d'ordre - L. Tromp · mo d n um erique p our le trai-temen t des signaux, un mo d ele de la...
190
Transcript of d'ordre - L. Tromp · mo d n um erique p our le trai-temen t des signaux, un mo d ele de la...

No d'ordre: 2333 TH�ESEPr�esent�ee devantl'Universit�e de Rennes 1pour obtenirle grade de : Do teur de l'Universit�e de Rennes 1Mention : Traitement du signal et T�el�e ommuni ationsparLaurent Tromp�Equipe d'a ueil : IRISA�E ole Do torale : S ien es Pour l'Ing�enieurComposante universitaire : Stru ture et Propri�et�es de la Mati�ereTitre de la th�ese :Surveillan e et diagnosti de syst�emes industriels omplexes :une appro he hybride num�erique/symbolique.
Soutenue le 25 Janvier 2000 devant la ommission d'examenMM. : Jean-Pierre Quadrat RapporteursMar el Staroswie kiMMe.: Mi h�ele Basseville Dire teur de th�eseMM. : Albert Benveniste ExaminateursClaude Jard


�A mes parents�A Emmanuelle


Remer iementsJe tiens d'abord �a remer ier M. Claude Jard d'avoir a ept�e la pr�esiden e du Jury deth�ese.Je remer ie �egalement MM. Jean-Pierre Quadrat et Mar el Staroswie ki pour leurle ture attentive et patiente de mon manus rit, et pour l'int�eret bienveillant qu'ils lui ontport�e.Bien sur, ma gratitude va vers Mme. Mi h�ele Basseville et M. Albert Benveniste, pourm'avoir propos�e un sujet si passionnant, d�epassant de beau oup mes omp�eten es initiales :malgr�e les al�eas de dialogue, ils ont su me montrer un droit hemin s ienti�que qui resteun exemple �a suivre.J'aimerais ensuite saluer l'�equipe enseignante dans laquelle j'ai e�e tu�e mon monitorat,et en parti ulier Tanguy Rouxel et Erwan Bouguenne qui a a ept�e la harge de tuteur.Ils m'ont permis de me souvenir souvent que la re her he ne doit pas �etre un o on danslequel on s'enferme.Je tiens ensuite �a f�eli iter Ni olas Moal, pour sa s�er�enit�e absolue au plus fort desa�res de la vie du th�esard que j'�etais. Bien que mise �a rude �epreuve pendant es trois ansde vie ommunautaire, son amiti�e onstante a su permettre l'a h�evement de e travail.Une mention toute parti uli�ere �a Armen Aghasaryan, pour sa sensibilit�e et son ouverturesur le monde, s ienti�que et humain. J'exprime en�n mes remer iements �a toute l'�equipeSigma2, passag�ere ou permanente, et en parti ulier �a Jean-Lu Le Calvez, MouhamadouSe k, Rapha�el Blouet ainsi qu'�a Patri k Perez et St�ephane Pateux, des projets Vista etTemi s.


Table des mati�eresTable des mati�eres 1I Introdu tion 51 Motivations et Obje tifs 72 D�ete tion et diagnosti de pannes dans les syst�emes omplexes 132.1 Sans mod�ele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 Mod�eles dis rets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3 Mod�eles ontinus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.4 Mod�eles hybrides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.5 Con lusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25II Mod�elisation d'un syst�eme hybride pour la surveillan e 271 Mod�elisation de la dynamique �a �etat ontinu 291.1 Mod�eles param�etriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291.2 Appro he lo ale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331.3 Con lusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412 Mod�elisation de la dynamique �a �ev�enements dis rets 432.1 Introdu tion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.2 Dynamique dis r�ete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.3 Mod�ele des pannes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482.4 Partie ommande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 572.5 Cas mono-mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 622.6 Cas multi-mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 632.7 Con lusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65III Algorithmes de surveillan e 731 Appro he markovienne de la surveillan e 751.1 Motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 751.2 HMM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 751.3 Algorithme pour HMM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 791.4 A priori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 841

Table des mati�eres1.5 Synth�ese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 862 Mod�eles hybrides sto hastiques/non-sto hastiques pour la surveillan e 892.1 Motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 892.2 PSPN hybride . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 952.3 Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1022.4 Observations num�eriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1062.5 Synth�ese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1122.6 Con lusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114IV Exemple 1151 Des ription de l'exemple et des rit�eres d'�evaluation 1171.1 Pr�eambule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1171.2 Pr�esentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1181.3 Mod�elisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1181.4 R�esidus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1221.5 Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1261.6 �Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1261.7 Algorithme HMM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1311.8 Algorithme sur le PSPN hybride . . . . . . . . . . . . . . . . . . . . . . . . 1382 Impl�ementation 1452.1 Mod�elisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1452.2 Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149Con lusions et Perspe tives 151A R�eseaux de Petri 157A.1 D�e�nitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157A.2 Capa it�e �nie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160A.3 Traje toires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161A.4 RdP sto hastiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166A.5 RdP partiellement sto h. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168Table des �gures 175Bibliographie 177
2



Premi�ere partieIntrodu tion
5


Chapitre 1Motivations et Obje tifsDans le domaine de la surveillan e et du diagnosti de grands syst�emes industriels danslequel notre �etude s'ins rit, une pla e roissante est faite �a la maintenan e pr�eventive et onditionnelle : elle- i requiert �a la fois une attention en ontinu port�ee sur le omporte-ment des omposants mais aussi une sensibilit�e �ne fa e �a un ensemble de d�efauts poten-tiels ou onnus pouvant les a�e ter. Nous nous pla� ons par ons�equent dans une appro heave mod�ele, motiv�ee par la possibilit�e de formaliser les di��erentes sour es d'informationdisponibles sur le syst�eme puis de les int�egrer dans un mod�ele unique a�n de proposer despro �edures g�en�erales, et si possible modulaires, de surveillan e et de diagnosti pour lessyst�emes qui r�epondent �a es exigen es.En parti ulier, l'exigen e d'une maintenan e pr�eventive a �et�e �a la sour e pendantla derni�ere d�e ennie, du d�eveloppement de pro �edures de surveillan e et de diagnosti pr�e o es : la pr�e o it�e y est omprise non seulement "au plus tot" ( 'est une enjeu g�en�eral)mais surtout "au moins grave", ar il s'agit d'abord de fo aliser l'attention des algorithmessur les petits hangements de omportement du syst�eme. Nous aurons don re ours �a deste hniques de mod�elisation param�etrique des d�efauts et de traitement statistique des si-gnaux (num�eriques) mesur�es sur le syst�eme. Nous pensons ensuite qu'un moyen d'augmen-ter l'a uit�e des pro �edures est de prendre en ompte l'information de �abilit�e, lorsqu'elleest disponible bien sur : elle- i d�e rit et quanti�e �a la fois les probabilit�es de d�efaillan esdes omposants, mais aussi leurs auses et leurs e�ets respe tifs, qu'ils soient �egalement onnus ou potentiels. On �elabore don i i, en parall�ele du mod�ele num�erique pour le trai-tement des signaux, un mod�ele de la dynamique ausale entre d�efaillan es, �a partir del'exp�erien e a quise sur le syst�eme tels que les arbres de d�efaillan es et les informationssur les onditions de retour �a l'�etat normal des omposants. En�n, la ontinuit�e de l'ob-servation du syst�eme, impose lorsque l'on s'est �x�e l'exigen e de pr�e o it�e, de prendreen ompte les hangements de omportements normaux du syst�eme, a�n de ne pas les onfondre ave des d�efaillan es : ette nouvelle dynamique est, elle, typiquement (maispas seulement) prise en harge par un automate d�eterministe de ontrole- ommande.La oexisten e de mod�eles de ph�enom�enes et, omme on le verra, de signaux de naturedi��erente, rend la m�ethode propos�ee hybride. Examinons e i maintenant d'un point devue plus te hnologique.Tout d'abord, de tels syst�emes omplexes pr�esentent souvent des ph�enom�enes dyna-miques de natures di��erentes : un grand nombre de syst�emes industriels sont �a la fois �a�evolution ontinue et �a �evolution dis r�ete : une installation est en e�et ompos�ee d'unepartie op�erative (PO), onstitu�ee de omposants en intera tion, r�ealisant la fon tion du7

Motivations et Obje tifssyst�eme (fabri ation, produ tion d'�energie : : : ) et d'une partie ommande (PC) oordon-nant le fon tionnement des omposants de la PO a�n d'assurer la fon tion au mieux ;PO et PC interagissent par le biais de apteurs et d'a tionneurs. Nous onsid�ererons quela PC, en tant que pro essus logique, est �a �ev�enements dis rets et que la PO, en tantque pro essus physique, est par nature �a �etat ontinu. Or, la majorit�e des appro hes exis-tantes pour la surveillan e de tels syst�emes repose sur une mod�elisation homog�ene (�a �etat ontinu ou �a �ev�enements dis rets) de l'installation �a surveiller, e qui ne permet pas �anotre avis de satisfaire les exigen es �enon �ees au d�ebut. Par exemple, les m�ethodes bas�eessur un syst�eme �a �ev�enements dis rets (SED) soit ne prennent pas en ompte les �evolutions ontinues [50, 60℄, soit en r�ealisent une abstra tion dis r�ete [52, 53℄. De leur ot�e, les ob-servations utilis�ees pour r�ealiser la surveillan e et le diagnosti sont symboliques, soit parnature, soit par dis r�etisation ou quanti� ation des signaux num�eriques.Nous pensons que la limite de ette lasse de m�ethodes pour des pannes a�e tant laPO, r�eside essentiellement dans la perte d'information due �a la dis r�etisation des obser-vations. De plus, es signaux sont souvent d�ependants d'un stade avan �e des d�efaillan es,leur d�e len hement se produisant au terme d'un hangement de omportement important,souvent trop tardif. Cette re her he de l'information �ne sur l'�etat d�efaillant d'une PO amotiv�e le d�eveloppement d'appro hes bas�ees sur un mod�ele �a �etat ontinu de l'installation[33, 34, 31, 5℄. Celui- i est �elabor�e �a partir d'une des ription physique ou omportementaledu syst�eme, dans laquelle les pannes peuvent etre introduites omme des param�etres dumod�ele ; un traitement d�eterministe ou statistique des signaux num�eriques mesur�es surles apteurs, permet alors d'obtenir une tr�es grande sensibilit�e �a de petits hangementsde omportements ( hangements de la valeur des param�etres), notamment par l'appro heasymptotique lo ale [16℄ pour la surveillan e [12, 66, 67℄ utilis�ee dans e m�emoire,permettant d'engager une politique de maintenan e onditionnelle [65℄.Pour nos obje tifs de surveillan e, es m�ethodes sont limit�ees d'une part par leur grandesensibilit�e en d�ete tion, impliquant que tout �e art par rapport �a un omportement der�ef�eren e est interpr�et�e par on eption omme une d�efaillan e ; or, un syst�eme industrielpr�esente des hangements normaux de omportement : en e�et, la PC ommande lesmises en mar he, les arrets, les sur-r�egimes, qui modi�ent le omportement dynamiquede la PO, et il n'est pas souhaitable que es hangements d�e len hent de fausses alarmesintempestives, voire sans au un sens si le omposant in rimin�e est �a l'arret : la surveillan een ontinu des syst�emes ontrol�es par une PC peut alors etre d�eli ate.D'autre part, leur apa it�e de s�eparation (lo alisation de la, ou des pannes, pr�esentessur le syst�eme), pr�esente ertaines limites, rendant d�eli at le diagnosti de pannesmultiples.Nous pensons par ons�equent qu'une d�emar he de surveillan e et de diagnosti permet-tant de satisfaire les ontraintes que nous nous �xons, n�e essite une mod�elisation onjointe�a �ev�enements dis rets et �a �etat ontinu du syst�eme :{ la surveillan e en ontinu d'un syst�eme industriel omplexe passe par la prise en ompte expli ite de hangements de mod�ele ontinu, es hangements �etant li�es auxordres symboliques, observ�es, �emis par la PC ; la surveillan e d'un syst�eme multi-modes sera multi-mod�ele ;{ le diagnosti des pannes multiples �etant limit�e dans les appro hes num�eriques,il semble potentiellement int�eressant d'in orporer une information a priori sur8

Motivations et Obje tifsl'organisation de leurs o urren es, a�n par exemple de limiter les on�gurations depannes �a onsid�erer �a un instant donn�e : ette logique sous-ja ente aux o urren eset aux propagations de pannes dans le syst�eme est, plus ou moins partiellement, re- ens�ee et formalis�ee par les �etudes de risque et de �abilit�e e�e tu�ees sur les syst�emespour lesquels la disponibilit�e et/ou la suret�e sont des fa teurs essentiels ;{ la surveillan e de hangements pr�e o es de omportement doit reposer sur unemod�elisation �a �etat ontinu, permettant seule d'exploiter l'information sur lespannes ontenue dans les signaux num�eriques.Finalement, la mod�elisation du syst�eme dynamique �a surveiller, prend en ompte l'en-semble de ses omportements ainsi que leurs intera tions : elle sera alors hybride dans lessens suivants :1. �a �etat ontinu et �a �ev�enements dis rets,2. sto hastique par les �ev�enements agissant sur la PO (o urren es de pannes et bruitssur les signaux num�eriques) et d�eterministe par le fon tionnement de la PC ;3. �a observations num�eriques, elles mesur�ees sur la PO et �a observations symboliques, elles �emises par la PC.PCPO
Dynamique du ontroleDynamiquedes pannes
Signaux symboliquesSignaux num�eriquesfon tionnementDynamique de
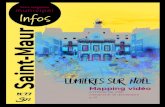
Fig. I.1.1: Comportements dynamiques du syst�eme utilis�es pour sa surveillan e. La dyna-mique de la partie ommande (PC), d�eterministe et s�equentielle, pilote la partie op�erative(PO), qui sera envisag�ee i i sous son fon tionnement ontinu. Les pannes modi�ent la dy-namique du fon tionnement, elles-memes �etant d�e rites par une dynamique onnue a priori(�abilit�e et risque). Le omportement symbolique externe est repr�esent�e par un ensemble designaux symboliques d�eterministes provenant de la PC et d'un ensemble de signaux num�eriquessto hastiques provenant des a tionneurs et apteurs de la PO.Le mod�ele dynamique global pour la surveillan e r�esultera de l'intera tion des troismod�eles suivants, 1/ du fon tionnement de la PO : sto hastique ( ar bruit�e) �a �etat ontinu, 2/ des pannes : (partiellement) sto hastique �a �ev�enements dis rets et 3/ dus�equen ement de la PC : d�eterministe �a �ev�enements dis rets. Plus pr�e is�ement, esmod�eles dynamiques interagissent de mani�ere orient�ee, e que repr�esentent les �e hessur la �gure I.1.1, o�u l'on note l'in uen e suppos�ee entre le ontrole et la dynamiquedes pannes, puisque les d�efaillan es des omposants d�ependent a priori de leur �etat de9

Motivations et Obje tifsfon tionnement (�a l'arret ou en mar he).Les te hniques utilis�ees dans e m�emoire sont propres �a haque partie du mod�ele, etd�e oulent �a la fois de l'information disponible et de l'obje tif de surveillan e :{ le omportement �a �etat ontinu sera mod�elis�e par un mod�ele d'�etat. Une d�emar he�eprouv�ee pour la surveillan e bas�ee sur un tel omportement onsiste 1/ �a introduiredans e mod�ele un ve teur de param�etres � dont la valeur nominale �0 est identi��ee(ou onnue a priori) en fon tionnement sain, et 2/ �a relier haque panne �a des �e artsdes omposantes du param�etre de leur valeur nominale. On peut alors onstruire,�a l'aide d'un traitement appropri�e des observations num�eriques une statistique de elles- i, dont la loi est onnue sous toute hypoth�ese d'�e art. Ce traitement statistiquedans les mod�eles param�etriques sera fond�e sur l'appro he asymptotique lo ale ;{ le omportement symbolique observ�e de la PC et elui inobserv�e, ou a h�e, de ladynamique des pannes, seront mod�elis�es onjointement par un r�eseau de Petri (RdP).On verra en e�et, que e formalisme onvient individuellement aux ph�enom�enes�etudi�es (dynamique des pannes et dynamique de ontrole) et qu'il permet la synth�esedu mod�ele global �a �ev�enements dis rets ;{ l'estimation de s�equen es d'�ev�enements a h�es (les d�efaillan es), sera obtenue parune te hnique de programmation dynamique, plus parti uli�erement un algorithmede Viterbi. Dans un premier temps, un mod�ele markovien reposant sur une probabi-lisation lassique du RdP restreint �a la dynamique des pannes, sera pr�esent�e. Un se- ond mod�ele utilisant une probabilisation partielle du RdP, s'inspirant d'un mod�eled�evelopp�e dans [2℄, sera ensuite pr�esent�e pour la surveillan e des syst�emes multi-mode. Un algorithme de Viterbi modi��e [2℄ sera utilis�e, mais �etendu i i aux syst�emeshybrides num�erique/symbolique. Dans les deux as, l'estimation sera onduite dansun adre bay�esien.L'ensemble de la d�emar he est pr�e is�e sur la �gure I.1.2.ContributionsAvant de souligner les apports de ette th�ese, rappelons les prin ipaux outils que nousutilisons :1. te hnique de mod�elisation markovienne a h�ee ;2. te hnique de probabilisation d'un r�eseau de Petri {RdP{ ( lassique : RdP sto has-tique, et r�e ente : RdP partiellement sto hastique) ;3. te hnique de g�en�eration et d'�evaluation de r�esidus par l'appro he asymptotique lo alepour des mod�eles d'�etat dynamiques param�etr�es ;4. te hnique d'estimation par programmation dynamique (algorithme de Viterbi dansle adre markovien, algorithme de Viterbi g�en�eralis�e dans le adre RdP partiellementsto hastique).Le premier apport est un adre de mod�elisation permettant la prise en ompte om-mune d'aspe ts des syst�emes onsid�er�es jusqu'i i s�epar�ement :10

Motivations et Obje tifsAutomateSto hastiqueP[panne℄
D�eterministeAutomateS�equentielAutomateSto hastiqueP[panne℄
y = F1(�; u) Traitement statistiquey = Fp(�; u) Traitement statistiquepannes /
pannes / Traitement statistiquey = F (�; u)D�e ision
D�e ision
\pannes = argmaxpannes P[ pannes ; Obs ℄
\pannes = argmaxpannes P[ pannes ; Obs ℄
�
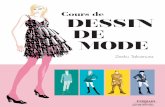
�Fig. I.1.2: Prin ipe de la d�emar he de mod�elisation et d'estimation dans les deux as trait�es : lapartie haute on erne les installations fon tionnant de mani�ere purement ontinue, repr�esent�eesi i uniquement par la partie op�erative (PO) au travers de la relation entr�ee/sortie (E/S). Lapartie basse on erne les installations dont la dynamique de la PO d�epend d'ordres (mise enmar he, arret, : : : ) �emis par la partie ommande (PC) : la PO est alors repr�esent�ee par unensemble de relations E/S pilot�ees par la PC. Dans les deux as, l'estimation des pannes este�e tu�ee dans un adre bay�esien.{ mod�elisation hybride ontinue/dis r�ete pour la surveillan e de syst�emes sto has-tiques �a observation num�erique/symbolique, utilisant la onnaissan e stru turellesur la dynamique des o urren es de pannes et de leurs en ha�nements, onnaissan eissue des �etudes de risque et de �abilit�e des syst�emes ;{ mod�elisation hybride sto hastique/non-sto hastique : extension du mod�ele initial(RdP partiellement sto hastique) au as o�u des �ev�enements ertains se produisentsur le syst�eme ( hangement de modes de fon tionnement, r�eparation).11

Motivations et Obje tifsLe se ond apport on erne la proposition d'algorithmes de surveillan e et de diagnosti sur les mod�eles �elabor�es pr�e �edemment :{ te hnique de surveillan e en ontinu par programmation dynamique (algorithme deViterbi), visant �a la fois �a la d�ete tion et au diagnosti de s�equen es d'�etats depannes1 ;{ te hnique de surveillan e en ontinu multi-mod�ele par un algorithme de Viterbig�en�eralis�e, visant �a la d�ete tion et au diagnosti de s�equen es de pannes2.OrganisationLe hapitre I.2 d�e rit di��erentes voies suivies dans le domaine de la surveillan e etdu diagnosti de pannes (ou en anglais Fault Dete tion and Isolation {fdi), parmi les-quelles nous onsid�erons plus parti uli�erement l'appro he param�etrique, utilis�ee dans lasuite du rapport. Celui- i se ompose de trois parties et d'une annexe : la partie II traitede la mod�elisation du syst�eme dans un but de d�ete tion et de diagnosti : le hapitre II.1d�eveloppe la mod�elisation �a �etat ontinu du syst�eme, et les outils statistiques utiles ; le ha-pitre II.2 d�e rit la mod�elisation �a �ev�enements dis rets et l'aspe t temporel de l'appro he.La partie III propose deux algorithmes reposant sur le mod�ele pr�e �edent : un premieralgorithme d'estimation des pannes �a base de mod�eles de Markov a h�es est pr�esent�e au hapitre III.1 ; l'extension aux syst�emes hybrides sous ontrainte de modularit�e l'est au hapitre III.2. La partie IV met en �uvre la mod�elisation et les algorithmes sur un simula-teur d'un g�en�erateur de vapeur d'une entrale thermique. L'annexe pr�esente les r�eseaux dePetri (RdP), ainsi que les extensions utilis�ees dans ette th�ese, i.e. les RdP sto hastiqueset les RdP partiellement sto hastiques.
1Il y a par ons�equent n�e essit�e de d�e�nir et �etat, e qui pr�esente des in onv�enients d'ordre statistique omme on le verra au hapitre III.2.2O�u l'on s'abstrait de la notion d'�etat et l'on tend vers une modularit�e des algorithmes.12

Chapitre 2D�ete tion et diagnosti de pannesdans les syst�emes omplexesDepuis vingt- inq ans, les exigen es de suret�e de fon tionnement et de produ tivit�edes installations industrielles ont motiv�e, dans leur domaine appli atif respe tif, une�ort important de re her he et de d�eveloppement pour la d�ete tion et le diagnosti des hangements de omportements des syst�emes, et e autant dans un ontexte th�eoriquequ'appliqu�e.Deux dire tions ont �et�e prises suivant la possibilit�e de on eption d'un mod�ele reliantles entr�ees/sorties du syst�eme �a ses pannes. Il ne s'agit pas i i de les opposer, ar esm�ethodes sont essentiellement ompl�ementaires : en e�et, la premi�ere requiert nonseulement une exp�erien e pratique (et th�eorique) suÆsante �a l'�elaboration d'un mod�ele,mais d'abord la possibilit�e d'envisager un tel mod�ele ; la se onde apporte une solution auxprobl�emes o�u au un mod�ele ne peut etre �elabor�e, ou bien dans les as o�u les expertises nesont pas suÆsantes pour pr�etendre on evoir un mod�ele \valable".La se tion 2.1 est onsa r�ee aux m�ethodes \sans mod�ele", largement majoritaires dansl'industrie du fait de leur simpli it�e de on eption. La se tion 2.2 re ense les m�ethodesave mod�ele(s) �a �ev�enements dis rets. La se tion 2.3 traite des mod�eles �a �etat ontinu :nous nous arretons plus parti uli�erement sur une m�ethodologie g�en�erale de on eptiond'indi ateurs de d�efauts et sur les te hniques de d�ete tion et de diagnosti qui lui sontatta h�ees ; 'est e�e tivement la brique de base de la d�emar he propos�ee i i. La se tion2.4 d�e rit les mod�eles hybrides existants. Nous proposons �a la se tion 2.5 les voies que l'onpourrait suivre dans e domaine, et nous justi�ons en parti ulier elle adopt�ee i i.2.1 D�ete tion et diagnosti sans mod�eleL'int�eret premier de es m�ethodes est l'exploitation dire te des signaux mesur�es.Fran hissement de seuils (Limit he king) : les signaux sont ompar�es �a des seuilspr�e�etablis, le fran hissement de l'un d'eux alertant d'un omportement d�efaillant,mais ne permettant pas d'en d�eterminer la ause. En produ tion, deux limitesdistin tes sont �x�ees, la premi�ere est dite de pr�e-alarme et permet d'entreprendreune a tion de maintenan e pr�eventive ; la se onde est l'alarme, et impose l'arret de13

Mod�eles dis retsla produ tion et l'engagement d'une a tion de maintenan e orre tive.Ces m�ethodes simples ont pour in onv�enients prin ipaux le traitement du bruit etle r�eglage des seuils d'alarme et de pr�e-alarme.Installation de apteurs : ertains apteurs d�edi�es r�ealisent dire tement la onfronta-tion de la quantit�e surveill�ee �a des seuils. Ils sont adapt�es �a une appli ation donn�eeet leur out est �elev�e. L'utilisation de apteurs multiples, d�edi�es ou non, permet lad�ete tion de leurs d�efauts ou eux de leurs instruments p�eriph�eriques : une indi a-tion sensiblement divergente fournie par les apteurs t�emoigne du fon tionnementanormal d'au moins l'un d'eux : la \bonne" indi ation pouvant etre obtenue par voteou par analyse du degr�e de oh�eren e des apteurs [63℄. Ce i requiert un degr�e deredondan e physique important.Syst�emes experts : ils interviennent dans le diagnosti des pannes, en post-traitementdes alarmes g�en�er�ees par l'un des dispositifs pr�e �edents et fon tionnent en deux�etapes :Apprentissage hors-ligne : les syst�emes doivent avoir �et�e observ�es dans tousleurs �etats de fon tionnement (sains et d�efaillants) possibles. L'expertise est ap-prise puis stru tur�ee dans des r�egles (d�eterministes, probabilistes, oues) reliantles pannes, individuelles ou ombin�ees (on dit alors que e sont des s �enariosde pannes), et les donn�ees.Exploitation en-ligne : les r�egles d'inf�eren e i-dessus sont utilis�ees pour re-lier les symptomes observ�es en fon tionnement (type et s�equen ement) auxs �enarios de pannes appris dans la premi�ere �etape, sa d�e ision �etant prise demani�ere autonome ou en oop�eration ave l'op�erateur.Leur avantage prin ipal est la faible onnaissan e requise sur le syst�eme pourla on eption des pro �edures. Leurs in onv�enients r�esident dans leur manque deg�en�eri it�e, et surtout dans l'apprentissage exhaustif de tous leurs omportementsd�efaillants, pr�ealable ou en ours de fon tionnement, qui doivent don etre observ�es.2.2 D�ete tion et diagnosti �a base de mod�eles dis retsCes mod�elisations ont pour obje tif de retrouver un s �enario de pannes orrespondant�a une s�equen e de symptomes observ�ee sur le syst�eme, mais ette fois �a partir d'un mod�ele.Trois voies ont �et�e explor�ees suivant que le syst�eme est mod�elis�e de mani�ere qualitative( 'est alors une formalisation des r�egles d'un syst�eme expert, dont nous ne parlerons pasi i) sous son aspe t fon tionnement (mod�eles fon tionnels) ou sous son aspe t d�efaillant(mod�eles des pannes).2.2.1 Mod�eles fon tionnelsCe sont des mod�eles g�en�erant impli itement toutes les s�equen es de symptomes obser-vables sur le syst�eme. Dans [52℄, la d�emar he suit deux �etapes :Con eption du mod�ele : 1/ Chaque omposant de l'installation est mod�elis�e par unsyst�eme �a �ev�enements dis rets (SED) et peut etre muni d'un ensemble de signaux14

Mod�eles dis rets Mod�eles des pannesbool�eens, indiquant si son fon tionnement est nominal ou non-nominal. 2/ Ces SEDsont ensuite onne t�es de mani�ere syn hrone en un SED global, mod�elisant la dyna-mique du syst�eme ; elle- i est mod�elis�ee par une ma hine �a �etat �ni, et pilot�ee :{ par les �ev�enements observ�es provenant des apteurs et des a tionneurs ;{ par les �ev�enements a h�es, i.e. les pannes.Con eption du diagnostiqueur : 'est �egalement un syst�eme d'inf�eren e �a base der�egles de d�edu tion formelles permettant de r�ealiser en-ligne une estimation de l'�etatdis ret du syst�eme et don des �ev�enements a h�es, ompatibles ave la dynamique i-dessus. Une th�eorie de la diagnosti abilit�e en temps �ni est onsid�er�ee dans [53℄.Cette m�ethodologie s'applique aux SED purs, mais l'avantage prin ipal de ette ap-pro he est, de l'avis de ses auteurs, d'�eviter le re ours aux mod�eles �a �etat ontinu pour lessyst�emes omplexes : l'exemple d�evelopp�e dans [52℄ est e�e tivement passablement om-pliqu�e, ar dot�e de nombreux omposants p�eriph�eriques dont la mod�elisation serait arduedans un ontexte ontinu (en fait le syst�eme est typiquement hybride ontinu/dis ret, etpr�esente don une diÆ ult�e pour les m�ethodes existantes).Le se ond avantage pratique de ette appro he est de ne pas avoir �a g�en�erer lespannes sur le syst�eme ar elles- i sont d�e rites a priori. Son in onv�enient r�eside dans lamod�elisation d�eterministe qui n�eglige une part importante du omportement du syst�eme :l'interpr�etation du r�esultat peut alors s'av�erer d�eli ate.2.2.2 Mod�eles des pannesLa mod�elisation est i i on entr�ee sur la dynamique �a �ev�enements dis rets des pannes,l'aspe t fon tionnement, ontinu ou dis ret, �etant laiss�e de ot�e.Les mod�eles des pannes reposent sur l'utilisation de graphes orient�es a y liques et plusparti uli�erement sur les graphes ausaux, ou r�eseaux bay�esiens, dont les sommets sontles pannes et les ar s repr�esentent les relations de ause �a e�et entre les d�efaillan es, ouentre les alarmes memes, (voir [8℄ pour une pr�esentation g�en�erale de es appro hes, et lesr�ef�eren es in luses). Une appli ation aux �el�ements d'un r�eseau de t�el�e ommuni ation, estd�evelopp�ee dans [26℄.Une autre appro he [2℄ �a base de RdP, appliqu�ee �egalement aux r�eseaux det�el�e ommuni ation, onsid�ere le syst�eme dans son ensemble. La diÆ ult�e pos�ee par essyst�emes r�eside d'abord dans l'�eloignement g�eographique de leurs omposants : e i im-pose pratiquement de r�epartir la surveillan e et le diagnosti �a di��erents endroits du r�eseauet de pouvoir prendre des d�e isions lo ales, i.e. ne faisant pas appel �a son �etat global. Orles te hniques de mod�elisation de ph�enom�enes al�eatoires survenant sur des RdP reposentsur une probabilisation (typiquement markovienne) ne permettant pas ette r�epartition, ar faisant appel �a une dynamique d'�etat.Pour r�epondre �a ette exigen e, une probabilisation originale des r�eseaux de Petri(les RdP partiellement sto hastiques, ou Partially Sto hasti Petri Nets - PSPN), a �et�ed�evelopp�ee dans [2, 3, 30, 4℄. Elle a une propri�et�e dite de modularit�e, sur laquelle nousreviendrons au hapitre III2, permettant de prendre des d�e isions lo ales. Nous nous ins-pirons de ette appro he dans e m�emoire ; elle est pour ela d�evelopp�ee dans l'annexe Apuis modi��ee dans le hapitre III.2 pour satisfaire aux ontraintes que nous nous �xons.15

Mod�eles ontinus2.3 Mod�eles ontinusNous pr�esentons maintenant les te hniques �a base de mod�eles ontinus, en �evoquant lesprin ipales m�ethodes dans un ordre sensiblement hronologique ; nous utilisons i i [63, 34,33, 5, 31℄, auxquels nous renvoyons pour plus de d�etails, ainsi qu'aux livres [47, 9, 55, 57℄pour un expos�e omplet.Nous �evoquons d'abord la te hnique de �ltrage qui sera utilis�ee dans ertains as denotre appro he ; nous envisageons ensuite les mod�eles de sauts de pro essus, dont nousproposons une version alternative ; en�n, nous d�etaillons l'appro he g�en�erale d'extra tiond'information �a partir d'un mod�ele param�etrique, utilis�ee dans toute la suite.2.3.1 Te hniques de �ltrageLe �ltrage est l'estimation de l'�etat d'un mod�ele d'�etat sto hastique, lin�eaire ou non-lin�eaire. Dans le as lin�eaire, on pose :{ Dynamique d'�etat : xk+1 = Akxk +Bkuk + vk (I.2.1){ Observation : yk = Ckxk +Dkuk + wk (I.2.2)o�u uk est l'entr�ee des a tionneurs du syst�eme, yk les mesures fournies par les apteurset xk l'�etat du mod�ele du pro essus ; les bruits vk et wk sont souvent suppos�es blan s, entr�es et Gaussiens, de matri es de ovarian e onnues, respe tivement not�ees Q et R.Les matri es Ak, Bk, Ck et Dk sont suppos�ees onnues.En fon tionnement nominal, ou sans panne, l'�etat d'un syst�eme lin�eaire observable peutetre estim�e de mani�ere optimale, au sens de l'erreur quadratique moyenne de pr�edi tion,par un �ltre de Kalman : xk+1jk = Akxkjk +Bkukxkjk = xkjk�1 +Kk k (I.2.3) k = yk � Ckxkjk�1 �Dkuko�u l'erreur de pr�edi tion est entr�ee et Gaussienne (en fon tionnement nominal), et o�ule gain Kk est al ul�e par : Pkjk�1 = AkPk�1jk�1ATk +QVk = CkPkjk�1CTk +RKk = Pkjk�1CTk V �1kPkjk = Pkjk�1 �KkCkPkjk�1o�u Pijj est la ovarian e de l'erreur d'estimation de l'�etat xijj, et Vk la ovarian e de .Finalement, ette estimation de l'�etat peut etre utilis�ee pour la ommande par retourd'�etat lin�eaire : uk = Gkxkjk16

Mod�eles ontinus Te hniques de �ltragex yuA tionneurs Installation CapteursLoi de ontrole Filtre estimateurFig. I.2.1: S h�ema fondamental d'un syst�eme : le syst�eme �a surveiller est d�e ompos�e entrois parties : a tionneurs, installation et apteurs, ha un pouvant pr�esenter des pannes. La ommande du pro essus par retour d'�etat repose sur la re onstru tion pr�ealable de elui- ipar un �ltre estimateur, de Kalman par exemple, estimation utilis�ee en entr�ee d'une loi de ommande.Le syst�eme omplet est repr�esent�e �a la �gure I.2.1.Selon [62℄, les questions de la d�ete tion et du diagnosti peuvent etre envisag�ees \dans labou le", une des premi�eres pr�eo upations �etant de her her �a utiliser le �ltre de Kalman,d�ej�a existant pour la ommande, a�n de r�ealiser les deux ta hes pr�e �edemment �enon �ees,suivies �eventuellement d'une re on�guration, ou d'une adaptation de la ommande (ou du�ltre dire tement). Dans [63℄, plusieurs solutions sont envisag�ees.Un hangement dans la dynamique ou dans l'observation du syst�eme (matri es Bk, Ckou Dk) provoque un biais dans l'innovation qui peut etre d�ete t�e et interpr�et�e.Lorsque seule la d�ete tion est vis�ee, un test d'hypoth�ese [19℄ sur l'erreur de pr�edi tion[38℄ est r�ealis�e, �a partir du �ltre (de ommande), identi��e en fon tionnement nominal.L'implantation de e d�ete teur est ais�ee et rapide et il ne perturbe pas la dynamiquenominale ; de plus, il prend en ompte le rapport signal (amplitude du hangement dela moyenne du r�esidu par exemple) �a bruit, e qui m�ene au ompromis n�e essaire entrela dynamique de d�ete tion et les performan es statistiques, r�esultant du ouplage entrela tailleN de la fenetre, sur laquelle est al ul�e le test, et la probabilit�e de fausse alarme PF .L'in onv�enient de l'utilisation du �ltre de ommande est qu'en omportement station-naire, elui- i a de petits gains et don une dynamique lente, pr�ejudi iable �a une d�ete tionrapide des hangements provoqu�es par les pannes. A�n de limiter l'inertie due aux donn�eespass�ees, il a �et�e propos�e de limiter la m�emoire du �ltre, par un fa teur d'oubli exponentielpar exemple. Ce i a ependant pour orrolaire une augmentation de la bande passante(BP) du �ltre et don une d�egradation des performan es de ommande en r�egime nominal ar la sensibilit�e au bruit est a rue. Dans [35℄, l'�etat du �ltre de Kalman est augment�epour tenir ompte des \�etats" de pannes (biais, pentes : : : ), qui sont alors �egalementestim�es. Ce i ne r�esout ependant pas le probl�eme de l'augmentation de la BP.De l�a d�e oule l'utilisation d'un double �ltre, un pour la ommande, un d�edi�e �ala d�ete tion, qui a men�e �a la notion de �ltres d�ete teurs [61℄ : le se ond �ltre (nonn�e essairement de Kalman) est alors optimis�e pour la d�ete tion des pannes, et 'estl'introdu tion de la notion fondamentale de r�esidu, ve teur dans lequel doivent ap-para�tre les manifestations des pannes. La d�ete tion et le diagnosti peuvent etree�e tu�es simultan�ement : une panne doit en e�et g�en�erer un �e art du r�esidu dans unsous-espa e donn�e, ara t�eristique d'une panne. Il s'agit d'une appro he g�eom�etrique,qui utilise la notion de redondan e analytique dans les syst�emes. L'extension aux �ltresd�ete teurs multiples [36℄ ( haque �ltre �etant optimis�e pour la d�ete tion d'une panne17

Te hnique de hangements de mod�eles Mod�eles ontinusdonn�ee) a soulev�e le probl�eme du hoix du "meilleur" mod�ele, qui a �et�e r�esolu dansun ontexte statistique : la probabilit�e onditionnelle d'avoir g�en�er�e les observationsest al ul�ee pour haque �ltre �a partir de la loi de , la d�e ision hoisissant la plusgrande. Cette appro he est simple mais n�e essite de onna�tre parfaitement les pannes.De plus, la omplexit�e ro�t exponentiellement en fon tion du nombre de pannes multiples.Des simpli� ations (pannes simples) ont �et�e onsid�er�ees, un test s�equentiel (Sequen-tial Probability Ratio Test- SPRT) al ulant pour haque mod�ele le rapport entre saprobabilit�e onditionnelle et la probabilit�e de non hangement. Une appro he bay�esiennea permis �egalement l'int�egration d'informations a priori en vue de simpli� ations poure�e tuer le al ul des probabilit�es a posteriori de haque mod�ele.Dans [62, 64℄, une mod�elisation param�etrique des pannes permet d'exploiter lesin uen es di��erentes de haque panne dans le biais de l'erreur de pr�edi tion. Il sembleque e soit la premi�ere introdu tion de pannes di��erentes dans le mod�ele dynamiquenominal du syst�eme ; les pannes onsid�er�ees sont ependant restreintes aux Dira et aux�e helons additifs dans l'�equation d'�etat ou d'observation.La d�e ision peut etre prise par l'identi� ation des param�etres (amplitudes, instants)sous ha une des hypoth�eses de panne additive i-dessus, au sens du maximum devraisemblan e (MV), ou par le rapport de vraisemblan e entre ha une des hypoth�eses.L'in uen e d'une panne sur l'innovation peut �egalement etre d�etermin�ee analytiquement(notion de signature de panne), e qui permet d'envisager l'inversion dans de bonnes onditions.Une appro he di��erente visant au diagnosti de hangements dans la dynamique dusyst�eme, est propos�ee dans [38℄ ; elle pr�esente des ara t�eristiques que nous exploiteronsdans e m�emoire.2.3.2 Te hnique de hangements de mod�elesDans [38℄, ette te hnique repose sur les trois �el�ements suivants, points ommuns ave notre m�ethode :1. d�ete tion et diagnosti de hangements dans la dynamique du syst�eme ( hangementde matri e A dans (I.2.1)) ;2. probabilisation de l'instant de hangement ;3. utilisation des informations a priori de �abilit�e (taux de d�efaillan e).La probabilit�e a posteriori de haque dynamique est obtenue par le al ul di��erentielsto hastique et la m�ethode pr�esente, selon les auteurs de [38℄, les avantages suivants :1. simpli it�e d'impl�ementation du d�ete teur,2. robustesse fa e aux in ertitudes de mod�elisation,3. in orporation d'information a priori sur les instants de hangements.En revan he, la onnaissan e a priori est obligatoire et de plus, seuls les syst�emesinvariants en r�egime stationnaire sont onsid�er�es.18

Mod�eles ontinus Vers une d�emar he g�en�erale2.3.3 Vers une d�emar he g�en�eraleLes appro hes pr�e �edentes sont limit�ees �a des stru tures de mod�eles ou �a des pannesde nature d�etermin�ee, ar elles sont tributaires des te hniques d'analyse des in uen esdes pannes sur les �e arts des sorties ou des r�esidus. Une d�emar he g�en�erale devrait etreind�ependante de es ontingen es.La d�emar he (sous-ja ente �a la te hnique de �ltrage) pr�esent�ee dans [22℄ est une ap-pro he en trois temps :1. Mod�elisation param�etrique de tout type de panne dans un mod�ele sto hastique defon tionnement.2. G�en�eration d'indi ateurs de d�efauts, ou r�esidus, dont la moyenne (asymptotique) enfon tionnement nominal est onnue et dont un �e art signi� atif r�esulte d'une panne,interpr�et�ee omme une d�eviation param�etrique.3. �Evaluation des r�esidus, i.e. on eption de r�egles de d�e ision, dans un but ded�ete tion, mais aussi maintenant dans un but de diagnosti , par extra tion d'uneinformation de plus haut niveau sur l'�e art param�etrique d�ete t�e.Des m�ethodes ont �et�e d�evelopp�ees dans les domaines d�eterministe et sto hastique,l'avis �emis dans [5℄ �etant que, dans le premier as, la d�emar he doit pro �eder d'un pr�e-traitement :1. transformation du probl�eme d�eterministe en un probl�eme sto hastique, puis2. g�en�eration/�evaluation omme d�e rit i-dessus.On peut donner les prin ipales raisons de ette onversion : d'abord, les syst�emes sont onnus ave ertaines in ertitudes provenant de la mod�elisation et du bruit de mesure ;or, es in ertitudes sont souvent bien mod�elis�ees dans un adre sto hastique. Ensuite,des outils statistiques puissants existent : rapport de vraisemblan e et sa g�en�eralisationGLR pour les prin ipaux qui, pouvant se situer dans un adre d'estimation bay�esienne,permettent d'in orporer naturellement les informations statistiques a priori disponibles.Nous pr�esentons dans la suite l'appro he reposant sur le rapport de vraisemblan e etsur le GLR, puis l'approximation utilis�ee i i (l'appro he lo ale).2.3.4 D�ete tion statistique dans les mod�eles param�etriquesOn suppose que le mod�ele d'�etat (I.2.1), (I.2.2) est param�etr�e par un ve teur � dontla valeur nominale �0 a �et�e pr�ealablement identi��ee en fon tionnement sain �a partir dedonn�ees r�eelles ; les pannes sus eptibles de se produire sont suppos�ees etre reli�ees a prioriaux hangements de param�etres du mod�ele. Nous appellerons a quisition de la signaturenominale ette �etape initiale.On distingue syst�ematiquement les deux �etapes suivantes, de surveillan e (d�ete tiondu hangement) et de diagnosti (lo alisation du hangement) :Surveillan e La surveillan e, ou d�ete tion de hangements de omportement, onsiste,�a partir de la signature nominale et de nouvelles mesures, �a d�e ider si le syst�eme19

D�ete tion statistique dans les mod�eles param�etriques Mod�eles ontinusest toujours dans son �etat nominal ou s'il ne l'est pas. Deux m�ethodes sont envisa-geables :1. A quisition d'une nouvelle signature, puis omparaison �a la signature nominale.Ce i pr�esente les in onv�enients suivants :{ une raison pratique : l'a quisition de la nouvelle signature peut etre outeuse, voire impossible ; elle n'est de plus, pas n�e essairement auto-matisable, l'op�erateur devant en g�en�eral initialiser puis valider les r�esultatsd'identi� ation ;{ deux raisons th�eoriques : d'une part, onnaissant la signature nominale, lad�e ision d�epend essentiellement de la m�etrique hoisie pour omparer lessignatures ; d'autre part, meme pour un hoix fond�e physiquement et/outh�eoriquement, la omparaison peut ne pas fournir de d�e ision ais�ee, lesdeux signatures pouvant etre trop pro hes l'une de l'autre [10℄, au sens de lam�etrique d�e�nie et d'un seuil d�etermin�e pour la s�eparation des hypoth�eses.2. Comparaison dire te des mesures �a la signature nominale. Ce i repose surune te hnique g�en�erale de on eption d'indi ateurs, r�esidus statistiques, deloi onnue sous toute hypoth�ese de panne et sur lesquels repose la d�e ision,prise par exemple par un test d'hypoth�eses selon le maximum de vraisemblan e.Diagnosti Le diagnosti , ou la lo alisation de d�efauts, est une ta he plus diÆ ile : ils'agit en e�et d'interpr�eter en termes d'�e arts param�etriques � � �0, les hange-ments, de moyenne par exemple, de l'indi ateur ; or, les �e arts param�etriques li�es �adi��erentes pannes sont plus ou moins fortement orr�el�es dans la moyenne du r�esidu,rendant d�eli at le d�e ouplage des auses. Une premi�ere �etape onsiste �a distinguerles pannes d'int�eret, elles que l'on her he �a isoler, et elles de nuisan e, qui n'ontau une importan e dans la d�e ision, voire la perturbent. Deux attitudes peuventetre adopt�ees au sujet des pannes de nuisan e, selon que l'on suppose qu'elles se sontproduites ou non. On her he dans le premier as �a obtenir un d�e ouplage maximalentre les pannes de nuisan e et elles d'int�eret. En l'absen e totale d'informationsur les premi�eres, on optimise la puissan e du test dans le pire des as [19, 9℄. C'estune hypoth�ese r�ealiste, quoique pessimiste et qui pr�esente l'in onv�enient d'a�aiblirla sensibilit�e aux pannes d'int�eret.Les deux m�ethodes sont dites, respe tivement, de sensibilit�e et de r�eje tion (ou min-max).Dans la suite de ette se tion, nous pr�esentons le probl�eme fondamental de la d�ete tionde hangement de moyenne dans une variable al�eatoire gaussienne, et son diagnosti parle GLR sous les deux hypoth�eses pr�e �edentes.Surveillan e : le probl�eme fondamentalSoit une suite d'observations (yn) s alaire :yn = �n + "nave la s�equen e ("n) de bruit blan entr�e de varian e �2 et o�u le param�etre surveill�e est :�n = � �0 si n � r � 1�1 si n � r20

Mod�eles ontinus D�ete tion statistique dans les mod�eles param�etriquesLe probl�eme onsiste en la d�ete tion du hangement de moyenne �n et l'estimation del'instant de hangement r ; on peut s'int�eresser �egalement �a la d�etermination des valeurs�0 et �1, si elle- i sont in onnues.La question est formul�ee i i en termes de test d'hypoth�eses, simples si les amplitudessont onnues, omposites sinon :H0 : r > n pas de hangement dans (yk)1�k�nH1 : r � n hangement dans (yk)1�k�nLe rapport de vraisemblan e, ou likelihood ratio, LR, entre les deux hypoth�eses s'�e rit :nYk=r p1(yk)p0(yk) (I.2.4)qui est al ul�e uniquement sur les n � r + 1 derni�eres observations, �e hantillon o�u lavraisemblan e est di��erente sous les deux hypoth�eses.Dans le as parti ulier o�u le bruit a une distribution Gaussienne N (0; �2), la distribu-tion de yk est Gaussienne N (�k; �2) et le logarithme du RV (I.2.4) s'exprime analytique-ment par : �n(r) = �1 � �0�2 nXk=r(yk � �0 + �12 )= 1�2Snr (�0; �)o�u Sji (�; �) = � jXk=i(yk � �� �2) (I.2.5)et o�u � = �1 � �0est l'amplitude du saut.L'instant r du saut �etant in onnu, une appro he lassique onsiste �a prendre son es-tim�ee au sens du maximum de vraisemblan e :rn , arg max1�r�n[r�1Yk=1 p0(yk) nYk=r p1(yk)℄= arg max1�r�nSnr (�0; �)Dans le as o�u �0 et � sont onnus, le d�ete teur est d�e�ni par :gn , �n(rn) = maxr Snr (�0; �) 7H0H1 � (I.2.6)o�u � est un seuil �a d�eterminer en fon tion des performan es vis�ees pour le test. Ce testexprime �egalement la d�ete tion du premier instant n tel que :gn = Sn1 (�0; �)� min1�k�nSk1 (�0; �) > � (I.2.7)21

D�ete tion statistique dans les mod�eles param�etriques Mod�eles ontinusqui est la r�egle d'arret de Page-Hinkley [45℄, onnue �egalement sous le nom d'algorithmede la somme umul�ee (Cumulative Sum) ; en�n, gn peut se al uler de mani�ere r�e ursiveet don permettre la d�ete tion en-ligne.Si maintenant l'amplitude � du saut est in onnue, e qui est le as g�en�eral pour lestests en-ligne, on peut adopter deux appro hes di��erentes :Tests parall�eles : �a ondition de �xer une valeur minimale �0 du saut �, un premieralgorithme de la somme umul�ee surveille un �e art � > �0, l'autre surveillant un�e art � < ��0.Estimation de l'�e art : de mani�ere similaire �a l'instant de hangement r, on prendpour � son estim�ee � au maximum de vraisemblan e, elle maximisant (I.2.5).Notons que la omplexit�e de l'estimation au maximum de vraisemblan e ne pose pasprobl�eme dans le as o�u la maximisation (I.2.6) est onnue analytiquement ( e qui est le as dans l'hypoth�ese Gaussienne, et qui justi�e l'e�ort fait pour se ramener le plus possible�a elle- i).Diagnosti Consid�erons le probl�eme similaire de la d�ete tion d'un hangement de moyenne dansun ve teur Gaussien. La te hnique de d�ete tion n'est pas modi��ee mais la lo alisation des omposantes responsables du hangement est maintenant pos�ee.Soit le ve teur al�eatoire Gaussien :Z � N (J�;�) (I.2.8)et o�u la matri e d'in iden e J est onnue, de rang plein et o�u � est d�e�nie positive. Enfon tionnement nominal, supposons que � = 0, et en pr�esen e de pannes, que � 6= 0.Le diagnosti onsiste �a isoler les omposantes de � responsables de l'�e art de moyennedu r�esidu Z. Pour ela [6℄, on r�eorganise le ve teur � en :� = � �a�b �ave �a; �b de dimensions respe tives la et lb (la + lb = l), o�u �a est le param�etre d'int�eretet �b est le param�etre de nuisan e. La matri e d'in iden e devient apr�es r�eorganisation :J = � Ja Jb � (I.2.9)La matri e d'information de Fisher [19℄ F du ve teur Gaussien Z, est donn�ee par :F , JT ��1 J = � Faa FabFba Fbb � (I.2.10)Pour tester un �eventuel �e art du param�etre d'int�eret �a par rapport �a 0, les deuxhypoth�eses sur les pannes de nuisan e sont envisag�ees su essivement.22

Mod�eles ontinus D�ete tion statistique dans les mod�eles param�etriquesTests de sensibilit�e Il s'agit de d�ete ter des hangements dans �a �a partir de 0 ave �bnul. Le test de sensibilit�e entre � = (0; 0) et � = (�a; 0) o�u �a 6= 0, dans le as o�u �a n'estpas onnu, est le logarithme du GLR suivant :eta = ln max�a pJa�a;�(Z)p0;�(Z) (I.2.11)On montre que e test dans le as Gaussien est distribu�e omme une variable du �2 �adim(�a) degr�es de libert�e et de param�etre de non- entralit�e 12� Ta J Ta F�1aa Ja�a.Ces tests pr�esentent une grande sensibilit�e par rapport �a des �e arts �a 6= 0, maisont des valeurs di��erentes suivant les valeurs du param�etre de nuisan e �b, i.e. si Z �N (Ja�a + Jb�b;�), ave �b 6= 0. A l'inverse, les tests de r�eje tion prennent le parti d'etrestru turellement insensibles �a toute valeur prise par �b.Tests de r�eje tion (ou min-max) On her he maintenant �a d�ete ter des variationssur �a, ave une robustesse totale vis-�a-vis des valeurs prises par �b. Dans e as, et si �aest in onnu, le test de r�eje tion est le logarithme du GLR suivant :t�a = max�a;�b pJa�a+Jb�b;�(Z)max�b pJb�b;�(Z) (I.2.12)On montre �egalement que le test (I.2.12) est distribu�e omme un �2 de memes a t�eristiques que elui de sensibilit�e. Il est maximalement d�e oupl�e des �e arts �b, d'o�u lad�enomination de \r�eje tion". Ce d�e ouplage a pour orollaire une moins grande sensibilit�eaux �e arts de �a.Limites du GLRLes tests GLR, simples dans leur expression, pr�esentent n�eanmoins deux limites :1. La omplexit�e : sauf dans ertains as parti uliers (ve teur Gaussien onsid�er�e plushaut), les al uls sont lourds �a entreprendre, et des probl�emes s�erieux d'optimisation(minima lo aux) peuvent appara�tre. Ils rendent n�e essaire une approximation de late hnique g�en�erale.2. L'eÆ a it�e statistique des tests [19℄ : les tests reposant sur le GLR sont tels qu'au untest satisfaisant (notamment pas de test UMP- Uniformly Most Powerful [27℄) nepeut etre �elabor�e dans un ontexte d'hypoth�eses omposites. Une appro he asympto-tique permet de ontourner le probl�eme en se ramenant �a une hypoth�ese Gaussienne[16℄. Nous suivons ette appro he dans e m�emoire.Des deux appro hes asymptotiques existantes, i.e. grandes d�eviations [27℄ et appro helo ale [51℄, nous retiendrons la se onde, ar elle s'adapte bien aux probl�emes de lad�ete tion et du diagnosti , et a �et�e largement �etudi�ee et appliqu�ee [16, 65, 7℄ dans e ontexte.La th�eorie math�ematique permet, pour une large lasse de pro essus sto hastiquesparam�etr�es par � de d�ete ter puis de diagnostiquer des hangements de omportements23

Mod�eles hybridesdus �a des \petits" �e arts Æ� du param�etre � de sa valeur nominale �0. Le prin ipe onsiste �a onvertir tout probl�eme de d�ete tion/diagnosti dans un pro essusquel onque, en un probl�eme universel de la surveillan e de la moyenne d'unve teur (et non d'un pro essus) Gaussien, de matri e de ovarian e onnue.Nous reviendrons �a ette te hnique au hapitre II.1.2.4 Mod�eles hybridesComme on l'a mentionn�e dans l'introdu tion, les m�ethodes �a base de mod�ele pr�esent�ees i-dessus, qu'elles soient dis r�etes ou ontinues, ne prennent en ompte qu'un aspe tdu syst�eme surveill�e. Or, la plupart des syst�emes industriels �a surveiller pr�esentent si-multan�ement des dynamiques dis r�etes et ontinues, qui ontiennent des informations ompl�ementaires sur l'�etat d�efaillant du syst�eme.La premi�ere �etude qui prend en ompte onstru tivement et aspe t hybride utilise desmod�eles multiples en intera tion (Intera ting Multiple Model - IMM) [68℄. L'id�ee de baseest la meme que elle pr�esidant aux �ltres d�ete teurs multiples, mais am�elior�ee pour tenir ompte de la dynamique a priori des hangements de mod�ele ; elle repose sur les mod�elesde Markov a h�es (ou Hidden Markov Models { HMM) ([48, 49℄ et voir le hapitre 1).Dans [68℄, le HMM a pour �etats a h�es les on�gurations, ou modes de d�efaillan e,dans lesquels le syst�eme peut se trouver ; les probabilit�es de transition entre �etats sontinitialis�ees �a une valeur a priori puis a tualis�ees p�eriodiquement selon les observationsre ueillies. L'�etat ou la s�equen e d'�etats optimale par ourue est ensuite estim�ee en-ligne.La te hnique propos�ee impose de limiter la surveillan e aux pannes additives de ap-teurs et d'a tionneurs et e pour des syst�emes lin�eaires invariants ; ette appro he sou�rede plus d'un manque de m�ethodologie de r�eglage des probabilit�es de transition et des seuilsde d�e ision.�A partir de ette premi�ere appro he, on peut formuler les questions suivantes, entralesdans l'�elaboration d'un adre hybride pour la surveillan e :Espa e d'�etat : l'�etat du HMM est d�e�ni par une on�guration de panne ; e i im-plique la on eption d'autant de mod�eles de pannes qu'il y a de ombinaisons depannes de apteurs, qui peuvent etre nombreuses, ar les pannes sont (sur un avionpour l'exemple simul�e dans [68℄) ind�ependantes, l'espa e d'�etat pr�esentant la a-ra t�eristique lassique des HMM, i.e. l'explosion ombinatoire.Changements de mod�ele : les �etats dis rets hangent de mani�ere sto hastique et ob-serv�ee, omme 'est e�e tivement le as pour la poursuite de ible [68℄ ou le hange-ment de tendan es boursi�eres [15℄. Comme on l'a soulign�e dans l'introdu tion, unepartie du syst�eme est purement non-sto hastique. N'y a-t-il pas un risque �a estimer ette information onnue de mani�ere ertaine1 ? Par ons�equent, est-il raisonnablede onsid�erer ensemble hangements de mode de fon tionnement (observ�es ertaine-ment) et d�efaillan es (non observ�ees et sto hastiques en g�en�eral) ?�Evaluation en-ligne des probabilit�es de transition : est- e une hypoth�ese oh�erente ave les ph�enom�enes rares telles que les pannes de apteurs ? Une1La situation est bien di��erente de l'utilisation d'une estim�ee y d'une mesure bruit�ee y dans le �ltrage :i i l'observation provenant du ontrole- ommande est sans in ertitude.24

Con lusioninformation a priori sur les taux de d�efaillan es ( omme d�ej�a utilis�ee dans les sautsde pro essus (se tion 2.3.2) ne serait-elle pas plus adapt�ee, laissant de sur ro�t toutle temps n�e essaire �a l'e�ort de d�ete tion ?Signi� ation des probabilit�es de transition : d�e�nies entre mod�eles, 'est-�a-direentre omportements et non entre les pannes elles-memes, omment les d�eterminer ?Pertinen e de la notion d'�etat de panne : est-elle valide pour d�e rire les propaga-tions de pannes �a travers les grands syst�emes dont les omposants sont majoritaire-ment ind�ependants ? Ne peut-on, �a l'instar de l'appro he [2℄, obtenir une notion demodularit�e �a l'int�erieur des syst�emes hybrides ?2.5 Con lusionAu travers des multiples appro hes d�evelopp�ees dans les vingt- inq derni�eres ann�ees,on peut distinguer les id�ees g�en�erales suivantes :{ Pour le domaine dis ret : en s'inspirant de [2℄, une repr�esentation par RdP sembleetre le bon moyen de mod�eliser onjointement les dynamiques �a �ev�enements dis rets :mod�eles de pannes d'une part et de fon tionnement d'autre part. Les PSPN (se tionA.5) permettent en plus d'envisager la r�epartition de la surveillan e.{ Pour le domaine ontinu, les arguments th�eoriques en faveur d'une appro hesyst�ematique par les mod�eles sto hastiques et param�etriques sont �etay�es par lesr�eussites appli atives [10℄.{ Toujours dans le domaine ontinu, la s�eparation m�ethodologique entre la g�en�erationd'instruments de surveillan e et la on eption de r�egles de d�e ision est admise [63℄.{ Dans le domaine hybride, �a notre avis, la d�emar he �a base d'Intera ting MultipleModel semble sou�rir d'un manque de m�ethodologie g�en�erale et d'une limitation auxpannes additives.Vers une notion de surveillan e de syst�emes hybridesLa diÆ ult�e prin ipale �a surmonter dans le ontexte hybride semble etre la on eptiondu mod�ele dis ret ind�ependamment du mod�ele ontinu et vi e-versa, puis la r�ealisation deleur intera tion : en e�et, de meme que dans le domaine de la ommande ou de l'analyse dessyst�emes hybrides d�evelopp�es depuis 15 ans, le risque existe pour le on epteur de partir dudomaine ( ontinu ou dis ret), ave lequel il est familier, et d'y in orporer progressivementdes notions de l'autre domaine. Or, ha un des deux points de vue a �et�e �elabor�e pourr�epondre �a ertaines questions et il faut en pr�eserver les sp�e i� it�es. Ainsi, �a notre avis labonne notion d'�etat dis ret doit etre le v�eritable �etat de panne, onsid�er�e par les mod�eles depannes �a �ev�enements dis rets, et non un syst�eme dynamique g�en�erateur du omportementobserv�e dans haque hypoth�ese de pannes, omme 'est le as dans les IMM, et qui d�erived'un point de vue ontinu.De meme, l'utilisation des observations num�eriques doit limiter les pertes d'in-formation. Le ontexte statistique bay�esien que nous proposons esp�ere r�epondre �a lase onde limite, en int�egrant, dans les observations memes et dans leurs lois, l'informationn�e essaire au diagnosti . En�n, en se pla� ant dans un ontexte modulaire omme elui25

Con lusiondes r�eseaux de Petri partiellement sto hastiques, on r�epond �a la premi�ere limite.La d�emar he propos�ee dans ette th�ese propose d'�elaborer s�epar�ement un mod�elead�equat pour haque aspe t du syst�eme :{ mod�ele dis ret d�eterministe pour la dynamique des modes de fon tionnement ( han-gement de mod�eles, ou sauts observ�es) ;{ mod�ele dis ret (partiellement) sto hastique pour la dynamique des pannes ;{ mod�ele d'�etat sto hastique param�etr�e pour la dynamique �a �etat ontinu,et en les on evant de mani�ere �a permettre leur intera tion.Au niveau te hnique, les prin ipaux outils utilis�es sont les suivants :1. l'appro he lo ale appliqu�ee aux mod�eles d'�etat est hoisie pour ses fondementsth�eoriques et pour sa apa it�e �a �evaluer l'in uen e individuelle de haque pannedans le r�esidu, et e de mani�ere syst�ematique, et majoritairement automatisable ;2. l'utilisation des r�eseaux de Petri pour la mod�elisation �a �ev�enements dis rets estmotiv�ee par son pouvoir d'expression de la on urren e, du non-d�eterminisme, du on it et de la syn hronisation, quatre aspe ts entraux dans les syst�emes omplexes ;3. en�n le diagnosti par programmation dynamique onvient �a la fois �a la notion depannes multiples s�equentielles d�e rites par les RdP et �a la d�ependan e des observa-tions �a un �etat, ou mieux, �a un �etat lo al, de panne.
26

Deuxi�eme partieMod�elisation d'un syst�emehybride pour la surveillan e
27


Chapitre 1Mod�elisation de la dynamique �a�etat ontinuOn onsid�ere dans e hapitre la mod�elisation de la dynamique �a �etat ontinu de lapartie op�erative (PO) en vue de sa surveillan e. Les hypoth�eses de d�epart de la m�ethodesont les suivantes :1. un ensemble F = fpg (F pour fault), �ni, de pannes p �a surveiller a �et�e �etabli sur lesyst�eme ;2. un mod�ele d'�etat ontinu nominal de la PO peut etre �elabor�e.De plus, on se pla e dans la on�guration de la partie haute de la �gure I.1.2 o�ula partie ommande (PC) n'intervient pas par son fon tionnement s�equentiel, mais parla ommande num�erique de la PO. La �gure II.1.1 reprend plus pr�e is�ement le syst�emesurveill�e et repr�esente les inter onnexions entre les di��erents aspe ts de la mod�elisationque nous utilisons dans e hapitre et les observations utiles pour la surveillan e.1.1 Mod�eles d'�etat param�etriques pour la surveillan eOn se pla e dans un adre param�etrique et on onsid�ere pour ela un mod�ele d'�etatnon-lin�eaire �e hantillonn�e de la forme :S � xk = f(xk�1; uk; �)yk = g(xk; �) + vk (II.1.1)o�u xk 2 Rn est l'�etat , uk 2 Rm la ommande et yk 2 Rp l'observation ; les fon tions fet g sont suppos�ees ontinument di��erentiables et les bruits d'observation vk, blan s, entr�es et d�e orr�el�es. Le ve teur � olle te un ensemble �ni de param�etres, de ardinal d.La valeur nominale (en l'absen e de pannes) �0 du param�etre �, est soit onnue a priori,soit identi��ee hors-ligne sur des donn�ees mesur�ees sur le syst�eme �a l'�etat sain.En fon tionnement, nous supposerons que :Hypoth�ese 1.1 La valeur du param�etre � �evolue �a des instants dis rets (tn)n in onnuset on note �(n) la nieme valeur de �, ave �(0) = �0.29

Mod�eles param�etriques
Composant 1 Composant 3Composant 2 tu(t; y)
�Ev�enements exog�enes Observations num�eriques
p2p1 p4p3
Ext�erieur du syst�emeSyst�eme surveill�e y u
Op�erateurBruit
Ensemble des pannes : F Fon tionnement �a �etat ontinu Commande num�eriqueuyAl�eas
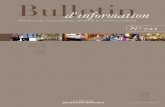
Fig. II.1.1: Des ription du syst�eme surveill�e (dans e hapitre) : d�elimit�e par une fronti�erearbitraire, il ommunique ave le monde ext�erieur par les ordres de l'op�erateur, qui �xe la loi de ommande, et par les �ev�enements al�eatoires qui g�en�erent les pannes (al�eas de fon tionnement)et le bruit. Les omposants sont pilot�es par les ommandes u, leurs apteurs fournissant lessorties y. L'ensemble des pannes F est onnu et on le repr�esente i i par un graphe dis ret(sans ar s) : les o urren es de pannes �etant a priori ind�ependantes les unes des autres.30

Mod�eles param�etriques Con�guration de pannesLa fon tion du temps t 7! �(t) est onstante par mor eaux et l'on s'int�eresse i i �a lad�ete tion et au diagnosti de es hangements ; pour ela, la param�etrisation du mod�eledoit satisfaire respe tivement �a :Hypoth�ese H0 de fon tionnement nominal : � = �0Hypoth�ese H1 de fon tionnement d�efaillant : � = �0 + �; � 6= 0 (II.1.2)pour la surveillan e , et pour le diagnosti , �a la possibilit�e de relier formellement les �e arts� �a un sous-ensemble parti ulier de F , que nous appelons on�guration de pannes.1.1.1 Con�guration de pannesSoit I = f1; : : : ; dg l'ensemble des indi es des omposantes du param�etre � : on asso iede mani�ere bije tive �a haque panne (�el�ementaire) p 2 F une partie de I, not�ee Ip 2P(I)1, repr�esentant l'ensemble des omposantes du ve teur � modi��ees par la panne p :�i 6= �0i ;8i 2 Ip. Plusieurs pannes pouvant etre pr�esentes simultan�ement sur le syst�eme,on d�e�nit de mani�ere g�en�erale les on�gurations de pannes :D�e�nition 1.1 (Con�guration de pannes ) On appelle indi��eremment on�gurationde pannes toute partie � de F et la partie I� de fIp; p 2 Fg orrespondante telle que :I� = [p2�Ip (II.1.3)I� regroupe l'ensemble des indi es des omposantes de � a�e t�ees par les pannes de �.Les pannes �el�ementaires � = p; p 2 F sont les on�gurations les plus simples depannes, et on onfondra les notations I� et Ip dans e as.Remarque 1.1 On appellera aussi sous- on�guration toute partie de I� non identique �aun Ip.Remarque 1.2 La n�e essit�e de traiter de mani�ere s�epar�ee les indi es des omposantes de �et les omposantes elles-memes provient des op�erations ensemblistes (union i i, interse tionet ompl�ementation plus loin) que l'on fait sur les premi�eres.La orrespondan e biunivoque entre les pannes et l'ensemble des omposantes du ve -teur param�etre qu'elles a�e tent, suppose par ons�equent que la param�etrisation n'estpas ambigu�e au niveau des pannes �el�ementaires (deux pannes di��erentes a�e tent desensembles d'indi es distin ts) ; en revan he, il est possible que Ipi \ Ipj 6= ;, pour deuxpannes distin tes. L'ensemble fIp; p 2 Fg forme don un re ouvrement (et non une parti-tion) de I. On note jFj le ardinal de F . Par ons�equent, on n'a pas a priori de bije tionentre l'ensemble des on�gurations de pannes omme union d'�el�ements p et omme uniond'�el�ements Ip : il se peut en e�et que ertaines on�gurations de pannes, par exemple � et�0, soient ambigu�es dans le omportement entr�ee/sortie du syst�eme ar elles a�e tent lesmemes omposantes de � : I� � I�0Un des obje tifs de la th�ese est de prendre en ompte la dynamique des pannes dans lasurveillan e et le diagnosti a�n de limiter (mais a priori pas supprimer) ette ambigu��t�e.1P(I) d�esigne l'ensemble des parties de l'ensemble I31

Ve teur r�eduit pour une on�guration de pannes Mod�eles param�etriques1.1.2 Ve teur r�eduit pour une on�guration de pannesIl sera utile dans la suite de on entrer l'attention sur les seules omposantes de � ayantd�evi�e de leur valeur nominale. On onsid�ere pour ela deux sous-ensembles ordonn�es deI : I� et I� tels que I� � I� � I. On d�e�nit sur es ensembles d'indi es, les trois matri esde s�ele tion I� de dimension ard(I�) � ard(I), I� de dimension ard(I�) � ard(I) etI�� de dimension ard(I�)� ard(I�) telles que :(I�)i;j = 1; ssi (I�)i = j(I�)i;j = 0; sinon (II.1.4)(I�)i;j = 1; ssi (I�)i = j(I�)i;j = 0; sinon (II.1.5)(I�� )i;j = 1; ssi (I�)i = (I�)j(I�� )i;j = 0; sinon (II.1.6)o�u, par exemple, (I�)i d�esigne le ii�eme �el�ement de I� ( lass�e dans un ordre roissant). Le oeÆ ient (I�� )i;j sera don �egal �a 1, ssi le ii�eme �el�ement de I� est le ji�eme �el�ement deI�. Si I� = I, alors I� = 1d (matri e identit�e de dimension d) et on omet l'exposant �dans (II.1.6).Par exemple, si I = f1; : : : ; 4g, I� = f1; 3; 4g et I� = f1; 4g alors :I� = 0� 1 0 0 00 0 1 00 0 0 1 1A ; I�� = � 1 0 00 0 1 �Ces matri es permettent alors de d�e�nir les trois ve teurs r�eduits suivants, obtenus parrestri tion du ve teur Æ� aux omposantes I� a�e t�ees dans une on�guration de panne �donn�ee :D�e�nition 1.2 (Ve teur r�eduit pour une on�guration de pannes) Soient troisensembles ordonn�es I, I� et I� tels que I� � I� � I. Le ve teur r�eduit Æ�� (resp. Æ��,Æ���) est la restri tion �a I� (resp. �a I�, �a I�� ) des omposantes du ve teur Æ� :Æ�� = I�Æ�; Æ�� = I�Æ� Æ��� = I��I�Æ� (II.1.7)En reprenant l'exemple pr�e �edent, on obtient :Æ��� = � Æ�1Æ�4 � = I�� 0� Æ�1Æ�3Æ�4 1A = I��I�0BB� Æ�1Æ�2Æ�3Æ�4 1CCAOn d�e�nit aussi les sous-espa es ve toriels (s.e.v.) suivants :D�e�nition 1.3 (S.e.v. asso i�es �a une on�guration de pannes) Les s.e.v ��, ��de Rd et le s.e.v. ��� de R ard(I� ) sont d�e�nis par :�� = Im �IT� � ; �� = Im �(I�)T� ; ��� = Im �(I�� )T� (II.1.8)o�u Im(A) d�esigne le s.e.v obtenu par toutes les ombinaisons lin�eaires des olonnes de lamatri e A. On notera �egalement � = Rd . 32

Appro he lo ale Con lusion1.1.3 Con lusionOn dispose d'une m�e anique simple d'asso iation d'une on�guration de pannes quel- onque �, partie de l'ensemble des pannes �el�ementaires F , aux omposantes du ve teur �s'�e artant de leur valeur nominale. Ce i a permis de onstruire les deux objets repr�esentantles degr�es de onnaissan e extremes sur l'�e art param�etrique :{ une onnaissan e parfaite en dire tion et en amplitude ontenue dans le ve teurr�eduit Æ�� des omposantes du param�etre dans la on�guration � ;{ une onnaissan e limit�ee aux indi es des omposantes de � ayant d�evi�e de leur valeurnominale, rer�esent�ee par l'espa e ve toriel �� dans lequel se trouve l'�e art Æ� dansla on�guration �.On verra plus loin que le premier type de onnaissan e permet de al uler la vraisem-blan e des observations onditionnellement �a une on�guration de panne donn�ee, lese ond permettant uniquement de al uler leur vraisemblan e g�en�eralis�ee. Cette se ondehypoth�ese est relativement pessimiste, mais o�re une possibilit�e de al uls analytiques.Nous n'envisagerons pas pour ette raison de degr�e de onnaissan e interm�ediaire, austade de ette �etude.Nous nous int�eressons maintenant �a l'"inversion" , i.e. �a l'extra tion d'information surÆ� �a partir des observations num�eriques.1.2 Appro he lo ale pour la g�en�eration du r�esiduIl est re onnu que la surveillan e et le diagnosti par mod�ele reposent sur l'utilisationd'indi ateurs de d�efauts, ou r�esidus, poss�edant des ara t�eristiques g�eom�etriques ou sta-tistiques que l'on peut relier aux hangements param�etriques. Nous avons re ens�e dansl'introdu tion plusieurs m�ethodes de g�en�eration d'un ve teur de r�esidu et nous avonssignal�e les raisons pour lesquelles l'appro he asymptotique lo ale est retenue i i. Nousl'envisageons dans le adre parti ulier de la mod�elisation d'�etat (II.1.1) [65℄. On supposepour ela onna�tre :1. un mod�ele nominal de l'installation :S � xk = f(xk�1; uk; �0)yk = g(xk; �0) + vk (II.1.9)aliment�e par les memes entr�ees uk que le syst�eme r�eel,2. les ensembles d'indi es de omposantes fIpg (d�e�nition 1.3), pour haque on�gura-tion de panne �,et on suppose disposer de blo s de donn�ees num�eriques y = (y1; : : : ; yN ), dont la taille estg�en�eriquement not�ee N , mesur�ees sur le syst�eme en fon tionnement.33

G�en�eration du r�esidu : appro he asymptotique lo ale Appro he lo ale1.2.1 G�en�eration du r�esidu : appro he asymptotique lo aleLa d�emar he g�en�erale [16, 65, 7℄ repose sur les deux �etapes suivantes :1. �elaboration d'un r�esidu primaire K(�; Zk) entr�e en fon tionnement nominal et dontla moyenne s'�eloigne signi� ativement de 0 en pr�esen e de panne ; Zk est une fon -tion appropri�ee des observations, et K(�; Zk) est suppos�ee 1/ etre di��erentiable en� au point �0, 2/ satisfaire une hypoth�ese d'identi�abilit�e lo ale et 3/ etre asympto-tiquement stationnaire [7℄ ;2. �elaboration d'un r�esidu se ondaire �(�0; N), ou "am�elior�e", onstruit omme somme umul�ee normalis�ee du r�esidu primaire :�(�0; N) , 1pN NXk=1K(�0; Zk) (II.1.10)L'appro he lo ale pour la surveillan e et le diagnosti [16, 65, 9, 7℄ onsiste �a analyseret �evaluer la sensibilit�e du r�esidu (II.1.10), par rapport �a de petits hangements dans leve teur �. Or, on montre que pour :� = �0 + �pN ; � 6= 0 (II.1.11)o�u le ve teur � d'�e art param�etrique, ou de panne, est in onnu mais suppos�e �xe surla fenetre de taille N asymptotiquement grande, la loi de �(�0; N) est asymptotiquementgaussienne : �(�0; N) ! N � J(�0) �; �(�0) � (II.1.12)de matri e de ovarian e asymptotique � :�(�0) , limN!1 E�0 ��(�0; N) �(�0; N)T � ; (II.1.13)suppos�ee d�e�nie positive et o�u J(�0) est une matri e ja obienne :J(�0) , � E�0 ��� K(�; Zk)�����=�0 (II.1.14)de rang olonne plein2.On appellera signature nominale du syst�eme le triplet ��0; J(�0);�(�0)� ; quand au- une ambigu��t�e n'est �a raindre, on simpli�era les notations en �eliminant les d�ependan esen �0 et en N . C'est la \ arte d'identit�e" des omposants ontinus �a l'�etat sain, �a laquellenous onfrontons les observations nouvelles.La d�ete tion et le diagnosti seront op�er�es sur le r�esidu se ondaire, ar sa loi est onnue et simple, ontrairement �a elle du probl�eme initial p�1(ykjyk�1; : : : ; y0), a prioriquel onque et in onnue.2E� repr�esente l'esp�eran e quand la vraie valeur du param�etre est �.34

Appro he lo ale G�en�eration du r�esidu : appro he asymptotique lo aleNotons que la seule valeur onnue du param�etre �etant �0, l'identi�abilit�e lo ale sera �av�eri�er en �0 (dans le as o�u ertaines omposantes de e ve teur sont onnues a priori).Cette ondition est n�e essaire pour le diagnosti des �e arts param�etriques de �.Un exemple important de fon tion K (r�esidu primaire) pour les syst�emes non lin�eairesdu type du mod�ele d'�etat (II.1.1), est le gradient de l'erreur quadratique moyenne depr�edi tion [7, 67℄ :K(�; Zk) , � 12 ��� ��Tk (�) �k(�)� = ��bykjk�1(�)�� �T �k(�) (II.1.15)o�u :1. le ve teur auxiliaire Zk est : Zk , ve �bykjk�1(�)���k(�) ! (II.1.16)o�u ve est l'op�erateur d'empilement en olonne,2. l'erreur de pr�edi tion est : �k(�) , yk � bykjk�1(�); (II.1.17)o�u bykjk�1(�) est la pr�edi tion �a un pas de la sortie, al ul�ee par exemple �a partird'un observateur omplet, du type d'un �ltre de Kalman (I.2.3) :� bxkjk�1(�) = bf(bxk�1jk�2; uk; yk�1; �)bykjk�1(�) = g(bxkjk�1; �) (II.1.18)3. et la matri e �bykjk�1(�)=�� dans (II.1.15) est la solution du syst�eme di��erentielobtenu par di��erentiation de (II.1.18) par rapport �a �, i.e. :8><>: �bxkjk�1�� = bf 0x �bxk�1jk�2�� + bf 0��bykjk�1(�)�� = g0x �bxkjk�1�� + g0� (II.1.19)L'expression (II.1.14) indique que �0 sera l'unique point o�u l'observateur (II.1.18)et son syst�eme gradient (II.1.19) seront int�egr�es.Notons qu'en pratique, tous les al uls sont e�e tu�es sur des blo s de taille N�nie : les deux matri es J et � seront alors estim�ees empiriquement sur un nombred'�e hantillons suÆsamment grand pour que le d�eveloppement asymptotique (II.1.12) soitvalide [65℄. On notera �k le r�esidu al ul�e sur le blo k. De plus, pour des blo s k et ldisjoints et pour N suÆsamment grand, on pourra onsid�erer que les r�esidus �k et �l sontind�ependants, et e sous toute hypoth�ese d'�e art param�etrique [65℄. Ce i est justi��e parl'oubli du pass�e dans le pro essus g�en�erant �, e qui implique une d�e orr�elation des r�esidus.On donne maintenant les expressions, n�e essaires �a la surveillan e et au diagnosti :35

Loi du r�esidu pour une on�guration de pannes Appro he lo ale1. de la vraisemblan e du r�esidu, pour une on�guration de panne si l'amplitude et ladire tion de l'�e art sont onnues ;2. de la vraisemblan e g�en�eralis�ee du r�esidu, pour une on�guration de pannes si in-versement ni l'amplitude ni la dire tion ne sont onnues ;3. de la vraisemblan e "biais�ee" du r�esidu, onstruite pour permettre la modularit�e dudiagnosti .1.2.2 Loi du r�esidu pour une on�guration de pannesNous noterons pJ�;�(�) la densit�e de probabilit�e d'un ve teur gaussien � � N (J�;�),et on note :lJ�(�) , � 2 ln pJ�;�(�) = (� � J�)T ��1 (� � J�) + ste (II.1.20)la log-vraisemblan e du r�esidu.Pour une on�guration de pannes I�, la notation donn�ee en (II.1.7) pour les �e arts ��s'�e rit aussi sur l'�e art param�etrique normalis�e :� = IT� ��; (II.1.21)o�u le ve teur de param�etre r�eduit �� est de dimension ard(I�), et o�u la matri e I� estd�e�nie en (II.1.4). En notant : J� = JIT�la matri e de dimension ard(I)� ard(I�) s�ele tionnant les olonnes de J orrespondantau ve teur r�eduit ��, la loi du r�esidu s'�e rit :� � N ( J���; �) (II.1.22)et �nalement : lJ���(�) = (� � J���)T ��1 (� � J���) + ste (II.1.23)1.2.3 Loi g�en�eralis�ee du r�esidu pour une on�guration de pannesSi au un a priori sur les amplitudes des �e arts �� n'est disponible, on peut rempla erdans (II.1.23) le param�etre �� par son estim�ee au maximum de vraisemblan e : �� , argmin�2�� lJ�(�)= argmin�� lJ���(�) (II.1.24)En rempla� ant ette valeur dans (II.1.23), on notera :l��(�) = lJ� ��(�) (II.1.25)l'expression de la log-vraisemblan e g�en�eralis�e du r�esidu.36

Appro he lo ale Loi du r�esidu pour un sous-ensemble de pannes : robustesse1.2.4 Loi du r�esidu pour un sous-ensemble de pannes : robustesseJusqu'i i la loi de l'observation � a �et�e �etablie sous une hypoth�ese on ernant l'�etatde panne global du syst�eme au travers de la on�guration param�etrique I�. Mais on asoulign�e dans la on lusion du hapitre I.2, qu'il est possible de re her her la r�epartitiondes algorithmes de surveillan e pour les grands syst�emes : dans le ontexte des r�eseauxde t�el�e ommuni ations, e i a �et�e formalis�e dans [2℄ par une propri�et�e de modularit�ed'un mod�ele �a �ev�enements dis rets. Nous souhaitons i i formuler le pendant du adremodulaire pour les syst�emes hybrides ontinus/dis rets.La modularit�e repose sur une notion de voisinage d'une panne, orrespondant auxnotions de pannes d'int�eret et de nuisan e dans le domaine param�etrique.Pannes d'int�eret, pannes de nuisan eDans notre ontexte, la ontrainte de modularit�e orrespond �a la n�e essit�e d'extraireune information fo alis�ee sur une panne d'int�eret, en �etant insensible �a la pr�esen e depannes de nuisan e. On expli ite ela dans le domaine param�etrique par la partition deI : I = fIa; Ib; I g (II.1.26)ave Ia l'ensemble des indi es des param�etres d' int�eret, Ib l'ensemble des indi es desparam�etres de nuisan e et le ompl�ementaire I de Ia [ Ib dans I, sur lequel on disposed'un a priori ( ertaines omposantes du ve teur � sont �a leur valeur nominale : : : ). Dansle domaine ve toriel, es ensembles permettent de d�e�nir les matri es de s�ele tion Ia, Ibet I (II.1.4) telles que l'on peut �e rire :� = (ITa ; ITb ; IT )�ab (II.1.27)ave le param�etre r�eorganis�e : �ab = 0� �a�b� 1A (II.1.28)o�u �a est le ve teur param�etre (r�eduit) d'int�eret, �b le ve teur param�etre (r�eduit) denuisan e et on supposera que l'information a priori sur � s'exprime par � � 0.La matri e ja obienne J est r�eorganis�ee en Jab :Jab = J:(ITa ; ITb ; IT )= (Ja; Jb; J )de sorte que la loi du r�esidu, en tenant ompte de l'a priori, s'exprime par :� � N (Jab�ab;�) (II.1.29)Si, dans la on�guration �, l'on s'int�eresse �a la d�e ision sur la sous- on�guration Ia �I�, alors la log-vraisemblan e du r�esidu sous ette hypoth�ese est proportionnelle �a :lJa�a(�) = (� � Ja�a)T ��1 (� � Ja�a) + ste (II.1.30)37

Loi du r�esidu pour un sous-ensemble de pannes : robustesse Appro he lo aleet, en pr�esen e de la nuisan e Ib (ave Ia [ Ib = I�), la loi du r�esidu �etant :� � N ( Ja�a + Jb�b; �) (II.1.31)l'esp�eran e de (II.1.30) n'est pas ind�ependante de �b.La modularit�e sera en pratique obtenue de la mani�ere suivante : pour une on�gurationr�eelle in onnue �, on her he une expression de la vraisemblan e du r�esidu dont la valeur{ d�epend des pannes d'int�eret,{ est statistiquement ind�ependante des pannes pouvant etre pr�esentes on omitam-ment (les pannes de nuisan e).On montrera que la modularit�e peut etre obtenue en utilisant une expression pro-portionnelle �a ette vraisemblan e, �a ondition que le fa teur de proportionnalit�e soitune onstante pour toutes les hypoth�eses de pannes, plus pr�e is�ement, le fa teur ne doitpas modi�er les rapports entre les vraisemblan e du r�esidu sous toute hypoth�ese depannes. C'est pourquoi le lemme suivant donne une �equivalen e entre un test de r�eje tion(I.2.12) poss�edant la propri�et�e de d�e ouplage her h�ee entre pannes d'int�eret et pannesde nuisan e, et un test de sensibilit�e (I.2.11) proportionnel �a une vraisemblan e "biais�ee"dont le fa teur de proportionnalit�e (vraisemblan e du r�esidu sous l'hypoth�ese d'�etat sain)est onstant pour toute hypoth�ese de pannes.Un lemme sur les tests d'hypoth�esesRappelons que dans un ontexte de test d'hypoth�eses statistiques (voir p.23), deuxattitudes peuvent etre adopt�ees on ernant les param�etres de nuisan e :{ une attitude \optimiste" onsistant �a faire l'hypoth�ese �b = 0, e qui revient �an�egliger l'in uen e de �b sur E�a ;�b [�℄, esp�eran e de � quand les vraies valeurs desparam�etres sont �a et �b. Les tests d'hypoth�eses fond�es sur le rapport de vraisem-blan e g�en�eralis�e sous ette hypoth�ese sont dits de sensibilit�e et s'expriment par :~ta = 2 ln max�a pJa�a;�(�)p0;�(�)= l0(�)�min�a lJa�a(�) (II.1.32)ave la notation d�e�nie en (II.1.20).{ une attitude obje tive prenant en ompte �b 6= 0, mais \pessimiste" ar ne supposantavoir au un a priori sur l'amplitude ni la dire tion de �b : les tests sont r�ealis�es sousl'hypoth�ese que �b prend la pire valeur, i.e. elle qui minimise la puissan e du testsur �a. Ces tests d�e ouplent de mani�ere maximale des in uen es mutuelles entre lesparam�etres et r�ealisent la r�eje tion des param�etres de nuisan e ; ils s'expriment i ipar : t�a = 2 ln max�a;�b pJa�a+Jb�b;�(�)max�b pJb�b;�(�)= min�b lJb�b(�)�min�a;�b lJa�a+Jb�b(�) (II.1.33)38

Appro he lo ale Loi du r�esidu pour un sous-ensemble de pannes : robustesseDans le as asymptotique lo al dans lequel on se pla e, les tests ~ta et t�a suiventasymptotiquement une loi du �2 �a dim(�a) degr�es de libert�e.Par onstru tion, la loi de la variable al�eatoire t�a est ind�ependante de la valeur de �b.En e�et, on montre ais�ement que le test de r�eje tion est donn�e par :t�a = �T ~PTJb��1Ja�JTa ��1 ~PJbJa��1 JTa ��1 ~PJb� (II.1.34)ave la notation : ~PL = I � L�LT��1L��1 LT��1 (II.1.35)qui satisfait �a : ~PLL = 0 (II.1.36)Par ons�equent, la ontribution de Jb�b �a la moyenne du r�esidu est nulle de par lapr�esen e d'une matri e de r�eje tion ~PJb (on l'appellera r�eje teur), e qui est la propri�et�e ded�e ouplage re her h�ee. Le lemme suivant donne une interpr�etation de e test de r�eje tion enun test de sensibilit�e, dont l'esp�eran e est adapt�ee �a nos ontraintes : elui- i pr�esentera les ara t�eristiques her h�ees pour �etablir notre adre bay�esien de la surveillan e, 'est-�a-dire,l'ind�ependan e aux valeurs prises par les param�etres de nuisan e, et la proportionnalit�e �aune vraisemblan e du r�esidu, "biais�ee" par un terme ( ~PJb) permettant la r�eje tion :Lemme 1.1 Soit t�a le test du maximum de vraisemblan e g�en�eralis�e entre les hypoth�esesH10 et H11 :� � � N (Jb�b;�); hypoth�ese H10 : �b in onnu; �a = 0N (Jb�b + Ja�a;�); hypoth�ese H11 : �a; �b in onnus; �a 6= 0donn�e par : t�a = 2 ln max�a;�b pJa�a+Jb�b;�(�)max�b pJb�b;�(�) (II.1.37)et soit T2 le test du maximum de vraisemblan e g�en�eralis�e entre les hypoth�ese H20 et H21 :� � � N (0;�); hypoth�ese H20 : �a = 0N ( ~PJbJa�a;�); hypoth�ese H21 : �a 6= 0soit T2 = 2 ln max�a p ~PJbJa�a;�(�)p0;�(�) (II.1.38)ave ~PJb d�e�ni en (II.1.35). Les tests t�a et T2 sont identiques : T2 = t�a. De plus, la loi deT2 sous H11 ne d�epend pas de �b. 39

Loi du r�esidu pour un sous-ensemble de pannes : robustesse Appro he lo alePreuve1. Soit la matri e de Fisher F [19℄ du ve teur Gaussien � � N (Ja�a + Jb�b;�) sousl'hypoth�ese H21 : F , JTa ~P TJb ��1 ~PJbJa (II.1.39)et soit la transformation du r�esidu :~�a , JTa ��1 ~PJb�En utilisant l'idempoten e de ~PJb (II.1.35) et l'�egalit�e :��1 ~PJb = ~PTJb��1 (II.1.40)l'hypoth�ese H21 devient pour le r�esidu transform�e ~�a � N (F�a;F) et on montreque le test T2 entre H20 et H21 e�e tu�e sur le r�esidu transform�e s'�e rit de la mani�eresuivante : T2 = ~�Ta F�1~�a= �T��1 ~PJbJa�JTa ~PTJb��1 ~PJbJa��1JTa ~PTJb��1�= �T ~PTJb��1Ja�JTa ��1 ~PJbJa��1JTa ��1 ~PJb� (II.1.41)qui est l'expression du test de r�eje tion t�a donn�ee en (II.1.34), don :t�a � T22. Il suÆt, pour montrer que la loi de T2 ne d�epend pas de �b sous H11, de le montrerpour son esp�eran e :EH11 [T2℄ = (Ja�a + Jb�b)T ~PTJb��1Ja�JTa ��1 ~PJbJa��1JTa ��1 ~PJb(Ja�a + Jb�b)= (Ja�a)T ~PTJb��1Ja�JTa ��1 ~PJbJa��1JTa ��1 ~PJb(Ja�a) + k(�a; �b) ~PJbJb�b= �(�a) ar (II.1.36) ) ~PJbJb = 0.Remarque 1.3 Notons que la loi du rapport de vraisemblan e :ln p ~PJbJa�a;�(�)p0;�(�) (II.1.42)ne d�epend pas de la valeur des param�etres de nuisan e �b. En e�et, en al ulant son40

Con lusionesp�eran e sous l'hypoth�ese de pr�esen e des pannes de nuisan e :EH11 [ln p ~PJbJa�a;�(�)p0;�(�) ℄ = EH11 [�12( ~PJbJa�a)T��1( ~PJbJa�a) + �T��1 ~PJbJa�a℄= �12( ~PJbJa�a)T��1( ~PJbJa�a) + (Ja�a + Jb�b)T��1( ~PJbJa�a)= �12( ~PJbJa�a)T��1(Ja�a) + (Ja�a + Jb�b)T ~PTJb��1(Ja�a)(II.1.43)= �12( ~PJbJa�a)T��1(Ja�a) + ( ~PJbJa�a)T��1(Ja�a)= 12( ~PJbJa�a)T��1(Ja�a)o�u, dans (II.1.43), on a utilis�e deux fois la propri�et�e ��1 ~PJb = ~PTJb��1, l'idempoten e de~PJb et la propri�et�e ~PJbJb = 0.Nous verrons au hapitre III.2 l'int�eret d'une telle �equivalen e. Notons d�es �a pr�esent,pour une partition (II.1.26) donn�ee et onditionnellement �a l'information a priori � � 0,la log-vraisemblan e g�en�eralis�ee du r�esidu sous l'hypoth�ese H21 :el�a;�b(�) = min�2�a l ~PJbJ�(�) (II.1.44)o�u �a et �b sont les s.e.v. de � asso i�es (II.1.8) respe tivement �a �a et �a �b (II.1.28).Par e lemme, nous avons obtenu l'expression d'une vraisemblan e biais�ee � �N ( ~PJbJa�a;�), qui n'est pas ind�ependante des pannes de nuisan e mais est proportionnelle�a une expression qui l'est, le fa teur de proportionnalit�e �etant une onstante pour toutesles hypoth�eses de on�guration de pannes, don ne modi�ant pas leur valeur relative.1.3 Con lusionDans e hapitre, nous avons pr�esent�e la premi�ere partie de la mod�elisation dessyst�emes hybrides pour la surveillan e : un mod�ele dynamique d'�etat du fon tionnement�a �etat ontinu, param�etr�e par � dont les omposantes sont reli�ees aux pannes p 2 Fre ens�ees sur le syst�eme. Une on�guration de pannes est par suite asso i�ee �a la d�eviationde leur valeur nominale des omposantes de �, dont les indi es sont ontenus dans I�.Pour e mod�ele, il est possible de onstruire un r�esidu �, dont la loi onditionnelle �aune on�guration de pannes d'abord, en pr�esen e ou en l'absen e d'a priori, puis �a unsous-ensemble de pannes ensuite, est onnue. C'est un premier pas vers l'inversion dumod�ele envisag�e statiquement, i.e. les pannes n'ayant au une dynamique propre onnue,et la g�en�eration des observations et de leurs lois �etant unique.Or, dans les syst�emes industriels omplexes, les mod�eles de fon tionnement doiventetre a tualis�es p�eriodiquement ar les omposants ne \fon tionnent" pas toujours de lameme mani�ere, du fait des hangements de r�egime, et/ou d'a tivit�e du syst�eme. De plus,41

Con lusionil est onnu que les pannes \s'en ha�nent", et leur propagation de omposant en omposantfait l'objet des �etudes de risque et de �abilit�e.Dans le hapitre II.2, nous prenons en ompte es deux aspe ts nouveaux dans lasurveillan e, en utilisant la onnaissan e que l'on a sur eux, et qui servira d'a prioristru turel pour les algorithmes �elabor�es dans la partie III.
42

Chapitre 2Mod�elisation de la dynamique �a�ev�enements dis rets2.1 Introdu tionLe hapitre pr�e �edent a mis l'a ent sur la mod�elisation du fon tionnement �a �etat ontinu, ar 'est gra e �a elle- i que l'on pense obtenir l'information la plus ri he surles pannes, �a la ondition ependant que les r�esidus et leurs lois soient bien adapt�es aufon tionnement ourant de l'installation. En e�et, ertains hangements de omportementssont normaux et ne doivent pas etre onfondus ave eux, anormaux, provoqu�es par lespannes. Nous sommes don amen�es �a onsid�erer les deux types d'�ev�enements suivants :1. les d�efaillan es, i.e. les o urren es de panne, et don pour le mod�ele les hangementsdu param�etre �, dont nous avons suppos�e (Hypoth�ese 1.1) qu'il est onstant parmor eaux, et varie �a des instants dis rets de mani�ere sto hastique ;2. les ommandes symboliques du type mar he/arret, mar he for �ee, augmentation der�egime : : : par lesquelles la PC dialogue ave la PO.Ces �ev�enements a�e tent de mani�ere distin te la dynamique du syst�eme (II.1.1) :{ les pannes modi�ent la moyenne du r�esidu,{ les ommandes symboliques (et �eventuellement num�eriques) modi�ent la loi du r�esidusous toute hypoth�ese de panne.Il est don n�e essaire de prendre en ompte dans la mod�elisation pour la surveillan eune dynamique pilotant la stru ture du mod�ele.Nous y sp�e i�ons �egalement les ph�enom�enes que l'on souhaite prendre en ompte etles informations a priori disponibles les on ernant ; dans les se tions II.2.3 et II.2.4, nousen proposons une mod�elisation �a base de r�eseaux de Petri. Les se tions II.2.5 et II.2.6r�e apitulent l'aspe t temporel de l'appro he.2.2 Des ription de la dynamique �a �ev�enements dis retsNous pr�esentons su essivement les dynamiques s�equentielles d�eterministe ( ontrole- ommande), puis sto hastique (pannes). 43

Fon tionnement s�equentiel observ�e : dynamique de ontrole Dynamique dis r�ete2.2.1 Fon tionnement s�equentiel observ�e : dynamique de ontroleLimites de l'appro he mono-mod�eleUn hangement d'�etat de fon tionnement de ertains omposants ( omposant 1, 2 ou3 sur la �gure II.1.1) peut modi�er sa dynamique propre : pour le omposant 3, d'�etatunique x3 : _x3 6= 0 en fon tionnement; _x3 = 0 �a l'arretCes hangements individuels de dynamique in uen ent qualitativement la dynamiqueglobale du syst�eme, e qui a pour premi�ere ons�equen e de modi�er la stru ture del'observateur (II.1.18) et don toute la pro �edure de g�en�eration des r�esidus. Tous lesr�esultats (signature nominale, lois du r�esidus) �etablis pour une on�guration de fon tion-nement, ou mode de fon tionnement (par analogie aux modes de mar he), sont adu sdans un autre mode. La dis tin tion entre mode de fon tionnement et de mar he provientfondamentalement du fait qu'un hangement dans la dynamique du syst�eme peut seproduire dans un mode de mar he donn�e, du �a un sur-r�egime temporaire normal : le al ul de l'instrument de surveillan e et don sa loi hangeront �a l'int�erieur d'un mode demar he. C'est pr�e is�ement la d�elimitation des phases de fon tionnement durant lesquellesl'on n'a pas �a a tualiser le pro essus d'�elaboration du r�esidu (pour une dynamique depanne �x�ee) qui d�e�nit onstru tivement les modes de fon tionnement pour la surveillan e.Dans le adre de la surveillan e mono-mod�ele, es hangements de dynamiques sontpris en ompte par une robusti� ation de la signature nominale, �a ondition que ladynamique varie dans des proportions limit�ees : l'identi� ation est alors e�e tu�ee surdes donn�ees re ueillies dans tous les modes de fon tionnement, et dont les variationssont trait�ees omme des in ertitudes de mod�ele, moyenn�ees dans le temps. Un fon -tionnement multi-modal du syst�eme implique ainsi dans la d�emar he de surveillan e(mono-mod�ele) une perte en sensibilit�e vis-�a-vis des pannes : en e�et, puisque la matri ede ovarian e �(�0) doit tenir ompte des �e arts de omportement des donn�ees dus aux hangements de modes, elle est n�e essairement pessimiste, et les d�eviations de la rela-tion E/S dues aux pannes doivent etre alors d'autant plus importantes pour etre d�ete t�ees.Si maintenant la dynamique varie dans de trop grandes proportions, on doit hangerde mod�ele, e qui pose probl�eme pour une surveillan e en ontinu �a partir des m�ethodesexistantes : notre appro he propose une m�ethodologie pour ela.Information a prioriDe mani�ere g�en�erale pour un syst�eme industriel, la partie op�erative (PO) est pilot�eepar la partie ommande (PC) : la partie �a �etat ontinu de la PO a �et�e mod�elis�ee au hapitrepr�e �edent par un syst�eme d'�equations aux di��eren es, et la PC a �et�e jusqu'i i restreinte �asa fon tion num�erique (�elaboration de la loi de ommande u(t; y)) (voir pour ela la �gureII.1.1). Mais la PC est d'abord un automate d�eterministe, d�e rit dans un langage de typeGraf et [24℄, ou Sequential Flow Chart, dont un exemple est donn�e �gure II.2.1 et o�u :les a tions sont les �ev�enements ( onsignes num�eriques et symboliques) pilotant la PO ;44

Dynamique dis r�ete Fon tionnement s�equentiel observ�e : dynamique de ontroleles r�e eptivit�es sont des fon tions des observations y de la PO, permettant d'a tualiserles a tions de la PC (i.e. de hanger �eventuellement de modes de fon tionnement).���� ����123
456(3) (5)(2) (4)(1)A1 A2A4A3
Fig. II.2.1: Exemple de graf et de ommande : les a tions sont sp�e i��ees dans les adres(atta h�es aux �etapes), les r�e eptivit�es sont li�ees �a leur transition et onditionnent (gardent)l'o urren e de l'�ev�enement.Par ons�equent, pour la surveillan e, l'�etat de fon tionnement de la PO est onnu demani�ere ertaine par l'�etat de fon tionnement de ha un de ses omposants : le mode defon tionnement ourant est don observ�e et sa dynamique est d�eterministe.Remarque 2.1 Les a tions d'un graf et1 sont i i d�e�nies au sens large : elles de la PCsont de plus haut niveau que elles de la ommande num�erique, g�en�erant les entr�ees u.En g�en�eral, ette derni�ere est d�eport�ee sur des modules sp�e i�ques (par exemple, artesd'axe, d�edi�ees au pilotage des d�epla ements des ma hines), le graf et ne fournissant queles onsignes symboliques n�e essaires �a l'�elaboration d'une traje toire de r�ef�eren e, en ommuniquant par exemple les points initial et �nal et le type de traje toire, la arted'axe se hargeant de l'interpolation, i.e. le al ul e�e tif des u. On onsid�erera ependantdans notre mod�ele que les onsignes num�eriques et symboliques �emanent toutes les deuxdu graf et.Remarque 2.2 Notre appro he n'est pas limit�ee aux seuls syst�emes munis d'une PC :les syst�emes autonomes (pont, batiment : : : ) ou partiellement autonomes (barrage : : : )doivent faire l'objet d'une surveillan e multi-mod�ele : leur dynamique est e�e tivement va-riable suivant des onditions exog�enes observ�ees omme la temp�erature, l'hygrom�etrie, letra� : : : pour lesquelles il est diÆ ile d'�elaborer un mod�ele unique exhaustif repr�esentantleur dynamique en toutes ir onstan es. Ce qui ompte dans notre appro he est de dispo-ser d'observations �ables sur es hangements de dynamique, et de disposer d'autant demod�eles ontinus qu'il existe de modes de fon tionnement.1L'initiale en minus ule d�esigne une impl�ementation parti uli�ere, la majus ule d�esigne le langage.45

Fon tionnement s�equentiel d�efaillant : dynamique des pannes Dynamique dis r�eteHypoth�ese 2.1 On supposera onnu a priori un automate d�e rivant la dynamiquedis r�ete et d�eterministe pilotant les hangements de dynamique �a �etat ontinu du syst�emesurveill�e, elle- i �etant �egalement suppos�ee onnue dans tous les modes de fon tionnement.2.2.2 Fon tionnement s�equentiel d�efaillant : dynamique des pannesLimites des appro hes existantesLes appro hes hybrides d�evelopp�ees pour la surveillan e ne prennent pas en ompte,�a notre onnaissan e, la logique gouvernant les o urren es de pannes. L'appro he IMM[68℄ �evoqu�ee dans l'�etat de l'art, onsid�ere une dynamique sto hastique entre mod�eles, equi pose un probl�eme d'interpr�etation important, omme nous l'avons soulign�e.Les appro hes purement ontinues ne onsid�erent pas de dynamique pour les varia-tions de param�etres Æ� ; elles- i se produisent �a n'importe quel instant et dans n'importequel ordre, e qui a �et�e s h�ematis�e (par avan e) dans la �gure II.1.1 par un graphe dis- ret. Ce i implique qu'�a tout instant, toute hypoth�ese sur la on�guration de pannes �(d�e�nition II.1.1) est envisageable et doit don faire l'objet d'une d�e ision. Or, autant lad�ete tion d'un fon tionnement anormal et la lo alisation d'une panne unique sont eÆ a- ement trait�ees par les tests d'hypoth�eses (voir se tion I.2.3.4, pour l'appro he lo ale),autant les pannes multiples posent probl�eme, tant au niveau de la d�ete tion d'une pannesuppl�ementaire que de sa lo alisation. Notamment, si les dire tions d'�e arts param�etriquessont fortement orr�el�ees dans haque omposante de �, la matri e d'information de Fi-sher (II.1.39) s'�eloigne de la forme diagonale, propri�et�e qui in ue sur \l'isolabilit�e" desparam�etres, et don le diagnosti . Un algorithme r�e ursif pour l'estimation du nombre etpour le diagnosti a �et�e propos�e dans [37℄.On peut don attendre un gain de la prise en ompte d'une stru turation des pannespour la surveillan e ; nous proposons de l'introduire sous forme d'information a priori.Information a prioriIl existe une sour e d'information a priori on ernant la dynamique des pannes, pourles syst�emes dont la s�e urit�e motive une �etude approfondie des risques d'o urren e et depropagation de pannes �a travers leurs omposants. Le re ensement des pannes, suivi del'�etude de leurs relations de ause �a e�et, permet d'exhiber deux aspe ts prin ipaux :1. leur stru ture ausale : elle est �etablie �a partir des diagrammes fon tionnels del'installation (prospe tive) et de l'exp�erien e a umul�ee sur elles d�ej�a en a tivit�e(empirique) ; elle est d�e rite analytiquement (par des �equations bool�eennes) ou gra-phiquement (par des graphes orient�es) de mani�ere normalis�ee. Nous en utiliseronsune repr�esentation usuelle, elle des arbres de d�efaillan es ;2. leurs statistiques : la dur�ee de vie des omposants est estim�ee et lass�ee dans plu-sieurs oeÆ ients (MTTF, MTBF, : : : ) [18, 23℄ dont une interpr�etation statistiqueest possible sous ertaines hypoth�eses (lois de dur�ee de vie exponentielles).Ces deux aspe ts ompl�ementaires permettent d'envisager l'�etude statistique du om-portement du syst�eme dans son entier, et de le mod�eliser sous forme d'un syst�eme �a�ev�enements dis rets, dont l'�etat repr�esente l'�etat de panne, et les �ev�enements autant lesd�efaillan es que les r�eparations. Il ne sera que partiellement sto hastique pour nous, arles r�eparations sont observ�ees de mani�ere ertaine.46

Dynamique dis r�ete Intera tion des dynamiques : hoix des R�eseaux de PetriCe mod�ele g�en�erateur (voir �etat de l'art) permettra essentiellement de pr�e iser l'hy-poth�ese II.1.1 a�n de :{ d�eterminer les hypoth�eses de pannes plausibles �a tout instant, en leur onf�erant unedynamique,{ sp�e i�er des probabilit�es a priori pour ha une des o urren es possibles.L'obje tif initial est don , par la sp�e i� ation d'une dynamique �a �ev�enements dis retspour les pannes, d'am�eliorer la d�ete tion et le diagnosti des pannes multiples sur lesyst�eme, qu'il soit mono-mode ou multi-modes.En e�et, on attend de la stru ture des pannes qu'elle limite les hypoth�eses plausibles,et des probabilit�es a priori qu'elles pond�erent les vraisemblan es g�en�eralis�ees a posterioripour haque hypoth�ese de panne obtenue par l'appro he lo ale par exemple.D'o�u,Hypoth�ese 2.2 On supposera onnue une information a priori sur les o urren es etpropagations de pannes �a travers le syst�eme, ainsi que la onnaissan e de statistiques surles pannes �el�ementaires.2.2.3 Intera tion des dynamiques : hoix des R�eseaux de PetriDe meme que la dynamique �a �etat ontinu, la dynamique des pannes est a�e t�ee parla dynamique des modes de fon tionnement. En e�et, un omposant arret�e a un risquede tomber en panne a priori di��erent que lorsqu'il est en fon tionnement : le risque peuts'annuler, auquel as la panne est \inhib�ee", omme etre plus (ou moins) important, auquel as la panne orrespond �a un �ev�enement di��erent, puisque ses statistiques d'o urren esont di��erentes.Cette intera tion entre les syst�emes �a �ev�enements dis rets sugg�ere d'adopter un langagede des ription ommun. On hoisit les r�eseaux de Petri (voir Annexe A) tout d'abord pourleur puissan e d'expression :{ du passage de ressour es (propagation des pannes dans le syst�eme),{ de l'ex�e ution s�equentielle (des modes),{ de la syn hronisation (des �evolutions entre modes et pannes),{ de la on urren e (entre d�efaillan es se produisant sur des parties \ind�ependantes"du syst�eme),{ du on it (entre les �ev�enements ertains et les �ev�enements in ertains).Ensuite, par e qu'ils pr�esentent des extensions sur lesquelles nous pouvons fonder uneappro he g�en�erale :1. les RdP sto hastiques permettent de se pla er dans un ontexte d'estimation mar-kovien (syst�emes mono-mode, non r�eparables) ;47

Mod�ele des pannes2. les RdP hybrides sto hastique/non-sto hastique (RdP Partiellement sto hastique,ou PSPN-Partially Sto hasti Petri Nets) permettent de se situer dans un adrebay�esien g�en�eralis�e pour la surveillan e de syst�emes hybrides.La se tion II.2.3 d�e rit l'information a priori dont on dispose au sujet des o urren esde pannes et de leurs en ha�nements : ette mod�elisation, qui est statique, est ensuiteinterpr�et�ee omme un syst�eme dynamique �a �ev�enements dis rets, que l'on appellera graphede pannes. La se tion II.2.4 on erne la PC et introduit les modes de fon tionnementen les d�e�nissant de mani�ere sp�e i�que pour la surveillan e ; ils seront mod�elis�es par unsyst�eme �a �ev�enements dis rets que l'on appellera graphe de ontrole. On examine aussil'intera tion entre les dynamiques, et plus parti uli�erement entre les deux syst�emes �a�ev�enements dis rets, en vue de la onstru tion du graphe de pannes multi-modes. En�n,les se tions II.2.5 et II.2.6 d�e rivent, dans le as mono-mode et multi-modes, l'aspe ttemporel des dynamiques entrant en jeu ( elles du syst�eme, du mod�ele et de l'estimation).Consid�erons d'abord la mod�elisation de la dynamique des pannes.2.3 Mod�elisation stru turelle de la dynamique des pannesOn utilise i i les analyses de suret�e de fon tionnement : e sont des �etudes stru tu-relles, qui �etablissent la su ession des d�efaillan es des omposants menant �a un �ev�enementredout�e au niveau du syst�eme.Les pannes sont d'abord re ens�ees et identi��ees, puis leurs auses, e�ets et degr�e de riti it�e sont d�eduits ou estim�es selon l'expertise disponible sur le syst�eme. Les r�esultatsde ette �etude, en g�en�eral pratiqu�ee �a l'�etape de on eption, sont formalis�es, par exempledans les Analyses des Modes de D�efaillan e, de leurs E�ets et Criti it�e (AMDEC ouFMEA{ Fault Mode and E�e t Analysis) [58℄.La vo ation premi�ere de l'AMDEC est la rationalisation des op�erations de mainte-nan e : �a un omportement anormal (un mode de d�efaillan e) orrespondent :{ un ensemble de auses possibles d�eterminant les a tions de maintenan e orre tives,{ un ensemble de ons�equen es possibles, d�eterminant les a tions de maintenan epr�eventives.L'eÆ a it�e de ette appro he de la maintenan e d�epend de la �nesse et de l'anti ipationdont sont apables les indi ateurs de d�efaut. �A la limite, si les indi ateurs �etaient suÆ-samment �ns, l'a tion orre tive pourrait dispara�tre, les pannes �etant d�ete t�ees, isol�eeset r�esorb�ees, avant meme que leurs e�ets ne se fassent sentir. On her he naturellement �aaller le plus loin possible dans ette dire tion.Pratiquement, on her hera �a formaliser l'information stru turelle ontenue dans lesAMDEC a�n d'automatiser la re her he pr�e o e 1/ de la (des) panne(s) d�e len hant lesindi ateurs, 2/ des ons�equen es possibles.Une repr�esentation de haut niveau, mais statique, ouramment utilis�ee dans l'industrieservira de base �a la formalisation : les arbres de d�efaillan es (AD). Nous en donnons uneinterpr�etation dynamique oh�erente ave notre appro he de la surveillan e.48

Mod�ele des pannes Les arbres de d�efaillan e (AD)2.3.1 Les arbres de d�efaillan e (AD)Les arbres de d�efaillan e sont une ara t�erisation logique, statique et d�eterministe des ombinaisons de pannes �el�ementaires menant �a la d�efaillan e du syst�eme ; ils formalisentgraphiquement la onnaissan e stru turelle des relations de ause �a e�et entre les pannesdu syst�eme.Stru ture de baseUn arbre de d�efaillan e est un graphe biparti a y lique, dont les noeuds sont s ind�es ensommets et portes logiques (ET et OU), les ar s du graphe n'existant qu'entre deux noeudsde natures di��erentes. Un exemple d'arbre de d�efaillan e est repr�esent�e �gure II.2.2. Ondistingue :{ La ra ine E5 est l'�ev�enement redout�e ; 'est souvent la panne ompl�ete du syst�eme.{ Les feuilles E1, E2 et E3 repr�esentent les �ev�enements ind�esirables de base, et sontli�es �a des omposants �el�ementaires.{ Les sommets interm�ediaires E4 sont des �ev�enements ompos�es obtenus par onjon -tion ou disjon tion d'�ev�enements de base ou d'�ev�enements ompos�es par des porteslogiques.Dans toute la suite, nous assimilerons l'�ev�enement tou hant un omposant et le mettanten d�efaut �a l'�etat du omposant lui-meme.Des portes plus omplexes que les portes ET et OU enri hissent le mod�ele et peuventn�e essiter une onversion pr�ealable, mais nous ne les onsid�ererons pas i i.E5E1 E2
�Ev�enementE3 E4 Porte ETPorte OU�Ev�enementRedout�e�Ev�enements Interm�ediaireInd�esirablesFig. II.2.2: Exemple d'arbre de d�efaillan e.Les arbres de d�efaillan es sont la repr�esentation graphique d'une �equation alg�ebriquebool�eenne : �a un sommet Ei est asso i�ee une variable bool�eenne, ei, telle que :ei = 0, omposant i �a l'�etat sainei = 1, omposant i en panneet telle que les portes logiques expriment l'�etat de la ra ine en fon tion des �etats desfeuilles. I i : e5 = e3 + e1:e249

Interpr�etation dynamique des arbres de d�efaillan e Mod�ele des pannesave le OU in lusif not�e +, le ET �etant not�e par le produit. Les arbres de d�efaillan es sontdon essentiellement statiques (le temps n'est pas pris en ompte) et d�eterministes.Remarque 2.3 Nous ne faisons au une hypoth�ese sur la granularit�e de la d�e ompositiondu syst�eme dans l'arbre de d�efaillan e : un sommet est li�e �a un omposant dont la tailleest d�e�nie par la panne unique qu'il peut pr�esenter. Un �el�ement mat�eriel donn�e pouvantsubir plusieurs d�efaillan es distin tes serait don d�e ompos�e en plusieurs sommets, ha un orrespondant �a un de ses sous- omposants dont la panne est unique.Remarque 2.4 Les ar s de e graphe biparti stru turent les in uen es entre pannes etnon entre les manifestations erron�ees (modes de d�efaillan e re ens�es par l'AMDEC) dusyst�eme. Un AD fait don abstra tion des modes de d�efaillan es pour se on entrer surles d�efaillan es elles-memes (�a la sour e des modes et des e�ets), e qui n'est pas le asg�en�eral des autres mod�elisations (pour la surveillan e) �a base de syst�eme �a �ev�enementsdis rets.2.3.2 Interpr�etation dynamique des arbres de d�efaillan eAutant l'aspe t statique onvient aux analyses de �abilit�e stru turelle, en d�eterminantpar exemple les oupes (ensembles minimaux de omposants d�efaillants menant �a lad�efaillan e du syst�eme) et leur probabilit�e respe tive, autant l'�evaluation de la dispo-nibilit�e d'un syst�eme requiert d�ej�a une vision dynamique des d�efaillan es. Or, bien questatique, l'AD abstrait ette dynamique sous-ja ente des pannes. Une onversion des ADen un mod�ele dynamique, les Arbres de D�efaillan e Dynamique (ADD), a �et�e utilis�ee dans[29℄ pour l'�evaluation de la disponibilit�e op�erationnelle d'une onstellation de satellites.Les ADD adjoignent une dimension temporelle qui autorise une mod�elisation sous la formede syst�emes �a �ev�enements dis rets par la onversion d'un sommet en un mod�ele dynamiqueet des portes logiques en syn hronisation et inhibition.Nous en proposons une autre interpr�etation, adapt�ee aux ta hes de surveillan e et dediagnosti , qui permet de plus l'intera tion ave la dynamique des modes de fon tionne-ment, onsid�er�ee �a la se tion suivante.Dynamique propre des omposantsAu ours de la vie du syst�eme, un omposant pr�esente de mani�ere su essive desd�efaillan es et des r�eparations. Pour le repr�esenter, on asso ie �a haque sommet unmod�ele de omposant dont la dynamique est elle d'une ma hine �a �etat/transition [24℄ :nous ne onsid�ererons pour simpli�er que deux �etats pour haque omposant, un �etat�etant orrespondant �a \l'absen e de d�efaillan e" (e = 0) et l'autre �a la \pr�esen e ded�efaillan e" (e = 1). Leur a tivit�e est ex lusive par d�e�nition et les passages de l'un �al'autre mod�elisent soit l'o urren e de la d�efaillan e soit sa r�esorption, par r�eparationnotamment. Ces �evolutions �etant suppos�ees etre �a temps dis ret, le mod�ele d'�etat d'un omposant, don i i d'un sommet, est un syst�eme �a �ev�enements dis rets (SED) que nousmod�elisons omme un r�eseau de Petri marqu�e sauf 1-born�e (voir annexe A). La onversiondes sommets est d�e rite �gure II.2.3.La pla e d'�etat sain pi;0 est reli�ee �a la pla e de panne pi;1 par une transition ti;1repr�esentant la d�efaillan e. La transition ti;0 repr�esente la disparition de la panne. Lasigni� ation bool�eenne des ressour es justi�e le hoix des RdP saufs, l'ex lusion mutuelledu marquage des deux pla es justi�ant la propri�et�e 1-born�ee.50

Mod�ele des pannes Interpr�etation dynamique des arbres de d�efaillan et4;1
t1;1 t2;1
�Etat de panne�Etat sain PanneR�eparation
E4E3E5
E1 E2 p1;1p3;1
p5;1p5;0 t5;0t5;1p3;0t3;0t3;1 t4;0 p4;0
t2;0 p2;0t1;0 p2;1p1;0p4;1
Fig. II.2.3: Conversion des omposants en ma hines �etat/transition, repr�esent�ees sous formede r�eseaux de Petri, dans la situation o�u tous les omposants sont �a l'�etat sain.Remarque 2.5 Notons que la disparition de la panne peut r�esulter pratiquement :{ d'une r�eparation,{ d'une r�esorption spontan�ee,{ d'une r�esorption par rela hement de ontrainte (ou "transmission" de l'�etatd�efaillant).Cha une de es interpr�etations implique un mod�ele de omposant di��erent omprenant�eventuellement plusieurs transitions de natures di��erentes. La �gure II.2.4 pr�esente deuxexemples de mod�eles.Dynamique de la propagation des pannesNous faisons l'interpr�etation suivante de l'arbre de d�efaillan e : l'AD d�e rit la propaga-tion des omportements d�efaillants entre omposants d'un syst�eme, et non pas seulementdes "pannes" du syst�eme. Lors d'une a tion de maintenan e orre tive, il est l�egitimede onsid�erer les sommets omme les "pannes" �a re her her sur le syst�eme, mais 'est �anotre avis une vision restri tive : en e�et la propagation d'un dysfon tionnement de om-posants en omposants n'attend pas n�e essairement la panne fran he pour s'en len her.Au ontraire, nous pensons que des dysfon tionnements non- ritiques peuvent s'en ha�nerpour aboutir �a terme �a une panne quel onque du syst�eme. Dans le adre de la maintenan epr�eventive dans lequel nous nous pla� ons (voir Introdu tion), les signaux re ueillis au fur51

Interpr�etation dynamique des arbres de d�efaillan e Mod�ele des pannesp0R�eparation �Etat sainPanne�Etat de panne t1p1t0 p0R�eparation �Etat sainPanne�Etat de panne t1p1
(B)(A) R�esorption spontan�ee t10t20Fig. II.2.4: Deux mod�elisations de la dynamique de l'�etat d'un omposant par une ma hine �a�etat/transition. (A) : la panne persiste jusqu'�a une op�eration de maintenan e ; (B) : la pannepersiste jusqu'�a une op�eration de maintenan e ou jusqu'�a sa r�esorption spontan�ee (panneintermittente).et �a mesure sur le syst�eme t�emoignent de es �evolutions su essives et permettent d'inf�ererune traje toire plausible des dysfon tionnements.Les relations de ause �a e�et sous-ja entes aux portes logiques de l'AD relient dyna-miquement les o urren es des pannes en aval (en sortie) de la porte aux pr�esen es despannes en amont (en entr�ee) :E4 peut tomber en panne ssi E1 ET E2 sont en panne, e4 : 0 1 ssi e1:e2 = 1Dans le adre des RdP, es relations ausales sont od�ees par la syn hronisation dufran hissement des transitions de pannes ( e sont les d�efaillan es), E5 (resp. E4) sur l'a -tivit�e des pla es (les �etats de panne) en amont, E3 et E4 (resp. E1 et E2). Les deux porteslogiques m�enent �evidemment �a des onversions distin tes :{ la disjon tion OU en amont de E5 impose de dupliquer les transitions de panne deE5 en autant de liens qui entrent par la porte ;{ la onjon tion ET en amont de E4 impose de syn hroniser la d�efaillan e E4 sur l'�etatde panne simultan�e de E1 et de E2.La onversion des portes logiques est imm�ediate : elle est donn�ee �gure II.2.5. La onversion ompl�ete appliqu�ee �a l'arbre de la �gure II.2.2 est donn�ee �gure II.2.6.Remarque 2.6 Importante Il faut noter la �e he en retour de t4;1 vers p1;1 et p2;1(et les autres de mani�ere similaire). Ces �e hes expriment que la propagation d'une pannene supprime pas la panne en question : les jetons onsomm�es sont r�eg�en�er�es en p1;1 et p2;1garantissant la viva it�e du r�eseau.Remarque 2.7 Dans le as d'un mod�ele de omposant ave une r�esorption par transmis-sion de panne, la �e he de retour a pour extr�emit�e p0 et non p1.52

Mod�ele des pannes Interpr�etation dynamique des arbres de d�efaillan eE1 E2 t2;1t1;1p1;1 p2;1E3 E4 t3;1p3;1 t4;1p4;1
�Ev�enement aval�Ev�enement aval dupliqu�e
E4
E5 p5;1p4;1t4;0t4;1p4;0
p1;0 p2;0t2;0t1;0 t5;0t15;1t25;1p5;0t3;0 t4;0 p4;0p3;0Fig. II.2.5: Conversion des portes logiques de l'arbre de d�efaillan e.Simpli� ationPar onstru tion, les sommets d'un ADD peuvent avoir soit une signi� ation logique(Panne 1 ET Panne 2 pr�esentes), soit une signi� ation ausale (Si la Panne 1 et la Panne 2sont pr�esentes, alors une panne 3 peut se produire) qui seule sous-entend une dynamique,par opposition �a la premi�ere qui est redondante : le odage d'une syn hronisation sur un�etat de panne simultan�e (sortie unique de la porte ET) est �equivalent �a une syn hronisa-tion simultan�ee sur les �etats de panne individuels (entr�ees multiples de la porte ET). Dansun ontexte de repr�esentation dynamique, es sommets purement logiques ne pr�esententau un int�eret et peuvent don etre �elimin�es du RdP. Notons que parmi tous les sommets,les feuilles sont les seuls sommets ne pouvant avoir qu'une s�emantique dynamique, tousles autres pouvant etre d'un type quel onque. Dans le as o�u la ra ine est elle-meme une ondition logique, on obtient des RdP non onne t�es.La s�emantique \amont" et \aval" sera maintenant rempla �ee par elle de \ ause" etde \ ons�equen e".Dans le as o�u E4 est une ondition logique et non une d�efaillan e nouvelle, le r�esultatde la onversion est d�e rit �gure II.2.7.Conjon tion de plusieurs arbres de d�efaillan esPlusieurs �ev�enements ind�esirables peuvent oexister sur un syst�eme, e qui peut ame-ner �a disposer de plusieurs de es arbres de d�efaillan es dans un mode de fon tionnement53

Interpr�etation dynamique des arbres de d�efaillan e Mod�ele des pannes
t1;1 t2;1E1 E2E4E3
E5p3;1 p4;1
p2;1p1;1
p5;1t5;0p5;0t3;0t3;1 p3;0 p4;0t4;0t4;1p1;0 p2;0t2;0t1;0
t15;1t25;1
Fig. II.2.6: Syn hronisation des ma hines �a �etat/transition. Cas o�u tous les sommets de l'arbresont li�es �a des omposants.E5E3 p3;1
p5;1
E2E4
E1
t5;0p5;0 t25;1t2;1t1;1p1;1 p2;1 p2;0p1;0p3;0 t1;0 t2;0
t15;1t3;0t3;1
Fig. II.2.7: Syn hronisation des ma hines �a �etat/transition. Cas o�u le sommet E4 n'est pasli�e �a un omposant.donn�e. De plus, et omme l'�etablissement des arbres se fait de mani�ere "des endante", de54

Mod�ele des pannes Synth�ese du graphe de pannesla ra ine vers les feuilles, ils peuvent pr�esenter des d�efaillan es de base ou interm�ediaires ommunes. Il s'agit alors de proposer une pro �edure simple de omposition des arbres.Consid�erons par exemple les deux arbres A1 et A2 du haut de la �gure II.2.8.Supposons d'abord que les d�efaillan es de ha un des arbres soient toutes distin tes, don que E 62 fE1; : : : ; E5g. D'un point de vue logique, l'�etat du sommet E5 est alg�ebriquementind�ependant de l'�etat de tous les sommets de A2. D'un point de vue dynamique, les�evolutions dynamiques sont alors on urrentes (voir Annexe A) et le RdP de pannesglobal est ompos�e des deux RdP de pannes dont les fon tionnements sont on urrents.Supposons maintenant que E = E2 ; de mani�ere alg�ebrique, les d�efaillan es de E5 etde E7 ne sont plus ind�ependantes : en e�et, si E1 et E6 sont d�efaillants, alors E5 et E7le sont n�e essairement. D'un point de vue dynamique, les d�efaillan es de E4 et de E7sont en on it, ar E2 parti ipe aux d�efaillan es de E4 et de E7. Les pla es des deuxma hines �a �etat/transition repr�esentant les memes �etats d'absen e et de pr�esen e d'uned�efaillan e donn�ee, nous pouvons les fusionner. De meme, les �ev�enements �etant propres�a une ma hine, leurs transitions respe tives peuvent etre fusionn�ees. Le r�esultat de la onjon tion dans le as E = E2 est repr�esent�e �gure II.2.8, partie basse.De plus, par d�e�nition, les arbres de d�efaillan es d�e rivent de mani�ere exhaustive les auses des d�efaillan es de tout sommet. Par ons�equent, si un sommet est ommun �aplusieurs arbres, tous les sommets en amont sont identiques dans ha un des arbres. Lapro �edure de onjon tion pour un sommet se g�en�eralise don �a des sous-arbres ommuns�a plusieurs arbres.2.3.3 Synth�ese du graphe de pannesLe mod�ele dynamique d'un arbre de d�efaillan e dans un mode donn�e (graphe depannes) est �nalement obtenu par la pro �edure suivante :1. analyse de l'arbre pour distinguer les sommets repr�esentant de nouvelles d�efaillan esde eux repr�esentant des onditions logiques ;2. onversion des sommets restants selon le mod�ele de omposant ad�equat ;3. syn hronisation des ma hines selon les onditions logiques de l'arbre de d�efaillan e ;4. onjon tion de tous les arbres onvertis.On appelle RdP de pannes ou graphe de pannes et on note R le r�eseau de Petrir�esultant de la pro �edure pr�e �edente. La pro �edure de g�en�eration du RdP de pannes, saufet n�born�e (n �etant le nombre de pannes distin tes sur le syst�eme) �a partir de l'arbre ded�efaillan e, est syst�ematique et automatisable.De mani�ere plus g�en�erale, il suÆt de disposer :{ de l'�equation logique donnant les onditions de fon tionnement normales du syst�eme,{ du type de d�efaillan es et de retours �a l'�etat sain de haque omposant,55

Synth�ese du graphe de pannes Mod�ele des pannesE5
E3E7
E6A1 A2E1 E2
E4
t1;1p3;1p5;1
p1;1 p2;1t7;1 p7;1p6;1
A1 [ A2t5;0p5;0 t25;1t15;1p3;0 t7;0p7;0
p6;0p2;0p1;0 t2;1t2;0t1;0t3;1t3;0 t6;1t6;0
Graphe de pannesE2
Fig. II.2.8: Conjon tion et onversion de deux arbres de d�efaillan es. Le sommet E2 est ommun aux deux arbres A1 et A2 : la ma hine �a �etat/transition asso i�ee est fusionn�ee.pour en d�eduire dire tement la onversion en RdP. En e�et, dans une �equation bool�eenne, haque variable est \utile", au sens o�u elle est li�ee �a un �etat de fon tionnement d'un omposant : il n'y a dans e as pas de phase de simpli� ation. �A haque variableest asso i�ee une ma hine �a �etat/transition dont le mod�ele de omposant d�e oule del'information dont on dispose sur la panne. La syn hronisation des ma hines d�e ouledire tement des op�erateurs logiques entre les variables des polynomes de l'�equation, etdu niveau hi�erar hique, re �et�e dans l'en apsulation des polynomes. Le graphe de pannes56

Partie ommande Con lusionr�esultant est identique.2.3.4 Con lusionNous avons pr�esent�e dans ette se tion l'information que l'on peut extraire des �etudesde risque e�e tu�ees sur ertaines installations sensibles. L'obtention d'un mod�ele a prioristru turel passe par la onnaissan e :1. des pannes individuelles (sp�e i� ation d'un mod�ele de omposant adapt�e �a la dyna-mique de l'�etat de haque omposant, voir par exemple les deux mod�eles de la �gureII.2.4),2. des in uen es mutuelles (sp�e i� ation des syn hronisations entre les d�efaillan es).Plusieurs arbres peuvent etre onjugu�es permettant d'obtenir un mod�ele dynamiqueglobal du syst�eme �a partir d'�etudes e�e tu�ees sur ertaines de ses sous-parties. C'estun premier pas vers la on eption (modulaire) des algorithmes de surveillan e pour lessyst�emes r�epartis.La se tion suivante pr�esente l'autre partie du mod�ele �a �ev�enements dis rets.2.4 Prise en ompte de la Partie CommandeComme nous l'avons dit au d�ebut de e hapitre, nous partons du onstat qu'un syst�emeindustriel omplexe ne fon tionne pas toujours de la meme mani�ere, en e sens que sadynamique �a �etat ontinu ainsi que ses risques de d�efaillan es hangent s�equentiellement, e qui en g�en�eral in uen e �a la fois les mesures y et les d�efaillan es possibles.2.4.1 Int�eret et n�e essit�e de la mod�elisation dis r�eteNous examinons i i la question de la validit�e d'une des ription unique pour la dyna-mique �a �etat ontinu et pour elle des pannes. La premi�ere intervient sur la g�en�eration desr�esidus, la se onde sur les possibilit�es de nouvelles d�efaillan es �a tout instant. Examinonsrespe tivement les in uen es de es hangements au niveau num�erique et symbolique.In uen e sur la mod�elisation num�eriqueLa g�en�eration du r�esidu requiert la stationnarit�e de l'erreur de pr�edi tion (II.1.17),et de son gradient, pour le rit�ere utilis�e i i. Or, si nous onsid�erons le syst�eme durantune p�eriode de fon tionnement suÆsamment longue, les p�eriodes de fon tionnement sta-tionnaires alternent ave des p�eriodes transitoires, selon des hangements des onsignesnum�eriques (r�egulation, poursuite, : : : ) et symboliques (arret, mar he, r�egime for �e : : : ).Consignes num�eriques : la r�eponse d�epend d'abord de la omplexit�e du syst�eme :r�eduit �a un \ omposant" unique, il est possible qu'une loi, physique ou empirique,d�e rive �d�element son omportement en toutes ir onstan es ( omposant lin�eaire uti-lis�e dans sa plage de fon tionnement). Mais la loi peut devenir omplexe (le meme omposant lin�eaire utilis�e en saturation, omposants �a hyst�er�esis, : : : ) : on peutalors hoisir de repr�esenter son fon tionnement hronologique par une su ession57

Int�eret et n�e essit�e de la mod�elisation dis r�ete Partie ommandes�equentielle et d�eterministe de lois plus simples. En�n, si le syst�eme est onstitu�ed'un ensemble de \ omposants" en intera tion, memes simples (premier as), ununique mod�ele d'�etat d�e rivant �d�element le omportement en toute ir onstan esera sans doute impossible �a �elaborer.Il semble par ons�equent indispensable de onsid�erer des hangements de stru turepilot�es de mani�ere d�eterministe, ou tout du moins observ�ee, permettant de d�e rirele fon tionnement de mani�ere suÆsamment �ne pour que les hypoth�ese n�e essaires�a la g�en�eration des r�esidus soient v�eri��ees.Consignes symboliques : omme on l'a �evoqu�e �a la se tion II.2.2.1, les mises en mar he,les arrets des omposants modi�ent les dynamiques individuelles, et par ons�equentla dynamique globale du syst�eme ; on peut alors onsid�erer un mod�ele \avant" et unmod�ele \apr�es", dont les alternan es seront i i aussi d�e len h�ees de mani�ere ertaineet observ�ee.Bien sur, quel que soit le type de hangement, l'�etat interne d'une installation physiqueest ontinu. D'o�u l'hypoth�ese :Hypoth�ese 2.3 La stru ture du mod�ele S ne peut �evoluer de mani�ere autonome au ours du temps, mais elle peut hanger de mani�ere ertaine (ou ontrol�ee) �a des instantsdis rets. Lors d'un hangement de stru ture, on pr�eserve la ontinuit�e de l'�etat x.In uen e sur la mod�elisation symboliqueIl est essentiel pour la on�an e apport�ee dans une pro �edure de surveillan e, que elle- i ne produise que des alarmes plausibles, memes si elles sont erron�ees : or, si un omposant est �a l'arret et si de plus il n'intervient pas dans la dynamique �a �etat ontinu,le risque qu'il g�en�ere un dysfon tionnement visible dans le r�esidu est nul. Il est don sou-haitable d'�eviter d'orienter les a tions de maintenan e sur des pannes dont on n'observeau un e�et, meme si elles ne sont pas impossibles (un omposant �a l'arret pouvant tomberen panne). Dans les m�ethodes existantes, ette \expertise" est rejet�ee en post-traitementdes alarmes observ�ees, en �ltrant es alarmes, mais tous les traitements e�e tu�es pour lesg�en�erer sont inutiles, et peuvent meme a�e ter num�eriquement la g�en�eration des alarmesplausibles. Nous proposons don d'int�egrer ette onnaissan e omme un a priori stru -turel du mod�ele : l'e�ort de mod�elisation est quasiment nul du fait que ette dynamiques�equentielle, d�ej�a abord�ee �a propos de la mod�elisation num�erique, est observ�ee de mani�ere ertaine.Remarquons ependant que les hangements de la dynamique des pannes (annulationou �evolution du risque) ne orrespondent pas n�e essairement au s�equen ement num�erique :un syst�eme lin�eaire en fon tionnement lin�eaire peut pr�esenter un taux de d�efaillan e plusgrand au del�a d'un ertain r�egime. D'o�u l'hypoth�ese :Hypoth�ese 2.4 La stru ture du mod�ele R de la dynamique des pannes ne peut �evoluerde mani�ere autonome au ours du temps, mais elle peut hanger de mani�ere observ�ee �ades instants dis rets.D�e�nissons maintenant e que nous entendons par mode de fon tionnement et propo-sons quelques indi ations pour leur onstru tion.58

Partie ommande Modes de fon tionnement2.4.2 Modes de fon tionnementD�e�nitionsD�e�nition 2.1 Un mode de fon tionnement est d�e�ni par la donn�ee onjointe :1. d'un mod�ele �a �etat ontinu S�,2. d'un mod�ele �a �ev�enements dis rets de ses d�efaillan es, R�.On d�e�nit alors la dynamique des modes de fon tionnement :D�e�nition 2.2 (Graphe de ontrole) La dynamique des modes de fon tionnement estun syst�eme �a �ev�enements dis rets (SED), pilot�e par les signaux num�eriques et symboliquesr�eels, et dont les a tions d�eterminent les hangements de mod�ele �a �etat ontinu et �a �etatdis ret. On appelle e SED graphe de ontrole.Dans le mode �, le syst�eme dynamique d�e rivant la dynamique �a �etat ontinu dusyst�eme sera : S� � xk = f�(xk�1; uk; ��)yk = g�(xk; ��) + vk (II.2.1)o�u les fon tions f� et g� sont suppos�ees ontinument di��erentiables, et o�u le ve teur ��des param�etres du mod�ele S� est la restri tion du ve teur param�etre � 2 Rd de S (II.1.1)�a ses omposantes \visibles" dans le mode �, not�ee I� ; �� a �et�e d�e�ni formellement page32. Il est lair que l'�etat ontinu x du syst�eme est le meme dans tous les modes, don ned�epend pas de � ; seule la mani�ere dont il �evolue au ours du temps (stru ture du syst�emed�e rite par sa dynamique f� et son observation g� en d�epend.Remarque 2.8 On pourrait alors d�e�nir l'�etat interne du syst�eme omme la r�eunion del'�etat x ontinu et de l'�etat de panne dis ret.Constru tionComme on l'a annon �e, la dynamique des modes est r�egie par un automated�eterministe, d�e oulant du graphe de ommande, s'il existe, tel que :{ au niveau global, l'ensemble des omposants en fon tionnement (i.e. non arret�es)�evolue de mani�ere s�equentielle : un graphe des modes de mar he de type State hartg�ere les phases de la produ tion, �a travers les phases d'a tivit�e de haque omposant,et d�etermine �a tout instant quelle est la dynamique globale de l'installation ; un outilde repr�esentation du type GEMMA (pour Guide d'�Etude des Modes de Mar he etd'Arret), est tr�es ouramment utilis�e en industrie ;{ au niveau lo al et dans un mode de mar he donn�e, le omportement ontinu d'un omposant d�epend des solli itations impos�ees par les a tionneurs, pilot�es par le graf- et de ommande (voir page 45),{ au niveau lo al toujours, le taux d'o urren e d'une d�efaillan e peut augmenter enfon tion des solli itations, lors de l'augmentation du r�egime par exemple.59

Graphe de pannes multi-modes Partie ommandeLa d�etermination du mod�ele de la dynamique des modes de fon tionnement r�esultepour les syst�emes industriels omplexes, d'une �etude de la dynamique s�equentielle desmodes de mar he, aÆn�ee par l'�etude onjointe 1/ du omportement ontinu des ompo-sants et 2/ de leur omportement d�efaillant, tous deux au sein d'un mode de mar he.Les p�eriodes o�u la dynamique interne, S� et R�, des omposants est �g�ee, d�elimitent onstru tivement les modes de fon tionnement et permettent la on eption du mod�ele.Mod�elisationLe graphe de ontrole d�etermine le mod�ele �a �etat ontinu et e i est repr�esent�e�gure I.1.1 par un interrupteur �a position multiple, qui agira num�eriquement dansl'impl�ementation des algorithmes.Il en est autrement pour l'intera tion entre le graphe de ontrole et la dynamique �a�ev�enements dis rets : �etant de meme nature ( e sont bien deux SED), leur intera tionpeut etre mod�elis�ee expli itement : le graphe de ontrole sera mod�elis�e par un r�eseaude Petri non-autonome, sauf, 1-born�e, d�eterministe, syn hronis�e sur �ev�enements externes(temporisations, ommande manuelle) et internes (seuils sur observations num�eriquess : : :), dont un exemple est donn�e �gure II.2.9. On peut alors envisager la mod�elisation d'unSED multi-modes �a partir du graphe de ontrole et des graphes de panne (se tion II.2.3.3).Remarque 2.9 Il est tr�es simple d'obtenir e RdP d�eterministe �a partir de la onnais-san e des modes de mar he du syst�eme et d'un graf et de ommande : un GEMMA se onvertit ais�ement en langage Graf et [54℄ et, sous ertaines onditions peu restri tives,un graf et se traduit en RdP syn hronis�e [24℄.����
P1 P2t3t1
Fig. II.2.9: RdP de ontrole (graphe des modes de fon tionnement). Le syst�eme fon tionnesous deux modes de fon tionnement di��erents. Le mode a tif est elui poss�edant un jeton. Lesfran hissements des transitions sont syn hronis�es sur les �ev�enements de ontrole, mesures surle syst�eme ou ordres exog�enes de l'op�erateur.2.4.3 Graphe de pannes multi-modesIndustriellement, les arbres de d�efaillan e sont �elabor�es dans haque mode de mar he,voire par mode de fon tionnement, e que l'on supposera i i. On suppose don disposerd'autant de RdP de pannes R� (�gure II.2.8) �etablis �a la se tion pr�e �edente, que demodes de fon tionnement, ha un �etant \a tiv�e" par l'entr�ee dans un mode d�etermin�e ;60

Partie ommande Graphe de pannes multi-modesa�n d'�eviter la redondan e dans la mod�elisation, on souhaite onstruire un mod�ele globalmulti-modes pour la surveillan e en ontinu : on s'int�eresse don d'abord aux �el�ements ommuns aux di��erents graphes de pannes :1. une pla e peut etre ommune �a plusieurs graphes : omme une pla e d�e�nit un �etatparti ulier d'un omposant, elle a la meme signi� ation dans ha un des graphes.C'est le as des pla es d'�etat sain et d'�etat d�efaillant, qui peuvent etre fusionn�ees enune seule pla e ;2. les transitions dont le fran hissement est observ�e, peuvent �egalement etre fusionn�ees :le seul exemple pour notre probl�eme est l'ensemble des a tions de maintenan e ;3. les transitions dont le fran hissement est inobserv�e ne peuvent pas a priori etre fu-sionn�ees : en e�et, le risque de d�efaillan e peut etre di��erent suivant les onditionsdans lesquelles le omposant tombe en panne, 'est don un �ev�enement \sto hasti-que" di��erent ar il n'a pas la meme distribution. Les r�esorptions spontan�ees pourla meme raison sont propres �a un mode.Remarquons que haque transition non observ�ee n'est fran hissable que dans le modede fon tionnement o�u le graphe de pannes dans lequel elle appara�t est a tiv�e. Pourdistinguer les �ev�enements dans les modes di��erents, on syn hronise leur fran hissementsur la pr�esen e d'un jeton dans la pla e du mode validant, e qui d�etermine le graphe depannes multi-modes.Le graphe de pannes multi-modes est don obtenu par la pro �edure suivante :Constru tion du graphe de ontrole : par analyse du fon tionnement du syst�eme ;Constru tion mono-mode : graphes de pannes dans haque mode de fon tionnement ;Syn hronisation : pour tout mode de fon tionnement � = i, garder haque transitionnon-observ�ee du graphe de pannes dans e mode par la ondition logique � == i.Conjon tion : toutes les pla es et les transitions de r�eparation des graphes de pannessont fusionn�ees.Remarque 2.10 L'absen e de garde revient �a dire que la transition est gard�ee par tousles modes ; valant 1, elle n'est pas mentionn�ee.Remarque 2.11 La garde bool�eenne �equivaut �a l'augmentation des ressour es de la tran-sition non-observ�ee : la pla e du mode validant est �a la fois dans son pre-set (syn hronisa-tion) et dans son post-set (r�ea tivation du mode, une fois la transition de panne fran hie).Reprenons l'exemple de la �gure II.2.8, en supposant maintenant que l'arbre A1 esta tif dans le mode 1 de la �gure II.2.9 et l'arbre A2 dans le mode 2 : ela orrespond �a unsyst�eme ompos�e de deux sous-syst�emes ayant un �el�ement ommun E2, et fon tionnantalternativement. Le RdP multi-modes est donn�e dans la �gure II.2.10, e qui a h�eve lamod�elisation de l'a priori.Nous avons pr�esent�e jusqu'i i l'aspe t stru turel du mod�ele dis ret : nous on luonspar la des ription des di��eren es temporelles entre toutes les parties de la mod�elisation.61

Cas mono-mode2.5 Aspe t temporel, as mono-modeNous introduisons i i les di��erentes �e helles de temps qui gouvernent le pro essus et lasurveillan e. Nous examinons les di��erentes relations que doivent entretenir les pro essuspour que l'appro he soit fond�ee.2.5.1 Dynamiques du syst�emeOn distingue les deux types d'�ev�enements :{ les observations (ut)t et (yt)t qui sont mesur�ees aux instants dis rets de p�eriodefondamentale �egale �a 1,{ le param�etre �(n) qui �evolue de mani�ere syn hrone ave les observations �a des ins-tants in onnus (tn)n (Hypoth�ese 1.1).On suppose de plus que :Hypoth�ese 2.5 Plusieurs �ev�enements symboliques (i i de pannes) peuvent se produiresur un blo de donn�ees num�eriques.On d�e�nit un tel ensemble d'�ev�enements sur un blo omme un �ev�enement estim�e : 'estune s�equen e ex�e utable (d�e�nition A.2, p.159) du RdP.La �gure II.2.11 r�esume le s�equen ement des op�erations. La date des �ev�enements a �et�e hoisie �a la �n du blo , pour respe ter la ausalit�e.2.5.2 Dynamique d'estimationL'estimation se fait en deux phases su essives :1. Constru tion des observations num�eriques ontenant l'information sur les pannes,on l'appellera la dynamique du mod�ele.2. Estimation proprement dite, par un algorithme de programmation dynamique.Pour la dynamique du mod�ele, les sorties re onstruites y par l'observateur sontsuppos�ees etre �e hantillonn�ees �a la meme fr�equen e fondamentale que le syst�eme. Par ons�equent, le r�esidu primaire (II.1.15) est �egalement disponible �a la meme fr�equen e.Les r�esidus se ondaires (�k)k (II.1.10) sont al ul�es sur des blo s de donn�ees de tailleN :nous supposerons de plus pour des raisons statistiques (ind�ependan e des r�esidus) que lesblo s ne se re ouvrent pas. Pour simpli�er, nous onsid�ererons de plus que les blo s sontadja ents, i.e. qu'au une observation n'est perdue d'un blo �a l'autre. La disponibilit�edes r�esidus suit alors une horloge dis r�ete, de p�eriode N fois plus lente que elle desobservations, et on suppose que :Hypoth�ese 2.6 Les transitoires de l'observateur et de son syst�eme gradient sont de dur�eepetite devant la dur�ee du blo .On peut adopter les deux points de vue suivants pour la dynamique d'estimation(pr�e is�ement un algorithme de Viterbi), 62

Cas multi-mode1. estimation pilot�ee par les observations, i i les r�esidus : 'est la d�emar he lassiquedans un ontexte markovien, o�u les �evolutions se traduisent par l'�emission d'un signal.Or i i, le d�e ouplage entre la dynamique des �ev�enements sous-ja ents que sont lespannes (suppos�ees syn hrones ave les observations y) et les r�esidus � (plusieurs�ev�enements pouvant survenir alors qu'un seul r�esidu n'est al ul�e), engendre lesprobl�emes suivants :(a) onstru tion de toutes les s�equen es ex�e utables de pannes, de longueur �x�eeou non, pouvant survenir sur la dur�ee d'un blo ,(b) onstru tion d'une vraisemblan e du r�esidu onditionnellement �a une s�equen eex�e utable.2. estimation pilot�ee par les �ev�enements, i i les d�efaillan es : �etant plus rapides que lag�en�eration des r�esidus, les observations sont sous-�e hantillonn�ees par rapport auxit�erations de l'algorithme d'estimation. On a dans e as, uniquement, le se ondprobl�eme �a r�esoudre.Nous hoisirons, pour des raisons �evidentes de outs de al uls, la se onde solution.Remarquons ependant que toute d�e ision ne sera prise qu'aux instants o�u le r�esidu estdisponible : l'estimation entre deux instants de disponibilit�e des r�esidus est une pr�edi tiona priori des s�equen es ex�e utables. Le mod�ele permettant ette pr�edi tion doit etre syn- hronis�e sur l'horloge de l'observation y, e qui n�e essite don la dis r�etisation du graphede pannes. Nous le pr�esentons onstru tivement �a partir des ma hines �a �etat/transitionpuis de leur omposition.Dis r�etisation d'une ma hine �a �etat/transitionNous prenons omme support pour la dis r�etisation, les ma hines de la �gure II.2.4.�A haque instant t, et dans ha un de ses �etats, l'estimation doit d�eterminer, pour unema hine donn�ee, si elle a hang�e d'�etat ou non. Or la possibilit�e d'attente (ni panne, nir�eparation) n'est pas pr�esente sur la ma hine : on ajoute une transition sur haque �etat,dite transition de stand-by, ou d'attente.La dis r�etisation d'une ma hine quel onque est illustr�ee dans les deux as i-dessus�gure II.2.12.Dis r�etisation du graphe de panneLa omposition syn hrone des ma hines dis r�etis�ees est r�ealis�ee de la meme mani�ereque pour la omposition asyn hrone ; le r�esultat de la dis r�etisation est repr�esent�e �gureII.2.13, dans le as o�u toutes les r�esorptions sont observ�ees.2.6 Aspe t temporel, as multi-modesEn plus des �ev�enements onsid�er�es �a la se tion pr�e �edente, on prend i i en ompteles hangements de mode de fon tionnement et de r�eparation : on examine leur in uen eau niveau num�erique et leur ons�equen e au niveau algorithmique en suivant la memepr�esentation qu'en 2.5. 63

Dynamiques du syst�eme Cas multi-mode2.6.1 Dynamiques du syst�emeOn distingue maintenant les trois types d'�ev�enements :{ les observations sto hastiques (ut)t et (yt)t,{ le param�etre �(n) dont les hangements sont gard�es par le mode de fon tionnement,{ ertains �ev�enements observ�es aux instants (�m)m.La �gure II.2.14 r�esume le s�equen ement des op�erations.2.6.2 Dynamique d'estimationAu niveau de l'algorithmique num�erique de g�en�eration des r�esidus, deux hor-loges sont �a onsid�erer :1. l'horloge \num�erique", N fois plus lente que elle des observations, qui pilote ladisponibilit�e des observations \utiles" que sont les r�esidus (�k)k, sous la ontraintede la se onde horloge,2. l'horloge \symbolique", asyn hrone, des hangements de mode de fon tionnement.Elle interrompt la premi�ere ar la g�en�eration des r�esidus est modi��ee par les han-gements de syst�eme S�.Un r�esidu est don disponible si et seulement si au un top de l'horloge symboliquen'est survenu entre deux tops ons�e utifs d'horloge \num�erique".Remarque 2.12 Si e n'est pas le as, on peut envisager trois solutions :1. r�eduire dynamiquement la taille de la fenetre, sous la ontrainte de validit�e de l'ap-proximation lo ale,2. augmenter dynamiquement la taille de la fenetre pr�e �edente, si elle �etait dans lememe mode ;3. si au une des deux possibilit�es n'est valide, les observations sont perdues.Bien que rien n'empe he d'adopter les deux premi�eres hypoth�eses, la troisi�eme est pluspertinente pour notre probl�eme :Hypoth�ese 2.7 Les observations mesur�ees entre un top d'horloge num�erique et un topd'horloge symbolique ons�e utif sont perdues.Il faut �egalement dis r�etiser le graphe de pannes syn hronis�e, la pro �edure �etant lameme que dans le as mono-mode, �a l'ex eption des �ev�enements observ�es qui n'ont biensur pas �a etre dis r�etis�es puisque leur o urren e est purement asyn hrone. En revan he,les �ev�enements de la ma hine doivent etre dis r�etis�es, mais en tenant ompte des gardesimpos�ees par le graphe de fon tionnement. 64

Con lusionsDis r�etisation d'une ma hine �a �etat/transition syn hronis�eeLa pro �edure g�en�erale de dis r�etisation est illustr�ee sur l'exemple sur la �gure II.2.15,dans le mode 2 de la ma hine �a �etat/transition E2 de la �gure II.2.10 : pour haque modede fon tionnement dans lequel la ma hine �a �etat/transition a une transition de d�efaillan eautoris�ee par le graphe de ontrole, on ajoute �a la pla e d'�etat sain une bou le �el�ementaire,autoris�ee uniquement dans e mode. Il en est de meme de l'�etat d�efaillant : dans tous lesmodes o�u la r�esorption peut survenir, la ma hine doit r�esoudre un on it.Les remarques faites dans le as mono-mode sont aussi valables i i.Dis r�etisation du graphe de pannesLa omposition des ma hines dis r�etis�ees est r�ealis�ee de la meme mani�ere que la om-position asyn hrone. Le r�esultat de la dis r�etisation est repr�esent�e �gure II.2.16, dans le as o�u toutes les r�eparations sont observ�ees et peuvent survenir dans tous les modes.2.7 Con lusionsLa mod�elisation dis r�ete �elabor�ee dans e hapitre est fond�ee sur les remarques sui-vantes :1. la dynamique �a �ev�enements dis rets est essentiellement s�equentielle si l'on admet :(a) qu'un automate d�eterministe �a �etat �ni d�e rit le s�equen ement observ�e desmodes,(b) qu'un automate �a �etat �ni d�e rit le s�equen ement des d�efaillan es (et non desmodes de d�efaillan es),( ) et que la dynamique de l'�etat de panne d'un �el�ement d�epend de son mode demar he.2. ette dynamique doit tenir ompte de la pro �edure de g�en�eration du r�esidu de sur-veillan e : il s'agit don d'aÆner la dynamique s�equentielle i-dessus, a�n de v�eri�erles hypoth�eses de g�en�eration des r�esidus.Nous avons hoisi les RdP omme langage de des ription ommun, du fait de leurpuissan e de mod�elisation. Un graphe de pannes multi-modes a �et�e obtenu par la syn- hronisation/ onjon tion des RdP de pannes sur le RdP de ontrole : il d�e rit toutes les onditions logiques dans lesquelles une d�efaillan e peut survenir.Nous utilisons e mod�ele global dans la partie suivante pour �etablir deux appro hespour la surveillan e des syst�emes hybrides num�eriques/symboliques.
65

Con lusionsE5
E3E7
E2 E6A1 : Mode 1 A2 : Mode 2E1 E2
E4p5;1
t7;1 p7;1T1T2
P1 P2
Graphe de pannes syn hronis�e Gt5;0p5;0 t7;0p7;0p3;1 p3;0p2;1
� = 1 � = 2
�1�1 �1
�1�1 t15;3t1;1 t12;1
t25;1t3;1t22;1�2t3;0
t1;0 t2;0 t6;0�2 �2 t6;1p2;0 p6;0p6;1p1;0p1;1
Fig. II.2.10: Conjon tion de deux arbres de d�efaillan es : as multi-modes. Les transitions deretour �a l'�etat normal ne sont pas gard�ees, elles peuvent s'e�e tuer dans tout mode.66

Con lusionsy1 y3 yt1 yt2 ytn0 tn t
�1 �2N N N
�ky2 t1 t2 t3
s2s1 sk� Ev�enementssyst�eme Symboliques Ca h�es
Num�eriquesR�esidus�Ev�enementsEstim�es (salves)Estimation
�(1) �(2) �(3) �(n)
Fig. II.2.11: �E helles de temps dans le as mono-mode. �Ev�enements : les observations(y1; : : : ; yn) sont index�ees par une horloge fondamentale ; �a des instants dis rets, suppos�esasyn hrones ave l'horloge des observations, se produisent les �ev�enements a h�es (pannes,non repr�esent�ees), qui se manifestent dans le mod�ele par des hangements syn hrones duparam�etre �. Estimation : sur des blo s de taille �xe N observations sont al ul�es les r�esidus(�1; : : : ; �k) asso i�es aux �ev�enements estim�es (s1; : : : ; sk), orrespondant soit �a l'o urren ed'au moins une d�efaillan e nouvelle, soit �a l'absen e de toute nouvelle panne sur le blo .p0t1 t00p1t01p0t0t1 t00t01 p1
(B)(A) t10t20Fig. II.2.12: Dis r�etisation d'une ma hine �a �etat/transition. Cas (A) : un seul type der�esorption. �A l'�etat sain (M(p0) = 1), la ma hine r�esout un on it entre deux transitions : lapanne t1 et l'attente t00. �A l'�etat d�efaillant, la ma hine r�esout un on it entre deux transitions :la r�esorption a lieu ou non. Cas (B) : deux types de r�esorption (r�eparation ou spontan�ee). �Al'�etat sain le on it oppose deux transitions, tandis qu'�a l'�etat de panne, le on it oppose troistransitions. 67

Con lusions
t7;0p7;0t3;0t1;0p1;0
p5;0t07;0 t07;1
t05;0
t2;0t1;1t3;1 t2;1 t02;0
t05;1t5;1t03;0 t5;2 Conjon tion de deux graphes de pannes Gd
p3;0 p3;1 t03;1t02;1
p7;1t7;1p5;1t5;0
p1;1 p2;0p2;1 p6;0t6;0t6;1p6;1t06;1t01;0 t01;1 t06;0Fig. II.2.13: Dis r�etisation de la onjon tion de deux arbres de d�efaillan es ; as o�u toutes lesr�esorptions sont observ�ees.
68

Con lusions
y1 y3 ytn0 tn ty2 y�m+1�my�1+1�1t1
R�esidus�Ev�enementsEstim�esCertains�Ev�enementsN N
��02��01NN
��13 ��mk
t2 t3yt3yt2yt1
s1 s2 s3 skPerduesObservations
�m�1
� Ev�enementssyst�eme
EstimationNum�eriquesSymboliques Ca h�esSymboliques observ�es �m�1
�0
�(2)�(1) �(3) �(n)
Fig. II.2.14: �E helles de temps dans le as multi-modes dans le as g�en�eral. En plus du s h�emapr�e �edent, on tient ompte des �ev�enements dis rets observ�es et d�eterministes (�1; : : : ; �m).Les blo s de donn�ees non a hev�es lors de l'o urren e d'un tel �ev�enement sont omis. Les obser-vations (y1; : : : ; yn) sont index�ees par une horloge r�eguli�ere n ; �a des instants dis rets, suppos�essyn hrones ave l'horloge des observations, se produisent les �ev�enements a h�es (pannes) ; surdes blo s de taille �xe N observations sont al ul�es les r�esidus (��01 ; : : : ; ��mk ) asso i�es aux�ev�enements estim�es (s1; : : : ; sk) sous ontrainte des �ev�enements observ�es (�1; : : : ; �m).69

Con lusions
T1T2
P2t202;1 t102;1t2;0P1t12;1t22;1p2;1 p2;0t02;1 �1�2
�2�1�1�2
Fig. II.2.15: Dis r�etisation de la ma hine �a �etat/transition E2 (�gure II.2.10), dont l'a tivit�ed�epend du mode de fon tionnement, et dont la r�eparation est exog�ene. La ma hine a deuxtransitions de pannes possibles : t12;1 autoris�ee dans le mode 1 et t22;1 autoris�ee dans le mode 2.L'ajout de deux bou les �el�ementaires (p2;0; t102;1; p2;0) et (p2;0; t202;1; p2;0), permet dans haquemode de onsid�erer les �ev�enements en on it (nouvelle d�efaillan e, absen e de d�efaillan e).Idem pour l'�etat d�efaillant : la r�esorption pouvant avoir lieu dans tous les modes, la bou le(p2;1; t02;1; p2;1) n'est pas gard�ee.
70

Con lusions
T1T2
t07;1t06;1
P1 P2t2;0 p6;0p3;0 t3;0t03;1
t01;1 t6;0t1;0p1;0 p1;1 t12;1t22;1 t6;1t1;1t3;1
t5;0p5;0 Graphe de pannes syn hronis�e dis r�etis�e Gd
t01;0p3;1 t03;0
p2;1 p6;1�1
�2�2�1
t07;2t7;1�2�2�1t202;1t02;0 t06;0�1
�1�1
t102;1�2
p5;1p7;1p7;0t5;2�1�1 t5;1t05;1 t05;2 t7;0
p2;0 �2�1�2�1Fig. II.2.16: Dis r�etisation de deux arbres de d�efaillan es, as multi-modes.
71

Con lusions
72

Troisi�eme partieAlgorithmes de surveillan e
73


Chapitre 1Appro he markovienne de lasurveillan e1.1 MotivationsNous onsid�erons dans e hapitre les syst�emes que nous appelons mono-mode, ou �a unseul mode de fon tionnement, non r�eparables, par opposition aux syst�emes multi-modesr�eparables que nous traiterons au hapitre suivant.Un syst�eme mono-mode a �et�e d�e�ni au hapitre pr�e �edent : 'est un syst�eme pourlequel un unique mod�ele (dynamique i i) param�etr�e, du type du mod�ele d'�etat (II.1.1)par exemple, suÆt �a d�e rire ses dynamiques internes sur une p�eriode donn�ee. Un syst�emenon-r�eparable est tel qu'au une a tion de maintenan e n'est tol�er�ee sur la p�eriode o�u lesyst�eme est surveill�e. Ces restri tions visent �a disposer d'un mod�ele dynamique purementsto hastique, ex luant par ons�equent les �ev�enements i-dessus qui sont ertains, au senso�u ils sont observ�es sans au une in ertitude, et qui modi�ent la dynamique interne dusyst�eme de mani�ere non-sto hastique1.Dans le ontexte sto hastique de e hapitre, nous �etablissons une mod�elisation parmod�ele de Markov Ca h�e (ou Hidden Markov Models {HMM). A l'aide d'un algorithmede programmation dynamique lassiquement asso i�e aux HMM, l'algorithme de Viterbi,nous proposons une nouvelle appro he pour la surveillan e en ontinu de es syst�emes.Nous montrons dans un se ond temps qu'il est possible de onstruire le mod�ele deMarkov a h�e en utilisant les informations de �abilit�e et de risque mod�elis�ees au hapitreII.2 sous la forme de r�eseaux de Petri sto hastiques et les liens existant entre r�eseaux dePetri et ha�nes de Markov.1.2 Mod�eles de Markov a h�es1.2.1 Cha�ne de Markov �a temps dis retUne ha�ne de Markov (CM) mod�elise le fon tionnement suivant : on suppose que l'�etatdu syst�eme s prend ses valeurs dans un ensemble (ou alphabet) �ni � = f1; : : : ; Eg. On1Notons que la mod�elisation markovienne des syst�emes dans une optique d'�etudes de �abilit�e ou dedisponibilit�e [23, 18℄ prend en ompte sto hastiquement les r�eparations, e qui n'est pas notre as. Enrevan he des pannes fugitives ou intermittentes, dont l'apparition et la disparition sont spontan�ees, seront onsid�er�ees. 75

Cha�ne de Markov Ca h�ee HMMnote sk le kieme �etat visit�e par le syst�eme et on suppose onna�tre une distribution :�i = P(s0 = i) (III.1.1)sur l'�etat initial. Ave une probabilit�e onnue, l'�etat peut ensuite �evoluer, et passer desk = i �a sk+1 = j. De mani�ere g�en�erale, ette probabilit�e d�epend de la s�equen e d'�etats,ou traje toire, par ourue depuis l'instant initial. Mais dans le as des mod�eles de Markovdu premier ordre onsid�er�es i i, ette d�ependan e s'arrete �a l'instant pr�e �edent k :P(sk+1 = ik+1jsk = ik; sk�1 = ik�1; : : : ) = P(sk+1 = ik+1jsk = ik)pour i0; : : : ; ik+1 2 �. Si es probabilit�es onditionnelles sont de plus ind�ependantes del'instant de hangement d'�etat, la CM est dite homog�ene, e que nous onsid�ererons dans lasuite et on peut d�e�nir les probabilit�es de transition de la ha�ne de Markov par la matri ea = faijg : aij = P(sk+1 = jjsk = i); 8i; j 2 � (III.1.2)telles que : Xj aij = 1 8i; j 2 �Le mod�ele ainsi onstruit prend le nom de ha�ne de Markov :D�e�nition 1.1 Une ha�ne de Markov CM est d�e�nie par :CM = (�; �;a)ave � un espa e d'�etat �ni, � une distribution de probabilit�e sur l'�etat initial et a lamatri e des probabilit�es de transition.1.2.2 Cha�ne de Markov Ca h�eeL'�etat s dont la dynamique markovienne est onnue n'est pas n�e essairement obser-vable. Consid�erons, omme nous l'avons annon �e dans le s h�ema II.2.11 du hapitre II.2,qu'une observation o 2 Rd soit �emise �a haque fran hissement d'une transition Tij entreles �etats sous-ja ents i et j de la ha�ne de Markov et qu'une probabilit�e onditionnellepour ette �emission soit onnue : P(ojTij) = P(oji; j) (III.1.3)Pour toutes les transitions Tij et pour toutes les observations o, on suppose que la famillede lois Po = nP(oji; j)o est onnue.Remarque 1.1 L'int�eret d'ajouter une \ ou he" au mod�ele de Markov provient de eque plusieurs �etats i; j; : : : , voire tous quand o est �a densit�e Gaussienne, peuvent etre �a lasour e de ette observation. Bien sur, si la orrespondan e entre �etat et observation estbiunivoque, elle n'apporte au un pouvoir de mod�elisation suppl�ementaire �a la ha�ne deMarkov initiale. 76

HMM Appli ation de la mod�elisation markovienne �a la surveillan eCe double pro essus sto hastique �a temps dis ret, dont le pro essus sous-ja ent estinobserv�e, ou a h�e, est un mod�ele de Markov a h�e, ou HMM :D�e�nition 1.2 (HMM) Un mod�ele de Markov a h�eM = (�;;a;Po; �) est d�e�ni par :1. l'espa e d'�etat �,2. l'espa e des observations ,et par les trois familles de distribution de probabilit�es (a;Po; �).1.2.3 Appli ation de la mod�elisation markovienne �a la surveillan eLe HMM que nous onsid�erons pour la surveillan e a les ara t�eristiques suivantes :Cha�ne de Markov a h�ee : on pr�e ise su essivement haque omposante de la CM.1. Chaque �etat du HMM repr�esente une on�guration de pannes � � F (d�e�nition1.1), que nous appellerons un �etat de panne. Par ons�equent nous identi�onsl'ensemble des �etats du HMM �a un sous-ensemble des parties de F :� � P(F)On notera dans la suite de la meme mani�ere un �etat du HMM et une on�gu-ration de pannes �.Dans le domaine num�erique, le lien entre les pannes et les observations a �et�eobtenu en deux temps :(a) on suppose qu'il existe une bije tion de l'ensemble des pannesF sur un sous-ensemble des parties Ip de I = f1; : : : ; dg, I �etant l'ensemble des indi esdes omposantes du ve teur � du syst�eme (II.1.1) ; les on�gurations depannes sont par suite d�e�nies par la r�eunion (II.1.3) :I� = [p2�Ipdes indi es asso i�es aux pannes p pr�esentes dans l'�etat (ou la on�guration)de pannes �.(b) �A une on�guration de panne, et don �a un �etat de panne s = � du HMMpeuvent orrespondre deux objets :i. un �e art ve toriel �� d�e�ni en (II.1.7), d'amplitude et de dire tion quipeuvent etre onnues a priori ou bien identi��ees ;ii. le s.e.v. �� (II.1.8) dans lequel �evolue l'�e art ��. Ce hoix s'imposesi d'une part il existe une panne au moins pour laquelle au un a priorin'est disponible, ou bien si le mod�ele n'est pas globalement identi�able.2. Probabilit�es initiales � (III.1.1) des �etats de la CM : ette distribution surl'ensemble � est suppos�ee onnue, elle repr�esente la on�an e que l'on a dansl'�etat de sant�e du syst�eme �a son d�emarrage.3. Matri e a des probabilit�es de transition entre �etats : elle d�epend des liaisons de ause �a e�et entre les �etats de panne.77

Estimation bay�esienne pour la surveillan e HMMObservations : elles seront onstitu�ees par les r�esidus � g�en�er�es par l'appro he asymp-totique lo ale : o = �L'espa e des observations est le domaine de d�e�nition du r�esidu (voir se tion II.1.1) : = Rd ; ave d = dim(�)o�u � est l'espa e du param�etre � du mod�ele ontinu (II.1.1).Lois onditionnelles aux transitions : la loi du r�esidu onditionnelle aux transitionsTij = (i; j) est onnue : elle est �egale �a sa vraisemblan e onditionnellement �a l'�etatd'arriv�ee j de la transition, i.e. �a elui sous lequel les observations ont �et�e g�en�er�ees :P[ojTij ℄ = P[�jj℄Nous avons vu que la loi du r�esidu a une expression di��erente suivant la signi� ationde l'�etat de la CM, nous l'expli iterons plus loin dans ha un des as.Le mod�ele de Markov a h�e est don ompl�etement sp�e i��e pour une appli ation �a lasurveillan e.Remarque 1.2 Notons que la vraisemblan e onditionnelle �a un �etat de panne est i id�e�nie dans un ontexte statistique qui fournit une m�etrique de omparaison entre lasignature de r�ef�eren e et les hypoth�eses de panne. Au ontraire, l'appro he IMM [68℄utilise une m�etrique ad-ho entre les observations, dont on onna�t les limites pour lespetits hangements : 'est une motivation essentielle pour l'utilisation de l'appro he lo ale.1.2.4 Estimation bay�esienne pour la surveillan eEn supposant maintenant le mod�ele d'�etat (II.1.1) pr�ealablement identi��e, et en ser�ef�erant de nouveau au s h�ema II.2.11, on s'int�eresse au al ul de la probabilit�e ondi-tionnelle d'une s�equen e d'�etats a h�es (i1; : : : ; i�) onnaissant une s�equen e de r�esidus(�1; : : : ; ��) et le mod�eleM. D�eterminer ensuite la s�equen e d'�etats expliquant au mieux lesobservations est �a la fois le probl�eme de la surveillan e et du diagnosti , omme remarqu�een [68℄.Dans un ontexte bay�esien, l'appro he onsiste �a estimer la s�equen e d'�etats a h�es(s1; : : : ; s�) au maximum de vraisemblan e a posteriori, onditionnellement �a une s�equen eobserv�ee (�1; : : : ; ��) de r�esidus. Pour ela, deux te hniques peuvent etre utilis�ees :{ Une mani�ere plus dire te onsiste �a her her les �etats individuels les plus probablestels que : s�k = argmaxi P(sk = ij�1; : : : ; ��); k = 1; : : : ; �Or, il est onnu que les s�equen es ainsi trouv�ees ne sont pas n�e essairement valideslorsque l'on onstruit la traje toire ompos�ee des s�k; k = 1; : : : ; � : en e�et, il peutexister un k tel que s�k = i et s�k+1 = j ave deux �etats i et j tels que aij = 0, rendanterron�ee la traje toire diagnostiqu�ee prise dans son ensemble.78

Algorithme pour HMM{ Un meilleur rit�ere, du point de vue de la dynamique des pannes, onsiste �a her herla s�equen e optimale maximisant la probabilit�e onditionnelle :maxi1;::: ;i� P(s1 = i1; : : : ; s� = i� j�1; : : : ; ��) (III.1.4)L'estimation au maximum de vraisemblan e a posteriori de la s�equen e d'�etats onnaissant la s�equen e d'observations, sera i i lassiquement r�ealis�ee par l'algo-rithme de Viterbi [48℄.Nous abr�egerons l'expression (III.1.4) en :maxi1;::: ;i� P(i1; : : : ; i� j�1; : : : ; ��)1.3 Algorithmes de Viterbi pour la surveillan e : as mar-kovienLa maximisation jointe de la probabilit�e onditionnelle (III.1.4) repose lassique-ment sur une te hnique de programmation dynamique. Notons tout d'abord qu'il est�equivalent de re her her l'argument maximisant P(i1; : : : ; i� j�1; : : : ; ��) et elui maximi-sant P(i1; : : : ; i� ; �1; : : : ; ��) : en e�et, la r�egle de Bayes permet d'�e rire :P(i1; : : : ; i� j�1; : : : ; ��) = P(i1; : : : ; i� ; �1; : : : ; ��)P(�1; : : : ; ��) (III.1.5)et la onstante de normalisation P(�1; : : : ; ��), �etant ind�ependante des �etats estim�es, nejoue au un role dans l'op�eration.L'algorithme de Viterbi onsiste �a exploiter la r�e urren e que v�eri�e la fon tion valeurVk(j) : Vk(j) = maxi1;::: ;ik�1 P(�1; : : : ; �k ; i1; : : : ; ik�1; sk = j) (III.1.6)qui est la probabilit�e maximale parmi toutes les traje toires de longueur k, dont l'�etat�nal est j, et ayant g�en�er�e les observations �1; : : : ; �k.�Equation de la r�e urren eD�eveloppons (III.1.6) par la r�egle de Bayes :Vk(j) = maxi1;::: ;ik�1 P(�k j�1; : : : ; �k�1 ; i1; : : : ; ik�1; sk = j)P(�1; : : : ; �k�1 ; i1; : : : ; ik�1; j)et, en utilisant su essivement la propri�et�e markovienne et l'hypoth�ese d'ind�ependan e desr�esidus (paragraphe 1.2.2), on obtient :Vk(j) = maxi1;::: ;ik�1 P(�k j j; ik�1)P(jjik�1)P(�1; : : : ; �k�1 ; i1; : : : ; ik�1)et omme le r�esidu est onnu onditionnellement �a l'�etat d'arriv�ee j, e i se simpli�e en :79

Algorithme de surveillan e et diagnosti ave a priori Algorithme pour HMMVk(j) = P(�k j j)maxi1;::: ;ik�1 P(jjik�1)P(�1; : : : ; �k�1 ; i1; : : : ; ik�1)= P(�k j j)maxik�1 P(jjik�1) maxi1;::: ;ik�2 P(�1; : : : ; �k�1 ; i1; : : : ; ik�1)| {z }Vk�1(ik�1)On obtient don : Vk(j) = P(�k j j)maxi aijVk�1(i) (III.1.7)qui est l'�equation de r�e urren e �a la base de l'algorithme de Viterbi.Prin ipe de l'algorithme de ViterbiL'algorithme de Viterbi suit les quatre �etapes suivantes :1. �A l'instant initial : V0(i) = �i; 8i 2 � (III.1.8)2. Du blo initial au blo �nal, on e�e tue la r�e urren e (phase avant) :Vk(j) = maxi P(�k j j)aijVk�1(i) (III.1.9)et on sto ke l'argument optimal dans un tableau :Sk(j) = argmaxi P(�k j j)aijVk�1(i) (III.1.10)3. L'�etat �nal optimal est hoisi par :i�� = argmaxi V�(i)4. La traje toire optimale est obtenue par une pro �edure de par ours arri�ere desmeilleurs ant�e �edents �a haque pas du tableau Sk(j).On �etablit dans les deux paragraphes suivants les algorithmes de surveillan e et dediagnosti en pr�esen e et en absen e d'a priori sur les amplitudes et dire tions de han-gement.1.3.1 Algorithme de surveillan e et diagnosti ave a prioriLa distribution asymptotique du r�esidu �(�0; N) est onnue (II.1.22) pour une on�-guration de pannes � : �(�0; N) � N ( J���; � ) (III.1.11)ave �� d�e�ni en (II.1.21), par l'appro he asymptotique lo ale :��pN = �� (III.1.12)80

Algorithme pour HMM Algorithme de surveillan e et diagnosti ave a prioriLa log-vraisemblan e du r�esidu sous l'hypoth�ese de la on�guration � est donn�ee par :lnP(�j��) = �12 (� � J���)T ��1 (� � J���) +K (III.1.13)o�u K ne d�epend pas de �.Nous faisons i i de ette expression une interpr�etation parti uli�ere, justi��eeexp�erimentalement par les simulations : bien que la loi (III.1.11) soit �etablie asymptoti-quement (pour N !1), dans un traitement par blo s, N est �ni, et doit don etre hoiside telle sorte que (III.1.11) soit v�eri��ee : pratiquement, il faut a umuler suÆsammentd'�e hantillons pour que le m�elange soit orre tement d�e rit par une gaussienne, e qui esten fait rapidement v�eri��e dans les simulations (100 �e hantillons suÆsent souvent pourl'exemple pr�esent�e dans la partie IV).On propose d'utiliser l'a priori sur l'�e art param�etrique en inje tant l'�equation(III.1.12) dans (III.1.13) pour obtenir :�(�0; N) � N � J�pNÆ�� ; � � (III.1.14)et pour une on�guration donn�ee � = j (on notera alors Æ�� = Æ�j et J� = Jj), on �e rit :lnP(�(�0; N) jj) , �12 ��(�0; N)� JjpNÆ�j�T ��1 ��(�0; N)� JjpNÆ�j� (III.1.15) omme loi des observations dans la r�e urren e de Viterbi, o�u la onstante additive K dans(III.1.13) est omise ar ommune �a tous les �etats j. Ave la loi (III.1.15), l'algorithmede Viterbi s'�e rit en passant au logarithme et en onservant la notation Vk(j) pour lelogarithme de la fon tion valeur :Algorithme de surveillan e et diagnosti ave a priori sur l'amplitude de han-gement1. Initialisation : V0(i) = ln�i; 8i 2 �,2. R�e urren e : Pour k = 1; : : : ; � et pour tout j 2 � :8>><>>: Vk(j) = maxi � lnaij + Vk�1(i)� � 12 ��k(�0; N)� JjpNÆ�j�T ��1 ��k(�0; N)� JjpNÆ�j�Sk(j) = argmaxi � lnaij + Vk�1(i)� (III.1.16)3. �Etat �nal optimal : i�� = argmaxi V�(i)4. Par ours arri�ere : k = �; : : : ; 1; i�k�1 = Sk(i�k)81

Algorithme sans a priori sur l'amplitude de hangement Algorithme pour HMM1.3.2 Algorithme sans a priori sur l'amplitude de hangementDans les as o�u l'on ne dispose pas de l'a priori n�e essaire pour toutes les pannes, onasso ie �a l'�etat j un s.e.v. �j dans lequel l'�e art Æ�j (en reprenant les notations introduitesau paragraphe pr�e �edent) peut se trouver. On se pla e alors dans la situation o�u ni l'am-plitude ni la dire tion de l'�e art ne sont onnues : 'est le degr�e minimal de onnaissan ea priori.Pour ela, nous allons montrer que, pour l'obje tif de surveillan e et de diagnosti , le al ul de la vraisemblan e g�en�eralis�ee peut etre rempla �e par elui de tests d'hypoth�esesdont l'expression analytique est onnue et al ulable eÆ a ement.Lien ave les tests d'hypoth�eses L'id�ee est la suivante : reprenons la r�e urren e(III.1.16), mais sous son expression en � :Vk(j) = maxi � lnaij + Vk�1(i)�� 12 lJj�j (�k)ave lJj�j (�k) = �2 lnP(�kj�j) (III.1.13). Comme l'�e art �j n'est pas onnu, nous prenonsson estim�ee au maximum de vraisemblan e (II.1.24) :�j = arg max�2�j �lJ�(�k)soit, Vk(j) = maxi � lnaij + Vk�1(i)� � 12 lJj �j (�k)Ajoutons puis retran hons 12 l0(�k) (II.1.23), log-vraisemblan e de �k sous H0 :Vk(j) = maxi � lnaij + Vk�1(i)��12 lJj �j (�k) + 12 l0(�k)| {z }A � 12 l0(�k)| {z }B (III.1.17)o�u l'on re onna�t dans A :tj(�k) = l0(�k)� lJj �j (�k)= l0(�k) + max�2�j (�lJ�(�k))qui est un test de sensibilit�e (voir (I.2.11)) entre les deux hypoth�eses� H0 : � = 0Hj : � 2 �j (III.1.18)On peut par ons�equent reformuler (III.1.17) en rempla� ant A par son expression et enomettant la onstante B ar elle est identique pour tous les �etats j.On peut, en suivant ette id�ee, reformuler de mani�ere g�en�erale le probl�eme de lasurveillan e et du diagnosti en absen e d'information a priori sur les hangements pa-ram�etriques. 82

Algorithme pour HMM Con lusionAlgorithme de surveillan e et diagnosti sans a priori On propose de onstruirel'algorithme �a partir d'une fon tion valeur g�en�eralis�ee, l'expression initiale (III.1.6) deve-nantVk(j) , maxi1; : : : ; ik�1�(1) 2 �i1 ; : : : �(k � 1) 2 �ik�1 ; �(k) 2 �j P(�1; : : : ; �k ; i1; : : : ; ik�1; j) (III.1.19)o�u �(k) est la valeur du param�etre � sur le blo k. En d�eveloppant (III.1.19) par lar�egle de Bayes, on obtient l'expression (III.1.7) sur laquelle porte maintenant une se ondemaximisation sur �(k) 2 �j e�e tu�ee sur le blo k :Vk(j) = maxi; �2�j � lnaij + Vk�1(i)� 12 lJ�(�k)�En reprenant la d�emar he pr�esent�ee au paragraphe pr�e �edent, on a su essivement :Vk(j) = maxi �2�j � lnaij + Vk�1(i) � 12 lJ�(�k)�+ 12 l0(�k)� 12 l0(�k)= maxi � lnaij + Vk�1(i)� +max�2�j 12�l0(�k)� lJ�(�k)��� 12 l0(�k)= maxi � lnaij + Vk�1(i)� + 12 tj(�k)� 12 l0(�k)Comme seul l'argument de la maximisation est re her h�e, on �e rit �nalement :Vk(j) = maxi � lnaij + Vk�1(i)� + 12 tj(�k) (III.1.20)On peut donner maintenant l'algorithme de Viterbi sur lequel repose la surveillan edans le as markovien sans a priori sur l'amplitude de hangement.1. Initialisation : V0(i) = ln�i; 8i 2 �,2. R�e urren e : Pour k = 1; : : : ; �, pour tout j 2 � :8>><>>: Vk(j) = maxi � lnaij + Vk�1(i)� + 12 tj(�k)Sk(j) = argmaxi � lnaij + Vk�1(i)� (III.1.21)3. �Etat �nal optimal : i�� = argmaxi V�(i)4. Par ours arri�ere : k = �; : : : ; 1; i�k�1 = Sk(i�k)1.3.3 Con lusionOn a don �etabli dans un ontexte bay�esien g�en�eral une nouvelle appro he de la sur-veillan e et du diagnosti , pour deux niveaux de onnaissan e a priori sur les pannes. Nousallons montrer maintenant que e mod�ele peut etre onstruit ompl�etement en utilisantl'information a priori stru turelle et statistique sur les o urren es de pannes.83

A priori1.4 Une onstru tion de l'a prioriNous proposons dans ette se tion un moyen onstru tif pour �etablir le HMM M �apartir de l'information a priori sur les d�efaillan es ontenues dans les analyses de risque et(ou) de �abilit�e disponibles sur ertaines installations, notamment les arbres de d�efaillan es(AD) dont une onversion sous forme de RdP a men�e �a la onstru tion du graphe depanne (voir par exemple la �gure II.2.7 pour une telle onversion). La dis r�etisation de ette dynamique des pannes a �et�e abord�ee �a la se tion II.2.5.2, et nous supposerons dansla suite de e hapitre que l'on dispose du mod�ele a priori onstitu�e par le graphe de pannedis r�etis�e, not�e R1.Nous examinons d'abord la onstru tion de la ha�ne de Markov, puis en introduisantles observations, nous d�e�nissons le HMM omplet.1.4.1 Constru tion de la ha�ne de MarkovDynamique a h�ee du graphe de pannePlusieurs simpli� ations sur le graphe de panne doivent etre e�e tu�ees pr�ealablement.�Ev�enements observ�es : Pour les syst�emes mono-mode, le graphe de ontrole ne joueau un role et sera don omis ; il en est de meme des gardes bool�eennes sur l'�etat du graphede ontrole.Pour les syst�emes non-r�eparables, les transitions de r�eparations ne orrespondent plus�a au un �ev�enement sur le syst�eme, et peuvent etre �elimin�ees. Notons que les r�esorptionsspontan�ees de pannes sont onserv�ees �a ondition qu'elles soient probabilis�ees.Pla es redondantes : Pour haque ma hine �a �etat/transition, le marquage des pla esd'�etat sain se d�eduit de elui des pla es de panne ; les premi�eres �etant don redondantesave les se ondes, on hoisit de onserver les se ondes et on �elimine les premi�eres.On appelle RS = (PS ;Ts; LS) le RdP simpli��e. Il est repr�esent�e �gure III.1.1.RdP et �abilit�e : RdP Sto hastiqueLes analyses de �abilit�e munissent en g�en�eral les sommets des arbres de d�efaillan esde taux de d�efaillan e qui, s'ils sont onstants, sont les param�etres de lois de dur�eesde vie exponentielles, d�eterminant les probabilit�es d'o urren e d'un �ev�enement dans unintervalle donn�e (voir annexe sur les RdP). Nous supposons es taux onnus autant pourles d�efaillan es premi�eres (les feuilles de l'arbre de d�efaillan e) que pour les d�efaillan esse ondes (sommets ompos�es) [58℄, et :Hypoth�ese 1.1 (Information a priori sto hastique) �A haque transition ti 2 Ts estasso i�ee une probabilit�e P(ti) onnue a priori.Le RdP RS est don un RdP sto hastique (RdPS).Remarque 1.3 C'est pr�e is�ement l'utilisation de ette information qui permet de s'af-fran hir de toute identi� ation du mod�ele sto hastique dis ret, mettant en d�efaut lesmod�eles du type IMM (se tion I.2.4). 84

A priori Constru tion de la ha�ne de MarkovE5
E3E2E1
p3t5t4E4 p4
p2p1t9
t1 t2t3t8 t7 t6Fig. III.1.1: Graphe de pannes RS , pour l'algorithme markovien.RdPS et ha�ne de MarkovIl est rappel�e �a la se tion A.4.2, qu'il existe un lien entre les RdP sto hastiques et lespro essus de Markov �a �etat �ni [59℄ : on montre que le pro essus de marquage du RdPS �atir exponentiel est isomorphe �a un pro essus de Markov homog�ene, dont les probabilit�esde transition sont d�etermin�ees �a partir de elles du RdPS initial repr�esent�e �a la �gureIII.1.1 et en fon tion de la p�eriode d'�e hantillonnage.Le mod�ele a priori issu des �etudes risque et de �abilit�e permet don de onstruire ompl�etement la CM pour la surveillan e. La mod�elisation par HMM sera a hev�ee unefois le lien ave les observations obtenu, apr�es avoir interpr�et�e le RdP initial en termesd'indi es du ve teur �.RdP et dynamique des pannesTout d'abord, haque pla e du RdPS est asso i�ee �a une panne de F . La notation ommune p, pour pla e et panne, permettra de onfondre les notions et les notations ; haque marquage a essible Mi 2 R (qui est, voir annexe A.4, un �etat d'une ha�ne deMarkov) repr�esente une on�guration de pannes � 2 P(F), et don par la se tion III.1.2.3,on a : � = R e qui d�e�nit onstru tivement la stru ture de la ha�ne de Markov �a partir de la stru turesur les pannes PS . La distribution sur les marquages initiaux P0 = P(M0), est obtenue �apartir de la distribution de probabilit�e pour haque panne du RdPS ; elle d�e�nit don ladistribution � (III.1.1) sur les �etats initiaux du HMM.85

Constru tion des lois des observations Synth�eseNotons que l'ensemble des on�gurations de pannes n'avait pas �et�e d�e�ni onstru ti-vement : 'est hose faite pour un marquage initial donn�e, l'ensemble des on�gurationsde pannes est l'espa e d'a essibilit�e R(M0), e qui permet d'�etablir du meme oup lamatri e de transition a.1.4.2 Constru tion des lois des observationsRdP et mod�elisation param�etriqueLes pla es asso i�ees aux pannes d�e�nissent bije tivement l'ensemble fIp; p 2 PSg. Par ons�equent, un marquage orrespondant �a une on�guration � sera not�e M�, et est telque : I� = [p2PS; M�(p)=1Ip (III.1.22)Ce i permet de onstruire, onditionnellement �a un marquage donn�e M�, la loi desobservations �, onnue pour toute ombinaison de panne I� et qui a �et�e �etablie en (II.1.22).Ce i a h�eve la mod�elisation par HMM.1.4.3 Con lusionL'utilisation de l'information issue des �etudes de risques et de �abilit�e r�ealis�ees sur ertaines installations, permet de onstruire un a priori stru turel sous forme de ha�nede Markov, e qui pr�esente l'avantage de d�eterminer �a la fois les on�gurations de pannes�a prendre en ompte et leur relation ausale, mais �egalement de mod�eliser leur dyna-mique dans un ontexte sto hastique. Gra e �a la mod�elisation param�etrique et l'appro heasymptotique lo ale, on a d�e�ni un adre observable pour la dynamique a h�ee de laCM, et don �etabli ompl�etement le HMM utilis�e dans la d�emar he de surveillan e et dediagnosti propos�ee �a la se tion III.1.3.1.5 Synth�eseAppro he markovienne de la surveillan eNous avons d�evelopp�e dans e hapitre une te hnique d'estimation bay�esienne pour lasurveillan e dans un adre HMM, dont l'�elaboration pro �ede en trois �etapes :1. un �etat de la Cha�ne de Markov (CM) est une on�guration (ou un �etat) de pannesdu syst�eme. Est propos�ee une pro �edure de onstru tion de la CM utilisant l'infor-mation a priori sur la �abilit�e stru turelle du syst�eme disponible sur ertaines ins-tallations industrielles ; ette information peut de plus souvent etre �etablie a priori.On onstruit ainsi un mod�ele g�en�erateur des s�equen es d'�etats de pannes ;2. une mod�elisation param�etrique de la PO �a �etat ontinu permet de relier son �etat depanne aux ara t�eristiques statistiques des observations, ou �a des fon tions \intelli-gentes" de es observations, notamment les r�esidus de surveillan e. Cette relation estexpli ite dans le as de la g�en�eration du r�esidu par l'appro he asymptotique lo ale,pierre d'angle de la d�emar he ;3. �nalement, la s�equen e des �etats de pannes optimaux au sens du maximum de vrai-semblan e a posteriori est estim�ee r�e ursivement par un algorithme de Viterbi.86

Synth�eseNous avons �etabli deux algorithmes selon que l'on dispose ou non d'un a priori surles amplitudes des �e arts param�etriques, e qui nous onduit dans la n�egative �a uneestimation a posteriori g�en�eralis�ee et �a l'utilisation des r�esultats onnus dans le domainedes tests d'hypoth�eses omposites.L'algorithme r�esulte fondamentalement de la d�emar he d'�elaboration du r�esidu(appro he asymptotique lo ale), qui pr�esente la parti ularit�e d'obtenir une distributiondu r�esidu expli ite en fon tion de l'�etat de panne. En ela, notre appro he HMM estradi alement di��erente de elle propos�ee dans l'appro he Intera ting Multiple Model(se tion I.2.4) : les observations num�eriques sont utilis�ees dans ette derni�ere au traversd'une distan e minimale �a un ensemble d'observations issues de mod�eles d�efaillantsfon tionnant en parall�ele. La surveillan e est fond�ee sur un omportement externed�efaillant, sour e d'ambigu��t�e entre les pannes se manifestant de mani�ere similairedans les sorties mais ave des ara t�eristiques dynamiques di��erentes. Nous utilisonsune omparaison dire te entre les observations et un �etat interne d�efaillant, moins am-bigu que le pr�e �edent ar il �evite les orr�elations entre �etats de panne dans les observations.Remarquons ependant que les grands hangements de omportements dus auxd�efaillan es, peuvent mettre notre appro he en d�efaut, ar sa validit�e d�epend de ellede l'approximation asymptotique, qui peut ne plus etre valable \trop" loin du param�etrenominal ; en revan he, les IMM sont eÆ a es dans e as, mais ils peuvent etre inop�erantspour de petits hangements, e qui est l'obje tif initiallement �x�e. Notons que la dyna-mique des pannes, telle que nous la on evons, peut etre int�egr�ee dans les IMM : en e�et,la on eption du mod�ele de Markov a h�e dans [68℄ n'est pas expli it�ee, et nous pensonsqu'utiliser les arbres de d�efaillan es est une information pertinente.Limites de l'appro he markovienneElles sont de deux natures di��erentes, li�ees pour l'une au omportement algorithmiqueet pour l'autre �a la limitation �a un type de syst�emes parti uliers :Comportement algorithmique : on en retient deux aspe ts :1. le ph�enom�ene d'explosion ombinatoire est onnu pour les mod�eles de Markov :le nombre d'�etats ard(�) ro�t exponentiellement en fon tion du nombre depannes ard(F) ;2. de plus, si au un a priori sur les amplitudes d'�e art n'est disponible, il est onnu que les tests de sensibilit�e sont tr�es sensibles, leur valeur roissant ra-pidement en fon tion du nombre de pannes pr�esentes : dans l'algorithme deViterbi, l'�equilibre entre a priori (a) et observation (�) peut etre pr�e aire. Ceprobl�eme, mentionn�e dans [15℄, onstitue le point faible des mod�eles ave apriori �xe, i.e. qui n'ont au une latitude d'adaptation.Prin ipales limites m�ethodologiques :1. l'oubli du pass�e orrespond �a des lois de dur�ees de vie de type exponentiel, oug�eom�etrique en temps dis ret, e qui peut etre ontraignant ;2. le adre stri tement sto hastique limite par hypoth�ese la m�ethode aux syst�emesnon-r�eparables, mono-mode ; 87

Synth�ese3. meme dans le as de petits syst�emes non-r�eparables, l'appro he markoviennepr�esente une limite importante : par d�e�nition des RdP, deux transitions on ur-rentes sont stru turellement ind�ependantes l'une de l'autre. Or, l'ordre de tirdes transitions on urrentes est probabilis�e dans le HMM puisque les proba-bilit�es de transitions sont d�e�nies entre �etats de panne et non pas entre lespannes elles-memes. Restituer une dynamique sto hastique lo ale orresponddon �a une exigen e de modularit�e, permettant d'�eviter le re ours �a l'�etat depanne pour les it�erations du Viterbi, et d'envisager la r�epartition, obje tif vis�edans e m�emoire et onsid�er�e au hapitre III.2.L'exemple pr�esent�e dans la partie IV montre le fon tionnement de l'algorithme sur desdonn�ees simul�ees.
88

Chapitre 2Mod�eles hybridessto hastiques/non-sto hastiquespour la surveillan e2.1 MotivationsDans le hapitre pr�e �edent, nous avons trait�e du probl�eme de la surveillan e et dudiagnosti de syst�emes mono-mode et non r�eparables : le syst�eme surveill�e a �et�e onsid�er�esous un angle purement sto hastique dans un ontexte markovien.Nous proposons dans e hapitre d'�etendre le prin ipe de mod�elisation hybridenum�erique et symbolique �a des syst�emes dont les ara t�eristiques impliquent :1. la omplexit�e du fon tionnement ontinu : un seul mod�ele, d'�etat par exemple, nesuÆt pas �a d�e rire orre tement et �nement la relation entr�ee/sortie au ours de lavie du syst�eme. Un s�equen ement d�eterministe des modes de fon tionnement doitetre int�egr�e a�n de ommuter de mod�ele selon les p�eriodes d'a tivit�e du syst�eme ;2. la r�esorption des pannes : les r�eparations e�e tu�ees lors d'op�erations de maintenan emodi�ent de mani�ere d�eterministe et observ�ee l'�etat de panne du syst�eme, soit parrempla ement de mat�eriel, soit par remise en �etat ;3. la r�epartition de l'algorithmique de surveillan e : elle n�e essite de pouvoir prendre desd�e isions sur une partie du syst�eme ind�ependamment de l'�etat du reste du syst�eme.Or, la probabilisation du mod�ele a priori obtenue dans le adre de RdP sto has-tiques utilis�e au hapitre pr�e �edent, �etablit une d�ependan e statistique arti� ielleentre des �ev�enements ind�ependants stru turellement ( on urrents), e qui est ontra-di toire ave la r�epartition. La th�ese [2℄ propose un adre probabiliste re ouvrant une�equivalen e entre l'ind�ependan e statistique et l'ind�ependan e stru turelle dans le as des syst�emes �a �ev�enements dis rets purement non-d�eterministes. La meme re- her he de r�epartition peut etre entreprise pour les syst�emes ontinus, voire hybridesdans notre as, qui rendent inappli ables les algorithmes du hapitre pr�e �edent.Cette modularit�e peut etre obtenue �a deux onditions :Modularit�e de la dynamique a priori : la probabilisation du syst�eme �a�ev�enements dis rets ne doit plus re ourir �a une dynamique globale d'�etat mais�a une dynamique lo ale d'�ev�enements, e que permettent les r�eseaux de Petri89

Motivationspartiellement sto hastiques (PSPN) [2℄. Mais ils ne sont pas suÆsants puisqu'ilssont on� us pour mod�eliser les syst�emes de nature purement non-d�eterministe :les �ev�enements d�eterministes observ�es ne pouvant y etre pris en ompte, nousen proposons une extension que nous appelons PSPN hybrides.Modularit�e des observations : les lois des observations asso i�ees aux transitionsdu graphe de panne ne doivent plus etre d�e�nies onditionnellement �a l'�etatde panne d'arriv�ee mais onditionnellement �a la transition fran hie : en ef-fet, l'algorithme de Viterbi expos�e au hapitre pr�e �edent op�ere sur l'�etat depanne, �evidemment pour la ha�ne de Markov, mais aussi pour les observations.Maintenir une d�ependan e statistique des observations sur l'�etat de panne est ontradi toire ave l'exigen e de modularit�e, ar elle n�e essite non seulement la onstru tion expli ite d'un espa e d'�etat, e dont on her he �a s'a�ran hir, maissurtout d'e�e tuer une r�e urren e sur l'�etat meme, et non sur les �ev�enements,propri�et�e essentielle de la modularit�e (voir la th�ese [2℄ pour les motivations ini-tiales de ette appro he). L'appro he asymptotique lo ale pourra etre utilis�eepour sa possibilit�e de gestion des pannes d'int�eret et de nuisan e, sous-ja entes�a la notion de modularit�e dans un ontexte num�erique.Ce adre de mod�elisation que nous d�eveloppons dans e m�emoire ouvre alors lavoie �a la r�epartition de l'algorithmique de surveillan e, pour les syst�emes hybrides, onstituant ainsi l'un de ses prolongements.Nous nous pla� ons en ore dans un adre bay�esien pour la surveillan e s'inspirantde elui d�evelopp�e pour les PSPN \ lassiques". Un algorithme de Viterbi g�en�eralis�e, oupuzzle de Viterbi hybride, permettra, omme en [2℄, l'estimation r�e ursive de la s�equen ede panne optimale.Nous adoptons la pr�esentation "modulaire" suivante :{ des ription des ara t�eristiques du syst�eme hybride surveill�e ;{ onstru tion du mod�ele a priori hybride ;{ supposant la modularit�e des observations, onstru tion du puzzle de Viterbi pourles syst�emes hybrides ;{ d�e�nition et onstru tion de la modularit�e des observations.Nous r�e apitulons sur trois �gures les �etapes de la d�emar he, �a l'aide des entr�ees etdes sorties du syst�eme (l'installation surveill�ee), de son mod�ele pour la surveillan e et dela pro �edure d'estimation.Syst�eme hybride La des ription \fon tionnelle" du syst�eme surveill�e est repr�esent�ee�gure III.2.1. Elle aÆne la des ription initiale de la �gure II.1.1 en prenant en ompteles dynamiques des pannes ainsi que les a tions symboliques du ontrole- ommande(r�eparations et hangements de mode de fon tionnement).Les entr�ees du syst�eme sont de nature hybride :{ symboliques : les ommandes fournies par l'op�erateur (mar he for �ee, arretd'urgen e : : : ), 90

Motivationsp1p3 p2p4 p = �Dynamique despannes y1 � 3 y1 > 3y2 � 2
Composant 1 Composant 3Composant 2 y1 � 1y2 � 2
Ext�erieur du syst�eme Observations hybrides
1; u1 2; u2 3; u3 0; u0
Maintenan e Al�eas Bruits Op�erateur Syst�eme surveill�eu y
y u
Controle-Commande Dynamique �a �etat ontinu
Fig. III.2.1: Des ription du fon tionnement du syst�eme surveill�e : le syst�eme est isol�e du mondeext�erieur et ommunique ave lui par les a tions observ�ees et ertaines de l'op�erateur et parles �ev�enements non observ�es al�eatoires (pannes et bruit). La partie op�erative est onsid�er�eepar la dynamique �a �etat ontinu de ses omposants, pilot�ee s�equentiellement par un automated�eterministe (de Controle-Commande (CC) repr�esent�e par un Graf et), par l'interm�ediaire de onsignes symboliques (mar he/arret) et num�eriques u ( hangement de r�egime, poursuite),lui-meme ayant pour entr�ees les sorties mesur�ees y du syst�eme et les ordres de l'op�erateur.Notons que le ontrole agit sur la dynamique des pannes par inhibition dans ertaines ir ons-tan es (arret du omposant). Les donn�ees utilis�ees pour sa surveillan e sont num�eriques etsymboliques.{ num�eriques : les onsignes fournies par l'op�erateur.Elles sont suppos�ees etre observ�ees sans erreur, i.e. de mani�ere ertaine.Les sorties, ou observations, sont �egalement hybrides :{ symboliques, not�ees : a quittement apr�es r�eparation (r�esultat d'une a tionsur le graphe de panne) et hangement de mode de fon tionnement � (r�esultatd'une a tion sur le graphe de ontrole),{ num�eriques u (entr�ees appliqu�ees aux a tionneurs) et y (mesures fournies parles apteurs pla �es sur les a tionneurs). Ce sont respe tivement les a tions et91

Rappel sur les PSPN Motivationsle r�esultat de l'a tion du graphe de ontrole sur les a tionneurs, suppos�es �adynamique ontinue.Nous ne onsid�erons volontairement pas les observations symboliques sto hastiques omme les alarmes : il est possible de les adjoindre sans au une diÆ ult�e, �a onditionqu'elles v�eri�ent la ontrainte de modularit�e, i.e. qu'elles soient sp�e i�ques �a unepanne donn�ee, et robustes �a toutes les autres.Mod�ele pour la surveillan e Le mod�ele hybride num�erique/symbolique nominal pourla surveillan e du syst�eme est donn�e �gure III.2.2. La dynamique �a �etat ontinu est on� ue omme un ensemble de mod�eles d'�etat fS�g, dont l'alternan e est pilot�ee parle graphe de ontrole (voir se tion II.2.4). Les al�eas �a temps ontinu sont mod�elis�espar des bruits gaussiens entr�es de varian e onnue. Le mod�ele ontient �egalement lesyst�eme gradient du mod�ele nominal, n�e essaire �a la onstru tion du r�esidu primaire(II.1.15).Les sorties du mod�ele nominal pour la surveillan e ontiennent :{ l'estimation de la sortie by,{ l'estimation du gradient de la sortie �by�� �evalu�ee en � = �0.Estimation La pro �edure d'estimation hybride omprend deux �etapes (�gure III.2.3) :1. Mise en forme de l'information num�erique : al ul des r�esidus se ondaires �(II.1.10) �a partir des entr�ees/sorties du syst�eme et du mod�ele.2. Estimation r�e ursive des �ev�enements a h�es, onditionnellement aux observa-tions, par programmation dynamique, ave pour entr�ee les r�esidus i-dessus etles observations symboliques . La sortie est une s�equen e de fran hissementsde transitions (voir �gure III.2.1).Nous nous int�eressons jusqu'�a la se tion III.2.4 au mod�ele dis ret pour la surveillan e.2.1.1 Rappel sur les PSPN : mod�ele d'un syst�eme sto hastique �a�ev�enement dis retOn onsid�ere dans toute la suite un RdP sauf (voir A.1), r�esultant de l'intera tiondu graphe de pannes et du graphe de ontrole, onstruit �a la �gure II.2.10. Nous nousint�eressons i i uniquement �a la probabilisation de e mod�ele �a �ev�enements dis rets.Notions de pi�e e et de puzzle (se tion A.3.3) Une pi�e e est asso i�ee de mani�erebiunivoque �a une transition et d�e rit l'e�et lo al du fran hissement de elle- i sur le mar-quage global du RdP : elle est d�e�nie par un triplet ompos�e 1/ du sous-marquage desressour es de la transition avant fran hissement, 2/ de la transition elle-meme et 3/ dusous-marquage des ressour es apr�es fran hissement :t !< m�t ; t;m+t >Quand au une onfusion n'est possible, on onfondra les notations et les termes de tran-sition et de pi�e e.On dira qu'une pi�e e t est onne table �a un marquage M , et on notera la onnexionM [ti, ssi la transition t est fran hissable dans M .92

Motivations Rappel sur les PSPNx1; x2 x3
Composant 1 Composant 3Composant 2
Entr�ees hybrides d�eterministes/al�eatoires etnum�eriques/symboliques
2 4�3 1 �2�1 �4 3
Syst�eme nominal mod�elis�eObservations du mod�ele nominaly
x�y��
Graphe de ontrole 5 �
y u
Mod�ele dynamique nominal �a �etat ontinu
S� � _x = f�(x; u; y; �0)y = g�(x; u; y; �0)�S��� ����=�0 ( _�x�� = �f��� (x; u; y; �)�y�� = �g��� (x; u; y; �)
Fig. III.2.2: Mod�elisation du fon tionnement du syst�eme pour sa surveillan e hybride. Lemod�ele en ontinu est mod�elis�e en fon tionnement nominal. Il se ompose i i d'un ensemblede mod�eles d'�etat fS�g�, et de son syst�eme gradient, index�es par le mode de fon tionnement�. Le s�equen ement des modes de fon tionnement est pilot�e par un automate d�eterministe,ou graphe de ontrole, i i un r�eseau de Petri, mod�elis�e en II.2.4.2 �a partir de l'automated�eterministe de ommande (�gure III.2.1). Nous ne repr�esentons pas la dynamique des pannes ar elle n'intervient pas dans la g�en�eration des observations simul�ees en r�egime nominal.Quant au puzzle (se tion A.3), il est form�e r�e ursivement par la onnexion de pi�e es :un puzzle est l'�equivalent en PSPN de la notion de s�equen e ex�e utable ' = (t1t2 : : : tn)(se tion A.1) des RdP ; on notera la onnexion M ['i.Probabilisation La probabilisation du mod�ele a priori doit tenir ompte de lar�epartition, ou modularit�e (se tion A.5), souhait�ee de l'algorithme. Pour ela on utilisel'interpr�etation de la dynamique du r�eseau dans un adre de RdP partiellement sto has-tique (ou Partially Sto hasti Petri Net- PSPN). On renvoie le le teur �a la se tion A.5pour une pr�esentation des motivations et de la mise en �uvre des PSPN.93

Rappel sur les PSPN Motivations
num�eriques/symboliquesObservations hybrides d�eterministes/al�eatoires et S�equen e de transitions partiellement ordonn�eeOptimisation par programmationdynamiqueG�en�eration des r�esidus���k (y; :y; �y�� ; �)�k
y y �y�� s = argmaxs=(t1;::: ;tn) L(��11 ; : : : ; ��nn ; s)��k
sFig. III.2.3: Pro �edure de surveillan e et de diagnosti : la s�equen e optimale est obtenue omme argument maximal d'une fon tion des transitions et des observations sur un horizon�x�e. L'estimation est en deux temps : al ul des r�esidus se ondaires en fon tion des sorties dusyst�eme et du mod�ele nominal puis optimisation par programmation dynamique adapt�ee ausyst�emes multi-modes.La probabilisation des PSPN permet de retrouver une propri�et�e d'�equivalen eentre l'ind�ependan e stru turelle d'o urren e des �ev�enements, la on urren e, et leurind�ependan e statistique, i.e. la non-probabilisation de leur ordre d'o urren e : la on lu-sion prin ipale de ette probabilisation est qu'�a toute pi�e e dont le fran hissement estprobabilis�e, est asso i�ee une vraisemblan e intrins�eque :L(t)qui est ind�ependante du marquage global dans lequel elle est fran hie. C'est la di��eren eessentielle ave la mod�elisation markovienne des RdP sto hastiques, o�u la vraisemblan ed'une transition d�epend du marquage omplet.Par suite, pour une traje toire ' = (t1; : : : ; tq), ou pour un puzzle, on obtient que :L(') =Yt2'L(t) (III.2.1)Si par exemple t1 et t2 sont deux transitions on urrentes, on aura :L(t1; t2) = L(t1)L(t2) = L(t2)L(t1)Ainsi, dans la mod�elisation PSPN, la vraisemblan e d'une traje toire est donn�ee parle produit des vraisemblan es des transitions qui la omposent, ind�ependamment des�etats interm�ediaires par ourus. Les PSPN permettent de retrouver ainsi une �equivalen eentre ind�ependan e stru turelle (les transitions t1 et t2 peuvent etre on urrentes) etind�ependan e sto hastique. 94

PSPN hybride Limite d'un adre sto hastique2.1.2 Limites d'un adre purement sto hastiqueUn PSPN est un mod�ele partiellement sto hastique pour une dynamique non-d�eterministe : seront d�e�nis omme �ev�enements d�eterministes, ou ertains, toutes les in-terventions exog�enes sur le syst�eme omme les r�eparations ou les hangements de modesde fon tionnement, et plus g�en�eralement, tous les �ev�enements pour lesquels il n'y a au unsens �a parler de probabilit�e d'o urren e.Prenons l'exemple de la ma hine �a �etat-transition dis r�etis�ee de la �gure III.2.4 dansle as o�u la r�esorption de la panne peut etre soit spontan�ee (transition t11) soit r�esulterd'une a tion de maintenan e (transition t21).t0 p0p1 t11t21 t10t1
Fig. III.2.4:Ma hine �a �etat/transition d'un omposant dont le retour �a l'�etat sain est spontan�eou d�e len h�e : la panne (pla e p0 marqu�ee) persiste jusqu'�a sa r�esorption spontan�ee don non-d�eterministe (transition t11), ou jusqu'�a une op�eration de maintenan e d�eterministe (transitiont21). �A tout instant o�u la ma hine fon tionne et en l'absen e d'op�eration de maintenan e, lapla e p0 �emet un hoix sto hastique entre t11 (la panne dispara�t) et t10 (la panne perdure)par sa variable al�eatoire �(p0) ave la ontrainte :P[�(p0) = t11℄ + P[�(p0) = t10℄ = 1Maintenant, si une a tion de maintenan e est engag�ee, le hoix de la pla e p0 (de memed'ailleurs que elui de p1) est for �epar l'a tion d'une ommande sur le RdP de panne. Cettedynamique ontrol�ee requiert une adaptation du mod�ele initial des PSPN.Nous proposons un autre adre de probabilisation s'inspirant du mod�ele PSPN per-mettant de marier les �ev�enements a h�es et les �ev�enements ertains, e que l'on appelleun PSPN hybride1.2.2 PSPN hybride2.2.1 Stru tureL'intera tion fon tionnement observ�e/fon tionnement a h�e modi�e onjointement lanature des �ev�enements et le omportement des ressour es. Commen� ons par d�e rire l'in-1Le besoin d'exprimer des hoix hybrides orrespondant �a des �ev�enements libres et �a des �ev�enements ontrol�es se ren ontre dans de nombreux domaines autres que la surveillan e : les �les d'attente ave temps d'attente limit�e et non-probabilis�e peuvent etre mod�elis�ees ainsi ; les ph�enom�enes de blo age dansles pro essus �egalement. 95

Stru ture PSPN hybride uen e de l'intera tion des graphes de ontrole et de panne sur les o urren es des�ev�enements.�Ev�enements : augmentation des ressour esSupposons qu'une transition du graphe de pannes syn hronis�e (voir �gure II.2.16 pourun exemple) soit gard�ee par la pr�esen e d'un jeton dans la pla e du graphe de ontrole orrespondant au mode de fon tionnement �.Dans les RdP, ette syn hronisation du graphe de pannes sur elui de ontrole signi�edans le vo abulaire des PSPN, que la pi�e e asso i�ee �a un �ev�enement gard�e n'est posable quelorsque le mode le validant est a tif, et nous souhaitons onvertir es onditions par unepropri�et�e stru turelle en regroupant toutes les ressour es atta h�ees �a une transition (modesde fon tionnement et pannes onfondus) : les ressour es des �ev�enements de panne serontaugment�ees de elle du \ mode de fon tionnement validant", syn hronisation stru turellerepr�esent�ee �gure III.2.5.��������
��������
��������
��������
����
��������
��
��������
����������
����������
����������
��������������������
����������
����������
����������
����������
����������
����������
��������������������
����������
����������
����������
��������������������
������������
������������
������������p2;0p2;0 Avant Apr�esfran hissement
p2;1 t12;1Avant Apr�esfran hissement
p2;1 t12;1 �1gard�enon gard�e
t12;1syn hronis�efran hissementAvant Apr�esModeP1p2;0
p2;1Fig. III.2.5: Extension des ressour es de la transition t12;1 : munie de ses ressour es propres,sur les deux s h�emas de gau he, et �etendues aux modes de fon tionnement, �a droite.La transformation (garde!syn hronisation) est unique ar un �ev�enement est d�e�nidans un mode unique.En suivant la distin tion entre �ev�enements a h�es et �ev�enements ertains, on partitionnel'ensemble des transitions du graphe de pannes syn hronis�e :D�e�nition 2.1 Une transition est dite d�eterministe, ou ertaine, si son fran hissementr�esulte d'une a tion exog�ene d�eterministe. On note Td l'ensemble de es transitions. Dansle as ontraire, une transition est dite non-d�eterministe.On note �egalement Ts = TnTd, Td et Ts formant une partition des transitions dugraphe de pannes syn hronis�e T .D�e�nition 2.2 (Alphabet hybride d'�ev�enements) On appelle alphabet hybride lar�eunion de Ts et Td.Il s'agit, omme dans les PSPN, de donner aux ressour es la apa it�e de d�e len herun �ev�enement appartenant �a l'alphabet hybride. La n�e essit�e de la modi� ation de laprobabilisation d�e oule don uniquement de la pr�esen e d'�ev�enements ertains.96

PSPN hybride ProbabilisationRessour esLe prin ipe des PSPN onsiste �a transf�erer le ontrole aux ressour es, qui seulesd�e ident des �evolutions du syst�eme �a �ev�enements dis rets. La politique de routagenon-d�eterministe des PSPN, donn�ee dans l'annexe, ne onvient plus puisque la variable �ne peut plus etre al�eatoire, une pla e du graphe de pannes pouvant etre amen�ee �a faireun hoix entre une d�efaillan e (probabilis�ee) et une r�eparation (non-probabilis�ee).On dira alors que l'alphabet Tp = (�p [ p�) d'une ressour e est hybride si elle peuttirer dans Ts et dans Td, et nous modi�ons la politique de routage en o�rant �a haquepla e un hoix pr�ealable entre les alphabets :1. Td \ Tp : alphabet des pi�e es d'entr�ee et de sortie d�eterministes,2. Ts \ Tp : alphabet des pi�e es d'entr�ee et de sortie non d�eterministes.puis, suivant l'alphabet T hoisi, un hoix probabilis�e est fait si T = Ts ou non-probabilis�esi T = Td.Nous proposons pour mod�eliser ette dynamique, la probabilisation suivante.2.2.2 ProbabilisationNous suivons la d�emar he adopt�ee pour la probabilisation des PSPN, et tout d'abordon d�e�nit les attributs des pla es.Attributs des pla es : adre PSPN hybrideToute pla e du PSPN hybride est munie de trois variables :1. son marquage Mn(p),2. une variable sto hastique/non-sto hastique �n(p),3. une variable enti�ere non-d�eterministe �n(p).La s�emantique du PSPN hybride repose sur un double hoix e�e tu�e par haque res-sour e dont l'alphabet est hybride : supposons par exemple que Mn(p) = 1, alors su es-sivement :{ la pla e se pronon e sur son d�esir de hanger d'�etat : �n(p) = 0 si elle ne le sou-haite pas, �n(p) = 1 si elle souhaite parti iper �a une transition non-d�eterministe(�eventuellement sto hastique) Ts \ Tp, �n(p) = 2 si elle souhaite parti iper �a unetransition d�eterministe Td \ Tp ;{ si �n(p) = 1 alors �n(p) 2 Ts \ p� (probabilis�e en g�en�eral),{ si �n(p) = 2 alors �n(p) 2 Td \ p� (non-probabilis�e en g�en�eral).Par d�efaut dans les PSPN hybrides, une pla e dispose des trois valeurs de hoix pour�(p) :D�e�nition 2.3 Une pla e (ou une ressour e) est dite hybride si �(p) 2 f0; 1; 2g.97

Probabilisation PSPN hybrideExemple : si la r�esorption peut etre spontan�ee ou bien e�e tu�ee par la maintenan e,une pla e d'�etat d�efaillant du graphe de pannes est hybride, ainsi qu'une pla e d'�etatsain.Si le hoix �n(p) = 1 ou �n(p) = 2 n'est pas possible, alors :D�e�nition 2.4 Une pla e (ou une ressour e) est dite non-sto hastique si le hoix �(p) = 1est impossible. On note l'ensemble de es pla es Pns. Une pla e (ou une ressour e) est ditesto hastique si le hoix �(p) = 2 est impossible.Exemple : une pla e du graphe de ontrole est non-sto hastique, une pla e d'�etatsain du graphe de pannes est sto hastique si la r�esorption de la panne n'est que spontan�ee.Notons que l'expression : P[�n(p) = t℄est d�e�nie pour les pla es hybrides et pour les pla es sto hastiques uniquement, leurr�eunion Pns est telle que : Pns = P � Pns (III.2.2)Pr�e isons �egalement e que nous entendons par d�eterministe et non-d�eterministe :D�e�nition 2.5 Une pla e (ou une ressour e) est dite d�eterministe ssi elle est non-sto hastique et si ( ard(�p) = 1 et ard(p�) = 1), quand es quantit�es existent. Dansle as ontraire, une pla e (ou une ressour e) est dite non-d�eterministe.Exemple : une pla e du graphe de ontrole o�u au une d�efaillan e n'est valid�eeet o�u un seul mode la pr�e �ede et la suit, est d�eterministe ; toutes les autres sontnon-d�eterministes.En�n, on d�e�nit une pi�e e hybride par :D�e�nition 2.6 (Pi�e e hybride) Une pi�e e (ou une transition) dont une ressour e aumoins tire dans un alphabet hybride est hybride.R�egles d'�evolution d'un PSPN hybrideLe fon tionnement d'un PSPN hybride ne di��ere que peu d'un PSPN \ lassique" �a hoix � purement non-d�eterministe :{ On peut onsid�erer un PSPN hybride omme un syst�eme dynamique de ve teurd'�etat Mn(p) pilot�e par une ommande hybride (�n; �n).�A haque instant n, toutes les pla es hoisissent si elles souhaitent hanger d'�etat autravers de �n :1. si elles souhaitent hanger d'�etat, elles hoisissent individuellement un alphabetT de mani�ere non-d�eterministe : si � = 1 alors T = Ts, si � = 2 alors T = Td ;puis elles pointent dans la dire tion souhait�ee au travers de �n :{ si une pla e a un jeton, elle hoisit une transition en sortie : �n(p) 2 p�\T ;98

PSPN hybride Vraisemblan e d'une traje toire{ si une pla e est vide, elle hoisit une transition en entr�ee : �n(p) 2 �p \ T.2. si elles ne souhaitent pas hanger d'�etat, elles hoisissent de mani�ere sto has-tique une transition, dans Ts s'il existe, ou de mani�ere non-sto hastique dansTd sinon.Ces s�ele tions sont suppos�ees etre ind�ependantes en temps (n) et en espa e (p).{ Pour permettre une �evolution (et la d�e len her imm�ediatement), toutes les ressour esd'une transition doivent etre unanimes, �a la fois dans leur souhait de hanger d'�etatet dans leur hoix :8t 2 T; t est fran hie �a n, t est valid�ee par Mn et [8p 2 �t [ t�; �n(p) > 0; �n(p) = t℄(III.2.3){ Une fois une transition fran hie, la r�egle d'�evolution du marquage est identique �a elle du RdP sous-ja ent.On d�e�nit maintenant une traje toire hybride et on al ule sa vraisemblan e.2.2.3 Vraisemblan e d'une traje toire hybrideD�e�nition 2.7 (Traje toire hybride) Une s�equen e ex�e utable du PSPN hybride estune traje toire hybride.Si ' = (s1; : : : ; sq) est une traje toire PSPN hybride, les si �etant des salves de transi-tions, alorsD�e�nition 2.8 (R�ealisation d'un PSPN hybride) Pour une s�equen e ex�e utable(s1; : : : ; sq), on appelle r�ealisation tout ouple (�; �) de variables de routageet de hoix, o�u � = �(�1(p1); �1(p2); : : : ); : : : ; (�q(p1); �q(p2); : : : )� et � =�(�1(p1); �1(p2); : : : ); : : : ; (�q(p1); �q(p2); : : : )�, g�en�erant la traje toire '. On notera :(�; �) ' (III.2.4)Tout omme dans les PSPN, la vraisemblan e d'une traje toire hybride ' de longueurq est d�etermin�ee par les variables al�eatoires qui parti ipent �a la r�ealisation (�; �) '(III.2.4).Elle est donn�ee par : L(�; �) = qYn=1 Yp 2 Pns :�n(p) 2Ts P[�n(p)℄ (III.2.5)ave la onvention selon laquelle : Yi2; xi = 199

Vraisemblan e d'une traje toire PSPN hybridei.e. le produit d'un nombre nul de variables vaut 1. Cette onvention est sp�e i�que auxPSPN hybrides, ar dans les PSPN toute pla e peut toujours faire un hoix sto hastique,et tous les fa teurs dans (III.2.5) sont non vides : par exemple, pour la ma hine �a�etat/transition de la �gure III.2.4, les deux pla es sont hybrides et si M(p0) = 1 etsi l'�ev�enement t21 se produit, il impose aux deux pla es p0 et p1 d'�emettre le souhait� = 2, pour lequel nous souhaitons que l'expression (III.2.5) ait un sens, bien qu'au uneprobabilit�e ne soit d�e�nie.De meme que pour les PSPN lassiques (voir se tion A.5), plusieurs r�ealisationspeuvent fournir une traje toire identique et nous hoisissons de d�e�nir la vraisemblan ede la traje toire omme elle de la r�ealisation la plus vraisemblable :L(') = max(�;�) 'L(�; �) (III.2.6)Examinons su essivement les �el�ements sur lesquels portent la maximisation :Variables de souhait Soit une r�ealisation (�; �) ' : les variables � des pla es parti- ipant �a un fran hissement dans sn sont �x�ees (� = 1 ou � = 2 suivant le type de ressour eet l'�ev�enement de sn) par la r�egle d'�evolution (III.2.3).Par ailleurs, les pla es telles que �n(p) = 1 mais ne parti ipant �a au un tir �a n, nedoivent pas in uer sur la traje toire ' ; par ons�equent, si l'on prend une autre r�ealisationmais telle que �n(p) = 0, on doit obtenir la meme vraisemblan e. On prend don la onvention suivante : les variables de souhait des pla es immobiles �a l'instant n sont �x�ees�a �n(p) = 0.De plus, la variable �n partitionne les pla es �a l'instant n, en trois ensembles :8<: fp : �n(p) = 0; �n(p) 2 Tsgfp : �n(p) = 1; �n(p) 2 Tsgfp : �n(p) = 2; �n(p) 2 Tdg (III.2.7)dont seuls les deux premiers parti ipent �a la vraisemblan e (III.2.6). Le troisi�eme ensembleagit omme une ontrainte sur la r�ealisation (�; �).En on lusion, toutes les variables �n sont d�etermin�ees pour tout p et pour tout n, etseuls les hoix de routage al�eatoires interviennent dans la maximisation (III.2.6).Variables de routage A�n d'e�e tuer la maximisation, on partitionne �a haque instantl'ensemble des pla es en suivant (III.2.7) :L(�; �) = qYn=1 Yp 2 Pns�n(p) 2Ts�n(p) = 1 P[�n(p)℄ Yp 2 Pns�n(p) 2Ts�n(p) = 0 P[�n(p)℄Les pla es mobiles �a n ont leur hoix �n impos�e par la transition fran hie �a et instant ;en revan he, les pla es immobiles sont libres de leur hoix ; omme on her he le maximumparmi toutes les r�ealisations (III.2.6), on prendra les hoix de probabilit�e maximale :100

PSPN hybride Vraisemblan e d'une traje toireL(') = qYn=1 Yp 2 Pns�n(p) 2Ts�n(p) = 1 P[�n(p)℄ Yp 2 Pns�n(p) 2Ts�n(p) = 0 P�n(p)ave P�n(p) = maxt2Ts\(�p[p�)P[�n(p) = t℄Si de plus, les hoix sto hastiques ne d�ependent pas de l'instant n, on �e rira P�(p).Dans une perspe tive de diagnosti , on ne s'int�eresse pas �a la valeur vraie de la vrai-semblan e de la traje toire, mais seulement aux valeurs relatives des vraisemblan es desdi��erentes traje toires. Le r�esultat sera don identique si l'on normalise toutes les vrai-semblan es par un meme fa teur ind�ependant des traje toires :� Yp2Pns P�(p)�qNous obtenons :L(') = qYn=1 Yp 2 Pns�n(p) 2Ts�n(p) = 1 P[�n(p)℄P�(p) Yp 2 Pns�n(p) 2Ts�n(p) = 0 P�n(p)P�(p) Yp 2 Pns�n(p) = 2 1P�(p)s�eparant les ontributions respe tives de haque ensemble de la partition (III.2.7).L'expression de L(') se simpli�e en :L(') = qYn=1 Yp 2 Pns�n(p) 2Ts�n(p) = 1 P[�n(p)℄P�(p) Yp 2 Pns�n(p) = 2 1P�(p) (III.2.8)o�u seules les pi�e es mobiles interviennent. Finalement, en mettant l'a ent sur les transi-tions, on obtient :L(') = qYn=1 Yt2'(n)\Ts h Yp2Pns\(�t[t�) P[�n(p)℄P�(p) i| {z }A Yt2'(n)\Td h Yp2Pns\(�t[t�) 1P�(p)i| {z }B (III.2.9)La forme fa toris�ee (III.2.9) est l'expression orrespondante de (A.20), que l'on retrouvesi au une transition ertaine ne se produit ; elle est apitale pour la modularit�e : le tir d'unetransition, ou la pose d'une pi�e e hybride a une vraisemblan e intrins�eque (ind�ependantedes marquages o�u elle est fran hie) tout omme dans les PSPN initiaux. On d�e�nit don la vraisemblan e g�en�eralis�ee d'une transition non-d�eterministe par :Lh(t) = Yp2Pns\(�t[t�) P[�n(p)℄P�(p) ; 8t 2 Ts (III.2.10)101

EstimationLa pose de ette pi�e e n'est bien sur possible que si elle est valid�ee, e qui est assur�epar les hoix non-sto hastiques des pla es hybrides et non-sto hastiques :�n(p) = 2; �n(p) = t; p 2 �t [ t�;La vraisemblan e de la traje toire est maintenant d�e�nie pour les �ev�enementsd�eterministes :Th�eor�eme 2.1 La vraisemblan e g�en�eralis�ee d'une traje toire hybride Lh(') est d�e�niepar : L(') = qYn=1 Yt2'(n)\TsLh(t) (III.2.11)ave Lh(t) d�e�ni en (III.2.10).La modularit�e initiale des PSPN est don �etendue aux traje toires hybrides par unemodi� ation ad�equate des attributs des pla es.2.3 Estimation bay�esienne pour les PSPN hybridesNous avons d�e rit jusqu'i i une probabilisation modulaire d'un mod�ele �a �ev�enementsdis rets dont ertains sont onnus ertainement. C'est e que nous avons d�enomm�emodularit�e d'�ev�enements dans la se tion III.2.1. Nous pr�esentons dans ette se tion un adre d'estimation bay�esienne pour es mod�eles, qui est une extension de la d�emar heinitiale pour les PSPN lassiques : par rapport �a elle- i, nous prenons en ompte auniveau algorithmique la pr�esen e des �ev�enements d�eterministes et nous en donnonsun algorithme de Viterbi adapt�e. Cette estimation repose sur le deuxi�eme aspe t demodularit�e d'observation, que l'on suppose a quis dans ette se tion, et dont nousproposons une onstru tion dans la se tion suivante.La premi�ere �etape onsiste �a d�e�nir dans un seul objet, l'ensemble de la onnaissan edisponible sur un �ev�enement : la vraisemblan e a priori de la pi�e e asso i�ee �a l'�ev�enementet l'information a posteriori apport�ee par l'observation. Nous rassemblons les deux aspe tsdans la notion de pi�e e �etendue. La se onde �etape, elle d'estimation a posteriori de latraje toire optimale, sera obtenue par onnexion de es pi�e es �etendues.2.3.1 Pi�e e �etendueNous on entrons dans la notion de pi�e e �etendue toute la onnaissan e, a priori eta posteriori, que l'on a sur un �ev�enement, a h�e ou ertain, survenant sur le graphe depannes syn hronis�e.ObservationsLes observations, not�ees g�en�eriquement o, du syst�eme prennent leur valeur dans unalphabet hybride :D�e�nition 2.9 (Alphabet d'observation hybride) On appelle alphabet d'observationd'un syst�eme hybride sto hastique/non-sto hastique, un ouple (�;Rd ), � �etant un en-semble �ni de symboles et d �etant un entier �ni.102

Estimation Pi�e e �etendueTypiquement, l'alphabet � est onstitu�e des signaux symboliques de ommande2.L'alphabet Rd ontient lui les signaux num�eriques sto hastiques �a densit�e, plussp�e i�quement i i, les r�esidus onstruits �a la se tion II.1.2.Nous supposerons que les observations v�eri�ent la propri�et�e suivante :D�e�nition 2.10 (Modularit�e d'observation) Une observation o 2 (�;Rd) est ditemodulaire si pour toute transition du PSPN hybride est d�e�nie une vraisemblan e mo-dulaire, ou intrins�eque :8t 2 (Td;Ts); 8o 2 (�;Rd ); P(ojt) onnueNotamment, pour les observations symboliques , on supposera la modularit�e au tra-vers d'une bije tion de Td dans � :8 2 �; 9!t 2 Td; P( jt) 6= 0 (III.2.12)Une transition ertaine peut ainsi �emettre une observation tir�ee dans un alphabetprobabilis�e, mais �a l'inverse, une observation asso i�ee �a un �ev�enement ertain ne peut etre�emise que par lui.A�n d'�eviter les blo ages de la dynamique du PSPN hybride, nous faisons l'hypoth�esede non- ontradi tion :Hypoth�ese 2.1 (Non- ontradi tion) Lors de l'�emission d'une observation ertaine t 2Td , il existe toujours une s�equen e ex�e utable, ou un puzzle, auquel l'�ev�enement ertainasso i�e est onne table.Ce i impose deux hypoth�eses sur le fon tionnement du syst�eme :1. le graphe de ontrole n'est pas d�efaillant et il �emet des ordres oh�erents ave son�etat interne : ette hypoth�ese est �egalement n�e essaire omme on le verra �a la se tionsuivante, pour la g�en�eration du r�esidu.2. une a tion de maintenan e est toujours justi��ee : le ontrole de la pr�esen e de lad�efaillan e est e�e tu�e avant d'entamer l'a tion de maintenan e.En�n, ontrairement au mod�ele PSPN initial d�evelopp�e dans [2℄ pour les r�eseaux det�el�e ommuni ations, i i toutes les transitions sto hastiques fournissent une vraisemblan epour le r�esidu. L'observation num�erique n'est en g�en�eral pas intrins�equement li�ee �a unetransition, et il s'agit dans les se tions suivantes d'extraire du r�esidu ette informationlo ale. Supposant obtenue une expression onfrontant le r�esidu �a une hypoth�ese lo ale, ond�e�nit :D�e�nition 2.11 (Pi�e e �etendue) Une pi�e e �etendue est d�e�nie par la donn�ee onjointe :1. d'une transition,2. d'une vraisemblan e a priori intrins�eque pour les �ev�enements a h�es,2Les signaux symboliques sto hastiques (alarmes) respe tant la modularit�e d'observation, peuvent etreintroduits sans diÆ ult�e dans le mod�ele. 103

Pi�e e �etendue Estimation3. d'un alphabet d'observation probabilis�e.Nous notons : Lhe(t; o)la vraisemblan e hybride �etendue du ouple (t; o) transition-observation.Exemples{ dans le as des transitions hybrides de pannes :Lhe(t; o) = Lh(t)P(ojt) 8 o 2 Rd= 0 sinon{ dans le as des transitions observ�ees :Lhe(t; o) = P(ojt) 8 o 2 �= 0 sinonet si une observation symbolique o est li�ee univoquement �a la transition t observ�ee, ond�e�nit dire tement : Lhe(t; o) = 1Vraisemblan e jointeLa d�e�nition intrins�eque des pi�e es �etendues permet de d�e�nir la vraisemblan e jointea posteriori d'une s�equen e d'observations (o1; : : : ; oq) ind�ependantes et d'une traje toire' : L(o; ') = P(oj')L(') (III.2.13)Or, en utilisant les hypoth�eses d'ind�ependan e mutuelle entre les �ev�enements d'une part(modularit�e d'�ev�enements) et entre les observations d'autre part (gra e �a la modularit�ed'observation suppos�ee), nous pouvons �e rire (III.2.13) de mani�ere fa toris�ee :Lhe(o; ') =Yn Yt2'(n) Lhe(t; on) (III.2.14)qui fait appara�tre le produit de toutes les pi�e es �etendues de la traje toire hybride.Le diagnosti est e�e tu�e s�equentiellement, de mani�ere similaire �a l'algorithme de Vi-terbi dans le as markovien, �a e i pr�es que :{ l'on rempla e la vraisemblan e onditionnelle du fran hissement d'une transition parrapport au marquage omplet, par une vraisemblan e intrins�eque �a la transition ;{ la r�e urren e sur l'�etat global M est rempla �ee par une r�e urren e sur les sous-marquages m (voir se tion A.3.2). Le sous-marquage est la \bonne" notion d'�etatpour les PSPN, sur laquelle la r�e urren e de Viterbi sera onduite ;{ les observations ertaines agissent omme des ontraintes sur la r�e urren e.104

Estimation Pi�e e �etenduePuzzle de Viterbi pour les PSPN hybridesOn suit i i la pro �edure d'estimation r�e ursive expos�ee pour les PSPN �a la se tionA.5.5, �a laquelle on renvoie le le teur.On her he �a estimer de mani�ere modulaire la s�equen e optimale de salves 'q =s1; : : : ; sq onnaissant une s�equen e d'observation ausale (ok)1�k�q, ompos�ee d'obser-vations symboliques non-sto hastiques, et de r�esidus ��. On fera l'hypoth�ese d'observa-tions ausales (A.24) : si une observation i est observ�ee avant l'observation j, alors latransition ti �emettant i a �et�e fran hie avant la transition tj produisant j .Comme il est �equivalent de maximiser (III.2.14) ou son logarithme, on utilisera dansla suite l'expression : lnLhe('; o) =Xt2' lnLhe(t; o) (III.2.15)1. Pr�e- al uls : Cal ul des pi�e es �etendues Lhe(t; o) (voir 2.3.1) ;2. Initialisation : n = 0 : mode initial � = �(0) onnu ; m0 �eventuellement onnu etdans e as, V0(M0) = lnP[M0℄; 8M0 2 m0.3. R�e urren e : Pour haque observation re� ue index�ee par n = 1; : : : ; q, soit Mnl'ensemble des sous-marquages ompatibles ave les observations o1; : : : ; on appar-tenant �a l'alphabet hybride (d�e�nition 2.2) ; soit Vn(mn) la vraisemblan e maximalesur toutes les s�equen es, 'n = s1; : : : ; sn arrivant en mn 2Mn :Vn(mn) = max['nimn lnLhe(on; tn) + : : :+ lnL(o1; t1)Alors pour l'observation suivante, on al ule :Vn+1(mn+1) = maxsn+1;mn+1 :t 2 sn+1mn[sn+1imn+1 lnLhe(on+1; t) + Vn(mn)et Sn+1(mn+1) = arg maxsn+1;mn+1 :t 2 sn+1mn[sn+1imn+1 Lhe(on+1; t) + Vn(mn) (III.2.16)4. �Etat �nal optimal : m�q = argmaxmq Vq(mq)5. Par ours arri�ere : 8n = q; : : : ; 1; (m�n�1; t�n�1) = S(m�n) e qui fournit la s�equen e ex�e utable optimale, sous la ontraintes des observationsd�eterministes. 105

Con lusion Observations num�eriques2.3.2 Con lusionLa stru ture du mod�ele a priori a �et�e d�e�nie �a la se tion II.2.4.3 : elle est le r�esultat dela syn hronisation des graphes de ontrole et de pannes dans tout mode de fon tionnement.Elle d�e rit l'ensemble des traje toires d'�ev�enements de d�efaillan e et de ontrole pouvantsurvenir sur le syst�eme.Nous avons propos�e une d�e�nition et une pro �edure de onstru tion d'une vraisem-blan e de es traje toires hybrides, ob�eissant gra e au adre PSPN hybride, �a l'exigen ede modularit�e, pos�ee en ondition au d�ebut de e hapitre : nous avons suppos�e pour elal'existen e de lois onditionnelles pour les observations ontinues, intrins�equement li�eesaux �ev�enements sous-ja ents et le reste de e hapitre leur est onsa r�e.2.4 Observations num�eriquesAu hapitre pr�e �edent, les observations num�eriques (r�esidus de surveillan e) ont �et�eutilis�ees au travers de l'information a posteriori qu'elles apportent sur l'�etat de panneglobal. De plus, ompte tenu de la dynamique sto hastique de l'algorithme utilis�e, unseul mode de fon tionnement �etait onsid�er�e. Nous �etendons i i la m�ethodologie �a laprise en ompte du graphe de ontrole, d'une part par son intera tion ave le graphe depannes (se tion II.2.4), et d'autre part ave la mod�elisation ontinue. Le se ond obje tifest de proposer un adre de travail pour la surveillan e r�epartie des syst�emes hybridesnum�eriques/symboliques et d�eterministes/non-d�eterministes.Il s'agit don d'une part de d�e�nir la g�en�eration du r�esidu pour des syst�emes multi-modes et d'autre part d'obtenir la modularit�e d'observations dans un adre num�erique.Pour ela nous suivons la d�emar he suivante :1. d�etermination des pannes de nuisan e sur le RdP syn hronis�e ;2. onstru tion du r�esidu multi-modes �� et de sa loi pour une on�guration de panne ;3. d�etermination des pannes de nuisan e dans le domaine param�etrique ;4. onstru tion des vraisemblan es de �� pour une d�efaillan e donn�ee ;5. onstru tion des pi�e es hybrides.2.4.1 Notion de modularit�e num�eriqueSupposons que l'on dispose d'un r�esidu �(�0; N) d�ependant de toutes les omposantesdu param�etre �. Supposons �egalement que l'on s'int�eresse �a la survenue d'un �ev�enementt (fran hissement d'une transition du graphe de panne). On her he alors �a obtenir unefon tion du r�esidu distinguant entre les hypoth�eses "t est survenue" et "t n'est pas surve-nue", et e de mani�ere ompl�etement ind�ependante de l'�etat global de panne dans lequelse trouve le syst�eme.Supposons en�n que le marquage initial est onnu, et de sur ro�t que le syst�eme est �al'�etat sain.La modularit�e num�erique telle que nous la pr�esentons i i sera obtenue en analysant lastru ture du graphe de panne, et plus pr�e is�ement, il s'agit de d�eterminer les ensemblessuivants : 106

Observations num�eriques Pannes d'int�eret et de nuisan e1. elui des pla es dont le marquage augmente lors du fran hissement de t : e sontexa tement les pannes d'int�eret li�ees �a l'�ev�enement t, 'est-�a-dire, elles dont onteste la pr�esen e.2. elui des pannes pr�esentes, ou pouvant etre pr�esentes avant que t ne soit fran hie.Il est lair qu'elles perturbent un test sur t ar les param�etres li�es �a une pla e sontprobablement orr�el�es ave eux li�es aux pannes d'int�eret : e sont don des pannesde nuisan e li�ees �a t. Comme on souhaite le d�e ouplage dans toutes les situations depannes, les pannes de nuisan e sont toutes elles qui ont pu survenir avant t.3. Il se peut en�n que la r�eunion des pannes de nuisan e et elles d'int�eret ne soit pas�egale �a F : en e�et, ertaines pannes d�ependent de l'o urren e pr�ealable de t pour seproduire. Ces pannes seront don n�e essairement absentes lorsque l'on s'int�eressera�a t. Ce i se traduira par un a priori nominal sur les param�etres li�es �a es pla es.L'hypoth�ese d'�etat initial sain est don ru iale pour l'exploitation du graphe a�n ded�e�nir les pannes de nuisan es : plus elles seront en faible nombre, plus le d�e ouplage seraais�e.Cette partition de l'ensemble des pla es (de pannes) est unique pour un marquageinitial donn�e : elle peut etre obtenue par l'exploration du graphe d'a essibilit�e du graphede pannes, et e ind�ependamment des modes de fon tionnement, ar on ne onna�t pasleur historique lors de la survenue de la panne. En�n, la partition des pla es implique elle des param�etres en param�etres d'int�eret et param�etres de nuisan e, retrouvant ainsile vo abulaire des tests d'hypoth�eses, bien que notre appro he soit purement bay�esienne.2.4.2 D�etermination stru turelle des pannes d'int�eret et de nuisan eOn s'int�eresse �a la d�ete tion d'une d�efaillan e vue omme le fran hissement d'unetransition t 2 Ts. Les pannes r�esultant de e fran hissement sont les nouvelles pla esmarqu�ees p 2 t�n�t.Pannes d'int�eretLes pannes d'int�eret sont par d�e�nition les pla es marqu�ees par le fran hissement det :D�e�nition 2.12 (Int�eret) Soit une d�efaillan e t 2 T ; les pannes d'int�eret sont donn�eespar : Pannes d'int�eret pour la d�efaillan e t : t�n�tNotons que le marquage de es pla es peut �egalement r�esulter du fran hissementant�erieur d'une autre transition, dite alors de nuisan e, que l'on d�e�nit pour une d�efaillan et. On adopte ependant ette onvention dans e as.Pannes de nuisan eOn onsid�ere la question de mani�ere statique : quel est l'ensemble des �ev�enementsant�erieurs �a t ? Cet ensemble est exa tement elui des �ev�enements qui ne n�e essitent pasde ressour es r�e�ees par le fran hissement de t, toutefois pour un �etat initial sain.107

R�esidu : as multi-mode Observations num�eriquesD�e�nition 2.13 (Nuisan e) Soit une d�efaillan e t 2 T et soit Tt l'ensemble des transi-tions fran hissables avant t �a partir du marquage initial. Pour un �etat initial sain :Pannes de nuisan e pour la d�efaillan e t : Pt = 0� [ti2Tt t�i1A n(t�n�t)On d�e�nit alors le marquage de nuisan e de l'�ev�enement t :D�e�nition 2.14 Le marquage M t tel que :M t(p) = � 1; p 2 Pt0; p 62 Ptest appel�e marquage de nuisan e de l'�ev�enement t.2.4.3 R�esidu pour un syst�eme multi-modesRappelons qu'un mode de fon tionnement est not�e de mani�ere g�en�erique �.Au hapitre II.2, nous avons d�e�ni dans le mode �, le mod�ele dynamique d�e rivant ladynamique �a �etat ontinu du syst�eme (II.2.1) et que nous rappelons :S� � xk = f�(xk�1; uk; ��)yk = g�(xk; ��) + vk (III.2.17)o�u les fon tions f� et g� sont suppos�ees ontinument di��erentiables et o�u �� est unerestri tion du param�etre � de S (II.1.1) �a l'ensemble I� � I.Expli itons maintenant les notations : dans haque mode � est d�e�nie une parti-tion des param�etres � = f��; ��g ( ar l'ensemble I des indi es y est partitionn�e enI = fI�; �I�g). L'ensemble �� regroupe les param�etres \non visibles" dans le mode �, i.e. eux n'apparaissant ni dans l'�equation de dynamique ni dans elle d'observation de S�.C'est le as par exemple des param�etres de ertains omposants �a l'arret.Le r�esidu al ul�e dans le mode � n'est don sensible, par d�e�nition du syst�eme S� qu'�a�� : �� = I��sa loi s'exprimant par : �� � N ( J�(�0;�) ��; ��(�0;�)) (III.2.18)et les matri es ja obienne (II.1.14) et de ovarian e (II.1.13) d�ependant alors uniquementdes param�etres nominaux �0;�, onstruit sur la restri tion de f�0g �a I�. Nous simpli�ons(III.2.18) en omettant la d�ependan e en �0;� :�� � N ( J���;��) (III.2.19)108

Observations num�eriques Modularit�e num�eriqueRemarque 2.1 Il n'y a bien sur au une relation �a her her entre J� et J�0 , ni entre ��et ��0 , pour deux modes de fon tionnement � et �0 di��erents, ar es matri es sont issuesde deux syst�emes dynamiques (III.2.17) di��erents.De plus, toute on�guration de pannes I� (d�e�nition II.1.1) admet une restri tion dans� qui est sa partie \visible" dans e mode ; elle est not�ee I�� et est donn�ee par :I�� = I� \ I� (III.2.20)Ve toriellement, la partition de �� pour une on�guration de pannes dans le mode �s'�e rira de la meme mani�ere que elle de (II.1.27) :�� = (I�� )T��� (III.2.21)En notant : J�� = J� (I�� )T;la loi du r�esidu (III.2.18) s'exprime aussi par :�� � N ( J�� ��� ; ��) (III.2.22)En nous reportant �a la notation (II.1.20), nous noterons :lJ�� ��� ;��(��) = �2 ln pJ����� ;��(��) (III.2.23)C'est l'expression de la log-vraisemblan e onditionnelle du r�esidu dans le mode � sousl'hypoth�ese d'une on�guration I�.2.4.4 Modularit�e num�eriqueDans l'appro he markovienne, la vraisemblan e du r�esidu a �et�e �etablie, puis utilis�ee, onditionnellement �a l'�etat de panne global du syst�eme, i.e. onditionnellement �a la on�-guration de pannes I�� , d�e�nie dans un mode � unique (syst�eme mono-mode non-r�eparablepar hypoth�ese de l'appro he markovienne). Dans un ontexte multi-modes, 'est exa te-ment l'expression (III.2.23) qui serait utilis�ee. Mais e i n'est pas satisfaisant : en e�et,la r�epartition des algorithmes de surveillan e, n�e essaire �a la modularit�e algorithmique,impose d'�eviter la d�ependan e �a un �etat global pour �emettre une d�e ision sur une sous- on�guration d'une on�guration globale de panne (voir d�e�nition II.1.1, et �a la page 37,le paragraphe sur les pannes d'int�eret et de nuisan e). La diÆ ult�e vient i i du pro �ed�e deg�en�eration du r�esidu bas�e sur (III.2.17) dans lequel �� intervient. En e�et, la moyenne de�� d�ependant e�e tivement de �� dans son entier, la modularit�e algorithmique onsiste �aextraire du r�esidu l'information ne on ernant que les ons�equen es de la survenue d'un�ev�enement parti ulier dit d'int�eret : ette extra tion sera obtenue par un \d�e ouplage" dela loi de l'observation vis-�a-vis de toutes les pannes qui ont pu se produire pr�ealablement�a la panne d'int�eret, et qui seront i i vues omme des param�etres de nuisan e.Il s'agit maintenant, selon le prin ipe de r�eje tion, de re enser tous les param�etres orrespondant aux pannes d'int�eret et de nuisan e, d�etermin�ees stru turellement au para-graphe pr�e �edent. 109

Param�etres de nuisan e et d'int�eret Observations num�eriques2.4.5 D�etermination des param�etres de nuisan e et d'int�eret�A haque pla e p 2 P p1 est asso i�e de mani�ere biunivoque un ensemble de param�etresIp � I, i.e. elui asso i�e �a la panne p li�ee �a la pla e p. Consid�erons d'abord le as d'unsyst�eme mono-mode : I� = I.Dans le domaine param�etrique, les param�etres de nuisan e pour un �ev�enement sontd�e�nis par le sous-ensemble de I� d�e�ni par la pire on�guration M t, dite de nuisan e.La on�guration asso i�ee aux pannes d'int�eret t�n�t est donn�ee par :D�e�nition 2.15 (Con�guration param�etrique d'int�eret) La on�guration pa-ram�etrique d'int�eret atta h�ee �a la d�efaillan e t est d�e�nie par :I�t = � [p2t�n�t Ip� \ I� (III.2.24)Elle d�e�nit l'ensemble des param�etres de la on�guration � visibles dans le mode �, en-semble atta h�e �a la d�efaillan e t. De meme, l'ensemble des param�etres de nuisan e estdonn�e par : [p02Pt Ip0 \ I� (III.2.25)mais, de par le re ouvrement de I que forment les fIpg, l'interse tion de la on�gurationde nuisan e (III.2.25) et de la on�guration des pannes d'int�eret peut etre non-vide :[p02Pt Ip0 \ I�t 6= ;Or, on prend la meme onvention que dans la d�e�nition de l'ensemble des pannes denuisan e, en privil�egiant les pannes d'int�eret : les param�etres de nuisan e sont d�e�nis parla sous- on�guration (voir se tion II.1.1) :D�e�nition 2.16 (Sous- on�guration param�etrique de nuisan e) La on�gurationparam�etrique de nuisan e atta h�ee �a la d�efaillan e t est d�e�nie par :fI�t = � [p2Pt Ip� \ (I�nIt) (III.2.26)On note la orrespondan e entre un �ev�enement et ses param�etres d'int�eret It� et denuisan e eIt� : t$ (I�t ;fI�t ) (III.2.27)Ve toriellement, les matri es I�t et fI�t de s�ele tion des omposantes de I�t et de fI�tdans I� permettent de d�e�nir, en suivant le prin ipe de onstru tion des s.e.v. asso i�es(II.1.3) : ��t = Im �(I�t )T�f��t = Im�(fIt�)T�On peut maintenant al uler les vraisemblan es du r�esidu asso i�ees �a tous les �ev�enementsde nature sto hastique. 110

Observations num�eriques Vraisemblan e a posteriori2.4.6 Vraisemblan e a posterioriOn va etre amen�e �a distinguer plusieurs types d'�ev�enements se produisant sur le graphede panne suivant leur on�guration respe tive d'int�eret et de nuisan e.�Ev�enements num�eriquement d�ete tablesC'est le as des �ev�enements o�u ertains (voire tous) des param�etres a�e t�es sont visiblesdans les observations dans le mode o�u ils se produisent.D�e�nition 2.17 (D�ete tabilit�e num�erique) Un �ev�enement t dans le mode � est ditd�ete table num�eriquement ssi I�t 6= ;.A�n de d�eterminer la vraisemblan e asso i�ee �a la transition t et qui permettra desatisfaire la ontrainte de modularit�e, on se pla e dans le adre de la se tion II.1.2.4 etnotamment on applique les r�esultats du Lemme 1.1, page 39. Lors du fran hissement dela transition t dans le mode �, nous avons la partition (II.1.26) qui s'�e rit i i :I� = fIa; Ib; I g= fI�t ;fI�t ; I� get J�ab = (J�t ;fJ�t ; J� ); ��ab = 0� ��tf��t�� 1AOn note de plus, ~P �t = ~PfJ�t .�A haque transition de d�efaillan e t d�ete table num�eriquement dans le mode �, onasso ie la loi "biais�ee" : �� � N ( ~P �t J�t ��t ;��) (III.2.28)dont l'expression suivant l'a priori prend les formes suivantes :Loi asso i�ee aux transitions, as ave a priori On obtient �a partir de (III.2.28) lalog-vraisemblan e :lt(��) = ��� � ~P �t J�t ��t �T (��)�1 ��� � ~P �t J�t ��t � (III.2.29)Loi asso i�ee aux transitions, as sans a priori Nous empruntons la notation �a lalog-vraisemblan e (II.1.44) pour d�e�nir la log-vraisemblan e g�en�eralis�ee dans le as o�u l'onne dispose pas d'a priori : lt(��) = min��2��t l ~P�t J��� (�) (III.2.30)111

Synth�ese�Ev�enements ind�ete tables num�eriquementL'ind�ete tabilit�e num�erique, i.e. It� = ; ave t fran hissable dans �, provient 1/ despannes ara t�eristiques des arrets prolong�es de omposants (grippage), dont l'�etat de pannene se manifeste dans les observations que lors de la remise en route, 2/ des d�efaillan es de omposants arret�es dont l'�etat de panne peut se propager �a d'autres omposants, ommeles ph�enom�enes d'�e hau�ement dus �a des ourts- ir uits par exemple. Ces �ev�enementsparti ipent de mani�ere silen ieuse �a la dynamique des pannes dans le mode �. On leurasso ie une vraisemblan e a priori Lh(t) et on prend pour la vraisemblan e du r�esidu lameme notation que (III.2.29) : lt(��) = 0 (III.2.31)Mais ils peuvent ependant etre d�ete tables stru turellement.�Ev�enements d�ete tables stru turellementPour tous les �ev�enements, qu'ils soient d�ete tables ou ind�ete tables, il existe unederni�ere forme de d�ete tabilit�e, elle o�u l'�ev�enement se traduit indire tement au traversd'�ev�enements d�ete tables num�eriquement :D�e�nition 2.18 (D�ete tabilit�e stru turelle) Un �ev�enement t est dit stru turelle-ment d�ete table s'il existe un �ev�enement t0 d�ete table num�eriquement tel que t0 est une ons�equen e de t.On a la propri�et�e �evidente, mais importante :Propri�et�e 2.1 Un �ev�enement ind�ete table num�eriquement peut etre d�ete table stru turel-lement.Elle souligne l'un des int�erets �a onsid�erer la dynamique des pannes.Remarque 2.2 Toutes les propri�et�es de d�ete tabilit�e sont stru turelles et peuvent etred�etermin�ees hors-ligne.�Ev�enements de r�esorption spontan�eeAu une observation num�erique ne peut etre atta h�ee �a une transition de r�esorptionspontan�ee : en e�et, les vraisemblan es peuvent etre sensibles �a la pr�esen e d'une nouvellepanne mais non �a son absen e.�Ev�enements d'attentePour la meme raison que elle avan �ee pour les �ev�enements de r�esorption, on ne peutasso ier de vraisemblan e �a un non-�ev�enement, qui de plus est de la meme nature pourtoutes les transitions d'attente. En revan he, leur probabilit�e a priori (not�ee plus loinLh(t)) est d�etermin�ee.2.5 Synth�ese sur les pi�e es hybrides �etenduesNous disposons maintenant des �el�ements n�e essaires �a la d�e�nition des pi�e es onne -tables pour la onstru tion r�e ursive du puzzle de Viterbi. N�eanmoins, la modularit�e despi�e es �etendues �a observation num�erique est obtenue au paragraphe suivant.112

Synth�ese Modularit�e des observations num�eriques2.5.1 Modularit�e des observations num�eriquesLes vraisemblan es (III.2.29) et (III.2.31) atta h�ees aux transitions num�eriquessto hastiques ne onviennent pas pour la d�e�nition d'une pi�e e �etendue au sens de lad�e�nition (D�ef.2.11) : en e�et, leur loi P(��jt) doit etre intrins�eque �a la transition t, i.e.ne pas d�ependre de la pr�esen e ou de l'absen e des pannes de nuisan e. Or on sait quel'esp�eran e de (III.2.29) d�epend des pannes de nuisan e f��t .E�e tuons alors la meme op�eration neutre que pour l'�etablissement du adre mar-kovien, et qui onsistait �a ajouter et retran her la log-vraisemblan e du r�esidu sous H0(absen e de panne) : �lt(��)� lnPH0(��) + lnPH0(��) (III.2.32)Or l'expression,�lt(��)� lnPH0(��) = ��� � ~P �t J�t ��t �T (��)�1 ��� � ~P �t J�t ��t � lnPH0(��) (III.2.33)v�eri�e la ontrainte de modularit�e requise pour etre utilis�ee dans l'algorithme de Viterbig�en�eralis�e de la page 105. En e�et, par le lemme II.1.1 page 39 et la remarque II.1.3 quile suit, on sait :{ qu'en l'absen e d'a priori sur l'amplitude, (III.2.33) est un test de sensibilit�e parti- ulier, �egal �a un test de r�eje tion, insensible �a la pr�esen e ou non des nuisan es f��t .Par ons�equent, l'expression (III.2.33) satisfait la ontrainte de modularit�e impos�eeau d�ebut de e hapitre ;{ qu'en pr�esen e d'a priori sur l'amplitude, par la remarque (II.1.3), nous savons que(III.2.33) est un rapport de vraisemblan e insensible aux pannes de nuisan e, et don satisfait la ontrainte de modularit�e.Notons que tout omme dans le as markovien, le terme ajout�e lnPH0(��) est une onstante pour toutes les transitions fran hissables, et don ne modi�e pas leurs valeursrelatives, et par suite n'in ue pas sur le r�esultat de l'optimisation, et peut don etre omis.On notera le rapport de vraisemblan e, g�en�eralis�e ou non, par :Vt(��) = �12 lt(��)� 12 lnPH0(��) (III.2.34)lnLhe(t; ��) = lnLh(t) + Vt(��)2.5.2 Cas g�en�eralNous re ensons dans la table III.2.1 les pi�e es hybrides �etendues que l'on a onstruitesdans e hapitre et qui sont utilis�ees dans le puzzle de Viterbi donn�e �a la se tion III.2.3.1.Ce i a h�eve la onstru tion du mod�ele PSPN hybride pour la surveillan e.113

Con lusionAlphabet�ev�enement Alphabetobservation Vraisemblan ehybride Log-Vraisemblan ePi�e e �etendue�Ev�enementsSymboliques Td � 1 lnP[ jt℄�Ev�enementsNum�eriques Ts Rd Lh lnLh + Vt(��)Tab. III.2.1: Ensemble des �ev�enements lass�es suivant leur type et leur observation.2.6 Con lusionNous avons propos�e dans e hapitre une nouvelle appro he bay�esienne de la sur-veillan e des syst�emes hybrides num�eriques/symboliques partiellement observ�es. Nous uti-lisons omme a priori l'information disponible sur la dynamique des pannes, dans son in-tera tion ave la dynamique observ�ee des modes de fon tionnement. Pour ela, un mod�elesto hastique/non-sto hastique ontrol�e a �et�e �elabor�e pour le fon tionnement �a �ev�enementsdis rets global du syst�eme. L'estimation est r�ealis�ee par un puzzle de Viterbi [2℄, dans lequeldes pi�e es hybrides dont le fran hissement est observ�e sont prises en ompte. Les pi�e esasso i�ees �a tous les �ev�enements survenant sur le syst�eme sont maintenant �egalement prisesen ompte.L'aspe t num�erique intervient omme g�en�erateur d'observations \intelligentes" du faitde l'information sur les pannes qui est utilis�ee pour leur g�en�eration. Ce sont en d�e�nitivede nouvelles alarmes symboliques modulaires, sensibles aux d�efaillan es, et non aux om-portements d�efaillants omme le sont les alarmes symboliques existant sur les syst�emesindustriels.L'estimation satisfait l'exigen e de modularit�e, ouvrant la voie �a la r�epartition e�e tivede l'algorithmique de surveillan e.
114

Quatri�eme partieExemple
115


Chapitre 1Des ription de l'exemple et des rit�eres d'�evaluation1.1 Pr�eambuleLa re her he d'un exemple de simulation doit satisfaire aux rit�eres qualitatifs suivants :{ la mod�elisation �a �etat ontinu doit etre envisageable, et la on eption d'un obser-vateur g�en�eral, i.e. ne fon tionnant pas qu'autour d'un point de fon tionnement,possible, ar les alternan es de modes de fon tionnement impliquent des hange-ments de point de fon tionnement ; le syst�eme doit pr�esenter �egalement des modesde fon tionnement di��erents, de dur�ee suÆsante pour satisfaire la ontrainte de sta-tionnarit�e du r�esidu ;{ la stationnarit�e du r�esidu est n�e essaire : il faut avoir une onvergen e rapide del'observateur par rapport �a la dur�ee des modes ; il faut �egalement que les pannesaient un sens pour le probl�eme, mais qu'en meme temps, leur param�etrisation donneune onvergen e rapide du syst�eme gradient ;{ le onditionnement de la matri e de Fis her ne doit pas etre "trop" importantpour obtenir un \bon" omportement num�erique des tests, e qui d�epend de laparam�etrisation et des niveaux de bruit.L'ensemble de es rit�eres n'�etait pas v�eri��e sur le premier exemple d'appli ation que nousavons d�evelopp�e [11℄, qui n'�etait don pas utilisable dans les deux adres de mod�elisation :le mod�ele d'un tour �a ommande num�erique (voir [11℄ pour la mise en �equation etpour les r�esultats exp�erimentaux), non-lin�eaire �a 7 �etats, 4 param�etres et 4 sorties a �et�eexp�eriment�e dans le adre markovien, mais en prenant, �a titre simpli� ateur, l'observateurid�eal du syst�eme en fon tionnement nominal que onstitue le mod�ele lui-meme. Cetexemple a permis de d�eterminer les points importants qui ont guid�e la mod�elisationhybride que nous proposons.En revan he, e syst�eme ne pr�esente pas d'int�eret pour la surveillan e multi-modes,du moins au niveau de g�en�eralit�e o�u il a �et�e envisag�e. Il a permis essentiellement ded�eterminer le type de syst�eme auquel la mod�elisation s'adresse, plus du type pro ess (denature ontinue, sur une longue p�eriode de temps) que manufa turier (de nature dis- ontinue, fon tionnant pi�e e par pi�e e, �a onstantes de temps ourtes) : les ontraintes117

Mod�elisation
up2D�ebit �oulD�ebit eauud2ud1up1 �1
�2y3y2
D�ebit vapeurud3 �3y1Pressionyp1
yp2Temp�eraturea1s+b1 k2k1k3 k4 k5 a4s+b4a3s+b3
a2s+b2k6x1 x2x4x3
Fig. IV.1.1: S h�ema-blo d'un g�en�erateur de vapeur.temporelles qui portent sur les di��erents aspe ts de la mod�elisation imposent en e�et dedisposer d'observateurs dont la onvergen e soit rapide lors de hangements de modesde fon tionnement ; de plus les pannes doivent se manifester suÆsamment longtemps etpr�esenter une dynamique lente par rapport aux traitements num�eriques e�e tu�es.C'est pourquoi, tout en renvoyant le le teur au rapport [11℄ pour la pr�esentation dupremier essai d'appli ation, nous avons hoisi de d�evelopper un mod�ele pr�esentant plusles ara t�eristiques souhait�ees. Nous l'avons hoisi lin�eaire a�n de ne pas ajouter les ontraintes propres �a la on eption d'observateurs en non-lin�eaire, �a l'�evaluation de lam�ethode.1.2 Pr�esentation du g�en�erateur de vapeurNous nous int�eressons �a l'exemple du g�en�erateur de vapeur d'une entrale thermique,emprunt�e au livre de Ph. de Larminat [28℄. Le g�en�erateur fournit de la vapeur �a pressionet temp�erature sp�e i��ees aux turbo-alternateurs. Les sorties �a ontroler sont la pressionen sortie du g�en�erateur y1, et la temp�erature y2 de la vapeur. Les deux grandeurs de ommande sont les d�ebits de �oul up1 onsomm�e par les bruleurs, et d'eau de d�esur hau�eup2. La perturbation prin ipale ud3 orrespond au d�ebit de vapeur demand�e par les turbo-alternateurs, d�ebit variant en fon tion de la harge du r�eseau �ele trique. La mesure bruit�eey3 de ud3 est disponible.Le s h�ema-blo du g�en�erateur en r�egime stationnaire est repr�esent�e �gure IV.1.1. Ona indiqu�e les �etats xi de la dynamique : ils sont pris usuellement omme sorties des blo sdu premier ordre.1.3 Mod�elisation pour la surveillan eOn pr�esente d'abord la d�e�nition des modes de fon tionnement �a partir du fon tion-nement �a �etat ontinu du syst�eme. L'information a priori sur les pannes est alors expos�ee.118

Mod�elisation Modes de fon tionnementLa mod�elisation est r�ealis�ee onform�ement au hapitre II.2.1.3.1 Modes de fon tionnementOn ne onsid�ere dans la suite que le fon tionnement de l'installation ; on omet sesphases d'arret pour maintenan e. Quatre phases du fon tionnement du g�en�erateur vontnous int�eresser ; elles sont d�e�nies en fon tion des onsignes de temp�erature :1. Fon tionnement stationnaire, basse harge,2. Mont�ee en puissan e,3. Fon tionnement stationnaire, pleine harge,4. Des ente en puissan e.Le syst�eme a un y le quotidien : la mont�ee dure 10% du temps de fon tionne-ment, la pleine harge 40%, la des ente 15% et la basse harge 35% : soit un y le de2:4� 9:6 � 3:6� 8:4 en heures.Les hangements de onsignes provoquent :1. d'une part, des hangements quantitatifs sur la dynamique ; ils ara t�erisent lesdi��erentes phases,2. d'autre part, des variation onnues (identi�ables et observables) de ertaines\ onstantes", lors du passage d'une phase �a une autre.Pr�e is�ement, en prenant le mod�ele en basse harge omme r�ef�eren e, nous onsid�ereronsque :1. lors de la mont�ee en harge, l'ouverture prolong�ee de la vanne de �oul diminue la onstante de temps 1b1 de 10% ; de plus, le gain a2 est augment�e de 30% ;2. en pleine harge, le d�ebit important augmente le oeÆ ient k1 de 3% et le oeÆ ientk5 de 3% �egalement ;3. lors de la des ente en harge, l'ouverture de la vanne de d�esur hau�e diminue la onstante de temps 1b3 de 15% ; de plus, le gain k5 est augment�e de 10% ;Selon la d�e�nition 2.1 page 59, es hangements dans la dynamique interne du syst�emed�e�nissent quatre modes de fon tionnement.Nous supposerons �egalement que le fon tionnement s�equentiel d�eterministe alterne les y les (mont�ee, pleine harge, des ente, basse harge) : le graphe de ontrole (page 55) orrespondant est repr�esent�e �gure IV.1.2. Tout autre s�equen ement, alternant les mont�eeset les p�eriodes de fon tionnement stationnaire par exemple, est possible : la seule ontrainteimpos�ee est que es hangements soient observ�es et qu'un mod�ele soit identi��e pour lesphases interm�ediaires, impliquant un e�ort de mod�elisation suppl�ementaire.Les oeÆ ients du s h�ema-blo IV.1.1, dans ha un des modes, sont donn�es dans latable IV.1.1. Ils sont donn�es pour des entr�ees/sorties normalis�ees et prenant leur valeurdans l'intervalle 0� 100.Les perturbations sont mod�elis�ees de la mani�ere suivante :119

Mod�elisation des d�efaillan es Mod�elisation����
P1 3t1 t2 t3t4
P2 P3 P4Fig. IV.1.2: Graphe de ontrole du g�en�erateur de vapeur. Le syst�eme fon tionnes�equentiellement sous quatre modes de fon tionnement di��erents. La pla e P1 est asso i�eeau mode �1 de basse harge, la pla e P2 au mode de mont�ee en harge, la pla e P3 �a la pleine harge et la pla e P4 �a la des ente en harge. Les transitions sont pilot�ees par l'op�erateur oupar un dire teur de ommande.Mode a1 a2 a3 a4 b1 b2 b3 b4 k1 k2 k3 k4 k5 k6�1 2 0:3 �0:1 1 2 �0:05 0:5 1 �0:7 �0:1 0:1 1:5 �0:85 �0:95�2 2 0:39 �0:1 1 2:2 �0:05 0:5 1 �0:7 �0:1 0:1 1:5 �0:85 �0:95�3 2 0:3 �0:1 1 2 �0:05 0:5 1 �0:721 �0:1 0:1 1:5 �0:8755 �0:95�4 2 0:3 �0:1 1 2 �0:05 0:575 1 �0:7 �0:1 0:1 1:5 �0:935 �0:95Tab. IV.1.1: CoeÆ ients du mod�ele dans les quatre modes de fon tionnement. Les valeursdes oeÆ ients ai et bj ont �et�e multipli�ees par 100 pour la lisibilit�e.1. Bruits de sortie : blan s, gaussiens, entr�es de varian e 0:01 ;2. Bruits d'a tionneurs : blan s, gaussiens, entr�es de varian e 0:005 ;3. La perturbation ud3 orrespondant �a la demande en vapeur �evolue prin ipalementen rampe : sur un horizon par ourant plusieurs hangements de mode, ette pertur-bation a une forme trap�ezo��dale.1.3.2 Mod�elisation des d�efaillan esNous avons d�etermin�e un ensemble de quatre pannes plausibles, et leurs a-ra t�eristiques.Re ensement des d�efaillan es1. D�ef. 1 : l'en rassement des onduits de hau�e augmente la onstante de tempsentre le d�ebit de �oul et la vapeur d'eau, et est re �et�e par une diminution de 10%du oeÆ ient b1. Cette d�egradation se manifeste essentiellement durant les mont�eesen harge du g�en�erateur, soit dans le mode �2 ;2. D�ef. 2 : un endommagement des onduits de resur hau�e peut provoquer une fuite.Cette d�efaillan e se ara t�erise par une diminution maximale de 10% de a4 ; 'estune manifestation qui peut survenir dans les modes de forte solli itation �2 et �3 ;120

Mod�elisation Mod�elisation des d�efaillan es3. D�ef. 3 : lors du hangement de uve de �oul, le oeÆ ient alori�que du �oul peutetre di��erent de sa valeur nominale : un �e art maximal de 6% sur le oeÆ ient a1mod�elise ette panne. De plus, omme on suppose que le hangement ne peut sefaire qu'en r�egime stationnaire de basse harge, la panne ne peut survenir que dansle mode �1 ;4. D�ef. 4 : la panne de la vanne de d�esur hau�e modi�e la dynamique du refroidissementpar l'augmentation du gain a3 : le oeÆ ient a3 subit une diminution d'au plus 15% ; e i ne peut se produire que dans les modes �3 et �4.Nous ferons des hypoth�eses sur la pr�esen e de ha une de es pannes quand nousaborderons les simulations.R�eparationsParmi les d�efaillan es re ens�ees, on onsid�ere que seules la se onde et la troisi�emepeuvent dispara�tre en fon tionnement : l'endommagement peut faire l'objet d'une a tionde maintenan e en isolant le tube in rimin�e. Le hangement de uve de �oul r�etablit eng�en�eral la qualit�e nominale, en tout as fait dispara�tre la manifestation an ienne de lapanne, au pro�t �eventuellement d'un autre d�efaut de qualit�e. Ces deux r�esorptions n'ontlieu qu'en r�egime stationnaire, plus pr�e is�ement apr�es une des ente en harge, soit aumode �1. Les deux autres d�efaillan es supposent l'arret de l'installation pour e�e tuer lamaintenan e.Causalit�es entre d�efaillan esLes pannes 3 ( uve) et 4 (vanne) sont des pannes premi�eres : on onsid�ere qu'ellespeuvent se produire respe tivement ave des taux de 1200h soit �3 = 1:4 10�6 et 15000h soit�4 = 5:5 10�8. Les pannes 1 et 2 sont en revan he des pannes se ondes :1. l'en rassement provient d'un mauvais pouvoir alori�que du �oul, se ren ontrant demani�ere plus pronon �ee en as de mauvaise qualit�e de �oul, ave un risque mesur�epar un taux de d�efaillan e �1 = 10�7.2. l'endommagement des onduits r�esulte en g�en�eral d'une panne de la vanne, dans lemode �3 seulement, mais peut aussi r�esulter de l'en rassement des onduits. Il seproduit ave un taux de 110000h soit �2 = 10�9.On onsid�ere que les taux et les probabilit�es de pannes sont onstants dans tous lesmodes o�u les d�efaillan es peuvent se produire.La �gure IV.1.3 repr�esente de mani�ere abr�eg�ee et restreinte aux pannes qui nousint�eressent les arbres de d�efaillan es onvertis de ha un des modes. Le graphe de pannessyn hronis�e est repr�esent�e �gure IV.1.4 : les pla es de haque ma hine �a �etat transitionont �et�e fusionn�ees (il en aurait �et�e de meme des transitions de r�eparation si elles avaientexist�e dans plusieurs modes) ; les transitions de d�efaillan e ont �et�e bien sur pr�eserv�ees etgard�ees par le mode qui les valide. 121

R�esidus
t4;1
R�eparation�Etat de panne�Etat sain t2;0 t3;0t2;1t1;1p1;0 p1;1
Mode �1Mode �2 p2;0 p2;1
p2;0 p3;0p2;1 t3;1
t4;1t02;1Mode �4
t2;1Mode �3p4;0 p4;1p1;1
p2;0 p2;1p4;0 p4;1
p3;1
p3;1
Fig. IV.1.3: Graphe de pannes dans haque mode. Les ma hines �a �etat/transition pour haquepanne ont �et�e simpli��ees pour ne faire appara�tre que les �ev�enements e�e tivement possibles.1.4 G�en�eration des r�esidusIl est important de noter que l'exemple n'est pas pr�esent�e dans le meme ontexte que elui duquel il est extrait : le but �etant i i la surveillan e et le diagnosti du syst�eme etnon sa ommande optimale : les ontraintes �a respe ter ne sont pas les memes, et nous onsid�ererons au ontraire une situation de \l�eg�ere" os illation, telle qu'elle pourrait etreappliqu�ee dans un but de diagnosti : 'est une d�emar he \logique" si l'on veut surveillerdes omposantes de la dynamique, et 'est pr�e is�ement es p�eriodes \non-optimales" quiservent en pratique ; la surveillan e durant les p�eriodes \optimales" n'est, elle, sensiblequ'�a des hangements de gains statiques. Une ons�equen e est que l'on ne her he pas �aoptimiser le rejet de la perturbation ud3 du d�ebit. Les onsignes on ernent la temp�eratureet la pression et on n'utilise pas i i la onnaissan e de la perturbation ud3.122

R�esidus
����
t1 �2 t2 �3 t3 �4t4
�1
p4;0 p4;1p2;0 t2;0t12;1�1�2
p1;0 p1;1p3;0 p3;1�1
�2 t1;1t3;1
�4 t14;1�3 t24;1
p2;1
t3;0�1t32;1t22;1�3�3
Fig. IV.1.4: Graphe de pannes syn hronis�e.Il s'agit dans e paragraphe de onstruire le r�esidu primaire K (II.1.15), ommegradient de l'erreur quadratique moyenne de pr�edi tion, e qui permettra d'e�e tuer lasomme umul�ee (II.1.10), donnant le r�esidu se ondaire �, utilis�e dans notre appro he,mais aussi de al uler la matri e ja obienne J (II.1.14) et la matri e de ovarian e �(II.1.13) lorsque le syst�eme est �a l'�etat sain. Pour notre as lin�eaire, nous hoisissons omme observateur un �ltre de Kalman asymptotique, et pour e�e tuer la ommande dupro essus, une te hnique LQ (Linear Quadrati ) a �et�e hoisie ; les al uls ont �et�e r�ealis�esave la bo�te �a outils Control de Matlab.Le syst�eme initial �etant �a �etat ontinu et la th�eorie ayant �et�e d�evelopp�ee pour dessyst�emes �e hantillonn�es, la premi�ere �etape onsiste �a onstruire le syst�eme omplet �a123

R�esidustemps dis ret, dans lequel seront introduits les param�etres �a surveiller. Dans une se onde�etape, le r�esidu primaire K est onstruit.La onversion du s h�ema-blo IV.1.1 du syst�eme �a l'�etat sain en mod�ele d'�etat donne :8>>>>>>>>>><>>>>>>>>>>:_x = 0BB� �b1 0 0 0a2 �b2 0 00 0 �b3 0a4k4 a4k6 a4 �b4 1CCAx + 0BB� a1 00 a2k30 a30 0 1CCAup + 0BB� a1 0 00 a2k3 a2k10 a3 00 0 a4k5 1CCAudy = 0� 0 1 0 00 0 0 10 0 0 0 1Ax + 0� 0 0 k20 0 00 0 1 1Aud + 0� 1 0 00 1 00 0 1 1A �(IV.1.1)Nous supposerons pour simpli�er que la perturbation mesur�ee ud3 ainsi que les pertur-bations non mesur�ees ud1 et ud2 sont nulles sur la p�eriode de surveillan e. On dis r�etised'abord le syst�eme �a une fr�equen e de 20Hz, puis en adoptant les notations de (I.2.1) et(I.2.2), on obtient les matri es Ak, Bk, Ck et Dk suppos�ees stationnaires dans un mode defon tionnement donn�e.Il est alors possible en suivant le prin ipe de s�eparation [28℄ de on evoir l'observateuret le ontroleur : la fon tion kalman de Matlab fournit la valeur stationnaire du gainde Kalman. On dispose don de quatre observateurs (I.2.3), ha un d'eux �etant a tiv�edans un mode donn�e du syst�eme. Ceux- i permettent de r�ealiser la ommande par retourd'�etat, en utilisant, par exemple, la fon tion lqr ave une pond�eration identique et unitairedes ommandes up1 et up2 et des sorties y1 et y2. La sortie y3 n'est pas utilis�ee pour la ommande omme elle ne mesure que la perturbation nulle par hypoth�ese.Le syst�eme ompos�e de l'observateur et du retour d'�etat :8<: xkjk�1 = Axk�1jk�2 + B � uk�1yk�1 �yk = Cxkjk�1 +Dukprend la forme param�etr�ee suivante dans les quatre modes, ompte tenu de la des riptiondes pannes re ens�ees �a la se tion IV.1.3.2 :
S�1 =8>>>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>>>:
xkjk�1 = 0BB� (�:2773e � 1):�1 �:3832e � 1 :1033e � 2 �:4649e � 2:2991e � 2 :3093e � 3 :3886e � 4 :1762e � 4:3132e � 4 :6358e � 3 �:5129e � 2 �:5873e � 4:15e � 1 �:95e � 2 (:1e � 1):�2 �:1e� 1 1CCA xk�1jk�2 +0BB� 2:9447:�3 68:7485 :4801e � 6 :2401e � 5 0:9914 �:2001 �:2522e � 7 �:3512e � 6 0�3:3046 :6669:�4 :1499e � 5 0 0�:4391e � 5 :8862e � 6 �:4429e � 5 �:2875e � 5 0 1CCA� uk�1yk�1 �yk = 0� 0 1 0 00 0 0 10 0 0 0 1A xkjk�1124

R�esidusS�2 =
8>>>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>>>:xkjk�1 = 0BB� (�:2981e � 1):�1 �:3664e � 1 :2048e � 2 �:3976e � 2:389e � 2 :3472e � 3 :3676 � 4 :1731e � 4:3259e � 4 :5093e � 3 �:5122e � 2 �:5772e � 4:15e � 1 �:95e � 2 (:1e � 1):�2 �:1e� 1 1CCA xk�1jk�2 +0BB� 2:9465:�3 68:75 :7553e � 6 :2906e � 5 0:9888 �:2597 �:8585 � 7 �:5034e � 6 0�3:296 :8658:�4 :1499e � 5 0 0�:4609e � 5 :1211e � 5 �:4331e � 5 �:3107e � 5 0 1CCA� uk�1yk�1 �yk = 0� 0 1 0 00 0 0 10 0 0 0 1A xkjk�1
S�3 =8>>>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>>>:
xkjk�1 = 0BB� (�:2773e � 1):�1 �:3832e � 1 :1033e � 2 �:4649e � 2:2991e � 2 :3093e � 3 :3886e � 4 :1762e � 4:3132e � 4 :6358e � 3 �:5129e � 2 �:5873e � 4:15e � 1 �:95e � 2 (:1e � 1):�2 �:1e� 1 1CCA xk�1jk�2 +0BB� 2:9447:�3 68:7485 :4801e � 6 :2401e � 5 0:9914 �:2001 �:2522e � 7 �:3512e � 6 0�3:3046 :6669:�4 :1499e � 5 0 0�:4391e � 5 :8862e � 6 �:4429e � 5 �:2875e � 5 0 1CCA� uk�1yk�1 �yk = 0� 0 1 0 00 0 0 10 0 0 0 1A xkjk�1S�4 =
8>>>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>>>:xkjk�1 = 0BB� (�:2775e � 1):�1 �:3853e � 1 :5188e � 3 �:4637e � 2:2991e � 2 :3155e � 3 :3361e � 4 :1711e � 4:3019e � 4 :6148e � 3 �:5862e � 2 �:5705e � 4:15e � 1 �:95e � 2 (:1e � 1):�2 �:1e� 1 1CCA xk�1jk�2 +0BB� 2:9416:�3 68:75 :4801e � 6 :2401e � 5 0:9914 �:2001 �:2522e � 7 �:3512e � 6 0�3:3045 :6670:�4 :1725e � 5 0 0�:4391e � 5 :8862e � 6 �:4429e � 5 �:2875e � 5 0 1CCA� uk�1yk�1 �yk = 0� 0 1 0 00 0 0 10 0 0 0 1A xkjk�1La valeur nominale des param�etres de surveillan e est �egale �a 1.On dispose maintenant du syst�eme (II.1.18) et don une estimation de l'�etat bxkjk�1(�)et de la sortie bykjk�1(�). L'erreur de pr�edi tion, not�ee �k = yk � bykjk�1(�) (II.1.17) est�egalement onnue.Le gradient �bykjk�1(�)�� , seul �el�ement manquant au al ul du r�esidu primaire, est obtenuen al ulant symboliquement le syst�eme gradient (II.1.19) du syst�eme (II.1.18), et en125

�Evaluationl'int�egrant sous � = �0, de meme que l'observateur (II.1.18). L'int�egration des observateurset des syst�emes gradients est �a temps dis ret de p�eriode d'�e hantillonnage Te = 0:05s. Lesolveur (ode45 de Matlab, impl�ementant une m�ethode de Runge-Kutta (4,5)) est hoisipour les �evolutions ontinues du mod�ele Simulink, satisfaisant lors des simulations.Le r�esidu est obtenu par l'expression (II.1.10), dans ha un des modes (dans le asmulti-modes), l'alternan e �etant pilot�ee par le ontrole ommande, des observateurs et dessyst�emes gradients.Les matri es ja obiennes et de ovarian e sont �egalement obtenues dans ha un desmodes de fon tionnement sur le syst�eme �a l'�etat sain.1.5 Exemple de simulationLa onsigne (normalis�ee) de pression est de 5 et on applique une rampe de temp�eraturede pente 0.01/s (normalis�ee) �a partir de la temp�erature 1. Les signaux obtenus durantle transitoires sont donn�es sur la �gure IV.1.5. La varian e des bruits de mesure est[�2y1 ; �2y2 ; �2y3 ℄ = [2; 1; 2℄:10�3. La dur�ee d'enregistrement est de 600s dans toute la suite.Un enregistrement de l'erreur de pr�edi tion est repr�esent�e sur la �gure IV.1.6, dansun as o�u deux pannes se sont produites aux instants indiqu�es par les barres verti ales :Æ�3 = 0:057 �a l'instant 38s (�e hantillon 760, premi�ere barre) et Æ�1 = 0:07 �a l'instant 216(�a l'�e hantillon 4320, se onde barre).
0 100 200 300 400 500 6000
1
2
3
4
5
6
7
8
Time offset: 0Fig. IV.1.5: Sorties du syst�eme pendant une rampe de temp�erature, fon tionnement nominal :la ourbe d�ebutant en 1 est la temp�erature, elle d�ebutant en 3 est le d�ebit de vapeur et elled�ebutant en 5 est la pression.1.6 �Evaluation des pro �eduresL'�evaluation suit les trois �etapes suivantes :1. pour une pro �edure d'estimation donn�ee, en estimer les performan es de mani�ere :{ statique : �etat de panne au dernier blo de donn�ees,{ hronologique : estimation des instants des d�efaillan es.126

�Evaluation0 2000 4000 6000 8000 10000 12000
−0.5
0
0.5
∆ y
1
0 2000 4000 6000 8000 10000 12000−0.2
0
0.2
∆ y
2
0 2000 4000 6000 8000 10000 12000−0.5
0
0.5
∆ y
3
Fig. IV.1.6: Erreur de pr�edi tion pour une s�equen e de deux pannes Æ�3 = 0:057 �a l'instant38s (�e hantillon 760) et Æ�1 = 0:07 �a l'instant 216s (�e hantillon 4320). Les deux instantsde hangements sont visualis�es par les barres verti ales. Les hangements provoqu�es sur lessignaux mesur�es ne sont pas distinguables �a l'�il.2. dans l'appro he bay�esienne, �evaluer l'utilit�e de onsid�erer les a priori :{ de stru ture,{ des probabilit�es de transition,{ sur les amplitudes de hangements.3. �evaluer l'in uen e des erreurs sur les param�etres des algorithmes, notamment sur lesa priori i-dessus.Pour ela, on a onstitu�e pour haque appro he et dans haque as, une base de donn�eesde K = 50 r�ealisations pour un nombre de pannes allant de 0 �a 4, et pour 10 amplitudesdi��erentes en progression arithm�etique. Les amplitudes de pannes sont tir�ees uniform�ementdans un intervalle [Æ�min; Æ�max℄, le tirage de haque omposante �etant ind�ependant dutirage des autres.Nous avons �x�e un intervalle de base pour les �e arts de haque omposante :Æ�1 2 [0:02; 0:025℄Æ�2 2 [0:02; 0:025℄Æ�3 2 [0:01; 0:015℄Æ�4 2 [0:02; 0:025℄Puis, les tirages uniformes pour les amplitudes roissantes ont �et�e e�e tu�es dans desintervalles index�es par l'entier q : [Æ�min + q(Æ�max � Æ�min) ; Æ�max + q(Æ�max � Æ�min)℄,q = 0; : : : ; 9, obtenus par translation de l'intervalle de base de la quantit�e Æ�min. Notonsqu'a�n d'augmenter l'�etendue des tests, les intervalles ainsi onstruits d�epassent lesvaleurs maximales re ens�ees �a la se tion IV.1.3.2.127

Crit�eres d'�evaluation �EvaluationNotons aussi que, pour l'int�eret de l'�evaluation sur simulation, les r�ealisations pourl'appro he markovienne ont �et�e e�e tu�ees, d'une part sur le syst�eme dans le mode 1 demont�ee en harge et d'autre part pour l'arbre de d�efaillan e omplet, don non restreintau mode 1.1.6.1 Crit�eres d'�evaluationCette appro he de la surveillan e �etant nouvelle, des rit�eres doivent etre d�e�nis pour�evaluer les r�esultats d'un algorithme pour un syst�eme et pour un mod�ele donn�es. Prin i-palement deux aspe ts vont nous int�eresser :{ statique : pour les s�equen es diagnostiqu�ees, nombre de fausse alarme, taux ded�ete tion orre te, pour un nombre de pannes donn�e ;{ hronologique : retard �a l'estimation, avan e �a l'estimation ( ara t�eristiques parti- uli�ere de la programmation dynamique, due �a l'�etape de par ours arri�ere de l'algo-rithme de Viterbi).Consid�erons pour d�e�nir es rit�eres, qu'un ouple de ve teurs de dimension d, ardinalde l'ensemble des param�etres �, est asso i�e �a la s�equen e simul�ee :�k = [�k(1); : : : ; �k(d)℄T �k = [�k(1); : : : ; �k(d)℄Ttel que si un �e art sur le param�etre �i se produit sur le blo �k(i), alors �k(i) = 1. �Al'inverse, si la panne sur �i ne se produit pas dans la s�equen e, alors �k(i) = � (� �etantsup�erieure au nombre de blo s).Deux ve teurs de dimension d sont �egalement asso i�es �a la s�equen e estim�ee : �k = [ �k(1); : : : ; �k(d)℄T b�k = [ b�k(1); : : : ; b�k(d)℄Tave les memes notations que i-dessus. On d�e�nit �egalement un ve teur taux de d�efaillan e� : � = [�1; : : : ; �d℄Tdonnant les taux de d�efaillan es a priori onnus de ha une des d pannes.On rappelle les notations prin ipales :{ n = jj�kjj1 le nombre de pannes pr�esentes dans la s�equen e �k ; n prendra ses valeursdans [0; 4℄.{ q le fa teur d'amplitude de l'�e art ; q prend ses valeurs dans [0; 9℄.{ K le nombre de r�ealisations pour haque n et pour haque q.Prenons l'exemple suivant pour illustrer les d�e�nitions des rit�eres :�k = [1; 0; 0; 1℄T ; �k = [1; �; �; 4℄Tet �k = [0; 0; 1; 1℄T ; b�k = [�; �; 5; 7℄T128

�Evaluation Crit�eres d'�evaluationNombre de fausse alarmePour haque n et haque q, on al ul le nombre de pannes pr�esentes dans �k mais pasdans �k : jj( �k � �k)+jj1 (IV.1.2)ave jjxjj1 =Pi jxij et (x)+ = sup(x; 0). Sur l'exemple, jj( �k��k)+jj1 = jj[0; 0; 1; 0℄T jj1 =1, le param�etre �3 ayant �et�e faussement estim�e non-nominal au blo 5, b�k(3).{ Si n > 0, le nombre de fausses alarmes rapport�e au nombre de pannes pr�esentes etau nombre de r�ealisations, d�e�nit le nombre de fausse alarme :FAn;q = 1nK KXk=1 jj( �k � �k)+jj1 (IV.1.3){ si n = 0, on al ulera le nombre moyen de pannes faussement d�ete t�ees :FA = 1K KXk=1 jj �kjj1 (IV.1.4)Taux de non d�ete tionC'est le rit�ere sym�etrique de la fausse alarme : une panne pr�esente dans �k n'est pasestim�ee dans �k. Le nombre de non d�ete tions sur la s�equen e �k est donn�e par :jj(�k � �k)+jj1 (IV.1.5)ave les memes notations. Sur l'exemple, jj(�k� �k)+jj1 = jj[1; 0; 0; 0℄T jj1 = 1, le param�etre�1 ayant �et�e faussement estim�e nominal.Pour un nombre n > 0 de pannes et un fa teur q d'amplitude, le taux de non-d�ete tionest al ul�e par : �Dn;q = 1nK KXk=1 jj(�k � �k)+jj1 (IV.1.6)Taux de d�ete tion orre teSur la s�equen e k, le taux de pannes orre tement d�ete t�ees est donn�e par :jj�kjj1 � jj(�k � �k)+jj1jj�kjj1 (IV.1.7)Sur l'exemple on a jj�kjj1�jj(�k� �k)+jj1jj�kjj1 = (2� 1)=2 = 0:5.Pour un nombre de pannes n > 0, pour un fa teur d'amplitude q donn�es et sur les Kr�ealisations, le taux de d�ete tion orre te est donn�e par :DCn;q = 1K PKk=1 jj�kjj1�jj(�k� �k)+jj1jj�kjj1= 1K PKk=1(1� jj(�k� �k)+jj1n )= 1� �Dn;q (IV.1.8)129

Conditions d'�evaluation �Evaluation�E art temporel moyen �a l'estimationL'�e art temporel moyen, ETM, �a l'estimation n'est d�e�ni que pour les �e arts �i or-re tement estim�es, i.e. pour lesquels �k(i) = �k(i) ; on note Ik les indi es de et ensemblede omposantes, et pour elui- i, l'�e art �a l'estimation est donn�e par :Xi2Ik j�k(i)� b�k(i)j (IV.1.9)Sur l'exemple, on a Ik = f4g et j�k(4)� b�k(4)j = j4� 7j = 3.Pour un nombre n � 2 de pannes et un fa teur q d'amplitude, l'�e art moyen �a l'esti-mation est al ul�e par : ETM = 1K KXk=1Pi2Ik j�k(i)� b�k(i)j ard(Ik) (IV.1.10)Pour une panne unique n = 1 et un fa teur q d'amplitude, l'�e art (alg�ebrique) moyen�a l'estimation est al ul�e par :ETM = 1K KXk=1 �k(Ik)� b�k(Ik) (IV.1.11) e qui permet de d�eterminer si l'�e art est un retard ou une avan e �a l'estimation, ar, omme on l'a dit pr�e �edemment, l'�etape de par ours arri�ere de l'algorithme de Viterbipeut rendre anti- hronologique la traje toire optimale : en e�et, seule la ausalit�e logiqueentre les pannes est �a exploiter stri tement dans le r�esultat. N�eanmoins, il est int�eressantd'examiner le omportement hronologique de l'algorithme en quanti�ant l'�e art (positifou n�egatif) entre l'instant o�u la d�efaillan e se produit et elui o�u elle est estim�ee, si ellel'est e�e tivement.1.6.2 Conditions d'�evaluationLes onditions d'�evaluation des pro �edures d'estimation d�ependent de plusieurs pa-ram�etres :1. Taille des blo s sur lesquels sont al ul�es les r�esidus : trois tailles orrespondant �a45, 90 et 135 se ondes d'enregistrements ave une fr�equen e d'�e hantillonnage de1=Te = 20Hz, ont �et�e hoisies. Le nombre N d'�e hantillons onsid�er�es est don respe tivement de 900, 1800, 2700.2. Probabilit�es a priori des transitions, pour la ha�ne de Markov et pour le PSPN :on peut envisager une onnaissan e pr�e ise (taux de d�efaillan e sp�e i�que �a haquepanne) ou impr�e ise, auquel as on peut onsid�erer une probabilit�e intuitive, pes-simiste ou optimiste, pour haque panne. Si l'on note �0 le ve teur des taux ded�efaillan es sous lesquels ont �et�e g�en�er�ees les donn�ees, on a e�e tu�e l'estimation enappliquant �a �0 les fa teurs multipli atifs suivants : �1 = 5=3�0; �2 = 4=3�0; �3 =1�0; �4 = 2=3�0; �5 = 1=3�0, allant de la sur-estimation (�1) �a la sous-estimation(�5) des fr�equen es d'o urren e des d�efaillan es.3. Probabilit�es a priori des amplitudes prises en ompte ou non, et si elles le sont,erreur sur et a priori. 130

Algorithme HMM1.7 Algorithme markovienOn donne d'abord, dans le as d'absen e de panne, le nombre de fausse alarme,seul rit�ere int�eressant dans e as. Puis pour le as d'une panne unique, on ompareles r�esultats obtenus en fon tion de la taille du blo . Ensuite, on pr�esente les r�esultatspour un nombre plus grand de pannes, pour une seule taille de blo . On examinera dansle meme temps l'in uen e sur les performan es des erreurs ommises sur les a priori(probabilit�es des transition et amplitudes des pannes).Toutes les �gures donnent les r�esultats pour les deux algorithmes de Viterbi ave (algorithme donn�e �a la page 81) et sans (algorithme donn�e �a la page 83) a priori sur lesamplitudes des �e arts param�etriques. On se r�ef�erera �a ha un par l'expression \ave apriori (d'amplitude)" et \sans a priori (d'amplitude)".1.7.1 Absen e de pannesSur l'ensemble des simulations r�ealis�ees en l'absen e de pannes, la taille du blo n'in uepas sur les r�esultats de simulation : nous pr�esentons es derniers pour la plus petite taillede blo .Le seul rit�ere �a onsid�erer est le nombre de fausse alarme FA, il est al ul�e par (IV.1.4)n = 0 et il est int�eressant de onsid�erer d�es maintenant l'in uen e de l'erreur ommisesur l'information a priori utilis�ee, notamment i i l'in uen e de la valeur a priori des tauxde d�efaillan e �i, ar elles onditionnent les performan es et permettent de onsid�erer unaspe t important de l'algorithme. La �gure IV.1.7 repr�esente en altitude le nombre defausse alarme FA en fon tion des inq fa teurs �i; i = 1; : : : ; 5, et pour l'algorithme sansa priori (1) et ave a priori (2).1
2
3
4
5
1
2
0
1
2
3
4
FA
Fig. IV.1.7: Nombre de fausse alarme FA pour le syst�eme �a l'�etat sain, pour l'algorithme (sansa priori : 1, ave a priori : 2) et pour inq a priori di��erents sur les taux de d�efaillan e : dela sur-estimation �1 (abs isse 1) �a leur sous-estimation �5 (abs isse 5), les donn�ees ayant �et�eg�en�er�ees sous la valeur 3.Algorithme ave a priori : Si l'on prend en ompte la probabilit�e a priori surl'amplitude de hangement, les valeurs di��erentes des probabilit�es de transition ne131

Absen e de pannes Algorithme HMMjouent exp�erimentalement au un role, e qui s'explique th�eoriquement : en e�et, dans e as, la vraisemblan e des observations �a l'�etat j 2 � est�12 lJi�i(�k) = �12 ��k � JipNÆ�i�T ��1 ��k � JipNÆ�i�Notant l'�etat sain de la ha�ne de Markov i = 1 ( orrespondant �a �i = 0), la vrai-semblan e a pour valeur : �12 l0(�k) = �12�Tk ��1�kOr, omme les r�esidus ont �et�e g�en�er�es sous H0 (pas de panne), on a :E0 [�12�Tk ��1�k℄ > E0 [�12 ��k � JipNÆ�i�T ��1 ��k � JpNÆ�i�℄ (IV.1.12)o�u E0 d�esigne l'esp�eran e sous H0 (voir (II.1.2). De plus, en reprenant les notationsde l'algorithme de Viterbi page 79, et en admettant que les a priori de transitionsont tels que : aij < aiiet en supposant en�n que l'�etat initial est l'�etat 1, on a :E0 [�12 l0(�k) + lna11℄ > E 0 [12 lJi�i(�k) + lna1i℄ (IV.1.13)Par ons�equent, la fon tion valeur Vk v�eri�e :E0 [Vk(1)℄ > E 0 [Vk(i)℄; 8i a essible �a partir de l'�etat 1Par ons�equent, l'�etat sain est plus vraisemblable que l'�etat i. Par suite, les �etats ja essibles depuis i ont une vraisemblan e qui v�eri�e �egalement (IV.1.12) et dont lesprobabilit�es d'a �es aij sont a priori inf�erieures �a a11 : or, la r�e urren e e�e tue lasomme de termes ayant ette propri�et�e, es derniers �etant tels que :E 0 [Vk(1)℄ > E0 [Vk(j)℄; 8j a essible �a l'instant kl'�etat sain �etant plus vraisemblable, en moyenne, que tous les �etats a essibles �al'instant k, e qui explique le r�esultat de l'algorithme ave a priori.Algorithme sans a priori : Si l'a priori n'est pas utilis�e, on doit omparer les tests desensibilit�e (II.1.32) : 12 ti(�k) = ln max�i pJi�i;�(�)p0;�(�)| {z }A (IV.1.14)sous H0 pour haque �etat. Or, (IV.1.14) est une forme quadratique telle que pourl'hypoth�ese d'�etat sain (index�e par 1), le num�erateur et le d�enominateur de A sont�egaux et don : 12 t1(�k) = 0132

Algorithme HMM Panne uniqueEn revan he, omme le r�esidu n'est pas nul,12 ti(�k) = �Tk (JTi ��1Ji)�1�k > 0; 8i 6= 1Par ons�equent, suivant les valeurs de a1i on aura :V1(1) > V1(i) ou V1(1) < V1(i)le se ond as lib�erant les traje toires de l'attra tion de l'�etat sain. Par la suite, lestests de sensibilit�e peuvent etre sup�erieurs aux aij : le nombre de pannes d�ete t�eespeut alors ro�tre rapidement : sur la �gure IV.1.7, la diminution des taux ded�efaillan e annule brusquement le nombre de fausses alarmes : on entre d'un seul oupdans le bassin d'attra tion de l'�etat sain, e qui explique qu'il n'y a pas d'�evolutionprogressive de es mauvaises d�ete tions.En on lusion, des erreurs sur les probabilit�es a priori pour les transitions ne modi�entpas en moyenne les performan es sous H0 de l'algorithme ave a priori sur l'amplitude.En revan he, es probabilit�es jouent un role entral dans les performan es de l'algorithmesans a priori, pour les raisons i-dessus.Remarquons que l'on peut voir dans et a priori un param�etre de r�eglage de l'algorithmeque l'on peut aÆner �a l'�etat sain, sur des enregistrements aussi nombreux que souhait�e.Notons �egalement que souvent, il suÆt de r�egler a1i �a une faible valeur pour ompensersous H0 les valeurs des tests pour les �etats d�efaillants : 'est en quelque sorte une barri�erede potentiel que doivent fran hir les tests en as de pr�esen e e�e tive de pannes.Les r�esultats pour les trois rit�eres sont pr�esent�es dans les paragraphes suivants.1.7.2 Panne uniqueLes probabilit�es de transition sont elles ayant g�en�er�e les donn�ees ; l'a priori sur l'am-plitude des d�eviations des omposantes de � orrespond i i �a la borne sup�erieure Æ�max, 'est-�a-dire que l'on est pessimiste sur les hangements. Les r�esultats de simulation sontdonn�es �gure IV.1.8.Algorithme ave a priori : On remarque d'abord que la taille du blo in ue peu sur lesperforman es, e qui est oh�erent ave la prise en ompte de elle- i (par le nombred'�e hantillons N) dans l'esp�eran e de la loi du r�esidu pour une hypoth�ese donn�ee(II.1.23).En revan he, les performan es sont relativement d�e oupl�ees : DC (IV.1.8) augmente(de 0:6 �a 1) en fon tion de l'amplitude alors que FA (IV.1.3) diminue (de 0:3 �a 0).L'�e art moyen �a l'estimation, ETM, d�e�ni par (IV.1.11) dans le as d'une panneunique, est faible : l'instant de hangement est don bien lo alis�e, ave un retard de1 blo pour les faibles amplitudes �a 0.5 blo pour les amplitudes �elev�ees. Ce i est lapremi�ere propri�et�e int�eressante de l'algorithme.Dans le as d'une panne, la somme de FA et de DC donne le nombre de pannesd�ete t�ees, qui i i est l�eg�erement inf�erieur �a 1 (0:76 et 0:98) pour les deux premiersfa teurs d'amplitude, puis est stri tement �egal �a 1 ensuite. C'est la se onde pro-pri�et�e de l'algorithme : dans le as d'une panne, l'algorithme d�ete te orre tementle hangement, en nombre et en instant.133

Panne unique Algorithme HMM1
1.52
510
0.6
0.8
1D
C
11.5
25
10
0123
Taille Bloc: 45
FA
11.5
25
10
−1
0
1
ET
M
11.5
25
10
0.6
0.8
1
DC
11.5
25
10
0123
Taille Bloc: 90
FA
11.5
25
10
−0.20
0.20.40.6
ET
M1
1.52
510
0.6
0.8
1
DC
11.5
25
10
0123
Taille Bloc: 135
FA
11.5
25
10
0.20.40.60.8
ET
M
Fig. IV.1.8: Taux de d�ete tion orre te DC (premi�ere olonne), nombre de fausse alarme FA( olonne 2) et �e art temporel moyen �a l'estimation ETM ( olonne 3), haque ligne orres-pondant �a une taille de blo di��erente (45, 90 et 135s). Les r�esultats sont donn�es pour 10amplitudes roissantes de hangement param�etrique � et pour les deux algorithmes, sans apriori (1) et ave a priori (2) sur l'amplitude maximale de hangement.On onstate d'ailleurs que si l'on modi�e le al ul de l'�e art moyen �a l'estimationpour prendre en ompte la premi�ere estimation (bonne ou fausse), on s'aper� oit quele retard �a la d�ete tion d'un hangement est pro he de 0.5 blo dans tous les as.L'am�elioration des performan es ave l'amplitude roissante des �e arts provient dufait que l'a priori est i i une dire tion de l'espa e des param�etres, i.e. une dire tionpour l'esp�eran e a priori du r�esidu pour haque on�guration de pannes. Or, plusl'amplitude augmente, plus les moyennes (dans des dire tions di��erentes) sont biens�epar�ees, et moins la d�e ision est ambigu�e.On onstate en�n en examinant les traje toires obtenues que la panne 3 est toujours(100% des as) orre tement diagnostiqu�ee alors que la panne 4 l'est moins bien,notamment pour ses petites amplitudes. En e�et, les orr�elations de deux param�etres�3 et �4 dans le r�esidu sont fortes, et il faut une plus grande amplitude pour que lesdire tions se s�eparent nettement. 134

Algorithme HMM Panne uniqueAlgorithme sans a priori : dans toutes les r�ealisations, la pire on�guration de pannes( elle omprenant toutes les pannes) a �et�e syst�ematiquement estim�ee. Le omporte-ment est don mauvais dans e as.L'interpr�etation est la suivante :1. sans a priori, on utilise des tests de sensibilit�e qui ont une valeur �elev�ee, rois-sante en fon tion du nombre d'�e hantillons pris en ompte : sous H1 (voir(II.1.2) page 31), ils sont tr�es rapidement sup�erieurs aux probabilit�es de transi-tion, qui ne jouent que faiblement leur role de limitation du nombre de pannesd�ete t�ees : on onstate don , ave [15℄, que l'utilisation d'un a priori �xe pourles probabilit�es de transition dans une appro he markovienne, implique le risquequ'il soit en pratique peu utile, et que de sur ro�t, il soit d�eli at �a r�egler, parmanque d'intuition essentiellement : en e�et, ontrairement aux probabilit�es a1iqui peuvent etre r�egl�ees sous H0, les probabilit�es aij d�ependent du marquage.2. on sait aussi que plus un test de sensibilit�e a de degr�es de libert�e (le ardinal dela on�guration de pannes), plus sa valeur sera �elev�ee (augmentant de mani�erequadratique en fon tion de l'�e art) : d'o�u globalement une propension �a d�ete terle nombre maximal de pannes.3. ependant, les ontributions de ha une des pannes possibles dans le test de sen-sibilit�e sont in�egales ; de plus, les orr�elations sont fortes, entra�nant des valeurspro hes pour des on�gurations de pannes pro hes. Notamment les on�gura-tions ne se distinguant que par la pr�esen e ou l'absen e de la \vraie" panne,peuvent avoir une valeur tr�es pro he de sorte que ette panne peut se trouverignor�ee dans la on�guration optimale �nale.Remarquons que le d�es�equilibre entre probabilit�es a priori et tests de sensibilit�e estlogique : supposons l'�e art Æ� �x�e : alors E� [�℄ � Æ�pN et don E� [ti(�)℄ � N . Par ons�equent, on pourrait normaliser les probabilit�es de transition en fon tion de Na�n de leur onf�erer le meme ordre de grandeur que les tests. N�eanmoins, pour plu-sieurs normalisations exp�eriment�ees, les r�esultats d�ependent fondamentalement desprobabilit�es de transition, la normalisation ne r�ealisant qu'une homoth�etie de toutesles valeurs. Il faudrait ependant �egalement modi�er la signi� ation a priori des pro-babilit�es de transition, e qui est un prolongement de e m�emoire : nous sommespartis de l'id�ee d'utiliser la onnaissan e a priori de es probabilit�es, onnaissan eissue des analyses de �abilit�e, e qui �xe d�e�nitivement leur valeur. Il semble qu'ilserait souhaitable de re onsid�erer ette hypoth�ese pour les faire d�ependre des va-leurs des tests sous les hypoth�ese d'absen e de pannes et de pr�esen e de pannes, equi revient �a introduire un a priori sur les amplitudes de hangement, et qui nousram�ene au premier algorithme propos�e.En�n, on remarque que l'ETM, d�e�ni dans le as d'une panne par (IV.1.11), estn�egatif : les pannes orre tement estim�ees le sont avant qu'elles ne se produisent (biensur 'est une d�e ision a posteriori). Ce i provient du par ours arri�ere qui ne tientpas ompte de la hronologie des �ev�enements (en fait, il diagnostique des s�equen es ompatibles ave le RdP, qui sont des ordres partiels, voir annexe A).L'�evolution des rit�eres, pour une taille de blo �x�ee, en fon tion de l'erreur ommisesur les probabilit�es de transition (donn�ee par les inq fa teurs multipli atifs), est donn�eesur la �gure IV.1.9. 135

Deux pannes Algorithme HMMOn y onstate omme annon �e que les performan es sont meilleures pour l'algorithmeave a priori, les fausses alarmes d�e roissant ave l'amplitude de hangement. L'algorithmesans a priori est moins lairement analysable, du fait 1/ des valeurs �elev�ees des tests quiprovoquent de nombreuses fausses alarmes et 2/ des valeurs pro hes des tests qui peuventfavoriser la non d�ete tion de la panne pr�esente au pro�t d'une autre panne.1.7.3 Deux pannesPour un algorithme donn�e, les trois rit�eres sont identiques en fon tion de la taille dublo , nous hoisissons par exemple la plus petite taille pour pr�esenter les on lusions. A�nd'�eviter les �gures redondantes, on pr�esentera d�esormais les r�esultats pour trois valeursdes probabilit�es de transition �1 = 5=3�0, �3 = �0 et �5 = 1=3�0 (voir �gure IV.1.10).On s'int�eresse d'abord au as o�u l'on dispose d'un a priori orre t pour les probabilit�es detransition ( ourbes au entre des �gures).Algorithme ave a priori : Le omportement de l'algorithme est moins bon que pourune panne : DC ro�t jusqu'�a 80% de d�ete tion orre te et un taux faible de faussealarme orrespondant �a une alarme erron�ee, stable en fon tion de l'amplitude de hangementOn remarque que le nombre de pannes d�ete t�ees est sous-�evalu�e pour les faiblesamplitudes de hangement (en moyenne 1:7 pour un fa teur inf�erieur �a 4), puis est orre tement estim�e au del�a et e de mani�ere stable. L'algorithme fournit en ore unbon estimateur du nombre de pannes pour les grandes amplitudes.Algorithme sans a priori : les memes ommentaires que pour le as d'une panneunique, s'appliquent i i.Si l'on s'int�eresse �a l'�evolution des rit�eres pour une taille de blo donn�ee en fon tionde l'erreur ommise sur les probabilit�es de transition, on obtient les parties haute et bassede la �gure IV.1.10.On onstate logiquement qu'une sur-�evaluation des probabilit�es de transition favorisela d�ete tion orre te, et augmente dans le meme temps les fausses alarmes ; ependant es derni�eres d�e roissent en fon tion de l'amplitude de hangement, jusqu'�a 35%, e qui orrespond �a 0.7 pannes.�A l'inverse, une sous-�evaluation des probabilit�es de transition a�e te nettement, et sur-tout, les d�ete tions orre tes ; les fausses alarmes restent stables, signe qu'une panne, for-tement orr�el�ee ave les deux pannes pr�esentes, persiste �a etre d�ete t�ee pr�ef�erentiellement.Rappelons que l'a priori sur les amplitudes n'est pas exa t ( elles- i sont tir�ees de mani�ereal�eatoire dans un intervalle).En ore une fois, pour l'algorithme ave a priori, le nombre de pannes est orre tementestim�e, malgr�e les erreurs sur les probabilit�es de transition, et e pour les amplitudes�elev�ees.1.7.4 Trois pannesLes r�esultats sont donn�es �gure IV.1.11.Algorithme ave a priori : Les taux de d�ete tion orre te et de fausse alarme sontplus faibles que dans le as de deux pannes, se stabilisant �a une valeur de 65% et15%. 136

Algorithme HMM Quatre pannesLe nombre de pannes d�ete t�ees est sous-�evalu�e, ulminant �a 2.4 pannes pour unfa teur d'amplitude de hangement plus grand que 4. De plus, l'ETM est �elev�e.Algorithme sans a priori : memes ommentaires que pour 2 pannes.L'in uen e des probabilit�es de transition, �gure IV.1.12, parties haute et basse, indiqueen ore que la sur-�evaluation des probabilit�es de transition am�eliore les deux rit�eres ave un minimum de 15% pour FA alors que DC=85%. Dans e as, le nombre de pannes estbien estim�e en moyenne, ex ept�e pour les tr�es faibles amplitudes.Il est int�eressant de noter que la sous-�evaluation est ritique dans e as : �a peine 40%de bonne estimation.1.7.5 Quatre pannesLes r�esultats sont donn�es �gure IV.1.12. De mani�ere inverse au as sans panne, FA n'aau une pertinen e i i.On onstate que les r�esultats sont quasiment identiques �a eux de la se tion pr�e �edente,la 4ieme panne �etant d�ete t�ee de la meme mani�ere, qu'elle soit pr�esente ou non : e i tientau fait que l'�e art param�etrique orrespondant joue un role n�egligeable dans la moyennedu r�esidu.On pourrait alors penser que sous-estimer la valeur a priori de l'�e art permettraitd'am�eliorer la d�ete tion. C'est en e�et le as pour les s�equen es de 4 pannes, mais elad�egrade les performan es de l'algorithme dans les on�gurations pr�esentant moins depannes (notamment pour une panne unique, on obtient FA>60% et DC<70%, �a om-parer �a la �gure IV.1.9), e qui n'est pas souhaitable.1.7.6 Synth�ese des r�esultats dans le as markovienOn re ense dans le tableau suivant l'ensemble des r�esultats obtenus pour l'algorithmemarkovien : on donne pour les amplitudes de pannes roissantes (Æ�i : 0.03 �a 0.3) et pourles s�equen es test�ees de 0 �a 4 pannes, la valeur des di��erents rit�eres obtenus pour haquealgorithme impl�ement�e. Les taux de d�ete tion orre te (DC) et les nombres de faussesalarmes (FA) sont donn�es selon l'amplitude roissante des �e arts simul�es.Æ�i : 0.03 �a 0.3 Nb pannes 0 1 2 3 4Sans a priori DC (taux) 1 1 1 1FA (Nombre) 0 3 1 0.3Ave a priori DC 0.6 �a 1 0.3 �a 0.9 0.3 �a 0.7 0.2 �a 0.6FA 0 0.2 �a 0 0 �a 0.3 0 �a 0.21.7.7 Con lusionsL'algorithme markovien donne des r�esultats variables suivant le nombre de pannessimul�ees et leur amplitude : sur une �e helle arbitraire de variation, les grandes ampli-tudes sont en g�en�eral mieux d�ete t�ees et diagnostiqu�ees que les petites amplitudes, e qui orrespond �a une augmentation du rapport signal �a bruit [7℄. Il est int�eressant de noterque e i n'a pas n�e essairement omme orollaire une augmentation du nombre de faussealarme, stable en g�en�eral pour les vraies probabilit�es de transition et dans le as o�u l'ondispose de l'a priori sur l'amplitude. Ne pas disposer d'a priori sur l'amplitude implique137

Algorithme sur le PSPN hybrideune baisse des performan es, provenant du d�es�equilibre entre probabilit�es de transition apriori (faibles en g�en�eral) et valeurs plus �elev�ees des tests.En�n, on onstate que la d�e ision entre 3 et 4 pannes est ambigu�e. On soup� onne un ef-fet \dynamique" de l'algorithme de Viterbi, rendant diÆ ilement d�ete tables les troisi�emeet quatri�eme pannes : en e�et, la pro �edure de programmation dynamique umule les va-leurs �elev�ees des pannes initiales, elles arrivant tardivement devant d�epasser es s orespour etre d�ete t�ees, alors meme que leur vraisemblan e peut etre �a peine plus �elev�ee quedans les on�gurations o�u elles ne �gurent pas.A�n de remettre le ompteur �a z�ero, on a test�e une version de l'algorithmep�eriodiquement r�einitialis�e sur l'�etat ayant le plus haut s ore (tous les 5 blo s), puisit�er�e �a partir du nouvel �etat initial. Ce i donne des performan es similaires �a elles del'algorithme non it�er�e, le gain se situant au niveau de l'ETM, plus faible d'un demi blo etdans le taux de d�ete tion orre te pour 3 et 4 pannes (90%). Diverses valeurs de p�eriodesd'initialisation ont �et�e test�ees, et on a observ�e une d�egradation pour les r�einitialisationstrop fr�equentes (en dessous de 4 blo s). Cette d�ependan e suppl�ementaire par rapport ausyst�eme ainsi que le manque d'information pour le r�eglage, limitent l'int�eret d'une tellemodi� ation.On on lut maintenant sur l'in uen e des a priori dans et exemple :1. il semble souhaitable de sur-�evaluer les probabilit�es de transition, plutot que l'in-verse ;2. les probabilit�es de transition n'in uent pas sur les fausses alarmes quand � = �0 etquand on dispose de l'a priori d'amplitude, mais elles sont ru iales si l'on ne disposepas de es a priori : notons qu'alors, seules les probabilit�es de sortie de l'�etat sainsont �a prendre en ompte pour le r�eglage sur le syst�eme �a l'�etat sain ;3. une sur-�evaluation des amplitudes de hangement est exp�erimentalement pr�ef�erable�a une sous-�evaluation, notamment pour les on�gurations de 1 et 2 pannes.Notons en�n que les valeurs de l'�e art moyen �a l'estimation ETM, indiquent la bonnequalit�e de l'estimation des instants de hangements, notamment ave a priori sur l'am-plitude. Il n'a rien �et�e on lu de pertinent des essais sur une dur�ee plus ourte, dans les on�gurations d'une ou deux pannes.Dans le as de l'algorithme ave a priori, on onstate que jusqu'�a trois pannes, etpour des amplitudes �elev�ees, le nombre de pannes d�ete t�ees ( orre tes ou fausses) esttr�es pro he du nombre de pannes e�e tivement pr�esentes. Dans les as d'ambigu��t�e sur lediagnosti , on peut utiliser �a la suite une autre pro �edure, par exemple les tests oupl�esmin-max/sensibilit�e [12℄ a�n de d�eterminer, pour un nombre de pannes donn�e, quelle estla on�guration la plus probable.1.8 Algorithme de Viterbi sur les PSPNLes r�esultats exp�erimentaux s'o�rent moins aux ommentaires que dans le as marko-vien et les performan es sont d�e evantes, nous en pr�esentons les ara t�eristiques prin ipalessur la �gure IV.1.13, pour une taille de blo de 135s et pour les probabilit�es de transitionqui ont g�en�er�e les donn�ees. 138

Algorithme sur le PSPN hybride Synth�ese des r�esultats dans le as PSPNOn onstate que seule la panne 3 (�3) est orre tement estim�ee en pr�esen e d'a priorisur les pannes, et que toutes les autres sont alors ignor�ees. L'algorithme sans a priori luin'estime pas la bonne panne, sauf �a une amplitude faible.1.8.1 Synth�ese des r�esultats dans le as PSPNOn re ense dans le tableau suivant l'ensemble des r�esultats obtenus pour l'algorithmePSPN hybride (voir le tableau pr�e �edent pour la signi� ation des quantit�es repr�esent�ees).�i : 0.03 �a 0.3 Nb pannes 0 1 2 3 4Sans a priori DC 0 0 0 0FA 0 1 0.5 0.3Ave a priori DC 0.7 �a 0.6 0.5 �a 0.4 0.3 �a 0.2 0.3 �a 0.2FA 0 0 0 0Les raisons de es r�esultats sont les suivantes :1. l'algorithme sans a priori repose sur les tests de r�eje tion dont le d�e ouplage par rap-port aux pannes de nuisan e a pour orollaire une att�enuation forte de la sensibilit�eaux pannes d'int�eret, et e de mani�ere roissante ave la orr�elation des param�etresdans le r�esidu. Par ons�equent, les probabilit�es de transition en faveur de l'absen e depannes l'emportent sur la vraisemblan e g�en�eralis�ee du r�esidu. Notons que le syst�eme onsid�er�e est parti uli�erement d�eli at �a diagnostiquer de mani�ere modulaire : en ef-fet, tous les param�etres interviennent dans toutes les omposantes du r�esidu, e quia pour e�et d'assimiler l'espa e de nuisan e �a l'espa e entier. Ce i se traduit pardes valeurs n�egligeables de la vraisemblan e modulaire du r�esidu par rapport auxprobabiit�es a priori.2. L'algorithme ave a priori ne fournit pas de r�esultats meilleurs pour la raison sui-vante : la pr�esen e dans sa loi (III.2.29) de la matri e ~P �t e�e tue la meme att�enuationn�efaste que pour les tests de r�eje tion. En e�et, ette matri e annule toute ontribu-tion du s.e.v. Im(fJ�t ) e qui revient �a onsid�erer que les pannes de nuisan e prennenttoute valeur possible, et don l'a priori sur les amplitudes des pannes de nuisan en'est pas utilis�e : en revan he, l'a priori sur les pannes d'int�eret, lui est utilis�e, maisne ompense pas le poids des pannes de nuisan e.Il faudrait, a�n de limiter e probl�eme, introduire l'a priori sur les pannes de nui-san e, non pas sur la loi du r�esidu reposant sur ~PfJ�t , mais sous la forme d'un domained'existen e de es amplitudes, question que nous n'avons pas abord�ee, n'o�rant pasde solutions analytiques utilisables, mais qui serait une perspe tive int�eressante del'appro he hybride num�erique/symbolique.
139

Synth�ese des r�esultats dans le as PSPN Algorithme sur le PSPN hybride1
1.52
510
0
1
2D
C
11.5
25
10
2
2.5
3
Facteur probabilite a priori: 5/3
FA
11.5
25
10
02468
ET
M
11.5
25
10
0.98
0.99
1
DC
11.5
25
10
123
Facteur probabilite a priori: 4/3
FA
11.5
25
10
02468
ET
M1
1.52
510
0.6
0.8
1
DC
11.5
25
10
0123
Facteur probabilite a priori: 3/3
FA
11.5
25
10
−101
ET
M
11.5
25
10
0.5
1
DC
11.5
25
10
0
1
Facteur probabilite a priori: 2/3
FA
11.5
25
10
−101
ET
M
11.5
25
10
0.5
1
DC
11.5
25
10
0
1
Facteur probabilite a priori: 1/3
FA
11.5
25
10
−101
ET
M
Fig. IV.1.9: R�esultats omplets pour des s�equen es d'une panne, et pour une taille de blo �x�ee (45s), haque ligne orrespond �a un a priori sur les taux de d�efaillan es. Les trois rit�eres(DC, FA, ETM) sont repr�esent�es en olonne (voir l�egende �gure IV.1.8 pour la signi� ationdes axes). 140

Algorithme sur le PSPN hybride Synth�ese des r�esultats dans le as PSPN
1
1.5
25
10
0.9
0.95
1
DC
1
1.5
25
10
0.5
1
Facteur probabilite a priori: 5/3
FA
1
1.5
25
10
2
4
6
ET
M
1
1.5
25
10
0.4
0.6
DC
1
1.5
25
10
0
0.2
0.4
Facteur probabilite a priori: 1/3
FA
1
1.5
25
10
1
2
3
ET
M
1
1.5
25
10
0.5
1
DC
1
1.5
25
10
0
0.5
1
Facteur probabilite a priori: 3/3
FA
1
1.5
25
10
1
2
ET
M
Fig. IV.1.10: R�esultats omplets pour des s�equen es de deux pannes (voir l�egendes des �guresIV.1.8 et IV.1.9).
141

Synth�ese des r�esultats dans le as PSPN Algorithme sur le PSPN hybride
11.5
25
10
0.8
0.9
1
DC
11.5
25
10
0.20.25
0.3
Facteur probabilite a priori: 5/3F
A
11.5
25
10
33.5
4
ET
M
11.5
25
10
0.5
1
DC
11.5
25
10
0
0.2
Facteur probabilite a priori: 3/3
FA
11.5
25
10
234
ET
M
11.5
25
10
0.2
0.4
DC
11.5
25
10
0
0.1
Facteur probabilite a priori: 1/3
FA
11.5
25
10
2
4
ET
M
Fig. IV.1.11: R�esultats omplets pour des s�equen es de trois pannes (voir l�egendes des �guresIV.1.8 et IV.1.9).
142

Algorithme sur le PSPN hybride Synth�ese des r�esultats dans le as PSPN
11.5
2 24
6
0.8
0.9
1
Facteur probabilite a priori: 5/3
DC
11.5
2 24
6
4
5
ET
M
11.5
2 24
6
0.5
1
Facteur probabilite a priori: 3/3
DC
11.5
2 24
6
2
4
ET
M
11.5
2 24
6
0.2
0.4
Facteur probabilite a priori: 1/3
DC
11.5
2 24
6
2
4
6
ET
M
Fig. IV.1.12: R�esultats omplets pour des s�equen es de quatre pannes (voir l�egendes des�gures IV.1.8 et IV.1.9).
143

Synth�ese des r�esultats dans le as PSPN Algorithme sur le PSPN hybride
11.5
25
10
0
0.5
1
DC
11.5
25
10
0
1
2
3
Nombre de pannes: 1
FA
11.5
25
10
−1
0
1
ETM
11.5
25
10
00.20.40.60.8
DC
11.5
25
10
00.20.40.60.8
Nombre de pannes: 2
FA
11.5
25
10
0
0.5
1
ETM
11.5
25
10
0.2
0.4
0.6
DC
11.5
25
10
0
0.1
0.2
0.3
Nombre de pannes: 3
FA
11.5
25
10
0
0.5
1
ETM
11.5
2 24
6
0.4
0.6
0.8
DC
11.5
2 24
6
−1
0
1
FA
Nombre de pannes: 4
11.5
2 24
6
0
0.5
1
ETM
Fig. IV.1.13: R�esultats omplets pour des s�equen es de une �a quatre pannes. On repr�esentepour les amplitudes d'�e arts (num�erot�ees de 1 �a 10) et pour les algorithmes sans (1) et ave a priori (2).144

Chapitre 2Impl�ementationToute l'impl�ementation e�e tu�ee pendant la th�ese a �et�e r�ealis�ee sous Matlab et sesbo�tes �a outils Symboli Math, Control, StateFlow, et les simulations sous Simulink. Les al uls sp�e i�ques �a l'appro he lo ale ( al uls des matri es de ovarian e et d'in iden e,impl�ementation des tests du GLR) utilisent un ensemble de routines Matlab, programm�eespar Q. Zhang �a l'IRISA ; la sp�e i� ation des PSPN et l'estimation de traje toires optimalesutilisent un ex�e utable programm�e par A. Aghasaryan [2℄ en EIFFEL [39℄, un langageorient�e objet.Nous s�eparons la pr�esentation en deux parties :1. Mod�elisation : des ription de l'entr�ee des mod�eles nominaux et de la sp�e i� ationdes pannes ;2. Estimation : des ription de l'impl�ementation des algorithmes de Viterbi markovienen Matlab et de l'algorithme de Viterbi g�en�eralis�e en EIFFEL.2.1 Mod�elisationSoit �a surveiller un syst�eme (III.2.17) �a partir de son mod�ele (i i un observateur(II.1.18)) : S� � xk = f�(xk�1; uk; ��)yk = g�(xk; ��) + vk (IV.2.1)o�u xk 2 Rn est l'�etat , uk 2 Rm la ommande et yk 2 Rp l'observation, � 2 Rd le ve teurparam�etre. Les fon tions f et g sont suppos�ees ontinument di��erentiables et les bruitsd'observation vk, blan s, entr�es et d�e orr�el�es.2.1.1 Prin ipe de la simulationNous avons essay�e i i de limiter au stri t minimum l'intervention de l'utilisateur enre ensant les quantit�es n�e essaires, et en automatisant toutes les �etapes qui pouvaientl'etre : e i permet, lorsqu'un mod�ele n'est pas stabilis�e, notamment au niveau de saparam�etrisation, de le modi�er uniquement �a la ra ine, e qui apporte une souplesse im-portante par rapport au ablage Simulink, ar il est onnu qu'un bon mod�ele pour la145

Impl�ementation des S-fon tions Mod�elisationsurveillan e n'est pas for �ement un bon mod�ele pour la ommande ou la des ription de omportement, et par ons�equent que de nombreuses modi� ations doivent etre apport�eespar it�erations su essives. Bien sur la pro �edure n'est pas optimis�ee, puisqu'elle est od�eeen Matlab, lent par rapport aux odes lassiques. De plus la simulation a re ours auxS-fon tions.Une S-fon tion est l'�equivalent sous Simulink, d'une fon tion sous Matlab, qui permetd'impl�ementer dire tement les syst�emes dynamiques par leurs �equations. La g�en�erationet l'impl�ementation automatique des syst�emes dynamiques (y ompris elles du syst�emegradient n�e essaire au al ul de l'instrument de surveillan e) fa ilitent le prototypaged'une te hnique de surveillan e. De plus, pour la simulation des syst�emes multi-modes,les S-fon tions onsid�erent d'embl�ee le syst�eme (i i surveill�e) par l'ensemble de sesdynamiques, i.e. dont l'�etat interne �evolue de mani�ere distin te suivant le mode defon tionnement. Cette possibilit�e n'est pas o�erte par les blo s standards de Simulink (dufait de l'impossibilit�e de sp�e i�er des onditions initiales d'un blo "syst�eme lin�eaire",d�e rivant un mode de fon tionnement, en fon tion des onditions �nales atteintes dansun blo , un mode, di��erent). D'un point de vue num�erique, l'a tualisation de l'�etat et le al ul des sorties d'une S-fon tion sont identiques �a eux obtenus par le ablage dire tet par l'utilisation (dans le as lin�eaire mono-mode seulement) des blo s lin�eaires1. Nousd�e rivons su intement le prin ipe de fon tionnement d'une S-fon tion impl�ement�ee enlangage Matlab2.La premi�ere ommande d'une S-fon tion est la suivante :fun tion [sys,x0,str,ts℄ = Nom S-fon tion(t,x,u, ag)Les arguments d'entr�ee t, x, u, ag orrespondent respe tivement �a l'instant, �a l'�etat, �al'entr�ee et au statut ourants de la simulation, e dernier indiquant quelle est la partiede l'algorithme �a ex�e uter. Durant la phase d'initialisation (sf ag=0), les ara t�eristiquesdu syst�eme (nombre d'entr�ees, de sorties, d'�etat ontinu, d'�etat dis ret : : : ) sont fourniesdans la sortie sys et l'�etat initial dans x0. Comme nous ne traitons que des syst�emesdynamiques �e hantillonn�es, seule la partie �a �etat dis ret nous int�eressera. Si ag=2, alorsSimulink al ule l'a tualisation de l'�etat xk+1 �a partir de l'�etat pr�e �edent x=xk et del'entr�ee u=uk+1. Si ag=3 alors la sortie yk+1 est al ul�ee �a partir de l'�etat a tualis�ex=xk+1 et de l'entr�ee u=uk+1.2.1.2 Impl�ementation des S-fon tionsLa onstru tion automatique des S-fon tions n�e essite de disposer des �equations ana-lytiques des dynamiques et des observations ; nous avons onsid�er�e d'abord le as dessyst�emes lin�eaires, que l'on suppose onna�tre sous forme matri ielle (issue par exemplede al uls d'observateurs ou de r�egulateurs �a l'aide des bo�tes �a outils Control de Matlab).Nous d�e rivons pas �a pas l'impl�ementation d'une S-fon tion, plus parti uli�erement elledu syst�eme gradient.1voir �a e sujet le guide d'utilisation de Simulink et l'arti le Nonlinear Systems Modeling in Simulinkde D�e embre 1998 onsultable sur le site de Mathworks traitant des di��erentes impl�ementations d'unsyst�eme non-lin�eaire sous Simulink. L'�equivalen e a ependant �et�e v�eri��ee exp�erimentalement sur haqueblo impl�ement�e.2On peut �egalement impl�ementer une S-fon tion en langage C.146

Mod�elisation A quisition de la signature nominaleOn suppose don disposer des matri es A�, B�, C� et D� de l'observateur dans ha unde ses modes �, et des param�etres surveill�es �. On extrait d'abord les informations on er-nant la stru ture du syst�eme (nombre d'entr�ees m, de sorties p, d'�etat n) puis, pour haquemode, on onvertit la formulation matri ielle en une formulation analytique en onstrui-sant les ha�nes de ara t�eres, repr�esentant les �equations param�etr�ees de la dynamique et elles des observations. Ces haines de ara t�eres sont ensuite on at�en�ees pour former unve teur de ha�nes de ara t�eres atta h�e �a un mode de fon tionnement. L'ensemble de esve teurs est r�euni dans une stru ture ind�ex�ee par les modes de fon tionnement.Cette onversion a un triple int�eret :1. par simple extra tion des n premi�eres omposantes d'un des ve teurs de ette stru -ture, on impl�emente la partie dynamique de la S-fon tion ; par extra tion des p omposantes suivantes, on impl�emente la partie observation ; en�n par par ours dela stru ture, on impl�emente haque mode de fon tionnement.2. la onversion des ha�nes de ara t�eres en expressions symboliques �a l'aide de la bo�te�a outils Symboli Math, permet d'envisager des d�erivations symboliques (exa tes, omme le permet la fon tion ja obian(expression symbolique; �)), le rempla ementsymbolique des param�etres par leur valeur num�erique nominale, puis, par onver-sion du r�esultat en ha�ne de ara t�eres, d'impl�ementer suivant le meme prin ipe lesyst�eme gradient dans haque mode de fon tionnement.3. le pilotage du s�equen ement des dynamiques �a �etat ontinu orrespondant aux modesde fon tionnement est obtenu par une ma hine �a �etat �ni impl�ement�ee en StateFlowsous Simulink. Une sortie de ette ma hine est la variable � qui prend sa valeurdans un ensemble �ni, et qui est une entr�ee suppl�ementaire de haque S-fon tion,qui aiguille, �a haque appel de haque S-fon tion, vers l'a tualisation de l'�etat ou del'observation dans e mode. Lors du hangement de mode, la ontinuit�e des �etatsinternes (du syst�eme surveill�e, de son observateur et du gradient de elui- i) estpr�eserv�ee. Le s�equen ement du fon tionnement de haque S-fon tion est syn hronis�eet il est de plus transparent pour le on epteur.L'attrait suppl�ementaire de ette impl�ementation est d'etre automatisable : il suÆtd'�e rire les S-fon tions, dont un � hier patron (template) est fourni de mani�ere standard.De plus, le s h�ema Simulink pour la surveillan e est largement g�en�erique et param�etrable :on peut ainsi modi�er uniquement les matri es du syst�eme �a surveiller, les param�etressurveill�es, leur valeur nominale, la pro �edure �etant ensuite standard3.2.1.3 A quisition de la signature nominaleLa signature nominale de l'installation pour un mod�ele dynamique param�etr�e donn�eest form�ee de �0, de la matri e de ovarian e � de l'instrument de surveillan e et de lamatri e d'in iden e J pour le syst�eme pour le syst�eme �a l'�etat sain. Or :{ �0 est suppos�e onnu (provenant �eventuellement d'une identi� ation pr�ealable) ;{ la matri e de ovarian e � est obtenue en simulation par l'ex�e ution du diagrammeSimulink omplet ave � = �0, puis par le traitement dans haque mode de fon tion-nement (observ�e et sto k�e) de l'instrument de surveillan e : les routines programm�ees3Dans notre impl�ementation, la g�en�eration de l'instrument de surveillan e primaire (II.1.15) est�egalement obtenue par une S-Fon tion. 147

Cas non-lin�eaire Mod�elisationpar Q. Zhang al ulent de mani�ere eÆ a e la ra ine arr�ee de �, seule quantit�e utiledans la suite.{ la matri e d'in iden e J n�e essite le al ul du syst�eme Hessien de l'observateur, desortie �2yk��2 �evalu�ee en � = �0. On onstate, de meme d'ailleurs que pour le syst�emegradient, que dans le as des syst�emes lin�eaires en �, le syst�eme Hessien est onstitu�ede la meme dynamique que l'observateur, r�ep�et�ee d2 fois, et dont le terme for� antd�epend du gradient de l'�etat re onstruit �xkjk�1�� , �evalu�e en � = �0. De plus, onremarque que e syst�eme est d'ordre n:d2 mais qu'il n'est n�e essaire que lors del'a quistion de la signature : on propose don , et on a impl�ement�e, un diagrammeSimulink sp�e i�que �a ette a quisition, dont la S-fon tion impl�ementant le gradient ontient �egalement le syst�eme Hessien, lequel dispose en entr�ee du gradient �xkjk�1�� .Pratiquement, la dynamique du syst�eme gradient est ompl�etement d�e oupl�ee de elle du syst�eme hessien : l'a tualisation de l'�etat global de la S-fon tion et le al ulde ses sorties sont obtenus par la on at�enation des �etats a tualis�es ind�ependamment(au passage du gradient �xkjk�1�� pr�es) et des sorties de haque syst�eme al ul�eeind�ependamment : le omportement num�erique est tel qu'au une interf�eren e d'ordrenum�erique entre eux n'a �et�e onstat�ee.2.1.4 Cas non-lin�eaireLe as non-lin�eaire n'a �et�e que partiellement envisag�e, �a ause de la diÆ ult�e de on ep-tion des observateurs dans e as : nous avons suppos�e, pour simpli�er, onna�tre le syst�emeparfaitement, l'observateur �etant onstitu�e du syst�eme lui-meme, pris en fon tionnementnominal.Le syst�eme est d�es lors onnu et entr�e dire tement par ses �equations sous forme de ha�nes de ara t�eres, e qui �elimine la phase initiale de onversion pour les syst�emeslin�eaires, �a ondition ependant d'adopter une onvention pour d�enommer les �etats, lesentr�ees, les sorties et les param�etres. Le al ul symbolique du gradient trouve tout sonint�eret i i, et l'impl�ementation sous forme de S-fon tion �egalement : le ablage d'un syst�emelin�eaire de dimension 4 ave 4 param�etres est �eventuellement envisageable "�a la main" s'ilest �nalis�e, mais e i n'est plus le as pour le syst�eme non-lin�eaire �etudi�e dans [11℄ (7�etats, 4 entr�ees, 3 sorties, 4 param�etres).En�n, pour simpli�er en ore, le al ul du Hessien n'a pas �et�e e�e tu�e dans le asnon-lin�eaire : la matri e d'in iden e est alors approxim�ee par :J ' E0 [�yk�� T �yk�� ℄On a onstat�e dans le as du syst�eme lin�eaire pr�esent�e au hapitre pr�e �edent, que ette approximation in ue sur le onditionnement de la matri e de Fisher mais pas sur lesr�esultats de simulation obtenus. Il serait int�eressant de quanti�er ette d�ependan e dansle as des syst�emes non-lin�eaires.2.1.5 Graphe de ontroleLe graphe de ontrole est impl�ement�e �a l'aide de la bo�te �a outils StateFlow (simulationde ma hines �a �etats �nis) dans un mod�ele Simulink in luant les S-fon tions pr�e �edentes :l'automate d�eterministe �a �etat �ni du graphe de ontrole est onstruit et pilot�e par une148

Estimation Graphe de panneshorloge externe provenant du mod�ele Simulink. Les sorties du mod�ele StateFlow sont les onsignes u et les ordres de hangement de mode �, qui sont les entr�ees des S-Fon tions.2.1.6 Graphe de pannesLe graphe de pannes est impl�ement�e dans un � hier Matlab sous la forme de deuxmatri es : Pre(p; t) : p ! t et Post(t; p) : t ! p ave p une pla e du r�eseau de Petride panne et T une de ses transitions4. Les transitions probabilis�ees sont pr�e is�ees ainsique leur probabilit�e. La simulation simultan�ee sous StateFlow n'a pas �et�e envisag�ee ar las�emantique de StateFlow ne permet pas les �evolutions probabilis�ees.2.1.7 SimulationLe fon tionnement s�equentiel est pilot�e par les sorties du mod�ele du syst�eme et nonpar elles de l'observateur. Il n'y a don jamais d'erreur de mod�ele dans la dynamiquenominale.Durant la simulation, on sto ke :1. le gradient de la sortie estim�ee �bykjk�1(�)�� �evalu�e en �0,2. les modes par ourus,3. le r�esidu primaire.2.2 Estimation2.2.1 Algorithme markovienSi l'on utilise le graphe de panne omme a priori , alors, onditionnellement au modesous lequel ont �et�e g�en�er�es les r�esidus, on extrait du graphe de panne le RdPS RS et on onstruit son graphe de marquage, ainsi que ses probabilit�es : 'est le treillis de Viterbi.Connaissant la signature nominale dans e mode, et �etant donn�e un nouvel enregistre-ment de r�esidus dans un mode unique, une fon tion Matlab prend en entr�ee la signature,le treillis de Viterbi et les r�esidus, et rend en sortie la s�equen e de transitions optimales al ul�ees par l'algorithme de Viterbi.2.2.2 Algorithme PSPNIl s'agit dans un premier temps de sp�e i�er, dans un format pres rit (adapt�e au pro-gramme d'A. Aghasaryan), le PSPN et ses observations : une fon tion analyse le graphede panne et impl�emente le � hier de des ription a priori. Les pi�e es �etendues du PSPNsont ensuite al ul�ees pour haque blo de donn�ees, elles sont sto k�ees dans un � hierd'observation, puis la s�equen e optimale hybride est estim�ee �a partir des pi�e es �etendues.4La donn�ee de es deux matri es est �equivalente �a la d�e�nition des liens orient�es L utilis�es dans etteth�ese. 149

Algorithme PSPN Estimation
150

Con lusions et Perspe tivesLa on eption de mod�eles et d'algorithmes pour la surveillan e et le diagnosti desyst�emes industriels omplexes, est fond�ee dans ette th�ese sur la mod�elisation onjointede la dynamique �a �etat ontinu et de la dynamique �a �ev�enements dis rets des o urren esde pannes sur le syst�eme.Nous avons d�evelopp�e pour ela deux adres de mod�elisation, et nous les onsid�eronss�epar�ement d'un point de vue th�eorique et exp�erimental.La premi�ere mod�elisation est adapt�ee �a la surveillan e en ontinu de petits syst�emesmono-mode en �evolution spontan�ee, i.e. sans intervention du ontrole- ommande ou dela maintenan e : leurs dynamiques nominale (�a �etat ontinu) et d'o urren e des pannes(dis r�ete) sont alors orre tement d�e rites par des mod�eles dynamiques sto hastiques, �a�etat ontinu et �a �ev�enements dis rets, premier aspe t de la mod�elisation hybride dessyst�emes. Un mod�ele de Markov a h�e est le premier moyen de marier les deux aspe ts dusyst�eme : la ha�ne de Markov sous-ja ente mod�elise la dynamique des �etats de pannes etles observations sont onstruites de telle sorte que leur loi soit onnue onditionnellement�a tout �etat. Supposant onnues les observations et leurs lois sous toute hypoth�ese sur l'�etatde pannes, l'estimation peut etre e�e tu�ee dans un ontexte bay�esien par une te hniquede programmation dynamique, plus pr�e is�ement un algorithme de Viterbi. Les s�equen esd'�ev�enements a h�es sont obtenues par optimisation de la vraisemblan e jointe a posteriorides �etats de pannes et des observations.L'observation n�e essaire �a l'algorithme de Viterbi doit �a la fois ontenir le maximumd'information sur les pannes, et avoir une loi suÆsamment g�en�erale pour etre int�egr�eede mani�ere syst�ematique. Or, les observations brutes du syst�eme ne poss�edent pas espropri�et�es : nous leur substituons une statistique ayant les propri�et�es re her h�ees. Celle- irepose d'abord sur un mod�ele dynamique �a �etat ontinu, param�etr�e et identi��e enfon tionnement nominal. Connaissant ette valeur de r�ef�eren e (la signature nominale)du param�etre de surveillan e, nous mod�elisons les pannes par des �e arts du param�etrede sa valeur nominale, dans des dire tions onnues. La te hnique asymptotique lo alepermet la onstru tion d'une telle statistique, le r�esidu de surveillan e, dont la loi,asymptotiquement gaussienne, est onnue sous toute hypoth�ese d'�e art param�etrique,don sous toute hypoth�ese d'�etat de panne : elle fait par ons�equent le lien dire t entrepartie a h�ee et observation ; 'est la premi�ere ontribution de l'�etude que d'�etablir unmod�ele de Markov a h�e pour la surveillan e reposant sur l'�etat de panne. L'appro helo ale est d'ailleurs la seule m�ethode, �a notre onnaissan e, �a donner une informationquantitative sur l'�e art param�etrique, sans n�e essiter la r�e-identi� ation du syst�eme, nison observation dans tous ses modes de d�efaillan es.L'int�eret de ette d�emar he de mod�elisation et de surveillan e est d'etre tout �a fait151

Con lusions et Perspe tivesg�en�erale et relativement exhaustive ; elle est de sur ro�t en grande partie automatisable. Deplus, et 'est la se onde ontribution, nous proposons d'utiliser l'information stru turelle etnum�erique a priori sur la dynamique des o urren es des pannes et de leurs en ha�nements, ontenue dans les �etudes de risque et de �abilit�e des syst�emes, notamment i i les arbresde d�efaillan es. Une mod�elisation �a �ev�enements dis rets de eux- i est propos�ee pour lasurveillan e, et leur interpr�etation en r�eseaux de Petri {RdP{, permet un lien fru tueuxave les mod�eles markoviens, a�n d'aboutir �a la on eption a priori du mod�ele dynamique a h�e.La mod�elisation a �et�e d�evelopp�ee sur un exemple simul�e d'un g�en�erateur de va-peur d'une entrale thermique ; les prin ipales on lusions sur la d�emar he markovienne on ernent essentiellement l'ad�equation de l'outil asymptotique lo al au ontexte bay�esien.Rappelons que l'appro he lo ale a �et�e on� ue pour un obje tif de d�ete tion de hangementde omportement des syst�emes et dans un ontexte de tests d'hypoth�eses. Or, nous enfaisons i i usage dans un ontexte bay�esien, o�u il ne s'agit plus de omparer un test �a unseuil, mais o�u l'on exploite, selon que l'on dispose d'a priori sur les amplitudes des �e artsparam�etriques, ou bien les valeurs de la vraisemblan e du r�esidu pour toute hypoth�esed'�etat de panne, ou bien sinon la valeur de la vraisemblan e g�en�eralis�ee du r�esidu, ou demani�ere �equivalente, la valeur de tests de sensibilit�e. Ajoutons que es tests de sensibilit�ese ara t�erisent pour ertaines param�etrisations par :1. leur grande r�ea tivit�e en pr�esen e de hangement de omportement,2. leur faible s�eparation des hypoth�eses pour un nombre de pannes important.En e�et, si les param�etres ont des in uen es orr�el�ees dans le r�esidu, les lois pour deshypoth�eses voisines (distin tes par la pr�esen e d'une panne, par exemple) peuvent etretr�es pro hes.Ainsi, dans le as d'absen e d'a priori sur les amplitudes d'�e art, la situation est peufavorable : les valeurs des tests (d�ependant de l'amplitude et du nombre de pannes) sont ombin�ees ave l'a priori �xe, de valeur souvent largement inf�erieure aux premi�eres. L'apriori ne joue don pas le role ompensatoire que l'on souhaiterait, le diagnosti �etant�nalement en faveur des on�gurations les plus �etendues, i.e. elles pour lesquelles lestests sont les plus �elev�es. L'id�ee qui onsisterait �a donner plus de poids aux probabilit�esde transition, quitte �a abandonner leur signi� ation en tant que taux de d�efaillan e, n'estpas viable : en e�et, ela reviendrait pratiquement �a les faire d�ependre de l'amplitude despannes : : : C'est pourquoi la perspe tive de ette appro he en l'absen e d'a priori, dansun ontexte markovien et en se fondant sur l'appro he lo ale, semble ompromise.En revan he, l'algorithme ave a priori sur les amplitudes (minimale, moyenne, maxi-male) est un bon estimateur du nombre de pannes et de leurs instants de hangements,bien sur tant que leur ontribution dans la statistique du r�esidu est signi� ative. En e�et,la vraisemblan e ave a priori permet de mieux s�eparer les hypoth�eses que ne le fait lavraisemblan e g�en�eralis�ee, e qui explique les bons r�esultats exp�erimentaux pour le mod�ele�etudi�e et pour un ensemble de param�etrisations envisag�ees. L'�etude de la diagnosti abilit�ea priori des pannes n'a pas �et�e envisag�ee �a e stade, mais 'est une perspe tive int�eressante, ette propri�et�e r�esultant d'une ombinaison omplexe de probabilit�es de transition, a priori�xes, et des in uen es umul�ees des vraisemblan es du r�esidu. Une se onde perspe tive on erne l'�etude syst�ematique de l'in uen e sur le diagnosti de l'erreur ommise sur l'apriori. 152

Con lusions et Perspe tivesLe se ond adre de mod�elisation est d�edi�e �a la surveillan e et au diagnosti de syst�emesmulti-modes r�eparables. Les syst�emes de e type sont �a la fois sto hastiques, par les bruitsenta hant les signaux num�eriques mesur�es et les al�eas �a la sour e des d�efaillan es, et non-sto hastiques, voire d�eterministes, par les a tions, symboliques, e�e tu�ees par le ontrole- ommande (mise en mar he, arret) et par la maintenan e (r�eparation, arret d'urgen e), lamod�elisation markovienne ne pouvant d�es lors plus s'appliquer.Envisageant les intera tions entre toutes les dynamiques (�a l'ex eption des pannessur le ontrole- ommande), nous avons propos�e une autre mod�elisation hybride onti-nue/dis r�ete mais �a observations num�eriques/symboliques, onstitu�ee d'un ensemble demod�eles �a �etat ontinu et d'un mod�ele �a �ev�enements dis rets r�ealisant l'intera tion entre ontrole- ommande et dynamique des d�efaillan es. Ce dernier pilote �egalement l'alternan eentre mod�eles �a �etat ontinu. Les RdP ont de nouveau �et�e hoisis, mais pour les raisonssuivantes :{ leur puissan e d'expression ( on urren e des �ev�enements de d�efaillan e et du ontrole- ommande et des pannes entre elles, syn hronisation, omp�etition : : : ) ;{ l'existen e d'un outil r�e ent, les RdP partiellement sto hastiques, probabilisationparti uli�ere des RdP, re ouvrant l'�equivalen e entre ind�ependan e stru turelle etstatistique d'�ev�enements on urrents, propri�et�e que l'on appelle modularit�e.Notre ontribution a port�e sur trois points :1. la mod�elisation globale du syst�eme hybride pour la surveillan e,2. l'extra tion d'une information num�erique modulaire �a partir des r�esidus, dans un adre bay�esien, e qui a amen�e �a d�e�nir les modes de fon tionnement dans le adrede la surveillan e, non plus seulement en rapport ave le ontrole- ommande maisaussi en fon tion de la g�en�eration du r�esidu, i.e. en fon tion du omportement ontinudu syst�eme,3. la prise en ompte des �ev�enements ertains, e qui a amen�e �a modi�er la proba-bilisation des RdP partiellement sto hastiques. Les PSPN hybrides r�esolvent leprobl�eme de la surveillan e sous les ontraintes que nous avons �x�ees au d�ebut de e m�emoire.Exp�erimentalement, les r�esultats ne sont ependant pas satisfaisants, du fait dessp�e i� it�es de l'appro he lo ale : que l'on dispose ou non d'a priori sur les amplitudes de hangement, on est ramen�e, pour satisfaire �a la modularit�e, �a l'utilisation d'un rapport devraisemblan e, ou d'un test de r�eje tion, version g�en�eralis�ee du rapport de vraisemblan e.Or, dans les deux as, le d�e ouplage statistique requis par la modularit�e a tendan e �a�e raser l'information utile. De plus, les probabilit�es de transition demeurent �xes, etjouent un role inverse au as markovien : l�a o�u le diagnosti �etait en faveur de toutes lespannes, il pl�ebis ite i i l'absen e de pannes. Contrairement au as markovien, l'utilisationd'a priori sur les amplitudes n'am�eliore pas la situation : la sensibilit�e �a l'erreur sur et a priori est exp�erimentalement onsid�erable. La ompr�ehension tardive de l'aspe tstru turel (non exp�erimental) de es limites, sugg�ere de her her plus avant �a int�egrer la onnaissan e a priori disponible sur les pannes, et 'est sans doute la premi�ere dire tion �asuivre pour une �etude ult�erieure. De plus, elle- i passera n�e essairement par une analysepr�ealable de la orr�elation entre les param�etres, re �et�ee par la matri e d'information153

Con lusions et Perspe tivesde Fis her, e qui peut obliger �a n�egliger ertaines pannes a�n d'avoir un d�e ouplagestru turel entre eux et limiter ainsi l'att�enuation des tests. La possibilit�e d'heuristiques depond�eration ad-ho pourrait etre �egalement envisag�ee, mais impliquerait de re onsid�ererla signi� ation de �abilit�e port�ee par les probabilit�es a priori.Une voie de re her he vers le d�e ouplage des param�etres onsisterait �a �etudierles relations entre les variables (entr�ees, �etats, sorties, param�etres) a�n de d�e ouplerstru turellement le syst�eme surveill�e en syst�emes de taille r�eduite, sur lesquels des r�esidusde dimension r�eduite peuvent etre al ul�es : ela limiterait les e�ets num�eriques dusaux onditionnement de matri es pour des omposantes du r�esidu \presque" d�e oupl�ees.Cette �etude doit etre envisag�ee de mani�ere onjointe ave la on eption des observateurs,qui devraient alors etre �elabor�es sur les mod�eles r�eduits.De mani�ere g�en�erale nous pensons que l'appro he markovienne ave a priori sur l'am-plitude de hangement est fond�ee et viable, et qu'elle n�e essite peu d'e�orts pour uneimplantation industrielle. L'appro he par PSPN hybride, lors de la prise en ompte des si-gnaux num�eriques, se heurte dans l'�etat a tuel de la re her he aux ontingen es du syst�emeet de son mod�ele �a �etat ontinu ; en revan he son formalisme est d'un int�eret essentiel pourla surveillan e en ontinu des syst�emes �a �ev�enements dis rets hybrides sto hastiques/non-sto hastiques.
154

Annexe
155


Annexe AR�eseaux de PetriLes r�eseaux de Petri ont �et�e introduits en 1962 dans la th�ese de Carl Adam Petri.Ils permettent de d�e rire des ph�enom�enes ren ontr�es sur les syst�emes �a �ev�enements dis- rets, gra e �a leur pouvoir d'expression qui, pour e qui nous on erne, se traduit par lespropri�et�es suivantes :{ le passage de ressour es mod�elise la propagation des pannes �a travers le syst�eme,don les relations de ausalit�e ;{ la on urren e : deux �ev�enements sont on urrents s'ils ne sont pas ausalementli�es, don peuvent se produire dans n'importe quel ordre. C'est le as des pannesind�ependantes ;{ la syn hronisation permet de valider ou d'autoriser les o urren es d'�ev�enements depannes selon le mode de fon tionnement ;{ le on it exprime les hoix entre les �ev�enements d�eterministes de la PC et euxsto hastiques du graphe de panne.Le non-d�eterminisme est pr�esent dans les situations de hoix, omme le on it ou la on urren e. On pourra se r�ef�erer �a [42, 24℄ pour un expos�e g�en�eral des RdP et de leursextensions.A.1 D�e�nitionsD�e�nition A.1 Un r�eseau de Petri R = (P; T; L) est un graphe biparti orient�e, ompos�ede deux ensembles distin ts et �nis de n�uds :{ les pla es p 2 P ,{ les transitions t 2 T .Les liens orient�es l 2 L n'existent qu'entre deux n�uds de natures di��erentes : L �(P � T ) [ (T � P ).On repr�esente fr�equemment les pla es par des er les et les transitions par des re -tangles ou des barres, voir �gure A.1. On suppose qu'au une transition ni pla e n'estisol�ee, i.e. n'est pas reli�ee �a un autre sommet.157

D�e�nitionsp5p2p1 p3 p4t1t0 t3t2 t4
Fig. A.1: Exemple de r�eseau de Petri (RdP). Les pla es p sont repr�esent�ees par des er leset les transitions t par des barres. Les liens orient�es ne se situent qu'entre deux sommets denatures di��erentes.p5p2p1 p3 p4t1t0 t3t2 t4
Fig. A.2: Exemple de RdP non pur : la bou le sur p2 r�eg�en�ere une ressour e ou r�ea tive une ondition.Les pla es repr�esentent des ressour es (des pi�e es, des donn�ees : : : ) ou des onditionslogiques (pr�esen e de pi�e e, espa e m�emoire disponible, pr�esen e d'une panne : : : ). Lestransitions repr�esentent des �ev�enements survenant sur le syst�eme ou des a tions e�e tu�eespar le syst�eme (pi�e e usin�ee, m�emoire utilis�ee, propagation ou r�esorption de panne : : : ).Pour toute transition t 2 T , ses pla es d'entr�ee, ou pre-set, sont elles onne t�ees enamont de t : �t = fp 2 P : (p; t) 2 LgDe meme, les pla es de sorties, ou post-set, de t sont onne t�ees en aval de t :t� = fp 2 P : (t; p) 2 LgSur le RdP de la �gure A.1, on a t�3 = p5 et �t3 = p4. Le pre-set rassemble l'ensembledes ressour es ou des onditions qui doivent etre r�eunies pour que l'�ev�enement ou l'a tionpuisse avoir lieu. �A l'inverse, le post-set indique les ressour es disponibles ou les onditionsremplies �a l'issue de l'o urren e de l'�ev�enement, ou de l'a tion. Notons qu'une pla e peutse trouver simultan�ement dans le pre-set et dans le post-set d'une transition t : p 2 �t\ t� ;de telles pla e et transition forment un y le �el�ementaire, ou une bou le sur p (�gure A.2).Un RdP sans bou le est dit pur ( 'est le as du RdP de la �gure A.1). Si une pla e mod�elisela ondition logique panne pr�esente, une bou le sur sa transition de sortie mod�elisera unepanne permanente. Un RdP pur mod�elisera par exemple la su ession logique de modesde fon tionnement d'un syst�eme.On d�e�nit de la meme mani�ere pour une pla e son pre-set �p et son post-set p�.La distribution des ressour es dans haque pla e du RdP est donn�ee par une fon tionmarquage M : P ! N. Consid�er�e sur l'ensemble des pla es du RdP, le marquage d�e�nitl'�etat du syst�eme, et si l'on ajoute le marquage initial M0 �a la d�e�nition du RdP initial,on onstruit un r�eseau de Petri marqu�e (P; T; L;M0). Le marquage est souvent repr�esent�e158

D�e�nitions���� p5p2p1 p3 p4t1t0 t3t2 t4
Fig. A.3: Exemple de RdP non pur marqu�e : le marquage M = [1; 0; 0; 0℄ est repr�esent�egraphiquement par un jeton dans la pla e p1.par un ve teur dont la iieme omposante repr�esente le nombre de jetons pr�esent dans lapla e pi (voir �gure A.3)S ave un marquage initial M0 = [1; 0; 0; 0℄T).Un RdP d�e rit don une dynamique de l'�evolution de la distribution des jetons dansles pla es, selon les r�egles suivantes :{ une pla e est dite valid�ee, ou fran hissable, ssi8p 2 �t; Mn(p) = 1 (A.1)une transition valid�ee peut etre fran hie ;{ le fran hissement d'une transition onsiste �a oter un jeton de toutes les pla esd'entr�ee et �a en pla er un dans toutes les pla es de sortie :M1(p) =M0(p) + 1fp2�tg � 1fp2t�g; 8p 2 Pun hangement d'�etat �etant not�e M0[tiM1.Ainsi, la dynamique globale du RdP ne d�epend que de onditions lo ales sur l'�etat : lefran hissement d'une transition t n'implique que les pla es �t[ t� de son voisinage. Si deuxtransitions n'ont au une pla e de leurs voisinages en ommun, elles peuvent etre fran hiesindi��eremment simultan�ement ou bien l'une apr�es l'autre. Compte tenu des r�egles de fran- hissement i-dessus, des onditions r�egissent les fran hissements su essifs de transitions,ou en ore les s�equen es ex�e utables :D�e�nition A.2 (S�equen e ex�e utable) Une s�equen e s = t1 : : : tnde fran hissementde transitions est dite ex�e utable �a partir du marquage M0 ssi M0[t1iM1[t2 : : : tniMn, equi est not�e M0[siMn. Une s�equen e est ditex�e utable s'il existe un marquage initial M0�a partir duquel elle soit ex�e utable.Ce i permet de d�e�nir l'espa e d'�etat asso i�e �a un RdP marqu�e (P; T; L;M0) :D�e�nition A.3 (Marquage a essible, espa e d'a essibilit�e) Un marquage Mnest a essible pour (P; T; L;M0), ssi il existe une s�equen e ex�e utable s telle que M0[siMn.L'ensemble des marquages a essibles R(M0) est l'espa e d'a essibilit�e de (P; T; L;M0).Comme la dynamique d'�etat est gouvern�ee par les r�egles de validation et de fran hisse-ment i-dessus, les transitions T d�e�nissent un syst�eme �a �ev�enements dis rets sur l'espa ed'a essibilit�e R(M0), que l'on peut �a son tour interpr�eter omme un RdP :159

Capa it�e �nieD�e�nition A.4 (RdP de marquage) Le triplet (R(M0); T; L0) est un RdP dont lespla es sont les marquages a essibles �a partir de M0, les transitions sont elles du RdP Ret L0 � (R(M0)� T ) [ (T �R(M0)) sont les ar s tels que :(M; t) 2 L0 ,M [ti; (t;M) 2 L0 , [tiMNotons qu'en g�en�eral, le nombre de jetons qu'une pla e peut re evoir au ours del'�evolution dynamique du RdP, n'est limit�e que par la stru ture de e dernier, e quiimplique que le nombre de marquages di��erents peut etre in�ni. Sur l'exemple du RdP nonpur de la �gure A.3, le nombre de jetons dans p2 ro�t ind�e�niment �a haque fran hissementde t1. Il est en de meme du RdP pur de la �gure A.1, pour la meme raison. Si en revan hele nombre de jetons dans toute pla e est born�e, on dit que le RdP est born�e.D�e�nition A.5 (RdP k-born�e) Soit k un entier. Le RdP (R;M0) est dit k�born�e ssi :8M 2 R(M0); M(p) � kSur le RdP pur de la �gure A.1 et pour un marquage initialM0 = [1; 0; 0; 0℄, le nombre dejeton des pla es p1, p3 et p5 est limit�e �a 1, e qui n'est pas le as des pla es p2 et p4, et leRdP n'est don pas born�e.Le as des RdP 1�born�es, appel�es r�eseaux saufs, nous int�eressera parti uli�erement.Les r�eseaux saufs ont le meme pouvoir d'expression que les RdP k-born�es, ar es dernierspeuvent toujours etre transform�es en RdP saufs [42℄. On ne perd don pas de pouvoird'expression en se restreignant aux RdP saufs.La propri�et�e d'un RdP d'etre born�e est une propri�et�e stru turelle, que l'on peut ne pasvouloir satisfaire ar la onversion en un RdP sauf passe par un ajout souvent importantde pla es, tout en souhaitant limiter le nombre de jeton �a un nombre �x�e. On peut alorsimposer une ondition suppl�ementaire �a la fran hissabilit�e d'une transition, e sont lesRdP �a apa it�e �nie.A.2 RdP �a apa it�e �nieDans un RdP �a apa it�e k �nie, une transition sera fran hissable uniquement si lemarquage de son post-set est stri tement inf�erieur �a sa apa it�e (de sto kage) k. Par ajoutde pla es au RdP �a apa it�e k �nie, on peut se ramener �a un RdP �a apa it�e 1, auquelnous nous restreindrons dans la suite. On montre de plus [42℄ que les RdP �a apa it�e 1sont �equivalents aux RdP saufs, eux-memes �equivalents aux RdP born�es. En se limitantaux RdP �a apa it�e 1, on utilise don le pouvoir d'expression des RdP born�es.D�e�nition A.6 (RdP �a apa it�e 1) Un RdP R = (P; T; L) est �a apa it�e 1 si la ondi-tion de fran hissabilit�e (A.1) est rempla �ee par :8p 2 �t; Mn(p) = 1; 8p 2 t�; Mn(p) = 0 (A.2)Les r�egles de fran hissement �etant pr�eserv�ees, on a aussi :8<: Avant fran hissement : 8p 2 �t; M0(p) = 1; et 8p 2 t�nt�; M0(p) = 0Apr�es fran hissement : 8p 2 �tnt�; M1(p) = 0; et 8p 2 t�; M1(p) = 1 (A.3)160

Traje toiresAinsi, la pr�esen e de \trous" dans toutes les pla es en aval d'une transition est aussin�e essaire �a sa fran hissabilit�e que la pr�esen e de jetons en amont. Les jetons et les troussont onsid�er�es omme des ressour es �equivalentes pour les RdP �a apa it�e 1. Par exemple,sur la �gure A.1, si le RdP est �a apa it�e 1, t1 ne sera fran hissable que si M(p1) = 1 etsi M(p2) =M(p3) = 0.Dans e adre, les propri�et�es utiles pour notre �etude se traduisent de la mani�ere sui-vante :Le passage de ressour e : si le fran hissement de t ontribue �a l'autorisation dire tede t0 et du fait que le fran hissement on erne, dans les RdP saufs, autant les jetonsque les trous, le passage de ressour es est d�e�ni par l'une des onditions :{ t� \ �t 6= ; : passage de jeton,{ (�tnt0�) \ (t0�n�t0) 6= ; : passage de trou.C'est le as sur la �gure A.1 pour les transitions t1 et t2.La omp�etition : propri�et�e on ernant le besoin d'une meme ressour e, jeton ou trou,pour le fran hissement de plusieurs transitions :(t� \ t0�) [ (�t \ �t0) 6= ;Ce i traduit l'ex lusion mutuelle entre des �ev�enements, i.e. l'impossibilit�e de fran hirsimultan�ement t et t0.La on urren e : 'est la situation ompl�ementaire, deux transitions �etant on urrentessi elles n'ont au une de leurs ressour es en ommun :(t� [ �t) \ (t0� [ �t0) = ;C'est le as par exemple des transitions t3 et t4.On s'int�eresse maintenant �a la dynamique d�e rite par les RdP.A.3 Traje toires des r�eseaux de PetriOn suit i i la pr�esentation tr�es laire d'A. Aghasaryan dans [2℄. On s'int�eresse �a laformalisation de la propagation des ressour es au travers du RdP, �el�ement entral dans laprobabilisation parti uli�ere utilis�ee dans les RdP partiellement sto hastiques (pr�esent�ee �ala se tion A.5). Une s�emantique de ausalit�e permet de d�e�nir les traje toires d'�ev�enementsdu RdP omme des graphes de ausalit�e ; une s�emantique alternative, elle d'ordre partiel,donne un autre �e lairage sur es traje toires. Elle est abord�ee ensuite.A.3.1 S�emantiques du RdPLes propagations des ressour es, autant des jetons que des trous, sont pilot�ees par lesfran hissements des transitions, i.e. l'o urren e d'�ev�enements sur le r�eseau. On onfondradans la suite le fran hissement d'une transition te et l'�ev�enement e qu'elle repr�esente.Pour tout ensemble d'�ev�enements E = fe1; : : : ; eng, d�e�nissant une s�equen e ex�e utable161

Marquages ompatibles Traje toirest2t1t0 t3 t1t0 t2t3 t4t4 t0Fig. A.4: Exemple de onversion d'un RdP en un graphe de ausalit�e (GdC) pour une s�equen eex�e utable s = t0t1t2t3t4t1. On note e graphe g (s). Notons que toute s�equen e ex�e utableplus longue se ram�ene �a e graphe de ausalit�e.s = te1 : : : ten (A.2), que l'on abr�egera en s = t1 : : : tn, le RdP d�e�nit une relation de ausalit�e bas�ee sur le passage de ressour es :ti ! tj () ���� Dans la s�equen e de fran hissementstj onsomme une ressour e r�e�ee dire tement par ti (A.4)Cette relation d�e�nit la s�emantique de ausalit�e sur le RdP, et �a tout RdP on peut asso iergra e �a elle un graphe orient�e, appel�e graphe de ausalit�e repr�esent�e sur la �gure A.4.D�e�nition A.7 (Graphe de ausalit�e) Le graphe de ausalit�e (GdC) orrespondant �aune s�equen e ex�e utable s = t1 : : : tn est le DAG g (s) = (E;F ) o�u E = fe1 : : : eng et Fest l'ensemble des �e hes onstruit �a partir de la relation (A.4) sur les �ev�enements de E.On ne onsid�ere en fait que le plus petit graphe orient�e a y lique (DAG- Dire tedA y li Graph) dans le graphe orient�e onstruit.On remarque imm�ediatement que la relation de ausalit�e d�e�nit, par fermeture tran-sitive de la relation (A.4), un ordre partiel sur les �ev�enements de E : (E;<). L'�ev�enementtj (ou plus pr�e is�ement i i, la transition tj asso i�ee �a l'�ev�enement ej) sera ausalement li�e�a ti si tj < ti. �A l'inverse, ti et tj seront dits on urrents s'ils ne sont pas ausalement li�es.L'ordre partiel (E;<) d�e�nit la s�emantique d'ordre partiel sur le RdP.D�e�nition A.8 (S�emantique d'ordre partiel) La s�emantique d'ordre partiel sur unensemble d'�ev�enements E est obtenue par fermeture transitive de la relation de ausalit�e.Elle est obtenue en ajoutant les liens transitifs sur le graphe de ausalit�e. Les deuxs�emantiques sont deux �e lairages di��erents de la dynamique du RdP.A.3.2 Marquages ompatiblesLes s�equen es ex�e utables sur un RdP sont une on at�enation d'�ev�enements, dont lavalidit�e est d�e�nie par la stru ture du RdP. On peut alors onsid�erer l'e�et d'une s�equen eex�e utable sur les ressour es omme la on at�enation d'op�erations e�e tu�ees sur les pr�e- etpost-set de haque transition, i.e. au niveau lo al. Ces op�erations lo ales sont ompl�etementrepr�esent�ees sur la restri tion du marquage global du RdP aux seules pla es des pr�e- etpost-set d'une transition, i.e. un sous-marquage.L'e�et lo al du fran hissement �etant le meme pour plusieurs marquages distin ts, les onditions lo ales sont bien repr�esent�ees par des lasses d'�equivalen e : on d�e�nit sur162

Traje toires Pi�e esl'ensemble R des marquages du RdP, une relation d'�equivalen e : soit Q un sous-ensemblede pla es de P et la relation d'�equivalen e �Q, alors :8M; M 0 2 R; M �Q M 0 , 8p 2 Q;M(p) =M 0(p) (A.5)On d�e�nit les sous-marquages m omme les lasses d'�equivalen e de ette relation :m(p) = � M(p); p 2 Q;8M 2 m� sinon (A.6)Le symbole � indique que le marquage des pla es p 62 Q est indi��erent, et peut don prendre n'importe quelle valeur. Les sous-marquages peuvent etre partiellement ordonn�eset on d�e�nit pour ela la relation d'in lusion sur les lasses d'�equivalen e :m1 � m2 () Q1 � Q2; et 8p 2 Q2; m1(p) = m2(p) (A.7)Le sous-marquagem1 sp�e i�e don le marquage de plus de pla es quem2. En�n, la relationde di��eren e sym�etrique :m1�m2 = fp 2 Q1 \Q2 : m1(p) 6= m2(p)g (A.8)sp�e i�e les pla es dont le marquage (impos�e di��erent de �) est di��erent.D�e�nition A.9 Deux marquages M1 et M2 sont ompatibles pour l'ensemble Q sileurs lasses d'�equivalen e pour Q sont d'interse tion non-vide m1 \ m2 6= ;, ou bienm1�m2 = ;.A.3.3 Pi�e esComme on l'a dit plus haut, le fran hissement d'une transition t n'implique que des onditions de marquage lo ales, restreintes �a ses ressour es propres t�n�t. On d�e�nit es onditions par l'�etat de es ressour es par les sous-marquages avant et apr�es le fran his-sement : m�t (p) = 8<: 1 si p 2 �t (pre-set plein)0 si p 2 t�n�t (post-set vide)� sinonm+t (p) = 8<: 0 si p 2 �tnt� (pre-set vide)1 si p 2 t� (post-set plein)� sinon (A.9)D�e�nition A.10 (Pi�e e) Pour toute transition t 2 T , soient m�t et m+t les sous-marquages d�e�nis par (A.9), le triplet hm�t ; t;m+t i d�e�nit la pi�e e asso i�ee �a la transitiont, i.e. satisfait : appli abilit�e : M 2 m�t , M [ta essibilit�e : M 2 m+t , [tiM 0 (A.10)On la note : �t = hm�t ; t;m+t i (A.11)163

Puzzles Traje toireset on onfondra souvent sa notation ave elle de la transition sous-ja ente.Il est ommode pour repr�esenter graphiquement les pi�e es de distinguer l'�etat avant lefran hissement et l'�etat apr�es le fran hissement : on appelle ette op�eration le d�epliage dutemps. Pour le RdP de la �gure A.1, on a repr�esent�e sur la �gure A.5 son d�epliage : haquepla e est dupliqu�ee et les transitions relient les pla es entre deux �etats ons�e utifs. La r�egled'�evolution (A.3) r�egit les �evolutions possibles par simple \le ture" du marquage du pre-set et du post-set �a gau he, i.e. dans le pass�e, e qui donne la ondition de fran hissabilit�e,et par \�e riture", ou pla ement des jetons dans le pre-set et le post-set �a droite, i.e. dansle futur. Une pi�e e est don asso i�ee de mani�ere biunivoque �a une transition, et en suivant��������
��������������������
��������������������
��������������������
��������������������
��������������������
��������
���������������
������������������������������
���������������
����������
��������������������
����������
����
����
����
��������
����������������
����������������
����������������
����������������
����������������
��������
������������
������������������������
������������
��������
����������������
��������
��
p5p1p3p2p4t0t3t4t1t2
t2t1t0 t3 t4p5p1 p3p2 p4
Marquage avant Marquage apr�esfran hissement fran hissementFig. A.5: D�epliage du temps pour le RdP de la �gure A.1 : l'�etat (le marquage) du RdPavant tout fran hissement est repr�esent�e �a gau he (i i le marquage initial M0 = [1; 0; 0; 0℄),l'�etat M1 apr�es fran hissement de la transition t1, seule fran hissable dans M0, est repr�esent�e�a �droite. On visualise ainsi la s�equen e M0[t1iM1.[2℄, on peut repr�esenter son a tion de mani�ere restreinte �a ses ressour es : les pi�e es duRdP sont donn�ees �gure A.6, partie haute.Remarque A.1 Dans le as o�u le RdP initial est elui du graphe de marquage, sarepr�esentation d�epli�ee est appel�ee treillis de Viterbi. Il repr�esente la dynamique de l'�etatdu RdP.A.3.4 PuzzlesSoit une s�equen e ex�e utable s = t1 : : : tn ; l'objet hm�s ; s;m+s i obtenu par onnexiondes pi�e es de ha un des �ev�enements t1; : : : ; tn est appel�e un puzzle. On peut le d�e�nir164

Traje toires Puzzles����
��
����
����������������
����������������
��������������������
���������������
���������������
����������������
����������������
����������������
����������������
����������������
��������������������
������������������������
��������
������������
������������������������
����������������
���������������
���������������
����������������������������
��������������������
�����������������������������
�������������������������
����������������
��������������������
��������
����
��
��
����
����
��
��
��
����
�� ����
����
����
��������
��������
����
��������
���������
���������
���������
���������
���������������
���������
����
���������
���������
����������
���������
�����������������
������
������������������
������
������
����
������������
������
������
���������
���������
������
������
�������������
���������
����
������
������
���������
���������
��������
������������
����������
����������������
������
������
������������
������������
������������
��������������������������������
��������������������
����������
����������
����������
����������
���������� ����������������������������
������������
��������
���������
�������������
������
������������������
��������
��������
��������
t1p5 t0p3 t1p1 t3p4 t4p2 t2
t2
t4p2p4 t2p5p1 p2p3
p1p3p5 t3p4
p5p3p1p4p2
t1
t0
t0t3t4
Marquage avantfran hissement de t1 Marquage apr�esfran hissement de t1 Ensemble des pi�e esPuzzle
Fig. A.6: Pi�e es et puzzle asso i�es au d�epliage du temps d'un r�eseau de Petri. Partie haute :d�epliage du temps sur le RdP de la �gure A.1 et ses pi�e es asso i�ees. Partie basse : lepuzzle (A.3.4) onstruit sur la s�equen e ex�e utable ' = (t1; t2; t4; t3; t0) �a partir du marquageM0 = [1; 0; 0; 0℄. Une pi�e e repr�esente de mani�ere ompa te toutes les modi� ations sur lemarquage du RdP provoqu�ees par le fran hissement d'une transition. Les pointill�es indiquentla permanen e des ressour es.r�e ursivement de la mani�ere suivante :D�e�nition A.11 (Puzzle) Soit s une s�equen e ex�e utable, le puzzle hm�s ; s;m+s i est la onnexion des pi�e es de s. La pi�e e hm�t ; t;m+t i est onne table �a hm�s ; s;m+s i ssi les sous-marquages m+s et m�e sont ompatibles. Le r�esultat de la onnexion est donn�e par :165

Traje toire d'un RdP RdP sto hastiquesm�se(p) =8<: m�s (p) si p 2 Qsm�e (p) si p 2 QtnQs� sinonm+se(p) =8<: m+e (p) si p 2 Qtm+s (p) si p 2 QsnQt� sinon (A.12)
Le puzzle orrespondant �a la s�equen e ex�e utable s = (t1; t2; t4; t3; t0) �a partir dumarquage M0 = [1; 0; 0; 0℄ est repr�esent�e sur la �gure A.6, partie basse. La pose d'unepi�e e n'a�e te que les ressour es de la transition asso i�ee, et laisse in hang�e le marquagedes autres pla es, e qui est indiqu�e par les traits pointill�es.A.3.5 Traje toire d'un RdPIl est montr�e dans [2℄ que les notions de pi�e es et de puzzles permettent de substituer�a la notion de s�equen e ex�e utable elle de GdC : toute s�equen e ex�e utable s0 onstruitesur le graphe de ausalit�e g (s), est not�ee s0 2 Lin(g (s)). Le GdC & = g (s) sp�e i�e unedynamique pour les �ev�enements survenant sur le RdP, toute s�equen e ex�e utable devantse onformer �a ette dynamique. Une traje toire est alors d�e�nie dire tement en termesde GdC :D�e�nition A.12 (Traje toire) Le puzzle orrespondant �a un GdC & est un triplethm�& ; &;m+& i tel que m�& = m�s et m+& = m+s , ave s 2 Lin(&).Dans la suite on emploiera indi��eremment le terme \traje toire" et \GdC". On d�e�nit�nalement une salve omme une s�equen e de transitions on urrentes fran hies simul-tan�ement : s = (t1; t2); t3 indique que t1 et t2 sont fran hies simultan�ement. Toutes lesnotions d�evelopp�ees i i se g�en�eralisent dire tement aux s�equen es de salves.A.4 R�eseaux de Petri sto hastiquesLa notion de temps n'est pas pr�esente dans la d�e�nition originale des r�eseaux de Petri.Son introdu tion devient indispensable pour la mod�elisation et l'analyse des syst�emes dy-namiques. Le temps intervient sous forme de d�elais avant le fran hissement de transitionsvalid�ees : la \dur�ee" di de fran hissement de la transition valid�ee ti peut etre �x�ee demani�ere d�eterministe, dans les RdP temporis�es, ou de mani�ere al�eatoire dans les RdP sto- hastiques. Nous nous int�eresserons i i �a es derniers, en montrant les liens qui les unissentau ha�nes de Markov, ainsi que leurs limites d'appli ation aux syst�emes distribu�es.A.4.1 RdP et ha�ne de Markov �a temps ontinuLes RdP sto hastiques asso ient au d�elai di de fran hissement de la transition ti unedensit�e de probabilit�e exponentielle de param�etre (ou de taux de transition) :�i = 1Dur�ee moyenne de fran hissement de ti166

RdP sto hastiques Dis r�etisation de la ha�ne de Markovtel que, si � est la dur�ee de vie d'un omposant, la loi exponentielle de param�etre � s'�e rit :P[� � d℄ = 1� e��dCette dur�ee moyenne repr�esente, dans un ontexte de �abilit�e, le temps moyen jusqu'�ala panne (Mean Time To Failure) ou entre deux pannes (Mean Time Between Failures) ons�e utives du meme mat�eriel [18, 23℄, et pour des transitions on urrentes t1; : : : ; tkdans le marquage M , la politique de la ourse (ra e poli y) impose le tir de elle qui a tir�ele d�elai le plus ourt.Or, la propri�et�e d'oubli du pass�e de la distribution exponentielle rappelle la propri�et�esimilaire des ha�nes de Markov (CM) : en e�et, on montre [41, 59℄ que le pro essus de mar-quage d'un RdPS born�e est isomorphe �a une ha�ne de Markov �a �etat �ni d'espa e d'�etat� = R(M0), ave R(M0) l'espa e d'a essibilit�e du RdP �a partir du marquage initialM0.Les taux de transition du pro essus de marquage sont d�etermin�es de la mani�ere suivante :soient deux marquages appartenant �a une s�equen e (Mk)k=1:n, le taux de transition entreMi et Mj est la somme des taux des transitions menant de Mi �a Mj :aij = Xt:Mi[tiMj �tLes taux de transition sont rassembl�es dans une matri e A = (aij)i;j, dite g�en�erateurin�nit�esimal du pro essus o�u, pour h! 0 et si s est l'�etat ourant :P[s(d+ h) =Mijs(d) =Mj℄ � aij:h; 8i 6= j; et aii = �Xj 6=i aij (A.13)De plus, on sait que la distribution de probabilit�e de l'�etat s �a l'instant d, Pi(d) =P[s(d) =Mi℄, en partant du marquage initial M0 �a l'instant 0, est la solution de l'e.d.o :_P(d) = A:P(d); ave P(d) = [P1(d); : : : ;Pm(d)℄Par ons�equent : P(d) = P(0)eAd (A.14)A.4.2 Dis r�etisation de la ha�ne de MarkovDans le ontexte de la surveillan e, l'o urren e d'�ev�enements n'est autoris�ee qu'�a desinstants dis rets de p�eriode � ; on s'int�eresse par ons�equent �a la dynamique dis r�etis�eedu pro essus de marquage : �a tout instant dis ret n�, le hoix est laiss�e entre hangerd'�etat et rester dans l'�etat ourant. Pour haque �etat Mj atteint par le tir d'une transitiont de taux aij �a partir d'un �etat onnu Mi, on a :(Q�)ij = P[s(�) =Mjjs(0) =Mi℄ = P[tjMi℄ (A.15)= (eA�)ij e qui d�etermine les probabilit�es de transition du pro essus de marquage, dis r�etis�e �a lap�eriode �. De plus, la probabilit�e d'ex�e uter une s�equen e s = (t1; : : : ; tk) �a partir dumarquage M0 se fa torise par la r�egle de Bayes, et en utilisant la propri�et�e d'oubli dupass�e, on a : P[sjM0℄ = P[t1jM0℄ : : : P[tnjMn�1℄ (A.16)167

Con lusions sur les RdPS RdP partiellement sto h.ave M0[t1iM1[t2i : : : tniMn�1.L'int�eret d'une mod�elisation par les r�eseaux de Petri sto hastiques pour notre probl�emede surveillan e et de diagnosti est d'interpr�eter le probl�eme d'estimation de s�equen e defran hissements de transitions du RdP de pannes en un probl�eme d'estimation marko-vienne, pour lequel des algorithmes de programmation dynamique, num�eriquement eÆ- a es, existent. Il exploite une forme d�epli�ee du graphe de marquage est appel�ee treillis deViterbi, du nom de l'auteur de l'algorithme que nous utiliserons. Nous ne le repr�esentonspas i i par manque de lisibilit�e : il a 11 �etats et 26 transitions.A.4.3 Con lusions sur les RdPSLa mod�elisation markovienne est attrayante du fait du adre statistique qui lui estatta h�e, notamment son extension aux observations dans le adre des mod�eles de MarkovCa h�es. De plus, les algorithmes d'estimation a posteriori, dont elui de Viterbi, sontsimples �a mettre en �uvre et eÆ a es d'un point de vue num�erique. Nous employons edernier au hapitre III.1 pour fournir une premi�ere solution au probl�eme de la surveillan ehybride num�erique/symbolique.N�eanmoins, les mod�eles de Markov sont limit�es aux petits syst�emes pour la raisonhabituelle de roissan e exponentielle de l'espa e d'�etat en fon tion de la taille du RdPSinitial, mais pas seulement.En e�et, le probl�eme prin ipal du adre markovien est la d�ependan e de la probabilit�ede tir d'une transition sur le marquage omplet (A.16) : pour la transition t2 sur le RdP(�g. A.1), sa probabilit�e de fran hissement �etant di��erente si M = [0; 1; 1; 0℄ ou si M =[0; 1; 0; 1℄ [59, 18℄. Or la notion de on urren e dans les RdP implique une ind�ependan estru turelle des onditions de tir sur l'�etat ourant du r�eseau : en e�et, les r�egles d'�evolutiondonn�ees dans la d�e�nition A.6 ne font intervenir que l'�etat du voisinage de la transitionet non elui de toutes les pla es. Dans le as extreme de deux RdP non onnexes, la ons�equen e est la probabilisation de l'ordre d'o urren e d'�ev�enements on urrents, equi est ontradi toire ave la propri�et�e de on urren e, et interdit toute pro �edure desurveillan e de syst�emes distribu�es pour lesquels la notion meme d'�etat global n'a au unsens. Ce probl�eme a motiv�e les re her hes de [2℄, qui ont abouti �a la d�e�nition d'unenouvelle probabilisation des RdP v�eri�ant l'�equivalen e souhait�ee entre les deux typesd'ind�ependan e, et nous nous en inspirerons au hapitre III.2 pour proposer un algorithmemodulaire (v�eri�ant ette propri�et�e sur les probabilit�es de tir des transitions) pour lessyst�emes hybrides partiellement observ�es. Nous en donnons un expos�e r�esum�e �a la se tionsuivante.A.5 R�eseaux de Petri partiellement sto hastiquesUn r�eseau de Petri partiellement sto hastique (Partially Sto hasti Petri Nets{PSPN)est un RdP pour lequel la propri�et�e d'ind�ependan e stru turelle (la on urren e) est�equivalente �a son ind�ependan e sto hastique. Nous nous pla� ons toujours dans le adredes RdP saufs. L'id�ee de base est la suivante : e sont les ressour es d'une transition, etuniquement elles- i, qui hoisissent, parmi leurs transitions d'entr�ee et de sortie, ellequ'elles \veulent" voir fran hie, au travers d'attributs sp�e i�ques.168

RdP partiellement sto h. Attributs des pla esA.5.1 Attributs des pla es�A une pla e p 2 P sont asso i�ees trois variables :1. Le marquage M(p), variable bool�eenne qui indique l'�etat de la ressour e, absente oupr�esente,2. La variable al�eatoire de routage, ou de hoix, �(p) �a valeur dans l'ensemble destransitions d'entr�ee,3. La variable non-d�eterministe de d�esir de hanger d'�etat, �(p) �a valeur bool�eenneindiquant le souhait d'une pla e de hanger d'�etat.A.5.2 R�egles d'�evolution d'un PSPNOn peut onsid�erer un PSPN omme un syst�eme dynamique de ve teur d'�etat Mn(p)pilot�e par une ommande partiellement sto hastique (�n; �n). Plus pr�e is�ement, �a haqueinstant n, toutes les pla es hoisissent si elles souhaitent hanger d'�etat au travers de �net, si 'est le as, pointent dans la dire tion souhait�ee au travers de �n :{ si une pla e a un jeton, elle hoisit une transition parmi ses pla es de sortie : �n(p) 2p� ;{ si une pla e est vide, elle hoisit une transition parmi ses pla es d'entr�ee : �n(p) 2 �p.Ces s�ele tions sont suppos�ees etre ind�ependantes en temps (n) et en espa e (p). Enrevan he, rien n'impose d'avoir une loi identique pour �(p) en fon tion du temps.La ontrainte permettant une �evolution du RdP est que toutes les ressour es d'unetransition soient unanimes �a la fois dans leur souhait de hanger et dans leur hoix. Lar�egle d'�evolution est don :8t 2 T; t est fran hie �a n, t est valid�ee par Mn et [8p 2 �t [ t�; �n(p) = 1; �n(p) = t℄(A.17)Une fois une transition fran hie, la r�egle d'�evolution du marquage est identique �a elledu RdP sous-ja ent. La probabilisation du mod�ele permet le fran hissement simultan�e deplusieurs transitions on urrentes.A.5.3 Traje toiresOn montre [30℄ que le PSPN et son RdP sous-ja ent g�en�erent les memes s�equen es desalves, et don les memes traje toires de RdP, qui peuvent etre interpr�et�ees omme desordres partiels ou des graphes de ausalit�e (voir se tion A.3).Dans le adre PSPN, le d�epliage temporel permet de visualiser les hoix e�e tu�es lorsd'une �evolution du RdP : haque transition lit les trois variables (marquage, routage, d�esir)de ses ressour es de son pre-set et de son post-set, �a gau he, i.e. dans le pass�e, puis, selonla r�egle (A.17), elle est fran hie si elle est �elue �a l'unanimit�e par ses ressour es, ou ne l'estpas sinon. La pr�esen e des jetons dans le futur (�a droite de la transition) est ompl�etementd�etermin�ee par les r�egles des RdP.Remarquons que la r�egle d'�evolution (A.17) ne d�etermine �a l'instant n de mani�ereunivoque que les variables des pla es qui ont parti ip�e �a un fran hissement �a et instant ;169

Vraisemblan e g�en�eralis�ee d'une traje toire RdP partiellement sto h.les autres pla es pr�eservent un degr�e de libert�e en �. Ce i signi�e que plusieurs r�ealisationsm�enent �a la meme s�equen e de salves, elle- i se distinguant par les hoix de � alorsque � = 0. Rappelons �egalement que plusieurs s�equen es m�enent �a un GdC donn�e. Lad�etermination de la vraisemblan e d'un GdC devra tenir ompte de es deux degr�es delibert�e.On d�e�nit dans le formalisme PSPN une r�ealisation de la traje toire du RdP par :D�e�nition A.13 Soit ' une s�equen e de � salves. Une r�ealisation de ette s�equen e estun ouple (�; �), o�u � et � sont des s�equen es f�n(p)g et f�n(p)g, 8p 2 P; n = 1; : : : ; �, quig�en�erent la s�equen e s dans le formalisme PSPN. On note e i (�; �) s. Par extension,on dira que (�; �) g�en�ere une traje toire &, not�e par (�; �) &, o�u & = g (s) et (�; �) s.On renvoie le le teur �a la th�ese [2℄ pour une pr�esentation plus ompl�ete de e adrede mod�elisation.A.5.4 Vraisemblan e g�en�eralis�ee d'une traje toireLa vraisemblan e d'une r�ealisation (�; �) est d�etermin�ee par les variables al�eatoires quiy parti ipent, i.e. les variables de routage �n(p); p 2 P; 1 � n � N . Toutes les variables�etant ind�ependantes en temps et en espa e, on a :L(�; �) = NYn=1Yp2P P[�n(p)℄puisque seuls les �n(p) sont al�eatoires.La vraisemblan e d'une traje toire sera vue omme elle de la r�ealisation la plus vrai-semblable en projetant la notion de vraisemblan e de r�ealisation sur les traje toires :L(') = max(�;�) (')L(�; �) (A.18)Nous ne onsid�ererons pas num�eriquement le passage d'une s�equen e �a un GdC ar,l'ordre de fran hissement des transitions on urrentes n'�etant pas probabilis�e, toutes less�equen es g�en�erant un meme GdC ont la meme vraisemblan e.Tout d'abord, remarquons qu'il est naturel que seules les ressour es intervenant dansla traje toires in uent sur sa vraisemblan e : par ons�equent, la vraisemblan e d'uner�ealisation dont ertaines pla es parti ipent �a un blo age, i.e. p est statique alors que�n(p) = 1, est la meme que elle de la r�ealisation o�u es pla es ne parti ipent �a au unblo age, mais sont statiques par hoix, i.e. �n(p) = 0. Alors, dans l'expression (A.18), onpeut restreindre la maximisation aux r�ealisations o�u �(p) = 0 pour les pla es immobiles.La maximisation s'e�e tue alors uniquement sur les �n(p).Pour et ensemble r�eduit de r�ealisations, soit une pla e parti ipe �a un tirage �a n, auquel as �n(p) = 1 et �n(p) = t, soit non et don �n(p) = 0 et �n(p) est libre. On peut don s inder la vraisemblan e en deux, en rejetant la maximisation sur la partie statique, lavaleur de la partie ompl�ementaire �etant d�etermin�ee de mani�ere unique :L(s) = NYn=1 Yp:�n(p)=1P[�n(p)℄ Yp:�n(p)=0P�n(p)170

RdP partiellement sto h. Vraisemblan e g�en�eralis�ee d'une traje toireave P�n(p) = max�n(p)P[�n(p)℄ (A.19)Si l'on suppose que les probabilit�es de hoix sont ind�ependantes du temps, alors on peutomettre l'indi e n dans (A.19).De plus, omme nous nous int�eressons �a des omparaisons de vraisemblan es, on peutrenormaliser l'expression par (Qp2P P�(p))N , onstante pour toutes les traje toires, soit :L(s) = NYn=1 Yp:�n(p)=1 P[�n(p)℄P�(p)Ce i on entre l'interpr�etation sur les pla es du r�eseau. Observ�e sous l'angle de sestransitions, il permet une interpr�etation plus physique :L(s1; : : : ; sN ) = NYn=1 Yt2sn h Yp2�t[t� P[�n(p) = t℄P�(p) i (A.20)On appelle vraisemblan e g�en�eralis�ee de la transition t le dernier fa teur :L(t) = Yp2�t[t� P[�n(p) = t℄P�(p) (A.21)Celui- i ne d�epend que de la transition t, e qui �etait la propri�et�e re her h�ee ; laprobabilit�e du tir de deux transitions on urrentes ob�eit maintenant �a :L(t2; t3) = L(t2)L(t3)Plus g�en�eralement, la vraisemblan e d'une traje toire est �egale au produit desvraisemblan es de transition, prises sur toutes les transitions fran hies dans la traje toire.�A partir de l'observation de la forme produit i-dessus, on �etablit [2℄ que toutes les tra-je toires ompatibles ave un ertain graphe de ausalit�e (extrait du RdP), ne peuvent etredistingu�ees par le al ul de la vraisemblan e. On tire de e i les 3 on lusions suivantes :1. la probabilit�e qu'une transition soit tir�ee n'est plus une fon tion de tout le marquage,mais d�epend des seules ressour es de ette transition ;2. l'ordre dans lequel deux transitions on urrentes sont fran hies n'est pas probabilis�e ;3. l'attente n'a pas d'in uen e sur la vraisemblan e, vu que les salves vides ne sont pasprises en ompte dans le al ul et omme seuls les graphes de ausalit�e peuvent etredistingu�es, on peut onsid�erer que le temps est partiellement ordonn�e.Ce i se r�esume par : L(') =Yt2'L(t) (A.22)ave L(t) la vraisemblan e d'une pi�e e (ou d'une transition), d�e�nie de mani�ere intrins�eque�a la transition.En revenant �a la se tion A.3.3, la dynamique du RdP vue �a travers son d�epliagetemporel donne dire tement la vraisemblan e de la traje toire par le ture des pi�e es pos�eespour onstruire le puzzle. 171

Optimisation : puzzle de Viterbi RdP partiellement sto h.ObservationsLes fran hissements n'�etant pas dire tement observ�es ( 'est un RdP " a h�e"), noussupposerons que le fran hissement d'une transition s'a ompagne de l'�emission d'une ob-servation prise dans un alphabet A ; on suppose onna�tre la probabilit�e onditionnelled'�emission de haque symbole pour toute transition :8a 2 A;8t 2 T; P(ajt) onnue (A.23)De plus, on supposera que la ausalit�e des �ev�enements est respe t�ee par les observations :ti ! tj ) ai ! aj (A.24)A.5.5 Optimisation : puzzle de ViterbiL'algorithme de Viterbi ([48, 49℄ et se tion III.1.3) r�esout le probl�eme de l'estimationde la s�equen e optimale de transitions, ou de mani�ere �equivalente, d'�etats, onnaissantune s�equen e d'observations gra e �a une r�e urren e sur l'�etat. Or, les PSPN refusent lanotion d'�etat global pour le diagnosti : l'adaptation de l'algorithme de Viterbi, dit alorsg�en�eralis�e, �etablit une r�e urren e sur les sous-marquages, e qui permet de ne pas imposerle marquage des pi�e es non-sp�e i��ees par un sous-marquage donn�e.On suppose la ausalit�e des observations (A.24) et on suppose la onnaissan e :1. des vraisemblan es intrins�eques des pi�e es du r�eseau : L(t) (A.21),2. des lois onditionnelles P(ajt) (A.23).On ne suppose pas en revan he onna�tre la distribution sur les �etats initiauxM0, bienqu'elle puisse etre utilis�ee si elle est disponible.Le diagnosti est i i pr�esent�e sous la forme unique des graphes de ausalit�e (GdC), laversion sous la forme d'ordres partiels s'en d�eduisant ; on renvoie de nouveau le le teur �a[2℄ pour ela.La s�equen e re her h�ee est obtenue par on at�enation des pi�e es t1; : : : ; tq qui la om-posent ; elle doit etre ompatible ave la s�equen e d'observations a1; : : : ; aq. L'estimationoptimale est l'argument du maximum de la vraisemblan e jointe a posteriori :maxt1;::: ;tq P(a1; : : : ; aqjt1; : : : ; tq)L(t1; : : : ; tq)La pro �edure onsiste �a onstruire r�e ursivement les puzzles optimaux ompatibles ave les observations. Pour ela on onsid�ere Mn l'ensemble des sous-marquages obtenus �al'instant n, et qui ont produit les observations a1; : : : ; an :mn 2Mn , 9t1; : : : ; tn : [t1 : : : tnimn; ai 2 A(ti); 1 � i � n (A.25)et la fon tion valeur Vn(mn), vraisemblan e maximale sur toutes les s�equen es, ou GdC,arrivant en mn et ompatibles ave les observations a1; : : : ; an :Vn(mn) = max'n:['nimn P(anjtn) : : : P(a1jt1)L('n)ave L('n) =Yt2s L(t)172

RdP partiellement sto h. Con lusionAlors, �a l'instant suivant :Vn+1(mn+1) = maxsn+1:[sn+1imn+1 P(an+1jtn+1)P(anjtn); : : : ;P(a1jt1)L(sn+1)= max tn+1;mn+1 :mn[tn+1imn+1 P(an+1jtn+1)L(tn+1)Vn(mn)et on m�emorise pour haque sous-marquage a essible mn+1 les arguments optimaux :Sn+1(mn+1) = arg maxtn+1; mn+1 :mn[tn+1imn+1 P(an+1jtn+1)L(tn+1)Vn(mn) (A.26)Le tableau Sn(mn) ontient �a la fois le sous-marquage pr�e �edent optimal et la transitionoptimale (qui n'est pas n�e essairement unique a priori).La r�e urren e est e�e tu�ee r�e ursivement de l'instant initial �a l'instant q ; �a l'instant�nal, le sous-marquage m�q ayant la plus grande fon tion valeur maxmq Vq(mq) est hoisi omme �etat �nal optimal ; la pro �edure de par ours arri�ere, ou de ba ktra king, fournit�nalement la s�equen e optimale :8n = q : : : 1; (m�n�1; t�n�1) = S(m�n)et don le diagnosti .A.5.6 Con lusionNous disposons d'un adre de probabilisation des RdP v�eri�ant la propri�et�ed'�equivalen e entre ind�ependan e stru turelle et sto hastique, permettant d'envisager lar�epartition de la surveillan e : en e�et, le diagnosti peut se d�erouler de mani�ere par-tielle et lo ale, vu que les �ev�enements sont maintenant d�e�nis intrins�equement. Dans [2℄, e i on ernait les syst�emes �a �ev�enements dis rets dont les �ev�enements sont a h�es, i.e.inobserv�es, et non-d�eterministes.Nous nous inspirons de e mod�ele pour la surveillan e des syst�emes partiellementd�eterministes, i.e. pour lesquels il existe des �ev�enements dont l'o urren e est observ�eede mani�ere ertaine. L'extension propos�ee du mod�ele est �egalement on� ue pour v�eri�erla ontrainte de modularit�e.
173

Con lusion RdP partiellement sto h.
174

Table des �guresI.1.1 Comportements dynamiques du syst�eme utilis�es pour sa surveillan e. . . . . 9I.1.2 Prin ipe de la d�emar he de mod�elisation. . . . . . . . . . . . . . . . . . . . 11I.2.1 S h�ema fondamental d'un syst�eme. . . . . . . . . . . . . . . . . . . . . . . 17II.1.1 Des ription du syst�eme mono-mode surveill�e. . . . . . . . . . . . . . . . . . 30II.2.1 Exemple de graf et de ommande. . . . . . . . . . . . . . . . . . . . . . . . 45II.2.2 Exemple d'arbre de d�efaillan e. . . . . . . . . . . . . . . . . . . . . . . . . . 49II.2.3 Conversion des omposants en ma hines �etat/transition. . . . . . . . . . . . 51II.2.4 Deux mod�elisations de la dynamique de l'�etat d'un omposant par une ma- hine �a �etat/transition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52II.2.5 Conversion des portes logiques de l'arbre de d�efaillan e. . . . . . . . . . . . 53II.2.6 Syn hronisation des ma hines �a �etat/transition, sommets li�es �a des omposants. 54II.2.7 Syn hronisation des ma hines �a �etat/transition, autre as. . . . . . . . . . . 54II.2.8 Conjon tion et onversion de deux arbres de d�efaillan es : as mono-mode. . 56II.2.9 RdP de ontrole (graphe des modes de fon tionnement). . . . . . . . . . . . 60II.2.10 Conjon tion et onversion de deux arbres de d�efaillan es : as multi-modes. . 66II.2.11 �E helles de temps dans le as mono-mode. . . . . . . . . . . . . . . . . . . 67II.2.12 Dis r�etisation d'une ma hine �a �etat/transition, as mono-mode. . . . . . . . 67II.2.13 Dis r�etisation de la onjon tion de deux arbres de d�efaillan es : as mono-mode. 68II.2.14 �E helles de temps dans le as multi-modes . . . . . . . . . . . . . . . . . . 69II.2.15 Dis r�etisation d'une ma hine �a �etat/transition, as multi-modes. . . . . . . . 70II.2.16 Dis r�etisation de la onjon tion de deux arbres de d�efaillan es, as multi-modes. 71III.1.1 Graphe de pannes pour l'algorithme markovien. . . . . . . . . . . . . . . . . 85III.2.1 Des ription du fon tionnement du syst�eme surveill�e : as multi-modes. . . . 91III.2.2 Mod�elisation du fon tionnement du syst�eme pour sa surveillan e hybride. . . 93III.2.3 Pro �edure de surveillan e et de diagnosti hybride. . . . . . . . . . . . . . . 94III.2.4 Ma hine �a �etat/transition d'un omposant dont le retour �a l'�etat sain estspontan�e ou d�e len h�e. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95III.2.5 Extension des ressour es d'une transition. . . . . . . . . . . . . . . . . . . 96IV.1.1 S h�ema-blo d'un g�en�erateur de vapeur. . . . . . . . . . . . . . . . . . . . . 118IV.1.2 Graphe de ontrole du g�en�erateur de vapeur. . . . . . . . . . . . . . . . . . 120IV.1.3 Graphe de pannes dans haque mode. . . . . . . . . . . . . . . . . . . . . . 122IV.1.4 Graphe de pannes syn hronis�e. . . . . . . . . . . . . . . . . . . . . . . . . . 123IV.1.5 Sorties du syst�eme pendant une rampe de temp�erature, fon tionnement no-minal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126175

Table des �guresIV.1.6 Erreur de pr�edi tion pour une s�equen e de deux pannes. . . . . . . . . . . . 127IV.1.7 Algorithme markovien : nombre de fausses alarmes FA pour le syst�eme �al'�etat sain. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131IV.1.8 Taux de d�ete tion orre te pour des s�equen es d'une panne. . . . . . . . . . 134IV.1.9 R�esultats omplets pour des s�equen es d'une panne. . . . . . . . . . . . . . 140IV.1.10R�esultats omplets pour des s�equen es de deux pannes. . . . . . . . . . . . 141IV.1.11R�esultats omplets pour des s�equen es de trois pannes. . . . . . . . . . . . . 142IV.1.12R�esultats omplets pour des s�equen es de quatre pannes. . . . . . . . . . . . 143IV.1.13Algorithme PSPN hybride : r�esultats omplets pour des s�equen es de une �aquatre pannes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144A.1 Exemple de r�eseau de Petri. . . . . . . . . . . . . . . . . . . . . . . . . . . 158A.2 Exemple de r�eseau de Petri non pur. . . . . . . . . . . . . . . . . . . . . . . 158A.3 Exemple de r�eseau de Petri non pur marqu�e. . . . . . . . . . . . . . . . . . 159A.4 Exemple de onversion d'un r�eseau de Petri en un graphe de ausalit�e pourune s�equen e ex�e utable. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162A.5 D�epliage du temps d'un r�eseau de Petri. . . . . . . . . . . . . . . . . . . . . 164A.6 Pi�e es et puzzle asso i�es au d�epliage du temps d'un r�eseau de Petri. . . . . . 165
176

Bibliographie[1℄ M. Ajmone Marsan, G. Balbo, G. Conte, S. Donatelli et G. Fran es hinis (1995).Modelling with generalized sto hasti Petri nets. Wiley Series in Parallel Computing.[2℄ A. Aghasaryan (1998). Formalisme HMM pour les r�eseaux de Petri partiellement sto has-tiques : appli ation au diagnosti de pannes dans les syst�emes r�epartis. Th�ese de do torat del'Universit�e de Rennes 1.[3℄ A. Aghasaryan, R. Boubour, E. Fabre, C. Jard et A. Benveniste (1997). A Petrinet approa h to fault dete tion and diagnosis in distributed systems. Rapport de Re her heIrisa 1117. ftp ://ftp.irisa.fr/te hreports/1997/PI-1117.ps.gz.[4℄ A. Aghasaryan, E. Fabre, A. Benveniste, R. Boubour et C. Jard (1997). A Petrinet approa h to fault dete tion and diagnosis in distributed systems. Part II : extendingViterbi algorithm and Hidden Markov Model te hniques to Petri nets. Pro . IEEE CDC'97,San Diego, CA.[5℄ M. Basseville (1988). Dete ting hanges in signals and systems- A survey. Automati a, 24,3, 309-326.[6℄ M. Basseville (1997). Information riteria for residual generation and fault dete tion andisolation. Automati a, 33, 5, 783-803.[7℄ M. Basseville (1998). On-board omponent fault dete tion and isolation using the statisti allo al approa h. Automati a, 34, 11, 1391-1416.[8℄ M. Basseville et M. O. Cordier (1996). Surveillan e et diagnosti de syst�emes dyna-miques : appro hes ompl�ementaires du traitement du signal et de l'intelligen e arti� ielle.Rapport de Re her he Irisa 1004. ftp ://ftp.irisa.fr/te hreports/1996/PI-1004.ps.gz.[9℄ M. Basseville et I. Nikiforov (1993). Dete tion of Abrupt Changes {Theory and Appli ations. Prenti e Hall Information and System S ien es Series.http ://www.irisa.fr/sigma2/kniga.[10℄ M. Basseville, M. Abdelghani et A. Benveniste (1997). Subspa e-based fault dete tionand isolation methods - Appli ation to vibration monitoring. Rapport de Re her he Irisa1143. ftp ://ftp.irisa.fr/te hreports/1997/PI-1143.ps.gz.[11℄ M. Basseville, A. Benveniste et L. Tromp (1998). Diagnosing hybrid dynami al sys-tems : Fault graphs, statisti al residuals and Viterbi algorithm. Pro . IEEE CDC'98, Tampa,FL. Voir aussi Rapport de Re her he Irisa 1199. ftp ://ftp.irisa.fr/te hreports/1997/PI-1199.ps.gz.[12℄ M. Basseville, A. Benveniste et Q. Zhang (1996). Surveillan e d'installations indus-trielles : d�emar he g�en�erale et on eption de l'algorithmique. Rapport de Re her he Irisa1010. ftp ://ftp.irisa.fr/te hreports/1996/PI-1010.ps.gz.177

Bibliographie[13℄ M. Basseville, A. Benveniste, G. Moustakides et A. Roug�ee (1987). Dete tion anddiagnosis of hanges in the eigenstru ture of non-stationary multivariable systems. Automa-ti a, 23, 479-489.[14℄ L.E. Baum et G.R. Sell (1968). Growth fun tions for transformations on manifolds. Pa .Journal of Mathemati s, 27,2, 211-227.[15℄ Y. Bengio (1996). Markovian models for sequential data. Rapport de re h. 1049, Univ. deMontr�eal, Dept. d'Info. et de Re h. Operat.[16℄ A. Benveniste, M. Basseville etG. Moustakides (1987). The asymptoti lo al approa hto hange dete tion and model validation. IEEE Trans. Autom. Control, AC-32, 7, 583-592.[17℄ A. Benveniste, B.C. L�evy, �E. Fabre et P. Le Guerni (1995). A al ulus of sto- hasti systems for the spe i� ation, simulation, and hidden state estimation of hybridsto hasti /non-sto hasti systems. LNCS 999, Springer-Verlag, 21-44.[18℄ J.L. Bon (1995). Fiabilit�e des syst�emes- M�ethodes math�ematiques. Te hniques Sto hastiques,Masson, Paris.[19℄ R. Borovkov (1987). Statistique math�ematique. T. R. , Mir, Mos ou.[20℄ R. Boubour, C. Jard, A. Aghasaryan, E. Fabre et A. Benveniste (1997). A Petrinet approa h to fault dete tion and diagnosis in distributed systems. Part I : appli ation totele ommuni ation networks, motivations and modelling. Pro . IEEE CDC'97, San Diego,CA.[21℄ P. Bouth�emy (1987). A maximum-liklihood framework for determining moving edges inimage sequen es. Rapport de Re her he IRISA 365.[22℄ E. Y. Chow et A. S. Willsky (1980). Issues in the development of a general algorithm forreliable failure dete tion. Pro . 19th Conf. on De ision and Control, Albuquerque, NM.[23℄ C. Co ozza-Thivent (1997). Pro essus sto hastiques et �abilit�e des syst�emes. Springer-Verlag.[24℄ R. David et H. Alla (1989). Du Graf et aux R�eseaux de Petri. Trait�e des Nouvelles Te h-nologies, S�erie Automatique, Herm�es, Paris.[25℄ M. H. A. Davis (1975). The appli ation of non-linear �ltering to fault dete tion in linearsystems. IEEE Trans. Aut. Control, 20, 2, 257-259.[26℄ R. H. Deng, A. A. Lazar et W. Wang (1993). A probabilisti approa h to fault diagnosisin linear lightwave networks. IEEE Journal on Sele ted Areas in Communi ations, 11, 9,1438-1448.[27℄ J. Deshayes et D. Pi ard (1986). O�-line statisti al analysis of hange-point models usingnon-parametri and likelihood methods. In Dete tion of abrupt hanges in signals and systems(M. Basseville, A. Benveniste, �editeurs), Le ture Notes in Control and Information S ien es,LNCIS 77, Dete tion of abrupt hanges in signals and systems, 103-168.[28℄ Ph. de Larminat (1996) Automatique, ommande des syst�emes lin�eaires, deuxi�eme �edition.Colle tion Automatique, Herm�es, Paris.[29℄ J.F. Ereau (1997). R�eseaux de Petri pour l'�etude de la disponibilit�e op�erationnelle dessyst�emes spatiaux en phases d'avant-projet. Th�ese de Do torat, Universit�e Paul Sabatier,LAAS, Toulouse. 178

Bibliographie[30℄ E. Fabre, A. Aghasaryan, A. Benveniste, R. Boubour et C. Jard (1998). Faultdete tion and diagnosis in distributed systems : an approa h by partially sto hasti Petrinets. J. of Dis rete Event Dynami Systems, Kluwer A ademi Publishers, Boston, 8, no.2,203-231. Voir aussi [3℄.[31℄ P. M. Frank (1990). Fault diagnosis in dynami systems using analyti al redundan y- Asurvey and new results. Automati a, 26, 459-474.[32℄ G.F. Franklin, J.D. Powell etM. Workman (1997).Digital Control of dynami Systems,troisi�eme �edition. Addison Wesley.[33℄ J. Gertler (1988). Survey of model-based failure dete tion and isolation in omplex systems.IEEE Control Systems Magazine, 8, 6, 3-11.[34℄ R. Isermann (1984). Pro ess fault dete tion based on modeling and estimation methods- Asurvey. Automati a, 20, 387-404.[35℄ T. H. Kerr (1980). Statisti al analysis of two-ellipsoid overlap test for real time failuredete tion. IEEE Trans. Automati Control, AC-25, 4, 762-772.[36℄ D. G. Lainiotis (1971). Joint dete tion, estimation and system identi� ation. Inform.Control, 19, 75-92.[37℄ G. Mathis (1994). Outils de D�ete tion de Rupture et de DIagnosti : Appli ation �a laSurveillan e de Turbines �a Gaz. Th�ese de do torat de l'Universit�e de Rennes 1.[38℄ R. K. Mehra et J. Pes hon (1971). An innovation approa h to fault dete tion and diagnosisin dynami systems. Automati a, 7, 637-640.[39℄ B. Meyer (1992). EIFFEL, the language. Prenti e-Hall obje t-oriented series.[40℄ M.K. Molloy (1981). On the integration of Delay and Throughput Measures in DistributedPro essing Systems. Th�ese de Do torat, Universit�e de Californie, Los Angeles.[41℄ M.K. Molloy (1982). Performan e analysis using sto hasti Petri nets. IEEE Trans. Com-puters, C-31, 9, 913-917.[42℄ T. Murata (1989). Petri Nets : Properties, Analysis and Appli ations. Pro . IEEE, 77, 4,541-580.[43℄ S. Natkin (1980). Les r�eseaux de Petri sto hastiques et leur appli ation �a l'�evaluation dessyst�emes informatiques. Th�ese de Do torat, CNAM, Paris.[44℄ I. V. Nikiforov (1986). Sequential dete tion of hanges in sto hasti systems. In Dete tionof abrupt hanges in signals and systems (M. Basseville, A. Benveniste, �editeurs), Le tureNotes in Control and Information S ien es, LNCIS 77, Dete tion of abrupt hanges in signalsand systems, 216-258.[45℄ E. S. Page (1954). Continuous inspe tion s hemes. Biometrika, 41, 100-115.[46℄ A. Pag�es et M. Gondran (1980). Fiabilit�e des syst�emes. Colle tion de la Dire tion des�etudes et re her hes d'Ele tri ite de Fran e, Eyrolles, Paris.[47℄ R.J. Patton, P. Frank et R. Clark, Eds. (1989). Fault Diagnosis in Dynami Systems {Theory and Appli ation. Prenti e Hall.[48℄ L.R. Rabiner et B.H. Huang (1986). An introdu tion to hidden Markov models. IEEEASSP Magazine, January 1986, 4-16. 179

Bibliographie[49℄ L.R. Rabiner (1989). A tutorial on hidden Markov models and sele ted appli ations inspee h re ognition. Pro . IEEE, 77, 2.[50℄ N.S.V. Rao et N. Viswanadham (1987). Fault diagnosis in dynami al systems : a graphtheoreti approa h. Int. J. Systems S ien e, 18, 4, 687-695.[51℄ G. G. Roussas (1972). Contiguity of probability measures ; some appli ations in statisti s.Cambridge University Press, Cambridge.[52℄ M. Sampath, R. Sengupta, S. Lafortune, K. Sinnamohideen et D. Teneketzis(1996). Failure diagnosis using dis rete-event models. IEEE Trans. on Control Systems Te h-nology, CST-4, 2, 105-123.[53℄ M. Sampath, R. Sengupta, S. Lafortune, K. Sinnamohideen et D. Teneketzis(1995). Diagnosability of dis rete event systems. IEEE Trans. Autom. Control, AC-40, 9,1555-1575.[54℄ M. Sartor etA.E.K. Sahraoui (1995). Constru tion d'un ensemble de graf ets hi�erar his�es�a partir d'une sp�e i� ation mixte State hart-Graf et. Rapport LAAS, no 95530, Toulouse.[55℄ M.G. Singh, K.S. Hindi, G. S hmidt et S.G. Tzafestas, Eds. (1987). Fault Dete tionand Reliability - Knowledge-Based and Other Approa hes. International Series on Systemsand Control, 9, Pergamon Press, Oxford, UK.[56℄ L. Tromp, A. Benveniste et M. Basseville, (1999). Fault dete tion and isolation inhybrid systems, a Petri-net approa h. Pro . IFAC'99.[57℄ S.G. Tzafestas, M.G. Singh et G. S hmidt, Eds. (1987). System Fault Diagnosis, Re-liability and Related Knowledge-based Approa hes { 1. Fault Diagnosti s and Reliability { 2.Knowledge-based and Fault-tolerant Te hniques. Reidel, Dordre ht, Holland.[58℄ A. Villemeur (1988). Suret�e de Fon tionnement des Syst�emes Industriels- Fiabilit�e, Fa -teurs Humains, Informatisation. Colle tion de la Dire tion des �etudes et re her hes d'Ele tri- ite de Fran e, Eyrolles, Paris.[59℄ N. Viswanadham et Y. Narahari (1992). Performan e Modeling of Automated Manufa -turing Systems. Prenti e Hall, NJ.[60℄ N. Viswanadham, V.V.S. Sarma et M.G. Singh (1987). Reliability of Computer andControl Systems. Systems and Control Series, 8, North-Holland, Amsterdam.[61℄ J.E. White et J.L. Speyer (1987). Dete tion �lter design : spe tral theory and algorithms.IEEE Trans. on Automati Control, AC-32, 7, 593-603.[62℄ A. S. Willsky et H. L. Jones (1974). A generalized likelihood ratio approa h to stateestimation in linear systems subje t to abrupt hanges. Pro . of 1974 IEEE Conf. on De isionand Control, Phoenix, Arizona.[63℄ A. S. Willsky (1976). A survey of design methods for failure dete tion in dynami systems.Automati a, 12, 601-611.[64℄ A. S. Willsky et H. L. Jones (1976). A generalized likelihood ratio approa h to the dete -tion and estimation of jumps in linear systems. IEEE Trans. Aut. Control, AC-21, 108-112.[65℄ Q. Zhang, M. Basseville et A. Benveniste (1994). Early warning of slight hanges insystems and plants with appli ation to ondition based maintenan e. Automati a, 30, 1, 95-114. 180

[66℄ Q. Zhang, M. Basseville et A. Benveniste (1998). Fault dete tion and isolation innonlinear dynami systems : a ombined input-output and lo al approa h. Automati a, 34,11, 1359-1374.[67℄ Q. Zhang et M. Basseville (1998). Monitoring nonlinear dynami al systems : a ombinedobserver-based and lo al approa h. Pro . IEEE CDC'98, Tampa, FL.[68℄ Y. Zhang et X. Rong Li (1998). Dete tion and Diagnosis of sensor and a tuator failuresusing Intera ting Multiple{Model Estimator. IEEE AES, 34, 4.
181



R�esum�eLa surveillan e et le diagnosti de pannes (SDP) dans les syst�emes omplexes reposent i i surla onnaissan e d'un omportement de r�ef�eren e et sur l'exploitation de signaux d�elivr�es par les apteurs, num�eriques ou symboliques (mar he/arret, alarmes : : : ). Nous prenons pour adre unemod�elisation onjointe, ou hybride num�erique/symbolique, de la produ tion de es signaux, parmod�ele �a �etat ontinu param�etr�e pour l'aspe t num�erique et sinon par syst�eme �a �ev�enementsdis rets, i i un r�eseau de Petri (RdP). La on eption du RdP propos�e exploite les onnaissan es apriori disponibles : arbres de d�efaillan es, issus des analyses de risque des syst�emes, et graphe (desmodes) de fon tionnement, issu par exemple d'un Graf et de ommande. La SDP onsiste alors �aestimer dans un adre bay�esien, la s�equen e optimale d'�ev�enements non observ�es (les d�efaillan es)survenus dans le RdP, onditionnellement aux signaux num�eriques dans lesquels se manifestent lespannes : pour ela deux algorithmes de type Viterbi sont d�evelopp�es, selon que le mod�ele hybrideest purement sto hastique ou non.Dans le premier as, le RdP est restreint �a la dynamique des d�efaillan es, suppos�ee ompl�etement probabilis�ee, e qui permet d'adopter un adre markovien a h�e pour l'estimation.Dans le se ond as, on in lut les possibilit�es de hangement de mode de fon tionnement : unensemble de mod�eles d'�etat d�e rit la produ tion des signaux num�eriques selon les phases de fon -tionnement du syst�eme ; leur alternan e �etant observ�ee de mani�ere ertaine, le RdP est maintenantpartiellement d�eterministe. Un algorithme de Viterbi g�en�eralis�e, r�e emment d�evelopp�e pour lesRdP partiellement sto hastiques, est i i �etendu �a e type de syst�eme. Dans les deux as, les ob-servations num�eriques du Viterbi sont �elabor�ees selon l'appro he asymptotique lo ale. Un exemplesimul�e pr�esente les qualit�es et limites de ette appro he.Mots- l�es : Surveillan e, Diagnosti de Pannes, R�eseaux de Petri, HMM, Viterbi, Statistiques,Fiabilit�e, Arbres de D�efaillan e, Modes de Fon tionnement.Abstra tFault dete tion and isolation (FDI) for omplex systems rely here on both knowledge of a referen ebehavior and the use of sensor-measured signals, either numeri al or symboli (on/o�, alarms : : : ).We propose here a new type of model for FDI that is hybrid numeri al/symboli . It is basedon a parameterized ontinuous state dynami al model for numeri al behaviors and on a dis reteevent system for faults and ontrol events, espe ially a Petri net (PN). Our PN design assumesthe availability of ertain data in luding fault trees (from safety ans risk studies) and a state hartdepi ting the dynami s of fun tionning modes. In this FDI approa h, knowing raws of signals, bothnumeri al (in uen ed by the faults) and symboli ( ontrol events), the optimal unobserved eventsequen e of failures is estimated in a bayesian framework through two types of Viterbi algorithms.In the �rst type, the PN is restri ted to the faults dynami s, that is assumed totally randomized,allowing its onversion into a hidden Markov model (HMM). The HMM observations are made ofstatisti s of the numeri al signals, omputed using the so- alled asymptoti lo al approa h.In the se ond type of algorithm, hanges of fun tionning modes are also taken into a ount :the whole PN drives not only the faults but also a set of state-spa e systems depi ting the distin toperating onditions of the plant, the swit hing from one system to another being observed de-terministi ally through ontrol events. As the PN is now only partially randomized, and moreoverpartially deterministi , a markovian framework does not suit any longer : a hybrid Viterbi algo-rithm, based on a re ent extended Viterbi algorithm dedi ated to partially sto hati PNs, is derivedand adapted to systems whi h are partially deterministi ally observed. A simulated example of asteam generator shows some qualities and limits of this new approa h.Key-words : Fault Dete tion and Isolation, Petri Nets, HMM, Viterbi, Statisti s, Reliability,Fault Trees, Fun tionning Modes.