Equations pour les mesures gradiométriques (GOCE) · 2017. 11. 10. · GRGS Groupe de Recherches...
17
GRGS Groupe de R echerches de Géodésie Spatiale Ecole d’ été du GRGS « Détermination du champ de gravité terrestre par les nouvelles missions spatiales » Forcalquier, 2-6 Septembre 2002 Equations pour les mesures gradiométriques (GOCE) G. Balmino , CNES-GRGS 1
Transcript of Equations pour les mesures gradiométriques (GOCE) · 2017. 11. 10. · GRGS Groupe de Recherches...

GRGS
G roupe de R echerches de G éodésie Spatiale
Ecole d’ été du GRGS« Détermination du champ de gravité terrestrepar les nouvelles missions spatiales » Forcalquier, 2-6 Septembre 2002
Equations pour les mesuresgradiométriques (GOCE)
G. Balmino , CNES-GRGS
1

CE QUE MESURE UN GRADIOMETRE
Rappel (cf. cours de P. Touboul)
( ) ( ) ( )
∑∑−
−−+∇−∇=
∧∧+∧+∧+=ℜ
Psat
electext
P
electSP
RRR
mM
fF
mPf
UU
)SP?(?SP)?(SP?SPSP
.. )(
2 &.... .
= 0 = 0
ℜ
R
. Scentre demasse
P
Q
ω
)( SPSPUUw SPP ∧∧−∧−∇−∇= ωωω&
wP
−−
−=Ω
00
0
12
13
23
ωωωω
ωω
Un accéléromètre en P donne accès à :
∇2P U . SP Ω . SP Ω . SPΩ .
De même, en Q :
*
*
wQ ∇2Q U . SQ Ω . SQ Ω . SQΩ .= _ _
= _ _.
.
Satellite
2
Fext (non gravi.)
force électrostatique exercée par lesatellite sur la masse d'épreuve mP
On calcule et soustrait le "mode commun"

wQ - wP = [∇ 2S U - (Ω + Ω 2) ] . [PQ]
Λ
U2∇
−−−−
−−=Ω
22
212313
3221
2312
312123
22
2
ωωωωωωωωωωωωωωωωωω
: sym.
: sym.
Ω : anti-sym.
.
.
22)(21
Ω−∇=Λ+Λ UT
Ω−=Λ−Λ &)(21 T
∫ Λ−Λ−Ω=Ωt
tT d
0
)(2/10 τ
3
+ autres données d'attitude(senseurs stellaires)

LES DIFFERENTES CONTRIBUTIONS A ∇ 2U
- POTENTIEL DU CORPS CENTRAL (TERRE)
Partie statique (« moyenne »)Variations temporelles : 1. marées terrestres
2. marées océaniques3. pression atmospérique4. humidité des sols,
enneigement, ...
- POTENTIELS « 3.ème - CORPS »Satellite(s) naturel(s) : LuneSoleilPlanètes
4

),,(
),(
λϕ
λϕ
ruK
YKrR
rGM
U
lmm
lm
mlmlm
l
l
∑
∑=
=
CORPS CENTRAL
x1
x2
x3
X2
X3
X1
S.
(R)(r)
(R )//
(ℜ)
(r) = xi : fixe/corps(R)= Xi : repère du gradiomètre
X1 : ~ vecteur vitesseX2 : ~ normal , X3 : ~ radial
En S
∑>
+=0
0l
lUUU
rGMU /0 =
• Les mesures sont faites dans (R) : U ”ij = ∂2U / ∂Xi ∂Xj
• On ne mesure pas (bien) tout le tenseur ∇2U = (U ”ij ) !Pour GOCE : U ”11 , U ”22 , U ”33 (et peut-être U ”13 )
Autres termes pas assez précis(erreurs sur ω, ω, ...)
.
(r,ϕ,λ) / (r)
5
Klm ,Ylmnorm.

Les signatures du potentiel gravitationnel terrestre dans U”ij
= X1 = X2 = X3
Si mesures parfaites : une seule composante suffit En présence d ’erreurs de mesures : plusieurs composantes nécessaires
Par rapport aux W ”ij d ’un ellipsoide de référence dynamique
U”ij -W ”ij (Eötvös)
6

(cf. planche 5 )
Si X = M x , avec M T = M -1
on a : ( ∇ U )(R) = M ( ∇ U )(r)
( ∇2U )(R) = M ( ∇2U )(r) M T
il faut écrire l ’équation d ’observation dans ( R )
Dans ( R ) : U”ij(obs) - U”ij(calc) = Σlm (∂U”ij / ∂Klm)(R) ∆Klm
= Σlm [ Σkn Mik (∂U”kn / ∂Klm)(r) Mjn ] ∆Klm
∂2 ulm
∂xk ∂xn=
7

Principe du calcul des ∂2 ulm / ∂xk ∂xn
Formalisme : non singulier aux pôles (et aussi précis)stable (précis) ∀ ϕ , ∀ (l,m) ; (l,m : grands, ~300 à 1000)rapide → récurrences
Bases : Ylm (ϕ,λ) = Plm(sin ϕ) e i mλ
θk = xk / r , ξ = θ1 , η = θ2
ξ + i η = cos ϕ e i λ
→ récurrences pour ξm , ηm et dérivées / λ
Relations de récurrence sur les polynômes d ’HelmholtzHlm et leurs dérivées,avec : Plm(sin ϕ) = cosm ϕ . Hlm (sin ϕ)
(sous forme normalisée)
cf. cours de J.C. Marty , R. Biancale
8

N.B. 1. ( ∇2U0 )(R) peut être traité à part
On a directement ∇2U0, ij = GM ( 3 xij / r 2 - δij ) / r 3
2. ∇2U est symétrique
3. U est harmonique à l ’extérieur des masses
⇔ vérifie l ’équation de Laplace
4. U”ij est (également) calculé dans les équations aux variations
0'' =∑i
iiU
5 composantesindépendantes
9

VARIATIONS TEMPORELLES
1. Marées terrestres
Modèle de Terre
Elastique : sphérique kl: ellipsoidale klm
(0,±)
Anélastique ellipsoidale klm(0,±) ∈ C
nombresde Love
Corrections aux Klm statiques :
∑ ΛΦ
+=∆
+
*
**1
*
*0
1 ),(~12 lm
l
T
lmlm Y
rR
GMGM
lk
K
+ termes indirects sur K4m : f (k+2m ) …………..( ellipticité)
(i)
(ii) termes correctifs dépendant de la fréquence (temporelle)
lmK2∆ : cf. ”Standards” IERS ; Cours de J.C. MartyCours de J.M. Lemoine, G. Ramilien
.
conj.
dans (r)
lmlmlm KKK 21 ∆+∆=∆
10

VARIATIONS TEMPORELLES (suite)
Autres effets
masse en surface
masse volumique ρ
↔ h , ε , ... → σ = densitéde surface
2. marées océaniquespour chaque onde :
h = hlm → σlm = ρocéan . hlm
3. pression atmosphériquep = plm → σlm = plm / g
Terre ≈ sphériquepesanteurmoyenne g
→ σ = σlm
4. humidité des sols, enneigement, ...ε = εlm : hauteur de matériau
εequiv. eau= εlm → σlm = ρeau . ε lm~ ~
∑∑ ∆=+
=∆
ll
mllmlm
lUY
lrR
RrG
U,
2 ),(12
14 λϕσπ
Attention !déformation
ll Uk ∆+ '...nombres de Love de charge
11

VARIATIONS TEMPORELLES (fin)
Donc, si l ’on écrit :
∑ ∆
=∆
mllmlm
lYK
rR
rGM
U,
),( λϕ
alors :
lml
lm lk
MR
K σπ
12'14 2
++
=∆
GgR
M2
=
lml
lm lk
gG
K σπ12'1
4+
+=∆
déterminables(éventuellement)
12

CONTRIBUTIONS DE TYPE 3.ème CORPS
P*LuneSoleilPlanètes
.
.S
P*
O
r
r*
ρ*
∑ −=*
).1
( 3*
*
***
PS
r
rrGMU
ρ
Dans le repère lié au corps, ou tout autre repère :
)( ixr =
)( **ixr =
[ ]ijjjiiij xxxxGM
U δρρ
−−−= 2***3*
*''* /)()(3
13

FILTRAGE DES EQUATIONS GRADIOMETRIQUES
Problème : la précision des mesures de gradients de gravité par micro-accélérométrie différentielle, dépend de la fréquence
(cf. Cours de P. Touboul)
(i) Espérer étendre la précision à toutes les fréquencesnécessaires par paramétrisation supplémentaire (en particulier à basse fréquence, en faisant confianceau SST-GPS , et/ou à l'aide d'un "très bon" modèle deréférence à grandes longueurs d'ondes - par ex. issude GRACE ...)
ou (ii) Filtrer les mesures (... et aussi les équationsd ’observation) pour ne garder l ’information quedans la bande de fréquence ad ’hoc
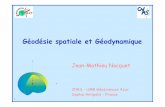
Pour GOCE , la précision est max. (et ~ constante) entre 0.005 et 0.1 Hz
1500 km - 75 km
14

0 0.001 0.01 0.10.1
1
10
100
X-axisY-axisZ-axis
frequency [Hz]
nois
e PS
D (*
1E12
) [m
/s2/
sqrt
(Hz)
]
.5 10 3 0.1
Single accelerometer noise PSD [m s-2 Hz-1/2]
Inst
rum
ent E
rror
[mE
/sqr
t(H
z)]
Spécificationinitiale :3 mE/√Hz entre0.005 et 0.1 Hz(pour L = 0.5 m)
Performancesprédites (à partird ’analyses et de tests)
(200 s) (10 s)
GOCE : densité spectrale de bruit du gradiomètre
σgg=√2 σg / L
~1/ f
PSD : Power Spectral Density = densité spectrale de puissance du bruit (η)= ℑωf.a.c.(η )
transformée de Fourier
15

FILTRAGE DES EQUATIONS GRADIOMETRIQUES(aperçu et fin)
Equations d'observation initiales Ax = bcov ( b) = Σ = cov (η)
16
Soit F : filtre (opérateur linéaire) appliqué aux observations,et aux quantités théoriques et vecteurs colonnes de A
b = F bA= F A
Ax = bcov ( b) = Σ = E( b bT) = F Σ FT
Σ := ℑ -1PSDη (ω) : ses éléments sont fonction de l' intervalle de tempsentre deux mesures, et de η
Soit R le facteur de Cholesky de Σ , i.e. Σ = RT R
⇒ si l'on prend F = (R -1)T alors : Σ = Id .
voir cours de G. Métris

F I N
17