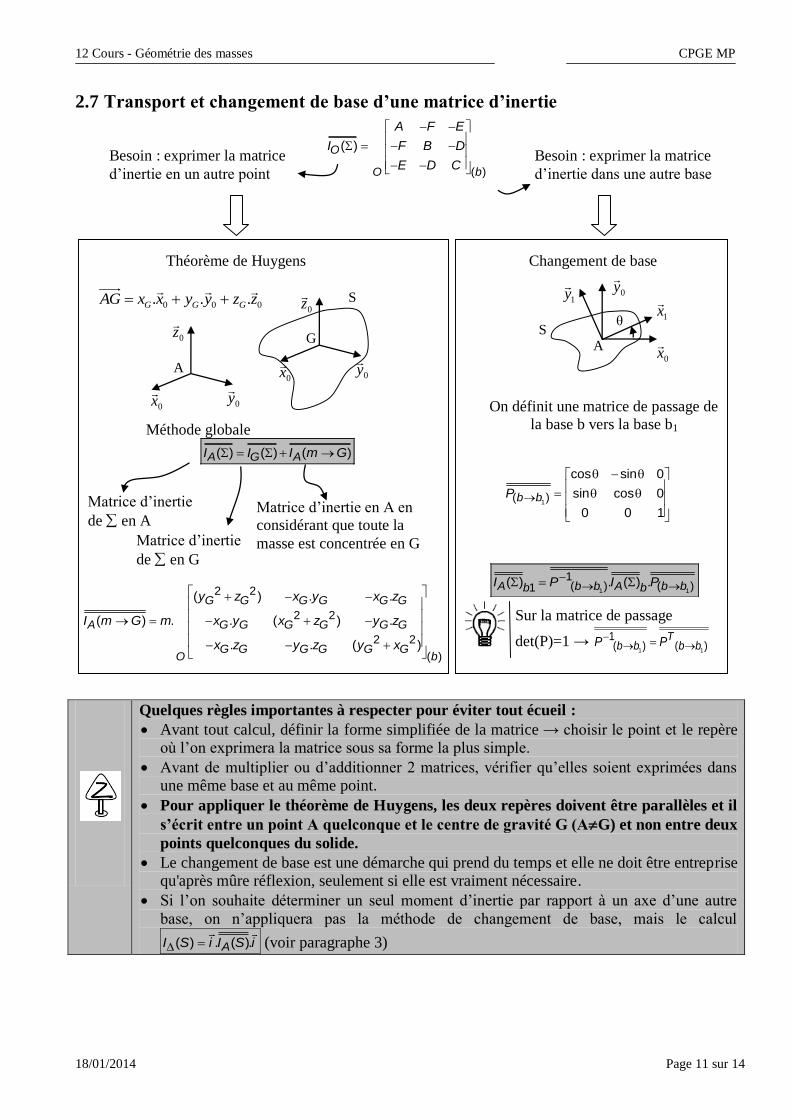
2.7 Transport et changement de base d’une matrice d’inertie
O
O b
A F E
I F B D
E D C
( )
( )
Théorème de Huygens
Méthode globale
A G AI I I m G ( ) ( ) ( )
Besoin : exprimer la matrice
d’inertie en un autre point
Besoin : exprimer la matrice
d’inertie dans une autre base
Changement de base
0x
0y
0z
A
S
G
0x
0y
0z
Matrice d’inertie
de en A
Matrice d’inertie
de en G
Matrice d’inertie en A en
considérant que toute la
masse est concentrée en G
S
0x
0y
1x
1y
θ
A
On définit une matrice de passage de
la base b vers la base b1
1( )
cos sin 0
sin cos 0
0 0 1
b bP
A b b A b bb bI P I P
1 1
1( ) ( )1( ) . ( ) .
Sur la matrice de passage
det(P)=1 → 1 1
1( ) ( )
Tb b b bP P
000 ... zzyyxxAG GGG
G G G G G G
A G G G G G G
G G G G G GO b
y z x y x z
I m G m x y x z y z
x z y z y x
2 2
2 2
2 2
( )
( ) . .
( ) . . ( ) .
. . ( )
Quelques règles importantes à respecter pour éviter tout écueil :
Avant tout calcul, définir la forme simplifiée de la matrice → choisir le point et le repère où l’on exprimera la matrice sous sa forme la plus simple.
Avant de multiplier ou d’additionner 2 matrices, vérifier qu’elles soient exprimées dans une même base et au même point.
Pour appliquer le théorème de Huygens, les deux repères doivent être parallèles et il
s’écrit entre un point A quelconque et le centre de gravité G (AG) et non entre deux
points quelconques du solide.
Le changement de base est une démarche qui prend du temps et elle ne doit être entreprise qu'après mûre réflexion, seulement si elle est vraiment nécessaire.
Si l’on souhaite déterminer un seul moment d’inertie par rapport à un axe d’une autre
base, on n’appliquera pas la méthode de changement de base, mais le calcul
( ) . ( ).AI S i I S i (voir paragraphe 3)
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 12 sur 14
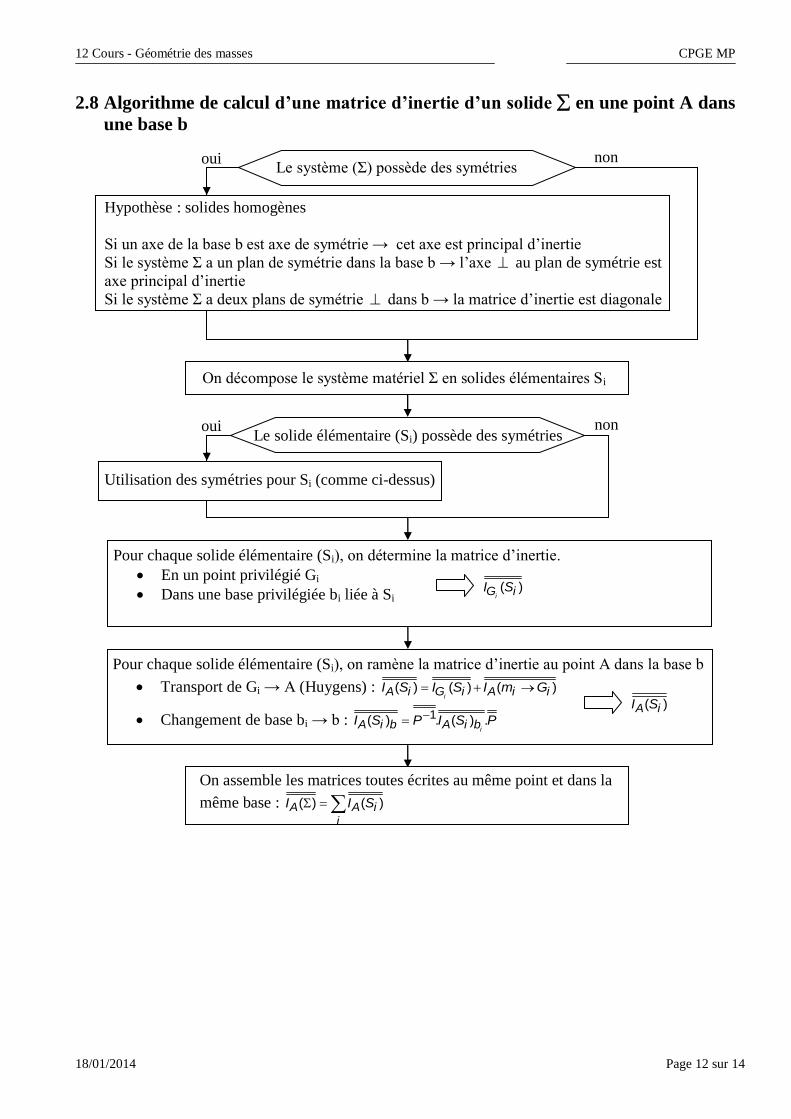
2.8 Algorithme de calcul d’une matrice d’inertie d’un solide en une point A dans
une base b
Le système (Σ) possède des symétries oui non
Hypothèse : solides homogènes
Si un axe de la base b est axe de symétrie → cet axe est principal d’inertie
Si le système Σ a un plan de symétrie dans la base b → l’axe au plan de symétrie est
axe principal d’inertie
Si le système Σ a deux plans de symétrie dans b → la matrice d’inertie est diagonale
On décompose le système matériel Σ en solides élémentaires Si
Le solide élémentaire (Si) possède des symétries oui non
Utilisation des symétries pour Si (comme ci-dessus)
Pour chaque solide élémentaire (Si), on détermine la matrice d’inertie.
En un point privilégié Gi
Dans une base privilégiée bi liée à Si
Pour chaque solide élémentaire (Si), on ramène la matrice d’inertie au point A dans la base b
Transport de Gi → A (Huygens) : ( ) ( ) ( )i
A i G i A i iI S I S I m G
Changement de base bi → b : 1( ) . ( ) .i
A i b A i bI S P I S P
( )i
G iI S
( )A iI S
On assemble les matrices toutes écrites au même point et dans la
même base : ( ) ( )A A ii
I I S
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 13 sur 14
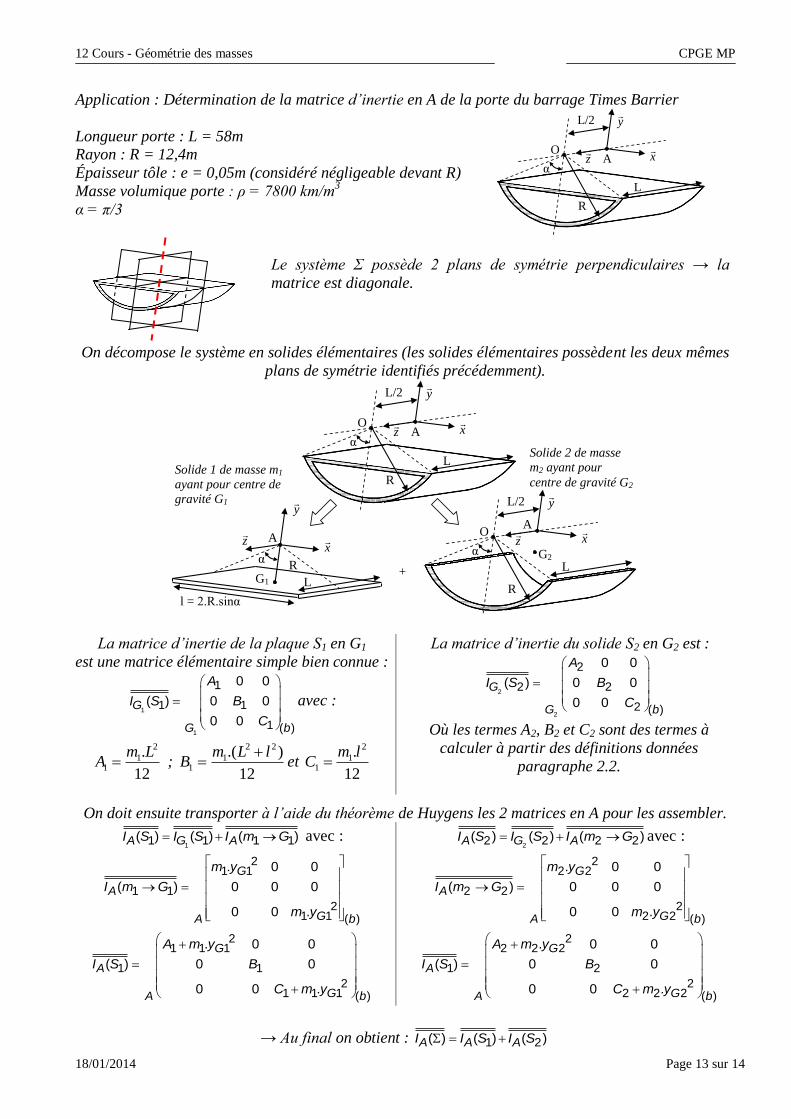
Application : Détermination de la matrice d’inertie en A de la porte du barrage Times Barrier
Longueur porte : L = 58m Rayon : R = 12,4m
Épaisseur tôle : e = 0,05m (considéré négligeable devant R)
Masse volumique porte : ρ = 7800 km/m3
α = π/3
α x
y
z
R
L/2
O A
L
Le système Σ possède 2 plans de symétrie perpendiculaires → la
matrice est diagonale.
On décompose le système en solides élémentaires (les solides élémentaires possèdent les deux mêmes
plans de symétrie identifiés précédemment).
+ α
x
y
z
R
L
A
Solide 1 de masse m1
ayant pour centre de
gravité G1
Solide 2 de masse
m2 ayant pour
centre de gravité G2
α x
y
z
R
L/2
O A
L
α x
y
z
R
L/2
O A
L G1
G2
l = 2.R.sinα
La matrice d’inertie de la plaque S1 en G1
est une matrice élémentaire simple bien connue :
G
G b
A
I S B
C
1
1
1
1 1
1 ( )
0 0
( ) 0 0
0 0
avec :
12
. 2
11
LmA ;
12
).( 22
11
lLmB
et
12
. 2
11
lmC
La matrice d’inertie du solide S2 en G2 est :
G
G b
A
I S B
C
2
2
2
2 2
2 ( )
0 0
( ) 0 0
0 0
Où les termes A2, B2 et C2 sont des termes à
calculer à partir des définitions données
paragraphe 2.2.
On doit ensuite transporter à l’aide du théorème de Huygens les 2 matrices en A pour les assembler.
11 1 1 1( ) ( ) ( )A G AI S I S I m G avec :
G
A
GA b
m y
I m G
m y
21 1
1 1
21 1 ( )
. 0 0
( ) 0 0 0
0 0 .
G
A
GA b
A m y
I S B
C m y
21 1 1
1 1
21 1 1 ( )
. 0 0
( ) 0 0
0 0 .
22 2 2 2( ) ( ) ( )A G AI S I S I m G avec :
G
A
GA b
m y
I m G
m y
22 2
2 2
22 2 ( )
. 0 0
( ) 0 0 0
0 0 .
G
A
GA b
A m y
I S B
C m y
22 2 2
1 2
22 2 2 ( )
. 0 0
( ) 0 0
0 0 .
→ Au final on obtient : 1 2( ) ( ) ( )A A AI I S I S
12 Cours - Géométrie des masses CPGE MP
18/01/2014 Page 14 sur 14
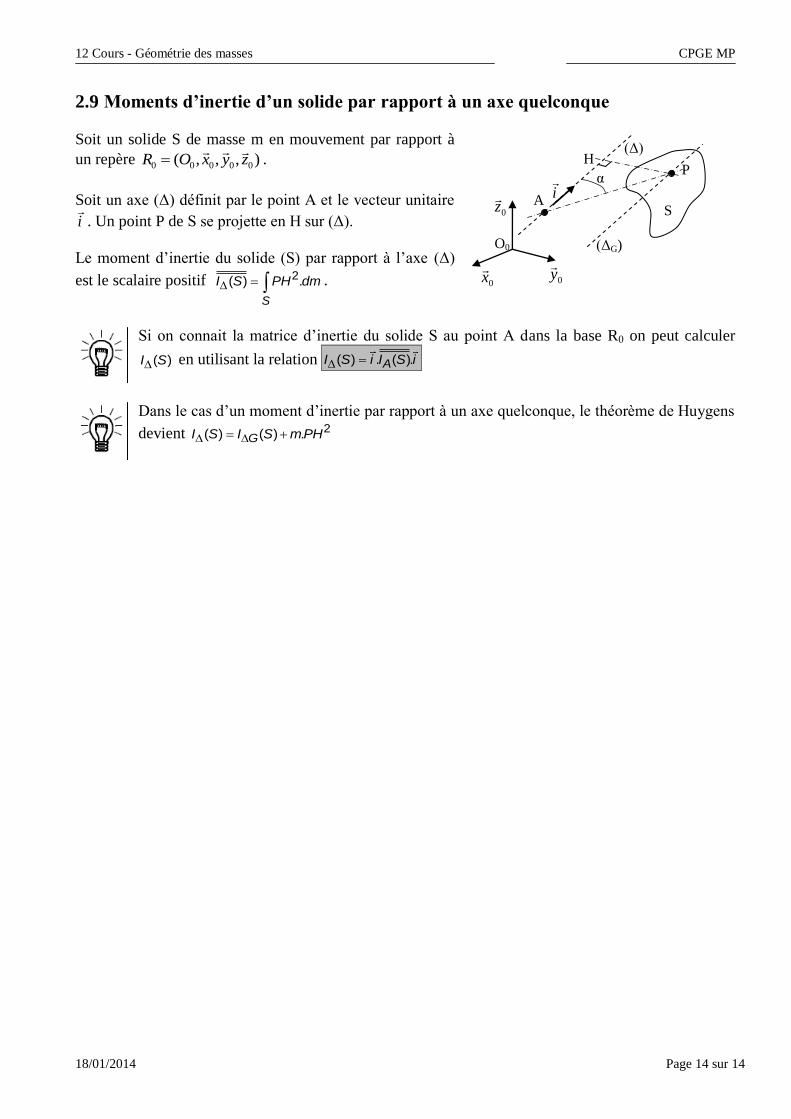
2.9 Moments d’inertie d’un solide par rapport à un axe quelconque
Soit un solide S de masse m en mouvement par rapport à
un repère ),,,( 00000 zyxOR
.
Soit un axe (Δ) définit par le point A et le vecteur unitaire
i
. Un point P de S se projette en H sur (Δ).
Le moment d’inertie du solide (S) par rapport à l’axe (Δ)
est le scalaire positif 2( ) .
S
I S PH dm .
0x
0y
0z
O0
S
i
P
A
H
α
(Δ)
(ΔG)
Si on connait la matrice d’inertie du solide S au point A dans la base R0 on peut calculer
( )I S en utilisant la relation ( ) . ( ).AI S i I S i
Dans le cas d’un moment d’inertie par rapport à un axe quelconque, le théorème de Huygens
devient 2( ) ( ) .GI S I S mPH