Ce résumé ne remplace pas votre cours de première année ... · des Systèmes Linéaires...
4
Lycée Militaire Aix en Provence Page 1 Ce résumé ne remplace pas votre cours de première année qui continue à servir de référence. Attention, la seule connaissance des formules n’est pas suffisante, vous devez vérifier votre capacité à : Compétences liées à : proposer un modèle de connaissance et de comportement Déterminer les fonctions de transfert à partir d’équations physiques (modèle de connaissance) Caractériser les signaux canoniques d’entrée Analyser ou établir le schéma bloc du système Renseigner les paramètres caractéristiques d’un modèle de comportement (premier et second ordre, dérivateur, intégrateur, gain, retard) 1 LA MODELISATION La compétence MODELISER est un savoir-faire majeur de votre formation (CPGE + écoles d’ingénieur) que vous cultiverez tout au long de votre parcours professionnel. La nouvelle épreuve de modélisation aux concours en témoigne. 1-1 Pourquoi modéliser ? Les ingénieurs sont confrontés à un environnement technologique mais aussi économique de plus en plus complexe. L’adaptation indispensable qui en découle conduit à des délais de conception réduits faisant appel à des outils de conception sophistiqués utilisant des prototypes virtuels. Ces modèles convergent vers une solution optimale et fiable beaucoup plus rapidement que par les méthodes traditionnelles basées sur des prototypes réels et l’empirisme. 1-2 Quoi modéliser ? En SI, nous nous limiterons aux systèmes définis comme : un agencement organisé de composants qui se coordonnent pour assurer une fonction désirée. Exemple : Seagway, avion, satellite … Ils évoluent dans un environnement par nature multi-physique : mécanique, électrique, fluidique, thermodynamique, aérodynamique, pneumatique et chimique. Le modèle recherché sera donc lui aussi multi- physique. 1-3 Comment modéliser ? Un modèle n’est qu’une représentation abstraite et simplifiée de la réalité existante ou souhaitée. Le schéma- blocs répond à l’objectif de créer ce modèle multi-physique (d’autres existent : représentation d’états, Bond graph …). Chaque bloc représente un sous-système orienté (dit causal) avec une entrée (la cause) et une sortie (l’effet) au sein duquel une expression mathématique (logique, algébrique, différentielle et/ou intégrale) relie les différentes variables entre elles à partir d’un modèle : - de connaissance = principe/loi/formule connue, par exemple : principe de conservation de la masse, lois de Newton, de Lenz, U = R.I …. - de comportement lorsque le phénomène physique est mal connu et que l’on tente de le représenter avec des équations (dont les paramètres sont sans lien avec le phénomène observé) ou des courbes expérimentales. La résolution s’effectue ensuite sur une séquence calculatoire unique et clairement orientée. COURS PSI 1/1 MODELISER SLCI Modèles de connaissances et de comportement des Systèmes Linéaires Continus Invariants (rappel année 1) Roue avec moteur intégré
Transcript of Ce résumé ne remplace pas votre cours de première année ... · des Systèmes Linéaires...

Lycée Militaire Aix en Provence Page 1
Ce résumé ne remplace pas votre cours de première année qui continue à servir de référence. Attention, la seule connaissance des formules n’est pas suffisante, vous devez vérifier votre capacité à :
Compétences liées à : proposer un modèle de connaissance et de comportement Déterminer les fonctions de transfert à partir d’équations physiques (modèle de connaissance)
Caractériser les signaux canoniques d’entrée Analyser ou établir le schéma bloc du système
Renseigner les paramètres caractéristiques d’un modèle de comportement (premier et second ordre, dérivateur, intégrateur, gain, retard)
1 LA MODELISATION
La compétence MODELISER est un savoir-faire majeur de votre formation (CPGE + écoles d’ingénieur) que vous cultiverez tout au long de votre parcours professionnel. La nouvelle épreuve de modélisation aux concours en témoigne.
1-1 Pourquoi modéliser ?
Les ingénieurs sont confrontés à un environnement technologique mais aussi économique de plus en plus complexe. L’adaptation indispensable qui en découle conduit à des délais de conception réduits faisant appel à des outils de conception sophistiqués utilisant des prototypes virtuels. Ces modèles convergent vers une solution optimale et fiable beaucoup plus rapidement que par les méthodes traditionnelles basées sur des prototypes réels et l’empirisme.
1-2 Quoi modéliser ?
En SI, nous nous limiterons aux systèmes définis comme : un agencement organisé de composants qui se coordonnent pour assurer une fonction désirée. Exemple : Seagway, avion, satellite … Ils évoluent dans un environnement par nature multi-physique : mécanique, électrique, fluidique, thermodynamique, aérodynamique, pneumatique et chimique. Le modèle recherché sera donc lui aussi multi-physique.
1-3 Comment modéliser ?
Un modèle n’est qu’une représentation abstraite et simplifiée de la réalité existante ou souhaitée. Le schéma-blocs répond à l’objectif de créer ce modèle multi-physique (d’autres existent : représentation d’états, Bond graph
…). Chaque bloc représente un sous-système orienté (dit causal) avec une entrée (la cause) et une sortie (l’effet) au sein duquel une expression mathématique (logique, algébrique, différentielle et/ou intégrale) relie les différentes variables entre elles à partir d’un modèle : - de connaissance = principe/loi/formule connue, par exemple : principe de conservation de la masse, lois de
Newton, de Lenz, U = R.I …. - de comportement lorsque le phénomène physique est mal connu et que l’on tente de le représenter avec
des équations (dont les paramètres sont sans lien avec le phénomène observé) ou des courbes expérimentales. La résolution s’effectue ensuite sur une séquence calculatoire unique et clairement orientée.
COURS
PSI 1/1
MODELISER SLCI
Modèles de connaissances et de comportement des Systèmes Linéaires Continus Invariants (rappel année 1)
Roue avec moteur intégré

Lycée Militaire Aix en Provence Page 2
Depuis peu, une nouvelle approche de modélisation multi-physique dite acausale se développe. Ce schéma-blocs n’est plus orienté et chaque bloc représente un constituant paramétrable contenant des équations implicites. Il n’y a plus de lien de cause à effet, ni de séquence calculatoire préétablie des variables.
2 MODELISATION DES SLCI
2.1 Généralités
Historique, raison d’être, classification :
2.2 Définitions
Le système est décrit par une équation différentielle du type : Le système est linéaire :
Tout SLCI peut se modéliser sous la forme du schéma-blocs suivant :
2.3 Laplace et théorèmes utiles
( ( )) ( ) ∫ ( )
Linéarité : L (A.x1(t)+ B.x2(t)) = A.X1(p) + B. X2(p)
Condition de Heaviside : f(O+) = f’(O+) = f’’(O+) = 0
Théorème du retard :
( ( )) ( ( )) ( )
Théorème de l'amortissement (décalage fréquentiel) : ( ( )) ( )
Théorème de la dérivation :
( ( ( ))
) ( ) ( )
( ( ( ))
) ( ) avec condition de Heaviside
Théorème de l'intégration :
(∫ ( ) ) ( )
Théorème de la valeur initiale :
( )
( ) Théorème de la valeur finale :
( )
( )
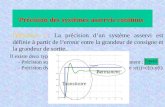
consigne entrée e(t) Correcteur +
-
Capteur
sortie s(t)
Mise en forme
écart ɛ(t)
Processus Pré-actionneur
Actionneur Transmetteur
Amplificateur
Chaîne directe
Chaîne de retour
Perturbation
( )
( )
( )
( )
( )
( ) ( )
e(t) s(t) S.L.C.I.
e1(t)+e2(t) s1(t)+s2(t)
S.L.C.I. e(t) s(t)
S.L.C.I.
Superposition
Proportionnalité
CAUSAL
ACAUSAL
VOIR COURS
ANNEE 1

Lycée Militaire Aix en Provence Page 3
Les transformations suivantes sont à connaitre. En cas de besoin, un formulaire plus complet sera fourni.
Signaux entrée unitaire type Autres signaux
Impulsion de Dirac : ( ( )) ( ( ))
Echelon : ( ( ))
( ( ))
Rampe : ( ( ))
( ( ))
( )
Harmonique : ( ( ) ( ))
( ( ) ( ))
2.4 Fonction de transfert simple
A partir de l’équation (1), on appelle fonction de transfert H(p) du système dans le domaine symbolique, la forme canonique suivante :
2.5 Fonction de transfert complexe - Système bouclé - FTBF - FTBO
Soit le schéma-blocs d’un système asservi :
2.6 Manipulations algébriques des fonctions de transfert
Simplification des schémas blocs :
Il ne faut pas déplacer un sommateur au-delà d’une jonction (ou l’inverse)
K : le gain statique n : l’ordre du système
: la classe du système Les zéros : les racines du numérateur Les pôles : les racines du dénominateur
( ) ( )
( )
( )
( ) ( )
Formule de Black :
( ) (
)
(
)
( )
( )
( ) ( )
( ) ( ) ( )
F(p)
R(p)
+ E(p) S(p) ɛ(p)
M(p)

Lycée Militaire Aix en Provence Page 4
Décomposition en éléments simples : Théorème dit de Bezout :
( ) ( )
( ) ∑∑
( )
∑∑
( )
Par exemple : ( )
( ) ( )
( )
( )
( )
Méthode pour déterminer les coefficients :
multiplier les 2 membres de l’équation par un des monômes (à la puissance la plus élevée) puis donner à p la valeur qui annule ce monôme. En déduire un premier coefficient,
répéter cette opération pour les autres monômes,
poursuivre en multipliant chaque membre par p puis faire tendre p vers l’infini,
si besoin, continuer en établissant autant d’équations qu’il reste d’inconnues avec des valeurs particulières pour p.
Le résultat obtenu permet d’effectuer la transformation inverse de Laplace et d’obtenir l’expression temporelle.
2.7 Le Moteur CC : modèle de connaissance à connaitre par cœur
Bien lire les hypothèse et les conditions d’étude de l’énoncé d’un sujet, car l’inductance et/ou le couple extérieur résistant et/ou le couple de frottement visqueux ne sont pas toujours pris en compte.
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
e(t) : Tension contre électromotrice (V) ki : Constante de couple (N.m/A) ke : Constante de fcem (V.s/rd) f : Coefficient de frottement visqueux Cm : Couple moteur (N.m) Cr : Couple extérieur résistant sur l’axe (N.m) Cf : Couple de frottement visqueux (N.m) J : Inertie de l’axe + stator (Kg.m
2)
ki