Chap 3 v2.1olazo.free.fr/IUT/Rezo/livre/Chap_3_v2.pdf · 2005-02-15 · CHAPITRE 3 . 3...
43
CHAPITRE 3 . Communication et Protocoles Du synchrone et de l’asynchrone 1 1 3 CHAPITRE 3 Communication et Protocoles Du synchrone Et de l’asynchrone Qui parle ?
Transcript of Chap 3 v2.1olazo.free.fr/IUT/Rezo/livre/Chap_3_v2.pdf · 2005-02-15 · CHAPITRE 3 . 3...
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
1
1
33 CCHHAAPPIITTRREE 33
CCoommmmuunniiccaattiioonn eett
PPrroottooccoolleess
DDuu ssyynncchhrroonnee EEtt ddee ll’’aassyynncchhrroonnee
Qui parle ?

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
2
2
L’objectif de ce chapitre est de décrire les principes de base sous-jacents à toute communication de données informatiques, en ayant cependant à l’esprit
que deux objectifs contradictoires sont recherchés. L’idéal est une communication qui ne prenne pas de temps et qui se fasse sans la moindre
erreur.
Dans notre contexte , la communication couvre deux sens : d’une part l’action de transmettre une information à un destinataire, et d’autre part ce qui permet
de joindre, mettre en relation deux entités.
L’action de transmettre un élément implique une notion de déplacement, de mouvement, et donc de temps. La transmission est caractérisée
quantitativement sur les données transportées (les bits) et son comportement temporel (débit).
La mise en relation concerne les infrastructures, les voies de communications : supports, média. On parle de canal de communication.
qu’un protocole est bien un ensemble de règles qu’il faut respecter pour que la communication puisse se faire. L’application de ces règles concerne les entités
impliquées dans la communication : généralement une entité source et une entité destination. Avant l’établissement d’une communication, il est
nécessaire que ces entités se soient (ou aient été) mises d’accord sur le protocole à mettre en oeuvre.
e ».
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
3
3
3.1 Communication, principes généraux. L’ordinateur est une machine de traitement et de stockage de l’information, mais aussi de communication soit pour les échanges internes à la machine, soit pour ceux avec le monde extérieur.
Le mot communication, dans le contexte qui nous intéresse, couvre deux sens : d’une part l’action de transmettre une information à un destinataire, et d’autre part ce qui permet de joindre, mettre en relation deux entités.
L’action de transmettre un élément implique une notion de déplacement, de mouvement, et donc de temps. La transmission est caractérisée quantitativement sur les données transportées (les bits) et son comportement temporel (débit).
La mise en relation concerne les infrastructures, les voies de communications : supports, média. On parle de canal de communication.
Plaçons nous sur un plan plus général. Pour réaliser un transport, il faut un véhicule qui assure le déplacement et une voie de circulation. La communication est d’autant plus performante (vitesse et sûreté) que le véhicule est bien adapté au support. Cela est vrai pour nos moyens de locomotion (vélo, voiture, camion, …) qui sont conçus en fonction des voies de circulation (chemins, routes, autoroutes,…). Cette question de l’adaptation du véhicule au support sera est des point clés abordés dans ce chapitre.
Nous parlerons d’abord des voitures et des routes, puis nous aborderons le « code de la route », c'est-à-dire le protocole ou procédure à respecter pour une circulation sûre.
Qu’est-ce qu’un protocole ? En se référant au dictionnaire, le protocole est un ensemble de règles à observer en matière d’étiquette, de préséances dans les cérémonies et les relations officielles. Remarquons que cette définition un peu neutre, laisse sous-entendre qu’en cas de non respect de ces règles, la cérémonie ou la relation risque de mal tourner. Si nous adaptons la définition à notre question de transport de l’information, nous pouvons retenir qu’un protocole est bien un ensemble de règles qu’il faut respecter pour que la communication puisse se faire. L’application de ces règles concerne les entités impliquées dans la communication : généralement une entité source et une entité destination. Avant l’établissement d’une communication, il est nécessaire que ces entités se soient (ou aient été) mises d’accord sur le protocole à mettre en oeuvre.
Cette problématique de la transmission de données est la même quelque soit l’échelle où l’on se place, que ce soit au niveau d’un processeur pour la transmission des bits entre des registres et l’UAL, au niveau du bus de la carte unité centrale pour les relations entre le processeur et le contrôleur de mémoire ou à celui des communications distantes entre ordinateurs via des réseaux locaux.

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
4
4
Le lecteur pourra également considérer ce chapitre comme une introduction à un cours de réseaux.
Pour transmettre des données il faut les déplacer entre une source et une destination, il faut les véhiculer. Le moyen actuellement privilégié pour cette transmission est le signal, c'est-à-dire une onde qui se propage sur un support donné. Ce « signal-véhicule » se déplace avec la vitesse1 de l’onde associée, soit électromagnétique, soit optique.
Dans toute la suite, nous considérerons que la transmission faite à l’aide de signaux. La chaîne de communication (Figure 3-1) laisse apparaître deux niveaux de codage-décodage. Le premier est dédié au codage de l’information en données et le second à celui du codage des données en signaux (et inversement à la réception).
Figure 3–1 De l’information à …l’information.
3.2 Le signal. Un signal, noté s(t), est une variation, au cours du temps, d’une grandeur physique mesurable qu’elle soit électrique, optique, sonore. La variation est indispensable –une constante a une quantité d’information nulle– et c’est l’ensemble de valeurs possibles qui détermine la quantité d’information qu’il peut véhiculer.
Tout signal a besoin d’un support qu’il se propage. Par la suite, nous raisonnerons essentiellement sur les signaux électriques, les résultats étant transposables aux autres types d’onde (i.e. les ondes de pression pour la communication acoustique). Le support agit de manière apparemment contradictoire vis à vis du signal : le signal ne peut exister que par son support, et d’un autre point de vue, le support va dégrader le signal tout au long de sa propagation. De la même manière qu’il faut une route pour faire circuler une voiture, cette route va aussi contribuer, par exemple, à l’usure de ses pneus et dans certains cas à sa destruction…
1 Il ne faut pas confondre vitesse de propagation et vitesse de transmission. Dans un cas extrême, par exemple une très grosses quantité d’information stockée sur des dizaines de cartouches magnétiques à transférer de Lyon à Paris, on peut trouver plus performant de transporter l’ensemble des cartouches dans le coffre d’une voiture que de les transmettre par les voies modernes de la téléinformatique (le débit binaire apparent plus être supérieur avec la voiture…)
information donnéesdonnées informationsignal
supportinformation donnéesdonnées informationsignalsupport
information donnéesdonnées informationsignalsupportinformation donnéesdonnées informationsignalsupport

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
5
5
Il nous faut caractériser à la fois le signal et le support pour évaluer la manière dont se fera l’interaction. On peut penser que, meilleure sera l’adaptation du signal au support, meilleure sera la conservation du signal au cours de sa propagation et meilleure sera sa réception.
3.2.1 Caractérisation d’un signal.
La caractérisation d’un signal consiste à représenter le signal par un modèle (mathématique) possédant des paramètres significatifs pour le triplet {données à transmettre, signal et support}.
Le signal est une fonction du temps, mais aussi des données à transmettre et sa caractérisation exacte parait donc impossible. La modélisation ne va pouvoir tenir compte que de « données moyennes » sans liaison directe avec l’information effectivement à transmettre. Le signal est caractérisé par un comportement moyen.
Ce point est important et vaut la peine d’être illustré par un exemple. Si on visualise le signal correspondant à un enregistrement musical, il est impossible de caractériser le morceau de musique avec seulement quelques paramètres : il faut en écouter une séquence continue plus ou moins longue. Par contre, il est possible de donner des caracté ristiques de comportement moyens comme : il y a beaucoup de sons graves (ou aigus), il y a peu de pauses, le rythme, avec ou sans chant…
Figure 3–2 Un signal analogique quelconque.
L’observation d’un signal est une certaine forme de caractérisation : elle n’est pas formelle , non utilisable d’un point de vue mathématique, mais elle est cependant riche d’information. Le signal ci-dessus montre d’abord que le signal est continu : à tout instant t, il a une valeur (il n’y a pas de trous dans le temps). D’autre part, le signal est à valeurs continues : les valeurs prises par le signal le sont dans une plage continue de valeurs : on parle de signal analogique. De visu, le signal montre des évolutions plus ou moins rapides.
Figure 3–3 Un signal numérique binaire.
Lorsque le signal ne prend qu’un nombre fini de valeurs, on parle de signal numérique. Avec deux valeurs, on parle de signal binaire. Le signal est toujours continu dans le temps, mais il n’y a pas de possibilité de jouer sur l’amplitude en dehors des deux valeurs fixées. Cela signifie qu’à un instant donné, un signal numérique transporte a priori moins d’information qu’un signal analogique. Dans
s(t)t
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
6
6
le cas numérique, le niveau d’une des valeurs doit être maintenue suffisamment longtemps pour qu’elle soit reconnaissable du coté de la réception.
Comme pour le signal analogique on peut voir , dans le signal numérique binaire de la figure 3-3, des zones où le signal évolue en moyenne plus rapidement que dans d’autres. Nous allons essayer de quantifier ce genre d’observations.
3.2.2 Caractérisation formelle d’un signal.
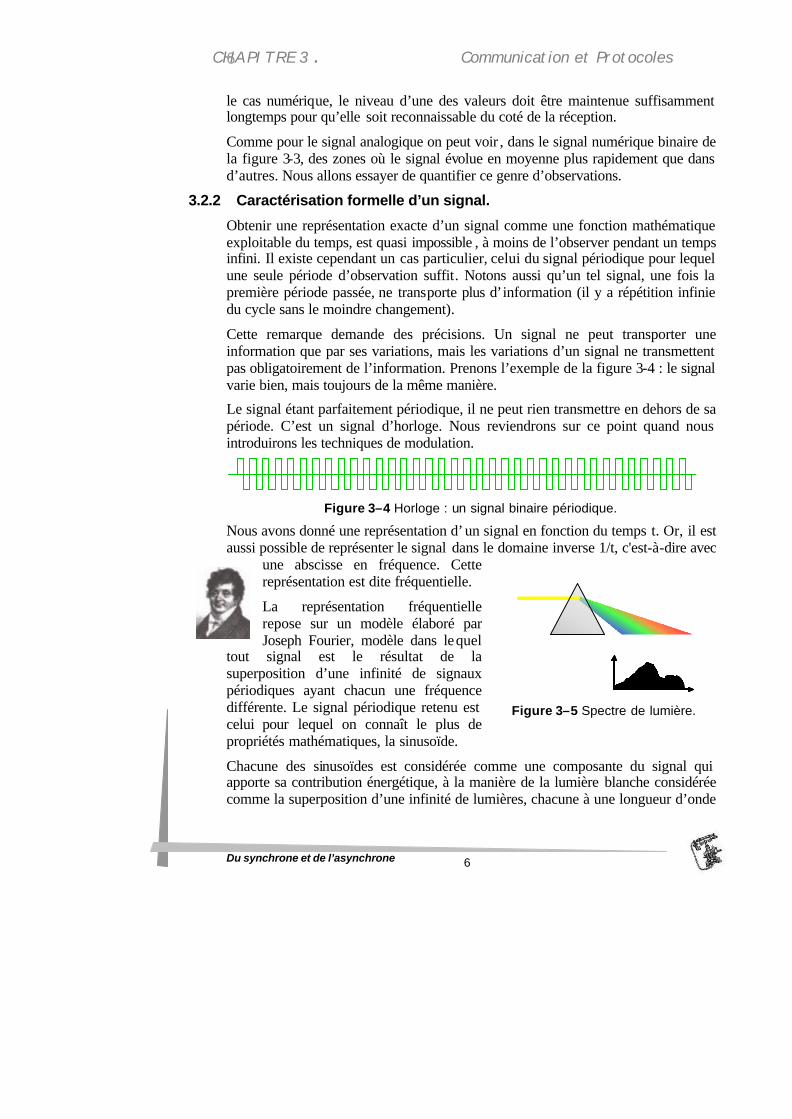
Obtenir une représentation exacte d’un signal comme une fonction mathématique exploitable du temps, est quasi impossible , à moins de l’observer pendant un temps infini. Il existe cependant un cas particulier, celui du signal périodique pour lequel une seule période d’observation suffit. Notons aussi qu’un tel signal, une fois la première période passée, ne transporte plus d’information (il y a répétition infinie du cycle sans le moindre changement).
Cette remarque demande des précisions. Un signal ne peut transporter une information que par ses variations, mais les variations d’un signal ne transmettent pas obligatoirement de l’information. Prenons l’exemple de la figure 3-4 : le signal varie bien, mais toujours de la même manière.
Le signal étant parfaitement périodique, il ne peut rien transmettre en dehors de sa période. C’est un signal d’horloge. Nous reviendrons sur ce point quand nous introduirons les techniques de modulation.
Figure 3–4 Horloge : un signal binaire périodique.
Nous avons donné une représentation d’un signal en fonction du temps t. Or, il est aussi possible de représenter le signal dans le domaine inverse 1/t, c'est-à-dire avec
une abscisse en fréquence. Cette représentation est dite fréquentielle.
La représentation fréquentielle repose sur un modèle élaboré par Joseph Fourier, modèle dans lequel
tout signal est le résultat de la superposition d’une infinité de signaux périodiques ayant chacun une fréquence différente. Le signal périodique retenu est celui pour lequel on connaît le plus de propriétés mathématiques, la sinusoïde.
Chacune des sinusoïdes est considérée comme une composante du signal qui apporte sa contribution énergétique, à la manière de la lumière blanche considérée comme la superposition d’une infinité de lumières, chacune à une longueur d’onde
Figure 3–5 Spectre de lumière.
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
7
7
différente. La contribution de chaque fréquence (couleur) peut se visualiser simplement avec un prisme (figure 3-5).
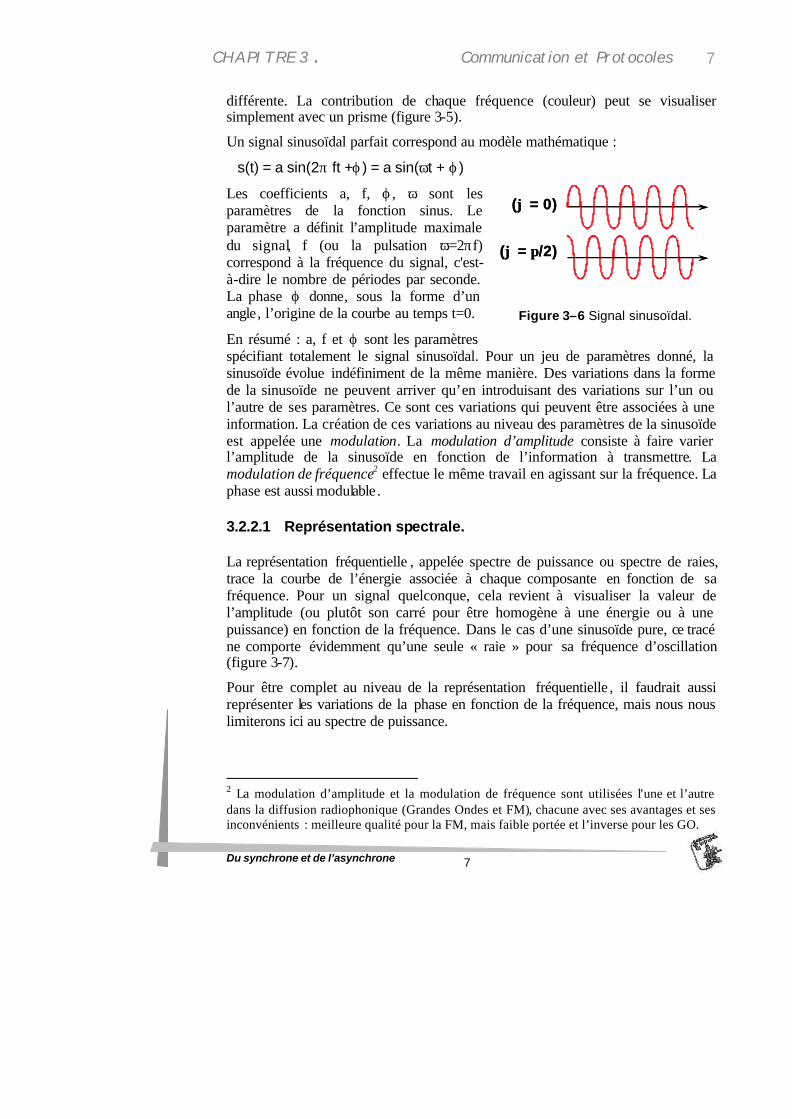
Un signal sinusoïdal parfait correspond au modèle mathématique :
s(t) = a sin(2π ft +ϕ) = a sin(ωt + ϕ)
Les coefficients a, f, ϕ, ω sont les paramètres de la fonction sinus. Le paramètre a définit l’amplitude maximale du signal, f (ou la pulsation ω=2πf) correspond à la fréquence du signal, c'est-à-dire le nombre de périodes par seconde. La phase ϕ donne, sous la forme d’un angle, l’origine de la courbe au temps t=0.
En résumé : a, f et ϕ sont les paramètres spécifiant totalement le signal sinusoïdal. Pour un jeu de paramètres donné, la sinusoïde évolue indéfiniment de la même manière. Des variations dans la forme de la sinusoïde ne peuvent arriver qu’en introduisant des variations sur l’un ou l’autre de ses paramètres. Ce sont ces variations qui peuvent être associées à une information. La création de ces variations au niveau des paramètres de la sinusoïde est appelée une modulation. La modulation d’amplitude consiste à faire varier l’amplitude de la sinusoïde en fonction de l’information à transmettre. La modulation de fréquence2 effectue le même travail en agissant sur la fréquence. La phase est aussi modulable .
3.2.2.1 Représentation spectrale.
La représentation fréquentielle , appelée spectre de puissance ou spectre de raies, trace la courbe de l’énergie associée à chaque composante en fonction de sa fréquence. Pour un signal quelconque, cela revient à visualiser la valeur de l’amplitude (ou plutôt son carré pour être homogène à une énergie ou à une puissance) en fonction de la fréquence. Dans le cas d’une sinusoïde pure, ce tracé ne comporte évidemment qu’une seule « raie » pour sa fréquence d’oscillation (figure 3-7).
Pour être complet au niveau de la représentation fréquentielle , il faudrait aussi représenter les variations de la phase en fonction de la fréquence, mais nous nous limiterons ici au spectre de puissance.
2 La modulation d’amplitude et la modulation de fréquence sont utilisées l’une et l’autre dans la diffusion radiophonique (Grandes Ondes et FM), chacune avec ses avantages et ses inconvénients : meilleure qualité pour la FM, mais faible portée et l’inverse pour les GO.
(ϕ = 0)
(ϕ = π/2)
(ϕ = 0)
(ϕ = π/2)
Figure 3–6 Signal sinusoïdal.
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
8
8
f
S(f)
ff
S(f)t
st
t
st
sinusoïde
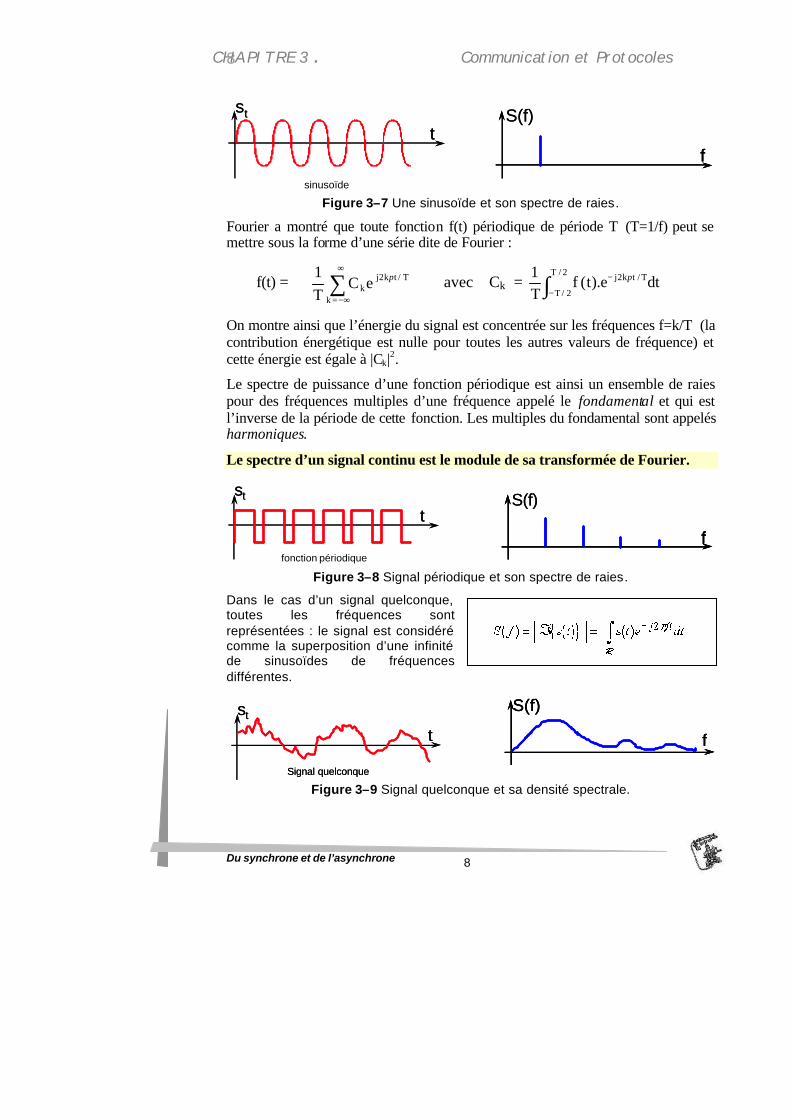
Figure 3–7 Une sinusoïde et son spectre de raies.
Fourier a montré que toute fonction f(t) périodique de période T (T=1/f) peut se mettre sous la forme d’une série dite de Fourier :
On montre ainsi que l’énergie du signal est concentrée sur les fréquences f=k/T (la contribution énergétique est nulle pour toutes les autres valeurs de fréquence) et cette énergie est égale à |Ck|2.
Le spectre de puissance d’une fonction périodique est ainsi un ensemble de raies pour des fréquences multiples d’une fréquence appelé le fondamental et qui est l’inverse de la période de cette fonction. Les multiples du fondamental sont appelés harmoniques.
Le spectre d’un signal continu est le module de sa transformée de Fourier.
fonction périodique
f
S(f)
ff
S(f)t
st
t
st
Figure 3–8 Signal périodique et son spectre de raies.
Dans le cas d’un signal quelconque, toutes les fréquences sont représentées : le signal est considéré comme la superposition d’une infinité de sinusoïdes de fréquences différentes.
f
S(f)st
t
Signal quelconque
f
S(f)
f
S(f)st
t
Signal quelconque Figure 3–9 Signal quelconque et sa densité spectrale.
f(t) = T/tk2j
kkeC
T1 π∑
+∞
−∞=
avec Ck = dte).t(fT1 2/T
2/T
T/tk2j∫−
− π
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
9
9
S(f)
f
ts(t)
pseudo-période pseudo-période
fréquences basses variations lentes
niveaucontinu
spectre signal
S(f)
f
ts(t)
pseudo-période pseudo-période
fréquences basses variations lentes
niveaucontinu
spectre signal
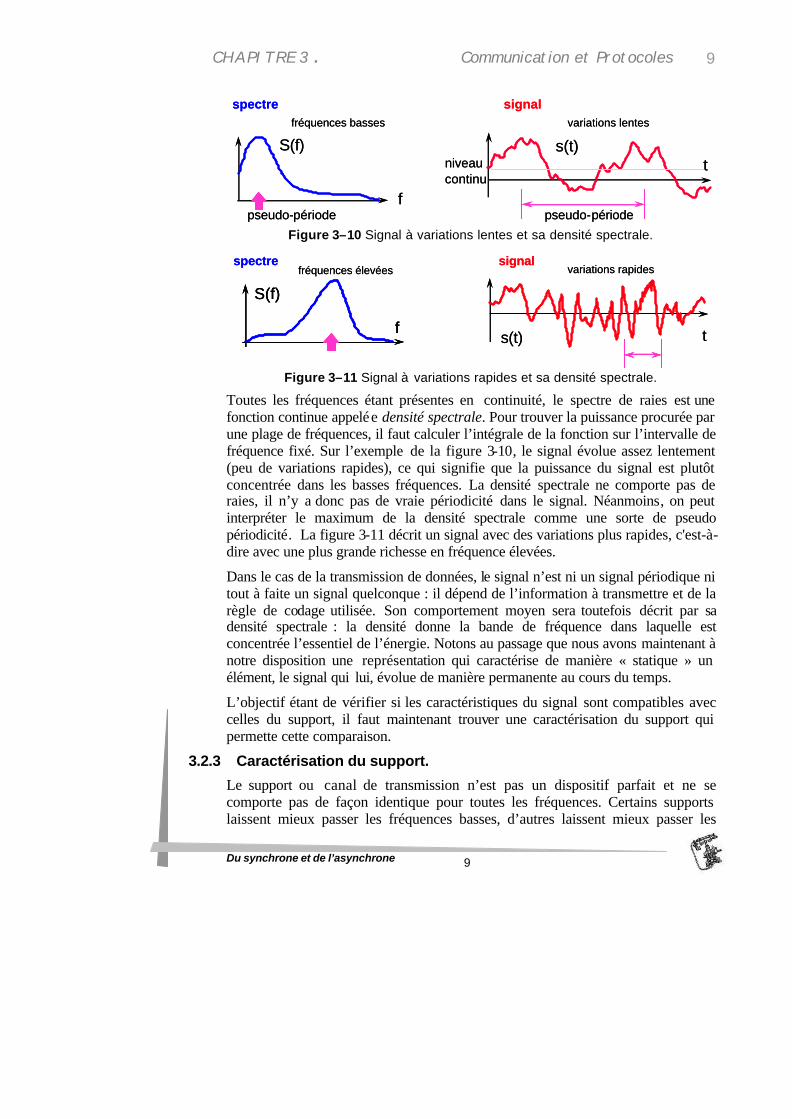
Figure 3–10 Signal à variations lentes et sa densité spectrale.
ts(t)f
S(f)
fréquences élevées variations rapidesspectre signal
ts(t)f
S(f)
f
S(f)
fréquences élevées variations rapidesspectre signal
Figure 3–11 Signal à variations rapides et sa densité spectrale.
Toutes les fréquences étant présentes en continuité, le spectre de raies est une fonction continue appelée densité spectrale. Pour trouver la puissance procurée par une plage de fréquences, il faut calculer l’intégrale de la fonction sur l’intervalle de fréquence fixé. Sur l’exemple de la figure 3-10, le signal évolue assez lentement (peu de variations rapides), ce qui signifie que la puissance du signal est plutôt concentrée dans les basses fréquences. La densité spectrale ne comporte pas de raies, il n’y a donc pas de vraie périodicité dans le signal. Néanmoins, on peut interpréter le maximum de la densité spectrale comme une sorte de pseudo périodicité. La figure 3-11 décrit un signal avec des variations plus rapides, c'est-à-dire avec une plus grande richesse en fréquence élevées.
Dans le cas de la transmission de données, le signal n’est ni un signal périodique ni tout à faite un signal quelconque : il dépend de l’information à transmettre et de la règle de codage utilisée. Son comportement moyen sera toutefois décrit par sa densité spectrale : la densité donne la bande de fréquence dans laquelle est concentrée l’essentiel de l’énergie. Notons au passage que nous avons maintenant à notre disposition une représentation qui caractérise de manière « statique » un élément, le signal qui lui, évolue de manière permanente au cours du temps.
L’objectif étant de vérifier si les caractéristiques du signal sont compatibles avec celles du support, il faut maintenant trouver une caractérisation du support qui permette cette comparaison.
3.2.3 Caractérisation du support.
Le support ou canal de transmission n’est pas un dispositif parfait et ne se comporte pas de façon identique pour toutes les fréquences. Certains supports laissent mieux passer les fréquences basses, d’autres laissent mieux passer les

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
10
10
fréquences hautes. Dans tous les cas, il n’existe pas de support laissant intactes toutes les fréquences possibles. On dit que le support agit comme un filtre qui peut être plutôt passe-bas, passe-haut voire passe-bande. Le support sera caractérisé par sa bande passante et celle-ci ne dépend que des caractéristiques physiques du support (matériau, taille, …).
Figure 3–12 Filtres idéaux et filtres réels.
La figure 3-12 décrit les trois types de filtres. Chaque figure représente la bande passante du filtre (support) en fonction de la fréquence. L’ordonnée est le gain du filtre et à l’intérieur de la bande passante, ce gain doit théoriquement être de 1 (pas d’atténuation).
Le premier filtre est un passe-bas idéal : toutes les fréquences entre 0 et la fréquences de coupure fc sont transmises intégralement. Au delà, le gain est nul (l’atténuation est totale), c'est-à-dire que le support est totalement opaque pour les fréquences supérieures à fc.
Le deuxième filtre est un passe-haut, idéal également, qui laisse passer intégralement les fréquences au-dessus de la fréquence de coupure. Le dernier filtre correspond à une composition des deux types précédents : le passe-bande laisse passer intégralement les fréquences situées entre la fréquence de coupure basse et la fréquence de coupure haute.
Ces filtres sont idéaux car la fréquence de coupure est parfaitement définie : à l’abscisse fc le gain passe directement de 0 à 1, ce qui est évidemment impossible. La partie droite de la figure décrit les filtres équivalents tels que l’on peut les rencontrer de manière plus réaliste avec des supports physiques. La première remarque qui s’impose est que l’atténuation est progressive et non brutale . Se pose alors la question de la fréquence de coupure : quelle est cette valeur ? Il faut
idéal réel
fc f f
fc f f
fch f f
Gain Gain
Gain Gain
Gain Gain
fcb

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
11
11
maintenant faire un choix et au lieu de dire que la fréquence de coupure est la fréquence où il y a un passage de 0 à 1 pour le gain, il faut fixer un seuil d’atténuation standard de manière à ce que différents filtres soient comparables.
Les valeurs retenues correspondent soit à une atténuation par deux au niveau de la puissance, soit une atténuation par deux au niveau de l’amplitude (soit une atténuation de 4 au niveau de la puissance) du signal. L’atténuation (ou le gain) pouvant prendre des valeurs sur une étendue très grande, elle est généralement exprimée en échelle logarithmique, soit :
Gain = 10 log PE/PS en déciBels. (dB)
PE est la puissance d’entrée, PS celle de sortie. La valeur la plus communément utilisée est une atténuation par deux de la puissance, ce qui équivaut à 3dB. L’atténuation est de 6dB si elle divise par deux l’amplitude.
Par exemple, on estime que pour transmettre correctement voix et musique il faut qu’une chaîne HiFi ait une bande passante de 20hz à 20kHz. Pour le téléphone analogique, la canal de transmission se comporte comme un filtre passe bande de 300Hz à 3400Hz.
Comparaison spectre/ bande passante
Nous avons en main les éléments pour faire la comparaison entre le signal et le support et ainsi savoir si le premier est adapté au second. En première approximation, l’adaptation est bonne si la densité spectrale « rentre » dans la bande passante du support (figure 3-15).
Dans la réalité, il n’y a pas que l’atténuation des fréquences qui déforment un signal, il y a aussi la distorsion de phase : toutes les fréquences ne se
fcb fch
3dB6dB
fcb fch
3dB6dB
Figure 3–13 Coupure à 3 et 6 dB.
S(f)
f
G(f)
Figure 3–15 Bande passante et Spectre.
1 0 0 0 0 0 1
2000bits/s : T=0,5ms
Passe bas 500Hz
Passe bas 1500Hz
Passe bas 4000Hz
1 0 0 0 0 0 1
2000bits/s : T=0,5ms
Passe bas 500Hz
Passe bas 1500Hz
Passe bas 4000Hz
Figure 3–14 Effets d’un filtre passe-bas.

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
12
12
propagent pas dans le support à la même vitesse. Cela signifie que toutes les composantes d’un signal n’arrivent pas en même temps au niveau de la réception, d’où des distorsions.
La figure 3-14 illustre les déformations que subit un signal supposé idéal d’un codage de données en deux niveaux (signal rectangulaire parfait) qui passe sur des supports passe-bas avec différentes fréquences de coupure. Pour le temps élémentaire prévu (0,5ms, soit un débit de 2000 bits/s), l’on constate que le signal ne passe réellement bien qu’avec un passe-bas de 4000 Hz. A 500Hz, les variations ne passent pas du tout et le signal résultant est une sinusoïdale inexploitable.
La figure 3-16 montre le signal réel obtenu sur un réseau Ethernet à partir d’une suite alternée de 0 et de 1 en codage de Manchester (section 3.5.2.1). On observe le fait que les fronts parfaits de montée ou de descente n’existent pas, que le support agit bien comme un filtre passe bas qui a tendance à lisser le signal. De plus, le signal est décalé sur la figure par rapport au signal théorique d’origine : ce décalage est dû au temps de propagation sur le support.
3.3 Les techniques de modulation. Le signal sinusoïdal est assez facile à générer physiquement (oscillateurs). Ce type de signal est donc largement utilisé pour la transmission de données. Dans le domaine analogique les modulations sont essentiellement la modulation d’amplitude et la modulation de fréquence.
Figure 3–17 Modulation d’amplitude et modulation de fréquence.
Dans la suite nous nous limiterons aux techniques de modulation définies dans le monde du numérique et plus précisément, les techniques adaptées à la transmission de données binaires. Pour une modulation en amplitude ou en fréquence, cela
1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 01 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
Figure 3–16 Signal « Ethernet » théorique et réel.

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
13
13
signifie par exemple que l’on va associer deux amplitudes ou deux fréquences au bit à transmettre.
3.3.1 Notion de rapidité de modulation.
Lorsque les valeurs de modulation sont en nombre fin i, deux comme nous venons de le dire, cela signifie que l’on donne une valeur de modulation pour un 1 et une valeur de modulation pour un 0. Cette valeur, ce paramètre de la sinusoïde doit être maintenue un temps minimal. Quel est ce temps ? De quoi dépend-il ?
Ce temps doit être tel que la variation du paramètre de modulation soit décelable par le récepteur. Supposons que notre support a une bande passante de 0 à 3 KHz et que nous voulions transmettre une suite de bits codés par les amplitudes a1 et a0. Si nous voulons envoyer nos bits à la cadence de un million de bits par seconde, il faudra changer les valeurs de l’amplitude à la même cadence, ce qui va générer un signal comportant des fréquences d’au moins un MHz. Eu égard à la bande passante du support, celui-ci ne laissera absolument pas passer ces variations qui en conséquence ne seront pas détectables à la réception.
On appelle moment élémentaire T, la durée pendant laquelle on maintient constant les paramètres de modulation. La rapidité de modulation R, qui s’exprime en Bauds , est le nombre de variations de paramètres de modulation par seconde. T et R sont reliés par la relation R =1/T Bauds.
Les données seront transmises d’autant plus rapidement que la rapidité de modulation pourra être élevée. Il est assez intuitif de penser que cette rapidité est limitée par les caractéristiques du support, et particulièrement sa bande passante. Nyquist a montré que la rapidité maximale de modulation Rmax est donnée par la relation
Rmax = 2 W
où W (en Hz) est la largeur de la bande passante du canal de transmission3 non bruité.
Nous avons fait une première hypothèse restrictive : un changement de bit génère un changement de paramètres de modulation. Or s’il y a suffisamment de valeurs de paramétrage possible, alors on peut très bien associer plusieurs bits à un seul changement de paramètres. Par exemple, en combinant la modulation d’amplitude (avec 2 valeurs a1 et a2) et la modulation de fréquence (avec 2 valeurs f1 et f2), nous obtenons 4 valeurs de paramètres de modulation (a1f1, a1f2, a2,f1, a2f2). La quantité d’information de 4 valeurs est de 2 bits, ce qui signifie que l’on peut transférer les bits de données par 2 durant un moment élémentaire. Le débit binaire
3 Pour le téléphone analogique, la canal de transmission se comporte comme un filtre passe bande de 300Hz à 3400Hz, la rapidité de modulation maximale est ainsi de 6200 Bauds ( = (3400-300)*2 ).
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
14
14
est doublé en associant ainsi chaque combinaison de 2 bits à une combinaison de 2 paramètres : a1f1 pour 00, a1f2 pour 01, a2f1 pour 01 et a2f2 pour 11. Un tel codage est appelé multi-symbole 4.
Les valeurs de rapidité de modulation sont normalisées : 110, 300, … 1200, 2400, 4800, … bauds, sont des valeurs standard. Valence.
La valence v d’une modulation est le nombre de valeurs possibles des paramètres de cette modulation. Le nombre n de bits que l’on peut transporter par moment élémentaire, c'est-à-dire le nombre de bits par baud, est alors donné par la relation
n = log2(v) (cf. définition de la quantité d’information). Débit binaire.
Le débit binaire D, exprimé en bits par seconde, est le nombre effectif de bits transmis par seconde sur le canal. La relation entre rapidité de modulation, valence et débit binaire est
D = R * log2 (v)
3.3.2 Canal bruité.
Les résultats précédents ont été obtenus avec l’hypothèse d’un canal non bruité. Dans la réalité, le signal est non seulement déformé par le filtrage, mais le canal de transmission génère ou capte aussi du bruit agissant comme un signal parasite ajouté au signal d’information.
Dans le cas d’un canal non bruité, il paraît simple d’obtenir de très haut débits : il d’augmenter suffisamment la valence. Avec une valence de 4 on multiplie le débit par 2, avec une valence de 1024 on multiplie le débit par 10. Or il est facile de comprendre que, plus la valence sera grande, plus le signal arrivant à la réception sera sensible à ce bruit car les écarts entre les amplitudes seront devenus trop faibles. Supposons que l’on transmettre des données binaires à l’aide des 2 tensions 0v et 5v avec un bruit moyen sur le support de l’ordre de quelques millivolts. Le bruit peut être considéré comme négligeable et ne créera pas de soucis à la réception. Par contre, si l’on veut multiplier le débit par 10, il faut une valence de 1024, c'est-à-dire que les niveaux de tensions à l’émission ne diffèrent que de 5 millivolts pour deux configurations consécutives. On est dans le même ordre de grandeur que l’amplitude du bruit et l’on aura forcément des erreurs à la réception.
Il y a donc une limite supérieure à la valence pour un canal donné. Cette limite est calculable à condition que l’on connaissance la nature du bruit sur le canal et sa puissance moyenne. Le bruit est un signal également caractérisable par son spectre.
4 Ce type de codage se retrouve dans les liaisons téléphoniques numériques (RNIS, Réseau Numérique à Intégration de Service) sous le nom de 2B1Q (2 bits et 1 symbole Quaternaire, donc 4 valeurs de niveau).
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
15
15
Le bruit blanc, dénomination donnée par analogie avec la lumière blanche, possède spectre uniformément plat : toutes les fréquences dans la bande de fréquence du support ont la même énergie. Ce bruit est dit stationnaire si ses caractéristiques de moyenne et de variance restent constantes au cours du temps. En matériel HiFi, ce type de bruit s’appelle du souffle.
Le bruit blanc est à opposer au bruit impulsif qui correspond à des parasites occasionnels, imprévisibles et de forte amplitude ; en HiFi on parlerait de parasites ou de crachotements.
Le bruit blanc génère des erreurs isolées alors que le bruit impulsif génère des erreurs groupées multiples.
3.3.2.1 Capacité d’un canal bruité, relation de Shannon
Le canal de transmission bruité par un bruit blanc, est caractérisable par la puissance moyenne de bruit PE comparativement à la puissance moyenne du signal PS transmis. On définit ainsi le canal par son rapport signal/bruit (S/B) qui s’exprime généralement sur une échelle logarithmique :
S/B dB = 10 log10 (PS / PE )
Shannon a montré que la valence maximale permettant de distinguer, à la réception, deux valeurs voisines sur un canal bruité par un bruit blanc est donnée par la relation :
v = (1 + PS / PE ) 1/2
Si nous combinons maintenant la limite de Nyquist concernant la rapidité de modulation et celle de Shannon concernant la valence, nous obtenons la capacité maximale, c'est-à-dire le débit binaire maximal, par la relation de Shannon :
Dmax = W log2 (1+ PS / PE )
Reprenons l’exemple de la liaison téléphonique analogique (RTC). La largeur de bande passante W est égale à 3100 Hz. On admet généralement que le rapport signal sur bruit est d’au moins de 30dB. Pour l’utilisation de la relation de Shannon, il faut transformer le rapport logarithmique en rapport linéaire des puissances.
30dB = 10 log10 (PS / PE ) d’où PS / PE = 1000
Le débit binaire maximal possible est alors d’environ 31.000 bits/s. Cette valeur est un peu pessimiste car le rapport S/B est en général est peu meilleur que celui annoncé, mais ce débit correspondant assez bien au débits observé au niveau des modems.

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
16
16
3.4 Des principes de communications aux normes. Afin de pouvoir assurer un minimum d’interopérabilité entre des équipements de communication, il est nécessaire d’introduire quelques éléments structurant, appelés interfaces, dans notre schéma de communication.
La première distinction à faire entre les équipements qui interviennent dans la communication, est de prendre d’une part les équipements qui génèrent ou reçoivent les données binaires et d’autre part ceux qui sont en prise directe avec le canal de communication.
Figure 3–18 de l’information à l’information ; de l’équipement à l’équipement.
L’ETTD, Equipement Terminal de Traitement de Données, est le dernier (premier) équipement qui traite les données avant (après) émission. Cela peut aussi bien être un ordinateur, qu’un terminal de saisie ou une imprimante.
L’ETCD5, Equipement de Terminaison de Circuit de Données, sont les équipements situés aux extrémités du canal de communication, ce sont eux qui sont en charge de l’adaptation du signal au support, c'est-à-dire codage (resp. décodage) binaire à signal (resp. signal à binaire). Le modem est un exemple d’ETCD.
La notion de jonction entre un ETTD et un ETCD se concrétise physiquement par les connecteurs ou prises qui sont standardisées d’un point de vue mécanique, électrique et fonctionnel. L’interface RS232 permet la connexion entre un ordinateur (prise COM1 sur un PC) et un modem externe (cet interface sera décrite dans le chapitre Entrées-Sorties).
3.4.1 Synchronisation des horloges.
Les bits de données sont transmis avec un cadencement défini par la rapidité de modulation et donc par la durée du moment élémentaire T. Il est implicite dans un protocole de transmission que cette durée T est parfaitement stable à l’émission et qu’est elle égale à la réception. A cette fin, les ETCD comportent une horloge pilotée par un quartz. L’ETCD récepteur procède à un échantillonnage du signal avec une périodicité T, puis décode la valeur de tension lue avec la règle appropriée. L’horloge de réception devrait bien sûr être égale à celle d’émission.
5 La terminologie anglaise souvent utilisée est DTE, Data Terminal Equipment et DCE, Data Communication Equipment).
information donnéesdonnées informationsignalsupport
ETTD ETTDETCD ETCDcanal
jonction jonction
ETTDETTD ETTDETCD ETCDcanal
jonction jonction

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
17
17
Dans la pratique, le récepteur va être confronté à un certain nombre de difficultés pour restituer correctement les données. En premier lieu, cette égalité des périodes des horloges est impossible à réaliser à coût raisonnable et les horloges seront données égales à une marge près. Ensuite, un quartz pour une fréquence donnée a une stabilité de l’ordre de 10-5. Même si les quartz sont choisis avec des références identiques, il pourra y avoir une dérive d’un bit au bout de 105 bits transmis.
Une dernière difficulté à prendre en compte vient la distance parcourue par le signal entre l’émetteur et le récepteur. Celle -ci est a priori indéterminée, le récepteur pouvant se trouver n’importe où, comme par exemple sur un réseau local, il lui est impossible de savoir quand le premier bit arrive. Même en connaissant la période, le récepteur ne saura pas quand procéder à l’échantillonnage. Toute erreur sur l’instant d’échantillonnage provoquera des erreurs à la réception.
Le récepteur doit résoudre le problème du calage ou ‘mise en phase’ de son horloge de réception sur celle de l’émission. Deux grandes techniques existent pour le résoudre. La première consiste à transmettre séparément sur un autre support, de même caractéristiques, l’horloge d’émission : cette solution fonctionne bien, mais présente l’inconvénient majeur d’utiliser des canaux de communication supplémentaires juste pour transmettre l’horloge.
La seconde technique, la seule que nous allons décrire, essaie de transmettre sur le même canal l’horloge et les informations par un multiplexage entre la transmission des bits d’information et la transmission de l’horloge. L’émetteur envoie d’abord une séquence d’horloge, alternance de 0 et 1 appelée ‘synchronisation bit’, que le récepteur utilise pour repérer les fronts de montées et des descentes et ainsi réaliser la mise en phase. Après ce calage, le récepteur pourra échantillonner au meilleur instant le signal pour acquérir les bits de données, mais … seulement pour un certain temps. En effet, comme les horloges ont forcément des dérives, la désynchronisation arrivera rapidement. Il faudra alors que, soit la suite de bits (trame) se termine suffisamment tôt avant cette désynchronisation, soit que le codage des données permette d’entretenir la synchronisation pendant toute la durée de la transmission (par exemple le code de Manchester vu plus loin).
3.4.2 Transmissions synchrones et asynchrones.
Une transmission est synchrone si le récepteur utilise la même horloge que l’émetteur. Soit les deux travaillent avec la même horloge (ils sont connectés physiquement à la même horloge), les agents communicants sont proches (par exemple une communication processeur – contrôleur de mémoire), ou alors l’horloge est transmise avec un canal de transmission équivalent de manière à ce que l’horloge d’émission est transportée avec la trame de données. La transmission synchrone permet de bien déterminer l’instant d’échantillonnage du signal, car la phase de l’horloge à la réception est maintenue en permanence pendant la réception. La transmission peut aussi être synchrone par émission permanente de bits qui correspondent soit à l’horloge, soit à la trame de données, c’est le cas par
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
18
18
exemple de la procédure HDLC (High level Data Link Control) utilisée en téléinformatique.
Pour illustrer cette notion, faisons une analogie dans la vie courante. Un escalier mécanique roulant qui se déplace en permanence effectue un déplacement synchrone : c’est à la personne d’attendre et de prendre la marche au bon moment par rapport à « l’horloge » de l’escalier, sinon... . La personne regarde inconsciemment l’avance de quelques marches pour effectuer cette synchronisation.
Dans le mode asynchrone, en dehors de l’émission du train de bits de la synchronisation bit (souvent réduit à un seul), la transmission peut commencer n’importe quand et se fait sans horloge pour régler l’échange. Il est alors souvent accompagné d’un mécanisme de signalisation temporel appelé poignée de main (handshake). Cette technique est parfois utilisée avec la mémoire, car elle permet d’adapter une opération de lecture (soit deux transmissions à l’alternat) au temps de cycle différents de plusieurs composants mémoire (DRAM et ROM).
Un escalier en mode asynchrone correspond à l’escalier qui « attend » (il est au repos) le passager qui peut arriver n’importe quand, il démarre à son arrivée (signalée par un capteur).
Cette description des modes synchrones et asynchrones correspond aux définitions des mots synchrone et asynchrone au niveau électronique des composants (circuits) et dans le domaine du temps réel. En téléinformatique, ces qualificatifs sont utilisés avec une signification quelque peu différente. Par exemple, une transmission est synchrone si la mise en phase est maintenue pendant toute la transmission, même si l’envoi du premier bit peut se faire n’importe quand et donc nécessiter l’envoi d’un préambule de bits de synchronisation de l’horloge. De fait en mode synchrone le récepteur effectue une synchronisation d’horloge en phase et en fréquence . Suivant cette définition Ethernet travaille en mode synchrone…Le mode asynchrone, qu’il faudrait plutôt appelé arythmique, est confondu en pratique avec l’émission en mode caractères : le temps s’écoulant entre l’émission de deux caractères est quelconque et chaque caractère est précédé d’un bit de démarrage (start bit) signalant l’arrivée des 7 bits du caractère et du bit de parité. Emetteur et récepteur travaillent avec des horloges convenues suffisamment voisines en valeur l’une de l’autre. Le ‘start bit’ sert alors juste à faire la synchronisation de phase. Ensuite, il n’y a pas d’entretien de l’horloge de réception car la stabilité de l’horloge est suffisante sur une dizaine de bit.
3.4.3 Voies et Modes de transmission : Série, Parallèle, Full et Half Duplex
Les transmissions de données dans l’ordinateur sont calées sur la taille de son mot (8,16, 32 bits). Cela se passe au niveau du bus du processeur, voire de l’ordinateur, où l’on met à disposition de la communication, un ensemble de fil, le bus, pour assurer le transfert simultané d’un mot complet c’est une transmission parallèle. Elle nécessite autant de fils que la taille du mot, mais requiert en général aussi des
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
19
19
fils supplémentaires pour transmettre l’horloge de synchronisation, l’adresse du destinataire, des signaux de commandes (lecture, écriture, acquittement, …). Ce nombre de fils est alors parfois très important (bus avec une centaine de lignes).
La transmission parallèle est celle qui est la plus rapide , mais les lois de la physique découragent d’une utilisation tout azimut de ce mode. Le cadencement du bus, c'est-à-dire la fréquence d’envoi d’un mot en parallèle, est en général très élevé pour obtenir un très haut débit binaire. Or, plus les fréquences sont élevées, plus les lignes d’une certaine longueur se comportent comme des antennes qui rayonnent et qui réceptionnent, ce qui se traduit par beaucoup d’interférences et finalement beaucoup d’erreurs dans la transmission. En fin de compte, si l’on veut obtenir une certaine fiabilité dans la transmission, il faudra se limiter soit sur la fréquence, soit sur la distance. Qui veut aller loin, ménage sa monture… D’autre part sur un plan économique, une liaison parallèle est coûteuse.
Par exemple , un bus interne de processeur avec une horloge à quelques Gigahertz limite la communication parallèle à une zone de quelques centimètres. Le bus d’un ordinateur (quelques centaines de Mégahertz) est limité à quelques dizaines de centimètres, d’où le montage de certains gros ordinateurs en cylindre pour minimiser les distances de connexion. Les bus parallèle s pour des appareils de mesure, comme IEEE 488 ont une longueur maximum de 20m pour un débit maximum de 1Mo/s. A technologie égale, le produit bande passante par le débit est constant. Les valeurs des exemples précédents ne sont pas directement comparables car les technologies associées (électronique en particulier) ne sont pas identiques.
Les liaisons parallèles sont donc essentiellement utilisées pour des débits très élevés sur de très courtes distances (bus AGP pour les cartes vidéo, bus SCSI pour les disques rapides).
A l’extérieur de l’ordinateur, la transmission se fait généralement en série. Il s’agit en fait d’éliminer tous les problèmes d’interférences des fils en torons, ou en nappes, en n’en gardant dans l’idéal … qu’un seul. Les bits doivent donc être transmis les uns à la suite des autres dans un ordre déterminé, d’où la dénomination de transmission série. Dans le cas idéal, une liaison série n’utilise qu’un seul ‘fil’ de transmission. En pratique, et en particulier pour la transmission de signaux électriques, il faut un conducteur supplémentaire (retour de masse, terre). C’est le cas du câble coaxial ou l’âme centrale transporte le signal et le retour de masse se fait par une tresse autour de l’ isolant. Par contre, avec les fibres optiques, une seule fibre est suffisante.
La liaison série a toujours été réputée lente par opposition à la liaison parallèle, mais on peut admettre qu’avec les progrès technologiques, à la fois au niveau des supports et de l’électronique associée, que de très hauts débits sont maintenant également atteints (fibre optique).
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
20
20
Comme de grandes distances peuvent être parcourues avec une transmission série , il est indispensable de bien la faire la différence entre la vitesse de propagation du signal et le temps de transmission d’un bit (débit binaire), ou la différence entre le temps de propagation6 (parfois appelé latence) et le temps de transmission.
3.4.4 Structuration d’un message. Encapsulation. Notion de trame.
En mode série ou en mode parallèle, les données d’information ne circulent pas toutes seules sur le canal de transmission. Nous avons déjà vu que pour être en mesure de détecter une erreur, il fallait adjoindre aux données une clé de contrôle . La plupart du temps, les supports de communications sont multipoints (plusieurs agents sont connectés sur le bus ou le réseau local) : il est alors indispensable d’accompagner les données avec l’identificateur ou adresse du destinataire, éventuellement complétée de celle de l’émetteur. Finalement, dans le cas d’une liaison série, les données doivent être précédées, comme nous l’avons vu, d’une suite binaire pour la mise en phase de l’horloge de réception (synchronisation bit).
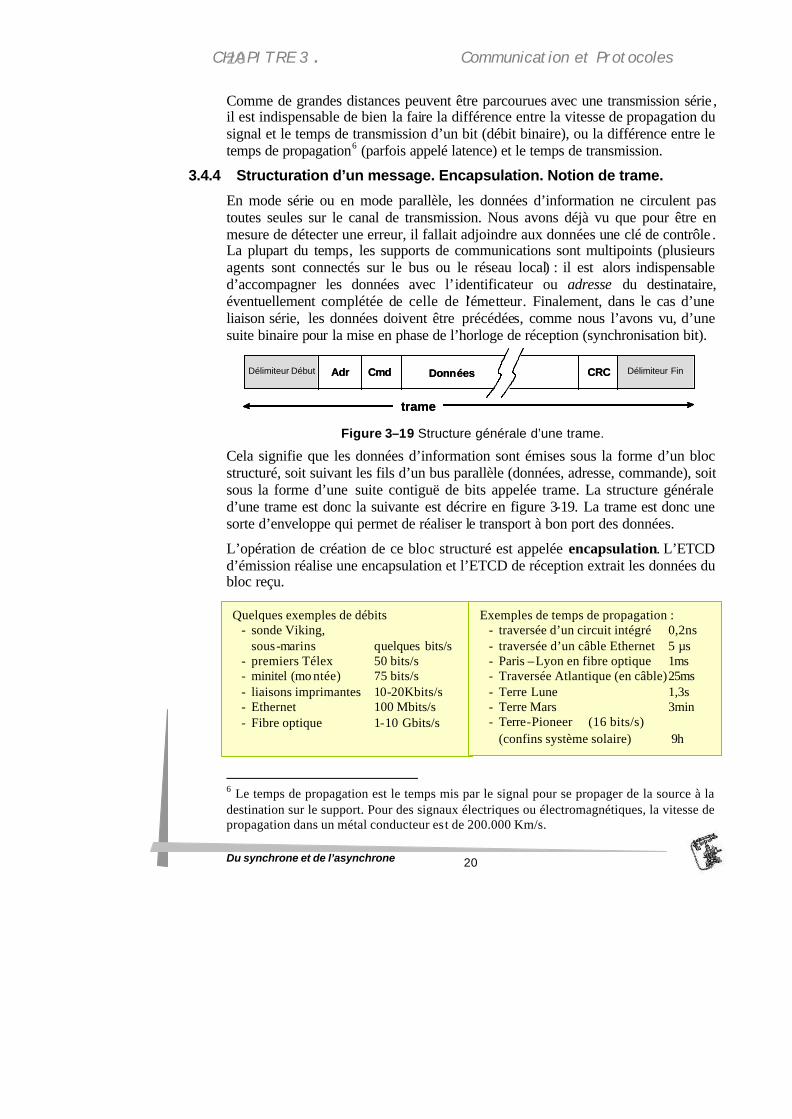
Figure 3–19 Structure générale d’une trame.
Cela signifie que les données d’information sont émises sous la forme d’un bloc structuré, soit suivant les fils d’un bus parallèle (données, adresse, commande), soit sous la forme d’une suite contiguë de bits appelée trame. La structure générale d’une trame est donc la suivante est décrire en figure 3-19. La trame est donc une sorte d’enveloppe qui permet de réaliser le transport à bon port des données.
L’opération de création de ce bloc structuré est appelée encapsulation. L’ETCD d’émission réalise une encapsulation et l’ETCD de réception extrait les données du bloc reçu.
6 Le temps de propagation est le temps mis par le signal pour se propager de la source à la destination sur le support. Pour des signaux électriques ou électromagnétiques, la vitesse de propagation dans un métal conducteur est de 200.000 Km/s.
Quelques exemples de débits - sonde Viking,
sous-marins quelques bits/s - premiers Télex 50 bits/s - minitel (mo ntée) 75 bits/s - liaisons imprimantes 10-20Kbits/s - Ethernet 100 Mbits/s - Fibre optique 1-10 Gbits/s
Exemples de temps de propagation : - traversée d’un circuit intégré 0,2ns - traversée d’un câble Ethernet 5 µs - Paris –Lyon en fibre optique 1ms - Traversée Atlantique (en câble) 25ms - Terre Lune 1,3s - Terre Mars 3min - Terre-Pioneer (16 bits/s)
(confins système solaire) 9h
Délimiteur Début Adr Cmd Données CRC
trame
Délimiteur FinDélimiteur Début Adr Cmd Données CRC
trame
Délimiteur Fin
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
21
21
3.4.5 Sens de transmission.
Entre des équipements d’extrémités A et B, il existe plusieurs manières de définir le sens de la transmission au niveau physique.
Dans une liaison en mode simplex, si A est l’émetteur alors B ne peut être que récepteur. Le mode de transmission est unidirectionnel, il n’y a pas de retour possible de B vers A. Ce mode de liaison correspond par exemple à la diffusion télé.
Pour les communications bidirectionnelles, deux fonctionnements sont possibles : l’alternat ou Half Duplex et le bidirectionnel intégral ou Full Duplex.
Dans une liaison Half Duplex, les trames circulent alternativement dans un sens puis dans l’autre. Une ligne à 2 fils (transmission et masse) est suffisante, mais évidemment les deux extrémités ne peuvent pas envoyer des trames simultanément. Il faut déterminer des trames permettant de définir le tour de parole. Pour passer d’un sens à l’autre, il faut un temps de commutation de la fonction de réception à celle d’émission, ce temps est appelé temps de retournement. Les radios amateurs ont des liaisons en mode alternat. La communication entre le processeur et le contrôleur de mémoire se fait à l’alternat.
Dans le mode Full Duplex, les trames peuvent circuler simultanément dans les deux sens. Cela suppose qu’entre les ETCD il y a au moins deux voies de communication, 1 fil dans un sens et un second pour l’autre, ou alors que le support est partagé par exemple suivant des bandes de fréquences différentes (multiplexage fréquentiel).
3.4.6 Partage de support, multiplexage et démultiplexage.
Le support de communication est aussi en fin de compte … un élément coûteux qu’il est intéressant de rentabiliser au niveau de son utilisation. Cela est vrai aussi bien pour le bus processeur que pour les câbles de communication à plus grandes distances, où les travaux de génie civil sont très largement plus onéreux que les équipements de terminaison et le support7.
Le partage du support de transmission pour permettre la simultanéité apparente ou réelle de plusieurs transmissions est une opération appelée multiplexage.
Le multiplexage fréquentiel est le partage du support en plusieurs canaux travaillant dans des bandes de fréquences différentes. Chaque transmission utilise son propre canal avec une longue d’onde (fréquence porteuse) bien spécifique. Chaque transmission n’utilise qu’une partie du support, mais peut le faire indéfiniment. Il y a réellement simultanéité dans les transmissions. Un exemple
7 Pour fixer un ordre de grandeur : la pose d’une fibre optique coûte environ 20 € le mètre si le cheminement existe, et environ 200 € le mètre si terrassement est à faire

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
22
22
bien connu de multiplexage fréquentiel est l’utilisation de la bande de fréquence FM pour différentes stations radio émettrices.
Le multiplexage temporel est le partage dans le temps du support : celui-c i est alternativement attribué à différents émetteurs pendant un laps de temps déterminé. Par contre, pendant ce laps de temps, la transmission peut utiliser le support dans son intégralité de bande passante. Il n’y a pas de réelle simultanéité, c’est le temps qui est partagé entre les différentes transmissions. Le multiplexage temporel est le plus efficace pour les communications internes à l’ordinateur. Quelques éléments supplémentaires vont donc être précisés. Comment multiplexer un signal ou des bits? Le circuit de base est un circuit logique à 2n entrées et une sortie. En fonction d’une entrée ‘commande de sélection’ sur n bits, le circuit dirige l’entrée choisie vers la sortie. Si le circuit est synchronisé avec une horloge, alors le circuit réalise un multiplexage temporel cyclique sur les 2n signaux d’entrées. Du coté du récepteur, l’opération inverse est réalisée par un circuit démultiplexeur. Les circuits multiplexeurs et démultiplexeurs ont été décrits dans le chapitre « Fonctions Logiques et Circuits ».
Figure 3–20 Multiplexage en ADSL.
Exemple de Multiplexage Fréquentiel : l’ADSL
L’ADSL, Asymetric Digital Subscriber Line, propose d’utiliser la ligne téléphonique entre usager et central téléphonique pour faire passer simultanément une liaison téléphonique classique une liaison informatique pour une connexion internet. La ligne a une bande passante de l’ordre du MHz, voire plus, et cette bande est partagée en trois grandes parties. La bande inférieure à 4 KHz est réservé au téléphone analogique et reste donc compatible avec le fonctionnement habituel de celui-ci. Le reste de la capacité (de 20KHz à 1MHz) de la ligne est pris pour la liaison ADSL. L’ADSL, à l’instar du Minitel, différentie de manière asymétrique le trafic montant (de l’usager vers le réseau) et le trafic descendant (du réseau vers l’usager). L’usager étant supposé consommer davantage de données qu’il n’en produit, la plus grande partie de la bande passante est dédiée au trafic descendant.
Puissance du spectre
Voie
‘RTC’
Espace sous porteuse 4,3 KHz
Transmissiondescendante
Transmissionmontante
4KHz 20KHz 1,1MHz
Fréquence
250KHz
Puissance du spectre
Voie
‘RTC’
Espace sous porteuse 4,3 KHz
Transmissiondescendante
Transmissionmontante
4KHz 20KHz 1,1MHz
Fréquence
250KHz
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
23
23
3.5 Le codage binaire à signal. Le but de cette partie est de décrire différentes techniques de génération d’un signal à partir d’une suite de données binaires. On donnera les propriétés de ces signaux, ce qui permettra de vérifier si le signal est bien adapté au cannal. Pour une même suite de bits, il y a différents codages possibles qui génèrent ainsi des signaux différents, c'est-à-dire avec des densités spectrales différentes. Pour une meilleure transmission de données par rapport à un canal donné, il faut donc trouver le codage pour lequel la densité spectrale « rentre » au mieux dans la bande passante. C’est au niveau du DCE que se réalise cette fonction de codage et il y a deux grandes catégories de modulation : la modulation large bande et la modulation en bande de base.
3.5.1 Modulation large bande.
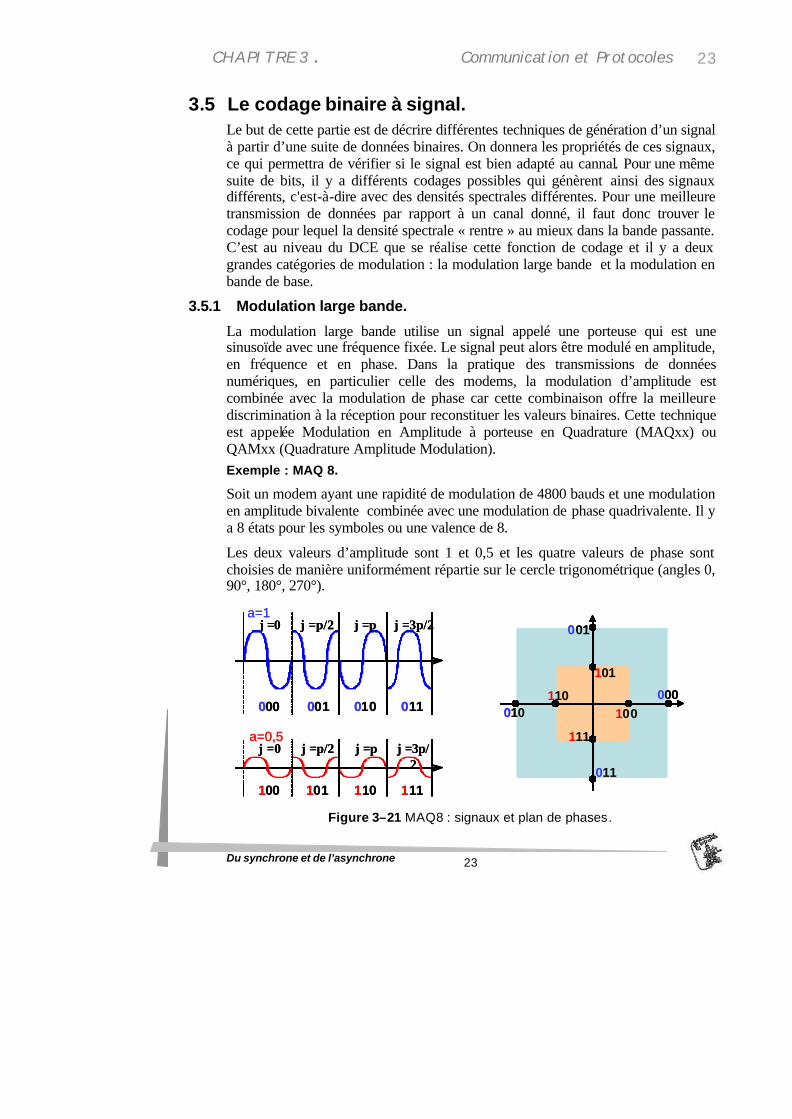
La modulation large bande utilise un signal appelé une porteuse qui est une sinusoïde avec une fréquence fixée. Le signal peut alors être modulé en amplitude, en fréquence et en phase. Dans la pratique des transmissions de données numériques, en particulier celle des modems, la modulation d’amplitude est combinée avec la modulation de phase car cette combinaison offre la meilleure discrimination à la réception pour reconstituer les valeurs binaires. Cette technique est appelée Modulation en Amplitude à porteuse en Quadrature (MAQxx) ou QAMxx (Quadrature Amplitude Modulation). Exemple : MAQ 8.
Soit un modem ayant une rapidité de modulation de 4800 bauds et une modulation en amplitude bivalente combinée avec une modulation de phase quadrivalente. Il y a 8 états pour les symboles ou une valence de 8.
Les deux valeurs d’amplitude sont 1 et 0,5 et les quatre valeurs de phase sont choisies de manière uniformément répartie sur le cercle trigonométrique (angles 0, 90°, 180°, 270°).
000 001 010 011
ϕ=0 ϕ=π/2 ϕ=π ϕ=3π/2
100 101 110 111
ϕ=0 ϕ=π/2 ϕ=π ϕ=3π/2
a=1
a=0,5
000 001 010 011
ϕ=0 ϕ=π/2 ϕ=π ϕ=3π/2
100 101 110 111
ϕ=0 ϕ=π/2 ϕ=π ϕ=3π/2
a=1
a=0,5
000
001
010
011
100
101
110
111
000
001
010
011
100
101
110
111
Figure 3–21 MAQ8 : signaux et plan de phases.
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
24
24
La modulation MAQxx est souvent représentée sous la forme d’un diagramme où l’on représente l’ensemble de xx états possibles du signal (figure 3-21).
Avec une valence de 8, le nombre de bits transportés par bauds est de 3 et le débit binaire devient égal à :
D = 4800 Bauds* 3 bits
D = 14 400 bits/s.
Le moment élémentaire T est égal à 0,208 ms (T= 1/4800).
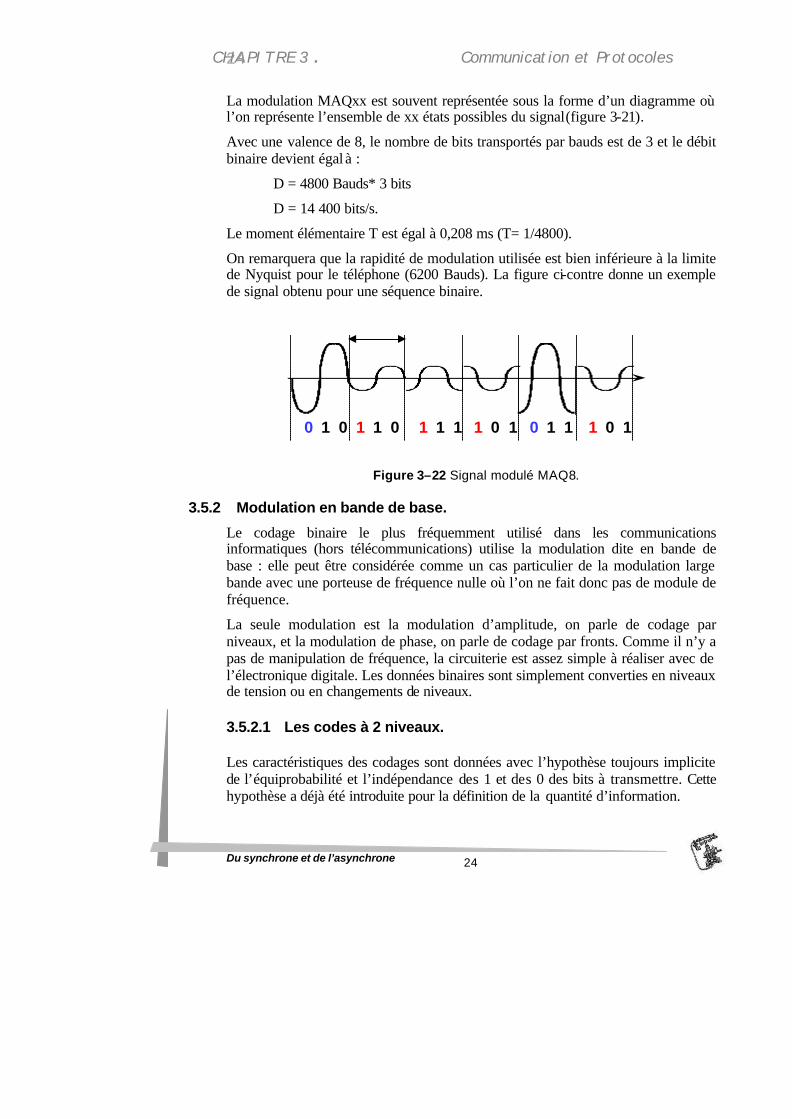
On remarquera que la rapidité de modulation utilisée est bien inférieure à la limite de Nyquist pour le téléphone (6200 Bauds). La figure ci-contre donne un exemple de signal obtenu pour une séquence binaire.
3.5.2 Modulation en bande de base.
Le codage binaire le plus fréquemment utilisé dans les communications informatiques (hors télécommunications) utilise la modulation dite en bande de base : elle peut être considérée comme un cas particulier de la modulation large bande avec une porteuse de fréquence nulle où l’on ne fait donc pas de module de fréquence.
La seule modulation est la modulation d’amplitude, on parle de codage par niveaux, et la modulation de phase, on parle de codage par fronts. Comme il n’y a pas de manipulation de fréquence, la circuiterie est assez simple à réaliser avec de l’électronique digitale. Les données binaires sont simplement converties en niveaux de tension ou en changements de niveaux.
3.5.2.1 Les codes à 2 niveaux.
Les caractéristiques des codages sont données avec l’hypothèse toujours implicite de l’équiprobabilité et l’indépendance des 1 et des 0 des bits à transmettre. Cette hypothèse a déjà été introduite pour la définition de la quantité d’information.
0 1 0 1 1 0 1 1 1 1 0 1 0 1 1 1 0 1
Figure 3–22 Signal modulé MAQ8.
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
25
25
Tous les bits sont également codés sur la même durée, le moment élémentaire T (inverse de la rapidité de modulation). Les codages NRZ.
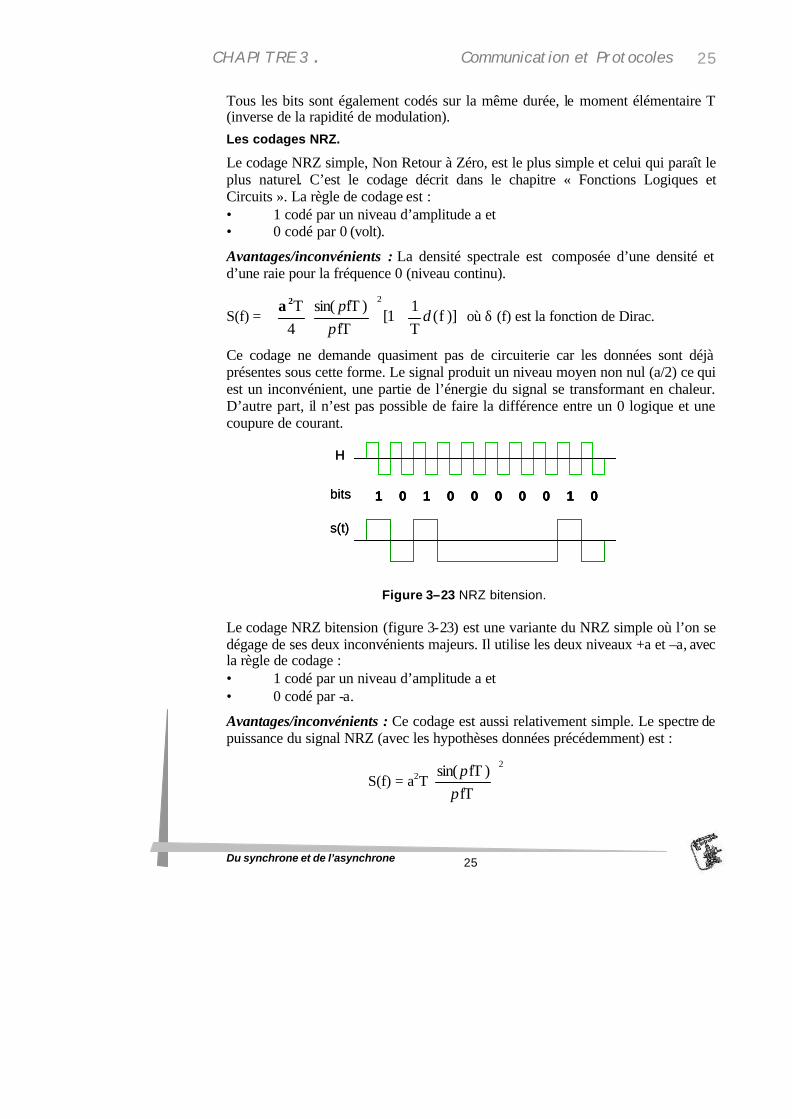
Le codage NRZ simple, Non Retour à Zéro, est le plus simple et celui qui paraît le plus naturel. C’est le codage décrit dans le chapitre « Fonctions Logiques et Circuits ». La règle de codage est : • 1 codé par un niveau d’amplitude a et • 0 codé par 0 (volt).
Avantages/inconvénients : La densité spectrale est composée d’une densité et d’une raie pour la fréquence 0 (niveau continu).
S(f) = )]f(T1
1fT
)fTsin(4T 2
δπ
π+[
2a
où δ (f) est la fonction de Dirac.
Ce codage ne demande quasiment pas de circuiterie car les données sont déjà présentes sous cette forme. Le signal produit un niveau moyen non nul (a/2) ce qui est un inconvénient, une partie de l’énergie du signal se transformant en chaleur. D’autre part, il n’est pas possible de faire la différence entre un 0 logique et une coupure de courant.
Le codage NRZ bitension (figure 3-23) est une variante du NRZ simple où l’on se dégage de ses deux inconvénients majeurs. Il utilise les deux niveaux +a et –a, avec la règle de codage : • 1 codé par un niveau d’amplitude a et • 0 codé par -a.
Avantages/inconvénients : Ce codage est aussi relativement simple. Le spectre de puissance du signal NRZ (avec les hypothèses données précédemment) est :
S(f) = a2T2
fT)fTsin(
ππ
H
bits
s(t)
H
bits
s(t)
1 0 1 0 0 0 0 0 1 01 0 1 0 0 0 0 0 1 01 0 1 0 0 0 0 0 1 0
Figure 3–23 NRZ bitension.
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
26
26
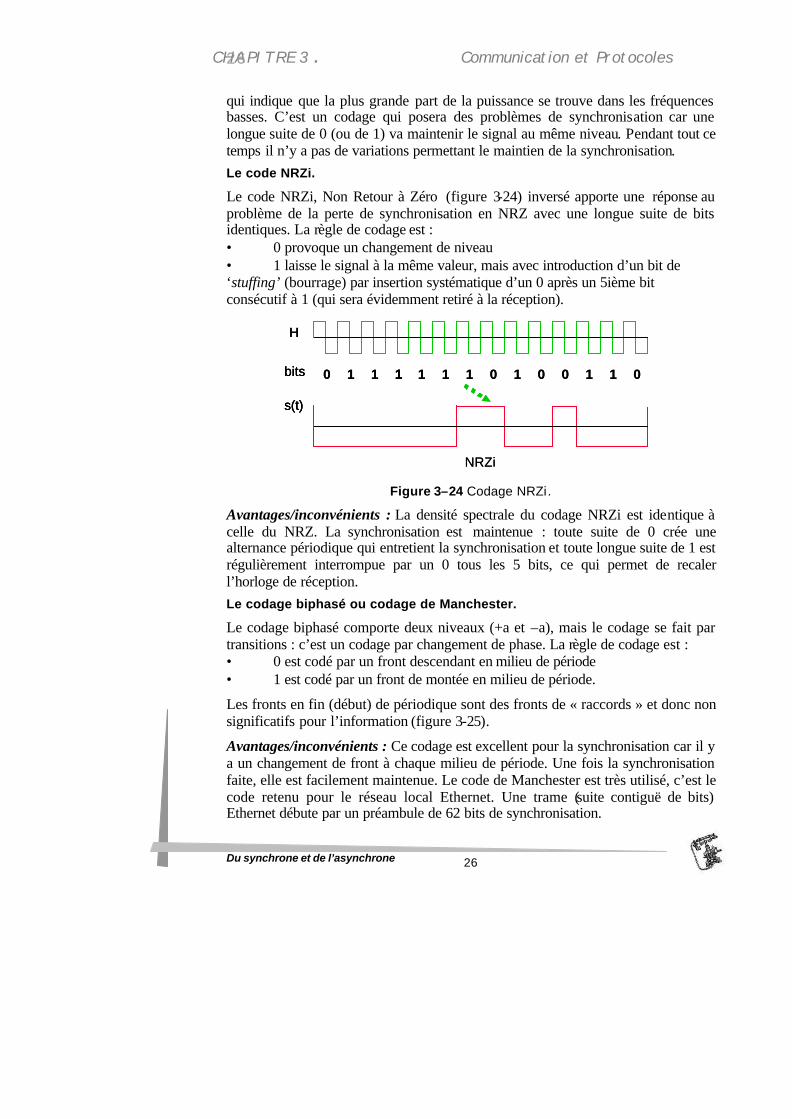
qui indique que la plus grande part de la puissance se trouve dans les fréquences basses. C’est un codage qui posera des problèmes de synchronisation car une longue suite de 0 (ou de 1) va maintenir le signal au même niveau. Pendant tout ce temps il n’y a pas de variations permettant le maintien de la synchronisation. Le code NRZi.
Le code NRZi, Non Retour à Zéro (figure 3-24) inversé apporte une réponse au problème de la perte de synchronisation en NRZ avec une longue suite de bits identiques. La règle de codage est : • 0 provoque un changement de niveau • 1 laisse le signal à la même valeur, mais avec introduction d’un bit de ‘stuffing’ (bourrage) par insertion systématique d’un 0 après un 5ième bit consécutif à 1 (qui sera évidemment retiré à la réception).
Figure 3–24 Codage NRZi.
Avantages/inconvénients : La densité spectrale du codage NRZi est identique à celle du NRZ. La synchronisation est maintenue : toute suite de 0 crée une alternance périodique qui entretient la synchronisation et toute longue suite de 1 est régulièrement interrompue par un 0 tous les 5 bits, ce qui permet de recaler l’horloge de réception. Le codage biphasé ou codage de Manchester.
Le codage biphasé comporte deux niveaux (+a et –a), mais le codage se fait par transitions : c’est un codage par changement de phase. La règle de codage est : • 0 est codé par un front descendant en milieu de période • 1 est codé par un front de montée en milieu de période.
Les fronts en fin (début) de périodique sont des fronts de « raccords » et donc non significatifs pour l’information (figure 3-25).
Avantages/inconvénients : Ce codage est excellent pour la synchronisation car il y a un changement de front à chaque milieu de période. Une fois la synchronisation faite, elle est facilement maintenue. Le code de Manchester est très utilisé, c’est le code retenu pour le réseau local Ethernet. Une trame (suite contiguë de bits) Ethernet débute par un préambule de 62 bits de synchronisation.
0 1 1 11 1 1 1 0 1 0 0 1 1 0
H
bits
s(t)
NRZi
0 1 1 11 1 1 1 0 1 0 0 1 1 0
H
bits
s(t)
H
bits
s(t)
NRZi
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
27
27
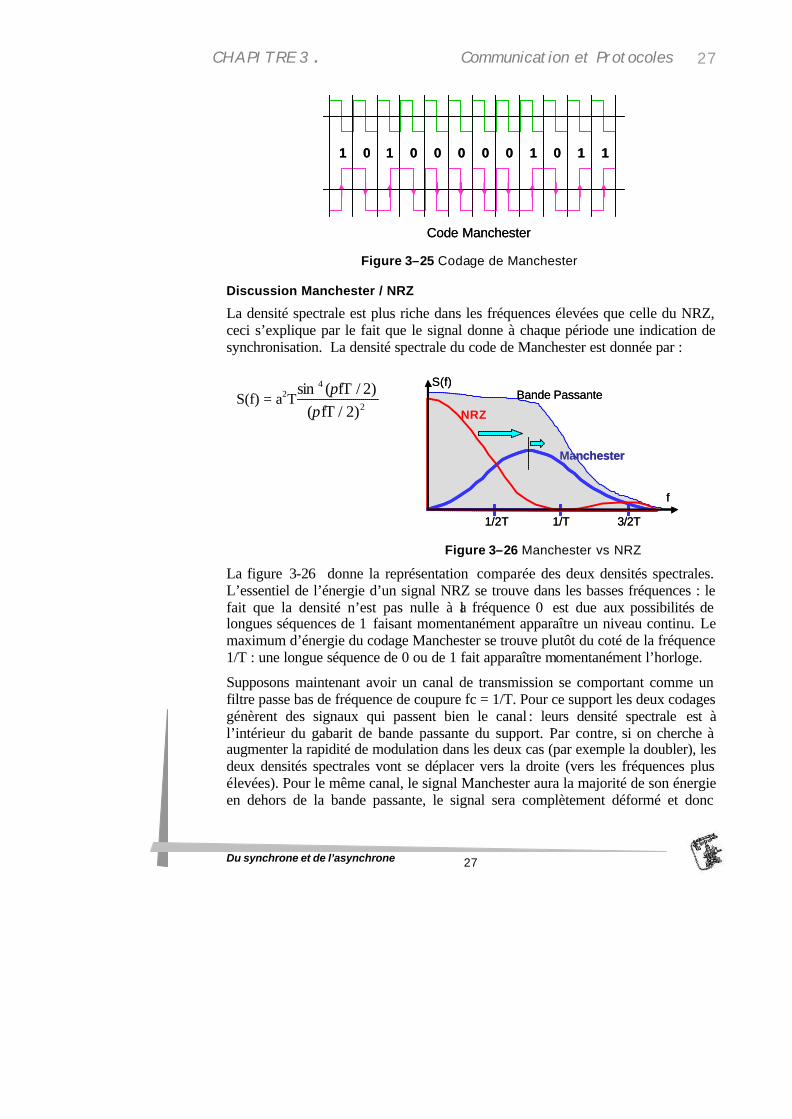
Discussion Manchester / NRZ
La densité spectrale est plus riche dans les fréquences élevées que celle du NRZ, ceci s’explique par le fait que le signal donne à chaque période une indication de synchronisation. La densité spectrale du code de Manchester est donnée par :
Figure 3–26 Manchester vs NRZ
La figure 3-26 donne la représentation comparée des deux densités spectrales. L’essentiel de l’énergie d’un signal NRZ se trouve dans les basses fréquences : le fait que la densité n’est pas nulle à la fréquence 0 est due aux possibilités de longues séquences de 1 faisant momentanément apparaître un niveau continu. Le maximum d’énergie du codage Manchester se trouve plutôt du coté de la fréquence 1/T : une longue séquence de 0 ou de 1 fait apparaître momentanément l’horloge.
Supposons maintenant avoir un canal de transmission se comportant comme un filtre passe bas de fréquence de coupure fc = 1/T. Pour ce support les deux codages génèrent des signaux qui passent bien le canal : leurs densité spectrale est à l’intérieur du gabarit de bande passante du support. Par contre, si on cherche à augmenter la rapidité de modulation dans les deux cas (par exemple la doubler), les deux densités spectrales vont se déplacer vers la droite (vers les fréquences plus élevées). Pour le même canal, le signal Manchester aura la majorité de son énergie en dehors de la bande passante, le signal sera complètement déformé et donc
1 0 1 0 0 0 0 0 1 0 1 1
Code Manchester
1 0 1 0 0 0 0 0 1 0 1 1
Code Manchester
Figure 3–25 Codage de Manchester
1/2T 1/T 3/2T
Bande Passante
NRZ
Manchester
S(f)
f
1/2T 1/T 3/2T
Bande Passante
NRZ
Manchester
S(f)
f
S(f) = a2T2
4
)2/fT()2/fT(sin
ππ

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
28
28
inexploitable. Par contre le signal NRZ aura encore toute son énergie utile dans la bande passante du canal et sera encore pleinement exploitable.
Pour un support (passe bas) donné, on peut en moyenne transmettre deux fois rapidement que le code de Manchester, mais avec un risque non négligeable de désynchronisation de l’horloge.
Il existe une variante appelée code de Manchester différentiel8 : le principe est le même, mais le codage s’applique sur changement de bits. La règle de codage est : ( bi étant le iième bit à transmettre) • si |bi-1 – bi| = 0 alors il y a génération d’un front descendant en milieu de période • si |bi-1 – bi| = 1 alors il y a génération d’un front de montée en milieu de période.
Le code de Miller.
Le code de Miller se déduit simplement du code Manchester par suppression d’une transition sur deux : il y a alors deux fois de variations dans le signal. Mais la règle de codage peut aussi s’exprimer par : • 0 pas de front en milieu de période, le signal vaut alternativement +a et –a (un 0 génère une transition en fin de temps bit s’il est suivi par un autre 0. • 1 génère un front en milieu de période, le sens est déterminé à partir de la valeur du signal à la fin du temps bit précédent.
Au décodage, une transition en milieu de période devient un 1 et l’absence de transition est lue comme un 0.
Figure 3–27 Manchester et Miller
8Le code de Manchester nécessite un repérage des fils sinon il y a changement de signe du signal. Le code Manchester différentiel ne nécessite pas le repérage des fils.
H
bits
s(t)
1 0 1 0 0 0 0 0 1 0 1 1
Code Manchester
Code Miller
s(t)
H
bits
s(t)
1 0 1 0 0 0 0 0 1 0 1 1
Code Manchester
Code Miller
s(t)
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
29
29
Avantages/inconvénients : La densité spectrale est donnée par :
S(f) = )8cos817(22
T2a
θθ +( 23 -2cosθ - 22cos 2θ -12 cos3θ + 5cos4θ +12 cos 5θ + 2cos 6θ
-8cos7θ+2cos8θ)
Elle présente une partie centrale étroite et donc élevée avec un centrage à une fréquence deux fois plus faible que le code de Manchester. Il permet donc un débit plus élevé sur des canaux à bande passante limitée. Par contre le spectre prend une valeur non nulle pour la fréquence 0, le canal doit donc laisser passer le continu.
3.5.2.2 Les codes à 3 niveaux.
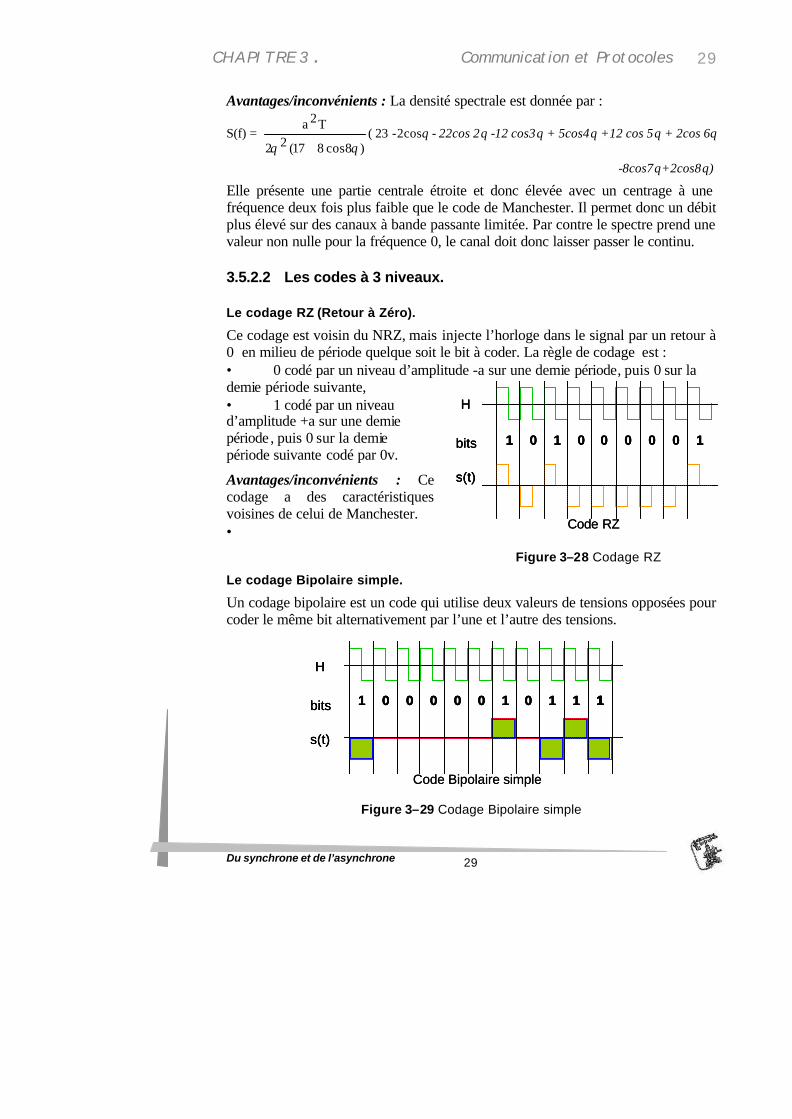
Le codage RZ (Retour à Zéro).
Ce codage est voisin du NRZ, mais injecte l’horloge dans le signal par un retour à 0 en milieu de période quelque soit le bit à coder. La règle de codage est : • 0 codé par un niveau d’amplitude -a sur une demie période, puis 0 sur la demie période suivante, • 1 codé par un niveau d’amplitude +a sur une demie période, puis 0 sur la demie période suivante codé par 0v.
Avantages/inconvénients : Ce codage a des caractéristiques voisines de celui de Manchester. •
Figure 3–28 Codage RZ
Le codage Bipolaire simple.
Un codage bipolaire est un code qui utilise deux valeurs de tensions opposées pour coder le même bit alternativement par l’une et l’autre des tensions.
Figure 3–29 Codage Bipolaire simple
1 0 1 0 0 0 0 0 1
Code RZ
H
bits
s(t)
1 0 1 0 0 0 0 0 11 0 1 0 0 0 0 0 1
Code RZ
H
bits
s(t)
H
bits
s(t)
1 0 0 0 0 0 1 0 1 1 11
H
bits
s(t)
Code Bipolaire simple
1 0 0 0 0 0 1 0 1 1 111 0 0 0 0 0 1 0 1 1 111 0 0 0 0 0 1 0 1 1 11
H
bits
s(t)
H
bits
s(t)
Code Bipolaire simple
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
30
30
La règle de codage est : • 0 codé par le niveau 0 v, • 1 alternativement codé par +a puis par –a.
La densité spectrale est donnée par la relation : S(f) = a2T2
4
)fT()fT(sin
ππ
Avantages/inconvénients : Il y a annulation du spectre à la fréquence 0, le support n’a ainsi pas besoin de passer le continu. La densité spectrale est calée comme celle de Miller et permet donc des débits élevés. Il faut cependant régler le problème du risque de la perte de synchronisation pour les longues suites de 0. Les codes bipolaires haute densité d’ordre n : BHDn, HDBn
L’objectif est de garder les propriétés spectrales permettant les débits élevés du code bipolaire, mais en supprimant les risques de désynchronisation dus aux longues suites de 0. La technique est analogue à celle du stuffing du code NRZi : il faut remplacer une suite de de (n+1) ‘0’ par une séquence comportant au plus n ‘0’.
Le codage HDB 3 (au plus 3 ‘0’) est utilisé dans le réseau téléphonique numérique RNIS. La règle de codage est : • 1 alternativement codé par +a puis par –a, comme dans le bipolaire simple. • 0 est codé par un 0v s’il y en a moins de 4 bits à ‘0’ à la suite. S’il y a 4 bits consécutifs à ‘0’ alors ceux-ci sont remplacés par une séquence de remplissage où tous les bits sont à 0 à l’exception du premier et du dernier. Le dernier bit est un bit un ‘viol’ de bipolarité (pour faire la différence avec un vrai 1), et le premier nouveau bit est un 0 ou +a ou –a de telle sorte que la polarité du viol soit alternée par rapport à celle du viol précédent.
Avantages/inconvénients :
Le codage HDB 3 est assez efficace du point de vue du débit, mais il faut faire attention au fait qu’une erreur de lecture d’un bit à la réception, entraîne des erreurs en cascade sur tous les bits suivants.
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
31
31
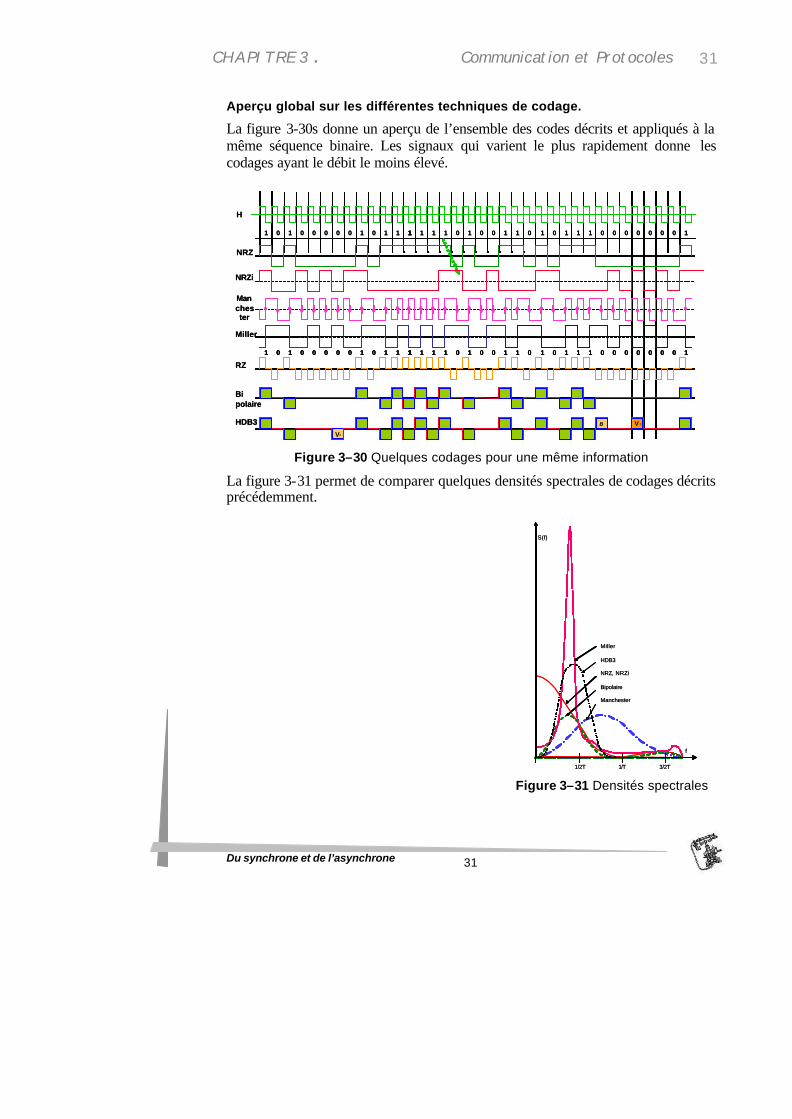
Aperçu global sur les différentes techniques de codage.
La figure 3-30s donne un aperçu de l’ensemble des codes décrits et appliqués à la même séquence binaire. Les signaux qui varient le plus rapidement donne les codages ayant le débit le moins élevé.
Figure 3–30 Quelques codages pour une même information
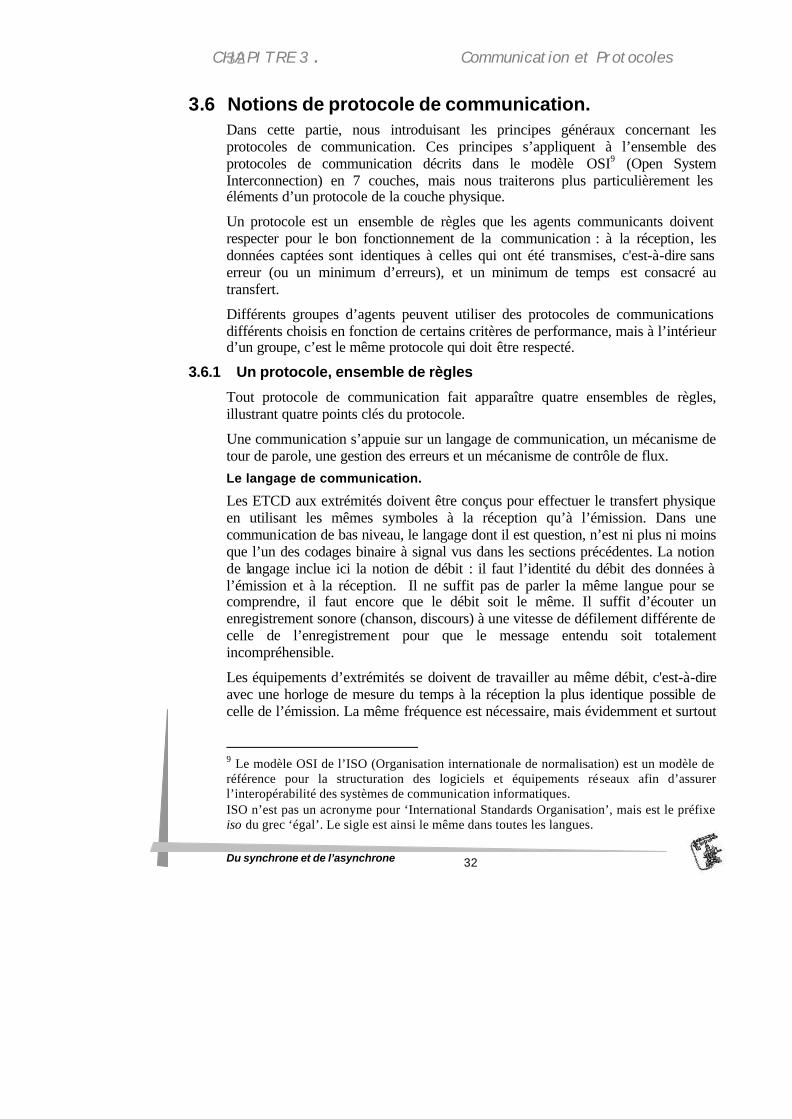
La figure 3-31 permet de comparer quelques densités spectrales de codages décrits précédemment.
Figure 3–31 Densités spectrales
S(f)
f
HDB3
NRZ, NRZi
Bipolaire
Manchester
1/2T 1/T 3/2T
Miller
S(f)
f
HDB3
NRZ, NRZi
Bipolaire
Manchester
1/2T 1/T 3/2T
Miller
1 0 1 0 0 0 0 0 1 0 1 1 11 1 1 1 0 1 0 0 1 1 0 1 0 1 1 1 0 0 0 0 0 0 0 1
1 0 1 0 0 0 0 0 1 0 1 1 11 1 1 1 0 1 0 0 1 1 0 1 0 1 1 1 0 0 0 0 0 0 0 1
V-
V-B
NRZ
NRZi
Manchester
Miller
RZ
Bipolaire
HDB3
H
1 0 1 0 0 0 0 0 1 0 1 1 11 1 1 1 0 1 0 0 1 1 0 1 0 1 1 1 0 0 0 0 0 0 0 1
1 0 1 0 0 0 0 0 1 0 1 1 11 1 1 1 0 1 0 0 1 1 0 1 0 1 1 1 0 0 0 0 0 0 0 11 0 1 0 0 0 0 0 1 0 1 1 11 1 1 1 0 1 0 0 1 1 0 1 0 1 1 1 0 0 0 0 0 0 0 1
V-
V-B
NRZ
NRZi
Manchester
Miller
RZ
Bipolaire
HDB3
H
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
32
32
3.6 Notions de protocole de communication. Dans cette partie, nous introduisant les principes généraux concernant les protocoles de communication. Ces principes s’appliquent à l’ensemble des protocoles de communication décrits dans le modèle OSI9 (Open System Interconnection) en 7 couches, mais nous traiterons plus particulièrement les éléments d’un protocole de la couche physique.
Un protocole est un ensemble de règles que les agents communicants doivent respecter pour le bon fonctionnement de la communication : à la réception, les données captées sont identiques à celles qui ont été transmises, c'est-à-dire sans erreur (ou un minimum d’erreurs), et un minimum de temps est consacré au transfert.
Différents groupes d’agents peuvent utiliser des protocoles de communications différents choisis en fonction de certains critères de performance, mais à l’intérieur d’un groupe, c’est le même protocole qui doit être respecté.
3.6.1 Un protocole, ensemble de règles
Tout protocole de communication fait apparaître quatre ensembles de règles, illustrant quatre points clés du protocole.
Une communication s’appuie sur un langage de communication, un mécanisme de tour de parole, une gestion des erreurs et un mécanisme de contrôle de flux. Le langage de communication.
Les ETCD aux extrémités doivent être conçus pour effectuer le transfert physique en utilisant les mêmes symboles à la réception qu’à l’émission. Dans une communication de bas niveau, le langage dont il est question, n’est ni plus ni moins que l’un des codages binaire à signal vus dans les sections précédentes. La notion de langage inclue ici la notion de débit : il faut l’identité du débit des données à l’émission et à la réception. Il ne suffit pas de parler la même langue pour se comprendre, il faut encore que le débit soit le même. Il suffit d’écouter un enregistrement sonore (chanson, discours) à une vitesse de défilement différente de celle de l’enregistrement pour que le message entendu soit totalement incompréhensible.
Les équipements d’extrémités se doivent de travailler au même débit, c'est-à-dire avec une horloge de mesure du temps à la réception la plus identique possible de celle de l’émission. La même fréquence est nécessaire, mais évidemment et surtout
9 Le modèle OSI de l’ISO (Organisation internationale de normalisation) est un modèle de référence pour la structuration des logiciels et équipements réseaux afin d’assurer l’interopérabilité des systèmes de communication informatiques. ISO n’est pas un acronyme pour ‘International Standards Organisation’, mais est le préfixe iso du grec ‘égal’. Le sigle est ainsi le même dans toutes les langues.

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
33
33
la bonne phase permettant au récepteur d’échantillonner le signal au moment le plus favorable. Le langage du protocole inclut alors aussi les mécanismes de synchronisation (« synchronisation bit », « synchronisation trame »). Un mécanisme de tour de parole.
Au niveau physique la communication s’appuie sur la transmission de signaux. Sur un canal de communication donné, la règle de base à respecter est qu’à un instant donné, s’il y a plusieurs agents communicants sur le canal, un seul doit émettre. Dans le cas contraire les signaux vont se mélanger et ne seront plus interprétables. Par contre, plusieurs agents peuvent être à l’écoute du message émis. Un support de transmission peut éventuellement avoir plusieurs canaux qui, eux, fonctionnent simultanément.
Un arbitrage doit être réalisé pour assurer que le droit d’émission ne soit attribué qu’à un seul agent. L’arbitrage est centralisé ou réparti. Dans un arbitrage centralisé, un agent, dit primaire, joue le rôle d’arbitre et distribue ce droit de parole (à la manière d’un président de séance dans une assemblée), les autres agents n’ont pas intrinsèquement droit à l’émission, sauf sur demande expresse du primaire. Dans ce mode, il n’y a pas de communication directe entre agents secondaires. Sur une carte unité centrale d’un ordinateur, ce type de mécanisme est utilisé sur le bus pour la communication entre le processeur et le contrôleur de mémoire centrale : c’est le processeur qui est maître des échanges de données (lecture ou écriture). Lorsque l’arbitrage est réparti, c’est chaque agent qui agit pour qu’il n’y ait pas de conflit. Les tours de parole sur des réseaux locaux comme Ethernet ou Token Ring sont des exemples d’arbitrages répartis. Une gestion des erreurs.
Aucun canal de transmission n’étant parfait, ni par sa bande passante, ni par le bruit ajouté au signal, le signal à l’arrivée est différent de celui qui a été émis. Si le support est suffisamment long, on peut noter que le signal se dégradant avec la distance, tous les agents qui sont sur le support ne voit pas le signal avec les mêmes déformations.
Quelle que soit l’origine de ces dégradations, le résultat palpable au niveau de la transmission est un taux d’erreurs. Pour un taux d’erreur donné, le risque d’une réception d’un entaché d’erreur est d’autant plus grand que ce message est long.
La gestion des erreurs est une politique de tolérances aux fautes, qui définit ce qui doit être fait lorsqu’il y a une erreur. Il faut évidemment d’abord être en mesure de détecter l’existence d’une erreur (voir section sur la détection des erreurs – bit de parité, code de Hamming, codes cycliques CRC). Après cette détection, il faut éventuellement mettre en œuvre un mécanisme de correction (par répétition du message ou autocorrection).

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
34
34
Un mécanisme de régulation (supervision) du trafic (contrôle de flux).
Un mécanisme de régulation de trafic est un ensemble de règles qui permettent de structurer l’échange de données dans le temps. Cela couvre aussi bien le contrôle de flux classique pour la congestion ou la saturation du destinataire, que la supervision (régulation) des échanges de données comme les mécanismes d’acquittement (appelés aussi dans certains protocoles la « poignée de main » -handshake-).
Cette supervision, si elle existe, implique que les agents échange des signaux (physiques ou logiques) de gestion de ce trafic pour signaler les bonnes ou mauvaises réceptions (signaux ACK, NACK), les demandes d’arrêt momentané d’émission pour limiter la congestion, …
L’illustration que nous proposons pour la mise en place d’un protocole au niveau physique concerne la gestion des échanges entre un processeur et le contrôleur de mémoire.
3.6.2 Les échanges mémoires, par l’exemple.
Les communications entre un processeur et le contrôleur de mémoire se résument à des requêtes d’écriture et des requêtes de lectures du processeur vers le contrôleur. Seul le processeur à l’initiative de l’échange : le contrôleur quand il parle ne fait que répondre.
Echange supposé sans erreur
Visualisation sous forme événements actions avec chronogramme de l’échange
Quand le processeur attend les données c’est le tour de parole.
Langue : NRZ, synchronisation par horloge
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
35
35
3.6.2.1 Exemple asynchrone avec acquittement temporel 68 020
Pour décrire un cycle de lecture effectué par le processeur 68020 (Motorola), il faut introduire quelques uns des signaux du bus intervenant dans l’échange. Le processeur 68020 est le premier de la famille 68000 à être un processeur complètement 32 bits, aussi bien en adressage qu’au niveau de la largeur du bus de données. La description des signaux se limite aux éléments nécessaires à la compréhension du cycle de lecture. Le codage binaire à signal est le NRZ simple.
La figure 3-32 décrit le chronogramme d’un cycle de lecture en mémoire centrale d'un mot long de 32 bits. Les lignes fléchées décrivent la causalité : le rond représente l’origine, la cause, l’événement et la flèche pointe sur l’action qui en découle.
A0 à A31. Bus d'adresse. Quelques signaux du bus du 68020
Le bus d'adresse fournit l'adresse complète lors d'un cycle bus
D0 à D31. Bus de Données. Ce bus, bi-directionnel, permet l’échange de données sur 32 bits, mais les échanges peuvent aussi se faire avec des largeurs inférieures (cf. SIZ0/1 ci-dessous)
SIZ0-SIZ1. Taille du Transfert Ces signaux indiquent la taille de l’opérante à faire circuler sur le bus de données. Les deux niveaux à 0 indiquent une taille par défaut de 32 bits AS*. Validation Adresse (Adress Strobe). Ce signal indique que l'adresse, la taille et R/W sont maintenant des informations valides sur le bus et qu’un contrôleur peut les utiliser.
DS*. Validation de Données ( Data Strobe). Ce signal indique, dans le cas d'une lecture que le contrôleur concerné par l'échange doit prendre possession du bus de données, le processeur indiquant par là qu’il est prêt à recevoir la donnée. Dans le cas d'une écriture, ce signal indique que le 68020 a déposé une donnée valide sur le bus de données.
DSACKx*. Acquittement de Transfert. (Data Transfert and Size Acknowledge).
Ces deux entrées (x=0,1) indiquent au 68020 qu'un transfert est terminé avec la taille correspondante à celle donnée par la taille du transfert. Dans un cycle de lecture, le 68020 échantillonne les données sur le bus lorsqu'il reconnaît les signaux DSACKx, puis termine le cycle bus.
R/W*. Lecture/Ecriture. Read/Write. Cette sortie définit le sens du transfert de données. Le niveau haut indique une lecture, alors que le niveau bas indique une écriture.
(la notation * signifie que c’est le niveau bas du signal qui est actif)
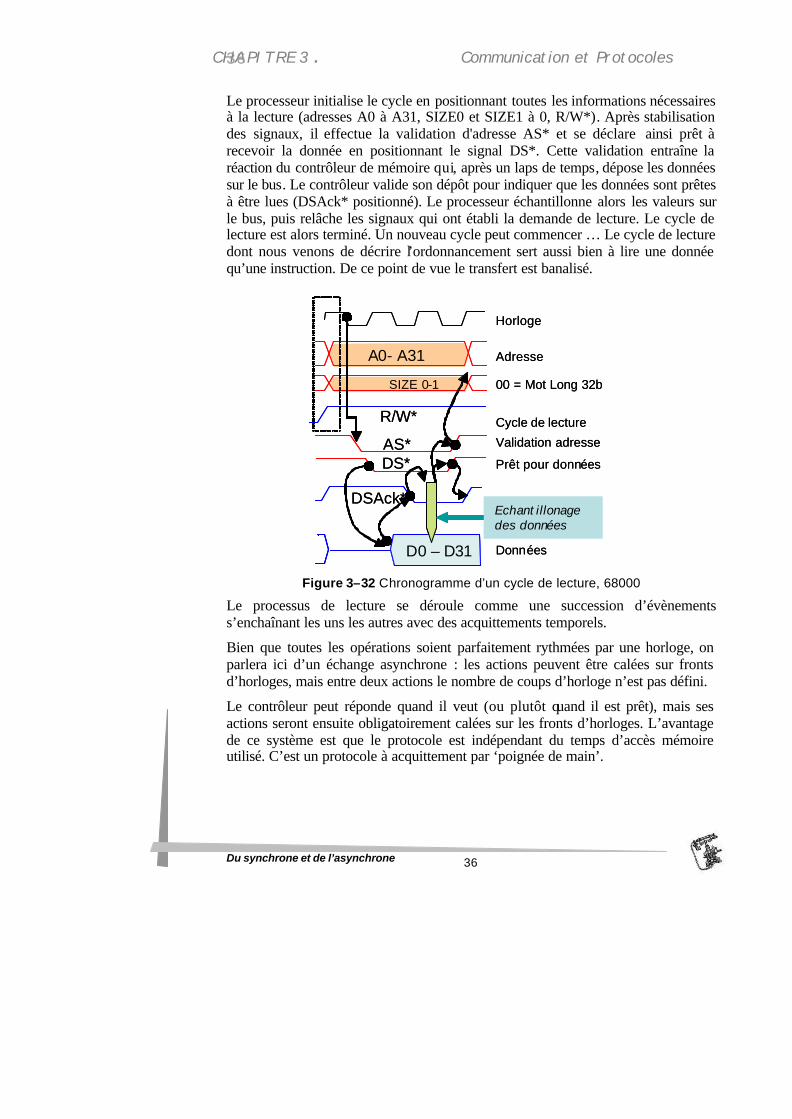
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
36
36
Le processeur initialise le cycle en positionnant toutes les informations nécessaires à la lecture (adresses A0 à A31, SIZE0 et SIZE1 à 0, R/W*). Après stabilisation des signaux, il effectue la validation d'adresse AS* et se déclare ainsi prêt à recevoir la donnée en positionnant le signal DS*. Cette validation entraîne la réaction du contrôleur de mémoire qui, après un laps de temps, dépose les données sur le bus. Le contrôleur valide son dépôt pour indiquer que les données sont prêtes à être lues (DSAck* positionné). Le processeur échantillonne alors les valeurs sur le bus, puis relâche les signaux qui ont établi la demande de lecture. Le cycle de lecture est alors terminé. Un nouveau cycle peut commencer … Le cycle de lecture dont nous venons de décrire l’ordonnancement sert aussi bien à lire une donnée qu’une instruction. De ce point de vue le transfert est banalisé.
Figure 3–32 Chronogramme d’un cycle de lecture, 68000
Le processus de lecture se déroule comme une succession d’évènements s’enchaînant les uns les autres avec des acquittements temporels.
Bien que toutes les opérations soient parfaitement rythmées par une horloge, on parlera ici d’un échange asynchrone : les actions peuvent être calées sur fronts d’horloges, mais entre deux actions le nombre de coups d’horloge n’est pas défini.
Le contrôleur peut réponde quand il veut (ou plutôt quand il est prêt), mais ses actions seront ensuite obligatoirement calées sur les fronts d’horloges. L’avantage de ce système est que le protocole est indépendant du temps d’accès mémoire utilisé. C’est un protocole à acquittement par ‘poignée de main’.
A0- A31
SIZE 0-1 00 = Mot Long 32b
R/W* Cycle de lecture
AS* Validation adresse
DS*
DSAck*
D0 – D31
Adresse
Données
Prêt pour données
Horloge
Echantillonagedes données
A0- A31
SIZE 0-1 00 = Mot Long 32b
R/W* Cycle de lecture
AS* Validation adresse
DS*
DSAck*
D0 – D31
Adresse
Données
Prêt pour données
Horloge
Echantillonagedes données
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
37
37
3.6.2.2 Exemple synchrone : cycle de lecture du Z80
Le Z80 est un processeur 8 bits avec un bus d’adresse de 16 bits. Il fait la distinction entre deux espaces d’adressage : l’espace mémoire et l’espace des entrées-sorties en utilisant le même bus d’adressage10. Il y a donc nécessité de signaux supplémentaires pour faire la distinction entre ces deux espaces. Le codage binaire à signal est le NRZ simple.
Le cycle de lecture se fait en 3 coups d’horloge. Toutes les étapes intermédiaires sont entièrement pilotées par l’horloge : les actions primitives sont générées par les fronts de montées ou de descente des tops.
Le déroulement de l’opération est totalement synchrone : au bout de 3 tops d’horloge, le processeur va lire le résultat, que celui-ci soit prêt ou non. Ce n’est pas un protocole à poignée de main.
Au cours de la première période T1, le processeur positionne l’adresse mémoire sur le bus d’adresse, puis, après le temps d’établissement des signaux sur ce bus, il valide ces signaux en précisant qu’il s’agit d’une opération de lecture dans l’espace mémoire. Le contrôleur mémoire est supposé pouvoir réagir au cours de la période T2, sachant que quoi qu’il arrive, le processeur va échantillonner le bus de données
10 Ce mécanisme est décrit plus en détail dans le chapitre traitant des Entrées Sorties.
A0 à A15. Bus d'adresse. Quelques signaux du bus du Z80
Le bus d'adresse fournit l'adresse complète lors d'un cycle bus
D0 à D7. Bus de Données.
Ce bus, bi-directionnel, permet le transfert des données sur 8 bits.
MemReq* (Memory Request), IORQ (Input Output Request). Le processeur positionne MemReq* lorsqu’il s’agit d’un échange avec la mémoire et le signal IORQ dans le cas d’un échange dans l’espace des entrées sorties.
10 RD*. Le processeur positionne ce signal pour effectuer une opération de lecture. La sélection de l’écriture se fait avec un autre signal (WR*)
11 Wait*. Le processeur possède l’entrée Wait* qui permet d’invalider le fonctionnement interne de l’horloge. Quand ce signal est positionné le processeur reste dans l’état où il était au moment de l’invalidation. Il reprend ses transitions dès que le signal est dépositionné.
(La notation * signifie que c’est le niveau bas du signal qui est actif)
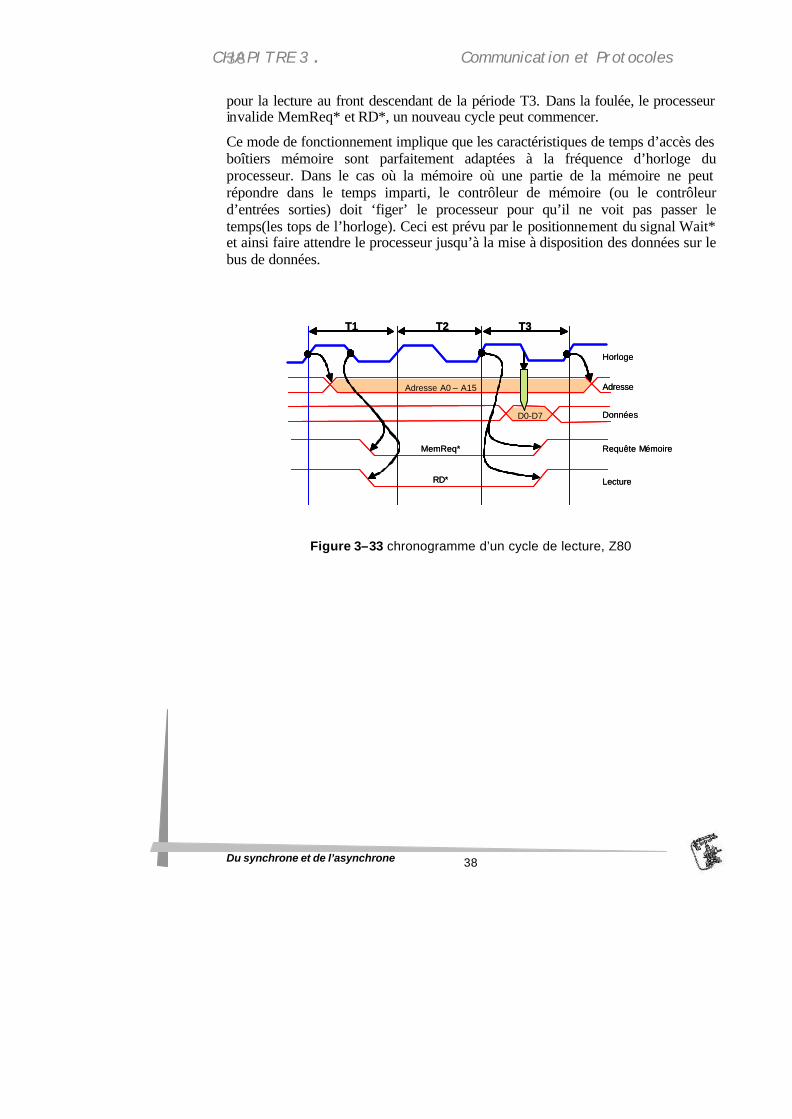
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
38
38
pour la lecture au front descendant de la période T3. Dans la foulée, le processeur invalide MemReq* et RD*, un nouveau cycle peut commencer.
Ce mode de fonctionnement implique que les caractéristiques de temps d’accès des boîtiers mémoire sont parfaitement adaptées à la fréquence d’horloge du processeur. Dans le cas où la mémoire où une partie de la mémoire ne peut répondre dans le temps imparti, le contrôleur de mémoire (ou le contrôleur d’entrées sorties) doit ‘figer’ le processeur pour qu’il ne voit pas passer le temps(les tops de l’horloge). Ceci est prévu par le positionnement du signal Wait* et ainsi faire attendre le processeur jusqu’à la mise à disposition des données sur le bus de données.
Figure 3–33 chronogramme d’un cycle de lecture, Z80
Horloge
T1 T2 T3
Adresse A0 – A15
D0-D7
MemReq*
RD*
Adresse
Données
Requête Mémoire
Lecture
Horloge
T1 T2 T3
Adresse A0 – A15
D0-D7
MemReq*
RD*
Adresse
Données
Requête Mémoire
Lecture

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
39
39
Et pour ceux qui apprécient les proba…
Exemple de calcul d’une densité spectrale. Cas du code de Manchester
Pour chaque codage binaire à signal que nous vu, nous avons donné , sans justification, l’expression mathématique de sa densité spectrale. Nous présentons dans cette annexe, le calcul de la densité spectrale du codage de Manchester.
Ce calcul présuppose que le lecteur soit familier avec les notions de bases en probabilités, et plus précisément les processus stochastiques, et les notions de calcul intégral. Notre point de départ est le théorème de la théorie des processus stochastiques qui définit la densité spectrale de puissance d’un signal.
Théorème :
La densité spectrale de puissance d’un signal stationnaire est égal à la transformée de Fourier de la fonction d’autocovariance du signal.
S(f) ττ τπ de).(Rs f2i∫+∞
∞−
−=
Un signal s(t) correspondant à un code comme celui de Manchester est un signal aléatoire avec l’hypothèse que les valeurs des bits sont d’une part indépendantes les uns des autres et d’autre part que les valeurs du signal (+a et –a, c'est-à-dire les 0 et les 1) sont équiprobables. Ce signal aléatoire est caractérisable d’un point de vue probabiliste par sa loi de probabilité de ses valeurs (ici équiprobabilité sur les deux valeurs) et par ses valeurs moyennes théoriques que sont l’espérance mathématique E[s(t)], la variance Var[s(t)] et surtout par sa fonction d’autocovariance Rs(τ) = E[s(t). s(t-τ) ]. Cette fonction d’autocovariance indique comment le signal dépend de lui-même : comment évolue en moyenne s(t) en fonction de la valeur prise par le signal au temps (t-τ). Par exemple un signal périodique fera clairement apparaître sa périodicité dans la fonction d’autocovariance.
Un signal est dit stationnaire11 si ses paramètres restent stables au cours du temps. Les valeurs prises par le signal étant toujours dans la même plage (codage de 0 et de 1), on peut admettre que la condition de stationnarité est vérifiée.
Nous avons indiqué que nous partons de l’indépendance de la suite de 0 et de 1 et pourtant nous allons calculer la fonction d’autocovariance pour déterminer la structure de dépendance du signal sur lui-même. En fait, il est facile de comprendre, en faisant un codage à la main de Manchester, que si l’on code les 0 et les 1 par des fonts de montées et des fronts descendants, les raccords de signaux à faire au niveau du changement de temps bit dépendent des deux bits qui se suivent.
11 La définition est informelle.
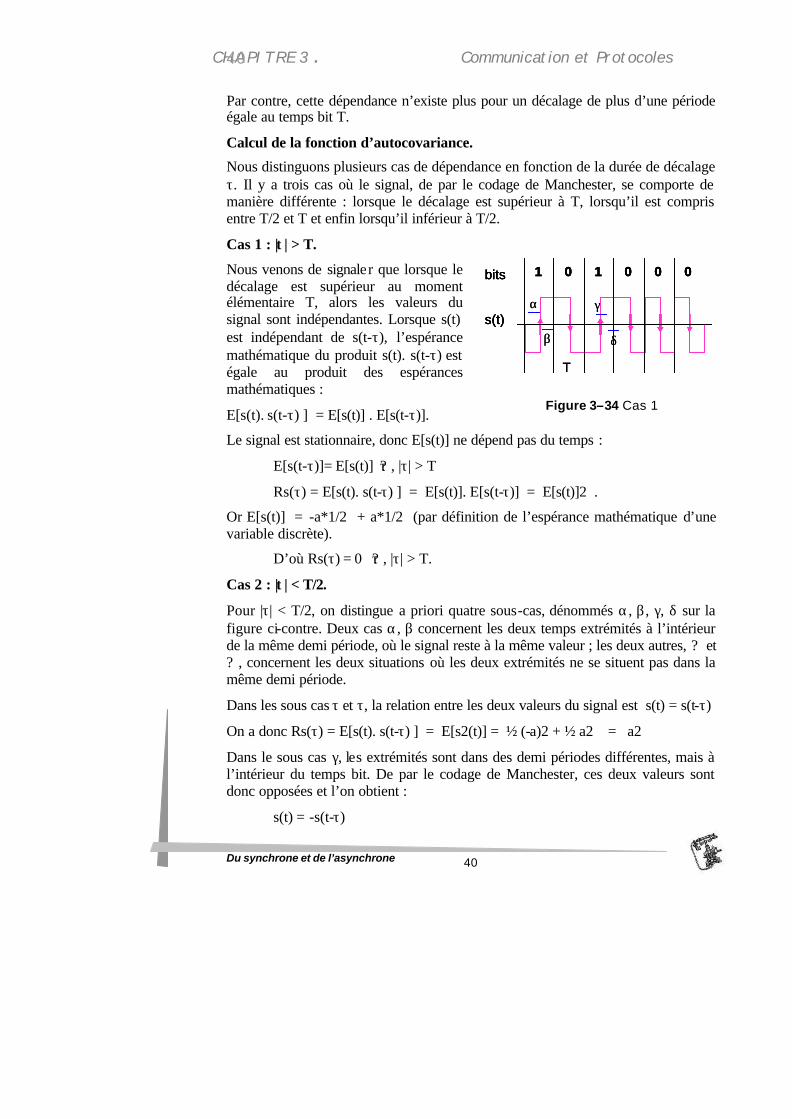
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
40
40
Par contre, cette dépendance n’existe plus pour un décalage de plus d’une période égale au temps bit T.
Calcul de la fonction d’autocovariance.
Nous distinguons plusieurs cas de dépendance en fonction de la durée de décalage τ. Il y a trois cas où le signal, de par le codage de Manchester, se comporte de manière différente : lorsque le décalage est supérieur à T, lorsqu’il est compris entre T/2 et T et enfin lorsqu’il inférieur à T/2.
Cas 1 : |τ | > T.
Nous venons de signaler que lorsque le décalage est supérieur au moment élémentaire T, alors les valeurs du signal sont indépendantes. Lorsque s(t) est indépendant de s(t-τ), l’espérance mathématique du produit s(t). s(t-τ) est égale au produit des espérances mathématiques :
E[s(t). s(t-τ) ] = E[s(t)] . E[s(t-τ)].
Le signal est stationnaire, donc E[s(t)] ne dépend pas du temps :
E[s(t-τ)]= E[s(t)] ?τ , |τ| > T
Rs(τ) = E[s(t). s(t-τ) ] = E[s(t)]. E[s(t-τ)] = E[s(t)]2 .
Or E[s(t)] = -a*1/2 + a*1/2 (par définition de l’espérance mathématique d’une variable discrète).
D’où Rs(τ) = 0 ?τ , |τ| > T.
Cas 2 : |τ | < T/2.
Pour |τ| < T/2, on distingue a priori quatre sous-cas, dénommés α, β, γ, δ sur la figure ci-contre. Deux cas α, β concernent les deux temps extrémités à l’intérieur de la même demi période, où le signal reste à la même valeur ; les deux autres, ? et ? , concernent les deux situations où les deux extrémités ne se situent pas dans la même demi période.
Dans les sous cas τ et τ, la relation entre les deux valeurs du signal est s(t) = s(t-τ)
On a donc Rs(τ) = E[s(t). s(t-τ) ] = E[s2(t)] = ½ (-a)2 + ½ a2 = a2
Dans le sous cas γ, les extrémités sont dans des demi périodes différentes, mais à l’intérieur du temps bit. De par le codage de Manchester, ces deux valeurs sont donc opposées et l’on obtient :
s(t) = -s(t-τ)
bits
s(t)
1 0 1 0 0 0
T
α
β
γ
δ
bits
s(t)
1 0 1 0 0 0
T
bits
s(t)
1 0 1 0 0 0bits
s(t)
1 0 1 0 0 0
T
α
β
γ
δ
Figure 3–34 Cas 1

CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
41
41
Rs(τ) = E[s(t). s(t-τ) ] = E[-s2(t) = -a2 .
Dans le cas δ, les deux extrémités se trouvent dans des temps bits différents, les valeurs sont indépendantes et l’on obtient : Rs(τ) = 0 comme dans le cas 1.
Pour calculer la valeur finale de Rs(τ) pour l’ensemble des 4 cas, nous devons pondérer chaque valeur par la probabilité des cas.
Pour les cas α et β, nous devons être dans la même demi période la probabilité d’être dans le cas α est égale à (T/2 -τ)/T. Cette probabilité est la même pour le cas β.
Pour le cas γ, la probabilité est simplement τ/T (idem pour le cas δ). On vérifiera au passage que la somme des probabilités est bien égale à 1, ce qui signifie que tous les cas ont bien été inventoriés. Pour le cas 2, nous avons le résultat suivant :
Rs(τ) = a2 [T/2-τ]/T + a2 [T/2-τ]/T - a2 τ/T + 0 . τ/T
Rs(τ) = a2 [1 – 3|τ|/T] ?τ , |τ| < T/2.
Cas 3 : T/2 < |τ | < T
Comme dans le cas 2, il y a 4 sous cas qui sont répertoriés dans la figure ci-contre. Dans les sous cas ? , ? , ? , les deux extrémités se trouvent dans des moments bits différents ce sui fait que les valeurs sont indépendantes et la fonction d’autocovariance vaut 0. Seul le cas ? donne une valeur non nulle : les deux extrémités, par construction du code de Manchester sont opposées et nous trouvons Rs(τ) = -a2
La probabilité d’être dans ce cas est égale à (T-τ)/T
Et finalement
Rs(τ) = a2 [1 –|τ|/T] ?τ , T/2 < |τ| < T
bits
s(t)
1 0 1 0 0 0
T
α
β
γ
δ
bits
s(t)
1 0 1 0 0 0
T
bits
s(t)
1 0 1 0 0 0bits
s(t)
1 0 1 0 0 0
T
α
β
γ
δ
+a2
-a2/2
TT/2-T/2-T
Rs(τ)
τ
+a2
-a2/2
TT/2-T/2-T
Rs(τ)
τ
Figure 3–35 Cas 2
Figure 3–36 Tracé général de Rs(τ)
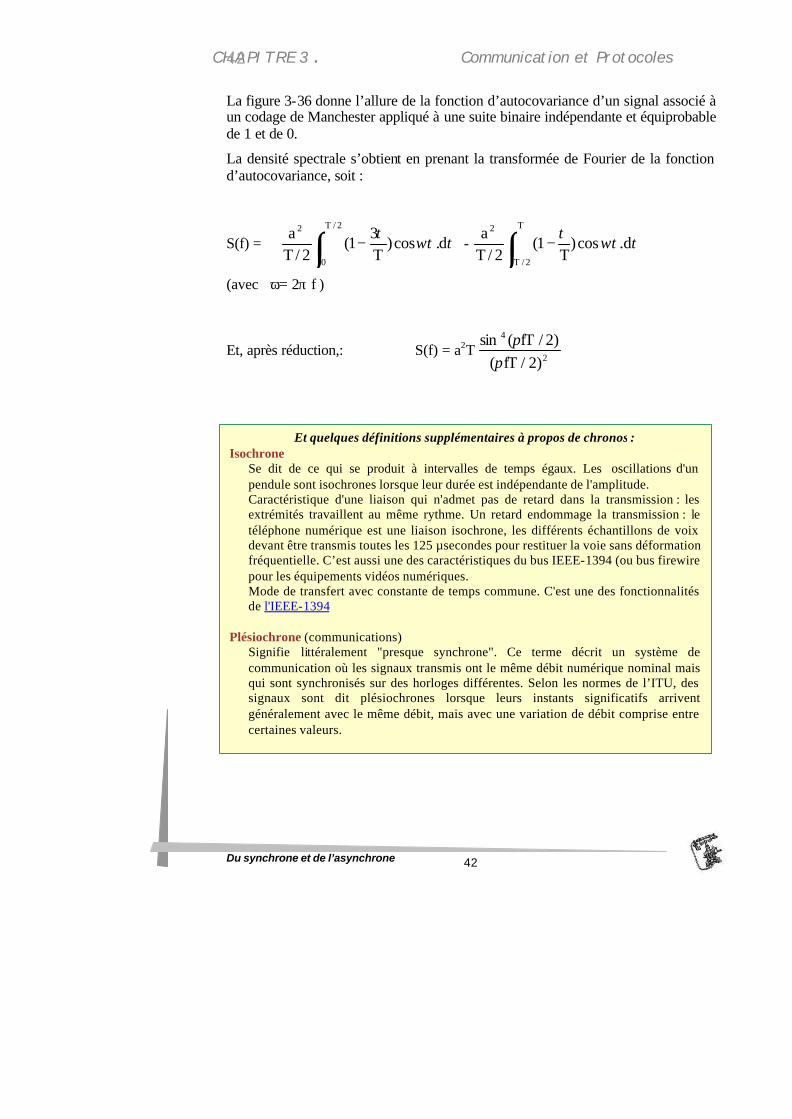
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
42
42
La figure 3-36 donne l’allure de la fonction d’autocovariance d’un signal associé à un codage de Manchester appliqué à une suite binaire indépendante et équiprobable de 1 et de 0.
La densité spectrale s’obtient en prenant la transformée de Fourier de la fonction d’autocovariance, soit :
S(f) = τωττ
d.cos)T3
1(2/T
a2/T
0
2
∫ − - τωττ
d.cos)T
1(2/T
aT
2/T
2
∫ −
(avec ω= 2π f )
Et, après réduction,: S(f) = a2T 2
4
)2/fT()2/fT(sin
ππ
Et quelques définitions supplémentaires à propos de chronos : Isochrone
Se dit de ce qui se produit à intervalles de temps égaux. Les oscillations d'un pendule sont isochrones lorsque leur durée est indépendante de l'amplitude. Caractéristique d'une liaison qui n'admet pas de retard dans la transmission : les extrémités travaillent au même rythme. Un retard endommage la transmission : le téléphone numérique est une liaison isochrone, les différents échantillons de voix devant être transmis toutes les 125 µsecondes pour restituer la voie sans déformation fréquentielle. C’est aussi une des caractéristiques du bus IEEE-1394 (ou bus firewire pour les équipements vidéos numériques. Mode de transfert avec constante de temps commune. C'est une des fonctionnalités de l'IEEE-1394
Plésiochrone (communications) Signifie littéralement "presque synchrone". Ce terme décrit un système de communication où les signaux transmis ont le même débit numérique nominal mais qui sont synchronisés sur des horloges différentes. Selon les normes de l’ITU, des signaux sont dit plésiochrones lorsque leurs instants significatifs arrivent généralement avec le même débit, mais avec une variation de débit comprise entre certaines valeurs.
CHAPITRE 3 . Communication et Protocoles
Du synchrone et de l’asynchrone
43
43
Table des matières 3 CHAPITRE 3 ................................................................................... 1 3.1 Le signal. .......................................................................................... 4 3.1.1 Caractérisation d’un signal. ......................................................... 5 3.1.2 Caractérisation formelle d’un signal. .......................................... 6
3.1.2.1 Représentation spectrale..................................................... 7 3.1.3 Caractérisation du support........................................................... 9 3.2 Les techniques de modulation. ....................................................... 12 3.2.1 Notion de rapidité de modulation.............................................. 13 3.2.2 Canal bruité. .............................................................................. 14
3.2.2.1 Capacité d’un canal bruité, relation de Shannon.............. 15 3.3 Des principes de communications aux normes. ............................. 16 3.3.1 Synchronisation des horloges.................................................... 16 3.3.2 Transmissions synchrones et asynchrones. ............................... 17 3.3.3 Voies et Modes de transmission : Série , Parallèle, Full et Half Duplex 18 3.3.4 Structuration d’un message. Encapsulation. Notion de trame. . 20 3.3.5 Sens de transmission. ................................................................ 21 3.3.6 Partage de support, multiplexage et démultiplexage................. 21 3.4 Le codage binaire à signal. ............................................................. 23 3.4.1 Modulation large bande............................................................. 23 3.4.2 Modulation en bande de base. ................................................... 24
3.4.2.1 Les codes à 2 niveaux. ...................................................... 24 3.4.2.2 Les codes à 3 niveaux. ...................................................... 29
3.5 Notions de protocole de communication. ...................................... 31 3.5.1 Un protocole, ensemble de règles ............................................. 32 3.5.2 Les échanges mémoires, par l’exemple ..................................... 34
3.5.2.1 Exemple asynchrone avec acquittement temporel 68 020 34 3.5.2.2 Exemple synchrone : cycle de lecture du Z80.................. 36