Dossier de conception préliminaire - sii-technologie.ac...
70
Dossier de conception préliminaire Reconception du spot orientable motorisé suivant deux axes BTS CIM Session 2004-2005 Henry Sébastien Lepiller Davy Leseigneur Matthieu Rodriguez Davy 1
Transcript of Dossier de conception préliminaire - sii-technologie.ac...

Dossier de conceptionpréliminaire
Reconception du spot orientable motorisé suivant deux axes
BTS CIM
Session 2004-2005
Henry SébastienLepiller DavyLeseigneur MatthieuRodriguez Davy
1

Sommaire
1. Cahier des charges fonctionnel 3• rappel du dossier original.
2. Étude du dossier existant 8• principe de fonctionnement.• analyse des coûts par fonction.• Hiérarchisation.
3. Recherche d'informations 18• tableau récapitulatif des recherches.• schéma cinématique retenu.
4. Analyse fonctionnelle des différentes pièces 21• critiques et choix :
- le couvercle/bâti- le porte moteur- le cache- la fourchette
5. Annexes 37• maquette Solidworks.• Recherche de l'existant
2

CahierCahier
desdes
chargescharges
fonctionnelfonctionnel
3

1.Présentation générale :
1.1 Le contexte du projet :
1.1.1 Énoncé du besoin global :
1.1.2Présentation générale :
– Origine du projet : Idée du groupe.– Nature du travail demandé : Alimentation électrique 230V, respecter
les normes de sécurité (isolation électrique, isolation thermique). Doitêtre esthétique.
– Caractère confidentiel : Oui, dans la mesure où le produit peut fairel'objet d'un brevet.
– Suite prévue : industrialisation, adaptation suivant demande.1.1.3
4
UtilisateurOrienter le spot
à distance
SPOT ORIENTABLE
Permet l'éclairage d'une surface désirée

1.1.4Diagnostic du marché :
– Insatisfactions relevées sur des produits voisins : Orientationmanuelle donc risque de brûlures.
– Produits concurrents et points précis à examiner : Modèles nonmotorisés chez les concurrents.
– Étude d'intérêt du produit sur les acquéreurs : Faciliter l'orientation duspot sans contact direct entre l'objet et son utilisateur.
– Qu'est ce qui peut faire évoluer ou disparaître le besoin : Évolution desnormes de sécurité électrique.
– Quel est le risque d'évolution ou de disparition : Apparition d'unmodèle plus performant.
– Espérance de vie commerciale : Indéterminée
1.1.4Documents et informations :
– Étude déjà effectuée : non– Brevet existant à consulter : INPI– Respect d'un standard d'une norme ou d'un règlement : ISO 9000– Documents à consulter et informations à recueillir : Se documenter sur
les spots à orientation manuelle.
1.1.5Directives particulières :
– Interdiction ou imposition d'une solution : Déplacement du spot surdeux axes.
– L'environnement du produit recherché : Maison, bureau, galerie.– Sécurité : Électrique, thermique.– S.A.V. : Garantie 1 an.– Documents utilisateur : Notice d'utilisation.– Conditionnement du produit : Boîte de rangement
2. Expression fonctionnelle du besoin :
– Description fonctionnelle : Recherche des fonctions deservice/recherche et expression du besoin.
– Inventaire des fonctions principales, contraintes, services...– Appréciation des fonctions de service.
5
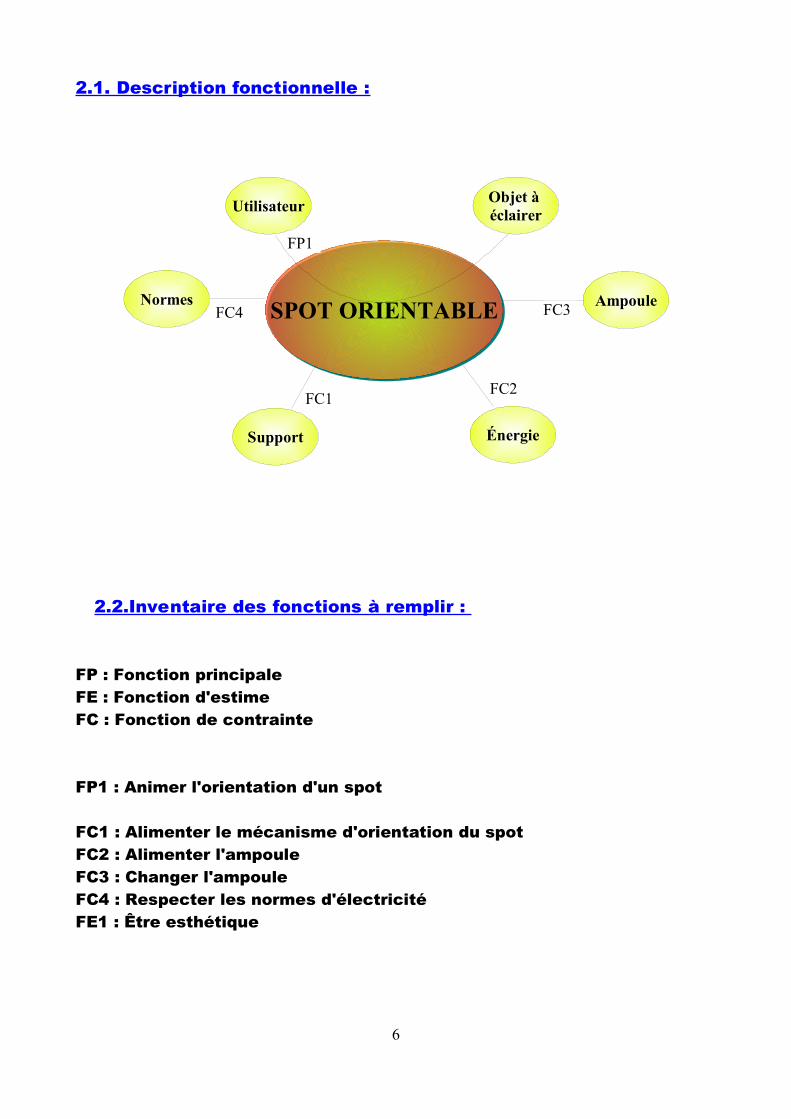
2.1. Description fonctionnelle :
2.2.Inventaire des fonctions à remplir :
FP : Fonction principaleFE : Fonction d'estimeFC : Fonction de contrainte
FP1 : Animer l'orientation d'un spot
FC1 : Alimenter le mécanisme d'orientation du spotFC2 : Alimenter l'ampouleFC3 : Changer l'ampouleFC4 : Respecter les normes d'électricitéFE1 : Être esthétique
6
SPOT ORIENTABLE
Objet à éclairer
Ampoule
Utilisateur
Normes
ÉnergieSupport
FC4
FP1
FC3
FC1 FC2

2.3.Appreciation des fonctions de service :
Rep. Fonction Critère Niveaux Flexibilité
FP1 Animer l'orientationd'un spot
Vitesseangulaire
2 rad/s(20tr/min)
1
FC1 Se fixer sur unsupport
/ /0
FC2 Utiliser l'énergiedisponible
Tension 220 Vac0
FC3 Changer l'ampoule Sans outilsupplémentai
re
/
1
FC4 Respecter les normes Instrumentsélectriques
ISO 90000
FE1 Être esthétique Goûtpersonnel
/0
Flexibilité : quantifiée ou degré de flexibilité ci-dessous
Flexibilité : 0 : Impératif 1 : On peut négocier 2 : Tout peut être remis en cause
3. Appel à variante :
Autorisé jusqu'à limite de début de réalisation du prototype.
7

ÉtudeÉtude
dudu
dossierdossier
existantexistant
8

Explication du systèmeexistant
Ce système est composé de 2 moteurs à courant continu quipermettent la mise en rotation du spot :
– Un premier moteur est maintenu serré dans le couvercle et sonaxe est maintenu par une vis de pression sur la fourchette.
– Un second moteur, placé lui horizontalement, est maintenu dansle porte-moteur qui est guidé grâce à une goupille . L'axe de cesecond moteur est bloqué par son méplat sur une butéecylindrique, celle-ci est maintenue par une vis.
Axe moteur
9
couvercle
Vis de pression
Butée cylindrique
Porte moteur
Vis de maintient
fourchette

Les 2 moteurs sont maintenus en position par des vis de pression :
La rotation de ce système est stoppé par des capteurs positionnés surla fourchette :
- 2 capteurs, pour la rotation du premier moteur, sont placés sousla fourchette. Leurs contacts avec la tige provoque l'arrêt enrotation :
10
Vis depression
CapteursTige
déplacement

- 2 capteurs, pour la rotation du second moteur, sont placés à 45°sur la fourchette. Le contact des axes du porte-moteur, sur undes capteurs, provoque l'arrêt en rotation de celui-ci :
L'ampoule est placée sur la douille elle même positionnée dans leporte-moteur. Cette douille est maintenue par une vis :
11
Goupilles
Capteurs à45°
DouilleVis demaintient

NOMENCLATURErepère Nombre Désignation Matière Observation
1 1 Vis M3
2 1Moto-
réducteur12 V
3 1 Entretoise PVC
4 1 Porte-moteur 2 EN AW-2017
5 4 Contacteurs
6 1 Clips CuZn39Pb2
7 1 Porte-moteur 1 EN AW-2017
8 1Moto-
réducteur12 V
9 1 Douille
10 1 Ampoule
11 1 Bâti P.O.M.
12 1 Cache EN AW-2017
13 1 fourchette PVC
14 2Vis M6 sans
tête
15 1 Vis M2
16 2 Goupilles ø3x11
17 1 Vis M6
18 1 Goupille ø2x10
19 3 Vis M3 X3
20 2 Vis M2
21 1 Tige capteur EN AW-2017
12

13
pièce/fonctions Commander Isolation Total
Vis de pression x 0,36 x x x x x x x 0,36 xClips x 11,68 x 11,68 x 11,68 x x 35,03 xColle x 12,9 12,9 x x x x x x x 25,8
Butée cylindrique x x 11,67 x 11,67 x 11,67 x x 35,01 xFils électriques 7,5 x x x x x x x x x 7,5
Goupille x x 0,22 x x x x x x x 0,22
Motoréducteur x 14,97 14,97 x x x x x x x 29,94Télécommande + récepteur x x x 114,8 x x x x x x 114,8
Entretoise x 1,66 x x 1,66 x 1,66 x x 5 xBâti x x x x x 13,7 13,7 13,7 13,7 54,81 x
Transformateur 5,9 x x x x x x x x x 5,9Cache x x 18,01 x x x 18,01 x 18,01 54,39 xVisserie x x x x x 0,5 x x 0,5 x 1Ampoule x x x x x x x x x x
Contacteurs x 6,66 6,66 6,66 x x x x x x 20Douille x x x x x x x x x x
Couvercle x x x x x x 34,03 x 34,03 68,05 xPorte éclairage x x 162,13 x x x x x x 162,13 xConnecteurs x x x x x x 21,5 x x x 21,5
tiges capteurs x 3,33 x 3,33 x x 3,33 x x 10,01 xPorte moteur x x 54 x x x 54 x 54 162,09 x
Coût réalisation/fonctions x 4,99 180,14 3,33 25,01 13,7 148,08 13,7 119,74 x xCoût fourniture/fonctions 13,4 34,53 34,75 121,46 x 0,5 21,5 x 0,5 x x
Coût d'étude 586 1640,8 1699,4 879 117,2 586 117,2 117,2 117,2 x x 5860Total fonctions 599,4 1680,32 1914,29 1003,79 142,21 600,2 286,78 130,9 237,44 586,88 226,66 6595,33
Alimenter en énergie
Réaliser un mouvement de rotation de l'axe 1
Réaliser un mouvement de rotation de l'axe 2
Limiter les pertes
d'énergies
Se fixer sur le support
Résister au milieu
environnant
Etre de dimension
réduite
Coût réalisation+
matière
Coût fourniture

14
Graphe d'importance relative des fonctions
Ft 1 Ft 2-1 Ft 2-1 0 Ft 1-2 Ft 1-2 Ft 1-2 Ft 1-2 Ft 1-2 10 Ft 1 alimenter en énergie
Ft 2 0 Ft 2-1 Ft 2-2 Ft 2-2 Ft 2-2 Ft 2-2 Ft 2-2 12 Ft 2 réaliser un mouvement de rotation suivant l'axe 1
Ft 3 Ft 3-1 Ft 3-2 Ft 3-2 Ft 3-2 Ft 3-2 Ft 3-2 12 Ft 3 réaliser un mouvement de rotation suivant l'axe 2
Ft 4 Ft 4-1 Ft 4-2 Ft 4-2 Ft 4-2 Ft 4-2 9 Ft 4 commander
Ft 5 Ft 6-2 Ft 5-1 Ft 8-1 Ft 5-2 3 Ft 5 limiter les pertes d'énergies
Ft 6 Ft 6-1 Ft 6-1 Ft 6-2 6 Ft 6 se fixer sur un support
Ft 7 Ft 8-1 Ft 7-1 1 Ft 7 resister au milieu environnant
Ft 8 Ft 8-1 3 Ft 8 être de dimensions réduites
Ft 9 0 Ft 9 Isoler
Ligne 4 Ligne 6 Ligne 8 Ligne 10 Ligne 12
0123456789
101112
Importance relative des fonctions
fonctions
importance

15
Fonctions Coût imputé par fonction Coût imputé par fonction Importance relative Importance relativeAlimenter en énergie 599,4 9,09% 10 17,86%Réaliser un mouvement de rotation suivant l'axe 1 1680,32 25,48% 12 21,43%Réaliser un mouvement de rotation suivant l'axe 2 1914,29 29,02% 12 21,43%Commander 1003,79 15,22% 9 16,07%limiter les pertes d'énergies 142,21 2,16% 3 5,36%Se fixer sur un support 600,2 9,10% 6 10,71%Résister au milieu environnant 286,78 4,35% 1 1,79%Être de dimensions réduites 130,9 1,98% 3 5,36%Isoler 237,44 3,60% 0 0
6595,33 100,00% 56 100,00%
Alim
en
ter
en
én
erg
ie
Ré
alise
r u
n m
ou
ve
me
nt
de
ro
tatio
n s
uiv
an
t l'a
xe
1
Ré
alise
r u
n m
ou
ve
me
nt
de
ro
tatio
n s
uiv
an
t l'a
xe
2
Co
mm
an
de
r
lim
ite
r le
s p
ert
es d
'én
erg
ies
Se
fix
er
su
r u
n s
up
po
rt
Ré
sis
ter
au
milie
u e
nvir
on
na
nt
Êtr
e d
e d
ime
nsio
ns r
éd
uite
s
Iso
ler
0,00%2,50%5,00%7,50%
10,00%12,50%15,00%17,50%20,00%22,50%25,00%27,50%30,00%
Coût imputé par fonctionImportance relative
Comparatif des fonctions
Coût imputé par fonction
Importance relative

Hiérarchisation des fonctions:Alimenter en
énergieA B1 B1
0A2 A2 A2 A2 A2
10Réaliser unmouvementde rotation
suivant l'axe1
B 0 B1 B2 B2 B2 B2 B2
12Réaliser unmouvementde rotation
suivant l'axe2
C C1 C2 C2 C2 C2 C2
12Commander D D1 D2 D2 D2 D2 9
Limiter lespertes
d'énergies E F2 E1 H1 E2 3Se fixer surun support
F F1 F1 F26
Résister aumilieu
environnant
G H1 G1
1Être de
dimensionsréduites
H H1
3Isoler I 0
16
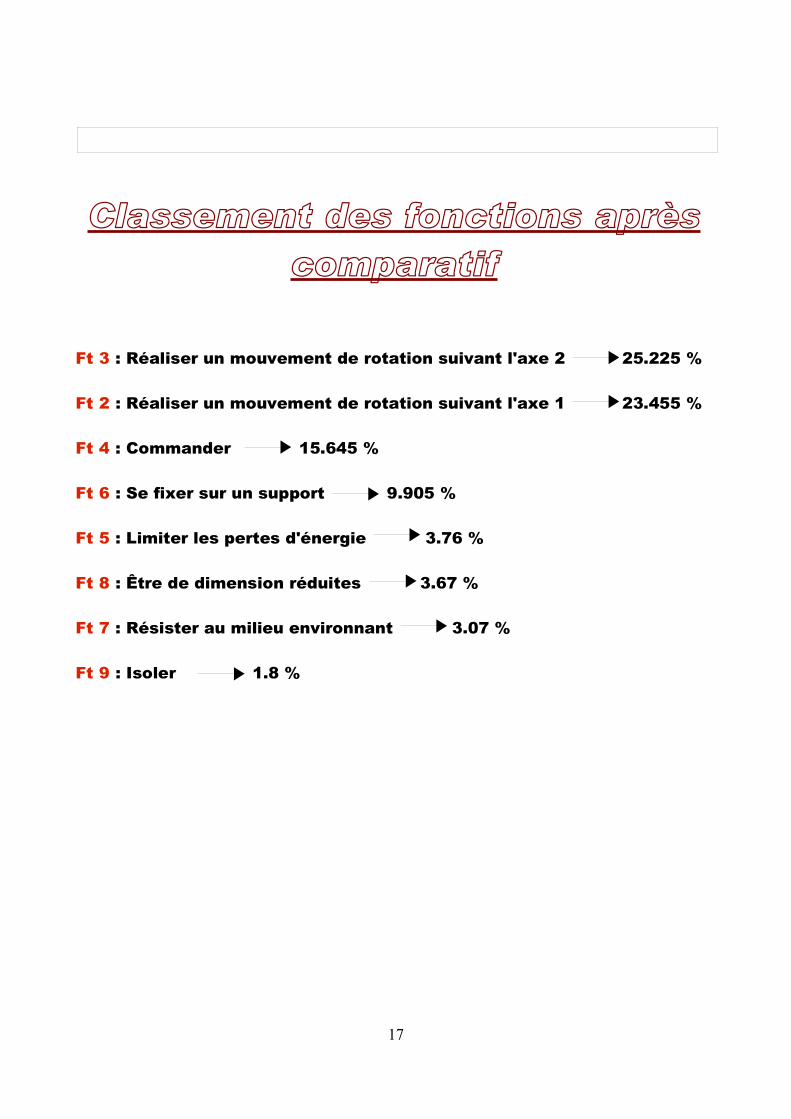
Classement des fonctions aprèscomparatif
Ft 3 : Réaliser un mouvement de rotation suivant l'axe 2 25.225 %
Ft 2 : Réaliser un mouvement de rotation suivant l'axe 1 23.455 %
Ft 4 : Commander 15.645 %
Ft 6 : Se fixer sur un support 9.905 %
Ft 5 : Limiter les pertes d'énergie 3.76 %
Ft 8 : Être de dimension réduites 3.67 %
Ft 7 : Résister au milieu environnant 3.07 %
Ft 9 : Isoler 1.8 %
17
RechercheRecherche
d'informationsd'informations
18

19
TABLEAU RECAPITULATIF DES RECHERCHES D'INFORMATIONS
Recherche de l'existant Différents sites internet, INPI RODRIGUEZ Davy
Moteur cc RODRIGUEZ Davy
Emetteur recepteur LESEIGNEUR Matthieu
Transistor Conrad, Radiospare LESEIGNEUR Matthieu
Microrupteur LESEIGNEUR Matthieu
Transformateur halogène Différents sites internet RODRIGUEZ Davy
Normes Différents sites internet Norme électrique LESEIGNEUR Matthieu
Pas d'existant sauf pour boîtes de nuit ou
professionnels de la lumière
Différents sites internet, MDP
Recherche sur dimensions moteurs, couple utile, prix
Différents sites internet, Conrad, Lextronic
Recherche sur dimensions carte électronique, prix
Recherche sur dimensions et prix
Différents sites internet et Conrad
Recherche sur dimensions et prix
Recherche sur dimensions et prix

Schéma cinématique:la solution retenue
20
Motoréducteur
n°1
Moto réducteur n°2
Lampe halogène
AnalyseAnalyse
fonctionnellefonctionnelle
desdes
différentesdifférentes
piècespièces21

Le porte moteur 1:
Cette pièce était aussi appelée couvercle car elle se fixe au bâti. Elleavait ainsi une double utilité, fermer le bâti le protégeant du milieuextérieur et également maintenir en position le moteur 1. Cette fixationse faisait par une solution, totalement critiquable, de vis de fixation, orles vis écrasaient les parois en tôle du moteur le rendant ainsiinutilisable. Nous avons, sur la maquette existante, analysés lessurfaces fonctionnelles nécessaires, ce qui nous permettra de pouvoirfaire varier toute les autres formes.
S5 S2 S1
S3 S4
22
Fonctions: ft7, ft9Prix par fonction:34.03€Prix total : 68.06€

S1 : Surface fonctionnelle permettant le logement du moteur. Lesméplats servent à éliminer la rotation du moteur dans sonlogement.
S2 : Forme non fonctionnelle qui facilite l'usinage du trou taraudé.
S3 : Forme fonctionnelle qui permet de fixer le porte-moteur avec lebâti à l'aide de 3 vis. (remise en cause possible)
S4 : Surface cylindrique : Permet le positionnement du couverclesur le bâti. (remise en cause possible)Surface plane : Surface fonctionnelle servant d'arrêt pour lemoteur. (remise en cause possible)
S5 : Surface fonctionnelle pour positionner la tige du capteur afinde déterminer la fin de course de l'axe 1. (remise en causepossible)
23

Le Bâti:
Le bâti est une pièce initialement montée en deux parties avec uncouvercle le refermant. Son épaisseur et disproportionnée par rapportaux efforts qu'il subit. Sur ce bâti était prévu une fixation au plafond parun système de lamelle.
S1 S3
S2 S4S1 : Surface non fonctionnelle pour fixer le porte-moteur avec le
bâti.
S2 : Surface non fonctionnelle permettant un épaulement avec lefaux plafond.
S3 : Surface fonctionnelle qui permet d'introduire le systèmeinterne.
S4: Surface non fonctionnelle pour la fixation du spot sur le fauxplafond.
24
Fonctions: ft6, ft7,ft8, ft9 prix par fonctions:13.70€prix total: 54.80€

Critiques de l'existant
le bâti : (Procédé : usinage)
– Remise en cause de l'épaulement– Trous de fixation qui peuvent être évités– Les formes ne sont pas esthétiques
Le couvercle : (Procédé : usinage)
– Pièce supplémentaire pas obligatoire– Trous de fixation qui peuvent être éviter
Tige capteur : (Procédé : usinage)
– pièce supplémentaire
SOLUTIONS ENVISAGEES: (procédé : moulage)
Bâti + couvercle + tige de capteur = une seule pièce
Remarques:
Le moulage a pour but de réduire le coût de réalisation. Enprocédant par moulage, il serait possible de faire le bâti, le couvercleainsi que la tige de capteur en une seule et même pièce réduisant leurcoût.
25
Fonction Ft6 : Se fixer sur un support
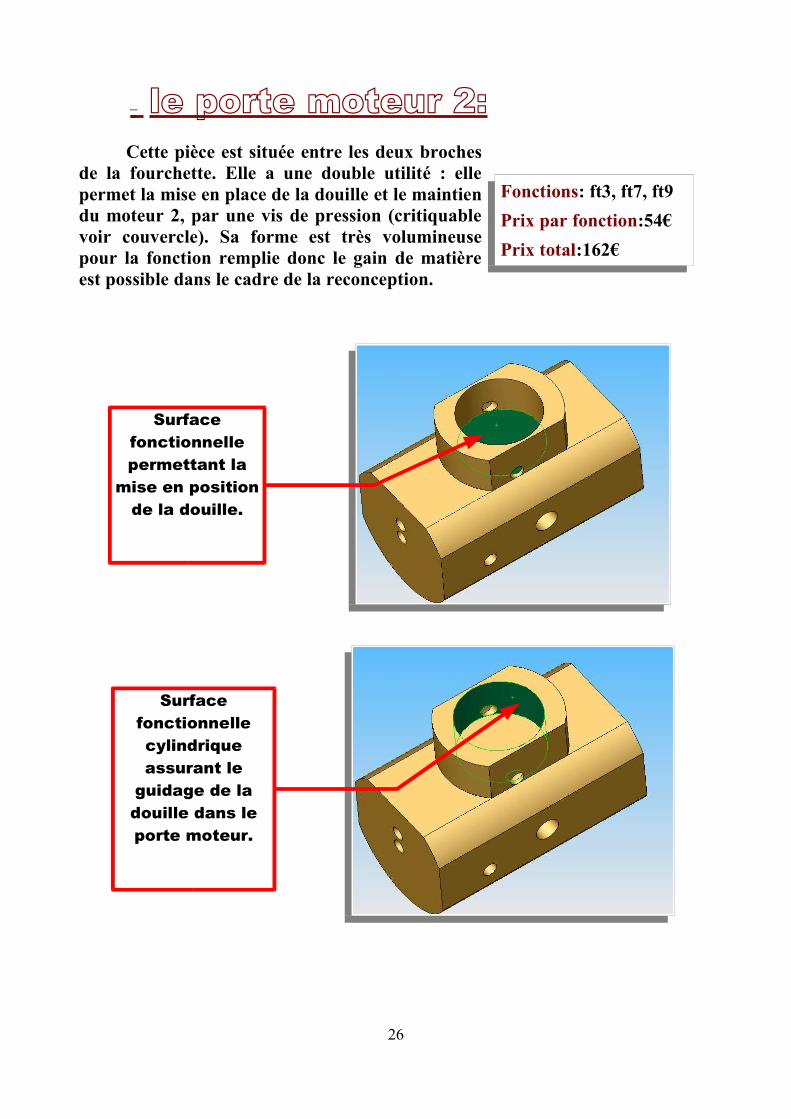
– le porte moteur 2:
26
Surface fonctionnelle permettant la
mise en position de la douille.
Surface fonctionnelle cylindrique assurant le
guidage de la douille dans le porte moteur.
Fonctions: ft3, ft7, ft9Prix par fonction:54€Prix total:162€
Cette pièce est située entre les deux brochesde la fourchette. Elle a une double utilité : ellepermet la mise en place de la douille et le maintiendu moteur 2, par une vis de pression (critiquablevoir couvercle). Sa forme est très volumineusepour la fonction remplie donc le gain de matièreest possible dans le cadre de la reconception.

27
Surface fonctionnelle cylindrique
guidant le moto-réducteur .
Surface fonctionnelle permettant l'arrêt en
translation du moteur.

28
Taraudage permettant, à
l'aide de vis de pression, l'arrêt en rotation du moteur dans la
pièce.
Perçage accueillant les axes d'arrêt en
rotation.

29
Passage des fils d'alimentation
du moteur.
Passage de l'axe de rotation du porte moteur.
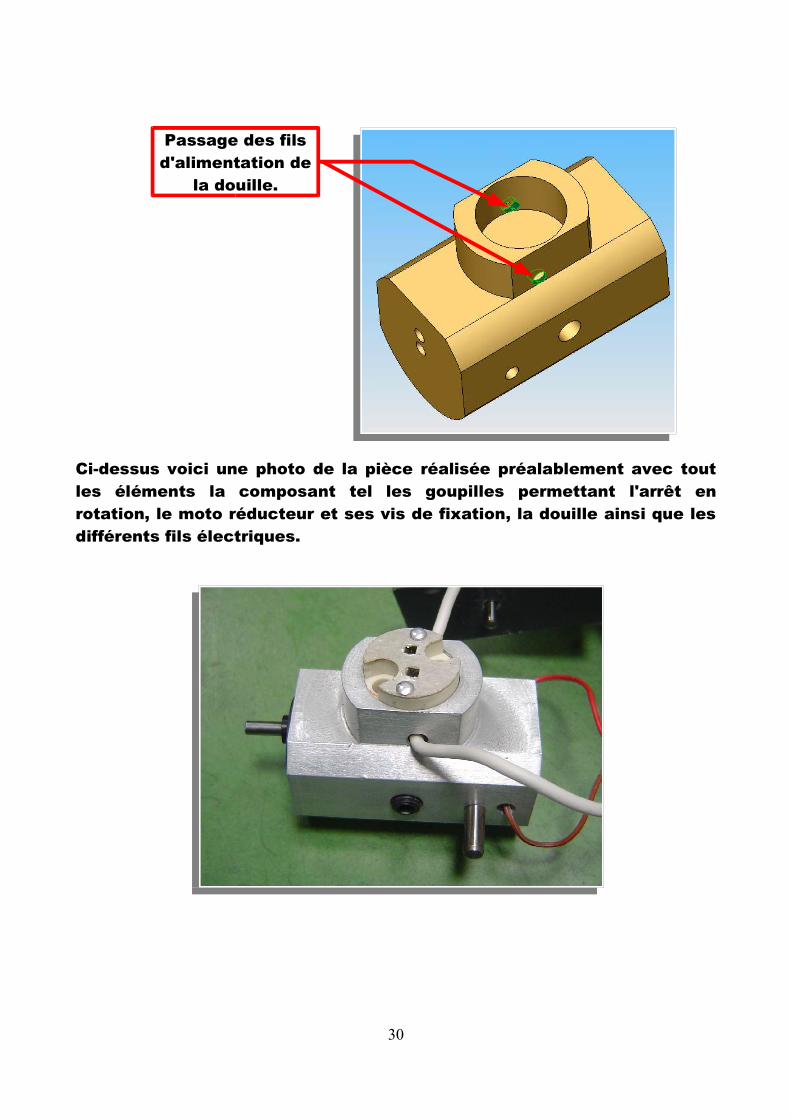
Ci-dessus voici une photo de la pièce réalisée préalablement avec toutles éléments la composant tel les goupilles permettant l'arrêt enrotation, le moto réducteur et ses vis de fixation, la douille ainsi que lesdifférents fils électriques.
30
Passage des fils d'alimentation de
la douille.
Solutions proposées
Matières utilisées:
Notre choix se porte principalement sur 2 matériaux. Remplissant le rôlequi leur est défini en fonction de leurs caractéristiques.
• alliage d'aluminium matériau employé pour le prototype déjà existant. Offrant debonnes caractéristiques mécaniques, simple à usiner.
• matière plastique matériau plus léger, plus simple à usiner, non conducteur,facilement injectable, au coût réduit.
Au final en analysant les différentes solutions nous avons décidé deréaliser la plupart des pièces du produit en matières plastiques.
Type d'obtention:
Vu la complexité des pièces, il nous fallait des méthodes d'obtention despièces relativement simples à manipuler remplissant toute lesopérations nécessaires, tout en étant adaptée à la réalisation en grandesérie. Notre regard s'est porté sur deux solutions.
• par usinage la réalisation par usinage conventionnel ou numérique est possiblemais avec coût relativement important de par la complexité de lapièce.
• par injection complexité du moule mais réduction du temps de production, coûtde revient moins élevé.La réalisation de la pièce par injection nécessite une épaisseurconstante.
Le procédé qui nous a semblé le plus adéquat pour la réalisation de nospièces a été le moulage car vraiment adapté à la production de grandesérie.
31
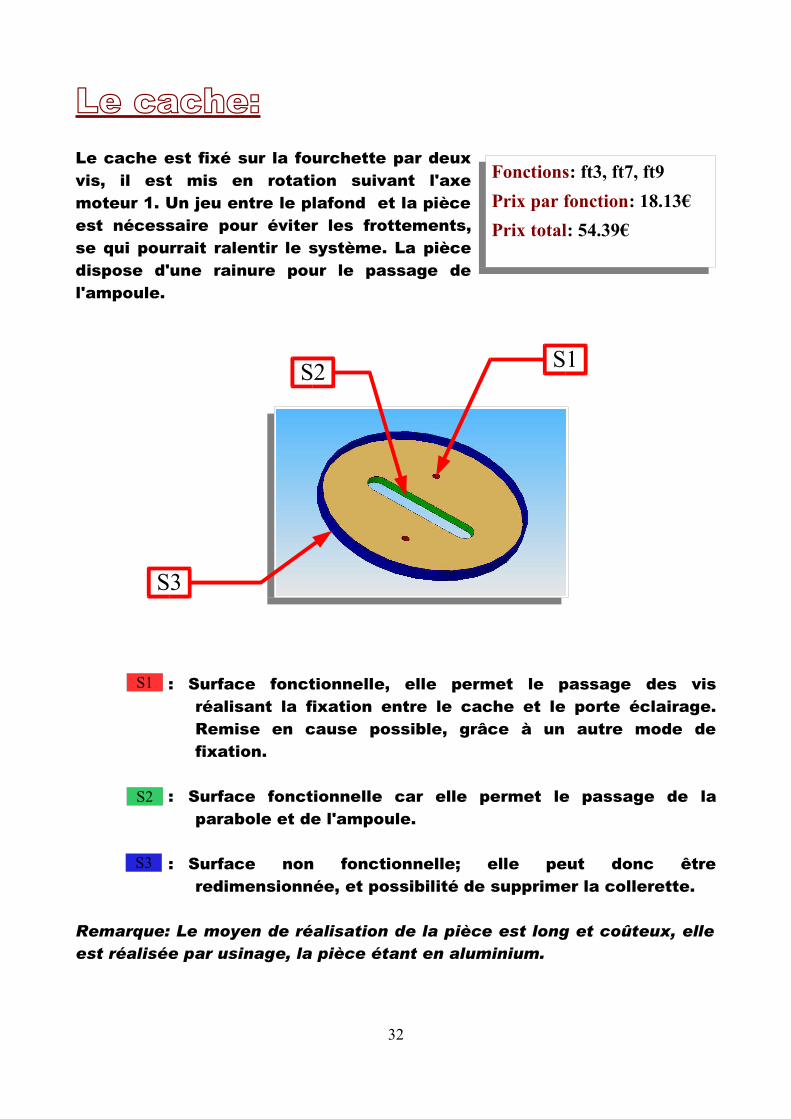
Le cache:Le cache est fixé sur la fourchette par deuxvis, il est mis en rotation suivant l'axemoteur 1. Un jeu entre le plafond et la pièceest nécessaire pour éviter les frottements,se qui pourrait ralentir le système. La piècedispose d'une rainure pour le passage del'ampoule.
: Surface fonctionnelle, elle permet le passage des visréalisant la fixation entre le cache et le porte éclairage.Remise en cause possible, grâce à un autre mode defixation.
: Surface fonctionnelle car elle permet le passage de laparabole et de l'ampoule.
: Surface non fonctionnelle; elle peut donc êtreredimensionnée, et possibilité de supprimer la collerette.
Remarque: Le moyen de réalisation de la pièce est long et coûteux, elleest réalisée par usinage, la pièce étant en aluminium.
32
S2
S3
S1
S1
S3
S2
Fonctions: ft3, ft7, ft9Prix par fonction: 18.13€Prix total: 54.39€

Solutions proposées
Matière utilisée:
• alliage d'aluminium matériau employé pour le cache du prototype déjà existant.Offrant une bonne résistance et des caractéristiques quipermettent un usinage simple, avec un bel aspect esthétique.
• alliage de cuivre matériau plus léger, plus simple à usiner. Il est très utilisé pourle découpage et peut être poli pour avoir un meilleur aspectvisuel.
• matière plastique matériau plus léger, plus simple à usiner, non conducteur,facilement injectable, coût réduit.
Au final ,en analysant les différentes solutions, nous avonsdécidé de réaliser la plupart des pièces du produit en plastique.
Type d'obtention:
• par injection La réalisation de la pièce par injection nécessite une épaisseurconstante. Le moule est simple à réaliser. La solution parinjection est donc un gain de temps et d'argent.
• Par découpage Le découpage permet également un gain de temps et d'argent.Le découpage opeut être fait par presse ou par laser.
• Par usinage L'usinage traditionnel du cache est plus long et plus coûteuxpar conséquent non approprié pour l'industrialisation du spot.
La méthode qui nous a semblé la plus adéquate pour la réalisation denos pièces a été l'injection car ce procédé est adapté à la productionsérielle.
33

La fourchette :
La fourchette est montée sur le moto-réducteur 1. Elle permet de mettreet de maintenir en position le moto-réducteur 2 en le coinçant entre sesdeux broches, tout en lui permettant une rotation possible. En fonctionde surfaces fonctionnelles nécessaires on peut se rendre compte de lasurdimension de la pièce.
34
S6
S5
S4
S2
S3
S1
Fonctions: ft3Prix par fonction:162.13€Prix total:162.13€
S1 : Surface fonctionnelle permettant le maintien en position, ducache sur la fourchette, par deux vis (remise en causepossible).
S2 : Perçage pour la passage de la goupille vers le porte-moteur.
S3 : Rainure permettant le passage de l'axe du moteur 2 (remiseen cause possible).
S4 : Surface fonctionnelle à 45° pour le positionnement descapteurs.
S5 : Perçage fonctionnel pour le passage de l'axe du moteur 1 etun deuxième perçage pour bloquer l'axe.
S6 : Logement de la goupille pour l'arrêt en translation de l'axe dumoteur 1 (remise en cause possible).
35
Solutions proposéesMatière utilisée :
Notre choix se porte sur le polypropylène dont les caractéristiquessupporte les fonctions définies :
Avantages particuliers : • Bonne résistance à la flexion • Excellentes propriétés électriques • Bonnes propriétés mécaniques • Très bonne résistance aux produits chimiques • Très léger avec une densité de 0.92
Précautions limites d'emploi :
• Inserts en cuivre et manganèse déconseillés • Fragilité à la basse température (limite O°) • Mauvaise tenue au vieillissement (nécessité adjuvants) • Jaunissement à la lumière (stabilisants) • Retrait non homogène
Type d'obtention :– Par usinage :
La complexité de la pièce ne permet pas une réalisation par usinageconventionnel ou numérique .
– Par injection :
La réalisation de la pièce par injection est possible en tenantcompte :
- de la complexité du moule
- de l'épaisseur constante
- du retrait
Ce procédé permet une réduction du temps de production et du coûtde revient. La production en grande série est applicable sur cettepièce.
36

ANNEXESANNEXES
37

Maquette SolidWorks
Prototype existant en éclaté:
Maquette disponible pour effectuer les travaux de la conceptiondétaillée
38

Recherche de l'existant
Nous avons retrouvé plusieurs modèles de projecteur asservis de taillesrelativement importantes et de prix conséquents. Ils sont exclusivementemployés par des professionnels de la lumière ou dans les boites de nuit.Les spots miniatures ont vu leur ventes progresser depuis quelquesannées or il n'en existe toujours pas d'orientable par un micro moteurvendu dans le commerce.
Les recherches ont été effectuées sur différents sites internetspécialisés en éclairage ainsi que dans des catalogues de grandessurfaces tel Bricomarché, Castorama, etc...
Ci-dessus quelques photos de modèles existants.
39

Recherche d'information sur lapartie fixation du spot
Le prototype existant du spot orientable était fixé au plafond partrois vis M4. Cette solution nous semblait non envisageable dans le butd'industrialiser le spot orientable. Pour cela nous avons recherché lesmodes de fixation des spots vendus dans le commerce afin de lesadapter au spot orientable.
Cette solution par lames ressort permet un montage etdémontage rapide du spot, il suffit juste de clipser le spot au plafond.Cette solution est simple à réaliser et peu coûteuse, elle a donc étéretenue.
40

Recherche d'information sur la partie électronique
Nous avons effectué plusieurs recherches sur la carte électronique. Cesidées sont encore en cours d'évaluation ainsi certaines seront retenuestandis que d'autres ne le seront pas.
• Carte électronique intégrée dans le boîtier du spot.1. Divisée en plusieurs parties et reliées par connectique2. Carte à composants CMS (plus petite)3. Dimensionnement et reconception de la carte4. Sous-traitement auprès de constructeurs spécialisés
• Remplacer les moteurs par des servomoteurs de tailles plus petitesmais de prix plus élevés.
• Remplacer l'émetteur-récepteur à fréquence radio par un autre àfréquence infrarouge, moins cher et plus petit. (vérifier que la lumièrede l'halogène n'interfère pas sur l'infrarouge)
• Essayer d'intégrer les deux transformateurs (pour l'alimentation de lalampe halogène en 12V alternatif et pour l'alimentation de la carteélectronique et les moteurs en 12V continu) à notre produit etl'adapter à l'installation électrique d'une maison.
41
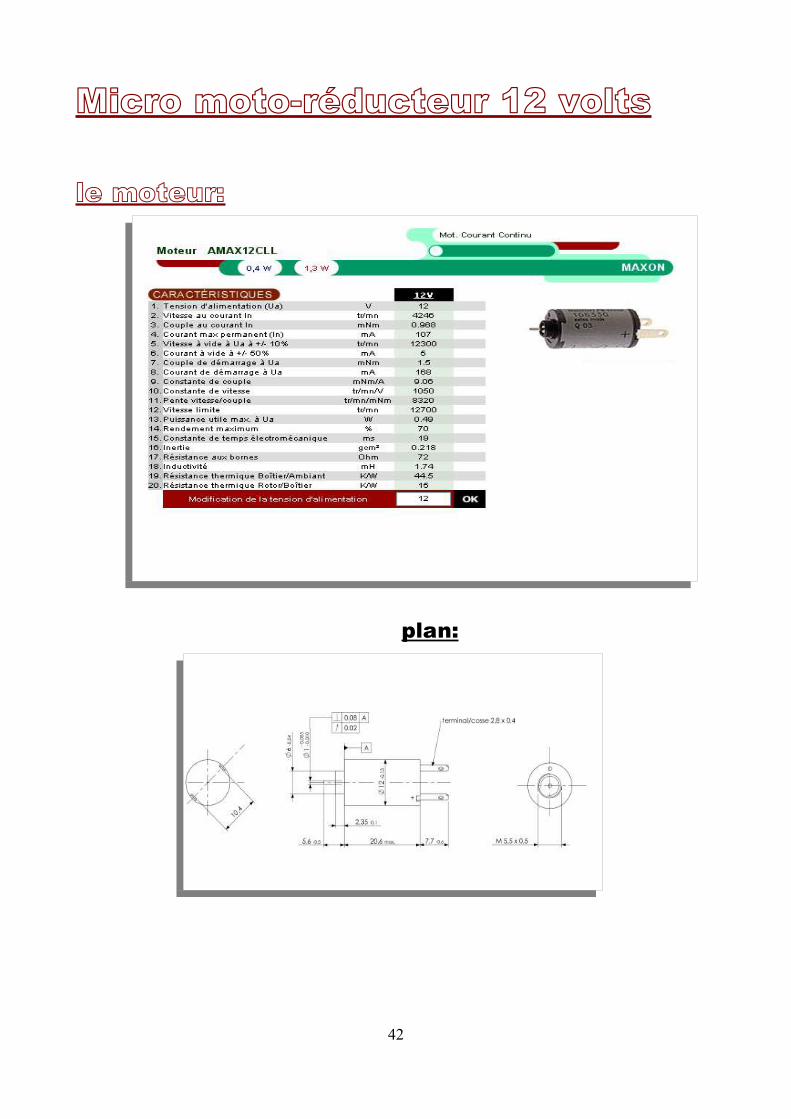
Micro moto-réducteur 12 volts
le moteur:
plan:
42

Ci dessus la courbe caractéristique du moteur en fonction de sa vitesse
et du courant.
Réducteur:
Devis auprès de MDP:
Prix 92 euro, disponible sous 48h
43

MOTEUR REDUCTEUR 33G312:
(Photo donnée à titre indicatif -Forme et couleur peuvent varier)
MOTEUR REDUCTEUR 33G312 Code: 244040 - C1 20,50 EUR
Description du produit :
Type 33G - 312Démultipl. 312 : 1Alim (V) 12Tension de fonct. 6 - 15 VNb de tours/mn à vide 18Courant (A) 0,10Nb de tours/min 17Courant (A) 0,16Couple moteur max. àvide
300 mNm
Couple moteur max 900 mNmPoids 130 g
Description du produit:Moteur réducteur performant avec variateur.
Remarque: On a choisi ce moteur car il répond à plusieurs critères :– le rapport qualité prix est le plus avantageux.– Le couple nécessaire pour répondre au cahier des
charges avec réducteur approprié.– Dimensions convenables.
44

Les prés-actionneurs:
Dans le cadre de la reconception de la carte électronique nousavons essayé de remplacer les relais de la carte existante, par destransistors plus petits et surtout beaucoup moins chers, remplissantpratiquement les mêmes fonctions.
Transistor 1:
Fournisseur: CONRAD
Avantages:
L'avantage de ces transistors est leur prix 0.20€ partransistor soit 1.60€ pour l'ensemble du spot. Car ce spot nécessite huittransistors, deux pour chaque sens de rotation de chaque moteur.
Inconvénients:
Ces composants sont des composants traditionnels et nondes CMS, ils sont plus gros ce qui augmente la taille du circuit et doncde l'ensemble du spot orientable.
45

Transistor 2:
Fournisseur: RADIOSPARE
46
Prix des transistors dans lecatalogue RADIOSPARE

Transistor 3:
Fournisseur: CONRAD
Avantages:
Ces transistors sont des transistors CMS, composants desurface, ils ont l'avantage d'être très petits et ils ne coûtent pas chers,0.10€ par transistor.
Inconvénients:
Il faut réaliser un autre circuit électronique, ce qui augmentele prix du spot orientable.
47

Les capteurs:Sur l'ancien prototype, 4 capteurs permettaient l'arrêt en rotation desmoteurs. Nous avons tout d'abord recherché si des modèlescomparables existaient mais de taille réduite, pour un soucid'encombrement, ou de prix moins élevés.
Mini rupteur 1:
Fournisseur: CONRAD
Avantages:
L'avantage de ces transistors est leur prix d'environ 1.50€ parmini rupteur, soit un total d'environ 6€ pour la version industrialisée. Deplus le grand levier peut s'avérer utile pour le spot.
Inconvénients:
Ces mini rupteurs sont petits, mais pas assez comparé à ceuxprésents sur l'existant pour un coût quasi égal.
48

Mini rupteur 2:
Fournisseur: CONRAD
Mini rupteurs de taille différentesdisponible sur internet.
• Note: si on utilise un servo-moteur à la place d'un moto-réducteur nous pouvons supprimer les capteurs de position
49
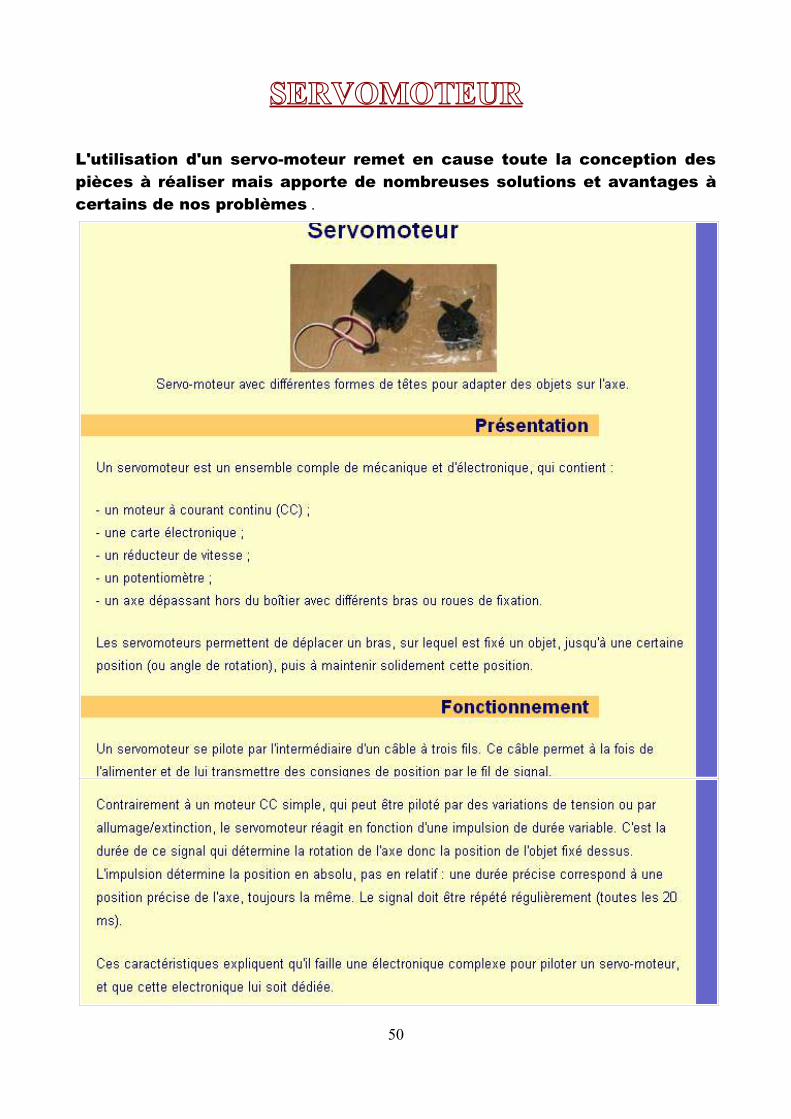
SERVOMOTEUR
L'utilisation d'un servo-moteur remet en cause toute la conception despièces à réaliser mais apporte de nombreuses solutions et avantages àcertains de nos problèmes .
50

51
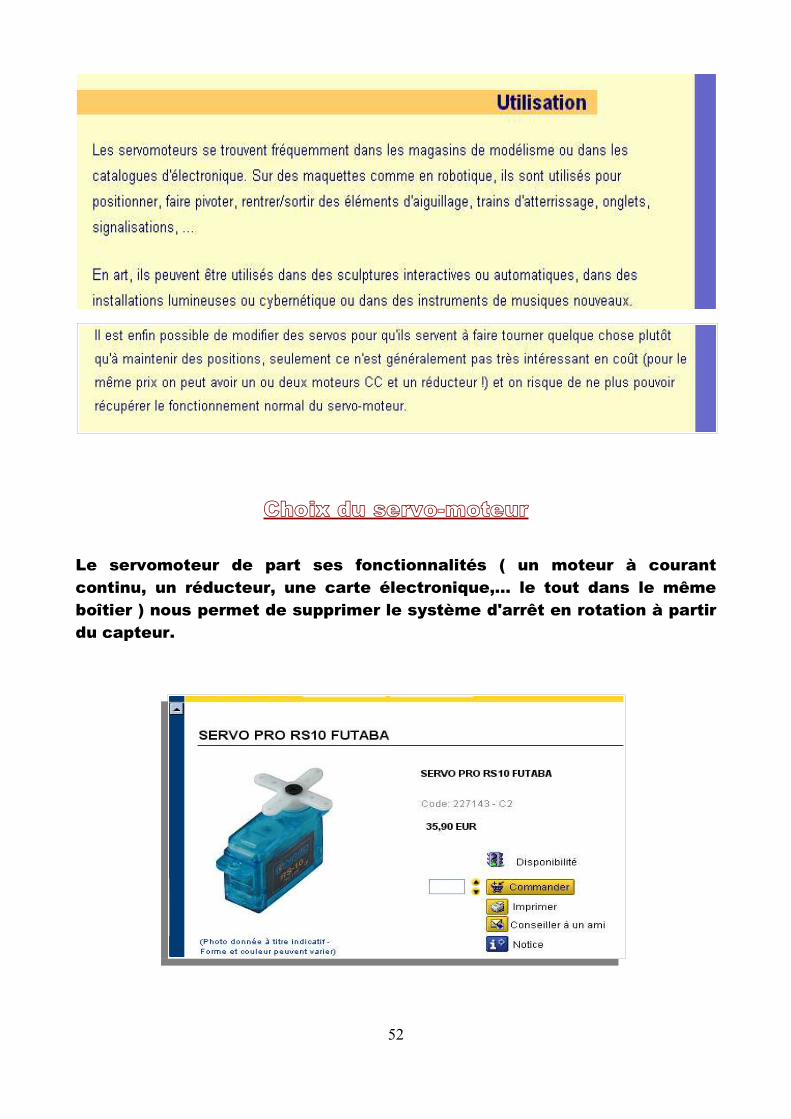
Choix du servo-moteur
Le servomoteur de part ses fonctionnalités ( un moteur à courantcontinu, un réducteur, une carte électronique,... le tout dans le mêmeboîtier ) nous permet de supprimer le système d'arrêt en rotation à partirdu capteur.
52

Nous avons choisit ce servomoteur pour ses dimensions faibles ( 19 x7.5 x 15.6 mm ) et pour son prix ( le moins élevé de sa catégorie )
surfaces fonctionnelles
vis de maintient de l'axe
perçage pour le maintient en position
solution retenue
53

RECHERCHE DE POSITIONNEMENT ET DE DIMENSIONNEMENT
Dans le cadre du changement du moto-réducteur par un servomoteurnous avons effectués des recherches afin de déterminer si lepositionnement et la dimension de se dernier ne remettait pas en causela conception .
L'intégration de servomoteur dans le système ne remet pas en causetoute la conception ni même le dimensionnement minimal.
54
Axe du bâti
Mise et maintien en position par encastrement
Mise en position par encastrement
Maintien par vis

Les transformateurs:
Pour alimenter le spot orientable nous avons fait des recherches sur lestransformateurs. En effet, le courant à la sortie d'une prise reliée ausecteur est de 230 volts alternatif. Ce courant n'est pas directementexploitable pour alimenter la carte électronique ainsi que les moteursqui ne peuvent fonctionner qu'avec une petite tension continue. Sur leprécédent prototype, l'ampoule halogène était quand à elle alimentée en12 volts alternatif. Il fallait ainsi pour l'alimenter utiliser un secondtransformateur 230v / 12v continu. Ces deux transformateurs nous ontposé des problèmes de place car placé à l'extérieur du système etrelativement encombrant.
Transformateurs externes 230/12V
55

Au final nous avons décidé d'intégrer le transformateur alimentant lacarte électronique et les moteurs à l'intérieur du produit, réduisantconsidérablement l'encombrement.
56

Ampoules halogène:Il existe 2 types d'ampoules halogènes: les ampoules 12v et lesampoules 230v.Le prototype utilise une ampoule 12v assurant un confort visuelsupérieur pour l'utilisateur mais nécessitant un transformateur 230/12valternatif pour fonctionner. Le prix de ce transformateur était bien surrelativement élevé et proposé un encombrement supplémentaire.Nous avons choisit une ampoule halogène 230v, supprimant ainsi letransformateur. L'encombrement et le prix restent sensiblementidentiques (10€52 pour une ampoule 12v). Sur ces modèles d'ampouleplusieurs culots sont disponible: E27 (à vis), E14 (à petite vis), B22 (àbaïonnette), GU10, G9, R7S (pour les ampoules crayon). Nous avonssélectionné le culot offrant une bonne disponibilité en cas dechangement d'ampoule et offrant une dimension moindre.
Solution retenue
57
R7SG9
GU10

Ci dessous on peut remarquer la différence de taille d'une ampoulehalogène avec culot GU10 (à gauche) et E14 qui nous a permis d'établirle choix final.
58

Ampoule halogène 36° GU10 /50 Watts Jaune
Ref : 803915
Apmpoule halogène MR16 220/240 Volts , culotGU10.Couleur jaune.Angle d'éclairage 36 °.
GE LIGHTING
11,90 € soit : 78,06 F
Plus du produit : Peut fonctionner avec un variateur delumière.La qualité et quantité de lumière resterontpratiquement identique toute la durée de vie de lalampe.Les lampes halogènes durent (en moyenne) aumoins deux fois plus longtemps que les lampes àincandescence.Une lumière plus blanche, plus éclatanteet plus intense assurant un meilleur rendu descouleurs.A puissance égale on obtient plus delumière.Economie d'énergie de 15 %. 2000 heures dedurée de vie.
conseils d'utilisation : Distance minimun entrel'ampoule et la surface à éclairer 0,80m.Fonctionne aussipour les culots GZ10.Les halogènes sont agréables dansles pièces à vivre comme le salon et la cuisine. Leshalogènes à réflecteur sont bien adaptés pour la lecture ;les trè Restrictions d'usage : Veillez à ce que vos lampeshalogènes ne soient pas à proximité de matièrescombustibles et tenez les enfants éloignés de ces lampespour éviter tout risque de brûlure.Vérifiez que lesluminaires sont bien stables. Pour changer les lampeshalogènes qui Normes et labels : CE Départ entrepôt : 15 jours
Solution retenue
59
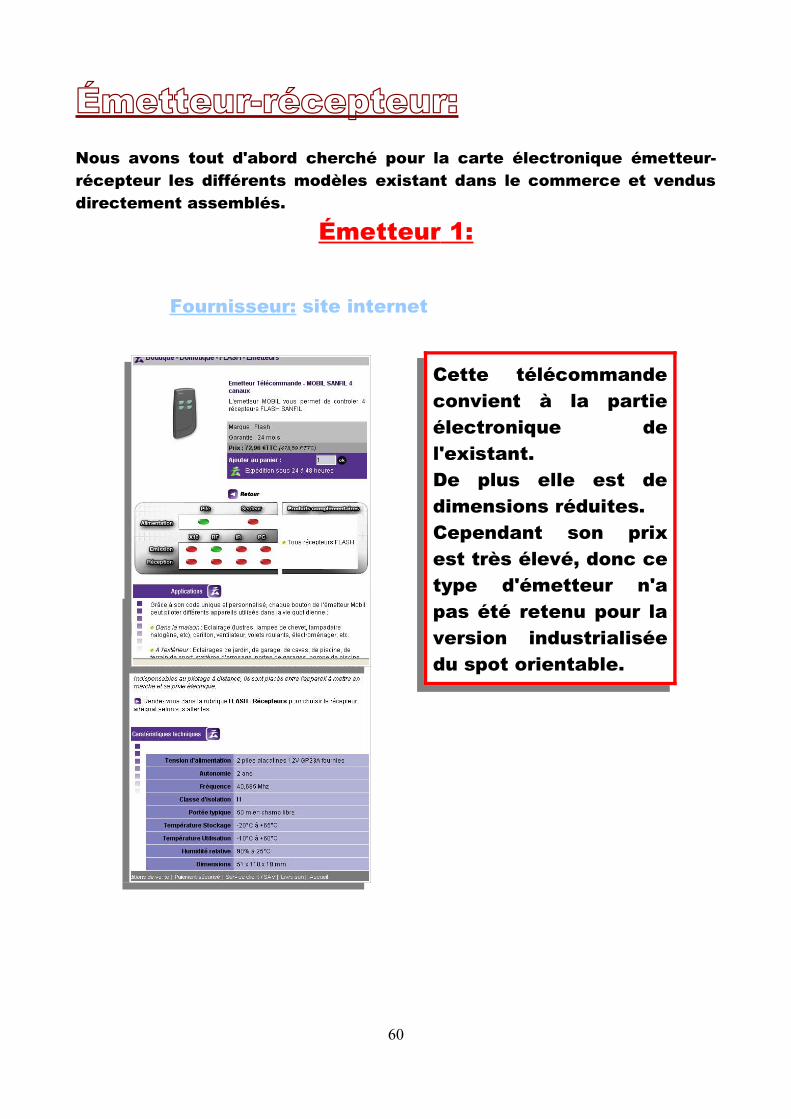
Émetteur-récepteur:Nous avons tout d'abord cherché pour la carte électronique émetteur-récepteur les différents modèles existant dans le commerce et vendusdirectement assemblés.
Émetteur 1:
Fournisseur: site internet
60
Cette télécommandeconvient à la partieélectronique del'existant.De plus elle est dedimensions réduites.Cependant son prixest très élevé, donc cetype d'émetteur n'apas été retenu pour laversion industrialiséedu spot orientable.
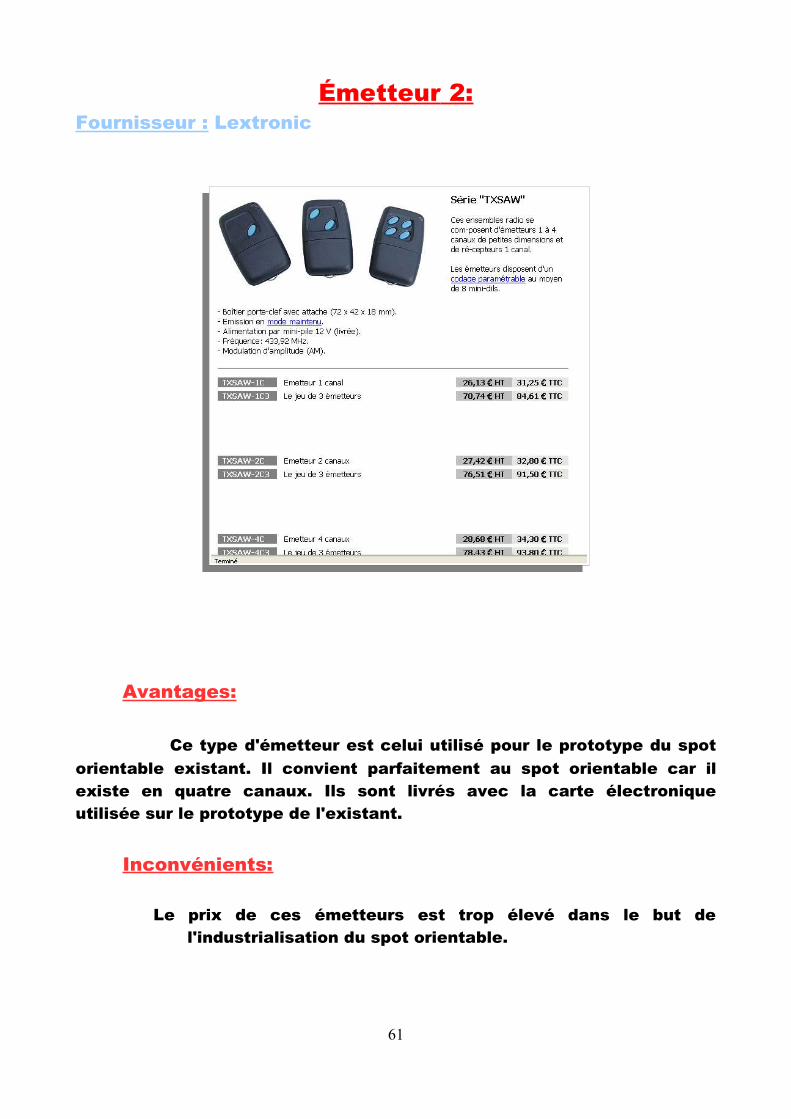
Émetteur 2: Fournisseur : Lextronic
Avantages:
Ce type d'émetteur est celui utilisé pour le prototype du spotorientable existant. Il convient parfaitement au spot orientable car ilexiste en quatre canaux. Ils sont livrés avec la carte électroniqueutilisée sur le prototype de l'existant.
Inconvénients:
Le prix de ces émetteurs est trop élevé dans le but del'industrialisation du spot orientable.
61

Récepteur 1:
Fournisseur: Lextronic
Avantages:
L'avantage de cette solution est la taille de la carteélectronique (56×37×20, avec le boîtier). De plus le prix de cette carteest moins élevé que celui de la carte utilisée sur le prototype du spotexistant.
Inconvénients:
L'utilisation de cette solution nécessite l'utilisation de quatretransistors, ce qui oblige à la réalisation d'une carte électronique.
62

Récepteur 2:
Fournisseur: site internet
Cette carte peut s'adapter au spot orientable, son prix est plusfaible que la carte existante. Cependant cette solution n'est pas retenuecar elle est trop encombrante.
Conclusion: le prix de la carte monobloc achetée dans lecommerce à l'inconvénient d'être de dimensiontrop importante, donc difficilement intégrabledans notre système, et de coûter relativementcher. Nous avons finalement opté d'assembler,d'après le schéma électrique de la carte, lescomposants nécessaires.
63

Schéma électronique de la carte réceptrice
Schéma simplifié:
Explication de la solution
Nous avons retenu cette solution de schéma électronique à cause deplusieurs critères:
-Intégration possible dans le spot-Commande facilement des servomoteurs-Coût fourniture plus avantageux
64
Circuit intégréDil 8 pôles
Réseau de résistance
Récepteur Micro-controleur
Emetteur
Décodeur
Dil 8 pôles
Servomoteur
Servomoteur

DETAILS DES COMPOSANTS DE LA PARTIE ELECTRONIQUE
DIL 8 POLES:
FOURNISSEUR : Conrad
Ce composant permet de coder l'information. Ce codage doit être lemême que celui de la télécommande. L'avantage de ce type decomposant est que l'on peut changer le codage afin de ne pas piloterplusieurs appareils à la fois. De plus ce composant ne coûte pas cher.
65

RESEAU DE RESISTANCES :
FOURNISSEUR : Lextronic
Ce composant est en fait composé de plusieurs résistances, cepermet un gain de place, diminuant les dimensions de la carteélectronique. Ce composant est en plus pas cher, à raison de 0.30€.
MODULE RECEPTEUR :
FOURNISSEUR : Lextronic
66

Caractéristiques :
Ce module est composé de plusieurs composants; cependant sonschéma électrique est complexe. Il s'adapte à l'émetteur retenu car ilfonctionne avec la fréquence de 433.92 Mhz. De plus son prix est peuélevé comparé à la complexité du schéma électrique. Ce module seradonc acheté directement et non réalisé par nos propres moyens.
CIRCUIT INTEGRE :
FOURNISSEUR : Lextronic
67

Caractéristiques :
Ce circuit intégré permet de contrôler les deux servomoteurssuivant leurs deux axes de rotation car il possède quatre sorties. Il estcompatible avec le module de réception RR3-433. Son prix est assezélevé, mais ce composant étant indispensable la solution est doncretenue.
Solution retenue pour la conception de la carte électronique.
68
NORMES D'ECLAIRAGE
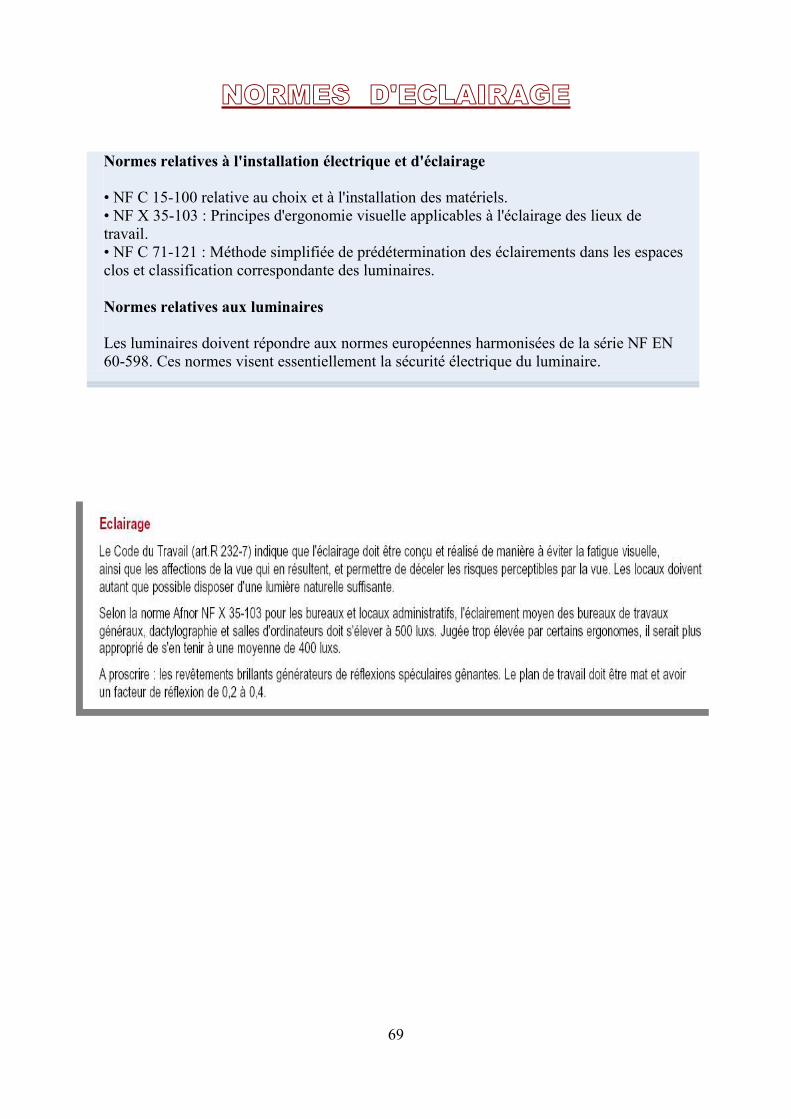
Normes relatives à l'installation électrique et d'éclairage
• NF C 15-100 relative au choix et à l'installation des matériels.• NF X 35-103 : Principes d'ergonomie visuelle applicables à l'éclairage des lieux detravail.• NF C 71-121 : Méthode simplifiée de prédétermination des éclairements dans les espacesclos et classification correspondante des luminaires.
Normes relatives aux luminaires
Les luminaires doivent répondre aux normes européennes harmonisées de la série NF EN60-598. Ces normes visent essentiellement la sécurité électrique du luminaire.
69
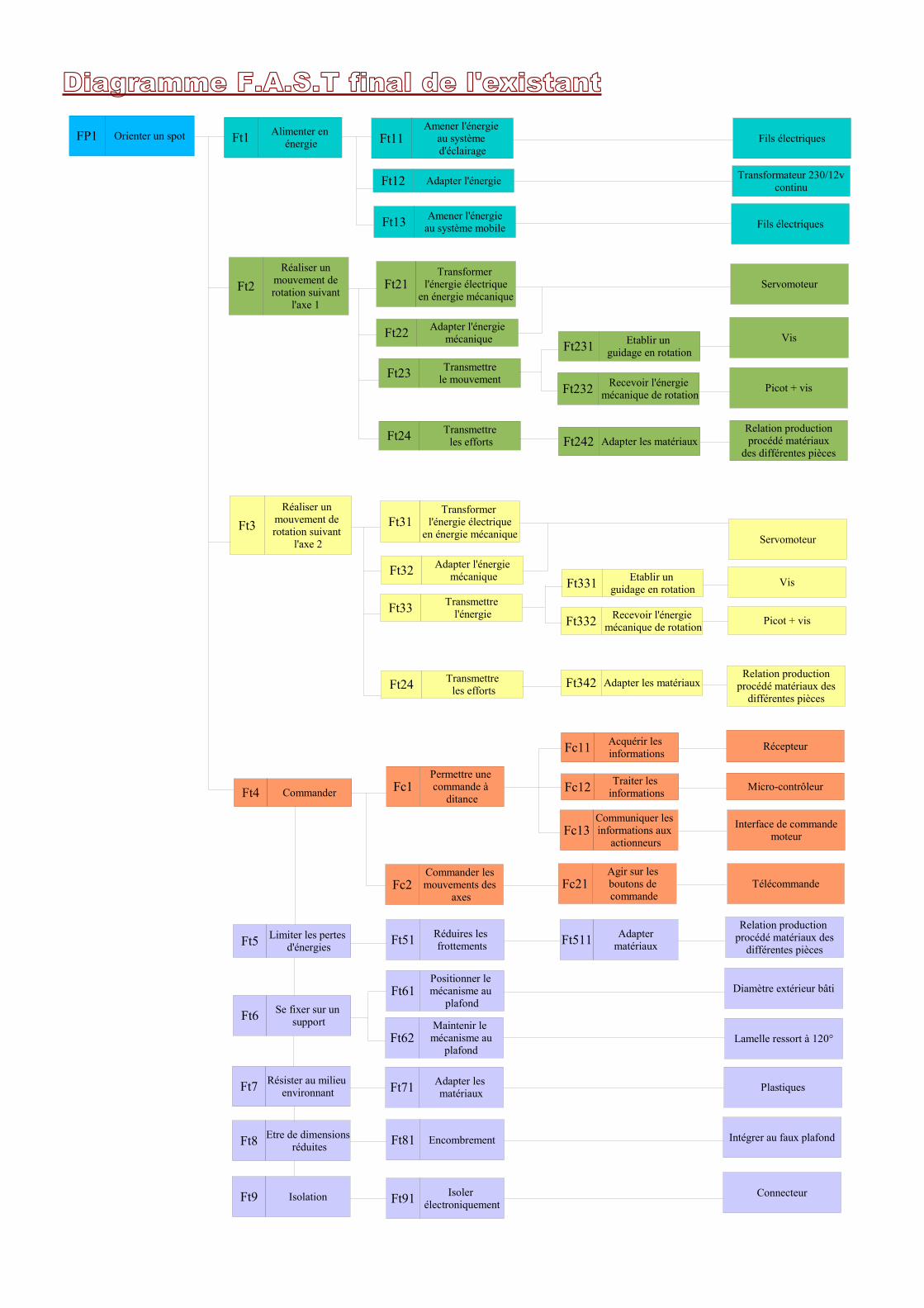
Diagramme F.A.S.T final de l'existant
FP1 Orienter un spot Ft1 Alimenter en énergie
Ft2Réaliser un
mouvement de rotation suivant
l'axe 1
Ft3Réaliser un
mouvement de rotation suivant
l'axe 2
Ft11Amener l'énergie
au système d'éclairage
Ft12 Adapter l'énergie
Ft13 Amener l'énergieau système mobile
Ft21Transformer
l'énergie électriqueen énergie mécanique
Ft23 Transmettrele mouvement
Ft24 Transmettre les efforts
Ft31Transformer
l'énergie électriqueen énergie mécanique
Ft22 Adapter l'énergie mécanique
Ft32 Adapter l'énergie mécanique
Ft33 Transmettre l'énergie
Ft24 Transmettre les efforts
Ft231 Etablir un guidage en rotation
Ft232 Recevoir l'énergie mécanique de rotation
Ft242 Adapter les matériaux
Ft331 Etablir un guidage en rotation
Ft332 Recevoir l'énergie mécanique de rotation
Ft342 Adapter les matériaux
Fc2Commander les mouvements des
axes
Ft5 Limiter les pertes d'énergies
Ft6 Se fixer sur un support
Ft4 Commander Fc1Permettre une commande à
ditance
Fc11 Acquérir les informations
Fc12 Traiter les informations
Fc13Communiquer les informations aux
actionneurs
Fc21Agir sur les boutons de commande
Ft7 Résister au milieu environnant
Ft8 Etre de dimensions réduites
Ft9 Isolation
Ft51 Réduires les frottements
Ft61Positionner le mécanisme au
plafond
Ft62Maintenir le mécanisme au
plafond
Ft71 Adapter les matériaux
Ft81 Encombrement
Ft91 Isoler électroniquement
Fils électriques
Transformateur 230/12vcontinu
Fils électriques
Servomoteur
Vis
Picot + vis
Relation productionprocédé matériaux
des différentes pièces
Servomoteur
Vis
Picot + vis
Relation productionprocédé matériaux des
différentes pièces
Récepteur
Micro-contrôleur
Interface de commandemoteur
Télécommande
Relation production procédé matériaux des
différentes pièces
Diamètre extérieur bâti
Lamelle ressort à 120°
Plastiques
Intégrer au faux plafond
Connecteur
Ft511 Adaptermatériaux