Directives 1 Ajustementsmarc.maldonado.free.fr/cours/PDF/auto evaluation.pdfbrement, la longueur de...
9
l d μ
Transcript of Directives 1 Ajustementsmarc.maldonado.free.fr/cours/PDF/auto evaluation.pdfbrement, la longueur de...

Évaluation en conception mécanique � septembre 2011Licence Professionnelle Ingénierie des Machines Spéciales
Directives
Pour chaque section, un sujet est proposé et des a�rmations sont proposées. Vous devez sélectionneruniquement les a�rmations justes ; aucune justi�cation n'est demandée.
1 Ajustements
1.1 Arbre
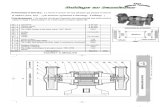
On considère une pompe à engrenages. Les arbres de la pompe sont guidés en rotation sur deux liaisonssur paliers lisses, diamètre 25 H7f6.On appelle l la longueur de chaque guidage, elle vaut 10 et d le diamètre nominal de l'ajustement du guidage.
(a) On peut modéliser le comportement cinématique de la liaison sur palier lisse par une liaison rotule.
(b) On peut modéliser le comportement cinématique de la liaison sur palier lisse par une liaison pivot.
(c) L'ajustement 25 H7f6 signi�e que le jeu moyen vaut 7x6 micromètres.
(d) La lettre H de l'ajustement 25 H7f6 signi�e que le diamètre de l'alésage sera compris entre 25 et 25+xx.
(e) Le chi�re 6 de l'ajustement 25 H7f6 signi�e que l'intervalle de tolérance est plus grand pour l'arbre quepour l'alésage.
(f) Dans ce type de guidage, un ajustement de type 25 H7h6 serait plus approprié, en réduisant les jeux.
1.2 Liaison pivot
On souhaite construire une liaison pivot entre un arbre et un carter. Pour un diamètre nominal valant25mm, l'ajustement H7f6 dé�nit un jeu minimal de 20 et un jeu maximal de 62 µm. Étant donné l'encom-brement, la longueur de guidage possible est de 40mm. L'abre doit avoir un diamètre de 25mm après calcul(dimensionnement par résistance des matériaux).
(a) Si on construit la liaison sur coussinet, l'ordre de grandeur du rotulage entre l'arbre et le carter serade 5' d'arc.
(b) Si on construit la liaison sur coussinet, on peut modéliser son comportement cinématique par uneliaison pivot.
(c) Si on construit la liaison sur roulement rigide à billes, à contact radial, on peut admettre 1 degré derotulage au droit de chaque roulement.
(d) Si on monte deux roulements à rouleaux coniques disposés en O, on aura augmenté la longueur duguidage.
(e) Si on construit la liaison sur roulement à rouleaux, on peut admettre 1' d'arc de rotulage au droit desroulements.
1

2 Systèmes mécaniques
2.0.1 Transformation de mouvement
Un projecteur de �lm 35mm utilise un système cinématique appelé "croix de malte" pour entrainer lapellicule.
(a) Ce système transforme un mouvement de rotation continue en mouvement de translation continue.
(b) Ce système transforme un mouvement de rotation continue en mouvement de rotation intermittente.
(c) Ce système transforme un mouvement de rotation continue en mouvement de translation alternative.
(d) Ce système transforme un mouvement de rotation continue en mouvement de translation circulaire.
(e) Ce système transforme un mouvement de rotation continue en mouvement de rotation alternative.
2.0.2 Préhenseur
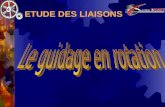
Un préhenseur angulaire (pince de robot) est modélisé de la façon ci-dessous. On appelle a l'angle entre
Figure 1 � Préhenseur mécanique
l'horizontale et l'axe AB d'une biellette.
(a) La caractéristique de ce système est d'ampli�er Fs par rapport à Fp.
(b) La caractéristique de ce système est de réduire Fs par rapport à Fp.
(c) L'ampli�cation est maximale lorsque a tend vers 90 degrés.
(d) La réduction est maximale lorsque a tend vers 0 degré.
(e) Fs s'annule quand a vaut 45 degrés.
(f) Il existe un point mort lorsque chaque biellette est parallèle à un mors.
3 Matériaux
3.1 Acier
On considère un acier courant C38, trempé et revenu.
(a) 38 signi�e que cet acier est composé de 3,8% de carbone.
(b) Un ordre de grandeur de sa résistance élastique est 10 000 MPa.
(c) C signi�e que cet acier contient du chrome.
(d) 38 signi�e que cet acier contient 0,38% de chrome.
(e) Cet acier admet une limite élastique valant 380 MPa.
(f) Le module d'élasticité longitudinal (module de Young) de l'acier varie en fonction de sa teneur encarbone.
2

3.2 Aluminium
Un considère un aluminium de la série 1050.
(a) Un ordre de grandeur de la résistance élastique de l'aluminium est de 200MPa.
(b) 50 signi�e qu'il y a 50% d'aluminium.
(c) L'aluminium a un densité d'environ 2,7.
(d) L'aluminium est 7 fois moins lourd qu'un acier courant.
(e) Le module d'élasticité longitudinal (module de Young) de l'aluminium vaut 70 GPa.
(f) Cet aluminium est trois fois plus souple qu'un acier.
4 Actionneurs
4.1 vérin
On considère un vérin pneumatique double e�et. On applique une pression e�ective de 6 bar dans lachambre sans tige. L'e�ort de frottement entre le corps et le piston est estimé à 15N. La course utile est de220mm. Les 5 derniers mm de courte amortisse le choc en �n de course. L'ensemble tige+piston a une massede 400g. Le diamètre du piston est de 55mm.
(a) L'ordre de grandeur de la vitesse de l'ensemble tige+piston par rapport au bâti à l'instant où le pistonaborde la zone d'amortissement est de 40m/s, en phase de sortie de tige.
(b) Le mouvement de la tige par rapport au bâti peut être considéré comme uniforme.
(c) L'accélération augmente pendant tout le mouvement du piston par rapport au bâti.
(d) La vitesse augmente pendant tout le mouvement du piston par rapport au bâti.
(e) La vitesse maximale de retour de l'ensemble tige+piston par rapport au bâti est de 40m/s.
(f)
4.2 vérin, suite
Étant donné le vérin considéré à la question précédente, on envisage le choix de composants pour saconception.
(a) On peut envisager d'installer un joint torique pour assurer l'étanchéité entre le piston et le fût du vérin.
(b) Une étanchéité directe serait possible et su�sante.
(c) On peut envisager d'installer un joint de type V-Ring pour assurer l'étanchéité entre le piston et le fûtdu vérin.
(d) On doit guider la tige sur coussinet
(e) On peut guider la tige sur coussinet si le facteur p.v dans la liaison est supérieur à 180 N/cm2.m/s(soit 180 W/cm2).
5 Schéma cinématique
5.1 Joystick
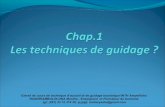
La �gure ci-dessous est la modélisation sous forme de schéma cinématique d'un joystick. Les deux mou-vements possibles entre le manche 1 et le carter 0 sont deux rotations. Ces mouvements sont récupérés surdeux arbres 2 et 3, reliés à des capteurs de rotations. La liaison entre 1 et 3 est une ponctuelle, et celle entre1 et 2, un appui plan.
3

Figure 2 � Schéma cinématique d'un joystick
(a) La liaison entre 0 et 1 est une rotule à doigt.
(b) Ce mécanisme tridimensionnel possède un degré d'hyperstatisme égal à 1.
(c) Changer la liaison pivot entre 0 et 2 en pivot glissant permet de diminuer le degré d'hyperstatisme dumécanisme.
(d) Changer la liaison appui plan entre 1 et 2 en liaison ponctuelle permet d'obtenir un mécanisme isosta-tique.
(e) Un mécanisme isostatique, en fonctionnement, est toujours préférable à un mécanisme hyperstatique.
5.2 Train d'engrenages
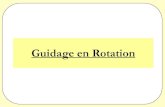
On considère le schéma cinématique de la vue ci-dessous. L'entrée est située sur l'arbre 1 et la sortie surl'arbre 2. La pièce 0 correspond dans ce cas au bâti.
Figure 3 � Schéma cinématique - train d'engrenages simple ?
4

(a) Ce système est un mécanisme permettant d'augmenter la vitesse de rotation entre l'entrée et la sortie.
(b) Ce système est un train d'engrenages simples.
(c) Dans ce type de mécanisme, il est conseillé de placer trois pignons identiques (repère 3) de façon àéquilibrer les e�orts radiaux.
(d) Les pignons 3 sont appelés satellites.
(e) Le rapport de réduction peut être calculé à l'aide de la formule de Willis.
(f) Dans un train d'engrenage simple, si la petite roue dentée constitue l'entrée ("pignon") et contient Z1
dents, et la grande roue dentée constitue la sortie("roue") et contient Z2 dents, alors le rapport deréduction sur les vitesses angulaires sera de Z1/Z2.
(g) Dans ce même train d'engrenage simple, si le rendement est noté η, le couple de sortie C2 vaut (si le
couple d'entrée est noté C1) : C2 = η.C1.Z1
Z2.
(h) Dans ce même train d'engrenage simple, si le rendement est noté η, le couple de sortie C2 vaut (si le
couple d'entrée est noté C1) : C2 = η.C1.Z2
Z1.
5.3 Système vis-écrou
On donne la modélisation du système vis-écrou à l'aide de deux schémas cinématique. La vitesse d'avancede l'écrou 3 est notée V , la vitesse angulaire de la vis notée ω. Une charge résistante T.~x s'exerce sur la tige3.
Figure 4 � Schéma cinématique � système vis-écrou
(a) La liaison entre 3 et 4 est une liaison hélicoïdale d'axe (B, ~x).
(b) Le pas de la liaison entre 3 et 4 est donnée par p =2π.V
ω.
(c) Si la vitesse V est constante, le couple qu'il faut exercer sur 4 pour l'entraîner en rotation en projection
sur ~x est égal à −TVω
(d) Le système constitué a un degré d'hyperstatisme égal à 4 si on le considère comme un mécanismetridimensionnel.
5

(e) Pour lever l'hyperstatisme, on peut modéliser le guidage entre 4 et 0 par une liaison ponctuelle denormale ~x.
(f) Pour lever l'hyperstatisme, il est nécessaire au montage de prévoir des réglages au niveau de la liaisonpivot en B.
6 Montage de roulements
6.1 Roulements précontraints
On considère le montage de roulements de la �gure ci-dessous. L'arbre 1 est soumis à un e�ort extérieurayant à la fois une composante axiale et une composante radiale.
Figure 5 � Arbre guidé sur roulements
(a) Le montage de roulements représenté sur la �gure est correct.
(b) Un roulement a une rangée de billes à contact oblique accepte une charge axiales plus importante qu'unroulement rigide de mêmes dimensions (diamètres intérieur et extérieur).
(c) Le montage de la �gure proposée est quali�é de montage en "O".
(d) L'entretoise entre les bagues intérieures a un rôle de réglage.
(e) L'angle de rotulage admissible par un roulement à une rangée de billes à contact oblique a un ordre degrandeur compris entre 8 et 12 degrés.
(f) Ce type de montage nécessite de précontraindre les roulements pour avoir une durée de vie correcte.
6.2 Arbre guidé sur 3 roulements
On se propose d'étudier le montage de roulements de la �gure ci-dessous.
(a) Les deux roulements à billes à contact oblique sont montés de façon à conférer une grande souplesse àla liaison et permettant d'encaisser une charge axiale importante.
(b) Le roulement rigide à billes, tel qu'il est monté, peut être modélisé par une liaison rotule.
6

Figure 6 � Arbre guidé sur 3 roulements
(c) Si on modélise chacun des roulements à contact oblique par une liaison rotule (unilatérale) et le roule-ment rigide à billes par une liaison linéaire annulaire, le modèle cinématique associé au système esthyperstatique de degré 2.
(d) La liaison équivalente à ce montage est une liaison pivot.
(e) Le joint à lèvre utilisé de le montage indique que la lubri�cation est faite à l'huile.
(f) Le jeu fonctionnel entre le couvercle droit et le roulement rigide à billes impose une longue chaîne decotes, passant par l'arbre.
(g) Il doit y avoir un jeu entre le couvercle droit et les roulements.
(h) Si l'écrou à encoches à un taraudage de pas 1,5mm, et possède 4 rainures, et si la rondelle à dents(rondelle "SKF") possède 11 dents, le réglage de la précontrainte pourra se faire avec une précision
valant1, 5
44mm.
(i) Le montage est correct si les e�orts axiaux sont orientés des roulements à contacts obliques vers leroulement rigide à billes.
7 Cotation géométrique
7.1 Exemple 1
La �gure ci-dessous présente un ensemble de spéci�cations portant sur deux pièces : un carter avec unalésage usiné, et un arbre cylindrique.
(a) On peut monter entre eux, sans forcer, n'importe quel carter avec n'importe quel arbre satisfaisantchacun aux dimensions précédentes.
(b) Si on enlève la spéci�cation symbolisée par E©, on peut encore monter entre eux, sans forcer, n'importequel carter avec n'importe quel arbre satisfaisant à ces spéci�cations.
(c) Si on enlève la spéci�cation (et sa cote 0,1) sur l'alésage, on peut encore monter entre eux, sans forcer,n'importe quel carter avec n'importe quel arbre satisfaisant à ces spéci�cations.
7

Figure 7 � Dessins de dé�nition
(d) La spéci�cation (et sa cote 0,1) est une spéci�cation de forme.
(e) La spéci�cation (et sa cote 0,1) est une concentricité.
(f) La spéci�cation (et sa cote 0,1) doit être indiqué par rapport à une référence manquante.
7.2 Exemple 2
On considère le plan fourni sur la �gure ci-après.
Figure 8 � Dessins de dé�nition
(a) L'élément tolérancé est un cylindre de diamètre 10mm.
(b) La zone de tolérance est cylindrique de rayon 0,1mm.
(c) L'élément de référence est une droite distante de 15mm de la surface A et de 45mm de la surface B.La surface A est le plan tangent extérieur matière associé à la surface réelle de la pièce minimisant ledéplacement par rapport à celle-ci. La surface B est le plan tangent extérieur matière à la surface réellede la pièce minimisant le déplacement par rapport à celle-ci, et orthogonal à la surface A.
(d) La spéci�cation de localisation donnée impose implicitement un défaut de forme (ici cylindrique) in-férieur à 0,05mm.
(e) La cote 10H7 est une cote tolérancée utilisant un arbre normal et une bonne qualité d'usinage.
(f) On peut associer à cette pièce une autre pièce pour réaliser un ajustement 10H7g6 correspondant à unajustement serré.
8

8 Guidage en translation
L'assemblage représenté sur la �gure ci-dessous permet une translation entre une tige 1 de diamètre d et uncoulisseau 2 de diamètre d+j, de longueur l. On suppose que le jeu j, bien que négligeable devant d (j << d)permet un basculement du coulisseau par rapport à la tige, ce qui conduit à considérer cet assemblage commel'association en parallèle de deux liaisons "ponctuelles", en A et B. Le contact est modélisé en utilisant lemodèle de Coulomb, et on note f le coe�cient de frottement. En�n, le coulisseau est soumis à un glisseur~F = −F.~y avec F > 0, dont l'axe central est distant de L de l'axe de la liaison. On se propose d'étudier lerisque d'arc-boutement de cette liaison.
Figure 9 � Dessins de dé�nition
(a) L'arc-boutement est un phénomène lié au frottement qui se traduit par un équilibre indépendant del'intensité de l'action mécanique qui tendrait à le rompre.
(b) Si on suppose qu'on est à la limite du glissement au niveau des deux contacts, on montre qu'il y a
arc-boutement si L >l
2f.
(c) Dans la pratique, pour avoir un guidage en translation sans coincement, l'e�ort F ne doit pas être situéà une distance trop importante de l'axe de la tige.
(d) Si l'action mécanique F est faible, il y a risque de "stick-slip" (ou broutage).
9