
FLUIDES EN ÉCOULEMENT Méthodes et...
190
FLUIDES EN ÉCOULEMENT Méthodes et modèles Jacques PADET Professeur Émérite à l’Université de Reims Seconde édition revue et augmentée
Transcript of FLUIDES EN ÉCOULEMENT Méthodes et...
FLUIDES EN ÉCOULEMENT Méthodes et modèles Jacques PADET Professeur Émérite à l’Université de Reims
Seconde édition revue et augmentée
PRÉFACE de la première édition

Octobre 1990
TABLE DES MATIÈRES PRÉSENTATION Préface de la 1ère édition Prologue de la 1ère édition Prologue de la 2ème édition Nomenclature CHAPITRE 1. – Bases physiques et théoriques. Bilans et lois de comportement Préambule 1.1. – Principales caractéristiques des milieux fluides 1.1.1. – Continuité des milieux fluides 1.1.2. – Déformabilité des fluides 1.1.3. – Viscosité des fluides : approche expérimentale 1.2. – Eléments de rhéologie 1.2.1. – Déformations 1.2.2. – Dilatation volumique 1.2.3. – Contraintes 1.2.4. – Fluides newtoniens
1.2.5. – Application : calcul de la contrainte locale T dans un cas simple 1.3. – Equations de bilans 1.3.1. – Relations générales entre flux et sources 1.3.2. – Bilan de masse 1.3.3. – Bilan de quantité de mouvement 1.3.4. – Bilan d’énergie mécanique 1.3.5. – Bilans d’énergie et d’enthalpie 1.3.6. – Prise en compte de la diffusion dans les équations de bilans 1.3.7. – Bilans d’entropie et d’exergie 1.4. – Vorticité et fonction de courant 1.4.1. – Ecoulement plan 1.4.2. – Fonction de courant 1.4.3. – Ecoulement axisymétrique 1.5. – Formulation générale d’un problème d’écoulement anisotherme Annexes au chapitre 1 1.A.1. – Les bilans sur un domaine mobile et le concept de dérivée particulaire 1.A.2. – Calculs relatifs au bilan de quantité de mouvement 1.A.3. – Calculs relatifs au bilan d’énergie cinétique 1.A.4. – Bilan d’entropie : formulation classique 1.A.5. – Expression des équations de bilans en coordonnées cylindriques CHAPITRE 2. – Similitude et adimensionnement 2.1. - Problématique 2.2. – Premiers apports de l’expérience 2.2.1. – Expérience de Reynolds
2.2.2. – Expérience de la plaque plane 2.2.3. – Exploitation des expériences 2.3. – Les fondements de la similitude 2.3.1. – Forme adimensionnelle d’une équation de bilan 2.3.2. – Les critères de similitude 2.3.3. – Conditions de validité de la similitude 2.4. – Panorama des critères de similitude 2.4.1. – Les principes et l’usage 2.4.2. – Le critère de similitude temporelle 2.4.3. – Les critères de similitude relatifs aux sources de quantité de mouvement 2.4.4. – Les critères de similitude relatifs aux sources de masse 2.4.5. – Les critères de similitude relatifs aux sources d’énergie 2.4.6. – Le critère de similitude relatif à l’équation d’état du fluide 2.5. – Paramètres de couplage et autres nombres sans dimension 2.5.1. – Couplage entre des sources ne relevant pas des mêmes bilans 2.5.2. – Comparaison entre sources dans un même bilan 2.5.3. – Autres nombres sans dimension usuels 2.6. – Similitude et adimensionnement : le bon usage 2.6.1. – Les diverses significations des nombres sans dimension 2.6.2. – Intérêt de la similitude 2.6.3. – Similitude partielle et ordres de grandeur 2.6.4. – Mises en garde Annexes au chapitre 2 2.A.1. – Tableaux récapitulatifs des termes de sources et des nombres sans dimension 2.A.2. – Sur l’analyse dimensionnelle et l’analyse d’échelle 2.A.3. – Critères de similitude relatifs aux bilans d’entropie et d’exergie 2.A.4. – Grandeurs géométriques de référence dans un bilan intégral CHAPITRE 3. – Que faire de la turbulence ? 3.1. – Données expérimentales 3.2. – Théorie statistique locale de la turbulence 3.2.1. – Équations de bilans aux valeurs moyennes 3.2.2. – Équation de bilan pour les fluctuations 3.2.3. – Le principe des fermetures en un point 3.3. – Une application de la théorie statistique locale : le modèle pseudo-laminaire 3.3.1. – Caractérisation d’un transfert laminaire 3.3.2. – L’idée directrice du modèle pseudo-laminaire 3.3.3. – Diffusion turbulente de masse 3.3.4. – Diffusion turbulente de quantité de mouvement 3.3.5. – Diffusion turbulente de chaleur 3.3.6. – Résolution du problème thermoconvectif 3.4. – Modèles locaux basés sur des équations d’appoint 3.4.1. – Modèle à une équation dynamique d’appoint ou modèle k – l 3.4.2. – Modèle k - ε standard 3.4.3. – Variantes du modèle k - ε standard 3.4.4. – Modèle k - ω 3.4.5. – Les taux de turbulence 3.5. – Description non locale de la turbulence
3.5.1. – Limites de la théorie statistique locale 3.5.2. –Coefficients de corrélation entre grandeurs fluctuantes 3.6. – Échelles de turbulence 3.6.1. – Approche physique 3.6.2. – Macro – échelles 3.6.3. – Micro – échelles 3.6.4. – A propos du nombre de Reynolds turbulent 3.6.5. – Simulation des grandes structures 3.6.6. – Simulation numérique directe 3.7. – Production d’entropie turbulente Annexes au chapitre 3 3.A.1. – Turbulence et non-linéarité 3.A.2. – Calcul des grandeurs moyennes dans un écoulement turbulent 3.A.3. – Écoulements turbulents à masse volumique variable
3.A.4. – Équations de bilans pour les corrélations kjj vvvc , et jvθ
3.A.5. – Équation de bilan pour l’énergie cinétique de turbulence k
3.A.6. – Équation de bilan de 2c 3.A.7. – Équation de bilan pour la dissipation ε Eléments de bibliographie Index alphabétique des matières
PROLOGUE de la première édition
Reims, décembre 1990
PROLOGUE de la deuxième édition La nouvelle édition de Fluides en écoulement, méthodes et modèles (en abrégé : FEMM) est d’abord une réponse à l’appel lancé par Alain Degiovanni lorsqu’il était président de la Société Française de Thermique, pour mettre sur le site web de la Société des cours et recueils d’exercices. Elle sera livrée chapitre par chapitre, au rythme de la rédaction. Par rapport à la première édition, elle comporte d’indispensables mises à jour et de nombreux compléments. L’enseignement dispensé année après année a permis aussi d’améliorer le contenu pédagogique de l’ouvrage : beaucoup de raisonnements ont ainsi été rendus plus logiques ou plus physiques. De plus, les erreurs ont été corrigées (il n’y en avait pas beaucoup, mais c’est toujours trop). Enfin, si l’avenir le permet, cette édition rénovée servira de support (avec l’autre volet publié sous le titre Principes des transferts convectifs) à un recueil d’exercices avec solutions rédigées.
Reims, septembre 2008
NOMENCLATURE Je suis exténué. Ce matin j’ai retiré une virgule à l’un de mes poèmes, et ce soir je l’ai remise.
OSCAR WILDE
a : diffusivité thermique (m2.s -1) b : demi - hauteur d’une canalisation rectangulaire c : fluctuation d’une grandeur C ex : exergie massique (J.kg – 1) g : accélération de la pesanteur (m.s -2) h : coefficient de convection thermi - que (W.m -2 K -1) : enthalpie massique (J.kg – 1) k : coefficient de convection massique (m.s -1) : énergie cinétique de turbulence (m2.s – 2) kj : facteur de perte de charge singulière sur une branche j l : longueur de mélange (m) : épaisseur d’un canal rectangulaire (m) p : pression statique (Pa) p* : pression motrice (Pa) qv, q : débit – volume (m3.s -1) qm : débit – masse (kg.s -1) qI : source volumique
q S : source surfacique r : distance à un axe (m) s : entropie massique (J.kg – 1.K – 1) t : temps (s) u, v, w :composantes du vecteur fluctuation de
vitesse v x c : abscisse de transition laminaire - turbulent y+ : ordonnée adimensionnée = y/δ Bo : nombre de Boussinesq C : densité volumique d’une grandeur extensive Cf : coefficient de frottement Cp : chaleur massique à pression constante (J.kg -1 .K -1) Cx : coefficient de traînée D : diamètre d’un tube (m)
D : tenseur des taux de déformation, de composantes εij (s
-1)
Dh : diamètre hydraulique (m) DA : diffusivité du constituant A dans un mélange (m2. s -1) DC : diffusivité de la grandeur C (m2.s – 1) Ec : nombre d’Eckert Eu : nombre d’Euler Fr : nombre de Froude Gr : nombre de Grashof J0 : poussée d’un jet (N) Ki : facteur de perte de charge en ligne sur une branche i L : longueur d’une canalisation, d’une plaque plane (m) Le : nombre de Lewis L0 : largeur d’une buse de soufflage (m) Nu : nombre de Nusselt Pe : nombre de Péclet Pr : nombre de Prandtl Pµ : puissance dissipée par viscosité (W) Pu : puissance utile d’une pompe (W) R : rayon d’un cylindre (m) Re : nombre de Reynolds Rec : nombre de Reynolds critique Ri : nombre de Richardson S : surface d’un domaine , section d’une canalisation (m2) : nombre de Strouhal Sc : nombre de Schmidt St : nombre de Stanton T : température (K) ∆T : écart de température (K ou °C) U, V, W : composantes du vecteur vitesse
V (m.s-1) Um : vitesse maximale dans un écoulement U∞ : vitesse d’un écoulement extérieur Uτ : vitesse de frottement (m.s – 1) Vd, V : vitesse de mélange (débitante) X : charge d’un écoulement (Pa ou J.m -3) ∆X : perte de charge (Id.) Xm : charge motrice d’une pompe (Id.)
Symboles divers : domaine d’étude
: longueur caractéristique d’une canali- sation
P : tenseur des quantités de mouvement : volume
β : dilatabilité du fluide (K -1) β(x) : longueur caractéristique dans un jet ou une couche limite Γ : critère de similitude δ : épaisseur de couche limite dynamique (m) δ1 : épaisseur de déplacement (m) δ2 : épaisseur de quantité de mouvement ε : dissipation turbulente (J.kg – 1.s – 1) : rugosité d’une paroi (m) ζ : coefficient de perte de charge singulière η : ordonnée adimensionnée = y/β(x) ou r/β(x) θ : fluctuation de température λ : conductivité thermique (W.m -1.K -1) Λ : coefficient de perte de charge en ligne = 4 Cf µ : viscosité dynamique (kg.m -1.s -1 ou Pa..s) µA : potentiel chimique du constituant A dans un mélange réactif (J.kg – 1) ν : viscosité cinématique (m2.s -1) ξ : ordonnée adimensionnée = yUτ /ν ρ : masse volumique (kg.m -3) ρA : masse volumique d’un constituant A dans un mélange Σ : surface latérale d’une canalisation
τ : tenseur des contraintes de viscosité
τ : vecteur contrainte visqueuse τp : contrainte pariétale (N.m – 2)
,jkτ (ou τt) : contrainte turbulente (tension de
Reynolds) (Id.) dτ : élément de volume (dans une inté- grale) Φ : fonction de dissipation (W.m – 3) Ω : vorticité (s-1) ω : fluctuation de vorticité turbulente ° : grandeur de référence + : grandeur adimensionnée
ET : Echangeurs thermiques (cf. Biblio- graphie.) FEMM : Fluides en écoulement, méthodes et modèles (id) PTC : Principes des transferts convectifs (id)
♣,♦,♥,♠ : désignent des sous-paragraphes. La paternité de ce symbolisme revient à J.-M. SOURIAU
⊗ Une remarque en passant : l’éditeur d’équations de WORD est une vraie catastrophe en mécanique des fluides : ses concepteurs n’ont pas été capables de faire une différence nette entre la lettre grecque nu (ν ) et le v minuscule (v ), ce qui embrouille beaucoup la lecture de nombreuses formules.
Chapitre 1 BASES PHYSIQUES ET THÉORIQUES BILANS ET LOIS DE COMPORTEMENT
Felix qui potuit rerum cognoscere causas
VIRGILE PRÉAMBULE Sur ce chapitre repose une bonne partie des développements ultérieurs, et il y sera fait constamment référence par la suite. Après avoir examiné les aspects physiques du phénomène de viscosité, on présente d’abord les éléments essentiels de la mécanique des milieux continus, en insistant sur la signification des termes introduits et sur le calcul pratique des contraintes dans un fluide newtonien. Pour établir les équations fondamentales de transferts, qui expriment des bilans, nous élaborons une équation générale de bilan intégral sur un domaine fixe et fini, d’où découle une équation générale de bilan local. L’une et l’autre s’appliquent ensuite à toutes les grandeurs physiques extensives. Cette démarche permet de bien identifier les termes de transport par la matière, les sources de surface et les sources de volume. Elle évite également le recours à la notion de dérivée particulaire, qui est présentée seulement en annexe avec les bilans sur un domaine mobile. L’équation générale est adaptée successivement aux bilans de masse, de quantité de mouvement et d’énergie interne (bilans primaires), à partir desquels on établit des bilans dérivés : bilans d’énergie cinétique, d’énergie mécanique, d’enthalpie et de vorticité. On souligne la distinction entre sources de volume (ou volumiques) et sources de surface (ou surfaciques), qui éclaire la signification et le rôle de certains termes dans les bilans dérivés. Nous avons accordé une place particulière aux phénomènes de diffusion, qui se traduisent dans les équations de bilans par des sources de surface. Plutôt que de les disséminer dans le chapitre, nous avons préféré grouper dans un même paragraphe : diffusion massique, diffusion thermique, diffusion en milieux poreux et diffusion de quantité de mouvement. Enfin, nous avons tenu à faire figurer ici les bilans d’entropie (bilan primaire) et d’exergie (bilan dérivé) qui sont en principe indispensables à toute étude d’optimisation, mais que l’on trouve trop rarement en dehors des ouvrages de thermodynamique. 1.1. – PRINCIPALES CARACTÉRISTIQUES DES MILIEUX FLU IDES On reconnaît aux fluides trois propriétés essentielles : ils sont continus, très déformables et visqueux. Examinons-en attentivement les implications.
1.1.1. – Continuité des milieux fluides Un milieu matériel est dit continu lorsque toutes ses propriétés sont des fonctions continues de l’espace et du temps (champ de contraintes, température, vitesse, loi de comportement etc.). Toutefois, un milieu peut être continu par morceaux, ceux-ci étant séparés par des surfaces de discontinuité (cas d’un contact entre milieux différents). On adopte habituellement deux hypothèses simplificatrices : - hypothèse d’homogénéité. – Certaines propriétés du milieu sont indépendantes des coordonnées spatiales (chaleur massique, conductivité thermique…); - hypothèse d’isotropie. – Certaines propriétés sont identiques dans toutes les directions. La définition des milieux continus implique de considérer des éléments de volume d très grands à l’échelle moléculaire et très petits à l’échelle macroscopique usuelle. Ceci est conforme à la plupart des conditions expérimentales, la précision des mesures de longueur variant de 10-2 mm à 1 mm. Parmi les exceptions, on notera les écoulements macromoléculaires, les écoulements aux très petites échelles, certains écoulements polyphasiques, les écoulements de gaz raréfiés et les écoulements dans les microcanaux. A ce propos, on rappellera que, au début des années 1900, le mathématicien allemand David Hilbert avait proposé une liste de 23 problèmes qui constituaient à son avis les plus importants à résoudre au cours du 20ème siècle. Le sixième problème concernait le passage de la description moléculaire à la description statistique, et de la description statistique à la description macroscopique. A ce jour il n’a pas encore trouvé de solution complète. En mécanique des fluides, un élément de volume d répondant aux spécifications précédentes est appelé particule fluide. La température, la masse volumique, et la vitesse sont uniformes sur d à chaque instant.
1.1.2. – Déformabilité des fluides La mobilité des fluides est une donnée perceptible par nos sens. Elle suppose une matière déformable, susceptible de prendre la forme de l’enceinte qui la contient. Alors que, dans les solides, des forces importantes provoquent des déformations très petites, dans les fluides des forces faibles entraînent des déformations importantes. En outre, le volume massique v, et par conséquent la masse volumique ρ = 1/v des fluides dépendent en général de p et de T. Les cas où cette dépendance est faible sont particulièrement intéressants : il peut s’agir soit d’un fluide isochore, pour lequel la masse volumique dépend très peu de la pression et de la température, soit d’un écoulement isochore, où les variations de pression et de température sont assez petites pour avoir peu d’incidence sur ρ, soit des deux à la fois (cf. Annexe 1.A.1). Pratiquement, dans leur majorité, les écoulements thermoconvectifs peuvent être considérés comme isochores, et par la suite nous utiliserons de préférence l’expression fluide isochore pour désigner toute situation où la masse volumique du fluide est assimilable à une constante.
1.1.3. – Viscosité des fluides : approche expérimentale On sait que dans un fluide immobile, les forces intérieures qui se manifestent sont des forces de pression, normales aux surfaces. Qu’en est-il dans un fluide en mouvement ? L’expérience de Couette (fin du 19e s.) apporte une réponse claire à cette question. 1.1.3.1. – EXPÉRIENCE FONDAMENTALE DE COUETTE
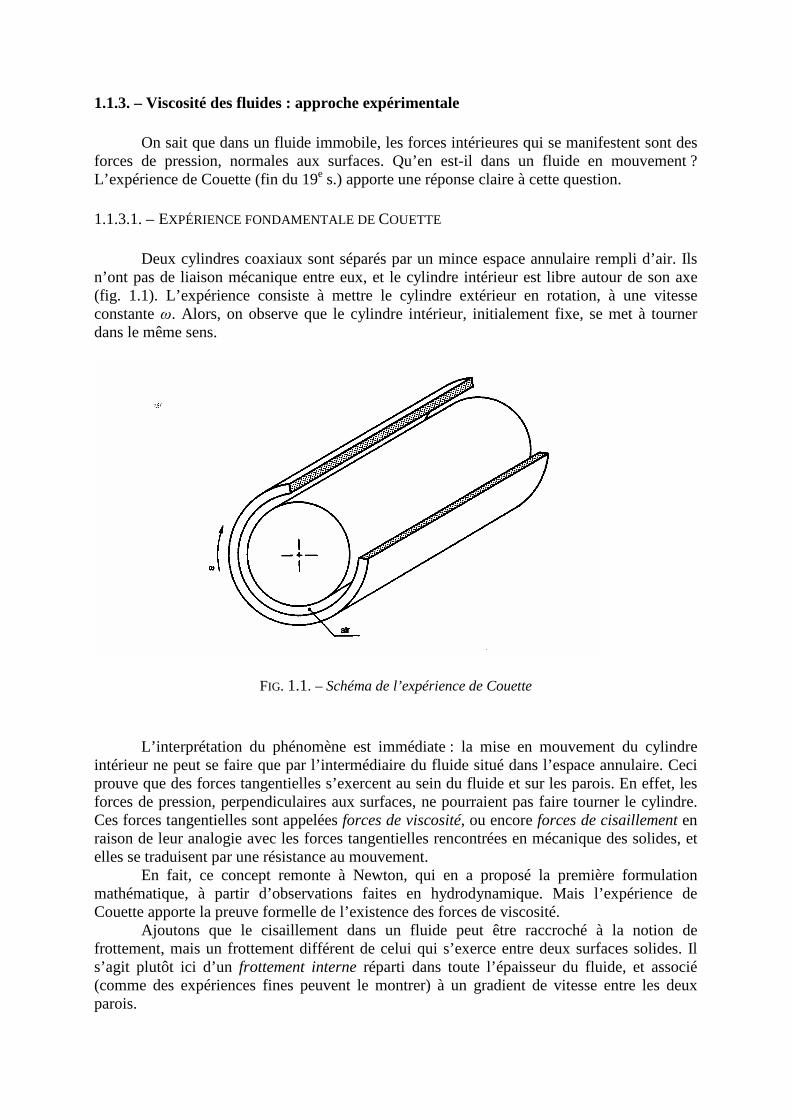
Deux cylindres coaxiaux sont séparés par un mince espace annulaire rempli d’air. Ils n’ont pas de liaison mécanique entre eux, et le cylindre intérieur est libre autour de son axe (fig. 1.1). L’expérience consiste à mettre le cylindre extérieur en rotation, à une vitesse constante ω. Alors, on observe que le cylindre intérieur, initialement fixe, se met à tourner dans le même sens.
FIG. 1.1. – Schéma de l’expérience de Couette L’interprétation du phénomène est immédiate : la mise en mouvement du cylindre intérieur ne peut se faire que par l’intermédiaire du fluide situé dans l’espace annulaire. Ceci prouve que des forces tangentielles s’exercent au sein du fluide et sur les parois. En effet, les forces de pression, perpendiculaires aux surfaces, ne pourraient pas faire tourner le cylindre. Ces forces tangentielles sont appelées forces de viscosité, ou encore forces de cisaillement en raison de leur analogie avec les forces tangentielles rencontrées en mécanique des solides, et elles se traduisent par une résistance au mouvement. En fait, ce concept remonte à Newton, qui en a proposé la première formulation mathématique, à partir d’observations faites en hydrodynamique. Mais l’expérience de Couette apporte la preuve formelle de l’existence des forces de viscosité. Ajoutons que le cisaillement dans un fluide peut être raccroché à la notion de frottement, mais un frottement différent de celui qui s’exerce entre deux surfaces solides. Il s’agit plutôt ici d’un frottement interne réparti dans toute l’épaisseur du fluide, et associé (comme des expériences fines peuvent le montrer) à un gradient de vitesse entre les deux parois.
1.1.3.2. – VISCOSITÉ DYNAMIQUE ET CONTRAINTES DE VISCOSITÉ
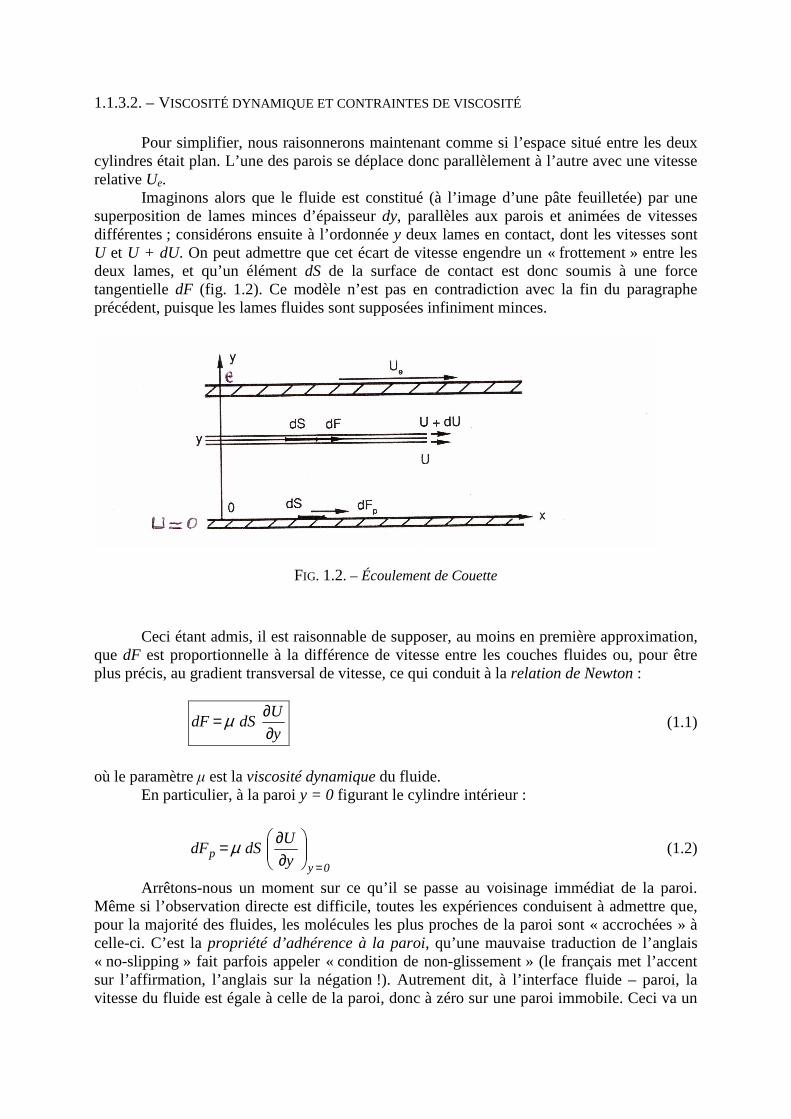
Pour simplifier, nous raisonnerons maintenant comme si l’espace situé entre les deux cylindres était plan. L’une des parois se déplace donc parallèlement à l’autre avec une vitesse relative Ue. Imaginons alors que le fluide est constitué (à l’image d’une pâte feuilletée) par une superposition de lames minces d’épaisseur dy, parallèles aux parois et animées de vitesses différentes ; considérons ensuite à l’ordonnée y deux lames en contact, dont les vitesses sont U et U + dU. On peut admettre que cet écart de vitesse engendre un « frottement » entre les deux lames, et qu’un élément dS de la surface de contact est donc soumis à une force tangentielle dF (fig. 1.2). Ce modèle n’est pas en contradiction avec la fin du paragraphe précédent, puisque les lames fluides sont supposées infiniment minces.
FIG. 1.2. – Écoulement de Couette Ceci étant admis, il est raisonnable de supposer, au moins en première approximation, que dF est proportionnelle à la différence de vitesse entre les couches fluides ou, pour être plus précis, au gradient transversal de vitesse, ce qui conduit à la relation de Newton :
y
UdSdF
∂∂= µ (1.1)
où le paramètre µ est la viscosité dynamique du fluide. En particulier, à la paroi y = 0 figurant le cylindre intérieur :
0y
p y
UdSdF
=
∂∂= µ (1.2)
Arrêtons-nous un moment sur ce qu’il se passe au voisinage immédiat de la paroi. Même si l’observation directe est difficile, toutes les expériences conduisent à admettre que, pour la majorité des fluides, les molécules les plus proches de la paroi sont « accrochées » à celle-ci. C’est la propriété d’adhérence à la paroi, qu’une mauvaise traduction de l’anglais « no-slipping » fait parfois appeler « condition de non-glissement » (le français met l’accent sur l’affirmation, l’anglais sur la négation !). Autrement dit, à l’interface fluide – paroi, la vitesse du fluide est égale à celle de la paroi, donc à zéro sur une paroi immobile. Ceci va un

peu à l’encontre du sens commun, et la condition d’adhérence a fait l’objet de vifs désaccords entre physiciens au 19ème siècle, avant de s’imposer finalement. Une conséquence de cette propriété est qu’il n’y a pas de frottement stricto sensu entre le fluide et la paroi mais, comme il a été dit plus haut, une résistance qui se répartit au sein du fluide, tout comme le glissement qui a lieu dans le fluide lui-même. Ceci explique par exemple pourquoi vous ne pouvez pas souffler toute la poussière déposée sur une surface lisse, et pourquoi il faut l’essuyer avec un chiffon. Pour la même raison, les bombes aérosols anti-poussière que l’on trouve dans le commerce sont une pure fumisterie ! Revenons à présent sur la viscosité dynamique µ du fluide, qui a pour dimension :
[ ] 1112
2
tLMtLL
LtLM
U
L
S
F −−−
−===µ
L’unité correspondante est donc le kg.m-1.s-1 ou encore Pa.s. La viscosité dynamique est une caractéristique de chaque fluide, qui dépend essentiellement de la température. A ce propos, on doit insister spécialement sur la différence de comportement d’un liquide et d’un gaz, puisque la viscosité du liquide diminue quand T augmente (pensons aux huiles alimentaires ou de lubrification) alors que la viscosité du gaz augmente avec la température (donc le gaz naturel circule mieux dans un gazoduc sibérien que dans un gazoduc saharien !). Dans l’expérience de Couette, la force totale Fp exercée sur la paroi peut être évaluée en mesurant le couple nécessaire pour immobiliser le cylindre intérieur, d’où l’on déduit la valeur de µ. C’est le principe du viscosimètre de Couette. On peut retenir comme valeurs de référence : - pour l’air à 20°C : : µ = 1,8 10-5 kg.m-1.s-1
- pour l’eau à 20°C : µ = 1,03 10-3 kg.m-1.s-1 - pour les huiles, une valeur très supérieure : 0,1 à 0,4 kg.m-1.s-1 Plus généralement, les ordres de grandeur sont faciles à retenir, en kg.m-1.s-1 : 10-5 pour les gaz, 10-3 pour les liquides usuels, 10-1 pour les huiles. L’approximation du fluide parfait consiste à admettre µ ≈ 0 ; elle est parfois acceptable loin des parois. A noter qu’il ne faut pas confondre « fluide parfait » et « gaz parfait » : la viscosité du gaz parfait n’est pas nulle ! A partir de (1.1) nous introduisons enfin la contrainte tangentielle τ à l’ordonnée y, qui est la force rapportée à l’unité de surface :
y
U
∂∂= µτ (N.m-2 ou Pa) (1.3)
La viscosité ne se manifeste évidemment que s’il y a mouvement. En statique des fluides, il n’y a pas de différence entre fluide parfait et fluide visqueux : τ = 0.

1.1.3.3. – VISCOSITÉ CINÉMATIQUE On définit la viscosité cinématique d’un fluide par :
ρµν = (1.4)
Cette grandeur, qui apparaît dans les équations de la mécanique des fluides, possède une signification physique simple : elle traduit l’aptitude d’un fluide agité à revenir au repos. Par exemple, si est grand : µ est grand (donc les forces de frottement sont importantes) et-/-ou ρ est petit (donc l’inertie mécanique est faible), ce qui favorise le retour du fluide à un état de repos. On pouvait facilement mettre cette propriété en évidence au restaurant lorsque l’huile et le vinaigre étaient présentés dans des carafes jumelées. Il suffisait d’agiter un peu l’ustensile et de le reposer sur la table : la surface libre du vinaigre ( petit) oscille plus
longtemps que celle de l’huile ( grand).
La viscosité cinématique a pour dimension : 3
11
LM
tLM][ −
−−=ν , l’unité
correspondante étant le m2.s-1. Ses variations en fonction de la température montrent les mêmes différences de comportement que pour µ entre les liquides usuels et les gaz. Quant aux ordres de grandeur de , ils sont de 10-6 m2/s avec les liquides et de 10-5 m2/s avec les gaz. Ainsi : - pour l’eau à 20 °C : = 1,01 10-6 m2/s
- pour l’air à 20 °C et 1 bar : = 1,5 10-5 m2/s
- pour les huiles, va de 1 10-4 à 4 10-4 m2/s. 1.2.- ÉLÉMENTS DE RHÉOLOGIE 1.2.1.- Déformations
♣ Un fluide étant un milieu continu déformable, il est d’abord nécessaire d’exprimer les déformations subies au cours du mouvement, en tenant compte de la propriété de continuité. Soit, au même instant, une particule fluide située en M(x,y,z) et une autre située en un point très voisin M’(x + dx, y + dy, z + dz). On écrit, en désignant par O un point de référence :
)OM(dOM'OM += Le vecteur vitesse en M’ a pour expression :
Vd)t,M(V)t,'M(V += (1.5) et ses composantes sont :

dzz
Vdy
y
Vdx
x
VVV iii
ii ∂∂
+∂∂
+∂
∂+=′ (i = x, y, z)
ce qui s’écrit, sous forme matricielle :
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
+
=
dz
dy
dx
z
W
y
W
x
Wz
V
y
V
x
Vz
U
y
U
x
U
W
V
U
'W
'V
'U
(1.6)
En introduisant le tenseur gradient du champ des vitesses Vgrad , la relation (1.6) s’écrit :
OMd.Vgrad)t,M(V)t,'M(V += (1.7)
♦ Pour bien séparer les différentes causes du mouvement relatif des deux particules, il
est commode de décomposer le tenseur Vgrad en une somme d’un tenseur symétrique D et
d’un tenseur antisymétrique ω , en remarquant que :
∂∂
−∂∂
+
∂∂
+∂∂
=∂∂
i
j
j
i
i
j
j
i
j
i
x
V
x
V
2
1
x
V
x
V
2
1
x
V (1.8)
On pose :
∂∂
+∂∂
=i
j
j
iij x
V
x
V
2
1ε
(1.9)
∂∂
−∂∂
=i
j
j
iij x
V
x
V
2
1ω
toujours avec i,j = x, y, z.
Les termes ijε et ijω sont les composantes des tenseurs D et ω , et la relation (1.7)
devient :
OMd.OMd.D)t,M(V)t,M(V ω++=′ (1.10) La vitesse de la particule située en M’ est donc la somme de trois termes représentant respectivement un mouvement de translation d’ensemble des particules fluides, un mouvement dû à la déformation du fluide et un mouvement de rotation.

Le tenseur symétrique D (où εij = εji) est appelé tenseur des taux de déformation, les εij étant les taux de déformation, exprimés en s- 1. On appelle souvent les gradients de vitesses
ji x/V ∂∂ « vitesses de déformation », mais ce terme est un peu impropre pour désigner des
grandeurs homogènes à l’inverse d’un temps.
Quant au tenseur antisymétrique ω , c’est le tenseur des taux de rotation. Ses composantes ωij sont les taux de rotation ( 0, iiijji =−= ωωω ). On vérifie aisément à partir
de (1.9) que les composantes du vecteur OMd.ω sont aussi celles du vecteur
OMdVrot2
1 ∧ , qui représente bien un mouvement de rotation.
Le vecteur Vrot2
1=Ω est généralement appelé vecteur tourbillon (ou encore
vecteur taux de rotation). C’est le vecteur dual du tenseur ω . Un mouvement irrotationnel de
fluide est caractérisé par 0=Ω (c’était sans doute l’objectif poursuivi par Alphonse ALLAIS lorsqu’il avait préconisé l’utilisation de casseroles carrées pour empêcher le lait de tourner).
♠ Revenons au tenseur D pour interpréter plus précisément ses composantes. Si l’écoulement est irrotationnel, la vitesse relative du point M’ par rapport au point M est, selon (1.10) :
OMd.D)t,M(V)t,'M(VVd =−= (1.11a) Plaçons-nous dans le cas particulier où M et M’ sont tous les deux sur l’axe x. Les
composantes de OMd sont alors respectivement : dx, 0, 0. D’où :
dx
0
0
dx
Vd
zx
yx
xx
zzzyzx
yzyyyx
xzxyxx
=
=εεε
εεεεεεεεε
(1.11b)
Le déplacement 'MMd de M’ par rapport à M (c'est-à-dire la déformation ''M'M de
'MM ) s’écrit d’après (1.11a) :
dtOMd.DdtVd'MMd''M'M === (1.11c)
Il est naturellement proportionnel à Vd , et on voit que le déplacement selon x est représenté par ε xx, tandis que les déplacements selon y et z sont représentés par ε yx et ε zx. Imaginons enfin, au sein du milieu matériel considéré, deux surfaces élémentaires dS et dS’ centrées en M et M’ , et perpendiculaires à l’axe x. Alors la déformation selon x (déplacement de dS’ par rapport à dS) correspond à une variation de l’écartement des deux surfaces, tandis que les déformations selon y et z correspondent à un glissement de dS’ par rapport à dS. Le même raisonnement peut être suivi en plaçant M et M’ sur l’axe y ou sur l’axe z, avec des surfaces dS et dS’ orthogonales à ces mêmes axes. Dans les trois cas, les termes
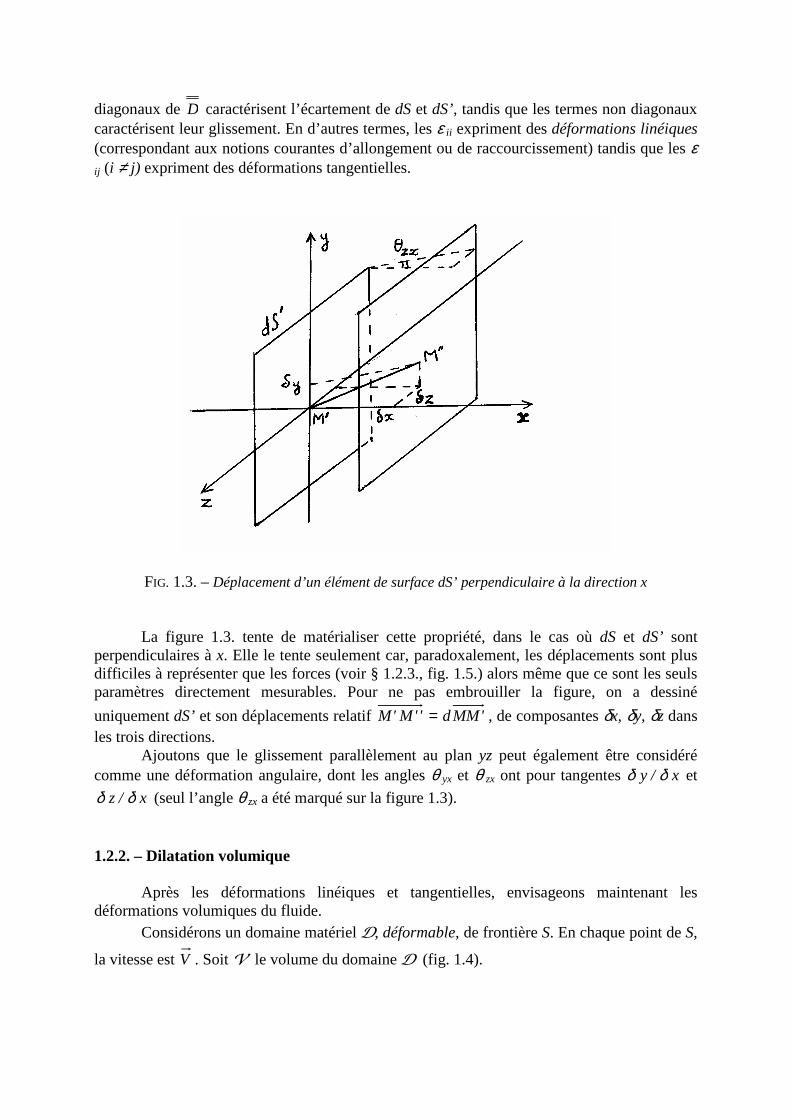
diagonaux de D caractérisent l’écartement de dS et dS’, tandis que les termes non diagonaux caractérisent leur glissement. En d’autres termes, les ε ii expriment des déformations linéiques (correspondant aux notions courantes d’allongement ou de raccourcissement) tandis que les ε
ij (i ≠ j) expriment des déformations tangentielles.
FIG. 1.3. – Déplacement d’un élément de surface dS’ perpendiculaire à la direction x La figure 1.3. tente de matérialiser cette propriété, dans le cas où dS et dS’ sont perpendiculaires à x. Elle le tente seulement car, paradoxalement, les déplacements sont plus difficiles à représenter que les forces (voir § 1.2.3., fig. 1.5.) alors même que ce sont les seuls paramètres directement mesurables. Pour ne pas embrouiller la figure, on a dessiné
uniquement dS’ et son déplacements relatif 'MMd''M'M = , de composantes δx, δy, δz dans les trois directions. Ajoutons que le glissement parallèlement au plan yz peut également être considéré comme une déformation angulaire, dont les angles θ yx et θ zx ont pour tangentes x/y δδ et
x/z δδ (seul l’angle θ zx a été marqué sur la figure 1.3). 1.2.2. – Dilatation volumique Après les déformations linéiques et tangentielles, envisageons maintenant les déformations volumiques du fluide. Considérons un domaine matériel , déformable, de frontière S. En chaque point de S,
la vitesse est V . Soit le volume du domaine (fig. 1.4).

FIG. 1.4. – Dilatation volumique d’un domaine fluide
Pendant un petit intervalle de temps dt, un élément de surface dS balaie un volume
d 2 = ( ) dSdtn.V , et le volume varie de d :
d = ( ) dSdtn.VS∫ (n normale extérieure à )
d’où, dτ désignant l’élément différentiel de volume :
d / dt =∫D dVdiv τ (1.12a)
La grandeur Vdiv , appelée taux de dilatation volumique, caractérise donc la rapidité locale de variation du volume. Dans un écoulement de fluide isochore (§ 1.1.2), on a :
0Vdiv = (1.12b) 1.2.3. – Contraintes Le problème est maintenant d’évaluer les efforts exercés sur la frontière S du domaine . Soit dS un élément de surface entourant un point M de S. La force de contact exercée
sur dS par le milieu extérieur est notée dST . Le vecteur T est la tension (ou le vecteur contrainte) en M.
D’après le théorème fondamental de Cauchy, T étant une fonction vectorielle
continue, il existe un tenseur T tel que :

n.TT = (n normale extérieure à ) (1.13a)
Ce tenseur T est appelé tenseur des contraintes en M.
Les composantes ijσ de T sont les contraintes en M. En désignant par zyx n,n,n les
composantes de n , (1.13a) s’écrit donc aussi :
=
z
y
x
zzzyzx
yzyyyx
xzxyxx
n
n
n
T
σσσσσσσσσ
(1.13b)
Examinons par exemple le cas où dS est perpendiculaire à l’axe Ox (fig. 1.5). Alors :
xTTet
0
0
1
n =
=
=
=
zz
yy
xx
zzzyzx
yzyyyx
xzxyxx
x
0
0
1
T
σσσ
σσσσσσσσσ
(1.14)
FIG. 1.5 – Contrainte xT sur un élément de surface perpendiculaire à la direction x
La grandeur xxσ est donc la composante de la contrainte xT perpendiculairement à dS,
tandis que σ yx et σ zx sont les composantes de xT dans le plan de S. Le même raisonnement
pourrait être repris avec dS perpendiculaire à Oy ou Oz, et s’applique également aux
déformations ε ij comme nous l’avons déjà vu (§ 1.2.1.♠). Ainsi donc :

- Les σii sont les contraintes normales en M. En mécanique des milieux continus, elles représentent soit un effort de traction (σii > 0 par convention), soit un effort de compression (σii < 0). - Les σij (i ≠ j) sont les contraintes tangentielles, ou de cisaillement. Elles agissent dans le plan de dS, et tendent à faire glisser l’un par rapport à l’autre deux éléments de surface parallèles. 1.2.4. – Fluides newtoniens
♣ Introduisons maintenant une loi de comportement du fluide, sous la forme d’une relation entre les contraintes et les déformations. La loi de comportement la plus simple est de la forme :
D2I.VdivIpT µη ++−= (1.15)
où I est le tenseur unité, de composantes δ ij (δ ii = 1, δ ij = 0 pour i ≠ j), et où les coefficients η et µ ne dépendent que de la température. Un fluide satisfaisant à cette loi est appelé fluide newtonien. Les justifications physiques de (1.15) sont très simples :
a) les composantes - pδ ij du tenseur - Ip sont des contraintes normales (termes de la diagonales principale) indépendantes des déformations. Le paramètre p est la pression statique au point M. L’expérience montre qu’il est toujours positif. Cela signifie que la force
de pression est dirigée en sens contraire de n , donc vers l’intérieur du domaine étudié. En d’autres termes, p traduit un effort de compression.
b) les composantes du tenseur I.Vdivη sont également des contraintes normales, mais elles
sont proportionnelles au taux de déformation volumique )Vdiv( du fluide. Le paramètre η est appelé viscosité de dilatation du fluide.
c) enfin, les composantes 2µεij du tenseur D2µ sont des contraintes proportionnelles aux
taux de déformation linéiques (εii) ou angulaires (εij, i ≠ j). La grandeur µ est la viscosité dynamique du fluide, déjà rencontrée à propos de l’expérience de Couette (§ 1.1.3.2). Quant au facteur 2, il est destiné à se simplifier plus loin avec le ½ de εij (relations 1.17 et 1.18).
On notera que d’éventuelles contraintes liées à la rotation du fluide (par
l’intermédiaire du tenseur ω ) ne sont pas prises en compte dans ce modèle élémentaire (cf. § 1.4.1).
Les tenseurs I et D étant symétriques, T est aussi un tenseur symétrique : σ ij = σ ji.

On pose habituellement :
τ+−= npT (1.16a) ou sous forme tensorielle :
+−=
+−=
ijijij p
IpT
τδσ
τ (1.16b)
Le tenseur τ défini par (1.16b) est le tenseur des contraintes de viscosité ; le vecteur
τ est le vecteur contrainte visqueuse au point M.
♦ Dans la plupart des cas usuels que l’on peut rencontrer, le terme I.Vdivη est soit nul
(fluide isochore), soit très petit devant D2µ . La loi de comportement se réduit alors à :
D2IpT µ+−= soit : D2µτ = (1.17) d’où, d’après (1.9) :
∂∂
+∂∂
==i
j
j
iijij x
V
x
V
2
122 µεµτ
∂∂
+∂∂
=i
j
j
iij x
V
x
Vµτ en N / m2 (ou Pa) (1.18)
On reconnaît dans (1.18) une généralisation de la relation (1.3) établie pour un écoulement unidimensionnel.
♥ Lorsque I.Vdivη n’est pas négligeable, c’est-à-dire dans les écoulements à masse
volumique fortement variable, on admet assez souvent la relation de Stokes : η = - (2/3)µ . Alors :
∂∂
−∂∂
+∂∂
=i
i
i
j
j
iij x
V
3
2
x
V
x
Vµτ
En toute rigueur, cette relation issue de la théorie cinétique des gaz n’est applicable qu’aux gaz monoatomiques. Elle reste acceptable pour les gaz diatomiques, mais η est beaucoup plus grand que µ avec les gaz triatomiques (CO2, NO2).

1.2.5. - Application : calcul de la contrainte locale T dans un cas simple Pour illustrer ce qui précède, considérons un écoulement bidimensionnel de fluide sur une surface plane imperméable, parallèle à la direction x (fig. 1.6), avec une direction y perpendiculaire à la paroi.
FIG. 1.6. – Ecoulement bidimensionnel sur une plaque plane
♣ D’après (1.16b) nous avons en géométrie bidimensionnelle :
+−+−
=
=
yyyx
xyxx
yyyx
xyxx
p
pT ττ
ττσσσσ
(1.19a)
où les τ ij sont donnés par (1.18).
♦ Déterminons le vecteur contrainte à la paroipT , en adoptant une normale n dirigée
vers l’extérieur du fluide selon la convention usuelle, soit :
−=
1
0n dans le repère x, y.
Alors, la force pT (ou yT ) exercée par la paroi sur le fluide a pour composantes :
−
+−+−
==1
0
p
pn.TT
yyyx
xyxxp ττ
ττ
∂∂−
∂∂+
∂∂−
=
−−
=
=
=
0y
0y
yy
xyp
y
V2p
x
V
y
U
pT
µ
µ
ττ
(1.19b)

La paroi étant imperméable, 0V 0y == en tout point, d’où : ( ) 0x/V 0y =∂∂ = et
( ) 0y/V 0y =∂∂ = (§ 4.3.3.2). Dans ces conditions, compte tenu du choix des directions Ox et
Oy, on a :
−=
∂∂−
= = pp
y
UT p
0ypτµ
(1.19c)
où ( ) ( )
0yxy0yp y/U== =∂∂= τµτ est la contrainte tangentielle exercée par le fluide sur la
paroi (le terme ( ) 0yy/U =∂∂− µ représente l’effort exercé par la paroi sur le fluide). La
contrainte ( )0yyy =
τ est nulle.
Les ordres de grandeur courants pour τ p sont de 0,01 à 0,5 N/m2 dans l’air, et de 1 à 100 N/m2 dans l’eau.
♥ Calculons maintenant la tension T sur un plan Π perpendiculaire à la paroi. La
normale est ici :
=
0
1n (domaine fluide à gauche de Π ) ; en outre, xTT = (§ 1.2.3).
+−=
+−+−
=yx
xx
yyyx
xyxxx
p
0
1
p
pT τ
τττ
ττ (1.19d)
soit, d’après (1.18) :
=
∂∂+
∂∂
∂∂+−
=yx
xxx
x
V
y
Ux
U2p
T σσ
µ
µ (1.19e)
Nous aurons à nous servir de ces résultats au chapitre 4 (§ 4.4.3) en étudiant la structure de l’écoulement au voisinage d’une paroi plane. 1.3. – EQUATIONS DE BILANS 1.3.1. – Relations générales entre flux et sources Les équations générales de la convection peuvent être déduites, soit sous forme intégrale, soit sous forme locale, d’une seule équation générale de bilan. Donnons-nous un domaine matériel , de dimensions finies, et de frontière fixe (fig. 1.7). Supposons-le parcouru par une « entité physique » additive, c’est-à-dire telle que dans un système constitué de plusieurs parties, sa valeur totale soit la somme des valeurs de chaque partie. Une telle entité porte le nom de grandeur extensive, et peut donc faire l’objet d’un bilan sur le domaine ; sa densité volumique locale est notée C = C(x,y,z,t).
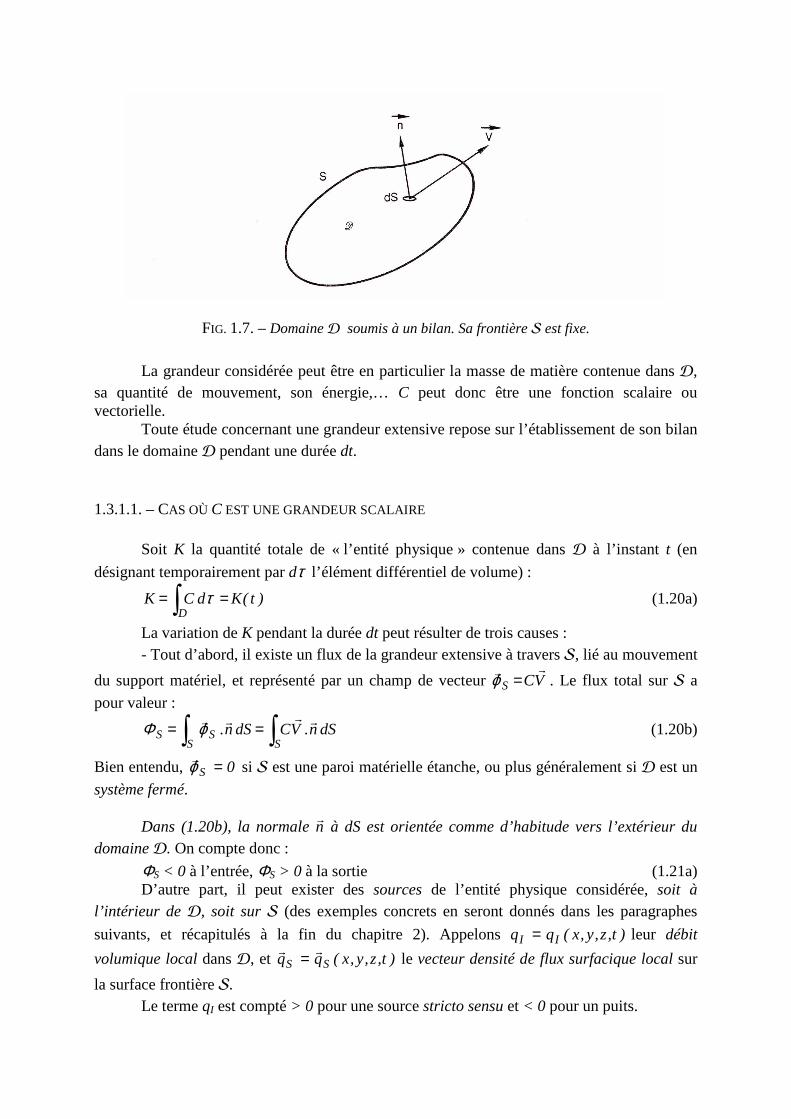
FIG. 1.7. – Domaine soumis à un bilan. Sa frontière est fixe.
La grandeur considérée peut être en particulier la masse de matière contenue dans , sa quantité de mouvement, son énergie,… C peut donc être une fonction scalaire ou vectorielle. Toute étude concernant une grandeur extensive repose sur l’établissement de son bilan dans le domaine pendant une durée dt. 1.3.1.1. – CAS OÙ C EST UNE GRANDEUR SCALAIRE Soit K la quantité totale de « l’entité physique » contenue dans à l’instant t (en
désignant temporairement par dτ l’élément différentiel de volume) :
∫ ==D
)t(KdCK τ (1.20a)
La variation de K pendant la durée dt peut résulter de trois causes : - Tout d’abord, il existe un flux de la grandeur extensive à travers , lié au mouvement
du support matériel, et représenté par un champ de vecteur VCS
rr=ϕ . Le flux total sur a
pour valeur :
dSn.VCdSn.S S
SS ∫ ∫== rrrrϕΦ (1.20b)
Bien entendu, 0S =ϕr si est une paroi matérielle étanche, ou plus généralement si est un
système fermé. Dans (1.20b), la normale n
r à dS est orientée comme d’habitude vers l’extérieur du
domaine . On compte donc :
ΦS < 0 à l’entrée, ΦS > 0 à la sortie (1.21a) D’autre part, il peut exister des sources de l’entité physique considérée, soit à l’intérieur de , soit sur (des exemples concrets en seront donnés dans les paragraphes
suivants, et récapitulés à la fin du chapitre 2). Appelons )t,z,y,x(qq II = leur débit
volumique local dans , et )t,z,y,x(qq SSrr = le vecteur densité de flux surfacique local sur
la surface frontière . Le terme qI est compté > 0 pour une source stricto sensu et < 0 pour un puits.
En ce qui concerne Sqr
, on introduit une densité de flux des sources sur en posant :
n.qq SSrr= . On a donc comme pour ΦS (1.21a) : qS > 0 à la sortie et < 0 à l’entrée.
Notons QS le flux total des sources sur et QI le débit total des sources de volume :
∫∫ ==D
IIS
SS dqQ;dSn.qQ τrr (1.21b)
Compte tenu des conventions de signes précédentes, si Sqr
ou Vr
est dirigé vers
l’intérieur de , QS ou ΦS est compté négatif, mais contribue à augmenter K, ce qui implique
dK > 0 (et inversement). Dans le bilan algébrique de la grandeur K sur pendant un temps
élémentaire dt, QS et ΦS doivent donc être affectés du signe moins :
dtdtQdtQdtt
KdK SSI Φ−−=
∂∂= (1.21c)
Il est intéressant de grouper d’un côté la variation de K et le terme de transport, de l’autre les sources. Compte tenu de (1.20b) et (1.21b), la formulation générale du bilan de K sur s’établit donc ainsi :
∫ ∫ ∫ ∫−=+∂∂
D S D SSI dSn.qdqdSn.VCdC
t
rrrrττ (1.22)
Notons dès à présent que, puisque la frontière du domaine a été choisie fixe, on a :
∫ ∫ ∂∂=
∂∂
D Dd
t
CdC
tττ
et cette formulation sera retenue dans la suite. Le théorème connu sous le nom de « flux – divergence » permet de transformer les intégrales sur en intégrales sur , et (1.22) devient :
∫∫∫∫ −=+∂∂
DS
DI
DDdqdivdqd)VC(divd
t
C ττττ rr (1.23)
Cette équation étant valable ", si C est continue, alors :
SI qdivq)VC(divt
C rr−=+
∂∂
(1.24)
Rappelons que : C = densité volumique de la grandeur considérée qI = débit volumique des sources dans
Sqr
= vecteur densité de flux des sources sur
L’équation (1.22) représente un bilan intégral sur un domaine de dimensions finies
et de frontière fixe, qui répond en général aux besoins de l’ingénieur. Quant à la relation (1.24), elle exprime un bilan local, ou différentiel.

1.3.1.2. – CAS OÙ C EST UNE FONCTION VECTORIELLE Lorsque l’entité physique faisant l’objet d’un bilan est de nature vectorielle, la transposition du cas précédent est aisée : - le débit volumique des sources devient une grandeur vectorielle Iq
r ;
- le vecteur densité de flux des sources de surface à travers devient une grandeur tensorielle
Sq , tandis que la densité de flux scalaire devient un vecteur Sqr
;
- la densité de flux transportée à travers par le mouvement du support matériel est n.VC⊗ . Les conventions de signes (1.21a) n’ayant de sens que pour une somme algébrique de scalaires, elles n’ont plus à être prises en compte ici, où l’on effectue une somme vectorielle, et le bilan intégral s’écrit :
∫∫∫∫ +=⊗+∂∂
SS
DI
SDdSqdqdSn.VCd
t
C ττ (1.25)
On peut ensuite passer au bilan local comme dans le paragraphe précédent, en écrivant
Sqr
sous la forme d’un produit tensoriel contracté, et de même pour n.VCrrr
⊗ (§ 1.3.3, bilan
de quantité de mouvement). En projetant sur les axes de coordonnées, on pourra évidemment remplacer (1.25) par trois équations scalaires. 1.3.1.3. – REMARQUES
♣ La technique du bilan sur un domaine fixe présente entre autres avantages celui de ne pas faire intervenir la notion de « dérivée particulaire », et donc d’alléger le raisonnement. Compte tenu toutefois de l’usage encore largement répandu de la dérivation particulaire, et de son importance historique en mécanique des fluides, cette notion est brièvement présentée et discutée dans l’Annexe 1.A.1, avec les bilans sur les domaines mobiles.
♦ D’autre part, on notera que les équations de bilan local ayant la forme (1.24) sont des équations aux dérivées partielles. Celles – ci ont eu longtemps la faveur des utilisateurs, qui recherchaient des solutions analytiques. Le développement des moyens de calcul numérique permet non seulement d’aller plus loin dans la résolution de telles équations, mais de redonner aussi tout leur intérêt aux équations intégrales, souvent mieux adaptées aux problèmes industriels. C’est le cas des calculs par volumes finis sur des domaines macroscopiques (par exemple pour la simulation des grandes structures turbulentes, cf. § 3.6).

1.3.2. – Bilan de masse 1.3.2.1. – BILAN DE MASSE TOTALE Nous choisirons comme premier exemple d’entité physique la masse de matière présente dans le domaine . Celle-ci étant une grandeur scalaire, la correspondance avec les termes qui interviennent dans (1.22) et (1.24) est alors la suivante : • C = ρ, masse volumique du milieu matériel (en kg/m3) • qI = 0 et 0qS =r
, car il ne peut y avoir de sources de masse, en vertu du principe de
conservation de la masse totale. Les équations de bilan intégral et local s’écrivent donc ici :
∫ ∫ =+∂∂
D S0dSn.Vd
t
rrρτρ
(1.26)
0Vdivt
=+∂∂ r
ρρ (1.27)
L’équation (1.27) de bilan local est traditionnellement baptisée équation de continuité. Pour un fluide isochore (ρ = cte), on retrouve l’équation (1.12b) :
0Vdiv =r
L’expression « débit–masse de fluide à travers une surface » (ou encore débit massique) désigne habituellement le terme de transport, c’est-à-dire le flux de masse, noté qm :
∫=S
m dSn.Vqrr
ρ (en kg/s)
d’où l’interprétation de (1.26) : la variation de masse de pendant le temps dt = 1 est égale
au débit – masse à travers . 1.3.2.2. – BILAN DE MASSE SUR UN CONSTITUANT Si le milieu matériel contenu dans est un mélange de plusieurs constituants (souvent appelés espèces dans le vocabulaire du génie des procédés), on peut aussi établir un bilan de masse sur un seul d’entre eux, noté A. On a dans ce cas : • C = ρA, masse volumique du constituant A dans le mélange (en kg/m3) • qI = qIA, taux de production local de A (en kg/m3.s). Ici, on pourra avoir qIA ≠ 0 si le mélange est le siège d’une transformation dans sa composition (réaction chimique, changement de phase). Par exemple, dans la combustion d’un hydrocarbure CnHm il apparaît un puits de masse si le bilan porte sur CnHm ou sur O2 (qI < 0), et une source de masse s’il concerne CO2 ou H2O (qI > 0). De même, dans un mélange liquide – vapeur en évolution, le bilan de masse sur l’une des deux phases fera intervenir un terme de source qI ≠ 0.
• SAS qq
rr = , vecteur densité de flux de masse relatif au constituant A pour les sources de
surface, le débit-masse local de ces sources étant n.qq SASArr= (en kg/m2.s). Ce terme
interviendra si A diffuse dans le mélange (§ 1.3.6.2). Conformément à (1.22) et (1.24), le bilan intégral et le bilan local de masse pour le constituant A sont donc exprimés par les relations :
∫ ∫ ∫∫ −=+∂
∂D D S
SAIAS
AA dSn.qdqdSn.Vdt
rrrrτρτρ
(1.29a)
SAIAAA qdivqVdivt
rr−=+
∂∂ ρρ
(1.29b)
1.3.3. – Bilan de quantité de mouvement 1.3.3.1. – CAS GÉNÉRAL Attachons-nous maintenant à exprimer le bilan de quantité de mouvement sur le domaine . Il concerne une grandeur vectorielle, et constitue donc une application de la relation (1.25). La loi fondamentale de la mécanique stipule que la variation de quantité de mouvement d’un système matériel est égale à la somme des forces appliquées. En d’autres termes, les « sources » de quantité de mouvement sont les forces appliquées au système, qui se divisent en deux catégories :
- les forces de volume, représentées par un champ continu )t,z,y,x(Fr
sur : forces de pesanteur (incluant les forces de flottabilité en convection libre ou mixte), éventuellement forces électromagnétiques dans le cas de fluides chargés électriquement ;
- les forces de surface sur : champ des contraintes de surface Tr
(1.13), forces de tension
superficielle si est la surface frontière entre deux phases dans un mélange polyphasique, ou entre deux constituants non miscibles dans un mélange hétérogène. On a donc, dans (1.25) :
• VCrr
ρ= , quantité de mouvement volumique (en N.s/m3)
• FqI
rr ρ= pour les sources volumiques (soit grρ en ne considérant que les forces de
pesanteur) (en N/m3 pour qI, en N/kg pour F)
• n.TTqSrrr == si le fluide est homogène (en Pa)
La quantité de mouvement transportée par le fluide à travers s’écrit :
∫ ∫=⊗S S
dSn.PdSn.VVrrrr
ρ (1.30a)

où VVPrr
⊗= ρ est le tenseur des quantités de mouvement, de composantes :
jiij VVP ρ= (en Pa)
soit encore :
=2
2
2
WWVWU
VWVVU
UWUVU
P ρ (1.30b)
L’expression du bilan intégral (1.25) est alors :
∫∫∫ ∫ +=+∂
∂SDD S
dSTdFdSn.Pdt
)V( rrrr
τρτρ (1.31)
où les termes du second membre représentent la somme des forces extérieures à : résultante
des forces de volume et résultante des actions de contact sur .
Lorsque les seules forces de volume en jeu sont les forces de pesanteur ( gFrr
= ), leur
résultante est le poids du fluide contenu dans :
∫ =D
gmdgrr τρ
Passant maintenant au bilan local de quantité de mouvement, et sachant que n.TTrr
= ,
on obtient à partir de (1.31), si le champ de vitesse Vr
est continu :
TdivFPdivt
)V( +=+∂
∂ rr
ρρ (1.32)
avec, d’après l’Annexe 1.A.2 :
)V(divVV.VgradPdivrrr
ρρ += (1.33a)
expression où l’on retrouve le tenseur gradient du champ des vitesses Vgradr
(1.7). Les
termes Pdiv et V.Vgrad ρr
sont des vecteurs, le second ayant pour composantes :
=Wgrad.V
Vgrad.V
Ugrad.V
V.Vgrad
ρρρ
ρ (1.33b)
(dans le deuxième membre, l’usage est de mettre V en premier, ce qui est permis par la commutativité du produit scalaire).
Si la viscosité dynamique µ varie peu (µ ≈ cte), l’expression de Tdiv s’écrit quant à elle (Annexe 1.A.2) :
)VdivgradV(pgradTdivr
++−= ∆µ (1.33c)

où Vr
∆ est le laplacien vectoriel du champ de vitesse :
=W
V
U
V
∆∆∆
∆r
(1.33d)
Reportant (1.33 a et c) dans (1.32), on aboutit à l’équation vectorielle :
)VdivgradV(pgradFVdivVV.Vgradt
)V( ++−=++∂
∂ ∆µρρρρ (1.34)
A condition que le bilan de quantité de mouvement porte sur la totalité de la matière
contenue dans , le recours à l’équation de continuité : t/Vdiv ∂∂−= ρρ permet enfin une simplification de l’équation de bilan, et il vient :
)VdivgradV(pgradFV.Vgradt
V ++−=+∂∂ ∆µρρρ (1.35)
On retrouve bien entendu le cas particulier de l’hydrostatique (fluide immobile dans le
champ de pesanteur) en faisant 0V = et gF = . Il reste :
gpgrad ρ= (1.36a)
soit, avec un axe z dirigé vers le haut : dzgdp ρ−= (1.36b) Un autre cas particulier d’importance historique, le mouvement d’un fluide parfait isochore sans champ de force extérieur, est décrit par l’équation d’Euler (1755) :
pgrad1
V.Vgradt
V
ρ−=+
∂∂
(1.36c)
1.3.3.2. – CAS PARTICULIER : FLUIDE ISOCHORE DANS LE CHAMP DE PESANTEUR Le plus souvent, on est amené à travailler sur des écoulements dans lesquels le fluide
peut être supposé isochore ( 0Vdiv,cte ==ρ ), et où gF ρρ = . C’est alors qu’il est habile de grouper les termes de pression et de pesanteur en posant :
gpgrad*pgrad ρ−= (1.37a) La grandeur p* ainsi définie est la « pression motrice », et le bilan (1.35) devient :
V*pgradV.Vgradt
V ∆µρρ +−=+∂
∂ (1.37b)
ou encore, en projection sur les axes d’un repère orthonormé x, y, z quelconque, et après division par ρ (cf. 1.33b) :

Wz
*p1Wgrad.V
t
W
Vy
*p1Vgrad.V
t
V
Ux
*p1Ugrad.V
t
U
∆νρ
∆νρ
∆νρ
+∂
∂−=+∂
∂
+∂
∂−=+∂∂
+∂
∂−=+∂
∂
(1.37c)
L’introduction de la pression motrice p* offre l’appréciable avantage de rendre les équations scalaires (1.37c) indépendantes de l’orientation des axes par rapport à l’horizontale et à la verticale, et donc de décrire de manière identique tous les écoulements, quelle que soit leur direction vis –à- vis de la pesanteur. Cependant, pour des raisons bien compréhensibles, la plupart du temps on choisit x et y comme directions horizontales, et z pour la direction verticale ascendante. Dans ces conditions, on remarquera que :
gzgradg −= Alors, d’après (1.37a) :
)gzp(grad*pgrad ρ+= (1.38a) ce qui donne l’expression de la pression motrice p* (à une constante près) : gzp*p ρ+= (1.38b) Quant aux équations (1.37c), qui sont alors appelées « équations de Navier – Stokes », elles prennent la forme :
Wz
p1g
z
WW
y
WV
x
WU
t
W
Vy
p1
z
VW
y
VV
x
VU
t
V
Ux
p1
z
UW
y
UV
x
UU
t
U
∆νρ
∆νρ
∆νρ
+∂∂−−=
∂∂+
∂∂+
∂∂+
∂∂
+∂∂−=
∂∂+
∂∂+
∂∂+
∂∂
+∂∂−=
∂∂+
∂∂+
∂∂+
∂∂
(1.38c)
En coordonnées cylindriques, les équations de Navier – Stokes sont données à la fin du présent chapitre, dans les annexes.
Enfin, si nous revenons au cas d’un fluide immobile ( 0V = , cf. 1.36b) on arrive à la « loi de l’hydrostatique » :
0*pgrad = soit ctegzp*p =+= ρ (1.38d)

1.3.4. – Bilan d’énergie mécanique 1.3.4.1. – FORME GÉNÉRALE Le bilan d’énergie mécanique n’est en fait qu’un sous-produit du bilan de quantité de mouvement. Il est cependant très utilisé, l’un de ses avantages étant le caractère scalaire de l’équation qui l’exprime. Il constitue en outre une étape indispensable pour établir le bilan d’énergie interne (§ 1.3.5). On part de l’équation (1.32) de bilan local :
TdivFPdivt
)V( +=+∂
∂ ρρ
Multiplions scalairement les deux membres par V :
Tdiv.VV.FPdiv.Vt
)V(.V +=+
∂∂ ρρ
(1.39a)
Le calcul des produits scalaires, que l’on trouvera dans l’annexe 1.A.3, conduit à l’équation suivante :
( )
j
iij
j
iji22
x
V
x
VV.FV
2
Vdiv
2
V
t ∂∂
−∂
∂+=
+
∂∂ σ
σρρρ (1.39b)
avec sommation sur les indices répétés pour les deux derniers termes. Si l’on compare cette relation à l’équation générale de bilan local (1.24), on constate
qu’elle exprime un bilan local d’énergie cinétique ( 2/VC2
ρ= , en J/m3). Les termes du second membre représentent les sources d’énergie cinétique, qui sont les puissances des forces appliquées (W/m3), à savoir :
- puissance des forces de volume : V.Fρ - puissance des forces de surface, c'est-à-dire des contraintes, exprimée par une divergence
(relation 1.23) : j
iji
x
)V(T.Vdiv
∂∂
=σ
- puissance locale des forces intérieures, ou puissance de déformation, due à la déformation de chaque élément de volume sous l’effet des contraintes : jiij x/V ∂∂σ . Dans un champ de
vitesse uniforme (mouvement en bloc), ce terme est nul. Intégrons maintenant (1.39b) sur le domaine :
∫ ∫ ∫∫∫ ∂∂
−∂
∂+=
+
∂∂
D D D j
iij
j
iji
DD
22
x
Vd
x
)V(dV.FdV.
2
Vdivd
2
V
tστ
στρτρτρ
L’application du théorème flux-divergence permet d’aboutir au bilan intégral d’énergie cinétique, encore appelé en mécanique théorème de l’énergie cinétique :
∫∫∫
∫∫
∂∂
−+=
+
∂∂
D j
iij
Sjiji
D
S
2
D
2
dx
VdSnVdV.F
dSn.V.2
Vd
2
V
t
τσστρ
ρτρ (1.40)
(avec gF = si les seules forces de volume sont les forces de pesanteur). 1.3.4.2 – APPLICATION AUX FLUIDES NEWTONIENS Si le fluide est newtonien, ijσ est de la forme : ijijij p τδσ +−= (1.16b). Nous le
reportons dans les deux derniers termes de (1.40), en rappelant que n.TT = et que n.ττ = .
♣ Puissance des forces de surface. D’après (1.16a) :
V.V.npV.T τ+−= Sur l’ensemble de la surface , cette puissance a pour valeur :
∫ ∫∫ +−=S S
jijiS
jiji dSnVdSn.VpdSnV τσ (1.41a)
Cas particulier En présence de parois imperméables fixes, la puissance des forces de surface est nulle. On a en effet sur de telles parois :
i) nV ⊥ ,d’où 0n.V = en tout point (1.41b)
ii) 0Voù'd
parfaitestfluidelesi0
)paroilaàadhérence(
visqueuxestfluidelesi0V
iji
ij
i
=
=
=τ
τ (1.41c)
♦ Puissance des forces intérieures :
Φτδσ +−=∂∂
+∂∂
−=∂∂
Vdivpx
V
x
Vp
x
V
j
iij
j
iij
j
iij
La fonction Φ qui vient d’apparaître :
j
i
i
j
j
i
j
iij x
V
x
V
x
V
x
V
∂∂
∂∂
+∂∂
=∂∂
= µτΦ (1.42)
est appelée « fonction de dissipation ». Elle représente la puissance locale des forces de viscosité dans le fluide, en W/m3 (cf. § 1.3.5.1). Rappelons au passage la convention de sommation sur les indices répétés : (1.42) doit se lire :
∑ ∂∂
∂∂
+∂∂
=j,i j
i
i
j
j
i
x
V
x
V
x
VµΦ (1.42a)
En particulier, dans un écoulement unidimensionnel (écoulement de Couette, §1.3.3.2 et chap. 6) on a : U = U(y), V=W=0, d’où :
2
y
U
∂∂= µΦ (1.42b)
relation également valable dans les écoulements de couche limite (chap. 3 et 4). Le second principe de la thermodynamique postule que Φ est positive, ce que l’on constate toutes les fois qu’elle est calculable. Le terme d’où émerge cette fonction de dissipation étant précédé du signe moins dans la relation de bilan (1.40), cela signifie qu’elle représente une énergie mécanique perdue (« dissipée ») du fait de la viscosité. Elle réapparaîtra dans le bilan d’énergie interne (§1.3.5.1) sous les apparences d’une source volumique de chaleur. Pour se référer à un exemple connu, c’est avec Φ que Mr Joule a chauffé son célèbre calorimètre. La propriété 0>Φ exprime l’irréversibilité de cette transformation d’énergie mécanique en chaleur. Intégrons sur ; il vient :
∫ ∫ ∫+−=∂∂
D D Dj
iij ddVdivpd
x
V τΦττσ (1.43)
♥ Puissance des forces de volume : Dans le champ de pesanteur, on sait que si z est la direction verticale ascendante (§1.3.3.1) :
gzgradg −= (1.44a) Ecrivons :
Vdivgz)Vgz(divV.gzgradV.g ρρρρ +−=−= soit, d’après la relation de continuité (1.27) :
t
gz)Vgz(divV.g∂∂−−= ρρρ

ce qui peut encore s’écrire, puisque z est indépendant de t dans un repère fixe :
t
)gz()Vgz(divV.g
∂∂−−= ρρρ
et :
τρρτρ dt
)gz(dSn.VgzdV.g
DSD ∫∫∫ ∂∂−−= (1.44b)
♠ En reportant les expressions (1.41), (1.43) et (1.44b) dans le théorème de l’énergie cinétique (1.40), on obtient après regroupement des termes la formule de Cotton-Fortier, ou équation de Bernoulli généralisée :
τΦττ
ρρτρρ
ddVdivpdSn.VpdSnV
dSn.V2
Vgzd
2
Vgz
t
DDSSjiji
D S
22
∫∫∫∫
∫ ∫
−+−=
++
+
∂∂
(1 .45a)
(on écrit aussi Bernouilli : l’orthographe des noms propres n’était pas encore stabilisée au 18ème siècle !) Lorsqu’il existe des surfaces solides mobiles à l’intérieur de (c’est le cas pour les pompes, turbines, hélices…), elles fournissent au fluide (ou reçoivent de lui) une puissance totale W (W > 0 ou < 0). Il s’agit d’une source d’énergie supplémentaire, et on ajoutera W au second membre de (1.45a). On observera que l’équation de Bernoulli généralisée (1.45a) se présente comme un
bilan de l’énergie mécanique 2/Vgz2
ρρ + (énergie potentielle + énergie cinétique), dont les sources sont les termes du second membre. Enfin, sous forme locale, cette équation (1.45a) ou (1.40) devient :
Φτ
ρρρρ −+−∂
∂=
++
+
∂∂
VdivpVpdivx
)V(V
2
Vgzdiv
2
Vgz
t j
iji22
(1.45b)
1.3.4.3. – ÉQUATION DE BERNOULLI Nous examinons ici un cas particulier considéré comme référence : celui d’un écoulement permanent de fluide parfait isochore (ρ = cte, 0t/ =∂∂ , µ = 0). On montre en cinématique des fluides que dans un écoulement permanent, les trajectoires sont confondues avec les lignes de courant. En tout point M, le vecteur vitesse
)M(V est donc tangent à la trajectoire qui passe par M.
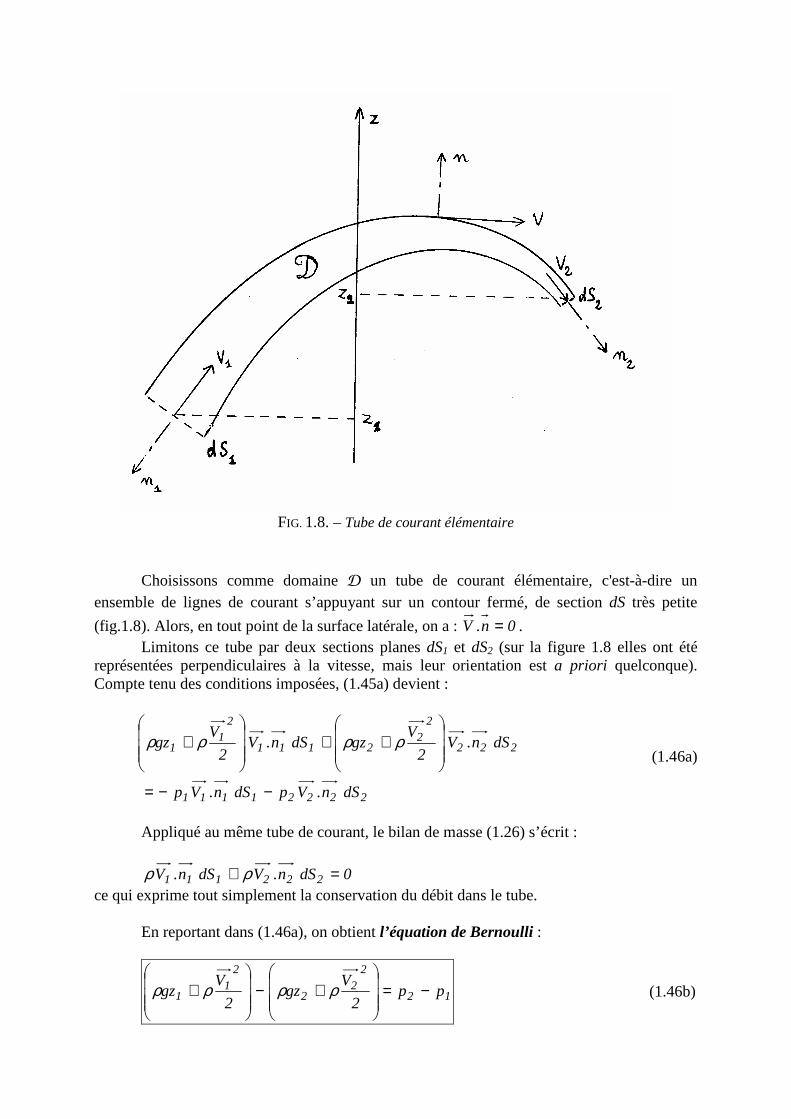
FIG. 1.8. – Tube de courant élémentaire
Choisissons comme domaine un tube de courant élémentaire, c'est-à-dire un ensemble de lignes de courant s’appuyant sur un contour fermé, de section dS très petite
(fig.1.8). Alors, en tout point de la surface latérale, on a : 0n.V = . Limitons ce tube par deux sections planes dS1 et dS2 (sur la figure 1.8 elles ont été représentées perpendiculaires à la vitesse, mais leur orientation est a priori quelconque). Compte tenu des conditions imposées, (1.45a) devient :
22221111
222
22
2111
21
1
dSn.VpdSn.Vp
dSn.V2
VgzdSn.V
2
Vgz
−−=
++
+ ρρρρ
(1.46a)
Appliqué au même tube de courant, le bilan de masse (1.26) s’écrit :
0dSn.VdSn.V 222111 =+ ρρ ce qui exprime tout simplement la conservation du débit dans le tube. En reportant dans (1.46a), on obtient l’équation de Bernoulli :
12
22
2
21
1 pp2
Vgz
2
Vgz −=
+−
+ ρρρρ (1.46b)

Le long d’un tube de courant élémentaire, la variation de l’énergie mécanique du fluide est égale et opposée à la variation de la pression. 1.3.4.4. – UN AUTRE REGARD SUR LA PRESSION La forme (1.46b) retenue ici pour l’équation de Bernoulli n’est pas la plus répandue dans la littérature. On préfère souvent la présenter comme une équation de conservation, en l’écrivant :
2
Vgzp
2
Vgzp
22
22
21
11 ρρρρ ++=++ (1.46c)
!!! Cette autre manière de voir illustre une chose importante : c’est l’ambivalence de la « pression statique » p (introduite, rappelons-le, au § 1.2.4 pour caractériser un fluide newtonien) qui se manifeste sous deux aspects, tantôt comme contrainte (s’exprimant en
N/m2), tantôt comme énergie volumique, en J/m3
=
××=
322 m
J
mm
mN
m
Npuisque . Ceci
justifie la terminologie usuelle qui désigne le groupement conservatif de (1.46c) par l’expression « pression totale » pt :
2
Vgzpp
2
t ρρ ++= (1.47a)
Dans le même esprit, l’énergie cinétique par unité de volume est appelée « pression dynamique » pd :
2
Vp
2
d ρ= (1.47b)
Plus généralement, en régime permanent (∂ / ∂t = 0) il est légitime de faire apparaître la formule de Cotton-Fortier comme un bilan de pression totale, en faisant passer le terme en
Vp dans le premier membre de (1.45 a ou b). Il vient ainsi pour la forme intégrale :
∫∫∫∫ −+=
++
DDjij
Si
S
2
ddVdivpdSnVdSn.V2
Vgzp τΦττρρ (1.48)
Nous retrouverons cette expression au chapitre 6 pour le calcul des pertes de charge dans les canalisations. 1.3.5. – Bilans d’énergie et d’enthalpie 1.3.5.1. – BILAN D’ÉNERGIE INTERNE La grandeur considérée est maintenant l’énergie que possède en propre le fluide du domaine (énergie interne + énergie cinétique), dont le bilan est exprimé par le premier principe de la thermodynamique. D’après ce principe, les sources correspondantes sont constituées par :

- la puissance des forces extérieures à
- le flux de chaleur fourni à par le milieu extérieur à travers
- la puissance calorifique créée à l’intérieur de . Ceci permet d’établir la signification des termes représentés dans les équations de bilans (1.22) et (1.24) :
♣ La densité C concernée est ici l’énergie volumique :
2
VeC
2
ρρ += (J / m3 ) (1.49a)
e désignant l’énergie interne par unité de masse.
♦ Les sources volumiques représentées par la grandeur qI sont :
- la puissance des forces de volume V.Fρ , réduite à V.gρ lorsque les forces de pesanteur sont seules en jeu ; - la puissance calorifique P par unité de volume, dégagée ou absorbée à l’intérieur de du fait d’une réaction chimique, d’un courant électrique, de micro-ondes, de l’émission d’un rayonnement par un gaz chaud, d’un changement de phase… : P = P(x, y ,z, t) (P < 0, ou > 0, ou = 0) d’où :
PV.gqI += ρ (W / m3 ) (1.49b)
♥ Les sources surfaciques d’énergie regroupées dans le terme Sq sont principalement :
- la puissance des forces de surface - V.T , où T est la force exercée par le milieu extérieur
sur . Si le travail est moteur ( 0V.T > ) il est fourni à , donc forcesSq est du sens contraire
de n (normale extérieure). Si le travail est résistant ( 0V.T < ) il est fourni par , donc
forcesSq et n sont de même sens. Ainsi, dans les deux cas on a :
V.Tn.q forcesS −= (1.49c)
D’après (1.13), en conservant la convention de sommation sur les indices répétés :
( ) jiji nVV.n.TV.T σ== (W / m2 ) (1.49d)
- la densité de flux de chaleur ϕ qui traverse , donnée par la loi de Fourier :
Tgradq chaleurS λϕ −==
soit :
n.Tgradn.n.q chaleurS λϕϕ −=== (1.49e)

où λ désigne la conductivité thermique du milieu (W / m . K ) et T la température, le signe –
provenant toujours d’une normale n dirigée vers l’extérieur de . - le rayonnement ϕ r absorbé au niveau de , si le milieu est semi-transparent :
∫ ∫∞=
===
λ
λ πλ λΩΩϕ
0 4rrayS ddLq (1.49f)
Lλ étant la luminance spectrale du milieu, et Ω un vecteur unité balayant l’espace sur 4π stéradiants. Au total :
n.n.TgradnVn.q rjijiS ϕλσ +−−= (1.49g)
Le bilan intégral d’énergie est obtenu en reportant les termes précédents dans (1.22) :
∫∫∫∫∫
∫∫
−+++=
++
+
∂∂
Sr
SSjiji
DD
S
2
D
2
dSn.dSn.TgraddSnVdPdV.g
dSn.V2
Ved
2
Ve
t
ϕλσττρ
ρρτρρ
Si l’on tient compte maintenant de l’équation (1.40) qui exprime le bilan d’énergie cinétique, et en utilisant (1.43), on aboutit au bilan intégral d’énergie interne :
( )
∫∫∫∫∫
∫∫−+−+=
+∂
∂
Sr
SDDD
SD
dSn.dSn.TgraddVdivpddP
dSn.Vedt
e
ϕλττΦτ
ρτρ
(1.50)
Cette relation constitue en quelque sorte un « premier principe bis », et caractérise les sources d’énergie qui sont spécifiquement des sources d’énergie interne, à savoir : • Pour les sources de volume : la puissance thermique P, l’énergie mécanique Φ dissipée par les frottements visqueux (qui réapparaît ici comme source de chaleur) et la
puissance liée à la dilatation volumique Vdivp ,
• Pour les sources de surface : le flux de chaleur et le flux de rayonnement. La forme locale du bilan d’énergie interne est obtenue de la manière usuelle, en appliquant le théorème flux - divergence à (1.50) :
( ) ( ) ( ) rdivTgraddivVdivpPVediv
t
e ϕλΦρρ −+−+=+∂
∂ (1.51)

1.3.5.2. – BILAN D’ENTHALPIE Pour intéressantes qu’elles soient, les relations (1.50) et (1.51) ne sont pas très opérationnelles car elles contiennent une grandeur non directement mesurable, à savoir : l’énergie interne e. Si l’on met à part le rayonnement, les paramètres directement accessibles à l’expérience sont la pression, la vitesse et la température. Pour substituer cette dernière à l’énergie interne, on devra passer par l’intermédiaire de l’enthalpie et des fonctions thermodynamiques. Considérons donc l’enthalpie massique h : H = e + p / ρ , soit ρ e = ρ h – p Reportons dans (1.50) ou (1.51) ; il vient, si nous passons directement à l’écriture locale :
( ) ( ) ( ) rdivTgraddivVdivpPVpdivVhdiv
t
p
t
h ϕλΦρρ −+−+=−+∂∂−
∂∂
soit encore :
( ) ( ) ( ) rdivTgraddivpgrad.VP
t
pVhdiv
t
h ϕλΦρρ −++++∂∂=+
∂∂
(1.52)
La relation ci-dessus (ou sa forme intégrale, que nous n’avons pas écrite) s’interprète comme un bilan d’enthalpie, et indique par là même quelles sont les sources d’enthalpie :
• pour les sources volumiques : pgrad.Vet,,P,t/p Φ∂∂
• pour les sources surfaciques : les flux de chaleur conductif et radiatif Sachant que :
t
Vdiv∂∂−= ρρ (équation de continuité),
(1.52) devient :
( ) rdivTgraddivPpgrad.Vt
phgrad.V
t
h ϕλΦρρ −++++∂∂=+
∂∂
(1.53)
L’enthalpie dépend du temps t et des coordonnées d’espace xi par l’intermédiaire de T et de p. On écrira donc :
∂∂+
∂∂=
∂∂
∂∂+
∂∂
∂∂=
∂∂
pgradp
hTgrad
T
hhgrad
t
p
p
h
t
T
T
h
t
h
(1.54)
On sait, d’autre part que, Cp étant la chaleur massique à pression constante (J / kg . K) et β le coefficient de dilatation volumique à pression constante (1 / K), on a :

( )
−=∂∂
=∂∂
T11
p
h
CT
hp
βρ
(1.55)
L’insertion de (1.54) et (1.55) dans (1.53) permet de relier la distribution de température au mouvement du fluide ; il vient après simplification :
( ) r
p
divTgraddivPpgrad.Vt
pT
Tgrad.Vt
TC
ϕλΦβ
ρ
−+++
+∂∂=
+∂∂
(1.56)
Cas particuliers (en l’absence de rayonnement): 1. Écoulements de gaz On admet qu’il s’agit de gaz parfaits, d’où : β = 1 / T
Pratiquement, les termes Φ,pgrad.V,t/p ∂∂ sont presque toujours négligeables, et il reste :
( ) rp divTgraddivPTgrad.Vt
TC ϕλρ −+=
+∂∂
(1.57a)
2. Écoulements de fluides isochores : On peut vérifier que β ∆T est petit par rapport à Φ. L’équation (1.56) se réduit à :
( )TgraddivPTgrad.Vt
TCp λΦρ ++=
+∂∂
(1.57b)
3. Milieux immobiles Le transfert d’énergie est purement conductif. Il est décrit par l’équation :
( )TgraddivPt
TCp λρ +=
∂∂
(1.58)
Lorsque la conductivité thermique λ du milieu est constante, on retrouve l’équation linéaire classique :
TPt
TCp ∆λρ +=
∂∂
(1.59)
Enfin, s’il n’y a pas de sources volumiques de chaleur (P = 0), et en introduisant le paramètre :
pC
aρ
λ= (1.60)

dénommé « diffusivité thermique » du milieu, la loi d’évolution de la température est donnée par l’équation : t/TTa ∂∂=∆ (1.61) La diffusivité thermique possède la même dimension (m2/s) que la viscosité cinématique ν, et s’interprète physiquement d’une manière analogue (§ 1.1.3.3) : elle traduit l’aptitude du matériau à effacer les hétérogénéités de température. Par exemple, si a est grand : λ est grand (la chaleur passe facilement d’un point à un autre) et / ou ρ Cp est petit (il y a peu de chaleur à transférer). Plus généralement, ces deux paramètres caractérisent des mécanisme de diffusion dont nous allons parler maintenant plus en détail. 1.3.6. Prise en compte des phénomènes de diffusion dans les équations de bilans 1.3.6.1. – LOI GÉNÉRALE DE LA DIFFUSION Pour établir la forme générale d’une équation de bilan dans un domaine limité par
une frontière , nous avons raisonné au paragraphe 1.3.1 sur une grandeur – ou entité physique – K, de densité volumique C variable en fonction des coordonnées d’espace et du temps, et nous avons distingué au niveau de la surface des flux et des sources. Cette distinction permet de prendre en compte le fait que le transfert de K peut s’effectuer suivant deux mécanismes très différents : par mouvement du support matériel (transport convectif, encore appelé advection) ou par diffusion. Dans le premier cas, le transport est lié à la vitesse du fluide, et le vecteur densité de flux de K s’écrit :
VCS =ϕ
d’où l’expression du flux correspondant à travers (relation 1.20) :
∫=S
S dSn.VCΦ
Le transfert par diffusion est caractérisé, quant à lui, par une loi phénoménologique particulière : le vecteur densité de flux est proportionnel au gradient de densité volumique C (ou au gradient de concentration dans des systèmes à plusieurs constituants) et dirigé dans le sens des densités décroissantes :
CgradkqS −= (1.62)
Il s’agit d’un mécanisme irréversible qui manifeste une tendance à l’uniformisation de la composition, du champ des vitesses ou du champ de température, et qui n’est pas lié de façon directe au mouvement du fluide. Il se rencontre d’ailleurs tout aussi bien dans les milieux immobiles. Dans une analyse de bilan en termes de flux et de sources, le transfert par diffusion correspond à une source surfacique.
Examinons brièvement les principaux cas de diffusion . 1.3.6.2. – DIFFUSION DE MATIÉRE (OU DIFFUSION MASSIQUE)
♣ Diffusion pure Considérons tout d’abord le cas où le fluide est composé de plusieurs constituants, et où ceux-ci présentent un gradient de concentration. De nombreux exemples d’une telle situation peuvent être cités. Le plus illustratif est peut-être celui qui figure dans beaucoup de traités de thermodynamique pour présenter la notion d’irréversibilité. On imagine deux enceintes fermées, séparées par une paroi, et contenant deux gaz différents (disons O2 et N2) à la même pression. A un moment donné, on ouvre une trappe dans la paroi. Que se passe – t – il ? Les molécules d’oxygène qui auraient frappé la paroi à cet endroit du fait du mouvement brownien vont entrer progressivement dans l’azote, et vice-versa pour les molécules d’azote. Par la trappe ouverte, les flux respectifs de O2 et de N2 sont proportionnels aux gradients correspondants de pression partielle (c’est-à-dire de concentration) et ne s’accompagnent d’aucun mouvement d’ensemble des deux gaz. Au bout d’un certain temps, l’homogénéisation sera réalisée dans les deux enceintes, et nulle réversibilité du phénomène ne peut être envisagée (une re-séparation des deux gaz est possible,
mais au prix d’une dépense d’énergie, § 1.3.6.4♦). Dans un registre tout à fait différent, quand un liquide s’évapore dans une atmosphère immobile, la vapeur produite à la surface libre s’en éloigne par diffusion dans le gaz, selon une concentration décroissante (PTC, Problème 7.1). Enfin, beaucoup de phénomènes liés à la dispersion des polluants et des contaminants divers dans l’air, l’eau ou les sols, sont gouvernés par des lois de type diffusion. Ceci est particulièrement important au regard de l’intérêt actuellement porté à la maîtrise de l’environnement. Donc, au sein d’un mélange inhomogène, un constituant A est l’objet d’un transfert de masse par diffusion, dont le vecteur densité de flux est exprimé par la loi de Fick :
( )ρρρ /gradDq AASA −= (1.63a)
pour le cas général, et lorsque le mélange est isochore, par la loi simplifiée :
AASA gradDq ρ−= (1.63b)
Dans (1.63), ρA désigne la masse volumique de A dans le mélange, ρ la masse volumique du mélange, et DA la diffusivité moléculaire de A dans le mélange. Ce coefficient DA s’exprime en m2/s, et il possède la même signification que la diffusivité thermique a et la viscosité cinématique ν (§ 1.3.6.3 et 1.3.6.5). Le bilan intégral de masse du constituant A s’écrit donc (relation 1.29a) :

∫ ∫ ∫∫ +=+∂
∂D S S
AA
DIAA
A dSn.gradDdqdSn.Vdt ρ
ρρτρτρ (1.64)
et le bilan local (relation (1.29b) :
( )
+=+∂
∂ρ
ρρρρ AAIAA
A gradDdivqVdivt
(1.65a)
Si le coefficient de diffusion DA est une constante, et si le mélange est isochore, alors :
AAA
A DgradDdiv ρ∆ρ
ρρ =
(1.65b)
♦ Diffusion dans un champ de forces La diffusion de matière en présence d’un champ de forces (champ de pression ou champ de forces extérieur) prend le nom de « convection massique » (PTC, chap. 7). Le plus souvent, l’origine du champ de forces extérieur est la pesanteur. Mais ce peut être aussi un champ d’accélération dû par exemple à la mise en rotation du fluide : alors les espèces ayant la plus grande masse volumique tendent à migrer vers la périphérie, tandis que les autres se concentrent vers l’axe de rotation. Cette propriété est mise en œuvre dans les appareils industriels appelés cyclones, ou encore dans les centrifugeuses. Ces dernières sont parfois sous les feux de l’actualité puisqu’elles peuvent servir en particulier à l’enrichissement de l’uranium, par séparation des isotopes 235 et 238 (sous la forme gazeuse d’hexafluorure UF6), le second ayant une masse volumique légèrement supérieure au premier. A une toute autre échelle, la formation d’un système planétaire à partir d’un nuage de gaz en rotation aboutit à la séparation des éléments légers (H2, He) qui s’accumulent au centre pour donner naissance à une étoile, et des éléments plus lourds qui forment les planètes. 1.3.6.3. – DIFFUSION THERMIQUE Le transport de chaleur par diffusion se caractérise par une densité de flux (souvent
notée ϕ ) proportionnelle au gradient de température ; la loi exprimant cette propriété est connue sous le nom de loi de Fourier :
Tgradλϕ −= (1.66)
λ désignant la conductivité thermique du milieu (W / m. K). Ce terme a déjà été pris en compte dans le bilan d’énergie (§ 1.3.5).
!!! En toute rigueur, la loi de Fourier ne s’identifie strictement à une loi de diffusion de l’énergie interne, ou de l’enthalpie, que lorsque ρ Cp = cte. Alors :
( )TCgrada pρϕ −=
a = λ /ρ Cp étant la diffusivité thermique du milieu, déjà introduite (relation 1.60).

1.3.6.4. – ÉCOULEMENTS EN MILIEUX POREUX
♣ Écoulements de liquides Un milieu poreux n’est pas le siège d’un écoulement au sens classique du terme, car il n’y a pas à proprement parler de mouvement d’ensemble du fluide : les particules fluides suivent dans les nombreux pores des trajets aléatoires qui rendent le mécanisme de transport de la matière analogue à un mécanisme de diffusion. Lorsque le milieu est saturé, c’est-à-dire lorsque les pores sont entièrement remplis d’une phase liquide de masse volumique ρ, le flux de masse moyen local est donné par la loi de Darcy :
*pgradK
qS µρ−= (1.67)
où p* désigne la pression motrice dans l’écoulement (§ 1.3.3.2), le paramètre K étant la perméabilité du milieu. Faisons ici une parenthèse. Par analogie avec un écoulement stricto sensu, on écrit
souvent cette loi sous la forme : VqS ρ= , en définissant V comme une vitesse apparente de
filtration. Ce terme V ne doit pas être confondu avec une vitesse locale du fluide, qui n’est pas définie dans un tel écoulement. Appliquons maintenant l’équation de bilan intégral (1.22) à la masse totale du fluide ; le terme de transport par mouvement d’ensemble du fluide est remplacé ici par un terme de source qui a pour expression :
dSn.*pgradK
dSqSS
S ∫∫ −=µρ
Bien entendu, il n’y a pas de sources volumiques qI puisque le bilan porte sur la masse totale du fluide (§ 1.3.2.1). Quant à la densité volumique locale de matière, dans le cas d’un milieu saturé elle a pour valeur : C = ρε, où ε est la « porosité » du milieu (volume des pores / volume total), d’où le bilan intégral de masse :
dSn.*pgradK
dt
)(
SD ∫∫ =∂
∂µρτρε
(1.68)
ainsi que le bilan local :
=∂
∂*pgrad
Kdiv
t
)(
µρρε
(1.69)
♦ Ecoulements de gaz Si le milieu poreux est traversé par un gaz, la loi de Darcy s’applique encore, à ceci près qu’il faudra souvent tenir compte de la variation de la masse volumique avec la pression.

1.3.6.5. – DIFFUSION DE QUANTITÉ DE MOUVEMENT Pour terminer cette brève revue des principaux phénomènes de diffusion, nous allons montrer que dans un grand nombre de situations, le transfert de quantité de mouvement provoqué par les forces de viscosité s’apparente à un mécanisme de diffusion. Ceci apparaît clairement en partant de l’équation (1.32) :
TdivFPdivt
)V( +=+∂
∂ ρρ
dans laquelle :
( )D2divpgraddivpgradTdiv µτ +−=+−=
Plaçons-nous dans l’hypothèse où µ = cte et ρ = cte (soit 0Vdiv = ). Alors, d’après
l’Annexe 1.A.2.♥, on a :
( ) ( ) VgraddivVgraddivDdiv2 ρνµµ == et d’après (1.33a) :
V.VgradPdiv ρ= Alors, (1.32) devient :
( ) VgraddivpgradFV.Vgradt
)V( ρνρρρ +−=+∂
∂ (1.70a)
Il est manifeste que le dernier terme traduit l’existence d’un flux de quantité de
mouvement qui est un flux de diffusion proportionnel au gradient de Vρ , avec un coefficient
de diffusion égal à la viscosité cinématique ν.
En projetant sur les axes de coordonnées, (1.70a) s’écrit enfin (Annexe 1.A.2.♣) :
( ) ( ) ( )i
iii
i Vgraddivx
pFVVdiv
t
V ρνρρρ+
∂∂−=+
∂∂
(1.70b)
1.3.7. – Bilans d’entropie et d’exergie 1.3.7.1. – LE RÔLE DES BILANS ENTROPIQUES A côté des bilans de masse, de quantité de mouvement et d’énergie, qui fournissent les équations de base pour résoudre les problèmes de thermoconvection, il existe une autre famille de bilans, qui jouent par rapport aux premiers un rôle un peu particulier. Ce sont les bilans entropiques : bilan d’entropie proprement dit, et bilan d’exergie. D’une part, le traitement de certains problèmes (mélanges réactifs, écoulements polyphasiques, structures dissipatives, transferts turbulents…) exige l’intervention d’équations supplémentaires. Celles-ci peuvent alors être obtenues par l’écriture des sources d’entropie, que la thermodynamique des processus irréversibles permet d’exprimer sous forme de relations phénoménologiques, ou en appliquant le principe du minimum de production locale d’entropie. Mais d’autre part, le bilan d’entropie ou d’exergie permet aussi d’optimiser un processus thermoconvectif, en déterminant parmi plusieurs évolutions possibles celles qui est

la plus avantageuse pour l’utilisateur. La démarche suivie concerne alors une recherche d’extrêmum : par exemple, le minimum de la production d’entropie, pour caractériser le processus le plus proche de la réversibilité. On retient ensuite les conditions aux limites qui donnent le « meilleur » processus. 1.3.7.2. – BILAN D’ENTROPIE L’entité physique considérée dans la relation générale (1.24) est ici l’entropie du milieu matériel, et C représente l’entropie volumique : C = ρ s (J / K . m3) s étant l’entropie par unité de masse. Par le second principe et la relation de Gibbs, la thermodynamique nous désigne les sources locales d’entropie, qui se divisent en trois groupes :
♣ Les sources visqueuses d’entropie, dues à l’énergie mécanique Φ dissipée sous forme de chaleur par la viscosité : Φ / T
♦ Les sources thermiques d’entropie, en relation avec les autres sources d’énergie interne représentées au second membre de (1.51), exception faite des sources élastiques (donc réversibles) liées à la pression : - Source liée à la puissance thermique P mise en jeu : P / T (P inclut l’énergie de réaction s’il s’agit d’un mélange réactif).
- Source liée au flux de chaleur : ( ) rdivT
1Tgraddiv
T
1 ϕλ −
♥ Les sources massiques (ou structurelles) d’entropie, liées à l’ensemble des sources de masse (§ 1.3.2.2), soit d’après (1.65) pour un mélange réactif à N constituants :
∑=
+−N
1A
AAIAA gradDdivq
T
1
ρρρµ
Dans cette dernière expression, les coefficients µA sont les potentiels chimiques massiques des différents constituants, exprimés en J / kg. Le signe – provient de la convention de signe avec laquelle ils sont définis. Le bilan local d’entropie s’écrit donc :
( ) ( )
( )
−−−++
=+∂
∂
∑∑==
N
1A
AAA
N
1A
IAAr gradDdivqdivTgraddivPT
1
Vsdivt
s
ρρρµµϕλΦ
ρρ
(1.71)
En apparence, cette équation n’est pas exactement conforme au modèle général (1.24) puisqu’elle ne dissocie pas clairement les sources volumiques des sources surfaciques, les

termes en div étant affectés des coefficients 1 / T ou µA / T. Mais elle s’y adapte aisément si on prend le temps de voir que :
a)
( )( )
+
=
−
=
2
2Tgrad
TTgrad
Tdiv
T
1grad.TgradTgrad
TdivTgraddiv
T
1
λλ
λλλ (1.72a)
b) 2
r2rrT
1
T
1divdiv
T
1 ϕϕϕ +
= (1.72b)
et que, de même :
T
1grad.gradDgrad
T
Ddiv
gradDdivT
1
AAA
AAA
AAA
ρρµρ
ρρµρ
ρρρµ
−
=
(1.73)
Remplaçons (1.72) et (1.73) dans (1.71), en regroupant les termes en divergence du second membre :
( ) ( ) ( )
∑
∑
∑
−
−
++
−+++=+∂
∂
A
AAAr
A
AAA
A
IAA2
r2
2
2
gradT
Ddiv
T
1div
TgradT
divT
1grad.gradD
qT
1
T
1Tgrad
TTT
PVsdiv
t
s
ρρρµϕ
λρ
ρµρ
µϕλΦρρ
(1.74)
Voilà une nouvelle écriture qui fait maintenant apparaître nettement les sources volumiques d’entropie (exprimées par les six premiers termes du second membre), et les sources surfaciques (représentées par les termes en divergence, et liées au flux de chaleur et au flux de masse). On observera, d’une part que la sixième source – volumique – est le fruit d’un couplage entre la diffusion de chaleur et la diffusion massique, d’autre part que le flux de chaleur par conduction thermique s’accompagne d’un flux d’entropie de même sens avec une « conduction entropique » égale à λ /T (source N°7). En thermodynamique des processus irréversibles, on appelle « taux de production d’entropie σ(s) » l’ensemble des productions volumiques d’entropie :
( )
∑∑ +−
−++=
A
AAA
A
IAA
2r2
2
2
T
1grad.gradDq
T
1T
1Tgrad
TTT
P)s(
ρρµρµ
ϕλΦσ (1.75)

D’après le second principe de la thermodynamique, cette production interne d’entropie n’est jamais négative : 0)s( ≥σ (1.76) Autrement dit, toute évolution pour laquelle on aurait σ (s) < 0 est une évolution impossible. Lorsque σ (s) = 0, l’évolution est réversible. Quand on a σ (s) > 0, le processus est irréversible et σ (s) caractérise son degré d’irréversibilité. D’un point de vue pratique, l’amélioration d’un processus vis-à-vis des irréversibilités consistera donc à minimiser le taux de production d’entropie σ (s). Quant au bilan intégral d’entropie (par lequel nous aurions pu commencer, mais qui est un peu volumineux à écrire), il s’établit immédiatement à partir de (1.74) et (1.75) :
( )
∑∫∫∫
∫∫∫−−+
=+∂
∂
AS
AAA
Sr
S
DSD
dSn.gradT
DdSn.
T
1dSn.Tgrad
T
d)s(dSn.Vsdt
s
ρρµρϕλ
τσρτρ
(1.77)
L’articulation entre les bilans présentés ici et la formulation traditionnelle en thermodynamique classique fait l’objet d’un paragraphe en Annexe (1.A.4). 1.3.7.3. – BILAN D’EXERGIE L’exergie n’est pas une des entités physiques fondamentales donnant lieu à bilan, car elle est définie à partir de l’enthalpie et de l’entropie. On a en effet : sThex e−= (1.78a)
où Te est la température ambiante extérieure au système, ex étant ici l’exergie massique exprimée en J/kg. Néanmoins, l’intérêt pour les bilans d’exergie se développe dans l’étude des processus industriels puisque l’exergie représente en fait l’enthalpie utilisable. Revenant aux équations de bilan local d’enthalpie (1.52) et d’entropie (1.74), nous pouvons établir le bilan local d’exergie, en nous limitant pour simplifier au cas où le fluide est transparent (ϕ r = 0), de composition uniforme et constante (ρA / ρ = cte ∀ A) :
( ) ( ) ( )( )
−−+−
++++∂∂=+
∂∂
TgradT
divTTgradT
T)P(
T
T
)Tgraddivpgrad.VPt
pVexdiv
t
ex
e2
2ee λλΦ
λΦρρ
soit, en regroupant :

( ) ( )( )
−+−
+
−++∂∂=+
∂∂
TgradT
T1divTgrad
T
T
pgrad.VT
T1)P(
t
pVexdiv
t
ex
e2
2e
e
λλ
Φρρ
(1.78b)
Ce bilan fait apparaître des sources volumiques d’exergie (sources mécaniques liées à la pression et sources thermiques), et une source surfacique (terme en divergence) qui s’interprète comme un terme de diffusion. 1.4. - VORTICITÉ ET FONCTION DE COURANT La résolution des équations de quantité de mouvement est souvent compliquée par la présence des termes de pression. Dans certaines circonstances, il est cependant possible de s’en débarrasser, en s’appuyant sur d’autres paramètres du mouvement. 1.4.1. – Écoulements plans Considérons un écoulement bidimensionnel de fluide isochore. Dans le plan x, y il est décrit par les deux premières équations (1.37c) :
Ux
*p1Ugrad.V
t
U ∆νρ
+∂
∂−=+∂
∂
Vy
*p1Vgrad.V
t
V ∆νρ
+∂
∂−=+∂∂
A l’évidence, un moyen simple d’éliminer la pression est de dériver la première équation par rapport à y, de dériver la seconde par rapport à x, et de soustraire celle-ci de la première, ce qui donne :
( ) ( )
∂∂−
∂∂=
∂∂−
∂∂+
∂∂−
∂∂
∂∂
Uy
Vx
Ugrad.Vy
Vgrad.Vxy
U
x
V
t∆∆ν (1.79a)
Les opérateurs ∂ et ∆ peuvent être permutés dans le second membre. En outre, en développant les termes, on montre que :
( ) ( )
∂∂−
∂∂=
∂∂−
∂∂
Vy
U
x
VdivUgrad.V
yVgrad.V
x
et l’équation (1.79a) devient :
∂∂−
∂∂=
∂∂−
∂∂+
∂∂−
∂∂
∂∂
y
U
x
VV
y
U
x
Vdiv
y
U
x
V
t∆ν (1.79b)

On reconnaît dans la grandeur entre parenthèses la composante selon z du vecteur
tourbillon Ω2 (§ 1.2.1.♦). En effet, dans un écoulement bidimensionnel :
∂∂−
∂∂
==
y
U
x
V0
0
Vrot2Ω
Cette composante est appelée vorticité de l’écoulement, et désignée par Ω (sans indice) :
y
U
x
V
∂∂−
∂∂=Ω (s -1) (1.80)
L’équation (1.79b) se présente donc comme un bilan local de vorticité (dérivé du bilan de quantité de mouvement) avec un terme source qui s’identifie à un mécanisme de diffusion visqueuse, et elle porte le nom d’équation de vorticité :
( ) ∆ΩνΩΩ =+∂
∂Vdiv
t (1.81)
Bien entendu, la pression n’a pas été évacuée du problème par un tour de passe – passe. Grâce à la petite manipulation précédente, les forces de pression n’apparaissent plus directement en tant que telles, mais elles ont été intégrées dans les autres paramètres du mouvement.
Par contre, cette astuce ne marche pas avec les écoulements tridimensionnels : on peut toujours éliminer la pression dans les équations (1.37c) prises deux par deux, mais on se retrouve avec des termes qui contiennent les trois composantes de la vitesse et qui n’apportent guère de simplification.
!!! Un autre point mérite d’être souligné : avoir écarté le vecteur Ω à partir du
paragraphe 1.2.1.♠ (en considérant des écoulements irrotationnels) pour le voir resurgir maintenant n’est pas le signe d’une contradiction. C’est seulement dans l’évaluation des contraintes que l’influence de la composante rotationnelle du mouvement a été négligée (§
1.2.4.♣). Mais dans les équations de bilans, tous les aspects du mouvement sont bien présents et entièrement décrits. 1.4.2. – Fonction de courant L’opération effectuée au paragraphe précédent a permis de s’affranchir de la pression, et simultanément de réduire de deux à une les équations dynamiques. Le système à résoudre est donc maintenant composé de l’équation (1.81) et de l’équation de continuité. Pour des raisons pratiques que nous ne détaillerons pas ici, il peut être avantageux d’introduire, en plus de Ω , une seconde fonction de U et V, la fonction de courant Ψ, définie par les relations :

x
V;y
U∂
∂−=∂
∂= ΨΨ (1.82)
Cette fonction de courant satisfait l’équation de continuité puisque :
0xyyxy
V
x
UVdiv
22
≡∂∂
∂−∂∂
∂=∂∂+
∂∂= ΨΨ
D’autre part, la vorticité Ω s’exprime aisément en fonction de Ψ :
∆ΨΨΨΩ −=∂∂−
∂∂−=
∂∂−
∂∂=
2
2
2
2
yxy
U
x
V
Il est donc parfaitement licite de remplacer l’équation de continuité par l’équation ci-dessus, réécrite en ne gardant que les deux termes extrêmes : 0=+ ∆ΨΩ (1.83) Le système à résoudre est alors composé des équations (1.81) et (1.83):
( )
0
Vdivt
=+
=+∂
∂
∆ΨΩ
∆ΩνΩΩ
La résolution donne successivement Ω, puis Ψ, et enfin U et V. 1.4.3. – Écoulements axisymétriques Les écoulements à symétrie cylindrique constituent une autre famille d’écoulements bidimensionnels, pour lesquels la méthode précédente s’applique avec quelques nuances. Dans n’importe quel plan diamétral x, r (x : direction axiale, r : direction radiale, vecteur
vitesse ( )V,UV = ), l’équation de continuité et les équations de Navier-Stokes s’écrivent :
0r
)rV(
r
1
x
U =∂
∂+∂∂
(1.84)
∂∂+
∂∂+
∂∂+
∂∂−=
∂∂+
∂∂+
∂∂
r
U
r
1
r
U
x
U
x
*p1
r
UV
x
UU
t
U2
2
2
2
νρ
(1.85a)
−
∂∂+
∂∂+
∂∂+
∂∂−=
∂∂+
∂∂+
∂∂
22
2
2
2
r
V
r
V
r
1
r
V
x
V
r
*p1
r
VV
x
VU
t
V νρ
(1.85b)
Le vecteur tourbillon a maintenant pour composantes :

=
∂∂−
∂∂
==Ω
Ω 0
0
r
U
x
V0
0
Vrot2 (1.86)
où r
U
x
V
∂∂−
∂∂=Ω est encore la vorticité de l’écoulement.
La dérivation de (1.85a) par rapport à r, puis de (1.85b) par rapport à x, suivie d’une soustraction, donne cette fois :
−
∂∂+
∂∂+
∂∂=
∂∂+
∂∂+
∂∂
22
2
2
2
rrr
1
rxr
)V(
x
)U(
t
ΩΩΩΩνΩΩΩ (1.87a)
ce qui s’écrit aussi, pour faire mieux apparaître l’aspect « bilan de vorticité » :
∆ΩνΩΩ =+∂
∂)V(div
t (1.87b)
Cette équation est l’équivalent de (1.81), obtenue pour un écoulement plan. D’autre part, la fonction de courant Ψ, solution de l’équation de continuité, est définie ici par :
xr
1V;
rr
1U
∂∂−=
∂∂= ΨΨ
(1.88)
En remplaçant dans l’expression de Ω, il vient :
∂∂
∂∂−
∂∂−=
rr
1
rxr
12
2 ΨΨΩ (1.89)
qui est l’équivalent de (1.83). La résolution s’effectue d’une façon analogue. 1.5. - FORMULATION GÉNÉRALE D’UN PROBLÈME D’ÉC OULEMENT ANISOTHERME Avec un fluide monophasique de composition uniforme et constante, résoudre complètement un problème de thermoconvection consiste à déterminer en fonction des coordonnées d’espace et du temps :
- la vitesse V (c’est-à-dire U, V, W) ; - la masse volumique ρ ; - la pression p ; - la température T.
Assez fréquemment, on pourra se limiter à une résolution en certains points particuliers. Quoi qu’il en soit, le problème comportant six inconnues doit être résolu au moyen de six équations, à savoir : - le bilan de masse ; - le bilan de quantité de mouvement (3 équations) - le bilan d’énergie ; - l’équation d’état du fluide.
Dans celles-ci, on devra faire intervenir des conditions aux limites portant sur V , p et T, qui peuvent être groupées en deux catégories.
♣ - Les conditions physiques générales : • condition d’adhérence à une paroi solide imperméable :
V = vitesse locale de la paroi ( 0V = sur une paroi fixe) ;
• continuité du champ de température • conservation du flux de chaleur.
♦- Les conditions circonstancielles, qui dépendent du problème traité, par exemple :
• p ou V imposée ; • T imposée, ou flux de chaleur imposé. La connaissance des champs de vitesses et de température, ainsi que de p et ρ, permet ensuite le calcul de toutes les grandeurs dynamiques et thermiques intéressantes : débit, frottement pariétal, flux de chaleur pariétal, puissance thermique échangée, etc. Eventuellement, l’examen du bilan d’entropie (ou d’exergie), permettra l’optimisation du processus étudié.
ANNEXES AU CHAPITRE 1 1.A.1. – LES BILANS SUR UN DOMAINE MOBILE ET LE CON CEPT DE DÉRIVÉE PARTICULAIRE Il est de tradition de présenter les équations de bilans en mécanique des fluides à l’aide d’un concept que nous n’avons pas utilisé : la dérivée particulaire. Pour le définir, reprenons le raisonnement suivi au paragraphe 1.3.1 lorsque nous avons établi la forme générale d’une équation de bilan, en y introduisant toutefois une différence importante : le domaine sera maintenant supposé mobile. Deux éventualités sont alors à considérer.
♣ Domaine animé du même mouvement que le fluide Plaçons-nous dans l’hypothèse où il n’y a pas de diffusion massique dans le fluide. Nous choisissons à l’instant initial un domaine fluide ∆, et nous suivons dans leur mouvement les molécules qu’il contient. La frontière Σ de ∆ va donc ici se déplacer et se déformer en fonction du mouvement des molécules qu’elle entoure, cependant que ∆ va renfermer toujours les mêmes molécules. Cette procédure est connue sous le nom de description lagrangienne, par opposition à la description eulérienne qui utilise un domaine fixe.
A chaque instant, la quantité totale K de la grandeur physique contenue dans ∆ a pour valeur :
∫=∆
τdCK
comme dans 1.3.1, mais cette fois ∆ est mobile. Aussi, pour la distinguer de la dérivée
classique t
K
∂∂
, la variation de K par unité de temps est-elle notée ici Dt
DK et appelée dérivée
particulaire. En description eulérienne du mouvement ( fixe), le bilan fait intervenir quatre grandeurs (§ 1.3.1) :
- la variation de K : τdt
C
t
K
D∫ ∂∂=
∂∂
;
- le flux ΦS à travers la surface S, dû au mouvement du support matériel ; - les sources surfaciques QS ; - les sources volumiques QI, et l’équation s’écrit :
SSI QQt
K Φ−−=∂∂
(1)
En description lagrangienne du mouvement, il n’y a plus de flux à travers Σ dû au mouvement du support matériel puisque Σ se déforme en suivant ce mouvement. Il reste donc dans le bilan :

- la variation de K : ∫=∆
τdCDt
D
Dt
DK ;
- les sources de surface QΣ ; - les sources volumiques QI, d’où l’équation :
ΣQQDt
DKI −= (2)
La dérivée particulaire est donc égale à la puissance des sources dans ∆ et sur Σ. Soit alors le domaine fixe qui coïncide avec ∆ à l’instant t. Le bilan instantané sur est conforme à la relation (1). Mais d’autre part, en comparant (1) et (2), on voit que DK / Dt s’écrit également :
St
K
Dt
DK Φ+∂∂=
soit : ∫∫ +∂∂=
SDdSn.VCd
t
C
Dt
DK τ (3)
d’où l’on déduit l’expression de la dérivée particulaire locale :
VCdivt
C
Dt
DC +∂∂= (4)
Si DC / Dt = 0, cela signifie que C est constante sur une trajectoire. En particulier,
dans un écoulement permanent, les conditions ¥C = cte sur une trajectoire¥ et ¥ 0VCdiv = ¥ sont équivalentes. On appelle écoulement isochore un écoulement tel que ρ = cte sur une trajectoire.
Dans ce cas, on a en tout point : V ⊥ ρgrad . D’autre part, d’après (4),
ρρρ grad.VVdiv0Vdiv +==
Par conséquent : 0Vdiv = . Il n’est donc pas nécessaire que le fluide soit isochore pour que cette propriété soit vérifiée.
♦ Domaine animé d’un mouvement propre Replaçons-nous maintenant dans le cas général, où il peut y avoir diffusion massique, et supposons que l’on veuille écrire un bilan pour un domaine ∆ animé d’un mouvement
donné. Chaque point de la surface Σ a une vitesse )t,z,y,x(WW = . Au même point, à
l’instant t, la vitesse de l’écoulement est V .
Soit rV la vitesse relative : WVVr −= .
La puissance instantanée des sources sur Σ et dans ∆ est toujours : QI - QΣ . Quant au flux ΦΣ à travers Σ, il a pour valeur :

∫=Σ
Σ ΣΦ dn.VC r
Soit δK la variation de K pendant un petit intervalle de temps ∆t. Le bilan s’écrit :
∫−−=−−=Σ
ΣΣΣ ΣΦδδ
dn.VCQQQQt
KrII
Appelons le domaine fixe qui coïncide avec ∆ à l’instant t. On peut encore conserver la définition précédente de la dérivée particulaire en posant : DK / Dt = QI – QS, soit d’après (3) :
dSn.VCdt
C
Dt
DK
SD ∫∫ +∂∂= τ
On a dans ce cas :
dSn.VCDt
DK
t
K
Sr∫−=
δδ
La notion de dérivation particulaire présente un grand intérêt historique et heuristique en mécanique des fluides car elle a permis la formulation des équations de bilan local. En effet, pour établir directement ces relations, qui ont chronologiquement précédé les équations de bilan intégral, le recours à la dérivation particulaire ne peut être évité. Mais dans la pratique, elle n’est vraiment indispensable que dans des cas particuliers. 1.A.2. – CALCULS RELATIFS AU BILAN DE QUANTITÉ DE M OUVEMENT Pour écrire le bilan de quantité de mouvement (§ 1.3.3), il a fallu faire intervenir les
termes Pdiv et Tdiv , que nous calculons ici.
♣ Le tenseur des quantités de mouvement P a pour composantes : Pij = ρ ViVj. La divergence d’un tenseur d’ordre 2 est un vecteur. Sa composante suivant la coordonnée i est par définition (on utilise la convention de sommation sur les indices répétés) :
)V.V(divx
)VV(
x
P)Pdiv( i
j
ji
j
iji ρ
ρ=
∂∂
=∂∂
=
d’où :
VdivVV.Vgrad)Pdiv( iii ρρ +=
et enfin, conformément à (1.33a) :
VdivVV.VgradPdiv ρρ +=
♦ D’après (1.17), on a d’autre part :
Ddiv2IpdivTdiv µ+−= . Le premier terme se décompose en deux :
pgrad.IIdivpIpdiv +=

mais I étant le tenseur unité, 0Idiv = et il reste :
pgradIpdiv = .
♥ Dans le second terme, on admettra d’abord µ = cte, d’où : DdivDdiv µµ = .
Compte tenu du fait que
∂∂
+∂∂
=i
j
j
iij x
V
x
V
2
1ε (relation 1.9), on obtient :
( )
∂∂
∂∂+
∂∂
=
∂∂∂
+∂
∂=
∂∂
=j
j
i2j
i2
ji
j2
2j
i2
j
iji x
V
xx
V
2
1
xx
V
x
V
2
1
xDdiv
ε
ou encore :
( )
∂∂+= Vdivx
Vgraddiv2
1Ddiv
iii .
Par conséquent :
( )VdivgradVgraddivDdiv2 += µµ soit en définitive (relation 1.33c) :
( )VdivgradVpgradTdiv ++−= ∆µ
♠ Si µ ≠ cte :
( )
∂∂
+∂∂
∂∂=
∂∂=
i
j
j
i
jij
ji x
V
x
V
x)(
xD2div µεµµ
i
j
jj
i
j x
V
xx
V
x ∂∂
∂∂+
∂∂
∂∂= µµ , que nous noterons :
= (I)i + (II ) i
Les choses sont claires pour le premier terme :
ii Vgraddiv)I( µ=
Elles le sont moins pour le second, que nous aurons intérêt à détailler :
ji
j
i
j
ji xx
V
x
V
x)II(
∂∂
∂∂
+
∂∂
∂∂= µµ
ce que la commutativité de l’opérateur dérivation permet d’écrire :
( )i
t
iji
j
j
j
ii grad.VgradVdivgrad
xx
V
x
V
x)II(
+=∂∂
∂∂
+
∂∂
∂∂= µµµµ
où t désigne la matrice transposée (permutation des indices i et j) d’où finalement :
( ) µµµµ grad.VgradVdivgradVgraddivDdiv2t
++=

Alors :
( ) µµµ grad.VgradVdivgradVgraddivpgradTdivt
+++−= 1.A.3. – CALCULS RELATIFS AU BILAN D’ÉNERGIE CINÉTI QUE On veut expliciter les termes de l’équation (1.39a) :
( )
Tdiv.VV.FPdiv.Vt
V.V +=+
∂∂ ρρ
Le premier terme s’écrit :
( )
tV
2
V
ttV
t
V.V
t
V.V
22
∂∂+
∂∂=
∂∂+
∂∂=
∂∂ ρρρρρ
et en appliquant l’équation de continuité : ( ) t/Vdiv ∂∂−= ρρ :
( ) ( )Vdiv
2
V
t2
V
2
V
tt
V.V
222
ρρρρ −∂∂+
∂∂=
∂∂
soit :
♣ ( ) ( )Vdiv
2
V
2
V
tt
V.V
22
ρρρ −
∂∂=
∂∂
Connaissant l’expression de Pdiv , donnée par (1.33a), le second terme devient, en utilisant la convention de sommation sur les indices répétés :
( ) ( )VdivV2
Vgrad.VVdivVVgrad.VVPdiv.V
22
iii ρρρρ +=+=
♦ ( )VdivV2
1V
2
VdivPdiv.V
22
ρρ +
=
Enfin, le dernier terme s’écrit :
j
iji x
VTdiv.V∂∂
=σ
ou encore :
♥ ( )
j
iij
j
iji
x
V
x
VTdiv.V
∂∂
−∂
∂= σ
σ
En reportant ♣, ♦, ♥ dans (1.39a), on obtient (1.39b) :
( )
j
iij
j
iji22
x
V
x
VV.FV
2
Vdiv
2
V
t ∂∂
−∂
∂+=
+
∂∂ σ
σρρρ

1.A.4. BILAN D’ENTROPIE : FORMULATION CLASSIQUE Il peut être utile de bien préciser comment le bilan d’entropie écrit en 1.3.7.2 se raccorde avec les formulations traditionnelles du second principe. Partons de l’expression (1.77). Puisque l’on a : 0≥σ , elle s’écrit encore :
∫∫∫∫ ++−≥∂
∂SS
rSD
dSn.TgradT
dSn.qT
1dSn.Vsd
t
)s( λρτρ (1)
L’expression à droite de l’inégalité représente le flux entropique dû aux échanges avec le milieu extérieur. En écriture symbolique, on a donc : SddS e≥
ou encore, en notant Sdi la production d’entropie due aux changements internes du système :
0d)s(SdD
i ≥= ∫ τσ
SdSddS ei +=
Si est un système fermé ( 0V = à la frontière), dont la température de surface T est uniforme, on retrouve à partir de (1) la relation connue : T/dQdS ≥ où dQ est la chaleur échangée avec l’extérieur. Enfin, s’il s’agit d’un système fermé et isolé (sans échanges d’énergie avec l’extérieur),
0dQ = et l’on a :
0SddS i ≥= .
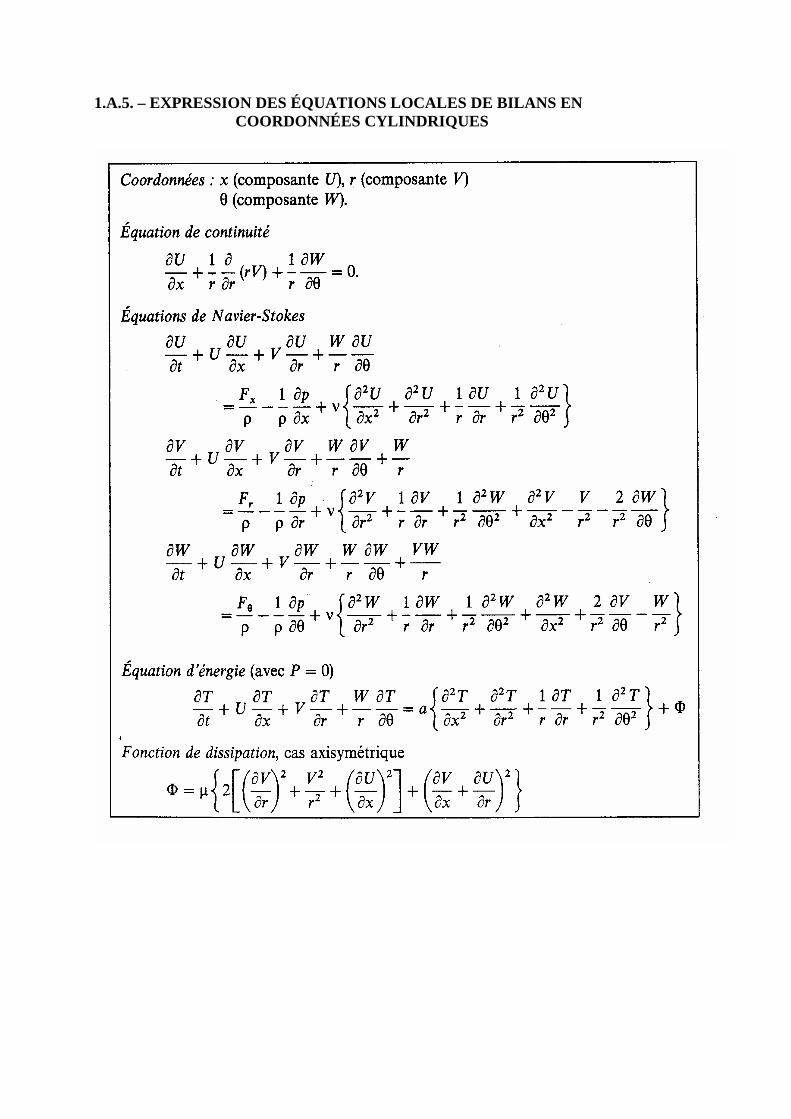
1.A.5. – EXPRESSION DES ÉQUATIONS LOCALES DE BILANS EN COORDONNÉES CYLINDRIQUES
Chapitre 2 SIMILITUDE ET ADIMENSIONNEMENT Il y a encore une grande découverte à faire en littérature : ce serait de payer les écrivains selon la quantité de livres qu’ils s’engageraient à ne pas écrire.
Thomas CARLYLE
2.1. – PROBLÈMATIQUE Les équations générales établies au chapitre 1 doivent permettre, en théorie, de résoudre tous les problèmes de transferts relatifs aux fluides newtoniens. En pratique cependant, il y a une quasi-impossibilité à résoudre complètement ces équations à chaque instant et en tout point de l’écoulement, sauf dans quelques cas particuliers. Il est donc indispensable de procéder à une simplification, en établissant une méthode de travail plus opérationnelle, et en élaborant des modèles schématisés qui constituent cependant une description aussi fidèle que possible de la réalité observable. On pourra ainsi établir des lois phénoménologiques d’un usage beaucoup plus commode. Dans ce but, et vu la multiplicité des paramètres qui interviennent dans l’ensemble des équations de bilans, il peut paraître judicieux de les agglomérer sous forme de groupements adimensionnels, pour faciliter l’interprétation et la comparaison des résultats expérimentaux. Pour ce faire, la méthode la plus naturelle consiste à implanter des grandeurs sans dimension dans les équations. Avec les démarches classiques comme l’analyse dimensionnelle ou l’analyse d’échelle, la signification physique des nombres sans dimension ne ressort pas toujours clairement, et certains d’entre eux sont introduits d’une façon quelque peu arbitraire. Nous cherchons dans ce chapitre à montrer l’intérêt que présente l’élaboration d’une méthode systématique. A cet égard, l’outil que constitue l’équation générale de bilan manifeste ici sa fécondité. Partant de l’équation locale pour une grandeur C, on l’écrit sous forme adimensionnelle, en faisant en sorte que le coefficient du terme de transport par la matière soit égal à 1. Apparaissent alors des « critères de similitude », groupements sans dimension associés chacun à un terme de source, et tels que deux expériences différentes donneront des résultats semblables si les critères de similitude ont la même valeur dans l’une et dans l’autre. La signification physique et la fonction de ces paramètres sont alors nettement marquées. Par exemple, dans ce formalisme, le nombre de Reynolds apparaît comme un critère de similitude relatif aux contraintes visqueuses dans le bilan de quantité de mouvement, alors que l’interprétation traditionnelle le donne pour un « rapport entre les forces d’inertie et les forces
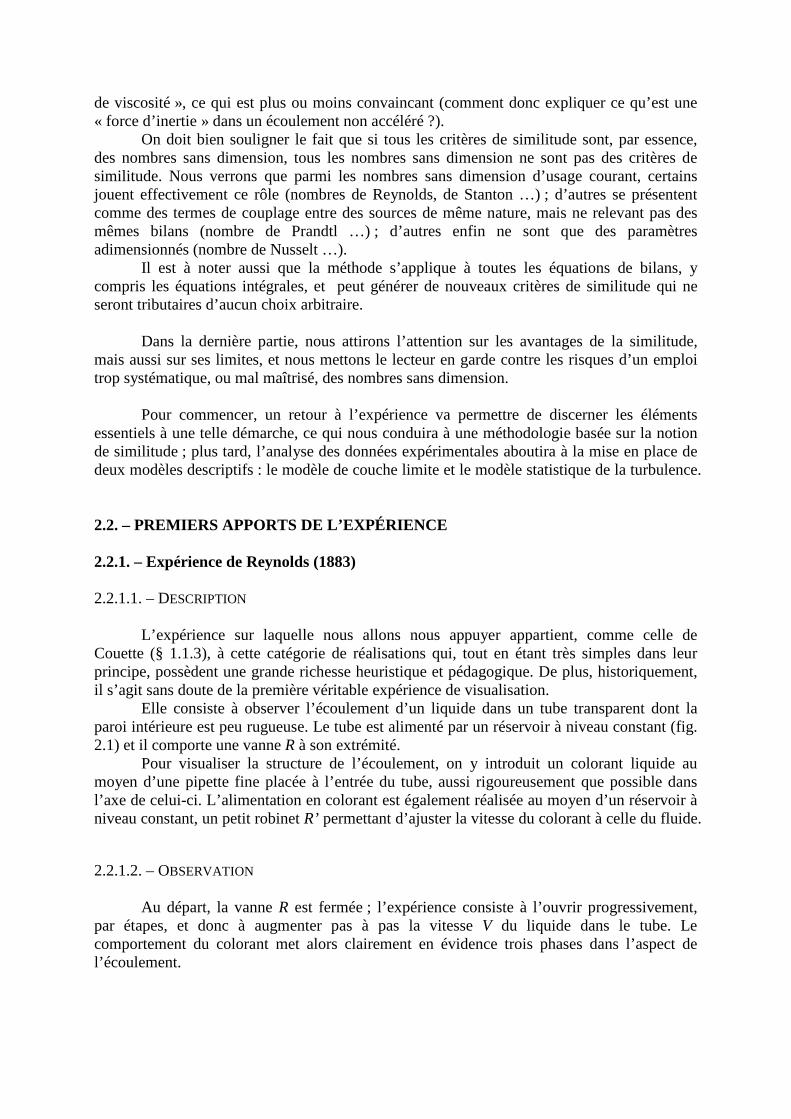
de viscosité », ce qui est plus ou moins convaincant (comment donc expliquer ce qu’est une « force d’inertie » dans un écoulement non accéléré ?). On doit bien souligner le fait que si tous les critères de similitude sont, par essence, des nombres sans dimension, tous les nombres sans dimension ne sont pas des critères de similitude. Nous verrons que parmi les nombres sans dimension d’usage courant, certains jouent effectivement ce rôle (nombres de Reynolds, de Stanton …) ; d’autres se présentent comme des termes de couplage entre des sources de même nature, mais ne relevant pas des mêmes bilans (nombre de Prandtl …) ; d’autres enfin ne sont que des paramètres adimensionnés (nombre de Nusselt …). Il est à noter aussi que la méthode s’applique à toutes les équations de bilans, y compris les équations intégrales, et peut générer de nouveaux critères de similitude qui ne seront tributaires d’aucun choix arbitraire. Dans la dernière partie, nous attirons l’attention sur les avantages de la similitude, mais aussi sur ses limites, et nous mettons le lecteur en garde contre les risques d’un emploi trop systématique, ou mal maîtrisé, des nombres sans dimension. Pour commencer, un retour à l’expérience va permettre de discerner les éléments essentiels à une telle démarche, ce qui nous conduira à une méthodologie basée sur la notion de similitude ; plus tard, l’analyse des données expérimentales aboutira à la mise en place de deux modèles descriptifs : le modèle de couche limite et le modèle statistique de la turbulence. 2.2. – PREMIERS APPORTS DE L’EXPÉRIENCE 2.2.1. – Expérience de Reynolds (1883) 2.2.1.1. – DESCRIPTION L’expérience sur laquelle nous allons nous appuyer appartient, comme celle de Couette (§ 1.1.3), à cette catégorie de réalisations qui, tout en étant très simples dans leur principe, possèdent une grande richesse heuristique et pédagogique. De plus, historiquement, il s’agit sans doute de la première véritable expérience de visualisation. Elle consiste à observer l’écoulement d’un liquide dans un tube transparent dont la paroi intérieure est peu rugueuse. Le tube est alimenté par un réservoir à niveau constant (fig. 2.1) et il comporte une vanne R à son extrémité. Pour visualiser la structure de l’écoulement, on y introduit un colorant liquide au moyen d’une pipette fine placée à l’entrée du tube, aussi rigoureusement que possible dans l’axe de celui-ci. L’alimentation en colorant est également réalisée au moyen d’un réservoir à niveau constant, un petit robinet R’ permettant d’ajuster la vitesse du colorant à celle du fluide. 2.2.1.2. – OBSERVATION Au départ, la vanne R est fermée ; l’expérience consiste à l’ouvrir progressivement, par étapes, et donc à augmenter pas à pas la vitesse V du liquide dans le tube. Le comportement du colorant met alors clairement en évidence trois phases dans l’aspect de l’écoulement.
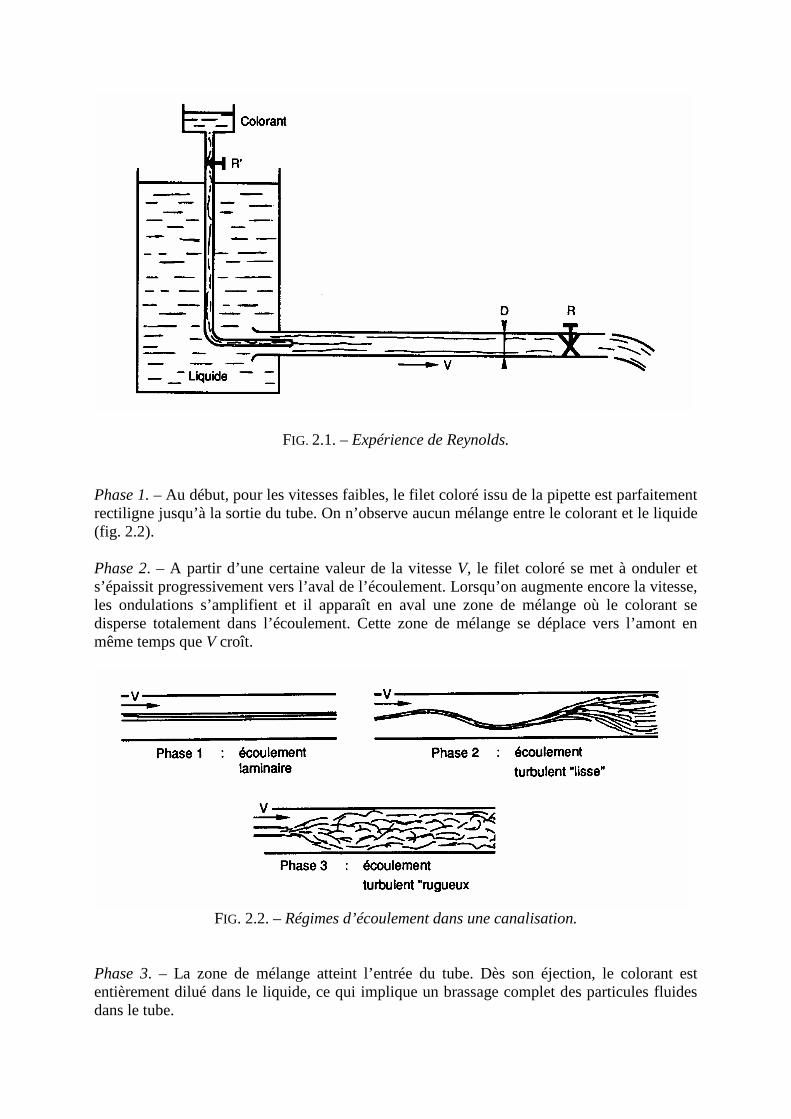
FIG. 2.1. – Expérience de Reynolds. Phase 1. – Au début, pour les vitesses faibles, le filet coloré issu de la pipette est parfaitement rectiligne jusqu’à la sortie du tube. On n’observe aucun mélange entre le colorant et le liquide (fig. 2.2). Phase 2. – A partir d’une certaine valeur de la vitesse V, le filet coloré se met à onduler et s’épaissit progressivement vers l’aval de l’écoulement. Lorsqu’on augmente encore la vitesse, les ondulations s’amplifient et il apparaît en aval une zone de mélange où le colorant se disperse totalement dans l’écoulement. Cette zone de mélange se déplace vers l’amont en même temps que V croît.
FIG. 2.2. – Régimes d’écoulement dans une canalisation.
Phase 3. – La zone de mélange atteint l’entrée du tube. Dès son éjection, le colorant est entièrement dilué dans le liquide, ce qui implique un brassage complet des particules fluides dans le tube.
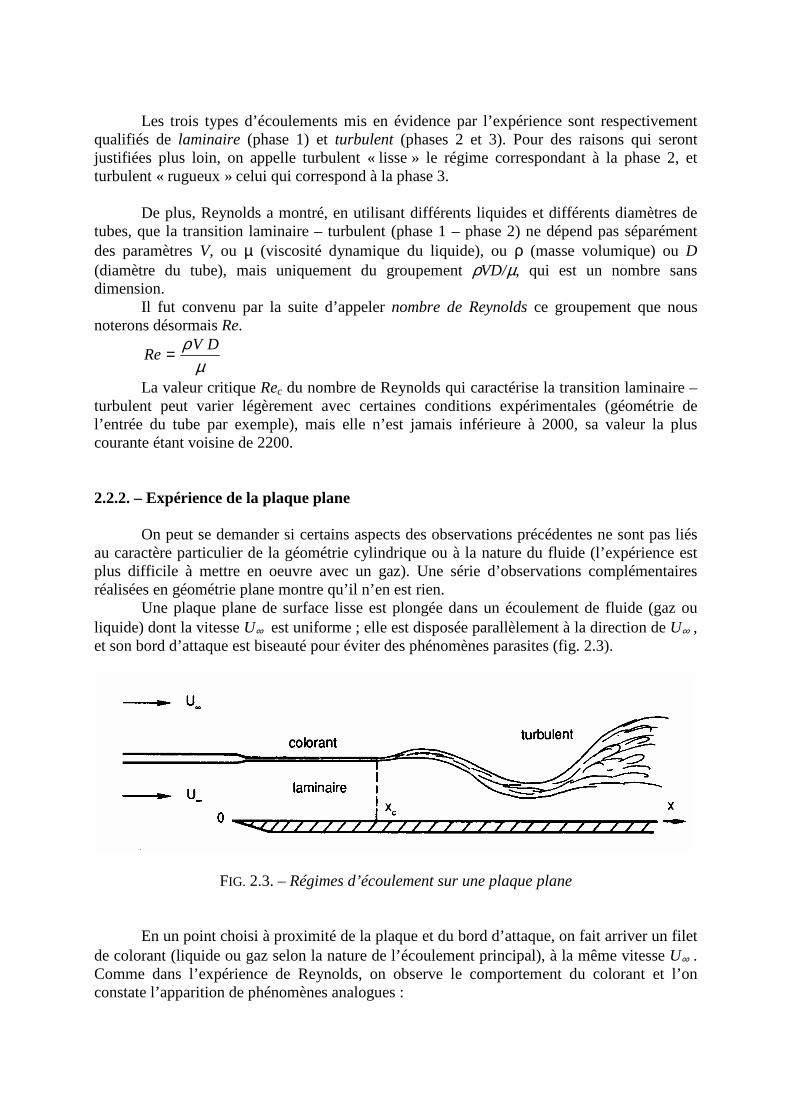
Les trois types d’écoulements mis en évidence par l’expérience sont respectivement qualifiés de laminaire (phase 1) et turbulent (phases 2 et 3). Pour des raisons qui seront justifiées plus loin, on appelle turbulent « lisse » le régime correspondant à la phase 2, et turbulent « rugueux » celui qui correspond à la phase 3. De plus, Reynolds a montré, en utilisant différents liquides et différents diamètres de tubes, que la transition laminaire – turbulent (phase 1 – phase 2) ne dépend pas séparément des paramètres V, ou µ (viscosité dynamique du liquide), ou ρ (masse volumique) ou D (diamètre du tube), mais uniquement du groupement ρVD/µ, qui est un nombre sans dimension. Il fut convenu par la suite d’appeler nombre de Reynolds ce groupement que nous noterons désormais Re.
µ
ρ DVRe=
La valeur critique Rec du nombre de Reynolds qui caractérise la transition laminaire – turbulent peut varier légèrement avec certaines conditions expérimentales (géométrie de l’entrée du tube par exemple), mais elle n’est jamais inférieure à 2000, sa valeur la plus courante étant voisine de 2200. 2.2.2. – Expérience de la plaque plane On peut se demander si certains aspects des observations précédentes ne sont pas liés au caractère particulier de la géométrie cylindrique ou à la nature du fluide (l’expérience est plus difficile à mettre en oeuvre avec un gaz). Une série d’observations complémentaires réalisées en géométrie plane montre qu’il n’en est rien. Une plaque plane de surface lisse est plongée dans un écoulement de fluide (gaz ou liquide) dont la vitesse U∞ est uniforme ; elle est disposée parallèlement à la direction de U∞ , et son bord d’attaque est biseauté pour éviter des phénomènes parasites (fig. 2.3).
FIG. 2.3. – Régimes d’écoulement sur une plaque plane En un point choisi à proximité de la plaque et du bord d’attaque, on fait arriver un filet de colorant (liquide ou gaz selon la nature de l’écoulement principal), à la même vitesse U∞ . Comme dans l’expérience de Reynolds, on observe le comportement du colorant et l’on constate l’apparition de phénomènes analogues :
• Le filet coloré est d’abord rectiligne et bien individualisé, ce qui correspond, d’après la définition du paragraphe précédent, à une zone d’écoulement laminaire. • Arrivé à une certaine distance du bord d’attaque, le filet commence à onduler en s’épaississant, puis se dilue dans le fluide ; on reconnaît ici une zone d’écoulement turbulent. Dans le cas présent, il n’est donc pas nécessaire de faire varier la vitesse pour observer les différentes structures d’écoulement puisque celles-ci coexistent le long de la plaque plane. En réitérant l’expérience pour différentes vitesses et différentes viscosités de fluides, on constate en outre que la transition laminaire – turbulent est caractérisée par une valeur critique du groupement ρU∞ x/µ, l’abscisse x étant mesurée le long de la paroi à partir du bord d’attaque. La parenté de ce terme sans dimension avec le paramètre ρVD /µ de l’expérience précédente conduisit à l’appeler également nombre de Reynolds. On a donc ici :
µ
ρ xURe ∞=
Si xc est l’abscisse de transition, la valeur critique de Re, soit Rexc = ρU∞ xc /µ, est de l’ordre de 105. 2.2.3. – Exploitation des expériences Ainsi qu’il a déjà été annoncé au début de ce chapitre, les expériences que l’on vient de décrire ont l’intérêt d’être simples à interpréter et de suggérer à la fois des modèles pour les écoulements laminaires et turbulents, et une méthode générale de travail. 2.2.3.1. – ANALYSE QUALITATIVE ET MODÉLISATION
♣ L’écoulement laminaire se caractérise par une quasi absence de mélange entre le fluide et le colorant. Il se produit bien un mélange dû à la diffusion moléculaire, mais celui-ci est très lent. Tout se passe donc en fait comme si les particules fluides suivaient des trajets qui ne s’entrecroisent jamais. Toutes les particules issues d’un même point forment une sorte de « filet fluide » analogue à un rail qui ne comporterait pas d’aiguillages. Pour des conditions
aux limites stationnaires, les paramètres de l’écoulement ( ,T,V,p etc.) sont des constantes. A partir de ces apparences, on peut dessiner un premier modèle où le fluide en écoulement serait constitué de lames minces (d’où le terme de laminaire) qui glisseraient les unes sur les autres, en exerçant sur leur surface de contact un effort de frottement τ ij dû à la viscosité. Cet aspect a déjà été évoqué à propos de l’écoulement de Couette (§ 1.1.3.2).
♦ D’autre part, dans le second type d’écoulement, qualifié de turbulent, il se produit pendant le déplacement un mélange progressif entre le fluide et le colorant, puis un brassage général. Ceci exige un enchevêtrement des trajectoires suivies par les particules fluides, et indique l’apparition locale de mouvements instationnaires tridimensionnels qui ne sont pas induits directement par les conditions aux limites puisqu’ils se manifestent même lorsque celles-ci sont stationnaires. On ne peut donc plus parler ici de filets fluides ou de lames fluides. La notion de trajectoire garde évidemment un sens physique mais perd tout intérêt opérationnel.
Cette interprétation conduit tout naturellement à un modèle d’écoulement turbulent dans lequel un mouvement chaotique, d’apparence aléatoire, se superposerait à un mouvement d’ensemble considéré comme mouvement moyen, c’est-à-dire pour le premier à un modèle statistique. Ce mouvement, d’aspect irrégulier (du moins à première vue) constitue le phénomène de la turbulence. La description des écoulements turbulents fera l’objet du chapitre 3. 2.2.3.2. – UNE MÉTHODE DE TRAVAIL : LA SIMILITUDE Penchons-nous maintenant sur le dernier enseignement des expériences précédentes. Celle-ci mettent en jeu quatre paramètres que l’on peut modifier : la vitesse du fluide (V ou U∞), une longueur (diamètre D du tube ou longueur de la plaque), la masse volumique ρ et la viscosité dynamique µ du fluide. Mais on observe que le critère de transition laminaire – turbulent fait intervenir un seul paramètre adimensionnel Re qui combine les quatre précédents. On peut alors légitimement se demander si d’autres propriétés des fluides en écoulement ne pourraient pas être décrites également par un nombre réduit de groupements sans dimension. Plus précisément, eu égard au nombre élevé de paramètres nécessaires pour décrire
complètement un problème d’écoulement anisotherme (ρ, V , T, p, µ, etc.), l’interrogation essentielle doit être formulée en ces termes : « A quelle condition peut-on attribuer une valeur générale à une expérience particulière ? ». Ou encore : « Peut-on établir des lois de comportement qui ne fassent pas intervenir les conditions particulières relatives à telle ou telle expérience ? ». La méthode qui permet de répondre par l’affirmative à ces questions porte le nom de similitude. Bien entendu, la même question se pose dans toutes les branches de la physique, mais elle prend une importance majeure en thermoconvection pour la raison indiquée plus haut. En outre, si elle se pose d’abord au théoricien, elle présente aussi un intérêt tout particulier pour l’ingénieur qui ne peut, dans bien des cas, ni résoudre son problème complet par le calcul (encore que les choses commencent à changer dans ce domaine), ni prendre le risque financier d’une expérimentation directe en grandeur nature et dans les conditions normales d’utilisation. Ce sera le rôle d’une étude sur maquette que d’apporter des renseignements sur le comportement du modèle définitif, la similitude permettant de transposer de l’une à l’autre les résultats obtenus. Intuitivement, on se rend compte, par exemple que, pour qu’il y ait similitude entre deux écoulements, il est nécessaire que les trajectoires des particules fluides soient semblables (similitude géométrique, impliquant celle des frontières) et que les particules occupent des positions homologues à des instants homologues (similitude cinématique). Il reste maintenant à préciser et à compléter ces données intuitives. 2.2.3.3. – UN OUTIL DE TRAVAIL : L’ADIMENSIONNEMENT D’une façon moins contraignante, on peut aussi se contenter d’utiliser des groupements sans dimension uniquement pour diminuer le nombre des paramètres mis en jeu, sans faire spécifiquement référence à la similitude. Ceci élargit l’éventail des possibilités, car il existe des nombres sans dimension qui ne sont pas représentatifs d’une similitude, mais qui sont néanmoins des outils de travail utiles et appréciés. Nous les passerons en revue au § 2.5.

2.3. – LES FONDEMENTS DE LA SIMILITUDE Avant de nous intéresser de façon plus approfondie aux modèles d’écoulements (ch. 3 et suivants) nous examinerons d’abord la question de la similitude, en essayant de poser le problème dans toute sa généralité. 2.3.1. – Forme adimensionnelle d’une équation de bilan Nous partirons de l’équation générale de bilan local (1.24) pour une entité physique scalaire :
SI qdivq)VC(divt
C −=+∂∂
en rappelant le sens des notations : C = densité volumique de l’entité considérée qI = débit local des sources de volume
Sq = densité de flux locale des sources de surface
Il va nous être utile d’indiquer, dans l’écriture de l’équation précédente, que pour une entité donnée, les sources de surface aussi bien que de volume peuvent être de plusieurs sortes, ce que nous symboliserons par des sommations sur deux indices n et m :
Sm
mn
In qdivq)VC(divt
C ∑∑ −=+∂∂
(2.1)
Si l’on veut faire apparaître dans cette équation des groupements sans dimension, et s’affranchir pour sa résolution des valeurs particulières de certains paramètres, on est conduit à y introduire des variables adimensionnelles. Il convient pour cela de comparer chaque variable à une valeur de référence (à l’inverse, l’idée même de comparaison conduit tout naturellement à la notion de grandeur sans dimension). Pour les coordonnées d’espace et de temps, on choisira ainsi : L° : longueur de référence relative à la géométrie de l’écoulement (ou « échelle de longueur ») t° : durée de référence (ou « échelle de temps »).
Les grandeurs de référence relatives à SmIn q,q,V,C seront, quant à elles, notées C°,
V° (grandeur scalaire) oInq et oSmq (scalaire également).
Les variables adimensionnelles (ou variables réduites) sont alors définies de la façon suivante :
oooo t
tt;
L
zz;
L
yy;
L
xx ==== ++++
0o V
VV;
C
CC ==
++ (2.2)
oSm
SmSmo
In
InIn
q
qq;
q
qq ==
++

Deux remarques s’imposent à propos des définitions précédentes. Premièrement, puisqu’on ne peut pas diviser un vecteur par un autre, la référence d’une grandeur vectorielle est obligatoirement un scalaire. Deuxièmement, le choix d’une même longueur de référence L° dans les trois directions de l’espace paraît à première vue une nécessité logique, mais il y a des exemples (comme les entrées de canalisations) où ce choix est physiquement inapproprié. Nous en parlerons au chapitre 6 (§ 6.5).
Remplaçons maintenant x, y, z, t, C, qIn, V et Smq en fonction des nouvelles variables
dans l’équation (2.1). On a en particulier :
+
+
∂∂=
∂∂
t
C
t
C
t
Co
o
+
++
∂∂=
∂∂
x
)VC(
L
VC
x
VCo
oo
(et de même pour y et z).
L’équation (2.1) s’écrit donc :
++++
+
+
∑∑ −=+∂∂
Sm
mo
oSm
In
n
oIno
oo
o
o
qdivL
qqqVCdiv
L
VC
t
C
t
C (2.3)
où tous les coefficients sont de dimension [C] [ t] - 1. Nous pouvons rendre cette relation complètement adimensionnelle en multipliant les deux membres par Lo/CoVo, qui est de dimension [t][C] – 1. L’opération présente en particulier
l’avantage d’isoler le terme de transport : ++VCdiv . On obtient ainsi :
∑∑++++
+
+−=+
∂∂
mSmoo
oSm
n
Inoo
ooIn
oo
o
qdivVC
VC
LqVCdiv
t
C
Vt
L (2.4)
Bien entendu, tout ceci n’a de sens que si les grandeurs de référence C°, L° …. sont des constantes. Les groupements sans dimension qui sont apparus dans l’équation (2.4) présentent un grand intérêt. Nous les noterons respectivement Γt , ΓIn , ΓSm :
=
=
=
oo
oSm
Sm
oo
ooIn
In
oo
o
t
VC
q
VC
Lq
Vt
L
Γ
Γ
Γ
(2.5)
d’où l’écriture définitive de l’équation générale adimensionnelle de bilan local :
∑∑++++
+
+−=+
∂∂
m
SmSm
n
InInt qdivqVCdivt
C ΓΓΓ (2.6)
On aboutit à des coefficients Γ identiques aux précédents si l’on raisonne sur une grandeur vectorielle. La méthode possède donc une validité tout à fait générale. 2.3.2. – Les critères de similitude
♣ L’étude d’un problème de thermoconvection sous forme adimensionnelle conduit donc à résoudre un système de plusieurs équations de bilans du type (2.6), équations relatives aux différentes entités physiques qui doivent être prises en compte. Les inconnues sont habituellement les distributions C+(x+, y+, z+, t+) des grandeurs physiques considérées. Les
termes de sources ++SmIn q,q et les vitesses dépendent en général des grandeurs C+. A titre
d’aide-mémoire, on trouvera en annexe (2.A.1) des tableaux rappelant les principales sources impliquées dans les bilans que nous aurons à utiliser. On voit que deux problèmes différents pourront être qualifiés de semblables s’ils ont des solutions adimensionnelles identiques, car alors, en tous points homologues des deux
écoulements (points ayant les mêmes coordonnées réduites x+, y+, z+), les grandeurs C, V , qIn,
Smq seront dans des rapports constants.
L’identité des solutions implique en particulier que les coefficients Γ définis par (2.5) soient respectivement égaux. Les Γ constituent donc un ensemble de « critères de similitude », chacun d’eux étant relatif à une grandeur C et à une source données, c’est-à-dire à un problème physique bien précis (sauf Γt , sur lequel nous reviendrons dans un instant).. Corrélativement, il y a invariance des solutions dans toute transformation réalisée à Γ constants. Enfin, les critères de similitude sont évidemment indépendants du système d’unités puisqu’ils sont sans dimension. Le choix que nous avons fait dans la construction des équations adimensionnées (coefficient 1 devant le terme de transport) revient à imposer la similitude à l’échelle 1 par rapport au flux transporté, et à chercher à quelles conditions une similitude sera également assurée pour les sources.
♦ Cependant, l’égalité des coefficients Γ ne suffit pas à assurer l’identité des solutions. Il faut en outre vérifier l’identité des conditions aux limites et des conditions initiales, exprimées également sous forme adimensionnelle. En particulier, les surfaces frontières des systèmes considérés devront avoir les mêmes équations en x+, y+, z+. Ceci implique la similitude géométrique des frontières des deux écoulements. A ce propos, la réalisation d’une maquette expérimentale est ordinairement entendue dans un sens diminutif, « maquette » étant identifiée à « modèle réduit » ; cette conception est trop restrictive, car la similitude autorise parfaitement l’usage de « modèles agrandis » si les dimensions du système à étudier sont trop petites.
♥ Les critères de similitude sont construits à partir de grandeurs de référence sur lesquelles nous n’avons donné pour l’instant aucune précision. En fait, les choix de ces grandeurs sont a priori arbitraires mais, en pratique, ils doivent être en relation avec les phénomènes physiques considérés. Par exemple, pour un écoulement dans un tuyau de section circulaire, l’expérience de Reynolds nous montre que la dimension caractéristique du phénomène n’est pas la longueur du tube, mais son diamètre. La longueur de référence L° sera donc ici le diamètre D. A l’inverse, pour l’écoulement sur une

plaque plane, l’expérience montre que c’est la longueur L mesurée depuis le bord d’attaque qui est représentative du phénomène, et c’est donc elle qui sera naturellement choisie comme valeur de L°. Toutes précisions sur les choix des grandeurs de référence seront données au fur et à mesure des besoins dans les chapitres d’applications. Signalons toutefois dès maintenant, car ceci est important, que d’une façon générale les grandeurs de référence seront choisies sur des surfaces frontières. Ce seront donc des conditions aux limites. Lorsque l’on veut rendre deux problèmes semblables, l’égalité des coefficients Γ assure alors ipso facto l’identité de certaines conditions aux limites.
♠ Si le problème étudié comporte au total N sources, il n’y aura pas forcément N critères Γ indépendants. En effet, certaines sources sont couplées entre elles, ce qui se traduit par des relations de dépendance entre les Γ correspondants (§ 2.5). Avec l’introduction de la similitude, l’un des buts poursuivis sera d’établir la forme de ces relations. Enfin, en l’absence de sources, une équation de bilan devient une simple équation de conservation. En régime permanent, il n’y a plus de critères de similitude. Pour que deux problèmes soient semblables, il suffit alors que les conditions aux limites exprimées en variables adimensionnelles soient identiques. 2.3.3. – Conditions de validité de la similitude L’invariance des lois physiques entre modèle et maquette est évidemment l’essence même de la similitude. A contrario, aucune similitude n’est possible si les lois qui gouvernent les transferts ne sont pas conservées lors d’un changement d’échelle (au sens large du terme : échelle de temps, de longueur, de température, échelle dans les propriétés thermophysiques …). Pour donner un exemple concret, on ne peut pas envisager de similitude entre un écoulement d’air à l’échelle centimétrique et à pression ambiante, et un écoulement d’air à échelle micrométrique ou à très faible pression : le changement d’échelle fait que le libre parcours moyen des molécules devient du même ordre de grandeur que les dimensions du système ; le gaz ne peut plus alors être considéré comme un milieu continu (cf. § 1.1.1) et les lois de comportement (relations contraintes / déformations ou flux de chaleur / écart de température) changent de forme. Mais bien entendu, on peut toujours construire une similitude dans tout domaine à l’intérieur duquel les lois physiques sont conservées, les définitions générales des critères Γ relatifs à chaque source restant valables dans leur forme générale (2.5). 2.4. – PANORAMA DES CRITÈRES DE SIMILITUDE 2.4.1. – Les principes et l’usage Après cette présentation globale, il convient maintenant de préciser les expressions des critères de similitude qui interviennent dans les relations de bilans établies au chapitre 1. Malheureusement, l’usage a imposé des nombres sans dimension qui ne coïncident pas exactement avec les coefficients Γ. C’est ainsi que les nombres de Strouhal (2.9), de Reynolds (2.26) ou de Péclet (2.57) sont les inverses des Γ correspondants, tandis que

d’autres (nombre de Grashof ( 2.29), de Boussinesq (2.61) …) en sont les inverses élevés au carré. Dans le principe, ceci est regrettable, mais la signification de ces nombres comme critères de similitude n’est pas en cause pour autant : il y a seulement un renversement d’échelle, et en plus, dans le second cas, une distorsion dans l’échelle des valeurs numériques utilisées, par rapport à celles des critères Γ. On trouvera en Annexe 2.A.1 des tableaux qui récapitulent l’ensemble des critères de similitude et des sources auxquelles ils se rattachent, ainsi que d’autres nombres sans dimension d’usage courant. 2.4.2. - Le critère de similitude temporelle Commençons par le coefficient Γt, qui n’intervient que dans les phénomènes instationnaires (équation 2.6). Son expression est dans tous les cas :
°°
°=Vt
LtΓ
Il s’agit d’un critère de similitude temporelle pour lequel deux situations sont à considérer.
♣ Le terme instationnaire ++ ∂∂ t/C est lié directement à l’évolution dans le temps des conditions aux limites. Par exemple, si la vitesse à l’entrée d’une canalisation varie en fonction du temps, la
quantité de mouvement Vρ dépendra de t en chaque point.
Soit dl le déplacement d’une particule fluide pendant une durée dt :
dtVdl =
Posons : °=+
L/dldl ; on a :
+++°°==° dtt.VVdtVdlL (2.7)
Ici, on ne peut pas choisir la durée de référence t° de façon arbitraire, si le choix de L° et de V° a déjà été fait, car on doit avoir, en coordonnées réduites :
+++= dtVdl
d’où en rapprochant de (2.7) : L° = V° t° On a par conséquent :
°°=°
V
Lt
et : 1t =Γ (2.8)
La similitude temporelle est automatiquement assurée à l’échelle 1.
♦ Le terme instationnaire ++ ∂∂ t/C n’est pas lié à l’évolution des conditions aux limites. C’est ce qu’il se passe par exemple dans un écoulement turbulent, où le mouvement est instationnaire même quand les conditions aux limites sont stationnaires (§ 2.2.3.1), ou
encore dans certains échangeurs thermiques qui sont parfois le siège de mouvements vibratoires… S’il y a superposition d’un mouvement vibratoire à un mouvement moyen, le terme
++ ∂∂ t/C peut se dédoubler ; il faut donc a priori considérer deux critères de similitude temporelle : - le premier, relatif au mouvement moyen, est égal à 1 d’après ce qui précède ; - dans le second, on choisira pour durée de référence la pseudo-période t° du phénomène. Le critère de similitude temporelle relatif au mouvement vibratoire sera donc : °°°= Vt/LtΓ (2.9a)
L’usage a retenu, plutôt que le nombre tΓ , son inverse (qui reste néanmoins un critère
de similitude, cf. § 2.4.1) appelé nombre de Strouhal S :
0
00
L
VtS = (2.9b)
!!! Ceci dit, dans la suite de ce chapitre nous considérerons uniquement des régimes permanents, indépendants du temps. En effet, dans la plupart des régimes variables, la caractérisation des grandeurs de référence pose de sérieux problèmes et limite l’intérêt de l’adimensionnement. 2.4.3. – Les critères de similitude relatifs aux sources de quantité de mouvement Pour des raisons pratiques que l’on constatera plus loin, nous allons examiner d’abord l’application de la similitude aux transferts de quantité de mouvement. 2.4.3.1. – GRANDEURS ET RELATIONS DE BASE Comme nous l’avons déjà précisé en (2.3.1), le fait que la grandeur considérée soit vectorielle ne change rien à la définition (2.5) des nombres Γ , et les grandeurs de référence utilisées sont toujours des scalaires. Dans le cas présent, on a donc :
°°=°= VC;VC ρρ
+++
=°°
= VV
VC ρ
ρρ
(2.10)
Notre équation de départ sera la relation de bilan local (1.32) (en régime permanent) :
TdivFPdiv += ρ
dans laquelle nous adopterons pour T la forme (1.16b)
τ+−= IpT
τ désignant le tenseur des contraintes de viscosité. Le bilan devient ainsi :
τρ divIpdivFPdiv +−=
ou plus simplement, d’après 1.A.2♦:
τρ divpgradFPdiv +−= (2.11)
2.4.3.2. – CRITÈRES RELATIFS AUX FORCES DE VOLUME Dans beaucoup d’applications, les sources volumiques de quantité de mouvement (qui sont les forces de volume appliquées au fluide) sont négligeables devant les autres sources. Lorsqu’elles ne le sont pas, trois situations sont principalement à envisager.
♣ Les forces de pesanteur sont prépondérantes devant les forces de pression (écoulements à surface libre, voir Ch. 8)
Alors, gFq I ρρ == et l’on devra prendre comme grandeur de référence un terme
du même ordre, à savoir : gq 00I ρ= .
Le critère de similitude relatif aux forces de pesanteur est ici (cf. 2.5) :
2
00I
g)V(
Lg
V.V
Lq
°°°°
=°°°
=ρρ
ρΓ
2g
)V(
Lg
°°
=Γ (2.12a)
L’inverse de gΓ est connu sous le nom de nombre de Froude Fr :
°
°==Lg
)V(1Fr
2
gΓ (2.12b)
♦ Les forces de pesanteur sont du même ordre de grandeur que les forces de pression (écoulements en charge, voir Ch. 6)
Comme on a dans un écoulement isochore )gz(gradgq I ρρ −== , où ρgz est
homogène à une pression, on voit qu’il est également possible de prendre pour valeur de
référence 0Iq un gradient de pression caractéristique de l’écoulement. La pression statique p
étant liée à la vitesse, on convient ordinairement de choisir :
2ooo )V(p ρ= (2.13a) c’est-à-dire : p0 = 2 fois la pression dynamique correspondant à la vitesse de référence.
Quant à la référence 0Iq (qui doit être une grandeur scalaire, cf. § 2.4.3.1), ce sera tout naturellement le quotient de la pression de référence par la longueur de référence :
0
000
IL
p)pgrad(q == (2.13b)
d’où, en appliquant la définition (2.5) :
200
0
0
200
000
00I
p)V(
L
L
)V(
V.V
Lq
ρρ
ρΓ ==
c’est-à-dire : 1p =Γ (2.13c)

Il n’y a donc plus ici de condition de similitude vis-à-vis des forces de pesanteur : cette similitude se trouve automatiquement assurée avec un rapport d’échelle égal à 1.
On aura noté qu’ici, le terme pgrad a été traité comme une source volumique, ce qui est parfaitement licite vu le caractère bivalent de la pression, signalé au paragraphe 1.3.4.4.
♥ Les forces d’Archimède (ou forces de flottabilité) sont du même ordre de grandeur que les forces de pression (convection mixte) Sous l’influence du gradient de température, le fluide subit des variations de masse volumique à partir d’une valeur de référence ρ∞ (PTC, Ch. 5 et 6). La force ascensionnelle exercée sur une particule fluide s’écrit :
gF∞
∞ −−=
ρρρ
, et Fq I ρ= (2.14)
En introduisant la dilatabilité du fluide :
pT
p1
∂∂−=
ρβ (2.15a)
et en admettant que ρ est une fonction linéaire de T, on peut faire apparaître les températures si l’on écrit :
TT
1
−−
−=∞
∞
∞
ρρρ
β , soit : )TT( ∞∞
∞ −=− β
ρρρ
(2.15b)
De ce fait :
gTg)TT(q I ∆βρβρ =−= ∞ (2.16a)
On prend alors pour valeur de référence :
gTq 0000I ∆βρ= (2.16b)
où 0T∆ est un écart caractéristique de température (en général Tparoi - T∞) On doit donc compter dans le cas présent avec un nouveau critère de similitude :
200
00I
)V(
Lq
ρΓβ = soit avec (2.16) :
20
000
)V(
LTg ∆βΓβ = (2.17a)
Par chance, le nombre sans dimension employé dans la pratique coïncide avec Γβ et n’est autre que le nombre de Richardson Ri (parfois appelé aussi nombre d’Archimède) :
20
000
)V(
LTgRi
∆βΓβ == (2.17b)
2.4.3.3. – CRITÈRES RELATIFS AUX FORCES DE SURFACE Les forces surfaciques se subdivisent en forces normales (pression) et en forces tangentielles. D’après (1.16b), (1.25) et (1.32), on a ici :
τ+−== IpTqS
(2.18)
2S1SS qqq +=
Il y aura donc a priori deux critères de similitude correspondant respectivement à 1Sq
(terme Ip ) et 2Sq (terme τ ).
♣ Forces de pression
1. La valeur de référence 01Sq est donc une pression p°. Comme il a déjà été dit au
paragraphe 2.4.3.2.♦, on peut choisir pour p° une pression dynamique en relation avec la vitesse de référence, à savoir :
200001S )V(pq ρ== (2.19)
Alors, selon (2.5) et (2.10), le critère ΓS1 associé est identique à Γp donné par (2.13) :
p000
0
00
01S
1SV.V
p
VC
q Γρ
Γ === (2.20a)
c’est-à-dire : 1p =Γ (2.20b)
Il est logique d’aboutir aux mêmes conclusions que dans le paragraphe cité puisque la grandeur de référence est la même dans les deux cas. 2. Mais il advient parfois que l’on s’intéresse plus spécialement à la pression en tant que telle (lorsqu’on parle de perte de charge dans une canalisation par exemple). On se tourne alors naturellement pour le choix d’une référence vers une pression statique p° (ou plutôt une différence de pression) significative de l’écoulement. Dans ce cas, Γp conserve la forme (2.20a) et prend le nom de nombre d’Euler Eu (ou parfois de « coefficient de pression ») :
200
0
statp)V(
pEu
ρΓ == (2.20c)
♦ Forces de viscosité Concernant les grandeurs de référence à prendre en compte, une question nouvelle et importante va maintenant être soulevée avec la caractérisation du critère de similitude relatif aux forces de viscosité. Pour les sources surfaciques engendrées par un mécanisme de diffusion (dans le cas présent, la diffusion de quantité de mouvement, cf. § 1.3.6.5 ; plus loin, la diffusion de masse ou de chaleur), on se trouve devant une alternative, selon que l’attention est portée en priorité sur le champ de la fonction inconnue (ici : le champ de vitesse) ou sur ses gradients (ici : les contraintes de viscosité).

I. – Référence aux gradients de vitesse Si l’on s’intéresse plutôt au champ des contraintes (qui sont proportionnelles aux gradients de vitesse, relation (1.18)), on reprendra la formulation (2.18) en écrivant :
τ=2Sq
Ceci permet d’adopter comme valeur scalaire de référence 02Sq une contrainte
visqueuse à la paroi, que l’on note τ p :
p00
2Sq ττ == (contrainte à la paroi) (2.21)
On obtient immédiatement le critère Γτ correspondant en revenant à la définition (2.5) :
200
p
)V(ρτ
Γτ = (2.22a)
Le nombre sans dimension usuel est le coefficient de frottement Cf , égal à 2Γτ ; on l’écrit habituellement :
200
pf
)V(C
2
1
ρτ
Γτ == (2.22b)
L’introduction du facteur ½ a pour origine le souci d’exprimer le dénominateur de Cf comme une énergie cinétique (ρV 2/2). Ce n’est pas très heureux, mais c’est maintenant une tradition. II. - Référence au champ de vitesse Si l’on veut au contraire mettre l’accent sur le champ de vitesse, il faut introduire l’expression détaillée de τ :
D2q 2S µτ ==
avec :
iji
j
j
iij )D(
x
V
x
V
2
1 =
∂∂
+∂∂
=ε (1.9)
et :
( )( ) +
+
+
+
∂∂=
∂∂=
∂∂
x
V
L
V
xL
VV
x
V0
0
0
0
Pour établir la forme que doit avoir ici la grandeur de référence 02Sq , on exprimera τ ij
en fonction des grandeurs adimensionnelles déjà définies :
∂
∂+
∂∂
== +
+
+
++
i
j
j
i0
00
ijijx
V
x
V
L
V
2
122 µµεµτ (2.23)
ce qui conduit à faire apparaître une viscosité dynamique de référence µ 0 , évaluée dans des conditions de température à préciser, telle que µ+ = µ /µ 0 . D’où :
++== D2
L
Vq
0
00
2S µµτ (2.24)
Puisque l’on doit pouvoir écrire : +
= τττ 0 , conformément à la définition des grandeurs réduites, il faut donc obligatoirement que :

0
000
L
Vµτ = (2.25)
Toujours d’après (2.5), l’expression du critère de similitude est maintenant :
000
0
V.VρτΓν =
00
0
000
0
LVLV
νρ
µΓν == (2.26a)
Ce terme est plus connu sous sa forme 1 / Γν , qui est le nombre de Reynolds Re, déjà cité au début du présent chapitre (§ 2.2.1 et 2.2.2) :
0
00 LV1Re
νΓν== (2.26b)
Comme il a été dit pour le nombre de Strouhal (§ 2.4.2), Re a toujours le sens d’un critère de similitude, mais l’échelle des valeurs numériques est inversée par rapport à Γν , ce qui est un peu regrettable. 2.4.3.4. – CAS OÙ IL N’Y A PAS DE VITESSE EXPÉRIMENTALE DE RÉFÉRENCE
♣ C’est le cas qui se rencontre en convection libre, où le seul paramètre V 0 expérimental que l’on puisse prendre pour référence (la vitesse du fluide loin des parois) est égal à zéro. La solution consiste alors à adopter pour V 0 une grandeur homogène à une vitesse, et liée à d’autres paramètres pour lesquels existe une valeur expérimentale caractéristique. En l’occurrence, sachant que la flottabilité qui est à l’origine de la convection naturelle est liée à l’existence d’un écart de température ∆T0 et d’une dilatabilité β dans le fluide, ainsi qu’à la pesanteur, le groupement le plus simple homogène à une vitesse et contenant ces ingrédients est :
( ) 2/10000 LTgV ∆β= (2.27) Les critères de similitude construits sur cette base seront affectés de l’indice « l » pour rappeler qu’il s’agit de convection libre.
♦ En remplaçant V0 par (2.27), le critère de similitude Γβ (2.17) relatif aux forces de pesanteur :
20
000
)V(
LTg ∆βΓβ =
devient alors : 1l =βΓ (2.28)
ce qui a pour conséquence d’assurer automatiquement la similitude à l’échelle 1 vis-à-vis des forces de pesanteur.
♥ Quant au critère de similitude relatif aux forces de viscosité, il peut là encore revêtir deux aspects : I.- Avec référence au champ de vitesse
000 LV/νΓν = (2.26a)
devient :
( ) ( ) 2/302/10
0
lLTg ∆β
νΓν = (2.29a)
Le problème est qu’on ne l’utilise jamais ! Il a dès l’origine cédé la place à son inverse élevé au carré, baptisé nombre de Grashof Gr :
20
300
2l )(
)L(Tg1Gr
ν∆β
Γν== (2.29b)
Une fois de plus, mais ce n’est pas la dernière, nous sommes confrontés à une tradition qui a imposé un nombre sans dimension très différent du critère de similitude originel. Malgré tout, Gr est aussi un critère de similitude (si Γν l a la même valeur dans deux systèmes différents, les nombres de Grashof sont égaux aussi), mais avec un renversement et une forte distorsion des valeurs numériques. II.- Avec référence aux gradients de vitesse
200
p
)V(ρτ
Γτ = (2.22a)
devient quant à lui :
0000
pl
LTg ∆βρτ
Γτ = (2.30)
Voilà un critère de similitude qui est resté complètement ignoré, et qui n’a donc jamais reçu de patronyme. On pourrait le considérer comme un coefficient de frottement modifié
2/C*f .
Enfin, le critère Γp (2.20b) relatif aux forces de pression n’est pas concerné par le
changement de vitesse de référence. Si l’on prend à nouveau 2000 )V(p ρ= , on a toujours :
Γp = 1 2.4.3.5.- ÉCRITURE ADIMENSIONNELLE DU BILAN DE QUANTITÉ DE MOUVEMENT 1. – Base de départ Le bilan de quantité de mouvement est exprimé par l’équation (2.11), que nous rappelons tout d’abord :

τρ divpgradFPdiv +−= (2.11) avec, si l’on développe les termes en divergence selon (1.33a) et (1.33c) :
V.VgradPdiv ρ=
( )VdivgradVdiv += ∆µτ En adoptant des références au champ de vitesse, la transposition adimensionnelle de (2.11) aura la forme générale :
++
−=
+++
++++++
VdivgradV
pgrad)ou1(F)ouou1(V.Vgrad statpg
∆µΓ
ΓρΓΓρ
ν
β (2.31)
Nous donnons dans le paragraphe suivant les formes habituelles dans les principales situations rencontrées. 2. – Applications (avec références au champ de vitesse)
♣ Ecoulements à surface libre (§ 2.4.3.2.♣ et Ch. 8)
S’agissant d’un fluide isochore dans le champ de pesanteur : gF = . Comme g et ρ
sont des constantes, g/gg =+ est le vecteur unitaire selon la verticale descendante, et
1=+ρ . En outre, les forces de gravité sont prépondérantes par rapport aux forces de pression. Les critères de similitude concernés sont donc les nombres de Froude et de Reynolds. Il vient alors :
+++++ += VRe
1g
Fr
1V.Vgrad ∆µ (2.32)
♦ Ecoulements en charge (§ 2.4.3.2.♦ et Ch. 5) Les conditions sont les mêmes, à ceci près que les forces de gravité et de pression sont du même ordre de grandeur. On fait alors intervenir la pression statique p* (1.37a) :
*pgradpgradg −=−ρ
Le critère de similitude correspondant est Γp = 1, d’où :
+++++ +−= VRe
1*)p(gradV.Vgrad ∆µ (2.33a)
avec :
200
0
0 )V(
p
p
*p*)p(
ρ==+ (2.33b)

♥ Convection mixte (§ 2.4.3.2.♥ et PTC, Ch. 6) A partir de (2.15) et (2.16), la température adimensionnée est définie par :
oo T/TTouT/TT ∆∆∆∆ == ++ (2.34a) La masse volumique est toujours supposée constante, sauf dans le terme de flottabilité, donc ρ+ = 1. Les critères de similitude qui interviennent dans ce cas sont Ri et Re, et (2.31) s’écrit :
+++++++ +−= VRe
1*)p(gradgTRiV.Vgrad ∆µ (2.34b)
♠ Convection libre (§ 2.4.3.4 et PTC, Ch.5) Le critère de similitude Γβ relatif aux forces de pesanteur est égal à 1. Le critère relatif aux forces de viscosité est le nombre de Grashof. Le gradient de pression motrice étant négligeable, il reste :
++++++ += VGr
1gTV.Vgrad
2/1∆µ (2.35)
3. – Avec référence aux gradients de vitesse Si l’on choisit de se référer aux gradients de vitesse pour adimensionner le tenseur des
contraintes (§ 2.4.3.3♦), le critère de similitude relatif aux forces de viscosité est le coefficient de frottement Cf et l’équation (2.11) devient :
+++++++ +−= τΓρΓΓρ β divC
2
1pgrad)ou1(F)ouou1(V.Vgrad fstatpg
(2.36)
Cette écriture est moins utilisée que la précédente pour le calcul du champ de vitesse. Par contre, Cf est un paramètre intéressant lorsqu’il s’agit de présenter des résultats qui font intervenir le frottement aux parois. 2.4.4. – Les critères de similitude relatifs aux sources de masse 2.4.4.1. – GRANDEURS ET RELATIONS DE BASE La grandeur physique C qui intervient dans l’équation (2.6) est ici la masse volumique ρ : C = ρ (ou ρA pour un constituant A d’un mélange)
C0 = ρ 0 (ou 0Aρ ) : valeur de référence
=== +++
0A
AA0
ouCρρρ
ρρρ (2.37)

Nous partirons maintenant de l’équation (1.65a) qui fait intervenir le terme de diffusion du constituant A dans le mélange :
+=+∂
∂ρ
ρρρρ AAIAA
A gradDdivq)V(divt
2.4.4.2. – SOURCES VOLUMIQUES Pour l’espèce A, dont le taux de production local est qIA, on définit un taux de
référence oIAq , d’où o
IAIAIA q/qq =+ . Le nombre Γ associé à IAq est donc d’après (2.5) :
00
A
00IA
IAV
Lq
ρΓ = (2.38)
2.4.4.3. – SOURCES SURFACIQUES
♣ Point de départ Si l’on est en présence d’un phénomène de diffusion, le débit-masse local du constituant A dans le mélange est, rappelons-le (§ 1.3.6.2) :
ρ
ρρ AASA gradDq −=
Dans ce qui va suivre, le raisonnement et les conclusions ne sont en rien modifiés si l’on se place dans le cas, plus simple à écrire, où ρ varie peu, car alors :
AASA gradDq ρρ−= (2.39)
Pour exprimer le critère de similitude Γ correspondant, on retrouve le même problème
qu’avec la diffusion de quantité de mouvement (§ 2.4.3.3.♦): deux possibilités se présentent, selon que la référence sera choisie dans le champ de concentration ou dans les gradients de concentration, c’est-à-dire dans les flux de masse.
♦ Avec référence aux concentrations Dans la première éventualité, on introduit à partir de (2.39) un scalaire de référence :
( )0A0A
0SA gradDq ρ= (2.40)
0AD est un coefficient de diffusion évalué dans des conditions de référence (T 0, p0,
etc.) à préciser. Si DA varie peu en fonction des paramètres de l’écoulement, on aura
évidemment A0A DD = , et 1DA =+ .
Le gradient de référence ( )0Agrad ρ , quant à lui, est déterminé par le choix de 0Aρ et
de L 0. En effet, en passant en variables réduites :

( ) ++ == A0
0A0
AA0A gradL
gradL
1grad ρρρρρ (2.41a)
Ensuite, ce gradient est lui-même décomposé selon les caractéristiques du champ
scalaire. Puisque ( )0A
AA
grad
gradgrad
ρ
ρρ =+ on a obligatoirement :
( )0
0A0
AL
gradρρ = (2.41b)
D’après (2.5) le critère de similitude, que nous noterons ΓAD , a pour expression :
0
0A0
A00A
00A
0SA
ADL
DV
1
V
q ρρρ
Γ ==
soit : 00
0A
ADLV
D=Γ (2.42)
On remarquera que ΓAD peut s’écrire aussi : 00
0
0
0A
ADLV
D νν
Γ = , où le dernier
groupement est égal à 1/Re. Quant au premier groupement, nous le retrouverons au § 2.5.1. sous le patronyme de nombre de Schmidt Sc :
0A
0
DSc
ν= (2.43)
L’expression courante du critère de similitude ΓAD est finalement :
ReSc
1AD =Γ (2.44)
♥ Avec référence aux gradients de concentration
Dans le second cas, on choisira pour 0SAq une densité de flux de référence au niveau
d’une paroi :
Ap0SA qq = densité de flux à la paroi
Selon (2.5) le critère de similitude, qui sera noté ΓAp pour le distinguer du précédent, s’écrira cette fois-ci :
00
A
ApAp
V
q
ρΓ = (2.45)
Pour la formulation courante de ce paramètre, le lecteur voudra bien se reporter au paragraphe 2.5.3.1.

♠ S’il n’y a pas de vitesse expérimentale de référence Cette situation, déjà envisagée au § 2.4.3.4., concerne ici la convection libre massique. Elle est analysée dans le chapitre 7 de PTC. 2.4.4.3. – ECRITURE ADIMENSIONNELLE DU BILAN DE MASSE La transposition de l’équation générale (2.6) au bilan de masse peut maintenant s’écrire : - avec référence aux concentrations :
++++ −= AIAIAA graddivReSc
1q)V(div ρΓρ (2.46a)
- avec référence aux flux de masse :
++++ −= SAApIAIAA qdivq)V(div ΓΓρ (2.46b)
où ApSASA q/qq =+
2.4.5. - Les critères de similitude relatifs aux sources d’énergie 2.4.5.1. – GRANDEURS ET RELATIONS DE BASE Comme on l’a expliqué au chapitre 1, le bilan d’enthalpie est beaucoup plus commode à utiliser que le bilan d’énergie. Pour établir les différents critères de similitude relatifs aux sources d’énergie, nous utiliserons donc la formulation enthalpique (1.52) en régime permanent :
( ) ( ) rdivTgraddivpgrad.VPVhdiv ϕλΦρ −+++= (2.47a)
dans laquelle les sources de volume sont P, Φ, pgrad.V , les sources de surface (flux de
diffusion) étant représentées par ( )Tgraddiv λ et rdivϕ .
Notons bien préalablement que les conclusions seraient identiques en partant de la forme (1.51) qui fait intervenir l’énergie interne e, puisque e et h ont la même dimension. Nous avons donc ici : C = ρ h ; C° = ρ° h° C+ = ρ+ h+ avec h+ = h / h° (2.47b) Pour la grandeur de référence h0, comme l’enthalpie est liée à la température, on pose tout naturellement :
00p
0 TCh = soit : 00p
00 TCC ρ= (2.47c)
En principe, 0pC est une chaleur massique de référence, évaluée dans des conditions de
température et de pression à préciser. Mais dans la majorité des cas, ce paramètre peut être considéré comme constant :
1C;CC pp0p == +
Quant à la température de référence, c’est en pratique un écart de température
caractéristique 0T∆ , dans la mesure où C0 ne représente pas une enthalpie totale, mais une différence entre deux états. Voyons maintenant quels nouveaux critères Γ vont apparaître dans l’équation adimensionnelle de bilan. 2.4.5.2. – SIMILITUDE VIS-A-VIS DES SOURCES VOLUMIQUES
♣ Critère relatif à la puissance thermique P Lorsqu’il existe, au sein du fluide, une source volumique de chaleur P = P(x, y, z, t) (dans les écoulements réactifs par exemple), on doit choisir pour celle-ci une valeur de référence P0. Alors :
00II Pq;Pq ==
Le critère de similitude (2.5) relatif à une source de volume est, rappelons-le :
00
00I
IVC
Lq=Γ
soit ici, en le notant ΓP :
00
p0
00
PVTC
LP
∆ρΓ = (2.48)
Ce terme peu employé est resté dans l’anonymat.
♦ Critère relatif à l’énergie de pression Dans l’équation (1.52), la source de volume correspondante est :
pgrad.VqI = dont la valeur de référence doit s’écrire :
0
000
IL
pVq = (2.49a)
avec 2000 )V(p ρ= , conformément à la convention usuelle (2.13a). Le nombre Γep relatif à cette source est le nombre d’Eckert Ec :

00
2000
00p
000
00I
ep LL
)V(V
VTC
1
VC
LqEc
ρ∆ρ
Γ ===
0
p
20
epTC
)V(Ec
∆Γ == (2.49b)
♥ Critère relatif au terme de dissipation Il s’agit maintenant de la fonction de dissipation (1.42) : jiij x/V ∂∂= τΦ .
De même que pour le bilan de quantité de mouvement (§.2.4.3.3♦, coefficients Γτ et Γν ), deux voies peuvent être empruntées ici pour exprimer le terme de source et sa valeur de référence. I. – Ou bien on écrit simplement :
x
VqI ∂
∂≈ τ
ce qui oblige à prendre comme grandeur de référence :
0
0000
IL
Vq τΦ == (2.50)
avec, comme dans (2.21) :
p0 ττ = (contrainte à la paroi).
La condition de similitude s’exprime alors au moyen du nombre sans dimension :
00
0
p00p
000
00I L
L
V
VTC
1
VC
Lq τ∆ρ
Γ τΦ ==
0
p0
p
TC ∆ρ
τΓ τΦ = (2.51a)
Il se trouve que ΓΦτ est le produit de deux critères de similitude qui nous sont déjà connus, à savoir le coefficient de frottement ½ Cf et le nombre d’Eckert Ec (parag. précédent), si bien qu’il n’a jamais bénéficié d’une identité propre. On écrit simplement :
EcC2
1f=τΦΓ (2.51b)
II. – Ou bien on décompose Φ :
j
i
i
j
j
i
j
iij x
V
x
V
x
V
x
V
∂∂
∂∂
+∂∂
=∂∂
= µτΦ
ce qui conduit au choix d’une autre référence, de même forme que Φ :
0
0
0
0000
IL
V
L
Vq µΦ == (2.52)

et donc à un autre critère de similitude (néanmoins équivalent au précédent) :
020
200
00p
0L
)L(
)V(
VTC
1 µ∆ρ
Γ νΦ =
00
p
00
LTC
V
∆νΓ νΦ = (2.53a)
Du côté de la terminologie, la situation est la même que pour le précédent critère. On vérifie facilement que ΓΦν est le quotient du nombre d’Eckert Ec par le nombre de Reynolds Re, et on se borne à écrire :
Re
Ec=νΦΓ (2.53b)
2.4.5.3. – SIMILITUDE VIS-A-VIS DES SOURCES SURFACIQUES On se souvient que dans l’équation d’énergie les sources de surface sont constituées par la diffusion thermique et le terme de rayonnement.
♣ Critère relatif à la diffusion thermique Le terme source est la densité de flux de chaleur ϕ (W. m - 2).
TgradqS λϕ −==
Une fois de plus, nous nous trouvons devant une alternative : mettre l’accent sur le flux thermique ou sur le champ de température. I. – Avec référence au flux de chaleur Dans la première éventualité, on est amené à choisir un flux de référence, habituellement sur une paroi, d’où la notation : ϕp
p0Sq ϕ= , flux thermique à la paroi
pS /q ϕϕ=+ (2.54)
On obtient immédiatement le critère correspondant, 000S VC/q=ϕΓ , qui est le
nombre de Stanton St , autrefois appelé dans la littérature francophone nombre de Margoulis :
00
p0
p
VTCSt
∆ρ
ϕΓϕ == (2.55)
II. – Avec référence au champ de température
Dans la seconde éventualité, on décompose l’expression de 0Sq , comme dans (2.25) ou
(2.41b) :
TgradqS λ−=
0
000
SL
Tq
∆λ= (2.56)
Le paramètre 0λ est une conductivité thermique de référence, évaluée dans des conditions conventionnelles. Le critère de similitude s’écrit donc cette fois-ci :
0
00
00p
000
0S
aL
T
VTC
1
VC
q ∆λ∆ρ
Γ ==
00
0
0Op
0
0
aLV
a
LVC==
ρλΓ (2.57a)
0a désignant la diffusivité thermique du fluide dans les conditions de référence. On reconnaît dans Γa l’inverse du nombre de Péclet Pe, d’où :
0
00
a a
LV1Pe ==
Γ (2.57b)
Ce nombre de Péclet est donc représentatif de la similitude. Cela nous rappelle quelque chose : le nombre de Reynolds Re (voir 2.26b), qui est lui aussi l’inverse du critère de similitude Γν .
♦ Critère relatif au terme de rayonnement Dans un milieu gris semi-transparent, isotrope et homogène, si le transfert de chaleur
est gouverné par deux températures de référence o1T et o
2T , la référence du terme radiatif peut s’approcher par :
4o2
4o1
2or
oS )T()T(nq −== σϕ (W/m2) (2.58)
où n est l’indice de réfraction du milieu (sans dimension), et σ la constante de Stefan-Boltzmann (W / m2.K 4). Le critère de similitude correspondant Γr est alors :
oop
o
4o2
4o1
2
oo
o
rVTC
)T()T(n
VC
q
∆ρσΓ −
== (2.59a)
où o2
o1
0 TTT −=∆ Lorsque l’écart des températures n’est pas trop grand, on peut adopter l’approximation linéaire :
3m
o4o2
4o1 TT4)T()T( ∆≈−
avec 2/)TT(T o2
o1m += .
Ceci donne une expression simplifiée du critère de similitude :
o
po
3m
2
rVC
Tn4
ρσΓ = (2.59b)
2.4.5.4. – CAS OÙ IL N’Y A PAS DE V0 EXPÉRIMENTAL En convection libre, on retrouve le problème déjà soulevé avec l’équation de quantité de mouvement (§ 2.4.3.4), la seule vitesse expérimentale que l’on puisse prendre pour référence, celle du fluide loin des parois, étant nulle. Nous avons vu que la difficulté était tournée en choisissant :
2/1000 )LTg(V ∆β=
Les termes Φ et pgrad.V sont habituellement négligeables en convection libre. Les sources concernées sont donc :
♣ La puissance thermique P Le critère ΓP devient :
( )
( ) 2/302/1p
0
2/100
PlT)g(C
LP
∆βρΓ = (2.60)
♦ La diffusion thermique Le critère Γa = 1/Pe = a0/V0L0 est remplacé par :
( ) ( ) 2/302/10
0
alLTg
a
∆βΓ = (2.61a)
Ce nombre sans dimension n’est pas utilisé. On rencontre parfois l’inverse de son carré (qui est donc également un critère de similitude) sous l’appellation de nombre de Boussinesq Bo :
20
300
2al )a(
)L(Tg1Bo
∆βΓ
== (2.61b)
Quant au nombre de Stanton, il se transforme en :
2/302/10
p0
pl
)T()Lg(C ∆βρ
ϕΓϕ = (2.62)
resté lui aussi inconnu et anonyme. Appelons-le nombre de Stanton modifié St*.
♥ Le rayonnement Les écarts de température étant relativement faibles en convection libre, on peut partir de la forme linéarisée (2.59b) du critère de similitude Γr, qui devient donc ici :
2/1oo
po
3m
2
rl)LTg(C
Tn4
∆βρσΓ = (2.63)
2.4.5.5. – ÉCRITURE ADIMENSIONNELLE DE L’ÉQUATION D’ÉNERGIE 1. – Base de départ Tout d’abord, dans le bilan d’énergie, le terme de transport se décompose ainsi :
( ) hgradVVdivhVhdiv ρρρ +=
En régime permanent : 0Vdiv =ρ . Sachant que h = ρ CpT, l’équation (2.47a) se réduit à :
( ) rp qdivTgraddivpgrad.VPTgrad.VC ++++= λΦρ (2.64)
Compte tenu des différents coefficients qui viennent d’être définis, et en adoptant des références au champ de température, la transposition adimensionnelle de (2.64) aura la forme générale :
( ) +++
++++++
−+
++=
rrlrala
epPlP
div)ou(Tgraddiv)ou(
pgrad.VP)ou(Tgrad.V
ϕΓΓλΓΓ
ΓΦΓΓΓ νΦ (2.65)
avec bien entendu T+ = T /∆T0 , 0P/PP =+ , Φ+ = Φ /Φ 0 (Φ 0 donnée par 2.52) et
0rr / ϕϕϕ =
+.
Compte tenu de la terminologie en usage pour les nombres sans dimension, nous donnons ci-dessous les écritures habituellement rencontrées dans la littérature. 2. – Formulation habituelle avec référence au champ de température
♣ Convection mixte ou forcée
( ) +++
++++++
−+
++=
rr
P
divTgraddivPe
1
pgrad.VEcRe
EcPTgrad.V
ϕΓλ
ΦΓ (2.66)
♦ Convection libre
( ) ++++++−+= rrl2/1Pl divTgraddiv
Bo
1PTgrad.V ϕΓλΓ (2.67)
3. – Avec référence au gradient de température
Le terme de diffusion de la chaleur ( )++ TgraddivPe
1 λ est remplacé par +
ϕdivSt ,
où p/ ϕϕϕ =+
(§ 2.4.5.3 ♣).
2.4.6. – Le critère de similitude relatif à l’équation d’état du fluide L’équation d’état du fluide n’est évidemment pas une relation de bilan ; il s’agit d’une loi phénoménologique de comportement. Mais comme elle est appelée dans certains cas à intervenir en complément aux bilans, il n’est pas inutile de la mettre également sous forme réduite, de manière à voir comment elle s’adapte aux exigences de la similitude. Nous ne considérons que le cas où l’équation d’état est celle du gaz parfait : p/ρ = rT (2.68a) En variables réduites, cela donne :
++
+= TTr
pp 00
0
ρρ (2.68b)
où la grandeur :
0T/TT =+ (2.68c)
est ici un rapport de deux températures absolues, à ne pas confondre avec un écart relatif ∆T+ comme dans (2.34a) (voir aussi § 2.4.5.1). Pour que la variable p+ soit la même que dans les équations de bilans, il faut prendre la même pression de référence (2.13a), c’est-à-dire :
2000 )V(p ρ= d’où l’on tire de (2.68b):
0
20
rT
)V(pT +
++ =
ρ (2.68c)
On voit donc apparaître un nouveau nombre sans dimension que nous noterons Γet :
0
20
etrT
)V(=Γ (2.69)
et l’équation d’état s’écrit sous forme adimensionnelle :
+
++ =
ρΓ p
T et (2.70)
Visiblement, on est en droit de considérer Γet comme un critère de similitude relatif au comportement thermodynamique du fluide en écoulement : dans deux expériences caractérisées par une même valeur de ce paramètre Γet , les solutions de l’équation d’état adimensionnée seront les mêmes. Cependant, le critère de similitude Γet (2.69) n’est pas utilisé sous cette forme. On écrit en effet :
( )
o
2o
etrT
V
γγΓ =
où γ est le coefficient de la loi isentropique pour le gaz considéré : γ = Cp / Cv. Sachant que la célérité du son dans un fluide à température T° a pour valeur :
oo rTc γ= (2.71)
on peut donc exprimer Γet sous la forme :
2
o
o
etc
V
= γΓ
Le rapport V°/c° est appelé nombre de Mach M, et l’on a :
2/1
eto
o
c
VM
==γ
Γ (2.72a)
d’où :
2et MγΓ = (2.72b)
Enfin, il va de soi – mais cela va encore mieux en le disant – que l’usage de l’équation d’état est incompatible avec l’hypothèse d’écoulement ou de fluide isochore. 2.4.7. – Bilans d’entropie et d’exergie En ce qui concerne la question – moins classique – des critères de similitude relatifs aux sources d’entropie et d’exergie, elle fait l’objet d’un paragraphe en annexe 2.A.3. 2.5. – PARAMÈTRES DE COUPLAGE ET AUTRES NOMBRES SANS DIMENSION 2.5.1. – Couplage entre des sources ne relevant pas des mêmes bilans Les sources de masse, de quantité de mouvement et d’énergie qui interviennent dans les relations de bilans ne sont pas forcément indépendantes les unes des autres, car chacun des fluides dont nous disposons, qu’il soit naturel ou artificiel, possède des propriétés mécaniques et thermiques bien spécifiques. Il se trouve que la similitude est un outil extrêmement intéressant pour mettre leurs couplages en évidence, puisqu’ils se traduisent alors par des relations de dépendance entre certains coefficients Γ, d’où va émerger une nouvelle famille de nombres sans dimension, les paramètres de couplage. L’examen des critères de similitude relatifs aux différentes sources recensées et à la loi d’état (cf. tableau 4 en annexe) fait apparaître les paramètres de couplage les plus importants. 2.5.1.1. – COUPLAGE ENTRE TENSION VISQUEUSE ET DIFFUSION DE MATIÈRE Ces deux sources jouent le même rôle dans les équations (2.46a) et (2.31). Les critères de similitude Γ concernés sont :
oo
oA
ADLV
D=Γ (2.42) et oo
o
LV
νΓν = (2.26)
On observe que le rapport Γν /ΓAD ne dépend que des propriétés du fluide dans les conditions de référence considérées. C’est le nombre de Schmidt Sc, déjà introduit dans les formules (2.43) et (2.44) :
oA
o
AD DSc
νΓΓν == (2.73)
2.5.1.2. – COUPLAGE ENTRE DIFFUSION THERMIQUE ET DIFFUSION DE MATIÈRE C’est maintenant dans les équations (2.46a) et (2.65) que ces deux sources jouent le même rôle. Les conditions de similitude s’expriment ici au moyen des coefficients :
oo
oA
ADLV
D=Γ (2.42) et oo
o
aLV
a=Γ (2.57)
On découvre alors un autre paramètre de couplage, lui aussi caractéristique du fluide dans les conditions de référence, appelé nombre de Lewis Le :
oA
o
AD
a
D
aLe ==
ΓΓ
(2.74)
2.5.1.3. – COUPLAGE ENTRE TENSION VISQUEUSE ET DIFFUSION THERMIQUE Il existe enfin un troisième terme de couplage, analogue aux deux précédents, qui relie les propriétés diffusives du fluide vis-à-vis de la quantité de mouvement et de la chaleur. Il concerne Γν (= 1/Re) et Γa ( = 1/Pe). On le dénomme nombre de Prandtl et on le note : Pr.
Re
PePr
a==
ΓΓν (2.75a)
soit :
o
o
aPr
ν= (2.75b)
De ce fait, on écrit souvent le nombre de Péclet sous la forme : Pe = Re Pr (2.76) On notera que la situation est la même en convection libre, où le rapport des paramètres Γν l (2.29) et Γal (2.61) est aussi égal à ν °/ a°. Enfin, les trois nombres Sc, Le et Pr sont liés par la relation : Sc = Le Pr (2.77) 2.5.1.4. – COUPLAGE ENTRE TENSION VISQUEUSE ET DISSIPATION VISQUEUSE Nous avons laissé cet exemple pour la fin car il présente un caractère différent des précédents. Les critères Γ impliqués sont ici ΓΦν et Γν (2.53, 2.26) (ou ΓΦτ et Γτ), présents dans les équations (2.31) et (2.65) :
oo
o
oop
oo
LV,
LTC
V νΓ∆
νΓ ννΦ ==
Ecrivons leur rapport. On retrouve le nombre d’Eckert (2.49b) :
EcTC
)V(epo
p
2o
=== Γ∆Γ
Γν
νΦ (2.78)
On constate donc que le rapport de ΓΦν à Γν n’est autre que le critère de similitude Γep relatif à l’énergie de pression. Nous avons affaire ici à un nombre sans dimension qui est à la fois un critère de similitude et un paramètre de couplage, mais qui n’est pas caractéristique du fluide utilisé. Bien évidemment, on aboutit à la même conclusion en comparant ΓΦτ et Γτ (2.51, 2.22) : ΓΦτ / Γτ = Γep = Ec (2.79) 2.5.1.5. – REMARQUE Les nombres de Schmidt, Lewis et Prandtl interviennent comme éléments de compatibilité entre certains critères de similitude, puisque ce sont des caractéristiques du fluide concerné. Concrètement, cela signifie que, lorsqu’on étudie un écoulement, on ne peut pas fixer arbitrairement deux critères comme Γν et Γa si la nature du fluide est imposée : il faut aussi respecter la relation Γν / Γa = Pr. D’autre part, comme on vient de le voir, ces trois nombres permettent de comparer les aptitudes d’un fluide à diffuser la masse, la quantité de mouvement ou la chaleur. Les valeurs numériques de Sc, Le, Pr et leurs conséquences physiques sur les transferts sont présentées et discutées dans PTC. 2.5.2. – Comparaison entre sources dans un même bilan 2.5.2.1. – RETOUR SUR LE SENS DES CRITÈRES DE SIMILITUDE Revenons sur la définition (2.5) des critères de similitude et sur le raisonnement qui l’a précédée. En dehors de leur signification vis-à-vis de la similitude, leur contenu physique est clair :
fluidelepartransportéréférencedeflux
sourceladeréférencedeflux=Γ (2.80a)
Une illustration très parlante nous en est donnée par le nombre de Stanton (2.55):
transportéchaleurdeflux
paroilaàchaleurdeflux
VTCSt
00p
0
p ===∆ρ
ϕΓϕ (2.80b)

Intéressons-nous à deux sources 1 et 2 dans un même bilan, et aux critères de similitude associés, Γ1 et Γ2. Le flux de référence transporté par le fluide est évidemment le même pour les deux. On a donc :
2sourceladeréférencedeflux
1sourceladeréférencedeflux
2
1 =ΓΓ
(2.81)
Ainsi, le rapport Γ1 /Γ2 permet de comparer l’importance de deux sources : il indique l’ordre de grandeur moyen de leur rapport. Si la source 1 est négligeable, 0/ 21 →ΓΓ ; si
c’est la source 2 qui est négligeable, ∞→21 / ΓΓ . Cette constatation élémentaire va maintenant être appliquée à quelques cas particuliers. 2.5.2.2. – CONVECTION MIXTE : FORCES DE FLOTTABILITÉ ET FORCES DE VISCOSITÉ En convection mixte (équation 2.34b), les critères relatifs aux forces de flottabilité et de viscosité sont respectivement :
Re
1;Ri == νβ ΓΓ
Leur rapport est le coefficient de poussée thermique RiRe :
ReRi=ν
β
ΓΓ
(2.82)
En convection forcée, 0ReRi → , et en convection naturelle ∞→ReRi : ce ne sont que des cas limites de la convection mixte. Cependant, un choix conventionnel mais judicieux de valeurs de RiRe peut permettre de fixer des seuils entre convection forcée dominante, convection mixte et convection naturelle dominante, ce qui revêt une certaine importance pratique. 2.5.2.3. – CONVECTION MIXTE OU FORCÉE : DISSIPATION VISQUEUSE ET FLUX DE CHALEUR Les sources appartiennent maintenant au bilan d’énergie (2.66), et les critères Γ concernés sont :
Pe
1;
Re
Eca == ΓΓ νΦ
Sachant que le rapport Pe/Re est le nombre de Prandtl (2.75), il vient :
EcPra
=Γ
Γ νΦ (2.83)
Le groupement PrEc est parfois appelé nombre de Brinkman Br. Il est nul quand la dissipation visqueuse est négligeable. 2.5.2.4. – MILIEUX SEMI-TRANSPARENTS : DIFFUSION THERMIQUE ET RAYONNEMENT Une comparaison est également possible entre le flux radiatif et le flux conductif, représentés par les critères de similitude Γr (2.59) et Γa = 1/Pe (2.57).
Dans le cas linéarisé :
3m
2
op
o
oop
o
0
rr
a
Tn4
VC
LVCPe
1
σ
ρ
ρλ
ΓΓΓ
==
o3
m2
o
r
a
LTn4 σλ
ΓΓ
= (2.84)
L’expression ci-dessus est valable aussi bien en convection forcée ou mixte qu’en convection naturelle puisque la vitesse de référence V° n’y figure pas. En outre, si l’on considère que la longueur de référence L° de l’écoulement est égale à 1/K (K : coefficient d’absorption du milieu, de dimension m – 1), on retrouve le nombre de
Stark : 3m
2o Tn4/K σλ .
2.5.3. – Autres nombres sans dimension usuels Il doit être bien évident que les différents concepts mis en œuvre en thermique ne se sont pas toujours dégagés d’une façon linéaire et cohérente (comme dans beaucoup d’autres disciplines), si bien que l’Histoire nous a légué des nombres sans dimension souvent différents des critères de similitude définis par les coefficients Γ. Pire encore, certains d’entre eux ne sont pas du tout des critères de similitude ! Voici les plus utilisés. 2.5.3.1. – DIFFUSION MASSIQUE : RÉFÉRENCE AUX GRADIENTS DE CONCENTRATION
Nous avons signalé dans plusieurs précédents paragraphes (en particulier 2.4.3.3.♦) que certains critères de similitude peuvent être construits à partir de valeurs de référence prises soit dans le champ scalaire, soit dans le champ des gradients. C’est le cas en particulier pour la diffusion massique.
Il se trouve que le critère ooAApAp V/q ρΓ = (2.45) relatif à la diffusion massique
n’est généralement pas utilisé sous cette forme (rappelons que Apq est la densité de flux de
masse à la paroi). En effet, on introduit un coefficient de convection massique à la paroi par la relation : )(kq AApAp ∞−= ρρ (2.85)
dans laquelle : ρAp = masse volumique du constituant A à la paroi ρA∞ = masse volumique caractéristique de A loin de la paroi qAp s’exprime en kg/m2.s, et k en m/s (homogène à une vitesse) On écrit alors les grandeurs adimensionnelles de l’équation de bilan (2.46b) en choisissant comme valeur de référence pour ρ :
∞−= AApoA ρρρ (2.86)
de telle sorte que ce terme disparaisse dans ΓAp, qui devient :

oAp
V
k=Γ (2.87)
Mais traditionnellement, on présente ΓAp de manière encore différente, en faisant apparaître un nouveau nombre sans dimension :
oo
oA
oA
o
oApVL
D
D
Lk
V
k ==Γ
Il s’agit de oA
o D/Lk , appelé nombre de Sherwood Sh :
oA
o
D
LkSh= (2.88a)
Compte tenu de (2.44) qui définit le critère de similitude ΓAD par référence au champ de concentration, le critère ΓAp s’exprime donc en fonction de Sh, Sc et Re :
ReSc
ShAp =Γ (2.88b)
et l’on voit bien que Sh n’est pas un critère de similitude car c’est le groupement Sh/ScRe qui joue ce rôle. 2.5.3.2. – DIFFUSION THERMIQUE : RÉFÉRENCE AU CHAMP DE TEMPÉRATURE Il est très commode d’exprimer le flux à la paroi ϕ p en introduisant un coefficient de convection thermique h (appelé aussi coefficient d’échange), homogène à une conductance thermique (et donc à l’inverse d’une résistance), défini par l’expression : )TT(h pp ∞−=ϕ (W/m2.K) (2.89)
où Tp = température du fluide à la paroi, T∞ = température caractéristique du fluide loin de la paroi. On choisit pour la définition des grandeurs adimensionnelles dans l’équation de bilan un écart de référence ∆T° qui permette d’éliminer la température du terme Γϕ , à savoir :
∞−= TTT po∆ (2.90)
Dans ces conditions, on a :
o
po VC
hSt
ρΓϕ == (2.91a)
Une coutume bien ancrée est de ne pas conserver St sous cette forme, mais de l’écrire :
oo
po
o
o
o
LVC
LhSt
ρλ
λ= (2.91b)
où l’on reconnaît le nombre de Péclet (2.57b) :
ooooop
oo LV/aLVC/Pe/1 == ρλ
ainsi qu’un nouveau nombre sans dimension qui est le nombre de Nusselt Nu :
o
oLhNu
λ= (2.92a)
La décomposition (2.91b) de St s’écrit donc encore (cf. 2.76) : PrReStPeStNu == (2.92b) et donc aussi (cf. 2.55, 2.57) : Nu =Γϕ /Γa (2.92c) Autrement dit, Nu caractérise le rapport entre la « conductance convective » (h) et la conductance de référence du fluide (λ/L) (ou entre les résistances thermiques correspondantes, qui en sont les inverses). L’introduction du coefficient de convection h dans la théorie n’est pas une nécessité absolue, et ne fait que déplacer le problème en remplaçant le calcul de ϕ p par un calcul de h. En outre, h se révèle peu adapté aux régimes instationnaires. Cependant, son avantage est de permettre la définition d’une « résistance thermique de convection » 1/h qui s’additionne aux autres résistances thermiques lorsqu’il y a transfert de chaleur à travers une paroi. Enfin, ce coefficient h est tellement entré dans les mœurs qu’il est maintenant bien difficile de s’en passer.
Il en va tout autrement du nombre de Nusselt, qui fait visiblement double emploi avec celui de Stanton, et qui n’est pas un critère de similitude (au vu de 2.92c, c’est le rapport de deux critères de similitude, ce qui n’est pas la même chose). Ainsi, deux écoulements à même nombre de Nusselt peuvent fort bien avoir des nombres de Stanton différents, c’est-à-dire ne pas être en similitude vis-à-vis de la diffusion thermique. Il y a ici l’amorce d’une identification périlleuse entre nombre sans dimension et critère de similitude. L’emploi préférentiel du nombre de Nusselt par rapport au nombre de Stanton recèle donc quelques dangers, et, par sécurité, il vaudrait mieux l’éviter. 2.5.3.3. – DIFFUSION THERMIQUE : CAS DE LA CONVECTION LIBRE En convection libre, où il n’y a plus de V° expérimental de référence (§ 2.4.5.4), on a coutume d’utiliser à la place du critère de similitude Γal le nombre de Rayleigh Ra défini par :
Pr
1
a
)L(TgRa
2al
oo
3oo
Γν∆β == (2.93a)
de telle sorte que :
2/1al Pr)Ra( −=Γ (2.93b)
La justification de cette définition réside dans le désir de conserver entre les nombres de Rayleigh et de Grashof, caractéristiques de la convection libre, la même relation de couplage qu’entre les nombres de Péclet et de Reynolds, qui leur correspondent en convection mixte ou forcée, à savoir :
PrGr
Ra = (2.93c)
relation que l’on retrouve aisément à partir de (2.29b) et (2.93a), et qui est analogue à (2.75a).
De même, à la place de Γϕ l (2.62), on se sert également du nombre de Nusselt, ces grandeurs étant liées par la relation :
2/1all
Pr)Ra(
NuNu == ΓΓϕ (2.94)
avec toujours (cf. 2.92a) : Nu = hL°/λ° Il est bien clair que ni Ra, ni Nu ne sont des critères de similitude. Leur utilisation est évidemment sans conséquence si l’on veut simplement exprimer un flux adimensionné ; mais une similitude basée sur ces nombres peut se révéler biaisée, et il faut être extrêmement prudent à cet égard. Pour éviter toute ambiguïté, un emploi systématique de Γϕ a et Γϕ l serait certainement souhaitable. 2.6. – SIMILITUDE ET ADIMENSIONNEMENT : LE BON USAG E 2.6.1. – Les diverses significations des nombres sans dimension
♣ Au vu de ce qui précède, on peut regrouper les nombres sans dimension en trois classes selon leur signification : - les critères de similitude - les paramètres de couplage, qui sont des caractéristiques thermophysiques des milieux fluides - le vulgus pecum, où se retrouvent tous ceux qui n’appartiennent pas aux deux premières catégories.
♦ Pour ce qui est des critères de similitude Γ, rappelons- leur sens premier (cf. 2.80a) :
fluidelepartransportéréférencedeflux
sourceladeréférencedeflux=Γ
Les choses sont claires également pour les paramètres de couplage (Sc, Le, Pr), chacun d’eux étant le rapport de deux coefficients de diffusion.
♥ On trouve pourtant d’autres interprétations dans la littérature. C’est que les nombres sans dimension sont un peu ce qu’on appelle dans le langage familier des auberges espagnoles, où le visiteur trouve ce qu’il apporte lui-même. En effet, n’importe quel nombre sans dimension peut être considéré comme le rapport de deux longueurs, ou de deux vitesses, ou de deux intervalles de temps, etc. selon le souhait de chacun. Ces diverses interprétations ne sont pas sans intérêt, car elles peuvent apporter un éclairage particulier sur tel ou tel aspect des choses, mais dans la théorie de la similitude elles ne jouent qu’un rôle marginal.

♠ Voici quelques exemples d’interprétations multiples. 1. – Le nombre de Strouhal
C’est le critère de similitude temporelle (2.9b) : oo
o
tVt
LS == Γ , qui s’écrit aussi :
a) ooo
o
t
't
t
1
V
LS == , où t’ = L°/V° est le temps nécessaire à l’écoulement pour
parcourir la longueur de référence.
b) ooo
o
V
'V
V
1
t
LS == , où V’ = L°/t° est une vitesse caractéristique du phénomène
c) 'L
LS
o
= , où L’ = t°V° représente le déplacement du fluide pendant
le temps de référence t°. 2. – Le nombre de Reynolds C’est le critère de similitude (2.26) relatif aux forces de viscosité dans le bilan de quantité de mouvement.
o
ooLV1Re
νΓν==
On a le choix entre trois décompositions.
a) 'L
LL
VRe
oo
o
o
==ν
, où L’ = ν°/V° est une longueur caractéristique de la
diffusion visqueuse
b) 'V
VLVRe
o
o
oo ==
ν, où V’ = ν°/L° est une « vitesse de diffusion » de la
quantité de mouvement
c) 't
tL
L
VRe
o
o
2o
o
o
==ν
, où t° et t’ sont respectivement le temps de parcours de
la distance L° par le fluide, et un « temps de diffusion visqueuse » sur la même distance. 3. – Le nombre de Richardson C’est le critère de similitude (2.17) relatif aux forces de flottabilité.
2o
ooo
)V(
LTgRi
∆βΓβ ==
On a encore le choix entre trois décompositions.
a) 'L
LL
)V(
TgRi
oo
2o
oo
== ∆β, où L’ est homogène à une longueur
b) 2o
2
)V(
)'V(Ri = , où V’ est homogène à une vitesse
c) 't
t
V
L
V
TgRi
o
o
o
o
oo
== ∆β , où t° est le temps de parcours de L° par le fluide, t’
étant homogène à un temps.
On touche ici les limites de la méthode, car la signification physique de L’, V’ et t’ dans la décomposition de Ri n’est pas vraiment évidente. Attention donc à ne pas trop systématiser ce genre d’analyse. 2.6.2. – Intérêt de la similitude L’intérêt majeur de la similitude est qu’elle permet de s’affranchir de certaines contraintes expérimentales, et de faciliter la comparaison entre des résultats d’expériences obtenus dans des conditions différentes. En effet, la similitude complète de deux modèles expérimentaux peut être en principe assurée pourvu que chaque critère Γ ait la même valeur dans les deux modèles. Simultanément, cette méthode facilite également le traitement de phénomènes physiques complexes, en diminuant le nombre de paramètres mis en jeu et en associant un nombre sans dimension à chaque terme de source dans les équations de bilans. Corrélativement, elle permet de remplacer dans certains cas les équations de bilans par des relations phénoménologiques, plus simples, entre certains paramètres sans dimension. Par exemple, on peut établir des lois de la forme : St = f(Re, Pr) pour le transfert de chaleur entre une paroi et un fluide. 2.6.3. – Similitude partielle et ordres de grandeur Il faut pourtant éviter de parer la similitude de toutes les vertus. En particulier, on prendra bien garde au fait qu’il est habituellement impossible de satisfaire simultanément toutes les conditions de similitude. Il est donc important de savoir estimer les ordres de grandeur des différentes sources, pour limiter la similitude à une (ou exceptionnellement deux) source dominante. C’est ce qu’on appelle respecter une similitude partielle, et c’est la démarche qui a d’ailleurs été suivie, sans le dire, pour établir les critères de similitude relatifs aux forces de volume (§ 2.3.4.2). Quant à cette estimation des ordres de grandeur, qui conditionne la validité d’une similitude partielle, elle peut s’appuyer soit sur des données expérimentales, soit sur une résolution préalable des équations écrites avec des grandeurs dimensionnées, seules à même de donner des informations indiscutables (voir ci-dessous). 2.6.4. – Mises en garde
Caressez un cercle, il deviendra vicieux. EUGÈNE IONESCO
En fin de compte, une certaine distanciation paraît nécessaire vis-à-vis de la similitude (et plus encore vis-à-vis d’un adimensionnement trop systématique), car un usage mal
maîtrisé des nombres sans dimension recèle des risques et peut conduire à des dérives dommageables.
♣ De ce qui précède, il ressort d’abord une évidence : tous les critères de similitude sont des nombres sans dimension, mais tous les nombres sans dimension ne sont pas des critères de similitude. C’est donc une erreur (déjà signalée § 2.5.3.3) d’asseoir une similitude sur les nombres de Nusselt ou de Rayleigh par exemple.
♦ D’autre part, les données expérimentales ou numériques sont souvent présentées sous la forme de relations entre plusieurs nombres sans dimension Nj , du type : N1 = f(N2 , N3 ,…) La question légitime qui surgit alors est celle-ci: Peut-on dire qu’une telle relation exprime une loi physique ? Sans verser dans la philosophie des sciences, on doit bien reconnaître que cette interrogation est d’une fausse simplicité, et que la réponse est, selon les points de vue : « oui », « oui si », « oui mais », « non »… !! - oui, a priori, dans l’espace des grandeurs adimensionnées E+(x+, y+,…C+). Le problème est que personne ne vit dans un tel espace, surtout pas l’ingénieur, qui doit travailler dans l’espace physique E(x, y,…C) avec des mètres, des joules, des secondes… - oui si la loi N1 = f(N2 , N3…) relie des paramètres indépendants, c'est-à-dire si les Nj sont des vecteurs propres de l’espace E+, ce qui n’est généralement pas le cas. Ainsi, dans une relation comme St = f(Ri, Re, Pr), plusieurs grandeurs physiques (la vitesse, la viscosité…) figurent simultanément dans deux ou trois des nombres sans dimension concernés. Si bien que faire varier l’un d’eux indépendamment des autres est une opération qui laisse un peu perplexe, même si le résultat est ensuite d’une apparence plaisante. - non, a priori dans l’espace physique réel. Il n’y a aucune raison pour qu’un processus conserve sa représentation en passant de l’espace E+ à l’espace E. D’ailleurs, on a parfois des surprises quand on revient aux relations entre grandeurs dimensionnées.
♥ Une autre catégorie d’interprétations incorrectes provient de la combinaison, dans la même formule, de grandeurs adimensionnées avec d’autres qui ne le sont pas, si des paramètres communs prennent place à la fois dans les unes et dans les autres. Ce mélange conduit alors à des apparences fallacieuses (cf. Ch. 4 et 7).
♠ Pour conclure sur une recommandation, disons qu’il y a un certain danger à se reposer sur un usage trop exclusif des nombres sans dimension, qui risque de masquer la réalité physique et la nature des mécanismes mis en jeu – usage qui risque aussi de faire perdre de vue la notion d’échelle des phénomènes. Dans n’importe quelle étude, il est donc recommandé de s’extraire le plus tôt possible du monde sans dimension pour revenir sur terre avec les grandeurs physiques habituelles, ce qui est de toute façon indispensable pour conclure le travail.
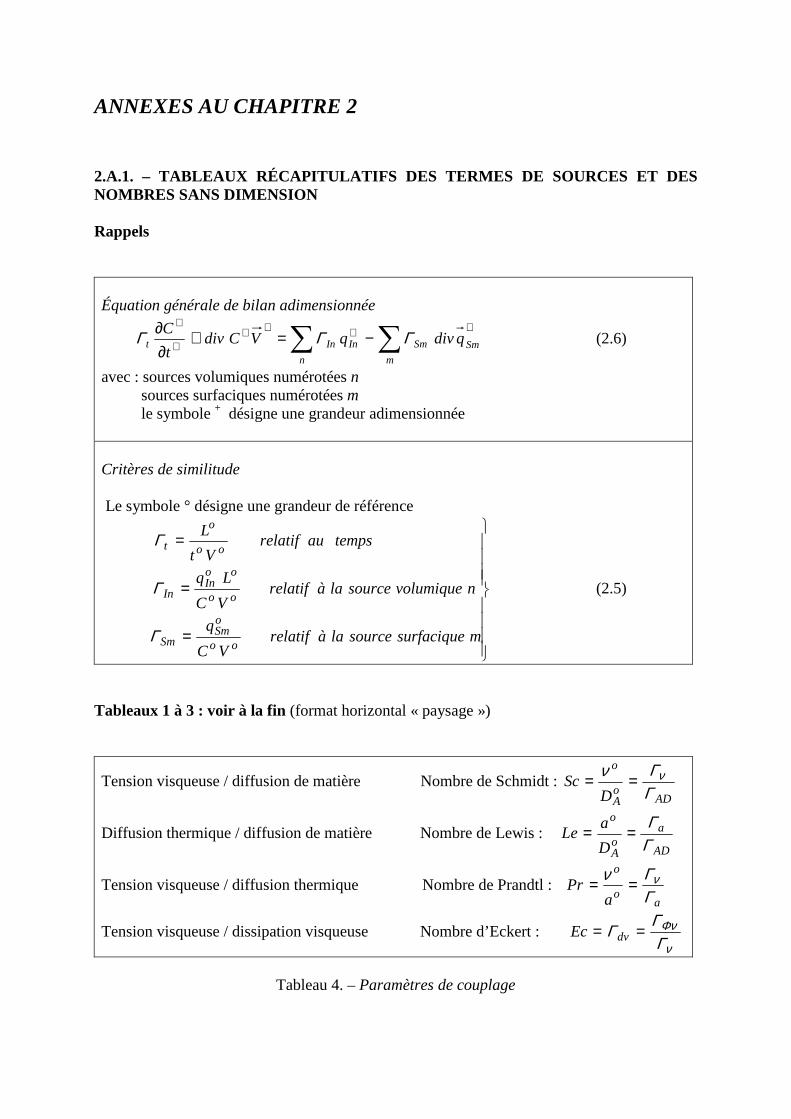
ANNEXES AU CHAPITRE 2 2.A.1. – TABLEAUX RÉCAPITULATIFS DES TERMES DE SOUR CES ET DES NOMBRES SANS DIMENSION Rappels Équation générale de bilan adimensionnée
∑∑++++
+
+−=+
∂∂
m
SmSm
n
InInt qdivqVCdivt
C ΓΓΓ (2.6)
avec : sources volumiques numérotées n sources surfaciques numérotées m le symbole + désigne une grandeur adimensionnée Critères de similitude Le symbole ° désigne une grandeur de référence
=
=
=
msurfaciquesourcelaàrelatifVC
q
nvolumiquesourcelaàrelatifVC
Lq
tempsaurelatifVt
L
oo
oSm
Sm
oo
ooIn
In
oo
o
t
Γ
Γ
Γ
(2.5)
Tableaux 1 à 3 : voir à la fin (format horizontal « paysage »)
Tension visqueuse / diffusion de matière Nombre de Schmidt : AD
oA
o
DSc
ΓΓν ν==
Diffusion thermique / diffusion de matière Nombre de Lewis : AD
aoA
o
D
aLe
ΓΓ
==
Tension visqueuse / diffusion thermique Nombre de Prandtl : a
o
o
aPr
ΓΓν ν==
Tension visqueuse / dissipation visqueuse Nombre d’Eckert : ν
νΦΓ
ΓΓ == dvEc
Tableau 4. – Paramètres de couplage
2.A.2 – SUR L’ANALYSE DIMENSIONNELLE ET L’ANALYSE D ’ÉCHELLE
Au sein d’une même foi, une coutume différente ne nuit pas à la sainte église.
Lettre du pape Grégoire le Grand à l’évêque Léandre de Séville (fin du VIème siècle)
Outre la méthode des critères de similitude, il existe deux autres cadres logiques pour élaborer des nombres sans dimension : l’analyse dimensionnelle et l’analyse d’échelle.
♣ L’analyse dimensionnelle est une approche mathématique du problème, basée sur le théorème de Vaschy-Buckingham, qui vise à établir une méthode systématique pour produire des combinaisons adimensionnelles non redondantes. Elle a eu son heure de gloire au milieu du 20ème siècle, grâce en particulier aux physiciens soviétiques comme Lev Landau ou Leonid Sedov. Mais sa capacité opérationnelle est relativement limitée. D’une part, on peut souvent retrouver ses conclusions par le biais d’une approche phénoménologique. Mais surtout, elle ne donne de renseignements ni sur la forme des lois, ni sur les ordres de grandeur relatifs des différents termes : elle n’est donc guère utile pour établir les conditions d’une similitude partielle, opération essentielle à l’ingénieur. Enfin, son apport à l’interprétation physique des phénomènes est modeste : elle ne permet pas, par exemple, d’introduire le concept de « critère de similitude relatif à une source donnée », ou encore d’éclairer la différence de contenu sémantique entre le nombre de Reynolds et le coefficient de frottement. Son intervention ne s’impose en fait que dans des cas très spécifiques, qui sortent du cadre de cet ouvrage.
♦ Totalement différente dans son esprit, l’analyse d’échelle est une approche d’ingénieur. Mise en forme tout particulièrement par A. Béjan, elle a pour objet d’établir les ordres de grandeur des différents termes dans les équations de bilans, ce qui donne naissance, par un jeu de comparaisons, aux principaux nombres sans dimension classiques. Elle permet aussi de caractériser les paramètres de couplage entre sources (Pr, Le, Sc). La méthode des critères de similitude, amorcée par A. Léontiev, et systématisée dans le présent chapitre, réunit les points positifs des deux techniques précédentes, mais elle va un cran plus loin, en spécifiant sans ambiguïté les nombres sans dimension qui sont des critères de similitude, et en éclairant les rapports entre sources, y compris au sein d’un même bilan. 2.A.3. – CRITÈRES DE SIMILITUDE RELATIFS AUX BILANS D’ENTROPIE ET D’EXERGIE
♣ Nous avons montré dans le paragraphe 2.3 qu’un ensemble de critères de similitude est associé à chaque relation de bilan. Qu’en est-il avec le bilan d’entropie ?

Il faut tout d’abord convenir de la référence s° (entropie massique), que l’on peut logiquement écrire comme le quotient d’une énergie interne (ou d’une enthalpie) par une température absolue T° :
o
oo
T
hs =
soit, d’après (2.47c) :
o
op
oooo
o
opo
T
TCsC;
T
TCs
∆ρρ
∆===
d’où l’entropie adimensionnelle :
os
ss =+
Appliquons ceci à un bilan d’entropie (1.74) abrégé, dans lequel on ne conserve que la dissipation et la diffusion thermique :
( )
++= TgradT
divTgradTT
)Vs(div2
2
λλΦρ
- Critère de similitude relatif à la dissipation (source volumique)
La référence oIq est ici, d’après (2.52 :
2
o
oo
oo
ooI
L
V
T
1
Tq
== µΦ
Le critère de similitude est donné par (2.5) :
oo
po
oo
oo
ooI
ILTC
V
VC
Lq
∆ρµΓ ==
soit, en revenant à (2.53) :
Re
EcI == νΦΓΓ
Ce critère de similitude est donc le même que dans le bilan d’enthalpie - Critère de similitude relatif à la production d’entropie par conduction thermique (source volumique)
Le terme concerné est : 22 T/)Tgrad(λ , d’où la référence :
2
o
o
2o
ooI
L
T
)T(q
= ∆λ
Appelons Γλ s le critère correspondant :
oo
po
o
o
o
oo
ooI
sLVCT
T
VC
Lq
ρλ∆Γλ ==
Pe
1
T
To
o
s∆Γλ =
Nous sommes ici en présence d’un nouveau critère de similitude, qui combine le nombre de Péclet avec un niveau relatif de température. Ceci est important car la production d’entropie due à la conduction thermique est souvent dominante par rapport aux autres sources.

- Critère de similitude relatif au flux d’entropie (source surfacique)
Il s’agit maintenant du terme : SqdivTgradT
div −=
λ, dont la référence est :
o
o
o
ooS
L
T
Tq
∆λ=
Le critère de similitude pour une source surfacique est de la forme : oooSS VC/q=Γ .
Après simplification, il reste :
Pe
1
LVC oop
o
o
S ==ρ
λΓ
Ce critère est le même que pour le flux de chaleur dans le bilan d’enthalpie. Dans l’équation adimensionnée d’entropie, il est naturel de conserver la température
oT/TT ∆=+ (voir 2.34a et 2.65). Sachant que sgrad.V)Vs(div =ρ du fait que 0Vdiv = , il vient :
( )
+
+= +
+
++
+
+
+
+++
TgradT
divPe
1Tgrad
TPe
1
T
T
TRe
Ecsgrad.V
2
2o
o λλ∆Φ
♦ Les conclusions sont analogues quand on passe au bilan d’exergie. Mais là, le raisonnement est un peu plus délicat, et on obtient absolument n’importe quoi si on ne s’astreint pas à une démarche rigoureuse et cohérente. 1. Maintenant, donc, nous avons : C = ρ ex = ρ (h - Te s) (relation 1.78a) où Te est la température absolue à l’extérieur du système. La première chose à faire est d’établir la valeur de référence C°, en n’oubliant pas que l’on doit pouvoir écrire :
oC
CC =+
C+ étant la grandeur C adimensionnée. Détaillons le calcul :
)ssTThh(CCC oe
oooo +++++ −== ∆ρρ
d’où, après ce qui a été dit au bilan d’entropie :
)sCTThTC(C peoo
po ++++ −= ∆∆ρρ
)sTh(.TCC eo
po ++++ −= ρ∆ρ
On voit dans cette dernière expression apparaitre +++++++ =−= ex)sTh(C e ρρ . Il
est donc naturel d’adopter pour C° :
op
oo TCC ∆ρ=
c’est-à-dire la même référence que pour l’enthalpie.

2. Les sources d’exergie sont répertoriées dans l’équation (1.78b). Prenons pour commencer la source volumique :
−=T
T1q e
I Φ
De même que précédemment, on doit avoir :
+= IoII qqq
et aussi :.
+
+++
+
+++ −
=−
=T
TT
TT
TTTTq eo
oe
ooo
I ΦΦ∆
∆∆ΦΦ
Il est logique de prendre, comme dans (2.52) :
2
o
oooo
IL
Vq
== µΦ
Le critère de similitude correspondant s’écrit :
oo
po
o2
o
oo
oo
ooI
VTC
L
L
V
VC
Lq
∆ρµΓ
==
Re
Ec
LTC
Voo
p
oo
=== νΦΓ∆
νΓ
On retrouve le même critère de similitude que dans les bilans d’énergie et d’entropie, relativement à la dissipation Φ.
3. Une autre source volumique d’exergie, à savoir 22e )Tgrad(
T
Tλ , est due au flux de
chaleur conductif. Dans ce cas :
2
o
o
2oeoo
IL
T
T
Tq
= ∆λ et
oo
ooI
IVC
Lq=Γ
Alors, en remplaçant oIq et C° :
oo
po
o
2oe
o
ILVCT
TT
ρλ∆Γ =
Le choix de Te comme température de référence T° semble naturel : Te = T°. Cela donne, après simplification :
so
o
oop
o
o
o
o
I Pe
1
T
T
LVCT
TλΓ∆
ρλ∆Γ ===
Pour la même nature de source, le critère de similitude est le même que dans le bilan
d’entropie (§ ♣ précédent).
4. Avec le flux d’exergie (source surfacique)
− TgradT
T1div eλ , on retombe sur un
critère de similitude égal à 1/Pe (le lecteur fera le calcul lui-même).

♥ En conclusion, pour les sources communes (dissipation, flux surfacique), les critères de similitude sont les mêmes avec l’entropie ou l’exergie qu’avec l’enthalpie. Pour les sources spécifiques aux bilans d’entropie et d’exergie (dues au flux conductif), le critère de similitude
1/Pe doit être corrigé relativement au niveau de température absolue, et devient : Pe
1
T
To
o∆.
2.A.4. – GRANDEURS GÉOMÉTRIQUES DE RÉFÉRENCE DANS UN BILAN INTÉGRAL Dans le paragraphe 2.3, nous avons introduit les critères de similitude en adimensionnant l’équation de bilan local pour une grandeur extensive C. Que se passerait-il si l’on adaptait le raisonnement à l’équation de bilan intégral sur un domaine , de frontière ? En régime permanent, l’équation (1.22) s’écrit :
∫∫∫ −=S
SD
IS
dSn.qdqdSn.VC τ
Pour toute grandeur X figurant dans l’équation, , on choisit une valeur de référence X°, et on pose X+ = X / X°. A priori, on doit faire intervenir ici deux grandeurs de référence géométriques : ° (surface de référence) et ° (volume de référence). Le domaine d’intégration n’est évidemment pas modifié par le changement de variables, et l’équation de bilan adimensionnée est maintenant :
∫∫ ++++ =D
IoI
S
ooo qqdSSn.VVCC ° dτ + ∫ ++−
S
oS
oS dSSn.qq
Divisons par C° V° S° pour assurer la similitude à l’échelle 1 vis-à-vis du terme de transport :
ooo
oI
S SVC
qdSn.VC =∫
++
° ∫∫+++ −
Ssoo
oS
DI dSn.q
VC
qdq τ
Les critères de « similitude intégrale » sont donc : - pour la source volumique :
ooo
oI
ISVC
q=Γ °
- pour la source surfacique :
oo
oS
SVC
q=Γ
En conséquence, 1) ΓS est le même que dans le bilan local (cf . 2.4, 2.5) ; il y a donc équivalence entre similitude locale et similitude globale pour les sources surfaciques. 2) Pour que ΓI soit égal au ΓI local (2.5), il faut prendre :
L° = ° / S° , d’où oo
ooI
IVC
Lq=Γ
La condition d’équivalence entre similitude locale et similitude intégrale est donc : L° = ° / S°
Pour le choix de ° et S°, deux voies sont ouvertes :
a) On adopte une convention sur L°, et l’on prend ° = (L°)3 et S° = (L°)2. Dans ce cas, le choix de L° risque d’être relativement arbitraire. b) Inversement, sachant que les phénomènes étudiés concernent le volume et la surface S
du domaine , on peut choisir :
° = ; S° = S, d’où L° = / S
Eventuellement, si la contribution de certaines parties de S à l’intégrale ∫S est
négligeable, il peut être justifié de prendre pour S° la partie significative de S. Nous rencontrerons une application de ce problème au chapitre 6, à propos des écoulements en canalisations : elle permettra de faire apparaître une longueur caractéristique = / Σ (Σ = surface latérale du tube) équivalente au diamètre hydraulique classique.
Chapitre 3 QUE FAIRE DE LA TURBULENCE ? Voyons, Monsieur, mettez-vous à la place d’un mobile qui se croit animé d’un mouvement de translation rectiligne et qui s’aperçoit qu’il a décrit une trajectoire circulaire ! CHRISTOPHE (L’idée fixe du savant Cosinus)
L’insolite étrangeté de cette curieuse bizarrerie me plonge dans une perplexité qui m’intrigue. Achille Talon (par GREG)
Comme nous avons déjà eu l’occasion de le signaler, les équations établies dans le chapitre 1 devraient en principe permettre de venir à bout de tous les problèmes de thermoconvection. Cette possibilité reste malheureusement illusoire la plupart du temps, en raison de difficultés mathématiques extrêmes, spécialement lorsque les écoulements sont turbulents. On doit donc recourir à des approximations ou à des modèles simplificateurs. Parler de turbulence est un exercice périlleux si l’on veut présenter les choses de façon assez claire et opérationnelle. Il faut naviguer entre Charybde et Scylla pour éviter le simplisme sans tomber dans des développements inutilisables par le non spécialiste. Le chapitre que nous abordons maintenant se borne à présenter l’aspect général de la turbulence, et les principaux modèles utilisés pour décrire les écoulements turbulents. Il ne contient pas d’applications directes ; celles-ci viendront en leur temps dans les chapitres qui suivent. La première partie est consacrée à notre perception expérimentale de la turbulence, qui débouche assez naturellement sur une description statistique du phénomène. Pour conserver la structure logique des deux premiers chapitres, on applique d’abord ce traitement statistique à l’équation générale de bilan local. Ceci permet d’introduire dans un cadre très large le modèle pseudo-laminaire, basé sur la définition de diffusivités turbulentes qui jouent un rôle analogue aux diffusivités moléculaires. Nous présentons ensuite les modèles basés sur des équations d’appoint, qui sont des relations de bilans supplémentaires portant sur certaines grandeurs fluctuantes : modèles k-l, k-ε et k-ω . Les volumineux calculs qui permettent d’établir ces relations sont relégués en annexe ; ils sont en partie justifiés par l’attention particulière que nous accordons à l’interprétation des différents éléments d’un bilan en termes de sources volumiques ou surfaciques.
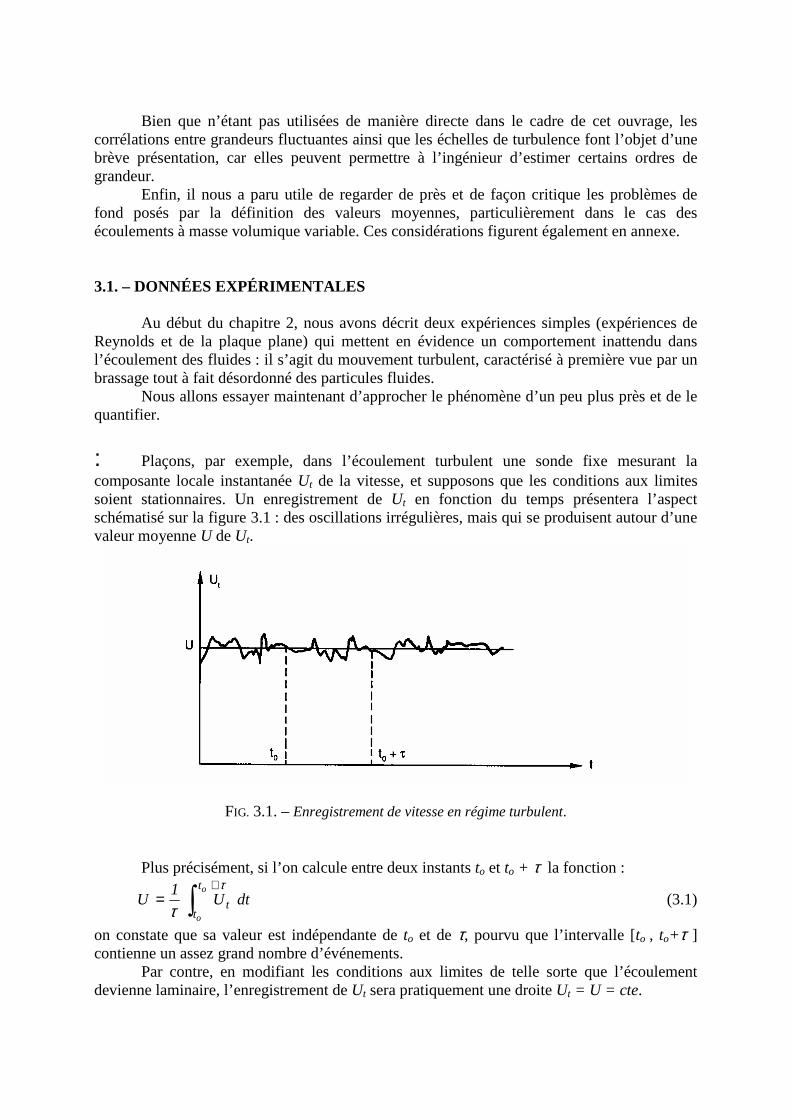
Bien que n’étant pas utilisées de manière directe dans le cadre de cet ouvrage, les corrélations entre grandeurs fluctuantes ainsi que les échelles de turbulence font l’objet d’une brève présentation, car elles peuvent permettre à l’ingénieur d’estimer certains ordres de grandeur. Enfin, il nous a paru utile de regarder de près et de façon critique les problèmes de fond posés par la définition des valeurs moyennes, particulièrement dans le cas des écoulements à masse volumique variable. Ces considérations figurent également en annexe. 3.1. – DONNÉES EXPÉRIMENTALES Au début du chapitre 2, nous avons décrit deux expériences simples (expériences de Reynolds et de la plaque plane) qui mettent en évidence un comportement inattendu dans l’écoulement des fluides : il s’agit du mouvement turbulent, caractérisé à première vue par un brassage tout à fait désordonné des particules fluides. Nous allons essayer maintenant d’approcher le phénomène d’un peu plus près et de le quantifier.
♣ Plaçons, par exemple, dans l’écoulement turbulent une sonde fixe mesurant la composante locale instantanée Ut de la vitesse, et supposons que les conditions aux limites soient stationnaires. Un enregistrement de Ut en fonction du temps présentera l’aspect schématisé sur la figure 3.1 : des oscillations irrégulières, mais qui se produisent autour d’une valeur moyenne U de Ut.
FIG. 3.1. – Enregistrement de vitesse en régime turbulent. Plus précisément, si l’on calcule entre deux instants to et to + τ la fonction :
∫+
=τ
τo
o
t
tt dtU
1U (3.1)
on constate que sa valeur est indépendante de to et de τ, pourvu que l’intervalle [to , to+τ ] contienne un assez grand nombre d’événements. Par contre, en modifiant les conditions aux limites de telle sorte que l’écoulement devienne laminaire, l’enregistrement de Ut sera pratiquement une droite Ut = U = cte.
Les mêmes observations pourraient être faites en mesurant les autres composantes instantanées Vt , Wt de la vitesse, la température ou la pression.
♦ Mais l’expérience dont nous venons de parler ne nous renseigne que sur l’aspect local du phénomène. Pour en avoir une vue tridimensionnelle, on peut aussi réaliser un film de l’écoulement, en ayant recours à divers moyens optiques permettant de visualiser les mouvements du fluide. L’aspect des choses paraît alors tout différent : on voit naître au sein du fluide des paquets tourbillonnaires de molécules – appelées bouffées de turbulence – qui se stabilisent puis se fragmentent et se diluent dans l’écoulement, tandis que d’autres les remplacent. Leur taille, leur vitesse, leur durée de vie, leur lieu d’origine et leur fréquence d’apparition sont à première vue absolument aléatoires. Un bon exemple de ces bouffées nous est fourni dans la vie quotidienne par les rafales de vent.
♥ Un phénomène de cette nature incite finalement à remettre en question le principe du déterminisme, du moins dans son aspect pratique. En effet, en régime laminaire, les trajectoires des particules fluides sont des courbes qui possèdent des propriétés de régularité mathématique. Deux particules infiniment voisines à un instant t restent proches à un instant t + ∆t, si ∆t est petit par rapport au temps de déplacement moyen dans l’écoulement (sauf éventuellement au voisinage d’une singularité). Le mouvement est déterministe comme en mécanique classique : en remontant le temps, on peut retrouver les conditions initiales, et dans l’autre sens on peut prévoir exactement l’état du système à un instant quelconque dans le futur. Au contraire, en régime turbulent, deux particules infiniment voisines à l’instant t peuvent avoir des positions pratiquement indépendantes à t + ∆t, et la notion de trajectoire, si elle conserve un sens physique, devient inutilisable. Il n’est alors plus possible de remonter aux conditions initiales, qui sont en partie « oubliées » par l’écoulement. Inversement, il y aura au bout d’un certain temps perte de prédictibilité déterministe, et ce d’autant plus tôt que les caractéristiques initiales de l’écoulement seront moins bien connues à petite échelle.
♠ Les écoulements turbulents présentent donc ce caractère d’avoir une structure à la fois complexe et apparemment désordonnée, voire non déterministe, ce qui ne va pas simplifier leur étude. Les effets pratiques de la turbulence sont cependant considérables et doivent être pris en compte : ce phénomène présente en effet une diffusion importante des diverses entités physiques transportées par les molécules fluides, la chaleur en particulier. Cela se traduit par un accroissement des flux et des contraintes aux parois, ou par un mélange rapide si le fluide comporte plusieurs constituants, comme dans l’expérience de Reynolds. 3.2. – THÉORIE STATISTIQUE LOCALE DE LA TURBULENCE Pour comprendre et décrire les mécanismes de la turbulence, deux grandes voies peuvent être explorées. La première s’appuie sur la non-linéarité des équations de bilans, et fait l’objet d’un court examen en Annexe (voir aussi § 3.3.1). Très séduisante dans son principe, elle se heurte malheureusement à de multiples difficultés, et ne paraît pas en mesure de donner naissance à des méthodes vraiment opérationnelles.

Il faut donc, pour disposer d’outils réellement utilisables, s’engager dans la seconde voie qui s’appuie sur une description statistique ou probabiliste. La théorie qui fut la première dans l’ordre chronologique, et qui reste la plus utilisée est la théorie statistique locale. Elle permet de construire des modèles efficaces, même s’ils sont loin d’être parfaits, en particulier au voisinage des parois. 3.2.1. – Équations de bilans aux valeurs moyennes
♣ En physique comme dans bien d’autres disciplines, lorsqu’on se trouve confronté à des phénomènes complexes, fluctuants, en apparence insaisissables, on a généralement recours à un traitement statistique qui permet au moins de dégager quelques lois simples ou à défaut quelques tendances. Il paraît donc légitime de procéder ainsi avec la turbulence. De surcroît, c’est un fait d’expérience que les écoulements turbulents manifestent quelques propriétés statistiques simples (ainsi l’existence de grandeurs locales moyennes comme il a été dit en 3.1), et que des écoulements turbulents réalisés dans des conditions macroscopiques identiques présentent des caractères statistiques identiques. On postule donc que toute grandeur physique de l’écoulement peut être considérée comme une variable aléatoire, dont la valeur instantanée est la somme d’une valeur moyenne C et d’une valeur fluctuante c. Dans les équations, on sera donc amené à remplacer C par
cC + : cCC +a (3.2)
Ce sera le cas en particulier de la vitesse, V étant remplacée par vV + :
vVV +a (3.3)
♦ Voyons alors les implications de cette hypothèse dans l’équation générale (1.24) de bilan local, qui s’écrit maintenant :
SI qdivq)vV()cC(divt
)cC( −=+++∂
+∂ (3.4)
Rappelons-nous tout d’abord (ch. 1) que fréquemment le terme source de surface
Sqdiv décrit le transfert par diffusion de la grandeur C et peut se mettre sous la forme :
)cC(gradDq cS +−= (3.5)
où Dc est la diffusivité (ou coefficient de diffusion) de C dans le milieu. Restreinte à cette catégorie de situations, (3.4) s’écrit :
)cC(gradDdivq)vV()cC(divt
)cC(cI ++=+++
∂+∂
(3.6)
♥ Dans un premier temps, on cherche à tirer de (3.6) une relation entre les valeurs
moyennes, en se débarrassant autant que possible de ces termes indésirables que sont c et v . Pour ce faire, le plus simple consiste à prendre la moyenne des deux membres de (3.6).

Nous ne considérons dans la suite que des écoulements permanents en moyenne, c’est-à-dire pour lesquels les conditions aux limites sont stationnaires (si elles sont variables dans le temps, la définition de la moyenne C pose quelques problèmes épineux que nous n’aborderons pas ici, cf. Annexe 3.A.2). Dans ce cas, C ne dépend ni de l’instant considéré, ni de la durée τ sur laquelle la moyenne est calculée, de telle sorte que :
0c;0t
C ==∂
∂ (3.7)
l’opération de moyenne étant symbolisée par la barre qui surmonte les différents termes. Les moyennes des termes de l’équation (3.6) sont calculées en Annexe 3.A.2. On obtient ainsi l’équation de bilan aux valeurs moyennes pour la grandeur C :
)CgradD(divq)vcVC(div cI +=+ (3.8a)
♠ Comparons cette relation avec l’équation générale de bilan en régime stationnaire, qui s’écrit compte tenu de (3.5) :
)CgradD(divqVCdiv cI += (3.8b)
A l’évidence, (3.8a) ressemble de très près à (3.8b) pourvu que l’on transfère à droite
le terme en vc :
vcCgradDdivqVCdiv cI −+= (3.9)
Le bilan local pour les valeurs moyennes C s’écrit donc de la même façon que pour les valeurs instantanées, à ceci près qu’il apparaît un nouveau terme exclusivement lié aux
fluctuations, à savoir vcdiv . Dans l’écriture (3.9), celui-ci est interprété comme une source de surface, qui se superpose à la diffusion classique. Il manifeste donc l’existence d’un nouveau
mécanisme de transfert de la grandeur C, provoqué par les fluctuations de vitesse v . Ce
mécanisme ainsi mis en parallèle avec la diffusion moléculaire (terme en Cgrad ) est qualifié de diffusion turbulente de la grandeur C.
Le terme vc , qui est donc le produit des fluctuations c et v pris en valeur moyenne,
est appelé covariance de c et v , ou encore corrélation. C’est un moment du second ordre qui caractérise le degré de dépendance (ou si l’on préfère le degré de couplage) de c par rapport
à v . En particulier, si 22 vcvc = , les grandeurs fluctuantes c et v sont totalement
corrélées, alors qu’elles sont indépendantes si 0vc = . Lorsque la corrélation est négligeable, le mouvement est solution de l’équation sans perturbation (3.8b).
Il pourrait aussi arriver que dans un écoulement turbulent, on ait :
)CgradD(divvcdiv c<<

c’est-à-dire que la diffusion turbulente soit négligeable sans que vc soit nul pour autant. Cela
est possible si vc est quasi uniforme : il y a bien diffusion turbulente, mais son bilan local est nul en moyenne. Ce type d’écoulement est un cas très particulier, qui rentre dans le cadre de la turbulence homogène (§ 3.4.5).
!!! Signalons enfin un point de terminologie : les moyennes utilisées dans ce chapitre (qui sont au point de vue mathématique des moyennes « mal définies », cf. annexe 3.A.2) sont souvent appelées moyennes de Reynolds, et dans la littérature anglo-saxonne leur application aux équations de quantité de mouvement est désignée par Reynolds Averaged Navier – Stokes, en abrégé RANS. 3.2.2. – Équation de bilan pour les fluctuations Nous pouvons maintenant établir une équation qui s’interprétera comme un bilan local de la grandeur fluctuante c. Pour cela, développons l’équation (3.6) en séparant, dans les
sources de volume qI, la moyenne Iq et la fluctuation 'Iq (soit : '
III qqq += ).
Sachant que 0/ =∂∂ tC (écoulement permanent en moyenne), il vient :
)cC(gradDdivqq)vcVcvCVC(divt
cc
'II +++=++++
∂∂
(3.10)
Soustrayons membre à membre l’équation aux valeurs moyennes (3.8a) et l’équation précédente. On obtient :
)()( ' CgradDdivqvcvcVcvCdivt
ccI +=−+++
∂∂
Soit encore, pour faire ressortir le bilan local de c :
vCvcvccgradDdivqVcdivt
cc
'I −−++=+
∂∂
(3.11)
3.2.3. – Le principe des fermetures en un point Malgré ses avantages, la méthode statistique adoptée ne règle pas toutes les difficultés, loin de là. En prenant la moyenne des termes dans l’équation (3.6), nous cherchions à remplacer les termes fluctuants par des grandeurs indépendantes du temps. Cet objectif est
réalisé, sauf que nous avons fait apparaître une nouvelle inconnue, la covariance vc , sans avoir augmenté le nombre d’équations. Le système est devenu « ouvert ». Pour le « fermer », il faudra donc établir une relation supplémentaire (vectorielle
puisque vc est un vecteur) pour chaque entité physique scalaire transportée (les composantes de la quantité de mouvement étant considérées comme telles). Ces relations portent le nom de « fermetures ». Malheureusement, rien dans la théorie ne permet d’établir de telles fermetures. D’une façon ou d’une autre, celles-ci reposeront donc sur des modèles phénoménologiques, voire quelquefois sur des hypothèses franchement empiriques. Toutes les fermetures relatives au modèle statistique local de la turbulence sont appelées fermetures en un point.
3.3. – UNE APPLICATION DE LA THÉORIE STATISTIQUE LOCALE : LE MODÈLE PSEUDO-LAMINAIRE 3.3.1. – Caractérisation d’un transfert laminaire ; transition vers la turbulence
♣ Avant d’examiner quelques-unes des fermetures en un point, il paraît utile de préciser, dans le cadre du modèle statistique de la turbulence, ce que l’on entendra par régime de transfert laminaire. Celui-ci se caractérise en effet plus aisément par rapport au régime de transfert turbulent. Physiquement, il est clair qu’un écoulement laminaire est un écoulement où les fluctuations de vitesse sont statistiquement « négligeables ». D’une manière plus précise et plus générale à la fois, nous dirons que dans un transfert laminaire, les termes de covariance sont nuls, c’est-à-dire que d’éventuelles fluctuations c et
v ne sont pas corrélées :
laminaire 0=⇔ vc (3.12) Cela signifie qu’une fluctuation isolée, qui peut toujours survenir, ne sera pas à l’origine d’autres fluctuations, et ne sera donc pas susceptible de déclencher un mécanisme turbulent. Alors, l’équation aux valeurs moyennes (3.9) s’identifie à l’équation générale de bilan en régime permanent (3.8b) :
)( CgradDdivqVCdiv cI +=
En particulier, si l’on considère les équations de quantité de mouvement, où jvc ρ= ,
on aura en régime laminaire :
0== vvvc jρ (3.13)
soit encore, pour un fluide isochore :
31,0 àkjvv kj =∀= (3.14)
Donc, en particulier, les moyennes quadratiques 2jv sont nulles. En conséquence, dans
un fluide isochore en écoulement laminaire, les fluctuations de vitesse s’identifient à des
fonctions de Dirac. Mais si le fluide n’est pas isochore, la condition 02 =jvρ n’implique pas
que 2jv soit nulle.
♦ A côté de la vision purement statistique des choses, on peut aussi considérer le comportement non-linéaire engendré par le bilan de quantité de mouvement (Annexe 3.A.1). Dans cette approche, les fluctuations sont plutôt appelées « perturbations ». Mais quelle que soit la terminologie, lorsque ces événements surviennent, c’est uniquement la viscosité moléculaire qui est en mesure de les résorber, les forces de viscosité jouant le rôle d’un frein. Cela se traduit par un pic de la dissipation Φ dans l’équation d’énergie. Plus précisément, si l’équation (3.11) est appliquée aux composantes de la quantité de
mouvement, elle possède des solutions en tie ω− , où ω est généralement complexe. Si sa
partie imaginaire est négative, tie ω− diminue au cours du temps : il y a amortissement. Mais
si la partie imaginaire est positive, l’exponentielle augmente en fonction du temps, ce qui correspond à une instabilité du mouvement. Il se trouve que les fluides usuels sont très peu visqueux, de sorte que des perturbations infimes peuvent ainsi s’amplifier et dégénérer en comportement chaotique si l’amortissement devient insuffisant, c’est-à-dire en fait si les termes non linéaires (transport de quantité de mouvement par le fluide en écoulement) deviennent suffisamment grands par rapport aux termes de viscosité. Le passage d’un type de comportement à l’autre constitue la transition vers la turbulence. Or nous disposons d’un indicateur pour évaluer l’ordre de grandeur relatif du terme de transport et du terme visqueux : c’est le critère de similitude Γν (2.26), qui est le quotient du flux de référence de la source (viscosité) par le flux de référence transporté. Sachant que le nombre de Reynolds Re = 1/Γν , on voit que Re mesure donc l’importance des termes non-linéaires par rapport au terme de dissipation. Ainsi, le nombre de Reynolds critique Rec (§ 2.2) est le seuil au-delà duquel les termes non-linéaires s’imposent, et donc où apparaissent des
parties imaginaires positives dans les exposants des termes en tie ω− . Il doit être bien entendu que le passage du régime laminaire au régime turbulent n’est pas un phénomène abrupt, mais une transition, comme on l’a dit plus haut, et qu’il s’étale sur une certaine plage de valeurs de Re, dont la valeur critique Rec constitue approximativement le centre. De plus, cette valeur n’est pas universelle, car elle dépend de chaque type d’écoulement. Dans le cadre choisi ici, cette brève analyse est sans conséquence pratique, mais elle contribue à la compréhension des mécanismes de la turbulence. 3.3.2. – L’idée directrice du modèle pseudo-laminaire
♣ On dispose de méthodes variées, analytiques ou numériques, pour résoudre les équations de type (3.8b) correspondant à un régime stationnaire laminaire. Par contre, les équations du genre (3.9) suscitent de sérieuses difficultés. Mais leur rapprochement suggère que si l’on pouvait gauchir les secondes d’une façon physiquement acceptable pour les faire ressembler à (3.8b), on simplifierait leur résolution. Cela devient possible en admettant que la diffusion turbulente obéit à la loi classique de la
diffusion, c’est-à-dire que vc est proportionnelle au gradient de la grandeur moyenne C. On formule donc l’hypothèse :
CgradDvc ct=− (3.15)
le coefficient Dct étant appelé diffusivité turbulente de la grandeur C.
!!! Il faut bien noter qu’il y a une différence essentielle entre Dct et la diffusivité moléculaire classique Dc. La seconde est une propriété intrinsèque du fluide, alors que la diffusivité turbulente définie par la relation (3.15) est essentiellement une propriété structurelle locale de l’écoulement, généralement fonction des conditions aux limites.

♦ On doit bien admettre que la formulation (3.15) est un peu réductrice. En toute généralité, il conviendrait de poser :
k
jkj x
CDvc
∂∂=− (3.16)
car le coefficient Dct peut dépendre de chaque direction considérée pour v et Cgrad . Alors, Djk est un tenseur du second ordre.
♥ Revenons malgré tout à l’hypothèse (3.15), beaucoup moins difficile à mettre en œuvre. En l’intégrant dans l’équation générale aux valeurs moyennes (3.9), on obtient :
CgradDDdivqVCdiv ctcI )( ++= (3.17)
dont l’analogie avec (3.8b) justifie l’expression de « modèle pseudo – laminaire ». 3.3.3. – Diffusion turbulente de masse 3.3.3.1. – BILAN DE MASSE TOTALE La grandeur C est ici la masse volumique ρ du fluide, et il n’y a pas de termes sources (§ 1.3.2.1) :
0;0; === SI qqC ρ (soit Dc = 0 )
Admettons pour simplifier que le fluide soit isochore (voir annexe 3.A.3 pour
cte≠ρ ). Alors les fluctuations ρ’ de ρ sont nulles, d’où :
0' == vvc ρ et il résulte de (3.9) et (3.11) les équations :
0Vdiv = (3.18a)
0vdiv = (3.18b)
L’équation de continuité classique s’applique donc également ici à la valeur moyenne
V de la vitesse et à sa fluctuation, pour laquelle la condition à la limite associée est 0=v sur toute surface solide fixe. En posant :
),,( WVUV = (3.18a) s’écrit en coordonnées cartésiennes :
0=∂
∂+∂∂+
∂∂
z
W
y
V
x
U (3.19)
et de même pour v avec u, v, w.

3.3.3.2. – BILAN DE MASSE SUR UN CONSTITUANT A Dans un mélange isochore, si l’on ne s’intéresse qu’à un constituant A (§ 1.3.2.2), on a : C = ρA (moyenne), '
Ac ρ= (fluctuation), et l’équation de bilan aux valeurs moyennes (3.9) devient :
vgradDdivqVdiv AAAIAA'ρρρ −+= (3.20)
DA étant la diffusivité moléculaire de A dans le mélange, et IAq la valeur moyenne des
sources volumiques de A (rappelons au passage que, lorsque 0=Vdiv , on a aussi :
AA gradVVdiv ρρ .)( = ). En application de (3.15), admettons que :
AtAA gradDv ρρ =− ' (3.21)
On introduit ainsi un coefficient DA t qui est la diffusivité turbulente du constituant A dans le mélange. D’où :
AtAAIAA gradDDdivqVdiv ρρ )()( ++= (3.22)
Pour un écoulement pleinement turbulent, on aura en général DAt >> D A. 3.3.4. – Diffusion turbulente de quantité de mouvement 3.3.4.1. – VISCOSITÉ CINÉMATIQUE TURBULENTE Passons maintenant au bilan local de quantité de mouvement. Notre point de départ reste l’équation générale aux valeurs moyennes (3.9) :
vcCgradDdivqVCdiv cI −+=
En conservant l’hypothèse du fluide isochore (soit : ρρ ≡ ) :
C = ρ Vj (composante de Vρ suivant la direction j)
c = ρ vj (fluctuation) Dc = ν (viscosité cinématique)
Les forces extérieures F ne subissent pas de fluctuations ; la pression p a une valeur
moyenne p : d’où l’équation aux valeurs moyennes pour la quantité de mouvement (§.1.3.6.5, eq. 1.70b) :
vvVgraddivx
pFVVdiv jj
jjj ρρνρρ −+
∂∂−=)( ( j = 1 à 3) (3.23)
Les composantes kjjk vvρτ −=' du vecteur vv jρ− qui intervient ci-dessus sont
connues sous le nom de tensions (ou contraintes) de Reynolds. Elles jouent le même rôle que les tensions visqueuses τ ij, mais elles expriment la diffusion de quantité de mouvement à l’échelle de la turbulence.

D’après (3.18a), avec les hypothèses retenues, nous avons : 0=Vdiv ; dans ce cas :
CCgradVVCdiv ∀= ,. En appliquant cette propriété et en divisant (3.23) par ρ, il vient :
vvVgraddivx
p1FVgrad.V jj
jjj −+
∂∂−= ν
ρ (3.24)
C’est ce que l’on appelle l’approche RANS (Random Averaged Navier – Stokes, voir § 3.2.1).
♣ Méthode générale Pour faire apparaître une diffusivité turbulente de quantité de mouvement, posons en accord avec (3.15) :
jjtj Vgradvv ν=− (3.25)
ce qui s’exprime scalairement par :
k
jjtkj x
Vvv
∂∂
=− ν (sans sommation sur j) (3.26a)
les termes précédents étant les éléments du tenseur des corrélations de vitesses (ou tenseur de Reynolds)
kjjk vvR = (3.26b)
Par analogie avec la viscosité cinématique ν, la grandeur νt j est appelée viscosité cinématique turbulente suivant la direction j, et l’équation locale aux valeurs moyennes (3.24) devient :
)31()(1
. àjVgraddivx
pFVgradV jjt
jjj =++
∂∂−= νν
ρ (3.27)
Enfin, dans les écoulements pleinement turbulents, la diffusion turbulente est beaucoup plus intense que la diffusion moléculaire, d’où νt j >> ν .
♦ Cas particulier Dans de nombreuses circonstances (ch. 5 et 6) on peut admettre V << U et W = 0, et
ne considérer qu’une seule viscosité turbulente (ou une seule contrainte de Reynolds 'kτ dans
la direction k) en posant :
Ugradvu tν=− ou : ρ
τν'k
ktk x
Uvu =
∂∂=− (3.28a)
soit :
x
Uu t ∂
∂=− ν2

(3.28b)
y
Uvu t ∂
∂=− ν
et (3.27) devient :
( ) Ugraddivx
p1F
y
UV
x
UU tx νν
ρ++
∂∂−=
∂∂+
∂∂
(3.28c)
♥ Variante de la méthode générale La forme de l’hypothèse (3.25a) oblige à introduire, dans le cas général, trois viscosités turbulentes νt j. Il y a là évidemment une source de complication pour les calculs. Pour se ramener à un seul paramètre νt sans opérer malgré tout une schématisation trop simpliste, on peut remplacer (3.25a) par la condition suivante :
∂∂
+∂∂
=−j
k
k
jtkj x
V
x
Vvv ν (3.29)
c’est-à-dire :
jktkj vv εν2=−
les εjk étant les taux de déformations (§ 1.2.1). Dans le cas particulier évoqué au paragraphe précédent (V << U, W = 0), les deux méthodes sont équivalentes et l’on retrouve les expressions (3.28b).
♠ Le modèle pseudo-laminaire ainsi adapté à la quantité de mouvement est rendu ensuite opérationnel par des hypothèses phénoménologiques sur νt, appelées « fermetures en un point » (cf. 3.2.3). Dans ce qui suit, nous ne considérons que l’équation en x (3.28c). L’extension des hypothèses à l’équation en y serait immédiate en cas de besoin. 3.3.4.2 – HYPOTHÈSE DE BOUSSINESQ (1877) L’hypothèse la plus élémentaire, due à Boussinesq, consiste à admettre que la viscosité turbulente νt est uniforme dans l’écoulement : νt = cte (3.30) d’où une simplification de l’équation (3.28c) (en négligeant ν) :
∂∂+
∂∂+
∂∂−=
∂∂+
∂∂
2
2
2
21
y
U
x
U
x
pF
y
UV
x
UU tx ν
ρ (3.31)
Nous avons insisté un peu plus haut sur le fait que les diffusivités turbulentes introduites par le modèle pseudo-laminaire dépendent des propriétés locales de chaque écoulement. Le caractère assez rustique de l’hypothèse (3.30) limite donc son domaine de validité. Elle est assez convenable dans le cas des écoulements atmosphériques, et acceptable en première approximation dans quelques autres cas comme les jets libres ou les écoulements dans la partie centrale d’une canalisation, νt dépendant alors des conditions aux limites (forme du tuyau ou de la buse de soufflage).
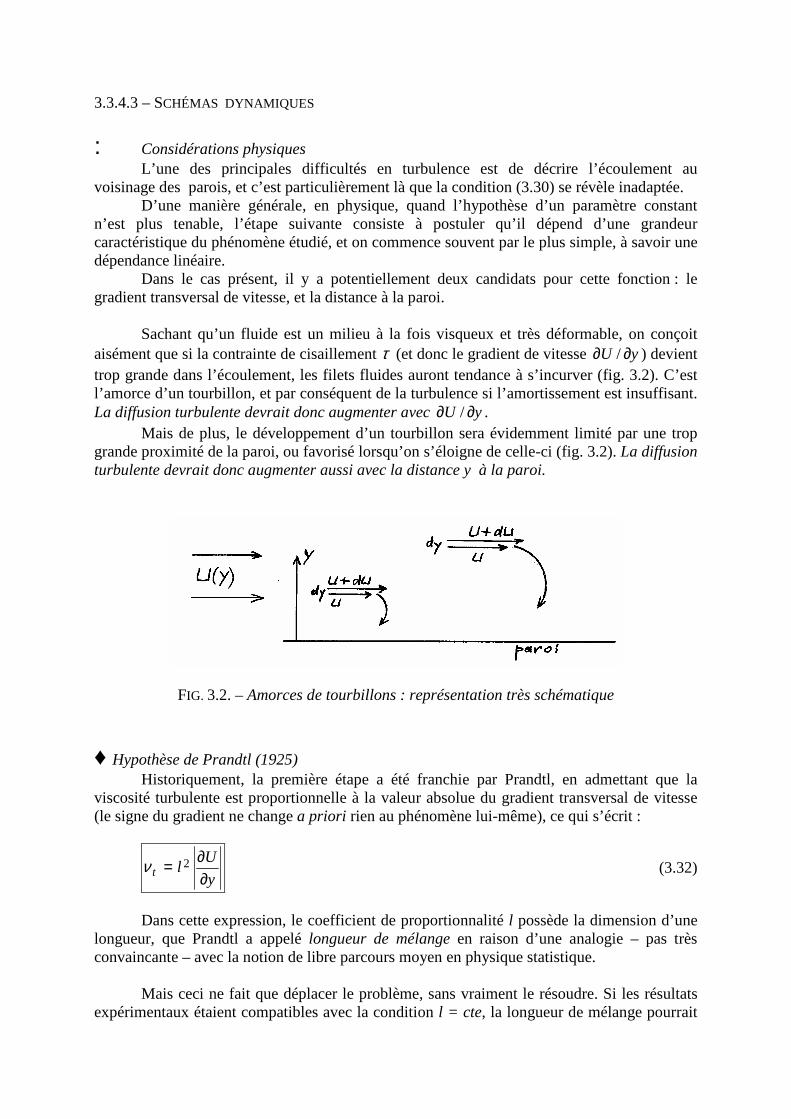
3.3.4.3 – SCHÉMAS DYNAMIQUES
♣ Considérations physiques L’une des principales difficultés en turbulence est de décrire l’écoulement au
voisinage des parois, et c’est particulièrement là que la condition (3.30) se révèle inadaptée. D’une manière générale, en physique, quand l’hypothèse d’un paramètre constant n’est plus tenable, l’étape suivante consiste à postuler qu’il dépend d’une grandeur caractéristique du phénomène étudié, et on commence souvent par le plus simple, à savoir une dépendance linéaire. Dans le cas présent, il y a potentiellement deux candidats pour cette fonction : le gradient transversal de vitesse, et la distance à la paroi. Sachant qu’un fluide est un milieu à la fois visqueux et très déformable, on conçoit aisément que si la contrainte de cisaillement τ (et donc le gradient de vitesse yU ∂∂ / ) devient trop grande dans l’écoulement, les filets fluides auront tendance à s’incurver (fig. 3.2). C’est l’amorce d’un tourbillon, et par conséquent de la turbulence si l’amortissement est insuffisant. La diffusion turbulente devrait donc augmenter avec yU ∂∂ / . Mais de plus, le développement d’un tourbillon sera évidemment limité par une trop grande proximité de la paroi, ou favorisé lorsqu’on s’éloigne de celle-ci (fig. 3.2). La diffusion turbulente devrait donc augmenter aussi avec la distance y à la paroi.
FIG. 3.2. – Amorces de tourbillons : représentation très schématique
♦Hypothèse de Prandtl (1925) Historiquement, la première étape a été franchie par Prandtl, en admettant que la viscosité turbulente est proportionnelle à la valeur absolue du gradient transversal de vitesse (le signe du gradient ne change a priori rien au phénomène lui-même), ce qui s’écrit :
y
Ult ∂
∂= 2ν (3.32)
Dans cette expression, le coefficient de proportionnalité l possède la dimension d’une longueur, que Prandtl a appelé longueur de mélange en raison d’une analogie – pas très convaincante – avec la notion de libre parcours moyen en physique statistique. Mais ceci ne fait que déplacer le problème, sans vraiment le résoudre. Si les résultats expérimentaux étaient compatibles avec la condition l = cte, la longueur de mélange pourrait
être déterminée expérimentalement dans diverses configurations. Malheureusement, la plupart du temps ce n’est pas le cas, surtout au voisinage d’une paroi. C’est ici qu’intervient la seconde étape, avec l’hypothèse d’une longueur de mélange proportionnelle à l’ordonnée y : yKl = (3.33a) de sorte que :
y
UyKt ∂
∂= 22ν (3.33b)
En admettant que K est une « vraie » constante (appelée constante de Karman), ce modèle est applicable dans des écoulements unidimensionnels ou faiblement bi-dimensionnels de type couche limite. Nous le retrouverons au chapitre 5.
♥ Hypothèse de Prandtl-Reichardt (1942) Le modèle précédent n’est pas le seul envisageable. Pour certaines catégories limitées d’écoulements (jets libres, panaches, écoulements atmosphériques), on obtient des résultats acceptables en considérant que νt est simplement proportionnelle à la composante U de la vitesse, soit : Ult =ν (3.34)
où l est encore homogène à une longueur.
♠ D’autres expressions de l peuvent être utilisées, qui sont plus ou moins bien adaptées à chaque problème. Il en sera fait état dans les chapitres suivants. Les schémas de fermeture de la forme (3.30), (3.32-33) ou (3.34) sont souvent appelés
fermetures algébriques, pour signifier que les kj vv sont déterminés par des expressions
algébriques qui les relient au champ des vitesses. 3.3.4.4. – MODÈLES BASÉS SUR DES ÉQUATIONS SUPPLÉMENTAIRES DE BILANS
♣ Principes Les modèles précédents sont bien utiles dans des cas relativement simples, mais ils sont très loin de répondre à tous les besoins concrets des ingénieurs autant que des chercheurs. Il faut donc franchir une autre étape conceptuelle et, dans la mesure ou l’on conserve le modèle pseudo-laminaire, accepter l’idée que la viscosité turbulente νt doit être raccordée de façon plus fine à d’autres paramètres moyens de l’écoulement. Dans cette optique, le progrès essentiel réalisé au tournant des années 1970 a été d’imaginer de nouvelles grandeurs susceptibles de faire l’objet d’un bilan, et de les relier à cette viscosité turbulente.
♦ Schéma énergétique : modèle k - l La première grandeur mise en relation avec νt a été l’énergie cinétique turbulente, ou plus précisément sa valeur moyenne k, définie par :
jj vvk2
1= (3.35a)
Si l’on désigne par u, v, w les composantes du vecteur fluctuation v , k s’écrit :
++= 222 wvu
2
1k (3.35b)
Pour exprimer la viscosité turbulente, on retiendra par exemple « l’hypothèse de Prandtl – Kolmogorov » (1945) :
2/1t kl=ν (3.36a)
où le paramètre l est toujours homogène à une longueur. Une formulation un peu plus fine à proximité d’une paroi (Noris et Reynolds, 1975) est :
−=−
ννky
cte2/1
t e1kl (3.36b)
Le schéma appelé « modèle k – l » requiert la résolution d’une nouvelle équation de bilan, qui porte sur l’énergie cinétique de turbulence k. Pour cette raison, il fera l’objet d’une analyse spécifique dans le § 3.4.
♥ Schéma énergétique – dissipatif : modèle k - ε On accède ensuite à des schémas beaucoup plus raffinés en appuyant le modèle pseudo-laminaire sur la résolution de deux équations supplémentaires de bilans. Le plus utilisé d’entre eux est le modèle k-ε, qui fait intervenir le bilan d’énergie cinétique turbulente k, et celui de la dissipation turbulente d’énergie, notée ε. Il sera lui aussi repris au parag. 3.4.
♠ Schéma énergétique – fréquentiel : modèle k - ω Avec le modèle k-ω, le bilan de la dissipation ε est remplacé par le bilan d’une grandeur ω, identifiable à une vorticité turbulente et homogène à l’inverse d’un temps, qui s’interprète aussi comme une fréquence d’apparition (ou d’extinction) de tourbillons (§ 3.4.4). 3.3.4.5 – A PROPOS DU PARAMÈTRE l Il faut bien se rendre compte que, en faisant intervenir la « longueur de mélange » l, on ne résout pas le problème posé : on ne fait que déplacer la détermination de νt à celle de l, qui est aussi une fonction de l’écoulement et non du fluide. La variété des hypothèses envisagées montre d’ailleurs bien que cette démarche n’aboutit pas à introduire une ligne directrice dans le raisonnement. Elle permet néanmoins de progresser, et présente en outre l’intérêt de se rattacher aux concepts d’échelles de turbulence (§ 3.6). D’une manière plus générale, le handicap majeur de tous les modèles de turbulence réside dans leur faiblesse de prédictibilité : on ne sait traiter que des catalogues de cas particuliers pour lesquels l’expérience a permis d’établir une loi phénoménologique sur l ou νt , ou de caler certains coefficients dans les équations en k , en ε ou en ω . Mais on n’est guère en mesure de prévoir ce qui va se passer dans des conditions pour lesquelles aucune expérience n’a été réalisée.

3.3.5. – Diffusion turbulente de chaleur 3.3.5.1. – DIFFUSIVITÉ THERMIQUE TURBULENTE S’agissant maintenant du problème thermique, nous noterons : T la valeur moyenne de la température θ sa fluctuation. Nous avons ici : C = ρ CpT, enthalpie volumique Dc = a, diffusivité thermique D’après (3.9), l’équation aux valeurs moyennes s’écrit, après division par ρ Cp :
vTgradadivPC
VTdivp
θρ
−+Φ+= )(1
(3.37)
avec qI = P + Φ pour un fluide isochore (P source volumique de chaleur, Φ fonction de dissipation, cf. 1.57b).
Soit encore, sachant que TgradVVTdiv .= (car ρ = cte, donc 0=Vdiv ) :
vTgradadivPC
TgradVp
θρ
−+Φ+= )(1
. (3.38)
La méthode est la même que pour la masse et la quantité de mouvement. Conformément à la relation (3.15), on pose :
Tgradav t=− θ (3.39)
Ce faisant, on définit une diffusivité thermique turbulente at , et l’équation aux valeurs moyennes (3.38) se transforme en :
Tgrad)aa(div)P(C
1Tgrad.V t
p+++= Φ
ρ (3.40)
Là encore, en turbulence développée (c’est - à - dire pas trop près des parois), on aura : at >> a. 3.3.5.2. – HYPOTHÈSES DE CALCUL Les hypothèses sur la diffusivité turbulente at ressemblent assez à celles qui ont été faites sur la viscosité turbulente. Citons en particulier :
♣ soit : at = cte (3.41) utilisable dans les écoulements atmosphériques ou les jets libres par exemple, ou encore dans les écoulements en canalisations,

♦ soit : y
Ullat ∂
∂= .θ (3.42)
acceptable dans des écoulements de couche limite. On retrouve la longueur de mélange dynamique l (§ 3.3.4.3) associée à un nouveau paramètre lθ appelé par analogie longueur de mélange thermique. Dans ce schéma, de nouvelles hypothèses doivent évidemment être faites sur lθ . Ainsi, au voisinage d’une paroi, on peut prendre : yKl θθ = (3.43)
♥ ou encore : ctea
t
t =ν
(3.44)
On admet donc ici que at est en tout point proportionnelle à la viscosité cinématique turbulente νt (§ 3.3.4). Par analogie avec le nombre de Prandtl classique Pr = ν / a (ch. 2), le rapport νt / at est appelé nombre de Prandtl turbulent Prt :
t
tt a
ν=Pr (3.45)
Cette hypothèse est validée dans beaucoup d’applications. Voici les valeurs calées expérimentalement pour quelques cas classiques : jet plan Prt # 0,5 jet axisymétrique 0,7 couche limite (voisinage d’une paroi) 0,9 canalisation circulaire 0,9 canalisation non circulaire 1 à 1,1 3.3.6. – Résolution du problème thermoconvectif Dans le cadre du modèle pseudo – laminaire, le système d’équations aux valeurs moyennes que l’on doit résoudre est en définitive :
0=Vdiv (3.18)
)3à1j(Vgrad)(divx
p1FVgrad.V jjt
jjj =++
∂∂−= νν
ρ (3.27)
Tgrad)aa(div)P(C
1Tgrad.V t
p+++= Φ
ρ (3.40)
avec éventuellement une équation supplémentaire pour chaque constituant A si le fluide est un mélange :
AtAAIAA grad)DD(divq)V(div ρρ ++= (3.22)
Les hypothèses sur DAt procèdent des mêmes démarches que les hypothèses sur at .

3.4. – MODÈLES LOCAUX BASÉS SUR DES ÉQUATIONS D’APPOINT Les différentes variantes du modèle pseudo – laminaire que nous avons examinées possèdent beaucoup de qualités, entre autres une relative simplicité. Toutefois, les résultats qu’elles fournissent ont un caractère partiel, catégoriel, et ce qui est plus grave, ils sont parfois peu satisfaisants, en particulier lorsqu’on se trouve en présence de gradients de pression. Des modèles plus élaborés se révèlent donc nécessaires. Dans le cadre de la théorie statistique locale de la turbulence, ces modèles font appel à des équations supplémentaires de bilans portant sur certaines grandeurs moyennes. La méthode générale consistant à écrire des bilans statistiques de grandeurs transportables a été initiée par A. Favre (1965). Les équations « d’appoint » les plus utilisées sont l’équation en k (énergie cinétique de turbulence) et l’équation en ε (dissipation). 3.4.1. – Modèle à une équation dynamique d’appoint ou modèle k – l Le modèle k – l fait intervenir à la fois l’hypothèse de Prandtl – Kolmogorov (3.36) reliant la viscosité turbulente νt à k, et la résolution de l’équation de bilan de k. Celle-ci sera déduite d’une équation plus générale que nous allons d’abord présenter. 3.4.1.1. – ÉQUATIONS DE BILANS POUR LES CORRÉLATIONS
♣ Au prix de quelques calculs un peu laborieux mais parfaitement classiques, on peut
établir une relation générale de bilan pour les corrélations jvc (le détail de ces calculs figure
en Annexe 3.A.4). La méthode est la suivante : on part de l’équation aux fluctuations (3.11) que l’on adapte au cas de la quantité de mouvement. Puis (3.11) est multipliée par vj tandis que l’équation de quantité de mouvement (3.23) est multipliée par c. On additionne membre à membre les deux nouvelles équations ainsi obtenues, et l’on en prend la moyenne. Voici le résultat de l’opération exprimé sous forme vectorielle (en coordonnées cartésiennes, vois Annexe 3.A.4) et valable pour des écoulements isochores, permanents en
moyenne (d’où 0/)( =∂∂ tvc j , § 3.2.1 ♥) où Dc et ν sont sensiblement constants :
)e(vvcdiv
)d()vgradc(div)cgradv(divD
)c(vgrad.cgrad)D(
)b(x
'pc
1qv
)a(Vgrad.vcCgrad.vvvcgrad.V
j
jjc
jc
j
'Icj
jjj
−
++
+−
∂∂−+
−−=
ν
ν
ρ
(3.46)
avec : p’ fluctuation de pression ; 'Icq fluctuation de la source locale de C.
Nous n’avions pas a priori les moyens d’écrire le bilan local de la grandeur jvc . Mais
la relation (3.46) se présente bien comme un tel bilan. Au premier membre on trouve en effet :

)(. VvcdivvcgradV jj = puisque 0=Vdiv
Au second membre, on reconnaît des sources de volume (a, b, c) et des sources de surface (termes en divergence : d, e).
L’interprétation des différentes sources est la suivante :
Le terme (a) exprime la production volumique de jvc due aux gradients de Vj et de C,
le premier tendant à augmenter les fluctuations de vitesse et le second les fluctuations c de la grandeur C. Le second terme (b) représente la contribution des fluctuations des sources internes
'Icq et p’ au bilan de jvc .
Quant à l’expression (c), elle traduit un processus de dissipation proche de celui que décrit la fonction Φ introduite au chapitre 1 (§ 1.3.4.2), puisque celle-ci contient également des produits de gradients. En ce qui concerne les sources surfaciques, on reconnaît en (d) un flux de diffusion, tributaire à la fois d’un coefficient de diffusion moléculaire (Dc ou ν ) et d’un coefficient turbulent : dans le premier terme, vj joue le rôle d’un coefficient de diffusion pour c et vice-versa dans le second terme. Enfin apparaît en (e) un terme de diffusion nouveau, qui fait intervenir une corrélation triple (ou moment du 3° ordre).
♦ Une première application de l’équation générale (3.46) concerne le cas où C est la
quantité de mouvement. On obtient alors une équation de bilan pour kj vv . Dans l’hypothèse
où l’on est en convection forcée (voir détails en Annexe 3.A.4.2) celle-ci s’écrit :
( ) vvvdivvvgraddiv
vgrad.vgrad2
x
'pv
x
'pv
1
Vgrad.vvVgrad.vvvvgrad.V
kjkj
kj
kj
jk
jkkjkj
−+
−
∂∂+
∂∂−
−−=
ν
ν
ρ (3.47)
Au point de vue physique, les corrélations kj vv sont des grandeurs relativement
abstraites. Mais rappelons-nous qu’en les multipliant par ρ , on retrouve les éléments jkRρ
du tenseur de Reynolds (3.26b), qui sont des quantités de mouvement turbulentes (l’analogie avec le tenseur (1.30) des quantités de mouvement de l’écoulement moyen est évidente). Le système (3.47) s’interprète donc comme un bilan de quantité de mouvement moyenne de la turbulence.
♥ On peut également identifier C à l’enthalpie et obtenir un bilan pour la corrélation
jvθ (Annexe 3.A.4.3) :
vvdiv
vgraddivgradvdiva
vgradgradax
p
VgradvTgradvvvgradV
j
jj
jj
jjj
θ
θνθ
θνθρ
θθ
−
++
+−∂∂−
−−=
.)('1
...
(3.48)
T désignant la valeur moyenne de la température et θ sa fluctuation. 3.4.1.2. – ÉQUATION DE BILAN POUR L’ÉNERGIE CINÉTIQUE DE TURBULENCE k La définition de l’énergie cinétique de turbulence a déjà été introduite au paragraphe 3.3.4.4 (relations 3.35), à savoir :
vvvvk jj .2
1
2
1 ==
Il s’agit en fait d’une énergie massique (en m2/s2), la véritable énergie cinétique
(volumique) étant bien entendu jj vvk ρρ2
1= . Les deux termes sont néanmoins
proportionnels si ρ = cte, et nous conserverons dans la suite la terminologie habituelle. Par contre, la signification physique de k est parfaitement claire : ρk est bien l’énergie cinétique moyenne de la turbulence. Soit, en effet, Ec l’énergie cinétique totale :
).2(2
1)(
2
1 222 vvVVvVEc ++=+= ρρ (3.49a)
En passant aux valeurs moyennes, et sachant que 0=v , on obtient :
kVvVEc ρρρρ +=+=222
2
1
2
1
2
1 (3.49b)
où le premier terme représente l’énergie cinétique du mouvement d’ensemble et le second l’énergie cinétique moyenne du mouvement turbulent. Cependant, on ne peut pas utiliser directement l’équation aux fluctuations (3.11) pour établir le bilan de k, car on ne dispose d’aucun critère pour en identifier a priori les sources (nous avons rencontré exactement le même problème au chapitre 1 (§ 1.3.4) pour exprimer le bilan d’énergie mécanique).
Il faut donc partir des trois équations de covariance ji vv (3.47) (où i, j = 1, 2, 3),
faire i = j dans chacune d’elles et additionner ensuite membre à membre (Annexe 3.A.5). On obtient alors une relation sur k qui s’interprète comme un bilan local (n’oublions pas que la répétition d’un indice dans un terme signifie « sommation sur cet indice ») :

)d(),d(vvvdiv2
1)kgrad(div
)c('pgrad.v1
)b(vgrad.vgrad
)a(Vgrad.vvkgrad.V
21jj
jj
jj
−+
−
−
−=
ν
ρ
ν (3.50)
Dans cette équation, on distingue bien :
♣ Les sources de surface qui sont les termes en divergence, c’est–à–dire les termes (d)
comprenant : diffusion liée aux fluctuations de vitesse vvvdiv jj et diffusion moléculaire
)( kgraddivν .
Portons un instant notre attention sur la corrélation triple vvvdiv jj pour bien
comprendre son origine et son interprétation. Ce terme évoque une diffusion turbulente
vcdiv , c représentant dans le cas présent la fluctuation d’énergie cinétique turbulente. En
effet, jj vv (qui est une autre façon d’écrire le vecteur fluctuant 2
v ) est la valeur instantanée
de l’énergie cinétique turbulente massique, somme de sa valeur moyenne k et d’une fluctuation que nous noterons k’ : 'kkvv jj +=
d’où :
vkvkvkkvvv jj ')'( +=+=
et comme k est déjà une moyenne, 0== vkvk puisque la moyenne d’une fluctuation est nulle, cf. Annexe 3.A.2). Donc, finalement :
vkvvv jj '= (3.51)
♦ Les sources de volume : production (a) et (c), et dissipation en chaleur (b). La « production » (a) est le produit des contraintes de Reynolds par le cisaillement moyen dans l’écoulement, c’est-à-dire le taux de production d’énergie cinétique turbulente par l’écoulement moyen, autrement dit de l’énergie qui est transférée du mouvement moyen au mouvement turbulent. Le terme (b), qui revêt une grande importance, est appelé « taux de dissipation de l’énergie cinétique de turbulence », ou plus brièvement « dissipation », et noté ε (prononcer « epsilon ») :
k
j
k
jjj x
v
x
vvgradvgrad
∂∂
∂∂
== ννε . (m2.s– 3) (3.52)
Plus concrètement, ρε (en W/m3) s’interprète comme la puissance volumique dissipée par les fluctuations turbulentes de vitesse.

3.4.1.3. – RÉSOLUTION DE L’ÉQUATION DE BILAN POUR k L’équation de bilan (3.50) n’est pas utilisable en l’état, mais elle peut être résolue au prix de quelques approximations et hypothèses.
♣ Tout d’abord, la confrontation avec l’expérience montre qu’on peut souvent négliger
le terme de pression '.1
pgradvρ
.
De plus, chez les sources surfaciques, on aura recours une fois encore au modèle de diffusion (3.15) en introduisant une diffusivité cinétique turbulente Dk t dans le terme (d2), soit compte tenu de (3.51), et puisque k représente l’énergie cinétique moyenne du mouvement turbulent :
)kgradD(divv'kdiv2
1vvvdiv
2
1ktjj −== (3.53)
♦ Ensuite, comme le modèle k – l est de type pseudo-laminaire, il exige l’intervention d’une viscosité cinématique turbulente νt. Celle-ci est définie conformément à l’hypothèse (3.29), c’est-à-dire que l’on écrit dans le terme (a) :
∂∂
+∂∂
=−i
j
j
itji x
V
x
Vvv ν (3.54)
d’où la nouvelle forme du bilan (3.50) de k, exprimé en coordonnées cartésiennes :
( )
)()()( bda
x
kD
xx
V
x
V
x
V
x
kV
ikt
ij
i
i
j
j
it
ii ενν −
∂∂+
∂∂+
∂∂
∂∂
+∂∂
=∂∂
(3.55)
On reconnaît en (a) un terme proportionnel à la fonction de dissipation Φ pour l’écoulement moyen (ch. 1, § 1.3.4.2). En effet :
j
i
i
j
j
i
x
V
x
V
x
V
∂∂
∂∂
+∂∂
=Φ µ
d’où :
Φ=∂∂
∂∂
+∂∂
µνν t
j
i
i
j
j
it x
V
x
V
x
V (3.56)
Dans ce contexte, on retiendra comme hypothèse sur νt une relation du type Prandtl-Kolmogorov (3.36) reliant la viscosité turbulente et l’énergie cinétique turbulente :
2/1klt =ν (3.57a)
où l est homogène à une longueur (certains auteurs écrivent 2/1klCt νν = en ajoutant une
constante sans dimension). En fait, cette relation est suggérée par des considérations dimensionnelles sur les échelles de turbulence, qui seront développées plus loin (§ 3.6.2).
♥ D’autre part, il semble naturel d’admettre que la dissipation ε ne dépend explicitement que de k (la source d’énergie) et de νt (sa capacité de diffusion). Sachant que k s’exprime en

m2.s-2, νt en m2.s-1 et ε en m2.s- 3, la forme de ε la plus simple qui soit compatible avec la condition dimensionnelle est :
t
2kC
νε µ= (3.57b)
où Cµ est un coefficient sans dimension qui doit être évalué expérimentalement. L’expérience montre que cette relation est bien vérifiée pour les écoulements à grand
nombre de Reynolds, à condition d’avoir une turbulence assez homogène (2jv sensiblement
uniforme dans l’écoulement). Compte tenu de l’hypothèse (3.57a), ε est donc de la forme :
l
kC
2/3
µε = (3.57c)
♠ Enfin, l’expérience suggère aussi que la diffusivité Dkt est proportionnelle à νt . On a donc, dans le terme (d) de (3.55) :
k
tktD
σν
= (3.58)
la constante de proportionnalité σk devant faire l’objet d’un calage expérimental. L’équation en k se présente donc finalement ainsi :
l
kC
x
k
xx
V
x
V
x
Vkl
x
kV
2/3
ik
t
ij
i
i
j
j
i2/1
ii µσ
νν −
∂∂
+
∂∂+
∂∂
∂∂
+∂∂
=∂∂
(3.59)
Bien évidemment, tout ce travail ne dispense pas de faire des hypothèses adéquates sur l et lθ pour fermer le système. En définitive, le système d’équations à résoudre est celui du paragraphe 3.3.6 (équations 18, 27, 45) auquel vient s’ajouter l’équation en k (3.59) pour la détermination de νt. 3.4.2. – Modèle « k – epsilon » (k - εεεε ) standard 3.4.2.1 - PRINCIPE
♣ Les insuffisances du modèle k-l ont conduit à une sorte de fuite en avant qui s’est essentiellement focalisée sur l’élaboration d’une nouvelle équation de bilan couplée avec l’équation en k, et supposée apporter des éléments plus solides que les hypothèses sur le paramètre « l », ce qui a donné naissance à des modèles dits « à deux équations ». Le plus connu d’entre eux est appelé modèle k-ε. Dans le modèle k-ε , le point de départ est le même que dans le modèle k-l : pour résoudre le problème dynamique, on admet l’existence d’une viscosité turbulente νt , et l’on reprend l’hypothèse (3.57) :

t
2kC
νε µ=
Mais cette fois, il n’est pas fait appel à une quelconque notion de longueur de mélange. De la relation précédente, on tire simplement :
ε
ν µ
2
tk
C= (3.60)
On reprend alors l’équation en k (3.55) à laquelle on adjoint une relation de bilan pour la dissipation ε.
♦ Tout d’abord, compte tenu de (3.57) et (3.60), l’équation (3.55) devient ;
t
2
ik
t
ij
i
i
j
j
it
ii
kC
x
k
xx
V
x
V
x
V
x
kV
νσννν µ−
∂∂
+
∂∂+
∂∂
∂∂
+∂∂
=∂∂
(3.61)
♥ Quant à la nouvelle équation de bilan pour la dissipation ε ,elle est établie en partant du bilan relatif aux fluctuations (3.11), dont on prend le gradient, et que l’on multiplie ensuite
scalairement par cgradD2 c . Le passage aux valeurs moyennes conduit à l’équation
cherchée, à condition de remplacer c par vj et Dc par ν (Annexe 3.A.7, éq. 11). Avec cette relation, les difficultés ne sont pas aplanies pour autant, car elle n’est pas utilisable directement. De plus, la modélisation de ses termes est d’autant moins facile que leur signification physique commence à devenir passablement abstraite, même si on y reconnaît encore des sources surfaciques et volumiques. Tout d’abord, une analyse des ordres de grandeur des différentes sources montre que les trois premières (b1, b2, c2) sont généralement négligeables. Aussi nous ne réécrirons ci-dessous que les termes conservés :
)h(),h(x
v
x
vv
xx
v
x
v
x
v2
)g(),g(xx
v
xx
v2
xxxV
12j
i
j
ik
kj
k
k
i
j
i
21kj
i2
kj
i2
2
kkkk
∂∂
∂∂
∂∂−
∂∂
∂∂
∂∂
−
∂∂∂
∂∂∂
−
∂∂
∂∂−=
∂∂
νν
νενε
(3.63)
Dans ce qui reste, deux autres termes ne sont pas trop difficiles à traiter : ce sont (g1) et (h1), correspondant à des sources surfaciques. Le premier représente une diffusion de ε gouvernée par la viscosité moléculaire, et n’a pas besoin d’être retouché. Le second s’écrit vectoriellement :
∂∂
∂∂
vx
v
x
vdiv
j
i
j
iν
Il présente une ressemblance avec le terme (d2) de (3.50), et peut faire l’objet d’un traitement analogue, par lequel la relation (3.51) devient :
v'vx
v
x
v
j
i
j
i εν =∂∂
∂∂
(3.64a)
où ε’ est la fluctuation de la dissipation ε. Ainsi, on introduit une diffusivité turbulente Dε t de ε , et on pose, de la même façon que dans (3.53) :
( )
∂∂
∂∂−=
−==
∂∂
∂∂
it
i
tj
i
j
i
xD
x
gradDdivv'divvx
v
x
vdiv
ε
εεν
ε
ε
(3.64b)
puis enfin on admet (comme pour ktD , relation 3.58) que tDε est proportionnelle à la
diffusivité turbulente νt soit, en appelant σε la constante de proportionnalité :
ε
ε σν t
tD = (3.64c)
si bien que (h1) s’écrit enfin :
∂∂
∂∂−=
∂∂
∂∂
ik
t
ij
i
j
i
xxv
x
v
x
vdiv
εσνν (3.65)
Les choses se compliquent avec les sources volumiques représentées par les termes (g2) et (h2). Pour les raccrocher aux grandeurs déjà définies (Φ, k, ε, νt), on est amené à leur appliquer une analyse à la fois paramétrique et dimensionnelle, en remarquant que la ressemblance des bilans de k et de ε doit se retrouver dans les équations modélisées. Il sort finalement du chapeau :
k
Cx
V
x
V
x
VkCC)h()g(
2
2j
i
i
j
j
i122
εεµε −
∂∂
∂∂
+∂∂
=+ (3.66)
où Cε1 et Cε2 sont de nouvelles constantes, que l’expérience seule permet d’évaluer.
♠ La forme opérationnelle finale de l’équation en ε (3.63) est donc :
k
Cxxx
V
x
V
x
VkCC
xV
2
2i
t
ij
i
i
j
j
i1
ii
εεσννε
εε
µε −
∂∂
+
∂∂+
∂∂
∂∂
+∂∂
=∂∂
(3.67)
(comme deux indices - en l’occurrence i et j - suffisent ici, l’indice k a été écarté pour éviter toute confusion avec l’énergie cinétique de turbulence). On dispose alors d’un système de deux équations (3.61 et 3.67) à deux inconnues (k et ε) qui permet de calculer la viscosité turbulente νt à partir de (3.60). Elles sont rassemblées ci-dessous, en écriture cartésienne :
t
2
ik
t
ij
i
i
j
j
it
ii
kC
x
k
xx
V
x
V
x
V
x
kV
νσννν µ−
∂∂
+
∂∂+
∂∂
∂∂
+∂∂
=∂∂
(3.68)
kC
xxx
V
x
V
x
VkCC
xV
2
2i
t
ij
i
i
j
j
i1
ii
εεσννε
εε
µε −
∂∂
+
∂∂+
∂∂
∂∂
+∂∂
=∂∂

et aussi en écriture vectorielle, la trace d’un tenseur (somme des éléments de la diagonale principale) étant notée Tr :
( )t
2
k
tt
kCkgraddivVgradD2Trkgrad.V
νσννν µ−
++⊗=
(3.69)
( )k
CgraddivVgradD2TrkCCgrad.V2
2t
1εε
σννε ε
εµε −
++⊗=
Sur une paroi, les conditions aux limites admises sont : 0;0y/k;0k ==∂∂= ε (3.70a) A titre d’exemple, voici les constantes adoptées dans le « modèle standard » pour un jet axisymétrique ou une couche limite : 92,1C;3,1;44,1C;1;09,0C 21k ===== εεεµ σσ (3.70b)
3.4.2.2. – PROCÉDURE DE RÉSOLUTION Au total, le modèle standard requiert la résolution de six équations dynamiques. Schématiquement, l’algorithme de résolution se déroule comme suit, du moins en convection forcée, lorsque les équations dynamiques et thermique sont découplées : 1.- Choisir des valeurs de départ 00 ,k ε , d’où l’on tire au moyen de (3.60), la viscosité
turbulente de départ νt0 . 2.- Avec cette viscosité, résoudre les équations dynamiques (3.18a) et (3.27) pour obtenir un champ de vitesses moyennes. 3.- Résoudre les équations couplées (3.68) en k et ε. 4.- Recalculer νt par (3.60) et revenir à 2. 5.- Réitérer l’opération jusqu’à la convergence. 6.- Résoudre l’équation d’énergie (3.40). 3.4.3. – Variantes du modèle k - εεεε standard Le schéma de base, dont les grandes lignes viennent d’être présentées, ne marche pas dans toutes les situations. Faute de mieux, il a donné naissance à un nombre considérable de variantes et de sous-variantes (beaucoup d’entre elles ne se distinguent que par la valeur des constantes) destinées à améliorer ses performances dans telle ou telle catégorie d’application. Nous n’en donnerons que les idées directrices.

3.4.3.1. – MODÈLES À BAS NOMBRE DE REYNOLDS Un défaut du modèle k - ε standard est qu’il surévalue le frottement et le flux de chaleur dans les écoulements de couche limite avec gradient de pression adverse. Les modèles dits (improprement) « à bas Reynolds » essaient de corriger cet inconvénient. Ils consistent à introduire des termes correctifs pour mieux tenir compte des effets de parois. Ceux-ci prennent généralement la forme de fonctions d’amortissement, notées fµ et f2 . La première, fµ , est appliquée à la viscosité turbulente, qui devient :
ε
ν µµ
2
tk
fC= (3.71)
Par ricochet, dans l’équation en ε, le facteur du premier terme Cε1 Cµ k, qui s’écrivait aussi en raison de (3.60) :
k
CkCC t11ενεµε =
devient de ce fait : kfCC 1 µµε
La seconde, f2, est appliquée au dernier terme de l’équation en ε. Formellement, dans (3.68) l’équation en k est donc inchangée tandis que l’équation en ε est corrigée comme suit :
kfC
xxx
V
x
V
x
VkfCC
xV
2
22i
t
ij
i
i
j
j
i1
ii
εεσννε
εε
µµε −
∂∂
+
∂∂+
∂∂
∂∂
+∂∂
=∂∂
(3.72)
Quant à ces fonctions d’amortissement fµ et f2, elles ont été ajustées (pour ne pas dire bricolées) à l’aide d’un nouveau paramètre, le « nombre de Reynolds turbulent » R t défini par :
εν
2
tk
R = (3.73)
L’appellation inattendue de « Reynolds turbulent » trouve une justification partielle grâce aux échelles de turbulence (§ 3.6.4) mais elle est malencontreuse, car R t n’a rien à voir avec le nombre de Reynolds Re de l’écoulement. Parmi les diverses fonctions d’amortissement qui ont été proposées, citons seulement comme exemples :
( )2t 50/R1
5,2
ef +−
=µ (Jones et Launder) (3.74a)
36
R
2
2t
e22,01f−
−= (Hanjalic) (3.74b) Mais pourquoi appelle–t–on ces modèles « bas Reynolds » ? C’est que, d’après (3.60) et (3.73) :
νν
εν µµ
t2
t fC
1kR == (3.74c)
Avec la dernière formule, on vérifie facilement que les valeurs numériques ne dépassent guère 100, et sont donc bien inférieures à celles de Re. Bref, tout ceci repose sur un échafaudage qui laisse un sentiment d’insatisfaction, tant du point de vue sémantique que physique, mais avec une justification de poids : les résultats sont meilleurs que ceux du modèle standard. 3.4.3.2. – MODÈLE « k - ε RNG » Basée sur une technique mathématique appelée renormalisation (d’où l’acronyme RNG : Re – Normalization Group), cette variante se caractérise en pratique, dans l’équation en ε, par un coefficient Cε2 dépendant de k/ε , donc variable. Ceci permet d’amortir la turbulence dans les régions à fort taux de déformation (turbulence surévaluée par le modèle standard). La qualité des résultats est améliorée pour l’écoulement en aval d’une marche, les zones de décollement – recollement et les écoulements tourbillonnaires. 3.4.3.3. - MODÈLE « k - ε RÉALISABLE » Le concept de « réalisabilité » introduit par Lumley signifie que le modèle doit respecter des situations asymptotiques. Par exemple, k et ε ne doivent jamais être négatifs. Ces contraintes entraînent une adaptation de l’équation en ε, de la forme :
ενεε
σννεε
εε +
−
∂∂
+
∂∂+
∂∂
∂∂
+∂∂
=∂∂
kC
xxx
V
x
V
x
VC
xV
2
2i
t
ij
i
i
j
j
i1
ii (3.75)
où C1 est une fonction de k/ε. Ce modèle paraît bien adapté aux jets circulaires, couches limites avec fort gradient de pression adverse, écoulements à forte courbure et écoulements tourbillonnaires. 3.4.3 4. - MODÈLE AUX TENSIONS DE REYNOLDS (RSM) Dans le modèle aux tensions (ou contraintes) de Reynolds (Reynolds Stress Model =
RSM), l’équation en k est remplacée par le système d’équations (3.47) en ji vv (qui représente
physiquement, au facteur ρ près, un bilan de quantité de mouvement turbulente). Comme il y
a 6 composantes ji vv distinctes (vu la symétrie du tenseur de Reynolds), donc 6 équations, le
modèle k - ε à deux équations devient ici un modèle «ji vv - ε » à 7 équations dynamiques.

(LÉONARD, par Turk et de Groot)
Rappelons les équations (3.47), avec les indices i et j :
( ) vvvdivvvgraddiv
vgrad.vgrad2
x
'pv
x
'pv
1
VgradvvVgradvvvvgrad.V
jiji
ji
ji
ij
ijjiji
−+
−
∂∂+
∂∂−
−−=
ν
ν
ρ (3.76)
Dans la version Launder – Reece – Rodi : a) - les deux premiers termes sont conservés sans modification b) - le dernier terme (corrélation triple) est modélisé d’une manière analogue à (3.53), mais en
tenant compte du caractère tensoriel des ji vv par l’introduction d’un tenseur gradient du
champ des vitesses turbulentes, analogue à Vgrad (voir ch.1):
−= v.vgradDdivvvvdiv Sji (3.77a)
avec un coefficient de diffusion:
εk
CD SS = (3.77b)
soit sous forme cartésienne :
∂∂
∂∂−=
l
jilkS
kji x
vvvv
kC
xvvvdiv
ε (3.77c)
c) – les termes en ν sont négligés d) – il faut bien se tenir à la rampe pour admettre que le terme de corrélation pression – vitesse devient (toujours pour un fluide isochore):
∂∂
+∂∂
+−k
ikj
k
jki2ji
1
x
Vvv
x
VvvCvv
k
C ε (3.77d)

En fin de compte, en regroupant, le nouveau système déduit de (3.76) est de la forme :
( )
∂∂
∂∂−
∂∂
+∂∂
−+−=∂
∂
l
jilkS
kk
ikj
k
jki2ji
1
k
jik x
vvvv
kC
xx
Vvv
x
Vvv1Cvv
k
C
x
vvV
εε
(3.78) D’autre part, l’équation en ε est aussi un peu arrangée pour faire apparaître les
corrélations ji vv :
( )k
Cx
vvk
Cxx
Vvv
kCgrad.V
2
2j
jiij
iji1
εεε
εε εεε −
∂∂
∂∂+
∂∂
−= (3.79)
avec pour constantes : 92,1C;18,0C;45,1C;22,0C;6,0C;8,1C 21S21 ====== εεε
Ce modèle a été construit pour mieux décrire les cellules contra – rotatives, mais à cause du nombre d’équations à résoudre il est assez gourmand en temps de calcul. 3.4.4. – Modèle « k – oméga » (k - ωωωω) Concurrent du modèle k - ε, le modèle k - ω fait appel aux mêmes idées directrices, mais remplace l’équation en ε par un bilan de vorticité turbulente.
Rappelons d’abord quelques notions présentées dans le chapitre 1 (§ 1.2.1 ♦ et 1.4.1).
Dans un écoulement bidimensionnel, le vecteur tourbillon Vrot2 =Ω a pour composantes
(0, 0, Ω ), où Ω (oméga majuscule) est appelée vorticité de l’écoulement. Cette vorticité, qui s’exprime en s – 1, est solution d’une équation de bilan dans laquelle la pression ne figure pas (équation 1.81).

Dans un écoulement bidimensionnel turbulent, on peut considérer la vorticité instantanée comme la somme d’une moyenne Ω et d’une fluctuation de vorticité ω (oméga minuscule), ou vorticité turbulente. L’équation de bilan (3.11) pour une fluctuation c et
l’équation de bilan de 2c (Annexe 3.A.6) s’appliquent donc à ω. Plus généralement, si l’écoulement est tridimensionnel, le vecteur tourbillon possède
trois composantes non nulles : ( )321 ,,2 ΩΩΩΩ = , chacune d’elles subissant une
fluctuation instantanée ω i (i = 1, 2, 3). Introduisons alors une fluctuation quadratique moyenne de vorticité :
ii2 ωωω = (s - 2)
En remplaçant c par ω dans le bilan de 2c (équation (5), annexe 3.A.6), il vient :
vdivgraddivD
grad.gradD2grad.v2grad.V
ii2
iiii2
ωωω
ωωΩωω
ω
Ω
−+
−−= (3.80a)
(il n’y a pas de source volumique 'Iq pour la vorticité). Les différents termes subissent un traitement analogue à ceux de l’équation en ε.
Mais il faut en outre postuler une relation entre ε, k et 2ω , directement ou sous la forme d’une hypothèse sur la longueur de mélange l (dans 3.57a). La forme retenue (Wilcox 1992) est :
2
kl
ω= (3.80b)
d’où, avec (3.57a) :
2t /k ων = (3.80c)
et, en conservant (3.60) :
2kC ωε µ= (3.80d)
Dans sa forme la plus simple, l’équation en ω s’écrit :
2/32
2i
2t
ij
i
i
j
j
i21
2 Cx
)(
xx
V
x
V
x
VCgrad.V
−
∂∂
+
∂∂+
∂∂
∂∂
+∂∂
= ωωσννωω ω
ωω
(3.81a) avec 11,1C 1 =ω ; 15,0C 2 =ω et 2=ωσ .
L’équation en k est la même que dans le modèle k - ε, mais on fait apparaître ω dans le dernier terme, ce qui donne :
2
ik
t
ij
i
i
j
j
it
ii kC
x
k
xx
V
x
V
x
V
x
kV ω
σννν µ−
∂∂
+
∂∂+
∂∂
∂∂
+∂∂
=∂∂
(3.81b)
Le modèle k - ω repose peut-être sur des bases un peu plus physiques que le modèle
ε−k , puisque le bilan de 2ω est obtenu de façon analogue au bilan de k, mais il est tout aussi artificiel dans le traitement des termes de ce bilan. Néanmoins, il semble donner de meilleurs résultats dans les écoulements autour d’obstacles de forme complexe. 3.4.5. – Les taux de turbulence
♣ Dans une description statistique de la turbulence, on peut considérer que l’un des
paramètres essentiels est la variance 2c d’une fluctuation c. C’est en effet la grandeur la plus simple permettant de caractériser l’amplitude des fluctuations de C(t). Elle présente en outre
l’avantage d’être relativement plus accessible à la mesure que les covariances jvc puisqu’on
l’obtient aisément à partir d’un enregistrement local de la grandeur C(t). De plus, nous avons
vu que l’on peut établir des équations de bilans pour les différentes grandeurs 2c (l’énergie cinétique de turbulence k et la vorticité turbulente ω en font partie). Pour évaluer ces variances par rapport aux caractéristiques moyennes de l’écoulement, on introduit un « taux de turbulence Ic de la grandeur C(t) » en posant :
C
cI
2
c = (3.82a)
♦ Les taux de turbulence usuels sont : - le « taux de turbulence thermique »
°−
=TT
I2θ
θ (3.82b)
où T° est une température de référence. - les « taux de turbulence dynamiques » :
j
2j
jV
vI = (3.82c)
En fait, I j est couramment dénommée, de façon quelque peu impropre intensité de turbulence dans la direction j. Elle peut varier de quelques pour cent en soufflerie jusqu’à plus de 30% dans les écoulements atmosphériques.
♥ On parle de « turbulence homogène » lorsque les 2jv sont sensiblement uniformes
dans chaque direction j (autrement dit 0x/v i2i =∂∂ ou faiblement variable). Alors, l’énergie
cinétique de turbulence k est également uniforme dans l écoulement puisque 2/vvk jj=
(définition 3.35).

Un paramètre assez représentatif est « l’intensité globale de turbulence » :
V
k2
V
vv
V
wvuI
jj222
==++
= (3.82d)
♠ La « turbulence de grille » est une turbulence « commandée », donc contrôlable, obtenue au moyen d’une grille oscillante qui vibre perpendiculairement à son plan, selon la direction de l’écoulement. Elle est le plus souvent réalisée dans une soufflerie, pour disposer d’un écoulement amont uniforme. Ses caractéristiques sont déterminées par la maille et la trame de la grille, et par sa fréquence et son amplitude de vibration. Dans ces conditions, l’écoulement moyen est unidimensionnel. Le modèle k-ε standard s’applique (sauf très près des parois) et donne des solutions analytiques dans les cas les plus simples. Un cas limite est celui d’une grille immobile (turbulence passive). L’expérience montre alors que les termes de diffusion du modèle k-ε peuvent être négligés. Il reste donc seulement dans (3.68), en appelant x la direction de l’écoulement :
kC
dx
dU
dx
dkU
2
2εε
ε
ε−=
−= (3.83a)
On vérifie que ce système possède une solution de la forme :
1C
C
2
1C
1
2
2
2 x1C
AU;xAk −
−−
−
−== ε
ε
ε
εε (3.83b)
où A dépend de la grille. La production d’énergie cinétique turbulente est nulle, et il y a donc décroissance de k lorsqu’on s’éloigne de la grille, en raison de la dissipation. On notera que la viscosité turbulente (négligée dans le calcul mais néanmoins non nulle) est d’après (3.60) :
92,0
08,01C
2C2
t xxk
C 2
2 −−−
≈≈= ε
ε
εν µ
L’exposant de x étant petit, νt décroît très lentement, et peut être considérée comme sensiblement constante. 3.5. – DESCRIPTION NON LOCALE DE LA TURBULENCE 3.5.1. – Limites de la théorie statistique locale Au début de ce chapitre, en présentant les données expérimentales, nous avons évoqué la structure spatiale de la turbulence caractérisée par un enchevêtrement de tourbillons plus ou moins éphémères et de dimensions très variables.
Mais la théorie statistique locale ne fait pas apparaître explicitement cet aspect des choses. Plus précisément, le phénomène se trouve doublement édulcoré par la description utilisée.
♣ D’une part, la méthode ne permet pas de savoir si les fluctuations en deux points voisins sont corrélées : la structure spatiale de la turbulence se trouve ainsi masquée. En effet, l’existence d’une corrélation entre les fluctuations de vitesse en deux points A et B signifie qu’une même « bouffée » de turbulence englobe les deux points. La dimension de ce tourbillon dans la direction AB est donc en moyenne supérieure à la distance AB. Sans la connaissance de telles corrélations, on ne peut accéder à ce qu’on appelle « l’échelle spatiale » de la turbulence.
♦ D’autre part, en rabotant ce qui est de nature instationnaire, le passage aux valeurs moyennes camoufle les relations qui peuvent exister entre les fluctuations en un point donné à différents instants. Car si, en un point A, les fluctuations en deux instants voisins t et t + τ sont corrélées, c’est que la durée de vie du tourbillon qui contient A est supérieure à τ . La méthode ne permet donc pas non plus d’accéder directement à « l’échelle des temps » de la turbulence.
♥ Les considérations qui précèdent ont des implications pratiques non négligeables. Au point de vue expérimental, tout d’abord, sur les dimensions des sondes et sur leur position. En schématisant un peu, il est clair que si les deux extrémités d’une sonde se trouvent en deux points non corrélés, la mesure effectuée n’aura aucune valeur locale ; de même, si le temps de réponse de la chaîne de mesure est supérieur à la durée de vie d’un tourbillon, on ne pourra évidemment pas mesurer la valeur instantanée d’une fluctuation. En outre, lorsqu’on procède à une résolution numérique des équations de bilans, il est important de connaître les ordres de grandeur des dimensions et des durées de vie des tourbillons, pour ajuster au mieux le maillage ∆x, ∆t.
♠ Implications pratiques également pour la modélisation ; outre ses effets sur une meilleure analyse des mécanismes turbulents, la connaissance des « échelles de turbulence »
et des covariances vc peut guider le choix de lois phénoménologiques pour les diffusivités
turbulentes at , νt …ou pour certains termes des équations en k , ε , ω , et donc contribuer à améliorer les résultats des modèles. 3.5.2. – Coefficients de corrélation entre grandeurs fluctuantes 3.5.2.1 – CORRÉLATIONS ENTRE LES FLUCTUATIONS DE VITESSE
♣ Coefficients d’intercorrélation Considérons deux points A et B dans un écoulement ; soient viA et viB les fluctuations de vitesse en A et B dans la direction i. Pour caractériser en moyenne l’interaction entre vi en A à l’instant t et vi en B au même instant t, on introduit le « coefficient d’intercorrélation de viA et viB », noté Ri(AB), qui est un nombre sans dimension défini par :
22
)(
iBiA
iBiAi
vv
vvABR = (3.84)
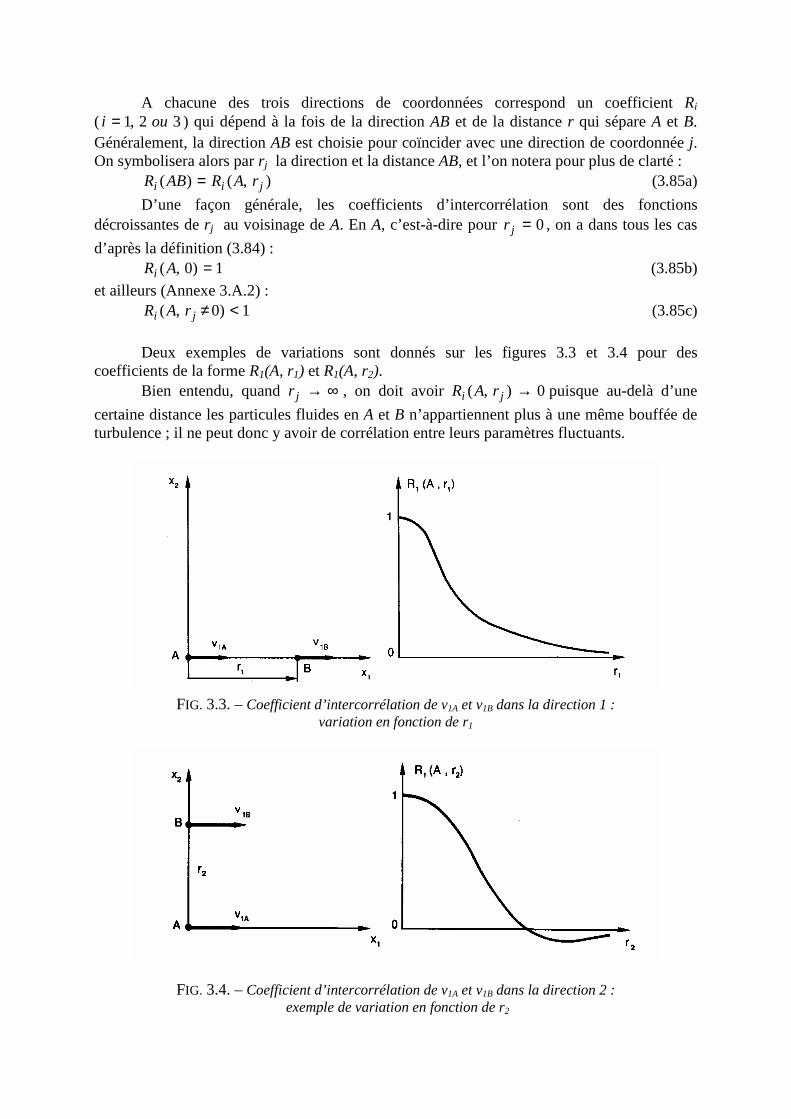
A chacune des trois directions de coordonnées correspond un coefficient Ri ( 32,1 oui = ) qui dépend à la fois de la direction AB et de la distance r qui sépare A et B. Généralement, la direction AB est choisie pour coïncider avec une direction de coordonnée j. On symbolisera alors par r j la direction et la distance AB, et l’on notera pour plus de clarté : ),()( jii rARABR = (3.85a)
D’une façon générale, les coefficients d’intercorrélation sont des fonctions décroissantes de r j au voisinage de A. En A, c’est-à-dire pour 0=jr , on a dans tous les cas
d’après la définition (3.84) : 1)0,( =ARi (3.85b)
et ailleurs (Annexe 3.A.2) : 1)0,( <≠ji rAR (3.85c)
Deux exemples de variations sont donnés sur les figures 3.3 et 3.4 pour des coefficients de la forme R1(A, r1) et R1(A, r2). Bien entendu, quand ∞→jr , on doit avoir 0),( →ji rAR puisque au-delà d’une
certaine distance les particules fluides en A et B n’appartiennent plus à une même bouffée de turbulence ; il ne peut donc y avoir de corrélation entre leurs paramètres fluctuants.
FIG. 3.3. – Coefficient d’intercorrélation de v1A et v1B dans la direction 1 :
variation en fonction de r1
FIG. 3.4. – Coefficient d’intercorrélation de v1A et v1B dans la direction 2 : exemple de variation en fonction de r2

♦ Coefficients d’autocorrélation Donnons-nous maintenant un point A et un intervalle de temps τ . Afin de caractériser en moyenne la relation entre la fluctuation viA en A à l’instant t et la même grandeur viA à l’instant t + τ , on définit un « coefficient d’autocorrélation de vi en A sur la durée τ » :
2
)(.)(),(
iA
iAiAi
v
tvtvAR
ττ += (3.86)
En chaque point A, les ),( τARi sont au nombre de trois (i = 1, 2 ou 3). Ce sont des
nombres sans dimension, fonctions de la variable τ. De même que les Ri(A,Rj), les coefficients d’autocorrélation Ri(A,τ) sont des fonctions décroissantes de τ (fig. 3.5). Pour τ = 0, on a toujours Ri(A, 0) = 1 d’après la définition (3.86). En outre, 0),( →τARi lorsque ∞→τ : il n’y a plus alors de corrélation entre )(tviA et
)( τ+tviA .
FIG. 3.5. – Coefficient d’autocorrélation de viA sur la durée τ :
variation en fonction de τ
♥ Coefficient de corrélation spatio-temporel Enfin, il est parfois utile d’introduire un « coefficient de corrélation spatio-temporel » des fluctuations de vi en A et B sur une durée τ , pour relier la fluctuation viA en A à l’instant t et la fluctuation viB en B à l’instant t + τ . On la note ),( τABRi , ou conformément à la
convention (3.85a), ),,( τji rAR :
22
)()(),,(
iBiA
iBiAji
vv
tvtvrAR
ττ += (3.87)
L’intérêt de ce paramètre est le suivant : Si l’on place deux sondes pour mesurer vi aux points A et B, on observe que ),,( τji rAR est maximum pour un intervalle de temps
optimum τm qui est le temps nécessaire à une perturbation de vi pour se propager d’une sonde à l’autre (fig. 3.6). Ainsi, on peut évaluer expérimentalement la célérité d’une perturbation et son amortissement.
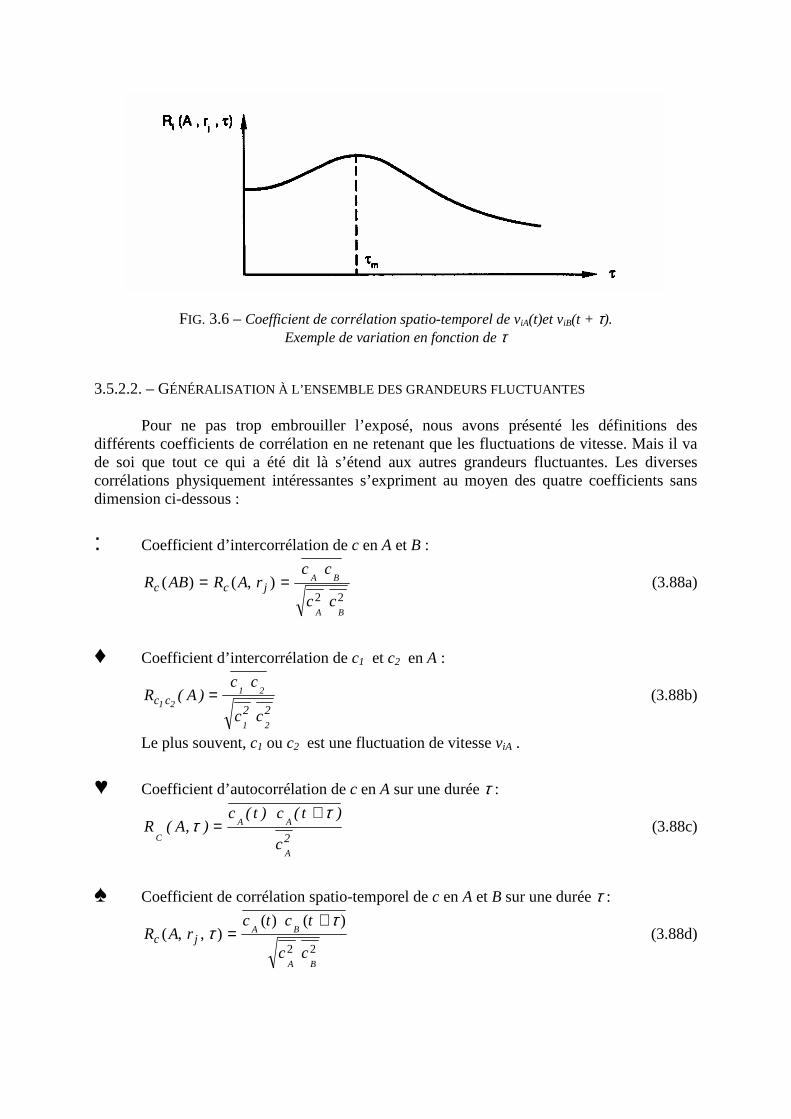
FIG. 3.6 – Coefficient de corrélation spatio-temporel de viA(t)et viB(t + τ). Exemple de variation en fonction de τ
3.5.2.2. – GÉNÉRALISATION À L’ENSEMBLE DES GRANDEURS FLUCTUANTES
Pour ne pas trop embrouiller l’exposé, nous avons présenté les définitions des différents coefficients de corrélation en ne retenant que les fluctuations de vitesse. Mais il va de soi que tout ce qui a été dit là s’étend aux autres grandeurs fluctuantes. Les diverses corrélations physiquement intéressantes s’expriment au moyen des quatre coefficients sans dimension ci-dessous :
♣ Coefficient d’intercorrélation de c en A et B :
22
),()(
BA
BA
cc
ccrARABR jcc == (3.88a)
♦ Coefficient d’intercorrélation de c1 et c2 en A :
22
cc
21
21
21
cc
cc)A(R = (3.88b)
Le plus souvent, c1 ou c2 est une fluctuation de vitesse viA .
♥ Coefficient d’autocorrélation de c en A sur une durée τ :
2A
AA
C c
)t(c)t(c),A(R
ττ
+= (3.88c)
♠ Coefficient de corrélation spatio-temporel de c en A et B sur une durée τ :
22
)()(),,(
BA
BA
cc
tctcrAR jc
ττ
+= (3.88d)
En convection thermique (resp. massique), ces différentes grandeurs permettent de repérer les corrélations entre les fluctuations de température θ (resp. les fluctuations de concentration), ou entre ces dernières et une fluctuation de vitesse vi . 3.5.2.3. – DÉTERMINATION DES COEFFICIENTS R
Les termes 22 ,,,AAAABA iiii vvvv θθ , etc., qui interviennent dans les différents
coefficients R, sont déterminés par calcul statistique à partir des enregistrements expérimentaux des valeurs instantanées viA(t), θ (t)… Il en résulte une certaine imprécision dans les résultats, à laquelle il est assez difficile de remédier. En particulier, on obtient parfois (surtout pour les Ri(A, ri), c’est-à-dire dans le sens longitudinal, cf. définition (3.85a) et fig. 3.3) des coefficients de corrélation qui ne tendent pas vers zéro lorsque r i (ou τ) devient grand, ce qui n’est guère justifiable physiquement. Nous en reparlerons à propos des macro-échelles de turbulence. 3.6. – ECHELLES DE TURBULENCE 3.6.1. – Approche physique Pour présenter la notion d’échelle de turbulence il est commode de raisonner d’abord sur la structure spatiale du champ des vitesses, qui constitue l’aspect le plus important du problème, puis de généraliser ensuite à d’autres grandeurs fluctuantes. Les structures turbulentes sont, comme nous l’avons déjà vu, de tailles très variables et constamment évolutives. C’est dans les grandes structures que s’échange l’essentiel de l’énergie cinétique (ou de la quantité de mouvement), tandis que dans les petites structures c’est la dissipation visqueuse qui est dominante. Pour un écoulement donné, les dimensions des tourbillons sont comprises entre deux bornes : au-delà d’une certaine taille, la viscosité ne peut plus assurer la cohérence d’un tourbillon, celui-ci perd alors son individualité et devient instable ; en deçà d’une taille minimale, c’est l’énergie cinétique qui devient insuffisante pour assurer sa survie, face aux effets de la viscosité qui tendent à homogénéiser l’écoulement. Les ordres de grandeur des dimensions correspondantes sont appelés « échelles dynamiques spatiales de turbulence », ou plus simplement « échelles dynamiques des longueurs ». Quant à l’évolution des structures turbulentes, elle peut être comparée à une sorte de cascade. Un grand tourbillon, que sa taille rend instable, franchit successivement divers échelons de la plus grande à la plus petite échelle, en se scindant à chaque étape en plusieurs tourbillons plus petits. Au cours de ces opérations de fractionnement, son énergie cinétique se trouve évidemment partagée entre les nouveaux tourbillons auxquels il a donné naissance. Le rapport entre les plus grandes et les plus petites échelles dynamiques peut dépasser un facteur 100. Entre ces deux extrêmes, pour certaines dimensions optimales, il arrive que les tourbillons fassent preuve d’une relative stabilité et bénéficient ainsi d’une plus grande longévité. On appelle « turbulence développée » ou « établie » une turbulence dans laquelle les échelles porteuses d’énergie et celles où se fait la dissipation sont nettement séparées.
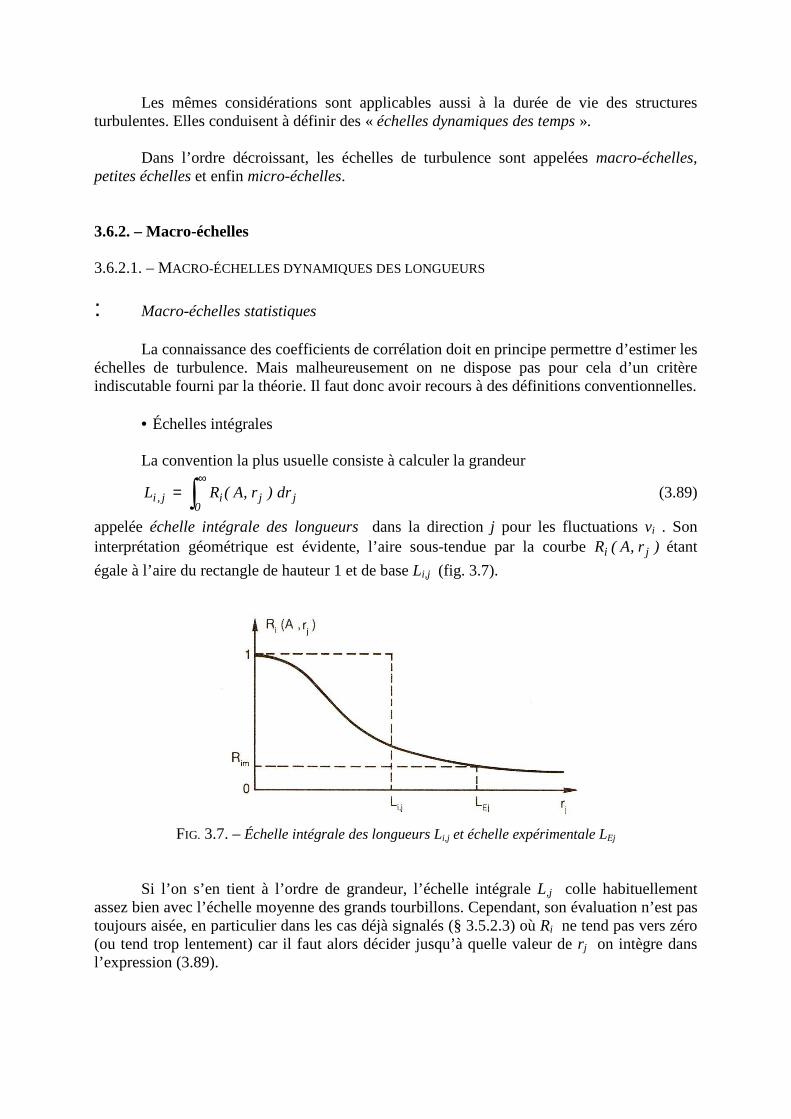
Les mêmes considérations sont applicables aussi à la durée de vie des structures turbulentes. Elles conduisent à définir des « échelles dynamiques des temps ». Dans l’ordre décroissant, les échelles de turbulence sont appelées macro-échelles, petites échelles et enfin micro-échelles. 3.6.2. – Macro-échelles 3.6.2.1. – MACRO-ÉCHELLES DYNAMIQUES DES LONGUEURS
♣ Macro-échelles statistiques La connaissance des coefficients de corrélation doit en principe permettre d’estimer les échelles de turbulence. Mais malheureusement on ne dispose pas pour cela d’un critère indiscutable fourni par la théorie. Il faut donc avoir recours à des définitions conventionnelles. • Échelles intégrales La convention la plus usuelle consiste à calculer la grandeur
∫∞
=0
jjij,i dr)r,A(RL (3.89)
appelée échelle intégrale des longueurs dans la direction j pour les fluctuations vi . Son interprétation géométrique est évidente, l’aire sous-tendue par la courbe )r,A(R ji étant
égale à l’aire du rectangle de hauteur 1 et de base Li,j (fig. 3.7).
FIG. 3.7. – Échelle intégrale des longueurs Li,j et échelle expérimentale LEj
Si l’on s’en tient à l’ordre de grandeur, l’échelle intégrale L,j colle habituellement assez bien avec l’échelle moyenne des grands tourbillons. Cependant, son évaluation n’est pas toujours aisée, en particulier dans les cas déjà signalés (§ 3.5.2.3) où Ri ne tend pas vers zéro (ou tend trop lentement) car il faut alors décider jusqu’à quelle valeur de r j on intègre dans l’expression (3.89).
• Échelles expérimentales On pourrait aussi simplifier la procédure, et admettre que l’échelle des grands tourbillons est la distance LEj au-delà de laquelle le coefficient d’intercorrélation Ri(A,rj) devient inférieur à une valeur Rim considérée comme un minimum significatif (fig. 3.7). Le choix de ce minimum Rim est évidemment un peu arbitraire et requiert une certaine pratique. Mais il permet aussi d’évacuer l’incidence de diverses erreurs systématiques, en particulier lorsque Ri ne tend pas vers zéro pour les grandes valeurs de r j . Les échelles expérimentales LEj sont supérieures aux échelles intégrales Li,j et correspondent plutôt aux plus grandes des structures turbulentes. Mais cette divergence n’est pas très gênante puisqu’on ne peut de toute façon atteindre que des ordres de grandeur. A cet égard, quelle que soit la définition retenue, et sauf contre-indication manifeste, on adoptera de préférence pour macro-échelle pratique L (ou LE) en chaque point la plus grande des valeurs Li,j (ou LEj) (i ou j = 1, 2 ou 3 selon la direction considérée).
♦ Macro-échelles phénoménologiques
Pour introduire des échelles caractéristiques de la turbulence, une procédure tout à fait différente consiste à examiner les mécanismes physiques par le biais de leur équation aux dimensions (ceci ne doit pas être confondu avec la similitude). Nous en avons déjà rencontré deux exemples qui concernent l’expression de la diffusivité turbulente dans le modèle pseudo-laminaire, sur lesquels nous allons revenir maintenant. • Premier point de vue : on s’intéresse à la quantité de mouvement Le transport de quantité de mouvement par les fluctuations de vitesse a été assimilé à un mécanisme de diffusion, caractérisé par une diffusivité turbulente νt , et l’hypothèse de Prandtl (3.32) stipule que νt est proportionnelle au gradient de vitesse transversal, soit : yUXt ∂∂= /ν (3.90a)
Au point de vue dimensionnel, X est obligatoirement le carré d’une longueur, d’où : yUlt ∂∂= /2ν (3.90b)
formule dans laquelle l a été appelée longueur de mélange. Sachant que la diffusion turbulente de quantité de mouvement est essentiellement
assurée par les grandes structures, il est alors licite d’interpréter l comme une macro-échelle de diffusion turbulente de la quantité de mouvement.
On doit remarquer que cette approche convient mieux à proximité des parois (où le gradient de vitesse est élevé) que dans l’écoulement général, où le gradient de vitesse moyenne tend vers zéro. • Second point de vue : on s’intéresse à l’énergie cinétique
Le raisonnement est à peu près le même, mais on privilégie cette fois un
rapprochement entre la viscosité turbulente et l’énergie cinétique de turbulence : c’est l’hypothèse de Prandtl-Kolmogorov (3.36a) que nous écrivons simplement ici : 2/1kLt =ν (3.90c)
L’équation aux dimensions correspondante montre que L est homogène à une longueur, qui présente alors le sens d’une macro-échelle de diffusion de l’énergie cinétique de turbulence. Cette deuxième approche a une validité plus large que la précédente, car elle est mieux adaptée à la description des écoulements loin des parois, où l’énergie cinétique de turbulence atteint sa valeur maximale. • Selon le point considéré dans l’écoulement, les ordres de grandeur de l ou L peuvent aller de l’échelle sub-millimétrique (près d’une paroi) à l’échelle décamétrique (voire hectométrique) dans les écoulements atmosphériques. 3.6.2.2. – MACRO-ÉCHELLES DYNAMIQUES DES TEMPS
♣ Les raisonnements qui conduisent à la définition de macro-échelles dynamiques des temps sont analogues aux précédents, en remplaçant le coefficient d’intercorrélation Ri(A, rj) par le coefficient d’autocorrélation Ri(A, τ). On atteint de cette façon, en ordre de grandeur, la durée moyenne de vie des grands tourbillons.
Les définitions (3.6.2.1 ♣) transposées aux corrélations temporelles vont donc nous donner : • Une échelle intégrale des temps pour la fluctuation vi en A :
∫∞
=0
iIi d),A(R τττ (3.91a)
dont la signification géométrique est identique à celle de Li,j (fig. 3.7). • Une échelle expérimentale des temps τEi telle que pour τ > τEi, on ait Ri(A, τ) inférieur à un minimum significatif donné Ri min. Les problèmes soulevés par ces deux définitions sont absolument les mêmes que pour les échelles des longueurs. Là encore, la plus grande des échelles τIi ou τEi sur les trois directions d’espace (i = 1, 2, 3) pourra être adoptée comme macro-échelle pratique des temps pour les fluctuations de vitesse en A.
♦ La notion de macro-échelle phénoménologique s’étend aussi au temps. Remarquons en effet que dans (3.90b) le quotient :
lt yU
l τν
=∂∂
=/
12 (3.91b)
est homogène à un temps, qui s’interprète donc dans la logique « phénoménologique » comme une échelle des temps de la diffusion turbulente. La même remarque s’applique en partant de (3.90c) où :
Lt k
LL τν
==2/1
2 (3.91c)

Certains auteurs identifient macro-échelles des temps et durées moyennes de vie des grosses structures. Disons plus prudemment que leurs ordres de grandeur sont comparables. 3.6.2.3. – MACRO-ÉCHELLES THERMIQUES A côté des structures turbulentes dynamiques associées au mouvement du fluide, on peut également mettre en évidence d’autres structures, liées à la fluctuation d’une grandeur C. En thermoconvection, particulièrement, des structures thermiques prennent naissance : elles sont associées aux fluctuations θ du champ de température, et ne coïncident pas de façon systématique avec les structures dynamiques. Les dimensions extrêmes des structures thermiques et leurs durées de vie (ou du moins leurs ordres de grandeur) seront les échelles thermiques de l’écoulement. Peuvent être ainsi définies : macro-échelles thermiques des longueurs et macro-échelles thermiques des temps.
♣ Par exemple, la « macro-échelle statistique thermique des longueurs en A dans la direction j » est par définition :
∫∞
=0
jjj dr)r,A(RL θθ (3.92a)
avec 22
),(
BA
BAjrAR
θθ
θθθ = (3.92b)
♦ Tout naturellement, si l’on fait référence aux hypothèses (3.42, 3.43) concernant la diffusion turbulente de chaleur, on aboutira à une « macro-échelle phénoménologique de diffusion thermique turbulente» lθ préalablement appelée « longueur de mélange thermique ».
Etant donné que y
Ult ∂
∂= 2ν et y
Ullat ∂
∂= θ , on voit que :
tt
t
l
l
aPr==
θ
ν (3.92c)
où Prt est le nombre de Prandtl turbulent (3.45).
♥ Quant à la macro-échelle thermique statistique des temps, elle aura pour expression :
∫∞
=0
j d),A(R τττ θθ
avec d’après (3.88c) :
2
A
AA)t()t(
),A(Rθ
τθθτθ
+= (3.92d)
3.6.2.4. – UTILITÉ DES MACRO-ÉCHELLES Les applications des macro-échelles de turbulence intéressent principalement le modèle pseudo-laminaire et la résolution numérique des équations.

Comme il a déjà été dit plus haut, une propriété importante des écoulements turbulents réside dans le fait que la diffusion turbulente est essentiellement le fait des grandes structures. Par exemple, ce sont les grands tourbillons qui transportent l’essentiel de l’énergie cinétique de turbulence, et qui assurent donc sa diffusion. En conséquence, l’estimation d’une diffusivité turbulente, qui est l’essence du modèle pseudo-laminaire, devra être effectuée sur la base d’une échelle de longueur qui soit caractéristique des grandes structures. Pour ce qui concerne la résolution numérique des équations intégrales de bilans, les grandes échelles de turbulence constituent un guide précieux pour l’estimation du domaine d’étude , et de la durée totale sur laquelle on opère. Ainsi, le choix d’un domaine de dimensions inférieures à l (ou L) conduirait à des résultats non significatifs puisque le calcul serait limité à l’intérieur d’un grand tourbillon. Il en irait de même pour une simulation numérique dont la durée serait inférieure à l’échelle de temps des grands tourbillons. 3.6.3 – Micro-échelles 3.6.3.1. – CARACTÈRES DES PETITES STRUCTURES Si les grandes structures réalisent l’essentiel du transport turbulent des diverses grandeurs physiques, les petites structures assurent quant à elles l’essentiel de la dissipation. Prenons, par exemple, le cas des plus petits tourbillons. A l’intérieur de ceux-ci, le mouvement est de type visqueux, c’est-à-dire gouverné par la viscosité moléculaire. En conséquence, le concept de viscosité turbulente n’a plus sa place à cette échelle et il faut revenir localement aux équations du mouvement laminaire. Et lorsqu’un petit tourbillon disparaît, c’est que toute son énergie cinétique propre (qui est, en quelque sorte, le support de son individualité) a été dissipée par viscosité. De même, dans les petites structures thermiques, la diffusion turbulente disparaît et il ne subsiste plus que la diffusion thermique moléculaire, caractérisée par la diffusivité thermique du fluide. 3.6.3.2. – MICRO-ÉCHELLES STATISTIQUES La description non-locale de la turbulence se prête mal à l’évaluation des micro-échelles. Il faut en effet pour cela s’appuyer sur les valeurs des coefficients de corrélation au voisinage de l’origine, c’est-à-dire là où ils varient faiblement (fig. 3.3 à 3.5), ce qui entraîne évidemment des problèmes de précision des mesures, et aussi de traitement des données : sur quoi se baser exactement pour proposer une définition ? L’idée la plus généralement retenue consiste à chercher l’intersection avec l’axe des abscisses de la parabole osculatrice à la courbe ),( ji rAR ou ),( τARi (c’est-à-dire la
parabole de même ordonnée et de même courbure que la fonction R à l’origine). L’abscisse du point d’intersection est la « micro-échelle de Taylor ». Au point de vue mathématique, il n’y a rien à dire ; mais physiquement on ne voit pas très bien à quoi raccorder les valeurs obtenues. Nous laisserons donc cette définition de côté. 3.6.3.3. – MICRO-ÉCHELLES PHÉNOMÉNOLOGIQUES

L’approche phénoménologique consiste à reprendre le raisonnement du § 3.6.2.1.♦, en l’adaptant : si dans les petites structures, l’énergie cinétique k est dissipée par la viscosité moléculaire, on admet, par analogie avec (3.90c) : 2/1klk=ν (3.93a)
La longueur kl définie par cette relation est une micro-échelle de dissipation de
l’énergie cinétique turbulente, appelée « échelle de Kolmogorov ». On ne peut pas dire que l’échelle de Kolmogorov est la dimension moyenne des plus petits tourbillons, mais elle en donne assez fidèlement l’ordre de grandeur, qui est le plus souvent de 210− à 110− mm. Au point de vue thermique maintenant, les plus petites structures sont celles dont l’énergie interne est entièrement dissipée par diffusion thermique moléculaire. L’analogie avec les structures dynamiques permet de déterminer leurs échelles moyennes (notées lT) par la relation : 2/1kla T= (3.93b) Le rapport entre les micro-échelles dynamiques et thermiques traduit le couplage entre diffusion thermique et diffusion de quantité de mouvement, exprimé par le nombre de Prandtl : Pr// == all Tk ν (3.93c)
3.6.3.4. – MICRO-ÉCHELLES ET SIMILITUDE
♣ Une autre voie pour aborder les échelles de turbulence consiste à raisonner en termes de similitude (voir Ch. 2). Revenons pour cela à la définition du terme de dissipation ε (3.52) :
k
j
k
j
x
v
x
v
∂∂
∂∂
= νε (3.52)
Nous avons vu que, dans le cadre du modèle pseudo-laminaire, on a également (relation 3.57c) : lkC /2/3
µε = (3.57c)
avec Cµ sans dimension, l = longueur caractéristique et k = énergie cinétique de turbulence
= 2/jj vv .
Pour appliquer la similitude à une équation de bilan telle que (3.50) (bilan de k), on doit faire un choix de valeurs de référence l°, ε°, v°, k° …. En ce qui concerne ε°, on se trouve face à une alternative : - soit, d’après (3.52) :
°°
°°=°
l
v
l
vνε (3.94a)
où v° est une vitesse de référence pour les fluctuations ; - soit, d’après (3.57c) :
°°=° lk /)( 2/3ε (3.94b) Plaçons-nous dans le cas de la turbulence homogène, où k varie peu dans l’écoulement : on prendra donc naturellement k° = k. En outre, vu la définition de k, il semble acceptable de choisir comme vitesse de référence pour les fluctuations: 2/12/1)( kkv =°=° (3.95a) v° étant souvent désignée comme une échelle de vitesse de la turbulence. La nécessaire cohérence des deux expressions de ε° entraîne :
°
=
°=
°°
l
k
l
k
l
v 2/322/12
νν
d’où la longueur l° compatible avec les autres grandeurs de référence :
klvkl ≡
°==° νν
2/1 (3.95b)
Par une autre voie, on retrouve donc ici l’échelle de Kolmogorov lk (3.93a). Ajoutons ici une propriété qui retient souvent l’attention des auteurs. En éliminant k entre les relations (3.94b) et (3.95b), on obtient :
4/13
kl
°=
εν
(3.95c)
♦ Enfin, lorsqu’on écrit (3.50) sous forme adimensionnelle, en respectant la procédure
établie au chapitre 2, on voit apparaître devant le terme )( kgraddivν un critère de similitude
ν/°°=Γ lVk , où V° est la vitesse de référence pour l’écoulement moyen.
Si l’on admet l’intensité globale de turbulence I (3.82d) à peu près constante dans l’écoulement, 2/1k et V sont dans un rapport lui-même constant. On peut donc considérer que v° est représentative de l’écoulement d’ensemble, et il n’est pas illicite alors de choisir : 2/1kvV =°=° (3.95d) d’où : 1/ =°°=Γ νlVk (3.95e)
!!! Cette propriété, considérée parfois comme un postulat et parfois comme un hasard, signifie simplement que, avec les grandeurs de référence choisies, la similitude vis-à-vis de la diffusion visqueuse d’énergie cinétique turbulente est automatiquement assurée à l’échelle 1 lorsqu’on est en turbulence homogène. D’autre part, l’absence de structures turbulentes de dimensions inférieures à lk en moyenne a pour conséquence, au voisinage d’une paroi, l’existence d’une sous - couche visqueuse dont l’épaisseur est en ordre de grandeur au moins égale à lk . Nous retrouverons cette couche visqueuse au chapitre 5.
♥ Quant à la micro-échelle des temps associée à lk , c’est bien entendu :
kv
lt kk
ν=°
= (3.96a)
qui représente (en ordre de grandeur) la longévité moyenne des plus petites structures dynamiques turbulentes. Celle des plus petites structures thermiques sera caractérisée à partir de (3.93b) par :
k
a
v
lt TT =
°= (3.96b)
3.6.3.5. – IMPORTANCE DES MICRO-ÉCHELLES Les micro-échelles de turbulence présentent un intérêt essentiellement pratique. D’une part, elles donnent des indications précieuses pour le dimensionnement des sondes de mesure dans un dispositif expérimental. En effet, on conçoit que si une sonde possède des dimensions plusieurs fois supérieures à celles des petites structures, les mesures qu’elle fournira ne pourront prétendre à une valeur vraiment locale. D’un autre côté, les micro-échelles de longueur et de temps permettent aussi d’estimer les dimensions minimales du maillage à utiliser dans une résolution numérique. 3.6.4. – A propos du nombre de Reynolds turbulent Nous avons rencontré sur notre route un nombre sans dimension dénommé « nombre de Reynolds turbulent » (§ 3.4.3.1.) défini par les relations (3.73) et (3.74c) :
νν
εν µµ
t2
t fC
1kR ==
Avec l’aide de l’hypothèse (3.90c) et de la définition (3.95c), Rt s’écrit encore :
νν µµµµ
Lv
fC
kL
fCRt
°== 11 2/1 (3.97)
En faisant abstraction de la fonction d’amortissement fµ , on constate que Rt est construit comme un critère de similitude relatif à la diffusion turbulente de quantité de mouvement, c’est-à-dire comme un « nombre de Reynolds ». Mais vu que la fonction d’amortissement est elle-même dépendante de Rt, et qu’elle constitue un élément clé des modèles dits « à bas Reynolds », la terminologie en usage introduit un élément de confusion et s’avère inadaptée. Il aurait mieux valu donner un autre nom à ce paramètre. 3.6.5. – Simulation des grandes structures (SGS) (en langage international : LES = Large Eddy Simulation) La simulation des grandes structures turbulentes est une approche intermédiaire hybride qui consiste à découpler, par des techniques numériques, le calcul de l’écoulement aux macro-échelles et aux micro-échelles. La justification de ce type d’approche réside dans l’idée suivante, déjà évoquée : les grands tourbillons produits par l’écoulement moyen sont difficiles à modéliser ; ils transportent cependant la majeure partie de l’énergie cinétique turbulente. Il faut donc de préférence les traiter directement, sans hypothèses simplificatrices. Par contre, les petits

tourbillons sont relativement plus faciles à prendre en compte, car ils sont dominés par la viscosité moléculaire. Cette technique semble bien adaptée aux écoulements dans lesquels les macro-échelles et les micro-échelles sont assez dissemblables, comme par exemple dans le bâtiment et son proche environnement. 3.6.6. – Simulation numérique directe (SND) (en langage international : DNS = Direct Numerical Simulation) Comme son nom l’indique, la simulation numérique directe consiste à résoudre directement les équations de bilans en espace et en temps. C’est évidemment l’idéal auquel rêve tout mécanicien des fluides. Sauf que ce genre de calcul se révèle si complexe et si exigeant en capacité et en temps d’ordinateur qu’il reste encore réservé à des petits domaines n’excédant guère 102 cm3. Il semble malgré tout que l’avenir soit là, à condition en particulier d’élaborer des techniques numériques de filtrage qui permettent d’accéder correctement et au moindre coût, soit au mouvement moyen, soit à des détails locaux. 3.7 – PRODUCTION D’ENTROPIE TURBULENTE Les équations de bilans, qui ont été adaptées dans ce chapitre au traitement statistique des grandeurs turbulentes, avaient évidemment pour but la détermination des champs moyens de vitesses et de température. Mais la turbulence se traduit aussi par une production spécifique d’entropie, qu’il est intéressant d’examiner maintenant. Revenons donc au bilan d’entropie (1.74) dans lequel n’ont été conservés que les termes dominants en convection thermique :
++Φ=+∂
∂Tgrad
TdivTgrad
TTVsdiv
t
s λλρρ 22
)()()(
(3.98a)
soit, pour un fluide isochore :
++Φ=+∂
∂Tgrad
TdivTgrad
TTsgradV
t
s λλρρ 22
)(.)(
(3.98b)
Pour la suite, il sera plus commode d’écrire cette équation sous forme cartésienne, en développant la fonction de dissipation Φ :
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
+∂∂
=∂∂+
∂∂
iiiij
i
i
j
j
i
ii x
T
Txx
T
x
T
Tx
V
x
V
x
V
Tx
sV
t
s λλµρρ2
(3.98c)
Comme pour toute autre grandeur turbulente, on considère que la valeur instantanée de
l’entropie est la somme d’une valeur moyenne s et d’une fluctuation s’ :
')( ssts += (3.99) En introduisant maintenant les grandeurs fluctuantes (rappelons que θ est la fluctuation de température), et en passant à la moyenne, il vient :

∂+∂
+∂∂+
∂+∂
∂+∂
++
∂+∂
∂+∂
+∂
+∂+
=∂
+∂+
ii
ii
j
ii
i
jj
j
ii
iii
x
T
Tx
x
T
x
T
T
x
vV
x
vV
x
vV
Tx
ssvV
)(
)()(
)(
)()()()'()(
2
θθ
λ
θθθ
λ
θµρ
Le résultat va donc faire surgir des termes contenant seulement les grandeurs moyennes de l’écoulement, et de nombreuses corrélations. Le calcul est basé sur les règles rappelées dans l’annexe 3.A.2, et ne présente aucune difficulté particulière (les termes en
)/(1 θ+T et en 2)/(1 θ+T font l’objet d’un développement limité à l’ordre 1). Nous en donnons simplement le résultat, après avoir laissé de côté les corrélations qui paraissent négligeables en ingénierie classique (pour plus de détails, on se reportera par exemple à J. HERPE, thèse, 2007) :
)(,)()'(
)(,)(
)(,)(
2
fex
sv
x
T
Tx
dcxxx
T
x
T
T
bax
v
x
v
x
v
Tx
V
x
V
x
V
Tx
sV
i
i
ii
iiii
j
i
i
j
j
i
j
i
i
j
j
i
ii
∂∂
−
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
+∂∂
+∂∂
∂∂
+∂∂
=∂∂
λ
θθλ
µµ
(3.100)
Les termes (e) et (f) sont des divergences, et caractérisent donc la diffusion d’entropie turbulente (le dernier provient du membre de gauche, comme dans 3.9). La création d’entropie turbulente est représentée par (b) et (d). On retrouve enfin dans (a) et (c) la production d’entropie de l’écoulement moyen. Comme on a souvent le choix, en ingénierie, entre plusieurs géométries, et qu’on dispose d’une certaine marge dans les conditions aux limites, l’évaluation des termes de l’équation (3.100) ouvre la voie à l’optimisation entropique d’un écoulement turbulent.

ANNEXES AU CHAPITRE 3 3.A.1. – TURBULENCE ET NON-LINÉARITÉ 3.A.1.1. – ORIGINE DES SOLUTIONS TURBULENTES Quand on examine la structure d’un écoulement turbulent (§ 3.1) et que l’on regarde les équations de bilans qui sont censées le décrire (1.27, 1.37, 1.56), on est en droit de se demander si des évolutions d’apparence aussi insaisissable peuvent être solutions d’équations aux dérivées partielles dont la forme semble très classique. En particulier, ce qui paraît à première vue le plus surprenant, c’est que des phénomènes instationnaires puissent prendre naissance dans un système dont les conditions aux limites sont maintenues stationnaires. La réponse à ces interrogations réside dans une propriété structurelle majeure de certaines équations de bilans : leur non-linéarité. Les méthodes analytiques sont actuellement insuffisantes pour obtenir les solutions complètes de ces équations, mais la résolution numérique de diverses équations différentielles non linéaires a montré dans certains cas un comportement chaotique des solutions, de même nature que ce que l’on rencontre en turbulence. Avec des problèmes simplifiés, on a pu également accéder à partir des équations de quantité de mouvement à des solutions numériques caractéristiques de la turbulence. Voyons d’abord où se situe la non-linéarité dans les équations générales. 3.A.1.2. – QU’EST-CE QU’UNE ÉQUATION LINÉAIRE ? Il n’est peut-être pas superflu de rappeler en quoi consiste la linéarité (ou la non-linéarité) dans les systèmes différentiels que nous avons à manipuler. Soient X et Y deux fonctions de x, y, z, t. Considérons l’équation fonctionnelle ),,,(),( tzyxGYXF = (1) Cette équation sera linéaire en X et Y si, en posant : 21 XXX βα += (où α et β sont des constantes arbitraires) le premier membre devient : ),(),(),( 2121 YXFYXFYXXF βαβα +=+ (2) et de même avec Y. Dans le cas où G = 0, on dit que l’équation est linéaire homogène en X et Y. Enfin, si la propriété (2) n’est pas vérifiée, l’équation est non-linéaire. 3.A.1.3 – LES ÉQUATIONS DE BILANS SONT-ELLES LINÉAIRES ? Examinons maintenant les trois principales équations de bilan local, en regardant si elles satisfont où non à la propriété de linéarité. Pour alléger le raisonnement, nous nous limiterons au cas d’un écoulement de fluide isochore et sans forces extérieures.

♣ En ce qui concerne l’équation de continuité,
0=Vdiv il est clair qu’elle répond à la condition de linéarité. Il n’y a donc pas de problème de ce côté.
♦ Avec les hypothèses adoptées, et en la présentant sous la forme (1), l’équation de quantité de mouvement (1.37b) s’écrit :
*.)( pgradVVgradVt
VVF −=∆−+
∂∂= µρρ (3)
Posons : 21 VVV βα += (α , β constantes). On voit immédiatement que l’on a :
)()()( 21 VFVFVF βα +≠ et que la propriété (2) n’est pas vérifiée. L’équation de quantité de mouvement est donc non-linéaire.
Ceci est dû à l’expression VgradV.ρ qui est un produit de termes contenant V . On dit alors que la non-linéarité est quadratique.
♥ Le problème est un peu plus compliqué avec l’équation d’énergie. Sous sa forme (1.56), elle devient ici :
)(. TgraddivTgradVCt
TC pp λρρ +Φ=+
∂∂
(4)
Tout d’abord, si la fonction de dissipation Φ peut être négligée devant les autres termes, et si les paramètres λ, Cp et µ sont indépendants de la température, on voit que (4) est linéaire en T. En effet, la vitesse est indépendante du champ de température quand µ est constant, et elle est déterminée par l’équation de quantité de mouvement, de telle sorte que (4) est de la forme :
0)(.)( =−+∂∂= TgraddivTgradVC
t
TCTF pp λρρ
et satisfait visiblement à la condition (2).
Mais si V est fonction de T (ce qui arrive lorsque µ dépend fortement de la température, mais également en convection naturelle ou mixte), alors la linéarité de l’équation d’énergie est détruite. Enfin, la prise en compte de la fonction de dissipation Φ dans (4) entraîne automatiquement la non-linéarité de cette équation puisque Φ, qui a pour expression :
j
i
i
j
j
i
x
V
x
V
x
V
∂∂
∂∂
+∂∂
=Φ µ
contient des termes quadratiques.
♠ En conclusion, même dans la situation la plus simple où nous nous sommes placés, l’une des équations (quantité de mouvement) est d’une structure fondamentalement non-linéaire. De plus, la non-linéarité s’étend souvent à l’équation d’énergie, et de toute façon les trois équations se trouvent non-linéaires si le fluide n’est pas isochore.
3.A.1.4. – LES CONSÉQUENCES DE LA NON-LINÉARITÉ Historiquement, la première interprétation des conséquences de la non-linéarité qui a eu cours est celle-ci : dans tout écoulement de fluide, il se produit accidentellement des instabilités de caractère aléatoire. Si elles tendent à se résorber rapidement, on ne les soupçonne pas et elles n’ont aucune influence : l’écoulement est laminaire (§ 3.3.1). Sinon, elles se développent, et c’est ce qui donne à l’écoulement son caractère turbulent. Or on s’aperçoit que lorsque le nombre de Reynolds Re est supérieur à la valeur critique Rec, le terme non-linéaire de l’équation (3) a pour effet d’amplifier systématiquement ces instabilités. Cependant, on admet maintenant qu’il n’est pas nécessaire de recourir à cette notion d’instabilité comme cause, ou comme explication, du mouvement turbulent. En effet, l’exploration numérique des systèmes dynamiques montre qu’un comportement d’allure chaotique peut naître spontanément au sein d’un système physique décrit par des équations non-linéaires. D’ailleurs, une analyse plus fine montre que ce chaos n’est pas total, et qu’il existe une structure cohérente dans un écoulement turbulent. La transition laminaire-turbulent n’est pas une frontière entre mouvement ordonné et mouvement désordonné, mais constitue le passage d’une structure très ordonnée à une structure moins ordonnée. Ce passage est conditionné par l’importance des termes non-linéaires vis-à-vis des termes visqueux, c’est-à-dire par la valeur de Re. Il faut aussi souligner que la réalisation de structures turbulentes n’est pas le monopole des systèmes gouvernés par des équations non-linéaires. En effet, des équations linéaires peuvent fort bien admettre des solutions turbulentes, pourvu que les conditions aux limites soient elles-mêmes de type turbulent, c’est-à-dire représentées par des fonctions pseudo-aléatoires (J. Bass, 1984). Enfin, on n’omettra pas le fait que, dans le traitement statistique de la turbulence, ce
sont les termes non-linéaires qui sont à l’origine des grandeurs jii vvcv , … La raison en est
que, dans l’opération de passage à la moyenne, ils sont l’objet d’une perte d’information (mais pas les autres termes : on ne perd pas d’information en moyennant une fonction linéaire !!), ce qui se traduit concrètement par l’apparition de nouvelles inconnues qui sont les corrélations. Toujours est-il que le problème de la turbulence est l’un des plus complexes de la physique ; malgré les espoirs que l’on peut mettre dans la simulation numérique directe, l’approche statistique reste indispensable pour un certain temps encore. 3.A.2. – CALCUL DES GRANDEURS MOYENNES DANS UN ÉCOULEMENT TURBULENT 3.A.2.1. – PROBLÈMES SOULEVÉS PAR LA DÉFINITION DE LA MOYENNE Pour toute densité volumique C(t) dépendant du temps, on définit une moyenne C entre les instants t0 et t0 + τ par :
∫+
==τ
τ0
0
t
tdt)t(C
1C)t(C (1)
expression qui généralise la définition (3.1) relative à la vitesse moyenne.

En fait, il faudrait écrire :
),()( 0 τtCtC = (2)
car cette moyenne dépend évidemment de l’intervalle de temps choisi : c’est une moyenne mobile, mal définie au sens mathématique. Un prolongement assez naturel de cette notion consiste à considérer que la fonction C(t) est la somme de sa moyenne et d’une fluctuation c(t) autour de la moyenne : )(),()( 0 tctCtC += τ (3)
où [ ]τ+∈ 00 , ttt
Rien n’interdit de réitérer l’opération de moyenne (1) sur l’égalité (3). Sachant que ),t(C 0 τ est indépendant de t, il vient :
)(),()( 0 tctCtC += τ
et compte tenu de (2), la conséquence est :
0)( =tc (4)
La moyenne de la fluctuation sur l’intervalle [ ]τ+00, tt est nulle.
Malgré tout, il y a une difficulté, car d’après sa définition (3), c(t) est une fonction implicite des bornes de l’intervalle de calcul, c’est-à-dire de t0 et de τ . La moyenne et sa fluctuation sont donc toutes les deux dépendantes de l’intervalle de temps utilisé. Cependant, le problème se simplifie si l’on considère une classe particulière
d’écoulements pour lesquels )(tC est un opérateur stationnaire, c’est-à-dire indépendant de la
durée d’intégration τ (pratiquement, ceci implique en particulier que l’on puisse choisir τ assez grand par rapport à la durée moyenne des fluctuations). Alors : cteCtC ==),( 0 τ (5)
et la fluctuation c(t) devient indépendante de l’intervalle τ (la propriété (4) restant évidemment vérifiée) . De tels écoulements sont dits permanents (ou stationnaires) en moyenne. Pour les réaliser, il est nécessaire (mais non suffisant) d’imposer des conditions aux limites indépendantes du temps. En ce qui concerne les écoulements qui ne répondent pas à la définition (5), le problème reste entier. Tout ce qui suit concerne donc exclusivement les écoulements permanents en moyenne. REMARQUE – Sachant que l’on a toujours : γρ=)(tC (γ densité massique de la grandeur
considérée), en écoulement isochore où cte== ρρ , il vient :
'c;C γργρ == (γ ’ = fluctuation de γ )
0' =γ 3.A.2.2. – ÉQUATION À TRAITER Rappelons que l’équation sur laquelle vont principalement avoir lieu les calculs de moyenne est l’équation (3.6) :

)cC(gradDdivq)vV()cC(divt
)cC(cI ++=+++
∂+∂
où V est le vecteur vitesse moyenne, et v le vecteur fluctuation de vitesse. En développant, on obtient :
)()( cgradCgradDdivqvcvCVcVCdivt
c
t
CcI ++=++++
∂∂+
∂∂
(6)
La méthode consiste à prendre la moyenne des deux membres de cette équation. 3.A.2.3. – MOYENNE D’UNE DÉRIVÉE PAR RAPPORT AU TEMPS
♣ D’après la définition (5) des écoulements permanents en moyenne :
0=∂∂
t
C (7)
♦ ∞→→−+=∂∂=
∂∂
∫+
ττττ
τsi0)t(c)t(c
1dt
t
c1
t
c 0
0
t
t00 , (c’est – à - dire en
pratique si τ est pris assez grand). On a donc :
0=∂∂t
c (8)
3.A.2.4. – MOYENNE D’UNE DÉRIVÉE PAR RAPPORT AUX COORDONNÉES D’ESPACE Soit une fonction X = X(t, xi). Par définition de la moyenne :
∫+
∂∂=
∂∂ τ
τ0
0
t
t iidt
x
X1
x
X
Les opérateurs ∫ et ix∂
∂ portent sur des grandeurs indépendantes et peuvent être
permutés :
i
t
tii x
XdtX
1
xx
X 0
0 ∂∂=
∂∂=
∂∂
∫+ τ
τ
On a donc :
XdivXdiv = pour un vecteur X
XgradXgrad = pour un scalaire X (9) En particulier :
),( ctesVCVCdivVCdivVCdiv ===
)0,(0 ==== ccteVVcdivVcdiv
0=vCdiv (même raison)

vcdivvcdiv =
)()( CgradDdivCgradDdiv cc = (car C = cte)
0)()( == cgradDdivcgradDdiv cc
3.A.2.5 – ÉQUATION AUX VALEURS MOYENNES Le passage aux valeurs moyennes dans l’équation (6) donne finalement :
)( CgradDdivqvcdivVCdiv cI +=+
Dans cette relation apparaît la covariance vc des fluctuations c et v (§ 3.2.1♠). En particulier, si c = ρvi (quantité de mouvement) on rencontrera dans l’équation des termes en
2iv , cette dernière grandeur étant la variance de vi .
3.A.2.6 – FONCTIONS ET COEFFICIENTS DE CORRÉLATION
♣ Fonctions et coefficients d’intercorrélation Soient deux points A(xi , xj , xk ) et B(xi , xj + r j , xk ). On appelle fonction d’intercorrélation des fluctuations c en A et B la fonction :
)()(),( tctcrAF BAj = (10)
Si A est confondu avec B (r j = 0), on a :
2)0,( AcAF = = variance de cA
Dans un écoulement permanent en moyenne, où cteC = pour toute grandeur C, la fonction d’intercorrélation ne dépend pas du temps. Le coefficient d’intercorrélation de c en A et B est un nombre sans dimension défini par :
2B
2A
BAjc
cc
cc)r,A(R = (11)
♦ Fonctions et coefficients d’autocorrélation Considérons maintenant un point A et deux instants t et t+τ . On désigne par fonction d’autocorrélation des fluctuations cA sur une durée τ la grandeur :
)()(),( ττ += tctcAF AA (12) Cette fonction caractérise en quelque sorte la « mémoire locale » du phénomène fluctuant. Dans un écoulement permanent en moyenne, la fonction d’autocorrélation est indépendante du temps. On définit un nombre sans dimension appelé coefficient d’autocorrélation de cA sur la durée τ par l’expression :
2
)()(),(
A
AAc
c
tctcAR
ττ += (13)
♥ Propriétés des coefficients de corrélation Nous allons montrer que :
1),(
1)0,(
≤
=
jc
c
rAR
AR
La première proposition est évidente puisque pour 0=jr on a AB cc = , d’où
1)0,( =ARc d’après la définition (11).
Pour établir la seconde propriété, formons l’expression : BA cc λ+ avec ∈λ donné. Quel que soit λ, on a : 0)( 2 ≥+ BA cc λ donc
0)( 2 ≥+ BA cc λ soit :
02 222 ≥++ ABAB cccc λλ
Ce trinôme du second degré en λ est positif ou nul si son discriminant est négatif ou nul :
0cc)cc( 2B
2A
2BA ≤−
2B
2A
2BA cc)cc( ≤
d’où 1),( ≤jc rAR
On démontrerait de même que : 1)0,( ==τARc
1),( ≤τARc
3.A.3 – ÉCOULEMENTS TURBULENTS À MASSE VOLUMIQUE VA RIABLE 3.A.3.1. – PROBLÉMATIQUE Pour toute densité volumique C dépendant du temps, on a : γρ=C
où γ est la densité massique de l’entité physique considérée. Si l’écoulement n’est pas isochore, ρ est variable, et les fluctuations de pression et de température vont induire des fluctuations de ρ. La grandeur C soumise à bilan est donc maintenant le produit de deux grandeurs fluctuantes, ce qui entraîne quelques difficultés, comme nous allons le voir.
Dans ce paragraphe, nous désignerons la moyenne par le symbole , et la fluctuation par ‘. Trois démarches peuvent être tentées.

3.A.3.2. – MÉTHODE « 0 » La grandeur fluctuante dont on exprime le bilan local étant la grandeur C, la logique voudrait que l’on posât simplement :
=
+=
)(0'
'
moyenneenpermanentécoulementC
CCC (1)
soit ici :
=
+=
0)'(
)'(
γργργργρ
(2)
Mais cette méthode naturelle conduit à une impasse car les grandeurs ordinairement
accessibles à l’expérience ne sont pas les γρ , mais bien ρ et γ (c’est-à-dire VT , …)
séparément. Or, on ne dispose d’aucun moyen pour isoler ρ et γ à partir de la relation (2). Il faut donc y renoncer pour des raisons pratiques, ou alors développer si cela est possible des
procédures expérimentales permettant d’obtenir directement les γρ , et considérer γρ=C comme l’inconnue dans une équation de bilan. 3.A.3.3. – MÉTHODE « I » Pour lever la difficulté soulevée par la méthode « 0 », on peut envisager d’ajouter à la
condition (2) deux règles supplémentaires destinées à préciser ρ et γ , à savoir :
=+=
=+=
0'avec'
0'avec'
γγγγρρρρ
(3)
On aura dans ce cas :
''''C γργργργργρ +++== (4) Mais alors, compte tenu de la relation (2), et puisque le terme non fluctuant de (4) est
γρ , on devrait pouvoir écrire :
)'(ργγρ +=C (5)
ce qui est incompatible avec (2) car en général on a : γργρ ≠ , et par voie de conséquence
0)'( ≠γρ . Il y a donc contradiction entre les conditions (2) et (3). Si l’on impose les relations (3), (2) n’est pas vérifiée, et vice-versa. Bien entendu, on peut toujours décider de postuler uniquement les conditions (3), mais cet accommodement avec la logique n’est pas récompensé, car on aboutit à des équations compliquées dont certains termes sont malaisés à interpréter.

3.A.3.4. – MÉTHODE « II » Pour s’affranchir des difficultés rencontrées dans les méthodes « 0 » et « I », A. Favre a proposé d’adopter un moyen terme en posant :
=+=
=+=
0';'
0~;~
ρρρργργργργρ
(6)
On a donc sacrifié l’une des relations (3), en l’occurrence celle qui porte sur γ , en introduisant à la place une « pseudo-fluctuation » γ~ définie par la première équation (6), à savoir :
ργργγ −=~ (7)
La moyenne de cette grandeur n’est généralement pas nulle car on a :
γργρ ≠
d’où :
0~ ≠−=ργργγ
ou bien, en combinant les règles (6) :
γργργρργρ ~'~~)'(0~ +=+== et à nouveau :
0~'~ ≠−=
ργργ
Quoi qu’il en soit, les relations (6) sont compatibles entre elles, et n’entraînent plus aucune contradiction. Les équations de bilans aux grandeurs moyennes s’en trouvent simplifiées. Malgré tout, il faut quand même reconnaître un caractère un peu artificiel à cette procédure, la seule méthode réellement consistante avec l’esprit de la théorie statistique étant la méthode « 0 ».



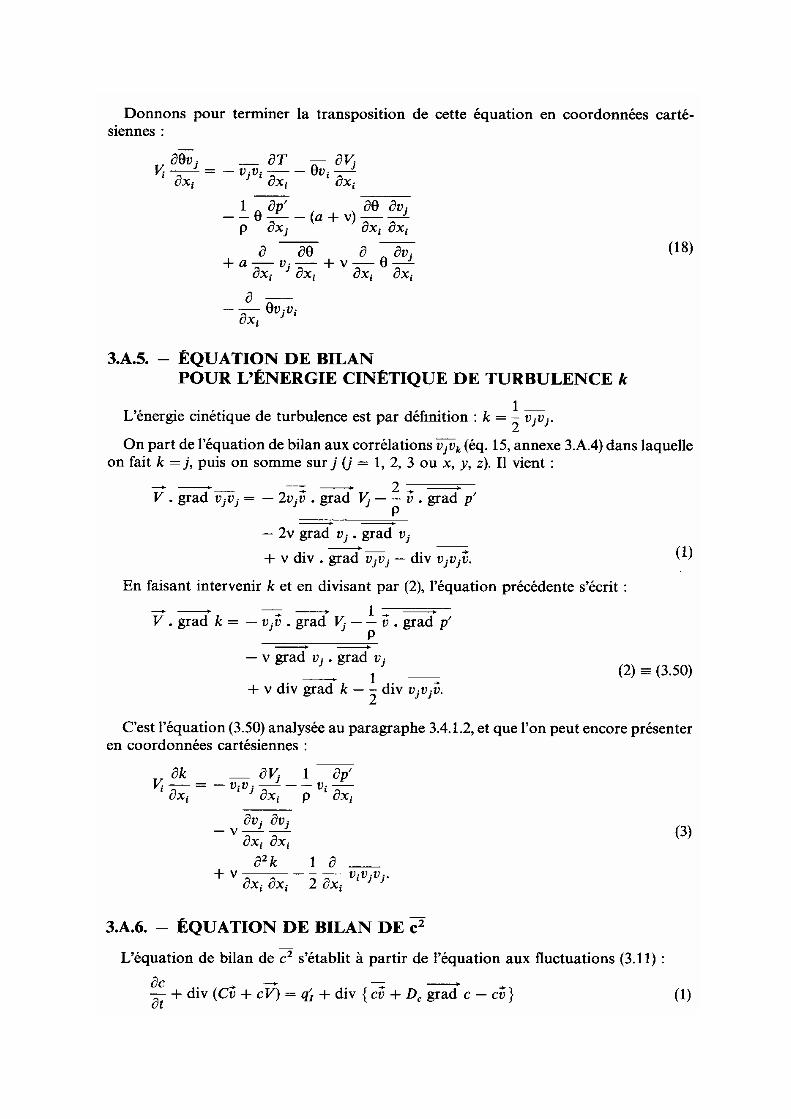


3.A.7 – ÉQUATION DE BILAN POUR LA DISSIPATION εεεε
On part encore de l’équation (3.11) dans laquelle on place le terme vCdiv à gauche :
vccgradDvcdivq)VcvC(divt
cc
'I −++=++
∂∂
(1)
Appliquons l’opérateur gradient à chaque membre, puis multiplions scalairement par
cgradD2 c :
)h()g()f()d(
)vccgradDvc(divgrad.cgradD2qgrad.cgradD2
)c()b()a(
)VcvC(divgrad.cgradD2t
cgrad.cgradD2
cc'Ic
cc
−++=
++∂∂
(2)
On calcule terme à terme, et on prend ensuite la moyenne :
!! 2c )cgrad(
tD)a(
∂∂= (3a)
La moyenne de t/ ∂∂ est nulle (3.A.2.3) :
0)a( = (3b)
!! )Cgrad.vvdivC(grad.cgradD2)b( c += , soit d’après (3.18) :
)Cgrad.v(grad.cgradD2 c= (4a)
ou avec une autre écriture qui fait apparaître les composantes:
∂∂
∂∂
∂∂=
kk
jjc x
Cv
xx
cD2)b(
kj
k
jc
kj
2
jkc x
C
x
v
x
cD2
xx
C
x
cvD2
∂∂
∂∂
∂∂+
∂∂∂
∂∂= (4b)
(b1) (b2) et en moyenne :
kj
k
jc
kj
2
jkc x
C
x
v
x
cD2
xx
C
x
cvD2)b(
∂∂
∂∂
∂∂+
∂∂∂
∂∂= (4c)
!! )cgrad.VVdivc(grad.cgradD2)c( c +=
et sachant que 0Vdiv = ,
)cgrad.V(grad.cgradD2)c( c=

j
k
kjc
kj
2
jkc
kk
jjc
x
V
x
c
x
cD2
xx
c
x
cVD2
x
cV
xx
cD2
∂∂
∂∂
∂∂+
∂∂∂
∂∂=
∂∂
∂∂
∂∂=
et au bout du compte:
j
k
kjc
2
jkkc x
V
x
c
x
cD2
x
c
xVD)c(
∂∂
∂∂
∂∂+
∂∂
∂∂= (5a)
L’opération de moyenne
j
k
kjc
jjkkc x
V
x
c
x
cD2
x
c
x
c
xVD)c(
∂∂
∂∂
∂∂+
∂∂
∂∂
∂∂=
va introduire ici une nouvelle grandeur :
jj
ccc x
c
x
cDcgrad.cgradD
∂∂
∂∂==ε (5b)
Alors :
j
k
kjc
k
ck x
V
x
c
x
cD2
xV)c(
∂∂
∂∂
∂∂+
∂∂
=ε
expression dans laquelle on reconnaît le gradient de εc :
j
k
kjcc x
V
x
c
x
cD2grad.V)c(
∂∂
∂∂
∂∂+= ε (5c)
(c1) (c2)
!! 'Ic qgrad.cgradD2)d( = (6)
!! )vcdiv(grad.cgradD2)f( c=
0)vcdiv(grad.cgradD2)f( c == (7)
car le second gradient est déjà une moyenne, tandis que, c étant une fluctuation, 0cgrad = (cf. 3.A.2.3).
!! )cgradDdiv(grad.cgradD2)g( cc= (8a)
∂∂
∂∂
∂∂
∂∂=
kc
kjjc x
cD
xxx
cD2
(la notation vectorielle n’est pas bien adaptée ici).

En permutant les dérivations par rapport aux coordonnées j et k et en admettant que cteDc = :
∂∂∂
∂∂
∂∂=
kj
2
ckj
c xx
cD
xx
cD2)g(
ce qui peut s’écrire aussi :
kj
2
kj
22c
kj
2
jc
kc xx
c
xx
cD2
xx
c
x
cD2
xD)g(
∂∂∂
∂∂∂−
∂∂∂
∂∂
∂∂=
et enfin :
kj
2
kj
22c
jjc
kkc xx
c
xx
cD2
x
c
x
cD
xxD)g(
∂∂∂
∂∂∂−
∂∂
∂∂
∂∂
∂∂= (8b)
Par passage à la moyenne, cette manipulation fait apparaître la grandeur εc définie par (5b) ci-dessus :
)g()g(
xx
c
xx
cD2
xxD)g(
21
kj
2
kj
22c
k
c
kc ∂∂
∂∂∂
∂−
∂∂
∂∂=
ε (8c)
!! vcdivgrad.cgradD2)h( c−= (9a)
Puisque 0vdiv = (§ 3.3.3.1) :
)cgrad.v(grad.cgradD2)h( c−=
∂∂
∂∂
∂∂−=
kk
jjc x
cv
xx
cD2
∂∂
∂∂
∂∂+
∂∂∂
∂∂−=
j
k
kjkj
2
jkc x
v
x
c
x
c
xx
c
x
cvD2
j
k
kjc
jjkkc x
v
x
c
x
cD2
x
c
x
c
xvD
∂∂
∂∂
∂∂−
∂∂
∂∂
∂∂−=
Le premier terme se transforme un peu :
k
k
jjjjk
kjjkk x
v
x
c
x
c
x
c
x
cv
xx
c
x
c
xv
∂∂
∂∂
∂∂−
∂∂
∂∂
∂∂=
∂∂
∂∂
∂∂
où 0vdivx
v
k
k ==∂∂
. Finalement, en passant directement à la moyenne :
)h()h(
x
v
x
c
x
cD2
x
c
x
cv
xD)h(
21
j
k
kjc
jjk
kc ∂
∂∂∂
∂∂−
∂∂
∂∂
∂∂−=
(9b)
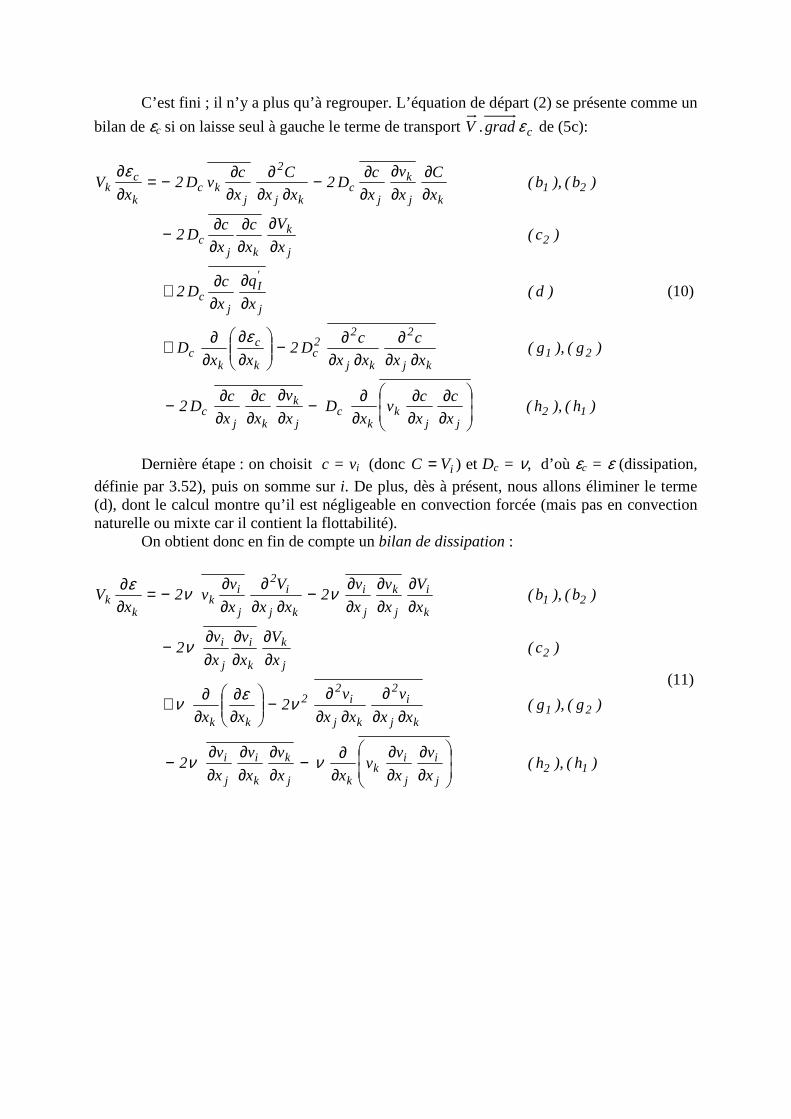
C’est fini ; il n’y a plus qu’à regrouper. L’équation de départ (2) se présente comme un
bilan de εc si on laisse seul à gauche le terme de transport cgrad.V ε de (5c):
)h(),h(x
c
x
cv
xD
x
v
x
c
x
cD2
)g(),g(xx
c
xx
cD2
xxD
)d(x
q
x
cD2
)c(x
V
x
c
x
cD2
)b(),b(x
C
x
v
x
cD2
xx
C
x
cvD2
xV
12jj
kk
cj
k
kjc
21kj
2
kj
22c
k
c
kc
j
'I
jc
2j
k
kjc
21kj
k
jc
kj
2
jkc
k
ck
∂∂
∂∂
∂∂−
∂∂
∂∂
∂∂−
∂∂∂
∂∂∂−
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂−
∂∂
∂∂
∂∂−
∂∂∂
∂∂−=
∂∂
ε
ε
(10)
Dernière étape : on choisit c = vi (donc iVC = ) et Dc = ν, d’où εc = ε (dissipation,
définie par 3.52), puis on somme sur i. De plus, dès à présent, nous allons éliminer le terme (d), dont le calcul montre qu’il est négligeable en convection forcée (mais pas en convection naturelle ou mixte car il contient la flottabilité). On obtient donc en fin de compte un bilan de dissipation :
)h(),h(x
v
x
vv
xx
v
x
v
x
v2
)g(),g(xx
v
xx
v2
xx
)c(x
V
x
v
x
v2
)b(),b(x
V
x
v
x
v2
xx
V
x
vv2
xV
12j
i
j
ik
kj
k
k
i
j
i
21kj
i2
kj
i2
2
kk
2j
k
k
i
j
i
21k
i
j
k
j
i
kj
i2
j
ik
kk
∂∂
∂∂
∂∂−
∂∂
∂∂
∂∂
−
∂∂∂
∂∂∂
−
∂∂
∂∂+
∂∂
∂∂
∂∂
−
∂∂
∂∂
∂∂
−∂∂
∂∂∂
−=∂∂
νν
νεν
ν
ννε
(11)
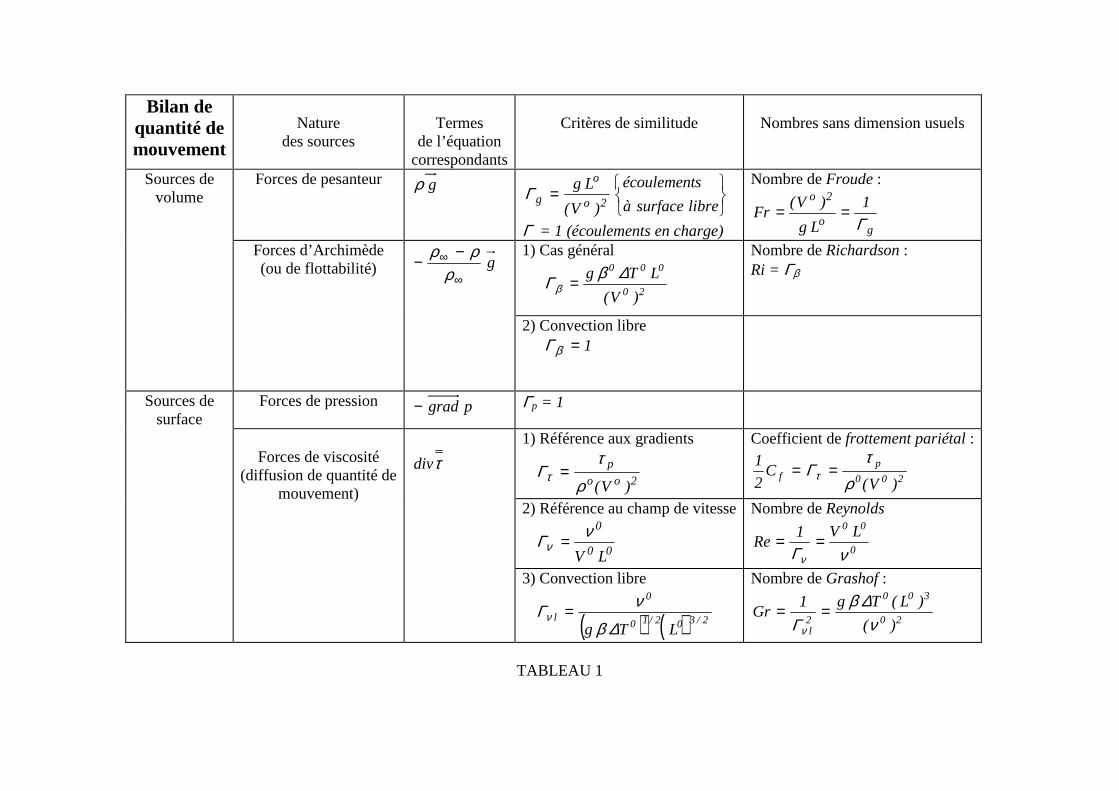
Bilan de quantité de mouvement
Nature
des sources
Termes
de l’équation correspondants
Critères de similitude
Nombres sans dimension usuels
Forces de pesanteur gρ
=libresurfaceà
sécoulement
)V(
Lg2o
o
gΓ
Γ = 1 (écoulements en charge)
Nombre de Froude :
go
2o 1
Lg
)V(Fr
Γ==
1) Cas général
20
000
)V(
LTg ∆βΓβ =
Nombre de Richardson : Ri = Γβ
Sources de volume
Forces d’Archimède (ou de flottabilité) g
∞
∞ −−
ρρρ
2) Convection libre 1=βΓ
Forces de pression
pgrad− Γp = 1
1) Référence aux gradients
2oo
p
)V(ρ
τΓτ =
Coefficient de frottement pariétal :
200
pf
)V(C
2
1
ρτ
Γτ ==
2) Référence au champ de vitesse
00
0
LV
νΓν =
Nombre de Reynolds
0
00 LV1Re
νΓν==
Sources de surface
Forces de viscosité
(diffusion de quantité de mouvement)
τdiv
3) Convection libre
( ) ( ) 2/302/10
0
lLTg ∆β
νΓν =
Nombre de Grashof :
20
300
2l )(
)L(Tg1Gr
ν∆β
Γν==
TABLEAU 1
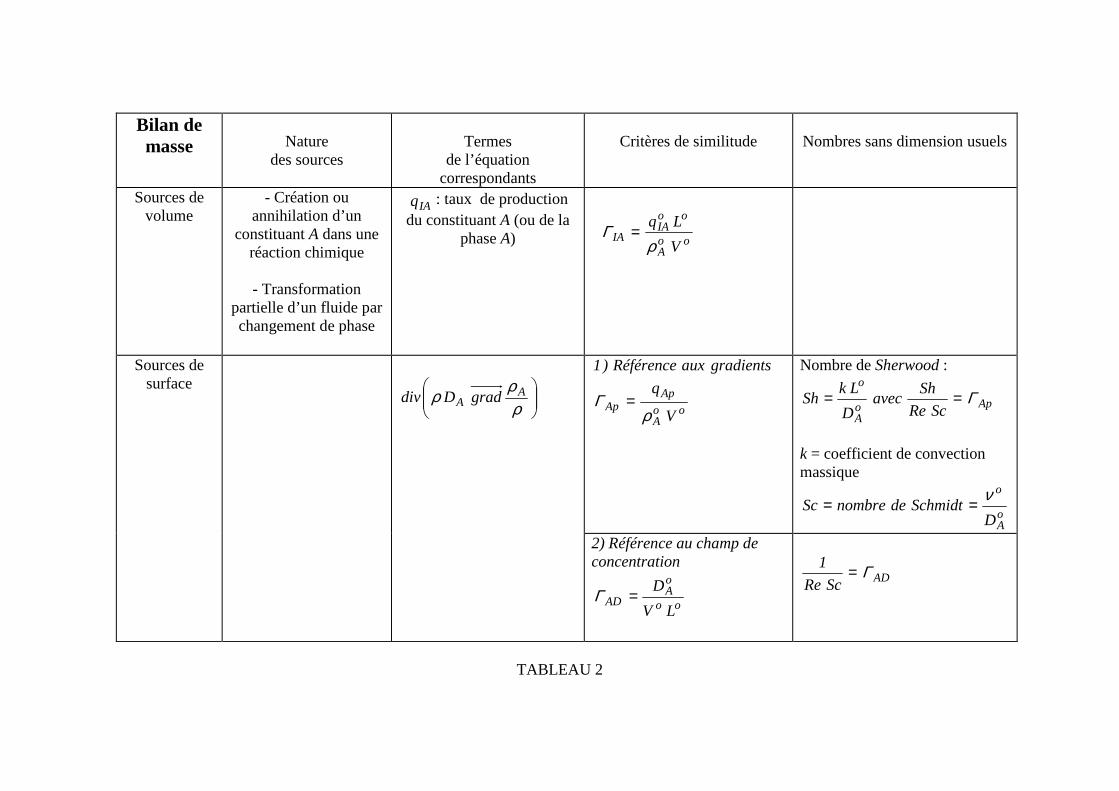
Bilan de masse
Nature
des sources
Termes
de l’équation correspondants
Critères de similitude
Nombres sans dimension usuels
Sources de volume
- Création ou annihilation d’un
constituant A dans une réaction chimique
- Transformation
partielle d’un fluide par changement de phase
IAq : taux de production du constituant A (ou de la
phase A)
oo
A
ooIA
IAV
Lq
ρΓ =
gradientsauxRéférence)1
ooA
ApAp
V
q
ρΓ =
Nombre de Sherwood :
ApoA
o
ScRe
Shavec
D
LkSh Γ==
k = coefficient de convection massique
oA
o
DSchmidtdenombreSc
ν==
Sources de surface
ρρρ A
A gradDdiv
2) Référence au champ de concentration
oo
oA
ADLV
D=Γ
ADScRe
1 Γ=
TABLEAU 2
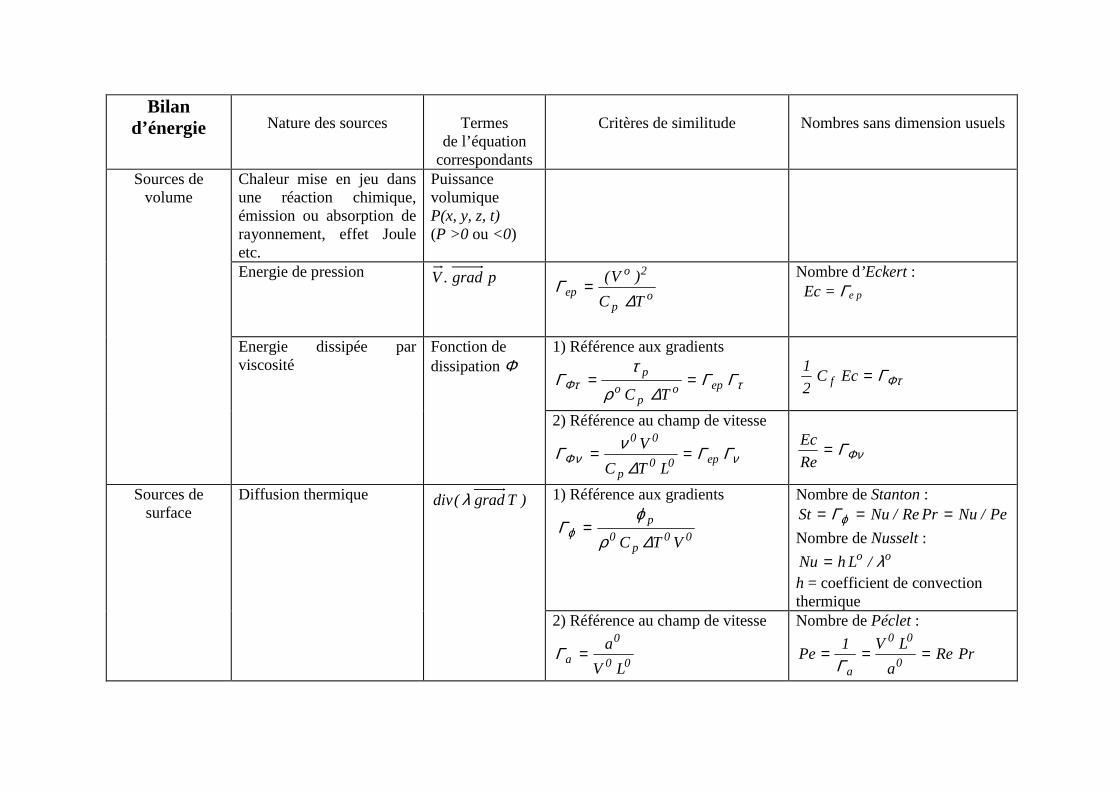
Bilan d’énergie
Nature des sources
Termes
de l’équation correspondants
Critères de similitude
Nombres sans dimension usuels
Chaleur mise en jeu dans une réaction chimique, émission ou absorption de rayonnement, effet Joule etc.
Puissance volumique P(x, y, z, t) (P >0 ou <0)
Energie de pression pgrad.V o
p
2o
epTC
)V(
∆Γ =
Nombre d’Eckert : Ec = Γe p
1) Référence aux gradients
ττΦ ΓΓ∆ρ
τΓ epo
po
p
TC==
τΦΓ=EcC2
1f
Sources de volume
Energie dissipée par viscosité
Fonction de dissipation Φ
2) Référence au champ de vitesse
ννΦ ΓΓ∆
νΓ ep00p
00
LTC
V ==
νΦΓ=Re
Ec
1) Référence aux gradients
00p
0
p
VTC ∆ρ
ϕΓϕ =
Nombre de Stanton : Pe/NuPrRe/NuSt === ϕΓ
Nombre de Nusselt : oo /LhNu λ=
h = coefficient de convection thermique
Sources de surface
Diffusion thermique
)Tgrad(div λ
2) Référence au champ de vitesse
00
0
aLV
a=Γ
Nombre de Péclet :
PrRea
LV1Pe
0
00
a===
Γ
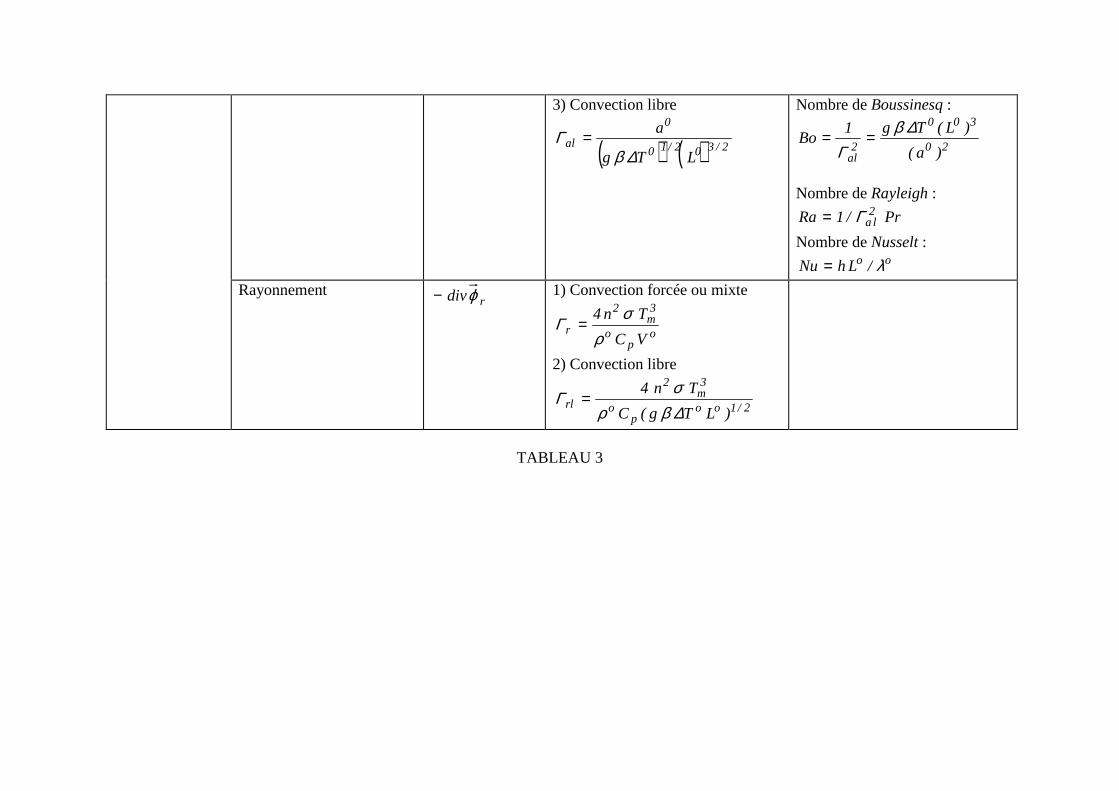
3) Convection libre
( ) ( ) 2/302/10
0
alLTg
a
∆βΓ =
Nombre de Boussinesq :
20
300
2al )a(
)L(Tg1Bo
∆βΓ
==
Nombre de Rayleigh :
Pr/1Ra 2laΓ=
Nombre de Nusselt : oo /LhNu λ=
Rayonnement rdivϕ− 1) Convection forcée ou mixte
op
o
3m
2
rVC
Tn4
ρσΓ =
2) Convection libre
2/1oop
o
3m
2
rl)LTg(C
Tn4
∆βρσΓ =
TABLEAU 3

INDEX ALPHABÉTIQUE DES MATIÈRES
A
Adhérence à la paroi, 1.1.3.2 ; Affinité (hypothèse d’), Analyse d’échelle, 2.A.2.
- dimensionnelle, 2.A.2.
B
Bilan d’une grandeur extensive, 1.3.1. Bilan intégral, 1.3.1 ; 2.A.4. Bilans statistiques, 3.2.
C
Charge, perte de charge, Coefficients de corrélation, 3.5.2. Coefficient de convection massique, 2.5.3.1. - de convection thermique, 2.5.3.2. - de corrélation, 3.A.2.6.
- de frottement, 2.4.3.3. - de perte de charge en ligne, - de perte de charge singulière, - de poussée thermique, 2.5.2.2. - de traînée, Conductivité thermique, 1.3.5.1 ; 1.3.6.3 ; Contraintes, 1.2.3 ; 1.2.4 ; 1.2.5 ; 3.3.4.3. Contrainte pariétale, 1.2.5 ; Contraintes (ou tensions) de Reynolds, 3.3.4 ;
3.4.1.2♦ ; 3.4.3.4. Convection libre, 2.4.3.4 ; 2.4.5.4 ; 2.5.3.3. - mixte, 2.4.3.2 ; 2.4.3.5 ; 2.5.2. Coordonnées cylindriques, 1.4.3 ; 1.A.5 ; Corrélations, covariance, 3.2.1 ; 3.4.1.1. Couche limite dynamique, - épaisseur, - hypothèses, Couplage (paramètres de - ), 2.5.1 ; 2.5.2. Critères de similitude, 2.3.2 ; 2.4 ; 2.5.2.1.
D Débit, 1.3.2.1 ; Déformations, 1.2.1 ; 1.2.4. Dérivée particulaire, 1.A.1. Diamètre hydraulique, Diffusion, 1.3.6 ; 2.4.4 ; 2.4.5.3 ; 2.5.3. - turbulente, 3.2.1 ; 3.3.4.3 ; 3.6.2.1. Diffusivité moléculaire, 1.3.6.2. Diffusivité thermique, 1.3.5.2 ; 1.3.6.3.
- turbulente, 3.3.2 ; 3.3.3.2 ; 3.3.5 ; 3.4.1.3 ; 3.4.2.
Dilatation volumique, 1.2.2. Dissipation turbulente, 3.4.1 ; 3.4.2 ; 3.4.3.
E Echelle de Kolmogorov, 3.6.3. Ecoulement de Couette, 1.1.3 ; Ecoulements établis, Ecoulements à masse volumique variable, 1.2.4 ; 3.A.3. Ecoulement permanent (stationnaire) en moyenne,
3.2.1 ; 3.A.2.1 ; 3.A.3.2. Ecoulements à surface libre, 2.4.3.2 ; 2.4.3.5 ; Energie cinétique turbulente, 3.3.4.4 ; 3.4.1.2. Energie interne, 1.3.5. Enthalpie, 1.3.5.2 ; 2.4.5.1. Entropie, 1.3.7 ; 1.A.4 ; 2.A.3; 3.7. Epaisseur de déplacement, - de quantité de mouvement, Equation de Bernoulli, 1.3.4.3 ; - de Bernoulli généralisée, 1.3.4.2 ; - de Blasius, - d’état, 1.5 ; 2.4.6. - d’Euler, 1.3.3.1. - de Falkner-Skan, - de Karman, Equations de Navier-Stokes, 1.3.3.2 ; Equilibrage d’un circuit, Exergie, 1.3.7 ; 2.A.3.
F Facteurs de forme Fermetures, 3.2.3. Fluide newtonien, 1.2.4 ; 1.3.4.2. Fonction de courant, 1.4.2 ; 1.4.3 ; Fonction de dissipation, 1.3.4.2 ; 1.3.5.1 ; 2.4.5.2 ; 2.5.1.4 ; 2.5.2.3 ; 3.4.1.3 ; 3.A.1. Formule de Blasius, Formule de Colebrook,
G Grandeurs de référence, 2.3.1 ; 2.4.3.3 ; 2.4.4.3 ; 2.4.5.3 ; 2.5.3 ; 2.A.4.
H Hydrostatique (loi de l’- ), 1.3.3.2. Hypothèse de Prandtl-Kolmogorov, 3.4.1.3 ; 3.6.2.1.
I
Intensité de turbulence, 3.4.5.
J
Jets turbulents,
L
Linéarité, 3.3.1 ; 3.A.1. Loi de Darcy, 1.3.6.4. - de Fick, 1.3.6.2. - de paroi, - en puissance Longueur caractéristique d’une canalisation, 2.A.4. - de mélange, 3.3.4.3 ; 3.3.4.5 ; 3.3.5.2 ;
3.4.4 ; 3.6.2.1 ; 3.6.2.3.
M
Méthode de Blasius, - de Cross, - de Pohlhausen, - différentielle, - intégrale, Milieux poreux, 1.3.6.4. Modèle de Couette, - bas - Reynolds, 3.4.3.1. - k - ε, 3.4.2 ; 3.4.3. - k – l, 3.4.1. - k - ω, 3.4.4. - de Van Driest, Moyennes, 3.2.1 ; 3.A.2.
N
Nombre d’Archimède, 2.4.3.2. - de Boussinesq, 2.4.5.4. - de Brinkman, 2.5.2.3. - d’Eckert, 2.4.5.2 ; 2.5.1.4.
- d’Euler, 2.4.3.3. - de Froude, 2.4.3.2. - de Grashof, 2.4.3.4. - de Lewis, 2.5.1.2. - de Mach, 2.4.6. - de Nusselt, 2.5.3.2. - de Péclet, 2.4.5.3 ; 2.5.1.3. - de Prandtl, 2.5.1.3. - - turbulent, 3.3.5.2. - de Rayleigh, 2.5.3.3.
- de Reynolds, 2.2.1.2 ; 2.2.2 ; 2.4.3.3 ; 2.6.1 ; 3.3.1.
- - turbulent, 3.4.3.1 ; 3.6.2.3 ; 3.6.4. - de Richardson, 2.4.3.2.
- de Schmidt, 2.4.4.3 ; 2.5.1.1. - de Sherwood, 2.5.3.1. - de Stanton, 2.4.5.3, - de Strouhal, 2.4.2 ; 2.6.1. Nombres sans dimension, 2.6.1 ; 2.6.4.
P
Point de fonctionnement d’un circuit, Pompes, Potentiels chimiques, 1.3.7.2. Poussée d’un jet, Pression dynamique, 1.3.4.4 ; 2.4.3.2. - motrice, 1.3.3.2 ; 1.3.6.4. - statique, 1.2.4 ; 1.3.4.4. - totale, 1.3.4.4.
R
Rayonnement, 1.3.5 ; 1.3.7 ; 2.4.5 ; 2.5.2.4. Régimes d’écoulement, 2.2. Rugosité, RANS, 3.2.1.
S
Similitude, 2.2.3.2 ; 2.3.2. Singularité, perte de charge singulière, Sources (surfaciques ou volumiques), 1.3 ; 1.A.1 ;
2.3 ; 2.4 ; 3.4.1 ; 3.4.2 ; 3.7. Sous – couche visqueuse, 3.6.3.4.
T
Taux de déformation, 1.2.1. - de production d’entropie, 1.3.7.2 ; 1.A.4. - de turbulence, 3.4.5. Tenseur des contraintes, 1.2.3 ; 1.2.4 ; 1.3.3.1 ; 1.3.4.1 ; - des quantités de mouvement, 1.3.3.1 ; 1.3.6.5 ; 1.A.2 ; 1.A.3. - de Reynolds, 3.3.4.1.
- gradient du champ des vitesses, 1.2.1 ; 1.3.3 ; 1.3.6.5 ; 1.A.2.
Théorème d’Euler, - de l’énergie cinétique, 1.3.4.1. - de Vaschy – Buckingham, 2.A.2. Tourbillon (vecteur), 1.2.1 ; 1.4.1 ; 1.4.3. Turbulence développée, 3.6.1.
- homogène, 3.4.5. - de grille, 3.4.5.
V
Viscosité cinématique, 1.1.3.3 ; 1.3.6.5.

- dynamique, 1.1.3.2 ; 1.2.4. - turbulente, 3.3.4. Vitesse de frottement,
Vitesse de mélange (débitante), Vorticité, 1.4 ; 3.4.4.
ÉLÉMENTS DE BIBLIOGRAPHIE
Rien n’est jamais perdu tant qu’il reste quelque chose à trouver
Pierre DAC
Aide-mémoire du thermicien. Elsevier, 1997. BASS J. – Fonctions de corrélation, fonctions pseudo-aléatoires et applications. Masson, 1984. BEJAN A. – Convection heat transfer. 2è Edition, John Wiley, 1995. BEJAN A. – Entropy generation through heat and fluid flow. John Wiley, 1994. BERGÉ P., POMEAU Y., VIDAL Ch. – L’ordre dans le chaos : vers une approche déterministe de la turbulence. Hermann, 1984. BOUTTES J. – Mécanique des fluides. Ellipses, 1988. BRADSHAW P., Ed. – Turbulence. Coll. Topics in Applied Physics, vol. 12. Springer-Verlag ,1978. CADIERGUES R. – Le calcul numérique des écoulements et transferts turbulents. Promoclim E, 11, p.45 et p.115, 1980. CANDEL S. – Mécanique des fluides. Dunod, 1990. CEBECI T., BRADSHAW P. – Physical and computational aspects of convective heat transfer. Springer-Verlag, 1984. COMOLET R. – Mécanique expérimentale des fluides. Masson, 1976. COUSTEIX J. – Couche limite laminaire. CEPADUES, Paris, 1988. COUSTEIX J. – Turbulence et couche limite. CEPADUES, Paris, 1989. FAVRE A., KOVASNAY L., DUMAS R., CAVIGLIO J., COANTIC H. – La turbulence en mécanique des fluides. Gauthier-Villars, 1976. FORTIER A. – Mécanique des fluides et transferts de chaleur et de masse par convection. Masson, 1975. GERMAIN P. – Mécanique. Coll. Ecole Polytechnique. Ellipses, 1986. GLANSDORFF P., PRIGOGINE I. – Structure, stabilité et fluctuations. Masson, 1971. GOTH Y., FEIDT M., LAURO F., BAILLY A. – Transferts de chaleur et pertes de charge en écoulement monophasique eau-eau dans les tubes corrugués. Rev. Gen. Therm. Fr, N° 294-295, 1986. GOSSE J. – Guide technique de thermique. Dunod, 1981. GUYON E., HULIN J.-P., PETIT L. – Hydrodynamique physique. InterEditions, CNRS, Paris, 1991. HERPE J. – Caractérisation des performances des surfaces d’échange basée sur l’évaluation numérique du taux de production d’entropie. Thèse Université de Valenciennes, France, 2007. HUNT J.C., Ed. – Turbulence and diffusion in stable environments. Clarendon Press, 1985. IDEL’CIK I. E. – Mémento des pertes de charge. Eyrolles, 1986. INCROPERA F.P., DE WITT D.P. – Fundamentals of heat and mass transfer. John Wiley, 1985. KAKAÇ S., YENER Y. – Convective heat transfer. CRC Press, Boca Raton, Floride, 1995. KAVIANY M. – Principles of convective heat transfer. Springer-Verlag, 1994. KAYS W.M., CRAWFORD M.E. – Convective heat and mass transfer. Mac Graw-Hill, 1980. LANDAHL M.T., MOLLO-CHRISTENSEN E. – Turbulence and random processes in fluid mechanics. Cambridge University Press, 1986. LANDAU L., LIFCHITZ E. – Mécanique des fluides. Ed. de Moscou, 1971. LEFEBVRE J. – Mesure des débits et des vitesses des fluides. Masson, 1985. LEONTIEV A. – Théorie des transferts de chaleur et de masse. Editions de Moscou, 1985. MIDOUX N. – Mécanique et rhéologie des fluides en génie chimique. Tec. Et Doc., Lavoisier, 1985. PADET J. – Fluides en écoulement. Méthodes et modèles. 1ère édition. Masson, 1991.
PADET J. – Echangeurs thermiques. Masson, 1994. PADET J. – Principes des transferts convectifs. Polytechnica – Economica, Paris, 1997. PADET J. – Similitude problems in convective heat and mass transfer. Recent advances in transport phenomena, I. Dincer, F. Yardim Ed, Elsevier, 2000. PADET J. – Les critères de similitude en convection naturelle thermique et massique. Studies of Applied Thermodynamics, p.98-115, Ed. Politehnica-Press, Bucarest, 2003. PADET J. – Convection thermique et massique. Techniques de l’Ingénieur, fascicules BE 8 205-206, Paris, 2005. PIELOU E.C. – Fresh water. The Univ. of Chicago Press, London, USA, 1998. RAJARATNAM N. – Turbulents jets. Elsevier, 1976. SAATDJIAN E. – Phénomènes de transport. Polytechnica, Paris, 1993. SACADURA J.-F. – Initiation aux transferts thermiques. Tec. Et Doc., Lavoisier, 1978. SHAH R.K., LONDON A.L. – Laminar flow forced convection in ducts. Academic Press, 1978. TAINE J., PETIT J.-P. – Transferts thermiques, Mécanique des fluides anisothermes. Dunod, 1989. TENNEKES H., LUMLEY J.L. – A first course in turbulence. M.I.T. Press, 1983. TERHMINA O., MOJTABI A. – Ecoulement et convection forcée en régimes dynamique et thermique non établis dans un espace annulaire. Int. J. Heat Mass Transfer, 31, p.583, 1988. ZEYTOUNIAN R. – Les modèles asymptotiques de la mécanique des fluides. Springer-Verlag, 1986.
Pour terminer, le lecteur est invité à méditer sur l’importance de la virgule dans la réplique ci-dessous.
Achille Talon, par GREG (Dargaud, Ed.)














