Bulletin of the JSME Ô ; ¶q æ B...*4 正員,大阪市立大学大学院工学研究科 *5...
12
Bulletin of the JSME Transactions of the JSME (in Japanese) 日本機械学会論文集 [DOI: 10.1299/transjsme.2014fe000 © 2014 The Japan Society of Mechanical Engineers 1 Vol.80, No.809, 2014 4] 動的接触角に与える接触線加速度運動の影響の実験的解明 * Experimental investigation on the effect of accelerating motion of contact line on the dynamic contact angle Takahiro ITO *1 , Shoji HIRUTA, Ryota SHIMURA, Kenji KATOH, Tatsuro WAKIMOTO, Yasufumi YAMAMOTO and Susumu NODA *1 Nagoya Univ., Dept. of Energy Engineering and Science Furo-cho, Chikusa-ku, Nagoya, 464-8603 Japan Abstract The dynamic contact angle, the angle between the surfaces of the liquid and the solid at a moving contact line, is one of the primary conditions for the dynamics of the liquid surface confined by solid wall. It has been commonly modeled as a function of the velocity of the contact line relative to the solid surface under steady state condition. Some situations, such as the impact of a drop on a solid surface or sudden release of a contact line stuck on an edge of solid, however, involve a transient motion of the contact line, which would lead to a deviation of the dynamic contact angle from the steady one. In this study, dynamic contact angle for an accelerating or decelerating contact line advancing on glass surface is measured in two experimental systems different with other, i.e. one with a rapid meniscus formation after contact of a descending rod with the liquid surface, and the other with accelerating advance of liquid column in a circular tube. The experimental results revealed that the contact angle is increased with the (positive) acceleration of the contact line relative to the solid and vice versa. The critical condition for the appearance of the deviation of the contact angle brought with the acceleration is also discussed. Key Words : Contact angle, Dynamic wetting, Inertia, Surface tension, Interface 1. 緒 言 液体の表面と固体面の交線である接触線の運動性はインクジェットプリント,半導体洗浄や燃料電池排水機構 といった比較的小さな機器体系における流れ場だけでなく,ボイラーにおける沸騰や管内二相流動といったより マクロな現象においても大きな影響を及ぼす.一般に接触線の運動は接触線における液体界面と固体表面のなす 角である接触角の関数として表されるため,それらの間の関係について数多くの理論的な研究(Voinov. 1976, Cox, 1986, Blake, 2006, Huh and Scriven, 1971, Qian, et al., 2003, Ren, et al., 2010),実験的なアプローチ(Hoffmann, 1975, Fermigier and Jenffer, 1991, Katoh, et al., 2010, Rame, et al., 2004)がなされてきている. これまでの理論解析に基づく知見からは,我々が通常の光学的な手法(分解能がおおよそマイクロメータ以上) によって得られる接触線運動時の接触角(‘巨視的’な動的接触角)の静止接触角からの変化は,以下の2つの因 子を考慮することによって説明されることが明らかにされている.すなわち (1)すべり長さのスケール(多くの場合分子スケールであることが想定される)で定義される接触角(微視的 接触角と呼ばれる)の静止接触角からのずれ(Qian, et al., 2003),および, 伊藤 高啓 *1 ,蛭田 将司 *2 ,志村 亮太 *3 ,加藤 健司 *4 脇本 辰郎 *4 ,山本 恭史 *5 ,野田 進 *6 * 論文 No.13-00693 [DOI:10.1299 *1 正員,名古屋大学大学院工学研究科(〒464-8603 愛知県名古屋市千種区不老町) *2 学生員,大阪市立大学大学院工学研究科(〒558-8585 大阪府大阪市住吉区杉本 3-3-138) *3 豊橋技術科学大学大学院工学研究科(〒441-8580 愛知県豊橋市天伯町雲雀が丘 1-1) *4 正員,大阪市立大学大学院工学研究科 *5 正員,関西大学システム理工学部(〒564-8680 大阪府吹田市山手町 3-3-35) *6 正員,フェロー,豊橋技術科学大学大学院工学研究科 E-mail: [email protected] /transjsme.2014fe0004] Received 3 September 2013
Transcript of Bulletin of the JSME Ô ; ¶q æ B...*4 正員,大阪市立大学大学院工学研究科 *5...

Bulletin of the JSME
Transactions of the JSME (in Japanese)日本機械学会論文集
[DOI: 10.1299/transjsme.2014fe000 © 2014 The Japan Society of Mechanical Engineers 1
Vol.80, No.809, 2014
4]
動的接触角に与える接触線加速度運動の影響の実験的解明*
Experimental investigation on the effect of accelerating motion of contact line on the dynamic
contact angle
Takahiro ITO *1
, Shoji HIRUTA, Ryota SHIMURA, Kenji KATOH,
Tatsuro WAKIMOTO, Yasufumi YAMAMOTO and Susumu NODA
*1 Nagoya Univ., Dept. of Energy Engineering and Science
Furo-cho, Chikusa-ku, Nagoya, 464-8603 Japan
Abstract
The dynamic contact angle, the angle between the surfaces of the liquid and the solid at a moving contact line, is one of the
primary conditions for the dynamics of the liquid surface confined by solid wall. It has been commonly modeled as a function
of the velocity of the contact line relative to the solid surface under steady state condition. Some situations, such as the impact
of a drop on a solid surface or sudden release of a contact line stuck on an edge of solid, however, involve a transient motion
of the contact line, which would lead to a deviation of the dynamic contact angle from the steady one. In this study, dynamic
contact angle for an accelerating or decelerating contact line advancing on glass surface is measured in two experimental
systems different with other, i.e. one with a rapid meniscus formation after contact of a descending rod with the liquid
surface, and the other with accelerating advance of liquid column in a circular tube. The experimental results revealed that the
contact angle is increased with the (positive) acceleration of the contact line relative to the solid and vice versa. The critical
condition for the appearance of the deviation of the contact angle brought with the acceleration is also discussed.
Key Words : Contact angle, Dynamic wetting, Inertia, Surface tension, Interface
1. 緒 言
液体の表面と固体面の交線である接触線の運動性はインクジェットプリント,半導体洗浄や燃料電池排水機構
といった比較的小さな機器体系における流れ場だけでなく,ボイラーにおける沸騰や管内二相流動といったより
マクロな現象においても大きな影響を及ぼす.一般に接触線の運動は接触線における液体界面と固体表面のなす
角である接触角の関数として表されるため,それらの間の関係について数多くの理論的な研究(Voinov. 1976, Cox,
1986, Blake, 2006, Huh and Scriven, 1971, Qian, et al., 2003, Ren, et al., 2010),実験的なアプローチ(Hoffmann, 1975,
Fermigier and Jenffer, 1991, Katoh, et al., 2010, Rame, et al., 2004)がなされてきている.
これまでの理論解析に基づく知見からは,我々が通常の光学的な手法(分解能がおおよそマイクロメータ以上)
によって得られる接触線運動時の接触角(‘巨視的’な動的接触角)の静止接触角からの変化は,以下の2つの因
子を考慮することによって説明されることが明らかにされている.すなわち
(1)すべり長さのスケール(多くの場合分子スケールであることが想定される)で定義される接触角(微視的
接触角と呼ばれる)の静止接触角からのずれ(Qian, et al., 2003),および,
伊藤 高啓*1,蛭田 将司*2,志村 亮太*3,加藤 健司*4 脇本 辰郎*4,山本 恭史*5,野田 進*6
* 論文 No.13-00693 [DOI:10.1299*1 正員,名古屋大学大学院工学研究科(〒464-8603 愛知県名古屋市千種区不老町) *2 学生員,大阪市立大学大学院工学研究科(〒558-8585 大阪府大阪市住吉区杉本 3-3-138) *3 豊橋技術科学大学大学院工学研究科(〒441-8580 愛知県豊橋市天伯町雲雀が丘 1-1) *4 正員,大阪市立大学大学院工学研究科 *5 正員,関西大学システム理工学部(〒564-8680 大阪府吹田市山手町 3-3-35) *6 正員,フェロー,豊橋技術科学大学大学院工学研究科 E-mail: [email protected]
/transjsme.2014fe0004]
Received 3 September 2013

2
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
(2)接触線からの距離が微視的スケールで定義される長さから巨視的スケールの長さに至るまでの領域におけ
る,流れによる粘性応力とそれに釣り合うべく発生するラプラス圧に見合うだけの界面曲率が発生するこ
とによる界面勾配の変化(Voinov, 1976, Cox, 1986),
である(Bonn, et al., 2009).(2)は,界面の曲率が無視できる場合には,液体の表面張力によって発生する応力の
固体表面に平行な方向の成分(=cos,:表面張力,:接触角.毛管力と呼ばれる)の静止時からのずれと,
液体内の粘性応力との釣り合い,と考えることもできる(de Gennes, 1986).微視的接触角についてはこれまでは接
触線の運動に関わらず静止接触角から変化しないものとして取り扱われることも多かったが,近年分子動力学を
用いた解析や応力間バランスを考慮した理論構築(Qian, et al., 2003)がなされ,接触線の運動の影響を受けることが
示されている.一方,巨視的な動的接触角の静止接触角からのずれ(これはマクロな界面形状を決定するうえで
最も重要なパラメータとなる)については,古くから多くの体系的な研究がなされている.Hoffmann(1974)は内
径 2mm 程度の毛細管内を流れる液体の動的接触角dを測定し,一連の結果が Ca 数(=VCL/,:粘度,VCL:
接触線の壁面に対する速度)および静止接触角sの関数 F(s)を用いて Ca + F(s)で統一的に表せることを見出し
た.また,Fermigier と Jenffer(1991)はシリコンオイルと空気を用いた実験における動的接触角の結果が
Hoffman-Tanner の法則(たとえば Šikalo, et al., 2005)および Cox(1986)による理論解とよく一致することを示した.
しかし,これまでの知見はいずれのスケールの接触角に対しても定常状態での値に基づくものであり,流体の
加速に伴って発生する応力の効果は議論されていない.いくつかの条件,たとえば液滴の固体面への衝突時(Šikalo,
et al., 2005)や,ピン止めされた接触線が解放されて運動を開始した際の接触線運動(Nikolayev, et al., 2006),または,
円柱が界面に接触した直後の急速な界面湾曲領域(メニスカス)の形成(Clanet and Quéré, 2002, Quéré and Meglio,
1994)や毛管内で加速・上昇を開始した直後の液柱運動(Quéré, 1997)といった現象においては,接触線速度の過渡
性が大きい.このような場合には流体の(時間)加速項による影響が粘性項と比較して無視できなくなり,動的
接触角が上で述べた定常理論から乖離する可能性がある.さらに,円柱の界面への接触時や液滴と固体が接触し
た直後のような状況では,接触角がそのときの定常接触角に等しいとは限らない.この際には,ラプラス圧に関
連する力や毛管力と粘性力の不釣り合いにより流体(ないし接触線)は加速されるものと考えられる.
また,接触線の過渡運動の影響は上記のような応力の不釣り合いのほか,特に短い時間スケールにおいては界
面運動の遅延によって引き起こされる接触角の偏差も顕著となる可能性がある.巨視的な動的接触角に寄与する
流体の領域(ここでは寄与領域と呼ぶ)の空間スケールは有限の大きさを持つため,接触線の運動速度の変化が
寄与領域全体に伝播するには有限の時間を必要とする.また,微視的なスケールにおける界面変形が巨視的接触
角のスケールに界面波として伝播するのも時間を要する.それらの遅延効果によっても接触角は定常時の値から
は異なった値となりうる.
接触線運動に与える慣性効果のうち,空間加速項(対流項)に関しては Cox(1998)や Fuentesと Cerro(2007)が理
論解析を,Stoevら(1999)が界面形状の測定を行っている.また,数値解析を用いたいくつかの研究では巨視的接
触角に対する慣性効果を取り入れた解析モデルを用いた解析(Šikalo, et al., 2005, Sui and Spelt, 2013)も行われてい
る.しかし,時間慣性(運動の過渡性)による接触角への効果を体系的に取り扱ったものは実験・解析とも見当
たらない.
このような背景のもと,本研究は接触線ないし接触線近傍流体の過渡運動が動的接触角に与える影響を実験的
に明らかにすることを目的として行った.本論文では,接触線加速度と接触角の定常接触角からのずれについて
二つの異なる体系―鉛直円柱を静止界面に微速接触させる体系および毛細管内において液柱を加速度を伴って上
昇させる体系―を用いて実験的に測定し,接触線運動の加速度との連関について検討した結果について述べる.
2. 実 験 手 法
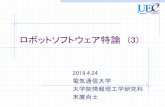
本研究では二つの異なる体系を用いて実験を行った.図 1および図 2にそれぞれの実験体系の概要を示す.
図 1に示す体系は液だめに貯留された供試液体の界面に,上方より鉛直円柱棒を微速で下降・接液させるもの
であり,Clanetと Quéré(2002)が接触線の過渡運動を測定するのに用いたものと同様である.以後本体系を「円柱
体系」と呼ぶ.円柱は直径 3mmのガラス棒であり,液だめの水平断面サイズは 70mm 60mmである.供試液体
にはエチレングリコール(表面張力 = 48.5 mN m-1,粘度=20.3mPa s,密度=1.1110
3 kg /m
3)を用いた.エチ

3
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
レングリコールはガラス棒を濡らす(本体系における静止接触角はおよそ 23)ため,円柱棒が接液すると棒表
面の接触線は棒に沿って前進(上昇)する.そのため,円柱近傍の界面は下に凸の湾曲部(メニスカス)を形成
する.この形成過程はきわめて短時間(おおよそ 200ms未満)で行われるため,メニスカスの形成過程は過渡性
が強く,接触線の大きな加速(および減速)を伴う.本研究ではこの過渡変化時の界面変形および接触角の変動
を測定対象とした.円柱の下降速度はリニアアクチュエータを用いて 0.05mm/s一定となるよう制御した.この速
度はのちに示す接触線の移動速度(最大で 50mm/s)に比べて十分に遅く,棒が運動することの現象への影響は無
視できる.
界面形状の測定には図1中に示すようなバックライト法を用いた.本体系の場合はガラス棒の中心軸付近以外
および流体のメニスカス部分はバックライトからの光が屈折されて暗く黒色となるため,気液界面およびガラス
表面の輪郭において大きな輝度値の差を生ずる.界面位置検出はこの輝度値の差を利用した.界面の撮影は時間
分解能 0.1ms,空間分解能 15.6mで行った.接触線位置は検出界面形状に多項式を最小二乗フィッティングして
得られた関数とガラス棒表面位置の交点として求めた.接触角は接触線位置におけるフィッティング関数とガラ
ス棒表面との液体側のなす角として求めた.また,接触線速度および接触線加速度は,高周波成分による振動を
取り除くため接触線位置の時間変化データ対して多項式で最小二乗フィッティングを行い,得られた多項式を1
階ないし2階微分することで得た(VCLについては円柱の下降速度(= 0.05mm/s)を引いている).接触角および接触
Liquid bath
High speed camera
Glass rod ( =3mm)
Halogen light
V=0.05mm/s
Data acquisition PC
Fig. 1 Experimental system – “Cylindrical-rod system”.
①②
③
④
①Capillary Tube
②Case
③High Speed Camera
④Computer
⑤Syringe
⑥Syringe Pump
⑥⑤
Rectangular Water Reservoir
Fig. 2 Experimental system - “Capillary system”.

4
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
線の加速度の測定の不確かさはそれぞれ±5°ならびに±500mm/s2である.これらの不確かさは界面位置の検出に
おける不確かさおよびフィッティングによる不確かさ(フィッティング曲線と測定値の差の標準偏差)の和に基
づいて評価した.また,ガラス棒は,超音波洗浄したのちエチレングリコールに浸し,その後すすぎ・乾燥を施
したものを用いた.
本実験条件における Bo数(= 𝑅0/√𝜎/𝜌𝑔, R0:円柱半径,g:重力加速度)は 0.71であり,重力の影響は表面張
力による圧力に比べて大きくないと考えられる.また,Ca数は最大でも 0.021である.これは,表面張力項が粘
性項に対して支配的であることを示す.また,Re数は最大 7程度であり,対流項は粘性項に比して小さな寄与し
か及ぼさない.
この実験体系については,接触角の時系列データを定常条件下における動的接触角と比較を行うため,定常動
的接触角を別途測定した.測定は上述のメニスカス形成実験と同じガラス棒を一定の速度で試料液体中に浸入(下
降)させ,定常な前進接触線を形成することで行った.撮影は上記と同じ空間分解能で行った.定常接触角は 8s
間の撮影で得られた 400~800枚の画像データの平均値として求めた.
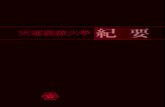
もう一方の体系は円柱体系で得られた知見をより定量的に評価するために用いた.この体系(以後毛細管体系
と呼ぶ)では図 2に示すように内径 0.642mmのガラス製毛細管内に供試液体をシリンジより流入させる.供試液
体の流入加速度(これは接触線運動の加速度にほぼ比例する)は任意に変化させられる.接触線加速度の範囲は
600 mm/s2 ~ 17000 mm/s
2,接触線の速度は 60 ~ 100 mm/sの間で変化させた.接触角および接触線の移動速度の検
出は円柱体系と同じくバックライト法を用いて行った.ただし,本体系では撮影に際して毛細管表面での屈折の
影響を抑制するため,図 2 に示す如く測定領域を囲う直方体の透明水槽を設置した.撮影は時間分解能 0.25ms,
空間分解能 4.2mで行った.供試流体には円柱体系と同じくエチレングリコールを用いた.接触線位置および接
触角,接触線の速度・加速度については円柱体系での処理と同様に,界面形状や時間発展データへの多項式のフ
ィッティングを用いて求めた.実験は各条件に対して 3回以上行い,得られた値の平均値を採用した.得られた
接触角および接触線加速度の測定の不確かさはそれぞれ±2°,ならびに±5%である.接触角の不確かさは静止時
における測定値と理論値との差(Katoh, et al., 2010),および定常上昇ないし加速実験での繰り返し実験ごとのばら
つきに基づいて評価した.一方接触線加速度の不確かさは円柱体系での評価と同様,界面位置測定とフィッティ
ングにおける不確かさ(フィッティング関数と測定値の差の標準偏差)に基づいて評価した.また,表面状態の
再現性確保のため,実験は毛細管内にエチレングリコールを注入したのちに引き抜く事前操作を何度か行ってか
ら実施した.ただし,この操作で表面に濡れ膜が残留することはなかった.
毛細管内半径に基づく Bo 数は 0.15 と小さく,重力の影響は表面張力に比べて無視できる.また,本実験体系
の場合はシリンジからの流体の流入に伴い流体全体が鉛直上方への加速運動を受けるが,その際の最大の加速時
(おおよそ 17000mm/s2)においても加速度を重力加速度に重畳させた Bo数は 0.25であり,流体全体が鉛直上方
へ加速されることによって界面が変形する効果は小さい.Ca 数は最大 0.042 である.また毛細管内径に基づく
Re数は最大でも 3.2であり,対流項の寄与はやはり小さい.
3. 実験結果および考察
3・1 円柱体系における結果
本節では円柱体系における実験結果について示すが,メニスカスを過渡的に形成する実験結果の説明に先立ち,
定常動的接触角dの測定結果について述べる.dと接触線のガラス棒に対する相対速度 VCL(本実験ではガラス
棒の下降速度の大きさと等しい)の関係に関する測定結果を図 3に示す.誤差棒は測定期間中における標準偏差
を表す.図に示すように,dは VCLの増加にしたがって増加し,図中に実線で示すHoffman-Tannerの法則(Šikalo,
et al., 2005)
𝜃𝑑 = √𝐶𝑇𝐶𝑎 + 𝜃𝑠33
= √𝐶𝑇𝜇𝑉𝐶𝐿/𝜎 + 𝜃𝑠33
(1)

5
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
でよくフィッティングされた.ここで CTは未定定数であり,本実験でのフィッティングでは 2.65107 deg
3であっ
た.以降の議論では定常動的接触角についてはこのフィッティングによって得られたdと VCLの関係から求めら
れる値を用いる.
図 4 はメニスカス形成実験における撮影画像の例である.円柱が界面に接触した直後のメニスカス(図 4(a))
は半径方向(水平方向)の拡がりも小さい.時間が経過するにしたがって接触線は上昇し,メニスカスは半径方
向,高さ方向ともに成長する(図 4(b),(c)).また,時間の経過とともに接触角は徐々に小さくなる(図 4(d)).
なお,ガラス棒の設置は注意深く行われたが,棒底面が液面に対してわずかに角度を持っていたため,図 4に示
す例では棒の写真奥側底面が手前側よりもわずかに先に接液し,メニスカスが先に形成され始めている.
0 10 20 30 40
20
40
60
80
VCL (mm/s)
d
(o)
θs= (const・VCL+θ03)1/3
const = 12816.8996
θ0 = 21.4206266
ExperimentFitting
Fig. 3 Dynamic contact angle in steady state conditions (Cylindrical-rod system). The blue line represents the best fitting with
Hoffman-Tanner’s law.
1.5mm
Fig. 4 Photographs of rapid meniscus formation just after the glass rod contacted with the interface. (a) The first picture in which
the interface was observed on the left side of the glass rod. Other pictures correspond to (b) 1.9 ms, (c) 6.9ms, (d)
21.9ms, after (a), respectively.
(a) (b)
(c) (d)

6
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
各時刻における界面形状は図 4に示した撮影画像から得た.界面形状の検出例を図 5に白丸プロットで示す.
なお,図 5で示す結果は図 4にてガラス棒の両側に見えているメニスカスのうち,左側に関するものであり,x 軸
は円柱左側面を原点として水平方向に取る.一方,y 軸および時間軸(t 軸)の原点については以下のように,検出
される界面の x軸方向拡がりに基づいて決めた.すなわち,検出される界面の x軸方向拡がりは,図 4の説明で
も述べたように,特に接触直後においてせまく,また界面における輝度差も小さい.このため,検出される界面
の水平方向拡がりの大きさがおよそ 20pixel(312m)未満の時間帯では,検出が可能な時刻と不可能な時刻とが混
在した.そこで,本研究では検出される界面幅が 20 pixel以上になった時刻を時間軸原点とするとともに,その
ときの接触線位置を y軸原点とし,詳細な定量的議論は t = 0ms以降を対象とした.なお,t = 0msは図 4では(b)
の時刻に相当する.検出された界面形状は図 4の説明にて述べたように,時間の経過に従って上方に移動すると
ともに水平方向にも拡大している.時刻 t=4ms以降はほぼ一定の形状を保って上昇している.
接触線位置は図 4に示す界面形状に多項式をフィッティングし,得られた式のガラス棒表面との交点として求
めた.図 5中に多項式によるフィッティング結果を実線で示すが実験データによく追従している.図 6には,得
られた接触線位置の時間変化を黒のプロットで示す.接触線は時間とともに上昇し,150msには約 1.3mmの高さ
に達している.また,その増加率は時間とともに減少している.メニスカス形成時の接触線位置の時間変化につ
いては,Clanetら(2002)が Ka ≫1 (Ka :Kapitsa数,Ka=[3 /(3g4
)]1/4,:動粘度),Bo≫1および接触角一定(0°)の
条件の下で t2/3に比例することを理論的に示すとともに,ヘキサンを用いた実験にて実験値と理論値の良い一致を
得ている.本実験では Ka = 16.6,Bo = 0.71であるので Bo数については Clanetらの条件を満たしていないが,図
6に示したデータは,6ms < t < 25 msの範囲では t2/3でよくフィッティングされ,Clanetらの理論予測と一致した.
しかしそれ以前については t のべき数は 0.8 程度であった.初期におけるべき数がそれ以降よりも大きな値であ
ったことの原因は,以下で示すように接触直後の接触角(約 60 ~ 90)がそれ以降(30 ~ 60)に比べて大きかっ
たことにより,接触線の主たる駆動力である毛管力の静止時との差がそれ以降と比べて大きかったことが挙げら
れる(Clanetらは一定の駆動力を仮定).
つづいて接触線の固体面に対する速度 VCLおよび加速度 aCLを示す.これらのパラメータは図 6 に示した接触
線位置の時間発展を 9次多項式でフィッティングし,得られた関数を微分して求めた.フィッティングの次数は
ノイズによる高周波成分を平滑化しつつ接触線の運動をよく再現するものとして選んだ.ただし,前述のとおり
時刻 tが 0ms未満の期間においてはデータの不確実性が増すため,フィッティングは 0ms以降のデータに対して
行った.フィッティングによって得られた近似多項式は図 6中に赤実線で示すように,実験値(黒プロット)に
よく追従しており,本フィッティングにより実験における接触線の運動を精度よく平滑化できることがわかる.
図 7 はこのようにして得られた VCL(黒線)および aCL(青線)の時間挙動である.VCLは t=0ms において最大値
49mm/s を取ったのち指数関数状に減少し,t =150msでは約 1mm/sとなった.一方,加速度 aCLは 0msにて最小
値3100mm/s2を取った後漸近的に増加し,t=150msでは25mm/s
2となった.
-0.4 -0.2 0
-0.1
0
0.1
0.2
0.3
0.4Experiment
Fitting
t=10ms
7ms
4ms
2ms
0ms
-1.6ms
x (mm)
y (m
m)
Gla
ss rod
Fig. 5 Measured interface profiles.
0 50 100 150
0
0.5
1
Time (ms)
y (m
m)
ExperimentFitting
+0.0471は志村君データの1個目に合せるため
y=C t0.63
(1<t<20ms)
y=Σan xn
a0=1.04659387e-02
a1=4.92554170e-02
a2=-1.60188467e-03
a3=4.65990659e-05
a4=-1.00229094e-06
a5=1.45030462e-08
a6=-1.35588993e-10
a7=7.82307965e-13
a8=-2.52673083e-15
a9=3.48828693e-18
4.15594533e-03
|r|=9.99904684e-01
Fig. 6 Time evolution of the contact line position.

7
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
図 8 には測定された接触角tの時間変化を黒点により示す.接触角は 90から急速に減少して t=0ms ではおお
よそ 65であった.減少はその後も継続し,t =150msでは約 29となった.本実験では接触線速度は単調に減少し
たから,このような接触角の減少は定常動的接触角が接触線速度の減少とともに減少する点で定性的に合致する.
しかしながら以下に示すように測定された接触角の値はその瞬間における VCLから求められる定常接触角とは一
致しない.同図に,定常動的接触角と速度の関係に関するフィッティング式(式(1))に各時刻における接触線速
度 VCLを代入して求めた接触角dを青実線で示す.これを測定された接触角tと比較すると特に t <20msの時間帯
においてtがdを顕著に下回っており,その差は t =0msで約 20°であった.この期間は加速度 aCLの絶対値が特に
大きく(|aCL| > 600mm/s2),接触線の加速運動がdとtの偏差をもたらしたことが強く示唆される.
図 9 はtとdの偏差(=t d)の aCLに対する依存性を示したものである.この図では,結果の再現性を示す
ことを目的として,前節までに説明したものと同様の実験を同種の2つの異なるガラス棒で行って得られた4つ
の実験の結果(2本のガラス棒の左右両側の接触線についてのデータ)が示されている.いずれの結果とも同様
な傾向を示しており,aCL の大きさが負の方向に大きくなるにつれても負の方向に直線的に増加していること
がわかる.このときの両者の比例定数は 8103
deg s2/mmであった. と aCLの間の比例定数が正の値であった
ことの要因は現時点では明らかではないが,たとえば,以下のメカニズムが考えられる.すなわち,潤滑近似下
での運動方程式の粘性項と加速項の増減を考えると,接触線の正(前進方向)の加速(すなわち壁面近傍流体の
加速)は粘性応力を増強する方向に働く(蛭田ら,2013).定常動的接触角は粘性応力の増加とともに増加するこ
とから,正の加速は接触角を増す(すなわち,正の比例定数を持つ)方向に働くものと考えられる.
Fig. 7 Time evolution of the contact line velocity VCL
(left axis) and the acceleration aCL (right axis). Fig. 8 Time evolution of t and d (contact angle in the
transient state and that estimated with Eq. (1), i.e.
the steady state experiment, respectively).
0 50 100 1500
20
40
60
-3000
-2000
-1000
0
Time (ms)
VC
L (
mm
/s)
aC
L (
mm
/s2)
VCL(←)aCL(→)
0 50 100 15020
40
60
80
(
o)
t
d
Time (ms)
0 50 100 1500
20
40
60
-3000
-2000
-1000
0
Time (ms)
VC
L (
mm
/s)
aC
L (
mm
/s2)
VCL(←)aCL(→)
0 50 100 15020
40
60
80
(
o)
t
d
Time (ms)
-2000 -1000 0-0.2
0
0.2
0.4
aCL (mm/s2)
cos
-3000 -2000 -1000 0-30
-20
-10
0
10
aCL (mm/s2)
(o
)
Fig. 9 Relation between (=td) and aCL in Cylinder experiment. Plot type corresponds to the contact
angle at each contact line in two experimental runs with the same condition.

8
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
また,このような力のつり合いについての検討からは,上記の結果とは逆のプロセスの存在も示唆される.す
なわち,何らかの要因により接触角が定常値から逸れた場合には,接触線は加速もしくは減速運動を課せられる
と考えられる.本体系において円柱棒が接液した瞬間の挙動を例によると,接触線は静止しているが接触角は 90
である.これは静止接触角(23)よりも相当程度大きく,接触線は上向きの加速度を受けたものと考えられる.
また,接触線が不均一な固体表面を運動することによって,接触線の位置での定常接触角が急激に変化した場合
にも接触線の加速・減速が起こりうると考えられる.ただし本研究では十分平滑で均一な表面を持つガラス棒を
用いたため,このような表面の不均一に起因すると考えられる接触線の加速は観察されなかった.
3・2 毛細管体系における結果
本節では毛細管体系における実験結果について示す.図 10は毛細管体系を用いた実験時の界面近傍の写真例で
ある.各写真の時間間隔は 0.5ms である.写真下方より流体がシリンジから流入する.それに伴って界面が上方
へと運動する.本写真では界面の上方への運動が加速中のものであり,図 10(c),(d)は(a)および(b)に比べて界面
がやや平坦になり,接触角も大きくなっているのがわかる.
接触線位置および接触角は円柱体系同様に図 10 に示す撮影データから得られる界面形状を多項式近似した関
数の毛細管表面における交点位置およびそこでの関数の接線と管表面のなす角としてから求めた.得られた接触
線の位置の時間変化を示したのが図 11である.ひし形のプロットが測定値であり,青色の実線は二次関数による
フィッティングを示す.フィッティングは実験値によく追随しており,接触線位置の時間変化が二次関数的であ
ること,すなわち接触線の加速度が一定であることがわかる.
図 12は上記の方法で得られたフィッティング関数を微分して得られる VCLの値が 60ないし 80, 1001 mm/sと
なった時刻における接触角をそのときの加速度 aCLに対してプロットしたものである.なお,図 12(および関連
Fig. 10 Typical interface dynamics in capillary experiment. The interval between two pictures is 0.5 ms.
(a) (b) (c) (d)
0 5 10 15 200
0.5
1
1.5
2
2.5
Time (ms)
y (m
m)
0 10000 2000030
40
50
60
aCL (mm/s2)
t
(o)
VCL=60mm/sVCL=80mm/sVCL=100mm/s
Fig. 12 Contact angle t as a function of aCL for given
value of VCL.
Fig. 11 Measured time evolution of the contact line
position. Black plots are the measured values and
blue line is the best fit with second order
polynomial function.

9
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
する図 13,図 14)に示す個々のプロットはいずれも 3回以上の測定の平均値を示している.図を見ると同一の速
度に対しても接触角tは加速度に依存して最大で約 20異なった値をとっており,接触角が接触線速度のみでは表
せないことを明確に示している.また,いずれの場合とも,加速度が大きくなるほど接触角が大きくなっている
ことがわかる.
図 13 は図 12 に示した過渡時の接触角tの定常時の接触角dとの偏差を加速度 aCLに対してプロットしたも
のである.ここで定常時の接触角は|aCL|<300mm/s2のときのデータの 3点以上の平均値として得た.この図は前節
で示した円柱実験体系の実験結果における図 9に相当する.これを見ると VCLが 60mm/sないし 80mm/sのときは
は aCLの増加に伴っておおむね直線的に増加している.一方 VCLが 100mm/sのときは aCLが 5000 mm/s2以下で
は直線状であるがそれ以上では勾配が aCLの増加とともに減少し,aCLが 13000mm/s2ではの増加はほぼ飽和し
ている.各分布の勾配(VCL=100mm/sについては aCL < 5000mm/s2の範囲に着目する)は VCLに依存し,1.310
-3 deg
s2/mm (VCL=60mm/s) ~ 2.610
-3 deg s
2/mm (VCL=100mm/s)であった.これを円柱実験の場合と比べると,その符号は
同一であり,接触線の(正の)加速運動により接触角が増加することが確かめられた.しかし,大きさは円柱実
験で得られた値の 1/3~1/6 程度であった.円柱実験との差異についての定量的議論は体系が異なるため困難であ
るが,比例定数の差異の原因の一つとして,本毛細管実験での代表長さ L(ここでは毛細管内半径(0.321mm)と考
えられる)が円柱実験(円柱半径=1.5mm)に比べて小さいことが挙げられる.すなわち,このような接触線運
動の加速度による影響は(時間)慣性力が表面張力による力(ラプラス圧に関連する)に対して顕著になったと
きに表れると考えられる.ここで時間慣性力は𝜌|𝑎𝐶𝐿|𝐿3で,表面張力による力は𝜎𝐿で代表されると考えられる.
よって,接触角の偏差に与える加速度の影響はそれらの力の比,すなわち加速度を陽に表した修正We数
𝑊𝑒′ =𝜌|𝑎𝐶𝐿|𝐿2
𝜎 (2)
に依ると考えられる.この式は Lが小さくなるにつれて慣性力の影響が減少することを示しており,それによっ
て接触角の偏差も小さくなることが予測される.
最後に,接触角に接触線運動の加速の影響が出現する条件について検討する.Cox(1986)は,代表時間,代表長
さ,代表速度をそれぞれ T,L,Uとした場合,接触角の時間変化に伴う圧力と粘性応力のオーダー比較により
𝑇 < 𝐿/𝑈 (3)
Fig. 13 Relation between (=td) and aCL in Capillary experiment.
0 10000 200000
10
20
aCL (mm/s2)
(o
)
VCL=60mm/sVCL=80mm/sVCL=100mm/s
0 5000 10000 15000
-0.2
-0.1
0

10
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
の場合に時間加速の影響が出うると述べている.よって本実験に基づいてこの条件式(3)の成立性について調べる.
ここでは本測定での体系を考慮して,代表長さおよび代表速度に毛細管内径 d0および接触線速度 VCLを取り.代
表時間 Tは接触線の加速度 aCLと速度 VCLを用いて T VCL / aCLとする.これらを用いると条件式(3)は
𝑉𝐶𝐿2 /(𝑎𝐶𝐿𝑑0) < 1 (4)
と変形できるので,この不等式(4)の左辺に対する偏差の振る舞いを求めた.その結果,図 14 に示すように
VCL2/(aCLd0)が 5~10以下のときにが顕著となっていることがわかる.したがって,Coxの提示した接触線運動の
加速の影響に関する条件式(4)は概ね妥当であると言える.ただし,本無次元化では各速度条件に対する結果が同
一の値をとることはなく,図 13同様に接触線速度 VCLへの依存性が認められた.このことは式(4)の左辺無次元量
が現象を十分に代表できているわけではないことを示しているため,さらなる検討を要する.
4. 結 言
接触線が過渡運動をする際の動的接触角について,円柱が静止界面に接触した際のメニスカスの過渡形成過程
および毛細管内の液柱界面の加速度を伴う上昇過程を対象として実験的に測定した.その結果,以下のことが明
らかとなった.
(1) メニスカスの過渡形成実験では接触線は負の加速度を取り続けたが,接触角はそのときの接触線速度に対
応する定常動的接触角よりも小さな値となった.また,毛細管実験では接触線が正の加速運動をしたが,
接触角は定常動的接触角よりも大きくなった.両実験結果から,動的接触角は接触線運動の加速度によっ
て定常値から変化することが初めて示されるととともに,接触角は加速度の正の増加とともに大きくなる
ことが明らかになった.
(2) 過渡時の接触角の定常接触角との偏差は接触線の加速度に対して線形に増加した.ただし接触線速度が大
きなときには比例定数が増加する傾向が見られた.
(3) 接触角に偏差が現れる限界条件は Cox(1986)が提示したものと概ね一致した.しかし,本実験では限界条
件の接触線速度への依存が見られたため,より詳細な検討が必要である.
謝 辞
本研究の一部は JSPS科研費 25420113の助成を受けて行われた.また,実験における撮影の一部は豊橋技術科
学大学の鈴木新一教授,関下信正准教授の技術的支援のもとに行われた.ここに記して謝意を表す.
Fig. 14 as a function of the criterion parameter for the transient effect by Cox (1986).
0.5 1 5 100
10
20VCL=60mm/sVCL=80mm/sVCL=100mm/s
(o
)
VCL2/aCLd0

11
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe0004]
文 献
Blake, T.D., The physics of moving wetting lines, Journal of Colloid and Interface Science, Vol. 299 (2006), pp.1-13.
Bonn, D., Eggers, J., Indekeu, J., Meunier, J. and Rolley, E., Wetting and spreading, Reviews of Modern Physics, Vol. 81
(2009), pp.739-805.
Clanet, C. and Quéré, D., Onset of menisci, Journal of Fluid Mechanics, Vol 460 (2002), pp.131-149.
Cox, R.G., The dynamics of the spreading of liquids on a solid surface. Part 1. Viscous flow, Journal of Fluid Mechanics, Vol.
168 (1986), pp.169-194.
Cox, R.G., Inertial and viscous effects on dynamic contact angles, Journal of Fluid Mechanics, Vol. 357 (1998), pp.249-278.
de Gennes, P. G., Deposition of Langmuir-Blodgett layers, Colloid and Polymer Science, Vol 264 (1986), pp.463-465.
Fermigier, M. and Jenffer, P., An experimental investigation of the dynamic contact angle in liquid-liquid systems, Journal of
Colloid and Interface Science, Vol. 146, No. 2 (1991), pp.226-241.
Fuentes, J. and Cerro, R.L., Surface forces and inertial effects on moving contact lines, Chemical Engineering Science, Vol.
62 (2007), pp.3231-3241.
Hoffman, R. L., A Study of the advancing interface I. Interface shape in liquid-gas systems, Journal of Colloid and Interface
Science, Vol. 50, No. 2 (1975), pp.228-241.
Huh, C. and Scriven, L. E., Hydrodynamic model of steady movement of a solid/liquid/fluid contact line, Journal of Colloid
and Interface Science, Vol. 35, No. 1 (1971), pp.85-101.
Katoh, K., Wakimoto, T. and Nitta, S., A Study on capillary flow under the effect of dynamic wetting, Journal of the Japanese
Society for Experimental Mechanics, Vol. 10 Special issue (2010), pp.s62–s66.
蛭田将司,伊藤高啓,脇本辰郎,山本恭史,加藤健司,毛細管内液柱の動的ぬれ挙動,日本混相流学会混相流シ
ンポジウム 2013 講演論文集(2013), 論文番号 B314.
Nikolayev, V.S., Gavrilyukc, S.L. and Gouind, H., Modeling of the moving deformed triple contact line: Influence of the fluid
inertia, Journal of Colloid and Interface Science, Vol. 302 (2006), pp.605-612.
Qian, T., Wang, X. –P. and Sheng, P., Molecular scale contact line hydrodynamics of immiscible flows, Physical Review E,
Vol. 68 (2003), pp.016306-1 – 016306-15.
Quéré, D. and Meglio, J. –M., The meniscus on a fibre, Advances in Colloid and Interface Science, Vol. 48 (1994),
pp.141-150.
Quéré, D., Inertial capillarity, Europhys. Letters, Vol. 39, No. 5 (1997), pp.533-538.
Ramé, E., Garoff, S. and Willson, K.R., Characterizing the microscopic physics near moving contact lines using dynamic
contact angle data, Physical Review E, Vol. 70 (2004), pp.031608-1 - 031608-9.
Ren, W., Hu, D. and E, W., Continuum models for the contact line problem, Physics of Fluids, Vol. 22 (2010), pp. 102103-1 –
102103-20.
Šikalo, Š., Wilhelm, H.-D., Roisman, I. V., Jakirlić, S. and Tropea, C., Dynamic contact angle of spreading droplets:
Experiments and simulations, Physics of Fluids, Vol. 17, (2005) 062103-1 - 062103-13.
Stoev, K, Ramé, E. and Garoff, S., Effects of inertia on the hydrodynamics near moving contact lines, Physics of Fluids, Vol.
11, No. 11 (1999), pp.3209-3216.
Sui, Y. and Spelt, P. D. M., An efficient computational model for macroscale simulations of moving contact lines, Journal of
Computational Physics, Vol. 242 (2013), pp.37–52.
Voinov, O. V., Hydrodynamics of wetting, Fluid Dynamics, Vol. 11 (1976), pp.714-721.
References
Blake, T.D., The physics of moving wetting lines, Journal of Colloid and Interface Science, Vol. 299 (2006), pp.1-13.
Bonn, D., Eggers, J., Indekeu, J., Meunier, J. and Rolley, E., Wetting and spreading, Reviews of Modern Physics, Vol. 81
(2009), pp.739-805.
Clanet, C. and Quéré, D., Onset of menisci, Journal of Fluid Mechanics, Vol 460 (2002), pp.131-149.
Cox, R.G., The dynamics of the spreading of liquids on a solid surface. Part 1. Viscous flow, Journal of Fluid Mechanics, Vol.
168 (1986), pp.169-194.
Cox, R.G., Inertial and viscous effects on dynamic contact angles, Journal of Fluid Mechanics, Vol. 357 (1998), pp.249-278.
de Gennes, P. G., Deposition of Langmuir-Blodgett layers, Colloid and Polymer Science, Vol 264 (1986), pp.463-465.
Fermigier, M. and Jenffer, P., An experimental investigation of the dynamic contact angle in liquid-liquid systems, Journal of

12
Ito, Hiruta, Shimura, Katoh, Wakimoto, Yamamoto and Noda,Transactions of the JSME (in Japanese), Vol.80, No.809 (2014)
© 2014 The Japan Society of Mechanical Engineers[DOI: 10.1299/transjsme.2014fe000 ]4
Colloid and Interface Science, Vol. 146, No. 2 (1991), pp.226-241.
Fuentes, J. and Cerro, R.L., Surface forces and inertial effects on moving contact lines, Chemical Engineering Science, Vol.
62 (2007), pp.3231-3241.
Hoffman, R. L., A Study of the advancing interface I. Interface shape in liquid-gas systems, Journal of Colloid and Interface
Science, Vol. 50, No. 2 (1975), pp.228-241.
Huh, C. and Scriven, L. E., Hydrodynamic model of steady movement of a solid/liquid/fluid contact line, Journal of Colloid
and Interface Science, Vol. 35, No. 1 (1971), pp.85-101.
Katoh, K., Wakimoto, T. and Nitta, S., A Study on capillary flow under the effect of dynamic wetting, Journal of the Japanese
Society for Experimental Mechanics, Vol. 10 Special issue (2010), pp.s62–s66.
Hiruta, M., Ito, T., Wakimoto, T., Yamamoto, Y. and Katoh, K., Dynamic wetting behavior of liquid column in a capillary
pipe, Proceedings of Symposium on Multiphase Flow 2013 (2013), Paper No. B314. (in Japanese)
Nikolayev, V.S., Gavrilyukc, S.L. and Gouind, H., Modeling of the moving deformed triple contact line: Influence of the fluid
inertia, Journal of Colloid and Interface Science, Vol. 302 (2006), pp.605-612.
Qian, T., Wang, X. –P. and Sheng, P., Molecular scale contact line hydrodynamics of immiscible flows, Physical Review E,
Vol. 68 (2003), pp.016306-1 – 016306-15.
Quéré, D. and Meglio, J. –M., The meniscus on a fibre, Advances in Colloid and Interface Science, Vol. 48 (1994),
pp.141-150.
Quéré, D., Inertial capillarity, Europhys. Letters, Vol. 39, No. 5 (1997), pp.533-538.
Ramé, E., Garoff, S. and Willson, K.R., Characterizing the microscopic physics near moving contact lines using dynamic
contact angle data, Physical Review E, Vol. 70 (2004), pp.031608-1 - 031608-9.
Ren, W., Hu, D. and E, W., Continuum models for the contact line problem, Physics of Fluids, Vol. 22 (2010), pp. 102103-1 –
102103-20.
Šikalo, Š., Wilhelm, H.-D., Roisman, I. V., Jakirlić, S. and Tropea, C., Dynamic contact angle of spreading droplets:
Experiments and simulations, Physics of Fluids, Vol. 17, (2005) 062103-1 - 062103-13.
Stoev, K, Ramé, E. and Garoff, S., Effects of inertia on the hydrodynamics near moving contact lines, Physics of Fluids, Vol.
11, No. 11 (1999), pp.3209-3216.
Sui, Y. and Spelt, P. D. M., An efficient computational model for macroscale simulations of moving contact lines, Journal of
Computational Physics, Vol. 242 (2013), pp.37–52.
Voinov, O. V., Hydrodynamics of wetting, Fluid Dynamics, Vol. 11 (1976), pp.714-721.