Chap. 2.4 à 2.6 Le pont de Wheatstone - cours.polymtl.ca · Département de Génie Mécanique...
33
Chap. 2.4 à 2.6 Le pont de Wheatstone MEC6405, Cours #2
Transcript of Chap. 2.4 à 2.6 Le pont de Wheatstone - cours.polymtl.ca · Département de Génie Mécanique...

Chap. 2.4 à 2.6Le pont de Wheatstone
MEC6405, Cours #2
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
Sujets couverts
• Pont de WheatstoneOutputSensibilitéCompensation en températureÉquilibrage initialÉtalonnage Shunt¼de pont, système à 3 fils
• Problèmes associés au pont• Disposition des jauges dans le pont
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
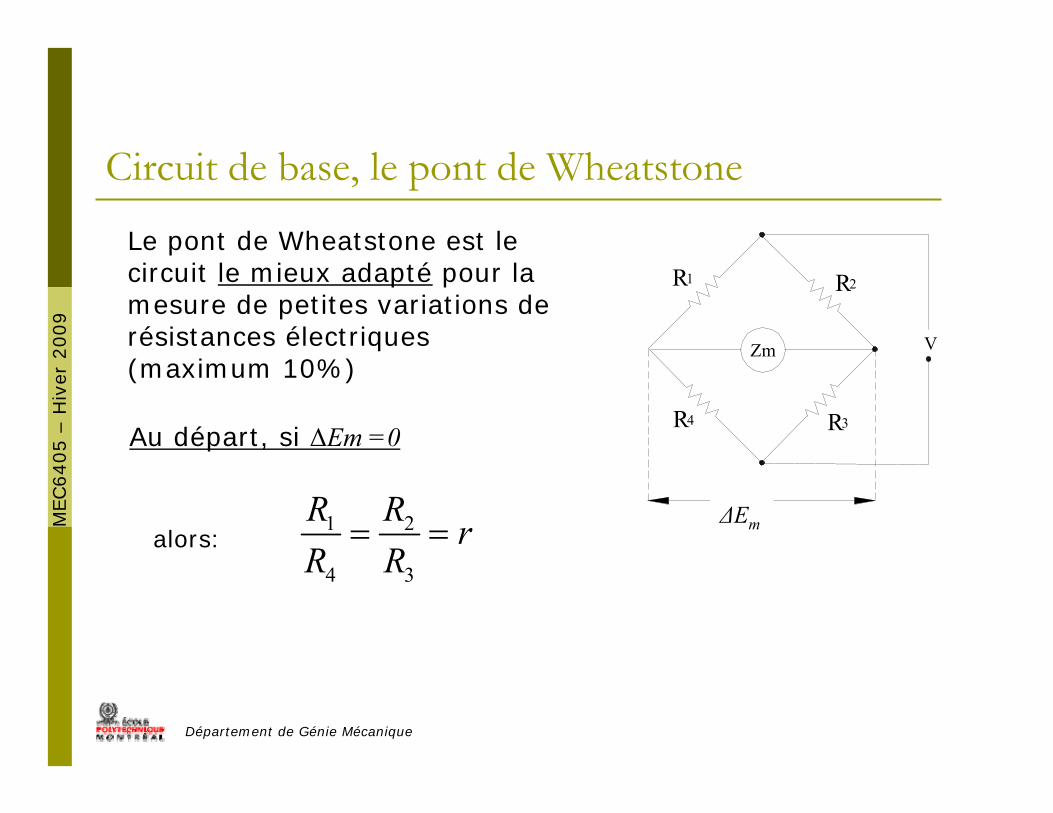
Circuit de base, le pont de Wheatstone
ΔE
VZm
R1 R2
R4 R3
ΔEm
Le pont de Wheatstone est le circuit le mieux adapté pour la mesure de petites variations de résistances électriques (maximum 10%)
Au départ, si ΔEm =0
1 2
4 3
R R rR R
= =alors:
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
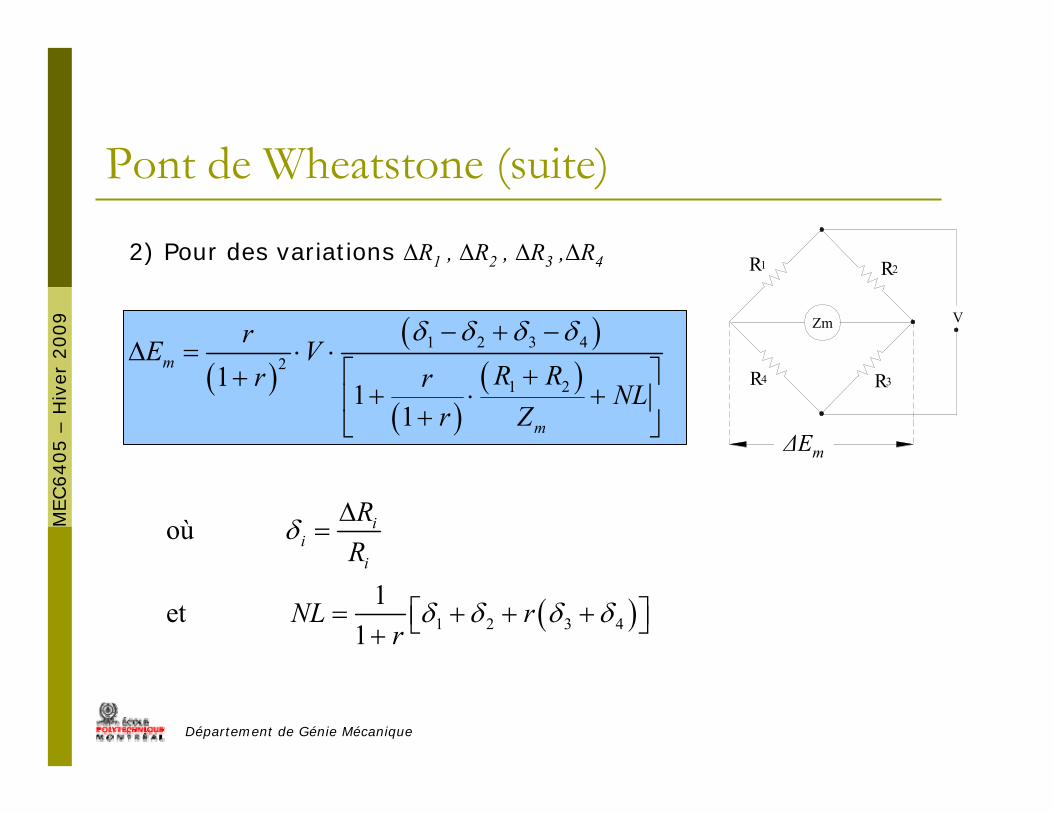
Pont de Wheatstone (suite)
ΔE
VZm
R1 R2
R4 R3
ΔEm
2) Pour des variations ΔR1 , ΔR2 , ΔR3 ,ΔR4
( )( )
( )( )
1 2 3 42
1 2
1 1
1
m
m
rE VR Rr r NL
r Z
δ δ δ δ− + −Δ = ⋅ ⋅
⎡ ⎤+++ ⋅ +⎢ ⎥+⎣ ⎦
( )1 2 3 4
où
1et 1
ii
i
RR
NL rr
δ
δ δ δ δ
Δ=
= + + +⎡ ⎤⎣ ⎦+
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
NL contribue à la non-linéarité de la réponse du pont
Si δi < 0.01, on peut négliger NL:
(16)
Si on a 4 résistances de mêmes valeurs (R1 = R2 = R3 = R4)
ou bien que r = 1 (R1/R4 = R2/R3 = 1) on obtient :
(17)
( )( )
( )( )
1 2 3 42
1 21 11
m
m
rE VR Rr r
r Z
δ δ δ δ− + −Δ = ⋅ ⋅
⎡ ⎤+++ ⋅⎢ ⎥+⎣ ⎦
( )1 2 3 4
4 1m
m
VE RZ
δ δ δ δ− + −Δ = ⋅
+
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
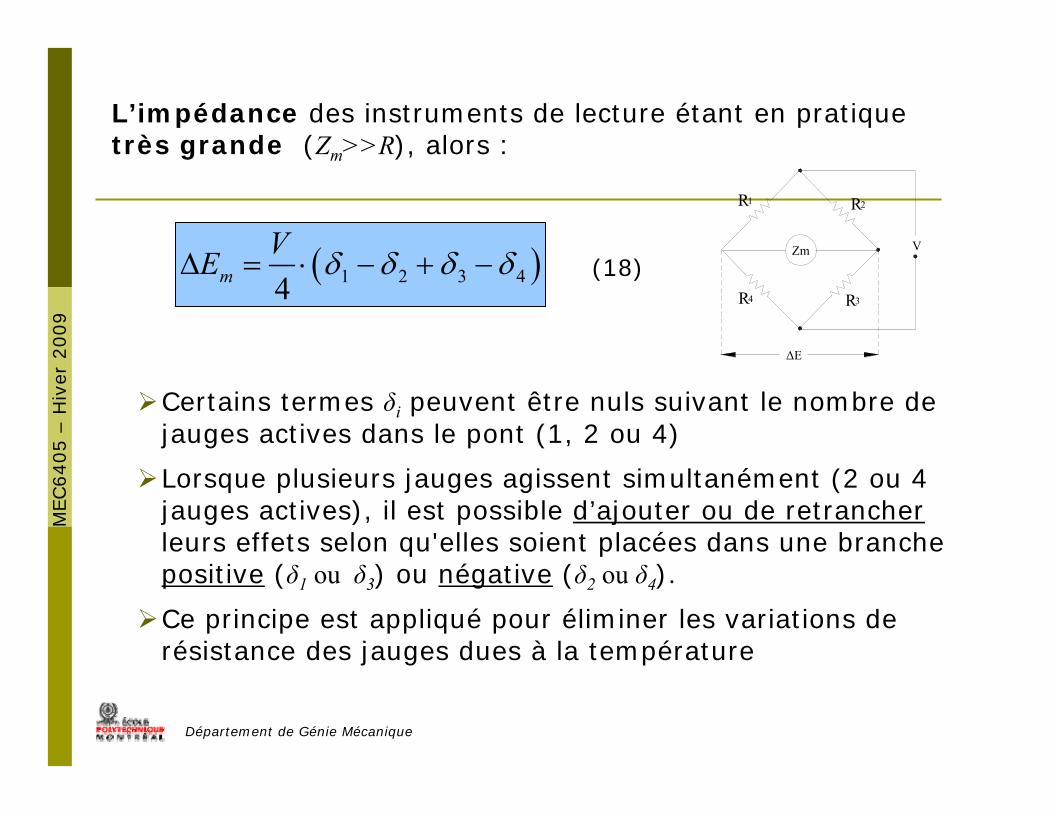
L’impédance des instruments de lecture étant en pratique très grande (Zm>>R), alors :
( )1 2 3 44mVE δ δ δ δΔ = ⋅ − + − (18)
Certains termes δi peuvent être nuls suivant le nombre de jauges actives dans le pont (1, 2 ou 4)
Lorsque plusieurs jauges agissent simultanément (2 ou 4 jauges actives), il est possible d’ajouter ou de retrancherleurs effets selon qu'elles soient placées dans une branche positive (δ1 ou δ3) ou négative (δ2 ou δ4).
Ce principe est appliqué pour éliminer les variations de résistance des jauges dues à la température
ΔE
VZm
R1 R2
R4 R3
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
Chap. 2.6
• Problèmes reliés au circuit du pont de Wheatstone
• Dépouillement des mesures par jauges• Disposition des jauges dans le pont
(capteurs à base de jauges)
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
2.6 PROBLÈMES RELIÉS AUX CIRCUITS AVEC PONT DE WHEATSTONE
• Non-linéarité de la réponse du pont
• Effets thermiques
• Effet des longs fils de liaison
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
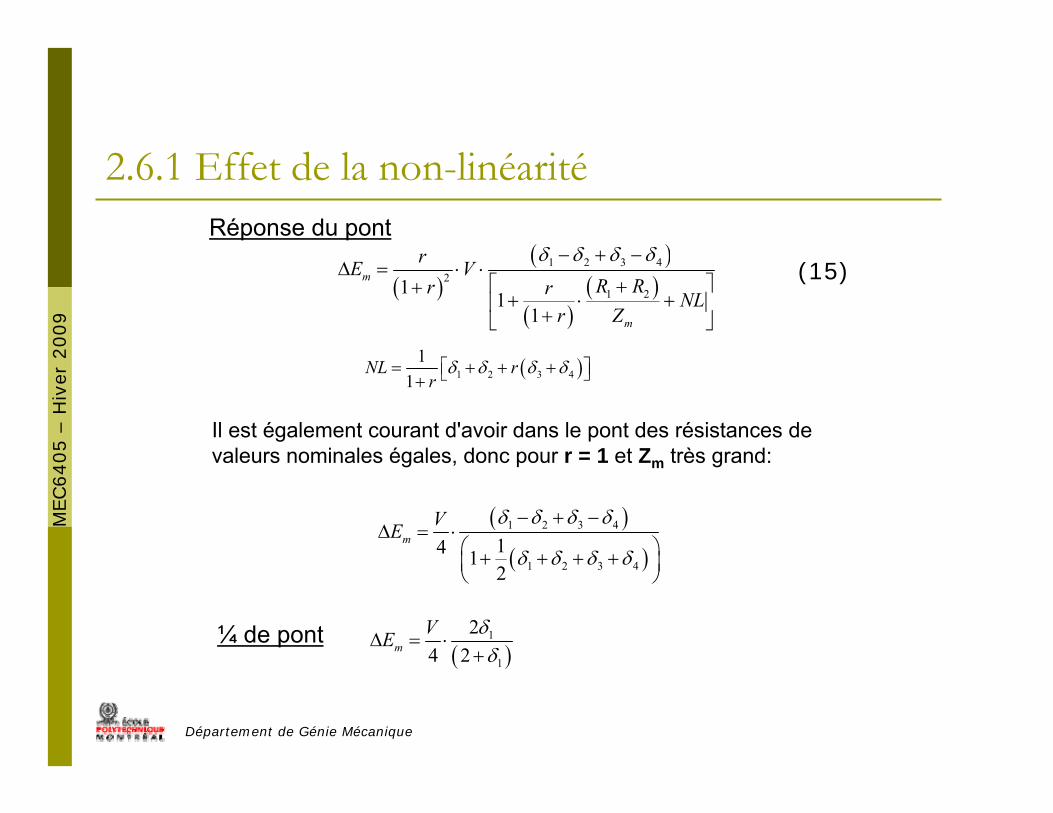
2.6.1 Effet de la non-linéarité
( )( )
( )( )
1 2 3 42
1 2
1 1
1
m
m
rE VR Rr r NL
r Z
δ δ δ δ− + −Δ = ⋅ ⋅
⎡ ⎤+++ ⋅ +⎢ ⎥+⎣ ⎦
( )1 2 3 41
1NL r
rδ δ δ δ= + + +⎡ ⎤⎣ ⎦+
Il est également courant d'avoir dans le pont des résistances de valeurs nominales égales, donc pour r = 1 et Zm très grand:
( )
( )1 2 3 4
1 2 3 4
14 12
mVE
δ δ δ δ
δ δ δ δ
− + −Δ = ⋅
⎛ ⎞+ + + +⎜ ⎟⎝ ⎠
¼ de pont( )
1
1
2 4 2mVE δ
δΔ = ⋅
+
Réponse du pont
(15)
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
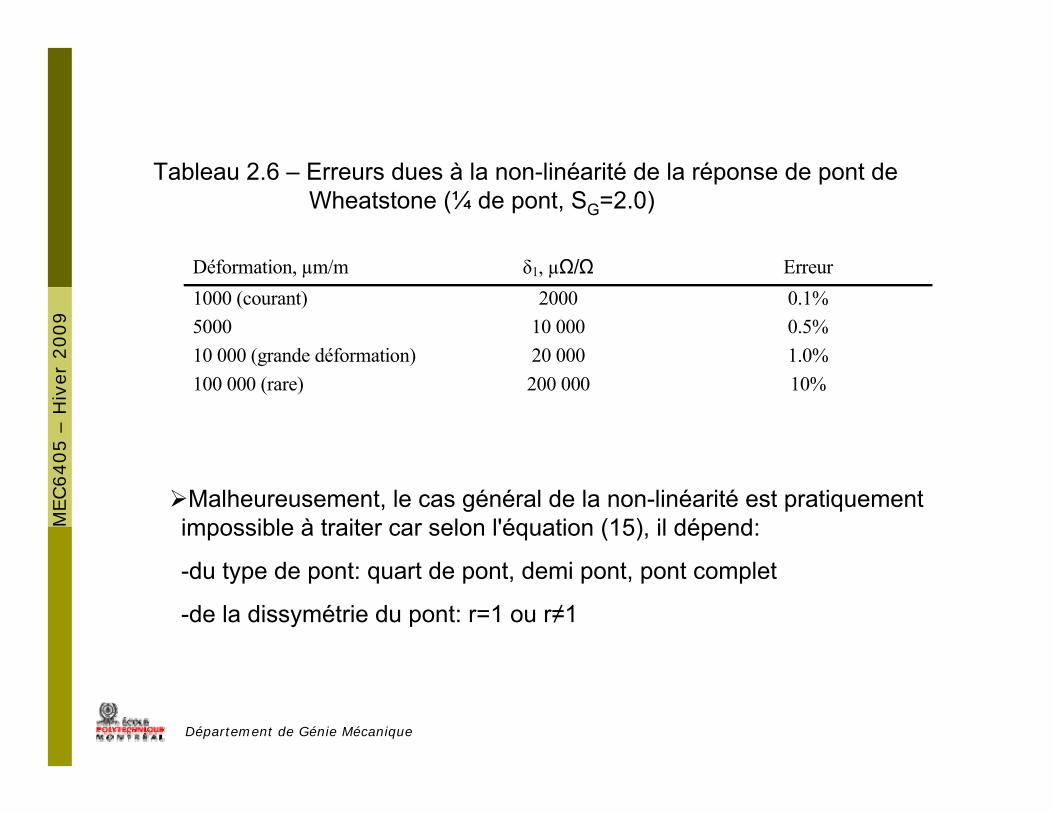
Tableau 2.6 – Erreurs dues à la non-linéarité de la réponse de pont de Wheatstone (¼ de pont, SG=2.0)
Déformation, µm/m δ1, µΩ/Ω Erreur 1000 (courant) 2000 0.1% 5000 10 000 0.5% 10 000 (grande déformation) 20 000 1.0% 100 000 (rare) 200 000 10%
Malheureusement, le cas général de la non-linéarité est pratiquement impossible à traiter car selon l'équation (15), il dépend:
-du type de pont: quart de pont, demi pont, pont complet
-de la dissymétrie du pont: r=1 ou r≠1
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
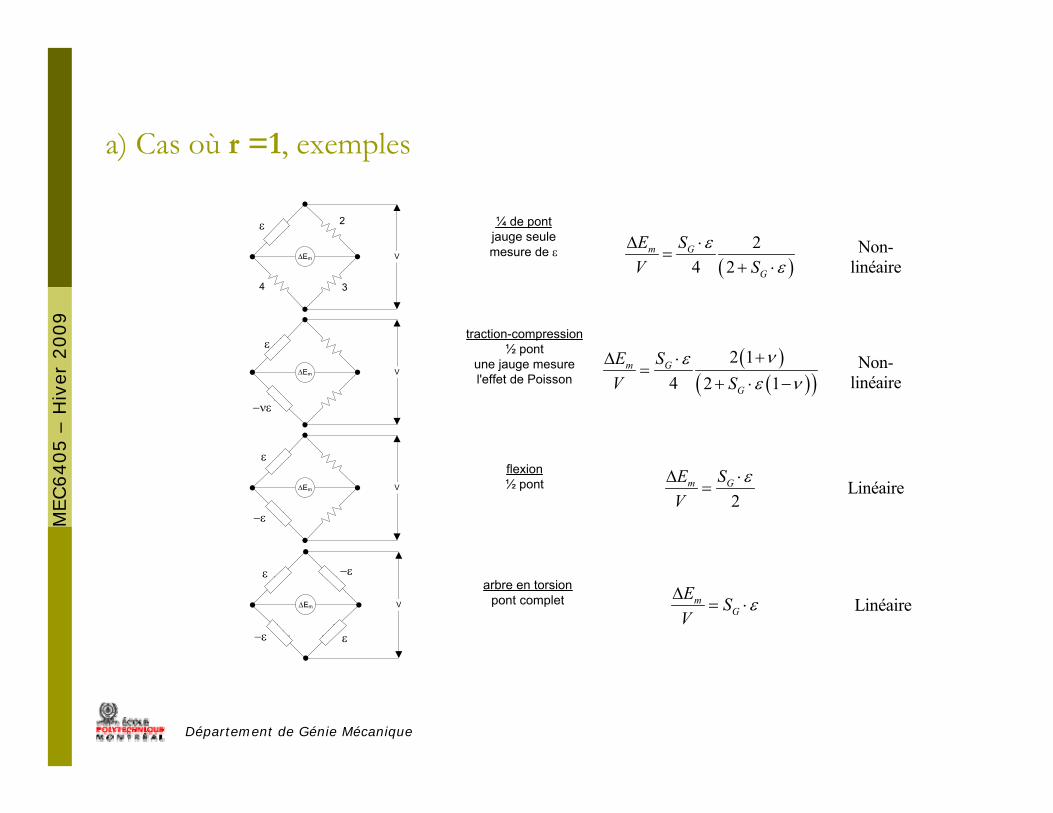
a) Cas où r =1, exemples
ε
4
VΔEm
2
3
¼ de pontjauge seulemesure de ε
( )2
4 2m G
G
E SV S
εε
Δ ⋅=
+ ⋅ Non-
linéaire
ε
−νε
VΔEm
traction-compression½ pont
une jauge mesurel'effet de Poisson
( )( )( )
2 14 2 1
m G
G
E SV S
νεε ν+Δ ⋅
=+ ⋅ −
Non-linéaire
ε
−ε
VΔEm
flexion½ pont
2m GE S
VεΔ ⋅
= Linéaire
ε
−ε
arbre en torsionpont completVΔEm
−ε
ε
mG
E SV
εΔ= ⋅ Linéaire
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
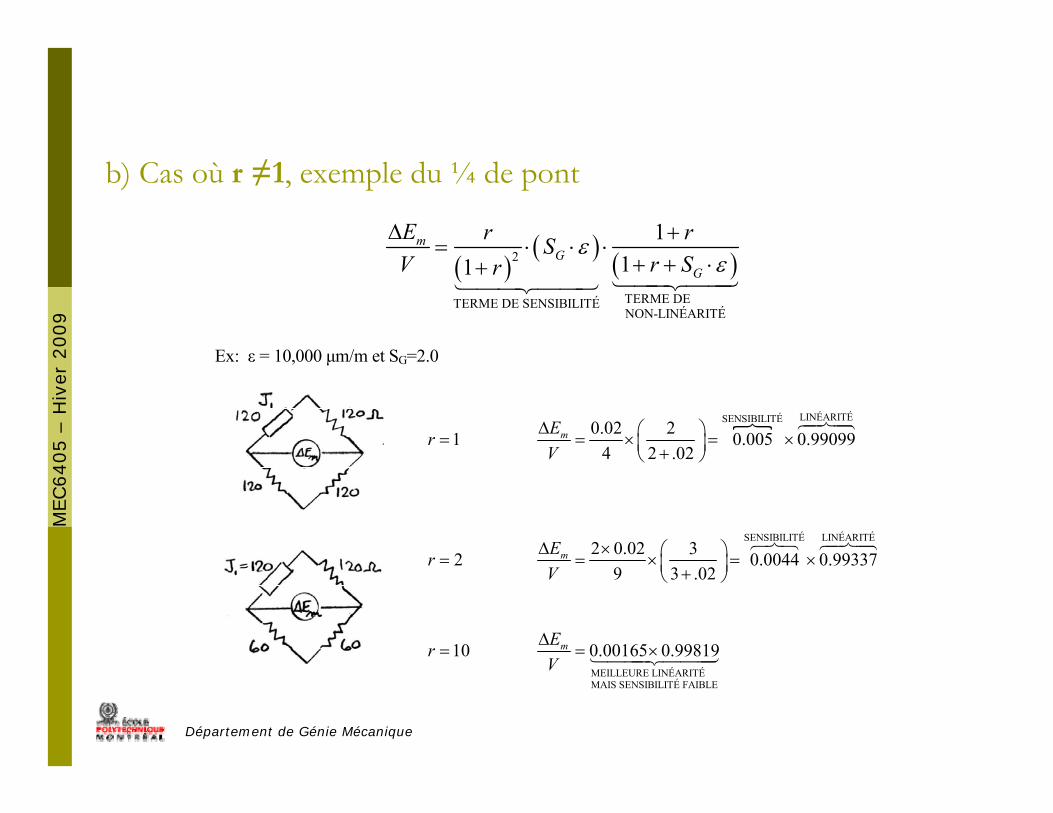
b) Cas où r ≠1, exemple du ¼ de pont
( )( ) ( )2
TERME DE TERME DE SENSIBILITÉNON-LINÉARITÉ
111
mG
G
E r rSV r Sr
εε
Δ += ⋅ ⋅ ⋅
+ + ⋅+
Ex: ε = 10,000 μm/m et SG=2.0
LINÉARITÉSENSIBILITÉ0.02 21 0.005 0.99099
4 2 .02mEr
VΔ ⎛ ⎞= = × = ×⎜ ⎟+⎝ ⎠
SENSIBILITÉ LINÉARITÉ
2 0.02 32 0.0044 0.993379 3 .02
mErV
Δ × ⎛ ⎞= = × = ×⎜ ⎟+⎝ ⎠
MEILLEURE LINÉARITÉMAIS SENSIBILITÉ FAIBLE
10 0.00165 0.99819mErV
Δ= = ×
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
2.6.2 Effets thermiquesLes trois principaux effets parasites d'origine thermique sont:
les effets de thermocouple avec les fils de liaisonla dérive thermique du zéro des jaugesla variation de sensibilité des jauges
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
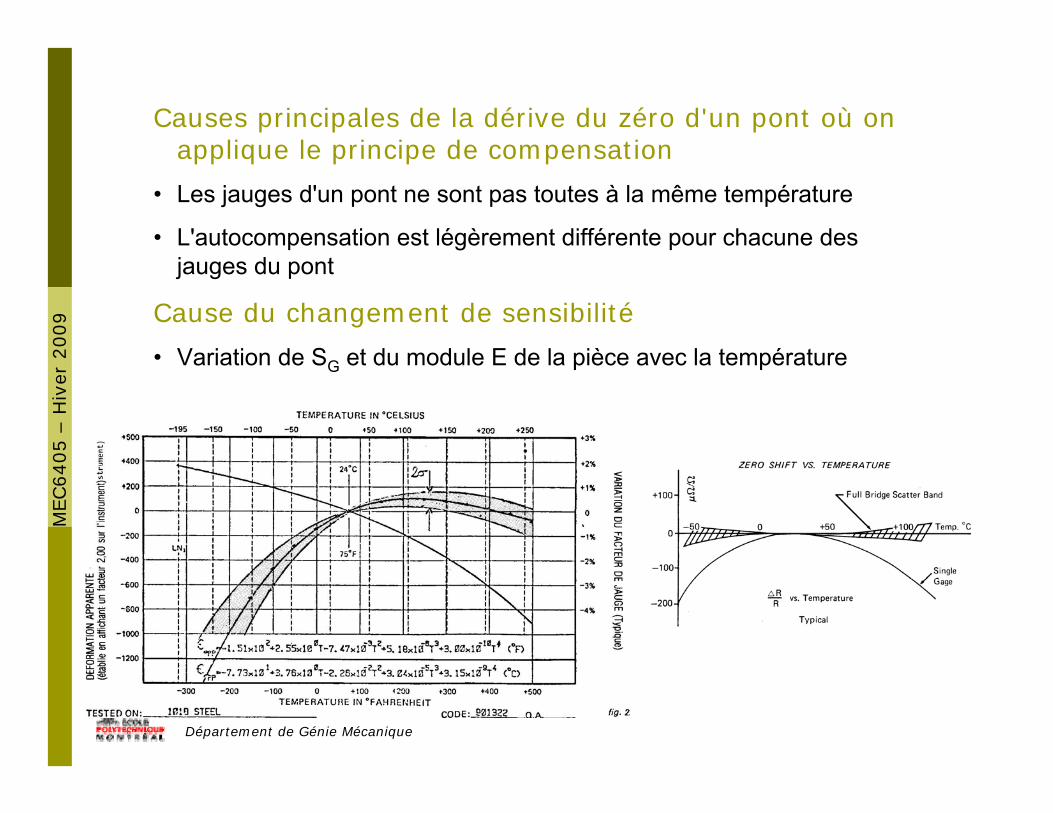
Causes principales de la dérive du zéro d'un pont où on applique le principe de compensation
• Les jauges d'un pont ne sont pas toutes à la même température
• L'autocompensation est légèrement différente pour chacune des jauges du pont
Cause du changement de sensibilité
• Variation de SG et du module E de la pièce avec la température
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
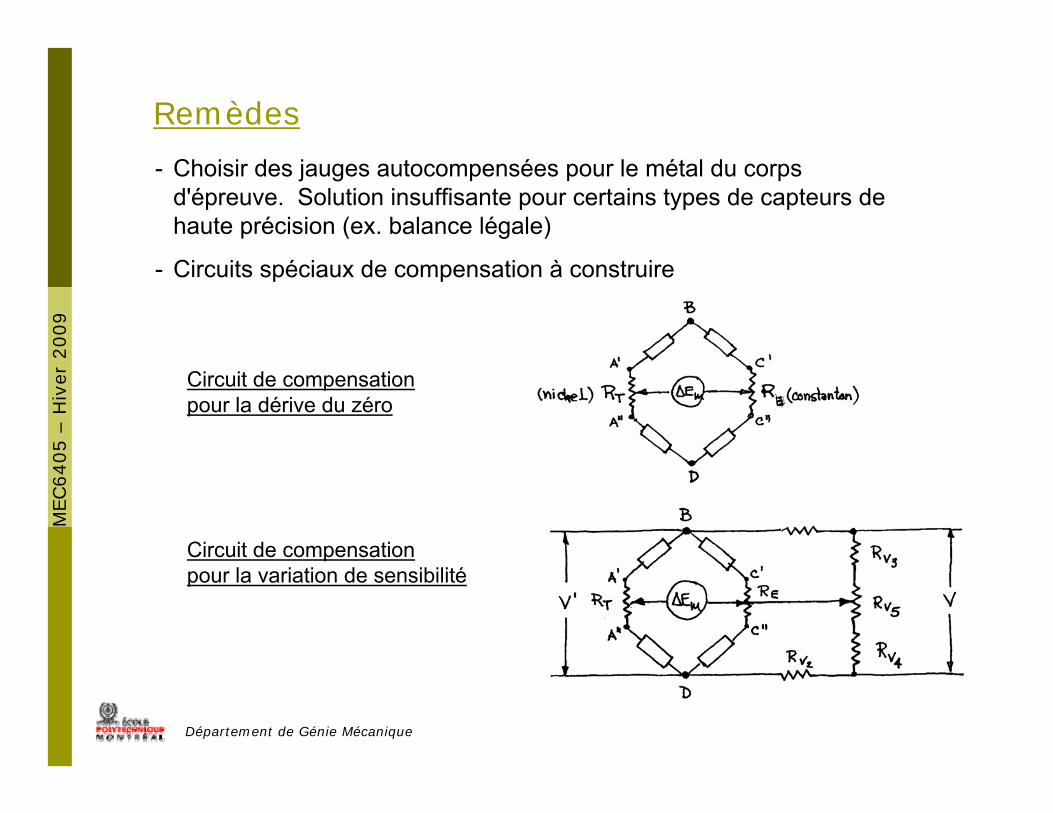
Remèdes
- Choisir des jauges autocompensées pour le métal du corps d'épreuve. Solution insuffisante pour certains types de capteurs de haute précision (ex. balance légale)
- Circuits spéciaux de compensation à construire
Circuit de compensationpour la dérive du zéro
Circuit de compensationpour la variation de sensibilité
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
2.6.3 Effets des longs fils (résistifs)Est la cause des erreurs suivantes:
1. La résistance des fils varie avec la température. C'est un effet parasite non contrôlé (On peut isoler les fils thermiquement afin de réduire ce problème)
2. Les fils de liaison sont des résistances montées en sérieavec le circuit de la jauge ce qui a pour effet de:
• désensibiliser le pont (output moins grand)
• rendre difficile voire impossible l'équilibrage initial du pont
• générer une erreur dans l'étalonnage électrique
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
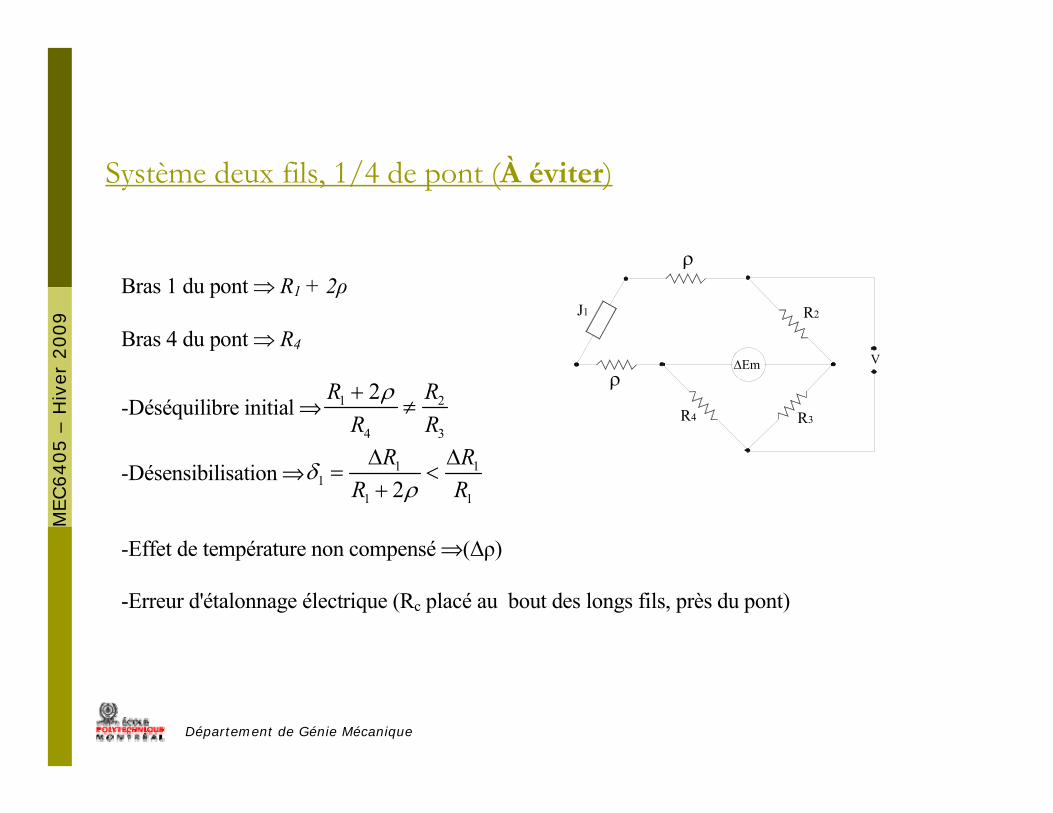
Système deux fils, 1/4 de pont (À éviter)
R4
ΔEm
J1
R3
R2
V
ρ
ρ Bras 1 du pont ⇒ R1 + 2ρ Bras 4 du pont ⇒ R4
-Déséquilibre initial ⇒ 1 2
4 3
2R RR R
ρ+≠
-Désensibilisation ⇒ 1 11
1 12R R
R Rδ
ρΔ Δ
= <+
-Effet de température non compensé ⇒(Δρ) -Erreur d'étalonnage électrique (Rc placé au bout des longs fils, près du pont)
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
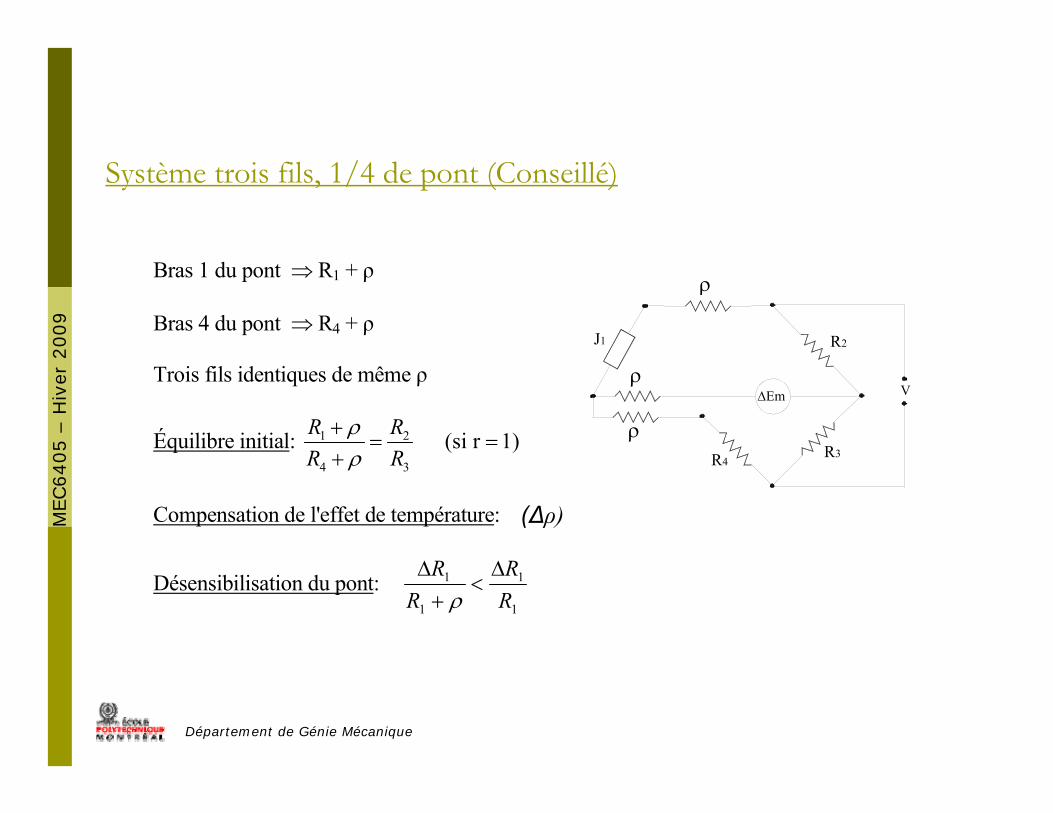
Système trois fils, 1/4 de pont (Conseillé)
Bras 1 du pont ⇒ R1 + ρ Bras 4 du pont ⇒ R4 + ρ Trois fils identiques de même ρ
Équilibre initial: 1 2
4 3
(si r 1)R RR R
ρρ
+= =
+
Compensation de l'effet de température:
Désensibilisation du pont: 1
1
1
1
RR
RR Δ
<+
Δρ
R4
ΔEm
J1
R3
R2
Vρ
ρ
ρ
(Δρ)
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
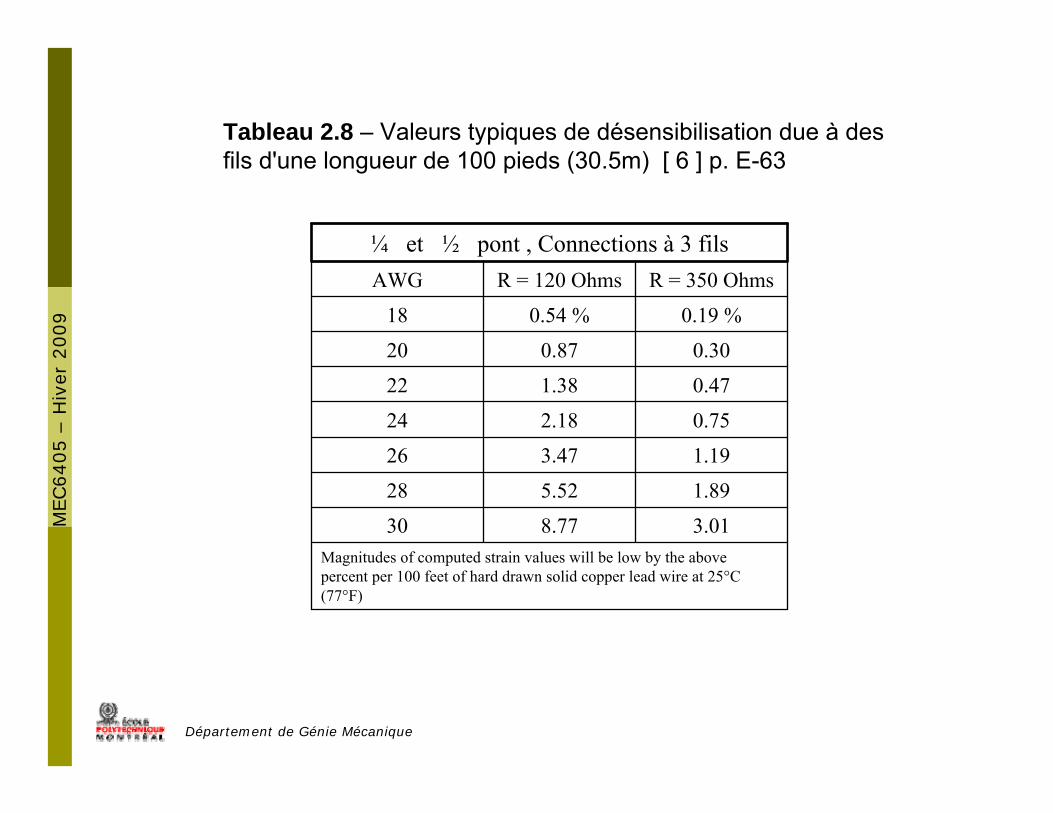
Tableau 2.8 – Valeurs typiques de désensibilisation due à des fils d'une longueur de 100 pieds (30.5m) [ 6 ] p. E-63
Magnitudes of computed strain values will be low by the above percent per 100 feet of hard drawn solid copper lead wire at 25°C (77°F)
3.018.7730
1.895.5228
1.193.4726
0.752.1824
0.471.3822
0.300.8720
0.19 %0.54 %18
R = 350 OhmsR = 120 OhmsAWG
¼ et ½ pont , Connections à 3 fils
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
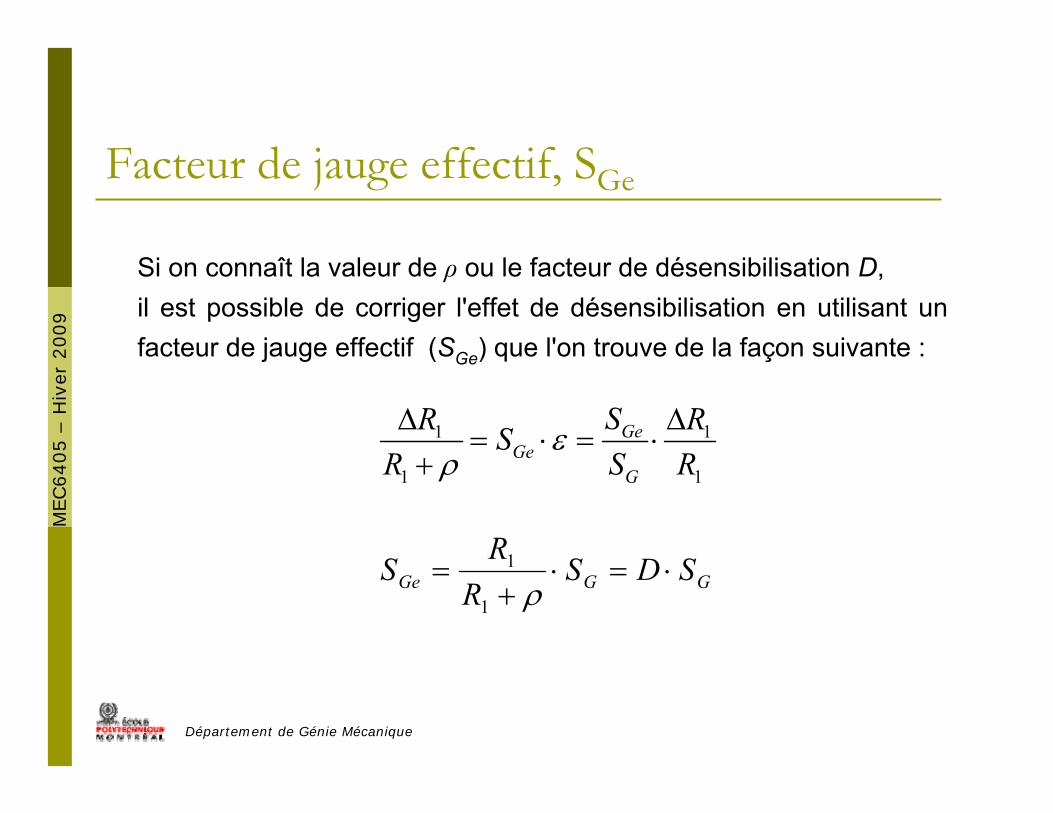
1 1
1 1
GeGe
G
SR RSR S R
ερ
Δ Δ= ⋅ = ⋅
+
GGGe SDSR
RS ⋅=⋅
+=
ρ1
1
Si on connaît la valeur de ρ ou le facteur de désensibilisation D,il est possible de corriger l'effet de désensibilisation en utilisant un facteur de jauge effectif (SGe) que l'on trouve de la façon suivante :
Facteur de jauge effectif, SGe
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
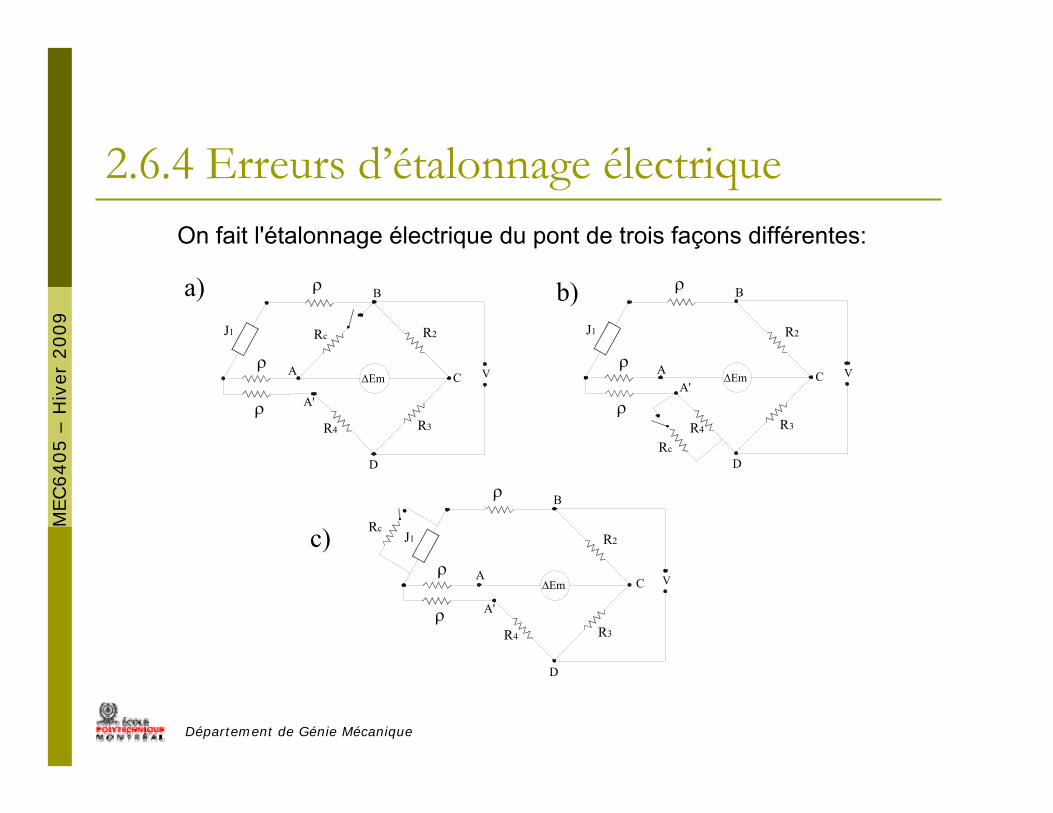
2.6.4 Erreurs d’étalonnage électriqueOn fait l'étalonnage électrique du pont de trois façons différentes:
ΔEm
J1
ρ
R4
ρ
R2
R3
V
a) b)
c)
Rc
ρ
B
A
A'
A
ρR4
A'
J1
ρ
ρ
Rc
VΔEm
R3
B
R2
A
ρR4
A'
J1
ρ
ρ
Rc
VΔEm
R3
B
R2
C
D
C
D
C
D
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
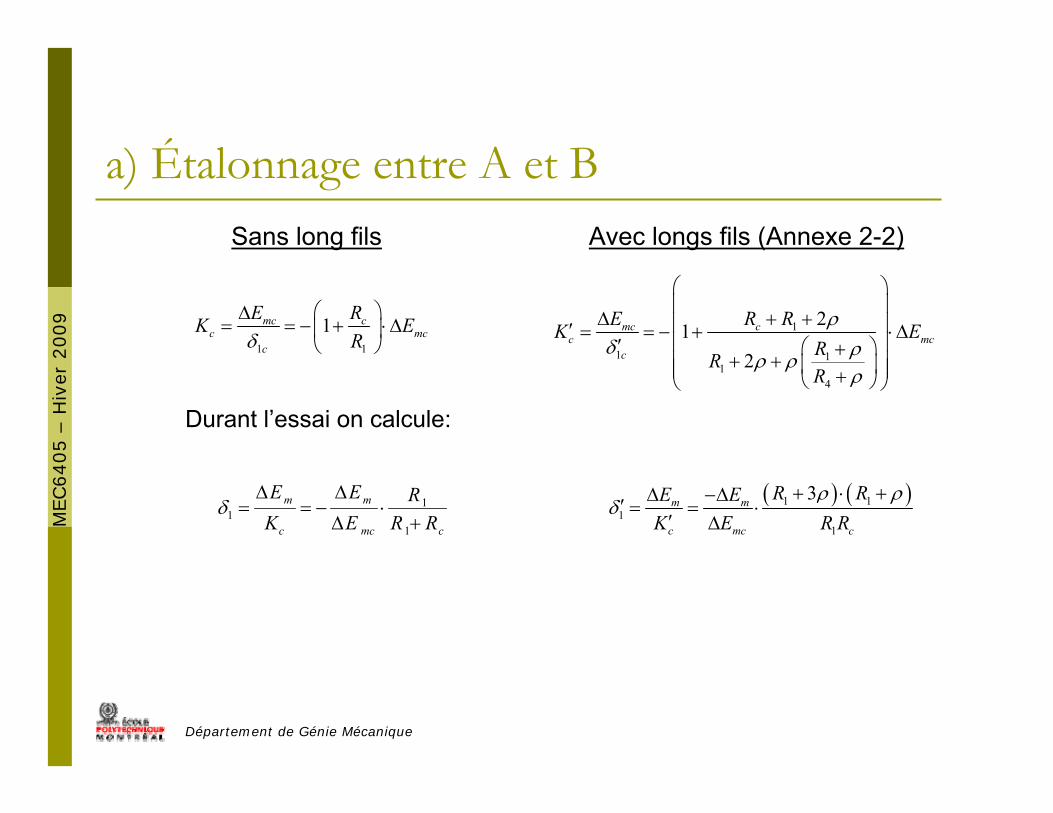
a) Étalonnage entre A et B Sans long fils Avec longs fils (Annexe 2-2)
1 1
1mc cc mc
c
E RK ERδ
⎛ ⎞Δ= = − + ⋅ Δ⎜ ⎟
⎝ ⎠
11
1
m m
c mc c
E E RK E R R
δΔ Δ
= = − ⋅Δ +
1
1 11
4
212
mc cc mc
c
E R RK ERRR
ρδ ρρ ρ
ρ
⎛ ⎞⎜ ⎟
Δ + +⎜ ⎟′ = = − + ⋅ Δ⎜ ⎟′ ⎛ ⎞++ +⎜ ⎟⎜ ⎟⎜ ⎟+⎝ ⎠⎝ ⎠
Durant l’essai on calcule:
( ) ( )1 11
1
3m m
c mc c
R RE EK E R R
ρ ρδ
+ ⋅ +Δ −Δ′ = = ⋅′ Δ
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009 ( ) ( ) ( ) ( )
12
11 1
1 1 11 1
1
33
m
mc cfaux
vrai m
mc c
E RE R R R
R RR REE R R
δδ ρ ρρ ρ
⎛ ⎞Δ− ⋅⎜ ⎟⎜ ⎟Δ +⎝ ⎠= =
+ ⋅ ++ ⋅ +⎛ ⎞Δ− ⋅⎜ ⎟Δ⎝ ⎠
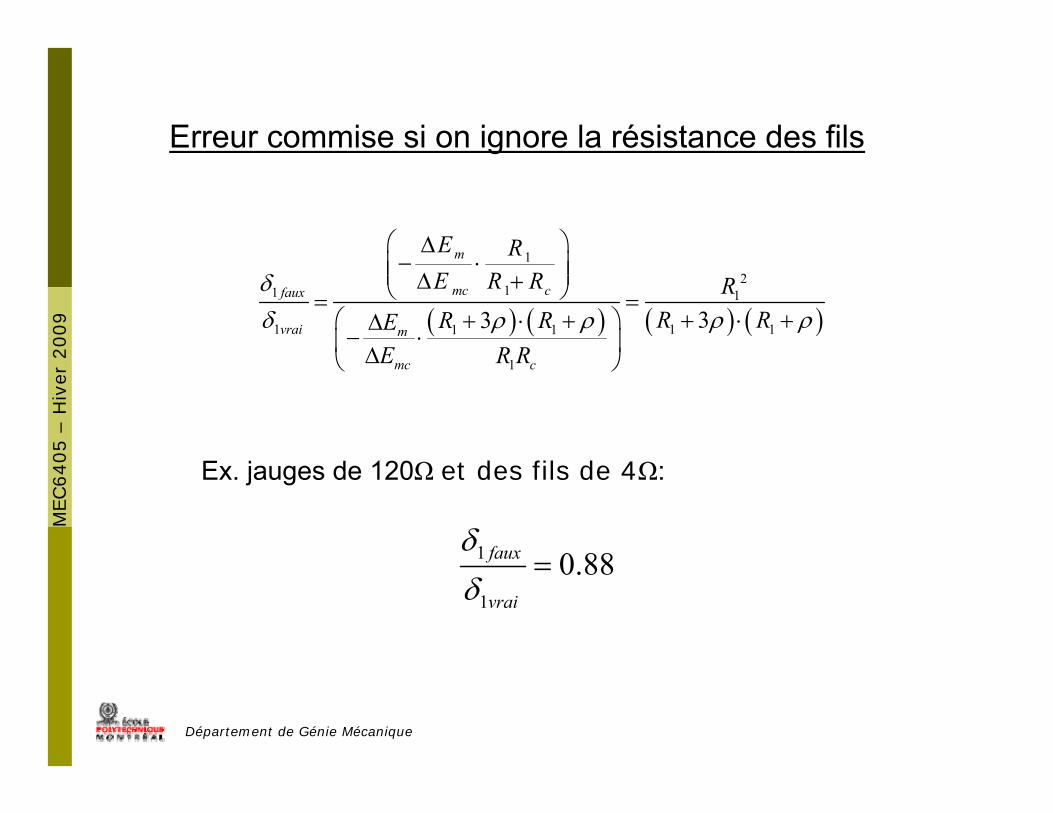
Erreur commise si on ignore la résistance des fils
Ex. jauges de 120Ω et des fils de 4Ω:
1
1
0.88faux
vrai
δδ
=
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
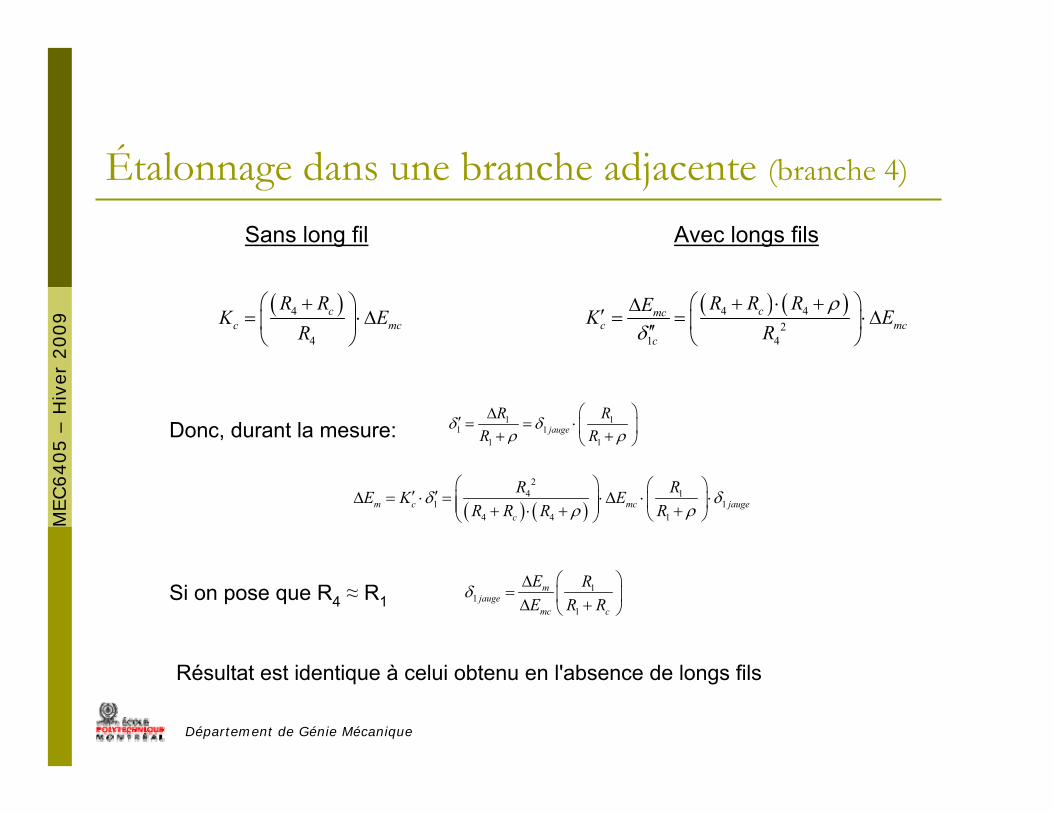
Étalonnage dans une branche adjacente (branche 4)
Sans long fil Avec longs fils
( )4
4
cc mc
R RK E
R+⎛ ⎞
= ⋅Δ⎜ ⎟⎝ ⎠
( ) ( )4 42
1 4
cmcc mc
c
R R REK ER
ρδ
+ ⋅ +⎛ ⎞Δ′ = = ⋅Δ⎜ ⎟′′ ⎝ ⎠
1 11 1
1 1jauge
R RR R
δ δρ ρ
⎛ ⎞Δ′ = = ⋅⎜ ⎟+ +⎝ ⎠
( ) ( )2
4 11 1
4 4 1m c mc jauge
c
R RE K ER R R R
δ δρ ρ
⎛ ⎞ ⎛ ⎞′ ′Δ = ⋅ = ⋅Δ ⋅ ⋅⎜ ⎟ ⎜ ⎟⎜ ⎟+ ⋅ + +⎝ ⎠⎝ ⎠
11
1
mjauge
mc c
E RE R R
δ⎛ ⎞Δ
= ⎜ ⎟Δ +⎝ ⎠
Donc, durant la mesure:
Si on pose que R4 ≈ R1
Résultat est identique à celui obtenu en l'absence de longs fils
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
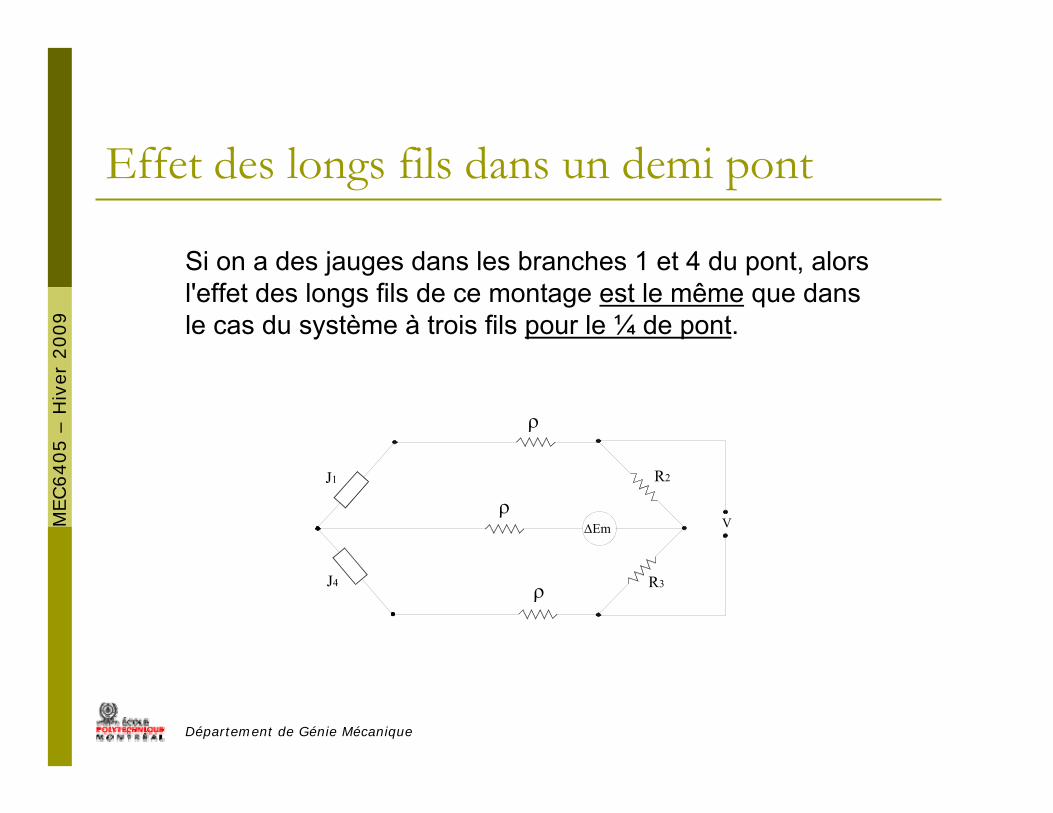
Effet des longs fils dans un demi pont
Si on a des jauges dans les branches 1 et 4 du pont, alors l'effet des longs fils de ce montage est le même que dans le cas du système à trois fils pour le ¼ de pont.
ΔEm
J1
R3
R2
Vρ
ρ
ρJ4
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
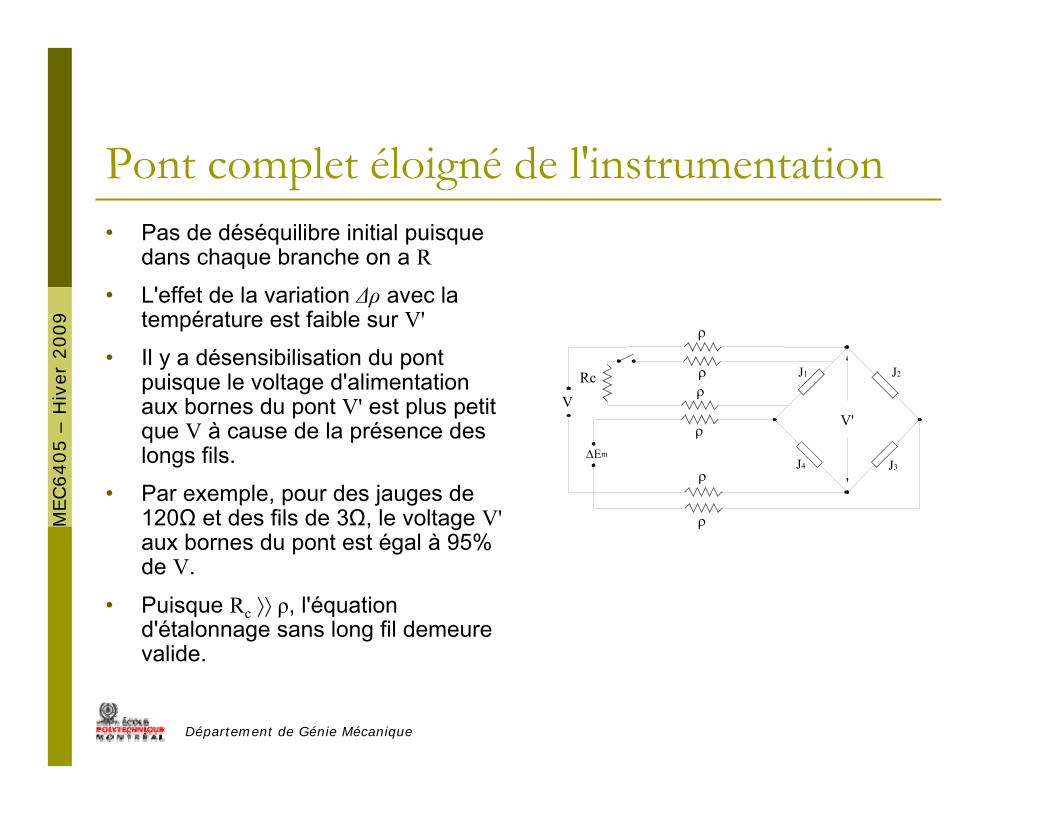
Pont complet éloigné de l'instrumentation• Pas de déséquilibre initial puisque
dans chaque branche on a R
• L'effet de la variation Δρ avec la température est faible sur V'
• Il y a désensibilisation du pont puisque le voltage d'alimentation aux bornes du pont V' est plus petit que V à cause de la présence des longs fils.
• Par exemple, pour des jauges de 120Ω et des fils de 3Ω, le voltage V'aux bornes du pont est égal à 95% de V.
• Puisque Rc ⟩⟩ ρ, l'équation d'étalonnage sans long fil demeure valide.
V'
J1 J2
J3J4
ρRc
ΔEm
V
ρ
ρ
ρ
ρ
ρ
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
Chap. 2.5
• Disposition des jauges dans le pont (capteurs à base de jauges)
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
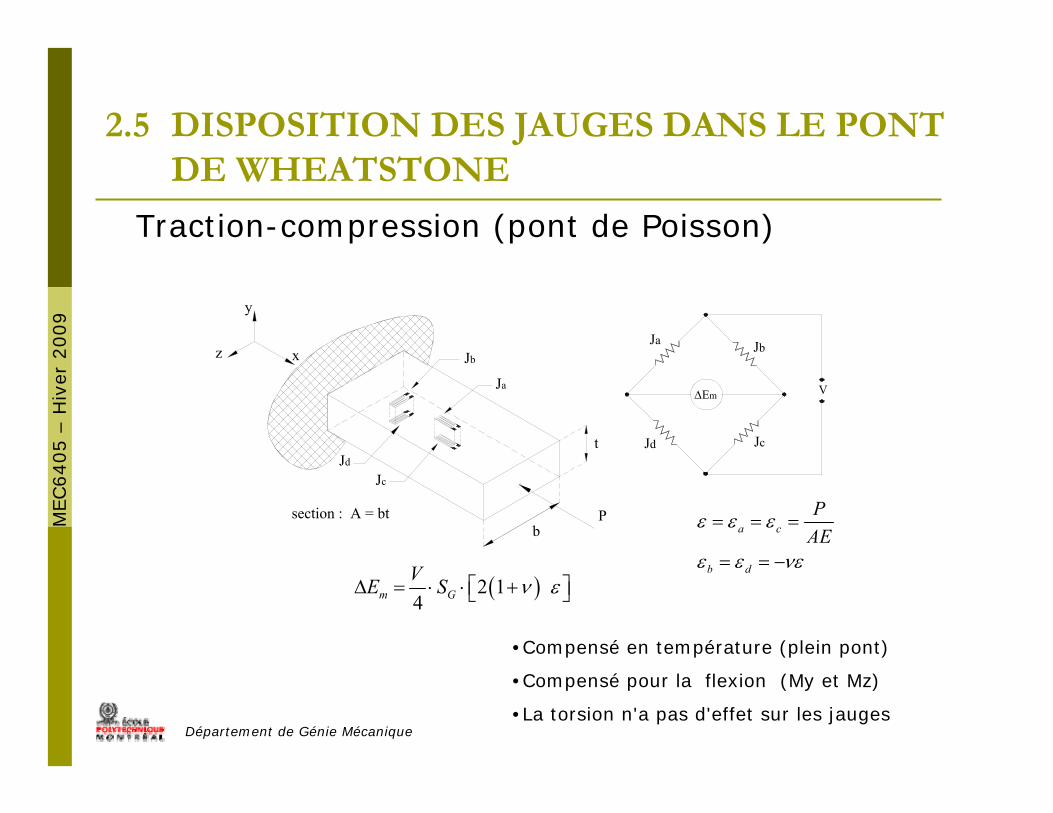
2.5 DISPOSITION DES JAUGES DANS LE PONT DE WHEATSTONE
Traction-compression (pont de Poisson)
x
y
z
P
t
bsection : A = bt
Ja
Jb
Jc
Jd
VΔEm
Ja Jb
JcJd
•Compensé en température (plein pont)
•Compensé pour la flexion (My et Mz)
•La torsion n'a pas d'effet sur les jauges
a c
b d
PAE
ε ε ε
ε ε νε
= = =
= = −( )2 1
4m GVE S ν εΔ = ⋅ ⋅ ⎡ + ⎤⎣ ⎦
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
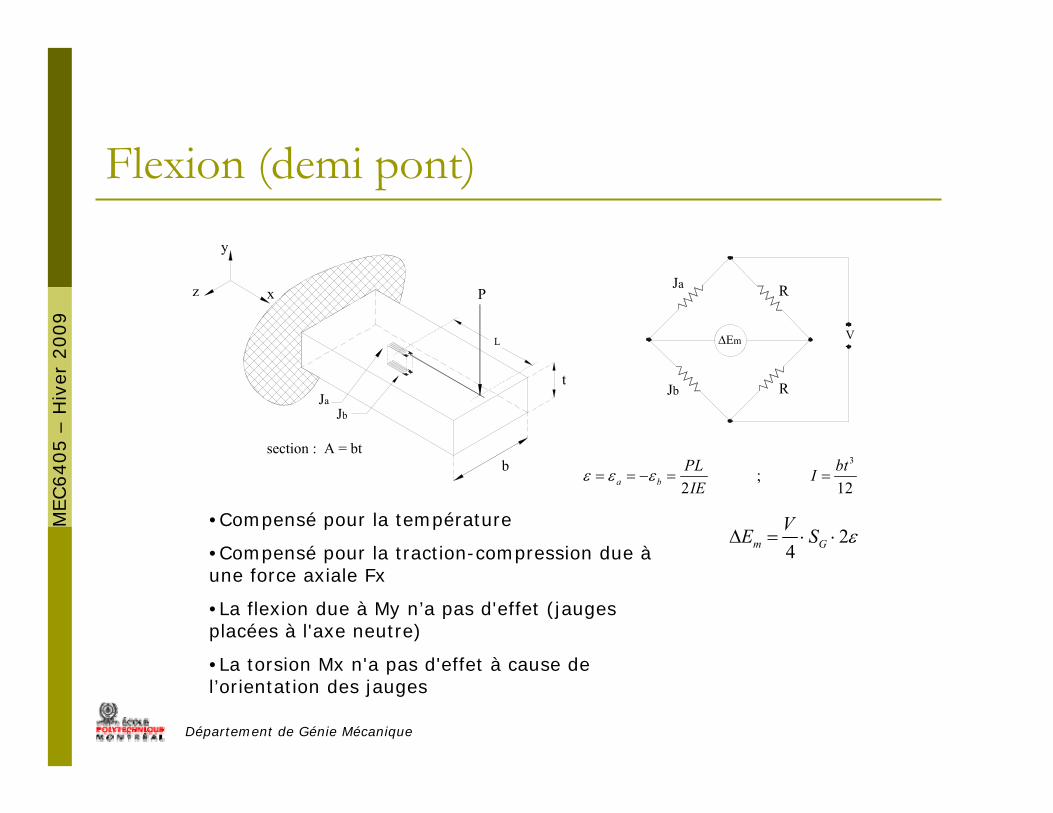
Flexion (demi pont)
x
y
z P
t
bsection : A = bt
JaJb
L VΔEm
Ja R
Jb R
3
;2 12a bPL btIIE
ε ε ε= = − = =
24m GVE S εΔ = ⋅ ⋅
•Compensé pour la température
•Compensé pour la traction-compression due àune force axiale Fx
•La flexion due à My n’a pas d'effet (jauges placées à l'axe neutre)
•La torsion Mx n'a pas d'effet à cause de l’orientation des jauges
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
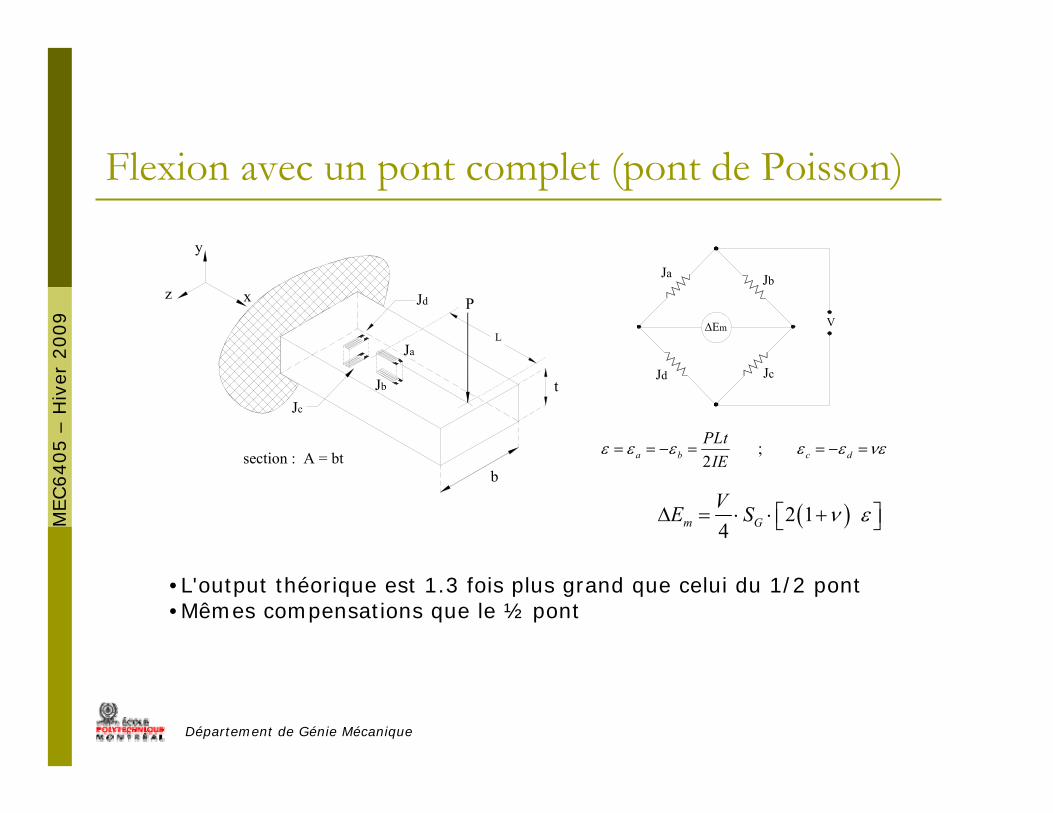
Flexion avec un pont complet (pont de Poisson)
x
y
z P
t
bsection : A = bt
Ja
Jb
Jc
Jd
LVΔEm
Ja Jb
JcJd
( )2 14m GVE S ν εΔ = ⋅ ⋅ ⎡ + ⎤⎣ ⎦
; 2a b c dPLt
IEε ε ε ε ε νε= = − = = − =
•L'output théorique est 1.3 fois plus grand que celui du 1/2 pont•Mêmes compensations que le ½ pont
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
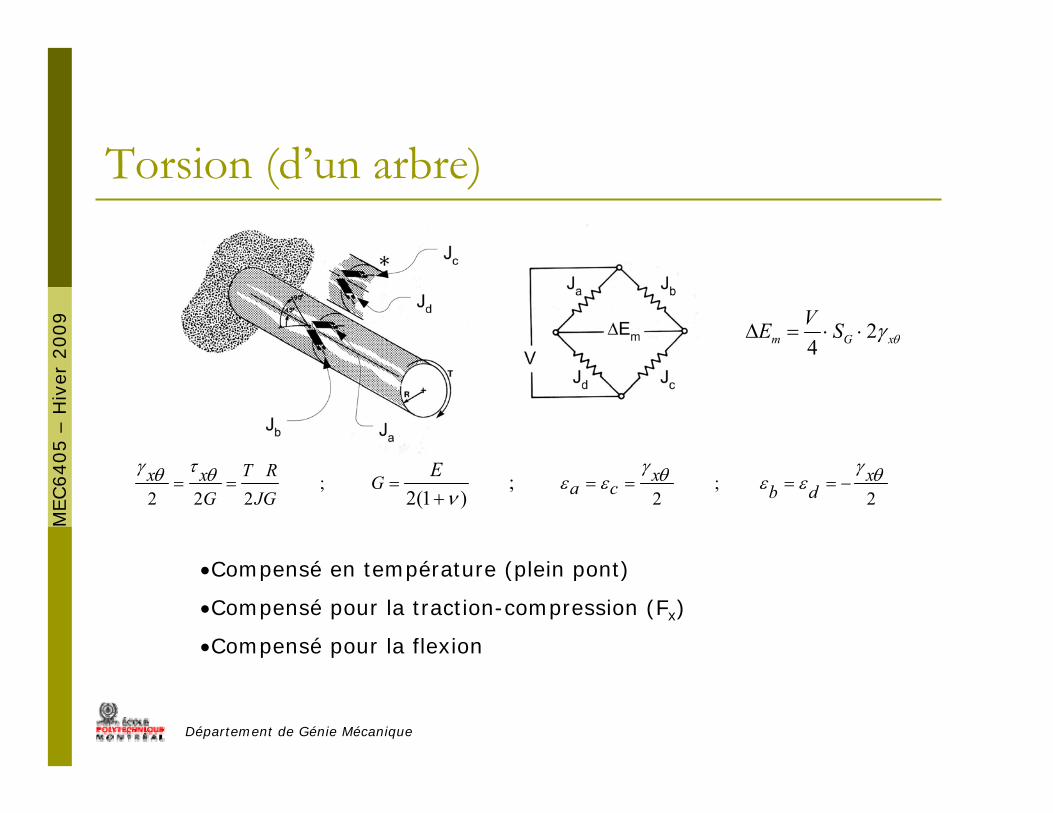
Torsion (d’un arbre)
•Compensé en température (plein pont)
•Compensé pour la traction-compression (Fx)
•Compensé pour la flexion
; ;2 2 2 2 2
;2(1 )
T Rx x x xG a c b dG JGEγ τ γ γθ θ θ θε ε ε ε
ν= = = = = = = −
+
24m G xVE S θγΔ = ⋅ ⋅
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
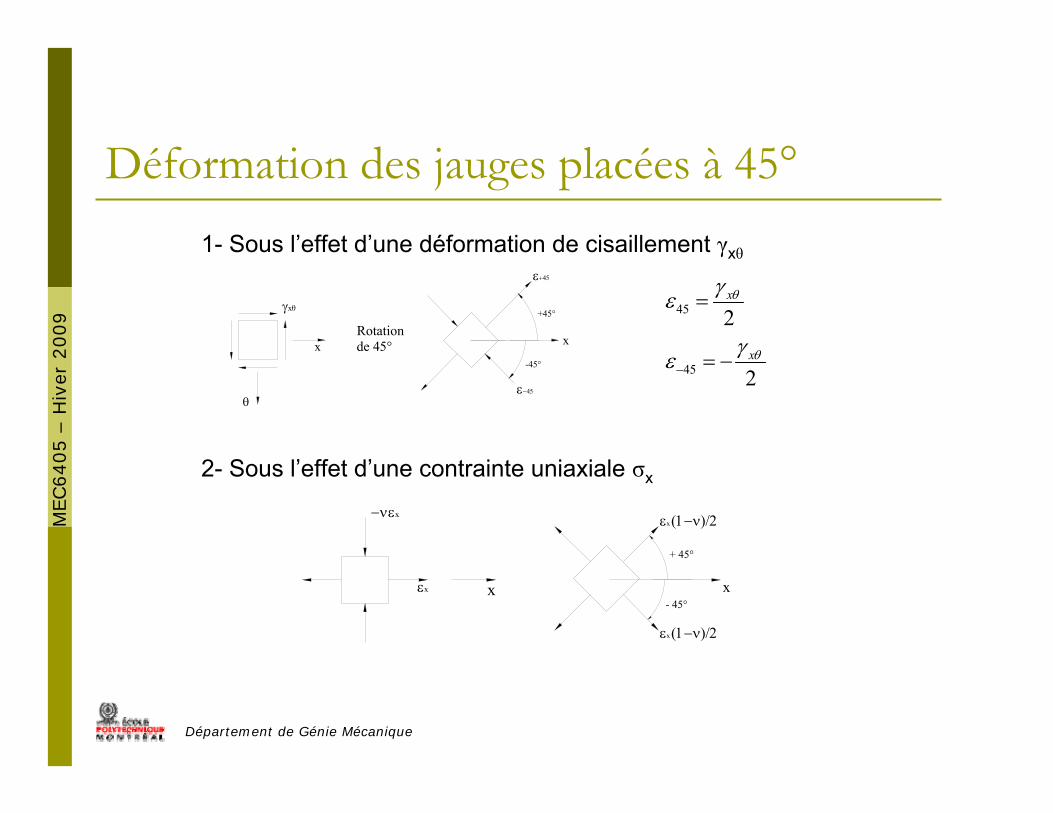
Déformation des jauges placées à 45°
x
θ
γxθ
x
ε−45
ε+45
Rotation de 45°
+45°
-45°
45
45
2
2
x
x
θ
θ
γε
γε−
=
= −
1- Sous l’effet d’une déformation de cisaillement γxθ
2- Sous l’effet d’une contrainte uniaxiale σx
εx
−ν εx
x
εx (1−ν)/2
εx (1−ν)/2
x
+ 45°
- 45°
Département de Génie Mécanique
MEC6405 –
Hiv
er 2
009
Conclusions- Les jauges sont collées sur le corps d'épreuve de façon à
réaliser un demi pont ou préférablement un pont complet
• compensation thermique
• isolation de l'effet mécanique désiré
• output électrique maximum
- Lorsqu'il s'agit de disposer les jauges dans le pont de Wheatstone, il faut se rappeler que :
• les branches 1 et 3 sont positives
• les branches 2 et 4 sont négatives

















![µo]©} o o[ ] r Ç ~W r r o] U^}uu X · dres » reprendre le métro direcon « Quatre Cantons » (ligne 1). Descendre à la staon « Pont de Bois », puis suivre le échage de l’Université,](https://static.fdocuments.fr/doc/165x107/5e48968d8b805a554257c789/o-o-o-r-w-r-r-o-uuu-x-dres-reprendre-le-mtro-direcon-quatre.jpg)