Etude dynamique d’un mécanisme - Site de la PSI du...
15
PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable APCB_JRP 1/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC Etude dynamique d’un mécanisme Cinétique. Dynamique. Caractéristiques d’inertie. Principe fondamental de la dynamique (P.F.D.). Problème technique posé : Vous êtes un passager de ce manège infernal ! (Magic Arms de Waagner-Biro (Barnth) Au cours des mouvements imposés aux éléments du manège, quelle position occupez- vous en fonction du temps ? Quelle vitesse et quelle accélération (quelles composantes par rapport aux axes de votre corps) ressentez- vous ? C’est l’étude cinématique qui répondra à ces questions. Quelles actions mécaniques : forces et moments, allez-vous subir ? Quelles actions mécaniques : forces et moments, s’exercent dans les liaisons et dans chaque pièce du manège ? Ces efforts et moments sont dus aux masses et aux accélérations . Quels couples (moments) les moteurs doivent-ils fournir au cours du temps pour maîtriser les lois de mouvements de chaque élément du manège et donc ce que ressent chaque passager ? C’est l’étude dynamique qui répondra à ces questions. Le principe fondamental de la dynamique appliqué à la nacelle 3 (contenant les passagers) du manège en son centre de gravité G 3 s'énonce par : le torseur dynamique galiléen de la nacelle 3 est égal au torseur résultant des actions mécaniques extérieures (efforts et moments) qui lui sont appliqués : { D(3 / R g ) } = { T( _ 3 → 3) } Avec : { D(3 / R g ) } Γ = ) 3/R , (G ) / ( m. g 3 3 3 G δ g R G et { T( _ 3 → 3)} = → → 3) ext G3 3) ext 3 G ( M R( Le torseur dynamique et les moyens pour l’exprimer seront définis et expliqués dans le cours de « Dynamique » Le torseur dynamique contient des grandeurs physiques telles que : masse [ kg] ; moment d’inertie [ kg. m 2 ] ; vecteur accélération d’un point [m.s -2 ] ; vecteur accélération angulaire d’un solide [rad.s -2 ] ; vecteur position d’un point [ m] Le torseur dynamique s’obtient à partir du torseur cinétique qui contient des grandeurs physiques telles que : masse [ kg] ; moment d’inertie [ kg. m 2 ] ; vecteur vitesse d’un point [m.s -1 ] ; vecteur vitesse angulaire d’un solide [rad.s -1 ] ; vecteur position d’un point [ m] Le torseur cinétique et les moyens pour l’exprimer seront définis et expliqués dans le cours de « Cinétique ». La masse, la position du centre d’inertie G et les moments d’inertie d’un solide seront définis et expliqués dans le cours « Caractéristiques d’inertie d’un solide » Nacelle 3 Bati 0 Petit bras 2 Grand bras 1 G 3
Transcript of Etude dynamique d’un mécanisme - Site de la PSI du...

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 1/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
Etude dynamique d’un mécanisme
Cinétique. Dynamique. Caractéristiques d’inertie. Principe fondamental de la dynamique (P.F.D.).
Problème technique posé : Vous êtes un passager de ce manège infernal ! (Magic Arms de Waagner-Biro (Barnth) Au cours des mouvements imposés aux éléments du manège, quelle position occupez-vous en fonction du temps ? Quelle vitesse et quelle accélération (quelles composantes par rapport aux axes de votre corps) ressentez-vous ? C’est l’étude cinématique qui répondra à ces questions.
Quelles actions mécaniques : forces et moments, allez-vous subir ? Quelles actions mécaniques : forces et moments, s’exercent dans les liaisons et dans chaque pièce du manège ? Ces efforts et moments sont dus aux masses et aux accélérations . Quels couples (moments) les moteurs doivent-ils fournir au cours du temps pour maîtriser les lois de mouvements de chaque élément du manège et donc ce que ressent chaque passager ? C’est l’étude dynamique qui répondra à ces questions.
Le principe fondamental de la dynamique appliqué à la nacelle 3 (contenant les passagers) du manège en son centre de gravité G3 s'énonce par : le torseur dynamique galiléen de la nacelle 3 est égal au torseur résultant des actions mécaniques extérieures (efforts et moments) qui lui sont appliqués :
D(3 / Rg) = T(_3 → 3)
Avec : D(3 / Rg)
Γ=
)3/R,(G
)/( m.
g3
3
3G δ
gRG et T(
_3 → 3)
=→
→
3)extG3
3)ext
3G (M
R(
Le torseur dynamique et les moyens pour l’exprimer seront définis et expliqués dans le cours de « Dynamique »
Le torseur dynamique contient des grandeurs physiques telles que : masse [ kg] ; moment d’inertie [ kg. m2] ; vecteur accélération d’un point [m.s-2 ] ; vecteur accélération angulaire d’un solide [rad.s-2 ] ; vecteur position d’un point [ m] Le torseur dynamique s’obtient à partir du torseur cinétique qui contient des grandeurs physiques telles que : masse [ kg] ; moment d’inertie [ kg. m2] ; vecteur vitesse d’un point [m.s-1 ] ; vecteur vitesse angulaire d’un solide [rad.s-1 ] ; vecteur position d’un point [ m]
Le torseur cinétique et les moyens pour l’exprimer seront définis et expliqués dans le cours de « Cinétique ». La masse, la position du centre d’inertie G et les moments d’inertie d’un solide seront définis et expliqués dans le cours « Caractéristiques d’inertie d’un solide »
Nacelle 3
Bati 0
Petit bras 2
Grand bras 1
G 3

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 2/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
Cinétique, dynamique, caractéristiques d’inertie du solide indéformable. P.F.D.
Table des matières :
I. Enoncé du Principe Fondamental de la Dynamique
1. Enoncé 2. Référentiel galiléen 3. Remarques 4. Torseur dynamique
a. Définition b. Propriétés torsorielles c. Résultante et moment dynamique
II. Torseur cinétique et lien avec le torseur dynamique
1. définitions a. Définition du torseur cinétique b. Résultante et moment cinétique c. Cas simplifié
2. Liens entre le torseur cinétique et le torseur dynamique
a. Au niveau des résultantes b. Au niveau des moments c. Cas particuliers
III. Inertie dans le cas du solide indéformable 1. Moments d’inertie d’un solide
a. Notion de moment d’inertie présenté à partir d’une masse ponctuelle en mouvement de rotation.
b. Moment d’inertie par rapport à un plan, par rapport à un axe, par rapport à un point.
c. Expressions des moments d’inertie de quelques volumes élémentaires
d. rayon de giration 2. Opérateur d’inertie d’un solide S
a. Introduction b. Définition c. Matrice associée
3. Propriétés de l’opérateur d’inertie a. Base principale d’inertie b. Influence des symétries matérielles c. Théorème de Huygens
IV. Calcul pratique du moment cinétique et du moment dynamique dans le cas d’un solide indéformable, la matrice d’inertie étant connue.
1. Moment cinétique d’un solide en mouvement par rapport à un repère Rg
2. Relations exprimant le moment cinétique 3. Relation pour le calcul du moment dynamique )
Solide de référence. Repère associé au solide de référence.
PFD en rotation, notion de moment d’inertie
Caractéristiques d’inertie d’un cylindre
Matrice d’inertie d’un solide quelconque 2 2
2 2
, ,2 2
( )
S S S
O
S S S
x y z
S S S
y z dm xydm xzdmA F E
I S yxdm x z dm yzdm F B D
E D Czxdm zydm x y dm
+ − −
− − = − + − = − − − −
− − +
∫ ∫ ∫
∫ ∫ ∫
∫ ∫ ∫r ur r

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 3/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
I. Enoncé du Principe Fondamental de la Dynamique
1. Enoncé Il existe au moins un repère, dit Galiléen, tel que, pour tout système matériel E de l’espace
matériel, le torseur dynamique de E dans son mouvement par rapport à ce repère soit égal au torseur résultant des actions mécaniques extérieures s’exerçant sur E, à chaque instant.
∃ Rg où ∀E, ∀t on a : D EERg/E →= τ
Il s’agit d’un principe, qui ne se démontre donc pas, énoncé pour la première fois par Isaac Newton à la fin du 17ème siècle. Sa justification réside dans l’exactitude constatée de ses conséquences par rapport à l’expérience.
2. Référentiel galiléen Un repère Galiléen est un repère dans lequel le PFD est vrai.
Nous pouvons citer trois repères utilisés couramment : Le repère de Copernic : défini par le centre
d’inertie du système solaire (sensiblement le centre du soleil) et trois directions stellaires. Ce repère est considéré comme Galiléen et utilisé pour la mise au point des fusées interplanétaires.
Le repère lié au centre d’inertie de la terre et dirigé vers les trois directions stellaires. Il est utilisé comme repère Galiléen pour l’étude de corps restant au voisinage de la terre (satellites par exemple).
Le repère lié à la terre : il est usuellement considéré comme Galiléen pour la mise au point de tous les systèmes mécanique courants.
Solide de référence.Solide de référence.Solide de référence.Solide de référence. Repère associé au solide de référence.Repère associé au solide de référence.Repère associé au solide de référence.Repère associé au solide de référence.
3. Remarques
Le PFS n’est donc qu’un cas particulier du PFD, dans lequel le torseur Dynamique est le torseur nul. Le PFD est ici énoncé pour un système matériel E quelconque, déformable ou non. En ce sens, le cas
du solide indéformable sera traité comme un cas particulier.
Le torseur résultant des actions mécaniques extérieures s’écrit : EE →τ ou E)E(mécaact ∑ →τ

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 4/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
4. Torseur dynamique
a. Définition
L’énoncé du PFD fait donc intervenir, dans un membre de l’égalité, le torseur
EE →τ qui est le torseur résultant des Actions Mécaniques extérieures qui s’exercent sur le
système isolé E. Vous savez déjà exprimer ce torseur, puisque c’est le même que celui écrit dans une étude statique.
Dans l’autre membre de l’égalité, nous voyons apparaître le torseur dynamique :
D Rg/E Ce torseur peut être explicité, dans le cas d’un système matériel E quelconque par :
.
.
= D
AEgR/M
EgR/M
A gR/E
Γ∧
Γ
∫
∫
dmAM
dm
r
r
où le vecteur noté gR/MΓ
rest l’accélération du point M, par
rapport au repère Rg , M étant un point quelconque de E.
Ici E ≡ nacelle 3
b. Propriétés torsorielles Il faut vérifier que le torseur dynamique est bien un torseur, c’est à dire qu’il en a les propriétés :
Le torseur en un point B s’écrit :
avec AMBABM += donc
.
.
= D
BEgR/M
EgR/M
B gR/E
Γ∧
Γ
∫
∫
dmBM
dm
r
r
∫∫∫ Γ∧+Γ∧=Γ∧E
gR/ME
gR/ME
gR/M ... dmAMdmBAdmBMrrr
∫∫ Γ∧+Γ∧=E
gR/ME
gR/M .. dmBAdmAMrr
ce qui montre qu’il s’agit bien d’un torseur car il vérifie la relation de Varignon (propriété de changement de point du moment)
c. Résultante et moment dynamiques
On appelle :

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 5/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
Résultante dynamique de E / Rg la résultante du torseur dynamique, à savoir :
∫
∫ =ΓE
2
2
EgR/M .. dm
dt
OMddm
Rg
r Or, d’après le principe de conservation de la
masse (annexe PFD p2 ), on a :
RgGRgRgRg
mOGmdt
ddmOM
dt
ddm
dt
OMd/2
2
2
2
E2
2
.... Γ===
∫∫
Moment dynamique en A de E / Rg le moment du torseur dynamique, à savoir :
∫ Γ∧E
gR/M .dmAMr
On le note : ∫ Γ∧=E
gR/M .)/( dmAMRgEA
rrδ
d’après la relation de Varignon, on a la propriété :
gR/G.)/()/( Γ∧+=rrr
mABRgERgE BA δδ
II. Torseur cinétique et lien avec le torseur dynamique
1. définitions Si l’expression de la résultante dynamique du torseur dynamique est simple à calculer
(vous savez déjà le faire), l’expression du moment dynamique est compliquée à obtenir par intégration directe. Pour cela, il est plus judicieux de mettre en place un torseur, appelé torseur cinétique, et de le relier au torseur dynamique.
a. Définition du torseur cinétique
Soit E un système matériel en mouvement par rapport à un repère R. On définit, à chaque instant, le torseur cinétique par :
.
.
= C
AEgR/M
EgR/M
A gR/E
∧∫
∫
dmVAM
dmV
r
r
où le vecteur noté gR/MV
rest la vitesse du point M, par rapport
au repère Rg , M étant un point quelconque de E. On vérifie bien qu’il s’agit d’un torseur en exprimant le moment cinétique en un point B :
Ici E ≡ 3
∫∫∫ ∧+∧=∧E
gR/ME
gR/ME
gR/M ... dmVAMdmVBAdmVBMrrr
∫∫ ∧+∧=E
gR/ME
gR/M .. dmVBAdmVAMrr
ce qui montre qu’il s’agit bien d’un torseur car il vérifie la relation de Varignon (propriété de changement de point du moment)

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 6/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
b. Résultante et moment cinétiques
On appelle : Résultante cinétique de E/R la résultante du torseur cinétique, à savoir :
∫
∫ =EE
gR/M .. dmdt
OMddmV
Rg
r. Or, d’après le principe de conservation de la
masse, on a : [ ] RgGRg
RgRg
VmOGmdt
ddmOM
dt
ddmdt
OMd/
E
.... ===
∫∫
Moment cinétique en A de E / Rg le moment du torseur cinétique, à savoir :
∫ ∧E
gR/M .dmVAMr
On le note : ∫ ∧=E
gR/M .)/( dmVAMRgEA
rrσ
d’après la relation de Varignon, on a la propriété : gR/G.)/()/( VmABRgERgE BA
rrr∧+=σσ .
c. Cas simplifié
Si on suppose que E est un point matériel, c’est à dire que la masse de E est concentrée au point G, on obtient le cas simplifié (de certains problèmes posés en sciences physiques) :
0
. = C
G
gR/GG
gR/E
r
rVm
et
0
. = D
G
gR/GG
gR/E
Γ
r
rm
en A : gR/G.)/( VmAGRgEA
rr∧=σ et
gR/G.)/( Γ∧=rr
mAGRgEAδ
2. Liens entre le torseur cinétique et le torseur dynamique
a. Au niveau des résultantes
[ ] [ ]RgGRg
RgGRg
RgG Vmdt
dV
dt
dmm /// ... ==Γ
La résultante dynamique est la dérivée de la résultante cinétique.
b. Au niveau des moments
Par définition, nous avons donc :
∫ ∧=E
gR/M .)/( dmVAMRgEA
rrσ donc : [ ]
∫ ∧=
dt
dmVAMd
dt
d
Rg
RgEARg
EgR/M
/,
.r
σ et,
d’après le Principe de Conservation de la masse, nous avons alors :
[ ] ∫∫
∧+∧=E
gR/MgR/M/, .. dmVdt
dAMdmV
dt
AMd
dt
d
RgRgEA
Rg
rrσ

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 7/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
∫∫
∫
Γ∧+∧+∧=
EgR/MgR/MgR/M ... dmAMdmV
dt
OMddmV
dt
AOd
E RgE Rg
rr
Soit encore :
∫∫
Γ∧++∧−=
EgR/MgR/M .0. dmAMdmV
dt
OAd
E Rg
rr
Soit, en conclusion : [ ] gR/GgR/AgR/EA,/, . VVmdt
dRgEA
Rg
rrr∧−=δσ
Il faut donc retenir la relation permettant de calculer le moment dynamique en A de E / Rg à partir de l’expression du moment cinétique en A de E / Rg :
[ ] gR/GgR/A/,gR/EA, . VVmdt
dRgEA
Rg
rrr∧+= σδ
c. Cas particuliers
Si A est fixe / Rg, ou si 0gR/GgR/A
rrr=∧ VV alors : [ ]RgEA
RgE
dt
d/,gR/A, σδ =
r
Au centre d’inertie, c’est à dire en G, on a : [ ]RgEGRgdt
d/,gR/EG, σδ =
r
Dans la pratique, si besoin au point A : on calcule [ ]RgEGRgdt
d/,gR/EG, σδ =
r puis on le
déplace au niveau du point A par Varignon (propriété de changement de point du moment d’un
torseur). gR/EG,.)/()/( Γ∧+=
rrrmABRgERgE BA δδ

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 8/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
III. Inertie dans le cas du solide indéformable
1. Moments d’inertie d’un solide
Soit S un solide, auquel on associe par équivalence un repère ( , , , )O x y zr ur r
.
a. Notion de moment d’inertie présenté à partir d’une masse ponctuelle en
mouvement de rotation.
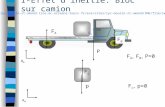
P.F.Dyn. en translation sur l’axe x : F = m . γγγγ Force = masse . accélération
P.F.Dyn. en rotation circulaire autour de l’axe Oz :
Sur la tangente : Ft = m . γγγγt Force tangentielle = masse x accélération tangentielle
or γγγγt =dVt /dt et Vt = R . ωωωω donc γγγγt = R . dωωωω / dt = γγγγt = R . d2θθθθ / dt2 d’où : Ft = m.R.dωωωω / dt = m. R . d2θθθθ / dt2 Exprimons maintenant le moment de la force Ft par rapport au point O : MO(Ft) = R . Ft = (m . R2). d2θθθθ / dt2 Ce n’est plus la masse qui intervient dans la mise en mouvement mais le produit (m . R2) nommé MOMENT D’INERTIE en [kg.m 2]
b. Moment d’inertie par rapport à un plan. Moment d’inertie par rapport à
un axe. Moment d’inertie par rapport à un point.
On définit le moment d’inertie
du solide S par rapport au plan π par :
∫=S
2.)/( dmrSI π
l’unité est donc le kg.m2
S M
r
π

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 9/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
On définit le moment d’inertie
du solide S par rapport à l’axe∆ par :
∫=∆S
2.)/( dmrSI
l’unité est donc le kg.m2
On définit le moment d’inertie
du solide S par rapport au point O par :
∫=S
2.)/( dmrOSI
l’unité est donc le kg.m2
Appliquons ces définition à la figure ci-contre : moment d’inertie par rapport au plan P1 puis P2 puis P3 :
2
2
2
( / )
( / )
( / )
S
S
S
I S xOy z dm
I S yOz x dm
I S zOx y dm
=
=
=
∫
∫
∫
S M
r
∆
S M
r
O

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 10/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
Ainsi, pour la figure ci-dessus, les moments d’inertie du solide S par rapport aux axes sont :
2 2
2 2
2 2
( / ) ( )
( / ) ( )
( / ) ( )
S
S
S
I S Ox y z dm
I S Oy x z dm
I S Oz x y dm
= +
= +
= +
∫
∫
∫
On remarque :
I(S/Ox) = I(S/xOy) + I(S/xOz)
I(S/Oy) = I(S/xOy) + I(S/yOz)
I(S/Oz) = I(S/xOz) + I(S/yOz)
Ainsi, pour la figure ci-dessus, on définit le moment d’inertie du solide S par rapport au
point O par : 2 2 2 2( / ) ( )
S S
I S O r dm x y z dm= = + +∫ ∫
On remarque que : ( / ) ( / ) ( / ) ( / )I S O I S xOy I S yOz I S xOz= + +
c. Expressions des moments d’inertie de quelques volumes élémentaires
Moments d’inertie à connaître : Cylindre de révolution de hauteur h, de masse m et de rayon R : moment d’inertie par rapport à son axe de révolution moments d’inertie par rapport aux axes transversaux
Parallélépipède :
Voir les documents annexes formulaires
d. Moments d’inertie d’un solide composé d’une somme ou d’une différence
de volumes élémentaires
document annexe : exemple pour un tube
e. rayon de giration Le rayon de giration d’un solide S par rapport à un axe ∆ est le rayon R d’un cylindre
de révolution d’axe ∆ , creux (d’épaisseur négligeable), qui aurait même masse et même moment d’inertie par rapport à ∆ que S.
S
M r
R 2 2
2
( / ) donc S
S
I S r dm mR
r dm
Rm
∆ = =
=
∫
∫

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 11/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
2. Opérateur d’inertie d’un solide S
a. Introduction Nous revenons sur la définition du moment d’inertie d’un solide par rapport à un axe.
Pour cela, nous avons :
Soit U , un vecteur unitaire de ∆ . Nous avons alors :
∫=∆S
2.)/( dmrSI avec rOMOMU ==∧ αsin. donc :
∫=∆S
2.)/( dmrSI = ∫∫ ∧∧=∧E
2).).((. dmOMUOMUdmOMU
E
∫ ∧∧=E
).()).(( dmOMUOMU ∫ ∧∧=E
).()).(( dmOMUOMU
(propriété de permutation des opérations produit vectoriel et produit scalaire dans un produit mixte)
∫ ∧∧=E
).()(. dmOMUOMU
b. Définition
On appelle opérateur d’inertie d’un solide S en un point O, l’opérateur linéaire qui a
tout vecteur U associe le vecteur : ∫ ∧∧E
).()( dmOMUOM
Application linéaire :),( SOℑ USIU O .)(a ∫ ∧∧=E
).()( dmOMUOM
On a alors : I(S / ∆) USIU O .)(.= USOU ).,(.ℑ=
c. Matrice associée
On appelle matrice d’inertie en O du solide S, la matrice associée à l’application linéaire
),( SOℑ . C’est donc la matrice )(SIO
Remarque : NOTATIONS : Le plus souvent dans les sujets ou les ouvrages de mécanique, les deux
notations sont confondues pour désigner la matrice d’inertie d’un solide : )(SIO ou ),( SOℑ
∆
M
O Vur
r
α
S
U

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 12/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
Soit ( , , , )O x y zℜr ur r
un repère associé au solide S (équivalence entre le repère et le solide).
En notant zcybxaU ... ++= et zzyyxxOM ... ++= , l’expression
USIO ).( ∫ ∧∧=E
).()( dmOMUOM devient :
USIO ).(
zyx
c
b
a
O
dmyxdmzydmzx
dmzydmzxdmyx
dmzxdmyxdmzy
SSS
SSS
SSS
,,,
.
).(....
..).(..
....).(
22
22
22
+−−
−+−
−−+
=
∫∫∫
∫∫∫
∫∫∫
La matrice d’inertie en O du solide S est donc la matrice dont l’expression est donnée par :
)(SIO
zyxO
CDE
DBF
EFA
dmyxdmzydmzx
dmzydmzxdmyx
dmzxdmyxdmzy
SSS
SSS
SSS
,,,).(....
..).(..
....).(
22
22
22
−−−−−−
=
+−−
−+−
−−+
=
∫∫∫
∫∫∫
∫∫∫
avec les notations où : A, B et C sont respectivement les moments d’inertie de S par
rapport aux axes ( , )O xr
, ( , )O yur
et ( , )O zr
. D, E et F sont les produits d’inertie.
Remarque : On vérifie que I(S / Ox) xSIx O ).(.=
3. Propriétés de l’opérateur d’inertie
a. Base principale d’inertie
)(SIO est une matrice réelle symétrique, elle est donc diagonalisable. Il existe donc une base B’,
tel que les produits d’inertie dans B’ soient nuls.
Dans la base B’, on a donc :
',',',
'00
0'0
00'
')(
zyxO
C
B
A
BSIO
= .
Les valeurs propres A’, B’ et C’ sont les moments principaux d’inertie. Soit P la matrice de passage de B vers B’. Alors il vient :
PB
SIPB
SI OO .'
)(.)( 1−=
( voir doc annexe matrice de passage d’une base à une autre )

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 13/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
Rem : Les logiciels de D.A.O. fournissent facilement ces résultats pour un solide construit en mode volumique. (Exemple en annexe :_inertie_résultats logiciel)
b. Influence des symétries matérielles
Cas d’un plan de symétrie
Considérons par exemple que le plan ( , , )O x yr ur
soit un plan de symétrie .
Alors il vient :
0
0
S
S
xzdm
yzdm
=
=
∫
∫ et donc
zyxO
C
BF
FA
BSIO
,,,
00
0
0
)(
−−
=
donc zr
est un vecteur propre de la base principale d’inertie. Cas d’une symétrie de révolution
Considérons une symétrie de révolution par rapport à l’axe zr
. Alors ( , , )O x zr r
et
( , , )O y zur r
sont des plans de symétrie et tous les produits d’inertie sont nuls. Toute base contenant le vecteur
zr
est une base principale d’inertie.
xr
et yur
jouant le même rôle, la matrice d’inertie a alors l’allure
suivante :
zO
C
A
A
SIO
,,,
00
00
00
)(
−−
= A = B
D’autre part, le calcul de A peut être fait de manière simple. En effet, le calcul de C est très simple puisque :
∫∫ =+=S
2
S
22 .).( dmrdmyxC
lorsque l’on utilise les coordonnées cylindriques et on a alors :
2A = A + B = ∫∫ +=++E
2
E
222 .2)..2( dmzCdmzyx
avec 2
S
z dm∫ qui est très simple à calculer. Le calcul pratique de A se traduit par : 2
2S
CA z dm= +∫
Autres exemples page annexe : Axes principaux d’inertie. Influence des symétries.
xr
yur
zr
O
z
-z
zr
xr y
ur
O

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 14/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
c. Théorème de Huygens
Ce théorème permet de relier les
matrices d’inertie d’un solide : )(SIO et )(SIG
matrice d’inertie en deux points différents O et G,
mais dans la même base.
USIO ).( ∫ ∧∧=S
).( dmOMUOM
∫ ∧∧=S
).( dmOMUOG ∫ ∧∧+S
).( dmOMUGM
).(S∫∧∧= dmOMUOG ∫ ∧∧+
S
).( dmOGUGM ∫ ∧∧+S
).( dmGMUGM
USIO ).( ).( OGmUOG ∧∧= ∫ ∧∧+S
)(. OGUdmGM + USIG ).( on pose alors
USIO ).( = UmGIUSI OG ).,().( + où ).().,( OGmUOGUmGIO ∧∧= et où le terme
),( mGIO est la matrice d’inertie en O d’un solide ponctuel en G de masse m.
notons
zyxOCDE
DBF
EFA
SI
OOO
OOO
OOO
O
,,,
)(
rr
−−−−−−
= et
zyxGCDE
DBF
EFA
SI
GGG
GGG
GGG
G
,,,
)(
rr
−−−−−−
=
OG = ( xG ; yG ; zG ) et
zyxOyxmzymzxm
zymzxmyxm
zxmyxmzym
mGI
GGGGGG
GGGGGG
GGGGGG
O
,,,).(....
..).(..
....).(
),(22
22
22
rr
+−−−+−−−+
=
relation sur les moments d’inertie : AO = AG + m.(yG
2 + zG2)
BO = BG + m.(xG2 + zG
2) CO = CG + m.(xG
2 + yG2)
relation sur les produits d’inertie : -DO = -DG - m.yG.zG -EO = -EG - m.xG.zG -FO = -FG - m.xG.yG
ou avec les autres notations : relation sur les moments d’inertie :
IOx = IGx + m.(yG2 + zG
2) IOy = IGy + m.(xG
2 + zG2)
IOz = IGz + m.(xG2 + yG
2)
relation sur les produits d’inertie : -POyz = -PGyz - m.yG.zG -POxz = -PGxz - m.xG.zG -POxy = -PGxy - m.xG.yG
voir aussi pages annexes : Annexes HUYGENS

PSI-MP- Sciences Industrielles pour l’Ingénieur Cours : Mécanique du solide indéformable
APCB_JRP 15/15 1_PFD_CINET_DYNAM_CARACT INERTIE_PROF_APCB_JRP.DOC
IV. Calcul pratique du moment cinétique puis du moment dynamique dans le cas d’un solide indéformable, la matrice d’inertie étant connue.
1. Moment cinétique d’un solide en mouvement par rapport à un repère Rg
Dans le cas du solide, le torseur cinématique et le torseur cinétique (vu en III.1) s’écrivent :
A
gR/S
A gR/S
gR/SV
Ω=
∈AV
r
et
)R/(S
. = C
Ag
gR/SG
A gR/S
∈
A
Vm
σ
r
Soit A et B deux points appartenant à ce solide S, dont le centre d’inertie est en G. Alors on a :
∫ ∈∧=S
gR/M .)/( dmVAMRgS SA
rrσ ∫ ∧Ω+∧= ∈S
gR/gR/B ).( dmBMVAM SS
rr
∫∫∫ ∧Ω∧+∧Ω∧+∧= ∈S
SS
SS dmBMBMdmBMABdmVAM ).().(.gR/gR/
SgR/B
rrr
)/( RgSAσrgR/gR/gR/B ).().(. SBSS SIBGmABVAGm Ω+∧Ω∧+∧= ∈
rrr
Cette formule n’a aucun intérêt pratique mais elle permet de montrer les relations suivantes, à connaître absolument : (en faisant ptA = ptB, puis ptB = pt G dans la relation ci-dessus)
2. Relations exprimant le moment cinétique (à connaître IMPERATIVEMENT) :
En A, on a : gR/gR/A ).(.)/( SASA SIVAGmRgS Ω+∧= ∈
rrrσ
Dans le cas particulier où A est fixe par rapport à Rg , on a : gR/).()/( SAA SIRgS Ω=
rrσ
En A, on a aussi : gR/gR/G ).(.)/( SGSA SIVAGmRgS Ω+∧= ∈
rrrσ
Enfin, que G soit fixe où non, on a : gR/).()/( SGG SIRgS Ω=
rrσ
3. Relations pour le calcul du moment dynamique (à connaître IMPERATIVEMENT) [ ] gR/GgR/A/,gR/EA, . VVm
dt
dRgEA
Rg
rrr∧+= σδ
ou [ ]RgEGRgdt
d/,gR/EG, σδ =
rpuis par propriété de changement de
point gR/G.)/()/( Γ∧+=
rrrmAGRgERgE GA δδ