
CHAPITRE 4 : CONTACT ET FROTTEMENT - INSA de...
28
CHAPITRE 4 : CONTACT ET FROTTEMENT
Transcript of CHAPITRE 4 : CONTACT ET FROTTEMENT - INSA de...

CHAPITRE 4 :
CONTACT ET FROTTEMENT

Chapitre 4 : Contact et frottement___________________________________________________________________________
114
Chapitre 4 : Contact et frottement___________________________________________________________________________
115
CHAPITRE 4 : CONTACT ET FROTTEMENT
La modélisation des procédés de mise en forme demande une attention touteparticulière pour la prise en compte du contact unilatéral avec frottement. La littérature à cesujet est très vaste et on peut citer l'ouvrage de RAOUS et al. [RAO 94] qui rassemble lesrécents travaux des mathématiciens et des mécaniciens dans ce domaine.
Il existe de nombreuses manières d'introduire les conditions de contact et de frottemententre un corps déformable et une surface rigide. La méthode des multiplicateurs de Lagrange[CAR 91] et tous les algorithmes hybrides [SIM 92], [CES 94], [BIL 94] qui en découlent,ainsi que les méthodes de pénalisation [WAN 96], [SHI 95], [BAI 96], [MOC 97], [PER 92],[BRU 87], [MIC 93] sont les techniques les plus utilisées.
Les choix effectués pour le logiciel POLLUX ont souvent été guidés par la simplicitéd'une méthode par rapport à une autre, ainsi que par les limitations liées aux schémasd'intégration temporelle.
Le contact est introduit dans l'algorithme implicite de Newmark par une technique depénalisation adaptée à la méthode de la raideur initiale. La contribution du frottement estajoutée dans l'équation d'équilibre. Elle est décomposée en une raideur de frottement constantependant tout l'incrément de calcul et une force de frottement itérative au second membre.Dans leurs travaux de modélisation de l'emboutissage BAILLET et BRUNET [BAI 96] ontmontré que le choix des coefficients de pénalisation a une influence directe sur les résultatsjuste après impact, et que les noeuds qui viennent d'entrer en contact rebondissent pour descoefficients trop importants. ABAQUS propose différents modèles numériques qui permettentd'adoucir le contact entre le corps déformable et la surface rigide (option activée par

Chapitre 4 : Contact et frottement___________________________________________________________________________
116
l'instruction softening contact), mais ces techniques nécessitent l'introduction de paramètressupplémentaires.
Pour la méthode explicite des différences finies centrées, chaque degré de liberté estétudié séparément. La condition d'impénétrabilité est respectée en rabattant les noeudscandidats au contact sur la surface rigide. Le frottement est introduit dans l'équationd'équilibre au second membre, par l'intermédiaire d'une force externe calculée à partir d'uneméthode de prédiction-correction.
Les outils sont décrits avec des segments de droite et sont supposés indéformables. Lacinématique des surfaces rigides autorise aussi bien un mouvement vertical suivant Z de l'outilsupérieur que de l'outil inférieur, afin de permettre, par exemple, les simulations des procédésde mise en forme tel que le marteau pilon avec contre-frappe. Du fait d'une formulationLagrangienne réactualisée explicitement, la géométrie des outils ainsi que les normales auxsegments d'outils restent constantes au cours de l'incrément de calcul. Pour pouvoir simplifierl'écriture des conditions aux limites, les équations d'équilibre sont projetées dans des axeslocaux pour tous les noeuds en contact. Le déplacement normal des noeuds en contact est égalà celui de l'outil alors que le déplacement tangentiel est piloté par les conditions de frottement.
Le plan de ce chapitre comprend quatre parties. La première concerne la modificationdes conditions aux limites. Les algorithmes de détection des nouveaux noeuds en contact, dechangement de segment d'outil et de décollement des noeuds sont détaillés. La seconde et latroisième partie exposent respectivement le calcul des déplacements normaux, et desdéplacements tangentiels. Finalement, les résultats obtenus sur un test de l'anneau et unecompression simple sont comparés pour la méthode explicite et la méthode implicite.
I- MODIFICATION DES CONDITIONS AUX LIMITES
La recherche des noeuds candidats au contact, ainsi que la détection des changementsde segments d'outils s'effectue juste après la résolution de l'équation d'équilibre pour chacundes degrés de liberté du maillage. Pour la méthode explicite des différences finies centrées larecherche des nouvelles conditions aux limites est incrémentale alors que pour la méthodeimplicite de Newmark elle est itérative.
I.1. Nouveaux noeuds en contact
Si pour un champ de déplacements solution de l'équation d'équilibre, un noeud ducontour du lopin, à l'instant t+∆t, est dans les environs très proches d'un segment d'outil(Figure 4.1) ou a tendance à pénétrer dans l'outil (Figure 4.2), il sera considéré commecandidat au contact. Toutes les caractéristiques propres au segment d'outil, c'est à dire lenuméro du segment, les cosinus directeurs et les conditions de frottement, seront affectées à cenoeud. Si le noeud a pénétré dans l'outil, il faudra également corriger sa position en leprojetant sur le segment d'outil (Figure 4.2).

Chapitre 4 : Contact et frottement___________________________________________________________________________
117
1
2M(t)
M(t+dt)
epsi2
&n
Figure 4.1 : gestion des noeuds candidats au contact sans pénétration
M(t+dt)corrigé
1
2M(t)
epsi1
M(t+dt) 1
2M(t)
epsi1
M(t+dt)Correction
&n
&n
Figure 4.2 : gestion des noeuds candidats au contact avec pénétration
Les scalaires epsi1 et epsi2 définissant la taille des rectangles de détection des noeudscandidats au contact, dépendent du maillage du lopin. On a choisi : epsi dlmoyen1 10 2= −. et
epsi dl2 10 5= −min.
où : dlmoyen représente la longueur moyenne des segments du contour du lopin
dlmin représente la longueur minimale des segments du contour du lopin
La construction des rectangles à partir des normales internes aux segments d'outilspermet la détection de la plupart des noeuds candidats au contact. Dans le cas d'une concavitéd'outil tournée vers le lopin (Figure 4.3), le triangle formé par les normales de deux segmentsconsécutifs sert lui aussi de zone d'arrêt. On affecte alors les propriétés du premier segment aunoeud et on le rabat à la jonction des deux segments.

Chapitre 4 : Contact et frottement___________________________________________________________________________
118
M(t)
M(t+dt)
M(t+dt)corrigé
epsi1
&n1
&n2
Figure 4.3 : Gestion des candidats au contact
I.2. Changement de segment d'outil
Les glissements des noeuds d'un segment à un autre sont également considérés commedes changements de conditions aux limites (Figure 4.4 et Figure 4.5). Si le noeud passe sur lesegment suivant ou sur le segment précédent, il faut réactualiser les propriétés (cosinusdirecteurs et conditions de frottement). Comme pour la pénétration dans l'outil, le noeud estsystématiquement guidé pour suivre une trajectoire qui le ramène sur le nouveau segmentauquel il est affecté (Figure 4.6).
1 2
M(t+dt)
M(t)
&n1 &
n2
Figure 4.4 : Changement de segment d'outil : le noeud passe sur le segment précédent
M(t+dt)M(t)
1
2
&n2
&n1
Figure 4.5 : Changement de segment d'outil : le noeud passe sur le segment suivant

Chapitre 4 : Contact et frottement___________________________________________________________________________
119
M(t)1M(t+dt)2
M(t+dt)corrigé
&n1
Figure 4.6 : Changement de segment d'outil : correction
Les points qui auraient tendance à quitter le nouveau segment d'outil sont traitésexactement comme les noeuds qui y pénètrent. Ce choix, assez drastique pour les noeudsayant tendance à retrouver leur liberté, semble le seul efficace. Dans un premier temps, lesconditions aux limites imposées à ces noeuds étaient supprimées mais cette méthode, bien queplus réaliste, entrainait des problèmes numériques, le point oscillant sans cesse entrel'ancienne et la nouvelle position.
I.3. Décollement
En fin d'incrément, les noeuds candidats au décollement sont détectés en réalisant unbilan des forces extérieures :
{ } { } [ ]{ } [ ]{ }dCdMFFext��� ++= int [4.1]
Une fois connues, ces forces sont projetées dans le repère local pour être décomposéesen forces tangentielle et normale. C'est à partir du signe de cette dernière que l'on détecte lesdécollements.
II. GESTION DES POINTS EN CONTACT
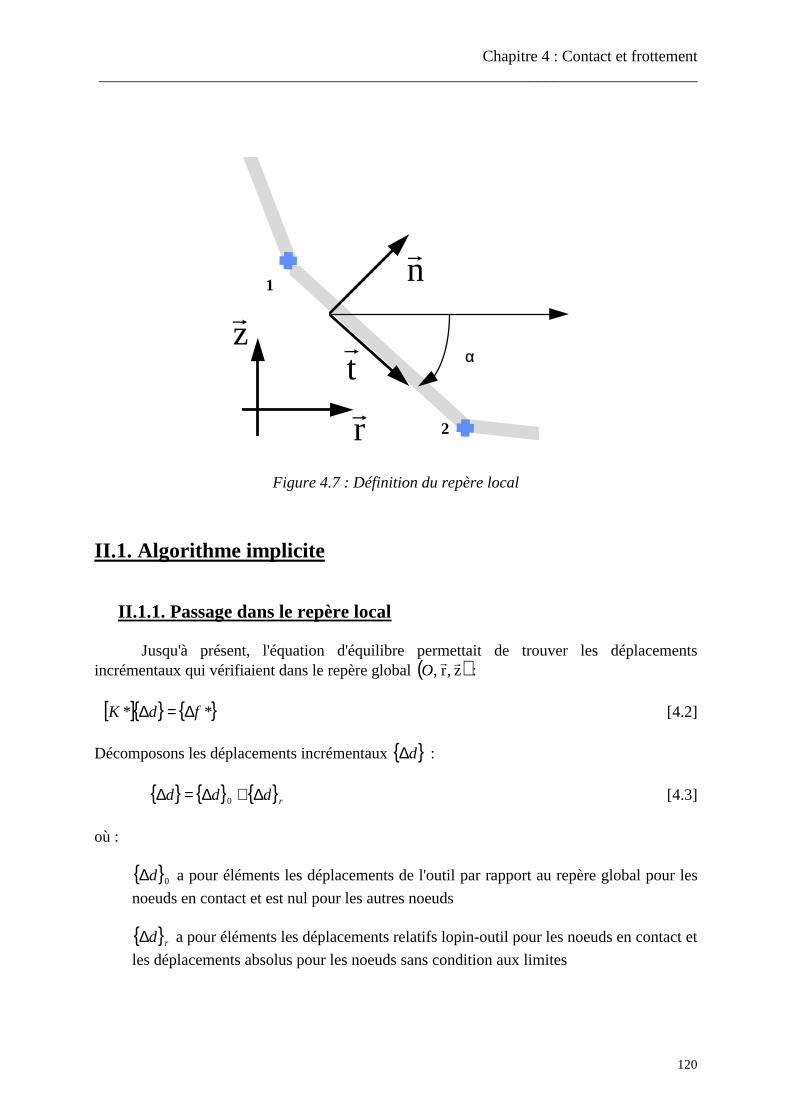
Tous les points en contact avec les outils sont étudiés dans le système local défini parla normale et la tangente caractéristiques du segment d'outil. (Figure 4.7)
Chapitre 4 : Contact et frottement___________________________________________________________________________
120
1
2
α
&n
&t
&z
&r
Figure 4.7 : Définition du repère local
II.1. Algorithme implicite
II.1.1. Passage dans le repère local
Jusqu'à présent, l'équation d'équilibre permettait de trouver les déplacementsincrémentaux qui vérifiaient dans le repère global ( )z ,r ,
&&O :
[ ]{ } { }** fdK ∆=∆ [4.2]
Décomposons les déplacements incrémentaux { }d∆ :
{ } { } { }rddd ∆+∆=∆ 0 [4.3]
où :
{ }0d∆ a pour éléments les déplacements de l'outil par rapport au repère global pour les
noeuds en contact et est nul pour les autres noeuds
{ }rd∆ a pour éléments les déplacements relatifs lopin-outil pour les noeuds en contact et
les déplacements absolus pour les noeuds sans condition aux limites

Chapitre 4 : Contact et frottement___________________________________________________________________________
121
La cinématique des outils étant connue à chaque instant t, on peut réarranger lesystème :
[ ]{ } { } [ ]{ }0*** dKfdK r ∆−∆=∆ [4.4]
Avec [P] la matrice de passage du repère global au repère local, l'équation d'équilibres'écrit :
[ ][ ][ ]( ){ } [ ] { } [ ]{ }( ) .* *. ... 0* globalgloballocal
rT dKfPdPKP ∆−∆=∆ [4.5]
Remarque :
Si pour un système à n degrés de liberté, le noeud de degrés k et k+1 est soumis à desconditions aux limites, la matrice de passage [P] aura pour forme :
[ ] ( )
( ) ( )( )
10............0
01000......
...0cossin0......
...0sincos0......
...0001......
............010
0............01
111
1
11
=
==−==
=
=
+++
+
nn
kkkk
kkkk
P
PP
PP
P
P
αααα [4.6]
II.1.2. Nouveaux noeuds candidats au contact
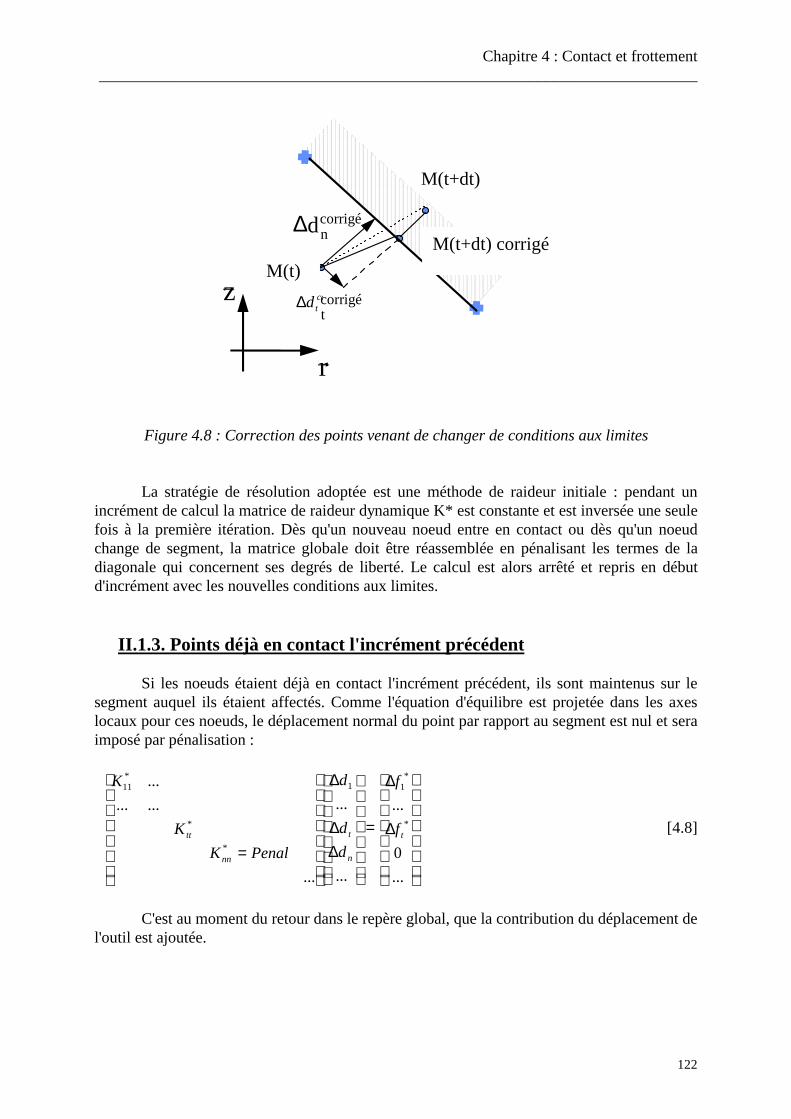
Les corrections à apporter aux déplacements des points venant d'entrer en contact ou
de changer de segment sont appliquées avec une méthode de pénalisation. Soient ∆dncorrigé et
∆dtcorrigé (Figure 4.8) les déplacements normaux et tangentiels à imposer pour tenir compte
des modifications, l'équation d'équilibre devient :
∆∆
∆
=
∆∆
∆
==
...
.
.
...
...
...
...
......
... *11
*
*
*11
corrigén
corrigét
n
t
nn
tt
dPenal
dPenal
f
d
d
d
PenalK
PenalK
K
[4.7]
où Penal est un scalaire choisi égal à 1020
Chapitre 4 : Contact et frottement___________________________________________________________________________
122
&z
&r
cotd∆tcorrigé
∆dncorrigé
M(t+dt)
M(t+dt) corrigé
M(t)
Figure 4.8 : Correction des points venant de changer de conditions aux limites
La stratégie de résolution adoptée est une méthode de raideur initiale : pendant unincrément de calcul la matrice de raideur dynamique K* est constante et est inversée une seulefois à la première itération. Dès qu'un nouveau noeud entre en contact ou dès qu'un noeudchange de segment, la matrice globale doit être réassemblée en pénalisant les termes de ladiagonale qui concernent ses degrés de liberté. Le calcul est alors arrêté et repris en débutd'incrément avec les nouvelles conditions aux limites.
II.1.3. Points déjà en contact l'incrément précédent
Si les noeuds étaient déjà en contact l'incrément précédent, ils sont maintenus sur lesegment auquel ils étaient affectés. Comme l'équation d'équilibre est projetée dans les axeslocaux pour ces noeuds, le déplacement normal du point par rapport au segment est nul et seraimposé par pénalisation :
∆
∆
=
∆∆
∆
=...
0
...
...
...
...
......
...
*
*11
*
*
*11
t
n
t
nn
tt f
f
d
d
d
PenalK
K
K
[4.8]
C'est au moment du retour dans le repère global, que la contribution du déplacement del'outil est ajoutée.

Chapitre 4 : Contact et frottement___________________________________________________________________________
123
II.2. Algorithme explicite
Comme l'algorithme explicite présente le gros avantage de traiter tous les degrés deliberté séparément, la gestion du contact et la gestion du frottement vont pouvoir êtreconsidérablement simplifiées.
Après avoir détecté les points qui viennent d'entrer en contact ou qui viennent dechanger de segment, les déplacements incrémentaux sont imposés de telle sorte que lesnouvelles coordonnées à t+∆t correspondent à celles des noeuds M(t+dt)corrigé (voir Figures4.2 à 4.6). Les accélérations et les vitesses calculées par la méthode des différences finiescentrées sont alors modifiées pour tenir compte des déplacements corrigés. Tant que lesnoeuds restent en contact avec un segment d'outil, on leur impose un déplacement normal égalau déplacement normal de l'outil.
III. GESTION DU FROTTEMENT
Les algorithmes utilisés pour l'introduction du frottement dans les équations d'équilibresont suffisamment généraux pour laisser une grande liberté à l'utilisateur quant au choix de laloi de frottement. Si pour la plupart des modèles la contrainte tangentielle de frottementdépend de la contrainte normale , on peut également ajouter une dépendance à la contrainted'écoulement du matériau (modèle de Tresca) et à la température. L'effet de cette dernière peutêtre significatif pour les lubrifiants avec une viscosité variable tels que le verre. Les modèlesimplantés par BAILLET [BAI 94] dans la version statique du logiciel restent actifs dans laversion dynamique
III.1. Différentes lois de frottement
III.1.1. Coulomb
Le modèle de Coulomb suppose que la contrainte de frottement τ appliquée àl'interface entre le lopin et les outils est directement proportionnelle à la contrainte normaleσn et agit dans la direction inverse à la vitesse relative tangentielle V entre les deux corps :
τ µ σ σ= − <. nV
V pour n 0 [4.9]
µ est le coefficient de Coulomb et inclut tous les paramètres locaux. Si le point est enadhérence, la contrainte tangentielle τ respecte :
τ µ σ σ< − <. nV
V pour n 0 [4.10]
Chapitre 4 : Contact et frottement___________________________________________________________________________
124
III.1.2. Tresca
Dans le modèle de Tresca la contrainte de frottement est proportionnelle à la contrainted'écoulement σy :
τσ
= −mV
Vy.3
[4.11]
Comme le coefficient de Coulomb µ, le coefficient de Tresca m inclut tous lesparamètres locaux.
III.1.3. Coulomb-Orowan
Pour prendre en compte la limite physique de la contrainte de cisaillement del'interface entre le lopin et les outils, le modèle de Coulomb-Orowan reprend le modèle deCoulomb présenté ci-dessus et borne la contrainte tangentielle :
−=
V
Vm
V
VMin y
n .3
. ,..σ
σµτ [4.12]
III.1.4. Modèle de la vague plastique
Les modèles présentés ci-dessus n'incluent ni la variation de la surface réelle decontact quand la pression augmente, ni la rugosité des pièces en contact. Suite à ses travaux derecherche, BAILLET [BAI 94] a proposé un modèle microscopique "le modèle de la vagueplastique" plus complexe, qui tient compte de ces phénomènes. Les équations du modèle sontintégrées par la méthode de la borne supérieure à par la théorie des lignes de glissement. Lemodèle de la vague plastique est étendu à un modèle de lubrification mixte qui tient comptede la contribution hydrostatique du fluide emprisonné entre la vague plastique du lopin etl'aspérité de l'outil.
III.2. Introduction du frottement dans l'algorithme implicite
III.2.1 Modification de la matrice de raideur et du second membre
Pour les noeuds auxquels on veut imposer des conditions de frottement, le secondmembre dans le système discrétisé établi au chapitre 1 s'écrit:
{ } { }dsNd
dF
s r
rfrott
frott ...∫ ∆∆∆−=∆ τ [4.13]

Chapitre 4 : Contact et frottement___________________________________________________________________________
125
où :
∆dr est le déplacement tangentiel relatif outil-lopin du noeud soumis à des conditionsde frottement∆τfrott est la variation de la contrainte tangentielle de frottement calculée à partir deslois de frottement{ }N
sont les fonctions d'interpolation
Comme le déplacement du lopin peut être décomposé à partir de la somme dudéplacement relatif outil-lopin et du déplacement de l'outil :
∆ ∆ ∆d d dr = − 0 [4.14]
On peut aussi écrire :
{ } { } { }dsNd
ddsN
d
dF
s rfrott
s rfrott
frott ...... 0∫∫ ∆∆
∆+∆∆∆−=∆ ττ [4.15]
Le champ de déplacement ∆d qui intervient dans l'équation est discrétisé avec lesfonctions d'interpolation { }N .
{ } [ ]{ } { }frottfrottfrott fdKF 0. ∆+∆=∆ [4.16]
avec K frott la raideur de frottement exprimée par :
[ ] { }{ } dsNNd
K T
s rfrott
frott ...1
.∫ ∆∆−= τ [4.17]
et { } { }dsNd
df
s rfrott
frott ... 00 ∫ ∆
∆∆=∆ τ [4.18]
Le premier terme de l'équation du second membre [4.16] est introduit au premiermembre de l'équation d'équilibre et la contribution de la raideur de frottement est ajoutée à lamatrice de raideur globale.
La nouvelle matrice à inverser prend alors la forme :
K K Kt
Mt
Cfrott* = − + +12∆ ∆β
γβ
[4.19]
Chapitre 4 : Contact et frottement___________________________________________________________________________
126
Pour que la matrice K* reste constante pendant tout l'incrément de calcul, il faut
introduire le déplacement relatif ∆dr de façon explicite. Il sera estimé à partir du champ dedéplacements de l'incrément précédent et corrigé au second membre au cours du procédéitératif exposé ci-dessous.
III.2.2 Correction
III.2.2.1 Ecriture incrémentale
Sur un pas de temps, la différence entre la force de frottement à appliquer { }réellefrottF∆ et
la force de frottement qui a été imposée { }estiméefrottF∆ peut s'écrire :
{ } { } { }estiméefrott
réellefrott
corrfrott FFF ∆−∆=∆ [4.20]
avec :
{ } { }{ } { }dsNd
ddsNN
d
dF
sréelr
frottT
sréelr
frottréellefrott ....... 0∫∫ ∆
∆∆+
∆
∆∆−=∆ ττ [4.21]
{ } { }{ } { }dsNd
ddsNN
d
dF
sestimér
frottT
sestimér
frottestiméefrott ....... 0∫∫ ∆
∆∆+
∆
∆∆−=∆ ττ [4.22]
où :
∆drréel est la valeur absolue du déplacement relatif réel obtenu pendant l'incrément
∆drestimé est la valeur absolue du déplacement relatif de l'incrément précédent
On obtient :
{ } { }{ } { }
∆∆
∆+∆
∆∆−
∆
∆−∆=∆ ∫∫ dsN
d
ddsNN
d
d
d
ddF
sestimér
frottT
sestimér
frottréelr
réelr
estimércorr
frott ....... 0ττ
[4.23]
ou encore :
{ } [ ]{ } { }( )frottfrott
réelr
réelr
estimércorr
frott fdKd
ddF 0∆+∆
∆
∆−∆=∆
[4.24]

Chapitre 4 : Contact et frottement___________________________________________________________________________
127
La nouvelle équation d'équilibre s'écrit alors :
[ ]{ } { } { }corrfrott
frott FfdK ∆+∆=∆ 0* [4.25]
III.2.2.2 Procédé itératif
Si on décompose le déplacement incrémental { }d∆ et la force incrémentale { }corrfrottF∆
en respectivement une somme de déplacements itératifs et une somme de forces itératives :
{ }
=∆ ∑
=
n
iidd
1
δ [4.26]
{ } ( )
=∆ ∑
=
n
i
corrfrott
corrfrott iFF
1
δ [4.27]
on obtient :
[ ] { } ( )
+∆=
∑∑
==
n
i
corrfrott
frottn
ii iFfdK
10
1
* δδ [4.28]
La force de frottement relative { }frottf0∆ est introduite entièrement à la première
itération. La correction ne peut pas être estimée à l'itération 1, mais est ajoutée au cours desitérations suivantes.
A la première itération de chaque incrément, on a uniquement :
[ ]{ } { }frottfdK 01* ∆=δ [4.29]
L'expression de l'équation d'équilibre aux itérations (k-1) et (k) permet d'isoler lacontribution d'une itération.
A l'itération (k-1) :
[ ] { } ( )
+∆=
∑∑
−
=
−
=
1
10
1
1
*k
i
corrfrott
frottk
ii iFfdK δδ [4.30]
A l'itération (k) :
[ ] { } ( )
+∆=
∑∑
==
k
i
corrfrott
frottk
ii iFfdK
10
1
* δδ [4.31]

Chapitre 4 : Contact et frottement___________________________________________________________________________
128
d'où le processus itératif pour i>1 :
[ ]{ } ( )
( )[ ]{ } { }( )
( )
( )[ ]{ } { }( )frott
ifrott
réelir
réelir
estimér
frotti
frott
réelir
réelir
estimér
i
fdKd
dd
fdKd
dddK
02
2
2
01
1
1*
∆−∆
∆
∆−∆−
∆−∆
∆
∆−∆=
−−
−
−−
−δ
[4.32]
III.2.3 Gestion de l'adhérence
Si à l'instant t le déplacement relatif du lopin par rapport à l'outil ∆dr est nul l'équation
[4.13] est indéterminée. Pour y remédier, on introduit la variable notée Elslip tel que :
si d Elslip alors d Elslipr r ∆ ∆≤ = [4.33]
Le coefficient Elslip doit être faible pour ne pas systématiquement sous estimer laraideur et la force de frottement, mais de trop petites valeurs peuvent entraîner des problèmesde convergence. En pratique on choisira le coefficient à partir du déplacement incrémental del'outil :
10 106 3− −≤ ≤. .∆ ∆d Elslip doutil outil [4.34]
La gestion de l'adhérence à partir d'un algorithme implicite reste toutefois délicate,surtout pour une loi de type Tresca. Si le matériau a un comportement élastique parfaitementplastique, la force de frottement sera imposée en totalité pendant un incrément. Si pendant cemême incrément, le déplacement relatif est borné à la valeur Elslip, les contraintestangentielles issues des conditions de frottement risquent d'être sous-estimées. Aussi, pouravoir une assez bonne maîtrise du frottement au cours de la simulation, la variation decontrainte ∆τ est calculée comme suit :
∆τ τ σ= −frott t [4.35]
où :τfrott est la contrainte tangentielle de frottement estimée à partir des lois de frottementσt est la contrainte tangentielle obtenue à la fin de l'incrément précédent à partird'une extrapolation du tenseur des contraintes aux noeuds par une méthode de Odenet Brauchli [ODE 71].
III.3. Introduction du frottement dans l'algorithme explicite

Chapitre 4 : Contact et frottement___________________________________________________________________________
129
La gestion du frottement est traitée indépendamment pour chaque noeud en contact.Elle intervient dans l'équation d'équilibre sous la forme d'une force extérieure qui est calculéeen deux temps, en début d'incrément.
Dans la première étape (Figure 4.9), on suppose que tous les points sont en adhérence,ainsi, leur déplacement incrémental tangentiel est nul et leur déplacement incrémental normalégal à celui de l'outil. Connaissant les déplacements, on réactualise les vitesses et lesaccélérations. L'équation d'équilibre permet d'estimer les forces extérieures compatibles avecce champ de déplacements.
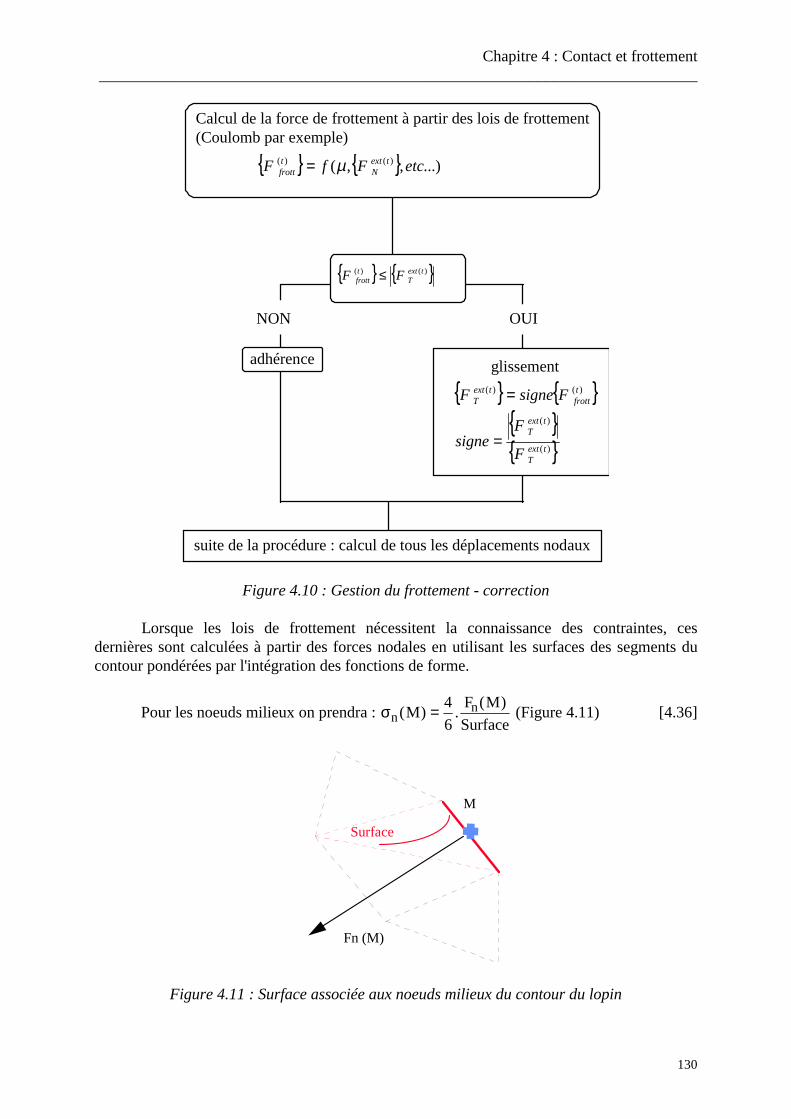
La seconde phase (Figure 4.10) vérifie si l'hypothèse d'adhérence est correcte pourchacun des noeuds. Les forces de frottement à appliquer sont calculées, en tenant compte desnon-linéarités éventuelles, et comparées aux forces extérieures tangentielles calculées pendantla première étape pour un glissement nul. Si la force extérieure tangentielle, obtenue avecl'hypothèse d'adhérence, est supérieure à la force de frottement, c'est que le noeud glisse. Ilfaut alors la borner à la force de frottement. Si la force extérieure tangentielle, obtenue avecl'hypothèse d'adhérence, est inférieure à la force de frottement, c'est que le noeud ne bougepas.
Estimation des déplacements normaux et tangentiels incrémentaux
Cumul des déplacements normaux et tangentiels
Calcul des forces extérieures à partir de l'équation d'équilibre
Réactualisation des vitesses et des accélérations
}{ }{}{ }{0=∆
∆=∆
T
outilNN
u
Vtu
}{ }{ }{}{ }{ t
Ttt
T
tNN
ttN
uu
uuu
=
+∆=∆+
∆+
} }{ }{ } }{ }{
} }{ }{ }{ } }{ }{ }{ )2(1
),2(1
)(2
1),(
2
1
2
..
2
..
..
ttT
tT
ttT
tT
ttN
tN
ttN
tN
ttT
ttT
tN
ttN
ttN
tN
dddt
ddddt
d
ddt
dddt
d
∆+∆+∆+∆+
∆−∆+∆−∆+
+−∆
=+−
∆=
−∆
=−
∆=
}{ }{ } }
}{ }{ } }tT
tT
tT
textT
tN
tN
tN
textN
dCdMFF
dCdMFF
+
+=
+
+=
...)int()(
...)int()(
][][
][][
Figure 4.9 : Gestion du frottement - prédiction
Chapitre 4 : Contact et frottement___________________________________________________________________________
130
Calcul de la force de frottement à partir des lois de frottement(Coulomb par exemple)
glissement
suite de la procédure : calcul de tous les déplacements nodaux
NON OUI
adhérence
}{ }{ ...),,( )()( etcFfF textN
tfrott µ=
}{ }{ )()( textT
tfrott FF ≤
}{ }{}{}{ )(
)(
)()(
textT
textT
tfrott
textT
F
Fsigne
FsigneF
=
=
Figure 4.10 : Gestion du frottement - correction
Lorsque les lois de frottement nécessitent la connaissance des contraintes, cesdernières sont calculées à partir des forces nodales en utilisant les surfaces des segments ducontour pondérées par l'intégration des fonctions de forme.
Pour les noeuds milieux on prendra : σnnM
F M
Surface( ) .
( )= 4
6 (Figure 4.11) [4.36]
M
Surface
Fn (M)
Figure 4.11 : Surface associée aux noeuds milieux du contour du lopin
Chapitre 4 : Contact et frottement___________________________________________________________________________
131
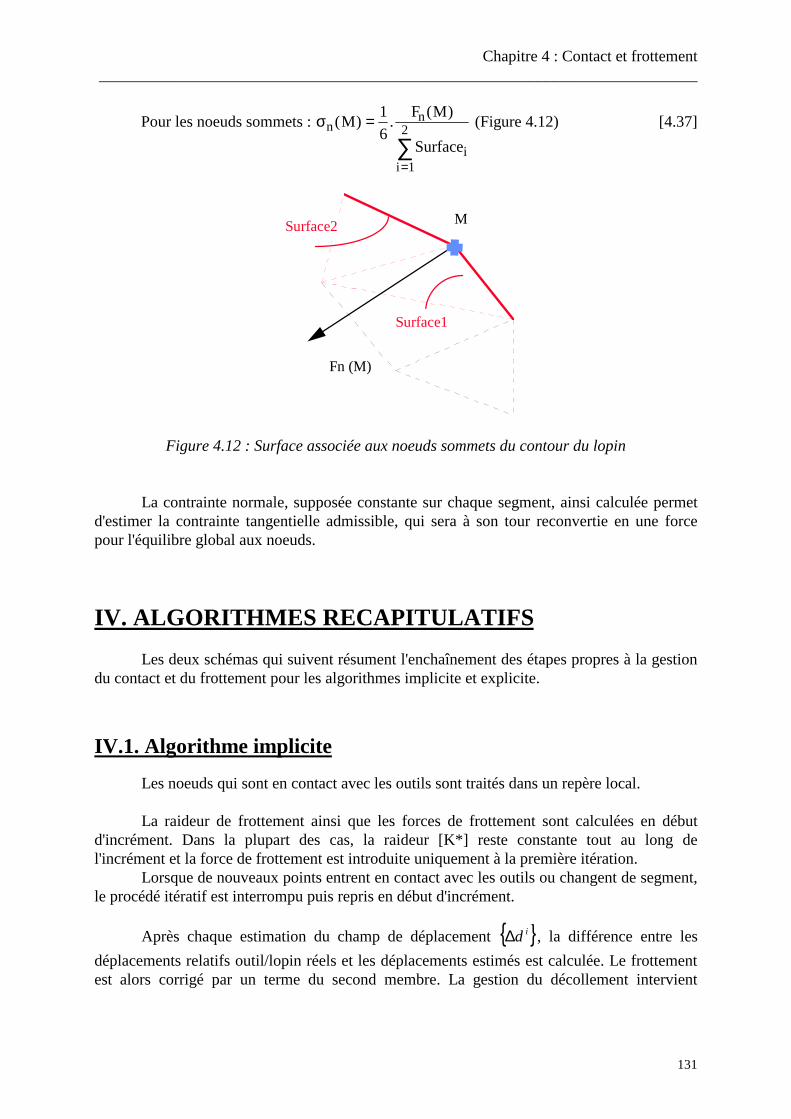
Pour les noeuds sommets : σnn
ii
MF M
Surface
( ) .( )=
=∑
1
6
1
2
(Figure 4.12) [4.37]
M
Surface1
Fn (M)
Surface2
Figure 4.12 : Surface associée aux noeuds sommets du contour du lopin
La contrainte normale, supposée constante sur chaque segment, ainsi calculée permetd'estimer la contrainte tangentielle admissible, qui sera à son tour reconvertie en une forcepour l'équilibre global aux noeuds.
IV. ALGORITHMES RECAPITULATIFS
Les deux schémas qui suivent résument l'enchaînement des étapes propres à la gestiondu contact et du frottement pour les algorithmes implicite et explicite.
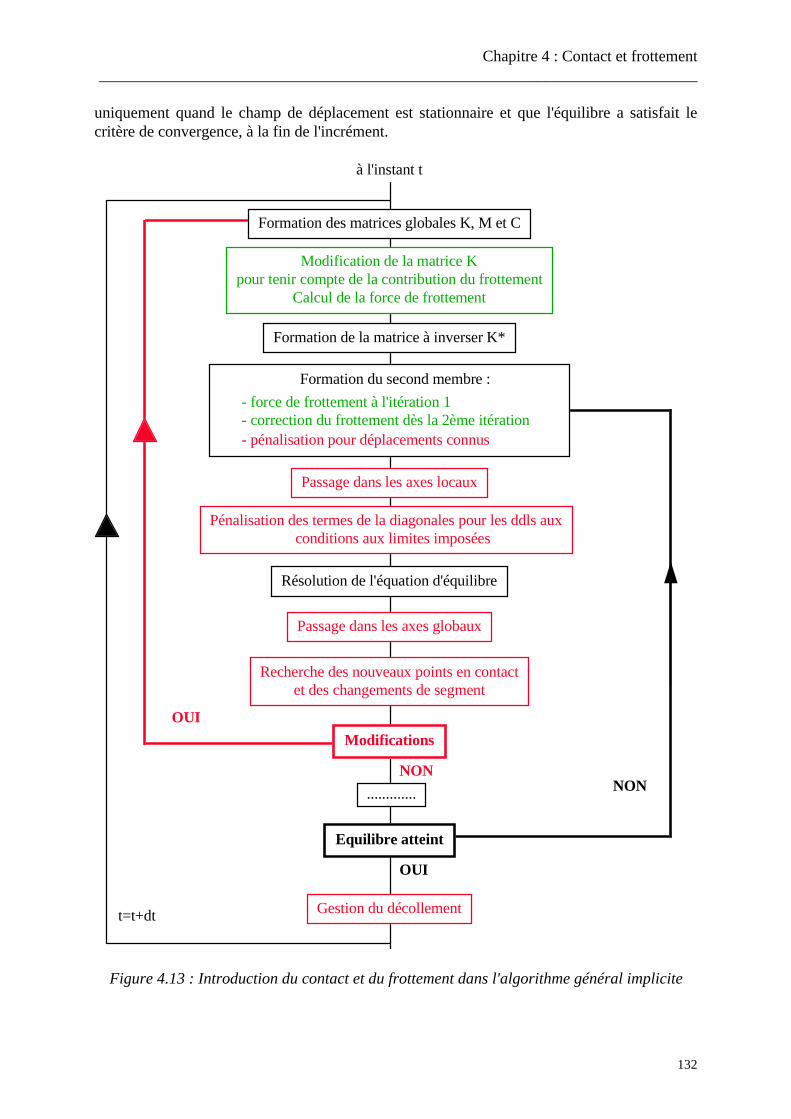
IV.1. Algorithme implicite
Les noeuds qui sont en contact avec les outils sont traités dans un repère local.
La raideur de frottement ainsi que les forces de frottement sont calculées en débutd'incrément. Dans la plupart des cas, la raideur [K*] reste constante tout au long del'incrément et la force de frottement est introduite uniquement à la première itération.
Lorsque de nouveaux points entrent en contact avec les outils ou changent de segment,le procédé itératif est interrompu puis repris en début d'incrément.
Après chaque estimation du champ de déplacement { }id∆ , la différence entre les
déplacements relatifs outil/lopin réels et les déplacements estimés est calculée. Le frottementest alors corrigé par un terme du second membre. La gestion du décollement intervient
Chapitre 4 : Contact et frottement___________________________________________________________________________
132
uniquement quand le champ de déplacement est stationnaire et que l'équilibre a satisfait lecritère de convergence, à la fin de l'incrément.
à l'instant t
Formation des matrices globales K, M et C
Formation de la matrice à inverser K*
Formation du second membre :
- force de frottement à l'itération 1- correction du frottement dès la 2ème itération- pénalisation pour déplacements connus
Passage dans les axes locaux
Résolution de l'équation d'équilibre
Passage dans les axes globaux
Recherche des nouveaux points en contactet des changements de segment
Modifications
Gestion du décollement
OUI
NON
OUI
NON.............
t=t+dt
Modification de la matrice Kpour tenir compte de la contribution du frottement
Calcul de la force de frottement
Pénalisation des termes de la diagonales pour les ddls auxconditions aux limites imposées
Equilibre atteint
Figure 4.13 : Introduction du contact et du frottement dans l'algorithme général implicite
Chapitre 4 : Contact et frottement___________________________________________________________________________
133
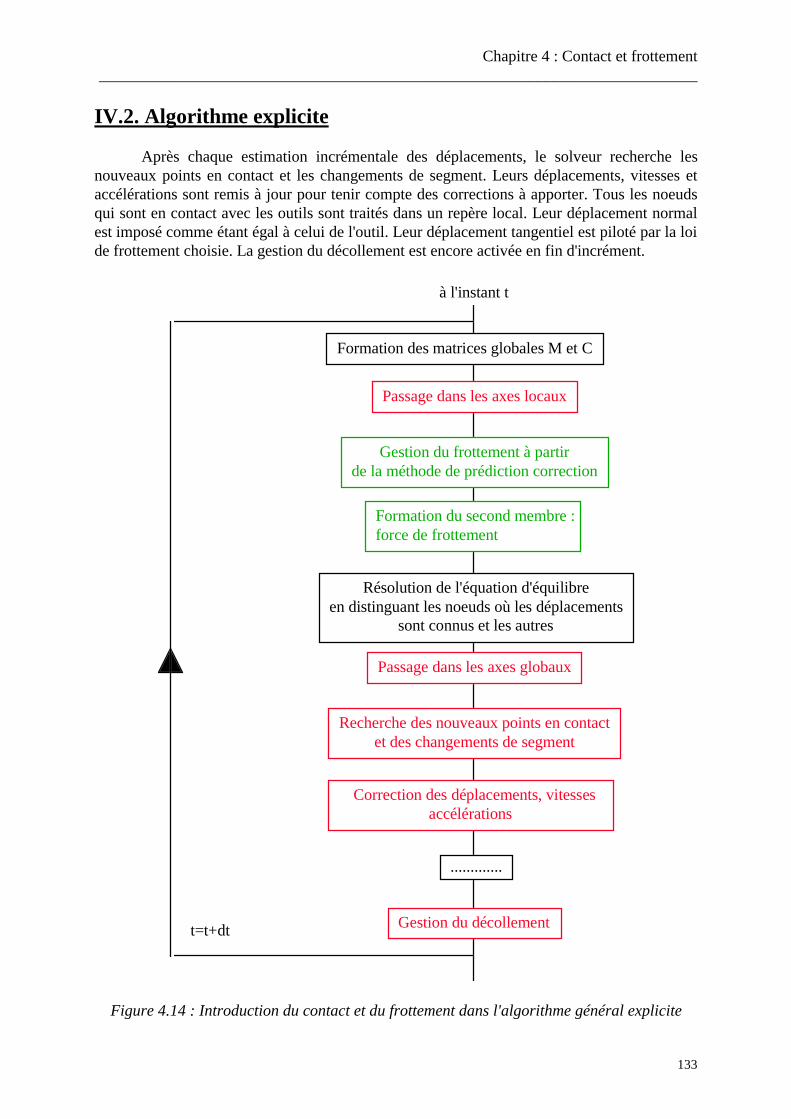
IV.2. Algorithme explicite
Après chaque estimation incrémentale des déplacements, le solveur recherche lesnouveaux points en contact et les changements de segment. Leurs déplacements, vitesses etaccélérations sont remis à jour pour tenir compte des corrections à apporter. Tous les noeudsqui sont en contact avec les outils sont traités dans un repère local. Leur déplacement normalest imposé comme étant égal à celui de l'outil. Leur déplacement tangentiel est piloté par la loide frottement choisie. La gestion du décollement est encore activée en fin d'incrément.
à l'instant t
Formation des matrices globales M et C
Passage dans les axes locaux
Résolution de l'équation d'équilibreen distinguant les noeuds où les déplacements
sont connus et les autres
Passage dans les axes globaux
Recherche des nouveaux points en contactet des changements de segment
Gestion du décollement
.............
t=t+dt
Gestion du frottement à partirde la méthode de prédiction correction
Formation du second membre :force de frottement
Correction des déplacements, vitessesaccélérations
Figure 4.14 : Introduction du contact et du frottement dans l'algorithme général explicite

Chapitre 4 : Contact et frottement___________________________________________________________________________
134
V. EXEMPLES
V.1. Test de l'anneau
Le test de l'anneau est un des tests les plus utilisés pour identifier le coefficient defrottement du modèle de Tresca. Il consiste à corréler le coefficient de frottementexpérimental à partir d'un abaque obtenu par simulation numérique de l'essai.
Pour un frottement nul l'anneau est soumis à un état de compression simple, et lesdéformations sont uniformes dans le lopin. Dès que le coefficient de frottement augmente, unbombé apparait sur les génératrices.
La géométrie de l'anneau est standardisée en imposant les rapports entre le diamètre
interne φint, le diamètre externe φext et la hauteur H : φφ
φext ext
Hint
= =2 3 et . Cependant, les
résultats restent sensibles aux effets de taille.
Les dimensions retenues pour cette exemple sont : φext=90 mm, φint=45 mm et H=30 mm.
L'anneau est en aluminium et la loi utilisée est élasto-plastique avec un écrouissage linéaire :
σ ε
ν
ρ
y MPa
E MPa
kg m
( ) .
.
/
= +
==
=
100 2 5
0 3
70 000
2 700 3
où ε est la déformation plastique équivalente
La vitesse de l'outil a progressivement été amenée à 1 m/s.
La Figure 4.15 représente, pour une course d'outil donnée, l’évolution desdéplacements radiaux pour différentes valeurs du coefficient de Tresca. Pour la simulationexplicite comme pour la simulation implicite, les déplacements radiaux diminuent quand lecoefficient de Tresca augmente et le bombé est de plus en plus marqué. Les déplacementsobtenus avec la méthode explicite sont systématiquement plus faibles que ceux obtenus avecla méthode implicite.

Chapitre 4 : Contact et frottement___________________________________________________________________________
135
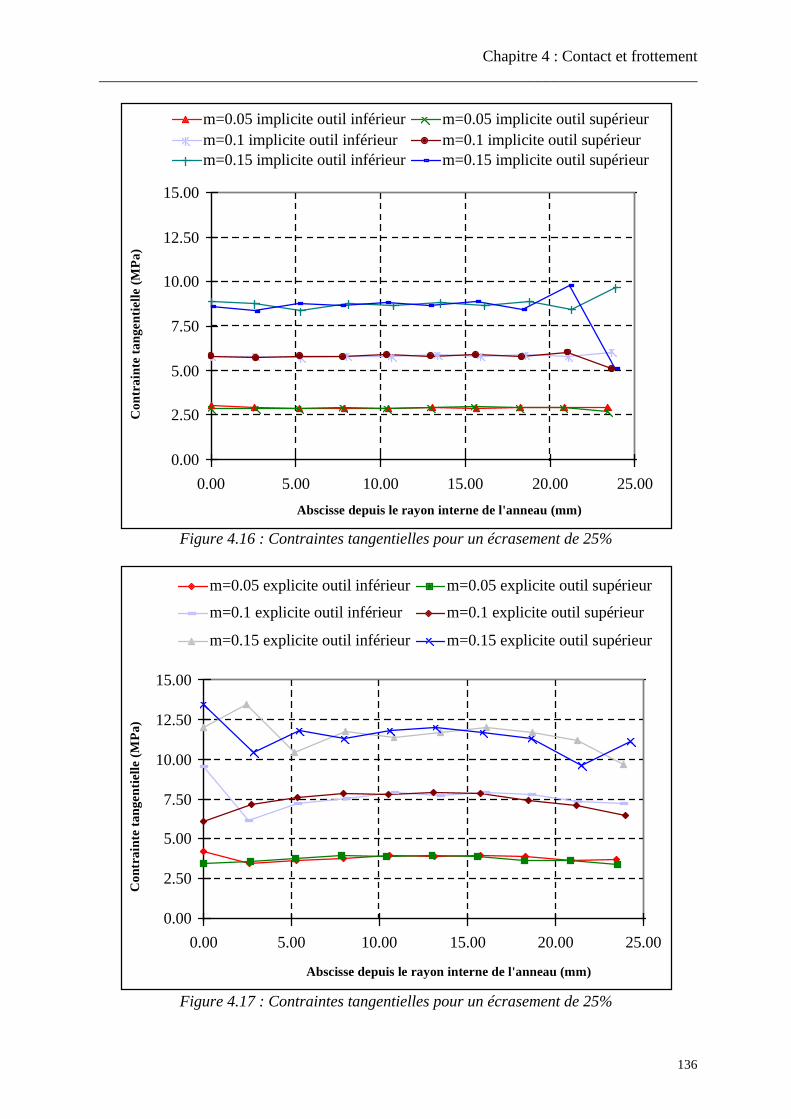
L'observation des contraintes tangentielles (Figure 4.16 et Figure 4.17) le long del'interface lopin-outil, montre que les efforts de frottement appliqués dans le cas de la méthodeexplicite sont systématiquement surestimés. L'écrouissage du matériau est négligeable, ainsi lacontrainte de frottement imposée lors de la simulation est 3, 6 et 9 MPa, pour respectivementun coefficient de Tresca de 0.05, 0.1 et 0.15. Ces valeurs correspondent exactement auxcontraintes tangentielles des noeuds en contact avec les outils dans le cas d'une méthodeimplicite (Figure 4.16). La correction itérative du déplacement tangentiel permet un boncontrôle du frottement. Pour la méthode explicite, l'absence de correction au cours d'unincrément, conduit à des contraintes tangentielles moins précises. La différence entre lacontrainte tangentielle obtenue et la contrainte de frottement désirée atteint 10 % pourm=0.15.
EXPLICITE IMPLICITE
4.9
4.2
3.5
2.8
2.1
1.4
0.7
5.6
Ur (mm)
m=0.05
m=0.15
m=0.1
Figure 4.15 : Déplacements radiaux (mm) pour un écrasement de 25%pour différentes valeurs du coefficient de Tresca
Chapitre 4 : Contact et frottement___________________________________________________________________________
136
0.00
2.50
5.00
7.50
10.00
12.50
15.00
0.00 5.00 10.00 15.00 20.00 25.00
Abscisse depuis le rayon interne de l'anneau (mm)
Con
trai
nte
tang
entie
lle (
MP
a)m=0.05 implicite outil inférieur m=0.05 implicite outil supérieurm=0.1 implicite outil inférieur m=0.1 implicite outil supérieurm=0.15 implicite outil inférieur m=0.15 implicite outil supérieur
Figure 4.16 : Contraintes tangentielles pour un écrasement de 25%
0.00
2.50
5.00
7.50
10.00
12.50
15.00
0.00 5.00 10.00 15.00 20.00 25.00
Abscisse depuis le rayon interne de l'anneau (mm)
Con
trai
nte
tang
entie
lle (
MP
a)
m=0.05 explicite outil inférieur m=0.05 explicite outil supérieur
m=0.1 explicite outil inférieur m=0.1 explicite outil supérieur
m=0.15 explicite outil inférieur m=0.15 explicite outil supérieur
Figure 4.17 : Contraintes tangentielles pour un écrasement de 25%
Chapitre 4 : Contact et frottement___________________________________________________________________________
137
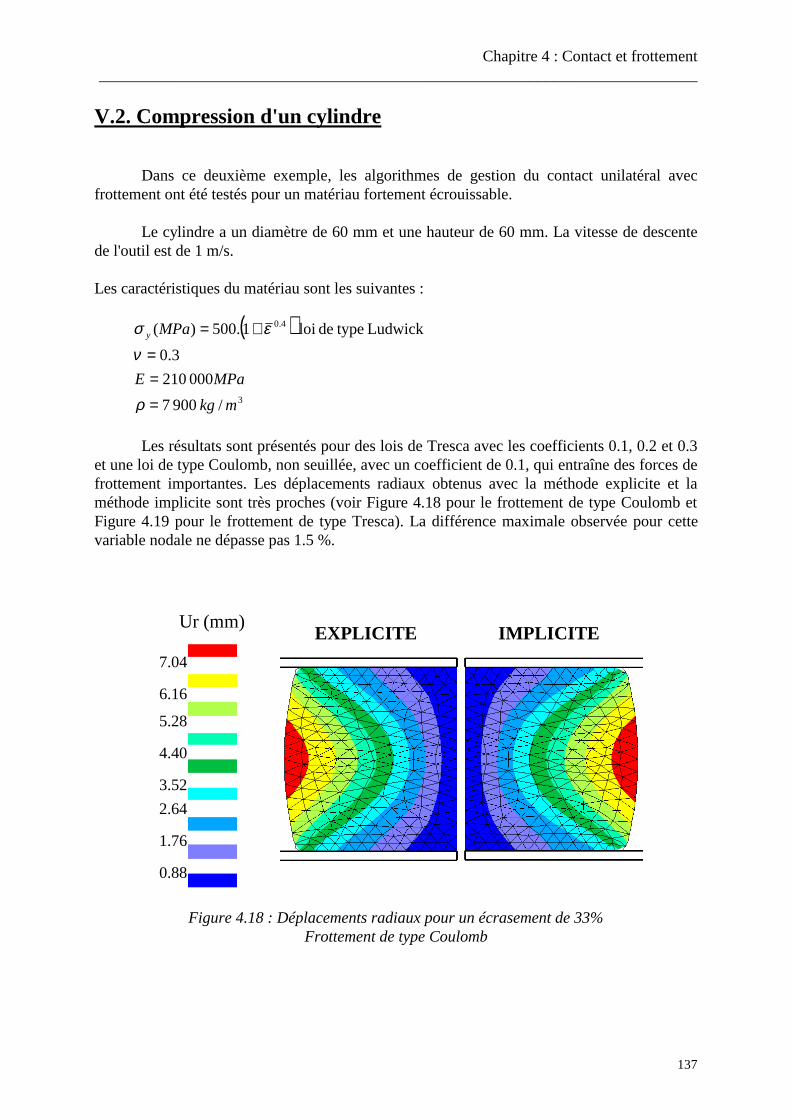
V.2. Compression d'un cylindre
Dans ce deuxième exemple, les algorithmes de gestion du contact unilatéral avecfrottement ont été testés pour un matériau fortement écrouissable.
Le cylindre a un diamètre de 60 mm et une hauteur de 60 mm. La vitesse de descentede l'outil est de 1 m/s.
Les caractéristiques du matériau sont les suivantes :
( )
3
4.0
/ 900 7
000 210
3.0
Ludwick typede loi 1.500)(
mkg
MPaE
MPay
=
==
+=
ρ
νεσ
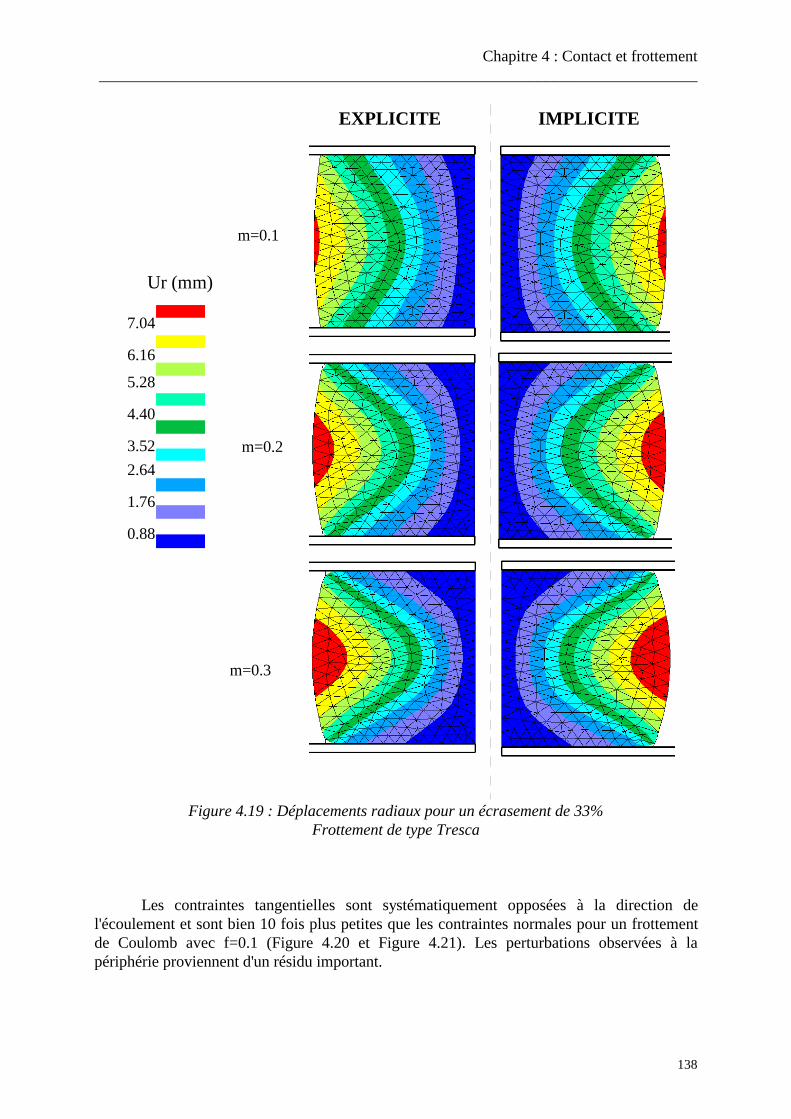
Les résultats sont présentés pour des lois de Tresca avec les coefficients 0.1, 0.2 et 0.3et une loi de type Coulomb, non seuillée, avec un coefficient de 0.1, qui entraîne des forces defrottement importantes. Les déplacements radiaux obtenus avec la méthode explicite et laméthode implicite sont très proches (voir Figure 4.18 pour le frottement de type Coulomb etFigure 4.19 pour le frottement de type Tresca). La différence maximale observée pour cettevariable nodale ne dépasse pas 1.5 %.
6.16
5.28
4.40
3.52
2.64
1.76
0.88
7.04
Ur (mm)EXPLICITE IMPLICITE
Figure 4.18 : Déplacements radiaux pour un écrasement de 33%Frottement de type Coulomb
Chapitre 4 : Contact et frottement___________________________________________________________________________
138
m=0.1
m=0.3
m=0.2
EXPLICITE IMPLICITE
6.16
5.28
4.40
3.52
2.64
1.76
0.88
7.04
Ur (mm)
Figure 4.19 : Déplacements radiaux pour un écrasement de 33%Frottement de type Tresca
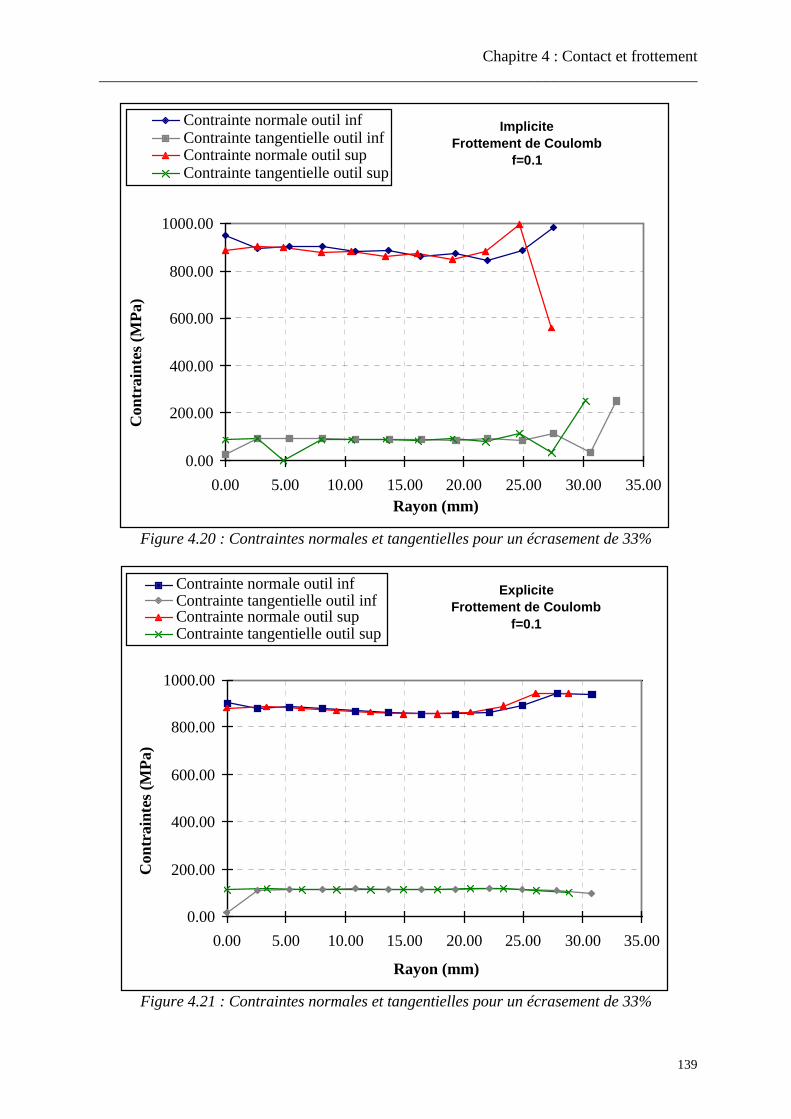
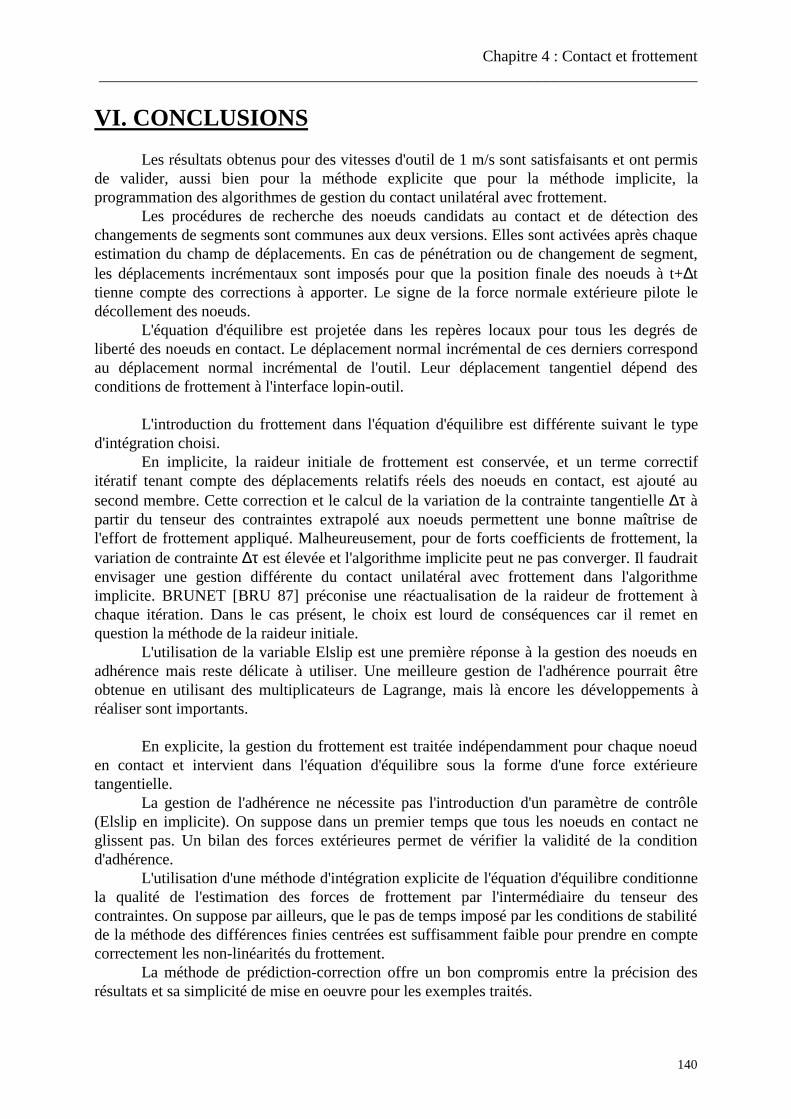
Les contraintes tangentielles sont systématiquement opposées à la direction del'écoulement et sont bien 10 fois plus petites que les contraintes normales pour un frottementde Coulomb avec f=0.1 (Figure 4.20 et Figure 4.21). Les perturbations observées à lapériphérie proviennent d'un résidu important.
Chapitre 4 : Contact et frottement___________________________________________________________________________
139
ImpliciteFrottement de Coulomb
f=0.1
0.00
200.00
400.00
600.00
800.00
1000.00
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00Rayon (mm)
Con
trai
ntes
(M
Pa)
Contrainte normale outil infContrainte tangentielle outil infContrainte normale outil supContrainte tangentielle outil sup
Figure 4.20 : Contraintes normales et tangentielles pour un écrasement de 33%
ExpliciteFrottement de Coulomb
f=0.1
0.00
200.00
400.00
600.00
800.00
1000.00
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00
Rayon (mm)
Con
trai
ntes
(M
Pa)
Contrainte normale outil infContrainte tangentielle outil infContrainte normale outil supContrainte tangentielle outil sup
Figure 4.21 : Contraintes normales et tangentielles pour un écrasement de 33%
Chapitre 4 : Contact et frottement___________________________________________________________________________
140
VI. CONCLUSIONS
Les résultats obtenus pour des vitesses d'outil de 1 m/s sont satisfaisants et ont permisde valider, aussi bien pour la méthode explicite que pour la méthode implicite, laprogrammation des algorithmes de gestion du contact unilatéral avec frottement.
Les procédures de recherche des noeuds candidats au contact et de détection deschangements de segments sont communes aux deux versions. Elles sont activées après chaqueestimation du champ de déplacements. En cas de pénétration ou de changement de segment,les déplacements incrémentaux sont imposés pour que la position finale des noeuds à t+∆ttienne compte des corrections à apporter. Le signe de la force normale extérieure pilote ledécollement des noeuds.
L'équation d'équilibre est projetée dans les repères locaux pour tous les degrés deliberté des noeuds en contact. Le déplacement normal incrémental de ces derniers correspondau déplacement normal incrémental de l'outil. Leur déplacement tangentiel dépend desconditions de frottement à l'interface lopin-outil.
L'introduction du frottement dans l'équation d'équilibre est différente suivant le typed'intégration choisi.
En implicite, la raideur initiale de frottement est conservée, et un terme correctifitératif tenant compte des déplacements relatifs réels des noeuds en contact, est ajouté ausecond membre. Cette correction et le calcul de la variation de la contrainte tangentielle ∆τ àpartir du tenseur des contraintes extrapolé aux noeuds permettent une bonne maîtrise del'effort de frottement appliqué. Malheureusement, pour de forts coefficients de frottement, lavariation de contrainte ∆τ est élevée et l'algorithme implicite peut ne pas converger. Il faudraitenvisager une gestion différente du contact unilatéral avec frottement dans l'algorithmeimplicite. BRUNET [BRU 87] préconise une réactualisation de la raideur de frottement àchaque itération. Dans le cas présent, le choix est lourd de conséquences car il remet enquestion la méthode de la raideur initiale.
L'utilisation de la variable Elslip est une première réponse à la gestion des noeuds enadhérence mais reste délicate à utiliser. Une meilleure gestion de l'adhérence pourrait êtreobtenue en utilisant des multiplicateurs de Lagrange, mais là encore les développements àréaliser sont importants.
En explicite, la gestion du frottement est traitée indépendamment pour chaque noeuden contact et intervient dans l'équation d'équilibre sous la forme d'une force extérieuretangentielle.
La gestion de l'adhérence ne nécessite pas l'introduction d'un paramètre de contrôle(Elslip en implicite). On suppose dans un premier temps que tous les noeuds en contact neglissent pas. Un bilan des forces extérieures permet de vérifier la validité de la conditiond'adhérence.
L'utilisation d'une méthode d'intégration explicite de l'équation d'équilibre conditionnela qualité de l'estimation des forces de frottement par l'intermédiaire du tenseur descontraintes. On suppose par ailleurs, que le pas de temps imposé par les conditions de stabilitéde la méthode des différences finies centrées est suffisamment faible pour prendre en comptecorrectement les non-linéarités du frottement.
La méthode de prédiction-correction offre un bon compromis entre la précision desrésultats et sa simplicité de mise en oeuvre pour les exemples traités.


















