Automatismes & Réseaux pour la GTB - univ-tln.fr
55
UE2 : Automatisme & Réseaux pour la GTB LP MEEDD Nicolas Néanne 02/10/2018 Automatismes & Automatismes & Réseaux pour la Réseaux pour la GTB GTB [email protected]
Transcript of Automatismes & Réseaux pour la GTB - univ-tln.fr

UE2 : Automatisme & Réseaux pour la GTB
LP MEEDD Nicolas Néanne02/10/2018
Automatismes & Automatismes & Réseaux pour la Réseaux pour la
GTBGTB

1- Introduction
Nicolas Néanne2
UE2D ARB
1 / Définitions et besoinsa – GTBb - Télégestion
2 / Transmissions des donnéesa – Codage numérique des informationsb – Codage électrique et modulations c – principe du bus de terraind – survol de TCP/IP
3 / Présentation d'un contrôleur de GTC/GTBa – Présentation du 750-849b – Éléments de Programmation
Ch 1 : Introduction
1- Introduction
Nicolas Néanne3
UE2D ARB
1- Définitions & Besoins
a – GTB
La Gestion Technique des Bâtiments (BMS en Anglais : « Building Management System ») vise à gérer et à superviser l'ensemble des équipements qui y sont installés, assurant les fonctions de :
✔ confort (optimisation de l'éclairage, du chauffage), ✔ gestion d'énergie (programmation), ✔ sécurité (comme les alarmes) ✔ communication (comme les commandes à distance ou l'émission de signaux
destinés à l'utilisateur) que l'on peut retrouver dans les maisons, les hôtels, les lieux publics...
Définition :

1- Introduction
Nicolas Néanne4
UE2D ARB
Les technologies mises en œuvre font appel à la programmation d'équipements visant à assurer les fonctions d'automatismes ainsi qu'à leur paramétrage en vue de les faire communiquer.

1- Introduction
Nicolas Néanne5
UE2D ARB
b – Télégestion
Suivi de production
La télégestion (gestion à distance) des installations de production d'énergie (centrales photovoltaïques notamment) va permettre des apports considérables en termes d'exploitation :
Suivi de production
Télémaintenance
Les technologies mises en jeu feront notamment appel à des réseaux de communications adaptés, ainsi que des serveurs Web embarqués dans les équipements de production (les onduleurs par exemple) ou indépendants.
La détection précoce d'un défaut de production, ou d'une panne sur un composant, permettra une intervention optimale des équipes de maintenances, et limitera ainsi les pertes de production.
L'archivage et le suivi en temps réelles des données de production permettra une estimation au plus juste, et permettra au propriétaire de la centrale de production de confronter la production réelle au prévisionnel.

1- Introduction
Nicolas Néanne6
UE2D ARB
2- transmission des données
a – Codage Numérique des informations
Tout système informatique (c'est à dire un système qui traite les informations de façon automatique) représente les données (ou informations) de façon numérique c'est à dire par des nombres).
Ces systèmes vont nous confronter à différentes représentations des nombres et caractères....
Par ailleurs, les systèmes que nous allons étudier étant basés sur les échanges et la communication, il va donc falloir appréhender la façon dont ces données sont transmises d'une unité à une autre.
1- Introduction
Nicolas Néanne7
UE2D ARB
✔ Réprésentations Binaires & HexadécimaleOutre la notation naturellement adoptée sous forme décimale des nombres, on rencontre fréquemment lorsque l'on est amené à intervenir sur un système informatique (tels que certains équipements de télégestion ou d'immotique) deux autres bases de numération :
✔ La base binaire : Elle comporte deux symboles ('0' et '1'). Cette représentation est la plus fidèle à la façon dont sont traités physiquement les données dans un système informatique.
On aura par exemple recours à cette représentation lorsqu'il s'agira d'analyser des données circulant sur une liaison à l'aide d'un appareil de mesure.
✔ La base hexadécimale : Elle comporte 16 symboles ('0' à '9' puis 'A' à 'F'). Cette offre l'avantage d'être beaucoup plus compacte que la représentation binaire; l'intérêt étant que le passage de l'une à l'autre et aisé.

1- Introduction
Nicolas Néanne8
UE2D ARB
Base Décimale Base Binaire Base Héxadécimale
0 0000 0
1 0001 1
2 0010 2
3 0011 3
4 0100 4
5 0101 5
6 0110 6
7 0111 7
8 1000 8
9 1001 9
10 1010 A
11 1011 B
12 1100 C
13 1101 D
14 1110 E
15 1111 F
16 10000 10
17 10001 11
18 10010 12

1- Introduction
Nicolas Néanne9
UE2D ARB
✔ Conversion Hexa → DécimalLa valeur (décimale) d'un nombre affiché sous forme hexadécimale peut être obtenue en multipliant chacun des symboles hexadécimaux par la puissance de 16 correspondant à sa position à l'intérieur du nombre; chacun des termes obtenus devant ensuite être sommé, comme dans l'exemple ci-dessous :
A12E16
→ 10 x 16 3 + 1 x 16 2 + 2 x 16 1 14 x 16 0
Pour obtenir la valeur hexadécimale d'un nombre affiché en décimal, on effectue sur ce nombre une succession de divisions par 16. Les quotients obtenus - compris entre 0 et 15 - peuvent être associés à un symbole hexadécimal, pour former la valeur correspondante dans la base 16. Le dernier quotient obtenu constitue le poids fort du nombre (le 1er le poids faible).
✔ Conversion Décimal → Hexa

1- Introduction
Nicolas Néanne10
UE2D ARB
✔ Conversion Binaire → DécimalLa valeur (décimale) d'un nombre affiché sous forme binaire peut être obtenue en multipliant chacun des bits par la puissance de 2 correspondant à sa position à l'intérieur du nombre; chacun des termes obtenus devant ensuite être sommé, comme dans l'exemple ci-dessous :
1001102 → 1 x 2 5 + 0 x 2 4 + 0 x 2 3 + 1 x 2 2 + 1 x 2 1 + 0 x 2 0
Pour obtenir la valeur hexadécimale d'un nombre affiché en décimal, on effectue sur ce nombre une succession de divisions par 2. Les quotients obtenus - compris entre 0 et 1 - forment la valeur correspondante dans la base 2. Le dernier quotient obtenu constitue le poids fort du nombre (le 1er le poids faible).
✔ Conversion Décimal → Binaire

1- Introduction
Nicolas Néanne11
UE2D ARB
✔ Conversions Binaire ↔ HexadécimalLe changement de base se fait en faisant la correspondance entre un symbole hexa et un groupe de 4 bits :
1001 11002
9 C 16
1 2 F 4 16
0001 0010 1111 0100 2

1- Introduction
Nicolas Néanne12
UE2D ARB
✔ Représentation des nombres entiers.Un nombre codé sur N bits peut prendre 2N valeurs différentes. Si la valeur à représenter est strictement positive (exemple : pression ambiante), on choisira une variable dite "non-signée" pour la représenter.
Dans ce cas, les 2N valeurs possible s'étaleront de 0 à 2N-1.
Si la valeur à représenter peut être positive ou négative (exemple : température extérieure), on travaillera alors en représentation dite "signée".
Dans ce cas, les 2N valeurs possible s'étaleront de -2N-1 à 2N-1-1
✔Applications :
- Les équipements d'automatismes travaillent le plus souvent sur un format de 16 bits. Donnez les plages de valeurs possibles en signé et en non signé.
- Les PC travaillent aujourd'hui en 64 bits. Donnez les plages de valeurs possibles en signé et en non signé pour des variables entières.

1- Introduction
Nicolas Néanne13
UE2D ARB
Table des caractères ASCII sur 7 bits :
Le code ASCII permet de représenter les caractères (affichage, impression...). La version initiale sur 7 bits comporte les caractères « de base » (non accentués, etc...) :
1- Introduction
Nicolas Néanne14
UE2D ARB
c – Codage électrique, modulations : Les informations numériques traitées par les équipements communicants circulent entre ceux-ci, à travers des canaux, le plus souvent filaires, mais également sans-fils.
Ces informations doivent donc prendre une forme physique :
- Tension
- Courant
- ondes électromagnétiques
Les caractéristiques (forme, fréquence, amplitudes etc...) des signaux ainsi véhiculés vont être choisies afin d'obtenir des propriétés intéressantes pour la communication à établir (exemples : immunité aux parasites, vitesse de transmission etc...).

1- Introduction
Nicolas Néanne15
UE2D ARB
NRZ : Non retour à Zéro
1- Introduction
Nicolas Néanne16
UE2D ARB
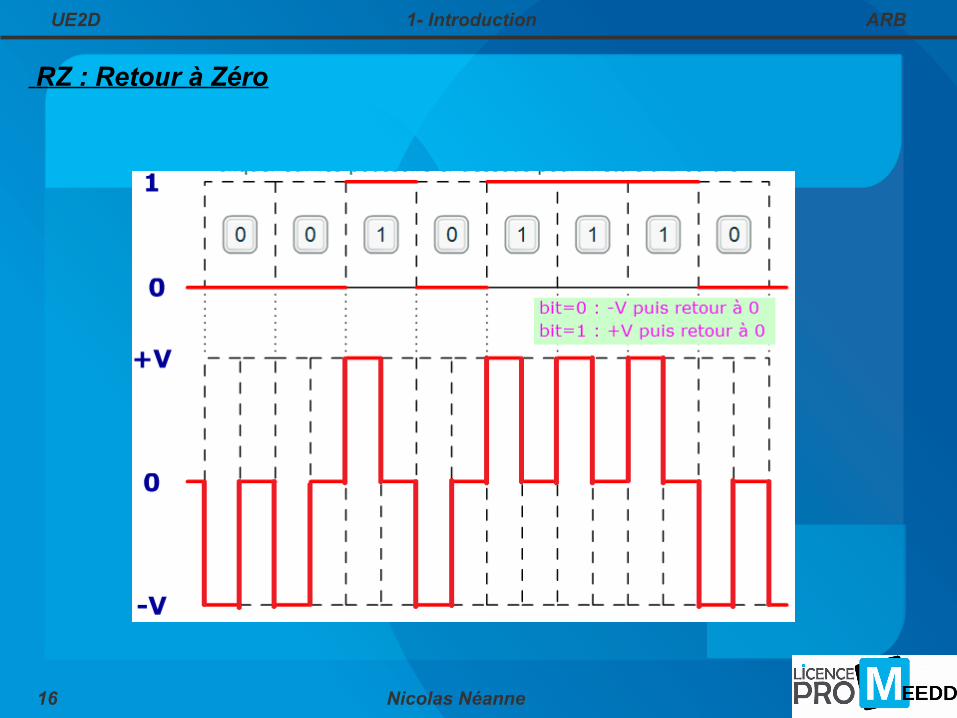
RZ : Retour à Zéro

1- Introduction
Nicolas Néanne17
UE2D ARB
NRZI : Manchester

1- Introduction
Nicolas Néanne18
UE2D ARB
✔Exercices :
Représenter les nombres suivants :
. 5A16
. 145
Dans les codages suivants :
- NRZ- RZ- Manchester

1- Introduction
Nicolas Néanne19
UE2D ARB
Les liaisons RS232 et RS485 sont deux normes très répandues dans le domaine des transmissions de données « filaires ».
Rappels :
RS232 : Transmission NRZ, niveaux de tension +/-12V référencés par rapport à la masse.RS485 : Transmission différentielle sur paire torsadée, niveaux de tension 0/5v.
Esclave
Maître
Esclave n°1
Maître
Esclave n° i...
RS232 :
Echanges entre 1 Maître & 1 esclave : POINT à POINT&Courtes Distances (<20m)
RS485 :
Echanges entre 1 Maître & plsrs esclave : MULTIPOINTJusqu'à 120m de distance
RS485 et RS232 :

1- Introduction
Nicolas Néanne20
UE2D ARB
0 0 1 0 1 1 1 0 1Bits transmis
VRS232
RS485 : D0
RS485 : D1
VRS485
+5v
0v
+5v
+12v
-12v
0v
+5v
-5v
Parasites e-m

1- Introduction
Nicolas Néanne21
UE2D ARB
ASK : Amplitude Shift Keying
Dans l'exemple ci-contrela porteuse est multipliée par 1si le bit à transmettre est 1ou par 0,5si le bit à transmettre est 0
OOK : On Off Keying
C'est une modulation tout ou rien
Dans l'exemple ci-contrela porteuse est multipliée par 1si le bit à transmettre est 1ou par 0si le bit à transmettre est 0
1- Introduction
Nicolas Néanne22
UE2D ARB
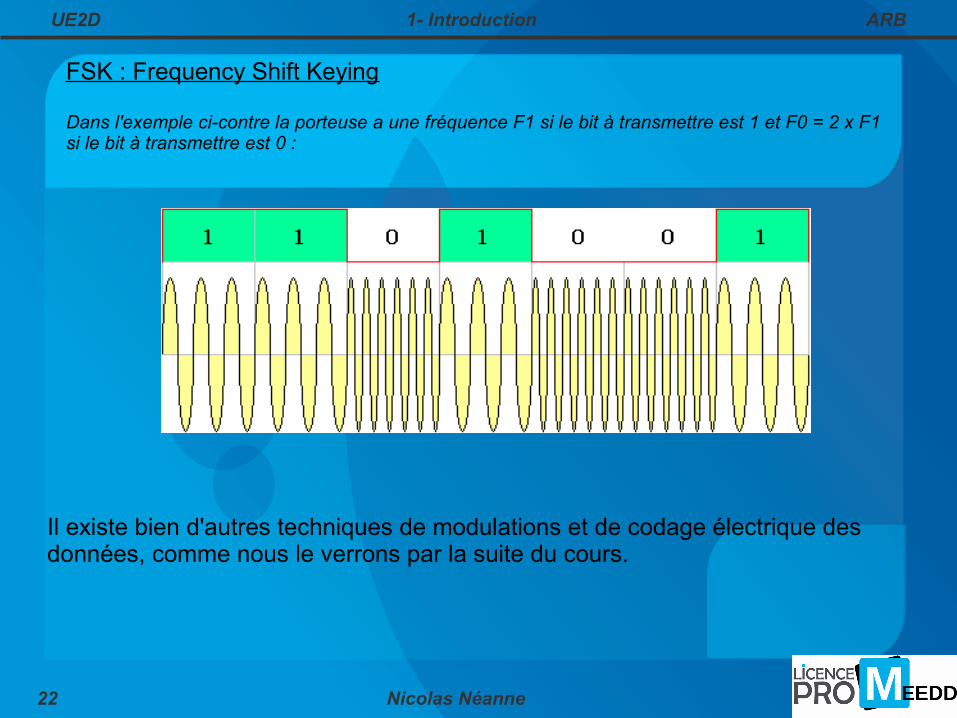
FSK : Frequency Shift Keying
Dans l'exemple ci-contre la porteuse a une fréquence F1 si le bit à transmettre est 1 et F0 = 2 x F1 si le bit à transmettre est 0 :
Il existe bien d'autres techniques de modulations et de codage électrique des données, comme nous le verrons par la suite du cours.

1- Introduction
Nicolas Néanne23
UE2D ARB
c – Principe du bus de terrain : Un bus de terrain est un canal de communication reliant plusieurs équipements électroniques sur une zone géographique donnée (usine, voiture, bâtiment, centrale électrique etc...).
Il s'agit généralement d'une communication filaire, à travers laquelle les équipements de terrain échangent des données numériques transmises en série (afin d'éviter la multiplication des fils).
On trouve des bus dédiées aux applications automobiles (bus CAN), industrielles (Profibus...), immotiques (KNX …) etc...
Chaque bus communique selon un protocole bien défini censé répondre au mieux aux besoin du terrain considéré.
On parle de « topologie » pour désigner la façon dont les équipements de terrain sont reliés entre eux pour former un réseau :
Topologie étoileTopologie Bus Topologie anneau

1- Introduction
Nicolas Néanne24
UE2D ARB
APPLICATION7
6
5
4
3
2
1
LIAISON
PHYSIQUE
Les couches 3 à 6 sont vides:
Pas d ’interconnexion avec un autre réseau
Un bus de terrain est basé sur un modèle de communication à 3 couches, chacune traitant un aspect spécifique nécessaire à la communication :
LLC : Logical Link Control (Détection des erreurs de transmission)MAC : Medium Access Control (accès au media de communication)
Services proposés par le bus de terrain (types de données échangés etc...)
Codage des bits + Caractéristiques électriques

1- Introduction
Nicolas Néanne25
UE2D ARB
d – Survol de TCP-IP: La communication de terrain ainsi que la supervision passe de plus en plus par TCP-IP afin d'interagir avec le réseau informatique, et éventuellement avec internet.
Nous allons donc présenter les rudiments d'ethernet et de l'adressage IP, sur lesquels sont basés les réseaux informatiques de petite (LAN : Local Area Network) et grande (WAN : World Area Network) envergure.

1- Introduction
Nicolas Néanne26
UE2D ARB
Ethernet :
Ethernet est une technologie pour les réseaux locaux développée au début des années 70 à Xerox PARC (Palo Alto Research Center).
Elle est standardisée en 1978 par un consortium DIX regroupant Digital, Intel et Xerox, puis normalise par l'IEEE, sous le numéro 802.3 et 802.2.
Couche physique :
Débit 10 Mbps
Codage Manchester
Voltage (+0,85V/-0,85V)
- 1995 passage au débit 100Mb/s et Auto-négociation 10/100Mb/s
- 1998 passage au débit 1Gb/s
1- Introduction
Nicolas Néanne27
UE2D ARB
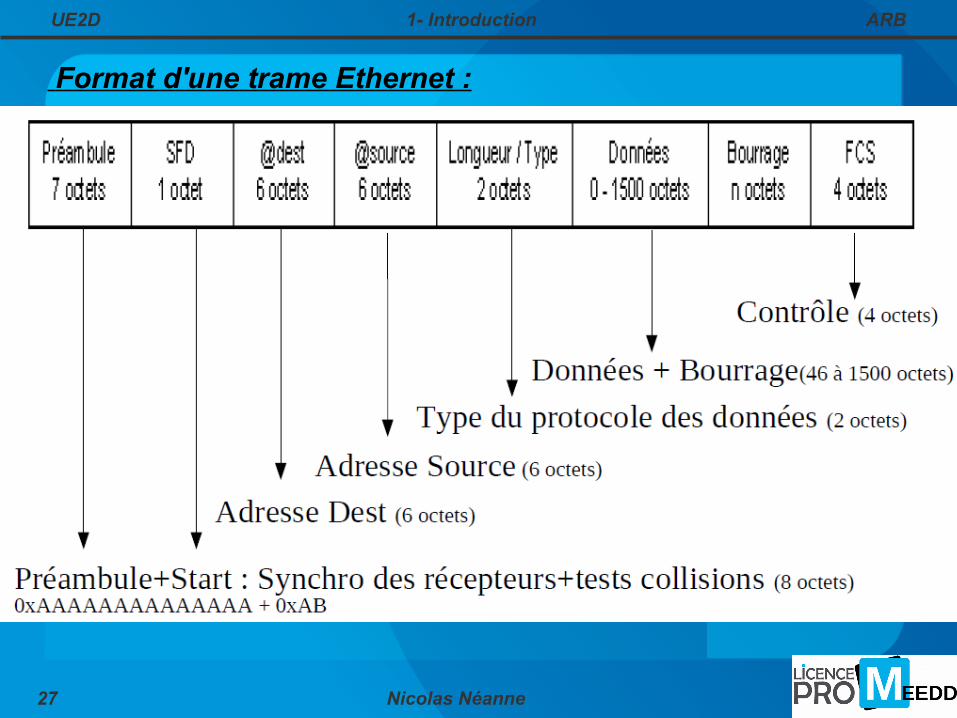
Format d'une trame Ethernet :

1- Introduction
Nicolas Néanne28
UE2D ARB
Sur Ethernet chaque station est repérée par une adresse unique au monde.
Cette adresse (on parlera de MAC address) est représentée sur6 octets :
Ex: 00-00-0C-F2-00-12 est l'adresse d'une carte CISCO
FF-FF-FF-FF-FF-FF est une adresse de diffusion, c-a-d toutes lesmachines sur le sous réseau sont considérées comme destinataires
Code constructeur (3 octets) Numéro de série (3 octets)

1- Introduction
Nicolas Néanne29
UE2D ARB
L'adressage IP v4 :
Le protocole IP ("Internet protocole") assure l'acheminement des messages d'une machine à une autre. La trame IP est contenue dans les données de la trame ethernet. C'est donc l'adresse IP qui va être utilisée dans l'acheminement des paquets de données à travers le réseau.
L'adresse IP est composée de 4 octets, généralement notés sous forme de 4 nombres décimaux séparés par un point (notation décimale pointée).
→ Exemple : 10.4.45.12
Il existe 3 classes d'adresses IP, correspondant à une étendue (nombre de machines connectées) plus ou moins importante :

1- Introduction
Nicolas Néanne30
UE2D ARB
On peut déterminer la classe d'un réseau à l'aide des bits de poids fort de son adresse :
0 Réseau (7 bits) / Machine (24 bits)
1 0 Réseau (14 bits) / Machine (16 bits)
1 1 0 Réseau (21 bits) / Machine (8 bits)
✔ Masque de sous-réseau :
Il permet de distinguer, dans une adresse IP, la partie identifiant le réseau et la partie identifiant la machine au sein de ce réseau.
En appliquant un ET logique entre le masque de sous réseau et l'adresse IP (tous deux écrits en binaire), on obtient l'adresse du sous-réseau. Deux machines appartenant au même sous réseau peuvent communiquer sans passer par un routeur.
Par défaut, le masque de sous-réseau pour une adresse de classe C est 255.255.255.0

1- Introduction
Nicolas Néanne31
UE2D ARB
➔ Exemple :
Un équipement a pour configuration :Adr IP v4 : 192.168.1.132Masque de sous réseau : 255.255.255.128
- Donnez l'adresse de sous-réseau correspondante.- Indiquez le nombre maximum de machines adressables sur ce réseau.

1- Introduction
Nicolas Néanne32
UE2D ARB
Le modèle client serveur :
TCP/IP est basé sur le modèle client/serveur. Lors d'un échange sur le réseau, le client est demandeur d'un service à un serveur, qui est quant à lui fournisseur de ce service.
Par exemple, une machine « cliente » accède au serveur au serveur du fournisseur « Orange.fr ». Celui-ci propose plusieurs types de services, qui vont être matérialisés par des numéros, appelés « ports ».
Ainsi, si le client veut consulter ses mails, il s'adressera au port n°110 (SMTP). Pour naviguer en http, le port 80 de ce même serveur sera sollicité.
Un serveur doit donc « écouter » en permanence si des demandes lui parviennent sur les différents numéros de port correspondant aux services qu'il propose.
L'ensemble « adresse IP + n°port » est appelé « socket » et identifie un service sur une machine.
• Notation : <adresse IP> : <n° de port>• Exemple : 192.168.0.125 : 502
• Rq : Les noms de domaine (tels que « Orange.fr ») correspondent à des serveurs, et sont donc associés à une adresse IP. La correspondance entre un nom et une adresse IP se fait par le biais d'un serveur DNS.

1- Introduction
Nicolas Néanne33
UE2D ARB
✔ Quelques commandes utiles (DOS) ...
IPCONFIG affiche un résumé des propriétés IP des cartes réseaux :
PING permet de vérifier la connectivité entre deux nœuds :
TELNET <adresse IP> <n°port> permet de vérifier l'accès à un service sur une machine distante

1- Introduction
Nicolas Néanne34
UE2D ARB
a – Présentation du WAGO 750-849 :
Ports Ethernet pour le chargement des programmes,
la supervision...
Interface série (configuration)
Bornes pour l'alimentation 24Vcc
3- Le contrôleur de GTC/GTB

1- Introduction
Nicolas Néanne35
UE2D ARB
Caractéristiques du contrôleur WAGO 750-849 :

1- Introduction
Nicolas Néanne36
UE2D ARB
Le Wago 750-849 est un contrôleur comprenant les fonctionnalités suivantes :
- Programmation avec les langages CEI
- système modulaire permettant de gérer différents signaux physiques (TOR, Ana) et cartes de communications (RS232, RS485...)
- Gestion des bus de communication propre aux bâtiments (KNX IP natif, ajout de cartes spécifiques)
- Serveur Web embarqué pour la supervision

1- Introduction
Nicolas Néanne37
UE2D ARB
➢ Exemple de Carte D'E TOR (750-400) :
1- Introduction
Nicolas Néanne38
UE2D ARB
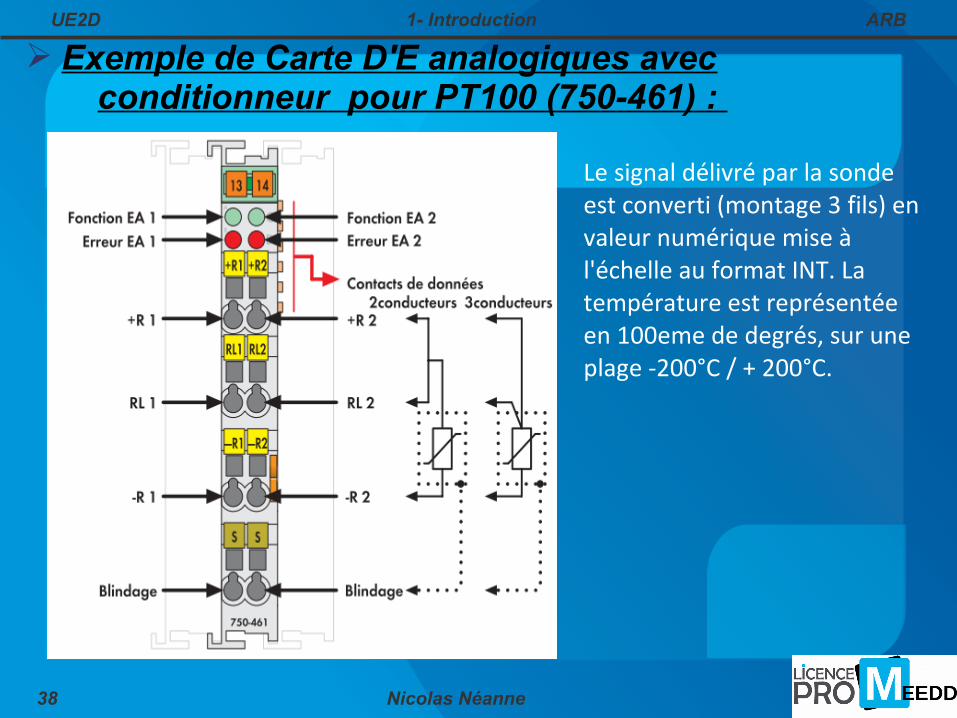
➢ Exemple de Carte D'E analogiques avec conditionneur pour PT100 (750-461) :
Le signal délivré par la sonde est converti (montage 3 fils) en valeur numérique mise à l'échelle au format INT. La température est représentée en 100eme de degrés, sur une plage -200°C / + 200°C.

1- Introduction
Nicolas Néanne39
UE2D ARB
➢ Exemple de Carte D'E analogiques 0-10V (750-459) :
la gamme de tension [0 V to +10V] est convertie par un CAN 12 bit, puis mise à l'échelle ; la gamme numérique obtenue est [0 ; 32760].

1- Introduction
Nicolas Néanne40
UE2D ARB
➢ Exemple de Carte D'E analogiques 4-20mA (750-454) :

1- Introduction
Nicolas Néanne41
UE2D ARBCette borne d’entrées analogiques traite des signaux sur une plage de courant standardisée de 0-20 mA ou de4-20 mA respectivement.Le signal d’entrée est séparé galvaniquement et le transfert à l’unité centrale se fait avec une résolution de 12 bits.

1- Introduction
Nicolas Néanne42
UE2D ARB
➢ Exemple de Carte De S TOR à Relais (750-513) :
1- Introduction
Nicolas Néanne43
UE2D ARB
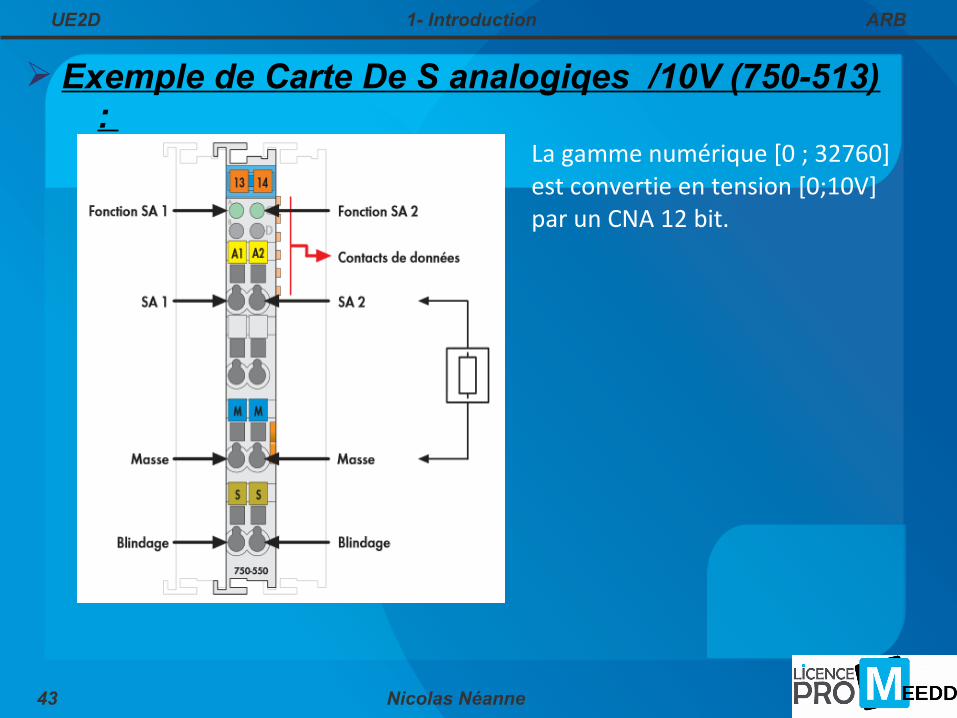
➢ Exemple de Carte De S analogiqes /10V (750-513) :
La gamme numérique [0 ; 32760] est convertie en tension [0;10V] par un CNA 12 bit.
1- Introduction
Nicolas Néanne44
UE2D ARB
b - Éléments de Programmation.
Le logiciel CoDeSys est une plateforme de développement ouverte, multimatérielle utilisée entre autres pour programmer les contrôleurs WAGO utilisés en TP.
Il obéit aux spécification de la norme CEI 61131-3 en termes de données et de langages.
Nous allons donner quelques éléments nécessaires à la programmation des fonctionnalités que nous étudierons.

1- Introduction
Nicolas Néanne45
UE2D ARB
✔ Principaux types de données rencontrés dans un programme :
BOOL : valeur booléenne (vraie = 'TRUE' ou fausse='FALSE')
INT : valeur entière signée sur 16 bits
WORD : valeur entière non signée sur 16 bits
DINT : valeur entière signée sur 32 bits
DWORD : valeur entière non signée sur 32 bits
REAL : valeur réelle sur 32 bits
TIME : durée définie en h/mn/s/ms Notation : t # ...h ...m ...s ...ms
DATE : date définie en année/mois/jour Notation : d # ...-...-...
TIME_OF_DAY : heure du jour définie en h/mn/s Notation : tod # ... : ... : ...
DATE_AND_TIME : date & heure Notation : dt # ...-...-... - ... : ... : ...
STRING : chaîne de caractères. Notation : ' Ma Chaine '
Les valeurs numériques peuvent être représentées sous formes décimales, hexadécimales (en ajoutant 16# devant la valeur) ou binaires (2#...)
•- exemples : 125 → 125 1A216
→ 16#1A2 01102 → 2#0110

1- Introduction
Nicolas Néanne46
UE2D ARB
✔ Déclarations de variables : Un programme doit réaliser des calculs et utilise donc des variables. Les variables d'entrés sorties se déclarent dans la configuration de l'automate :
1- Introduction
Nicolas Néanne47
UE2D ARB
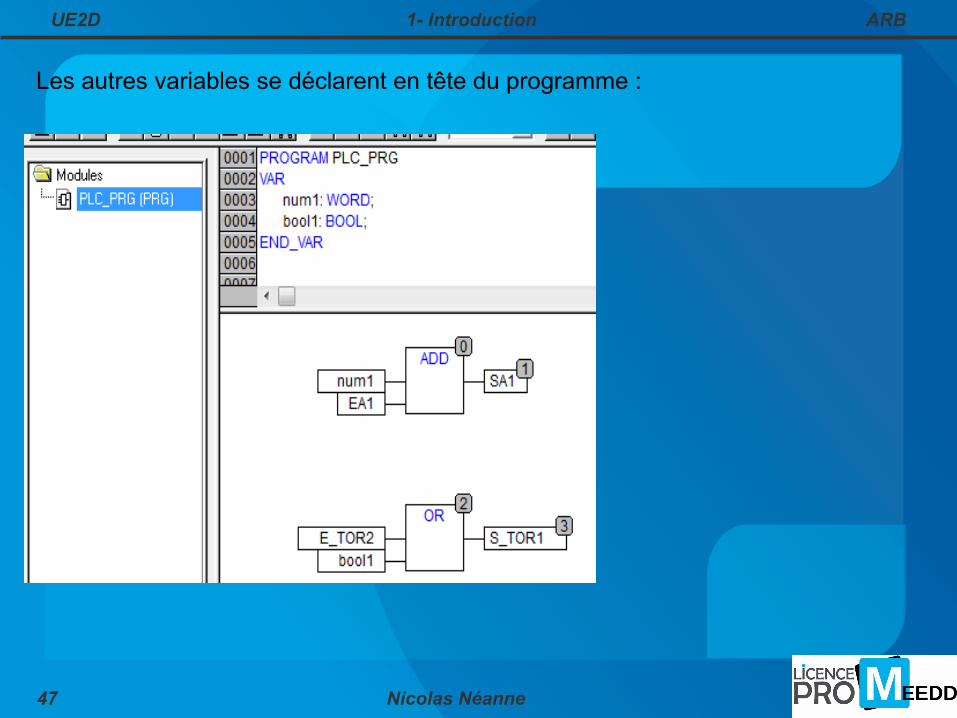
Les autres variables se déclarent en tête du programme :

1- Introduction
Nicolas Néanne48
UE2D ARB
✔ Le langage CFC :
Le langage CFC (Component Functional Chart) est un langage de programmation graphique s'apparentant à un logigramme (proche du langage normalisé FBD).
Il est assez simple à mettre en œuvre et couvrira la majorité des besoins de ce cours.
Chaque fonction est représentée par un bloc, placée sur la page à la manière d'un schéma (Un numéro attribué à chaque bloc indique l'ordre d’exécution si besoin).

1- Introduction
Nicolas Néanne49
UE2D ARB
✗ Fonctions logiques de base :

1- Introduction
Nicolas Néanne50
UE2D ARB
✗ Fonctions mathématiques :
................................................................
................................................................
................................................................
................................................................
................................................................
................................................................
................................................................
................................................................
................................................................
................................................................
1- Introduction
Nicolas Néanne51
UE2D ARB
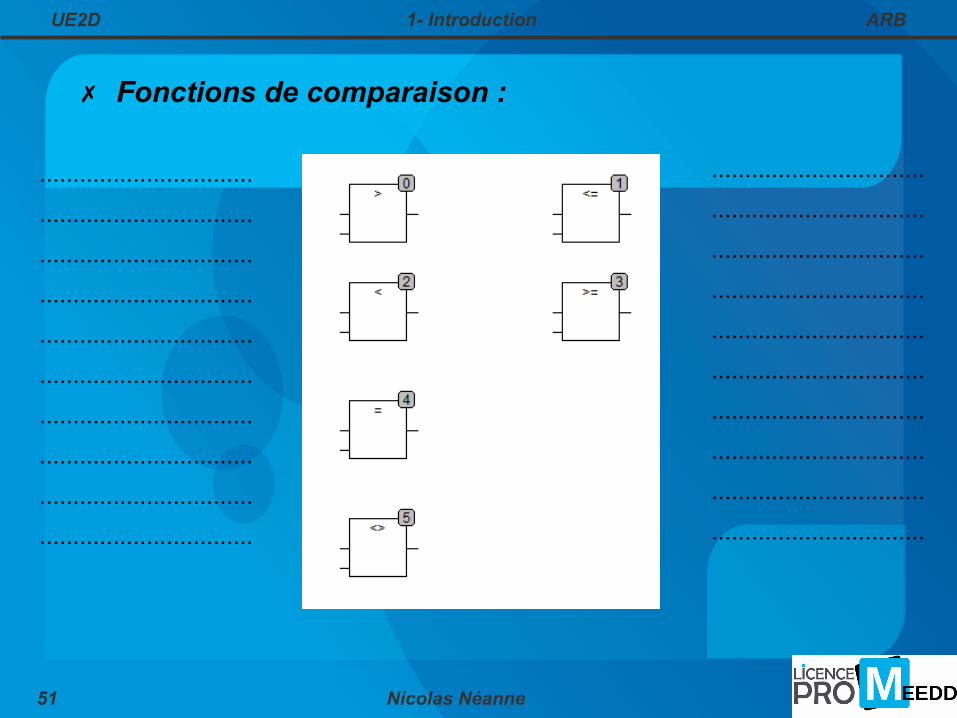
✗ Fonctions de comparaison :
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................
................................

1- Introduction
Nicolas Néanne52
UE2D ARB
✗ Fonctions de conversions :
.......................................................................
.......................................................................
.......................................................................
.......................................................................
................................................................
....................................................................
....................................................................
....................................................................
....................................................................
....................................................................
........

1- Introduction
Nicolas Néanne53
UE2D ARB
✗ Fonctions de comptage :
......................................................................
......................................................................
......................................................................
......................................................................
....................................................................
....................................................................
....................................................................
....................................................................
....................................................................
....................................................................
........

1- Introduction
Nicolas Néanne54
UE2D ARB
➢ Temporisation : retard à l'activation
➢ Temporisation : retard au déclenchement
➢ Temporisation : monostable
t
t
A
x3s
t
t
A
x3s
t
t
A
x
3s
1- Introduction
Nicolas Néanne55
UE2D ARB
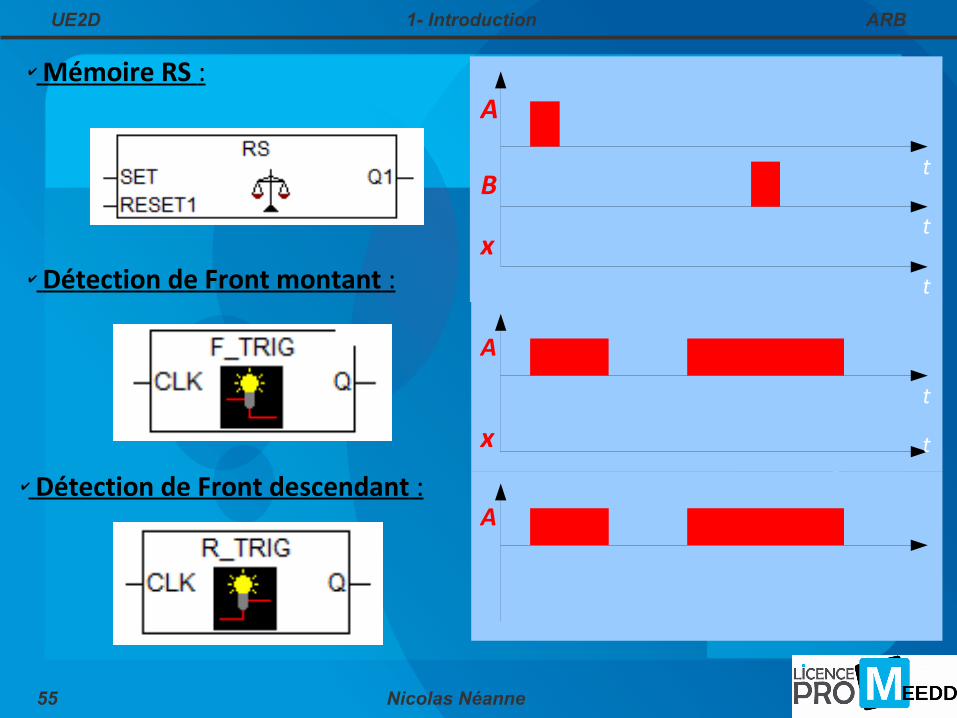
✔ Mémoire RS :
✔ Détection de Front montant :
t
t
t
A
B
x
t
t
t
A
x
t
tx
A✔ Détection de Front descendant :