Cours Msn Mdf(Polyi)
18
DEPARTEMENT GENIE MECANIQUE 2 ème Année - Cycle ingénieur (Semestre 2) Filière : Gestion et Organisation Industrielle (GOI) Electronique Electrotechnique et Automatique (EEA) Module Méthodes de Simulation Numérique (PREMIERE PARTIE) A. RECHIA
Transcript of Cours Msn Mdf(Polyi)
DEPARTEMENT GENIE MECANIQUE
2ème
Année - Cycle ingénieur (Semestre 2)
Filière :
Gestion et Organisation Industrielle (GOI)
Electronique Electrotechnique et Automatique (EEA)
Module
Méthodes de Simulation Numérique
(PREMIERE PARTIE)
A. RECHIA
Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
1
Table des matières
Chapitre I MODELISATION, DISCRETISATION ET SIMULATION NUMERIQUE 2
I.1 Qu'est-ce qu'un modèle ? 2
I.2 Pourquoi faut-il modéliser ? 2
I.3 Quels sont les différents modèles ? 2
I.4 De la modélisation à la simulation numérique 3
I.5 Aspect fini des ordinateurs 3
I.6 Consistance, Stabilité et convergence 3
I.7 Les trois grandes familles de Méthodes de discrétisation des EDP. 5
Chapitre II LES DIFFERENCES FINIES 6
II.1 Discrétisation d’opérateurs différentiels 6
II.2 Notation indicielle – cas 1D 8
II.3 Dérivées croisées 10
II.4 Conditions aux limites 11
II.5 Génération d’un schéma aux différences finies 11
II.6 Evaluation pratiques des différentes erreurs d’approximation 15
Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
2

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
3
I.6 Consistance, Convergence et Stabilité

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
4
Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
5
I.7 Les trois grandes familles de Méthodes de discrétisation des EDP.
Pour passer d’un problème exact continu régit par une EDP au problème approché discret, il
existe trois grandes familles de méthodes :
Les différences finies.
La méthode consiste à remplacer les dérivées partielles par des différences divisées ou
combinaisons de valeurs ponctuelles de la fonction en un nombre fini de points discrets ou nœuds
du maillage.
Avantages : grande simplicité d'écriture et faible coût de calcul.
Inconvénients : limitation à des géométries simples, difficultés de prise en compte des conditions
aux limites de type Neumann.
Les éléments finis.
La méthode consiste à approcher, dans un sous-espace de dimension finie, un problème écrit
sous forme variationnelle (comme minimisation de l'énergie en général) dans un espace de
dimension infinie. La solution approchée est dans ce cas une fonction déterminée par un nombre
fini de paramètres comme, par exemple, ses valeurs en certains points ou nœuds du maillage.
Avantages : traitement possible de géométries complexes, nombreux résultats théoriques sur la
convergence.
Inconvénient : complexité de mise en oeuvre et grand coût en temps de calcul et mémoire.
Les volumes finis.
La méthode intègre, sur des volumes élémentaires de forme simple, les équations écrites sous
forme de loi de conservation. Elle fournit ainsi de manière naturelle des approximations discrètes
conservatives et est particulièrement bien adaptée aux équations de la mécanique des fluides. Sa
mise en oeuvre est simple avec des volumes élémentaires rectangles.
Avantages : permet de traiter des géométries complexes avec des volumes de forme quelconque,
détermination plus naturelle des conditions aux limites de type Neumann.
Inconvénient : peu de résultats théoriques de convergence.
Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
6
II.1 Discrétisation d’opérateurs différentiels
Soit ( , , , )f x y z t une fonction de l’espace et du temps. Par définition de la dérivée, on a :
0
( , , , ) ( , , , )lim
x
f f x x y z t f x y z t
x x
Si x est petit, un développement de Taylor de ( , , , )f x y z t au voisinage de x donne :
2 2 3 3
2 3
( , , , ) ( , , , ) ( , , , )( , , , ) ( , , , ) .......
1! 2! 3!
x f x y z t x f x y z t x f x y z tf x x y z t f x y z t
x x x
En tronquant la série au premier ordre en x , on obtient :
( , , , ) ( , , , ) ( , , , )( )
f x x y z t f x y z t f x y z tx
x x
L’approximation de la dérivée ( , , , )
f x y z t
x est alors d’ordre 1 indiquant que l’erreur de troncature
( )x tend vers zéro comme la puissance première de x .
Remarque : la puissance de x avec laquelle l’erreur de troncature tend vers zéro est appelée
l’ordre de la méthode.
Fonction à une variable : soit h x , et à l’ordre piéme on écrit :
2 2
2
( ) ( ) ( )( ) ( ) ......
1! 2! !
p p
p
h f x h f x h f xf x h f x
x x p x (Approximation à droite)
2 2
2 2
( ) ( ) ( )( ) ( ) ... ( 1)
1! 2! !
p pph f x h f x h f x
f x h f xx x p x
(Approximation à gauche)

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
7
Détermination de la forme discrète des opérateurs
2
2et
x x
Discrétisation de l’opérateur
xà l’ordre 1, soit :
2
1
( )( ) ( )
1!
h f xf f x h f h
x (1)
2
1
( )( ) ( )
1!
h f xf f x h f h
x (2)
Pour obtenir la forme discrète de x
à l’ordre 1, on écrit :
De (1) 1( )( )
f ff xh
x h , (3)
Appelée schéma aux DF d’ordre 1 avant ou décentré avant
De (2) 1( )( )
f ff xh
x h , (4)
Appelée schéma aux DF d’ordre 1 arrière ou décentré arrière
( )h : est l’erreur de troncature à l’ordre 1 entre la fonction ( )f x analytique et discrète.
Discrétisation de l’opérateur
xà l’ordre 2, soit
2 23
1 2
( ) ( )( ) ( )
1! 2!
h f x h f xf f x h f h
x x (5)
2 2
3
1 2
( ) ( )( ) ( )
1! 2!
h f x h f xf f x h f h
x x (6)
Pour obtenir la forme discrète de x
à l’ordre 2, on écrit
On pose 1 1( )
2
f ff x
x h, (7)
Schéma aux DF d’ordre 2 centré, pour approximer la dérivée première de ( )f x
3 21 1( ) ( )(5) (6) 2 ( ) ( )
2
f ff x f xh h h
x x h

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
8
2( )h : est l’erreur de troncature à l’ordre 2 entre la fonction ( )f x analytique et discrète.
Discrétisation de l’opérateur 2
xà l’ordre 2, soit
On pose
2
1 1
2 2
2( )
f f ff x
x h, (8)
Schéma aux DF d’ordre 2 centré, pour approximer la dérivée seconde de ( )f x
Fonction à deux variables : soit , h x k y , et à l’ordre 2 on écrit :
2 2 2 2 2
2 2
( ) ( ) ( ) 2 ( ) ( )( , ) ( , ) ......
1! 1! 2! 2! 2!
h f x k f x h f x hk f x k f xf x h y k f x y
x y x x y y
On emploi le même principe que dans le cas d’une fonction à une variable pour la détermination
des formes discrètes des opérateurs simples et croisées.
II.2 Notation indicielle – cas 1D
Considérons un cas monodimensionnel où l'on souhaite déterminer une grandeur ( )f x sur
l'intervalle [0,1]. La recherche d'une solution discrète de la grandeur ( )f x amène à constituer un
maillage de l'intervalle de définition. On considère un maillage (ou grille de calcul) composé de N +
1 points 0,....,ix pour i N régulièrement espacés avec un pas x . Les points ix i x sont appelés
les noeuds du maillage. Le problème continu de départ de détermination d'une grandeur sur un
ensemble de dimension infinie se ramène ainsi à la recherche de N valeurs discrètes de cette
grandeur aux différents noeuds du maillage.
Notation : on note if la valeur discrète de ( )f x au point
ix , soit ( )i if f x . De même pour la
dérivée de ( )f x au noeud ix , on note :
'
i
i
x x i
f ff
x x
Cette notation s'utilise de façon équivalente pour toutes les dérivées d'ordre successif de la grandeur
( )f x . Le schéma aux différences finies d'ordre 1 présenté au-dessus s'écrit, en notation indicielle :
22 4
1 1 2
( )(5) (6) 2 ( )
f xf f f h h
x

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
9
1 ( )
i i
i
f ffx
x x
La forme discrète des dérivées premier et seconde (3), (4), (7) et (8) sous forme indicielle
s’écrivent comme suit :
1 ( )
i i
i
f ffx
x x Schéma ordre 1 avant
1 ( )
i i
i
f ffx
x x Schéma ordre 1 arrière
21 1 ( )2
i i
i
f ffx
x x Schéma ordre 2 centrée
2
21 1
2 2( )
i i i
i
f f ffx
x x Schéma ordre 2 centrée
Généralisation de la notation indicielle
Dans le cas 1D instationnaire, considérons l'évolution d'une grandeur ( , )f x t en fonction de
l'espace et du temps. Le domaine de définition de ( , )f x t est décomposé en N noeuds ix répartis
régulièrement avec un pas d'espace x . De même, le temps est décomposé en intervalle élémentaire
de pas constant t . On notera n
if la valeur discrète de la grandeur ( , )f x t au noeud ix et au temps
n t .
Dans le cas 2D, considérons une grandeur ( , )f x y définie sur un certain domaine. Ce dernier
est décomposé en N P noeuds ( , )i jx y répartis régulièrement avec un pas d'espace x dans la
direction x et y dans l'autre direction. On notera ijf la valeur discrète de la grandeur ( , )f x y au
nœud ( , )i jx y .
De façon similaire, dans le cas 2D instationnaire, on notera n
ijf la valeur discrète de la
grandeur ( , , )f x y t au nœud ( , )i jx y et au temps n t . Et dans le cas 3D instationnaire, on notera
n
ijkf la valeur discrète de la grandeur ( , , , )f x y z t au noeud ( , , )i j kx y z et au temps n t .
Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
10
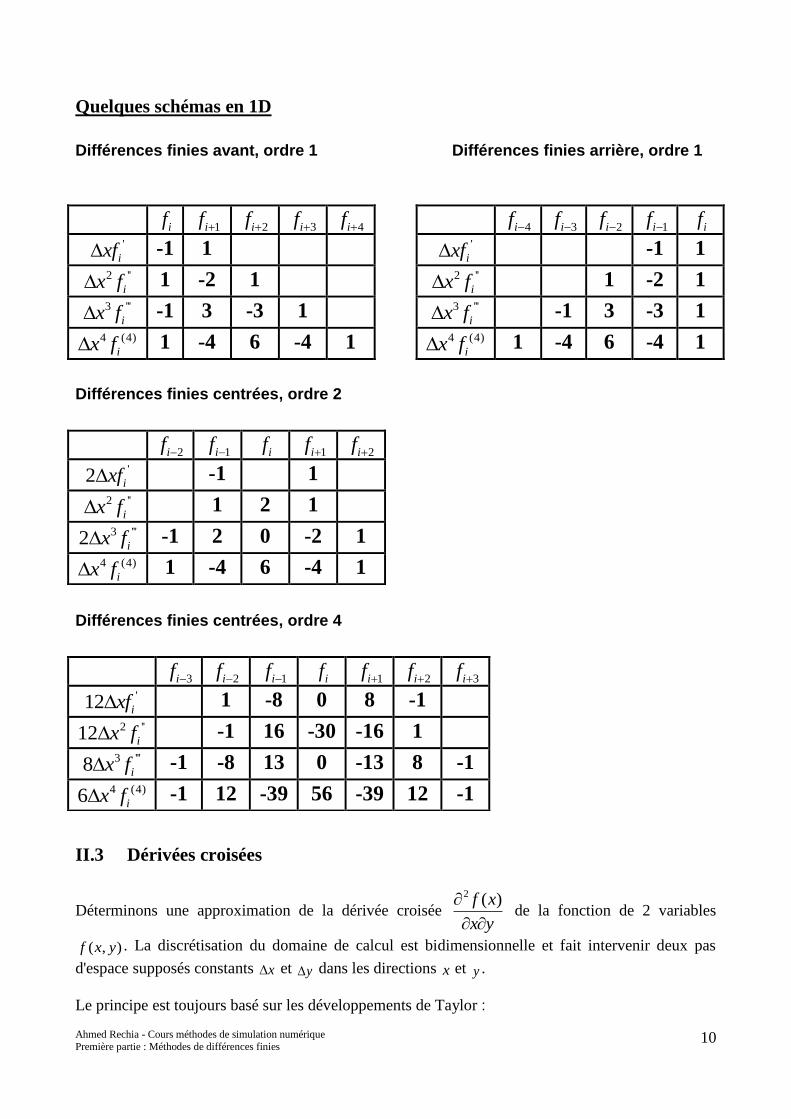
Quelques schémas en 1D
Différences finies avant, ordre 1 Différences finies arrière, ordre 1
Différences finies centrées, ordre 2
Différences finies centrées, ordre 4
II.3 Dérivées croisées
Déterminons une approximation de la dérivée croisée
2 ( )
f x
x y de la fonction de 2 variables
( , )f x y . La discrétisation du domaine de calcul est bidimensionnelle et fait intervenir deux pas
d'espace supposés constants x et y dans les directions x et y .
Le principe est toujours basé sur les développements de Taylor :
if 1if
2if 3if
4if ' ixf -1 1
2 '' ix f 1 -2 1
3 ''' ix f -1 3 -3 1
4 (4) ix f 1 -4 6 -4 1
4if 3if
2if 1if
if ' ixf -1 1
2 '' ix f 1 -2 1
3 ''' ix f -1 3 -3 1
4 (4) ix f 1 -4 6 -4 1
2if 1if
if 1if
2if '2 ixf -1 1
2 '' ix f 1 2 1
3 '''2 ix f -1 2 0 -2 1
4 (4) ix f 1 -4 6 -4 1
3if 2if
1if if
1if 2if
3if '12 ixf 1 -8 0 8 -1
2 ''12 ix f -1 16 -30 -16 1
3 '''8 ix f -1 -8 13 0 -13 8 -1
4 (4)6 ix f -1 12 -39 56 -39 12 -1

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
11
A l’ordre 2 et au voisinage du point ( , )i j on obtient l’approximation de Taylor suivante :
2 2 2 2 2
1, 1 , 2 2
,2 2
i j i j
i j i j i j
f f f x f y ff f x y x y
x y x y x y (9)
2 2 2 2 2
1, 1 , 2 2
,2 2
i j i j
i j i j i j
f f f x f y ff f x y x y
x y x y x y (10)
2 2 2 2 2
1, 1 , 2 2
,2 2
i j i j
i j i j i j
f f f x f y ff f x y x y
x y x y x y (11)
2 2 2 2 2
1, 1 , 2 2
,2 2
i j i j
i j i j i j
f f f x f y ff f x y x y
x y x y x y (12)
En effectuant une combinaison linéaire des quatre équations précédentes ((9)+(10)-(11)-(12)), nous
obtenons une approximation de la dérivée croisée à l'ordre 1 :
21, 1 1, 1 1, 1 1, 1
,4
i j i j i j i j
i j
f f f ff
x y x y
II.4 Conditions aux limites
Les principales conditions aux limites rencontrées sont les suivantes :
Conditions de DIRICHLET :
Elles imposent uniquement les valeurs de la fonction sur la frontière.
Conditions de NEUMANN :
Elles imposent uniquement les valeurs de la dérivée normale sur la frontière.
Conditions de CAUCHY :
Elles imposent sur la frontière, les valeurs de la fonction ainsi que les valeurs de la dérivée normale.
II.5 Génération d’un schéma aux différences finies
Introduction sur un exemple : Discrétisation de l'équation de la chaleur 1D
Considérons le problème monodimensionnel de la conduction de la chaleur dans une barre de 1m de
longueur. Le champ de température T(x, t) vérifie le problème suivant :

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
12
2
2
0
g d
T T0, (Equ. transfert chaleur à 1 Dimension)
t x
Dans le domaine d 'étude D : x 0,1 , et t 0
Ou est la diffusivité thermique
avec Conditions initiales T(x,0) T
Conditions aux limites : T(0, t) T et T(1, t) T
Pb(1)
L'intervalle [0,1] est discrétisé en N 1 nœuds de coordonnées ix (i varie de 0 à N)
régulièrement espacés. Notons x le pas d'espace. Le temps est discrétisé en intervalles de pas
constant t . Notons n
iT la température au noeud ix i x et à l'instant t n t .
On peut utiliser deux approches pour discrétiser cette équation de la chaleur. La première dite
explicite utilise une discrétisation au noeud ix et à l'itération courante n :
nn 2
2
i i
T T0
t x
Et la seconde dite implicite utilise une discrétisation au noeud ix et à l'itération n 1 :
n 1n 1 2
2
i i
T T0
t x
II.5.1 Schéma explicite
Nous utilisons un schéma avant d'ordre 1 pour évaluer la dérivée temporelle et un schéma centré
d'ordre 2 pour la dérivée seconde en espace : n n 1 n
i i
i
T TT
t t
n
n n n2
i 1 i i 1
2 2
i
T 2T TT
x x
Considérons le Pb (1) et supposons connue T(x, t) en tout point x 0,1 à l’instant n . Le Pb
(1) discrétisé peut s’écrire de la forme suivante :
n 1 n n n n
i i i 1 i i 1
2
0
i 0
n n
0 g 1 d
T T T 2T T0
t x
C.I T T
C.L T T , T T
Pb(1’)
Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
13
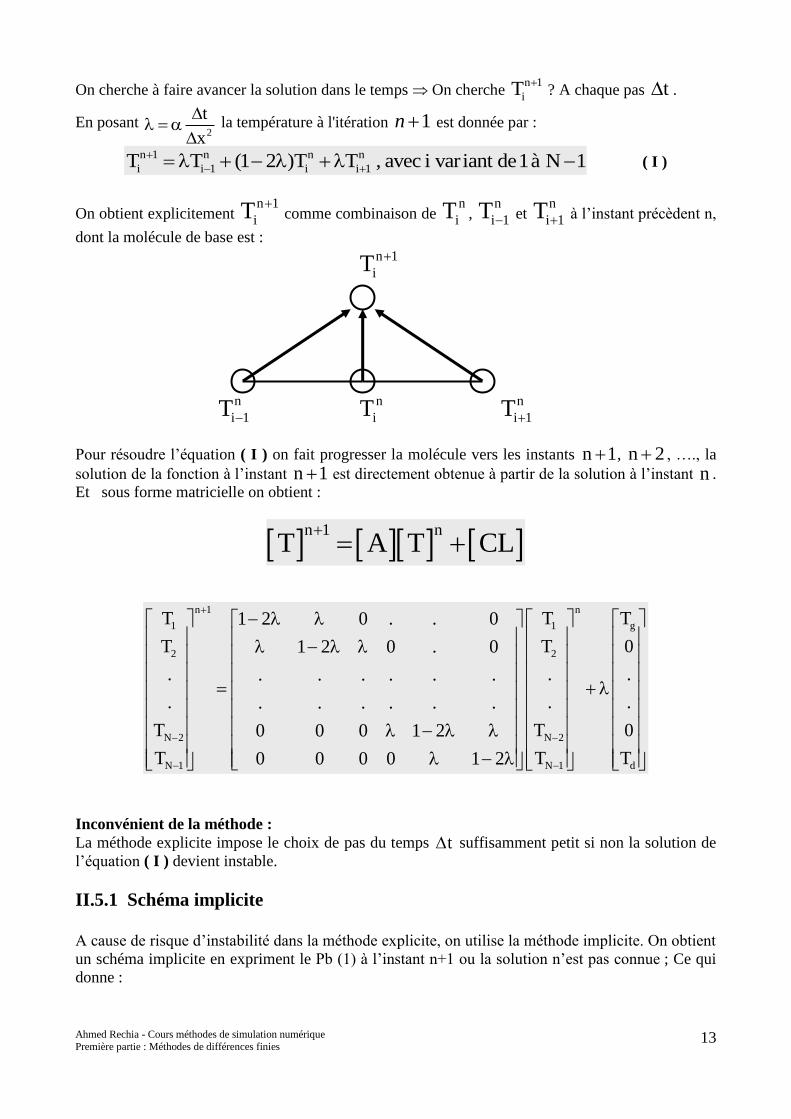
On cherche à faire avancer la solution dans le temps On cherche n 1
iT ? A chaque pas t .
En posant 2
t
x
la température à l'itération 1n est donnée par :
n 1 n n n
i i 1 i i 1T T (1 2 )T T , avec i var iant de1à N 1
( I )
On obtient explicitement n 1
iT comme combinaison de
n
iT , n
i 1T et n
i 1T à l’instant précèdent n,
dont la molécule de base est :
n 1
iT
n
i 1T n
iT n
i 1T
Pour résoudre l’équation ( I ) on fait progresser la molécule vers les instants n 1 , n 2 , …., la
solution de la fonction à l’instant n 1 est directement obtenue à partir de la solution à l’instant n .
Et sous forme matricielle on obtient :
n 1 n
T A T CL
n 1 n
1 1 g
2 2
N 2 N 2
N 1 N 1 d
T T T1 2 0 . . 0
T T 01 2 0 . 0
. . .. . . . . .
. . .. . . . . .
T T 00 0 0 1 2
T T T0 0 0 0 1 2
Inconvénient de la méthode :
La méthode explicite impose le choix de pas du temps t suffisamment petit si non la solution de
l’équation ( I ) devient instable.
II.5.1 Schéma implicite
A cause de risque d’instabilité dans la méthode explicite, on utilise la méthode implicite. On obtient
un schéma implicite en expriment le Pb (1) à l’instant n+1 ou la solution n’est pas connue ; Ce qui
donne :

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
14
n 1 n n 1 n 1 n 1
i i i 1 i i 1
2
1
i
n n
1 ini m fin
T T T 2T T0
t x
C.I T 0
C.L T T , T T
Pb(2’)
On posant 2
t
x
la température à l'itération 1n est donnée par :
n 1 n 1 n 1 n
i i 1 i 1 i(1 2 )T (T T ) T , avec i var iant de1à N 1
( II )
On constate que les inconnues à l'itération N 1 sont reliées entre elles par une relation implicite
(d'où le nom de la méthode). Dont la molécule de base est :
n 1
i 1T
n 1
iT
n 1
i 1T
n
iT
Ainsi l’équation (II) s’écrit sous forma matricielle :
n 1 n
B T T CL
n 1 n
1 1 g
2 2
N 2 N 2
N 1 N 1 d
T T T1 2 0 . . 0
T T 01 2 0 . 0
. . .. . . . . .
. . .. . . . . .
T T 00 0 0 1 2
T T T0 0 0 0 1 2
(III)
A chaque itération, le vecteur des inconnues discrètes se détermine par résolution d'un système
linéaire. La matrice du système étant tridiagonale, un algorithme de Thomas (basé sur la méthode
du pivot de Gauss) est très souvent utilisé.

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
15
Avantage de la méthode implicite
Cette méthode est toujours stable t , la seule limitation sur t est celle qui maintient les erreurs
de troncature dans des limites acceptables.
Inconvénient de la méthode implicite
La solution est obtenue indirectement. Il faut résoudre le système linéaire (III) à chaque instant t
par itération jusqu’à convergence de la solution.
C.à.d n 1 n 6
i iT T , avec de l'ordre10
II.6 Evaluation pratiques des différentes erreurs d’approximation
On note :
n
i
n
i
n
i
: la la solution analytique exacte.
T : la solution exacte du schéma.
t : la solution numérique trouvée.
On appel erreur globale de la résolution numérique : n
iE
n n n
i i iE t
Valeur exacte de la solution analytique Valeur numérique trouvé
après de l’équation de départ du Pb (1). Calculs sur ordinateur.
Soit :
n n n n n n n
i i i i i i iE ( T ) (T t ) d s
Erreur de Erreur de
Discrétisation Stabilité
II.6.1 Consistance d’un Schéma aux différences finies (SDF) On dit qu’un SDF est consistant si :
L’erreur de troncature n n n
i i id T 0 quand x 0
On sait que l’expression de l’erreur de troncature est définie par :

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
16
n 1 n n n n22i i i 1 i i 1
2 2
T T T 2T TT T( t) ( x )
t x t x
Ce schéma est consistant si : 2( t) ( x ) 0 Quand
x 0
t 0
On général, un SDF est dit consistant si au moins les équations discrètes sont écrites au moins au
second ordre prés.
II.6.2 Stabilité d’un SDF
On appel : n n n
i i is T t l’erreur de stabilité du SDF au nœud (i,n) .
La stabilité d’un SDF traduit le fait que des erreurs locales à un instant donnée s’affaiblissent ou
augmente quand le paramètre temps ‘t’ augmente.
On dit qu’un SDF est stable si :
n n
i iT t 0 Avec les dimensions du maillage.
Etude de la stabilité du SDF du Pb (1’), par la méthode de VAN-NEUMANN
a) Cas du SDF par la méthode explicite
On pose la fonction solution trouvée par calcul sur ordinateur n
it (t)de la forme complexe
n j x 2
it (t) (t)e (avec j 1) (13)
Soit 1 , on peut écrire l’équation du Pb (1’) de la forme :
j x j xj (x x) j x j (x x)
2
(t t)e (t)e (t)e 2e e
t x
En posant 2
t
x
et après transformation, on obtient :
2 x(t t) (t) 1 4 sin ( )
2
Soit 2
ex
xG 1 4 sin ( )
2
, et pour que le SDF du Pb (1’) soit stable :
Il faut que le facteur d’amplification 2
ex
xG 1, or sin ( ) 1 , x
2

Ahmed Rechia - Cours méthodes de simulation numérique
Première partie : Méthodes de différences finies
17
Il reste à vérifier alors que 1
4 1 1 4 2, Soit 0.52
En fin, la condition de stabilité CFL du SDF est : 2
t0.5
x
b) Cas du SDF par la méthode implicite
A partir de l’expression (13) de la fonction n
it (t) l’équation discrète du Pb (2’) s’écrit :
j x j x
j (x x) j x j (x x)
2
(t t)e (t)e (t t)e 2e e
t x
En posant 2
t
x
et après transformation, on obtient :
2 x(t t) 1 4 sin ( ) (t)
2
Soit alors
2
1(t t) (t)
x1 4 sin ( )
2
On pose 2
im
xG 1 4 sin ( )
2
, et pour que le SDF du Pb (2’) soit stable :
Il faut que le facteur d’amplification :
im
11,
G en effet :
On a toujours 2 xsin ( ) 1 , x
2
et par conséquence :
2
11
x1 4 sin ( )
2
Donc le schéma implicite est inconditionnellement stable.
II.6.3 Convergence d’un SDF Si un schéma numérique aux différences finies est consistant est stable alors il est convergent.
Convergence = consistance + Stabilité