Chapitre 2 Descriptions Mathematiques Des Systemes Physiques
8
Cours Automatique Niveau : 2 ISET NABEUL - 20 - CHELBI Hassen FICHE MATIERE Unité d’enseignement : Automatique 1 ECUE n° 1 : Signaux et Systèmes Linéaires Chapitre 2 Descriptions Mathématiques des Systèmes Physiques Nombre d’heures/chapitre : 4h Cours intégré Système d’évaluation : Continu OBJECTIFS DE L’ENSEIGNEMENT : -Connaître les notions des signaux. -Connaître les notions des systèmes et plus particulièrement les systèmes asservis : Système mono variable ou multi variable. CONTENU THEORIQUE : Dans ce chapitre on s’intéresse à la classification des systèmes qui se répartie entre système mono variable et multi variable Nous présentant la description des systèmes continus linéaires invariants (SLCI), leurs représentations, aussi que les équations différentielles et leurs résolutions tout en se basant sur la transformée de Laplace et la résolution des fonctions de Transfert d’un système de premier ordre et second ordre.
Transcript of Chapitre 2 Descriptions Mathematiques Des Systemes Physiques

7/23/2019 Chapitre 2 Descriptions Mathematiques Des Systemes Physiques
http://slidepdf.com/reader/full/chapitre-2-descriptions-mathematiques-des-systemes-physiques 1/8
Cours Automatique Niveau : 2
ISET NABEUL - 20 - CHELBI Hassen
FICHE MATIERE
Unité d’enseignement : Automatique 1
ECUE n° 1 : Signaux et Systèmes Linéaires
Chapitre 2
Descriptions Mathématiques des Systèmes Physiques
Nombre d’heures/chapitre : 4h
Cours intégré
Système d’évaluation : Continu
OBJECTIFS DE L’ENSEIGNEMENT :
-Connaître les notions des signaux.
-Connaître les notions des systèmes et plus particulièrement les systèmes asservis : Système mono
variable ou multi variable.
CONTENU THEORIQUE :
Dans ce chapitre on s’intéresse à la classification des systèmes qui se répartie entre système mono
variable et multi variable
Nous présentant la description des systèmes continus linéaires invariants (SLCI), leurs
représentations, aussi que les équations différentielles et leurs résolutions tout en se basant sur la
transformée de Laplace et la résolution des fonctions de Transfert d’un système de premier ordre et
second ordre.

7/23/2019 Chapitre 2 Descriptions Mathematiques Des Systemes Physiques
http://slidepdf.com/reader/full/chapitre-2-descriptions-mathematiques-des-systemes-physiques 2/8
Cours Automatique Niveau : 2
ISET NABEUL - 21 - CHELBI Hassen
Chapitre II
Descriptions Mathématiques des Systèmes Physiques
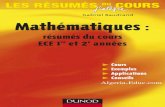
1. Classification des systèmes :
Fig. II.1 : Classifications des systèmes.
Les systèmes qui nous intéressent sont les systèmes continus linéaires invariants.
2. Description des systèmes continus linéaires invariants (SLCI) :
2.1. Définitions :
a) Système continu :
Un système est continu si les signaux d’entrées et de sorties sont des fonctions continues (Figure
II.2) :
Fig. II.2
Entrée e (t)Système
Sortie s (t)
Système
monovariable ou
multivariable
Discret
Continu
VariantInvariant
Non linéaireLinéaire

7/23/2019 Chapitre 2 Descriptions Mathematiques Des Systemes Physiques
http://slidepdf.com/reader/full/chapitre-2-descriptions-mathematiques-des-systemes-physiques 3/8
Cours Automatique Niveau : 2
ISET NABEUL - 22 - CHELBI Hassen
b) Système causal :
Un système est dit causal si le signal d’entrée est nul pour un intervalle de temps négatif.
c) Système invariant :
On dit qu’un système est invariant lorsque les caractéristiques de son comportement ne varient
pas au cours du temps (Figure II.3).
Fig. II.3
2.2. Systèmes linéaires :
* Au sens mathématique : )(t f t → )()()( 2121 t f t f t t f λ λ λ λ +=+
Linéarité mathématique :
• Principe de superposition
Fig. II.4 : Principe de superposition
• Principe de proportionnalité
Fig. II.5 : Principe de proportionnalité.
* Invariance temporelle :
)(..)( τ τ −→→− t s LS t e
)(..)( τ τ +→→+ t s LS t e
Entrée e (t-τ)Système
Sortie s (t- τ)
e2(t) S.L.s2(t)
e1(t) S.L.s1(t)
e1(t) +e2(t) S.L.
s1(t) + s2(t)
e(t)S.L.
s(t) ke(t)S.L.
ks(t)

7/23/2019 Chapitre 2 Descriptions Mathematiques Des Systemes Physiques
http://slidepdf.com/reader/full/chapitre-2-descriptions-mathematiques-des-systemes-physiques 4/8
Cours Automatique Niveau : 2
ISET NABEUL - 23 - CHELBI Hassen
* Au sens physique :
Une fonction est linéaire au sens physique si elle est linéaire au sens mathématique, plus
l’invariance temporelle.
Exemple : circuit R, L, C.
2.3. Représentation de SLCI :
On considère un système physique représenté par son schéma bloc. Ce système est linéaire
lorsqu’il est décrit par une équation différentielle à coefficients constants.
m
m
mn
n
ndt
t ed b
dt
t ed b
dt
t debt eb
dt
t sd a
dt
t sd a
dt
t dsat sa
)(...
)()()(
)(...
)()()(
2
2
2102
2
210 ++++=++++
Pour les systèmes réels il faut que m<n
Exemples
1) circuit électrique :
)()()( t st i Rt e +=
)()(
)( t sdt
t ds RC t e += : Système linéaire (S.L.)
Fig. II.6: Circuit RC
2) système mécanique
2
2
dt
xd f
dt dx M Kx F e ++= : Système linéaire (S.L.)
Fig. II.7: Système mécanique.
3) système électromécanique :
2
2
dt
d J
dt
d f C C r M
θ θ ++=
Fig. II.7: Système électromécanique.
3. Résolution des équations différentielles
Pour résoudre une équation différentielle on utilise :
M
i
u(t)
Jω Chargef
e(t)
i
i
vc(t)
R
C
MK
x

7/23/2019 Chapitre 2 Descriptions Mathematiques Des Systemes Physiques
http://slidepdf.com/reader/full/chapitre-2-descriptions-mathematiques-des-systemes-physiques 5/8
Cours Automatique Niveau : 2
ISET NABEUL - 24 - CHELBI Hassen
Méthode classique
Equation différentielle :
Equation différentielle sans second membre : réponse équation libre s1(t)
Solution particulière : réponse forcée s2(t)
s(t) = s1(t) + s2(t).
Solution homogène : On pose e(t) = 0, on pose aussi 0)( =dt
t de
Solution particulière : on pose s(t) de la même manière que e(t).
Méthode de la transformée de Laplace
Cette méthode est la plus simple et la plus utilisée.
4. Transformée de Laplace :
4.1. Définition
La transformée de Laplace de la fonction f(t) telle que f(t) = 0 pour t<0 est :
[ ] ∞
−==0
)')()( dt et f p F t f TL pt
Cette transformation permet de passer du domaine temporel au domaine de Laplace.
4.2. Propriétés et théorèmes :
Propriétés et théorèmes
Théorème de la valeur initiale )0()(lim)(lim0
+
∞→→==
+ f p pF t f
pt
Théorème de la valeur finale )()(lim)(lim0
+∞==→+∞→
f p pF t f pt
Théorème du retard temporel [ ] )()( p F et f TL pτ τ
−=−
Théorème de l’avance )()( ∞+=−∞ p F t f eTL t
Linéarité [ ] )()( 22112211 p F a p F a f a f aTL +=+
Dérivation [ ] )0(...)0()0()()( 11)2()1( +−+−+− −−−−= nnnnn f f p f p p F pt f TL
Sans conditions initiales )()( p F pt f TL nn =
L’intégration p
p F dt t f TL
t )()(
0=
Tab.2.1
Exemple : Circuit RC (voir figure 2.6)
)()()( t st i Rt e +=

7/23/2019 Chapitre 2 Descriptions Mathematiques Des Systemes Physiques
http://slidepdf.com/reader/full/chapitre-2-descriptions-mathematiques-des-systemes-physiques 6/8
Cours Automatique Niveau : 2
ISET NABEUL - 25 - CHELBI Hassen
)()(
)( t sdt
t dsC Rt e +=
)()()( pS pS p RC p E +=
)()1()( pS p RC p E +=
Application :
Donner :
- équation différentielle,
- entrée temporelle,
- condition initiale nulle
* Objectif :
Recherche de la réponse temporelle du système.
* Démarche :
- calcul de la fonction de transfert H(p)
-
calcul de l’entrée dans le domaine de Laplace E(p)
- calcul de la sortie dans le domaine de Laplace Y(p)
- calcul de la sortie temporelle en appliquant la transformée de Laplace inverse y(t)
5. Fonction de Transfert
5.1. Définition
Soit le système décrit par l’équation différentielle suivante :
Fig.2.9
)()()(
...)(
)()()(
...)(
012
2
2012
2
2 t ebdt
t deb
dt
t ed b
dt
t sd bt sa
dt
t dsa
dt
t sd a
dt
t sd a
m
m
mn
n
n ++++=++++
La transformée de Laplace (si les conditions initiales sont nulles)
)()()(...)()()()(...)( 012
2012
2 p E b p pE b p E pb p E pb pS a p pS a pS pa pS pa mm
nn ++++=++++
)()...()()...( 01
2
201
2
2 p E b pb pb pb pS a pa pa pa m
m
n
n ++++=++++
)(...
...
)(
)(
01
2
2
01
2
2 p H a pa pa pa
b pb pb pb
p E
pS n
n
m
m =++++
++++=
L’équation de transfert est dite aussi équation d’isomorphe qui est définit par le quotient des grandeurs
de sortie et d’entrée :
Entrée e(t)Système
Sortie s(t)

7/23/2019 Chapitre 2 Descriptions Mathematiques Des Systemes Physiques
http://slidepdf.com/reader/full/chapitre-2-descriptions-mathematiques-des-systemes-physiques 7/8
Cours Automatique Niveau : 2
ISET NABEUL - 26 - CHELBI Hassen
01
2
2
01
2
2
...
...
)(
)()(
a pa pa pa
b pb pb pb
p D
p N p H
n
n
m
m
++++
++++==
Remarque : La fonction de transfert caractérise la dynamique du système. Dans un système physique
réel le degré de D(p), n, est supérieur au degré de N(p), m.
5.2. Equation caractéristique :
01
2
2...)( a pa pa pa p D n
n ++++=
Les solutions de l’équation caractéristique D(p) = 0 sont appelées les racines ou les pôles du
système.
Les solutions de l’équation N(p) = 0 sont appelées les zéros du système.
* 0)( = p D ⇔ 0... 01
2
2 =++++ a pa pa pa n
n
⇔ 0))...()(( 01 =−−− −
p p p p p p nn
⇔ 0)(0
=−∏=
n
i
i p p
* 0)( = p N ⇔ 0... 01
2
2 =++++ b pb pb pb m
m
⇔ 0))...()(( 01 =−−− −
z p z p z p mm
⇔ 0)(0
=−∏=
m
j
j z p
∏
∏
=
=
−
=−
=n
i
i
m
j
j
p p
z p
p H
0
0
)(
0)(
)(
∏
∏
=
=
−
−
=n
i
i
m
j
j
p p
z p
p E
pS
0
0
)(
)(
)(
)( )(
)(
)(
)(
0
0 p E
p p
z p
pS n
i
i
m
j
j
∏
∏
=
=
−
−
=
Remarques
Les « pi » peuvent être des réels ou des complexes ;
Si les « pi » sont réels différents =
=n
i
t p
iieC t s
0
)( =
=n
i
t p
iieC iml t s
0
)(lim
• Si les pi <0 s(t) 0 si t +∞ : système stable.
• Si les pi >0 s(t) +∞ si t +∞ : système instable.
5.3. Théorème
Un système est dit stable si les parties réelles de ces pôles sont à partie réelle négatives.

7/23/2019 Chapitre 2 Descriptions Mathematiques Des Systemes Physiques
http://slidepdf.com/reader/full/chapitre-2-descriptions-mathematiques-des-systemes-physiques 8/8
Cours Automatique Niveau : 2
ISET NABEUL - 27 - CHELBI Hassen
5.4. Equation caractéristique d’un système de premier ordre :
Un système est dit de 1er
ordre s’il est décrit par une équation différentielle de type :
)()( t ket ydt
dy=+τ )()()( pkE pY p pY =+τ
p
k
p E
pY p H
τ +==
1)(
)()(
K : gain statique
τ: constante du temps.
5.5. Equation caractéristique d’un système de second ordre :
Un système est dit de second ordre s’il est décrit par une équation différentielle de second ordre.
)()(
)(
2
)( 2
0
2
002
2
t ek t sdt
t ds
mdt
t sd
ω ω ω =++
k : gain statique )(/)( ∞∞= e sk
m : coefficient d’amortissement
0ω : pulsation propre (naturelle).
)(E)()( p2)( p 2
0
2
00
2 pk pS pS m pS ω ω ω =++ 2
00
2
2
0
2)(
)(
ω pmω p
k ω H(p)
p E
pS
++==
p2 p
H(p)2
00
2
2
0
ω ω
ω
++=
m
k