Équilibrage des rotors rigides et...
17
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie mécanique BM 5 130 − 1 Équilibrage des rotors rigides et flexibles par Jean-Marc PUGNET Ingénieur Arts et Métiers, ingénieur automaticien de l’Université de Grenoble Chef du département recherches et développement de FRAMATOME - THERMODYN Expert principal du groupe FRAMATOME l est connu qu’une pièce « qui ne tourne pas rond » génère des efforts tournants dus aux balourds installés d’autant plus élevés que la vitesse de rotation augmente : Force centrifuge (N) = Masse (kg) · Rayon (m) · Vitesse de rotation 2 (rad/s) Des vibrations de la machine en résultent, sous l’effet des forces développées par les paliers pour s’opposer aux forces des balourds. La manifestation la plus connue en est le franchissement d’une « vitesse critique », coïncidence d’une fréquence propre du rotor et de la vitesse de rotation. Dans aucun cas il ne doit y avoir contact entre rotor et stator, et l’intégrité de l’installation en fatigue doit être respectée. La solution est l’équilibrage, action consistant à minimiser le balourd du rotor. 1. Rotors et balourds ................................................................................... BM 5 130 - 2 1.1 Rotors............................................................................................................ — 2 1.2 Origine des balourds sur les rotors ............................................................ — 3 1.3 Rotors rigides et flexibles............................................................................ — 4 1.4 Effets des balourds sur les vibrations ........................................................ — 5 2. Critères d’équilibrage ............................................................................. — 6 2.1 Balourds résiduels ....................................................................................... — 6 2.2 Vibrations résiduelles .................................................................................. — 6 2.3 Vitesse d’équilibrage ................................................................................... — 7 3. Techniques d’équilibrage ....................................................................... — 7 3.1 Installation de balourds correcteurs........................................................... — 7 3.2 Méthode des coefficients d’influence ........................................................ — 8 4. Équilibrage des rotors rigides .............................................................. — 9 4.1 Machines à équilibrer .................................................................................. — 9 4.2 Équilibrage en un plan ................................................................................ — 10 4.3 Équilibrage en deux plans........................................................................... — 11 4.4 Équilibrage séquentiel ................................................................................. — 12 4.5 Incertitudes ................................................................................................... — 12 5. Équilibrage des rotors flexibles ........................................................... — 13 5.1 Installation d’équilibrage............................................................................. — 13 5.2 Paliers souples ou paliers rigides ............................................................... — 13 5.3 Mesures et traitement ................................................................................. — 13 5.4 Procédure d’équilibrage .............................................................................. — 14 5.5 Remarques sur la méthode des coefficients d’influence.......................... — 14 5.6 Équilibrage modal........................................................................................ — 15 5.7 Équilibrage in situ ........................................................................................ — 15 5.8 Incertitudes ................................................................................................... — 15 Pour en savoir plus ........................................................................................... Doc. BM 5 130 I
Transcript of Équilibrage des rotors rigides et...
BM
5 1
30
7 -
1997
Équilibrage des rotors rigideset flexibles
par Jean-Marc PUGNETIngénieur Arts et Métiers, ingénieur automaticien de l’Université de GrenobleChef du département recherches et développement de FRAMATOME - THERMODYNExpert principal du groupe FRAMATOME
l est connu qu’une pièce « qui ne tourne pas rond » génère des effortstournants dus aux balourds installés d’autant plus élevés que la vitesse de
rotation augmente :
Force centrifuge (N) = Masse (kg) · Rayon (m) · Vitesse de rotation2 (rad/s)
Des vibrations de la machine en résultent, sous l’effet des forces développéespar les paliers pour s’opposer aux forces des balourds. La manifestation la plusconnue en est le franchissement d’une « vitesse critique », coïncidence d’unefréquence propre du rotor et de la vitesse de rotation. Dans aucun cas il ne doity avoir contact entre rotor et stator, et l’intégrité de l’installation en fatigue doitêtre respectée. La solution est l’équilibrage, action consistant à minimiser lebalourd du rotor.
1. Rotors et balourds ................................................................................... BM 5 130 - 21.1 Rotors............................................................................................................ — 21.2 Origine des balourds sur les rotors............................................................ — 31.3 Rotors rigides et flexibles............................................................................ — 41.4 Effets des balourds sur les vibrations ........................................................ — 5
2. Critères d’équilibrage ............................................................................. — 62.1 Balourds résiduels ....................................................................................... — 62.2 Vibrations résiduelles .................................................................................. — 62.3 Vitesse d’équilibrage ................................................................................... — 7
3. Techniques d’équilibrage ....................................................................... — 73.1 Installation de balourds correcteurs........................................................... — 73.2 Méthode des coefficients d’influence ........................................................ — 8
4. Équilibrage des rotors rigides .............................................................. — 94.1 Machines à équilibrer .................................................................................. — 94.2 Équilibrage en un plan ................................................................................ — 104.3 Équilibrage en deux plans........................................................................... — 114.4 Équilibrage séquentiel................................................................................. — 124.5 Incertitudes................................................................................................... — 12
5. Équilibrage des rotors flexibles ........................................................... — 135.1 Installation d’équilibrage............................................................................. — 135.2 Paliers souples ou paliers rigides............................................................... — 135.3 Mesures et traitement ................................................................................. — 135.4 Procédure d’équilibrage .............................................................................. — 145.5 Remarques sur la méthode des coefficients d’influence.......................... — 145.6 Équilibrage modal........................................................................................ — 155.7 Équilibrage in situ ........................................................................................ — 155.8 Incertitudes................................................................................................... — 15
Pour en savoir plus ........................................................................................... Doc. BM 5 130
I
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique BM 5 130 − 1
ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES ____________________________________________________________________________________________
Ponctuellement, le problème est très simple. Il consiste à ramener le centrede masse sur l’axe de rotation. En général, les rotors présentent plusieurs roues,disques, masses, ou accouplements ... montés sur un arbre qui est plus longque le plus grand diamètre extérieur. La difficulté rencontrée est que la distri-bution de balourd tout le long du rotor est inconnue et, par conséquent, que lebalourd ponctuel ne peut être corrigé individuellement ! Une définition plusrigoureuse est donc que l’équilibrage est l’opération qui consiste à minimiserl’effet des balourds sur les vibrations du rotor et sur les efforts transmis auxpaliers.
Les procédures utilisées consistent à appliquer, sur cette distribution inconnuede balourd, un ensemble fini de balourds correcteurs, de façon à ce quel’ensemble se comporte de façon satisfaisante. Il s’agit donc bien de la recherched’un compromis, dont le résultat est lié aux conditions choisies pour réaliserl’opération d’équilibrage.
La maintenance préventive des machines tournantes passe par une sur-veillance permanente de leurs vibrations. Un comportement sain est synonymed’un bas niveau des vibrations et de leur constance dans le temps.
Le balourd résiduel qui gouverne la vibration synchrone correspond à une qua-lité intrinsèque de la machine, au même titre que ses performances énergétiques.
Cet article va s’attacher à décrire les procédures et critères d’équilibrages. Ontraitera surtout des machines telles que moteurs électriques, pompes rotatives,turbines, compresseurs, ventilateurs, engrenages, etc., qui sont d’un usage par-ticulièrement courant pour toute transformation de forme d’énergie. Les rotorsconsidérés ont deux propriétés principales :
— ils sont axisymétriques (axe de symétrie de révolution) ;— ils sont isotropes (mêmes propriétés dans toutes les directions radiales).Les équilibrages de rotors rigides (à basse vitesse) et flexibles (à vitesse nomi-
nale ou in situ) seront présentés. Par contre, l’équilibrage des ensembles mobilesdes machines alternatives ne sera pas traité spécifiquement, car les efforts d’iner-tie des pistons ne sont pas d’origine centrifuge et ne tournent pas avec le rotor.Néanmoins, les principes définis dans cet article pourront leur être transposés,la méthode des coefficients d’influence étant assez universelle. L’équilibrage sta-tique par gravit é, appliqué à de très grandes roues Francis destinées à des bar-rages hydrauliques, est juste cité ici, mais ne sera pas traité.
Enfin, on remarquera qu’il est nécessaire d’utiliser des modèles mathé-matiques. La pratique de l’équilibrage ne peut pas être déconnectée de la théoriepour comprendre précisément les phénomènes.
1. Rotors et balourds
1.1 Rotors
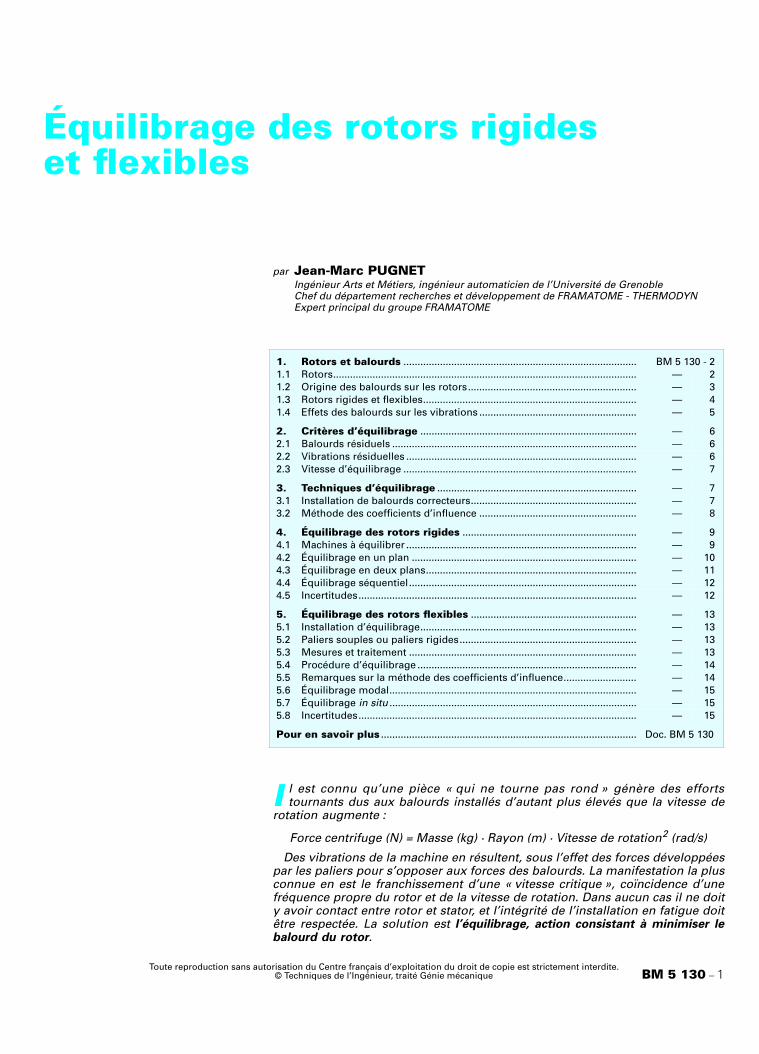
Un rotor est composé d’un arbre sur lequel sont montées lesparties actives (roues, bobinages, engrenages, etc.). Il est maintenudans le stator par des liaisons tournantes (des paliers radiaux et unebutée axiale) ; les tourillons sont les parties de l’arbre en regard despaliers. Un accouplement en porte-à-faux transmet le coupled’entraînement.
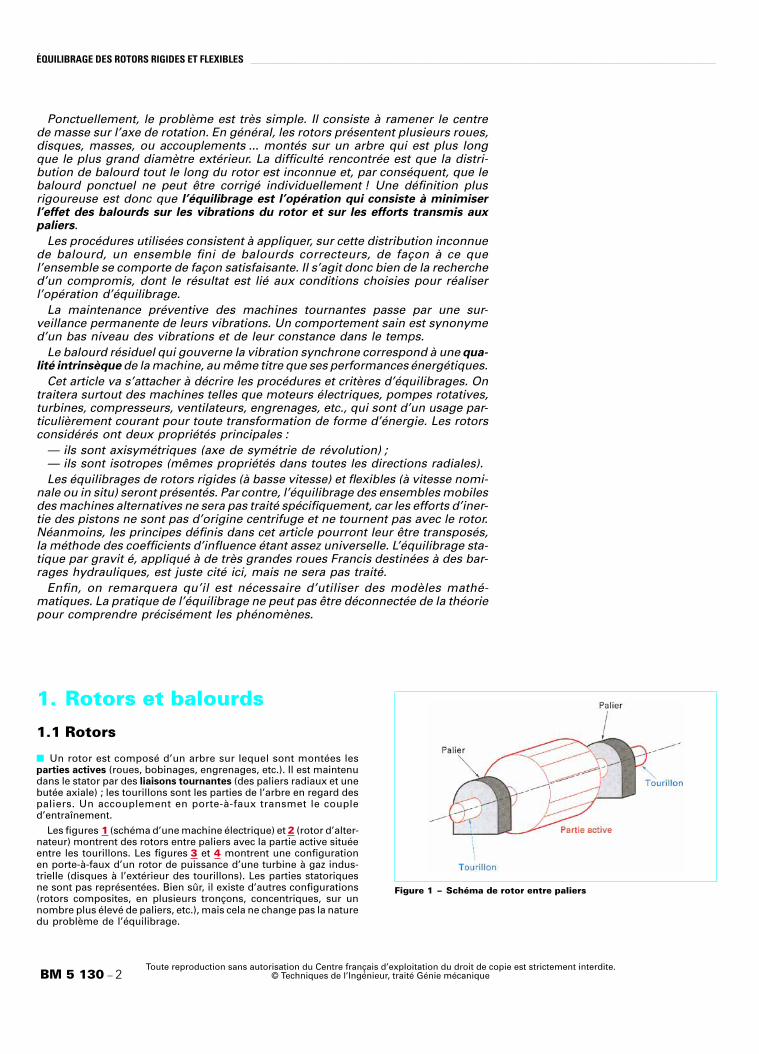
Les figures 1 (schéma d’une machine électrique) et 2 (rotor d’alter-nateur) montrent des rotors entre paliers avec la partie active situéeentre les tourillons. Les figures 3 et 4 montrent une configurationen porte-à-faux d’un rotor de puissance d’une turbine à gaz indus-trielle (disques à l’extérieur des tourillons). Les parties statoriquesne sont pas représentées. Bien sûr, il existe d’autres configurations(rotors composites, en plusieurs tronçons, concentriques, sur unnombre plus élevé de paliers, etc.), mais cela ne change pas la naturedu problème de l’équilibrage.
Figure 1 – Schéma de rotor entre paliers
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.BM 5 130 − 2 © Techniques de l’Ingénieur, traité Génie mécanique
___________________________________________________________________________________________ ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES
Le rotor est soumis, entre autres, à un ensemble d’efforts station-naires radiaux de fonctionnement, comme le poids, une réaction dedenture pour un engrenage, une attraction magnétique pour unemachine électrique, des forces hydrodynamiques ou aérodyna-miques pour des turbomachines, la résultante des paliers et de labutée, etc.
L’arbre se déforme sous l’effet de ces forces et chacun de sestronçons tourne autour d’une position d’équilibre statiqueconstituant la ligne de rotation (figure 5). Cette ligne change avecles conditions de fonctionnement, mais, en aucun cas, elle nereprésente une distribution de balourd par rapport à la droitepassant par les centres des tourillons. Bien sûr, cette déformée ades effets induits par ailleurs (fatigue de l’arbre, modification descharges des paliers), mais pas sur la répartition de balourd.
1.2 Origine des balourds sur les rotors
La distribution de balourd d’un rotor est liée à la position du centrede masse de chacun des tronçons élémentaires par rapport à la lignede rotation, elle-même différente de l’axe géométrique passant parles centres des paliers (figure 5). Les origines des balourds sont mul-tiples. On pense souvent aux inhomogénéités de matériaux, maisd’autres causes, beaucoup plus courantes et plus fondamentales,sont illustrées par quelques exemples typiques.
1.2.1 Géométrie des pièces tournantes
Le centre de masse des roues de pompes centrifuges se déplaceavec la dispersion des volumes internes des canaux, liée auxtolérances de fonderie (il se déplacera encore lorsque les canauxseront pleins d’eau). Pour les rotors monoblocs forgés possédantdes disques usinés dans la masse, les écarts d’usinage modifientla position des centres de masse locaux (figure 6). Les ailettes deturbine ont une dispersion naturelle de masse qui donnera unbalourd fonction de leurs positions relatives de montage...
Figure 2 – Rotor d’alternateur à 4 pôles (1 500 tr/min)(doc. JEUMONT INDUSTRIE)
Figure 3 – Schéma de rotor en porte-à-faux
Figure 4 – Turbine à gaz industrielle, rotor de la turbine librede puissance (doc. THERMODYN et ALLISON)
Figure 5 – Ligne de rotation
Figure 6 – Écarts d’usinage (excentricité – parallélisme)
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique BM 5 130 − 3

ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES ____________________________________________________________________________________________
Dans le même ordre d’idée, il faut être très vigilant sur le rôledans l’équilibrage des éléments d’assemblage tels que clavettes,vis, etc. Dans certains cas, des demi-clavettes doivent être fabri-quées pour pouvoir reproduire le comportement des pièces dansleur service réel.
1.2.2 Assemblage de pièces
L’assemblage des pièces tournantes sur l’arbre déplace naturel-lement leurs centres de masse. On pense en particulier aux turbinesavec les tolérances de fabrication des gorges de fixation des ailettes(figure 7). C’est également le cas des machines électriques avec desbarres montées dans des encoches ou des bobinages assemblés surdes pôles saillants.
Il faut insister sur le procédé d’assemblage lui-même qui faitde deux pièces parfaitement équilibrées un ensemble balourdé.
Ce balourd n’est dû ni à la qualité de l’usinage de l’arbre (dansla tolérance), ni à la qualité d’équilibrage de la roue, mais il n’enreste pas moins trop élevé pour le rotor et devra être corrigé. Celaconcerne toutes les pièces à assembler sur l’arbre (rouets, disques,accouplements, entretoises, collets de butée...) et est un phénomènetrès courant (figure 8).
1.2.3 Conditions de service
Il a déjà été cité (§ 1.2.1) le cas des roues de pompe moulées oùla présence d’un liquide dans des canaux non parfaitement uni-formes provoque un balourd naturel, même si le rotor était parfai-tement équilibré.
On citera aussi tous les problèmes d’origine thermique. Un rotorde turbine à vapeur, plus chaud sur une génératrice à l’arrêt parceque le stator présente des dissymétries thermiques azimutales (boîteà soupapes d’admission chaude à la partie supérieure, condenseurfroid à la partie inférieure), va se cintrer à l’arrêt et devra subir unvirage à basse vitesse pour homogénéiser sa température avant depouvoir redémarrer la machine. Une usure ou une érosion non axi-symétrique, une relaxation des contraintes apportent également desbalourds évoluant dans le temps. Les balourds stationnaires cor-respondants peuvent alors être corrigés par un rééquilibrage in situou en usine.
1.3 Rotors rigides et flexibles
1.3.1 Dynamique de rotors
Les arbres ont leurs caractéristiques propres de masse et deraideur ; les éléments rapportés ont leurs propriétés inertielles etsont soumis aux effets gyroscopiques ; les paliers ont leurs proprié-tés dynamiques (que l’on peut désigner par le terme d’impédance),comportant raideurs et amortissements. Dans une turbomachine, lerotor tourne dans un fluide en mouvement qui interviendra aussipar des effets de masse ajoutée et d’impédance (interactions fluide-structure) au niveau des roues et des étanchéités.
Cela conduit à la modélisation matricielle d’équilibre dynamiquedu rotor en flexion [relation (1)], avec une formulation de type auxéléments finis (poutres à 4 degrés de liberté par nœud, 2 déplace-ments radiaux et 2 pentes de la déformée, le déplacement axial etla rotation n’étant pas considérés ici) :
[M ] X ’’ + [C ] X ’ + [K ] X = F (t ) (1)
avec [M ] (kg et kg · m2) matrice de masse et d’inertie,
[C ] (N · s/m et N · m · s/rad) matrice d’amortissement,incluant les termes gyrosco-piques,
[K ] (N/m et N · m/rad) matrice de raideur radiale etangulaire,
X (m et rad) vecteur des déplacementsnodaux, avec 2 translations et2 pentes par nœud,
F (t ) (N et N · m) vecteur des efforts nodaux,avec 2 forces radiales et2 moments transversaux auxnœuds.
On retiendra ci-après deux éléments relatifs à la simulation numé-rique et particulièrement utiles à l’équilibrage.
1.3.1.1 Fréquences propres et modes propres
Ce sont les solutions de l’équation d’équilibre dynamique sanssecond membre [équation aux valeurs propres-vecteurspropres (2)] :
[M ] X ’’ + [C ] X ’ + [K ] X = O (2)
Les valeurs propres sont complexes et conjuguées deux à deux.Chaque partie imaginaire représente une fréquence propre (ou fré-quence naturelle) et la partie réelle correspondante est l’amortisse-ment associé.
Exemple : un arbre, de diamètre 150 mm et de longueur 2 m, peutprésenter une excentricité locale de 0,01 mm par rapport à la ligne derotation ; le disque de 80 kg, équilibré avec un balourd résiduel de80 g · mm, constituera un balourd total de 800 g · mm une fois montésur l’arbre, soit 10 fois celui de la pièce seule.
Figure 7 – Rotor de turbine à vapeur industrielle (doc. THERMODYN)
Figure 8 – Balourds apportés par le montage : excentricités parallèle ( ) et angulaire ( )
εδ
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.BM 5 130 − 4 © Techniques de l’Ingénieur, traité Génie mécanique

___________________________________________________________________________________________ ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES
Les fréquences propres dépendent de la vitesse de rotation parles effets gyroscopiques et les impédances des paliers. Elles devien-nent vitesses critiques s’il y a coïncidence avec une fréquence d’exci-tation et si leur amortissement est faible.
Les déformées modales tournent autour de la ligne de rotationen raison des effets gyroscopiques. Pour des paliers isotropes, lestrajectoires sont circulaires, sinon elles sont elliptiques. La figure 9montre la schématique des modes propres. Si un rotor travailleen dessous de son premier mode propre de flexion élastique (modeà 2 nœuds), on dit qu’il a un fonctionnement rigide, sinon lefonctionnement est supercritique.
En équilibrage, on s’intéresse à la position des fréquencespropres par rapport à la vitesse de fonctionnement et aux vitessesd’équilibrage, ainsi qu’à la position des plans de correction par rap-port aux nœuds (figure 10, § 3.1.1).
On utilise aussi en équilibrage la notion des balourds modaux,qui correspondent à une décomposition de la distribution physiquede balourd sur la base modale. Le balourd modal relatif au modepropre numéro n est obtenu par l’équation (3) :
Un = tΦn · U (3)
avec Un balourd modal d’ordre n , tΦn nième vecteur propre transposé,
U vecteur de distribution de balourd.
1.3.1.2 Réponse à un balourd
L’excitation par le balourd [second membre de l’équation (1)] estdéfinie sur les quatre degrés de liberté par l’équation (4) :
(4)
avec m · a (kg · m ou 10–6 g · mm) balourd,
m (kg) masse,
a (m) excentricité,
ω (rad/s) vitesse de rotation,
t (s) temps,
ψ (rad) angle de calage du balourdpar rapport à la référenceangulaire du rotor.
La réponse du rotor à cette excitation permettra de calculer lescoefficients d’influence nécessaires à l’équilibrage. De plus, l’intérêtde la méthode aux éléments finis est que la réponse obtenue consi-dère aussi la distribution de balourd causée par la répartition demasse et la déformée en flexion du rotor sous l’effet de la totalitédes forces tournantes.
1.3.2 Classification des équilibrages
On pratique des équilibrages en rotor rigide et des équilibragesen rotor flexible. La distinction entre ces deux modes est relative àla position de la vitesse d’équilibrage (§ 2.3), à ne pas confondre avecla vitesse de service, par rapport à la fréquence du premier modepropre élastique de flexion (figure 9).
On réalise un équilibrage en rotor rigide à une vitesse inférieureà 70 à 80 % de cette vitesse critique. Il suffit alors de corriger l’effetdu balourd sur les deux modes de corps solide par l’intermédiairede deux plans de correction choisis arbitrairement. Lorsque la vitessed’équilibrage est plus élevée, il faut un équilibrage en rotor flexible,permettant de corriger l’effet du balourd sur les modes propres élas-tiques, en agissant sur plus de deux plans de correction. La définitiondes plans de correction est donnée au paragraphe 3.1.2.
1.4 Effets des balourds sur les vibrations
1.4.1 Mouvement de rotor et vibration
Il est très important de bien comprendre la différence de naturephysique du mouvement du rotor.
Considérons tout d’abord un rotor possédant des modes propresde forme circulaire (§ 1.3.1.1). La réponse à une distribution debalourd (§ 1.3.1.2) est une trajectoire qui tourne à la vitesse de rota-tion, de façon parfaitement synchrone avec le rotor lui-même. Celasignifie que le rotor est déformé dans l’espace de façon statique, etqu’il tourne, ainsi fléchi, autour de sa ligne de rotation. Aucunefatigue liée au balourd n’est induite dans le rotor.
La vibration n’apparaît que lorsqu’on regarde cette déformée tour-ner dans l’espace, depuis l’extérieur et suivant une direction fixe.
Si maintenant le rotor possède une dissymétrie ou des paliers ani-sotropes, il décrit alors une trajectoire elliptique , ce qui lui donne unpeu de flexion alternée d’une amplitude égale à la différence desdeux axes principaux de l’ellipse et à une fréquence double de cellede rotation.
Figure 9 – Modes propres de corps solide et modes propres élastiques de rotor
F t( )
m a⋅ ω2 ωt ψ+( )cos⋅ ⋅∑m a⋅ ω2 ωt ψ+( )sin⋅ ⋅∑
0
0 Translation horizontale
Translation verticale
Pente verticale
Pente horizontale
=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique BM 5 130 − 5
ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES ____________________________________________________________________________________________
1.4.2 Vibrations synchrones
Les forces de balourd sont liées au rotor et tournent avec lui. Vuesdu stator, les vibrations générées par ces forces sont synchronesavec la rotation. Les signaux vibratoires issus des capteurs doiventdonc être filtrés sur la raie de rotation observée sur la répartitionspectrale du signal.
Les deux modes de surveillance habituels des machines sontutilisables.
Lorsque des capteurs de déplacement de rotor sont installés surles paliers, on mesure des vibrations relatives. Deux capteurs, à90 degrés l’un de l’autre, permettent de connaître le grand axe del’ellipse et la phase de la trajectoire.
Lorsque des accéléromètres sont implantés, on mesure desvibrations sur parties fixes, conséquences de la transmissibilité despaliers.
1.4.3 Non-linéarités
Si les balourds conduisent à de grandes amplitudes des trajec-toires, les forces, et donc les vibrations générées, comportent desharmoniques de la vitesse de rotation dues aux non-linéarités. Celan’est pas considéré en équilibrage, car on atteint des balourdsrésiduels de faible amplitude.
1.4.4 Faux-ronds. Excentricité
Les mesures de vibrations relatives se font par des capteurs detype à courants de Foucault. La piste de détection a une influencedans la mesure, car elle a des défauts à la fois géométriques de cir-cularité et de types métallurgique, magnétique et électrique. Ce phé-nomène a généralement peu d’importance en équilibrage, car ladécomposition en série de Fourier donne des taux harmoniques (quisont un bruit du signal de mesure). Tant que la mesure est effectuéesur le même diamètre que le tourillon, le niveau sera faible pour lefondamental qui est la seule composante qui peut entacher d’erreurune mesure relative au balourd par ce moyen (notamment pour unéquilibrage in situ ).
2. Critères d’équilibrageChaque fois qu’une opération de contrôle industriel est effectuée,
le résultat doit être comparé à un critère. Il en est de même en équi-librage. Les normes et codes de construction des machines (ou lescontrats) fixent des critères. Quelques exemples sont donnésci-après.
2.1 Balourds résiduels
La norme ISO 1940-1, générale pour tout type de machine, maisrelative aux rotors rigides, donne des classes d’équilibrage,comme par exemple :G 250 pour les gros moteurs Diesel rapides à 4 cylindres ;G 100 pour les moteurs complets de voitures, camions et de
locomotives ;G 40 pour les roues de voitures, les vilebrequins de moteur ;G 16 pour les arbres d’hélice ;G 6,3 pour les ventilateurs, les machines-outils, les moteurs
électriques ;G 2,5 pour les turbines, alternateurs, turbocompresseurs ;G 1 pour les entraînements de meules ;G 0,4 pour les broches de précisions, les gyroscopes.
La valeur numérique correspond à la vitesse efficace exprimée enmillimètres par seconde de déplacement du centre de masse à lavitesse de rotation nominale. Cette définition qui permet de calculerle balourd résiduel ne peut s’appliquer qu’à un rotor en fonction-nement rigide.
Les normes ISO 10436, 10437, 10439 etc., relatives aux turbo-machines destinées à l’industrie pétrolière, définissent un balourdrésiduel admissible par palier :
(5)
avec Ur (g · mm) balourd résiduel admissible,
W (daN) charge statique du palier,
N (tr/min) vitesse de rotation maximale.
Ce critère est de même nature que la classe d’équilibrage G 0,66de l’ISO 1940-1, mais s’appliquant pour la vitesse maximale conti-nue, que le rotor soit en fonctionnement rigide ou flexible.
Bien trop souvent, lorsque le critère G de l’ISO 1940-1 est utilisé,on ne lui associe pas de vitesse de rotation, ou bien alors on l’utilisepour un rotor flexible sans tenir compte de la présence du modepropre élastique de flexion. On veut insister ici sur le fait qu’il fautqu’un critère d’équilibrage soit :
— correctement défini (balourd résiduel à une vitesse de rota-tion donnée, nature de fonctionnement du rotor à cette vitesse) ;
— cohérent avec l’objectif de vibration admissible.
2.2 Vibrations résiduelles
La norme ISO 11342, relative à l’équilibrage de rotors flexibles,définit une transformation du critère vibratoire demandé à lamachine en critère vibratoire de mesure lors de l’équilibrage durotor :
Vibéquilibrage = K2 K1 K0 Vibmachine (6)
avec K2 facteur de conversion pour des mesures en équilibragefaites à des emplacements différents de ceux spécifiéssur le site (position des capteurs dans les plans despaliers ou non),
K1 facteur de conversion pour passer des conditionsd’installation du site à celle du banc d’équilibrage (flexi-bilité des supports, accouplement, mesures sur partiesfixes ou mobiles...),
K0 rapport de la vibration synchrone admissible à la vibra-tion totale admissible (K0 1, dépendant du type demachine).
Cette transformation nécessite de bien connaître le matérielconstruit et ses conditions d’utilisation. Elle doit être basée surl’expérience. On remarquera de plus qu’il ne s’agit que d’un critèrevibratoire et non pas d’un critère de balourd résiduel.
Lorsque l’unique critère défini est un niveau de vibration admis-sible, seuls trois éléments peuvent transformer ce niveau en critèrede balourd résiduel admissible :
— la connaissance fine de la construction ;— l’expérience de ce type de machine (parc installé) ;— la simulation numérique.
En effet, ce type de conversion pour un rotor en fonctionnementflexible, nécessite obligatoirement une hypothèse de répartition dubalourd, alors que la distribution réelle est totalement inconnue.
Ur 6 350 WN ------=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.BM 5 130 − 6 © Techniques de l’Ingénieur, traité Génie mécanique
___________________________________________________________________________________________ ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES
2.3 Vitesse d’équilibrage
La vitesse d’équilibrage fait partie de la définition du critèred’équilibrage. Il est souhaitable qu’elle corresponde à la vitessenominale de rotation de la machine. Cela n’est pas toujours pos-sible, notamment pour le cas de rotors aubés et l’expérience dufabricant intervient lorsque le nombre de fréquences propres tra-versées ou approchées en équilibrage est différent de celui dufonctionnement réel.
3. Techniques d’équilibrage
3.1 Installation de balourds correcteurs
On a dit dans l’introduction que l’opération d’équilibrage était larecherche d’un compromis entre les effets de la distributioninconnue du balourd physique du rotor et ceux d’un ensemble finide balourds correcteurs. Ces balourds correcteurs sont caractériséspar leur intensité, leur position angulaire et leur emplacement axialsur le rotor.
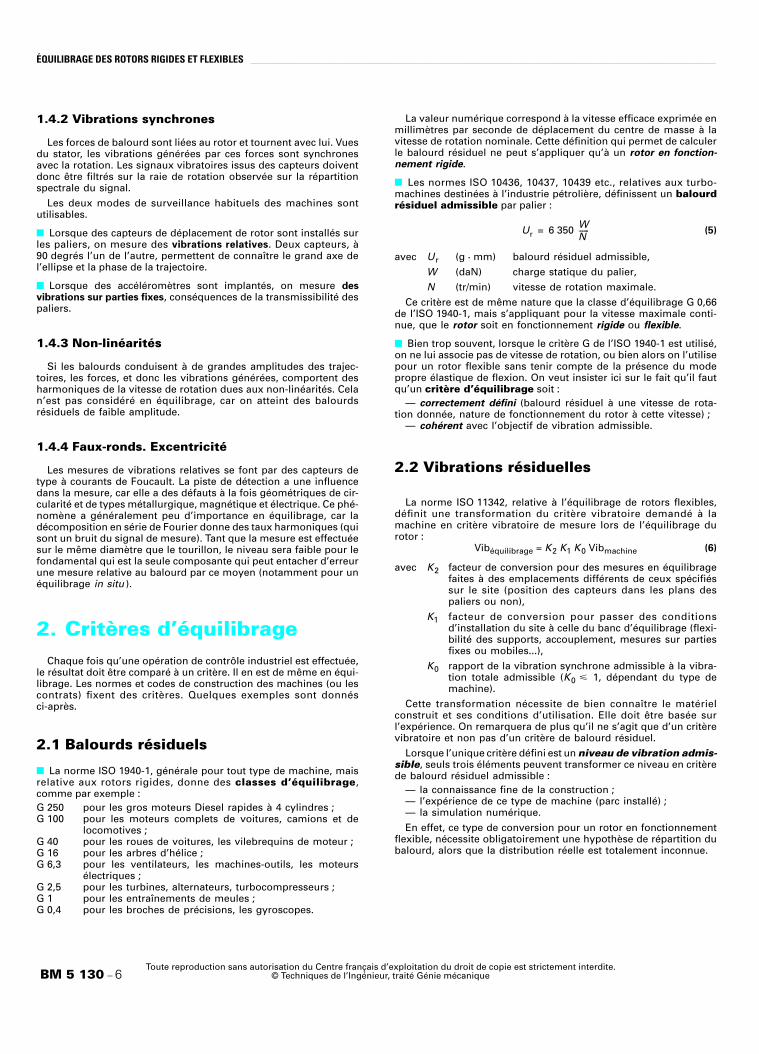
3.1.1 Disposition de balourds correcteurs
Pour un rotor symétrique simple, on s’intéresse ici aux conditionsélémentaires de la figure
10
, dans laquelle
G
est le centre de massede l’ensemble du rotor et les flèches symbolisent des correctionsinstallées.
Dans le
cas
(
a
), le balourd placé au centre de masse a un effet surle mode propre de translation et le premier mode propre de flexion(cf. figure
9
), mais pas sur le mode propre de basculement ni sur ledeuxième mode propre de flexion parce que le balourd est placédans la zone nodale centrale de ces deux derniers modes propres.
Lorsque le rotor est de forme allongée, on choisira plutôt la
confi-guration
(
b
) qui a rigoureusement le même effet que (
a
) ; les effetsdes deux demi-forces aux extrémités se compensent sur le modepropre de basculement.
Le
cas
(
c
) est celui de l’application d’un couple pur ; cette confi-guration aura un effet sur le mode propre de basculement et sur ledeuxième mode propre de flexion, mais pas sur le mode propre detranslation ni sur le premier mode propre de flexion.
Le
cas
(
d
) est une combinaison linéaire de (
b
) et (
c
), où tous lesmodes propres sont sollicités.
Le
cas
(
e
) est un cas extrême de (
d
), qui montre qu’un balourdplacé ailleurs qu’au centre de masse [cas (
a
)] sollicite tous les modespropres.
Dans les
cas
(
f
), (
g
) et (
h
), le torseur résultant au centre de masseest nul ; ces répartitions sont donc sans aucun effet sur les modespropres de corps solide (translation et basculement). (
f
) et (
g
)agissent spécifiquement sur le premier mode propre de flexion, avecla particularité, pour le cas (
g
), que les deux demi-balourds sont ins-tallés dans les zones nodales du premier mode propre élastique ; seulle balourd central agit, les balourds latéraux ayant pour but decompenser l’effet de ce balourd central sur le mode propre de trans-lation du cas (
a
). (h ) agit spécifiquement sur le deuxième modepropre élastique de flexion.
3.1.2 Plans de correction
En se référant aux cas (a ) à (h ), on voit que l’on va devoir implanterdes balourds correcteurs dans différentes positions axiales, qui sontappelées les plans de correction.
Si la vitesse de rotation est inférieure à la fréquence propre dupremier mode élastique, deux plans de correction suffisent pourcompenser les « balourds statiques » influençant les deux modespropres de corps solide.
Si la vitesse de rotation est supérieure à la fréquence propre dupremier mode propre élastique, il faut avoir une action spécifiquepour ce mode, ne serait-ce que pour le franchir, donc une correctionde type (f ) ou (g ). Si la vitesse de rotation est supérieure à la fré-quence propre du deuxième mode propre élastique, il faudra unecorrection de type (h ), etc.
En conséquence, le nombre de plans de correction à implantersur un rotor est n + 2, où n est le nombre de modes propres élas-tiques traversés pour arriver à la vitesse maximale d’utilisation etoù 2 correspond aux deux modes propres de corps solide.
Encore faut-il que la position axiale de ces plans sur le rotor per-mette une réponse des différents modes propres vibratoirestraversés, d’où la nécessité de tenir compte des résultats de l’analysedynamique pour choisir leur implantation sur le rotor.
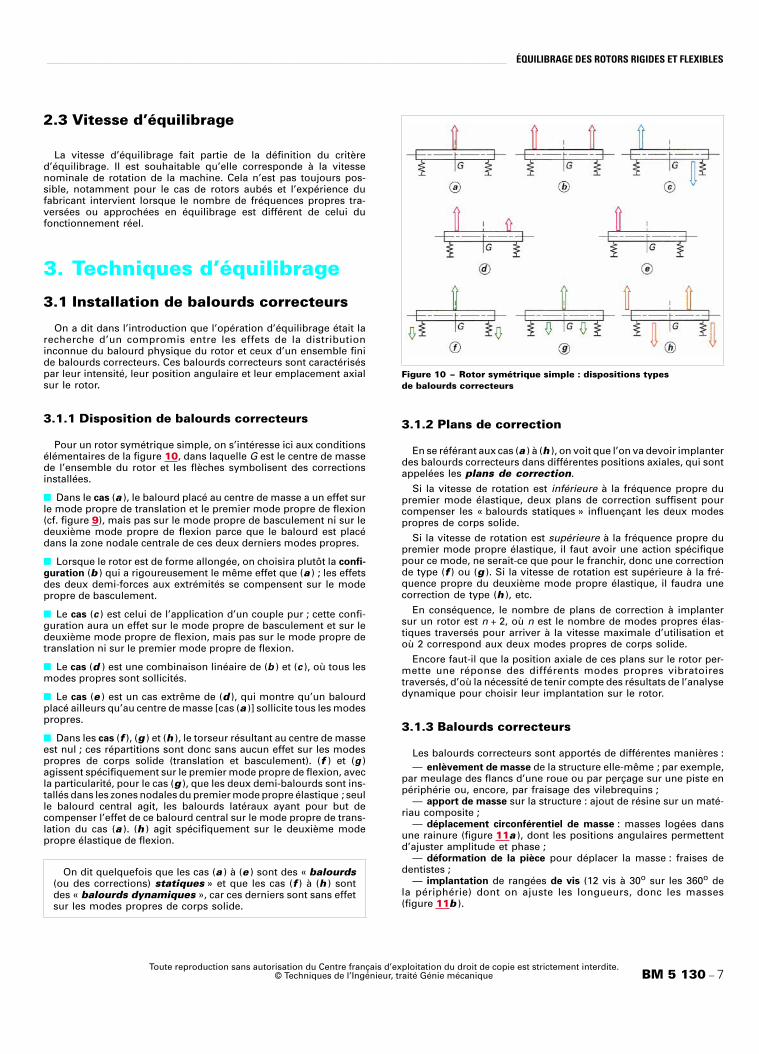
3.1.3 Balourds correcteurs
Les balourds correcteurs sont apportés de différentes manières :— enlèvement de masse de la structure elle-même ; par exemple,
par meulage des flancs d’une roue ou par perçage sur une piste enpériphérie ou, encore, par fraisage des vilebrequins ;
— apport de masse sur la structure : ajout de résine sur un maté-riau composite ;
— déplacement circonférentiel de masse : masses logées dansune rainure (figure 11a ), dont les positions angulaires permettentd’ajuster amplitude et phase ;
— déformation de la pièce pour déplacer la masse : fraises dedentistes ;
— implantation de rangées de vis (12 vis à 30o sur les 360o dela périphérie) dont on ajuste les longueurs, donc les masses(figure 11b ).
On dit quelquefois que les cas (a ) à (e ) sont des « balourds(ou des corrections) statiques » et que les cas (f ) à (h ) sontdes « balourds dynamiques », car ces derniers sont sans effetsur les modes propres de corps solide.
Figure 10 – Rotor symétrique simple : dispositions typesde balourds correcteurs
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique BM 5 130 − 7
ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES ____________________________________________________________________________________________
Ces balourds correcteurs mécaniques peuvent être répartissuivant le besoin (figure 11c ).
3.2 Méthode des coefficients d’influence
La méthode d’équilibrage traitée ici est une méthode dynamique,nécessitant la mise en rotation du rotor. Les équilibrages statiquespar gravité ne sont pas traités spécifiquement. Il est courammentadmis que la méthode des coefficients d’influence est devenue uni-verselle et qu’elle couvre tous les cas d’application.
3.2.1 Principe
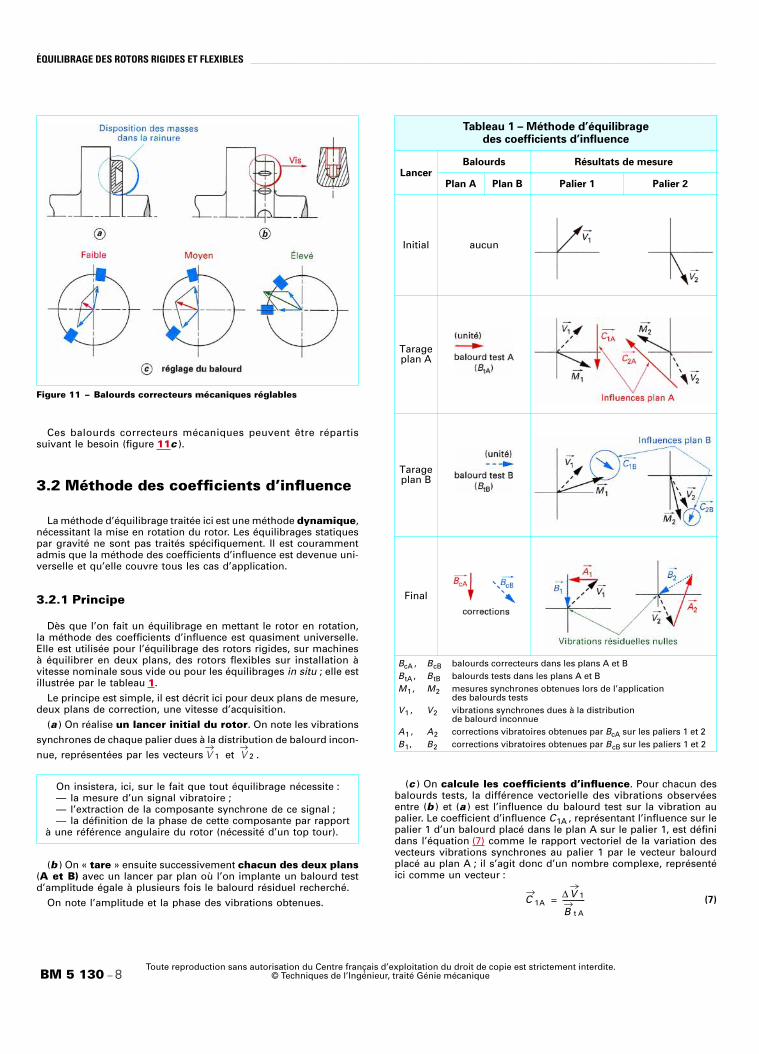
Dès que l’on fait un équilibrage en mettant le rotor en rotation,la méthode des coefficients d’influence est quasiment universelle.Elle est utilisée pour l’équilibrage des rotors rigides, sur machinesà équilibrer en deux plans, des rotors flexibles sur installation àvitesse nominale sous vide ou pour les équilibrages in situ ; elle estillustrée par le tableau 1. (0)
Le principe est simple, il est décrit ici pour deux plans de mesure,deux plans de correction, une vitesse d’acquisition.
(a ) On réalise un lancer initial du rotor. On note les vibrations
synchrones de chaque palier dues à la distribution de balourd incon-
nue, représentées par les vecteurs et .
(b ) On « tare » ensuite successivement chacun des deux plans(A et B) avec un lancer par plan où l’on implante un balourd testd’amplitude égale à plusieurs fois le balourd résiduel recherché.
On note l’amplitude et la phase des vibrations obtenues.
(c ) On calcule les coefficients d’influence. Pour chacun desbalourds tests, la différence vectorielle des vibrations observéesentre (b ) et (a ) est l’influence du balourd test sur la vibration aupalier. Le coefficient d’influence C1A , représentant l’influence sur lepalier 1 d’un balourd placé dans le plan A sur le palier 1, est définidans l’équation (7) comme le rapport vectoriel de la variation desvecteurs vibrations synchrones au palier 1 par le vecteur balourdplacé au plan A ; il s’agit donc d’un nombre complexe, représentéici comme un vecteur :
(7)
Figure 11 – Balourds correcteurs mécaniques réglables
On insistera, ici, sur le fait que tout équilibrage nécessite :— la mesure d’un signal vibratoire ;— l’extraction de la composante synchrone de ce signal ;— la définition de la phase de cette composante par rapport
à une référence angulaire du rotor (nécessité d’un top tour).
V 1 V 2
Tableau 1 – Méthode d’équilibragedes coefficients d’influence
LancerBalourds Résultats de mesure
Plan A Plan B Palier 1 Palier 2
Initial aucun
Tarageplan A
Tarageplan B
Final
BcA , BcB balourds correcteurs dans les plans A et BB tA , B tB balourds tests dans les plans A et BM1 , M2 mesures synchrones obtenues lors de l’application
des balourds testsV1 , V2 vibrations synchrones dues à la distribution
de balourd inconnueA1 , A2 corrections vibratoires obtenues par BcA sur les paliers 1 et 2B1, B2 corrections vibratoires obtenues par BcB sur les paliers 1 et 2
C 1A∆ V 1
B t A
-------------=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.BM 5 130 − 8 © Techniques de l’Ingénieur, traité Génie mécanique

___________________________________________________________________________________________ ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES
On remarquera qu’il faut avoir une variation relative suffisante duvecteur vibration pour que le coefficient d’influence soit déterminéavec suffisamment de précision (sinon il faut refaire le lancer detarage (b ) avec un balourd test plus important, voire dans une autreposition angulaire).
(d ) On procède ensuite au calcul des balourds correcteurs.Il faut minimiser les vibrations du lancer (a ), soit :
(8)
(e ) On implante les balourds correcteurs et on effectue un lancerfinal pour vérifier que l’on a bien atteint le critère désiré de balourdrésiduel (§ 2.1).
Si le critère n’est pas atteint, c’est que :— les balourds initiaux étaient très élevés par rapport au balourd
résiduel ;— les coefficients d’influence ne sont pas déterminés avec suffi-
samment de précision (le calcul des incertitudes de mesure surmachine équilibrée est une opération complexe) ;
— le balourd correcteur, s’il est important, a dû être implanté surune plage angulaire importante ; l’équilibrage doit alors être affinéen repartant éventuellement de l’état obtenu comme nouvel étatinitial.
Si le critère est atteint du premier coup, on a réalisé quatre lancers(lancer initial, un tarage par plan, lancer final).
3.2.2 Application et extension
Dans le cas idéal traité au paragraphe 3.2.1, qui correspond à celuid’un équilibrage à une seule vitesse de rotation, on obtient un sys-tème de deux équations à deux inconnues, facile à résoudre. Onremarquera que l’on n’a fait aucune hypothèse sur le franchissementou non d’une quelconque vitesse critique, ce qui confirme que cetteméthode s’applique dans tous les cas.
3.2.2.1 Acquisitions à plusieurs vitesses de rotation
Pour une machine à vitesse variable, et dont la plage de vitesseest réalisable sur l’équilibreuse, on voudra faire un équilibrage parexemple au minimum, au milieu et au maximum de cette plage devitesse. En réalisant ces 3 acquisitions, on obtiendra 6 équations(3 vitesses – 2 paliers), pour toujours 2 inconnues des balourdscorrecteurs. On appliquera alors une méthode des moindres carréspour résoudre ce système surdimensionné afin que le résultat vibra-toire soit aussi bon que possible sur toute la plage de fonctionnement(au lieu d’être excellent sur une seule vitesse).
Cela montre bien à nouveau l’aspect « compromis » des équili-brages, sachant que l’on ne peut qu’appliquer une correction ponc-tuelle sur une distribution inconnue ; le résultat ne sera bien adaptéque pour les conditions choisies de l’équilibrage.
Une illustration extrême de ce cas est celui des moteurs d’avion(figure 12), où, pour maintenir le confort des passagers affecté parles phénomènes vibro-acoustiques de la cellule, des critères vibra-toires sont définis pour le vol, très inférieurs à ceux liés à l’intégritédu moteur lui-même. Lorsque le critère est dépassé, le balourdcorrecteur à placer dans un plan accessible sans aucun démontage(opération effectuée par le personnel de maintenance des compa-gnies aériennes) est calculé directement par l’ordinateur de bord àpartir d’acquisitions faites sur un seul capteur, mais pour environ200 vitesses de rotation du moteur.
3.2.2.2 Lignes d’arbres à plusieurs paliers
Les lignes d’arbres des grands groupes turboalternateurs des cen-trales de production d’énergie électrique (jusqu’à 1 500 MW actuel-lement) ne sont assemblées complètement que sur le site et peuventcomporter jusqu’à 10 paliers. Autant de plans de mesure seront uti-lisés pour l’équilibrage final réalisé in situ. La matrice des coefficientsest donc de très grande taille.
3.2.2.3 Précaution à prendre
La matrice des coefficients d’influence doit être bien définie. Ilfaut toujours avoir à l’esprit que l’on mesure Np paliers à Nv vitessesde rotation et que l’on cherche Nbc balourds correcteurs. Il faut :
Np × Nv (équations indépendantes) Nbc (inconnues) (9)
Le terme équations indépendantes signifie que deux mesures pra-tiquées à des vitesses de rotation proches l’une de l’autre, mais éloi-gnées d’une fréquence propre, sont pratiquement identiques, et quel’une des deux n’apporte pas d’information supplémentaire pour lesystème à résoudre. La connaissance de la dynamique propre aurotor est à nouveau un élément important pour éviter ce typed’écueil.
4. Équilibrage des rotors rigides
La réponse en rotation d’un rotor rigide est gouvernée essentiel-lement par la réponse des deux modes propres de corps solide(translation et basculement, cf. figure 9), la participation des modespropres élastiques supérieurs étant négligeable. Les équilibrages enrotors rigides sont pratiqués très couramment, y compris pour lesrotors flexibles comme préliminaire à basse vitesse d’un équilibrageà vitesse nominale.
4.1 Machines à équilibrer
Rapides et faciles de mise en œuvre, elles sont équipées d’uneinstrumentation et de moyens de calculs autonomes sur microcal-culateur, et sont des outils très performants. Elles sont construitessuivant la norme ISO 2953 (machines à équilibrer-description etévaluation).
C 1A C 1B
C 2A C 2B B cA
B cB
⋅ V
1
V
2
–=
Figure 12 – Moteur CFM 56
(doc.SNECMA)
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique BM 5 130 − 9

ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES ____________________________________________________________________________________________
L’entraînement du rotor se fait par un moteur à vitesse variableà courant continu, avec éventuellement une boîte de vitesses, puispar courroie, comme sur la figure
13
, ou par accouplement(figure
7
).
Un entraînement par
courroie
(figure
13
) amène peu de pertur-bation sur la mesure, mais est réservé aux équilibreuses de petitetaille pour des rotors légers.
Les
accouplements
sont de deux types, soit avec des membranesélastiques (dits
« à flector »
), soit à cardan, ce dernier type étant des-
tiné à des rotors ayant plus d’inertie et nécessitant plus de coupled’entraînement. Les accouplements apportent des erreurs systéma-tiques dans l’équilibrage, dues à leur assemblage mécaniquecomplexe et à leurs masses. Il convient donc de choisir le meilleurmoyen d’entraînement en fonction du critère à atteindre.
Les
paliers
illustrés sur la figure
14
sont des ensembles de galetsréglables pour s’adapter à la géométrie du rotor ou de la pièce à équi-librer (diamètres et entraxe des tourillons). Ils sont souvent extrême-ment souples dans la direction horizontale (voire avec un montagependulaire), tout en restant raides dans la direction verticale pour
reprendre
le poids.
Le balourd provoque un déplacement du palier dans la directionhorizontale, mesuré généralement par un vélocimètre. L’instru-mentation est complétée par un
top tour
donnant la vitesse derotation, ainsi que la référence angulaire du rotor.
Les
indicateurs de mesure
(figure
15
) traitent les signauxvibratoires de chacun des deux paliers, les filtrent sur la vitesse derotation pour en extraire les amplitudes et phases par rapport aurotor des composantes synchrones. En donnant, de plus, le type derotor et la distance entre les paliers et les deux plans de correctionchoisis, l’affichage donne directement sur des diagrammes polairesles balourds supposés exister dans ces deux plans.
4.2 Équilibrage en un plan
Cet équilibrage est
a priori
rustique, car on n’agit que sur le modepropre de translation. Il n’en reste pas moins très adapté aux rotors,pour lesquels la masse est pratiquement concentrée dans un seulplan, et, surtout, pour des composants individuels avant de lesassembler sur un rotor.
4.2.1 Principe
Pour un rotor simple, la correction devra minimiser les deuxsignaux aux paliers, leur annulation rigoureuse n’étant théorique-ment pas possible. Cette situation est gérée par l’électronique desmachines à équilibrer.
4.2.2 Équilibrage par retournement
Lorsqu’on utilise un outillage d’équilibrage, comme un mandrin,il est extrêmement important d’isoler le balourd de montage (excen-tricité propre au mandrin) de celui propre à la pièce, qui est le seulà corriger. La procédure utilisée consiste à faire plusieurs mesuresà différentes positions angulaires relatives de la pièce à équilibrerpar rapport à l’outillage. Le balourd de montage ne change pas, alorsque celui de la pièce tourne. On choisit, par exemple, deux positionsà 180
o
(figure
16
a
) ou trois positions à 120
o
(figure
16
b
), condui-sant à deux ou trois mesures. Le barycentre de la figure géométriqueobtenue par l’extrémité des vecteurs de mesure (segment pour2 positions, triangle équilatéral pour 3 positions) définit le balourdde montage. Le balourd propre à la pièce est le complément desvecteurs vibratoires.
Le
critère d’équilibrage visé
consiste alors à ramener le balourdrésiduel de l’ensemble dans un cercle centré sur le balourd del’outillage.
Figure 13 – Équilibrage de rotor de moteur électrique entraînépar courroie
(doc. SCHENCK)
Figure 14 – Palier d’équilibreuse sur un rotor de soufflante
(doc. SCHENCK)
Figure 15 – Indicateurs d’équilibrage
(doc. SCHENCK)
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.BM 5 130 − 10 © Techniques de l’Ingénieur, traité Génie mécanique

___________________________________________________________________________________________ ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES
4.2.3 Procédure
La procédure d’équilibrage consiste :— à placer le rotor sur l’équilibreuse ;— à afficher les données (type de rotor et dimensions) ;— à effectuer le lancer initial ;— à lire les balourds installés ramenés dans les plans de correc-
tion (calculés automatiquement par l’instrumentation) ;— à pratiquer, le cas échéant, les retournements angulaires dans
le cas d’une pièce sur mandrin ;— à calculer les balourds correcteurs ;— à installer les balourds correcteurs ;— à effectuer un lancer de vérification.
Cette méthode demande donc, au minimum, deux lancers pourun rotor normal, trois lancers et deux montages pour un retourne-ment de 180
o
, quatre lancers et trois montages pour des retourne-ments de 120
o
.
4.3 Équilibrage en deux plans
4.3.1 Principe
Cette méthode s’applique pour des rotors relativement courts ouayant des caractéristiques inertielles assez concentrées et où lamasse de la partie centrale s’étale sur une longueur au moins égaleau diamètre extérieur. On compense alors les deux modes propresde corps solide de translation et de basculement.
Le rotor étant rigide, on écrit avec la [relation (10)] son équilibre
statique (force et couple), sous l’effet des balourds et
dans les deux plans de correction A et B, des deux réactions aux
paliers et :
(10)
avec pour le rotor de gauche de la figure
17
a
ayant les deux planscorrecteurs situés entre les paliers :
et pour le rotor de droite de la figure
17
b
ayant un plan correcteursitué entre les paliers et l’autre en porte-à-faux :
On remarque que l’écriture de ces systèmes statiques conduitdirectement à la matrice des coefficients d’influence
C
I
qui n’est fonc-tion que de la géométrie du rotor et dont les termes sont alors réels.
Compte tenu de la répartition initiale de balourd du rotor, rame-
née directement dans les plans de correction et en termesde grammes-millimètres et position angulaire, on obtient directe-ment la valeur des balourds correcteurs à implanter :
(11)
soit :
(12)
Les systèmes d’acquisition et de traitement utilisés sur lesmachines convertissent directement les mesures de vitessevibratoire aux paliers en balourd équivalent dans les plans despaliers. La connaissance de la géométrie du rotor permet le calcul
B iA B iB
P 1 P 2
P 1
P 2
1 α– γα 1 γ–
B iA
B iB
⋅=
α aa b c + +------------------------=
γ ca b c + +------------------------=
α aa b +---------------=
γ c – a b
+---------------=
Figure 16 – Équilibrage en un plan par retournement de la pièce
Figure 17 – Équilibrage de rotors rigides en deux plans
B iA B iB
B cA
B cB
B iA
B iB
+0
0
=
B cA
B cB
C I [ ] 1 – – P
1
P
2
⋅ =
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique BM 5 130 − 11
ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES ____________________________________________________________________________________________
automatique de la matrice inverse des coefficients d’influence, pourproposer directement les balourds correcteurs à implanter.
4.3.2 Équilibrage par retournement
Dans le cas d’équilibrage d’un élément long tel qu’un accouple-ment, sur un outillage d’équilibrage, on procède à des retournementsde 180
o
ou de 120
o
comme expliqué pour l’équilibrage en un seulplan (cf. § 4.2.2). La seule différence est que la recherche du balourdpropre à l’outillage est faite dans chacun des deux paliers (recherchedu barycentre de la figure géométrique) et non plus en un seul.
4.3.3 Procédure
La procédure d’équilibrage est identique à celle décrite ci-dessus(cf. § 4.2.3), sauf que l’on traite les deux plans.
4.4 Équilibrage séquentiel
Il est important de citer ici une procédure d’équilibrage très utiliséepour les rotors travaillant
en régime supercritique, mais pour la pro-duction desquels on ne dispose que d’une équilibreuse de rotorrigide (dite alors à « basse vitesse », car inférieure à la vitesse critiquedu premier mode propre élastique au-delà de laquelle la machineva fonctionner). Cette procédure est citée dans la norme ISO 11342(rotors de « type 2 ») et est recommandée par les codes relatifs auxturbomachines pour l’industrie du gaz naturel et du pétrole.
Pour ces rotors, on commence par un équilibrage en rigide durotor nu, sans aucun élément actif.
Ensuite, on monte les éléments sur le rotor par nombre maximalde deux éléments voisins. On pratique un nouvel équilibrage en rotorrigide, et en appliquant les corrections dans le plan de ces éléments.On poursuit ensuite le montage en reproduisant cette procédure.
Il s’agit donc ici d’une procédure très intéressante, qui permet deréduire la distribution de balourd d’un rotor flexible, tout en nepratiquant que des équilibrages en rotor rigide, avec des moyensmoins lourds qu’un banc d’équilibrage sous vide à vitesse nominale.
4.5 Incertitudes
Les incertitudes de mesure sont de deux types. La norme ISO 2953considère la sensibilité de mesure sous la définition de « balourdrésiduel minimal réalisable », et la justesse sous le terme de « capa-cité de réduction de balourd ».
Cette norme définit de plus les procédures de vérification expé-rimentale et d’étalonnage de la machine à équilibrer.
4.5.1 Balourd résiduel minimal réalisable
Il s’agit du plus petit balourd mesurable pour la machine, notéUrmr . Deux éléments le constituent :
— la construction des paliers, la sensibilité des capteurs et del’électronique de traitement et d’affichage ;
— l’erreur systématique apportée par le moyen d’entraînement.
Le premier type est une caractéristique de la machine, le secondaussi, bien sûr, mais dépend surtout du rotor à entraîner parl’intermédiaire de l’accouplement à installer en fonction du couplenécessaire.
L’erreur systématique est plus faible pour un entraînement parcourroie que pour un accouplement à cardan. En effet, le montagedu cardan sur le rotor apporte un balourd d’excentricité de la masseajoutée. Les excentricités entre moteur et rotor interviennent... Onremarque donc que le savoir-faire du constructeur et les procéduresutilisées (retournement ou non des accouplements) influencent cettevaleur.
Une autre erreur systématique est constituée par le fait que, danscertains cas, notamment dans le cas des paliers magnétiques actifs,les tourillons eux-mêmes ne peuvent pas être utilisés directementpar la rotation sur les galets de l’équilibreuse et que l’on doit trouversur des pistes voisines mais avec une excentricité non nulle.
4.5.2 Taux de réduction de balourd
Une équilibreuse est caractérisée également par la justesse de soninstrumentation en termes de mesures d’amplitude et de phase desvibrations. Cela s’exprime par la capacité de corriger une grande pro-portion, par exemple 95 %, du balourd initial en un seul lancer.
Si un balourd résiduel plus faible que le balourd restant est requis,deux lancers successifs ou plus seront réalisés. Le nombre de lancersest donc fonction à la fois du balourd initial installé et du critère àrespecter. Plus cette capacité de réduction est élevée, plus le nombrede lancers sera faible, et plus la machine sera productive (fabricationen série).
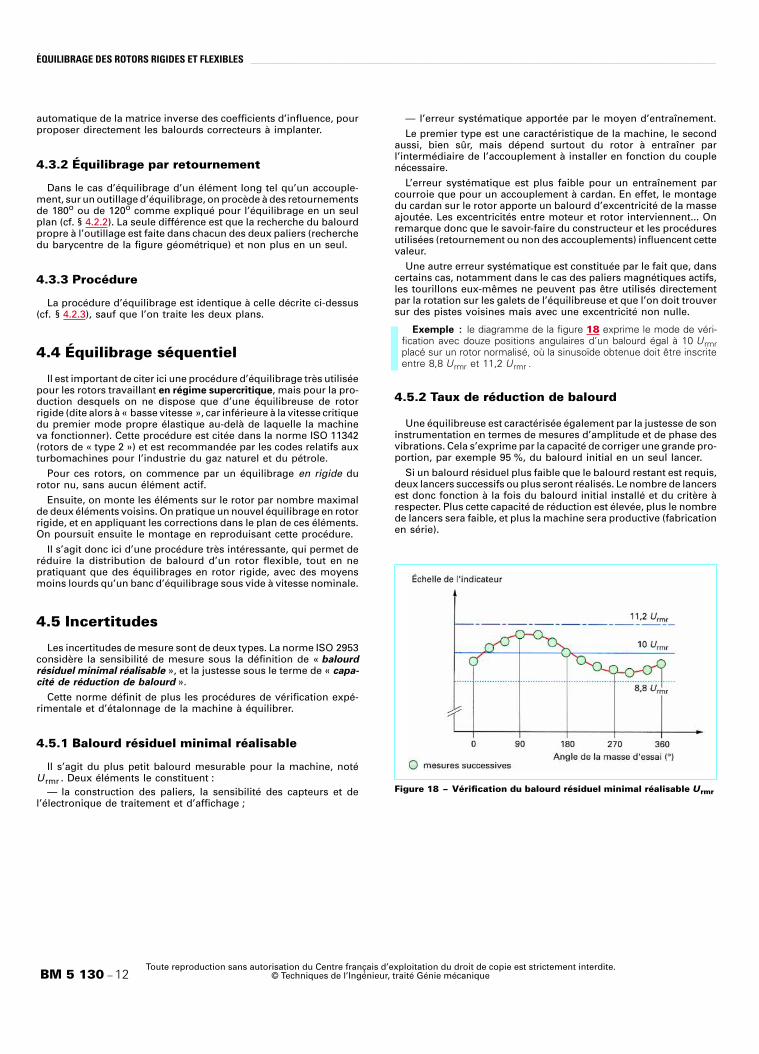
Exemple : le diagramme de la figure 18 exprime le mode de véri-fication avec douze positions angulaires d’un balourd égal à 10 U rmrplacé sur un rotor normalisé, où la sinusoïde obtenue doit être inscriteentre 8,8 U rmr et 11,2 U rmr .
Figure 18 – Vérification du balourd résiduel minimal réalisable Urmr
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.BM 5 130 − 12 © Techniques de l’Ingénieur, traité Génie mécanique

___________________________________________________________________________________________ ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES
5. Équilibrage des rotors flexibles
La recherche d’excellents comportements vibratoires desmachines sur les sites conduit à des équilibrages aussi près que pos-sible des conditions de fonctionnement, soit :
— des excitations en balourd plus élevées à haute vitesse, doncune meilleure sensibilité ;
— un fonctionnement souvent supercritique, avec des techniquesd’équilibrage de rotors flexibles et non plus rigides ;
— des puissances d’entraînement plus élevées, donc des instal-lations d’équilibrage spécifiques ;
— des lancers dans toute la plage de vitesse pour couvrir lesfonctionnements à basse vitesse (démarrage), le franchissement devitesses critiques et la plage normale de fonctionnement continu.
Ces techniques recouvrent également les équilibrages in situ, dontle cas le plus complexe est celui des lignes d’arbres des grandsgroupes turboalternateurs des centrales de production d’électricité(alternateur entraîné par une turbine comportant un corps hautepression, un corps moyenne pression et plusieurs corps bassepression).
5.1 Installation d’équilibrage
On s’intéresse ici aux installations en usine.
Les machines à équilibrer, décrites au paragraphe 4.1, sont utili-sables si leurs caractéristiques de paliers conviennent aux rotors(masse – vitesse de rotation – types de tourillons).
Pour des rotors lourds (alternateurs), on aura des installations avecsupportage sur paliers hydrauliques du même type que ceux devantéquiper la machine et une protection extérieure de la machine.
Pour des rotors de turbomachines, la mise en rotation des rouesaubées dans l’air ambiant à vitesse nominale conduirait à uneconsommation énergétique très élevée (ventilation – compression).L’installation utilisée est alors une chambre sous vide (environ10 mbar), de dimension adaptée à celle du rotor (figure 19).
Le rotor tournant à vitesse nominale est installé dans des paliershydrodynamiques du même type que ceux qui équipent lamachine (figure 20). Le circuit d’huile est sous vide. L’entraînementse fait par un moteur électrique à vitesse variable et une boîte devitesses extérieure à la chambre et par une traversée de cloisonétanche.
Le banc de THERMODYN permet d’installer des rotors sur deuxpaliers et des lignes d’arbres sur trois paliers (accouplement rigide)ou quatre paliers (accouplement flexible) jusqu’à 6 m de longueur ;la plage de vitesse atteint 22 000 tr/min ; le diamètre peut atteindre2 m. Les bancs de GEC Alsthom permettent l’installation desgrands rotors basse pression des turbines de centrale deproduction d’énergie électrique et sont, par conséquent, de taillegigantesque. Ces types d’installation sont donc totalement adaptésà la production de chaque constructeur.
5.2 Paliers souples ou paliers rigides
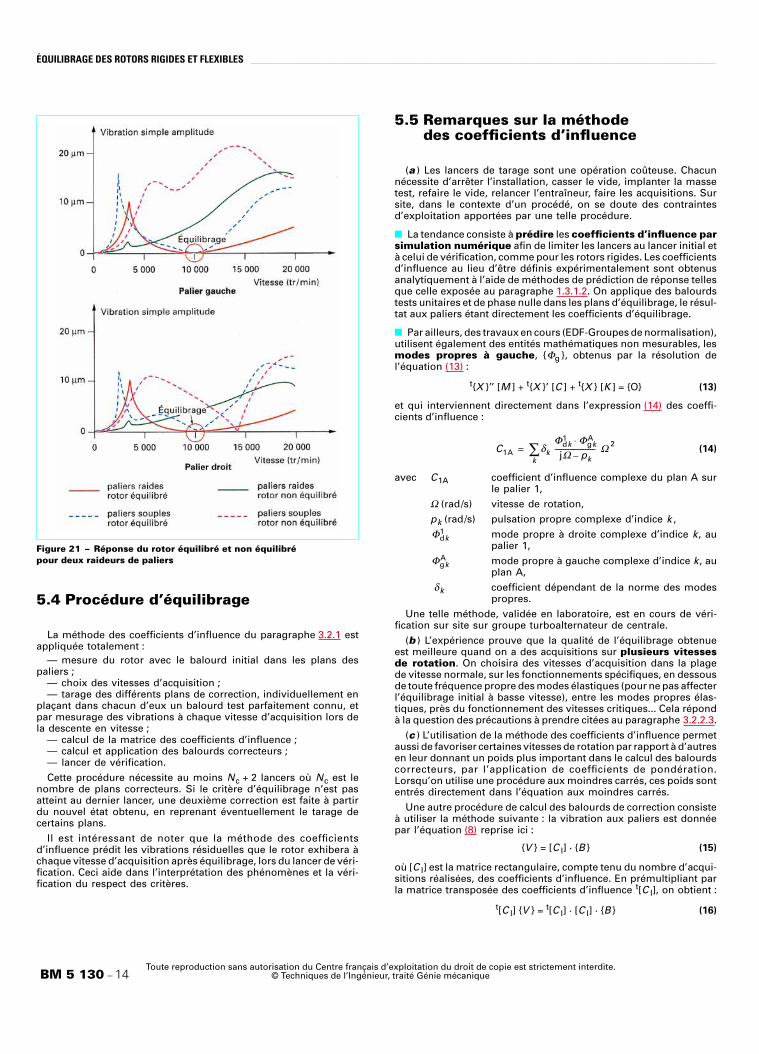
Les paliers des installations d’équilibrage sont montés sur desstructures qui peuvent être souples ou rigides. Une simulation surun rotor conduit au résultat de la figure 21 pour un équilibrage endeux plans à 10 000 tr/min. Il est évident que, à cette vitesse, lesbalourds correcteurs sont identiques dans les deux cas, car il n’y aqu’une solution possible pour annuler à la fois les déplacements etles forces aux paliers (ce qui rend la solution indépendante de laraideur de ces paliers).
Par contre, il est bien évident que ce rotor, utilisé dans d’autresconditions de fonctionnement que celles de l’équilibrage, aura uncomportement différent suivant la nature des supports, par exempleau banc d’équilibrage ou sur la machine réelle.
5.3 Mesures et traitement
Les acquisitions sont constituées par une mesure par plan depalier. Il peut s’agir indépendamment d’un déplacement relatif rotor-palier, d’une vitesse de vibration ou d’une accélération du corps depalier.
Pour connaître la vibration synchrone en amplitude et en phase,on redira la nécessité de disposer d’un top tour , délivrant le signalde référence de vitesse de rotation et de position angulaire du rotor.
Figure 19 – Chambre d’équilibrage sous vide (doc. THERMODYN)
Figure 20 – Rotor de compresseur centrifuge en équilibrageà vitesse nominale (doc. THERMODYN)
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique BM 5 130 − 13
ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES ____________________________________________________________________________________________
5.4 Procédure d’équilibrage
La méthode des coefficients d’influence du paragraphe 3.2.1 estappliquée totalement :
— mesure du rotor avec le balourd initial dans les plans despaliers ;
— choix des vitesses d’acquisition ;— tarage des différents plans de correction, individuellement en
plaçant dans chacun d’eux un balourd test parfaitement connu, etpar mesurage des vibrations à chaque vitesse d’acquisition lors dela descente en vitesse ;
— calcul de la matrice des coefficients d’influence ;— calcul et application des balourds correcteurs ;— lancer de vérification.
Cette procédure nécessite au moins Nc + 2 lancers où Nc est lenombre de plans correcteurs. Si le critère d’équilibrage n’est pasatteint au dernier lancer, une deuxième correction est faite à partirdu nouvel état obtenu, en reprenant éventuellement le tarage decertains plans.
Il est intéressant de noter que la méthode des coefficientsd’influence prédit les vibrations résiduelles que le rotor exhibera àchaque vitesse d’acquisition après équilibrage, lors du lancer de véri-fication. Ceci aide dans l’interprétation des phénomènes et la véri-fication du respect des critères.
5.5 Remarques sur la méthodedes coefficients d’influence
(a ) Les lancers de tarage sont une opération coûteuse. Chacunnécessite d’arrêter l’installation, casser le vide, implanter la massetest, refaire le vide, relancer l’entraîneur, faire les acquisitions. Sursite, dans le contexte d’un procédé, on se doute des contraintesd’exploitation apportées par une telle procédure.
La tendance consiste à prédire les coefficients d’influence parsimulation numérique afin de limiter les lancers au lancer initial età celui de vérification, comme pour les rotors rigides. Les coefficientsd’influence au lieu d’être définis expérimentalement sont obtenusanalytiquement à l’aide de méthodes de prédiction de réponse tellesque celle exposée au paragraphe 1.3.1.2. On applique des balourdstests unitaires et de phase nulle dans les plans d’équilibrage, le résul-tat aux paliers étant directement les coefficients d’équilibrage.
Par ailleurs, des travaux en cours (EDF-Groupes de normalisation),utilisent également des entités mathématiques non mesurables, lesmodes propres à gauche, Φg , obtenus par la résolution del’équation (13) :
tX ’’ [M ] + tX ’ [C ] + tX [K ] = O (13)
et qui interviennent directement dans l’expression (14) des coeffi-cients d’influence :
(14)
avec C1A coefficient d’influence complexe du plan A surle palier 1,
Ω (rad/s) vitesse de rotation,
pk (rad/s) pulsation propre complexe d’indice k ,
mode propre à droite complexe d’indice k , aupalier 1,
mode propre à gauche complexe d’indice k , auplan A,
δk coefficient dépendant de la norme des modespropres.
Une telle méthode, validée en laboratoire, est en cours de véri-fication sur site sur groupe turboalternateur de centrale.
(b ) L’expérience prouve que la qualité de l’équilibrage obtenueest meilleure quand on a des acquisitions sur plusieurs vitessesde rotation. On choisira des vitesses d’acquisition dans la plagede vitesse normale, sur les fonctionnements spécifiques, en dessousde toute fréquence propre des modes élastiques (pour ne pas affecterl’équilibrage initial à basse vitesse), entre les modes propres élas-tiques, près du fonctionnement des vitesses critiques... Cela répondà la question des précautions à prendre citées au paragraphe 3.2.2.3.
(c ) L’utilisation de la méthode des coefficients d’influence permetaussi de favoriser certaines vitesses de rotation par rapport à d’autresen leur donnant un poids plus important dans le calcul des balourdscorrecteurs, par l’application de coefficients de pondération.Lorsqu’on utilise une procédure aux moindres carrés, ces poids sontentrés directement dans l’équation aux moindres carrés.
Une autre procédure de calcul des balourds de correction consisteà utiliser la méthode suivante : la vibration aux paliers est donnéepar l’équation (8) reprise ici :
V = [C I] · B (15)
où [C I] est la matrice rectangulaire, compte tenu du nombre d’acqui-sitions réalisées, des coefficients d’influence. En prémultipliant parla matrice transposée des coefficients d’influence t[C I], on obtient :
t[C I] V = t[C I] · [C I] · B (16)
Figure 21 – Réponse du rotor équilibré et non équilibrépour deux raideurs de paliers
C1A δkk∑
Φ
d
k 1
Φ
g
k
A ⋅
j Ω p
k
–------------------------ Ω 2 =
Φdk1
ΦgkA
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.BM 5 130 − 14 © Techniques de l’Ingénieur, traité Génie mécanique
___________________________________________________________________________________________ ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES
Or
t
[
C
I
] · [
C
I
] est une matrice carrée, qui est inversable (dans lamesure bien sûr où les acquisitions étaient indépendantes (§ 3.2.2.3),ce qui conduit au calcul des balourds correcteurs) :
(17)
On peut également remplacer
t
[
C
I
] par une matrice [
A
] de mêmetaille, telle que :
(18)
Le choix de cette matrice [
A
], plus général mais de même natureque celui des coefficients de pondération, est un savoir-faire dumétier. Des procédures informatiques itératives existent pour choisirautomatiquement cette matrice [
A
], en minimisant les vibrations descritères à respecter.
5.6 Équilibrage modal
L’équilibrage modal est une variante de l’équilibrage en rotorflexible où l’on fait des acquisitions sur, ou près, des vitesses cri-tiques afin de faciliter leur franchissement lors des démarrages-arrêts de la machine par l’application de balourds correcteurs spéci-fiques (cf. § 3.1.1 et figure
10
).
5.7 Équilibrage in situ
Dans un équilibrage
in situ
, la méthode ci-dessus est totalementappliquée, avec la seule restriction que tous les plans de correctiond’équilibrage ne sont pas accessibles, car cela demanderait trop detemps de démontage. Mais on insistera à nouveau sur l’importancefondamentale de ce type d’équilibrage, car c’est uniquement dansces conditions que l’on peut équilibrer certains groupes qui ne sontassemblés définitivement que sur les sites (accouplements rigidesà plateaux boulonnés). Généralement, les rotors auront déjà été équi-librés auparavant individuellement à vitesse nominale en utilisantles techniques précédemment décrites.
5.8 Incertitudes
Les incertitudes d’équilibrage sont liées aux éléments qui suivent.
Instrumentation
Les incertitudes sont liées à la construction des paliers del’installation d’équilibrage, à la sensibilité des capteurs, à la sensi-bilité de l’électronique de traitement (filtrage de la composantesynchrone et extraction de la phase), à la conversion analogique-numérique, à la quantification numérique... dont les valeurs sontdonnées par le fournisseur de l’installation.
Erreurs systématiques liées au banc
Elles dépendent du montage de l’accouplement d’entraînementau moteur (pour des appareils comme les gyroscopes, on va réaliserun entraînement en rotation par les moyens propres de la machine,ce qui va supprimer cette erreur systématique), de l’emplacementdes capteurs (utilisation de capteurs relatifs de position sur une pistedifférente des tourillons de paliers), ces éléments étant connus duconstructeur de la machine.
Tarage des plans de correction
Pour la définition des coefficients d’influence, il faut que la dif-férence de mesure entre le lancer initial et le lancer de tarage soitsuffisamment grande en
amplitude et en phase
pour que le coeffi-cient d’influence soit déterminé correctement.
Équilibrages
in situ
Il y a incertitude dans le cas où tous les plans d’équilibrage nesont pas accessibles, mais cela affecte plus la qualité d’équilibragefinal que l’incertitude de mesure elle-même.
On remarquera que les opérations d’équilibrage de rotor flexibleconsidèrent à la fois des balourds tests ou correcteurs mesurés et,d’autre part, des vibrations mesurées aux paliers. Cela est un faitimportant pour comparer le résultat obtenu avec son incertitude demesure au critère défini, que celui-ci soit exprimé en terme debalourd résiduel ou de vibration admissible.
Excentricités
Si les mesurages des vibrations se font avec des capteurs de posi-tion d’arbre, il y a lieu de tenir compte de l’excentricité des pistesde mesure par rapport aux tourillons des paliers (harmonique 1 dufaux-rond). La procédure consiste à faire un relevé à très bassevitesse de rotation, caractérisant l’excentricité et à soustraire vec-toriellement cette valeur du signal mesuré à la vitesse d’équilibrage.Cette opération, absolument nécessaire, introduit obligatoirementune incertitude.
Bc [ C I [ ] t
C I [ ]⋅ ] 1
–
– C I [ ] t
V ⋅ ⋅ =
Bc [ A [ ] C I [ ]⋅ ] 1
–
– A [ ] t
V ⋅ ⋅ =
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique BM 5 130 − 15
Do
c. B
M 5
13
0
7
- 19
97
POUR
EN
SA
Équilibrage des rotors rigideset flexibles
par Jean-Marc PUGNETIngénieur Arts et Métiers, ingénieur automaticien de l’Université de GrenobleChef du département recherches et développement de FRAMATOME - THERMODYNExpert principal du groupe FRAMATOME
VOIR
PL
BibliographieBIGRET (R.), KARAJANI (P.), VIALARD (S.) et
CHEVALIER (R.). – Machines tournantes – Déter-mination des coefficients d’influence par lescaractéristiques modales. Deuxième conférenceMSTDAV (Méthodes de surveillance et Tech-niques de diagnostic acoustiques et vibratoires),Senlis (France). Société française de mécanique(F.), Revue française de mécanique no 1995-4,p. 277-283 , oct. 1995.
CHILDS (D.). – Turbomachinery Rotordynamics(Dynamique de rotor des turbomachines). 476 p.,J. Wiley & Sons New York (USA) (1993).
FRENE (J.), NICOLAS (D.), DEGUEURCE (B.),BERTHE (D.) et GAUDET (M.). – Lubrification
hydrodynamique – Paliers et butées. 488 p.,Eyrolles (F.) (1990).
LALANNE (M.) et FERRARIS (G.). – Rotordynamicsprediction in engineering (Prédiction de dyna-mique de rotor en conception). J.Wiley & SonsLtd (G.B.), 198 p. (1990).
LALANNE (M.) et FERRARIS (G.). – Dynamique desrotors en flexion, B5110, traité Génie mécanique,Techniques de l’ingénieur, nov. 1996.
MOREL (J.). – Vibrations des machines et diagnosticde leur état mécanique. 378 p., Eyrolles (F.)(1992).
VANCE (J.M.). – Rotordynamics of turbomachinery(Dynamique de rotor des turbomachines). 388 p.,J.Wiley & Sons New York (USA) (1988).
WIESE (D.). – Evaluation of the state of unbalance inflexible rotors – Vibration velocity versus modalunbalances (Évaluation de l’état de balourd desrotors flexibles – Vitesse vibratoire en fonctiondes balourds modaux). 6e conférence internatio-nale sur les vibrations de machines tournantes.Oxford London (G.B.), sept. 1996.
CETIM (F.). – Journée équilibrage des rotors. Recueilde conférences, Journée du 30 mai 1996 à Senlis.
US
Fournisseurs de matériel d’équilibrageMachines à équilibrerIRD Mechanalysis France SA
REUTLINGER France
SCHENCK SA
Logiciels d’équilibragea) Voir les trois compagnies ci-dessus
b) ETS VIBRO-METER France
c) De nombreuses autres sociétés et organismes ont ou diffusent des logicielsd’équilibrage par la méthode des coefficients d’influence. On ne peut pas êtreici exhaustif, mais on citera :— BERTIN & CIE— CAMPAGNA & IND— CETIM Établissement de Senlis— EDF Direction des études et recherches— Laboratoire de mécanique des structures de l’INSA de Lyon— METRAVIB RDS
etc.
Normes françaises et internationales
ISO 1925 1990 avec amendement de 1995 (3e édition). Vibrationsmécaniques – Équilibrage. Vocabulaire.
ISO 2041 1990 (2e édition)ou NF E 90-001 06-1993 Vibrations et chocs – Vocabulaire.
NF E 90-002 10-1984 (1re édition) Vibrations et chocs mécaniques –Vocabulaire de l’équilibrage.
NF E 90-600 10-1985 (1re édition) Vibrations et chocs mécaniques –Critères d’équilibrage des rotors en état rigide.
ISO 1940/1 1986 (1re édition). Vibrations mécaniques – Exigencesen matière de qualité dans l’équilibrage des rotorsrigides. Partie 1 : Détermination du balourd rési-duel admissible.
ISO 1940/2 Vibrations mécaniques – Exigences en matière dequalité dans l’équilibrage des rotors rigides.Partie 2 : Erreurs dans l’équilibrage. Une premièreédition déjà parue a été annulée, une nouvelle édi-tion est en cours de parution.
ISO 11342 1994 Vibrations mécaniques : Méthodes et critèresd’équilibrage mécanique des rotors flexibles.
ISO 8821 1989 (1re édition) Équilibrage – Convention relative auxclavettes d’arbres et aux éléments rapportés.
ISO 2953 1985 (2e édition)ou NF E 90-601 04-1986 Vibrations et chocs mécaniques – Machines à équi-
librer – Description, caractéristiques et possibilités.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copieest strictement interdite. − © Techniques de l’Ingénieur, traité Génie mécanique Doc. BM 5 130 − 1
ÉQUILIBRAGE DES ROTORS RIGIDES ET FLEXIBLES ____________________________________________________________________________________________POUR
EN
SAVOIR
PLUS
Organismes dispensant de la formation continuedans le domaine de l’équilibrage
BENTLY NEVADA (Nantes)
CAMPAGNA & IND (Vienne)
CETIM – Centre technique des industries mécaniques (Senlis)
IRD Mechanalysis (Louvres)
SCHENCK SA (Chambourcy)
SKF France (Montigny-le-Bretonneux – St Quentin-en-Yvelines)
Ets VIBRO-METER (Paris)
etc.
Congrès internationaux et recueilsde conférences correspondants
a) ASME – TURBO EXPO (alternativement années impaires aux USA, annéespaires en Europe)
ASME (American Society of Mechanical Engineers) et IGTI (International GasTurbine Institute)
Renseignements : ASME – Atlanta Georgia – USA
b)Turbomachinery Symposium à Houston organisé tous les ans par le Turbo-machinery Laboratory Texas – A&M University College Station, Texas USA
c) Conférences internationales sur les vibrations des machines tournantes orga-nisées par l’IMechE (Institution of Mechanical Engineers) tous les quatre ansau Royaume-Uni (1976 - 1980 -1984 -1988 -1992 à Bath - 1996 à Oxford, etc.)
Renseignements : Institution of Mechanical Engineers. London
d) Conférences internationales sur la dynamique des rotors organisées parl’IFToMM (International Federation for the Theory of Mechanics and Mecha-nisms) tous les quatre ans en alternance avec les précédents (1982 – 1986 àTokyo – 1990 à Lyon – 1994 à Chicago – 1998 à Darmstadt)
Renseignements : Dr. N. RIEGER – Stress Technology Inc. Rochester USA
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copieDoc. BM 5 130 − 2 est strictement interdite. − © Techniques de l’Ingénieur, traité Génie mécanique