Dimensionnement d'une jonction triphasée · centrale doit ensuite être acheminée vers les...
142
UNIVERSITÉ DE LIÈGE Faculté des Sciences Appliquées Institut d'électricité Montefiore Dimensionnement d'une jonction triphasée Travail de fin d'études présenté par Olivier Houet en vue de l'obtention du grade académique d' Ingénieur Civil Électromécanicien (Électricité) Année Académique 1997-1998
Transcript of Dimensionnement d'une jonction triphasée · centrale doit ensuite être acheminée vers les...

UNIVERSITÉ DE LIÈGE
Faculté des Sciences Appliquées
Institut d'électricité Montefiore
Dimensionnementd'une jonction triphasée
Travail de fin d'études présenté par
Olivier Houet
en vue de l'obtention du grade académique d'
Ingénieur Civil Électromécanicien (Électricité)
Année Académique 1997-1998
1
Remerciements.
Ce travail représente l'aboutissement de mes études d'ingénieur civil. Il est à la fois le fruit
d'une démarche personnelle et d'une collaboration fructueuse avec d'autres personnes.
Et puisqu'il est l'heure des remerciements, qu'il me soit permis de présenter les personnes
auxquelles je pense le plus :
En premier lieu, je me dois de remercier mes parents et ma famille pour leur amour et leur
soutien tout au long de mes études.
Je tiens ensuite à exprimer toute ma gratitude et ma sympathie à Monsieur le Professeur
Jean-Louis Lilien pour sa guidance exceptionnelle, pour sa disponibilité sans égale et
particulièrement pour ses nombreux encouragements.
Par la même occasion, je ne voudrais pas oublier l'ensemble du service de Transport et
Distribution de l'Énergie Electrique du Professeur Pol Pirotte.
Je ne peux terminer sans mentionner toutes celles et tous ceux qui, de près ou de loin m'ont
également aidés pour ce travail, et parmi celles-ci : Jean-François Colson, Pascal Dal Farra,
Jean-Claude Delclisard, Fabrice Delfosse, Christophe Druet, Damien Ernst, Ivan Fontaine,
Anne-Catherine Geets, Grégory Pelzer et Jean-Michel Toussaint.
Olivier Houet.
2
Préface.
Dans notre monde industrialisé, la Fée Électricité comme beaucoup l’appellent est
omniprésente. Issue de diverses sources primaires possibles, l'énergie électrique produite en
centrale doit ensuite être acheminée vers les usagers via des lignes de transport et de
distribution. Ces lignes, souterraines ou aériennes, jouent un rôle aussi fondamental que celui
des centres de production. En amenant sous tension d'usage l'énergie vers les consommateurs,
elles augmentent la valeur intrinsèque de cette énergie. Ceci justifie les dépenses
d'investissement et d'exploitation nécessaires à ce transport et à cette distribution.
Ce travail a pour but de faire créer un programme recherchant le moyen le plus économique
pour alimenter une charge de caractéristiques données. Deux grands domaines seront
examinés : tout d'abord les lignes aériennes, et ensuite les câbles souterrains.
Dans les deux cas nous rappellerons la théorie développée, avant de définir les contraintes qui
devront être respectées. Ensuite nous appliquerons les résultats de ce programme à la
recherche de caractéristiques fondamentales dans le dimensionnement et la modélisation d'une
ligne aérienne. Pour conclure, nous terminerons par deux exemples de résolution de
problèmes.
3
Table des matières.
REMERCIEMENTS............................................................................................................................... .................. 1
PRÉFACE.............................................................................................................................................................. 2
TABLE DES MATIÈRES. ......................................................................................................................................... 3
SECTION 1 LES LIGNES AÉRIENNES .......................................................................................................... 6
1. INTRODUCTION ET OBJECTIF. ........................................................................................................................... 7
1.1. Introduction. ........................................................................................................................................... 7
1.2. Objectif.................................................................................................................................................... 7
2. PRÉSENTATION DE L’ALGORITHME................................................................................................................... 8
3. MÉTHODE DE DIMENSIONNEMENT. ................................................................................................................ 10
3.1. Boucle sur les conducteurs. .................................................................................................................. 10
3.2. Le critère de court-circuit. .................................................................................................................... 11
3.3. Critère de courant nominal................................................................................................................... 12
3.4. Critère de la chute de tension. .............................................................................................................. 14
3.5. Boucle sur la tension mécanique........................................................................................................... 14
3.6. Calcul des Psi et Péq. ........................................................................................................................... 15
3.7. Calcul des portées hypothétiques.......................................................................................................... 17
3.8. Calcul de paramètres divers. ................................................................................................................ 23
3.9. Calcul de la longueur des chaînes d'isolateurs..................................................................................... 24
3.10. Calcul de la géométrie et des coûts des supports................................................................................ 29
3.11. Effet de couronne. ............................................................................................................................... 34
3.12. Calcul des coûts. ................................................................................................................................. 34
3.13. Moins cher que l'Idéal ?...................................................................................................................... 37
3.14. Présentation des résultats. .................................................................................................................. 37
4. COMPLÉMENTS. ............................................................................................................................................. 39
4.1. Faisceaux de conducteurs. .................................................................................................................... 39
4.2. Câble de garde...................................................................................................................................... 40
SECTION 2 MODULES COMPLÉMENTAIRES.......................................................................................... 42
1. CALCUL DES CARACTÉRISTIQUES R,L,C........................................................................................................ 43
1.1. Introduction. ......................................................................................................................................... 43
1.2. Rappels.................................................................................................................................................. 43
1.3. Etude des caractéristiques longitudinales............................................................................................. 49
1.4. Caractéristiques transversales.............................................................................................................. 57
2. PERTURBATIONS DUES À L’EFFET DE COURONNE. .......................................................................................... 66
2.1. Introduction. ......................................................................................................................................... 66
4
2.2. Niveau perturbateur.............................................................................................................................. 66
3. CALCUL DU CHAMP ÉLECTRIQUE. .................................................................................................................. 71
3.1. Introduction. ......................................................................................................................................... 71
3.2. Calcul du profil du champ électrique.................................................................................................... 71
4. CALCUL DU CHAMP MAGNÉTIQUE. ................................................................................................................ 74
4.1. Introduction. ......................................................................................................................................... 74
4.2. Calcul du champ magnétique................................................................................................................ 74
5. CALCUL DE L’IMPÉDANCE HOMOPOLAIRE. ..................................................................................................... 79
5.1. Introduction. ......................................................................................................................................... 79
5.2. La transformation de Fortescue............................................................................................................ 79
5.3. La ligne de Carson................................................................................................................................ 81
5.4. Calcul de l'impédance triphasée et séquentielle. .................................................................................. 84
5.5. Présence d'un câble de garde. .............................................................................................................. 86
6. CALCUL DES CAPACITÉS HOMOPOLAIRES. ..................................................................................................... 88
6.1. Introduction. ......................................................................................................................................... 88
6.2. Sans câble de garde. ............................................................................................................................. 88
6.3. Présence d'un câble de garde. .............................................................................................................. 90
SECTION 3 LES CÂBLES SOUTERRAINS.................................................................................................. 92
1. INTRODUCTION ET OBJECTIF. ......................................................................................................................... 93
1.1. Introduction. ......................................................................................................................................... 93
1.2. Objectif.................................................................................................................................................. 93
2. RAPPELS SUR LA CONSTITUTION DES CÂBLES. ............................................................................................... 94
2.1. Les matériaux utilisés............................................................................................................................ 94
2.2. Les différents isolants............................................................................................................................ 95
2.3. L'ensemble gaine et écran..................................................................................................................... 96
2.4. Fourniture des câbles. .......................................................................................................................... 97
2.5. Pose du câble. ....................................................................................................................................... 98
2.6. Accessoires............................................................................................................................................ 98
2.7. Les pertes. ............................................................................................................................................. 99
3. PRÉSENTATION DE L’ALGORITHME ET CALCUL DES CONTRAINTES............................................................... 100
3.1. Algorithme de calcul. .......................................................................................................................... 100
3.2. Contrainte de court-circuit. ................................................................................................................ 101
3.3. Chute de tension.................................................................................................................................. 102
3.4. Courant nominal. ................................................................................................................................ 103
SECTION 4 CONCLUSIONS......................................................................................................................... 105
1. INTRODUCTION. ........................................................................................................................................... 106
2. EXEMPLES. .................................................................................................................................................. 107
5
2.1. Exemple de ligne aérienne. ................................................................................................................. 107
2.2. Exemple de câble souterrain............................................................................................................... 118
SECTION 5 ANNEXES ................................................................................................................................... 125
ANNEXE A : CALCUL DU FACTEUR D’ACTUALISATION. ................................................................................... 126
ANNEXE B : CALCUL DE LA SECTION VIA LE CRITÈRE DE COURANT DE COURT-CIRCUIT.................................. 128
ANNEXE C : COURANTS DE COURT-CIRCUIT.................................................................................................... 129
ANNEXE D : FACTEURS DE CORRECTION LIÉS À LA RÉSISTIVITÉ THERMIQUE................................................... 131
ANNEXE E : PROGRAMME DE RECHERCHE DU GABARIT DES SUPPORTS. .......................................................... 132
BIBLIOGRAPHIE ............................................................................................................................................ 138
BIBLIOGRAPHIE. .............................................................................................................................................. 139
Ouvrages de référence. .............................................................................................................................. 139
Les lignes aériennes................................................................................................................................... 139
Calcul des caractéristiques R-L-C. ............................................................................................................ 139
Perturbations dues à l'effet de couronne. .................................................................................................. 140
Calcul du champ électrique et du champ magnétique. .............................................................................. 140
Calcul de l'impédance et des capacités homopolaires. .............................................................................. 140
Câbles souterrains. .................................................................................................................................... 140
Informatique............................................................................................................................................... 141
Divers......................................................................................................................................................... 141
Section 1
Les lignes aériennes
SECTION 1 : LES LIGNES AÉRIENNES 7
1. Introduction et objectif.
1.1. Introduction.
Les lignes aériennes constituent le moyen actuel le plus économique de transport de l'énergie
électrique à grande distance. Il n'est donc pas étonnant que deux sections du présent ouvrage
leur soient consacrées !
Leur dimensionnement mêle intimement la mécanique des matériaux et l'électricité, et le
lecteur appréciera à sa juste valeur ce regroupement des différentes sciences de l'ingénieur.
1.2. Objectif.
Notre objectif est d'apporter une réponse à la question : Comment transmettre au moindre
coût une certaine puissance active à partir d'un poste moyenne tension pour alimenter une
charge, située à une certaine distance, et caractérisée par un certain cos ϕ ?
Pour cela, nous allons créer un programme qui nous donnera une estimation du coût de la
solution la moins coûteuse. Ce programme devra être le plus souple possible, de telle sorte
qu'il soit indépendant des réglementations en vigueur, des conditions climatiques ainsi que
des coûts. Pour ces derniers, le programme proposera des valeurs par défaut qui seront des
ordres de grandeurs et que l'utilisateur pourra aisément modifier.
Il ne faut pas non plus perdre de vue que ce programme devra transférer ses données à des
outils de calculs d'effet de couronne, de caractéristiques RLC, de champs électriques et
magnétiques, etc. D'où encore plus de souplesse.
Pour terminer, ce programme devra être un outil de recherche pédagogique : clair et structuré,
il permettra à des étudiants de se familiariser au domaine des lignes aériennes.
Nous avons utilisé le Borland Delphi 3. Ce programme permet de créer des applications sous
Windows 95 en Pascal Orienté Objet. C'est un langage de haut niveau, facile d'apprentissage
et d'utilisation.
SECTION 1 : LES LIGNES AÉRIENNES 8
2. Présentation de l'algorithme.
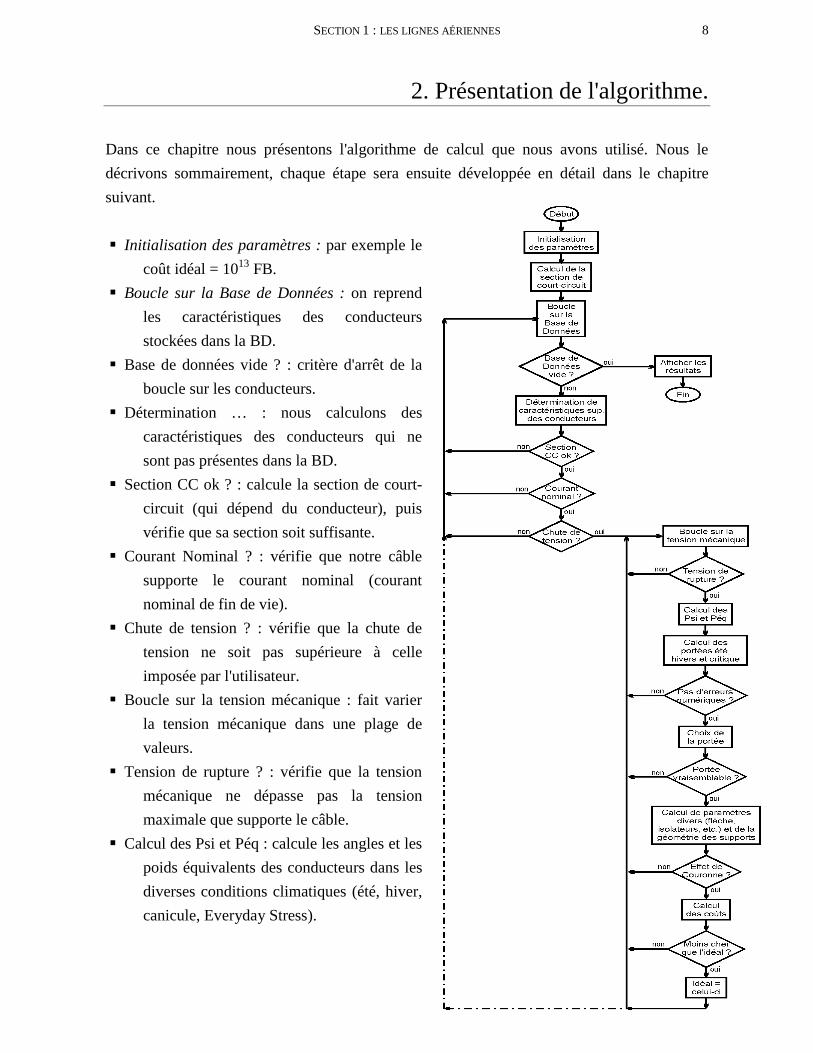
Dans ce chapitre nous présentons l'algorithme de calcul que nous avons utilisé. Nous le
décrivons sommairement, chaque étape sera ensuite développée en détail dans le chapitre
suivant.
Initialisation des paramètres : par exemple le
coût idéal = 1013 FB.
Boucle sur la Base de Données : on reprend
les caractéristiques des conducteurs
stockées dans la BD.
Base de données vide ? : critère d'arrêt de la
boucle sur les conducteurs.
Détermination … : nous calculons des
caractéristiques des conducteurs qui ne
sont pas présentes dans la BD.
Section CC ok ? : calcule la section de court-
circuit (qui dépend du conducteur), puis
vérifie que sa section soit suffisante.
Courant Nominal ? : vérifie que notre câble
supporte le courant nominal (courant
nominal de fin de vie).
Chute de tension ? : vérifie que la chute de
tension ne soit pas supérieure à celle
imposée par l'utilisateur.
Boucle sur la tension mécanique : fait varier
la tension mécanique dans une plage de
valeurs.
Tension de rupture ? : vérifie que la tension
mécanique ne dépasse pas la tension
maximale que supporte le câble.
Calcul des Psi et Péq : calcule les angles et les
poids équivalents des conducteurs dans les
diverses conditions climatiques (été, hiver,
canicule, Everyday Stress).
SECTION 1 : LES LIGNES AÉRIENNES 9
Calcul des portées été, hiver et critique : permet de déterminer les différentes portées en
fonction des conditions climatiques.
Pas d'erreurs numériques ? : vérifie que suite à des valeurs trop faibles de certains
paramètres, on n'aboutisse à des divisions par zéro ou des indéterminations
fondamentales.
Choix de la portée : on détermine la portée moyenne, celle qui sera utilisée pour la suite du
calcul.
Portée vraisemblable ? : vérifie que la portée ne soit pas fantaisiste, comme par exemple
3 m ou 20 km !
Calcul de paramètres divers : avec la portée, on peut enfin calculer la flèche, la longueur
des isolateurs, le gabarit des supports ainsi que leurs coûts.
Effet de couronne ? : vérifie rapidement que le champ superficiel ne dépasse pas la valeur
fixée par l'utilisateur.
Calcul des coûts : on distingue le coût des supports, des accessoires, des conducteurs, du
tirage, des pertes, de l'indemnisation et le coût total.
Moins cher que l'idéal ? : compare le coût total de la situation la moins coûteuse avec celle
que l'on vient de calculer et …
Idéal = celui-ci : … et si c'est le cas, retiens celui-ci comme la nouvelle situation idéale.
Maintenant que nous avons présenté l'algorithme dans sa généralité, nous allons en étudier les
différentes parties.

SECTION 1 : LES LIGNES AÉRIENNES 10
3. Méthode de dimensionnement.
3.1. Boucle sur les conducteurs.
Grâce à sa conductivité exceptionnelle, le cuivre a longtemps été un matériau très apprécié
dans la mise en œuvre des lignes aériennes. Cependant, étant donné sa masse volumique
importante, son coût fluctuant et ses problèmes de fluage, on s'est peu à peu tourné vers
l'aluminium.
La résistivité de l'aluminium est plus importante que celle du cuivre (1,6 fois), mais sa masse
volumique est nettement plus faible : 2700 kg/m3 au lieu de 8900 pour le cuivre. Il est
pourtant rare de rencontrer de l'aluminium seul. On préfère les alliages d'aluminium, comme
l'almélec (ou AMS) qui est un alliage d'aluminium, de magnésium (0,7 %) et de silicium
(0,6 %), ou des combinaisons aluminium-acier, ou enfin almelec-acier. Dans ces
combinaisons, les brins d'acier permettent d'accroître de façon importante les caractéristiques
mécaniques du conducteur.
Nous avons regroupé dans le tableau 3.1 les caractéristiques principales de ces matériaux. Une
de celles-ci est le CFI, qui est un paramètre lié à l'espacement minimal entre phases. Nous y
reviendrons plus tard.
La base de données des conducteurs contient les champs suivants : nom, section, diamètre,
module de Young, résistance linéique, masse linéique et tension de rupture. Nous déterminons
à partir de ces valeurs d'autres caractéristiques, telles la masse volumique et la résistivité.
Nous modifions la résistance linéique pour qu'elle prenne en compte l'effet de peau :
R50 Hz = R . (1 + YS) (3.1)
où :
2S
2S
S8,0192
Yξ⋅+
ξ= (3.2)
avec :
7
DC Tservice,S 10
R
f8 −⋅⋅π⋅=ξ (3.3)

SECTION 1 : LES LIGNES AÉRIENNES 11
Conducteur
Caractéristique Cuivre Aluminium Almélec (AMS)
structure torsadé torsadé lisse torsadé
Module de Young [N/mm2] 1010 de 5,4 à 7,1.1010 de 5,4 à 7,1.1010
Masse spécifique [kg/m3] 8920 2703 2700
Chaleur spécifique à 20 °C [J/kg.K] 393 924 924
Coefficient de dilatation thermique [K-1] 1,62.10-5 2,24.10-5 2,4.10-5
Résistivité à 20 °C [Ω.m] 1,76.10-8 2,83.10-8 3,57.10-8
Coefficient de variation de la résistivité avec
la température [K-1]
3,8.10-3 4.10-3 4.10-3
Limite de rupture en traction [N/mm2] 210 80 245
Coefficient CFI 0,75 1 1
Température maximale admissible [°C] 150 120 150
Coefficient aérodynamique Cx 1,45 1,45 1,2 1,45
Tableau 3.1 : caractéristique des matériaux utilisés.
3.2. Le critère de court-circuit.
Le pas suivant est le critère de court-circuit. La formule donnant le courant de court-circuit est
la suivante :
U.3
SI cc
cc = [A] (3.4)
La puissance de court-circuit Scc est fonction du réseau environnant la ligne étudiée, mais du
point de vue dimensionnement, on retient souvent les valeurs suivantes pour les tensions
caractéristiques :
Tension phase/phase
U [kV]
Puissance de court-circuit
Scc [MVA]
Courant de court-circuit
Icc [kA]
150 8000 30,8
70 2500 20,6
15 350 13,5
6 120 11,6
Tableau 3.2 : valeurs habituelles de la puissance de court-circuit.

SECTION 1 : LES LIGNES AÉRIENNES 12
Afin de trouver la section minimum permettant de supporter ce courant durant le temps tcc, on
dispose de la formule suivante, où a est un facteur dépendant du type de matériau constituant
le câble (voir annexe B) :
a
t.IS cccc= (∀ t < 5 sec) [mm²] (3.5)
Cette section est la section minimale que doit posséder notre conducteur. Si ce n'est pas le cas,
il est rejeté et on passe au conducteur suivant.
Remarques :
- le cuivre est toujours supérieur à l'aluminium pour une même section, étant donné
sa meilleure capacité à évacuer la chaleur ;
- des valeurs moyennes du paramètre a sont les suivantes : a = 105,3 pour le cuivre,
a = 55,07 pour l'aluminium et a = 61,98 pour l'AMS.
3.3. Critère de courant nominal.
Vient ensuite le critère de courant nominal. Ce critère a pour but de vérifier que notre
conducteur supportera sans difficultés le passage du courant nominal. Le problème est
essentiellement d'ordre thermique : le passage du courant entraîne un échauffement par effet
Joule. Il faut tenir également compte de l'apport de chaleur dû au soleil. En ce qui concerne
l'énergie dissipée, elle prend deux formes : par rayonnement et par convection. Les
considérations qui suivent sont extraites de la norme NBN-C34/100.
Notre bilan énergétique s'écrit :
R.I2 = WR + WC - WI (3.6)
où : - R est la résistance linéique à la température de service du conducteur [Ω/m] ;
- WR est l'énergie dissipée par rayonnement ;
- WC est l'énergie dissipée par convection ;
- WI est l'énergie fournie par le rayonnement solaire.
Déterminons maintenant les divers éléments de l'équation (3.6) :
WR = Emiss . Stef . p . [ TSERVICE4 – TAMBIANTE
4] . Diam (3.7)
SECTION 1 : LES LIGNES AÉRIENNES 13
où : - Emiss est le pouvoir émissif du conducteur par rapport au corps noir (= 1) ;
- Stef est la constante de Stefan-Bolzmann et a pour valeur 5,7.10-8 W/m2 ;
- TSERVICE est la température de service du conducteur en [K] (= 70°C) ;
- TAMBIANTE est la température ambiante en [K] (= 20°C) ;
- Diam est le diamètre du conducteur.
WC,conducteur torsadé = 0,38715 . ( V . Diam )0,448 . [ TSERVICE – TAMBIANTE] (3.8)
WC,conducteur lisse = 0,46213 . ( V . Diam )0,462 . [ TSERVICE – TAMBIANTE] (3.9)
où : - V est la vitesse du vent (= 55 cm/s).
et : WI = Ensol . Diam . WS (3.10)
où : - Ensol est le coefficient d'absorption de l'énergie solaire par le conducteur (= 1) ;
- WS est la puissance du rayonnement solaire émis (= 1000 W/m2).
Nous avons indiqué entre parenthèses des ordres de grandeurs pour les différents paramètres.
Nous aboutissons finalement à l'expression :
C75
ICRADM R
WWWI
°
−+= (3.11)
Le courant nominal se détermine par le raisonnement suivant :
Vu la puissance de départ Pdépart et le pourcentage d’augmentation annuelle de la puissance
consommée a, on détermine tout d'abord la puissance circulant dans le câble après les T
années d'utilisation suivant :
PT = Pdépart . (1 + a)T [MW] (3.12)
On en déduit le courant circulant alors dans chaque phase du câble par :
)cos(.U.3
PI T
T,N ϕ= [A] (3.13)
SECTION 1 : LES LIGNES AÉRIENNES 14
La condition s'écrira donc :
IN,T < IADM (3.14)
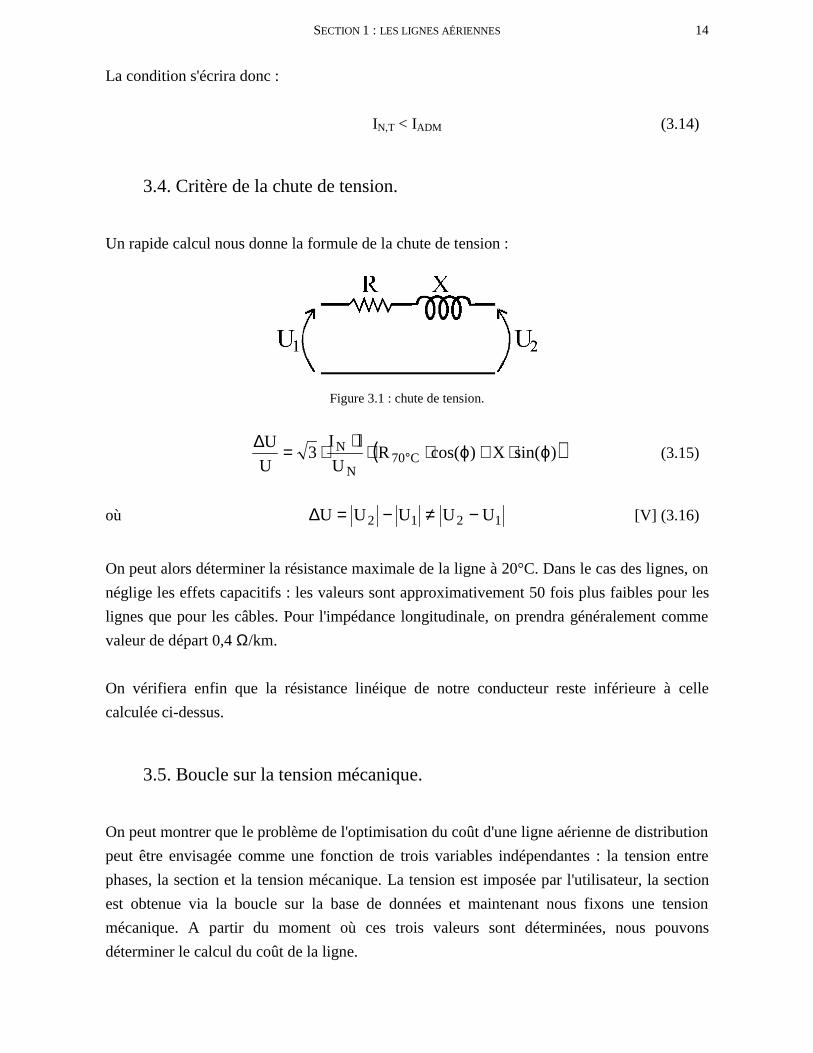
3.4. Critère de la chute de tension.
Un rapide calcul nous donne la formule de la chute de tension :
Figure 3.1 : chute de tension.
( ))sin(X)cos(RU
lI3
U
UC70
N
N ϕ⋅+ϕ⋅⋅⋅
⋅=∆° (3.15)
où 1212 UUUUU −≠−=∆ [V] (3.16)
On peut alors déterminer la résistance maximale de la ligne à 20°C. Dans le cas des lignes, on
néglige les effets capacitifs : les valeurs sont approximativement 50 fois plus faibles pour les
lignes que pour les câbles. Pour l'impédance longitudinale, on prendra généralement comme
valeur de départ 0,4 Ω/km.
On vérifiera enfin que la résistance linéique de notre conducteur reste inférieure à celle
calculée ci-dessus.
3.5. Boucle sur la tension mécanique.
On peut montrer que le problème de l'optimisation du coût d'une ligne aérienne de distribution
peut être envisagée comme une fonction de trois variables indépendantes : la tension entre
phases, la section et la tension mécanique. La tension est imposée par l'utilisateur, la section
est obtenue via la boucle sur la base de données et maintenant nous fixons une tension
mécanique. A partir du moment où ces trois valeurs sont déterminées, nous pouvons
déterminer le calcul du coût de la ligne.
SECTION 1 : LES LIGNES AÉRIENNES 15
La tension mécanique déterminée par cette boucle est la tension mécanique dans les
conditions canicule Tcanicule (le lecteur comprendra l'utilité de cette remarque lorsque nous
arriverons à la recherche des portées hypothétiques).
Nous faisons varier arbitrairement la variable Tension mécanique de 100 N à 105 N par pas de
100 N. Cette valeur est un bon compromis entre la précision et la rapidité de l'algorithme.
Nous vérifions ensuite que la tension mécanique ne dépasse pas la tension de rupture.
Rappelons que la tension de rupture nous est fournie par notre base de donnée.
3.6. Calcul des Psi et Péq.
Dans l'établissement d'un projet de ligne, le concepteur doit disposer des conditions
climatiques à prendre en compte dans son calcul : les températures, l'action du vent et les
surcharges éventuelles de glace, de givre ou de neige. Ces conditions vont nous permettre de
calculer l'angle que font les conducteurs par rapport à la verticale suite à l'effet du vent (ce
sont les Psi), ainsi que le poids équivalent que devra supporter les chaînes d'isolateurs (les
Péq).
3.6.a. Les conditions climatiques.
En pratique on se fixe pour ces conditions climatiques des valeurs raisonnables, combinées de
la manière la plus défavorable au point de vue des effort et de l'importance de la flèche. Le
R.G.I.E.1 stipule que :
Le vent souffle dans la direction horizontale la plus défavorable, c'est-à-dire
perpendiculairement à la direction de la ligne, et dans les conditions ci-dessous (pour la
Belgique) :
- Hypothèse été : température de +15°C et vent de force maximale "normale" ;
- Hypothèse hiver : température de -15°C et vent de force réduite.
Ces valeurs sont susceptibles d'être modifiées suivant le règlement du pays et en fonction des
conditions géographiques et climatiques que devra supporter la ligne au cours de sa vie. C'est
la raison pour laquelle nous avons permis à l'utilisateur d'accéder à ces valeurs.
En plus de ces deux hypothèses, nous en définissons deux supplémentaires :
- Hypothèse canicule : température de +70°C et pas de vent ;
1 Règlement Général sur les Installations Electriques.
SECTION 1 : LES LIGNES AÉRIENNES 16
- Hypothèse Everyday Stress : température de +15°C et pas de vent.
L'hypothèse canicule nous sera utile pour définir la flèche maximale, tandis que l'hypothèse
Everyday Stress nous permet d'estimer le risque pour notre ligne de subir des vibrations
éoliennes. Nous y reviendrons plus loin dans ce chapitre.
3.6.b. Effet du givre.
Les surcharges de givres, de neige ou de verglas sont prises en compte : l'utilisateur a la
possibilité d'indiquer la masse supplémentaire par mètre que le conducteur devra supporter.
La surcharge de givre a pour effet que le conducteur subit des tensions mécaniques plus
importantes et qu'il se rapproche donc de sa limite de rupture.
Un ordre de grandeur : une surcharge de 2 à 10 kg/m n'a rien d'exceptionnel. Des manchons
de givre de 30 à 40 cm de diamètre pesant 20 à 30 kg/m ont déjà été observés, mais il est hors
de question de prévoir des constructions capables de résister avec une sécurité absolue à tous
les cas extraordinaires de surcharge de givre !
Le R.G.I.E. ne considère pas la surcharge de givre comme un critère de dimensionnement.
Cependant, dans une région où les lignes sont susceptibles de subir une surcharge de givre, on
considérera un poids de givre que le conducteur supporterait sans dépassement de sa limite
élastique. On définira également des hypothèses simples de givre symétrique auxquelles le
pylône doit résister sans dépassement des limites élastiques de ses éléments ou le flambage de
certaines poutrelles.
3.6.c. Effet du vent.
L'effort F du vent, exprimé en Newtons, sur les éléments constitutifs de la ligne est fourni par
la formule :
FL = CX . Qpression . A [N] (3.17)
où : CX est le coefficient aérodynamique d'ensemble dans la direction du vent ;
Qpression est la pression dynamique, exprimée en pascals, qui est proportionnelle à la
pression dynamique de base, qbase.
A est la surface, en m2, que l'élément présente au vent, perpendiculairement à la
direction dans laquelle il souffle. Pour les conducteurs elle est calculée par le diamètre
du conducteur * la portée.
La pression dynamique de base se détermine comme ceci :

SECTION 1 : LES LIGNES AÉRIENNES 17
Soit la masse volumique de l’air dans des conditions standard : ρA = 1,225 kg/m3. On se limite
à des supports inférieurs à 25 mètres, d'où une vitesse maximale du vent à prendre en
considération de 35 m/s. Il en résulte la pression dynamique de base :
3125,75035225,12
1v
2
1q 22
Abase =⋅⋅=⋅ρ⋅= [N/m2] (3.18)
et la valeur imposée par le R.G.I.E. est de 800 N/m2 (l'utilisateur peut aussi modifier ce
paramètre).
La pression dynamique Qpression est égale à la pression dynamique de base qbase à un
coefficient de dispersion près. Ce coefficient varie de 0,25 à 0,7 et dépend de l'hypothèse
climatique sélectionnée (été, hiver, canicule ou Everyday stress).
3.6.d. Calcul des Psi et Péq.
On calcule donc ψ et péqu pour les quatre hypothèses via les formules suivantes :
Par équilibre aux extrémités du câble, nous obtenons :
Selon X : p cos(ψ) + FL sin(ψ) = péqu
Selon Y : p sin(ψ) = FL cos(ψ)
ce qui donne finalement :
ψ = arctg
p
FL (3.19)
péqu = p cos(ψ) + FL sin(ψ) (3.20)
3.7. Calcul des portées hypothétiques.
Pour pouvoir calculer les portées hypothétiques, nous devons introduire l'équation d'état, dite
de Blondel. Elle permet de calculer un état inconnu de à partir d'un état connu où, par état,
nous entendons une caractéristique inconnue de la ligne (la portée, la tension mécanique, …).
Cette équation est probablement le passage fondamental dans le calcul des lignes et nous
allons l'étudier en détails.
Figure 3.2 : Péq.

SECTION 1 : LES LIGNES AÉRIENNES 18
3.7.a. Forme de la courbe d'équilibre.
Partant de l'hypothèse que les câbles et les fils conducteurs peuvent être assimilés à des fils
pesants, homogènes et parfaitement flexibles, leur courbe d'équilibre est une chaînette, dont
l'équation rapportée aux axes OX et OY s'écrit :
( )
⋅=
a
xcoshaxy (3.21)
où a est une quantité définie comme étant le rapport entre la projection horizontale de la
tension mécanique TMEC et son poids linéique p. Elle est appelée "paramètre" du conducteur :
p
Ta = (3.22)
Figure 3.3 : chaînette.
Afin de simplifier les développements analytiques qui vont suivre, nous substituons à la
chaînette l'équation de la parabole osculatrice au sommet de la chaînette, obtenue en
conservant les deux premiers termes du développement en série :
( )a2
xxy
21
⋅= (3.23)
La flèche f de la parabole s'obtient en fonction de la portée x en prenant x1 = 0,5 . x, d'où
T8
xp
a8
xf
22
⋅⋅=
⋅= (3.24)

SECTION 1 : LES LIGNES AÉRIENNES 19
3.7.b. Etablissement de l'équation d'état.
Plusieurs facteurs, notamment atmosphériques, imposent des variations des conditions de
tension mécanique aux conducteurs de lignes aériennes. C'est ainsi que par exemple un
accroissement de la température va provoquer un allongement du conducteur et donc une
détente de sa tension. Nous allons donc utiliser l'équation d'état pour déterminer la portée
moyenne, mais aussi pour déterminer la tension mécanique ou la flèche en fonction des
différentes hypothèses.
Pour ce faire, nous allons supposer que le conducteur est homogène, c'est-à-dire que le
module d'élasticité E (module de Young) et le coefficient de dilatation linéaire α sont
constants. Nous connaissons la nature du conducteur, sa section S, son diamètre d, son poids
linéique équivalent p, et nous supposons connue la portée x.
Hypothèse 1 : - température initiale du conducteur θ1 [°C] ;
- poids linéique équivalent p1 [N/m] ;
- projection horizontale de la tension T1 [N].
Hypothèse 2 : - température initiale du conducteur θ2 [°C] ;
- poids linéique équivalent p2 [N/m] ;
- projection horizontale de la tension T2 [N].
Pour obtenir l'expression de l'équation d'état, il suffit de remarquer la différence de longueur
d'arc entre l'état final (hyp. 2) et l'état initial (hyp. 1), notée s2-s1 peut se déterminer aussi bien
par voie géométrique que par voie mécanique :
θ∆⋅α+
⋅−+⋅=SE
TT1ll 12
0 (3.25)
où l'allongement correspond à la somme algébrique de l'allongement élastique d'une part :
SE
TTs 121 ⋅
−⋅ (3.26)
et de l'allongement thermique d'autre part :
( )121s θ−θ⋅α⋅ (3.27)

SECTION 1 : LES LIGNES AÉRIENNES 20
Tandis que géométriquement, par définition de la parabole et de la longueur d'une courbe
on a :
2i
32
iT24
xps
⋅⋅= i = 1,2 (3.28)
En égalant les deux expressions de l'allongement, nous obtenons :
( )12112
121
32
22
32
sSE
TTs
T24
xp
T24
xp θ−θ⋅α⋅+⋅−⋅=
⋅⋅−
⋅⋅
(3.29)
On passe ensuite aux allongements relatifs avec l'approximation x ≈ s1.
( )1212
12
1
22
122
22
SE
T
SE
T
s
x
T24
xp
s
x
T24
xp θ−θ⋅α+⋅
−⋅
=⋅⋅⋅−⋅
⋅⋅
(3.29)
ce qui donne finalement l'équation d'état :
θ⋅α−
⋅−
⋅⋅=
θ⋅α−
⋅−
⋅⋅
11
21
22
22
22
22
SE
T
T24
xp
SE
T
T24
xp(3.29)
3.7.c. Calcul de la portée hypothétique été.
On définit l'état été avec la température θété = +15°C, et l'on prend pour p2 le poids linéique
équivalent pété en tenant compte du vent maximal. On définit la portée hypothétique été celle
pour laquelle la tension mécanique dans le conducteur serait égale à la valeur maximale
admissible TMAX. La valeur de TMAX est identique à celle de TRUPTURE du conducteur à un
coefficient de sécurité près. Ce coefficient de sécurité à pour valeur minimale 3 (imposée par
le R.G.I.E.), mais l'utilisateur a la possibilité de le modifier.
On définit l'état de référence comme étant l'hypothèse canicule : θcanicule = +70°C et pas de
vent. La tension mécanique dans ces conditions est celle définie par la boucle de tensions
mécaniques, c'est-à-dire Tcanicule.
L'équation de changement d'état reliant les hypothèses été et canicule va nous donner
l'expression de la portée hypothétique été xété :

SECTION 1 : LES LIGNES AÉRIENNES 21
étéMAX
2MAX
2été
2été
caniculecanicule
2canicule
2été
2canicule
SE
T
T24
xp
SE
T
T24
xpθ⋅α−
⋅−
⋅⋅
=θ⋅α−⋅
−⋅
⋅(3.30)
ce qui conduit à :
( )2
canicule
canicule2
MAX
été
étécaniculecaniculeMAX
été
T
p
T
p
SE
TT
24x
−
θ−θ⋅α−⋅
−
⋅= [m] (3.31)
3.7.d. Calcul de la portée hypothétique hiver.
On définit l'état été avec la température θété = +15°C, et l'on prend pour p2 le poids linéique
équivalent pété en tenant compte du vent maximal. Nous prenons la même référence que pour
la recherche de la portée hypothétique hiver.
L'équation de changement d'état reliant les hypothèses hiver et canicule va nous donner
l'expression de la portée hypothétique hiver xhiver :
hiverMAX
2MAX
2hiver
2hiver
caniculecanicule
2canicule
2hiver
2canicule
SE
T
T24
xp
SE
T
T24
xpθ⋅α−
⋅−
⋅⋅
=θ⋅α−⋅
−⋅
⋅(3.32)
ce qui conduit à :
( )2
canicule
canicule2
MAX
hiver
hivercaniculecaniculeMAX
hiver
T
p
T
p
SE
TT
24x
−
θ−θ⋅α−⋅
−
⋅= [m] (3.33)
3.7.e. Calcul de la portée critique.
On définit enfin la portée critique xcritique comme étant celle pour laquelle la contrainte
observée en conditions hiver est égale à la contrainte observée en conditions été. En d’autres
termes, nous avons donc pour la valeur critique de la portée : Tété = Thiver = TMAX égal à la
tension maximale admissible dans le conducteur.

SECTION 1 : LES LIGNES AÉRIENNES 22
Nous reprenons l'équation d'état constituée des deux seconds membres des équations (3.30) et
(3.32), avec comme portée xété = xhiver = xcritique.
étéMAX
2MAX
2critique
2été
hiverMAX
2MAX
2critique
2hiver
SE
T
T24
xp
SE
T
T24
xpθ⋅α−
⋅−
⋅
⋅=θ⋅α−
⋅−
⋅
⋅(3.34)
et en isolant xcritique :
( )2hiver
2été
hiverétéMAXcritique
pp
24Tx
−θ−θ⋅α⋅
⋅= (3.35)
qui est la valeur de la portée critique.
Dans notre algorithme, nous avons mentionné une vérification d'erreurs numériques. En
réalité, cette vérification est effectuée en même temps que le calcul des différentes portées. Il
vérifie que les termes dans les racines carrées soient bien positifs et les dénominateurs non
nuls. Cette vérification est nécessaire dans les cas où la portée et/ou la tension mécanique sont
invraisemblables (trop importante ou trop faible).
3.7.f. Choix de la portée moyenne.
A partir de la connaissance des portées hypothétiques hiver, été et critique, nous pouvons
déterminer la portée moyenne :
- pour une portée moyenne inférieure à la portée critique, c'est l'hypothèse hiver qui
sera la plus contraignante.
- par contre, si la portée moyenne est supérieure à la portée critique, l'hypothèse été
sera la plus contraignante.
Nous adopterons donc la stratégie suivante :
Si xété est supérieure à xcritique, nous retiendrons comme portée moyenne la portée
hypothétique été xété.
Si xhiver est inférieure à xcritique, nous retiendrons comme portée moyenne la portée
hypothétique été xhiver.
Si aucune de ces conditions n'est satisfaite, c'est que nous nous trouvons dans un état
(T,S) non admissible.

SECTION 1 : LES LIGNES AÉRIENNES 23
Enfin, si les deux conditions sont simultanément satisfaites, l'idéal est de calculer le coût
de la ligne pour les deux valeurs de la portée et de choisir la solution la moins coûteuse.
Toutefois, dans nos régions à hivers doux, nous choisirons les conditions été plutôt que
hiver.
Dans notre algorithme, nous avons un critère de portée vraisemblable. Le but de ce critère est
de ne pas se retrouver avec des portées trop petites ou trop grandes. Nous avons défini deux
conditions à remplir pour être acceptée comme portée acceptable :
2
100Ux aleminno +
≥ et ( ) 2100Ux aleminno ⋅+≤ (3.36)
3.8. Calcul de paramètres divers.
3.8.a. Calcul de la flèche maximale.
Nous utilisons l'équation (3.24) et nous l'appliquons dans les conditions canicule :
canicule
2caniculecanicule
MAX T8
xpf
⋅⋅
= (3.37)
En effet, les conditions canicules sont celles menant à la flèche la plus importante.
3.8.b. Calcul de la garde au sol.
La Garde au sol signifie la hauteur en dessous de laquelle un conducteur ne peut pas se
trouver. Sa valeur est déterminante pour le calcul de la hauteur des supports.
Le R.G.I.E. définit une valeur de base :
GSOL = 6 m (3.38)
avec des variations en fonction du niveau de tension et de tous les obstacles situés dans le
voisinage de la ligne (routes, maisons, cours d'eau, …). Nous ne tiendrons compte que du
niveau de tension :
100
50U7G leminno
SOL−
+= si Unominale > 50 kV [m] (3.39)
SECTION 1 : LES LIGNES AÉRIENNES 24
3.8.c. Calcul de la distance EϕN.
La distance minimale entre les structures au potentiel de la terre et les trois phases est imposée
par le R.G.I.E. :
150
1U1,0E aleminno
N−
+=ϕ [m] (3.40)
3.9. Calcul de la longueur des chaînes d'isolateurs.
3.9.a. Règle de bonne pratique.
Nous devons calculer le nombre d'assiettes nécessaires au maintien de la distance de
contournement. Pour une approche rapide, nous utiliserions le tableau suivant :
Tension UN (kV) Nombre d’assiettes
15 1 à 2
90 5 à 6
120 6 à 7
150 7 à 8
Tableau 3.3 : nombre d'assiettes pour les chaînes d'isolateurs.
Cependant, nous avons préféré implémenter une méthode de dimensionnement développée
par l'Université de Liège.
3.9.b. Méthode développée par le Service de TDEE de l'ULg.
On détermine d'abord le degré de salinité, ensuite la tension de tenue aux chocs de foudre BIL
et finalement la longueur de fuite "théorique" Lf qui devra être respectée par la chaîne de
façon à protéger la ligne de façon correcte.
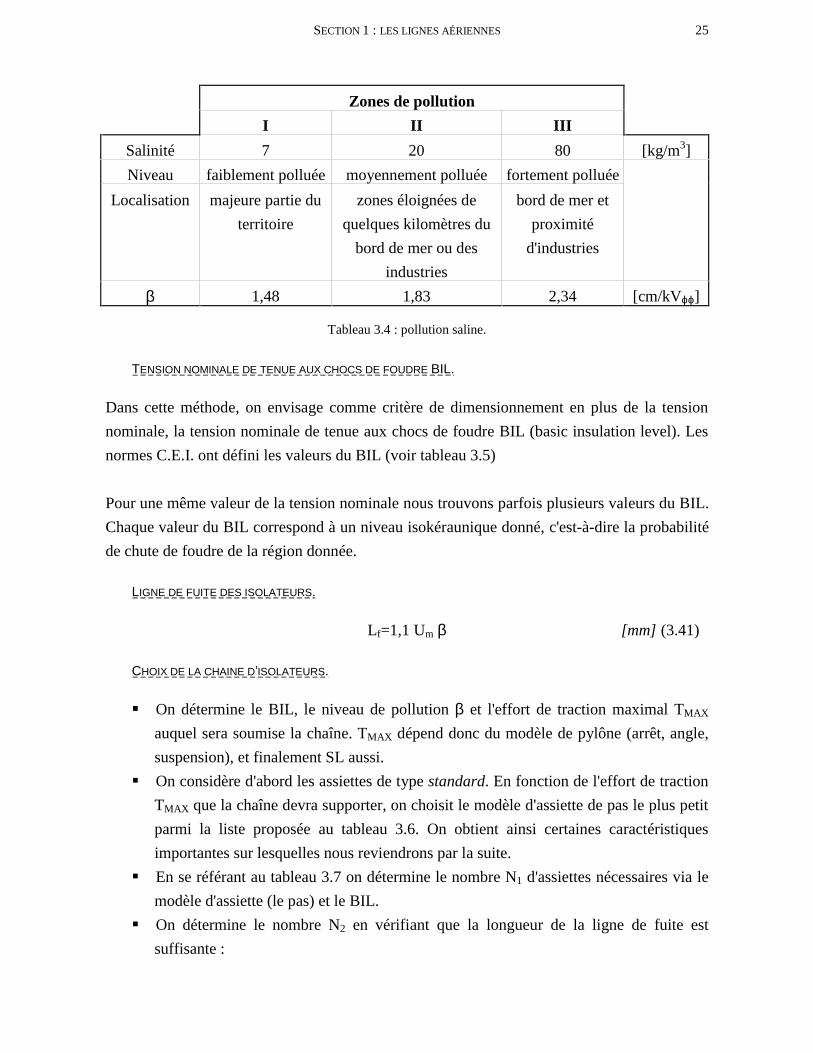
DEGRE DE SALINITE.
En fonction de la zone de pollution retenue, nous allons pouvoir fixer la tension de
contournement β [cm/kVϕϕ].
SECTION 1 : LES LIGNES AÉRIENNES 25
Zones de pollution
I II III
Salinité 7 20 80 [kg/m3]
Niveau faiblement polluée moyennement polluée fortement polluée
Localisation majeure partie du
territoire
zones éloignées de
quelques kilomètres du
bord de mer ou des
industries
bord de mer et
proximité
d'industries
β 1,48 1,83 2,34 [cm/kVϕϕ]
Tableau 3.4 : pollution saline.
TENSION NOMINALE DE TENUE AUX CHOCS DE FOUDRE BIL.
Dans cette méthode, on envisage comme critère de dimensionnement en plus de la tension
nominale, la tension nominale de tenue aux chocs de foudre BIL (basic insulation level). Les
normes C.E.I. ont défini les valeurs du BIL (voir tableau 3.5)
Pour une même valeur de la tension nominale nous trouvons parfois plusieurs valeurs du BIL.
Chaque valeur du BIL correspond à un niveau isokéraunique donné, c'est-à-dire la probabilité
de chute de foudre de la région donnée.
LIGNE DE FUITE DES ISOLATEURS.
Lf=1,1 Um β [mm] (3.41)
CHOIX DE LA CHAINE D’ISOLATEURS.
On détermine le BIL, le niveau de pollution β et l'effort de traction maximal TMAX
auquel sera soumise la chaîne. TMAX dépend donc du modèle de pylône (arrêt, angle,
suspension), et finalement SL aussi.
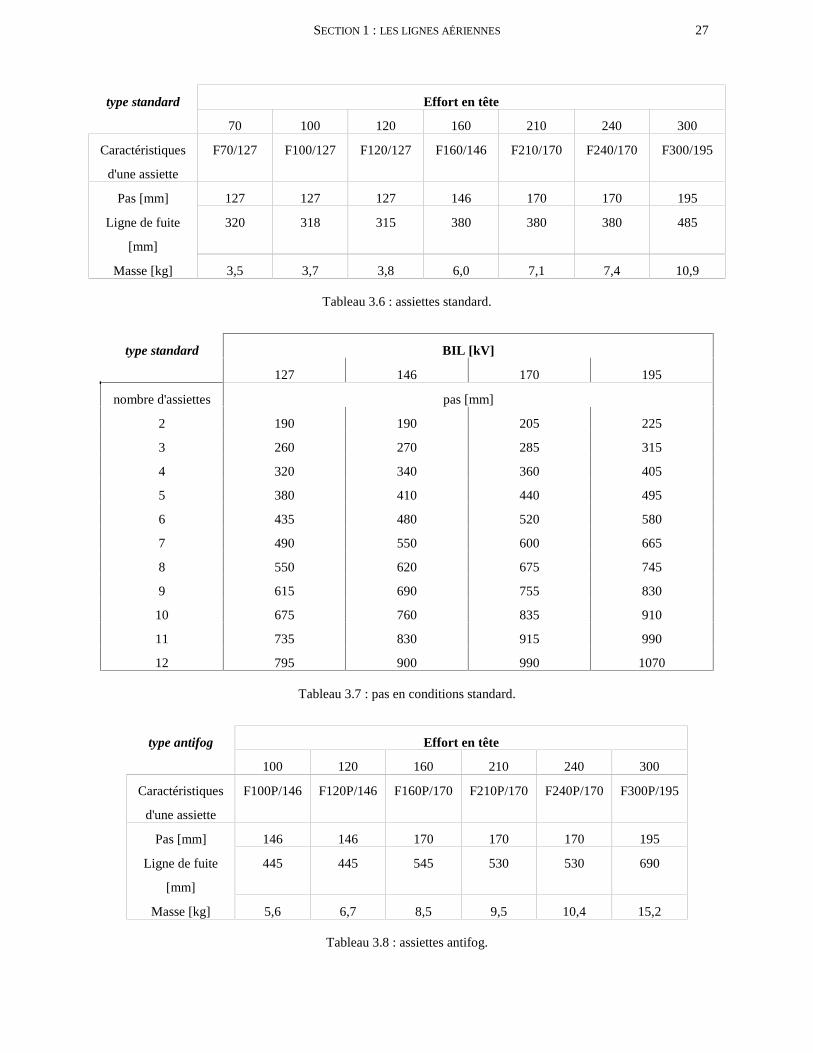
On considère d'abord les assiettes de type standard. En fonction de l'effort de traction
TMAX que la chaîne devra supporter, on choisit le modèle d'assiette de pas le plus petit
parmi la liste proposée au tableau 3.6. On obtient ainsi certaines caractéristiques
importantes sur lesquelles nous reviendrons par la suite.
En se référant au tableau 3.7 on détermine le nombre N1 d'assiettes nécessaires via le
modèle d'assiette (le pas) et le BIL.
On détermine le nombre N2 en vérifiant que la longueur de la ligne de fuite est
suffisante :

SECTION 1 : LES LIGNES AÉRIENNES 26
assiette uned’ effective fuite delongueur
LN f
2 =
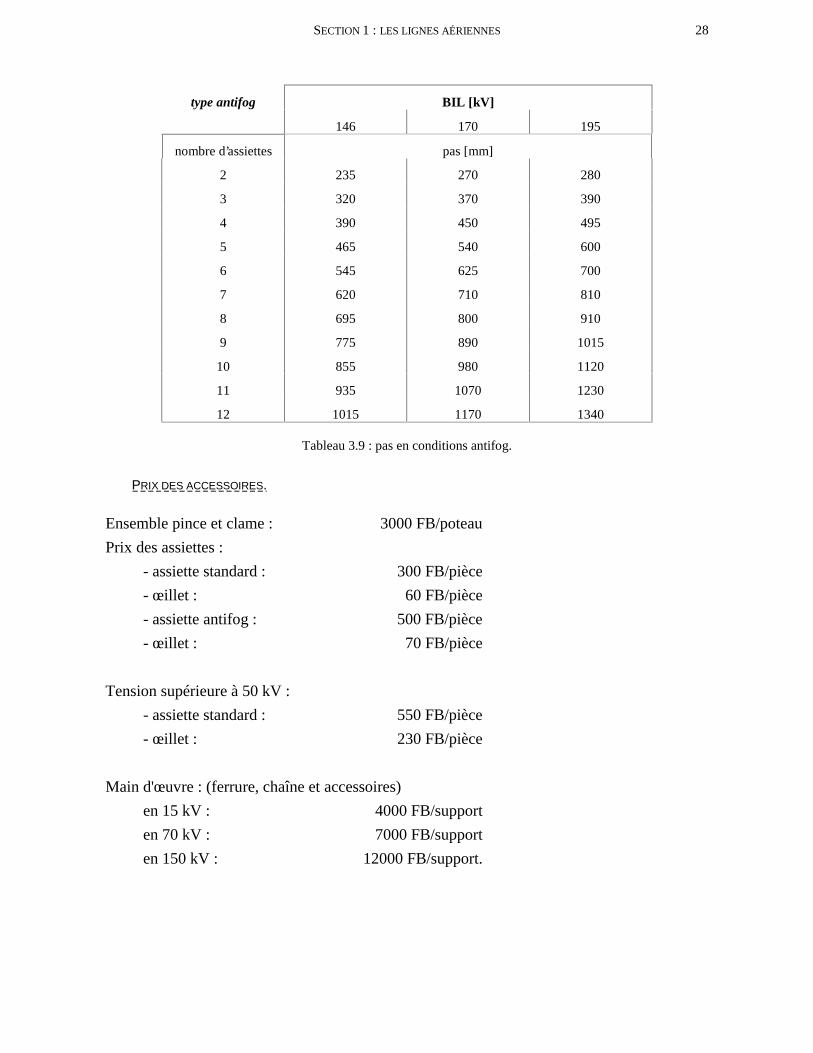
On compare N1 et N2 : si le module de leur différence est inférieur à 5 alors on fixe
comme nombre d'assiettes la plus grande des deux valeurs N1 et N2. Dans le cas
contraire, nous devons considérer que les conditions sont néfastes et avoir recours à
des assiettes de type antifog, surdimensionnées du point de vue ligne de fuite par
rapport aux assiettes standard. Dans ce cas on recommence le calcul avec les tableaux
3.8 et 3.9.
Finalement on obtient les caractéristiques pas et masse de l'assiette choisie, ainsi que
le nombre d'assiettes permettent le calcul de la longueur SL, du poids de la chaîne
d'isolateurs et du coût.
Tension nominale de laligne
UN [kVeff]
Tension nominale de tenue auxchocs de foudre
BIL [kVcrête]3,6 20
407,2 40
6012 60
7595
17,5 7595
24 95125145
36 145170
52 25072.5 325123 450
550145 450
550650
170 550650750
245 650850
1050300 850
9501050
362 95010501175
420 105013001425
525 117514251550
765 167519502100
Tableau 3.5 : BIL.
SECTION 1 : LES LIGNES AÉRIENNES 27
Effort en têtetype standard
70 100 120 160 210 240 300
Caractéristiques
d'une assiette
F70/127 F100/127 F120/127 F160/146 F210/170 F240/170 F300/195
Pas [mm] 127 127 127 146 170 170 195
Ligne de fuite
[mm]
320 318 315 380 380 380 485
Masse [kg] 3,5 3,7 3,8 6,0 7,1 7,4 10,9
Tableau 3.6 : assiettes standard.
BIL [kV]type standard
127 146 170 195
nombre d'assiettes pas [mm]
2 190 190 205 225
3 260 270 285 315
4 320 340 360 405
5 380 410 440 495
6 435 480 520 580
7 490 550 600 665
8 550 620 675 745
9 615 690 755 830
10 675 760 835 910
11 735 830 915 990
12 795 900 990 1070
Tableau 3.7 : pas en conditions standard.
Effort en têtetype antifog
100 120 160 210 240 300
Caractéristiques
d'une assiette
F100P/146 F120P/146 F160P/170 F210P/170 F240P/170 F300P/195
Pas [mm] 146 146 170 170 170 195
Ligne de fuite
[mm]
445 445 545 530 530 690
Masse [kg] 5,6 6,7 8,5 9,5 10,4 15,2
Tableau 3.8 : assiettes antifog.
SECTION 1 : LES LIGNES AÉRIENNES 28
BIL [kV]type antifog
146 170 195
nombre d’assiettes pas [mm]
2 235 270 280
3 320 370 390
4 390 450 495
5 465 540 600
6 545 625 700
7 620 710 810
8 695 800 910
9 775 890 1015
10 855 980 1120
11 935 1070 1230
12 1015 1170 1340
Tableau 3.9 : pas en conditions antifog.
PRIX DES ACCESSOIRES.
Ensemble pince et clame : 3000 FB/poteau
Prix des assiettes :
- assiette standard : 300 FB/pièce
- œillet : 60 FB/pièce
- assiette antifog : 500 FB/pièce
- œillet : 70 FB/pièce
Tension supérieure à 50 kV :
- assiette standard : 550 FB/pièce
- œillet : 230 FB/pièce
Main d'œuvre : (ferrure, chaîne et accessoires)
en 15 kV : 4000 FB/support
en 70 kV : 7000 FB/support
en 150 kV : 12000 FB/support.

SECTION 1 : LES LIGNES AÉRIENNES 29
3.10. Calcul de la géométrie et des coûts des supports.
Afin de ne pas compliquer la lecture du présent ouvrage, nous allons simplifier au maximum
la présentation du calcul de la géométrie des supports. Nous avons implémenté quatre
modèles : nappe, nappe-voûte, triangle et drapeau. Nous allons tout d'abord présenter en détail
un de ces quatre modèles avec les différentes contraintes, puis en évaluer le coût. Pour les
trois autres modèles, le lecteur se reportera au code source du programme (repris à
l'annexe E). Pour chaque modèle de support, il existe trois type de support : suspension
(alignement), arrêt (ancrage) et angle.
Figure 3.4 : modèles de supports.
Les supports de suspension ou d'alignement ont uniquement pour rôle de maintenir les
conducteur à une hauteur suffisante au-dessus du sol et doivent donc supporter les efforts dû
au poids des conducteurs d'une part, et les efforts transversaux du vent sur les conducteurs et
le support lui-même d'autre part.
Les supports d'arrêt et d'ancrage ont au départ les mêmes caractéristiques, mais ils doivent en
outre être capable de faire face à une défaillance dans le sens longitudinale et éviter la
propagation d'un défaut de type mécanique (par exemple rupture des trois phases). Notons la
légère distinction que l'on fait entre support d'ancrage et d'arrêt : les premiers se trouvent aux
limites de cantons de pose et sont contigus à deux supports, tandis que les seconds sont situés
aux extrémités de la ligne, à l'entrée ou à la sortie d'un poste.
Enfin les supports d'angle sont utilisés lorsque l'on veut ou l'on doit imposer un changement
de direction à la ligne.
3.10.a. Présentation du modèle triangle.
Avant de dimensionner le support d'alignement, nous devons définir plusieurs valeurs :
- distance entre phases : Eϕϕ, vertical
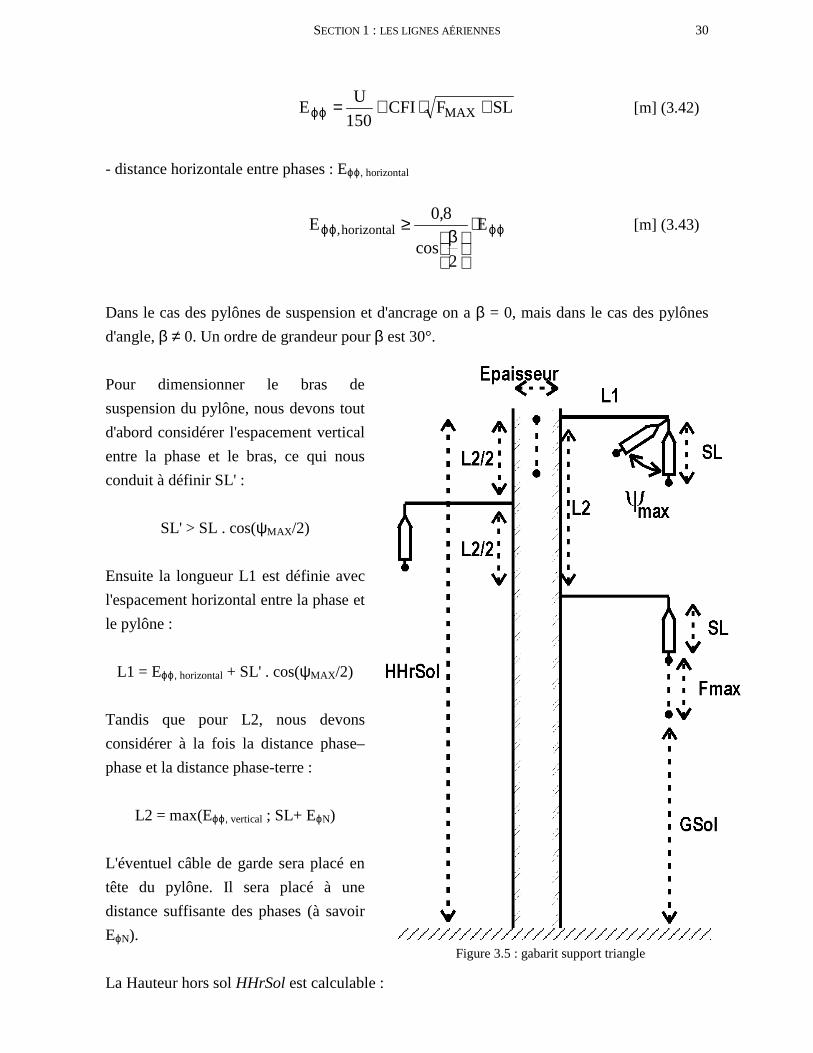
SECTION 1 : LES LIGNES AÉRIENNES 30
Figure 3.5 : gabarit support triangle
SLFCFI150
UE MAX +⋅+=ϕϕ [m] (3.42)
- distance horizontale entre phases : Eϕϕ, horizontal
ϕϕϕϕ ⋅
β
≥ E
2cos
8,0E horizontal, [m] (3.43)
Dans le cas des pylônes de suspension et d'ancrage on a β = 0, mais dans le cas des pylônes
d'angle, β ≠ 0. Un ordre de grandeur pour β est 30°.
Pour dimensionner le bras de
suspension du pylône, nous devons tout
d'abord considérer l'espacement vertical
entre la phase et le bras, ce qui nous
conduit à définir SL' :
SL' > SL . cos(ψMAX/2)
Ensuite la longueur L1 est définie avec
l'espacement horizontal entre la phase et
le pylône :
L1 = Eϕϕ, horizontal + SL' . cos(ψMAX/2)
Tandis que pour L2, nous devons
considérer à la fois la distance phase–
phase et la distance phase-terre :
L2 = max(Eϕϕ, vertical ; SL+ EϕN)
L'éventuel câble de garde sera placé en
tête du pylône. Il sera placé à une
distance suffisante des phases (à savoir
EϕN).
La Hauteur hors sol HHrSol est calculable :

SECTION 1 : LES LIGNES AÉRIENNES 31
HHrSol = Garde au sol + Flèche maximale + SL + L2 [m]
avec un éventuel supplément au cas où on prendrait en compte un câble de garde.
La profondeur d'enfouissement du pylône est une fonction de sa hauteur totale. Elle est
imposée par les normes belges :
Prof = 0,1 . H + 1 [m]
A partir de là nous pouvons déterminer la hauteur totale de notre pylône. Les normes belges
nous imposent une hauteur majorée au demi mètre supérieur. Nous en tirons l'équation
globale de la hauteur par rapprot à la hauteur hors-sol :
( )
⋅+⋅⋅=
9
101HHrSol2CEIL
2
1H [m]
Nous avons alors déterminé le gabarit du pylône triangle. Les gabarits suspension, ancrage et
angle sont différents car certains paramètres le sont : β, SL, ...
3.10.b. Détermination du coût du support.
Le coût des supports est une fonction de deux de ses caractéristiques : sa hauteur H et son
effort en tête maximal E. Nous avons essayé d'obtenir une équation de la forme :
5coef3coef E4coefH2coef1coefcoût ⋅+⋅+= [FB] (3.44)
Les valeurs des coefficients coef1..5 dépendent du modèle de pylône : symétrique ou non.
L'équation (3.44) contient le prix des fondations.
coef1 coef2 coef3 coef4 coef5
symétrique -11600 48,28 2,28 1,607 0,99
dissymétrique -11200 48,28 2,28 1,607 0,99
Tableau 3.10 : coefficient des fonctions coût.
Ces valeurs ont été obtenues via deux échantillons de 131 poteaux symétriques et 144 poteaux
dissymétriques. Ces valeurs sont évidemment des ordres de grandeur et l'utilisateur pourra les
modifier comme bon lui semble.
SECTION 1 : LES LIGNES AÉRIENNES 32
Nous avons déjà calculé la hauteur des supports, il nous reste à calculer l'effort en tête.
EFFORT EN TETE DES SUPPORTS DE SUSPENSION.
Il subit trois moments :
- M1 = moment dû au poids propre de l'ensemble, formé par les conducteurs, les chaînes
d'isolateurs et la surcharge éventuelle de givre ;
- M2 = moment dû à la force aérodynamique du vent s'exerçant sur les conducteurs ;
- M3 = moment dû à la force aérodynamique appliquée de façon répartie sur le support.
M1 est nul pour les pylônes nappe et nappe-voûte. Il ne l'est pas pour les pylônes triangle et
drapeau. Pour le calculer, il faut multiplier le bras de levier par la force "poids". Cette force se
compose du poids linéique des conducteurs avec la surcharge éventuelle de givre, multipliée
par deux fois la longueur d'une demi-portée, auquel on ajoute le poids de la chaîne d'isolateur.
Ce calcul doit être effectué pour les trois phases.
M2 est toujours non nul. Le bras de levier correspond à la somme des hauteurs d'ancrage des
trois phases. La force qui s'exerce sur le support correspond à la force aérodynamique FL (voir
équation 3.17).
M3 est lui aussi toujours non nul. Comme la force est répartie sur tout le pylône, nous devons
obtenir le moment M3 par un calcul intégral :
Fpyl = Cxpyl . Qpyl . Apyl [N] (3.45)
avec Qpression, pyl = 0,8 . qbase [Pa] (3.46)
Nous avons implémenté la surface soumise au vent de la manière suivante :
Apyl = V . HHrSol [m2] (3.47)
Donc l'utilisateur propose au programme la largeur du rectangle équivalent (qui possède une
hauteur HHrSol) dont la surface est égale à celle du pylône.
La force répartie sur la hauteur du pylône s'écrit :
Fpyl = Cxpyl . Qpyl . V [N/m] (3.48)
et le moment à l'extrémité du pylône s'obtient via :

SECTION 1 : LES LIGNES AÉRIENNES 33
2
HHrSolFdzzF3M
2
pyl
HHrSol
0pyl ⋅=⋅⋅= ∫ [N.m] (3.49)
Pour obtenir l'effort en tête E, il suffit alors de faire la somme des trois moments M1, M2 et
M3 puis de diviser le résultat par la hauteur hors sol.
EFFORT DE TETE DES SUPPORTS D’ARRET.
Les pylônes d'arrêt doivent supporter les mêmes contraintes que les pylônes de suspension,
avec en plus un moment M4 qui représente l'effet de la tension mécanique maximale TMAX
dans les conducteurs de phase sur le pylône :
∑⋅=phases les toutes
MAX phases des accrochaged’ hauteursT4M (3.50)
Nous devons alors combiner M1, M2, M3 et M4. Ce qui est gênant, c'est que les moments
sont perpendiculaires et pour être rigoureux, nous devrions les combiner en utilisant le cercle
de Mohr. Mais vu les faibles valeurs de M1, M2 et M3, nous nous limiterons à les combiner
comme ceci2 :
( )M M M MTOTAL = + +42
2 3
2(3.51)
L'effort en tête se déduit alors très rapidement en divisant MTOTAL par la hauteur hors sol.
EFFORTS DE TETE DES SUPPORTS D’ANGLE.
Les supports d'angle doivent supporter les mêmes moments que les supports de suspension.
La formulation de M2 est cependant différente puisque les efforts sont dirigés
longitudinalement aux câbles, donc décalés d'un angle β/2.
M2 = [2 . FL . Pmoy . cos(β/2) + 2 . TMAX . sin(β/2)] . ∑phases les toutes
phases accrochage hauteurs
(3.52)
Comme pour les supports de suspension, l'effort en tête E s'obtient par la somme des trois
moments M1, M2 et M3 et en divisant la somme par la hauteur hors sol.
2Dans la majorité des cas, il est permis de négliger tout simplement les moments M2 et M3 vis à vis de M4.

SECTION 1 : LES LIGNES AÉRIENNES 34
3.11. Effet de couronne.
L'effet couronne est un phénomène compliqué à quantifier et il existe une littérature
abondante sur le sujet. Un critère rapide est le suivant : nous vérifions que le champ électrique
superficiel reste bien inférieur à 18 kVeff/cm. Le champ superficiel EMAX vaut :
+⋅⋅
⋅⋅⋅
=
22MIN
MIN
effMAX
EPHH4r
EPHH2lnr
VE [kVeff/cm] (3.53)
La valeur limite de 18 kVeff/cm est un ordre de grandeur et l'utilisateur pourra la modifier si
bon lui semble.
3.12. Calcul des coûts.
Nous allons distinguer différents coûts : les supports, l'indemnisation, les accessoires, les
conducteurs, le tirage des conducteurs et les pertes par effet Joule.
3.12.a. Coût des supports.
On détermine tout d'abord le nombre de pylônes :
=
moyenne Portée
longueurceilNbrePyl (3.54)
Ensuite, le coût de chaque pylône (suspension, arrêt et angle) est multiplié par les
pourcentages respectifs de chaque pylône, et ensuite par le nombre total de pylônes.
Nous devons aussi tenir compte du type de sol dans lequel sera construit les fondations. Les
trois types de sols proposés sont : meuble, pierreux et rocheux. Nous disposons de deux
équations :
Pierreux = 640 + 1,11 . Meuble (3.55)
Rocheux = 7921 + 1,04 . Meuble + 2,6.10-6 . Meuble2 (3.56)
où Meuble est le coût des pylônes en terrain meuble, c'est à dire celui calculé ci-dessus.

SECTION 1 : LES LIGNES AÉRIENNES 35
Tous les coefficients donnés dans les équations (3.55) et (3.56) sont accessibles et facilement
modifiables.
3.12.b. Coût de l'indemnisation.
C'est le coût supplémentaire lié à l'indemnisation à accorder à un propriétaire afin d'implanter
un support dans son terrain privé. Si le coût d'un pylône de suspension en terrain meuble est
inférieur à 9000 FB, alors l'indemnité est de 3700 FB. Si il est supérieur à 60 000 FB, elle se
monte à 12 700 FB. Entre les deux, nous avons l'équation suivante :
Coût = 2155 + 0,14 . x + 6.10-7 . x2 + 6.10-11 . x3 – 10-15 . x4 (3.57)
où x est le prix d'un pylône de suspension en terrain meuble.
3.12.c. Coût de l'indemnisation.
Parmi les accessoires, on distingue la ferrure des chaînes d'isolation. Le coût de la ferrure
dépend de la longueur des bras de ferrure et de l'effort auquel est soumis le bras :
Pferrure = k . n . d2 . F (3.58)
où : k est un coefficient de proportionnalité qui vaut 0,375 FB/m2.N ;
n est le nombre de phases ;
d est la longueur du bras de ferrure ;
F est le plus grand des trois termes suivants :
1) poids d'une portée + surcharge de 3000 N ;
2) n5
supportdu été"" mximaleffort
⋅
3) n5
supportdu hivers"" mximaleffort
⋅
3.12.d. Coût des conducteurs.
Les conducteurs de lignes aériennes se vendent au poids. On évalue leur prix via l'équation
suivante :
3 [phases] . PrixKg . ρ [kg/m3] . Longueur [m] . Section [m2] [FB] (3.59)
SECTION 1 : LES LIGNES AÉRIENNES 36
où : PrixKg est le prix au kg du matériau utilisé. Des ordres de grandeurs sont fournis par le
programme. Ils sont de 80 FB/kg pour le cuivre, 70 FB/kg pour l'aluminium et 100
FB/kg pour l'AMS ;
ρ est la masse volumique du matériau à la température de service ;
Longueur est la longueur de la jonction ;
Section est bien entendu la section des conducteurs.
3.12.e. Coût du tirage des conducteurs.
Le tirage constitue l'étape de placement des conducteurs, c'est-à-dire leur suspension aux
supports. Il paraît évident que le coût sera différent en fonction de l'accessibilité aux supports.
Pourtant, nous allons modéliser ce coût par un terme constant et un terme proportionnel à la
section. En effet, les frais d'installation seront d'autant plus importants que le conducteur est
lourd.
Coût = Longueur . (291 . S + 54 465) (3.60)
où la section est exprimée en mm2 et la longueur en km.
3.12.f. Coût des pertes actualisées.
Les pertes par effets Joule peuvent être évaluées à partir de l'équation :
S
fpNIL3 2 ⋅⋅⋅⋅⋅ρ⋅[FB] (3.61)
où :
ρ = résistivité du conducteur [Ω.m] à la température de service à la fréquence de service ;
L = longueur de la liaison [m] ;
I = courant parcourant le câble en début de vie (car on multiplie ce courant par le facteur
d’actualisation f) [A] ;
N = nombre d'heures par année d'utilisation à pleine charge du point de vue des pertes (pour
les pertes, une heure d'utilisation à mi-charge équivaut à un quart d'heure d'utilisation à
pleine charge) [h/an].3 ;
p = prix du kWh de pertes [FB/Wh] ;
S = section du conducteur [m2].
3 ∫ ⋅=h 8760
02MAX
2
dtI
)t(IN où 8760 heures équivalent 1 an.
SECTION 1 : LES LIGNES AÉRIENNES 37
Le facteur f, qui est le facteur d'actualisation, prend en compte l'érosion de la valeur de
l'argent au cours des années. Il est calculé comme suit :4
fQ
ioù Q
rr
avec r
a b
i
T
=+
=−−
=+
+
+
1100
11
1100
1100
1100
2
.(3.62)
3.13. Moins cher que l'Idéal ?
Ce critère compare le coût total de la ligne aérienne avec les valeurs (S,T) définies avec le
coût total minimal calculé jusqu'à présent (l'Idéal). Ce coût Idéal est initialisé avec une valeur
astronomique afin que la première solution valable soit moins chère que l'Idéal. Ensuite
l'algorithme suivra son cours …
Dans le cas où la configuration calculée est moins coûteuse que l'Idéal, on redéfinit l'Idéal
avec ce nouveau conducteur et tous les paramètres associés.
Lorsqu'on arrive à la fin de la base de donnée, il suffit de présenter les résultats à l'utilisateur.
3.14. Présentation des résultats.
Notre programme permet à l'utilisateur de récupérer les informations soit de manière visuelle,
soit via un fichier texte nommé RESULTAT.TXT.
Lorsqu'une solution optimale a été trouvée, le programme montre à l'utilisateur quels
paramètres ont été employés.
Il présente tout d'abord les caractéristiques du conducteur idéal : son nom, sa section, son
diamètre, …
Il propose ensuite les caractéristiques géométriques des supports de suspension, d'arrêt et
d'angle. On y retrouve les coordonnées d'accrochage des phases avec pour origine le pied du
pylône. Y figurent également les coûts des différents modèles.
4 Explications supplémentaires sur l'obtention des formules à l'annexe A.

SECTION 1 : LES LIGNES AÉRIENNES 38
Le point suivant concerne les isolateurs : type d’assiette, nombre d’assiettes, poids total, prix et
longueur.
Ensuite, c'est des caractéristiques générales de la ligne que notre programme indique. Par
exemple le nombre total de pylônes, la portée moyenne et les tensions mécaniques dans les
quatre hypothèses (été, hiver, canicule et Everyday stress), calculées via l'équation d'état.
A ce sujet, l'utilisateur constatera que l'Everyday Stress est proposé en pourcentage de la
tension de rupture du conducteur. Le résultat doit être aux environs de 20 %. S'il est supérieur
à 25 %, on risque de voir apparaître un vieillissement prématuré du câble par fatigue, dû aux
vibrations éoliennes. La solution proposée alors est de modifier le coefficient de sécurité (voir
3.7.c.), ce qui a pour effet de limiter la tension mécanique maximale acceptable dans les
conducteurs.
Finalement, nous obtenons tous les coûts calculés précédemment.
L'utilisateur a alors la possibilité de soit revenir en arrière et modifier une ou l'autre donnée,
soit continuer et utiliser les modules supplémentaires.

SECTION 1 : LES LIGNES AÉRIENNES 39
4. Compléments.
4.1. Faisceaux de conducteurs.
L'utilisation de faisceaux de conducteurs est utilisée afin de diminuer le champ électrique
superficiel et donc les effets de couronne. En effet, en électrostatique, un système de n
conducteurs de rayon r situés sur une circonférence de rayon R est équivalent à un conducteur
fictif de rayon :
néquivalent R
rnRR
⋅⋅= (4.1)
Ce procédé permet de maintenir dans des limites raisonnables l'intensité maximale du champ
électrique.
Nous allons présenter la manière que nous avons choisie pour appréhender ce problème.
Tout d'abord, lors du critère de court-circuit, nous déterminons la section minimale qui permet
de supporter le courant de court-circuit. Nous la comparons alors avec la section du
conducteur. Dans le cas de plusieurs conducteurs en faisceaux, nous multiplions la section du
conducteur par le nombre de sous-conducteurs.
De la même manière lors du critère de courant nominal, nous multiplions la section du
conducteur par le nombre de sous-conducteurs.
Ensuite, pour le critère de la chute de tension, nous obtenons la résistance linéique minimale
qui donne la chute de tension fixée par l'utilisateur. Nous la comparons ensuite à celle du
conducteur. Dans le cas de faisceaux, les résistances sont placées en parallèle et donc nous
devons multiplier la section minimale par le nombre de sous-conducteurs.
La boucle sur la tension mécanique nous donne la tension mécanique dans les conditions
canicule, et concernant un seul conducteur dans un faisceau.
L'angle que fera la portée suite à l'effet du vent et de son propre poids est identique au cas du
conducteur unique : le poids est multiplié par le nombre de sous-conducteurs mais l'effort dû
au vent est lui aussi multiplié par le nombre de sous-conducteurs.

SECTION 1 : LES LIGNES AÉRIENNES 40
Le calcul des portées et de l'équation d'état ne doit pas être influencé par le nombre de sous-
conducteurs : le comportement d'un seul est suffisant puisque la tension de référence est celle
d'un conducteur du faisceau. Etant donné qu’ils subissent les mêmes contraintes, il peuvent
être étudiés indépendamment les uns des autres.
Dans le calcul des chaînes d'isolateur, le paramètre de poids n'est plus celui d'un seul
conducteur, mais du faisceau tout entier. On multiplie donc le poids linéique par le nombre de
sous-conducteurs.
Dans la recherche du gabarit des pylônes, nous devons tenir compte du nombre de sous-
conducteurs car les efforts sont plus importants. Les différences se situent lors du calcul de
M1, M2 et du prix de la ferrure. Les distances sont elles aussi modifiées par l'écartement entre
sous-conducteurs.
Le critère de l'effet de couronne doit évidemment tenir compte du nombre de sous-
conducteurs. En effet, la présence de couronne est due au champ superficiel et au rayon de
courbure du conducteur. En faisceau, on dispose d'un conducteur équivalent de rayon de
courbure plus important (voir équation 4.1), d'où diminution de l'effet couronne.
Dans le calcul du coût des conducteurs, nous devons multiplier le nombre de phases par le
nombre de sous-conducteurs par phases. Idem pour le tirage. Concernant les pertes par effet
Joule, nous devons les diviser par le nombre de sous-conducteurs : la résistance de faisceaux
de conducteurs est n fois moins importante que celle de conducteurs simples.
4.2. Câble de garde.
Le rôle du câble de garde est de protéger la ligne aérienne de la foudre. Il joue aussi un rôle
important au niveau des caractéristiques RLC, du champ électrique généré par la ligne et des
caractéristiques séquentielles de la ligne.
La question qui se posait était : comment le dimensionner ? Voici les critères que nous avons
considérés pour le dimensionnement.
Sa section est, par définition, au minimum égale à celle du court-circuit. Ensuite, la flèche
maximale du câble de garde doit être au pire égale à celle des conducteurs, afin de respecter la
distance phase-terre. Enfin, il devra supporter la tension mécanique dans les conditions été ou
SECTION 1 : LES LIGNES AÉRIENNES 41
hiver, ainsi que l'éventuelle surcharge de givre à laquelle il est plus sensible vu sa faible
section. Une dernière condition doit être respectée : l'Everyday stress ne peut pas dépasser 20
à 25% de la tension de rupture du câble de garde.
Nous avons développé une boucle supplémentaire, placée dans l'algorithme juste après la
détermination de la flèche maximale, et qui trouve le conducteur de section minimale vérifiant
les conditions ci-dessus à partir d'une base de donnée supplémentaire.
L'influence du câble de garde se ressent au niveau de la géométrie du pylône : sa hauteur est
augmentée, afin de pouvoir respecter la distance phase-terre. Mais c'est surtout au niveau des
efforts qu'il intervient : son poids, sa traînée au vent et sa tension mécanique ne peuvent
qu'augmenter l'effort en tête du pylône, et donc son coût. Il n'est pas gratuit non plus : les
coûts d'achat et de tirage seront augmentés.

Section 2
Modules complémentaires
SECTION 2 : MODULES COMPLÉMENTAIRES. 43
1. Calcul des caractéristiques R,L,C.
1.1. Introduction.
Nous allons étudier les caractéristiques longitudinales (les résistances des conducteurs et les
inductances entre les conducteurs) et les caractéristiques transversales (la capacité des
conducteurs) d'une ligne aérienne. Les résultats d'une analyse des caractéristiques R, L et C
d'une ligne sont vitales dans le cadre de la modélisation d'un réseau, c'est pourquoi nous avons
créé ce module.
1.2. Rappels.
1.2.a. Schéma équivalent d'une ligne.
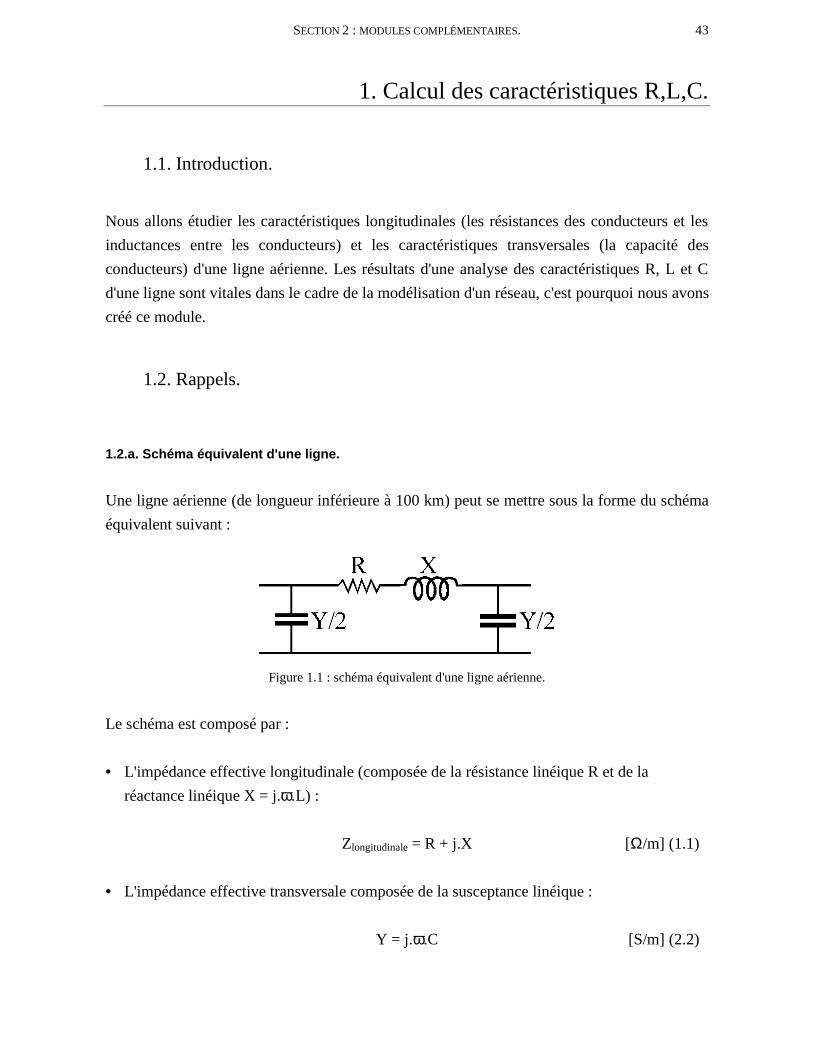
Une ligne aérienne (de longueur inférieure à 100 km) peut se mettre sous la forme du schéma
équivalent suivant :
Figure 1.1 : schéma équivalent d'une ligne aérienne.
Le schéma est composé par :
• L'impédance effective longitudinale (composée de la résistance linéique R et de la
réactance linéique X = j.ω.L) :
Zlongitudinale = R + j.X [Ω/m] (1.1)
• L'impédance effective transversale composée de la susceptance linéique :
Y = j.ω.C [S/m] (2.2)

SECTION 2 : MODULES COMPLÉMENTAIRES. 44
1.2.b. Partie résistive.
Partons de la loi d’Ohm locale :
EJrr
⋅σ= [A/m2] (1.3)
où : J est la densité de courant [A/m2] ;
σ est la conductivité électrique [Ω-1m-1] ;
E est le champ électrique [V/m].
La loi de Pouillet s'en déduit aisément pour un conducteur de longueur l [m], de section S
[m2] et de conductivité σ [Ω-1m-1], parcouru par un courant continu, nous trouvons :
S
l
S
lR
⋅ρ=⋅σ
= [Ω] (1.4)
où ρ = 1/σ est la résistivité du conducteur [Ωm].
Par extension, la loi d'Ohm est utilisée en régime quasi-stationnaire. Ce régime introduit des
modifications dans la répartition du courant dans les conducteurs.
Les courants alternatifs qui circulent dans les conducteurs créent un champ d'induction
magnétique qui existe non seulement entre les conducteurs, mais aussi à l'intérieur de ceux-ci.
Un contour fermé à l'intérieur d'un conducteur embrasse un flux d'induction variable et se
trouve être le siège d'une tension induite, qui provoque à son tour des courants induits dans le
métal. Ces courants appelés courants de Foucault modifient la répartition du vecteur J densité
de courant admise uniforme en première approximation. Plus la fréquence est élevée et
l'épaisseur des conducteurs forte, plus l'effet des courants de Foucault est important. La
répartition du courant à l'intérieur d'un conducteur plein ou d'un faisceau de conducteurs est
différente en courant alternatif de ce qu'elle est en courant continu.
Pour un conducteur, le courant utilisera essentiellement la surface externe du conducteur
(effet pelliculaire1). Pour un faisceau de conducteurs, le courant empruntera la surface interne
des conducteurs (effet de proximité2).
1 La profondeur de pénétration de l'effet pelliculaire ou effet de peau est défini comme θ = 2
0ω σ µ avec ω la
pulsation du courant, σ la conductivité du milieu, µ0 perméabilité du vide. La densité de courant en surface estd'autant plus marquée que l'épaisseur du matériau est grande ou que ω est élevée.
SECTION 2 : MODULES COMPLÉMENTAIRES. 45
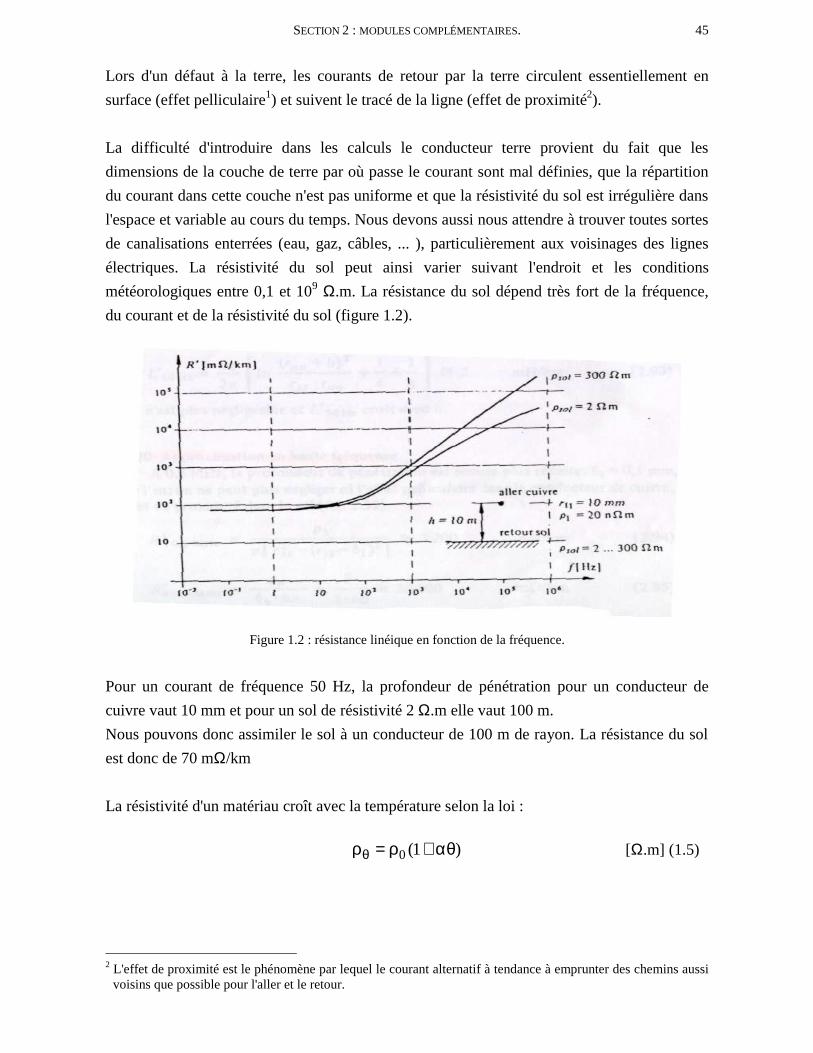
Lors d'un défaut à la terre, les courants de retour par la terre circulent essentiellement en
surface (effet pelliculaire1) et suivent le tracé de la ligne (effet de proximité2).
La difficulté d'introduire dans les calculs le conducteur terre provient du fait que les
dimensions de la couche de terre par où passe le courant sont mal définies, que la répartition
du courant dans cette couche n'est pas uniforme et que la résistivité du sol est irrégulière dans
l'espace et variable au cours du temps. Nous devons aussi nous attendre à trouver toutes sortes
de canalisations enterrées (eau, gaz, câbles, ... ), particulièrement aux voisinages des lignes
électriques. La résistivité du sol peut ainsi varier suivant l'endroit et les conditions
météorologiques entre 0,1 et 109 Ω.m. La résistance du sol dépend très fort de la fréquence,
du courant et de la résistivité du sol (figure 1.2).
Figure 1.2 : résistance linéique en fonction de la fréquence.
Pour un courant de fréquence 50 Hz, la profondeur de pénétration pour un conducteur de
cuivre vaut 10 mm et pour un sol de résistivité 2 Ω.m elle vaut 100 m.
Nous pouvons donc assimiler le sol à un conducteur de 100 m de rayon. La résistance du sol
est donc de 70 mΩ/km
La résistivité d'un matériau croît avec la température selon la loi :
)1(0 αθ+ρ=ρθ [Ω.m] (1.5)
2 L'effet de proximité est le phénomène par lequel le courant alternatif à tendance à emprunter des chemins aussi
voisins que possible pour l'aller et le retour.
SECTION 2 : MODULES COMPLÉMENTAIRES. 46
où ρ0 est la résistivité du conducteur à 0°C [Ω.m] ;
α est le coefficient de température [°C-1] ;
θ est la température [°C].
1.2.c. Réactance longitudinale (inductance).
Une inductance (supposée linéaire) est toujours le quotient d’un flux, embrassé par le contour,
par le courant qui en est la cause. Elle est déterminée par la relation :
i/L φ= [H] (1.6)
où φ est le flux induit par le courant [Wb] ;
i est le courant circulant dans le conducteur [A].
Nous avons deux types d'inductances :
• Inductance propre : La self-inductance d'un conducteur électrique parcouru par un courant
est défini à un instant donné comme étant le rapport entre les valeurs du flux induit par le
courant et ce courant lui-même.
• Inductance mutuelle : L'inductance mutuelle se manifeste par l'interaction entre les
conducteurs de phases, les conducteurs des différents ternes et tous les conducteurs
parcourus par un courant tel que le fil de garde et le retour par la terre.
1.2.d. Réactance transversale (capacité).
Nous pouvons assimiler les lignes aériennes à un condensateur qui est constitué de deux
conducteurs (les conducteurs de phase et la terre). A cause de la présence des charges, sur ces
deux conducteurs, le potentiel a des valeurs différentes sur ces deux-ci. Si nous prenons
comme valeur du potentiel de la terre la valeur zéro (la référence), la valeur de la tension des
conducteurs de phase représente la différence de potentiel.
La relation linéaire qui lie la charge électrique (q+, q-) sur les deux conducteurs et la
différence de potentiel entre ceux-ci est donnée par :
u/qC = [F] (1.7)
1.2.e. Systèmes équilibrés et déséquilibrés.
Les réseaux sont dit "parfaitement équilibrés" si les amplitudes des courants de phase et les
amplitudes des tensions phase-terre sont égaux (I1 = I2 = I3 = I et U1 = U2 = U3 = U).

SECTION 2 : MODULES COMPLÉMENTAIRES. 47
Pour un système triphasé équilibré parfaitement, ceci se traduit par :
⋅=π+ω⋅=
⋅=π−ω⋅=
ω⋅=
Ia)3
2tsin(Ii
Ia)3
2tsin(Ii
tsinIi
3
22
1
[A] (1.8)
où effI2 I ⋅= [A] (1.9)
et donc 0i3
1kk =∑
=(1.10)
Ce qui signifie que la somme des courants de phase est nulle.
⋅=π+ω⋅=
⋅=π−ω⋅=
ω⋅=
Ua)3
2tsin(Uu
Ua)3
2tsin(Uu
tsinUu
2n3
n2
n1
[V] (1.11)
où effU2 U ⋅= [V] (1.12)
et donc 0u3
1kkn =∑
=(1.13)
Ce qui signifie que la somme des tensions phase-neutre est nulle.
Certains réseaux peuvent être équilibrés soit en courant ou soit en tension.
Lors d'une perturbation sur une ligne (foudre, défaut à la terre, ... ), les courants de phases ou
les tensions phase-terre ne sont plus égaux. Nous avons un courant de retour qui circule soit
par le fil de garde (s'il existe), soit par la terre.
Nous avons deux types de systèmes déséquilibrés :

SECTION 2 : MODULES COMPLÉMENTAIRES. 48
1. Système déséquilibré géométriquement : nous pouvons compenser un déséquilibre pardes méthodes de transposition (ce qui consiste à inverser régulièrement les phases surla longueur de la ligne).
2. Système déséquilibré électriquement : ces systèmes sont traités par les de Clarck ou
de Fortescue.5
Dans ce cas, il faut tenir compte des conducteurs de phases mais aussi du fil de garde et de la
terre.
1.2.f. Les réseaux symétriques.
Tous les réseaux électriques peuvent être représentés par une matrice d'impédance Z telle que:
[U] = [Z] [I] [V] (1.14)
où U est le vecteur tension phase-neutre et I le vecteur courant de phase.
Tous les réseaux équilibrés peuvent être découplés.
Si de plus la matrice d'impédance Z est de symétrie au moins circulante telle que :
⋅
=
3
2
1
ACB
BAC
CBA
3
2
1
i
i
i
ZZZ
ZZZ
ZZZ
u
u
u
[V] (1.15)
où la matrice Z est de symétrie circulante.
Ce système peut se réduire à trois relations similaires mais déphasées de 120°. L'analyse du
système total se réduit à l'étude d'une phase unique (gain de temps).
Si de plus la matrice d'impédance Z est de symétrie complète (ZB = ZC), le système se réduit à
trois relations identiques et nous pouvons de nouveau analyser uniquement une phase.
5 Ces méthodes permettent d'étudier à la place du système déséquilibré, trois sous systèmes équilibrés (direct,
inverse, homopolaire) ce qui facilite l'analyse de ce système.
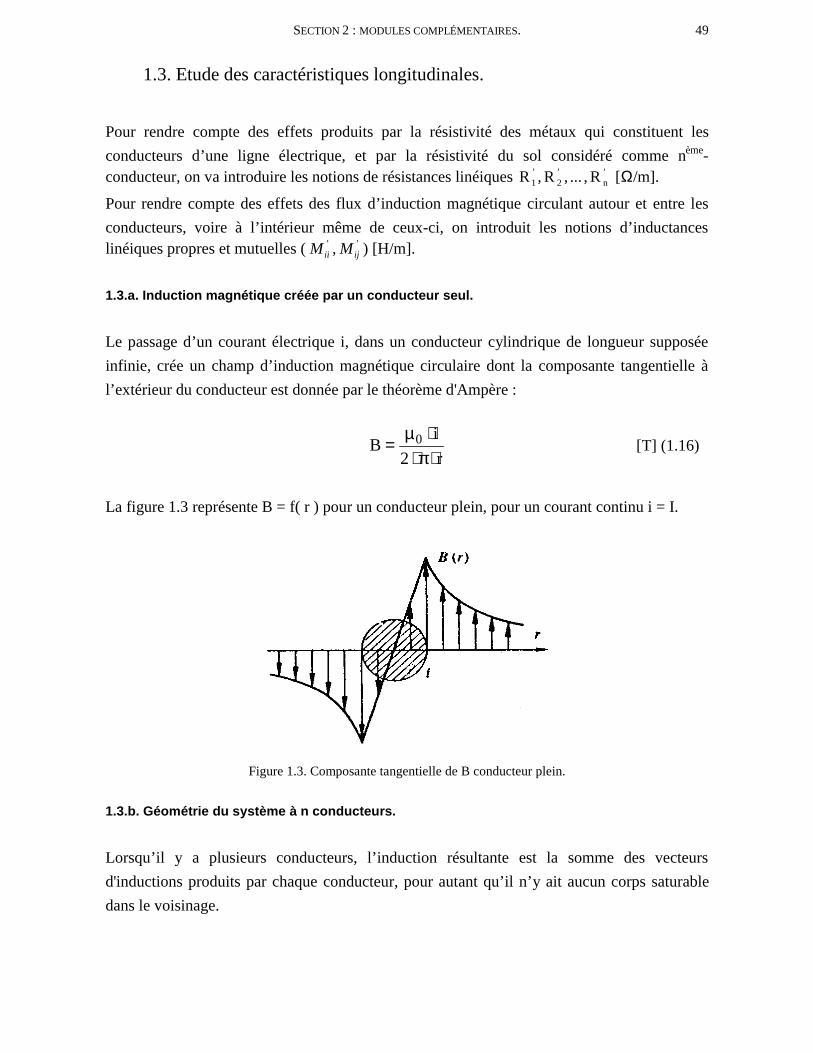
SECTION 2 : MODULES COMPLÉMENTAIRES. 49
1.3. Etude des caractéristiques longitudinales.
Pour rendre compte des effets produits par la résistivité des métaux qui constituent les
conducteurs d’une ligne électrique, et par la résistivité du sol considéré comme nème-conducteur, on va introduire les notions de résistances linéiques ’
n’2
’1 R, ... ,R,R [Ω/m].
Pour rendre compte des effets des flux d’induction magnétique circulant autour et entre les
conducteurs, voire à l’intérieur même de ceux-ci, on introduit les notions d’inductanceslinéiques propres et mutuelles (M Mii ij
’ ’, ) [H/m].
1.3.a. Induction magnétique créée par un conducteur seul.
Le passage d’un courant électrique i, dans un conducteur cylindrique de longueur supposée
infinie, crée un champ d’induction magnétique circulaire dont la composante tangentielle à
l’extérieur du conducteur est donnée par le théorème d'Ampère :
r2
iB 0
⋅π⋅⋅µ
= [T] (1.16)
La figure 1.3 représente B = f( r ) pour un conducteur plein, pour un courant continu i = I.
Figure 1.3. Composante tangentielle de B conducteur plein.
1.3.b. Géométrie du système à n conducteurs.
Lorsqu’il y a plusieurs conducteurs, l’induction résultante est la somme des vecteurs
d'inductions produits par chaque conducteur, pour autant qu’il n’y ait aucun corps saturable
dans le voisinage.
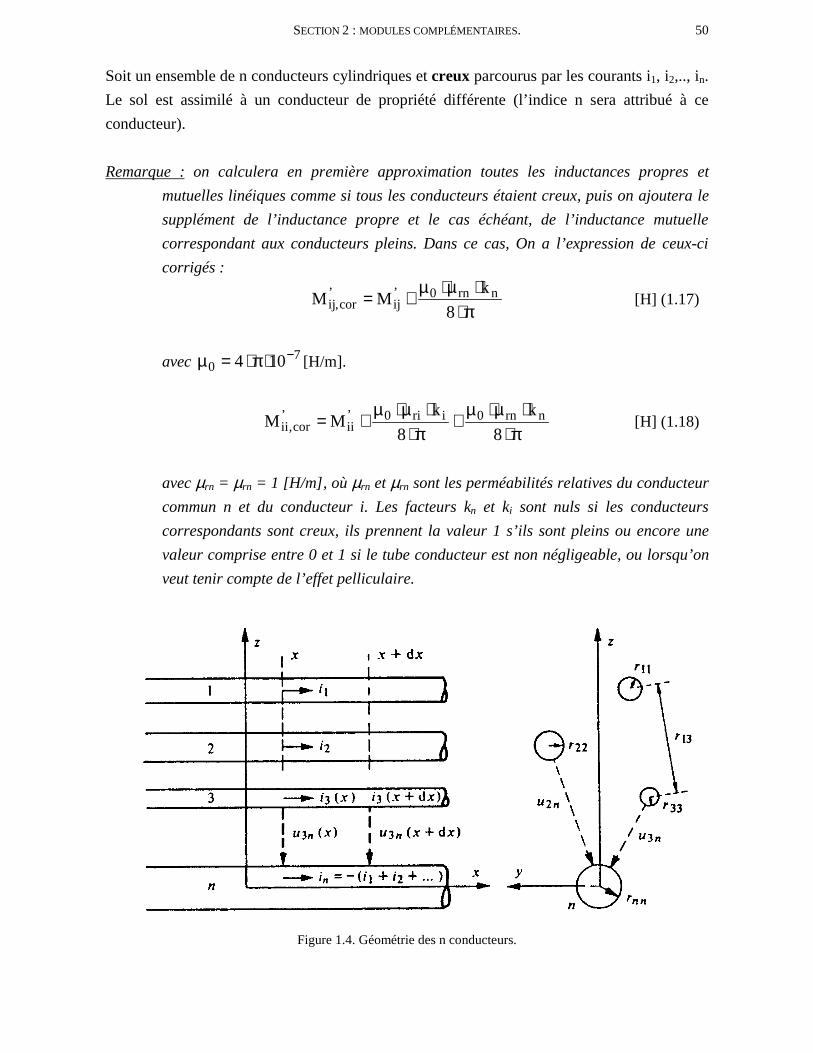
SECTION 2 : MODULES COMPLÉMENTAIRES. 50
Soit un ensemble de n conducteurs cylindriques et creux parcourus par les courants i1, i2,.., in.
Le sol est assimilé à un conducteur de propriété différente (l’indice n sera attribué à ce
conducteur).
Remarque : on calculera en première approximation toutes les inductances propres et
mutuelles linéiques comme si tous les conducteurs étaient creux, puis on ajoutera le
supplément de l’inductance propre et le cas échéant, de l’inductance mutuelle
correspondant aux conducteurs pleins. Dans ce cas, On a l’expression de ceux-ci
corrigés :
π⋅⋅µ⋅µ
+=8
kMM nrn0’
ij’
cor,ij [H] (1.17)
avec 70 104 −⋅π⋅=µ [H/m].
π⋅⋅µ⋅µ
+π⋅
⋅µ⋅µ+=
8
k
8
kMM nrn0iri0’
ii’
cor,ii [H] (1.18)
avec µrn = µrn = 1 [H/m], où µrn et µrn sont les perméabilités relatives du conducteur
commun n et du conducteur i. Les facteurs kn et ki sont nuls si les conducteurs
correspondants sont creux, ils prennent la valeur 1 s’ils sont pleins ou encore une
valeur comprise entre 0 et 1 si le tube conducteur est non négligeable, ou lorsqu’on
veut tenir compte de l’effet pelliculaire.
Figure 1.4. Géométrie des n conducteurs.
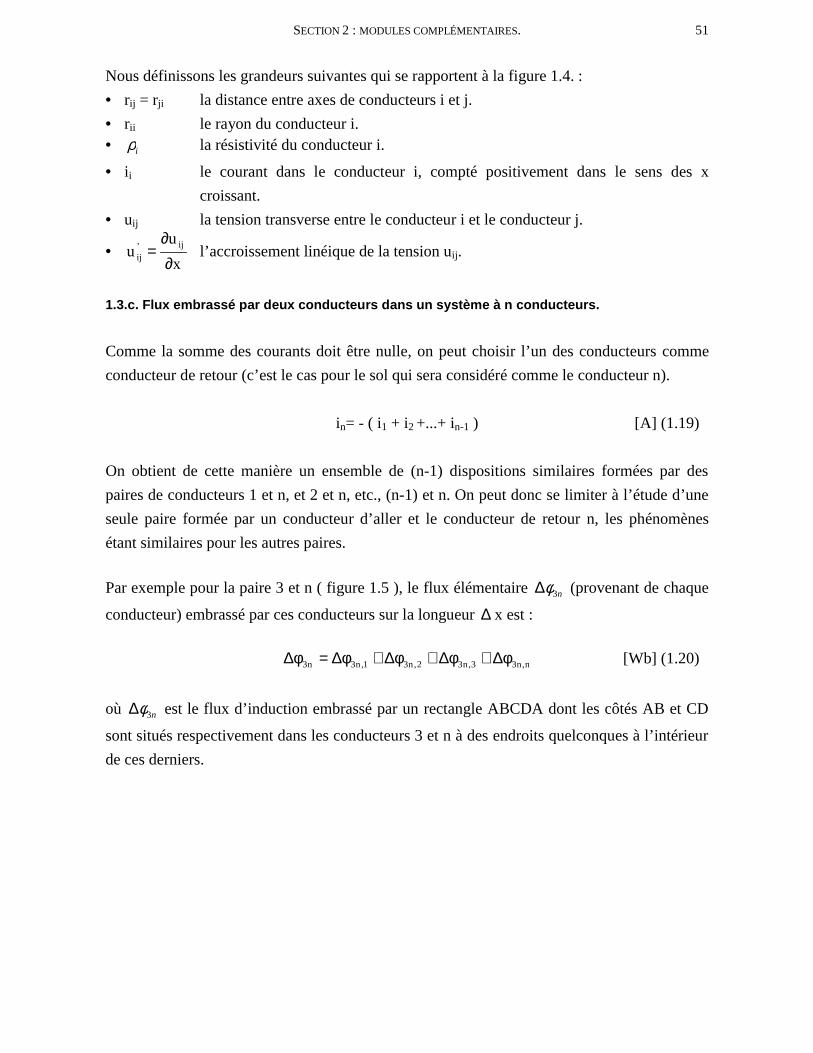
SECTION 2 : MODULES COMPLÉMENTAIRES. 51
Nous définissons les grandeurs suivantes qui se rapportent à la figure 1.4. :
• rij = rji la distance entre axes de conducteurs i et j.
• rii le rayon du conducteur i.• ρi la résistivité du conducteur i.
• i i le courant dans le conducteur i, compté positivement dans le sens des x
croissant.
• uij la tension transverse entre le conducteur i et le conducteur j.
• x
uu ij’
ij ∂∂
= l’accroissement linéique de la tension uij.
1.3.c. Flux embrassé par deux conducteurs dans un système à n conducteurs.
Comme la somme des courants doit être nulle, on peut choisir l’un des conducteurs comme
conducteur de retour (c’est le cas pour le sol qui sera considéré comme le conducteur n).
in= - ( i1 + i2 +...+ in-1 ) [A] (1.19)
On obtient de cette manière un ensemble de (n-1) dispositions similaires formées par des
paires de conducteurs 1 et n, et 2 et n, etc., (n-1) et n. On peut donc se limiter à l’étude d’une
seule paire formée par un conducteur d’aller et le conducteur de retour n, les phénomènes
étant similaires pour les autres paires.
Par exemple pour la paire 3 et n ( figure 1.5 ), le flux élémentaire ∆φ3n (provenant de chaque
conducteur) embrassé par ces conducteurs sur la longueur ∆ x est :
n,n33,n32,n31,n3n3 φ∆+φ∆+φ∆+φ∆=φ∆ [Wb] (1.20)
où ∆φ3n est le flux d’induction embrassé par un rectangle ABCDA dont les côtés AB et CD
sont situés respectivement dans les conducteurs 3 et n à des endroits quelconques à l’intérieur
de ces derniers.
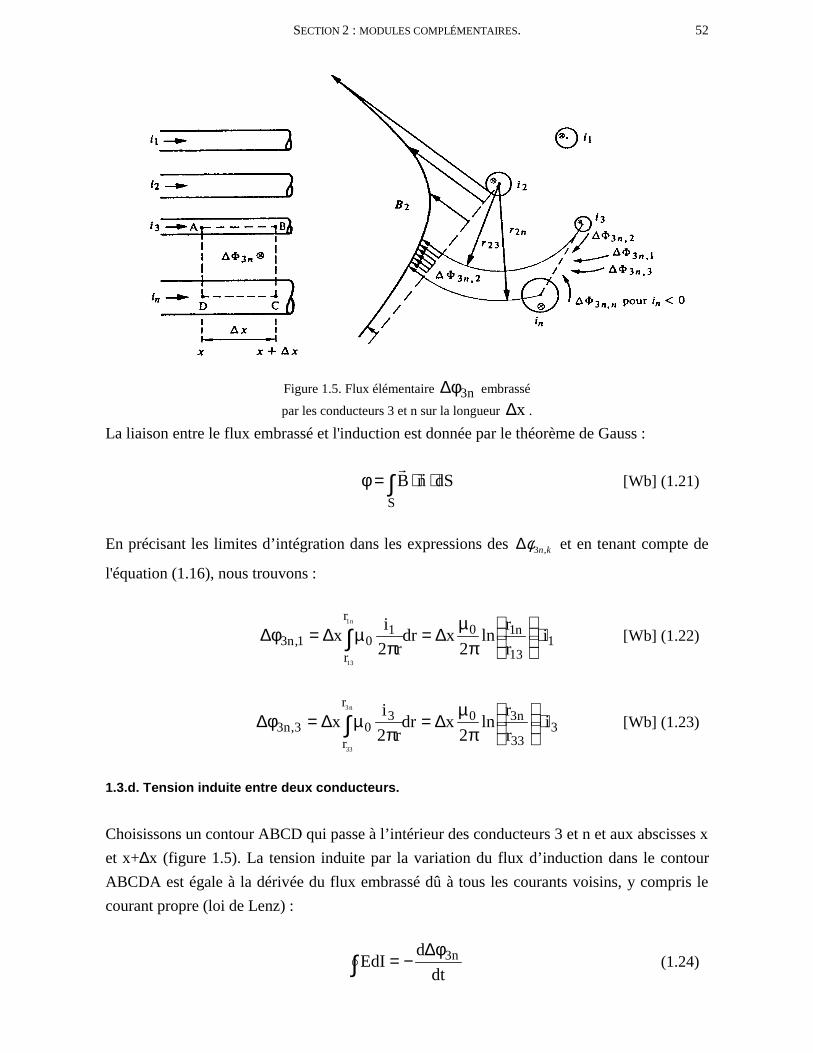
SECTION 2 : MODULES COMPLÉMENTAIRES. 52
Figure 1.5. Flux élémentaire n3φ∆ embrassé
par les conducteurs 3 et n sur la longueur x∆ .
La liaison entre le flux embrassé et l'induction est donnée par le théorème de Gauss :
∫ ⋅⋅=φS
dSnBrr
[Wb] (1.21)
En précisant les limites d’intégration dans les expressions des ∆φ3n k, et en tenant compte de
l'équation (1.16), nous trouvons :
113
n10r
r
101,n3 i
r
rln
2xdr
r2
ix
n1
13
⋅
π
µ∆=
πµ∆=φ∆ ∫ [Wb] (1.22)
333
n30r
r
303,n3 i
r
rln
2xdr
r2
ix
n3
33
⋅
π
µ∆=
πµ∆=φ∆ ∫ [Wb] (1.23)
1.3.d. Tension induite entre deux conducteurs.
Choisissons un contour ABCD qui passe à l’intérieur des conducteurs 3 et n et aux abscisses x
et x+∆x (figure 1.5). La tension induite par la variation du flux d’induction dans le contour
ABCDA est égale à la dérivée du flux embrassé dû à tous les courants voisins, y compris le
courant propre (loi de Lenz) :
∫φ∆
−=dt
dEdI n3 (1.24)
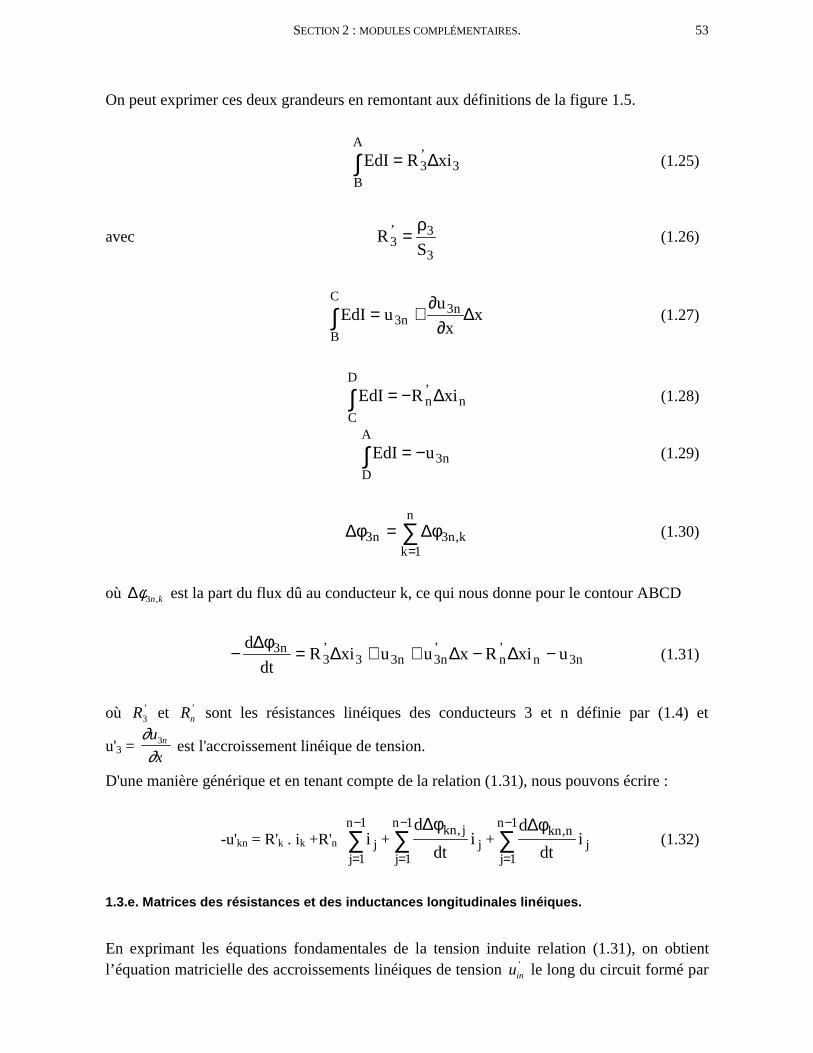
SECTION 2 : MODULES COMPLÉMENTAIRES. 53
On peut exprimer ces deux grandeurs en remontant aux définitions de la figure 1.5.
∫ ∆=A
B3
’3 xiREdI (1.25)
avec3
3’3 S
Rρ
= (1.26)
xx
uuEdI
C
B
n3n3 ∆
∂∂
+=∫ (1.27)
n
D
C
’n xiREdI ∆−=∫ (1.28)
∫ −=A
Dn3uEdI (1.29)
∑=
φ∆=φ∆n
1kk,n3n3 (1.30)
où ∆φ3n k, est la part du flux dû au conducteur k, ce qui nous donne pour le contour ABCD
n3n’n
’n3n33
’3
n3 uxiRxuuxiRdt
d−∆−∆++∆=
φ∆− (1.31)
où R3’ et Rn
’ sont les résistances linéiques des conducteurs 3 et n définie par (1.4) et
u'3 = ∂∂u
xn3 est l'accroissement linéique de tension.
D'une manière générique et en tenant compte de la relation (1.31), nous pouvons écrire :
-u'kn = R'k . ik +R'n ∑−
=
1n
1jji + ∑
−
=
φ∆1n
1jj
j,kni
dt
d+ ∑
−
=
φ∆1n
1jj
n,kn idt
d(1.32)
1.3.e. Matrices des résistances et des inductances longitudinales linéiques.
En exprimant les équations fondamentales de la tension induite relation (1.31), on obtientl’équation matricielle des accroissements linéiques de tension uin
’ le long du circuit formé par
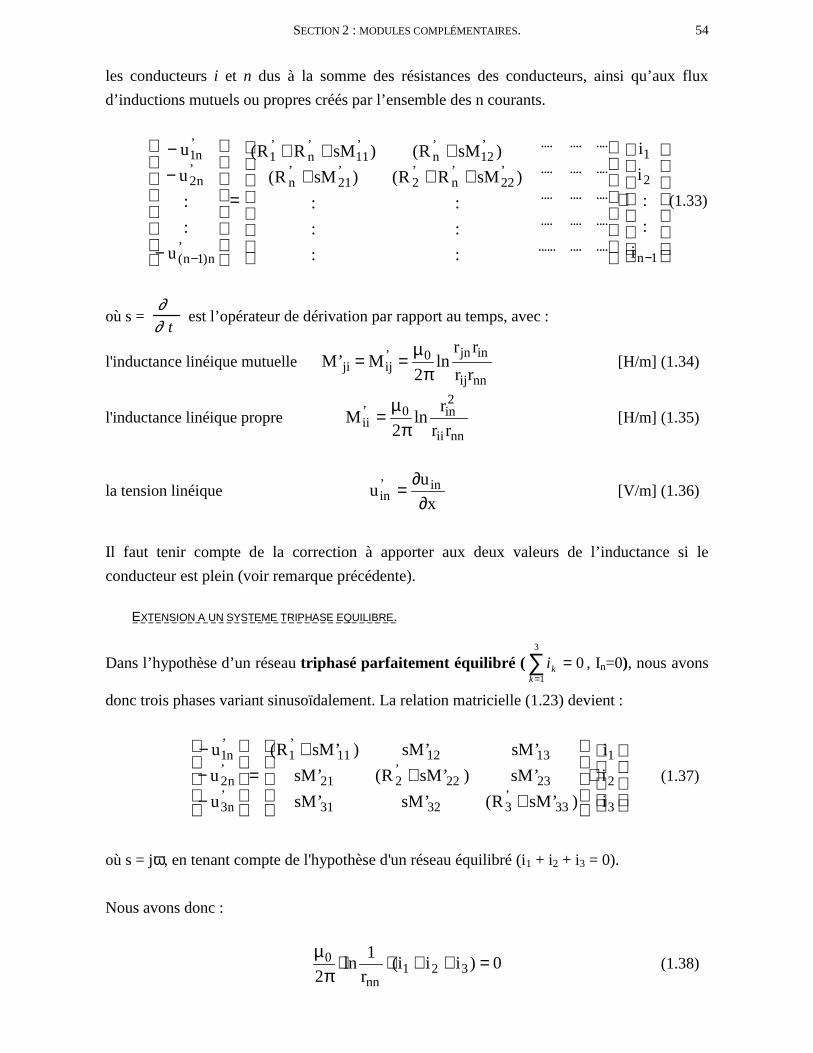
SECTION 2 : MODULES COMPLÉMENTAIRES. 54
les conducteurs i et n dus à la somme des résistances des conducteurs, ainsi qu’aux flux
d’inductions mutuels ou propres créés par l’ensemble des n courants.
⋅
++++++
=
−
−−
−− 1n
2
1’22
’n
’2
’21
’n
’12
’n
’11
’n
’1
’n)1n(
’n2
’n1
i
:
:
i
i
¨¨¨¨¨¨¨::
¨¨¨¨¨¨::
¨¨¨¨¨¨::
¨¨¨¨¨¨)sMRR()sMR(
¨¨¨¨¨¨)sMR()sMRR(
u
:
:
u
u
(1.33)
où s = ∂∂ t
est l’opérateur de dérivation par rapport au temps, avec :
l'inductance linéique mutuellennij
injn0’ijji rr
rrln
2M’M
πµ
== [H/m] (1.34)
l'inductance linéique proprennii
2in0’
ii rr
rln
2M
πµ
= [H/m] (1.35)
la tension linéiquex
uu in’
in ∂∂= [V/m] (1.36)
Il faut tenir compte de la correction à apporter aux deux valeurs de l’inductance si le
conducteur est plein (voir remarque précédente).
EXTENSION A UN SYSTEME TRIPHASE EQUILIBRE.
Dans l’hypothèse d’un réseau triphasé parfaitement équilibré ( ikk =∑ =
1
3
0 , In=0), nous avons
donc trois phases variant sinusoïdalement. La relation matricielle (1.23) devient :
⋅
++
+=
−−−
3
2
1
33’33231
2322’221
131211’1
’n3
’n2
’n1
i
i
i
)’sMR(’sM’sM
’sM)’sMR(’sM
’sM’sM)’sMR(
u
u
u
(1.37)
où s = jω, en tenant compte de l'hypothèse d'un réseau équilibré (i1 + i2 + i3 = 0).
Nous avons donc :
0)iii(r
1ln
2 321nn
0 =++⋅⋅π
µ(1.38)
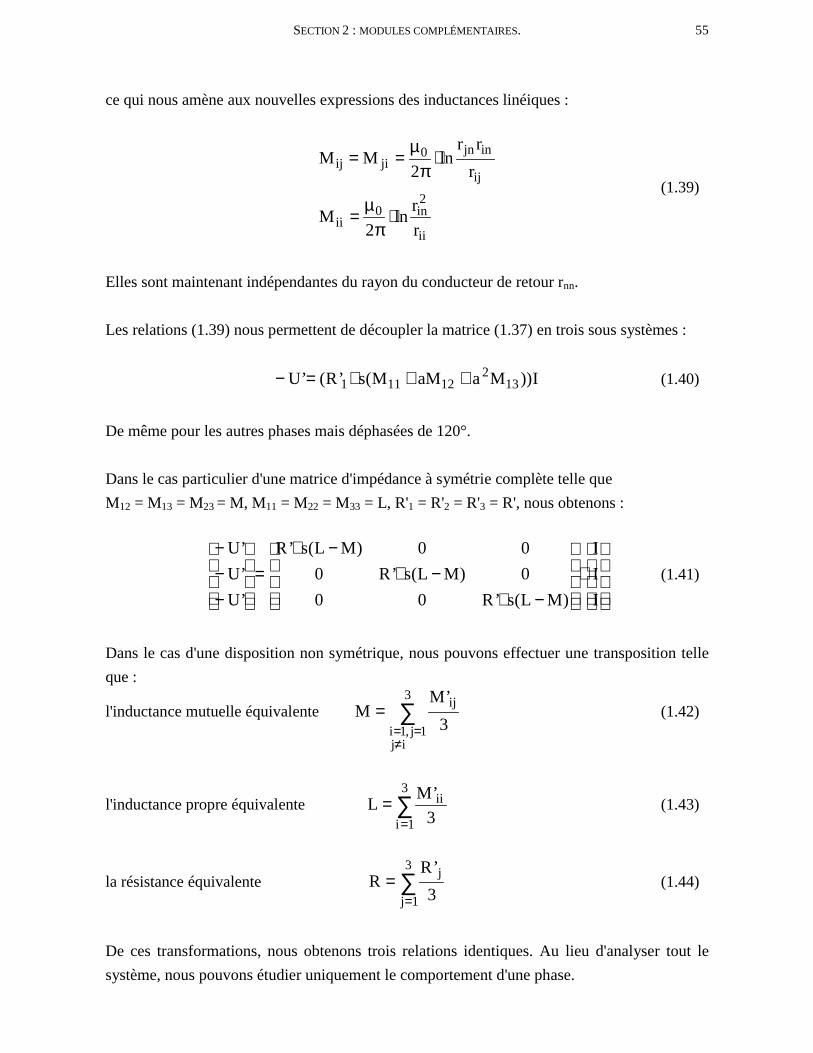
SECTION 2 : MODULES COMPLÉMENTAIRES. 55
ce qui nous amène aux nouvelles expressions des inductances linéiques :
ii
2in0
ii
ij
injn0jiij
r
rln
2M
r
rrln
2MM
⋅π
µ=
⋅π
µ==
(1.39)
Elles sont maintenant indépendantes du rayon du conducteur de retour rnn.
Les relations (1.39) nous permettent de découpler la matrice (1.37) en trois sous systèmes :
I))MaaMM(s’R(’U 132
12111 +++=− (1.40)
De même pour les autres phases mais déphasées de 120°.
Dans le cas particulier d'une matrice d'impédance à symétrie complète telle que
M12 = M13 = M23 = M, M11 = M22 = M33 = L, R'1 = R'2 = R'3 = R', nous obtenons :
⋅
−+−+
−+=
−−−
I
I
I
)ML(s’R00
0)ML(s’R0
00)ML(s’R
’U
’U
’U
(1.41)
Dans le cas d'une disposition non symétrique, nous pouvons effectuer une transposition telle
que :
l'inductance mutuelle équivalente ∑≠
===
3
ij1j,1i
ij
3
’MM (1.42)
l'inductance propre équivalente ∑=
=3
1i
ii
3
’ML (1.43)
la résistance équivalente ∑=
=3
1j
j
3
’RR (1.44)
De ces transformations, nous obtenons trois relations identiques. Au lieu d'analyser tout le
système, nous pouvons étudier uniquement le comportement d'une phase.
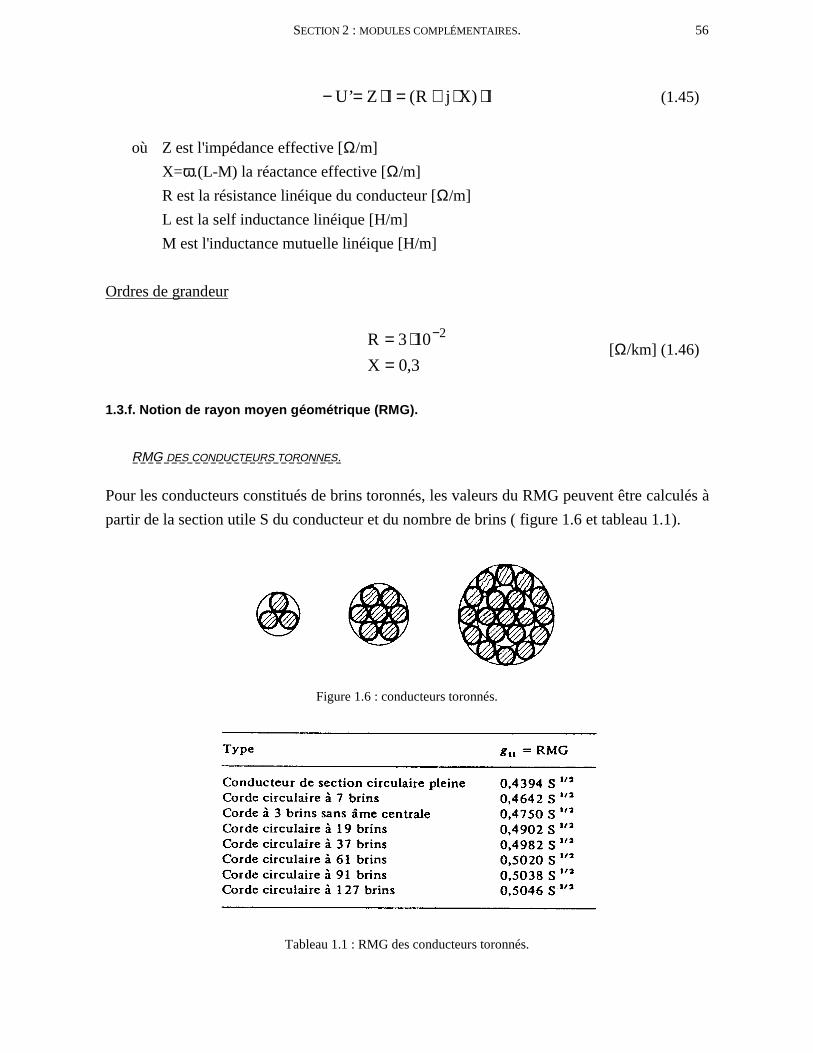
SECTION 2 : MODULES COMPLÉMENTAIRES. 56
I)XjR(IZ’U ⋅⋅+=⋅=− (1.45)
où Z est l'impédance effective [Ω/m]
X=ω.(L-M) la réactance effective [Ω/m]
R est la résistance linéique du conducteur [Ω/m]
L est la self inductance linéique [H/m]
M est l'inductance mutuelle linéique [H/m]
Ordres de grandeur
3,0X
103R 2
=⋅= −
[Ω/km] (1.46)
1.3.f. Notion de rayon moyen géométrique (RMG).
RMG DES CONDUCTEURS TORONNES.
Pour les conducteurs constitués de brins toronnés, les valeurs du RMG peuvent être calculés à
partir de la section utile S du conducteur et du nombre de brins ( figure 1.6 et tableau 1.1).
Figure 1.6 : conducteurs toronnés.
Tableau 1.1 : RMG des conducteurs toronnés.
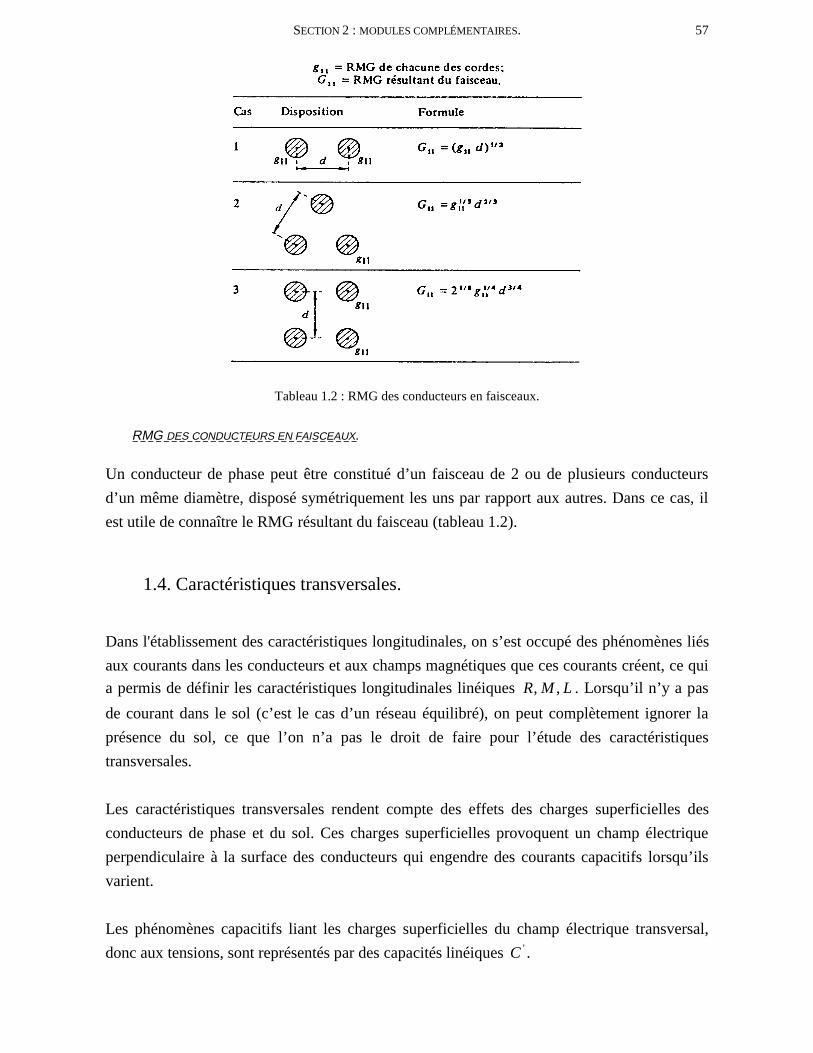
SECTION 2 : MODULES COMPLÉMENTAIRES. 57
Tableau 1.2 : RMG des conducteurs en faisceaux.
RMG DES CONDUCTEURS EN FAISCEAUX.
Un conducteur de phase peut être constitué d’un faisceau de 2 ou de plusieurs conducteurs
d’un même diamètre, disposé symétriquement les uns par rapport aux autres. Dans ce cas, il
est utile de connaître le RMG résultant du faisceau (tableau 1.2).
1.4. Caractéristiques transversales.
Dans l'établissement des caractéristiques longitudinales, on s’est occupé des phénomènes liés
aux courants dans les conducteurs et aux champs magnétiques que ces courants créent, ce qui
a permis de définir les caractéristiques longitudinales linéiques R M L, , . Lorsqu’il n’y a pas
de courant dans le sol (c’est le cas d’un réseau équilibré), on peut complètement ignorer la
présence du sol, ce que l’on n’a pas le droit de faire pour l’étude des caractéristiques
transversales.
Les caractéristiques transversales rendent compte des effets des charges superficielles des
conducteurs de phase et du sol. Ces charges superficielles provoquent un champ électrique
perpendiculaire à la surface des conducteurs qui engendre des courants capacitifs lorsqu’ils
varient.
Les phénomènes capacitifs liant les charges superficielles du champ électrique transversal,
donc aux tensions, sont représentés par des capacités linéiques C ’.
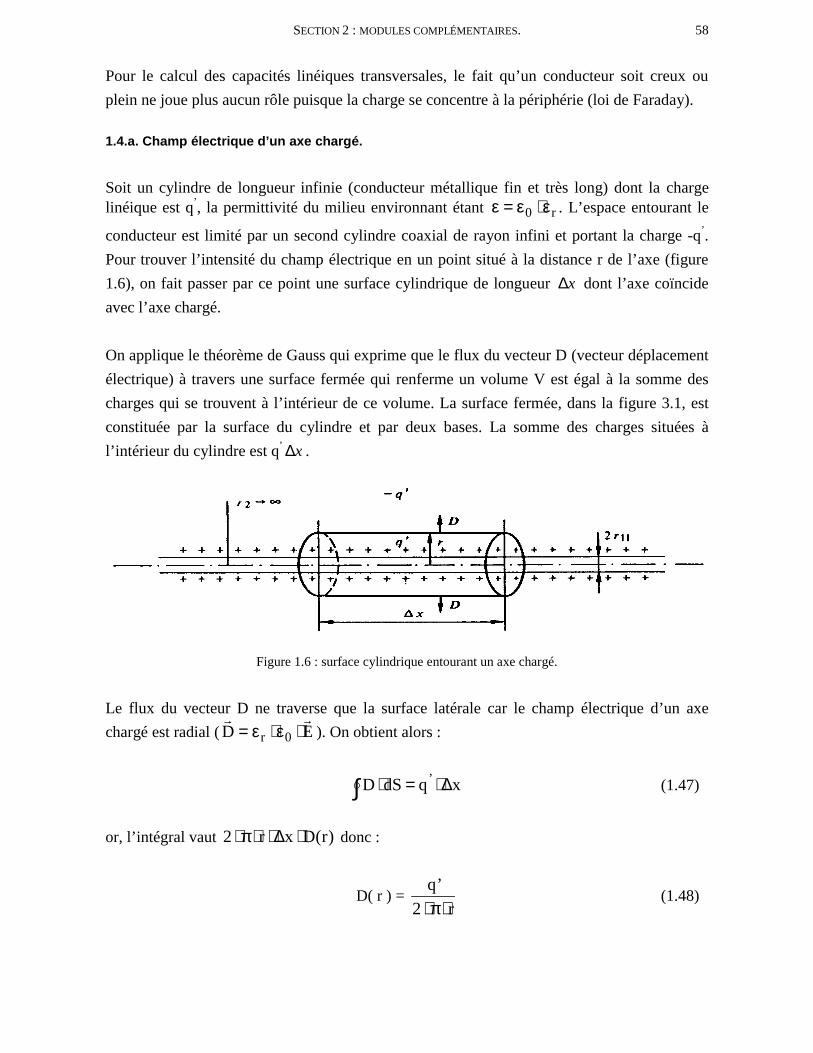
SECTION 2 : MODULES COMPLÉMENTAIRES. 58
Pour le calcul des capacités linéiques transversales, le fait qu’un conducteur soit creux ou
plein ne joue plus aucun rôle puisque la charge se concentre à la périphérie (loi de Faraday).
1.4.a. Champ électrique d’un axe chargé.
Soit un cylindre de longueur infinie (conducteur métallique fin et très long) dont la chargelinéique est q’, la permittivité du milieu environnant étant r0 ε⋅ε=ε . L’espace entourant le
conducteur est limité par un second cylindre coaxial de rayon infini et portant la charge -q’.
Pour trouver l’intensité du champ électrique en un point situé à la distance r de l’axe (figure
1.6), on fait passer par ce point une surface cylindrique de longueur ∆x dont l’axe coïncide
avec l’axe chargé.
On applique le théorème de Gauss qui exprime que le flux du vecteur D (vecteur déplacement
électrique) à travers une surface fermée qui renferme un volume V est égal à la somme des
charges qui se trouvent à l’intérieur de ce volume. La surface fermée, dans la figure 3.1, est
constituée par la surface du cylindre et par deux bases. La somme des charges situées à
l’intérieur du cylindre est q’ ∆x .
Figure 1.6 : surface cylindrique entourant un axe chargé.
Le flux du vecteur D ne traverse que la surface latérale car le champ électrique d’un axe
chargé est radial ( ED 0r
rr⋅ε⋅ε= ). On obtient alors :
xqdSD ’ ∆⋅=⋅∫ (1.47)
or, l’intégral vaut )r(Dxr2 ⋅∆⋅⋅π⋅ donc :
D( r ) = r2
’q
⋅π⋅(1.48)
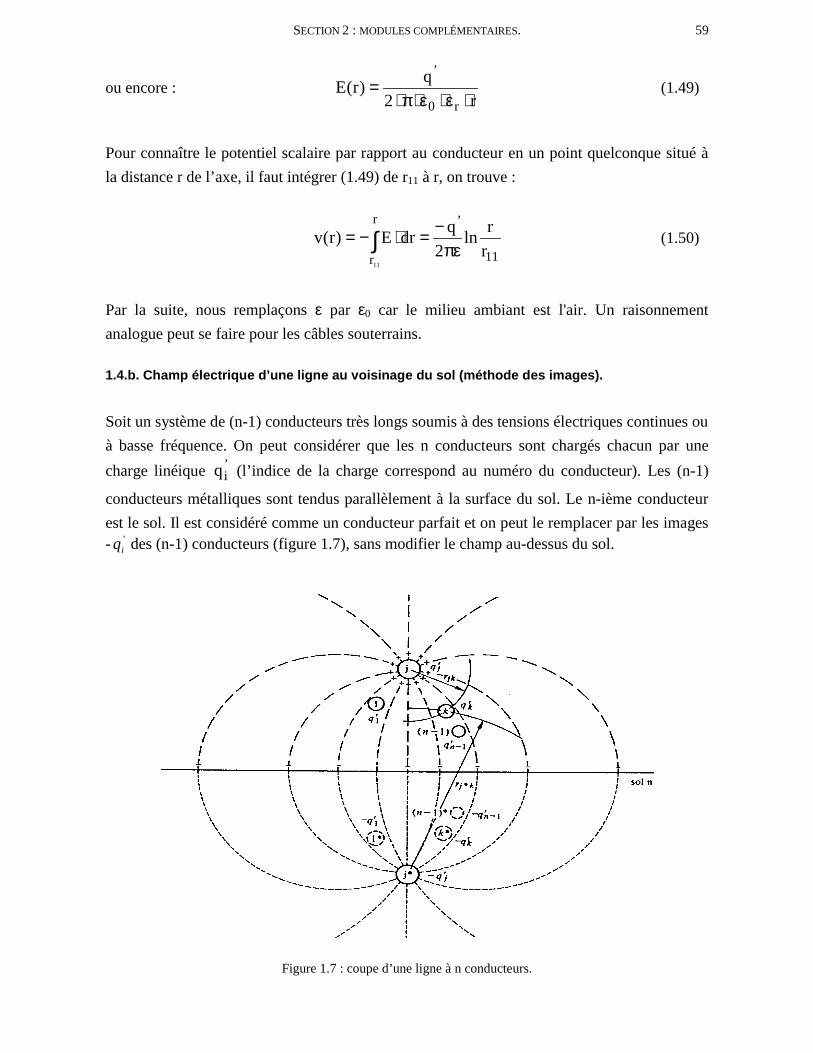
SECTION 2 : MODULES COMPLÉMENTAIRES. 59
ou encore :r2
q)r(E
r0
’
⋅ε⋅ε⋅π⋅= (1.49)
Pour connaître le potentiel scalaire par rapport au conducteur en un point quelconque situé à
la distance r de l’axe, il faut intégrer (1.49) de r11 à r, on trouve :
11
r
r
’
r
rln
2
qdrE)r(v
11
∫ πε−=⋅−= (1.50)
Par la suite, nous remplaçons ε par ε0 car le milieu ambiant est l'air. Un raisonnement
analogue peut se faire pour les câbles souterrains.
1.4.b. Champ électrique d’une ligne au voisinage du sol (méthode des images).
Soit un système de (n-1) conducteurs très longs soumis à des tensions électriques continues ou
à basse fréquence. On peut considérer que les n conducteurs sont chargés chacun par une
charge linéique ’iq (l’indice de la charge correspond au numéro du conducteur). Les (n-1)
conducteurs métalliques sont tendus parallèlement à la surface du sol. Le n-ième conducteur
est le sol. Il est considéré comme un conducteur parfait et on peut le remplacer par les images- qi
’ des (n-1) conducteurs (figure 1.7), sans modifier le champ au-dessus du sol.
Figure 1.7 : coupe d’une ligne à n conducteurs.

SECTION 2 : MODULES COMPLÉMENTAIRES. 60
1.4.c. Champ électrique de deux axes parallèles dans l’air.
Soit une paire d’axes parallèles j et j* de longueur infinie (figure 1.8)et soit +q j’ et -q j
’ les
charges linéiques de l’un et de l’autre. En un point P, la résultante de l’intensité du champ Ej
est égale à la somme vectorielle des champs dus à chacune des charges avec :
Pj0
’j*
jp0
’j
*r2
qE
r2
qE
πε−
=
πε=
(1.51)
avec rjp et rj p* sont les distances respectives du point P au conducteur j et au conducteur j*.
Le potentiel (par rapport à une référence) est lié au champ électrique par la relation :
gradVE −=r
(1.52)
Dans le cas bi-dimensionnel, cette relation devient :
r
VE
∂∂−= (1.53)
et le potentiel est déterminé par intégration :
∫−=1
0
r
r
EdrV (1.54)
où r0 localise la référence et r1 la localisation de la valeur du potentiel par rapport à la
référence. Nous sommons les contributions de chaque charge.
Donc le potentiel du point P dû à la paire de charges +q j’ et -q j
’ par rapport au plan médian
sera, en séparant les influences de +q j’ et -q j
’ :
jp
pj
0
’j
j
pj
0
’j
jp
j
0
’j*
r
h*
0
’j
h
r 0
’j
p r
rln
2
q
h
rln
2
q
r
hln
2
qdr
r2
qdr
r2
qv
**p*j
j
j
jp
πε=
πε+
πε=
πε
−−
πε= ∫∫ (1.55)
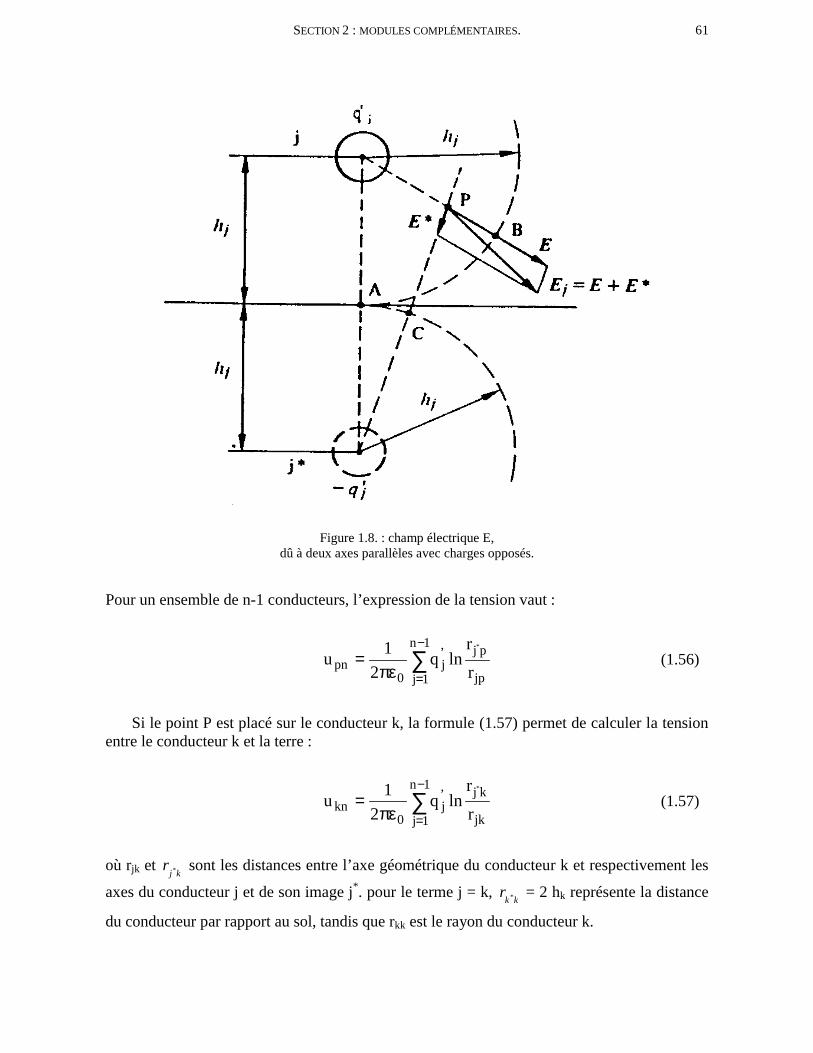
SECTION 2 : MODULES COMPLÉMENTAIRES. 61
Figure 1.8. : champ électrique E,dû à deux axes parallèles avec charges opposés.
Pour un ensemble de n-1 conducteurs, l’expression de la tension vaut :
∑−
=πε=
1n
1j jp
pj’j
0pn r
rlnq
2
1u
*
(1.56)
Si le point P est placé sur le conducteur k, la formule (1.57) permet de calculer la tensionentre le conducteur k et la terre :
∑−
=πε=
1n
1j jk
kj’j
0kn r
rlnq
2
1u
*
(1.57)
où rjk et rj k* sont les distances entre l’axe géométrique du conducteur k et respectivement les
axes du conducteur j et de son image j*. pour le terme j = k, rk k* = 2 hk représente la distance
du conducteur par rapport au sol, tandis que rkk est le rayon du conducteur k.
SECTION 2 : MODULES COMPLÉMENTAIRES. 62
Si l’on pose :
jk
kj
0kj r
rln
2
1K
*
πε= (1.58)
La tension ukn s’écrit :
∑−
==
1n
1j
’jkjkn qKu (1.59)
puisque r rj k kj* *= et rjk = rkj , on a Kjk = Kkj.
Les coefficients Kjk sont appelés coefficients de potentiel ou coefficients d’influence.
1.4.d. Matrice des coefficients de potentiel.
A partir de (1.59), on peut obtenir un système d’équations qui permet de calculer les tensionsu1n ... ukn ... u(n-1)n par rapport à la terre lorsqu’on connaît les charges linéiques q q qj n1 1
’ ’ ’... ... −
des (n-1) conducteurs.
On a donc :
⋅
=
−−−−−
−
−
− ’1n
’2
’1
)1n)(1n(2)1n(1)1n(
)1n(22221
)1n(11211
n)1n(
n2
n1
q
:
:
q
q
K......KK
:......::
:......::
K......KK
K......KK
u
:
:
u
u
(1.60)
Cette matrice K est symétrique.
En général on connaît plutôt les tensions que les charges linéiques, il est utile de résoudre le
système d’équations (1.60) par rapport aux charges.
On peut alors écrire :
[q'] = [K] -1 . [u] (1.61)

SECTION 2 : MODULES COMPLÉMENTAIRES. 63
En posant [C’] = [K]-1 on obtient en notation matricielle :
⋅
=
−−−−−
−
−
− n)1n(
n2
n1
’)1n)(1n(
’2)1n(
’1)1n(
’)1n(2
’22
’21
’)1n(1
’12
’11
’1n
’2
’1
u
:
:
u
u
C......CC
:......::
:......::
C......CC
C......CC
q
:
:
q
q
(1.62)
La matrice C est une matrice symétrique appelée matrice des capacités linéiques nodales.
Les coefficients C'ij ont la dimension d'une capacité par unité de longueur [F/m].
T1 )A()Kdet(
1)K(’C =≡ − [F/m] (1.63)
Où det(K) est le déterminant de la matrice K et (A)T la matrice transposée des cofacteurs
(mineur avec signe) de la matrice K.
EXTENSION AUX SYSTEMES TRIPHASES EQUILIBRES.
Dans l’hypothèse d’un réseau triphasé parfaitement équilibré ( uknk =∑ =
1
3
0 ), nous avons trois
phases variant sinusoidalement.
Si le réseau possède un fil de garde, son potentiel par rapport à la terre est nulle (ugn = 0)
puisqu'il est connecté à la terre par un pylône ou par une liaison métallique.
L’équation matricielle (1.60) devient pour un réseau triphasé :
⋅
=
g
3
2
1
ggg3g2g1
3g332313
2g322212
1g312111
gn
n3
n2
n1
’q
’q
’q
’q
KKKK
KKKK
KKKK
KKKK
u
u
u
u
[V] (1.64)
Puisque ugn = 0, nous pouvons réduire cette matrice aux trois premiers accès telle que :
⋅
=
3
2
1
332313
322212
312111
n3
n2
n1
’q
’q
’q
’K’K’K
’K’K’K
’K’K’K
u
u
u
[V] (1.65)

SECTION 2 : MODULES COMPLÉMENTAIRES. 64
avec K’ij sont les coefficient de la matrice K réduite aux trois accès.
Transformons cette matrice pour obtenir la matrice des capacités linéiques nodales :
C'=K'-1 (1.66)
⋅
=
n3
n2
n1
333231
232221
131211
’3
’2
’1
u
u
u
’C’C’C
’C’C’C
’C’C’C
q
q
q
[C/m] (1.67)
Le schéma équivalent de ce système se met sous la forme :
Figure 1.9 : schéma équivalent du système triphasé.
Ce schéma triangulaire peut se ramener à une forme étoilée par la transformation triangle-
étoile.
Figure 1.10 : schéma équivalent en étoile.
Nous arrivons au schéma équivalent final suivant :
Figure 1.11. Schéma équivalent final.
Le point N est au même potentiel que la terre.
Les valeurs de CN1, CN2 et CN3 sont données par:
CN1 = C12 + C13 + C12 C13 / C23
CN2 = C12 + C23 + C12 C23 / C13 [F/m]
CN3 = C13 + C23 + C13 C23 / C21

SECTION 2 : MODULES COMPLÉMENTAIRES. 65
Dans le cas particulier d'un système à symétrie complète, nous avons :
C11 = C22 = C33 = Ceq et C12 = C13 = C32 = Cd
Nous obtenons alors :
CN1 = CN2 = CN3 = 3.Cd = CN
Dans le cas d'un système non symétrique, nous devons transposer les termes de la matrice [K]
tels que :
)KKKKKK(6
1K
K4
1K
g3g2g1231312transfert
g
1iiidiagonal
+++++=
= ∑= (1.68)
De ces transformations, nous obtenons une matrice de symétrie.
De ces deux cas, le système se réduit à l'étude d'une seule phase. L'équation du système
devient :
UCU)CC(’q dp ⋅=⋅+= [C/m] (1.69)
où C est la capacité linéique transversale [F/m]Y = jωC est l'impédance transversale [µS/m].
Ordre de grandeur
5,12/Y = [µS/km] (1.70)

SECTION 2 : MODULES COMPLÉMENTAIRES. 66
2. Perturbations dues à l'effet de couronne.
2.1. Introduction.
Le niveau perturbateur est un critère de dimensionnement d'une ligne aérienne, plus
précisément dans le choix correct des sections à utiliser en haute et très haute tension. Depuis
plus de 30 ans, de nombreux chercheurs ont tenté d'établir des méthodes de prédétermination
de ce niveau perturbateur.
Il existe de par le monde une multitude de méthode empiriques ou semi-empiriques, ainsi que
quelques méthodes analytiques.
Une enquête mondiale CIGRE-IEEE a permis une analyse complète des méthodes de
prédétermination empirique grâce à des formules absolues et des méthodes analytiques. C'est
cette méthode que nous avons choisi d'implémenter et que nous allons rappeler ici.
2.2. Niveau perturbateur.
La formule CIGRE, qui permet d'évaluer le niveau perturbateur, nécessite la connaissance du
gradient maximal du champ électrique à la surface du conducteur ou du faisceau. Nous allons
donc le déterminer.
2.2.a. Méthode de calcul de g m.
Nous allons reprendre des résultats établis dans le cadre du calcul des caractéristiques R L C
d'une ligne. L'équation à partir de laquelle nous allons rechercher gm est la suivante :
⋅
=
g
3
2
1
ggg3g2g1
3g332313
2g322212
1g312111
gn
n3
n2
n1
’q
’q
’q
’q
KKKK
KKKK
KKKK
KKKK
u
u
u
u
[V] (1.64)
que, par convention et pour se conformer aux notations CIGRE, nous réécrivons :

SECTION 2 : MODULES COMPLÉMENTAIRES. 67
⋅
λλλλλλλλλλλλλλλλ
=
= 4
3
2
1
44434241
34333231
24232221
14131211
4
3
2
1
Q
Q
Q
Q
0V
V
V
V
[V] (2.1)
ou encore : [V] = [λ] [Q] [V] (2.2)
On obtient évidemment la matrice des capacités en prenant l'inverse de [λ] :
[C] = [λ]-1 (2.3)
et [Q] = [C] [V] (2.4)
où [ ]
⋅−−
⋅+−
⋅+
⋅=
02
3j
2
12
3j
2
10j1
VV (2.5)
avec V la tension phase-terre.
On en déduit la valeur des charges [Q], vecteur colonne dont les quatre éléments sont
complexes.
Le théorème de Gauss nous permet alors de déterminer l'intensité du champ électrique
superficiel :
r2
Q
n
1g
0
imoyen,i ⋅ε⋅π⋅
⋅= où i=1,2,3 (2.6)
où n = nombre de sous-conducteurs du faisceau ;
r = rayon moyen du conducteur élémentaire du faisceau ;
Qi = la charge du conducteur i ;
ε0 = 8,854 . 10-12 F/m.
Dans le cas de conducteurs uniques, gmoyen est le champ électrique maximal. Dans le cas des
conducteurs en faisceaux, il est différent. Nous pouvons écrire qu'à la périphérie d'un des
conducteurs l'intensité du champ électrique varie selon l'expression :
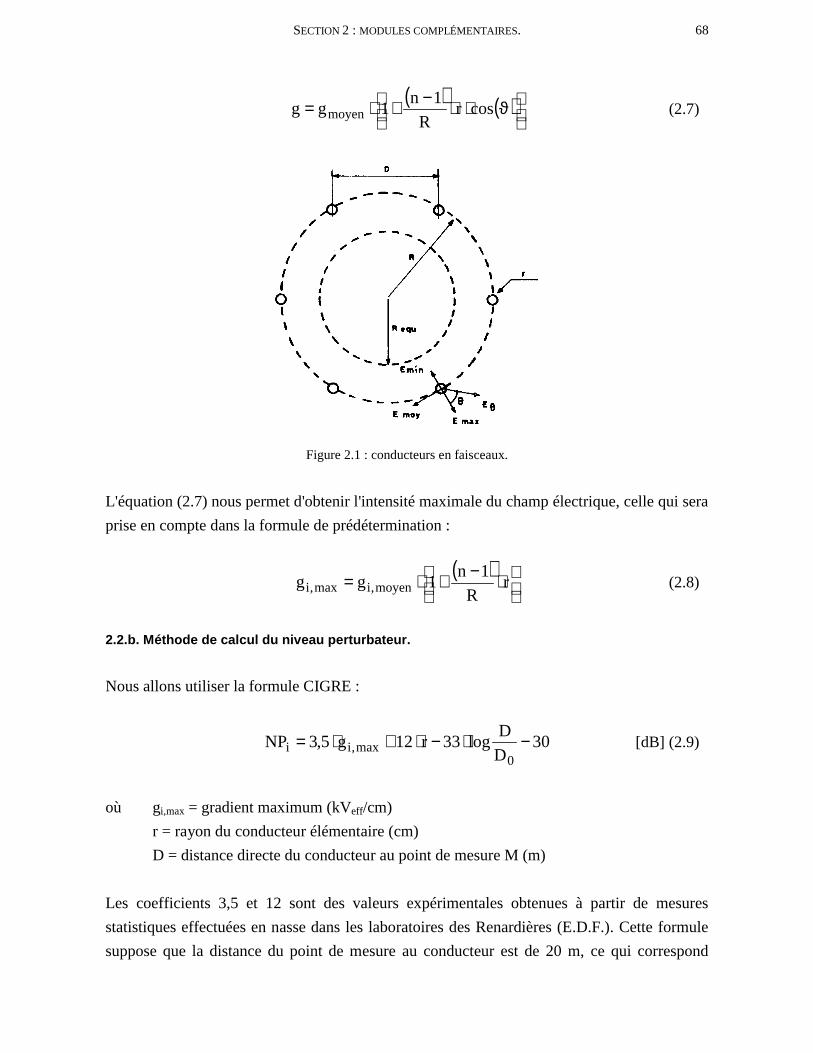
SECTION 2 : MODULES COMPLÉMENTAIRES. 68
( ) ( )
ϑ⋅⋅−+⋅= cosr
R
1n1gg moyen (2.7)
Figure 2.1 : conducteurs en faisceaux.
L'équation (2.7) nous permet d'obtenir l'intensité maximale du champ électrique, celle qui sera
prise en compte dans la formule de prédétermination :
( )
⋅−+⋅= r
R
1n1gg moyen,imax,i (2.8)
2.2.b. Méthode de calcul du niveau perturbateur.
Nous allons utiliser la formule CIGRE :
30D
Dlog33r12g5,3NP
0max,ii −⋅−⋅+⋅= [dB] (2.9)
où gi,max = gradient maximum (kVeff/cm)
r = rayon du conducteur élémentaire (cm)
D = distance directe du conducteur au point de mesure M (m)
Les coefficients 3,5 et 12 sont des valeurs expérimentales obtenues à partir de mesures
statistiques effectuées en nasse dans les laboratoires des Renardières (E.D.F.). Cette formule
suppose que la distance du point de mesure au conducteur est de 20 m, ce qui correspond
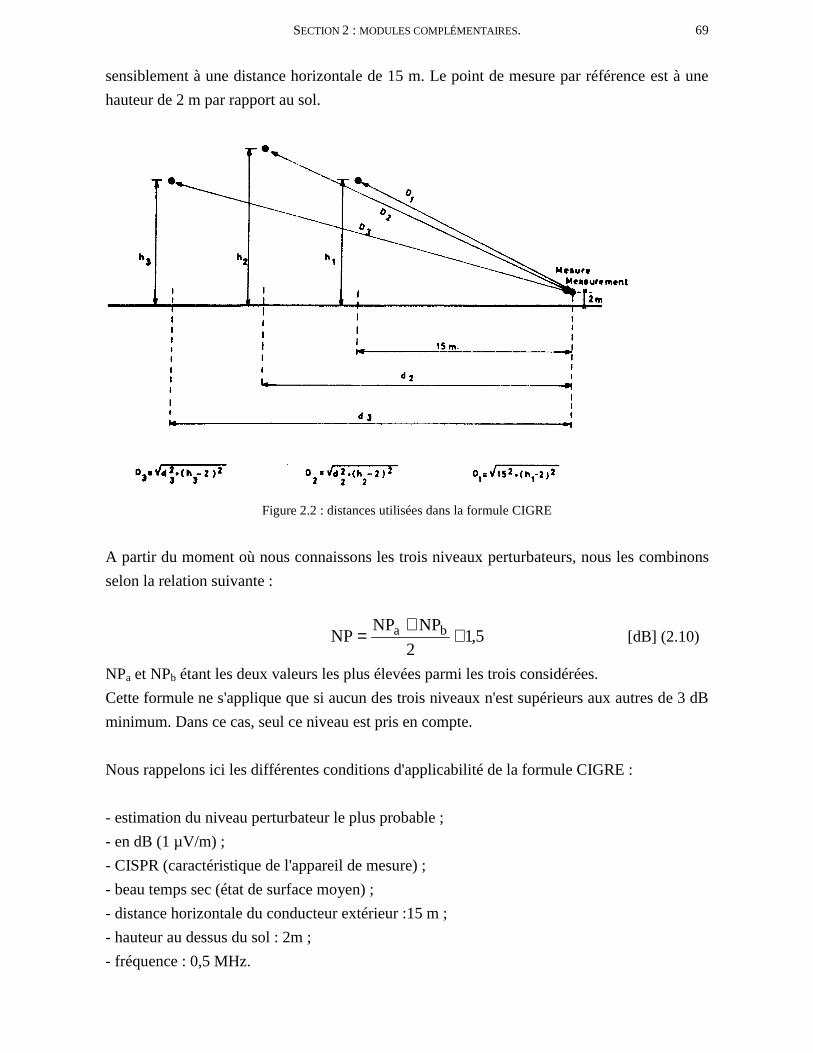
SECTION 2 : MODULES COMPLÉMENTAIRES. 69
sensiblement à une distance horizontale de 15 m. Le point de mesure par référence est à une
hauteur de 2 m par rapport au sol.
Figure 2.2 : distances utilisées dans la formule CIGRE
A partir du moment où nous connaissons les trois niveaux perturbateurs, nous les combinons
selon la relation suivante :
5,12
NPNPNP ba +
+= [dB] (2.10)
NPa et NPb étant les deux valeurs les plus élevées parmi les trois considérées.
Cette formule ne s'applique que si aucun des trois niveaux n'est supérieurs aux autres de 3 dB
minimum. Dans ce cas, seul ce niveau est pris en compte.
Nous rappelons ici les différentes conditions d'applicabilité de la formule CIGRE :
- estimation du niveau perturbateur le plus probable ;
- en dB (1 µV/m) ;
- CISPR (caractéristique de l'appareil de mesure) ;
- beau temps sec (état de surface moyen) ;
- distance horizontale du conducteur extérieur :15 m ;
- hauteur au dessus du sol : 2m ;
- fréquence : 0,5 MHz.

SECTION 2 : MODULES COMPLÉMENTAIRES. 70

SECTION 2 : MODULES COMPLÉMENTAIRES. 71
3. Calcul du champ électrique.
3.1. Introduction.
Le champ électrique présent sous une ligne à haute tension est un sujet qui a longtemps
inquiété les foules. Bien qu'aucune enquête épidémiologique à long terme n'ait encore prouvé
les méfaits des champs électriques, le législateur a déjà pris des mesures pour les limiter.
Actuellement, il n'existe pas encore de standard international reconnu concernant les
limitations de l'émission de champ électrique, chaque pays ayant son propre règlement. Il est
cependant évident que dorénavant le champ électrique sera un critère de dimensionnement des
lignes aériennes, et qu'il va prendre de plus en plus d'influence.
3.2. Calcul du profil du champ électrique.
Le calcul du profil du champ électrique au niveau du sol est relativement aisé vu les
développements que nous avons énoncés dans le chapitre précédent. Nous allons donc
reprendre les deux équations suivantes :
[C] = [λ]-1 (2.3)
et [Q] = [C] [V] (2.4)
Connaissant les charges (linéiques) portées par les conducteurs, il est très aisé d'obtenir
l'intensité du champ électrique en un point via le théorème de Gauss :
ρ⋅ε⋅π⋅⋅=
0
ii 2
Q
n
1E où i=1,2,3 (3.1)
où n = nombre de sous-conducteurs du faisceau ;
r = rayon moyen du conducteur élémentaire du faisceau ;
Qi = la charge du conducteur i ;
ε0 = 8,854 . 10-12 F/m ;
ρ = distance du point où se calcule le champ par rapport au conducteur ou à son image
et qui porte la charge linéique Q.
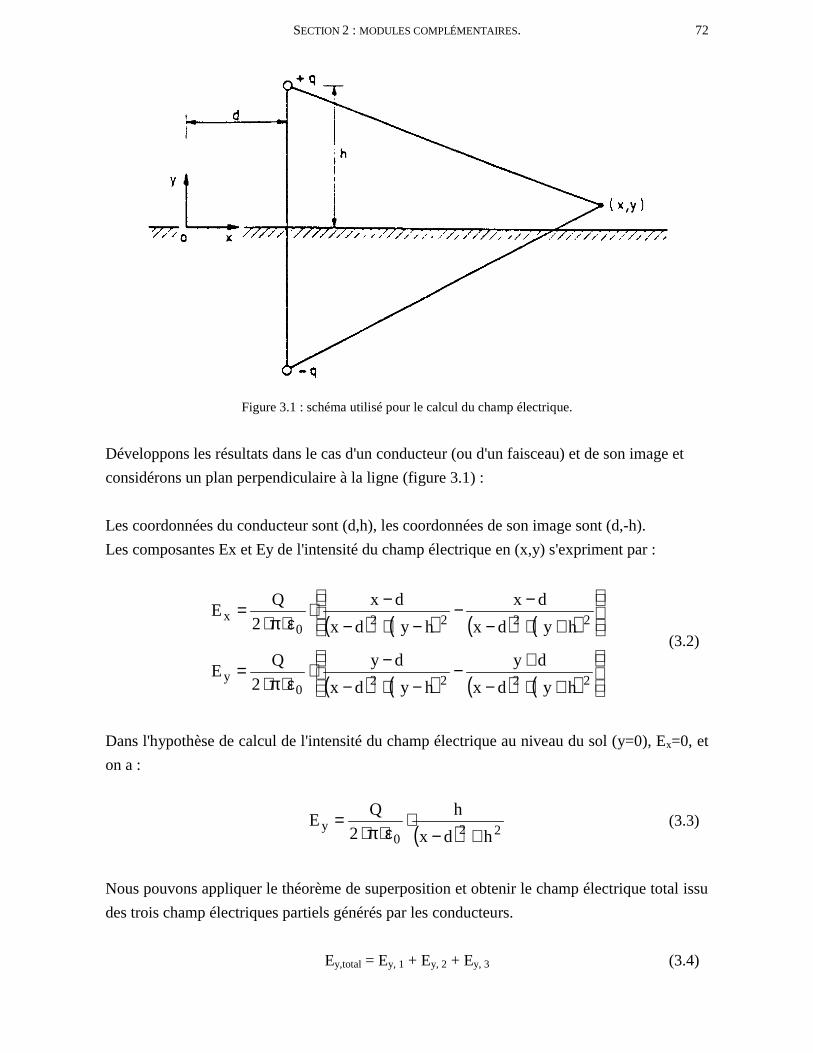
SECTION 2 : MODULES COMPLÉMENTAIRES. 72
Figure 3.1 : schéma utilisé pour le calcul du champ électrique.
Développons les résultats dans le cas d'un conducteur (ou d'un faisceau) et de son image et
considérons un plan perpendiculaire à la ligne (figure 3.1) :
Les coordonnées du conducteur sont (d,h), les coordonnées de son image sont (d,-h).
Les composantes Ex et Ey de l'intensité du champ électrique en (x,y) s'expriment par :
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
++−+−
−+−−⋅
ε⋅π⋅=
++−−−
−+−−⋅
ε⋅π⋅=
22220
y
22220
x
hydx
dy
hydx
dy
2
QE
hydx
dx
hydx
dx
2
QE
(3.2)
Dans l'hypothèse de calcul de l'intensité du champ électrique au niveau du sol (y=0), Ex=0, et
on a :
( ) 220
yhdx
h
2
QE
+−⋅
ε⋅π⋅= (3.3)
Nous pouvons appliquer le théorème de superposition et obtenir le champ électrique total issu
des trois champ électriques partiels générés par les conducteurs.
Ey,total = Ey, 1 + Ey, 2 + Ey, 3 (3.4)

SECTION 2 : MODULES COMPLÉMENTAIRES. 73
La figure 3.2 donne un exemple de profil de champ électrique sous une ligne.
Figure 3.2 : profil du champ électriquesous une ligne haute tension.

SECTION 2 : MODULES COMPLÉMENTAIRES. 74
4. Calcul du champ magnétique.
4.1. Introduction.
Bien que moins souvent évoqué que le champ électrique, le champ magnétique est lui aussi un
critère de dimensionnement des lignes aériennes. Son calcul est assez aisé. Nous feront
cependant plusieurs hypothèses, ce qui permettra de simplifier nos calculs sans pour autant
générer des erreurs significatives.
4.2. Calcul du champ magnétique.
Avant toute chose, nous devons faire l'hypothèse de quasi-staticité des champs électriques et
magnétiques, ce qui permet l'analyse indépendante, sans interaction, des champs magnétiques
et électriques.
La première loi fondamentale de la magnétostatique est la loi d'ampère :
∫ =⋅ ildHrr
(4.1)
Nous allons l'appliquer dans le cas du fil long et rectiligne parcouru par un courant donné.
Considérons un cercle, dans un plan perpendiculaire à l'axe du conducteur, centré sur celui-ci.
Pour des raisons de symétrie, le champ magnétique H est constant tout au long du cercle. Si le
rayon de celui-ci est r, le champ magnétique sera donné par :
r2
iH
⋅π⋅= [A/m] (4.2)
et la densité de flux magnétique (ou champ d'induction magnétique) par :
r2
iB
⋅π⋅⋅µ= [T] (4.2)
et B est dirigé tangentiellement aux cercles centrés sur le conducteur et est contenu dans le
plan perpendiculaire à celui-ci.
La question de l'image des conducteurs doit être considérée ici différemment que lors du
calcul du champ électrique. Les images sont situées à une profondeur, dans le sol, bien plus
SECTION 2 : MODULES COMPLÉMENTAIRES. 75
grande que la hauteur des conducteurs de phase. En première approximation, la profondeur d
vaut :
f660d
ρ⋅= [m] (4.3)
où ρ est la résistivité du sol [Ω.m] et f la fréquence [Hz].
Le calcul précis du champ magnétique nécessite l'emploi des termes de Carson (voir 5.3. La
ligne de Carson) pour évaluer les effets d'un sol imparfaitement conducteur. Dans la plupart
des applications, il suffit de considérer les conducteurs de phase en espace libre, sans tenir
compte des images.
Nous calculerons tout d'abord le courant nominal circulant dans la ligne :
( )ϕ⋅⋅=
cosU3
PI [A] (4.4)
En système triphasé équilibré on a :
⋅−−
⋅+−
⋅+
⋅=
2
3j
2
12
3j
2
10j1
II [A] (4.5)
d'où on en déduit :
i
i0i r2
iB
⋅π⋅⋅µ
= i = 1,2,3 [T] (4.6)
et les termes iB et ii ont des valeurs complexes.
Il nous faut calculer le champ résultant :

SECTION 2 : MODULES COMPLÉMENTAIRES. 76
Figure 4.1 : schéma de calculdu champ magnétique total
Les composantes verticales et horizontales du champ d'induction magnétique s'expriment
alors :
( ) ( ) ( )( ) ( ) ( )[ ]332211Y,r
332211X,r
sinBsinBsinBB
cosBcosBcosBB
θ⋅+θ⋅+θ⋅−=
θ⋅+θ⋅+θ⋅=(4.7)
Nous allons exprimer ces deux composantes sous la forme :
⋅+=⋅+=djcB
bjaB
x
y (4.8)
Exprimées en fonction du temps ces composantes s'écrivent :
( ) ( )( ) ( )
⋅ω⋅+⋅ω⋅=⋅ω⋅+⋅ω⋅=tsindtcoscB
tsinbtcosaB
x
y (4.9)
On peut voir immédiatement que si la condition a.d = b.c est satisfaite, le vecteur-champ a
une et une seule direction. Sinon il est elliptique. Nous allons donc déterminer le module et
l'inclinaison du grand axe et du petit axe de l'ellipse (voir figure 4.2).

SECTION 2 : MODULES COMPLÉMENTAIRES. 77
Figure 4.2 : représentation vectorielled'un champ elliptique
Le module du vecteur-champ s'exprime en fonction du temps à partir de (4.9) par :
( ) ( ) ( ) t sint cosdcba2tsindbtcosca
BBM
222222
2x
2y
2
ω⋅ω⋅⋅+⋅⋅+ω⋅++ω⋅+=
+=(4.10)
Les extremums de M2 seront obtenus en calculant :
( ) 0td
dM2
=⋅ω
(4.11)
soit :
( ) ( )[ ] ( ) ( ) 0t sint cosdcba2t costsincadb2 222222 =ω−ω⋅⋅+⋅⋅+ω⋅ω⋅+−+⋅ (4.12)
Divisant cette expression par cos2(ωt) et en posant tg(ωt) = ρ on obtient :
2
4kk 2 +±=ρ (4.13)
avec :
SECTION 2 : MODULES COMPLÉMENTAIRES. 78
( ) ( )( )dcba
cadbk
2222
⋅+⋅+−+= (4.14)
d’autre part :
21
1t cos
ρ+=ω
21t sin
ρ+
ρ=ω (4.15)
Les deux solutions de ρ fournissent les deux inclinaisons α1 et α2 des deux axes, soit :
ρ⋅+ρ⋅+=αα
dc
ba tg , tg 21 (4.16)
avec :
1 tg tg 21 −=α⋅α (4.17)
ainsi que leurs modules :
( ) ( ) ( )[ ]ρ⋅⋅+⋅⋅+++ρ⋅+⋅ρ+
= dcba2dbca1
1M,M 22222
221 (4.18)
C’est la valeur maximale de M1 et M2 qui nous intéresse et que nous garderons comme valeur
de l'intensité du champ magnétique.

SECTION 2 : MODULES COMPLÉMENTAIRES. 79
5. Calcul de l'impédance homopolaire.
5.1. Introduction.
Les systèmes triphasés équilibrés font plus partie de la théorie que de la pratique, mais dans la
majorité des problèmes, il est habituel de les supposer complètement équilibrés. Cependant,
dans certaines applications comme par exemple des défauts non symétriques, une charge non
équilibrées ou une situation de déséquilibre dans une machine tournante, il est nécessaire de
pouvoir quantifier cette dissymétrie. Nous allons donc calculer la matrice des impédances
séquentielles Z0di.
La matrice d'impédances séquentielle est aussi une donnée importante dans l'utilisation de
relais à composante négative, ou de filtres à composante positive et homopolaire.
5.2. La transformation de Fortescue.
En 1918, Fortescue a proposé une méthode de décomposition d'un système de n phaseurs non
équilibrés en n systèmes de phaseurs équilibrés appelés composantes symétriques.
Appliquée aux systèmes triphasés, la transformée de Fortescue permet de passer d'un système
de 3 phaseurs déséquilibrés en trois systèmes de phaseurs équilibrés : le système d'ordre
direct, inverse et homopolaire. On parle également de système de séquence positive, négative
et de séquence zéro.
La séquence d'ordre direct est représentée par un système équilibré de trois phaseurs de même
intensité et séparés de 120°. Ce système de phaseurs tourne dans le même sens que les
phaseurs originaux, à savoir dans le sens positif (voir figure 5.1.b).
La séquence d'ordre inverse est également représentée par un système de trois phaseurs de
même intensité et séparés de 120°, mais tournant dans le sens opposé à celui des phaseurs
originaux (voir figure 5.1.c).
La séquence d'ordre homopolaire est représentée par trois phaseurs de même intensité et
parallèles entre eux (voir figure 5.1.d).
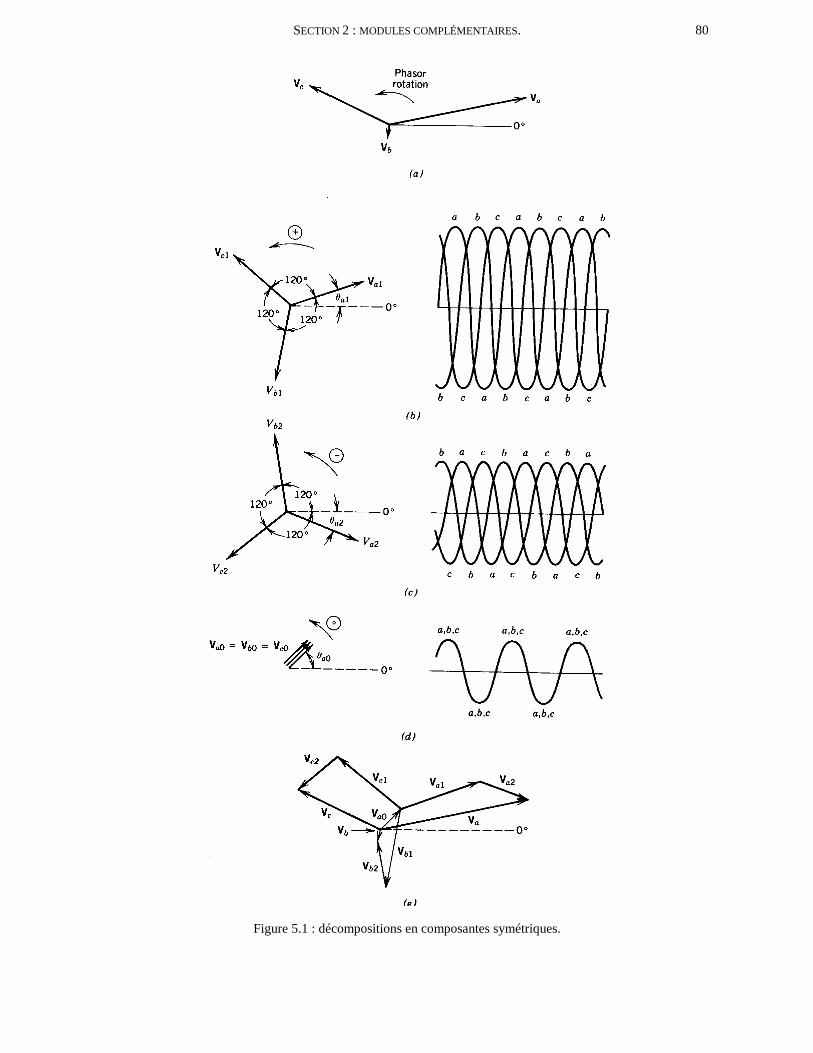
SECTION 2 : MODULES COMPLÉMENTAIRES. 80
Figure 5.1 : décompositions en composantes symétriques.

SECTION 2 : MODULES COMPLÉMENTAIRES. 81
Par convention nous utiliserons les indices a, b et c pour dénoter les phaseurs du système
triphasé, et les indices 0, 1 et 2 pour dénoter respectivement la séquence homopolaire, la
séquence d'ordre direct et la séquence d'ordre inverse.
La transformation de Fortescue peut se mettre sous une forme matricielle. Nous reprenons
brièvement ci-dessous les formules permettant de passer du système triphasé au système de
composantes 012.
°⟨=⋅=π⋅
1201e1a 3
2j
(5.1)
[ ]
=
2
2
aa1
aa1
111
A (5.2)
[ ]
⋅=−
aa1
aa1
111
3
1A
2
21 (5.3)
[ ] [ ] [ ]012abc VAV ⋅= (5.4)
[ ] [ ] [ ]abc1
012 VAV ⋅= − (5.5)
[ ] [ ] [ ] [ ]
=
⋅⋅= −
222120
121110
020100
abc1
012
ZZZ
ZZZ
ZZZ
AZAZ
(5.6)
5.3. La ligne de Carson.
Avant d'entrer dans le calcul proprement dit de l'impédance séquentielle, nous devons encore
modéliser l'impédance de la terre. La modélisation la plus couramment employée est celle de
Carson, et c'est celle que nous utiliserons.
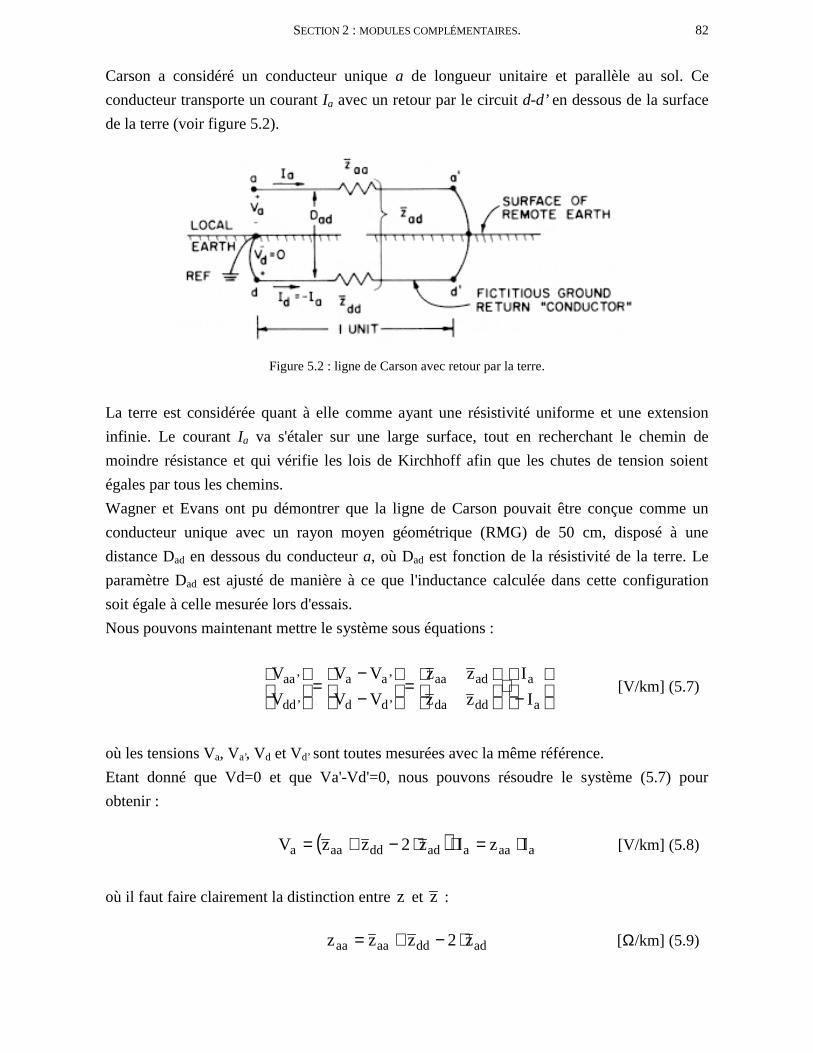
SECTION 2 : MODULES COMPLÉMENTAIRES. 82
Carson a considéré un conducteur unique a de longueur unitaire et parallèle au sol. Ce
conducteur transporte un courant Ia avec un retour par le circuit d-d’ en dessous de la surface
de la terre (voir figure 5.2).
Figure 5.2 : ligne de Carson avec retour par la terre.
La terre est considérée quant à elle comme ayant une résistivité uniforme et une extension
infinie. Le courant Ia va s'étaler sur une large surface, tout en recherchant le chemin de
moindre résistance et qui vérifie les lois de Kirchhoff afin que les chutes de tension soient
égales par tous les chemins.
Wagner et Evans ont pu démontrer que la ligne de Carson pouvait être conçue comme un
conducteur unique avec un rayon moyen géométrique (RMG) de 50 cm, disposé à une
distance Dad en dessous du conducteur a, où Dad est fonction de la résistivité de la terre. Le
paramètre Dad est ajusté de manière à ce que l'inductance calculée dans cette configuration
soit égale à celle mesurée lors d'essais.
Nous pouvons maintenant mettre le système sous équations :
−
⋅
=
−−
=
a
a
ddda
adaa
’dd
’aa
’dd
’aa
I
I
zz
zz
VV
VV
V
V[V/km] (5.7)
où les tensions Va, Va’, Vd et Vd’ sont toutes mesurées avec la même référence.
Etant donné que Vd=0 et que Va'-Vd'=0, nous pouvons résoudre le système (5.7) pour
obtenir :
( ) aaaaadddaaa IzIz2zzV ⋅=⋅⋅−+= [V/km] (5.8)
où il faut faire clairement la distinction entre z et z :
adddaaaa z2zzz ⋅−+= [Ω/km] (5.9)

SECTION 2 : MODULES COMPLÉMENTAIRES. 83
Nous pouvons calculer les valeurs de ddz et adz par les équations suivantes :
−⋅⋅ω⋅+=⋅ω⋅+= 1
D
2lnkjrljrz
saaaaaa [Ω/km] (5.10)
−⋅⋅ω⋅+= 1
D
2lnkjrz
sdddd [Ω/km] (5.11)
−⋅⋅ω⋅= 1
D
2lnkjz
adad
où k = 1 unité de longueur. Carson a obtenu comme résultat que la résistance de la terre est
une fonction de la fréquence :
f10869,9r 4d ⋅⋅= − [Ω/km] (5.12)
On peut alors calculer l'impédance du câble a avec retour par la terre :
( )sa
2ad
daadddaaaa D
Dlnkjrrz2zzz ⋅⋅ω⋅++=⋅−+= [Ω/km] (5.13)
en prenant pour Dsd une longueur caractéristique (une unité de longueur). Nous allons noter le
terme sa
2ad
D
D = De. La valeur de De est une fonction de la résistivité du sol et de la fréquence.
Elle s'exprime :
f2160De
ρ⋅= [km] (5.14)
Type de sol : Résistivité [Ω.m]
eau de mer 0,01 – 1
sol marécageux 10 – 100
terre humide 100
terre sèche 1000
terrain sablonneux 109
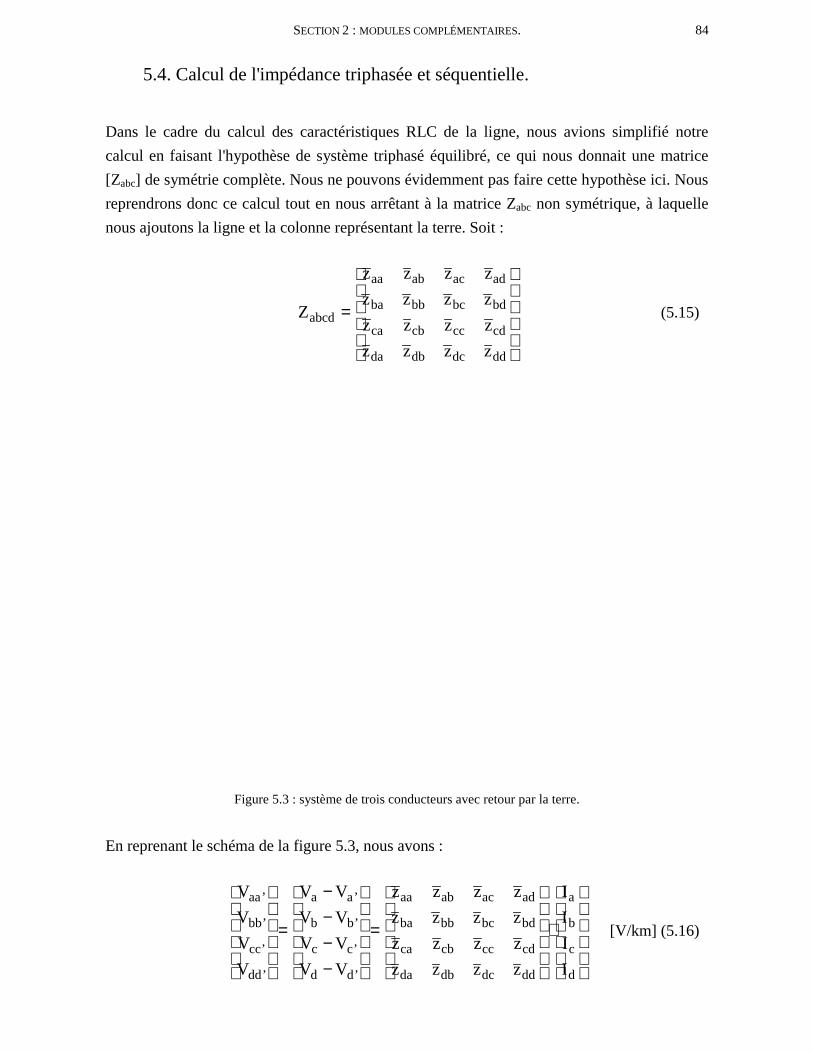
SECTION 2 : MODULES COMPLÉMENTAIRES. 84
5.4. Calcul de l'impédance triphasée et séquentielle.
Dans le cadre du calcul des caractéristiques RLC de la ligne, nous avions simplifié notre
calcul en faisant l'hypothèse de système triphasé équilibré, ce qui nous donnait une matrice
[Zabc] de symétrie complète. Nous ne pouvons évidemment pas faire cette hypothèse ici. Nous
reprendrons donc ce calcul tout en nous arrêtant à la matrice Zabc non symétrique, à laquelle
nous ajoutons la ligne et la colonne représentant la terre. Soit :
=
dddcdbda
cdcccbca
bdbcbbba
adacabaa
abcd
zzzz
zzzz
zzzz
zzzz
Z (5.15)
Figure 5.3 : système de trois conducteurs avec retour par la terre.
En reprenant le schéma de la figure 5.3, nous avons :
⋅
=
−−−−
=
d
c
b
a
dddcdbda
cdcccbca
bdbcbbba
adacabaa
’dd
’cc
’bb
’aa
’dd
’cc
’bb
’aa
I
I
I
I
zzzz
zzzz
zzzz
zzzz
VV
VV
VV
VV
V
V
V
V
[V/km] (5.16)

SECTION 2 : MODULES COMPLÉMENTAIRES. 85
où Id = - (Ia + Ib+ Ic) (5.17)
Nous allons prendre comme tension de référence la valeur à l'extrémité gauche de la ligne, et
nous allons résoudre le système (5.16) pour les tension Va, Vb et Vc. Cette résolution est
rendue possible par la connaissance de Id d'une part, et parce que nous pouvons écrire :
0VV ’d’a =− ; 0VV ’d’b =− ; 0VV ’d’c =− (5.18)
Etant donné que le potentiel de la terre est nul, Vd = 0, nous pouvons soustraire les quatre
équations de (5.16) hors de la première, ce qui a pour résultat :
( ) ( ) ( )( ) cddcdadac
bddbdadabaddadaa’d’aa
Izzzz
IzzzzIzz2zVVV
⋅+−−+⋅+−−+⋅+⋅−=−−
(5.19)
Par commodité, nous réécrivons cette équation sous la forme :
cacbabaaaa IzIzIzV ⋅+⋅+⋅= (5.20)
où nous définissons les impédances zaa, zab et zac. Nous pouvons par ailleurs constater que si
Ib =Ic = 0, zaa a la même valeur que le cas d'un conducteur unique avec retour par la terre.
En répétant cette opération sur les phases b et c, nous obtenons finalement :
⋅
=
c
b
a
ccbcac
bcbbab
acbaaa
c
b
a
I
I
I
zzz
zzz
zzz
V
V
V
(5.21)
Nous pouvons constater que les termes d'impédance mutuelle ont une partie résistive due au
"conducteur" de terre.
Maintenant, il ne nous reste plus qu'à appliquer la transformée de Fortescue à notre système
(5.21) pour obtenir la matrice des impédances séquentielles [Z012] :
[ ] [ ] [ ] [ ]
=
⋅⋅= −
222120
121110
020100
abc1
012
ZZZ
ZZZ
ZZZ
AZAZ
(5.22)

SECTION 2 : MODULES COMPLÉMENTAIRES. 86
5.5. Présence d'un câble de garde.
Le problème se résout de manière similaire au cas sans câble de garde. Nous réutilisons
également une partie de la théorie sur le calcul des caractéristiques R,L,C d'une ligne avec
câble de garde. Nous avons alors :
⋅
=
−−−−−
=
d
w
c
b
a
ddewdcdbda
wddwwcwbwa
cdcwcccbca
bdbwbcbbba
adawacabaa
’d
’w
’cc
’bb
’aa
’dd
’ww
’cc
’bb
’aa
I
I
I
I
I
zzzzz
zzzzz
zzzzz
zzzzz
zzzzz
V0
V0
VV
VV
VV
V
V
V
V
V
(5.23)
Figure 5.4 : système de trois conducteurset câble de garde avec retour par la terre.
Le courant de retour va se diviser en deux parties : une via le câble de garde, l'autre via la
terre. Nous pouvons écrire :
( )dwcba IIIII +−=++ (5.24)
ou encore ( )wcbad IIIII +++−= (5.25)
Et en utilisant (5.25) dans le système (5.23), nous pouvons soustraire l'équation Vdd’ des
quatre autres équations et obtenir :

SECTION 2 : MODULES COMPLÉMENTAIRES. 87
⋅
=
= w
c
b
a
wwwcwbwa
cwcccbca
bwbcbbba
awacabaa
w
c
b
a
I
I
I
I
zzzz
zzzz
zzzz
zzzz
0V
V
V
V
[V/km] (5.26)
avec comme précédemment :
w,c,b,aq,p
zzzzz dddqpdpqpq
=
+−−=(5.27)
La marche à suivre consiste alors à condenser le système (5.26) aux accès a, b et c :
[ ]
⋅−
⋅−
⋅−
⋅−
⋅−
⋅−
⋅−
⋅−
⋅−
=
⋅
⋅
−
=
ww
wccwcc
ww
wbcwcb
ww
wacwca
ww
wcbwbc
ww
wbbwbb
ww
wabwba
ww
wcawac
ww
wbawab
ww
waawaa
wcwbwaww
bw
bw
aw
ccbcac
bcbbab
acbaaa
abc
z
zzz
z
zzz
z
zzz
z
zzz
z
zzz
z
zzz
z
zzz
z
zzz
z
zzz
zzzz
1
z
z
z
zzz
zzz
zzz
Z)
(5.28)
pour ensuite lui appliquer la transformée de Fortescue :
[ ] [ ] [ ] [ ]
=
⋅⋅= −
222120
121110
020100
abc1
012
ZZZ
ZZZ
ZZZ
AZAZ)
(5.29)
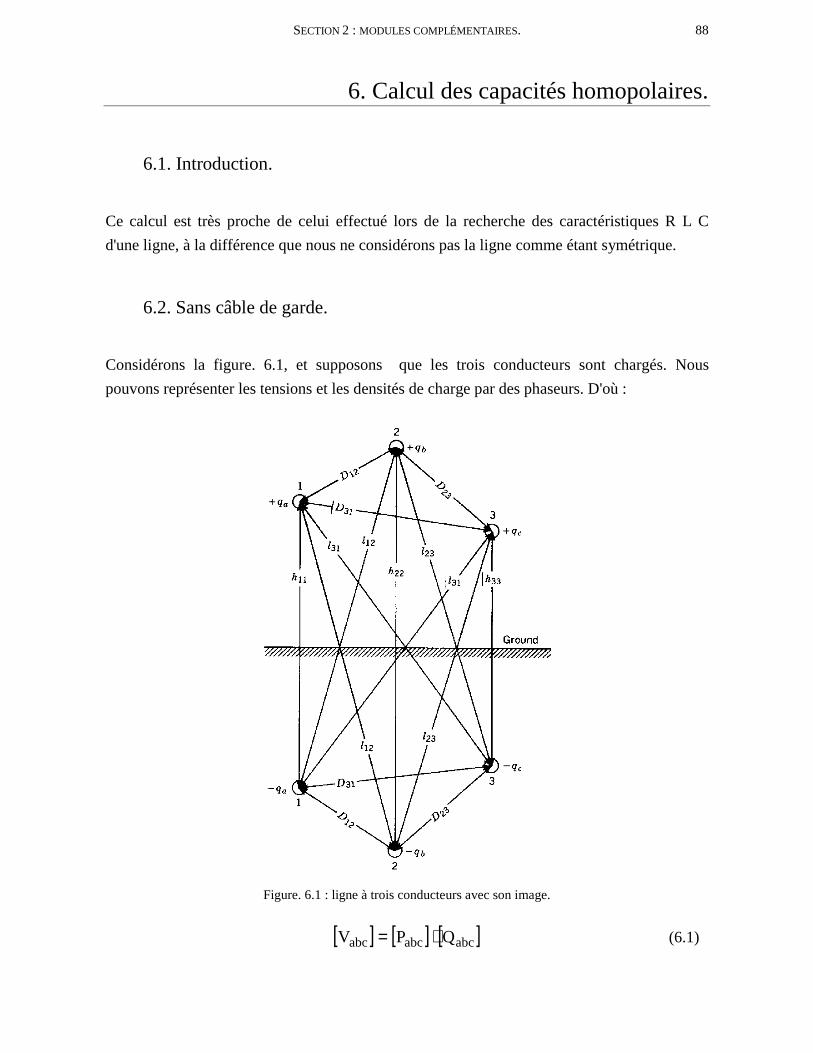
SECTION 2 : MODULES COMPLÉMENTAIRES. 88
6. Calcul des capacités homopolaires.
6.1. Introduction.
Ce calcul est très proche de celui effectué lors de la recherche des caractéristiques R L C
d'une ligne, à la différence que nous ne considérons pas la ligne comme étant symétrique.
6.2. Sans câble de garde.
Considérons la figure. 6.1, et supposons que les trois conducteurs sont chargés. Nous
pouvons représenter les tensions et les densités de charge par des phaseurs. D'où :
Figure. 6.1 : ligne à trois conducteurs avec son image.
[ ] [ ] [ ]abcabcabc QPV ⋅= (6.1)

SECTION 2 : MODULES COMPLÉMENTAIRES. 89
⋅
=
c
b
a
cccbca
bcbbba
acabaa
c
b
a
q
q
q
ppp
ppp
ppp
V
V
V
(6.2)
où : [Pabc] = matrice des coefficients de potentiel
a
11aa r
hln
2
1p ⋅
ε⋅π⋅= [m/F] (6.3)
b
22bb r
hln
2
1p ⋅
ε⋅π⋅= [m/F] (6.4)
c
33cc r
hln
2
1p ⋅
ε⋅π⋅= [m/F] (6.5)
12
12baab D
Lln
2
1pp ⋅
ε⋅π⋅== [m/F] (6.6)
23
23cbbc D
Lln
2
1pp ⋅
ε⋅π⋅== [m/F] (6.7)
31
31caac D
Lln
2
1pp ⋅
ε⋅π⋅== [m/F] (6.8)
De (6.1) nous tirons la matrice [Qabc] :
[ ] [ ] [ ][ ] [ ]abcabc
abc1
abcabc
VC
VPQ
⋅=⋅= −
[C/m] (6.9)
où [ ] [ ] 1abcabc PC −= [F/m] (6.10)
or [ ]
−−−−−−
=
cccbca
bcbbba
acabaa
abc
CCC
CCC
CCC
C [F/m] (6.11)
où la matrice [Cabc] est appelée matrice des coefficients de Maxwell. Les termes diagonaux
sont les coefficients de Maxwell et les éléments non diagonaux sont les coefficients
d'induction électrostatiques.
Nous pouvons dès maintenant obtenir la matrice des capacités séquentielles C012 :
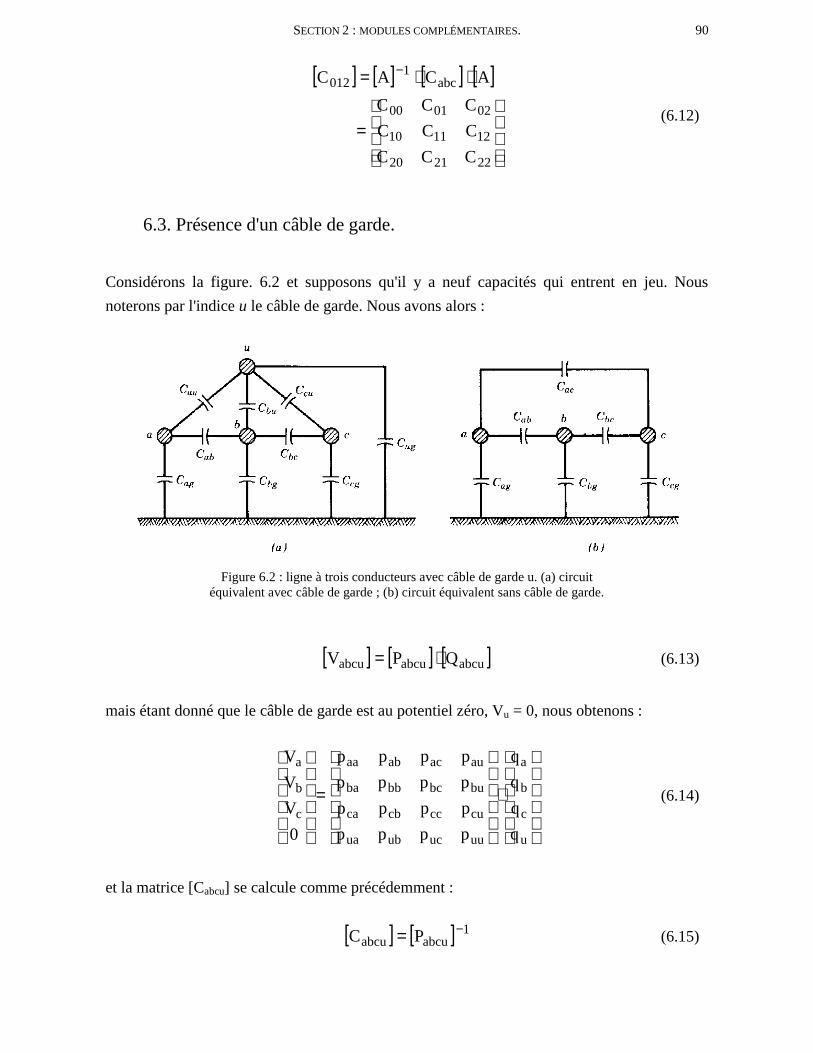
SECTION 2 : MODULES COMPLÉMENTAIRES. 90
[ ] [ ] [ ] [ ]
=
⋅⋅= −
222120
121110
020100
abc1
012
CCC
CCC
CCC
ACAC
(6.12)
6.3. Présence d'un câble de garde.
Considérons la figure. 6.2 et supposons qu'il y a neuf capacités qui entrent en jeu. Nous
noterons par l'indice u le câble de garde. Nous avons alors :
Figure 6.2 : ligne à trois conducteurs avec câble de garde u. (a) circuitéquivalent avec câble de garde ; (b) circuit équivalent sans câble de garde.
[ ] [ ] [ ]abcuabcuabcu QPV ⋅= (6.13)
mais étant donné que le câble de garde est au potentiel zéro, Vu = 0, nous obtenons :
⋅
=
u
c
b
a
uuucubua
cucccbca
bubcbbba
auacabaa
c
b
a
q
q
q
q
pppp
pppp
pppp
pppp
0
V
V
V
(6.14)
et la matrice [Cabcu] se calcule comme précédemment :
[ ] [ ] 1abcuabcu PC −= (6.15)

SECTION 2 : MODULES COMPLÉMENTAIRES. 91
Le circuit équivalent correspondant est illustré à la figure. 6.2.a. Cette représentation est utile
dans le cadre d'études portant sur la commutation de charge ou les surtensions.
La matrice [Pabcu] peut être réduite aux accès a, b et c en utilisant la technique de réduction de
Kron : on peut réexprimer l'équation (6.14) sous la forme :
⋅
=
u
abc
43
21ab
Q
Q
PP
PP
0
V(6.16)
Après réduction, nous obtenons :
[ ] [ ] [ ]abcabcabc QPV ⋅= (6.17)
où
[ ] [ ] [ ] [ ] [ ]31
421abc PPPPP ⋅⋅−= − (6.18)
et donc la matrice des coefficients de Maxwell est obtenue comme précédemment via :
[ ] [ ] 1abcabc PC −= (6.19)
Le circuit équivalent est illustré à la figure 6.2.b. Cette représentation est utile dans le cadre
d'études sur des problèmes de load-flow.

Section 3
Les câbles souterrains
SECTION 3 : LES CÂBLES SOUTERRAINS 93
1. Introduction et objectif.
1.1. Introduction.
La mise en œuvre d'une procédure de calcul pour les câbles souterrains est relativement plus
aisée que pour les lignes aériennes. En effet il n'est plus question ici de supports, de portées
ou de conducteurs en faisceaux. L'évaluation du coût d'une jonction triphasée souterraine en
sera soulagée, ainsi que le lecteur probablement …
Afin de familiariser le lecteur, nous avons trouvé utile de faire d'abord un rappel des différents
modèles de câbles disponibles ainsi que de leurs principales caractéristiques. Suivra ensuite
une étude de l'algorithme de calcul et des différentes contraintes que les câbles seront amenés
à devoir supporter.
1.2. Objectif.
Notre objectif sera d'implémenter une procédure de calcul d'une jonction triphasée
souterraine. Pour cela nous disposons d'une base de données contenant des modèles de câbles,
de données électriques et géographiques diverses, ainsi que des informations sur les différents
coûts. Les valeurs des coûts indiquées ici ne sont que des ordres de grandeurs, et nous devons
veiller à ce que l'utilisateur du programme puisse facilement les modifier.
SECTION 3 : LES CÂBLES SOUTERRAINS 94
2. Rappels sur la constitution des câbles.
2.1. Les matériaux utilisés.
2.1.a. La norme belge NBN-C33.
Les câbles que nous allons étudier dans cette section sont des câbles d'énergie, également
dénommés câbles de transport et distribution de l'énergie électrique. Tous répondent à la
norme belge NBN-C33 xyz, où les trois chiffres x, y et z ont la signification suivante :
Premier chiffre x : conducteur
0 = généralités
1 = cuivre
2 = aluminium
3 = combinaison cuivre-aluminium
Deuxième chiffre y : l'isolant
0 = généralités
1 = isolation à papier imprégné
2 = isolant synthétique
Troisième chiffre z :
sert à donner l'ordre chronologique de normes dans chaque groupe.
2.1.b. Les conducteurs.
Comme le laisse entendre la norme NBN-C33, les deux matériaux conducteurs utilisés sont le
cuivre et l'aluminium.
2.1.c. Les isolants.
D'après la norme NBN-C33, on distingue d'une part le papier imprégné (PI), d'autre part les
isolants synthétiques. Avant l'apparition des isolants synthétiques, la technologie du papier
imprégné régnait dans le domaine des câbles, à plus forte raison dès l'apparition de câbles à
masse huileuse non migrante. Depuis une quarantaine d'années, les câbles en PI sont
SECTION 3 : LES CÂBLES SOUTERRAINS 95
fortement concurrencés par les isolants synthétiques dont les qualités et les performances ne
cessent d'augmenter.
Il nous semble dès à présent judicieux de faire une rapide comparaison des différents isolants
synthétiques.
2.2. Les différents isolants.
2.2.a. Le polychlorure de vinyl.
Le polychlorure de vinyle (PVC) présente une permittivité diélectrique élevée qui peut se
révéler dangereuse en cas de présence de vacuoles. Ses pertes diélectriques sont importantes,
sa rigidité médiocre et la mauvaise allure de sa courbe tg δ en fonction de la température en
font l'isolant idéal pour les basses tensions (1 à 6 kV).
2.2.b. Le polyéthylène.
Le polyéthylène (PE) possède des qualités diélectriques remarquables, meilleures que celles
du PI. C'est donc un isolant de choix pour les niveaux de tensions intermédiaires jusqu'à
10 kV.
2.2.c. Le polyéthylène réticulé.
Le polyéthylène réticulé (PRC ou XLPE) possède des caractéristiques diélectriques fort
semblables à celles du polyéthylène. Mais alors que celui-ci présente un point de fusion
relativement bas, situé aux environs de 110°C, et ne peut supporter une température de
fonctionnement que de 70°C, le PRC peut supporter aisément les 90°C et même 250°C en
conditions de court-circuit.
Cet ensemble de qualité fait donc du polyéthylène réticulé l'isolant de pointe pour les câbles à
très haute tension (220 kV, et bientôt 380 kV !).
2.2.d. Le caoutchouc et le butyle.
Le caoutchouc et le butyle (B) sont des isolants en voie de disparition : les câbles EPR et PVC
les surclassant nettement dans leur gamme de tension (1 à 6 kV).
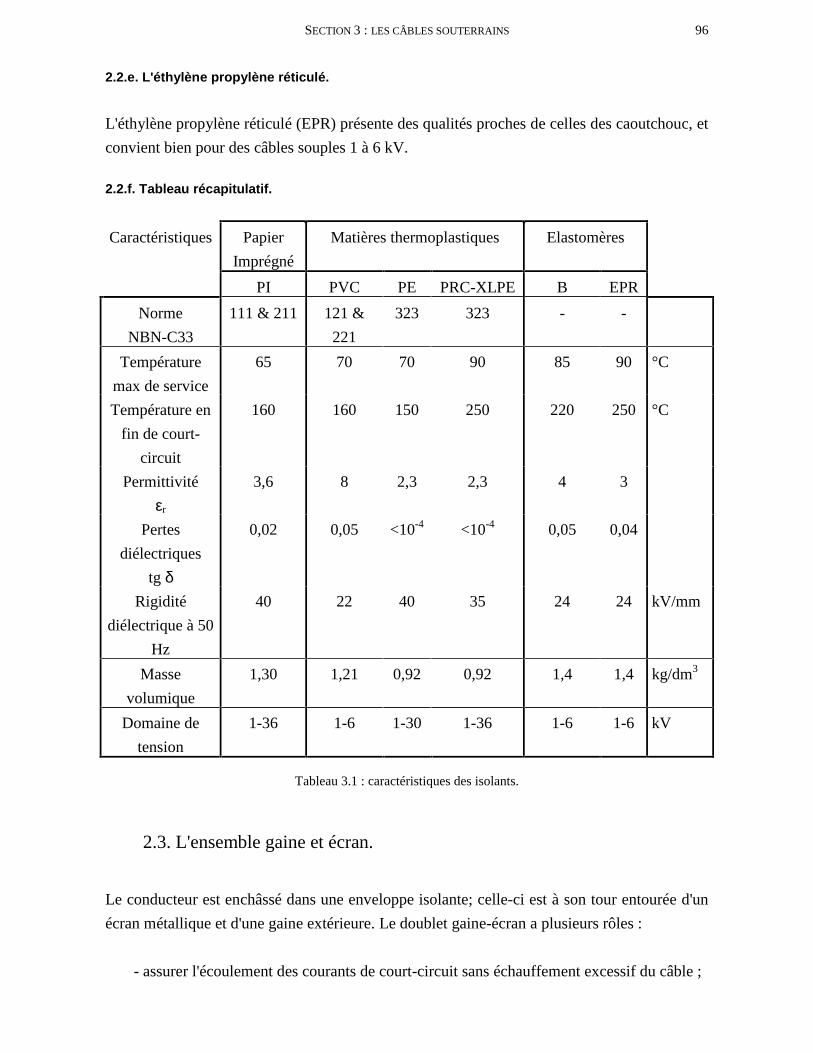
SECTION 3 : LES CÂBLES SOUTERRAINS 96
2.2.e. L'éthylène propylène réticulé.
L'éthylène propylène réticulé (EPR) présente des qualités proches de celles des caoutchouc, et
convient bien pour des câbles souples 1 à 6 kV.
2.2.f. Tableau récapitulatif.
Caractéristiques Papier
Imprégné
Matières thermoplastiques Elastomères
PI PVC PE PRC-XLPE B EPR
Norme
NBN-C33
111 & 211 121 &
221
323 323 - -
Température
max de service
65 70 70 90 85 90 °C
Température en
fin de court-
circuit
160 160 150 250 220 250 °C
Permittivité
εr
3,6 8 2,3 2,3 4 3
Pertes
diélectriques
tg δ
0,02 0,05 <10-4 <10-4 0,05 0,04
Rigidité
diélectrique à 50
Hz
40 22 40 35 24 24 kV/mm
Masse
volumique
1,30 1,21 0,92 0,92 1,4 1,4 kg/dm3
Domaine de
tension
1-36 1-6 1-30 1-36 1-6 1-6 kV
Tableau 3.1 : caractéristiques des isolants.
2.3. L'ensemble gaine et écran.
Le conducteur est enchâssé dans une enveloppe isolante; celle-ci est à son tour entourée d'un
écran métallique et d'une gaine extérieure. Le doublet gaine-écran a plusieurs rôles :
- assurer l'écoulement des courants de court-circuit sans échauffement excessif du câble ;
SECTION 3 : LES CÂBLES SOUTERRAINS 97
- protéger mécaniquement le câble contre les diverses dégradations qu'on pourrait lui
faire subir ;
- assurer l'étanchéité radiale du câble contre la pénétration de l'humidité ainsi qu'une
bonne tenue à la corrosion ;
- présenter une faible résistance thermique.
La section de l'écran doit être suffisante pour supporter le courant de court-circuit sans
échauffement excessif, mais elle doit être limitée afin de ne pas pénaliser la capacité de
transport du câble. En effet, pour de grandes sections d'écran, on observe une induction de
pertes Joule excessives en régime permanent due aux courants de circulation dans l'écran en
cas de mise à la terre en plusieurs points.
Pendant longtemps, le plomb était le matériau utilisé pour les écrans métalliques, mais sa
densité et sa température maximale admissible de 210°C lui ont vite fait préférer un écran
allégé à base d'alliage d'aluminium.
Enfin la gaine des câbles haute tension est souvent en PE ou en PVC : le PE est plus dur que
le PVC et il présente une perméabilité à l'eau dix fois moindre.
2.4. Fourniture des câbles.
Lorsque la tension U reste inférieure à 15 kV, il est courant de rencontrer des câbles
tripolaires, tandis que les tensions supérieures on utilise plus souvent un système de trois
câbles monopolaires. Dans ce dernier cas, il faut examiner la disposition des trois phases. On
distingue la disposition en nappe et celle en trèfle.
La pose en nappe est aussi toujours plus avantageuse pour une même section, mais présente
les inconvénients électriques suivants : elle introduit une légère dissymétrie au niveau des
trois phases (ce qui n'est pas le cas de la pose en trèfle) et la self-induction de la liaison est
presque deux fois plus élevée que lors d'une pose en trèfle. On peut pratiquement pallier au
premier inconvénient en permutant les phases au niveau des manchons de raccordement, mais
on ne sait rien faire pour le second qui influence surtout la chute de tension.
Les câbles sont vendus à l'unité de longueur. Pour simplifier, nous pouvons dire que les câbles
monopolaires sont disponibles par bobines de 1000 m pour autant que leur section reste
inférieure à 400 mm2, tandis que les câbles tripolaires sont fournis par bobines de 600 m.
SECTION 3 : LES CÂBLES SOUTERRAINS 98
2.5. Pose du câble.
Pour pouvoir régler le problème de la pose, nous devons connaître différents paramètres :
- la profondeur de pose (70 cm pour les tensions inférieures à 15 kV, 1 m sinon);
- la nature du sol ainsi que sa résistivité thermique moyenne (100 °C.cm/W)
- la température maximale du sol à la profondeur de pose du câble (20°C);
- la pose en trèfle ou en nappe;
- l'installation en fourreau ou bien enfouissement direct des câbles dans le sol ;
- présence ou proximité d'autres câbles.
Les valeurs indiquées ici sont celles préconisées par le R.G.I.E. Des prescriptions
supplémentaires doivent être introduites en cas d'obstacles particuliers. Dans le cadre de nos
calculs, nous les négligerons.
Le coût de la pose des câbles dépend bien évidemment de la profondeur à creuser. Aux
profondeurs de pose standard, nous associons les prix suivants :
- tension supérieure à 15 kV : profondeur de 1 m : 1500 F/mètre ;
- tension inférieure à 15 kV : profondeur de pose de 70 cm : 1200 F/m.
Si l'on désire enterrer le câble à une profondeur plus importante, il faut compter un surcoût de
10 à 25 % par 10 cm supplémentaires suivant la nature du sol.
Pour des câbles de tension supérieure à 50 kV, il est préférable d'effectuer la pose en
caniveaux, malgré le surcoût que cela va introduire, afin de permettre une meilleure
évacuation de la chaleur. C'est l'une des principales limitations de l'utilisation intensive des
câbles souterrains en haute et très haute tension.
2.6. Accessoires.
Deux types d'accessoires sont à prendre en compte : il y a tout d'abord les extrémités
terminales, qui se placent au départ et à l'arrivée du câble. Ensuite, il faut placer une jonction
par phase tous les kilomètres pour les câbles monopolaires, et tous les 600 m pour les câbles
tripolaires.
- terminales : prix unitaire : 80 000,- FB/pièce;
main d'œuvre : 10 000,- FB/pièce;
- jonctions : prix unitaire : 25 000,- FB/pièce;
main d'œuvre : 8 000,- FB/pièce.

SECTION 3 : LES CÂBLES SOUTERRAINS 99
2.7. Les pertes.
Les pertes par effets Joule peuvent être évaluées de la même manière que pour les lignes
aériennes. Le coût total des pertes s'exprime par :
S
fpNIL3 2 ⋅⋅⋅⋅⋅ρ⋅[FB] (2.1)
où nous avons :
ρ = résistivité du conducteur [Ω.m] à la température de service à la fréquence de service ;
L = longueur de la liaison [m] ;
I = courant parcourant le câble en début de vie (car on multiplie ce courant par le facteur
d'actualisation f) [A] ;
N = nombre d'heures par an d'utilisation à pleine charge du point de vue des pertes (pour les
pertes, une heure d'utilisation à mi-charge équivaut à un quart d'heure d'utilisation à pleine
charge) [h/an].6 ;
p = prix du kWh de pertes [FB/Wh] ;
S = section du conducteur [m2].
Le facteur f, qui est le facteur d'actualisation, prend en compte l'érosion de la valeur de
l'argent au cours des années. Il est calculé comme suit :7
fQ
ioù Q
rr
avec r
a b
i
T
=+
=−−
=+
+
+
1100
11
1100
1100
1100
2
.[années] (2.2)
6 ∫ ⋅=h 8760
02MAX
2
dtI
)t(IN où 8760 heures équivalent 1 an.
7 Explications supplémentaires sur l'obtention des formules à l'annexe A.

SECTION 3 : LES CÂBLES SOUTERRAINS 100
3. Présentation de l'algorithme et calcul des contraintes.
3.1. Algorithme de calcul.
Voici l’algorithme de calcul que nous avons
utilisé. Décrivons-le brièvement.
Début : l'utilisateur encode les données
nécessaires au calcul.
Initialisation des paramètres : Par
exemple : coût idéal = 1013 FB.
Calcul de la section de court-circuit :
calcule la section minimale requise
pour supporter le courant de court-
circuit.
Boucle sur la BD : ouvre le fichier
contenant les modèles de câbles
existants.
Base de donnée vide ? : critère d'arrêt de
notre algorithme. Si on n'a pas trouvé
de câble idéal, c'est qu'aucun n'a
supporté les contraintes.
Diélectrique ok ? : vérifie que le modèle
choisi est bien recouvert du
diélectrique demandé.
Section CC ok ? : vérifie que la section
soit suffisante pour supporter la
contrainte de court-circuit.
Données nécessaires présentes ? :
vérifie que toutes les informations
nécessaires aux calculs sont
disponible. Sinon, c'est que le câble
ne supporte pas par exemple la
tension demandée.

SECTION 3 : LES CÂBLES SOUTERRAINS 101
Chute de tension ? : vérifie que la chute de tension due aux caractéristiques R, L, C soit
inférieure à la limite imposée.
Courant nominal ? : vérifie que le câble supporte le courant nominal qu'il devra subir en
permanence.
Nombre de jonctions : calcule, en fonction du type de câble choisi (3*monopolaires ou
tripolaire), le nombre de jonctions intermédiaires nécessaires.
Calcul des coûts : calcule les coûts du conducteur, des accessoires, de la main d'œuvre, de
la pose et des pertes actualisées.
3.2. Contrainte de court-circuit.
Tout d'abord nous devons déterminer le courant de court-circuit, c'est à dire celui qui
circulerait dans le conducteur dans une situation de court-circuit. On déduit directement ce
courant de la formule donnant la puissance de court-circuit :
U.3
SI cc
cc = [A] (2.3)
Afin de trouver la section minimum permettant de supporter ce courant durant le temps tcc, on
dispose de la formule suivante, où a est un facteur dépendant du type de matériau constituant
l'âme du câble.
a
t.IS cccc= (∀ t < 5 sec) [mm²] (2.4)
Remarques :
- le cuivre est toujours supérieur à l'aluminium pour une même section, étant donné
sa meilleure capacité à évacuer la chaleur ;
- la formule empirique fournie est basée sur un échauffement du câble supposé
adiabatique durant le court-circuit. Elle est démontrée dans l'annexe B.
Nous avons rassemblé dans le tableau ci-dessous les limites de température et les densité
admissibles pendant une seconde exprimées par le coefficient a pour les différentes normes
belges NBN-C33. Nous reproduisons par ailleurs à l'annexe C les différents tableaux proposés
par les normes concernant les courants de court-circuit.
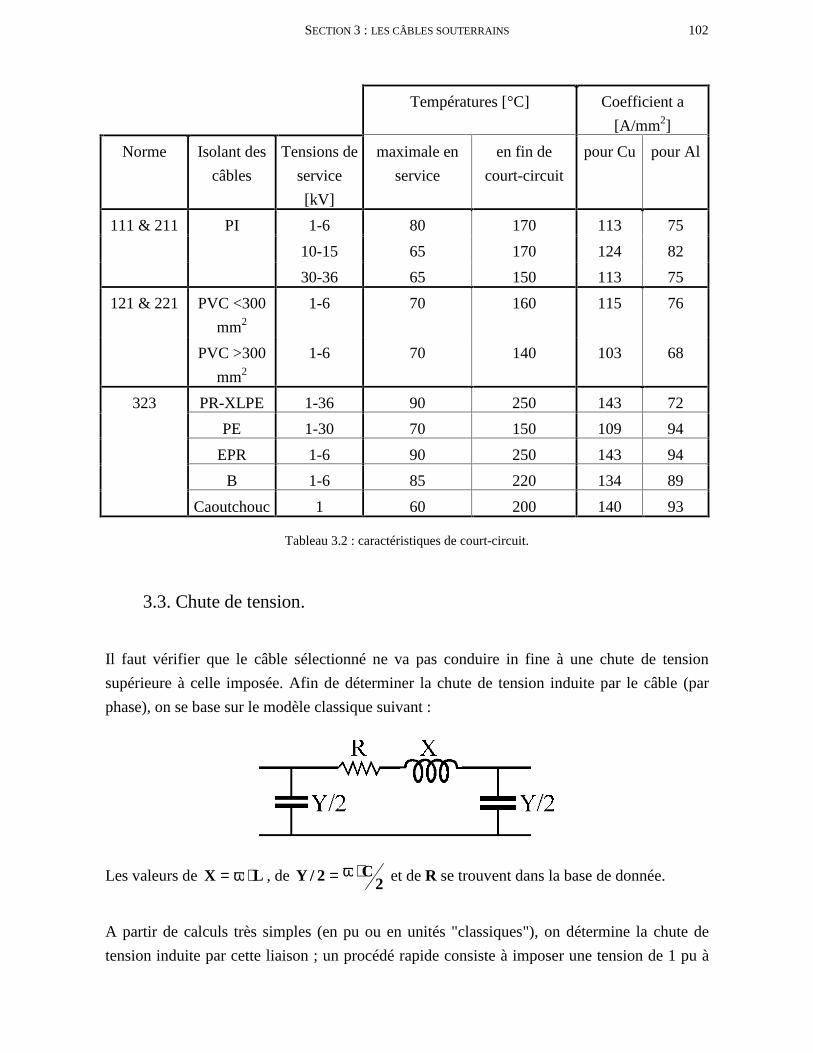
SECTION 3 : LES CÂBLES SOUTERRAINS 102
Températures [°C] Coefficient a
[A/mm2]
Norme Isolant des
câbles
Tensions de
service
[kV]
maximale en
service
en fin de
court-circuit
pour Cu pour Al
1-6 80 170 113 75
10-15 65 170 124 82
111 & 211 PI
30-36 65 150 113 75
PVC <300
mm2
1-6 70 160 115 76121 & 221
PVC >300
mm2
1-6 70 140 103 68
PR-XLPE 1-36 90 250 143 72
PE 1-30 70 150 109 94
EPR 1-6 90 250 143 94
B 1-6 85 220 134 89
323
Caoutchouc 1 60 200 140 93
Tableau 3.2 : caractéristiques de court-circuit.
3.3. Chute de tension.
Il faut vérifier que le câble sélectionné ne va pas conduire in fine à une chute de tension
supérieure à celle imposée. Afin de déterminer la chute de tension induite par le câble (par
phase), on se base sur le modèle classique suivant :
Les valeurs de LX ⋅ω= , de 2C2/Y ⋅ω= et de R se trouvent dans la base de donnée.
A partir de calculs très simples (en pu ou en unités "classiques"), on détermine la chute de
tension induite par cette liaison ; un procédé rapide consiste à imposer une tension de 1 pu à

SECTION 3 : LES CÂBLES SOUTERRAINS 103
l'entrée du câble et à calculer la tension présente à l'autre extrémité. Cela fournit directement
la chute de tension en pour-cent.
3.4. Courant nominal.
On doit bien entendu dimensionner le câble de telle façon qu'il puisse supporter le courant qui
va y circuler en fin de vie, c'est-à-dire à la fin de la période d'utilisation prévue. En effet, c'est
à ce moment que la puissance qu'il devra faire transiter sera la plus importante.
Vu la puissance de départ Pdépart et le pourcentage d’augmentation annuelle de la puissance
consommée a, on détermine tout d'abord la puissance circulant dans le câble après les T
années d'utilisation suivant :
PT = Pdépart . (1 + a)T [MW] (2.5)
On en déduit le courant circulant alors dans chaque phase du câble par :
)cos(.U.3
PI T
T ϕ= [A] (2.6)
Nous devrons comparer cette intensité avec le courant permanent maximal qui nous est
fournit par la base de donnée. A ce niveau, il faut être attentif au fait que les intensités
fournies par la base de donnée sont normalisées pour un sol dont la résistivité thermique est
de 100°C.cm/W. Il importe donc de tenir compte d'un facteur correctif suivant la résistivité
moyenne du sol dans lequel les câbles seront enfouis. C'est évident, un sol de résistivité
thermique moindre dissipera la chaleur plus facilement : on devra multiplier le courant
nominal par un facteur CF. Ce facteur CF sera calculé dans les tables :
3.4.a. Influence de la température du sol.
Plus la température du sol s'élève et plus il est difficile d'évacuer les calories produites par le
câble lorsque celui-ci s'échauffe sous l'effet du passage du courant. Une distinction est à faire
en fonction des propriétés thermiques de l'isolant utilisé.
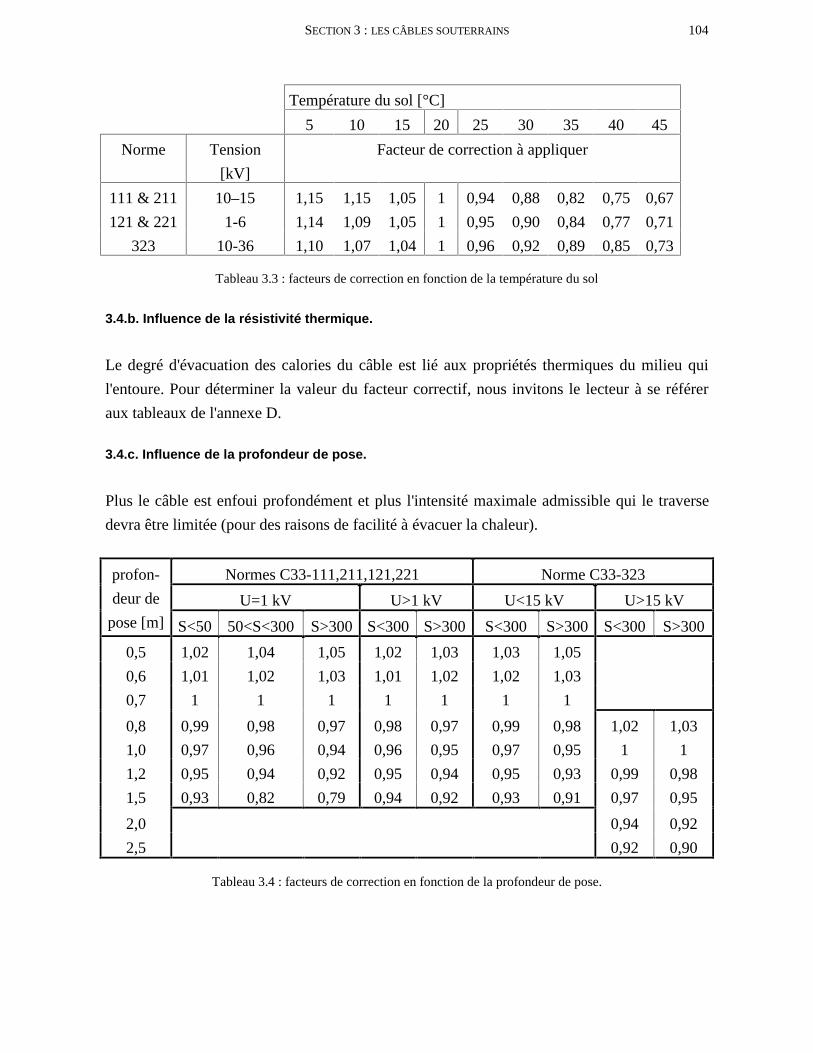
SECTION 3 : LES CÂBLES SOUTERRAINS 104
Température du sol [°C]
5 10 15 20 25 30 35 40 45
Norme Tension
[kV]
Facteur de correction à appliquer
111 & 211 10–15 1,15 1,15 1,05 1 0,94 0,88 0,82 0,75 0,67
121 & 221 1-6 1,14 1,09 1,05 1 0,95 0,90 0,84 0,77 0,71
323 10-36 1,10 1,07 1,04 1 0,96 0,92 0,89 0,85 0,73
Tableau 3.3 : facteurs de correction en fonction de la température du sol
3.4.b. Influence de la résistivité thermique.
Le degré d'évacuation des calories du câble est lié aux propriétés thermiques du milieu qui
l'entoure. Pour déterminer la valeur du facteur correctif, nous invitons le lecteur à se référer
aux tableaux de l'annexe D.
3.4.c. Influence de la profondeur de pose.
Plus le câble est enfoui profondément et plus l'intensité maximale admissible qui le traverse
devra être limitée (pour des raisons de facilité à évacuer la chaleur).
Normes C33-111,211,121,221 Norme C33-323
U=1 kV U>1 kV U<15 kV U>15 kV
profon-
deur de
pose [m] S<50 50<S<300 S>300 S<300 S>300 S<300 S>300 S<300 S>300
0,5 1,02 1,04 1,05 1,02 1,03 1,03 1,05
0,6 1,01 1,02 1,03 1,01 1,02 1,02 1,03
0,7 1 1 1 1 1 1 1
0,8 0,99 0,98 0,97 0,98 0,97 0,99 0,98 1,02 1,03
1,0 0,97 0,96 0,94 0,96 0,95 0,97 0,95 1 1
1,2 0,95 0,94 0,92 0,95 0,94 0,95 0,93 0,99 0,98
1,5 0,93 0,82 0,79 0,94 0,92 0,93 0,91 0,97 0,95
2,0 0,94 0,92
2,5 0,92 0,90
Tableau 3.4 : facteurs de correction en fonction de la profondeur de pose.

Section 4
Conclusions
SECTION 4 : CONCLUSIONS. 106
1. Introduction.
Rappelons brièvement nos objectifs : établir un programme qui recherche l'optimum
économique d'une liaison triphasée aérienne ou souterraine. Ce programme devra être
souple, clair et structuré.
Il est évidemment difficile de juger de la clarté et de la structure avec si peu de recul. Nous ne
nous y tenterons pas.
Concernant la souplesse, la remarque est identique, mais nous pouvons cependant présenter
l'esprit avec lequel nous avons implémenté les algorithmes et géré l'interface graphique.
Nous tenions particulièrement à ce que ce programme soit un outil modulable, facile à
modifier et pratique.
Ainsi, il est très facile d'"automatiser" la résolution de problèmes, ce qui permet par exemple
une étude de sensibilité à certains paramètres, ou la création d'une base de données en vue
d'un apprentissage inductif.
La programmation fonctionnelle du langage nous a permis de fabriquer des fonctions de
calcul prêtes à être utilisées dans d'autres applications. C'est particulièrement le cas des
modules supplémentaires présentés à la section 2.
Une des innovation de ce programme est l'utilisation de bases de données. Elle permet de
reprendre des données réelles de conducteurs, ce qui donne plus de crédit aux solutions
obtenues.
Enfin, nous avons implémenté la possibilité d'enregistrer toutes les données dans des fichiers
binaires. Ce n'était pas nécessaire mais c'est terriblement pratique. Ainsi l'utilisateur pourra
conserver les cas étudiés sur fichiers.
Quelques pistes auraient pu être explorées. Nous pensons particulièrement à la prise en
compte de la crête de puissance consommée, le cas des portées dénivelées ou encore la
réponse thermique d'un câble souterrain suite à des variations de courant. Par ailleurs, il aurait
été judicieux d'ajouter un fichier d'aide à ce programme. L'utilisateur qui se pose une question
à propos de tel ou tel paramètre trouverait immédiatement une réponse associée à un rappel
théorique.
D'autre part, il aurait été utile de remettre à jour les ordres de grandeur et les valeurs par
défaut de notre programme : les informations statistiques, les différents coefficient et les coûts
datent de 1990 ... Nous avons cependant préféré donner l'accessibilité à pratiquement toutes
les variables, comme par exemple les coefficients imposés par le R.G.I.E ou encore les coûts
des matériaux.
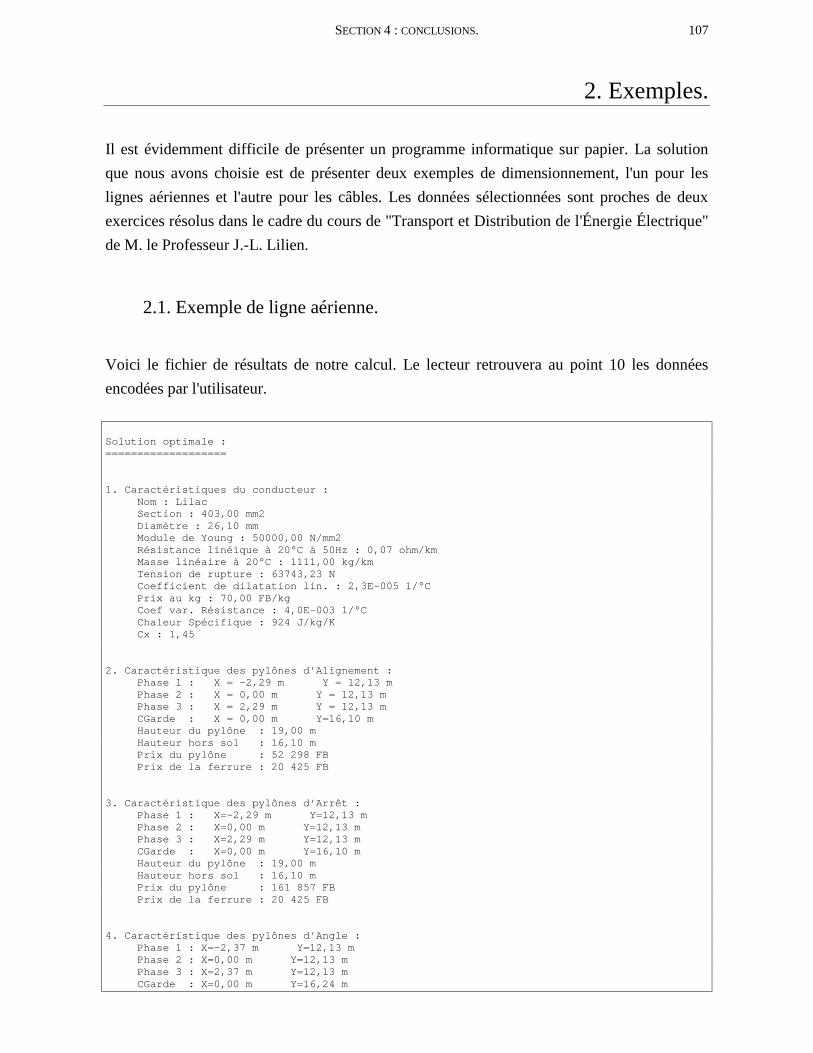
SECTION 4 : CONCLUSIONS. 107
2. Exemples.
Il est évidemment difficile de présenter un programme informatique sur papier. La solution
que nous avons choisie est de présenter deux exemples de dimensionnement, l'un pour les
lignes aériennes et l'autre pour les câbles. Les données sélectionnées sont proches de deux
exercices résolus dans le cadre du cours de "Transport et Distribution de l'Énergie Électrique"
de M. le Professeur J.-L. Lilien.
2.1. Exemple de ligne aérienne.
Voici le fichier de résultats de notre calcul. Le lecteur retrouvera au point 10 les données
encodées par l'utilisateur.
Solution optimale :===================
1. Caractéristiques du conducteur : Nom : Lilac Section : 403,00 mm2 Diamètre : 26,10 mm Module de Young : 50000,00 N/mm2 Résistance linéique à 20°C à 50Hz : 0,07 ohm/km Masse linéaire à 20°C : 1111,00 kg/km Tension de rupture : 63743,23 N Coefficient de dilatation lin. : 2,3E-005 1/°C Prix au kg : 70,00 FB/kg Coef var. Résistance : 4,0E-003 1/°C Chaleur Spécifique : 924 J/kg/K Cx : 1,45
2. Caractéristique des pylônes d'Alignement : Phase 1 : X = -2,29 m Y = 12,13 m Phase 2 : X = 0,00 m Y = 12,13 m Phase 3 : X = 2,29 m Y = 12,13 m CGarde : X = 0,00 m Y=16,10 m Hauteur du pylône : 19,00 m Hauteur hors sol : 16,10 m Prix du pylône : 52 298 FB Prix de la ferrure : 20 425 FB
3. Caractéristique des pylônes d'Arrêt : Phase 1 : X=-2,29 m Y=12,13 m Phase 2 : X=0,00 m Y=12,13 m Phase 3 : X=2,29 m Y=12,13 m CGarde : X=0,00 m Y=16,10 m Hauteur du pylône : 19,00 m Hauteur hors sol : 16,10 m Prix du pylône : 161 857 FB Prix de la ferrure : 20 425 FB
4. Caractéristique des pylônes d'Angle : Phase 1 : X=-2,37 m Y=12,13 m Phase 2 : X=0,00 m Y=12,13 m Phase 3 : X=2,37 m Y=12,13 m CGarde : X=0,00 m Y=16,24 m

SECTION 4 : CONCLUSIONS. 108
Hauteur du pylône : 19,50 m Hauteur hors sol : 16,24 m Prix du pylône : 108 220 FB Prix de la ferrure : 22 033 FB
5. Caractéristique des isolateurs pour les pylônes d'Alignement : Um : 52 kV Bil : 250 kV Nombre d'assiettes : 3 Modèle d'assiette : F70/127, Assiette Standard pas : 127 mm lf : 320 mm masse : 3,50 kg Poids total de l'isolateur : 104 N Prix de l'isolateur : 8 080 FB Longueur totale de l'isolateur : 0,65 m
6. Caractéristique des isolateurs pour les pylônes d'Arrêt : Um : 52 kV Bil : 250 kV Nombre d'assiettes : 3 Modèle d'assiette : F70/127, Assiette Standard pas : 127 mm lf : 320 mm masse : 3,50 kg Poids total de l'isolateur : 104 N Prix de l'isolateur : 8 080 FB Longueur totale de l'isolateur : 0,65 m
7. Caractéristique des isolateurs pour les pylônes d'Angle : Um : 52 kV Bil : 250 kV Nombre d'assiettes : 3 Modèle d'assiette : F70/127, Assiette Standard pas : 127 mm lf : 320 mm masse : 3,50 kg Poids total de l'isolateur : 104 N Prix de l'isolateur : 8 080 FB Longueur totale de l'isolateur : 0,65 m
8. Caractéristiques de la jonction : Modèle des pylônes : nappe Nombre total de pylônes : 129 Portée Moyenne : 223,61 m Tension mécanique : 16 221 N (été) Tension mécanique : 21 245 N (hiver) Tension mécanique : 11 100 N (canicule) -> Everyday Stress = 39,42 N/mm2 24,92 % de la tension de rupture
9. Coûts de l'installation : Prix des supports : 11 MFB (21 %) Prix des accessoires : 8 MFB (15 %) Prix de l'indemnisation : 0 MFB (0 %) Prix des conducteurs : 12 MFB (22 %) Prix du tirage : 24 MFB (45 %) ------------------------------------------ Prix de l'ensemble : 54 MFB (hors pertes) Soit : 2 MFB/km
Prix des pertes act. : 108 MFB ------------------------------------------ Prix de l'ensemble sur 20 ans : 162 MFB
10. Données du problème : Menu Principal : Puissance active 10 MW, Puissance réactive 4,84 MVArs, CosPhi 0,90 Tension nominale 36 kV, Longueur 35 km Puissance de court-circuit 2000 MVA, durée du court-circuit 0,30 s Chute de tension maximale 9,0 % , utilisation 2000,00 h/an
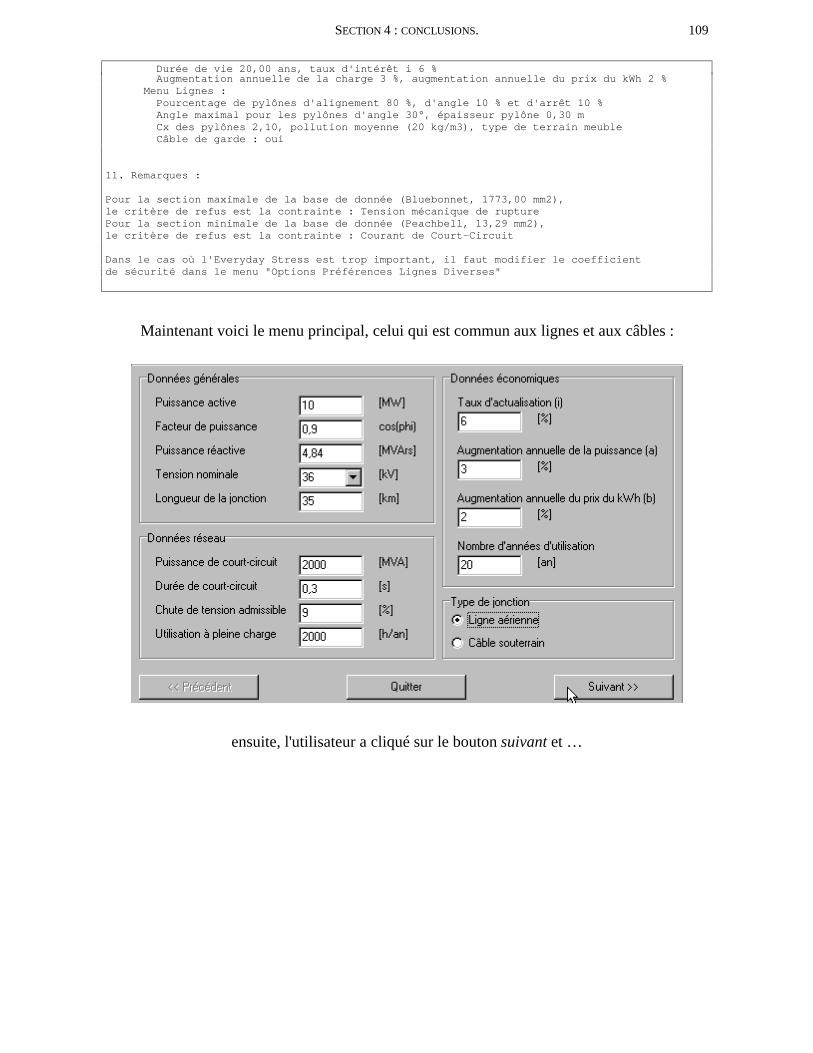
SECTION 4 : CONCLUSIONS. 109
Durée de vie 20,00 ans, taux d'intérêt i 6 % Augmentation annuelle de la charge 3 %, augmentation annuelle du prix du kWh 2 % Menu Lignes : Pourcentage de pylônes d'alignement 80 %, d'angle 10 % et d'arrêt 10 % Angle maximal pour les pylônes d'angle 30°, épaisseur pylône 0,30 m Cx des pylônes 2,10, pollution moyenne (20 kg/m3), type de terrain meuble Câble de garde : oui
11. Remarques :
Pour la section maximale de la base de donnée (Bluebonnet, 1773,00 mm2),le critère de refus est la contrainte : Tension mécanique de rupturePour la section minimale de la base de donnée (Peachbell, 13,29 mm2),le critère de refus est la contrainte : Courant de Court-Circuit
Dans le cas où l'Everyday Stress est trop important, il faut modifier le coefficientde sécurité dans le menu "Options Préférences Lignes Diverses"
Maintenant voici le menu principal, celui qui est commun aux lignes et aux câbles :
ensuite, l'utilisateur a cliqué sur le bouton suivant et …
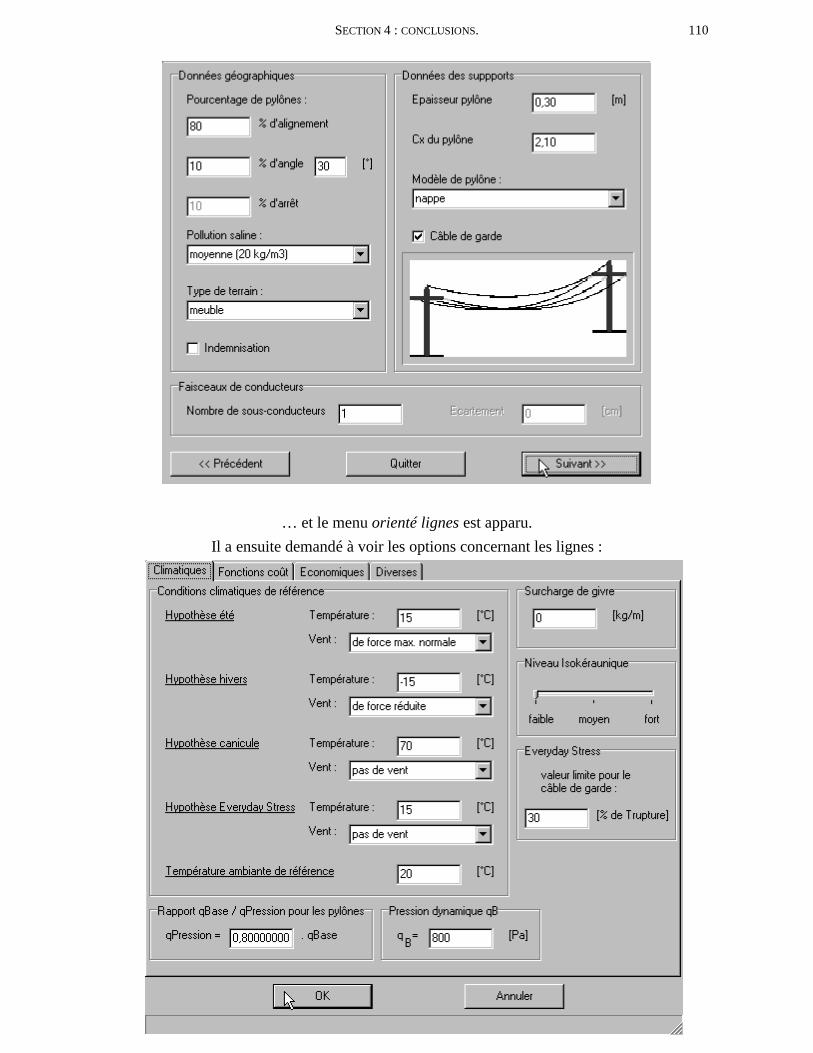
SECTION 4 : CONCLUSIONS. 110
… et le menu orienté lignes est apparu.
Il a ensuite demandé à voir les options concernant les lignes :
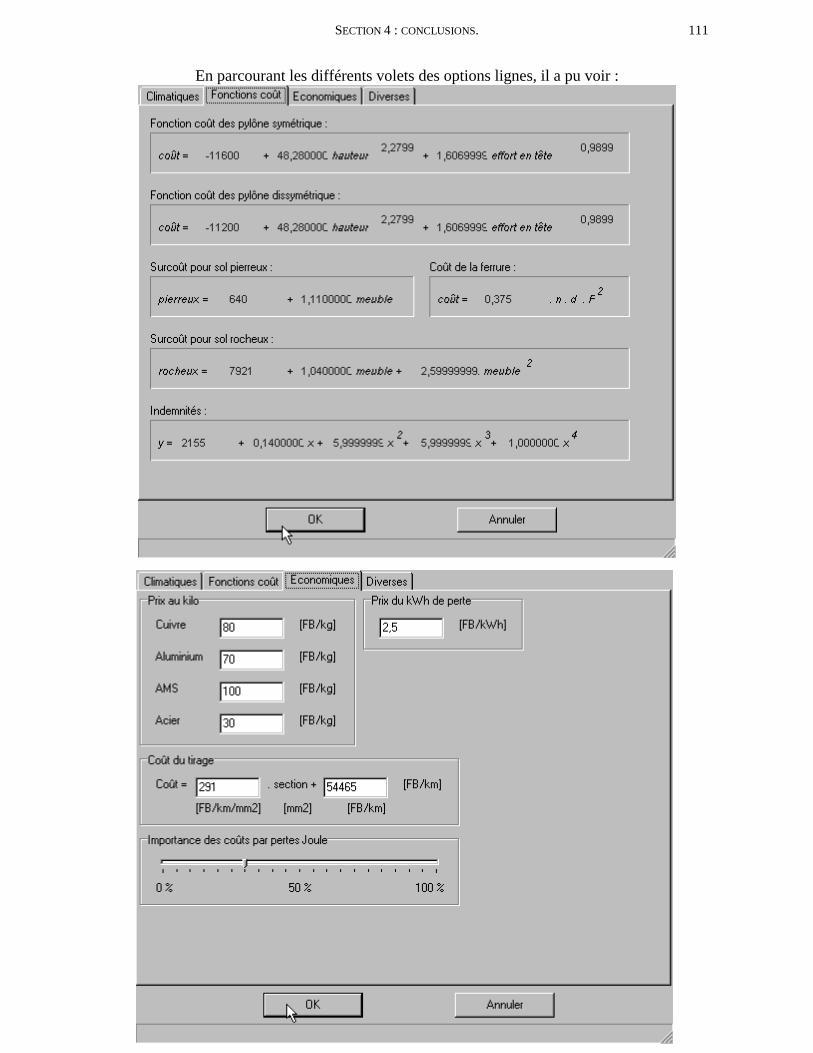
SECTION 4 : CONCLUSIONS. 111
En parcourant les différents volets des options lignes, il a pu voir :
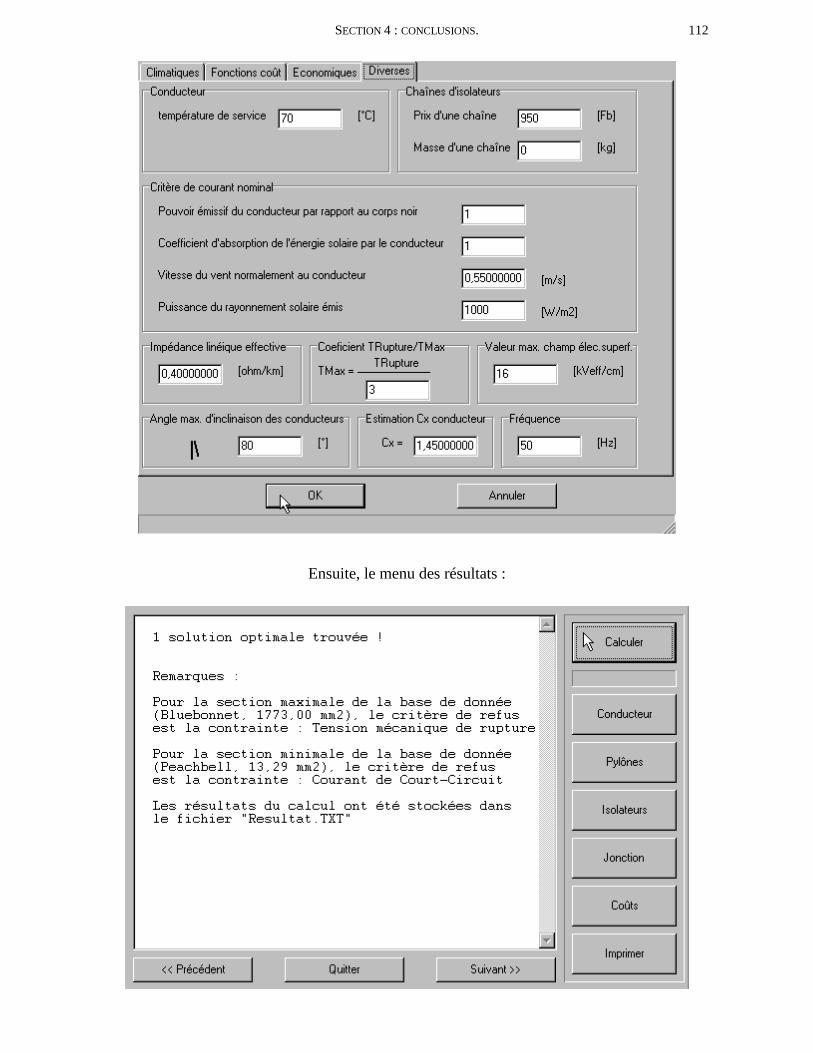
SECTION 4 : CONCLUSIONS. 112
Ensuite, le menu des résultats :
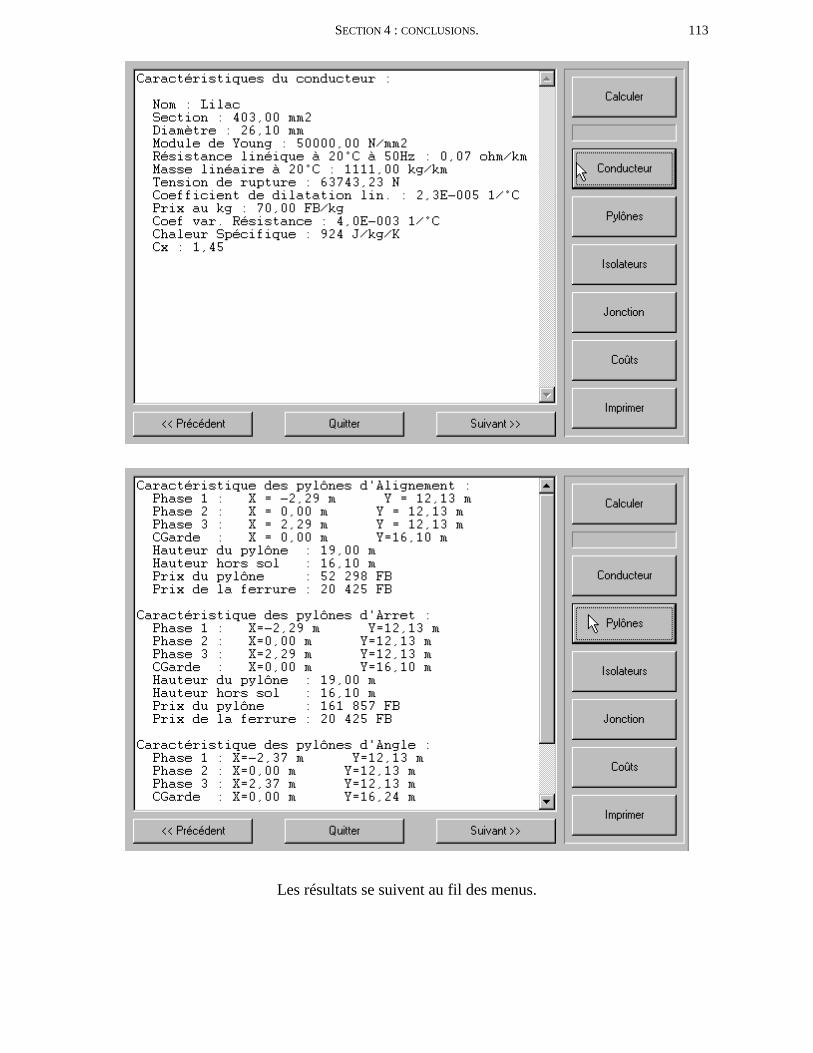
SECTION 4 : CONCLUSIONS. 113
Les résultats se suivent au fil des menus.
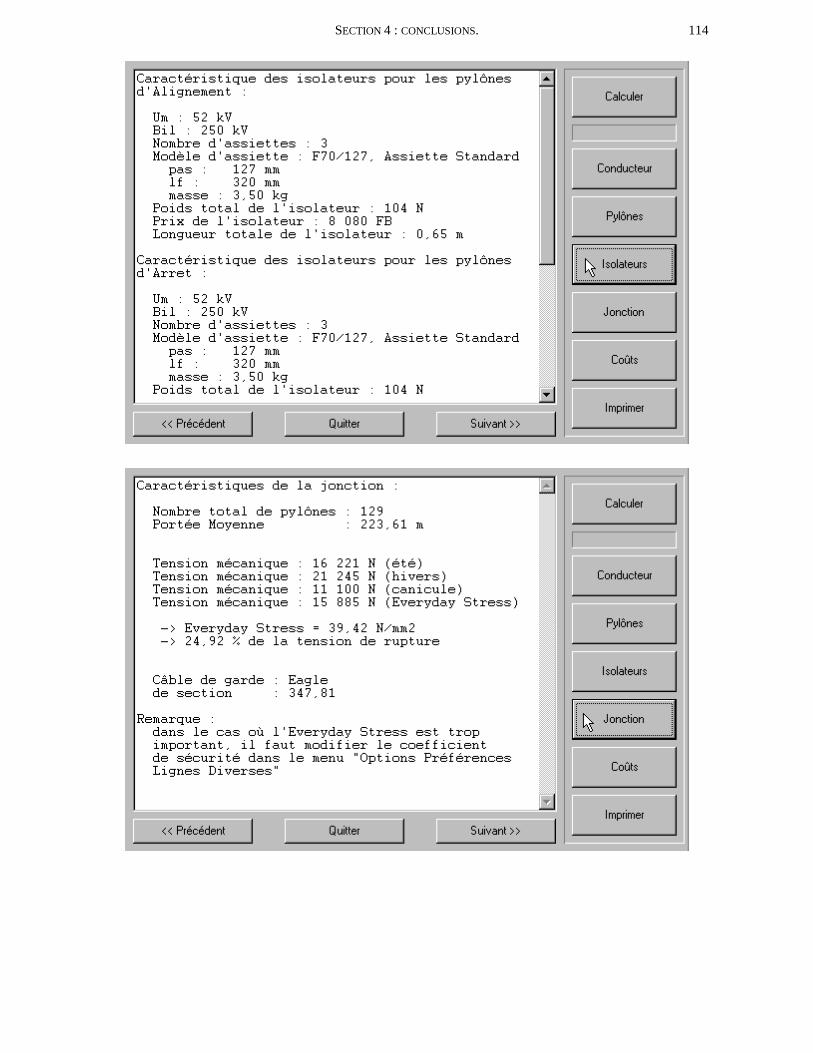
SECTION 4 : CONCLUSIONS. 114

SECTION 4 : CONCLUSIONS. 115
Maintenant que la ligne est dimensionnée, l'utilisateur peut utiliser les modules
complémentaires en cliquant sur suivant. Il obtiendra alors le menu de sélection des modules,
et pour chaque module les fenêtres suivants :
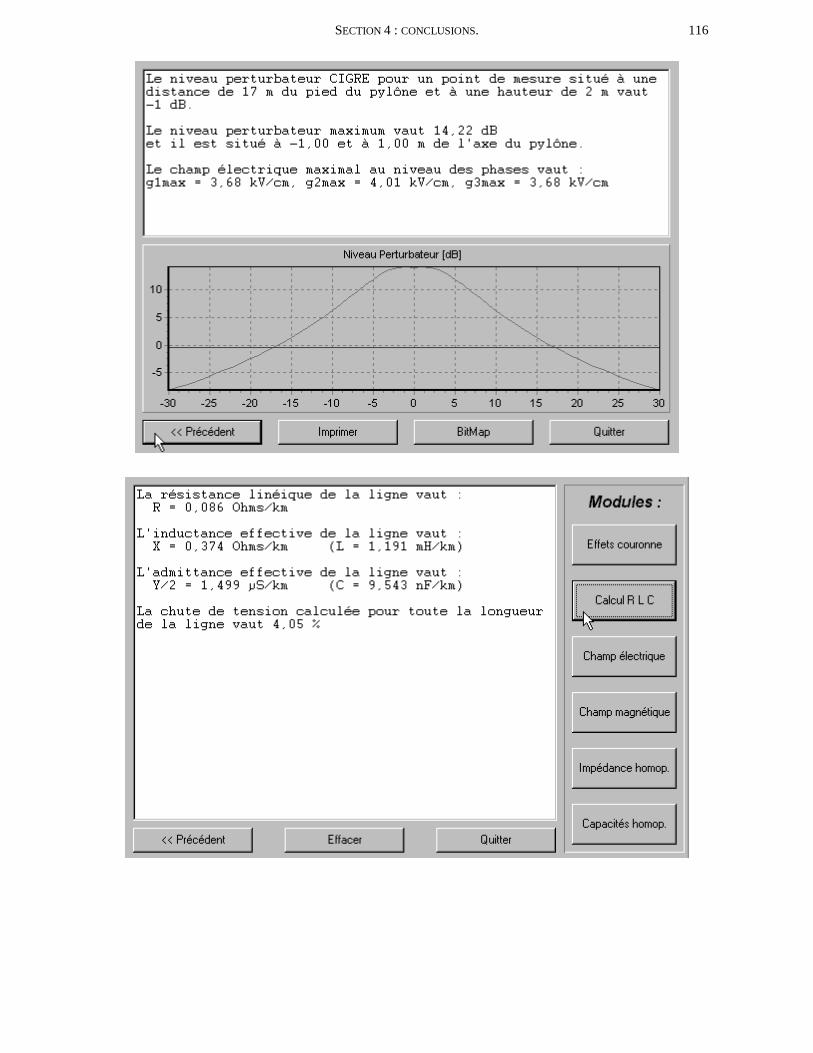
SECTION 4 : CONCLUSIONS. 116
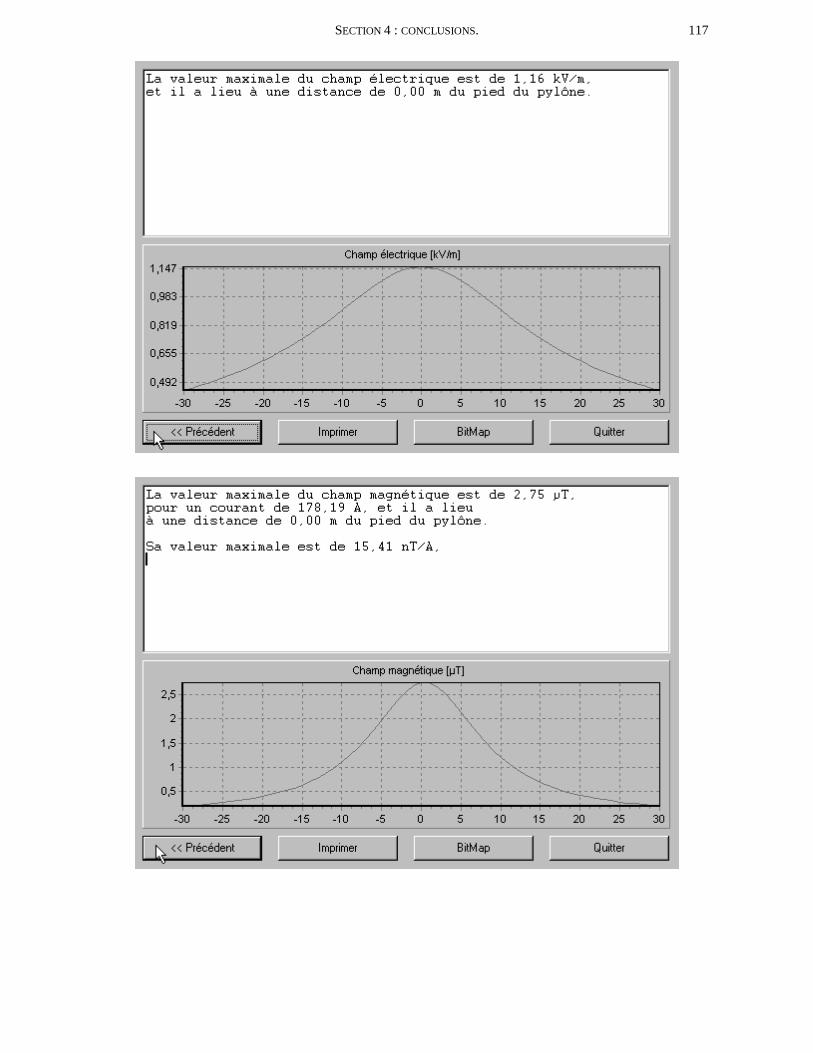
SECTION 4 : CONCLUSIONS. 117

SECTION 4 : CONCLUSIONS. 118
2.2. Exemple de câble souterrain.
Voici le fichier de résultats de notre calcul. Le lecteur y retrouvera les données encodées par
l'utilisateur.
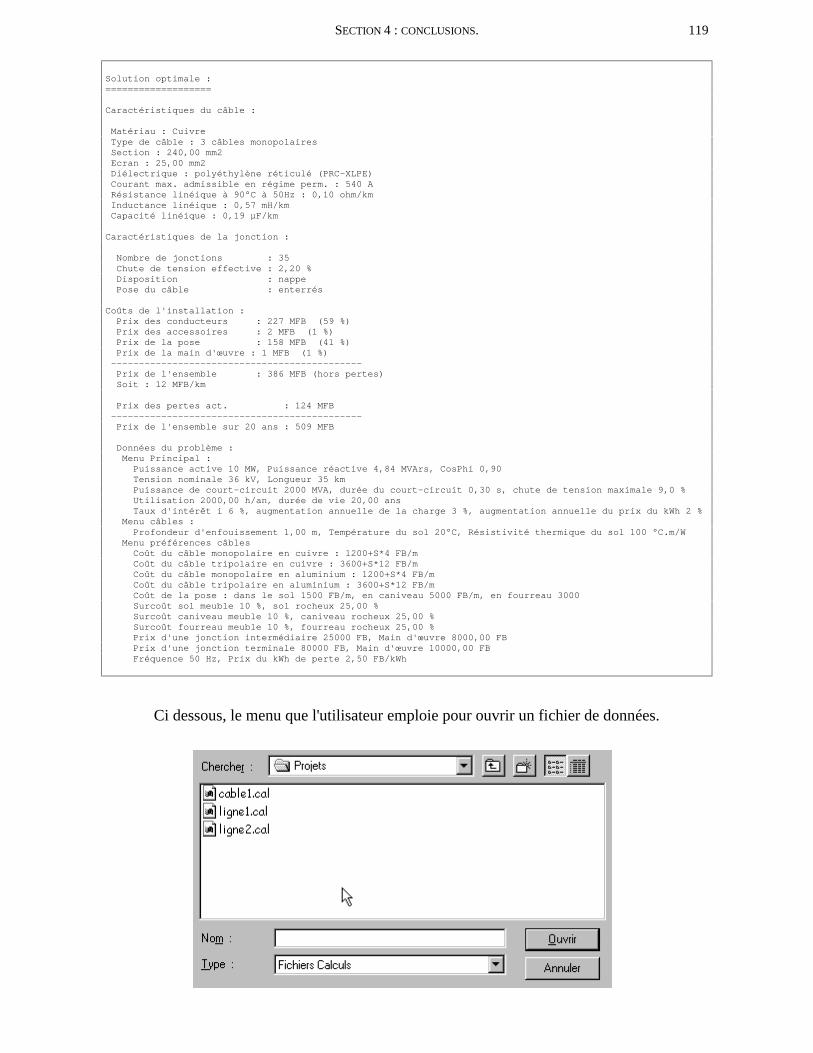
SECTION 4 : CONCLUSIONS. 119
Solution optimale :===================
Caractéristiques du câble :
Matériau : Cuivre Type de câble : 3 câbles monopolaires Section : 240,00 mm2 Ecran : 25,00 mm2 Diélectrique : polyéthylène réticulé (PRC-XLPE) Courant max. admissible en régime perm. : 540 A Résistance linéique à 90°C à 50Hz : 0,10 ohm/km Inductance linéique : 0,57 mH/km Capacité linéique : 0,19 µF/km
Caractéristiques de la jonction :
Nombre de jonctions : 35 Chute de tension effective : 2,20 % Disposition : nappe Pose du câble : enterrés
Coûts de l'installation : Prix des conducteurs : 227 MFB (59 %) Prix des accessoires : 2 MFB (1 %) Prix de la pose : 158 MFB (41 %) Prix de la main d'œuvre : 1 MFB (1 %) --------------------------------------------- Prix de l'ensemble : 386 MFB (hors pertes) Soit : 12 MFB/km
Prix des pertes act. : 124 MFB --------------------------------------------- Prix de l'ensemble sur 20 ans : 509 MFB
Données du problème : Menu Principal : Puissance active 10 MW, Puissance réactive 4,84 MVArs, CosPhi 0,90 Tension nominale 36 kV, Longueur 35 km Puissance de court-circuit 2000 MVA, durée du court-circuit 0,30 s, chute de tension maximale 9,0 % Utilisation 2000,00 h/an, durée de vie 20,00 ans Taux d'intérêt i 6 %, augmentation annuelle de la charge 3 %, augmentation annuelle du prix du kWh 2 % Menu câbles : Profondeur d'enfouissement 1,00 m, Température du sol 20°C, Résistivité thermique du sol 100 °C.m/W Menu préférences câbles Coût du câble monopolaire en cuivre : 1200+S*4 FB/m Coût du câble tripolaire en cuivre : 3600+S*12 FB/m Coût du câble monopolaire en aluminium : 1200+S*4 FB/m Coût du câble tripolaire en aluminium : 3600+S*12 FB/m Coût de la pose : dans le sol 1500 FB/m, en caniveau 5000 FB/m, en fourreau 3000 Surcoût sol meuble 10 %, sol rocheux 25,00 % Surcoût caniveau meuble 10 %, caniveau rocheux 25,00 % Surcoût fourreau meuble 10 %, fourreau rocheux 25,00 % Prix d'une jonction intermédiaire 25000 FB, Main d'œuvre 8000,00 FB Prix d'une jonction terminale 80000 FB, Main d'œuvre 10000,00 FB Fréquence 50 Hz, Prix du kWh de perte 2,50 FB/kWh
Ci dessous, le menu que l'utilisateur emploie pour ouvrir un fichier de données.
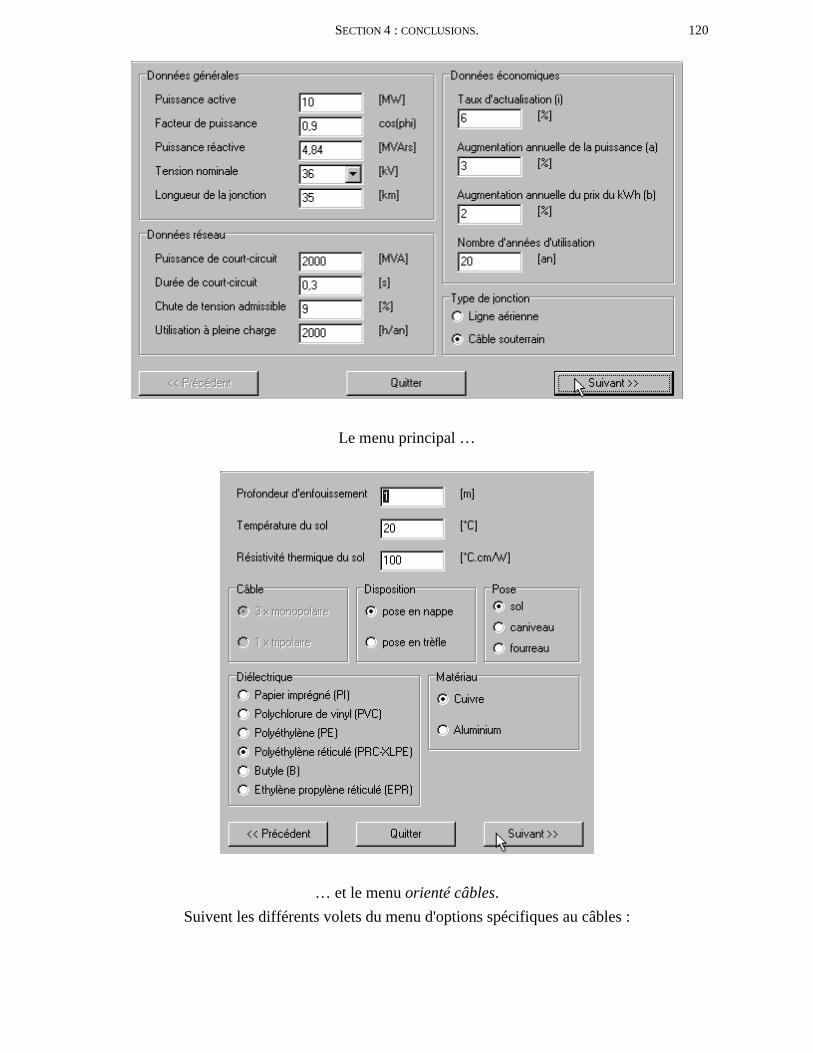
SECTION 4 : CONCLUSIONS. 120
Le menu principal …
… et le menu orienté câbles.
Suivent les différents volets du menu d'options spécifiques au câbles :

SECTION 4 : CONCLUSIONS. 121
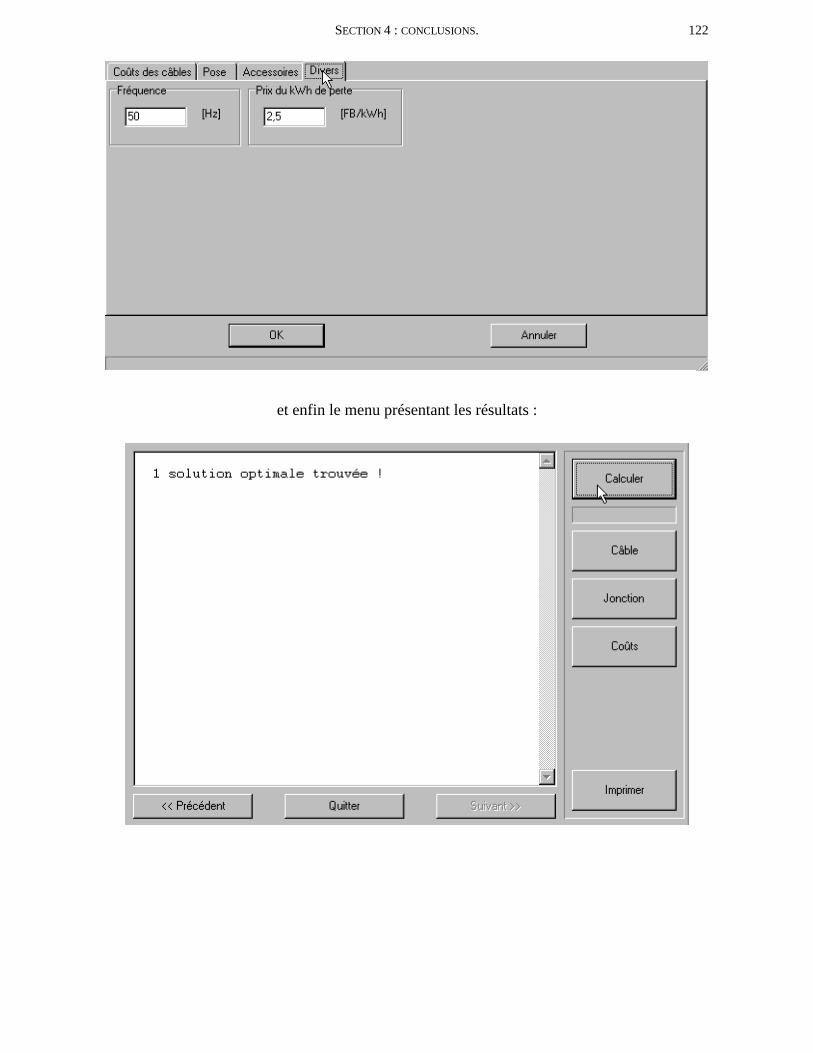
SECTION 4 : CONCLUSIONS. 122
et enfin le menu présentant les résultats :
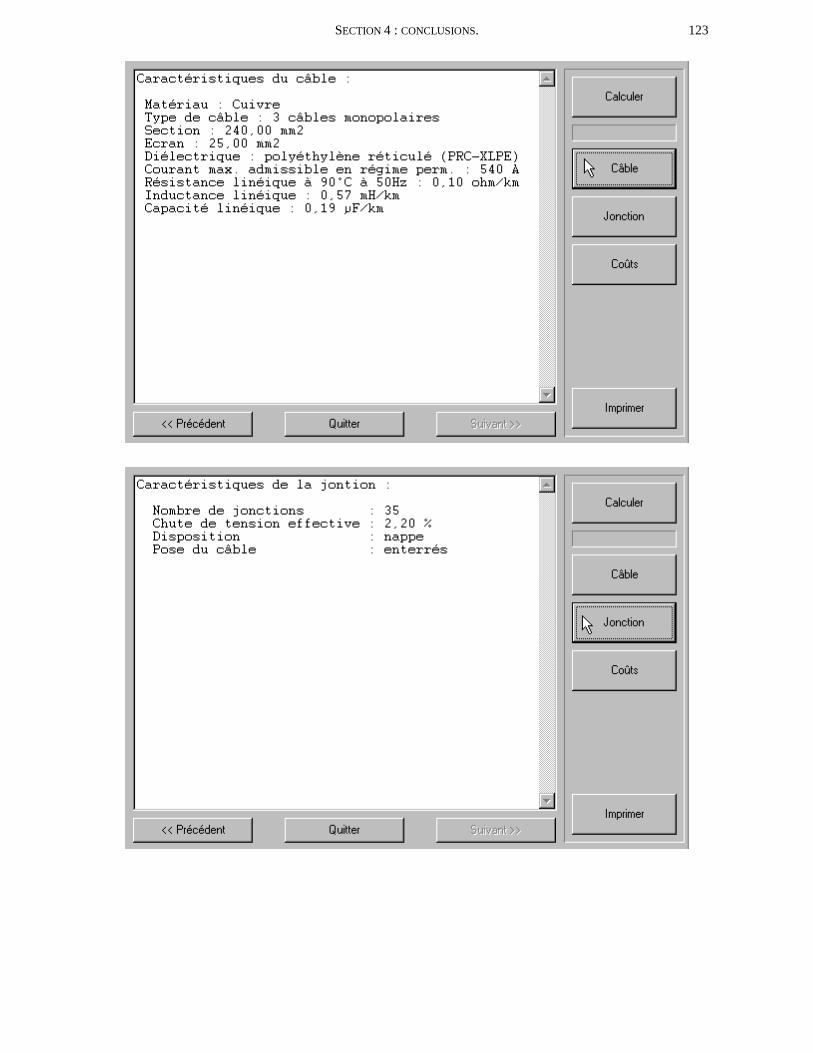
SECTION 4 : CONCLUSIONS. 123
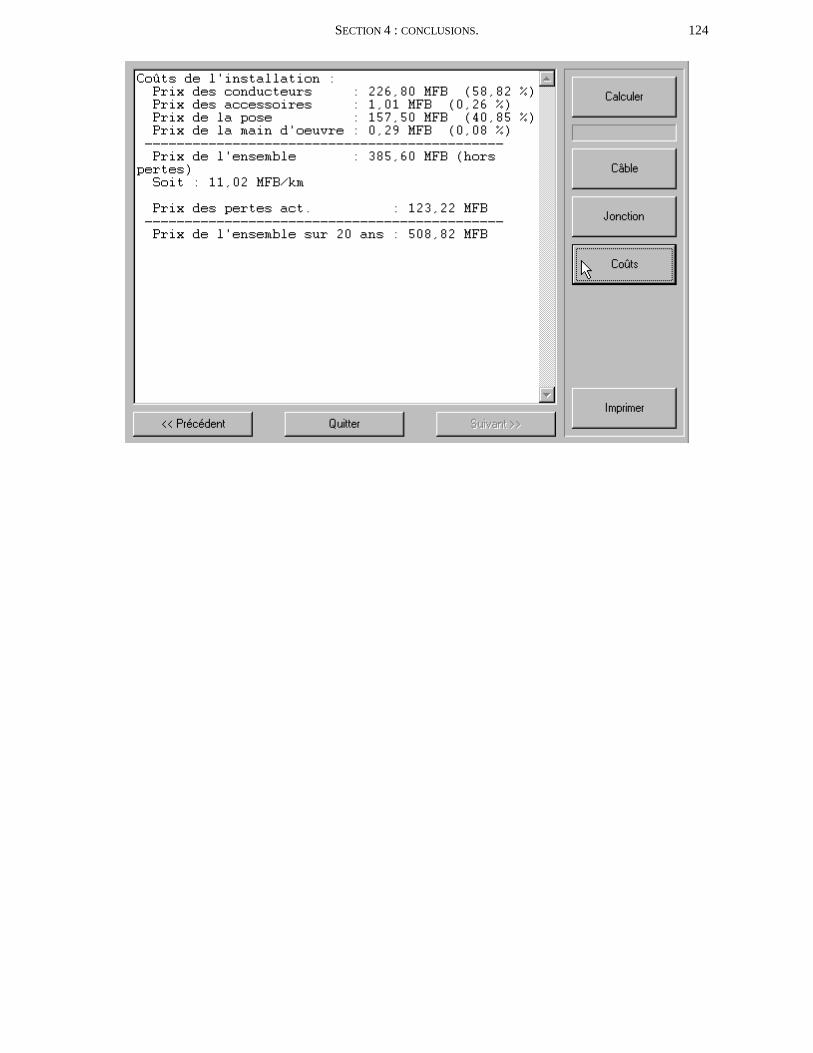
SECTION 4 : CONCLUSIONS. 124
Section 5
Annexes
SECTION 5 : ANNEXES. 126
Annexe A : Calcul du facteur d’actualisation.
Le coût total dû aux pertes se compose de deux parties : les frais d'énergie et le coût associé à
une puissance de pointe supplémentaire nécessaire pour couvrir les pertes.
Les pertes d'énergie pendant la première année s'expriment par :
3.ρ.l.I².N.P (A.1)
où :
ρ = résistivité du conducteur [Ω.m] à la température de service à la fréquence de service ;
L = longueur de la liaison [m] ;
I = courant parcourant le câble en début de vie (car on multiplie ce courant par le facteur
d'actualisation f) [A] ;
N = nombre d'heures par an d'utilisation à pleine charge du point de vue des pertes (pour
les pertes, une heure d'utilisation à mi-charge équivaut à un quart d'heure
d'utilisation à pleine charge) [h/an].8 ;
p = prix du kWh de pertes [FB/Wh] ;
Le coût de capacité de production additionnelle nécessaire pour compenser ces pertes est :
3.ρ.l.I².D (A.2)
où D contient les frais annuels pour couvrir ces pertes [FB/W.an].
Le coût global des pertes au cours de la première année est donc :
3.ρ.l.I².(N.P+D) (A.3)
Si les coûts sont payés en fin d'année, leur valeur actualisée à la date d'achat de l'installation
est :
8 ∫ ⋅=h 8760
02MAX
2
dtI
)t(IN où 8760 heures équivalent 1 an.
SECTION 5 : ANNEXES. 127
( ) ( )( )100
i1
DPNIl3 2
++⋅⋅⋅⋅ρ⋅
(A.4)
De la même façon, la valeur actuelle des coûts de l'énergie pendant N années de service,
actualisée à la date de l'achat est :
( ) ( )( ) Q
100i1
DPNIl3 2
⋅+
+⋅⋅⋅⋅ρ⋅(A.5)
où Q est un coefficient prenant en compte l'accroissement de charge, l'augmentation du coût
de l'énergie pendant les N années et le taux d'actualisation :
( )∑=
−−
−==N
1n
N1n
r1
r1rQ (A.6)
où :( ) ( )
( )100i1
100b1100
a1r
2
+
+⋅+= (A.7)
Dans notre cas, nous utilisons le coût du kWh de perte p qui reprend P+D/N, d'où finalement :
( )100i1
QpNIl3 2
+⋅⋅⋅⋅⋅ρ⋅ (A.8)

SECTION 5 : ANNEXES. 128
Annexe B : Calcul de la sectionvia le critère de courant de court-circuit.
Nous supposons que l'intégralité des calories produites par effet Joule pendant la durée tCC de
passage du courant de court-circuit ICC va conduire exclusivement à augmenter la température
du métal selon un échauffement adiabatique.
Soit un conducteur de longueur L, de section S et de résistivité ρ :
dE = R I2 dt = S L δ C dθ = ρ L S-1 (σ S)2 dt
= ρ L S σ2 dt = S L δ C dθ
d'où la relation
ρ σ2 dt = δ C dθ (B.1)
- δ est la masse spécifique [kg/m3],
- C est la capacité calorifique supposée constante sur l'intervalle de température considéré
[J/kg K]
- ρ = ρ0 (1+α θ) est la résistivité à la température considérée [Ω m]
- σ = I/S est la densité de courant [A/mm2]
- θ est la température
- α = α20°C est le coefficient de variation de la résistivité en fonction de la température [K]
Nous avons alors :
ρ0 (1+α θ) σ2 dt = δ C dθ (B.2)
et après intégration :
2
0initiale
0finale
0CC
2CC2 a
)(1
)(1ln
Ct
S
It =
θ−θ⋅α+θ−θ⋅α+
⋅ρ⋅α⋅δ=⋅
=⋅σ (B.3)
a
tIS CCCC ⋅
= [mm2] (B.4)
où a est une constante pour un métal donné.
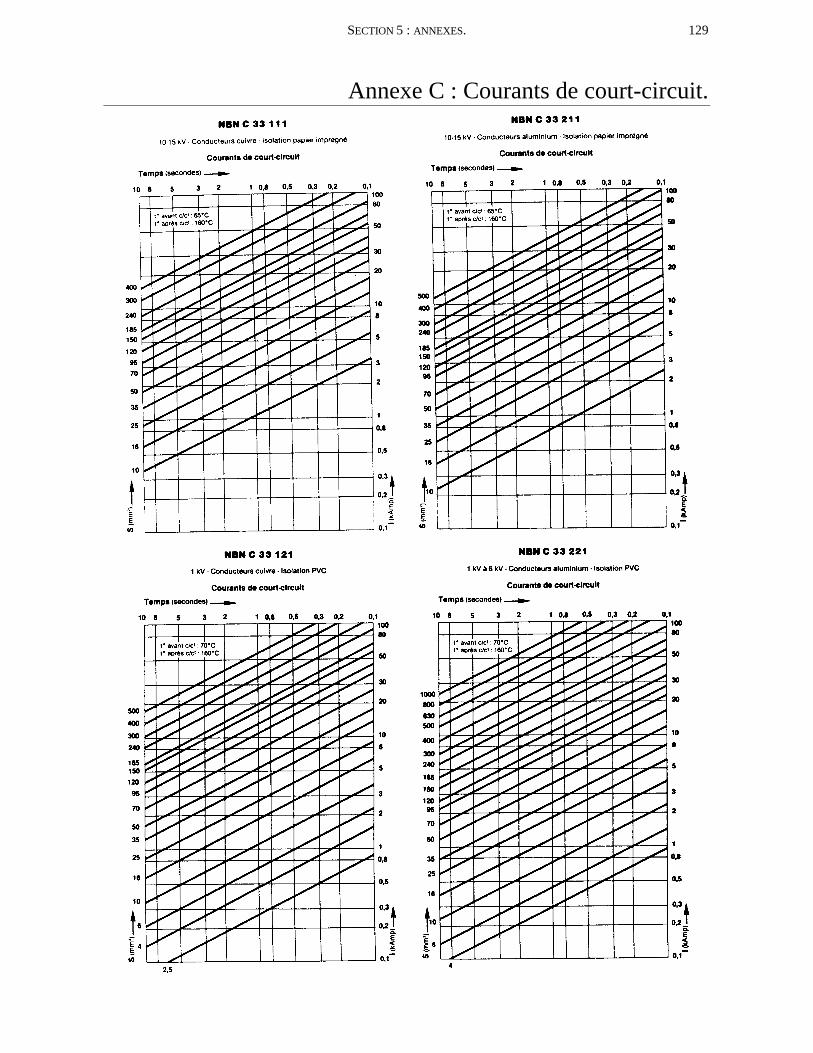
SECTION 5 : ANNEXES. 129
Annexe C : Courants de court-circuit.
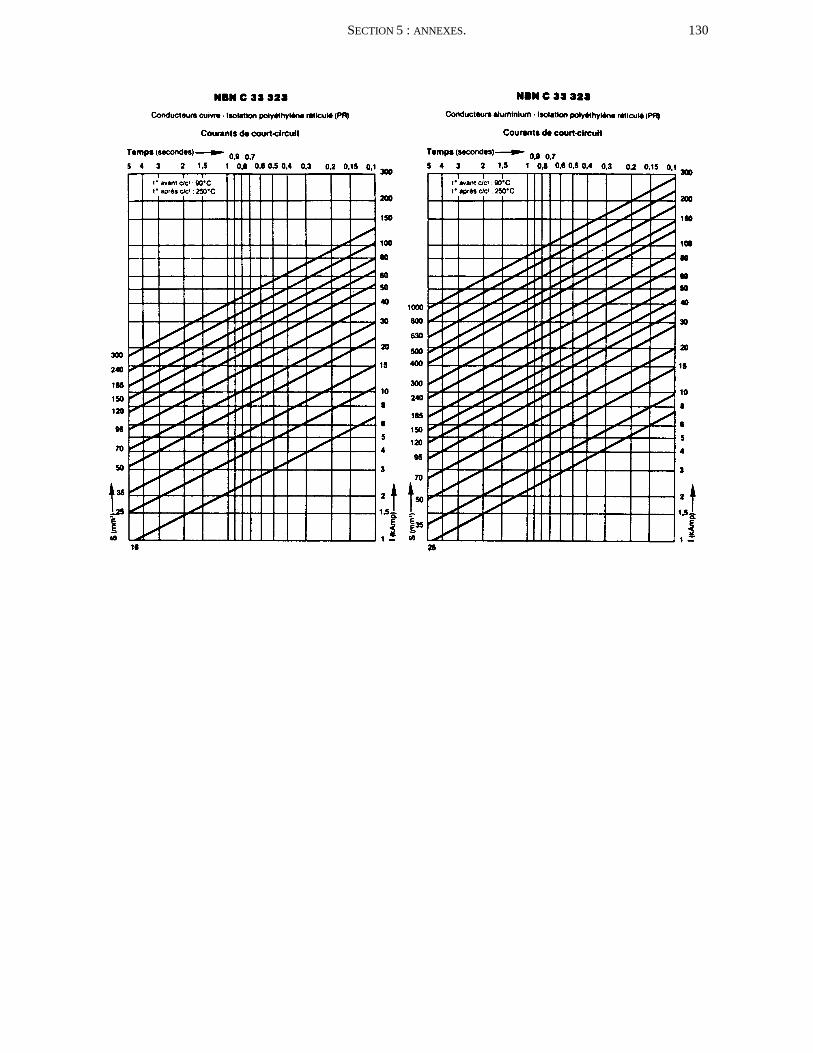
SECTION 5 : ANNEXES. 130
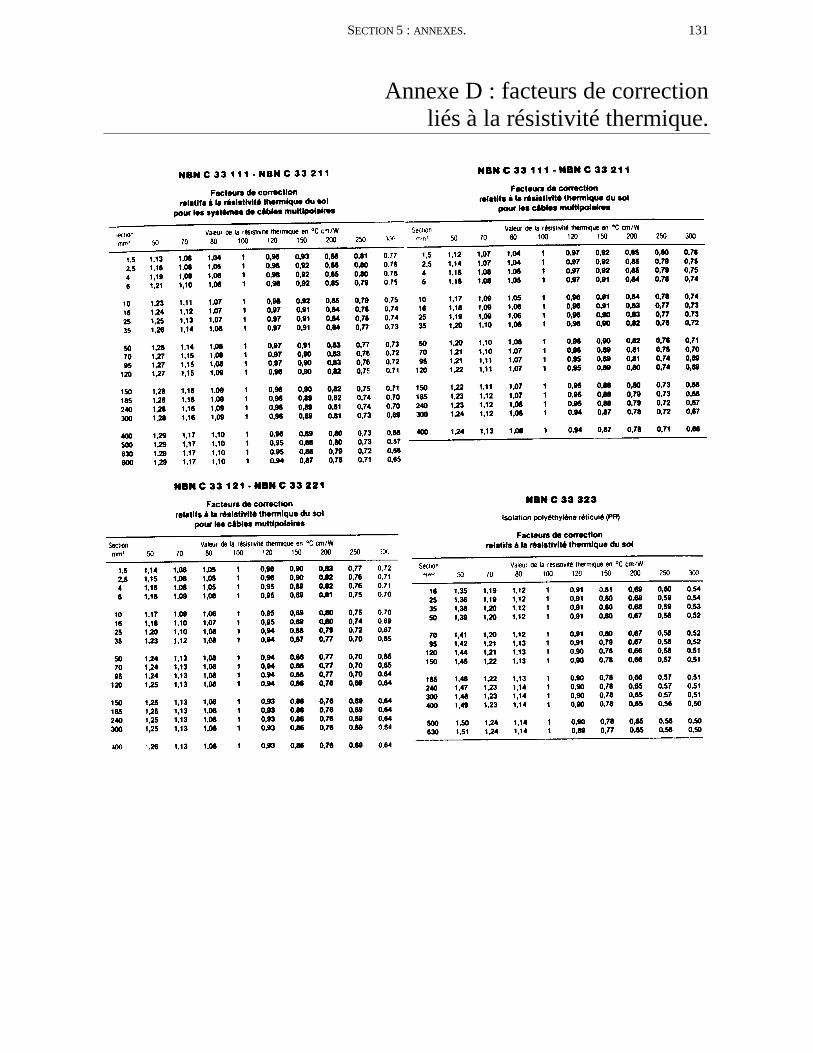
SECTION 5 : ANNEXES. 131
Annexe D : facteurs de correctionliés à la résistivité thermique.

SECTION 5 : ANNEXES. 132
Annexe E : programme de recherche du gabarit des supports.
// WWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWW// W Fonctions coût et gabarit des pylônes W// WWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWWW
FunctionPyloneNappe(DataMenuP:DataMenuPrinc;DataMenuL:DataMenuLignes;DataPrefL:DataPrefLignes;Divers:Autres;Pyl:DataPylones;Conducteur,ConducteurCG:DataConducteurLigne):DataPylones;var Eph, EPhH, L1, GD, HHrSol, H, M2, M3, M4, TMax, TMaxCG :real; Pylone:DataPylones;begin (* Tension Maximale pour un FAISCEAU de conducteurs *) TMax:=(Conducteur.TRupture/DataPrefL.CoefSecurite)*DataMenuL.NbreSCond; TMaxCG:=ConducteurCG.TRupture/DataPrefL.CoefSecurite; (* Calcul du gabarit Align du pylône Nappe *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Align.SL.Longueur))); EPhH:=0.8*EPh; L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Align.SL.Longueur*sin(DegToRad(Divers.PsiMax)); GD:=DataMenuL.CGarde*(Maximum(sqrt(EPh*EPh+L1*L1),sqrt(3)*L1)-Pyl.Align.SL.Longueur); HHrSol:=Divers.GSol+Conducteur.FMax+Pyl.Align.SL.Longueur+DataMenuL.CGarde*GD; H:=0.5*ceil((HHrSol+1)*20/9);
M2:=3*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*DataMenuL.NbreSCond*(HHrSol-DataMenuL.CGarde*GD)+DataMenuL.CGarde*ConducteurCG.Cx*Conducteur.Qpression*ConducteurCG.Diam/1000*Conducteur.PorteeMoy*HHrSol; M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl; Pylone.Align.PrixPyl:=DataPrefL.coef1 + DataPrefL.coef2*power(H,DataPrefL.coef3) +DataPrefL.coef4*power(((M2+M3)/HHrSol),DataPrefL.coef5);
Pylone.Align.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Align.SL.PoidsTotal)*(2*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+DataMenuL.CGarde*GD*GD); if (Pylone.Align.PrixFerrure>(0.5*Pylone.Align.PrixPyl)) thenPylone.Align.PrixFerrure:=0.5*Pylone.Align.PrixPyl; Pylone.Align.Ph1X:=-L1-DataMenuL.EcartementSCond/200; Pylone.Align.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Align.Ph2X:=0; Pylone.Align.Ph2Y:=Divers.GSol+Conducteur.FMax; Pylone.Align.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Align.Ph3Y:=Divers.GSol+Conducteur.FMax; Pylone.Align.CGX:=0; Pylone.Align.CGY:=HHrSol*DataMenuL.CGarde; Pylone.Align.Hauteur:=H; Pylone.Align.HHrSol:=HHrSol; (* Calcul du gabarit Arret du pylône Nappe *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Arret.SL.Longueur))); EPhH:=0.8*EPh; L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Arret.SL.Longueur*sin(DegToRad(Divers.PsiMax)); GD:=DataMenuL.CGarde*(Maximum(sqrt(EPh*EPh+L1*L1),sqrt(3)*L1)-Pyl.Arret.SL.Longueur); HHrSol:=Divers.GSol+Conducteur.FMax+Pyl.Arret.SL.Longueur+DataMenuL.CGarde*GD; H:=0.5*ceil((HHrSol+1)*20/9);
M2:=3*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*(HHrSol-DataMenuL.CGarde*GD)+DataMenuL.CGarde*ConducteurCG.Cx*Conducteur.Qpression*ConducteurCG.Diam/1000*Conducteur.PorteeMoy*HHrSol; M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl; M4:=3*TMax*(HHrSol-DataMenuL.CGarde*GD)+DataMenuL.CGarde*TMaxCG*HHrSol; Pylone.Arret.PrixPyl:=DataPrefL.coef1 + DataPrefL.coef2*power(H,DataPrefL.coef3) +DataPrefL.coef4*power((sqrt((M2+M3)*(M2+M3)+M4*M4)/HHrSol),DataPrefL.coef5);
Pylone.Arret.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Arret.SL.PoidsTotal)*(2*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+DataMenuL.CGarde*GD*GD); if (Pylone.Arret.PrixFerrure>(0.5*Pylone.Arret.PrixPyl)) thenPylone.Arret.PrixFerrure:=0.5*Pylone.Arret.PrixPyl; Pylone.Arret.Ph1X:=-L1-DataMenuL.EcartementSCond/200; Pylone.Arret.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Arret.Ph2X:=0; Pylone.Arret.Ph2Y:=Divers.GSol+Conducteur.FMax; Pylone.Arret.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Arret.Ph3Y:=Divers.GSol+Conducteur.FMax; Pylone.Arret.CGX:=0; Pylone.Arret.CGY:=HHrSol*DataMenuL.CGarde; Pylone.Arret.Hauteur:=H; Pylone.Arret.HHrSol:=HHrSol; (* Calcul du gabarit Angle du pylône Nappe *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Angle.SL.Longueur))); EPhH:=0.8*EPh/cos(DegToRad(DataMenuL.Beta/2)); L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Angle.SL.Longueur*sin(DegToRad(Divers.PsiMax));

SECTION 5 : ANNEXES. 133
GD:=DataMenuL.CGarde*(Maximum(sqrt(EPh*EPh+L1*L1),sqrt(3)*L1)-Pyl.Angle.SL.Longueur); HHrSol:=Divers.GSol+Conducteur.FMax+Pyl.Angle.SL.Longueur+DataMenuL.CGarde*GD; H:=0.5*ceil((HHrSol+1)*20/9); M2:=3*(HHrSol-DataMenuL.CGarde*GD)*((DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*cos(DegToRad(DataMenuL.Beta/2))+TMax*sin(DegToRad(DataMenuL.Beta/2)));
M2:=M2+DataMenuL.CGarde*HHrSol*2*(ConducteurCG.Cx*ConducteurCG.Qpression*ConducteurCG.Diam/1000*ConducteurCG.PorteeMoy*cos(DegToRad(DataMenuL.Beta/2))+TMaxCG*sin(DegToRad(DataMenuL.Beta/2))); M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl; Pylone.Angle.PrixPyl:=DataPrefL.coef1 + DataPrefL.coef2*power(H,DataPrefL.coef3) +DataPrefL.coef4*power(((M2+M3)/HHrSol),DataPrefL.coef5);
Pylone.Angle.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Angle.SL.PoidsTotal)*(2*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+DataMenuL.CGarde*GD*GD); if (Pylone.Angle.PrixFerrure>(0.5*Pylone.Angle.PrixPyl)) thenPylone.Angle.PrixFerrure:=0.5*Pylone.Angle.PrixPyl; Pylone.Angle.Ph1X:=-L1-DataMenuL.EcartementSCond/200; Pylone.Angle.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Angle.Ph2X:=0; Pylone.Angle.Ph2Y:=Divers.GSol+Conducteur.FMax; Pylone.Angle.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Angle.Ph3Y:=Divers.GSol+Conducteur.FMax; Pylone.Angle.CGX:=0; Pylone.Angle.CGY:=HHrSol*DataMenuL.CGarde; Pylone.Angle.Hauteur:=H; Pylone.Angle.HHrSol:=HHrSol; (* Je conserve les infos sur SL *) Pylone.Align.SL:=Pyl.Align.SL; Pylone.Arret.SL:=Pyl.Arret.SL; Pylone.Angle.SL:=Pyl.Angle.SL; (* Je passe les informations *) PyloneNappe:=Pylone;end;
FunctionPyloneDrapeau(DataMenuP:DataMenuPrinc;DataMenuL:DataMenuLignes;DataPrefL:DataPrefLignes;Divers:Autres;Pyl:DataPylones;Conducteur,ConducteurCG:DataConducteurLigne):DataPylones;var EPh, EPhH, L1, GD, HHrSol, H, M1, M2, M3, M4, TMax, TMaxCG :real; Pylone:DataPylones;begin (* Tension Maximale pour un FAISCEAU de conducteurs *) TMax:=(Conducteur.TRupture/DataPrefL.CoefSecurite)*DataMenuL.NbreSCond; TMaxCG:=ConducteurCG.TRupture/DataPrefL.CoefSecurite; (* Calcul du gabarit Align du pylône Drapeau *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Align.SL.Longueur))); EPhH:=0.8*EPh; L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Align.SL.Longueur*sin(DegToRad(Divers.PsiMax)); GD:=DataMenuL.CGarde*(Maximum(sqrt(EPh*EPh+L1*L1),sqrt(3)*L1)-Pyl.Align.SL.Longueur)+(notDataMenuL.CGarde)*0.4; HHrSol:=Divers.GSol+Conducteur.FMax+3*Pyl.Align.SL.Longueur+2*EPh+GD; H:=0.5*ceil((HHrSol+1)*20/9);
M1:=3*(L1+DataMenuL.EcartementSCond/200)*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Align.SL.PoidsTotal);
M2:=3*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*(Divers.GSol+Conducteur.FMax+EPh+2*Pyl.Align.SL.Longueur)+DataMenuL.CGarde*ConducteurCG.Cx*Conducteur.Qpression*ConducteurCG.Diam/1000*Conducteur.PorteeMoy*HHrSol; M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl; Pylone.Align.PrixPyl:=DataPrefL.coef6 + DataPrefL.coef7*power(H,DataPrefL.coef8) +DataPrefL.coef9*power(((M1+M2+M3)/HHrSol),DataPrefL.coef10);
Pylone.Align.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Align.SL.PoidsTotal)*(3*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+DataMenuL.CGarde*GD*GD); if (Pylone.Align.PrixFerrure>(0.5*Pylone.Align.PrixPyl)) thenPylone.Align.PrixFerrure:=0.5*Pylone.Align.PrixPyl; Pylone.Align.Ph1X:=L1+DataMenuL.EcartementSCond/200; Pylone.Align.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Align.Ph2X:=L1+DataMenuL.EcartementSCond/200; Pylone.Align.Ph2Y:=Divers.GSol+Conducteur.FMax+Pyl.Align.SL.Longueur+EPh; Pylone.Align.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Align.Ph3Y:=Divers.GSol+Conducteur.FMax+2*Pyl.Align.SL.Longueur+2*EPh; Pylone.Align.CGX:=0; Pylone.Align.CGY:=HHrSol*DataMenuL.CGarde; Pylone.Align.Hauteur:=H; Pylone.Align.HHrSol:=HHrSol; (* Calcul du gabarit Arret du pylône Drapeau *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Arret.SL.Longueur))); EPhH:=0.8*EPh; L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Arret.SL.Longueur*sin(DegToRad(Divers.PsiMax)); GD:=DataMenuL.CGarde*(Maximum(sqrt(EPh*EPh+L1*L1),sqrt(3)*L1)-Pyl.Arret.SL.Longueur)+(notDataMenuL.CGarde)*0.4; HHrSol:=Divers.GSol+Conducteur.FMax+3*Pyl.Arret.SL.Longueur+2*EPh+GD; H:=0.5*ceil((HHrSol+1)*20/9);

SECTION 5 : ANNEXES. 134
M1:=3*(L1+DataMenuL.EcartementSCond/200)*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Align.SL.PoidsTotal);
M2:=3*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*(Divers.GSol+Conducteur.FMax+EPh+2*Pyl.Align.SL.Longueur)+DataMenuL.CGarde*ConducteurCG.Cx*Conducteur.Qpression*ConducteurCG.Diam/1000*Conducteur.PorteeMoy*HHrSol; M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl; M4:=3*TMax*(Divers.GSol+Conducteur.FMax+EPh+2*Pyl.Arret.SL.Longueur); if DataMenuL.CGarde=1 thenM4:=M4+TMaxCG*(Divers.GSol+Conducteur.FMax+2*EPh+3*Pyl.Arret.SL.Longueur+GD); Pylone.Arret.PrixPyl:=DataPrefL.coef6 + DataPrefL.coef7*power(H,DataPrefL.coef8) +DataPrefL.coef9*power((sqrt((M1+M2+M3)*(M1+M2+M3)+M4*M4)/HHrSol),DataPrefL.coef10);
Pylone.Arret.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Arret.SL.PoidsTotal)*(3*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+DataMenuL.CGarde*GD*GD); if (Pylone.Arret.PrixFerrure>(0.5*Pylone.Arret.PrixPyl)) thenPylone.Arret.PrixFerrure:=0.5*Pylone.Arret.PrixPyl; Pylone.Arret.Ph1X:=L1+DataMenuL.EcartementSCond/200; Pylone.Arret.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Arret.Ph2X:=L1+DataMenuL.EcartementSCond/200; Pylone.Arret.Ph2Y:=Divers.GSol+Conducteur.FMax+Pyl.Arret.SL.Longueur+EPh; Pylone.Arret.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Arret.Ph3Y:=Divers.GSol+Conducteur.FMax+2*Pyl.Arret.SL.Longueur+2*EPh; Pylone.Arret.CGX:=0; Pylone.Arret.CGY:=HHrSol*DataMenuL.CGarde; Pylone.Arret.Hauteur:=H; Pylone.Arret.HHrSol:=HHrSol; (* Calcul du gabarit Angle du pylône Drapeau *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Angle.SL.Longueur))); EPhH:=0.8*EPh/cos(DegToRad(DataMenuL.Beta/2)); L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Angle.SL.Longueur*sin(DegToRad(Divers.PsiMax)); GD:=DataMenuL.CGarde*(Maximum(sqrt(EPh*EPh+L1*L1),sqrt(3)*L1)-Pyl.Angle.SL.Longueur)+(notDataMenuL.CGarde)*0.4; HHrSol:=Divers.GSol+Conducteur.FMax+3*Pyl.Angle.SL.Longueur+2*EPh+GD; H:=0.5*ceil((HHrSol+1)*20/9);
M1:=3*(L1+DataMenuL.EcartementSCond/200)*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Angle.SL.PoidsTotal); M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl;
M2:=3*(Divers.GSol+Conducteur.FMax+EPh+2*Pyl.Angle.SL.Longueur)*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000*Conducteur.PorteeMoy*cos(DegToRad(DataMenuL.Beta/2))+TMax*sin(DegToRad(DataMenuL.Beta/2)));
M2:=M2+DataMenuL.CGarde*HHrSol*2*(ConducteurCG.Cx*ConducteurCG.Qpression*ConducteurCG.diam/1000*ConducteurCG.PorteeMoy*cos(DegToRad(DataMenuL.Beta/2))+TMaxCG*sin(DegToRad(DataMenuL.Beta/2))); Pylone.Angle.PrixPyl:=DataPrefL.coef6 + DataPrefL.coef7*power(H,DataPrefL.coef8) +DataPrefL.coef9*power(((M1+M2+M3)/HHrSol),DataPrefL.coef10);
Pylone.Angle.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Angle.SL.PoidsTotal)*(3*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+DataMenuL.CGarde*GD*GD); if (Pylone.Angle.PrixFerrure>(0.5*Pylone.Angle.PrixPyl)) thenPylone.Angle.PrixFerrure:=0.5*Pylone.Angle.PrixPyl; Pylone.Angle.Ph1X:=L1+DataMenuL.EcartementSCond/200; Pylone.Angle.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Angle.Ph2X:=L1+DataMenuL.EcartementSCond/200; Pylone.Angle.Ph2Y:=Divers.GSol+Conducteur.FMax+Pyl.Angle.SL.Longueur+EPh; Pylone.Angle.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Angle.Ph3Y:=Divers.GSol+Conducteur.FMax+2*Pyl.Angle.SL.Longueur+2*EPh; Pylone.Angle.CGX:=0; Pylone.Angle.CGY:=HHrSol*DataMenuL.CGarde; Pylone.Angle.Hauteur:=H; Pylone.Angle.HHrSol:=HHrSol; (* Je conserve les infos sur SL *) Pylone.Align.SL:=Pyl.Align.SL; Pylone.Arret.SL:=Pyl.Arret.SL; Pylone.Angle.SL:=Pyl.Angle.SL; (* Je passe les informations *) PyloneDrapeau:=Pylone;end;
FunctionPyloneNappeVoute(DataMenuP:DataMenuPrinc;DataMenuL:DataMenuLignes;DataPrefL:DataPrefLignes;Divers:Autres;Pyl:DataPylones;Conducteur,ConducteurCG:DataConducteurLigne):DataPylones;var EPh, EPhH, L1, L2, HHrSol, H, M2, M3, M4, TMax :real; Pylone:DataPylones;begin (* Tension Maximale pour un FAISCEAU de conducteurs *) TMax:=(Conducteur.TRupture/DataPrefL.CoefSecurite)*DataMenuL.NbreSCond; (* Calcul du gabarit Align du pylône Nappe-Voûte *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Align.SL.Longueur))); EPhH:=0.8*EPh/cos(DegToRad(DataMenuL.Beta/2)); L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Align.SL.Longueur*sin(DegToRad(Divers.PsiMax)); L2:=sqrt(EPh*EPh-L1*L1);

SECTION 5 : ANNEXES. 135
HHrSol:=Divers.GSol+Conducteur.FMax+Pyl.Align.SL.Longueur+L2; H:=0.5*ceil((HHrSol+1)*20/9);
M2:=3*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*(3*HHrSol-2*L2); M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl; Pylone.Align.PrixPyl:=DataPrefL.coef1 + DataPrefL.coef2*power(H,DataPrefL.coef3) +DataPrefL.coef4*power(((M2+M3)/HHrSol),DataPrefL.coef5);
Pylone.Align.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Align.SL.PoidsTotal)*(2*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+L2*L2); if (Pylone.Align.PrixFerrure>(0.5*Pylone.Align.PrixPyl)) thenPylone.Align.PrixFerrure:=0.5*Pylone.Align.PrixPyl; Pylone.Align.Ph1X:=-L1-DataMenuL.EcartementSCond/200; Pylone.Align.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Align.Ph2X:=0; Pylone.Align.Ph2Y:=HHrSol-Pyl.Align.SL.Longueur; Pylone.Align.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Align.Ph3Y:=Divers.GSol+Conducteur.FMax; Pylone.Align.CGX:=0; Pylone.Align.CGY:=0; Pylone.Align.Hauteur:=H; Pylone.Align.HHrSol:=HHrSol; (* Calcul du gabarit Arret du pylône Nappe-Voûte *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Arret.SL.Longueur))); EPhH:=0.8*EPh/cos(DegToRad(DataMenuL.Beta/2)); L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Arret.SL.Longueur*sin(DegToRad(Divers.PsiMax)); L2:=sqrt(EPh*EPh-L1*L1); HHrSol:=Divers.GSol+Conducteur.FMax+Pyl.Arret.SL.Longueur+L2; H:=0.5*ceil((HHrSol+1)*20/9);
M2:=3*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*(3*HHrSol-2*L2); M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl; M4:=TMax*(3*HHrSol-2*L2); Pylone.Arret.PrixPyl:=DataPrefL.coef1 + DataPrefL.coef2*power(H,DataPrefL.coef3) +DataPrefL.coef4*power((sqrt((M2+M3)*(M2+M3)+M4*M4)/HHrSol),DataPrefL.coef5);
Pylone.Arret.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Arret.SL.PoidsTotal)*(2*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+L2*L2); if (Pylone.Arret.PrixFerrure>(0.5*Pylone.Arret.PrixPyl)) thenPylone.Arret.PrixFerrure:=0.5*Pylone.Arret.PrixPyl; Pylone.Arret.Ph1X:=-L1-DataMenuL.EcartementSCond/200; Pylone.Arret.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Arret.Ph2X:=0; Pylone.Arret.Ph2Y:=HHrSol-Pyl.Arret.SL.Longueur; Pylone.Arret.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Arret.Ph3Y:=Divers.GSol+Conducteur.FMax; Pylone.Arret.CGX:=0; Pylone.Arret.CGY:=0; Pylone.Arret.Hauteur:=H; Pylone.Arret.HHrSol:=HHrSol; (* Calcul du gabarit Angle du pylône Nappe-Voûte *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Angle.SL.Longueur))); EPhH:=0.8*EPh/cos(DegToRad(DataMenuL.Beta/2)); L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Angle.SL.Longueur*sin(DegToRad(Divers.PsiMax)); L2:=sqrt(EPh*EPh-L1*L1); HHrSol:=Divers.GSol+Conducteur.FMax+Pyl.Angle.SL.Longueur+L2; H:=0.5*ceil((HHrSol+1)*20/9); M2:=2*(3*HHrSol-2*L2)*((DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*cos(DegToRad(DataMenuL.Beta/2))+TMax*sin(DegToRad(DataMenuL.Beta/2))); M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl; Pylone.Angle.PrixPyl:=DataPrefL.coef1 + DataPrefL.coef2*power(H,DataPrefL.coef3) +DataPrefL.coef4*power(((M2+M3)/HHrSol),DataPrefL.coef5);
Pylone.Angle.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Angle.SL.PoidsTotal)*(2*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+L2*L2); if (Pylone.Angle.PrixFerrure>(0.5*Pylone.Angle.PrixPyl)) thenPylone.Angle.PrixFerrure:=0.5*Pylone.Angle.PrixPyl; Pylone.Angle.Ph1X:=-L1-DataMenuL.EcartementSCond/200; Pylone.Angle.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Angle.Ph2X:=0; Pylone.Angle.Ph2Y:=HHrSol-Pyl.Angle.SL.Longueur; Pylone.Angle.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Angle.Ph3Y:=Divers.GSol+Conducteur.FMax; Pylone.Angle.CGX:=0; Pylone.Angle.CGY:=0; Pylone.Angle.Hauteur:=H; Pylone.Angle.HHrSol:=HHrSol; (* Je conserve les infos sur SL *) Pylone.Align.SL:=Pyl.Align.SL; Pylone.Arret.SL:=Pyl.Arret.SL; Pylone.Angle.SL:=Pyl.Angle.SL; (* Je passe les informations *)

SECTION 5 : ANNEXES. 136
PyloneNappeVoute:=Pylone;end;
FunctionPyloneTriangle(DataMenuP:DataMenuPrinc;DataMenuL:DataMenuLignes;DataPrefL:DataPrefLignes;Divers:Autres;Pyl:DataPylones;Conducteur,ConducteurCG:DataConducteurLigne):DataPylones;var EPh, EPhH, L1, L2, GD, HHrSol, H, M1, M2, M3, M4, TMax, TMaxCG :real; Pylone:DataPylones;begin (* Tension Maximale pour un FAISCEAU de conducteurs *) TMax:=(Conducteur.TRupture/DataPrefL.CoefSecurite)*DataMenuL.NbreSCond; TMaxCG:=ConducteurCG.TRupture/DataPrefL.CoefSecurite; (* Calcul du gabarit Align du pylône Triangle *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Align.SL.Longueur))); EPhH:=0.8*EPh/cos(DegToRad(DataMenuL.Beta/2)); L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Align.SL.Longueur*sin(DegToRad(Divers.PsiMax)); L2:=Maximum(EPh,Pyl.Align.SL.Longueur+Divers.EPhN); GD:=DataMenuL.CGarde*(Maximum(sqrt(EPh*EPh-L1*L1),sqrt(3)-Pyl.Align.SL.Longueur))+(notDataMenuL.CGarde)*0.4; HHrSol:=Divers.GSol+Conducteur.FMax+Pyl.Align.SL.Longueur+L2+GD; H:=0.5*ceil((HHrSol+1)*20/9);
M1:=(L1+DataMenuL.EcartementSCond/200)*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Align.SL.PoidsTotal); M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl;
M2:=3*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*(Divers.GSol+Conducteur.FMax+Pyl.Align.SL.Longueur+0.5*L2);
M2:=M2+DataMenuL.CGarde*ConducteurCG.Cx*Conducteur.Qpression*ConducteurCG.diam/1000*Conducteur.PorteeMoy*HHrSol; Pylone.Align.PrixPyl:=DataPrefL.coef6 + DataPrefL.coef7*power(H,DataPrefL.coef8) +DataPrefL.coef9*power(((M1+M2+M3)/HHrSol),DataPrefL.coef10);
Pylone.Align.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Align.SL.PoidsTotal)*(3*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+DataMenuL.CGarde*GD*GD); if (Pylone.Align.PrixFerrure>(0.5*Pylone.Align.PrixPyl)) thenPylone.Align.PrixFerrure:=0.5*Pylone.Align.PrixPyl; Pylone.Align.Ph1X:=L1+DataMenuL.EcartementSCond/200; Pylone.Align.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Align.Ph2X:=-L1-DataMenuL.EcartementSCond/200; Pylone.Align.Ph2Y:=Divers.GSol+Conducteur.FMax+0.5*L2; Pylone.Align.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Align.Ph3Y:=Divers.GSol+Conducteur.FMax+L2; Pylone.Align.CGX:=0; Pylone.Align.CGY:=DataMenuL.CGarde*HHrSol; Pylone.Align.Hauteur:=H; Pylone.Align.HHrSol:=HHrSol; (* Calcul du gabarit Arret du pylône Triangle *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Arret.SL.Longueur))); EPhH:=0.8*EPh/cos(DegToRad(DataMenuL.Beta/2)); L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Arret.SL.Longueur*sin(DegToRad(Divers.PsiMax)); L2:=Maximum(EPh,Pyl.Arret.SL.Longueur+Divers.EPhN); GD:=DataMenuL.CGarde*(Maximum(sqrt(EPh*EPh-L1*L1),sqrt(3)-Pyl.Arret.SL.Longueur))+(notDataMenuL.CGarde)*0.4; HHrSol:=Divers.GSol+Conducteur.FMax+Pyl.Arret.SL.Longueur+L2+GD; H:=0.5*ceil((HHrSol+1)*20/9);
M1:=(L1+DataMenuL.EcartementSCond/200)*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Align.SL.PoidsTotal); M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl;
M2:=3*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000)*Conducteur.PorteeMoy*(Divers.GSol+Conducteur.FMax+Pyl.Align.SL.Longueur+0.5*L2);
M2:=M2+DataMenuL.CGarde*ConducteurCG.Cx*Conducteur.Qpression*ConducteurCG.diam/1000*Conducteur.PorteeMoy*HHrSol; M4:=TMax*(3*(Divers.GSol+Conducteur.FMax+Pyl.Arret.SL.Longueur)+1.5*L2); M4:=M4+TMaxCG*(Divers.GSol+Conducteur.FMax+Pyl.Arret.SL.Longueur+2.5*L2+GD); Pylone.Arret.PrixPyl:=DataPrefL.coef6 + DataPrefL.coef7*power(H,DataPrefL.coef8) +DataPrefL.coef9*power((sqrt((M1+M2+M3)*(M1+M2+M3)+M4*M4)/HHrSol),DataPrefL.coef10);
Pylone.Arret.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Arret.SL.PoidsTotal)*(3*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+DataMenuL.CGarde*GD*GD); if (Pylone.Arret.PrixFerrure>(0.5*Pylone.Arret.PrixPyl)) thenPylone.Arret.PrixFerrure:=0.5*Pylone.Arret.PrixPyl; Pylone.Arret.Ph1X:=L1+DataMenuL.EcartementSCond/200; Pylone.Arret.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Arret.Ph2X:=-L1-DataMenuL.EcartementSCond/200; Pylone.Arret.Ph2Y:=Divers.GSol+Conducteur.FMax+0.5*L2; Pylone.Arret.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Arret.Ph3Y:=Divers.GSol+Conducteur.FMax+L2; Pylone.Arret.CGX:=0; Pylone.Arret.CGY:=DataMenuL.CGarde*HHrSol; Pylone.Arret.Hauteur:=H;

SECTION 5 : ANNEXES. 137
Pylone.Arret.HHrSol:=HHrSol; (* Calcul du gabarit Angle du pylône Triangle *) EPh:=((DataMenuP.Unom/150)+(Conducteur.CFI*sqrt(Conducteur.FMax+Pyl.Angle.SL.Longueur))); EPhH:=0.8*EPh/cos(DegToRad(DataMenuL.Beta/2)); L1:=Maximum(Divers.EPhN,EPhH)+Pyl.Angle.SL.Longueur*sin(DegToRad(Divers.PsiMax)); L2:=Maximum(EPh,Pyl.Angle.SL.Longueur+Divers.EPhN); GD:=DataMenuL.CGarde*(Maximum(sqrt(EPh*EPh-L1*L1),sqrt(3)-Pyl.Angle.SL.Longueur))+(notDataMenuL.CGarde)*0.4; HHrSol:=Divers.GSol+Conducteur.FMax+Pyl.Angle.SL.Longueur+L2+GD; H:=0.5*ceil((HHrSol+1)*20/9);
M1:=(L1+DataMenuL.EcartementSCond/200)*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Angle.SL.PoidsTotal);
M2:=3*(Divers.GSol+Conducteur.FMax+Pyl.Angle.SL.Longueur+0.5*L2)*(DataMenuL.NbreSCond*Conducteur.Cx*Conducteur.Qpression*Conducteur.Diam/1000*Conducteur.PorteeMoy*cos(DegToRad(DataMenuL.Beta/2))+TMax*sin(DegToRad(DataMenuL.Beta/2)));
M2:=M2+DataMenuL.CGarde*HHrSol*2*(ConducteurCG.Cx*ConducteurCG.Qpression*ConducteurCG.diam/1000*Conducteur.PorteeMoy*cos(DegToRad(DataMenuL.Beta/2))+TMaxCG*sin(DegToRad(DataMenuL.Beta/2))); M3:=HHrSol*HHrSol*0.5*DataMenuL.CPyl*Pyl.Qpression*DataMenuL.EpaisseurPyl; Pylone.Angle.PrixPyl:=DataPrefL.coef6 + DataPrefL.coef7*power(H,DataPrefL.coef8) +DataPrefL.coef9*power(((M1+M2+M3)/HHrSol),DataPrefL.coef10);
Pylone.Angle.PrixFerrure:=DataPrefL.coef21*(DataMenuL.NbreSCond*Conducteur.MasseLin/1000*9.80665*Conducteur.PorteeMoy+Pyl.Angle.SL.PoidsTotal)*(3*(L1+DataMenuL.EcartementSCond/200)*(L1+DataMenuL.EcartementSCond/200)+DataMenuL.CGarde*GD*GD); if (Pylone.Angle.PrixFerrure>(0.5*Pylone.Angle.PrixPyl)) thenPylone.Angle.PrixFerrure:=0.5*Pylone.Angle.PrixPyl; Pylone.Angle.Ph1X:=L1+DataMenuL.EcartementSCond/200; Pylone.Angle.Ph1Y:=Divers.GSol+Conducteur.FMax; Pylone.Angle.Ph2X:=-L1-DataMenuL.EcartementSCond/200; Pylone.Angle.Ph2Y:=Divers.GSol+Conducteur.FMax+0.5*L2; Pylone.Angle.Ph3X:=L1+DataMenuL.EcartementSCond/200; Pylone.Angle.Ph3Y:=Divers.GSol+Conducteur.FMax+L2; Pylone.Angle.CGX:=0; Pylone.Angle.CGY:=DataMenuL.CGarde*HHrSol; Pylone.Angle.Hauteur:=H; Pylone.Angle.HHrSol:=HHrSol; (* Je conserve les infos sur SL *) Pylone.Align.SL:=Pyl.Align.SL; Pylone.Arret.SL:=Pyl.Arret.SL; Pylone.Angle.SL:=Pyl.Angle.SL; (* Je passe les informations *) PyloneTriangle:=Pylone;end;
Bibliographie
SECTION 5 : ANNEXES. 139
Bibliographie.
Ouvrages de référence.
TRANSPORT ET DISTRIBUTION DE L'ÉNERGIE ELECTRIQUE,
Dr Jean-Louis Lilien, notes de cours, Université de Liège, 1997.
QUALITÉ DE L'ÉNERGIE ELECTRIQUE,
Dr Pol Pirotte, notes de cours, Université de Liège, 1998.
RÉSEAUX DE DISTRIBUTION DE L'ÉNERGIE ELECTRIQUE – CONSIDÉRATIONS TECHNICO-ECONOMIQUES,
Louis Maesen, travail de fin d'études, Université de Liège, 1990.
Les lignes aériennes.
RÈGLEMENT GÉNÉRAL SUR LES INSTALLATIONS ELECTRIQUES,
éd. AIB VINÇOTTE A.S.B.L., 1996.
CONSTRUCTION DES LIGNES AÉRIENNES À HAUTE TENSION,
Charles Avril, éd. Eyrolles, 1984.
ELECTRICAL TRANSMISSION AND REFERENCE BOOK,
vol. 1 et 2, éd. Central Station Engineer of the Westinghouse Electric Corporation.
DYNAMIQUE DES RÉSEAUX DE TRANSPORT DE L’ÉNERGIE ÉLECTRIQUE,
T. Van Cutsem, notes de cours, Université de Liège, 1997.
CALCUL DES RÉSEAUX DE PUISSANCE,
J.L. Horward, notes de cours, Université de Liège, 1997.
TRANSMISSION LINE REFERENCE BOOK : CONDUCTOR MOTION,
Electric Power Research Institute, 1979.
OVERHEAD LINE DESIGN,
vol. 1 et 2, Electric Power Research Institute.
ELECTRIC POWER DISTRIBUTION SYSTEM ENGINEERING,
Turan Gönen, éd. John Wiley & Sons, 1986.
ELECTRIC POWER TRANSMISSION SYSTEM ENGINEERING : ANALYSIS AND DESIGN,
Turan Gönen, éd. John Wiley & Sons, 1985.
COMPORTEMENT ÉLECTROMÉCANIQUE DES RÉSEAUX,
Dr Jean-Louis Lilien, notes de cours, Université de Liège, 1998.
Calcul des caractéristiques R-L-C.
MODERN POWER SYSTEM ANALYSIS,
Turan Gönen, éd. John Wiley & Sons, 1988.
ANALYSIS OF FAULTED POWER SYSTEMS,
Paul Andeson, Iowa State University Press, 1973.
SECTION 5 : ANNEXES. 140
Perturbations dues à l'effet de couronne.
EFFET DE COURONNE – RÉSEAUX À HAUTE TENSION,
Dr Pol Pirotte, Presse Universitaires de Liège, A.S.B.L., 1980.
CARACTÉRISTIQUES DES LIGNES ET DES ÉQUIPEMENTS À HAUTE TENSION RELATIVES AUX PERTURBATIONS
RADIOÉLECTRIQUES, PREMIÈRE PARTIE : DESCRIPTION DES PHÉNOMÈNES,
Normes C.E.I. : publication 18-1, 1982.
PERTURBATIONS ENGENDRÉES PAR L’EFFET COURONNE DES RÉSEAUX DE TRANSPORT,
CIGRE Working Group 36.01, CIGRE, 1974.
INTERFERENCES PRODUCED BY CORONA EFFECT OD ELECTRIC SYSTEMS,
CIGRE Working Group 36.01, CIGRE, 1996.
CONTRIBUTION À L’ÉTUDE DES CONSÉQUENCES DE L’EFFET DE COURONNE SUR LES LIGNES AÉRIENNES À TRÈS
HAUTE TENSION CONTINUE,
Dr Pol Pirotte.
Calcul du champ électrique et du champ magnétique.
CHAMPS ÉLECTRIQUES ET MAGNÉTIQUES ENGENDRÉS PAR LES RÉSEAUX DE TRANSPORT,
CIGRE Working Group 36.01, CIGRE, 1980.
LE TRANSPORT DE L’ÉNERGIE ÉLECTRIQUE ET L’ENVIRONNEMENT : CHAMPS, BRUITS ET PERTURBATIONS,
CIGRE Working Group 36.01, CIGRE.
ELECTROTECHNIQUE I,
Dr W.Legros, Centrale des Cours de l'A.E.E.S., Université de Liège, 1997.
OVERHEAD LINE DESIGN IN RELATION TO ELECTRIC AND MAGNETIC FIELD LIMITS,
B.J. Maddock, Power Engineering Journal, septembre 1992.
Calcul de l'impédance et des capacités homopolaires.
MODERN POWER SYSTEM ANALYSIS,
Turan Gönen, éd. John Wiley & Sons, 1988.
ANALYSIS OF FAULTED POWER SYSTEMS,
Paul Andeson, Iowa State University Press, 1973.
CALCUL DE L'IMPÉDANCE DE SÉQUENCE ZÉRO DES CÂBLES,
Edward I. ANDERSON, Janusz KAROLAK, Tome 42, éd. Archiwum Elektrotechniki, 1993.
Câbles souterrains.
MANUEL TECHNIQUE DE CALCUL,
Société Nouvelle des Câbleries de Charleroi S.A., 1997.
CÂBLES D’ÉNERGIE,
Alcatel Cable Benelux, 1997.
CALCUL DU COURANT ADMISSIBLE DANS LES CÂBLES EN RÉGIME PERMANENT,

SECTION 5 : ANNEXES. 141
Norme C.E.I. : publication n°287 et compléments, 1982.
OPTIMISATION ÉCONOMIQUE DES SECTIONS D’ÂME DE CÂBLE,
Projet C.E.I., Montréal 1985, mise à jour de mars 1988.
OPTIMISATION ÉCONOMIQUE DE LA SECTION CONDUCTRICE DES CÂBLES D’ÉNERGIE SELON LE DOCUMENT C.E.I.
20A(BC)131 – MÉTHODE DE CALCUL SIMPLIFIÉE,
Daniel Kaszowski et Pierre Mirebeau, Sycabel.
Informatique.
LANGAGES DE PROGRAMMATION,
Dr. Daniel Ribbens, notes de cours, Université de Liège, 1997.
BORLAND DELPHI 3,
Gérald Deutsch, Michaël Gross, Karsten et Markus Richter, éd. Micro Applications, 1997.
GRAND LIVRE DE DELPHI 3,
Gérald Deutsch, Michaël Gross, Karsten et Markus Richter, éd. Micro Applications, 1997.
APPRENDRE LE C,
Claude Delannoy, 2ème édition, éd. Eyrolles, 1994.
APPRENDRE LE C++,
Claude Delannoy, 2ème édition, éd. Eyrolles, 1994.
Divers.
MÉCANIQUE DES MATÉRIAUX ,
Charles Massonnet et Serge Cescotto, éd. De Boeck, 1994.
IEEE STANDARD DICTIONARY OF ELECTRICAL AND ELECTRONIC TERMS,
2ème édition, éd. John Wiley & Sons, 1977.
HANDBOOK OF MATHEMATICAL FUNCTIONS,
Miltonn Abramowitz et Irene A.Stegun, éd. Dover, 1970