Ecole Nationale Superieure de Physique de Strasbourg ...
118
Ecole Nationale Sup´ erieure de Physique de Strasbourg Formation d’Ing´ enieurs en Partenariat Cours d’Automatique Bernard BAYLE, ann´ ee 2005–2006
Transcript of Ecole Nationale Superieure de Physique de Strasbourg ...
Ecole Nationale Superieure de Physique de Strasbourg
Formation d’Ing enieurs en Partenariat
Cours d’Automatique
Bernard BAYLE, ann ee 2005–2006

Ce documentevolue gracea votre concours. Pour l’ameliorer, communiquez moi vosremarques ou corrections par mail : [email protected]
Bernard Bayle
Table des matieres
Introduction 1
Partie I – Systemes et asservissementsa temps continu 3
1 Systemesa temps continu 41.1 Proprietes des systemesa temps continu . . . . . . . . . . . . . . . . . 4
1.1.1 Linearite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.2 Invariance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.3 Principe de causalite . . . . . . . . . . . . . . . . . . . . . . . 51.1.4 Linearite et invariance . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Reponses des systemesa temps continu . . . . . . . . . . . . . . . . . 51.2.1 Formulation generale . . . . . . . . . . . . . . . . . . . . . . . 51.2.2 Reponse impulsionnelle . . . . . . . . . . . . . . . . . . . . . 61.2.3 Reponse indicielle . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Representation des systemesa temps continu . . . . . . . . . . . . . . 61.3.1 Transformee de Laplace . . . . . . . . . . . . . . . . . . . . . 61.3.2 Fonction de transfert . . . . . . . . . . . . . . . . . . . . . . .101.3.3 Reponse harmonique et diagrammes harmoniques . . . . . . . .11
1.4 Systemesa temps continuelementaires . . . . . . . . . . . . . . . . . .131.4.1 Systemes du premier ordre . . . . . . . . . . . . . . . . . . . .131.4.2 Systemes du second ordre . . . . . . . . . . . . . . . . . . . .171.4.3 Simplification de modeles . . . . . . . . . . . . . . . . . . . . 24
2 Systemes asservisa temps continu 282.1 Notion de systeme asservi . . . . . . . . . . . . . . . . . . . . . . . .28
2.1.1 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . .282.1.2 Schema d’un systeme asservi . . . . . . . . . . . . . . . . . . .302.1.3 Fonction de transfert d’un systeme asservi . . . . . . . . . . . .312.1.4 Comportement frequentiel d’un systeme asservi . . . . . . . . . 33
2.2 Stabilite et precision des systemesa temps continu . . . . . . . . . . . 342.2.1 Stabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.2.2 Precision . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
2.3 Commande des systemesa temps continu . . . . . . . . . . . . . . . .402.3.1 Cahier des charges . . . . . . . . . . . . . . . . . . . . . . . .40
ii Table des matieres
2.3.2 CorrecteursPID : introduction . . . . . . . . . . . . . . . . . 412.3.3 Adequation correcteurs/systemesa asservir . . . . . . . . . . . 422.3.4 Synthese de correcteur par la methode du lieu des racines . . . .452.3.5 Methodes harmoniques . . . . . . . . . . . . . . . . . . . . . .472.3.6 Autres methodes . . . . . . . . . . . . . . . . . . . . . . . . .50
Partie II – Systemes et asservissementsa temps discret 53
3 Systemesa temps discret 543.1 Representation des signauxa temps discret etechantillonnage . . . . . 54
3.1.1 Signauxa temps discret . . . . . . . . . . . . . . . . . . . . .543.1.2 Echantillonnage ideal . . . . . . . . . . . . . . . . . . . . . . . 553.1.3 Transformee de Laplace d’un signalechantillonne . . . . . . . 563.1.4 Reconstruction d’un signala partir d’un signalechantillonne . . 603.1.5 Transformee enz . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.2 Representation des systemesa temps discret . . . . . . . . . . . . . . .693.2.1 Fonction de transfert d’un systemea temps discret . . . . . . . 693.2.2 Fonction de transfert d’un systemeechantillonne . . . . . . . . 703.2.3 Poles et zeros d’un systemeechantillonne . . . . . . . . . . . . 72
4 Asservissementsa temps discret 774.1 Notion de systeme asservia temps discret . . . . . . . . . . . . . . . .77
4.1.1 Structure des systemesa commande numerique . . . . . . . . . 774.1.2 Fonction de transfert d’un systemeechantillonne boucle . . . . 79
4.2 Stabilite et precision des systemesa temps discret . . . . . . . . . . . .804.2.1 Stabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 804.2.2 Precision . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82
4.3 Commande numerique des systemes lineaires invariants . . . . . . . . . 844.3.1 Synthese continue . . . . . . . . . . . . . . . . . . . . . . . .844.3.2 Transposition de correcteurs continus . . . . . . . . . . . . . .844.3.3 Choix de la periode d’echantillonnage . . . . . . . . . . . . . .874.3.4 CorrecteurPID numerique . . . . . . . . . . . . . . . . . . . 894.3.5 Synthese directe de correcteurs discrets . . . . . . . . . . . . .89
Annexes 93
A Correspondance des termes en anglais 95
B Table de transformees 97
C Modelisation du moteur a courant continu 99
D Lieu des racines (lieu d’Evans) 105
Table des matieres iii
Bibliographie 111


Introduction
Notion de systeme
Le motsystemefait referenceetymologiquementa un ensemble organise. En Auto-matique, on definit un systeme dynamique1 en considerant un procede de nature quel-conque (physique, biologique,economique, . . .) quievolue sous l’action de sonentreeu (input2) et dont l’evolution est caracterisee par sasortiey (output).
Si ces deux grandeurs sont des fonctions d’une variable continuet, on parle desystemea temps continu, d’entreeu(t) et de sortiey(t). S’il s’agit de fonctions d’unevariable discretek, on parle desystemea temps discret, d’entreeu(k) et de sortiey(k).
Hypotheses du cours
On s’interesse dans ce coursa une classe restreinte de systemes reels. Il s’agitdessystemes mono-entree mono-sortie lineaires invariants. Ces systemes sont decrits parune equation differentielle lineairea coefficients constants dans le cas continu et paruneequation aux differences lineairea coefficients constants dans le cas discret.
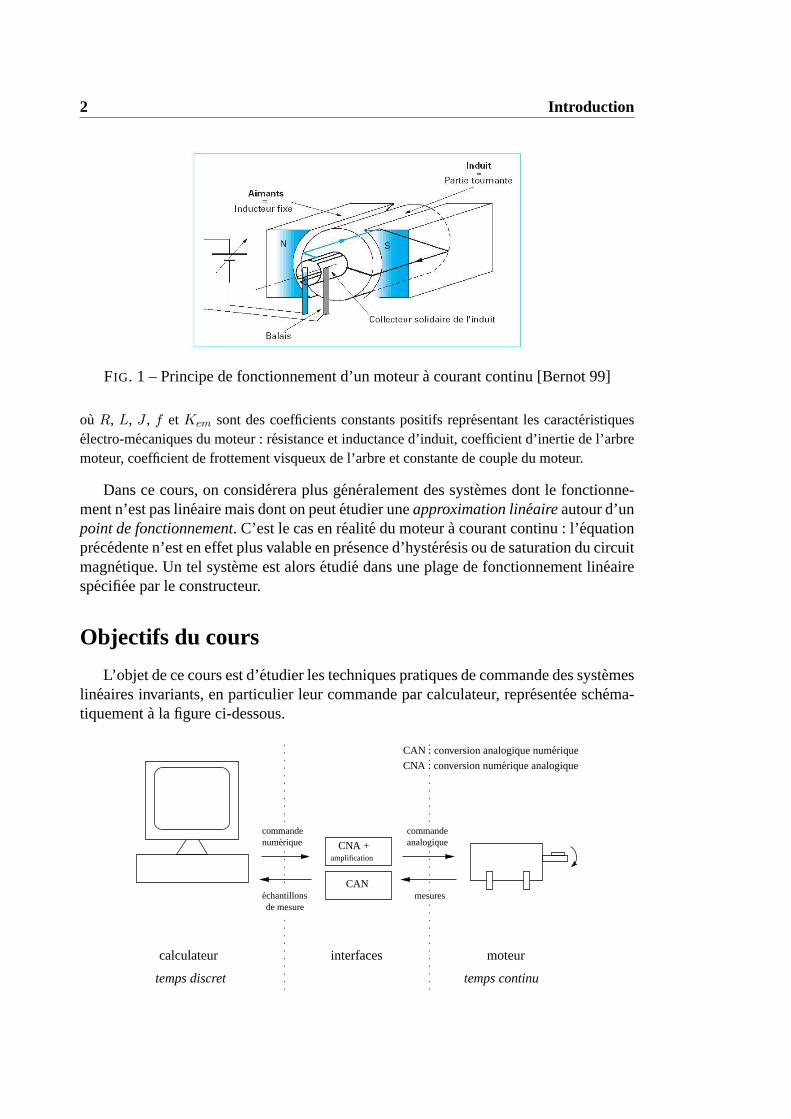
Exemple : cas du moteura courant continu Un moteura courant continu (MCC),dont le schema de principe est donne a la figure 1, est un dispositifelectromecanique qui conver-tit une energieelectrique d’entree enenergie mecanique. L’energieelectrique est apportee parun convertisseur de puissance qui alimente le bobinage dispose sur l’induit mobile (rotor). Cebobinage est place dans un champ magnetique, permanent ou non. On supposera pour simplifierque cette excitation est separee et constante, comme c’est souvent le cas. Le courant circulantdans les spires de l’induit du moteur, des forceselectriques lui sont appliquees et, gracea undispositif adapte (balais et collecteur), les forces s’additionnent pour participera la rotation. Onpeut ainsi considerer le moteur comme un systeme dont l’entree est la tension d’induit et la sor-tie la vitesse de rotation du rotor. La relation entree-sortie du systeme est decrite par l’equationdiff erentielle :
ω(t) +RJ + Lf
Rf + K2em
dω(t)dt
+LJ
Rf + K2em
d2ω(t)dt2
=Kem
Rf + K2em
u(t),
1Le termedynamiqueest souvent omis.2Il est necessaire, notamment pour utiliser certains logiciels de simulation, de connaıtre la version
anglaise des differents termes. L’ensemble des termes anglais introduits dans ce cours, designes la suitepar le symbole, sont regroupesa l’annexe A page 95.
2 Introduction
FIG. 1 – Principe de fonctionnement d’un moteura courant continu [Bernot 99]
ou R, L, J , f et Kem sont des coefficients constants positifs representant les caracteristiqueselectro-mecaniques du moteur : resistance et inductance d’induit, coefficient d’inertie de l’arbremoteur, coefficient de frottement visqueux de l’arbre et constante de couple du moteur.
Dans ce cours, on considerera plus generalement des systemes dont le fonctionne-ment n’est pas lineaire mais dont on peutetudier uneapproximation lineaireautour d’unpoint de fonctionnement. C’est le cas en realite du moteura courant continu : l’equationprecedente n’est en effet plus valable en presence d’hysteresis ou de saturation du circuitmagnetique. Un tel systeme est alorsetudie dans une plage de fonctionnement lineairespecifiee par le constructeur.
Objectifs du cours
L’objet de ce cours est d’etudier les techniques pratiques de commande des systemeslineaires invariants, en particulier leur commande par calculateur, representee schema-tiquementa la figure ci-dessous.
numeriquecommande
analogiquecommande
de mesureechantillons mesures
moteur
temps continu
interfacescalculateur
temps discret
CAN
amplification
CNA +
CAN : conversion analogique numerique
CNA : conversion numerique analogique
Partie I
Systemes et asservissementsa tempscontinu
Chapitre 1
Systemesa temps continu
1.1 Proprietes des systemesa temps continu
1.1.1 Linearite
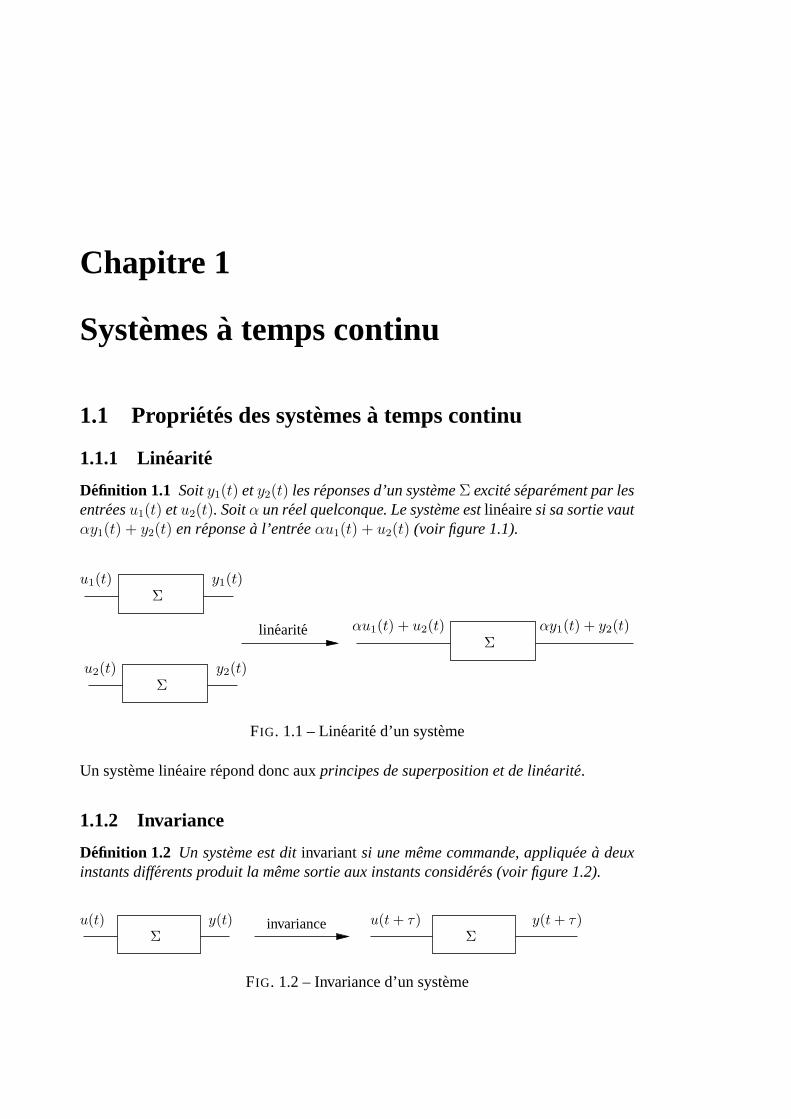
Definition 1.1 Soity1(t) ety2(t) les reponses d’un systemeΣ excite separement par lesentreesu1(t) etu2(t). Soitα un reel quelconque. Le systeme estlineairesi sa sortie vautαy1(t) + y2(t) en reponsea l’entreeαu1(t) + u2(t) (voir figure 1.1).
y1(t)
y2(t)u2(t)
u1(t)
Σ
Σ
αu1(t) + u2(t) αy1(t) + y2(t)Σ
linearite
FIG. 1.1 – Linearite d’un systeme
Un systeme lineaire repond donc auxprincipes de superposition et de linearite.
1.1.2 Invariance
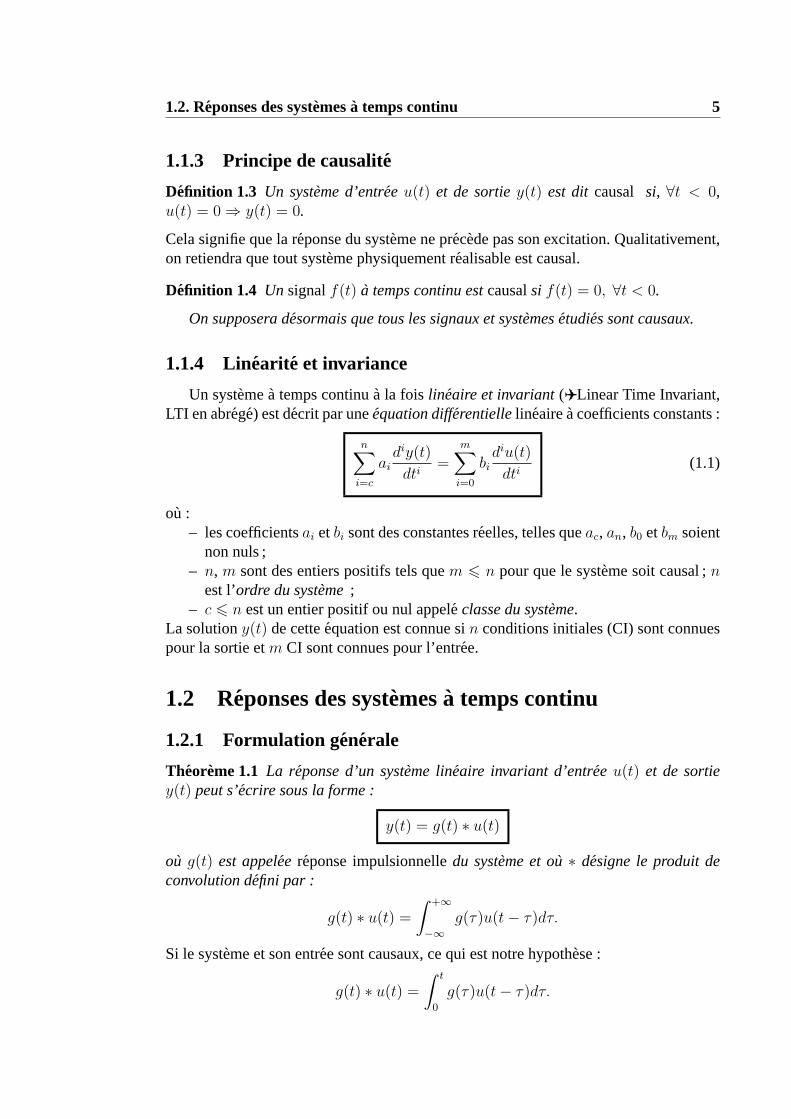
Definition 1.2 Un systeme est ditinvariantsi une meme commande, appliqueea deuxinstants differents produit la meme sortie aux instants consideres (voir figure 1.2).
Σu(t) y(t)
Σu(t + τ)invariance y(t + τ)
FIG. 1.2 – Invariance d’un systeme
1.2. Reponses des systemesa temps continu 5
1.1.3 Principe de causalite
Definition 1.3 Un systeme d’entreeu(t) et de sortiey(t) est dit causal si, ∀t < 0,u(t) = 0⇒ y(t) = 0.
Cela signifie que la reponse du systeme ne precede pas son excitation. Qualitativement,on retiendra que tout systeme physiquement realisable est causal.
Definition 1.4 Un signalf(t) a temps continu estcausalsi f(t) = 0, ∀t < 0.
On supposera desormais que tous les signaux et systemesetudies sont causaux.
1.1.4 Linearite et invariance
Un systemea temps continua la foislineaire et invariant(Linear Time Invariant,LTI en abrege) est decrit par uneequation differentiellelineairea coefficients constants :
n∑i=c
aidiy(t)
dti=
m∑i=0
bidiu(t)
dti(1.1)
ou :– les coefficientsai etbi sont des constantes reelles, telles queac, an, b0 etbm soient
non nuls ;– n, m sont des entiers positifs tels quem 6 n pour que le systeme soit causal ;n
est l’ordre du systeme;– c 6 n est un entier positif ou nul appeleclasse du systeme.
La solutiony(t) de cetteequation est connue sin conditions initiales (CI) sont connuespour la sortie etm CI sont connues pour l’entree.
1.2 Reponses des systemesa temps continu
1.2.1 Formulation generale
Theoreme 1.1La reponse d’un systeme lineaire invariant d’entreeu(t) et de sortiey(t) peut s’ecrire sous la forme :
y(t) = g(t) ∗ u(t)
ou g(t) est appelee reponse impulsionnelledu systeme et ou ∗ designe le produit deconvolution defini par :
g(t) ∗ u(t) =
∫ +∞
−∞g(τ)u(t− τ)dτ.
Si le systeme et son entree sont causaux, ce qui est notre hypothese :
g(t) ∗ u(t) =
∫ t
0
g(τ)u(t− τ)dτ.
6 1. Systemesa temps continu
1.2.2 Reponse impulsionnelle
D’apres le theoreme precedent, la reponse impulsionnelle (impulse response) d’unsysteme represente sa reponsea uneimpulsion de Dirac. En effet, par definition del’impulsion de Dirac :
y(t) = g(t) ∗ δ(t) =
∫ t
0
g(τ)δ(t− τ)dτ = g(t).
1.2.3 Reponse indicielle
On appellereponse indicielle(step response) d’un systeme sa reponsea unechelonunite :
U(t) =
0, si t < 0,
1, si t > 0.
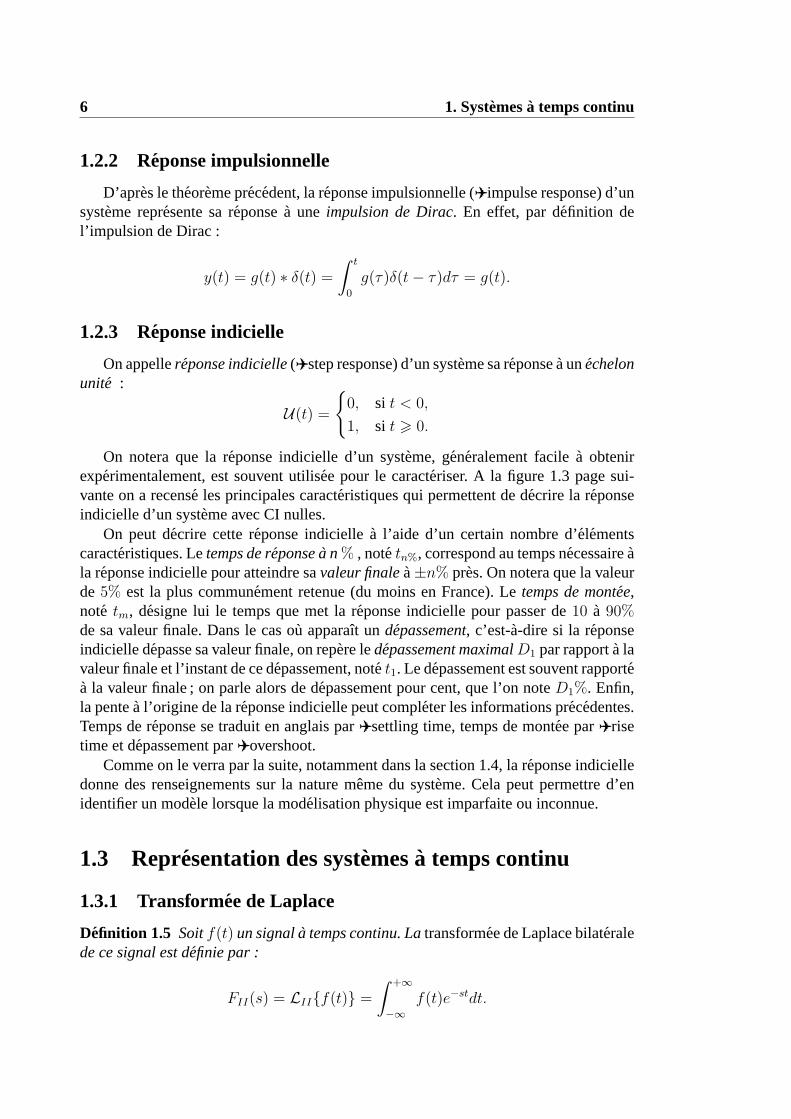
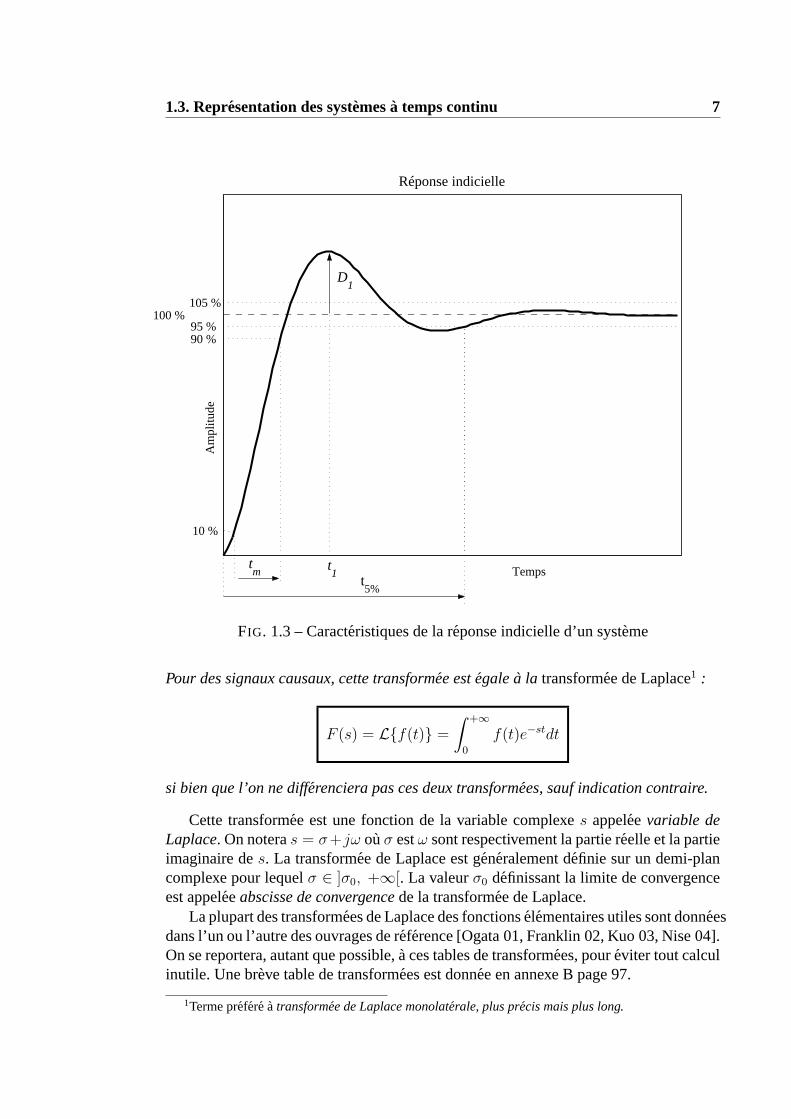
On notera que la reponse indicielle d’un systeme, generalement facilea obtenirexperimentalement, est souvent utilisee pour le caracteriser. A la figure 1.3 page sui-vante on a recense les principales caracteristiques qui permettent de decrire la reponseindicielle d’un systeme avec CI nulles.
On peut decrire cette reponse indiciellea l’aide d’un certain nombre d’elementscaracteristiques. Letemps de reponsea n% , notetn%, correspond au temps necessaireala reponse indicielle pour atteindre savaleur finalea±n% pres. On notera que la valeurde 5% est la plus communement retenue (du moins en France). Letemps de montee,note tm, designe lui le temps que met la reponse indicielle pour passer de10 a 90%de sa valeur finale. Dans le cas ou apparaıt un depassement, c’est-a-dire si la reponseindicielle depasse sa valeur finale, on repere ledepassement maximalD1 par rapporta lavaleur finale et l’instant de ce depassement, notet1. Le depassement est souvent rapportea la valeur finale ; on parle alors de depassement pour cent, que l’on noteD1%. Enfin,la pentea l’origine de la reponse indicielle peut completer les informations precedentes.Temps de reponse se traduit en anglais parsettling time, temps de montee parrisetime et depassement parovershoot.
Comme on le verra par la suite, notamment dans la section 1.4, la reponse indicielledonne des renseignements sur la nature meme du systeme. Cela peut permettre d’enidentifier un modele lorsque la modelisation physique est imparfaite ou inconnue.
1.3 Representation des systemesa temps continu
1.3.1 Transformee de Laplace
Definition 1.5 Soitf(t) un signala temps continu. Latransformee de Laplace bilateralede ce signal est definie par :
FII(s) = LIIf(t) =
∫ +∞
−∞f(t)e−stdt.
1.3. Representation des systemesa temps continu 7
Temps
Am
plitu
de
Réponse indicielle
100 % 95 %
105 %
90 %
10 %
t5%
tm t
1
D1
FIG. 1.3 – Caracteristiques de la reponse indicielle d’un systeme
Pour des signaux causaux, cette transformee estegalea la transformee de Laplace1 :
F (s) = Lf(t) =
∫ +∞
0
f(t)e−stdt
si bien que l’on ne differenciera pas ces deux transformees, sauf indication contraire.
Cette transformee est une fonction de la variable complexes appeleevariable deLaplace. On noteras = σ+jω ouσ estω sont respectivement la partie reelle et la partieimaginaire des. La transformee de Laplace est generalement definie sur un demi-plancomplexe pour lequelσ ∈ ]σ0, +∞[. La valeurσ0 definissant la limite de convergenceest appeleeabscisse de convergencede la transformee de Laplace.
La plupart des transformees de Laplace des fonctionselementaires utiles sont donneesdans l’un ou l’autre des ouvrages de reference [Ogata 01, Franklin 02, Kuo 03, Nise 04].On se reportera, autant que possible,a ces tables de transformees, poureviter tout calculinutile. Une breve table de transformees est donnee en annexe B page 97.
1Terme prefere a transformee de Laplace monolaterale, plus precis mais plus long.

8 1. Systemesa temps continu
Exemple Calculer la transformee de Laplace def(t) = e−at U(t).
Propri etes
Soit deux signauxf(t) etg(t) de transformees de Laplace respectivesF (s) etG(s).Les principales proprietes de la transformee de Laplace sont rappelees dans le tableau 1.1.Leur demonstration est laissee au lecteur.
linearite Lf(t) + αg(t) = F (s) + αG(s), ∀α ∈ R
changement d’echelle Lf
(t
α
)= αF (αs), ∀α ∈ R
retard Lf(t− τ) = e−τsF (s), ∀τ ∈ R
derivation ent Ldf(t)
dt
= sF (s)− f(0)
derivation ensdF (s)
ds= L−tf(t)
integration L∫ t
0
f(τ)dτ
=F (s)
s
theoreme de lavaleur initiale limt→0
f(t) = lims→+∞
sF (s)
theoreme de la valeur finale limt→∞
f(t) = lims→0
sF (s)
produit de convolution Lf(t) ∗ g(t) = F (s) G(s)
produit Lf(t) g(t) =1
2πjF (s) ∗G(s)
TAB . 1.1 – Proprietes principales de la transformee de Laplace
Transformee de Laplace inverse
Definition 1.6 SoitF (s) la transformee de Laplace d’un signala temps continuf(t).La transformee de Laplace inverse deF (s) s’ecrit :
f(t) = L−1F (s) =1
2πj
∮Γ
F (s)estds.
Il s’agit de l’integrale d’une fonction complexe sur un contour de BromwichΓ en-veloppant toutes les singularites de la fonctionF (s), en particulier les racines dudenominateur.
Ceci est illustre a la figure 1.4 page ci-contre avec un contourΓ englobant deux singu-larites situees sur l’axe imaginaire.

1.3. Representation des systemesa temps continu 9
singularites de la transformee
−∞←
Γ
contour de BromwichΓ
Axe reel
Axe imaginaire
FIG. 1.4 – Contour de Bromwich et singularites de la transformee de Laplace
La definition precedente est peu utile en pratique. Son application directe consisteadeterminer l’integralea l’aide du theoreme des residus. En general, on prefere deduire latransformee de Laplace inverse de tables de conversion. Comme on peut aisement le de-viner la transformee de Laplace inverse est lineaire. Ainsi, si necessaire, on decomposeraau prealable la transformee de Laplace enelements simples pour retomber sur une com-binaison des transformeeselementaires presentes dans les tables.
Int eret de la transformee de Laplace
L’int eret de la transformee de Laplace pour l’etude des systemes lineairesa tempscontinu reside dans la possibilite de transformer lesequations differentielles decrivantl’ evolution dynamique du systeme2 enequations algebriques. Celles-ci sont plus facilesa manipuler et on peut prevoir l’allure des reponses temporelles sans les calculer expli-citement.
Exemple : cas du moteura courant continu L’annexe C page 99 decrit en detail lamodelisation d’un moteura courant continua excitation separee. On considere que le moteurest commande par sa tension d’induit (entree du systeme) et que l’on s’interessea la vitesse derotation de son rotor (sortie du systeme), comme explique dans l’introduction de ce cours. Ladynamique du moteur est alors decrite par l’une ou l’autre desequations (C.9) ou (C.10),etabliesa l’annexe C page 99. La transformee de Laplace de cesequations, si l’on suppose les CI nulles,est facilea obtenir : la variable de Laplaces est simplement substitueea toute derivation parrapport au temps dans l’equation differentielle. On obtient, d’apres (C.10) :(
1 +RJ + Lf
Rf + K2em
s +LJ
Rf + K2em
s2
)Ω(s) =
Kem
Rf + K2em
U(s), (1.2)
ouΩ(s) etU(s) representent respectivement les transformees de Laplace de la vitesse de rotationdu rotor et de la tension aux bornes de l’induit. Ceci peut aussi s’ecrire, d’apres (C.9) :(
s2 +RJ + Lf
LJs +
Rf + K2em
LJ
)Ω(s) =
Kem
LJU(s).
2On dira simplementla dynamiquepar abus de langage.
10 1. Systemesa temps continu
On met ici en avant le terme de plus haut degre ens.
1.3.2 Fonction de transfert
Soit un systeme lineaire invariant d’entreeu(t) et de sortiey(t). On a vua la section1.2 que la reponse du systeme peut s’ecrirey(t) = g(t) ∗ u(t) avecg(t) la reponseimpulsionnelle du systeme. En appliquant la transformee de Laplacea cetteequationon obtientY (s) = G(s)U(s). En variable de Laplace la relation entree-sortie n’est doncplus un produit de convolution, mais un simple produit, ce qui rejoint les remarquesfaites au paragraphe precedent.
On appellefonction de transfertdu systeme la transformee de LaplaceG(s) de lareponse impulsionnelle :
G(s) =Y (s)
U(s)
qui est le rapport des transformees de Laplace de la sortie et de l’entree,a CI nulles. Leterme detransmittance, synonyme de fonction de transfert est souvent utilise.
Dans le cas des systemes lineaires invariantssans retardla fonction de transfertprend la forme d’une fraction rationnelle :
G(s) =N(s)
D(s)=
∑mi=0 bis
i∑ni=c aisi
(1.3)
qui resulte de la transformation de l’equation differentielle (1.1). Les racines du nume-rateurN(s) de la fonction de transfert, au nombre dem, sont appelees leszeros dusysteme. Les racines du denominateurD(s), au nombre den, sont appelees lespolesdu systeme. Tout comme la variable de Laplaces, les zeros et les poles sont complexes,dans le cas general.
Si l’on developpe l’equation (1.3), il vient :
G(s) =b0 + b1s+ . . . bms
m
acsc + ac+1sc+1 + . . . ansn,
qui s’ecrit encore :
G(s) =K
sc
1 + b1b0s+ · · ·+ bm
b0sm
1 + ac+1
acs+ · · ·+ an
acsn−c
,
ou K = b0ac
est legain statiquedu systeme, dont nous verrons l’interet enetudiant laprecision des systemes asservis,a la section 2.2.
Si, au contraire, on factorise le numerateurN(s) et le denominateurD(s) de lafonction de transfert (1.3), on obtient :
G(s) =bman
∏mi=1 (s− zi)∏ni=1 (s− pi)
(1.4)
1.3. Representation des systemesa temps continu 11
ou leszi et lespi sont respectivement les zeros et les poles du systeme. Le coefficientbm
anest parfois appele coefficient de gain. On aura soin de ne pas le confondre avec le
gain statique defini precedemment. Cette autre forme de la fonction de transfert est utile,notamment pouretudier la stabilite du systeme, comme nous le verronsa la section 2.2.
Exemple : cas du moteura courant continu D’apres l’equation (1.2), la fonction detransfert du moteura courant continu s’ecrit :
G(s) =Ω(s)U(s)
=KemLJ
s2 + RJ+LfLJ s + Rf+K2
emLJ
. (1.5)
donc :
N(s) =Kem
LJ
etD(s) = s2 +RJ + Lf
LJs +
Rf + K2em
LJ.
Le systeme ne possede pas de zero carN(s) ne s’annule jamais. En resolvant l’equation :D(s) = 0 on determine les poles du systemes. L’expression analytique de ces poles n’est passimple si l’on ne fait pas d’hypothese sur les differentes grandeurs caracteristiques du moteur.On montre (voir annexe C page 99) que l’on peut obtenir la fonction de transfert sous la formefactorisee (1.4) :
G(s) =Ω(s)U(s)
=K
τelτem(s + 1
τel
)(s + 1
τem
) ,
avec :
τel =L
R,
τem =RJ
Rf + K2em
,
etK =Kem
Rf + K2em
.
Le systeme possede donc deux poles :
p1 = − 1τel
etp2 = − 1τem
.
1.3.3 Reponse harmonique et diagrammes harmoniques
On se place dans le cas d’un systeme lineaire invariant de fonction de transfertG(s),en regime permanent sinusoıdal de pulsationω. On appellereponse harmoniquedusysteme la fonctionG(s = jω). On montre que la reponse du systemea une entreesinusoıdaleu(t) = A sinωt est :
y(t) = A |G(jω)| sin (ωt+ ArgG(jω)) .
12 1. Systemesa temps continu
La connaissance deG(jω) permet donc de deduire le comportement frequentiel dusysteme. Cela s’applique au-dela du simple cas des signaux sinusoıdaux puisque toutsignal periodique est decomposable en serie de Fourier. L’analyse harmonique, c’est-a-dire l’etude de la fonctionG(jω), donne donc des informations sur le comportement dusysteme excite par des signaux d’entree periodiques quelconques.
La reponse harmoniqueetant un nombre complexe, fonction de la variable com-plexejω, on l’illustre le plus souvent par des diagrammes mettant en correspondance lemodule et l’argument deG(jω).
Diagramme de Bode
Le diagramme de Bodeest constitue de deux courbes. La premiere donne le moduleen decibels (dB) :
GdB(ω) = 20 log10 |G(jω)|et la seconde l’argument, generalement exprimee en degres (deg) :
ϕ(ω) = ArgG(jω)
quand la pulsationω varie. On utilise traditionnellement les termes degainet dephase,plutot que les termes modules et argument.
L’int eret du diagramme de Bode provient du fait que le module d’un produit denombres complexes est le produit de leurs modules. Par consequent le module endBd’un produit de nombres complexes est la somme de leurs modules endB. L’argumentd’un produit de nombres complexes est la somme des arguments. On peut donc traceraisement un diagramme de Bode de tout systemea l’aide de la forme factorisee de sareponse harmonique en sous-systemes d’ordre un et deux. Par ailleurs l’echelle en abs-cisse du diagramme de Bode est logarithmique, pour mettre enevidence des proprietescaracteristiques.
Diagramme de Nyquist
Le diagramme de Nyquistest le lieu deG(jω) dans le plan complexe, lorsqueωvarie de−∞ a +∞. Ce diagramme est donc oriente selon lesω croissants. En generalon choisi l’echelle du diagramme de Nyquist de sorte que le point complexe d’abscisse−1, dit point critiqueapparaisse et puisseetre situe par rapport au lieu deG(jω).
Diagramme de Black
Lediagramme de Blackest le lieu oriente des points de coordonnees(ϕ(ω), GdB(ω))lorsqueω varie de−∞ a +∞. On tache aussi de faire apparaıtre le point critique decoordonnees(−180, 0) sur ce lieu.
Exemples On considere un moteura courant continu Maxon F2260 bobinage 885 (voirdocumentation C.1 page 103).
1. Determiner les caracteristiques du moteur necessaires pouretablir l’expression numeriquedu modele du moteur sous la forme (1.5) .

1.4. Systemesa temps continuelementaires 13
2. Etablir l’expression numerique de la fonction de transfert definie par l’equation (1.5).
3. Tracer les diagrammes de Bode, de Nyquist et de Black de ce moteur.
1.4 Systemesa temps continuelementaires
Une bonne connaissance dessystemes du premier et du second ordreest fonda-mentale en Automatique. On peut en effet frequemment assimiler un systeme reel a unsystemeequivalent d’ordre un ou deux, en choisissant une plage de fonctionnement etdes hypotheses de modelisation raisonnables. Ceci est interessant car ces systemes sontles seuls dont les proprietes soienta la fois bien connues et en nombre limite.
1.4.1 Systemes du premier ordre
Un systeme lineaire invarianta temps continu d’ordre un est decrit par uneequationdiff erentielle d’ordre una coefficients constants reliant son entreeu(t) et sa sortiey(t) :
y(t) + τdy(t)
dt= Ku(t) (1.6)
ou τ etK sont des constantes reelles non nulles ;τ est laconstante de tempsdu systemeetK son gain statique.
Reponse indicielle
Traditionnellement, on caracterise le comportement temporel du systeme par sareponse indicielle. La solution de l’equation (1.6) pouru(t) = U(t) s’ecrit :
y(t) = α+ βe−tτ , (1.7)
avecα etβ deux constantes reelles dependant des CI. A l’instantt = 0, l’ equation (1.7)donne :
y(0) = α+ β. (1.8)
On n’etudie que le cas ou τ > 0, de sorte que le systeme se stabilise pourt tendantvers l’infini3. Lorsque le systeme a atteint sa valeur finaledy(t)
dt= 0, ce que l’on peut
supposer vrai pourt tendant vers l’infini. Alors, d’apres (1.6) et (1.7) :
limt→∞
y(t) = K,
et limt→∞
y(t) = α.
Il en resulte queα = K, puis, en utilisant (1.8), queβ = y(0)−K. Finalement on ob-tient la reponse indicielle :
y(t) = K(1− e−tτ ) + y(0)e−
tτ .
Cette reponse comporte :
3Le casτ 6 0 decrivant une reponse tendant vers l’infini serait celui d’un systeme instable.
14 1. Systemesa temps continu
– un terme constant : le gain statiqueK, qui represente leregime permanentde lasortie (steady state) ;
– une partie variable :(y(0)−K) e−tτ , qui represente leregime transitoire(tran-
sient response).
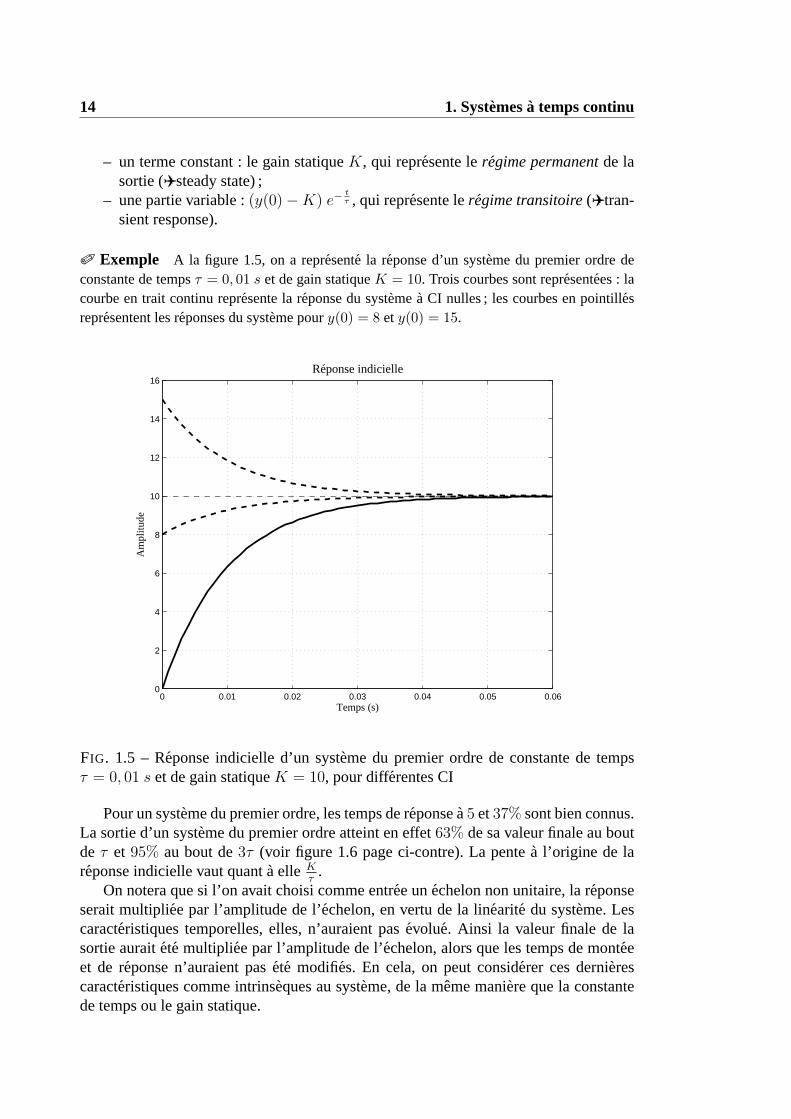
Exemple A la figure 1.5, on a represente la reponse d’un systeme du premier ordre deconstante de tempsτ = 0, 01 s et de gain statiqueK = 10. Trois courbes sont representees : lacourbe en trait continu represente la reponse du systemea CI nulles ; les courbes en pointillesrepresentent les reponses du systeme poury(0) = 8 ety(0) = 15.
0 0.01 0.02 0.03 0.04 0.05 0.060
2
4
6
8
10
12
14
16
Temps (s)
Am
plitu
de
Réponse indicielle
FIG. 1.5 – Reponse indicielle d’un systeme du premier ordre de constante de tempsτ = 0, 01 s et de gain statiqueK = 10, pour differentes CI
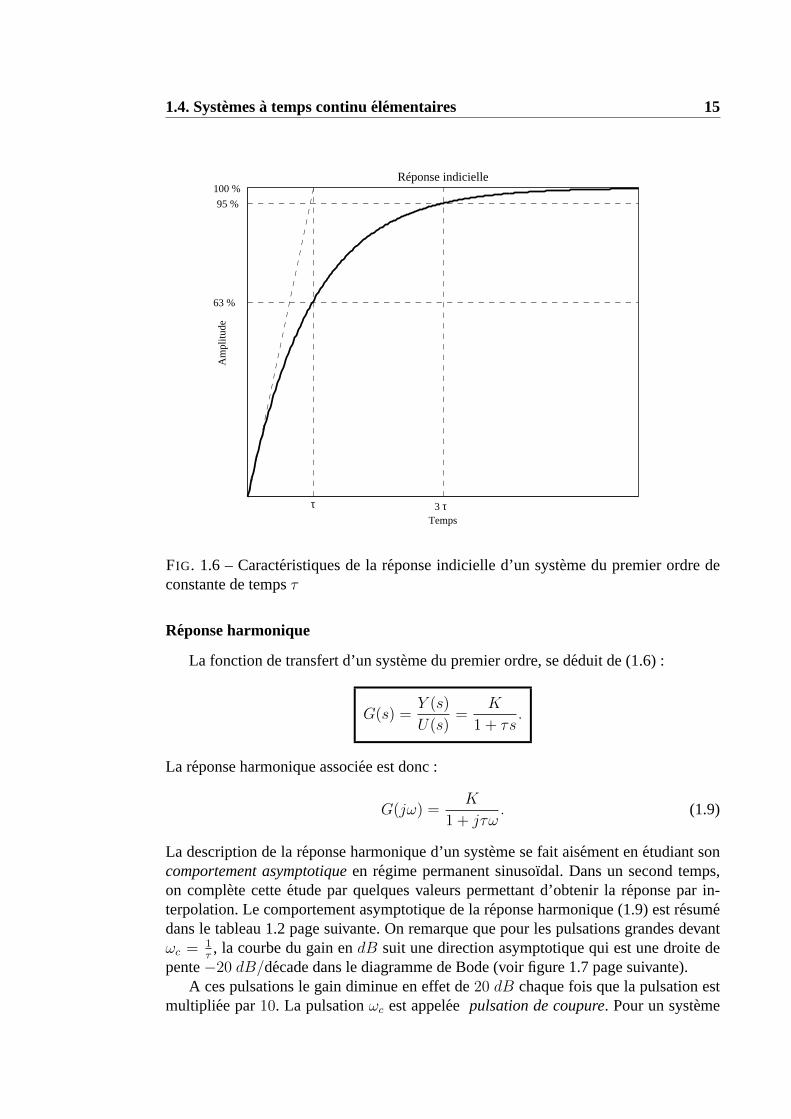
Pour un systeme du premier ordre, les temps de reponsea5 et37% sont bien connus.La sortie d’un systeme du premier ordre atteint en effet63% de sa valeur finale au boutde τ et 95% au bout de3τ (voir figure 1.6 page ci-contre). La pentea l’origine de lareponse indicielle vaut quanta elle K
τ.
On notera que si l’on avait choisi comme entree unechelon non unitaire, la reponseserait multipliee par l’amplitude de l’echelon, en vertu de la linearite du systeme. Lescaracteristiques temporelles, elles, n’auraient pasevolue. Ainsi la valeur finale de lasortie auraitete multipliee par l’amplitude de l’echelon, alors que les temps de monteeet de reponse n’auraient pasete modifies. En cela, on peut considerer ces dernierescaracteristiques comme intrinseques au systeme, de la meme maniere que la constantede temps ou le gain statique.
1.4. Systemesa temps continuelementaires 15
Temps
Am
plitu
de
Réponse indicielle100 %
63 %
95 %
τ 3 τ
FIG. 1.6 – Caracteristiques de la reponse indicielle d’un systeme du premier ordre deconstante de tempsτ
Reponse harmonique
La fonction de transfert d’un systeme du premier ordre, se deduit de (1.6) :
G(s) =Y (s)
U(s)=
K
1 + τs.
La reponse harmonique associee est donc :
G(jω) =K
1 + jτω. (1.9)
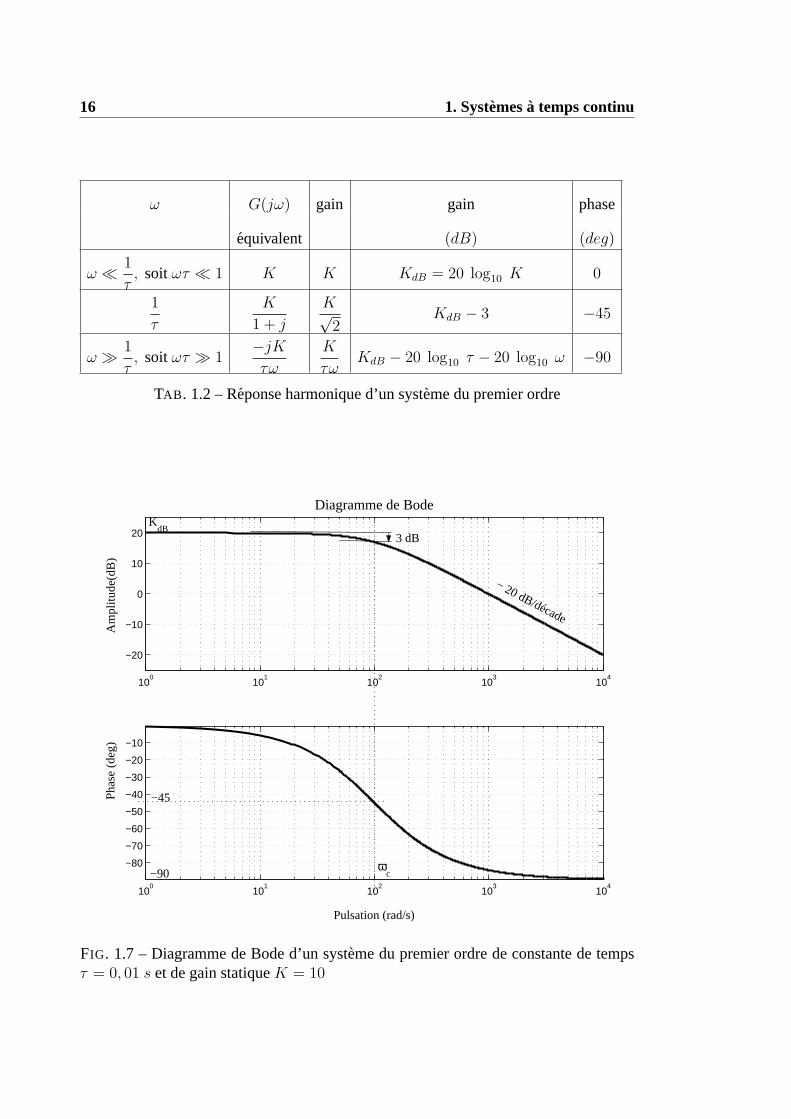
La description de la reponse harmonique d’un systeme se fait aisement enetudiant soncomportement asymptotiqueen regime permanent sinusoıdal. Dans un second temps,on complete cetteetude par quelques valeurs permettant d’obtenir la reponse par in-terpolation. Le comportement asymptotique de la reponse harmonique (1.9) est resumedans le tableau 1.2 page suivante. On remarque que pour les pulsations grandes devantωc = 1
τ, la courbe du gain endB suit une direction asymptotique qui est une droite de
pente−20 dB/decade dans le diagramme de Bode (voir figure 1.7 page suivante).A ces pulsations le gain diminue en effet de20 dB chaque fois que la pulsation est
multipliee par10. La pulsationωc est appelee pulsation de coupure. Pour un systeme
16 1. Systemesa temps continu
ω G(jω) gain gain phase
equivalent (dB) (deg)
ω 1
τ, soitωτ 1 K K KdB = 20 log10 K 0
1
τ
K
1 + j
K√2
KdB − 3 −45
ω 1
τ, soitωτ 1
−jKτω
K
τωKdB − 20 log10 τ − 20 log10 ω −90
TAB . 1.2 – Reponse harmonique d’un systeme du premier ordre
100
101
102
103
104
−20
−10
0
10
20
Am
plitu
de(d
B)
Diagramme de Bode
100
101
102
103
104
−80
−70
−60
−50
−40
−30
−20
−10
Pulsation (rad/s)
Pha
se (
deg)
ωc
KdB
3 dB
−45
−90
− 20 dB/décade
FIG. 1.7 – Diagramme de Bode d’un systeme du premier ordre de constante de tempsτ = 0, 01 s et de gain statiqueK = 10

1.4. Systemesa temps continuelementaires 17
du premier ordre elle corresponda une attenuation du gain de3 dB par rapport au gainaux faibles pulsations eta un dephasage de−45 deg. La bande passante(bandwidth)du systeme est donnee par la frequencefc = ωc
2πassocieea cette pulsation de coupure.
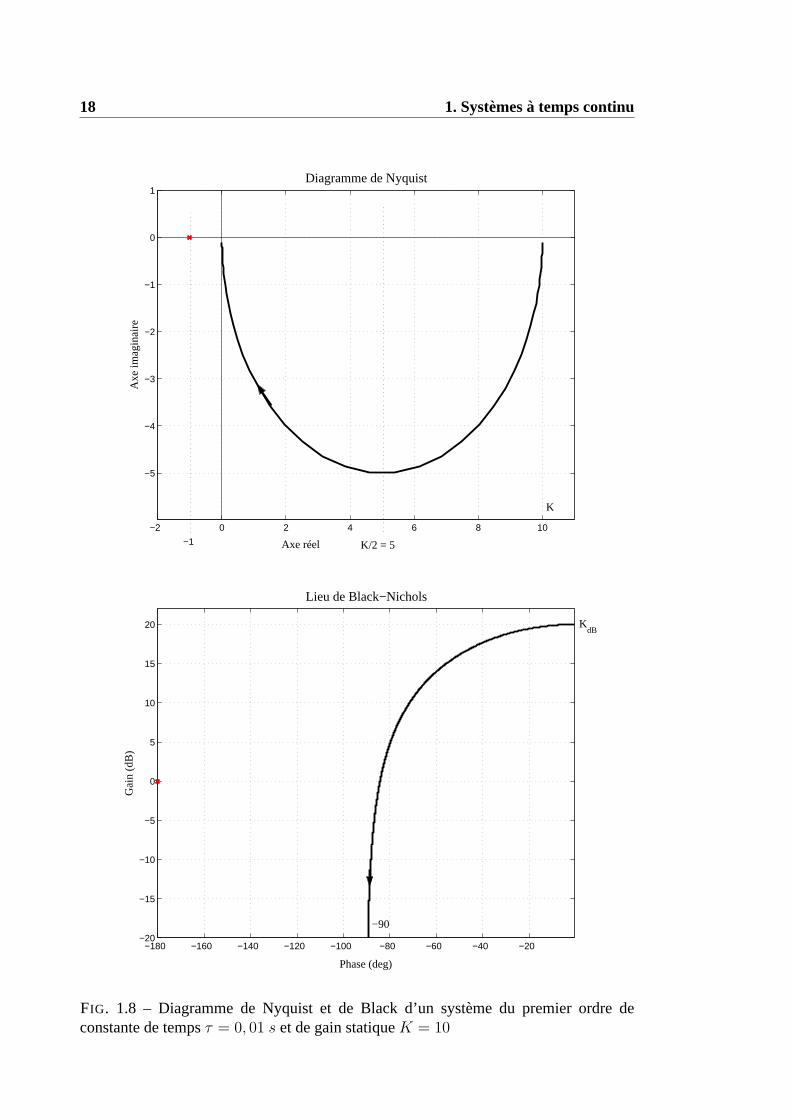
Exemple Les diagrammes harmoniques du systeme du premier ordre de constante detempsτ = 0, 01 s et de gain statiqueK = 10 sont donnes aux figures 1.7 et 1.8. On noteque la construction du diagramme de Nyquist est tres incomplete si l’on ne s’interesse qu’auxproprietes asymptotiques de la reponse harmonique. Il faut pour construire le diagramme deNyquist remarquer que :
G(jω) = K1− jτω
1− (τω)2
est l’equation parametrique d’un demi-cercle dans le plan complexe.
1.4.2 Systemes du second ordre
Un systeme lineaire invarianta temps continu d’ordre deux est decrit par uneequationdiff erentielle d’ordre deuxa coefficients constants reliant son entreeu(t) et sa sortiey(t). On considere des systemes dont l’equation differentielle se met sous la forme ca-nonique4 :
ω2n y(t) + 2ξωn
dy(t)
dt+d2y(t)
dt2= Kω2
n u(t), (1.10)
ou ξ et K sont des constantes reelles strictement positives etωn une constante reellenon nulle. Pour ce systemeξ est lecoefficient d’amortissementdu systeme (dampingratio),ωn sapulsation naturelle(natural frequency) oupulsation propre non amortieetK son gain statique.
La fonction de transfert du systeme du second ordre se deduit de (1.10) :
G(s) =Y (s)
U(s)=
Kω2n
ω2n + 2ξωns+ s2
. (1.11)
Cette forme particuliere facilite le calcul des poles du systeme. En effet les poles dusysteme sont les solutions de l’equation
ω2n + 2ξωns+ s2 = 0,
qui valent :
p1,2 = −(ξ ± j√
1− ξ2)ωn si 0 < ξ 6 1
etp1,2 = −(ξ ±√ξ2 − 1)ωn si ξ > 1. (1.12)
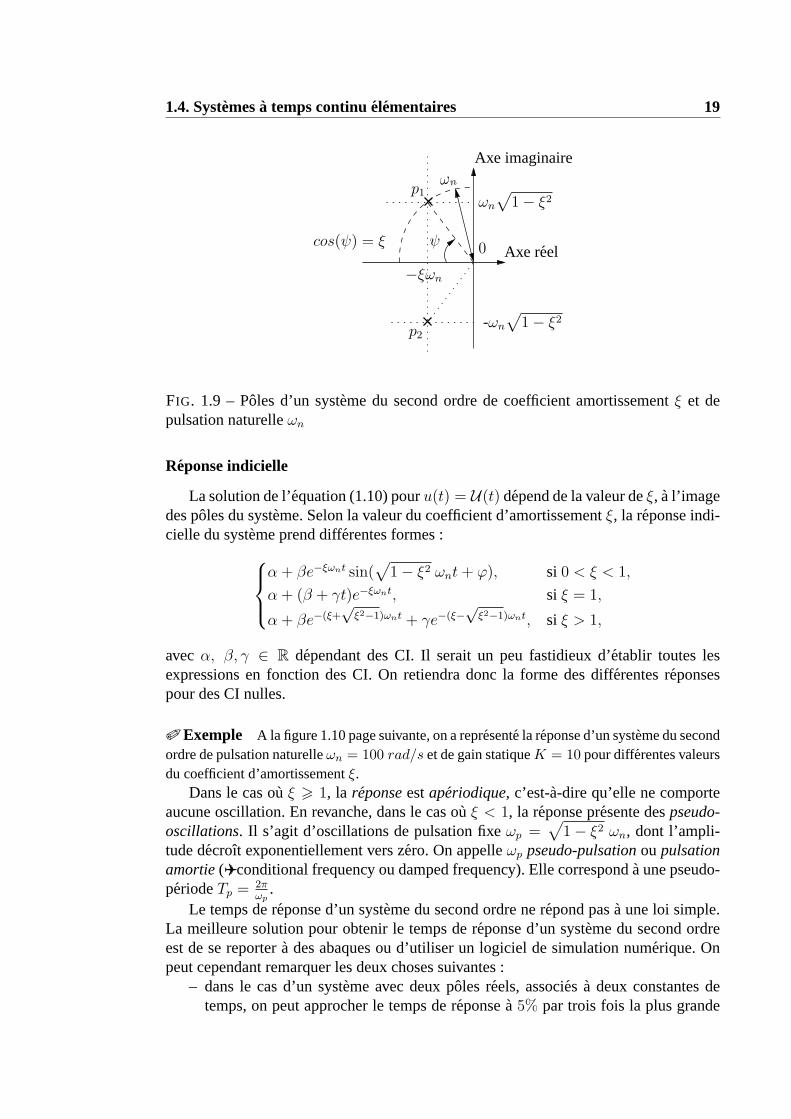
On peut representer graphiquement ces poles dans le plan complexe, comme cela est faita la figure 1.9 page 19. D’apres ce schema, les notions de coefficient d’amortissementet de pulsation naturelle peuventetreetenduesa un pole quelconque, quel que soit ledegre du systeme.
4Dans le cas general, la derivee de l’entree peut intervenir, mais nous excluons cette possibilite ici,pour plus de clarte dans l’expose. De memeξ et ω sont choisis positifs pour assurer la stabilite, commeon le comprendra plus tard.
18 1. Systemesa temps continu
−2 0 2 4 6 8 10
−5
−4
−3
−2
−1
0
1
Axe réel
Axe
imag
inai
re
Diagramme de Nyquist
K
K/2 = 5 −1
−180 −160 −140 −120 −100 −80 −60 −40 −20−20
−15
−10
−5
0
5
10
15
20
Phase (deg)
Gai
n (d
B)
Lieu de Black−Nichols
−90
KdB
FIG. 1.8 – Diagramme de Nyquist et de Black d’un systeme du premier ordre deconstante de tempsτ = 0, 01 s et de gain statiqueK = 10
1.4. Systemesa temps continuelementaires 19
0
ωn
√1− ξ2
-ωn
√1− ξ2
Axe reel
Axe imaginaire
p2
p1
−ξωn
cos(ψ) = ξ
ωn
ψ
FIG. 1.9 – Poles d’un systeme du second ordre de coefficient amortissementξ et depulsation naturelleωn
Reponse indicielle
La solution de l’equation (1.10) pouru(t) = U(t) depend de la valeur deξ, a l’imagedes poles du systeme. Selon la valeur du coefficient d’amortissementξ, la reponse indi-cielle du systeme prend differentes formes :
α+ βe−ξωnt sin(√
1− ξ2 ωnt+ ϕ), si 0 < ξ < 1,
α+ (β + γt)e−ξωnt, si ξ = 1,
α+ βe−(ξ+√
ξ2−1)ωnt + γe−(ξ−√
ξ2−1)ωnt, si ξ > 1,
avecα, β, γ ∈ R dependant des CI. Il serait un peu fastidieux d’etablir toutes lesexpressions en fonction des CI. On retiendra donc la forme des differentes reponsespour des CI nulles.
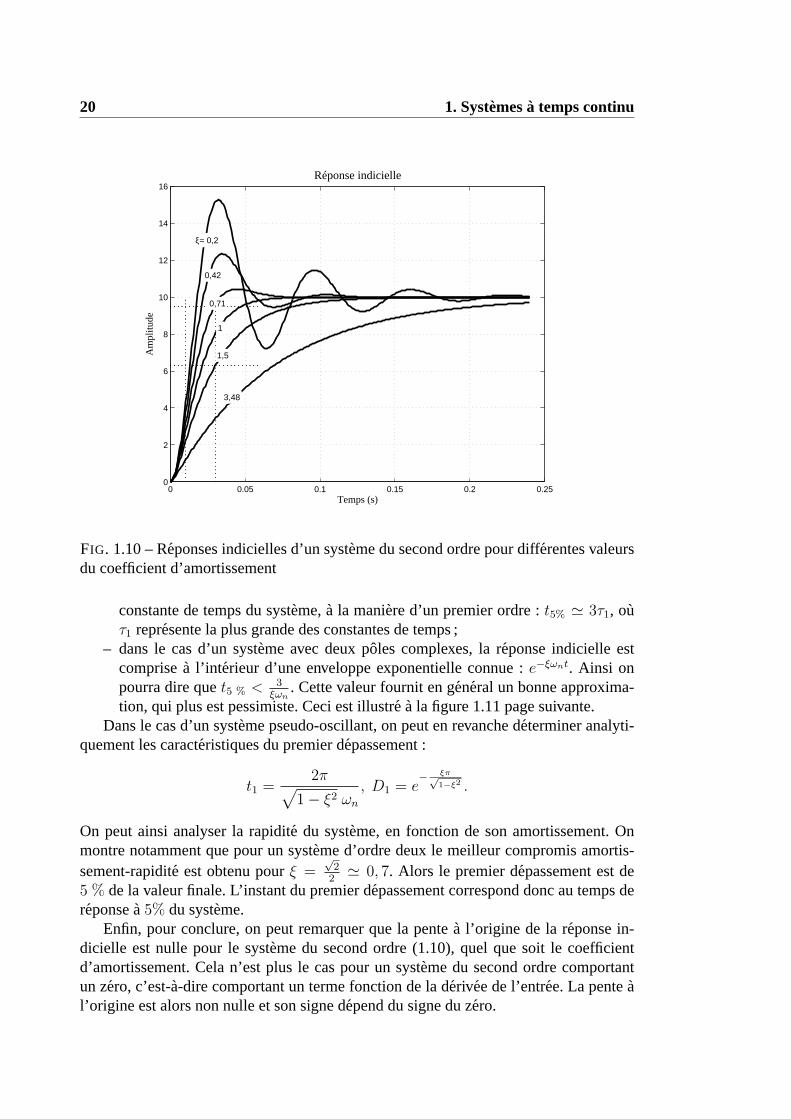
Exemple A la figure 1.10 page suivante, on a represente la reponse d’un systeme du secondordre de pulsation naturelleωn = 100 rad/s et de gain statiqueK = 10 pour differentes valeursdu coefficient d’amortissementξ.
Dans le cas ou ξ > 1, la reponseestaperiodique, c’est-a-dire qu’elle ne comporteaucune oscillation. En revanche, dans le cas ou ξ < 1, la reponse presente despseudo-oscillations. Il s’agit d’oscillations de pulsation fixeωp =
√1− ξ2 ωn, dont l’ampli-
tude decroıt exponentiellement vers zero. On appelleωp pseudo-pulsationou pulsationamortie(conditional frequency ou damped frequency). Elle corresponda une pseudo-periodeTp = 2π
ωp.
Le temps de reponse d’un systeme du second ordre ne repond pasa une loi simple.La meilleure solution pour obtenir le temps de reponse d’un systeme du second ordreest de se reportera des abaques ou d’utiliser un logiciel de simulation numerique. Onpeut cependant remarquer les deux choses suivantes :
– dans le cas d’un systeme avec deux poles reels, associes a deux constantes detemps, on peut approcher le temps de reponsea 5% par trois fois la plus grande
20 1. Systemesa temps continu
0 0.05 0.1 0.15 0.2 0.250
2
4
6
8
10
12
14
16
Temps (s)
Am
plitu
de
Réponse indicielle
3,48
1,5
1
0,71
0,42
ξ= 0,2
FIG. 1.10 – Reponses indicielles d’un systeme du second ordre pour differentes valeursdu coefficient d’amortissement
constante de temps du systeme,a la maniere d’un premier ordre :t5% ' 3τ1, ouτ1 represente la plus grande des constantes de temps ;
– dans le cas d’un systeme avec deux poles complexes, la reponse indicielle estcomprisea l’interieur d’une enveloppe exponentielle connue :e−ξωnt. Ainsi onpourra dire quet5 % < 3
ξωn. Cette valeur fournit en general un bonne approxima-
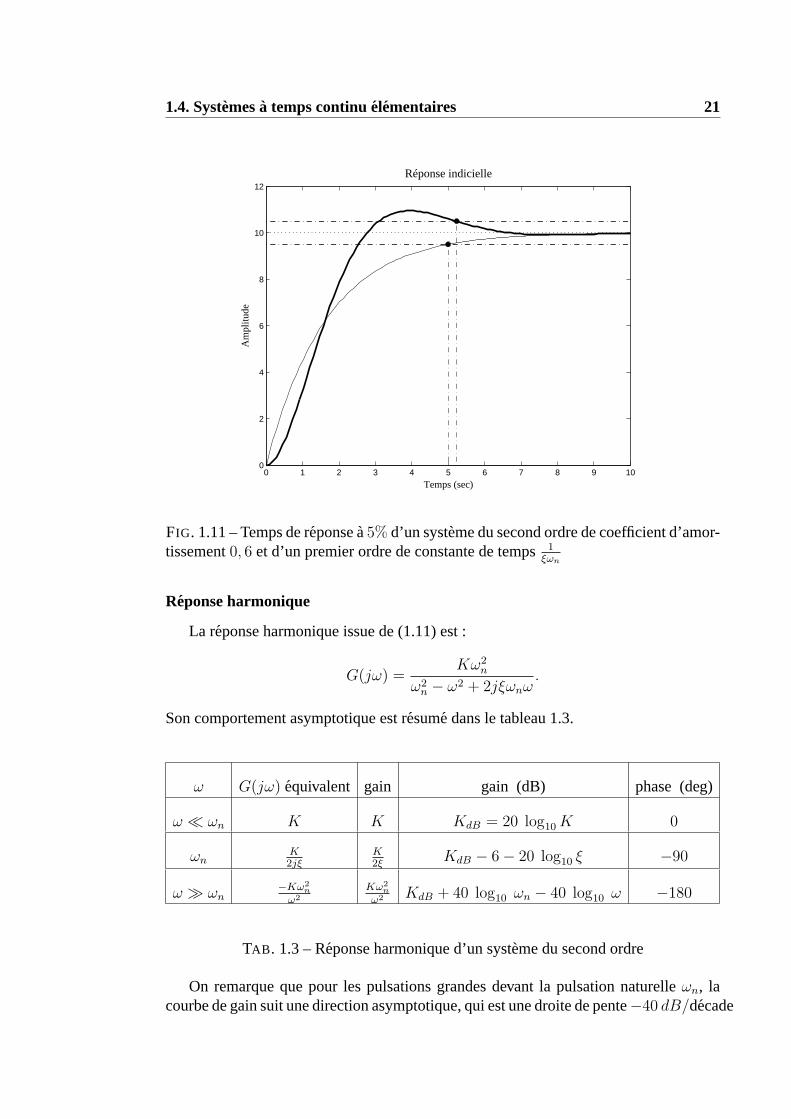
tion, qui plus est pessimiste. Ceci est illustre a la figure 1.11 page suivante.Dans le cas d’un systeme pseudo-oscillant, on peut en revanche determiner analyti-
quement les caracteristiques du premier depassement :
t1 =2π√
1− ξ2 ωn
, D1 = e− ξπ√
1−ξ2 .
On peut ainsi analyser la rapidite du systeme, en fonction de son amortissement. Onmontre notamment que pour un systeme d’ordre deux le meilleur compromis amortis-sement-rapidite est obtenu pourξ =
√2
2' 0, 7. Alors le premier depassement est de
5 % de la valeur finale. L’instant du premier depassement correspond donc au temps dereponsea5% du systeme.
Enfin, pour conclure, on peut remarquer que la pentea l’origine de la reponse in-dicielle est nulle pour le systeme du second ordre (1.10), quel que soit le coefficientd’amortissement. Cela n’est plus le cas pour un systeme du second ordre comportantun zero, c’est-a-dire comportant un terme fonction de la derivee de l’entree. La penteal’origine est alors non nulle et son signe depend du signe du zero.
1.4. Systemesa temps continuelementaires 21
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
Réponse indicielle
Temps (sec)
Am
plitu
de
FIG. 1.11 – Temps de reponsea5% d’un systeme du second ordre de coefficient d’amor-tissement0, 6 et d’un premier ordre de constante de temps1
ξωn
Reponse harmonique
La reponse harmonique issue de (1.11) est :
G(jω) =Kω2
n
ω2n − ω2 + 2jξωnω
.
Son comportement asymptotique est resume dans le tableau 1.3.
ω G(jω) equivalent gain gain (dB) phase (deg)
ω ωn K K KdB = 20 log10K 0
ωnK2jξ
K2ξ
KdB − 6− 20 log10 ξ −90
ω ωn−Kω2
n
ω2
Kω2n
ω2 KdB + 40 log10 ωn − 40 log10 ω −180
TAB . 1.3 – Reponse harmonique d’un systeme du second ordre
On remarque que pour les pulsations grandes devant la pulsation naturelleωn, lacourbe de gain suit une direction asymptotique, qui est une droite de pente−40 dB/decade
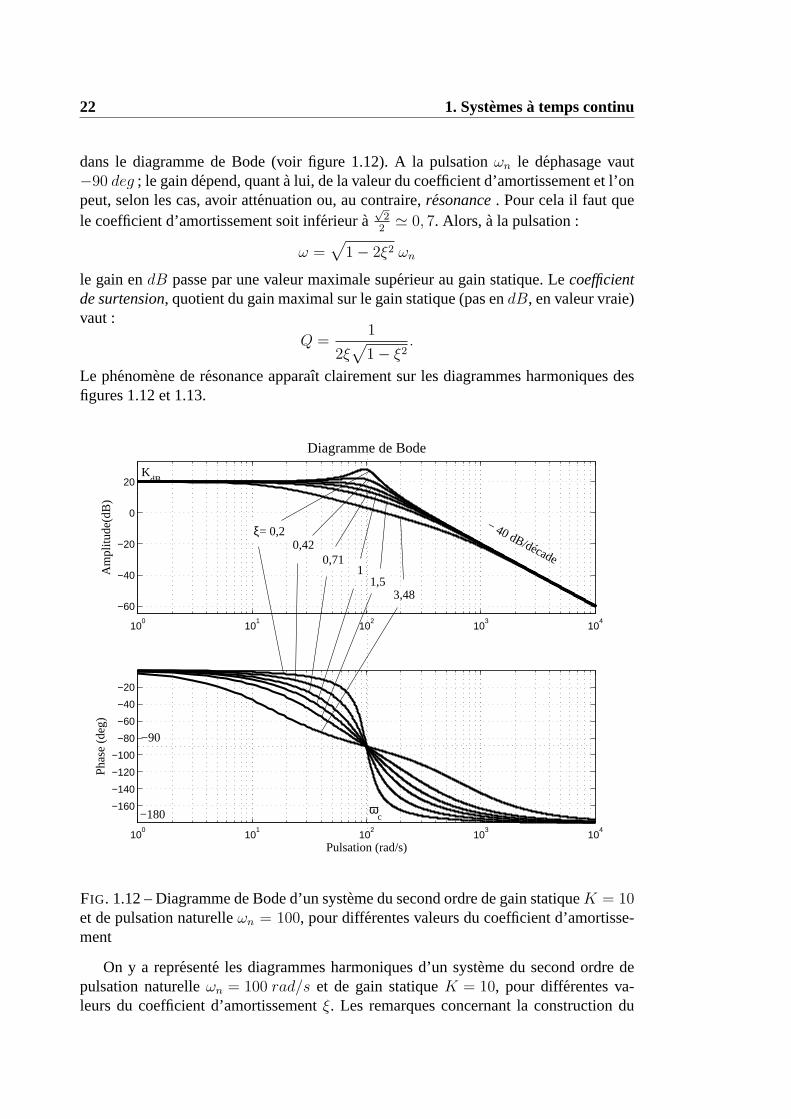
22 1. Systemesa temps continu
dans le diagramme de Bode (voir figure 1.12). A la pulsationωn le dephasage vaut−90 deg ; le gain depend, quanta lui, de la valeur du coefficient d’amortissement et l’onpeut, selon les cas, avoir attenuation ou, au contraire,resonance. Pour cela il faut quele coefficient d’amortissement soit inferieura
√2
2' 0, 7. Alors, a la pulsation :
ω =√
1− 2ξ2 ωn
le gain endB passe par une valeur maximale superieur au gain statique. Lecoefficientde surtension, quotient du gain maximal sur le gain statique (pas endB, en valeur vraie)vaut :
Q =1
2ξ√
1− ξ2.
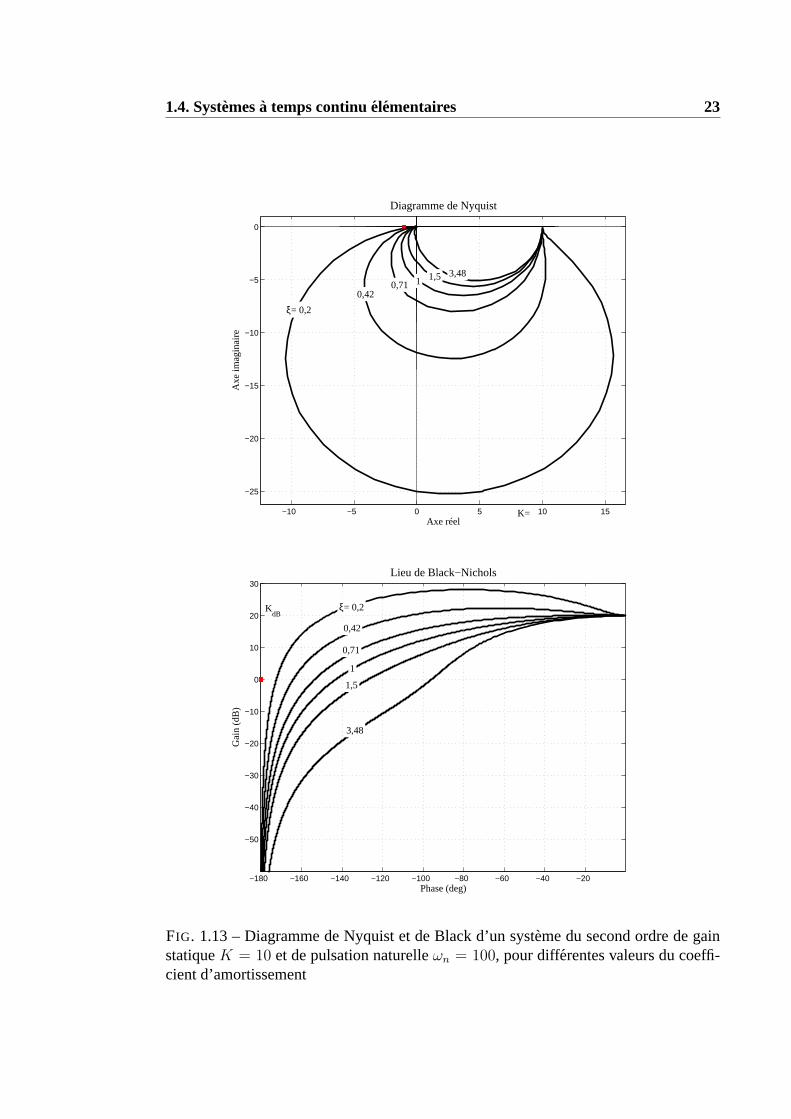
Le phenomene de resonance apparaıt clairement sur les diagrammes harmoniques desfigures 1.12 et 1.13.
100
101
102
103
104
−60
−40
−20
0
20
Am
plitu
de(d
B)
Diagramme de Bode
100
101
102
103
104
−160
−140
−120
−100
−80
−60
−40
−20
Pulsation (rad/s)
Pha
se (
deg)
ξ= 0,20,42
0,711
1,53,48
ωc
−90
−180
KdB
− 40 dB/décade
FIG. 1.12 – Diagramme de Bode d’un systeme du second ordre de gain statiqueK = 10et de pulsation naturelleωn = 100, pour differentes valeurs du coefficient d’amortisse-ment
On y a represente les diagrammes harmoniques d’un systeme du second ordre depulsation naturelleωn = 100 rad/s et de gain statiqueK = 10, pour differentes va-leurs du coefficient d’amortissementξ. Les remarques concernant la construction du
1.4. Systemesa temps continuelementaires 23
−10 −5 0 5 10 15
−25
−20
−15
−10
−5
0
Axe réel
Axe
imag
inai
re
Diagramme de Nyquist
3,481,510,710,42
ξ= 0,2
K=
−180 −160 −140 −120 −100 −80 −60 −40 −20
−50
−40
−30
−20
−10
0
10
20
30
Phase (deg)
Gai
n (d
B)
Lieu de Black−Nichols
3,48
1
0,42
0,71
ξ= 0,2
1,5
KdB
FIG. 1.13 – Diagramme de Nyquist et de Black d’un systeme du second ordre de gainstatiqueK = 10 et de pulsation naturelleωn = 100, pour differentes valeurs du coeffi-cient d’amortissement

24 1. Systemesa temps continu
diagramme de Nyquist s’appliquent toujours. Le diagramme de Nyquist d’un systemed’ordre deux est toujours une portion de cercle dont le rayon depend du coefficientd’amortissement du systeme (voir 1.13).
1.4.3 Simplification de modeles
Cette section decrit comment on peut simplifier un modele, essentiellement en ob-servant ses poles et zeros. Cela s’appliquea des systemes lineaires invariants d’ordresuperieur ouegala deux.
Un systeme lineaire invariant possede des poles (resp. des zeros) complexes ou reels.Les poles (resp. les zeros) complexes vont systematiquement par paire de poles (resp. dezeros) conjugues. En associant les poles (resp. les zeros) on peut transformer la formegenerique de la fonction de transfert, pour obtenir :
G(s) =K
sc
∏pi=1(1 + τis)
∏qi=p+1(1 + 2 ξi
ωnis+ 1
ωn2is2)∏p′
j=1(1 + τjs)∏q′
j=p′+1(1 + 2ξj
ωnjs+ 1
ωn2js2)
. (1.13)
On peut deduire le diagramme de Bode asymptotique d’un systeme tel que celui repre-sente par la fonction de transfert (1.13) en additionnant les diagrammes de gain et dephase associes :
– aux sous-systemes d’ordre un, correspondant aux poles et zeros reels ;– aux sous-systemes d’ordre deux, correspondant aux poles et zeros complexes
conjugues.Pour comprendre, le mieux est de traiter l’exemple suivant.
Exemple : cas du moteura courant continu Le modele d’ordre un d’un moteuracourant continu est donne par la fonction de transfert (C.8). Dans le cas du Maxon F2260, avecles caracteristiquesetablies dans les exemples precedents, on obtient la fonction de transfert dupremier ordre :
G(s) =Ω(s)U(s)
=9, 8975
1 + 0, 0184s,
Si l’on utilise maintenant le modele d’ordre deux issu de la fonction de transfert (C.11), on a :
G(s) =9, 8975
(1 + 0, 0184s)(1 + 0, 0004s). (1.14)
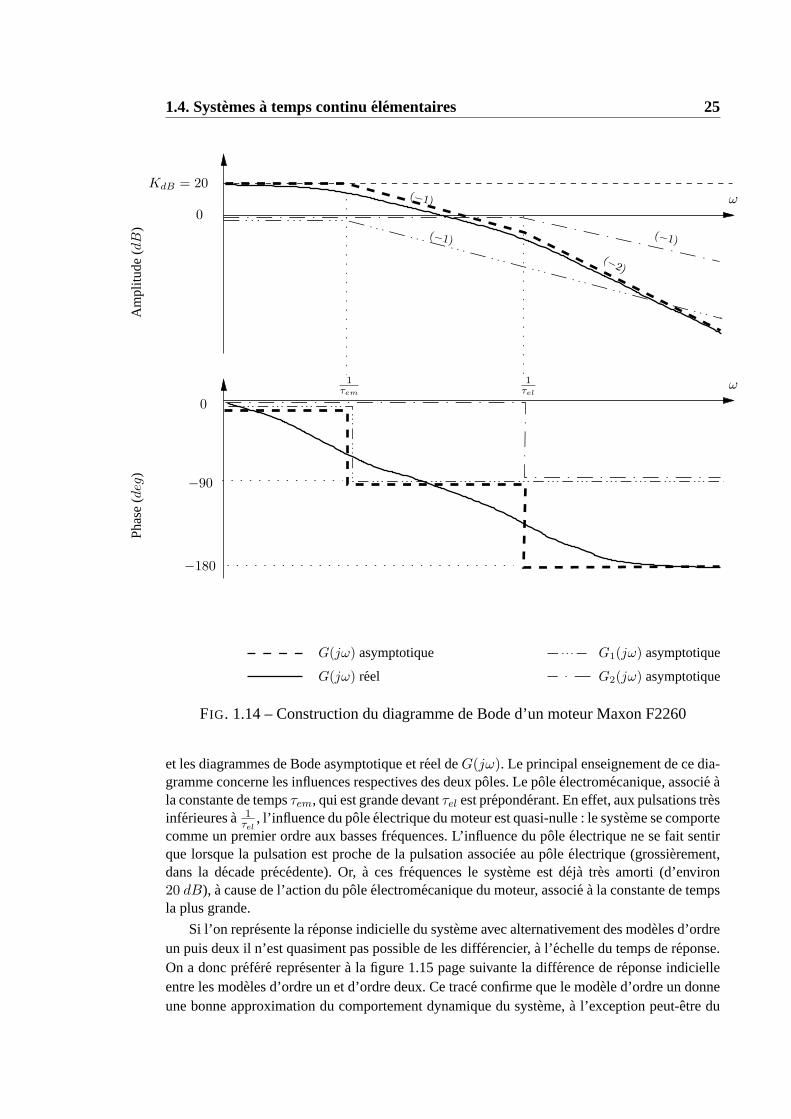
Dans ce cas on a deux constantes de tempsτel etτem, associeesa deux poles reels distincts. Pouranalyser la validite de l’hypothese d’un modele du premier ordre, on a trace a la figure 1.14 pageci-contre les diagrammes de Bode asymptotiques de :
G1(jω) =1
1 + 0, 0184jω,
de
G2(jω) =1
1 + 0, 0004jω
1.4. Systemesa temps continuelementaires 25
G(jω) asymptotique
G(jω) reel
0
KdB = 20
0
−180
ω
ω
G1(jω) asymptotique
G2(jω) asymptotique
Am
plitu
de(d
B)
−90
Pha
se(de
g)
(−1)(−1)
(−1)
(−2)
1τel
1τem
FIG. 1.14 – Construction du diagramme de Bode d’un moteur Maxon F2260
et les diagrammes de Bode asymptotique et reel deG(jω). Le principal enseignement de ce dia-gramme concerne les influences respectives des deux poles. Le pole electromecanique, associe ala constante de tempsτem, qui est grande devantτel est preponderant. En effet, aux pulsations tresinferieuresa 1
τel, l’influence du poleelectrique du moteur est quasi-nulle : le systeme se comporte
comme un premier ordre aux basses frequences. L’influence du pole electrique ne se fait sentirque lorsque la pulsation est proche de la pulsation associee au pole electrique (grossierement,dans la decade precedente). Or,a ces frequences le systeme est deja tres amorti (d’environ20 dB), a cause de l’action du pole electromecanique du moteur, associe a la constante de tempsla plus grande.
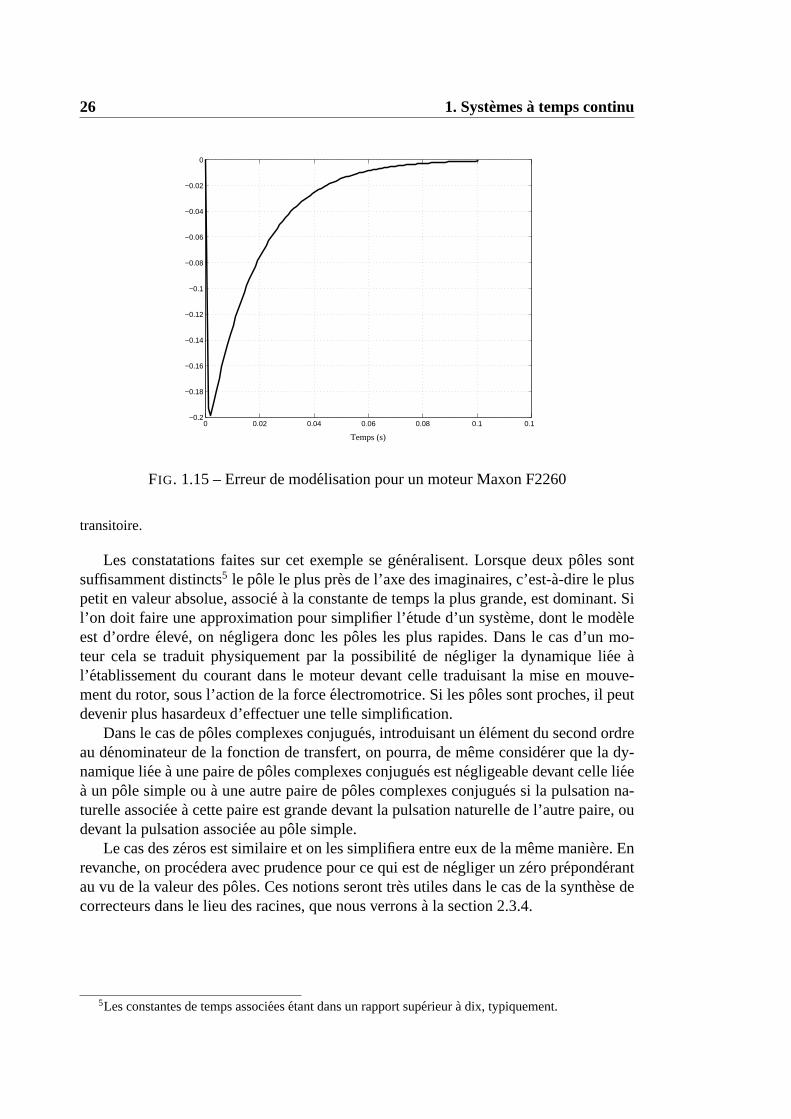
Si l’on represente la reponse indicielle du systeme avec alternativement des modeles d’ordreun puis deux il n’est quasiment pas possible de les differencier,a l’echelle du temps de reponse.On a donc prefere representera la figure 1.15 page suivante la difference de reponse indicielleentre les modeles d’ordre un et d’ordre deux. Ce trace confirme que le modele d’ordre un donneune bonne approximation du comportement dynamique du systeme,a l’exception peut-etre du
26 1. Systemesa temps continu
0 0.02 0.04 0.06 0.08 0.1 0.12−0.2
−0.18
−0.16
−0.14
−0.12
−0.1
−0.08
−0.06
−0.04
−0.02
0
Temps (s)
Am
plitu
de
FIG. 1.15 – Erreur de modelisation pour un moteur Maxon F2260
transitoire.
Les constatations faites sur cet exemple se generalisent. Lorsque deux poles sontsuffisamment distincts5 le pole le plus pres de l’axe des imaginaires, c’est-a-dire le pluspetit en valeur absolue, associe a la constante de temps la plus grande, est dominant. Sil’on doit faire une approximation pour simplifier l’etude d’un systeme, dont le modeleest d’ordreeleve, on negligera donc les poles les plus rapides. Dans le cas d’un mo-teur cela se traduit physiquement par la possibilite de negliger la dynamique liee al’ etablissement du courant dans le moteur devant celle traduisant la mise en mouve-ment du rotor, sous l’action de la forceelectromotrice. Si les poles sont proches, il peutdevenir plus hasardeux d’effectuer une telle simplification.
Dans le cas de poles complexes conjugues, introduisant unelement du second ordreau denominateur de la fonction de transfert, on pourra, de meme considerer que la dy-namique lieea une paire de poles complexes conjugues est negligeable devant celle lieea un pole simple oua une autre paire de poles complexes conjugues si la pulsation na-turelle associeea cette paire est grande devant la pulsation naturelle de l’autre paire, oudevant la pulsation associee au pole simple.
Le cas des zeros est similaire et on les simplifiera entre eux de la meme maniere. Enrevanche, on procedera avec prudence pour ce qui est de negliger un zero preponderantau vu de la valeur des poles. Ces notions seront tres utiles dans le cas de la synthese decorrecteurs dans le lieu des racines, que nous verronsa la section 2.3.4.
5Les constantes de temps associeesetant dans un rapport superieura dix, typiquement.

1.4. Systemesa temps continuelementaires 27
Exercices1. Montrer que le produit de convolution est commutatif.
2. Montrer que le moteura courant continu decrit par l’equation :
ω(t) +RJ + Lf
Rf + K2
dω(t)dt
+LJ
Rf + K2
d2ω(t)dt2
=K
Rf + K2u(t)
est un systeme lineaire invariant et causal.
3. Discuter la definition deδ(t) presenteea la figure suivante.
1a
t0
f(t)
a
δ(t) = lima→0 f(t)
4. Donner une illustration graphique de la reponse indicielle d’un systemea partir de l’equation :
y(t) = g(t) ∗ U(t) =∫ t
0g(τ) U(t− τ)dτ =
∫ t
0g(τ)dτ.
5. Demontrer les differentes proprietes de la transformee de Laplace donnees au tableau 1.1.
6. Etablir les transformees de Laplace du signal causalf(t) U(t) pour les fonctionsf(t)suivantes :
1,δ(t),δ(t− τ),t,
1(n−1)! t
n−1,
e−tτ ,
1− e−tτ ,
e−at − e−bt,sinωt,cos ωt,e−αt cos ωt,
ωn√1−ξ2
e−ξωnt sin(ωn
√1− ξ2t).
7. Verifier, en utilisant la decomposition enelements simples de la fonctionF (s), que :
F (s) =b− a
(s + a)(s + b)
est bien la transformee de Laplace du signal :
f(t) = e−at − e−bt.
8. De la meme maniere,etablir les transformees de Laplace inverses des fonctions :
F (s) =a
s2(s + a)
etG(s) =
s
(s + a)2.
Chapitre 2
Systemes asservisa temps continu
2.1 Notion de systeme asservi
2.1.1 Exemples
A la douche
Pour saisir la notion desysteme asserviousysteme avec contre-reaction(feedbacksystem), supposons que l’on vient de finir en sueur un match de rugby. Plusieurs cas defigure se presentent selon que vous jouez au fin fond du Cantal ou au Stade Toulousain :
– la douche est rustique et par consequentequipee d’un simple bouton qui laissecouler l’eaua la temperature prevue : une fois l’eau chaude (s’il y en a) arriveedans le circuit, la temperature se stabilisea peu pres. Qu’elle soita votre goutou non, vous n’avez pas de possibilite de reglage de l’entree en fonction de votreperception ;
– apres la douche brulante (dans le meilleur des cas) de la semaine passee (casprecedent) vous testez les nouvelles douches de votre club qui dispose de deuxrobinets : un d’eau chaude et un d’eau froide. L’eau chaude ayant coule depuisassez longtemps, vous commencez deja a vous bruler : vous ajustez la temperatureen agissant sur l’arrivee d’eau froide. L’eau se refroidit, vous reajustez, elle esttrop chaude, vous reajustez, et ainsi de suite, jusqu’a la temperature esperee ;
– arrive la consecration du club professionnel : les douches avec thermostat. Plusbesoin de passer votre tempsa regler la temperature en passant de la doucheecossaisea la brulure. Vous ajustez la valeur souhaitee qui apparaıt sur l’ecrandigital du thermostat et la temperature monte rapidementa la valeur souhaitee :vous avez decouvert la regulation numerique.
Ces trois scenes de la vie«courante» illustrent parfaitement la notion de contre-reaction. Le deuxieme cas est interessant : en reponsea une information de sortie (latemperature de l’eau), l’utilisateur reajuste l’entree (le debit d’eau froide ou chaude)pour amener la sortiea la valeur desiree ou autour de celle-ci. C’est le principe memede la contre-reaction. Dans le troisieme exemple, la regulation est realisee de maniereautomatique,a l’aide d’un calculateur : c’est le but de ce cours ! Le premier cas illustrelui un systeme (douche+douche) sans possibilite de contre-reaction.
2.1. Notion de systeme asservi 29
Cas du moteura courant continu
Le moteura courant continu peut lui aussietre vu comme un systemea contre-reaction. Pour s’en apercevoir il faut reprendre lesequations du systeme,etablies dansl’annexe C page 99. La transformee de Laplace appliquee auxequations (C.1), (C.2),(C.3) et (C.4), avec l’hypotheseKem = Ke = Km, donne respectivement :
U(s) = E(s) + (R + Ls)I(s),E(s) = Kem Ω(s),
Γ(s) = (f + Js)Ω(s),Γ(s) = KemI(s).
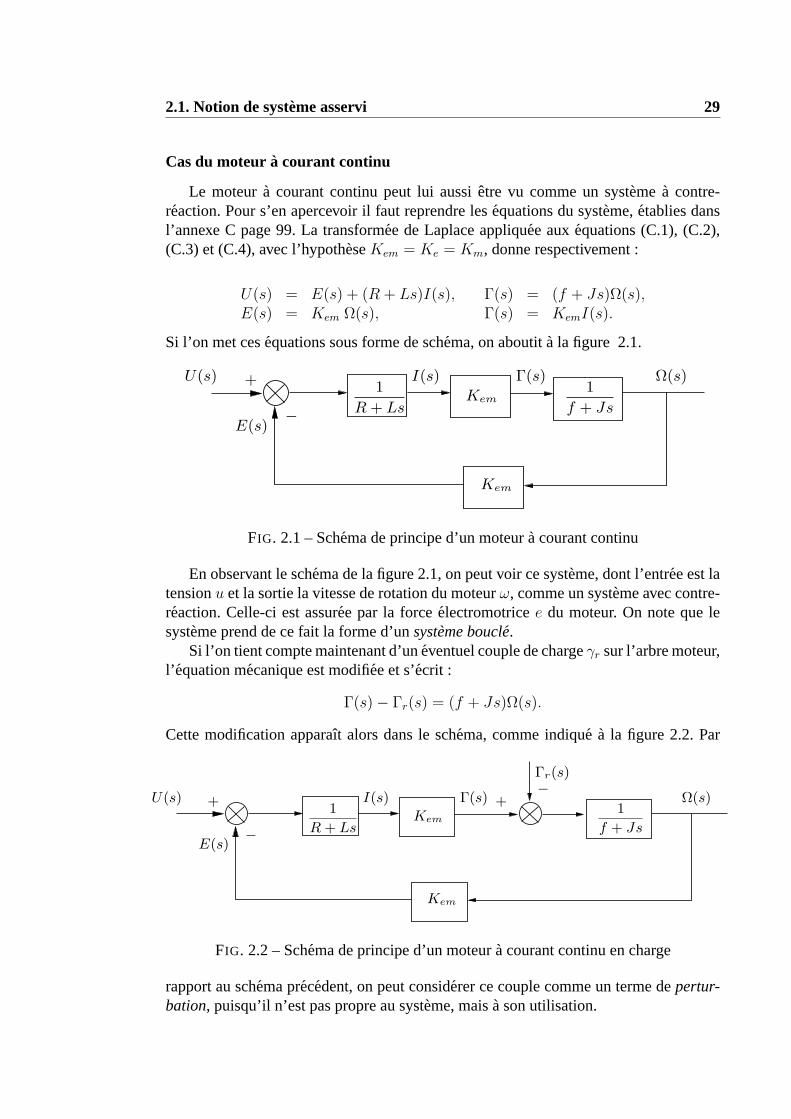
Si l’on met cesequations sous forme de schema, on aboutita la figure 2.1.
I(s) Γ(s) Ω(s)+
−
U(s)
E(s)
Kem
Kem
1
f + Js
1
R + Ls
FIG. 2.1 – Schema de principe d’un moteura courant continu
En observant le schema de la figure 2.1, on peut voir ce systeme, dont l’entree est latensionu et la sortie la vitesse de rotation du moteurω, comme un systeme avec contre-reaction. Celle-ci est assuree par la forceelectromotricee du moteur. On note que lesysteme prend de ce fait la forme d’unsysteme boucle.
Si l’on tient compte maintenant d’uneventuel couple de chargeγr sur l’arbre moteur,l’ equation mecanique est modifiee et s’ecrit :
Γ(s)− Γr(s) = (f + Js)Ω(s).
Cette modification apparaıt alors dans le schema, comme indique a la figure 2.2. Par
+
−
−Γr(s)
I(s) Γ(s)U(s)
E(s)
Ω(s)+
Kem
Kem1
f + Js
1
R + Ls
FIG. 2.2 – Schema de principe d’un moteura courant continu en charge
rapport au schema precedent, on peut considerer ce couple comme un terme depertur-bation, puisqu’il n’est pas propre au systeme, maisa son utilisation.
30 2. Systemes asservisa temps continu
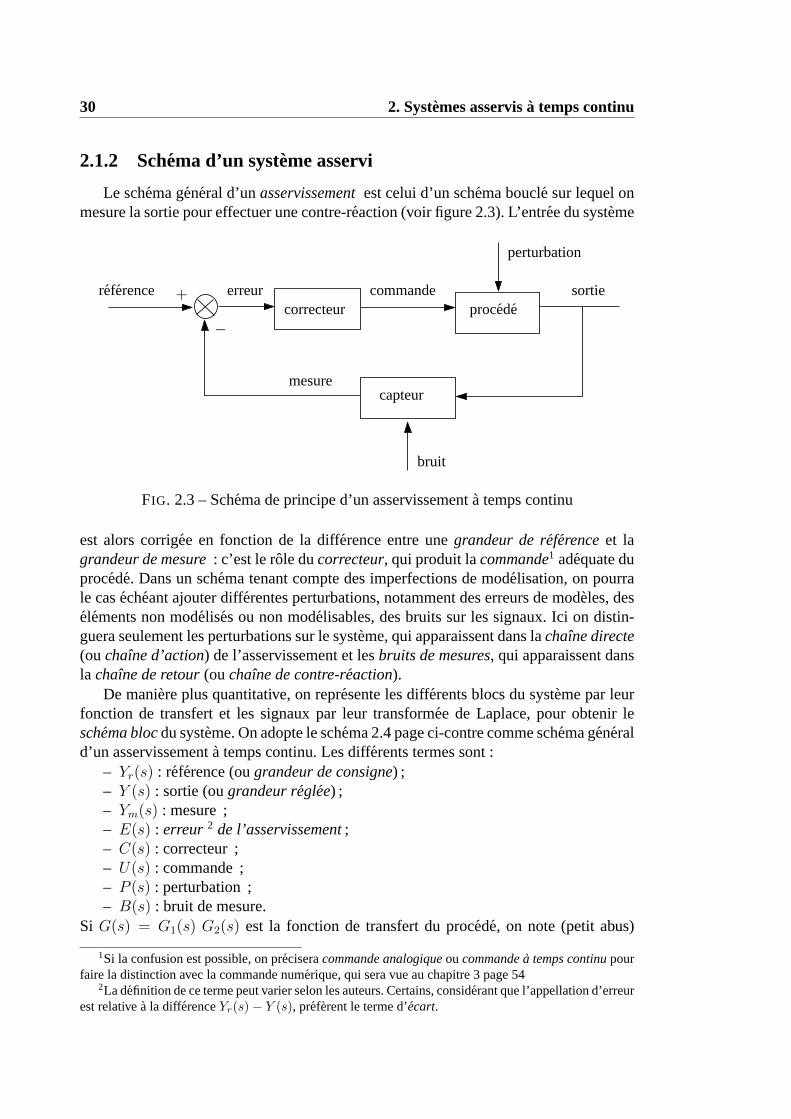
2.1.2 Schema d’un systeme asservi
Le schema general d’unasservissementest celui d’un schema boucle sur lequel onmesure la sortie pour effectuer une contre-reaction (voir figure 2.3). L’entree du systeme
+
−
erreur commandeprocede
perturbation
correcteur
capteur
reference
bruit
sortie
mesure
FIG. 2.3 – Schema de principe d’un asservissementa temps continu
est alors corrigee en fonction de la difference entre unegrandeur de referenceet lagrandeur de mesure: c’est le role ducorrecteur, qui produit lacommande1 adequate duprocede. Dans un schema tenant compte des imperfections de modelisation, on pourrale casecheant ajouter differentes perturbations, notamment des erreurs de modeles, deselements non modelises ou non modelisables, des bruits sur les signaux. Ici on distin-guera seulement les perturbations sur le systeme, qui apparaissent dans lachaıne directe(ouchaıne d’action) de l’asservissement et lesbruits de mesures, qui apparaissent dansla chaıne de retour(ouchaıne de contre-reaction).
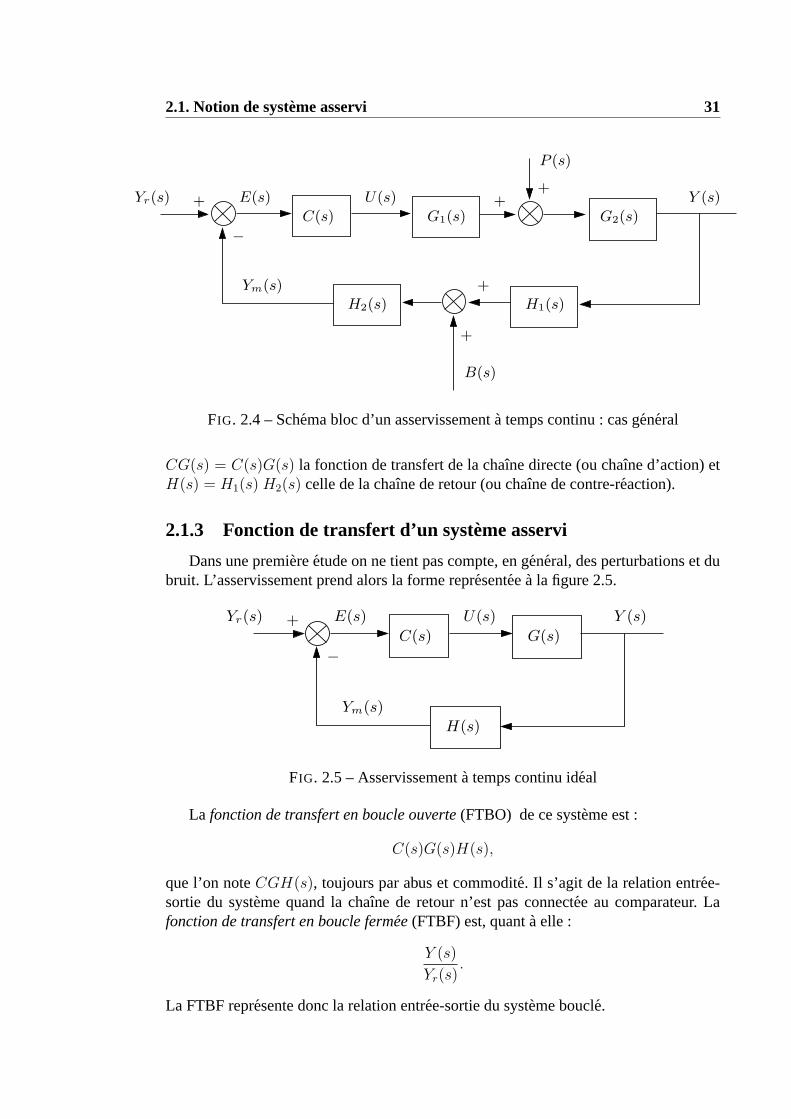
De maniere plus quantitative, on represente les differents blocs du systeme par leurfonction de transfert et les signaux par leur transformee de Laplace, pour obtenir leschema blocdu systeme. On adopte le schema 2.4 page ci-contre comme schema generald’un asservissementa temps continu. Les differents termes sont :
– Yr(s) : reference (ougrandeur de consigne) ;– Y (s) : sortie (ougrandeur reglee) ;– Ym(s) : mesure ;– E(s) : erreur 2 de l’asservissement;– C(s) : correcteur ;– U(s) : commande ;– P (s) : perturbation ;– B(s) : bruit de mesure.
Si G(s) = G1(s) G2(s) est la fonction de transfert du procede, on note (petit abus)
1Si la confusion est possible, on preciseracommande analogiqueoucommandea temps continupourfaire la distinction avec la commande numerique, qui sera vue au chapitre 3 page 54
2La definition de ce terme peut varier selon les auteurs. Certains, considerant que l’appellation d’erreurest relativea la differenceYr(s)− Y (s), preferent le terme d’ecart.
2.1. Notion de systeme asservi 31
+
−
Yr(s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P (s)
C(s)
Ym(s)H1(s)H2(s)
+
FIG. 2.4 – Schema bloc d’un asservissementa temps continu : cas general
CG(s) = C(s)G(s) la fonction de transfert de la chaıne directe (ou chaıne d’action) etH(s) = H1(s) H2(s) celle de la chaıne de retour (ou chaıne de contre-reaction).
2.1.3 Fonction de transfert d’un systeme asservi
Dans une premiereetude on ne tient pas compte, en general, des perturbations et dubruit. L’asservissement prend alors la forme representeea la figure 2.5.
H(s)
+
−
Yr(s) E(s) U(s)
C(s) G(s)
Y (s)
Ym(s)
FIG. 2.5 – Asservissementa temps continu ideal
La fonction de transfert en boucle ouverte(FTBO) de ce systeme est :
C(s)G(s)H(s),
que l’on noteCGH(s), toujours par abus et commodite. Il s’agit de la relation entree-sortie du systeme quand la chaıne de retour n’est pas connectee au comparateur. Lafonction de transfert en boucle fermee(FTBF) est, quanta elle :
Y (s)
Yr(s).
La FTBF represente donc la relation entree-sortie du systeme boucle.
32 2. Systemes asservisa temps continu
Le systeme de la figure 2.5 page precedente obeit auxequations suivantes :
U(s) = C(s)E(s), (2.1)
E(s) = Yr(s)− Ym(s), (2.2)
Ym(s) = H(s)Y (s), (2.3)
Y (s) = G(s)U(s). (2.4)
D’apres (2.1), (2.2) et (2.3) :
U(s) = C(s) (Yr(s)−H(s)Y (s)) ,
et donc, d’apres (2.4) :
Y (s) = CG(s) (Yr(s)−H(s)Y (s)) .
Finalement, la FTBF s’ecrit :
Y (s)
Yr(s)=
CG(s)
1 + CGH(s). (2.5)
Il est utile de retenir ce resultat (et par ailleurs de savoir le redemontrer). On montreaisement (prenez donc un exemple) que la FTBF et la FTBO ont le meme ordre.
Pour tenir compte des imperfections representees sur le schema 2.4 page precedente,on calcule la transformee de Laplace de la sortiea l’aide du theoreme de superposition.Onecrit pour cela que la sortie est la somme des sorties obtenues par les actions separeesde l’entree, de la perturbation et du bruit (proceder ainsi simplifie le calcul). On trouve,apres quelques schemas et calculs :
Y (s) =CG(s) Yr(s) +G2(s) P (s)− CG(s) H2(s) B(s)
1 + CGH(s).
Exercice Dessiner les schemas en question, calculer les modeles et retrouver la formuleprecedente. . .
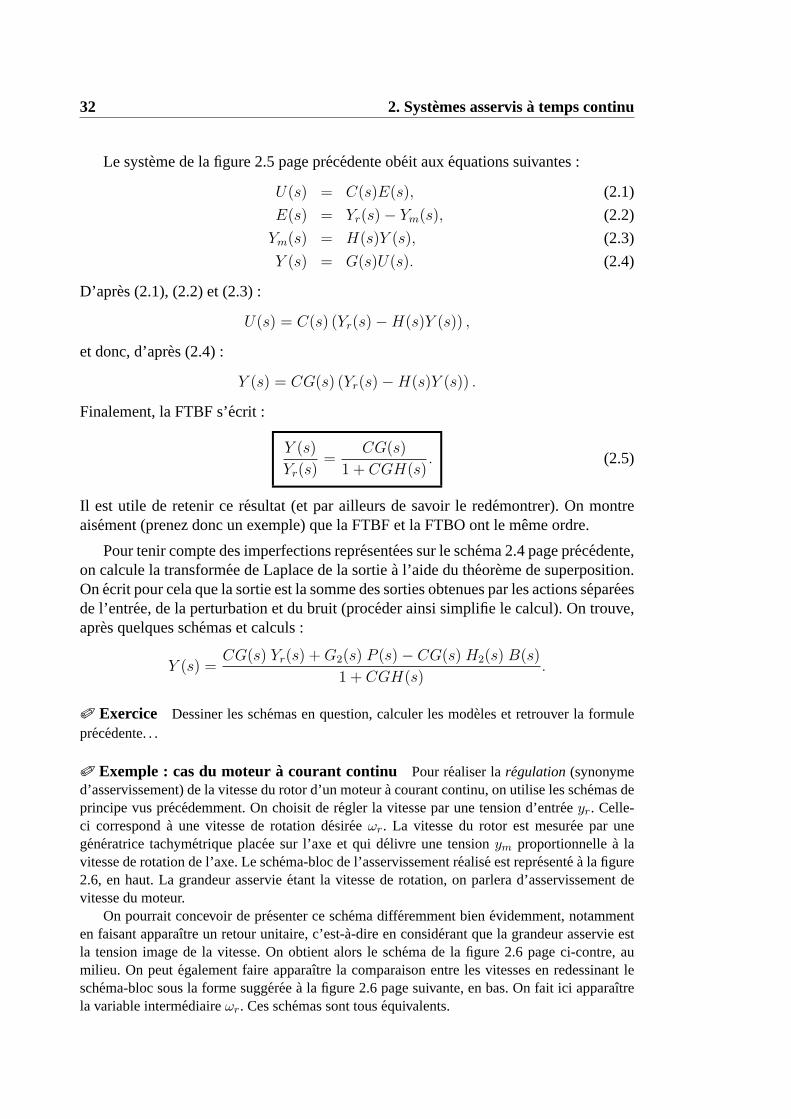
Exemple : cas du moteura courant continu Pour realiser laregulation(synonymed’asservissement) de la vitesse du rotor d’un moteura courant continu, on utilise les schemas deprincipe vus precedemment. On choisit de regler la vitesse par une tension d’entreeyr. Celle-ci corresponda une vitesse de rotation desiree ωr. La vitesse du rotor est mesuree par unegeneratrice tachymetrique placee sur l’axe et qui delivre une tensionym proportionnellea lavitesse de rotation de l’axe. Le schema-bloc de l’asservissement realise est represente a la figure2.6, en haut. La grandeur asservieetant la vitesse de rotation, on parlera d’asservissement devitesse du moteur.
On pourrait concevoir de presenter ce schema differemment bienevidemment, notammenten faisant apparaıtre un retour unitaire, c’est-a-dire en considerant que la grandeur asservie estla tension image de la vitesse. On obtient alors le schema de la figure 2.6 page ci-contre, aumilieu. On peutegalement faire apparaıtre la comparaison entre les vitesses en redessinant leschema-bloc sous la forme suggereea la figure 2.6 page suivante, en bas. On fait ici apparaıtrela variable intermediaireωr. Ces schemas sont tousequivalents.
2.1. Notion de systeme asservi 33
Ω(s)+
−C(s)
Yr(s) U(s)
Kω
KemLJ
s2+RJ+LfLJ
s+Rf+K2
emLJ
Ym(s)
+
−C(s)
Yr(s)
Kω
U(s) Ω(s)KemLJ
s2+RJ+LfLJ
s+Rf+K2
emLJ
Ym(s)
Kω
Ω(s)C(s)
U(s)+
−
Yr(s)1
Kω
Ωr(s) KemLJ
s2+RJ+LfLJ
s+Rf+K2
emLJ
FIG. 2.6 – Asservissement de vitesse d’un moteura courant continu
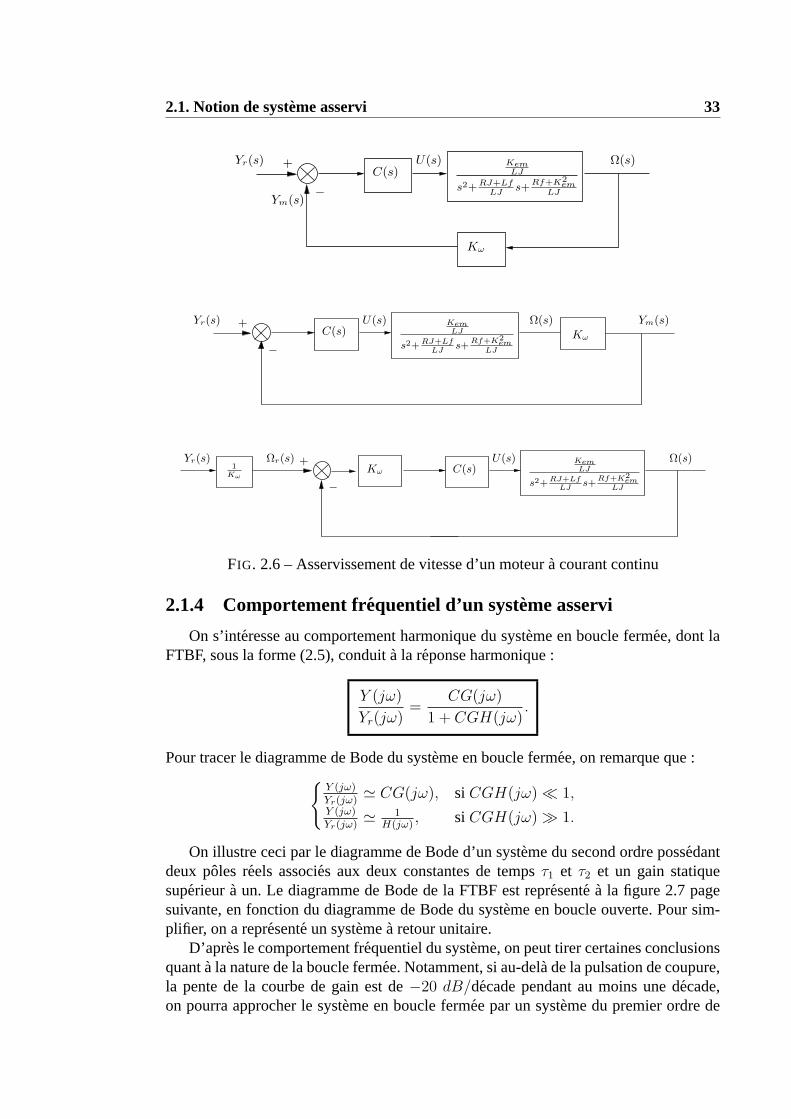
2.1.4 Comportement frequentiel d’un systeme asservi
On s’interesse au comportement harmonique du systeme en boucle fermee, dont laFTBF, sous la forme (2.5), conduita la reponse harmonique :
Y (jω)
Yr(jω)=
CG(jω)
1 + CGH(jω).
Pour tracer le diagramme de Bode du systeme en boucle fermee, on remarque que :Y (jω)Yr(jω)
' CG(jω), siCGH(jω) 1,Y (jω)Yr(jω)
' 1H(jω)
, siCGH(jω) 1.
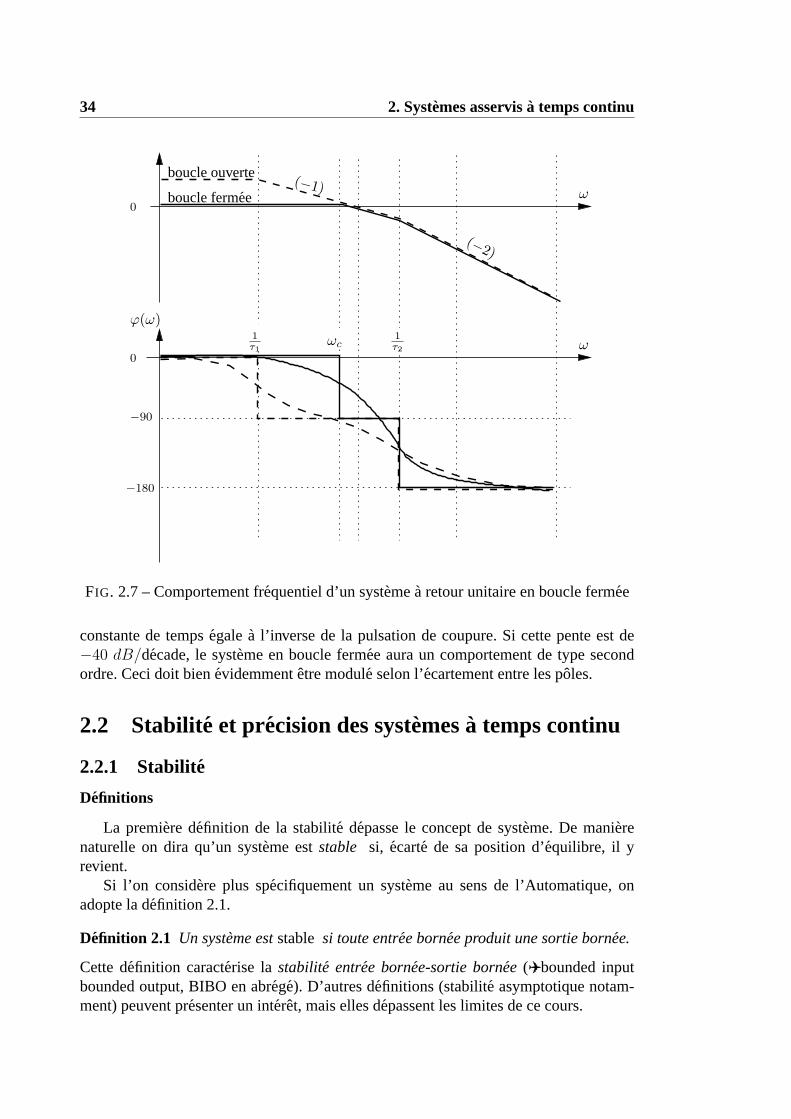
On illustre ceci par le diagramme de Bode d’un systeme du second ordre possedantdeux poles reels associes aux deux constantes de tempsτ1 et τ2 et un gain statiquesuperieura un. Le diagramme de Bode de la FTBF est represente a la figure 2.7 pagesuivante, en fonction du diagramme de Bode du systeme en boucle ouverte. Pour sim-plifier, on a represente un systemea retour unitaire.
D’apres le comportement frequentiel du systeme, on peut tirer certaines conclusionsquanta la nature de la boucle fermee. Notamment, si au-dela de la pulsation de coupure,la pente de la courbe de gain est de−20 dB/decade pendant au moins une decade,on pourra approcher le systeme en boucle fermee par un systeme du premier ordre de
34 2. Systemes asservisa temps continu
−180
−90
(−1)
(−2)
1τ1
ωc1τ2
ϕ(ω)
0
0
ω
ω
boucle fermee
boucle ouverte
FIG. 2.7 – Comportement frequentiel d’un systemea retour unitaire en boucle fermee
constante de tempsegalea l’inverse de la pulsation de coupure. Si cette pente est de−40 dB/decade, le systeme en boucle fermee aura un comportement de type secondordre. Ceci doit bienevidemmentetre module selon l’ecartement entre les poles.
2.2 Stabilite et precision des systemesa temps continu
2.2.1 Stabilite
Definitions
La premiere definition de la stabilite depasse le concept de systeme. De manierenaturelle on dira qu’un systeme eststable si, ecarte de sa position d’equilibre, il yrevient.
Si l’on considere plus specifiquement un systeme au sens de l’Automatique, onadopte la definition 2.1.
Definition 2.1 Un systeme eststable si toute entree bornee produit une sortie bornee.
Cette definition caracterise lastabilite entree bornee-sortie bornee (bounded inputbounded output, BIBO en abrege). D’autres definitions (stabilite asymptotique notam-ment) peuvent presenter un interet, mais elles depassent les limites de ce cours.
2.2. Stabilite et precision des systemesa temps continu 35
Crit eres algebriques de stabilite
Theoreme 2.1Un systeme lineaire invarianta temps continu est stable si tous ses polessonta partie reelle strictement negative.
Le theoreme 2.1 permet de determiner la stabilite du systeme si l’on n’est capable decalculer tous ses poles. On parlera destabilite au sens larges’il existe des pole a partiereelle nulle et destabilite au sens strictsi aucun de ses poles n’esta partie reelle positiveou nulle. Ce theoreme est valable pour tout systeme, qu’il soit en boucle ouverte oufermee. Pour un systeme d’ordreeleve, il faut generalement recourira une resolutionnumerique pour determiner les poles du systeme. Pour cette raison un certain nombrede methodes alternatives ontete developpees pour caracteriser la stabilite d’un systeme.
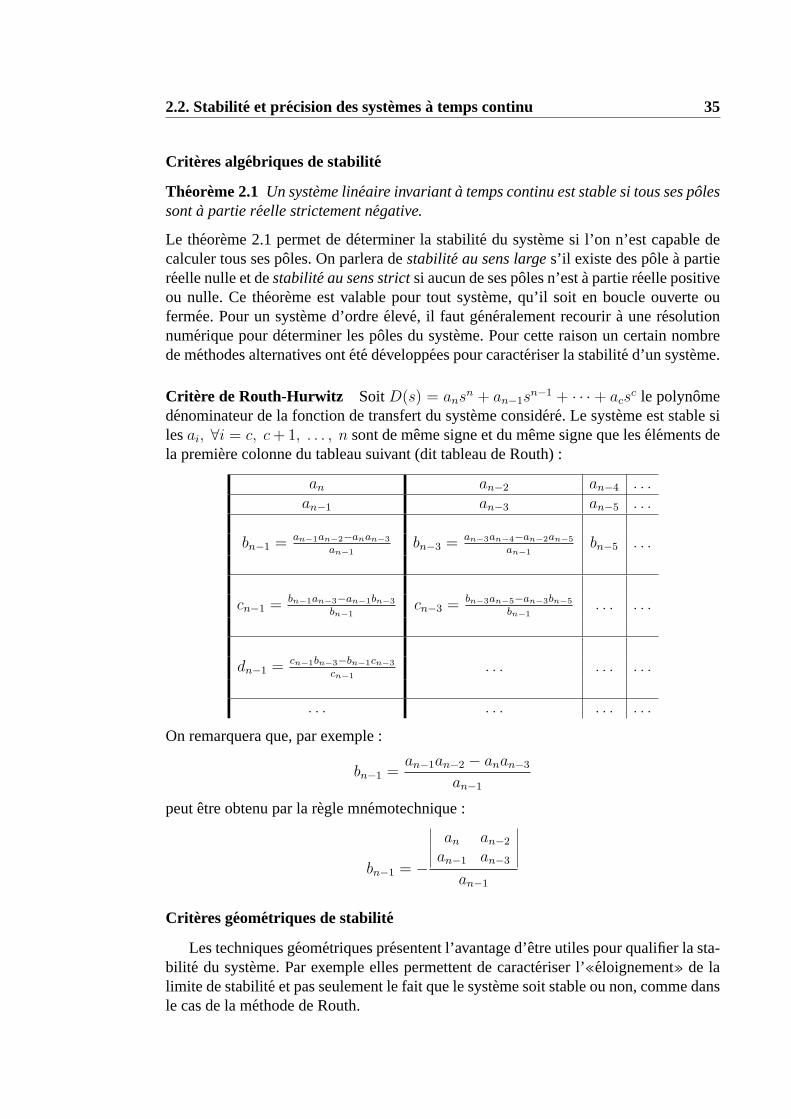
Crit ere de Routh-Hurwitz SoitD(s) = ansn + an−1s
n−1 + · · · + acsc le polynome
denominateur de la fonction de transfert du systeme considere. Le systeme est stable silesai, ∀i = c, c+ 1, . . . , n sont de meme signe et du meme signe que leselements dela premiere colonne du tableau suivant (dit tableau de Routh) :
an an−2 an−4 . . .an−1 an−3 an−5 . . .
bn−1 = an−1an−2−anan−3
an−1bn−3 = an−3an−4−an−2an−5
an−1bn−5 . . .
cn−1 = bn−1an−3−an−1bn−3
bn−1cn−3 = bn−3an−5−an−3bn−5
bn−1. . . . . .
dn−1 = cn−1bn−3−bn−1cn−3
cn−1. . . . . . . . .
. . . . . . . . . . . .
On remarquera que, par exemple :
bn−1 =an−1an−2 − anan−3
an−1
peutetre obtenu par la regle mnemotechnique :
bn−1 = −
an an−2
an−1 an−3
an−1
Crit eres geometriques de stabilite
Les techniques geometriques presentent l’avantage d’etre utiles pour qualifier la sta-bilit e du systeme. Par exemple elles permettent de caracteriser l’«eloignement» de lalimite de stabilite et pas seulement le fait que le systeme soit stable ou non, comme dansle cas de la methode de Routh.
36 2. Systemes asservisa temps continu
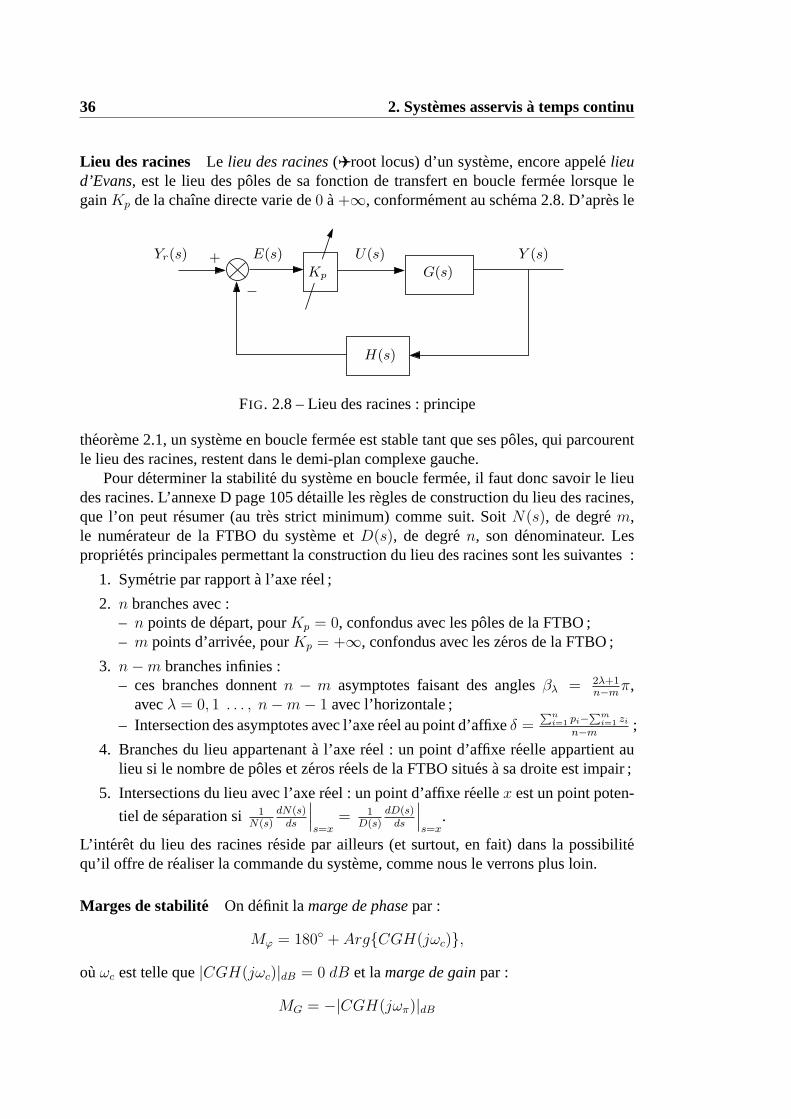
Lieu des racines Le lieu des racines(root locus) d’un systeme, encore appele lieud’Evans, est le lieu des poles de sa fonction de transfert en boucle fermee lorsque legainKp de la chaıne directe varie de0 a+∞, conformement au schema 2.8. D’apres le
+
−
Yr(s) E(s) Y (s)
G(s)
U(s)
H(s)
Kp
FIG. 2.8 – Lieu des racines : principe
theoreme 2.1, un systeme en boucle fermee est stable tant que ses poles, qui parcourentle lieu des racines, restent dans le demi-plan complexe gauche.
Pour determiner la stabilite du systeme en boucle fermee, il faut donc savoir le lieudes racines. L’annexe D page 105 detaille les regles de construction du lieu des racines,que l’on peut resumer (au tres strict minimum) comme suit. SoitN(s), de degre m,le numerateur de la FTBO du systeme etD(s), de degre n, son denominateur. Lesproprietes principales permettant la construction du lieu des racines sont les suivantes :
1. Symetrie par rapporta l’axe reel ;
2. n branches avec :– n points de depart, pourKp = 0, confondus avec les poles de la FTBO ;– m points d’arrivee, pourKp = +∞, confondus avec les zeros de la FTBO ;
3. n−m branches infinies :– ces branches donnentn − m asymptotes faisant des anglesβλ = 2λ+1
n−mπ,
avecλ = 0, 1 . . . , n−m− 1 avec l’horizontale ;– Intersection des asymptotes avec l’axe reel au point d’affixeδ =
Pni=1 pi−
Pmi=1 zi
n−m;
4. Branches du lieu appartenanta l’axe reel : un point d’affixe reelle appartient aulieu si le nombre de poles et zeros reels de la FTBO situesa sa droite est impair ;
5. Intersections du lieu avec l’axe reel : un point d’affixe reellex est un point poten-
tiel de separation si 1N(s)
dN(s)ds
∣∣∣s=x
= 1D(s)
dD(s)ds
∣∣∣s=x
.
L’int eret du lieu des racines reside par ailleurs (et surtout, en fait) dans la possibilitequ’il offre de realiser la commande du systeme, comme nous le verrons plus loin.
Marges de stabilite On definit lamarge de phasepar :
Mϕ = 180 + ArgCGH(jωc),
ou ωc est telle que|CGH(jωc)|dB = 0 dB et lamarge de gainpar :
MG = −|CGH(jωπ)|dB

2.2. Stabilite et precision des systemesa temps continu 37
ouωπ est tel queArgCGH(jωπ) = −180. Ces deux grandeurs sont appeleesmargesde stabilite et caracterisent le systeme en boucle ouverte. L’interet est qu’elles per-mettent de conclure sur la stabilite du systeme en boucle fermee, d’apres le theoremesuivant.
Theoreme 2.2Le systeme est stable en boucle fermee si la marge de phase ou la margede gain du systeme en boucle ouverte est positive.
Ce critere peut tres bien s’appliquer dans l’un ou l’autre des diagrammes harmoniques.On l’applique frequemment dans le diagramme de Bode, mais les marges de stabilitesont aussi facilesa observer dans le diagramme de Black.
Exemple On s’interessea un procede de fonction de transfert :
F1(s) =5000
s3 + 61s2 + 560s + 500.
Il s’agit d’un systeme du troisieme ordre sans zero.
1. Calculer les poles du systeme en boucle ouverte. Le systeme est-il stable ?
2. Appliquer le critere de Routh-Hurwitz pour resoudre le meme probleme.
3. Reprendre les deux questions precedentes pour le systeme en boucle ferme, avec retourunitaire.
4. Determiner maintenant le lieu des racines du systeme.
5. Quelle est l’influence d’un zero ? Pour cela ajouter un zero, de sorte que le systeme aitpour fonction de transfert :
F2(s) = 50000, 2s + 1
s3 + 61s2 + 560s + 500.
6. Determiner les marges de stabilite du systeme.
2.2.2 Precision
Expression de l’erreur
On considere un systeme asservi sous la forme de la figure 2.5 page 31. On supposedonc que le systeme est sans perturbation de modele ou de mesure. D’apres lesequations(2.2) et (2.3) :
E(s) = Yr(s)−H(s)Y (s),
et donc, d’apres (2.5) :
E(s) = Yr(s)−CGH(s)Yr(s)
1 + CGH(s).
L’expression de l’erreur est donc finalement :
E(s) =Yr(s)
1 + CGH(s). (2.6)

38 2. Systemes asservisa temps continu
Precision statique et precision dynamique
La precision statiquedu systeme est caracterisee par l’erreur en regime permanenten reponsea unechelon :
ε∞ = limt→+∞
ε(t).
Cette erreur est appeleeerreur statique(ou erreur de position). D’apres le theoreme dela valeur finale (voir les proprietes de la transformee de Laplace, tableau 1.1 page 8), onpeut la calculera l’aide de l’equation (2.6) par :
ε∞ = lims→0
sE(s). (2.7)
On parlera deprecision dynamiquedes que l’entree du systemeevolue de manierecontinue dans le temps : par exemple on designe parerreur de vitessela valeur del’erreur quand l’entree du systeme est une rampe.
Expression generale de l’erreur
D’apres (2.6) et (2.7), l’expression generale de l’erreur d’un systeme asservi est :
ε∞ = lims→0
sYr(s)
1 + CGH(s). (2.8)
Les transformees de Laplace des signaux typeechelon, rampe,etc.servanta analyser laprecision d’un systeme sont connues. Il est donc possible de calculer l’erreur statiqueou dynamique du systeme si l’on connaıt le comportement aux limites deCGH(s). Laforme generale de la fonction de transfert d’un systeme lineaire invariant, donnee parl’ equation (1.3) peut s’ecrire, pour la FTBO :
CGH(s) =K
sc
1 + β1s+ . . .
1 + α1s+ . . .(2.9)
ou c, la classe du systeme, correspond au nombre d’integrations pures presentes dansle modele du systeme. Alors, la precision du systeme peutetre calculee de manieresystematiquea l’aide de (2.8) et (2.9) et l’onetablit les resultats du tableau 2.1. On
entree echelonYr(s) =E0
srampeYr(s) =
V0
s2
classe 0E0
1 +K∞
classe 1 0V0
K
classe 2 0 0
TAB . 2.1 – Precision des systemes asservis lineaires continus, en fonction de leur classe
comprend bien comment ce tableau s’etend au cas des systemes de classe superieureadeux et au cas d’entrees polynomiales de degre superieur ouegala deux.
2.2. Stabilite et precision des systemesa temps continu 39
Dualit e stabilite-precision
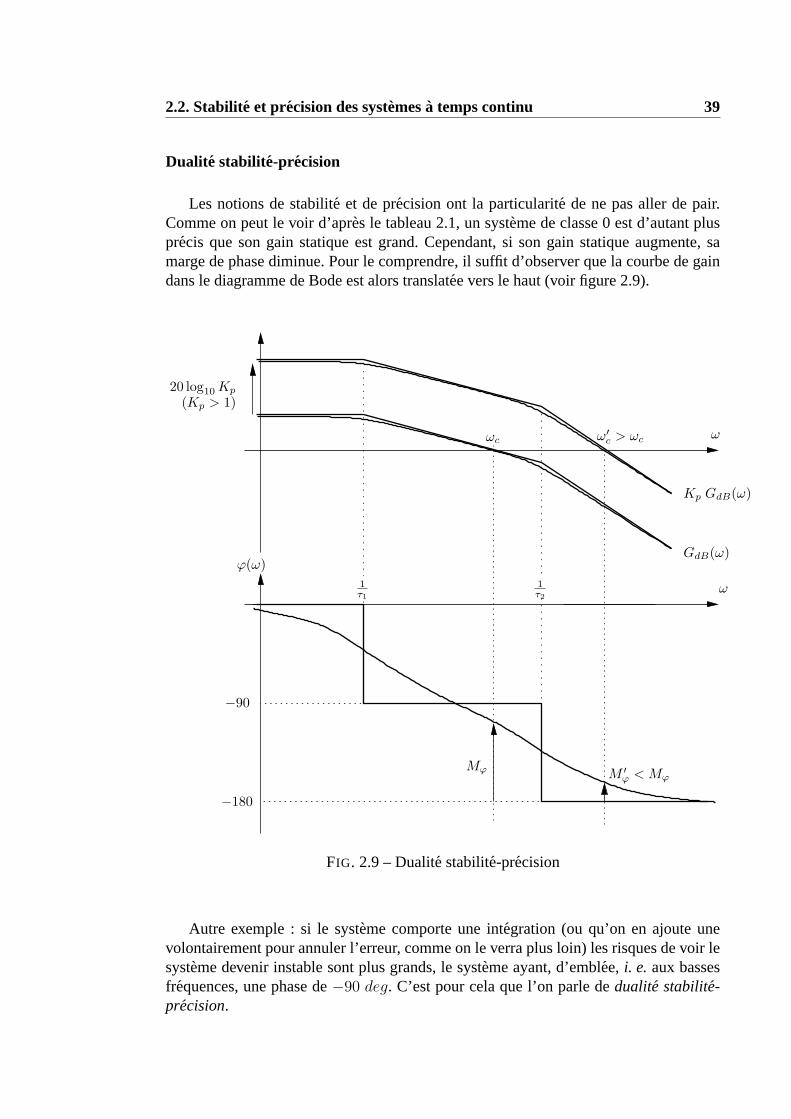
Les notions de stabilite et de precision ont la particularite de ne pas aller de pair.Comme on peut le voir d’apres le tableau 2.1, un systeme de classe 0 est d’autant plusprecis que son gain statique est grand. Cependant, si son gain statique augmente, samarge de phase diminue. Pour le comprendre, il suffit d’observer que la courbe de gaindans le diagramme de Bode est alors translatee vers le haut (voir figure 2.9).
20 log10 Kp
ωc ω′c > ωc ω
(Kp > 1)
GdB(ω)
Kp GdB(ω)
ϕ(ω)
−90
−180
ω
Mϕ M ′ϕ < Mϕ
1τ2
1τ1
FIG. 2.9 – Dualite stabilite-precision
Autre exemple : si le systeme comporte une integration (ou qu’on en ajoute unevolontairement pour annuler l’erreur, comme on le verra plus loin) les risques de voir lesysteme devenir instable sont plus grands, le systeme ayant, d’emblee,i. e. aux bassesfrequences, une phase de−90 deg. C’est pour cela que l’on parle dedualite stabilite-precision.
40 2. Systemes asservisa temps continu
2.3 Commande des systemesa temps continu
La commandeu(t) d’un systemea temps continu peutetre modifiee en asservissantce systeme, comme on l’a vu depuis le debut de ce chapitre. Outre la structure meme del’asservissement (la facon de boucler le systeme) la facon naturelle d’adapter la com-mande du systeme pour obtenir la sortie desiree est d’utiliser un bloc additionnel : lecorrecteur. Lacommande d’un systemeconsiste donca choisir un type de correcteur etses parametres pour remplir uncahier des chargesdonne (on parle souvent desynthesed’un correcteur). On va s’interesser dans le cadre de ce cours specifiquement auxcor-recteurs serie. Il s’agit de correcteurs places en debut de chaıne directe, apres le compa-rateur. La commande du systeme resulte alors de l’action du correcteur sur l’erreur dusysteme3.
2.3.1 Cahier des charges
Le probleme pose au concepteur de la commande d’un systemea temps continudoit logiquement se presenter sous la forme d’un cahier des charges. Il s’agit d’un cer-tain nombre de contraintesa satisfaire pour que la sortie du systeme offre les proprietes(depassement maximal, precision statique ou dynamique, temps de reponse, bande pas-sante,etc.) desirees. S’il est bien concu, ce cahier des charges doit bienevidemmentetrerealisable : l’ensemble des contraintes imposees doiventetre compatibles et les perfor-mances attendues doivent tenir compte de la realisation pratique et donc des limitationsimposeesa tout asservissement. On peut reformuler un cahier des charges en termes de :
– stabilite : le systeme doit bienevidemmentetre stable, mais il faut generalementque son amortissement soit bien maıtrise. Certaines applications imposeront parexemple qu’il n’y ait pas de depassement (asservissement de position). On admetgeneralement que dans une application standard, une marge de phase compriseentre50 et70 degres assure un amortissement optimal du systeme. En dessous decette valeur le systeme oscillera beaucoup lors des transitoires. Au-dela, il risqued’etre trop amorti, au detriment de la rapidite ;
– precision : selon le cahier des charges et la classe du systeme, on pourra attendredes performances plus ou moinselevees en terme de precision. Si le systeme estde classe0, son erreur statique n’est pas nulle, mais inversement proportionnelleau gain de la chaıne directe. Plutot que d’augmenter ce gain, et donc de risquer desaturer l’entree du systeme ou de le rendre instable, on preferera introduire uneintegration ;
– rapidite : la rapidite du systeme en boucle fermee est liee a sa bande passante.Un systeme ayant une pulsation de coupureelevee sera caracterise par une faibleconstante de temps, et donc sera rapide. Celaetant, il faut la encore faire un com-promis, la marge de phase diminuant si la bande passante augmente.
Bien evidemment, selon le nombre de contraintesa satisfaire simultanement, on com-prend aisement que le correcteur obtenu sera plus ou moins complexe.
3La decouverte d’autres structures d’asservissement, moins frequentes mais parfois interessantes(bouclage parallele, boucles imbriquees,etc.) est laissee au lecteur, qui rencontrera ces structures dansla plupart des ouvrages de references cites dans la bibliographie.
2.3. Commande des systemesa temps continu 41
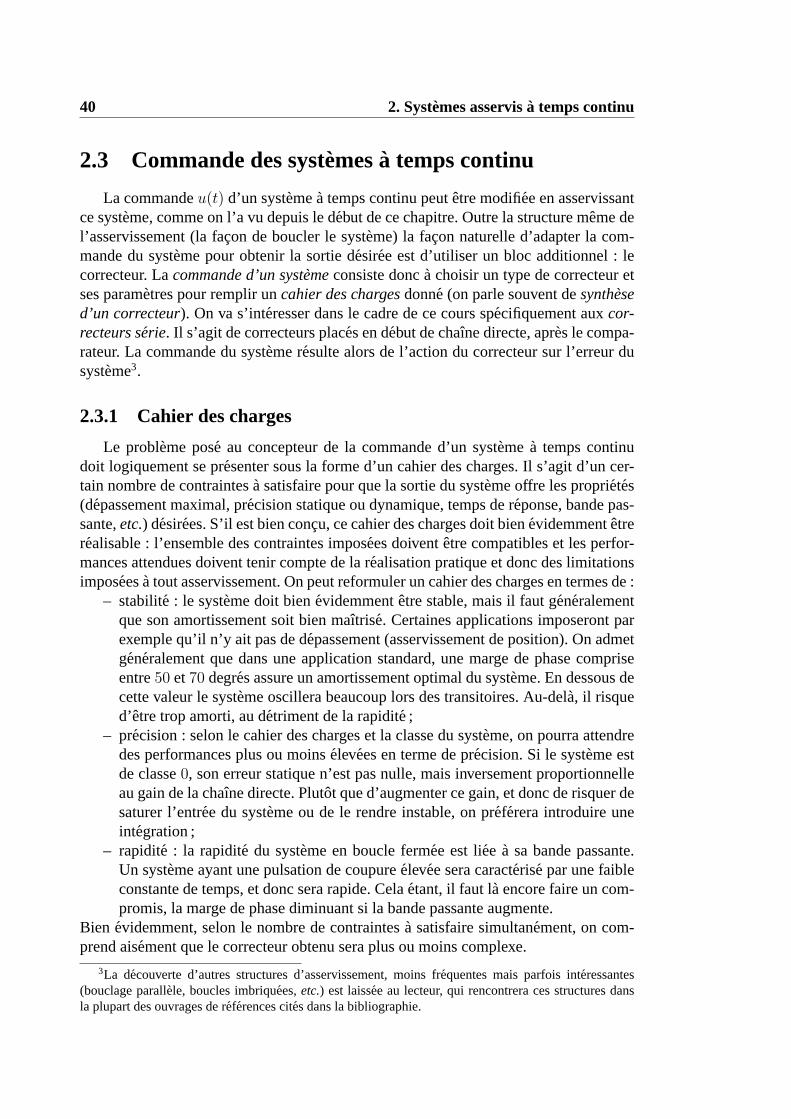
2.3.2 CorrecteursPID : introduction
Les correcteurs serie les plus repandus (voir figure 2.10) sont de typeproportionnel,integral, derive (PID) car ils permettent d’appliquer ces trois actionselementaires au si-gnal d’erreurE(s) pour commander le systeme. La fonction de transfert d’un correcteurPID ideal est :
C(s) = Kp
(1 +
1
τis+ τds
). (2.10)
+
−
Yr(s) E(s) Y (s)
G(s)
U(s)
H(s)
C(s) = Kp
„1 +
1
τis+ τds
«
FIG. 2.10 – Schema bloc d’un asservissement avec correcteur serie PID
En pratique,a une categorie de systemesa asservir donnee correspond un type decorrecteur adapte : celui dont on sait, par experience et/ouetude, qu’il va le mieuxconvenir. Pour effectuer un choix judicieux, il faut connaıtre les effets des differentesactions, proportionnelle, integrale et derivee. On va d’abord les analyser separement.
Action proportionnelle D’apres le tableau 2.1, on voit que la precision du systemeest amelioree par une augmentation du gain de la chaıne directe, ce qui est realise parune correction proportionnelle. En contrepartie la stabilite diminue si le gain augmente.Ceci est une illustration de la dualite stabilite-precision. Le temps de montee est reduitet le systeme plus oscillant. En revanche, une augmentation du gain proportionnel nediminue pas necessairement le temps de reponse du systeme.
Action int egrale L’ajout d’un terme integral dans la chaıne directe augmente sa classe.Par consequent la precision est amelioree : un systeme stable, sans integration (i. e. declasse 0), verra son erreur statique annulee par une action integrale. En contrepartie lamarge de phase est diminuee de90 deg par l’ajout d’une integration pure. Enfin, un cor-recteur integral presente le defaut de saturer facilement, si l’erreur ne devient pas nulle.Il faut eventuellement envisager l’ajout d’un dispositif d’anti-saturation.
Action derivee Dans le cas d’un systeme de classe superieure ouegalea un, cette ac-tion permet d’augmenter la bande passante du systeme ou de rendre celui-ci plus stable,a bande passanteegale. Un correcteur de type derive n’est pas causal, donc pas physi-quement realisable. On lui substitue donc systematiquement un correcteur approche4,
4Les correcteurs ditsapprochessont en fait des correcteurs construitsa partir d’un choix de poles etde zeros. Leur fonction de transfert differe donc de la forme habituelle desPID. Ceci n’empeche pas

42 2. Systemes asservisa temps continu
comme nous le verrons par la suite. On parle alors defiltrage du terme derive. Le termederiveKpτds du correcteur est ainsi remplace par l’approximation causaleτds
1+τdN
s, avec
N assez grand.
Les actions precedentes sont generalement combinees. Les correcteurs les plus cou-ramment rencontres sont de typeproportionnel, proportionnel et integral(PI) ouretardde phase(PI approche), proportionnel et derive (PD) ou avance de phase(PD ap-proche) et enfinPID ou avance et retard de phase(PID approche). La forme deduitede (2.10) par filtrage du terme derive est diteforme standard du correcteurPID :
C(s) = Kp
(1 +
1
τis+
τds
1 + τd
Ns
), (2.11)
avecN > 5.Bienevidemment la complexification d’un correcteur rend plus difficile sa synthese.
Les differentes methodes que nous allons voir dans la suite de cette section ne sont bienevidemment pas exhaustives, mais dressent neanmoins un bon apercu des methodesmodernes et efficaces.
2.3.3 Adequation correcteurs/systemesa asservir
Le choix du correcteur est generalement dicte par la faculte qu’il a de corriger leslacunes du systeme asservi non corrige. Nous allons ainsievoquer ici les differentescombinaisons correcteurs-systemes permettant de realiser des asservissements aux per-formances satisfaisantes.
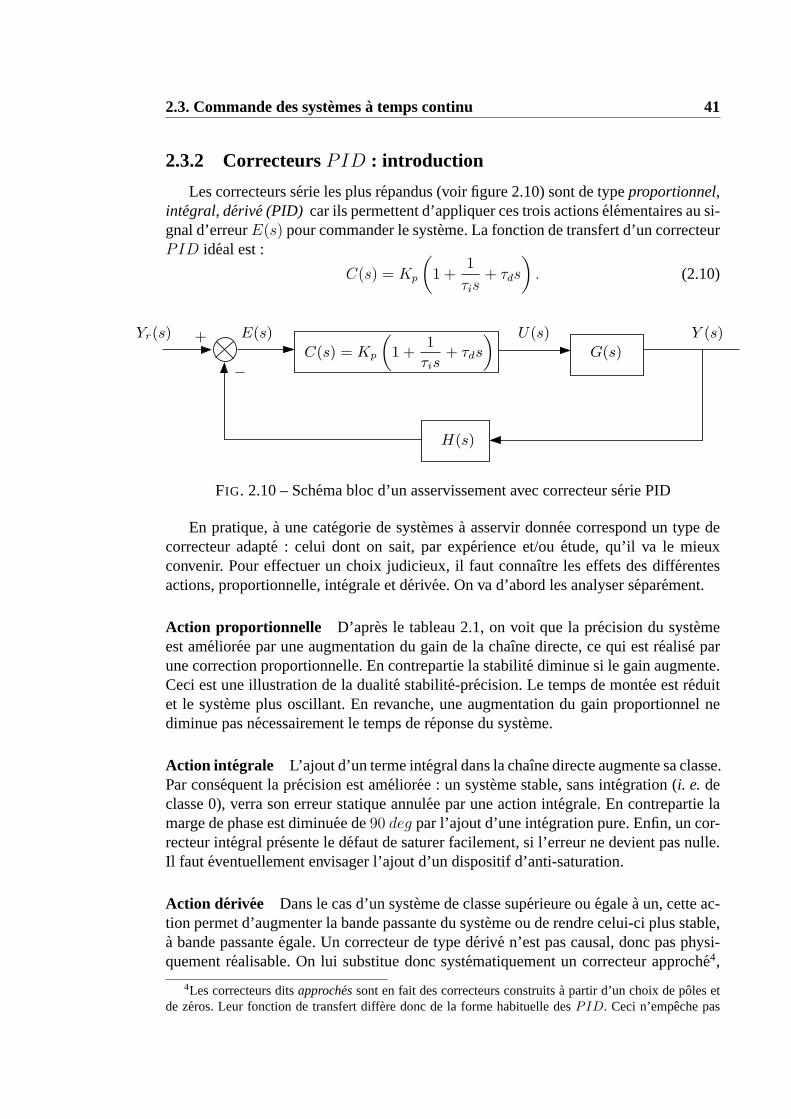
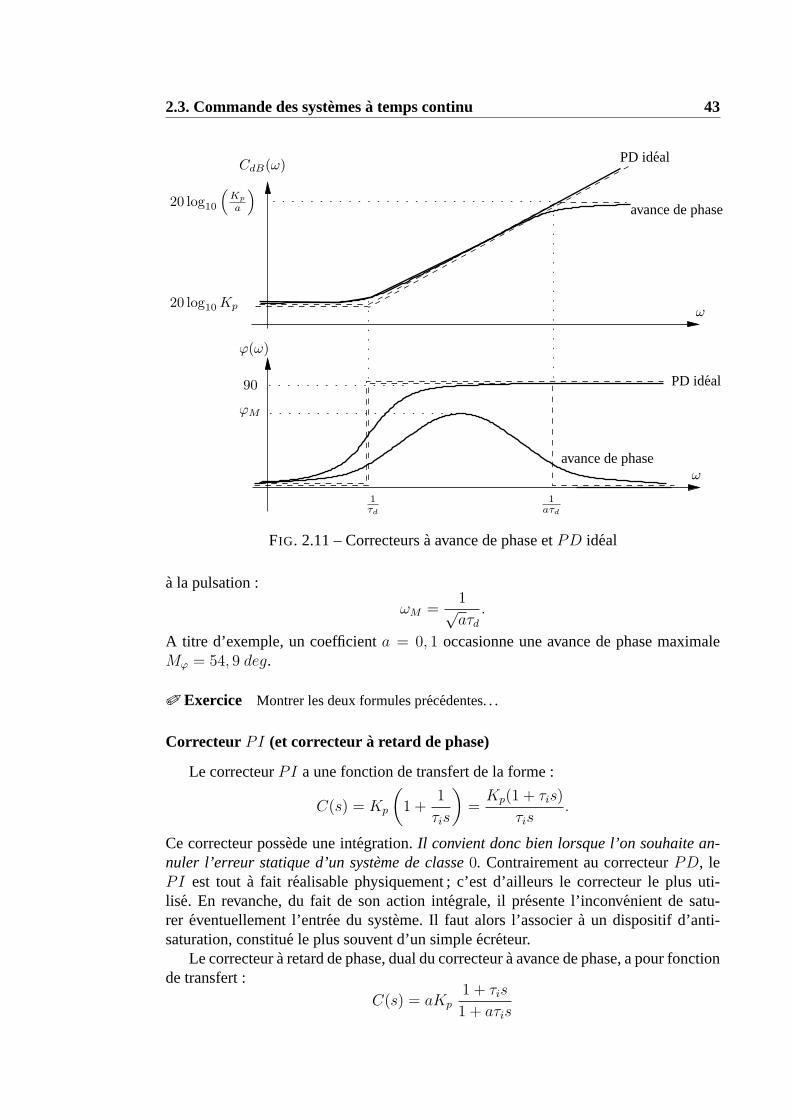
Correcteur a avance de phase (et correcteurPD)
Un correcteura avance de phase a une fonction de transfert de la forme :
C(s) = Kp1 + τds
1 + aτds,
aveca < 1. Il peut etre vu comme un correcteurPD approche, sia 1 : l’action dece correcteur approche en effet celle d’un correcteurPD aux pulsations inferieuresaω = 1
aτd, comme l’illustre la figure 2.11.
L’int eret de ce type de correcteur est d’ajouter de la phase au systeme en boucle ou-verte, dans une certaine bande de frequence. Ceci peut permettre, sous certaines condi-tions, de rendre le systeme stable ou d’augmenter sa marge de phase. Pour cette raisonle correcteura avance de phase se prete biena la correction des systemes peu stables,comme les systemes de classe superieure ouegalea un. On montre que l’avance dephase maximale amenee par le correcteur vaut :
sinϕM =1− a1 + a
,
que le choix des poles et zeros les rendent proches de tel ou tel correcteurPID standard.
2.3. Commande des systemesa temps continu 43
ω
CdB(ω) PD ideal
20 log10
(Kp
a
)
20 log10 Kp
PD ideal
1τd
1aτd
90
ϕM
ω
avance de phase
avance de phase
ϕ(ω)
FIG. 2.11 – Correcteursa avance de phase etPD ideal
a la pulsation :
ωM =1√aτd
.
A titre d’exemple, un coefficienta = 0, 1 occasionne une avance de phase maximaleMϕ = 54, 9 deg.
Exercice Montrer les deux formules precedentes. . .
Correcteur PI (et correcteur a retard de phase)
Le correcteurPI a une fonction de transfert de la forme :
C(s) = Kp
(1 +
1
τis
)=Kp(1 + τis)
τis.
Ce correcteur possede une integration.Il convient donc bien lorsque l’on souhaite an-nuler l’erreur statique d’un systeme de classe0. Contrairement au correcteurPD, lePI est touta fait realisable physiquement ; c’est d’ailleurs le correcteur le plus uti-lise. En revanche, du fait de son action integrale, il presente l’inconvenient de satu-rer eventuellement l’entree du systeme. Il faut alors l’associera un dispositif d’anti-saturation, constitue le plus souvent d’un simpleecreteur.
Le correcteura retard de phase, dual du correcteura avance de phase, a pour fonctionde transfert :
C(s) = aKp1 + τis
1 + aτis
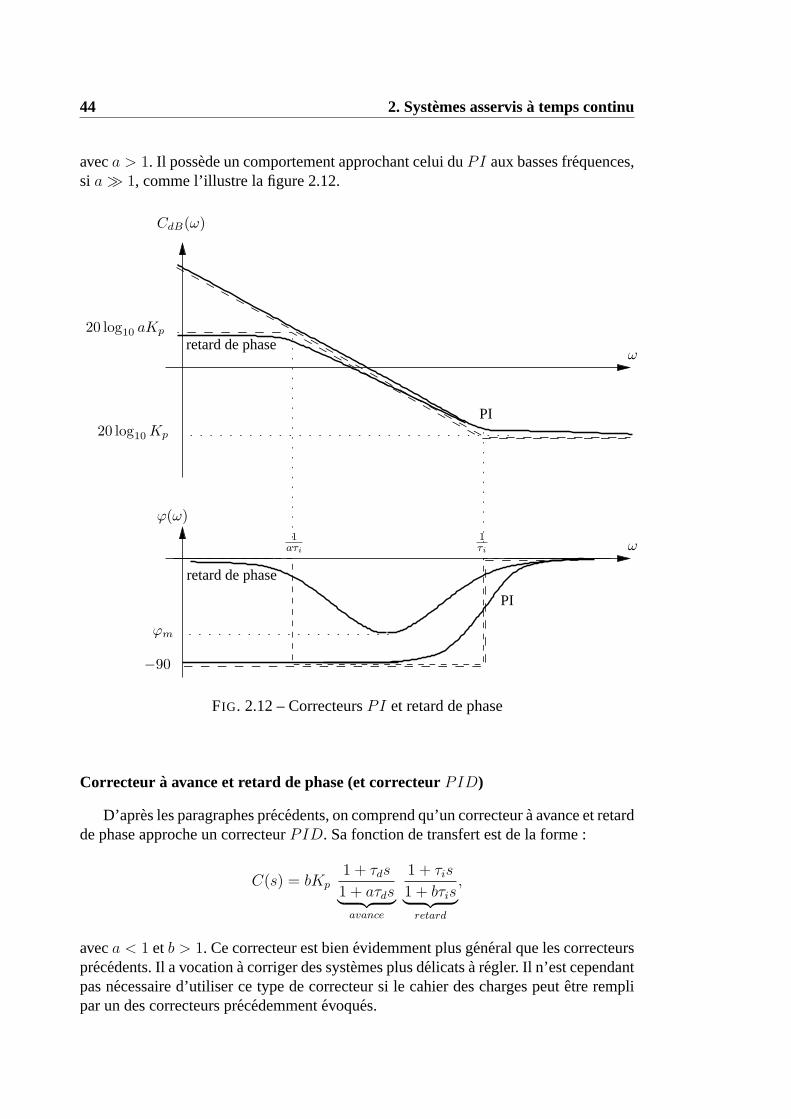
44 2. Systemes asservisa temps continu
aveca > 1. Il possede un comportement approchant celui duPI aux basses frequences,si a 1, comme l’illustre la figure 2.12.
ω
ω
CdB(ω)
ϕm
ϕ(ω)
20 log10 aKp
PI
PI20 log10 Kp
−90
1aτi
1τi
retard de phase
retard de phase
FIG. 2.12 – CorrecteursPI et retard de phase
Correcteur a avance et retard de phase (et correcteurPID)
D’apres les paragraphes precedents, on comprend qu’un correcteura avance et retardde phase approche un correcteurPID. Sa fonction de transfert est de la forme :
C(s) = bKp1 + τds
1 + aτds︸ ︷︷ ︸avance
1 + τis
1 + bτis︸ ︷︷ ︸retard
,
aveca < 1 etb > 1. Ce correcteur est bienevidemment plus general que les correcteursprecedents. Il a vocationa corriger des systemes plus delicatsa regler. Il n’est cependantpas necessaire d’utiliser ce type de correcteur si le cahier des charges peutetre remplipar un des correcteurs precedemmentevoques.
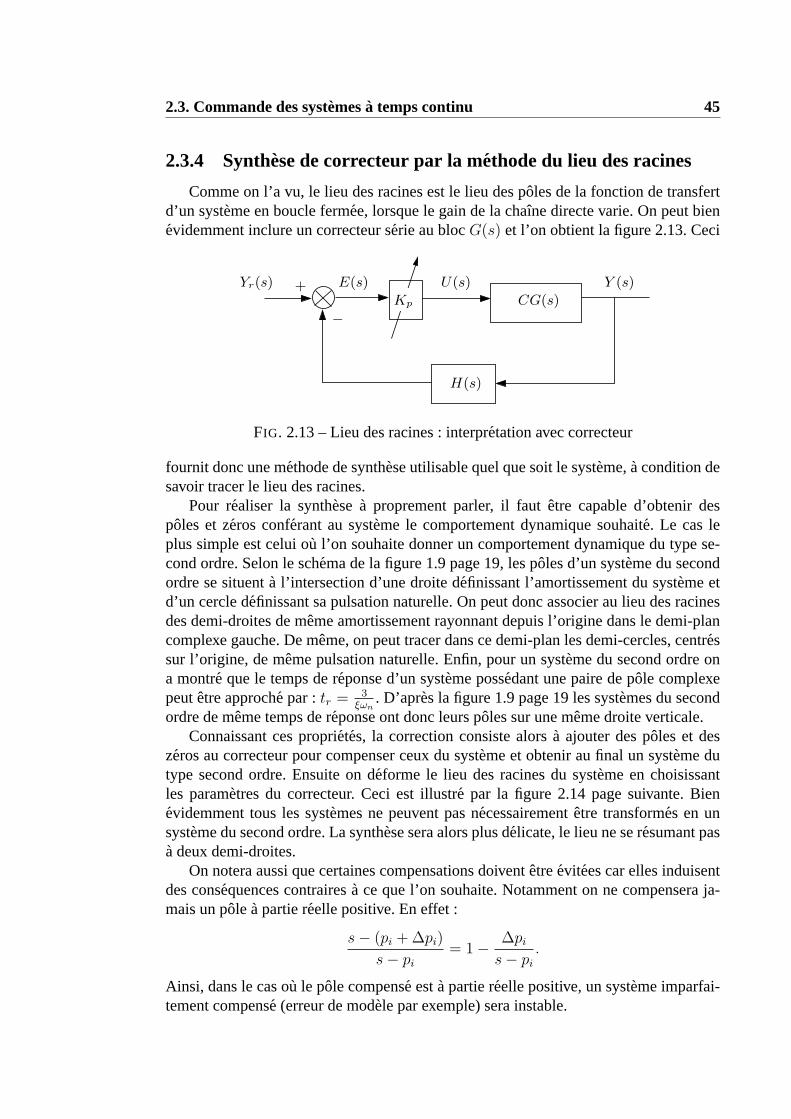
2.3. Commande des systemesa temps continu 45
2.3.4 Synthese de correcteur par la methode du lieu des racines
Comme on l’a vu, le lieu des racines est le lieu des poles de la fonction de transfertd’un systeme en boucle fermee, lorsque le gain de la chaıne directe varie. On peut bienevidemment inclure un correcteur serie au blocG(s) et l’on obtient la figure 2.13. Ceci
+
−
Yr(s) E(s) Y (s)U(s)
H(s)
Kp CG(s)
FIG. 2.13 – Lieu des racines : interpretation avec correcteur
fournit donc une methode de synthese utilisable quel que soit le systeme,a condition desavoir tracer le lieu des racines.
Pour realiser la synthesea proprement parler, il fautetre capable d’obtenir despoles et zeros conferant au systeme le comportement dynamique souhaite. Le cas leplus simple est celui ou l’on souhaite donner un comportement dynamique du type se-cond ordre. Selon le schema de la figure 1.9 page 19, les poles d’un systeme du secondordre se situenta l’intersection d’une droite definissant l’amortissement du systeme etd’un cercle definissant sa pulsation naturelle. On peut donc associer au lieu des racinesdes demi-droites de meme amortissement rayonnant depuis l’origine dans le demi-plancomplexe gauche. De meme, on peut tracer dans ce demi-plan les demi-cercles, centressur l’origine, de meme pulsation naturelle. Enfin, pour un systeme du second ordre ona montre que le temps de reponse d’un systeme possedant une paire de pole complexepeutetre approche par :tr = 3
ξωn. D’apres la figure 1.9 page 19 les systemes du second
ordre de meme temps de reponse ont donc leurs poles sur une meme droite verticale.Connaissant ces proprietes, la correction consiste alorsa ajouter des poles et des
zeros au correcteur pour compenser ceux du systeme et obtenir au final un systeme dutype second ordre. Ensuite on deforme le lieu des racines du systeme en choisissantles parametres du correcteur. Ceci est illustre par la figure 2.14 page suivante. Bienevidemment tous les systemes ne peuvent pas necessairementetre transformes en unsysteme du second ordre. La synthese sera alors plus delicate, le lieu ne se resumant pasa deux demi-droites.
On notera aussi que certaines compensations doiventetreevitees car elles induisentdes consequences contrairesa ce que l’on souhaite. Notamment on ne compensera ja-mais un pole a partie reelle positive. En effet :
s− (pi + ∆pi)
s− pi
= 1− ∆pi
s− pi
.
Ainsi, dans le cas ou le pole compense esta partie reelle positive, un systeme imparfai-tement compense (erreur de modele par exemple) sera instable.
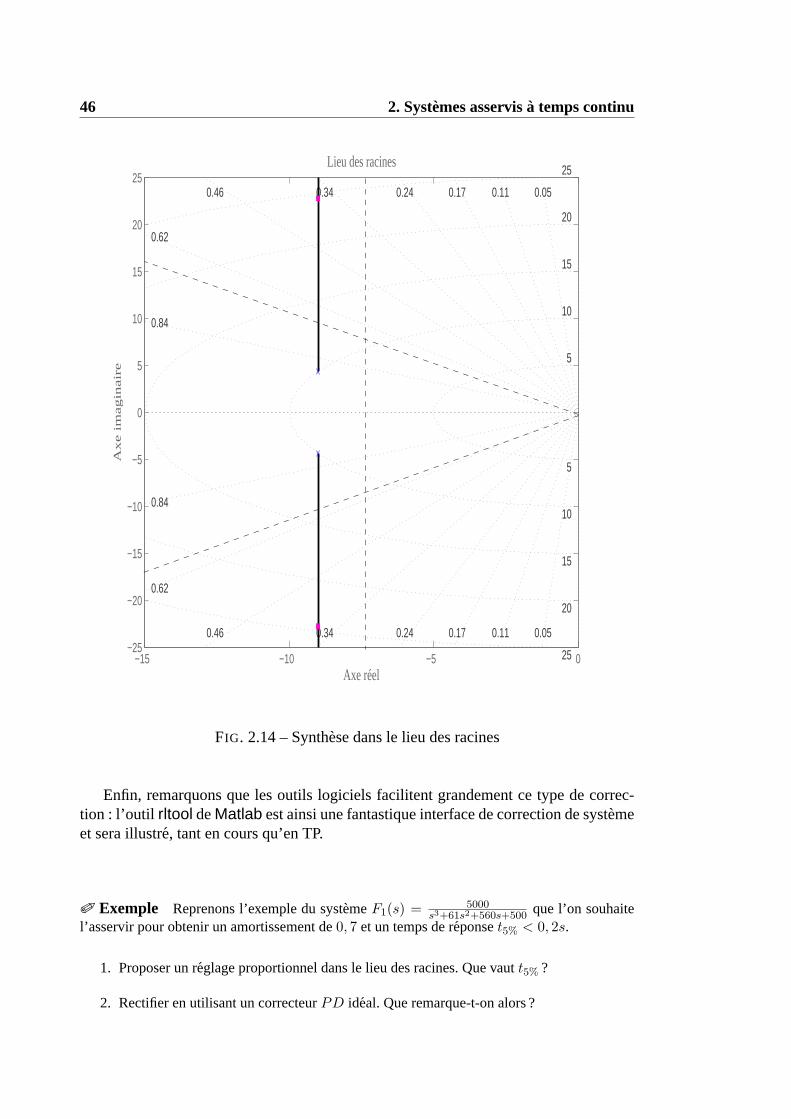
46 2. Systemes asservisa temps continu
−15 −10 −5 0−25
−20
−15
−10
−5
0
5
10
15
20
250.050.110.170.240.340.46
0.62
0.84
0.050.110.170.240.340.46
0.62
0.84
5
10
15
20
25
5
10
15
20
25
Lieu des racines
Axe réel
Axe
im
ag
ina
ire
FIG. 2.14 – Synthese dans le lieu des racines
Enfin, remarquons que les outils logiciels facilitent grandement ce type de correc-tion : l’outil rltool deMatlab est ainsi une fantastique interface de correction de systemeet sera illustre, tant en cours qu’en TP.
Exemple Reprenons l’exemple du systemeF1(s) = 5000s3+61s2+560s+500
que l’on souhaitel’asservir pour obtenir un amortissement de0, 7 et un temps de reponset5% < 0, 2s.
1. Proposer un reglage proportionnel dans le lieu des racines. Que vautt5% ?
2. Rectifier en utilisant un correcteurPD ideal. Que remarque-t-on alors ?

2.3. Commande des systemesa temps continu 47
2.3.5 Methodes harmoniques
Correction PI
On peut aisement regler un correcteurPI :
C(s) = Kp
(1 +
1
τis
)=Kp(1 + τis)
τis
en utilisant le diagramme de Bode.On considere pour simplifier que le systeme est de classe zero et possede deux poles
reels5, associes aux constantes de tempsτ1 etτ2, avecτ1 τ2. On choisit de compenserle pole dominant par le zero du correcteurPI, soit :
τi = τ1.
Le diagramme de Bode asymptotique du systeme corrige est represente schematiquementa la figure 2.15. Pour le reglage du correcteurPI, il est alors interessant de specifier lescontraintes du cahier des charges en termes de marge de phase desireeMϕ, typiquementde45 deg. Soitωc la pulsationa laquelle le systeme a pour phase−180 +Mϕ. Il suffitalors d’ajuster le gainKp pour que le gain endB soit nula la pulsationωc.
Correction a avance de phase
On s’interesse au reglage d’un correcteura avance de phase en utilisant le dia-gramme de Bode. Le correcteur a pour fonction de transfert :
C(s) = Kp1 + τds
1 + aτds
aveca < 1.On suppose que le systeme est de classe 1 et possede un pole reel6, associe a la
constante de tempsτ1. La methode presentee ici est exacte. Celle-ci necessite que lacontrainte de rapidite du systeme soit transformee en une contrainte de bande passante,si ce n’est deja le cas. Soitωc la bande passante desiree pour le systeme. Le reglageconsistea apporter le maximum d’avance de phasea cette pulsation. Ceci impliquedonc que :
ωM = ωc.
La contrainte de stabilite doit alorsetre exprimee en termes de marge de phase et l’onchoisit :
a =1− sinMϕ
1 + sinMϕ
,
pour que l’avance apportee permette au systeme d’avoir la marge de phase desiree.Enfin, on regleKp pour que le gain du systeme en boucle ouverte vaille 1a la pulsationωc. Ceci est represente a la figure 2.16.
5Outre le fait de simplifier, c’est le type de systeme pour lequel la correctionPI est adaptee, commeon l’a vu au paragraphe 2.3.3 page 42.
6Idem.
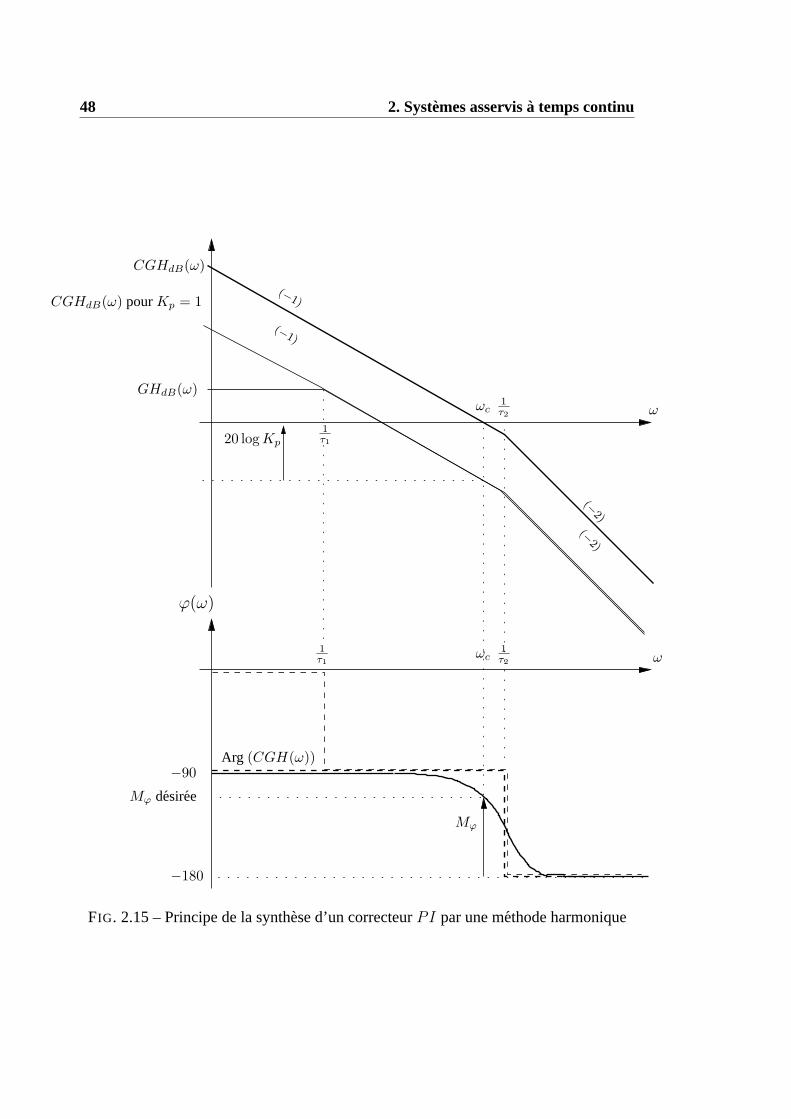
48 2. Systemes asservisa temps continu
ωωc
ϕ(ω)
−90
−180
Mϕ
1τ1
1τ2
ωc
CGHdB(ω)
GHdB(ω)1τ2
(−1)
ω
(−1)
CGHdB(ω) pourKp = 1
20 log Kp
Arg (CGH(ω))
Mϕ desiree
1τ1
(−2)
(−2)
FIG. 2.15 – Principe de la synthese d’un correcteurPI par une methode harmonique
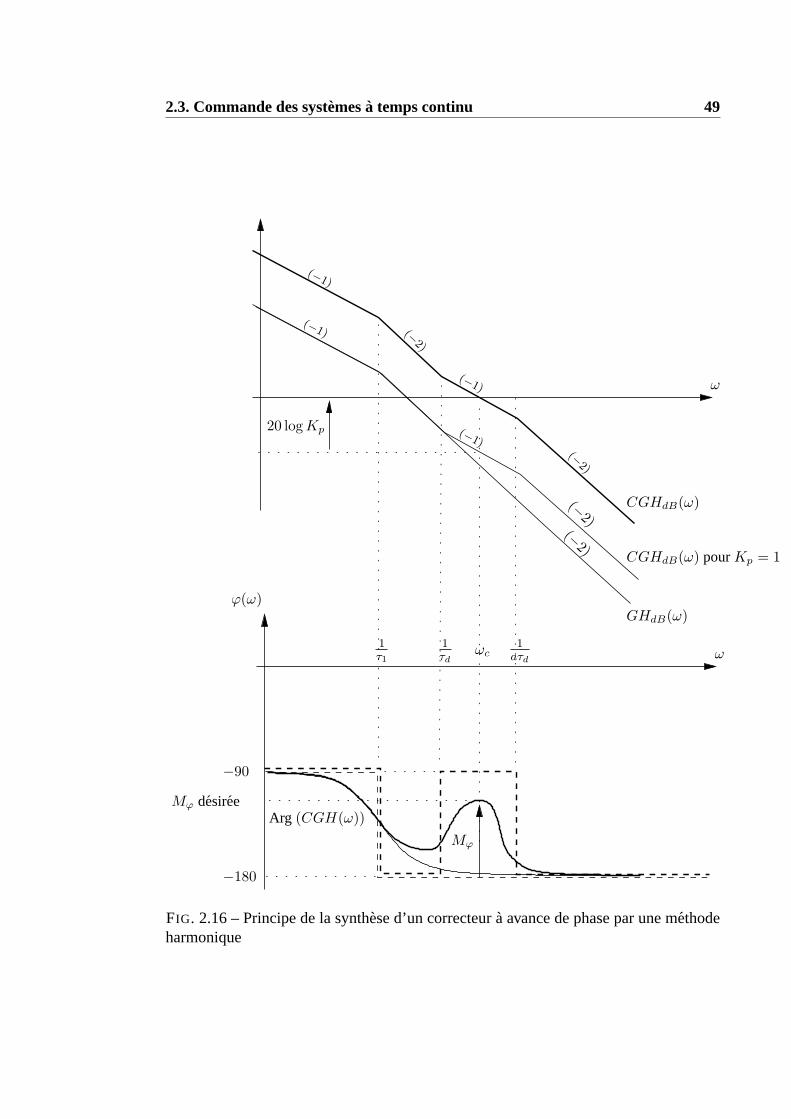
2.3. Commande des systemesa temps continu 49
ω(−1)
(−1)
(−1)
(−1)
ϕ(ω)
−90
−180
20 log Kp
Arg (CGH(ω))Mϕ
Mϕ desiree
CGHdB(ω)
ω
(−2)
(−2)
(−2)(−2)
CGHdB(ω) pourKp = 1
GHdB(ω)
1τ1
1τd
ωc1
aτd
FIG. 2.16 – Principe de la synthese d’un correcteura avance de phase par une methodeharmonique
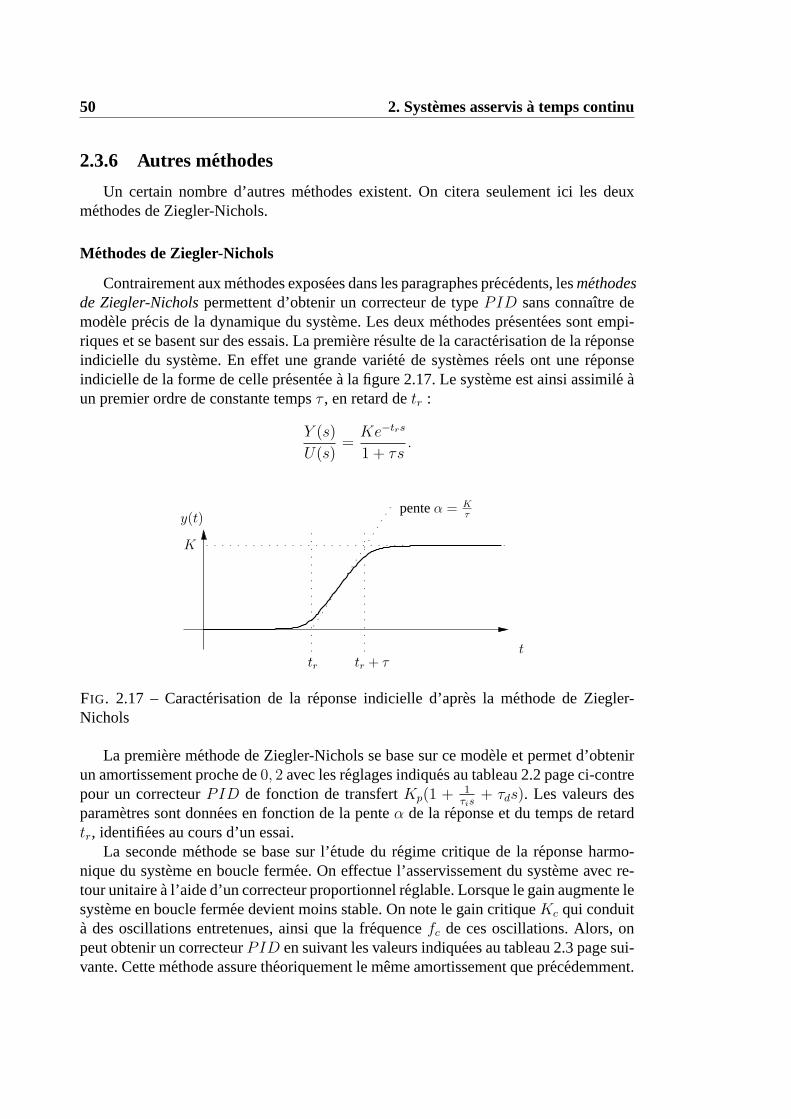
50 2. Systemes asservisa temps continu
2.3.6 Autres methodes
Un certain nombre d’autres methodes existent. On citera seulement ici les deuxmethodes de Ziegler-Nichols.
Methodes de Ziegler-Nichols
Contrairement aux methodes exposees dans les paragraphes precedents, lesmethodesde Ziegler-Nicholspermettent d’obtenir un correcteur de typePID sans connaıtre demodele precis de la dynamique du systeme. Les deux methodes presentees sont empi-riques et se basent sur des essais. La premiere resulte de la caracterisation de la reponseindicielle du systeme. En effet une grande variete de systemes reels ont une reponseindicielle de la forme de celle presenteea la figure 2.17. Le systeme est ainsi assimile aun premier ordre de constante tempsτ , en retard detr :
Y (s)
U(s)=Ke−trs
1 + τs.
t
K
y(t)
tr + τ
penteα = Kτ
tr
FIG. 2.17 – Caracterisation de la reponse indicielle d’apres la methode de Ziegler-Nichols
La premiere methode de Ziegler-Nichols se base sur ce modele et permet d’obtenirun amortissement proche de0, 2 avec les reglages indiques au tableau 2.2 page ci-contrepour un correcteurPID de fonction de transfertKp(1 + 1
τis+ τds). Les valeurs des
parametres sont donnees en fonction de la penteα de la reponse et du temps de retardtr, identifiees au cours d’un essai.
La seconde methode se base sur l’etude du regime critique de la reponse harmo-nique du systeme en boucle fermee. On effectue l’asservissement du systeme avec re-tour unitairea l’aide d’un correcteur proportionnel reglable. Lorsque le gain augmente lesysteme en boucle fermee devient moins stable. On note le gain critiqueKc qui conduita des oscillations entretenues, ainsi que la frequencefc de ces oscillations. Alors, onpeut obtenir un correcteurPID en suivant les valeurs indiquees au tableau 2.3 page sui-vante. Cette methode assure theoriquement le meme amortissement que precedemment.
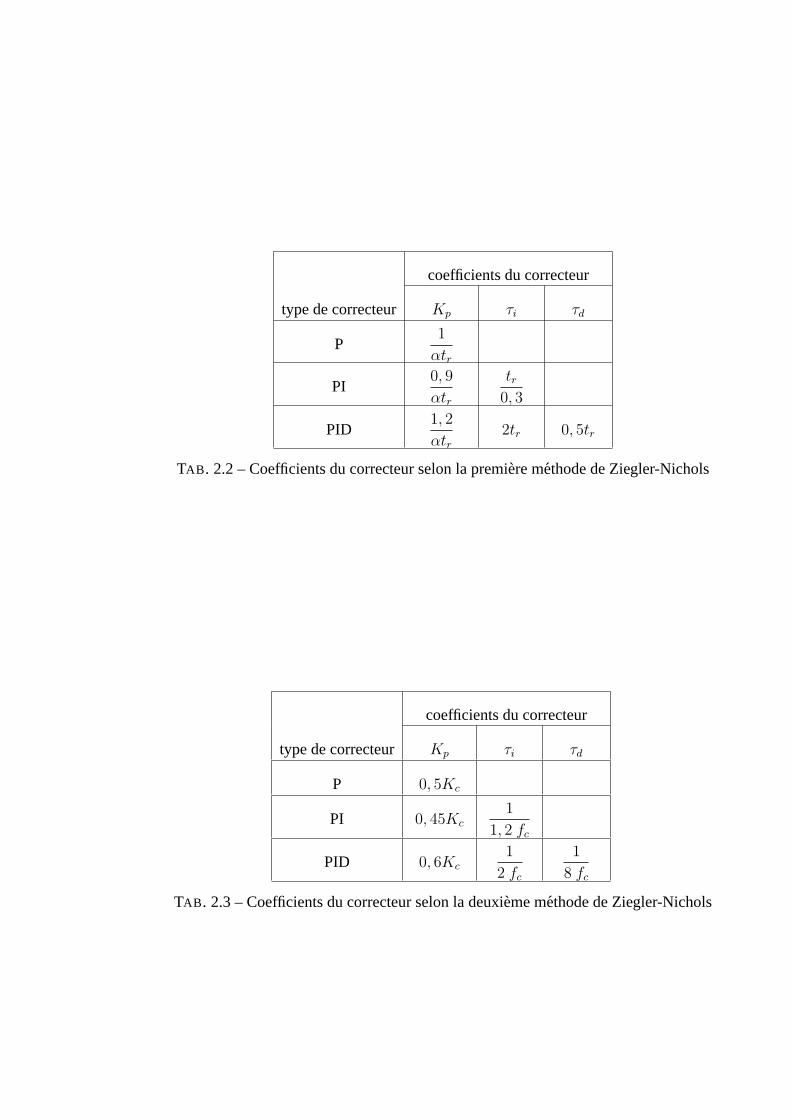
coefficients du correcteur
type de correcteur Kp τi τd
P1
αtr
PI0, 9
αtr
tr0, 3
PID1, 2
αtr2tr 0, 5tr
TAB . 2.2 – Coefficients du correcteur selon la premiere methode de Ziegler-Nichols
coefficients du correcteur
type de correcteur Kp τi τd
P 0, 5Kc
PI 0, 45Kc1
1, 2 fc
PID 0, 6Kc1
2 fc
1
8 fc
TAB . 2.3 – Coefficients du correcteur selon la deuxieme methode de Ziegler-Nichols

Partie II
Systemes et asservissementsa tempsdiscret
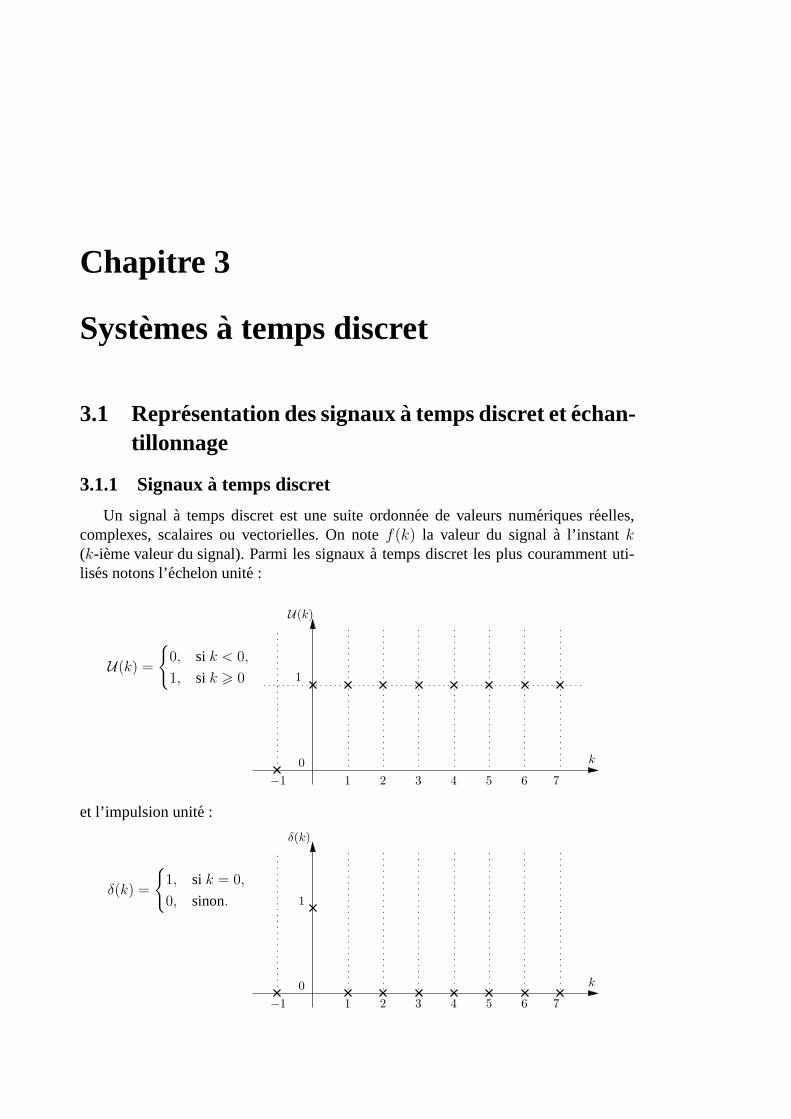
Chapitre 3
Systemesa temps discret
3.1 Representation des signauxa temps discret etechan-tillonnage
3.1.1 Signauxa temps discret
Un signal a temps discret est une suite ordonnee de valeurs numeriques reelles,complexes, scalaires ou vectorielles. On notef(k) la valeur du signala l’instant k(k-ieme valeur du signal). Parmi les signauxa temps discret les plus couramment uti-lises notons l’echelon unite :
1−1 2 3 4 5 6
U(k)
07
k
U(k) =
0, si k < 0,
1, si k > 0 1
et l’impulsion unite :
1−1 2 3 4 5 60
1
7
k
δ(k) =
1, si k = 0,
0, sinon.
δ(k)

3.1. Representation des signauxa temps discret etechantillonnage 55
Par souci de simplicite et par analogie avec le temps continu, on noteraf(k) le signalatemps discret, c’est-a-dire l’ensemble des valeurs prises.
3.1.2 Echantillonnage ideal
Soitf(t) un signala temps continu. On appellesignalechantillonne ideal le signala temps continu issu def(t), defini par :
f ∗(t) =+∞∑
k=−∞
f(kTe)δ(t− kTe) (3.1)
ou δ(t) represente l’impulsion de Dirac1, definiea la section 1.2. Ce signal est un objetmathematique dont le role est d’etudier les proprietes spectrales de l’echantillonnage dusignala temps continuf(t). La definition (3.1) peut encore s’ecrire :
f ∗(t) =+∞∑
k=−∞
f(t)δ(t− kTe),
soit :
f ∗(t) = f(t)+∞∑
k=−∞
δ(t− kTe).
Le signalechantillonne ideal est donc constitue d’un peigne d’impulsions de Dirac (si-gnal periodique non causal) :
δTe(t) =+∞∑
k=−∞
δ(t− kTe),
de periodeTe, module en amplitude par le signalf(t). Il contient les informationsnecessairesa la caracterisation de l’operation d’echantillonnage : instants d’echantil-lonnage et quantification du signal.
Le choix du signalechantillonne ideal pour representer l’operation d’echantillonnagen’est evidemment pas le fruit du hasard. En effet, on peut considerer l’echantillonnagecomme le prelevement, aux instantst = kTe, de la valeur du signal continu. On peutdonc representer cette operation de maniere assez realiste par la modulation en ampli-tude du signala temps continu par un signal periodiquemod(t) de periodeTe, constituede fenetres rectangulaires de largeurTw et d’amplitude unite, comme indique a la figure3.1 [Nise 04]. Lesignalechantillonne reels’exprime alors par :
fm(t) = f(t) mod(t) = f(t)+∞∑
k=−∞
U(t− kTe)− U(t− kTe − Tw).
1Attention, l’impulsion discrete (signala temps discret) et l’impulsion de Dirac (signala tempscontinu) sont traditionnellement representees par le meme symboleδ. Cela est notamment du a cer-taines analogies. Neanmoins il n’y a aucune correspondance entre ces signaux. En particulier l’impulsiondiscrete ne provient absolument pas de l’echantillonnage de l’impulsion de Dirac.
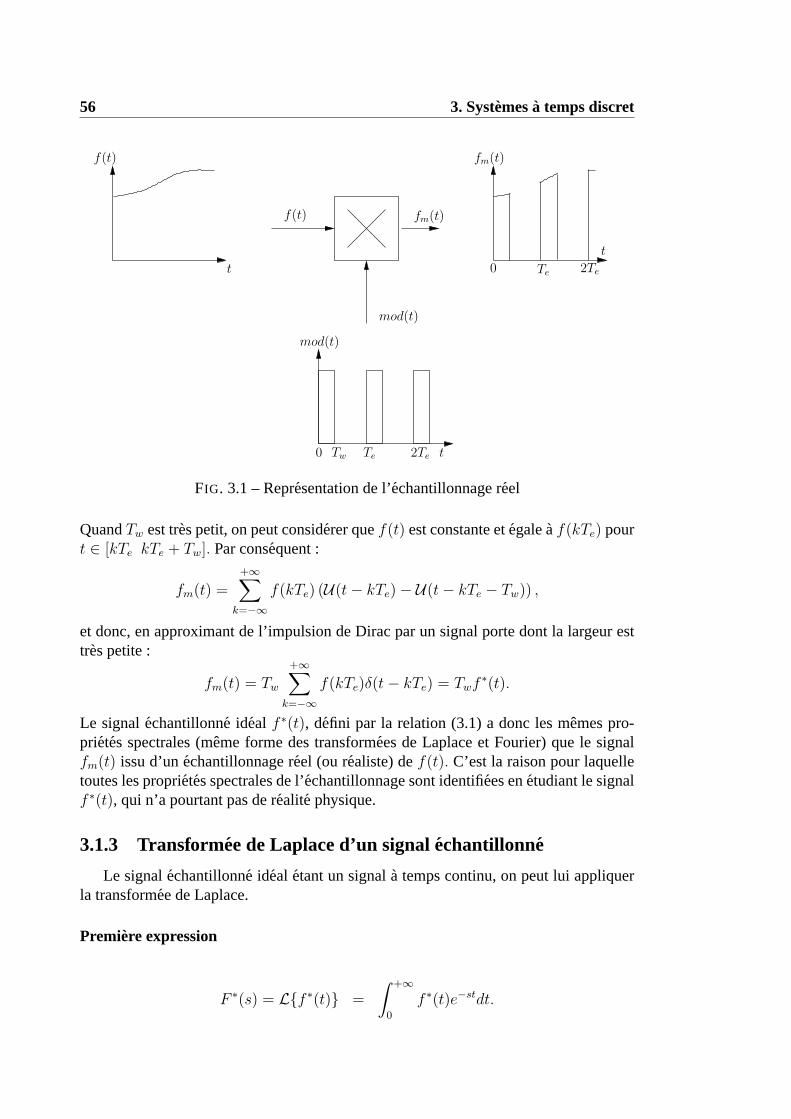
56 3. Systemesa temps discret
tTw
0t
f(t)
f(t)
0
t
mod(t)
mod(t)
fm(t)
fm(t)
Te 2Te
Te 2Te
FIG. 3.1 – Representation de l’echantillonnage reel
QuandTw est tres petit, on peut considerer quef(t) est constante etegaleaf(kTe) pourt ∈ [kTe kTe + Tw]. Par consequent :
fm(t) =+∞∑
k=−∞
f(kTe) (U(t− kTe)− U(t− kTe − Tw)) ,
et donc, en approximant de l’impulsion de Dirac par un signal porte dont la largeur esttres petite :
fm(t) = Tw
+∞∑k=−∞
f(kTe)δ(t− kTe) = Twf∗(t).
Le signalechantillonne ideal f ∗(t), defini par la relation (3.1) a donc les memes pro-prietes spectrales (meme forme des transformees de Laplace et Fourier) que le signalfm(t) issu d’unechantillonnage reel (ou realiste) def(t). C’est la raison pour laquelletoutes les proprietes spectrales de l’echantillonnage sont identifiees enetudiant le signalf ∗(t), qui n’a pourtant pas de realite physique.
3.1.3 Transformee de Laplace d’un signalechantillonne
Le signalechantillonne ideal etant un signala temps continu, on peut lui appliquerla transformee de Laplace.
Premiere expression
F ∗(s) = Lf ∗(t) =
∫ +∞
0
f ∗(t)e−stdt.

3.1. Representation des signauxa temps discret etechantillonnage 57
On remarque que sif(t) est causal, la somme (3.1) se ramenea une somme pourk ∈[0 +∞[. Alors, il vient :
F ∗(s) =
∫ +∞
0
(+∞∑k=0
f(kTe)δ(t− kTe)
)e−stdt,
=+∞∑k=0
f(kTe)
(∫ +∞
0
δ(t− kTe)e−stdt
).
Comme : ∫ +∞
0
δ(t− kTe)e−stdt =
e−kTes, si k > 0,
0, sinon,
on obtient finalement :
F ∗(s) =+∞∑k=0
f(kTe)e−kTes. (3.2)
Deuxieme expression
On peut obtenir une autre expression de la transformee de Laplace du signalechan-tillonne ideal en utilisant le fait que le peigne de DiracδTe(t), signal periodique deperiodeTe, est decomposable en serie de Fourier :
δTe(t) =+∞∑
k=−∞
cke2jπkt
Te ,
avec :
ck =1
Te
∫ Te2
−Te2
δTe(t)e−2jπkt
Te dt =1
Te
.
Comme :
f ∗(t) = f(t)δTe(t),
= f(t)+∞∑
k=−∞
1
Te
e2jπkt
Te ,
=1
Te
+∞∑k=−∞
f(t)e2jπkt
Te .
Alors :
F ∗(s) =
∫ +∞
0
(1
Te
+∞∑k=−∞
f(t)e2jπkt
Te
)e−stdt,
=1
Te
+∞∑k=−∞
(∫ +∞
0
f(t)e−(s− 2jπkTe
)tdt
),
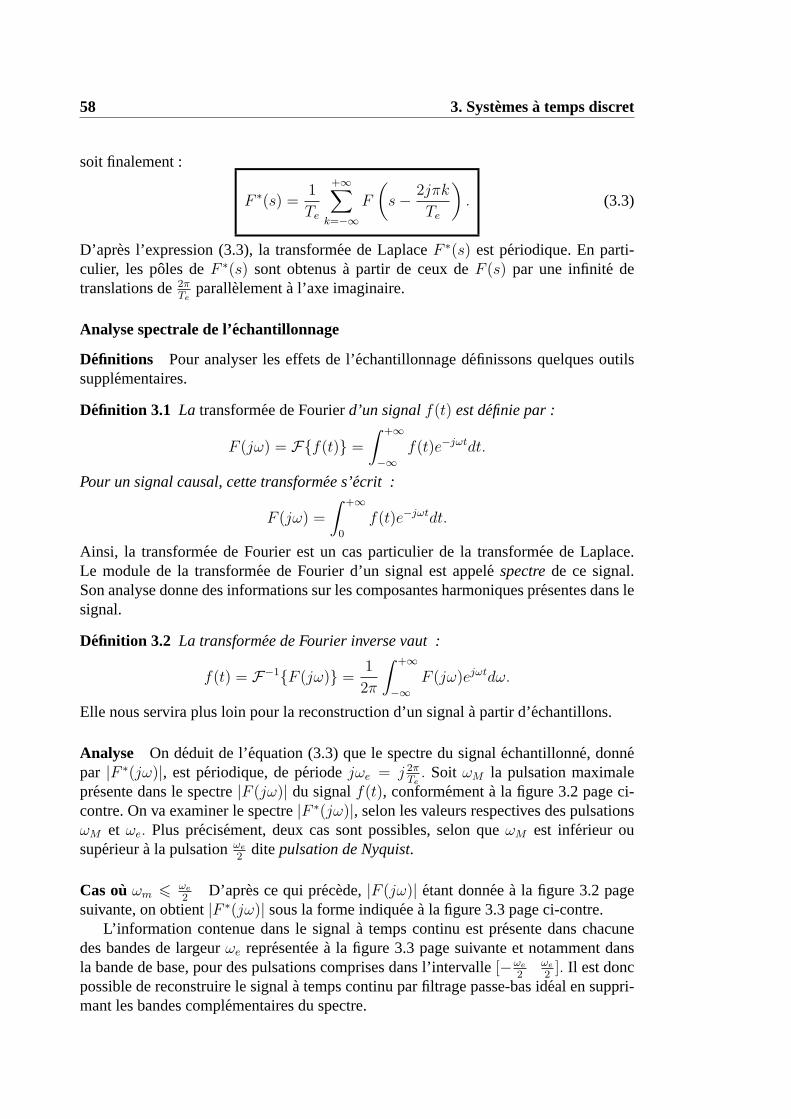
58 3. Systemesa temps discret
soit finalement :
F ∗(s) =1
Te
+∞∑k=−∞
F
(s− 2jπk
Te
). (3.3)
D’apres l’expression (3.3), la transformee de LaplaceF ∗(s) est periodique. En parti-culier, les poles deF ∗(s) sont obtenusa partir de ceux deF (s) par une infinite detranslations de2π
Teparallelementa l’axe imaginaire.
Analyse spectrale de l’echantillonnage
Definitions Pour analyser les effets de l’echantillonnage definissons quelques outilssupplementaires.
Definition 3.1 La transformee de Fourierd’un signalf(t) est definie par :
F (jω) = Ff(t) =
∫ +∞
−∞f(t)e−jωtdt.
Pour un signal causal, cette transformee s’ecrit :
F (jω) =
∫ +∞
0
f(t)e−jωtdt.
Ainsi, la transformee de Fourier est un cas particulier de la transformee de Laplace.Le module de la transformee de Fourier d’un signal est appele spectrede ce signal.Son analyse donne des informations sur les composantes harmoniques presentes dans lesignal.
Definition 3.2 La transformee de Fourier inverse vaut :
f(t) = F−1F (jω) =1
2π
∫ +∞
−∞F (jω)ejωtdω.
Elle nous servira plus loin pour la reconstruction d’un signala partir d’echantillons.
Analyse On deduit de l’equation (3.3) que le spectre du signalechantillonne, donnepar |F ∗(jω)|, est periodique, de periodejωe = j 2π
Te. Soit ωM la pulsation maximale
presente dans le spectre|F (jω)| du signalf(t), conformementa la figure 3.2 page ci-contre. On va examiner le spectre|F ∗(jω)|, selon les valeurs respectives des pulsationsωM et ωe. Plus precisement, deux cas sont possibles, selon queωM est inferieur ousuperieura la pulsationωe
2ditepulsation de Nyquist.
Cas ou ωm 6 ωe
2D’apres ce qui precede,|F (jω)| etant donneea la figure 3.2 page
suivante, on obtient|F ∗(jω)| sous la forme indiqueea la figure 3.3 page ci-contre.L’information contenue dans le signala temps continu est presente dans chacune
des bandes de largeurωe representeea la figure 3.3 page suivante et notamment dansla bande de base, pour des pulsations comprises dans l’intervalle[−ωe
2ωe
2]. Il est donc
possible de reconstruire le signala temps continu par filtrage passe-bas ideal en suppri-mant les bandes complementaires du spectre.
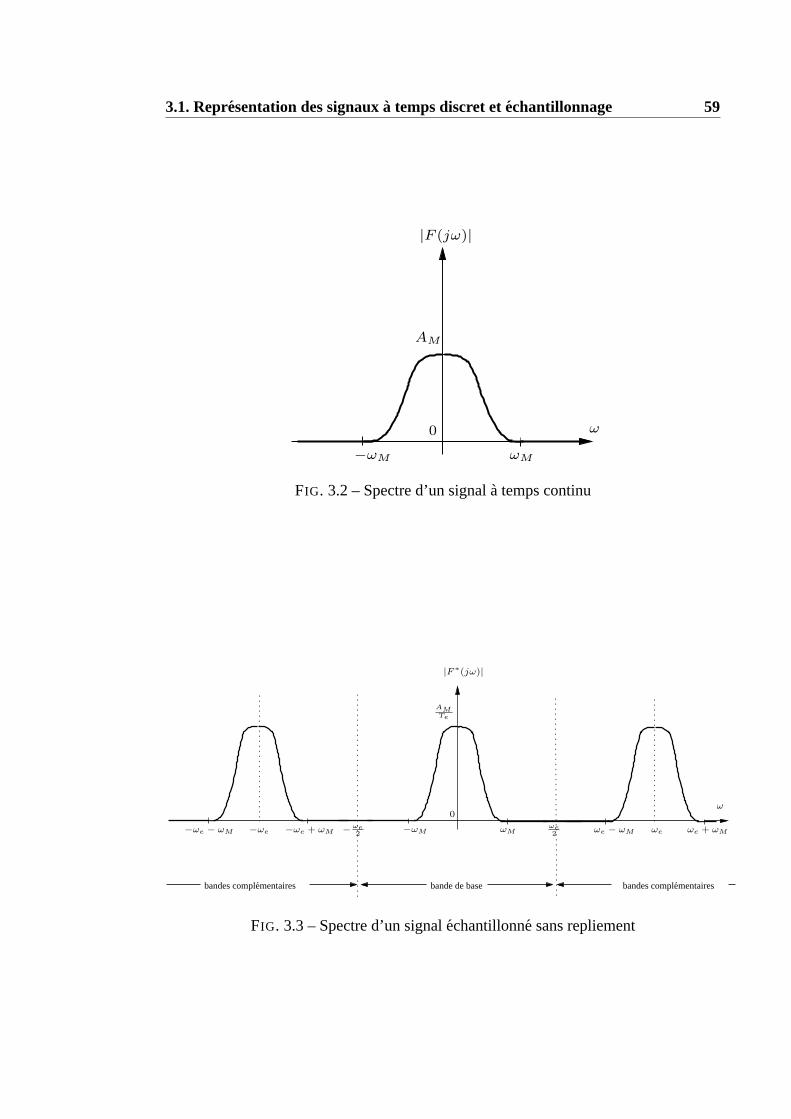
3.1. Representation des signauxa temps discret etechantillonnage 59
ω
ωM−ωM
0
|F (jω)|
AM
FIG. 3.2 – Spectre d’un signala temps continu
−ωe2 ωM−ωM
0
ωe − ωM ωe + ωMωe2−ωe + ωM−ωe−ωe − ωM ωe
bande de base bandes complementairesbandes complementaires
ω
AMTe
|F∗(jω)|
FIG. 3.3 – Spectre d’un signalechantillonne sans repliement
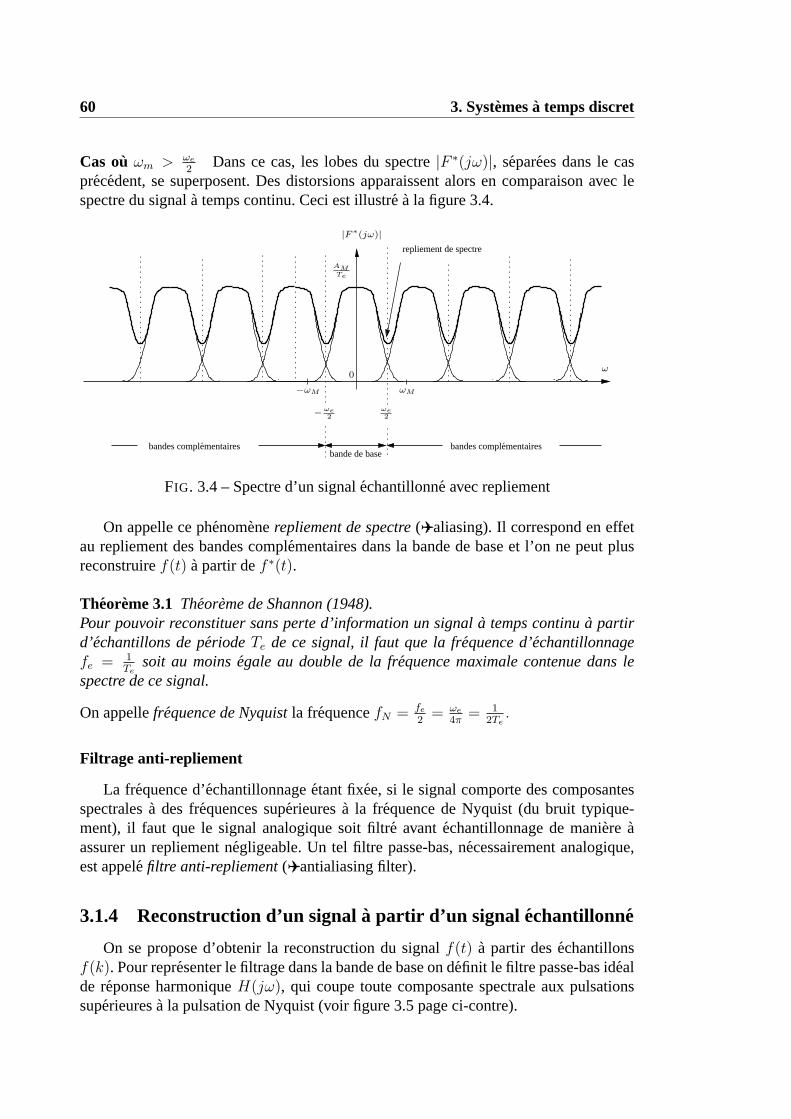
60 3. Systemesa temps discret
Cas ou ωm > ωe
2Dans ce cas, les lobes du spectre|F ∗(jω)|, separees dans le cas
precedent, se superposent. Des distorsions apparaissent alors en comparaison avec lespectre du signala temps continu. Ceci est illustre a la figure 3.4.
0
bande de basebandes complementaires bandes complementaires
ωM
ω
AMTe
ωe2−ωe
2
repliement de spectre
|F∗(jω)|
−ωM
FIG. 3.4 – Spectre d’un signalechantillonne avec repliement
On appelle ce phenomenerepliement de spectre(aliasing). Il correspond en effetau repliement des bandes complementaires dans la bande de base et l’on ne peut plusreconstruiref(t) a partir def ∗(t).
Theoreme 3.1Theoreme de Shannon (1948).Pour pouvoir reconstituer sans perte d’information un signala temps continua partird’echantillons de periodeTe de ce signal, il faut que la frequence d’echantillonnagefe = 1
Tesoit au moinsegale au double de la frequence maximale contenue dans le
spectre de ce signal.
On appellefrequence de Nyquistla frequencefN = fe
2= ωe
4π= 1
2Te.
Filtrage anti-repliement
La frequence d’echantillonnageetant fixee, si le signal comporte des composantesspectralesa des frequences superieuresa la frequence de Nyquist (du bruit typique-ment), il faut que le signal analogique soit filtre avantechantillonnage de maniere aassurer un repliement negligeable. Un tel filtre passe-bas, necessairement analogique,est appelefiltre anti-repliement(antialiasing filter).
3.1.4 Reconstruction d’un signala partir d’un signal echantillonne
On se propose d’obtenir la reconstruction du signalf(t) a partir desechantillonsf(k). Pour representer le filtrage dans la bande de base on definit le filtre passe-bas idealde reponse harmoniqueH(jω), qui coupe toute composante spectrale aux pulsationssuperieuresa la pulsation de Nyquist (voir figure 3.5 page ci-contre).
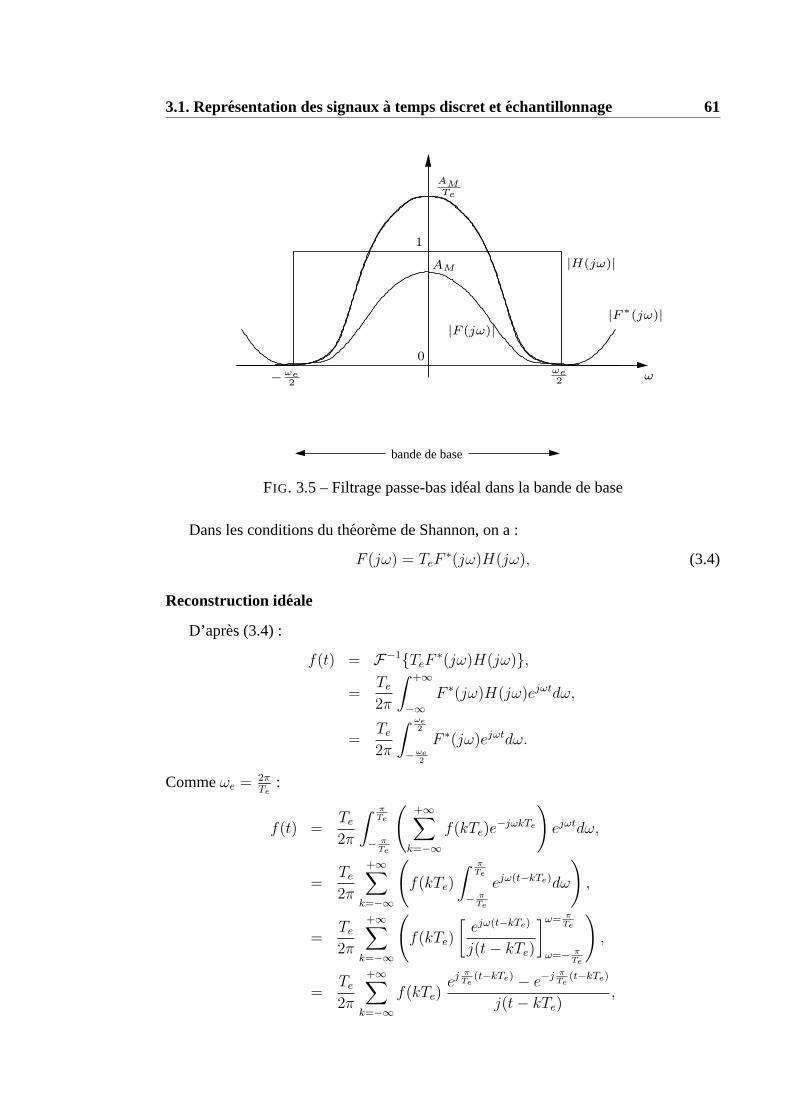
3.1. Representation des signauxa temps discret etechantillonnage 61
−ωe2
ωe2
0
bande de base
|H(jω)|
|F∗(jω)|
AMTe
AM
ω
1
|F (jω)|
FIG. 3.5 – Filtrage passe-bas ideal dans la bande de base
Dans les conditions du theoreme de Shannon, on a :
F (jω) = TeF∗(jω)H(jω), (3.4)
Reconstruction ideale
D’apres (3.4) :
f(t) = F−1TeF∗(jω)H(jω),
=Te
2π
∫ +∞
−∞F ∗(jω)H(jω)ejωtdω,
=Te
2π
∫ ωe2
−ωe2
F ∗(jω)ejωtdω.
Commeωe = 2πTe
:
f(t) =Te
2π
∫ πTe
− πTe
(+∞∑
k=−∞
f(kTe)e−jωkTe
)ejωtdω,
=Te
2π
+∞∑k=−∞
(f(kTe)
∫ πTe
− πTe
ejω(t−kTe)dω
),
=Te
2π
+∞∑k=−∞
(f(kTe)
[ejω(t−kTe)
j(t− kTe)
]ω= πTe
ω=− πTe
),
=Te
2π
+∞∑k=−∞
f(kTe)ej π
Te(t−kTe) − e−j π
Te(t−kTe)
j(t− kTe),
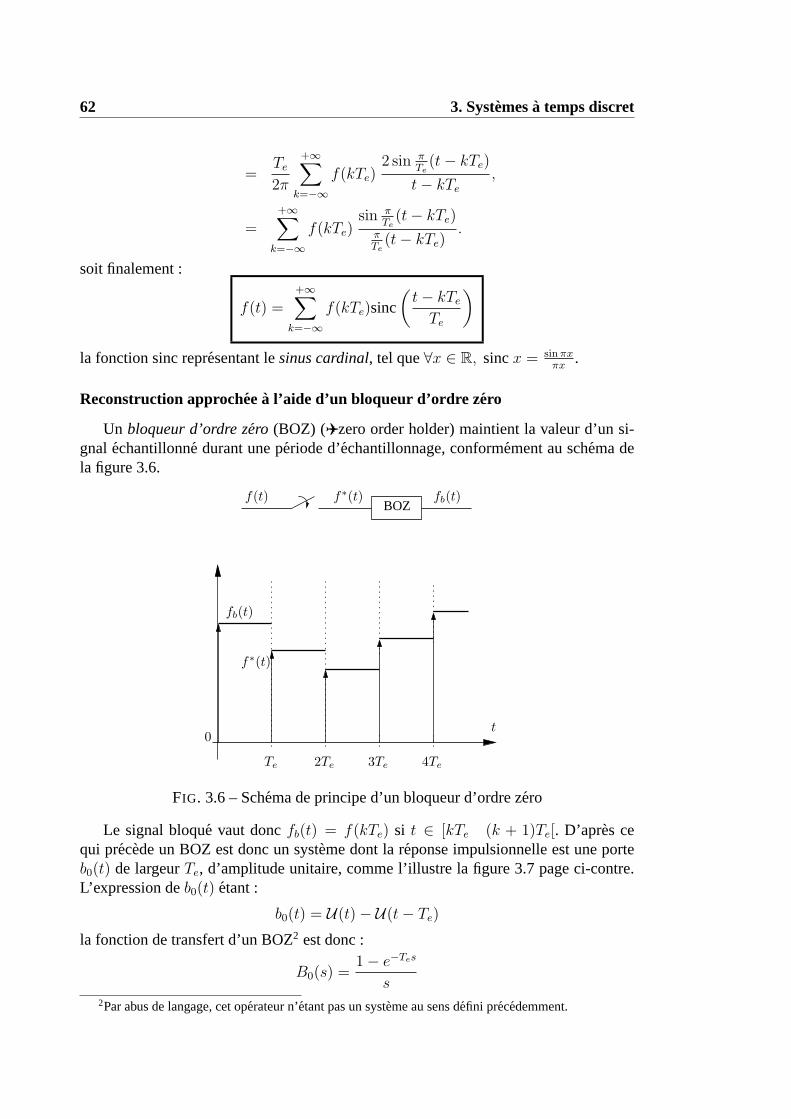
62 3. Systemesa temps discret
=Te
2π
+∞∑k=−∞
f(kTe)2 sin π
Te(t− kTe)
t− kTe
,
=+∞∑
k=−∞
f(kTe)sin π
Te(t− kTe)
πTe
(t− kTe).
soit finalement :
f(t) =+∞∑
k=−∞
f(kTe)sinc
(t− kTe
Te
)la fonction sinc representant lesinus cardinal, tel que∀x ∈ R, sincx = sin πx
πx.
Reconstruction approcheea l’aide d’un bloqueur d’ordre z ero
Un bloqueur d’ordre zero (BOZ) (zero order holder) maintient la valeur d’un si-gnal echantillonne durant une periode d’echantillonnage, conformement au schema dela figure 3.6.
0
fb(t)f(t)BOZ
t
Te 2Te 3Te 4Te
fb(t)
f∗(t)
f∗(t)
FIG. 3.6 – Schema de principe d’un bloqueur d’ordre zero
Le signal bloque vaut doncfb(t) = f(kTe) si t ∈ [kTe (k + 1)Te[. D’apres cequi precede un BOZ est donc un systeme dont la reponse impulsionnelle est une porteb0(t) de largeurTe, d’amplitude unitaire, comme l’illustre la figure 3.7 page ci-contre.L’expression deb0(t) etant :
b0(t) = U(t)− U(t− Te)
la fonction de transfert d’un BOZ2 est donc :
B0(s) =1− e−Tes
s2Par abus de langage, cet operateur n’etant pas un systeme au sens defini precedemment.
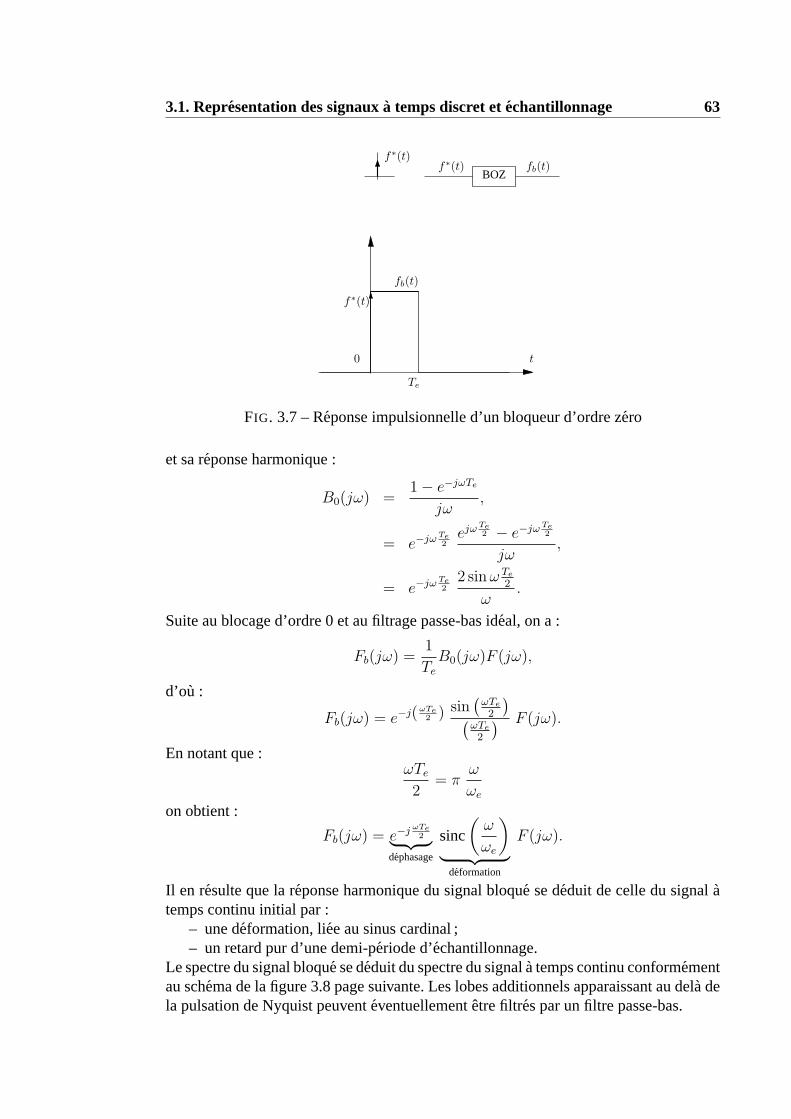
3.1. Representation des signauxa temps discret etechantillonnage 63
Te
0 t
fb(t)
fb(t)BOZ
f∗(t)f∗(t)
f∗(t)
FIG. 3.7 – Reponse impulsionnelle d’un bloqueur d’ordre zero
et sa reponse harmonique :
B0(jω) =1− e−jωTe
jω,
= e−jω Te2ejω Te
2 − e−jω Te2
jω,
= e−jω Te2
2 sinω Te
2
ω.
Suite au blocage d’ordre 0 et au filtrage passe-bas ideal, on a :
Fb(jω) =1
Te
B0(jω)F (jω),
d’ou :
Fb(jω) = e−j(ωTe2 ) sin
(ωTe
2
)(ωTe
2
) F (jω).
En notant que :ωTe
2= π
ω
ωe
on obtient :
Fb(jω) = e−j ωTe2︸ ︷︷ ︸
dephasage
sinc
(ω
ωe
)︸ ︷︷ ︸
deformation
F (jω).
Il en resulte que la reponse harmonique du signal bloque se deduit de celle du signalatemps continu initial par :
– une deformation, liee au sinus cardinal ;– un retard pur d’une demi-periode d’echantillonnage.
Le spectre du signal bloque se deduit du spectre du signala temps continu conformementau schema de la figure 3.8 page suivante. Les lobes additionnels apparaissant au dela dela pulsation de Nyquist peuventeventuellementetre filtres par un filtre passe-bas.
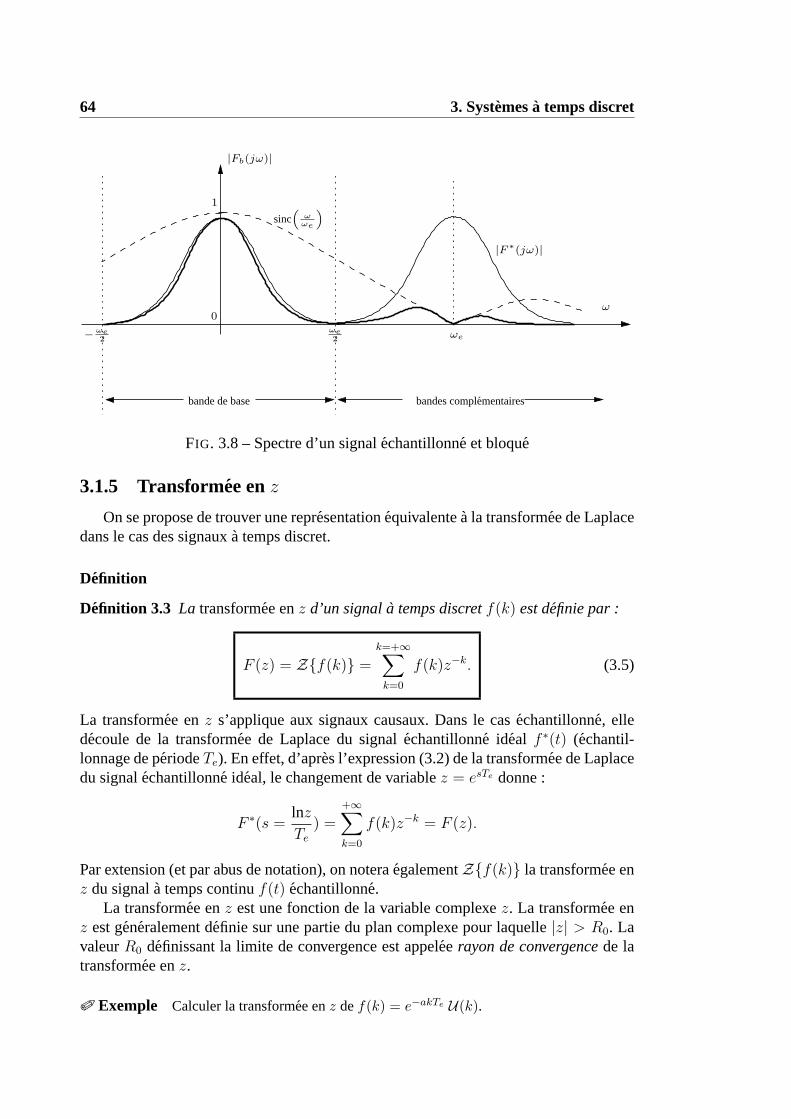
64 3. Systemesa temps discret
−ωe2
ω0
ωe
bande de base bandes complementaires
ωe2
1
|Fb(jω)|
sinc“
ωωe
”|F∗(jω)|
FIG. 3.8 – Spectre d’un signalechantillonne et bloque
3.1.5 Transformee enz
On se propose de trouver une representationequivalentea la transformee de Laplacedans le cas des signauxa temps discret.
Definition
Definition 3.3 La transformee enz d’un signala temps discretf(k) est definie par :
F (z) = Zf(k) =k=+∞∑
k=0
f(k)z−k. (3.5)
La transformee enz s’applique aux signaux causaux. Dans le casechantillonne, elledecoule de la transformee de Laplace du signalechantillonne ideal f ∗(t) (echantil-lonnage de periodeTe). En effet, d’apres l’expression (3.2) de la transformee de Laplacedu signalechantillonne ideal, le changement de variablez = esTe donne :
F ∗(s =lnzTe
) =+∞∑k=0
f(k)z−k = F (z).
Par extension (et par abus de notation), on noteraegalementZf(k) la transformee enz du signala temps continuf(t) echantillonne.
La transformee enz est une fonction de la variable complexez. La transformee enz est generalement definie sur une partie du plan complexe pour laquelle|z| > R0. LavaleurR0 definissant la limite de convergence est appeleerayon de convergencede latransformee enz.
Exemple Calculer la transformee enz def(k) = e−akTe U(k).

3.1. Representation des signauxa temps discret etechantillonnage 65
Propri etes
Les proprietesenoncees sont valables dans le cas general des signauxa temps dis-cret. Soit deux signauxa temps discretf(k) et g(k), de transformees enz respectivesF (z) et G(z). Les principales proprietes de la transformee enz sont rappelees dansle tableau 3.1. Leur demonstration est laissee au lecteur. La plupart de ces proprietespeuvent neanmoinsetre deduites des proprietes de la transformee de Laplace, donneesau tableau 1.1 page 8. Ces proprietes concernent tous les signaux et systemesa temps
linearite Zf(k) + αg(k) = F (z) + αG(z), ∀α ∈ R
changement d’echelle Zαkf(k) = F( zα
), ∀α ∈ R
retard Zf(k − n) = z−nF (z), ∀n ∈ N
avance Zf(k + n) = zn
(F (z)−
k=n−1∑k=0
f(k) z−k
), ∀n ∈ N
multiplication par une rampeZkf(k) = −z dF (z)
dz
theoreme de la valeur initiale limk→0
f(k) = limz→+∞
F (z)
theoreme de la valeur finalea limk→∞
f(k) = limz→1
(1− z−1)F (z)
convolution discrete Zf(k) ∗ g(k) = Zn=+∞∑n=−∞
f(n)g(k − n) = F (z)G(z)
aIl faut pour que la valeur finale existe que les poles de la transformeeF (z) soient tousa l’interieurdu cercle unite.
TAB . 3.1 – Proprietes principales de la transformee enz
discret. Elles sont donc valables dans le cas de signaux provenant de l’echantillonnagede signauxa temps continu.
Transformee enz inverse
Qualitativement, on peut comprendre que la transformee enz d’un signalf(t) echan-tillonne a la periodeTe, ne peut pas permettre de retrouver le signal originala tempscontinuf(t), mais donnera seulement le signala temps discretf(k) constitue desechan-tillons aux instantst = kTe. Pour s’en convaincre, il suffit de considerer deux signauxatemps continuf(t) etg(t) ayant memes valeurs aux instants d’echantillonnaget = kTe.Ces signaux auront meme transformee enz alors que les valeurs entre les instantsd’echantillonnage peuvent tres bienetre differentes, comme l’illustre la figure 3.9 pagesuivante.
Le calcul de latransformee enz inverse, a l’image de celui de la transformee deLaplace inverse se fera, autant que possible,a l’aide de tables de transformations. Une
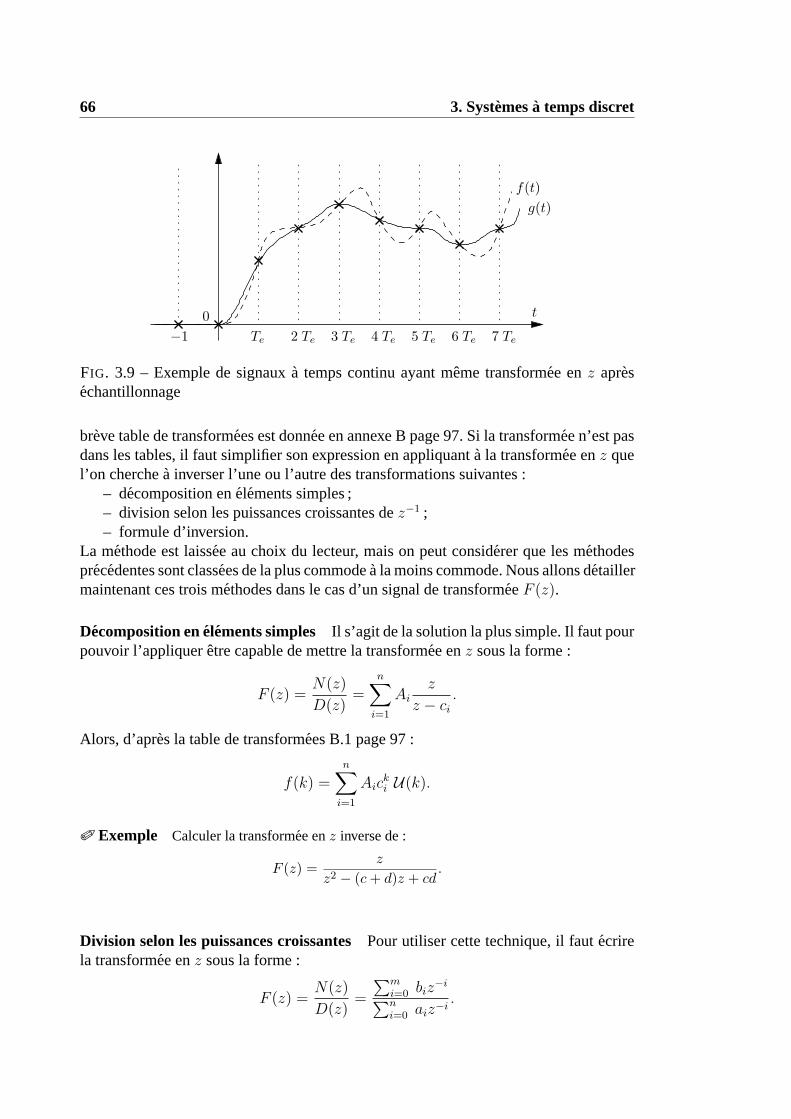
66 3. Systemesa temps discret
07 Te
t
−1 Te 2 Te 3 Te 4 Te 5 Te 6 Te
f(t)g(t)
FIG. 3.9 – Exemple de signauxa temps continu ayant meme transformee enz apresechantillonnage
breve table de transformees est donnee en annexe B page 97. Si la transformee n’est pasdans les tables, il faut simplifier son expression en appliquanta la transformee enz quel’on cherchea inverser l’une ou l’autre des transformations suivantes :
– decomposition enelements simples ;– division selon les puissances croissantes dez−1 ;– formule d’inversion.
La methode est laissee au choix du lecteur, mais on peut considerer que les methodesprecedentes sont classees de la plus commodea la moins commode. Nous allons detaillermaintenant ces trois methodes dans le cas d’un signal de transformeeF (z).
Decomposition enelements simples Il s’agit de la solution la plus simple. Il faut pourpouvoir l’appliqueretre capable de mettre la transformee enz sous la forme :
F (z) =N(z)
D(z)=
n∑i=1
Aiz
z − ci.
Alors, d’apres la table de transformees B.1 page 97 :
f(k) =n∑
i=1
Aicki U(k).
Exemple Calculer la transformee enz inverse de :
F (z) =z
z2 − (c + d)z + cd.
Division selon les puissances croissantesPour utiliser cette technique, il fautecrirela transformee enz sous la forme :
F (z) =N(z)
D(z)=
∑mi=0 biz
−i∑ni=0 aiz−i
.

3.1. Representation des signauxa temps discret etechantillonnage 67
La division selon les puissances croissantes dez−1 deN(z) parD(z) donne :
F (z) = c0 + c1z−1 + c2z
−2 + . . . (3.6)
D’apres la propriete sur le retard de la transformee enz, on deduit de l’equation (3.6)que :
f(k) = c0δ(k) + c1δ(k − 1) + c2δ(k − 2) + . . .
ce qui conduit aux valeurs :
f(0) = c0,
f(1) = c1,
f(2) = c2,
. . .
L’obtention des coefficientsci, pouri = 1, 2, . . . , qui donnent les valeurs du signal auxinstants discrets3 se fait donc par une simple division :
b0 + b1z−1 + . . . a0 + a1z
−1 + . . .
− (b0 + b0a1
a0z−1 + . . . )
b0a0︸︷︷︸c0
+
(b1a0 − b0a1
a20
)︸ ︷︷ ︸
c1
z−1 + . . .
0 +(b1 − b0a1
a0
)z−1 + . . .
Exemple Calculer la transformee enz inverse de :
F (z) =−z + z2
2 + 3z + z2.
Formule d’inversion La transformee enz inverse de de la transformeeF (z) s’ecrit :
f(k) = Z−1F (z) =1
2πj
∫Γ
F (z)zk−1dz,
ou Γ est un domaine du plan complexe contenant toutes les singularites deF (z). Al’image de la transformee de Laplace inverse, cette integrale se calcule par la methodedes residus.
3. . . qui peuventetre des instants d’echantillonnage si la transformee provient d’un signala tempscontinuechantillonne.

68 3. Systemesa temps discret
Application de la transformee enz a la resolution d’equations aux differences
On a vua la section 1.3 page 6 que la transformee de Laplace permet de transfor-mer enequations algebriques lesequations differentielles des signauxa temps continu. Ilexiste une proprieteequivalente pour les signauxa temps discret. Considerons l’equationaux differences:
a0f(k)+a1f(k+1)+· · ·+anf(k+n) = b0g(k)+b1g(k+1)+ · · ·+bmg(k+m). (3.7)
D’apres les proprietes de la transformee enz on calcule la transformee des signauxdecales en temps :
Zf(k) = F (z),
Zf(k + 1) = zF (z)− zf(0),
Zf(k + 2) = z2F (z)− z2f(0)− zf(1),
. . .
et de meme Zg(k) = G(z),
Zg(k + 1) = zG(z)− zg(0),Zg(k + 2) = z2G(z)− z2g(0)− zg(1),
. . .
Par consequent, si l’on applique la transformee enz aux termes de l’equation auxdiff erences (3.7) on obtient :
(a0 + a1z + · · ·+ anzn)F (z) = (b0 + b1z + . . . bmz
m)G(z) + Pn(z),
ou Pn(z) est un polynome enz d’ordren, dependant des CI des signauxf(k) et g(k).On en deduit que :
F (z) =b0 + b1z + · · ·+ bmz
m
a0 + a1z + . . . anznG(z) +
Pn(z)
a0 + a1z + . . . anzn.
Par transformee enz inverse on peut donc resoudre l’equation aux differences originale(3.7).
Il est important de remarquer que les termes lies aux CI proviennent du fait quel’on considere des termes en avance sur le tempsk. Si on modifie l’equation par undecalage, de facona ne plus avoir que des retards, ces termes disparaissent. Une fois laresolution faite, on peut appliquer la translation en temps inverse, si necessaire, c’est-a-dire uniquement si l’on a une expression litterale fonction dek.
Exemple Resoudre l’equation aux differences :
f(k + 2) + 2f(k + 1) + f(k) = 0, 8g(k + 1) + 0, 4g(k)
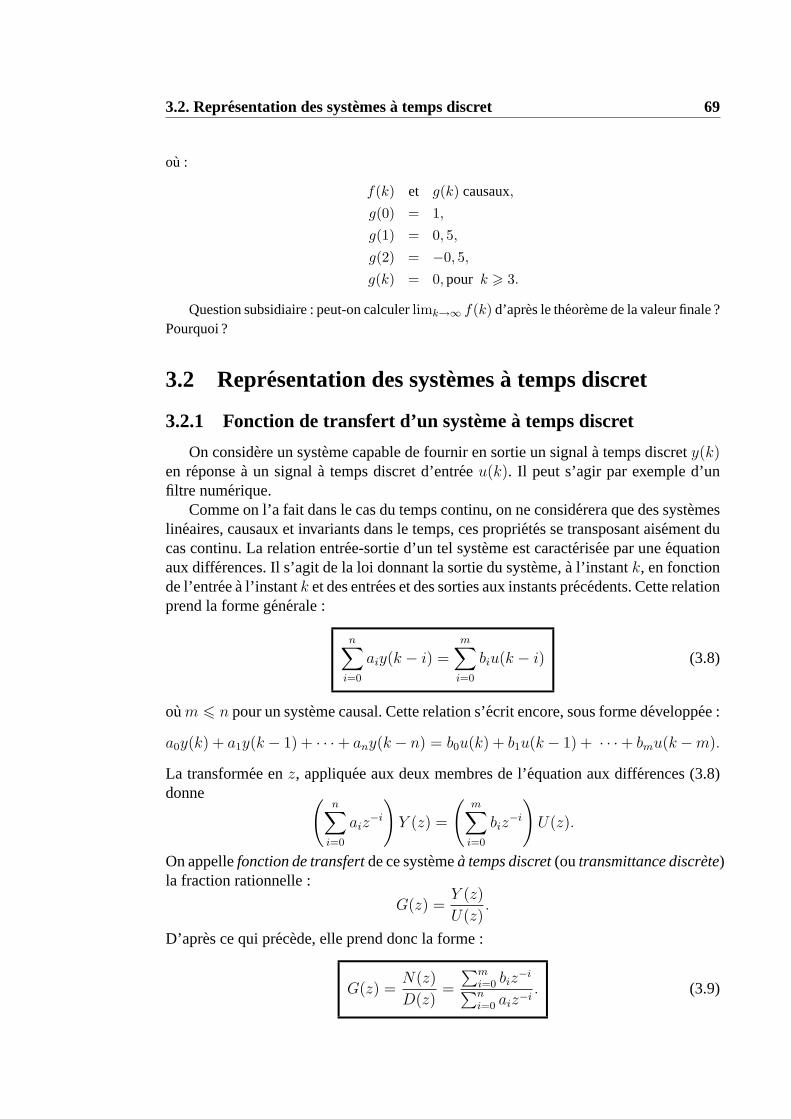
3.2. Representation des systemesa temps discret 69
ou :
f(k) et g(k) causaux,
g(0) = 1,
g(1) = 0, 5,
g(2) = −0, 5,
g(k) = 0, pour k > 3.
Question subsidiaire : peut-on calculerlimk→∞ f(k) d’apres le theoreme de la valeur finale ?Pourquoi ?
3.2 Representation des systemesa temps discret
3.2.1 Fonction de transfert d’un systemea temps discret
On considere un systeme capable de fournir en sortie un signala temps discrety(k)en reponsea un signala temps discret d’entreeu(k). Il peut s’agir par exemple d’unfiltre numerique.
Comme on l’a fait dans le cas du temps continu, on ne considerera que des systemeslineaires, causaux et invariants dans le temps, ces proprietes se transposant aisement ducas continu. La relation entree-sortie d’un tel systeme est caracterisee par uneequationaux differences. Il s’agit de la loi donnant la sortie du systeme,a l’instantk, en fonctionde l’entreea l’instantk et des entrees et des sorties aux instants precedents. Cette relationprend la forme generale :
n∑i=0
aiy(k − i) =m∑
i=0
biu(k − i) (3.8)
oum 6 n pour un systeme causal. Cette relation s’ecrit encore, sous forme developpee :
a0y(k) + a1y(k − 1) + · · ·+ any(k − n) = b0u(k) + b1u(k − 1) + · · ·+ bmu(k −m).
La transformee enz, appliquee aux deux membres de l’equation aux differences (3.8)donne (
n∑i=0
aiz−i
)Y (z) =
(m∑
i=0
biz−i
)U(z).
On appellefonction de transfertde ce systemea temps discret(outransmittance discrete)la fraction rationnelle :
G(z) =Y (z)
U(z).
D’apres ce qui precede, elle prend donc la forme :
G(z) =N(z)
D(z)=
∑mi=0 biz
−i∑ni=0 aiz−i
. (3.9)

70 3. Systemesa temps discret
On peut remarquer que la fonction de transferta temps discret est la transformee enz de la reponse du systemea une impulsion unite discrete. En effet, siu(k) = δ(k), alorsU(z) = 1 et par consequentY (z) = G(z), soit y(k) = g(k). Cecietablit une certaineanalogie avec les signauxa temps continu4. Cette analogie peutetre menee plus loin. Eneffet, la sortiey(k) du systemea temps discret resulte du produit de convolution discretde l’entreeu(k) avec la reponse impulsionnelleg(k), soit :
y(k) = g(k) ∗ u(k) =n=+∞∑n=−∞
g(n)u(k − n),
qui s’ecrit encore :
y(k) =n=+∞∑n=k
g(n)u(k − n)
pour un systeme causal. Ceci decoule directement de la definition (3.9) de la fonction detransfert du systemea temps discret et de la propriete de la convolution discrete rappeleeau tableau 3.1.
Exemple Soit le signala temps discretf(k), de transformee enz :
F (z) =10z + 5
z2 − 1, 2z + 0, 2.
A la lumiere du paragraphe precedent, calculerf(k). Il s’agit bien evidemment d’un exercicede comprehension, la methode la plus naturelleetant ici de factoriser (deux polesevidents !) etdecomposer enelements simplesF (z) ou d’effectuer la division selon les puissances croissantesdez−1.
3.2.2 Fonction de transfert d’un systemeechantillonne
Si les signauxa temps discret sont issus d’un procede d’echantillonnage, il se peutque l’on ait le schema de la figure 3.10.
u(t) y(t)Te Te
U(s)G(s)
Y (s)
Y (z)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
FIG. 3.10 – Systemea temps discreta entree et sortieechantillonnees
Il y a equivalence entre les transformees de Laplace des signauxechantillonnes etles transformees enz des signauxa temps discret. Evaluons :
Y ∗(s) = (G(s)U∗(s))∗ .
4On ne perdra cependant pas de vue que l’impulsion unite a temps discret n’est pas une impulsion deDirac (signal«immateriel»a temps continu).

3.2. Representation des systemesa temps discret 71
D’apres (3.3) :
Y ∗(s) =1
Te
+∞∑k=−∞
Y
(s− 2jπk
Te
),
=1
Te
+∞∑k=−∞
G
(s− 2jπk
Te
)U∗(s− 2πk
Te
).
Comme :
U∗(s) =1
Te
+∞∑k=−∞
U
(s− 2jπk
Te
)est periodique, de periode2jπk
Te, on peutecrire :
Y ∗(s) =
(1
Te
+∞∑k=−∞
G
(s− 2jπk
Te
))U∗(s).
On en deduit que :Y ∗(s) = G∗(s) U∗(s).
Si l’on utilise alors l’equivalence entre transformee de Laplace des signauxechantil-lonnes et transformee enz des signauxa temps discret, on peutecrire :
Y (z) = G(z) U(z).
La fonction de transfert enz du systemeechantillonne en boucle ouverte represente a lafigure 3.10 page precedente est donc :
G(z) =Y (z)
U(z).
Si le procede continu est compose de deux sous procedes en serie, commea lafigure 3.11, ces sous-systemes ne peuventetre dissocies.
u(t)Te
U(s)G1(s) G2(s)
Te
Y (z)
y(t)
Y (s)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
FIG. 3.11 – Association de systemes continus etechantillonnage
En effet :(G1(s)G2(s))
∗ 6= (G1(s))∗ (G2(s))
∗
Alors, on aura :Y (z) = G1G2(z)U(z),

72 3. Systemesa temps discret
en notant, pour alleger :
G1G2(z) = ZL−1G1(s)G2(s).
C’est en particulier le cas de l’association representeea la figure 3.12.
u(t)Te
U(s)
Te
Y (z)
y(t)
Y (s)BOZ G(s)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
FIG. 3.12 – Chaıne bloqueur d’ordre zero et procede
L’association d’un BOZ avec un procede physique constitue un systemea temps continude fonction de transfert :
Y (s)
U∗(s)=
(1− e−Tes
s
)G(s).
Donc :
Y (z)
U(z)= Z
L−1
(1− e−Tes
s
)G(s)
,
= ZgI(t)− gI(t− Te),
ou gI(t) = L−1G(s)
s
. Par consequent :
Y (z)
U(z)= (1− z−1)ZgI(t),
ce qui conduit au resultat remarquable :
Y (z)
U(z)= (1− z−1)Z
G(s)
s
(3.10)
avec l’abus de notation classique :Z
G(s)s
= Z
L−1
G(s)
s
.
3.2.3 Poles et zeros d’un systemeechantillonne
On considere un systemeechantillonne tel que celui representea la figure 3.10 page 70.
Poles
Les poles (resp. les zeros) ens du systeme represente a la figure 3.10 sont les poles(resp. les zeros) deG(s) = Y (s)
U∗(s). Ses poles (resp. ses zeros) enz sont les poles (resp. les

3.2. Representation des systemesa temps discret 73
zeros) deG(z) = Y (z)U(z)
. SiG(s) ne comporte que des poles simples, elle se decomposeenelements simples sous la forme :
G(s) =n∑
i=1
Ai
s− pi
et par consequent :
g(t) = L−1G(s) =n∑
i=1
AiepitU(t).
Les poles enz sont obtenus en appliquant alors la transformee enz :
G(z) =n∑
i=1
Aiz
z − epiTe.
A un pole simple ens d’affixe pi correspond donc un pole enz en epiTe, ce qui estillustre par la figure 3.13. Sur cette figure on a par ailleurs represente les poles resultantde l’echantillonnage ideal.
!!!!!!""""""
########$$$$$$
%%%&&&
''''((())))))))******
++++,,,---...////0000 111222
Im(s)
Im(s)
σ2 σ1
echantillonnage idealtemps continu temps discret
poless = σ ± jω poless = σ ± jω mod jωepolesz = ejω
Re(s)
ωe
−ω2
−ωe
ω2
3ωe2
−ωe2
ωe2
− 3ωe2
ωe − ω2
−ωe + ω2
ωe + ω2
−ωe − ω2
−ω2
Re(s)
ω2
eσ1Te
Re(z)
ω2Te
Im(z)
σ1σ2 eσ2Te
FIG. 3.13 – Correspondance entre les plans ens et enz
Le but est d’illustrer la correspondance entre les plans ens et enz. Il faut observer quele passage se fait naturellement en sachant que la transformee enz d’un signala temps
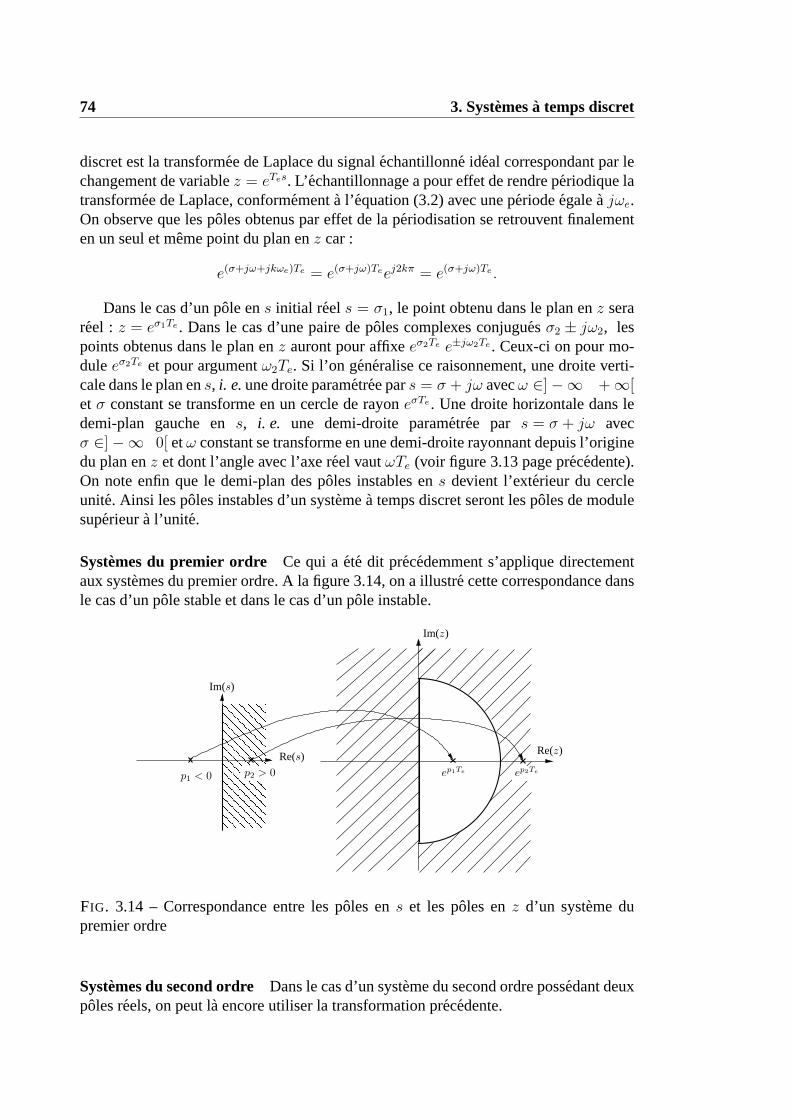
74 3. Systemesa temps discret
discret est la transformee de Laplace du signalechantillonne ideal correspondant par lechangement de variablez = eTes. L’ echantillonnage a pour effet de rendre periodique latransformee de Laplace, conformementa l’equation (3.2) avec une periodeegalea jωe.On observe que les poles obtenus par effet de la periodisation se retrouvent finalementen un seul et meme point du plan enz car :
e(σ+jω+jkωe)Te = e(σ+jω)Teej2kπ = e(σ+jω)Te .
Dans le cas d’un pole ens initial reels = σ1, le point obtenu dans le plan enz serareel : z = eσ1Te. Dans le cas d’une paire de poles complexes conjuguesσ2 ± jω2, lespoints obtenus dans le plan enz auront pour affixeeσ2Te e±jω2Te. Ceux-ci on pour mo-duleeσ2Te et pour argumentω2Te. Si l’on generalise ce raisonnement, une droite verti-cale dans le plan ens, i. e.une droite parametree pars = σ + jω avecω ∈]−∞ +∞[et σ constant se transforme en un cercle de rayoneσTe. Une droite horizontale dans ledemi-plan gauche ens, i. e. une demi-droite parametree par s = σ + jω avecσ ∈]−∞ 0[ etω constant se transforme en une demi-droite rayonnant depuis l’originedu plan enz et dont l’angle avec l’axe reel vautωTe (voir figure 3.13 page precedente).On note enfin que le demi-plan des poles instables ens devient l’exterieur du cercleunite. Ainsi les poles instables d’un systemea temps discret seront les poles de modulesuperieura l’unite.
Systemes du premier ordre Ce qui aete dit precedemment s’applique directementaux systemes du premier ordre. A la figure 3.14, on a illustre cette correspondance dansle cas d’un pole stable et dans le cas d’un pole instable.
Im(s)
p1 < 0 ep1Te
Re(z)
Im(z)
p2 > 0Re(s)
ep2Te
FIG. 3.14 – Correspondance entre les poles ens et les poles enz d’un systeme dupremier ordre
Systemes du second ordre Dans le cas d’un systeme du second ordre possedant deuxpoles reels, on peut la encore utiliser la transformation precedente.
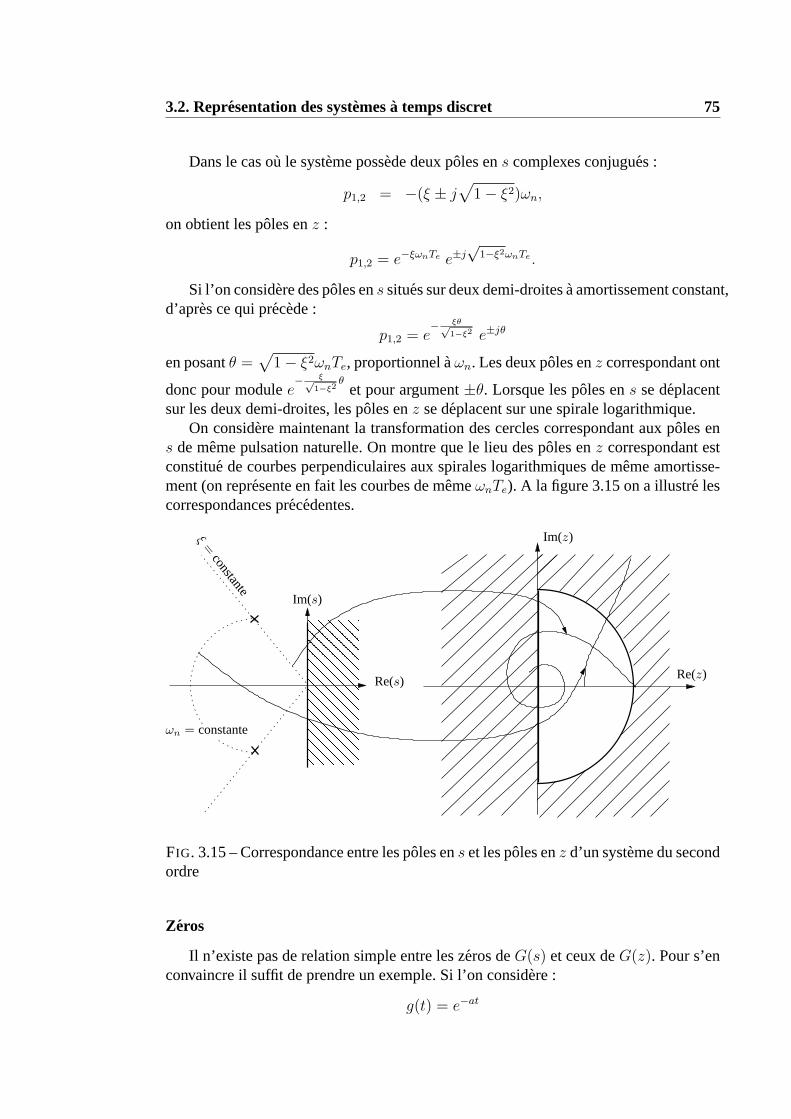
3.2. Representation des systemesa temps discret 75
Dans le cas ou le systeme possede deux poles ens complexes conjugues :
p1,2 = −(ξ ± j√
1− ξ2)ωn,
on obtient les poles enz :
p1,2 = e−ξωnTe e±j√
1−ξ2ωnTe .
Si l’on considere des poles ens situes sur deux demi-droitesa amortissement constant,d’apres ce qui precede :
p1,2 = e− ξθ√
1−ξ2 e±jθ
en posantθ =√
1− ξ2ωnTe, proportionnelaωn. Les deux poles enz correspondant ont
donc pour modulee− ξ√
1−ξ2θ
et pour argument±θ. Lorsque les poles ens se deplacentsur les deux demi-droites, les poles enz se deplacent sur une spirale logarithmique.
On considere maintenant la transformation des cercles correspondant aux poles ens de meme pulsation naturelle. On montre que le lieu des poles enz correspondant estconstitue de courbes perpendiculaires aux spirales logarithmiques de meme amortisse-ment (on represente en fait les courbes de memeωnTe). A la figure 3.15 on a illustre lescorrespondances precedentes.
Im(s)ξ =
constante
Re(z)
Im(z)
Re(s)
ωn = constante
FIG. 3.15 – Correspondance entre les poles ens et les poles enz d’un systeme du secondordre
Zeros
Il n’existe pas de relation simple entre les zeros deG(s) et ceux deG(z). Pour s’enconvaincre il suffit de prendre un exemple. Si l’on considere :
g(t) = e−at

76 3. Systemesa temps discret
alors :
G(s) =1
s+ a,
G(z) =z
z − e−aTe.
Ainsi, il existe un pole enz alors qu’il n’en existe pas ens.
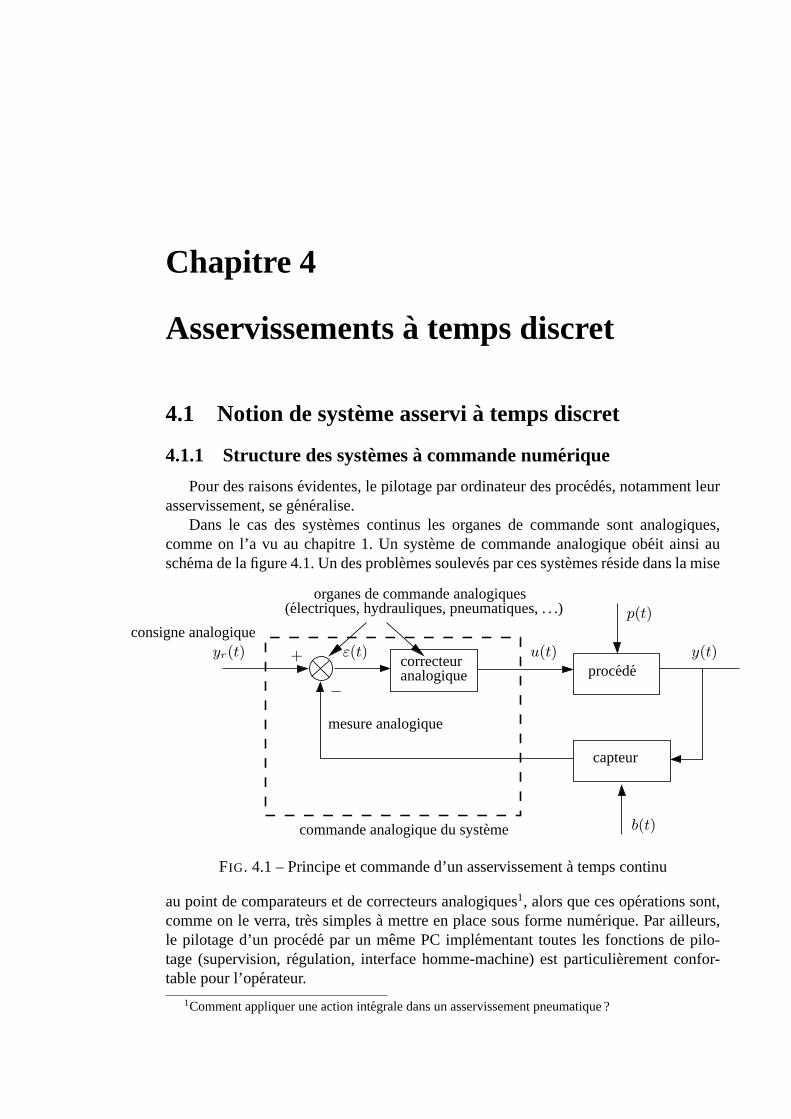
Chapitre 4
Asservissementsa temps discret
4.1 Notion de systeme asservia temps discret
4.1.1 Structure des systemesa commande numerique
Pour des raisonsevidentes, le pilotage par ordinateur des procedes, notamment leurasservissement, se generalise.
Dans le cas des systemes continus les organes de commande sont analogiques,comme on l’a vu au chapitre 1. Un systeme de commande analogique obeit ainsi auschema de la figure 4.1. Un des problemes souleves par ces systemes reside dans la mise
+
−procede
yr(t) ε(t)correcteuranalogique
capteur
u(t)
b(t)
y(t)
mesure analogique
p(t)
commande analogique du systeme
organes de commande analogiques(electriques, hydrauliques, pneumatiques, . . .)
consigne analogique
FIG. 4.1 – Principe et commande d’un asservissementa temps continu
au point de comparateurs et de correcteurs analogiques1, alors que ces operations sont,comme on le verra, tres simplesa mettre en place sous forme numerique. Par ailleurs,le pilotage d’un procede par un meme PC implementant toutes les fonctions de pilo-tage (supervision, regulation, interface homme-machine) est particulierement confor-table pour l’operateur.
1Comment appliquer une action integrale dans un asservissement pneumatique ?
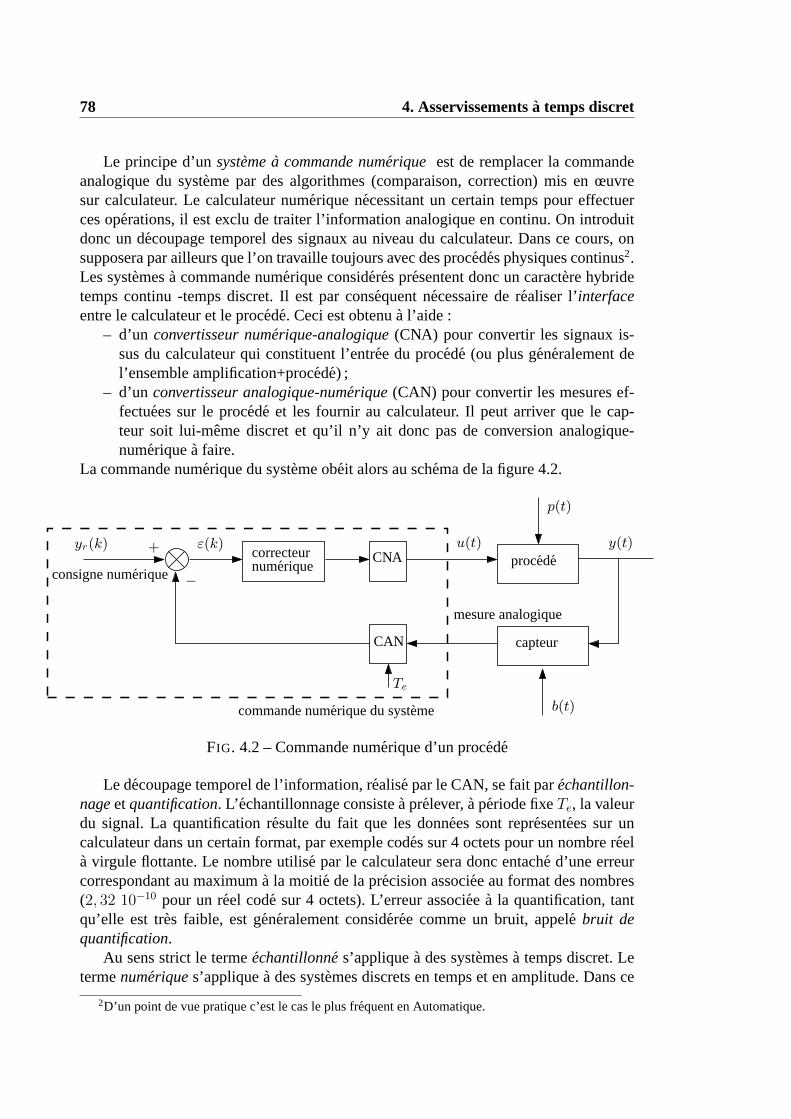
78 4. Asservissementsa temps discret
Le principe d’unsystemea commande numerique est de remplacer la commandeanalogique du systeme par des algorithmes (comparaison, correction) mis en œuvresur calculateur. Le calculateur numerique necessitant un certain temps pour effectuerces operations, il est exclu de traiter l’information analogique en continu. On introduitdonc un decoupage temporel des signaux au niveau du calculateur. Dans ce cours, onsupposera par ailleurs que l’on travaille toujours avec des procedes physiques continus2.Les systemesa commande numerique consideres presentent donc un caractere hybridetemps continu -temps discret. Il est par consequent necessaire de realiser l’interfaceentre le calculateur et le procede. Ceci est obtenua l’aide :
– d’un convertisseur numerique-analogique(CNA) pour convertir les signaux is-sus du calculateur qui constituent l’entree du procede (ou plus generalement del’ensemble amplification+procede) ;
– d’un convertisseur analogique-numerique(CAN) pour convertir les mesures ef-fectuees sur le procede et les fournir au calculateur. Il peut arriver que le cap-teur soit lui-meme discret et qu’il n’y ait donc pas de conversion analogique-numeriquea faire.
La commande numerique du systeme obeit alors au schema de la figure 4.2.
procede
capteur
u(t)
b(t)
y(t)
p(t)
commande numerique du systeme
+
−
correcteurε(k)
numerique
yr(k)
mesure analogique
CAN
CNA
Te
consigne numerique
FIG. 4.2 – Commande numerique d’un procede
Le decoupage temporel de l’information, realise par le CAN, se fait parechantillon-nageetquantification. L’ echantillonnage consistea prelever,a periode fixeTe, la valeurdu signal. La quantification resulte du fait que les donnees sont representees sur uncalculateur dans un certain format, par exemple codes sur 4 octets pour un nombre reela virgule flottante. Le nombre utilise par le calculateur sera donc entache d’une erreurcorrespondant au maximuma la moitie de la precision associee au format des nombres(2, 32 10−10 pour un reel code sur 4 octets). L’erreur associeea la quantification, tantqu’elle est tres faible, est generalement consideree comme un bruit, appele bruit dequantification.
Au sens strict le termeechantillonne s’appliquea des systemesa temps discret. Letermenumeriques’appliquea des systemes discrets en temps et en amplitude. Dans ce
2D’un point de vue pratique c’est le cas le plus frequent en Automatique.
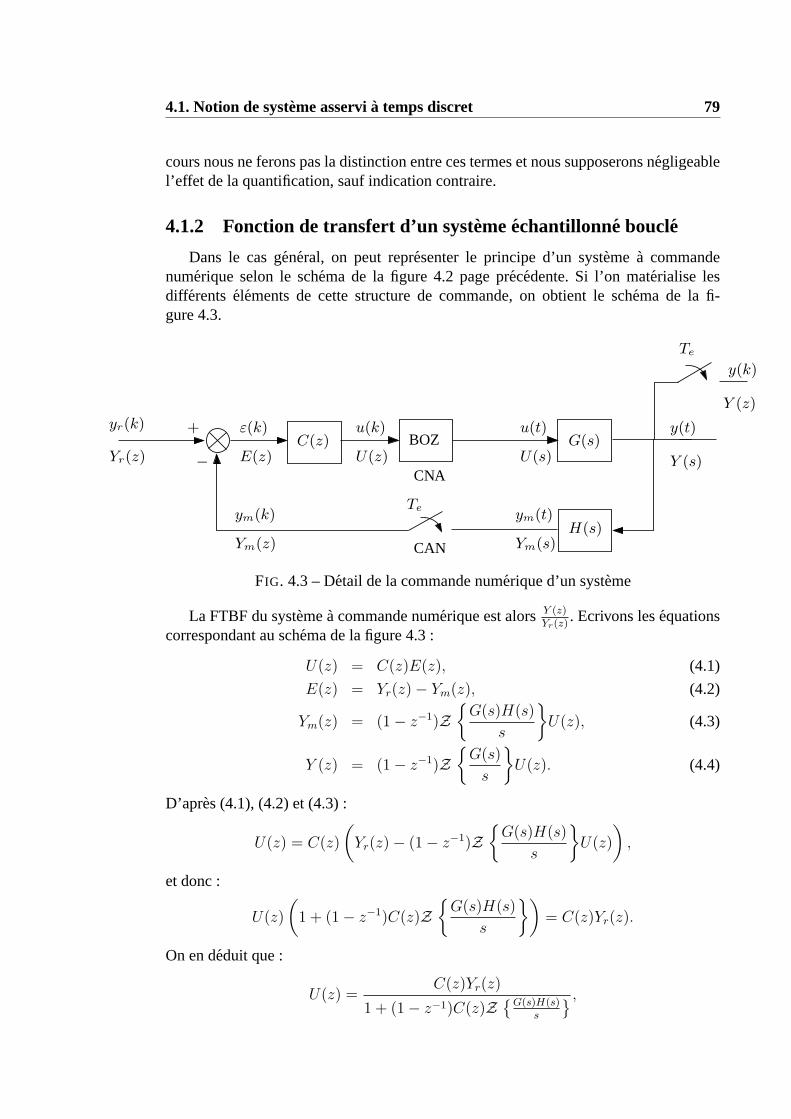
4.1. Notion de systeme asservia temps discret 79
cours nous ne ferons pas la distinction entre ces termes et nous supposerons negligeablel’effet de la quantification, sauf indication contraire.
4.1.2 Fonction de transfert d’un systemeechantillonne boucle
Dans le cas general, on peut representer le principe d’un systeme a commandenumerique selon le schema de la figure 4.2 page precedente. Si l’on materialise lesdiff erentselements de cette structure de commande, on obtient le schema de la fi-gure 4.3.
y(t)
Y (s)
y(k)
Y (z)
Te
+yr(k)
−CNA
Te
CAN
ym(t)ym(k)
ε(k) u(k) u(t)C(z) BOZ G(s)
H(s)
E(z)Yr(z) U(z) U(s)
Ym(s)Ym(z)
FIG. 4.3 – Detail de la commande numerique d’un systeme
La FTBF du systemea commande numerique est alorsY (z)Yr(z)
. Ecrivons lesequationscorrespondant au schema de la figure 4.3 :
U(z) = C(z)E(z), (4.1)
E(z) = Yr(z)− Ym(z), (4.2)
Ym(z) = (1− z−1)ZG(s)H(s)
s
U(z), (4.3)
Y (z) = (1− z−1)ZG(s)
s
U(z). (4.4)
D’apres (4.1), (4.2) et (4.3) :
U(z) = C(z)
(Yr(z)− (1− z−1)Z
G(s)H(s)
s
U(z)
),
et donc :
U(z)
(1 + (1− z−1)C(z)Z
G(s)H(s)
s
)= C(z)Yr(z).
On en deduit que :
U(z) =C(z)Yr(z)
1 + (1− z−1)C(z)ZG(s)H(s)
s
,
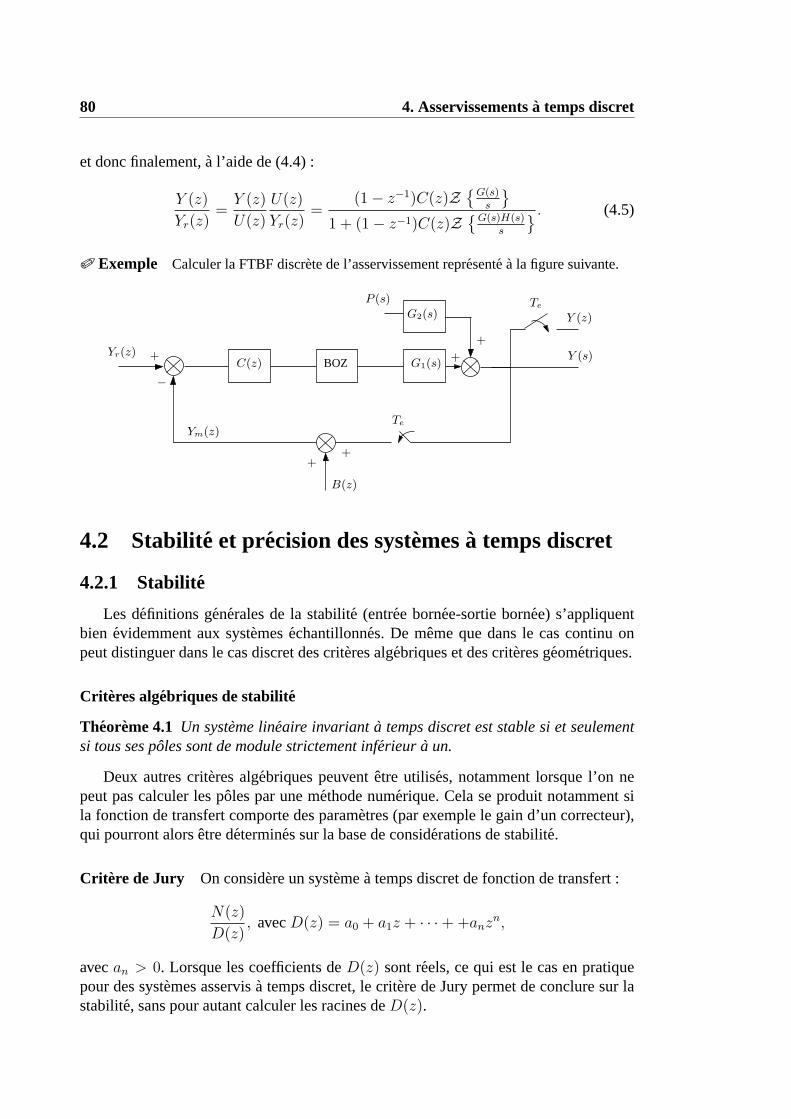
80 4. Asservissementsa temps discret
et donc finalement,a l’aide de (4.4) :
Y (z)
Yr(z)=Y (z)
U(z)
U(z)
Yr(z)=
(1− z−1)C(z)ZG(s)
s
1 + (1− z−1)C(z)Z
G(s)H(s)s
. (4.5)
Exemple Calculer la FTBF discrete de l’asservissement represente a la figure suivante.
+
−
++
B(z)
BOZC(z)
+
+
Y (z)
Te
Y (s)Yr(z)
Ym(z)
P (s)
G2(s)
G1(s)
Te
4.2 Stabilite et precision des systemesa temps discret
4.2.1 Stabilite
Les definitions generales de la stabilite (entree bornee-sortie bornee) s’appliquentbien evidemment aux systemesechantillonnes. De meme que dans le cas continu onpeut distinguer dans le cas discret des criteres algebriques et des criteres geometriques.
Crit eres algebriques de stabilite
Theoreme 4.1Un systeme lineaire invarianta temps discret est stable si et seulementsi tous ses poles sont de module strictement inferieur a un.
Deux autres criteres algebriques peuventetre utilises, notamment lorsque l’on nepeut pas calculer les poles par une methode numerique. Cela se produit notamment sila fonction de transfert comporte des parametres (par exemple le gain d’un correcteur),qui pourront alorsetre determines sur la base de considerations de stabilite.
Crit ere de Jury On considere un systemea temps discret de fonction de transfert :
N(z)
D(z), avecD(z) = a0 + a1z + · · ·+ +anz
n,
avecan > 0. Lorsque les coefficients deD(z) sont reels, ce qui est le cas en pratiquepour des systemes asservisa temps discret, le critere de Jury permet de conclure sur lastabilite, sans pour autant calculer les racines deD(z).

4.2. Stabilite et precision des systemesa temps discret 81
Theoreme 4.2Soit :a0,i = ai, ∀i = 0, 1, . . . , n,
aj+1,i =aj,0 aj,n−j−i
aj,n−j aj,i, avec0 6 i 6 n− j − 1.
Le critere s’enonce comme suit : une condition necessaire et suffisante pour queD(z), a coefficients reels ait ses racines de module inferieura l’unite est que les inegalitessuivantes soient verifiees :
1. |a0| − an < 0 ;
2. D(1) > 0 ;
3. (−1)n D(−1) > 0 ;
4. |aj,0| − |aj,n−j| > 0,∀j = 1, 2, . . . , n− 2.
Exemple Etudier ce critere pour les systemes d’ordre inferieur ouegala trois.
Crit ere de Routh Le critere de Routh aete vu pour les systemesa temps continu. Ilne s’applique donc pas tel quel aux systemesa temps discret. Pour pouvoir l’appliqueron utilise la transformee enw :
w =z − 1
z + 1⇐⇒ z =
1 + w
1− w
qui associea l’interieur du cercle unite du plan enz le demi-plan gauche du plan enw.La condition de stabilite du theoreme 4.1, portant sur l’etude du polynome denominateurde la fonction de transfertD(z) est modifiee. On admet que la stabilite est verifiee si lepolynome enw :
D′(w) = (1− w)nD
(1 + w
1− w
)verifie le critere de Routh.
Exemples A l’aide des criteres algebriques precedents, montrer que le systeme de fonctionde transfert :
G1(z) =1, 42− 0, 12z + 0, 113z2
0, 1066− 0, 5620z + 1, 67z2 − 2, 2z3 + z4
est stable, alors que le systeme de fonction de transfert :
G2(z) =1, 42− 0, 12z + 0, 113z2
0, 98− 0, 5620z + 1, 67z2 − 2, 2z3 + z4
est instable.
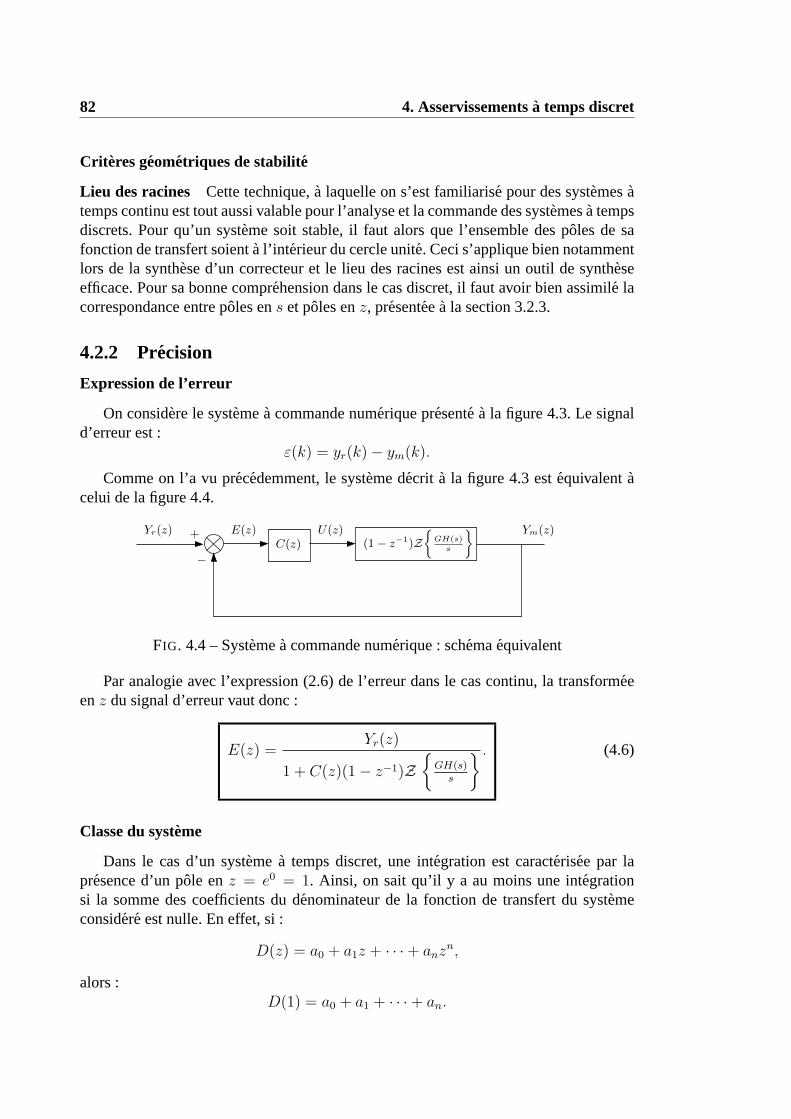
82 4. Asservissementsa temps discret
Crit eres geometriques de stabilite
Lieu des racines Cette technique,a laquelle on s’est familiarise pour des systemesatemps continu est tout aussi valable pour l’analyse et la commande des systemesa tempsdiscrets. Pour qu’un systeme soit stable, il faut alors que l’ensemble des poles de safonction de transfert soienta l’interieur du cercle unite. Ceci s’applique bien notammentlors de la synthese d’un correcteur et le lieu des racines est ainsi un outil de syntheseefficace. Pour sa bonne comprehension dans le cas discret, il faut avoir bien assimile lacorrespondance entre poles ens et poles enz, presenteea la section 3.2.3.
4.2.2 Precision
Expression de l’erreur
On considere le systemea commande numerique presente a la figure 4.3. Le signald’erreur est :
ε(k) = yr(k)− ym(k).
Comme on l’a vu precedemment, le systeme decrit a la figure 4.3 estequivalentacelui de la figure 4.4.
+
−C(z)
Yr(z) E(z) U(z) Ym(z)(1− z−1)Z
GH(s)
s
ff
FIG. 4.4 – Systemea commande numerique : schemaequivalent
Par analogie avec l’expression (2.6) de l’erreur dans le cas continu, la transformeeenz du signal d’erreur vaut donc :
E(z) =Yr(z)
1 + C(z)(1− z−1)Z
GH(s)s
. (4.6)
Classe du systeme
Dans le cas d’un systemea temps discret, une integration est caracterisee par lapresence d’un pole enz = e0 = 1. Ainsi, on sait qu’il y a au moins une integrationsi la somme des coefficients du denominateur de la fonction de transfert du systemeconsidere est nulle. En effet, si :
D(z) = a0 + a1z + · · ·+ anzn,
alors :D(1) = a0 + a1 + · · ·+ an.

4.2. Stabilite et precision des systemesa temps discret 83
Expression generale de l’erreur
D’apres le theoreme de la valeur finale pour les systemesa temps discret (voir lesproprietes de la transformee enz, tableau 3.1 page 65), on peut calculer l’expressiongenerale de l’erreura l’aide de l’equation (4.6) par :
ε∞ = limz→1
z − 1
zE(z). (4.7)
Ceci n’est valable qu’a la condition que l’ensemble des poles dez−1z
E(z) soient al’int erieur du cercle unite.
D’apres (4.6) et (4.7), l’expression generale de l’erreur d’un systeme asservi est :
ε∞ = limz→1
z − 1
z
Yr(z)
1 + C(z)(1− z−1)Z
GH(s)s
. (4.8)
Selon le meme cheminement que dans le cas continu, il est donc possible de calculerl’erreur statique ou dynamique du systeme si l’on connaıt les limites en1 de la fonc-tion de transfert en boucle ouverte. Si l’on considere que la fonction de transfert d’unsysteme lineaire invarianta temps discret est donnee par l’equation :
C(z)(1− z−1)ZGH(s)
s
=
K
(z − 1)c
1 + β1z + . . .
1 + α1z + . . .(4.9)
ou c est la classe du systeme. La precision du systeme peutetre calculee de manieresystematiquea l’aide de (4.8) et (4.9). Onetablit les resultats du tableau 4.1. On com-
entree echelonYr(z) =E0z
z − 1rampeYr(z) =
V0z
(z − 1)2
classe 0E0
1 +K∞
classe 1 0V0
K
classe 2 0 0
TAB . 4.1 – Precision des systemesa commande numerique, en fonction de leur classe
prend bien comment ce tableau s’etend au cas des systemes de classe superieurea deuxet au cas d’entrees polynomiales de degre superieur ouegala deux.
Erreur due aux perturbations
Soit le schema de la figure 4.3, dans lequel on introduit une perturbationp(t), commerepresente a la figure 4.5. Soitc2 le nombre d’integration dansG2(s)H(s) (inferieura la
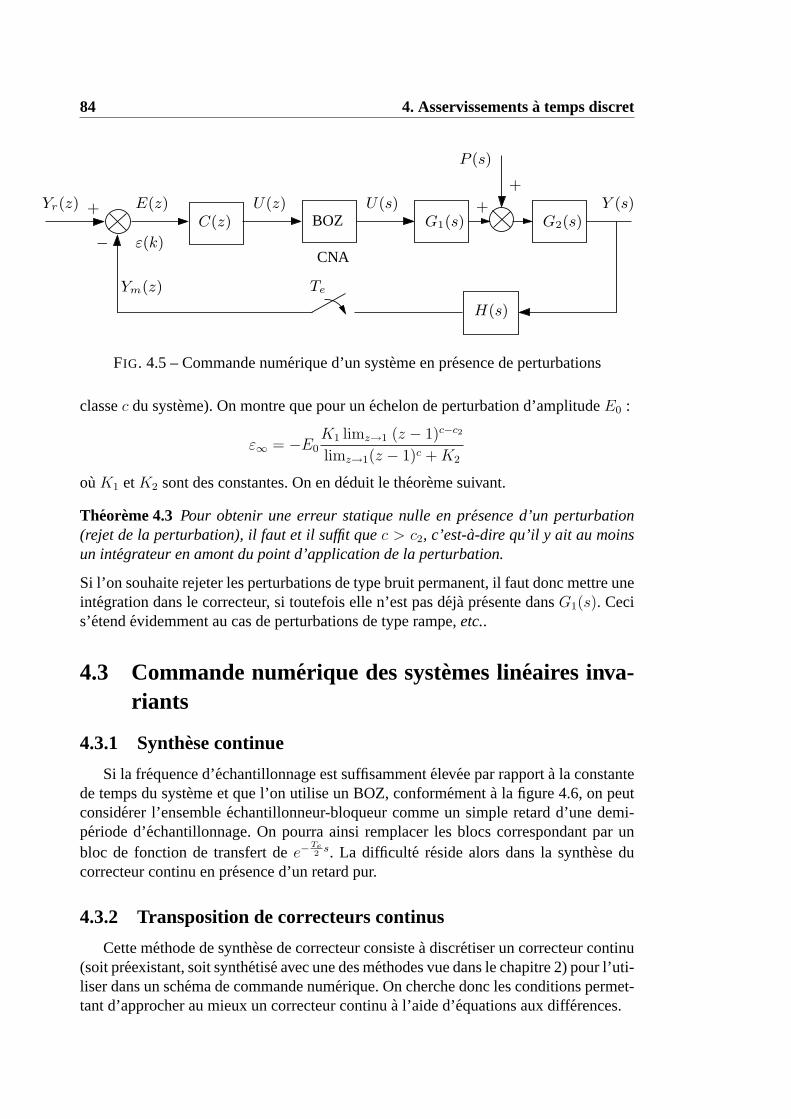
84 4. Asservissementsa temps discret
+
−CNA
Te
C(z) BOZ
H(s)
E(z)
ε(k)
U(z) U(s)
Ym(z)
+
+
G1(s) G2(s)Y (s)
P (s)
Yr(z)
FIG. 4.5 – Commande numerique d’un systeme en presence de perturbations
classec du systeme). On montre que pour unechelon de perturbation d’amplitudeE0 :
ε∞ = −E0K1 limz→1 (z − 1)c−c2
limz→1(z − 1)c +K2
ouK1 etK2 sont des constantes. On en deduit le theoreme suivant.
Theoreme 4.3Pour obtenir une erreur statique nulle en presence d’un perturbation(rejet de la perturbation), il faut et il suffit quec > c2, c’est-a-dire qu’il y ait au moinsun integrateur en amont du point d’application de la perturbation.
Si l’on souhaite rejeter les perturbations de type bruit permanent, il faut donc mettre uneintegration dans le correcteur, si toutefois elle n’est pas deja presente dansG1(s). Cecis’etendevidemment au cas de perturbations de type rampe,etc..
4.3 Commande numerique des systemes lineaires inva-riants
4.3.1 Synthese continue
Si la frequence d’echantillonnage est suffisammentelevee par rapporta la constantede temps du systeme et que l’on utilise un BOZ, conformementa la figure 4.6, on peutconsiderer l’ensembleechantillonneur-bloqueur comme un simple retard d’une demi-periode d’echantillonnage. On pourra ainsi remplacer les blocs correspondant par unbloc de fonction de transfert dee−
Te2
s. La difficulte reside alors dans la synthese ducorrecteur continu en presence d’un retard pur.
4.3.2 Transposition de correcteurs continus
Cette methode de synthese de correcteur consistea discretiser un correcteur continu(soit preexistant, soit synthetise avec une des methodes vue dans le chapitre 2) pour l’uti-liser dans un schema de commande numerique. On cherche donc les conditions permet-tant d’approcher au mieux un correcteur continua l’aide d’equations aux differences.
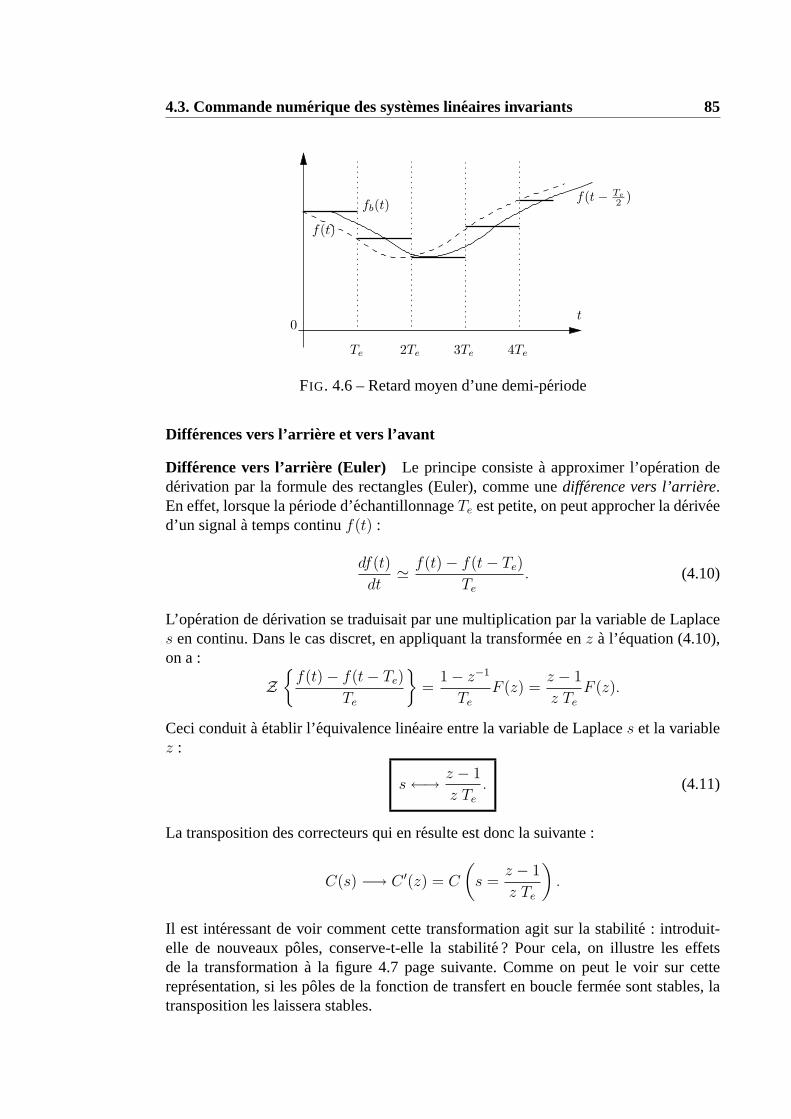
4.3. Commande numerique des systemes lineaires invariants 85
0t
Te 2Te 3Te 4Te
fb(t)
f(t)
f(t− Te
2 )
FIG. 4.6 – Retard moyen d’une demi-periode
Diff erences vers l’arriere et vers l’avant
Diff erence vers l’arriere (Euler) Le principe consistea approximer l’operation dederivation par la formule des rectangles (Euler), comme unedifference vers l’arriere.En effet, lorsque la periode d’echantillonnageTe est petite, on peut approcher la deriveed’un signala temps continuf(t) :
df(t)
dt' f(t)− f(t− Te)
Te
. (4.10)
L’operation de derivation se traduisait par une multiplication par la variable de Laplaces en continu. Dans le cas discret, en appliquant la transformee enz a l’equation (4.10),on a :
Zf(t)− f(t− Te)
Te
=
1− z−1
Te
F (z) =z − 1
z Te
F (z).
Ceci conduita etablir l’equivalence lineaire entre la variable de Laplaces et la variablez :
s←→ z − 1
z Te
. (4.11)
La transposition des correcteurs qui en resulte est donc la suivante :
C(s) −→ C ′(z) = C
(s =
z − 1
z Te
).
Il est interessant de voir comment cette transformation agit sur la stabilite : introduit-elle de nouveaux poles, conserve-t-elle la stabilite ? Pour cela, on illustre les effetsde la transformationa la figure 4.7 page suivante. Comme on peut le voir sur cetterepresentation, si les poles de la fonction de transfert en boucle fermee sont stables, latransposition les laissera stables.

86 4. Asservissementsa temps discret
Im(s)
Re(z)
Im(z)
Re(s)
conserve la stabilite
FIG. 4.7 – Effet de la transposition par la methode des differences vers l’arriere
Diff erences vers l’avant Dans ce cas on approxime la derivee d’un signala tempscontinuf(t) par unedifference vers l’avant:
df(t)
dt=f(t+ Te)− f(t)
Te
ce qui conduita l’equivalence lineaire :
s←→ z − 1
Te
et a la transposition des correcteurs :
C(s) −→ C ′(z) = C
(s =
z − 1
Te
).
Cette transposition ne conserve pas la stabilite, comme indique a la figure 4.8 pagesuivante : on ne l’utilisera generalement pas.
Transformation bilin eaire
On definit la transformation bilineaireou transformation homographiquesuivante :
z =1 + Te
2s
1− Te
2s
(4.12)
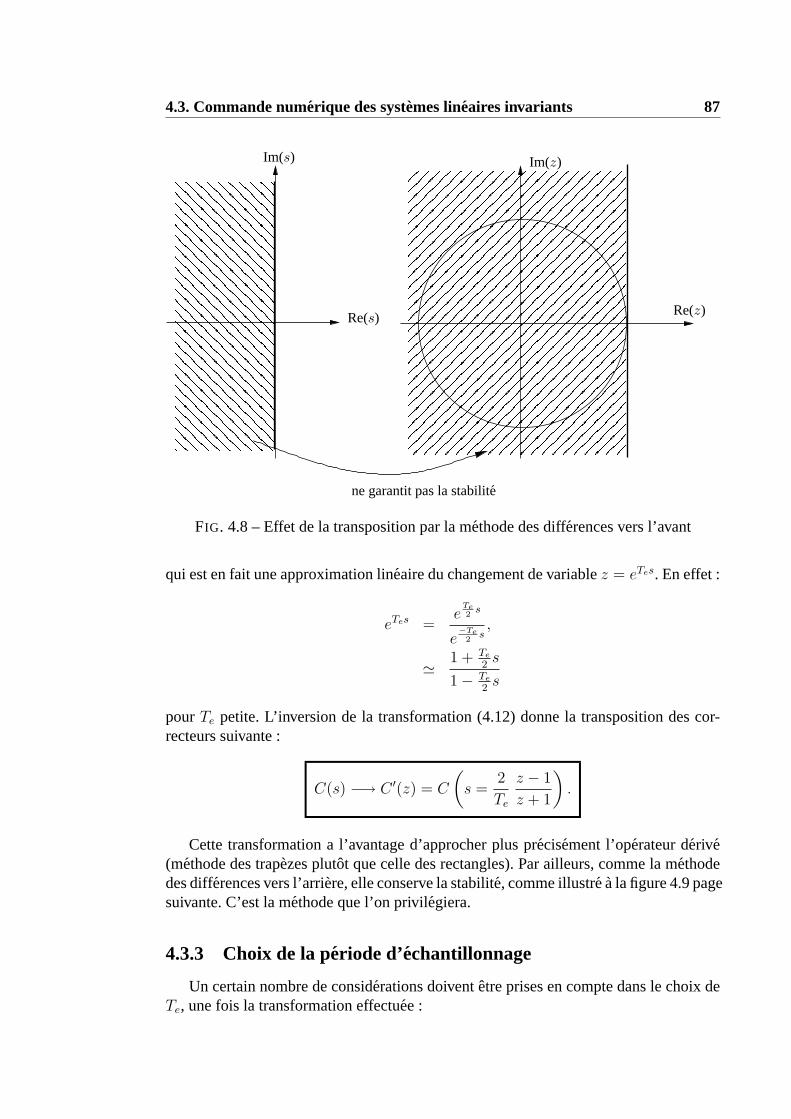
4.3. Commande numerique des systemes lineaires invariants 87
Im(s)
Re(z)
Im(z)
Re(s)
ne garantit pas la stabilite
FIG. 4.8 – Effet de la transposition par la methode des differences vers l’avant
qui est en fait une approximation lineaire du changement de variablez = eTes. En effet :
eTes =e
Te2
s
e−Te
2s,
'1 + Te
2s
1− Te
2s
pourTe petite. L’inversion de la transformation (4.12) donne la transposition des cor-recteurs suivante :
C(s) −→ C ′(z) = C
(s =
2
Te
z − 1
z + 1
).
Cette transformation a l’avantage d’approcher plus precisement l’operateur derive(methode des trapezes plutot que celle des rectangles). Par ailleurs, comme la methodedes differences vers l’arriere, elle conserve la stabilite, comme illustrea la figure 4.9 pagesuivante. C’est la methode que l’on privilegiera.
4.3.3 Choix de la periode d’echantillonnage
Un certain nombre de considerations doiventetre prises en compte dans le choix deTe, une fois la transformation effectuee :
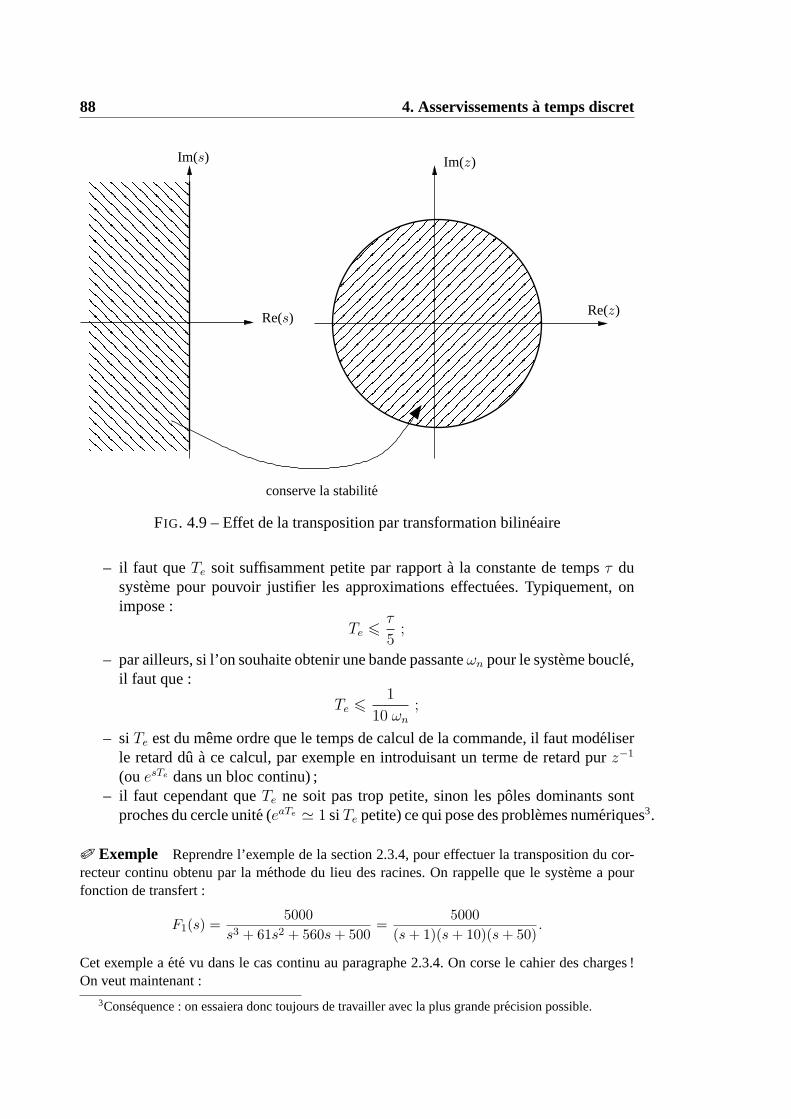
88 4. Asservissementsa temps discret
Im(s)
Re(z)
Im(z)
Re(s)
conserve la stabilite
FIG. 4.9 – Effet de la transposition par transformation bilineaire
– il faut queTe soit suffisamment petite par rapporta la constante de tempsτ dusysteme pour pouvoir justifier les approximations effectuees. Typiquement, onimpose :
Te 6τ
5;
– par ailleurs, si l’on souhaite obtenir une bande passanteωn pour le systeme boucle,il faut que :
Te 61
10 ωn
;
– si Te est du meme ordre que le temps de calcul de la commande, il faut modeliserle retard du a ce calcul, par exemple en introduisant un terme de retard purz−1
(ou esTe dans un bloc continu) ;– il faut cependant queTe ne soit pas trop petite, sinon les poles dominants sont
proches du cercle unite (eaTe ' 1 siTe petite) ce qui pose des problemes numeriques3.
Exemple Reprendre l’exemple de la section 2.3.4, pour effectuer la transposition du cor-recteur continu obtenu par la methode du lieu des racines. On rappelle que le systeme a pourfonction de transfert :
F1(s) =5000
s3 + 61s2 + 560s + 500=
5000(s + 1)(s + 10)(s + 50)
.
Cet exemple aete vu dans le cas continu au paragraphe 2.3.4. On corse le cahier des charges !On veut maintenant :
3Consequence : on essaiera donc toujours de travailler avec la plus grande precision possible.
4.3. Commande numerique des systemes lineaires invariants 89
– erreur statique nulle ;– coefficient d’amortissement de0, 9 ;– temps de reponset5% < 0, 2s.
4.3.4 CorrecteurPID numerique
Forme standard
La forme standard du correcteurPID numerique provient de la transposition de laforme standard continue, donneea l’equation (2.11). En appliquant la transposition pardiff erences vers l’avant au terme integral et la transposition par differences vers l’arriereau terme derive, on obtient :
C(z) = Kp
(1 +
Te
τi(z − 1)+
N(z − 1)
(1 + NTe
τd)z − 1
).
Les variantesP , PI et PD, aisement deduites de la forme precedente, sont bienevi-demmentegalement utilisees.
Exemple Mettre le correcteur trouve lors de l’exemple du paragraphe precedent sousforme standard.
Anti-saturation du terme int egral
Dans le cas (c’est-a-dire toujours) ou les actionneurs presentent des saturations, lapresence d’un terme integral dans le correcteur peut poser probleme. Des lors que l’ac-tionneur est sature, le systeme se retrouve dans une configuration assimilablea uneboucle ouverte. En cas de variations de la consigne, le correcteur integre jusqu’a de tresgrandes valeurs, traduisant ainsi uneffet memoire. Quand l’erreur est reduite (actionintegrale desaturee), il se peut qu’il faille un temps important pour que les valeurs desvariables ne soient correctes de nouveau : on appelle ce phenomene l’emballement duterme integral (integral wind-up). Pour l’eviter il existe plusieurs methodes :
– soit on suspend l’action integrale quand la commande est saturee ;– soit on applique une methode d’anti-saturation, qui consistea recalculer le terme
integral pour ne pas saturer.
4.3.5 Synthese directe de correcteurs discrets
Les techniques de synthese directe enz presentees ici consistent en un placementdes poles du systeme en boucle fermee par choix des poles et zeros d’un correcteurserie de typePID4.
4Parmi les nombreuses methodes existant on cite, pour memoire : methode du lieu des racines,syntheseRST [Godoy 03], methode du modele,etc.

90 4. Asservissementsa temps discret
Premiere approche du placement de poles
Dans cette premiere approche, on propose de donner des regles pour choisir la formed’un correcteur serie (structure parfois appeleeR/S). Le correcteura synthetiser doitposseder un certain nombre de degres de liberte (gain, poles, zeros, integrations) choisis(nombre et valeurs) de manierea satisfaire les contraintes du cahier des charges. Pourcela, on rechercheC(z) sous la forme :
C(z) = Kc
(z
z − 1
)lDI(z)
NI(z)
1 + β1z + . . .
1 + α1z + . . .,
ou :– l est le nombre minimal d’integrations permettant de satisfaire la specification en
precision, le choixetant fait au plus juste pour obtenir le regime transitoire le plusrapide ;
– la FTBO prenant la forme generale :
(1− z−1)ZG(s)H(s)
s
=NI(z)
DI(z)
NE(z)
DE(z),
le correcteur compense les poles et zeros representes par l’indice.I : il s’agit engeneral des poles et zerosa l’interieur du cercle unite. On s’abstient cependant leplus souvent de compenser les poles oscillants trop proches du cercle ainsi queceuxa partie reelle negative, qui conduisenta une commande oscillante ;
– on introduit alternativement des poles et des zeros supplementaires (parametresαi
et βi) correspondant au nombre de specifications moins une, cette derniereetantobtenue par reglage du gain ajustableKc.
Exemple On considere un asservissement conforme au schema de la figure 4.3, avecH(s) = 1. Le procede considere a pour fonction de transfert :
G(s) =K
s(1 + τs)
de forme similairea celle d’un moteura courant continu dont on commande la positiona l’aidede sa tension d’induit (voir annexe C). On aK = 50, τ = 0, 3 et la commande numeriqueestechantillonneea la frequence de100 Hz. Le retour est suppose unitaire. Pour effectuer lasynthese directe d’un correcteur :
1. Calculer la fonction de transfert enz equivalente au blocBOZ + procede noteeGH(z) ;
2. On souhaite que le systeme en boucle fermee ait un comportement analoguea celui d’undeuxieme ordre de pulsation naturelleωn = 4 rad/s et de coefficient d’amortissementξ = 0, 71. Par ailleurs, on souhaite avoir une erreur de position nulle en regime permanentet une erreur de vitesse de0, 1 rad/s en presence d’une consigne en rampe.– donner la forme du correcteur envisage ;– calculer ce correcteur de facon a ce qu’il remplisse le cahier des charges precedent ;– en deduire l’equation aux differences constituant la relation entree-sortie de ce correc-
teur.
4.3. Commande numerique des systemes lineaires invariants 91
Synthese de correcteur par la methode du lieu des racines
La compensation de zeros et de poles par leur introduction dans la fonction de trans-fert d’un correcteur serie trouve un interet particulier lorsque l’on realise cette syntheseen s’appuyant sur le lieu des racines, dont on connaıt le parametrage en courbes dememe amortissement et en courbes de meme pulsation naturelle.
On peut adopter les regles generales vues dans le paragraphe precedent pour choisirla forme du correcteur que l’on regle alors en s’appuyant sur la construction du lieu desracines.
Exemple Reprendre la synthese precedente en s’appuyant sur le lieu des racines.

Annexes

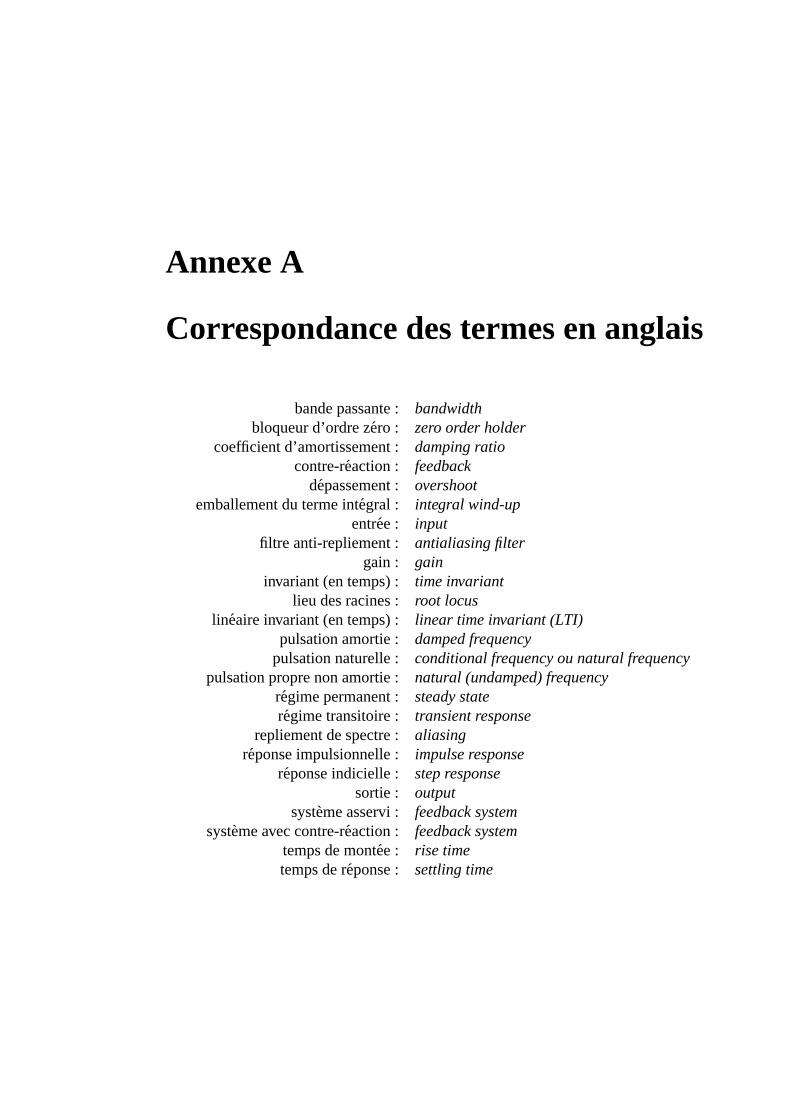
Annexe A
Correspondance des termes en anglais
bande passante :bandwidthbloqueur d’ordre zero : zero order holder
coefficient d’amortissement :damping ratiocontre-reaction : feedback
depassement : overshootemballement du terme integral : integral wind-up
entree : inputfiltre anti-repliement : antialiasing filter
gain : gaininvariant (en temps) : time invariant
lieu des racines : root locuslineaire invariant (en temps) :linear time invariant (LTI)
pulsation amortie : damped frequencypulsation naturelle : conditional frequency ou natural frequency
pulsation propre non amortie :natural (undamped) frequencyregime permanent : steady stateregime transitoire : transient response
repliement de spectre :aliasingreponse impulsionnelle : impulse response
reponse indicielle : step responsesortie : output
systeme asservi : feedback systemsysteme avec contre-reaction : feedback system
temps de montee : rise timetemps de reponse : settling time

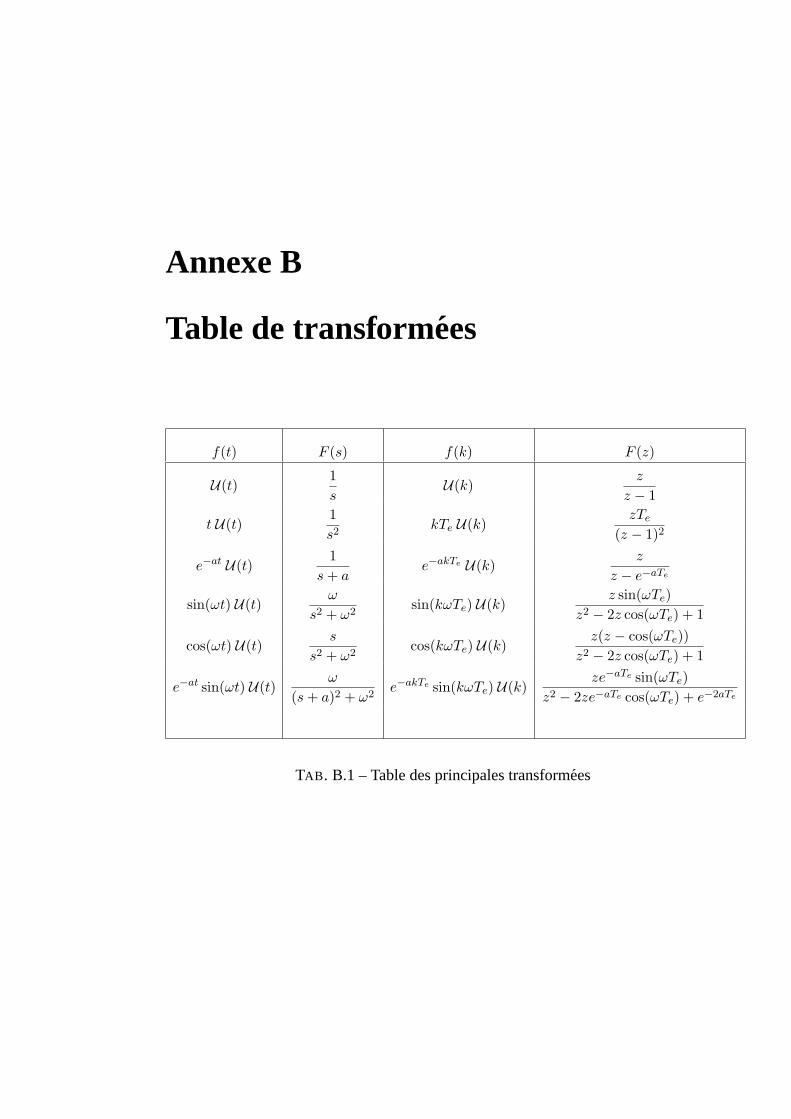
Annexe B
Table de transformees
f(t) F (s) f(k) F (z)
U(t)1s
U(k)z
z − 1
t U(t)1s2
kTe U(k)zTe
(z − 1)2
e−at U(t)1
s + ae−akTe U(k)
z
z − e−aTe
sin(ωt) U(t)ω
s2 + ω2sin(kωTe) U(k)
z sin(ωTe)z2 − 2z cos(ωTe) + 1
cos(ωt) U(t)s
s2 + ω2cos(kωTe) U(k)
z(z − cos(ωTe))z2 − 2z cos(ωTe) + 1
e−at sin(ωt) U(t)ω
(s + a)2 + ω2e−akTe sin(kωTe) U(k)
ze−aTe sin(ωTe)z2 − 2ze−aTe cos(ωTe) + e−2aTe
TAB . B.1 – Table des principales transformees

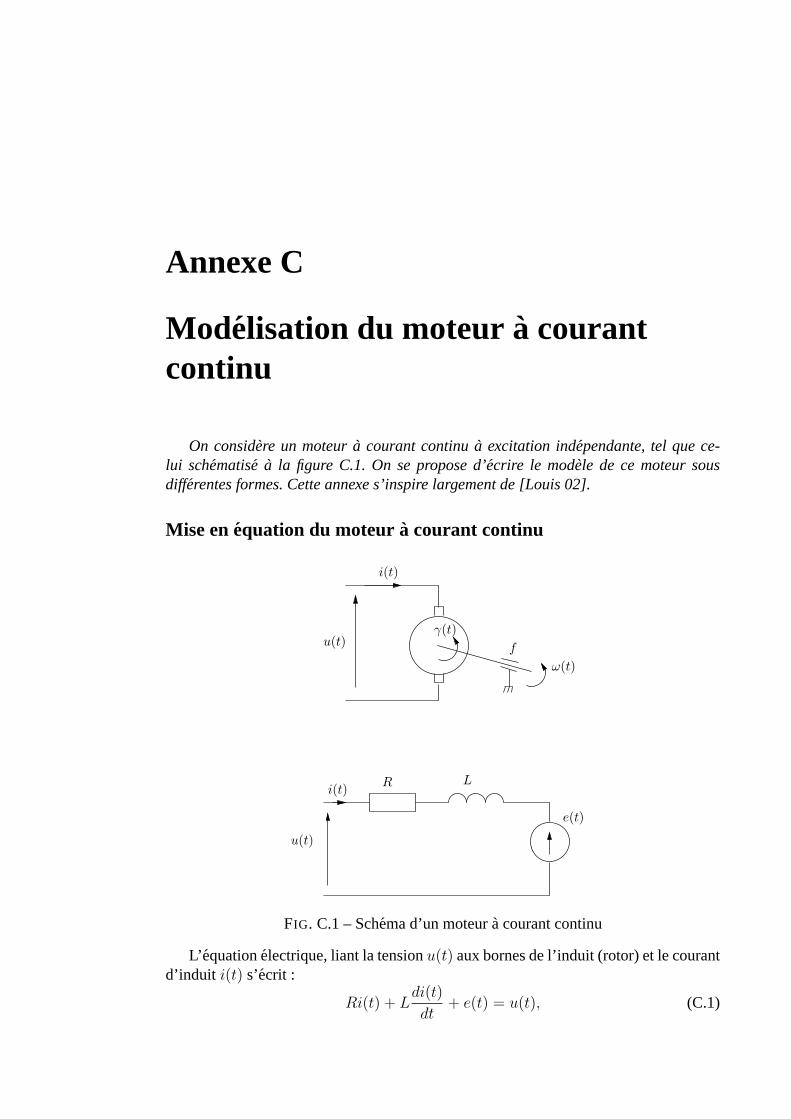
Annexe C
Modelisation du moteur a courantcontinu
On considere un moteura courant continua excitation independante, tel que ce-lui schematise a la figure C.1. On se propose d’ecrire le modele de ce moteur sousdifferentes formes. Cette annexe s’inspire largement de [Louis 02].
Mise enequation du moteur a courant continu
e(t)
R Li(t)
u(t)
f
ω(t)
γ(t)
i(t)
u(t)
FIG. C.1 – Schema d’un moteura courant continu
L’ equationelectrique, liant la tensionu(t) aux bornes de l’induit (rotor) et le courantd’induit i(t) s’ecrit :
Ri(t) + Ldi(t)
dt+ e(t) = u(t), (C.1)

100 C. Modelisation du moteur a courant continu
ouR est la resistance de l’induit du moteur,L son inductance ete(t) la forceelectromotrice,qui est proportionnellea la vitesse de rotation du rotor :
e(t) = Ke ω(t). (C.2)
L’ equation mecanique rendant compte des couples agissant sur le rotor s’ecrit :
γ(t)− fω(t) = Jdω(t)
dt, (C.3)
ou γ(t) est le couple moteur,f le coefficient de frottement visqueux etJ le momentd’inertie du rotor. Par construction, le coupleγ(t) est proportionnel au courant d’induiti(t) :
γ(t) = Kmi(t). (C.4)
En regle generale les coefficientsKe etKm sont si proches qu’il est raisonnable deles considereregaux, negligeant alors les pertes durant la conversionelectromecaniquede puissance. On poseKem = Ke = Km.
Lesequations (C.3) et (C.4) donnent :
Kemi(t) = fω(t) + Jdω(t)
dt. (C.5)
En derivant (C.5), il vient :
Kemdi(t)
dt= f
dω(t)
dt+ J
d2ω(t)
dt2. (C.6)
En combinant (C.5) et (C.6) avec (C.1) et (C.2) :
R
Kem
(fω(t) + J
dω(t)
dt
)+
L
Kem
(fdω(t)
dt+ J
d2ω(t)
dt2
)+Kem ω(t) = u(t). (C.7)
Modeles pour l’asservissement de vitesse du moteur
Modele d’ordre un
On neglige l’influence de l’inductance d’induit.L’ equation (C.7) se simplifie en :
Rf +K2em
Kem
ω(t) +RJ
Kem
dω(t)
dt= u(t),
soit :
ω(t) +RJ
Rf +K2em
dω(t)
dt=
Kem
Rf +K2em
u(t).
La fonction de transfert reliant la commande en tension du moteurU(s) et sa vitesseΩ(s) est :
G(s) =Ω(s)
U(s)=
K
1 + τems, (C.8)

101
si l’on definit laconstante de tempselectromecanique du systeme:
τem =RJ
Rf +K2em
,
et songain statique:
K =Kem
Rf +K2em
Le systeme ainsi modelise est donc d’ordre un. Il possede un pole stablep = −1/τem.
Modele d’ordre deux
On leve maintenant l’hypothese du paragraphe precedentpour obtenir un modeleplus fin du moteura courant continu. Deux expressions interessantes de la fonction detransfert sont alors possibles :
1. En ordonnant (C.7) de facona avoir un coefficient de un devant le degre dederivation le pluseleve, il vient :
d2ω(t)
dt2+RJ + Lf
LJ
dω(t)
dt+Rf +K2
em
LJω(t) =
Kem
LJu(t). (C.9)
ce qui conduita la fonction de transfert sous la forme :
G(s) =Kem
LJ
s2 + (RL
+ fJ)s+ Rf+K2
em
LJ
.
Cetteecriture est interessante pour identifier la fonction de transfert sous la formecanonique :
G(s) =K ω2
n
s2 + 2ξωns+ ω2n
.
2. En ordonnant (C.7) de facona avoir un coefficient de un devant le degre dederivation le plus faible (i.e.ω(t)), il vient :
ω(t) +RJ + Lf
Rf +K2em
dω(t)
dt+
LJ
Rf +K2em
d2ω(t)
dt2=
Kem
Rf +K2em
u(t). (C.10)
ce qui conduita la fonction de transfert sous la forme :
G(s) =K
1 + (τem + µτel)s+ τelτems2, (C.11)
si l’on definit laconstante de tempselectrique du systeme:
τel =L
R.
On note encore que :
µ =Rf
Rf +K2em

102 C. Modelisation du moteur a courant continu
est petit devant un (terme lie au frottement). Enfin, comme on peut raisonnable-ment supposer queτel τem :
τem + µτel ' τem ' τem + τel.
Cela permet d’ecrire finalement la fonction de transfert sous la forme :
G(s) =Ω(s)
U(s)=
K
(1 + τels)(1 + τems).
Les poles du systemep1 = −1/τel etp2 = −1/τem apparaissent alors clairement.
Modeles pour l’asservissement de position du moteur
La position du moteur se deduisant de sa vitesse par integration on obtient aisementla fonction de transfert reliant la tension commande du moteurU(s) et sa positionΘ(s) = Lθ(t), d’apres les resultats du paragraphe precedent. D’apres le cas le plusgeneraletudie precedemment, il vient :
G(s) =Θ(s)
U(s)=
K
s(1 + τels)(1 + τems).
Le systeme possede trois polesp1 = 0, p2 = −1/τel etp3 = −1/τbem.
Cet annexe se termine par la documentation technique C.1 du moteura courantcontinu sans fer Maxon F2260 qui serta titre d’exemple dans ce cours.
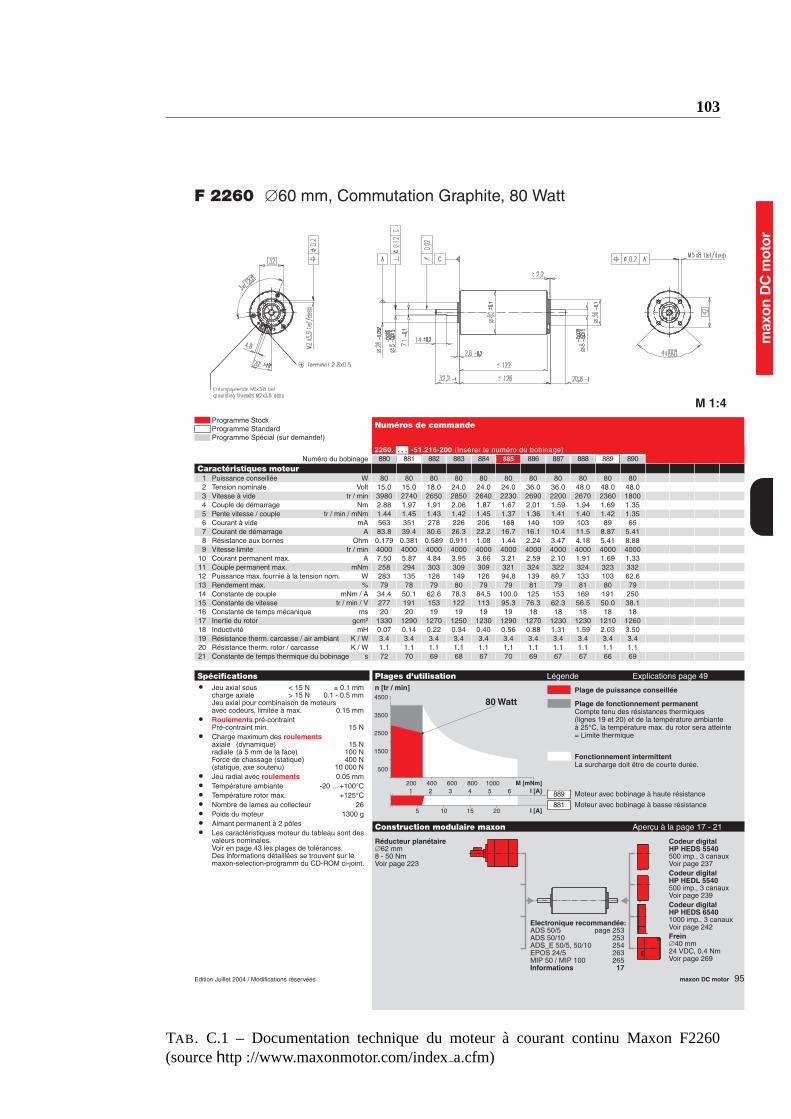
103
Plages d'utilisation Légende Explications page 49
Plage de puissance conseillée
Plage de fonctionnement permanentCompte tenu des résistances thermiques(lignes 19 et 20) et de la température ambianteà 25°C, la température max. du rotor sera atteinte= Limite thermique
Fonctionnement intermittentLa surcharge doit être de courte durée.
Moteur avec bobinage à haute résistance
Moteur avec bobinage à basse résistance
n [tr / min]
max
onD
Cm
otor
Spécifications
Programme StockProgramme StandardProgramme Spécial (sur demande!)
Numéros de commande
Edition Juillet 2004 / Modifications réservées maxon DC motor 95
Construction modulaire maxon Aperçu à la page 17 - 21
200 400 600 800 1000
4500
3500
2500
1500
500
80 Watt
1 2 3 4 5 6
5 10 15 20
M [mNm]I [A]
I [A]
889
881
F 2260 60 mm, Commutation Graphite, 80 Watt
Jeu axial sous < 15 N 0.1 mmcharge axiale > 15 N 0.1 - 0.5 mmJeu axial pour combinaison de moteursavec codeurs, limitée à max. 0.15 mm
Roulements pré-contraintPré-contraint min. 15 N
Charge maximum des roulementsaxiale (dynamique) 15 Nradiale (à 5 mm de la face) 100 NForce de chassage (statique) 400 N(statique, axe soutenu) 10 000 N
Jeu radial avec roulements 0.05 mm Température ambiante -20 ... +100°C Température rotor max. +125°C Nombre de lames au collecteur 26 Poids du moteur 1300 g Aimant permanent à 2 pôles Les caractéristiques moteur du tableau sont des
valeurs nominales.Voir en page 43 les plages de tolérances.Des informations détaillées se trouvent sur lemaxon-selection-programm du CD-ROM ci-joint.
Réducteur planétaire62 mm8 - 50 NmVoir page 223
Codeur digitalHP HEDS 5540500 imp., 3 canauxVoir page 237Codeur digitalHP HEDL 5540500 imp., 3 canauxVoir page 239Codeur digitalHP HEDS 65401000 imp., 3 canauxVoir page 242
2260. . . . -51.216-200 (Insérer le numéro du bobinage)Numéro du bobinage 880 881 882 883 884 885 886 887 888 889 890
Caractéristiques moteur1 Puissance conseillée W 80 80 80 80 80 80 80 80 80 80 802 Tension nominale Volt 15.0 15.0 18.0 24.0 24.0 24.0 36.0 36.0 48.0 48.0 48.03 Vitesse à vide tr / min 3980 2740 2650 2850 2640 2230 2690 2200 2670 2360 18004 Couple de démarrage Nm 2.88 1.97 1.91 2.06 1.87 1.67 2.01 1.59 1.94 1.69 1.355 Pente vitesse / couple tr / min / mNm 1.44 1.45 1.43 1.42 1.45 1.37 1.36 1.41 1.40 1.42 1.356 Courant à vide mA 563 351 278 226 206 168 140 109 103 89 657 Courant de démarrage A 83.8 39.4 30.6 26.3 22.2 16.7 16.1 10.4 11.5 8.87 5.418 Résistance aux bornes Ohm 0.179 0.381 0.589 0.911 1.08 1.44 2.24 3.47 4.18 5.41 8.889 Vitesse limite tr / min 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000
10 Courant permanent max. A 7.50 5.87 4.84 3.95 3.66 3.21 2.59 2.10 1.91 1.69 1.3311 Couple permanent max. mNm 258 294 303 309 309 321 324 322 324 323 33212 Puissance max. fournie à la tension nom. W 283 135 128 149 126 94.8 139 89.7 133 103 62.613 Rendement max. % 79 78 79 80 79 79 81 79 81 80 7914 Constante de couple mNm / A 34.4 50.1 62.6 78.3 84.5 100.0 125 153 169 191 25015 Constante de vitesse tr / min / V 277 191 153 122 113 95.3 76.3 62.3 56.5 50.0 38.116 Constante de temps mécanique ms 20 20 19 19 19 19 18 18 18 18 1817 Inertie du rotor gcm2 1330 1290 1270 1250 1230 1290 1270 1230 1230 1210 126018 Inductivité mH 0.07 0.14 0.22 0.34 0.40 0.56 0.88 1.31 1.59 2.03 3.5019 Résistance therm. carcasse / air ambiant K / W 3.4 3.4 3.4 3.4 3.4 3.4 3.4 3.4 3.4 3.4 3.420 Résistance therm. rotor / carcasse K / W 1.1 1.1 1.1 1.1 1.1 1.1 1.1 1.1 1.1 1.1 1.121 Constante de temps thermique du bobinage s 72 70 69 68 67 70 69 67 67 66 69
Frein40 mm24 VDC, 0.4 NmVoir page 269
M 1:4
Electronique recommandée:ADS 50/5 page 253ADS 50/10 253ADS_E 50/5, 50/10 254EPOS 24/5 263MIP 50 / MIP 100 265Informations 17
TAB . C.1 – Documentation technique du moteura courant continu Maxon F2260(sourcehttp ://www.maxonmotor.com/indexa.cfm)

Annexe D
Lieu des racines (lieu d’Evans)
Avertissement Cette annexe,ecrite initialement par Patrick Danes (Universite de Tou-louse) et tres peu modifiee, est une presentation sommaire (et reductrice) du lieu d’Evanset de son utilisation. Dans le cas ou elle ne serait pas suffisante, nous vous invitonsavous reportera des ouvrages de reference [Franklin 02, Ogata 01].
Introduction
Soit le systeme asservi admettant une chaıne directe et une chaıne de retour de trans-mittances respectivesG(s) = NG(s)
DG(s)et H(s) = NH(s)
DH(s). On appellefonction de trans-
fert en boucle ouvertele produitGBO(s) = G(s)H(s). On designe parm le degre dunumerateurNBO(s) = NG(s)NH(s) de la boucle ouverte, et parn son ordre, ”cad” ledegre de son denominateurDBO(s) = DG(s)DH(s).
La transmittance de cet asservissement (fonction de transfert en boucle fermee) estdefinie par :
F (s) =G(s)
1 +G(s)H(s)=
NG(s)DH(s)
NG(s)NH(s) +DG(s)DH(s).
Ses zeros sont les zeros de sa chaıne directe et les poles de sa chaıne de retour. En effet,
z ∈ C est un zero deF (s)⇔ NG(z) = 0 ouDH(z) = 0.
D’autre part, les poles de la fonction de transfert du systeme asservi sont les racines del’ equation caracteristique1 +G(s)H(s) = 0, soit
s ∈ C est un pole deF (s)⇔ 1 +GBO(s) = 0 (D.1)
ou bien, sous forme polynomiale,
s ∈ C est un pole deF (s)⇔ Num1 +G(s)H(s) = NG(s)NH(s) +DG(s)DH(s) = 0.(D.2)
Ainsi, le systeme asservi :
106 D. Lieu des racines (lieu d’Evans)
– est du meme ordre que sa boucle ouverte ;– est stable si et seulement si les solutions de l’equation1 + GBO(s) = 0 sont a
parties reelles negatives. En effet, un systeme de fonction de transfertF (s) eststable si et seulement si ses poles sont situesa gauche de l’axe imaginaire dans leplan complexe.
Definition du lieu d’Evans
Il est particulierement interessant d’etudier la configuration des poles d’un systemeasservi lorsqu’un gaink variable est insere dans sa boucle. On peut alors en deduireles valeurs dek pour lesquelles l’asservissement est stable, celles pour lesquelles il estrapide, suffisamment amorti, etc.
Si un amplificateur de gaink est introduit dans la boucle du systeme asservi – enaval du comparateur par exemple – alors lesn poles de la fonction de transfert en bouclefermee sont les solutions de l’equation caracteristique
1 + kGBO(s) = 0, (D.3)
ou bien, sous forme polynomiale
DBO(s) + kNBO(s) = 0. (D.4)
Le lieuE de l’ensemble des solutions obtenues lorsquek varie est appele le lieu desracines(pour ”lieu des racines de l’equation caracteristique de l’asservissement lorsquele gaink varie”), lieu des poles du systeme asservi(sous-entendu ”lorsquek varie”), oulieu d’Evans(du nom de son createur).
Regles pour l’elaboration deESi
GBO(s) = kBOΓ(s), avecΓ(s) =N(s)
D(s)=
∏i=1,..., m
(s− zi)∏j=1,..., n
(s− pj),
alors l’equation (D.3) peutetre reecrite sous la forme ”canonique”
1 +KΓ(s) = 0, avecK = kBOk, (D.5)
soit
D(s) +KN(s) = 0, (D.6)

107
ou bien ∏i=1,..., m
(s− zi)∏j=1,..., n
(s− pj)= − 1
K. (D.7)
Nous nous placons dans l’hypothese ou K ∈ R+ (si K ≤ 0, se referer a unouvrage de base). SoientZi d’affixe zi, i = 1, . . . , m, etPj d’affixepj, j = 1, . . . , n, lespoints du plan complexe correspondant aux zeros et aux poles deΓ(s), respectivement.D’apres (D.7), un pointM d’affixe s appartient au lieu des racinesE si et seulement si∑
i=1,..., m
arg−−→ZiM −
∑j=1,..., n
arg−−→PjM = π + 2λπ. (D.8)
Cette condition necessaire et suffisante d’appartenancea E est appeleecondition desangles. En outre, (D.7) implique la condition suivante, ditecondition des modules, uti-lisee pour graduer le lieuE en fonction deK.∏
i=1,..., m
|−−→ZiM |∏
j=1,..., n
|−−→PjM |
=1
K. (D.9)
Voici les regles que l’onetablita partir de (D.8)–(D.9) pour la construction du lieu :
1. Nombre de branches du lieu :egal au degre n deD(s) (ordre de la fonction detransfert en boucle ouverte) ;
2. Symetrie du lieu par rapporta l’axe reel : un pointM [s] appartenant au lieuE estsoit sur l’axe reel, soit admet une partie imaginaire non nulle ; dans ce dernier cas,le lieu E comprendegalement le symetriqueM∗ deM , d’affixe s∗ (conjugue des) ;
3. Depart et arrivee des branches : le lieu comporte– n points de depart, pourK = 0, situes sur lespolespj deΓ(s) ;– m (avec bien surm < n) points d’arrivee, pourK = +∞, situes sur leszeroszi deΓ(s) ;
– n−m branches infinies ;
4. Asymptotes :– lesn−m asymptotes des branches infinies du lieuE font les anglesβλ = 2λ+1
n−mπ,
λ = 0, . . . , (n−m− 1) avec l’horizontale ;– elles intersectent l’axe reel en le point∆, d’affixe δ =
Ppj−
Pzi
n−m;
5. Branches du lieu appartenanta l’axe reel : un pointM d’affixe reelle appartientaE si le nombre de poles et zeros reels deΓ(s) situesa droite deM est impair ;
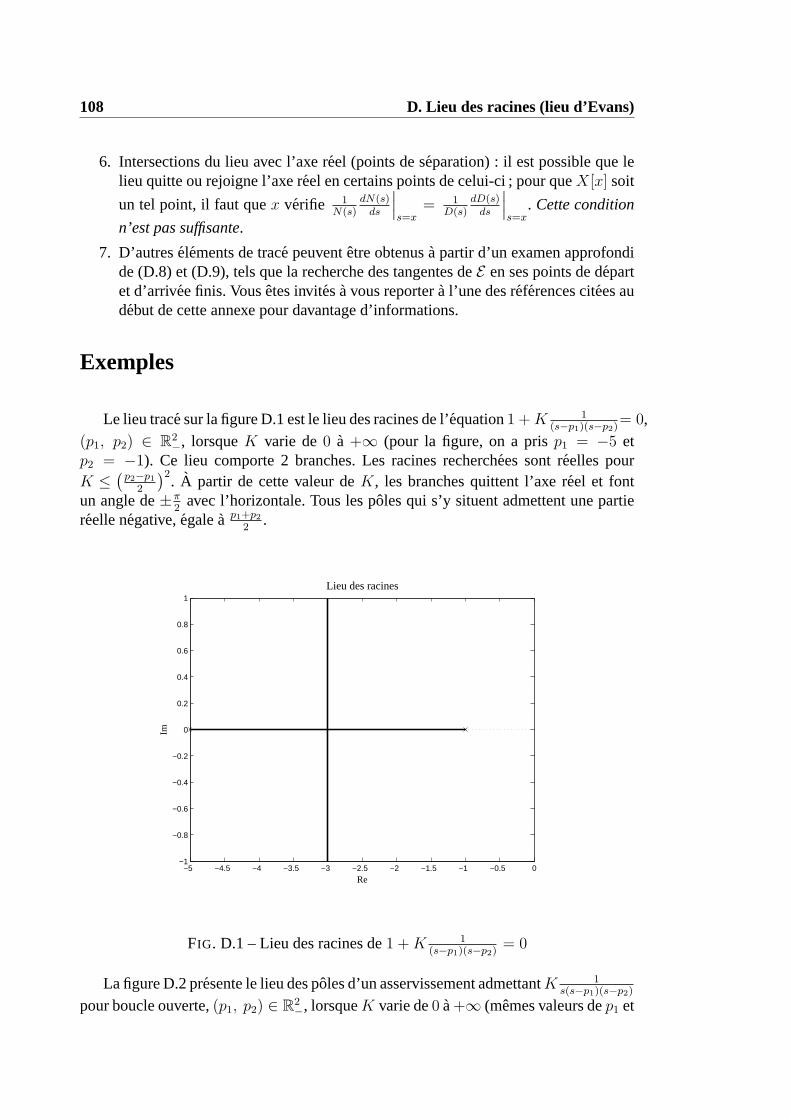
108 D. Lieu des racines (lieu d’Evans)
6. Intersections du lieu avec l’axe reel (points de separation) : il est possible que lelieu quitte ou rejoigne l’axe reel en certains points de celui-ci ; pour queX[x] soit
un tel point, il faut quex verifie 1N(s)
dN(s)ds
∣∣∣s=x
= 1D(s)
dD(s)ds
∣∣∣s=x
. Cette condition
n’est pas suffisante.
7. D’autreselements de trace peuventetre obtenusa partir d’un examen approfondide (D.8) et (D.9), tels que la recherche des tangentes deE en ses points de departet d’arrivee finis. Vousetes invitesa vous reportera l’une des references citees audebut de cette annexe pour davantage d’informations.
Exemples
Le lieu trace sur la figure D.1 est le lieu des racines de l’equation1 +K 1(s−p1)(s−p2)
= 0,(p1, p2) ∈ R2
−, lorsqueK varie de0 a +∞ (pour la figure, on a prisp1 = −5 etp2 = −1). Ce lieu comporte 2 branches. Les racines recherchees sont reelles pourK ≤
(p2−p1
2
)2. A partir de cette valeur deK, les branches quittent l’axe reel et font
un angle de±π2
avec l’horizontale. Tous les poles qui s’y situent admettent une partiereelle negative,egalea p1+p2
2.
−5 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Lieu des racines
Re
Im
FIG. D.1 – Lieu des racines de1 +K 1(s−p1)(s−p2)
= 0
La figure D.2 presente le lieu des poles d’un asservissement admettantK 1s(s−p1)(s−p2)
pour boucle ouverte,(p1, p2) ∈ R2−, lorsqueK varie de0 a+∞ (memes valeurs dep1 et
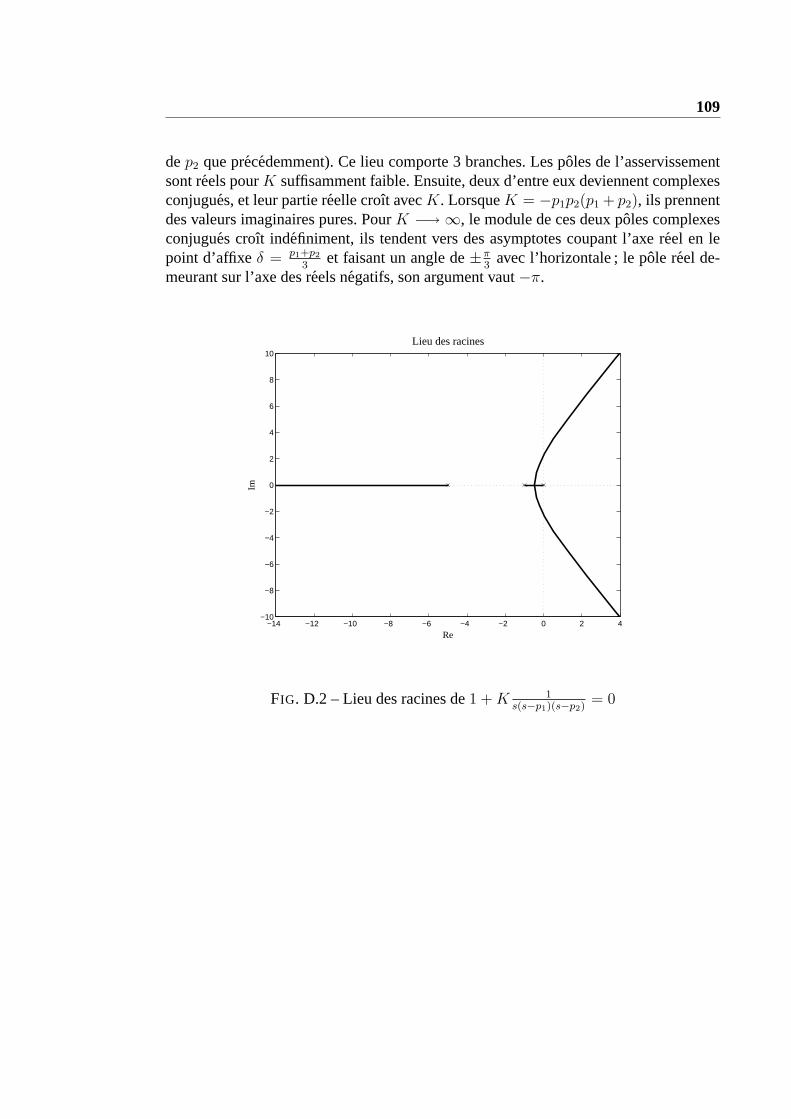
109
dep2 que precedemment). Ce lieu comporte 3 branches. Les poles de l’asservissementsont reels pourK suffisamment faible. Ensuite, deux d’entre eux deviennent complexesconjugues, et leur partie reelle croıt avecK. LorsqueK = −p1p2(p1 + p2), ils prennentdes valeurs imaginaires pures. PourK −→ ∞, le module de ces deux poles complexesconjugues croıt indefiniment, ils tendent vers des asymptotes coupant l’axe reel en lepoint d’affixeδ = p1+p2
3et faisant un angle de±π
3avec l’horizontale ; le pole reel de-
meurant sur l’axe des reels negatifs, son argument vaut−π.
−14 −12 −10 −8 −6 −4 −2 0 2 4−10
−8
−6
−4
−2
0
2
4
6
8
10
Lieu des racines
Re
Im
FIG. D.2 – Lieu des racines de1 +K 1s(s−p1)(s−p2)
= 0

Bibliographie
[Bernot 99] F. Bernot. Machinesa Courant Continu. Constitution et fonction-nement. Techniques de l’Ingenieur, traite Genieelectrique, pages D3555 1–14, 1999.
[de Mathelin 99] M. de Mathelin.Cours de commande numerique des systemes. Uni-versite Louis Pasteur, Strasbourg, 1999. Communication personnelle.
[Franklin 97] G. F. Franklin, J. D. Powell et M. L. Workman. Digital control ofdynamic systems. Addison-Wesley, 1997.
[Franklin 02] G. F. Franklin, J. D. Powell et A. Emami-Naeini. Feedback control ofdynamic systems. Prentice Hall, 2002.
[Godoy 03] E. Godoy et E. Ostertag. Commande numerique des systemes. El-lipses, Technosup, 2003.
[Kuo 03] B. C. Kuo et F. Golnaraghi. Automatic control systems. John Wiley& Sons, 2003.
[Longchamp 95]R. Longchamp. Commande numerique de systemes dynamiques.Presses polytechniques et universitaires romandes, 1995.
[Louis 02] J.-P. Louis, B. Multon, Y. Bonnassieux et M. Lavabre.Commande desMachinesa Courant Continu (mcc)a Vitesse Variable. Techniques del’Ingenieur, traite Genieelectrique, pages D 3610 1–17, 2002.
[Nise 04] N. S. Nise. Control systems engineering. John Wiley & Sons, 2004.
[Ogata 94] K. Ogata. Discrete-time control systems. Prentice Hall, 1994.
[Ogata 01] K. Ogata. Modern control engineering. Prentice Hall, 2001.
[Ostertag 04] E. Ostertag. Systemes et asservissements continus. Modelisation, ana-lyse, synthese des lois de commande. Ellipses, Technosup, 2004.