Chapitre 1
11
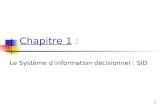
Chapitre 1 : Généralité sur les moteurs pas-à-pas. 3 1.Introduction : Un moteur pas à pas permet de transformer une impulsion électrique en un mouvement angulaire. Les moteurs pas à pas doivent leur nom à leur aptitude à assurer un déplacemen t mécanique composé d'incré ments unitaire appelés pas. Ainsi, dans ce t ype de moteur, l'application d'une ou plusieurs impulsions de commande provoque le déplacement d'un nombre équivalent de pas. De même, l'application d’impulsions de commande à fréquence fixe provoque le déplacement du moteur à une vitesse de rotation pratiquement constante. Le caractère synchrone du moteur pas à pas permet, par le contrôle de la position ou de la vitesse , de garantir la conversion d'informations numériques en un déplacement incrémental sans nécessiter pour autant un capteur de position. On trouve trois types de moteurs pas à pas : le moteur à réluctance variable ; le moteur à aimants permanents ; le moteur hybride, qui est une combinaison des deux technologies précédentes . 2. Historique : Le moteur pas à pas fut inventé par Marius Lavet en 1936 pour l'industrie horlogère. 3.Les différents type de moteur pas-a-pas : A. Moteur à réluctance variable : Un moteur pas à pas à réluctance variable comporte un rotor à encoches non aimanté se positionnant dans la direction de la plus faible rélucta nce. Le fonctionn ement du moteu r est assuré par un pilotage du type unipolaire et l'avance du rotor est obtenue en excitant tour à tour une paire de pôles du stator. A.1 Composition d’un moteur pas à pas à réluctance variable : Composition d'un moteur pas à pas à réluctance variable Un moteur pas à pas à réluctance variable est composé d’un rotor feuilleté en fer doux comportant un certain nombre de dents, et d’un stator également en fer doux feuilleté comportant un certain nombre de bobines. Le nombre de bobines doit être différent du nombre de paires de dents du rotor. L’alimentation de chacune des bobines va permettre la
-
Upload
mika-badjio -
Category
Documents
-
view
50 -
download
0
Transcript of Chapitre 1

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 1/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
3
1.Introduction :
Un moteur pas à pas permet de transformer une impulsion électrique en un mouvementangulaire. Les moteurs pas à pas doivent leur nom à leur aptitude à assurer un déplacementmécanique composé d'incréments unitaire appelés pas. Ainsi, dans ce type de moteur,
l'application d'une ou plusieurs impulsions de commande provoque le déplacement d'unnombre équivalent de pas. De même, l'application d’impulsions de commande à fréquencefixe provoque le déplacement du moteur à une vitesse de rotation pratiquement constante. Lecaractère synchrone du moteur pas à pas permet, par le contrôle de la position ou de la vitesse , de garantir la conversion d'informations numériques en un déplacement incrémental sansnécessiter pour autant un capteur de position. On trouve trois types de moteurs pas à pas :
le moteur à réluctance variable ; le moteur à aimants permanents ; le moteur hybride, qui est une combinaison des deux technologies précédentes.
2. Historique :
Le moteur pas à pas fut inventé par Marius Lavet en 1936 pour l'industrie horlogère.
3.Les différents type de moteur pas-a-pas :
A. Moteur à réluctance variable :
Un moteur pas à pas à réluctance variable comporte un rotor à encoches non aimanté sepositionnant dans la direction de la plus faible réluctance. Le fonctionnement du moteur estassuré par un pilotage du type unipolaire et l'avance du rotor est obtenue en excitant tour àtour une paire de pôles du stator.
A.1 Composition d’un moteur pas à pas à réluctance variable :
Composition d'un moteur pas à pas à réluctance variable
Un moteur pas à pas à réluctance variable est composé d’un rotor feuilleté en fer doux
comportant un certain nombre de dents, et d’un stator également en fer doux feuilleté
comportant un certain nombre de bobines. Le nombre de bobines doit être différent dunombre de paires de dents du rotor. L’alimentation de chacune des bobines va permettre la

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 2/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
4
création d’un champ magnétique dans le stator, et le rotor s’oriente suivant les lignes de
champ. On peut noter que lorsque le moteur n’est pas alimenté, comme il n’y a pas d’aimant
permanent, le rotor peut prendre n’importe quelle position : un moteur pas à pas à réluctance
variable n’a pas de couple résiduel ou couple de détente.
A.2 Les modes de commande d’un moteur pas à pas à réluctance variable :
A.2.1. Fonctionnement à pas complet :
Comme pour le moteur pas à pas à aimant permanent, on alimente successivement lesdifférentes bobines. Par contre, ici le sens d’alimentation n’a pas d’importance car le rotor
n’est pas polarisé. Le rotor va prendre une position telle qu’une des paires de dents soit
alignée avec la bobine alimentée.
A.2.2. Fonctionnement avec couple maximal :
De même, on peut utiliser un moteur pas à pas à réluctance variable en mode « High torque »en alimentant 2 bobines. Le rotor prendra donc les positions intermédiaires, et comme pour lemoteur à aimant permanent, le couple sera plus élevé dans ce mode que dans le modeprécédent
A.2.3. Fonctionnement à demi-pas :
En combinant les deux modes précédents, on obtient un fonctionnement en 24 pas, et doncune résolution de 15°. Le fonctionnement est illustré par l’animation ci-contre. Globalementle nombre de pas (en fonctionnement pas entier) d’un moteur pas à pas à réluctance variable
est donné par la formule suivante :
avec
Np nombre de pas
Ns nombre de dents du stator
Nr nombre de dents
B. Moteur à aimants permanents :
Les moteurs à aimants permanents sont semblables aux moteurs à réluctance variable, sauf que le rotor possède des pôles NORD et SUD. À cause des aimants permanents, le rotor restefreiné à sa dernière position lorsque le bloc d'alimentation cesse de fournir des impulsions.
Une façon simple de voir le système, est de placer une boussole entre deux aimants. Suivantla bobine qui est alimentée et le sens du courant, l'aimant va s'aligner avec le champ.

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 3/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
5
B.1. Moteur à aimant permanent bipolaire :
Le courant de commande est bidirectionnel et l'avance d'un pas s'effectue par une séquence decommutation des enroulements statoriques.
Pour ce type de moteur nous avons trois possibilités de commande :
B.1.1. Fonctionnement à pas complet :
La première consiste à alimenter les enroulements en suivant la séquence A vers B / C vers D / B vers A / D vers C (BA est le même enroulement que AB mais alimenté par un courant depolarité inverse). Par la suite nous simplifierons la notation pour une meilleurecorrespondance avec les chronogrammes des phases en indiquant uniquement la phase qui estalimentée par un courant "positif". Soit : A C B D.
Cette séquence est connue sous le nom de "one phase on full step" (traduisez phase par phaseou une phase à la fois en pas entier). A tout moment il n'y a qu'une seule phase d'alimentée etnous travaillons en mode pas entier.
B.1.2. Fonctionnement avec couple maximal :
La seconde possibilité est d'alimenter une paire de phase en même temps de façon à ce que lerotor se positionne entre deux pôles.
Appelé "two-phase-on full step" (deux phases à la fois en pas entier) ce mode de commandeest celui qui procure le couple le plus élevé.
La séquence sera donc : AC / CB / BD / DA.

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 4/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
6
B.1.3. Fonctionnement à demi-pas :
La troisième option est un mélange des deux première puisque l'on alimente tour à tour lemoteur sur une phase puis deux puis une... Cette séquence connue sous le nom de mode demipas procure effectivement un division par 2 de l'angle d'avance d'un pas, mais aussi un couple
moins régulier.La séquence qui en découle est la suivante : A / AC / C / CB / B / BD / D /DA.
Pour obtenir une rotation dans la direction opposée les mêmes séquences sont utilisée eninversant l'ordre de défilement.Comme nous pouvons le constater sur les diagrammes, les moteurs sont représentés avec uneavance de pas à 90°.Dans les moteurs réels le nombres de pôles ont été multipliés pour réduire à quelques degrésseulement l'angle d'avance d'un pas. Le nombre d'enroulements et la séquence de commanderestant, quant à eux, inchangés.

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 5/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
7
B.2. Moteur à aimant permanent unipolaire :
Les moteurs unipolaires se différencient par le fait qu'ils sont à double bobinage.
Le double bobinage est utilisé pour l'inversion du flux statorique et le moteur se commande de
la même manière qu'un bipolaire excepté qu'un seul transistor pour chaque enroulement suffitdans l'étage de puissance (soit quatre Darlington pour un moteur ou un réseau de 4 transistors- voir ULN 2075B).
Simplement, les moteurs unipolaires sont plus chère car leur fabrication réclame un doublebobinage. De plus, pour une taille donnée, ce type de moteur à un couple plus faible à causedes enroulements qui sont plus fins.
Il fût une époque où les moteurs unipolaires étaient intéressants pour les concepteurs parcequ'ils simplifiaient l'étage de commande électronique. Maintenant, grâce aux circuits decommande (push pull monolithique) du genre L298, les moteurs bipolaires sont devenu
populaires et d'une utilisation courante.Tous les moteurs à aimant permanent souffrent des oscillations (et des harmoniques qui s'ensuivent) générées par le rotor qui limitent la vitesse de rotation.
Quand des accélérations et des vitesses plus élevées sont nécessaires on utilisera de préférenceles moteurs à reluctance variable.
B.2.1 fonctionnement d’un moteur pas-a-pas unipolaire :
on partira du principe que la rotation d'un moteur pas à pas s'effectue en 4 étapes, dans laréalité, le moteur est constitué d'une succession d'alternance de pôles : ainsi, l'axe du modèle
dont nous disposons dans notre réalisation fait un tour complet en 48 pas (un pas corresponddonc à 360°/48 = 7,5°).
Dans les schémas, la flèche noire représente l'aiguille d'une boussole qui serait disposé enplace et lieu du rotor ; elle indique l'orientation du champ magnétique (elle pointe vers lenord, qui attire donc le pôle Sud du rotor) et se décale alors d'un quart de tour à chaque étape.B.2.1 Etape 1 :
Figure B.2.1 :Etape 1

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 6/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
8
Etape 1, position 1 :1. Premier bobinage (stator bleu) :
Phase 1 (interrupteur gauche) non alimentée. Phase 2 (interrupteur droit) alimentée.
2. Second bobinage (stator vert) :
Phase 1 (interrupteur gauche) alimentée. Phase 2 (interrupteur droit) non alimentée.
B.2.1 Etape 2 :
Figure B.2.1 : Etape 2Etape 2, position 2 :
1. Premier bobinage (stator bleu) :
Phase 1 (interrupteur gauche) alimentée. Phase 2 (interrupteur droit) non alimentée.
2. Second bobinage (stator vert) :
Phase 1 (interrupteur gauche) alimentée. Phase 2 (interrupteur droit) non alimentée.
B.2.1 Etape 3 :
Figure B.2.1 : Etape 3

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 7/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
9
Etape 3, position 3 :1. Premier bobinage (stator bleu) :
Phase 1 (interrupteur gauche) alimentée. Phase 2 (interrupteur droit) non alimentée.
2. Second bobinage (stator vert) :
Phase 1 (interrupteur gauche) non alimentée. Phase 2 (interrupteur droit) alimentée.
B.2.1 Etape 4 :
Figure B.2.1 : Etape 4
Etape 4, position 4 :1. Premier bobinage (stator bleu) :
Phase 1 (interrupteur gauche) non alimentée. Phase 2 (interrupteur droit) alimentée.
2. Second bobinage (stator vert) :
Phase 1 (interrupteur gauche) non alimentée. Phase 2 (interrupteur droit) alimentée.
B.2.2 Etats successifs des phases du moteur unipolaire :
La table de vérité B.2.2.1 résume les états successifs des différentes phases ; l'état logiqueindique si la phase est alimentée ("1") ou non ("0").
Numéro de l'étape : 1 2 3 4
Bobinage 1, Phase 1 0 1 1 0
Bobinage 1, Phase 2 1 0 0 1Bobinage 2, Phase 1 1 1 0 0
Bobinage 2, Phase 2 0 0 1 1
Figure B.2.2.1 :Table Etat successifs des phases

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 8/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
10
Le chronogramme correspondant est représenté en figure B.2.2.2
Figure B.2.2.2 : Chronogramme
Le chronogramme laisse apparaitre que pour le bobinage 1, les signaux de contrôle de laphase 1 (B1,P1) et de la phase 2 (B1,P2) sont complémentaires ; il en va de même pour le
bobinage 2, concernant (B2,P1) et (B2,P2).
B.2.3 Fonctionnant du moteur unipolaire en mode demi-pas :
Le moteur de notre schéma effectue une rotation en quatre pas, il se caractérise par unfonctionnement dit "par pas" ; il existe également un mode de fonctionnement par "demi-pas": il consiste à intercaler entre deux étapes, une période au cours de laquelle l'on coupel'alimentation du bobinage du stator dont l'aimantation s'apprête à changer de sens (elle passedonc par zéro) ; durant cette nouvelle étape, le rotor tourne d'un demi-pas (45°) en s'alignantsur le seul stator alimente ; une rotation totale se produit alors au bout de huit demi-pas, latable de vérité des phases est représentée en table B.2.3.
Numéro de l'étape : 1 2 3 4 5 6 7 8
Bobinage 1, Phase 1 0 0 1 1 1 0 0 0
Bobinage 1, Phase 2 1 0 0 0 0 0 1 1
Bobinage 2, Phase 1 1 1 1 0 0 0 0 0
Bobinage 2, Phase 2 0 0 0 0 1 1 1 0
Table B.2.3 : Etat successifs des phases lors de l'utilisation des demi pas.
Le mouvement s'effectué à la suite d'une inversion du champ magnétique en alimentant l'uneou l'autre des phases d'un bobinage a point milieu ; seule une moitié du bobinage est doncutilisée a un instant donné. Un autre type de moteur, dit moteur à deux phases, permetd'obtenir un couple plus important ; son principe consiste à utiliser un bobinage sans pointmilieu, et à faire circuler le courant dans un sens ou dans l'autre...C.Moteur pas à pas hybride :
Pour tirer profit des avantages des moteurs pas à pas à aimants permanents et à réluctancevariable, on utilise des moteurs hybrides. La commande est similaire à un moteur pas à pas àaimant permanent mais la constitution du rotor permet d'obtenir beaucoup plus de pas.

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 9/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
11
C.1. Composition d’un moteur pas à pas hybride :
Le rotor présente plusieurs dents comme pour un moteur pas à pas à réluctance variable, maischaque dent est polarisée comme pour un moteur pas à pas à aimants permanents.Physiquement le rotor est composé de deux éléments identiques à un rotor de moteur à
réluctance variable (rouge et bleu ici), reliés ensemble par un aimant permanent (noir), avecun déphasage d’une 1/2 dent. De ce fait ces deux éléments ont une polarisatio n différente(nord et sud) et vont réagir à la polarisation de chacune des dents du stator. C’est cette
polarisation qui permet de n’utiliser que 2 bobines, qui forment en réalité 4 états différents
puisque le sens du courant entre ici en jeu. C.2 .Fonctionnement d’un moteur pas à pas hybride :
En mode pas entier, les bobines sont alimentées une par une alternativement, dans un sens puis dans l’autre. On voit bien ici l’intérêt d’avoir un rotor polarisé : quand on coupe
l’alimentation de la bobine verte et qu’on alimente la bobine rose, en l’absence de polarisation
du rotor on n’aurait aucun contrôle sur le sens de rotation, les deux dents bleues et rouges
étant attirés de la même façon par la bobine. Avec un rotor polarisé, on peut choisir une de cesdeux dents en agissant sur le sens du courant dans la bobine. Il en résulte le mouvement décritsur la figure suivante :
C.3. Commande d’un moteur pas à pas hybride :
Nous venons de voir que pour commander un moteur pas à pas hybride, comme pour unmoteur à aimant permanent, on doit contrôler le sens courant dans chacune des bobines. Enpratique, le bobinage est généralement réalisé sur une pièce en fer doux dentée, et polarisecette pièce suivant le sens du courant. Pour cela, il existe 3 types de câblages pour les moteurs
pas à pas :Câblages 4 fils :
Il n’y a qu’une seule bobine pour chaque pôle. Ce type de configuration impose de pouvoir
changer le sens du courant au niveau du système d’alimentation. Ces moteurs sont appelés
moteurs pas à pas bipolaires, car lors de leur rotation chacune des bobines va être polarisée dedeux façons différentes.
Câblages 6 fils : Un point milieu est créé sur chacun des bobinages. Généralement ces deux points milieux(2 et 5) sont reliés à une borne du dispositif d’alimentation. En alimentant un des 4 autres
points on peut choisir le sens du courant sans avoir d’inversion de polarité. L’inconvénient

5/17/2018 Chapitre 1 - slidepdf.com
http://slidepdf.com/reader/full/chapitre-1-55ab59b110fa7 10/10
Chapitre 1 : Généralité sur les moteurs pas-à-pas.
12
est qu’on n’utilise que la moitié du cuivre, ces moteurs pas à pas unipolaires ont donc un
rendement massique plus faible.Câblages 8 fils :
Cette configuration de moteur pas à pas permet de choisir entre les deux configurations
précédentes au moment du câblage. On peut relier les bobines de chaque groupe en série ouen parallèle pour utiliser le moteur en bipolaire, ou les relier en série en gardant le pointmilieu pour l’utiliser en unipolaire.
Moteur pas à pas hybride 4 fils Moteur pas à pas hybride 6 fils Moteur pas à pas hybride 8 fils
4. Comparaison entre les différents types des moteurs pas à pas :
Cette comparaison peut se résumer selon le tableau suivant :
Critère de comparaison Moteur P-à-P àAiment permanent
Moteur P-à-P àRéluctance variable
Couple de travail Elevé FaibleVitesse de fonctionnement Faible FaiblePas exécuté Faible ElevéInertie propre Elevé FaibleCouple de maintien Non négligeable NégligeableAmortissement des oscillations Plus important Moins important
5. CONCLUSION :
On constate qu’il existe différents types de moteur pas à pas . Le moteur pas à pas hybrideest un moteur puissant cependant le problème qui se présente maintenant c’est comment
commander ce moteur autrement dit comment peut- on faire varier le sens de rotation demoteur , l’angle de rotation ,etc…
Ce problème peut être facilement résolu en utilisant des circuits intégrés spécialisés dans lacommande des moteurs pas à pas .Ces circuits sont nombreux dont on va choisir un des plusefficace.