cours_régulation automatique analogique

of 276
Transcript of cours_régulation automatique analogique
-
7/31/2019 cours_rgulation automatique analogique
1/276
ecole dingenieurs du canton de Vaud( eivd )
Departement delectricite etdinformatique
Filiere ElectroniqueDepartement des systemes industriels etdes microtechniques
Filiere Microtechnique
REGULATIONAUTOMATIQUE
A
i
iutomatisation
n s t i t u t d '
n d u s t r i e l l e
Michel ETIQUE, fevrier 2004, Yverdon-les-Bains
-
7/31/2019 cours_rgulation automatique analogique
2/276
eivd R egulation automatique
2 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
3/276
eivd R egulation automatique
Table des matieres
1 Introduction ` a la regulation automatique 111.1 Regulation automatique : tentative de denition . . . . . . . . . . 111.2 Exemples introductifs . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2.1 Regulation automatique de temperature . . . . . . . . . . 131.2.2 Regulation automatique de la vitesse dun moteur DC ` aexcitation separee constante . . . . . . . . . . . . . . . . . 18
1.3 Elements et signaux caracteristiques dun systeme de regulationautomatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.3.1 Blocs fonctionnels et sous-systemes . . . . . . . . . . . . . 241.3.2 Signaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.4 Regulation de correspondance et regulation de maintien . . . . . . 291.5 Problemes fondamentaux des systemes de regulation automatique 30
1.5.1 Stabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301.5.2 Precision et rapidite . . . . . . . . . . . . . . . . . . . . . 321.5.3 Dilemme stabilite-precision . . . . . . . . . . . . . . . . . . 33
1.6 Principe de la regulation numerique . . . . . . . . . . . . . . . . . 401.7 Generalites sur les systemes . . . . . . . . . . . . . . . . . . . . . 41
1.7.1 Comportement dynamique . . . . . . . . . . . . . . . . . . 421.7.2 Comportement statique . . . . . . . . . . . . . . . . . . . 431.7.3 Systeme statique . . . . . . . . . . . . . . . . . . . . . . . 431.7.4 Systeme dynamique . . . . . . . . . . . . . . . . . . . . . . 431.7.5 Systeme lineaire . . . . . . . . . . . . . . . . . . . . . . . . 44
1.8 Autres exemples de systemes asservis . . . . . . . . . . . . . . . . 461.9 Le projet dautomatique . . . . . . . . . . . . . . . . . . . . . . . 52
1.10 Lautomatique : un domaine important pour tous les domaines dela technique et plus encore . . . . . . . . . . . . . . . . . . . . . . . 54
2 Modelisation, representation et simulation des systemes dyna-miques lineaires 572.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 572.2 Exemples de reponses indicielles typiques . . . . . . . . . . . . . . 59
2.2.1 Systemes a retard pur . . . . . . . . . . . . . . . . . . . . 592.2.2 Systemes a modes aperiodiques . . . . . . . . . . . . . . . 60
3 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
4/276
eivd R egulation automatique
2.2.3 Systemes a modes oscillatoires et systemes `a dephasagenon-minimal . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.2.4 Systemes a comportement integrateur et derivateur . . . . 642.3 Modelisation de connaissance/representation des systemes par leurs
equations differentielles . . . . . . . . . . . . . . . . . . . . . . . . 672.3.1 Exemple : Circuit RLC serie . . . . . . . . . . . . . . . . . 672.3.2 Exemple : Filtre passe-bas RC dordre 1 . . . . . . . . . . 692.3.3 Analogies des systemes electriques et mecaniques . . . . . 712.3.4 Exemple : Moteur DC a excitation separee constante . . . 772.3.5 Generalisation . . . . . . . . . . . . . . . . . . . . . . . . . 80
2.4 Representation par la reponse impulsionnelle . . . . . . . . . . . . 812.5 Representation par la fonction de transfert (transmittance iso-
morphe) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.5.1 Denition . . . . . . . . . . . . . . . . . . . . . . . . . . . 812.5.2 Forme de G(s) . . . . . . . . . . . . . . . . . . . . . . . . 822.5.3 Poles et zeros, ordre et degre relatif . . . . . . . . . . . . . 832.5.4 Exemple : moteur DC . . . . . . . . . . . . . . . . . . . . 832.5.5 Exemple : Integrateur . . . . . . . . . . . . . . . . . . . . 842.5.6 Conguration p oles-zeros . . . . . . . . . . . . . . . . . . . 852.5.7 Type dun systeme . . . . . . . . . . . . . . . . . . . . . 862.5.8 Presentation des fonctions de transfert . . . . . . . . . . . 87
2.6 Systemes fondamentaux . . . . . . . . . . . . . . . . . . . . . . . 892.6.1 Systeme fondamental dordre 1 . . . . . . . . . . . . . . . 892.6.2 Systeme fondamental dordre 2 . . . . . . . . . . . . . . . 92
2.7 Representation dun systeme dynamique lineaire par son modeledetat. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 992.7.1 Exemple introductif : circuit RLC serie . . . . . . . . . . . 992.7.2 Denition . . . . . . . . . . . . . . . . . . . . . . . . . . . 1032.7.3 Forme matricielle . . . . . . . . . . . . . . . . . . . . . . . 1062.7.4 Schema fonctionnel . . . . . . . . . . . . . . . . . . . . . . 1082.7.5 Calcul de la fonction de transfert a partir du modele detat 1092.7.6 Application : linearisation autour dun point de fonction-
nement ([[1], chap.11], [[7],3.6]) . . . . . . . . . . . . . . 1153 Schemas fonctionnels 121
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1213.2 Systemes en cascade . . . . . . . . . . . . . . . . . . . . . . . . . 1223.3 Systemes en parallele . . . . . . . . . . . . . . . . . . . . . . . . . 1233.4 Systemes en contre-reaction/reaction . . . . . . . . . . . . . . . . 1243.5 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1283.6 Exemple : moteur DC . . . . . . . . . . . . . . . . . . . . . . . . 129
3.6.1 Schema technologique, mise en equations, modeles en t eten s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
4 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
5/276
eivd R egulation automatique
3.6.2 Schema fonctionnel detaille . . . . . . . . . . . . . . . . . 1293.6.3 Reduction du schema fonctionnel detaille . . . . . . . . . . 130
4 Regulateur PID 1334.1 Fonctions de transfert dun systeme asservi . . . . . . . . . . . . . 133
4.1.1 Fonction de transfert du systeme ` a regler G (s) . . . . . . 1344.1.2 Fonction de transfert en boucle ouverte G (s) . . . . . . . 1344.1.3 Fonction de transfert en boucle fermee, regulation de cor-
respondance G (s) . . . . . . . . . . . . . . . . . . . . . . 1354.1.4 Fonction de transfert en regulation de maintien G (s) . . . 136
4.2 Reponse du systeme asservi travaillant dans les deux modes deregulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
4.3 Regulateur PID analogique . . . . . . . . . . . . . . . . . . . . . . 1384.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . 1384.3.2 Regulateurs non-lineaires . . . . . . . . . . . . . . . . . . . 1404.3.3 Regulateur `a action proportionnelle (P) . . . . . . . . . . . 1424.3.4 Regulateur `a action integrale (I) . . . . . . . . . . . . . . . 1464.3.5 Regulateur `a action proportionnelle (P) et derivee (D) . . 1574.3.6 Regulateur industriel PID . . . . . . . . . . . . . . . . . . 1684.3.7 Hit parade des regulateurs classiques . . . . . . . . . . . 171
4.4 Methodes empiriques de synthese (selon [1]) . . . . . . . . . . . . 1724.4.1 Methode de Ziegler-Nichols en boucle ouverte (premiere
methode de Ziegler-Nichols) . . . . . . . . . . . . . . . . . 1724.4.2 Methode de Ziegler-Nichols en boucle fermee (seconde methode
de Ziegler-Nichols) . . . . . . . . . . . . . . . . . . . . . . 1734.4.3 Auto-ajustement dun regulateur PID . . . . . . . . . . . . 174
5 Performances des systemes asservis 1795.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1795.2 Stabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
5.2.1 Denition . . . . . . . . . . . . . . . . . . . . . . . . . . . 1795.2.2 Etude de la stabilite par la reponse impulsionnelle . . . . . 1805.2.3 Condition fondamentale de stabilite . . . . . . . . . . . . . 186
5.3 Precision en regime permanent . . . . . . . . . . . . . . . . . . . . 1875.3.1 Forme des fonctions de transfert . . . . . . . . . . . . . . . 1885.3.2 Calcul de lerreur . . . . . . . . . . . . . . . . . . . . . . . 1885.3.3 Cas particulier : erreur statique E . . . . . . . . . . . . . 1895.3.4 Generalisation : erreurs dordre superieur . . . . . . . . . . 190
5.4 Rapidite des systemes de regulation automatique . . . . . . . . . 1935.4.1 Cas particulier o u G (s) est dordre 1 fondamental . . . . 1945.4.2 Cas particulier o u G (s) est dordre 2 fondamental . . . . 1955.4.3 Systemes a temps mort (retard pur) . . . . . . . . . . . . . 196
5.5 Qualite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
5 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
6/276
eivd R egulation automatique
5.6 Poles dominants . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1985.6.1 Poles dominants des systemes asservis . . . . . . . . . . . 199
6 Analyse frequentielle 2036.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2036.2 Analyse frequentielle de systemes dynamiques, reponse harmonique 203
6.2.1 Calcul de la reponse harmonique . . . . . . . . . . . . . . 2036.2.2 Representation graphique de la reponse harmonique G( j ) : lieu de Nyquist . . . . . . . . . . . . . . . . . . . . . . 2066.2.3 Representation graphique de la reponse harmonique G( j ) : diagramme de Bode . . . . . . . . . . . . . . . . . . . 209
6.3 Esquisse du diagramme de Bode en boucle fermee, regulation decorrespondance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
6.4 Bande passante en boucle fermee . . . . . . . . . . . . . . . . . . 2156.5 Allure typique du diagramme de Bode en boucle ouverte . . . . . 2166.6 Valeur approximative de la duree de reglage T reg . . . . . . . . . . 2176.7 Systemes a retard pur . . . . . . . . . . . . . . . . . . . . . . . . 219
6.7.1 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2216.8 Etude de la stabilite par la reponse harmonique : critere de Nyquist223
6.8.1 Critere de Nyquist generalise . . . . . . . . . . . . . . . . . 2236.8.2 Critere de Nyquist simplie (critere du revers) . . . . . . . 2306.8.3 Marge de phase et marge de gain A . . . . . . . . . . 232
6.9 Methode de Bode . . . . . . . . . . . . . . . . . . . . . . . . . . . 2376.9.1 Marche a suivre . . . . . . . . . . . . . . . . . . . . . . . . 237
6.10 Stabilite robuste [7] . . . . . . . . . . . . . . . . . . . . . . . . . . 2396.10.1 Incertitude sur la fonction de transfert du systeme ` a regler
[[7], p.46-47] . . . . . . . . . . . . . . . . . . . . . . . . . . 2406.10.2 Theoreme de la stabilite robuste [[7], p.53] . . . . . . . . . 2436.10.3 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
7 Analyse dans le plan complexe 2497.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2497.2 Fonctions de transfert . . . . . . . . . . . . . . . . . . . . . . . . 2497.3 Denition du lieu dEvans . . . . . . . . . . . . . . . . . . . . . . 2517.4 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2527.5 Condition des angles et condition des modules . . . . . . . . . . . 254
7.5.1 Condition des angles . . . . . . . . . . . . . . . . . . . . . 2557.5.2 Condition des modules . . . . . . . . . . . . . . . . . . . . 255
7.6 Trace du lieu dEvans . . . . . . . . . . . . . . . . . . . . . . . . . 2567.6.1 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
7.7 Valeurs particulieres du gain k . . . . . . . . . . . . . . . . . . . 2607.7.1 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
7.8 Marges de stabilite absolue et relative . . . . . . . . . . . . . . . . 262
6 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
7/276
eivd R egulation automatique
8 Synthese frequentielle(notes de cours) 2678.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2678.2 Procedure dajustage dun regulateur PI . . . . . . . . . . . . . . 2688.3 Procedure dajustage dun regulateur PD . . . . . . . . . . . . . . 2698.4 Procedure dajustage dun regulateur PID . . . . . . . . . . . . . 270
8.4.1 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
7 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
8/276
eivd R egulation automatique
Fiches de cours
10.09.1997/MEE-St (MEE EE rgu. automatique)
Rgulation automatique
Dpartement:
Filire:
Orientation:
Electricit
Electronique
Systmes automatiss
Contrle des connaissances
Semestre: 1 2 3 4 5 6 Total heures Contrle continu Propdeutique Final4 72 X I II
OBJECTIFSa) Matriser les mthodes danalyse des systmes dynamiques linaires et les appliquer aux processus industriels.b) Pouvoir comprendre les problmes spcifiques dun systme de rgulation automatique.c) Pouvoir formuler le cahier des charges dun systme de rgulation automatique.d) Etre apte faire la synthse de rgulateurs classiques sur la base de spcifications de performances.
CONTENU (avec dotation approximative en %)
Introduction 10% Exemples dapplications industrielles, dfinitions gnrales, rgulateurs tout-ou-rien et proportionnel, notion de
statisme et de stabilit, linarit, rgulation de correspondance et de maintien, principe de la rgulationnumrique.
Modlisation et simulation 20% Fonction de transfert, modle dtat. Systmes fondamentaux. Schma fonctionnel. Simulation laide du
logiciel MATLAB.
Caractristiques et performances des systmes asservis 20% Fonctions de transfert en boucle ouverte et en boucle ferme. Rgulateur PID. Mthode de Ziegler-Nichols.
Stabilit, rapidit, prcision. Condition fondamentale de stabilit. Prcision en rgime permanent.
Analyse et synthse frquentielles 30% Rponse harmonique, lieux de Nyquist et de Bode. Critre de Nyquist. Lieux de Bode en boucle ferme. Synthse de rgulateurs P, PI, PD et PID. Mthode de Bode. Compensation ple-zro. Rgulateurs robustes.
Analyse dans le plan complexe 10% Lieu dEvans, marges de stabilit. Courbes qui-amortissement.
Analyse des systmes non-linaires 10% Non-linarits essentielles et accidentelles. Mthodes du premier harmonique et du plan de phase
FORME DE L'ENSEIGNEMENT: Cours en classe, exercices en classe et au laboratoire.
LIAISON AVEC D'AUTRES COURS: Pralable requis : Mathmatique, mcanique rationnelle, physique, machines lectriques,
lectronique, lectrotechnique, programmation, traitement de signal. Prparation pour : Rgulation numrique, laboratoire de rgulation automatique, cours
dentranements rgls et dlectronique de puissance, projets de semestre et dediplme.
Voir aussi: Laboratoire de rgulation automatique.
SUPPORT DE COURS: Polycopi, exercices avec corrigs dtaills, logiciels daide lenseignement.
BIBLIOGRAPHIE: Rgulation automatique, L. Maret, 1987, PPUR.Modern Control Systems, Dorf et Bishop, 1995, Addison-Wesley.
8 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
9/276
eivd R egulation automatique
10.09.1997/MEE-St (MEE EE rgu. automatique)
Rgulation automatique
Dpartement:
Filire:
Orientation:
Electricit
Electronique
Systmes intgrs
Contrle des connaissances
Semestre: 1 2 3 4 5 6 Total heures Contrle continu Propdeutique Final4 72 X I II
OBJECTIFSa) Matriser les mthodes danalyse des systmes dynamiques linaires et les appliquer aux processus industriels.b) Pouvoir comprendre les problmes spcifiques dun systme de rgulation automatique.c) Pouvoir formuler le cahier des charges dun systme de rgulation automatique.d) Etre apte faire la synthse de rgulateurs classiques sur la base de spcifications de performances.
CONTENU (avec dotation approximative en %)
Introduction 10%
Exemples dapplications industrielles, dfinitions gnrales, rgulateurs tout-ou-rien et proportionnel, notion destatisme et de stabilit, linarit, rgulation de correspondance et de maintien, principe de la rgulationnumrique.
Modlisation et simulation 20% Fonction de transfert, modle dtat. Systmes fondamentaux. Schma fonctionnel. Simulation laide du
logiciel MATLAB.
Caractristiques et performances des systmes asservis 20% Fonctions de transfert en boucle ouverte et en boucle ferme. Rgulateur PID. Mthode de Ziegler-Nichols.
Stabilit, rapidit, prcision. Condition fondamentale de stabilit. Prcision en rgime permanent.
Analyse et synthse frquentielles 30% Rponse harmonique, lieux de Nyquist et de Bode. Critre de Nyquist. Lieux de Bode en boucle ferme. Synthse de rgulateurs P, PI, PD et PID. Mthode de Bode. Compensation ple-zro. Rgulateurs robustes.
Analyse dans le plan complexe 10% Lieu dEvans, marges de stabilit. Courbes qui-amortissement.
Analyse des systmes non-linaires 10% Non-linarits essentielles et accidentelles. Mthodes du premier harmonique et du plan de phase
FORME DE L'ENSEIGNEMENT: Cours en classe, exercices en classe et au laboratoire.
LIAISON AVEC D'AUTRES COURS: Pralable requis : Mathmatique, mcanique rationnelle, physique, machines lectriques,
lectronique, lectrotechnique, programmation, traitement de signal. Prparation pour : Rgulation numrique, laboratoire de rgulation automatique, cours
dentranements rgls et dlectronique de puissance, projets de semestre et dediplme.
Voir aussi: Laboratoire de rgulation automatique.
SUPPORT DE COURS: Polycopi, exercices avec corrigs dtaills, logiciels daide lenseignement.
BIBLIOGRAPHIE: Rgulation automatique, L. Maret, 1987, PPUR.Modern Control Systems, Dorf et Bishop, 1995, Addison-Wesley.
9 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
10/276
eivd R egulation automatique
PreambuleLe present polycopie de regulation automatique nest au stade actuel quun
condense de notes de cours. Il sinspire tres largement de la reference [1].Pour la liere electronique, ce cours de regulation automatique est enseigne
pendant un demi-semestre, ` a raison de 8 periodes par semaine pour un totalde 72 periodes. Environ la moitie de celles-ci est consacree aux exercices, dontles donnees sont fournies separement et pour lesquels un corrige est distribue.Ce cours est complete par des travaux de laboratoire ( laboratoire de regulation automatique ), reparti sur un semestre (36 periodes au total).
Lorientation systemes automatises de la liere electronique voit sa formationen automatique completee par un cours de regulation numerique , donne ensuiteavec la meme dotation horaire (semestre dhiver) complete par un laboratoire(laboratoire de regulation numerique , 72 periodes, semestre dete).
Les differents documents distribues sont en principe disponibles sous formeinformatique sur le site
http ://iai1.eivd.ch
ou tous les chiers, y compris les diapositives de presentation, sont accessibles(suivre le lien Regulation automatique ).
Pour le travail au laboratoire (exercices et experiences), les etudiants rece-vront les nom dutilisateur, mot de passe et nom de domaine necessaire pour seconnecter sur le serveur iAi.
On trouvera `a ces references les differents chapitres en format pdf , ainsi que laplus grande partie des gures ( * . dsf , *. eps ), realisees avec le logiciel MicrografxDesigner, dont l eivd a la licence de site. Lorsque le chier pdf du cours est ouvert,il est possible de telecharger les gures au format eps en cliquant sur celles-ci.Les simulations sont faites avec les logiciels MATLABet SysQuake , qui serontabondamment utilises dans le cadres des exercices et laboratoires. Un certainnombre des chiers de simulation sont egalement accessibles en cliquant sur leurnom dans le document pdf .
10 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/ -
7/31/2019 cours_rgulation automatique analogique
11/276
eivd R egulation automatique
Chapitre 1
Introduction a la regulationautomatique
1.1 Regulation automatique : tentative de denition
y1(t)Systme(processus)
f_01_28.eps
y2(t)u2(t)u1(t)
Traitement(rgulateur)
Grandeurs physiquesmesures
(presssion,temprature,vitesse, etc)
Commandes
Comportement
souhait(consignes)
Effets del'environnement(perturbat ions)
w1(t)
w2(t)
v1(t) v2(t)
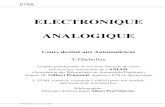
Fig. 1.1 Structure dun systeme de regulation automatique : le fonctionnementde linstallation requiert que certaines grandeurs physiques y (t), y (t), . . . dunsysteme aient un comportement xe par les consignes w (t), w (t), . . . , malgre lapresence de perturbations v (t ), v (t), . . . dorigine externe et imprevisibles. Dansce but, y (t), y (t), . . . sont mesurees, traitees puis une action est entreprise surle systeme au moyen des commandes u (t), u (t), . . . (f 01.dsf).
La regulation automatique (automatic control , Regelungstechnik) est la tech-nique de lingenieur offrant les methodes et les outils necessaires ` a la prise decontr ole dune ou plusieurs grandeurs physiques dun systeme en vue den impo-ser le comportement. Les grandeurs physiques, ou signaux (vitesse, temperature,
Chapitre 1 11 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_28.eps -
7/31/2019 cours_rgulation automatique analogique
12/276
eivd R egulation automatique
pression, courant, etc), doivent etre mesurees an de verier leur etat puis dedeterminer `a laide dun traitement approprie laction ` a entreprendre sur le systemeou processus (installation de production, robot, alimentation electronique stabi-lisee, disque dur, etc) pour quelles se comportent comme souhaite (gure 1.1 pageprecedente). Avec le qualicatif automatique , on admet quaucune interventionmanuelle nest necessaire atteindre cet objectif.
Le comportement des grandeurs contr olees y (t), y (t), . . . peut/doit en generalsatisfaire plusieurs criteres :
on souhaite quune certaine grandeur physique (p.ex. vitesse, courantelectrique,temperature) ait une valeur moyenne donnee en regime permanent, malgrelinuence de lenvironnement ( perturbations ) ;
cette meme grandeur physique doit passer dune valeur ` a une autre en untemps donne, voire avec un prol de variation impose.
Fait remarquable, les methodes de lautomatique offrent donc la possibilitede modier le comportement statique et dynamique dune ou plusieurs grandeursphysiques dun processus, an quelles evoluent conformement aux exigences delapplication (gure 1.2 page suivante). Dun certain point de vue, ces methodescontribuent signicativement ` a augmenter la valeur ajoutee aux produits, en of-frant les moyens dameliorer les performances de ceux-ci.
En sappuyant fondamentalement sur la technique de la contre-reaction(feedback, R uckfuhrung), les methodes de lautomatique permettent de traiter dessituations o u interviennent des systemes
intrinsequement lents devant etre rendus plus rapides (gure 1.2 page ci-contre) ; impossibles a contr oler manuellement (systemes tres rapides (ayant des
constantes de temps < 1 [s]), tres precis (1%)) ; difficilement controlables manuellement (sustentation et levitation magnetiques,
aviation, etc) devant etre rendus stables an detre utilisables.Les applications de la regulation automatique se rencontrent donc dans tous
les systemes dont une (ou plusieurs) grandeur physique (temperature, pH, debit,pression, courant, vitesse, force, altitude, profondeur, orientation, etc) doit cor-respondre a une valeur prescrite, la consigne , laquelle pouvant etre variable, etcela sans intervention manuelle, i.e. de maniere completement automatique.
1.2 Exemples introductifs
On presente ci-apres quelques exemples simples de systemes de regulationautomatique. Ceux-ci sont egalement appeles systemes asservis .
Chapitre 1 12 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
13/276
eivd R egulation automatique
Thermo-couple
Anneau de chauffage
Ailettes de refroidissement
Intrieur du tube
Tle pour diriger le flux d'air
Parrois du tube
Flux d'air
f_01_32.eps
0 100 200 300 400 500 600 700 800 900 100050
0
50
100
150
t [s]
T [ C ]
0 100 200 300 400 500 600 700 800 900 1000172
174
176
178
180
182
t [s]
T [ C ]
Fig. 1.2 Regulation de la temperature dun processus industriel : en haut,la reponse indicielle du systeme seul (temperature T en fonction du temps tsuite a lapplication dun saut de puissance thermique), en bas la reponse indi-cielle en regulation automatique (suite ` a lapplication dun saut de consigne detemperature). On observe que lon parvient, gr ace a la contre-reaction, ` a rendrele systeme beaucoup plus rapide ! (mes 10 01 2001.m)
1.2.1 Regulation automatique de temperatureRegulation manuelle de temperature : schema technologique
La gure 1.3 page suivante represente schematiquement une installation per-mettant de faire une regulation manuelle de temperature. Loperateur agit sur unpotentiometre pour ajuster la tension de commande de lamplicateur de puis-sance, lequel alimente un corps de chauffe electrique. Comme les elements dessinesrepresentent assez explicitement des dispositifs dependant de la realisation tech-nique de linstallation (par exemple, corps de chauffe electrique et non chauffage
a gaz), on parle de schema technologique .
Regulation manuelle de temperature : representation par schema fonc-tionnel
On peut representer le principe de la regulation manuelle de temperature parun schema fonctionnel , i.e. decouper logiquement la fonction globale regulationmanuelle de temperature en une serie de sous-fonctions ou composants plussimples, en indiquant la fonction realisee ainsi que la nature de linformation
Chapitre 1 13 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///mes_10_01_2001.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_mes_10_01_2001_1.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_32.eps -
7/31/2019 cours_rgulation automatique analogique
14/276
eivd R egulation automatique
A
Potentiomtre
Amplificateur
de puissance
Corps de
chauffe
i
u
Text
T
Puissancedissipe par effet Joule
Tc
pth
f_01_01.eps
Tm
Fig. 1.3 Regulation manuelle de temperature : T est la temperature deconsigne, i.e. la temperature souhaitee, T la temperature effective en [ C].Loperateur souhaite que T , du moins la temperature T quil percoit senso-riellement, concide avec T . Il agit pour cela sur le potentiometre an dajusterla puissance thermique dissipee par effet Joule dans la resistance du corps dechauffe (f 01.dsf).
Chapitre 1 14 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_01.eps -
7/31/2019 cours_rgulation automatique analogique
15/276
eivd R egulation automatique
Tc(t)Cerveau,
main
angle du potent iomtre
tempraturede consigne
temprature(perue, mesure)
Tm (t)Sens
Amplificateurde puissance
LocalCorps dechauffe
T(t)
tempraturedu local
p(t)=u( t) 2 /R
puiss ance
G(t)
tension aux bornes du corp s de chauffe
ucc (t)
f_01_06.eps
Text (t)tempratureextrieure
Fig. 1.4 Representation par schema fonctionnel du mode de fonctionnement deloperateur en cas de regulation manuelle : loperateur compare la temperature deconsigne T , i.e. la temperature souhaitee, avec la temperature mesuree (per cue)
T , image aussi dele que possible de la temperature reelle T [C] (cela dependde la qualite du capteur : dans cet exemple, cest operateur qui per coit sensoriel-lement la temperature T ). En fonction du resultat de la comparaison, loperateuragit sur le potentiometre (il le tourne dun angle ), ce qui modie la tension uaux bornes du corps de chauffe, la puissance instantanee dissipee p(t) et nale-ment la temperature T du local (f 01.dsf).
(signal) entrant et sortant de chacune dentre-elles. En se livrant ` a cet exercicepour le schema technologique de la gure 1.3 page ci-contre, on peut a prioriidentier les fonctions suivantes :
volume dair du local (entree puissance de chauffage, sortie temperature) ; corps de chauffe (entree tension electrique, sortie puissance de chauffage) ; amplicateur de puissance (entree commande de tension, sortie tension am-
pliee en puissance) ; mesure de temperature (entree temperature, sortie estimation de temperature) ; traitement de la mesure et action sur le potentiometre.
Graphiquement, le schema fonctionnel peut ainsi prendre la forme de la gure 1.4.On observe que le schema fonctionnel de la gure 1.4 fait apparatre une boucle :
la temperature mesuree T apparat en effet : au depart de laction sur le potentiometre : (t) depend de T (t) ; egalement comme consequence de cette action : T (t) depend de (t ).
On dit que la temperature mesuree T est contre-reactionnee . Le systeme dela gure 1.4 presente ainsi une contre-reaction 1.
1On dit aussi retro-action. En anglais : feedback . En allemand : Ruckf uhrung
Chapitre 1 15 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_06.eps -
7/31/2019 cours_rgulation automatique analogique
16/276
eivd R egulation automatique
Tc(t)
tempraturede consigne
temprature mesure
Tm (t)Capteur
Amplificateurde puissance
LocalCorps dechauffe
T(t)
tempraturedu local p(t)=u(t)
2/R
puissanc etension aux bornes du corp s de chauffe
ucc (t)
f_01_07.eps
5
-
w(t)
consigne
y(t)
grandeur rgle
e(t)
erreur
u(t)
commande
x(t)
grandeur
rgle
brute
Rgulateur
Text(t)
tempratureextrieure
e(t)
G(t) u(t)
Fig. 1.5 Representation par schema fonctionnel du mode de fonctionnementdune regulation automatique de temperature (f 01.dsf).
Adaptation du principe de regulation manuelle en vue dune automa-tisation
Il y a plusieurs raisons justiant le remplacement de loperateur par un systemeentierement automatique :
augmentation de la abilite et de la repetabilite ; augmentation de la rapidite ; diminution des couts; garantie de la securite de loperateur (lorsque celui devrait par exemple
operer dans une atmosphere de travail explosive ou toxique, etc) ; souvent, le systeme est trop rapide pour etre gere par manuellement (en-
tranements regles, etc) ; amelioration de la securite de linstallation elle-meme.
Se basant sur les schemas technologique et fonctionnel des gures 1.3 page 14et 1.4 page precedente, on peut les transformer en vue de rendre la regulation detemperature completement automatique (gures 1.6 page ci-contre et 1.5).
Chapitre 1 16 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_07.eps -
7/31/2019 cours_rgulation automatique analogique
17/276
eivd R egulation automatique
A
Amplificateur
de puissance
Corps de
chauffe
i
Tc
u
Text
pth
w
Potentiomtre
de mesure
Potentiomtre
de consigne
+
-
e
u
Rgulateur
action
deux positions
Comparateur
Gnrateur
de consigne
Capteur
y
Puissancedissipe par effet Joule
f_01_02.eps
Fig. 1.6 Schema technologique dune regulation automatique de temperature :
le role de loperateur se limite maintenant ` a xer la consigne de temperatureT
,la comparaison avec la temperature mesuree T par un capteur ad hoc (ici unbilame) etant effectuee par un dispositif appele regulateur qui se charge dagirsur le corps de chauffe. Ici le regulateur a un comportement de type tout-ou-rien, que lon nomme parfois regulateur ` a action `a deux positions : si lerreurde temperature est en-dessous dune certaine limite, on impose 0 [V] aux bornesdu corps de chauffe, sinon, sil fait trop froid, on applique la tension maximale(f 01.dsf).
Chapitre 1 17 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_02.eps -
7/31/2019 cours_rgulation automatique analogique
18/276
eivd R egulation automatique
1.2.2 Regulation automatique de la vitesse dun moteurDC a excitation separee constante
Des applications o u une regulation de vitesse est necessaire sont par exemple : la broche dune machine-outil, an de garantir la bonne vitesse de coupe ; le disque dur dun ordinateur ; laide a la conduite de vehicules automobiles (tempomat, voir exercice ) ; installation dimpression des journaux : le papier doit deler devant les
rouleaux encreurs (rouge, vert, bleu) ` a une vitesse determinee.Dans lexemple ci-dessous, le but de la regulation de vitesse de larbre dun moteura courant continu, manuelle ou automatique, est de garantir que la vitesse corresponde a la vitesse de consigne , i.e. la vitesse souhaitee, malgre la presencede couple resistant T [N m].Regulation manuelle
ia
ua
LaRa
J
u(t)
M (t)
M
Rf
a m p l
i f i c a t e u r
d e p u
i s s a n c e
p a
l i e r s
M c(t)
f_01_03.eps
Fig. 1.7 Regulation manuelle de la vitesse dun moteur DC : loperateur estime(mesure) la vitesse de rotation , la compare avec la vitesse de consigne et ajuste la tension u aux bornes de linduit par le biais du potentiometre. Pourla mesure de vitesse, il peut bien s ur disposer dun appareil ad hoc (f 01.dsf).
La regulation manuelle de vitesse de la gure 1.7 voit loperateur agir sur latension aux bornes du moteur DC an de tendre ` a augmenter ou a diminuer sa vi-tesse, selon la comparaison entre la vitesse souhaitee et la mesure/lestimationde la vitesse effective . En modiant la tension aux bornes du moteur, lacaracteristique statique couple-vitesse est en effet modiee, selon les courbes dela gure 1.8 page suivante.
Chapitre 1 18 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_03.epshttp://iai1.eivd.ch/cours/cours_ra/exercices/latex/ex_ra.pdf -
7/31/2019 cours_rgulation automatique analogique
19/276
eivd R egulation automatique
0 M
Tem
u a = 0 [ V ]
u a = 0 . 5 u a N
u a = u a N
M 0iN
M c
f_01_08.eps
T res
ua pourT res =0 [Nm]
ua pourT res >0 [Nm]
Fig. 1.8 Caracteristique couple ( T [N
m])-vitesse ( ), regime permanent
constant, dun moteur DC ` a excitation separee constante : on observe que lavitesse de rotation peut etre ajustee en modiant la tension u aux bornes delinduit. Pour quelle corresponde `a , il faut que la tension soit a justee `a desvaleurs differentes selon le niveau de couple resistant (frottement sec et visqueux,etc) : ici sont illustres les cas o u T = 0 [N m] et T > 0 [Nm]. Le symbole T est utilise ici comme etant la premiere lettre de torque, i.e. couple en anglais(f 01.dsf).
Chapitre 1 19 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_08.eps -
7/31/2019 cours_rgulation automatique analogique
20/276
eivd R egulation automatique
Regulation automatique
Regulateur ` a action a 2 positions Lautomatisation de la regulation de
vitesse presentee necessite la mise en place dun capteur de vitesse delivrant unsignal y(t) = (t) prenant le plus souvent la forme dune tension electriqueproportionnelle a (t). Un dispositif reproduisant si possible le comportement deloperateur doit etre construit. Dans une premiere version (gure 1.9), la strategiepourrait etre :
si > 0 alors u = + umax si < 0 alors u = umaxLimplantation de cettre strategie de commande seffectue dans le regulateur ,qui porte ici le nom de regulateur ` a action `a 2 positions , ou regulateur tout-ou-rien . La gure 1.10 page suivante montre les resultats de la simulation dune
Potentiomtre
de consigne
+
- e
RgulateurComparateur
Gnrateurde consigne
ia
ua T
y(t)
LaRa
J
KmM
e(t) u(t)M (t)
M
Rf
a m p
l i f i c a t e u r
d e
p u i s s a n c e
p a
l i e r s
w(t)u
c a p t e u r
M c
f_01_04.eps
Fig. 1.9 Regulation automatique de la vitesse dun moteur DC : loperateurest remplace par un regulateur, ici de type ` a action a deux positions. La mesurey(t) de la vitesse de rotation est realisee au moyen dun capteur (une dynamo-tachymetrique dans le cas illustre). La mesure y(t) est contre-reactionnee et com-paree a la consigne (t) = w(t), lerreur e(t) = w(t) y(t) est construite etdetermine laction, i.e. la commande u(t) que le regulateur va entreprendre envue de lannuler (f 01.dsf).
telle installation : sans surprise, on observe que la tension de commande u(t)oscille entre ses 2 seuls etats possibles umax. Cela provoque une suite continue dechangements de signe de lacceleration et ainsi une oscillation de la vitesse autourde sa valeur nale = 1. La derivee de la vitesse, i.e. lacceleration, changeantde signe a frequence elevee, la mecanique peut en souffrir (usure prematuree,augmentation des jeux de transmissions, etc). Dun point de vue electrique, lespointes de courants provoquees par des changements brusques de la tension de
Chapitre 1 20 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_04.eps -
7/31/2019 cours_rgulation automatique analogique
21/276
eivd R egulation automatique
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.5
1
1.5
c ,
m [
r a d / s e c
]
Consigne de vitesse et vitesse mesure
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.110
5
0
5
10
u [ V ]
t [s]
Commande
Fig. 1.10 Regulation automatique de la vitesse dun moteur DC, avec regulateura action a deux positions ( Demo 03. mdl , cal Demo 03. m ). La mesure de lavitesse de rotation concide, en regime permanent constant, avec la consigne , qui a ici la forme dun saut unite, mais au prix dune commande u commutanta une frequence tendant vers l
(demo 03.m).
Chapitre 1 21 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///demo_03.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_03_1.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///demo_03.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_03_1.eps -
7/31/2019 cours_rgulation automatique analogique
22/276
eivd R egulation automatique
e(t) u(t)K p
f_01_10.eps
R2
+
-
u(t)e(t)
R1
e
u
e(t) u(t)
Fig. 1.11 Schema fonctionnel dun regulateur P et schema de principe (schematechnologique) de sa realisation electronique (f 01.dsf).
commande peuvent endommager le moteur si celui-ci nest pas assez selque alorsquun echauffement excessif par effet Joule des enroulements est ` a redouter.
Regulateur a action proportionnelle Une alternative au regulateur ` a ac-tion a deux positions consiste a utiliser un regulateur ` a action proportionnelle ,lequel applique une commande u(t) proportionnelle a lerreur e(t ). On lappelleregulateur P :
u(t) = K e(t)Les gures 1.12 page ci-contre et 1.13 page suivante montrent respectivement le
schema technologique de linstallation ainsi que les resultats de la simulation. Siles oscillations de vitesse ont disparu et la commande est notablement plus doucequavec un regulateur `a action a 2 positions, on doit en revanche constater quela vitesse mesuree natteint pas exactement la consigne. Ce probleme seraexamine au 1.5.2 page 32.Chapitre 1 22 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_10.eps -
7/31/2019 cours_rgulation automatique analogique
23/276
eivd R egulation automatique
Potentiomtre
de consigne
+
- e
RgulateurComparateur
Gnrateur
de consigne
ia
ua T
y(t)= M m(t)
LaRa
J
KmMe(t) u(t)
M (t)
M
Rf
a m p l
i f i c a t e u r
d e p u
i s s a n c e
p a
l i e r s
w(t) u
c a p t e u r
M c
f_01_09.eps
Fig. 1.12 Regulation automatique de la vitesse dun moteur DC : le regulateurest ici de type proportionnel, ce qui signie que la commande u(t) delivree par leregulateur est proportionnelle ` a lerreur e(t) (f 01.dsf).
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
0
0.2
0.4
0.6
0.8
1
c
, m [
r a d / s e c
]
Consigne de vitesse et vitesse mesure
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10.25
0.3
0.35
0.4
0.45
0.5
u [ V ]
t [s]
Commande
Fig. 1.13 Regulation automatique de la vitesse dun moteur DC, avec regulateurP, K = 0 .5 (Demo 02. mdl , cal Demo 02. m ). La commande ne varie pas aussibrutalement quavec un regulateur ` a action a deux positions, mais la grandeurreglee (mesure) ne concide pas parfaitement avec la consigne en regimepermanent constant. Il subsiste ce quon appelle une erreur statique de valeurE 55% (demo 02.m).
Chapitre 1 23 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///demo_02.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_02_1.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_02_1.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///demo_02.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_02_1.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_09.eps -
7/31/2019 cours_rgulation automatique analogique
24/276
eivd R egulation automatique
1.3 Elements et signaux caracteristiques dunsysteme de regulation automatique
Par les quelques exemples introductifs du paragraphe precedent, plusieurstermes nouveaux sont apparus. La gure 1.14 les reprend dans le cadre dunsysteme de regulation automatique presente sous forme generale, o` u apparaissentdes blocs fonctionnels ainsi que des signaux.
w(t)
v(t)
x(t)
y(t)
u(t)
Systme rgler
Comparateur
Rgulateur ProcessusActionneur5 e(t)
commandeerreur perturbation grandeur rgle(brute)
consigne
grandeur rgle(mesure)
Capteur
contre-raction
"feedback"
"Rckfhrung"f_01_05.eps
5
n(t) bruit
sur la mesure
Fig. 1.14 Schema fonctionnel mettant en evidence les elements et signauxcaracteristiques dun systeme de regulation automatique (f 01.dsf).
Les sous-systemes ainsi que les signaux intervenant dans la gure sont detaillesdans les paragraphes ci-apres.
1.3.1 Blocs fonctionnels et sous-systemes
On distingue essentiellement 4 sous-systemes :
Chapitre 1 24 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_05.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_05.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_05.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_05.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_05.eps -
7/31/2019 cours_rgulation automatique analogique
25/276
eivd R egulation automatique
v(t)
x(t)
y(t)
u(t)
Systme rgler
ProcessusActionneur
Capteur
f_01_27.eps
5
n(t)
Fig. 1.15 Systeme a regler (f 01.dsf).
Element FonctionComparateur Construit le signal derreur e(t) = w(t) y(t)Regulateur Traite le signal derreur e(t) et en deduit le signal de
commandeu
(t) destine a diminuer
e(t)Amplicateur de puis-
sanceAmplie en puissance le signal de commande u(t) defacon a ce quil soit applicable au processus
Processus Installation `a asservirCapteur Forme une image y(t) aussi dele que possible de la gran-
deur reglee brute x(t)
Tab. 1.1 Blocs fonctionnels et sous-systemes.
On note quavec le schema adopte, le systeme ` a regler comprend tous leselements (actionneur, processus, capteur, etc) se trouvant entre la commandeu(t) delivree par le regulateur et la grandeur reglee (mesuree) y(t ), y compris lecapteur (gure 1.15).
1.3.2 SignauxLes signaux intervenant dans le schema general dun systeme de regulation
automatique sont resumes ci-dessous.
Chapitre 1 25 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_27.eps -
7/31/2019 cours_rgulation automatique analogique
26/276
eivd R egulation automatique
Signal Notation RemarquesConsigne w(t) Signal a poursuivre, a caractere generalement
deterministe, par opposition ` a aleatoire : ce signalest deni pour une application donnee
Grandeurreglee brute
x(t) Grandeur physique reglee, dans son unite physiquepropre ( , [C], etc). Seule une image peut en etreobtenue, par lintermediaire dun capteur
Grandeurreglee me-suree
y(t) Image de la vraie grandeur reglee fournie par le cap-teur, i.e. image de la grandeur reglee brute x(t). Cestla seule information dont dispose le regulateur, lequelasservit donc en realite la grandeur reglee mesuree y(t)et non directement la grandeur reglee brute x(t). Cestpourquoi la qualite de la mesure (capteur et traitement
lui etant associe) est primordiale en automatiqueCommande u(t) Signal delivre par le regulateur au systeme ` a regler. Cesignal doit normalement tendre ` a faire diminuer lerreur
Perturbation v(t) Signal aleatoire representant les perturbations interve-nant sur le systeme `a regler
Bruit sur lamesure
n (t) Signal aleatoire representant le bruit intervenant sur lamesure (nnoise)Erreur ou
ecarte(t) Difference entre consigne w(t ) et grandeur reglee y(t ) :
e(t) = w(t) y(t)Tab. 1.2 Signaux principaux dun systeme de regulation automatique.
Signaux dentree et signaux de sortie Les signaux dentree du systeme deregulation automatique sont les suivants :
consigne w(t) (plusieurs en regulation multivariable) perturbation v(t) (perturbation de charge, pouvant etre de differentes na-
tures et intervenant ` a plusieurs endroits dans le systeme) bruit de mesure n (t) (perturbation de signal), voir gure 1.16 page suivante
Pour les signaux de sortie, on a : grandeur reglee y(t ) (plusieurs en regulation multivariable)
Unites physiques des signaux Il est important de relever quun systeme deregulation automatique ne realise pas directement lasservissement de la grandeurreglee brute x(t), mais bel et bien de limage y(t) donnee de celle-ci par le capteur.y(t) est alors le plus souvent un signal ayant une autre nature physique que lagrandeur reglee brute x(t) : pour des raisons dimplantation, lunite physiquede y(t) est typiquement le [V]. Comme le regulateur effectue la comparaison de
Chapitre 1 26 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
27/276
eivd R egulation automatique
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.180
500
1000
1500
2000
c ,
m ,
m s
i m u
l [ t / m i n ]
Influence du bruit de mesure dans le cas dun asservissemen t de vitesse
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.1860
40
20
0
20
40
60
c
m ,
c
m
s i m u l
[ t / m i n ]
t [s]
Fig. 1.16 Visualisation du bruit de mesure dans le cas dun asservissement devitesse (br ui t 01. m). La consigne de vitesse a la forme dun triangle (accelerationconstante puis freinage-arret). On compare ici la vitesse reglee effective et sasimulation de fa con a bien mettre en evidence le bruit (bruit01.m).
w(t) et de y(t), il sensuit que la consigne w(t) a imperativement la meme unitephysique que la grandeur reglee mesuree y(t).
Chapitre 1 27 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///bruit_01.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_bruit_01_1.eps -
7/31/2019 cours_rgulation automatique analogique
28/276
eivd R egulation automatique
Signal Notation Unite physique Regulationde
temperature
Regulationde vitesse
Consigne w(t) Correspond a lunitephysique de la grandeurreglee y(t) fournie parle capteur. Typiquementdes [V] ou des [A]
[T ] = V [ ] = V
Grandeurreglee me-suree
y(t) Correspond a la naturedu signal de sortie ducapteur. Typiquementdes [V]
[T ] = V [ ] = V
Grandeurreglee brute
x(t) Grandeur physiquereglee, dans son unite
[T ] = C [] = rads
Commande u(t) Correspond a lunitephysique du signal desortie du regulateur,tel quil est realise.Typiquement des [V]
[u] = V [u] = V
Perturbation v(t ) Depend de lendroit o u laperturbation intervient
[v] = [W] [v] = N mBruit sur lamesure
n (t) Correspond a lunite dey(t)
[n ] = V [n ] = V
Erreur e(t) Correspond a la naturedu signal de sortie ducapteur. Typiquementdes [V]
[e] = V [e] = V
Tab. 1.3 Unites physiques des principaux signaux dun systeme de regulationautomatique. Par unite physique, on entend celle du signal lui-meme, denie parla realisation du systeme, et non celle de linformation quil porte. Ainsi le signalde mesure de vitesse fourni par exemple par un capteur de type dynamo-tachymetrique a pour unite des [V] et non des .
Chapitre 1 28 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
29/276
eivd R egulation automatique
1.4 Regulation de correspondance et regulationde maintien
On peut envisager deux modes de regulation automatique : la regulation de correspondance (tracking, poursuite), o` u le but essen-
tiel est de poursuivre une consigne w(t) variable (gure 1.17) ;
t [s]
w(t)(consigne)
0y(t)(grandeurrgle) f_01_16.eps
Fig. 1.17 Regulation de correspondance (f 01.dsf).
la regulation de maintien , ou le regulateur a pour t ache principale de main-tenir la grandeur reglee y(t) egale a la consigne w(t) malgre la presence deperturbations v(t) (gure 1.18).
t [s]
w(t)(consigne)
t0
y(t)(grandeurrgle)
f_01_17.eps
t [s]t0
v(t)(perturbation)
Fig. 1.18 Regulation de maintien (f 01.dsf).
Dans la realite, les 2 modes coexistent le plus souvent, le regulateur reagissant ` atoute forme derreur, quelle quen soit sont la cause (consigne variable ou pertur-bation aleatoire).
Chapitre 1 29 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_17.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_17.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_17.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_17.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_17.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_16.eps -
7/31/2019 cours_rgulation automatique analogique
30/276
eivd R egulation automatique
1.5 Problemes fondamentaux des systemes deregulation automatique
1.5.1 Stabilite
La stabilite dun systeme de regulation automatique (voir denition rigou-reuse chap.5) est une condition imperative an que linstallation soit utilisable.Or, tout systeme contre-reactionne est potentiellement instable. La cause en estdue au retard parfois trop important que peut subir un signal (ou certaines deses composantes spectrales) se propageant ` a travers la boucle le ramenant verslentree, i.e. la boucle de contre-action. Lexemple de la douche illustre cela demaniere intuitive (gure 1.19). En negligeant les pertes thermiques dans le tuyau,
pommeaude douche
Tc T
T0
eau froide
eau chaude
f_01_11.eps
tuyaude douchevanne
mlangeuse(rpartition linairechaud-froid,dbit constant)
Tm
T(t)=T 0(t-T r)
G
Fig. 1.19 Regulation manuelle de la temperature dune douche : schema tech-nologique. Pour lexemple, on suppose que le debit est constant et que seule larepartition chaud-froid est modiee (f 01.dsf).
on a simplement :
T (t ) = T (t T )ou T est le temps necessaire `a leau pour se propager a travers le tuyau de douche.Dans le vocabulaire des systemes asservis, on lappelle retard pur (5.4.3 page 196).Chapitre 1 30 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_11.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_11.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_11.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_11.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_11.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_11.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_11.epshttp://iai1.eivd.ch/cours/cours_ra/chap_05/latex/chap_05.pdf -
7/31/2019 cours_rgulation automatique analogique
31/276
eivd R egulation automatique
Tc(t)
Cerveau,main
angle dela vanne
tempraturede consigne
temprature(perue, mesure)
Tm (t)Sens
Vanne Tuyau
temprature la sortie
de la vanne
T0 (t)
f_01_12.eps
temprature la sortiedu tuyau
T(t)
T(t)=T 0 (t-T r)
G(t)
Fig. 1.20 Regulation manuelle de la temperature dune douche : schema fonc-tionnel (f 01.dsf).
1
2
0 5 1 0 1 50
0. 5
1
1 .5
2
T c
( t ) , T
m ( t ) [ - ]
Rgulation manuelle de la temprature d'une douche
0 5 1 0 1 50
0. 5
1
1 .5
C o m m a n d e
G ( t )
0 5 1 0 1 50
0. 5
1
1 .5
2
T 0
( t )
t [s]
3
4
5
8
7
6
Tr
f_01_13.eps
Fig. 1.21 Regulation manuelle de la temperature dune douche ( Demo 05. mdl ,cal Demo 05. m ) : cas de loperateur presse, i.e. dun regulateur ` a gain eleve(f 01.dsf).
Chapitre 1 31 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_13.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_13.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_13.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_13.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_13.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_12.eps -
7/31/2019 cours_rgulation automatique analogique
32/276
eivd R egulation automatique
Il y a donc dans cet exemple un retard pur T [s] entre laction entreprise parloperateur sur la vanne pour modier la temperature T (t) et leffet resultant.Cest le cas de loperateur presse (gure 1.21 page precedente) qui met enevidence le phenomene dinstabilite :
1. Loperateur commence sa douche et desire que leau soit ` a la temperatureT ;
2. Loperateur sapercoit que la temperature T de leau est bien inferieure ala valeur souhaitee T ;
3. Loperateur ouvre moderement la vanne melangeuse ;
4. Loperateur sapercoit que louverture de la vanne melangeuse est sans effetnotable ;
5. Loperateur ouvre davantage la vanne melangeuse ;
6. La temperature T de leau directement a lentree du tuyau est alors ` a unevaleur elevee ;
7. Leau de temperature elevee parvient ` a loperateur : la temperature de leauT depasse alors largement la consigne T ;
8. Loperateur reagit en tournant la vanne dans lautre sens.
Et le pire est a venir : leau beaucoup trop chaude parvient au bout du tuyau,provoquant une reaction vive de loperateur. Si celui-ci se comporte de manieresymetrique (que leau soit trop chaude ou trop froide), leau va devenir exagerementfroide et une oscillation de plus ou moins longue duree peut sensuivre. Le systemeobserve ici nest pas instable, mais presente des signes alarmants de tendance verslinstabilite : il peut devenir incontr olable si un operateur encore plus presse prendsa douche . . .
1.5.2 Precision et rapiditeLexemple de la regulation de vitesse (gure 1.13 page 23) avec regulateur P
montre que meme en regime permament constant (consigne constante, etc), uneerreur subsiste : ce phenomene est malheureusement normal puisquen effet, pourque le moteur DC tourne, meme `a vide, a une vitesse non-nulle correspondantsi possible a la consigne, il faut lalimenter par une tension u (t) aux bornes delinduit que lon simagine facilement differente de zero. Or :
u (t ) u(t) dans le cas dun amplicateur de puissance ideal ; u (t ) = 0[V]u(t) = 0[V] ; u(t) = 0[V]e(t) = p a p = E = 0 [V].
Lerreur E observee sappelle erreur statique . On dit que le systeme asservi adu statisme . Dans le cas simple du moteur a vide, la tension u (t) doit equilibrerla FEM (tension induite de mouvement) e (t) = K (t ). On en deduit la valeurChapitre 1 32 mee \ coursra.tex \ 16 fevrier 2004
-
7/31/2019 cours_rgulation automatique analogique
33/276
eivd R egulation automatique
0 5 10 150
0.5
1
1.5
T c
( t ) , T
m ( t ) [ ]
Rgulation manuelle de la temprature dune douche
0 5 10 150
1
2
3
( t )
0 5 10 150
0.5
1
1.5
T 0
( t )
t [s]
Fig. 1.22 Regulation manuelle de la temperature dune douche(cal Demo 04. m ) : cas de loperateur calme (cal demo 04.m).
de lerreur E :
E =e (t )
K =
K (t )K
=K K (t )
Pour diminuer la valeur de lerreur statique E , il faut logiquement augmen-ter le gain proportionnel K du regulateur. Ce faisant, laction entreprise par leregulateur en presence derreur est de plus en plus energique et la rapidite dusysteme est egalement amelioree (gure 1.23 page suivante).
1.5.3 Dilemme stabilite-precisionSi, appliquant les conclusions du paragraphe precedent, on tente dameliorer
la precision et la rapidite en augmentant encore le gain K du regulateur pro-portionnel a 53, un phenomene analogue `a celui observe avec la douche (-gure 1.21 page 31) apparat (gure 6.23 page 233) : le systeme asservi oscille demaniere apparemment entretenue ` a une frequence voisine de 129 [Hz], lamplitudede loscillation ayant tendance `a crotre indeniment : le systeme est pratique-ment instable. On peut comprendre intuitivement la cause de cette instabilite en
Chapitre 1 33 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///cal_demo_04.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_04_1.eps -
7/31/2019 cours_rgulation automatique analogique
34/276
eivd R egulation automatique
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
0
0.2
0.4
0.6
0.8
1
c
, m [
r a d / s e c
]
Consigne de vitesse et vitesse mesure
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.5
1
1.5
2
u [ V ]
t [s]
Commande
Fig. 1.23 Regulation automatique de la vitesse dun moteur DC, avec regulateurP, K = 2 ( Demo 02. mdl , cal Demo 06. m ). Lerreur statique E 25%est inferieure a celle de la gure 1.13 page 23 et le systeme est plus rapide(cal demo 06.m).
examinant la reponse frequentielle du systeme asservi en boucle ouverte, i.e. lecomportement frequentiel de la chane delements (gure 1.25 page 36) allant delentree du regulateur (lerreur e(t)) a la sortie du capteur (la grandeur regleey(t)). Le diagramme de Bode la gure 6.22 page 232 montre en effet quun signalderreur :
ne subit, la frequence denviron 129 [Hz], aucune attenuation ou amplica-tion, le gain de boucle a cette frequence etant de 0 [dB] = 1 ;
est dephase, i.e. retarde, dexactement 180 [] a cette meme frequence.En consequence, la composante spectrale ` a 129 [Hz] du signal derreur e(t) sepropageant dans la boucle voit tout simplement son signe inverse, ce qui im-plique qua cette frequence, il nest pas contre-reactionne, mais reactionne (-gure 1.27 page 38) : du fait de la structure bouclee, une augmentation de lagrandeur de commande u(t) provoque une augmentation de la grandeur regleey(t) qui provoque a son tour une augmentation de lerreur e(t ) et par suite de lagrandeur de commande. Le systeme semballe, nest plus sous contr ole, ce qui peutaboutir a sa destruction si des limites physiques ninterviennent pas suffisammentt ot (echauffement du moteur, depassement de la vitesse limite des roulements,etc). Les exemples de la douche (1.5.1 page 30) et de la regulation de vitessemontrent que plus laction du regulateur est violente (cas de loperateur presse,Chapitre 1 34 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///cal_demo_06.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_06_1.eps -
7/31/2019 cours_rgulation automatique analogique
35/276
eivd R egulation automatique
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
c ,
m [
r a d / s
e c
]
t [s]
Consigne de vitesse et vitesse mesure
f_cal_demo_07_1.eps
Fig. 1.24 Regulation automatique de la vitesse dun moteur DC, avec regulateurP, K = 53 (Demo 02. mdl , cal Demo 07. m ). Le systeme asservi est quasi instable(cal demo 07.m).
Chapitre 1 35 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_1.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///cal_demo_07.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_1.eps -
7/31/2019 cours_rgulation automatique analogique
36/276
eivd R egulation automatique
e
Rgulateur Pia
ua T
LaRa
J
K t
e(t)u(t)
M (t)M
Rf
a m p
l i f i c a t e u r
d e p u
i s s a n c e
p a
l i e r s
u
y(t)f 01 14.eps
Fig. 1.25 Obtention de la reponse harmonique en boucle ouverte : le signaldentree est lerreur e(t) et celui de sortie la grandeur reglee y(t ). Le resultat estdonne sur la gure 6.22 page 232 (f 01.dsf).
respectivement cas du regulateur P de vitesse avec K = 53), i.e. plus le gain duregulateur est eleve, plus il y a risque dinstabilite. Pour des raisons de stabilite,et par suite de securite de linstallation, il y a donc en principe interet ` a travailleravec des gains modestes.
Mais lamelioration de la precision et de la rapidite de la regulation de vi-tesse evoquee au 1.5.2 page 32 montre au contraire tout le benece quil y a ` aaugmenter les gains du regulateur, i.e. la raideur de lasservissement.
Ces interets contraires constituent ce qui est communement appele le dilemme
stabilite-precision . Tout lart de lingenieur automaticien consiste ` a trouver unesolution satisfaisant simultanement les exigences de stabilite et de precision.En pratique, un autre dilemme rend le travail de lingenieur-automaticien plus
complexe : on pourrait lappeler dilemme precision-bruit , lequel limite sou-vent les performances du systeme asservi bien avant celui de stabilite-precision.En effet, les performances des systemes asservis sont souvent limitees non paspar des questions de stabilite, mais par des problemes de bruit sur la com-mande, qui est en fait d u essentiellement a lamplication (par exemple par legain K dun regulateur P) du bruit de mesure. Si n (t ) est ce bruit, sa propa-gation au travers du regulateur le transforme en un bruit de valeur K n (t) devaleur dautant plus elevee que le gain K est eleve, i.e. que les performancesexigees sont de haut niveau (gure 4.36 page 164). Dans le cas ou la commandea une inuence directe sur une grandeur mecanique, le bruit quelle contientdevient meme audible et peut par exemple accelerer des phenomenes dusure.Pour des systemes 100% electriques, le bruit de la commande peut provoquer unechauffement supplementaire.
Chapitre 1 36 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_14.eps -
7/31/2019 cours_rgulation automatique analogique
37/276
eivd R egulation automatique
1
1 0
1 0 0 1 8 8
. 0 5 0 4
1 0 0 0
1 0 0 0 0
6 0
4 0
2 0 0
2 0
4 0
D
i a g r a m m e
d e
B o
d e e n
b o u c
l e o u v e r t e
g a i n [ d B ]
G a
i n d e
b o u c
l e u n
i t a
i r e e n
2 1
2 9
. 6 3 7 6 [ H z
]
1
1 0
1 0 0 1 8 8
. 0 5 0 4
1 0 0 0
1 0 0 0 0
2 7 0
2 2 5
1 8 0
1 3 5
9 0
4 5 0
[ r
a d / s ]
p h a s e [ d e g r ]
P h a s e
1 8 0
[ ]
f_ c a l_ d e m o
_ 0 7
_ 2
. e p s
Fig. 1.26 Reponse frequentielle du systeme de regulation de vitesse en boucleouverte ( Demo 02. mdl , cal Demo 07. m , K = 53) (cal demo 07.m).
Chapitre 1 37 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/matlab///cal_demo_07.mhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_cal_demo_07_2.eps -
7/31/2019 cours_rgulation automatique analogique
38/276
eivd R egulation automatique
e
Rgulateur P
e(t)u(t)
M(t)u
-1
129 [Hz]
e(t)
y(t)
y(t)
-1e(t)y(t)
5e(t)w(t)=0
M Tua(t)
le comparateurreprsente ungain de (-1) pout y(t) !
-1y(t)
e(t)-1
f_01_15.eps
e(t)
@129 []Hz
@129 []Hz
@129 []Hz
Fig. 1.27 Regulation automatique de vitesse ( Demo 02. mdl , cal Demo 07. m ) :pour K = 53, la composante spectrale `a 129 [Hz] du signal derreur e(t)voit tous les elements de la boucle quelle traverse comme un simple gainA()| [rads ] = 1. La contre-reaction devient, pour cette frequence, dela reaction (f 01.dsf).
Chapitre 1 38 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_15.eps -
7/31/2019 cours_rgulation automatique analogique
39/276
-
7/31/2019 cours_rgulation automatique analogique
40/276
eivd R egulation automatique
1.6 Principe de la regulation numeriqueEn regulation numerique, le regulateur est realise sous la forme dun algo-
rithme de traitement, programme par exemple en langage C, sexecutant ` a in-tervalles reguliers h [s]. h est la periode dechantil lonnage . Cela signie que lagrandeur reglee y(t) est echantillonnee, i.e. y(t) nest observee quaux instantsdechantillonnage
0 h, 1 h, 2 h , . . . k h , . . .auxquels une conversion A/D est effectuee. Lalgorithme du regulateur est alorsexecute et delivre une grandeur de commande u(k h) egalement `a intervallesreguliers h . Lavantage principal de la regulation numerique est la souplesse dem-
AD
AD
w(kh)
y(kh)
u(t) x(t)u(kh)
ANALOGIQUE NUMERIQUE
ALGORITHMESYSTEME
AREGLER
HORLOGE
u(kh)
kh
y(kh )
kh
t
w(kh)
kh t
h
t
y(t)
v(t)
5
+
+
n(t)
consigne
bruit sur la mesure
grandeur rgle
commandecommande
perturbation
f_01_23.eps
Rgulateur
Fig. 1.29 Principe de la regulation numerique : le regulateur prend la formedun algorithme programme sur microprocesseur et execute en temps reel, i.e.imperativement ` a chaque periode dechantillonnage h . Les valeurs typiques deh vont de 10 [s] pour des systemes de regulation de temperature ` a 50 [s] pourdes asservissements de courants dans les entranements regles. Pour ces derniers,une implantation du regulateur en assembleur sur processeur de signal (DSP) estquasi indispensable (f 01.dsf).
ploi, puisquaussi bien les parametres du regulateur que sa structure peuvent etre
Chapitre 1 40 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_23.eps -
7/31/2019 cours_rgulation automatique analogique
41/276
eivd R egulation automatique
aisement adaptes ` a lapplication [10].
void r e g ul a te u r P I ( )
{ s t at i c f l oa t e [ 2 ] = {0 . 0 , 0 . 0 };s t at i c f l oa t u [ 2 ] = {0 . 0 , 0 . 0 };/ L it l e contenu du r e g i s tr e de s o r ti e du c o n ve r ti s se u r A/D / AD Conv(&y ) ;
e [ 0 ] = w[ 0 ] y [ 0 ] ; / forme l ec ar t / / Calcule la commande u[ k ] / u [ 0] = u [ 1] + b0 e [ 0 ] + b1 e [ 1 ] ;
/ Commande la con ver sion D/A de u[ k ] / DA Conv(u [ 0 ] ) ;
u [ 1 ] = u [ 0 ] ; / mise a jou r , g es ti on de la p i le u / e [ 1 ] = e [ 0 ] ; / mise a jou r , g es ti on de la p i le e /
}
1.7 Generalites sur les systemes
Dun point de vue technique, tout ensemble delements, de composants, dispo-sitifs, etc associes un but specie constitue un systeme (gure 1.30). Un systemepeut etre simple ou complexe.
y1(t)Systme
f_01_20.eps
y2(t)
u2(t)u1(t)
Fig. 1.30 Systeme quelconque, multi-variable (f 01.dsf).
Chapitre 1 41 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_20.eps -
7/31/2019 cours_rgulation automatique analogique
42/276
eivd R egulation automatique
An de pouvoir contr oler (regler, asservir) un systeme, il est necessaire deconnatre un certain nombre de ses proprietes :
nombre et nature des entrees et des sorties ; comportement statique; comportement dynamique (temps de montee, nombre et periode des oscil-
lations, etc) ; linearite ou non-linearites ; stabilite ; etc
On se limite ci-apres a letude de systemes mono-variable (1 entree u(t), 1 sortiey(t), gure 1.31)
(t) y(t)Systmemono-variable
f_01_19.eps
Fig. 1.31 Systeme monovariable. Dans un contexte general, le signal dentreeest appele u(t ) et celui de sortie y(t) (f 01.dsf).
1.7.1 Comportement dynamique
t [s]
u(t)
0
y(t)
f_01_18.epsrgime transitoire rgime permanent
Fig. 1.32 Exemple de reponse indicielle dun systeme dynamique (f 01.dsf).
Le comportement dynamique, i.e. en regime transitoire, est souvent difficilea qualier (quantier) sur la base de lanalyse temporelle seule. Il faut des outils
Chapitre 1 42 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_18.epshttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_19.eps -
7/31/2019 cours_rgulation automatique analogique
43/276
eivd R egulation automatique
speciques tel que les transformations de Fourier et de Laplace.
1.7.2 Comportement statiqueOn considere le systeme etudie en regime permanent constant, i.e. lorsque
u(t) = const. et que t . On peut alors en calculer le gain statique K :
K =lim y(t)lim u(t)
1.7.3 Systeme statiqueUn systeme est statique si sa sortie y(t) a linstant t ne depend que de lentree
u(t) au meme instant t .Un tel systeme reagit donc instantanement, sans retard, sans regime transi-
toire ou temps detablissement. Il est sans memoire puisque le passe ninuencepas sa sortie presente. Un exemple de systeme statique est la resistance electriqueideale (gure 1.33).
u(t)=i R(t) y(t)=u R(t)
uR(t)
R
f_01_22.eps
t [s]
u(t)
t0
y(t)
Fig. 1.33 Exemple de systeme statique (f 01.dsf).
Du point de vue de lautomaticien, un systeme statique peut sans autre etredecrit, i.e. represente, par son gain statique K .
1.7.4 Systeme dynamiqueUn systeme est dynamique si sa sortie y(t) depend non seulement de lentree
presente u(t) mais aussi des entrees (sorties) passees.
Chapitre 1 43 mee \ coursra.tex \ 16 fevrier 2004
http://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb///f_01.dsfhttp://iai1.eivd.ch/cours/cours_ra/chap_01/Figures/rgb/f_01_22.eps -
7/31/2019 cours_rgulation automatique analogique
44/276
eivd R egulation automatique
Un exem