
Chaque partie sera rédigée sur une copie indépendante...
5
Département de Mécanique Année 2003/2004 GM1/PL1/MIQ1 – CE6 – Procédés 1 Usinage d'un Bloc de liaison Durée de l'épreuve : 1h40' Documents autorisés : aucun Document joint : annexe A1, dessin de définition du bloc de liaison Chaque partie sera rédigée sur une copie indépendante (indiquer votre nom sur les 3 copies) Mise en situation Le bloc de liaison ci-contre, dont le dessin de définition est fourni en annexe 1 du sujet, est un composant de circuit hydraulique. Il dispose de 3 orifices, qui vont être brasés (type particulier de soudure) aux canalisations du circuit. Equipé de 2 servo-valves (robinets dont la position est contrôlée par un servo-moteur), il peut par exemple servir de mélangeur. Dans ce cas, les orifices 1 et 2 constituent les entrées du mélangeur, et l'orifice 3 la sortie. En sortie, le dosage entre les fluides arrivant en 1 et en 2 dépend de la position d'ouverture des servo-valves qui contrôlent respectivement le passage du fluide entre les orifices 1et 3, et entre les orifices 2 et 3. Les 2 vannes sont fixées sur les plan inclinés à l'aide des 2 groupes de 4 taraudages M8. Orifice 1 Orifice 2 Orifice 3 Servo-valve contrôlant le passage du fluide de 1 vers 3 Servo-valve contrôlant le passage du fluide de 2 vers 3 Bloc de laison 1 2 3
Transcript of Chaque partie sera rédigée sur une copie indépendante...

Département de MécaniqueAnnée 2003/2004
GM1/PL1/MIQ1 – CE6 – Procédés 1
Usinage d'un Bloc de liaison
Durée de l'épreuve : 1h40'Documents autorisés : aucunDocument joint : annexe A1, dessin de définition du bloc de liaison
Chaque partie sera rédigée sur une copie indépendante (indiquer votre nom sur les 3 copies)
Mise en situationLe bloc de liaison ci-contre, dont le dessin de définition est fourni en annexe 1 du sujet, est un composant de circuit hydraulique. Il dispose de 3 orifices, qui vont être brasés (type particulier de soudure) aux canalisations du circuit.
Equipé de 2 servo-valves (robinets dont la position est contrôlée par un servo-moteur), il peut par exemple servir de mélangeur. Dans ce cas, les orifices 1 et 2 constituent les entrées du mélangeur, et l'orifice 3 la sortie. En sortie, le dosage entre les fluides arrivant en 1 et en 2 dépend de la position d'ouverture des servo-valves qui contrôlent respectivement le passage du fluide entre les orifices 1et 3, et entre les orifices 2 et 3. Les 2 vannes sont fixées sur les plan inclinés à l'aide des 2 groupes de 4 taraudages M8.
Orifice 1
Orifice 2
Orifice 3
Servo-valve contrôlant le passage du fluide de 1 vers 3
Servo-valve contrôlant le passage du fluide de 2 vers 3
Bloc de laison1 2
3

Département de MécaniqueAnnée 2003/2004
Partie 1 : Analyse des spécifications géométriquesAfin de coter fonctionnellement la pièce, un ensemble de références spécifiées a été mis en place sur le dessin de définition. On précise la définition de deux d'entre elles.
• La référence spécifiée G est le plan parfait passant par les axes parfaits F et K.
• La référence spécifiée J, est le plan parfait perpendiculaire aux plans G et H, passant par l'intersection des axes F et K.
Question 1.1Décoder la spécification géométrique de localisation en complétant un tableau de la forme suivante:
Tolérance: Réels: Modèles:Type et condition Élément(s)
tolérancé(s)Élément(s) de référence
Référence spécifiée Zone de tolérance
Question 1.2Quelles sont la (ou les) surface(s) fonctionnelle(s) de la pièce qui permettent d'assurer l'étanchéité entre la canalisation amont et aval, quand la vanne est en position fermée?
Question 1.3Quelle(s) surface(s) assure(nt) le centrage de la vanne sur le corps?
Question 1.4Justifiez l'existence de cette spécification de localisation et plus particulièrement le choix du système de référence.
Question 1.5Parmi les propositions suivantes, la(les)quelles sont équivalentes au système de référence de la spécification de localisation? Justifiez.
a) J G
b) F-K J
c) H G J
Question 1.6Décoder la spécification géométrique de coaxialité en complétant un tableau de la forme suivante:
Tolérance: Réels: Modèles:Type et condition Élément(s)
tolérancé(s)Élément(s) de référence
Référence spécifiée Zone de tolérance
Question 1.7Justifier l'existence de cette spécification de coaxialité, imposée par le procédé.
Département de MécaniqueAnnée 2003/2004
Partie 2 : Étude de la gamme d'usinageQuestion 2.1
On part d'un brut moulé.Faites une analyse morphologique de la pièce, et dégagez-en les principaux groupes de surfaces.Représentez sur un schéma la position relative de ces principaux groupes de surfaces.
Question 2.2On réalise dans la phase 10 le surfaçage du plan inférieur du bloc de liaison (plan repéré Pl3 sur l'annexe A1) sur une fraiseuse conventionnelle.
Justifiez le choix du plan Pl3 comme première surface usinée.
Proposez (sur un schéma) une mise en position de la pièce pour cette phase 10 (on ne représentera que les normales de mise en position, et la normale de serrage).
Question 2.3Le plan Pl3 est usiné avec une fraise 2 tailles à plaquettes carbure, de diamètre 80mm, et possédant 8 dents.
Proposez une vitesse de coupe et une avance par dent pour réaliser ce surfaçage.
Déterminez la fréquence de rotation de la broche et la vitesse d'avance de la table à régler sur la fraiseuse.
Question 2.4En phases 20, 30 et 40 on réalise les cylindres intérieurs de diamètres 29,7 correspondant respectivement aux orifices 1, 2 et 3.
Proposez (sur un schéma) une mise en position de la pièce pour la phase 20 (on ne représentera que les normales de mise en position, et la normale de serrage).
Question 2.5Toujours pour cette phase 20 :
– choisissez une machine pour la phase 20,
– proposez les opérations nécessaires pour réaliser le cylindre,
– choisissez et dessinez la silhouette des outils correspondant aux opérations,
– proposez des conditions de coupe pour chacune des opérations (V, f, ap).
Question 2.6En phase 50, on réalise sur une fraiseuse verticale à commande numérique 3 axes, le plan repéré H sur le dessin de définition, les 4 taraudages M8 et le tronc de sphère de rayon 30mm qui y sont associés.
Proposez (sur un schéma) une mise en position de la pièce pour la phase 50 (on ne représentera que les normales de mise en position, et la normale de serrage).
Question 2.7Dessinez à main levée l'esquisse d'un montage d'usinage correspondant à la mise en position retenue à la question 2.6 pour la phase 50.

Département de MécaniqueAnnée 2003/2004
Partie 3 : MétrologieOn souhaite contrôler la spécification de coaxialité. Pour cela, on a défini deux plans PL1 et PL2, distants de 10 mm. Dans le plan PL1, on définit le point O1, comme le centre du cercle de référence associé au cercle réel de diamètre 33,7 mm. Dans le plan PL2, on définit le point O2, comme le centre du cercle de référence associé au cercle réel de diamètre 33,7 mm. On associe un repère orthonormé direct (O1, x, y, z), tel que l'axe O1z soit confondu avec la droite O1O2 .
10 mm
15 mm
On mesure les coordonnées de trois points du cylindre intérieur dans le plan PL1 :L1 (0; 14,90; 0)M1 (0; -14,74; 0)N1 (14,92; 0; 0)
On mesure les coordonnées de trois points du cylindre intérieur dans le plan PL2 :L2 (0; 14,84; 10)M2 (0; -14,90; 10)N2 (14,85; 0; 10)
Question 3.1Calculer les coordonnées du centre du cercle C1, passant par les points L1, M1, N1.
Calculer les coordonnées du centre du cercle C2, passant par les points L2, M2, N2.
Question 3.2En vous basant sur un schéma, expliquez la méthode de quantification du défaut de coaxialité.
Question 3.3Calculer le défaut de coaxialité de cette pièce. Qu'en déduisez-vous sur le respect de la spécification?
PL1 PL2
O1 z
x
10
2.52.5
O2
Département de MécaniqueAnnée 2003/2004
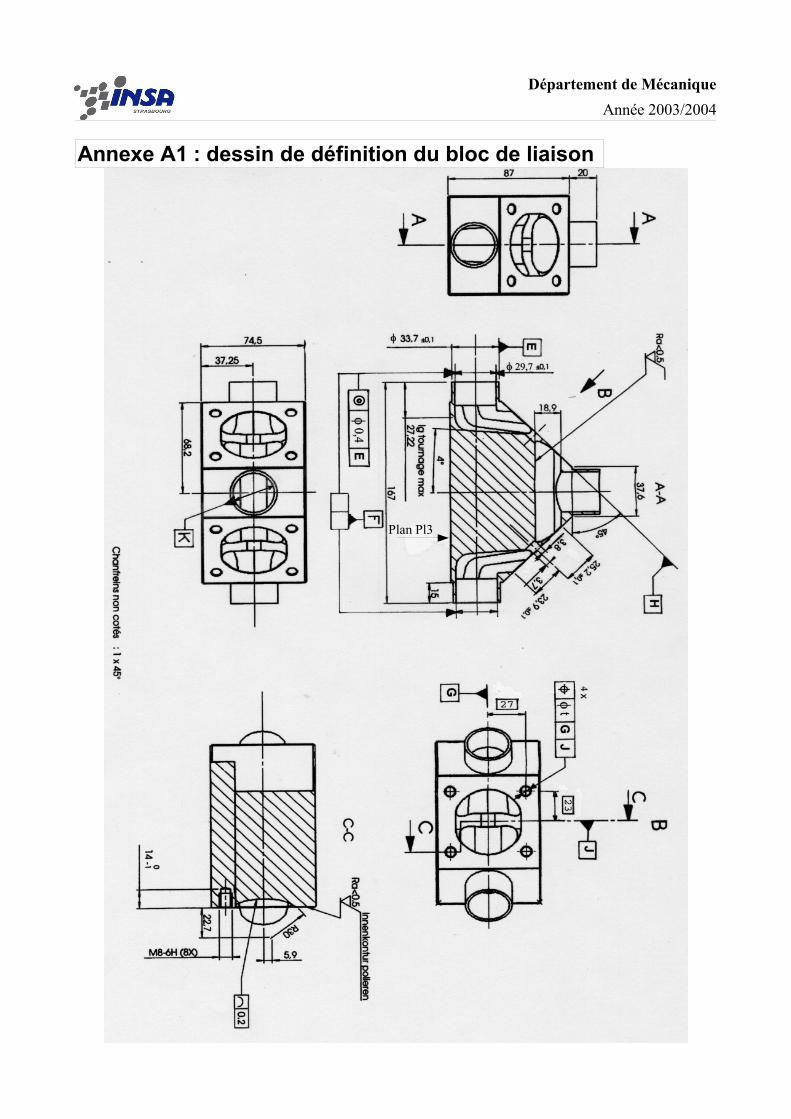
Annexe A1 : dessin de définition du bloc de liaison
Plan Pl3










