CATALOGUE MECATRONIQUE · - Coupelles amenées au poste de sertissage à l¶aide dun vérin...
60
DELAFRCA Sarl « Une Action pour l’Avenir » CATALOGUE MECATRONIQUE Solutions En Équipement Didactique Scientifique Et Technologique Génie des procédés Transformation agroalimentaire Génie mécanique Maintenance et électrotechnique Energétique Régulation etc…. Partenaire et Représentant de DELTALAB - SMT
-
Upload
truongduong -
Category
Documents
-
view
218 -
download
0
Transcript of CATALOGUE MECATRONIQUE · - Coupelles amenées au poste de sertissage à l¶aide dun vérin...
DELAFRCA Sarl
« Une Action pour l’Avenir »
CATALOGUE
MECATRONIQUE
Solutions En Équipement Didactique Scientifique Et Technologique
Génie des procédés
Transformation agroalimentaire
Génie mécanique
Maintenance et électrotechnique
Energétique
Régulation etc….
Partenaire et Représentant de DELTALAB - SMT
MECATRONIQUE
CANDELA - SYSTEME AUTOMATISE DE FABRICATION DE BOUGIE ........... 1
SPH400 - STATION DE POMPAGE .................................................................... 5
TS2000 - STATION DE TRAITEMENT DE SURFACE ........................................ 8
PL200 - PALETTISEUR DE SACS .................................................................... 10
MP131A - BANC D’ETUDES DES AUTOMATISMES - FONCTIONS TOR / HORODATEUR .................................................................................................. 12
MP131B - BANC D’ETUDES DES AUTOMATISMES/ REGULATION ANALOGIQUE FONCTIONS TOR / PID / ANALOGIQUE / HORODATEUR ..... 14
TRIAXE - BANC D’ETUDE DU STOCKAGE DE BARRES A COMBUSTIBLE 16
TRI TECH - PALETTISEUR INDUSTRIEL ......................................................... 18
CAPTECH - SYSTEME D’ETUDE DES CAPTEURS ......................................... 20
CAPTIVA - MALETTES D’ETUDE DES CAPTEURS ........................................ 23
EX800 - PLATE-FORME 6 AXES ...................................................................... 25
EX620 - BOITE DE VITESSE « CVT » ............................................................... 27
EX1000 - BANC D’ESSAI DE MOTEUR A ESSENCE MONOCYLINDRE ........ 29
EX600 - SYSTEME MOTORISE D’EMPENNAGE ............................................. 31
SH MILLENIUM - SIMULATEUR HYDRAULIQUE ............................................ 33
SHP250 - BANC HYDRAULIQUE A VISUALISATION DE CIRCUIT ................. 52

MECATRONIQUE
Automatisme
CANDELA - SYSTEME AUTOMATISE DE FABRICATION DE BOUGIE
Produit développé dans le cadre d’une collaboration entre enseignants et industriel. La particularité de ce système automatisé est de posséder une diversité des technologies utilisées (électrique, pneumatique, hydraulique).
Fabrication réelle :
Ce système automatisé représente une ligne de fabrication de bougies de type "chauffe plat" en paraffine et se décompose en deux parties.
Une première partie permet de fabriquer les pastilles de paraffine avec ou sans couleur et une deuxième partie peut offrir la possibilité de sertir et couper la mèche à longueur et d’assembler l’ensemble dans un godet et de conditionner le produit fini dans des boîtes. Le produit fini est parfaitement utilisable.
Produit recyclable :
Le produit fini est recyclable à l’aide du broyeur, ce qui limite l’approvisionnement en matière.
1
Module 1 :
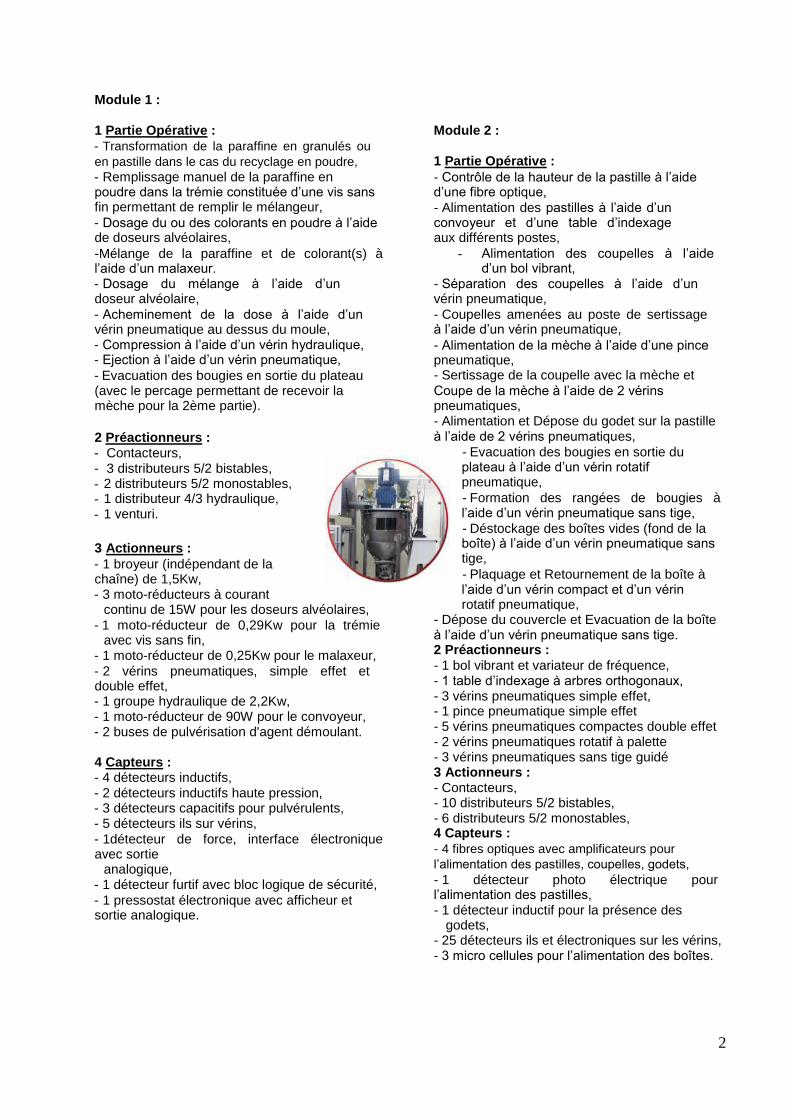
1 Partie Opérative : - Transformation de la paraffine en granulés ou
en pastille dans le cas du recyclage en poudre,
- Remplissage manuel de la paraffine en poudre dans la trémie constituée d’une vis sans fin permettant de remplir le mélangeur, - Dosage du ou des colorants en poudre à l’aide de doseurs alvéolaires, -Mélange de la paraffine et de colorant(s) à l’aide d’un malaxeur. - Dosage du mélange à l’aide d’un doseur alvéolaire, - Acheminement de la dose à l’aide d’un vérin pneumatique au dessus du moule, - Compression à l’aide d’un vérin hydraulique, - Ejection à l’aide d’un vérin pneumatique, - Evacuation des bougies en sortie du plateau (avec le percage permettant de recevoir la mèche pour la 2ème partie).
2 Préactionneurs : - Contacteurs, - 3 distributeurs 5/2 bistables, - 2 distributeurs 5/2 monostables, - 1 distributeur 4/3 hydraulique, - 1 venturi.
3 Actionneurs : - 1 broyeur (indépendant de la chaîne) de 1,5Kw, - 3 moto-réducteurs à courant
continu de 15W pour les doseurs alvéolaires, - 1 moto-réducteur de 0,29Kw pour la trémie
avec vis sans fin, - 1 moto-réducteur de 0,25Kw pour le malaxeur, - 2 vérins pneumatiques, simple effet et double effet, - 1 groupe hydraulique de 2,2Kw, - 1 moto-réducteur de 90W pour le convoyeur, - 2 buses de pulvérisation d'agent démoulant.
4 Capteurs : - 4 détecteurs inductifs, - 2 détecteurs inductifs haute pression, - 3 détecteurs capacitifs pour pulvérulents, - 5 détecteurs ils sur vérins, - 1détecteur de force, interface électronique avec sortie
analogique, - 1 détecteur furtif avec bloc logique de sécurité, - 1 pressostat électronique avec afficheur et sortie analogique.
Module 2 :
1 Partie Opérative : - Contrôle de la hauteur de la pastille à l’aide d’une fibre optique, - Alimentation des pastilles à l’aide d’un convoyeur et d’une table d’indexage aux différents postes,
- Alimentation des coupelles à l’aide d’un bol vibrant,
- Séparation des coupelles à l’aide d’un vérin pneumatique, - Coupelles amenées au poste de sertissage à l’aide d’un vérin pneumatique, - Alimentation de la mèche à l’aide d’une pince pneumatique, - Sertissage de la coupelle avec la mèche et Coupe de la mèche à l’aide de 2 vérins pneumatiques, - Alimentation et Dépose du godet sur la pastille à l’aide de 2 vérins pneumatiques,
- Evacuation des bougies en sortie du plateau à l’aide d’un vérin rotatif pneumatique, - Formation des rangées de bougies à l’aide d’un vérin pneumatique sans tige, - Déstockage des boîtes vides (fond de la boîte) à l’aide d’un vérin pneumatique sans tige, - Plaquage et Retournement de la boîte à l’aide d’un vérin compact et d’un vérin rotatif pneumatique,
- Dépose du couvercle et Evacuation de la boîte à l’aide d’un vérin pneumatique sans tige. 2 Préactionneurs : - 1 bol vibrant et variateur de fréquence, - 1 table d’indexage à arbres orthogonaux, - 3 vérins pneumatiques simple effet, - 1 pince pneumatique simple effet - 5 vérins pneumatiques compactes double effet - 2 vérins pneumatiques rotatif à palette - 3 vérins pneumatiques sans tige guidé 3 Actionneurs : - Contacteurs, - 10 distributeurs 5/2 bistables, - 6 distributeurs 5/2 monostables, 4 Capteurs : - 4 fibres optiques avec amplificateurs pour
l’alimentation des pastilles, coupelles, godets,
- 1 détecteur photo électrique pour l’alimentation des pastilles, - 1 détecteur inductif pour la présence des
godets, - 25 détecteurs ils et électroniques sur les vérins, - 3 micro cellules pour l’alimentation des boîtes.
2
5. Partie commande : - Un automate programmable TELEMECANIQUE TSX 37 avec des entrées/sorties analogiques TOR, - Des entrées/sorties TOR déportées, - Un pupitre terminal de dialogue d’exploitation MAGELIS, communication avec l’automate sur la ligne série, protocole UNI-TELWAY, permettant de saisir les paramètres du système, - Une armoire de commande sur module 1, - 2 armoires de commandes sur module 2, - Un superviseur sur PC avec protocole Modbus/Jbus, connecté à l’automate à l’aide d’un convertisseur RS232-RS485 et d’une carte coupleur PCMCIA sur l’automate.
6. Supervision : La supervision permet la visualisation d’état, des défauts du système. Il sert aussi à la conduite et à la
surveillance du système à l’aide de plusieurs pages d’écran disponibles pour l’utilisateur avec notamment les grafcets animés.
7. Présentation : - Entièrement cartérisée avec ouverture sur la face avant, - Encombrement : Module 1 : L x l x h = 800 x 1950 x 2000mm, Module 2 : L x l x h = 800 x 2200 x 2000mm,
8. Caractéristiques pédagogiques : Le cycle est décrit sous forme de grafcets et du Gemma (Guide d’Etudes des Modes de Marche et d’Arrêts). Les différentes actions sont décrites sous forme de tâches, regroupées dans un grafcet de tâches au niveau de la structure du programme.
9. Applications pédagogiques : - Maintenance industrielle, - Analyse fonctionnelle du système, -
Automatisme, - Dialogue entre pupitre - automate, et supervision - automate, - Mécanique industrielle.
9.1 Conduite de système automatisé : - Exploitation de ligne de production : - A l’aide de l’interface homme/machine, - Et de la supervision, - Ces 2 composants permettent de saisir les paramètres nécessaires au fonctionnement du système automatisé nombre de bougies réalisées, les défauts, manque de matière; ainsi que d’informer l’utilisateur sur l’état de la chaîne à tout moment.
9.2 Mécanique industrielle : · Etude des choix technologiques retenus pour la partie opérative en fonction de certaines caractéristiques (vitesse, course, capacité de stockage, temps de cycle…).
9.3 Automatisme : - Dialogue homme/machine à l’aide du pupitre de dialogue et de la supervision : - Visualisation des défauts, et de l’état de la machine à chaque instant (synoptiques des différentes parties, grafcets, gemma animés), - Visualisation de l’état des capteurs et des moteurs.
Etude des modes de marche et d’arrêt : - Possibilité de faire fonctionner la machine suivant 2 modes : - Mode de fonctionnement normal (F1), - Mode pas à pas dans le désordre (F4).
Etude l’architecture réseau : - Echange d’informations entre le pupitre de dialogue, l’automate, le superviseur…
Analyse fonctionnelle du système : - Identification et découpage du système automatisé en tâches, - Recherche des antériorités entre les tâches, - Elaboration des grafcets.
Etude des cadences avec la coordination des tâches pour le fonctionnement normal : - Optimisation des cadences, - Comparaison entre le comportement réel du système et la simulation temporelle du cycle de fonctionnement.
3
9.4 Maintenance industrielle : Recherches de pannes : - Les entrées/sorties déportées utilisées offrent la possibilité de simuler les pannes facilement, - Les connecteurs à chaque capteur permettent leur remplacement par un capteur défectueux, - Aide au diagnostic à l’aide du pupitre de dialogue et du superviseur.
Entretien des éléments mécaniques après un certain nombre d’heures (comme indiqué dans les notices constructeurs) : Pour les doseurs de colorant, le mélangeur et la trémie doseuse après un certain nombre d’heures d’utilisation : - Nettoyage des trémies, - Nettoyage de la vis sans fin, - Nettoyage du malaxeur.
Pour le moule après un certain nombre d’heures d’utilisation : - nettoyage des parois et du piston.
Pour le groupe hydraulique : - Vérification du niveau d’huile, - Réglage de la pression, - Réglage du limiteur de vitesse.
Pour la bande transporteuse : - Réglage de la tension de la bande, - Centrage de la bande par rapport à la structure du tapis.
Pour le module de translation de la dose de mélange : - Vérification et réglage du ressort de compression.
Pour le capteur de force sous la trémie doseuse : - Etalonnage du capteur.
Pour l’ensemble du matériel électrique, mécanique et pneumatique : - Vérification ou remplacement des pièces d’après les préconisations constructeurs, répertoriées dans le dossier pédagogique.
Pour l’alimentation en mèche après un certain nombre d’heures : - Nettoyage des pièces permettant le guidage de la mèche paraffinée.
Pour les rives de guidage sous l’indexeur et en sortie de l’indexeur : - Nettoyage des pièces pour enlever les résidus de paraffine.
Pour les vérins pneumatiques : - Vérification de la position des capteurs (ILS).
Exemples d’écrans logiciel
4

MECATRONIQUE
Automatisme
SPH400 - STATION DE POMPAGE
Ce produit, conçu en collaboration avec des enseignants, permet de couvrir un nombre de thèmes riches en automatismes notamment dans les sections d’enseignement en électrotechnique et en maintenance des systèmes automatisés.
DESCRIPTION La station de pompage didactisée SPH400 est une réplique à l’échelle réduite d’un réseau de distribution d’une petite cité et de la campagne environnante qui est alimentée par un réservoir de stockage de l’eau. Ce système a été retenu du fait : du nombre variable des utilisateurs, des très fortes fluctuations des réserves d’eau captées notamment en été, d’une réserve importante en eau car la puissance installée du système ne peut subvenir à cette forte demande de débit pendant ces périodes.
Modélisation : On désire modéliser la station de pompage rurale comprenant : - Un puits en liaison avec la nappe phréatique, - Un réservoir tampon, - Un château d’eau. fonctionnement : La pompe d’exhaure pompe dans la nappe phréatique et remplie un réservoir tampon. Trois pompes reprennent cette eau et remplissent un château d’eau. Trois électrovannes placées sur le château d’eau simulent la consommation des ménages avec un retour de l’eau à la bâche.
Description des constituants : Le «puits» est constitué d’un bac de 130 litres. Une vanne manuelle de vidange est située au point le plus bas du système. La pompe d’exhaure est constituée d’une pompe centrifuge mue par un moteur asynchrone triphasé à cage, lui même piloté par un variateur de vitesse à loi U/f (puissance = 0,75 kW). Le réservoir tampon transparent de 60 litres est muni d’un capteur de niveau analogique qui permet en liaison avec l’automate programmable industriel et le variateur U/f, un contrôle de type PID du niveau d’eau dans le réservoir tampon. En outre deux capteurs de type Tout ou Rien contrôlent les niveaux min. et max. de ce réservoir tampon. Une canalisation munie d’une vanne boisseau à commande manuelle relie ce réservoir tampon au «puits». Cette canalisation permet un débit de vidange supérieur au débit de la pompe d’exhaure. A partir de ce réservoir tampon, trois pompes centrifuges mues par trois moteurs asynchrones triphasés à cage, remplissent le château d’eau transparent 60 litres. La consommation des ménages est modélisée par trois électrovannes permettant de façon manuelle par appui sur trois boutons poussoirs ou de façon automatique par l’automate programmable industriel, de simuler les différents régimes de consommation par retour de l’eau du «château d’eau» au «puits». Ces trois électrovannes sont placées sur 3 canalisations de différentes sections pour retrouver 7 débits différents par combinaisons des trois commandes d’électrovannes.
5
Le château d’eau est muni de trois capteurs de type tout ou rien. Deux pour capter les niveaux min. et max., le troisième pour le niveau nominal moyen. Ce dernier permet de maintenir un niveau assurant une pression hydrostatique suffisante dans le réseau de distribution. En fonction de la consommation des ménages (1, 2 ou 3 électrovannes alimentées) 1, 2 ou 3 pompes de reprises seront mises en marche. L’automatisme est piloté par un automate programmable industriel compact. Un module de communication est installé et permet le dialogue avec un micro-ordinateur de type P.C. sur liaison série. Les messages de diagnostic, de consigne et de maintenance sont émis sur afficheur de type «cristaux liquides» à 2 lignes de message. L’automate programmable industriel compact est muni d’un logiciel permettant la régulation PID. Le système est muni de toutes les sécurités pour en assurer l’exploitation et la maintenance en toute sécurité. Ce banc est conforme à la norme C.E. Le système est fourni avec le logiciel de programmation en langage GRAFCET de l’automate programmable industriel sur PC. Les constituants de commande du système (automate programmable industriel, pré-actionneurs, etc...) sont placés dans une armoire métallique située de façon à permettre des interventions aisées en toute sécurité. Le système est munie de roulettes (avec blocage) permettant son déplacement.
COMPOSITION
a) Partie opérative : Châssis mobile intégrant : - 1 puits de captage des eaux (réservoir en PVC, capacité 130 litres), - 1
bassin de reprise (réservoir transparent, capacité 60 litres),
- 1 château d’eau (réservoir transparent, capacité, 60 litres), - 1 groupe d’exhaure (pompe centrifuge en inox, débit 5 m 3 /h; 0,75 kW), - 3 groupes de reprise (pompes centrifuges en inox débit 1,5 m 3 /h; 0,37 kW), - 1 capteur de débit analogique et un manomètre sur le circuit du groupe d'exhaure, - 5 capteurs de niveau TOR, - 1 capteur de niveau analogique, - 3 électro-vannes.
b) Partie de commande : Un coffret électrique intégrant : - Un automate programmable TSX 37 avec des sorties et entrées analogiques et TOR, un bloc de régulation PID, 2 interfaces de communication, - Un pupitre terminal de dialogue d'exploitation à 2 lignes d'affichage, 20 caractères, communication avec l'automate sur la ligne série, protocole UNI-TELWAY, clavier 12 touches fonction, 10 touches de service et 12 touches numériques. Programmation faite sur plusieurs pages d'application et pages alarmes, - Un variateur de fréquence numérique, - Les appareils d’alimentation et de protection de l’installation.
Dimensions du banc : - Longueur : 1800 mm, - Profondeur : 700 mm, - Hauteur : 2000 mm, - Masse : 218 kg.
Services nécessaires : - 3 x 380 V 50 Hz - 16 A, - Arrivée d'eau.
Ce logiciel a été conçu pour le dialogue avec l’automate programmable de la station de pompage, en complément du terminal de dialogue opérateur existant. Un effort particulier a été apporté à l’ergonomie pour permettre une compréhension rapide et intuitive de la machine par l’élève lors de travaux pratiques.
6
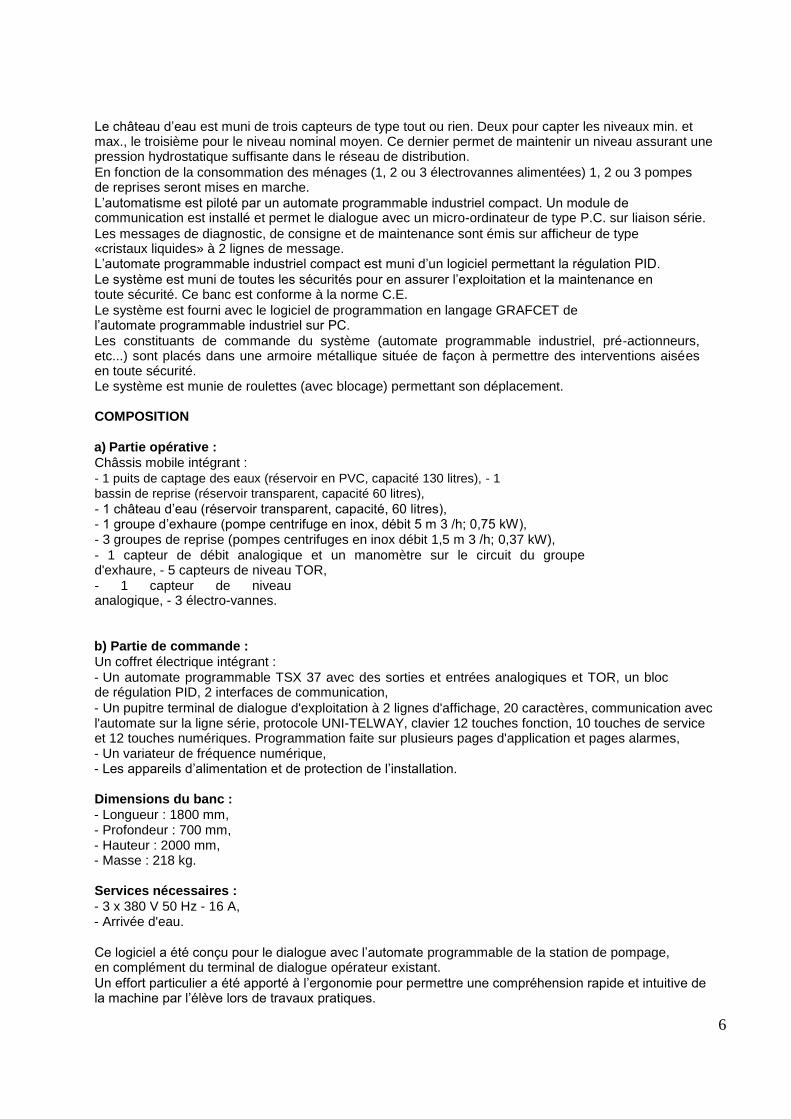
Exemples d’écrans existants
Synoptique : (ci-dessus) Représente le synoptique de la station de pompage. Le passage de la souris sur le synoptique affiche une info-bulle donnant plus de détails sur l’élément choisi. Un clic de la souris sur chaque composant ouvre une sous fenêtre avec des commandes possibles. Par exemple, ci-dessus, un clic de la souris sur le bassin de reprise ouvre une sous fenêtre "Régulation de niveau du bassin" avec les correcteurs PID.
Les variables analogiques et logiques (la mesure de niveau, la sortie du bloc PID, l’état des pompes, …etc.) sont historisées, c’est à dire stockées sous forme de fichiers consultables ultérieurement. La fenêtre "courbe" est munie d’un zoom et d’un pointeur affichant les coordonnées des courbes.
Grafcet : Cet écran affiche le grafcet animé du cycle automatique du réservoir ainsi qu’un chronogramme avec les états logiques des pompes, électrovannes et détecteurs de niveau du réservoir.
Alarmes : Les alarmes présentes sont affichées sous forme de liste et doivent être acquittées par l’opérateur. Cet écran permet également de consulter l’historique des alarmes et des événements. Configuration minimale du micro-ordinateur 486 DX2 66, RAM 16 Mo, lecteur CD-ROM 2X, Windows 95, un port LPT1 pour insérer la clé de protection, un port série COM2 (voir COM1) pour la communication avec l’automate. Liaison entre le PC et l’automate Par le cordon SCHNEIDER du pack PL7 micro, fournis avec la station de pompage.
7

MECATRONIQUE
Automatisme
TS2000 - STATION DE TRAITEMENT DE SURFACE
PRESENTATION Le système de traitement de surface TS2000 couvre un nombre important de thèmes qui peuvent être développés : - Gestion des courants forts, - Régulation de température, - Electrochimie, - Manutention de pièces, - Automatique, - Conduite d'un système pluritechnologique, - Protection des biens et des personnes, - Optimisation d'un système automatisé, - Maintenance d'un système automatisé.
COMPOSITION a) Partie opérative :
Châssis mobile intégrant : - Poste de dégraissage chimique, - Poste de rinçage, - Poste de dépassivation acide, - Poste de rinçage, - Poste de zingage acide, - Moteur de translation horizontale, - Moteur de translation vertical, - Potence, - Cuve de rétention, - Bloc de filtration, - Coffret électrique, - Enceinte de protection, transparente, - Hotte de ventilation. La manutention de la potence dans les 2 axes Y et Z (horizontal et vertical) est faite avec une vitesse de déplacement de l’ordre de 0,2 m/s. Régulation de la température du bain de dégraissage chimique par train d’ondes et relais statique, L’alimentation du bain de zingage électrolytique est faite par un générateur de courant 0-10A courant continu régulé. Alimentation du générateur de courant à partir du réseau monophasé. Affichage de la tension et de courant.
b) Partie commande :
Un coffret électrique intégrant : Un automate industriel compact avec des entrées et sorties analogiques et TOR»un bloc de régulation PID, 2 interfaces de communication. Un pupitre terminal de dialogue d’exploitation à 2 lignes d’affichage. 20 caractères. Communication avec l’automate sur la ligne série, protocole UNI-TELWAY, clavier 12 touches fonction, 10 touches de service et 12 touches numériques. Programmation faite sur plusieurs pages d’application et pages alarmes. Les appareils d’alimentation et de protection des personnes : disjoncteur différentiel, contacteurs, fusibles, transformateur.
8
Générateur de courant pour le bain de zingage électrolytique. L’automate assure les fonctions suivantes : - Gestion de 5 positions sur l’axe Y afin d assurer les opérations de dégraissage chimique, rinçage. dépassivation acide, rinçage et zingage. - Gestion de 2 positions sur axe (haute et basse). - Régulation de la température du bain de dégraissage chimique. - Marche manuelle.
PROTECTION DES PERSONNES ET DE L’ENVIRONNEMENT : - Aspiration des vapeurs au dessus de l’ensemble des cuves, - Aucun rejet à l’égout, les bains usés seront reconditionnés dans les bidons de livraison et dirigés vers des centres agréés pour le traitement, - Le milieu sonore est nettement inférieur à 70db. - Protection des personnes par l’enceinte transparente verrouillage à clef; - Auto-contrôle du capteur de porte par un boîtier de sécurité.
SERVICES NECESSAIRES : - Alimentation électrique 3 x 380V + N + T. 16A, - Raccordement à l’eau sanitaire, - Raccordement extérieur pour évacuation des vapeurs nocives par tuyau flexible longueur 3m. - Diamètre intérieur 150 mm.
CARACTERISTIQUES : - Longueur 2,4m largeur 0,69 m, - Hauteur sans la hotte 1,7 m, - Hauteur avec la hotte 2,25 m, - Poids 326 kg. - Niveau sonore < 70 dB(A).
9
MECATRONIQUE
Automatisme
PL200 - PALETTISEUR DE SACS
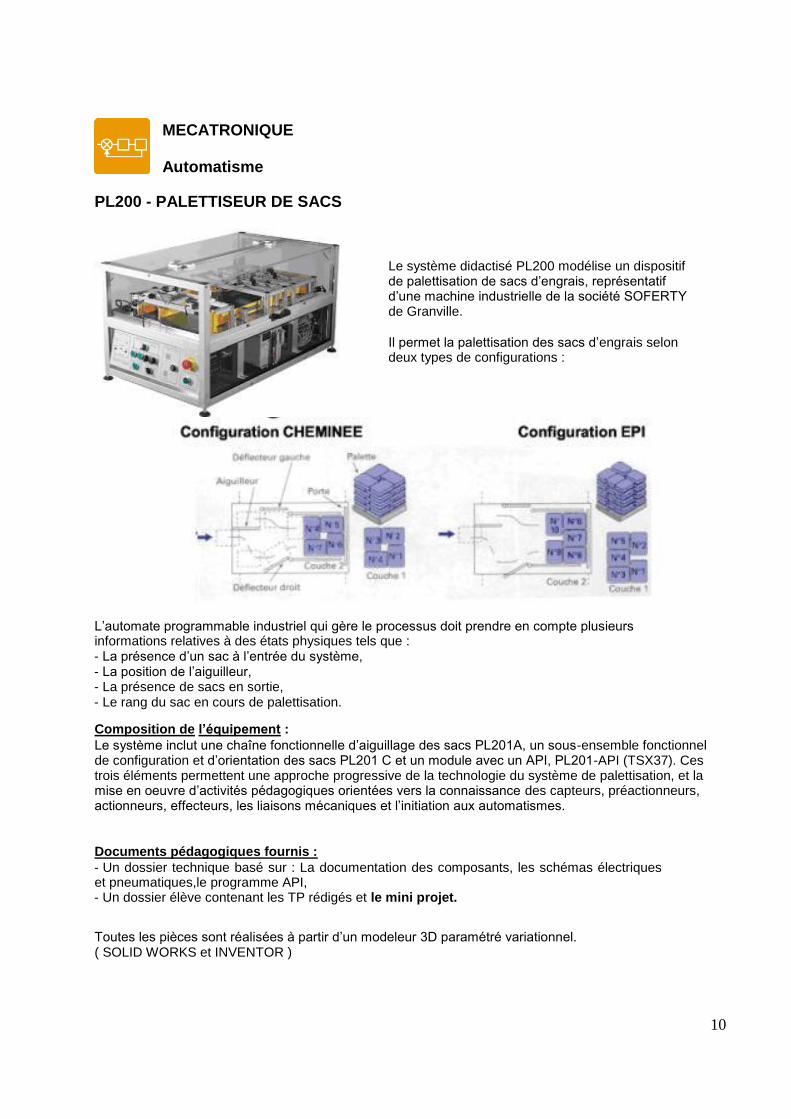
Le système didactisé PL200 modélise un dispositif de palettisation de sacs d’engrais, représentatif d’une machine industrielle de la société SOFERTY de Granville.
Il permet la palettisation des sacs d’engrais selon deux types de configurations :
L’automate programmable industriel qui gère le processus doit prendre en compte plusieurs informations relatives à des états physiques tels que : - La présence d’un sac à l’entrée du système, - La position de l’aiguilleur, - La présence de sacs en sortie, - Le rang du sac en cours de palettisation. Composition de l’équipement : Le système inclut une chaîne fonctionnelle d’aiguillage des sacs PL201A, un sous-ensemble fonctionnel de configuration et d’orientation des sacs PL201 C et un module avec un API, PL201-API (TSX37). Ces trois éléments permettent une approche progressive de la technologie du système de palettisation, et la mise en oeuvre d’activités pédagogiques orientées vers la connaissance des capteurs, préactionneurs, actionneurs, effecteurs, les liaisons mécaniques et l’initiation aux automatismes.
Documents pédagogiques fournis : - Un dossier technique basé sur : La documentation des composants, les schémas électriques et pneumatiques,le programme API, - Un dossier élève contenant les TP rédigés et le mini projet.
Toutes les pièces sont réalisées à partir d’un modeleur 3D paramétré variationnel. ( SOLID WORKS et INVENTOR )
10

Partie opérative : - Transfert par convoyeur à tapis sans fin, - Aiguillage de sacs par couple pignon-crémaillère, - Orientation de sacs par vérins pneumatiques, - Configuration de palettisation par vérins pneumatiques, - Evacuation de la couche constituée par vérins pneumatiques. Préactionneurs : - Contacteurs, - Distributeurs 5/2 bistables, - Distributeurs 5/2 monostables, - I nterfaces électro-pneumatiques 3/2. Actionneurs : - 2 Moto-réducteurs, - 5 Vérins pneumatiques, double effet. Capteurs : - Détecteurs photoélectriques, - Détecteurs inductifs, - Détecteurs ILS sur vérins. Partie commande : -Automate programmable TELEMECANIQUE TSX37. - Pupitre de commande. Encombrement : L x 1 x h = 1000 x 600 x 510mm, Masse : 68 kg. Energie nécessaire : - Electricité : 220 V alternatif monophasé, - Air comprimé 6 bar, Caractéristiques pédagogiques : - Le système permet de visualiser 5 tâches opératives analysées sous forme S.A.D. T, - Le cycle est décrit par GRAFCET et GEMMA, - Des travaux dirigés permettent de comprendre les diverses séquences du programme. Activivités pédagogiques : Domaine mécanique : - Transformation du mouvement circulaire en mouvement rectiligne (moteur-réducteur-poulies etcourroies crantées). Domaine automatique : - Le système permet la simulation du GRAFCETet
l’exploitation du GEMMA du système complet.
CHAINE FONCTIONNELLE D’AIGUILLAGE DES SACS PL201A : (Fonctionne avec le module PL201-API)
Activités pédagogiques : -Transformation du mouvementcirculaire en mouvement
rectiligne (moteur-réducteur-pignoncrémaillère), - Mesure de force, de distance, de temps, de dépla-
cement, de tension et d’intensité électriques,
- Bilan énergétique, notion de rendement. Domaine automatique : - Raccordement du préactionneur au moteur, - Raccordement du préactionneur à la PO, - Simulation du cycle GRAFCET. Encombrement : L x I x h = 500 x 360 x 230mm Masse : 8 kg,
SOUS-ENSEMBLE FONCTIONNEL DE CONFIGURATION ET D’ORIENTATION DES SACS PL201 C
(Fonctionne avec le module PL201-API)
Activités pédagogiques : - Etude de liaisons : pivot, rotule, linéaire rectiligne. - Transformation du mouvement linéaire rectiligne en mouvement circulaire. Domaine automatique : - Raccordement de l’actionneur pneumatique, -
Raccordementdu préactionneurpneumatiqueàsa
commande (bouton tournant),
- Raccordement du préactionneur pneumatique aux interfaces électropneumatiques, - Raccordementdes interfaces électropneumatiques à l’automate programmable, - Simulation du cycle relatif au module étudié, - Encombrement : L x 1 x h = 500 x 360 x 230mm. Module PL201 - API Le PL201-API permet la commande de la chaîne
fonctionnelle et du sous-ensemble fonctionnel. Le
raccordement se fait par bornes de Ø4 mm sécurisées.
11

AUTOMATISMES ET REGULATION
MP131A - BANC D’ETUDES DES AUTOMATISMES - FONCTIONS TOR / HORODATEUR
Photo non contractuelle OBJECTIFS PEDAGOGIQUES
Etudier les systèmes automatisés de commande et de contrôle associés aux installations
hydrauliques (variation de vitesse de pompe, régulation de pH, mesure de niveau, vidange de bassin, agitation de bassin).
Identification des capteurs, actionneurs, processus à contrôler, traitement des différents signaux,
Ecriture d’un GRAFCET,
DESCRIPTIF
Le système est constitué d’un bac de mélange agité alimenté par deux bacs. Chaque bac possède une vanne de vidange électrique et une vanne de vidange manuelle et un capteur de niveau bas. Le bac de mélange possède en plus un capteur de niveau haut.
Le banc se compose d’un châssis en inox revêtu PVC et monté sur vérins à poser sur table : Trois cuves de 5 litres en PVC munies de vidange,
Trois électrovannes électriques,
Quatre détecteurs de niveau capacitifs,
Un agitateur (moteur et hélice).
12
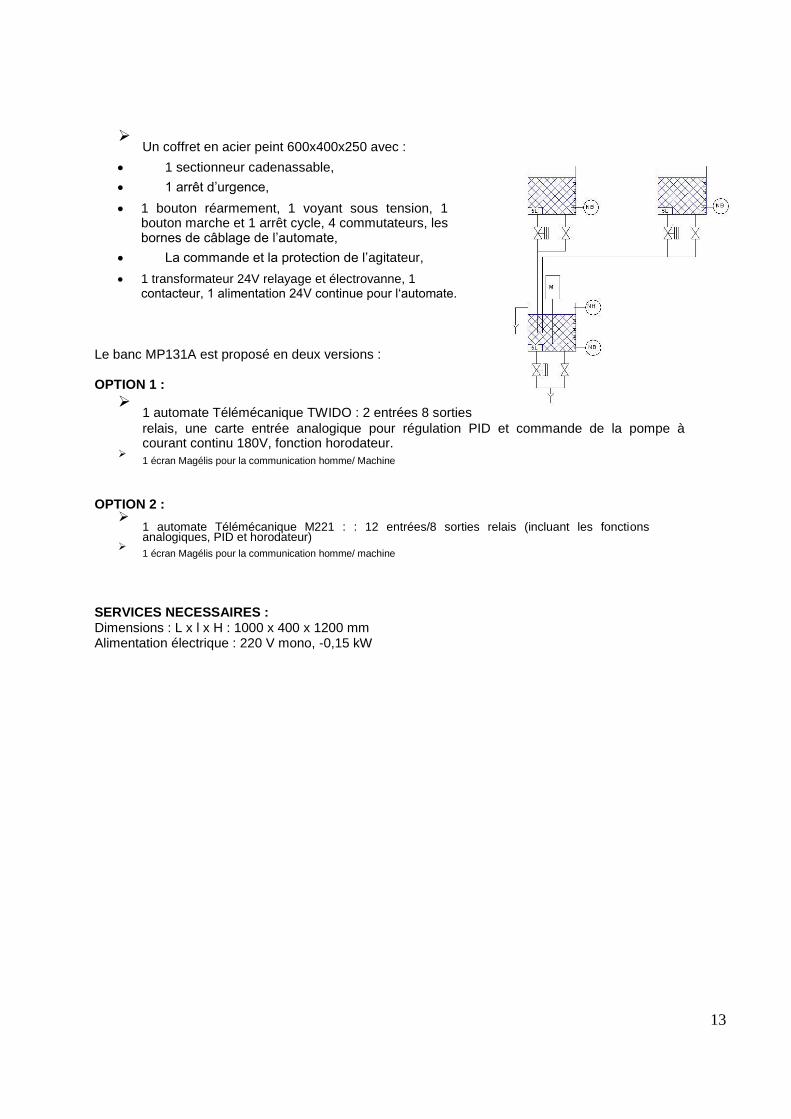
Un coffret en acier peint 600x400x250 avec :
1 sectionneur cadenassable, 1 arrêt d’urgence,
1 bouton réarmement, 1 voyant sous tension, 1
bouton marche et 1 arrêt cycle, 4 commutateurs, les bornes de câblage de l’automate,
La commande et la protection de l’agitateur,
1 transformateur 24V relayage et électrovanne, 1 contacteur, 1 alimentation 24V continue pour l‘automate.
Le banc MP131A est proposé en deux versions :
OPTION 1 : 1 automate Télémécanique TWIDO : 2 entrées 8 sorties
relais, une carte entrée analogique pour régulation PID et commande de la pompe à courant continu 180V, fonction horodateur.
1 écran Magélis pour la communication homme/ Machine
OPTION 2 : 1 automate Télémécanique M221 : : 12 entrées/8 sorties relais (incluant les fonctions
analogiques, PID et horodateur)
1 écran Magélis pour la communication homme/ machine
SERVICES NECESSAIRES : Dimensions : L x l x H : 1000 x 400 x 1200 mm Alimentation électrique : 220 V mono, -0,15 kW
13

AUTOMATISMES ET REGULATION
MP131B - BANC D’ETUDES DES AUTOMATISMES/ REGULATION ANALOGIQUE
FONCTIONS TOR / PID / ANALOGIQUE / HORODATEUR
Photo non contractuelle
OBJECTIFS PEDAGOGIQUES
Etudier les systèmes automatisés de commande et de contrôle associés aux installations
hydrauliques et techniques (variation de vitesse de pompe, régulation de pH, mesure de niveau, vidange de bassin, agitation de bassin)
Identifier des capteurs, actionneurs, processus à contrôler
Ecrire un GRAFCET.
Etalonner un capteur analogique et d’étudier sa linéarité,
DESCRIPTIF
Le système est constitué d’un bac de mélange agité alimenté par deux bacs. Chaque bac possède une vanne de vidange électrique et une vanne de vidange manuelle et un capteur de niveau bas. Le bac de mélange possède en plus un capteur de niveau haut.
Le banc se compose de : Trois cuves de 5 litres en PVC munies de vidange,
Trois électrovannes électriques,
14
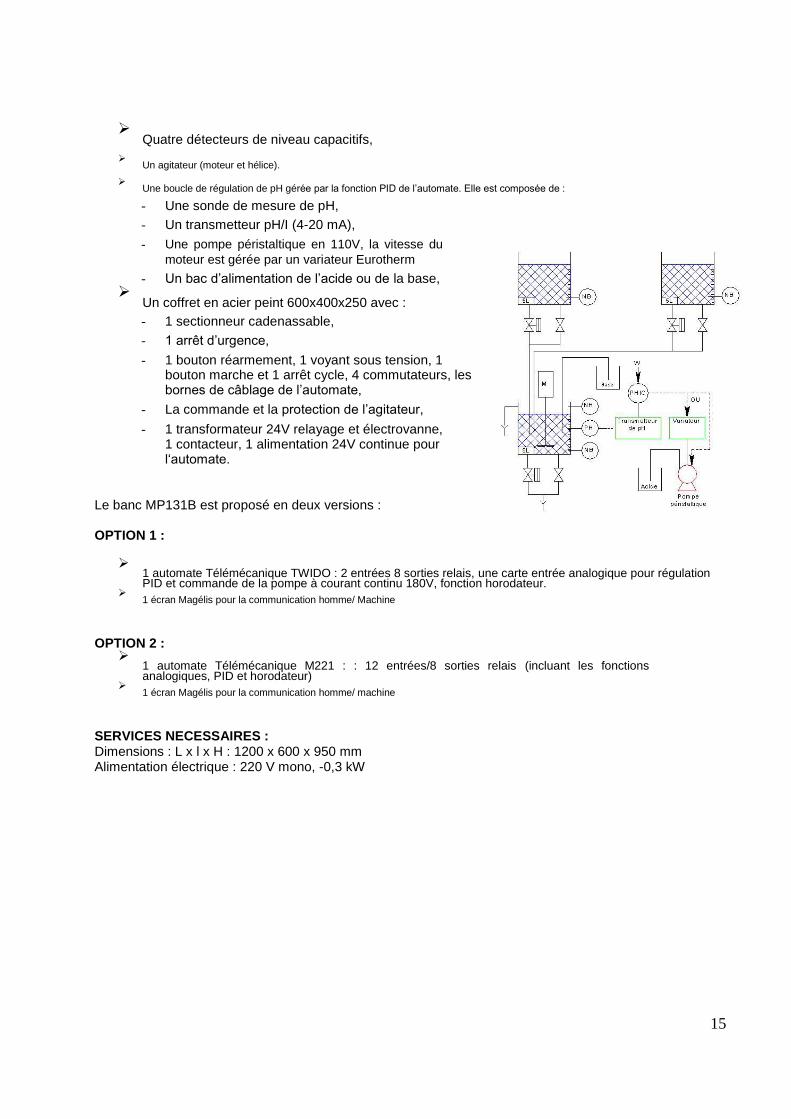
Quatre détecteurs de niveau capacitifs,
Un agitateur (moteur et hélice).
Une boucle de régulation de pH gérée par la fonction PID de l’automate. Elle est composée de :
- Une sonde de mesure de pH, - Un transmetteur pH/I (4-20 mA),
- Une pompe péristaltique en 110V, la vitesse du
moteur est gérée par un variateur Eurotherm
- Un bac d’alimentation de l’acide ou de la base, Un coffret en acier peint 600x400x250 avec :
- 1 sectionneur cadenassable, - 1 arrêt d’urgence,
- 1 bouton réarmement, 1 voyant sous tension, 1
bouton marche et 1 arrêt cycle, 4 commutateurs, les bornes de câblage de l’automate,
- La commande et la protection de l’agitateur,
- 1 transformateur 24V relayage et électrovanne,
1 contacteur, 1 alimentation 24V continue pour l‘automate.
Le banc MP131B est proposé en deux versions :
OPTION 1 :
1 automate Télémécanique TWIDO : 2 entrées 8 sorties relais, une carte entrée analogique pour régulation
PID et commande de la pompe à courant continu 180V, fonction horodateur.
1 écran Magélis pour la communication homme/ Machine
OPTION 2 : 1 automate Télémécanique M221 : : 12 entrées/8 sorties relais (incluant les fonctions
analogiques, PID et horodateur)
1 écran Magélis pour la communication homme/ machine
SERVICES NECESSAIRES : Dimensions : L x l x H : 1200 x 600 x 950 mm Alimentation électrique : 220 V mono, -0,3 kW
15

MECATRONIQUE
Automatisme
TRIAXE - BANC D’ETUDE DU STOCKAGE DE BARRES A COMBUSTIBLE Le TRIAXE est un système à 3 axes mettant en oeuvre différentes technologies. Il s’adresse au classes de BAC PRO ELEEC et BAC STI génie électrotechnique.
Cet équipement est une réplique à l’échelle réduite d’un transtockeur utilisé dans les centrales nucléaires. Il permet le stockage de déchets hautement radioactifs dans un bassin adapté. Ces déchets représentés sous forme de barres à combustible sont entreposés dans des cavités situés dans le bassin. Dans le cadre du TRIAXE, 2 zones de stockage comprenant chacune 4 emplacements sont disponibles.
ACTIONNEURS
- Moteur brushless 24v (avec codeur intégré 12 points) - Moteur à courant continu avec système vis a bille (pas=10mm), action tout ou rien du moteur avec 2 positions - Vérin pneumatique Ø20 double effet à action tout ou rien - Pince pneumatique (3 doigts) montée en bout du vérin pneumatique. Pince monostable 2 positions
DETECTEURS :
Capteurs de « présence pièce » emplacement de stockage :
- Fibre optique, - Capteur inductif, - Capteur capacitif, - Fin de course mécanique à galet
Capteurs disponibles sur l’axe X : - 2 fins de course mécanique à galet pour la surcourse - 1 codeur 12 points pour le positionnement de l’axe
16

Capteurs disponibles sur l’axe Y : - 2 fins de course mécanique à galet - 2 capteurs inductifs pour le positionnement de l’axe
Capteurs disponibles sur l’axe Z : - 2 détecteurs magnétiques ILS pour la position du vérin de descente - 1 détecteur magnétique sur la pince pneumatique
Les capteurs sont montés principalement sur connecteur débrochable (pour un remplacement ou une étude approfondie du composant)
INTERFACE HOMME / MACHINE : - Console Magelis XBTN410 (4 lignes d’affichage) déportée sur un bras mobile disposé sur la face avant du système. Elle dispose de 2 modes de fonctionnement (Pas à Pas et automtique). - Commande manuelle du système sur le pupitre déporté, ainsi qu’un arrêt d’urgence. - Porte équipée d’un capteur de sécurité (aimant codé) et reliée à un relais de sécurité normalisé.
AUTOMATE : - Automate Télémécanique TWIDO 12 entrées / 8 sorties en 24vcc (fourni avec son câble et logiciel de programmation), - Carte de communication avec sortie RS485 afin de communiquer avec la console de dialogue.
SUPERVISION : Cette application réalisée sous le logiciel PLANT VUE permet de dialoguer avec l’automate du système TRIAXE. Le protocole de communication utilisé est le Modbus Ethernet. Cette supervision dispose de 2 modes : - Administrateur (accès complet) - invité (accès limité)
Plusieurs synoptiques sont proposés :
- Synoptique principal :
Il permet de paramètrer les différents déplacements en cliquant sur le point d’origine et le point d’arrivé et visualiser l’évolution dynamique du système en temps réel.
- Alarmes :
Les défaults présentes sont afichées sous forme de liste. Cette écran permet de consulter l’historique des alarmes et des évenements.
- Synoptique de configuration :
Cette page est réservée au mode administrateur. Elle permet notamment le réglage de l’axe X (Vitesse moteur brushless et position).
CARACTERISTIQUES : - Dimensions : 1800 * 1200 * 1800 mm - Poids : 150 Kg SERVICES NECESSAIRES : - Alimentation électrique 220V - Monophasé
- Pneumatique : 6 Bars
17

MECATRONIQUE
Automatisme
TRI TECH - PALETTISEUR INDUSTRIEL
Machine développée autour d’une table hydraulique de palettisation industrielle. Elle met en œuvre les 3 énergies hydraulique, électrique et pneumatique.
DESCRIPTIF Châssis mécano soudé avec enceinte de protection grillagée, comprenant :
- Une table à rouleaux pour l’approvisionnement du palettiseur, - Une table de palettisation actionnée par un vérin hydraulique de levage de diamètre 50mm et sécurisé
par une valve d’équilibrage, - Un ensemble de chargement actionné par un vérin hydraulique de translation, - Une table à rouleaux pour l’évacuation des palettes constituées, - Accès à la machine par un portillon avec contact électrique de fermeture et verrouillage à clé.
Une centrale hydraulique séparée comprenant : - Un groupe motopompe 0,75 kW, 3 litres/minute, pression : 80 bars, - Un réservoir 28 litres équipé d’un niveau visuel avec thermomètre,
un filtre à air, un bouchon de remplissage, de vidange et d’un filtre retour, - Un limiteur de pression, - Un manomètre, - Trois distributeurs électro-hydrauliques, - Deux limiteurs de débit, - Un ensemble de raccordement hydraulique, - Un ensemble de bouchons hydrauliques de protection.
18
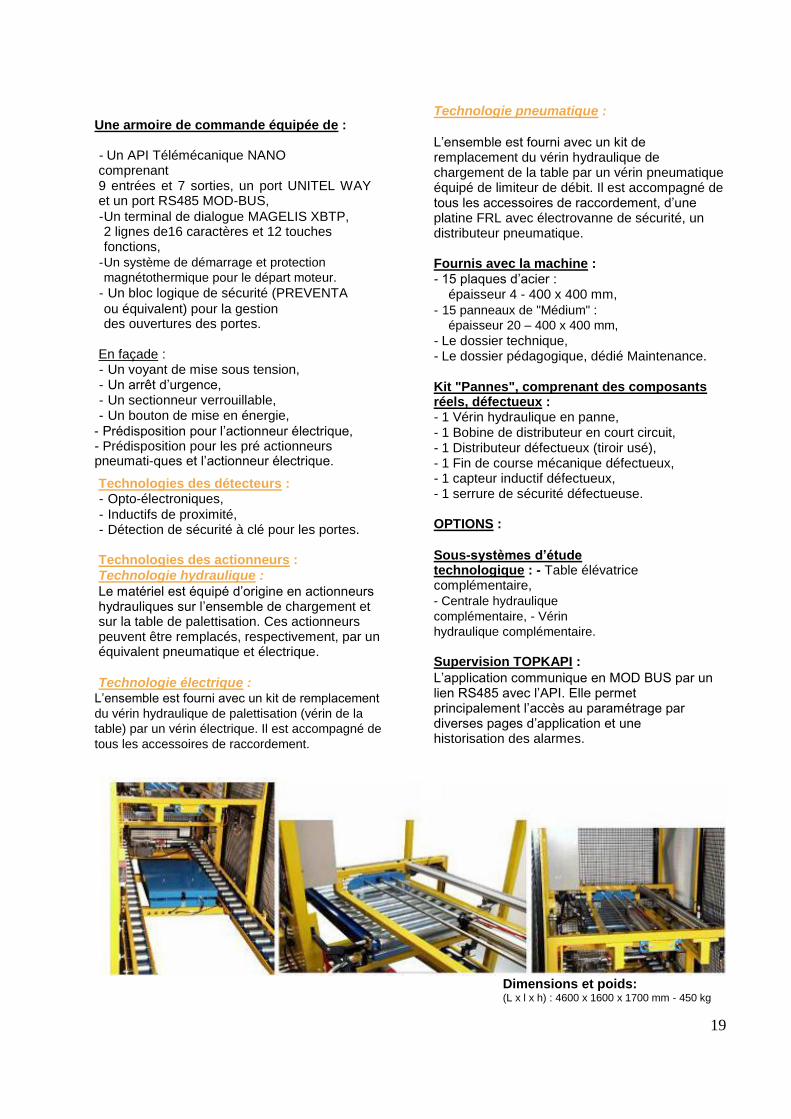
Une armoire de commande équipée de :
- Un API Télémécanique NANO comprenant 9 entrées et 7 sorties, un port UNITEL WAY et un port RS485 MOD-BUS, - Un terminal de dialogue MAGELIS XBTP, 2 lignes de16 caractères et 12 touches fonctions,
- Un système de démarrage et protection
magnétothermique pour le départ moteur.
- Un bloc logique de sécurité (PREVENTA ou équivalent) pour la gestion des ouvertures des portes.
En façade : - Un voyant de mise sous tension, - Un arrêt d’urgence, - Un sectionneur verrouillable, - Un bouton de mise en énergie,
- Prédisposition pour l’actionneur électrique, - Prédisposition pour les pré actionneurs pneumati-ques et l’actionneur électrique. Technologies des détecteurs : - Opto-électroniques, - Inductifs de proximité, - Détection de sécurité à clé pour les portes.
Technologies des actionneurs : Technologie hydraulique : Le matériel est équipé d’origine en actionneurs hydrauliques sur l’ensemble de chargement et sur la table de palettisation. Ces actionneurs peuvent être remplacés, respectivement, par un équivalent pneumatique et électrique.
Technologie électrique : L’ensemble est fourni avec un kit de remplacement
du vérin hydraulique de palettisation (vérin de la
table) par un vérin électrique. Il est accompagné de
tous les accessoires de raccordement.
Technologie pneumatique :
L’ensemble est fourni avec un kit de remplacement du vérin hydraulique de chargement de la table par un vérin pneumatique équipé de limiteur de débit. Il est accompagné de tous les accessoires de raccordement, d’une platine FRL avec électrovanne de sécurité, un distributeur pneumatique.
Fournis avec la machine : - 15 plaques d’acier :
épaisseur 4 - 400 x 400 mm, - 15 panneaux de "Médium" :
épaisseur 20 – 400 x 400 mm,
- Le dossier technique, - Le dossier pédagogique, dédié Maintenance.
Kit "Pannes", comprenant des composants réels, défectueux : - 1 Vérin hydraulique en panne, - 1 Bobine de distributeur en court circuit, - 1 Distributeur défectueux (tiroir usé), - 1 Fin de course mécanique défectueux, - 1 capteur inductif défectueux, - 1 serrure de sécurité défectueuse.
OPTIONS :
Sous-systèmes d’étude technologique : - Table élévatrice complémentaire, - Centrale hydraulique
complémentaire, - Vérin
hydraulique complémentaire.
Supervision TOPKAPI : L’application communique en MOD BUS par un lien RS485 avec l’API. Elle permet principalement l’accès au paramétrage par diverses pages d’application et une historisation des alarmes.
Dimensions et poids: (L x l x h) : 4600 x 1600 x 1700 mm - 450 kg
19

MECATRONIQUE
Etude des capteurs
CAPTECH - SYSTEME D’ETUDE DES CAPTEURS
Ce convoyeur à bandes motorisées permet l’étude des capteurs Tout ou Rien et analogiques. Sa fonction est de trier des boîtes de hauteurs et de matières différentes. Il comprend un rail incliné à l’entrée du 1er convoyeur pour acheminer les boîtes. Dès que les boîtes sont détectées à l’entrée du plateau (détection de la hauteur), elles sont orientées sur une des deux bandes du convoyeur pour être acheminées dans des bacs prévus à cet effet. L’aiguillage vers la 2ème bande du convoyeur se fait à l’aide d’un plateau rotatif et d’un actionneur électrique. Les boîtes non ferreuses sont stockées dans un 3ème bac. Au total, 3 zones de stockage sont disponibles :
- zone de stockage des grandes boîtes, - zone de stockage des petites boîtes, - zone de stockage des boîtes non ferreuses ou rebus.
PUPITRE : Le pupitre de commande (500 x 400 x 400 mm) avec plan incliné en profilé aluminium à poser sur plan de travail comprend : • 1 face avant sérigraphiée • Entrée/Sorties sur bornes double puits 4 mm et prises Harting sur le côté, • 1 interrupteur M/A avec cordon d’alimentation 220V, • 1 transformateur 220V /24V, • Disjoncteur moteur et contacteur moteur, • 1 automate TSX37-22 avec E/S analogiques intégrées, et carte E/S comprenant 16 Entrées et 12 Sorties, • 1 pupitre de dialogue Magelis type XBTR avec 4 lignes de 20 caractères, 12 touches fonction et 6 touches de service, • 1 bouton tournant à 3 positions suivant le type de raccordement (Asi, Bornes, Harting), • 1 Arrêt d’urgence à clef, • 1 bouton poussoir lumineux vert pour Départ cycle, • 1 bouton poussoir rouge pour Arrêt cycle, • 1 bouton tournant 2 positions pour Fin de cycle ou vidange, • Des switchs pour simuler les capteurs.
20
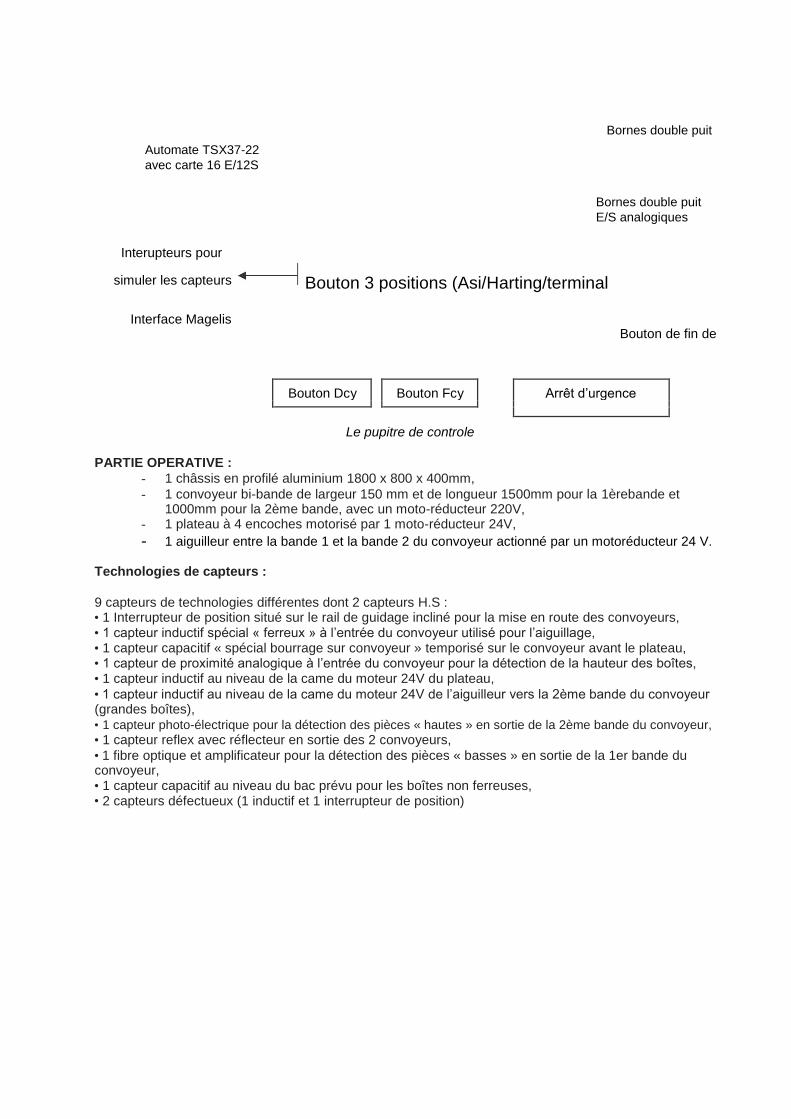
Automate TSX37-22 avec carte 16 E/12S
Bornes double puit
Bornes double puit
E/S analogiques
Interupteurs pour
simuler les capteurs Bouton 3 positions (Asi/Harting/terminal
Interface Magelis Bouton de fin de
Bouton Dcy Bouton Fcy Arrêt d’urgence
Le pupitre de controle
PARTIE OPERATIVE : - 1 châssis en profilé aluminium 1800 x 800 x 400mm, - 1 convoyeur bi-bande de largeur 150 mm et de longueur 1500mm pour la 1èrebande et
1000mm pour la 2ème bande, avec un moto-réducteur 220V, - 1 plateau à 4 encoches motorisé par 1 moto-réducteur 24V, - 1 aiguilleur entre la bande 1 et la bande 2 du convoyeur actionné par un motoréducteur 24 V.
Technologies de capteurs :
9 capteurs de technologies différentes dont 2 capteurs H.S : • 1 Interrupteur de position situé sur le rail de guidage incliné pour la mise en route des convoyeurs, • 1 capteur inductif spécial « ferreux » à l’entrée du convoyeur utilisé pour l’aiguillage, • 1 capteur capacitif « spécial bourrage sur convoyeur » temporisé sur le convoyeur avant le plateau, • 1 capteur de proximité analogique à l’entrée du convoyeur pour la détection de la hauteur des boîtes, • 1 capteur inductif au niveau de la came du moteur 24V du plateau, • 1 capteur inductif au niveau de la came du moteur 24V de l’aiguilleur vers la 2ème bande du convoyeur (grandes boîtes), • 1 capteur photo-électrique pour la détection des pièces « hautes » en sortie de la 2ème bande du convoyeur, • 1 capteur reflex avec réflecteur en sortie des 2 convoyeurs, • 1 fibre optique et amplificateur pour la détection des pièces « basses » en sortie de la 1er bande du convoyeur, • 1 capteur capacitif au niveau du bac prévu pour les boîtes non ferreuses, • 2 capteurs défectueux (1 inductif et 1 interrupteur de position)
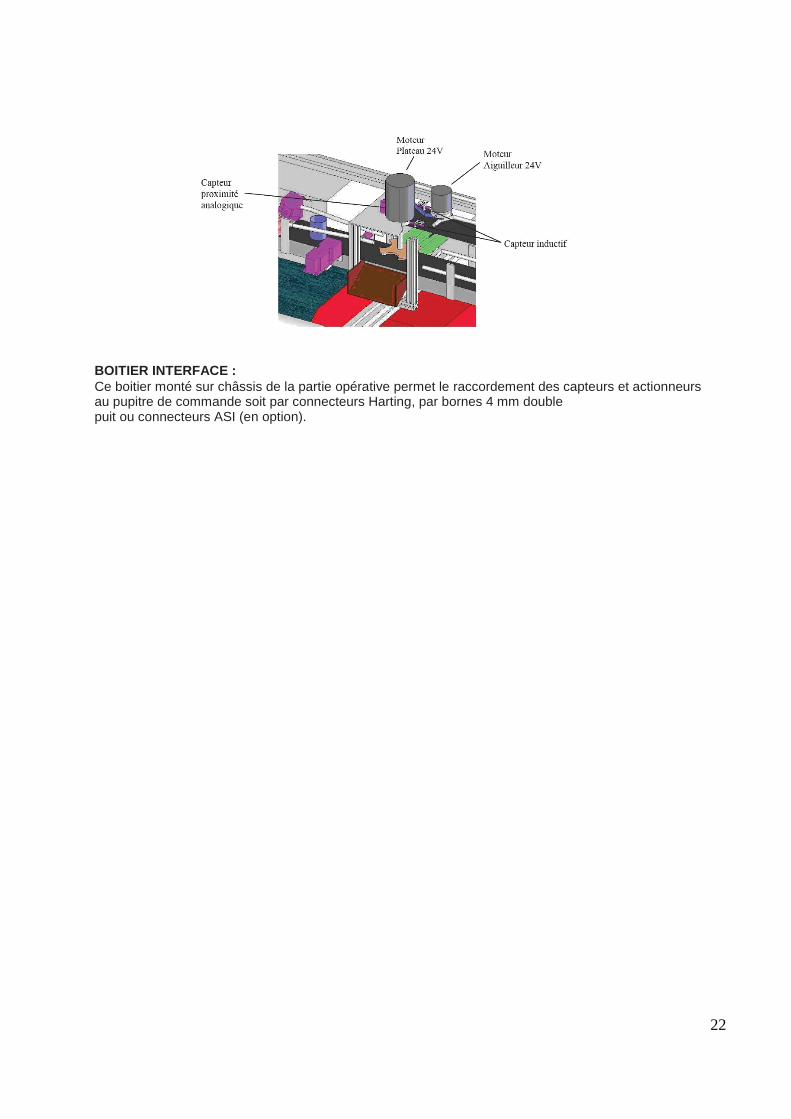
BOITIER INTERFACE : Ce boitier monté sur châssis de la partie opérative permet le raccordement des capteurs et actionneurs au pupitre de commande soit par connecteurs Harting, par bornes 4 mm double
puit ou connecteurs ASI (en option).
22

MECATRONIQUE
Etude des capteurs
CAPTIVA - MALETTES D’ETUDE DES CAPTEURS
PRÉSENTATION
Grâce à l’évolution rapide de la technologie, les capteurs sont devenus des composants de haute technicité, incontournables dans une installation automatisée actuelle.
La diversité et l’innovation technologique des capteurs permettent de réaliser la mise en œuvre d’ un dispositif d’apprentisssage particulièrement riche en exploitations pédagogiques. Ainsi, l’ensemble de mallettes CAPTIVA incite l’élève à s’interroger sur le choix du capteur approprié en fonctions de la spécificité du besoin de détection et de son environnement.
CAPTIVA est un système modulaire, construit sur une platine en aluminium, permettant la mise en
situation d’une variété de capteurs dans diverses situations environnementales.
Captiva permet ainsi de vérifier les caractéristiques de capteurs réunis en collection et présentés en mallettes thématiques : capteurs inductifs et capacitifs, capteurs optiques, capteurs mécaniques, dispositif de vision…etc
CAPTIVA est l’équipement indispensable des enseignements liés aux automatismes.
23

DESCRIPTIONS
L’ensemble CAPTIVA est constituée d’une platine rainurée en aluminium et de deux mallettes contenants :
Un lot de 7 capteurs différents : - Capteurs de proximité inductif, noyé, raccordement 3 fils sortie pnp, raccordement 2 fils en 24Vac. - Capteur capacitif, - Capteurs opto-électronique NO ou NC proximité, réflex, fibre optique réflexion directe faisceau barrage, réglage de la sensibilité, mode apprentissage, -Capteur ILS pour vérin pneumatique.
Actionneurs : - Vérin découpé pour voir le déplacement du noyau, - Un moteur a courant continu équipé de différents disques,
Boîtiers électroniques : - Boîtier d’alimentation des capteurs, - Boîtier d’alimentation réglable et de mesure de vitesse de rotation du moteur,
Différents matériaux à détecter : - Acier, aluminium, nylon et catadioptre
Accessoires : - Outillage, cordons électriques, pied à coulisse,
Documentation
Caractéristiques : - Platine : 400 x 700 mm - 6,5 kg,
- Mallette 1 : 510 x 370 mm - 5 kg, - Mallette 2 : 510 x 370 mm - 5 kg.
24

MECATRONIQUE
Systèmes mécaniques
EX800 - PLATE-FORME 6 AXES
La plate-forme 6 axes, EX800, est un ensemble permettant de conduire une étude très complète sur un matériel performant représentatif des simulateurs de vol et de conduite automobile, machines-outils, cinéma dynamique, robots, grand télescope astronomique. PRINCIPAUX OBJECTIFS PEDAGOGIQUES
La plate-forme permet: L'étude des systèmes et des constituants des chaînes fonctionnelles
L'analyse, la modélisation et la commande du système
La vérification des performances en: -mécanique: géométrie, cinématique, statique et dynamique, mécanique des structures. -automatique: asservissement de position, précision, rapidité, stabilité, influence des correcteurs. A l'aide du logiciel, on peut effectuer: Une simulation des différentes architectures mécaniques de ce système Un pilotage générant les consignes de déplacement des vérins en vue d'atteindre une position ou un ensemble de positions (trajectoire) Une visualisation des données acquises sous forme de graphe La conduite de travaux pratiques
DESCRIPTIF TECHNIQUE
La plate-forme comprend :
Une partie opérative
Une partie commande L'architecture de la partie opérative est celle d'un robot parallèle comportant 6 vérins. Chacun des vérins comporte une extrémité articulée sur une embase fixe et l'autre extrémité s'articule sur une plate-forme mobile. Chaque vérin est un vérin électrique construit à partir d'une liaison hélicoïdale motorisée à l'aide d'un moteur à courant continu.
L'asservissement de chaque vérin est réalisé par un capteur de position absolue. Il est optimisé par une
génératrice tachymétrique. Un septième vérin est monté isolé sur un support spécifique. Il permet d'effectuer
25
des tests (raideur, influence des paramètres de l'asservissement...) en s'affranchissant des phénomènes de couplage dynamique rencontrés sur une plateforme 6 axes. La commande des 6 axes de la plate-forme s'effectue à partir d'un PC, d'une carte d'interface E/S (au format PCI) et d'une carte de commande 7 axes intégrée dans l'embase de la plateforme. La communication entre le PC et la plate-forme s'effectue dans les deux sens. L'acquisition de données (consigne de position, recopie de position vitesse, couple) s'effectue en temps réel sur 3 axes. L'étude des petits déplacements est effectuée par un système de mesure à 6 comparateurs. Une maquette de la plateforme possédant des vérins ajustables en longueur et des fixations magnétiques permet l'étude de configurations différentes de la plateforme.
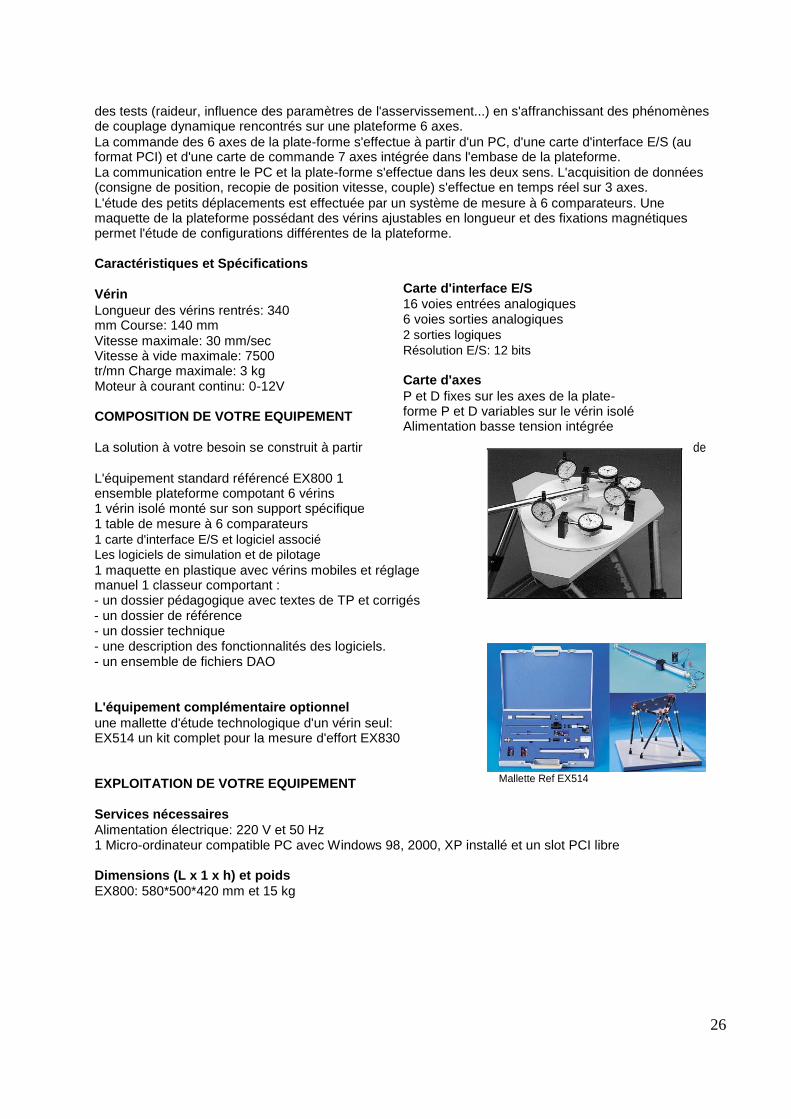
Caractéristiques et Spécifications
Vérin Longueur des vérins rentrés: 340 mm Course: 140 mm Vitesse maximale: 30 mm/sec Vitesse à vide maximale: 7500 tr/mn Charge maximale: 3 kg Moteur à courant continu: 0-12V
COMPOSITION DE VOTRE EQUIPEMENT
Carte d'interface E/S 16 voies entrées analogiques 6 voies sorties analogiques 2 sorties logiques
Résolution E/S: 12 bits Carte d'axes P et D fixes sur les axes de la plate-forme P et D variables sur le vérin isolé Alimentation basse tension intégrée
La solution à votre besoin se construit à partir de
L'équipement standard référencé EX800 1 ensemble plateforme compotant 6 vérins
1 vérin isolé monté sur son support spécifique 1 table de mesure à 6 comparateurs 1 carte d'interface E/S et logiciel associé
Les logiciels de simulation et de pilotage
1 maquette en plastique avec vérins mobiles et réglage manuel 1 classeur comportant : - un dossier pédagogique avec textes de TP et corrigés - un dossier de référence - un dossier technique - une description des fonctionnalités des logiciels. - un ensemble de fichiers DAO
L'équipement complémentaire optionnel une mallette d'étude technologique d'un vérin seul: EX514 un kit complet pour la mesure d'effort EX830
EXPLOITATION DE VOTRE EQUIPEMENT Mallette Ref EX514
Services nécessaires Alimentation électrique: 220 V et 50 Hz 1 Micro-ordinateur compatible PC avec Windows 98, 2000, XP installé et un slot PCI libre
Dimensions (L x 1 x h) et poids EX800: 580*500*420 mm et 15 kg
26

MECATRONIQUE
Systèmes mécaniques
EX620 - BOITE DE VITESSE « CVT »
La boîte automatique CVT (Continously Variable Transmission) est un système très représentatif de l'évolution de la technologie dans le secteur automobile. En effet, cette boîte équipe des voitures de petites cylindrées qui ne pouvaient l'être jusqu'à présent car les transmissions automatiques classiques avec convertisseur de couple absorbent une grande partie de leur puissance moteur. La boîte CVT EX620 est présentée sous la forme d'un éclaté réel comportant les sous ensembles suivants : le module d’entrée avec des trains épicycloïdaux commandés par des freins et embrayages hydrauliques, le module de variation à courroie comprimée, le réducteur de vitesse et le différentiel
Les flasques en alliage d'aluminium sont maintenues écartées par des barres sur lesquelles viennent prendre appui les sous-ensembles. Ces sous-ensembles fonctionnels, maintenus en position par des plaques supports, peuvent glisser les uns par rapport aux autres sur les barres d'écartement et forment ainsi un ensemble idéal pour la bonne compréhension du fonctionnement global de la boîte CVT. D'autre part ces sous-ensembles peuvent être extraits de l'éclaté pour mener des études technologiques sur des thèmes précis.
PRINCIPAUX OBJECTIFS PEDAGOGIQUES
L’objectif analytique de la série de TP est de manipuler les composants standards de la mécanique (roulements, engrenages, trains épicycloïdaux, embrayages, freins, composant poulie courroie,…..) Par ailleurs une approche systémique montre comment sont agencés ces différents composants afin d’obtenir la fonction : « variation continue de vitesse » Les centres d’intérêts suivants peuvent être traités, soit avec les modules du système, soit avec les plans d’ensemble :
- L’énergétique et la schématisation cinématique avec le système et les plans - L’analyse cinématique d’un mécanisme (trains épicycloïdaux) avec le module d’entrée - La modulation cinématique et statique du réel avec le module d’entrée - Le guidage en rotation avec le module de réduction intermédiaire - La cinématique et la transmission d’effort avec le module différentiel - La variation de vitesse par système
poulies-courroie avec le module de variation de vitesse
Dessin d’un sous système variateur de
Dessin de la boite de vitesse sous Soliworks®
vitesse
27

SPECIFICATIONS TECHNIQUES
•Le bâti support : le carter et la commande hydraulique. •Le sous-ensemble d’entrée : le train épicycloïdal, l’embrayage et le frein multidisques et la pompe à engrenage. •Le sous-ensemble variation de vitesse : les poulies de diamètre variable, la chaîne composite en acier fritté et les vérins de commande. •Le sous-ensemble de sortie :le réducteur de vitesse à train simple et le différentiel.
Le système est composé de :
- La boîte de vitesse CVT en éclaté - Un logiciel de simulation du
fonctionnement de la boîte de vitesse
- Un dossier technique et pédagogique sur CD-Rom avec les modèles volumiques sous SolidWorks et MECA 3D
Services nécessaires (non fournis): Logiciel de simulation cinématique dédié
- micro-ordinateur - Logiciel Solid Works - Logiciel MECA 3D - Microsoft excel
Dimensions (l x w x h) et poids 1100 x 560 x 550 mm - 50 kg.
28
MECATRONIQUE
Systèmes mécaniques
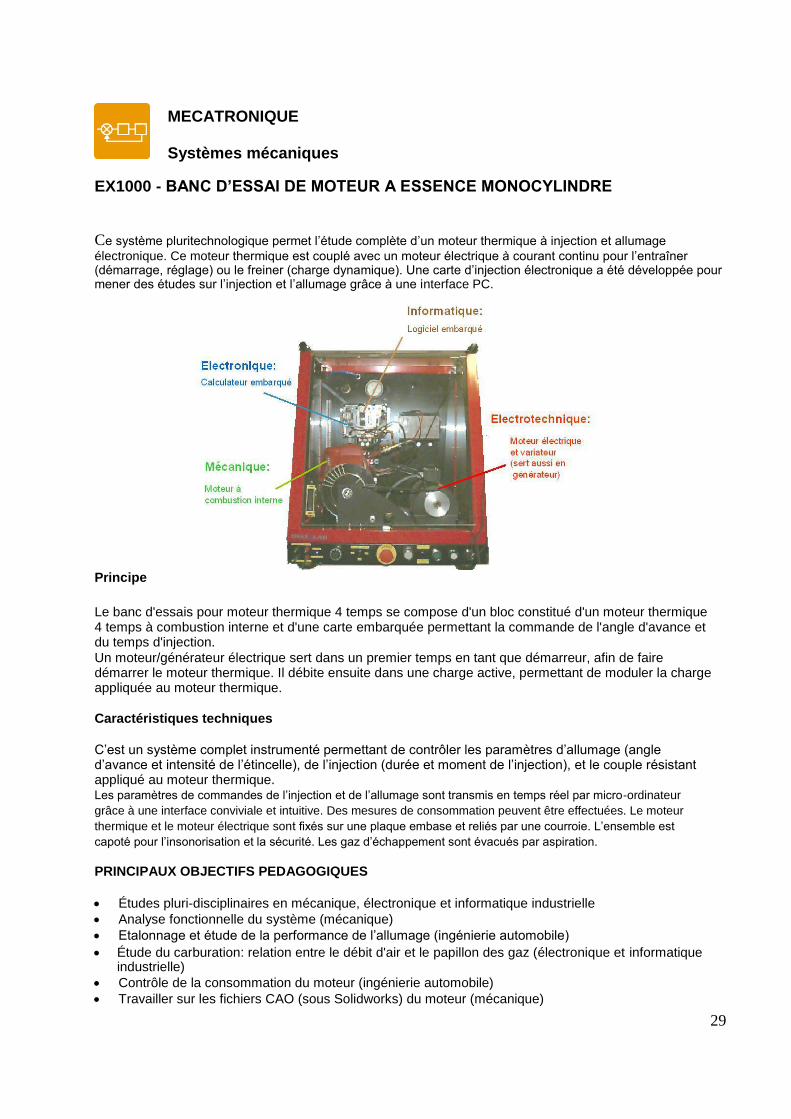
EX1000 - BANC D’ESSAI DE MOTEUR A ESSENCE MONOCYLINDRE
Ce système pluritechnologique permet l’étude complète d’un moteur thermique à injection et allumage électronique. Ce moteur thermique est couplé avec un moteur électrique à courant continu pour l’entraîner (démarrage, réglage) ou le freiner (charge dynamique). Une carte d’injection électronique a été développée pour mener des études sur l’injection et l’allumage grâce à une interface PC.
Principe
Le banc d'essais pour moteur thermique 4 temps se compose d'un bloc constitué d'un moteur thermique 4 temps à combustion interne et d'une carte embarquée permettant la commande de l'angle d'avance et du temps d'injection. Un moteur/générateur électrique sert dans un premier temps en tant que démarreur, afin de faire démarrer le moteur thermique. Il débite ensuite dans une charge active, permettant de moduler la charge appliquée au moteur thermique.
Caractéristiques techniques
C’est un système complet instrumenté permettant de contrôler les paramètres d’allumage (angle d’avance et intensité de l’étincelle), de l’injection (durée et moment de l’injection), et le couple résistant appliqué au moteur thermique. Les paramètres de commandes de l’injection et de l’allumage sont transmis en temps réel par micro-ordinateur
grâce à une interface conviviale et intuitive. Des mesures de consommation peuvent être effectuées. Le moteur
thermique et le moteur électrique sont fixés sur une plaque embase et reliés par une courroie. L’ensemble est
capoté pour l’insonorisation et la sécurité. Les gaz d’échappement sont évacués par aspiration.
PRINCIPAUX OBJECTIFS PEDAGOGIQUES
Études pluri-disciplinaires en mécanique, électronique et informatique industrielle Analyse fonctionnelle du système (mécanique) Etalonnage et étude de la performance de l’allumage (ingénierie automobile) Étude du carburation: relation entre le débit d'air et le papillon des gaz (électronique et informatique
industrielle)
Contrôle de la consommation du moteur (ingénierie automobile) Travailler sur les fichiers CAO (sous Solidworks) du moteur (mécanique)
29
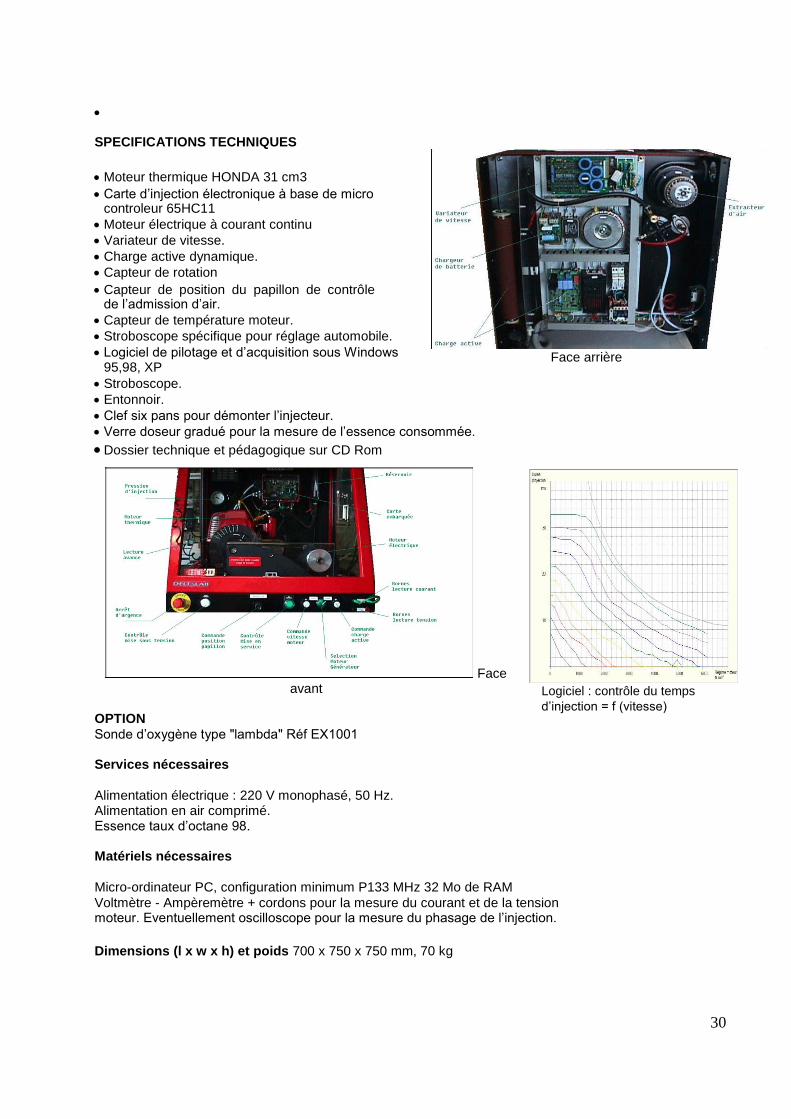
SPECIFICATIONS TECHNIQUES
Moteur thermique HONDA 31 cm3 Carte d’injection électronique à base de micro
controleur 65HC11
Moteur électrique à courant continu Variateur de vitesse. Charge active dynamique. Capteur de rotation Capteur de position du papillon de contrôle
de l’admission d’air. Capteur de température moteur. Stroboscope spécifique pour réglage automobile. Logiciel de pilotage et d’acquisition sous Windows
95,98, XP
Stroboscope. Entonnoir. Clef six pans pour démonter l’injecteur. Verre doseur gradué pour la mesure de l’essence consommée.
Dossier technique et pédagogique sur CD Rom
Face
avant
OPTION Sonde d’oxygène type "lambda" Réf EX1001
Services nécessaires
Alimentation électrique : 220 V monophasé, 50 Hz. Alimentation en air comprimé. Essence taux d’octane 98.
Matériels nécessaires
Face arrière
Logiciel : contrôle du temps
d’injection = f (vitesse)
Micro-ordinateur PC, configuration minimum P133 MHz 32 Mo de RAM Voltmètre - Ampèremètre + cordons pour la mesure du courant et de la tension moteur. Eventuellement oscilloscope pour la mesure du phasage de l’injection.
Dimensions (l x w x h) et poids 700 x 750 x 750 mm, 70 kg
30

MECATRONIQUE
Systèmes mécaniques
EX600 - SYSTEME MOTORISE D’EMPENNAGE
L’empennage horizontal proposé fait partie de la maquette aérodynamique de l’avion Airbus A320, destinée aux essais en soufflerie, réalisée à l’échelle 1/11e.
PRINCIPAUX OBJECTIFS PEDAGOGIQUES Empennage motorisé EX 600
Ce système permet aussi bien d’aborder les
domaines du Génie Mécanique et du Génie Electrique :
Analyse structurelle du mécanisme de commande de l’empennage 1 TD avec corrigé : rôle de l’empennage dans la dynamique du vol de l’avion A320 Analyse fonctionnelle du mécanisme de commande de l’empennage Identification des constituants du mécanisme de commande de l’empennage Représentations schématique et géométrique de ce mécanisme Comportement cinématique de ce mécanisme Comportement statique de ce mécanisme Analyse technique, caractéristiques des assemblages et des guidages Définition, structure d’un système asservi et définition des performances Fonctionnement en boucle ouverte du système avec obtention des graphes des fonctions
cinématiques et dynamiques Fonctionnement en boucle fermée du système asservi (réglage des gains) avec obtention des
graphes des fonctions cinématiques et dynamiques
SPECIFICATIONS TECHNIQUES
Une partie chaîne d’énergie composée : d’un support d’empennage articulé par rapport à l’armature de fixation, Le support a été conçu pour permettre de créer, manuellement, un effort
complémentaire de perturbation sur l’empennage d’un moteur à courant continu d’un couple d’engrenage conique, à denture droite, d’un système vis – écrou à billes,
31
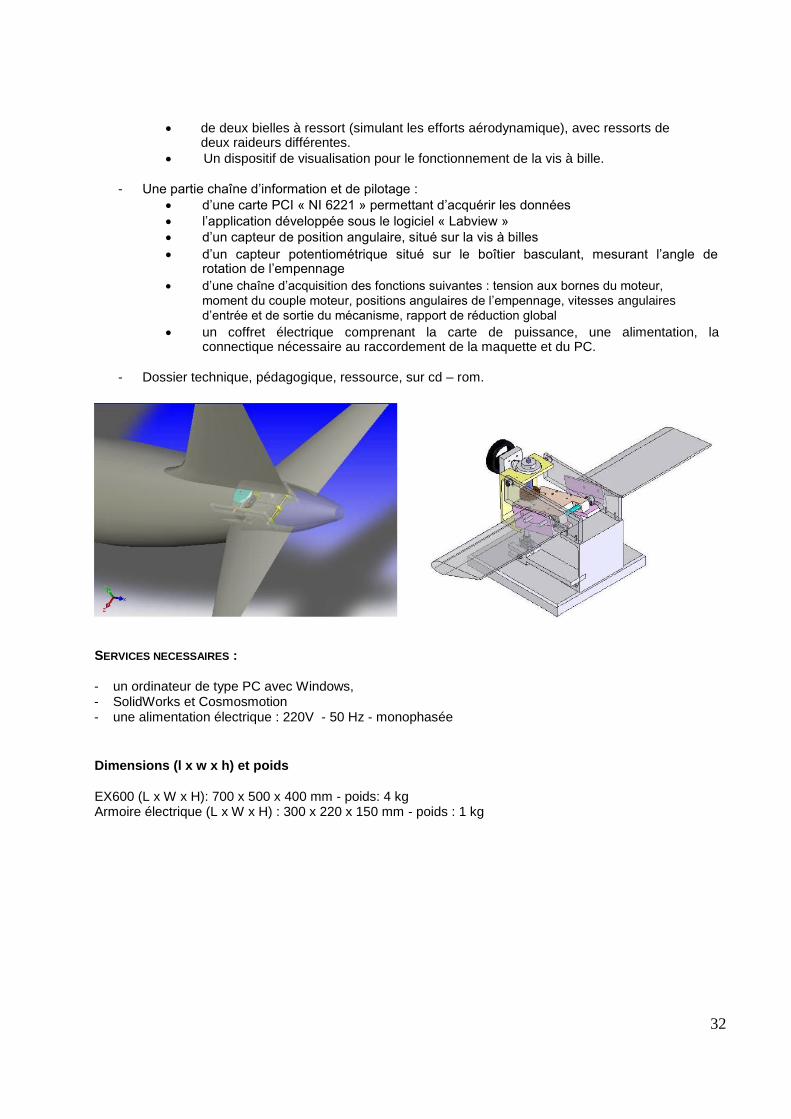
de deux bielles à ressort (simulant les efforts aérodynamique), avec ressorts de deux raideurs différentes.
Un dispositif de visualisation pour le fonctionnement de la vis à bille.
- Une partie chaîne d’information et de pilotage :
d’une carte PCI « NI 6221 » permettant d’acquérir les données l’application développée sous le logiciel « Labview » d’un capteur de position angulaire, situé sur la vis à billes d’un capteur potentiométrique situé sur le boîtier basculant, mesurant l’angle de
rotation de l’empennage d’une chaîne d’acquisition des fonctions suivantes : tension aux bornes du moteur,
moment du couple moteur, positions angulaires de l’empennage, vitesses angulaires
d’entrée et de sortie du mécanisme, rapport de réduction global un coffret électrique comprenant la carte de puissance, une alimentation, la
connectique nécessaire au raccordement de la maquette et du PC.
- Dossier technique, pédagogique, ressource, sur cd – rom.
SERVICES NECESSAIRES :
- un ordinateur de type PC avec Windows, - SolidWorks et Cosmosmotion - une alimentation électrique : 220V - 50 Hz - monophasée
Dimensions (l x w x h) et poids
EX600 (L x W x H): 700 x 500 x 400 mm - poids: 4 kg Armoire électrique (L x W x H) : 300 x 220 x 150 mm - poids : 1 kg
32

AUTOMATISME ET ELECTROTECHNIQUE
Automatisme
SH MILLENIUM - SIMULATEUR HYDRAULIQUE
Structure d’accueil : Longueur : 2120 mm (hors tout avec les accessoires), Profondeur : 700 mm, Hauteur : 1700 mm. Masse : simple face 110kg,
double face 140kg.
Alimentation électrique : 3 x 400 V + N + T
Le simulateur hydraulique SH.Millenium a été conçu pour répondre au besoin croissant d’un enseignement "à la carte" permettant de changer rapidement la configuration du simulateur afin de le rendre accessible à tous les niveaux de formation.
SH.Millenium est évolutif, car il permet d’être complété par d’autres types de groupes hydrauliques,
par des modules de l’hydraulique traditionnelle ou proportionnelle, par des cartes de commande
électroniques boucle
La structure du SH.Millenium d’accueil permet d’être configurée soit en simple face, permettant le raccordement de modules hydrauliques à l’arrière ou à l'avant, soit en double face, permettant un double poste de travail
Les centrales hydrauliques dédiées au simulateur SH.Millenium existent avec des pompes à cylindrée fixe, soit avec le groupe moto-pompe simple pour le simple face, soit avec le groupe moto-pompe double pour le double face.
Nous proposons à titre indicatif, différentes configurations de base qui peuvent évidemment évoluer ou être choisies en fonction des besoins.
33

BANC SIMPLE FACE
- ELEMENTS HYDRAULIQUES SUR 1 SEULE FACE - 1 SEUL TP EN FONCTIONNEMENT - RACCORDEMENTS HYDRAULIQUES —> FACE ARRIERE - BRANCHEMENTS ELECTRIQUES —> FACE AVANT - 2 CONFIGURATIONS POSSIBLES
Etude de l’hydraulique CONVENTIONNELLE Etude de l’hydraulique PROPORTIONNELLE
BANC DOUBLE FACE
- ELEMENTS HYDRAULIQUES SUR 2 FACES - 2 TP EN FONCTIONNEMENT EN MEME TEMPS - NECESSITE UNE CENTRALE DOUBLE - RACCORDEMENTS HYDRAULIQUES ET ELECTRIQUES EN FACE AVANT - 3 CONFIGURATIONS POSSIBLES
Etude de l’hydraulique CONVENTIONNELLE et Etude de l’hydrauliqueCONVENTIONNELLE
Etude de l’hydraulique CONVENTIONNELLE et Etude de l’hydrauliquePROPORTIONNELLE
Etude de l’hydraulique PROPORTIONNELLE et Etude de l’hydrauliquePROPORTIONNELLE
34
HYDRAULIQUE CONVENTIONNELLE CONFIGURATION MIL-BS – HYDRAULIQUE DE BASE À COMMANDE MANUELLE :
Centrale hydraulique simple à cylindrée fixe MIL-CBS montée sur roulettes comprenant:
1 réservoir équipé de niveau visuel,1 filtre retour,1 bouchon de remplissage et de vidange, 1 pompe à engrenage, débit 6l / min, pression 70 bar,
1 moteur électrique triphasé 0,75kW, 1 manomètre,
1 vanne de by-pass, 1 coffret de démarrage moteur avec protection magnéto-thermique, bouton marche, arrêt d’urgence, 1 lot d’accessoires de raccordement et un support de flexibles, 1 fût d’huile hydraulique ISO VG32.
Structure d’accueil montée sur roulettes avec les modules suivants : 1 platine électrique E15M comprenant 3boutons poussoirs, 3 boutons tournants et 4
relais, 1 module M 1 - 4 manomètres,
1 module M 2- limiteur de pression à action directe, 1 module M 3-1- distributeur 4/2 à commande manuelle, 1 module M 4.1 - robinet,
1 module M 6.3- 3 clapets anti-retour, 1 module M 10- distributeur 4/3 à commande manuelle, 1 module M 11- clapet piloté double, 1 module M 12- limiteur de débit double, 1 module M 14- régulateur de débit, 1 module M 15- réducteur de pression, 1 module M 16- valve de séquence,
1 module M 18-1 - accumulateur,
1 module M 23 - moteur hydraulique,
1 module M 24 - vérin hydraulique,
1 module M 47 - débitmètre à piston
LOTS DE COMPOSANTS COMPLEMENTAIRES
LOT DE COMPOSANTS ÉLECTRO-HYDRAULIQUE MIL-EL COMPRENANT : 1 module M3 – distributeur 4/2 monostable, à commande électrique*, 1 module M7 –distributeur 4/3 centre fermé, à commande électrique*, 1 module M8 – distributeur 4/3 centre Y, à commande électrique*, 1 module M9 – distributeur 4/3 centre ouvert, à commande électrique*, 1 module M 19 – manostat*,
LOT DE COMPOSANTS HYDRAULIQUE AVANCÉE MIL-AV COMPRENANT : 1 module M 80 - vérin vertical avec charge suspendue et capot de protection de la charge, 1 module M 82 - éprouvette graduée, 1 module M 17- perte de charge, 1 module M 33 - conjoncteur-disjoncteur, 1 module M 42 - valve d’équilibrage double.
LOT DE COMPOSANTS HYDRAULIQUE MOBILE MIL-MO COMPRENANT : 1 module M 35 -distributeur à commande manuelle 3 éléments, 1 module M 36 - distributeur à commande hydraulique 2éléments, 1 module M 37 - manipulateur hydraulique 4directions, 1 module M 38 - dispositif de direction hydraulique, 1 module M 83 - distributeur proportionnel Danfoss PVG32, 1 module M 84 - manipulateur électrique 2 directions*
ACCESSOIRES HYDRAULIQUES COMPRENANT : 1 lot de flexibles hydrauliques de longueurs différentes équipées de coupleurs propres 1 lot de capillaires pour prises ‘minimess,1 lot de Tés équipés,1 module prise de pression
35
HYDRAULIQUE PROPORTIONNELLE
CONFIGURATION MIL- PRBO – HYDRAULIQUE PROPORTIONNELLE EN BOUCLE OUVERTE :
Centrale hydraulique simple à cylindrée fixe MIL-CBS montée sur roulettes comprenant: (Equipement pour banc simple face) 1 réservoir équipé de niveau visuel,1 filtre retour,1 bouchon de remplissage et de vidange, 1 pompe à engrenage, débit 6l / min, pression 70 bar,
1 moteur électrique triphasé 0,75kW, 1 manomètre,
1 vanne de by-pass, 1 coffret de démarrage moteur avec protection magnéto-thermique, bouton marche, arrêt d’urgence, 1 lot d’accessoires de raccordement et un support de flexibles, 1 fût d’huile hydraulique ISO VG32.Masse : 75 kg.
Structure d’accueil montée sur roulettes avec les modules suivants :
1 module M1 - 4 manomètres 1 module M2P - limiteur de pression piloté 1 module M3 - distributeur 4/2 à commande électrique 1 module M7 - distributeur 4/3 à commande électrique 1 module M23 - moteur hydraulique, 1 module M24 - vérin hydraulique 1 module M28 - régulateur de débit à action proportionnelle 1 module M29 - régulateur de pression à action proportionnelle 1 module M32 - distributeur à action proportionnelle 1 module M34A - débitmètre à turbine analogique avec afficheur digital 1 platine électrique E15M comprenant 3 boutons poussoirs, 3 boutons tournants et 4 relais
LOTS DE COMPOSANTS COMPLEMENTAIRES POUR UN CONFIGURATION
HYDRAULIQUE PROPORTIONNELLE MODULE SPECIFIQUE ASSERVISSEMENT
1 module M14 – régulateur de débit 1 module M50 – sélecteur de circuit 1 module M53 – distributeur 4/3 à action proportionnelle 1 module M54 – régulateur de débit à action proportionnelle 1 module M55 – régulateur de pression à action proportionnelle 1 module M59 – servo moteur avec frein mécanique 1 module M74 – servo-vérin + vérin antagoniste
Les modules spécifiques asservissement nécessitent une platine électrique E30 comprenant : 1 régulateur numérique configurable en boucle ouverte ou en boucle fermée
avec l’algorithme PID, et logiciel de paramétrage E30R
1 potentiomètre E2S, 1 interrupteurs E3S, 1 relais E4S, 1 ampèremètre à une voie E1M.
36
CENTRALES HYDRAULIQUES
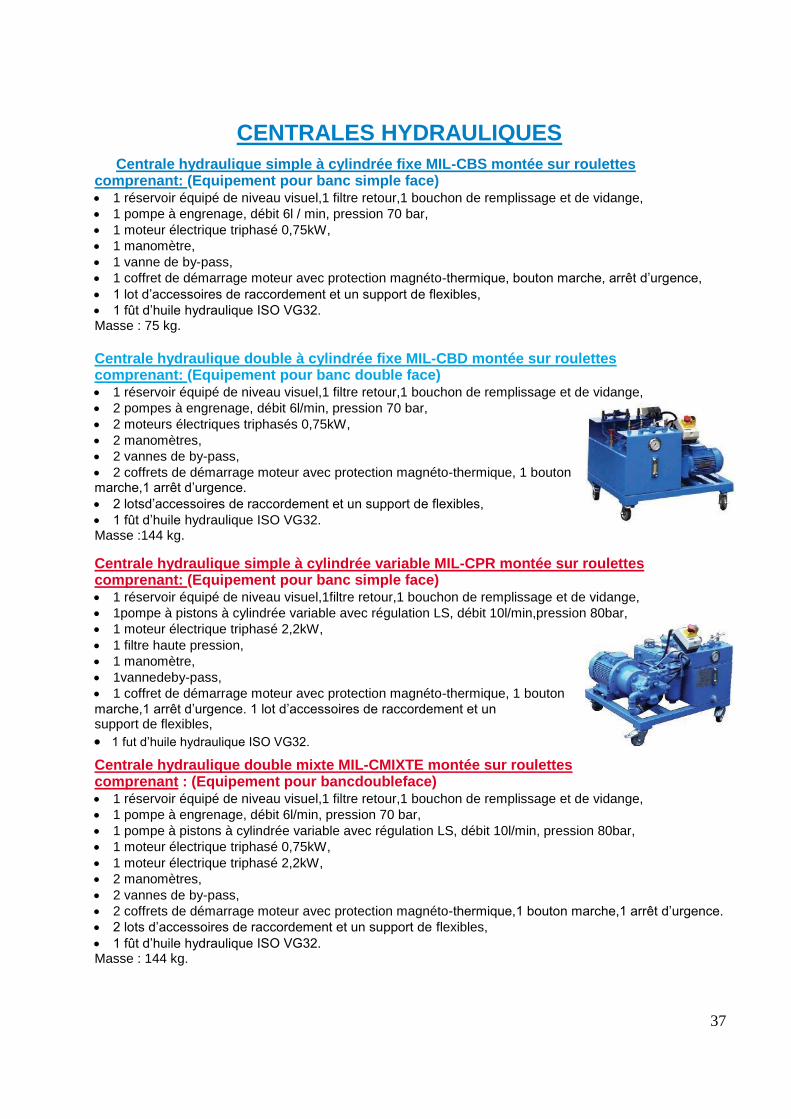
Centrale hydraulique simple à cylindrée fixe MIL-CBS montée sur roulettes comprenant: (Equipement pour banc simple face) 1 réservoir équipé de niveau visuel,1 filtre retour,1 bouchon de remplissage et de vidange, 1 pompe à engrenage, débit 6l / min, pression 70 bar, 1 moteur électrique triphasé 0,75kW, 1 manomètre, 1 vanne de by-pass, 1 coffret de démarrage moteur avec protection magnéto-thermique, bouton marche, arrêt d’urgence, 1 lot d’accessoires de raccordement et un support de flexibles, 1 fût d’huile hydraulique ISO VG32.Masse : 75 kg.
Centrale hydraulique double à cylindrée fixe MIL-CBD montée sur roulettes comprenant: (Equipement pour banc double face) 1 réservoir équipé de niveau visuel,1 filtre retour,1 bouchon de remplissage et de vidange, 2 pompes à engrenage, débit 6l/min, pression 70 bar, 2 moteurs électriques triphasés 0,75kW, 2 manomètres, 2 vannes de by-pass, 2 coffrets de démarrage moteur avec protection magnéto-thermique, 1 boutonmarche,1 arrêt d’urgence. 2 lotsd’accessoires de raccordement et un support de flexibles, 1 fût d’huile hydraulique ISO VG32.Masse :144 kg.
Centrale hydraulique simple à cylindrée variable MIL-CPR montée sur roulettes comprenant: (Equipement pour banc simple face) 1 réservoir équipé de niveau visuel,1filtre retour,1 bouchon de remplissage et de vidange, 1pompe à pistons à cylindrée variable avec régulation LS, débit 10l/min,pression 80bar, 1 moteur électrique triphasé 2,2kW, 1 filtre haute pression, 1 manomètre, 1vannedeby-pass, 1 coffret de démarrage moteur avec protection magnéto-thermique, 1 bouton marche,1 arrêt d’urgence. 1 lot d’accessoires de raccordement et un support de flexibles,
1 fut d’huile hydraulique ISO VG32. Centrale hydraulique double mixte MIL-CMIXTE montée sur roulettes comprenant : (Equipement pour bancdoubleface) 1 réservoir équipé de niveau visuel,1 filtre retour,1 bouchon de remplissage et de vidange, 1 pompe à engrenage, débit 6l/min, pression 70 bar, 1 pompe à pistons à cylindrée variable avec régulation LS, débit 10l/min, pression 80bar, 1 moteur électrique triphasé 0,75kW, 1 moteur électrique triphasé 2,2kW, 2 manomètres, 2 vannes de by-pass, 2 coffrets de démarrage moteur avec protection magnéto-thermique,1 bouton marche,1 arrêt d’urgence. 2 lots d’accessoires de raccordement et un support de flexibles, 1 fût d’huile hydraulique ISO VG32.Masse : 144 kg.
37

MODULES HYDRAULIQUES
N° MODULES SCHEMAS DESIGNATIONS
MANOMETRES 1
4 manomètres, 0 à 100 bars
MANOMETRES
1-2 3 manomètres 0 à 100 bars
2
LIMITEUR DE
PRESSION
2-1
3
3-1
Limiteur de pression à
action directe
LIMITEUR DE
PRESSION
DISTRIBUTEUR 4/2 MONOSTABLE A
COMMANDE ELECTRIQUE
DISTRIBUTEUR 4/2
A COMMANDE MANUELLE
38
N° MODULES SCHEMAS DESIGNATIONS
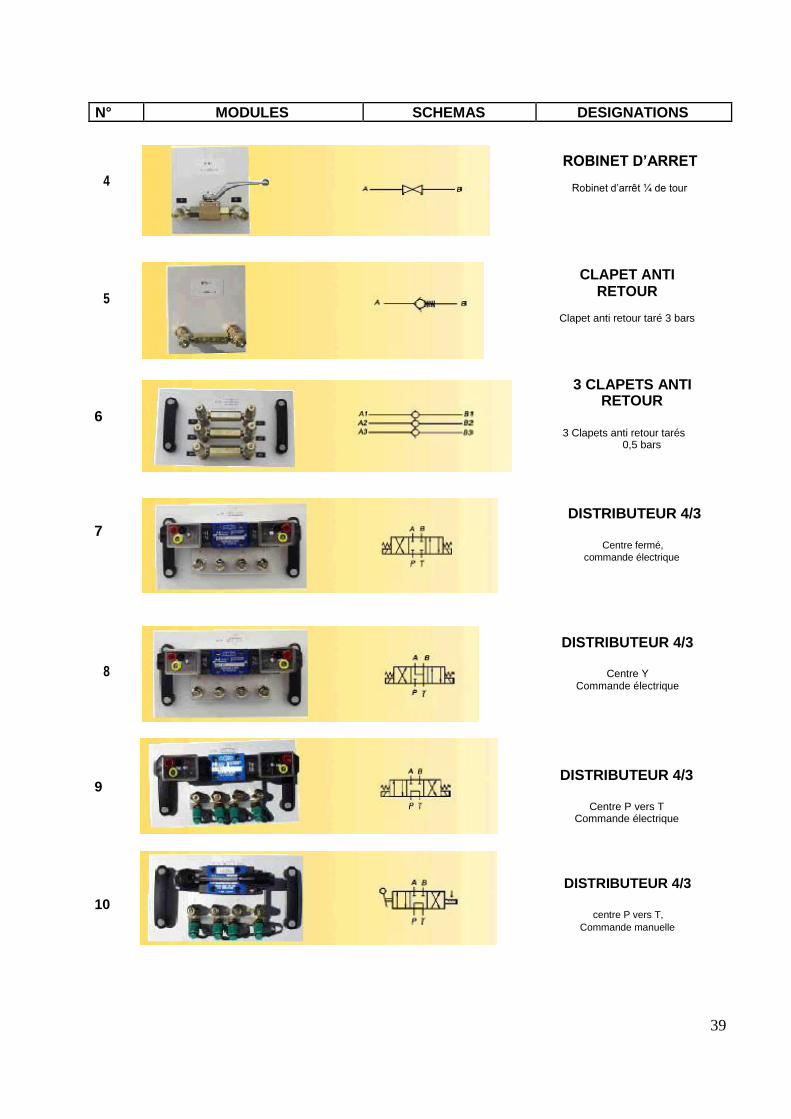
ROBINET D’ARRET 4
Robinet d’arrêt ¼ de tour
CLAPET ANTI
5 RETOUR
Clapet anti retour taré 3 bars
3 CLAPETS ANTI RETOUR
6 3 Clapets anti retour tarés
0,5 bars
DISTRIBUTEUR 4/3 7
Centre fermé,
commande électrique
DISTRIBUTEUR 4/3
8 Centre Y Commande électrique
9
DISTRIBUTEUR 4/3
Centre P vers T
Commande électrique
DISTRIBUTEUR 4/3 10
centre P vers T,
Commande manuelle
39

N° MODULES SCHEMAS DESIGNATIONS
11
11-2
12
13
14
14-2
15
CLAPET PILOTE DOUBLE
CLAPET PILOTE
LIMITEUR DE DEBIT DOUBLE
LIMITEUR DE DEBIT SIMPLE
REGULATEUR DE DEBIT 2 VOIES
COMPENSE
REGULATEUR DE
DEBIT 3 VOIES COMPENSE
REDUCTEUR DE PRESSION
Réducteur de pression à pilotage
interne
40

N° MODULES SCHEMAS DESIGNATIONS
VALVE DE SEQUENCE
16 Valve de séquence à pilotage
interne
PERTE DE CHARGE
17 (tube spirale)
ACCUMULATEUR
18-1 0.8 L à membrane avec bloc de
sécurité
ACCUMULATEUR
18-2 0.8 L à membrane, avec pressostat, limiteur
de pression et valve parachute
MANOSTAT
19 Manostat réglable
25-100 bars
MOTEUR HYDRAULIQUE
23 12,5 cm
3/t
VERIN HYDRAULIQUE
Vérin horizontal 35 x 20 – course 200 mm
24 avec 3 interrupteurs de fin de course à 1
contact NO et 1 contact NF.
41
N° MODULES SCHEMAS DESIGNATIONS
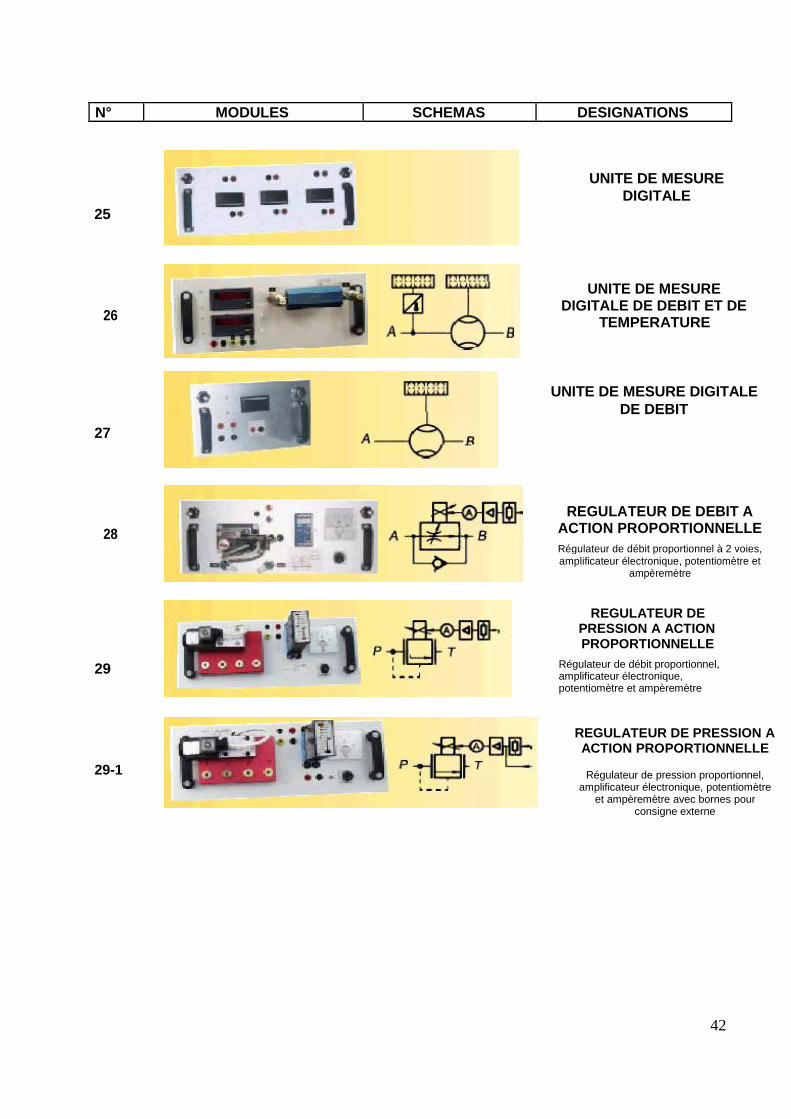
UNITE DE MESURE DIGITALE
25
UNITE DE MESURE
26 DIGITALE DE DEBIT ET DE
TEMPERATURE
UNITE DE MESURE DIGITALE DE DEBIT
27
REGULATEUR DE DEBIT A
28 ACTION PROPORTIONNELLE
Régulateur de débit proportionnel à 2 voies,
amplificateur électronique, potentiomètre et
ampèremètre
29
29-1
REGULATEUR DE PRESSION A ACTION PROPORTIONNELLE
Régulateur de débit proportionnel, amplificateur électronique, potentiomètre et ampèremètre
REGULATEUR DE PRESSION A ACTION PROPORTIONNELLE
Régulateur de pression proportionnel,
amplificateur électronique, potentiomètre et ampèremètre avec bornes pour
consigne externe
42
N° MODULES SCHEMAS DESIGNATIONS
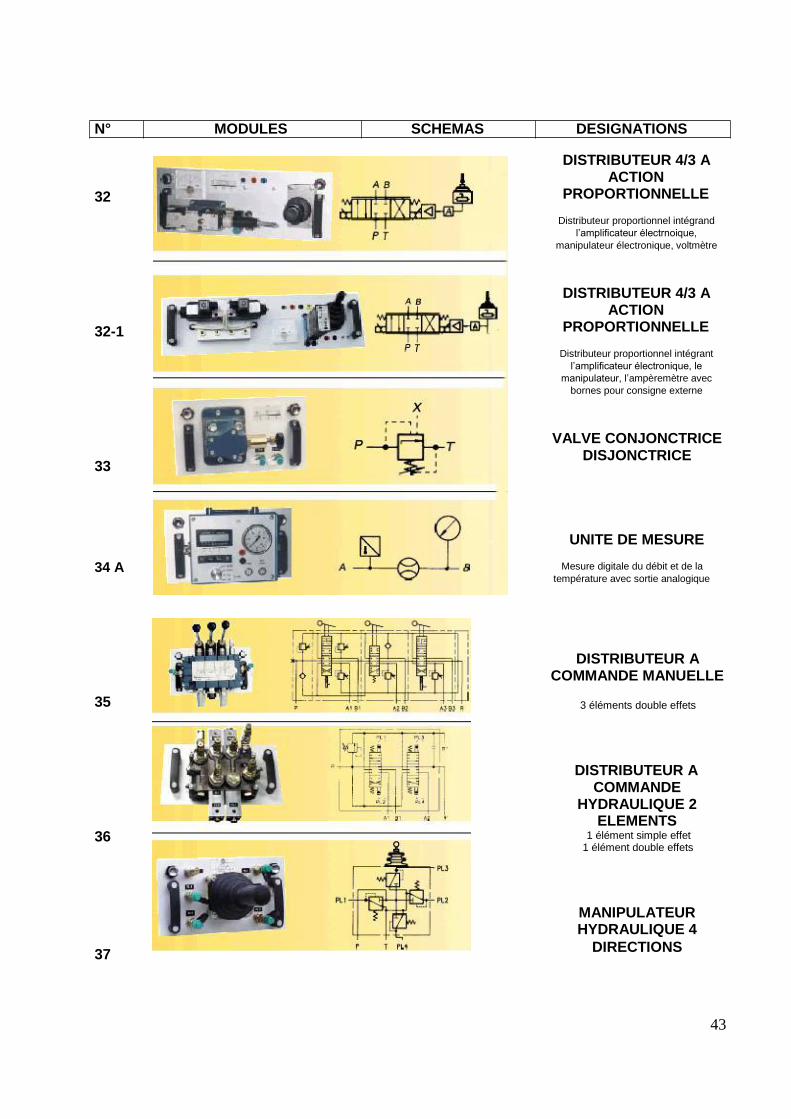
32
32-1
33
34 A
35
36
37
DISTRIBUTEUR 4/3 A ACTION
PROPORTIONNELLE
Distributeur proportionnel intégrand
l’amplificateur électrnoique,
manipulateur électronique, voltmètre
DISTRIBUTEUR 4/3 A ACTION
PROPORTIONNELLE
Distributeur proportionnel intégrant
l’amplificateur électronique, le
manipulateur, l’ampèremètre avec
bornes pour consigne externe
VALVE CONJONCTRICE DISJONCTRICE
UNITE DE MESURE
Mesure digitale du débit et de la
température avec sortie analogique
DISTRIBUTEUR A COMMANDE MANUELLE
3 éléments double effets
DISTRIBUTEUR A
COMMANDE HYDRAULIQUE 2
ELEMENTS 1 élément simple effet
1 élément double effets
MANIPULATEUR
HYDRAULIQUE 4 DIRECTIONS
43
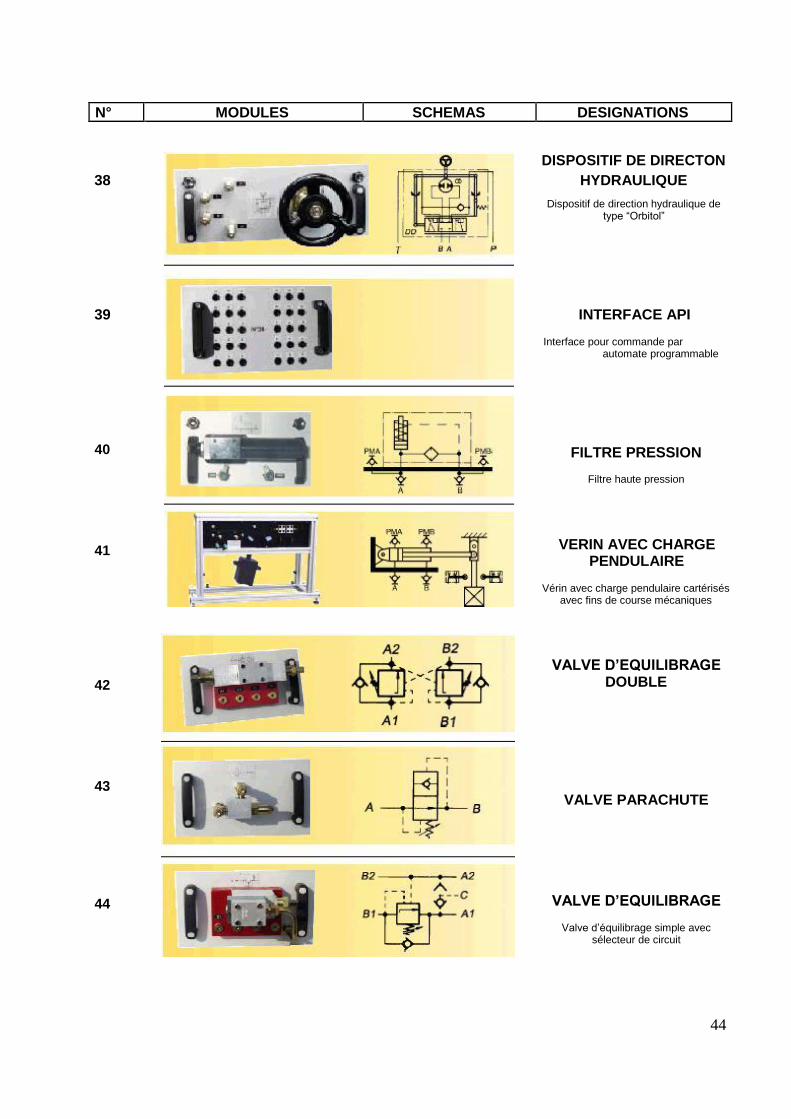
N° MODULES SCHEMAS DESIGNATIONS
DISPOSITIF DE DIRECTON
38 HYDRAULIQUE
Dispositif de direction hydraulique de type “Orbitol”
39 INTERFACE API
40
41
42
43
44
Interface pour commande par
automate programmable
FILTRE PRESSION
Filtre haute pression
VERIN AVEC CHARGE
PENDULAIRE
Vérin avec charge pendulaire cartérisés avec fins de course mécaniques
VALVE D’EQUILIBRAGE
DOUBLE
VALVE PARACHUTE
VALVE D’EQUILIBRAGE
Valve d’équilibrage simple avec sélecteur de circuit
44
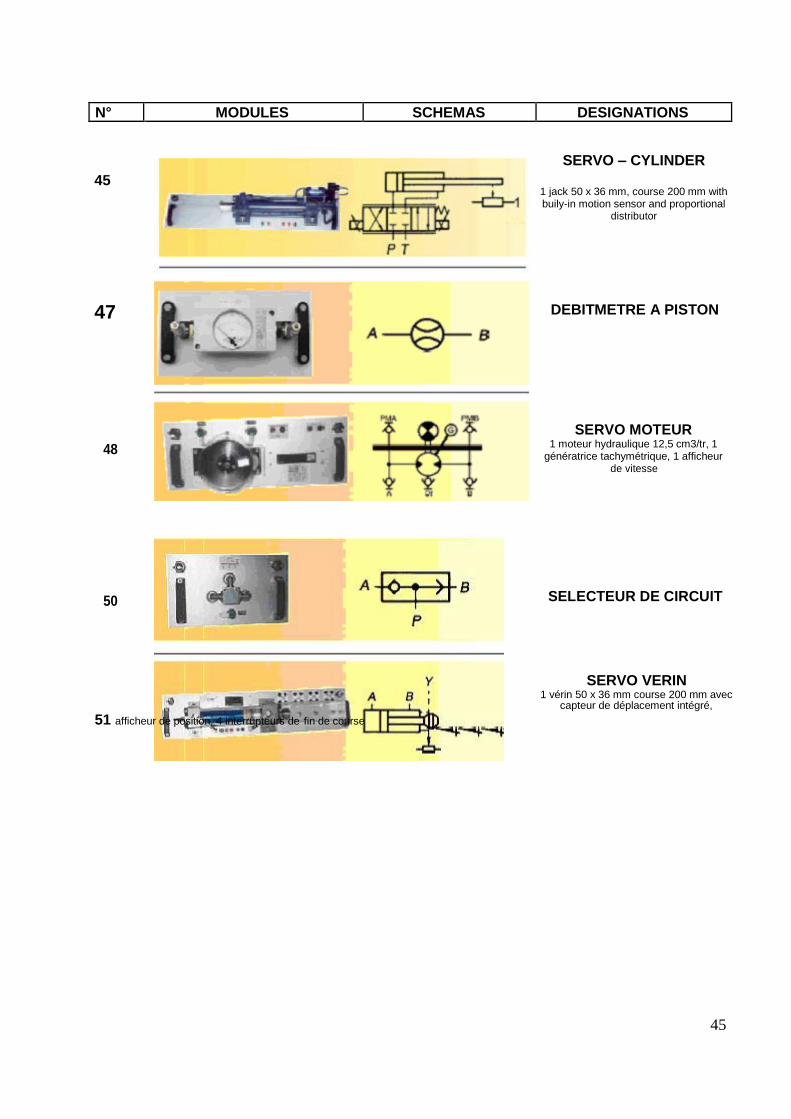
N° MODULES SCHEMAS DESIGNATIONS
SERVO – CYLINDER
45 1 jack 50 x 36 mm, course 200 mm with
buily-in motion sensor and proportional
distributor
47 DEBITMETRE A PISTON
SERVO MOTEUR
48 1 moteur hydraulique 12,5 cm3/tr, 1
génératrice tachymétrique, 1 afficheur
de vitesse
50 SELECTEUR DE CIRCUIT
SERVO VERIN 1 vérin 50 x 36 mm course 200 mm avec
capteur de déplacement intégré, 51 afficheur de position, 4 interrupteurs de fin de course
45
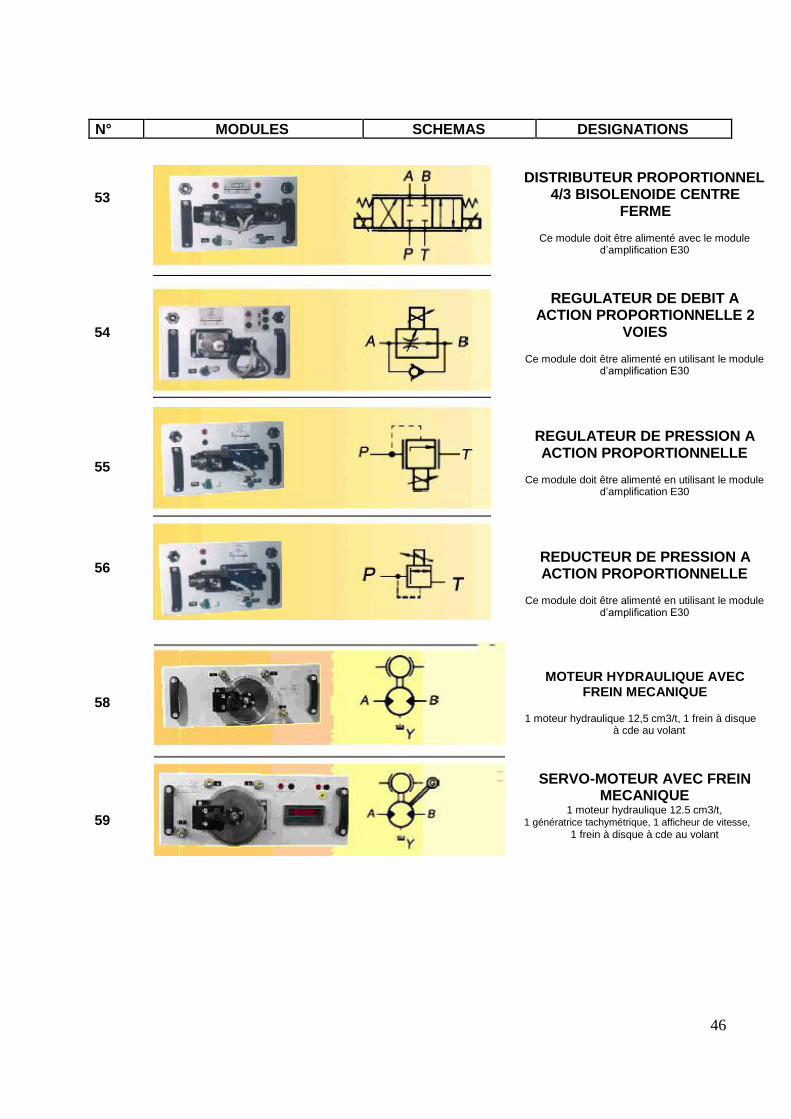
N° MODULES SCHEMAS DESIGNATIONS
53
54
55
56
58
59
DISTRIBUTEUR PROPORTIONNEL
4/3 BISOLENOIDE CENTRE FERME
Ce module doit être alimenté avec le module
d’amplification E30
REGULATEUR DE DEBIT A ACTION PROPORTIONNELLE 2
VOIES Ce module doit être alimenté en utilisant le module
d’amplification E30
REGULATEUR DE PRESSION A ACTION PROPORTIONNELLE
Ce module doit être alimenté en utilisant le module
d’amplification E30
REDUCTEUR DE PRESSION A ACTION PROPORTIONNELLE
Ce module doit être alimenté en utilisant le module
d’amplification E30
MOTEUR HYDRAULIQUE AVEC FREIN MECANIQUE
1 moteur hydraulique 12,5 cm3/t, 1 frein à disque
à cde au volant
SERVO-MOTEUR AVEC FREIN
MECANIQUE 1 moteur hydraulique 12.5 cm3/t,
1 génératrice tachymétrique, 1 afficheur de vitesse, 1 frein à disque à cde au volant
46
N° MODULES SCHEMAS DESIGNATIONS
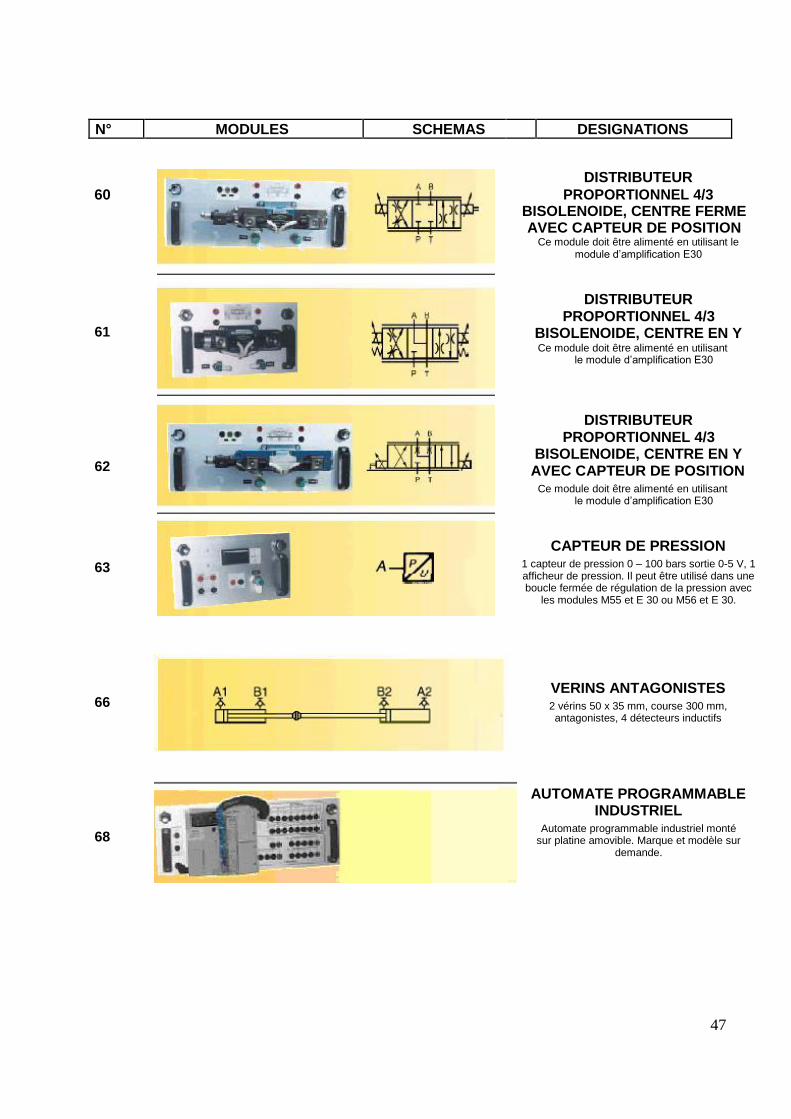
DISTRIBUTEUR
60 PROPORTIONNEL 4/3
BISOLENOIDE, CENTRE FERME
AVEC CAPTEUR DE POSITION Ce module doit être alimenté en utilisant le module d’amplification E30
61
62
63
66
68
DISTRIBUTEUR PROPORTIONNEL 4/3
BISOLENOIDE, CENTRE EN Y Ce module doit être alimenté en utilisant
le module d’amplification E30
DISTRIBUTEUR PROPORTIONNEL 4/3
BISOLENOIDE, CENTRE EN Y AVEC CAPTEUR DE POSITION
Ce module doit être alimenté en utilisant
le module d’amplification E30
CAPTEUR DE PRESSION 1 capteur de pression 0 – 100 bars sortie 0-5 V, 1 afficheur de pression. Il peut être utilisé dans une boucle fermée de régulation de la pression avec
les modules M55 et E 30 ou M56 et E 30.
VERINS ANTAGONISTES
2 vérins 50 x 35 mm, course 300 mm, antagonistes, 4 détecteurs inductifs
AUTOMATE PROGRAMMABLE
INDUSTRIEL
Automate programmable industriel monté sur platine amovible. Marque et modèle sur
demande.
47
N° MODULES SCHEMAS DESIGNATIONS
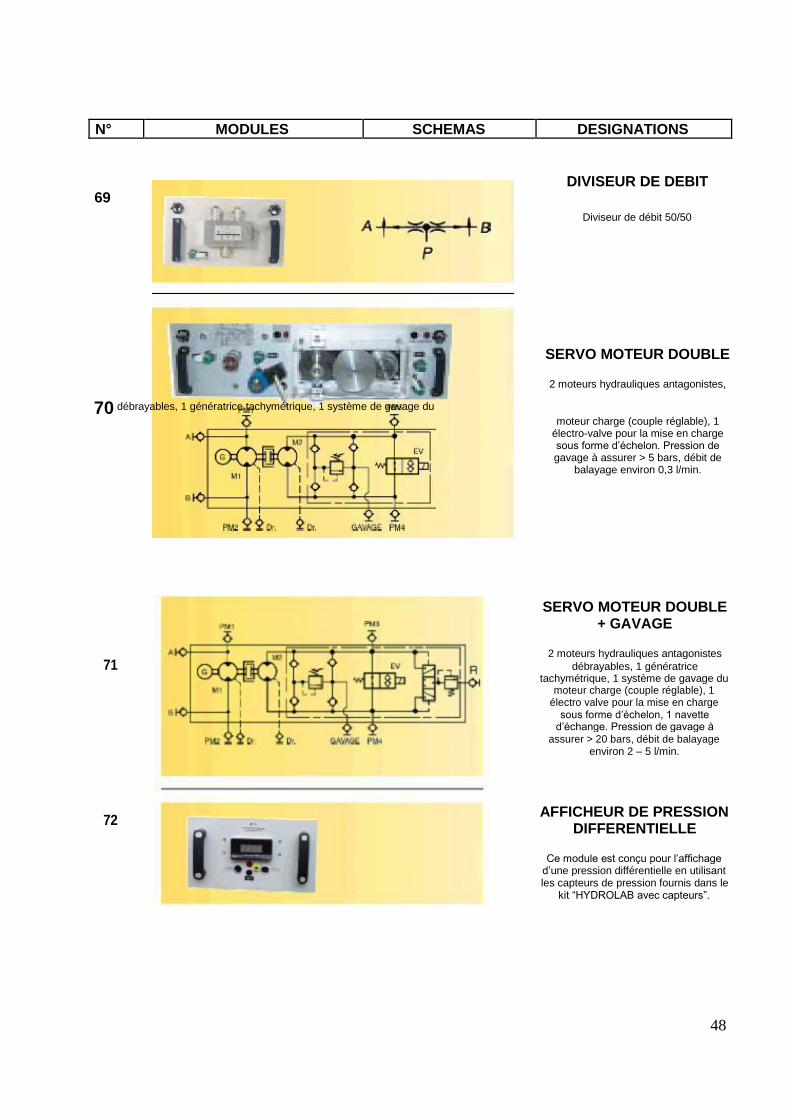
DIVISEUR DE DEBIT
69
Diviseur de débit 50/50
SERVO MOTEUR DOUBLE
2 moteurs hydrauliques antagonistes,
70 débrayables, 1 génératrice tachymétrique, 1 système de gavage du moteur charge (couple réglable), 1
électro-valve pour la mise en charge sous forme d’échelon. Pression de gavage à assurer > 5 bars, débit de
balayage environ 0,3 l/min.
SERVO MOTEUR DOUBLE
+ GAVAGE
2 moteurs hydrauliques antagonistes 71 débrayables, 1 génératrice
tachymétrique, 1 système de gavage du moteur charge (couple réglable), 1 électro valve pour la mise en charge sous forme d’échelon, 1 navette d’échange. Pression de gavage à assurer > 20 bars, débit de balayage environ 2 – 5 l/min.
72 AFFICHEUR DE PRESSION
DIFFERENTIELLE
Ce module est conçu pour l’affichage
d’une pression différentielle en utilisant
les capteurs de pression fournis dans le
kit “HYDROLAB avec capteurs”.
48
N° MODULES SCHEMAS DESIGNATIONS
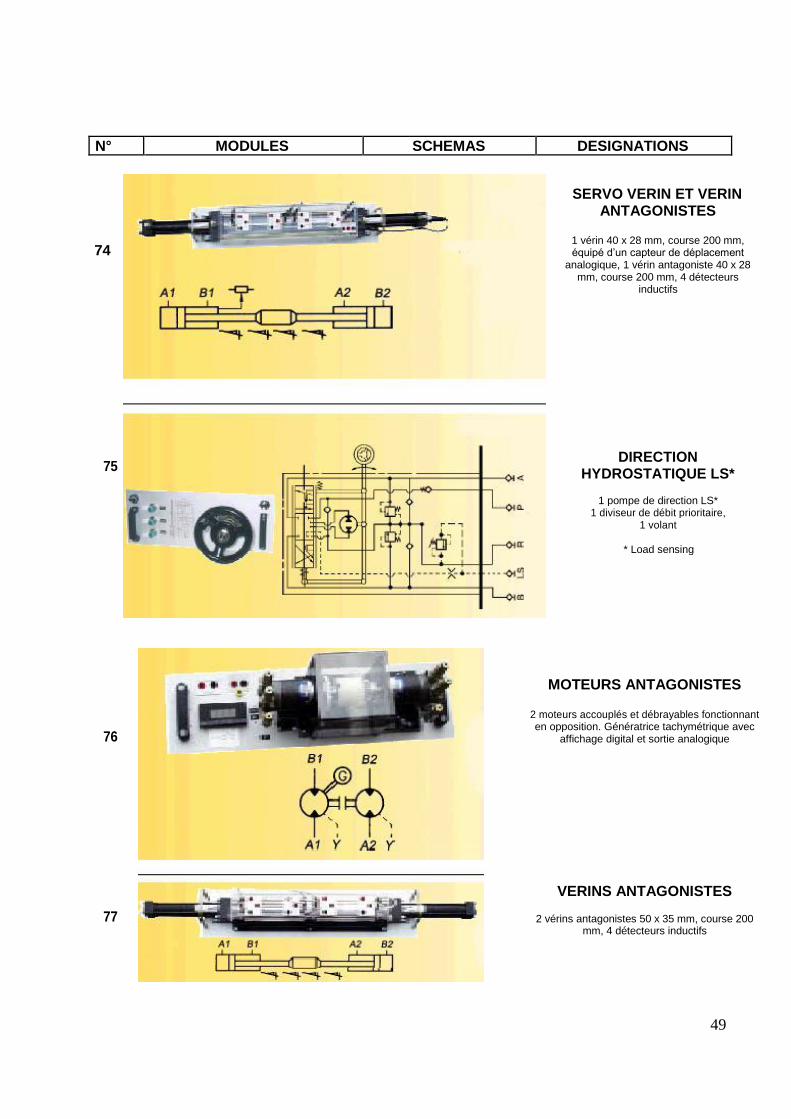
SERVO VERIN ET VERIN
ANTAGONISTES
74 1 vérin 40 x 28 mm, course 200 mm,
équipé d’un capteur de déplacement
analogique, 1 vérin antagoniste 40 x 28
mm, course 200 mm, 4 détecteurs
inductifs
75 DIRECTION
HYDROSTATIQUE LS*
1 pompe de direction LS*
1 diviseur de débit prioritaire,
1 volant
* Load sensing
MOTEURS ANTAGONISTES
2 moteurs accouplés et débrayables fonctionnant
76 en opposition. Génératrice tachymétrique avec
affichage digital et sortie analogique
VERINS ANTAGONISTES
77 2 vérins antagonistes 50 x 35 mm, course 200 mm, 4 détecteurs inductifs
49
N° MODULES SCHEMAS DESIGNATIONS
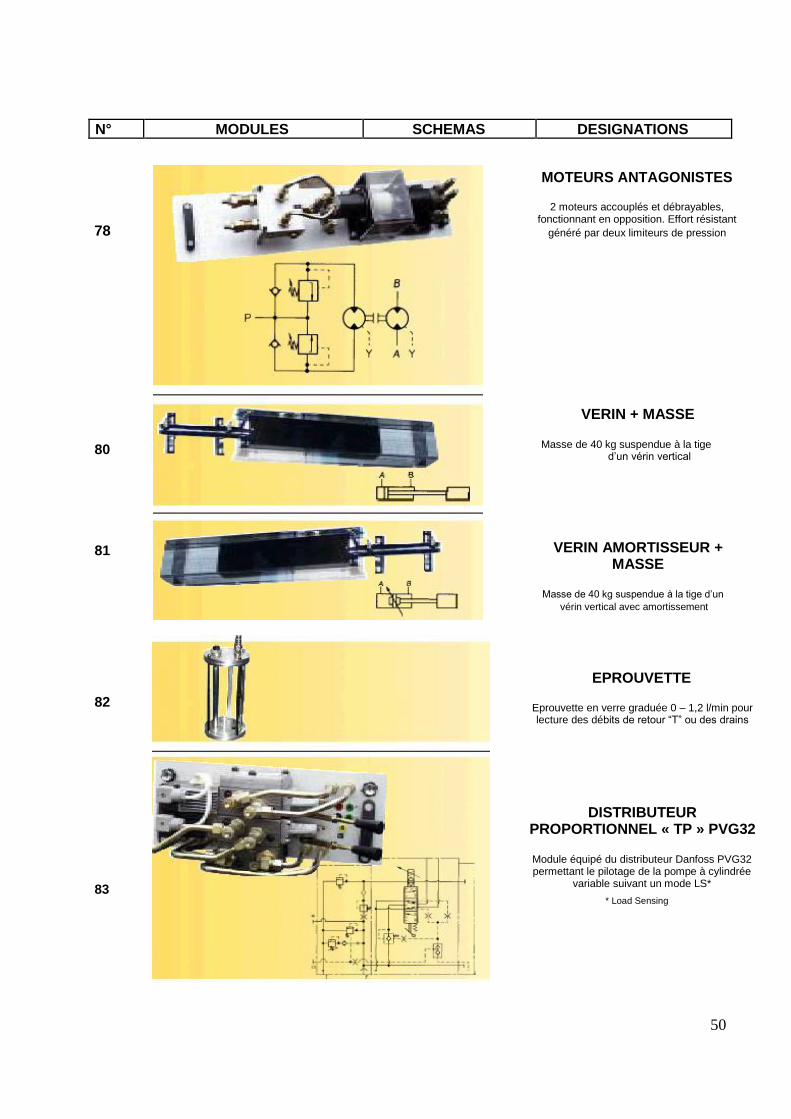
MOTEURS ANTAGONISTES
2 moteurs accouplés et débrayables,
78 fonctionnant en opposition. Effort résistant
généré par deux limiteurs de pression
VERIN + MASSE
80
81
82
Masse de 40 kg suspendue à la tige
d’un vérin vertical
VERIN AMORTISSEUR +
MASSE
Masse de 40 kg suspendue à la tige d’un
vérin vertical avec amortissement
EPROUVETTE
Eprouvette en verre graduée 0 – 1,2 l/min pour lecture des débits de retour “T” ou des drains
DISTRIBUTEUR
PROPORTIONNEL « TP » PVG32
Module équipé du distributeur Danfoss PVG32 permettant le pilotage de la pompe à cylindrée
variable suivant un mode LS* 83
* Load Sensing
50
N° MODULES SCHEMAS DESIGNATIONS
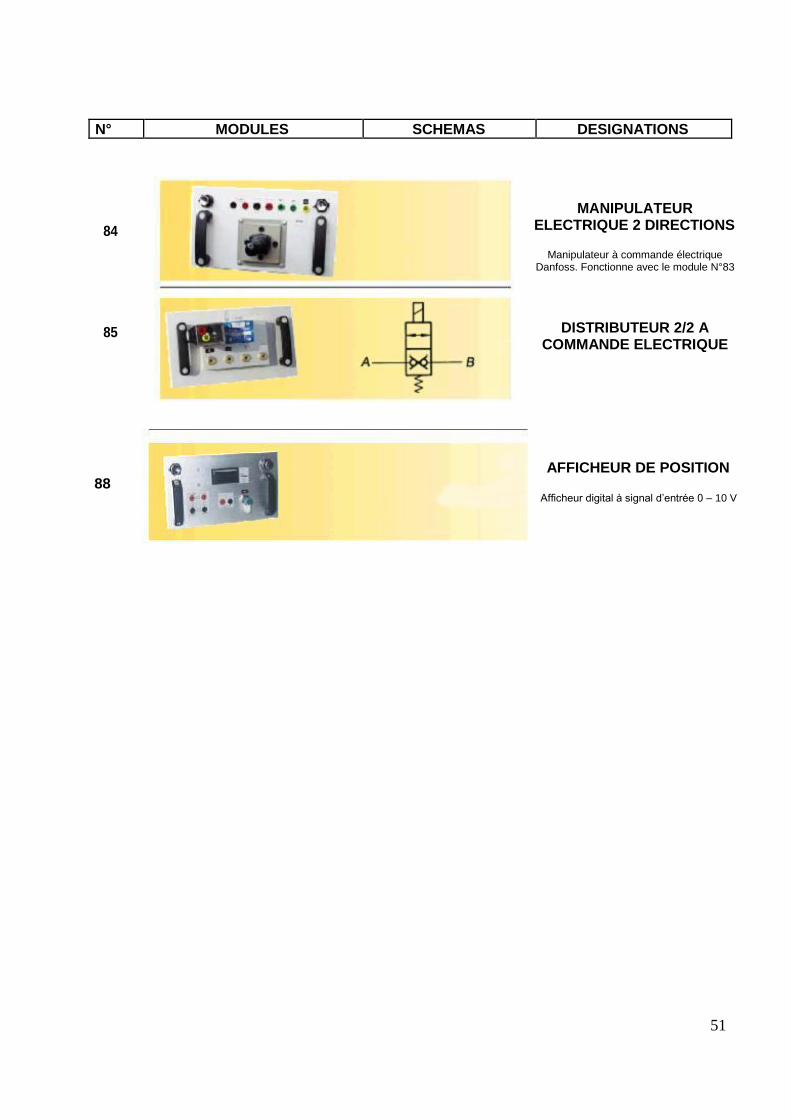
MANIPULATEUR
84 ELECTRIQUE 2 DIRECTIONS
Manipulateur à commande électrique
Danfoss. Fonctionne avec le module N°83
85 DISTRIBUTEUR 2/2 A
COMMANDE ELECTRIQUE
AFFICHEUR DE POSITION
88 Afficheur digital à signal d’entrée 0 – 10 V
51
MECATRONIQUE
Maintenance hydraulique
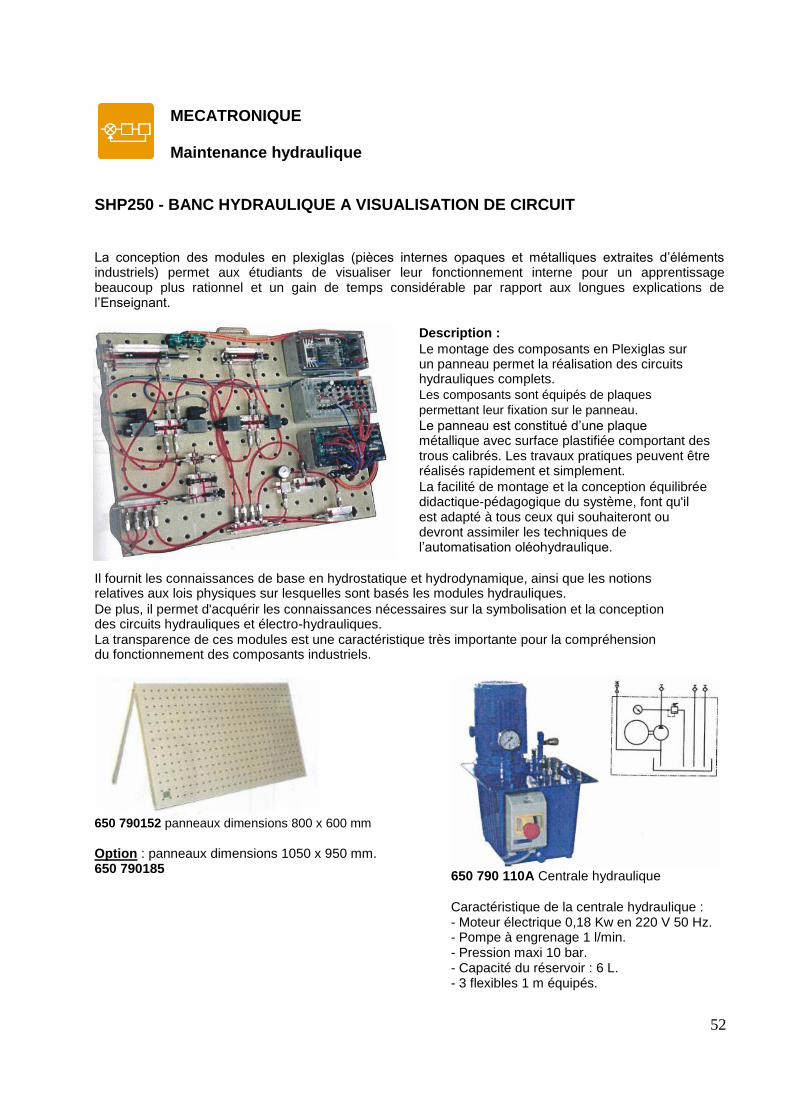
SHP250 - BANC HYDRAULIQUE A VISUALISATION DE CIRCUIT
La conception des modules en plexiglas (pièces internes opaques et métalliques extraites d’éléments industriels) permet aux étudiants de visualiser leur fonctionnement interne pour un apprentissage beaucoup plus rationnel et un gain de temps considérable par rapport aux longues explications de l’Enseignant.
Description : Le montage des composants en Plexiglas sur un panneau permet la réalisation des circuits hydrauliques complets. Les composants sont équipés de plaques
permettant leur fixation sur le panneau.
Le panneau est constitué d’une plaque métallique avec surface plastifiée comportant des trous calibrés. Les travaux pratiques peuvent être réalisés rapidement et simplement. La facilité de montage et la conception équilibrée didactique-pédagogique du système, font qu'il est adapté à tous ceux qui souhaiteront ou devront assimiler les techniques de l’automatisation oléohydraulique.
Il fournit les connaissances de base en hydrostatique et hydrodynamique, ainsi que les notions relatives aux lois physiques sur lesquelles sont basés les modules hydrauliques. De plus, il permet d'acquérir les connaissances nécessaires sur la symbolisation et la conception des circuits hydrauliques et électro-hydrauliques. La transparence de ces modules est une caractéristique très importante pour la compréhension du fonctionnement des composants industriels.
650 790152 panneaux dimensions 800 x 600 mm
Option : panneaux dimensions 1050 x 950 mm. 650 790185
650 790 110A Centrale hydraulique
Caractéristique de la centrale hydraulique : - Moteur électrique 0,18 Kw en 220 V 50 Hz. - Pompe à engrenage 1 l/min. - Pression maxi 10 bar. - Capacité du réservoir : 6 L. - 3 flexibles 1 m équipés.
52

MODULES PLEXIGLAS / DOTATION DE BASE POUR SHP 250
Vérin double effet Vérin simple effet Limiteur de pression direct
Réducteur de pression Distributeur manuel 4/2 monostable Répartiteur 3 voies avec
manomètre
Répartiteur 6 voies Robinet 2 voies Répartiteur 4 voies
Régulateur de débit compensé Valve de séquence Etrangleur unidirectionnel
Clapet anti retour Clapet anti retour piloté Flexibles équipés
53

KIT ELECTRO-HYDRAULIQUE EK 250
Module d'alimentation Module de cde et temporisation Module 3 relais
Electro-distributeur 4/2 Fin de course double Electro-distributeur 4/3 centre fermé monostable
Pressostat Cordons électriques (bleu / rouge). 28 x lg. 0,50 m, 16 x lg. 1,50 m
KIT HYDRAULIQUE A COMMANDE PROPORTIONNELLE PK 250
Module cde proportionnelle Electro-distributeur à cde.proportionnelle 4/3
54
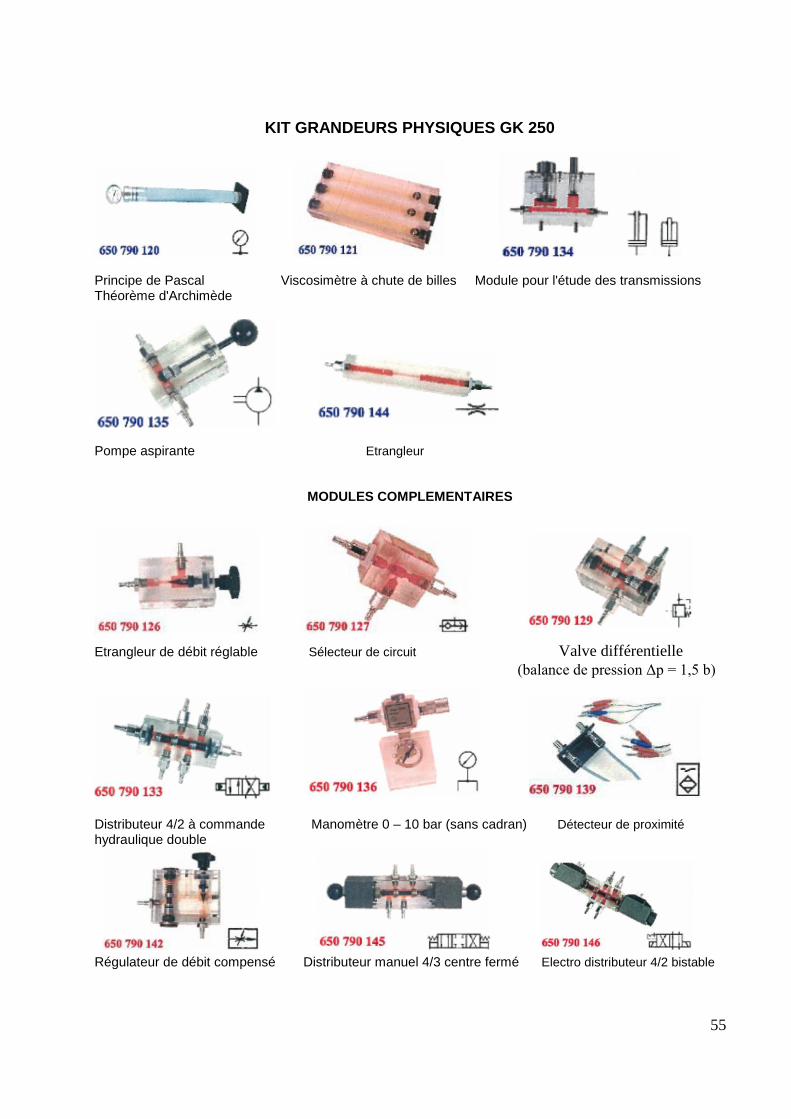
KIT GRANDEURS PHYSIQUES GK 250
Principe de Pascal Viscosimètre à chute de billes Module pour l'étude des transmissions Théorème d'Archimède
Pompe aspirante Etrangleur
MODULES COMPLEMENTAIRES
Etrangleur de débit réglable Sélecteur de circuit
Valve différentielle (balance de pression Δp = 1,5 b)
Distributeur 4/2 à commande Manomètre 0 – 10 bar (sans cadran) Détecteur de proximité hydraulique double Régulateur de débit compensé Distributeur manuel 4/3 centre fermé Electro distributeur 4/2 bistable
55
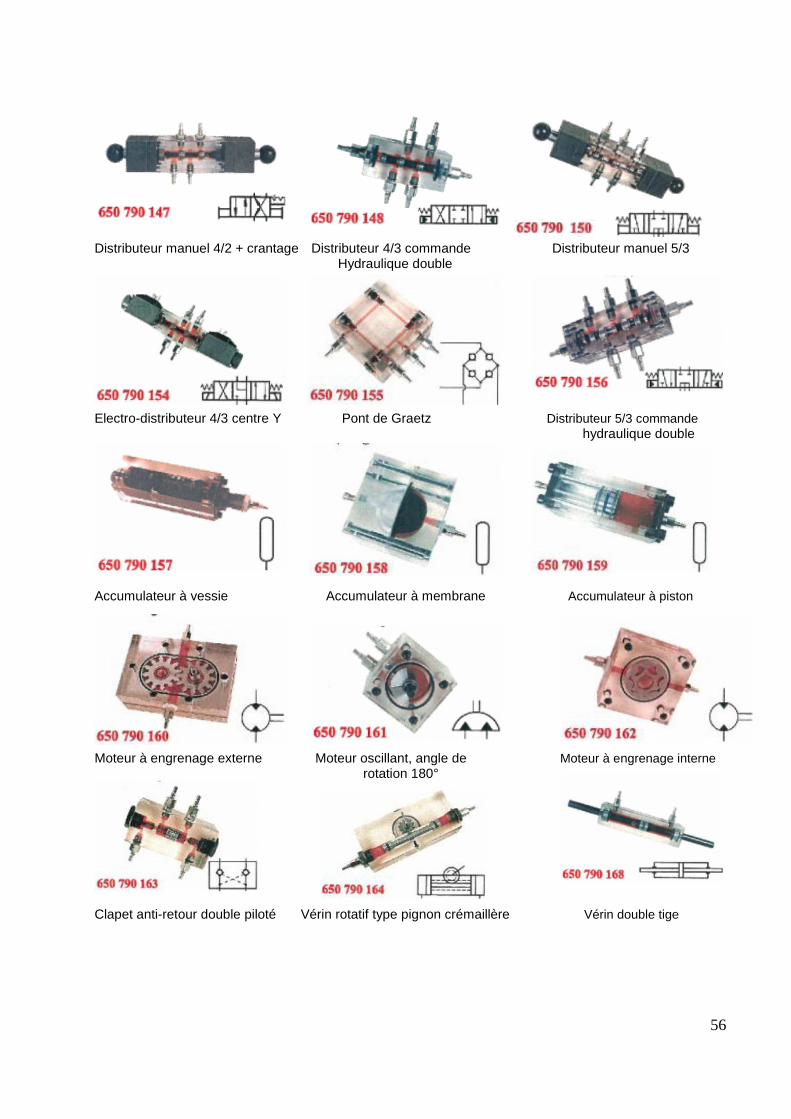
Distributeur manuel 4/2 + crantage Distributeur 4/3 commande Distributeur manuel 5/3
Hydraulique double
Electro-distributeur 4/3 centre Y Pont de Graetz Distributeur 5/3 commande hydraulique double
Accumulateur à vessie Accumulateur à membrane Accumulateur à piston Moteur à engrenage externe Moteur oscillant, angle de Moteur à engrenage interne
rotation 180°
Clapet anti-retour double piloté Vérin rotatif type pignon crémaillère Vérin double tige
56
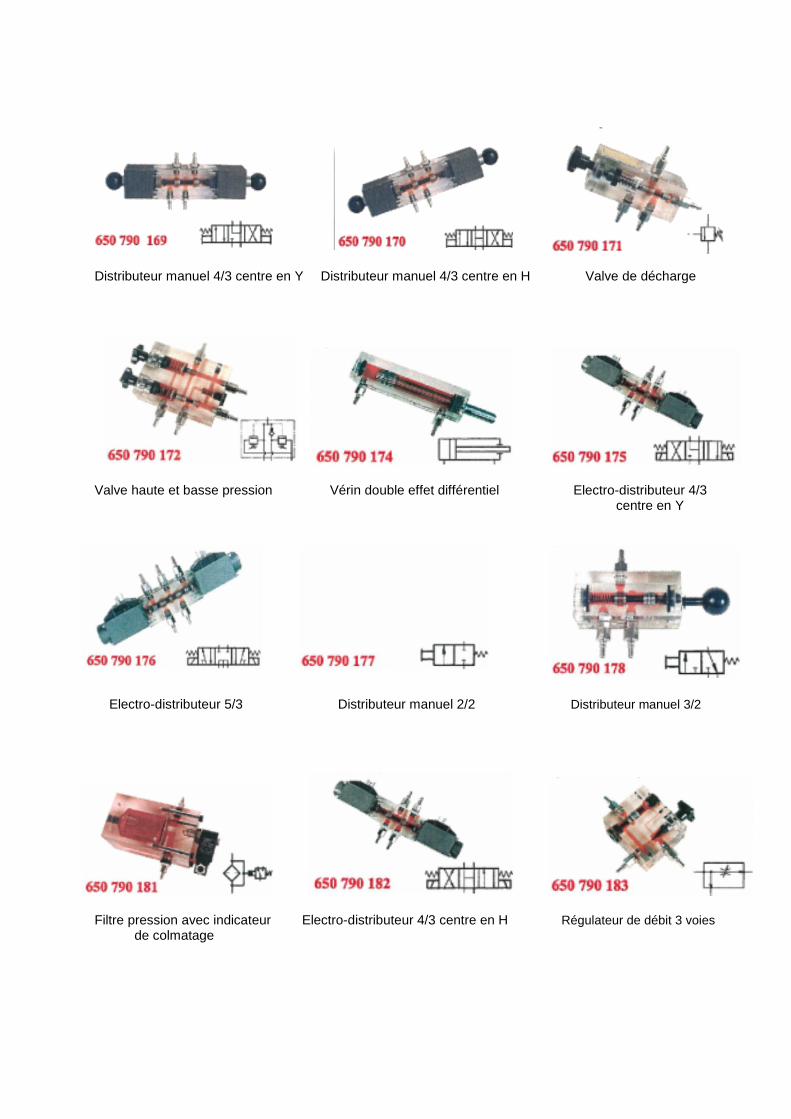
Distributeur manuel 4/3 centre en Y Distributeur manuel 4/3 centre en H Valve de décharge
Valve haute et basse pression Vérin double effet différentiel Electro-distributeur 4/3 centre en Y
Electro-distributeur 5/3 Distributeur manuel 2/2 Distributeur manuel 3/2
Filtre pression avec indicateur Electro-distributeur 4/3 centre en H Régulateur de débit 3 voies de colmatage

57