
Contribution à l’étude de la ligne analogique du...
65
Contribution à l’étude de la ligne analogique du détecteur VeLo dans le cadre de l’expérience LHCb Projet de Master présenté au Laboratoire de Physique des Hautes Energies Samuel De Laere 1 Encadré par Jérémie Borel 2 Sous la direction du professeur Aurélio Bay 3 1 samuel.delaere@epfl.ch 2 jeremie.borel@epfl.ch 3 aurelio.bay@epfl.ch
Transcript of Contribution à l’étude de la ligne analogique du...
Contribution à l’étude de la ligneanalogique du détecteur VeLo dans le
cadre de l’expérience LHCb
Projet de Master
présenté au
Laboratoire de Physique des Hautes Energies
Samuel De Laere 1
Encadré par Jérémie Borel 2
Sous la direction du professeur Aurélio Bay 3


Résumé :
Ce travail de master est spécialement centré sur la transmission analogique des signaux re-cueillis par un des sous-détecteurs du LHCb : le Vertex Locator (ou VeLo). Les pistes desilicium constituant le détecteur VeLo sont séparées par un cable de ∼ 60 m du systèmed’acquisition des données situé à l’abris des radiations dans un environnement protégé. Laperte de qualité du signal due à cette longue distance de transmission analogique nécessiteun traitement adéquat d’amplification. Les mesures et simulations effectuées montrent que ladynamique de travail est incluse dans l’intervalle de réponse linéaire du système, et que lavaleur absolue de la charge résiduelle obtenue avec l’ajout d’un filtre FIR est de ∼0, 7%


Table des matières
1 L’expérience LHCb 1
1.1 Introduction à l’expérience LHCb . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 L’accélérateur LHC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Le détecteur LHCb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4 Le détecteur VeLo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.5 Le système de Trigger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.6 Le Beetle 1.5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.7 Chaine de transmission des données . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Paramètres expérimentaux 10
2.1 Paramètres du Beetle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 Calibration du pulse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3 Acquisition de données . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.1 Oscilloscopes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.3.2 Procédure de digitalisation . . . . . . . . . . . . . . . . . . . . . . . . . 122.3.3 Soustraction du Piédestal et du Mode Commun . . . . . . . . . . . . . . 132.3.4 Mesures effectuées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 La ligne analogique 15
3.1 Le système de transmission analogique . . . . . . . . . . . . . . . . . . . . . . . 153.2 Le code SPICE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.3 Réponse fréquentielle du système . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3.1 Le driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.3.2 Le receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.3.3 Le câble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3.4 Le système entier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4 Saturation de la ligne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.4.1 Paramètres du receiver utilisés . . . . . . . . . . . . . . . . . . . . . . . 293.4.2 Résultats avec le générateur de signal . . . . . . . . . . . . . . . . . . . 293.4.3 Résultats avec le Beetle 1.5 . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5 Charge résiduelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.5.1 Résultats avec le générateur de signal . . . . . . . . . . . . . . . . . . . 35
3.6 Implémentation envisageable sur le receiver . . . . . . . . . . . . . . . . . . . . 39
4 Algorithme FIR 43
4.1 Description du FIR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.2 Définition mathématique du FIR . . . . . . . . . . . . . . . . . . . . . . . . . . 434.3 Méthode utilisée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.4 Résultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5 Conclusion 48
6 Annexe 54
6.1 Calcul de la fonction de transfert du driver . . . . . . . . . . . . . . . . . . . . . 546.2 Fichiers de simulations utilisés dans SPICE . . . . . . . . . . . . . . . . . . . . 566.3 Algorithme du FIR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59

1 L’expérience LHCb
L’expérience LHCb [3], installée dans le futur accélérateur de particules LHC du CERN,commencera ses premières mesures en 2007. C’est un spectromètre à un bras spécialementconçu pour effectuer des mesures précises sur la violation CP et les désintégrations rares dansle secteur des quarks b. De récentes expériences récentes ont montré que la violation CP estgrande dans ce secteur.
Dans les expériences qui seront menées au LHC, l’électronique d’acquisition jouera unrôle primordial à cause des taux élevés de collisions. La transmission des données pour LHCbs’effectue de la manière suivante : Le passage de particules dans un senseur (d’un des sous-détecteur du LHCb) crée un signal électrique. Celui-ci passe dans un circuit électronique quile modifie et le conduit jusqu’au système d’acquisition "offline" où il va être stocké. Toutesles collisions proton-proton du LHC ne sont pas intéressantes. Un système de "trigger" a pourrôle de filtrer ces événements et de sélectionner ceux qui vont être finalement stockés.
Ce rapport est divisé de la manière suivante : Une première partie donne un aperçu desbuts recherchés dans l’expérience LHCb ainsi que sa description. Une seconde partie donneles paramètres expérimentaux liés à l’étude de la chaine de transmission du détecteur VeLo.La troisième et quatrième partie donnent les résultats des mesures effectuées sur cette chainede transmission analogique.
1.1 Introduction à l’expérience LHCb
La physique des hautes énergies étudie les intéractions entre les particules élémentaires,les composants de la matière. La théorie dominante actuelle est le Modèle Standard. Les blocsfondamentaux de la matière sont les 6 quarks (u,c,t,d,s,b) et les 3 leptons avec leur neutri-nos associés (e, µ, τ, νe, νµ, ντ ). Toutes ces particules possèdent leur anti-particules propres. Aceci s’ajoutent les bosons d’échanges qui décrivent les intéractions entre les éléments fonda-mentaux : le photon est le médiateur de l’intéraction électromagnétique, les 8 gluons sont lesmédiateurs de l’intéraction forte assurant la cohésion des noyaux et les bosons Z, W+, W−
sont ceux de l’intéraction faible responsable de la désintégration des noyaux instables. Toutceci forme le Modèle Standard des particules.
Cependant plusieurs problèmes restent non-éclaircis. Entre autre, l’asymétrie de la quan-tité de matière et d’antimatière de l’univers ne correspond pas avec l’évolution que préditla théorie du Big Bang. Une des causes nécessaires à cette constatation est qu’il existe uneviolation CP (C est l’opération de conjugaison de charge, P l’opération de parité). Cette vio-lation de la symétrie CP a été observée la première fois en 1964 dans la désintégration du kaonneutre K0
L. Depuis, de nombreuses expériences effectuées ont confirmé ce résultat. Dans le Mo-
dèle Standard, la violation CP est introduite par la matrice de Cabibbo-Kobayashi-Maskawa(CKM). La matrice CKM paramétrise le mélange entre les différentes générations de quarks.La possibilité d’introduire une phase complexe dans cette matrice permet d’introduire la vio-lation CP. Cette matrice à 3× 3 éléments est unitaire dans le Modèle Standard pour consever
1

Fig. 1 – Modèle Standard des particules.
les probabilités de transition entre les 3 familles de quarks. Historiquement, c’est Kobayashiet Maskawa en 1973 qui ont prédit une troisième famille de quarks (b et t) pour introduirela violation CP dans le Modèle Standard, quarks qui ont été décourverts par la suite. La dé-couverte, par des mesures futures, de la non-unitarité de la matrice CKM pour des systèmesparticuliers, permettrait d’imaginer l’existence d’une nouvelle famille de quarks.
Les premières mesures de violation CP ont été effectuées avec des kaons neutres. Le ModèleStandard prédit une violation CP dans d’autres systèmes, notamment dans la désintégrationdes mésons B. Plusieurs expériences récentes ont vérifié la violation CP avec des mésons Bneutres (BELLE, BaBar). Dans ce domaine, les expériences futures sont préparées dans le butde vérifier les prédictions du Modèle Standard pour la violation CP et peut-être découvrirune nouvelle physique au-delà du Modèle Standard. L’expérience LHCb a été mise sur piedpour étudier les désintégrations des mésons B à hautes énergies et mesurer des effets prédits deviolation CP. L’énergie dans le centre de masse des collisions proton-proton pourront atteindre14 TeV dans le futur accélérateur LHC du CERN. À une telle énergie, la production de mésonsB est très abondante (∼500 mbarn).
1.2 L’accélérateur LHC
Le "Large Hadron Collider" (LHC) en construction au CERN est un accélérateur de 27 Kmde circonférence fournissant des collisions proton-proton à haute luminosité avec une énergiede centre de masse de 14 TeV. L’accélérateur SPS est utilisé comme injecteur pour le LHC. Lesfaisceaux de proton sont accélérés dans un accélérateur linéaire (Linac) jusqu’à une énergie de50 MeV. Puis deux accélérateurs circulaires les poussent jusqu’à 1 GeV (Booster) et 26 GeVavant qu’ils ne rentrent dans le SPS ("Super Proton Synchrotron"). Ils sont ensuite amenésà une énergie de 450 GeV et entrent dans le LHC par deux tunnels (voir figure 2). L’énergie
2

finale de 7 TeV par faisceau est limitée par le champ magnétique de 8, 34 T dans les aimantssupra-conducteurs.
L’accélérateur LHC est utilisé par 5 expériences. Les expériences ATLAS et CMS, situéesdans des nouvelles cavernes construit en IP1 et IP5 (IP :point d’intéraction), ont plusieursbuts. Le principal est la découverte du boson de Higgs jamais encore détecté en utilisant lahaute luminosité du LHC (L = 1×1034 cm−2s−1). L’expérience ALICE en IP2 étudie le plasmaquark-gluon dans des collisions d’ions lourds. TOTEM est un détecteur en IP5 étudiant lesprocessus chromodynamiques quantiques (QCD). Il mesure également la section efficace totaldu LHC, importante pour la mesure de sa luminosité. Finalement, l’expérience LHCb en IP8est dédiée à la physique des mésons B.
Fig. 2 – Le futur accélérateur LHC du CERN.
1.3 Le détecteur LHCb
Le détecteur LHCb est construit pour étudier la violation CP en particulier dans le systèmedes mésons B utilisant la production par le LHC de hadrons possédant des quarks b. Lemécanisme de production dominant des mésons B dans des collisions proton-proton est lafusion de deux ou plusieurs gluons avec les quarks constituant les protons. Cela produit unedistribution angulaire particulière montrant que la direction des deux mésons est très corrélée.La figure 3 montre les deux pics correspondant à l’émission des paires bb. On voit qu’il y adeux directions corrélées préférentielles d’émission. Cela explique la géométrie spécifique dudétecteur LHCb. C’est un spectromètre à un bras mesurant une des deux régions possiblesd’émission préférentielle des mésons B. Il a une couverture angulaire de 10 mrad à 300 mradpour le plan horizontal et de 10 mrad à 250 mrad pour le plan vertical. Pour cette mêmeraison, l’expérience LHCb s’apparente à une expérience à cible fixe.
3

Fig. 3 – Angles polaires correspondant à la direction des hadrons b et b.
Une difficulté majeure d’une expérience mesurant des phénomènes rares est la conceptiondu schéma du trigger. Les événements correspondant aux mésons B peuvent être distinguésdes autres événements par la présence de traces de particules ayant une quantité de mouve-ment transverse élevée et de vertex secondaires éloignés des vertex primaires. LHCb travailleactuellement sur la base d’une luminosité de L = 2 × 1032 cm−2s−1. Cette luminosité estatteignable par l’accélérateur LHC très tôt après le lancement de ce dernier, ce qui donne àl’expérience LHCb la possibilité d’obtenir des résultats bien avant les autres expériences.
La figure 4 montre une représentation géométrique du détecteur LHCb et de ses compo-sants. Ces derniers sont les suivants :
– Le VeLo (Vertex Locator) est le détecteur du LHCb situé le plus près du faisceau del’accélérateur. Sa description est donnée au paragraphe 1.4.
– Le détecteur Veto est constitué de 2 stations de silicium situées en avant du détecteurVeLo, à l’opposé du reste du détecteur LHCb par rapport au point d’intéraction. Ilpermet d’identifier les intéractions proton-proton multiples.
– Les détecteurs RICH servent à identifier les hadrons en utilisant l’effet Cherenkov (Ring-Imaging CHerenkov). Leur tâche principale est d’obtenir une séparation des kaons et despions en fonction de leur quantitité de mouvement. Les particules ayant une quantitéde mouvement élevée (jusqu’à ∼ 100 GeV/c) sont identifiées par le détecteur RICH2 ,celles ayant une quantité de mouvement plus faible (jusqu’à ∼ 60 GeV) sont détectéespar le détecteur RICH1.
– Le TT ("Trigger Tracker") est situé après le RICH1 a l’entrée du champ magnétique deLHCb. Sa surface active est recouverte de micropistes de silicium. Il est premièrement
4
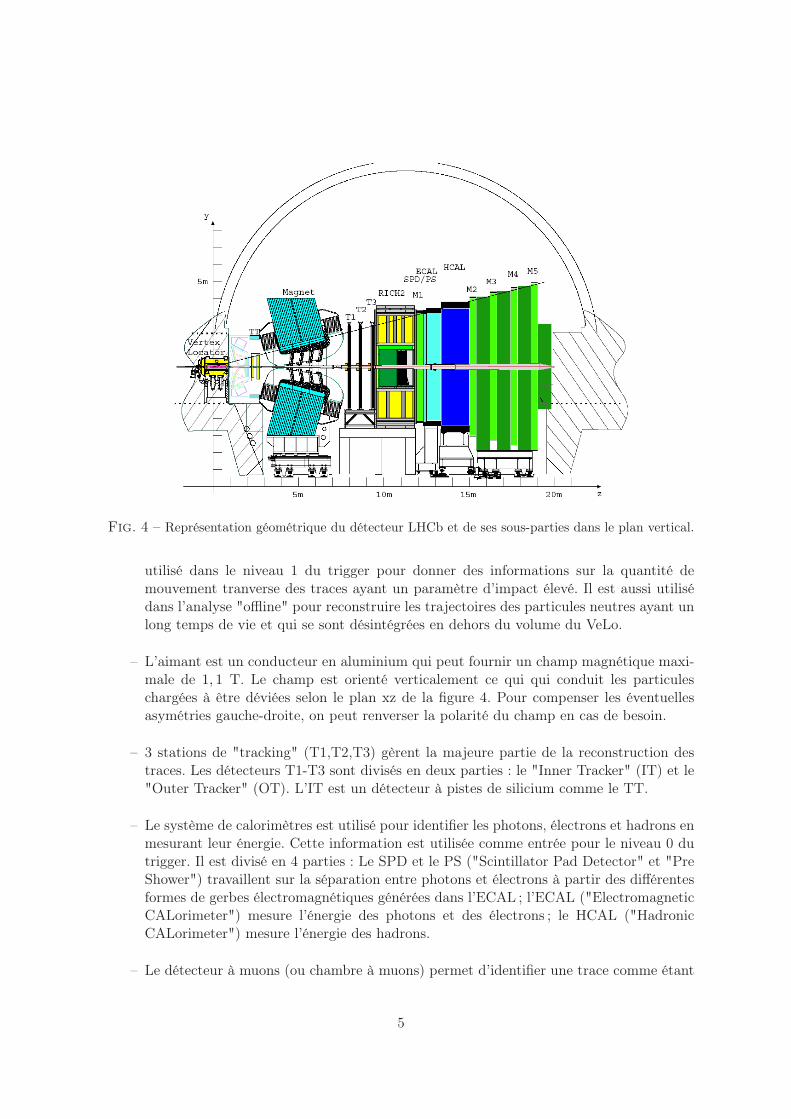
Fig. 4 – Représentation géométrique du détecteur LHCb et de ses sous-parties dans le plan vertical.
utilisé dans le niveau 1 du trigger pour donner des informations sur la quantité demouvement tranverse des traces ayant un paramètre d’impact élevé. Il est aussi utilisédans l’analyse "offline" pour reconstruire les trajectoires des particules neutres ayant unlong temps de vie et qui se sont désintégrées en dehors du volume du VeLo.
– L’aimant est un conducteur en aluminium qui peut fournir un champ magnétique maxi-male de 1, 1 T. Le champ est orienté verticalement ce qui qui conduit les particuleschargées à être déviées selon le plan xz de la figure 4. Pour compenser les éventuellesasymétries gauche-droite, on peut renverser la polarité du champ en cas de besoin.
– 3 stations de "tracking" (T1,T2,T3) gèrent la majeure partie de la reconstruction destraces. Les détecteurs T1-T3 sont divisés en deux parties : le "Inner Tracker" (IT) et le"Outer Tracker" (OT). L’IT est un détecteur à pistes de silicium comme le TT.
– Le système de calorimètres est utilisé pour identifier les photons, électrons et hadrons enmesurant leur énergie. Cette information est utilisée comme entrée pour le niveau 0 dutrigger. Il est divisé en 4 parties : Le SPD et le PS ("Scintillator Pad Detector" et "PreShower") travaillent sur la séparation entre photons et électrons à partir des différentesformes de gerbes électromagnétiques générées dans l’ECAL ; l’ECAL ("ElectromagneticCALorimeter") mesure l’énergie des photons et des électrons ; le HCAL ("HadronicCALorimeter") mesure l’énergie des hadrons.
– Le détecteur à muons (ou chambre à muons) permet d’identifier une trace comme étant
5

celle d’un muon. Cette identification est essentielle dans la recherche des désintégrationsrares semileptoniques. Le détecteur est composé de 5 stations. La station M1, situéeà l’entrée du calorimètre ECAL, est utilisée pour mesurer la quantité de mouvementtransverse des muons (information utilisée dans le niveau 0 du trigger). Les stationsM2-M5 sont situées à la fin de la géométrie du détecteur LHCb.
L’étude effectuée dans le cadre de ce travail de master se limite au détecteur VeLo. Plusprécisément, la chaine de transmission analogique des données du VeLo. On se limitera donc àune description de cette dernière. Des informations complémentaires concernant le détecteurVeLo peuvent être trouvées dans [3].
1.4 Le détecteur VeLo
Le détecteur étudié dans ce rapport est le Vertex Locator (VeLo) de LHCb. Le VeLo estun détecteur à pistes de silicium qui s’occupe de la reconstruction des traces près du pointd’intéraction. Il doit pouvoir résister aux hautes radiations. Ce détecteur est composé de 21stations placées perpendiculairement à l’axe du faisceau de part et d’autre du point d’inté-raction (voir figure 5). Chaque station du VeLo mesure les positions r et φ (en coordonnéessphériques) des particules chargées les traversant et est donc constituée par deux disques desilicium séparés de 2 mm
1m
RF-foil
VELO silicon sensors
Fig. 5 – Représentation de l’arrangement des stations du VeLo le long de l’axe du faisceau.
6
1.5 Le système de Trigger
Le système de trigger est un composant essentiel pour l’expérience LHCb. Une collisionproton-proton est générée toutes les 25 ns (soit à une fréquence de 40 MHz). Sachant qu’unévénement moyen dans LHCb correspond à une taille de 0, 1 MB de données informatiques,enregistrer tous les événements détectés impliquerait un flux de 4 TB/s. On sait cependantque la plupart des événements ne sont pas intéressants pour la physique des B que l’expérienceLHCb veut analyser. La solution est de filtrer les événements et de sélectionner ceux qui sontclassés intéressants. Au final, sur les millions d’événements générés par seconde, le trigger doiten sélectionner en moyenne 200.
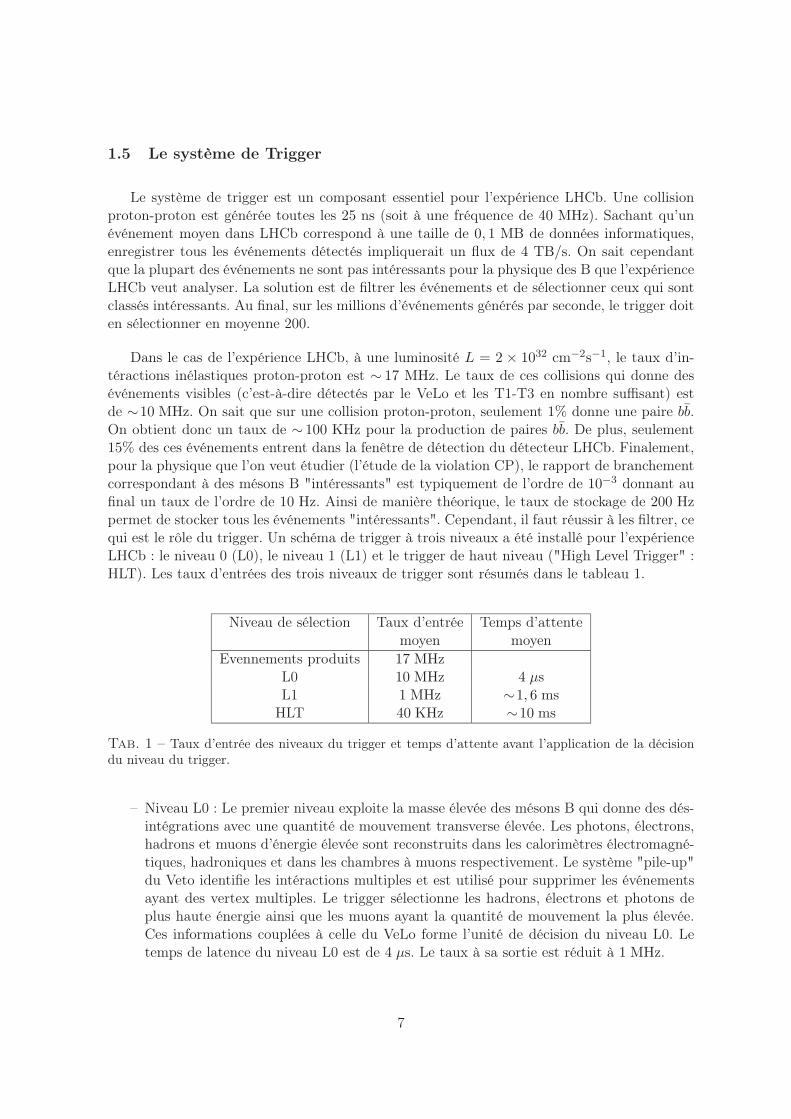
Dans le cas de l’expérience LHCb, à une luminosité L = 2 × 1032 cm−2s−1, le taux d’in-téractions inélastiques proton-proton est ∼ 17 MHz. Le taux de ces collisions qui donne desévénements visibles (c’est-à-dire détectés par le VeLo et les T1-T3 en nombre suffisant) estde ∼10 MHz. On sait que sur une collision proton-proton, seulement 1% donne une paire bb.On obtient donc un taux de ∼ 100 KHz pour la production de paires bb. De plus, seulement15% des ces événements entrent dans la fenêtre de détection du détecteur LHCb. Finalement,pour la physique que l’on veut étudier (l’étude de la violation CP), le rapport de branchementcorrespondant à des mésons B "intéressants" est typiquement de l’ordre de 10−3 donnant aufinal un taux de l’ordre de 10 Hz. Ainsi de manière théorique, le taux de stockage de 200 Hzpermet de stocker tous les événements "intéressants". Cependant, il faut réussir à les filtrer, cequi est le rôle du trigger. Un schéma de trigger à trois niveaux a été installé pour l’expérienceLHCb : le niveau 0 (L0), le niveau 1 (L1) et le trigger de haut niveau ("High Level Trigger" :HLT). Les taux d’entrées des trois niveaux de trigger sont résumés dans le tableau 1.
Niveau de sélection Taux d’entrée Temps d’attentemoyen moyen
Evennements produits 17 MHzL0 10 MHz 4 µsL1 1 MHz ∼1, 6 ms
HLT 40 KHz ∼10 ms
Tab. 1 – Taux d’entrée des niveaux du trigger et temps d’attente avant l’application de la décisiondu niveau du trigger.
– Niveau L0 : Le premier niveau exploite la masse élevée des mésons B qui donne des dés-intégrations avec une quantité de mouvement transverse élevée. Les photons, électrons,hadrons et muons d’énergie élevée sont reconstruits dans les calorimètres électromagné-tiques, hadroniques et dans les chambres à muons respectivement. Le système "pile-up"du Veto identifie les intéractions multiples et est utilisé pour supprimer les événementsayant des vertex multiples. Le trigger sélectionne les hadrons, électrons et photons deplus haute énergie ainsi que les muons ayant la quantité de mouvement la plus élevée.Ces informations couplées à celle du VeLo forme l’unité de décision du niveau L0. Letemps de latence du niveau L0 est de 4 µs. Le taux à sa sortie est réduit à 1 MHz.
7

– Niveau L1 : Le niveau 1 du trigger utilise les informations du niveau 0, du VeLo et duTT, réduisant en sortie le taux à 40 KHz. L’algorithme reconstruit en 2D les traces pro-venant du VeLo, vérifie si elles correspondent à celle du niveau 0 et mesure leur quantitéde mouvement. Les événements sont sélectionnés sur les traces ayant une quantité demouvement élevée et un grand paramètre d’impact par rapport à tous les vertex pri-maires. L’algorithme L1 est implémenté dans le TELL1 situé dans la zone protégée desradiations.
– Niveau HLT : L’information complète du détecteur est disponible pour le niveau HLT.Il recalcule les traces du VeLo avec une meilleure précision et prend en compte lesinformations sur les quantités de mouvement fournies par les stations T1-T3. La décisionfinale est une combinaison du niveau L1 et des coupures spécifiques pour chaque canauxde désintégration. Les événements sélectionnés par le HLT sont stockés pour des analysesultérieures.
1.6 Le Beetle 1.5
Le Beetle [13] est une puce électronique spécialement conçue pour l’expérience LHCb.C’est le premier élément du traitement de données de l’information. Dans le VeLo, les 128canaux d’entrées d’un Beetle sont directement reliés aux pistes de silicium correspondantes.Il y a 16 Beetles pour un disque de Silicium du VeLo correspondant à 2048 pistes. De partleur position, les Beetles sont exposés à de fortes doses de radiations (similaire aux valeurs dela figure 4) et sont construits de tels sortes qu’ils puissent résister 10 ans à celles-ci. Le rôled’un Beetle est de collecter les charges provenant de 128 canaux du détecteur à la fréquencede 40 MHz. Il est constitué de plusieurs étages de traitement de signaux : un premier étagede préamplification ; un processus de mise en forme ; un buffer ; un pipeline pour stocker lessignaux en attendant une réponse du L0 ; un multiplexer ; un amplificateur de sortie et undernier étage qui transforme les signaux en signaux différentiels. Le Beetle possède égalementun dispositif lui permettant envoyer des signaux pulsés ("testpulses"). Ce sont ces signauxpulsés qui sont utilisés dans nos mesures.
Les signaux entrant dans le Beetle sont donc préamplifés puis mis en forme. Ils sont en-suite stockés dans une des 187 cellules du pipeline. En présence d’une décision L0, les donnéessont envoyés au travers d’un amplificateur dans un multiplexer. Les 128 canaux sont répartisen 4 lignes de sortie, contenant chacune 32 canaux, qui sont envoyées au TELL1 ("TriggerElectronics and Level-1 board", spécialement développé pour l’acquisition des données dansLHCb). Dans le but de caractériser les événements, 16 bits PDB (Pseudo-digital Bits) sontinsérés avant le flot de données analogiques du signal. Ces bits forment l’en-tête du signalou "header" et contiennent des informations concernant la position occupée dans le pipelinedes données envoyées (PCN : Pipeline Column Number). 8 bits sont dédiés aux PCN. Les8 bits restants du header contiennent des status spécifiques au signal ainsi que des informa-tions d’erreurs de transmission. La paraléllisation du signal permet d’accélérer la transmissiondes données analogiques (chaque ligne transporte 32+4 bits de 25 ns chacun). La durée detransmission d’un événement est ainsi de 900 ns.
8

1.7 Chaine de transmission des données
Les données collectées par le VeLo doivent être analysées. Afin de minimiser la quantité dematière électronique dans la zone hautement radioactive, cette analyse du signal est effectuéedans une zone protégée des radiations (environ à 60 m de l’emplacement du détecteur). Dansle cas du VeLo, les charges des pistes de silicium sont collectées par les Beetles. Entre le Beetleet le TELL1 (carte d’acquisition des données), les signaux passent par les étapes suivantes :
– Dans le but de compenser les pertes liées au transport de données jusqu’à la zone pro-tégée des radiations, les 4 lignes vont passer premièrement au travers d’une carte RPT(Repeater MotherBoard). Cette carte fait partie des composantes du niveau 0 de l’élec-tronique du détecteur LHCb. elle contient 4 drivers (ou line driver), un pour chaqueligne. Le driver est un circuit électronique qui amplifie les signaux entrants de manièreadéquate afin d’anticiper les pertes qui vont survenir dans le transport jusqu’au TELL1.
– Les 4 lignes vont ensuite traverser un cable de ∼ 60 m de long qui les mènent dans lazone protégée des radiations. Le cable contient 16 paires torsadées et blindées indivi-duellement. Il regroupe donc en entrée, les signaux provenant de 16 lignes, donc de 4Beetles.
– Les 4 lignes vont ensuites être recueillies sur une carte ARx (Analog receiver card). Cettecarte possède 4 entrées et contient deux circuits électroniques différents : le receiver etl’ADC. Le receiver a pour but de recadrer le signal entrant dans une fenêtre d’amplitudeacceptable pour l’ADC (2 V différentiel). L’ADC (Analog to Digital Converter) estun digitaliseur qui convertit les signaux analogiques entrant en signaux numériques. lafréquence d’échantillonage est de 25 ns.
– Les signaux ainsi numérisés sont ensuite traités par les unités de calcul du TELL1 etenvoyés vers le trigger.
9

2 Paramètres expérimentaux
Dans cette section, on présente les paramètres expérimentaux qui ont été utilisés dansl’étude du système de transmission analogique du détecteur VeLo. On ne traitera en particulierque les parties de la chaine de transmission utilisées pour effectuer les mesures présentées dansla suite de ce rapport.
2.1 Paramètres du Beetle
Le Beetle est commandé par le système d’acquisition de données au travers d’une interfaceI2C. Il possède des registres de mémoire qui paramétrisent certains étages de traitement dusignal. Les valeurs utilisées sont données dans les tableaux 2 et 3. Le tableau 2 donne lesvaleurs nominales selon [13], le tableau 3 donne les valeurs utilisées par l’équipe du CERN endate du 21 décembre 2004.
Itp #0 0x1A Ipipe #10 0x0D
Ipre #1 0x4C Vd #11 0x66
Isha #2 0x0A Vdcl #12 0x70
Ibuf #3 0x0A Ivoltbuf #13 0x1A
Vfp #4 0x00 Isf #14 0x0D
Vfs #5 0x00 Icurrbuf #15 0x99
Icomp #6 0x00 Latency #16 0x15
Ithdelta #7 0x00 ROCtrl #17 0x1C
Ithmain #8 0x00 RclkDic #18 0x00
Vrc #9 0x00 CompControl #19 0x08
Tab. 2 – Valeurs nominales des registres du Beetle (valeurs hexadécimales).
Itp #0 0x20 Ipipe #10 0x0D
Ipre #1 0x4B Vd #11 0x82
Isha #2 0x0A Vdcl #12 0x63
Ibuf #3 0x0A Ivoltbuf #13 0x1A
Vfp #4 0x00 Isf #14 0x1A
Vfs #5 0x47 Icurrbuf #15 0x66
Icomp #6 0x00 Latency #16 0x15
Ithdelta #7 0x00 ROCtrl #17 0x1C
Ithmain #8 0x00 RclkDic #18 0x00
Vrc #9 0x00 CompControl #19 0x08
Tab. 3 – Valeurs des registres du Beetle du CERN au 21/12/04 (valeurs hexadécimales).
La seule valeur du registre que l’on modifie pour changer l’amplitude du pulse est le courantdu testpulse (Itp).
10

2.2 Calibration du pulse
Le signal de sortie du module de mise en forme du Beetle est une semi-Gaussienne dontla forme est contrôlée par 5 paramètres : Ipre, Isha, Ibuf, Vfp et Vfs. La figure 6 donnel’équivalence des valeurs hexadécimales entrées dans le registre en tension. En utilisant lesvaleurs nominales données par le tableau 2, on obtient Ipre= 600 µA, Isha=Ibuf=80 µA,Vfp=Vfs= 0 V. Ces valeurs donnent la calibration suivante (voir figure 6) entre la chargeinjectée et la tension de sortie du Beetle : AQ = VFEout
/Qin = 38 mV/22000e−= 38 mV/MIPpour une polarité du signal. En sortie du Beetle, le signal différentiel présente une amplitudede 76 mV/MIP.
Fig. 6 – Table issu de [13] donnant la conversion des valeurs hexadécimales en courant, pour lesparamètres de mise en forme dans le cas des valeurs nominales.
L’unité utilisée est le MIP : "Minimum Ionizing Particle". Cela signifie une particule dontla perte d’énergie par unité de longueur traversée est minimum selon l’équation de Bethe-Bloch (1). L’énergie moyenne perdue dans le silicium est donnée par cette même équation(voir [6]). Dans la distribution de Landau, on parle ici d’énergie moyenne, ce qui diffère de laplus probable par un facteur X ∼0, 7.
dE
dX
∣
∣
∣
∣
Si
min
= 1.664MeV
g cm−2(1)
L’épaisseur du silicium est d = 200 µm et sa densité est ρSi = 2.33 g/cm3. Ainsi, onobtient l’énergie d’un MIP donnée par l’équation (2).
1 MIP =dE
dX
∣
∣
∣
∣
Si
min
ρSi d = 7.75.10−2 MeV (2)
La création d’une paire e−/ion à 300 K dans le silicium demande une énergie :W = 3.62 eV/paire. Une particule qui dépose un MIP crée donc :
N =7.75.10−2.106
3.62= 2.14.104 paires ≃ 22000e− (3)
C’est le nombre d’électrons correspondant à 1 MIP. Dans notre système, il n’y a pas demécanisme d’injection de charges au travers d’un réseau RC qui simulerais la présence du
11

silicium. Seule la valeur d’amplitude du courant du testpulse donnée par le champ Itp duregistre permet une calibration entre les valeurs entrées dans le registre et la charge injectéedans le Beetle. On a la relation suivante [13] :
Qin = 131.2e−/µA · Itp = 1025e− · (valeur Itp du registre) (4)
Où Itp est exprimée en µA dans la première égalité de l’équation (4). On obtient ladeuxième égalité de l’équation (4) en appliquant la conversion donnée par le tableau de lafigure 6.
2.3 Acquisition de données
2.3.1 Oscilloscopes
Les mesures effectuées et présentées dans ce rapport ont toutes été acquises par l’inter-médiaire d’oscilloscopes numériques à haute bande-passante. Les différents modèles d’oscillo-scopes utilisés, tous issus du fabriquant LeCroy, sont les suivants :
– LeCroy wavepro 7200 : C’est un oscilloscope ayant 2 GHz de bande-passante. Il numériseà une fréquence de 20 GB/s.
– LeCroy LC534A : il a une bande-passante de 1 GHz. Il numérise à une fréquence de2 GB/s.
– LeCroy waverunner LT354 : il a également une bande-passante de 1 GHz et numérise àune fréquence de 1 GB/s.
Dans tous les cas, on limite la bande-passante des oscilloscopes à 200 MHz. Pour la mesuredes signaux différentielles en sortie du système, on utilise une sonde différentielle active ayantune capacité d’entrée de 0, 7 pF qui perturbe très faiblement le signal mesuré. Cette sondepossède une bande-passante de 500 MHz et une sortie couplée à 50 Ω. On remarquera que l’onne mesure que des signaux différentiels et jamais des signaux d’une polarité. La soustractiondes signaux de deux polarités opposées se fait mathématiquement par les oscilloscopes.
Lors des mesures effectuées avec le Beetle, les signaux mesurés sont triggés sur le TTC(Timing and Trigger Control) au moyen de sondes actives du même type que la sonde activedifférentielle. Le TTC est le système de synchronisation pour l’ensemble de l’expérience LHCb.
2.3.2 Procédure de digitalisation
Lors de mesures d’événements dans le détecteur VeLo, la numérisation des signaux se ferapar les ADC situés sur les cartes ARx. Les cartes de numérisation contiennent 16 canaux.Chaque canal possède un receiver et les données analogiques sont numérisées sur 10 bits parl’ADC à une fréquence de 40 MHz. Dans le cadre de nos mesures, toutes les numérisations sonteffectuées sur des échantillons analogiques acquis par l’oscilloscope à l’entrée de l’ADC. Lessources des codes peuvent être trouvées à l’adresse suivante :
12

http://lphe.epfl.ch/~jborel/code.html. Pour numériser les signaux analogiques, on aprocédé à une numérisation par période de 25 ns en prenant une moyenne sur 0, 5 ns afind’éviter des divergences dues aux très hautes fréquences. On doit également fixer le point dedépart de la phase du signal, ce qui est fait à l’aide de l’oscilloscope. Un signal est envoyé parle Beetle à chaque trigger L0 (voir figure 7). Il est numérisé en 36 canaux : 4 canaux pour leheader, 32 canaux pour les données. Ils sont numérotés de de −4 à −1 pour le header et de 0à 32 pour les données.
2.3.3 Soustraction du Piédestal et du Mode Commun
Les soustractions des piédestaux sur les signaux analogiques ont été effectuées manuelle-ment sur l’oscilloscope LeCroy wavepro 7200. La figure 7 montre les signaux envoyés par leBeetle dans la ligne analogique. La figure de gauche montre ce que l’on appelle le piédestal :un signal non pulsé. La figure de droite montre un signal pulsé. La soustraction du piédestalmanuelle effectuée consiste à soustraire au signal pulsé une moyenne sur un échantillon depiédestaux enregistrés dans les mêmes conditions. Ceci a pour conséquence de réduire consi-dérablement l’offset de la ligne de base du signal.
time (ns)55200 55400 55600 55800 56000
amp
litu
de
(mV
)
-300
-200
-100
0
100
200
Analog trace #8 analogEntries 10002Mean 5.553e+04RMS 321
Analog trace #8
time (ns)55200 55400 55600 55800 56000
amp
litu
de
(mV
)
-300
-200
-100
0
100
200
300
Analog trace #1008 analogEntries 10002Mean 5.554e+04RMS 289.2
Analog trace #1008
Fig. 7 – Signaux pulsés envoyés par le Beetle après passage dans la ligne analogique, mesuré parl’oscilloscope LeCroy wavepro 7200. A gauche, un signal non pulsé. A droite un signal pulsé
La soustraction du mode commun effectuée dans certaines mesures est aussi manuelle.Pour effectuer cette opération, on fait préalablement une soustraction du piédestal et on faitune moyenne sur un nombre fixé de signaux ainsi soustraits. Cela a pour but de réduire lesfluctuations à basse fréquence.
Lorsque l’expérience LHCb sera fonctionnelle, les soustractions des piédestaux ainsi que dumode commun seront effectuées par les unités de calcul du TELL1 sur les signaux déjà numé-risés par l’ADC, au moyen d’algorithmes adéquats (par exemple, l’algorithme LCMS ("LinearCommon Mode Suppression") pour la soustraction du mode commun). Dans la configurationfinale, toutes ces opérations se feront de manière automatique.
13

2.3.4 Mesures effectuées
Les mesures effectuées et présentées dans ce rapport concerne essentiellement la ligneanalogique (le driver, le cable, le receiver). Dans le but de qualifier la transmission des donnéesdu système, on a effectué une étude de la réponse fréquentielle de la ligne analogique. Ona également mesuré la plage de réponse linéaire de notre système ainsi que sa saturation.La mesure de la charge résiduelle (voir paragraphe 3.5) est une mesure de la qualité de lacompensation effectuée par l’insertion du driver dans la ligne analogique. Finalement, dans lecadre de signaux numérisés, on a effectué une étude sur un filtre FIR, dans le but de faireencore diminuer la valeur de cette charge résiduelle. Toutes ces mesures sont présentées dansles parties 3 et 4.
14

3 La ligne analogique
3.1 Le système de transmission analogique
Le système de transmission entre le détecteur VeLo et le parc informatique doit respectercertaines contraintes. A cause de la forte irradiation dégagée par les collisions des particulesdans l’accélérateur LHC, et notamment à l’emplacement du détecteur VeLo, tous les com-posants électroniques situés près du point de collision doivent être résistants aux radiations.Les stations informatiques sont séparées de l’emplacement du détecteur par un épais mur deprotection en béton de sorte que le transport des données depuis l’emplacement du détecteurau parc informatique est effectué par l’intermédiaire de câbles de cuivre de longueur d’environ60m (voir figure 8). Ce dispositif induit directement des pertes et du bruit dans la transmissiondes données. Ces pertubations doivent être compensées, limitées et quantifiées afin de pouvoiranalyser correctement le signal arrivant à l’interface d’acquisition.
Fig. 8 – Schéma de la disposition du détecteur LHCb dans la caverne [CERN copyright].
Ces perturbations sont connues : la ligne induit une perte d’amplitude du signal et unemodification de la réponse fréquentielle du système. De plus, des pics de bruits électroniquespeuvent êtres générés. On utilise donc une transmission différentielle : une paire de câblesdans laquelle on envoi de manière identique dans l’un des deux câbles le signal et dans lesecond l’opposé de ce signal. A l’autre bout de la ligne, on effectue une soustraction de cesdeux signaux, afin de supprimer les pics de bruits. Pour compenser les pertes induites par laligne analogique, on insère dans la chaine du système un "driver" (line-driver) pour modifier lesignal entrant et corriger la réponse fréquentielle du système. L’analyse de cette correction sefait au moyen des mesures des fonctions de transfert pour chaque partie de la ligne analogiqueainsi que pour le système entier. Le but est d’obtenir pour le système entier une fonction detransfert plate dans le domaine des fréquences utilisées pour l’expérience.
15

Le système de transmission analogique (voir figure 9) reliant les beetles aux cartes d’ac-quisition TELL1 peut être décomposé en trois parties :
– Le driver, fixé sur une carte RPT (Repeater Board), se situe en entrée du système. Ila pour but d’inverser de la manière la plus optimale les distortions dues au passage dusignal dans le câble.
– Le câble (∼ 60 m) qui est constitué de 16 paires différentielles torsadées et blindéesindividuellement.
– le receiver, fixé sur une carte ARx (Analog Digitizer card) suivi de l’ADC situé à l’entréede la carte d’acquisition TELL1.
Les connexions entre toutes les parties de la ligne analogique sont DC. Il n’y a pas de filtreentre les différentes parties du système. On veut que la bande passante aille jusqu’à 40 MHz.
BEETLE DRIVER
G=2
60m CABLE RECEIVER
G=2
ADC
100
100
50
50
Fig. 9 – Schéma du système électronique.
3.2 Le code SPICE
Dans tous les résultats présentés sur la ligne analogique, les simulations sur les comporte-ments du système électronique ont été effectuées à l’aide du logiciel NGSPICE [14]. NGSPICEest un simulateur de circuit utilisant le code de trois logiciels en license libre : Cider1b1, Xspiceet Spice3f5 qui est le code original issu de l’université de Berkeley en Californie. Les codesutilisés pour la simulation des différentes composantes du système sont donnés en annexe (voir6.2 ).
3.3 Réponse fréquentielle du système
L’analyse de la réponse fréquentielle du système passe par l’analyse des fonctions de trans-fert. Pour ceci, on va travailler avec des signaux sinusoïdaux. Il est important de souligner quetous les sous-systèmes de la ligne analogique (driver, cable, receiver) sont linéaires (c’est-à-direque la distorsion du signal est à peu près nulle), ce qui implique que le système est linéaire.Une caractéristique de tels systèmes est de conserver la forme des signaux sinusoïdaux. Etantdonné que la transformée de Fourrier d’un sinus est un Dirac représentant une unique fré-quence, un sinus n’est pas déformé par son passage dans la ligne analogique. On parle donc derégime sinusoïdal. Les grandeurs définies et mesurables pour de tels signaux sont : la fréquence,l’amplitude, la valeur efficace et la valeur moyenne. Si on appelle Uin la tension à l’entrée ducircuit on a :
Uin(t) = U cos(ωt + φ) = U exp(j(ωt + φ)) = U exp(jωt) (5)
16

où U est l’amplitude du signal, f = ω/(2π) sa fréquence donc ω sa pulsation et φ saphase. La valeur moyenne de ce signal est nulle et sa valeur efficace est par définition égale àson amplitude divisée par
√2. La notation U est la tension complexe qui dépend uniquement
de la phase du signal. Par définition, la fonction de transfert d’un système électronique estle module de sa réponse fréquentielle. L’unité utilisée pour le gain est usuellement le décibel(dB) défini ci-dessous :
Gain[dB] = 20 log(Gain) = 20 log
∣
∣
∣
∣
Uout(t)
Uin(t)
∣
∣
∣
∣
= 20 log
∣
∣
∣
∣
Uout
Uin
∣
∣
∣
∣
(6)
Les simulations et les mesures ont été effectuées en utilisant des signaux sinusoïdaux defréquences connues. Ils ont une fréquence identique à l’entrée et à la sortie du circuit, laligne analogique ne modifiant pas leur fréquence. Cette dernière assertion explique la dernièreégalité de l’équation 6. La mesure du module du gain s’effectue donc directement en calculantle rapport des amplitudes des tensions d’entrée sur celles de sortie. On a utilisé comme sourcede signaux un générateur de sinus et lu directement les amplitudes d’entrées sur l’oscilloscopeLeCroy waverunner LT354 et celles de sorties sur l’oscilloscope LeCroy wavepro 7200 avec lasonde active différentielle.
Dans toutes les mesures concernant la réponse fréquentielle du système, les barres d’erreursdes amplitudes ont été déterminées à partir de l’erreur de lecture sur l’oscilloscope. Cette erreura été estimée à ∼10 mV dans tous les cas (même méthode de lecture) ce qui correspond à uneerreur sur le gain de ∼0, 4 dB.
3.3.1 Le driver
Les drivers sont regroupés par quatre sur un RPT (Repeater Board) (voir figure 10). Dufait que les RPT sont situés dans un environnement hautement radioactif, la quantité decomposants électroniques utilisés doit être minimale et ces derniers doivent pouvoir résister àune haute dose de rayonnement (voir tableau 4). Il y a plusieurs critères nécessaires que lesdrivers doivent respecter :
– La consommation de courant par canal doit être la plus basse possible pour minimiserla dissipation de chaleur.
– Le driver doit être entièrement différentiel et doit accepter une haute variation de latension du mode commun (+/- 500 mV).
– Le driver doit pouvoir compenser les pertes dues à la présence du câble dans la chaineélectronique.
– Les interférences entre les canaux de données doivent être les plus basses possibles (<5%)
Dose Total (Rad) équivalence pour Hadrons d’énergiedes neutrons de 1 MeV > 20 MeV
5, 0 × 103 3, 9 × 1011 6, 5 × 1010
Tab. 4 – Valeurs moyennes des radiations annuelles estimées à l’emplacement des RPT.
17
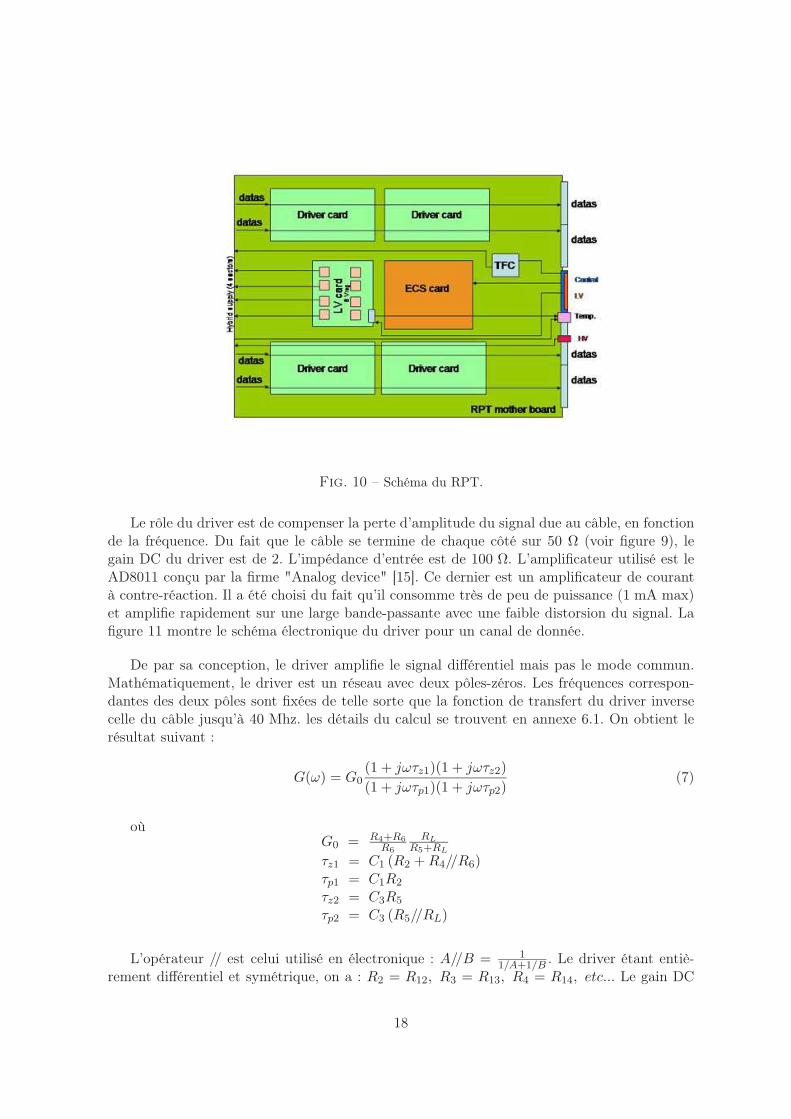
Fig. 10 – Schéma du RPT.
Le rôle du driver est de compenser la perte d’amplitude du signal due au câble, en fonctionde la fréquence. Du fait que le câble se termine de chaque côté sur 50 Ω (voir figure 9), legain DC du driver est de 2. L’impédance d’entrée est de 100 Ω. L’amplificateur utilisé est leAD8011 conçu par la firme "Analog device" [15]. Ce dernier est un amplificateur de courantà contre-réaction. Il a été choisi du fait qu’il consomme très de peu de puissance (1 mA max)et amplifie rapidement sur une large bande-passante avec une faible distorsion du signal. Lafigure 11 montre le schéma électronique du driver pour un canal de donnée.
De par sa conception, le driver amplifie le signal différentiel mais pas le mode commun.Mathématiquement, le driver est un réseau avec deux pôles-zéros. Les fréquences correspon-dantes des deux pôles sont fixées de telle sorte que la fonction de transfert du driver inversecelle du câble jusqu’à 40 Mhz. les détails du calcul se trouvent en annexe 6.1. On obtient lerésultat suivant :
G(ω) = G0
(1 + jωτz1)(1 + jωτz2)
(1 + jωτp1)(1 + jωτp2)(7)
oùG0 = R4+R6
R6
RL
R5+RL
τz1 = C1 (R2 + R4//R6)τp1 = C1R2
τz2 = C3R5
τp2 = C3 (R5//RL)
L’opérateur // est celui utilisé en électronique : A//B = 1
1/A+1/B . Le driver étant entiè-rement différentiel et symétrique, on a : R2 = R12, R3 = R13, R4 = R14, etc... Le gain DC
18

R11
R22
100
100
33pF
33pF
180pF
180pFC3
R551
51
C13
R15
1k5
R2
R12
C11
C1
R4
R6
R16
R14
AD8011
AD8011
51
51VIN+
VIN−
VOUT+
VOUT−
2*RL1k
5
1k1k
1k1k
+
−
+
−
Fig. 11 – Schéma électronique du driver pour un canal. les valeurs des résistances (en Ω) et descapacités sont indiquées ainsi que leur noms en gras. La ligne pointillée représente l’impédance d’entréedu câble.
est G0. On trouve G0 = 1 ce qui est normal car on a inclu dans le schéma électronique larésistance de ligne de 50 Ω de l’entrée du câble, ce qui divise le gain DC par deux. Sans cettedernière, on retrouverais le résultat énnoncé plus haut que le gain DC est de 2.
L’équation 7 possède deux pôles. Un pôle est engendré par le montage RC en série dansla contre-réaction de l’amplificateur (R2, R4, R6 et C1), le deuxième par la capacité C3 enparallèle à la résistance R5 de sortie du driver. Les valeurs attribuées aux différents compo-sants électroniques du driver ont été choisies grâce aux simulations effectuées sur le systèmeélectronique ainsi que par rapport à la réponse fréquentielle du câble dans le but d’optimiser lacompensation de ce dernier par le driver. On peut calculer les valeurs des fréquences associéesaux constantes de temps τz1, τp1, τz2, τp2 en faisant la conversion suivante ν [Hz] = 1
2πτ , τétant en seconde.
Pôle (MHz) Zéro (MHz)ν1 3, 22 2, 41ν2 34, 67 17, 34
Tab. 5 – Valeurs des pôles-zéros du driver en MHz.
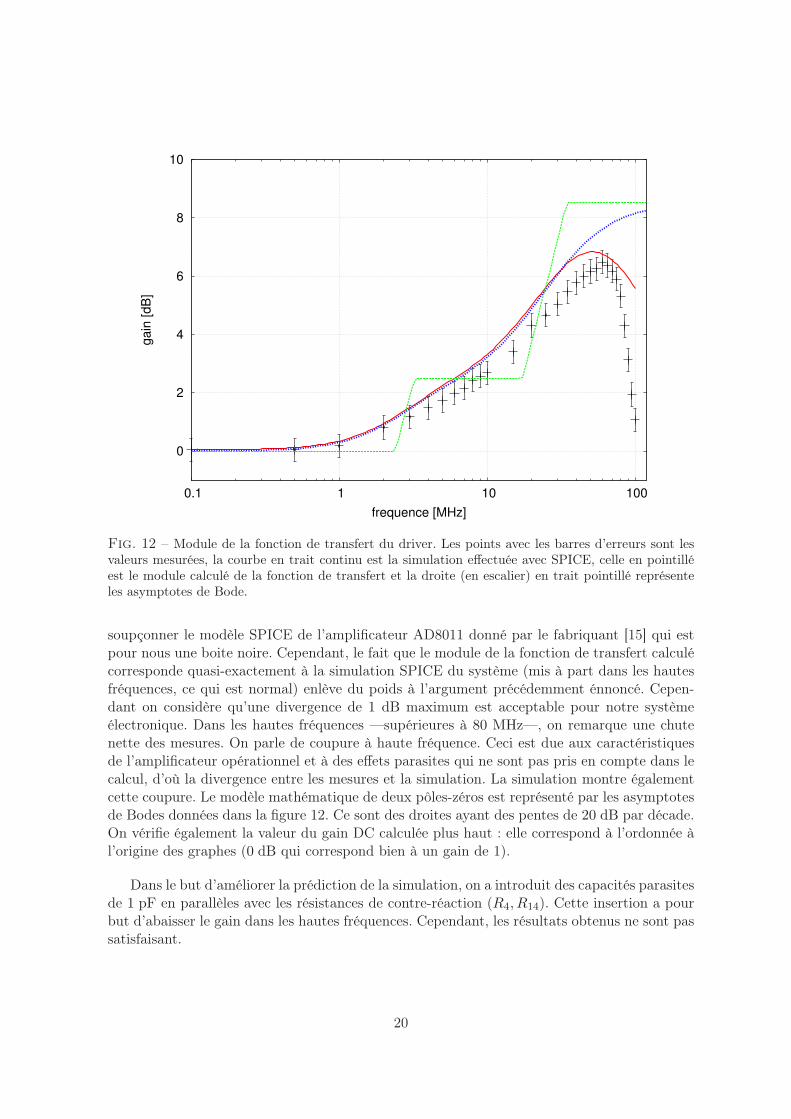
Les mesures ainsi que la simulation du module de la fonction de transfert sont présentéesdans la figure 12. On voit que les mesures s’accordent plus ou moins bien avec la simulationjusqu’à la fréquence de 80 MHz (1 dB maximum de différence entre simulation et mesures).Cependant, cette petite divergence de 1 dB n’est pas expliquée quant à son origine. On peut
19
0
2
4
6
8
10
0.1 1 10 100
gain
[dB
]
frequence [MHz]
Fig. 12 – Module de la fonction de transfert du driver. Les points avec les barres d’erreurs sont lesvaleurs mesurées, la courbe en trait continu est la simulation effectuée avec SPICE, celle en pointilléest le module calculé de la fonction de transfert et la droite (en escalier) en trait pointillé représenteles asymptotes de Bode.
soupçonner le modèle SPICE de l’amplificateur AD8011 donné par le fabriquant [15] qui estpour nous une boite noire. Cependant, le fait que le module de la fonction de transfert calculécorresponde quasi-exactement à la simulation SPICE du système (mis à part dans les hautesfréquences, ce qui est normal) enlève du poids à l’argument précédemment énnoncé. Cepen-dant on considère qu’une divergence de 1 dB maximum est acceptable pour notre systèmeélectronique. Dans les hautes fréquences —supérieures à 80 MHz—, on remarque une chutenette des mesures. On parle de coupure à haute fréquence. Ceci est due aux caractéristiquesde l’amplificateur opérationnel et à des effets parasites qui ne sont pas pris en compte dans lecalcul, d’où la divergence entre les mesures et la simulation. La simulation montre égalementcette coupure. Le modèle mathématique de deux pôles-zéros est représenté par les asymptotesde Bodes données dans la figure 12. Ce sont des droites ayant des pentes de 20 dB par décade.On vérifie également la valeur du gain DC calculée plus haut : elle correspond à l’ordonnée àl’origine des graphes (0 dB qui correspond bien à un gain de 1).
Dans le but d’améliorer la prédiction de la simulation, on a introduit des capacités parasitesde 1 pF en parallèles avec les résistances de contre-réaction (R4, R14). Cette insertion a pourbut d’abaisser le gain dans les hautes fréquences. Cependant, les résultats obtenus ne sont passatisfaisant.
20
3.3.2 Le receiver
Les précédentes versions du receiver incluaient une correction au niveau du gain en fonctionde la fréquence pour la ligne analogique. Dans les dernières versions du receiver, ce n’est plusle cas : seul le driver corrige le gain de la chaine analogique. Cela pouurait avoir commeconséquence que la dynamique de sortie du signal après le câble est trop grande et ne laissepas assez de marge pour la variation du mode commun d’où une saturation possible desamplificateurs opérationnels. Une transformation linéaire du signal a été ajoutée au receiverafin que la digitalisation effectuée par l’ADC ait une dynamique de 10 MIP.
AD8138
100
470
470
47
47
3pF
VOCM
1k
1k
10k+
−
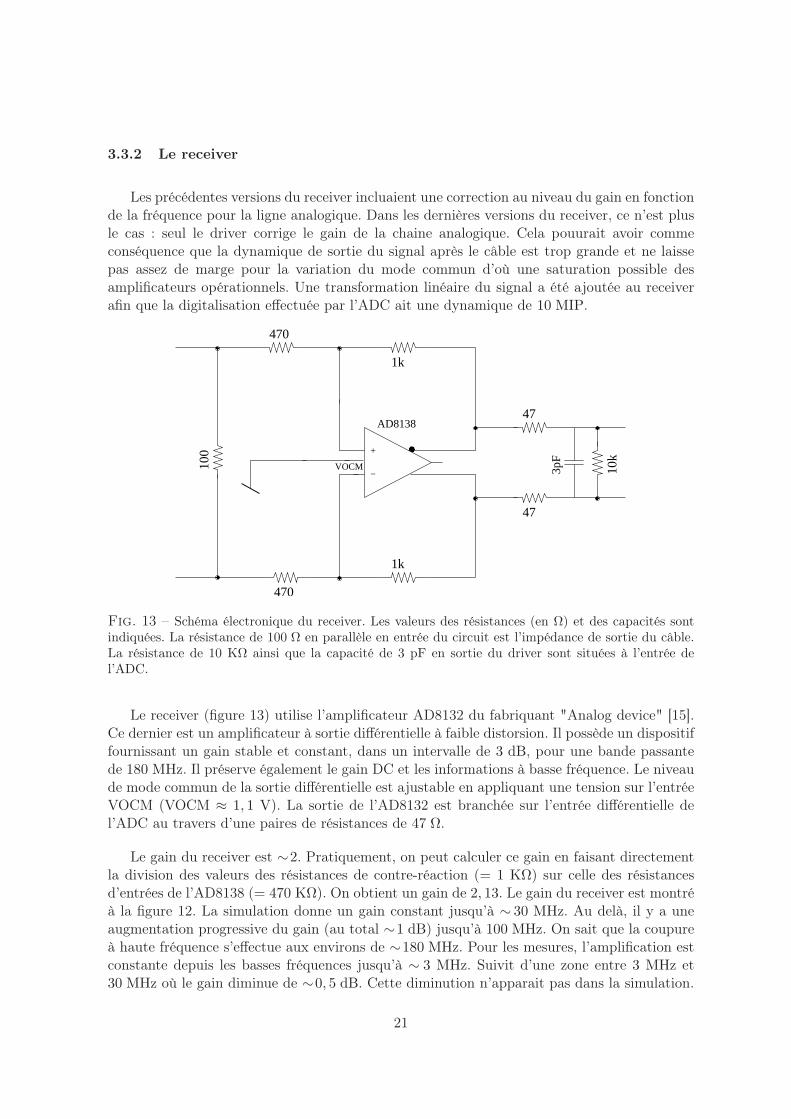
Fig. 13 – Schéma électronique du receiver. Les valeurs des résistances (en Ω) et des capacités sontindiquées. La résistance de 100 Ω en parallèle en entrée du circuit est l’impédance de sortie du câble.La résistance de 10 KΩ ainsi que la capacité de 3 pF en sortie du driver sont situées à l’entrée del’ADC.
Le receiver (figure 13) utilise l’amplificateur AD8132 du fabriquant "Analog device" [15].Ce dernier est un amplificateur à sortie différentielle à faible distorsion. Il possède un dispositiffournissant un gain stable et constant, dans un intervalle de 3 dB, pour une bande passantede 180 MHz. Il préserve également le gain DC et les informations à basse fréquence. Le niveaude mode commun de la sortie différentielle est ajustable en appliquant une tension sur l’entréeVOCM (VOCM ≈ 1, 1 V). La sortie de l’AD8132 est branchée sur l’entrée différentielle del’ADC au travers d’une paires de résistances de 47 Ω.
Le gain du receiver est ∼2. Pratiquement, on peut calculer ce gain en faisant directementla division des valeurs des résistances de contre-réaction (= 1 KΩ) sur celle des résistancesd’entrées de l’AD8138 (= 470 KΩ). On obtient un gain de 2, 13. Le gain du receiver est montréà la figure 12. La simulation donne un gain constant jusqu’à ∼ 30 MHz. Au delà, il y a uneaugmentation progressive du gain (au total ∼1 dB) jusqu’à 100 MHz. On sait que la coupureà haute fréquence s’effectue aux environs de ∼180 MHz. Pour les mesures, l’amplification estconstante depuis les basses fréquences jusqu’à ∼ 3 MHz. Suivit d’une zone entre 3 MHz et30 MHz où le gain diminue de ∼0, 5 dB. Cette diminution n’apparait pas dans la simulation.
21

-4
-2
0
2
4
6
8
10
12
0.01 0.1 1 10 100
ga
in [
dB
]
frequence [MHz]
Fig. 14 – Module de la fonction de transfert du receiver. Les points avec les barres d’erreurs sont lesvaleurs mesurées et la courbe en trait continu est la simulation effectuée avec SPICE.
La concordance entre mesure et simulation est bonne dans l’ensemble.
22

3.3.3 Le câble
L’élément critique de la ligne analogique est le câble. C’est le seul élément sur lequelon a pas de contrôle direct. C’est à partir de celui-ci que tous les paramètres des autreséléments de la ligne sont fixés. Auparavant, le câble était un modèle CAT6 avec 4 pairesblindées individuellement. La collaboration du VELO a décidé de changer ce dernier. Le câbleutilisé actuellement possède 16 paires individuellement blindées et a été conçu et fabriqué parTecniKabel [18]. Les spécifications de ce câble sont données à la table 15.
Fig. 15 – Spécifications du câble.
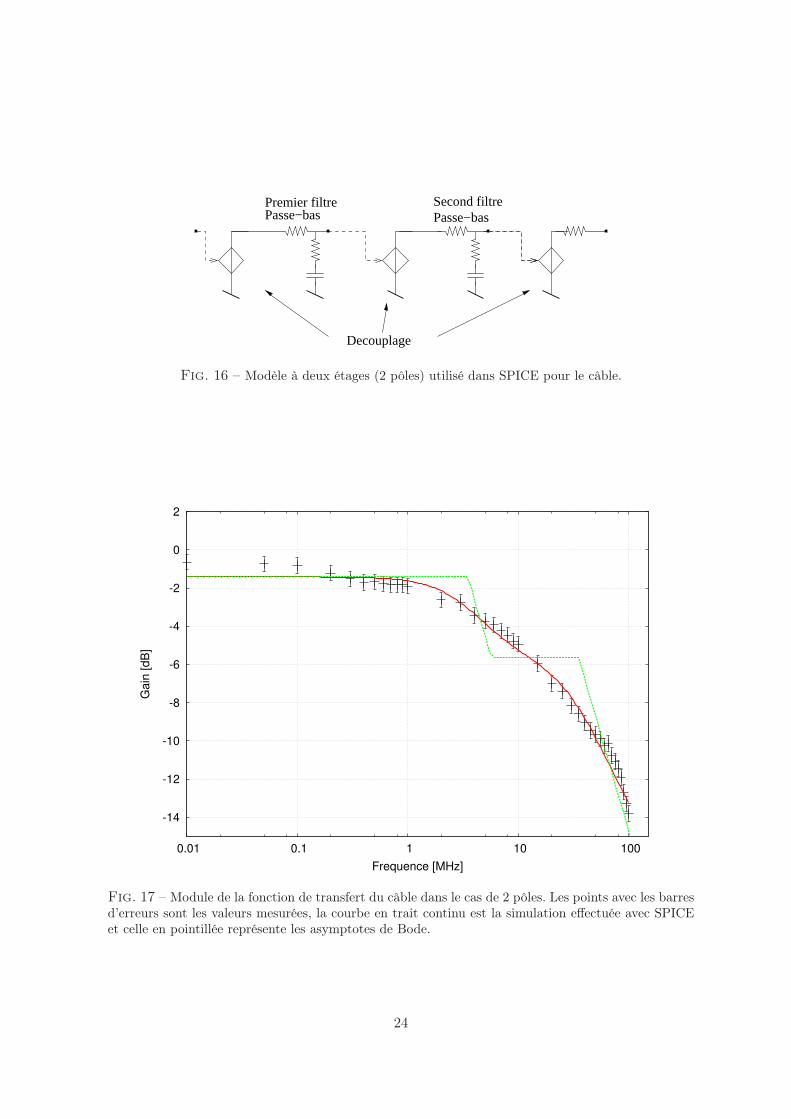
Afin d’introduire la fonction de transfert du câble dans les simulations, plusieurs modèlesSPICE de câble ont été testés. Aucun n’a reproduit de façon satisfaisante le comportementdu câble utilisé. On emploie à la place des réseaux RC découplés consécutifs pour simuler soncomportement. Ceci donne une reproduction assez fidèle du module de la fonction de transfert,mais pas de sa phase. On insère également une source controlée à chaque étage du réseaudans le but de découpler les filtres RC. La forme mathématique de la fonction de transfertde ce circuit est la même que celle de l’équation 7 pour le driver. Le nombre de facteurs aunumérateur et au dénominateur correspond au nombre de pôles-zéros du circuit. Ceci impliqueque la fonction de transfert du driver a été choisie à deux pôles car les simulations du câbleont été effectuées avec un réseau à 2 pôles-zéros. La figure 16 présente le schéma électroniquedu modèle du câble à 2 pôles utilisé dans SPICE. Les valeurs des résistances et des capacitésdes étages du réseau RC sont calculées à partir des valeurs des pôles-zéros déterminées par lesmesures. On obtient les résultats ci-dessous pour 2 pôles :
Pôle (MHz) Zéro (MHz)τ1 3, 5 5, 7τ2 35 129, 7
Tab. 6 – Valeurs des pôles-zéros du câble dans le cas de 2 pôles.
La figure 17 présente les résultats de la mesure du module de la fonction de transfertdans le cas de 2 pôles. Le diagramme de Bode est une fonction a deux pentes. Les mesures
23
Premier filtrePasse−bas
Second filtrePasse−bas
Decouplage
Fig. 16 – Modèle à deux étages (2 pôles) utilisé dans SPICE pour le câble.
-14
-12
-10
-8
-6
-4
-2
0
2
0.01 0.1 1 10 100
Ga
in [
dB
]
Frequence [MHz]
Fig. 17 – Module de la fonction de transfert du câble dans le cas de 2 pôles. Les points avec les barresd’erreurs sont les valeurs mesurées, la courbe en trait continu est la simulation effectuée avec SPICEet celle en pointillée représente les asymptotes de Bode.
24

effectuées avec le câble correspondent bien à ce que l’on attendait. Le gain du câble décroitcontinuellement au fur et à mesure que la fréquence augmente. La simulation à 2 pôles suit plusou moins bien les mesures (avec 1 dB de différence au maximum) dans la plage 0, 5 à 100 MHz.Il y a une différence un peu plus marquée dans les basses fréquences (10 KHz → 100 KHz) de∼ 1, 7 dB. Ce qui est dérangeant, c’est le fait qu’il y ait une diminution progressive du gainentre 10 KHz → 100 KHz de 1 dB dans les mesures alors que la simulation reste constante.Cette diminution laisse penser qu’il y a une pente qui nous manque dans le diagramme deBode. De même, on voit sur le graphe de la figure 17 que la simulation commence à diminuerun peu tard aux alentours de 2 MHz dans le but de pouvoir coïncider au maximum avec lesvaleurs dans les fréquences plus élevées.
En conclusion, il n’est pas déraisonnable d’inclure dans notre simulation un troisième pôlequi permettrait d’ajuster de manière plus fidèle la simulation aux mesures. On implémentedonc une nouvelle simulation en rajoutant un troisième pôle qui se traduit par un étagesupplémentaire pour chaque polarité dans notre réseau RC (voir figure 18) . Les valeurs despôles-zéros optimales sont présentées dans le tableau 7.
Pôle (MHz) Zéro (MHz)τ1 0, 215 0, 26τ2 5, 5 9, 2τ3 45 130
Tab. 7 – Valeurs des pôles-zéros du câble dans le cas de 3 pôles.
Troisieme filtrePasse−bas
Second filtrePasse−bas
Premier filtrePasse−bas
Decouplage
Fig. 18 – Modèle à trois étages (3 pôles) utilisé dans SPICE pour le câble.
On obtient les graphes de la figure 19. Le diagramme de Bode est ici une fonction à troispentes. On observe une perte de ∼ 2 dB de 10 KHz jusqu’à ∼ 3 MHz qui corrrepond à unepremière pente, puis une seconde pente jusqu’à ∼30 MHz qui chute plus rapidement (perte de∼ 5 dB) et la dernière jusqu’à 100 MHz qui chute encore plus rapidement que la précédente.La comparaison entre la simulation et les mesures est excellente. On remarque toutefois unedivergence dans les hautes fréquences (à partir de 80 MHz), mais ceci peut être négligé étantdonné que cette intervalle de fréquence n’a que peu d’influence dans l’étude de notre système.
25

-14
-12
-10
-8
-6
-4
-2
0
2
0.01 0.1 1 10 100
Ga
in [
dB
]
Frequence [MHz]
Fig. 19 – Module de la fonction de transfert du câble dans le cas de 3 pôles. Les points avec les barresd’erreurs sont les valeurs mesurées, la courbe en trait continu est la simulation effectuée avec SPICEet celle en pointillé représente les asymptotes de Bode.
26
3.3.4 Le système entier
Driver Cable Receiver
10k10
0
100
+
−
+
−
+
−
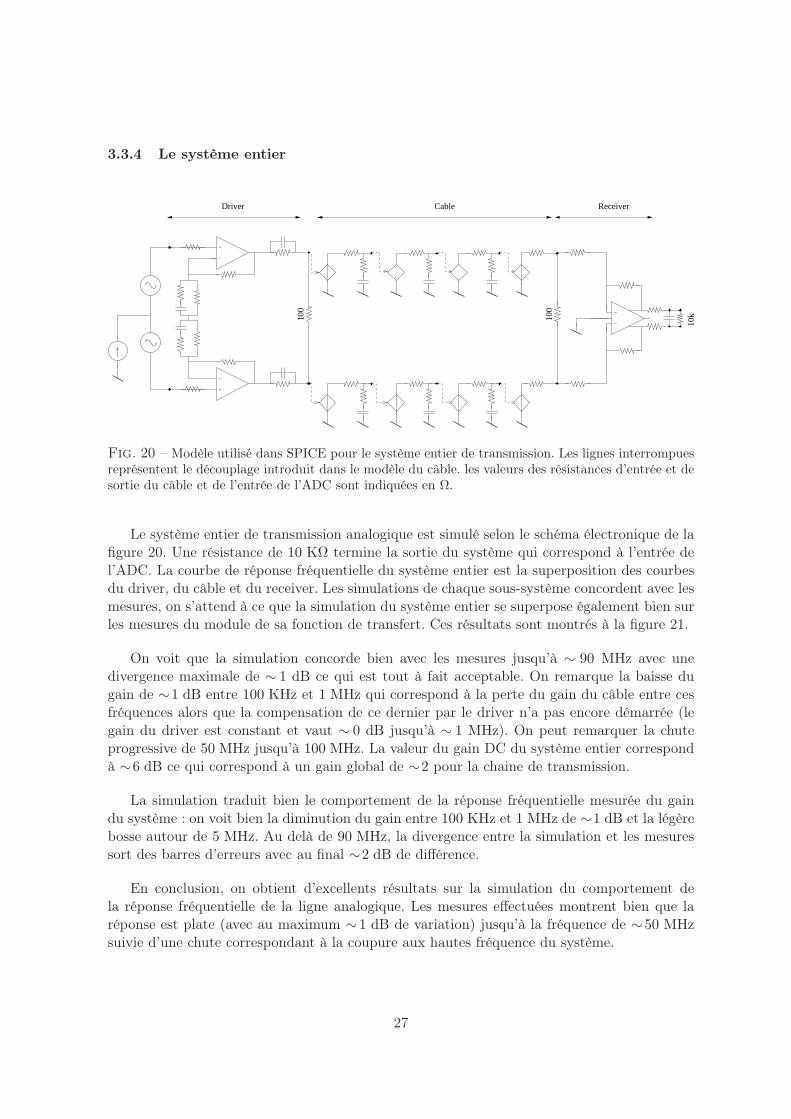
Fig. 20 – Modèle utilisé dans SPICE pour le système entier de transmission. Les lignes interrompuesreprésentent le découplage introduit dans le modèle du câble. les valeurs des résistances d’entrée et desortie du câble et de l’entrée de l’ADC sont indiquées en Ω.
Le système entier de transmission analogique est simulé selon le schéma électronique de lafigure 20. Une résistance de 10 KΩ termine la sortie du système qui correspond à l’entrée del’ADC. La courbe de réponse fréquentielle du système entier est la superposition des courbesdu driver, du câble et du receiver. Les simulations de chaque sous-système concordent avec lesmesures, on s’attend à ce que la simulation du système entier se superpose également bien surles mesures du module de sa fonction de transfert. Ces résultats sont montrés à la figure 21.
On voit que la simulation concorde bien avec les mesures jusqu’à ∼ 90 MHz avec unedivergence maximale de ∼ 1 dB ce qui est tout à fait acceptable. On remarque la baisse dugain de ∼1 dB entre 100 KHz et 1 MHz qui correspond à la perte du gain du câble entre cesfréquences alors que la compensation de ce dernier par le driver n’a pas encore démarrée (legain du driver est constant et vaut ∼ 0 dB jusqu’à ∼ 1 MHz). On peut remarquer la chuteprogressive de 50 MHz jusqu’à 100 MHz. La valeur du gain DC du système entier correspondà ∼6 dB ce qui correspond à un gain global de ∼2 pour la chaine de transmission.
La simulation traduit bien le comportement de la réponse fréquentielle mesurée du gaindu système : on voit bien la diminution du gain entre 100 KHz et 1 MHz de ∼1 dB et la légèrebosse autour de 5 MHz. Au delà de 90 MHz, la divergence entre la simulation et les mesuressort des barres d’erreurs avec au final ∼2 dB de différence.
En conclusion, on obtient d’excellents résultats sur la simulation du comportement dela réponse fréquentielle de la ligne analogique. Les mesures effectuées montrent bien que laréponse est plate (avec au maximum ∼ 1 dB de variation) jusqu’à la fréquence de ∼ 50 MHzsuivie d’une chute correspondant à la coupure aux hautes fréquence du système.
27

-8
-6
-4
-2
0
2
4
6
8
0.01 0.1 1 10 100
Gain
[dB
]
Frequence [MHz]
Fig. 21 – Module de la fonction de transfert du système entier. Les points avec les barres d’erreurssont les valeurs mesurées, la courbe en trait continu est la simulation effectuée avec SPICE.
28
3.4 Saturation de la ligne
3.4.1 Paramètres du receiver utilisés
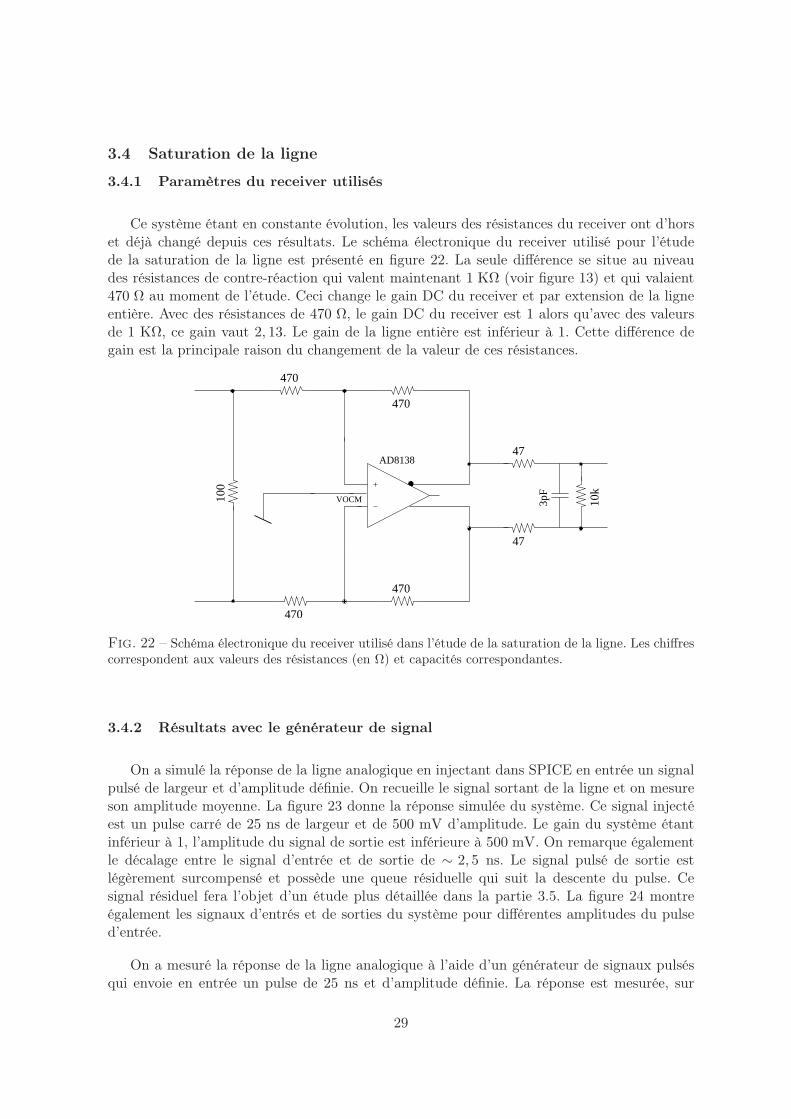
Ce système étant en constante évolution, les valeurs des résistances du receiver ont d’horset déjà changé depuis ces résultats. Le schéma électronique du receiver utilisé pour l’étudede la saturation de la ligne est présenté en figure 22. La seule différence se situe au niveaudes résistances de contre-réaction qui valent maintenant 1 KΩ (voir figure 13) et qui valaient470 Ω au moment de l’étude. Ceci change le gain DC du receiver et par extension de la ligneentière. Avec des résistances de 470 Ω, le gain DC du receiver est 1 alors qu’avec des valeursde 1 KΩ, ce gain vaut 2, 13. Le gain de la ligne entière est inférieur à 1. Cette différence degain est la principale raison du changement de la valeur de ces résistances.
AD8138
100
470
470
470
470
47
47
3pF
VOCM 10k+
−
Fig. 22 – Schéma électronique du receiver utilisé dans l’étude de la saturation de la ligne. Les chiffrescorrespondent aux valeurs des résistances (en Ω) et capacités correspondantes.
3.4.2 Résultats avec le générateur de signal
On a simulé la réponse de la ligne analogique en injectant dans SPICE en entrée un signalpulsé de largeur et d’amplitude définie. On recueille le signal sortant de la ligne et on mesureson amplitude moyenne. La figure 23 donne la réponse simulée du système. Ce signal injectéest un pulse carré de 25 ns de largeur et de 500 mV d’amplitude. Le gain du système étantinférieur à 1, l’amplitude du signal de sortie est inférieure à 500 mV. On remarque égalementle décalage entre le signal d’entrée et de sortie de ∼ 2, 5 ns. Le signal pulsé de sortie estlégèrement surcompensé et possède une queue résiduelle qui suit la descente du pulse. Cesignal résiduel fera l’objet d’un étude plus détaillée dans la partie 3.5. La figure 24 montreégalement les signaux d’entrés et de sorties du système pour différentes amplitudes du pulsed’entrée.
On a mesuré la réponse de la ligne analogique à l’aide d’un générateur de signaux pulsésqui envoie en entrée un pulse de 25 ns et d’amplitude définie. La réponse est mesurée, sur
29

0
100
200
300
400
500
600
-10 0 10 20 30 40 50 60 70 80 90
Am
plit
ud
e [
mV
]
Temps [ns]
Fig. 23 – Allure des signaux pulsés simulés dans SPICE. La courbe en trait pointillé est le signalenvoyé dans le système. Celle en trait plein est le signal de sortie du système.
l’entrée de l’ADC, à l’oscilloscope. La courbe des amplitudes de sortie en fonction de cellesd’entrées du système permet de mesurer la linéarité du système et de fixer les limites de cetteréponse en examinant la saturation. Cette courbe est donnée à la figure 25.
Les mesures confirment le fait que le système est linéaire. Elles se superposent aux valeurssimulées jusqu’à ∼ 1, 5 V. Au-delà de cette valeur, la simulation commence à saturer alorsque la réponse mesurée du système est toujours linéaire. On remarque que c’est le driver quisature en premier. Le modèle SPICE fournit par le fabricant de l’amplificateur AD8011 utilisédans le driver est peut-être la cause de cette saturation prématurée de la simulation. De toutemanière, dans l’ensemble de la transmission analogique du détecteur au TELL1, c’est le Beetlequi sature en premier (voir 3.4.3), bien avant d’atteindre les limites de l’intervalle d’amplitudeutilisé ici. En conclusion, les mesures confirment le fait que le système a une réponse linéairedans notre intervalle de travail.
On peut également remarquer que le gain mesuré à partir du graphe de la figure 25de ∼0, 85 est, conformément à ce que l’on s’attend, inférieur à 1.
30

0
500
1000
1500
2000
2500
3000
500 600 700 800 900 1000 1100 1200 1300
Am
plit
ud
e [m
V]
Temps [ns]
Vpul =
0.25V0.50V0.75V1.00V1.25V1.50V1.75V2.00V2.25V2.50V2.75V3.00V
0
500
1000
1500
2000
500 600 700 800 900 1000 1100 1200 1300
Am
plit
ud
e [
mV
]
Temps [ns]
Vpul =
0.25V0.50V0.75V1.00V1.25V1.50V1.75V2.00V2.25V2.50V2.75V3.00V
Fig. 24 – Simulations de la réponse différentielle du système. Le graphe du haut montre les signauxd’entrée injectés dans le système et celui-du bas la réponse en sortie du système. Les graphes sontdécalés sur l’axe horizontal pour une meilleure lisibilité. Les valeurs données en légende des graphescorrespondent à l’amplitude des signaux injectés.
31

0
200
400
600
800
1000
1200
1400
1600
1800
0 500 1000 1500 2000
Am
plit
ude S
ort
ie (
mV
)
Amplitude Entree (mV)
Fig. 25 – Amplitude différentielle de sortie du système en fonction de l’amplitude différentielle d’en-trée. Les points sont les valeurs mesurées, la courbe en trait pointillé est la simulation effectuée avecSPICE. Le gain est de ∼0, 85.
3.4.3 Résultats avec le Beetle 1.5
Les mêmes mesures de saturation ont été effectuées avec le Beetle 1.5. On obtient ungraphe d’allure similaire à celui de la figure 7. L’amplitude d’entrée est fixée par le registreItp du Beetle. On mesure l’amplitude du pulse directement à la sortie du Beetle (avant laligne analogique) et à l’entrée de l’ADC (après la ligne analogique). La figure 26 montre cettemesure. On voit bien l’atténuation de l’amplitude du signal avant la ligne et après qui découledu fait que le gain de la ligne est inférieur à 1. Il ne faut pas en conclure du graphe de la figure26 que le beetle sature en fonction de l’axe des abscisses. On sait que l’amplitude des pulsesenvoyés par le beetle n’est pas linéaire avec la valeur entrée dans son registre.
La figure 27 donne les mesures de l’amplitude à l’entrée de l’ADC en fonction de l’amplitudeà la sortie du Beetle. De ce graphe, on voit qu’il y a une partie plus ou moins linéaire jusqu’àla valeur de ≃ 400 mV. On peut voir une saturation qui commence à partir de ce point. Encomparant cette plage linéaire à celle de la figure 25, on en conclu que la saturation provient icidu Beetle et non de la ligne analogique. L’intervalle de réponse linéaire voulu est de ±5 MIP.Sachant que 1 MIP équivaut pour notre système à 76 mV, alors 5 MIP correspond à la valeurde 380 mV (voir paragraphe 2.2). Notre dynamique de travail est comprise dans l’intervallede réponse linéaire du Beetle.
On remarque que le graphe de la figure 27 présente un gain mesurable graphiquement(∼0, 7 ± 0, 1) légèrement inférieur au gain mesuré avec le générateur de signaux de ∼0, 85.
32

0
100
200
300
400
500
600
700
0 50 100 150 200 250
Am
plit
ud
e S
ort
ie (
mV
)
Amplitude Entree [valeur du registre Itp]
~5 MIP
Fig. 26 – Mesure de la réponse du système avec le Beetle en fonction de l’amplitude d’un signalinjecté. L’axe des abscisses correspond à une l’échelle de valeurs du registre du Beetle. Les croix sontles mesures effectuées directement à la sortie du Beetle, les ronds sont les mesures effectuées à l’entréede l’ADC.
50
100
150
200
250
300
350
0 100 200 300 400 500 600 700
Am
plit
ud
e S
ort
ie (
mV
)
Amplitude Entree (mV)
f(x)=0.65*x+36.52
~5 MIP
Fig. 27 – Amplitude différentielle de sortie du système en fonction de l’amplitude d’entrée avec unsignal pulsé envoyé par le Beetle. Les points sont les valeurs mesurées. La droite en trait pointillé estune régression linéaire, dont l’équation est donnée en haut de figure, effectuée dans la zone de réponselinéaire délimitée par les droites en trait interrompu. Le gain est de ∼0, 7.
33
On peut en conclure que le système ne sature pas dans notre dynamique de travail. Laligne analogique a une réponse linéaire bien au-delà de la saturation du Beetle avec un gainglobal de 1 ou de 2. C’est le Beetle qui fixe le point de saturation du système aux environs de5 MIP.
34
3.5 Charge résiduelle
Dans cette partie, toutes les mesures ont été effectuées avec la configuration de la figure13 du receiver.
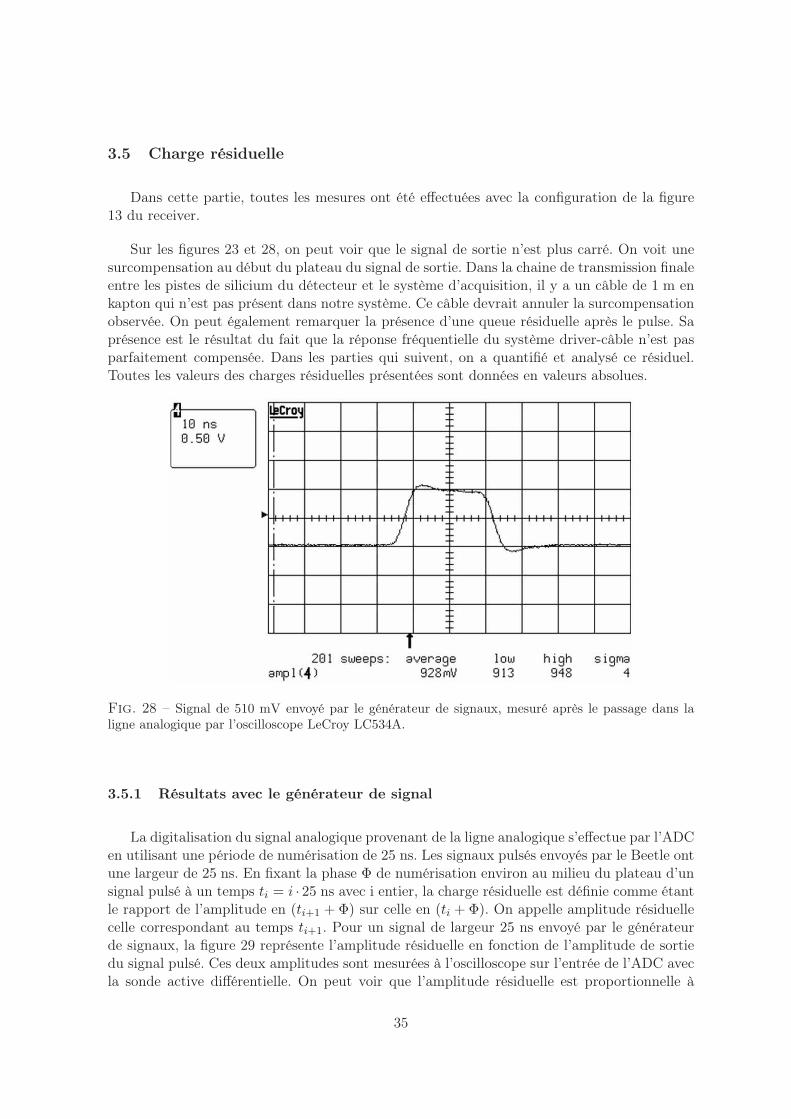
Sur les figures 23 et 28, on peut voir que le signal de sortie n’est plus carré. On voit unesurcompensation au début du plateau du signal de sortie. Dans la chaine de transmission finaleentre les pistes de silicium du détecteur et le système d’acquisition, il y a un câble de 1 m enkapton qui n’est pas présent dans notre système. Ce câble devrait annuler la surcompensationobservée. On peut également remarquer la présence d’une queue résiduelle après le pulse. Saprésence est le résultat du fait que la réponse fréquentielle du système driver-câble n’est pasparfaitement compensée. Dans les parties qui suivent, on a quantifié et analysé ce résiduel.Toutes les valeurs des charges résiduelles présentées sont données en valeurs absolues.
Fig. 28 – Signal de 510 mV envoyé par le générateur de signaux, mesuré après le passage dans laligne analogique par l’oscilloscope LeCroy LC534A.
3.5.1 Résultats avec le générateur de signal
La digitalisation du signal analogique provenant de la ligne analogique s’effectue par l’ADCen utilisant une période de numérisation de 25 ns. Les signaux pulsés envoyés par le Beetle ontune largeur de 25 ns. En fixant la phase Φ de numérisation environ au milieu du plateau d’unsignal pulsé à un temps ti = i · 25 ns avec i entier, la charge résiduelle est définie comme étantle rapport de l’amplitude en (ti+1 + Φ) sur celle en (ti + Φ). On appelle amplitude résiduellecelle correspondant au temps ti+1. Pour un signal de largeur 25 ns envoyé par le générateurde signaux, la figure 29 représente l’amplitude résiduelle en fonction de l’amplitude de sortiedu signal pulsé. Ces deux amplitudes sont mesurées à l’oscilloscope sur l’entrée de l’ADC avecla sonde active différentielle. On peut voir que l’amplitude résiduelle est proportionnelle à
35

l’amplitude du pulse du signal de sortie mesuré. On en déduit par une régression linéaire quela charge résiduelle est de 1, 76%.
0
5
10
15
20
0 200 400 600 800 1000 1200
Am
plit
ud
e r
[mV
]
Amplitude pulse [mV]
f(x)=0.01767*x-0.07016
Fig. 29 – Valeur absolue de l’amplitude résiduelle pour un signal pulsé de 25 ns mesuré à la sortie dela ligne analogique en fonction de son amplitude. Les croix sont les valeurs mesurées, la ligne en traitpointillé est une régression linéaire dont l’équation est donnée en haut de figure. Ces mesures ont étéeffectuées par Raymond Frei.
On mesure également la charge résiduelle pour différentes largeurs du signal. En effet,durant une acquisition, le Beetle peut envoyer plusieurs pulses consécutifs. On mesure lacharge résiduelle pour des largeurs de signaux valant 25, 50 ou 75 ns. On a simulé ces trois casavec SPICE et calculé la charge résiduelle dans chacun de ces cas. On a également effectué cesmesures avec le générateur de signaux. Le tableau 8 donne ces résultats pour une amplitudedifférentielle du signal d’entrée de 520 mV.
Largeur du signal Charge résiduelle simulée Charge résiduelle mesurée25 ns 2, 1% 2, 0%50 ns 3, 0% 2, 1%75 ns 2, 2% 2, 1%
Tab. 8 – Valeurs absolues des charges résiduelles calculées à partir de signaux simulés sous SPICE etde signaux mesurés sur l’oscilloscope.
La valeur de la charge résiduelle calculée dépend évidemment de la phase de numérisation.
36

On ne peut pas effectuer ces mesures avec le Beetle à cause de la manière dont les testpulsessont envoyés. Si on programme deux pulses consécutifs, ce dernier envoie un pulse positif suivid’un pulse négatif.
La figure 30 montre une autre mesure effectuée avec le générateur de signaux en effectuantune moyenne sur les signaux de sortie. Cette figure montre les signaux de sortie mesurés avecla sonde différentielle branchée sur l’entrée de l’ADC pour des largeurs de 25, 50 et 75 ns. Lespoints de numérisations ainsi que les charges résiduelles sont également donnés.
-600
-400
-200
0
200
400
600
-40 -20 0 20 40 60 80 100 120
Am
plit
ud
e [
mV
]
Temps [ns]
1,5%
-600
-400
-200
0
200
400
600
-40 -20 0 20 40 60 80 100 120
Am
plit
ud
e [
mV
]
Temps [ns]
1,6%
-600
-400
-200
0
200
400
600
-40 -20 0 20 40 60 80 100 120
Am
plit
ud
e [
mV
]
Temps [ns]
0,5%
Fig. 30 – Réponse moyennée de la ligne analogique à des signaux rectangulaires envoyés par legénérateur de signaux de 25, 50 et 75 ns de largeur. Les points de numérisation sont les barres verticalesen pointillés. Les valeurs absolues des charges résiduelles sont indiquées par des flèches.
Les valeurs des charges résiduelles calculées à partir des points de numérisation graphi-quement fixés donnent de bons résultats comparables à ceux obtenus au tableau 8. Le faitque les résultats de la figure 30 donne des charges résiduelles légèrement inférieures à cellesmesurées précédemment (voir tableau 8) est du principalement à l’emplacement des pointsde numérisation qui peuvent être plus ou moins habilement choisis et aussi au fait que l’on acalculé ces charges résiduelles sur des moyennes de signaux.
Le Beetle n’est pas une source idéale de signaux carrés. On sait également (voir [1] et [2])que celui-ci génère un résiduel supplémentaire à additionner à celui du au passage à travers laligne analogique. On a deux sources de résiduels, une venant du Beetle et l’autre du fait quela ligne analogique n’est pas parfaitement compensée dans le domaine des fréquences.
37

De manière générale, on peut en conclure que l’amplitude résiduelle varie linéairement parrapport à l’amplitude du signal pulsé, et que ceci implique que la charge résiduelle (étantle rapport de ces deux quantités) est indépendante de cette amplitude du signal. On peutégalement conclure que cette charge résiduelle reste quasiment constante par rapport à lalargeur du signal pulsé.
Dans l’optique de minimer davantage la valeur de la charge résiduelle dans notre signal desortie, on peut imaginer améliorer la correction effectuée par le driver. Ceci peut être fait par lechangement des valeurs des capacités et/ou des résistances du driver avec la contrainte supplé-mentaire que ces mêmes résistances fixent la bande-passante des amplificateurs opérationnelsutilisés. Ceci peut être également effectuée par l’ajout d’un troisième pôle dans la correctiondu driver qui compenserais de manière plus fiable le modèle à trois pôles du câble utilisé dansles simulations. Finalement, on peut encore corriger cette charge résiduelle au niveau logicielpar le traitement du signal par un filtre approprié au niveau de la carte d’acquisition TELL1.Ce cas est traité dans la partie 4.
38

3.6 Implémentation envisageable sur le receiver
Dans cette partie, on va traiter d’un travail de simulation effectué sur le receiver donnépar le schéma de la figure 31.
AD8138
100
470
470
47
47
3pF
Vdaq
A
Vdaq
B
VCOM
10k
10k
10k
1k
1k
+
−
Fig. 31 – Schéma électronique du receiver. Les chiffres correspondent aux valeurs des résistances(en Ω) et capacités correspondantes. Les deux zones A et B encadrées en pointillés représentent lesdeux positions possibles de l’ajout de la source Vdaq au travers d’une résistance de 10 KΩ.
On veut implémenter une source de courant sur le receiver. Le but recherché par cet ajoutest de pouvoir effectuer une translation controlée de la ligne de base du signal entrant dans lereceiver sur l’axe des amplitudes. En effet, la fenêtre d’entrée de l’ADC est de ±1 V (= 2 Vdifférentiel) autour d’une tension de référence de ∼ 1, 1 V. Selon la configuration de la ligneanalogique et du gain fixé sur ses composants ainsi que des paramètres entrés dans le Beetle, ilest possible que la ligne de base des signaux soit décalée vers des valeurs positives ou négativespar rapport à la tension de référence. Cela peut entrainer la sortie du signal pulsée de la fenêtred’entrée de l’ADC. L’ajout de la source Vdaq permettrait alors de rectifier ce décalage pourrecentrer le signal dans la fenêtre de digitalisation. On souhaite simuler sous SPICE les effetsde cette implémentation. Sur la figure 31, on voit qu’il y a deux positions possibles dans le
39

circuit électronique pour l’insertion de la source Vdaq. Une seule des deux positions peut-êtreimplémentée à la fois.
Les figures 32 et 33 montrent les résultats obtenus avec l’insertion de Vdaq dans chacunedes positions A et B. Premièrement, on injecte dans le circuit original (sans la présence dela source Vdaq) un signal pulsé différentiel dont la ligne de base est centré sur 0 V. On peutdéjà remarquer que la ligne de base du signal de sortie différentiel n’est pas centré autour de0 V mais autour d’une valeur légèrement positive. Cela veut dire que les lignes de bases dessignaux de chaque polarités ne sont pas confondues mais légèrement décalées en amplitude.
-100
0
100
200
300
400
500
600
700
500 550 600 650 700 750 800
Am
plit
ud
e [
mV
]
Temps [ns]
sans VdaqVdaq = 0V
-100
0
100
200
300
400
500
600
700
500 550 600 650 700 750 800
Am
plit
ud
e [
mV
]
Temps [ns]
Vdaq =
0,5V1,0V2,5V4,0V
Fig. 32 – Simulation de la réponse différentielle du receiver à un signal pulsé de 25 ns différentiel de100 mV avec Vdaq en position A. La figure de gauche montre la réponse du receiver sans Vdaq et avecVdaq= 0 V. Celle de droite montre cette réponse pour plusieurs valeurs données à Vdaq.
-500
-400
-300
-200
-100
0
100
200
300
500 550 600 650 700 750 800
Am
plit
ud
e [
mV
]
Temps [ns]
sans VdaqVdaq = 0V
-500
-400
-300
-200
-100
0
100
200
300
500 550 600 650 700 750 800
Am
plit
ud
e [
mV
]
Temps [ns]
Vdaq =
0,5V1,0V2,5V4,0V
Fig. 33 – Simulation de la réponse différentielle du receiver à un signal pulsé de 25 ns différentiel de100 mV avec Vdaq en position B. La figure de gauche montre la réponse du receiver sans Vdaq et avecVdaq= 0 V. Celle de droite montre cette réponse pour plusieurs valeurs données à Vdaq.
On veut maintenant juste observer l’effet de l’ajout de cette source dans le circuit électro-nique (on pose Vdaq = 0 V). Cet ajout dans la position A entraine une fuite au travers dela résistance de 10 KΩ du signal de la polarité positive. Ceci entraine une baisse de tension
40

de sa ligne de base entrainant un décalage négatif de la tension différentielle de sortie. Onpeut voir ce résultat sur le graphe de gauche de la figure 32. De même, l’ajout de la sourceVdaq en position B entraine les mêmes conséquences pour la polarité négative. Cela donne uneaugmentation de la différence d’amplitude des lignes de base des deux polarités entrainant undécalage positif de la tension différentielle de sortie. Ce résultat est montré sur le graphe degauche de la figure 33.
En regardant les graphes de droite des figures 32 et 33, on peut également en conclure quel’ajout de la source Vdaq a bien l’effet désiré : dans le cas A elle permet de décaler positivementle signal de sortie différentiel proportionnellement à la tension fixée ; dans le cas B elle permetde le décaler négativement toujours proportionnellement à la tension Vdaq fixée.
-150
-100
-50
0
50
100
150
500 520 540 560 580 600 620 640
Am
plit
ud
e [
mV
]
Temps [ns]
800
900
1000
1100
1200
1300
1400
500 520 540 560 580 600 620 640
Am
plit
ud
e [
mV
]
Temps [ns]
-150
-100
-50
0
50
100
150
500 520 540 560 580 600 620 640
Am
plit
ud
e [
mV
]
Temps [ns]
800
900
1000
1100
1200
1300
1400
500 520 540 560 580 600 620 640
Am
plit
ud
e [
mV
]
Temps [ns]
Fig. 34 – Simulation de la réponse du receiver à l’injection d’un signal pulsé de 25 ns superposé à unmode commun. Les graphes de gauches montrent les deux polarités d’entrée et ceux de droites cellesde sortie. Les graphes du haut correspondent à l’injection d’un sinus de 1 MHz, ceux du bas à un sinusde 5 MHz.
On veut également vérifier que l’ajout de la source Vdaq ne perturbe pas la rejection dumode commun effectuée par l’amplificateur AD8138. Dans ce but, on fixe Vdaq en positionB avec une tension de 1 V. On injecte à l’entrée du receiver un pulse de 25 ns de 200 mVd’amplitude différentielle en superposition avec un sinus de 10 mV d’amplitude de fréquencevariable sur chaque polarité d’entrée. Ce signal sinusoïdal d’amplitude raisonnable par rapport
41

à celle du pulse simule un mode commun variant dans le temps. On mesure les signaux desortie sur chaque polarités. Les résultats sont montrés aux figures 34 et 35.
-100
-50
0
50
100
150
500 520 540 560 580 600 620 640
Am
plit
ud
e [
mV
]
Temps [ns]
800
900
1000
1100
1200
1300
1400
500 520 540 560 580 600 620 640A
mp
litu
de
[m
V]
Temps [ns]
-150
-100
-50
0
50
100
150
500 520 540 560 580 600 620 640
Am
plit
ud
e [
mV
]
Temps [ns]
800
900
1000
1100
1200
1300
1400
500 520 540 560 580 600 620 640
Am
plit
ud
e [
mV
]
Temps [ns]
Fig. 35 – Simulation de la réponse du receiver à l’injection d’un signal pulsé de 25 ns superposé à unmode commun. Les graphes de gauches montrent les deux polarités d’entrée et ceux de droites cellesde sortie. Les graphes du haut correspondent à l’injection d’un sinus de 10 MHz, ceux du bas à unsinus de 20 MHz.
On a simulé des modes communs pour des fréquences allant jusqu’à 20 MHz. Cette dernièrevaleur est au-dessus du maximum envisageable. Dans tous les cas, on voit sur les figures 34 et35 que le mode commun est supprimé en sortie du receiver. La présence de la source Vdaq neperturbe pas cette suppression. En conclusion, on peut dire que les simulations effectuées sontconcluantes. On a bien réussi à obtenir l’effet désiré sur la translation de la ligne de base dusignal de sortie différentiel du receiver. Les simulations montrent également que la rejectiondu mode commun effectuée par l’amplificateur AD8138 n’est pas perturbée par la présence dela source Vdaq.
42
4 Algorithme FIR
Dans toute cette partie, les signaux sont générés par le Beetle 1.5 avec les valeurs desregistres données par le tableau 3. L’amplitude de ces signaux pulsés est dans tous les cas de1 MIP selon la conversion établie au paragraphe 2.2.
4.1 Description du FIR
La compensation fréquentielle de la ligne analogique ne corrige pas entièrement les effetsdus au passage dans le cable de 60 m comme on l’a vu dans la partie 3. Afin d’affiner cettecompensation, on utilise un filtre FIR (Finite Impulse Response) que l’on va appliquer aprèsla digitalisation. L’emploi d’un filtre numérique linéaire FIR présente des avantages :
– Ce type de filtre est toujours stable– La phase est linéaire si les coefficients du filtre sont symétriques −→ pas de distorsion
de phase.– Ces filtres sont non-récursifs et n’ont pas de contre-réaction.
En contre partie, les filtres FIR demandent beaucoup de puissance de calculs. C’est laraison pour laquelle, on emploie un filtre FIR avec un ordre bas pour limiter l’utilisation deressources des unités de calculs du TELL1.
On travaille dans un domaine temporel discret qui correspond à un signal échantillonné.Le principe du filtre FIR est le suivant : lors du passage d’un signal numérisé dans un filtredégradant, on considère que l’amplitude du signal dans un canal correspondant à un tempsdiscrétisé n est en grande partie due à celle qu’il avait avant le passage dans le filtre plus unepartie de l’amplitude des canaux voisins. Cet effet du au passage dans le filtre dégradant esttoujours le même pour tous les signaux. D’où l’idée de quantifier à l’aide de coefficients Ai
cet effet sur un nombre limité de canaux voisins. Le but du FIR est alors d’inverser cet effeten appliquant d’autres coefficients Bi calculés à partir des Ai afin de retrouver les valeursoriginales des amplitudes des canaux du signal. Dans notre cas, le filtre dégradant est la ligneanalogique. Après numérisation du signal par l’ADC, l’application du filtre FIR doit permettreentre autre de diminuer la charge résiduelle des canaux qui suivent celui du pulse.
4.2 Définition mathématique du FIR
La définition mathématique d’un filtre FIR utilisé ici est simple :
y(n) = b0x(n) + b1x(n − 1) + b2x(n − 2) + . . . + bMx(n − M) (8)
où les x(n − k) sont les signaux numérisés avant le filtre et y(n) sont ceux après, avec0 ≤ k ≤ M , M entier fini et n entier est le temps discrétisé. L’équation (8) décrit un filtred’ordre M + 1 utilisant M + 1 coefficients bk qui paramétrisent le comportement du filtre.
43

La réponse impulsionnelle h(n) est obtenue à la sortie d’un filtre numérique quand le signald’entré est une impulsion δ = [1, 0, 0, 0, . . .]. On obtient :
h(k) =
0, k < 0bk, 0 ≤ k ≤ M0, k > 0
(9)
Dès lors, on obtient les égalités suivantes :
y(n) =M∑
m=0
bmx(n − m) =∞
∑
m=−∞
h(m)x(n − m) = (h ∗ x)(n) (10)
où ∗ dénote l’opération de convolution entre h et x. En conclusion, un filtre FIR opèrecomme une convolution du signal d’entré x(n) avec la réponse impulsionnelle du filtre h(n),d’où son nom. Le terme "fini" du terme FIR vient du fait que le filtre opère sur un nombrefini d’échantillon (c’est-à-dire M < ∞). De l’équation (10), on peut voir que la réponseimpulsionnelle h(n) est toujours nulle pour n < 0. Cette propriété donne le qualificatif decausal au filtre FIR utilisé. En d’autres termes, le signal y(n) au temps discret n ne dépendque de lui-même et des M signaux précédents pondérés par les coefficients bk. Il ne dépendpas des amplitudes des canaux correspondant à des valeurs de n négatives. Le CERN, quantà lui, envisage la possibilité d’employer un filtre FIR effectuant des corrections en prenant encompte les canaux des deux côtés par rapport à celui du pulse (filtre FIR non-causal).
Dans notre application d’un filtre FIR causal sur le signal, on travaille dans une représen-tation matricielle. Tout filtre linéaire peut être exprimé par une matrice constante H de sorteque :
Y = H X (11)
où Y T = [y(n), . . . , y(n + M)], XT = [x(n), . . . , x(n + M)] et H est la matrice de Toeplitz(matrice dont les coefficients sont constants le long de ses diagonales) contenant les coefficientsdu filtres bk, k = 0, . . . , M . Dans le cas de notre étude, on va se limiter à un filtre d’ordre 3pour le FIR. On obtient la matrice de Toeplitz triangulaire suivante pour H :
H =
b0 0 0b1 b0 0b2 b1 b0
(12)
De l’équation (11), on obtient donc :
yn
yn+1
yn+2
=
b0 0 0b1 b0 0b2 b1 b0
xn
xn+1
xn+2
(13)
L’équation (13) permet l’appliquation d’un filtre FIR d’ordre 3 sur tous les canaux dusignal numérisé lorsque l’on fait varier n sur l’ensemble des canaux. Cette équation est à la
44

base de l’algorithme utilisé pour appliquer le FIR sur le signal numérisé de sortie de notresystème.
4.3 Méthode utilisée
Avant de pouvoir appliquer un filtre FIR rectificateur sur le signal numérisé, il faut aupa-ravant calculer ses coefficients. Ayant numérisé le signal, on peut considérer la ligne analogiquecomme un filtre FIR dégradant dont l’effet est à inverser par l’application d’un autre filtre FIRrectificatif. On utilise le Beetle pour générer des signaux ayant un unique pulse vers le milieudu signal. On enregistre un lot de 1000 signaux pulsés ainsi que 1000 signaux non-pulsés. Oneffectue une soustraction du piédestal en soustrayant aux 1000 événements pulsés la moyenneeffectuée sur les 1000 signaux non-pulsés. On numérise (voir paragraphe 2.3.2) les signauxainsi obtenus et on effectue ensuite la moyenne sur tous ces signaux pulsés, une manière desoustraire manuellement le mode commun.
On utilise l’équation (11) avec une impulsion comme signal d’entrée afin de pourvoir calcu-ler les coefficients de la réponse impulsionnelle du filtre FIR dégradant à l’ordre 3. On a doncfixé XT = [1, 0, 0]. Le signal de sortie correspond à notre signal numérisé et donne le vecteurY T = [y(n), y(n + 1), y(n + 2)], où n est le canal du pulse du signal et y(n) son amplitude.Les trois coefficients de la matrice de Toeplitz triangulaire associée H sont déterminables fa-cilement. Cependant, ce que l’on cherche, c’est la matrice qui permet de retrouver le vecteurX à partir du vecteur Y . On inverse donc le système matriciel donné par l’équation (11) eton trouve les coefficients de la matrice H−1 qui correspondent aux trois coefficients du filtreFIR rectificatif voulus. Ces coefficients sont déterminés une fois pour toute par cette méthodeet sont utilisés sur d’autre lots de signaux afin de voir l’effet du FIR recificatif.
On veut maintenant les appliquer sur un autre lot de signaux. De même que précédemment,on enregistre un lot de 1000 signaux pulsés ainsi que 1000 signaux non-pulsés. On effectue unesoustraction du piédestal et une soustraction manuelle du mode commun. On utilise l’équation(13) connaissant les coefficients du FIR b0, b1, b2 calculés précédemment. X contient les valeursdu signal avant le filtre et Y après ce dernier. On utilise l’algorithme donnée en annexe (voir6.3). Toutes les amplitudes des canaux du signal sont rectifiées par l’application de ce filtreFIR. Les résultats sont montrés dans la partie 4.4.
4.4 Résultats
Toutes les valeurs des charges résiduelles sont données en valeurs absolues.
On applique la méthode décrite dans le paragraphe précédent. On programme le Beetlepour qu’il envoie trois pulses séparés de trois canaux chacuns vers le milieu du signal, ceci afinde pouvoir vérifier l’application du filtre FIR sur l’ensemble des canaux. Après soustractiondu piédestal et du mode commun, on numérise le lot des 1000 signaux recueillis après passagedans la ligne analogique. On calcule les charges résiduelles des canaux suivant ceux des pulses.On applique ensuite le filtre FIR d’ordre 3 et on recalcule ces charges résiduelles. La figure 36montre les résultats obtenus.
45

Fig. 36 – Moyenne effectuée sur 1000 signaux envoyés par le Beetle et numérisés après passage dansla ligne analogique sur lesquels on a individuellement appliqué le FIR. Les valeurs absolues des chargesrésiduelles sont indiquées par des flèches. Le graphe du haut donne les résultats avant l’application duFIR, celui du bas après.
46

Les charges résiduelles calculées avant l’application du filtre FIR, bien que calculées aprèsnumérisation du signal, sont en accord avec les mesures effectuées au paragraphe 3.5 sur lessignaux analogiques. Ces charges résiduelles sont de l’ordre de ∼ 2, 2% avant l’applicationdu FIR. Elles deviennent de l’ordre de ∼ 0, 7% après application du FIR. On voit une nettediminution de la charge résiduelle grâce à l’application du filtre FIR. Les résultats obtenusdémontrent la validité et l’utilité d’avoir recours à un filtre numérique FIR au niveau logicielde la chaine de transmission de données.
Finalement, on peut en conclure que le traitement de la charge résiduelle doit être double.Il faut en premier lieu compenser la réponse fréquentielle de la ligne analogique au niveaumatériel afin de minimiser les résiduels qui suivent les pulses des signaux. Dans le but d’affinerencore cette correction, l’application au niveau logiciel d’un filtre FIR sur les signaux numériséspermet de diminuer les valeurs des charges résiduelles par un facteur ∼3. La combinaison deces deux procédés permet d’obtenir des résultats satisfaisants.
47

5 Conclusion
L’étude sur la qualité du système de transmission entre le Beetle et le TELL1 est concluante.On a réussi à simuler de manière satisfaisante la ligne analogique. On a reproduit fidèlement lecomportement du gain de celle-ci en fonction de la fréquence. Cette dernière mesure a permisde conclure que la réponse fréquentielle de la ligne analogique est plate dans l’intervalle defréquence d’étude (au moins jusqu’à 40 MHz). On a également vérifié que ce système donnaitune réponse linéaire dans notre dynamique de travail (±5 MIP). Les mesures des charges rési-duelles des signaux de sortie donnent des valeurs satisfaisantes (∼2% en valeur absolue). Onestime finalement avoir bien compris la structure électronique de l’ensemble des composantesde la ligne analogique. En parallèle, on a également montré, au moyen de simulations, la pos-sibilité d’une implémentation sur le receiver d’une source de courant permettant de réguler lesvariations des lignes de base des signaux.
On a finalement montré que les corrections effectuées sur les signaux au niveau logiciel sontefficaces en appliquant un filtre FIR qui réduit de manière significative les charges résiduellesmesurées des canaux qui suivent celui du pulse (∼0, 7% en valeur absolue).
Merci à Jérémie Borel pour son aide précieuse dans la rédaction de ce rapport ainsi que pour son
assistance tout au long de ce projet de master.
Merci au professeur A.Bay de m’avoir permis d’effectuer ce projet.
Merci à Raymond Frei et Guido Haefeli de m’avoir aidé lors des mesures et d’avoir toujours eu la
patience de répondre à mes questions.
48


Références
[1] J. Borel, et al. Measurement on the VeLo analog link system, LHCb note 2005-030, June2005.
[2] L. Locatelli, et al. Tests on the VeLo analogue transmission line with the TELL1 prototype
RB3, LHCb note 2004-086, October 2004.
[3] LHCb Collaboration. VELO Technical Design Report, Technical report. CERN/LHCC2001-011, May 2001.
[4] Jean-François Loude. Méthodes électroniques de la physique. Lecture given at the Lau-sanne University, 1999.
[5] G. Haefeli. Contribution to the developpement of the acquisition electronics fot he LHCc
experiment. PhD thesis, Swiss Federal Institute of Technology, Lausanne, IPEP, LPHE,2004.
[6] T. Schietinger. Détection de Particules, Cour donné à l’EPFL, Juin 2005.
[7] Smith, Julius O. Introduction to Digital Filters, May 2004 Draft, Center for Compu-ter Research in Music and Acoustics (CCRMA), Stanford University, Web published athttp://ccrma.stanford.edu/~jos/filters/
[8] Mlynek, Daniel. Introduction à l’électronique pour ingénieur physiciens, Laboratoire deSystèmes Intégrés (LSI), Ecole Polytechnique Fédérale de Lausanne, 1999, publiée à http://lsiwww.epfl.ch/LSI2001/teaching/physiciens/index.html
[9] Raymond Frei. Velo repeater board : RPT board. LHCb technical note, pas encore publiée,January 2006.
[10] Raymond Frei. Velo repeater board : Driver Card. LHCb technical, pas encore publiée,January 2006.
[11] Raymond Frei. Velo ARx : Analog receiver card. LHCb technical note, pas encore publiée,January 2006.
[12] Raymond Frei. Velo Analog : Link Performances. LHCb technical note, pas encore publiée,January 2006.
[13] N. Van Bakel, et al. The Beetle Reference Manual - chip version 1.3, 1.4, 1.5 -. ReferenceManual, February 2005.
[14] NgSpice Website[http://ngspice.sourceforge.net/]
[15] Analog, Inc[http://www.analog.com/]
[17] CERN CDS Website[http://cdsweb.cern.ch/]
[18] TecniKabel Website[http://www.tecnikabel.it]


Table des figures
1 Modèle Standard des particules. . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 L’accélérateur LHC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 Angles polaires correspondant à la direction des hadrons b et b. . . . . . . . . . 44 Représentation géométrique du détecteur LHCb. . . . . . . . . . . . . . . . . . 55 Représentation de l’arrangement des stations du VeLo le long de l’axe du faisceau. 66 Table de conversion des valeurs hexadécimales des paramètres de mise en forme
du Beetle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117 Signaux pulsés et non-pulsés envoyés par le Beetle après passage dans la ligne
analogique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138 Schéma de la disposition du détecteur LHCb dans la caverne. . . . . . . . . . . 159 Schéma du système électronique de la ligne analogique. . . . . . . . . . . . . . . 1610 Schéma du RPT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1811 Schéma électronique du driver pour un canal. . . . . . . . . . . . . . . . . . . . 1912 Module de la fonction de transfert du driver. . . . . . . . . . . . . . . . . . . . . 2013 Schéma électronique du receiver. . . . . . . . . . . . . . . . . . . . . . . . . . . 2114 Module de la fonction de transfert du receiver. . . . . . . . . . . . . . . . . . . . 2215 Spécifications du câble. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2316 Modèle à deux étages du cable utilisé dans SPICE. . . . . . . . . . . . . . . . . 2417 Module de la fonction de transfert du câble dans le cas de 2 pôles. . . . . . . . 2418 Modèle à trois étages du cable utilisé dans SPICE. . . . . . . . . . . . . . . . . 2519 Module de la fonction de transfert du câble dans le cas de 3 pôles. . . . . . . . 2620 Modèle utilisé dans SPICE pour le système entier de transmission. . . . . . . . 2721 Module de la fonction de transfert du système entier. . . . . . . . . . . . . . . . 2822 Schéma électronique du receiver utilisé dans l’étude de la saturation de la ligne. 2923 Allure des signaux pulsés simulés dans SPICE. . . . . . . . . . . . . . . . . . . 3024 Simulations de la réponse différentielle du système. . . . . . . . . . . . . . . . . 3125 Amplitude différentielle de sortie du système en fonction de l’amplitude diffé-
rentielle d’entrée. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3226 Mesure de la réponse du système avec le Beetle en fonction de l’amplitude d’un
signal injecté. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3327 Amplitude différentielle de sortie du système en fonction de l’amplitude d’entrée
avec un signal pulsé envoyé par le Beetle. . . . . . . . . . . . . . . . . . . . . . 3328 Signal envoyé par le générateur de signaux et mesuré après le passage dans la
ligne analogique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3529 Mesure de l’amplitude résiduelle mesuré à la sortie de la ligne analogique en
fonction de l’amplitude du signal. . . . . . . . . . . . . . . . . . . . . . . . . . . 3630 Charges résiduelles calculées sur des réponses moyennées de la ligne analogique
à des signaux rectangulaires envoyés par le générateur de signaux. . . . . . . . . 3731 Schéma électronique du receiver avec l’implémentation de Vdaq. . . . . . . . . . 3932 Simulation de la réponse différentielle du receiver à un signal pulsé différentiel
avec Vdaq en position A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4033 Simulation de la réponse différentielle du receiver à un signal pulsé différentiel
avec Vdaq en position B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4034 Simulation de la réponse du receiver implémenté avec Vdaq à l’injection d’un
signal pulsé superposé à un mode commun (1/2). . . . . . . . . . . . . . . . . . 41

35 Simulation de la réponse du receiver implémenté avec Vdaq à l’injection d’unsignal pulsé superposé à un mode commun (2/2). . . . . . . . . . . . . . . . . . 42
36 Résultats avec le FIR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Liste des tableaux
1 Taux d’entrée et temps d’attente des niveaux du trigger. . . . . . . . . . . . . . 72 Valeurs nominales des registres du Beetle. . . . . . . . . . . . . . . . . . . . . . 103 Valeurs des registres du Beetle du CERN au 21/12/04 . . . . . . . . . . . . . . 104 Valeurs moyennes des radiations annuelles estimées à l’emplacement des RPT. . 175 Valeurs des pôles-zéros du driver. . . . . . . . . . . . . . . . . . . . . . . . . . . 196 Valeurs des pôles-zéros du câble dans le cas de 2 pôles. . . . . . . . . . . . . . . 237 Valeurs des pôles-zéros du câble dans le cas de 3 pôles. . . . . . . . . . . . . . . 258 Charges résiduelles calculées à partir de signaux simulés et mesurés. . . . . . . 36

6 Annexe
6.1 Calcul de la fonction de transfert du driver
On effectue le calcul de la fonction de transfert du driver donnée par le schéma électroniqueci-dessous.
R11
R2210
0
100
33pF
33pF
180pF
180pFC3
R551
51
C13
R15
1k5
R2
R12
C11
C1
R4
R6
R16
R14
AD8011
AD8011
51
51VIN+
VIN−
VOUT+
VOUT−
2*RL
1k5
1k1k
1k1k
+
−
+
−
On va calculer la fonction de transfert pour une des polarités du driver ce qui revient àcalculer la fonction de transfert pour les deux polarités. On va faire une simplification dansle schéma électronique en regroupant les résistances et capacités en impédances équivalentescomme le montre la figure ci-après. Z1 regroupe les résistances R2, R6 et la capacité C1. Z2est la résistance R4, et Z3 regroupe R5 et C3. Le calcul de Z1, Z2 et Z3 est montré ci-dessous.
R11AD8011
Z1
Z2
Z3
RL
Uin UitUout
+
−
Z1 regroupe en série R2 et C1, puis regroupe ce résultat en parallèle avec R6. Ceci donnecomme impédance équivalente :
Z1 = 1/
[
1
ZR6
+1
ZR2+C1
]
= 1/
[
1
R6+
11
R2+ jωC1
]
= 1/
[
1
R6+
jωC1
1 + jωR2C1
]
(14)

Z2 est égal à R4. Z3 regroupe en parallèle C3 et R5. On obtient :
Z3 = 1/
[
1
ZR5
+1
ZC3
]
= 1/
[
1
R5+ jωC3
]
. (15)
Dans le cas idéal - et c’est le cas que l’on va adopter - le courant d’entrée de l’amplificateurAD8011 est nul car il a une impédance d’entrée infinie. Ceci implique qu’on ne prend pas encompte la résistance R11 dans le calcul de la fonction de transfert du driver. La formule dugain d’un amplificateur opérationnel appliquée à notre cas donne :
Uit
Uin= 1 +
Z2
Z1
= 1 +R4
R6+
jωR4C1
1 + jωC1R2=
R6 + R4 + jωC1(R2R6 + R2R4 + R4R6)
R6(1 + jωC1R2)(16)
=⇒Uit
Uin=
R4 + R6
R6
1 + jωC1(R2 + R4//R6)
1 + jωC1R2. (17)
On a également :
Uout
Uit= 1 +
Z3
Z3 + ZRL=
RL
R5 + RL
1 + jωC3R5
1 + jωC3(R5//RL). (18)
Le gain de la chaine électronique complète du driver est défini par le rapport Uout
Uin. Ce qui
nous donne le résultat final :
G =Uout
Uin=
R4 + R6
R6
RL
RL + R5
[1 + jωC1(R2 + R4//R6)] [1 + jωC3R5]
[1 + jωC1R2] [1 + jωC3(R5//RL)]. (19)
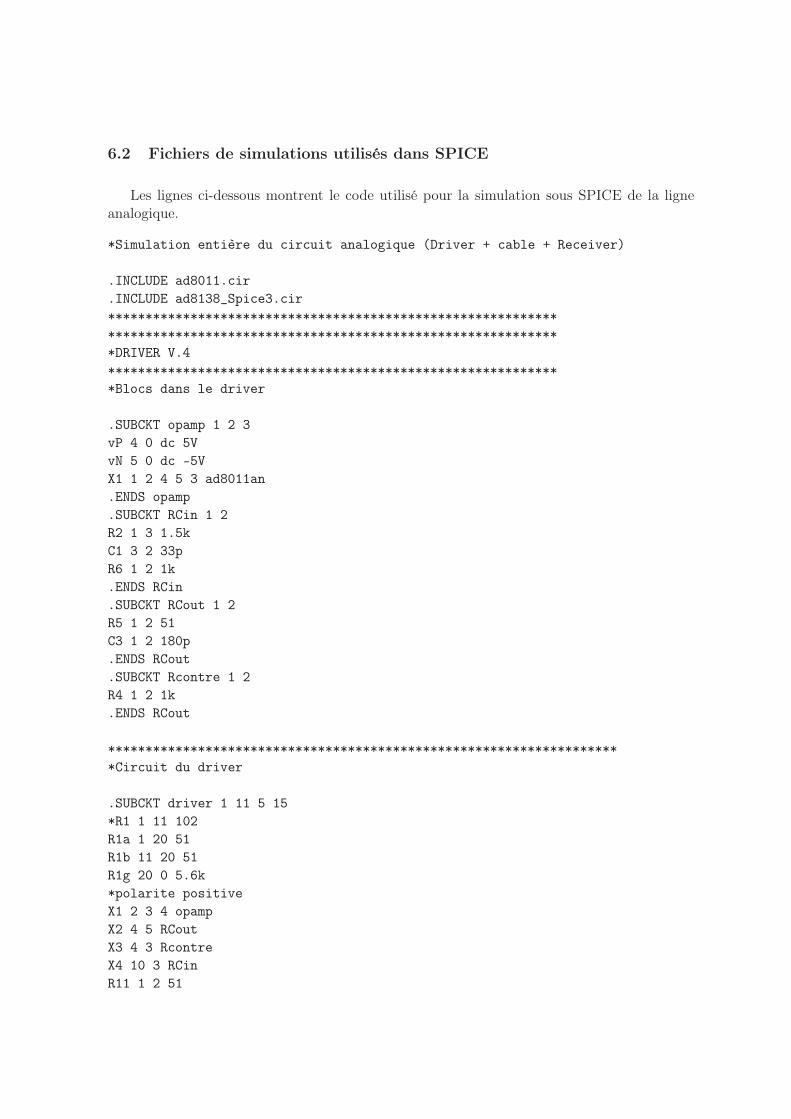
6.2 Fichiers de simulations utilisés dans SPICE
Les lignes ci-dessous montrent le code utilisé pour la simulation sous SPICE de la ligneanalogique.
*Simulation entière du circuit analogique (Driver + cable + Receiver)
.INCLUDE ad8011.cir
.INCLUDE ad8138_Spice3.cir
************************************************************
************************************************************
*DRIVER V.4
************************************************************
*Blocs dans le driver
.SUBCKT opamp 1 2 3
vP 4 0 dc 5V
vN 5 0 dc -5V
X1 1 2 4 5 3 ad8011an
.ENDS opamp
.SUBCKT RCin 1 2
R2 1 3 1.5k
C1 3 2 33p
R6 1 2 1k
.ENDS RCin
.SUBCKT RCout 1 2
R5 1 2 51
C3 1 2 180p
.ENDS RCout
.SUBCKT Rcontre 1 2
R4 1 2 1k
.ENDS RCout
********************************************************************
*Circuit du driver
.SUBCKT driver 1 11 5 15
*R1 1 11 102
R1a 1 20 51
R1b 11 20 51
R1g 20 0 5.6k
*polarite positive
X1 2 3 4 opamp
X2 4 5 RCout
X3 4 3 Rcontre
X4 10 3 RCin
R11 1 2 51
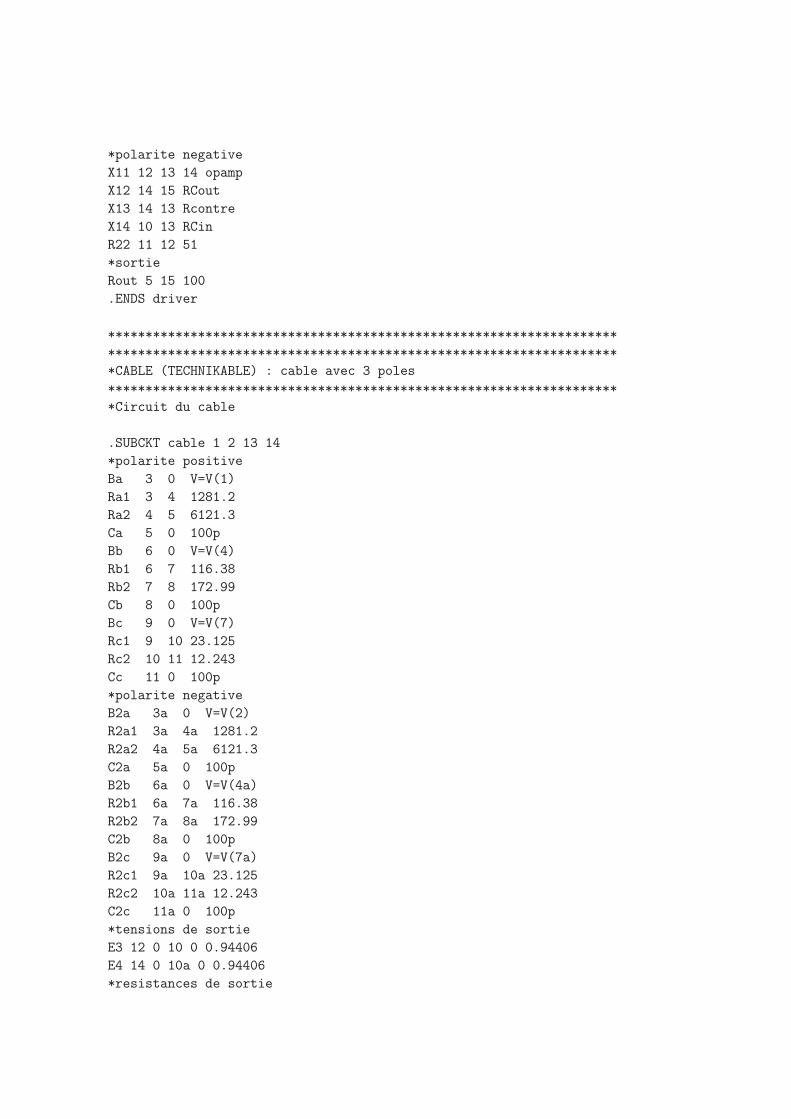
*polarite negative
X11 12 13 14 opamp
X12 14 15 RCout
X13 14 13 Rcontre
X14 10 13 RCin
R22 11 12 51
*sortie
Rout 5 15 100
.ENDS driver
********************************************************************
********************************************************************
*CABLE (TECHNIKABLE) : cable avec 3 poles
********************************************************************
*Circuit du cable
.SUBCKT cable 1 2 13 14
*polarite positive
Ba 3 0 V=V(1)
Ra1 3 4 1281.2
Ra2 4 5 6121.3
Ca 5 0 100p
Bb 6 0 V=V(4)
Rb1 6 7 116.38
Rb2 7 8 172.99
Cb 8 0 100p
Bc 9 0 V=V(7)
Rc1 9 10 23.125
Rc2 10 11 12.243
Cc 11 0 100p
*polarite negative
B2a 3a 0 V=V(2)
R2a1 3a 4a 1281.2
R2a2 4a 5a 6121.3
C2a 5a 0 100p
B2b 6a 0 V=V(4a)
R2b1 6a 7a 116.38
R2b2 7a 8a 172.99
C2b 8a 0 100p
B2c 9a 0 V=V(7a)
R2c1 9a 10a 23.125
R2c2 10a 11a 12.243
C2c 11a 0 100p
*tensions de sortie
E3 12 0 10 0 0.94406
E4 14 0 10a 0 0.94406
*resistances de sortie

Rout1 12 13 51
Rout2 14 15 51
.ENDS cable
********************************************************************
********************************************************************
* RECEIVER
********************************************************************
*Circuit du receiver
.SUBCKT receiver 1 2 3 4
*Alimentation
Val1 8 0 dc 5
Val2 9 0 dc -5
*Circuit
R3 1 5 470
R5 2 6 470
R7 5 11 1k
R8 6 10 1k
R13 10 3 47
R14 11 4 47
X1 5 6 8 9 10 11 7 ad8138
C1 7 0 100n
Vref 7 0 dc 0
*Entree de l’ADC
Rload 3 4 10k
Cload 3 4 3pF
.ENDS receiver
********************************************************************
********************************************************************

6.3 Algorithme du FIR
On utilise un filtre FIR causal. On choisit un sens d’application du FIR suivant le type decharge résiduelle que l’on veut minimiser ("backward, forward") par rapport au canal du pulse.On a choisit de minimiser la charge résiduelle des canaux situés après celui du pulse (selonl’axe du temps). Sachant qu’un signal est numérisée en 36 canaux, on obtient l’algorithmesuivant donnée en C++ :
for(int n = 35; i >= 3; i −−)(y[n] = b0y[n] + b1y[n − 1] + b2y[n − 2]
)
y[2] = b0y[2] + b1y[1] + b2y[0]y[1] = b0y[1] + b1y[0]y[0] = b0y[0]
(20)
où y[n] est l’amplitude du canal n.


















