AUTOMAG : Système AUTOnome pour MAGnétomètrie portative · 2018. 6. 5. · AUTOMAG : Système...
16
AUTOMAG : Système AUTOnome pour MAGnétomètrie portative Participants : Minoru UEHARA (IR CNRS CEREGE) - Yoann QUESNEL (MCF CEREGE) - Corinne Rousse (MCF AMU CCJ MMSH) Partenaires impliqués : Jules Fleury (IR CNRS CEREGE) - Philippe Dussouillez (IR CNRS CEREGE) - Corinne Landuré (SRA PACA-CCJ MMSH) - Souen Fontaine (DRASSM CCJ MMSH) - Claude Vella (MCF AMU, CEREGE)
Transcript of AUTOMAG : Système AUTOnome pour MAGnétomètrie portative · 2018. 6. 5. · AUTOMAG : Système...
-
AUTOMAG : Système AUTOnome pour
MAGnétomètrie portative
Participants :Minoru UEHARA (IR CNRS CEREGE) - Yoann QUESNEL
(MCF CEREGE) - Corinne Rousse (MCF AMU CCJ MMSH)Partenaires impliqués :Jules Fleury (IR CNRS CEREGE) - Philippe Dussouillez (IR CNRS CEREGE) - Corinne Landuré (SRA PACA-CCJ MMSH) - Souen Fontaine (DRASSM
CCJ MMSH) - Claude Vella (MCF AMU, CEREGE)
-
Le Service Géophysique (carte magnétique)
Détection des anomalies magnétiques dues aux structures subsurface (archéologique, tectonique, géologique, déchets etc.).
La prospection besoin des précisions aux• Champs magnétique (1 nT)• Positionnement (1 m)
GPS Mag
Camargue
La motivation du développement
• Autonome (one-man opération)• Automatisation (drone etc..)• Portatif (prospection étranger)• Vectoriel (maximiser donnée)
Minimum 2 – 3 operateurs
250m
Repère
-
3ch24bit ADC
AnalogFE
PICMicro
controller
Flash MEMGPS
BatterieLithium
ANT
7.4V PWR
Carte
Capteur Fluxgate
BxByBz
Boîtier Aluminium
USB
Chargeur
Target Spécifications : Vectoriel, 10 nT, 1 m résolutions @ 10 Hz update ratePoids: < 500g Taille: 10 x 10 x 5 cm (max) Autonomie: >10 heurs
AUX9-axis
Attitude
Automag
HOSTPC
Drone Bateau / Véhicule A main Station fixe
Position: GPS (WGS84)Direction vectoriel: Attitude mètreChamp Magnétique vectoriel
GPS
xyz
GPS
-
Calendrier des développements2017 20182016
Plan
3 6 9 3 6 9 3 6
Assemblage
TestArboisCamargue
Programming
1er prototype
Rhône
TMod
2e prototype AOI CEREGE 2017
Gradiomètre
TOstia, Roma
Variation 1Imperméable
Variation 2Gradiomètre
PlanAssemblage
T dGPS
Variation 1
Variation 2
casq
ue, c
apte
ur
Real-time map
Prototype
Automag v1
-
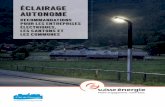
1
2
4
1. Campus ArboisDebug, Anomalies Fortes
2. Camargue (Rés. Natu. Marais du Vigueirat)Anomalies Faibles
3. Chateauneuf-du-PapeBateau, Rhône
4. Ostia Antica (Parc Archéologique)Application Archéologique
Sites
3
-
Prototype3-axial Fluxgate magnetic field sensor
GPS antenna
GPScard
LiPo battery
Sensor direction Magnetic field vector
The geomagnetic field
F: 47475 nTD: 1.471 degI: 59.252 deg
43.5N 5.3E 200m
1 Fluxgate Sensor + Attitude + GPS
Télécharger
Marcher
Stocker
Post-traitements
-
Arbois test (15 minutes)Déclination (°) Inclination (°)
IGRF 1.5°
IGRF 59.3°
Champ Total (nT) IGRF 46465nT
voiture Chambre AmagnétiqueLabo magnétismeAutomag peut détecter des
anomalies fortes (>100 nT).
Panneaux solaire
-
1st test in the field
600 m
Beaucoup des problèmes « sans données » -> Ajouter la fonction de «auto-reprendre»Beaucoup des jumpings dans données GPS -> Ajouter anti-bruit électriques
Debugging dans le site.
-
Anomalies faibles Geonics (Cs)
Automag (FG)
Des bruits a cause de mouvement de capteur est plus fort que des anomalies.
Testing de bruit
Automag ne peux pas détecter des anomalies faibles (5 nT).
-
GPS erreurIn the forest or the shade of the building -> scattered GPS scattering @ Camargue (Site 2)
Z: 4mX, Y : 1 – 2 mNouvelle version: post-traitement de la donnée brute (DGPS, filtrage).
1m
1m
GPS X GPS X
GPS
Z
GPS
Y
-
Précision et Bruits Magnétique
46300
46302
46304
46306
46308
46310
46312
46314
46316
46318
46320
46470
46472
46474
46476
46478
46480
46482
46484
46486
46488
46490
2:55:41 PM 3:02:53 PM 3:10:05 PM 3:17:17 PM 3:24:29 PM 3:31:41 PM 3:38:53 PM 3:46:05 PM
F FG
(nT)
F Pr
oton
(nT)
Time (2017/8/29)
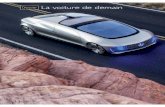
Proton Magnetometer v.s. 3-axis Flux Gate Magnetic Field Sensors
F Proton F 3-axe FG 30 Moy. mobile sur pér. (F 3-axe FG)
10 nT
@Camargue (site 2)
Observation of geomagnetic field variation at Camargue (Site 3).White noise level : 2 nTAlmost same trend with more precise Proton magnetometer, but 180 nT offset.
2 nT
-
Sur le bâteau
Il y a des passages des bateau.Le remorqueur est magnétique.
Quai (acier)
DistanceInstable
Trésor?
Imperméable (tube PVC)
Capteur mag Attitude
Rhôn
e
-
Evolution: Gradiomètre, ArcheologieOstia Antica, Rome, Italy
• Gradiomètre (horizontal)• Optimise site archéo.• Plus sensible pour
anomalies magnétiques superficiels
• Mapping temps réel
B1 B2
dB = B1 – B2dBgeo= 0
Dir
1m
Bgeo Bgeo
Superficiel
mai 2018
AOI CEREGE 2017
ECCOEV 2016
-
Real time mapping
Décalage = Mal alignement
B2
X YZ
SensorHeading
Heading Tab
?bug?
-
N 10Hz 4 minutes Horizontal X component? High-pass filtered (10 sec)
Thermae
7 mai 2018100m
m m
-
Autoévaluation du projetFortes• Synchronisation des 3 capteurs + 1 mémoire Flash• Temps réel• Système complet qui marche sue le terrainFaibles• Essai avec drone• Brevets, publicationEvolution
• Testing avec un drone et des autres platforms• Corriger des Heading error avec données directions• Augmenter la résolution spatial par donnée ΔV (INS).• Intégrer le fonction dGPS post-traitement.• Missions étranger / domestique
AUTOMAG : Système AUTOnome pour MAGnétomètrie portativeLe Service Géophysique (carte magnétique)Diapositive numéro 3Calendrier des développementsDiapositive numéro 5PrototypeArbois test (15 minutes)1st test in the fieldAnomalies faiblesGPS erreurPrécision et Bruits MagnétiqueSur le bâteauEvolution: Gradiomètre, Archeologie�Ostia Antica, Rome, ItalyReal time mappingDiapositive numéro 15Autoévaluation du projet