
Comportement des pieux sous actions sismiques€¦ · Force - Moment = Encastré Solutions pour...
67
Alain Holeyman (*) Université catholique de Louvain (*) animations dues à M. Jafari Comportement des pieux sous actions sismiques
Transcript of Comportement des pieux sous actions sismiques€¦ · Force - Moment = Encastré Solutions pour...
Alain Holeyman (*)
Université catholique de Louvain
(*) animations dues à M. Jafari
Comportement des pieux sous actions sismiques
2
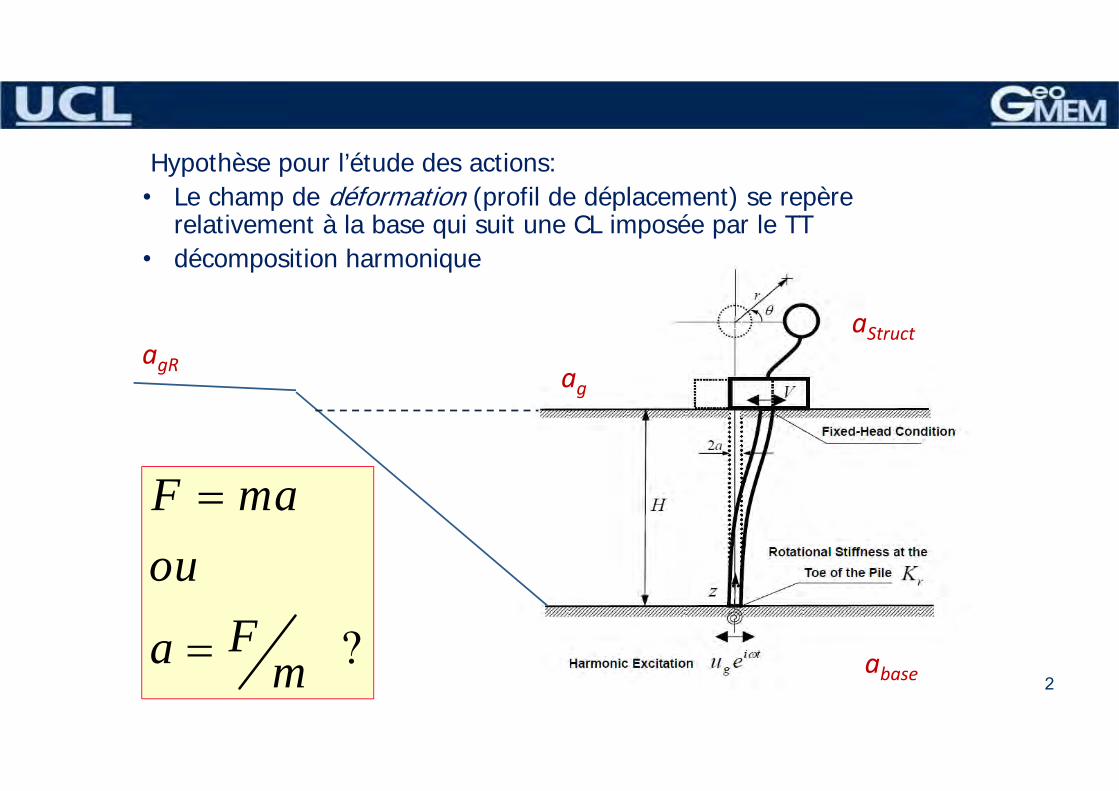
Hypothèse pour l’étude des actions:• Le champ de déformation (profil de déplacement) se repère
relativement à la base qui suit une CL imposée par le TT• décomposition harmonique
agR
abase
ag
aStruct
?
F maou
Fa m
1. Actions sismiques sur les pieux et leursinteractions avec la structure et le sol
2. Comportement du sol sous sollicitations cycliques et amortissement
3. Modèles de calcul – Impédance latérale et axiale des pieux
4. Liquéfaction des sols
5. Conclusions
Contenu
3
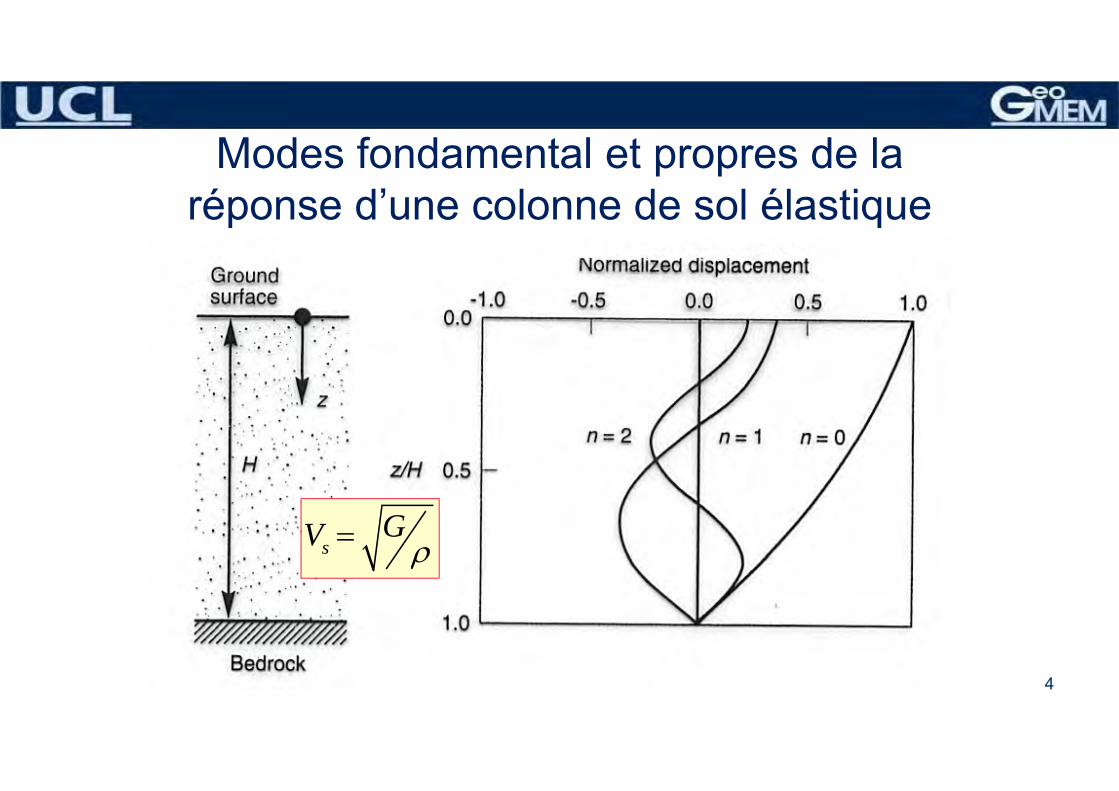
Modes fondamental et propres de la réponse d’une colonne de sol élastique
sGV
4
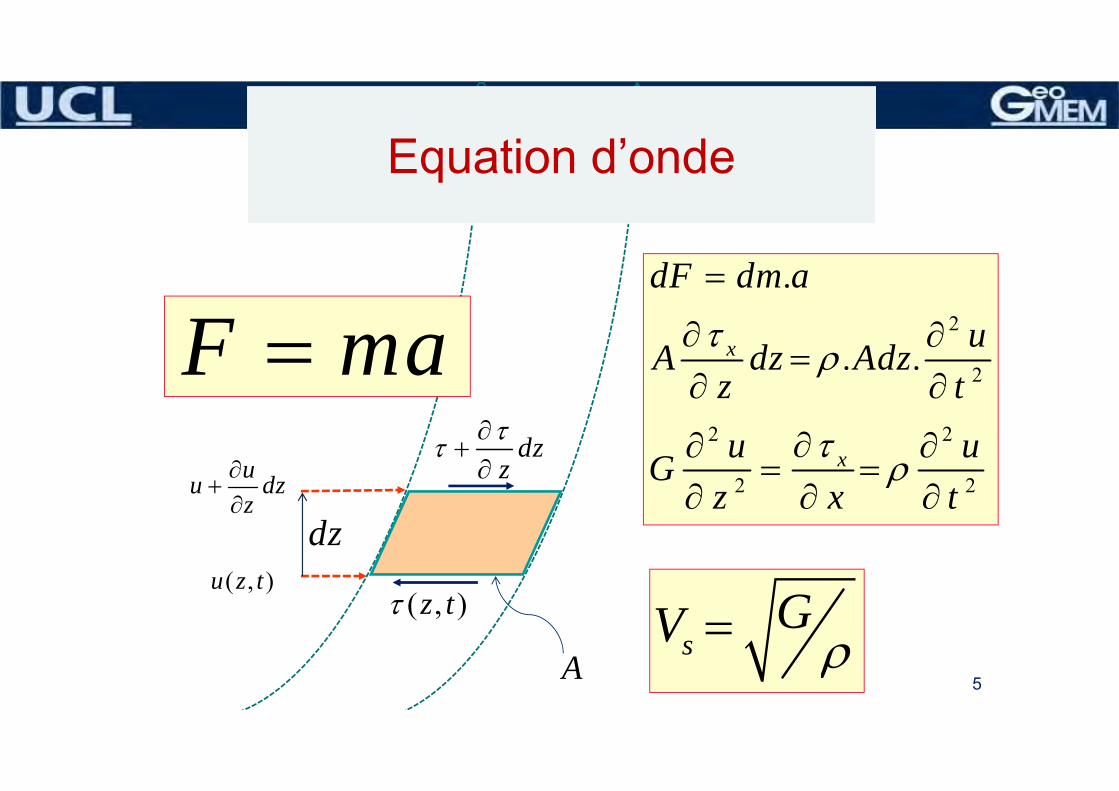
dzz
5A
uu dzz
( , )z t( , )u z t
F ma 2
2
2 2
2 2
.
. .x
x
dF dm auA dz Adz
z tu uG
z x t
dz
sGV
Equation d’onde
6
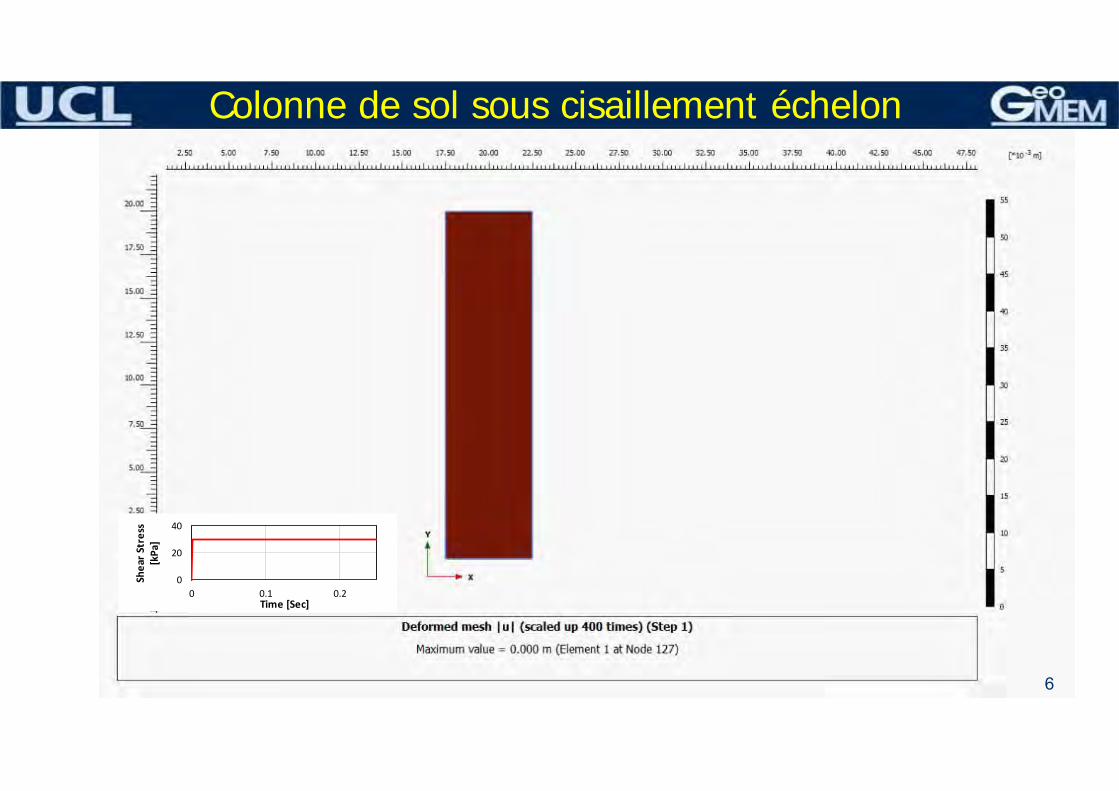
Colonne de sol sous cisaillement échelon
0
20
40
0 0.1 0.2
Shear S
tress
[kPa]
Time [Sec]
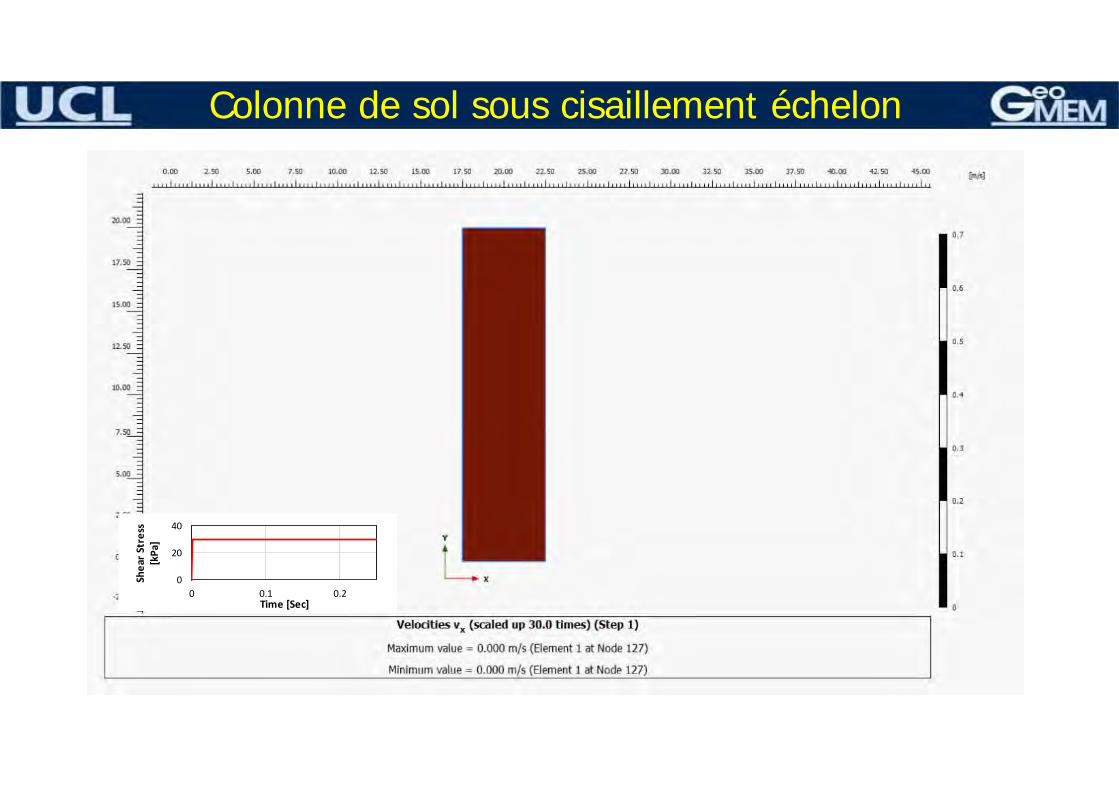
0
20
40
0 0.1 0.2
Shear S
tress
[kPa]
Time [Sec]
Colonne de sol sous cisaillement échelon
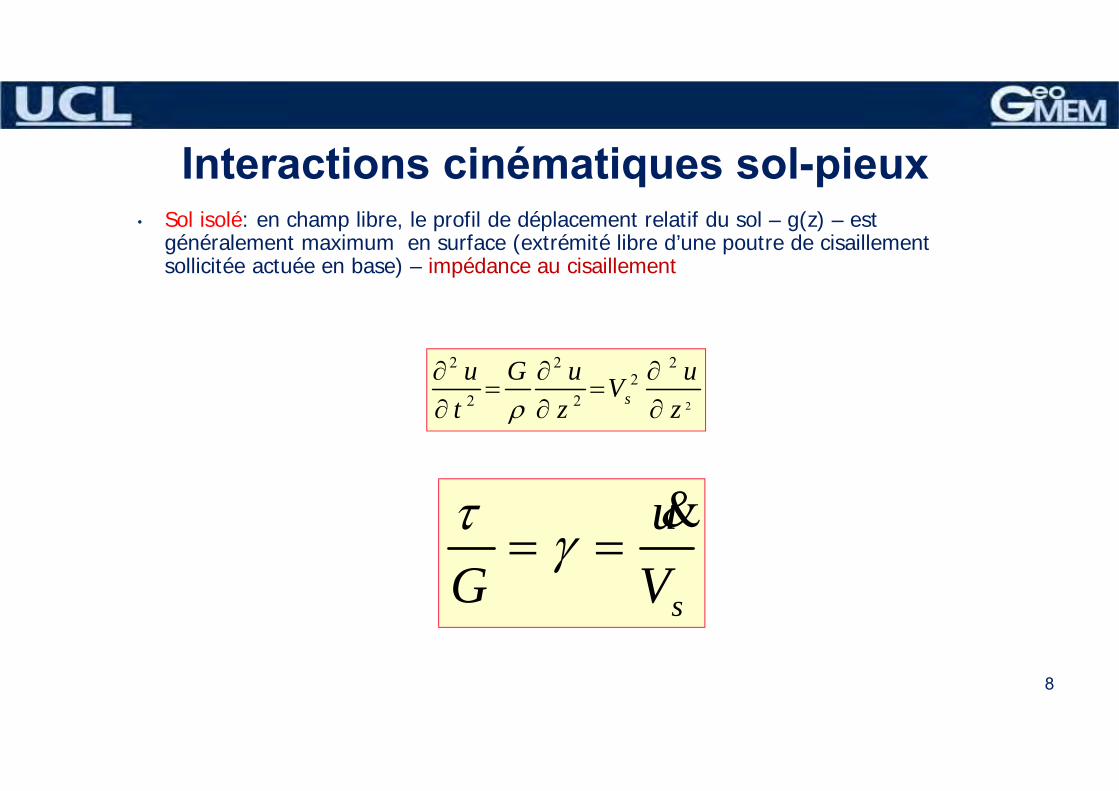
• Sol isolé: en champ libre, le profil de déplacement relatif du sol – g(z) – estgénéralement maximum en surface (extrémité libre d’une poutre de cisaillementsollicitée actuée en base) – impédance au cisaillement
Interactions cinématiques sol-pieux
8
2
2 2 22
2 2 su G u uV
t z z
s
uG V
&
9
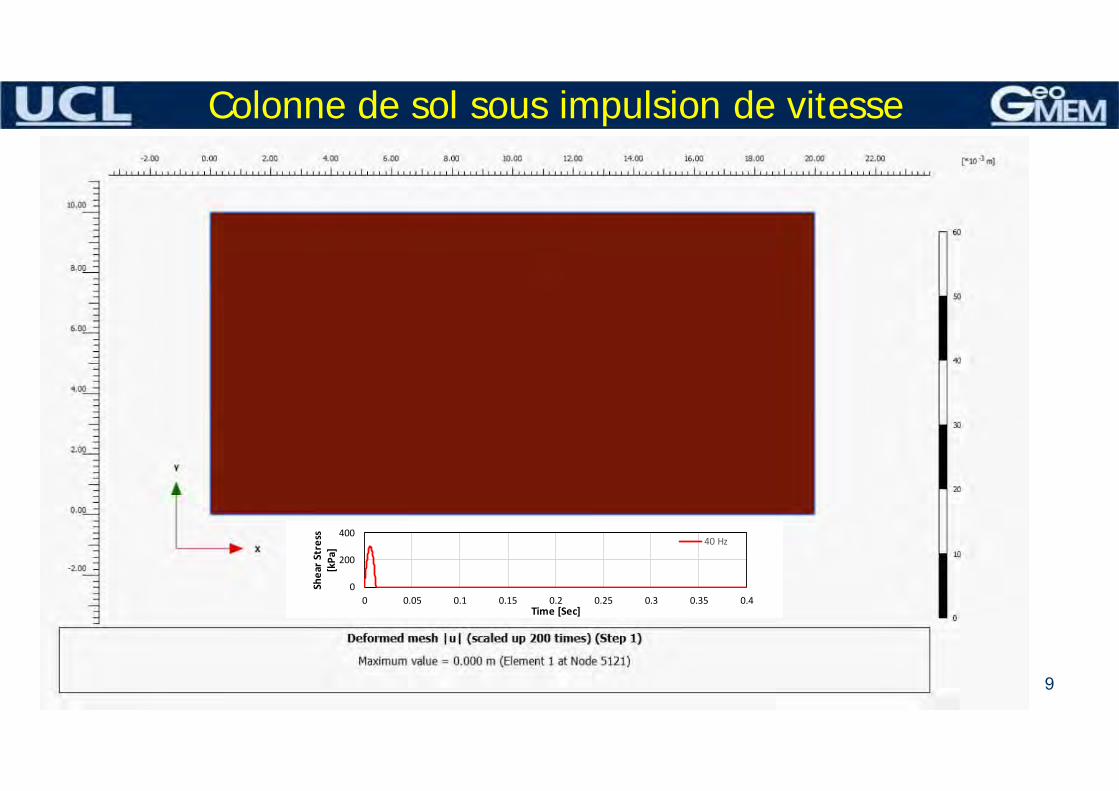
0
200
400
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Shear S
tress
[kPa]
Time [Sec]
40 Hz
Colonne de sol sous impulsion de vitesse

10
0
0.5
1
1.5
0 0.001 0.002 0.003 0.004 0.005Velocity [m
/s]
Time [Sec]
1000 Hz
Pieu libre sous impulsion de vitesse en base
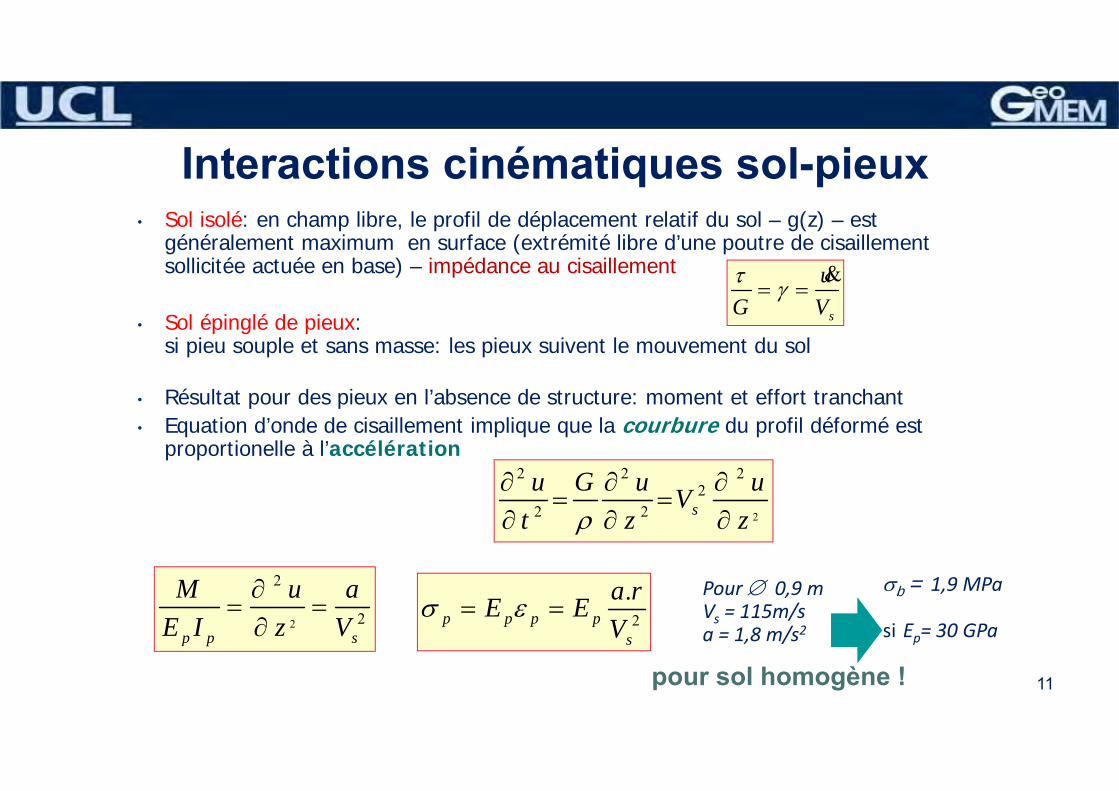
• Sol isolé: en champ libre, le profil de déplacement relatif du sol – g(z) – estgénéralement maximum en surface (extrémité libre d’une poutre de cisaillementsollicitée actuée en base) – impédance au cisaillement
• Sol épinglé de pieux: si pieu souple et sans masse: les pieux suivent le mouvement du sol
• Résultat pour des pieux en l’absence de structure: moment et effort tranchant• Equation d’onde de cisaillement implique que la courbure du profil déformé est
proportionelle à l’accélération
Interactions cinématiques sol-pieux
11
2
2 2 22
2 2 su G u uV
t z z
2
.p p p p
s
a rE EV
2
2
2p p s
M u aE I z V
Pour 0,9 mVs = 115m/sa = 1,8 m/s2
b = 1,9 MPa
si Ep= 30 GPa
pour sol homogène !
s
uG V
&
12
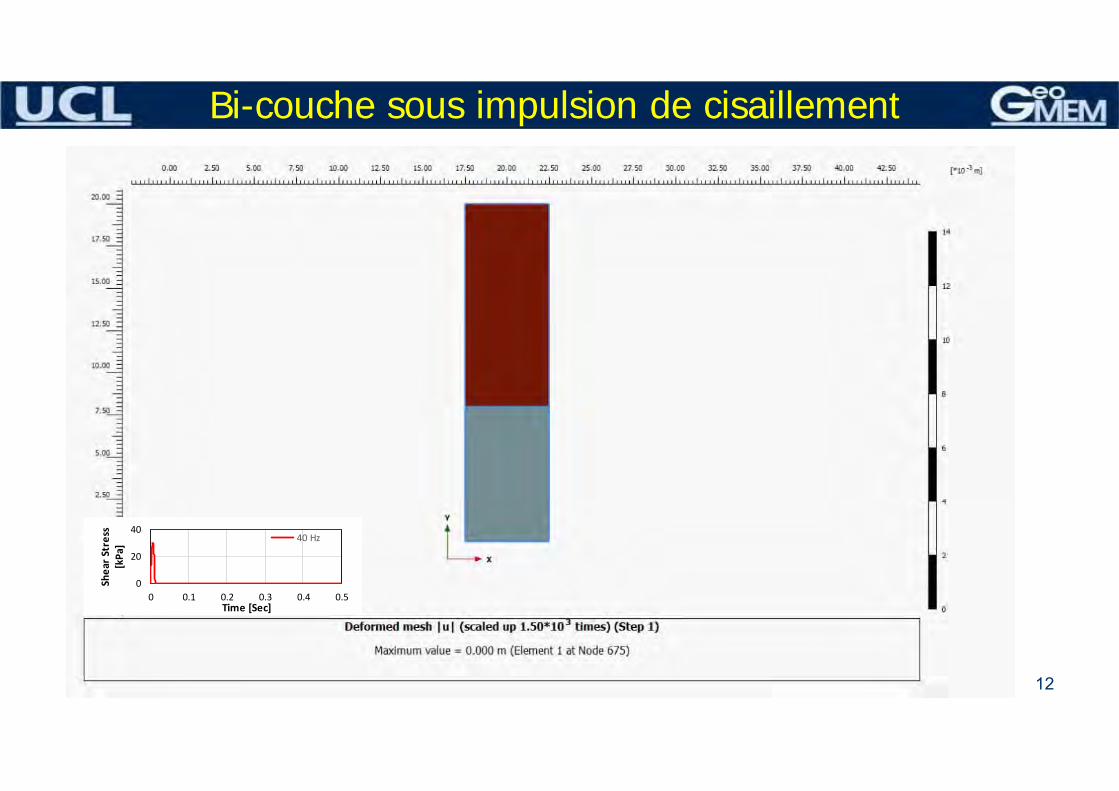
0
20
40
0 0.1 0.2 0.3 0.4 0.5
Shear S
tress
[kPa]
Time [Sec]
40 Hz
Bi-couche sous impulsion de cisaillement
13
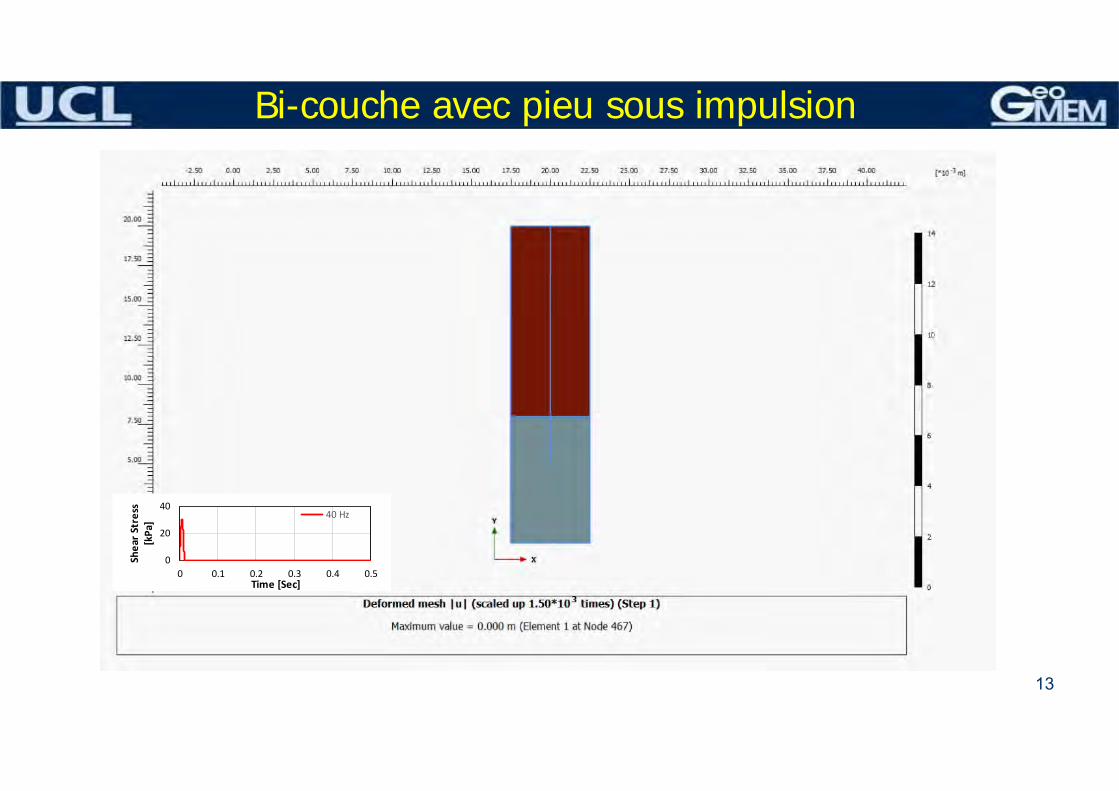
0
20
40
0 0.1 0.2 0.3 0.4 0.5
Shear S
tress
[kPa]
Time [Sec]
40 Hz
Bi-couche avec pieu sous impulsion
• si pieu raide et sans masse: sollicitation “passive” des pieux suivantapproche P-y en calculant le déplacement relatif latéral équilibrantl’ensemble des efforts latéraux pour un profil de déformationcompatible g(z)-P/y
• Résultats- pour des pieux en l’absence de structure moment et effort tranchant- pour le sol: tendance à la diminution et à l’uniformisation du profilde déplacement
Interactions cinématiques sol-pieux
14
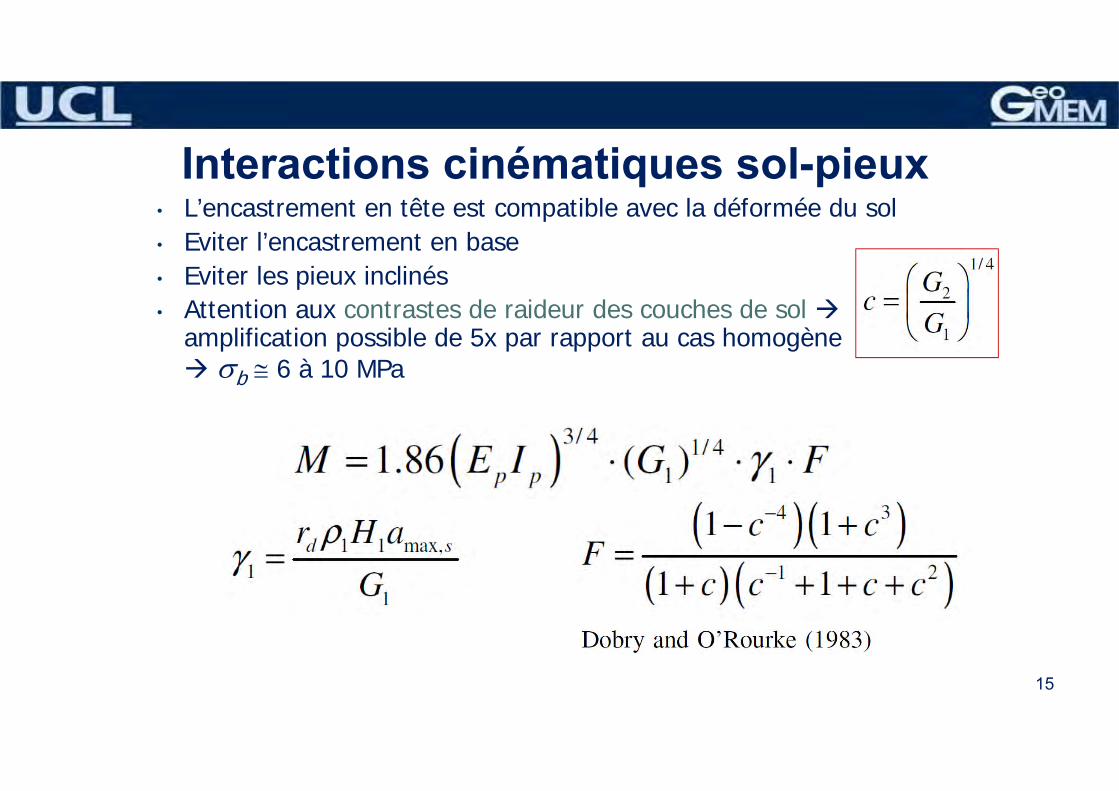
• L’encastrement en tête est compatible avec la déformée du sol• Eviter l’encastrement en base• Eviter les pieux inclinés• Attention aux contrastes de raideur des couches de sol
amplification possible de 5x par rapport au cas homogène b 6 à 10 MPa
Interactions cinématiques sol-pieux
15
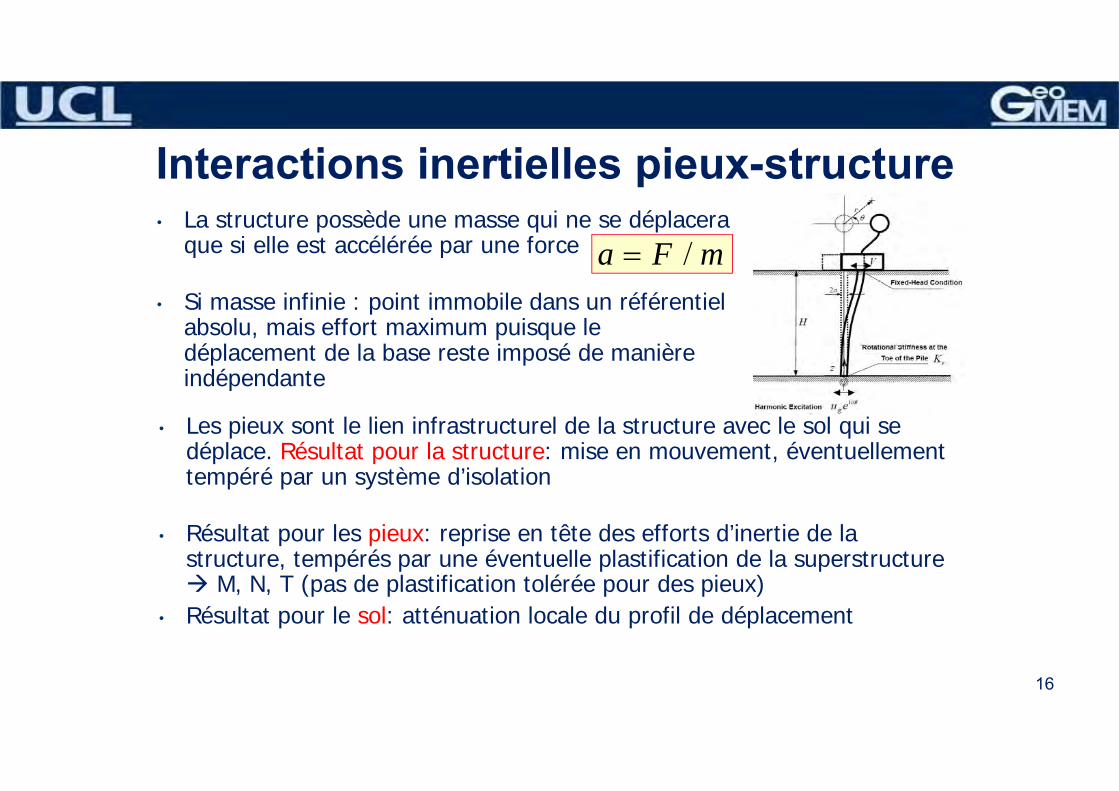
• La structure possède une masse qui ne se déplaceraque si elle est accélérée par une force
• Si masse infinie : point immobile dans un référentielabsolu, mais effort maximum puisque le déplacement de la base reste imposé de manièreindépendante
Interactions inertielles pieux-structure
16
/a F m
• Les pieux sont le lien infrastructurel de la structure avec le sol qui se déplace. Résultat pour la structure: mise en mouvement, éventuellementtempéré par un système d’isolation
• Résultat pour les pieux: reprise en tête des efforts d’inertie de la structure, tempérés par une éventuelle plastification de la superstructure M, N, T (pas de plastification tolérée pour des pieux)
• Résultat pour le sol: atténuation locale du profil de déplacement
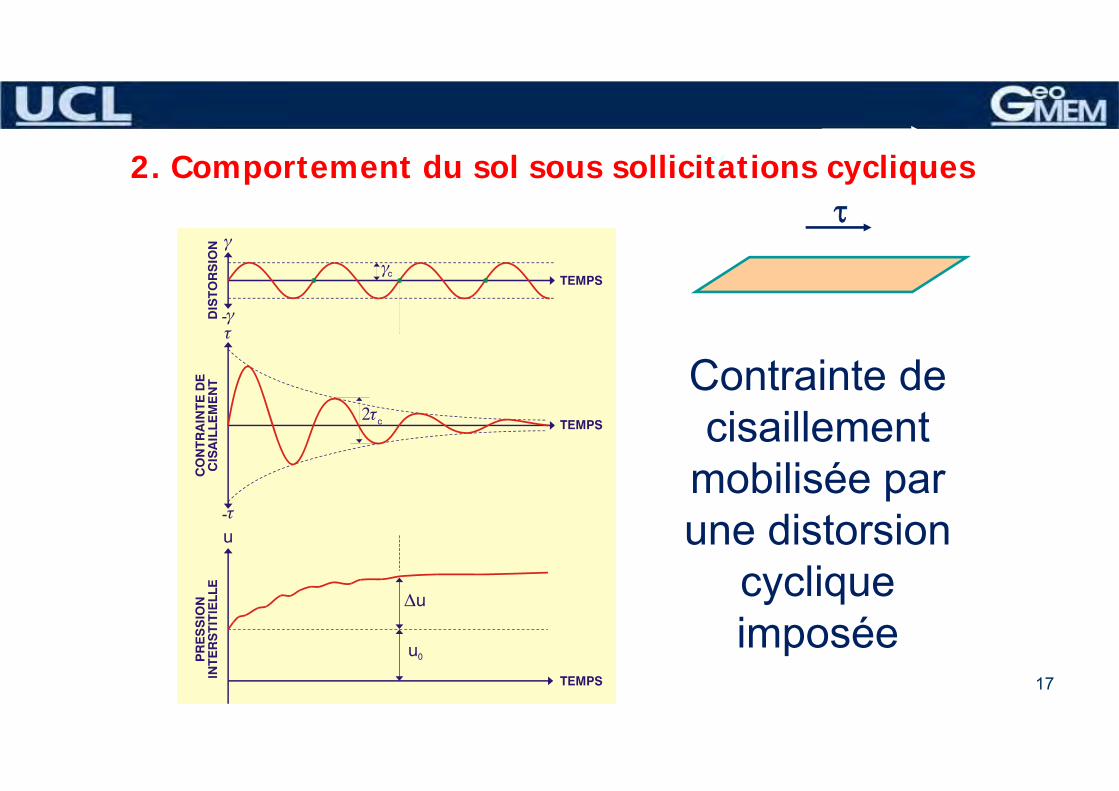
Contrainte de cisaillement
mobilisée par une distorsion
cyclique imposée
17
2. Comportement du sol sous sollicitations cycliques
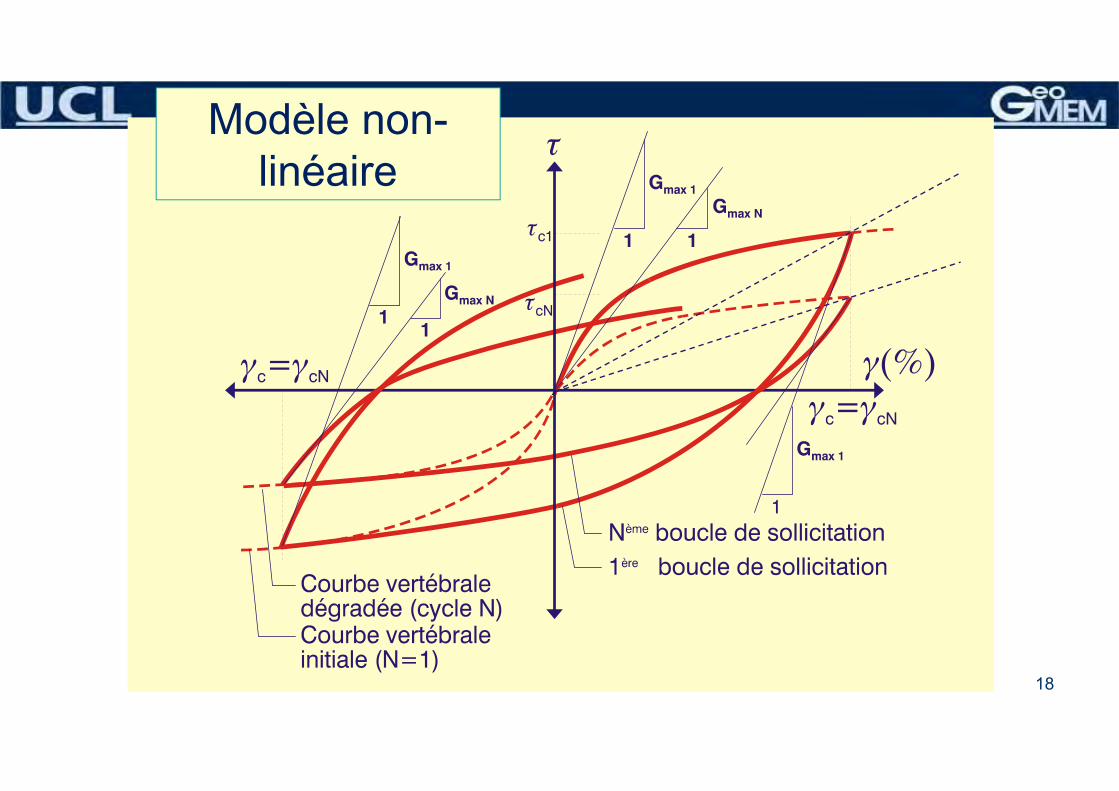
Modèle non-linéaire
18
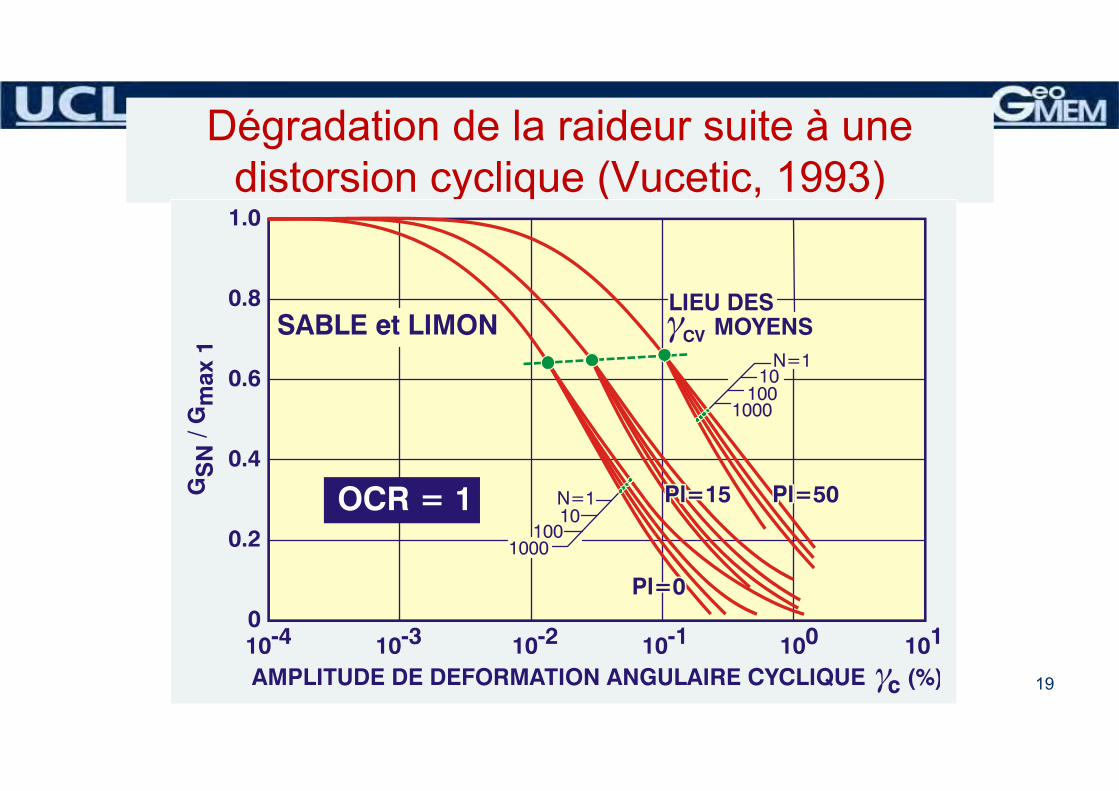
Dégradation de la raideur suite à une distorsion cyclique (Vucetic, 1993)
19
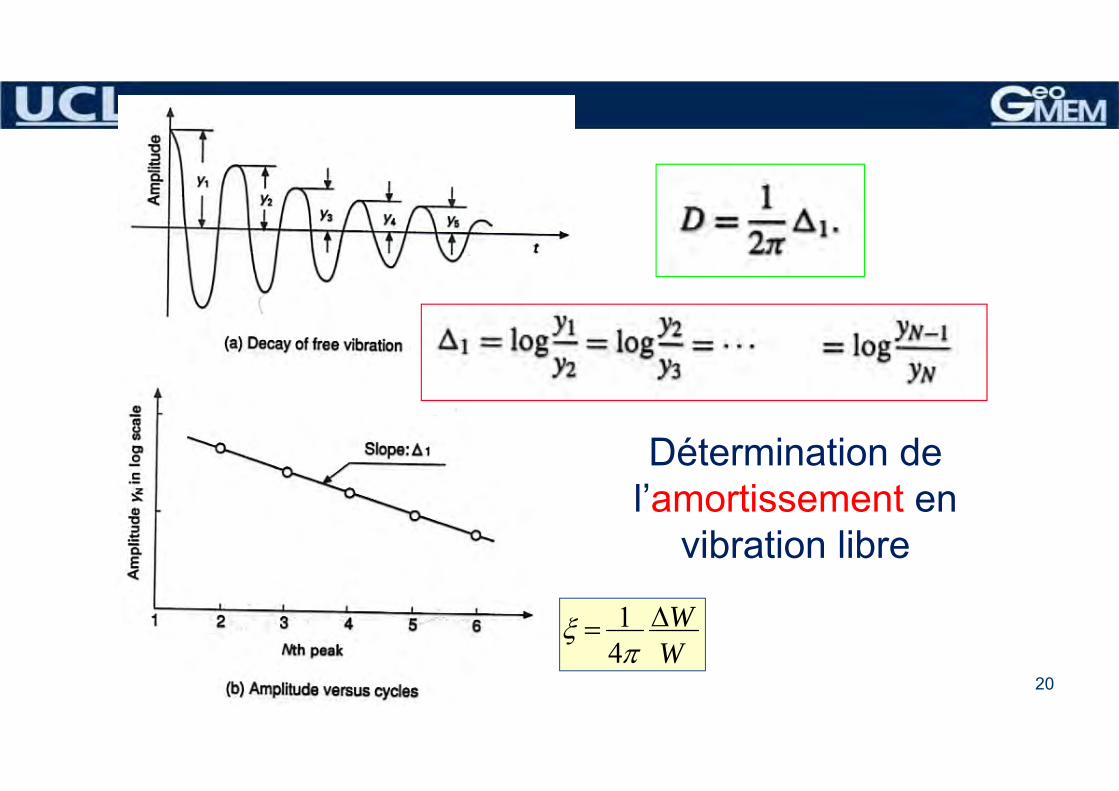
Détermination de l’amortissement en
vibration libre
WW
41
20
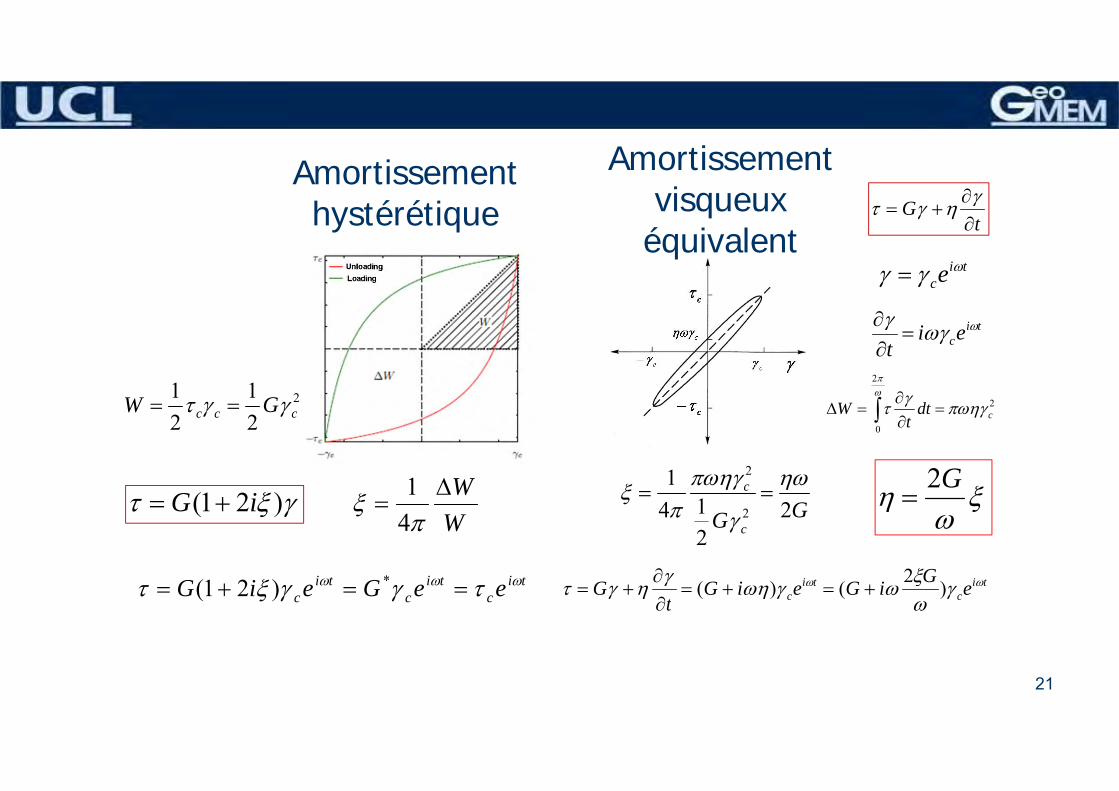
Amortissement hystérétique
21
2
21
21
ccc GW
WW
41
GG c
c
2214
12
2
G2
tice
ticei
t
tic
tic eGiGeiG
tG
)2()(
(1 2 )G i
tG
Amortissement visqueux
équivalent
2
2
0cdt
tW
tic
tic
tic eeGeiG *)21(
22
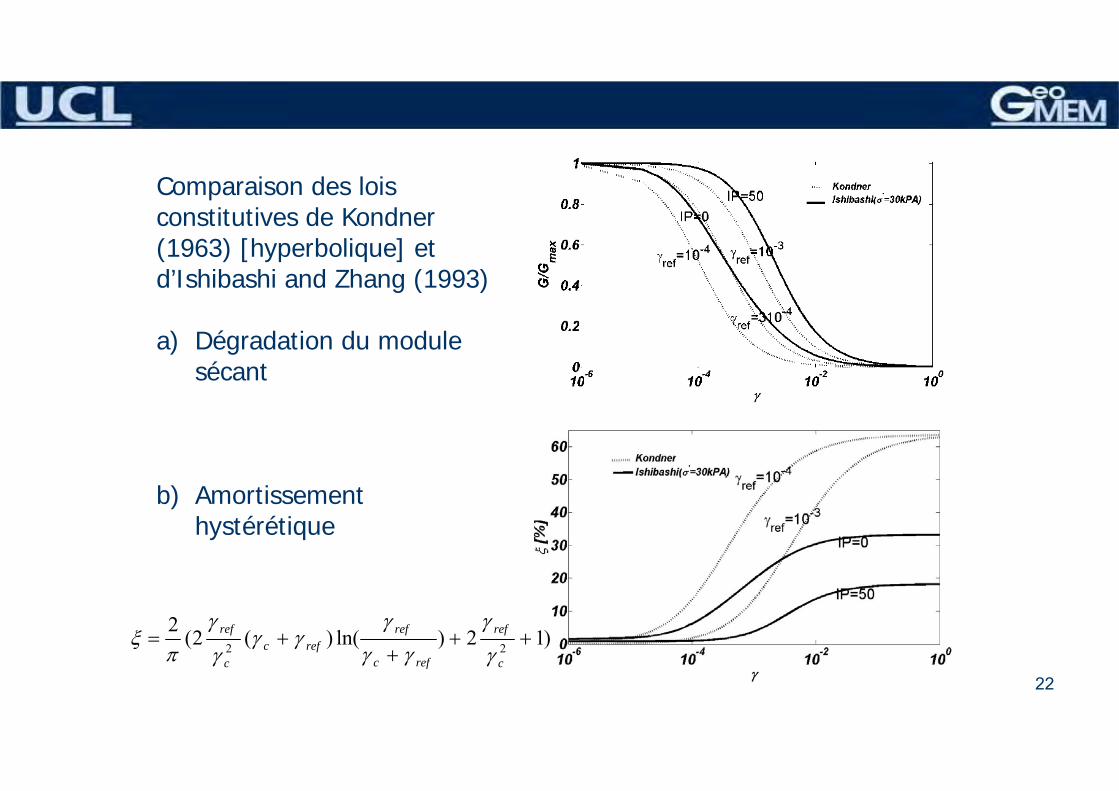
Comparaison des loisconstitutives de Kondner(1963) [hyperbolique] et d’Ishibashi and Zhang (1993)
a) Dégradation du module sécant
b) Amortissementhystérétique
)12)ln()(2(222
c
ref
refc
refrefc
c
ref
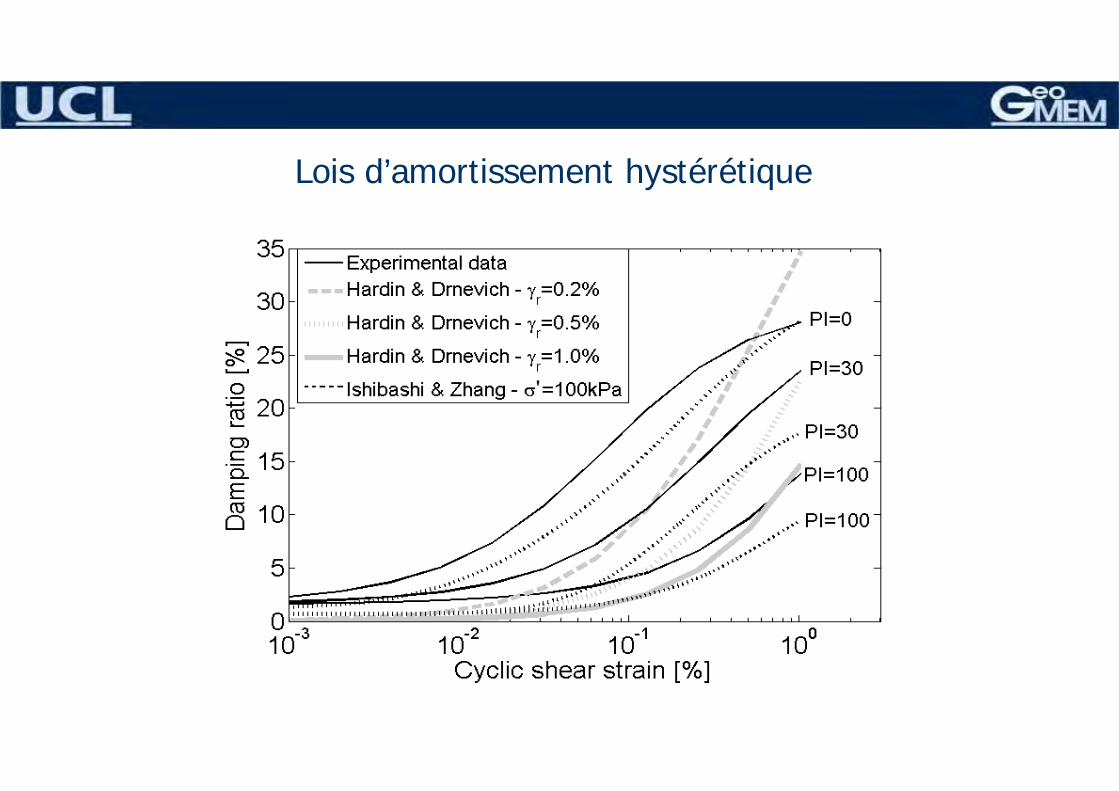
Soil damping coefficient c)Lois d’amortissement hystérétique
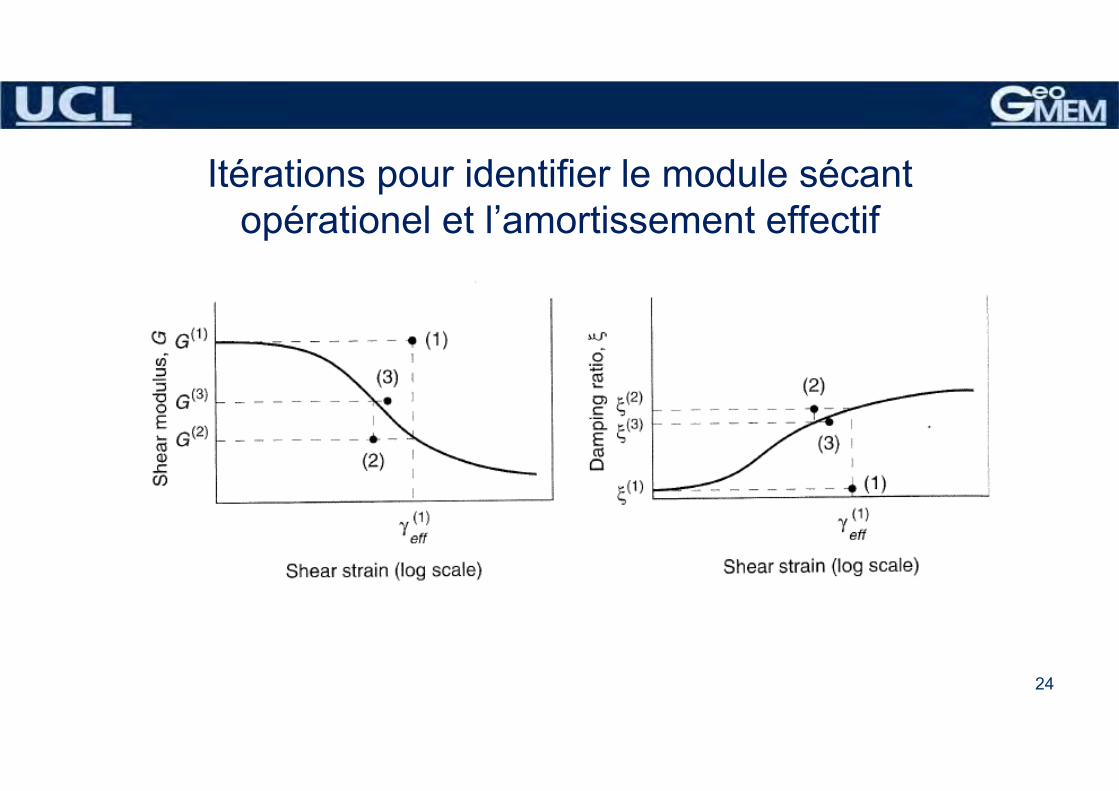
24
Itérations pour identifier le module sécantopérationel et l’amortissement effectif
1. Essais acoustiques de laboratoire
2. Essais in situa) Géo-sismiqueb) Cross-hole et SASW
3. Comportement mécaniquea) Module de cisaillement initialb) Dégradationc) Amortissementd) Modèles constitutifs
PROPRIETES DYNAMIQUES DES SOLS
25
Interaction sol - structure
INTERACTION SOL-STRUCTURE
26
3. Modèles de calcul1. Règles de bonne pratique (Codes) – Approche
pseudo-statique de type Fb = Se(T). m. + répartition des actions sur les pieux
2. Méthodes simplifiées aux- ressorts ponctuels équivalents- coefficient de raideur distribués le long des pieux modélisés en sous-sol
3. Modélisation numérique du milieu continu
INTERACTION SOL-STRUCTURE
27
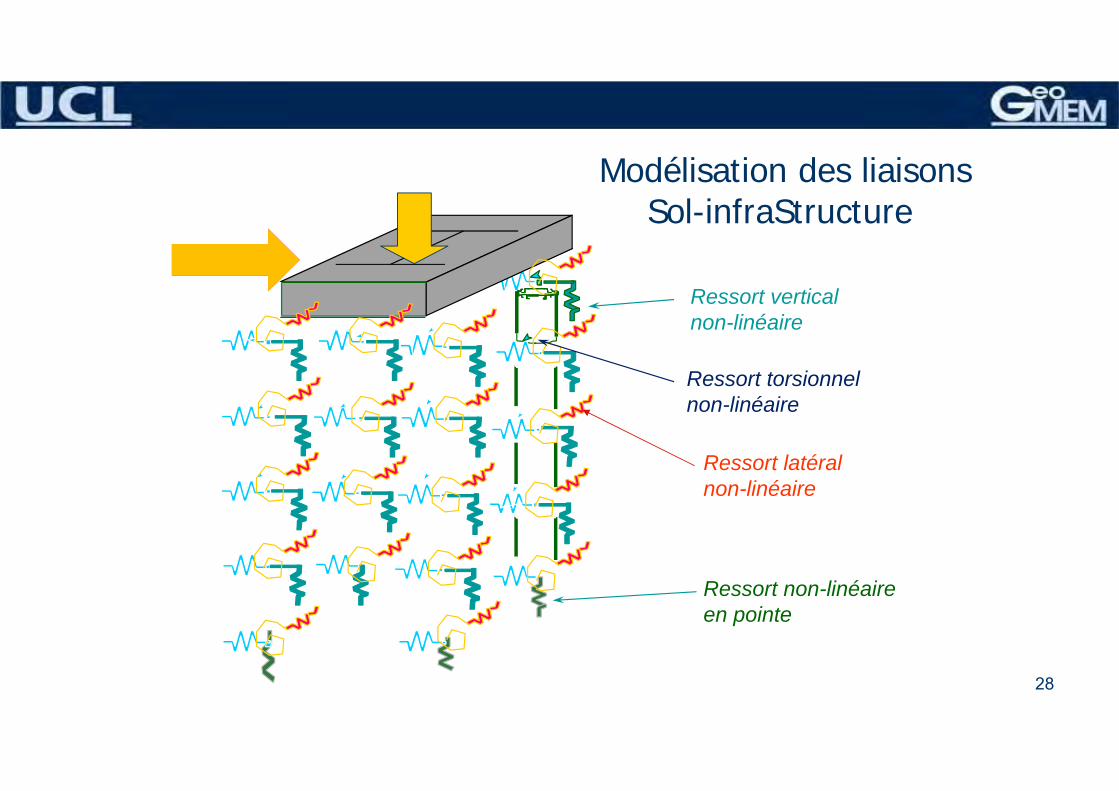
Modélisation des liaisons Sol-infraStructure
Ressort vertical non-linéaire
Ressort latéral non-linéaire
Ressort torsionnel non-linéaire
Ressort non-linéaire en pointe
28
Modes d’interaction statique
Axial (vertical): modèles “t-z” & “q-z”
Transversal (Latéral): modèles P-y
Torsionnel: modèles “-”
29
Ces modes sont généralement considérés indépendamment car le couplage, c’est à dire l’influence de P ou y sur la réponse t-z reste du domaine de la recherche (Allani, 2014)
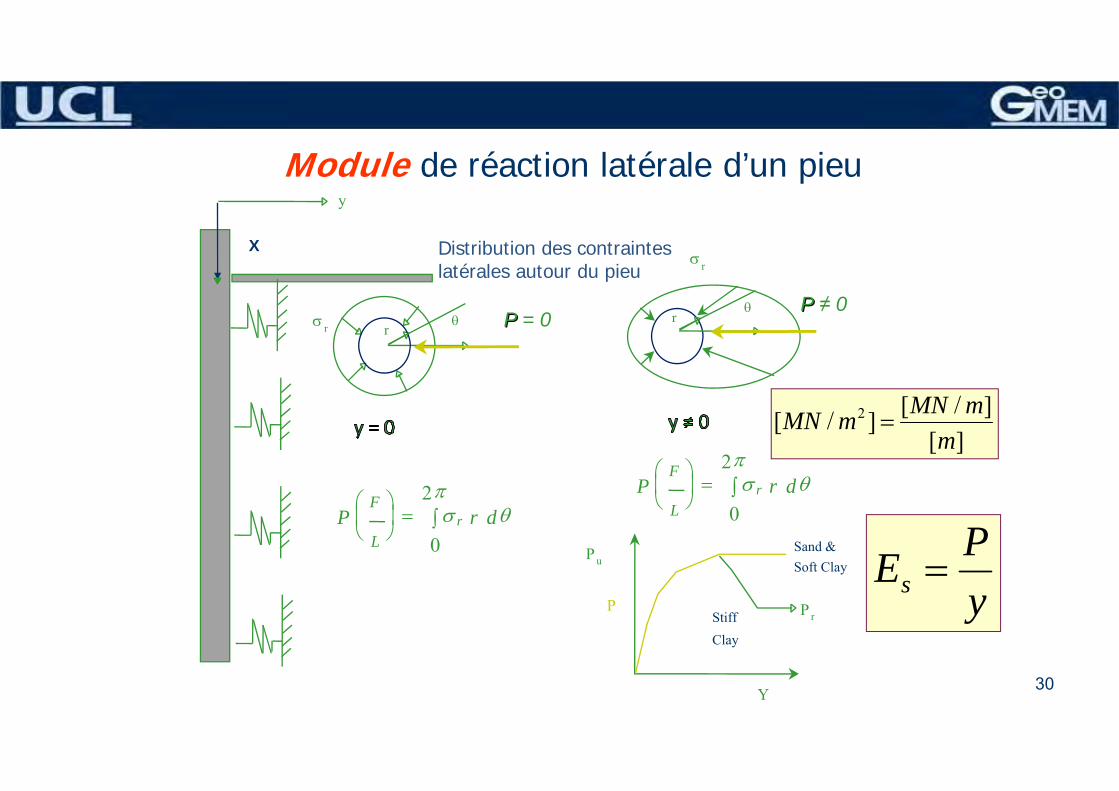
Distribution des contrainteslatérales autour du pieu
r
y
X
P r dF
Lr
0
2
P r dF
Lr
0
2
r
r
r
P
Y
Pu
P rStiffClay
Sand &Soft Clay
PP = 0PP ≠ 0
30
Module de réaction latérale d’un pieu
][]/[]/[ 2
mmMNmMN
yPEs
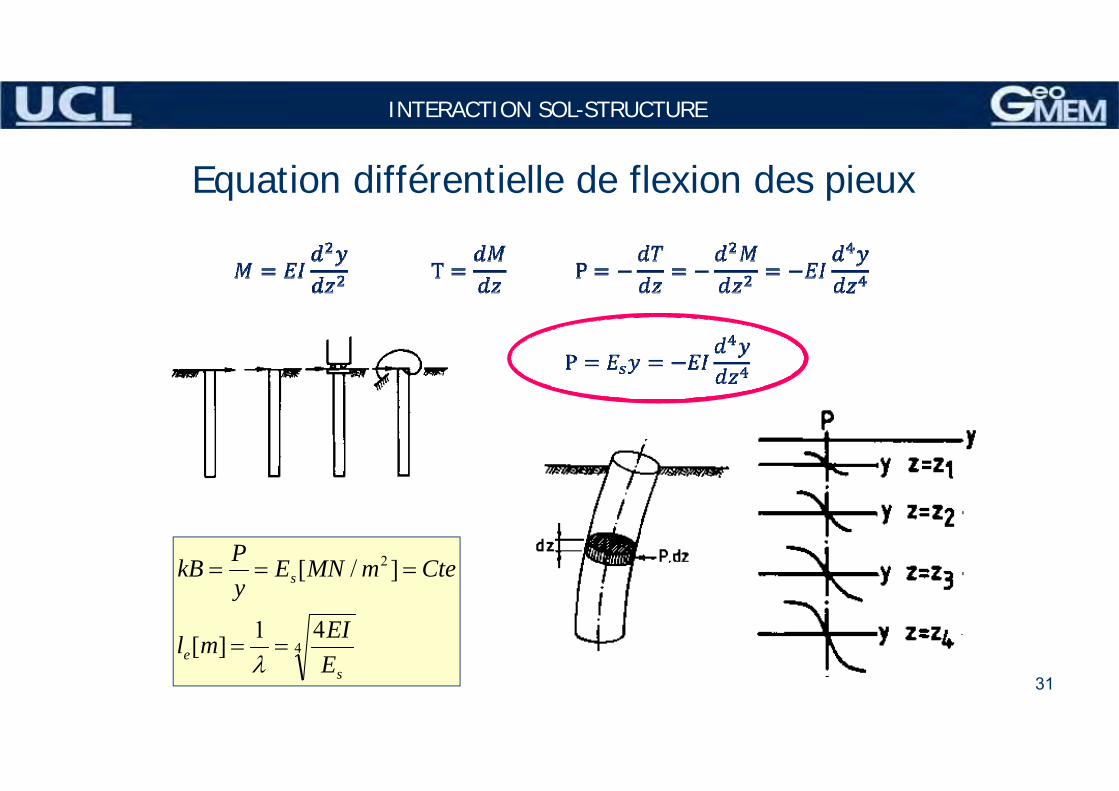
Equation différentielle de flexion des pieux
INTERACTION SOL-STRUCTURE
31
4
2
41][
]/[
se
s
EEIml
CtemMNEyPkB
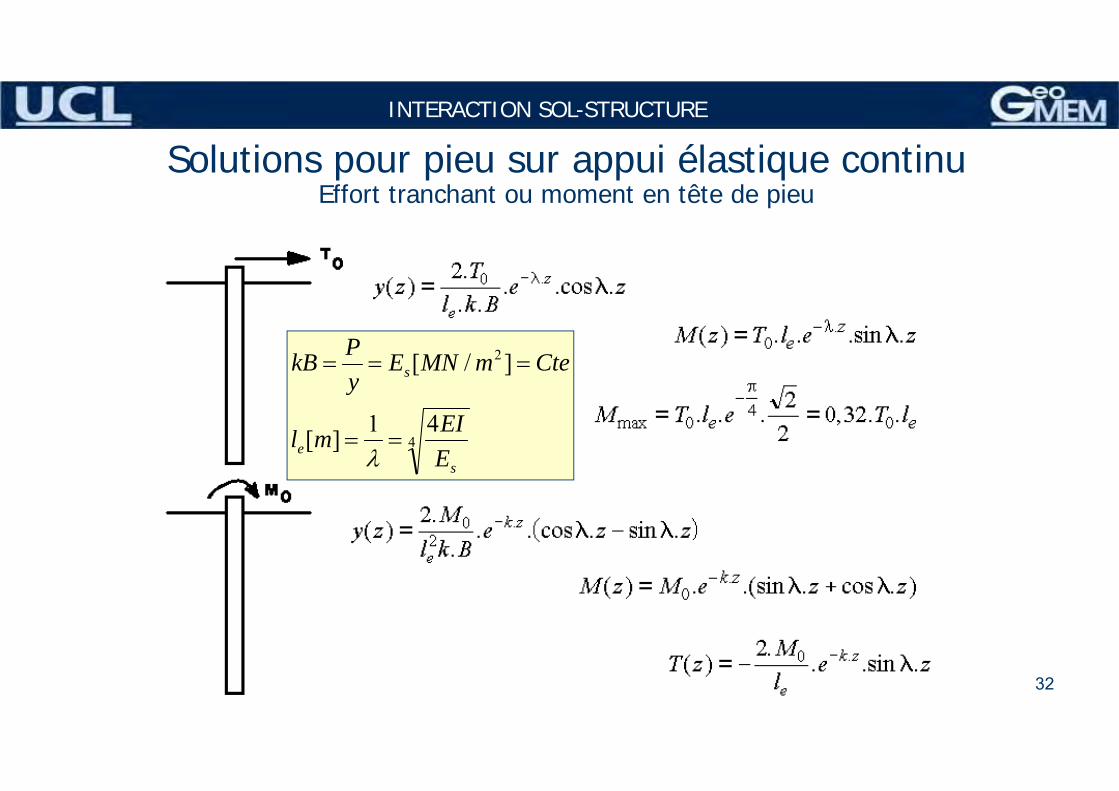
Solutions pour pieu sur appui élastique continuEffort tranchant ou moment en tête de pieu
INTERACTION SOL-STRUCTURE
4
2
41][
]/[
se
s
EEIml
CtemMNEyPkB
32
Force - Moment = Encastré
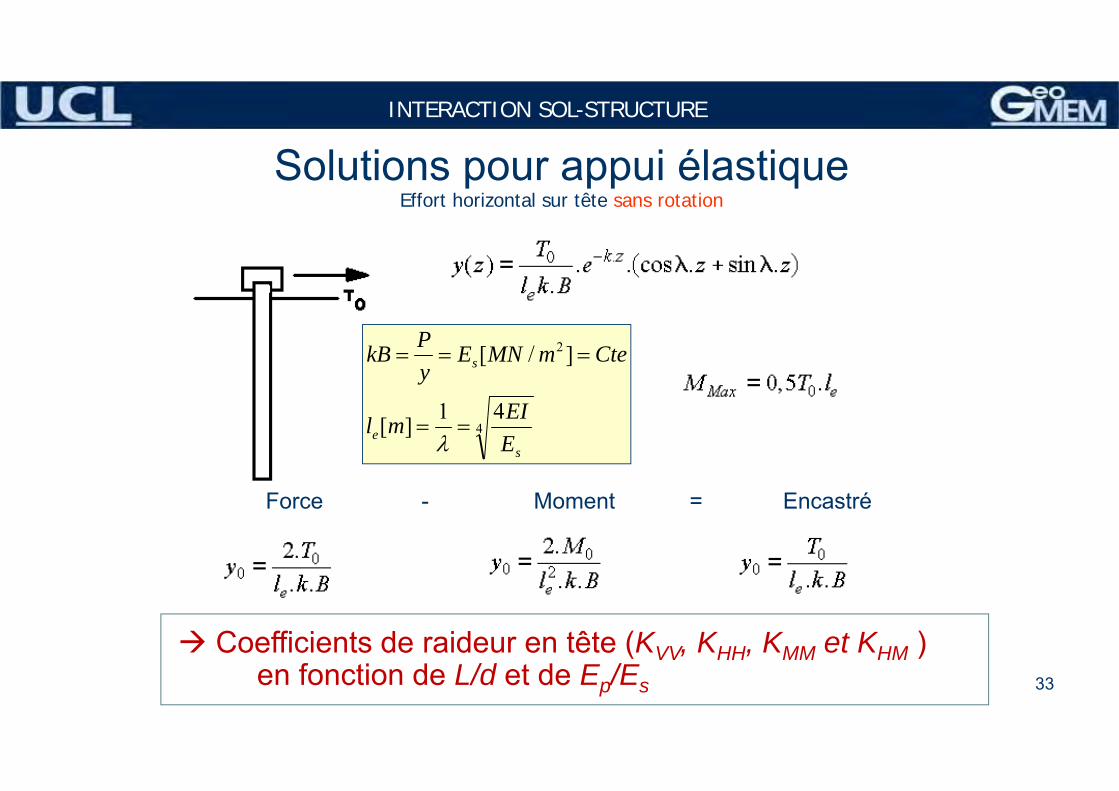
Solutions pour appui élastiqueEffort horizontal sur tête sans rotation
INTERACTION SOL-STRUCTURE
4
2
41][
]/[
se
s
EEIml
CtemMNEyPkB
33
Coefficients de raideur en tête (KVV, KHH, KMM et KHM ) en fonction de L/d et de Ep/Es
34
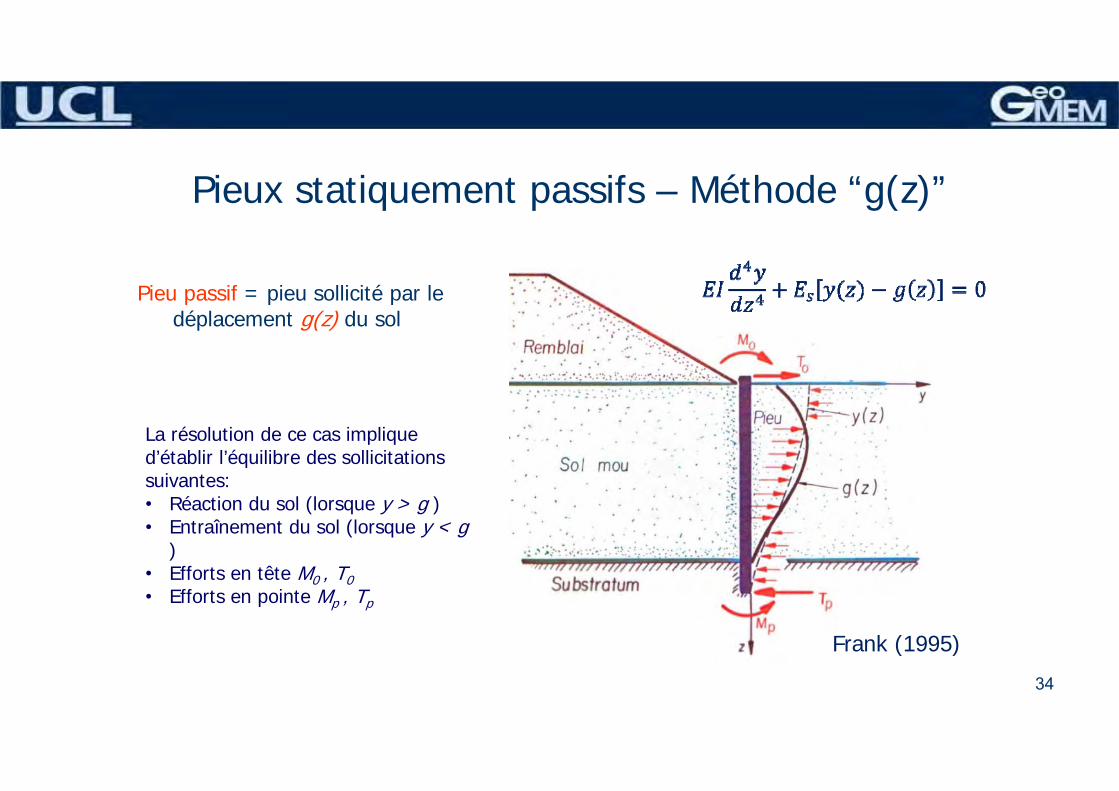
Pieux statiquement passifs – Méthode “g(z)”
Pieu passif = pieu sollicité par le déplacement g(z) du sol
La résolution de ce cas implique d’établir l’équilibre des sollicitations suivantes:• Réaction du sol (lorsque y > g )• Entraînement du sol (lorsque y < g
)• Efforts en tête M0 , T0• Efforts en pointe Mp , Tp
Frank (1995)
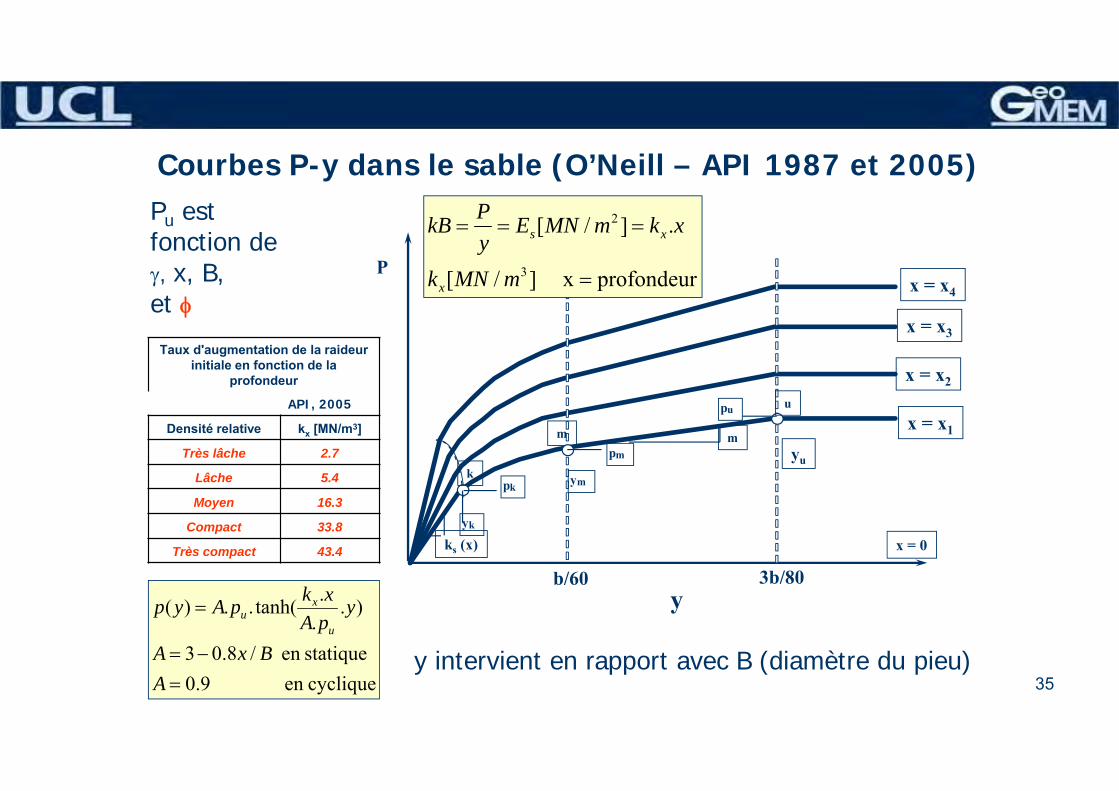
Courbes P-y dans le sable (O’Neill – API 1987 et 2005)
k
m
b/60 3b/80
x = 0
x = x1
x = x2
x = x3
x = x4
u
pk
yk
ym
yupm
pu
m
y
P
ks (x)
Pu est fonction de , x, B,et
y intervient en rapport avec B (diamètre du pieu)
Taux d'augmentation de la raideur initiale en fonction de la
profondeur
API, 2005
Densité relative kx [MN/m3]
Très lâche 2.7
Lâche 5.4
Moyen 16.3
Compact 33.8
Très compact 43.4
cycliqueen 9.0statiqueen /8.03
)...tanh(..)(
ABxA
ypAxkpAypu
xu
profondeur x]/[
.]/[
3
2
mMNk
xkmMNEyPkB
x
xs
35
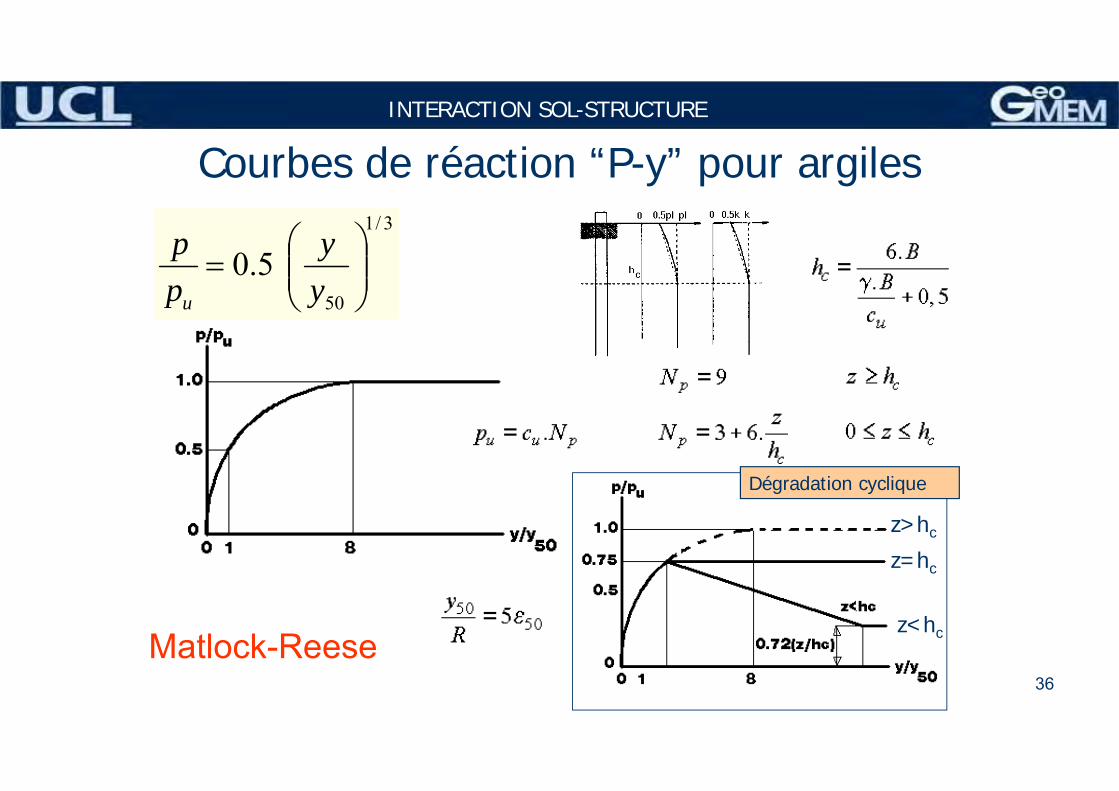
Courbes de réaction “P-y” pour argiles
Matlock-Reese
3/1
50
5.0
yy
pp
u
INTERACTION SOL-STRUCTURE
Dégradation cyclique
z>hc
z=hc
z<hc
36
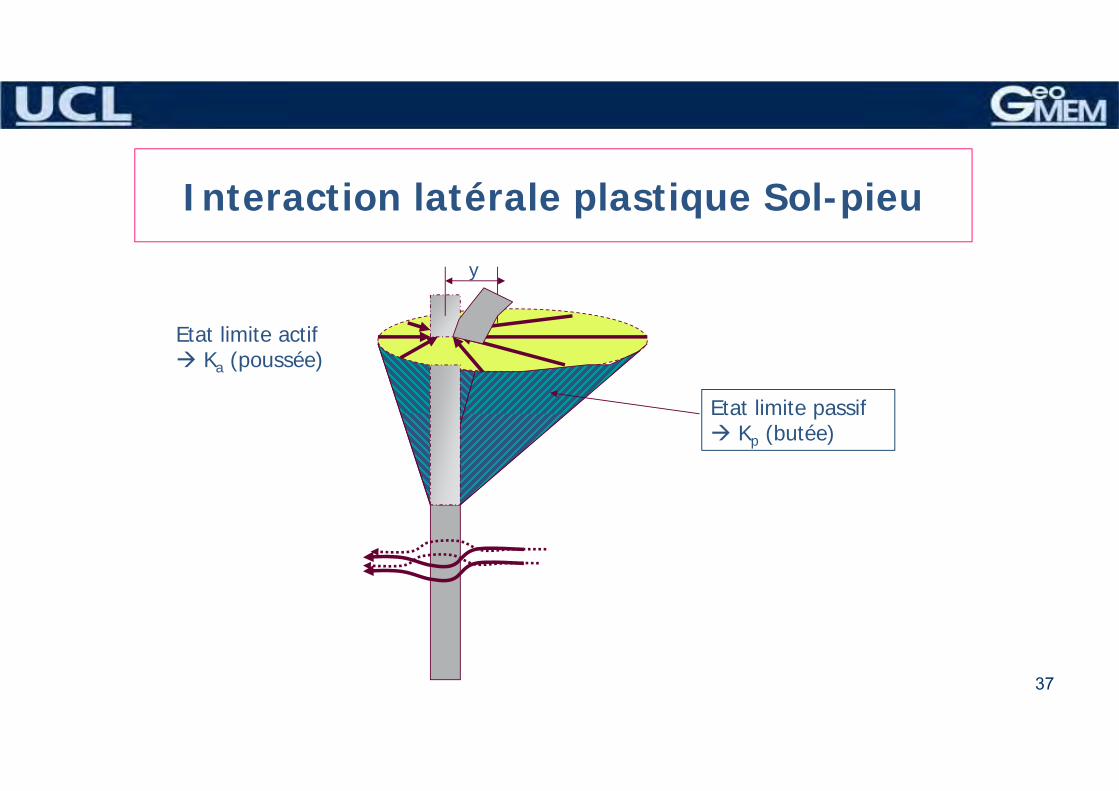
Interaction latérale plastique Sol-pieu
Etat limite actif Ka (poussée)
y
Etat limite passif Kp (butée)
37
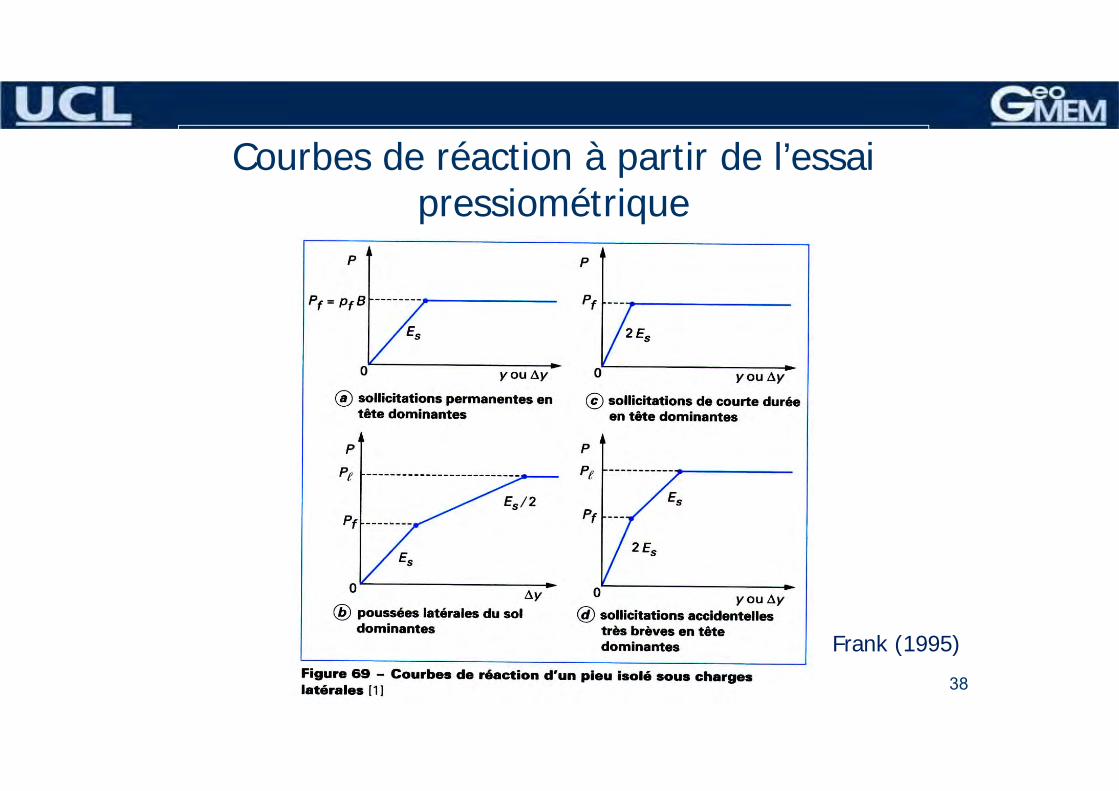
Courbes de réaction à partir de l’essai pressiométrique
38
Frank (1995)
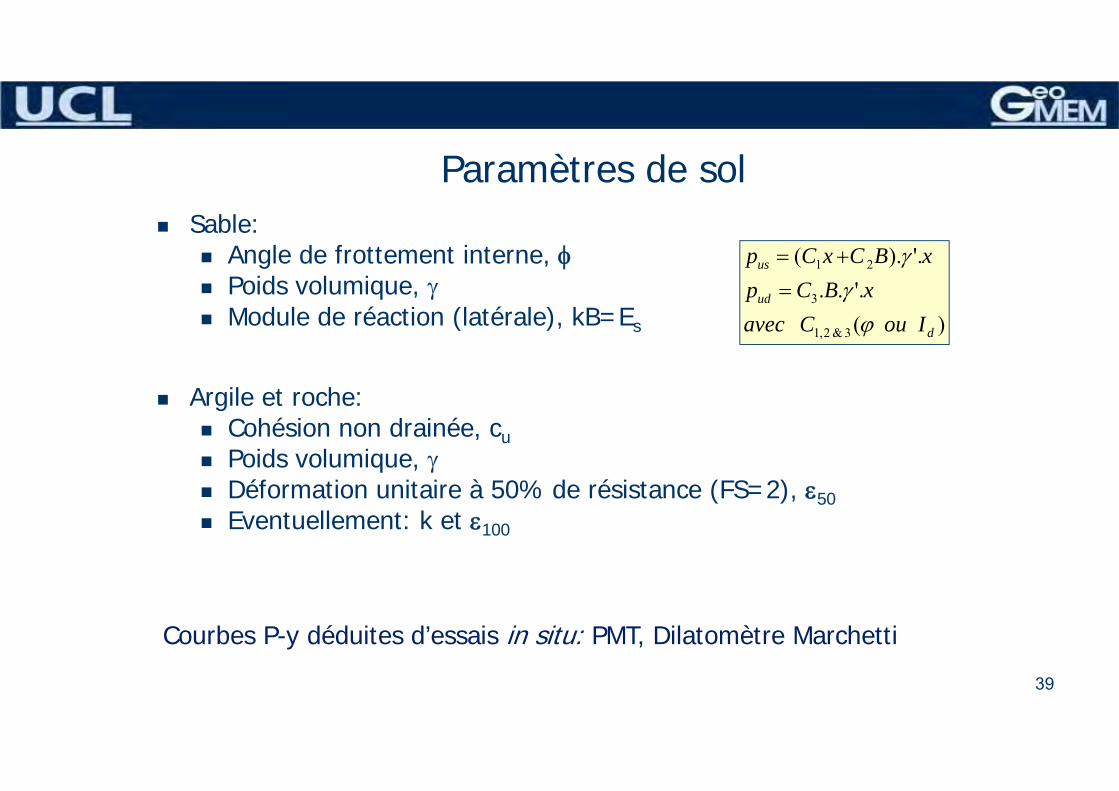
Paramètres de sol Sable:
Angle de frottement interne, Poids volumique, Module de réaction (latérale), kB=Es
Argile et roche: Cohésion non drainée, cu Poids volumique, Déformation unitaire à 50% de résistance (FS=2), 50 Eventuellement: k et 100
) ( '...
'.).(
3 & 2,1
3
21
d
ud
us
IouCavecxBCp
xBCxCp
39
Courbes P-y déduites d’essais in situ: PMT, Dilatomètre Marchetti
Modes d’interaction dynamique Axial (vertical): modèles “t-z” & “q-z”
Transversal (Latéral): modèles P-y
Torsionnel: modèles “-”
40
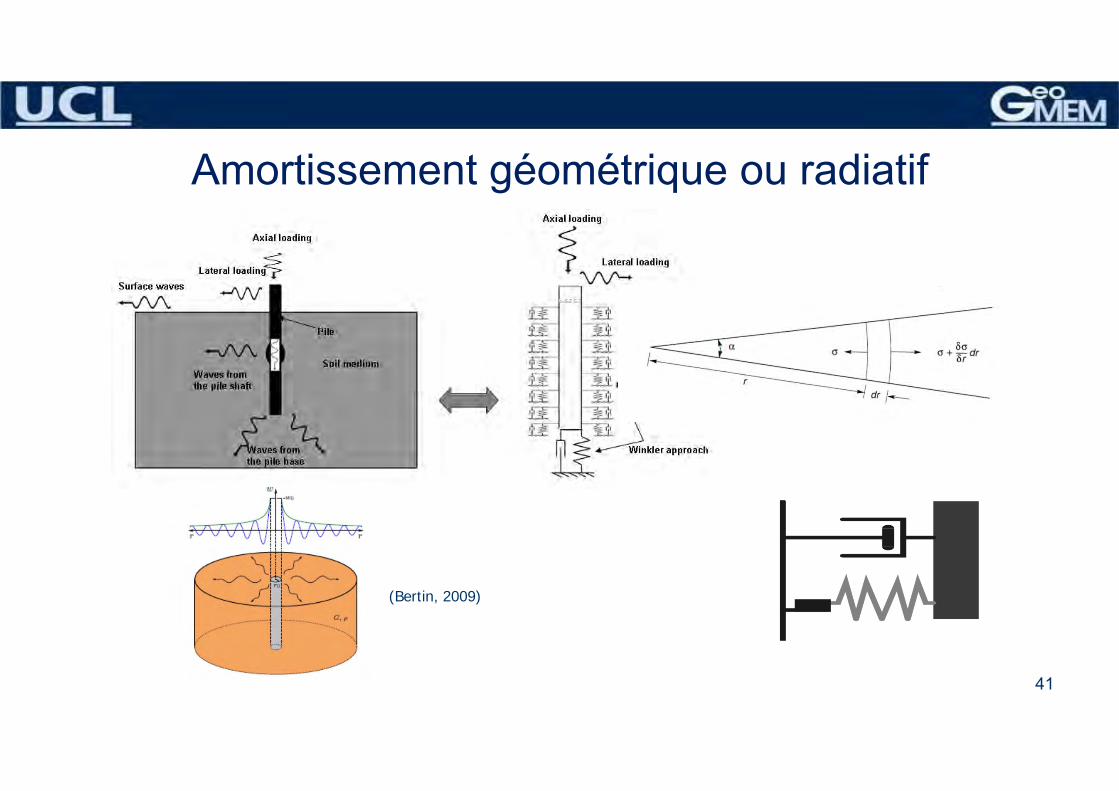
Amortissement géométrique ou radiatif
41
(Bertin, 2009)
42
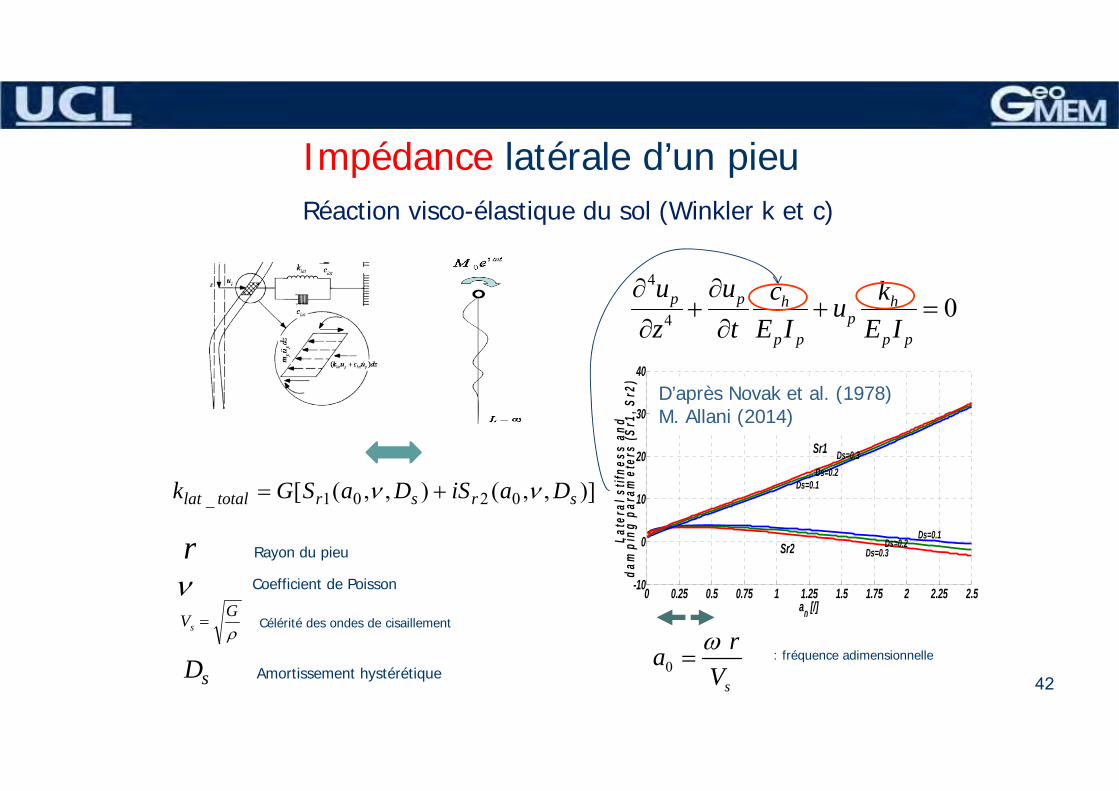
Impédance latérale d’un pieuRéaction visco-élastique du sol (Winkler k et c)
04
4
pp
hp
pp
hpp
IEku
IEc
tu
zu
0 0.25 0.5 0.75 1 1.25 1.5 1.75 2 2.25 2.5-10
0
10
20
30
40
a0 [/]La
tera
l stif
ness
and
da
mpi
ng p
aram
eter
s (S
r1, S
r2)
Sr1
Sr2
Ds=0.1Ds=0.2
Ds=0.3
Ds=0.1Ds=0.2
Ds=0.3
)],,(),,([ 0201_ srsrtotallat DaiSDaSGk
GVs
r
Célérité des ondes de cisaillement
Rayon du pieu
Coefficient de Poisson
Amortissement hystérétique 0s
raV
sD
: fréquence adimensionnelle
D’après Novak et al. (1978)M. Allani (2014)
0 0.005 0.01 0.0150
5
10
15
20
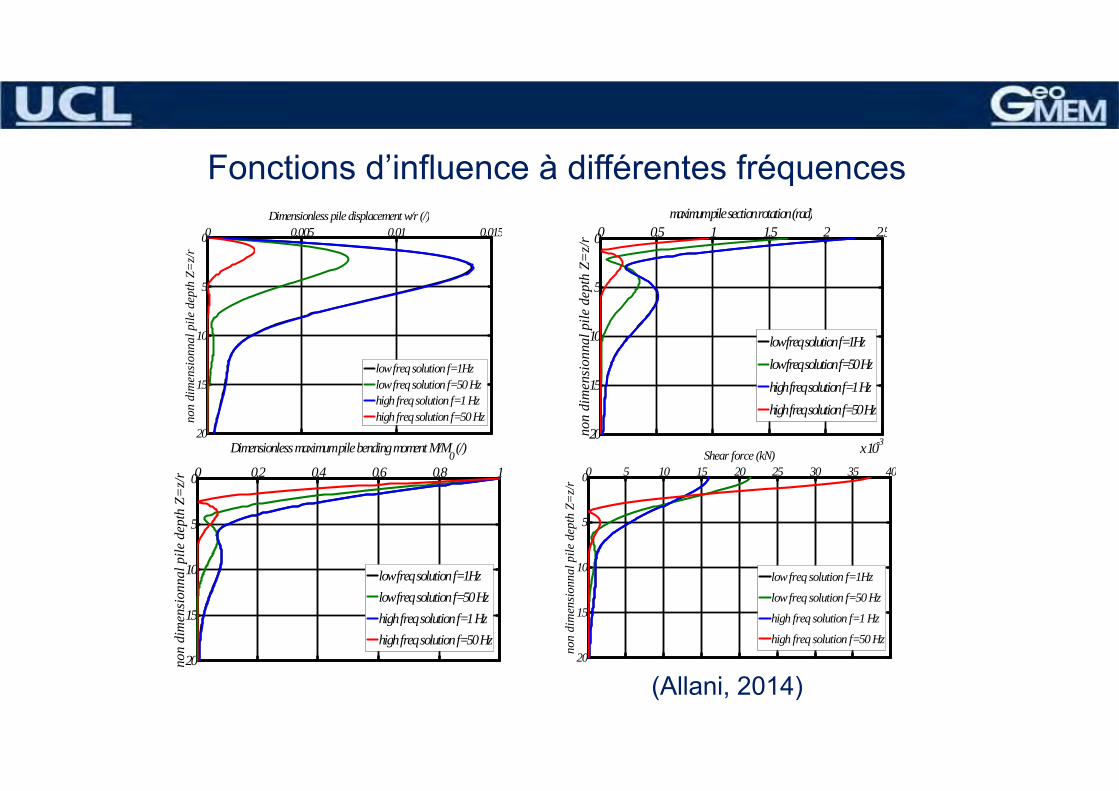
Dimensionless pile displacement w/r (/)
non
dim
ensi
onna
l pile
dep
th Z
=z/
r
low freq solution f=1Hzlow freq solution f=50 Hzhigh freq solution f=1 Hzhigh freq solution f=50 Hz
0 0.5 1 1.5 2 2.5
x 10-3
0
5
10
15
20
maximum pile section rotation (rad)
non
dim
ensi
onna
l pile
dep
th Z
=z/
r
low freq solution f=1Hzlow freq solution f=50 Hzhigh freq solution f=1 Hzhigh freq solution f=50 Hz
0 0.2 0.4 0.6 0.8 10
5
10
15
20
Dimensionless maximum pile bending moment M/M0 (/)
non
dim
ensi
onna
l pile
dep
th Z
=z/
r
low freq solution f=1Hzlow freq solution f=50 Hzhigh freq solution f=1 Hzhigh freq solution f=50 Hz
0 5 10 15 20 25 30 35 400
5
10
15
20
Shear force (kN)
non
dim
ensi
onna
l pile
dep
th Z
=z/
rlow freq solution f=1Hz
low freq solution f=50 Hz
high freq solution f=1 Hz
high freq solution f=50 Hz
Fonctions d’influence à différentes fréquences
k=10 MN/m/ml ; c=1 MN/m.s/ml; r=20cm; M=60kN.m(Allani, 2014)
44
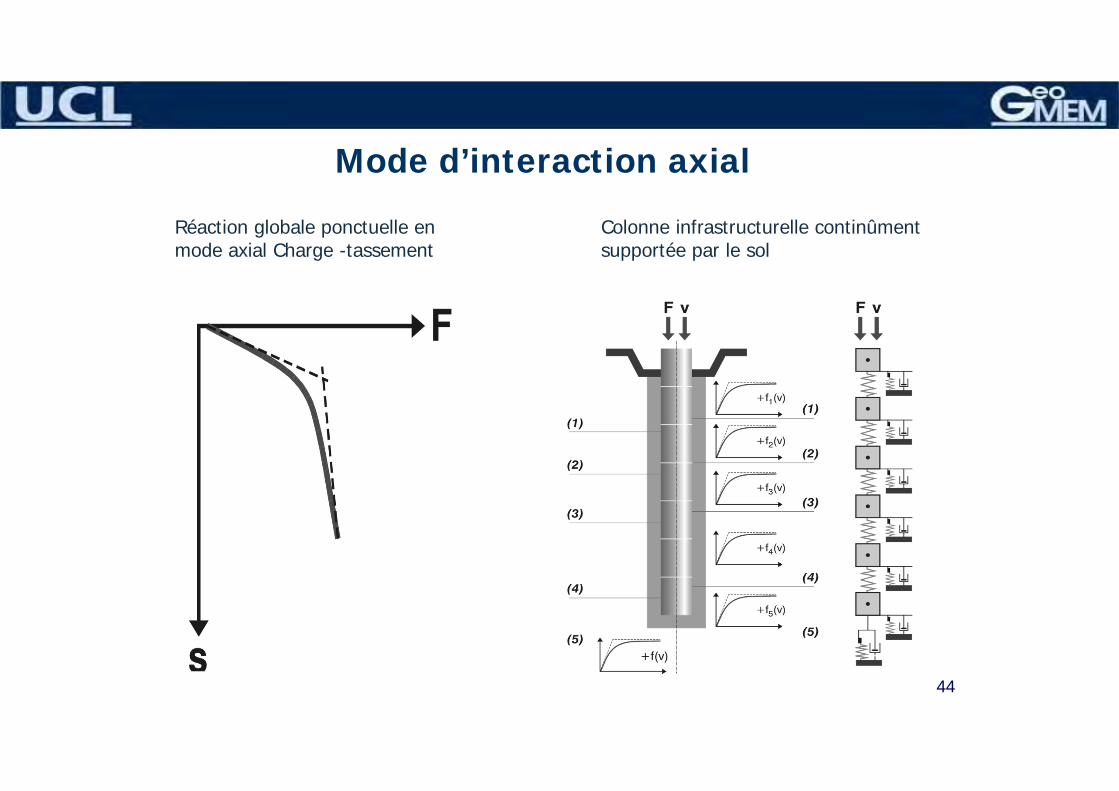
Réaction globale ponctuelle enmode axial Charge -tassement
Colonne infrastructurelle continûmentsupportée par le sol
Mode d’interaction axial
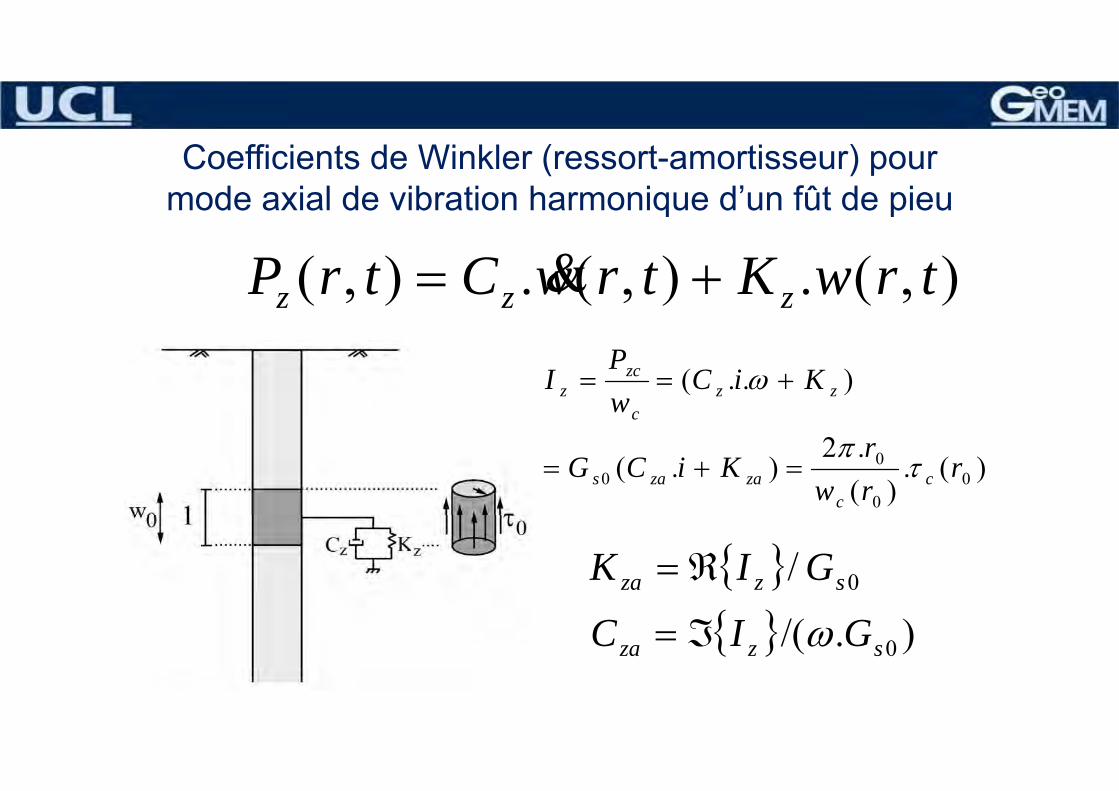
Coefficients de Winkler (ressort-amortisseur) pour mode axial de vibration harmonique d’un fût de pieu
),(.),(.),( trwKtrwCtrP zzz
)(.)(
.2).(
)..(
00
00 r
rwr
KiCG
KiCwP
I
cc
zazas
zzc
zcz
0/ szza GIK
)./( 0szza GIC
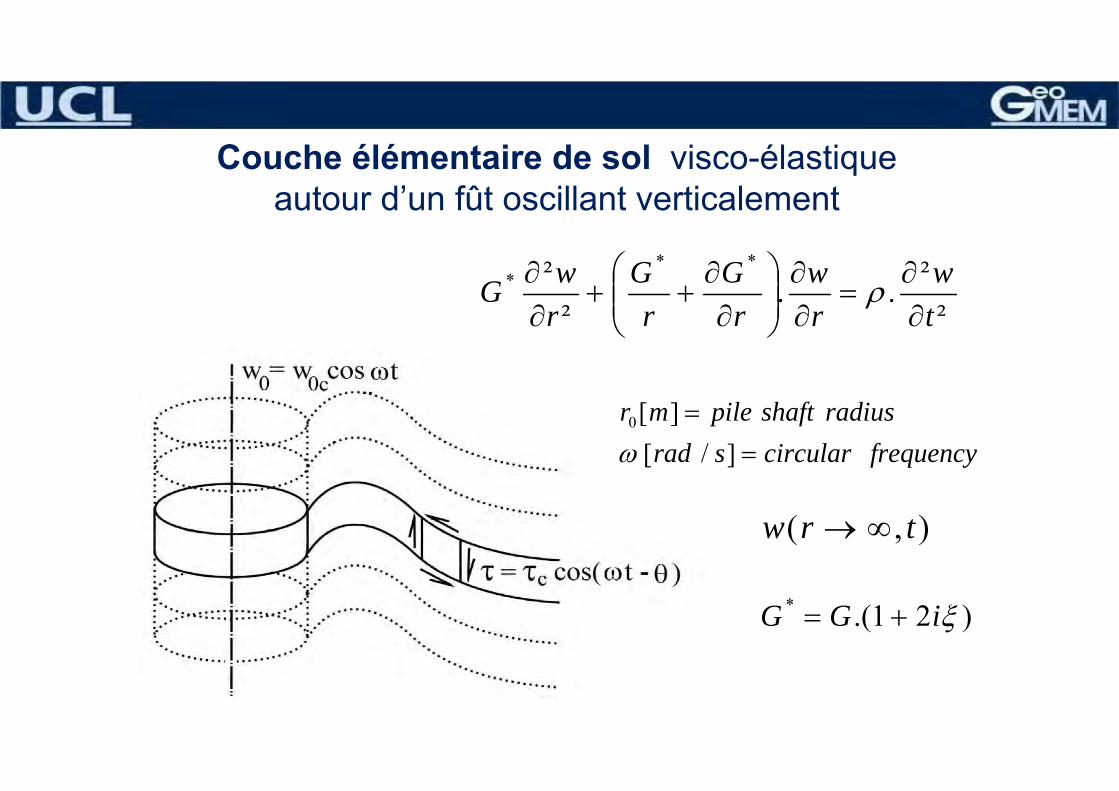
Couche élémentaire de sol visco-élastiqueautour d’un fût oscillant verticalement
²²..
²² **
*
tw
rw
rG
rG
rwG
)21.(* iGG
frequencycircularsradradiusshaftpilemr
]/[ ][0
),( trw
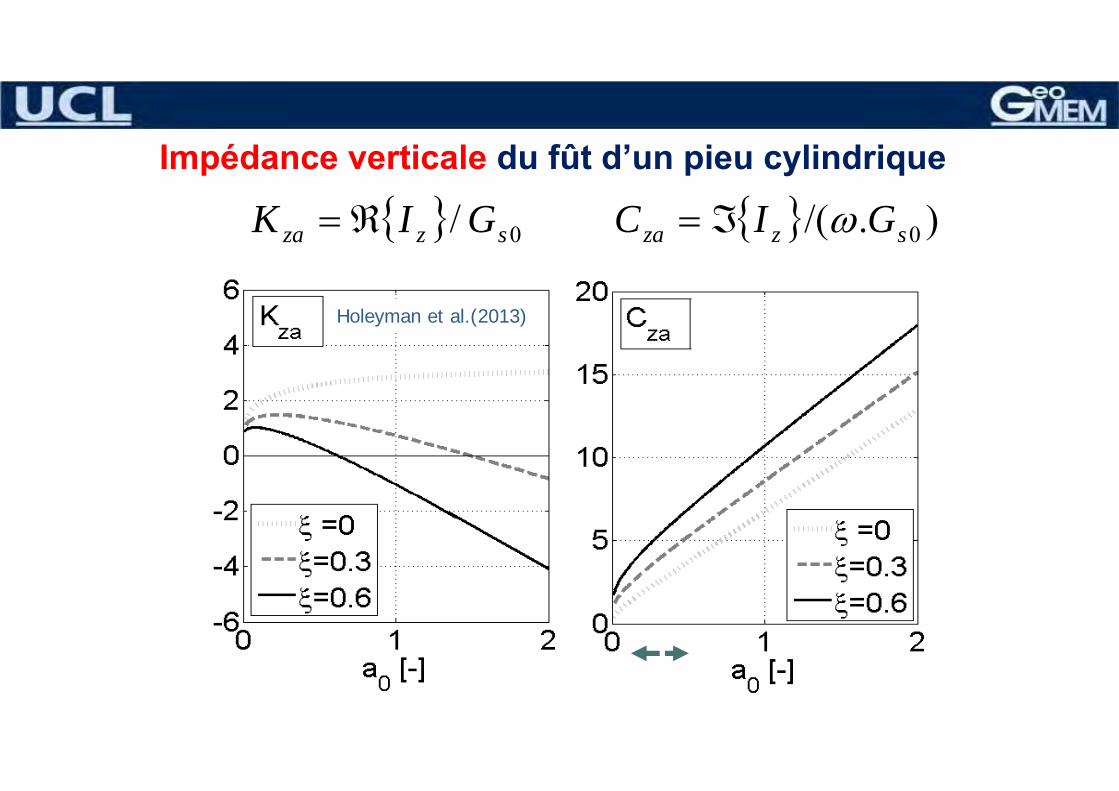
Impédance verticale du fût d’un pieu cylindrique
0/ szza GIK )./( 0szza GIC
Holeyman et al.(2013)
49
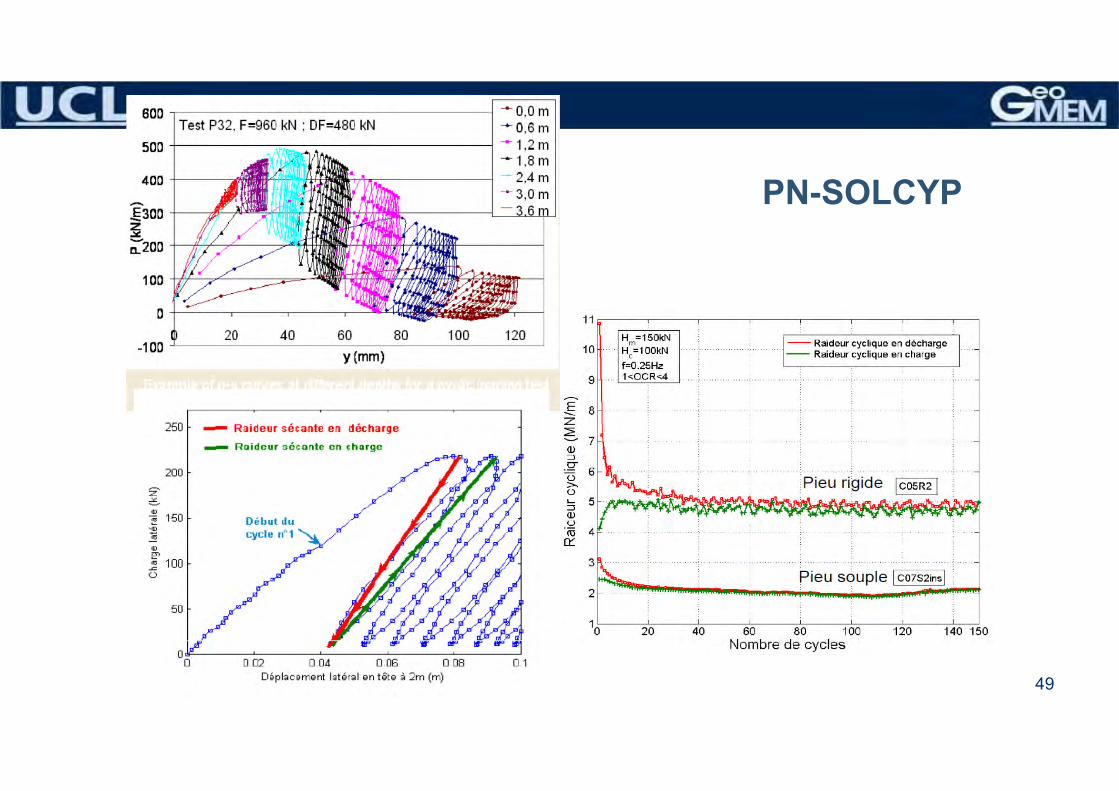
PN-SOLCYP
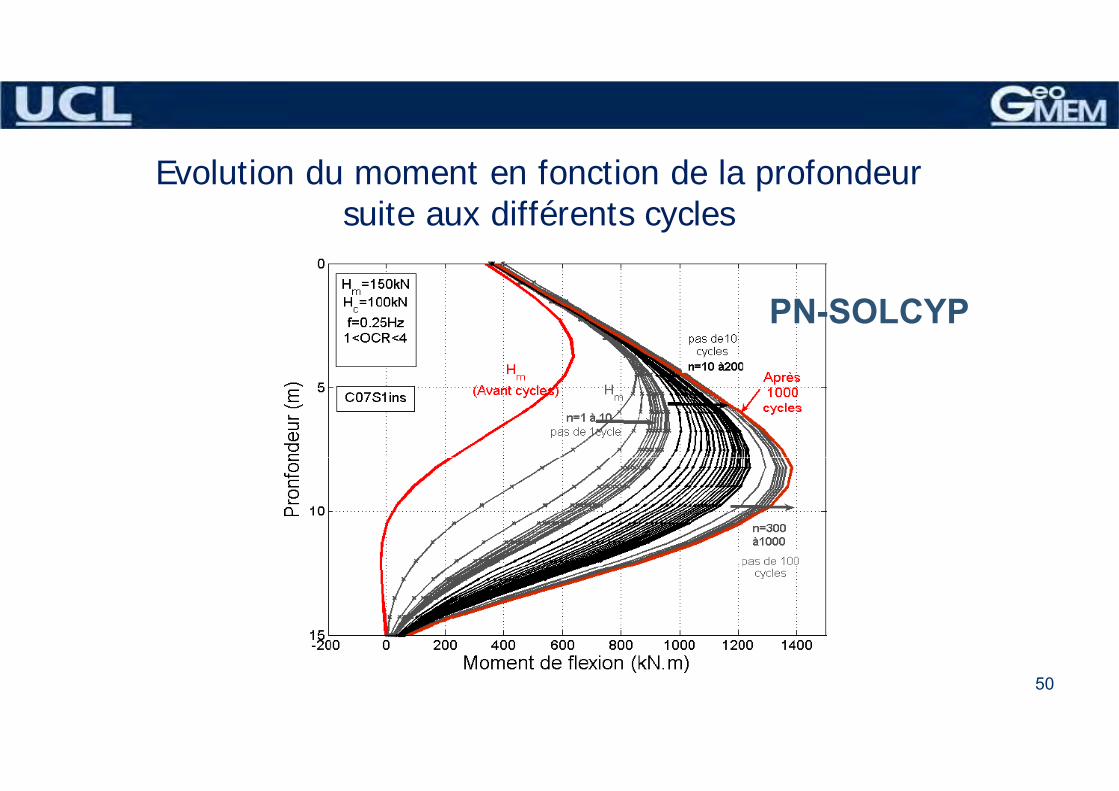
Evolution du moment en fonction de la profondeur suite aux différents cycles
50
PN-SOLCYP
51
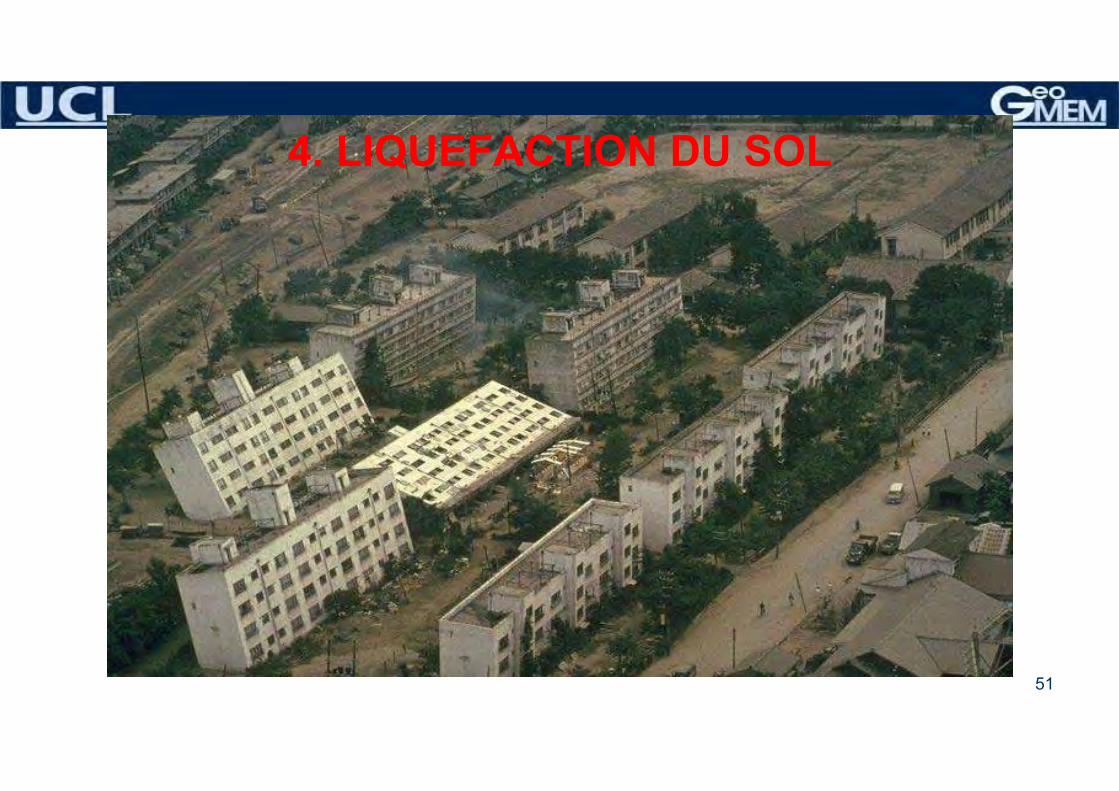
4. LIQUEFACTION DU SOL

52
Mécanisme de liquéfaction
sous cisaillement
cyclique
53
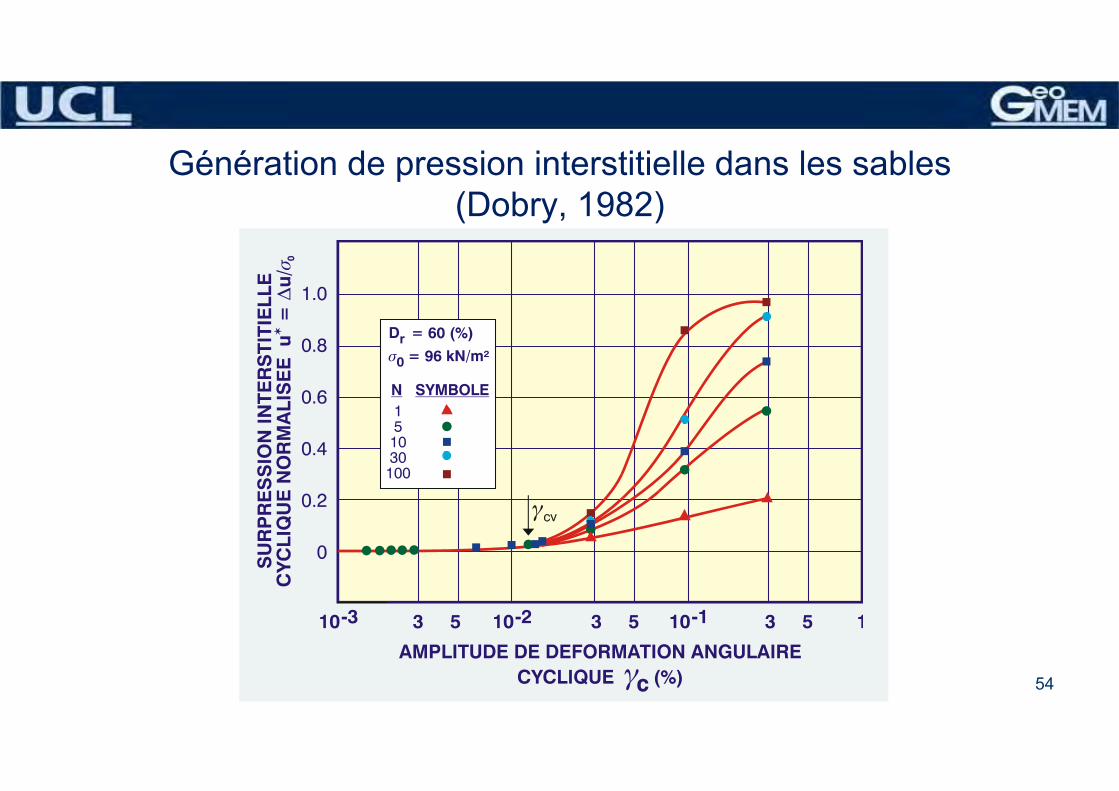
Génération de pression interstitielle dans les sables (Dobry, 1982)
54
55
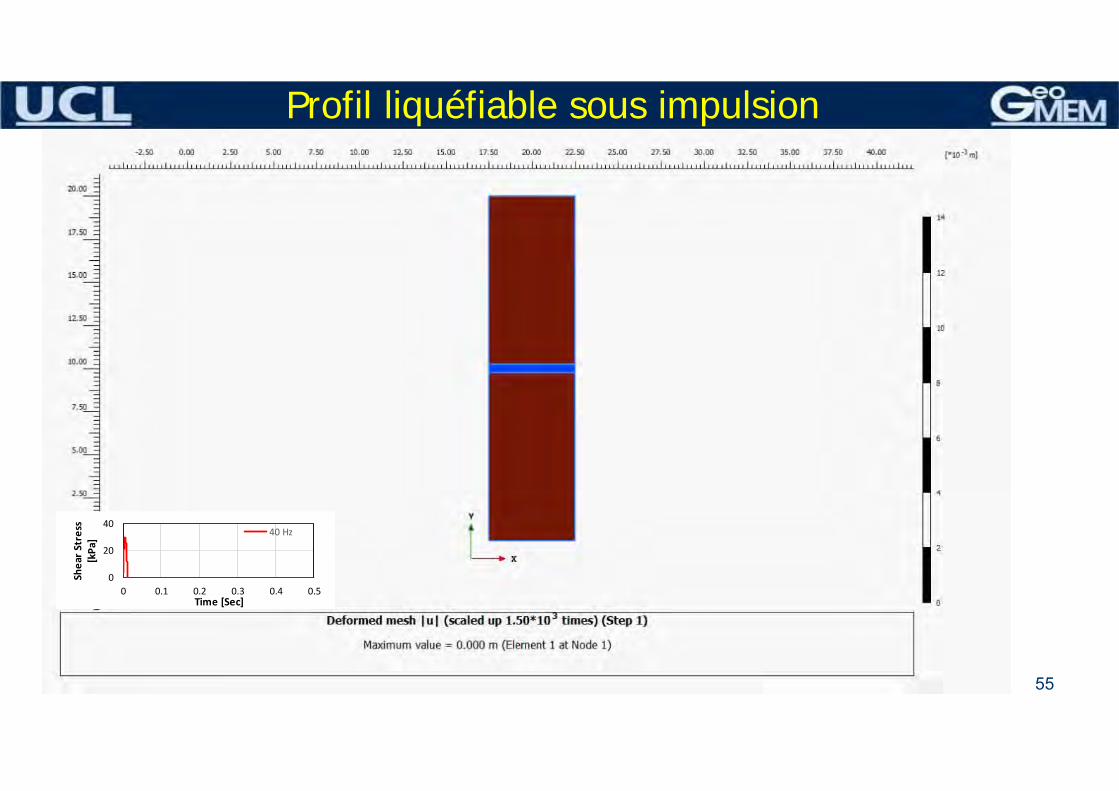
Profil liquéfiable sous impulsion
0
20
40
0 0.1 0.2 0.3 0.4 0.5
Shear S
tress
[kPa]
Time [Sec]
40 Hz
Estimation de la liquéfaction initiale- Sur base d’essais de laboratoire- Sur base d’essais in situ (SPT, …)
Evaluation des tassements subséquents
Liquéfaction d’écoulement?
Evaluation pratique de la liquéfaction
56
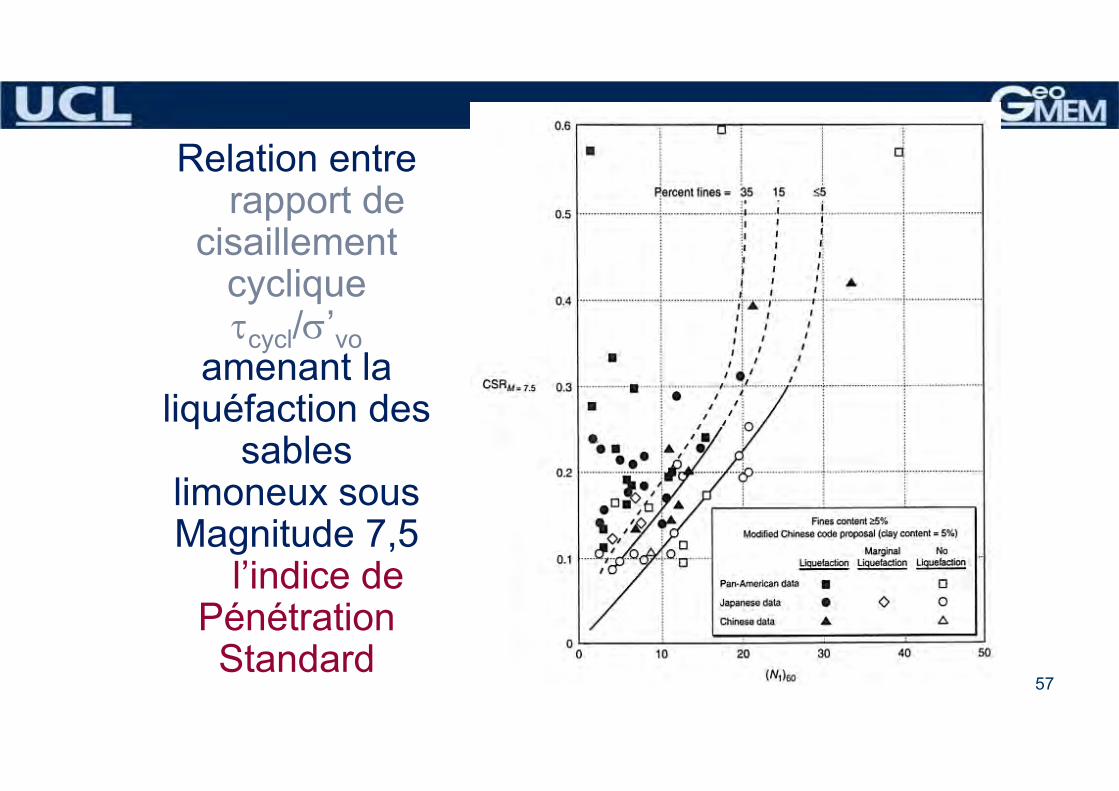
Relation entre le rapport de cisaillement
cycliquecycl/’vo
amenant la liquéfaction des
sables limoneux sousMagnitude 7,5 et l’indice de PénétrationStandard
57
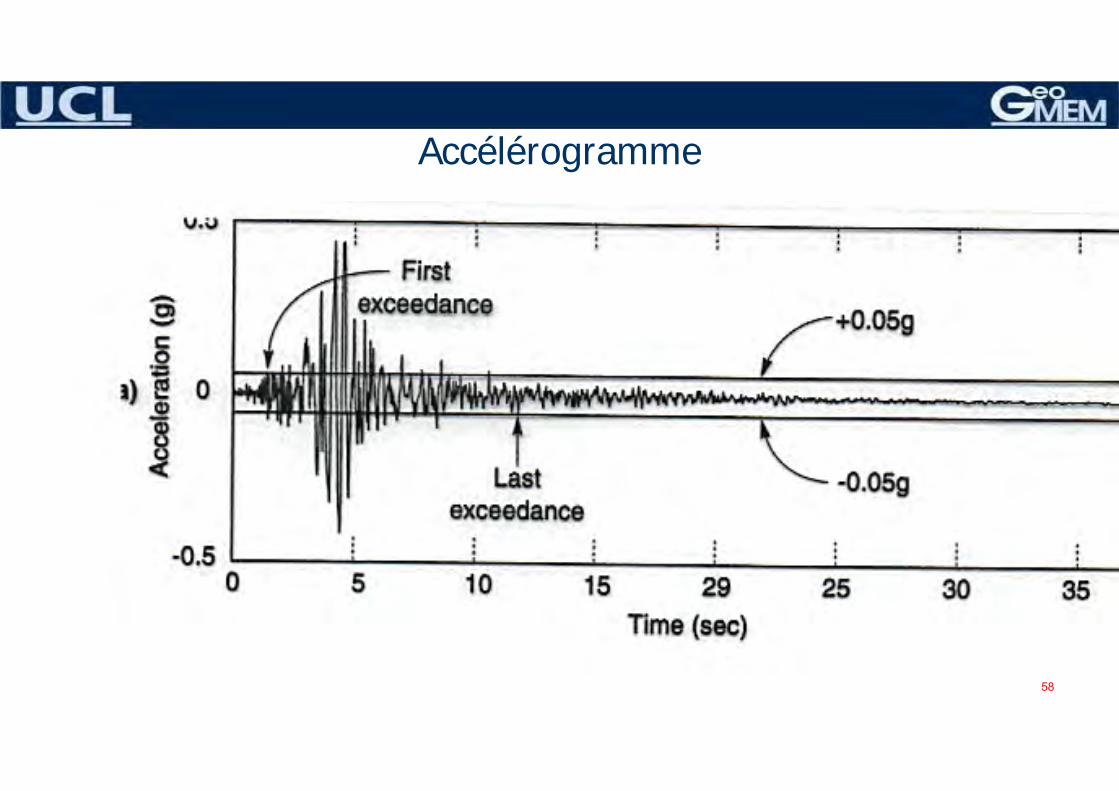
58
Accélérogramme
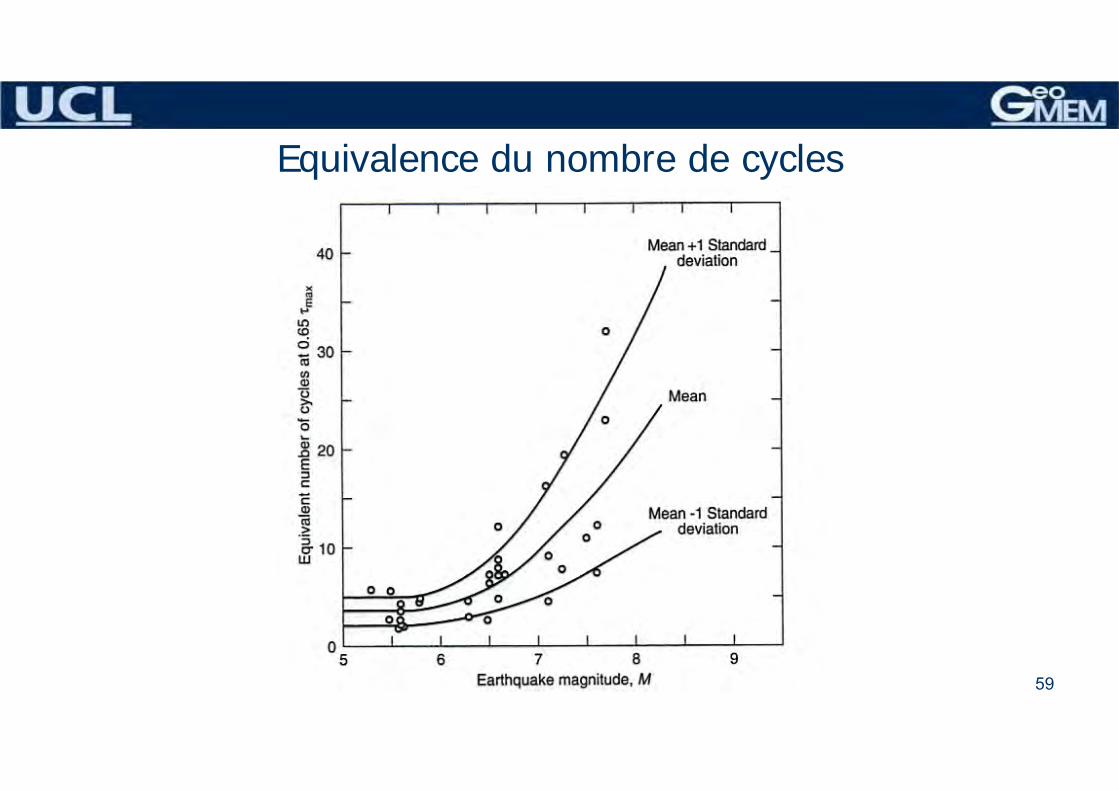
Equivalence du nombre de cycles
59
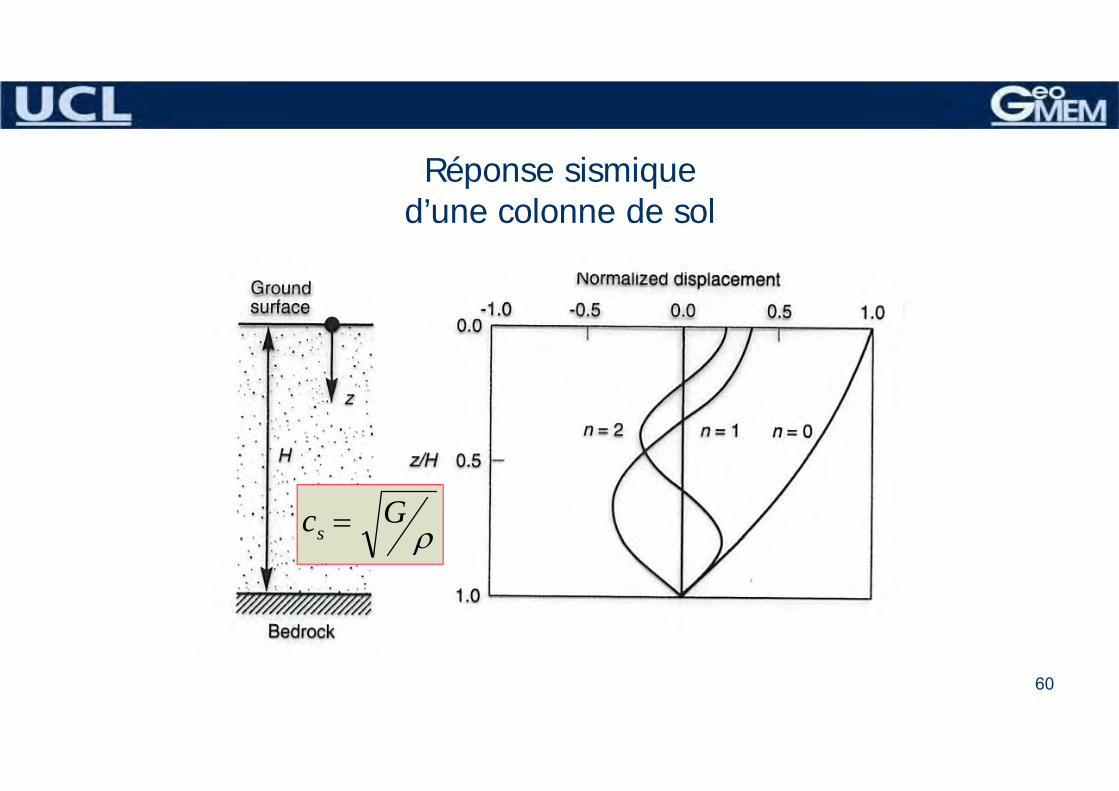
Réponse sismiqued’une colonne de sol
Gcs
60
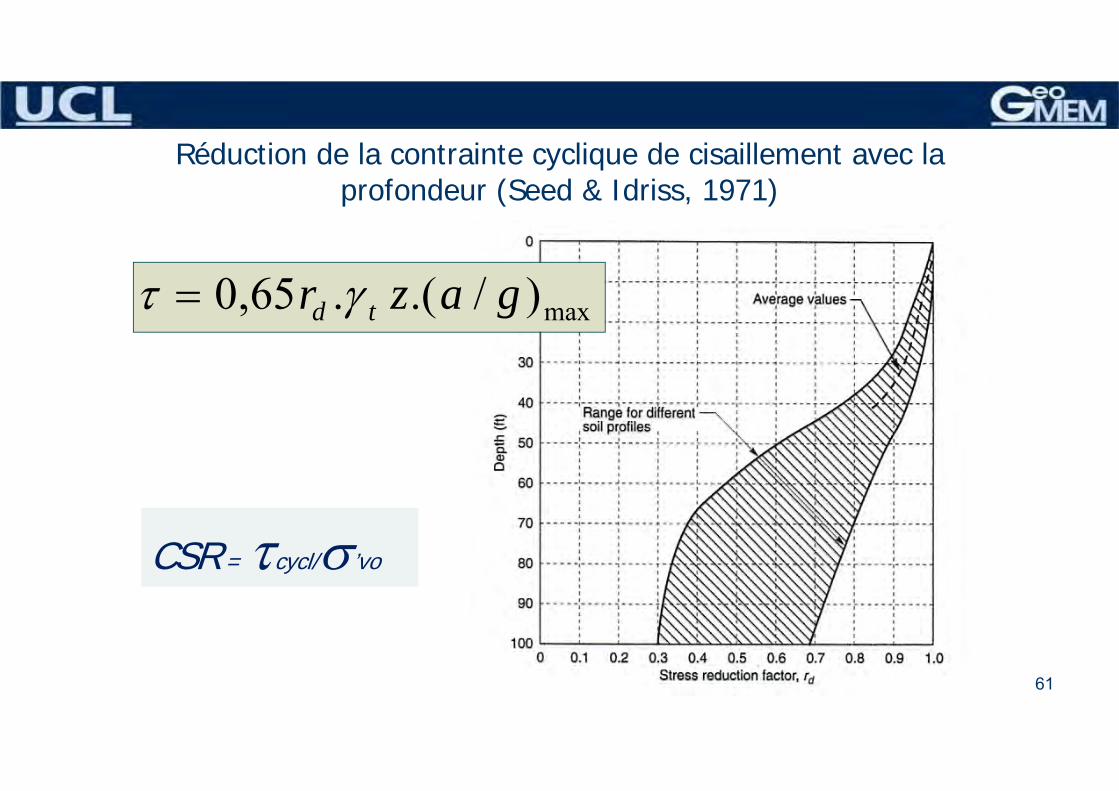
Réduction de la contrainte cyclique de cisaillement avec la profondeur (Seed & Idriss, 1971)
CSR = cycl/’vo
max)/.(.65,0 gazr td
61
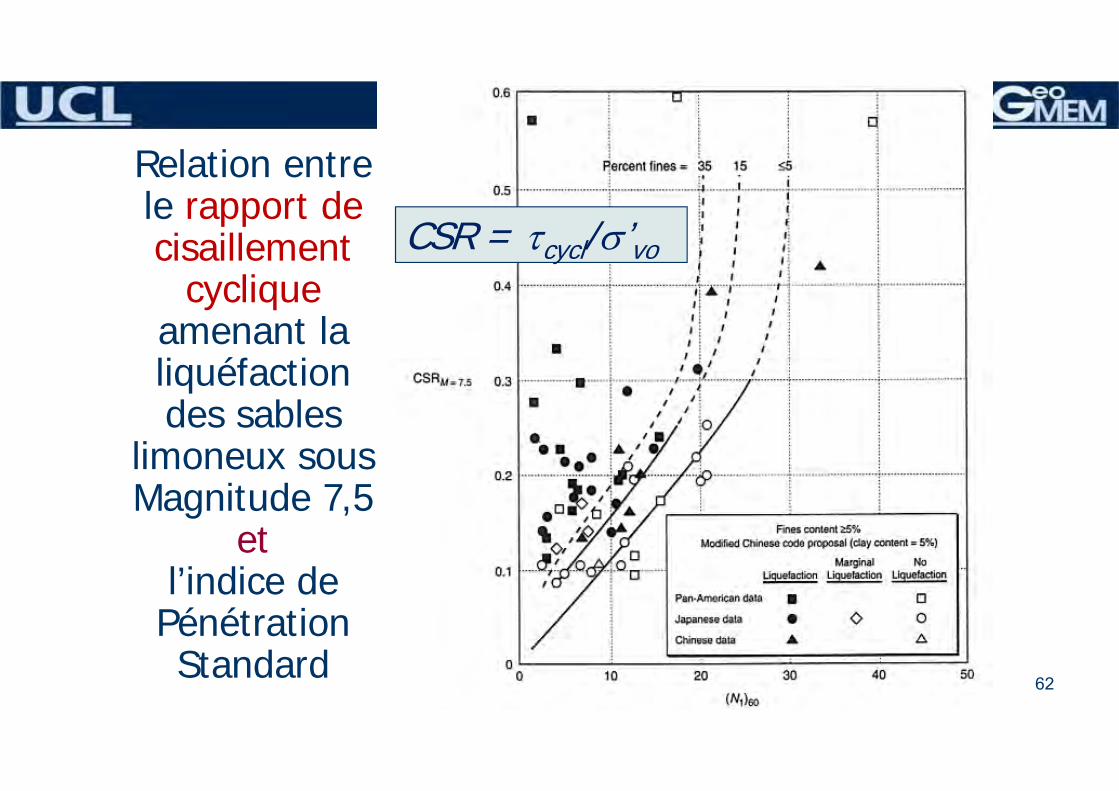
CSR = cycl/’vo
62
Relation entrele rapport de cisaillement
cycliqueamenant la liquéfactiondes sables
limoneux sous Magnitude 7,5
etl’indice de PénétrationStandard
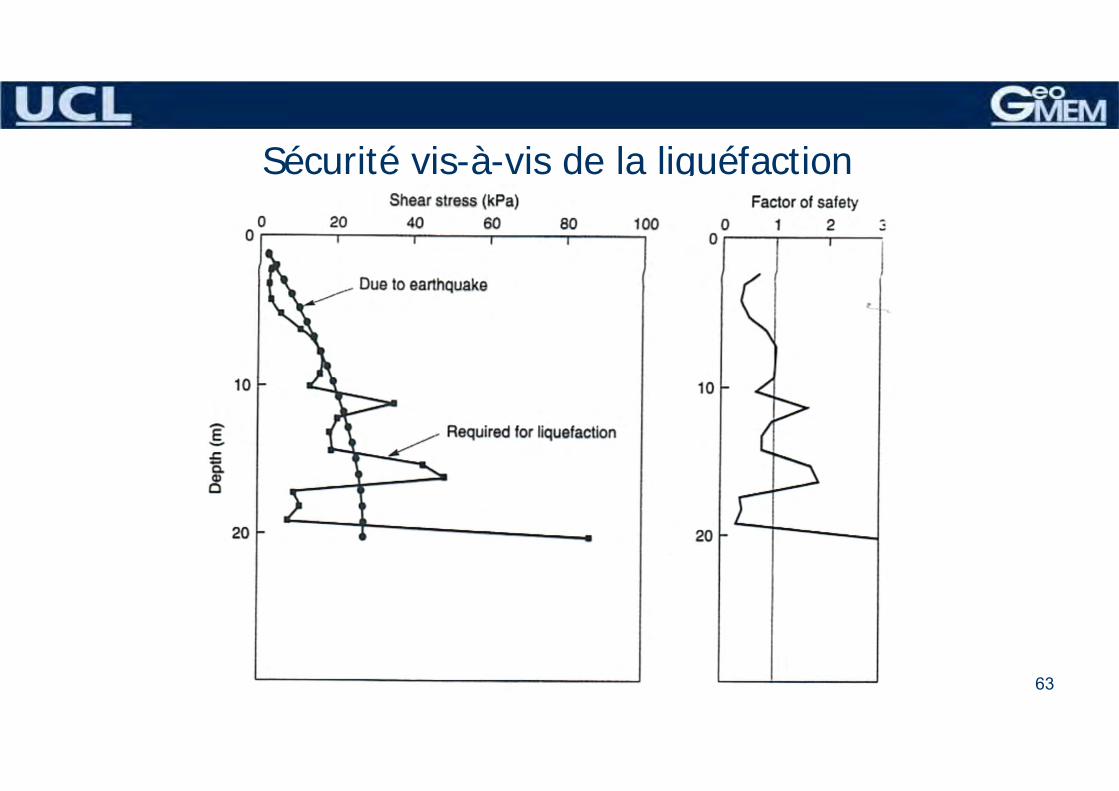
Sécurité vis-à-vis de la liquéfaction
63
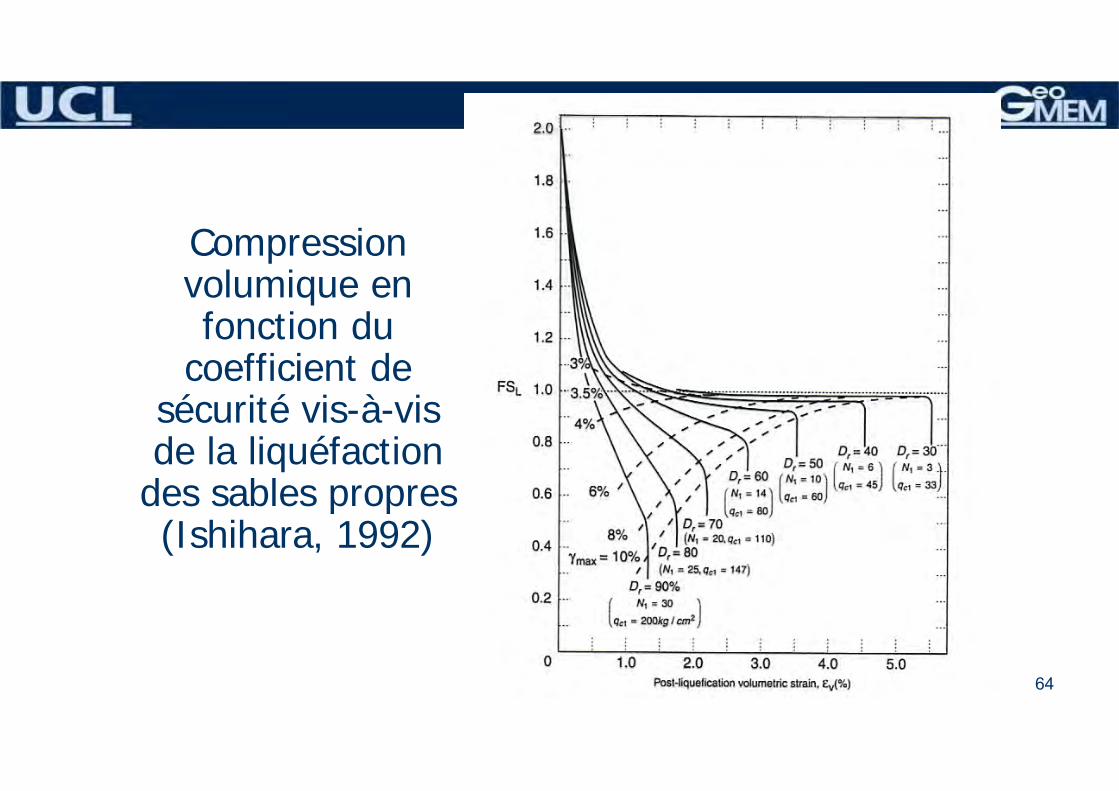
Compression volumique enfonction du
coefficient de sécurité vis-à-vis de la liquéfaction
des sables propres(Ishihara, 1992)
64
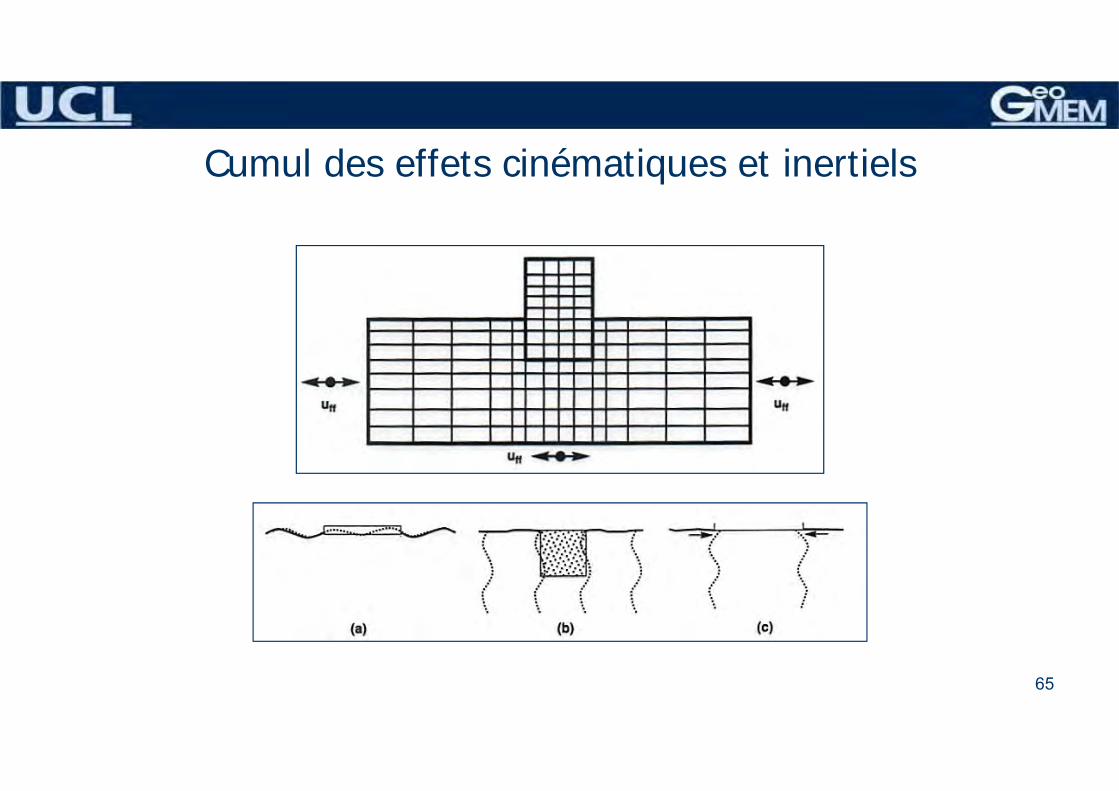
Cumul des effets cinématiques et inertiels
65
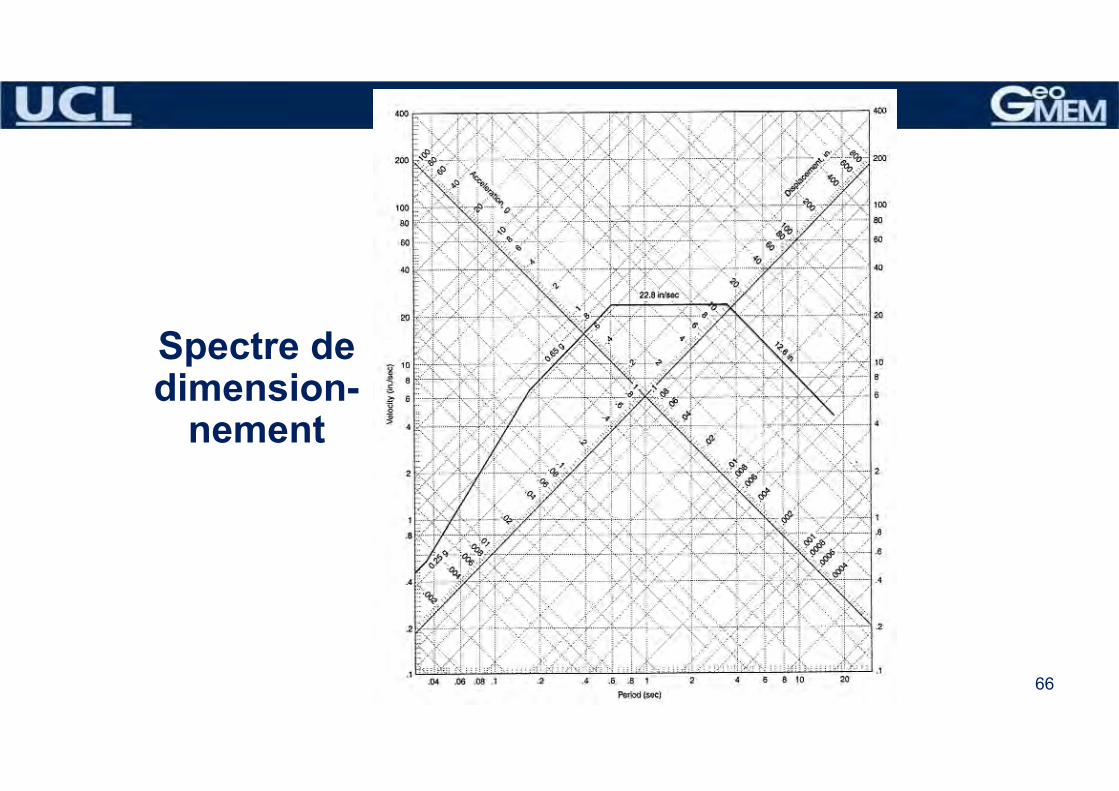
Spectre de dimension-
nement
66
• L’interaction cinématique sol-pieux devient significative dans sols mous et sous accélération modérée
• L’interaction inertielle sollicite les composantes de réaction latérale et axiale des pieux en phase avec (a) le déplacement (b) la vitesse
• Dégradation du module et augmentation de l’amortissement intrinsèque du sol sous distorsions cycliques croissantes
• Plusieurs degrés de modélisation des systèmes sol-pieux-superstructure
• Impédances horizontales et verticales des pieux disponibles
• Combinaison des effets
5. Conclusions
67


















