COMMANDE D’UN HELICOPTERE A QUATRE ROTORS
161
ECOLE NATIONALE D’INGENIEURS DE TARBES PROJET DE FIN D’ETUDES 2003 Projet N° 1-115-03 Titre : Par : DIAZ Frédérick Responsable du stage : Professeur Nacer K. M’Sirdi Année Universitaire 2002-2003 COMMANDE D’UN HELICOPTERE A QUATRE ROTORS
Transcript of COMMANDE D’UN HELICOPTERE A QUATRE ROTORS

ECOLE NATIONALE D’INGENIEURS DE
TARBES
PROJET DE FIN D’ETUDES 2003
Projet N° 1-115-03
Titre :
Par :
DIAZ Frédérick
Responsable du stage :
Professeur Nacer K. M’Sirdi
Année Universitaire 2002-2003
COMMANDE D’UN HELICOPTERE
A QUATRE ROTORS

Les engins aériens miniatures et autonomes suscitent un intérêt croissant dans les milieux civils et militaires. Les champs d’application sont très vastes. C’est la raison pour laquelle on étudie les lois de commande sur un hélicoptère à quatre rotors. Au cours de ce travail, on effectue une comparaison parmi trois types de lois de commande afin de pouvoir établir une analyse critique concernant la robustesse, le nombre de capteurs à employer pour la mise en place de lois de commande et la facilité d’implantation de chaque commande. Les trois types de lois de commande abordées sont la linéarisation exacte, la rétro-itération et la commande exploitant la passivité du système. Enfin, afin de pouvoir minimiser le nombre de capteurs à utiliser pour la synthèse de la commande, on va également s’intéresser à la mise en place d’observateurs, c’est-à-dire les observateurs à modes glissants et les observateurs à rétro-itération. The miniature and autonomous air machines arouse an interest growing in the civil and military mediums. The fields of application are very vast. This is why one studies the laws of control on a helicopter with four rotors. During this work, one carries out a comparison among three types of laws of control in order to be able to establish a critical analysis concerning the robustness, the number of sensors to be used for the installation of laws of control and the facility of establishment of each control. The three types of laws of control approached are the exact linearization, the backstepping and the control exploiting the passivity of the system. Lastly, in order to be able to minimize the number of sensors to be used for the synthesis of the control, one also will be interested in the installation of observers, i.e. the observers with sliding modes and the observers with backstepping.

REMERCIEMENTS
Je tiens à témoigner toute mon estime et ma gratitude à M. N. K. M’SIRDI, professeur à l’université de Versailles Saint-Quentin, pour m’avoir accueilli au LRV et pour son encadrement tout au long de ce stage. Je tiens également à souligner sa grande disponibilité et ses qualités humaines qui m’ont réellement touché.
Un immense remerciement également à M. MEDERREG, étudiant en thèse, pour son
soutien continuel et ses conseils avisés sur la commande par rétro-itération. Je lui adresse toute ma sympathie.
Je remercie Mlle KRAMDI et M. LETOURNEUR, les deux stagiaires qui ont
partagé avec moi mes difficultés et mes satisfactions rencontrées au cours de ce stage. Je remercie aussi vivement Mlle KRAIEF et M. RABHI, étudiants en thèse, pour
leur soutien moral et leur gentillesse. Toute ma reconnaissance à M. ROTELLA, professeur à l’Ecole Nationale
d’Ingénieurs de Tarbes pour m’avoir autorisé à effectuer ce stage et pour la formation qu’il m’a apportée.
Enfin, je tiens à témoigner de manière plus personnelle, toute mon affection et mes
remerciements à Myriam, mon amie, qui, depuis plus de deux années, est à mes côtés et qui me soutient continuellement dans toutes mes activités.

Sommaire
Rapport de PFE i
SOMMAIRE
PRESENTATION DU LRV................................................................................................................................. 1
INTRODUCTION................................................................................................................................................. 3
CHAPITRE 1
ETUDE SUR LE BANC D'ESSAIS DU LRV..................................................................................................... 6
1. OBJECTIF DU TRAVAIL............................................................................................................................... 6 2. MODELISATION DU BANC D'ESSAIS ....................................................................................................... 6 3. COMMANDE DU SYSTEME PAR BOUCLAGE INTERNE ..................................................................... 9 4. COMMANDE DU SYSTEME PAR RETRO-ITERATION...................................................................... 11 5. COMMANDE PAR RETRO-ITERATION AVEC OBSERVATEURS NON LINEAIRES .................. 12 6. BILAN GENERAL ......................................................................................................................................... 16
CHAPITRE 2
ETUDE SUR L'HELICOPTERE A QUATRE ROTORS DU LRV .............................................................. 17
1. INTRODUCTION........................................................................................................................................... 17 2. MODELISATION DE L'HELICOPTERE A QUATRE ROTORS........................................................... 17 3. COMMANDE DE L'HELICOPTERE PAR LINEARISATION EXACTE.............................................. 20 4. COMMANDE DE L'HELICOPTERE PAR RETRO-ITERATION ......................................................... 23 5. ETUDE COMPARATIVE ENTRE LES DEUX COMMANDES UTILISEES ........................................ 25 6. SYNTHESE D'UNE COMMANDE PAR RETRO-ITERATION AVEC OBSERVATEURS .............. 25 7. BILAN GENERAL ......................................................................................................................................... 28
CHAPITRE 3
ETUDE SUR L'HELICOPTERE A QUATRE ROTORS DU GRASP LAB ................................................ 30
1. MOTIVATIONS DE L'ETUDE .................................................................................................................... 30 2. MODELISATION DE L'HELICOPTERE A QUATRE ROTORS........................................................... 30 3. COMMANDE/OBSERVATEUR PAR RETRO-ITERATION ................................................................. 32 4. COMMANDE BASEE SUR LA PASSIVITE DU SYSTEME.................................................................... 34 5. NOUVELLE MODELISATION DE L'HELICOPTERE ........................................................................... 40 6. BILAN GENERAL ......................................................................................................................................... 41
CONCLUSION.................................................................................................................................................... 42
ANNEXES ........................................................................................................................................................... 44
REFERENCES BIBLIOGRAPHIQUES ........................................................................................................129

Introduction
Rapport de PFE 3
Introduction
Les engins aériens miniatures et autonomes, suscitent un intérêt croissant dans les milieux
civils et militaires. Les champs d’application de ces appareils sont vastes. On peut citer entre
autres les missions de recherche, de surveillance, d’inspection, d’auscultation d’ouvrages d’arts et
de cartographie aérienne ainsi que les missions à caractère écologique [18][19]. Les hélicoptères
miniatures sont particulièrement appropriés pour ce type d’applications, ils sont très maniables,
capables de faire du vol stationnaire et peuvent décoller ou atterrir verticalement.
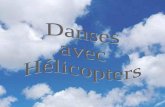
Figure 1 : Hélicoptère à quatre rotors du LRV
L’engin montré sur la figure 1 représente un hélicoptère à quatre rotors. La configuration
de cet hélicoptère parait particulièrement intéressante pour certaines applications, où la stabilité,
la fiabilité, la sécurité des personnes et des biens ainsi que la facilité d’utilisation et de
maintenance sont primordiales. En effet, cet hélicoptère, ne disposant pas de tête de rotor, est
mécaniquement très simple. Il a également une faible prise au vent ce qui accroît sa stabilité en
environnement perturbé. Il se caractérise aussi par une capacité d’emport qui permet de
transporter des capteurs supplémentaires.

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 29
l’on cherche à poursuivre avec la commande par rétro-itération, pour la mise en place d’observateurs. Concernant la synthèse de la commande à partir d’observateurs, on a rencontré quelques difficultés. Ces problèmes sont liés à la « forme » du système pour laquelle il est difficile d’établir une procédure permettant d’élaborer une commande efficace avec états observés. Malgré de nombreuses tentatives de transformation du système (« forme » triangulaire ou modèle à injection de sortie), on a dû abandonner les recherches. Le problème reste donc en suspens à partir de ce modèle.
A cause des problèmes engendrés par la « forme » de ce système, on va donc chercher un nouveau modèle pour lequel il serait possible d’établir une commande par rétro-itération avec synthèse d’observateurs afin de diminuer le nombre de capteurs à employer. D’autre part, on va essayer également d’établir une commande exploitant la passivité du système dans le but d’obtenir une commande robuste mais moins « lourde » en calculs que la commande par rétro-itération.

Introduction
Rapport de PFE 4
Cependant, la complexité de pilotage des hélicoptères, le manque de visibilité, les
conditions climatiques défavorables et l’interaction mal connue avec l'environnement ne
permettent pas raisonnablement d'envisager leur pilotage autrement que par un opérateur humain
expérimenté, dans le but d'accomplir une tâche de haut niveau. Il est nécessaire de concevoir des
systèmes de pilotage automatique capables de suivre des trajectoires prédéfinies même en
présence de vent et de turbulences. C’est la raison pour laquelle de nombreuses études ont porté
sur l’élaboration de lois de commandes pour les hélicoptères ([1][16][14][15]).
L’hélicoptère à quatre rotors a été modélisé [1][4] et une commande de type linéarisation
entrées–sorties a été développée. Cette dernière nécessite un modèle précis de la dynamique du
système, c’est-à-dire qu’il faut connaître avec exactitude la « forme » du modèle et commettre
peu d’erreur sur l’estimation des paramètres. Ces conditions ne sont pas réunies en pratique.
D’autres approches de commande de type non linéaire doivent donc être développées. Parmi ces
approches, les techniques basées sur la Rétro-itération∗ et la passivité du système paraissent
particulièrement intéressantes [4].
L’autre problème à résoudre est celui de l’implémentation d’observateurs pour la synthèse
de lois de commandes non linéaires. En effet, l’élaboration d’une loi de commande faisant appel
à des observateurs est confrontée au problème de la non validité du principe de séparation, c’est-
à-dire que l’on ne peut traiter en deux parties distinctes la commande et l’observateur. On doit
donc étudier le moyen de détourner le principe de séparation puisqu’en pratique, on n’est pas
forcément en possession de tous les capteurs nécessaires à l’élaboration de la commande soit
pour des raisons financières, soit tout simplement parce que certains capteurs n’existent pas sur le
marché.
Ce rapport a pour principal objectif de dresser une comparaison parmi trois types de loi de
commandes et ainsi d’établir une analyse critique concernant la robustesse et la faisabilité
d’implémentation ultérieurement. Pour cela, le travail est effectué sur deux systèmes, le banc
d’essais du LRV(dont l’intérêt est étroitement lié à celui de l’hélicoptère) permettant d’effectuer
une pré-étude sur les lois de commandes, et enfin l’hélicoptère à quatre rotors.
∗ Rétro-itération : Backstepping

Introduction
Rapport de PFE 5
Dans une première partie, on va évaluer les performances de deux types de commandes (
la commande par bouclage interne et la commande par rétro-itération) et essayer de les
départager. On va également étudier l’efficacité d’un observateur à modes glissants appliqué sur
une commande par rétro-itération. Dans une seconde partie, on va réétudier les commandes
précédentes mais appliquées sur l’hélicoptère à quatre rotors. On va de nouveau tenter de tirer des
conclusions. Enfin, dans une dernière partie, on va réaliser une synthèse observateur / commande
performante (commande / observateur à rétro-itération) sur un autre modèle permettant une telle
stratégie. On va également essayer de réduire la complexité des calculs de la commande par
rétro-itération en cherchant à mettre au point une commande robuste basée sur la passivité du
système.

Présentation du LRV
Rapport de PFE 1
Présentation du LRV
Contexte: Le LRV a été créé le 1er janvier 2002 à l' Université de Versailles- Saint Quentin en Yvelines (Equipe d'Accueil de l'UVSQ), à la suite de la restructuration du LRP dont il émane pour l'essentiel de ses membres. Ses activités sont centrées principalement sur les Systèmes de Locomotion Articulée, la Réalité Virtuelle et Vision (SLA) et les systèmes de Transport Routes et Véhicules Intelligents (TRVI). Elles concernent soit l'interaction homme - système soit l'interaction système - environnement. Les thèmes Locomotion et Réalité Virtuelle correspondent à une restructuration des points forts qui existaient dans le groupe.
Objectifs: Maîtrise du comportement de systèmes robotisés et complexes. Le succès dans ce domaine passe par la présence de compétences complémentaires particulièrement dans les problèmes d'interaction homme-machine, d'interaction machine-environnement et de la maîtrise des systèmes complexes. Les Axes de recherche fondamentaux et de compétences sont les suivants : modélisation, identification, analyse et simulation de processus complexes, observation et commande non linéaires robustes et adaptatives, définition et planification de trajectoires avec optimisation du comportement, gestion et contrôle de l'interaction avec l'environnement, contrôle énergétique, vision, traitement des images et information capteurs pour la localisation et la commande par télé-opération, retour haptique et Réalité Virtuelle. Une partie importante des travaux se déroule dans un cadre contractuel: projets nationaux ou internationaux et projets industriels.
Structure: Le LRV se caractérise par le croisement de deux pôles (Conception Optimisation Electromécanique et Contrôle - Commande) avec 2 Thèmes d’application (SLA et TRVI). Ces deux grands sujets de recherche génèrent les deux équipes de recherche qui constituent le LRV.

Présentation du LRV
Rapport de PFE 2
Equipe 1 . Systèmes de Locomotion Articulée :
La locomotion articulée (SLA) a comme thèmes : la conception et le contrôle réflexe de robots marcheurs ou rampants. (robot-serpent, robot-oiseau, hexapode, quadrupède, bipède humanoïde), la prise d'information temps réel sur l'environnement du robot marcheur via des systèmes de vision, la commande/ contrôle de robots via des interfaces homme-robot s'appuyant sur les techniques de réalité virtuelle. Les travaux de l'équipe SLA s'articulent en 3 axes: l'étude des modes de locomotion, autour de modèles biologiques, serpents et oiseaux, en étroite relation avec le Muséum National d'Histoires Naturelles (ROBEA RoboCoq), la proposition de méthodologie de commande de robots à pattes à allures dynamiques, dans le cadre du GdR automatique et de projets ROBEA, l'étude de systèmes de locomotions appliquée, depuis 1998 sur les prototypes SONY et la conception de robots originaux (hexapodes et grimpeurs). L'équipe SLA utilise ses compétences en Réalité Virtuelle et vision pour la conception des robots et leur contrôle de façon autonome ou télé-opérée.
Equipe 2 . La Robotique de Transport :
Le thème TRVI entre dans le cadre de la politique scientifique que souhaite développer l'UVSQ dans le domaine des applications au transport et aux véhicules routiers. Il représente un soutien scientifique au projet de développement d'une plate-forme technologique et de recherche scientifique en association avec les constructeurs et équipementiers automobiles. Le programme de recherche novateur de l'équipe TRVI a pour thèmes : la dynamique des véhicules et le contrôle des interactions véhicule / environnement, le développement d'estimateurs embarqués et l'amélioration de la sécurité routière.
Coopérations et Contrats de recherches en cours (2001-2003) Thème Transports RTVI: LCPC, ARCOS2004, CETE-SEMR-EUROVIA , Valéo, Dassault DDS, ... Thème Locomotion SLA: 2 ROBEA, SONY, CLAWAR, EURON Thème Réalité Virtuelle, Vision et Téléopération: PERF-RV, EMM3D, CLEOPATRE, ...
L'effectif du LRV tourne autour d'une quarantaine de personnes dont une quinzaine de chercheurs statutaires et 5 ingénieurs, techniciens et administratifs (ITA) permanents. Les autres participants se composent de chercheurs au statut différent, de stagiaires, de chercheurs visiteurs et d'étudiants en thèse de doctorat.
6 Professeurs et directeurs de recherches
9 Maîtres de conférences ou équivalent
4 Docteurs- Post Doctorants
10 Doctorants
4 Administratifs et IATOS

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 6
CHAPITRE 1
Etude sur le banc d’essais du LRV
1 . OBJECTIF DU TRAVAIL
Cette étude est motivée par son lien direct avec l’hélicoptère à quatre rotors. En effet, les vitesses des quatre moteurs de l’hélicoptère peuvent être commandées indépendamment. De ce fait, il est intéressant d’étudier le banc d’essais dont la structure est composée d’une tige articulée autour d’un axe, d’un seul moteur et d’une seule hélice, puisque cela permet de trouver une relation entre la tension du moteur (commande du système) et la force de poussée de l’hélice. L’hélicoptère étant commandé par les forces de poussée (cf chapitre 2) , on pourra ainsi par la suite essayer de le commander avec les quatre tensions des moteurs (à partir du travail effectué sur le banc) ce qui apparaît en pratique plus réaliste.
D’autre part, cette étude permet de valider ou non le bon fonctionnement des capteurs
(potentiomètre, gyromètre, accéléromètre) susceptibles d’être embarqués sur l’hélicoptère à quatre rotors : l’étude des capteurs a été réalisée en collaboration avec Mlle Naima Kramdi, stagiaire de Maitrise de Physique lors d’une analyse de traitement du signal mais elle ne figure pas dans ce rapport consacré à la commande.
Enfin, ce système permet surtout de réaliser une pré-étude sur les lois de commandes
sur un système plus simple et ainsi de voir le champ d’application sur l’hélicoptère à quatre rotors.
2 . MODELISATION DU BANC D’ESSAIS Le but de cette modélisation est d’obtenir à partir des équations de la dynamique du banc d’essais et des équations électriques régissant le fonctionnement du moteur à courant continu, une représentation d’état permettant l’élaboration d’une loi de commande.
2.1 . Equations de la dynamique du système
Le système est composé d’une tige articulée autour d’un axe. Un moteur et une hélice sont placés à l’une de ses extrémités. La représentation géométrique du banc d’essais est donnée par la figure 2, où T est la poussée générée par l’hélice.

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 7
Figure 2 : Représentation géométrique du banc d’essais
cos( )
cos( )
M J
J dmg RTdmg R T
J J
θ
θ θ
θ θ
=
= − +
= − +
∑
1 2
cos( )
tige moteur
C C Tm M Mθ θ= − += +
avec :
1 2. et Cd mg RCJ J
= = ; d est la distance entre le centre de gravité et l’axe de la tige
2.2 . Equations électriques du moteur
Le moteur utilisé par le dispositif est un moteur à courant continu. En appliquant le principe fondamental de la dynamique sur le moteur et avec les relations existantes entre les différentes grandeurs physiques, on obtient les équations suivantes :
WJm + fW = emC
Ri + dtdiL + WKm =U
emC = Ki
T = 20WK
d
R
T
L
θ
.m g

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 8
où emC représente le couple électromagnétique exercé par le moteur, U la tension du moteur, mJ l’inertie mécanique du moteur, f les frottements mécaniques et W la vitesse de rotation
du moteur.
2.3 . Représentation d’état du système A partir des équations établies précédemment, on peut établir sous forme de schéma bloc, une première modélisation du banc d’essais (cf figure 3). Cette première approche va permettre d’établir la représentation d’état du système.
Figure 3 : Modélisation du banc d’essais
Dans ce système, on peut distinguer une partie linéaire traduisant la fonction de transfert entre la vitesse de rotation du moteur W et la tension du moteur U (commande du système) et une partie non linéaire traduisant la relation entre l’angle de la tige (sortie du système) et la vitesse de rotation du moteur W. Ainsi, on obtient une représentation d’état du système de la forme :
1x = 2x ( 1 )
2x = 233 xC - )cos( 11 xC
3x = 4x
4x = aU - 4bx - 3cx y = 1x où : 1x représente l’angle de la tige θ 2x représente la vitesse angulaire θ 3x représente la vitesse de rotation du moteur W 4x représente la dérivée de la vitesse de rotation du moteur W
avec : 1C = Jdmg ; 3C = J
RK0 ; a = mLJ
K ; b = m
m
LJLfRJ + ; c =
m
m
LJKKfR+

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 9
3 . COMMANDE DU SYSTEME PAR BOUCLAGE INTERNE Cette méthode s’appelle aussi commande par la linéarisation exacte puisqu’il s’agit d’un cas particulier de cette technique. En effet, la commande par la linéarisation exacte s’applique de manière générale aux systèmes multi-entrées multi-sorties. Or ici, il s’agit d’un système mono-entrée mono-sortie, donc la méthode utilisée a la même finalité mais un formalisme mathématique différent.(dans ce cas, on n’applique pas les dérivées de Lie, cf chapitre 2) L’objectif de cette technique est de linéariser le système dans un premier temps, pour pouvoir ensuite appliquer une commande linéaire sur le nouveau système ainsi obtenu. Cependant, pour pouvoir appliquer cette démarche, il faut vérifier si la linéarisation est totale. Dans le cas contraire, on doit étudier la stabilité interne du système, c’est-à-dire la dynamique des zéros.
3.1 . Commande du système par la tension du moteur On cherche donc à commander avec la tension du moteur. On utilise donc la représentation d’état du système complet ( 1 ) qui prend en compte le moteur, en appliquant la démarche suivante : y = 1x y = 2x y = 2
33 xC - )cos( 11 xC y = 4332 xxC + )sin( 121 xxC
)4(
y = UxaC 332 - 433 (2 bxxC + )3cx + 2432 xC + 2
331 ( xCC - )))sin(cos( 111 xxC + )cos( 1221 xxC
⇒ la commande apparaît et r = 4 ⇒ la linéarisation est totale
⇒ bouclage interne : on veut 2v =)4(
θ ⇒ U = ( )( ))cos()sin()cos(2)(2
21
1221111
2331
24334332
33xxCxxCxCCxCcxbxxCv
xaC−−−−++
A présent, on doit commander un quadri-intégrateur dont la commande est 2v . Ce système est commandable par un proportionnel dérivé. La loi de commande est proposée sous la forme :
2v =)4(
dθ - θ(1k - )dθ - θ(2k - )dθ - θ(3k - )dθ - θ(4k - )dθ

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 10
Figure 4 : Schéma bloc de la loi de commande La figure 4 représente le principe de synthèse de la loi de commande par bouclage interne réalisée sur MATLAB/Simulink.
3.2 . Résultats de simulation de la commande par bouclage interne Afin d’évaluer les performances de la loi de commande du système par la tension du moteur, on effectue des simulations sur MATLAB/Simulink. Dans un premier temps, on lance des simulations sans introduire d’erreur sur les paramètres a, b, c, 1C et 3C . Ensuite, on réalise une autre simulation en introduisant 20 % d’erreur sur les paramètres du système pour évaluer la robustesse de cette loi de commande. (cf annexe 1) Les gains de la commande sont choisis de manière à vérifier l’équation de l’erreur en
boucle fermée : )4(
e + ek1 + ek2 + ek3 + ek4 = 0 . D’autre part, on définit la trajectoire à poursuivre : dθ = sin(t ). En conclusion, on peut dire que la poursuite de trajectoire est atteinte. Malgré l’introduction d’erreur sur les paramètres, l’asservissement reste correct. Cependant, au delà de 20 % d’erreur sur les paramètres du système, les résultats ne sont plus satisfaisants. Ce manque de robustesse s’explique du fait que l’on linéarise le système avant de le commander. En effet, si les paramètres du système sont mal estimés alors cela signifie que l’on applique une commande linéaire sur un système non linéaire. Autrement dit, on ne commande plus un quadri-intégrateur mais un système non linéaire, donc la commande ne peut pas être performante. Par conséquent, pour que cette commande soit efficace, il faut que la « forme » du système soit connue avec exactitude mais il faut aussi que les erreurs sur les paramètres restent faibles afin de bien pouvoir commander un système linéaire. Un autre inconvénient réside au niveau des capteurs à utiliser. En effet, pour pouvoir appliquer cette commande, on a besoin d’un potentiomètre, d’un gyromètre, d’un accéléromètre, d’un capteur de jerk et de deux autres capteurs pour la vitesse du moteur et sa dérivée. Le problème concerne le capteur de jerk qui est, en pratique, pas évident à mettre en place. Il faut donc trouver une commande permettant de résoudre ce problème et qui, si possible utilise moins de capteurs.

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 11
4 . COMMANDE DU SYSTEME PAR RETRO-ITERATION
La commande par bouclage interne pose des problèmes de robustesse vis-à-vis des paramètres du système. D’autre part, elle utilise six capteurs dont le capteur de jerk qui n’est pas évidemment à mettre en place. L’objectif à présent consiste à établir une loi de commande non linéaire appelée rétro-itération afin de résoudre le problème de robustesse et celui des capteurs.
4.1 . Principe de la commande par rétro-itération La commande par rétro-itération est une approche de conception récursive de loi de commande. Le principe et les méthodes de synthèse sont décrits dans [4]. Cette méthode de commande peut être utilisée aussi bien pour les systèmes non linéaires que pour les systèmes linéaires. Elle demande une certaine connaissance de la dynamique du système.
4.2 . Mise en place de la loi de commande A partir de la représentation d’état du système ( 1 ), on peut développer la loi de commande. La sortie à commander étant l’angle θ , on désire effectuer la poursuite d’une trajectoire dθ . Pour chaque itération, on va chercher à annuler chaque erreur introduite. La procédure est détaillée en annexe 2 .
Figure 5 : Schéma bloc de la loi de commande
La figure 5 représente le principe de synthèse de la loi de commande par rétro-
itèration réalisée sur MATLAB/Simulink
4.3 . Résultats de simulation de la commande par rétro-itération
Afin de mesurer les performances de la loi de commande par rétro-itération et de comparer ses performances à celles de la commande par bouclage interne, on effectue des simulations sur MATLAB/Simulink comme précédemment. On lance des simulations sans introduire d’erreur sur les paramètres a, b, c, 1C et 3C . Ensuite, on réalise une autre

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 12
simulation en introduisant 40 % d’erreur sur les paramètres du système pour évaluer la robustesse de cette loi de commande.(cf annexe 3) On définit la même trajectoire à poursuivre : dθ = sin(t) et on choisit des valeurs de gains relativement semblables à celles précédentes afin d’être dans les mêmes conditions pour pouvoir comparer les performances des deux techniques. D’après les simulations, on peut dire que la poursuite de trajectoire est atteinte. Avec 20 % d’erreur d’estimation sur les paramètres, les résultats sont comparables aux résultats lancés sans erreur de paramètres. Même avec 40 % d’erreur sur les paramètres, les résultats demeurent satisfaisants, avec des oscillations d’amplitudes faibles autour de 0 en régime permanent. On peut donc dire que cette commande est robuste puisqu’elle est tolérante aux erreurs d’estimation sur les paramètres du système. Cette commande apparaît donc plus performante que la précédente. Ceci est en partie dû au fait que l’on ne cherche pas à linéariser le système et qu’on applique directement une commande non linéaire. Aussi, le temps de réponse d’environ 0.3 s est bien inférieur à celui de la commande précédente. Néanmoins, tout comme la commande par bouclage interne, elle nécessite la connaissance de la « forme » du modèle. D’autre part, les calculs à mettre en œuvre à chaque itération sont relativement importants surtout lorsque le système est complexe (cf chapitre 2). Enfin, concernant les capteurs, cette commande non linéaire utilise seulement 4 capteurs, un potentiomètre, un gyromètre et deux capteurs supplémentaires pour le moteur. On peut donc dire que de ce point de vue, cette commande est là encore très intéressante.
Concernant l’expression de la loi de commande U, on remarque que celle-ci est définie dans la région où la vitesse de rotation du moteur est non nulle (à cause de la singularité en 3x = 0). Afin de résoudre cet inconvénient, on pose en condition initiale dans MATLAB,
)0(3x = 1. En pratique, la commande ne peut pas agir tant que la vitesse de rotation du moteur est nulle donc on peut envoyer une impulsion de courte durée et ainsi, la commande peut démarrer. Après, cette singularité n’est plus rencontrée puisque les vitesses des moteurs augmentent ou diminuent lors du fonctionnement mais ne s’annulent plus, sauf à l’arrêt du système.
5 . COMMANDE PAR RETRO-ITERATION AVEC OBSERVATEURS NON LINEAIRES Le nombre de capteurs à utiliser et la nature de ceux-ci sont des paramètres importants pour le choix d’une commande. En effet, on peut ne pas posséder certains capteurs nécessaires à la commande ou bien, on peut chercher également à minimiser le nombre de capteurs à embarquer pour des raisons d’encombrement ou financières par exemple. Par conséquent, on va s’intéresser à ce problème par l’implémentation d’observateurs non linéaires. En effet, les observateurs sont des « capteurs informatiques » permettant de remplacer les capteurs « physiques » dont on ne dispose pas. Cependant, il faut s’assurer de mettre en place des observateurs robustes afin de ne pas trop dégrader les performances de la commande. Et surtout, l’introduction de ces organes en vu de l’élaboration d’une loi de commande non linéaire s’expose au problème de non validité du principe de séparation.

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 13
5.1 . Observateurs non linéaire et principe de séparation Si on considère les systèmes non linéaires[12], la plupart des observateurs qui existent dans la littérature ont la structure suivante :
C’est-à-dire une copie du modèle plus un terme correcteur )ˆ,( xyg qui permet d’établir la convergence de x̂ vers x . Ainsi, la dynamique de l’erreur d’observation xxe ˆ−= est aussi non linéaire, dépendante de l’état et de l’entrée du système :
)ˆ,(),(),( xyguexfuxfe −−−= ( 2 ) et par conséquent, le principe de séparation n’est plus vérifié en non linéaire. De ce fait, la commande n’est plus indépendante de l’observateur. On ne peut donc plus remplacer dans l’expression de la commande, les états à priori inconnus par les états estimés. Il faut tenir compte de la dynamique de ( 2 ) si on veut faire la synthèse d’une commande basée sur x̂ .
5.2 . Observabilité du système
Avant d’établir l’expression de l’observateur, on va montrer l’observabilité du système en vérifiant la condition de rang d’observabilité :
− hdL
hdL
dh
Rang
nf
f
1
= n
Cette condition est équivalente à la possibilité de reconstruire formellement l’état x à
partir de la sortie du système et de ses dérivées successives jusqu’à l’ordre n 1− . Les matrices hdLhdLdh n
ff1,,, − définissent les dérivées de Lie appliquées au système. Dans le cas présent,
n = 4. On calcule donc l’expression de la matrice d’observabilité. En lançant des calculs en symbolique sur MATLAB, on vérifie la condition de rang d’observabilité (cf annexe 4).
5.3 . Utilisation d’un observateur à modes glissants Dans cette partie, on veut mettre en œuvre un observateur robuste [7][12]. C’est pour cette raison que le choix s’est orienté vers un observateur à modes glissants. On considère que
=
+=
)ˆ(ˆ
)ˆ,(),ˆ(ˆ
xhy
xyguxfx

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 14
l’on mesure uniquement l’angle de la tige θ avec un potentiomètre et que l’on observe la vitesse angulaire de la tige θ , la vitesse du moteur W et sa dérivée W . Pour mettre en place l’observateur, on suit une certaine procédure. Tout d’abord, on définit une surface attractive telle que toute trajectoire appartenant à la surface attractive y reste et toute trajectoire n’appartenant pas à cette surface, converge exponentiellement vers celle-ci. Ensuite, à partir du modèle de l’observateur obtenu, on effectue une analyse de convergence sur les erreurs d’observation afin de déterminer les gains correcteurs nécessaires pour la convergence de l’observateur. A partir de la représentation d’état du système ( 1 ), on établit le modèle de l’observateur à modes glissants. Il est donc de la forme :
( 3 )
où : les gains 1Γ , 2Γ , 3Γ , 4Γ servent à réduire le temps de convergence de l’observateur les gains 1H , 2H , 3H , 4H permettent de faire converger l’observateur les x~ représentent les erreurs d’observation Maintenant, on va chercher les conditions à obtenir sur les gains 1H , 2H , 3H , 4H permettant de faire converger exponentiellement les erreurs d’observations vers 0 . Pour cela, on réalise une analyse de convergence (cf annexe 5).
5.4 . Commande par rétro-itération associée à l’observateur à modes glissants Malgré les remarques mentionnées sur la non validité du principe de séparation concernant la théorie du non linéaire, on tente de lancer des simulations en occultant ce fait, en synthétisant la commande et l’observateur séparément (cf figure 6). On va donc reprendre la commande par rétro-itération réalisée précédemment en remplaçant directement les états
432 ,, xxx par les états observés 432 ˆ,ˆ,ˆ xxx de l’observateur à modes glissants.
=
+Γ+−−=
+Γ+=
+Γ+−=
+Γ+=
1
1414344
131343
1212112332
111121
)(~ˆˆˆ
)~(~ˆˆ
)~(~)cos(ˆˆ
)~(~ˆˆ
xy
xsignHxxcxbaUx
xsignHxxx
xsignHxxCxCx
xsignHxxx

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 15
Figure 6 : Schéma bloc de la loi de commande avec observateur
Normalement, étant donnée la démarche, les résultats ne devraient pas être forcément garantis. Pourtant, les résultats de poursuite de trajectoire de l’angle de la tige restent relativement performants (cf annexe 6). Ceci est dû au fait que les non linéarités sont toutes localisées sur une équation et ne sont pas « noyées » dans le système. De plus, l’erreur d’observation sur la sortie reste faible, ce qui est important pour la qualité des performances des simulations. L’utilisation d’un observateur robuste avec une commande robuste contribue à la qualité des résultats.
Lorsque l’on simule la commande et que l’on regarde les erreurs d’observation, on constate que celles-ci sont légèrement dégradées par rapport à celles que l’on obtient lorsque l’on simule uniquement les résultats de l’observateur sans la commande (cf annexe 7). Ceci est dû au problème de non validité du principe de séparation. Ainsi, cela explique pourquoi l’erreur de suivi de trajectoire est moins bonne que celle obtenue dans l’annexe 3. En effet, pour retrouver des résultats comparables à ceux de l’annexe 3, il aurait fallu que l’on ait 1
~x = 0 en temps fini lorsque l’on simule la synthèse de la commande et de l’observateur. Ce qui n’est pas le cas complètement à cause de la non validité du principe de séparation, alors que l’on obtient bien 1
~x = 0 avec la simulation de l’observateur seul.
Finalement, on peut dire que la commande par rétro-itération « résiste » aux incertitudes engendrées par les erreurs d’observation lorsque l’on réalise la synthèse de la commande avec l’observateur par modes glissants. Ce nouveau résultat permet de montrer de nouveau la robustesse de cette loi de commande. Cependant, il est très important là encore de rappeler que l’on obtient des résultats très corrects malgré la non validité du principe de séparation en non linéaire qui ne permet pas de visualiser en général des résultats aussi satisfaisants. D’ailleurs, on sera réellement confronté à ce problème dans le chapitre 2 avec l’hélicoptère à 4 rotors. Enfin, concernant l’observateur à modes glissants, si on avait choisi de mesurer en plus la vitesse de rotation du moteur, on aurait encore obtenu de meilleurs résultats puisque toutes les non linéarités du système auraient été mesurées.

Etude sur le banc d’essais du LRV Chapitre 1
Rapport de PFE 16
5.5 . Remarques sur l’observateur à rétro-itération La non validité du principe de séparation dans le cadre du non linéaire pose des problèmes pour la synthèse de loi de commande avec des observateurs. De ce fait, pour la suite, il est important de penser à une stratégie permettant de contourner ce problème. L’une des solutions envisageables consiste à mettre en place une procédure de commande par rétro-itération utilisant un observateur à rétro-itération. Cette technique permet de tenir compte des erreurs de l’observateur et de les traiter dans la partie commande, en introduisant des termes correcteurs. Cet aspect sera développé dans le chapitre 3 pour la commande de l’hélicoptère à 4 rotors.
6 . BILAN GENERAL La commande par bouclage interne est intéressante par sa simplicité de mise en œuvre puisqu’ après avoir réalisé la linéarisation totale du système, il suffit d’appliquer une commande de type proportionnel dérivé. En revanche, cette technique rencontre des problèmes de robustesse puisqu’au delà de 20 % d’erreur d’estimation sur les paramètres du système, les résultats obtenus ne sont plus satisfaisants. Par ailleurs, pour l’élaboration de cette loi de commande, on a besoin d’utiliser six capteurs, un potentiomètre, un gyromètre, un accéléromètre, un capteur pour le jerk et deux autres capteurs pour la vitesse de rotation et l’accélération du moteur tout en sachant que la mesure du jerk n’est pas évidente à obtenir. En revanche, la technique de la rétro-itération permet de réduire le nombre de capteurs à utiliser puisque cette commande fait appel à seulement quatre capteurs, un potentiomètre pour l’angle, un gyromètre pour la vitesse angulaire de la tige et deux autres capteurs pour la vitesse et l’accélération du moteur. De plus, cette commande est robuste car même avec 40 % d’erreur sur l’estimation des paramètres du système, elle produit des résultats performants. Néanmoins, cette méthode est « lourde » en calculs et donc son implémentation reste plus compliquée à mettre en œuvre que la commande par bouclage interne. Ceci sera confirmé lors de l’étude de l’hélicoptère à quatre rotors (cf chapitre 2). D’autre part, la non validité du principe de séparation dans le cadre de la théorie du non linéaire pose des problèmes. En effet, même si pour l’étude du banc d’essais, les résultats obtenus restent corrects en séparant la partie commande et la partie observateur, de manière générale on ne peut procéder de cette façon. Or, les observateurs sont primordiaux pour la synthèse d’une loi de commande puisqu’ils permettent de remplacer un certain nombre de capteurs, donc de minimiser leur emploi. De ce fait, il faut s’intéresser à une stratégie permettant de régler le problème du principe de séparation. C’est pour cette raison que l’on va chercher à élaborer une commande par rétro-itération utilisant un observateur à rétro-itération permettant d’agir sur les erreurs de l’observateur par le biais d’un procédé spécifique. Ceci sera abordé dans le chapitre 3 pour la commande du drone avec observateur.

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 17
CHAPITRE 2
Etude sur l’hélicoptère à quatre rotors du LRV
1 . INTRODUCTION L’objectif de ce travail est de tester des lois de commande sur l’hélicoptère à quatre rotors. Lors de la pré-étude réalisée sur le banc d’essais, on a évalué les performances de deux types de loi de commande. Ces commandes vont être de nouveau développées dans ce chapitre afin de confirmer ou non leurs efficacités sur le système qui nous intéresse.
2 . MODELISATION DE L’HELICOPTERE A QUATRE ROTORS
Le modèle d’hélicoptère [1] étudié possède quatre rotors dont deux qui tournent dans le sens des aiguilles d’une montre et deux autres qui tournent dans le sens opposé. Ceci a pour but d’annuler l’effet des couples sur la plate-forme qui sont générés par la rotation des rotors. Chaque rotor est animé par un moteur électrique à courant continu.
Figure 7
lacet
roulis
tangage

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 18
Les vitesses des rotors peuvent être commandées indépendamment. Pour contrôler l’altitude, on augmente la poussée verticale, on fait varier la tension des quatre moteurs de la même façon. Pour le faire pivoter, on diminue le couple de deux moteurs sur un même axe et on augmente les deux autres simultanément de la même valeur pour conserver une élévation constante. Enfin pour le faire avancer ou reculer, on déséquilibre le système momentanément en donnant une tension différente sur les deux moteurs d’un axe de symétrie, ce qui crée une poussée horizontale. En général, d’autres manœuvres sont possibles en combinant les vitesses de rotation des rotors.
2.1 . Relations cinématiques et modèle dynamique
Le modèle mathématique de l’hélicoptère contient des équations cinématiques et des équations de la dynamique. Les équations cinématiques relient la position et l’orientation de l’hélicoptère à sa vitesse tandis que les équations de la dynamique expriment l’évolution de la vitesse en fonction des efforts extérieurs que subit l’hélicoptère (cf annexe 8). (u1,u2,u3,u4) sont les entrées de commande, où : • u1 est l’entrée de commande agissant sur les 4 rotor,
• u2 est l’entrée de commande agissant sur les rotors droite et gauche,
• u3 est l’entrée de commande agissant sur les rotors avant et arrière,
• u4 est la différence entre les moments agissant sur les rotors qui tournent dans le sens des
aiguilles d’une montre et les deux autres, c’est donc la commande sur les couples de lacet.
Figure 8
Où iv est la poussée relative au ieme rotor.
2.2 . Représentation d’état
En utilisant les équations de la cinématique et de la dynamique, on peut représenter le système sous une forme plus appropriée pour élaborer des lois de commande. Le vecteur d’état est donné par :
1 1 3 4v u u u= + +
2 1 2 4v u u u= + +
3 1 3 4v u u u= + −
4 1 2 4v u u u= + −

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 19
0 0 0 0 0 0( , , , , , , , , , , , )Tx x y z u v w p q rψ θ φ=
la représentation d’état du système est de la forme :
4
1
( ) ( )i ii
x f x g x u=
= + ∑ ( 5 )
0
0
0
sin sec cos seccos sin
sin tan cos tan( )
//
/( ) / /( ) / /( ) / /
x
y
z
y z x p x
z x y g y
x y z r z
uvw
q rq r
p q rf x
A mA m
A m gqr I I I A Ipr I I I A Ipq I I I A I
φ θ φ θφ φ
φ θ φ θ
+ −
+ + = +
− + − + − +
avec : 7 8 9
1 1 1 1(0,0,0,0,0,0, , , ,0,0,0)Tg g g g=
2 (0,0,0,0,0,0,0,0,0, / ,0,0)Txg d I=
3 (0,0,0,0,0,0,0,0,0,0, / ,0)Tyg d I=
4 (0,0,0,0,0,0,0,0,0,0,0,1/ )Txg I=
71 1/ (cos cos sin sin sin )g m φ ψ θ φ ψ= − +
81 1/ (cos sin sin cos sin )g m φ θ ψ ψ φ= − −
91 1/ (cos cos )g m θ φ= −

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 20
3 . COMMANDE DE L’HELICOPTERE PAR LINEARISATION EXACTE Cette technique, dont le principe a été abordé dans le chapitre 1, dans le cas d’un système mono-entrée mono-sortie, s’applique également pour les systèmes multi-entrées multi-sorties. Cette loi de commande [1][2] a donc été appliquée pour l’hélicoptère à quatre rotors par des chercheurs du LRV. On la mentionne donc de nouveau dans ce rapport afin de pouvoir comparer ses performances à celles de la commande par rétro-itération qui sera développée ultérieurement dans ce chapitre.
3.1 . Principe de la commande par linéarisation exacte via bouclage dynamique
La synthèse et la mise en œuvre de loi de commande pour hélicoptères à partir de leurs modèles est difficile à réaliser, a priori, car les équations régissant leurs mouvements sont fortement non linéaires et couplées. Il est donc légitime de chercher à transformer le modèle non linéaire de l’hélicoptère en un modèle linéaire sur lequel on pourra appliquer les outils de la théorie linéaire. C’est l’objectif de la linéarisation exacte, qui synthétise un retour d’état et un changement de coordonnées dans l’espace d’état, de manière à rendre le système bouclé linéaire, commandable et découplé du point de vue entrées-sorties.
3.2 . Application de la linéarisation exacte
Le but de cette commande est la linéarisation et le découplage de système non linéaire[1]. On considère le système ( 5 ) pour la synthèse de la commande. Tout d’abord, il est nécessaire de définir les objectifs de commande en choisissant les sorties à commander. Afin d’éviter des complications de calculs inutiles, on prend le nombre de sorties égale au nombre d’entrées. On veut commander la position absolue de l’hélicoptère 0 0 0( , , )x y z et l’angle de lacet ψ , on choisit la fonction de sortie suivante :
0 0 0( ) ( , , , )Ty h x x y z ψ= =
On suppose que l’état du système est complètement mesurable. La loi de commande aura la forme suivante :
( ) ( )u x x vα β= + ( 6 ) avec : v : entrée de référence externe définissant la commande linéaire à appliquer
1 2 3 4( ) ( ( ), ( ), ( ), ( ))Tx x x x xα α α α α= ( )xβ est une matrice 4×4.
On dérive les sorties jusqu’à l’obtention d’une entrée commande dans les expressions
obtenues. On définit { }1 2 3, 4, , ,r r r r , vecteur des degrés relatifs du système ( ir est le nombre de dérivation de la iéme sortie nécessaire pour faire apparaître la commande).

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 21
1(inf , ,1 4, 0)j
ki g fr k j j L L −= ∃ ≤ ≤ ≠ ∗
On obtient :
31 2 4( )( ) ( ) ( )1 2 3 4( , , , ) ( ) ( )rr r r Ty y y y b x x u= + ∆
avec :
1 1
1
1 11 4 1
..
4 1 4 11 4 4 4
( ) ... ( )
( ) ... . ...( ) ... ( )
r rg f g f
r rg f g f
L L h x L L h x
xL L h x L L h x
− −
− −
∆ =
1
1
44
( ).
( ).
( )
rf
rf
L h x
b x
L h x
=
Une des conditions nécessaire au problème de découplage entrée-sortie d’un système non- linéaire est que la matrice de découplage ( )x∆ soit inversible[1]. Dans ce cas, on aura un retour d’état statique avec:
1( ) ( ) ( )x x b xα −= −∆ et 1( ) ( )x xβ −= ∆ . ( 7 )
Il permettra d’obtenir un système linéaire et découplé, de la forme suivante : ( )iriy v=
pour tout , 1 4i i≤ ≤ , pour lequel une commande de type proportionnel dérivé est suffisante (cf annexe 10).
Figure 9 : Schéma bloc de la loi de commande * fL symbolise la dérivée de Lie le long du champ f

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 22
3.3 . Résultats de simulation de la commande par linéarisation exacte
Afin de mesurer les performances et la robustesse de la loi de commande obtenue, on a effectué des simulations d’asservissement sur un simulateur de l’hélicoptère à quatre rotors développé sous MATLAB/Simulink. Lors de la synthèse de la commande, on a négligé les perturbations dues vent et les erreurs sur les paramètres ( , , , )x y zI I I m . On choisit la trajectoire désirée suivante :
cos( )
sin( )2
10
3
d
d
d
d
x tty
tz
πψ
=
=
= −
=
Dans un premier temps, on simule un vol de l’hélicoptère sans perturbation liée au vent et en supposant que les paramètres , , ,m Ix Iy Iz sont connus avec exactitude. Les résultats sont représentés sur l’annexe 11. On peut voir la poursuite de trajectoire de chaque sortie. Le temps de réponse est de moins de deux secondes pour les quatre sorties. Cela montre une bonne convergence de la commande de toutes les sorties puisque les erreurs tendent vers zéro après un cours temps de réponse . On conclut que la commande donne de bons résultats pour une simulation sans perturbation.
Lors de la synthèse des lois de commandes, on a négligé les effets du vent en annulant les forces et moments aérodynamiques. Pour l’étude de robustesse, on prend en considération cette perturbation ainsi que des erreurs sur les paramètres , , ,x y zm I I I de 20%. Les résultats de simulation sont donnés dans l’annexe 12.
Dans les deux dernières figures, on remarque que la commande est moins efficace en
présence de perturbations. On note des erreurs statiques variant autour de 0.45m± pour les sorties 0 0 0, 0.5 pourx y et rad ψ . La troisième sortie est la moins affectée par ces effets (moins de 0.1m). On constate aussi que la commande est plus sensible aux perturbations dues au vent qu’aux erreurs sur les paramètres. Le temps de réponse est plus important (2 à 3 seconde). Finalement, la linéarisation exacte a permis de transformer le modèle non linéaire de l’hélicoptère en un modèle linéaire commandable sur lequel on applique une commande proportionnelle dérivée pour l’asservissement. Les résultats de la simulation révèlent que la commande est performante en absence de perturbations mais qu’elle n’est pas robuste autrement. On va donc appliquer une commande par rétro-itération pour essayer de remédier à ces inconvénients comme pour l’étude du banc d’essais.
-1-0.5
00.5
1
-1
-0.5
00.5
10
0.5
1
1.5
2
xy
z

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 23
4 . COMMANDE DE L’HELICOPTERE PAR RETRO-ITERATION
Pour l’application de la commande par rétro-itération sur l’hélicoptère à quatre rotors, on reprend la représentation d’état ( 5 ). On suppose que l’état du système est complètement mesuré et que les paramètres du modèle sont connus. On reprend la même fonction de sortie que celle choisie pour la linéarisation exacte.
4.1 . Elaboration de la loi de commande
L’objectif de la commande est de faire tendre les sorties du système
0 0 0( , , , )Ty x y z ψ= vers une trajectoire désirée ( , , , )Td d d d dy x y z ψ= . La première étape
est d’écrire le système sous une forme appropriée, car en dérivant les sorties, on remarque que la commande 1u a tendance à apparaître avant les autres 2 3 4( , , )u u u .En conservant le système sous cette forme, on sera confronté à un problème de singularité au niveau d’une matrice que l’on devra inverser afin d’obtenir l’expression des quatre commandes. La solution pour éviter cette singularité, est d’effectuer là encore une extension dynamique ( 8 ) identique à celle réalisée pour la linéarisation exacte.
Figure 10: Schéma block de la commande par rétro-itération
Par conséquent, on va appliquer la commande par rétro-itération sur le système étendu ( 9 ) en suivant la même procédure que pour le banc d’essais. On réécrit ce système en rassemblant tous les termes. (cf annexe 13).
En procédant par étape, on cherche à faire tendre vers zéro les erreurs qu’on définit au fur et à mesure que l’on dérive les expressions des fonctions de Lyapunov. On s’arrête lorsque les commandes apparaissent. Pour les trois premières sorties 0 0 0( , , )x y z , on doit dériver

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 24
quatre fois 1 2 3( 4)r r r= = = ∗. La quatrième sortie requière deux dérivations pour faire apparaître les commandes 4( 2)r = * (cf annexe 13). 4.2 . Simulation de la commande par rétro-itération sur l’hélicoptère
Afin de mesurer les performances et la robustesse de la loi de commande obtenue, nous avons effectué des simulations d’asservissement de l’hélicoptère à quatre rotors développé sous MATLAB/Simulink. Pour la synthèse des lois de commandes, on a utilisé des outils informatiques de calcul formel, (Symbolic toolbox de Matlab et Maple). On a négligé les perturbations dues au vent et les erreurs sur les paramètres ( , , , )x y zI I I m . On les considérera par la suite comme entrées de perturbation pour tester la robustesse de la commande. La trajectoire désirée est :
cos( )
sin( )2
10
3
d
d
d
d
x tty
tz
πψ
=
=
= −
=
Simulation sans perturbations et sans erreurs sur les paramètres
Dans cette partie, on simule un vol de l’hélicoptère sans vent et en supposant que les
paramètres , , ,m Ix Iy Iz sont connus avec exactitude. Dans l’annexe 15, on peut voir la poursuite de trajectoire de chaque sortie. Le temps de réponse est de moins de 0.5 seconde pour les quatre sorties. Les simulations montrent une bonne convergence de la commande de toutes les sorties puisque les erreurs tendent vers zéro après un cours temps de réponse. On en conclut donc que la commande par rétro-itération sans perturbations et sans erreurs sur les paramètres donne de bons résultats en simulation. Simulation avec perturbations et erreurs sur les paramètres
Lors de la synthèse des lois de commandes, on a négligé les effets du vent en annulant
les forces et moments aérodynamiques. Pour l’étude de robustesse on prend en considération cette perturbation ainsi que des erreurs sur les paramètres , , ,x y zm I I I de 20% (cf annexe 16). Les résultats montrent que la poursuite est toujours effective pour les quatre sorties
∗ les ir symbolisent les degrés relative des sorties. F7 représente la septième ligne de x
-1-0.5
00.5
1
-1
-0.5
00.5
10
0.5
1
1.5
2
xy
z

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 25
malgré les perturbations simulées. On voit que les erreurs de poursuite convergent vers zéro. On remarque les effets des perturbations au démarrage de la simulation, le temps de réponse est un peu plus long (0.2 seconde de plus). On note une erreur statique pour la quatrième sortie de 0.013 seconde. Elle est négligeable Pour les trois autres sorties.
5 . ETUDE COMPARATIVE ENTRE LES DEUX COMMANDES UTILISEES
Sur un même modèle d’hélicoptère à quatre rotors, on a appliqué deux commandes de nature différente. La linéarisation exacte a permis d’obtenir un système linéaire et découplé du point de vue entrée sortie. Cela a permis d’appliquer une commande proportionnelle dérivée. La synthèse de la commande fut relativement simple à réaliser. Les performances ont été correctes pour la simulation sans perturbations. Une étude de robustesse a révélé des erreurs de poursuite en présence de vent et erreurs sur les paramètres. La deuxième commande étudiée, la commande par rétro-itération a donné de bons résultats (temps de réponse inférieur à la linéarisation exacte) pour une simulation sans perturbation, et a montré une bonne robustesse aux perturbations et aux erreurs sur les paramètres. L’inconvénient de cette commande, est la complexité d’implémentation et les temps de calculs.
Enfin, concernant le nombre de capteurs à employer pour l’élaboration de ces deux
lois de commande, on constate de nouveau, que la technique par linéarisation exacte est moins avantageuse que la procédure par rétro-itération. En effet, on a besoin d’utiliser 20 capteurs pour établir la commande par linéarisation exacte :14 pour la mesure de l’état étendu et 6 supplémentaires, nécessaires pour la commande linéaire. En revanche, la commande par rétro-itération nécessite seulement 14 capteurs pour la mesure de l’état étendu du système.
6 . SYNTHESE D’UNE COMMANDE PAR RETRO-ITERATION AVEC OBSERVATEUR La procédure par rétro-itération permet d’utiliser moins de capteurs que la commande par linéarisation exacte, si l’on souhaite mesurer l’état complet du système. De ce fait, on va chercher encore à diminuer le nombre de capteurs à employer pour la commande par rétro-itération en essayant de mettre en place des observateurs non linéaires. Par conséquent, on envisage plusieurs choix possibles.
Dans une première approche, on va ignorer la non validité du principe de séparation, (comme cela a été fait pour l’étude du banc d’essais), en traitant séparément la commande et l’observateur et on va regarder si les résultats sont encore acceptables. Pour cela, on utilise un observateur à modes glissants. D’autre part, on va s’intéresser à deux autres méthodes permettant cette fois-ci de contourner la non validité du principe de séparation : soit par l’élaboration d’une commande par rétro-itération combinée avec un observateur à rétro-itération [4], soit en essayant de transformer le système sous forme triangulaire afin de pouvoir appliquer un observateur à modes glissants récursif [9][10][12] permettant de faire converger toutes les erreurs d’observation vers 0 en temps fini.

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 26
6.1 . Commande par rétro-itération avec observateur à modes glissants Dans cette approche, on traite la partie commande et la partie observateur séparément. Pour cela, on va construire un observateur à modes glissants. Ensuite, on reprendra la commande déjà établie en remplaçant seulement l’état x par les états observés fournis par cet observateur. Pour cela, on considère que l’on mesure la position du centre de gravité de l’hélicoptère ),,( 000 zyx et les trois angles d’Euler ),,( φθψ et que l’on observe les autre états du système. A présent, on construit l’observateur en suivant une procédure similaire à celle du chapitre 1 . Le système ( 5 ) permet de construire l’observateur suivant :
( 12 )
où : ( )Txxxxxxy 654321 ,,,,,~= et les constantes knlhfd ,,,,, sont relatives au système ( 5 )
A partir du système ( 12 ), on établit la dynamique des erreurs d’observation et on
effectue une analyse de convergence afin de trouver des conditions sur les gains correcteurs nécessaires à la convergence de l’observateur (cf annexe 17).
( )
( )
+Γ++=
+Γ++=
+Γ++=
+Γ+−=
+Γ+−−=
+Γ++−=
+Γ+++=
+Γ+−=
+Γ++=
+Γ+=
+Γ+=
+Γ+=
)~(~ˆˆˆ
)~(~ˆˆˆ
)~(~ˆˆˆ
)~(~)cos()cos(1ˆ
)~(~)sin()cos()sin()sin()cos(1ˆ
)~(~)sin()sin()sin()cos()cos(1ˆ
)~(~)tan()cos(ˆ)tan()sin(ˆˆˆ
)~(~)sin(ˆ)cos(ˆˆ
)~(~)sec()cos(ˆ)sec()sin(ˆˆ
)~(~ˆˆ
)~(~ˆˆ
)~(~ˆˆ
12124111012
11113121011
10102121110
991659
881644568
771465467
6656125611106
556126115
44561256114
3393
2282
1171
ysignHykuxxnx
ysignHyluxxhx
ysignHyfuxxdx
ysignHyuxxmgx
ysignHyuxxxxxmx
ysignHyuxxxxxmx
ysignHyxxxxxxxx
ysignHyxxxxx
ysignHyxxxxxxx
ysignHyxx
ysignHyxx
ysignHyxx

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 27
Résultats de la simulation de la commande avec observateur
Contrairement au cas du banc d’essais dans le chapitre 1, la non validité du principe de séparation se remarque sur l’hélicoptère à quatre rotors malgré la mise en place d’un observateur robuste et d’une commande robuste. En effet, les résultats obtenus ne sont pas complètement satisfaisants : on remarque des erreurs d’observation notables (cf annexe 17) et par ailleurs, on constate que les poursuites de trajectoires ne sont pas parfaitement assurées même si les résultats sont corrects (cf annexe 18). Ceci est dû au fort couplage du système, contrairement au banc d’essais. De ce fait, on va chercher d’autres stratégies permettant d’améliorer davantage les résultats.
6.2 . Forme d’observation triangulaire L’objectif de cette partie est de contourner le problème de non validité du principe de séparation. Pour cela, on s’intéresse à la géométrie différentielle du système. On cherche à transformer la « forme » du système en forme triangulaire pour laquelle des observateurs spécifiques sont développés[9][10][12 ]. La forme du système recherchée est la suivante :
−
nnx
x
xx
1
2
1
=
++
++
−−
),()(),,,(
),,(),(
111
2123
112
uxgxfuxxgx
uxxgxuxgx
nnnnn
Pour un tel système, on peut construire un observateur récursif à modes glissants permettant de prouver la convergence vers 0 en temps fini de toutes les erreurs d’observation. Ceci a pour avantage de permettre de traiter l’observateur et la partie commande séparément sans se soucier de la non validité du principe de séparation. Cependant pour pouvoir appliquer ce raisonnement, on doit tout de même respecter certaines conditions. En effet, ces conditions sont explicitées dans le théorème [12] suivant : THEOREME : Si le système est à entrées bornées et à états bornés, alors pour tout état initial )0(x , )0(x̂ et toute entrée bornée u, il existe un choix de iλ tel que l’état de l’observateur x̂ converge en un temps fini vers l’état du système x . Etape par étape on obtient une convergence en un temps fini , et d’une manière récurrente pour chaque composante de l’erreur d’observation. La structure de l’observateur récursif à développer en conséquence est de la forme :
−
n
n
xx
xx
ˆˆ
ˆˆ
1
2
1
=
−++−++
−++−++
−−−−−−
)ˆ~(),~,,~,()~,~,()ˆ~(),~,,~,(ˆ
)ˆ~(),~,(ˆ)ˆ(),(ˆ
2121
11111211
22222123
1111112
nnnnnnnnnnnnnnn
xxsignuxxxgxxxfxxsignuxxxgx
xxsignuxxgxxxsignuxgx
λλ
λλ

Etude sur l’hélicoptère à quatre rotors du LRV Chapitre 2
Rapport de PFE 28
où : les variables )ˆ~(ˆ~111, −−− −+= iiimoyiii xxsignxx λ
avec : 1, −imoysign désigne la fonction 1−isign filtrée.
Malgré des tentatives de changement de variables, on n’a pas pu mettre sous forme triangulaire ce système. De ce fait, on a dû abandonner cette piste de recherche. La question reste toujours en suspens.
6.3 . Observateur à rétro-itération appliqué à la commande par rétro-itération Précédemment, on a tenté de contourner la non validité du principe de séparation en essayant de changer le système en « forme » triangulaire afin de pouvoir appliquer un observateur à modes glissants récursif. A présent, on cherche de nouveau à éviter le problème de la non validité du principe de séparation, par la mise en place d’une procédure par rétro-itération incluant l’utilisation d’observateur à rétro-itération[4].
Cette stratégie permet de traiter les erreurs d’observation lors de l’élaboration de la commande, en injectant dans celle-ci des termes correcteurs appelés « Nonlinear Damping ». Ces termes correcteurs permettent d’agir sur les erreurs d’observation en considérant celles-ci comme des perturbations. Pour la mise en œuvre de cette procédure, on distingue deux étapes :
Etape 1 : Construire un observateur réduit exponentiellement stable pour les états à observer. Etape 2 : Lancer la procédure de commande par rétro-itération en utilisant à chaque itération et pour chaque erreur d’observation rencontrée, un terme correcteur « Nonlinear Damping ». Cette technique sera expliquée plus en détail au cours du chapitre 3. Il est à noter également que pour mettre en place cette méthode, on est contraint de mesurer toutes les non- linéarités du système.
Comme pour l’étude précédente, on a de nouveau dû abandonner cette procédure
puisqu’il a été impossible de construire un observateur exponentiellement stable exploitable. Même si on est capable de construire un observateur à modes glissants qui lui converge exponentiellement, il est cependant impossible de l’utiliser pour cette procédure puisque l’on est amené à dériver la fonction sign qui n’est pas dérivable. D’autre part, on s’est également intéressé à la géométrie différentielle du système en essayant de mettre le système sous forme d’injection de sortie, afin de pouvoir construire un observateur exploitable. Mais là encore les recherches n’ont pas abouti.
7 . BILAN GENERAL
L’étude sur l’hélicoptère à quatre rotors a permis de confronter de nouveau, deux types de commande, déjà testées sur le banc d’essais. Ce travail a donc vérifié les résultats établis dans le chapitre 1. En effet, la commande par linéarisation exacte réalisée par les chercheurs du LRV a montré des faiblesses de robustesse contrairement à la commande rétro-itération. Par ailleurs, elle nécessite l’emploi de 20 capteurs contrairement à la commande par rétro-itération qui fait appel seulement à 14 capteurs. C’est d’ailleurs, pour ces deux raisons que

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 30
CHAPITRE 3
Etude sur l’hélicoptère à quatre rotors du GRASP Lab
1 . MOTIVATIONS DE L’ETUDE Avant d’entrer dans le détail, il est important de rappeler l’intérêt d’étudier un autre modèle d’hélicoptère à quatre rotors. Dans le chapitre précédent, on a pu constater que la modélisation du drone (malgré des tentatives de transformation du système) ne permettait pas de synthétiser une loi commande non linéaire avec mise en place d’observateurs à rétro-itération ou à modes glissants récursifs puisqu’il était impossible de construire un observateur exponentiel exploitable. Or ceci a son importance puisque cela permet de se « libérer » de la contrainte engendrée par la non validité du principe de séparation. De ce fait, on est , à présent contraint de chercher un autre modèle valide sur l’hélicoptère à quatre rotors sur lequel de telles théories peuvent s’appliquer.
C’est pour cette raison que notre choix s’est orienté vers le modèle de l’hélicoptère à quatre rotors du GRASP Lab, de l’université de Pennsylvanie[3]. En effet, cette nouvelle modélisation va permettre de développer la théorie de la rétro-itération avec mise en place d’observateurs, car les termes de traînée sont pris en compte dans ce modèle. Or, on va voir par la suite, l’importance de ces termes supplémentaires puisque ce sont eux qui vont permettre d’établir un observateur simple et ainsi de lancer la procédure désirée. D’autre part, étant donnée l’importance des calculs pour la mise en place d’une procédure par rétro-itération, on souhaite élaborer un autre type de commande basée sur la passivité du système, qui soit robuste mais aussi qui reste moins « lourde » en calculs. Or, de nouveau, cette nouvelle modélisation va simplifier les choses.
2 . MODELISATION DE L’HELICOPTERE A QUATRE ROTORS Ce nouveau modèle est proche de celui établi par les chercheurs du LRV. En effet, même si les équations sont plus simples, le principe de modélisation est conservé. La différence réside au niveau de l’expression des dérivées des angles qui sont totalement découplées des dérivées des autres grandeurs du système : ceci va permettre de simplifier les choses concernant l’élaboration ultérieure de la commande passive. Les commandes sont identiques au modèle du LRV : on commande toujours l’hélicoptère avec quatre commandes qui sont exprimées en fonction des quatre forces de poussée et des moments agissants sur chacun des rotors. La représentation d’état du système est donnée par ( 14 ).

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 31
1F 2F
4F 3F
La représentation d’état est donnée par la forme suivante : x = ( )Tzzyyxx φφψψθθ ,,,,,,,,,,, ( 14 )
( )
( )
−=
=
−=
=
−=
=
−−=
=
−−=
=
−+=
=
∗
∗
∗
∗
∗
∗
123
6412
1211
102
5310
109
81
428
87
63
9716
65
42
911971114
43
21
911971112
21
)cos()cos(
)sin()cos()cos()sin()sin(
)sin()sin()cos()sin()cos(
xJKUx
xx
xJ
LKLUx
xx
xJ
LKLUx
xx
xmKgxxUx
xx
xmKxxxxxUx
xx
xmKxxxxxUx
xx

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 32
∗ On voit clairement apparaître dans la représentation d’état, les termes de traînée et leurs coefficients qui constituent l’une des différences fondamentales avec l’ancien modèle. D’autre part, les constantes 321 ,,, JJJm sont respectivement la masse et les trois moments d’inertie de l’hélicoptère à quatre rotors. A présent, à partir de cette représentation d’état, on va chercher à établir des lois de commande, soit par une procédure par rétro-itération avec observateurs, soit par la passivité du système.
3 . COMMANDE/OBSERVATEUR A RETRO-ITERATION Comme cela a été mentionné dans les chapitres précédents, la stratégie de commande rétro-itération combinée avec des observateurs à rétro-itération permet de contourner la non validité du principe de séparation. On va donc au cours de cette étude mettre en place cette méthode.
3.1 . Principe de la procédure
Les erreurs d’observation sont traitées comme des perturbations, lors de l’élaboration de la commande par rétro-itération par introduction de termes correcteurs appelés « nonlinear damping ». La synthèse d’une telle loi de commande s’effectue en deux étapes : Etape 1 : On doit construire un observateur réduit exponentiellement stable pour les états à observer. Cet observateur en fait, recopie juste les équations de la représentation d’état correspondants aux états à mesurer en changeant les x par les x̂ . Etape 2 : Ensuite, on lance la procédure de commande par rétro-itération en utilisant à chaque itération et pour chaque erreur d’observation rencontrée, un terme correcteur « nonlinear damping ». Ces étapes seront plus détaillées par la suite. Cependant, afin de pouvoir comprendre l’intérêt du terme correcteur pour la synthèse de cette commande, on rappelle le lemme[4] consacré au nonlinear damping et ses conditions d’application : LEMME 1 :
Considérons un système de la forme :
+=∆+=
),(),()(1
ξξξϕξ
xgutxx
On considère que l’on aborde une procédure de commande par rétro-itération et que l’on est à l’itération 1, où : ),( tξ∆ est une perturbation inconnue bornée , )(1 xϕ représente les non linéarités mesurées du système et ξ représente l’entrée de commande à l’itération 1. Si ces deux conditions sont vérifiées alors on peut introduire une entrée virtuelle lors de la procédure de commande par rétro-itération de la manière suivante :
)()( 21 xxkxcx ϕα −−= , ( c et k sont des gains) où le dernier terme appelé « nonlinear

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 33
damping » permet d’agir sur la perturbation inconnue. Ainsi, en écrivant la fonction de Lyapunov correspondante à cette itération 2
21 xV = , on peut vérifier que sa dérivée sera
négative ou nulle si à la prochaine itération on cherche à annuler l’erreur : )(xe αξ −= , puisque le « nonlinear damping » traite la perturbation inconnue.
On peut donc appliquer ce lemme si et seulement si la perturbation inconnue est bornée et si les non linéarités du système sont mesurées. Dans notre cas, les perturbations inconnues sont en fait les erreurs d’observation sur lesquelles on va faire agir les « nonlinear damping ». On voit donc à travers cette condition nécessaire pourquoi on doit construire au préalable un observateur exponentiel, puisque grâce à cet observateur, les perturbations seront bornées et la condition sera vérifiée.
3.2 . Application de la loi de commande L’objectif de la commande est de faire tendre la position absolue ( )zyx ,, et l’angle de lacet φ de l’hélicoptère vers une trajectoire désirée. La première étape est d’écrire le système sous une forme appropriée, car comme pour l’ancien modèle en dérivant les sorties, on remarque que la commande 1u a tendance à apparaître avant les autres 2 3 4( , , )u u u .En conservant le système sous cette forme, on sera donc confronté à un problème de singularité au niveau d’une matrice que l’on devra inverser afin d’obtenir l’expression des quatre commandes. La solution pour éviter cette singularité, est d’effectuer là encore une extension dynamique identique à celle réalisée pour le modèle précédent :
113 Ux =
1413 xx =
114 Ux =
A partir de là, on peut donc réécrire le système ( 14 ) (cf annexe 20). On renomme aussi les commandes 4321 ,,, UUUU afin de rester homogène dans les notations. A partir de ce nouveau système étendu, on va donc pouvoir dérouler la procédure de commande par rétro-itération combinée avec l’observateur à rétro-itération. Pour ce faire, on va dans un premier temps construire un observateur et montrer qu’il converge bien exponentiellement et enfin on lancera la procédure selon le principe précédemment expliqué (cf annexe 21). 3.3 . Résultats de simulation de la loi de commande Les résultats obtenus en simulation sont performants (cf annexe 24). On remarque en effet que la poursuite de trajectoire est effective avec un excellent temps de réponse. Les

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 34
résultats sont comparables à ceux obtenus sans observateur, avec cependant un temps de réponse plus lent. Les erreurs d’observation sont convenables (cf annexe 25). En effet, celles-ci ont été traitées par la partie commande par l’action des « nonlinear damping ».
Finalement, il a donc été possible de mettre au point une commande par rétro-itération avec un observateur permettant d’obtenir des performances concluantes. Néanmoins, pour pouvoir mettre en place cette procédure, on a été contraint de mesurer les non-linéarités du système et de mesurer la position dans l’espace de l’hélicoptère à quatre rotors. Or, on sait que les mesures de x et y ne sont pas évidentes à obtenir, nécessitant un GPS (à cadence lente 1s). En effet, on peut mesurer sans difficulté l’altitude avec un altimètre, en revanche, pour mesurer la position en x et en y d’un robot volant évoluant dans un espace ouvert, on a besoin d’un GPS. Pour mesurer ces paramètres dans un espace fermé, dans ce cas il sera possible d’utiliser des proximètres, à condition que le robot évolue dans un univers relativement restreint et connu.
4 . COMMANDE BASEE SUR LA PASSIVITE DU SYSTEME On a vu au cours des études précédentes qu’il était possible de mettre en place une procédure de commande par rétro-itération avec observateurs. Cette technique permet à la fois d’obtenir une bonne robustesse mais aussi de diminuer considérablement le nombre de capteurs à utiliser puisque l’on a besoin seulement de mesurer la position du centre de gravité et les trois angles d’Euler de l’hélicoptère à quatre rotors. Néanmoins, cette technique reste « lourde » en calculs et rend son implémentation un peu compliquée. C’est pour cette raison que l’on veut mettre en place un autre type de loi de commande permettant de diminuer la complexité des calculs tout en conservant la robustesse. Le choix s’est tourné vers une commande exploitant la passivité du système. Cette catégorie de loi de commande a prouvé ses performances sur de nombreux systèmes comme par exemple sur les robots manipulateurs[12]. Elle exploite les propriétés physiques du système de façon à permettre un modelage de l’énergie du système en boucle fermée. Dans le modèle du GRASP Lab, on a des relations directes entre les dérivées secondes, les dérivées et les états du système. Ceci permet d’écrire le système sous une certaine forme permettant l’élaboration d’un schéma équivalent passif. Dans cette partie, on va tenter de réaliser une commande en deux temps. Tout d’abord, on va chercher à commander le drone de manière à ce qu’il se déplace seulement verticalement. Dans un second temps, on va essayer d’établir une loi de commande de manière à ce qu’il effectue une trajectoire quelconque préalablement définie. 4.1 . Commande de l’hélicoptère pour un déplacement vertical
Pour débuter, on réécrit le système ( 14 ), sous une autre forme permettant de faire
apparaître des relations entre les dérivées secondes, les dérivées et les états à commander (cf annexe 26).

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 35
Ce système est sous actionné. Il possède quatre commandes pour six paramètres à commander. L’objectif étant , dans cette partie, de contrôler le décollage vertical du robot, on va chercher à commander les trois angles d’Euler et l’altitude z. Ceci étant posé, l’objectif est maintenant de mettre sous la forme : τ=++ )(),()( qGqqqCqqM (19), (où τ est la commande) le système, en utilisant exclusivement les quatre dernières équations du système. Cette forme particulière traduit la dynamique d’un robot manipulateur pour laquelle il est possible d’établir un schéma équivalent passif, afin de commander les coordonnées q .
On pose : [ ] Tzq φψθ ,,,= .
En manipulant les équations, on obtient la forme ( 19 ). Les différentes matrices sont
données en annexe 27. La matrice )(qM est définie positive pour
ΠΠ−∈ 2;2, ψθ ,
intervalle dans lequel ces angles sont définis.
Pour les systèmes se mettant sous la forme (19), il est montré que si on considère pour entrée
)(qG−τ et pour sortie q , alors le transfert de )(qG−τ vers q est passif. Ainsi, l’inégalité
de Popov : 20
1
0
γ−≥∫t
t
T dtuy est toujours vérifiée (cf figure 11). En effet, en intégrant (19), on
trouve : ))((21))())(((2
1))(( 0000
qqMqtqtqMqdtqGq TTt
T −=−∫ τ 20γ−≥
)(qG−τ q
figure 11 : Schéma équivalent passif de (19)
A présent, on va appliquer une commande passive afin de commander les trois angles d’Euler et l’altitude z de l’hélicoptère à quatre rotors. Pour cela, on définit un modèle de référence en vitesse rq par :
)( ddrqqqq −−= λ
λ est une matrice diagonale strictement positive. L’erreur de suivi de ce modèle de référence
s est donnée par : s ee λ+= , avec : dqqe −=
A partir de (19), on établit la loi de commande de la manière suivante :
qqqCqqM ),()( +

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 36
sFqqqCqqMqG vrr −++= ),()()(τ , où vF est une matrice diagonale strictement positive
correspondant à un gain proportionnel dérivé ( vF et λ ). En boucle fermée, on obtient la relation suivante : sFsqqCsqM v−=+ ),()( .
Par conséquent, en prenant comme entrée sFv et comme sortie s , on peut montrer qu’en
boucle fermée, on vérifie l’inégalité de Popov :
20
0
))0())0(()0((21 γ−≥−=∫ sqMsdtuy
tTT
- s
-
s
figure 12 : Schéma équivalent passif en boucle fermée
Le bloc de la chaîne directe ( vF > 0) est strictement positif réel (SPR) (figure 12).
Donc, on peut conclure à l’hyperstabilité asymptotique du système ( 19 ), c’est-à-dire que s est bornée et tend vers 0. On montre ainsi que e tend aussi vers 0 puisque s ee λ+= .On récapitule les expressions des quatre commandes en annexe 28.
Pour pouvoir appliquer cette commande, on a juste considéré une partie du système (18) qui pouvait être transformée en (19). On peut le faire concernant les quatre variables choisies car les quatre équations utilisées ne font pas intervenir de dynamique sur les états non commandés x et y. On va donc pouvoir s’apercevoir lors des simulations que cela n’a pas d’incidence sur les variables à commander. Concernant la commande passive, on peut légèrement améliorer la robustesse en rajoutant un terme )(sKsign− permettant de créer ainsi une surface attractive s.
Résultats de simulation
Dans un premier temps, on lance des simulations sans introduire d’erreur sur les
paramètres du système (cf annexe 29). On constate que la poursuite de trajectoire est assurée pour les quatre états à commander. Les trajectoires désirées sont les suivantes :
)sin(tddd === φψθ et tzd 1.0=
vF
sqqCsqM ),()( +

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 37
Après, on cherche à tester la robustesse de la commande en introduisant 30 % d’erreur sur les paramètres du système ( cf annexe 30). On remarque de nouveau que la commande reste performante. On remarque donc que les trois angles d’Euler et l’altitude de l’hélicoptère à quatre rotors sont parfaitement commandés. En revanche, on remarque que les états non commandés x et y présentent une dérive car ils ne sont pas contrôlés. Ceci n’est pas surprenant puisque l’on a vérifié uniquement l’hyperstabilité d’une partie du système. Ceci constitue un problème car même en sachant que l’on ne peut commander les autres états, il faut tout de même s’assurer que ces états non commandés sont stables. Comme on veut, lors de cette étude, que l’hélicoptère décolle verticalement et qu’il faut résoudre le problème de dérive des états non commandés, on va donc chercher les trajectoires désirées ddd φψθ ,, qu’il
faut appliquer afin de pouvoir atteindre la configuration souhaitée, c’est-à-dire 0=dx et
0=dy . Les angles étant parfaitement commandés, on peut penser que cette technique fonctionnera. Pour cela, on applique le raisonnement suivant : On désire avoir 0=dx et 0=dy ⇒ les vitesses et les accélération désirées à appliquer en conséquence sur x et y sont donc données par :
0== dd yx
0== dd yx En reprenant les 2 premières équations du système ( 18 ) et les trajectoires désirées précédentes, on obtient une relation traduisant les conditions à satisfaire par les trajectoires désirées sur les angles pour obtenir un décollage vertical de l’hélicoptère :
dddddddddd ψφψθφψφψθφ sincoscossinsinsinsincossincos −=+ (20) A partir de la relation (20), on en déduit des conditions directes sur les angles : Si 0=
dθ ⇒ 0)cossin(sin =+ ddd φφψ
⇒ 0=dψ OU 4Π−=dφ
Par conséquent, on prenant par exemple 0=
dθ et 0=dψ , on vérifie les trajectoires
désirées 0=dx et 0=dy . Ainsi, les quatre commandes vont permettre de poursuivre les trajectoires sur les angles qui elles-mêmes vont imposées les trajectoires désirées sur x et y (cf figure 13).
A partir des conditions sur les trajectoires désirées déterminées précédemment, on lance d’autres simulations (cf annexe 31). On remarque que les poursuites de trajectoire sur les angles et la position du centre de gravité de l’hélicoptère sont bien assurées.

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 38
Figure 13 : Principe de commande de X et Y Finalement, on a vu qu’il était possible de commander l’hélicoptère à quatre rotors afin qu’il puisse effectuer un décollage vertical selon une trajectoire arbitraire z. Cependant, l’objectif n’est pas de commander l’hélicoptère selon cette configuration particulière mais de réaliser un asservissement de trajectoire selon une configuration (x, y, z) quelconque. De ce fait, on va essayer, par la suite, de réaliser une commande pour une telle configuration. 4.2 . Commande de l’hélicoptère pour une trajectoire quelconque Dans cette partie, on cherche à commander l’hélicoptère de manière à poursuivre une trajectoire quelconque. Pour cela, on essaye de procéder comme dans l’étude précédente, c’est-à-dire que l’on va chercher des relations entre les trajectoires désirées sur les angles et celles sur les positions x, y, z. L’idée est donc la suivante : quelle combinaison de ddd φψθ ,,
faut-il pour avoir ddd zyx ,, ? (cf annexe 32)
A présent, on lance des simulations à partir des relations obtenues ( 21 ) à ( 23 ) sur les trajectoires désirées. En choisissant donc la trajectoire que l’on veut poursuivre sur le centre de gravité ),,( ddd zyx de l’hélicoptère, on va déterminer en conséquence, les trajectoires
désirées que l’on doit poursuivre sur les angles ),,( ddd φψθ . Cependant, on est restreint sur le choix des trajectoires désirées sur x, y et z en raison des singularités présentes dans les expressions ( 22 ) et ( 23 ). Il faut donc faire attention sur le choix des trajectoires désirées. Résultats de simulation
Lorsque l’on lance les simulations, on s’aperçoit que l’on arrive pas à asservir la
position de l’hélicoptère en x et y (il y a même divergence), malgré l’application du raisonnement précédent. Ce problème est en fait dû au problème de la dynamique des zéros qui résultent des mouvements de l’hélicoptère dans le plan x-y. Par conséquent, cela engendre de l’instabilité. C’est pour cette raison que dans le cas précédent, cette technique a marché puisque l’on ne se situait pas dans le plan x-y. Mais pour un mouvement quelconque de l’hélicoptère, cela ne peut fonctionner. Le principe de simulation est donné par la figure 14. En raison de ces résultats, on doit chercher une autre méthode afin de pouvoir réaliser un asservissement pour une trajectoire quelconque de l’hélicoptère. Les recherches se sont donc portées sur une autre technique concernant le contrôle des systèmes sous actionnés [11].
U1 U2 U3 U4 ddd φψθ Xd Yd

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 39
Figure 14 : Principe de la simulation Technique de commande basée sur l’énergie pour les systèmes sous actionnés
Cette technique a été développée pour les robots manipulateurs sous actionnés [11].
Elle peut être mise en place pour les systèmes pouvant se mettre sous la forme :
011212111 =+++ φhqMqM
τφ =+++ 22222121 hqMqM
Avec :
=
2221
1211)( MMMMqM
Pour pouvoir appliquer cette méthode, il faut au préalable que M soit définie symétrique et positive. Les 1q représentent les états non commandés, les 2q sont les états commandés et τ est la commande. Cette technique réalise dans un premier temps une commande linéarisante pour les états commandés. La commande linéaire appliquée est du type proportionnel dérivé mais elle contient en plus un terme permettant de tenir compte de la stabilité des états non commandés (ce terme sera expliqué plus tard). L’intérêt de cette technique réside dans le fait qu’on peut exprimer (en manipulant les deux expressions ci-dessus) une relation liant la commande linéarisante et les états non actionnés. Le terme supplémentaire qui apparaît dans la commande linéarisante est définit de la manière suivante :
)~( 1qEsatu = . Ce terme tient compte de l’énergie totale du système. Il sert à stabiliser les états non commandés en faisant tendre l’énergie du système vers une énergie de référence.

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 40
Malheureusement, la méthode ne sera pas expliquée plus en détail puisqu’elle n’a pas pu être achevée faute de temps. Dans cette partie, on a donc était capable seulement de commander un décollage vertical de l’hélicoptère à quatre rotors, à partir d’une commande basée sur la passivité. Pour un suivi d’une trajectoire quelconque de l’hélicoptère, le problème de la commande basée sur la passivité reste en suspens.
5 . NOUVELLE MODELISATION DE L’HELICOPTERE Comme cela a été mentionné au cours du chapitre 1, il serait intéressant de trouver une modélisation pour l’hélicoptère à quatre rotors, dans laquelle les commandes ne seraient plus les forces de poussée mais les tensions des moteurs à courant continu. Dans cette partie, on va réaliser une telle modélisation. Ce nouveau modèle a été effectué à partir de la publication du GRASP Lab, mais on peut parfaitement réaliser une telle modélisation sur le modèle du LRV. Pour atteindre l’objectif, on va faire le lien entre l’étude réalisée sur le banc d’essais et celle effectuée sur l’hélicoptère. 5.1 . Expression de la poussée en fonction de la tension du moteur
En manipulant les équations électriques du moteur établies dans le chapitre 1, on arrive à obtenir une équation différentielle liant la force de poussée F à la tension du moteur u . Cette relation est de la forme :
(24) Avec :
MJLKK
A21
01
2= ;
M
M
JLfLJR
A+
−=2 ; MJLfR
A2
3 −=
5.2 . Représentation d’état du nouveau système En combinant la représentation d’état du système ( 14 ) et la relation ( 24 ), on va pouvoir établir un nouveau modèle dans lequel les commandes ne seront plus les forces de poussée mais les tensions alimentant chaque moteur à courant continu. La représentation (14 ) ne permet pas directement d’obtenir ce nouveau modèle puisque les commandes de ce système ne font pas apparaître tout de suite les forces de poussée. Mais connaissant les relations existant entre les commandes et les forces de poussée, il est possible de faire apparaître directement les forces de poussée dans le système (14 ) . Une fois que cette transformation a été réalisée, on peut combiner la relation ( 24 ) avec le système ( 14 ) transformé, pour obtenir une nouvelle représentation d’état où les nouvelles commandes sont les quatre tensions d’alimentation des moteurs à courant continu.
2132
21
1 FFFAFAuFAF −+++=

Etude sur l’hélicoptère à quatre rotors du GRASP Lab Chapitre 3
Rapport de PFE 41
On peut réécrire l’expression ( 24 ) de la manière suivante :
1+= ii xx
21
1312
21
11 +−
++ +++= iiiiii xxxAxAuxAx où : ii xF = et 1+= ii xF
A partir de cela, on peut écrire une nouvelle représentation d’état où les commandes sont les quatre tensions alimentant les moteurs à courant continu (cf annexe 33). A partir de ce nouveau modèle, il est possible d’appliquer les commandes déjà étudiées. De la même façon, les problèmes non résolus sur l’autre modèle persisteront sur ce modèle. Par ailleurs, il est à noter que pour la commande de ce système soit par linéarisation exacte soit par rétro-itération , il est inutile d’effectuer une extension dynamique au préalable.
6 . BILAN GENERAL Dans cette partie, on a montré qu’il était possible d’établir une procédure par rétro-itération avec observateurs permettant de contourner le problème de non validité du principe de séparation. Cette stratégie de commande a fourni de bons résultats. Cependant, cette technique est « lourde » en calculs et rend son implémentation complexe. C’est pour cette raison que l’on a étudié une commande basée sur la passivité permettant de conserver des propriétés de robustesse et de réduire considérablement la complexité des calculs. Malheureusement, cette commande est efficace uniquement pour un déplacement vertical de l’hélicoptère et non pas pour une trajectoire quelconque, en raison de l’instabilité des zéros dynamiques dans le plan x-y. Enfin, on a réalisé une nouvelle modélisation de l’hélicoptère afin de pouvoir commander avec les tensions alimentant les quatre moteurs à courant continu. Ceci a permis de faire le lien entre l’étude réalisée sur le banc d’essais et celle effectuée sur l’hélicoptère à quatre rotors.

Conclusion
Rapport de PFE 42
Conclusion
Le travail effectué au cours de ce stage a permis de comparer plusieurs types de
commandes, mises en place en simulation sur l’hélicoptère à quatre rotors. La robustesse, le
nombre de capteurs à utiliser et la facilité d’implémentation sont les facteurs qui ont été pris
en compte pour le choix de l’étude d’une commande. La commande par linéarisation exacte
réalisée par des chercheurs du LRV a montré des faiblesses concernant la robustesse. De plus,
elle utilise un nombre important de capteurs. L’étude de la commande par rétro-itération a
permis de remédier au problème du manque de robustesse ainsi que de réduire le nombre de
capteurs à employer.
Par ailleurs, une procédure de commande par rétro-itération utilisant des observateurs
à rétro-itération a été mise en place afin de diminuer davantage le nombre de capteurs à
employer. Cette approche a fourni des résultats performants mais on a dû changer de modèle.
Or, on peut se rendre compte finalement qu’en rajoutant les termes de traînée dans le modèle
d’hélicoptère du LRV, on aurait pu appliquer cette commande avec observateurs sur cette
même modélisation. D’autre part, la mise en œuvre de cette technique impose des choix
concernant les états à mesurer . En effet, les non linéarités du système doivent obligatoirement
être mesurées. Aussi, afin d’obtenir un observateur exponentiellement stable, on a dû mesurer
la position du centre de gravité de l’hélicoptère. Or, on sait pertinemment que dans la pratique
de telles mesures ne sont pas évidentes à obtenir : il est possible de mesurer sans difficulté
l’altitude de l’hélicoptère avec un altimètre, en revanche, il est beaucoup plus difficile de
mesurer la position en x et en y (si le robot volant se trouve dans un espace clos, il est
possible de mesurer x et y à l’aide de proximètres, mais si le drone évolue dans un espace
ouvert, dans ce cas on doit avoir recours au GPS avec toutes les incertitudes de mesures que
cela entraîne).
Pour résoudre l’inconvénient de la complexité d’implémentation de la commande par
rétro-itération, on a étudié une commande basée sur la passivité du système.
Malheureusement, cette commande donne des résultats performants uniquement pour un
déplacement vertical de l’hélicoptère.
Aussi, une étude sur la modélisation de l’hélicoptère a été réalisée dans l’unique but de
pouvoir commander ce système avec les tensions des moteurs à courant continu. En effet, ceci
trouve son intérêt dans la pratique puisqu’il est plus facile de commander avec des tensions

Conclusion
Rapport de PFE 43
plutôt qu’avec des forces de poussée. Ce travail a été réalisé sur le modèle du GRASP Lab
mais il peut parfaitement être effectué sur le modèle du LRV. On peut montrer aussi que les
commandes étudiées peuvent être appliquées sur un tel modèle. Enfin, on tient à mentionner
que des manipulations ont été réalisées sur le banc d’essais du LRV pour tester les
commandes. Mais les résultats obtenus n’ont pas été probants à cause d’un mauvais signal
émis par le gyromètre et en raison d’importants problèmes de frottements secs inhérents à la
construction du banc (cf annexe 34).
A partir de ce travail, d’autres perspectives peuvent être envisagées. On pourra
s’intéresser notamment à rendre la commande par rétro-itération avec observateurs, adaptative
afin de se consacrer à l’estimation des paramètres du système. Pour cela, il faudra étudier
inévitablement la géométrie différentielle du système afin de pouvoir transformer celui-ci en
modèle à injection de sortie pour lequel des méthodes de commande systématiques sont
développées (dans tous les cas, il faudra s’attarder sur la modélisation). D’autre part, on
pourra également effectuer des recherches sur la mise en place d’une commande basée sur la
linéarisation robuste [20] qui n’a pas eu le temps d’être abordée. Cette technique utilise les
espaces de Sobolev et permet de résoudre le problème de robustesse rencontré par la
linéarisation exacte. On pourrait aussi éventuellement s’intéresser à une commande hybride
permettant de réagir rapidement si l’hélicoptère se trouvait dans une configuration critique (à
cause de fortes perturbations par exemple). On pourrait ainsi relier le problème de détection à
celui de la commande. Enfin, les questions concernant la planification de trajectoires
optimales pourraient être abordées selon l’avancement des recherches sur la commande. Des
manipulations pourront être réalisées afin de vraiment pouvoir tester les commandes, sur un
banc de manipulation qui sera effectif dans un proche avenir (cf annexe 35 ).

Références Bibliographiques
Rapport de PFE 129
Références Bibliographiques
[1] V.Mislter, A.Benallegue and N.K.M’Sirdi : Exact linearization and noninteracting control of a 4rotors helicopter via dynamic feedback, Proceedings ROMAN Septembre 2001 Bordeaux-Paris
[2] V.Mislter, A.Benallegue and N.K.M’Sirdi : Linéarisation exacte et découplage entrées-
sorties, Comparaison entre l’hélicoptère standard & l’hélicoptère 4 rotors. CIFA 2002 [3] Erdinç Altug, James P. Ostrowski, Robert Mahony : Control of a Quadrotor Helicopter
Using Visual Feedback. GRASP Lab. University of Pennsylvania, Philadelphia. [4] Miroslav Krstic, Ionnis Kanellakopo, Petar KoKotovic, NonLinear and Adaptive Control
Design [5] Jean-Jacques E-Slotine, Weiping Li : Applied NonLinear Control [6] H. Imine, L. Laval, N.K. M’sirdi, Y. Delanne : Sliding Mode Observers with unknown
inputs to estimate the road profile. June 2002. [7] N. Manamanni, M. Djemaï, T. Boukhobza, N.K. M’sirdi : Nonlinear Sliding Observer-
based Control for a Pneumatic Robot. [8] M. Djemaï, J-P Barbot, T. Boukhobza : Some comments on Higher Order Sliding Modes. [9] M. Djemaï, J-P Barbot : Smooth Manifolds and High Order Sliding Mode Control.
Proceeding of the 41st IEEE. Conference on Decision and Control, Las Vegas, Nevada USA, December 2002.
[10] J-P Barbot, T. Boukhobza, M. Djemaï : Sliding Mode Observer for Triangular Input
Form. Proceeding of the 35st. Conference on Decision and Control, Kobe, Japan, December 1996.
[11] Mark W. Spong : Energy Based Control of a Class of Underactuated Mechanical
Systems. Coordinated Science Laboratory, University of Illinois, Urbana. [12] N. Manamanni : THESE Commandes et observateurs pour systèmes pneumatiques-
méthodologie pour la locomotion à patte, Université Pierre et Marie Curie, Février 1998. [13] H.Nijmeijer and A.van der Schaft. Nonlinear Dynamical Control Systems. Springer-
Verlag, 1990. [14] R Mahony and T Hamel 'Stable tracking control for unmanned aerial vehicles using non-
inertial measurements.' Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, NSW, 12-15 Dec 2000, 2971 - 2976, 2000

Références Bibliographiques
Rapport de PFE 130
[15] E.N. Johnson, P.A. Debitetto, C.A. Trott, M.C. Bosse, « The 1996 Draper Laboratory Small Autonomous Aerial Vehicle », AIAA/IEEE Digital Avionics Systems Conference Proceedings, 1996.
[16] H. Shim, T.J. Koo, F. Hoffmann, S. Sastry, « A Comprehensive Study of Control Design
for an Autonomous Helicopter ». [17] Srikanth Saripalli, Gaurav S. Sukhatme, James F. Montgomery : An experimental Study
of the Autonomous Helicopter Landing Problem. Submitted to Eight International Symposium on Expérimental Robotics, July 2002.
[18] Carnegie Mellon Robotics Institute Autonomous helicopter project webpage.
http ://www.cs.cmu.edu/afs/cs.cmu.edu/project/chopper/www/. [19] Robotics Information Technology Institute and Computer Vision Laboratory. Aurora
Project webpage. http ://www.ia.cti.br/lrv/aurora.html [20] Hervé Guillard, Henri Bourlès : Robust Feedback Linearization, Laboratoire
d’Automatique des Arts et Métiers.

Annexes
Rapport de PFE 44
ANNEXES

Annexe 14
Rapport de PFE 70
ANNEXE 14 . LOIS DE COMMANDE
u1 ( ) + + ( )sin φ ( )sin θ 2 ( )sin ψ ( )cos φ ( )cos ψ ( )sin θ ( )cos θ 2 ( )sin φ ( )sin ψ (( :=
k14 Ix Iy xd02 m k12 xd04 m Ix Iy k14 Ix Iy k13 k11 xd01 m− − − k14 Ix Iy k13 k12 u0 m k14 Ix Iy k13 k12 xd01 m xd02 m Ix Iy k12 k11 + − − ζ Ix Iy k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k11 ( )cos φ ( )sin ψ p − − ξ Ix Iy k12 ( )cos φ ( )sin ψ p ζ Ix Iy k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 ( )cos φ ( )sin ψ p + − ξ Ix Iy k12 k11 ( )cos φ ( )cos ψ ( )sin θ xd03 m Ix Iy k12 xd03 m Ix Iy k13 − − − xd03 m Ix Iy k11 xd02 m Ix Iy k13 k11 xd02 m Ix Iy k13 k12 − − − k14 Ix Iy k12 k11 xd01 m k14 Ix Iy k12 k11 u0 m k14 Ix Iy k13 k12 k11 x0 m − + + k14 Ix Iy k13 k12 k11 xd0 m ζ Ix Iy k11 ( )sin φ ( )sin ψ k14 Ix Iy k13 xd02 m − − − k14 Ix Iy xd03 m k14 Ix Iy k13 k11 u0 m k14 Ix Iy xd02 m k11 − + − k13 k12 k11 u0 m Ix Iy k13 k12 k11 xd01 m Ix Iy + −
( )cos ψ Ix Iy ξ q ( )sin θ r ( )sin φ ξ Iy2 ( )sin φ ( )cos ψ ( )sin θ q r − +
ξ Iy2 ( )cos φ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )cos ψ ( )sin θ q r − − ξ ( )cos ψ ( )cos θ Ix2 p r Ix Iy ξ ( )sin ψ q2 ( )sin φ + +
( )cos ψ Ix Iy ξ q2 ( )sin θ ( )cos φ Ix Iy ξ ( )cos φ ( )cos ψ ( )sin θ p2 + +
ξ Iy Iz ( )cos φ ( )sin ψ q r ξ ( )cos ψ ( )cos θ Ix Iz p r Ix Iy ξ ( )sin φ ( )sin ψ p2 + − + ξ ( )cos θ Ix Iy k12 ( )cos ψ q ξ ( )cos θ Ix Iy k13 ( )cos ψ q − − k14 Ix Iy ζ ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ζ ( )sin φ ( )sin ψ − − k14 ( )cos θ Ix Iy ξ ( )cos ψ q k14 Ix Iy k13 ξ ( )sin φ ( )sin ψ − − k14 Ix Iy ξ k11 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k11 ( )sin φ ( )sin ψ − − k14 Ix Iy ξ ( )cos φ ( )sin ψ p ξ ( )cos θ Ix Iy k11 ( )cos ψ q − −
( )cos ψ Ix Iy ( )cos θ ξ p r Ix Iy ( )cos φ ( )sin ψ ξ r q − + ξ Ix Iy k12 k11 ( )sin φ ( )sin ψ ζ Ix Iy k13 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ k12 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k12 ( )sin φ ( )sin ψ − − ζ Ix Iy k13 ( )sin φ ( )sin ψ k14 Ix Iy k13 ξ ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 k11 ( )sin φ ( )sin ψ + − ξ Ix Iy k13 k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k13 k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 k11 ( )cos φ ( )cos ψ ( )sin θ ζ Ix Iy k11 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k12 ( )sin φ ( )cos ψ ( )sin θ p + + 2 Ix Iy ζ ( )cos θ ( )cos ψ q 2 Ix Iy ζ ( )sin φ ( )cos ψ ( )sin θ p − +
2 Ix Iy ζ ( )cos φ ( )sin ψ p − ) ( )sin φ 2 ( )sin ψ 2 ( )sin θ 2() (( )sin φ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos φ 2 ( )sin θ 2 ( )sin ψ 2 + + +
( )cos ψ 2 ( )sin φ 2 ( )sin θ 2 ( )cos ψ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ( )sin ψ 2 + + +
( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 + ) Ix Iy ) ( −
( )− + + ( )cos φ ( )sin θ ( )sin ψ ( )sin φ ( )cos ψ ( )sin θ 2 ( )cos θ 2 ( )sin φ ( )cos ψ (

Annexe 14
Rapport de PFE 71
k23 k22 k21 v0 m Ix Iy k24 Ix Iy yd02 m k21 yd04 m Ix Iy − − ξ Ix Iy k23 ( )cos ψ ( )cos φ p ζ Ix Iy k21 ( )cos ψ ( )sin φ + + ζ Ix Iy k22 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k22 ( )cos ψ ( )sin φ − + ζ Ix Iy k23 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k23 ( )cos ψ ( )sin φ − + ξ Ix Iy k22 ( )cos ψ ( )cos φ p ξ Ix Iy k23 ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k23 k22 ( )cos ψ ( )sin φ ζ Ix Iy k21 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k23 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k22 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k22 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy ξ ( )cos ψ ( )cos φ p k24 Ix Iy ξ k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy k23 ξ ( )cos ψ ( )sin φ k24 Ix Iy ξ ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k22 k21 ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy ξ k22 ( )cos ψ ( )sin φ − + k24 Ix Iy k23 ξ ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy yd03 m − − k24 Ix Iy ζ ( )cos ψ ( )sin φ k24 Ix Iy ξ k21 ( )cos ψ ( )sin φ + + k24 Ix Iy ξ k22 ( )cos φ ( )sin θ ( )sin ψ yd02 m Ix Iy k22 k21 − − yd02 m Ix Iy k23 k21 k24 Ix Iy k23 k22 yd01 m k24 Ix Iy k23 k22 v0 m − − + k24 Ix Iy k23 k22 k21 yd0 m yd02 m Ix Iy k23 k22 yd03 m Ix Iy k21 − − − yd03 m Ix Iy k22 yd03 m Ix Iy k23 k24 Ix Iy k23 yd02 m − − − k24 Ix Iy k22 k21 yd01 m k24 Ix Iy k23 k21 v0 m k24 Ix Iy k23 k21 yd01 m − + − k24 Ix Iy k23 k22 k21 y0 m k23 k22 k21 yd01 m Ix Iy k24 Ix Iy k22 k21 v0 m + − + 2 Ix Iy ζ ( )cos θ ( )sin ψ q ξ ( )sin ψ ( )cos θ Ix Iz p r − − 2 Ix Iy ζ ( )sin φ ( )sin θ ( )sin ψ p 2 Ix Iy ζ ( )cos ψ ( )cos φ p + +
ξ ( )sin ψ ( )cos θ Ix2 p r ( )sin ψ Ix Iy ξ q2 ( )sin θ ( )cos φ + +
( )sin ψ Ix Iy ξ q ( )sin θ r ( )sin φ Ix Iy ξ ( )cos ψ q2 ( )sin φ − − Ix Iy ξ ( )sin ψ r p ( )cos θ k24 ( )cos θ Ix Iy ξ ( )sin ψ q − − Ix Iy ξ ( )cos ψ q r ( )cos φ ξ ( )cos θ Ix Iy k22 ( )sin ψ q − − ξ ( )cos θ Ix Iy k21 ( )sin ψ q ξ ( )cos θ Ix Iy k23 ( )sin ψ q − −
Ix Iy ξ ( )cos ψ ( )sin φ p2 Ix Iy ξ ( )cos φ ( )sin θ ( )sin ψ p2 − + ξ Ix Iy k22 ( )sin φ ( )sin θ ( )sin ψ p k24 Ix Iy ζ ( )cos φ ( )sin θ ( )sin ψ + − ξ Iy Iz ( )cos ψ ( )cos φ q r ξ Iy2 ( )cos ψ ( )cos φ q r − +
ξ Iy2 ( )sin φ ( )sin θ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )sin θ ( )sin ψ q r + − ξ Ix Iy k21 ( )sin φ ( )sin θ ( )sin ψ p ξ Ix Iy k21 ( )cos ψ ( )cos φ p + +
k24 Ix Iy yd02 m k22 − ) ( )sin φ 2 ( )sin ψ 2 ( )sin θ 2 ( )sin φ 2 ( )sin ψ 2 ( )cos θ 2 + () (( )cos φ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos φ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos ψ 2 ( )sin φ 2 ( )sin θ 2 + + +
( )cos ψ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 + + + )Ix Iy ) ( )cos θ ( )cos φ zd04 m Ix Iy zd03 m Ix Iy k33 Ix Iy ( )sin θ ξ p r− − + ( +
2 Ix Iy ( )sin φ ζ p ( )cos θ k34 Ix Iy k33 k31 w0 m k34 Ix Iy k33 k31 zd01 m + + − k34 Ix Iy k33 zd02 m k34 Ix Iy k33 k32 w0 m k34 Ix Iy k33 k32 zd01 m − + − k34 Ix Iy k33 k32 k31 z0 m k34 Ix Iy k33 k32 k31 zd0 m + −
Ix Iy ( )cos φ ξ p2 ( )cos θ ( )cos θ ( )sin φ ξ Iy2 q r ( )cos θ ( )sin φ ξ Iy q r Iz + + − ( )sin φ ξ Ix Iy k31 p ( )cos θ ( )sin φ ξ Ix Iy k32 p ( )cos θ + + ( )sin φ ξ Ix Iy k33 p ( )cos θ k34 Ix Iy k33 g m Ix Iy k32 k31 ( )cos θ ( )cos φ ξ + + −

Annexe 14
Rapport de PFE 72
Ix Iy k33 k31 ( )cos θ ( )cos φ ξ Ix Iy k33 k32 ( )cos θ ( )cos φ ξ − − ( )cos θ ( )cos φ ζ Ix Iy k31 ( )cos θ ( )cos φ ζ Ix Iy k32 − − ( )cos θ ( )cos φ ζ Ix Iy k33 k34 Ix Iy ( )sin φ ξ p ( )cos θ − +
k34 Ix Iy ( )cos θ ( )cos φ ζ k34 Ix Iy k31 ( )cos θ ( )cos φ ξ − − k34 Ix Iy k32 ( )cos θ ( )cos φ ξ k34 Ix Iy k33 ( )cos θ ( )cos φ ξ − − 2 Ix Iy ζ q ( )sin θ ξ Ix Iy k33 q ( )sin θ ξ Ix Iy k32 q ( )sin θ + + + ξ Ix Iy k31 q ( )sin θ k34 Ix Iy ξ q ( )sin θ k33 k32 k31 w0 m Ix Iy + + + k33 k32 k31 zd01 m Ix Iy Ix Iy k32 k31 g m Ix Iy k33 k31 g m − + + Ix Iy k33 k32 g m zd02 m Ix Iy k32 k31 zd02 m Ix Iy k33 k31 + − − zd02 m Ix Iy k33 k32 zd03 m Ix Iy k31 zd03 m Ix Iy k32 − − − k34 Ix Iy k32 k31 w0 m k34 Ix Iy k31 g m k34 Ix Iy k32 g m + + + k34 Ix Iy k32 k31 zd01 m k34 Ix Iy zd02 m k31 k34 Ix Iy zd02 m k32 − − −
k34 Ix Iy zd03 m Ix Iy ξ ( )cos θ q r ( )sin φ Ix Iy ξ ( )cos θ q2 ( )cos φ − − +
( )sin θ ξ Ix2 p r ( )sin θ ξ Ix p r Iz − + ) (( ) + + + ( )cos φ 2 ( )sin θ 2 ( )sin φ 2 ( )sin θ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 Ix Iy )
u2 ( )− + − ( )cos φ ( )sin θ 2 ( )sin ψ ( )sin φ ( )cos ψ ( )sin θ ( )cos θ 2 ( )cos φ ( )sin ψ ((− =
k14 Ix Iy xd02 m k12 xd04 m Ix Iy k14 Ix Iy k13 k11 xd01 m− − − k14 Ix Iy k13 k12 u0 m k14 Ix Iy k13 k12 xd01 m xd02 m Ix Iy k12 k11 + − − ζ Ix Iy k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k11 ( )cos φ ( )sin ψ p − − ξ Ix Iy k12 ( )cos φ ( )sin ψ p ζ Ix Iy k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 ( )cos φ ( )sin ψ p + − ξ Ix Iy k12 k11 ( )cos φ ( )cos ψ ( )sin θ xd03 m Ix Iy k12 xd03 m Ix Iy k13 − − − xd03 m Ix Iy k11 xd02 m Ix Iy k13 k11 xd02 m Ix Iy k13 k12 − − − k14 Ix Iy k12 k11 xd01 m k14 Ix Iy k12 k11 u0 m k14 Ix Iy k13 k12 k11 x0 m − + + k14 Ix Iy k13 k12 k11 xd0 m ζ Ix Iy k11 ( )sin φ ( )sin ψ k14 Ix Iy k13 xd02 m − − − k14 Ix Iy xd03 m k14 Ix Iy k13 k11 u0 m k14 Ix Iy xd02 m k11 − + − k13 k12 k11 u0 m Ix Iy k13 k12 k11 xd01 m Ix Iy + −
( )cos ψ Ix Iy ξ q ( )sin θ r ( )sin φ ξ Iy2 ( )sin φ ( )cos ψ ( )sin θ q r − +
ξ Iy2 ( )cos φ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )cos ψ ( )sin θ q r − − ξ ( )cos ψ ( )cos θ Ix2 p r Ix Iy ξ ( )sin ψ q2 ( )sin φ + +
( )cos ψ Ix Iy ξ q2 ( )sin θ ( )cos φ Ix Iy ξ ( )cos φ ( )cos ψ ( )sin θ p2 + +
ξ Iy Iz ( )cos φ ( )sin ψ q r ξ ( )cos ψ ( )cos θ Ix Iz p r Ix Iy ξ ( )sin φ ( )sin ψ p2 + − + ξ ( )cos θ Ix Iy k12 ( )cos ψ q ξ ( )cos θ Ix Iy k13 ( )cos ψ q − − k14 Ix Iy ζ ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ζ ( )sin φ ( )sin ψ − − k14 ( )cos θ Ix Iy ξ ( )cos ψ q k14 Ix Iy k13 ξ ( )sin φ ( )sin ψ − − k14 Ix Iy ξ k11 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k11 ( )sin φ ( )sin ψ − − k14 Ix Iy ξ ( )cos φ ( )sin ψ p ξ ( )cos θ Ix Iy k11 ( )cos ψ q − −
( )cos ψ Ix Iy ( )cos θ ξ p r Ix Iy ( )cos φ ( )sin ψ ξ r q − +

Annexe 14
Rapport de PFE 73
ξ Ix Iy k12 k11 ( )sin φ ( )sin ψ ζ Ix Iy k13 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ k12 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k12 ( )sin φ ( )sin ψ − − ζ Ix Iy k13 ( )sin φ ( )sin ψ k14 Ix Iy k13 ξ ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 k11 ( )sin φ ( )sin ψ + − ξ Ix Iy k13 k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k13 k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 k11 ( )cos φ ( )cos ψ ( )sin θ ζ Ix Iy k11 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k12 ( )sin φ ( )cos ψ ( )sin θ p + + 2 Ix Iy ζ ( )cos θ ( )cos ψ q 2 Ix Iy ζ ( )sin φ ( )cos ψ ( )sin θ p − +
2 Ix Iy ζ ( )cos φ ( )sin ψ p − ) ξ d ( )sin φ 2 ( )sin ψ 2 ( )sin θ 2() (( )sin φ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos φ 2 ( )sin θ 2 ( )sin ψ 2 + + +
( )cos ψ 2 ( )sin φ 2 ( )sin θ 2 ( )cos ψ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ( )sin ψ 2 + + +
( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 + ) Iy ) ( −
( ) + + ( )sin φ ( )sin θ ( )sin ψ ( )cos φ ( )cos ψ ( )sin θ 2 ( )cos θ 2 ( )cos φ ( )cos ψ (k23 k22 k21 v0 m Ix Iy k24 Ix Iy yd02 m k21 yd04 m Ix Iy − −
ξ Ix Iy k23 ( )cos ψ ( )cos φ p ζ Ix Iy k21 ( )cos ψ ( )sin φ + + ζ Ix Iy k22 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k22 ( )cos ψ ( )sin φ − + ζ Ix Iy k23 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k23 ( )cos ψ ( )sin φ − + ξ Ix Iy k22 ( )cos ψ ( )cos φ p ξ Ix Iy k23 ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k23 k22 ( )cos ψ ( )sin φ ζ Ix Iy k21 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k23 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k22 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k22 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy ξ ( )cos ψ ( )cos φ p k24 Ix Iy ξ k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy k23 ξ ( )cos ψ ( )sin φ k24 Ix Iy ξ ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k22 k21 ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy ξ k22 ( )cos ψ ( )sin φ − + k24 Ix Iy k23 ξ ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy yd03 m − − k24 Ix Iy ζ ( )cos ψ ( )sin φ k24 Ix Iy ξ k21 ( )cos ψ ( )sin φ + + k24 Ix Iy ξ k22 ( )cos φ ( )sin θ ( )sin ψ yd02 m Ix Iy k22 k21 − − yd02 m Ix Iy k23 k21 k24 Ix Iy k23 k22 yd01 m k24 Ix Iy k23 k22 v0 m − − + k24 Ix Iy k23 k22 k21 yd0 m yd02 m Ix Iy k23 k22 yd03 m Ix Iy k21 − − − yd03 m Ix Iy k22 yd03 m Ix Iy k23 k24 Ix Iy k23 yd02 m − − − k24 Ix Iy k22 k21 yd01 m k24 Ix Iy k23 k21 v0 m k24 Ix Iy k23 k21 yd01 m − + − k24 Ix Iy k23 k22 k21 y0 m k23 k22 k21 yd01 m Ix Iy k24 Ix Iy k22 k21 v0 m + − + 2 Ix Iy ζ ( )cos θ ( )sin ψ q ξ ( )sin ψ ( )cos θ Ix Iz p r − − 2 Ix Iy ζ ( )sin φ ( )sin θ ( )sin ψ p 2 Ix Iy ζ ( )cos ψ ( )cos φ p + +
ξ ( )sin ψ ( )cos θ Ix2 p r ( )sin ψ Ix Iy ξ q2 ( )sin θ ( )cos φ + +
( )sin ψ Ix Iy ξ q ( )sin θ r ( )sin φ Ix Iy ξ ( )cos ψ q2 ( )sin φ − − Ix Iy ξ ( )sin ψ r p ( )cos θ k24 ( )cos θ Ix Iy ξ ( )sin ψ q − − Ix Iy ξ ( )cos ψ q r ( )cos φ ξ ( )cos θ Ix Iy k22 ( )sin ψ q − − ξ ( )cos θ Ix Iy k21 ( )sin ψ q ξ ( )cos θ Ix Iy k23 ( )sin ψ q − −
Ix Iy ξ ( )cos ψ ( )sin φ p2 Ix Iy ξ ( )cos φ ( )sin θ ( )sin ψ p2 − + ξ Ix Iy k22 ( )sin φ ( )sin θ ( )sin ψ p k24 Ix Iy ζ ( )cos φ ( )sin θ ( )sin ψ + −

Annexe 14
Rapport de PFE 74
ξ Iy Iz ( )cos ψ ( )cos φ q r ξ Iy2 ( )cos ψ ( )cos φ q r − +
ξ Iy2 ( )sin φ ( )sin θ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )sin θ ( )sin ψ q r + − ξ Ix Iy k21 ( )sin φ ( )sin θ ( )sin ψ p ξ Ix Iy k21 ( )cos ψ ( )cos φ p + +
k24 Ix Iy yd02 m k22 − ) ξ d ( )sin φ 2 ( )sin ψ 2 ( )sin θ 2() (( )sin φ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos φ 2 ( )sin θ 2 ( )sin ψ 2 + + +
( )cos ψ 2 ( )sin φ 2 ( )sin θ 2 ( )cos ψ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ( )sin ψ 2 + + +
( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 + ) Iy ) ( )cos θ ( )sin φ zd04 m Ix Iy zd03 m Ix Iy k33− − ( − Ix Iy ( )sin θ ξ p r 2 Ix Iy ( )sin φ ζ p ( )cos θ k34 Ix Iy k33 k31 w0 m + + + k34 Ix Iy k33 k31 zd01 m k34 Ix Iy k33 zd02 m k34 Ix Iy k33 k32 w0 m − − + k34 Ix Iy k33 k32 zd01 m k34 Ix Iy k33 k32 k31 z0 m − +
k34 Ix Iy k33 k32 k31 zd0 m Ix Iy ( )cos φ ξ p2 ( )cos θ ( )cos θ ( )sin φ ξ Iy2 q r − + + ( )cos θ ( )sin φ ξ Iy q r Iz ( )sin φ ξ Ix Iy k31 p ( )cos θ − + ( )sin φ ξ Ix Iy k32 p ( )cos θ ( )sin φ ξ Ix Iy k33 p ( )cos θ k34 Ix Iy k33 g m + + +
Ix Iy k32 k31 ( )cos θ ( )cos φ ξ Ix Iy k33 k31 ( )cos θ ( )cos φ ξ − − Ix Iy k33 k32 ( )cos θ ( )cos φ ξ ( )cos θ ( )cos φ ζ Ix Iy k31 − −
( )cos θ ( )cos φ ζ Ix Iy k32 ( )cos θ ( )cos φ ζ Ix Iy k33 − − k34 Ix Iy ( )sin φ ξ p ( )cos θ k34 Ix Iy ( )cos θ ( )cos φ ζ + − k34 Ix Iy k31 ( )cos θ ( )cos φ ξ k34 Ix Iy k32 ( )cos θ ( )cos φ ξ − − k34 Ix Iy k33 ( )cos θ ( )cos φ ξ 2 Ix Iy ζ q ( )sin θ ξ Ix Iy k33 q ( )sin θ − + + ξ Ix Iy k32 q ( )sin θ ξ Ix Iy k31 q ( )sin θ k34 Ix Iy ξ q ( )sin θ + + + k33 k32 k31 w0 m Ix Iy k33 k32 k31 zd01 m Ix Iy Ix Iy k32 k31 g m + − + Ix Iy k33 k31 g m Ix Iy k33 k32 g m zd02 m Ix Iy k32 k31 + + − zd02 m Ix Iy k33 k31 zd02 m Ix Iy k33 k32 zd03 m Ix Iy k31 zd03 m Ix Iy k32 − − − − k34 Ix Iy k32 k31 w0 m k34 Ix Iy k31 g m k34 Ix Iy k32 g m + + + k34 Ix Iy k32 k31 zd01 m k34 Ix Iy zd02 m k31 k34 Ix Iy zd02 m k32 − − −
k34 Ix Iy zd03 m Ix Iy ξ ( )cos θ q r ( )sin φ Ix Iy ξ ( )cos θ q2 ( )cos φ − − +
( )sin θ ξ Ix2 p r ( )sin θ ξ Ix p r Iz − + ) (( ) + + + ( )cos φ 2 ( )sin θ 2 ( )sin φ 2 ( )sin θ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ξ d Iy )
u3 ( )cos θ ( )cos ψ k14 Ix Iy xd02 m k12 xd04 m Ix Iy k14 Ix Iy k13 k11 xd01 m− − − ( =
k14 Ix Iy k13 k12 u0 m k14 Ix Iy k13 k12 xd01 m xd02 m Ix Iy k12 k11 + − − ζ Ix Iy k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k11 ( )cos φ ( )sin ψ p − − ξ Ix Iy k12 ( )cos φ ( )sin ψ p ζ Ix Iy k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 ( )cos φ ( )sin ψ p + − ξ Ix Iy k12 k11 ( )cos φ ( )cos ψ ( )sin θ xd03 m Ix Iy k12 xd03 m Ix Iy k13 − − − xd03 m Ix Iy k11 xd02 m Ix Iy k13 k11 xd02 m Ix Iy k13 k12 − − − k14 Ix Iy k12 k11 xd01 m k14 Ix Iy k12 k11 u0 m k14 Ix Iy k13 k12 k11 x0 m − + + k14 Ix Iy k13 k12 k11 xd0 m ζ Ix Iy k11 ( )sin φ ( )sin ψ k14 Ix Iy k13 xd02 m − − − k14 Ix Iy xd03 m k14 Ix Iy k13 k11 u0 m k14 Ix Iy xd02 m k11 − + −

Annexe 14
Rapport de PFE 75
k13 k12 k11 u0 m Ix Iy k13 k12 k11 xd01 m Ix Iy + −
( )cos ψ Ix Iy ξ q ( )sin θ r ( )sin φ ξ Iy2 ( )sin φ ( )cos ψ ( )sin θ q r − +
ξ Iy2 ( )cos φ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )cos ψ ( )sin θ q r − −
ξ ( )cos ψ ( )cos θ Ix2 p r Ix Iy ξ ( )sin ψ q2 ( )sin φ + + ( )cos ψ Ix Iy ξ q2 ( )sin θ ( )cos φ Ix Iy ξ ( )cos φ ( )cos ψ ( )sin θ p2 + +
ξ Iy Iz ( )cos φ ( )sin ψ q r ξ ( )cos ψ ( )cos θ Ix Iz p r Ix Iy ξ ( )sin φ ( )sin ψ p2 + − + ξ ( )cos θ Ix Iy k12 ( )cos ψ q ξ ( )cos θ Ix Iy k13 ( )cos ψ q − − k14 Ix Iy ζ ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ζ ( )sin φ ( )sin ψ − − k14 ( )cos θ Ix Iy ξ ( )cos ψ q k14 Ix Iy k13 ξ ( )sin φ ( )sin ψ − − k14 Ix Iy ξ k11 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k11 ( )sin φ ( )sin ψ − − k14 Ix Iy ξ ( )cos φ ( )sin ψ p ξ ( )cos θ Ix Iy k11 ( )cos ψ q − −
( )cos ψ Ix Iy ( )cos θ ξ p r Ix Iy ( )cos φ ( )sin ψ ξ r q − + ξ Ix Iy k12 k11 ( )sin φ ( )sin ψ ζ Ix Iy k13 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ k12 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k12 ( )sin φ ( )sin ψ − − ζ Ix Iy k13 ( )sin φ ( )sin ψ k14 Ix Iy k13 ξ ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 k11 ( )sin φ ( )sin ψ + − ξ Ix Iy k13 k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k13 k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 k11 ( )cos φ ( )cos ψ ( )sin θ ζ Ix Iy k11 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k12 ( )sin φ ( )cos ψ ( )sin θ p + + 2 Ix Iy ζ ( )cos θ ( )cos ψ q 2 Ix Iy ζ ( )sin φ ( )cos ψ ( )sin θ p − + 2 Ix Iy ζ ( )cos φ ( )sin ψ p − ) (
( ) + + + ( )sin ψ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos ψ 2 ( )cos θ 2 ξ d Ix )( )cos θ ( )sin ψ k23 k22 k21 v0 m Ix Iy k24 Ix Iy yd02 m k21 yd04 m Ix Iy − − ( +
ξ Ix Iy k23 ( )cos ψ ( )cos φ p ζ Ix Iy k21 ( )cos ψ ( )sin φ + + ζ Ix Iy k22 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k22 ( )cos ψ ( )sin φ − + ζ Ix Iy k23 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k23 ( )cos ψ ( )sin φ − + ξ Ix Iy k22 ( )cos ψ ( )cos φ p ξ Ix Iy k23 ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k23 k22 ( )cos ψ ( )sin φ ζ Ix Iy k21 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k23 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k22 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k22 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy ξ ( )cos ψ ( )cos φ p k24 Ix Iy ξ k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy k23 ξ ( )cos ψ ( )sin φ k24 Ix Iy ξ ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k22 k21 ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy ξ k22 ( )cos ψ ( )sin φ − + k24 Ix Iy k23 ξ ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy yd03 m − − k24 Ix Iy ζ ( )cos ψ ( )sin φ k24 Ix Iy ξ k21 ( )cos ψ ( )sin φ + + k24 Ix Iy ξ k22 ( )cos φ ( )sin θ ( )sin ψ yd02 m Ix Iy k22 k21 − − yd02 m Ix Iy k23 k21 k24 Ix Iy k23 k22 yd01 m k24 Ix Iy k23 k22 v0 m − − + k24 Ix Iy k23 k22 k21 yd0 m yd02 m Ix Iy k23 k22 yd03 m Ix Iy k21 − − − yd03 m Ix Iy k22 yd03 m Ix Iy k23 k24 Ix Iy k23 yd02 m − − − k24 Ix Iy k22 k21 yd01 m k24 Ix Iy k23 k21 v0 m k24 Ix Iy k23 k21 yd01 m − + − k24 Ix Iy k23 k22 k21 y0 m k23 k22 k21 yd01 m Ix Iy k24 Ix Iy k22 k21 v0 m + − + 2 Ix Iy ζ ( )cos θ ( )sin ψ q ξ ( )sin ψ ( )cos θ Ix Iz p r − −

Annexe 14
Rapport de PFE 76
2 Ix Iy ζ ( )sin φ ( )sin θ ( )sin ψ p 2 Ix Iy ζ ( )cos ψ ( )cos φ p + +
ξ ( )sin ψ ( )cos θ Ix2 p r ( )sin ψ Ix Iy ξ q2 ( )sin θ ( )cos φ + +
( )sin ψ Ix Iy ξ q ( )sin θ r ( )sin φ Ix Iy ξ ( )cos ψ q2 ( )sin φ − − Ix Iy ξ ( )sin ψ r p ( )cos θ k24 ( )cos θ Ix Iy ξ ( )sin ψ q − − Ix Iy ξ ( )cos ψ q r ( )cos φ ξ ( )cos θ Ix Iy k22 ( )sin ψ q − − ξ ( )cos θ Ix Iy k21 ( )sin ψ q ξ ( )cos θ Ix Iy k23 ( )sin ψ q − −
Ix Iy ξ ( )cos ψ ( )sin φ p2 Ix Iy ξ ( )cos φ ( )sin θ ( )sin ψ p2 − + ξ Ix Iy k22 ( )sin φ ( )sin θ ( )sin ψ p k24 Ix Iy ζ ( )cos φ ( )sin θ ( )sin ψ + − ξ Iy Iz ( )cos ψ ( )cos φ q r ξ Iy2 ( )cos ψ ( )cos φ q r − +
ξ Iy2 ( )sin φ ( )sin θ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )sin θ ( )sin ψ q r + − ξ Ix Iy k21 ( )sin φ ( )sin θ ( )sin ψ p ξ Ix Iy k21 ( )cos ψ ( )cos φ p + + k24 Ix Iy yd02 m k22 − ) (
( ) + + + ( )sin ψ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos ψ 2 ( )cos θ 2 ξ d Ix )( )sin θ zd04 m Ix Iy zd03 m Ix Iy k33 Ix Iy ( )sin θ ξ p r− − + ( −
2 Ix Iy ( )sin φ ζ p ( )cos θ k34 Ix Iy k33 k31 w0 m k34 Ix Iy k33 k31 zd01 m + + − k34 Ix Iy k33 zd02 m k34 Ix Iy k33 k32 w0 m k34 Ix Iy k33 k32 zd01 m − + − k34 Ix Iy k33 k32 k31 z0 m k34 Ix Iy k33 k32 k31 zd0 m + − Ix Iy ( )cos φ ξ p2 ( )cos θ ( )cos θ ( )sin φ ξ Iy2 q r ( )cos θ ( )sin φ ξ Iy q r Iz + + −
( )sin φ ξ Ix Iy k31 p ( )cos θ ( )sin φ ξ Ix Iy k32 p ( )cos θ + + ( )sin φ ξ Ix Iy k33 p ( )cos θ k34 Ix Iy k33 g m Ix Iy k32 k31 ( )cos θ ( )cos φ ξ + + −
Ix Iy k33 k31 ( )cos θ ( )cos φ ξ Ix Iy k33 k32 ( )cos θ ( )cos φ ξ − − ( )cos θ ( )cos φ ζ Ix Iy k31 ( )cos θ ( )cos φ ζ Ix Iy k32 − − ( )cos θ ( )cos φ ζ Ix Iy k33 k34 Ix Iy ( )sin φ ξ p ( )cos θ − +
k34 Ix Iy ( )cos θ ( )cos φ ζ k34 Ix Iy k31 ( )cos θ ( )cos φ ξ − − k34 Ix Iy k32 ( )cos θ ( )cos φ ξ k34 Ix Iy k33 ( )cos θ ( )cos φ ξ − − 2 Ix Iy ζ q ( )sin θ ξ Ix Iy k33 q ( )sin θ ξ Ix Iy k32 q ( )sin θ + + + ξ Ix Iy k31 q ( )sin θ k34 Ix Iy ξ q ( )sin θ k33 k32 k31 w0 m Ix Iy + + + k33 k32 k31 zd01 m Ix Iy Ix Iy k32 k31 g m Ix Iy k33 k31 g m − + + Ix Iy k33 k32 g m zd02 m Ix Iy k32 k31 zd02 m Ix Iy k33 k31 + − − zd02 m Ix Iy k33 k32 zd03 m Ix Iy k31 zd03 m Ix Iy k32 − − − k34 Ix Iy k32 k31 w0 m k34 Ix Iy k31 g m k34 Ix Iy k32 g m + + + k34 Ix Iy k32 k31 zd01 m k34 Ix Iy zd02 m k31 k34 Ix Iy zd02 m k32 − − − k34 Ix Iy zd03 m Ix Iy ξ ( )cos θ q r ( )sin φ Ix Iy ξ ( )cos θ q2 ( )cos φ − − +
( )sin θ ξ Ix2 p r ( )sin θ ξ Ix p r Iz − + ) ( ) + ( )sin θ 2 ( )cos θ 2 ξ d Ix( )

Annexe 14
Rapport de PFE 77
u4 Iz ( )cos θ ( )cos ψ ( )sin φ k14 Ix Iy xd02 m k12 xd04 m Ix Iy− − (− = k14 Ix Iy k13 k11 xd01 m k14 Ix Iy k13 k12 u0 m k14 Ix Iy k13 k12 xd01 m − + − xd02 m Ix Iy k12 k11 ζ Ix Iy k12 ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )cos φ ( )sin ψ p ξ Ix Iy k12 ( )cos φ ( )sin ψ p − − ζ Ix Iy k12 ( )sin φ ( )sin ψ ξ Ix Iy k13 ( )sin φ ( )cos ψ ( )sin θ p − + ξ Ix Iy k13 ( )cos φ ( )sin ψ p ξ Ix Iy k12 k11 ( )cos φ ( )cos ψ ( )sin θ − − xd03 m Ix Iy k12 xd03 m Ix Iy k13 xd03 m Ix Iy k11 xd02 m Ix Iy k13 k11 − − − − xd02 m Ix Iy k13 k12 k14 Ix Iy k12 k11 xd01 m k14 Ix Iy k12 k11 u0 m − − + k14 Ix Iy k13 k12 k11 x0 m k14 Ix Iy k13 k12 k11 xd0 m + − ζ Ix Iy k11 ( )sin φ ( )sin ψ k14 Ix Iy k13 xd02 m k14 Ix Iy xd03 m − − − k14 Ix Iy k13 k11 u0 m k14 Ix Iy xd02 m k11 k13 k12 k11 u0 m Ix Iy + − + k13 k12 k11 xd01 m Ix Iy ( )cos ψ Ix Iy ξ q ( )sin θ r ( )sin φ − −
ξ Iy2 ( )sin φ ( )cos ψ ( )sin θ q r ξ Iy2 ( )cos φ ( )sin ψ q r + −
ξ Iy Iz ( )sin φ ( )cos ψ ( )sin θ q r ξ ( )cos ψ ( )cos θ Ix2 p r − + Ix Iy ξ ( )sin ψ q2 ( )sin φ ( )cos ψ Ix Iy ξ q2 ( )sin θ ( )cos φ + +
Ix Iy ξ ( )cos φ ( )cos ψ ( )sin θ p2 ξ Iy Iz ( )cos φ ( )sin ψ q r + +
ξ ( )cos ψ ( )cos θ Ix Iz p r Ix Iy ξ ( )sin φ ( )sin ψ p2 − + ξ ( )cos θ Ix Iy k12 ( )cos ψ q ξ ( )cos θ Ix Iy k13 ( )cos ψ q − − k14 Ix Iy ζ ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ζ ( )sin φ ( )sin ψ − − k14 ( )cos θ Ix Iy ξ ( )cos ψ q k14 Ix Iy k13 ξ ( )sin φ ( )sin ψ − − k14 Ix Iy ξ k11 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k11 ( )sin φ ( )sin ψ − − k14 Ix Iy ξ ( )cos φ ( )sin ψ p ξ ( )cos θ Ix Iy k11 ( )cos ψ q − −
( )cos ψ Ix Iy ( )cos θ ξ p r Ix Iy ( )cos φ ( )sin ψ ξ r q − + ξ Ix Iy k12 k11 ( )sin φ ( )sin ψ ζ Ix Iy k13 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ k12 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k12 ( )sin φ ( )sin ψ − − ζ Ix Iy k13 ( )sin φ ( )sin ψ k14 Ix Iy k13 ξ ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 k11 ( )sin φ ( )sin ψ + − ξ Ix Iy k13 k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k13 k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 k11 ( )cos φ ( )cos ψ ( )sin θ ζ Ix Iy k11 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k12 ( )sin φ ( )cos ψ ( )sin θ p + + 2 Ix Iy ζ ( )cos θ ( )cos ψ q 2 Ix Iy ζ ( )sin φ ( )cos ψ ( )sin θ p − + 2 Ix Iy ζ ( )cos φ ( )sin ψ p − ) (
( ) + + + ( )sin ψ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos ψ 2 ( )cos θ 2 ( )cos φξ Ix Iy ) Iz ( )cos θ ( )sin φ ( )sin ψ k23 k22 k21 v0 m Ix Iy k24 Ix Iy yd02 m k21 − ( − yd04 m Ix Iy ξ Ix Iy k23 ( )cos ψ ( )cos φ p ζ Ix Iy k21 ( )cos ψ ( )sin φ − + + ζ Ix Iy k22 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k22 ( )cos ψ ( )sin φ − + ζ Ix Iy k23 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k23 ( )cos ψ ( )sin φ − + ξ Ix Iy k22 ( )cos ψ ( )cos φ p ξ Ix Iy k23 ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k23 k22 ( )cos ψ ( )sin φ ζ Ix Iy k21 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k23 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k22 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k22 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy ξ ( )cos ψ ( )cos φ p k24 Ix Iy ξ k21 ( )cos φ ( )sin θ ( )sin ψ + −

Annexe 14
Rapport de PFE 78
k24 Ix Iy k23 ξ ( )cos ψ ( )sin φ k24 Ix Iy ξ ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k22 k21 ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy ξ k22 ( )cos ψ ( )sin φ − + k24 Ix Iy k23 ξ ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy yd03 m − − k24 Ix Iy ζ ( )cos ψ ( )sin φ k24 Ix Iy ξ k21 ( )cos ψ ( )sin φ + + k24 Ix Iy ξ k22 ( )cos φ ( )sin θ ( )sin ψ yd02 m Ix Iy k22 k21 − − yd02 m Ix Iy k23 k21 k24 Ix Iy k23 k22 yd01 m k24 Ix Iy k23 k22 v0 m − − + k24 Ix Iy k23 k22 k21 yd0 m yd02 m Ix Iy k23 k22 yd03 m Ix Iy k21 − − − yd03 m Ix Iy k22 yd03 m Ix Iy k23 k24 Ix Iy k23 yd02 m − − − k24 Ix Iy k22 k21 yd01 m k24 Ix Iy k23 k21 v0 m k24 Ix Iy k23 k21 yd01 m − + − k24 Ix Iy k23 k22 k21 y0 m k23 k22 k21 yd01 m Ix Iy k24 Ix Iy k22 k21 v0 m + − +
2 Ix Iy ζ ( )cos θ ( )sin ψ q ξ ( )sin ψ ( )cos θ Ix Iz p r − − 2 Ix Iy ζ ( )sin φ ( )sin θ ( )sin ψ p 2 Ix Iy ζ ( )cos ψ ( )cos φ p + +
ξ ( )sin ψ ( )cos θ Ix 2 p r ( )sin ψ Ix Iy ξ q 2 ( )sin θ ( )cos φ + +
( )sin ψ Ix Iy ξ q ( )sin θ r ( )sin φ Ix Iy ξ ( )cos ψ q 2 ( )sin φ − − Ix Iy ξ ( )sin ψ r p ( )cos θ k24 ( )cos θ Ix Iy ξ ( )sin ψ q − − Ix Iy ξ ( )cos ψ q r ( )cos φ ξ ( )cos θ Ix Iy k22 ( )sin ψ q − − ξ ( )cos θ Ix Iy k21 ( )sin ψ q ξ ( )cos θ Ix Iy k23 ( )sin ψ q − −
Ix Iy ξ ( )cos ψ ( )sin φ p 2 Ix Iy ξ ( )cos φ ( )sin θ ( )sin ψ p 2 − + ξ Ix Iy k22 ( )sin φ ( )sin θ ( )sin ψ p k24 Ix Iy ζ ( )cos φ ( )sin θ ( )sin ψ + − ξ Iy Iz ( )cos ψ ( )cos φ q r ξ Iy 2 ( )cos ψ ( )cos φ q r − +
ξ Iy 2 ( )sin φ ( )sin θ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )sin θ ( )sin ψ q r + − ξ Ix Iy k21 ( )sin φ ( )sin θ ( )sin ψ p ξ Ix Iy k21 ( )cos ψ ( )cos φ p + + k24 Ix Iy yd02 m k22 − ) (
( ) + + + ( )sin ψ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos ψ 2 ( )cos θ 2 ( )cos φξ Ix Iy ) Iz ( )sin φ ( )sin θ zd04 m Ix Iy zd03 m Ix Iy k33 Ix Iy ( )sin θ ξ p r− − + ( +
2 Ix Iy ( )sin φ ζ p ( )cos θ k34 Ix Iy k33 k31 w0 m k34 Ix Iy k33 k31 zd01 m + + − k34 Ix Iy k33 zd02 m k34 Ix Iy k33 k32 w0 m k34 Ix Iy k33 k32 zd01 m − + − k34 Ix Iy k33 k32 k31 z0 m k34 Ix Iy k33 k32 k31 zd0 m + − Ix Iy ( )cos φ ξ p2 ( )cos θ ( )cos θ ( )sin φ ξ Iy 2 q r ( )cos θ ( )sin φ ξ Iy q r Iz + + −
( )sin φ ξ Ix Iy k31 p ( )cos θ ( )sin φ ξ Ix Iy k32 p ( )cos θ + + ( )sin φ ξ Ix Iy k33 p ( )cos θ k34 Ix Iy k33 g m Ix Iy k32 k31 ( )cos θ ( )cos φ ξ + + −
Ix Iy k33 k31 ( )cos θ ( )cos φ ξ Ix Iy k33 k32 ( )cos θ ( )cos φ ξ − − ( )cos θ ( )cos φ ζ Ix Iy k31 ( )cos θ ( )cos φ ζ Ix Iy k32 − −
( )cos θ ( )cos φ ζ Ix Iy k33 k34 Ix Iy ( )sin φ ξ p ( )cos θ − + k34 Ix Iy ( )cos θ ( )cos φ ζ k34 Ix Iy k31 ( )cos θ ( )cos φ ξ − − k34 Ix Iy k32 ( )cos θ ( )cos φ ξ k34 Ix Iy k33 ( )cos θ ( )cos φ ξ − − 2 Ix Iy ζ q ( )sin θ ξ Ix Iy k33 q ( )sin θ ξ Ix Iy k32 q ( )sin θ + + + ξ Ix Iy k31 q ( )sin θ k34 Ix Iy ξ q ( )sin θ k33 k32 k31 w0 m Ix Iy + + +

Annexe 14
Rapport de PFE 79
k33 k32 k31 zd01 m Ix Iy Ix Iy k32 k31 g m Ix Iy k33 k31 g m − + + Ix Iy k33 k32 g m zd02 m Ix Iy k32 k31 zd02 m Ix Iy k33 k31 + − − zd02 m Ix Iy k33 k32 zd03 m Ix Iy k31 zd03 m Ix Iy k32 − − − k34 Ix Iy k32 k31 w0 m k34 Ix Iy k31 g m k34 Ix Iy k32 g m + + + k34 Ix Iy k32 k31 zd01 m k34 Ix Iy zd02 m k31 k34 Ix Iy zd02 m k32 − − − k34 Ix Iy zd03 m Ix Iy ξ ( )cos θ q r ( )sin φ Ix Iy ξ ( )cos θ q2 ( )cos φ − − +
( )sin θ ξ Ix 2 p r ( )sin θ ξ Ix p r Iz − + ) ( ) + ( )sin θ 2 ( )cos θ 2 ( )cos φ ξ Ix Iy( ) +
( )cos θ Iz
( ) + q ( )sin φ ( )sec θ ( )tan θ r ( )cos φ ( )sec θ ( )tan θ ( ) − q ( )cos φ r ( )sin φ−( ) − q ( )cos φ ( )sec θ r ( )sin φ ( )sec θ ( ) + + p q ( )sin φ ( )tan θ r ( )cos φ ( )tan θ −
( )sin φ ( )sec θ ( ) − Iz Ix p rIy
( )cos φ ( )sec θ ( ) − Ix Iy p qIz k41 q ( )sin φ( − − −
k41 r ( )cos φ k41 psid01 ( )cos θ psid02 ( )cos θ k42 q ( )sin φ k42 r ( )cos φ + − − + +
k42 psid01 ( )cos θ k42 k41 ( )cos θ ψ k42 k41 ( )cos θ psid0 − + − ( )cos θ)/ ( )cos φ/

Annexe 14
Rapport de PFE 80

Annexe 14
Rapport de stage 70
ANNEXE 14 . LOIS DE COMMANDE
u1 ( ) + + ( )sin φ ( )sin θ 2 ( )sin ψ ( )cos φ ( )cos ψ ( )sin θ ( )cos θ 2 ( )sin φ ( )sin ψ (( :=
k14 Ix Iy xd02 m k12 xd04 m Ix Iy k14 Ix Iy k13 k11 xd01 m− − − k14 Ix Iy k13 k12 u0 m k14 Ix Iy k13 k12 xd01 m xd02 m Ix Iy k12 k11 + − − ζ Ix Iy k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k11 ( )cos φ ( )sin ψ p − − ξ Ix Iy k12 ( )cos φ ( )sin ψ p ζ Ix Iy k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 ( )cos φ ( )sin ψ p + − ξ Ix Iy k12 k11 ( )cos φ ( )cos ψ ( )sin θ xd03 m Ix Iy k12 xd03 m Ix Iy k13 − − − xd03 m Ix Iy k11 xd02 m Ix Iy k13 k11 xd02 m Ix Iy k13 k12 − − − k14 Ix Iy k12 k11 xd01 m k14 Ix Iy k12 k11 u0 m k14 Ix Iy k13 k12 k11 x0 m − + + k14 Ix Iy k13 k12 k11 xd0 m ζ Ix Iy k11 ( )sin φ ( )sin ψ k14 Ix Iy k13 xd02 m − − − k14 Ix Iy xd03 m k14 Ix Iy k13 k11 u0 m k14 Ix Iy xd02 m k11 − + − k13 k12 k11 u0 m Ix Iy k13 k12 k11 xd01 m Ix Iy + −
( )cos ψ Ix Iy ξ q ( )sin θ r ( )sin φ ξ Iy2 ( )sin φ ( )cos ψ ( )sin θ q r − +
ξ Iy2 ( )cos φ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )cos ψ ( )sin θ q r − − ξ ( )cos ψ ( )cos θ Ix2 p r Ix Iy ξ ( )sin ψ q2 ( )sin φ + +
( )cos ψ Ix Iy ξ q2 ( )sin θ ( )cos φ Ix Iy ξ ( )cos φ ( )cos ψ ( )sin θ p2 + +
ξ Iy Iz ( )cos φ ( )sin ψ q r ξ ( )cos ψ ( )cos θ Ix Iz p r Ix Iy ξ ( )sin φ ( )sin ψ p2 + − + ξ ( )cos θ Ix Iy k12 ( )cos ψ q ξ ( )cos θ Ix Iy k13 ( )cos ψ q − − k14 Ix Iy ζ ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ζ ( )sin φ ( )sin ψ − − k14 ( )cos θ Ix Iy ξ ( )cos ψ q k14 Ix Iy k13 ξ ( )sin φ ( )sin ψ − − k14 Ix Iy ξ k11 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k11 ( )sin φ ( )sin ψ − − k14 Ix Iy ξ ( )cos φ ( )sin ψ p ξ ( )cos θ Ix Iy k11 ( )cos ψ q − −
( )cos ψ Ix Iy ( )cos θ ξ p r Ix Iy ( )cos φ ( )sin ψ ξ r q − + ξ Ix Iy k12 k11 ( )sin φ ( )sin ψ ζ Ix Iy k13 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ k12 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k12 ( )sin φ ( )sin ψ − − ζ Ix Iy k13 ( )sin φ ( )sin ψ k14 Ix Iy k13 ξ ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 k11 ( )sin φ ( )sin ψ + − ξ Ix Iy k13 k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k13 k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 k11 ( )cos φ ( )cos ψ ( )sin θ ζ Ix Iy k11 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k12 ( )sin φ ( )cos ψ ( )sin θ p + + 2 Ix Iy ζ ( )cos θ ( )cos ψ q 2 Ix Iy ζ ( )sin φ ( )cos ψ ( )sin θ p − +
2 Ix Iy ζ ( )cos φ ( )sin ψ p − ) ( )sin φ 2 ( )sin ψ 2 ( )sin θ 2() (( )sin φ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos φ 2 ( )sin θ 2 ( )sin ψ 2 + + +
( )cos ψ 2 ( )sin φ 2 ( )sin θ 2 ( )cos ψ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ( )sin ψ 2 + + +
( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 + ) Ix Iy ) ( −
( )− + + ( )cos φ ( )sin θ ( )sin ψ ( )sin φ ( )cos ψ ( )sin θ 2 ( )cos θ 2 ( )sin φ ( )cos ψ (

Annexe 14
Rapport de stage 71
k23 k22 k21 v0 m Ix Iy k24 Ix Iy yd02 m k21 yd04 m Ix Iy − − ξ Ix Iy k23 ( )cos ψ ( )cos φ p ζ Ix Iy k21 ( )cos ψ ( )sin φ + + ζ Ix Iy k22 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k22 ( )cos ψ ( )sin φ − + ζ Ix Iy k23 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k23 ( )cos ψ ( )sin φ − + ξ Ix Iy k22 ( )cos ψ ( )cos φ p ξ Ix Iy k23 ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k23 k22 ( )cos ψ ( )sin φ ζ Ix Iy k21 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k23 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k22 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k22 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy ξ ( )cos ψ ( )cos φ p k24 Ix Iy ξ k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy k23 ξ ( )cos ψ ( )sin φ k24 Ix Iy ξ ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k22 k21 ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy ξ k22 ( )cos ψ ( )sin φ − + k24 Ix Iy k23 ξ ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy yd03 m − − k24 Ix Iy ζ ( )cos ψ ( )sin φ k24 Ix Iy ξ k21 ( )cos ψ ( )sin φ + + k24 Ix Iy ξ k22 ( )cos φ ( )sin θ ( )sin ψ yd02 m Ix Iy k22 k21 − − yd02 m Ix Iy k23 k21 k24 Ix Iy k23 k22 yd01 m k24 Ix Iy k23 k22 v0 m − − + k24 Ix Iy k23 k22 k21 yd0 m yd02 m Ix Iy k23 k22 yd03 m Ix Iy k21 − − − yd03 m Ix Iy k22 yd03 m Ix Iy k23 k24 Ix Iy k23 yd02 m − − − k24 Ix Iy k22 k21 yd01 m k24 Ix Iy k23 k21 v0 m k24 Ix Iy k23 k21 yd01 m − + − k24 Ix Iy k23 k22 k21 y0 m k23 k22 k21 yd01 m Ix Iy k24 Ix Iy k22 k21 v0 m + − + 2 Ix Iy ζ ( )cos θ ( )sin ψ q ξ ( )sin ψ ( )cos θ Ix Iz p r − − 2 Ix Iy ζ ( )sin φ ( )sin θ ( )sin ψ p 2 Ix Iy ζ ( )cos ψ ( )cos φ p + +
ξ ( )sin ψ ( )cos θ Ix2 p r ( )sin ψ Ix Iy ξ q2 ( )sin θ ( )cos φ + +
( )sin ψ Ix Iy ξ q ( )sin θ r ( )sin φ Ix Iy ξ ( )cos ψ q2 ( )sin φ − − Ix Iy ξ ( )sin ψ r p ( )cos θ k24 ( )cos θ Ix Iy ξ ( )sin ψ q − − Ix Iy ξ ( )cos ψ q r ( )cos φ ξ ( )cos θ Ix Iy k22 ( )sin ψ q − − ξ ( )cos θ Ix Iy k21 ( )sin ψ q ξ ( )cos θ Ix Iy k23 ( )sin ψ q − −
Ix Iy ξ ( )cos ψ ( )sin φ p2 Ix Iy ξ ( )cos φ ( )sin θ ( )sin ψ p2 − + ξ Ix Iy k22 ( )sin φ ( )sin θ ( )sin ψ p k24 Ix Iy ζ ( )cos φ ( )sin θ ( )sin ψ + − ξ Iy Iz ( )cos ψ ( )cos φ q r ξ Iy2 ( )cos ψ ( )cos φ q r − +
ξ Iy2 ( )sin φ ( )sin θ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )sin θ ( )sin ψ q r + − ξ Ix Iy k21 ( )sin φ ( )sin θ ( )sin ψ p ξ Ix Iy k21 ( )cos ψ ( )cos φ p + +
k24 Ix Iy yd02 m k22 − ) ( )sin φ 2 ( )sin ψ 2 ( )sin θ 2 ( )sin φ 2 ( )sin ψ 2 ( )cos θ 2 + () (( )cos φ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos φ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos ψ 2 ( )sin φ 2 ( )sin θ 2 + + +
( )cos ψ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 + + + )Ix Iy ) ( )cos θ ( )cos φ zd04 m Ix Iy zd03 m Ix Iy k33 Ix Iy ( )sin θ ξ p r− − + ( +
2 Ix Iy ( )sin φ ζ p ( )cos θ k34 Ix Iy k33 k31 w0 m k34 Ix Iy k33 k31 zd01 m + + − k34 Ix Iy k33 zd02 m k34 Ix Iy k33 k32 w0 m k34 Ix Iy k33 k32 zd01 m − + − k34 Ix Iy k33 k32 k31 z0 m k34 Ix Iy k33 k32 k31 zd0 m + −
Ix Iy ( )cos φ ξ p2 ( )cos θ ( )cos θ ( )sin φ ξ Iy2 q r ( )cos θ ( )sin φ ξ Iy q r Iz + + − ( )sin φ ξ Ix Iy k31 p ( )cos θ ( )sin φ ξ Ix Iy k32 p ( )cos θ + + ( )sin φ ξ Ix Iy k33 p ( )cos θ k34 Ix Iy k33 g m Ix Iy k32 k31 ( )cos θ ( )cos φ ξ + + −

Annexe 14
Rapport de stage 72
Ix Iy k33 k31 ( )cos θ ( )cos φ ξ Ix Iy k33 k32 ( )cos θ ( )cos φ ξ − − ( )cos θ ( )cos φ ζ Ix Iy k31 ( )cos θ ( )cos φ ζ Ix Iy k32 − − ( )cos θ ( )cos φ ζ Ix Iy k33 k34 Ix Iy ( )sin φ ξ p ( )cos θ − +
k34 Ix Iy ( )cos θ ( )cos φ ζ k34 Ix Iy k31 ( )cos θ ( )cos φ ξ − − k34 Ix Iy k32 ( )cos θ ( )cos φ ξ k34 Ix Iy k33 ( )cos θ ( )cos φ ξ − − 2 Ix Iy ζ q ( )sin θ ξ Ix Iy k33 q ( )sin θ ξ Ix Iy k32 q ( )sin θ + + + ξ Ix Iy k31 q ( )sin θ k34 Ix Iy ξ q ( )sin θ k33 k32 k31 w0 m Ix Iy + + + k33 k32 k31 zd01 m Ix Iy Ix Iy k32 k31 g m Ix Iy k33 k31 g m − + + Ix Iy k33 k32 g m zd02 m Ix Iy k32 k31 zd02 m Ix Iy k33 k31 + − − zd02 m Ix Iy k33 k32 zd03 m Ix Iy k31 zd03 m Ix Iy k32 − − − k34 Ix Iy k32 k31 w0 m k34 Ix Iy k31 g m k34 Ix Iy k32 g m + + + k34 Ix Iy k32 k31 zd01 m k34 Ix Iy zd02 m k31 k34 Ix Iy zd02 m k32 − − −
k34 Ix Iy zd03 m Ix Iy ξ ( )cos θ q r ( )sin φ Ix Iy ξ ( )cos θ q2 ( )cos φ − − +
( )sin θ ξ Ix2 p r ( )sin θ ξ Ix p r Iz − + ) (( ) + + + ( )cos φ 2 ( )sin θ 2 ( )sin φ 2 ( )sin θ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 Ix Iy )
u2 ( )− + − ( )cos φ ( )sin θ 2 ( )sin ψ ( )sin φ ( )cos ψ ( )sin θ ( )cos θ 2 ( )cos φ ( )sin ψ ((− =
k14 Ix Iy xd02 m k12 xd04 m Ix Iy k14 Ix Iy k13 k11 xd01 m− − − k14 Ix Iy k13 k12 u0 m k14 Ix Iy k13 k12 xd01 m xd02 m Ix Iy k12 k11 + − − ζ Ix Iy k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k11 ( )cos φ ( )sin ψ p − − ξ Ix Iy k12 ( )cos φ ( )sin ψ p ζ Ix Iy k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 ( )cos φ ( )sin ψ p + − ξ Ix Iy k12 k11 ( )cos φ ( )cos ψ ( )sin θ xd03 m Ix Iy k12 xd03 m Ix Iy k13 − − − xd03 m Ix Iy k11 xd02 m Ix Iy k13 k11 xd02 m Ix Iy k13 k12 − − − k14 Ix Iy k12 k11 xd01 m k14 Ix Iy k12 k11 u0 m k14 Ix Iy k13 k12 k11 x0 m − + + k14 Ix Iy k13 k12 k11 xd0 m ζ Ix Iy k11 ( )sin φ ( )sin ψ k14 Ix Iy k13 xd02 m − − − k14 Ix Iy xd03 m k14 Ix Iy k13 k11 u0 m k14 Ix Iy xd02 m k11 − + − k13 k12 k11 u0 m Ix Iy k13 k12 k11 xd01 m Ix Iy + −
( )cos ψ Ix Iy ξ q ( )sin θ r ( )sin φ ξ Iy2 ( )sin φ ( )cos ψ ( )sin θ q r − +
ξ Iy2 ( )cos φ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )cos ψ ( )sin θ q r − − ξ ( )cos ψ ( )cos θ Ix2 p r Ix Iy ξ ( )sin ψ q2 ( )sin φ + +
( )cos ψ Ix Iy ξ q2 ( )sin θ ( )cos φ Ix Iy ξ ( )cos φ ( )cos ψ ( )sin θ p2 + +
ξ Iy Iz ( )cos φ ( )sin ψ q r ξ ( )cos ψ ( )cos θ Ix Iz p r Ix Iy ξ ( )sin φ ( )sin ψ p2 + − + ξ ( )cos θ Ix Iy k12 ( )cos ψ q ξ ( )cos θ Ix Iy k13 ( )cos ψ q − − k14 Ix Iy ζ ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ζ ( )sin φ ( )sin ψ − − k14 ( )cos θ Ix Iy ξ ( )cos ψ q k14 Ix Iy k13 ξ ( )sin φ ( )sin ψ − − k14 Ix Iy ξ k11 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k11 ( )sin φ ( )sin ψ − − k14 Ix Iy ξ ( )cos φ ( )sin ψ p ξ ( )cos θ Ix Iy k11 ( )cos ψ q − −
( )cos ψ Ix Iy ( )cos θ ξ p r Ix Iy ( )cos φ ( )sin ψ ξ r q − +

Annexe 14
Rapport de stage 73
ξ Ix Iy k12 k11 ( )sin φ ( )sin ψ ζ Ix Iy k13 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ k12 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k12 ( )sin φ ( )sin ψ − − ζ Ix Iy k13 ( )sin φ ( )sin ψ k14 Ix Iy k13 ξ ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 k11 ( )sin φ ( )sin ψ + − ξ Ix Iy k13 k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k13 k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 k11 ( )cos φ ( )cos ψ ( )sin θ ζ Ix Iy k11 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k12 ( )sin φ ( )cos ψ ( )sin θ p + + 2 Ix Iy ζ ( )cos θ ( )cos ψ q 2 Ix Iy ζ ( )sin φ ( )cos ψ ( )sin θ p − +
2 Ix Iy ζ ( )cos φ ( )sin ψ p − ) ξ d ( )sin φ 2 ( )sin ψ 2 ( )sin θ 2() (( )sin φ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos φ 2 ( )sin θ 2 ( )sin ψ 2 + + +
( )cos ψ 2 ( )sin φ 2 ( )sin θ 2 ( )cos ψ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ( )sin ψ 2 + + +
( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 + ) Iy ) ( −
( ) + + ( )sin φ ( )sin θ ( )sin ψ ( )cos φ ( )cos ψ ( )sin θ 2 ( )cos θ 2 ( )cos φ ( )cos ψ (k23 k22 k21 v0 m Ix Iy k24 Ix Iy yd02 m k21 yd04 m Ix Iy − −
ξ Ix Iy k23 ( )cos ψ ( )cos φ p ζ Ix Iy k21 ( )cos ψ ( )sin φ + + ζ Ix Iy k22 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k22 ( )cos ψ ( )sin φ − + ζ Ix Iy k23 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k23 ( )cos ψ ( )sin φ − + ξ Ix Iy k22 ( )cos ψ ( )cos φ p ξ Ix Iy k23 ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k23 k22 ( )cos ψ ( )sin φ ζ Ix Iy k21 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k23 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k22 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k22 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy ξ ( )cos ψ ( )cos φ p k24 Ix Iy ξ k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy k23 ξ ( )cos ψ ( )sin φ k24 Ix Iy ξ ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k22 k21 ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy ξ k22 ( )cos ψ ( )sin φ − + k24 Ix Iy k23 ξ ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy yd03 m − − k24 Ix Iy ζ ( )cos ψ ( )sin φ k24 Ix Iy ξ k21 ( )cos ψ ( )sin φ + + k24 Ix Iy ξ k22 ( )cos φ ( )sin θ ( )sin ψ yd02 m Ix Iy k22 k21 − − yd02 m Ix Iy k23 k21 k24 Ix Iy k23 k22 yd01 m k24 Ix Iy k23 k22 v0 m − − + k24 Ix Iy k23 k22 k21 yd0 m yd02 m Ix Iy k23 k22 yd03 m Ix Iy k21 − − − yd03 m Ix Iy k22 yd03 m Ix Iy k23 k24 Ix Iy k23 yd02 m − − − k24 Ix Iy k22 k21 yd01 m k24 Ix Iy k23 k21 v0 m k24 Ix Iy k23 k21 yd01 m − + − k24 Ix Iy k23 k22 k21 y0 m k23 k22 k21 yd01 m Ix Iy k24 Ix Iy k22 k21 v0 m + − + 2 Ix Iy ζ ( )cos θ ( )sin ψ q ξ ( )sin ψ ( )cos θ Ix Iz p r − − 2 Ix Iy ζ ( )sin φ ( )sin θ ( )sin ψ p 2 Ix Iy ζ ( )cos ψ ( )cos φ p + +
ξ ( )sin ψ ( )cos θ Ix2 p r ( )sin ψ Ix Iy ξ q2 ( )sin θ ( )cos φ + +
( )sin ψ Ix Iy ξ q ( )sin θ r ( )sin φ Ix Iy ξ ( )cos ψ q2 ( )sin φ − − Ix Iy ξ ( )sin ψ r p ( )cos θ k24 ( )cos θ Ix Iy ξ ( )sin ψ q − − Ix Iy ξ ( )cos ψ q r ( )cos φ ξ ( )cos θ Ix Iy k22 ( )sin ψ q − − ξ ( )cos θ Ix Iy k21 ( )sin ψ q ξ ( )cos θ Ix Iy k23 ( )sin ψ q − −
Ix Iy ξ ( )cos ψ ( )sin φ p2 Ix Iy ξ ( )cos φ ( )sin θ ( )sin ψ p2 − + ξ Ix Iy k22 ( )sin φ ( )sin θ ( )sin ψ p k24 Ix Iy ζ ( )cos φ ( )sin θ ( )sin ψ + −

Annexe 14
Rapport de stage 74
ξ Iy Iz ( )cos ψ ( )cos φ q r ξ Iy2 ( )cos ψ ( )cos φ q r − +
ξ Iy2 ( )sin φ ( )sin θ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )sin θ ( )sin ψ q r + − ξ Ix Iy k21 ( )sin φ ( )sin θ ( )sin ψ p ξ Ix Iy k21 ( )cos ψ ( )cos φ p + +
k24 Ix Iy yd02 m k22 − ) ξ d ( )sin φ 2 ( )sin ψ 2 ( )sin θ 2() (( )sin φ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos φ 2 ( )sin θ 2 ( )sin ψ 2 + + +
( )cos ψ 2 ( )sin φ 2 ( )sin θ 2 ( )cos ψ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ( )sin ψ 2 + + +
( )cos θ 2 ( )cos φ 2 ( )cos ψ 2 + ) Iy ) ( )cos θ ( )sin φ zd04 m Ix Iy zd03 m Ix Iy k33− − ( − Ix Iy ( )sin θ ξ p r 2 Ix Iy ( )sin φ ζ p ( )cos θ k34 Ix Iy k33 k31 w0 m + + + k34 Ix Iy k33 k31 zd01 m k34 Ix Iy k33 zd02 m k34 Ix Iy k33 k32 w0 m − − + k34 Ix Iy k33 k32 zd01 m k34 Ix Iy k33 k32 k31 z0 m − +
k34 Ix Iy k33 k32 k31 zd0 m Ix Iy ( )cos φ ξ p2 ( )cos θ ( )cos θ ( )sin φ ξ Iy2 q r − + + ( )cos θ ( )sin φ ξ Iy q r Iz ( )sin φ ξ Ix Iy k31 p ( )cos θ − + ( )sin φ ξ Ix Iy k32 p ( )cos θ ( )sin φ ξ Ix Iy k33 p ( )cos θ k34 Ix Iy k33 g m + + +
Ix Iy k32 k31 ( )cos θ ( )cos φ ξ Ix Iy k33 k31 ( )cos θ ( )cos φ ξ − − Ix Iy k33 k32 ( )cos θ ( )cos φ ξ ( )cos θ ( )cos φ ζ Ix Iy k31 − −
( )cos θ ( )cos φ ζ Ix Iy k32 ( )cos θ ( )cos φ ζ Ix Iy k33 − − k34 Ix Iy ( )sin φ ξ p ( )cos θ k34 Ix Iy ( )cos θ ( )cos φ ζ + − k34 Ix Iy k31 ( )cos θ ( )cos φ ξ k34 Ix Iy k32 ( )cos θ ( )cos φ ξ − − k34 Ix Iy k33 ( )cos θ ( )cos φ ξ 2 Ix Iy ζ q ( )sin θ ξ Ix Iy k33 q ( )sin θ − + + ξ Ix Iy k32 q ( )sin θ ξ Ix Iy k31 q ( )sin θ k34 Ix Iy ξ q ( )sin θ + + + k33 k32 k31 w0 m Ix Iy k33 k32 k31 zd01 m Ix Iy Ix Iy k32 k31 g m + − + Ix Iy k33 k31 g m Ix Iy k33 k32 g m zd02 m Ix Iy k32 k31 + + − zd02 m Ix Iy k33 k31 zd02 m Ix Iy k33 k32 zd03 m Ix Iy k31 zd03 m Ix Iy k32 − − − − k34 Ix Iy k32 k31 w0 m k34 Ix Iy k31 g m k34 Ix Iy k32 g m + + + k34 Ix Iy k32 k31 zd01 m k34 Ix Iy zd02 m k31 k34 Ix Iy zd02 m k32 − − −
k34 Ix Iy zd03 m Ix Iy ξ ( )cos θ q r ( )sin φ Ix Iy ξ ( )cos θ q2 ( )cos φ − − +
( )sin θ ξ Ix2 p r ( )sin θ ξ Ix p r Iz − + ) (( ) + + + ( )cos φ 2 ( )sin θ 2 ( )sin φ 2 ( )sin θ 2 ( )sin φ 2 ( )cos θ 2 ( )cos θ 2 ( )cos φ 2 ξ d Iy )
u3 ( )cos θ ( )cos ψ k14 Ix Iy xd02 m k12 xd04 m Ix Iy k14 Ix Iy k13 k11 xd01 m− − − ( =
k14 Ix Iy k13 k12 u0 m k14 Ix Iy k13 k12 xd01 m xd02 m Ix Iy k12 k11 + − − ζ Ix Iy k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k11 ( )cos φ ( )sin ψ p − − ξ Ix Iy k12 ( )cos φ ( )sin ψ p ζ Ix Iy k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 ( )cos φ ( )sin ψ p + − ξ Ix Iy k12 k11 ( )cos φ ( )cos ψ ( )sin θ xd03 m Ix Iy k12 xd03 m Ix Iy k13 − − − xd03 m Ix Iy k11 xd02 m Ix Iy k13 k11 xd02 m Ix Iy k13 k12 − − − k14 Ix Iy k12 k11 xd01 m k14 Ix Iy k12 k11 u0 m k14 Ix Iy k13 k12 k11 x0 m − + + k14 Ix Iy k13 k12 k11 xd0 m ζ Ix Iy k11 ( )sin φ ( )sin ψ k14 Ix Iy k13 xd02 m − − − k14 Ix Iy xd03 m k14 Ix Iy k13 k11 u0 m k14 Ix Iy xd02 m k11 − + −

Annexe 14
Rapport de stage 75
k13 k12 k11 u0 m Ix Iy k13 k12 k11 xd01 m Ix Iy + −
( )cos ψ Ix Iy ξ q ( )sin θ r ( )sin φ ξ Iy2 ( )sin φ ( )cos ψ ( )sin θ q r − +
ξ Iy2 ( )cos φ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )cos ψ ( )sin θ q r − −
ξ ( )cos ψ ( )cos θ Ix2 p r Ix Iy ξ ( )sin ψ q2 ( )sin φ + + ( )cos ψ Ix Iy ξ q2 ( )sin θ ( )cos φ Ix Iy ξ ( )cos φ ( )cos ψ ( )sin θ p2 + +
ξ Iy Iz ( )cos φ ( )sin ψ q r ξ ( )cos ψ ( )cos θ Ix Iz p r Ix Iy ξ ( )sin φ ( )sin ψ p2 + − + ξ ( )cos θ Ix Iy k12 ( )cos ψ q ξ ( )cos θ Ix Iy k13 ( )cos ψ q − − k14 Ix Iy ζ ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ζ ( )sin φ ( )sin ψ − − k14 ( )cos θ Ix Iy ξ ( )cos ψ q k14 Ix Iy k13 ξ ( )sin φ ( )sin ψ − − k14 Ix Iy ξ k11 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k11 ( )sin φ ( )sin ψ − − k14 Ix Iy ξ ( )cos φ ( )sin ψ p ξ ( )cos θ Ix Iy k11 ( )cos ψ q − −
( )cos ψ Ix Iy ( )cos θ ξ p r Ix Iy ( )cos φ ( )sin ψ ξ r q − + ξ Ix Iy k12 k11 ( )sin φ ( )sin ψ ζ Ix Iy k13 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ k12 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k12 ( )sin φ ( )sin ψ − − ζ Ix Iy k13 ( )sin φ ( )sin ψ k14 Ix Iy k13 ξ ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 k11 ( )sin φ ( )sin ψ + − ξ Ix Iy k13 k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k13 k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 k11 ( )cos φ ( )cos ψ ( )sin θ ζ Ix Iy k11 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k12 ( )sin φ ( )cos ψ ( )sin θ p + + 2 Ix Iy ζ ( )cos θ ( )cos ψ q 2 Ix Iy ζ ( )sin φ ( )cos ψ ( )sin θ p − + 2 Ix Iy ζ ( )cos φ ( )sin ψ p − ) (
( ) + + + ( )sin ψ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos ψ 2 ( )cos θ 2 ξ d Ix )( )cos θ ( )sin ψ k23 k22 k21 v0 m Ix Iy k24 Ix Iy yd02 m k21 yd04 m Ix Iy − − ( +
ξ Ix Iy k23 ( )cos ψ ( )cos φ p ζ Ix Iy k21 ( )cos ψ ( )sin φ + + ζ Ix Iy k22 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k22 ( )cos ψ ( )sin φ − + ζ Ix Iy k23 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k23 ( )cos ψ ( )sin φ − + ξ Ix Iy k22 ( )cos ψ ( )cos φ p ξ Ix Iy k23 ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k23 k22 ( )cos ψ ( )sin φ ζ Ix Iy k21 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k23 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k22 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k22 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy ξ ( )cos ψ ( )cos φ p k24 Ix Iy ξ k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy k23 ξ ( )cos ψ ( )sin φ k24 Ix Iy ξ ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k22 k21 ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy ξ k22 ( )cos ψ ( )sin φ − + k24 Ix Iy k23 ξ ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy yd03 m − − k24 Ix Iy ζ ( )cos ψ ( )sin φ k24 Ix Iy ξ k21 ( )cos ψ ( )sin φ + + k24 Ix Iy ξ k22 ( )cos φ ( )sin θ ( )sin ψ yd02 m Ix Iy k22 k21 − − yd02 m Ix Iy k23 k21 k24 Ix Iy k23 k22 yd01 m k24 Ix Iy k23 k22 v0 m − − + k24 Ix Iy k23 k22 k21 yd0 m yd02 m Ix Iy k23 k22 yd03 m Ix Iy k21 − − − yd03 m Ix Iy k22 yd03 m Ix Iy k23 k24 Ix Iy k23 yd02 m − − − k24 Ix Iy k22 k21 yd01 m k24 Ix Iy k23 k21 v0 m k24 Ix Iy k23 k21 yd01 m − + − k24 Ix Iy k23 k22 k21 y0 m k23 k22 k21 yd01 m Ix Iy k24 Ix Iy k22 k21 v0 m + − + 2 Ix Iy ζ ( )cos θ ( )sin ψ q ξ ( )sin ψ ( )cos θ Ix Iz p r − −

Annexe 14
Rapport de stage 76
2 Ix Iy ζ ( )sin φ ( )sin θ ( )sin ψ p 2 Ix Iy ζ ( )cos ψ ( )cos φ p + +
ξ ( )sin ψ ( )cos θ Ix2 p r ( )sin ψ Ix Iy ξ q2 ( )sin θ ( )cos φ + +
( )sin ψ Ix Iy ξ q ( )sin θ r ( )sin φ Ix Iy ξ ( )cos ψ q2 ( )sin φ − − Ix Iy ξ ( )sin ψ r p ( )cos θ k24 ( )cos θ Ix Iy ξ ( )sin ψ q − − Ix Iy ξ ( )cos ψ q r ( )cos φ ξ ( )cos θ Ix Iy k22 ( )sin ψ q − − ξ ( )cos θ Ix Iy k21 ( )sin ψ q ξ ( )cos θ Ix Iy k23 ( )sin ψ q − −
Ix Iy ξ ( )cos ψ ( )sin φ p2 Ix Iy ξ ( )cos φ ( )sin θ ( )sin ψ p2 − + ξ Ix Iy k22 ( )sin φ ( )sin θ ( )sin ψ p k24 Ix Iy ζ ( )cos φ ( )sin θ ( )sin ψ + − ξ Iy Iz ( )cos ψ ( )cos φ q r ξ Iy2 ( )cos ψ ( )cos φ q r − +
ξ Iy2 ( )sin φ ( )sin θ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )sin θ ( )sin ψ q r + − ξ Ix Iy k21 ( )sin φ ( )sin θ ( )sin ψ p ξ Ix Iy k21 ( )cos ψ ( )cos φ p + + k24 Ix Iy yd02 m k22 − ) (
( ) + + + ( )sin ψ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos ψ 2 ( )cos θ 2 ξ d Ix )( )sin θ zd04 m Ix Iy zd03 m Ix Iy k33 Ix Iy ( )sin θ ξ p r− − + ( −
2 Ix Iy ( )sin φ ζ p ( )cos θ k34 Ix Iy k33 k31 w0 m k34 Ix Iy k33 k31 zd01 m + + − k34 Ix Iy k33 zd02 m k34 Ix Iy k33 k32 w0 m k34 Ix Iy k33 k32 zd01 m − + − k34 Ix Iy k33 k32 k31 z0 m k34 Ix Iy k33 k32 k31 zd0 m + − Ix Iy ( )cos φ ξ p2 ( )cos θ ( )cos θ ( )sin φ ξ Iy2 q r ( )cos θ ( )sin φ ξ Iy q r Iz + + −
( )sin φ ξ Ix Iy k31 p ( )cos θ ( )sin φ ξ Ix Iy k32 p ( )cos θ + + ( )sin φ ξ Ix Iy k33 p ( )cos θ k34 Ix Iy k33 g m Ix Iy k32 k31 ( )cos θ ( )cos φ ξ + + −
Ix Iy k33 k31 ( )cos θ ( )cos φ ξ Ix Iy k33 k32 ( )cos θ ( )cos φ ξ − − ( )cos θ ( )cos φ ζ Ix Iy k31 ( )cos θ ( )cos φ ζ Ix Iy k32 − − ( )cos θ ( )cos φ ζ Ix Iy k33 k34 Ix Iy ( )sin φ ξ p ( )cos θ − +
k34 Ix Iy ( )cos θ ( )cos φ ζ k34 Ix Iy k31 ( )cos θ ( )cos φ ξ − − k34 Ix Iy k32 ( )cos θ ( )cos φ ξ k34 Ix Iy k33 ( )cos θ ( )cos φ ξ − − 2 Ix Iy ζ q ( )sin θ ξ Ix Iy k33 q ( )sin θ ξ Ix Iy k32 q ( )sin θ + + + ξ Ix Iy k31 q ( )sin θ k34 Ix Iy ξ q ( )sin θ k33 k32 k31 w0 m Ix Iy + + + k33 k32 k31 zd01 m Ix Iy Ix Iy k32 k31 g m Ix Iy k33 k31 g m − + + Ix Iy k33 k32 g m zd02 m Ix Iy k32 k31 zd02 m Ix Iy k33 k31 + − − zd02 m Ix Iy k33 k32 zd03 m Ix Iy k31 zd03 m Ix Iy k32 − − − k34 Ix Iy k32 k31 w0 m k34 Ix Iy k31 g m k34 Ix Iy k32 g m + + + k34 Ix Iy k32 k31 zd01 m k34 Ix Iy zd02 m k31 k34 Ix Iy zd02 m k32 − − − k34 Ix Iy zd03 m Ix Iy ξ ( )cos θ q r ( )sin φ Ix Iy ξ ( )cos θ q2 ( )cos φ − − +
( )sin θ ξ Ix2 p r ( )sin θ ξ Ix p r Iz − + ) ( ) + ( )sin θ 2 ( )cos θ 2 ξ d Ix( )

Annexe 14
Rapport de stage 77
u4 Iz ( )cos θ ( )cos ψ ( )sin φ k14 Ix Iy xd02 m k12 xd04 m Ix Iy− − (− = k14 Ix Iy k13 k11 xd01 m k14 Ix Iy k13 k12 u0 m k14 Ix Iy k13 k12 xd01 m − + − xd02 m Ix Iy k12 k11 ζ Ix Iy k12 ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )cos φ ( )sin ψ p ξ Ix Iy k12 ( )cos φ ( )sin ψ p − − ζ Ix Iy k12 ( )sin φ ( )sin ψ ξ Ix Iy k13 ( )sin φ ( )cos ψ ( )sin θ p − + ξ Ix Iy k13 ( )cos φ ( )sin ψ p ξ Ix Iy k12 k11 ( )cos φ ( )cos ψ ( )sin θ − − xd03 m Ix Iy k12 xd03 m Ix Iy k13 xd03 m Ix Iy k11 xd02 m Ix Iy k13 k11 − − − − xd02 m Ix Iy k13 k12 k14 Ix Iy k12 k11 xd01 m k14 Ix Iy k12 k11 u0 m − − + k14 Ix Iy k13 k12 k11 x0 m k14 Ix Iy k13 k12 k11 xd0 m + − ζ Ix Iy k11 ( )sin φ ( )sin ψ k14 Ix Iy k13 xd02 m k14 Ix Iy xd03 m − − − k14 Ix Iy k13 k11 u0 m k14 Ix Iy xd02 m k11 k13 k12 k11 u0 m Ix Iy + − + k13 k12 k11 xd01 m Ix Iy ( )cos ψ Ix Iy ξ q ( )sin θ r ( )sin φ − −
ξ Iy2 ( )sin φ ( )cos ψ ( )sin θ q r ξ Iy2 ( )cos φ ( )sin ψ q r + −
ξ Iy Iz ( )sin φ ( )cos ψ ( )sin θ q r ξ ( )cos ψ ( )cos θ Ix2 p r − + Ix Iy ξ ( )sin ψ q2 ( )sin φ ( )cos ψ Ix Iy ξ q2 ( )sin θ ( )cos φ + +
Ix Iy ξ ( )cos φ ( )cos ψ ( )sin θ p2 ξ Iy Iz ( )cos φ ( )sin ψ q r + +
ξ ( )cos ψ ( )cos θ Ix Iz p r Ix Iy ξ ( )sin φ ( )sin ψ p2 − + ξ ( )cos θ Ix Iy k12 ( )cos ψ q ξ ( )cos θ Ix Iy k13 ( )cos ψ q − − k14 Ix Iy ζ ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ζ ( )sin φ ( )sin ψ − − k14 ( )cos θ Ix Iy ξ ( )cos ψ q k14 Ix Iy k13 ξ ( )sin φ ( )sin ψ − − k14 Ix Iy ξ k11 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k11 ( )sin φ ( )sin ψ − − k14 Ix Iy ξ ( )cos φ ( )sin ψ p ξ ( )cos θ Ix Iy k11 ( )cos ψ q − −
( )cos ψ Ix Iy ( )cos θ ξ p r Ix Iy ( )cos φ ( )sin ψ ξ r q − + ξ Ix Iy k12 k11 ( )sin φ ( )sin ψ ζ Ix Iy k13 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ k12 ( )cos φ ( )cos ψ ( )sin θ k14 Ix Iy ξ k12 ( )sin φ ( )sin ψ − − ζ Ix Iy k13 ( )sin φ ( )sin ψ k14 Ix Iy k13 ξ ( )cos φ ( )cos ψ ( )sin θ − − ξ Ix Iy k11 ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k13 k11 ( )sin φ ( )sin ψ + − ξ Ix Iy k13 k12 ( )cos φ ( )cos ψ ( )sin θ ξ Ix Iy k13 k12 ( )sin φ ( )sin ψ − − ξ Ix Iy k13 k11 ( )cos φ ( )cos ψ ( )sin θ ζ Ix Iy k11 ( )cos φ ( )cos ψ ( )sin θ − − k14 Ix Iy ξ ( )sin φ ( )cos ψ ( )sin θ p ξ Ix Iy k12 ( )sin φ ( )cos ψ ( )sin θ p + + 2 Ix Iy ζ ( )cos θ ( )cos ψ q 2 Ix Iy ζ ( )sin φ ( )cos ψ ( )sin θ p − + 2 Ix Iy ζ ( )cos φ ( )sin ψ p − ) (
( ) + + + ( )sin ψ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos ψ 2 ( )cos θ 2 ( )cos φξ Ix Iy ) Iz ( )cos θ ( )sin φ ( )sin ψ k23 k22 k21 v0 m Ix Iy k24 Ix Iy yd02 m k21 − ( − yd04 m Ix Iy ξ Ix Iy k23 ( )cos ψ ( )cos φ p ζ Ix Iy k21 ( )cos ψ ( )sin φ − + + ζ Ix Iy k22 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k22 ( )cos ψ ( )sin φ − + ζ Ix Iy k23 ( )cos φ ( )sin θ ( )sin ψ ζ Ix Iy k23 ( )cos ψ ( )sin φ − + ξ Ix Iy k22 ( )cos ψ ( )cos φ p ξ Ix Iy k23 ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k23 k22 ( )cos ψ ( )sin φ ζ Ix Iy k21 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k23 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k22 ( )cos φ ( )sin θ ( )sin ψ + − ξ Ix Iy k22 k21 ( )cos ψ ( )sin φ ξ Ix Iy k23 k21 ( )cos φ ( )sin θ ( )sin ψ + − k24 Ix Iy ξ ( )cos ψ ( )cos φ p k24 Ix Iy ξ k21 ( )cos φ ( )sin θ ( )sin ψ + −

Annexe 14
Rapport de stage 78
k24 Ix Iy k23 ξ ( )cos ψ ( )sin φ k24 Ix Iy ξ ( )sin φ ( )sin θ ( )sin ψ p + + ξ Ix Iy k22 k21 ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy ξ k22 ( )cos ψ ( )sin φ − + k24 Ix Iy k23 ξ ( )cos φ ( )sin θ ( )sin ψ k24 Ix Iy yd03 m − − k24 Ix Iy ζ ( )cos ψ ( )sin φ k24 Ix Iy ξ k21 ( )cos ψ ( )sin φ + + k24 Ix Iy ξ k22 ( )cos φ ( )sin θ ( )sin ψ yd02 m Ix Iy k22 k21 − − yd02 m Ix Iy k23 k21 k24 Ix Iy k23 k22 yd01 m k24 Ix Iy k23 k22 v0 m − − + k24 Ix Iy k23 k22 k21 yd0 m yd02 m Ix Iy k23 k22 yd03 m Ix Iy k21 − − − yd03 m Ix Iy k22 yd03 m Ix Iy k23 k24 Ix Iy k23 yd02 m − − − k24 Ix Iy k22 k21 yd01 m k24 Ix Iy k23 k21 v0 m k24 Ix Iy k23 k21 yd01 m − + − k24 Ix Iy k23 k22 k21 y0 m k23 k22 k21 yd01 m Ix Iy k24 Ix Iy k22 k21 v0 m + − +
2 Ix Iy ζ ( )cos θ ( )sin ψ q ξ ( )sin ψ ( )cos θ Ix Iz p r − − 2 Ix Iy ζ ( )sin φ ( )sin θ ( )sin ψ p 2 Ix Iy ζ ( )cos ψ ( )cos φ p + +
ξ ( )sin ψ ( )cos θ Ix 2 p r ( )sin ψ Ix Iy ξ q 2 ( )sin θ ( )cos φ + +
( )sin ψ Ix Iy ξ q ( )sin θ r ( )sin φ Ix Iy ξ ( )cos ψ q 2 ( )sin φ − − Ix Iy ξ ( )sin ψ r p ( )cos θ k24 ( )cos θ Ix Iy ξ ( )sin ψ q − − Ix Iy ξ ( )cos ψ q r ( )cos φ ξ ( )cos θ Ix Iy k22 ( )sin ψ q − − ξ ( )cos θ Ix Iy k21 ( )sin ψ q ξ ( )cos θ Ix Iy k23 ( )sin ψ q − −
Ix Iy ξ ( )cos ψ ( )sin φ p 2 Ix Iy ξ ( )cos φ ( )sin θ ( )sin ψ p 2 − + ξ Ix Iy k22 ( )sin φ ( )sin θ ( )sin ψ p k24 Ix Iy ζ ( )cos φ ( )sin θ ( )sin ψ + − ξ Iy Iz ( )cos ψ ( )cos φ q r ξ Iy 2 ( )cos ψ ( )cos φ q r − +
ξ Iy 2 ( )sin φ ( )sin θ ( )sin ψ q r ξ Iy Iz ( )sin φ ( )sin θ ( )sin ψ q r + − ξ Ix Iy k21 ( )sin φ ( )sin θ ( )sin ψ p ξ Ix Iy k21 ( )cos ψ ( )cos φ p + + k24 Ix Iy yd02 m k22 − ) (
( ) + + + ( )sin ψ 2 ( )sin θ 2 ( )sin ψ 2 ( )cos θ 2 ( )cos ψ 2 ( )sin θ 2 ( )cos ψ 2 ( )cos θ 2 ( )cos φξ Ix Iy ) Iz ( )sin φ ( )sin θ zd04 m Ix Iy zd03 m Ix Iy k33 Ix Iy ( )sin θ ξ p r− − + ( +
2 Ix Iy ( )sin φ ζ p ( )cos θ k34 Ix Iy k33 k31 w0 m k34 Ix Iy k33 k31 zd01 m + + − k34 Ix Iy k33 zd02 m k34 Ix Iy k33 k32 w0 m k34 Ix Iy k33 k32 zd01 m − + − k34 Ix Iy k33 k32 k31 z0 m k34 Ix Iy k33 k32 k31 zd0 m + − Ix Iy ( )cos φ ξ p2 ( )cos θ ( )cos θ ( )sin φ ξ Iy 2 q r ( )cos θ ( )sin φ ξ Iy q r Iz + + −
( )sin φ ξ Ix Iy k31 p ( )cos θ ( )sin φ ξ Ix Iy k32 p ( )cos θ + + ( )sin φ ξ Ix Iy k33 p ( )cos θ k34 Ix Iy k33 g m Ix Iy k32 k31 ( )cos θ ( )cos φ ξ + + −
Ix Iy k33 k31 ( )cos θ ( )cos φ ξ Ix Iy k33 k32 ( )cos θ ( )cos φ ξ − − ( )cos θ ( )cos φ ζ Ix Iy k31 ( )cos θ ( )cos φ ζ Ix Iy k32 − −
( )cos θ ( )cos φ ζ Ix Iy k33 k34 Ix Iy ( )sin φ ξ p ( )cos θ − + k34 Ix Iy ( )cos θ ( )cos φ ζ k34 Ix Iy k31 ( )cos θ ( )cos φ ξ − − k34 Ix Iy k32 ( )cos θ ( )cos φ ξ k34 Ix Iy k33 ( )cos θ ( )cos φ ξ − − 2 Ix Iy ζ q ( )sin θ ξ Ix Iy k33 q ( )sin θ ξ Ix Iy k32 q ( )sin θ + + + ξ Ix Iy k31 q ( )sin θ k34 Ix Iy ξ q ( )sin θ k33 k32 k31 w0 m Ix Iy + + +

Annexe 14
Rapport de stage 79
k33 k32 k31 zd01 m Ix Iy Ix Iy k32 k31 g m Ix Iy k33 k31 g m − + + Ix Iy k33 k32 g m zd02 m Ix Iy k32 k31 zd02 m Ix Iy k33 k31 + − − zd02 m Ix Iy k33 k32 zd03 m Ix Iy k31 zd03 m Ix Iy k32 − − − k34 Ix Iy k32 k31 w0 m k34 Ix Iy k31 g m k34 Ix Iy k32 g m + + + k34 Ix Iy k32 k31 zd01 m k34 Ix Iy zd02 m k31 k34 Ix Iy zd02 m k32 − − − k34 Ix Iy zd03 m Ix Iy ξ ( )cos θ q r ( )sin φ Ix Iy ξ ( )cos θ q2 ( )cos φ − − +
( )sin θ ξ Ix 2 p r ( )sin θ ξ Ix p r Iz − + ) ( ) + ( )sin θ 2 ( )cos θ 2 ( )cos φ ξ Ix Iy( ) +
( )cos θ Iz
( ) + q ( )sin φ ( )sec θ ( )tan θ r ( )cos φ ( )sec θ ( )tan θ ( ) − q ( )cos φ r ( )sin φ−( ) − q ( )cos φ ( )sec θ r ( )sin φ ( )sec θ ( ) + + p q ( )sin φ ( )tan θ r ( )cos φ ( )tan θ −
( )sin φ ( )sec θ ( ) − Iz Ix p rIy
( )cos φ ( )sec θ ( ) − Ix Iy p qIz k41 q ( )sin φ( − − −
k41 r ( )cos φ k41 psid01 ( )cos θ psid02 ( )cos θ k42 q ( )sin φ k42 r ( )cos φ + − − + +
k42 psid01 ( )cos θ k42 k41 ( )cos θ ψ k42 k41 ( )cos θ psid0 − + − ( )cos θ)/ ( )cos φ/

Annexe 14
Rapport de stage 80

Annexe 13
Rapport de PFE 66
ANNEXE 13 . COMMANDE PAR RETRO – ITERATION DE L’ HELICOPTERE A QUATRE ROTORS
( )x F x= avec : 0 0 0 0 0 0( , , , , , , , , , , , , , )x col x y z u v w p q rψ θ φ ζ ξ= ( 11 )
0
0
0
1
2
3
4
sin sec cos seccos sin
sin tan cos tan1/ (cos cos sin sin sin )
( )1/ (cos sin sin cos sin )
1/ (cos cos )
( ) / ( / )( ) / ( / )( ) / ( / )
y z x x
z x y y
x y z z
uvw
q rq r
p q rm
F xm
g m
uqr I I I d I upr I I I d I upq I I I d I u
φ θ φ θφ φ
φ θ φ θφ ψ θ φ ψ ζφ θ ψ ψ φ ζ
θ φ ζξ
+−
+ +− +
=− −
−
− +− +− +
En procédant par étape, on cherche à faire tendre vers zéro les erreurs qu’on définit au fur et à mesure que l’on dérive les expressions des fonctions de Lyapunov. On s’arrête lorsque les commandes apparaissent. Pour les trois premières sorties 0 0 0( , , )x y z , on doit dériver quatre fois 1 2 3( 4)r r r= = = ∗. La quatrième sortie requière deux dérivations pour faire apparaître les commandes 4( 2)r = *. ITERATION 1 On définit une première erreur : 11 1 de x x= − Le but est de forcer cette erreur à tendre vers zéro. On choisit une fonction de Lyapunov candidate 11e
21 11
12
V e= ⇒ 1 11 11 11 0 11 0( ) ( )d dV e e e x x e u x= = − = −
∗ les ir symbolisent les degrés relative des sorties. F7 représente la septième ligne de x

Annexe 13
Rapport de PFE 67
Aucune entrée de commande n’apparaît dans l’expression de 1V . On définit alors une entrée
virtuelle : 11 11 11dx k eα = − , avec : 11 0 11maxk u α> −
telle que : 20 11 1 11 11 0u V k eα→ ⇒ ≤ − ≤ 11 0e⇒ →
ITERATION 2 Pour faire tendre 0u vers 11α , on définit une deuxième erreur à annuler : 12 0 11e u α= −
On définit une deuxième fonction de Lyapunov candidate : 22 12
12
V e=
2 12 12 12 0 11 12 7 11( ) ( )V e e e u e Fα α⇒ = = − = − 0 7( )u F=
Aucune entrée de commande apparaît dans l’expression de 2V . On introduit une nouvelle
entrée virtuelle : 12 11 12 12k eα α= − , avec : 12 7 12maxk F α> −
telle que : 27 12 2 12 12 120 0F V k e eα→ ⇒ ≤ − ≤ ⇒ →
ITERATION 3 On définit une troisième erreur à annuler : 13 7 12e F α= −
On définit une troisième fonction de Lyapunov candidate: 23 13
12
V e=
3 13 13 13 7 12( )V e e e F α⇒ = = − Aucune commande apparaît. On introduit une nouvelle entrée virtuelle : 13 12 13 13k eα α= − ,
avec : 13 7 13maxk F α> −
telle que : 27 13 3 13 13 130 0F V k e eα→ ⇒ ≤ − ≤ ⇒ →
ITERATION 4 On introduit une quatrième erreur : 14 7 13e F α= −
On définit une quatrième fonction de Lyapunov candidate : 24 14
12
V e=
4 14 14 14 7 13( )V e e e F α⇒ = = − A cette étape, on voit apparaître les commandes dans l’expression de 7F . Il est donc possible d’imposer un signe négative à 4V qui fera tendre 4e vers zéro, et remonter jusqu’à 1e .
24 14 14 7 13 14 140 0V k e F k eα≤ − ≤ ⇒ − + = , avec : 14 0k >
Cette dernière équation aura la forme suivante
1 1 1 2 1 3 1 4 1 0a u b u c u d u h+ + + + =
4987 ,,, FFFF sont les lignes 7,8,9,4 de la représentation d’état ( 11)

Annexe 13
Rapport de PFE 68
En suivant la même procédure pour les sorties 0y et 0z , On arrive à obtenir les équations suivantes :
8 32 42 42 0F k eα− + = 42 0k > 8 0( )F v=
9 33 43 42 0F k eα− + = 43 0k > 9 0( )F w=
Pour la quatrième sortie, la même procédure est adoptée mais les commandes apparaissent plus tôt. C'est-à-dire qu’au bout de la deuxième erreur, on peut maîtriser le signe de la dérivée de la fonction de Lyapunov : ITERATION 5 On définit une nouvelle erreur : 41 de ψ ψ= −
On définit une fonction de Lyapunov candidate : 21 41
12
V e=
1 41 41 4( ) ( )d dV e e Fψ ψ ψ⇒ = − = − ; 4( )F ψ=
on prend : 14 14 41d k eα ψ= − , avec : 14 4 14maxk F α> −
tel que : 24 14 1 14 41 410 0F V k e eα→ ⇒ ≤ − ≤ ⇒ →
ITERATION 6 On définit une nouvelle erreur : 42 4 14e F α= −
On définit une autre fonction de Lyapunov candidate : 22 42
12
V e= 2 12 4 14( )V e F α⇒ = −
Dans l’expression de 2V apparaissent les entrées de commandes 3 4,u u . Par conséquent, on peut la forcer à avoir une valeur négative, chose qui fera tendre l’erreur 42e vers zéro.
2 22 24 42 4 14 24 20 0V k e F k eα≤ − ≤ ⇒ − + = , avec : 24 0k >
Une fois toutes les équations établies, On aboutit à un système à quatre équations avec quatre inconnues 1 2 3 4( , , , )u u u u . Il est de la forme suivante :
HUA =×
où :
=
4444
3333
2222
1111
dcbadcbadcbadcba
A
1
2
3
4
uu
Uuu
=
−=
4
3
2
1
hhhh
H

Annexe 13
Rapport de PFE 69
Pour trouver les commandes, il faut résoudre le système d’équations. ceci est possible
si et seulement si la matrice A est inversible. (Elle aurait été singulière pour tout x si on
n’avait pas mis le système sous forme étendue). La Matrice A est inversible si son déterminant
est différent de zéro :
( )2 2
3
- d cos( )det A =(m Iz Ix Iy cos( ))
ζ φθ
× ×× × × ×
La matrice A est inversible si : 0, ,2 2 2 2π π π πζ φ θ≠ − < < − ≤ ≤ .
C’est le cas pour etφ θ qui sont les angles de roulis et tangage respectivement. L’hélicoptère est sensé planer et donc leurs valeurs sont petites. ζ résulte de l’extension dynamique, et représente la sortie du double intégrateur de 1u . Les entrées de commandes sont obtenues par:
1U A H−= × (cf annexe 14)

Annexe 13
Rapport de PFE 70

Annexe 12
Rapport de PFE 65
ANNEXE 12 . POURSUITES ET ERREURS DE POURSUITES AVEC 20 % D’ERREUR SUR LES PARAMETRES
ET AVEC PERTURBATION
0 5 10 15 20-1.5
-1
-0.5
0
0.5
1
time (s)
x
0 5 10 15 20 -1.5
-1
-0.5
0
0.5
1
time (s)
y
0 5 10 15 20-2
-1.5
-1
-0.5
0
time (s)
z
0 5 10 15 20 0
0.5
1
1.5
2
time (s)
psi
0 5 10 15 20-1
-0.8
-0.6
-0.4
-0.2
time
x
0 5 10 15 20 -0.4
-0.2
0
0.2
0.4
time
y
0 5 10 15 20-
0
0.05
0.1
0.15
time
z
0 5 10 15 20 -1.5
-1
-0.5
0
0.5
1
time
psi

Annexe 12
Rapport de PFE 66

Annexe 11
Rapport de PFE 64
ANNEXE 11 . POURSUITES ET ERREURS DE POURSUITES SANS ERREURS SUR LES PARAMETRES
ET SANS PERTURBATION
0 5 10 15 20-1
-0.5
0
0.5
time (s)
x
0 5 10 15 20 -0.2
-0.15
-0.1
-0.05
0
0.05
time (s)
y
0 5 10 15 20-0.01
0 0.01 0.02 0.03 0.04
time (s)
z
0 5 10 15 20 -1.5
-1
-0.5
0
0.5
time (s)
psi

Annexe 11
Rapport de PFE 65

Annexe 10
Rapport de PFE 59
ANNEXE 10 . COMMANDE PAR LINEARISATION EXACTE DE L’HELICOPTERE A QUATRE ROTORS
Extension dynamique Pour le système étudié (1), on a :
1 2 3 4 2r r r r= = = = et :
1,1
2,1
3,1
4,3 4,4
0 0 00 0 0
( )0 0 0
0 0
x
∆ ∆ ∆ = ∆ ∆ ∆
avec :
71,1 1
82,1 1
93,1 1
4,3
4,4
(sin sec )
1 (cos sec )
y
z
g
g
gdI
I
φ θ
φ θ
∆ =
∆ =
∆ =
∆ =
∆ =
Comme on peut le constater, la matrice de découplage ( )x∆ est singulière pour tout
x puisqu’elle contient une colonne nulle. Par conséquent, le découplage entrée-sortie n’est pas possible avec une commande par retour d’état statique. La raison de cette singularité est qu’au niveau des dérivations des sorties (2) (2) (2)
1 2 3, ,y y y , l’apparition de l’entrée de commande 1u est prématurée par rapport aux autres entrées de commandes. La solution serait de « retarder » l’effet de 1u en espérant que les autres commandes apparaissent à temps. Il s’agit de l’extension dynamique. Cela est possible en posant 1u égale à la sortie d’un double intégrateur alimenté par 1u , c’est à dire :
1u ζ=
ζ ξ= ( 8 )
1uξ =

Annexe 10
Rapport de PFE 60
On note que 1u n’est plus une entrée du système ( 5 ), elle devient une variable d’état interne ζ du nouveau système dynamique ( 8 ). Par souci de bonne notation, il est bon de redéfinir les autres entrées de commandes.
2 2
3 3
4 4
u uu uu u
===
Le système étendu obtenu est :
4
1( ) ( )i i
ix f x g x u
== +∑ ( 9 )
avec : 0 0 0 0 0( , , , , , , , , , , , , )Tx x y z u w p q rψ θ φ ζ ξ=
0
0
0
7181
91
sin sec cos seccos sin
sin tan cos tan/ ( , , )
( ) / ( , , )/ ( , , )
0( ) / /( ) / /( ) / /
x
y
z
y z x p x
z x y g y
x y z r z
uvw
q rq r
p q rA m g
f x A m gA m g g
qr I I I A Ipr I I I A Ipq I I I A I
φ θ φ θφ φ
φ θ φ θψ θ φ ζψ θ φ ζ
ψ θ φ ζξ
+ − + + +=
+ + +
− + − + − +
1( ) (0,0,0,0,0,0,0,0,0,0,1,0,0,0)Tg x =
2 ( ) (0,0,0,0,0,0,0,0,0,0,0, / ,0,0)Txg x d I=
3( ) (0,0,0,0,0,0,0,0,0,0,0,0, / ,0)Tyg x d I=
4 ( ) (0,0,0,0,0,0,0,0,0,0,0,0,0,1/ )Tzg x I=

Annexe 10
Rapport de PFE 61
Le découplage entrée-sortie est à présent possible pour le système ( 5 ) avec une loi de commande par bouclage dynamique en appliquant une loi de commande par bouclage statique au système ( 9 ). Le vecteur des degrés relatifs ( )1 2 3 3, , ,r r r r du nouveau système non linéaire ( 9 ) est donné par :
1 2 3
4
42
r r rr= = ==
La dimension du système étendu (5) est n = 14 . La condition « 1 2 3 4r r r r n+ + + = »
est donc vérifiée (condition nécessaire pour avoir une linéarisation totale). Le nouveau système étendu peut être linéarisé et découplé en utilisant la loi de commande par retour d’état dynamique suivante :
( ) ( )u x b x vα= + .
( )xα et ( )xβ sont calculé selon (3). La matrice de découplage du nouveau système (5) est non singulière, si ζ ≠ 0 et
] [, / 2, / 2φ θ π π∈ − . Commande du système linéarisé
Les conditions de linéarisation étant réunies, le système ( 9 ) peut être transformé en un système linéaire et controllable via un bouclage dynamique. Afin d’appliquer une commande linéaire, on procède à un changement de variables.
( )z x= Φ est donné par :
1 0 8 0
2 0 9 0
3 0 10 0
4 0 11 0
5 0 12 0
6 0 13
7 0 14
z x z yz x z zz x z zz x z zz y z zz y zz y z
ψψ
= == =
= =
= =
= == =
= =
La représentation de ce nouveau système est donnée par :
z Az Bvy Cz= += ( 10 )

Annexe 10
Rapport de PFE 62
où :
( )( )
1 2 14
1 2 3 4
, ,...,
, , ,
T
T
z z z z
v v v v v
=
=
Avec :
A =
4
3
2
1
000
000
000
000
A
A
A
A
; B = [ ]TBBBB 4321 ; C =
2
1
1
1
000
000
000
000
C
C
C
C
1A =
0000
1000
0100
0010
; 2A =
00
10 ; 1B =
0001
0000
0000
0000
; 2B =
0010
0000
0000
0000
;
3B =
0100
0000
0000
0000
; 4B =
1000
0000 ; 1C = [ ]0001 ; 2C = [ ]01 .

Annexe 10
Rapport de PFE 63
Le système (10 ) est un système multi-variables linéaire et commandable. Il peut être considéré comme une superposition de quatre systèmes mono-variable pour lesquels on peut appliquer des commandes du type proportionnel dérivé. On obtient :
(4) (3) (3)1 3 0 2 0 1 0 0 0
(4) (3) (3)2 3 0 2 0 1 0 0 0
(4) (3) (3)3 3 0 2 2 2 1 0 0 0 0
4 5
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( )
d d d d d
d d d d d
d d d
d d
v x c x x c x x c x x c x x
v y c y y c y y c y y c y y
v x c z z c z z c z z c z zv c cψ ψ ψ
= − − − − − − − −
= − − − − − − − −
= − − − − − − − −= − − − 4 ( )dψ ψ−
Les coefficients ic sont choisis pour obtenir un ensemble de valeurs propres désirées
pour le comportement en boucle fermée. ( , , , )d d d dx y z ψ est la trajectoire désirée.

Annexe 10
Rapport de PFE 64

Annexe 9
Rapport de PFE 57
ANNEXE 9 . ANGLES D’ EULER
x0
y0
z1=z0
x1
y1
Φ
y1
z1
x2=x1
y2
z2
θ
x2
y2
z3=z2
x3
y3
ϕ
10213230 RRRR ⋅⋅=
=
333231
232221
131211
30
RRRRRRRRR
R
( ) ( )( ) ( )
ΦΦ−ΦΦ
=1000cossin0sincos
10R
=
0
0
0
10
1
1
1
zyx
Rzyx
( ) ( )( ) ( )
−=
θθθθ
cossin0sincos0
001
21R
=
1
1
1
21
2
2
2
zyx
Rzyx
( ) ( )( ) ( )
−=
1000cossin0sincos
32 ϕϕϕϕ
R
=
2
2
2
32
3
3
3
zyx
Rzyx

Annexe 9
Rapport de PFE 58
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( )( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )( ) ( )( ) ( )( ) ( )
( )θθ
θθϕ
ϕϕθϕθϕ
ϕθϕϕθϕθϕ
cossincos
sinsinsincos
sinsincoscoscossincoscossincos
sinsinsincossincoscossinsincoscoscos
33
32
31
23
22
21
13
12
11
=Φ−=
Φ==
Φ−Φ=Φ−Φ−=
=Φ+Φ=Φ−Φ=
RRRRRRRRR

Annexe 8
Rapport de PFE 54
ANNEXE 8 . RELATIONS CINEMATIQUES ET MODELE DYNAMIQUE
Relations cinématiques
La position absolue de l’hélicoptère est décrite par les trois coordonnées 0 0 0( , , )Tx y z de son centre de gravité, par rapport à un référentiel inertiel, attaché à la terre. L’orientation de l’hélicoptère peut être paramétrée par les trois angles d’Euler ( , , )ψ θ φ . Ces trois angles sont appelés l’angle de lacet (yaw angle), l’angle de tangage (pitch angle) et angle de roulis (roll angle) respectivement.
La paramétrisation de l’orientation par les angles d’Euler n’est pas globale et peut poser quelques problèmes à cause des singularités. Mais tant que l’hélicoptère n’effectue pas d’acrobaties, cette paramétrisation est suffisante et minimale.(cf annexe 9) Les dérivées temporelles des angles d’Euler peuvent être exprimées sous la forme suivante : ( , , ) ( , , )T Mψ θ φ ψ θ φ ω=
avec ( , , )Tp q rω = représentant la vitesse angulaire exprimée dans un repère lié à la terre.
M (3 3)× est la matrice de passage du repère lie à l’hélicoptère vers le repère lie à la terre.
Elle est donnée par:1
−=
θφθφφφθφθφ
φθψtancostansin1
sincos0seccossecsin0
),,(M (cf annexe 9)
Cette matrice dépend uniquement de ( , , )ψ θ φ et est inversible si :
] [ ] [, / 2, / 2 , ,φ θ π π ψ π π∈ − ∈ − De manière similaire, la dérivée temporelle de la position absolue est donnée par :
0 ( , , )V R Vψ θ φ=
1 1sec
sinθ
θ=

Annexe 8
Rapport de PFE 55
avec ( , , )R ψ θ φ est une matrice de rotation donnée par (matrice de passage du repère lie à l’hélicoptère vers le repère lie à la terre, voir annexe):
cos cos sin sin cos cos sin cos sin cos sin sincos sin sin sin sin cos cos cos sin sin sin cos
sin sin cos cos cosR
θ ψ φ θ ψ φ ψ φ θ ψ φ ψθ ψ φ θ ψ φ ψ φ θ ψ φ ψ
θ φ θ φ θ
− + = + − −
0 0 0 0( , , )TV u v w= est la vitesse absolue de l’hélicoptère, exprimée dans le repère inertiel, lié à la terre.
( , , )TV u v w= est la vitesse absolue de l’hélicoptère, exprimée dans le repère lié à l’hélicoptère.
Modèle dynamique Il est nécessaire de faire un certain nombre d’approximations afin d’obtenir un modèle utilisable pour la synthèse de lois de commande. On assimile l’hélicoptère à un corps indéformable ayant 6 degrés de liberté, soumis à des efforts extérieurs. On suppose qu’il vole lentement. L’interaction entre les rotors et le fuselage est également négligée.
Tout les effets négligés sont considérés comme des perturbations d’un modèle
dynamique idéalisé sur lequel se base la synthèse de lois de commande. Les équations dynamiques sont obtenues classiquement en appliquant les lois de
commandes sur le centre de gravité dans le repère mobile lié à l’hélicoptère.
0 extmV F=∑
extJ J Tω ω ω= − × +∑ ∗ m représente la masse de l’hélicoptère et J la matrice d’inertie donnée par :
0 00 00 0
x
y
z
IJ I
I
=
,ext extF T∑ ∑ représentent les vecteurs des forces et moments externes respectivement. Ils
incluent le poids de l’hélicoptère, le vecteur des forces aérodynamiques, la poussée et les moments développés par les rotors.
∗ × représente le produit vectoriel

Annexe 8
Rapport de PFE 56
1
1
1
(cos cos sin sin sin )(cos sin sin cos sin )
(cos cos )
x
ext y
z
A uF A u
A mg u
φ ψ θ φ ψφ θ ψ ψ φ
θ φ
− + = − − + −
∑
2
3
4
p
ext q
r
A u dT A u d
A u d
+ = +
+ ∑
( , , )x y zA A AT
et ( , , )Tp q zA A A représentent les forces et moments aérodynamiques agissant
212i air iA CWρ= ( iC coefficients aérodynamiques, airρ est la densité de l’air, W vitesse de
l’hélicoptère par rapport à l’air)

Annexe 8
Rapport de PFE 57

Annexe 7
Rapport de PFE 53
ANNEXE 7 . ERREURS D’ OBSERVATION
Erreurs d’observation sur l’angle et la vitesse angulaire de la tige
Erreur d’observation sur la vitesse de rotation et l’accélération du moteur

Annexe 6
Rapport de PFE 52
ANNEXE 6 . ERREUR DE POURSUITE AVEC OBSERVATEUR
Erreur de poursuite sur l’angle

Annexe 5
Rapport de PFE 50
ANNEXE 5 . ANALYSE DE CONVERGENCE Etape 1 : Définir une surface attractive Comme 1x est la sortie mesurée du système, on définit 1
~x = 0 comme étant la surface attractive. Etape 2 : Montrer que 1
~x = 0 en temps fini A partir des systèmes ( 1 ) et ( 3 ), on obtient un nouveau système traduisant la dynamique des erreurs d’observation :
−Γ−−−=
−Γ−=
−Γ−−=
−Γ−=
)~(~~~~
)~(~~~
)~(~)ˆ(~
)~(~~~
1414344
131343
121223
2332
111121
xsignHxxcxbx
xsignHxxx
xsignHxxxCx
xsignHxxx
( 4 )
On définit une fonction de Lyapunov candidate : 1V = 2
1~
21 x ≥ 0 et on veut : 1V ≤ 0
⇒ 1V = 11~~ xx = ))~(~~(~
111121 xsignHxxx −Γ− ⇒ En prenant : 1H > max 2
~x
⇒ 1V ≈ )~(~~111
211 xsignHxx −Γ−
Si 1~x < 0 alors 1V ≤ 0
Si 1~x < 0 alors 1V ≤ 0
⇒ le choix pour 1H est correct ⇒ 1
~x = 0 en temps fini 0t ⇒ 1
~x = 0 en temps fini 0t ⇒ )~( 1xsignmoy = 2
11
~xH − Etape 3 : Montrer que les erreurs 2
~x , 3~x , 4
~x convergent exponentiellement vers 0 A t ≥ 0t , la dynamique des erreurs d’observation devient :
−−−=
−=
−−=
=
−
−
−
21
14344
21
1343
21
1223
2332
1
~~~~
~~~
~)ˆ(~
0~
xHHxcxbx
xHHxx
xHHxxCx
x

Annexe 5
Rapport de PFE 51
On définit une autre fonction de Lyapunov candidate : 2V = xxT~~
21 ≥ 0 et on veut : 2V ≤ 0
Où : x~ = [ ]Txxx 432~,~,~
⇒ 2V = Tx x = xQxT ~~ où : Q =
−−−
−
+−
−
−
−
bcHH
HH
xxCHH
114
113
3331
12
10
0)ˆ(
Avec : 2
323 x̂x − = )ˆ(~
333 xxx + ⇒ Pour respecter la condition 2V ≤ 0 il faut donc avoir : Q < 0 ⇒ On choisit donc les gains correcteurs 1H , 2H , 3H , 4H tels que : Q < 0 ⇒ En prenant des gains 2H , 3H , 4H prépondérants devant 1H , on obtient : Q < 0 ⇒ Les erreurs 2
~x , 3~x , 4
~x convergent exponentiellement vers 0.

Annexe 4
Rapport de PFE 49
ANNEXE 4 . OBSERVABILITE DU SYSTEME
On veut vérifier la condition de rang d’observabilité :
− hdL
hdL
dh
Rang
nf
f
1
= n
Avec : h = 1x dh = x
h∂∂ = [ ]0001
fL = ),( Uxfxh×∂∂ = [ ]
−−
−×
34
4
11233
2
)cos(0001
cxbxaU
x
xCxC
x
= 2x
fdL = fLx∂∂ = [ ]0010
2fL = ),()( UxfLx f ×∂
∂ = )cos( 11233 xCxC −
2fdL = 2
fLx∂∂ = [ ]020)sin( 3311 xCxC
3fL = ),()( 2 UxfLx f ×∂
∂ = 433121 2)sin( xxCxxC +
3fdL = 3
fLx∂∂ = [ ]334311121 22)sin()cos( xCxCxCxxC

Annexe 4
Rapport de PFE 50

Annexe 3
Rapport de PFE 48
ANNEXE 3 . ERREURS DE POURSUITE SUR L’ANGLE
Erreur de poursuite sans erreur sur les paramètres
Erreur de poursuite avec 40 % d’erreur sur les paramètres

Annexe 3
Rapport de PFE 49

Annexe 2
Rapport de PFE 46
ANNEXE 2 . COMMANDE PAR RETRO - ITERATION DU BANC D’ESSAIS
Itération 1 On définit une première erreur 1e = 1x - dx1 Le but est de forcer cette erreur à tendre vers 0 On définit une fonction de Lyapunov candidate : 11V = 2
121e ≥ 0 et on veut : ≤1V 0
⇒ 1V = 11 ee = )( 121 dxxe − ⇒ la commande U n’apparaît pas ⇒ On introduit une entrée virtuelle 1α = 111 ekx d − ⇒ 1V = )( 11121 ekxe −−α . Pour respecter la condition ≤1V 0, il faut que 12 α−x tende vers 0. Ainsi, on aura : 1V = 2
11 ek− ≤ 0 pour 1k > 2 1max x α− . Itération 2 On définit une deuxième erreur 2e = 12 α−x Le but est de forcer cette erreur à tendre vers 0 On définit une fonction de Lyapunov candidate : 2V = 2
221e ≥ 0 et on veut : 2V ≤ 0
⇒ 2V = 22ee = ))cos(( 1233112 α−+− xCxCe ⇒ la commande U n’apparaît pas
⇒ On introduit une entrée virtuelle 2α = 221 ek−α ⇒ 2V = )( 22222 ekxe −−α . Pour respecter la condition 2V ≤ 0, il faut que 22 α−x tende vers 0. Ainsi, on aura : 2V = 2
22ek− ≤ 0 pour 2k > 2 2max x α− . Itération 3 On définit une troisième erreur 3e = 22 α−x Le but est de forcer cette erreur à tendre vers 0 On définit une fonction de Lyapunov candidate : 3V = 2
321e ≥ 0 et on veut : 3V ≤ 0
⇒ 3V = 33ee = )( 223 α−xe ⇒ la commande U n’apparaît pas ⇒ On introduit une entrée virtuelle 3α = 332 ek−α ⇒ 3V = )( 33323 ekxe −−α . Pour respecter la condition 3V ≤ 0, il faut que 32 α−x tende vers 0. Ainsi, on aura : 3V = 2
33ek− ≤ 0 pour 3k > 2 3max x α− Itération 4 On définit une quatrième erreur 4e = 32 α−x Le but est de forcer cette erreur à tendre vers 0 On définit une fonction de Lyapunov candidate : 4V = 2
421e ≥ 0 et on veut : 4V ≤ 0
⇒ 4V = 44ee = )22)cos()sin(( 343343312211214 α−+++ xxCxxCxxCxxCe
⇒ 4V = ))(22)cos())cos()(sin(( 334332431
22111
233114 α−−−+++− cxbxaUxCxCxxCxCxCxCe
⇒ la commande U apparaît ⇒ En choisissant :

Annexe 2
Rapport de PFE 47
U =
( )3233343
2431
22111
21
2313144
31222)cos()cos()sin()sin(
21 α+++−−+−− cxCxbxCxCxxCxxCxxCCekaxC
On aboutit à : 4V = 2
44ek− ≤ 0 avec 4k > 0.
Avec :
4e = )sin( 121 xxC + 3432 xxC dddd xkkkkkkkkkxkkkxkkkxx 13212313121321132121 )()()( −++−++−+++−
13212313212 )( xkkkkkkkkkx ++++ ;
3α = )()()()( 23132121321231312132113212
)4(
1 kkkkkkxxkkkkkkkkkxkkkxkkkxx dddd ++−+++++++++−
2321 xkkk− .

Annexe 2
Rapport de PFE 48

Annexe 1
Rapport de PFE 45
ANNEXE 1 . ERREURS DE POURSUITE SUR L’ANGLE
Erreur de poursuite sans erreur sur les paramètres
Erreur de poursuite avec 20 % d’erreur sur les paramètres

Annexe 1
Rapport de PFE 46

Annexe 35
Rapport de stage 128
ANNEXE 35 . BANC D’ EXPERIMENTATION POUR
L’ HELICOPTERE

Annexe 34
Rapport de stage 127
ANNEXE 34 . BANC D’ ESSAIS DU LRV

Annexe 33
Rapport de PFE 126
ANNEXE 33 . NOUVELLE MODELISATION DE L’ HELICOPTERE A QUATRE ROTORS
+++=
=+++=
=+++=
=+++=
=
−−+−=
=
−−++−=
=
−++−−=
=
−+++=
=
−−+++=
=
−++++=
=
−
−
−
−
220
1191932024
21
19120
2019
218
1171731823
21
17118
1817
216
1151531622
21
15116
1615
214
1131331421
21
13114
1413
123
6
31917151312
1211
102
5
21917151310
109
81
4
1191715138
87
63
97191715136
65
42
9119711191715134
43
21
9119711191715132
21
)(
)(
)(
/)cos(cos)(
/)sincoscossinsin()(
/)sinsincossincos()(
xxxAxAuxAx
xxxxxAxAuxAx
xxxxxAxAuxAx
xxxxxAxAuxAx
xx
xJK
JCxxxxx
xx
xJKL
JLxxxxx
xx
xJKL
JLxxxxx
xx
xmKmxxxxxxx
xx
xmKmxxxxxxxxxx
xx
xmKmxxxxxxxxxx
xx

Annexe 33
Rapport de PFE 127

Annexe 32
Rapport de PFE 124
ANNEXE 32 . RELATIONS ENTRE LES TRAJECTOIRES DESIREES
A partir des trois premières équations de (18) et en les combinant, on obtient les deux relations suivantes :
gzxdd
dddddd
dd
dddddd
ψθ
ψφψθφ
ψθ
ψφψθφ
coscos
sinsincossincos
coscos
sinsincossincos ++
+=
dddd
ddddd xmKzm
K 13
coscos
sinsincossincos−
++
ψθ
ψφψθφ
gzydd
dddddd
dd
dddddd
ψθ
ψφψθφ
ψθ
ψφψθφ
coscos
sincoscossinsin
coscos
sincoscossinsin −+
−=
dddd
ddddd ymKzm
K 23
coscos
sincoscossinsin−
−+
ψθ
ψφψθφ
Maintenant, on effectue une hypothèse sur la trajectoire désirée de l’angle de roulis dψ . On
suppose que l’on veut 0=dψ ( 21 ), ce qui peut se concevoir puisque l’angle de roulis peut varier faiblement. Cette trajectoire désirée va impliquer des simplifications dans les deux relations précédentes :
)(tancos 13dddddd xm
KzmKgzx −+++= θφ
)(tansin 23dddddd ym
KzmKgzy −++= θφ
En manipulant ces deux équations, on aboutit à deux expressions concernant les trajectoires désirées sur les angles de lacet et de tangage :

Annexe 32
Rapport de PFE 125
−++
−++=
)(
)(arctan
23
13
dddd
dddd
d
ymKzm
Kgzx
xmKzm
Kgzyφ (22)
(23)
−++=
dddd
dd
ymKzm
Kgz
y
φθ
sin)(arctan
23

Annexe 31
Rapport de PFE 123
ANNEXE 31 . POSITION EN X ET Y ET ERREUR DE POURSUITE SUR L’ ALTITUDE ET LES 3 ANGLES

Annexe 30
Rapport de PFE 122
ANNEXE 30 . ERREURS DE POURSUITE SUR L’ ALTITUDE ET LES 3 ANGLES AVEC 30 % D’ ERREUR
SUR LES PARAMETRES

Annexe 29
Rapport de PFE 121
ANNEXE 29 . ERREURS DE POURSUITE SUR L’ ALTITUDE ET LES 3 ANGLES SANS ERREUR SUR
LES PARAMETRES

Annexe 28
Rapport de PFE 120
ANNEXE 28 . EXPRESSIONS DES COMMANDES PASSIVES
( ) ( ) ( )ddvdddd zzzzFzzzm
KzzzgU −+−−−−+−−+= )()(coscos
)(coscos
1coscos 11
311
1λλ
ψθλ
ψθψθ
( ) ( ) ( )ddvdddd FJK
LU θθθθλθθλθθθλθ −+−−−−+−−= )()()(122
1
422
2
( ) ( ) ( )ddvdddd FJK
LU ψψψψλψψλψψψλψ −+−−−−+−−= )()()(133
2
533
3
( ) ( ) ( )ddvdddd FJK
LU φφφφλφφλφφφλφ −+−−−−+−−= )()()(144
3
644
4

Annexe 27
Rapport de PFE 119
ANNEXE 27 . EXPRESSIONS DES MATRICES DU MODELE ( 19)
=
1000
0100
0010
000coscos
1
)(
L
LqM
ψθ
;
=
3
6
2
5
1
4
3
000
000
000
000coscos
),(
JK
JK
JK
mK
qqC
ψθ
=
0
0
0
coscos
)(
ψθg
qG ;
=
4
3
2
1
U
U
U
U
τ .

Annexe 26
Rapport de PFE 118
ANNEXE 26 . TRANSFORMATION DU SYSTEME ( 14 )
( 18 )
où les commandes sont définies de la manière suivante :
mFFFF
U 43211
+++=
1
43212 J
FFFFU
++−−=
2
43213 J
FFFFU
−++−=
3
43214 J
FFFFCU
−+−=
−=
−=
−=
−−=
−−=
−+=
φφ
ψψ
θθ
ψθ
ψφψθφ
ψφψθφ
3
64
2
53
1
42
31
21
11
coscos
)sincoscossin(sin
)sinsincossin(cos
JKU
JKLLU
JKLLU
zmKgUz
ymKUy
xmKUx

Annexe 25
Rapport de PFE 117
ANNEXE 25 . ERREURS D’ OBSERVATION SUR LA VITESSE ABSOLUE ET LA DERIVEE DES ANGLES

Annexe 24
Rapport de PFE 116
ANNEXE 24 . ERREURS DE POURSUITE SUR LA POSITION ET L’ ANGLE DE LACET

Annexe 23
Rapport de PFE 103
ANNEXE 23 . LOI DE COMMANDES
1U = (cos(x7)^2*sin(x11)*sin(x9)+sin(x7)^2*sin(x9)*sin(x11)+cos(x11)*sin(x7)*cos(x9))/(cos(x11)^2*sin(x7)^2*cos(x9)^2+sin(x11)^2*sin(x9)^2*cos(x7)^2+sin(x11)^2*sin(x9)^2*sin(x7)^2+sin(x11)^2*sin(x7)^2*cos(x9)^2+cos(x11)^2*sin(x9)^2*cos(x7)^2+cos(x11)^2*sin(x9)^2*sin(x7)^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+cos(x7)^2*sin(x11)^2*cos(x9)^2)*(-c4*z4-z3-M*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-p1*x2obs)-x14*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))*x10obs)-x13*(-p6*x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x12obs*(-x12obs*sin(x11)*sin(x9)+x10obs*cos(x9)*cos(x11)-x12obs*cos(x11)*sin(x7)*cos(x9)-cos(x7)*sin(x11)*cos(x9)*x8obs+x10obs*sin(x9)*sin(x11)*sin(x7))-p4*x8obs*cos(x7)*cos(x11)*cos(x9)-x8obs^2*sin(x7)*cos(x11)*cos(x9)-x12obs*x8obs*sin(x11)*cos(x7)*cos(x9)-x10obs*x8obs*sin(x9)*cos(x7)*cos(x11)+p5*x10obs*cos(x9)*sin(x11)*sin(x9)*cos(x11)*sin(x7)+x10obs*(-x10obs*sin(x9)*sin(x11)+x12obs*cos(x9)*cos(x11)-x10obs*cos(x9)*cos(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)*sin(x7)-x8obs*cos(x7)*sin(x9)*cos(x11)))-(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*((c1+d1-p1)*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-p1*x2obs)+gamma*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD)+x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+x13*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))*x10obs)-x1pppD-(c1+d1)*x1ppD)-BETA*(x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+x13*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11)))-gamma*(x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+x13*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))-x1pppD-(c1+d1)*x1ppD)-x14*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))+x1ppppD+(c1+d1)*x1pppD-d3*(2*x14*x13*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)+x13^2*((2*cos(x11)*sin(x9)-2*sin(x11)*sin(x7)*cos(x9))*(-x12obs*sin(x11)*sin(x9)+x10obs*cos(x9)*cos(x11)-x12obs*cos(x11)*sin(x7)*cos(x9)-cos(x7)*sin(x11)*cos(x9)*x8obs+x10obs*sin(x9)*sin(x11)*sin(x7))+(-2*x8obs*sin(x7)*cos(x11)*cos(x9)-2*x12obs*sin(x11)*cos(x7)*cos(x9)-2*x10obs*sin(x9)*cos(x7)*cos(x11))*cos(x7)*cos(x11)*cos(x9)+(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*(-x10obs*sin(x9)*sin(x11)+x12obs*cos(x9)*cos(x11)-

Annexe 23
Rapport de PFE 104
x10obs*cos(x9)*cos(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)*sin(x7)-x8obs*cos(x7)*sin(x9)*cos(x11))))*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))-d4*((c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))^2*gamma^2*(c1+d1)^2+(x13*(-x8obs*sin(x7)*cos(x11)*cos(x9)-x12obs*sin(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*cos(x11))+(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*x13*cos(x7)*cos(x11)*cos(x9)+BETA*x13*cos(x7)*cos(x11)*cos(x9)+gamma*x13*cos(x7)*cos(x11)*cos(x9)+x14*cos(x7)*cos(x11)*cos(x9)+(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*((-2*cos(x11)*sin(x9)+2*sin(x11)*sin(x7)*cos(x9))*cos(x7)*sin(x11)*cos(x9)-2*sin(x7)*cos(x11)^2*cos(x9)^2*cos(x7)-(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*cos(x7)*sin(x9)*cos(x11)))^2+(x13*(x12obs*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))-x8obs*cos(x7)*sin(x9)*cos(x11)+x10obs*(-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9)))+(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*x13*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+BETA*x13*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+gamma*x13*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+x14*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*((2*cos(x11)*sin(x9)-2*sin(x11)*sin(x7)*cos(x9))*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))-2*sin(x9)*cos(x7)^2*cos(x11)^2*cos(x9)-(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))))^2+(x13*(x12obs*(-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9))-cos(x7)*sin(x11)*cos(x9)*x8obs+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))*x10obs)+(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*x13*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+BETA*x13*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+gamma*x13*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x14*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*((2*cos(x11)*sin(x9)-2*sin(x11)*sin(x7)*cos(x9))*(-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9))-2*cos(x7)^2*sin(x11)*cos(x11)*cos(x9)^2+(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))))^2)*z4)-(cos(x7)^2*cos(x11)*sin(x9)+sin(x7)^2*sin(x9)*cos(x11)-sin(x11)*sin(x7)*cos(x9))/(cos(x11)^2*sin(x7)^2*cos(x9)^2+sin(x11)^2*sin(x9)^2*cos(x7)^2+sin(x11)^2*sin(x9)^2*sin(x7)^2+sin(x11)^2*sin(x7)^2*cos(x9)^2+cos(x11)^2*sin(x9)^2*cos(x7)^2+cos(x11)^2*sin(x9)^2*sin(x7)^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+cos(x7)^2*sin(x11)^2*cos(x9)^2)*(-c8*z8-z7-M2*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-

Annexe 23
Rapport de PFE 105
p2*x4obs)-x14*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*x12obs+cos(x7)*sin(x11)*cos(x9)*x8obs-(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))*x10obs)-x13*((-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9))*p6*x12obs+x12obs*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))-p4*x8obs*cos(x7)*sin(x11)*cos(x9)-x8obs^2*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7)*sin(x11)*x8obs+p5*x10obs*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))-x10obs*(x10obs*cos(x9)*sin(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)*sin(x7)+x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*sin(x9)*cos(x11)-x12obs*sin(x11)*cos(x9)))-(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*((c5+d5-p2)*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-p2*x4obs)+GAMMA2*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD+BETA2*x4obs-(c5+d5)*x3pD)+x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*x12obs+cos(x7)*sin(x11)*cos(x9)*x8obs-(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))*x10obs)-x3pppD-(c5+d5)*x3ppD)-BETA2*(x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*(x12obs*cos(x11)*sin(x7)*cos(x9)+cos(x7)*sin(x11)*cos(x9)*x8obs-x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11)))-GAMMA2*(x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*(x12obs*cos(x11)*sin(x7)*cos(x9)+cos(x7)*sin(x11)*cos(x9)*x8obs-x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11))-x3pppD-(c5+d5)*x3ppD)-x14*(x12obs*cos(x11)*sin(x7)*cos(x9)+cos(x7)*sin(x11)*cos(x9)*x8obs-x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11))+x3ppppD+(c5+d5)*x3pppD-d7*(2*x14*x13*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)+x13^2*((2*cos(x11)*sin(x7)*cos(x9)+2*sin(x11)*sin(x9))*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))+2*cos(x7)*sin(x11)*cos(x9)*(-x8obs*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*sin(x11))+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*(x10obs*cos(x9)*sin(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)*sin(x7)+x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*cos(x9)*sin(x11)-x12obs*sin(x11)*cos(x9))))*(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)-d8*((c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))^2*GAMMA2^2*(c5+d5)^2+(x13*(-x8obs*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*sin(x11))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*x13*cos(x7)*sin(x11)*cos(x9)+BETA2*x13*cos(x7)*sin(x11)*cos(x9)+GAMMA2*x13*cos(x7)*sin(x11)*cos(x9)+x14*cos(x7)*sin(x11)*cos(x9)+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-

Annexe 23
Rapport de PFE 106
cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)*d7*x13^2*(2*cos(x7)*cos(x11)*cos(x9)*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-2*cos(x7)*sin(x7)*sin(x11)^2*cos(x9)^2+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*cos(x7)*sin(x9)*sin(x11)))^2+(x13*(x12obs*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))-x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9)))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*x13*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+BETA2*x13*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+GAMMA2*x13*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+x14*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3D)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)*d7*x13^2*((2*cos(x11)*sin(x7)*cos(x9)+2*sin(x11)*sin(x9))*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))-2*cos(x7)^2*sin(x11)^2*sin(x9)*cos(x9)+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*(sin(x11)*sin(x7)*cos(x9)-cos(x9)*sin(x11))))^2+(x13*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*(cos(x11)*sin(x9)*sin(x7)-cos(x9)*sin(x11)))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+BETA2*x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)*d7*x13^2*((2*cos(x11)*sin(x7)*cos(x9)+2*sin(x11)*sin(x9))*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+2*cos(x7)^2*sin(x11)*cos(x11)*cos(x9)^2+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*(cos(x11)*sin(x9)*sin(x7)-cos(x9)*sin(x11))))^2)*z8)+cos(x7)*cos(x9)/(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2+sin(x9)^2*sin(x7)^2+cos(x7)^2*cos(x9)^2)*(-c12*z12-z11-M3*(x13*cos(x7)*cos(x9)-g-p3*x6obs)-2*x14*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7))-x13*(p4*x8obs*sin(x7)*cos(x9)-x8obs^2*cos(x7)*cos(x9)+2*x10obs*sin(x9)*sin(x7)*x8obs+p5*x10obs*sin(x9)*cos(x7)-x10obs^2*cos(x9)*cos(x7))-(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*(BETA3*(x13*cos(x7)*cos(x9)-g-p3*x6obs)+GAMMA3*(x13*cos(x7)*cos(x9)-g-x5ppD+BETA3*x6obs-(c9+d9)*x5pD)+x14*cos(x7)*cos(x9)+x13*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7))-x5pppD-(c9+d9)*x5ppD)-BETA3*(x14*cos(x7)*cos(x9)+x13*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7)))-GAMMA3*(x14*cos(x7)*cos(x9)+x13*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7))-x5pppD-(c9+d9)*x5ppD)+x5ppppD+(c9+d9)*x5pppD-d11*(2*x14*x13*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)+x13^2*(2*sin(x7)*cos(x9)*(x8obs*cos(x7)*cos(x9)-x10obs*sin(x9)*sin(x7))+2*sin(x9)*cos(x7)*(x10obs*cos(x9)*cos(x7)-sin(x7)*cos(x9)*x8obs)))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+x13*cos(x7)*cos(x9)-g-x5ppD-(c9+d9)*x5pD)-d12*((c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))^2*GAMMA3^2*(c9+d9)^2+(x13*(-x8obs*cos(x7)*cos(x9)+x10obs*sin(x9)*sin(x7))-(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*x

Annexe 23
Rapport de PFE 107
13*sin(x7)*cos(x9)-BETA3*x13*sin(x7)*cos(x9)-GAMMA3*x13*sin(x7)*cos(x9)-x14*sin(x7)*cos(x9)+d11*x13^2*(2*sin(x7)*cos(x9)^2*cos(x7)-2*sin(x9)^2*cos(x7)*sin(x7))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+x13*cos(x7)*cos(x9)-g-x5ppD-(c9+d9)*x5pD))^2+(x13*(sin(x7)*sin(x9)*x8obs-x10obs*cos(x9)*cos(x7))-(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*x13*sin(x9)*cos(x7)-BETA3*x13*sin(x9)*cos(x7)-GAMMA3*x13*sin(x9)*cos(x7)-x14*sin(x9)*cos(x7)+d11*x13^2*(-2*sin(x7)^2*cos(x9)*sin(x9)+2*sin(x9)*cos(x7)^2*cos(x9))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+x13*cos(x7)*cos(x9)-g-x5ppD-(c9+d9)*x5pD))^2)*z12)+(sin(x7)^2+cos(x7)^2-1)*x13*cos(x9)*sin(x9)*sin(x7)/(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2+sin(x9)^2*sin(x7)^2+cos(x7)^2*cos(x9)^2)*(-c14*z14-z13+p4*x12obs+x11ppD-(c13+d13)*(x12obs-x11pD)-d14*(c13+d13)^2*z14)
2U = 1/L/x13*cos(x7)*cos(x11)/(cos(x7)^2*sin(x11)^2+cos(x11)^2*cos(x7)^2+cos(x11)^2*sin(x7)^2+sin(x11)^2*sin(x7)^2)/cos(x9)*(-c4*z4-z3-M*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-p1*x2obs)-x14*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))*x10obs)-x13*(-p6*x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x12obs*(-x12obs*sin(x11)*sin(x9)+x10obs*cos(x9)*cos(x11)-x12obs*cos(x11)*sin(x7)*cos(x9)-cos(x7)*sin(x11)*cos(x9)*x8obs+x10obs*sin(x9)*sin(x11)*sin(x7))-p4*x8obs*cos(x7)*cos(x11)*cos(x9)-x8obs^2*sin(x7)*cos(x11)*cos(x9)-x12obs*x8obs*sin(x11)*cos(x7)*cos(x9)-x10obs*x8obs*sin(x9)*cos(x7)*cos(x11)+p5*x10obs*cos(x9)*sin(x11)*sin(x9)*cos(x11)*sin(x7)+x10obs*(-x10obs*sin(x9)*sin(x11)+x12obs*cos(x9)*cos(x11)-x10obs*cos(x9)*cos(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)*sin(x7)-x8obs*cos(x7)*sin(x9)*cos(x11)))-(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*((c1+d1-p1)*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-p1*x2obs)+gamma*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD)+x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+x13*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))*x10obs)-x1pppD-(c1+d1)*x1ppD)-BETA*(x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+x13*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11)))-gamma*(x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+x13*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))-x1pppD-(c1+d1)*x1ppD)-x14*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-

Annexe 23
Rapport de PFE 108
x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))+x1ppppD+(c1+d1)*x1pppD-d3*(2*x14*x13*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)+x13^2*((2*cos(x11)*sin(x9)-2*sin(x11)*sin(x7)*cos(x9))*(-x12obs*sin(x11)*sin(x9)+x10obs*cos(x9)*cos(x11)-x12obs*cos(x11)*sin(x7)*cos(x9)-cos(x7)*sin(x11)*cos(x9)*x8obs+x10obs*sin(x9)*sin(x11)*sin(x7))+(-2*x8obs*sin(x7)*cos(x11)*cos(x9)-2*x12obs*sin(x11)*cos(x7)*cos(x9)-2*x10obs*sin(x9)*cos(x7)*cos(x11))*cos(x7)*cos(x11)*cos(x9)+(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*(-x10obs*sin(x9)*sin(x11)+x12obs*cos(x9)*cos(x11)-x10obs*cos(x9)*cos(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)*sin(x7)-x8obs*cos(x7)*sin(x9)*cos(x11))))*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))-d4*((c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))^2*gamma^2*(c1+d1)^2+(x13*(-x8obs*sin(x7)*cos(x11)*cos(x9)-x12obs*sin(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*cos(x11))+(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*x13*cos(x7)*cos(x11)*cos(x9)+BETA*x13*cos(x7)*cos(x11)*cos(x9)+gamma*x13*cos(x7)*cos(x11)*cos(x9)+x14*cos(x7)*cos(x11)*cos(x9)+(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*((-2*cos(x11)*sin(x9)+2*sin(x11)*sin(x7)*cos(x9))*cos(x7)*sin(x11)*cos(x9)-2*sin(x7)*cos(x11)^2*cos(x9)^2*cos(x7)-(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*cos(x7)*sin(x9)*cos(x11)))^2+(x13*(x12obs*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))-x8obs*cos(x7)*sin(x9)*cos(x11)+x10obs*(-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9)))+(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*x13*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+BETA*x13*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+gamma*x13*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+x14*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*((2*cos(x11)*sin(x9)-2*sin(x11)*sin(x7)*cos(x9))*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))-2*sin(x9)*cos(x7)^2*cos(x11)^2*cos(x9)-(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))))^2+(x13*(x12obs*(-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9))-cos(x7)*sin(x11)*cos(x9)*x8obs+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))*x10obs)+(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*x13*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+BETA*x13*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+gamma*x13*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x14*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-

Annexe 23
Rapport de PFE 109
x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*((2*cos(x11)*sin(x9)-2*sin(x11)*sin(x7)*cos(x9))*(-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9))-2*cos(x7)^2*sin(x11)*cos(x11)*cos(x9)^2+(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))))^2)*z4)+1/L/x13*cos(x7)*sin(x11)/(cos(x7)^2*sin(x11)^2+cos(x11)^2*cos(x7)^2+cos(x11)^2*sin(x7)^2+sin(x11)^2*sin(x7)^2)/cos(x9)*(-c8*z8-z7-M2*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-p2*x4obs)-x14*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*x12obs+cos(x7)*sin(x11)*cos(x9)*x8obs-(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))*x10obs)-x13*((-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9))*p6*x12obs+x12obs*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))-p4*x8obs*cos(x7)*sin(x11)*cos(x9)-x8obs^2*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7)*sin(x11)*x8obs+p5*x10obs*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))-x10obs*(x10obs*cos(x9)*sin(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)*sin(x7)+x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*sin(x9)*cos(x11)-x12obs*sin(x11)*cos(x9)))-(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*((c5+d5-p2)*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-p2*x4obs)+GAMMA2*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD+BETA2*x4obs-(c5+d5)*x3pD)+x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*x12obs+cos(x7)*sin(x11)*cos(x9)*x8obs-(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))*x10obs)-x3pppD-(c5+d5)*x3ppD)-BETA2*(x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*(x12obs*cos(x11)*sin(x7)*cos(x9)+cos(x7)*sin(x11)*cos(x9)*x8obs-x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11)))-GAMMA2*(x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*(x12obs*cos(x11)*sin(x7)*cos(x9)+cos(x7)*sin(x11)*cos(x9)*x8obs-x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11))-x3pppD-(c5+d5)*x3ppD)-x14*(x12obs*cos(x11)*sin(x7)*cos(x9)+cos(x7)*sin(x11)*cos(x9)*x8obs-x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11))+x3ppppD+(c5+d5)*x3pppD-d7*(2*x14*x13*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)+x13^2*((2*cos(x11)*sin(x7)*cos(x9)+2*sin(x11)*sin(x9))*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))+2*cos(x7)*sin(x11)*cos(x9)*(-x8obs*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*sin(x11))+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*(x10obs*cos(x9)*sin(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)*sin(x7)+x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*cos(x9)*sin(x11)-x12obs*sin(x11)*cos(x9))))*(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)-d8*((c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))^2*G

Annexe 23
Rapport de PFE 110
AMMA2^2*(c5+d5)^2+(x13*(-x8obs*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*sin(x11))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*x13*cos(x7)*sin(x11)*cos(x9)+BETA2*x13*cos(x7)*sin(x11)*cos(x9)+GAMMA2*x13*cos(x7)*sin(x11)*cos(x9)+x14*cos(x7)*sin(x11)*cos(x9)+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)*d7*x13^2*(2*cos(x7)*cos(x11)*cos(x9)*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-2*cos(x7)*sin(x7)*sin(x11)^2*cos(x9)^2+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*cos(x7)*sin(x9)*sin(x11)))^2+(x13*(x12obs*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))-x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9)))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*x13*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+BETA2*x13*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+GAMMA2*x13*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+x14*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3D)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)*d7*x13^2*((2*cos(x11)*sin(x7)*cos(x9)+2*sin(x11)*sin(x9))*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))-2*cos(x7)^2*sin(x11)^2*sin(x9)*cos(x9)+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*(sin(x11)*sin(x7)*cos(x9)-cos(x9)*sin(x11))))^2+(x13*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*(cos(x11)*sin(x9)*sin(x7)-cos(x9)*sin(x11)))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+BETA2*x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)*d7*x13^2*((2*cos(x11)*sin(x7)*cos(x9)+2*sin(x11)*sin(x9))*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+2*cos(x7)^2*sin(x11)*cos(x11)*cos(x9)^2+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*(cos(x11)*sin(x9)*sin(x7)-cos(x9)*sin(x11))))^2)*z8)-sin(x7)/L/x13/(sin(x7)^2+cos(x7)^2)/cos(x9)*(-c12*z12-z11-M3*(x13*cos(x7)*cos(x9)-g-p3*x6obs)-2*x14*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7))-x13*(p4*x8obs*sin(x7)*cos(x9)-x8obs^2*cos(x7)*cos(x9)+2*x10obs*sin(x9)*sin(x7)*x8obs+p5*x10obs*sin(x9)*cos(x7)-x10obs^2*cos(x9)*cos(x7))-(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*(BETA3*(x13*cos(x7)*cos(x9)-g-p3*x6obs)+GAMMA3*(x13*cos(x7)*cos(x9)-g-x5ppD+BETA3*x6obs-(c9+d9)*x5pD)+x14*cos(x7)*cos(x9)+x13*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7))-x5pppD-(c9+d9)*x5ppD)-BETA3*(x14*cos(x7)*cos(x9)+x13*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7)))-GAMMA3*(x14*cos(x7)*cos(x9)+x13*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7))-x5pppD-(c9+d9)*x5ppD)+x5ppppD+(c9+d9)*x5pppD-d11*(2*x14*x13*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)+x13^2*(2*sin(x7)*cos(x9)*(x8obs*cos(x7)*cos(x9)-

Annexe 23
Rapport de PFE 111
x10obs*sin(x9)*sin(x7))+2*sin(x9)*cos(x7)*(x10obs*cos(x9)*cos(x7)-sin(x7)*cos(x9)*x8obs)))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+x13*cos(x7)*cos(x9)-g-x5ppD-(c9+d9)*x5pD)-d12*((c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))^2*GAMMA3^2*(c9+d9)^2+(x13*(-x8obs*cos(x7)*cos(x9)+x10obs*sin(x9)*sin(x7))-(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*x13*sin(x7)*cos(x9)-BETA3*x13*sin(x7)*cos(x9)-GAMMA3*x13*sin(x7)*cos(x9)-x14*sin(x7)*cos(x9)+d11*x13^2*(2*sin(x7)*cos(x9)^2*cos(x7)-2*sin(x9)^2*cos(x7)*sin(x7))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+x13*cos(x7)*cos(x9)-g-x5ppD-(c9+d9)*x5pD))^2+(x13*(sin(x7)*sin(x9)*x8obs-x10obs*cos(x9)*cos(x7))-(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*x13*sin(x9)*cos(x7)-BETA3*x13*sin(x9)*cos(x7)-GAMMA3*x13*sin(x9)*cos(x7)-x14*sin(x9)*cos(x7)+d11*x13^2*(-2*sin(x7)^2*cos(x9)*sin(x9)+2*sin(x9)*cos(x7)^2*cos(x9))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+x13*cos(x7)*cos(x9)-g-x5ppD-(c9+d9)*x5pD))^2)*z12)-1/L*sin(x9)*cos(x7)/(sin(x7)^2+cos(x7)^2)/cos(x9)*(-c14*z14-z13+p4*x12obs+x11ppD-(c13+d13)*(x12obs-x11pD)-d14*(c13+d13)^2*z14)
3U = 1/L/x13*(sin(x7)^2*cos(x9)*sin(x11)-cos(x11)*sin(x9)*sin(x7)+cos(x7)^2*cos(x9)*sin(x11))/(cos(x11)^2*sin(x7)^2*cos(x9)^2+sin(x11)^2*sin(x9)^2*cos(x7)^2+sin(x11)^2*sin(x9)^2*sin(x7)^2+sin(x11)^2*sin(x7)^2*cos(x9)^2+cos(x11)^2*sin(x9)^2*cos(x7)^2+cos(x11)^2*sin(x9)^2*sin(x7)^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+cos(x7)^2*sin(x11)^2*cos(x9)^2)*(-c4*z4-z3-M*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-p1*x2obs)-x14*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))*x10obs)-x13*(-p6*x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x12obs*(-x12obs*sin(x11)*sin(x9)+x10obs*cos(x9)*cos(x11)-x12obs*cos(x11)*sin(x7)*cos(x9)-cos(x7)*sin(x11)*cos(x9)*x8obs+x10obs*sin(x9)*sin(x11)*sin(x7))-p4*x8obs*cos(x7)*cos(x11)*cos(x9)-x8obs^2*sin(x7)*cos(x11)*cos(x9)-x12obs*x8obs*sin(x11)*cos(x7)*cos(x9)-x10obs*x8obs*sin(x9)*cos(x7)*cos(x11)+p5*x10obs*cos(x9)*sin(x11)*sin(x9)*cos(x11)*sin(x7)+x10obs*(-x10obs*sin(x9)*sin(x11)+x12obs*cos(x9)*cos(x11)-x10obs*cos(x9)*cos(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)*sin(x7)-x8obs*cos(x7)*sin(x9)*cos(x11)))-(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*((c1+d1-p1)*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-p1*x2obs)+gamma*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD)+x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+x13*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))*x10obs)-x1pppD-(c1+d1)*x1ppD)-

Annexe 23
Rapport de PFE 112
BETA*(x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+x13*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11)))-gamma*(x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+x13*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))-x1pppD-(c1+d1)*x1ppD)-x14*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))+x1ppppD+(c1+d1)*x1pppD-d3*(2*x14*x13*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)+x13^2*((2*cos(x11)*sin(x9)-2*sin(x11)*sin(x7)*cos(x9))*(-x12obs*sin(x11)*sin(x9)+x10obs*cos(x9)*cos(x11)-x12obs*cos(x11)*sin(x7)*cos(x9)-cos(x7)*sin(x11)*cos(x9)*x8obs+x10obs*sin(x9)*sin(x11)*sin(x7))+(-2*x8obs*sin(x7)*cos(x11)*cos(x9)-2*x12obs*sin(x11)*cos(x7)*cos(x9)-2*x10obs*sin(x9)*cos(x7)*cos(x11))*cos(x7)*cos(x11)*cos(x9)+(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*(-x10obs*sin(x9)*sin(x11)+x12obs*cos(x9)*cos(x11)-x10obs*cos(x9)*cos(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)*sin(x7)-x8obs*cos(x7)*sin(x9)*cos(x11))))*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))-d4*((c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))^2*gamma^2*(c1+d1)^2+(x13*(-x8obs*sin(x7)*cos(x11)*cos(x9)-x12obs*sin(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*cos(x11))+(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*x13*cos(x7)*cos(x11)*cos(x9)+BETA*x13*cos(x7)*cos(x11)*cos(x9)+gamma*x13*cos(x7)*cos(x11)*cos(x9)+x14*cos(x7)*cos(x11)*cos(x9)+(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*((-2*cos(x11)*sin(x9)+2*sin(x11)*sin(x7)*cos(x9))*cos(x7)*sin(x11)*cos(x9)-2*sin(x7)*cos(x11)^2*cos(x9)^2*cos(x7)-(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*cos(x7)*sin(x9)*cos(x11)))^2+(x13*(x12obs*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))-x8obs*cos(x7)*sin(x9)*cos(x11)+x10obs*(-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9)))+(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*x13*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+BETA*x13*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+gamma*x13*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+x14*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))+(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*((2*cos(x11)*sin(x9)-2*sin(x11)*sin(x7)*cos(x9))*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))-2*sin(x9)*cos(x7)^2*cos(x11)^2*cos(x9)-(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))))^2+(x13*(x12obs*(-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9))-

Annexe 23
Rapport de PFE 113
cos(x7)*sin(x11)*cos(x9)*x8obs+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))*x10obs)+(c3+d3*(gamma^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))^2)))*x13*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+BETA*x13*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+gamma*x13*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x14*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*((2*cos(x11)*sin(x9)-2*sin(x11)*sin(x7)*cos(x9))*(-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9))-2*cos(x7)^2*sin(x11)*cos(x11)*cos(x9)^2+(2*cos(x9)*sin(x11)-2*cos(x11)*sin(x9)*sin(x7))*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))))^2)*z4)-1/L/x13*(sin(x7)^2*cos(x9)*cos(x11)+sin(x11)*sin(x9)*sin(x7)+cos(x7)^2*cos(x9)*cos(x11))/(cos(x11)^2*sin(x7)^2*cos(x9)^2+sin(x11)^2*sin(x9)^2*cos(x7)^2+sin(x11)^2*sin(x9)^2*sin(x7)^2+sin(x11)^2*sin(x7)^2*cos(x9)^2+cos(x11)^2*sin(x9)^2*cos(x7)^2+cos(x11)^2*sin(x9)^2*sin(x7)^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+cos(x7)^2*sin(x11)^2*cos(x9)^2)*(-c8*z8-z7-M2*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-p2*x4obs)-x14*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*x12obs+cos(x7)*sin(x11)*cos(x9)*x8obs-(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))*x10obs)-x13*((-cos(x11)*sin(x7)*cos(x9)-sin(x11)*sin(x9))*p6*x12obs+x12obs*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))-p4*x8obs*cos(x7)*sin(x11)*cos(x9)-x8obs^2*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7)*sin(x11)*x8obs+p5*x10obs*(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))-x10obs*(x10obs*cos(x9)*sin(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)*sin(x7)+x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*sin(x9)*cos(x11)-x12obs*sin(x11)*cos(x9)))-(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*((c5+d5-p2)*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-p2*x4obs)+GAMMA2*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD+BETA2*x4obs-(c5+d5)*x3pD)+x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*x12obs+cos(x7)*sin(x11)*cos(x9)*x8obs-(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))*x10obs)-x3pppD-(c5+d5)*x3ppD)-BETA2*(x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*(x12obs*cos(x11)*sin(x7)*cos(x9)+cos(x7)*sin(x11)*cos(x9)*x8obs-x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11)))-GAMMA2*(x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*(x12obs*cos(x11)*sin(x7)*cos(x9)+cos(x7)*sin(x11)*cos(x9)*x8obs-x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11))-x3pppD-(c5+d5)*x3ppD)-x14*(x12obs*cos(x11)*sin(x7)*cos(x9)+cos(x7)*sin(x11)*cos(x9)*x8obs-x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11))+x3ppppD+(c5+d5)*x3pppD-d7*(2*x14*x13*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)+x13^2*((2*cos(x11)*sin(x7)*cos(x9)+2*sin(x11)*sin(x9))*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x11)*cos(x7)*cos(x9)-

Annexe 23
Rapport de PFE 114
x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))+2*cos(x7)*sin(x11)*cos(x9)*(-x8obs*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*sin(x11))+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*(x10obs*cos(x9)*sin(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)*sin(x7)+x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*cos(x9)*sin(x11)-x12obs*sin(x11)*cos(x9))))*(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)-d8*((c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))^2*GAMMA2^2*(c5+d5)^2+(x13*(-x8obs*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*sin(x11))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*x13*cos(x7)*sin(x11)*cos(x9)+BETA2*x13*cos(x7)*sin(x11)*cos(x9)+GAMMA2*x13*cos(x7)*sin(x11)*cos(x9)+x14*cos(x7)*sin(x11)*cos(x9)+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)*d7*x13^2*(2*cos(x7)*cos(x11)*cos(x9)*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-2*cos(x7)*sin(x7)*sin(x11)^2*cos(x9)^2+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*cos(x7)*sin(x9)*sin(x11)))^2+(x13*(x12obs*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))-x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9)))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*x13*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+BETA2*x13*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+GAMMA2*x13*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+x14*(-sin(x11)*sin(x9)*sin(x7)-cos(x9)*cos(x11))+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3D)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)*d7*x13^2*((2*cos(x11)*sin(x7)*cos(x9)+2*sin(x11)*sin(x9))*(-cos(x11)*sin(x9)*sin(x7)+cos(x9)*sin(x11))-2*cos(x7)^2*sin(x11)^2*sin(x9)*cos(x9)+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*(sin(x11)*sin(x7)*cos(x9)-cos(x9)*sin(x11))))^2+(x13*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*(cos(x11)*sin(x9)*sin(x7)-cos(x9)*sin(x11)))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x11)*sin(x9)*sin(x7)+cos(x9)*cos(x11))^2)))*x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+BETA2*x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD)*d7*x13^2*((2*cos(x11)*sin(x7)*cos(x9)+2*sin(x11)*sin(x9))*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+2*cos(x7)^2*sin(x11)*cos(x11)*cos(x9)^2+(2*sin(x11)*sin(x9)*sin(x7)+2*cos(x9)*cos(x11))*(cos(x11)*sin(x9)*sin(x7)-cos(x9)*sin(x11))))^2)*z8)-1/L/x13*cos(x7)*sin(x9)/(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2+sin(x9)^2*sin(x7)^2+cos(x7)^2*cos(x9)^2)*(-c12*z12-z11-M3*(x13*cos(x7)*cos(x9)-g-p3*x6obs)-2*x14*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7))-x13*(p4*x8obs*sin(x7)*cos(x9)-x8obs^2*cos(x7)*cos(x9)+2*x10obs*sin(x9)*sin(x7)*x8obs+p5*x10obs*sin(x9)*cos(x7)-

Annexe 23
Rapport de PFE 115
x10obs^2*cos(x9)*cos(x7))-(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*(BETA3*(x13*cos(x7)*cos(x9)-g-p3*x6obs)+GAMMA3*(x13*cos(x7)*cos(x9)-g-x5ppD+BETA3*x6obs-(c9+d9)*x5pD)+x14*cos(x7)*cos(x9)+x13*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7))-x5pppD-(c9+d9)*x5ppD)-BETA3*(x14*cos(x7)*cos(x9)+x13*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7)))-GAMMA3*(x14*cos(x7)*cos(x9)+x13*(-sin(x7)*cos(x9)*x8obs-x10obs*sin(x9)*cos(x7))-x5pppD-(c9+d9)*x5ppD)+x5ppppD+(c9+d9)*x5pppD-d11*(2*x14*x13*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)+x13^2*(2*sin(x7)*cos(x9)*(x8obs*cos(x7)*cos(x9)-x10obs*sin(x9)*sin(x7))+2*sin(x9)*cos(x7)*(x10obs*cos(x9)*cos(x7)-sin(x7)*cos(x9)*x8obs)))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+x13*cos(x7)*cos(x9)-g-x5ppD-(c9+d9)*x5pD)-d12*((c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))^2*GAMMA3^2*(c9+d9)^2+(x13*(-x8obs*cos(x7)*cos(x9)+x10obs*sin(x9)*sin(x7))-(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*x13*sin(x7)*cos(x9)-BETA3*x13*sin(x7)*cos(x9)-GAMMA3*x13*sin(x7)*cos(x9)-x14*sin(x7)*cos(x9)+d11*x13^2*(2*sin(x7)*cos(x9)^2*cos(x7)-2*sin(x9)^2*cos(x7)*sin(x7))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+x13*cos(x7)*cos(x9)-g-x5ppD-(c9+d9)*x5pD))^2+(x13*(sin(x7)*sin(x9)*x8obs-x10obs*cos(x9)*cos(x7))-(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*x13*sin(x9)*cos(x7)-BETA3*x13*sin(x9)*cos(x7)-GAMMA3*x13*sin(x9)*cos(x7)-x14*sin(x9)*cos(x7)+d11*x13^2*(-2*sin(x7)^2*cos(x9)*sin(x9)+2*sin(x9)*cos(x7)^2*cos(x9))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+x13*cos(x7)*cos(x9)-g-x5ppD-(c9+d9)*x5pD))^2)*z12)+(sin(x7)^2*cos(x9)^2+sin(x9)^2+cos(x7)^2*cos(x9)^2)/L*sin(x7)/(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2+sin(x9)^2*sin(x7)^2+cos(x7)^2*cos(x9)^2)*(-c14*z14-z13+p4*x12obs+x11ppD-(c13+d13)*(x12obs-x11pD)-d14*(c13+d13)^2*z14)
4U = -c14*z14-z13+p4*x12obs+x11ppD-(c13+d13)*(x12obs-x11pD)-d14*(c13+d13)^2*z14 N.B: x1D, x1pD,....,x11ppD correspondent aux dérivées successives sur les trajectoires désirées.

Annexe 22
Rapport de PFE 95
ANNEXE 22 . COEFFICIENTS DES COMMANDES A1 = cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9) A2 = L*x13*cos(x7)*cos(x11)*cos(x9) A3 = -L*x13*sin(x9)*cos(x11)*sin(x7)+L*x13*cos(x9)*sin(x11) A4 = -x13*sin(x11)*sin(x7)*cos(x9)+x13*cos(x11)*sin(x9) A5 = M*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-p1*x2obs)+... x14*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))*x12obs+cos(x7)*cos(x11)*cos(x9)*x8obs+... (cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))*x10obs)+... x13*(-p6*x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x12obs*(-x12obs*sin(x11)*sin(x9)+... x10obs*cos(x9)*cos(x11)-x12obs*cos(x11)*sin(x7)*cos(x9)-x8obs*cos(x7)*sin(x11)*cos(x9)+x10obs*sin(x7)*sin(x11)*sin(x9))-... p4*x8obs*cos(x7)*cos(x11)*cos(x9)-... x8obs^2*sin(x7)*cos(x11)*cos(x9)-x12obs*x8obs*sin(x11)*cos(x7)*cos(x9)-x10obs*x8obs*sin(x9)*cos(x7)*cos(x11)-... p5*x10obs*(cos(x9)*sin(x11)*-sin(x9)*cos(x11)*sin(x7))+... x10obs*(-x10obs*sin(x9)*sin(x11)+x12obs*cos(x9)*cos(x11)-x10obs*cos(x9)*cos(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)*sin(x7)-... x8obs*cos(x7)*sin(x9)*cos(x11)))+... (c3+d3*(GAMMA^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+... (cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))^2)))*((c1+d1-p1)*(x13*(cos(x11)*sin(x7)*cos(x9)+... sin(x11)*sin(x9))-p1*x2obs)+GAMMA*(x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD+BETA*x2obs-(c1+d1)*x1pD)+... x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+... x13*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))*x12obs+cos(x7)*cos(x11)*cos(x9)*x8obs+... (cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))*x10obs)-x1pppD-(c1+d1)*x1ppD)+BETA*(x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+...

Annexe 22
Rapport de PFE 96
x13*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x7)*cos(x11)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+... x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11)))+GAMMA*(x14*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+... x13*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x7)*cos(x11)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+... x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))-x1pppD-(c1+d1)*x1ppD)+... x14*(-x12obs*sin(x11)*sin(x7)*cos(x9)+x8obs*cos(x7)*cos(x11)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+... x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))-x1ppppD-(c1+d1)*x1pppD+... d3*(2*x14*x13*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x11)^2*cos(x9)^2+... (cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))^2)+... x13^2*(2*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))*(-x12obs*sin(x11)*sin(x9)+x10obs*cos(x9)*cos(x11)-... x12obs*cos(x11)*sin(x7)*cos(x9)-x8obs*cos(x7)*sin(x11)*cos(x9)+x10obs*sin(x9)*sin(x11)*sin(x7))+... 2*(-x8obs*sin(x7)*cos(x11)*cos(x9)-x12obs*sin(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*cos(x11))*cos(x7)*cos(x11)*cos(x9)+... 2*(cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))*(-x10obs*sin(x9)*sin(x11)+x12obs*cos(x11)*cos(x9)-... x10obs*cos(x9)*cos(x11)*sin(x7)+... x12obs*sin(x11)*sin(x9)*sin(x7)-x8obs*cos(x7)*sin(x9)*cos(x11))))*(BETA*x2obs+x13*(cos(x11)*sin(x7)*cos(x9)+... sin(x11)*sin(x9))-x1ppD-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D))) A6 = (c3+d3*(GAMMA^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x11)^2*cos(x9)^2+... (cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))^2)))*GAMMA*(c1+d1); A7 = x13*(-x12obs*cos(x7)*sin(x11)*cos(x9)-x8obs*sin(x7)*cos(x11)*cos(x9)-x10obs*cos(x7)*sin(x9)*cos(x11))+... (c3+d3*(GAMMA^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x11)^2*cos(x9)^2+... (cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))^2)))*x13*cos(x7)*cos(x11)*cos(x9)+BETA*x13*cos(x7)*cos(x11)*cos(x9)+... GAMMA*x13*cos(x7)*cos(x11)*cos(x9)+x14*cos(x7)*cos(x11)*cos(x9)+(BETA*x2obs+x13*(cos(x11)*sin(x7)*cos(x9)+... sin(x11)*sin(x9))-x1ppD-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+... d1*(x1-x1D)))*d3*x13^2*(-2*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))*cos(x7)*sin(x11)*cos(x9)-...

Annexe 22
Rapport de PFE 97
2*sin(x7)*cos(x11)^2*cos(x9)^2*cos(x7)-2*(cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))*cos(x7)*sin(x9)*cos(x11)) A8 = x13*(x12obs*(cos(x9)*cos(x11)+sin(x9)*sin(x11)*sin(x7))-x8obs*cos(x7)*cos(x11)*sin(x9)+... x10obs*(-sin(x9)*sin(x11)-cos(x9)*cos(x11)*sin(x7)))+(c3+d3*(GAMMA^2*(c1+d1)^2+... x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+cos(x7)^2*cos(x9)^2*cos(x11)^2+(cos(x9)*sin(x11)-... sin(x9)*cos(x11)*sin(x7))^2)))*x13*(cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))+BETA*x13*(cos(x9)*sin(x11)-... sin(x9)*cos(x11)*sin(x7))+GAMMA*x13*(cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))+x14*(cos(x9)*sin(x11)-... sin(x9)*cos(x11)*sin(x7))+(BETA*x2obs+x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-x1ppD-(c1+d1)*x1pD+... (c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*(2*(cos(x11)*sin(x9)-... sin(x11)*sin(x7)*cos(x9))*(cos(x9)*cos(x11)+sin(x9)*sin(x11)*sin(x7))-2*sin(x9)*cos(x7)^2*cos(x11)^2*cos(x9)-... 2*(cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))*(sin(x9)*sin(x11)+cos(x9)*cos(x11)*sin(x7))) A9 = x13*(x12obs*(-sin(x11)*sin(x9)-cos(x11)*sin(x7)*cos(x9))-x8obs*sin(x11)*cos(x7)*cos(x9)+x10obs*(cos(x11)*cos(x9)+... sin(x11)*sin(x9)*sin(x7)))+(c3+d3*(GAMMA^2*(c1+d1)^2+x13^2*((cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))^2+... cos(x7)^2*cos(x11)^2*cos(x9)^2+(cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))^2)))*x13*(cos(x11)*sin(x9)-... sin(x11)*sin(x7)*cos(x9))+BETA*x13*(-sin(x11)*sin(x7)*cos(x9)+cos(x11)*sin(x9))+GAMMA*x13*(-sin(x11)*sin(x7)*cos(x9)+... cos(x11)*sin(x9))+x14*(-sin(x11)*sin(x7)*cos(x9)+cos(x11)*sin(x9))+(BETA*x2obs+x13*(cos(x11)*sin(x7)*cos(x9)+... sin(x11)*sin(x9))-x1ppD-(c1+d1)*x1pD+(c2+d2*(c1+d1)^2)*(x2obs+c1*(x1-x1D)-x1pD+d1*(x1-x1D)))*d3*x13^2*(2*(cos(x11)*sin(x9)-... sin(x11)*sin(x7)*cos(x9))*(-sin(x11)*sin(x9)-cos(x11)*sin(x7)*cos(x9))-2*sin(x11)*cos(x7)^2*cos(x9)^2*cos(x11)+... 2*(cos(x9)*sin(x11)-sin(x9)*cos(x11)*sin(x7))*(cos(x11)*cos(x9)+sin(x11)*sin(x9)*sin(x7))) G1 = -p4*x12obs-x11ppD+(c13+d13)*(x12obs-x11pD)

Annexe 22
Rapport de PFE 98
G2= c13+d13 F1 = cos(x7)*cos(x9) F2 = -L*x13*sin(x7)*cos(x9) F3 = -L*x13*sin(x9)*cos(x7) F4 = M3*(x13*(cos(x7)*cos(x9))-g-p3*x6obs)+x14*(-sin(x7)*cos(x9)*x8obs-sin(x9)*cos(x7)*x10obs)+... x13*(p4*x8obs*sin(x7)*cos(x9)-x8obs^2*cos(x7)*cos(x9)+x10obs*sin(x9)*sin(x7)*x8obs+... p5*x10obs*sin(x9)*cos(x7)-x10obs^2*cos(x9)*cos(x7)+x8obs*sin(x7)*sin(x9)*x10obs)+... (c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*(BETA3*(x13*(cos(x7)*cos(x9))-g-p3*x6obs)+... GAMMA3*(x13*(cos(x7)*cos(x9))-g-x5ppD+BETA3*x6obs-(c9+d9)*x5pD)+x14*(cos(x7)*cos(x9))+... x13*(-x8obs*sin(x7)*cos(x9)-x10obs*sin(x9)*cos(x7))-x5pppD-(c9+d9)*x5ppD)+BETA3*(x14*(cos(x7)*cos(x9))+... x13*(-x8obs*sin(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)))+GAMMA3*(x14*(cos(x7)*cos(x9))+... x13*(-x8obs*sin(x7)*cos(x9)-x10obs*sin(x9)*cos(x7))-x5pppD-(c9+d9)*x5ppD)+... x14*(-x8obs*sin(x7)*cos(x9)-x10obs*sin(x9)*cos(x7))-x5ppppD-(c9+d9)*x5pppD+d11*(2*x14*x13*(sin(x7)^2*cos(x9)^2+... sin(x9)^2*cos(x7)^2)+x13^2*(2*sin(x7)*cos(x9)*(x8obs*cos(x7)*cos(x9)-x10obs*sin(x9)*sin(x7))+... 2*sin(x9)*cos(x7)*(x10obs*cos(x9)*cos(x7)-x8obs*sin(x7)*cos(x9))))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+... x13*(cos(x7)*cos(x9))-g-x5ppD-(c9+d9)*x5pD) F5 = (c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+sin(x9)^2*cos(x7)^2)))*GAMMA3*(c9+d9)

Annexe 22
Rapport de PFE 99
F6 = x13*(-cos(x7)*cos(x9)*x8obs+sin(x7)*sin(x9)*x10obs)+(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+... sin(x9)^2*cos(x7)^2)))*(x13*(-sin(x7)*cos(x9)))-BETA3*x13*sin(x7)*cos(x9)-GAMMA3*x13*sin(x7)*cos(x9)-x14*sin(x7)*cos(x9)+... d11*x13^2*(2*sin(x7)*cos(x9)^2*cos(x7)-2*sin(x9)^2*cos(x7)*sin(x7))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+... x13*(cos(x7)*cos(x9))-g-x5ppD-(c9+d9)*x5pD) F7 = x13*(sin(x9)*sin(x7)*x8obs-cos(x9)*cos(x7)*x10obs)+(c11+d11*(GAMMA3^2*(c9+d9)^2+x13^2*(sin(x7)^2*cos(x9)^2+... sin(x9)^2*cos(x7)^2)))*(x13*(-sin(x9)*cos(x7)))-BETA3*x13*sin(x9)*cos(x7)-GAMMA3*x13*sin(x9)*cos(x7)-x14*sin(x9)*cos(x7)+... d11*x13^2*(-2*sin(x7)^2*cos(x9)*sin(x9)+2*sin(x9)*cos(x7)^2*cos(x9))*(BETA3*x6obs+GAMMA3*(x6obs+(c9+d9)*(x5-x5D)-x5pD)+... x13*(cos(x7)*cos(x9))-g-x5ppD-(c9+d9)*x5pD) B1 = sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9) B2 = L*x13*cos(x7)*sin(x11)*cos(x9) B3 = -L*x13*sin(x9)*sin(x11)*sin(x7)-L*x13*cos(x9)*cos(x11) B4 = x13*cos(x11)*sin(x7)*cos(x9)+x13*sin(x11)*sin(x9)

Annexe 22
Rapport de PFE 100
B5 = M2*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-p2*x4obs)+x14*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*x12obs+... cos(x7)*sin(x11)*cos(x9)*x8obs-(sin(x9)*sin(x11)*sin(x7)+cos(x9)*cos(x11))*x10obs)+... x13*(-(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*p6*x12obs+x12obs*(-x12obs*sin(x11)*sin(x7)*cos(x9)+... x8obs*cos(x7)*cos(x11)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))-... p4*x8obs*cos(x7)*sin(x11)*cos(x9)-x8obs^2*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)*x8obs-... x10obs*sin(x9)*cos(x7)*sin(x11)*x8obs+p5*x10obs*(sin(x9)*sin(x11)*sin(x7)+cos(x9)*cos(x11))-... x10obs*(x10obs*cos(x9)*sin(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)*sin(x7)+x8obs*cos(x7)*sin(x9)*sin(x11)-... x10obs*sin(x9)*cos(x11)-x12obs*sin(x11)*cos(x9)))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+... sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x9)*sin(x11)*sin(x7)+... cos(x9)*cos(x11))^2)))*((c5+d5-p2)*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-p2*x4obs)+... GAMMA2*(x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD+BETA2*x4obs-(c5+d5)*x3pD)+... x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+x13*((cos(x11)*sin(x7)*cos(x9)+... sin(x11)*sin(x9))*x12obs+cos(x7)*sin(x11)*cos(x9)*x8obs-(sin(x9)*sin(x7)*sin(x11)+cos(x9)*cos(x11))*x10obs)-... x3pppD-(c5+d5)*x3ppD)+BETA2*(x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+... x13*(x12obs*cos(x11)*sin(x7)*cos(x9)+x8obs*cos(x7)*sin(x11)*cos(x9)-x10obs*sin(x9)*sin(x11)*sin(x7)+... x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11)))+GAMMA2*(x14*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))+... x13*(x12obs*cos(x11)*sin(x7)*cos(x9)+x8obs*cos(x7)*sin(x11)*cos(x9)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11)-... x10obs*sin(x9)*sin(x11)*sin(x7))-x3pppD-(c5+d5)*x3ppD)+x14*(x12obs*cos(x11)*sin(x7)*cos(x9)+x8obs*cos(x7)*sin(x11)*cos(x9)-... x10obs*sin(x9)*sin(x11)*sin(x7)+x12obs*sin(x11)*sin(x9)-x10obs*cos(x9)*cos(x11))-x3ppppD-(c5+d5)*x3pppD+... d7*(2*x14*x13*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x9)*sin(x11)*sin(x7)+... cos(x9)*cos(x11))^2)+x13^2*(2*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*(-x12obs*sin(x11)*sin(x7)*cos(x9)+... x8obs*cos(x7)*cos(x11)*cos(x9)-x10obs*sin(x9)*cos(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)+x10obs*cos(x9)*sin(x11))+...

Annexe 22
Rapport de PFE 101
2*cos(x7)*sin(x11)*cos(x9)*(-x8obs*sin(x7)*sin(x11)*cos(x9)+x12obs*cos(x11)*cos(x7)*cos(x9)-x10obs*sin(x9)*cos(x7)*sin(x11))+... 2*(sin(x9)*sin(x11)*sin(x7)+cos(x9)*cos(x11))*(x10obs*cos(x9)*sin(x11)*sin(x7)+x12obs*cos(x11)*sin(x9)*sin(x7)+... x8obs*cos(x7)*sin(x9)*sin(x11)-x10obs*sin(x11)*cos(x9)-x12obs*sin(x11)*cos(x9))))*(BETA2*x4obs+GAMMA2*(x4obs+... (c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-(c5+d5)*x3pD) B6 = (c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+... (sin(x9)*sin(x11)*sin(x7)+cos(x9)*cos(x11))^2)))*GAMMA2*(c5+d5) B7 = x13*(x12obs*cos(x7)*cos(x11)*cos(x9)-x8obs*sin(x7)*sin(x11)*cos(x9)-x10obs*cos(x7)*sin(x9)*sin(x11))+... (c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+... (sin(x9)*sin(x7)*sin(x11)+cos(x9)*cos(x11))^2)))*x13*cos(x7)*sin(x11)*cos(x9)+BETA2*x13*cos(x7)*sin(x11)*cos(x9)+... GAMMA2*x13*cos(x7)*sin(x11)*cos(x9)+x14*cos(x7)*sin(x11)*cos(x9)+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+... x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-x3ppD-... (c5+d5)*x3pD)*d7*x13^2*(2*cos(x7)*cos(x11)*cos(x9)*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))-... 2*cos(x7)*sin(x7)*sin(x11)^2*cos(x9)^2+2*(sin(x9)*sin(x11)*sin(x7)+cos(x9)*cos(x11))*cos(x7)*sin(x9)*sin(x11)) B8 = x13*(x12obs*(-sin(x9)*cos(x11)*sin(x7)+cos(x9)*sin(x11))-x8obs*sin(x9)*cos(x7)*sin(x11)-... x10obs*(cos(x9)*sin(x11)*sin(x7)-sin(x9)*cos(x11)))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+... sin(x11)*sin(x9))^2+cos(x7)^2*cos(x9)^2*sin(x11)^2+(sin(x9)*sin(x11)*sin(x7)+... cos(x9)*cos(x11))^2)))*x13*(-sin(x9)*sin(x11)*sin(x7)-cos(x9)*cos(x11))+BETA2*x13*(-sin(x9)*sin(x11)*sin(x7)-... cos(x9)*cos(x11))+GAMMA2*x13*(-cos(x9)*cos(x11)-sin(x9)*sin(x11)*sin(x7))+x14*(-sin(x9)*sin(x11)*sin(x7)-cos(x9)*cos(x11))+...

Annexe 22
Rapport de PFE 102
(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3D)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-... x3ppD-(c5+d5)*x3pD)*d7*x13^2*(2*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*(-sin(x9)*cos(x11)*sin(x7)+cos(x9)*sin(x11))-... 2*cos(x7)^2*sin(x11)^2*sin(x9)*cos(x9)+2*(sin(x9)*sin(x11)*sin(x7)+cos(x9)*cos(x11))*(cos(x9)*sin(x11)*sin(x7)-... sin(x11)*cos(x9))) B9 = x13*(x12obs*(cos(x11)*sin(x9)-sin(x11)*sin(x7)*cos(x9))+x8obs*cos(x11)*cos(x7)*cos(x9)-x10obs*(cos(x11)*sin(x9)*sin(x7)-... sin(x11)*cos(x9)))+(c7+d7*(GAMMA2^2*(c5+d5)^2+x13^2*((cos(x11)*sin(x7)*cos(x9)+... sin(x11)*sin(x9))^2+cos(x7)^2*sin(x11)^2*cos(x9)^2+(sin(x9)*sin(x11)*sin(x7)+... cos(x9)*cos(x11))^2)))*x13*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))+BETA2*x13*(cos(x11)*sin(x7)*cos(x9)+... sin(x11)*sin(x9))+(BETA2*x4obs+GAMMA2*(x4obs+(c5+d5)*(x3-x3D)-x3pD)+x13*(sin(x11)*sin(x7)*cos(x9)-cos(x11)*sin(x9))-... x3ppD-(c5+d5)*x3pD)*d7*x13^2*(2*(cos(x11)*sin(x7)*cos(x9)+sin(x11)*sin(x9))*(-sin(x11)*sin(x7)*cos(x9)+cos(x11)*sin(x9))+... 2*cos(x7)^2*sin(x11)*cos(x11)*cos(x9)^2+2*(sin(x9)*sin(x11)*sin(x7)+cos(x9)*cos(x11))*(cos(x11)*sin(x9)*sin(x7)-... sin(x11)*cos(x9))) N.B: x1D, x1pD,....,x11ppD correspondent aux dérivées successives sur les trajectoires désirées.

Annexe 21
Rapport de PFE 88
ANNEXE 21 . PROCEDURE DE COMMANDE / OBSERVATEUR PAR RETRO - ITERATION
ETAPE 1 : Construction d’un observateur exponentiellement stable
On mesure 14131197531 ,,,,,,, xxxxxxxx et on observe les autres états. A partir de là, on construit un observateur réduit pour les états à observer à partir du système (15 ) :
(16)
A partir du système ( 16 ), on écrit la dynamique des erreurs d’observation :
On définit une fonction de Lyapunov : 0~~21 ≥= XXV T ,où : [ ]TxxxxxxX 12108642 ,,,,,=
⇒ 0~~ ≤−= XXPV T , où 1 2 3 4 5 6( , , , , , )P diag p p p p p p= , avec ip > 0
⇒ L’observateur est bien exponentiellement stable. A présent, on peut réécrire un système sur lequel sera appliquée la procédure par rétro-itération :
( )( )
−=−=−=
−−=−−=−+=
126412
105310
8428
6397136
429119711134
219119711132
ˆˆˆˆˆˆ
ˆ)cos()cos(ˆˆ)sin()cos()cos()sin()sin(ˆˆ)sin()sin()cos()sin()cos(ˆ
xpUxxpULxxpULx
xpgxxxxxpxxxxxxxxpxxxxxxx
−=−=−=−=−=−=
12612
10510
848
636
424
212
~~~~~~~~~~~~
xpxxpxxpxxpxxpxxpx

Annexe 21
Rapport de PFE 89
(17 )
ETAPE 2 : Lancement de la procédure par rétro-itération
A partir du système ( 17 ), on élabore la loi de commande. ITERATION 1 On veut poursuivre la trajectoire dx1
On définit donc l’erreur : dxxz 111 −= et veut la faire tendre vers 0.
⇒ dxxxz 1221~ˆ −+=
⇒ entrée de commande : 2x̂ ; perturbation inconnue : 2~x
⇒ application du « nonlinear damping » : 111111 zdxzc d −+−=α
( )
( )
=
=
−=
+=
−=
+=
−=
+=
−−=
+=
−−=
+=
−+=
+=
114
1413
123
6412
121211
102
5310
10109
81
428
887
63
97136
665
42
9119711134
443
21
9119711132
221
ˆˆ
~ˆ
ˆˆ
~ˆ
ˆˆ
~ˆ
ˆ)cos()cos(ˆ
~ˆ
ˆ)sin()cos()cos()sin()sin(ˆ
~ˆ
ˆ)sin()sin()cos()sin()cos(ˆ
~ˆ
Ux
xx
xJKUx
xxx
xJLKULx
xxx
xJLKULx
xxx
xmKgxxxx
xxx
xmKxxxxxxx
xxx
xmKxxxxxxx
xxx

Annexe 21
Rapport de PFE 90
ITERATION 2
On définit une autre erreur : 122 ˆ α−= xz et on veut la faire tendre vers 0.
⇒ ( ) )~)((ˆ)())sin(sin()cos())sin(cos( 1211211119119711132 dd xxdcxpdcxxxxxxxz −++−++−+=
⇒ entrée de commande : 2111 ˆ)( xpdc −+ ; perturbation inconnue : 2~x
⇒ application du « nonlinear damping » :
( ) 22
1121111911971113222 )()())sin(sin()cos())sin(cos( zdcdxdcxxxxxxxzc dd +−++++−−=α
ITERATION 3
On définit une autre erreur : 221113 ˆ)( α−−+= xpdcz
⇒ ( )( )219119711131113 ˆ))sin(sin()cos())sin(cos()( xpxxxxxxpdcz −+−+=
( ) ( )( ))~)((ˆ)())sin(sin()cos())sin(cos()( 1211211119119711132
1122 dd xxdcxpdcxxxxxxxdcdc −++−++−++++
( )))sin(sin()cos())sin(cos( 911971114 xxxxxx ++
( )( ))~ˆ)(cos()cos()cos()~ˆ()cos())sin(sin())sin(cos( 8891171212971191113 xxxxxxxxxxxxx +++−+
( ) dd xdcxxxxxxxxx 11111010711911913 )()~ˆ())sin(cos()sin())sin(cos( +−−+−+
⇒ entrée de commande : ( )( ) 211111112
1122 ˆ)()()( xpdcppdcdcdc −+−−+++
( )( )8911712971191113 ˆ)cos()cos()cos(ˆ)cos())sin(sin())sin(cos( xxxxxxxxxxx +−+
( )( )10711911913 ˆ))sin(cos()sin())sin(cos( xxxxxxx −+ ;
perturbations inconnues : 121082~,~,~,~ xxxx
⇒ application du « nonlinear damping » :
( )( ))sin()sin()cos()sin()cos( 911971113333 xxxxxxzc +−−= βα
( )( )dd xdcxxxxxxx 1111911971113 )())sin(sin()cos())sin(cos( +−−+− γ
( ) ( ) 32
112
31111911971114 )()())sin(sin()cos())sin(cos( zdcdxdcxxxxxxx dd +−++++− γ
( ) 392
112
722
97119112133 )(cos)(cos)(cos)cos())sin(sin())sin(cos( zxxxxxxxxxd
+−−
( )( ) 32
71191192133 ))sin(cos()sin())sin(cos( zxxxxxxd −−

Annexe 21
Rapport de PFE 91
Avec : ( )21122 )( dcdc ++=γ et 111 pdc −+=β et ββγ 1pM −=
ITERATION 4
On définit une autre erreur :
( )( )8911712971191113214 ˆ)cos()cos()cos(ˆ)cos())sin(sin())sin(cos(ˆ)( xxxxxxxxxxxxpz +−+−= βγβ
( ) 371191191013 ))sin(cos()sin())sin(cos(ˆ α−−+ xxxxxxx
⇒ ( )( )219119711134 ˆ))sin(sin()cos())sin(cos( xpxxxxxxMz −+=
( )( )8911712971191114 ˆ)cos()cos()cos(ˆ)cos())sin(sin())sin(cos( xxxxxxxxxxx +−+
( ) ( )( ) )ˆ()cos())sin(sin())sin(cos())sin(cos()sin())sin(cos(ˆ 126497119111371191191014 xpUxxxxxxxxxxxxx −−+−+
( ))~ˆ)(cos())sin(cos()~ˆ)(cos()cos()~ˆ)()sin(sin(ˆ 12129711101011912129111213 xxxxxxxxxxxxxxx +−+++−+
( ) )ˆ)(cos()cos()cos()~ˆ)()sin()sin(sin()~ˆ)(cos())sin(cos(ˆ 842911713101071198891171213 xpULxxxxxxxxxxxxxxxx −++++−+
( ))~ˆ(ˆ)cos()cos()sin()~ˆ(ˆ)cos()cos()sin( 121289711888911713 xxxxxxxxxxxxx +−+−+
( )( )))sin(cos()sin())sin(cos()ˆ()~ˆ(ˆ)cos()cos()sin( 7119119105310108117913 xxxxxxpULxxxxxxx −−++−+
( ))~ˆ)()sin(cos()cos()~ˆ)(cos()cos()~ˆ)()sin(sin(ˆ 10107119121291110101191013 xxxxxxxxxxxxxxx +−+++−+
( ))~ˆ)(cos())sin(cos()~ˆ)()sin()sin(sin(ˆ 881197121279111013 xxxxxxxxxxxx +−++
)(cos)(cos)(cos))cos())sin(sin())sin(((cos()((( 92
112
722
971191121311
233 xxxxxxxxxdcdc +−++++ γ
)ˆ)))sin(sin()cos())sin((cos()()))(()))sin(cos()sin())sin((cos( 219119711131112
7119119 xpxxxxxxpdcxxxxx −+−+−+
)cos())sin((cos())~)((ˆ)))sin(sin()cos())sin((cos(( 971114121121911971113 xxxxxxdcxxxxxxxx dd +−+++−++ βγ
)~ˆ)(cos()cos()cos()~ˆ))(cos())sin(sin())sin(((cos()))sin(sin( 8891171212971191113911 xxxxxxxxxxxxxxx +++−++
)))sin(sin()cos())sin((cos(())()~ˆ))()sin(cos()sin())sin((cos( 911971114111110107119119 xxxxxxxdcxxxxxxxx dd +++−−+−+ β
)~ˆ)()sin(cos()sin()~ˆ)(cos()cos()cos()~ˆ)(cos())sin(sin(( 101071198891171212971113 xxxxxxxxxxxxxxxx +−+++−+
)))sin(sin()cos())sin((cos(()))~ˆ)()sin(cos()~ˆ)()sin(cos( 91197111410101191212911 xxxxxxxxxxxxxx ++++++ γ
)~ˆ)()sin(cos()sin()~ˆ)(cos()cos()cos()~ˆ)(cos())sin(sin(( 101071198891171212971113 xxxxxxxxxxxxxxxx +−+++−+
19119711111110101191212911 )))sin(sin()cos())sin((cos())())~ˆ)()sin(cos()~ˆ)()sin(cos( Uxxxxxxdcxxxxxxxxx dd +++−−++++
)~ˆ)()sin(cos()sin()~ˆ)(cos()cos()cos()~ˆ)(cos())sin(sin(( 101071198891171212971114 xxxxxxxxxxxxxxxx +−+++−+)4(
110101191212911 ))~ˆ)()sin(cos()~ˆ)()sin(cos( dxxxxxxxxx −++++ ))sin(((cos(2()( 91113143111 xxxxdxdc d ++−
))))sin(cos()sin())sin((cos()(cos)(cos)(cos))cos())sin(sin( 271191199
211
27
229711 xxxxxxxxxxx −++−

Annexe 21
Rapport de PFE 92
)~ˆ)(cos()cos()~ˆ)()sin(sin())(cos())sin(sin())sin((cos(2( 101011912129119711911213 xxxxxxxxxxxxxx +++−−+
))~ˆ)()sin()sin(sin()~ˆ)(cos())sin(cos()~ˆ)(cos())sin(cos( 1010711988911712129711 xxxxxxxxxxxxxxx +++−+−
)~ˆ)(cos()cos()sin()~ˆ)(cos()cos()sin((2 12129711889117 xxxxxxxxxx +−+−+
×−++− ° )))sin(cos()sin())sin((cos(2)cos()cos()cos())~ˆ)(cos()cos()sin( 7119119911710101179 xxxxxxxxxxxxx
)~ˆ)()sin(cos()cos()~ˆ)(cos()cos()~ˆ)()sin(sin(( 1010711912129111010119 xxxxxxxxxxxxx +−+++−
)cos()sin()(cos(ˆ))))(~ˆ)(cos()sin()cos()~ˆ)(sin()sin()sin( 971113288119712127911 xxxxxxxxxxxxxxx ++−++ β
)))()(ˆ)()(()()))sin(sin( 111111122
11221111911 ddddd xxdxxxcxdcdcxdcxxx −+−−+++++−−+
1291088726544332211~~~~ xAxAxAxAAUAUAUAUA ++++++++=
⇒ Les expressions des commandes apparaissent. Les expressions des coefficients iA sont données en annexe 22. A présent, on va réécrire un système pour lequel on peut appliquer un lemme 2 [4] permettant d’établir l’une des quatre relations nécessaires à la détermination des commandes. Ce système concerne les dérivées des erreurs établies à chaque itération :
2112111~ zzdxzcz +−+−= .
322
112211222 )(~)( zzdcdxdczcz ++−++−= .
8911712971191113211333~)cos()cos()cos(~))cos())sin(sin())sin(((cos(~)(( xxxxxxxxxxxxdczcz +−+++−= γ
))sin(((cos()(()~)))sin(cos()sin())sin((cos( 911213
211
23107119119 xxxdcdxxxxxx ++−−+ γ
))sin((cos()(cos)(cos)(cos))cos())sin(sin( 11992
112
722
9711 xxxxxxxx ++−
29 11 7 3 4sin( ) cos( )sin( )) ))x x x z z− + .
4z 1291088726544332211~~~~ xAxAxAxAAUAUAUAUA ++++++++= .
⇒ En choisissant :
429
28
27
264534444332211 )( zAAAAdAzzcUAUAUAUA +++−−−−=+++ ( a )
et en remplaçant cette relation dans l’expression de 4z , on obtient :
2112111~ zzdxzcz +−+−= .
322
112211222 )(~)( zzdcdxdczcz ++−++−= .

Annexe 21
Rapport de PFE 93
8911712971191113211333~)cos()cos()cos(~))cos())sin(sin())sin(((cos(~)(( xxxxxxxxxxxxdczcz +−+++−= γ
))sin(((cos()(()~)))sin(cos()sin())sin((cos( 911213
211
23107119119 xxxdcdxxxxxx ++−−+ γ
))sin((cos()(cos)(cos)(cos))cos())sin(sin( 11992
112
722
9711 xxxxxxxx ++−
29 11 7 3 4sin( ) cos( )sin( )) ))x x x z z− + .
429
28
27
26412910887263444 )(~~~~ zAAAAdxAxAxAxAzzcz +++−++++−−= .
En mettant le système sous cette forme, on peut montrer la stabilité global en posant la
fonction de Lyapunov : ∑=
=4
1
243214 2
1),,,(i
izzzzzV . Ceci constitue le lemme 2
On répète la même procédure pour les trois autres poursuites de trajectoire à assurer :
dxxz 335 −=
dxxz 559 −=
dxxz 111113 −=
et on obtient ainsi les trois autres relations ( b ), ( c ), ( d ) nécessaires au calcul des expressions des commandes 4321 ,,, UUUU . On récapitule donc à présent les quatre relations obtenues :
429
28
27
264534444332211 )( zAAAAdAzzcUAUAUAUA +++−−−−=+++ ( a )
829
28
27
268578844332211 )( zBBBBdBzzcUBUBUBUB +++−−−−=+++ ( b )
122
72
62
51241112124332211 )(0 zFFFdFzzcUUFUFUF ++−−−−=+++ ( c )
14221411314144321 1000 zGdGzzcUUUU −−−−=+++ ( d )
Les gains ic et id sont définis strictement positifs. Les coefficients iiii GetFBA ,, sont donnés dans l’annexe 22. On rappelle que le nombre d’itérations nécessaires pour faire apparaître les commandes dans les expressions ( b ) et ( c ) sont au nombre de quatre et qu’il faut en revanche seulement deux itérations pour faire apparaître les commandes dans la relation ( d ) .

Annexe 21
Rapport de PFE 94
A partir des quatre relations précédentes, on va déterminer les expressions des commandes en résolvant un système de quatre équations à quatre inconnues. Le système est de la forme : HUA =× . Les expressions des commandes données dans l’annexe 23, vérifient :
−−−−
++−−−−
+++−−−−
+++−−−−
=
−
1422141131414
122
72
62
5124111212
829
28
27
2685788
429
28
27
2645344
1
321
4321
4321
4
3
2
1
)(
)(
)(
1000
0
zGdGzzc
zFFFdFzzc
zBBBBdBzzc
zAAAAdAzzc
FFF
BBBB
AAAA
U
U
U
U
Comme pour la commande par rétro-itération à états connus du chapitre 2, on constate que si on n’avait pas étendu le système au préalable, des singularité dans la matrice A auraient été présentes et auraient rendu la résolution impossible. D’autre part, la loi de commande est définie dans la région où 0)(det ≠A , c’est-à-dire :
213
2cos)( xLADET ψ−=
Il faut donc éviter : 2
Π±=ψ , ce qui ne pose aucun problème puisque l’hélicoptère est sensé
plané, donc il ne réalise pas de grands angles. D’autre part, 13x représente l’extension dynamique, par conséquent là encore cela ne pose aucun problème physiquement.

Annexe 21
Rapport de PFE 95

Annexe 20
Rapport de PFE 87
ANNEXE 20 . SYSTEME ETENDU
( 15 )
( )
( )
=
=
−=
=
−=
=
−=
=
−−=
=
−−=
=
−+=
=
114
1413
123
6412
1211
102
5310
109
81
428
87
63
97136
65
42
9119711134
43
21
9119711132
21
)cos()cos(
)sin()cos()cos()sin()sin(
)sin()sin()cos()sin()cos(
Ux
xx
xJKUx
xx
xJLKULx
xx
xJLKULx
xx
xmKgxxxx
xx
xmKxxxxxxx
xx
xmKxxxxxxx
xx

Annexe 19
Rapport de PFE 86
ANNEXE 19 . POURSUITES DE TRAJECTOIRE SUR LA POSITION ET L’ ANGLE DE LACET

Annexe 18
Rapport de PFE 85
ANNEXE 18 . OBSERVATION DES 12 ETATS
Observation sur la position absolue et les 3 angles
Observation sur la vitesse absolue et les dérivées des 3 angles

Annexe 17
Rapport de PFE 82
ANNEXE 17 . ANALYSE DE CONVERGENCE
A partir du système ( 12 ), on établit la dynamique des erreurs d’observation :
( 13 )
* ( ) ( ) jiijjjijiijiji xxxxxxxxxxxxxx ~ˆ~~ˆ~ˆˆˆ +=−−+=− ANALYSE DE CONVERGENCE Etape 1 : Définir une surface attractive Comme ( )Txxxxxxy 654321 ,,,,,~= est la sortie mesurée du système, on définit y~ = 0 comme étant la surface attractive. Etape 2 : Montrer que y~ = 0 en temps fini A partir du système ( 13 ) , on réécrit sous forme matricielle où :
−Γ−+=
−Γ−+=
−Γ−+=
−Γ−=
−Γ−=
−Γ−=
−Γ−++=
−Γ−−=
−Γ−+=
−Γ−=
−Γ−=
−Γ−=
*)~(~~ˆ~~
*)~(~~ˆ~~
*)~(~~ˆ~~
)~(~~
)~(~~
)~(~~
)~(~)tan()cos(~)tan()sin(~~~
)~(~)sin(~)cos(~~
)~(~)sec()cos(~)sec()sin(~~
)~(~~~
)~(~~~
)~(~~~
12121110101112
11111210101211
10101211111210
999
888
777
6656125611106
556126115
44561256114
3393
2282
1171
ysignHyxxnxnxx
ysignHyxxhxhxx
ysignHyxxdxdxx
ysignHyx
ysignHyx
ysignHyx
ysignHyxxxxxxxx
ysignHyxxxxx
ysignHyxxxxxxx
ysignHyxx
ysignHyxx
ysignHyxx

Annexe 17
Rapport de PFE 83
[ ]TxxxxxxX 6543211 ,,,,,= ;
[ ]TxxxxxxX 1211109872 ,,,,,= .
)~(~~~1121 XsignHXXAX AA −Γ−=
)~(~~~1122 XsignHXXBX BB −Γ−=
Avec :
A =
−
)tan()cos()tan()sin(1000
)sin()cos(0000
))sec(cos())sec(sin(0000
000100
000010
000001
5656
66
5656
xxxx
xx
xxxx ; B =
0ˆ000
ˆ0000
ˆ0000
000000
000000
000000
1011
1012
1112
xnnx
xhhx
xddx
BBA H,,ΓΓ 66×ℜ∈
( )AAAAAAA hhhhhhdiagH 654321 ,,,,,= On définit une fonction de Lyapunov : 0~~
21
111 ≥= XXV T et on veut : 01 ≤V
En choisissant : Ah1 > max 7
~x
Ah2 > max 8~x
Ah3 > max 9~x
Ah4 > max ( )5 5 11 6 12sec( ) sin( ) cos( )x x x x x+
Ah5 > max ( )6 11 6 12cos( ) sin( )x x x x+
Ah6 > max ( )10 5 6 11 6 12tan( ) sin( ) cos( )x x x x x x+ +
⇒ )~(~~11
211 XsignXHXV AA −Γ−≈
⇒ 01 ≤V ⇒ 0~1 =X en temps fini 0t
⇒ 0~1 =X ⇒ 2
11
~)~( XAHXsign Amoy −= Ainsi, on peut réécrire la dynamique des erreurs d’observation de la manière suivante :

Annexe 17
Rapport de PFE 84
0~1 =X (à 0tt= )
21
22~~~ XAHHXBX AB
−−= (à 0tt≥ ) Etape 3 : Montrer que 2
~X converge exponentiellement vers 0
On définit une fonction de Lyapunov : 0~~21
222 ≥= XXV T et on veut : 02 ≤V
⇒ 21
22~)(~ XAHHBXV AB
T −−=
⇒ 02 ≤V si et seulement si : BH > AHBA 1− ; avec det(A)≠ 0 pour Π≠5x et 46Π−≠x
⇒ 2~X converge exponentiellement vers 0

Annexe 17
Rapport de PFE 85

Annexe 16
Rapport de PFE 81
ANNEXE 16 . POURSUITES ET ERREURS DE POURSUITES AVEC 20 % D’ ERREURS SUR LES PARAMETRES
ET PERTURBATION
0 5 10 15 20-1
-0.5
0
0.5 1
1.5
time (s)
x
0 5 10 15 20 -1
-0.5
0
0.5
1
1.5
time (s)
y
0 5 10 15 200
0.5
1 1.5
2
2.5
time (s)
z
0 5 10 15 20 0
0.5
1
1.5
time (s)
psi
0 5 10 15 20-1
-0.5
0
0.5
time (s)
x
0 5 10 15 20 -20
-15
-10
-5
0
5x 10
-3
time (s)
y
0 5 10 15 20-4 -3 -2 -1 0 1 x 10 -3
time (s)
z
0 5 10 15 20 -1.5
-1
-0.5
0
0.5
time (s)
psi

Annexe 15
Rapport de PFE 80
ANNEXE 15 . POURSUITES ET ERREURS DE POURSUITES SANS ERREURS SUR LES PARAMETRES
ET SANS PERTURBATION
0 5 10 15 20-1
-0.5
0
0.5
1
time (s)
x
0 5 10 15 20 -1
-0.5
0
0.5
1
time (s)
y
0 5 10 15 200
0.5 1
1.5 2
2.5
time (s)
z
0 5 10 15 20 0
0.5
1
1.5
time (s)
psi
0 5 10 15
-0.8
-0.6
-0.4
-0.2
0
time
x
5 10 15 20
-15
-10
-5
0x 10
-3
time
y
0 5 10 15 20-3
-2
-1
0
1 x 10
-3
time
z
0 5 10 15 20 -1.5
-1
-0.5
0
0.5
time
psi

Sommaire
Rapport de stage i
SOMMAIRE
PRESENTATION DU LRV................................................................................................................................. 1
INTRODUCTION................................................................................................................................................. 3
CHAPITRE 1
ETUDE SUR LE BANC D'ESSAIS DU LRV..................................................................................................... 6
1. OBJECTIF DU TRAVAIL............................................................................................................................... 6 2. MODELISATION DU BANC D'ESSAIS ....................................................................................................... 6 3. COMMANDE DU SYSTEME PAR BOUCLAGE INTERNE ..................................................................... 9 4. COMMANDE DU SYSTEME PAR RETRO-ITERATION...................................................................... 11 5. COMMANDE PAR RETRO-ITERATION AVEC OBSERVATEURS NON LINEAIRES .................. 12 6. BILAN GENERAL ......................................................................................................................................... 16
CHAPITRE 2
ETUDE SUR L'HELICOPTERE A QUATRE ROTORS DU LRV .............................................................. 17
1. INTRODUCTION........................................................................................................................................... 17 2. MODELISATION DE L'HELICOPTERE A QUATRE ROTORS........................................................... 17 3. COMMANDE DE L'HELICOPTERE PAR LINEARISATION EXACTE.............................................. 20 4. COMMANDE DE L'HELICOPTERE PAR RETRO-ITERATION ......................................................... 23 5. ETUDE COMPARATIVE ENTRE LES DEUX COMMANDES UTILISEES ........................................ 25 6. SYNTHESE D'UNE COMMANDE PAR RETRO-ITERATION AVEC OBSERVATEURS .............. 25 7. BILAN GENERAL ......................................................................................................................................... 28
CHAPITRE 3
ETUDE SUR L'HELICOPTERE A QUATRE ROTORS DU GRASP LAB ................................................ 30
1. MOTIVATIONS DE L'ETUDE .................................................................................................................... 30 2. MODELISATION DE L'HELICOPTERE A QUATRE ROTORS........................................................... 30 3. COMMANDE/OBSERVATEUR PAR RETRO-ITERATION ................................................................. 32 4. COMMANDE BASEE SUR LA PASSIVITE DU SYSTEME.................................................................... 34 5. NOUVELLE MODELISATION DE L'HELICOPTERE ........................................................................... 40 6. BILAN GENERAL ......................................................................................................................................... 41
CONCLUSION.................................................................................................................................................... 42
ANNEXES ........................................................................................................................................................... 44
REFERENCES BIBLIOGRAPHIQUES ........................................................................................................129

Références Bibliographiques
Rapport de stage 129
Références Bibliographiques
[1] V.Mislter, A.Benallegue and N.K.M’Sirdi : Exact linearization and noninteracting control of a 4rotors helicopter via dynamic feedback, Proceedings ROMAN Septembre 2001 Bordeaux-Paris
[2] V.Mislter, A.Benallegue and N.K.M’Sirdi : Linéarisation exacte et découplage entrées-
sorties, Comparaison entre l’hélicoptère standard & l’hélicoptère 4 rotors. CIFA 2002 [3] Erdinç Altug, James P. Ostrowski, Robert Mahony : Control of a Quadrotor Helicopter
Using Visual Feedback. GRASP Lab. University of Pennsylvania, Philadelphia. [4] Miroslav Krstic, Ionnis Kanellakopo, Petar KoKotovic, NonLinear and Adaptive Control
Design [5] Jean-Jacques E-Slotine, Weiping Li : Applied NonLinear Control [6] H. Imine, L. Laval, N.K. M’sirdi, Y. Delanne : Sliding Mode Observers with unknown
inputs to estimate the road profile. June 2002. [7] N. Manamanni, M. Djemaï, T. Boukhobza, N.K. M’sirdi : Nonlinear Sliding Observer-
based Control for a Pneumatic Robot. [8] M. Djemaï, J-P Barbot, T. Boukhobza : Some comments on Higher Order Sliding Modes. [9] M. Djemaï, J-P Barbot : Smooth Manifolds and High Order Sliding Mode Control.
Proceeding of the 41st IEEE. Conference on Decision and Control, Las Vegas, Nevada USA, December 2002.
[10] J-P Barbot, T. Boukhobza, M. Djemaï : Sliding Mode Observer for Triangular Input
Form. Proceeding of the 35st. Conference on Decision and Control, Kobe, Japan, December 1996.
[11] Mark W. Spong : Energy Based Control of a Class of Underactuated Mechanical
Systems. Coordinated Science Laboratory, University of Illinois, Urbana. [12] N. Manamanni : THESE Commandes et observateurs pour systèmes pneumatiques-
méthodologie pour la locomotion à patte, Université Pierre et Marie Curie, Février 1998. [13] H.Nijmeijer and A.van der Schaft. Nonlinear Dynamical Control Systems. Springer-
Verlag, 1990. [14] R Mahony and T Hamel 'Stable tracking control for unmanned aerial vehicles using non-
inertial measurements.' Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, NSW, 12-15 Dec 2000, 2971 - 2976, 2000

Références Bibliographiques
Rapport de stage 130
[15] E.N. Johnson, P.A. Debitetto, C.A. Trott, M.C. Bosse, « The 1996 Draper Laboratory Small Autonomous Aerial Vehicle », AIAA/IEEE Digital Avionics Systems Conference Proceedings, 1996.
[16] H. Shim, T.J. Koo, F. Hoffmann, S. Sastry, « A Comprehensive Study of Control Design
for an Autonomous Helicopter ». [17] Srikanth Saripalli, Gaurav S. Sukhatme, James F. Montgomery : An experimental Study
of the Autonomous Helicopter Landing Problem. Submitted to Eight International Symposium on Expérimental Robotics, July 2002.
[18] Carnegie Mellon Robotics Institute Autonomous helicopter project webpage.
http ://www.cs.cmu.edu/afs/cs.cmu.edu/project/chopper/www/. [19] Robotics Information Technology Institute and Computer Vision Laboratory. Aurora
Project webpage. http ://www.ia.cti.br/lrv/aurora.html [20] Hervé Guillard, Henri Bourlès : Robust Feedback Linearization, Laboratoire
d’Automatique des Arts et Métiers.