Exploitation du logiciel eCognition pour la …infoterre.brgm.fr/rapports/RP-52120-FR.pdfbiais est...
32
Exploitation du logiciel eCognition pour la classification assistée par ordinateur BRGM/RP-52120-FR janvier 2003
Transcript of Exploitation du logiciel eCognition pour la …infoterre.brgm.fr/rapports/RP-52120-FR.pdfbiais est...

Exploitation du logiciel eCognitionpour la classification assistée
par ordinateur
BRGM/RP-52120-FRjanvier 2003

Exploitation du logiciel eCognitionpour la classification assistée
par ordinateur
BRGM/RP-52120-FRjanvier 2003
Étude réalisée dans le cadre du projetde la Direction de la recherche 2002-RIS-R06
S. Hosford

eCognition : la classification assistée par ordinateur
2 BRGM/RP-52120-FR
Mots clés : Segmentation d’image, Classification automatique à partir de caractéristiques,eCognition
En bibliographie, ce rapport sera cité de la façon suivante :
Hosford S. (2003) - Exploitation du logiciel eCognition pour la classification assistéepar ordinateur. BRGM/RP-52120-FR, 29 p., 12 fig., 2 tabl.
© BRGM, 2003, ce document ne peut être reproduit en totalité ou en partie sans l’autorisation expresse du BRGM.

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 3
Synthèse
e rapport décrit l’évaluation du logiciel eCognition pour la classification semi-automatique de l’imagerie à très haute résolution spatiale. D’abord la logique du
fonctionnement du logiciel est introduite et les algorithmes de segmentation et declassification sont abordés avec des descriptions techniques. L’apport du procédé declassification implémenté dans eCognition est examiné à l’aide d’une comparaison durésultat avec l’algorithme de Maximum de Vraisemblance (MSV) d’Erdas Imagine.Cette comparaison s’effectue en se servant de deux cas tests du jeu de donnéesIKONOS de l’East Rand en Afrique du Sud pour la détection du réseau routier et pourla différenciation tailings et toits. Ces tests s’avèrent particulièrement difficiles pour leMSV d’Erdas. Les performances constatées montrent une amélioration claire avec lesprocédures d’eCognition. Néanmoins, le niveau d’amélioration combiné à la naturerécursive des procédés d’eCognition signalent que ce logiciel ne peut pas êtreconsidéré comme un outil opérationnel pour beaucoup d’applications.
C

eCognition : la classification assistée par ordinateur
4 BRGM/RP-52120-FR

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 5
Sommaire
1. Introduction ...............................................................................................................7
2. Présentation de eCognition .....................................................................................9
2.1. Introduction ..............................................................................................................9
2.2. Étape de traitement : segmentation .......................................................................102.2.1. Description de l’algorithme ..........................................................................102.2.2. Exemples .....................................................................................................112.2.3. Synthèse......................................................................................................14
2.3. Étape de traitement : classification ........................................................................142.3.1. Techniques de classifications disponibles ...................................................152.3.2. Outils d’analyse des caractéristiques ..........................................................16
3. Exploitation de eCognition.....................................................................................19
3.1. Introduction ............................................................................................................19
3.2. Détection du reseau routier....................................................................................19
3.3. Différenciation des tailings et des toits...................................................................22
4. Conclusion ..............................................................................................................27
Liste des figures
Fig. 1 - eCognition Workflow.......................................................................................9Fig. 2 - Exemple d’objets image générés par les procédés de segmentation
avec un choix de paramètre extrême. ..........................................................12Fig. 3 - Objets issus de la segmentation-lissage (gauche), objets issus
de la segmentation-compactage (droite). .....................................................13Fig. 4 - Objets issus de la segmentation-forme-lissage (gauche), objets issus
de la segmentation-couleur (droite). .............................................................14

eCognition : la classification assistée par ordinateur
6 BRGM/RP-52120-FR
Fig. 5 - Deux exemples d’image des valeurs de la caractéristique « Longueur/Largeur » pour l’extraction des routes. ............................................................16
Fig. 6 - Histogrammes des échantillons d’arbre (en noir) et de route (en bleu)pour les caractéristiques de « valeurs moyennes » pour chaque canalet la caractéristique « Longueur/Largeur ». ..................................................17
Fig. 7 - Gauche : le réseau routier défini comme étant « vérité » ; droite :l’image originale............................................................................................20
Fig. 8 - Masque des routes généré par la méthode de Maximum de vraisemblanced’ERDAS Imagine...........................................................................................21
Fig. 9 - Masque des routes issu d’eCognition à l’aide des caractéristiquesradiométriques et de forme (Longueur/ Largeur). ...............................................21
Fig. 10 - Masque des routes issu d’eCognition généré par un traitementmultiéchelle...................................................................................................21
Fig. 11 - Vérité de terrain définie pour les classes (a) « toits » et (b) « tailings ». ......23Fig. 12 - Les résultats comparés de la classification des classes « tailings » (rouge)
et « toits » (bleu ciel) pour les logiciels ERDAS et eCognition......................24
Liste des tableaux
Tabl. 1 - Résultats de l’extraction des routes par des différentes méthodes declassification....................................................................................................21
Tabl. 2 - Résultats de l’extraction des taillings et des toits par les deux outils declassification....................................................................................................25

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 7
1. Introduction
e rapport porte sur l’évaluation du logiciel eCognition pour l’extraction semi-automatique des informations à partir des images de télédétection. Il a été rédigé
dans le cadre du projet R&D du BRGM intitulé « Démonstrateur hyperspectral et trèshaute résolution optique ».
La très haute résolution accroît la complexité de la représentation de la surfaceterrestre, et en particulier augmente l'importance de la texture dans l'analyse d'image,celle-ci étant auparavant occultée par une moindre résolution. Il devient doncintéressant de prendre en compte cette nouvelle dimension dans les procédures declassification, en suivant une approche basée non plus sur la seule valeur du pixel,mais sur le pixel dans son environnement.
Dans le temps alloué à cette étude il ne s’agit pas d’essayer d’expérimenter toutes lesnombreuses fonctionnalités d’eCognition, mais de fournir une vue globale del’opérationnalité du logiciel. Au moyen d’exemples concrets, ce rapport mettra envaleur l’apport de ce logiciel comparé aux techniques de classification supervisée dusol communément employées et basées sur la seule radiométrie des images.
Dans un premier chapitre, le logiciel eCognition est introduit avec des descriptions desfonctionnalités clés de segmentation et de classification. Ensuite, on présente deuxexemples concrets où le logiciel eCognition est susceptible d’améliorer la précision desrésultats obtenus avec d’autres logiciels et algorithmes classiques de classification.
C

eCognition : la classification assistée par ordinateur
8 BRGM/RP-52120-FR

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 9
2. Présentation de eCognition
2.1. INTRODUCTION
Le logiciel eCognition fonctionne d’une manière un peu différente de la plupart deslogiciels sur le marché qui permettent de faire de la classification. Au lieu de travaillerau niveau pixel, c’est-à-dire utiliser les pixels comme objets fondamentaux declassification, eCognition génère d’abord ses propres objets, appelés « imageobjects », par un procédé de segmentation paramétrable. Ensuite ces objets sontclassifiés en utilisant une des techniques disponible dans le logiciel. La figure 1présente la procédure suivie par ce logiciel.
Fig. 1 - eCognition Workflow.

eCognition : la classification assistée par ordinateur
10 BRGM/RP-52120-FR
Trois étapes principales existent dans la chaîne de traitement d’eCognition. La première estde construire un projet à partir des données images, la seconde consiste à générer unesegmentation appropriée pour l’application. Cette segmentation peut compter plusieursniveaux d’échelle. Chaque niveau est issu d’une segmentation appliquée à l’échelleprécédente. Ainsi les objets générés par la segmentation à une échelle servent d’objet debase pour la segmentation à l’échelle supérieure. L’étape finale dans eCognition produit uneclassification en utilisant des objets générés par les différents niveaux de segmentation. Parla suite, ces diverses étapes seront examinées en détail.
2.2. ÉTAPE DE TRAITEMENT : SEGMENTATION
2.2.1. Description de l’algorithme
Dans eCognition la segmentation n’est pas vue comme une fin en soi, mais commeune étape dans laquelle on extrait des objets que l’on exploitera par la suite. Laméthode de segmentation implémentée est censée fournir un ensemble d’objetshomogènes à partir desquels une classification pertinente peut être construite. Lasegmentation s’appuie donc sur des critères d’hétérogénéité pour regrouper les pixelsen petits objets. Pendant le déroulement de la segmentation, des objets de plus enplus hétérogènes sont regroupés avec, comme conséquence, l’augmentation du critèred’hétérogénéité global. Ces regroupements sont effectués jusqu’au dépassement duseuil défini par le facteur d’échelle. La procédure fonctionne ainsi :- démarrage en considérant chaque pixel comme un objet ;- regroupement d’objets voisins semblables. Ces objets sont sélectionnés de manière
à faire augmenter aussi peu que possible le critère d’hétérogénéité ;- calcul de l’augmentation du critère d’hétérogénéité global ;- si cette augmentation est inférieure au seuil défini par le facteur échelle, le
regroupement est accepté, sinon la procédure repart de l’étape numéro 2.
Afin de bien comprendre cette description d’algorithme on doit définir plus en détailplusieurs points précis dans les paragraphes suivants.
a) Critère d’hétérogénéité
Un aspect critique pour l’efficacité de l’étape de segmentation est le critère qui définitl’hétérogénéité de chaque objet. Ce critère est en effet construit à partir de plusieursindices portant sur la forme et la radiométrie des objets. Plus précisément, ce critèreest calculé à partir de deux indices de forme et un indice de couleur, définis ci-après :- indice d’hétérogénéité de couleur : défini par la somme des écarts types des valeurs
spectrales de chaque canal, il est pondéré par le poids attribué à chaque canal. Plusla radiométrie des pixels de l’objet est variée, plus cet indice sera grand ;
- indice d’hétérogénéité de forme compacte : il est défini par la longueur de lafrontière de l’objet divisée par la racine carrée du nombre de pixels. Plus la frontièrecontient de pixels de l’objet, plus cet indice sera grand ;

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 11
- indice hétérogénéité de forme lisse : il est défini par la longueur de la frontière del’objet divisée par la plus courte longueur possible de la frontière. Plus la frontièred’un objet est découpée, plus cet indice sera grand.
Un indice général de forme est ensuite généré en fusionnant les deux indices deforme. Le critère d’hétérogénéité est issu de la fusion de cet indice global de formeavec l’indice couleur.
b) Le facteur échelle
L’étape segmentation d’eCognition donne la possibilité de régler l’échelle à laquelle ontravaille. Le paramètre d’échelle agit sur l’hétérogénéité permise pendant la générationdes objets. L’augmentation de ce paramètre force l’algorithme à accepter des objetsplus hétérogènes et donc de plus grande taille.
2.2.2. Exemples
L’utilisation des différents paramètres décrits dans le paragraphe précédent peutproduire des résultats très différents. Ci-dessous des exemples de ces divers résultatssont présentés, en prenant à chaque fois les valeurs extrêmes de ces paramètres. Lesimages dans la figure 2 montrent l’image originale comparée aux trois ensemblesd’objets image issus d’une segmentation de paramètre extrême : lissage, compactageet couleur.
• Segmentation extrême : mise en valeur des critères de forme (lissage)
L’image en bas à gauche de la figure 2 montre les objets image issus d’unesegmentation avec comme critère principal le lissage (ang.: smoothness) de l’objet. Cebiais est exprimé par le poids attribué à chaque aspect du critère d’homogénéité.Comme on peut le voir dans la grille des poids montrée ci-dessous, on privilégie laforme des objets par rapport à la couleur et dans la forme, le lissage est prépondérantpar rapport au compactage (ang.: compactness).
Paramètres de segmentation :
• Échelle : 10
• Homogénéité :Homogénéité
Couleur Forme
0.1 0.9
Compacte Lisse
0.1 0.9

eCognition : la classification assistée par ordinateur
12 BRGM/RP-52120-FR
Image originale Segmentation-compactage
Segmentation-couleurSegmentation-lissage
Fig. 2 - Exemple d’objets image générés par les procédés de segmentation avecun choix de paramètre extrême.Image originale (en haut à gauche), objets image générés issus de la segmentation-lissage (en bas à gauche), objets image générés issus de la segmentation-compactage (en haut à droite), objets image générés issus de la segmentation-couleur (en bas à droite).
• Segmentation extrême : mise en valeur des critères de forme (compactage)
Dans ce cas, les paramètres choisis accentuent le compactage pendant la générationdes objets. La figure 3 montre la segmentation-lissage comparée à la segmentation-compactage. Comme on peut le constater, les deux ensembles d’objets générés àpartir de ces deux paramétrages diffèrent surtout par leur taille et leur forme. Le critèred’homogénéité basé sur le lissage regroupe moins de pixels dans un seul objet pour lamême valeur d’échelle. Les objets de lissage ont aussi tendance à être plus longs etétroits que ceux issus de la segmentation-compactage. On confirme ainsi que lesformes des objets générés correspondent bien aux critères de segmentation choisisdans les deux cas.

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 13
Paramètres de segmentation :
• Échelle : 10
• Homogénéité :
Fig. 3 - Objets issus de la segmentation-lissage (gauche), objets issus de lasegmentation-compactage (droite).
• Segmentation extrême : mise en valeur des critères de couleur
Ici la segmentation se déroule avec le même facteur d’échelle que pour les autressegmentations, mais en accentuant l’aspect couleur des objets plutôt que la forme.
Paramètres de segmentation :
• Échelle : 10
• Homogénéité :
Homogénéité
Couleur Forme
0.1 0.9
Compacte Lisse
0.9 0.1
Homogénéité
Couleur Forme
0.9 0.1
Compacte Lisse
0.5 0.5

eCognition : la classification assistée par ordinateur
14 BRGM/RP-52120-FR
Fig. 4 - Objets issus de la segmentation-forme-lissage (gauche), objets issus dela segmentation-couleur (droite).
La figure 4 montre que les objets générés sont beaucoup plus petits pour le mêmefacteur d’échelle pour ce paramétrage de segmentation. En moyenne, la superficie desobjets dans l’image de gauche est de 60 pixels, comparée à 20 pixels dans l’image dedroite. Ceci veut dire que le critère d’homogénéité associé à la couleur produit desvaleurs plus élevées que le critère basé sur la forme des objets, que ce soit le lissageou le compactage.
2.2.3. Synthèse
Ce premier niveau de segmentation se fait à partir des objets les plus primitifs : lespixels. Lorsque l’on segmente à un niveau (Logiciel : Level) plus élevé, les primitivesde base sont les objets issus de la segmentation du niveau inférieur. Il est doncimportant, de bien choisir les poids attribués à chaque critère pour la génération dechaque niveau. Le paragraphe concernant l’exploitation de eCognition montrera pardes exemples, l’influence des objets générés par l’étape de segmentation sur lesrésultats finaux. Cette influence est d’autant plus importante lorsque l’on emploie descaractéristiques de forme pour faire la classification.
2.3. ÉTAPE DE TRAITEMENT : CLASSIFICATION
Au lieu de se baser exclusivement sur la radiométrie dans plusieurs canaux pourclasser les pixels, comme le font la plupart des logiciels courants, eCognition s’appuiesur d’autres caractéristiques telles que la forme, la texture ou la classe des objetsalentour. Cette approche de classification basée sur les caractéristiques (angl.: feature-based classification), jusqu’alors réservée à quelques chercheurs, est maintenantdisponible à tout utilisateur de eCognition. Cependant l’exploitation de tellescaractéristiques implique le traitement à l’échelle de groupes de pixels et non d’unpixel. Dans eCognition on appelle ces regroupements, qui sont générés par l’étape desegmentation, les « objets image » (ang.: image objects). L’étape de classification
eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 15
débute après la phase d’extraction des objets image par le processus desegmentation.
Les caractéristiques (ang.: features) pouvant être exploitées par eCognition sontnombreuses (voir documentation “eCognition user manual” p.3.51 à 3.53) ce quientraîne un problème de choix de caractéristiques pour une classification donnée.Deux principales techniques de classification implémentée qui sont le plus prochevoisin (PPV) et la logique floue, gèrent ce problème de manière différente.
2.3.1. Techniques de classifications disponibles
Il existe dans eCognition deux techniques principales de classification. La méthode laplus rapide à implémenter et la plus efficace lorsque l’on exploite un grand nombre decaractéristiques est la méthode dite du « plus proche voisin ». En dépit de sa simplicitéconceptuelle, cette méthode, très utilisée comme référence, s’avère dans beaucoup decas performante.
• Plus proche voisin
L’algorithme du plus proche voisin (PPV) (Bishop, 1996) est basé sur le principe quedeux éléments semblables se ressemblent en tous points. Ainsi, si les caractéristiquesd’un élément sont très proches d’un autre, il est probable qu’ils appartiennent tousdeux à une seule classe. Ce postulat amène deux questions :- Comment choisir les caractéristiques de comparaison ?- Comment quantifier les similarités ?
Habituellement les caractéristiques à utiliser pour une classification donnée sontdéfinies à l’aide des connaissances sur le problème acquises soit auparavant, soit parl’analyse des données disponibles. Pour quantifier les similarités, il faut utiliser unemesure de distance telle que la distance Euclidienne. L’algorithme de classificationPPV consiste à attribuer un objet à une classe en se basant sur les objets les plusproches dont la classe est connue.
Dans eCognition il existe deux implémentations de l’algorithme du plus proche voisinnommé « Standard Nearest Neighbour » et « Nearest Neighbour » respectivement. Àla première méthode s’associe un ensemble de caractéristiques (ang.: feature set)globales qui s’applique à tout objet à classifier. La deuxième implémentation fonctionneavec un ensemble de caractéristiques propres à chaque classe. Dans les deux cas,l’utilisateur définit un échantillonnage (ang.: sample set) qui décrit chaque classe. Toutpixel est classifié selon sa similarité à ces descriptions de classe et une valeurd’appartenance (ang.: membership value) est calculée pour chacune. Il faut noter quepour un pixel à classifier, les valeurs d’appartenance à chaque classe impliquée dansle procédé de classification PPV peuvent ensuite servir d’entrée dans le processus declassification par la logique floue. Dans ce cas, ces valeurs seront traitées commetoutes autres valeurs d’appartenance issues d’une fonction d’appartenance.

eCognition : la classification assistée par ordinateur
16 BRGM/RP-52120-FR
• Logique floue
Le processus de classification par la logique floue s’appuie sur la définition des classesen termes de fonction d’appartenance. Après avoir choisi les caractéristiquespertinentes à chaque classe, une fonction d’appartenance définit la gamme de valeursacceptée. Ces fonctions varient d’une valeur de 0 à 1 et peuvent être de toute forme.La description des outils disponibles dans eCognition et qui aident à la définition de cesfonctions sera abordée au paragraphe 0. Lorsque plusieurs caractéristiques sontutilisées au sein d’une même classe, le calcul de la valeur d’appartenance peut se fairede plusieurs façons. Il existe divers opérateurs de logique floue disponibles danseCognition qui combinent les influences de chaque caractéristique.
2.3.2. Outils d’analyse des caractéristiques
• Outil : Feature View
La fonction « Feature View » permet d’afficher n’importe laquelle des caractéristiquescomme le niveau de gris dans la fenêtre d’affichage. Ainsi, dans ce mode d’affichage,c’est la valeur de la caractéristique de chaque objet qui est affichée au lieu d’afficherdu niveau de gris moyen de l’objet. Il est aussi possible de mettre en valeuruniquement l’ensemble d’objets ayant une valeur de la caractéristique désiréecomprise dans une certaine gamme. La figure 5 illustre ces deux possibilités : dansl’image de gauche les valeurs de la caractéristique « Longueur/Largeur » brutes sontaffichées ; à droite sont affichés en bleu uniquement les objets ayant une valeur« Longueur/Largeur » supérieure à 15. Comme on peut le voir, ce choix de seuil sur lacaractéristique « Longueur/Largeur » met en valeur le réseau routier.
Fig. 5 - Deux exemples d’image des valeurs de la caractéristique « Longueur/Largeur » pour l’extraction des routes.

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 17
• Outil : Sample Editor
Cet outil aussi permet d’analyser les valeurs des caractéristiques des objets. Il affichedes histogrammes des valeurs de la caractéristique choisie pour des objets définiscomme échantillons (ang.: sample). La figure 6 montre la fenêtre du Sample Editor.Des différences importantes apparaissent sur les distributions des valeurs descaractéristiques « Mean petite_ikonos 4 » (canal 4) et « Length/Width » pour les arbres(histogramme en noir) et les routes (histogramme en bleu). En se servant de cesinformations mises en valeur par le Sample Editor on peut définir deux fonctionsd’appartenance basées sur ces caractéristiques qui différencieront ces deux classes.
Mean petite_ikonos 1
Mean petite_ikonos 2
Mean petite_ikonos 3
Mean petite_ikonos 4
Length/Width
Fig. 6 - Histogrammes des échantillons d’arbre (en noir) et de route (en bleu)pour les caractéristiques de « valeurs moyennes » pour chaque canal etla caractéristique « Longueur/Largeur ».

eCognition : la classification assistée par ordinateur
18 BRGM/RP-52120-FR

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 19
3. Exploitation de eCognition
3.1. INTRODUCTION
Comme on a pu le constater dans le chapitre précédent, le logiciel eCognition fournit àtous les utilisateurs une fonctionnalité qui a été jusqu’à présent réservée auxchercheurs. La mise à disposition de ce logiciel en même temps que l’accès auximages de haute résolution présentent une opportunité importante pour améliorer laprécision des informations issues de la télédétection. Ce chapitre présente lespremières tentatives d’utilisation de ce logiciel pour faire face aux problèmes typiquesde classification automatique d’image. Afin de comparer les résultats obtenus pareCognition, nous utiliserons une classification issue du procédé de classificationsupervisée Maximum de Vraisemblance (MVS) du logiciel ERDAS Imagine. Pour lesdeux problématiques abordées, cette classification « MVS » est comparée d’une part àdes classifications générées par eCognition et d’autre part à une classificationmanuelle de « vérité terrain ». Ainsi les points forts et faibles des classifications issuesde chacune des chaînes de traitement peuvent être évalués de manière quantitative.
3.2. DÉTECTION DU RÉSEAU ROUTIER
En dehors de certains contextes très restreints tels que le désert, le problème de l’extractionautomatique du réseau routier n’est toujours pas résolu de manière systématique. Ce faitimplique que les informations utilisées dans les images jusqu’alors, en quasi-totalité baséesuniquement sur la radiométrie, ne suffisent pas. Lors de cette étude, l’opportunité seprésente de tester l’approche objet implémentée par eCognition.
Afin de pouvoir mesurer de manière quantitative les performances relatives desapproches d’Erdas et eCognition, un réseau routier « vérité » a été défini par laclassification manuelle d’une segmentation fine d’eCognition. Cette opérations’effectue en se basant sur une segmentation qui, avec un facteur d’échelle choisi trèspetit, génère des objets d’une taille moyenne de vingt pixels. Une fois les objetsgénérés, l’option « Input manual classification » est choisi et l’ensemble d’objets de laclasse route défini. Cette vérité est montrée, avec l’image originale, dans la figure 7.
Noter que la segmentation utilisée pour la définition de la vérité de terrain estindépendante de tout traitement appliqué par la suite. Cette mesure de sécurité a pourbut de réduire autant que possible l’éventualité d’un biais dans les résultats obtenus.
Le tableau 1 présente :
- ER MVS Rad : la classification des routes générée par la technique de Maximum deVraisemblance du logiciel Erdas Imagine et basée sur les seules valeursradiométriques est présentée dans la figure 8. Dans cette image on note que lesroutes sont pour la plupart bien identifiées, mais qu’il y a en revanche denombreuses fausses détections caractérisées par des pixels identifiés en tant queroutes mais qui n’en sont pas. Le résultat en nombre de pixels bien ou mal classéspar rapport au masque vérité terrain défini dans la figure 7 est donné dans letableau 1.

eCognition : la classification assistée par ordinateur
20 BRGM/RP-52120-FR
Fig. 7 - Gauche : le réseau routier défini comme étant « vérité » ; droite : l’imageoriginale.
Fig.
7 -
Gau
che
: le
rése
au ro
utie
r déf
ini c
omm
e ét
ant «
vér
ité »
; dr
oite
: l’i
mag
e or
igin
ale.

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 21
Vérité TerrainA B C A/(A+B) C/(A+C)
Classifiés« route »
Classification« routes erronées »
Routes maisnon classifiées
% classifiécorrect % manqué
ER MVS : Rad 57 652 175 031 81 857 25 59ECog : Rad-L/L 82 459 87 648 57 050 48 41ECog : Rad-cov 104 075 164 061 35 434 39 25
Tabl. 1 - Résultats de l’extraction des routes par des différentes méthodes declassification.
Fig. 8 - Masque des routes généré par laméthode de Maximum de vraisem-blance d’ERDAS Imagine.
Fig. 9 - Masque des routes issu d’eCognitionà l’aide des caractéristiques radio-métriques et de forme (Longueur/Largeur).
Fig. 10 - Masque des routes issu d’eCognition généré par un traitementmultiéchelle.

eCognition : la classification assistée par ordinateur
22 BRGM/RP-52120-FR
- eCog Rad-L/L : le résultat obtenu avec eCognition lorsqu’on applique uneclassification basée sur les caractéristiques de radiométrie dans les bandesIKONOS 1 et 2 et sur le ratio Longueur/Largeur de l’objet. Ce résultat est présentédans la figure 9.
- eCog Rad-cov : on utilise pour ce traitement la fonctionnalité multi-échelledisponible dans eCognition. Dans un premier temps une segmentation en petitsobjets est générée. Ceux-ci sont ensuite classifiés selon des caractéristiques deradiométrie ou de forme. Pour la classe « route », deux classes sont définies afin depouvoir mieux regrouper par la suite les diverses caractéristiques de la classe.Ensuite, on génère un deuxième niveau de segmentation regroupant les objets dupremier niveau, la classification des routes se fait alors à l’aide d’une nouvellecaractéristique nommée « Relative Area Routes ». Pour chaque objet, cette valeurreprésente la superficie relative de ses sous-objets classifiés dans une des deuxclasses « routes » au niveau inférieur par rapport à la superficie totale de l’objet. Sila superficie relative est supérieure au seuil prédéfini, cet objet est classifié comme« route » (cf. fig. 10).
Les résultats fournis dans le tableau 1 donnent, en plus du nombre de pixels classifiéspar les différentes méthodes :
- le pourcentage de pixels classifiés en tant que « route » et qui correspondent à desroutes sur le masque vérité terrain (% classifié correct) ;
- le pourcentage de pixels « route » sur le masque vérité terrain mais qui n’ont pasété classifiés en tant que « route » par les traitements (% manqué).
On peut aussi estimer de manière qualitative la performance relative de ces troisapproches à l’aide du masque des pixels classifiés comme « route ». La figure 9montre l’image produite par la deuxième approche : eCog Rad-L/L.
La technique la plus efficace en termes de proportion de pixels manqués est l’approchemultiéchelle, néanmoins, dans ce cas, il peut y avoir une surestimation de la taille desroutes qui fait baisser la proportion des pixels corrects. Le résultat « ECog : Rad-cov »montré dans la figure 10, semble être le plus convaincant en raison de sa couverturede la plupart des grandes structures de routes. Pour une étude plus fine il est possibled’utiliser des classes supplémentaires pour améliorer la description des zones deparking et de tailings. Dans ce cas, il est fort possible que le nombre de faussesalarmes (pixels classifiés comme « routes » alors qu’ils n’en sont pas) pourrait êtrerevu à la baisse.
3.3. DIFFÉRENCIATION DES TAILINGS ET DES TOITS
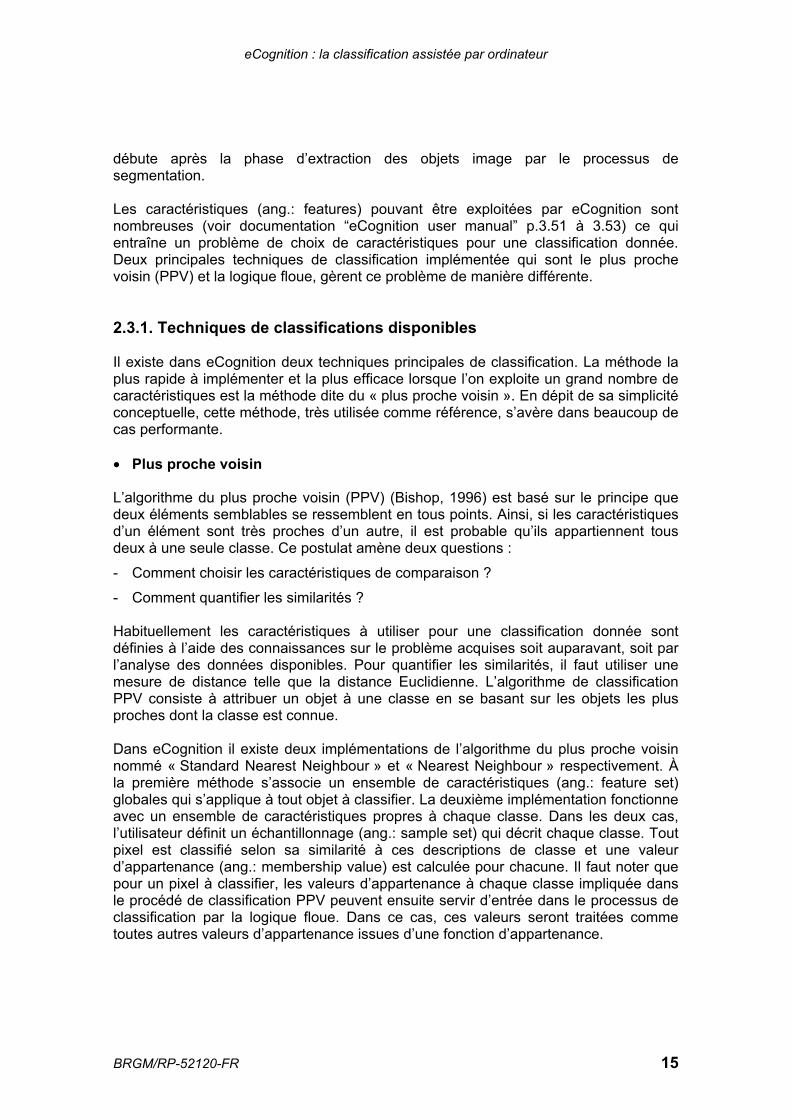
Un deuxième cas test pour le logiciel eCognition est la différenciation entre les zonesde tailings (déchets dus aux activités minières) et les toits de maison ou d’installationsindustrielles. De la même manière que pour le paragraphe précédent, une « vérité »terrain est définie afin d’estimer la précision des résultats obtenus. La figure 11 illustreles « images vérités », obtenues avec le même traitement que celui décrit auparagraphe 3.2, pour les deux classes considérées. La validation qualitative de ces« images véritées » peut se faire à l’aide de l’image originale de la figure 7.
eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 23
(a) vérité de terrain « toits »
(b) vérité de terrain « tailings »Fig. 11 - Vérité de terrain définie pour les classes (a) « toits » et (b) « tailings ».

eCognition : la classification assistée par ordinateur
24 BRGM/RP-52120-FR
Fig. 12 - Les résultats comparés de la classification des classes « tailings »(rouge) et « toits » (bleu ciel) par les logiciels ERDAS et eCognition.
Fig.
12
- Le
s ré
sulta
ts c
ompa
rés
de la
cla
ssifi
catio
n de
s cl
asse
s «
taili
ngs
» (r
ouge
) et «
toits
» (b
leu
ciel
) par
les
logi
ciel
s ER
DA
S et
eC
ogni
tion.

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 25
Comme précédemment, le résultat de l’application de la technique de maximum devraisemblance d’ERDAS a été comparée à une classification faite à l'aide d’eCognition.L’image de gauche dans la figure 12 (le résultat de la classification ERDAS) montretrès nettement le problème que l’on espère pouvoir améliorer avec les techniques declassification d’eCognition : une confusion importante entre la classe « tailings » et laclasse « toits ». Ce comportement se vérifie de manière quantitative dans le tableau 2.En effet, 22 % (ligne 2, A/(B + C), (16 212/(45 343 + 26 847)) des pixels classifiés entant que « tailings » appartiennent en fait à la classe « toits » d’après la vérité terrain.
À part la confusion entre la classe des « tailings » et celle des « toits », on remarqueaussi la profusion de pixels « toits » qui se trouvent un peu partout dans l’image. Cecomportement se ressent aussi fortement en regardant le tableau 2. Ici, on note la trèsfaible proportion des pixels classifiés en tant que « toit » (14 %) qui le sont réellement(d’après la vérité terrain), et le grand nombre de pixels « toits » qui, ne sont pas du toutidentifiés dans cette classification (68 % de pixels manqués).
L’image de droite dans la figure 12 montre la classification finale générée pareCognition. On constate que cette classification est loin d’être optimale pour lacouverture des deux classes « toits » et « tailings ». Néanmoins, le problème évidentdans la classification ERDAS, c’est-à-dire la confusion entre les « tailings » et les« toits » ne s’avère pas être un problème important dans ce cas. Aucun pixel classifié« toits » n’est réellement un pixel « tailings », et seulement 0,2 % (ligne 4, A/(B + C),(121/(45 188 + 23 061)) des pixels classifiés en tant que « tailings » sont des pixels dela classe « toits » (d’après la vérité terrain). En dépit de cette bonne performance sur leplan des erreurs de classification, l’approche eCognition adoptée ne se montre pasentièrement convaincante. Comme dans le premier exemple, les proportions correctesdes pixels classifiés sont assez faibles avec en moyenne sur les quatre exemples declassification d’eCognition (« eCog Rad L/L » 48 %, « eCog Rad-cov » : 39 %, « eCogToits » : 48 % et « eCog Tailings » : 66 %) un résultat de seulement 50 %.
Tabl. 2 - Résultats de l’extraction des « taillings » et des « toits » par les deuxoutils de classification.

eCognition : la classification assistée par ordinateur
26 BRGM/RP-52120-FR

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 27
4. Conclusion
ette étude, qui a été menée dans le cadre du projet DR 02RISR06« Démonstrateur hyperspectral et très haute résolution optique », a eu pour but
d’évaluer la performance du logiciel eCognition pour la classification automatique ousemi-automatique d’imagerie haute résolution. Le lancement de nombreux nouveauxcapteurs très haute-résolution a généré une disponibilité inédite d’imagerie trèsprometteuse pour plusieurs domaines d’applications d’intérêt direct au BRGM.Néanmoins, étant donné la quantité d’informations disponibles dans ce type d’imageriece n’est que par les moyens automatisés ou semi-automatisés que l’on pourravraiment exploiter cette ressource.
Lors des premières études qui se sont servies de ce type d’imagerie, on a constatéque les approches algorithmiques jusqu’alors disponibles dans les logiciels référencestels que ERDAS n’étaient pas adaptées au traitement automatique de ces images.Grâce à la résolution élevée, il est maintenant possible d’exploiter des informationscontextuelles contenues dans l’image. Ces informations étant liées non seulement à laradiométrie, mais aussi à la texture et à la forme des objets, le logiciel eCognition estun des premiers outils commercialisés qui permette l’exploitation de ce genred’information.
Dans l’évaluation d’eCognition décrite dans ce rapport, deux thèmes correspondantaux deux principales fonctions de ce logiciel sont abordés :- la segmentation d’image ;- la classification automatique d’image.
Le chapitre deux fournit la description du fonctionnement de la segmentation et uneintroduction aux différents classificateurs disponibles dans ce logiciel.
Deux cas tests ont également été inclus dans ce rapport afin de comparer laperformance des algorithmes d’eCognition et celle du Maximum de Vraisemblanceimplémenté dans ERDAS. Ces deux cas tests sont :- détection du réseau routier ;- différenciation des tailings (résidus miniers) et des toits.
Pour les deux tests, les résultats ont montré une amélioration significative lors del’utilisation d’eCognition. L’amélioration se manifeste à la fois dans l’augmentaion dupourcentage correct de pixels classifiés et dans la diminution du pourcentage de pixelsqui ne sont pas classifiés alors qu’ils appartiennent à la classe (dits « pixelsmanqués »). Néanmoins, le pourcentage correct de pixels classifiés reste assez faibleavec une moyenne de 50 % pour les classifications effectuées sous eCognition. Bienque ce chiffre soit favorable par rapport à la moyenne de 34 % obtenue sur l’ensembledes classifications ERDAS, on peut espérer, par des études ultérieures, atteindre unemeilleure précision.
C

eCognition : la classification assistée par ordinateur
28 BRGM/RP-52120-FR
Il faut signaler que dans les deux cas tests la vérité de terrain a été définie à partird’une segmentation fine d’eCognition. Il existe la possibilité d’un biais en faveur desclassificateurs implémentés dans eCognition.
Dans certains cas la performance décrite peut s’améliorer avec la définition d’autresclasses plus fines, mais il faut trouver le meilleur rapport entre le temps passé pouraffiner la définition des classes et l’amélioration attendue des résultats. Pour chaqueproblème de classification sur une image donnée il existe une limite de précisionréellement atteignable pour une configuration de classes données. Idéalement, ilfaudrait connaître à priori la définition appropriée des classes de départ et leur limite deprécision connue. Ceci permettrait l’évaluation d’un résultat issu d’une classificationeCognition dans son contexte.
En dépit des améliorations significatives apportées par le logiciel eCognition, sonexploitation actuellement itérative l’empêche de devenir à court terme un outilopérationnel pour un grand nombre d’applications.

eCognition : la classification assistée par ordinateur
BRGM/RP-52120-FR 29
Bibliographie
Bishop C.M. (1996) - Neural Networks for Pattern Recognition, Oxford UniversityPress. ISBN : 0198538642.
eCognition user manual.

eCognition : la classification assistée par ordinateur
30 BRGM/RP-52120-FR

Centre scientifique et techniqueService aménagement et risques naturels
3, avenue Claude-GuilleminBP 6009 – 45060 Orléans Cedex 2 – France – Tél. : 02 38 64 34 34