CH XXI : Variables aléatoires réelles à...
24
ECE1-B 2015-2016 CH XXI : Variables aléatoires réelles à densité I. Généralités sur les v.a.r. à densité I.1. Les v.a.r. à densité Définition On dit qu’une v.a.r. X est à densité si sa fonction de répartition F X est : a) continue sur R, b) de classe C 1 sur R sauf en un nombre fini de points. Remarque • Rappelons tout d’abord le rôle central joué par les fonctions de répartition des v.a.r. . La fonction de répartition F X caractérise la loi de X : connaître F X c’est connaître la loi de X et inversement. • Démontrer qu’une v.a.r. X est à densité c’est donc montrer la régularité d’une fonction (à savoir F X ). • Dire que f est C 1 sauf en un nombre fini n de points signifie qu’il existe (x 1 ,...,x n ) ∈ R n tel que : (on considère que les points sont ordonnés : x 1 <x 2 < ··· <x n ) f est C 1 sur ] -∞,x 1 [, ]x n , +∞[ et sur tout ]x i ,x i+1 [ pour i ∈ J1,n - 1K i.e. f est C 1 sur ] -∞,x 1 [ ∪ ]x 1 ,x 2 [ ∪ ···∪ ]x n-1 ,x n [ ∪ ]x n , +∞[. • Il faut faire attention : si X admet une densité alors F X n’est (éventuelle- ment) pas C 1 en les x i mais est continue sur R tout entier. Donc F X est notamment C 0 en les x i . Exemple Une v.a.r. X telle que X, →U (J1, 5K) admet-elle une densité ? Rappelons la fonction de répartition d’une telle v.a.r. 0 1 2 3 4 1 5 • Ici, F X est bien C 1 sur ] -∞, 1[ ∪ ]1, 2[ ∪ ]2, 3[ ∪ ]3, 4[ ∪ ]4, 5[ ∪ ]5, +∞[. • Par contre, F X n’est pas continue sur R car non continue en les x i . Ainsi, si une v.a.r. discrète finie suit une loi uniforme, alors X n’admet pas de densité. Remarque • On rappelle que la forme en escalier est caractéristique des fonctions de répartition des v.a.r. discrètes. La hauteur des contremarches est égale aux valeurs successives des P([X = x]), pour x ∈ X (Ω). • Rappelons alors que : F X est continue en x ∈ R ⇔ P([X = x]) = 0. Cela permet de tirer la conclusion suivante : X est une v.a.r. discrète ⇒ X n’admet pas de densité La définition de v.a.r. admettant une densité étant établie, il nous reste à défnir la notion de densité elle-même. 1
Transcript of CH XXI : Variables aléatoires réelles à...

ECE1-B 2015-2016
CH XXI : Variables aléatoires réelles à densité
I. Généralités sur les v.a.r. à densité
I.1. Les v.a.r. à densité
DéfinitionOn dit qu’une v.a.r. X est à densité si sa fonction de répartition FX est :
a) continue sur R,b) de classe C1 sur R sauf en un nombre fini de points.
Remarque
• Rappelons tout d’abord le rôle central joué par les fonctions de répartitiondes v.a.r. . La fonction de répartition FX caractérise la loi de X : connaîtreFX c’est connaître la loi de X et inversement.
• Démontrer qu’une v.a.r. X est à densité c’est donc montrer la régularitéd’une fonction (à savoir FX).
• Dire que f est C1 sauf en un nombre fini n de points signifie qu’il existe(x1, . . . , xn) ∈ Rn tel que :(on considère que les points sont ordonnés : x1 < x2 < · · · < xn)f est C1 sur ]−∞, x1[, ]xn,+∞[ et sur tout ]xi, xi+1[ pour i ∈ J1, n− 1Ki.e. f est C1 sur ]−∞, x1[ ∪ ]x1, x2[ ∪ · · · ∪ ]xn−1, xn[ ∪ ]xn,+∞[.
• Il faut faire attention : si X admet une densité alors FX n’est (éventuelle-ment) pas C1 en les xi mais est continue sur R tout entier.Donc FX est notamment C0 en les xi.
ExempleUne v.a.r. X telle que X → U(J1, 5K) admet-elle une densité ?Rappelons la fonction de répartition d’une telle v.a.r.
0 1 2 3 4
1
5
• Ici, FX est bien C1 sur ]−∞, 1[ ∪ ]1, 2[ ∪ ]2, 3[ ∪ ]3, 4[ ∪ ]4, 5[ ∪ ]5,+∞[.
• Par contre, FX n’est pas continue sur R car non continue en les xi.
Ainsi, si une v.a.r. discrète finie suit une loi uniforme, alors X n’admet pasde densité.
Remarque
• On rappelle que la forme en escalier est caractéristique des fonctions derépartition des v.a.r. discrètes. La hauteur des contremarches est égale auxvaleurs successives des P([X = x]), pour x ∈ X(Ω).
• Rappelons alors que : FX est continue en x ∈ R ⇔ P([X = x]) = 0.Cela permet de tirer la conclusion suivante :
X est une v.a.r. discrète ⇒ X n’admet pas de densité
La définition de v.a.r. admettant une densité étant établie, il nous reste àdéfnir la notion de densité elle-même.
1

ECE1-B 2015-2016
I.2. Densité d’une v.a.r.
Définition
Soit X une v.a.r. admettant une densité.
On dit qu’une fonction fX : R→ R est une densité de X si :
a) ∀x ∈ R, fX(x) > 0,
b) fX coïncide avec F ′ sauf en un nombre fini de points.Autrement dit, il existe x1, . . . , xn tel que :
∀x ∈ R \ x1, . . . , xn, fX(x) = F ′X(x)
Remarque
• Pour faliciter les démonstrations, et sans perte de généralité, on notera lespoints x1, . . . , xn de manière ordonnée i.e. tel que :
x1 < . . . < xn
• D’où vient le caractère positif de fX ?Soit (x1, x2) ∈ R2 tel que fX(x) = F ′X(x) pour tout x ∈]x1, x2[.Comme FX est une fonction de répartition, elle est croissante sur R (etdonc a fortiori sur ]x1, x2[). Or on a :
FX croissante sur ]x1, x2[ ⇔ F ′X = fX > 0 sur ]x1, x2[
On montre ainsi que : fX > 0 sur ]x1, x2[ ∪ . . . ∪ ]xn−1, xn[.
• De par la définition, si X admet une densité, alors X admet une infinitéde densité. En effet, la définition ne contraint pas précisément la valeur defX en les xi. La seule exigence est que fX(xi) > 0.
ExempleConsidérons une v.a.r. X dont la fonction de répartition F est la suivante.
0 5
1
Cela correspond à la fonction F : x 7→
0 si x ∈ ]−∞, 0[x/5 si x ∈ [0, 5]1 si x ∈ ]5,+∞[
• Tout d’abord, remarquons que cette fonction vérifie bien les propriétéscaractéristiques des fonctions de répartitions.× F est croissante sur R,× lim
x→−∞F (x) = 0 et lim
x→+∞F (x) = 1,
× F est continue à droite en tout point de R.• De plus, la v.a.r. X est bien une v.a.r. à densité puisque :
1) F est continue sur R,2) F est C1 (même C∞) sur ]−∞, 0[, ]0, 5[, ]5,+∞[ car polynomiale.
• Pour déterminer une densité de X, on commence par dériver la fonctionF sur les intervalles ouverts ]−∞, 0[, ]0, 5[, ]5,+∞[.
f : x 7→
0 si x ∈ ]−∞, 0[
1/5 si x ∈ ]0, 5[0 si x ∈ ]5,+∞[
En choisissant la valeur (forcément positive) de f en 0 et 5, on définit unedensité de X. Par exemple, on peut prendre f(0) = 1/5 = f(5).Mais on pourrait tout autant choisir f(0) = 32 et f(5) = 13
√2
e3 .
2

ECE1-B 2015-2016
Théorème 1.
Soit X une v.a.r. admettant une densité notée fX .
Les propriétés suivantes sont vérifiées.
1) ∀x ∈ R, FX(x) = P([X 6 x]) =
∫ x
−∞fX(t) dt
2)∫ +∞
−∞fX(t) dt = 1 3) ∀x ∈ R, P([X = x]) = 0
4) ∀(a, b) ∈ R2, on a : P([X < a]) = P([X 6 a]) =
∫ a
−∞fX(t) dt
P([X > b]) = 1− P([X 6 b]) =
∫ +∞
bfX(t) dt
5) ∀(a, b) ∈ R2, si a 6 b, on a :
P([a < X 6 b]) = FX(b)− FX(a) =
∫ b
afX(t) dt
P([a < X < b]) = P([a < X 6 b]) = P([a 6 X < b]) = P([a 6 X 6 b])
Démonstration.
Pour faire cette démonstration, on se place dans le cadre restreint : onsuppose que FX est C1 sur R tout entier et que fX = F ′X sur R. Ainsi ladensité fX est supposée C0 sur R.
1) Soit x ∈ R. Notons U la fonction définie par U(y) =
∫ x
yfX(t) dt pour
y 6 0. On a alors :
U(y) =
∫ x
yfX(t) dt =
∫ x
yF ′X(t) dt = [ FX(t) ]
x
y
= FX(x)− FX(y) −→y→−∞
FX(x)
En effet, limy→−∞
FX(y) = 0 par propriété des fonctions de répartition.
On en déduit que∫ x
−∞fX(t) dt est convergente et de valeur :
∫ x
−∞fX(t) dt = FX(x) = P([X 6 x])
2) Notons V la fonction définie par V (y) =
∫ y
0fX(t) dt pour y > 0.
V (y) =
∫ y
0fX(t) dt =
∫ y
0F ′X(t) dt = [ FX(t) ]
y
0
= FX(y)− FX(0) −→y→+∞
1− FX(0)
En effet, limy→+∞
FX(y) = 1 par propriété des fonctions de répartition.
On en déduit que∫ +∞
0fX(t) dt est convergente et de valeur :
∫ +∞
0fX(t) dt = 1− FX(0)
3

ECE1-B 2015-2016
Or, d’après le point précédent,∫ 0
−∞fX(t) dt converge et vaut FX(0). On
en déduit que∫ +∞
−∞fX(t) dt converge et vaut : FX(0) + 1− FX(0) = 1.
3) Soit x ∈ R. De par le chapitre sur les variables aléatoires (CH 20), on a :
limt→x−
FX(t) = FX(x)− P([X = x]) = P([X < x])
Or X est une v.a.r. à densité. Donc FX est une fonction continue sur R.Elle est donc, a fortiori, continue à gauche en x.On en déduit : lim
t→x−FX(t) = FX(x) et donc : P([X = x]) = 0.
4) Soit (a, b) ∈ R2. Par l’égalité (encadrée) précédente, on a :
P([X < a]) = FX(a)− P([X = a]) =
∫ a
−∞fX(t) dt
D’autre part : [X > b] = [X 6 b] et donc : P([X > b]) = 1− P([X 6 b]).
P([X > b]) = 1− P([X 6 b]) =
∫ +∞
−∞fX(t) dt−
∫ b
−∞fX(t) dt
=
∫ b
−∞fX(t) dt +
∫ +∞
bfX(t) dt−
∫ b
−∞fX(t) dt
5) Soit (a, b) ∈ R2 tel que a 6 b. On a alors :
P([a < X 6 b]) = FX(b)− FX(a)
=
∫ a
−∞fX(t) dt +
∫ b
afX(t) dt−
∫ a
−∞fX(t) dt
La première égalité est vérifiée pour toute fonction de répartition (cf CH20). D’autre part, on a : [a < X 6 b] = [a < X < b] ∪ [X = b], uniond’événements incompatibles. On en déduit :
P([a < X 6 b]) = P([a < X < b]) + P([X = b])
Les autres égalités sont démontrées de la même façon.
Remarque• Ce théorème illustre l’intérêt des v.a.r. à densité : on obtient la valeur dela fonction de répartition FX et donc la loi de X sous forme d’un calculd’intégrales (éventuellement impropres).
• Nous avons obtenu des résultats analogues dans le chapitre précédent.
Cas discret(v.a.r. discrète)
Cas continu(v.a.r. à densité)
P([X 6 b])∑
x∈X(Ω)
x6b
P([X = x])∫ b
−∞fX(t) dt
P([a 6 X 6 b])
(avec a 6 b)
∑x∈X(Ω)
a6x6b
P([X = x])∫ b
afX(t) dt
P([a 6 X 6 b])
(avec a 6 b)FX(b)−FX(a) +P([X = a]) FX(b)− FX(a)
P(Ω) = 1∑
x∈X(Ω)
P([X = x]) = 1
∫ +∞
−∞fX(t) dt = 1
Régularité deFX
En tout point x ∈ R :
• FX continue à droite en x
• FX admet une limite finieà gauche en x
FX continue sur R
4

ECE1-B 2015-2016
• Le symbole∑
(somme au plus dénombrable) du cas discret est l’analogue,dans le cas continu, du symbole
∫(somme continue = intégrale).
• La quantité fX(t) dt doit être comprise comme la probabilité que la v.a.r.à densité X soit dans l’intervalle infinitésimal dt. C’est l’analogue de laquantité P([X = x]) du cas discret.
Théorème 2.Soit f : R→ R une fonction.
f est une densitéde probabilité ⇔
1. f est continue sur R sauf en un nombrefini de points,
2. ∀x ∈ R, f(x) > 0,
3.∫ +∞
−∞f(t) dt est convergente et vaut 1.
Démonstration.(⇒) Si f est une densité de probabilité alors, par définition, f = F ′X (pourune certaine v.a.r. X) sauf en un nombre fini de points. Or FX est C1 saufen un nombre fini de points donc F ′X est C0 sauf en un nombre fini de points.La fonction f est positive par définition.
Enfin∫ +∞
−∞f(t) dt = 1 a été démontré dans le théorème précédent.
(⇐) Admis.
RemarqueCe théorème peut être vu comme une réciproque des résultats précédents :× si FX est la fonction de répartition d’une v.a.r. alors la fonction f définie
par f(x) = F ′X(x) (sauf en un nombre fini de points) est une densité deprobabilité à condition que f soit positive.
× inversement, si f vérifie les trois propriétés du théorème précédent, alors
la fonction F définie par : F (x) =
∫ x
−∞f(t) dt est une fonction de répar-
tition.
ExempleOn définit une fonction f sur R par :
f(x) =
0 si x < −1
1 + x si − 1 6 x < 01− x si 0 6 x < 1
0 si 1 6 x
a. Montrer que f est une densité de probabilité et tracer son graphe.b. Soit X une variable aléatoire de densité f . Expliciter FX .
c. Calculer P([X >
1
2
])et P
([|X| 6 1
3
]).
Démonstration.a. D’après le théorème précédent, il s’agit de démontrer que f vérifie trois
propriétés.1. f est C0 sur R\−1, 0, 1. En fait, f est même continue sur R puisque :
limx→−1−
f(x) = 0 = limx→−1+
= f(−1).
(et égalités analogues en 0 et 1)2. ∀x ∈ R, f(x) > 0. Par exemple, si x ∈ [−1, 0[, alors 0 6 1 + x < 1 et
donc f(x) > 0 si x ∈ [−1, 0[.
3. Notons U(y) =
∫ 0
ypour y 6 −1. On a alors :∫ 0
yf(t) dt =
∫ −1
yf(t) dt+
∫ 0
−1f(t) dt
=
∫ 0
−1f(t) dt =
∫ 0
−1(1 + t) dt =
[t+
t2
2
]0−1
= −(−1 +
(−1)2
2
)=
1
2−→y→−∞
1
2
On en déduit que∫ 0
−∞f(t) dt converge et vaut
1
2. On démontre de
même que∫ +∞
0f(t) dt converge et vaut
1
2. En effet :
5

ECE1-B 2015-2016
∫ 1
0f(t) dt =
∫ 1
0(1− t) dt =
∫ −1
0(1 + u) (−du) =
∫ 0
−1f(u) du
On en déduit que∫ +∞
−∞f(t) dt converge et vaut 1
2 + 12 = 1.
0−1 1
1
b. La densité de probabilité f étant définie par morceaux, il en est (a priori)de même pour FX .
× Si x < −1 : FX(x) =
∫ x
−∞f(t) dt =
∫ x
−∞0 dt = 0.
× Si −1 6 x < 0 : FX(x) =
∫ x
−∞f(t) dt =
∫ −1
−∞0 dt+
∫ x
−1(1 + t) dt
Or :∫ x
−1(1 + t) dt =
[t+
t2
2
]x−1
=
(x+
x2
2
)−(−1 +
(−1)2
2
)et donc FX(x) = x2
2 + x+ 12 .
× Si 0 6 x < 1 : FX(x) =
∫ −1
−∞0 dt+
∫ 0
−1(1 + t) dt+
∫ x
0(1− t) dt
Or :∫ x
0(1− t) dt =
[t− t2
2
]x0
=
(x− x2
2
)et∫ 0
−1(1 + t) dt =
1
2
et donc FX(x) = −x2
2 + x+ 12 .
× Si x > 1 : FX(x) =
∫ −1
−∞0 dt+
∫ 1
−1f(t) dt+
∫ x
10 dt
et donc FX(x) = 1.
c. Il y a deux manières de rédiger cette question :
• P([X >
1
2
])=
∫ +∞
12
f(t) dt =
∫ 1
12
(1− t) dt+
∫ +∞
10 dt
Or :∫ 1
12
(1− t) dt =
[t− t2
2
]112
=
(1− 1
2
)−
(1
2−
(12)2
2
)=
1
8
• P([X >
1
2
])= 1− P
([X 6
1
2
])= 1− FX
(1
2
)=
1
8
car FX(
1
2
)= −
(12)2
2+
1
2+
1
2=
7
8
On peut aussi utiliser l’une ou l’autre de ces rédactions pour la questionsuivante :
• P([|X| 6 1
3
])= P
([−1
36 X 6
1
3
])=
∫ 13
− 13
f(t) dt = 2
∫ 13
0f(t) dt
par parité. Or :∫ 1
3
0(1− t) dt =
[t− t2
2
]13
0
=1
3− 1
18=
5
18
• P([|X| 6 1
3
])= P
([−1
36 X 6
1
3
])= FX
(1
3
)− FX
(−1
3
)=
5
9
car FX(
1
3
)= −
(13)2
2+
1
3+
1
2=
7
9
et FX(−1
3
)=
(−13)2
2− 1
3+
1
2=
2
9
6

ECE1-B 2015-2016
I.3. Transformation d’une v.a.r. à densité
I.3.a) Transformation affine d’une v.a.r. à densité
Théorème 3.
Soit X une v.a.r. à densité fX .
Soit a et b deux réels tels que a 6= 0.
1) La var Y = aX + b est une v.a.r. à densité.
2) De plus, sa densité est donnée par fY : x 7→ 1
|a|fX
(x− ba
)Démonstration.Notons Y la v.a.r. définie par Y = aX + b. Déterminons FY la fonction derépartition de Y .
∀x ∈ R, FY (x) = P([Y 6 x]) = P([aX + b 6 x]) = P([aX 6 x− b])
On doit alors distinguer deux cas :
1) Si a > 0, alors : FY (x) = P([X 6
x− ba
])= FX
(x− ba
)2) Si a < 0, alors :
FY (x) = P([X >
x− ba
])= 1− P
([X <
x− ba
])= 1− FX
(x− ba
)Or la fonction x 7→ x− b
aest C1 sur R. La fonction FX étant la fonction de
répartition d’une v.a.r. à densité, on sait que FX est C0 sur R et C1 sauf enun nombre fini de points. Par composition, on en déduit que FY est C0 surR et C1 sauf en un nombre fini de points. On en déduit que Y est une v.a.r.à densité.
Déterminons une densité de Y .
1) Si a > 0, alors : F ′Y (x) =1
aF ′X
(x− ba
)=
1
afX
(x− ba
)2) Si a < 0, alors : F ′Y (x) = −1
aF ′X
(x− ba
)= −1
afX
(x− ba
)On en conclut qu’une densité de Y est donnée par : x 7→ 1
|a|fX
(x− ba
).
Remarque
• Peut-on généraliser cette propriété : si X et Y sont des variables à densité,la v.a.r. X + Y est-elle à densité ?NON ! on peut par exemple considérer :
× une v.a.r. X suivant une loi uniforme sur [0, 1] (définition à suivre),
× et la v.a.r. Y donnée par Y = 1−X.
Alors X + Y = 1, ce qui montre que X(Ω) = 1.Ainsi, X + Y n’admet pas de densité en tant que v.a.r. discrète (finie).
• L’ensemble des v.a.r. à densité n’est donc pas stable par addition.De ce fait, ce n’est pas un espace vectoriel.
7

ECE1-B 2015-2016
I.3.b) Transformation polynomiale (carré)
Théorème 4.Soit X une v.a.r. à densité fX .1) La var Y = X2 est une v.a.r. à densité.2) De plus, sa densité est donnée par :
fY : x 7→
0 si x < 01
2√x
(fX(√x) + fX(−
√x)) si x > 0
Démonstration.La démonstration est analogue à la démonstration précédente.• Si x < 0 : [Y 6 x] =
[X2 6 x
]= ∅,
et alors : FY (x) = P([Y 6 x]) = P(∅) = 0.• Si x > 0 : [Y 6 x] =
[X2 6 x
]= [−
√x 6 X 6
√x].
et alors : FY (x) = P([Y 6 x]) = P([−x 6 X 6 x]) = FX(√x)−FX(−
√x).
La fonction FY est C1 sur ]−∞, 0[ (car constante sur cet intervalle).Sur ]0,+∞[, FY est obtenue comme composée de la fonction FX qui est C1
sur R sauf (éventuellement) en un nombre fini de points et de la fonctionx 7→
√x qui est C1 sur ]0,+∞[.
Ainsi, FY est C1 sur R sauf (éventuellement) en un nombre fini de points.Enfin, en tout point x > 0 où FY est dérivable, on a :
F ′Y (x) =1
2√xF ′X(√x)−
(− 1
2√xF ′X(−
√x)
)=
1
2√xfX(√x)− 1
2√xfX(−
√x)
=1
2√x
(fX(√x) + fX(−
√x))
et F ′Y (x) = 0 pour tout x < 0.
I.4. Espérance d’une v.a.r. à densité
Définition
Soit X une v.a.r. de densité fX .
• On dit que X admet une espérance E(X) si l’intégrale∫ +∞
−∞x fX(x) dx
est absolument convergente.
• Dans ce cas, E(X) =
∫ +∞
−∞x fX(x) dx
Remarque
• Il faut bien comprendre que, même si la notation est la même que précé-demment (E(X)), nous venons de définir un nouvel opérateur qui agit surles v.a.r. à densité et plus sur les v.a.r. discrètes.
• Il n’y a donc pas de raison pour que les propriétés classiques de l’opérateurespérance des v.a.r. discrètes soient vérifiées pour l’opérateur espérance desv.a.r. à densité.
• Une propriété aussi simple que la linéarité et notamment l’égalité :
E(X + Y ) = E(X) + E(Y )
est problématique. En effet, on a vu que même si X et Y sont à densité,X + Y ne l’est pas forcément. Il faut donc se demander ce que représenteles différents symboles E de cette égalité . . .
• En fait, il existe une théorie permettant d’unifier sous une même écriturele cas discret et le cas continu. Toutefois, c’est hors de notre portée et nousn’en dirons donc pas plus.
8

ECE1-B 2015-2016
Méthode.
Montrer que∫ +∞
−∞t f(t) dt est absolument convergente.
Il s’agit de démontrer que :∫ +∞
−∞|t f(t)| dt est convergente.
Pour ce faire, il faut considérer :
1) U(y) =
∫ 0
y|t f(t)| dt (si y 6 0) et montrer que lim
y→−∞U(y) est finie,
2) V (y) =
∫ y
0|t f(t)| dt (si y > 0) et montrer que lim
y→+∞V (y) est finie.
Étudions précisément ces deux cas :
1) Si y 6 0, alors t 7→ |t f(t)| est intégrée sur [y, 0] ⊆]−∞, 0].On a donc : t 6 0 et ainsi : |t f(t)| = |t| |f(t)| = −t f(t)car la fonction f est positive. Ainsi :
U(y) =
∫ 0
y−t f(t) dt = −
∫ 0
yt f(t) dt
2) Si y > 0, alors t 7→ |t f(t)| est intégrée sur [y, 0] ⊆ [0,+∞[.On a donc : t > 0 et ainsi : |t f(t)| = |t| |f(t)| = t f(t)
car la fonction f est positive. Ainsi : V (y) =
∫ y
0t f(t) dt
Soit X une v.a.r. de densité f .
X admet uneespérance ⇔
1)∫ 0
−∞t f(t) dt est convergente
2)∫ +∞
0t f(t) dt est convergente
ExempleSoit X une variable aléatoire de densité f donnée dans l’exemple précédent.Démontrons que X admet une espérance.
1) Si y 6 −1, on note U(y) =
∫ 0
yt f(t) dt =
∫ −1
yt× 0 dt+
∫ 0
−1t (1+t) dt
On a donc : limy→−∞
U(y) =
∫ 0
−1t (1 + t) dt, limite finie comme intégrale
d’une fonction continue sur un segment.
2) Si y > 1, on note V (y) =
∫ y
0t f(t) dt =
∫ 1
0t× (1− t) dt+
∫ y
1t× 0 dt
On a donc : limy→+∞
V (y) =
∫ 1
0t (1 − t) dt, limite finie comme intégrale
d’une fonction continue sur un segment.
On en déduit que X admet une espérance. De plus, on a :
E(X) =
∫ +∞
−∞t f(t) dt =
∫ 0
−1t (1 + t) dt+
∫ 1
0t (1− t) dt
=
∫ 0
1−u (1− u)(− du) +
∫ 1
0t (1− t) dt
= −∫ 1
0u (1− u) du+
∫ 1
0t (1− t) dt = 0
Ainsi : E(X) = 0.(note : la densité f considérée ici est paire ; le calcul effectué tire partie ducaractère impaire de la fonction t 7→ t f(t))
9

ECE1-B 2015-2016
Proposition 1.
On considère la fonction f définie par :
f : R → R
x 7→ 1
π(1 + x2)
1) Alors f est une densité de probabilité (densité de la loi dite de Cauchy).
2) Si X est une v.a.r. de densité f alors X n’admet pas d’espérance.
Il existe des v.a.r. à densité n’admettant pas d’espérance
Démonstration.
(i) f est continue sur R comme inverse d’une fonction continue qui nes’annule pas sur R.
(ii) ∀x ∈ R, f(x) > 0.
(iii)∫ +∞
−∞f(t) dt = 1 (on l’admet ici).
On en déduit que f est une densité de probabilité d’une v.a.r. X. Intéressons-nous maintenant à l’espérance, si elle existe, de cette v.a.r. X. On va prouver
que∫ +∞
1x f(x) dx diverge et donc que
∫ +∞
−∞x f(x) dx diverge. Ce qui
démontre que X n’admet pas d’espérance.
Pour tout x > 1, on a :x
1 + x2>
1
2x> 0.
Or, par le critère de Riemann, l’intégrale∫ +∞
1
1
2xdx est divergente.
On en déduit que∫ +∞
1
x
1 + x2dx et donc
∫ +∞
1x f(x) dx est divergente.
Ainsi, X n’admet pas d’espérance.
Proposition 2.Soit X une v.a.r. à densité f admettant une espérance.Soit (a, b) ∈ R2 tels que a 6= 0.1) La v.a.r. Y = aX + b est une v.a.r. à densité et admet une espérance.
2) E(aX + b) = a E(X) + b
Démonstration.Pour améliorer la lisibilité de la démonstration, on choisit a > 0. On auradonc |a| = a (le cas a 6 0 se traite de manière analogue).1) On a déjà démontré que si X a pour densité f alors Y = aX + b est une
v.a.r. à densité et fY (x) =1
|a|fX
(x− ba
)=
1
afX
(x− ba
).
Il s’agit donc de démontrer que l’intégrale∫ +∞
−∞t fY (t) dt est absolument
convergente.
• si y 6 0, notons U(y) =
∫ 0
yt fY (t) dt. On a alors :
U(y) =1
|a|
∫ 0
yt fX
(t− ba
)dt =
1
a
∫ − ba
y−ba
(au+ b) fX(u) a du
= a
∫ − ba
y−ba
u fX(u) du + b
∫ − ba
y−ba
fX(u) du
−→y→−∞
a
∫ − ba
−∞u fX(u) du + b
∫ − ba
−∞fX(u) du
Or l’intégrale∫ − b
a
−∞u fX(u) du est convergente car, par hypothèse, X
admet une espérance. D’autre part,∫ − b
a
−∞fX(u) du est aussi conver-
gente (c’est FX(− ba)). Ainsi,
∫ 0
−∞t fY (t) dt est convergente.
10

ECE1-B 2015-2016
• si y > 0, notons V (y) =
∫ y
0t fY (t) dt. On a alors :
V (y) =1
|a|
∫ y
0t fX
(t− ba
)dt =
1
a
∫ y−ba
− ba
(au+ b) fX(u) a du
−→y→−∞
a
∫ +∞
− ba
u fX(u) du + b
∫ +∞
− ba
fX(u) du
On conclut de même que∫ +∞
0t fY (t) dt est convergente.
Ainsi,∫ +∞
−∞t fY (t) dt est absolument convergente ce qui permet de
conclure que X admet une espérance.
2) Par la démonstration précédente :
E(X) =
∫ 0
−∞t fY (t) dt+
∫ +∞
0t fY (t) dt
= a
(∫ − ba
−∞u fY (u) du+
∫ +∞
− ba
u fY (u) du
)
+ b
(∫ − ba
−∞fY (u) du+
∫ +∞
− ba
fY (u) du
)
= a
∫ +∞
−∞u fY (u) du︸ ︷︷ ︸E(X)
+ b
∫ +∞
−∞fY (u) du︸ ︷︷ ︸1
Remarque
• On peut penser cette propriété comme une version faible de la propriétéde linéarité.
• La propriété de linéarité existe mais demande le cadre de la théorie unifi-catrice citée précédemment.
Définition Variable centrée
Soit X une v.a.r. à densité.
• On dit que la variable X est une variable centrée si :
1) X admet une espérance,
2) E(X) = 0.
• Si X admet une espérance, alors la v.a.r. X − E(X) est centrée. Elle estappelée v.a.r. centrée associée à X.
Remarque
• Soit X une v.a.r. à densité admettant une espérance. Alors on a :
1) la v.a.r. X − E(X) est une v.a.r. à densité et admet une densité (cfProposition 2).
2) d’après cette même proposition, la v.a.r. Y = X−E(X) (Y = aX+bavec a = 1 et b = −E(X)) admet pour espérance : E(Y ) = E(X −E(X)) = E(X)− E(X) = 0.
• Ce type d’opération est à comprendre comme un opérateur de normali-sation. Pour démontrer certains résultats, il est utile de se placer dans lecas où la v.a.r. X est centrée. On ne peut supposer, en toute généralité,qu’une v.a.r. est centrée. Par contre, on peut montrer le résultat sur lav.a.r. centrée Y = X − E(X) puis en déduire un résultat analogue sur X.
11

ECE1-B 2015-2016
I.5. Variance d’une loi à densité
Définition Moments d’ordre r
Soit X une v.a.r. de densité fX et soit r ∈ N∗.
• On dit que X admet un moment d’ordre r, noté mr(X), si l’intégrale∫ +∞
−∞xr fX(x) dx est absolument convergente.
• Sous réserve d’existence, on a : mr(X) = E(Xr) =
∫ +∞
−∞xr fX(x) dx
Remarque
• Si r = 0, on a X0 = 1 et donc m0(X) = E(1) = 1.
• Si r = 1, on a X1 = X et donc m1(X) = E(X).
• Le fait que E(Xr) puisse s’écrire sous la forme d’une intégrale n’est pasévident. Pour le démontrer, on peut considérer la variable Y = Xr, montrerqu’elle est à densité fY et démontrer par un changement de variable que :∫ +∞
−∞xfY (x) dx =
∫ +∞
−∞xrfX(x) dx (cf démonstration du théorème 5)
• On peut aussi utiliser le théorème de transfert (admis). Sous les hypo-thèses :
× X v.a.r. de densité f ,
× g continue sur R privé d’un nombre fini de points,
×
∫ +∞
−∞g(t)f(t) dt est absolument convergente.
Alors1) la v.a.r. g(X) admet une espérance
2) E(g(X)) =
∫ +∞
−∞g(t)f(t) dt
DéfinitionSoit X une v.a.r. à densité.
• Si la v.a.r. X admet une espérance E(X) et que la v.a.r. (X−E(X)) admetun moment d’ordre 2, on dit que X admet une variance, notée V(X) :
V(X) = m2(X − E(X)) = E((X − E(X))2)
• Sous ces hypothèses on appelle écart-type et on note σ(X) =√
V(X)
Remarque• Si X est une v.a.r. à densité alors Y = X −E(X) est une v.a.r. de densitéfY : x 7→ fX(x+ E(X)) (cf transformation affine). De même, Z = Y 2 estune v.a.r. à densité (cf transformation polynomiale). Ainsi, SI X ADMETUNE VARIANCE, l’opérateur espérance évoqué dans cette définition est l’opé-rateur sur les v.a.r. à densité et on a :
V(X) = E(Y 2) = E(Z) =
∫ +∞
−∞x fZ(x) dx =
∫ +∞
0x fZ(x) dx
puisque fZ(x) = 0 si x < 0 (cf transformation polynomiale).• On remarque au passage que l’écart-type bien défini puisque, si X admet
une variance, V(X) > 0. En effet,∫ +∞
0x fZ(x) dx > 0 car fZ est une
densité et est donc positive et que x > 0 sur l’intervalle d’intégration.• La variance d’une v.a.r. X consiste en le calcul du moment d’ordre 2 dela variable Y = X − E(X). Cette v.a.r. est centrée. De ce fait, V(X) estdéfini comme le moment centré d’ordre 2 de la v.a.r. X.
• La variance (comme l’écart-type) est une mesure moyenne de l’écart exis-tant entre X et E(X).I Mais alors, pourquoi mesure-t-on le moment centré d’ordre 2 (= moyenne
du carré de l’écart entreX et E(X)) et pas simplement le moment centréd’ordre 1 (= moyenne de l’écart entre X et E(X)) ?
12

ECE1-B 2015-2016
+ Tout simplement parce que l’espérance de la v.a.r. Y = X − E(X),si elle existe, est nulle (v.a.r. centrée). Le moment centré d’ordre 1 nenous fournit donc pas d’information sur la moyenne de l’écart entre Xet E(X).
Théorème 5.Soit X une v.a.r. à densité fX .On suppose que X admet une variance. Alors :
V(X) =
∫ +∞
−∞(x− E(X))2 fX(x) dx
Démonstration.Notons Y = X−E(X) et Z = Y 2 = (X−E(X))2. On a vu dans la remarqueprécédente que si une v.a.r. à densité X admet une variance, celle-ci s’écrit :
V(X) =
∫ +∞
0x fZ(x) dx
(= lim
s→+∞
∫ s
0x fZ(x) dx
)Considérons alors la quantité U(s) =
∫ s
0x fZ(x) dx. On a alors :
U(s) =
∫ s
0x fZ(x) dx
=
∫ s
0x
1
2√x
(fY (√x) + fY (−
√x)) dx
=1
2
∫ s
0
√x (fY (
√x) + fY (−
√x)) dx
On effectue alors le changement de variable suivant.∣∣∣∣∣∣∣∣∣• u =
√x donc du =
1
2√xdx et dx = 2u du
• Si x = 0 alors u =√
0 = 0
• Si x = s alors u =√s
Ainsi, on a :
U(s) =1
2
∫ √s0
u (fY (u) + fY (−u)) (2u du)
=
∫ √s0
u2 fY (u) du+
∫ √s0
u2 fY (−u) du
=
∫ √s0
u2 fY (u) du−∫ −√s
0(−v)2 fY (v) dx
La dernière quantité étant obtenue grâce au changement de variable :∣∣∣∣∣∣∣• v = −u donc dv = − du et du = − dv
• Si u = 0 alors v = −0 = 0
• Si u = −√s alors v = −(−
√s) =
√s
On peut alors finir le calcul.
U(s) =
∫ √s0
u2 fY (u) du+
∫ 0
−√sv2 fY (v) dv =
∫ √s−√st2 fY (t) dt
=
∫ √s−√st2 fX(t+ E(X)) dx =
∫ √s+E(X)
−√s+E(X)
(x− E(X))2 fX(x) dx
−→s→+∞
∫ +∞
−∞(x− E(X))2 fX(x) dx
La convergence est obtenue par le fait que U(s) admet une limite finie en+∞ (qui est V(X)) et que
√s+ E(X)→ +∞ quand s→ +∞.
La dernière égalité, quant à elle, a été encore une fois obtenue grâce à unchangement de variable :∣∣∣∣∣∣∣
• x = t+ E(X) donc dx = dt
• Si t =√s alors x =
√s+ E(X)
• Si t = −√s alors x = −
√s+ E(X)
D’où le résultat.
13

ECE1-B 2015-2016
Remarque• Le théorème 5 peut être vu comme un cas particulier du théorème detransfert en prenant l’application g : x 7→ (x− E(X))2.
Théorème 6. Formule de Kœnig-HuygensSoit X une v.a.r. à densité.On suppose que X admet une espérance E(X).
La v.a.r. X admetune variance ⇔ La v.a.r. X admet un
moment d’ordre 2
Et dans ce cas :V(X) = E(X2)− (E(X))2
Démonstration.La v.a.r. X admet une varianceSSI la v.a.r. Y = X − E(X) admet un moment d’ordre 2
SSI∫ +∞
−∞(x− E(X))2 fX(x) dx est absolument convergente
SSI∫ 0
s(x− E(X))2 fX(x) dx admet une limite quand s→ −∞
et∫ t
0(x− E(X))2 fX(x) dx admet une limite quand t→ +∞.
On note alors U(s, t) =
∫ t
s(x− E(X))2 fX(x) dx et on remarque que :
(x− E(X))2 = x2 − 2E(X)x+ (E(X))2. On en déduit :
U(s, t) =
∫ t
s(x2 − 2E(X)x+ (E(X))2) fX(x) dx
=
∫ t
sx2 fX(x) dx+
∫ t
s−2E(X)x fX(x) dx+
∫ t
s(E(X))2 fX(x) dx
=
∫ t
sx2 fX(x) dx− 2E(X)
∫ t
sx fX(x) dx+ (E(X))2
∫ t
sfX(x) dx
Par hypothèse X admet une espérance donc∫ +∞
−∞x fX(x) dx est conver-
gente et vaut E(X). D’autre part,∫ +∞
−∞fX(x) dx est convergente et vaut 1.
On en déduit que∫ +∞
−∞(x − E(X))2 fX(x) dx est absolument convergente
si∫ t
sx2 fX(x) dx l’est, ce qui démontre le résultat.
En cas de convergence, on a :
V(X) =
∫ +∞
−∞x2 fX(x) dx− 2E(X)× E(X) + (E(X))2 × 1
= E(X2)− 2(E(X))2 + (E(X))2
= E(X2)− (E(X))2
Définition Variables centrées réduites
Soit X une v.a.r. à densité.
a) Si X admet une espérance égale à 0 on dit que X est une variable centrée.
b) Si X admet une variance égale à 1 on dit que X est une variable réduite.
c) SiX admet une variance, la variableX∗ =X − E(X)
σ(X)est appelée variable
centrée réduite associée à X.
RemarqueOn peut considérer ceci comme une opération de normalisation de la variance(plus simple pour raisonner dans les théorèmes).
14

ECE1-B 2015-2016
II. Lois à densité usuelles
II.1. Loi uniforme sur un intervalle réel
Définition
• On dit qu’une v.a.r. X suit la loi uniforme sur [a, b] (pour a et bdeux réels tels que a < b) si :
a) X(Ω) = [a, b]
b) X admet pour densité la fonction f définie par :
f : R → R
x 7→
1
b− asi x ∈ [a, b]
0 sinon
• On utilisera la notation X → U([a, b]) pour signifier que X suit la loiuniforme sur [a, b].
Remarque• On vérifie aisément que f est bien une densité de probabilité :
1) f est continue sur ]−∞, a[ ∪ ]a, b[ ∪ ]b,+∞[
2) ∀x ∈ R, f(x) > 0
3)∫ +∞
−∞f(t) dt converge en tant qu’intégrale sur le segment [a, b] de
la fonction f [a,b] continue sur [a, b]. En effet :∫ +∞
−∞f(t) dt =
∫ a
−∞f(t) dt +
∫ b
af(t) dt+
∫ +∞
bf(t) dt
=
∫ b
a
1
b− adt =
b− ab− a
= 1
• On définit de même la loi uniforme sur ]a, b[, [a, b[, ]a, b].
Proposition 3.Soit X une v.a.r. telle que X → U([a, b]).Alors sa fonction de répartition FX est définie par :
FX : R → R
x 7→
0 si x ∈]−∞, a[
x− ab− a
si x ∈ [a, b]
1 si x ∈]b,+∞[
Démonstration.Soit x ∈ R. On étudie la valeur de FX(x) en fonction de x.• Si x < a :
FX(x) =
∫ x
−∞f(t) dt =
∫ x
−∞0 dt = 0
• Si x ∈ [a, b] :
FX(x) =
∫ x
−∞f(t) dt =
∫ a
−∞f(t) dt +
∫ x
af(t) dt
=
∫ a
−∞0 dt +
∫ x
a
1
b− adt
= 0 +x− ab− a
• Si x > b :
FX(x) =
∫ a
−∞f(t) dt +
∫ b
af(t) dt +
∫ x
bf(t) dt
=
∫ a
−∞0 dt +
∫ b
a
1
b− adt +
∫ x
a0 dt
= 0 +b− ab− a
+ 0 = 1
15

ECE1-B 2015-2016
Théorème 7.Soit X une v.a.r. telle que X → U([a, b]) (a < b).Alors, on a :
1) X admet une espérance.
2) E(X) =a+ b
2
Démonstration.∫ +∞
−∞tf(t) dt converge comme intégrale sur le segment [a, b] de la restriction
sur [a, b] de la fonction t 7→ tf(t), continue sur [a, b]. En effet :∫ +∞
−∞t f(t) dt =
∫ a
−∞t f(t) dt +
∫ b
at f(t) dt+
∫ +∞
bt f(t) dt
=
∫ b
a
t
b− adt =
1
b− a
∫ b
at dt =
1
b− a
[t2
2
]ba
=1
2
b2 − a2
b− a=
1
2
(b− a)(b+ a)
b− a=
a+ b
2
On en déduit que X admet une espérance et que E(X) =a+ b
2.
Cas particulier de la loi uniforme sur [0, 1]En Scilab, l’opérateur rand permet de simuler la loi U([0, 1]). Comme on l’avu en TP, cette fonction rand permet aussi la simulation des lois uniformessur [a, b]. Il suffit pour ce faire d’effectuer une simple transformation affine.Le résultat mathématique correspondant est le suivant.
Soit (a, b) ∈ R2 et a < b. Soit X une v.a.r. à densité.
Notons Y = a+ (b− a)X.
X → U([0, 1]) ⇔ Y → U([a, b])
Si X → U([0, 1]), ses caractéristiques sont les suivantes.
• Densité :fX : R → R
x 7→
1 si x ∈ [0, 1]0 sinon
• Fonction de répartition :
FX : R → R
x 7→
0 si x ∈]−∞, 0]x si x ∈ [0, 1]1 si x ∈]1,+∞[
• Espérance de X : E(X) =1
2
Représentation graphique.On considère une v.a.r. X telle que X → U([a, b]).• Représentation graphique de la densité fX .
0a b
• Représentation graphique de la fonction de répartition FX .
0a b
1
16

ECE1-B 2015-2016
II.2. Loi exponentielle
Définition
• On dit qu’une v.a.r. X suit la loi exponentielle de paramètre α(avec α > 0) si :
a) X(Ω) = [0,+∞[
b) X admet pour densité la fonction f définie par :
f : R → R
x 7→
α e−αx si x ∈ [0,+∞[
0 sinon
• On utilisera la notation X → E (α) pour signifier que X suit la loiexponentielle de paramètre α.
Remarque
• On vérifie aisément que f est bien une densité de probabilité :
1) f est continue sur ]−∞, 0[ ∪ ]0,+∞[
2) ∀x ∈ R, f(x) > 0
3)∫ +∞
−∞f(t) dt =
∫ +∞
0f(t) dt converge. En effet, si y > 0 :∫ y
0f(t) dt =
∫ y
0α e−αt dt = α
∫ y
0e−αt dt = α
[−e−αt
α
]y0
= −e−αy + eα0 = −e−αy + 1 −→y→+∞
1
On en déduit :∫ +∞
−∞f(t) dt = 1.
Proposition 4.Soit X une v.a.r. telle que X → E (α).Alors sa fonction de répartition FX est définie par :
FX : R → R
x 7→
0 si x ∈]−∞, 0[
1− e−αx si x ∈ [0,+∞[
Démonstration.Faite dans la remarque précédente.
Théorème 8.Soit X une v.a.r. telle que X → E (α) (avec α > 0).Alors, on a :
1) X admet une espérance.
2) E(X) =1
α
Démonstration.
1) Notons U(y) =
∫ y
−∞tf(t) dt =
∫ y
0tf(t) dt pour y > 0.
On effectue une intégration par parties :u = t u′ = 1
v′ = e−αt v = − e−αtα
.
U(y) =
∫ y
0tf(t) dt = − 1
α
[t e−αt
]y0
+1
α
∫ y
0e−αt dt
=1
α((−y e−αy + 0) + (−e−αy + 1)) −→
y→+∞
1
α
En effet, limy→+∞
− y e−αy = 0 et limy→+∞
− e−αy = 0.
2) On en déduit : E(X) =1
α.
17

ECE1-B 2015-2016
Théorème 9.
Soit X une v.a.r. à densité.
X suit une loi exponentielle si et seulement si :
1) X(Ω) = R+
2) ∀(s, t) ∈ R+ × R+, P[X>s]([X > s+ t]) = P([X > t])
(on dit que la loi exponentielle est sans mémoire)
3) ∀s ∈ R+, P([X > s]) 6= 0
Démonstration.(⇒) S’il existe α > 0 tel que X → E (α) alors :
1) X(Ω) = R+ (par définition),
2) P[X>s]([X > s+ t]) =P([X > s] ∩ [X > s+ t])
P([X > s])=
P([X > s+ t])
P([X > s])
En effet, [X > s+ t] ⊆ [X > s]. Or on a :
P([X > s]) = 1− P([X 6 s]) = 1− FX(s) = 1− (1− e−αs)= e−αs
Ainsi : P[X>s]([X > s+ t]) =e−α(s+t)
e−αs= e−αt = P([X > t]).
3) Si s ∈ R+, P([X > s]) = e−αs > 0.
(⇐) Ce résultat plus compliqué nécessite de savoir résoudre une équationfonctionnelle. Plus précisément, si G est une fonction G : R+ → R+, on a :
• ∀(s, t) ∈ (R+)2, G(s+ t) = G(s) G(t)
• G(1) 6= 0
• G est décroissante sur R+
⇒ ∃α ∈ R+,∀t ∈ R+, G(t) = e−αt
En notant G : R+ → R+ la fonction définie par G(t) = P([X > t]) (pourt ∈ R+), on démontre que G vérifie les propriétés ci-dessus et ainsi que :
FX(t) = P([X 6 t]) = 1− P([X > t]) = 1−G(t) = 1− e−αt
pour un certain α > 0. On reconnaît la fonction de répartition d’une loiexponentielle. On en déduit que X → E (α).
Représentation graphique.On considère une v.a.r. X telle que X → E (2).• Représentation graphique de la densité fX .
0
2
• Représentation graphique de la fonction de répartition FX .
0
1
18

ECE1-B 2015-2016
II.3. Loi normale centrée réduite
Définition
• On dit qu’une v.a.r. X suit la loi normale centrée réduite si :
a) X(Ω) =]−∞,+∞[
b) X admet pour densité la fonction ϕ définie par :
ϕ : R → R
x 7→ 1√2π
e−x2
2
• On utilisera la notation X → N (0, 1) pour signifier que X suit la loinormale centrée réduite.
Remarque
• On peut vérifier que ϕ est bien une densité de probabilité :
1) ϕ est continue sur R2) ∀x ∈ R, ϕ(x) > 0
3)∫ +∞
−∞ϕ(t) dt = 1 (Admis).
• La fonction φ est paire. Son graphe sera donc symétrique par rapport àl’axe des ordonnées.
• La fonction de répartition associée à la loi normale centrée réduite n’admetpas d’expression « simple ». On la note Φ.
Φ : R → R+
x 7→∫ x
−∞
1√2π
e−t2
2 dt
Théorème 10.
Soit X une v.a.r. telle que X → N (0, 1).
Alors, on a :
1) X admet une espérance.
2) E(X) = 0 (et V(X) = 1)
Démonstration.
1) Notons U(y) =
∫ y
0tϕ(t) dt =
∫ y
0
1√2π
t e−t2
2 dt =1√2π
∫ y
0t e−
t2
2 dt
pour y > 0.
On a alors :∫ y
0t e−
t2
2 dt =
[−e−
t2
2
]y0
= −e−y2
2 + e0 = 1− e−y2
2 .
Or, comme limy→+∞
e−y2
2 = 0. On en déduit que∫ +∞
0tϕ(t) dt est conver-
gente et vaut 1.
De même, notons V (y) =
∫ y
0tϕ(t) dt =
1√2π
∫ 0
yt e−
t2
2 dt pour y 6 0.
On a alors :
∫ 0
yt e−
t2
2 dt = −∫ 0
−y−t e−
(−t)22 dt =
∫ −y0
−t e−(−t)2
2 dt
= −(1− e−(−y)2
2 ) = −1 + e−y2
2
(on utilise en fait le caractère impair de la fonction t→ tϕ(t))
On en déduit que∫ 0
−∞tϕ(t) dt est convergente et vaut −1.
Ainsi∫ +∞
−∞t ϕ(t) dt est une intégrale absolument convergente.
2) Par le calcul précédent, E(X) a pour valeur : 1− 1 = 0.
19

ECE1-B 2015-2016
Représentation graphique.On considère une v.a.r. X telle que X → N (0, 1).• Représentation graphique de la densité ϕ.
0
• Représentation graphique de la fonction de répartition Φ.Φ n’admet pas d’expression « simple ». On représente donc graphiquementΦ(x) comme l’aire sous la courbe de φ entre −∞ et x.
0 x
0a b
= Φ(x) et = Φ(b)− Φ(a)
Proposition 5.Notons Φ la fonction de répartition de la loi N (0, 1).
∀x ∈ R, Φ(−x) = 1− Φ(x)
Démonstration.
Soit x ∈ R. On a : Φ(−x) =
∫ −x−∞
1√2π
e−t2
2 dt = −∫ x
+∞
1√2π
e−(−u)2
2 du =∫ +∞
x
1√2π
e−u2
2 du =
∫ +∞
−∞
1√2π
e−u2
2 du −∫ x
−∞
1√2π
e−u2
2 du = 1 −
Φ(x).
RemarqueCe résultat provient de la parité de ϕ et peut se lire graphiquement.
0 x
= Φ(x) et = 1− Φ(x)
0x
= Φ(−x)
20

ECE1-B 2015-2016
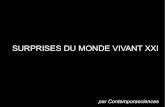
Table de la loi normale centrée réduite.On utilise parfois (notamment en statistiques), des tables contenant les va-leurs caractéristiques de certaines lois usuelles. La table ci-dessous contientles valeurs de Φ, fonction de répartition de la loi normale centrée réduite.
Φ(t) = P([X 6 t]) =
∫ t
−∞
1√2π
e−u2
2 du
t 0.00 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
0.0 0.5000 0.5040 0.5080 0.5120 0.5160 0.5199 0.5239 0.5279 0.5319 0.53590.1 0.5398 0.5438 0.5478 0.5517 0.5557 0.5596 0.5636 0.5675 0.5714 0.57530.2 0.5793 0.5832 0.5871 0.5910 0.5948 0.5987 0.6026 0.6064 0.6103 0.61410.3 0.6179 0.6217 0.6255 0.6293 0.6331 0.6368 0.6406 0.6443 0.6480 0.65170.4 0.6554 0.6591 0.6628 0.6664 0.6700 0.6736 0.6772 0.6808 0.6844 0.68790.5 0.6915 0.6950 0.6985 0.7019 0.7054 0.7088 0.7123 0.7157 0.7190 0.72240.6 0.7257 0.7291 0.7324 0.7357 0.7389 0.7422 0.7454 0.7486 0.7517 0.75490.7 0.7580 0.7611 0.7642 0.7673 0.7704 0.7734 0.7764 0.7794 0.7823 0.78520.8 0.7881 0.7910 0.7939 0.7967 0.7995 0.8023 0.8051 0.8078 0.8106 0.81330.9 0.8159 0.8186 0.8212 0.8238 0.8264 0.8289 0.8315 0.8340 0.8365 0.8389
1.0 0.8413 0.8438 0.8461 0.8485 0.8508 0.8531 0.8554 0.8577 0.8599 0.86211.1 0.8643 0.8665 0.8686 0.8708 0.8729 0.8749 0.8770 0.8790 0.8810 0.88301.2 0.8849 0.8869 0.8888 0.8907 0.8925 0.8944 0.8962 0.8980 0.8997 0.90151.3 0.9032 0.9049 0.9066 0.9082 0.9099 0.9115 0.9131 0.9147 0.9162 0.91771.4 0.9192 0.9207 0.9222 0.9236 0.9251 0.9265 0.9279 0.9292 0.9306 0.93191.5 0.9332 0.9345 0.9357 0.9370 0.9382 0.9394 0.9406 0.9418 0.9429 0.94411.6 0.9452 0.9463 0.9474 0.9484 0.9495 0.9505 0.9515 0.9525 0.9535 0.95451.7 0.9554 0.9564 0.9573 0.9582 0.9591 0.9599 0.9608 0.9616 0.9625 0.96331.8 0.9641 0.9649 0.9656 0.9664 0.9671 0.9678 0.9686 0.9693 0.9699 0.97061.9 0.9713 0.9719 0.9726 0.9732 0.9738 0.9744 0.9750 0.9756 0.9761 0.9767
2.0 0.9772 0.9778 0.9783 0.9788 0.9793 0.9798 0.9803 0.9808 0.9812 0.98172.1 0.9821 0.9826 0.9830 0.9834 0.9838 0.9842 0.9846 0.9850 0.9854 0.98572.2 0.9861 0.9864 0.9868 0.9871 0.9875 0.9878 0.9881 0.9884 0.9887 0.98902.3 0.9893 0.9896 0.9898 0.9901 0.9904 0.9906 0.9909 0.9911 0.9913 0.99162.4 0.9918 0.9920 0.9922 0.9925 0.9927 0.9929 0.9931 0.9932 0.9934 0.99362.5 0.9938 0.9940 0.9941 0.9943 0.9945 0.9946 0.9948 0.9949 0.9951 0.99522.6 0.9953 0.9955 0.9956 0.9957 0.9959 0.9960 0.9961 0.9962 0.9963 0.99642.7 0.9965 0.9966 0.9967 0.9968 0.9969 0.9970 0.9971 0.9972 0.9973 0.99742.8 0.9974 0.9975 0.9976 0.9977 0.9977 0.9978 0.9979 0.9979 0.9980 0.99812.9 0.9981 0.9982 0.9982 0.9983 0.9984 0.9984 0.9985 0.9985 0.9986 0.9986
Fig. 1 Table de la loi normale N (0, 1)
Comment lire les valeurs de cette table ?
• Par exemple, pour lire la valeur de Φ(1.64)
× on sélectionne la ligne 1.6
× on sélectionne alors la colonne 0.04
On lit la valeur de la cellule l’intersection de cette ligne et colonne. On lit :Φ(1.64) = 0.9495(la probabilité de l’événement [X 6 1.64] est d’environ 95%)
• Par exemple, pour lire la valeur de Φ(−0.81)On utilise la formule : Φ(−0.81) = 1− Φ(0.81)On lit alors : Φ(−0.81) = 1− 0.7881 = 0.2119(la probabilité de l’événement [X 6 −0.81] est d’environ 21%)
21

ECE1-B 2015-2016
II.4. Loi normale (ou de Laplace-Gauss)
Définition
• On dit qu’une v.a.r. X suit la loi normale (ou loi deLaplace-Gauss) de paramètre (m,σ) (avec m ∈ R et σ > 0) si :
a) X(Ω) =]−∞,+∞[
b) X admet pour densité la fonction fX définie par :
fX : R → R
x 7→ 1
σ√
2πe−
12(x−mσ )
2
• On utilisera la notation X → N (m,σ) pour signifier que X suit laloi normale de paramètre (m,σ).
Remarque• L’expression de fX est proche de celle de ϕ : on obtient fX(x) en ap-pliquant à x un transformation affine (à multiplication par 1
σ près). Plusprécisément, notons t : R→ R la fonction définie par
∀x ∈ R, t(x) =x−mσ
On a alors : ∀x ∈ R, fX(x) =1
σϕ(t(x)).
• On peut se servir de cette propriété pour déduire les propriétés de fX decelle de ϕ. Par exemple, on peut vérifier que fX est bien une densité deprobabilité :
1) fX est C0 sur R comme composée de deux fonctions C0 sur R2) ∀x ∈ R, fX(x) > 0
3)∫ +∞
−∞fX(x) dx =
∫ +∞
−∞
1
σϕ(t(x)) dx =
1
σ
∫ +∞
−∞σϕ(u) du
La dernière égalité provient du changement de variable suivant :∣∣∣∣∣∣∣∣• u = t(x) =
x−mσ
donc du =1
σdx et dx = σ du
• Si x = −∞ alors u = −∞• Si x = +∞ alors u = +∞
Théorème 11.
Soit X une v.a.r. à densité.
Soient m ∈ R et σ > 0.
On a alors :
X → N (m,σ) ⇔ X −mσ
→ N (0, 1)
Démonstration.
Notons X∗ =X −mσ
.
(⇒) On se sert ici du fait que X∗ apparaît comme transformée affine de la
v.a.r. X. En effet : X∗ =1
σX − m
σ(X∗ = aX + b avec a = 1
σ et b = −mσ ).
On en déduit que, pour tout x ∈ R, la densité de probabilité fX∗ vérifie :
fX∗(x) =1
|a|fX
(x− ba
)=
11σ
fX
(x+ m
σ1σ
)= σ · fX (σ x+m)
= σ · 1
σ√
2πe−
12
((σx+m)−m
σ
)2
=1√2π
e−12
(x)2
On reconnaît la densité de probabilité de la loi normale centrée réduite.Ainsi : X∗ → N (0, 1).
22

ECE1-B 2015-2016
(⇐) On se sert ici du fait que X apparaît comme transformée affine de lav.a.r. X∗. En effet : X = σ X∗ +m (X = aX∗ + b avec a = σ et b = m).On en déduit que, pour tout x ∈ R, la densité de probabilité fX vérifie :
fX(x) =1
|a|fX∗
(x− ba
)=
1
σfX∗
(x−mσ
)=
1
σ
1√2π
e−12(x−mσ )
2
On reconnaît la densité de probabilité de la loi normale de paramètre (m,σ).Ainsi : X∗ → N (m,σ).
Théorème 12.
Soit X une v.a.r. telle que X → N (m,σ).
Alors, on a :
1) X admet une espérance.
2) E(X) = m (et V(X) = σ2)
Démonstration.Il y a deux manières de faire cette démonstration.
• La manière directe consiste à étudier∫ +∞
−∞t fX(t) dt (bon exercice).
• La seconde manière est plus élégante. Elle consiste à utiliser le théorème
précédent. Notons X∗ =X −mσ
. On a alors X = σ X∗ +m.
Par la linéarité (faible) de l’espérance, la v.a.r. X∗ admet une espérancedonnée par : E(X∗) = σ E(X) +m = σ × 0 +m = m.
(de même, V(X∗) = σ2V(X) = σ2 × 1 = σ2)
Remarque
• Ce théorème permet de comprendre les notations m et σ.Si X → N (m,σ) alors m = E(X) et σ2 = V(X). Ainsi :
× La notation m peut-être lue comme « moyenne ».
× La notation σ est celle que nous avons déjà utilisé pour l’écart type.
• La loi normale centrée réduite est simplement une loi normale particulière :celle dont les paramètres (m,σ) vérifient m = 0 et σ = 1.
• Évidemment, on a :
• X → N (m,σ)
• E(X) = 0
• V(X) = 1
⇔ X → N (0, 1)
Autrement dit, la loi normale centrée réduite est donc la loi des v.a.r. X quisuivent une loi normale (X → N (m,σ)) et qui sont centrées (E(X) = 0)et réduites (V(X) = 1).
23

ECE1-B 2015-2016
Représentation graphique.On considère une v.a.r. X telle que X → N (m,σ).La densité d’une telle loi est représentée par une courbe en cloche.× Dans le cas d’une loi N (0, 1), cette cloche est centrée en 0.× Dans le cas d’une loi N (m,σ), cette cloche est centrée en m.D’autre part, la forme de cette cloche (hauteur et largeur) dépend de σ :× plus σ est petit, plus le pic est haut et fin ;× plus σ est grand, plus le pic est bas et large.Notez que l’aire sous la courbe entre −∞ et +∞ est invariante (on a toujours∫ +∞
−∞fX(t) dt = 1).
• Représentation graphique de la densité fX de la loi N (m,σ).
0 m
1
σ√
2π
m = 2σ = 1.5
• Représentation graphique de la densité fX de la loi N (m,σ).
0 m
1
σ√
2π
m = 2σ = 0.8
• Représentation graphique de la densité fX de la loi N (m,σ).
0 m
1
σ√
2π
m = 2σ = 0.2
24