
Etude de la Boîte de vitesse PK6 - Connexion au...
15
Dossier Technique Boite de vitesse automatique DP0 Licence GMPE 1/15 Etude de la Boîte de vitesse DP0 Dossier Technique 1. Analyse fonctionnelle 1.1. Enoncé du besoin La fonction principale d’une boîte de vitesses automatique est la même que celle d’une boîte manuelle : adapter le couple moteur et la vitesse moteur aux roues. La seule différence est que l’on souhaite automatiser le passage des rapports et supprimer la commande d’embrayage. 1.2. Analyse descendante 1.3. Architecture d’une BVA Le schéma synoptique du cheminement de la puissance d’un Groupe Motopropulseur doté d’une boite de vitesse manuelle est le suivant : Le schéma synoptique du cheminement de la puissance pour un Groupe Motopropulseur doté d’une transmission automatique est le suivant : L’embrayage est remplacé par un coupleur convertisseur qui assure hydrauliquement et en permanence l’accouplement du moteur à la boite de vitesse. La boite de vitesse n’est plus constitué d’un train d’engrenage simple mais d’un ou plusieurs trains épicycloïdaux dont on vient contrôler alternativement l’un ou l’autre des constituants par des freins ou embrayages pour réaliser les différents rapport. (voir cours de cinématique) passage des vitesses BVM BVA A-0 C moteur moteur C roues roues Adapter de manière automatique BVA Pertes infos réglages ordres lubrification moteur coupleur - convertisseur boite de vitesse différentiel roues moteur boite de vitesse différentiel roues embrayage
Transcript of Etude de la Boîte de vitesse PK6 - Connexion au...

Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 1/15
Etude de la Boîte de vitesse DP0 Dossier Technique
1. Analyse fonctionnelle
1.1. Enoncé du besoin
La fonction principale d’une boîte de vitesses automatique est la même que celle d’une boîte manuelle : adapter le couple moteur et la vitesse moteur aux roues. La seule différence est que l’on souhaite automatiser le passage des rapports et supprimer la commande d’embrayage.
1.2. Analyse descendante
1.3. Architecture d’une BVA
Le schéma synoptique du cheminement de la puissance d’un Groupe Motopropulseur doté d’une boite de vitesse manuelle est le suivant :
Le schéma synoptique du cheminement de la puissance pour un Groupe Motopropulseur doté d’une transmission automatique est le suivant :
L’embrayage est remplacé par un coupleur convertisseur qui assure hydrauliquement et en permanence l’accouplement du moteur à la boite de vitesse. La boite de vitesse n’est plus constitué d’un train d’engrenage simple mais d’un ou plusieurs trains épicycloïdaux dont on vient contrôler alternativement l’un ou l’autre des constituants par des freins ou embrayages pour réaliser les différents rapport. (voir cours de cinématique)
passage des vitesses
BVM BVA
A-0
Cmoteur
moteur
Croues
roues
Adapter de manière
automatique
BVA
Pertes
infos
réglages ordres lubrification
moteur
coupleur -
convertisseur
boite de
vitesse
différentiel
roues
moteur
boite de
vitesse
différentiel
roues
embrayage

Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 2/15
1 Moyeu d’alimentation hydraulique 2 Embrayage E2 3 Embrayage E1 4 Frein F1 ( à disques ) 5 Frein F2 ( à bande ) 6 Train épicycloïdal double 7 Pignon primaire 8 Frein F3 ( à bande ) 9 Pompe à huile 10 Convertisseur 11 Pignon secondaire 12 Différentiel
2. Mise en situation du support d’étude.
Le support de travail proposé est la boîte de vitesse DP0 fabriquée conjointement par Renault et Peugeot et montée notamment sur les LAGUNA avec une motorisation F9Qt
Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 3/15
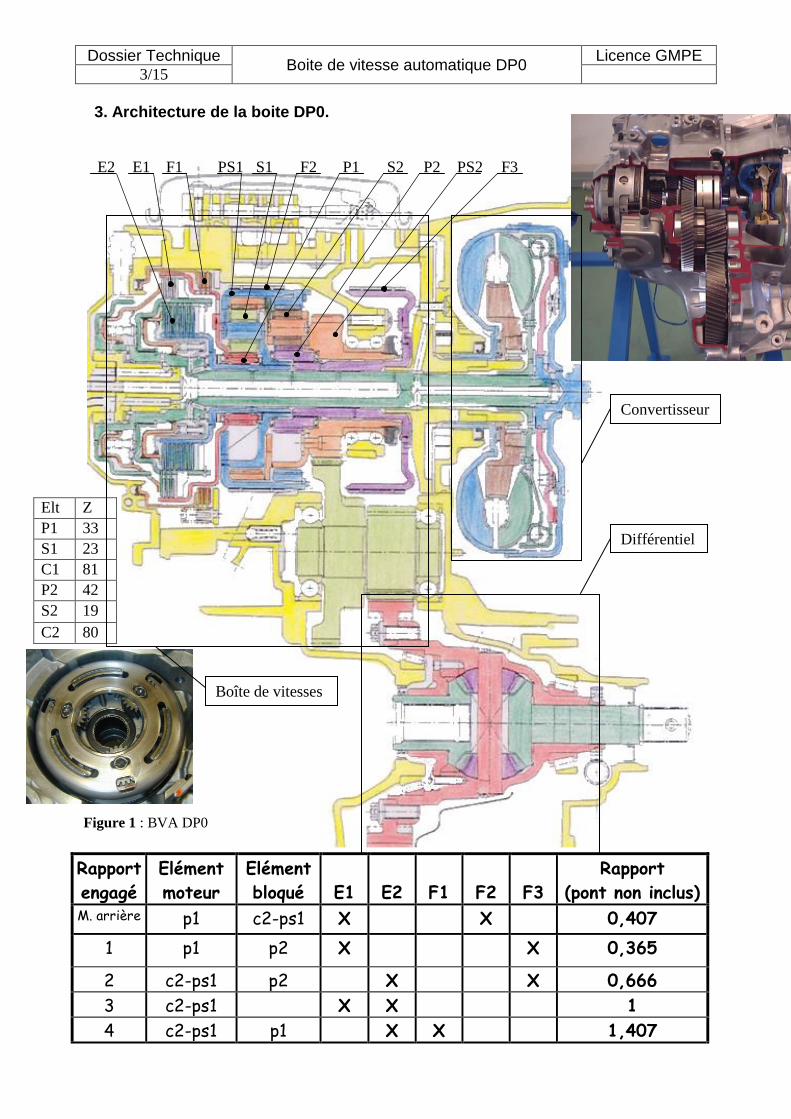
3. Architecture de la boite DP0.
Elt Z
P1 33
S1 23
C1 81
P2 42
S2 19
C2 80
Rapport
engagé
Elément
moteur
Elément
bloqué
E1
E2
F1
F2
F3
Rapport
(pont non inclus) M. arrière p1 c2-ps1 X X 0,407
1 p1 p2 X X 0,365
2 c2-ps1 p2 X X 0,666
3 c2-ps1 X X 1
4 c2-ps1 p1 X X 1,407
Figure 1 : BVA DP0
Convertisseur
Différentiel
Boîte de vitesses
E2 E1 F1 PS1 S1 F2 P1 S2 P2 PS2 F3
Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 4/15
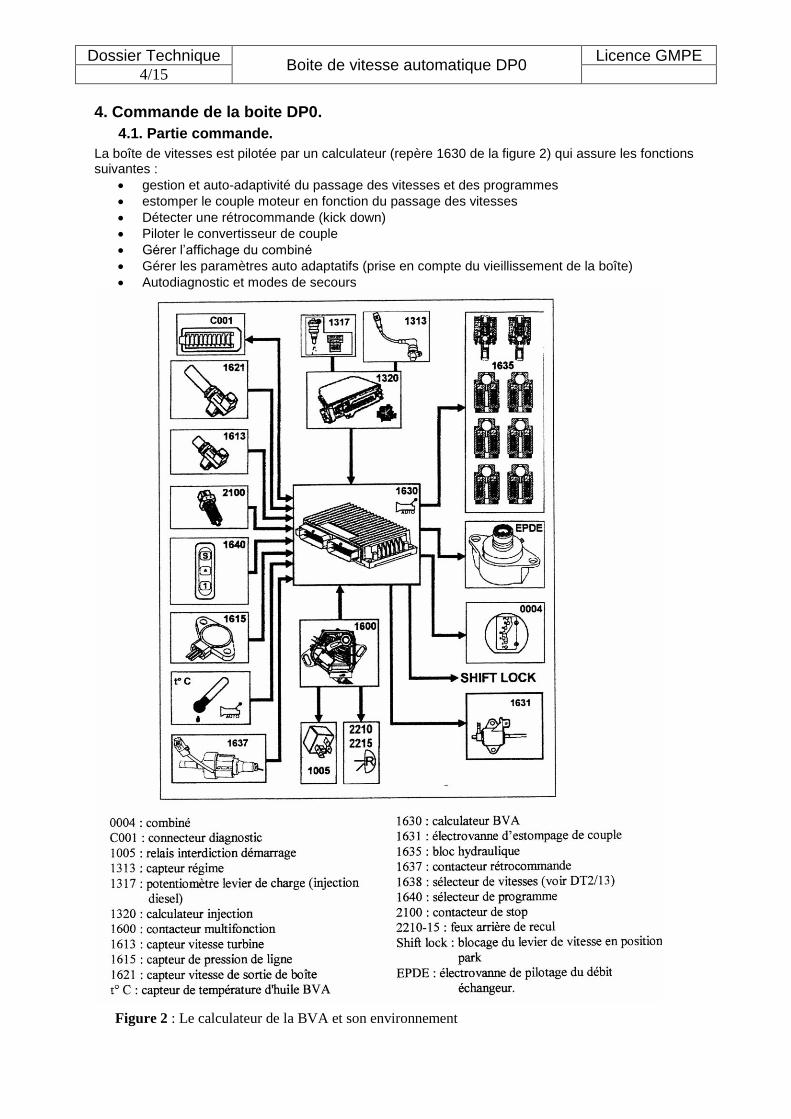
4. Commande de la boite DP0.
4.1. Partie commande.
La boîte de vitesses est pilotée par un calculateur (repère 1630 de la figure 2) qui assure les fonctions suivantes :
gestion et auto-adaptivité du passage des vitesses et des programmes
estomper le couple moteur en fonction du passage des vitesses
Détecter une rétrocommande (kick down)
Piloter le convertisseur de couple
Gérer l’affichage du combiné
Gérer les paramètres auto adaptatifs (prise en compte du vieillissement de la boîte)
Autodiagnostic et modes de secours
Figure 2 : Le calculateur de la BVA et son environnement

Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 5/15
Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 6/15
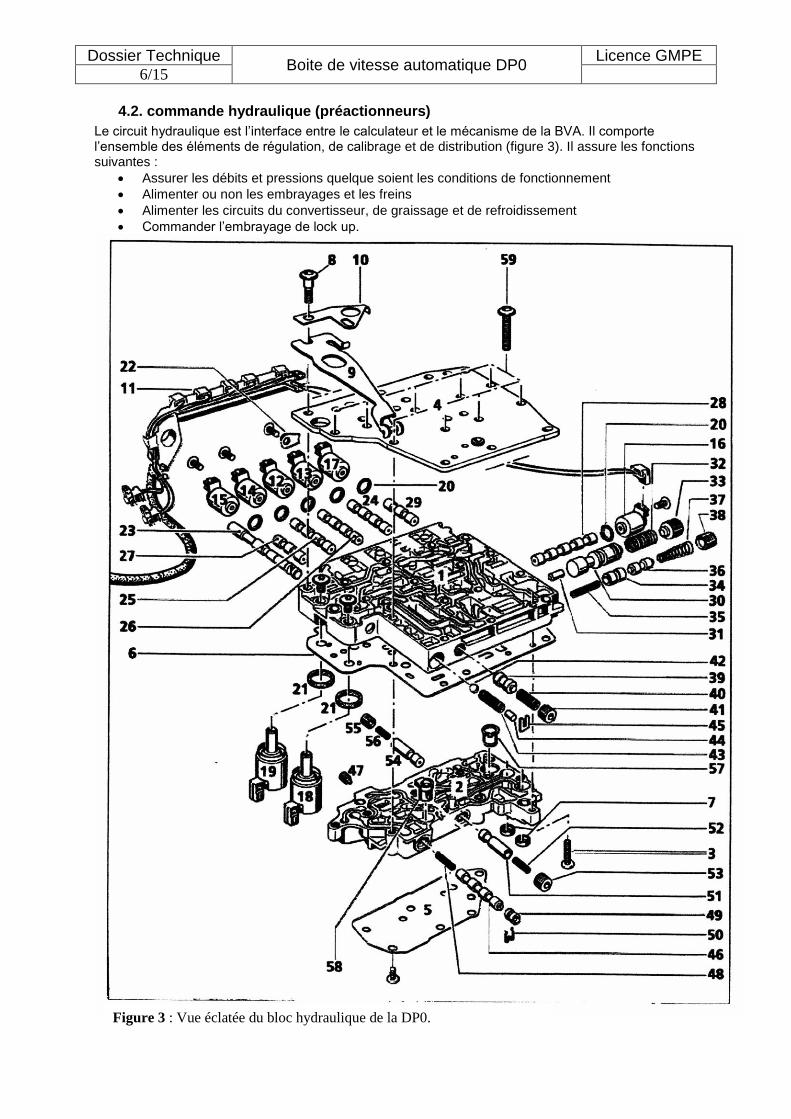
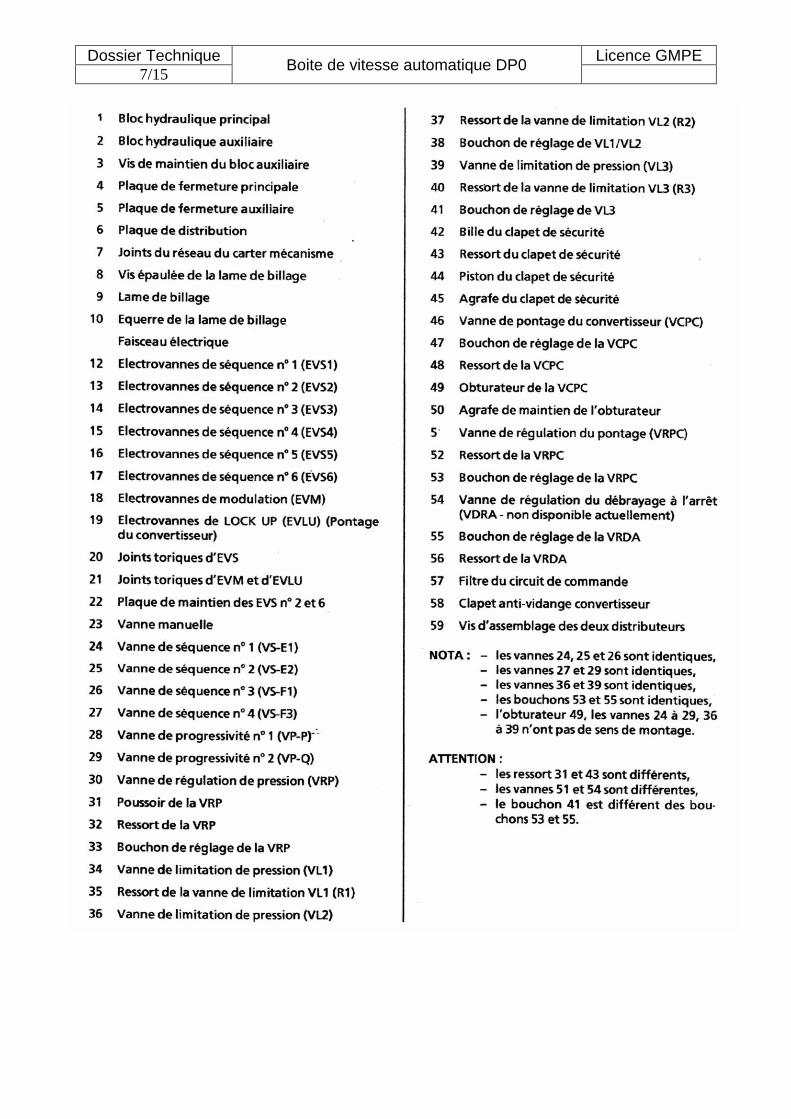
4.2. commande hydraulique (préactionneurs)
Le circuit hydraulique est l’interface entre le calculateur et le mécanisme de la BVA. Il comporte l’ensemble des éléments de régulation, de calibrage et de distribution (figure 3). Il assure les fonctions suivantes :
Assurer les débits et pressions quelque soient les conditions de fonctionnement
Alimenter ou non les embrayages et les freins
Alimenter les circuits du convertisseur, de graissage et de refroidissement
Commander l’embrayage de lock up.
Figure 3 : Vue éclatée du bloc hydraulique de la DP0.
Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 7/15
Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 8/15
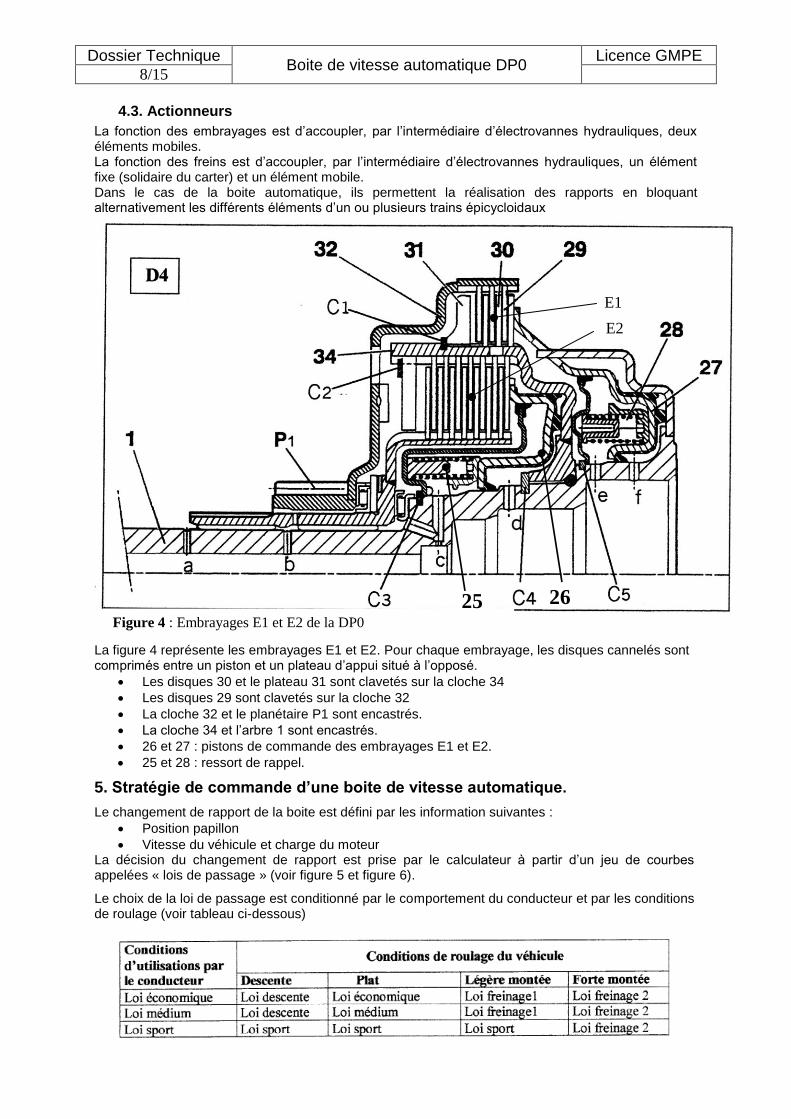
4.3. Actionneurs
La fonction des embrayages est d’accoupler, par l’intermédiaire d’électrovannes hydrauliques, deux éléments mobiles. La fonction des freins est d’accoupler, par l’intermédiaire d’électrovannes hydrauliques, un élément fixe (solidaire du carter) et un élément mobile. Dans le cas de la boite automatique, ils permettent la réalisation des rapports en bloquant alternativement les différents éléments d’un ou plusieurs trains épicycloidaux
La figure 4 représente les embrayages E1 et E2. Pour chaque embrayage, les disques cannelés sont comprimés entre un piston et un plateau d’appui situé à l’opposé.
Les disques 30 et le plateau 31 sont clavetés sur la cloche 34
Les disques 29 sont clavetés sur la cloche 32
La cloche 32 et le planétaire P1 sont encastrés.
La cloche 34 et l’arbre 1 sont encastrés.
26 et 27 : pistons de commande des embrayages E1 et E2.
25 et 28 : ressort de rappel.
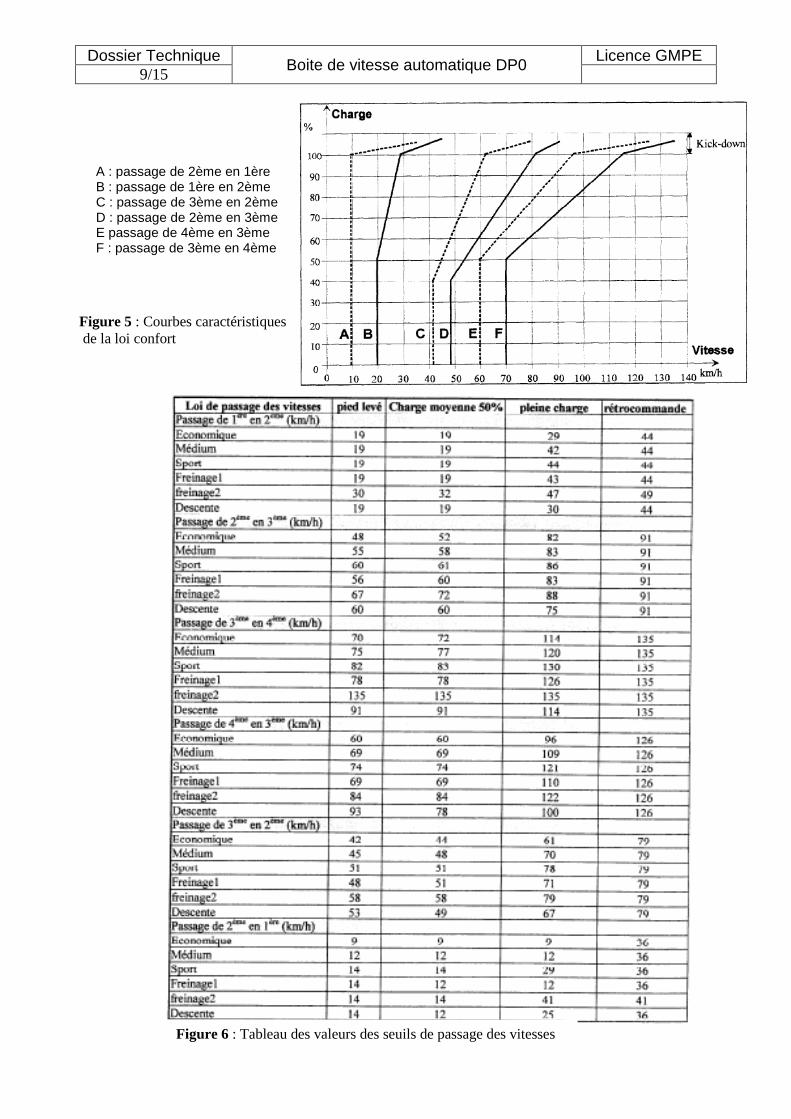
5. Stratégie de commande d’une boite de vitesse automatique.
Le changement de rapport de la boite est défini par les information suivantes :
Position papillon
Vitesse du véhicule et charge du moteur La décision du changement de rapport est prise par le calculateur à partir d’un jeu de courbes appelées « lois de passage » (voir figure 5 et figure 6).
Le choix de la loi de passage est conditionné par le comportement du conducteur et par les conditions de roulage (voir tableau ci-dessous)
Figure 4 : Embrayages E1 et E2 de la DP0
E1
E2
26 25
Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 9/15
Figure 5 : Courbes caractéristiques
de la loi confort
Figure 6 : Tableau des valeurs des seuils de passage des vitesses
A : passage de 2ème en 1ère B : passage de 1ère en 2ème C : passage de 3ème en 2ème D : passage de 2ème en 3ème E passage de 4ème en 3ème F : passage de 3ème en 4ème

Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 10/15
6. Fonctionnement du coupleur convertisseur.
6.1. Rôle et description
Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 11/15
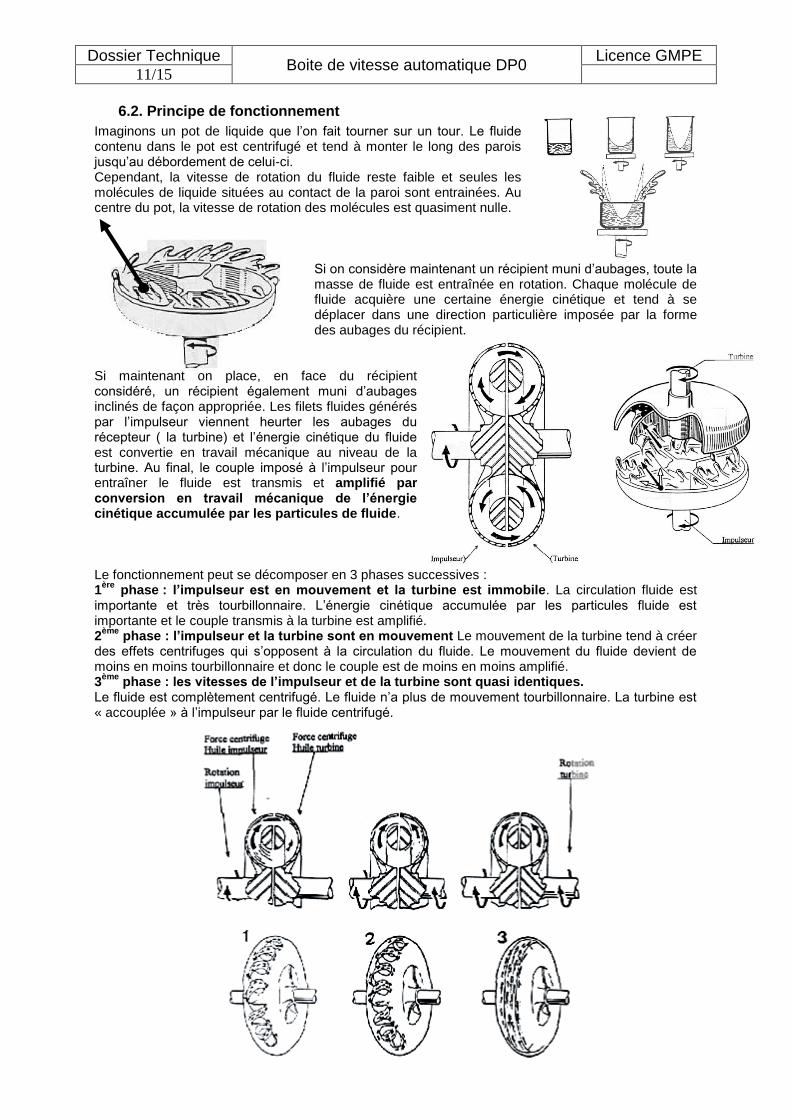
6.2. Principe de fonctionnement
Imaginons un pot de liquide que l’on fait tourner sur un tour. Le fluide contenu dans le pot est centrifugé et tend à monter le long des parois jusqu’au débordement de celui-ci. Cependant, la vitesse de rotation du fluide reste faible et seules les molécules de liquide situées au contact de la paroi sont entrainées. Au centre du pot, la vitesse de rotation des molécules est quasiment nulle.
Si on considère maintenant un récipient muni d’aubages, toute la masse de fluide est entraînée en rotation. Chaque molécule de fluide acquière une certaine énergie cinétique et tend à se déplacer dans une direction particulière imposée par la forme des aubages du récipient.
Si maintenant on place, en face du récipient considéré, un récipient également muni d’aubages inclinés de façon appropriée. Les filets fluides générés par l’impulseur viennent heurter les aubages du récepteur ( la turbine) et l’énergie cinétique du fluide est convertie en travail mécanique au niveau de la turbine. Au final, le couple imposé à l’impulseur pour entraîner le fluide est transmis et amplifié par conversion en travail mécanique de l’énergie cinétique accumulée par les particules de fluide.
Le fonctionnement peut se décomposer en 3 phases successives : 1
ère phase : l’impulseur est en mouvement et la turbine est immobile. La circulation fluide est
importante et très tourbillonnaire. L’énergie cinétique accumulée par les particules fluide est importante et le couple transmis à la turbine est amplifié. 2
ème phase : l’impulseur et la turbine sont en mouvement Le mouvement de la turbine tend à créer
des effets centrifuges qui s’opposent à la circulation du fluide. Le mouvement du fluide devient de moins en moins tourbillonnaire et donc le couple est de moins en moins amplifié. 3
ème phase : les vitesses de l’impulseur et de la turbine sont quasi identiques.
Le fluide est complètement centrifugé. Le fluide n’a plus de mouvement tourbillonnaire. La turbine est « accouplée » à l’impulseur par le fluide centrifugé.
Dossier Technique Boite de vitesse automatique DP0
Licence GMPE 12/15
U
C
W
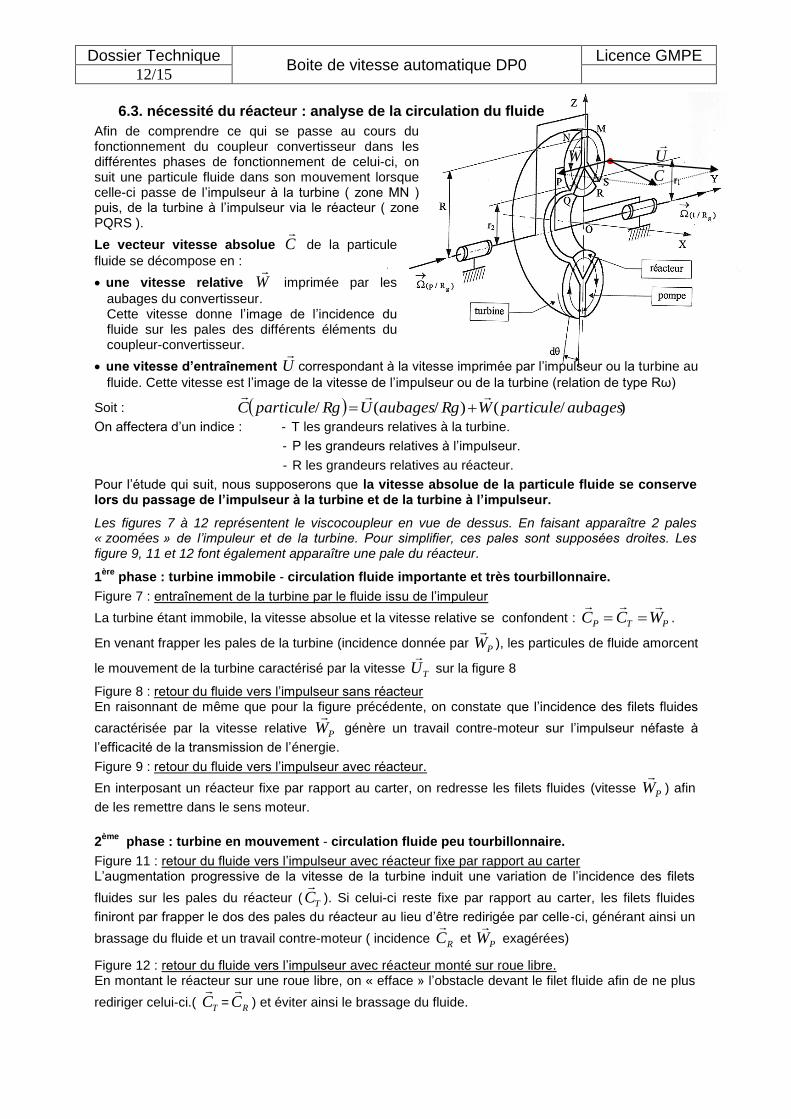
6.3. nécessité du réacteur : analyse de la circulation du fluide
Afin de comprendre ce qui se passe au cours du fonctionnement du coupleur convertisseur dans les différentes phases de fonctionnement de celui-ci, on suit une particule fluide dans son mouvement lorsque celle-ci passe de l’impulseur à la turbine ( zone MN ) puis, de la turbine à l’impulseur via le réacteur ( zone PQRS ).
Le vecteur vitesse absolue C
de la particule
fluide se décompose en :
une vitesse relative W
imprimée par les
aubages du convertisseur. Cette vitesse donne l’image de l’incidence du fluide sur les pales des différents éléments du coupleur-convertisseur.
une vitesse d’entraînement U
correspondant à la vitesse imprimée par l’impulseur ou la turbine au
fluide. Cette vitesse est l’image de la vitesse de l’impulseur ou de la turbine (relation de type Rω)
Soit : )/()/(/ aubagesparticuleWRgaubagesURgparticuleC
On affectera d’un indice : - T les grandeurs relatives à la turbine.
- P les grandeurs relatives à l’impulseur.
- R les grandeurs relatives au réacteur.
Pour l’étude qui suit, nous supposerons que la vitesse absolue de la particule fluide se conserve lors du passage de l’impulseur à la turbine et de la turbine à l’impulseur.
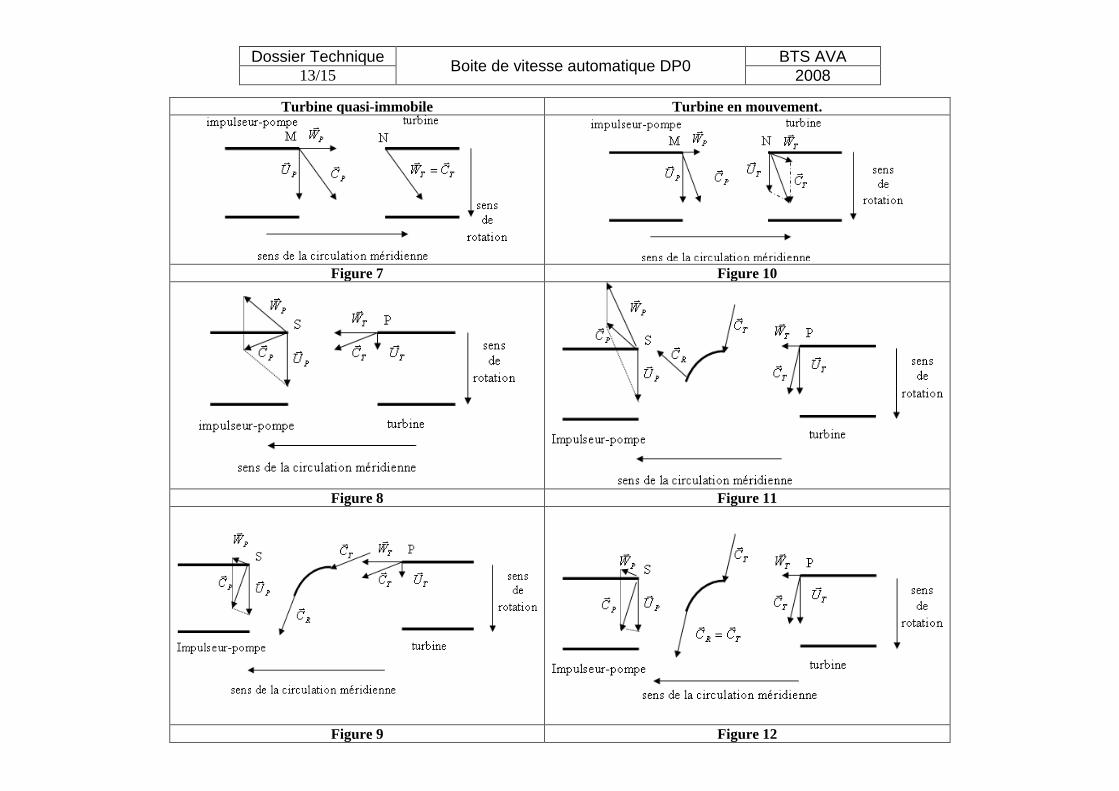
Les figures 7 à 12 représentent le viscocoupleur en vue de dessus. En faisant apparaître 2 pales « zoomées » de l’impuleur et de la turbine. Pour simplifier, ces pales sont supposées droites. Les figure 9, 11 et 12 font également apparaître une pale du réacteur.
1ère
phase : turbine immobile - circulation fluide importante et très tourbillonnaire.
Figure 7 : entraînement de la turbine par le fluide issu de l’impuleur
La turbine étant immobile, la vitesse absolue et la vitesse relative se confondent : PTP WCC
.
En venant frapper les pales de la turbine (incidence donnée par PW
), les particules de fluide amorcent
le mouvement de la turbine caractérisé par la vitesse TU
sur la figure 8
Figure 8 : retour du fluide vers l’impulseur sans réacteur En raisonnant de même que pour la figure précédente, on constate que l’incidence des filets fluides
caractérisée par la vitesse relative PW
génère un travail contre-moteur sur l’impulseur néfaste à
l’efficacité de la transmission de l’énergie.
Figure 9 : retour du fluide vers l’impulseur avec réacteur.
En interposant un réacteur fixe par rapport au carter, on redresse les filets fluides (vitesse PW
) afin
de les remettre dans le sens moteur.
2ème
phase : turbine en mouvement - circulation fluide peu tourbillonnaire.
Figure 11 : retour du fluide vers l’impulseur avec réacteur fixe par rapport au carter L’augmentation progressive de la vitesse de la turbine induit une variation de l’incidence des filets
fluides sur les pales du réacteur (TC
). Si celui-ci reste fixe par rapport au carter, les filets fluides
finiront par frapper le dos des pales du réacteur au lieu d’être redirigée par celle-ci, générant ainsi un
brassage du fluide et un travail contre-moteur ( incidence RC
et PW
exagérées)
Figure 12 : retour du fluide vers l’impulseur avec réacteur monté sur roue libre. En montant le réacteur sur une roue libre, on « efface » l’obstacle devant le filet fluide afin de ne plus
rediriger celui-ci.( TC
=RC
) et éviter ainsi le brassage du fluide.
Dossier Technique Boite de vitesse automatique DP0
BTS AVA 13/15 2008
Turbine quasi-immobile Turbine en mouvement.
Figure 7 Figure 10
Figure 8 Figure 11
Figure 9 Figure 12
Dossier Technique Boite de vitesse automatique DP0
BTS AVA 14/15 2008
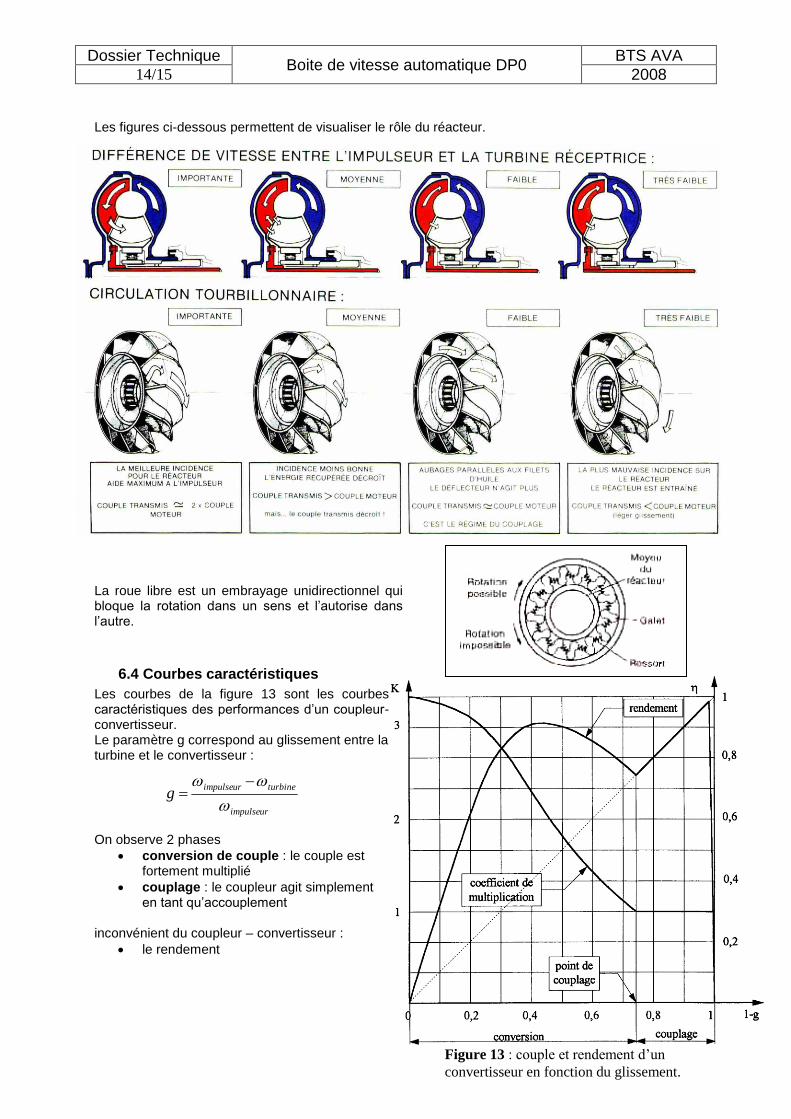
Figure 13 : couple et rendement d’un
convertisseur en fonction du glissement.
Les figures ci-dessous permettent de visualiser le rôle du réacteur.
La roue libre est un embrayage unidirectionnel qui bloque la rotation dans un sens et l’autorise dans l’autre.
6.4 Courbes caractéristiques
Les courbes de la figure 13 sont les courbes caractéristiques des performances d’un coupleur-convertisseur. Le paramètre g correspond au glissement entre la turbine et le convertisseur :
On observe 2 phases
conversion de couple : le couple est fortement multiplié
couplage : le coupleur agit simplement en tant qu’accouplement
inconvénient du coupleur – convertisseur :
le rendement
impulseur
turbineimpulseurg
Dossier Technique Boite de vitesse automatique DP0
BTS AVA 15/15 2008
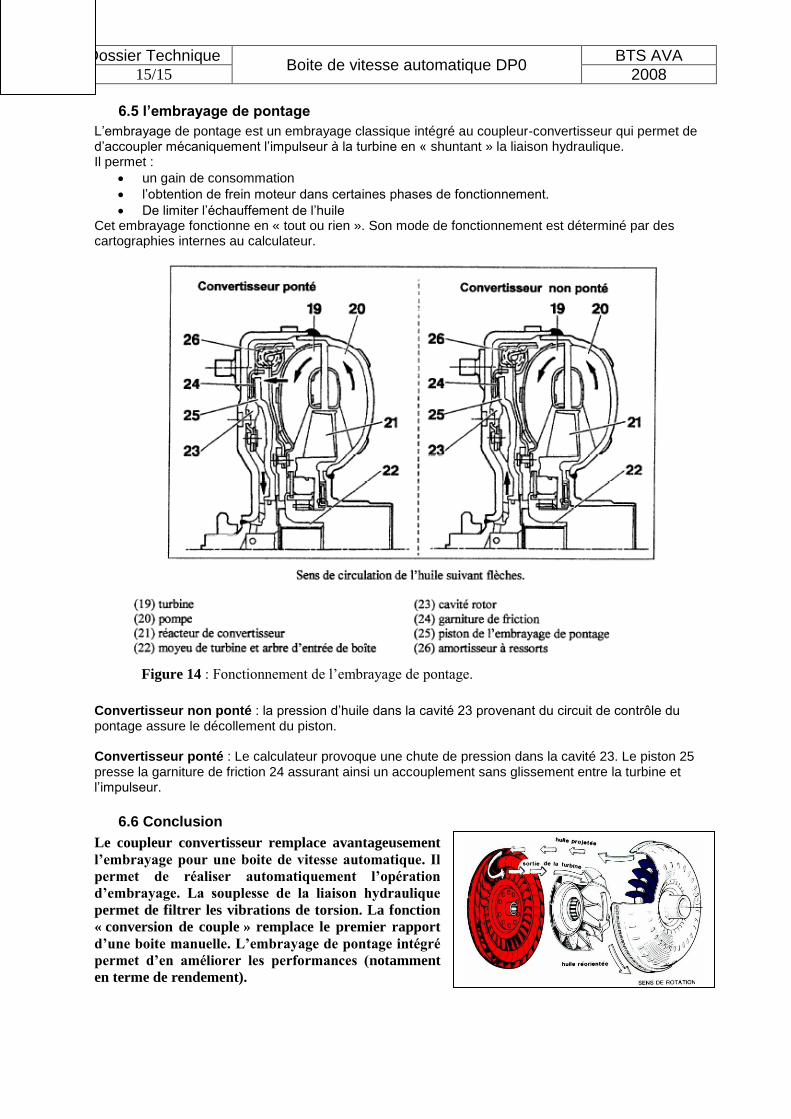
Figure 14 : Fonctionnement de l’embrayage de pontage.
6.5 l’embrayage de pontage
L’embrayage de pontage est un embrayage classique intégré au coupleur-convertisseur qui permet de d’accoupler mécaniquement l’impulseur à la turbine en « shuntant » la liaison hydraulique. Il permet :
un gain de consommation
l’obtention de frein moteur dans certaines phases de fonctionnement.
De limiter l’échauffement de l’huile Cet embrayage fonctionne en « tout ou rien ». Son mode de fonctionnement est déterminé par des cartographies internes au calculateur.
Convertisseur non ponté : la pression d’huile dans la cavité 23 provenant du circuit de contrôle du pontage assure le décollement du piston. Convertisseur ponté : Le calculateur provoque une chute de pression dans la cavité 23. Le piston 25 presse la garniture de friction 24 assurant ainsi un accouplement sans glissement entre la turbine et l’impulseur. 6.6 Conclusion
Le coupleur convertisseur remplace avantageusement
l’embrayage pour une boite de vitesse automatique. Il
permet de réaliser automatiquement l’opération
d’embrayage. La souplesse de la liaison hydraulique
permet de filtrer les vibrations de torsion. La fonction
« conversion de couple » remplace le premier rapport
d’une boite manuelle. L’embrayage de pontage intégré
permet d’en améliorer les performances (notamment
en terme de rendement).


















