Caractéristiques du produit - library.e.abb.com · PDF fileGrâce à...
30
Caractéristiques du produit IRB 340 3HAC 10767-1 / Rev. 3 M2000
Transcript of Caractéristiques du produit - library.e.abb.com · PDF fileGrâce à...

Caractéristiques du produitIRB 340
3HAC 10767-1 / Rev. 3M2000

Les informations contenues dans le présent document peuvent être modifiées sans préavis et ne devraient pas être interprétées comme un engagement de la part de ABB Robotics AB. La responsabilité de ABB Robotics AB ne sera pas engagée par suite d’erreurs contenues dans ce document.
En aucun cas, la responsabilité de ABB Robotics AB ne pourra être engagée à la suite de dommages fortuits ou liés à l’utilisation du présent document ou du logiciel ou du matériel décrit dans le présent document.
Le présent document ne doit pas être reproduit ou copié intégralement ou en partie sans la permission écrite de ABB Robotics AB, et le contenu ne devra être ni utilisé à des fins non-autorisées. Les con-trevenants seront poursuivis.
© ABB Robotics AB
Article Numéro: 3HAC 10767-1/Rev.3Publication: M2000
ABB Robotics ABS-721 68 Västerås
Sweden

Spécification du Produit IRB 340
TABLE DES MATIERESPage
1 Description ....................................................................................................................... 3
1.1 Structure.................................................................................................................. 3
1.2 Sécurité/ Normes .................................................................................................... 7
1.3 Installation .............................................................................................................. 8
1.4 Maintenance et dépannage...................................................................................... 18
1.5 Mouvements du robot............................................................................................. 19
2 Spécification des différents modèles et des options ...................................................... 23
3 Accessoires ....................................................................................................................... 25
4 Indice ................................................................................................................................ 27
Spécification du Produit IRB 340 M2000 1

Spécification du Produit IRB 340
2 Spécification du Produit IRB 340 M2000

Description
1 Description
1.1 Structure
La famille IRB 340 est constituée d’un robot industriel à 4 axes de conception modulaire et tout spécialement destiné aux industries exigeant une automatisation de grande flexibilité, par exemple les opérations de prise et de pose et d’assemblage.
L’IRB 340 est très puissant : son accélération peut aller jusqu’à 10 G et sa capacité de manutention jusqu’à 2 kg. Grâce à l’optimisation des ses chaînes de commande et aux fonctions QuickMoveTM brevetées par ABB, il est le robot le plus rapide de sa catégorie assurant jusqu’à 180 opérations de prise par minute (définition selon cycle et charge).
Le robot est disponible en version standard, en version WashDown et en version Stainless Wasdown. La version Standard est utilisée dans les applications sèches. La version Washdown est prévue pour être nettoyée et désinfectée et est donc utilisée dans les applications humides.
L’IRB 340 est approuvé pour les salles blanches de classe 10.
L’IRB 340 est conçu pour utilisation avec le contrôleur S4Cplus et le logiciel de com-mande du robot, BaseWare OS. BaseWare OS supporte toutes les fonctions du système de robot, telles que le contrôle du déplacement, le développement et l’exécution de pro-grammes d’application, etc. Voir la Spécification du Produit S4Cplus.Les normes de sécurité exigent qu’un contrôleur soit connecté au robot.
Il est possible d’ajouter un certain nombre d’options BaseWare pour augmenter les performances et le nombre de fonctions du système de robot. Des produits ProcessWare sont également disponibles ; ils sont conçus pour des applications spécifiques du processus pour améliorer le résultat du processus et simplifier l’installation et la programmation. Voir la Spécification du Produit RobotWare Options.
PickMaster est un logiciel d’application spécifique pour la prise guidée par vision. Il offre les possibilités d’une programmation spécifique à la tâche et d’exécution d’opérations rapides de prise et de pose.Voir la Spécification du Produit PickMaster/PickWare.
Figure 1 La version standard du manipulateur IRB 340.
Axe 1
Axe 2
Axe 4
Axe 3
CDO
Spécification du Produit IRB 340 M2000 3

Description
Les différentes versions du robot
L’IRB 340 est disponible en plusieurs versions avec différentes capacités de manutention et pour différents environnements. Toutes les versions sont approuvées pour des salles blanches de classe 10 conformément à la norme « US Federal Standard 209 ». Les types de robots suivants sont disponibles :
Charge utile Standard WashDown WashDown Stainless
1 kg IRB 340 IRB 340 SA IRB 340 SAS2 kg IRB 340/2 IRB 340 SA/2 IRB 340 SAS/2
Poids: Manipulateur Standard 140 kgWashDown 165 kg
Niveau de bruit ambiant :Niveau de pression acoustique hors < 70 dB (A) Leq (conformément à lade l’espace de travail Directive Machines 89/392 CEE)
4 Spécification du Produit IRB 340 M2000

Description
Figure 2 Vues du manipulateur, version Standard (dimensions en mm).
250
860
330
Axe 3 Axe 1
Axe 2
R=566Axe 3
Axe 2
Axe 1
Axe 4
Spécification du Produit IRB 340 M2000 5

Description
Figure 3 Vues du manipulateur, version WashDown (dimensions en mm).
250
860
290
Axe 3 Axe 1
Axe 2
Axe 4 Version WashDown
R=566Axe 3
Axe 2
Axe 1
6 Spécification du Produit IRB 340 M2000

Description
1.2 Sécurité/ Normes
Le robot est conforme aux normes suivantes :
EN 292-1 Sécurité des machines, terminologie
EN 292-2 Sécurité des machines, caractéristiques techniques
EN 954-1 Sécurité des machines, parties des systèmes de commande relatives à la sécurité
EN 60204 Equipement électrique des machines industrielles
CEI 204-1 Equipement électrique des machines industrielles
ISO 10218, EN 775 Robots manipulateurs industriels, sécurité
ANSI/RIA 15.06/1999 Robots industriels, exigences de sécurité
ISO 9787 Robots manipulateurs industriels, systèmes decoordonnées et mouvements
CEI 529 Degrés de protection fournis par les enceintes.
EN 50081-2 Compatibilité électromagnétique, émission générique
EN 50082-2 Compatibilité électromagnétique, immunité générique
Le robot est conforme aux normes de santé et de sécurité stipulées dans les Directives Machines de la CEE.
Le robot a été conçu dans un soucis de sécurité absolue. Il est pourvu d’un système de sécurité spécifique basé sur un circuit à deux voies surveillé en permanence. En cas de panne d’un composant, l’alimentation électrique des moteurs est immédiatement coupée et les freins sont engagés.
Sécurité, catégorie 3Le dysfonctionnement d’un seul composant, comme les contacts collés d’un relais, est détecté à la prochaine opération MOTEUR A L’ARRET/MOTEUR EN MARCHE. Il n’est alors pas possible de commander MOTEUR EN MARCHE et la partie défec-tueuse est identifiée. Cela est conforme à la catégorie 3 de la norme EN 954-1, Sécurité des machines - partie des systèmes de commande relatives à la sécurité - 1ère partie.
Sélection du mode de fonctionnementLe robot peut fonctionner soit en mode manuel, soit en mode automatique. En mode manuel, le robot peut être commandé à partir du pupitre mobile d’apprentissage seule-ment et donc, à partir d’aucun dispositif externe.
Limitation de la vitesseEn mode manuel, la vitesse est limitée à un maximum de 250 mm/s (600 pouces/min). La limitation de vitesse s’applique non seulement au CDO (centre d’outil) mais aussi à toutes les parties du robot. On peut aussi surveiller la vitesse des équipements montés sur le robot.
Gâchette de validation à trois positionsLa gâchette de validation se trouvant sur le pupitre mobile d’apprentissage doit être uti-lisée pour déplacer le robot en mode manuel. La gâchette de validation consiste en un interrupteur à trois positions : tous les mouvements du robot sont interrompus quand la gâchette de validation est complètement enfoncée ou quand elle est complètement relâ-chée. La sécurité lors de l’utilisation du robot est ainsi accrue.
Mouvement manuel sûrL’opérateur peut déplacer le robot à l’aide d’un joystick et éviter ainsi de regarder le pupitre mobile d’apprentissage pour y trouver la touche adéquate.
Protection contre les excès de vitesseLa vitesse du robot est surveillée par deux ordinateurs indépendants.
Spécification du Produit IRB 340 M2000 7

Description
Arrêt d’urgenceIl y a un bouton-poussoir d’arrêt d’urgence sur le système de commande et un autre sur le pupitre mobile d’apprentissage. On peut connecter des boutons d’arrêt d’urgence supplémentaires au circuit de la chaîne de sécurité du robot.
Arrêt de l’espace de sécuritéLe robot possède plusieurs entrées électriques qui peuvent être utilisées pour connecter des équipements de sécurité externes, comme des portails de sécurité ou des barrières photoélectriques. Ainsi, les fonctions de sécurité du robot peuvent être activées aussi bien par des équipements périphériques que par le robot lui-même.
Arrêt temporisé de l’espace de sécuritéCette fonction permet d’obtenir un arrêt en douceur. Le robot s’arrête comme pour un arrêt de programme normal, sans déviation par rapport à la trajectoire programmée. Après environ 1 seconde, l’alimentation électrique des moteurs est coupée.
Limitation de l’espace de travailLe mouvement du manipulateur peut être limité en utilisant des limites logicielles défi-nies par des intervalles de coordonnées x, y, z et θ.
Maintien en cours de déplacementCette fonction signifie que vous devez appuyer sur la touche de démarrage pour dépla-cer le robot. Quand on relâche cette touche, le robot s’arrête. Cette fonction rend plus sûr le test de programmes.
Lampe de sécurité (option)Le robot peut être équipé d’une lampe de sécurité disponible en option. Celle-ci s’active lorsque les moteurs sont en mode MOTEURS EN MARCHE.
Déclaration WashDownTous les composants ont été constatés conformes aux dispositions du USDA/FDA, du Code of Federal Regulations (CFR) Titre 21, en ce qui concerne le choix de matériaux, le comportement des matériaux et les opérations de sanitation. (Les chapitres pertinents du CFR sont les parties 100-199). L’usage prévu est un contact fortuit avec les produits alimentaires. Tout préhenseur à utiliser devra faire l’objet d’un examen séparé).
1.3 Installation
En fonction de la version de robot, un terminal de 1 à 2 kg max (y compris la charge utile) peut être monté sur la bride de montage du robot. Voir Diagrammes des charges à la page 11. D’autres équipements, comme un tuyau, peuvent être montés sur les bras supérieur et inférieur, 300 g/m max. Voir Montage d’équipements supplémentaires sur les bras du manipulateur à la page 17.
Exigences de fonctionnement
Normes de protection CEI529
Manipulateur IRB 340, IRB 304/2 IP55Manipulateur IRB 340 SA, IRB SA/2 IP67Manipulateur IRB 340 SAS, IRB SAS/2 IP67
Atmosphère explosiveNe pas installer ou faire fonctionner le robot dans une atmosphère explosive.
8 Spécification du Produit IRB 340 M2000

Description
Température ambianteManipulateur pendant le fonctionnement +5oC (41oF) - +52oC (125oF)Robot complet lors du transport et du stockage -25oC (13oF) - +55oC (131oF)
Remarque : Si le robot fonctionne sous des températures basses ou des températures supérieures à +35oC, il est recommandé d’évacuer le flux d’air généré par le ventilateur interne. Dans un environnement difficile et en cas de démarrages et d’arrêts fréquents, de la condensation peut se former à l’intérieur de la base et de l’air externe est nécessaire pour que l’intérieur de la base reste sec.
Pour la version standard, le tuyau courbée (a) doit être remplacé par des tuyaux externes (b). Pour la version WashDown, la plaque pour la circulation de l’air interne sera remplacée par la plaque pour la circulation de l’air externe, option 061.
Humidité relativeRobot complet lors du transport et du stockage 95 % max. à temp. constanteRobot complet lors du fonctionnement 95 % max. à temp. constante
Montage du manipulateur
La force maximale aux points de fixation est de 500 N selon la direction z du système de coordonnées de la base.
Le châssis du robot n’est pas compris dans la livraison.Rigidité nécessaire pour le châssis : la fréquence naturelle la plus basse du châssis avec le robot est supérieure à 17 Hz.
Figure 4 Configuration des trous de montage (dimensions en mm).
ab b Entrée d’airSortie d’air
L’espace de travail estreprésenté Figure 14
23°23°23°23°23°23°23°23°
14
3939
1414
3939
1414
3939
1414
3939
14
Axe 3
Axe 1
Axe 2
A A
A
AA
A
R 370
120 o(3x)
M16
A - A
4012
25 H
8 (
)
Plan de fixation
+0.0
3330o
Y
X
0
Zone pourl’outil d’étalonnage
Zone disponiblepour la fixationdu manipulateur
Spécification du Produit IRB 340 M2000 9

Description
Il suffit de deux goujons de guidage pour fixer le robot. Les trous correspondants dans le châssis peuvent être l’un rond, l’autre ovale, comme représenté sur la Figure 5.
Figure 5 Exemple de fixation du manipulateur(dimensions en mm).
2xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,52xR12,5
4
Ø 25 H8
4
Ø 25 H8
44
Ø 25 H8Ø 25 H8
4444
Ø 25 H8Ø 25 H8Ø 25 H8Ø 25 H8
44444444
Ø 25 H8Ø 25 H8Ø 25 H8Ø 25 H8Ø 25 H8Ø 25 H8Ø 25 H8Ø 25 H8
10 Spécification du Produit IRB 340 M2000

Description
Diagrammes des charges
Remarque : le poids admissible pour les charges inclut les préhenseurs, etc...
Figure 6 Poids maximal autorisé pour une charge (100 g) montée sur la bride de montage en différentes positions (centre de gravité).
Z = Voir le diagramme ci-dessus et le système de coordonnée dans la Spécification du Produit S4Cplus.L = Distance dans le plan X-Y de l’axe Z au centre de gravité de la charge.
Les charges dont le centre de gravité se trouve en dehors de la courbe de performance à 100 % peuvent être utilisées avec une accélération réduite, voir les courbes de performance à 75%. La performance doit être réduitemanuellement en utilisant l’instruction RAPID « AccSet » dans le programme du robot.
IRB 340, 340 SA et 340 SASCharge 100 g
10
20
30
40
60
50
70
80
90
100
110
120
130
140
150
160
170
0
180
190
200
210
220
230
10 40 6050 70
0
75%
100%
Z (mm)
L (mm)
20 30
Remarque :loaddata et tooldataavec moment d’inertie doivent être utilisées.
Remarque :l’accélération doit être réduite de « AccSet »dans chaque programme
loaddata Poids sur le préhenseur (kg). Le centre de gravité du préhenseur (mm). Le moment d’inertie du préhenseur (kgm2).tooldata Poids du produit (kg). Le centre de gravité du produit (mm). Le moment d’inertie du produit (kgm2).
L’absence de valeur ou une valeur erronée peuvent endommager le robot. Pour davantage d’informations, consulter le Manuel de Référence RAPID.
Pour des performances d’accélération max, Jo < 8,3 x 10 -4 kgm2. Jo= moment d’inertie propre pour le poids total manipulé.
de robot
Spécification du Produit IRB 340 M2000 11

Description
Remarque : le poids admissible pour les charges inclut les préhenseurs, etc...
Figure 7 Poids maximal autorisé pour une charge (300 g) montée sur la bride de montage en différentes positions (centre de gravité).
Remarque :loaddata et tooldataavec moment d’inertie doivent être utilisées.
10
20
30
40
60
50
70
80
90
100
110
120
130
140
150
160
170
0
180
190
200
0
75%
100%
L (mm)
Z (mm)
IRB 340, 340 SA et 340 SASCharge 300 g
10 20 30 40 50
Remarque :l’accélération doit être réduite de « AccSet »dans chaque programmede robot
Z = Voir le diagramme ci-dessus et le système de coordonnée dans la Spécification du Produit S4Cplus.L = Distance dans le plan X-Y de l’axe Z au centre de gravité de la charge.
Les charges dont le centre de gravité se trouve en dehors de la courbe de performance à 100 % peuvent être utilisées avec une accélération réduite, voir les courbes de performance à 75%. La performance doit être réduitemanuellement en utilisant l’instruction RAPID « AccSet » dans le programme du robot.
loaddata Poids sur le préhenseur (kg). Le centre de gravité du préhenseur (mm). Le moment d’inertie du préhenseur (kgm2).tooldata Poids du produit (kg). Le centre de gravité du produit (mm). Le moment d’inertie du produit (kgm2).
L’absence de valeur ou une valeur erronée peuvent endommager le robot. Pour davantage d’informations, consulter le Manuel de Référence RAPID.
Pour des performances d’accélération max, Jo < 8,3 x 10 -4 kgm2. Jo= moment d’inertie propre pour le poids total manipulé.
12 Spécification du Produit IRB 340 M2000

Description
Remarque : le poids admissible pour les charges inclut les préhenseurs, etc...
Figure 8 Poids maximal autorisé pour une charge (500 g) montée sur la bride de montage en différentes positions (centre de gravité).
Remarque :loaddata et tooldataavec moment d’inertie doivent être utilisées.
100%
75%
Z (mm)
L (mm)
IRB 340, 340 SA et 340 SASCharge 500 g
10
20
30
40
60
50
70
80
90
100
110
120
130
140
150
160
170
180
10 20 30 40 50
0
0
loaddata Poids sur le préhenseur (kg). Le centre de gravité du préhenseur (mm). Le moment d’inertie du préhenseur (kgm2).tooldata Poids du produit (kg). Le centre de gravité du produit (mm). Le moment d’inertie du produit (kgm2).
L’absence de valeur ou une valeur erronée peuvent endommager le robot. Pour davantage d’informations, consulter le Manuel de Référence RAPID.
Pour des performances d’accélération max, Jo < 8,3 x 10 -4 kgm2. Jo= moment d’inertie propre pour le poids total manipulé.
Z = Voir le diagramme ci-dessus et le système de coordonnée dans la Spécification du Produit S4Cplus.L = Distance dans le plan X-Y de l’axe Z au centre de gravité de la charge.
Les charges dont le centre de gravité se trouve en dehors de la courbe de performance à 100 % peuvent être utilisées avec une accélération réduite, voir les courbes de performance à 75%. La performance doit être réduitemanuellement en utilisant l’instruction RAPID « AccSet » dans le programme du robot.
Remarque :l’accélération doit être réduite de « AccSet »dans chaque programmede robot
Spécification du Produit IRB 340 M2000 13

Description
Remarque : le poids admissible pour les charges inclut les préhenseurs, etc...
Figure 9 Poids maximal autorisé pour une charge (750 g) montée sur la bride de montage en différentes positions (centre de gravité).
Remarque :loaddata et tooldataavec moment d’inertie doivent être utilisées.
Z (mm)
L (mm)
IRB 340, IRB 340 SA et 340 SASCharge 750 g
75%
100%
10
20
30
40
60
50
70
80
90
100
110
120
130
140
150
10 20 30
0
0
Remarque :l’accélération doit être réduite de « AccSet »dans chaque programmede robot
Z = Voir le diagramme ci-dessus et le système de coordonnée dans la Spécification du Produit S4Cplus.L = Distance dans le plan X-Y de l’axe Z au centre de gravité de la charge.
Les charges dont le centre de gravité se trouve en dehors de la courbe de performance à 100 % peuvent être utilisées avec une accélération réduite, voir les courbes de performance à 75%. La performance doit être réduitemanuellement en utilisant l’instruction RAPID « AccSet » dans le programme du robot.
loaddata Poids sur le préhenseur (kg). Le centre de gravité du préhenseur (mm). Le moment d’inertie du préhenseur (kgm2).tooldata Poids du produit (kg). Le centre de gravité du produit (mm). Le moment d’inertie du produit (kgm2).
L’absence de valeur ou une valeur erronée peuvent endommager le robot. Pour davantage d’informations, consulter le Manuel de Référence RAPID.
Pour des performances d’accélération max, Jo < 8,3 x 10 -4 kgm2. Jo= moment d’inertie propre pour le poids total manipulé.
14 Spécification du Produit IRB 340 M2000

Description
Remarque : le poids admissible pour les charges inclut les préhenseurs, etc...
Figure 10 Poids maximal autorisé pour une charge (1000 g) montée sur la bride de montage en différentes positions (centre de gravité).
Remarque :loaddata et tooldataavec moment d’inertie doivent être utilisées.
IRB 340, 340 SA et 340 SAS
Z (mm)
L (mm)
100%
75%
Charge 1000 g
10 20 30
10
20
30
40
60
50
70
80
90
100
110
120
0
0
Remarque :l’accélération doit être réduite de « AccSet »dans chaque programmede robot
Z = Voir le diagramme ci-dessus et le système de coordonnée dans la Spécification du Produit S4Cplus.L = Distance dans le plan X-Y de l’axe Z au centre de gravité de la charge.
Les charges dont le centre de gravité se trouve en dehors de la courbe de performance à 100 % peuvent être utilisées avec une accélération réduite, voir les courbes de performance à 75%. La performance doit être réduitemanuellement en utilisant l’instruction RAPID « AccSet » dans le programme du robot.
loaddata Poids sur le préhenseur (kg). Le centre de gravité du préhenseur (mm). Le moment d’inertie du préhenseur (kgm2).tooldata Poids du produit (kg). Le centre de gravité du produit (mm). Le moment d’inertie du produit (kgm2).
L’absence de valeur ou une valeur erronée peuvent endommager le robot. Pour davantage d’informations, consulter le Manuel de Référence RAPID.
Pour des performances d’accélération max, Jo < 8,3 x 10 -4 kgm2. Jo= moment d’inertie propre pour le poids total manipulé.
Spécification du Produit IRB 340 M2000 15

Description
Remarque : le poids admissible pour les charges inclut les préhenseurs, etc...
Figure 11 Poids maximal autorisé pour une charge (2000 g) montée sur la bride de montage en différentes positions (centre de gravité).
Remarque :loaddata et tooldataavec moment d’inertie doivent être utilisées.
IRB 340/2, 340 SA/2 et 340 SAS/2Charge 2000 g
Z (mm)
L (mm)
100%
75%
10 20 30
10
20
30
40
60
50
70
80
90
100
110
120
0
0
Remarque :l’accélération doit être réduite de « AccSet »dans chaque programmede robot
Z = Voir le diagramme ci-dessus et le système de coordonnée dans la Spécification du Produit S4Cplus.L = Distance dans le plan X-Y de l’axe Z au centre de gravité de la charge.
Les charges dont le centre de gravité se trouve en dehors de la courbe de performance à 100 % peuvent être utilisées avec une accélération réduite, voir les courbes de performance à 75%. La performance doit être réduitemanuellement en utilisant l’instruction RAPID « AccSet » dans le programme du robot.
loaddata Poids sur le préhenseur (kg). Le centre de gravité du préhenseur (mm). Le moment d’inertie du préhenseur (kgm2).tooldata Poids du produit (kg). Le centre de gravité du produit (mm). Le moment d’inertie du produit (kgm2).
L’absence de valeur ou une valeur erronée peuvent endommager le robot. Pour davantage d’informations, consulter le Manuel de Référence RAPID.
Pour des performances d’accélération max, Jo < 8,3 x 10 -4 kgm2. Jo= moment d’inertie propre pour le poids total manipulé.
16 Spécification du Produit IRB 340 M2000

Description
Force de pression maximale
La force de pression maximale autorisée dans les directions X, Y et Z est de 100 N.Le couple maximale de l’axe 4 = 1Nm.
Montage d’équipements supplémentaires sur les bras du manipulateur
Figure 12 Définition d’une charge supplémentaire sur les bras du robot (dimensions en mm).
Le robot est réglé pour le système à vide (option 218-9) ou le tuyau moyen(option 174-2). Si l’une de ces options est utilisée, aucune charge supplémentaire ne doit être définie.
Si ni le système à vide, ni le tuyau moyen ne sont choisis :- et M1 et M2 pèsent tous deux moins de 175 g chacun, le robot peut fonctionner
à 100 % et aucune charge supplémentaire ne doit être définie
- et M1 pèse plus de 175 g, une charge supplémentaire doit être définie dans la définition des charges. La charge supplémentaire doit être de M1−175 g.La charge supplémentaire maximale autorisée est de 175 g (M1 max. = 350 g)
- et M2 pèse plus de 175 g, une charge supplémentaire doit être définie dans la définition des charges. La charge supplémentaire doit être de M2−175 g.La charge supplémentaire maximale autorisée est de 175 g (M2 max. = 350 g)
La charge supplémentaire doit être définie dans CDO 0.
10050
300
300
500
40
40
20
20
Limites ducentre de gravitéde M2
Limites ducentre de gravitéde M1
Spécification du Produit IRB 340 M2000 17

Description
18 Spécification du Produit IRB 340 M2000
Figure 13 L’interface mécanique (bride de montage), dimensions en mm.
1.4 Maintenance et dépannage
Le robot n’a besoin que d’un minimum de maintenance en cours de fonctionnement. Il a été conçu de façon à faciliter au maximum son entretien :
- Des moteurs à courant alternatif ne nécessitant aucun entretien sont utilisés.
- De l’huile est utilisée pour les réducteurs.
- Tout le câblage est fixe, aucun mouvement.Dans le cas improbable d'une défaillance, sa conception modulaire facilite le remplacement des éléments.
La fréquence des entretiens dépend de l’utilisation du robot. Pour plus d’informations sur les procédures de maintenance, voir la section Maintenance dans le Manuel du Produit.
Prise pour clé 22 h7 h=6
Bride de montage R3/8”, profondeur 14 Whitworth ISO-228/1Ø25
Ø52
2xR1/4” (connexion vide et fluides)

Description
Spécification du Produit IRB 340 M2000 19
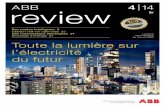
1.5 Mouvements du robot
Figure 14 Espace de travail de l’IRB 340 (dimensions en mm).
250
860
Axe 3
Axe 2
Axe 1
Y
X
Système de coordonnées
R 566
Z
Les numéros des axes sont indiqués en bas de
chaque surface de serrage
Espace de travail maximal à l’intérieur du cylindre.L’espace de travail peut être réduit selon x-y-z.
Zone hachurée = un exemple d’espace de travail réduit
Les positions extrêmes du bras du robot sont représentées Figure 15
de la base

Description
Figure 15 Positions extrêmes des bras du robot.
P2
P1
0+-
U
V
W
Valeurs extrêmes des angles des bras :
Position de P1U = 100o V = 95,5o W = 134,5o
Position de P2U = -46,1o V = -50,6o W = 43,9o
Angles définis comme sur la figure
Butée mécanique :Quand l’angle V= -57,o la butéemécanique est atteinte.
20 Spécification du Produit IRB 340 M2000

Description
Performances selon ISO 9283
Avec la charge nominale et à la vitesse de 1m/s sur le plan de test incliné ISO, les 4 axes du robot étant en mouvement.
Répétabilité de pose unidirectionnelle :RP = 0,1 mm, 0,4o standardRP = 0,1 mm, 1,5o WashDown
Précision absolu :± 0,2 mm, ± 0,2o standard± 0,2 mm, ± 0,75o WashDown
Précision de la trajectoire linéaire :AT = 0,5 - 3 mm
Répétabilité de la trajectoire linéaire :RT = 0,5 - 1 mm
Les valeurs ci-dessus reflètent la plage des résultats moyens obtenus suite au test de plusieurs robots. Si vous avez besoin de valeurs garanties, veuillez contacter votre centre ABB Flexible Automation le plus proche.
Vitesse
Directions x, y, z 10 m/sθ 3600 o/s
Un contrôle est effectué pour prévenir toute surchauffe au cours des applications nécessitant des mouvements fréquents et intensifs.
Accélération
IRB 340, SA, SAS IRB 340/2, SA/2, SAS/2
x, y, z 100 m/s2 60 m/s2
θ 1200 rad/s2 720 rad/s2
Temps de cycles typiques
Les données relatives aux temps de cycles peuvent être modifiées dans préavis.
R12,5
R12,5
305
700
25
25
0,1 kg 1,0 kg
0,44 s 0,55 s
0,33 s 0,38 s
Temps de cycles approx.
IRB 340, SA, SAS IRB 340/2, SA/2, SAS/2
2,0 kg
0,65 s
0,83 s
Cycle 1
Cycle 2
Cycle 1
Cycle 2
Spécification du Produit IRB 340 M2000 21

Description
22 Spécification du Produit IRB 340 M2000

Spécification des différents modèles et des options
2 Spécification des différents modèles et des options
Les différents modèles et options de l’IRB 340 sont décrits ci-dessous.Les mêmes numéros sont utilisés dans ce document et dans le formulaire des Spécifications Techniques.Pour les options logicielles, consultez la Spécification du Produit S4Cplus et la Spécification du Produit RobotWare Options.
1 MANIPULATEUR435-33 IRB 340435-34 IRB 340 SA WashDown435-35 IRB 340 WashDown Stainless435-47 IRB 340/2435-48 IRB 340 SA/2 WashDown435-49 IRB 340 SAS/2 WashDown Stainless
INTERFACE D’APPLICATION
Sortie média218-5 Signaux et puissance
L’alimentation électrique et les signaux du client sont connectés directement à la base du robot à un connecteur FCI à 12 broches UT001412SHT (R2.CP) et un connecteur FCI à 23 broches UT001823SHT (R2.CS). Le câble entre le manipulateur et le système de commande est inclus. L’alimentation électrique et les signaux sont connectés à un bornier à vis à 12 pôles dans le système de commande.
218-9 Système à vide Un système à vide intégré permet de prendre des produits par l’intermédiairede ventouses. Le système comprend un éjecteur, des vannes, un filtre et un tuyau (D=15/10) vers le point d’outil. Il dispose de trois signaux: prise, relâchement et alarme niveau de vide.
Éjecteur de type venturi qui nécessite :alimentation en air : 4-6 bar,air : sec et propre,consommation d’air : 270-380 l/min,niveau de vide : −0,9 bar max.,capacité de l’éjecteur : 39 l/min −0,7 bar
180 l/min −0,3 bar
Le câble pour les signaux entre le manipulateur et le système de commande est inclus. Le câble est connecté à un bornier à vis à 12 pôles dans le système de commande.
Remarque : une seule des options 218-5 et 218-9 peut être choisie.
Le systèmeà vide
Connexion des signauxet de la puissance
Spécification du Produit IRB 340 M2000 23

Spécification des différents modèles et des options
Tuyau vers le centre d’outilN’est pas disponible avec l’option 218-9 (tuyau inclus)
174-2 Tuyau moyen, D = 15/10 mm174-1 Gros tuyau, D = 20/27 mm
Connexion à l’armoire (longueurs des câbles)
94-1 7m94-2 15m94-3 22m94-4 30m
EQUIPEMENT
213-1 Lampe de sécuritéUne lampe de sécurité avec une lumière orange fixe peut être montée sur le manipulateur.La lampe est active en mode MOTEURS EN MARCHE.
12-1 Entrée/sortie pour l’air externe (nécessaire uniquement pour la version WashDown)Plaque pour raccorder l’air externe à l’intérieur de la base du manipulateur (entrée et sor-tie, diamètre 76 mm) pour la circulation interne d’air. Recommandée dans les environne-ments chauds et froids, et lorsqu’il y a risque de condensation à l’intérieur de la base.
24 Spécification du Produit IRB 340 M2000

Accessoires
3 Accessoires
Il existe toute une gamme d'outils et d'équipements spécialement conçus pour le robot.
Logiciel de base et options logicielles pour robot et PC
Pour plus d’informations, consultez la Spécification du Produit S4C et la Spécification du Produit RobotWare Options.
PickMaster et le système de vision
Pour plus d’informations, consulter la Spécification du Produit PickMaster et le Guide de l’Utilisateur de Pickmaster.
Spécification du Produit IRB 340 M2000 25

Accessoires
26 Spécification du Produit IRB 340 M2000

Indice
4 Indice
A
accessoires 25arrêt d’urgence 8arrêt de l’espace de sécurité 8
temporisé 8
C
charge 8charge utile 8
D
dépannage 18dispositif de refroidissement 4
E
encombrement 4entretien 18espace de travail 19
limitation 8extra equipment 17
F
force de pression maximale 17
G
gâchette de validation 7
H
humidité 9
I
installation 8
L
lampe de sécurité 8, 24limitation de la vitesse 7load diagrams 11
Spécification du Produit IRB 340 M2000
M
maintenance 18maintien en cours de déplacement 8maximum pressure force 17modèles 23montage
robot 9mounting
extra equipment 17mouvement 19
N
niveau de bruit 4normes 7normes de protection 8
O
operating requirements 8options 23
P
performances 21PickMaster 25protection contre les excès de vitesse 7protection standards 8
R
répétabilité 21
S
safety 7structure 3système à vide 17, 23système de vision 25
T
TCP 3temps de cycles 21
W
working space 19
27

Indice
2
8 Spécification du Produit IRB 340 M2000