Commande d’un système mécanique sous-actionné par retour d ...
Automatique
AUTOMATIQUECOMMANDE PAR RETOUR D’ETAT
M. BATEMAN
Ecole de l’Air
25 novembre 2016
1 / 25
Automatique
1 Commande par retour d’etatExemple introductifPrincipePlacement des poles
2 Synthese du correcteurCalcul de K : cas mono-commandeCalcul de K : cas multi-commandesSynthese de la precommande
3 Commande par retour de sortie
4 Comparaison retour d’etat / de sortie
2 / 25
Automatique
Retour d’etat
Exemple introductif
Commande par retour d’etat - Exemple introductif
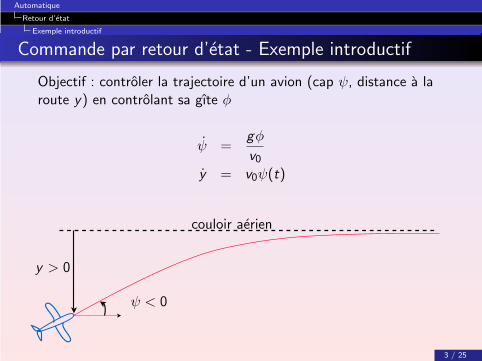
Objectif : controler la trajectoire d’un avion (cap ψ, distance a laroute y) en controlant sa gıte φ
ψ =gφ
v0y = v0ψ(t)
ψ < 0
y > 0
couloir aerien
3 / 25
Automatique
Retour d’etat
Principe
Commande par retour d’etat - Principe
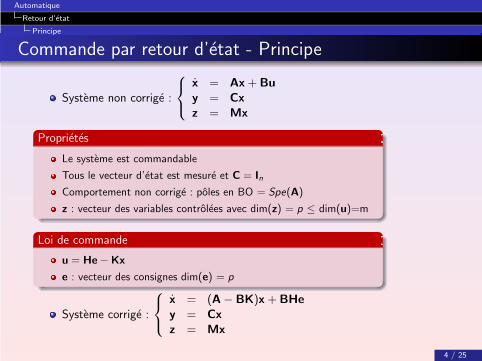
Systeme non corrige :
x = Ax+ Bu
y = Cx
z = Mx
Proprietes
Le systeme est commandable
Tous le vecteur d’etat est mesure et C = In
Comportement non corrige : poles en BO = Spe(A)
z : vecteur des variables controlees avec dim(z) = p ≤ dim(u)=m
Loi de commande
u = He−Kx
e : vecteur des consignes dim(e) = p
Systeme corrige :
x = (A− BK)x+ BHe
y = Cx
z = Mx
4 / 25
Automatique
Retour d’etat
Principe
Commande par retour d’etat - Principe
Systeme non corrige :
x = Ax+ Bu
y = Cx
z = Mx
Proprietes
Le systeme est commandable
Tous le vecteur d’etat est mesure et C = In
Comportement non corrige : poles en BO = Spe(A)
z : vecteur des variables controlees avec dim(z) = p ≤ dim(u)=m
Loi de commande
u = He−Kx
e : vecteur des consignes dim(e) = p
Systeme corrige :
x = (A− BK)x+ BHe
y = Cx
z = Mx
4 / 25
Automatique
Retour d’etat
Principe
Commande par retour d’etat - Principe
Systeme non corrige :
x = Ax+ Bu
y = Cx
z = Mx
Proprietes
Le systeme est commandable
Tous le vecteur d’etat est mesure et C = In
Comportement non corrige : poles en BO = Spe(A)
z : vecteur des variables controlees avec dim(z) = p ≤ dim(u)=m
Loi de commande
u = He−Kx
e : vecteur des consignes dim(e) = p
Systeme corrige :
x = (A− BK)x+ BHe
y = Cx
z = Mx
4 / 25
Automatique
Retour d’etat
Principe
Commande par retour d’etat - Principe
Systeme non corrige :
x = Ax+ Bu
y = Cx
z = Mx
Proprietes
Le systeme est commandable
Tous le vecteur d’etat est mesure et C = In
Comportement non corrige : poles en BO = Spe(A)
z : vecteur des variables controlees avec dim(z) = p ≤ dim(u)=m
Loi de commande
u = He−Kx
e : vecteur des consignes dim(e) = p
Systeme corrige :
x = (A− BK)x+ BHe
y = Cx
z = Mx
4 / 25
Automatique
Retour d’etat
Principe
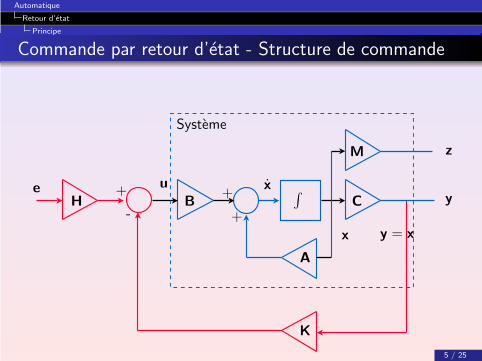
Commande par retour d’etat - Structure de commande
Systeme
-
y = x
K
e +
+B C
A
∫+
x
xu
M z
H y
5 / 25
Automatique
Retour d’etat
Principe
A propos de la dimension des matrices
Commande par retour d’etat u = He−Kx
e consignes avec dim(e) = dim(z)H matrice de precommande
H ∈ R en mono-consigne / mono-sortieH ∈ Mmp(R) si m consignes - p sorties controlees
K matrice de contre-reaction
K ∈ M1n(R) en mono-commandeK ∈ Mmn(R) si m commandes
Pratiquement, les coefficients de ces matrices sont des gains.
6 / 25
Automatique
Retour d’etat
Principe
A propos de la dimension des matrices
Commande par retour d’etat u = He−Kx
e consignes avec dim(e) = dim(z)H matrice de precommande
H ∈ R en mono-consigne / mono-sortieH ∈ Mmp(R) si m consignes - p sorties controlees
K matrice de contre-reaction
K ∈ M1n(R) en mono-commandeK ∈ Mmn(R) si m commandes
Pratiquement, les coefficients de ces matrices sont des gains.
6 / 25
Automatique
Retour d’etat
Principe
A propos de la dimension des matrices
Commande par retour d’etat u = He−Kx
e consignes avec dim(e) = dim(z)H matrice de precommande
H ∈ R en mono-consigne / mono-sortieH ∈ Mmp(R) si m consignes - p sorties controlees
K matrice de contre-reaction
K ∈ M1n(R) en mono-commandeK ∈ Mmn(R) si m commandes
Pratiquement, les coefficients de ces matrices sont des gains.
6 / 25
Automatique
Retour d’etat
Principe
A propos de la dimension des matrices
Commande par retour d’etat u = He−Kx
e consignes avec dim(e) = dim(z)H matrice de precommande
H ∈ R en mono-consigne / mono-sortieH ∈ Mmp(R) si m consignes - p sorties controlees
K matrice de contre-reaction
K ∈ M1n(R) en mono-commandeK ∈ Mmn(R) si m commandes
Pratiquement, les coefficients de ces matrices sont des gains.
6 / 25
Automatique
Retour d’etat
Principe
A propos de la dimension des matrices
Commande par retour d’etat u = He−Kx
e consignes avec dim(e) = dim(z)H matrice de precommande
H ∈ R en mono-consigne / mono-sortieH ∈ Mmp(R) si m consignes - p sorties controlees
K matrice de contre-reaction
K ∈ M1n(R) en mono-commandeK ∈ Mmn(R) si m commandes
Pratiquement, les coefficients de ces matrices sont des gains.
6 / 25
Automatique
Retour d’etat
Principe
A propos de la dimension des matrices
Commande par retour d’etat u = He−Kx
e consignes avec dim(e) = dim(z)H matrice de precommande
H ∈ R en mono-consigne / mono-sortieH ∈ Mmp(R) si m consignes - p sorties controlees
K matrice de contre-reaction
K ∈ M1n(R) en mono-commandeK ∈ Mmn(R) si m commandes
Pratiquement, les coefficients de ces matrices sont des gains.
6 / 25
Automatique
Retour d’etat
Principe
Commande par retour d’etat - Principe
On veut
un comportement dynamique donne
le suivi de la consigne en regime permanent
Resume methodologique
choix des poles souhaites de la boucle fermee (νiBF )i∈[1..n]
determination de K tel que Sp(A− BK) = (νiBF )i∈[1..n]
determination de H tel qu’en regime permanent (x = 0) on aitz = e
7 / 25
Automatique
Retour d’etat
Placement
Choix des poles - Rappel
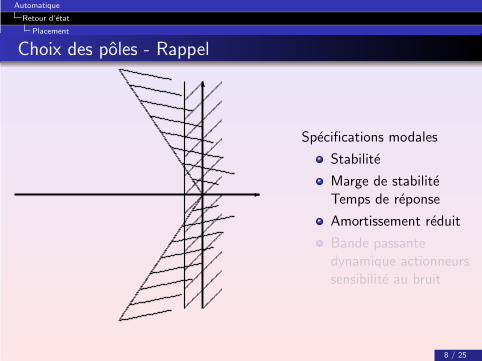
Specifications modales
Stabilite
Marge de stabiliteTemps de reponse
Amortissement reduit
Bande passantedynamique actionneurssensibilite au bruit
8 / 25
Automatique
Retour d’etat
Placement
Choix des poles - Rappel
✲
✻
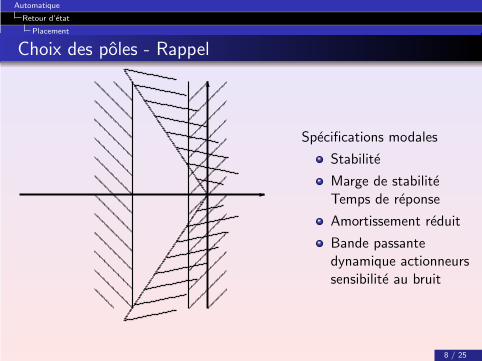
Specifications modales
Stabilite
Marge de stabiliteTemps de reponse
Amortissement reduit
Bande passantedynamique actionneurssensibilite au bruit
8 / 25
Automatique
Retour d’etat
Placement
Choix des poles - Rappel
✲
✻
Specifications modales
Stabilite
Marge de stabiliteTemps de reponse
Amortissement reduit
Bande passantedynamique actionneurssensibilite au bruit
8 / 25
Automatique
Retour d’etat
Placement
Choix des poles - Rappel
✲
✻
Specifications modales
Stabilite
Marge de stabiliteTemps de reponse
Amortissement reduit
Bande passantedynamique actionneurssensibilite au bruit
8 / 25
Automatique
Retour d’etat
Placement
Choix des poles - Rappel
✲
✻
Specifications modales
Stabilite
Marge de stabiliteTemps de reponse
Amortissement reduit
Bande passantedynamique actionneurssensibilite au bruit
8 / 25
Automatique
Synthese K
mono
Calcul de K : cas mono-commande
Cas mono-commande1 On s’impose Sp(A− BK) = (νiBF i∈[1..n])
2 on deduit PA−BK (ν).
3 On pose K = (k1 k2 · · · kn) et on calcule |νIn − (A− BK)|
4 qu’on identifie a PA−BK (ν) d’ou les ki
9 / 25
Automatique
Synthese K
mono
Calcul de K : cas mono-commande
Cas mono-commande1 On s’impose Sp(A− BK) = (νiBF i∈[1..n])
2 on deduit PA−BK (ν).
3 On pose K = (k1 k2 · · · kn) et on calcule |νIn − (A− BK)|
4 qu’on identifie a PA−BK (ν) d’ou les ki
9 / 25
Automatique
Synthese K
mono
Calcul de K : cas mono-commande
Cas mono-commande1 On s’impose Sp(A− BK) = (νiBF i∈[1..n])
2 on deduit PA−BK (ν).
3 On pose K = (k1 k2 · · · kn) et on calcule |νIn − (A− BK)|
4 qu’on identifie a PA−BK (ν) d’ou les ki
9 / 25
Automatique
Synthese K
mono
Calcul de K : cas mono-commande
Cas mono-commande1 On s’impose Sp(A− BK) = (νiBF i∈[1..n])
2 on deduit PA−BK (ν).
3 On pose K = (k1 k2 · · · kn) et on calcule |νIn − (A− BK)|
4 qu’on identifie a PA−BK (ν) d’ou les ki
9 / 25
Automatique
Synthese K
mono
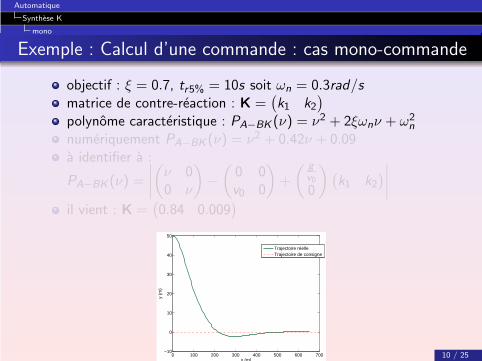
Exemple : Calcul d’une commande : cas mono-commande
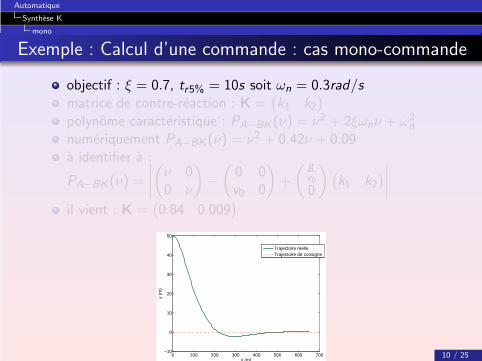
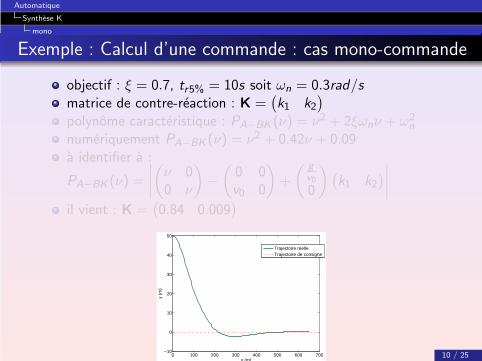
objectif : ξ = 0.7, tr5% = 10s soit ωn = 0.3rad/smatrice de contre-reaction : K =
(k1 k2
)
polynome caracteristique : PA−BK (ν) = ν2 + 2ξωnν + ω2n
numeriquement PA−BK (ν) = ν2 + 0.42ν + 0.09a identifier a :
PA−BK (ν) =
∣∣∣∣
(ν 00 ν
)
−
(0 0v0 0
)
+
( gv0
0
)(k1 k2
)∣∣∣∣
il vient : K =(0.84 0.009
)
0 100 200 300 400 500 600 700−10
0
10
20
30
40
50
x (m)
y (m
)
Trajectoire réelleTrajectoire de consigne
10 / 25
Automatique
Synthese K
mono
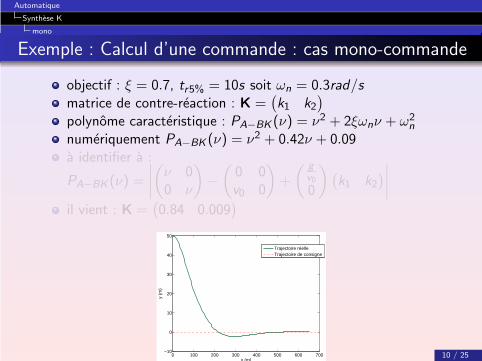
Exemple : Calcul d’une commande : cas mono-commande
objectif : ξ = 0.7, tr5% = 10s soit ωn = 0.3rad/smatrice de contre-reaction : K =
(k1 k2
)
polynome caracteristique : PA−BK (ν) = ν2 + 2ξωnν + ω2n
numeriquement PA−BK (ν) = ν2 + 0.42ν + 0.09a identifier a :
PA−BK (ν) =
∣∣∣∣
(ν 00 ν
)
−
(0 0v0 0
)
+
( gv0
0
)(k1 k2
)∣∣∣∣
il vient : K =(0.84 0.009
)
0 100 200 300 400 500 600 700−10
0
10
20
30
40
50
x (m)
y (m
)
Trajectoire réelleTrajectoire de consigne
10 / 25
Automatique
Synthese K
mono
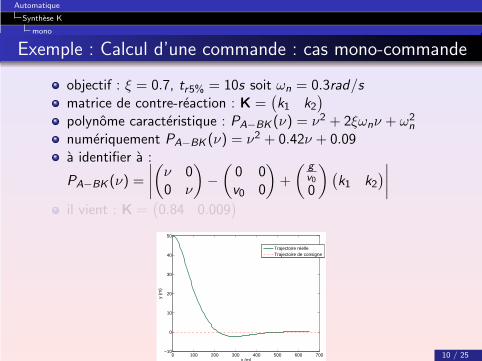
Exemple : Calcul d’une commande : cas mono-commande
objectif : ξ = 0.7, tr5% = 10s soit ωn = 0.3rad/smatrice de contre-reaction : K =
(k1 k2
)
polynome caracteristique : PA−BK (ν) = ν2 + 2ξωnν + ω2n
numeriquement PA−BK (ν) = ν2 + 0.42ν + 0.09a identifier a :
PA−BK (ν) =
∣∣∣∣
(ν 00 ν
)
−
(0 0v0 0
)
+
( gv0
0
)(k1 k2
)∣∣∣∣
il vient : K =(0.84 0.009
)
0 100 200 300 400 500 600 700−10
0
10
20
30
40
50
x (m)
y (m
)
Trajectoire réelleTrajectoire de consigne
10 / 25
Automatique
Synthese K
mono
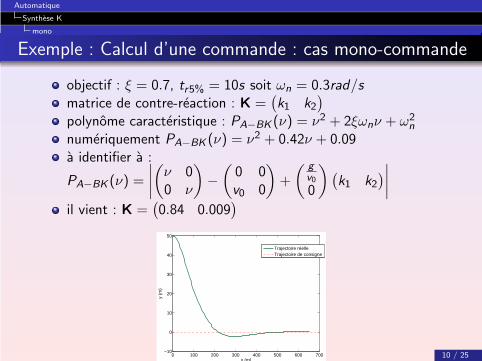
Exemple : Calcul d’une commande : cas mono-commande
objectif : ξ = 0.7, tr5% = 10s soit ωn = 0.3rad/smatrice de contre-reaction : K =
(k1 k2
)
polynome caracteristique : PA−BK (ν) = ν2 + 2ξωnν + ω2n
numeriquement PA−BK (ν) = ν2 + 0.42ν + 0.09a identifier a :
PA−BK (ν) =
∣∣∣∣
(ν 00 ν
)
−
(0 0v0 0
)
+
( gv0
0
)(k1 k2
)∣∣∣∣
il vient : K =(0.84 0.009
)
0 100 200 300 400 500 600 700−10
0
10
20
30
40
50
x (m)
y (m
)
Trajectoire réelleTrajectoire de consigne
10 / 25
Automatique
Synthese K
mono
Exemple : Calcul d’une commande : cas mono-commande
objectif : ξ = 0.7, tr5% = 10s soit ωn = 0.3rad/smatrice de contre-reaction : K =
(k1 k2
)
polynome caracteristique : PA−BK (ν) = ν2 + 2ξωnν + ω2n
numeriquement PA−BK (ν) = ν2 + 0.42ν + 0.09a identifier a :
PA−BK (ν) =
∣∣∣∣
(ν 00 ν
)
−
(0 0v0 0
)
+
( gv0
0
)(k1 k2
)∣∣∣∣
il vient : K =(0.84 0.009
)
0 100 200 300 400 500 600 700−10
0
10
20
30
40
50
x (m)
y (m
)
Trajectoire réelleTrajectoire de consigne
10 / 25
Automatique
Synthese K
mono
Exemple : Calcul d’une commande : cas mono-commande
objectif : ξ = 0.7, tr5% = 10s soit ωn = 0.3rad/smatrice de contre-reaction : K =
(k1 k2
)
polynome caracteristique : PA−BK (ν) = ν2 + 2ξωnν + ω2n
numeriquement PA−BK (ν) = ν2 + 0.42ν + 0.09a identifier a :
PA−BK (ν) =
∣∣∣∣
(ν 00 ν
)
−
(0 0v0 0
)
+
( gv0
0
)(k1 k2
)∣∣∣∣
il vient : K =(0.84 0.009
)
0 100 200 300 400 500 600 700−10
0
10
20
30
40
50
x (m)
y (m
)
Trajectoire réelleTrajectoire de consigne
10 / 25
Automatique
Synthese K
mono
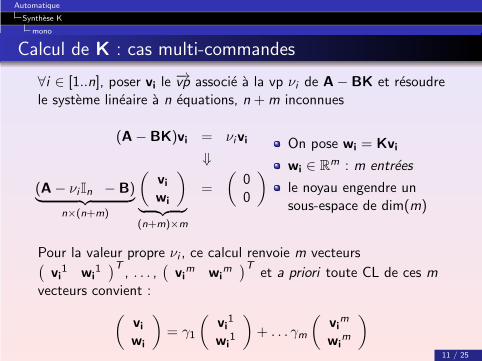
Calcul de K : cas multi-commandes
∀i ∈ [1..n], poser vi le−→vp associe a la vp νi de A−BK et resoudre
le systeme lineaire a n equations, n +m inconnues
(A− BK)vi = νivi
⇓
(A− νi In − B)︸ ︷︷ ︸
n×(n+m)
(viwi
)
︸ ︷︷ ︸
(n+m)×m
=
(00
)
On pose wi = Kvi
wi ∈ Rm : m entrees
le noyau engendre unsous-espace de dim(m)
Pour la valeur propre νi , ce calcul renvoie m vecteurs(vi
1 wi1)T
, . . . ,(vi
m wim
)Tet a priori toute CL de ces m
vecteurs convient :
(viwi
)
= γ1
(vi
1
wi1
)
+ . . . γm
(vi
m
wim
)
11 / 25
Automatique
Synthese K
mono
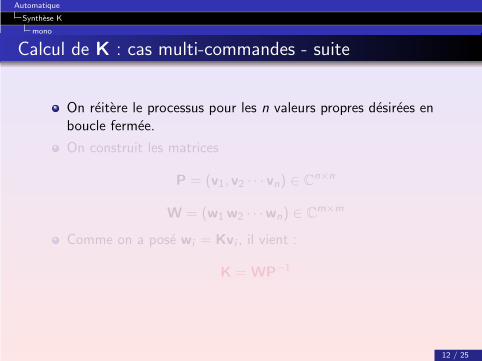
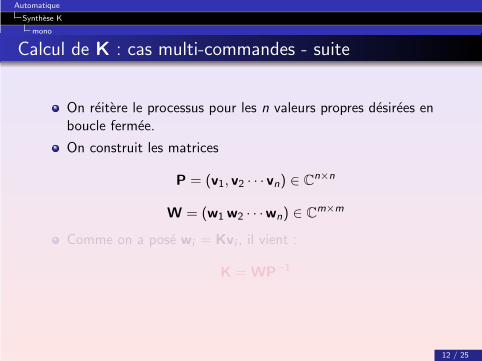
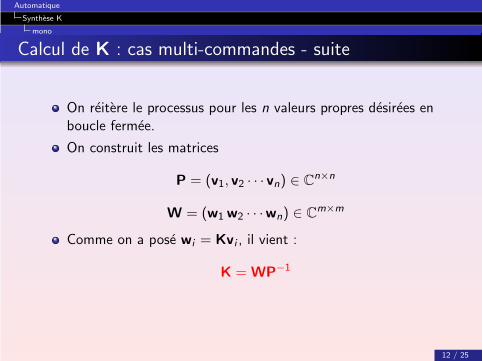
Calcul de K : cas multi-commandes - suite
On reitere le processus pour les n valeurs propres desirees enboucle fermee.
On construit les matrices
P = (v1, v2 · · · vn) ∈ Cn×n
W = (w1w2 · · ·wn) ∈ Cm×m
Comme on a pose wi = Kvi , il vient :
K = WP−1
12 / 25
Automatique
Synthese K
mono
Calcul de K : cas multi-commandes - suite
On reitere le processus pour les n valeurs propres desirees enboucle fermee.
On construit les matrices
P = (v1, v2 · · · vn) ∈ Cn×n
W = (w1w2 · · ·wn) ∈ Cm×m
Comme on a pose wi = Kvi , il vient :
K = WP−1
12 / 25
Automatique
Synthese K
mono
Calcul de K : cas multi-commandes - suite
On reitere le processus pour les n valeurs propres desirees enboucle fermee.
On construit les matrices
P = (v1, v2 · · · vn) ∈ Cn×n
W = (w1w2 · · ·wn) ∈ Cm×m
Comme on a pose wi = Kvi , il vient :
K = WP−1
12 / 25
Automatique
Synthese K
mono
Du sens des vecteurs wi
La matrice de contre-reaction :
K = WP−1
u = e−Kx
u = e−WP−1x
u = e−WP−1Pζ (ζ vecteur d’etat dans la base modale)
u = e−Wζ
Les vi traduisent la sensibilite des variables d’etat aux modesdefinis par les poles νi
Les wi traduisent celles des commandes a ces memes modes
13 / 25
Automatique
Synthese K
mono
Du sens des vecteurs wi
La matrice de contre-reaction :
K = WP−1
u = e−Kx
u = e−WP−1x
u = e−WP−1Pζ (ζ vecteur d’etat dans la base modale)
u = e−Wζ
Les vi traduisent la sensibilite des variables d’etat aux modesdefinis par les poles νi
Les wi traduisent celles des commandes a ces memes modes
13 / 25
Automatique
Synthese K
mono
Du sens des vecteurs wi
La matrice de contre-reaction :
K = WP−1
u = e−Kx
u = e−WP−1x
u = e−WP−1Pζ (ζ vecteur d’etat dans la base modale)
u = e−Wζ
Les vi traduisent la sensibilite des variables d’etat aux modesdefinis par les poles νi
Les wi traduisent celles des commandes a ces memes modes
13 / 25
Automatique
Synthese K
mono
Du sens des vecteurs wi
La matrice de contre-reaction :
K = WP−1
u = e−Kx
u = e−WP−1x
u = e−WP−1Pζ (ζ vecteur d’etat dans la base modale)
u = e−Wζ
Les vi traduisent la sensibilite des variables d’etat aux modesdefinis par les poles νi
Les wi traduisent celles des commandes a ces memes modes
13 / 25
Automatique
Synthese K
mono
Du sens des vecteurs wi
La matrice de contre-reaction :
K = WP−1
u = e−Kx
u = e−WP−1x
u = e−WP−1Pζ (ζ vecteur d’etat dans la base modale)
u = e−Wζ
Les vi traduisent la sensibilite des variables d’etat aux modesdefinis par les poles νi
Les wi traduisent celles des commandes a ces memes modes
13 / 25
Automatique
Synthese K
mono
Du sens des vecteurs wi
La matrice de contre-reaction :
K = WP−1
u = e−Kx
u = e−WP−1x
u = e−WP−1Pζ (ζ vecteur d’etat dans la base modale)
u = e−Wζ
Les vi traduisent la sensibilite des variables d’etat aux modesdefinis par les poles νi
Les wi traduisent celles des commandes a ces memes modes
13 / 25
Automatique
Synthese K
mono
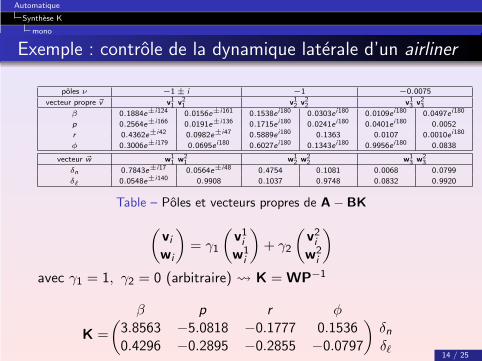
Exemple : controle de la dynamique laterale d’un airliner
poles ν −1 ± i −1 −0.0075
vecteur propre ~v v11 v21 v12 v22 v13 v23β 0.1884e±i124 0.0156e±i161 0.1538e i180 0.0303e i180 0.0109e i180 0.0497e i180
p 0.2564e±i166 0.0191e±i136 0.1715e i180 0.0241e i180 0.0401e i180 0.0052
r 0.4362e±i42 0.0982e±i47 0.5889e i180 0.1363 0.0107 0.0010e i180
φ 0.3006e±i179 0.0695e i180 0.6027e i180 0.1343e i180 0.9956e i180 0.0838
vecteur ~w w11 w2
1 w12 w2
2 w13 w2
3
δn 0.7843e±i17 0.0564e±i48 0.4754 0.1081 0.0068 0.0799
δℓ 0.0548e±i140 0.9908 0.1037 0.9748 0.0832 0.9920
Table – Poles et vecteurs propres de A− BK
(viwi
)
= γ1
(v1iw1
i
)
+ γ2
(v2iw2
i
)
avec γ1 = 1, γ2 = 0 (arbitraire) K = WP−1
K =
β p r φ( )3.8563 −5.0818 −0.1777 0.1536 δn0.4296 −0.2895 −0.2855 −0.0797 δℓ
14 / 25
Automatique
Synthese K
mono
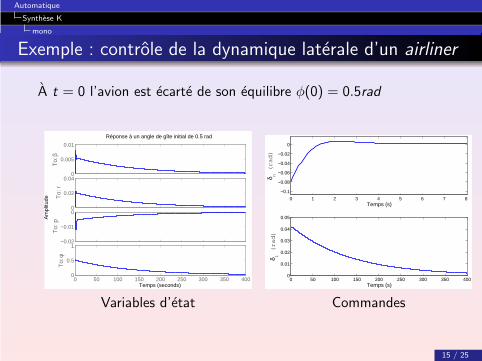
Exemple : controle de la dynamique laterale d’un airliner
A t = 0 l’avion est ecarte de son equilibre φ(0) = 0.5rad
0
0.005
0.01
To:
β
0
0.02
0.04
To:
r
−0.02
−0.01
0
To:
p
0 50 100 150 200 250 300 350 4000
0.5
1
To:
φ
Réponse à un angle de gîte initial de 0.5 rad
Temps (seconds)
Am
plitu
de 0 1 2 3 4 5 6 7 8
−0.1
−0.08
−0.06
−0.04
−0.02
0
Temps (s)
δ n (rad)
0 50 100 150 200 250 300 350 4000
0.01
0.02
0.03
0.04
0.05
Temps (s)
δ l (rad)
Variables d’etat Commandes
15 / 25
Automatique
Synthese K
mono
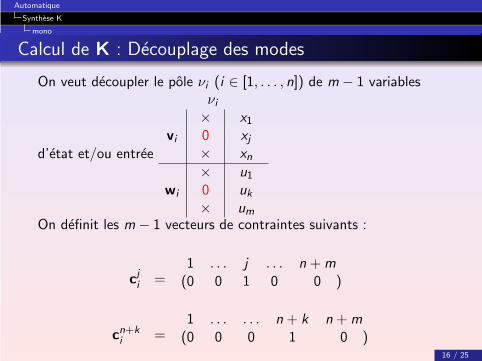
Calcul de K : Decouplage des modes
On veut decoupler le pole νi (i ∈ [1, . . . , n]) de m − 1 variables
d’etat et/ou entree
νi
vi
×0×
x1xjxn
wi
×0×
u1ukum
On definit les m − 1 vecteurs de contraintes suivants :
cji =
1 . . . j . . . n +m
( )0 0 1 0 0
cn+ki =
1 . . . . . . n + k n +m
( )0 0 0 1 016 / 25
Automatique
Synthese K
mono
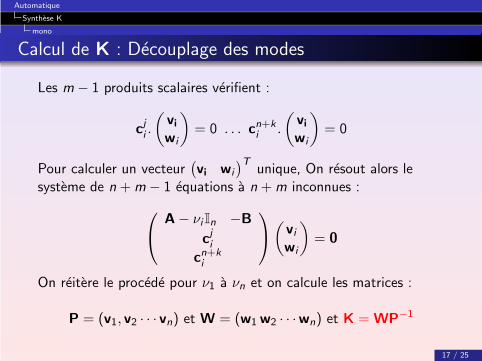
Calcul de K : Decouplage des modes
Les m − 1 produits scalaires verifient :
cji .
(viwi
)
= 0 . . . cn+ki .
(viwi
)
= 0
Pour calculer un vecteur(vi wi
)Tunique, On resout alors le
systeme de n +m − 1 equations a n +m inconnues :
A− νi In −B
cji
cn+ki
(viwi
)
= 0
On reitere le procede pour ν1 a νn et on calcule les matrices :
P = (v1, v2 · · · vn) et W = (w1w2 · · ·wn) et K = WP−1
17 / 25
Automatique
Synthese K
mono
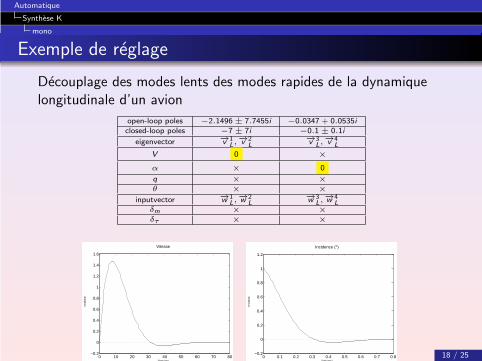
Exemple de reglage
Decouplage des modes lents des modes rapides de la dynamiquelongitudinale d’un avion
open-loop poles −2.1496 ± 7.7455i −0.0347 + 0.0535iclosed-loop poles −7 ± 7i −0.1 ± 0.1i
eigenvector −→v 1L,
−→v 2L
−→v 3L,
−→v 4L
V 0 ×
α × 0
q × ×
θ × ×
inputvector −→w 1L,
−→w 2L
−→w 3L,
−→w 4L
δm × ×
δτ × ×
0 10 20 30 40 50 60 70 80−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Vitesse
Time (sec)
Am
plitu
de
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Incidence (°)
Time (sec)
Am
plitu
de
18 / 25
Automatique
Synthese K
Synthese H
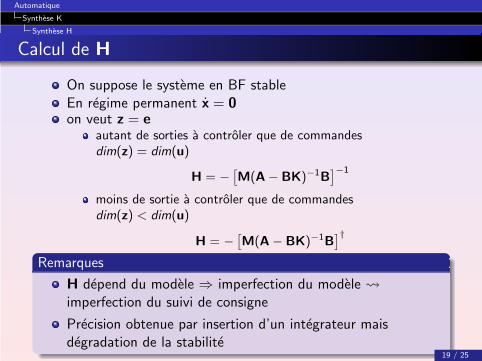
Calcul de H
On suppose le systeme en BF stableEn regime permanent x = 0on veut z = e
autant de sorties a controler que de commandesdim(z) = dim(u)
H = −[M(A− BK)−1B
]−1
moins de sortie a controler que de commandesdim(z) < dim(u)
H = −[M(A− BK)−1B
]†
Remarques
H depend du modele ⇒ imperfection du modele imperfection du suivi de consigne
Precision obtenue par insertion d’un integrateur maisdegradation de la stabilite
19 / 25
Automatique
Retour de sortie
Commande par retour de sortie
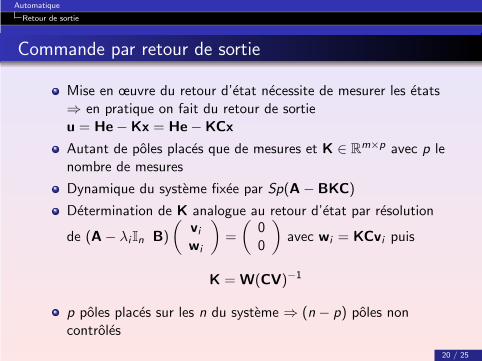
Mise en œuvre du retour d’etat necessite de mesurer les etats⇒ en pratique on fait du retour de sortieu = He−Kx = He−KCx
Autant de poles places que de mesures et K ∈ Rm×p avec p le
nombre de mesures
Dynamique du systeme fixee par Sp(A− BKC)
Determination de K analogue au retour d’etat par resolution
de (A− λi In B)
(viwi
)
=
(00
)
avec wi = KCvi puis
K = W(CV)−1
p poles places sur les n du systeme ⇒ (n − p) poles noncontroles
20 / 25
Automatique
Retour de sortie
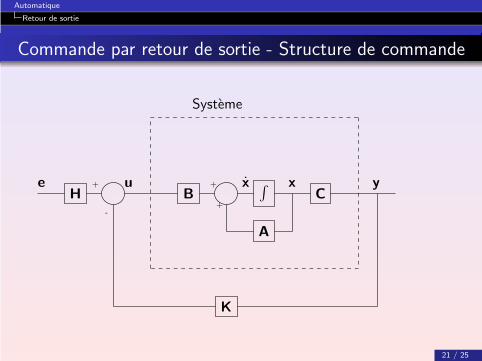
Commande par retour de sortie - Structure de commande
B∫
C
A
H
K
e +
-
u
Systeme
+ x x
+
y
21 / 25
Automatique
Comparaison
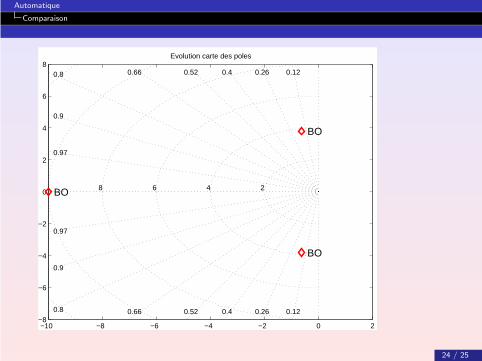
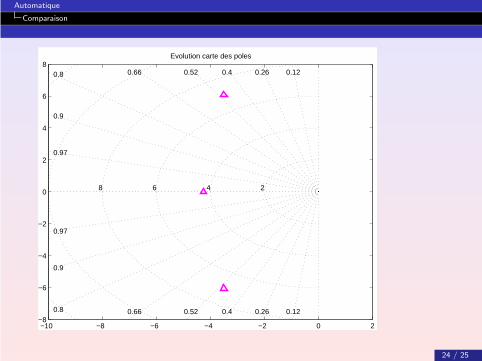
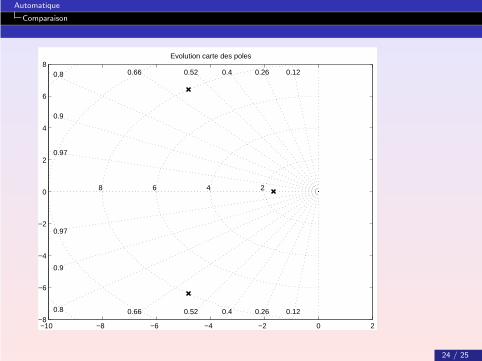
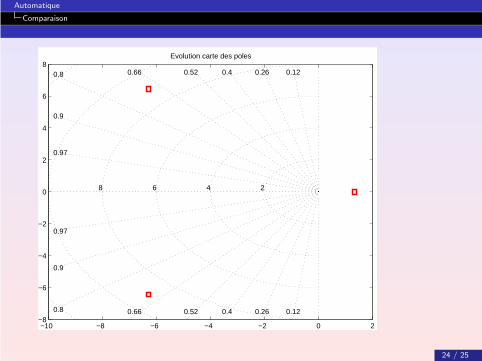
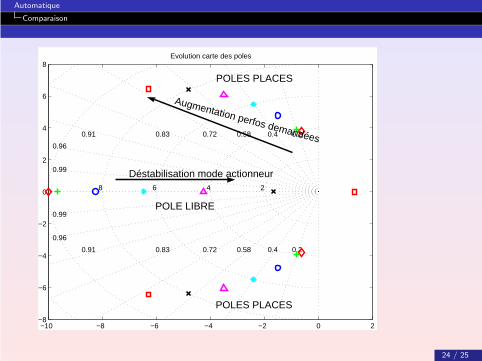
Exemple de comparaison retour d’etat / de sortie
Etude d’un avion en longitudinal avec ou sans prise en compte dela dynamique de la servo-commande
Notations
α : incidenceq : vitesse de tangageδm : braquage de la profondeurδmc : demande de braquage de la profondeur
Application du theoreme du moment cinetique autour de l’axe detangage
{α = q
q = mq q +mα α+mδm δm
Modele de servo-commande : 1er ordre, gain statique unitaireτ ˙δm + δm = δmc
22 / 25
Automatique
Comparaison
Exemple de comparaison retour d’etat / de sortie
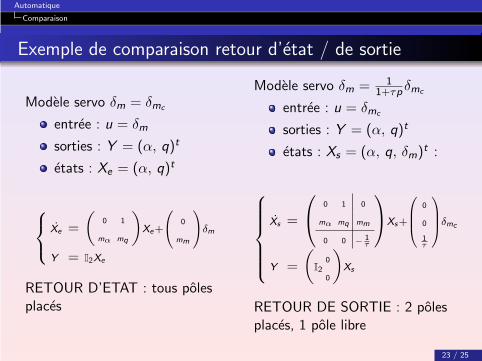
Modele servo δm = δmc
entree : u = δm
sorties : Y = (α, q)t
etats : Xe = (α, q)t
Xe =
(0 1
mα mq
)
Xe+
0
mm
δm
Y = I2Xe
RETOUR D’ETAT : tous polesplaces
Modele servo δm = 11+τp
δmc
entree : u = δmc
sorties : Y = (α, q)t
etats : Xs = (α, q, δm)t :
Xs =
0 1 0
mα mq mm
0 0 −1τ
Xs+
0
0
1τ
δmc
Y =
(
I20
0
)
Xs
RETOUR DE SORTIE : 2 polesplaces, 1 pole libre
23 / 25
Automatique
Comparaison
−10 −8 −6 −4 −2 0 2−8
−6
−4
−2
0
2
4
6
8
10 8 6 4 2
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
Evolution carte des poles
BO
BO
BO
24 / 25
Automatique
Comparaison
−10 −8 −6 −4 −2 0 2−8
−6
−4
−2
0
2
4
6
8
10 8 6 4 2
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
Evolution carte des poles
24 / 25
Automatique
Comparaison
−10 −8 −6 −4 −2 0 2−8
−6
−4
−2
0
2
4
6
8
10 8 6 4 2
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
Evolution carte des poles
24 / 25
Automatique
Comparaison
−10 −8 −6 −4 −2 0 2−8
−6
−4
−2
0
2
4
6
8
10 8 6 4 2
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
Evolution carte des poles
24 / 25
Automatique
Comparaison
−10 −8 −6 −4 −2 0 2−8
−6
−4
−2
0
2
4
6
8
10 8 6 4 2
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
Evolution carte des poles
24 / 25
Automatique
Comparaison
−10 −8 −6 −4 −2 0 2−8
−6
−4
−2
0
2
4
6
8
10 8 6 4 2
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
Evolution carte des poles
24 / 25
Automatique
Comparaison
−10 −8 −6 −4 −2 0 2−8
−6
−4
−2
0
2
4
6
8
10 8 6 4 2
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
0.97
0.9
0.8 0.66 0.52 0.4 0.26 0.12
Evolution carte des poles
24 / 25
Automatique
Comparaison
−10 −8 −6 −4 −2 0 2−8
−6
−4
−2
0
2
4
6
8
10 8 6 4 2
0.99
0.96
0.91 0.83 0.72 0.58 0.4 0.2
0.99
0.96
0.91 0.83 0.72 0.58 0.4 0.2
Evolution carte des poles
POLES PLACES
POLES PLACES
Augmentation perfos demandées
Déstabilisation mode actionneur
POLE LIBRE
24 / 25
Automatique
Comparaison
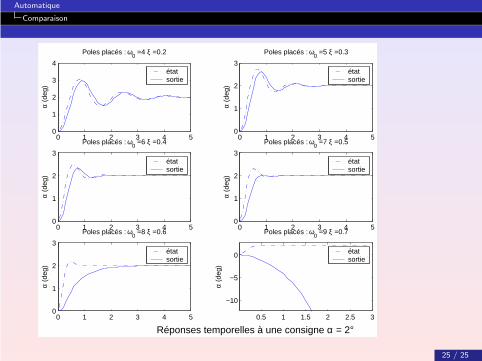
0 1 2 3 4 50
1
2
3
4
Poles placés : ω0 =4 ξ =0.2
α (d
eg)
étatsortie
0 1 2 3 4 50
1
2
3
Poles placés : ω0 =5 ξ =0.3
α (d
eg)
étatsortie
0 1 2 3 4 50
1
2
3
Poles placés : ω0 =6 ξ =0.4
α (d
eg)
étatsortie
0 1 2 3 4 50
1
2
3
Poles placés : ω0 =7 ξ =0.5
α (d
eg)
étatsortie
0 1 2 3 4 50
1
2
3
Poles placés : ω0 =8 ξ =0.6
α (d
eg)
étatsortie
0.5 1 1.5 2 2.5 3
−10
−5
0
Poles placés : ω0 =9 ξ =0.7
α (d
eg)
étatsortie
Réponses temporelles à une consigne α = 2°
25 / 25