Chapitre 5 : Cinématique et dynamique Newtoniennesterminalesmermoz.free.fr/Cours/C5.pdf · 2018....
14
Terminale S Thème Comprendre Chap.5 Programme 2012 1/ 14 Chapitre 5 : Cinématique et dynamique Newtoniennes Introduction : Activité page 130 « Emilie Chatelet , une femme passionnée de sciences » 1) Decrire un mouvement On se limitera cette année à l’étude de systèmes de faibles dimensions par rapport à leurs déplacements : Il s’agit du modèle du point matériel , centre d’inertie G ( par opposition au solide). Les différentes études ne porteront que sur les mouvements PLANS dans un espace à 3 dimensions. 1.1. Le vecteur position La position du centre d’inertie G est définie dans un repère orthonormé ( O, , , )
Transcript of Chapitre 5 : Cinématique et dynamique Newtoniennesterminalesmermoz.free.fr/Cours/C5.pdf · 2018....
-
Terminale S Thème Comprendre Chap.5 Programme 2012
1/ 14
Chapitre 5 : Cinématique et dynamique Newtoniennes
Introduction :
Activité page 130 « Emilie Chatelet , une femme passionnée de sciences »
1) Decrire un mouvement On se limitera cette année à l’étude de systèmes de faibles dimensions par rapport à leurs
déplacements : Il s’agit du modèle du point matériel , centre d’inertie G ( par opposition au solide).
Les différentes études ne porteront que sur les mouvements PLANS dans un espace à 3 dimensions.
1.1. Le vecteur position La position du centre d’inertie G est définie dans un repère orthonormé ( O, , , )
-
Terminale S Thème Comprendre Chap.5 Programme 2012
2/ 14
Rem :
On se limitera cette année à l’étude de mouvements dans un plan ( O, , ) par exemple. L’ensemble des points occupés successivement par le mobile M au cours du temps est appelé
trajectoire.
Lorsqu’un solide se déplace sur sa trajectoire, la position de son centre d’inertie change au cours du
temps : A chaque position OG est donc associée une date t : on la notera : OG (t)
)(
)(
)(
)(
tz
ty
tx
tOG Avec x(t), y(t) et z(t) des fonctions qui dépendent du temps t.
x(t), y(t) et z(t) sont des équations HORAIRES alors que y= f (x) est l’équation de la TRAJECTOIRE .
1.2. Le vecteur vitesse
Le vecteur vitesse caractérise la variation du vecteur position en fonction du temps
La vitesse MOYENNE entre 2 points est le rapport de la distance parcourue par le temps nécéssaire.
La vitesse INSTANTANEE correspond à une vitesse moyenne entre 2 instants infiniment proches, on
l’appellera aussi vitesse du point G
On définit son vecteur position : OG :
G
G
G
G
G
G
z
y
x
OG
zz
yy
xx
OG
0
0
0
kzjyixOM GGG
y
x
G (xG, yG, zG)
O
OG
Trajectoire
-
Terminale S Thème Comprendre Chap.5 Programme 2012
3/ 14
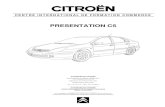
Graphiquement, sur un relevé de position, le vecteur vitesse en un point est une moyenne de la vitesse
entre le point précédent et le point suivant. Ce vecteur est porté par la tangente à la trajectoire et est
orienté dans le sens du mouvement.
t
OM
tempsiation
positioniationv
var
var
242
24
24
24
24
3
MM
tt
OMOM
tt
OMOMv
Rem : La durée constante entre deux positions
successives du mobile sur un relevé est notée ici .
Méthode de tracé du vecteur vitesse v3 :
1) Mesurer les segments M2M3 et M3M4
2) Calculer la norme du vecteur :
24332
33
MMMMvv
3) Tracer ce vecteur sur le relevé en tenant compte
de l’échelle.
Exercice 1:
La position d’un mobile M au cours du temps est donnée par le vecteur :
0)(
2105)(
12)(
)( 2
tz
ttty
ttx
tOM
a) Représenter sa trajectoire dans un repère entre 0 et 3 secondes.
b) Pourquoi peut-on parler d’un mouvement plan ?
c) Déterminer l’expression du vecteur vitesse du mobile en fonction du temps.
d) Déterminer la valeur de la vitesse du mobile à la date t = 2,0 s.
Exercice 2: Exercice 3:
M2
M3
M1
x
y v3
-
Terminale S Thème Comprendre Chap.5 Programme 2012
4/ 14
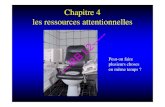
1.3. Le vecteur accélération Le vecteur accélération caractérise la variation du vecteur vitesse en fonction du temps.
Graphiquement, sur un relevé de position, pour tracer le vecteur accélération en un point, il faut au
préalable tracer le vecteur « variation de vitesse » noté v .
t
v
tempsiation
vitesseiationa
var
var
235354
4
vv
t
vv
t
va
Méthode de tracé du vecteur accélération a4 :
1. Tracer le vecteur vitesse en M3 et celui en M5.
2. Construite en partant de M4 le vecteur : 35 vvv
3. Calculer la norme de l’accélération grâce à la
formule :
24
4
va
4. Tracer ce vecteur accélération dans le même sens et la même direction que
4v en tenant compte de l’échelle.
Exercice 4:
La position d’un mobile M au cours du temps est donnée par le vecteur :
0)(
2105)(
12)(
)( 2
tz
ttty
ttx
tOM
a) Déterminer l’expression du vecteur accélération a(t) en fonction du temps.
b) Calculer la valeur de l’accélération subie par le mobile à la date t = 2,7 s.
v5 – v3
v5 v3
x
y
v4
a4
-
Terminale S Thème Comprendre Chap.5 Programme 2012
5/ 14
1.4. Le vecteur quantité de mouvement
Le vecteur « quantité de mouvement » p d’un point matériel est égale au produit de sa masse m par son
vecteur vitesse v :
Rem : Le vecteur quantité de mouvement et le vecteur vitesse ont toujours même sens et même
direction.
2) Reconnaitre un mouvement
2.1. Mouvement RECTILIGNE uniforme Dans un référentiel donné, un mouvement est rectiligne uniforme , si son vecteur vitesse reste
CONSTANT au cours du temps ( Son accélération est donc NULLE).
Exemple d’un mouvement rectiligne et uniforme sur un axe Ox orienté :
2.2. Mouvement RECTILIGNE uniformément varié
Dans un référentiel donné, un mouvement rectiligne est uniformément varié si son vecteur
accélération est CONSTANT au cours du temps.
Exemple d’un mouvement rectiligne uniformément varié sur un axe (Ox) orienté :
vmp
m en kg
v en ms – 1
p en kgms – 1
TS star : Couple de patineurs ( 15 min )
-
Terminale S Thème Comprendre Chap.5 Programme 2012
6/ 14
2.3. Mouvement CIRCULAIRE uniforme
2.4. Mouvement CIRCULAIRE uniformément accélérée
4) Les lois deNewton
3.1. Référentiel Galiléen
Définition : Un référentiel dans lequel les lois de Newton sont vérifiées est appelé référentiel Galiléen.
Rem : On admet que le référentiel terrestre est Galiléen ( ce qui est faux en toute rigueur , car il est en
rotation…)
Les référentiels terrestres :
Ils sont construits à partir de n’importe quel solide de référence lié à la terre (le solide doit être fixe par rapport
à la terre).
On les utilisera pour étudier tout mouvement à la surface de la terre. Dans ce référentiel, le terre est IMMOBILE
Dans un référentiel donné , un mouvement circulaire est uniforme, si la trajectoire est une portion de cercle de rayon R, et si la valeur de la vitesse reste CONSTANTE. L’accélération est lors centripète et de valeur constante :
a =
Dans un référentiel donné , un mouvement circulaire est uniformément accéléré, si la trajectoire est une portion de cercle de rayon R, et si la valeur de son accélération N’EST PAS CONSTANTE. Le vecteur accélération s’écrit :
a = +
avec : =
accélération NORMALE
et =
accélération TANGENTIELLE
-
Terminale S Thème Comprendre Chap.5 Programme 2012
7/ 14
Le référentiel géocentrique :
Il est utilisé pour décrire le mouvement de la lune ou des satellites artificiels.
Il est définit par le centre de la terre et 3 axes dirigés vers 3 étoiles lointaines. On considère que ce sont des
étoiles fixes, les axes sont donc fixes.
Dans ce référentiel , le terre a un mouvement de rotation uniforme
Le référentiel héliocentrique :
Il est utilisé pour décrire le mouvement des astres du système solaire.
Son centre est le centre du soleil et ces 3 axes sont dirigés vers les mêmes étoiles lointaines que pour le
référentiel géocentrique.
Dans ce référentiel, la Terre a un mouvement de double rotation sur elle-même et autour du Soleil
2.2. Première Loi : Principe d’inertie
Principe d’inertie
Dans un référentiel galiléen, tout corps persévère
dans son état de repos ou de mouvement rectiligne
uniforme s’il est soumis à des forces qui se
compensent.
Remarques :
L’état de repos et le mouvement rectiligne
uniforme sont tous deux caractérisés par un
vecteur vitesse constant.
Donc 0v
Référentiel galiléen et référentiel non galiléen
-
Terminale S Thème Comprendre Chap.5 Programme 2012
8/ 14
Or t
va
donc 0
0
ta
Un corps soumis à des forces qui se
compensent est dit pseudo-isolé.
Un corps soumis à aucune force est dit isolé.
Un référentiel est dit galiléen si le principe de l’inertie y est vérifié.
Exemple :Dans l’ascenseur immobile (à gauche) la pomme lâchée tombe. Son mouvement n’est pas
rectiligne uniforme car elle n’est pas soumise à des forces qui se compensent (il n’y a que le poids). Le
principe de l’inertie est vérifié.
Dans l’ascenseur en chute libre, la pomme est immobile par rapport à l’ascenseur, pourtant elle n’est
soumise qu’à une force (son poids). Donc les forces ne se compensent pas ! Le principe d’inertie n’est
pas vérifié !
L’ascenseur en chute libre n’est pas un référentiel galiléen.
3.3. Deuxième Loi : Principe fondamental de la dynamique
Principe fondamentale de la dynamique
Dans un référentiel galiléen, si un objet ponctuel est soumis à des forces
extérieures, alors le vecteur « somme des forces » F est égal à la dérivé par
rapport au temps de son vecteur « quantité de mouvement » p :
Rem :
Seules les forces exercées par l’extérieur sur le système étudié sont à prendre en compte dans le bilan des
forces.
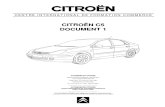
Exercice 5:
a) On considère le système {Terre}. D’après la figure 11, Déterminer la direction et le sens du vecteur
quantité de mouvement de la Terre
b) On considère le système {voiture + caravane} de la figure 11.
Parmi les forces représentées, déterminer celles que l’on appelle des forces extérieures.
c) Montrer que la relation fondamentale de le dynamique peut aussi s’écrire : amF
dt
pdF
SystTerreP /
SystSolR /
CarVoitF / VoitCarF /
Terre
Soleil
F
F’
-
Terminale S Thème Comprendre Chap.5 Programme 2012
9/ 14
2.4. Troisième Loi : Principe d’interaction
Principe des actions réciproques
Si un système A exerce sur un système B une force BAF / alors
le système B exerce sur le système A une force ABF / telle que :
Rem : Ces deux forces ont donc même direction et même intensité mais sont de sens opposés.
Exemple :
La force exercée par la Terre sur la Lune a même direction et
même intensité que la force exercée par la Lune sur la Terre.
2//
LT
TLTLLT
d
MMGFF
Par contre ces deux forces sont de sens opposés.
ABBA FF //
Exercice 6:
-
Terminale S Thème Comprendre Chap.5 Programme 2012
10/ 14
4) Application à la propulsion
A chaque instant, le vecteur quantité de mouvement d’un système constitué de n points matériels est
égal à la somme des vecteurs quantité de mouvement de chaque point matériel.
n
insystèmeppppp
1
21 ...
Exercice 8:
Considérons un système {canon-boulet}
initialement au repos. Le canon monté sur roues
tire à l’horizontale.
La masse du canon est M = 2,5 t. La masse du
boulet est de m = 25 kg.
Avant le tir, le système est immobile dans le
référentiel terrestre.
Juste après le tir, la vitesse du boulet à la sortie
du canon vaut v = 540 km/h et la vitesse de
recul du canon est V = 1,5 m/s.
a) Que vaut la quantité de mouvement du système avant le tir ?
b) Que peut-on alors dire du système ?
c) Déterminer la quantité du mouvement du système juste après le tir.
d) Conclure
V v x
y
Exercice 7:
-
Terminale S Thème Comprendre Chap.5 Programme 2012
11/ 14
Dans un référentiel galiléen, le vecteur quantité de mouvement d’un système isolé est un vecteur constant.
Exercice 9:
Exercice 10 :
-
Terminale S Thème Comprendre Chap.5 Programme 2012
12/ 14
5) Exercice BAC N°5 : Etude mécanique
Enoncé :
Emma, de masse mc= 56 kg, roule sur son vélo de masse mv= 8,0 kg. La valeur du champ de pesanteur est g = 9,8 N.kg-
1. L'étude est réalisée dans le référentiel terrestre, supposé galiléen .
1) Emma roule à la vitesse constante v=18 km.h-1 en ligne droite. a. Dessiner cinq positions successives du centre d'inertie G du système {Emma+vélo}. L'intervalle de temps entre
deux positions successives est T = 2,0 s. A4 de. 1
Échelle des longueurs : 1 cm sur le dessin représente 5,0 m en réalité.
b. Déterminer et tracer le vecteur vitesse V. pour la première et la troisième positions de G. Échelle des vitesses : 1 cm représente 5,0 m.s-1.
C. Exprimer les coordonnées du vecteur V dans le repère (Oxy).
d. En déduire le vecteur accélération a d'Emma.
e. Déterminer la valeur de la réaction normale , exercée par le sol sur le système {Emma+vélo}.
2) Elle parcourt à présent un virage circulaire de rayon R= 50 m, toujours à la vitesse constante v = 18 km.h-
1.Quelles sont les caractéristiques du vecteur accélération a ? Calculer sa valeur.
TS star : Ascenseur ( 15 min )
-
Terminale S Thème Comprendre Chap.5 Programme 2012
13/ 14
6) Exercice BAC N°6 : Pousser la voiture
Enoncé :
Antoine, en panne d'essence, pousse son véhicule en ligne droite sur un sol horizontal (Fig. 3).
Le but de cet exercice est de déterminer et d'exploiter équation horaire du véhicule de masse m = 1,00 t.
La voiture est repérée par la position x de son centre d'inertie G sur l'axe (Ox) horizontal et orienté dans le sens
du déplacement du véhicule.
A t= 0, G est en O et la vitesse de la voiture est nulle.
La poussée d'Archimède et les frottements de l'air sont négligés. La force horizontale F exercée par Antoine
est supposée constante et de valeur F = 2,23. .
La force de frottement horizontale f, due au sol, supposée également constante, vaut f = 2,20.102 N.
a) Faire le bilan des forces qui s'exercent sur la voiture et les représenter.
-
Terminale S Thème Comprendre Chap.5 Programme 2012
14/ 14
b) Ouel est le référentiel le plus adapté pour étudier le mouvement de la voiture ?
c) Écrire l'expression vectorielle de la deuxième loi de Newton.
d) En déduire la valeur de la coordonnée , de l'accélération. Aida e) Déterminer l'expression de la vitesse v, de la voiture en fonction du temps t. Montrer ensuite que l'équation
horaire de sa position s'écrit x(t)=
. .
f) Le garage se situe à une distance d= 0,50 km du lieu de la panne. Au bout de combien de temps Antoine y
arrive-t-il en poussant sa voiture ?
Solution :
a) Le véhicule subit son poids P, la force exercée par son conducteur F, la réaction normale du sol et la
force de frottement f (Fig. 4).
b) Le référentiel terrestre supposé galiléen est le référentiel d’étude adapté. ,
c) La deuxième loi de Newton appliquée au système étudié ( de masse constante) s’écrit :
P+Rn+ f +F = m.a
d) projection de la relation vectorielle précédente sur l’axe ( Ox) est : 0 + 0 – f + F = m.a. Ainsi :
=
=
= 3. m.
e) La primitive de ax est : vx(t)-= axt + k où k est une constante. À t = 0, vx(0) = 0.
Cette vitesse initiale s'écrit aussi : vx (0) = ax x 0 + k. Il en résulte que k= 0.
Donc vx(t)= ax.t.
Une deuxième intégration permet d'obtenir l'équation horaire demandée :
x(t) =
.a.t2 +k’ où k’ est une constante.
La condition initiale sur la position s'écrit x(0) = 0 et donne k'= 0. Donc finalement x(t) =
.a.t2
f) Antoine poussant sa voiture arrive au garage, situé à la distance d= 0,50 km, à la date t1 vérifiant x(t1) = d
ce qui donne : d =
.a.
soit =
= 6. s, soit près de 10 minutes.