Corr 8350

of 4
-
Upload
stephane-durel-mbida -
Category
Documents
-
view
216 -
download
0
Transcript of Corr 8350
-
7/24/2019 Corr 8350
1/4
Systmes Asservis Dimensionnements
J.-M. Allenbach 1 2002-07-02
E 8.3.50Un systme rgler est connu par sa fonction de transfert:
G ss s s
s ( ) ( , ) ( , ) ( , )=
+ + +
6
1 0 05 1 0 02 1 0 003
A Choisir un rgulateur pour que le systme asservi rponde aux spcifications suivantes
(rsultat: quotient de polynmes factoriss):
dpassement maximal sur la rponse indicielle ~5%.
temps de rponse 5% infrieur 100 [ms].
cart statique nul.
faible cot
faible sensibilit au bruit
peu de saturation (10 [V]) de la sortie du rgulateur en cas de saut de consigne de 8 [V].
B Mme question qu'en A, mais pour un temps de 20 [ms].
C 8.3.50 A La condition dcart statique nul impose une composante intgrale au systme enboucle ouverte, qui sera apporte par le rgulateur. Les conditions sur le cot et l'immunit au
bruit nous invitent renoncer la composante D.
Tn=T1 = 50 [ms] (1 pt)
Les deux constantes de temps de 3 et 20 [ms] peuvent tre remplaces par une petite
constante de temps quivalente Tpe= 20 + 3 = 23 [ms]. (1 pt)
PourD1= 5 %, on calcule la valeur de Ti =2*Ks*Tpe= 2*6 *(23*10-3
)= 276 [ms]. le tableau
5.A.1 permet d'estimer le temps de rponse: tr= 4,2*Tpe= 97 [ms], ce qui est conforme au
cahier des charges. (2 pts)
G ss
sR( )
( , )
,=
+1 0 050
0 276 (1 pt)
Au temps t= 0, on peut estimer le gain 0,05/0,276 = 0,18. Pour une variation de
consigne de 8 [V], la sortie ne variera que de 1,45 [V], bien loin de la saturation. (1 pt)
BPour un temps de rponse plus court, il faut passer au PID:
Tn=T1 = 50 [ms] Tv= T2 = 20 [ms]. (2 pts)
Pour D1= 5 %, on calcule la valeur de Ti = 2*Ks*T3= 2*6 *(3*10-3
)= 36 [ms]. le tableau
5.A.1 permet d'estimer le temps de rponse: tr= 4,2*T3= 12,6 [ms], ce qui est conforme au
cahier des charges . (2 pts)
G ss s
sR( )
( , )( , )
,=
+ +1 0 05 1 0 02
0 036. (2 pts)
Au temps t= 0, on peut estimer le gain (0,05+0,02)/0,036 = 1,94. Pour une variationde consigne de 8 [V], la sortie varierait de 15,5 [V] pour la seule partie proportionnelle, il y
aura saturation, surtout qu'il s'y ajoute la composante drive! La composante drive rendra
la boucle plus sensible au bruit. (2 pts)
Temps tudiants 20 TOTAL 15 pts
Ayant une marge de 7,4 [ms] avec PID par rapport au cahier des charges, on peut en
profiter pour installer un filtre sur la mesure: Tf =7,4/4,2=1,7 [ms]. => nouveau Ti= 56 [ms].
Pour viter d'augmenter le dpassement sur la grandeur rgle, on place encore un filtre Tlcde
mme valeur sur la consigne, cela vitera aussi de saturer la composante drive. Avec un tel
filtre, les frquences de bruit suprieures 1 [kHz] (calcul: 936 [Hz]) sont attnues de plusde 20 [dB]. (bonus: 2 pts)
-
7/24/2019 Corr 8350
2/4
Systmes Asservis Dimensionnements
J.-M. Allenbach 2 2002-07-02
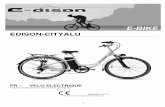
A On peut vrifier les comportements soussimulink, dabord avec le PI. Un bruit 1 kHz est
superpos la mesure.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-0.2
0
0.2
0.4
0.6
0.8
1
1.2
( 0.14821 , 1.0438 )
( 0.10228 , 0.95 )
Linfluence du bruit sur le signal de sortie (bleu) est trs peu perceptible. Le
dpassement est de 4,38 % et le temps de rponse de 92,28 [ms] (compte tenu du changement
de consigne t= 0,01 [s]).
-
7/24/2019 Corr 8350
3/4
Systmes Asservis Dimensionnements
J.-M. Allenbach 3 2002-07-02
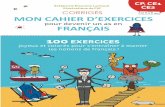
BEssayons un PID
commande(j)
mesure(m)
consigne (bl)
Rglage par rgulateur analogiqueJMA 20020702
Donnes
rcuprables
dans l'espace
de travail deMATLAB
3
0.003s+1
sous-systm e 3
2
0.02s+1
sous-systme 2
1
0.05s+1
sous-systme 1
y
signaux
0.02*0.05/0.036/1e-4(s+1/0.05)(s+1/0.02)
s(s+1/0.0001)rgulateur
perturbation
1
0.0s+1
filtre
diff1
diffconsigne
t
base de temps
Sine Wave
S
OscilloscopeMux
Mux
0.2
Gain de
canal
Clock
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-0.2
0
0.2
0.4
0.6
0.8
1 ( 0.028676 , 1.0479 )
( 0.022322 , 0.95 )
Le dpassement est de 4,79 % et le temps de rponse de 12,32 [ms] (compte tenu du
changement de consigne t = 0,01 [s]). Lacclration du rglage est bien russie, mais
linfluence du bruit sur le signal de sortie du rgulateur(bleu) est maintenant trs visible (0.6
peak to peak).
-
7/24/2019 Corr 8350
4/4
Systmes Asservis Dimensionnements
J.-M. Allenbach 4 2002-07-02
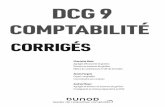
B Pour terminer, on profite de la marge entre le temps de rponse atteint (12 [ms]) et le temps
de rponse souhait (20 [ms]) pour filtrer la mesure.
commande(j)
mesure(m)
consigne (bl)
Rglage par rgulateur analogique
JMA 20020702
Donnes
rcuprables
dans l'espace
de travail de
MATLAB
3
0.003s+1
sous-systm e 3
2
0.02s+1
sous-systme 2
1
0.05s+1
sous-systme 1
y
signaux
0.02*0.05/0.06/1e-4(s+1/0.05)(s+1/0.02)s(s+1/0.0001)
rgulateur
perturbation
1
0.0018s+1
filtre
diff1
diffconsigne
t
base de temps
Sine Wave
S
OscilloscopeMux
Mux
0.2
Gain de
canal
Clock
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-0.2
0
0.2
0.4
0.6
0.8
1 ( 0.036266 , 1.0406 )
( 0.027267 , 0.95 )
Le cahier des charges est respect, mais le bruit est rduit dun facteur 13 au niveau de
la sortie du rgulateur (22,5 [dB]).





![3e2 corr la gestion d'un projet et la recherche de ...techno.saintemarie.free.fr/corr/3_corr/3_corr_e2.pdf · - la roue [1] autour de l'axe a ; - les pédales [2] autour des axes](https://static.fdocuments.fr/doc/165x107/5b9bbd7f09d3f2d6288b6409/3e2-corr-la-gestion-dun-projet-et-la-recherche-de-la-roue-1-autour.jpg)