BEAT : UN SIMULATEUR VIRTUEL DE DEFAUTS DE...
33
BEAT : UN SIMULATEUR VIRTUEL DE DEFAUTS DE ROULEMENTS Béchir Badri 1 , Marc Thomas 1 et Sadok Sassi 2 1 Département de génie mécanique, École de technologie supérieure, Montréal [email protected] 2 Faculty of Engineering, Sohar university, PO Box 44, Postal code 311, Sohar, Sultanate of OMAN .[email protected] Résumé Les paliers à roulements sont sujets à de l'usure pendant leur fonctionnement, et en conséquence ils peuvent devenir défectueux à n'importe quel moment. Malgré la vaste expérience qui s'est accumulée au sujet des prévisions sur leur durée de vie liée à la fatigue, peu de modèles ont été proposés pour expliquer le comportement dynamique des roulements soumis à des défauts localisés ou répartis. Un nouveau logiciel, appelé BEAT, a été développé pour prédire la réponse vibratoire de roulements à des excitations produites par des défauts. Le développement de BEAT a été obtenu à l’aide d’un nouveau modèle hybride combinant des équations théoriques ainsi que des techniques de résolution numérique. La génération de vibrations par un défaut ponctuel dans un élément de roulement est modélisée, en fonction de la rotation du roulement, de la répartition de la charge dans le roulement, de la fonction de transfert entre le roulement et le capteur, de l'élasticité de la structure du roulement, et des caractéristiques élasto-hydro-dynamiques du film d'huile. Pour tester la capacité prédictive du modèle, les résultats produits ont été comparés aux résultats expérimentaux effectués sur un banc d'essai de roulement. Une concordance très bonne entre les deux résultats, a été trouvée pour les paramètres temporels (valeur de crête, valeur efficace, facteurs de crête, Kurtosis) et pour les paramètres fréquentiels (amplitude de BPFO, de 2 BPFO et de 3 BPFO). mots-clés : roulements à billes, simulation numérique, vibration, indicateurs de défauts 1. INTRODUCTION Actuellement le progrès considérable de l’informatique et des outils de calcul numérique permet d’une part la conception et l’étude du comportement des systèmes mécaniques complexes, et d’autre part le développement des outils de diagnostic et l’amélioration des moyens de contrôle. Ces outils de diagnostic sont utilisés principalement dans le cadre de la maintenance préventive pour des motifs de rentabilité et de productivité. Ainsi faut-t-il prévenir tout endommagement accidentel des organes de machines – notamment les roulements – pour éviter le plus possible les arrêts des installations et les frais qui s’en suivent. Dans le contexte général de l’automatisation du diagnostic des éléments de machines, nous essayerons de mettre en place une approche de modélisation d’un élément fondamental dans les machines tournantes à savoir, le roulement en vue de simuler son comportement vibratoire en présence de défauts localisés.
Transcript of BEAT : UN SIMULATEUR VIRTUEL DE DEFAUTS DE...

BEAT : UN SIMULATEUR VIRTUEL DE DEFAUTS DE ROULEMENTS
Béchir Badri1, Marc Thomas1 et Sadok Sassi2
1 Département de génie mécanique, École de technologie supérieure, Montréal [email protected]
2 Faculty of Engineering, Sohar university, PO Box 44, Postal code 311, Sohar, Sultanate of OMAN [email protected]
Résumé Les paliers à roulements sont sujets à de l'usure pendant leur fonctionnement, et en conséquence ils peuvent devenir défectueux à n'importe quel moment. Malgré la vaste expérience qui s'est accumulée au sujet des prévisions sur leur durée de vie liée à la fatigue, peu de modèles ont été proposés pour expliquer le comportement dynamique des roulements soumis à des défauts localisés ou répartis. Un nouveau logiciel, appelé BEAT, a été développé pour prédire la réponse vibratoire de roulements à des excitations produites par des défauts. Le développement de BEAT a été obtenu à l’aide d’un nouveau modèle hybride combinant des équations théoriques ainsi que des techniques de résolution numérique. La génération de vibrations par un défaut ponctuel dans un élément de roulement est modélisée, en fonction de la rotation du roulement, de la répartition de la charge dans le roulement, de la fonction de transfert entre le roulement et le capteur, de l'élasticité de la structure du roulement, et des caractéristiques élasto-hydro-dynamiques du film d'huile. Pour tester la capacité prédictive du modèle, les résultats produits ont été comparés aux résultats expérimentaux effectués sur un banc d'essai de roulement. Une concordance très bonne entre les deux résultats, a été trouvée pour les paramètres temporels (valeur de crête, valeur efficace, facteurs de crête, Kurtosis) et pour les paramètres fréquentiels (amplitude de BPFO, de 2 BPFO et de 3 BPFO). mots-clés : roulements à billes, simulation numérique, vibration, indicateurs de défauts 1. INTRODUCTION
Actuellement le progrès considérable de l’informatique et des outils de calcul numérique permet d’une part la conception et l’étude du comportement des systèmes mécaniques complexes, et d’autre part le développement des outils de diagnostic et l’amélioration des moyens de contrôle. Ces outils de diagnostic sont utilisés principalement dans le cadre de la maintenance préventive pour des motifs de rentabilité et de productivité. Ainsi faut-t-il prévenir tout endommagement accidentel des organes de machines – notamment les roulements – pour éviter le plus possible les arrêts des installations et les frais qui s’en suivent.
Dans le contexte général de l’automatisation du diagnostic des éléments de machines, nous essayerons de mettre en place une approche de modélisation d’un élément fondamental dans les machines tournantes à savoir, le roulement en vue de simuler son comportement vibratoire en présence de défauts localisés.

αδδ
ψδ
δtg.1
)cos(11
ra
i
maxi
+
−−=
y
x
Qi α
β γ
)(oδ F
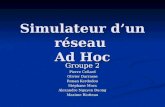
Angle de contact α L’angle de contact α est l’angle que fait la ligne de contact du roulement avec la direction radiale.
Paramètre de chargement ε
)cos(.cos.sin. irai ψαδαδδ += (5)
iδ est maximal pour l’élément roulant le plus chargé.
αδαδδ cos.sin. ramax += (6) (5) et (6) ⇒ (7)
Soit )(oδ le déplacement
rigide de la bague intérieure BI
par rapport à la bague extérieure
BE
yx)o( ra δδδ += , avec
aδ : la déflection axiale, rδ :
la déflexion radiale et soit iδ le
rapprochement des deux bagues
selon la normale commune aux
points de contact avec ième
élément roulant.
Figure N°1.4 : Le déplacement rigide de la bague intérieure BI
1.1

Par définition, le paramètre de chargement ε est donnée par : (3) (3) (8)
(7) s’écrit alors εψ
δδ
2)cos(1
1i
maxi −
−= (9)
En pratique, connaissant les efforts axial et radial et l’angle de contact α, on détermine ε à partir du tableau suivant :
αtgFF
ar . 1 0.9318 0.8964 0.8601 0.8225 0.7835 0.7427 0.6995
ε 0.0 0.2 0.3 0.4 0.5 0.6 0.7 0.8
]tg.1.[21
ra αδ
δε +=

y
x F β
O
αtgFF
ar .
0.6529 0.6000 0.4338 0.3088 0.1850 0.0831 0
ε 0.9 1.0 1.25 1.67 2.5 5.0 ∞
Angle de chargement β
On aboutit au système suivant :
=−
=−
∑
∑
=
=
0)cos(.cos.QF
0sin.QF
iNb
1iir
Nb
1iia
ψα
α
ce qui donne l’expression de l’angle β :∑
∑
=
=== Nb
1iii
Nb
1ii
ra
)cos(.Q
Q.tgF
Ftgψ
αβ
On a donc nécessairement : αβ tgtg ≥ Les angles α et β étant compris entre 0 et π, on a alors la condition suivante ;
Angle maximal de chargement ψm L’angle maximal de chargement ψm est donné pour un rapprochement iδ nul ce qui implique d’après (9) :
0.2)cos(1
1m
=−
− εψ
⇒
αβ ≥
).21cos(Arcm εψ −±=
avec Nb : nombre d’éléments roulants,
L’angle de chargement β est l’angle que
fait l’effort F avec la direction radiale.
En écrivant la condition d’équilibre de la
bague intérieure :
0QFNb
1ii =+ ∑
= Figure N°1.6 : L’angle de chargement β

Efforts axial et radial appliqués
En tenant compte des équations d’équilibre de la bague intérieure (11) et (12) et en
utilisant la loi de comportement élastique des contacts liant iδ à Qi :
tii .KQ δ= [2
Où K et t sont des constantes qui dépendent de la nature du contact, le système devient :
=−
=−
∑
∑
=
=
0)cos(.cos..
0sin..
1
1
i
Nb
i
tir
Nb
i
tia
KF
KF
ψαδ
αδ
D’après (5) nous avons
=−
−−
=−
−−
∑
∑
=
=
0)cos(.cos.]2
)cos(11.[.
0sin.]2
)cos(11.[.
1max
1max
i
ti
Nb
i
tr
Nb
i
tit
a
KF
KF
ψαε
ψδ
αε
ψδ
⇒
En supposant que le nombre d’éléments roulants est assez grand [2] , les expressions de Fa et Fr deviennent :
−−=
−−=
∫
∫
m
m
dNbQF
dNbQF
tr
ta
ψ
ψ
ψψεψ
πα
ψεψ
πα
0max
0max
).cos(.2cos1
1..cos.
.2cos1
1..sin.
−−+=
−−+=
∑
∑
=
=
)cos(.2)cos(1
1.21.cos.
2)cos(1
1.21.sin.
)2/(
1max
)2/(
1max
itiNbE
ir
NbE
i
tia
QF
QF
ψεψ
α
εψ
α
(24) (25)
[2]

On définit alors les intégrales de Sjoväll [2] :
−−=
−−=
∫
∫
m
m
dJr
dJa
t
t
ψ
ψ
ψψεψ
πε
ψεψ
πε
0
0
).cos(.2cos1
1.1)(
.2cos1
1.1)(
Les expressions de Fa et Fr deviennent alors :
Charge maximale
La charge maximale maxQ agissant sur l’élément roulant le plus chargé est :
=
=
)(J.cos.Q.NbF
)(J.sin.Q.NbF
rmaxr
amaxa
εα
εα
αεαε cos).(J.NbF
sin).(J.NbFQ
rr
aamax ==

Déplacement maximal, déflexion axiale, déflexion radiale
Le déplacement maximal maxδ au niveau de l’élément roulant le plus chargé est : Dans le cas des roulements à billes et pour les aciers AFNOR 100 C6 de module de Young E= 2.1. 105 MPa et de coefficient de poisson 3.0≈υ , on obtient la formule suivante :
3/1b
3/2max4max DQ.10.5.4 −=δ
où Db est le diamètre des billes en mm.
On en déduit les déflexions axiale aδ et radiale rδ à partir de (8) et (9) :
Expression de la charge Qi Les relations (5) et (13) donnent :
( ) ( )t
it
maxi
tmax
ti
max
i
.2cos11.K
.KQ
Q
−−=== ε
ψδ
δδδ
Formule de la distribution de charge Synoptique
t1
maxmax K
Q
=δ
αεε
δδ sin.212
maxa−
= αεδδ cos.21maxr =
et
( )t
imaxi .2
cos11QQ
−−= ε
ψ
Q(i)

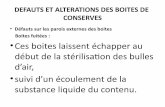
1.1.3 Vérification de la distribution de l’effort statique par la méthode des Éléments finis :
Afin de valider la théorie de la distribution de l’effort statique sur le roulement (formule 35) nous avons procédé à une simulation sur un logiciel d’éléments finis, a savoir COSMOS/DesignSTAR (v7.0).
Condition aux limites = conditions de simulation
Maillage sur le logiciel d’éléments finis
BE fixe BI chargé : 1000N Direction radiale 200N Direction axiale
Matériau : Acier 100C6 (Voir annexe pour caractéristiques complètes)
Tableau de valeur :
Bille N° 1 2 3 4 5
Effort donné par la formule théorique (N) 257 509 671 509 257
Valeur de la contrainte donnée par COSMOS (N /m²) 3,34E+07 1,02E+08 1,51E+08 9,99E+07 4,81E+07
1er rayon de l’ellipse Lb 5,28E-03 5,10E-03 4,83E-03 5,10E-03 5,28E-03
2eme rayon de l’ellipse La 3,01E-04 2,91E-04 2,76E-04 2,91E-04 3,01E-04
Zone de contact*
Surface de l’ellipse 4,99E-06 4,66E-06 4,18E-06 4,66E-06 4,99E-06
Effort donné par COSMOS (N) =Contrainte*Surface de contact 166,81 475,81 631,01 466,02 240,22
Écart relatif (%) 35,84 ** 6,52 5,96 5,28 6,53 * Voir chapitre caractérisation de la géométrie de contact ** On ne prendra pas en considération cette valeur car l’écart est principalement dû à la valeur de contrainte prélevé de COSMOS (incertitude du maillage), le roulement et les conditions de simulations étant symétriques, on utilisera les valeurs de la bille symétriquement opposé pour l’interprétation.

Figure 1.7b: Répartition des contraintes dans le roulement NB : vue en coupe
Comparaison entre la formule theorique et COSMOS
671
492509
260 257466,02475,81
166,81 240,22
631,01
0
200
400
600
800
1 2 3 4 5
N° de la bille
Effo
rt a
ppliq
ué (N
)
Effort donnépar laformulethéorique(N)
Effort donnéparCOSMOS(N)
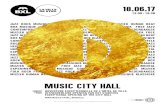
2.1.1 Effort de choc dynamique :
Caractéristiques Cinématiques de la bille en pivotant autour d’un défaut Soit T1 = Énergie Cinématique Initiale U1 = Énergie Potentielle Initiale
T2 = Énergie Cinématique Finale U2 = Énergie Potentielle Finale
ω2
V2½ Bd cos α
α
G
État (2)
ω1
V1
½ Bd G
État (1)
2 g m U1
dΒ=
22
222 wI
21 V m
21 T +=
21
211 wI
21 V m
21 T +=
2 cos g m U2
dΒ= α

La conservation de l’énergie mécanique totale entre l’état (1) et l’état (2) s’écrit comme suit : T1 + U1 = T2 + U2 Sachant que la vitesse du point G est VG = ½ Bd � = r � et que le moment d’inertie de la bille est alors : ½ m V 2 + ½ I � 2 = ½ m (r �) 2 + ½ (2/5 m r 2 ) �2 = ½ m 7/5 r 2 �2 ½ m V 2 + ½ I � 2 = 7/10 m r 2 �2 la conservation de l’énergie mécanique totale s’écrit alors :
+ = + αcos wr m 107 wr m
107 2
222
12 rgmrgm
rg αωω cos1
7102
1
2
2
−=−
Bg
d
αωω
cos17202
1
2
2
−=−
Cette expression est de la forme =
ααωω 22
1
2
2 =−
L’accélération angulaire de la bille dans son mouvement de chute ou de pivotement autour du coin du défaut est =
Bg
dα
αα
cos17
10 −=
et la vitesse finale aura pour expression =
252 r m I =

ωαω 12+= t
Masse de choc Par analogie avec une voiture qui roule sur un « nid de poule », et qui reçoit un choc, la
masse totale responsable du choc est la somme de la masse à vide du véhicule et de la masse chargée (celle des voyageurs), la masse totale de la bille est la somme de sa masse réelle (à vide) et de la masse transportée.
gF
gFmm SS
videchoc≈+=
L’approximation est légitime car la masse à vide de la bille est négligeable devant la masse transportée Effort de choc L’effort Dynamique (ou de choc) est celui qui correspond à une transmission de l’énergie cinétique de la bille.
SVmF D ∆
∆=2
21
SV
gFF S
D ∆∆≈
2
21
mmm échvidechoc arg+=

L’effort Total lors du choc au point S, est la somme de l’effort Statique et de l’effort Dynamique. Effort ( Total ) = Effort ( Statique ) + Effort ( Dynamique )
αsinFFF DST +=
αsin21 2
SV
gFFF S
ST ∆∆+=
ou
Bd
B
d
d
def
d
def
==
2
2sinα
+ = FT
FD FS
α
FSTATIQUE
FDYNAMIQUE
α
d
G

On obtient alors : 2.3. Mise en place d’un modèle général
Le modèle général du roulement suivant une ligne radiale donnée est explicité dans la
figure suivante :
où : K21 : la rigidité du film d’huile entre billes et BE [ N.m-1 ]
dBd
S2
=∆
=
∆∆+
SV
gFF ST
2
2sin
1α
K1 M1
K21
C21 C23
K23
M2 M3 K3
Figure N°2.18 : Le modèle du roulement suivant une ligne radiale

K23 : la rigidité du film d’huile entre billes et BI [ N.m-1 ] C21 : l’amortissement du film d’huile entre billes et BE [ N.s.m-1 ] C23 : l’amortissement du film d’huile entre billes et BI [ N.s.m-1 ] M1 : la masse de la bague extérieure [ Kg ] M2 : la masse de la bille [ Kg ] M3 : la masse de la bague intérieure [ Kg ] K1 : la rigidité de la bague extérieure [ N.m-1 ] K3 : la rigidité de la bague intérieure [ N.m-1 ] 3.1. Mise en équation du problème
=−++−+
=−++−−++−
=−++−+
32332333
232132122
12112111
.21)21(2121.
.21).2122(.2221).2122(22.
.22)22(2222.
FyKyKKyCyCyM
FyKyKKyKyCyCCyCyM
FyKyKKyCyCyM
K1 M1
K21
C21 C23
K23
M2 M3 K3

3.4. Réponse du modèle à un effort donné suivant la ligne radiale Réponse du modèle à un effort causé par un défaut sur la BE
On considère le même roulement de référence SKF 6206 Les conditions de fonctionnement sont : La résultante des efforts F = 2000 N. L’angle de chargement β = 30°. Un défaut sur la bague extérieure de diamètre ΦBE = 1 mm.
Figure N°3.4 : Réponse du modèle à un effort causé par un défaut 1mm sur la
BE

4.1. Correction géométrique de la réponse 4.1.1. Cas d’un défaut sur la bague extérieure La position angulaire θBE d’un défaut sur la bague extérieure reste constante au cours du temps. A chaque fois que l’élément roulant vient en contact avec le défaut, il se produit un effort de choc suivant la ligne radiale ∆m. Cet effort de choc engendre une déformation maximale de la bague extérieure suivant cette même ligne. Le modèle qui a été établi donne, justement, la réponse suivant la ligne radiale ∆m ( ligne de maximum de déformation ), alors que la réponse réelle est donnée suivant la ligne radiale de mesure (oy) là où on a placé le capteur. 4.1.2. Cas d’un défaut sur la bague intérieure La position angulaire θBI d’un défaut sur la bague intérieure est variable au cours du temps. La réponse que donne le modèle est toujours une réponse suivant la ligne radiale de maximum de déformation. Cette réponse a donc une amplitude constante, alors que la réponse réelle enregistrée par un capteur est donnée suivant la ligne radiale de mesure et aura donc une amplitude variable au cours du temps. Ceci vient du fait que la bague intérieure vibre et tourne au même temps.
2
2
2
22222
b)(cos
a)(sin1R
)(cos.b)(sin.ab.aR)(
θθθθθδ
+
−=+
−=
z
y ∆m
θBE
O
La bague extérieure
Ligne de maximum de déformation Un capteur
Figure N°4.1 : Direction de déformation – direction de mesure( pour BE)

Bd
d
def
4.1.3. Réponse corrigée Dans les deux cas on doit donc introduire un terme correctif qui tient compte de l’influence de la variation de la déformation de la bague au cours du temps ; pour ramener la réponse du modèle à la réponse réelle que donne un capteur placé sur une ligne de mesure bien déterminée. En vibrant, les bagues se déforment et prennent une forme elliptique suivant la direction de l’effort et donc selon la direction du défaut. 4.2. Effets des perturbations aléatoires
Des études précédentes ont montré que l’amplitude acoustique du bruit généré par le
roulement suivait la loi suivante
=S
FVKA max2
2/1
où K : constante de pondération. Fmax : Charge maximale subit par le roulement [ N ]. S : l’aire de contact elliptique bille / bague [ m² ]. V : vitesse de glissement au niveau du contact bille / bague [ m / s ].
Or cette loi n’est valable que pour un roulement ne contenant pas de défaut, et on a droit de penser qu’une loi du comportement aléatoire régissant les roulements défectueux obéirait aux mêmes paramètres tout en tenant compte du rapport (diamètre de défaut sur diamètre de bille). Cette loi serait de la forme suivante :
Figure N°4.2 : Direction de déformation – direction de mesure( pour BI)
z
y
θBI(t)
O
La bague intérieure
Un capteur

××
=
SFV
Bd
Ad
deff max2
2/1
Ou f serais la fonction de pondération qui nous permettra de déterminer avec précision l’amplitude de la composante aléatoire à ajouter à notre signal pour avoir les même descripteurs temporels que le signal mesuré. Nous avons recueillit les résultats suivants :
Diamètre du défaut Variable correction 0,00 4,00 0,25 30 0,50 5,50 0,75 6,80 1,00 7,50 1,50 70,00 1,75 140,00 2,00 180,00
y = -230,76x6 + 1365x5 - 3119,2x4 + 3502,5x3 - 1913,4x2 + 401,65x + 4,1832
R2 = 0,9989
0,00
50,00
100,00
150,00
200,00
0,00 0,50 1,00 1,50 2,00 2,50
Maintenant on a une équation polynomiale du 6eme ordre qui nous donne l’amplitude du bruit en fonction rapport (Diamètre du défaut / Diamètre de la bille).
++++++= h
Bdd
gBdd
fBdd
eBdd
cBdd
bBdd
axf defdefdefdefdefdef '''''')( 2
2
3
3
4
4
5
5
6
6
2
∗=
SFVxfA max
2
2
2/1)(
Étude Expérimentale
6.1. Dispositif d’application de l’effort radial : 6.4.1 Théorie :
Nous avons opté pour l’application de l’effort radial pour un système de déséquilibre de masse ( BALOURD ) ; qui en tournant crée par son inertie un effort centrifuge :
ou F : la force en N. M :la masse de déséquilibre en Kg R : le rayon ou se trouve le centre de gravité de la masse de déséquilibre en m. W :est la vitesse de rotation en rad/s.

Figure 5.4 : Image réelle du disque Figure 5.5 : Image du logiciel de CAO Nous avons utilisé une masse de déséquilibre totale de 600g. Pour minimiser l’effort de
cisaillement exercé sur les boulons de maintien des masses, La masse totale a été repartie sur 3 positions séparées de 30°; et nous avons disposé les masses des deux cotés du disque. Le rayon ou se trouve le centre de gravité des masse est 115 mm .
6.4.2 Effort utile appliqué au roulement suite a la charge radiale : L’effort radial que nous avons calculé précédemment est valable dans le plan du disque de
balourd, et puisque notre roulement n’est pas contenu dans ce plan, nous allons dans ce qui suit calculer l’effort « utile » situé dans le plan du roulement : Figure 5.6 : Représentation de l’axe avec disque de balourd
Nous allons appliquer la théorie, des moments fléchissants pour calculer la réaction Rb (de notre roulement )face à l’effort qui lui est appliqué (et qui est notre inconnue )
Rb
Ra Fr
400 mm 110 mm
O B
CMb=180N

LKF ∆×=
6.2. Dispositif d’application de l’effort axial : 6.5.1 Théorie
L’effort axial est appliqué par la compression d’un ressort ; en effet un ressort comprimé génère un effort :
Ou F : la force en (N) K : La rigidité du ressort en (N.m-1) ∆L : Déformation du ressort(m). Reste à savoir que pour obtenir un effort dans l’ordre de grandeur qu’on s’est fixé ; il
fallait un ressort de grande rigidité ; Or des ressorts avec de telles rigidités existent et sont utilisés dans l’industrie comme à la fois supports et absorbeurs de vibration pour les machines tournantes de grandes dimensions ou tournant à grande vitesse et jugées vitales dans la chaîne de fabrication. Image réelle (sans disque de Balourd) CAO (SolidWors2003)
Figure 5.8 : Image réelle (sans disque pour raison de clarté)
Figure 5.9 : Image CAO
6.5.2 Détermination de la rigidité du ressort :
Pour déterminer la rigidité du ressort, nous avons, dans un premier temps, procédé à une
analyse par éléments finis. Dans un deuxième temps, et dans le soucis de toujours confronter notre modèle théorique
avec la réalité physique nous avons mené des essais expérimentaux pour déterminer la rigidité du ressort sur une machine de traction compression.

LKF ∆×= LKF ∆×=
6.5.2.1 Détermination de la rigidité du ressort par la méthode des éléments finis : Les dessins ont été réalisés sur SolidWorks© 2003, l’analyses par éléments finis à été
effectué sur Cosmos©DesignSTAR© 4.0. Vous que nous savons que la relation reliant l’effort par rapport à la déformation est linéaire
pour un ressort, nous nous sommes contentés de 2 efforts appliqués au ressort, nous avons mesuré les déformations correspondantes, ce qui nous à permis d’avoir une première estimation de la rigidité de notre ressort.
Les conditions aux limites sont visibles sur les graphiques des simulations : Flèches vertes : fixes Flèches rouges : effort de chargement. Matériaux : fonte austénitique de module d’élasticité E=130 MPa. .
Vue du ressort sur le logiciel de CAO
Simulation 1 : Force appliquée = 600 N Déformation résultante : 19.74 mm
K= 30 395 N.m-1
Simulation 1 : Force appliquée = 1200 N Déformation résultante : 39.49 mm
K= 30 387 N.m-1

6.5.2.2 Détermination expérimentale de la rigidité du ressort par la machine de sollicitation : Pour déterminer avec précision la rigidité de notre ressort; nous avons effectué des essais sur une machine de sollicitation de traction compression. Cette machine permet d’appliquer un effort de valeur connu entre les deux mords et est aussi équipée d’un dispositif permettant de mesurer la distance entre eux avec une précision de 10 µm. Machine d’essai Traction Compression : Figure 5.10 : Machine d’essai en résistance des matériaux : Test de ressort
Tableau de valeur :
Force (N) Déformation (m)
0 0,00E+00 108 3,29E-03 204 6,36E-03 302 9,55E-03 410 1,30E-02 504 1,60E-02 606 1,98E-02 703 2,23E-02 801 2,57E-02 903 2,91E-02 1004 3,21E-02
Raideur du ressort
y = 30564x - 2,3475R2 = 0,9995
-200
0200
400
600
8001000
1200
0 0,01 0,02 0,03 0,04
Compression (m)
Forc
e (N
)
Force
Linear (Force)
Mord fixe
Mord mobile
Valeur de la déformation
Valeur de l’effort appliqué
Jauges (mesure l’effort )

Ces essais expérimentaux nous ont permis d’évaluer la rigidité de notre ressort à 30564 N.m-1, ce qui concorde parfaitement avec notre analyse par élément finis, l’écart relatif entre les deux méthode que nous avons utilisé est de 0.55%. Pour notre simulateur nous avons utilisé la rigidité déterminée à partir des essais expérimentaux. Emplacement des jauges et aménagement du palier :
Demi-Palier Inférieur Demi-Palier Supérieur
Figure 5.15 : Jauges directement collées sur la bague extérieure
Figure 5.15b : Dégagement pour la jauge et trou pour le passage des fils
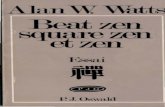
Spectre du signal recueillit par les jauges :
60Hz
BPFO
3*60Hz RPM
2*RPM

Figure 5.15b : Spectre du signal recueillit par les jauges Avec les jauges, on a réussi à identifier les fréquences ou se produisent les efforts de chocs
subit par le roulement, et en comparant avec les signaux recueillis par les accéléromètres, on a pu démontrer que ces derniers ne restituent pas que les efforts de chocs subit par le roulement mais bien toutes les vibrations ayant siège au sein du palier (Balourd, désalignement, roulement …) contrairement a la jauge, qui directement collé au roulement, n’est sensible qu’à la déformation du roulement due a l’effort de choc. On s’est assuré de la validité de nos outils en les comparant avec un logiciel d’aide au diagnostic : ADLIB © développé par la firme IMS (Voir annexe).
Allure de la réponse temporelle pour un défaut sur bague extérieure avec effort radial
tournant : Figure 5.24 : Allure de la réponse temporelle
6.10.1 Filtrage de la réponse expérimentale : Fonction de transfert du filtre :
Chocs à BPFO
Modulation à la vitesse de rotation
Composante due au balourd

Figure 5.24 : Diagramme de BODE

Réponse Avant et après filtrage :
On remarque clairement la disparition de la composante basse fréquence après application du filtre coupe bande.

Le Simulateur BEARING TOOLBOX B.E.A.T
Fenêtre 1 : Caractéristiques Géométriques du roulement
On peut choisir entre deux roulements déjà programmés ou bien entrer manuellement les caractéristiques d’ un autre roulements Fenêtre 2 : Caractéristiques et emplacements des défauts

Cette simulation à été réalisé avec un seul défaut sur la bague intérieure, cependant il est possible de faire la simulation avec plusieurs défauts localisés sur la BE, la BI ainsi que sur les billes. Fenêtre 3 : Conditions de fonctionnement

Fenêtre 4 : Simulation :
La simulation étant en cours, on peut déjà voir l’allure de la réponse temporelle en déplacement, en vitesse et en accélération. Résultats et outils de traitement du signal Chocs, réponse et descripteurs temporels On peut déjà conclure quand à la présence de modulation, normal puisque la charge radiale est de direction fixe et le défaut est tournant (sur la Bague intérieure )

Demarche :
A partir de la distribution des chocs(1ere courbe) et en se basant sur notre modèle de roulement, on calcule la réponse temporelle (courbe 2), ensuite la transformée de HILBERT, qui est l’enveloppe du signal (courbe 3)est utilisée pour calculer le spectre enveloppe de la réponse (courbe 4) Spectre enveloppe et spectre de la réponse en échelle linéaire : Les curseurs verticaux indiquent l’emplacement des fréquences de défauts de roulements calculées à partir des formules théoriques : c’est là que nous devrons trouver les pics.

Spectre enveloppe et spectre de la réponse en échelle Logarithmique :
Representation Temps Fréquences 3D du signal simulé : L’avantage de cette technique est de combiner les avantages de la représentation
temporelle et fréquentielles du signal, l’on peut ainsi juger d’éventuelle modulation dans le domaine temporel, et déterminer a quelles fréquences ces phénomènes se produisent

Representation Temps Fréquences 3D de l’enveloppe du signal simulé : En comparant avec la courbe précédente, on peut aisément voir l’intérêt de la technique
d’enveloppe : Elle ramène des phénomènes se produisant dans les hautes fréquences vers les basses fréquences.
Representation Temps Fréquences 3D du signal simulé :
Signal étudié
∆1 ∆2
Spectre dans la ligne ∆1
Reponse dans la ligne ∆2

Il est évident ici que la représentation temps fréquences permet d’associer la représentation temporelle et la représentation fréquentielle sur le même graphique. Fenêtre Analyse Avancée :
Cette fenêtre donne une idée sur les différents outil dont dispose notre simulateur pour traiter un signal provenant d’un défaut de roulement : Chocs, Réponse temporelle, enveloppe de réponse, spectre enveloppe, spectre, représentation temps fréquence, représentation temps fréquence enveloppe, descripteurs temporels…