Analyse de données LiDAR aéroportées et apport des méthodes ...
68
École Supérieure des Géomètres et Topographes – 1 boulevard Pythagore – 72000 Le Mans Ministère de l’Enseignement Supérieur et de la Recherche Conservatoire National des Arts et Métiers École Supérieure des Géomètres et Topographes MÉMOIRE DE TRAVAIL DE FIN D’ÉTUDES présenté en vue de l’obtention du titre d’ingénieur diplômé de l’ESGT Analyse de données LiDAR aéroportées et apport des méthodes topographiques pour les expérimentations géophysiques de tomographie dans le cadre du projet TOMUVOL sur le site expérimental du dôme volcanique du Puy de Dôme. Mémoire soutenu par : CHANEL Camille Le 05 Juillet 2012 Jury : Président : Mme DUROY Joëlle Maître de stage : Mr LABAZUY Philippe Professeur référent : Mr DURAND Stéphane
Transcript of Analyse de données LiDAR aéroportées et apport des méthodes ...

École Supérieure des Géomètres et Topographes – 1 boulevard Pythagore – 72000 Le Mans
Ministère de l’Enseignement Supérieur et de la Recherche Conservatoire National des Arts et Métiers
École Supérieure des Géomètres et Topographes
MÉMOIRE DE TRAVAIL DE FIN D’ÉTUDES présenté en vue de l’obtention
du titre d’ingénieur diplômé de l’ESGT
Analyse de données LiDAR aéroportées et apport des méthodes topographiques pour les expérimentations géophysiques de
tomographie dans le cadre du projet TOMUVOL sur le site expérimental du dôme volcanique du Puy de Dôme.
Mémoire soutenu par :
CHANEL Camille Le 05 Juillet 2012
Jury :
Président : Mme DUROY Joëlle
Maître de stage : Mr LABAZUY Philippe
Professeur référent : Mr DURAND Stéphane

Crédit photo du Puy de Dôme : Pierre Soissons

Camille CHANEL – TFE 2012 -3-
AAvvaannttpprrooppooss Ce Travail de Fin d’Etude a pour objectif d’apporter des connaissances topographiques dans le cadre
du projet ToMuVol (Tomographie par Muons atmosphériques des Volcans). Ce projet est porté par le Laboratoire Magmas et Volcans (LMV) et le Laboratoire de Physique Corpusculaire (LPC). Les expériences se déroulent sur le site expérimental du Puy de Dôme.
Cet apport de connaissances est surtout déterminé par deux axes. Une première problématique est l’analyse des données LiDAR, suite à la campagne de lever aéroporté réalisée au mois de mars 2011. L’autre problématique concerne le positionnement et l’orientation d’un instrument géophysique, dans un référentiel absolu, par rapport aux structures environnantes.
Le présent travail fait suite à celui de Monsieur Vincent Trefond au Laboratoire Magmas et Volcans à Clermont-Ferrand (V.Trefond, 2011).
RReemmeerrcciieemmeennttss En premier lieu je tiens à remercier Philippe Labazuy, mon maître de stage, pour m’avoir proposé ce
sujet et accueilli au sein du Laboratoire Magmas et Volcans. Mais aussi pour m’avoir accompagnée tout au long de mon TFE en me laissant une autonomie certaine.
Je souhaite également remercier Stéphane Durand, enseignant chercheur de l’ESGT, qui m’a apporté son aide technique et ses conseils en plusieurs occasions.
Naturellement mes remerciements vont aussi à Angélie Portal, étudiante de M2R (Master 2 de Recherche), pour ses explications sur les méthodes géophysiques, les formations volcaniques et pour son envie communicative d’étudier les volcans.
Je n’oublie pas les membres du projet TOMUVOL, en particulier Cristina Carlagonu et François Daudon.
Un grand merci encore à Monsieur Voldoire qui nous a prêté du matériel pour la réalisation de nos missions topographiques, à Jean-Luc Froger, pour le partage de ses connaissances et enfin à tous ceux qui m’ont apporté leur aide lors de missions topographiques, Frédéric Jouves, François Daudon, Angélie Portal, Philippe Labazuy et Frank Pointud.
Enfin, je tiens à remercier les personnes qui de près ou de loin m’ont aidés dans la relecture de ce mémoire.

Camille CHANEL – TFE 2012 -4-
TTaabbllee ddeess mmaattiièèrreess
1. PRESENTATION DU PROJET DE TOMOGRAPHIE PAR MUONS ATMOSPHERIQUES DES VOLCANS (TOMUVOL) ................................................................................ 8
1.1. Le projet ToMuVol ........................................................................................................................... 8 1.1.1. Les Muons ............................................................................................................................................ 8 1.1.2. Le principe de détection ...................................................................................................................... 9
1.1.2.1. Le détecteur ................................................................................................................................. 9 1.1.2.2. La composition d’un plan de détection ...................................................................................... 10
1.1.3. L’apport du MNT de haute précision ................................................................................................. 10 1.1.4. L’apport des données topographiques dans le cadre des mesures géophysiques ............................ 11
1.1.4.1. Prospects gravimétriques ........................................................................................................... 11 1.1.4.2. La tomographie de résistivité électrique .................................................................................... 12
1.2. Les acteurs ..................................................................................................................................... 13 1.2.1. Le Laboratoire Magmas et Volcans (LMV) ......................................................................................... 13 1.2.2. Le Laboratoire de Physique Corpusculaire (L.P.C) ............................................................................. 13 1.2.3. L’Observatoire de Physique du Globe de Clermont‐Ferrand (O.P.G.C) ............................................. 13 1.2.4. Institut de Physique Nucléaire de Lyon (IPNL) ................................................................................... 13
2. ANALYSE DES DONNEES LIDAR .................................................................................... 14
2.1. Génération du Modèle Numérique de Terrain (MNT) ...................................................................... 15 2.1.1. Généralités......................................................................................................................................... 15
2.1.1.1. Définition .................................................................................................................................... 15 2.1.1.2. Méthode d’élaboration d’un M.N.T ........................................................................................... 15 2.1.1.3. Méthodes d’interpolation .......................................................................................................... 15
2.1.2. Etude sur les données fournies par GeoPhenix ................................................................................. 18 2.1.3. Calcul du M.N.T .................................................................................................................................. 27
2.2. Géomorphologie : outils d’analyse et traitements quantitatifs ........................................................ 30 2.2.1. Etude sur le MNT ombré.................................................................................................................... 30 2.2.2. Etude des pentes sur la zone du Puy de Dôme .................................................................................. 32 2.2.3. Carte de l’exposition .......................................................................................................................... 33 2.2.4. Profil topographiques ........................................................................................................................ 34

Camille CHANEL – TFE 2012 -5-
3. POSITIONNEMENT DU DETECTEUR DE MUONS ..................................................... 36
3.1. Problématique ............................................................................................................................... 36
3.2. Positionnement du détecteur de muons au Gros Manaux ............................................................... 37 3.2.1. Positionnement du détecteur dans le repère lié à la pièce ............................................................... 37
3.2.1.1. Situation/Contexte ..................................................................................................................... 37 3.2.1.2. Méthodologie adoptée .............................................................................................................. 38 3.2.1.3. Déroulement de la mission ........................................................................................................ 39 3.2.1.4. Calcul de la solution ................................................................................................................... 41
3.2.2. Positionnement en RGF93 ................................................................................................................. 42 3.2.2.1. Situation ..................................................................................................................................... 43 3.2.2.2. Méthodologie ............................................................................................................................. 43
3.3. Positionnement du détecteur dans le futur ..................................................................................... 48 3.3.1. Contexte de l’étude et problématique .............................................................................................. 48 3.3.2. Déplacement en cours d’expérience ................................................................................................. 49 3.3.3. Le phénomène de dilatation .............................................................................................................. 49 3.3.4. Etape 1 : Positionnement des Pads dans la cassette ......................................................................... 50 3.3.5. Etape 2 : Positionnement des cassettes dans le plan ........................................................................ 51 3.3.6. Etape 3 : Positionnement des plans par rapport au bâti ................................................................... 51 3.3.7. Etape 4 : Positionnement du Bâti par rapport à l’édifice .................................................................. 51
3.4. Conclusion ..................................................................................................................................... 52
TABLE DES TABLEAUX ............................................................................................................... 59

Camille CHANEL – TFE 2012 -6-
IInnttrroodduuccttiioonn Au sein du Laboratoire Magmas et Volcans, les volcanologues cherchent à comprendre les structures
internes des volcans ainsi que leur fonctionnement. Ces connaissances permettent de mieux appréhender la formation des édifices volcaniques et leur évolution, afin d’améliorer les méthodes de surveillance des volcans actifs.
Parmi les méthodes classiquement utilisées, on peut citer les outils de la géophysique, tels que les méthodes gravimétriques, de résistivités électriques, la sismologie ou encore l’électromagnétisme. Ces études fournissent des informations pertinentes et complémentaires sur la structure interne des volcans, telles que la densité et la résistivité des terrains par exemple. Ces prospections ne sont pas toujours aisées ; en effet, elles imposent une proximité avec le volcan qui peut être source de danger notamment lors des prospections sur des volcans actifs.
Dans ce contexte, le projet ToMuVol a pour objectif de développer une nouvelle technologie pour l’étude des volcans. Il s’agit de déterminer les flux de particules cosmiques, les muons, grâce à un détecteur positionné sur un flanc d’un volcan. La possibilité d’éloigner le détecteur de l’édifice volcanique à étudier est un des principaux avantages de cette méthode. La détermination des flux de ces particules est utilisée pour réaliser une image de l’intérieur des volcans afin de définir la structure interne de l’édifice.
D’un point de vue conceptuel, la tomographie muonique peut être assimilée aux techniques classiques de radiographie. En effet, lors d’une radiographie, il y a génération de rayons X par la collision d'électrons sur des atomes de matière, qui vont traverser une structure, dans ce cas, un corps humain par exemple et vont impressionner un plan de détection en fonction de leur énergie. La quantité de rayons X reçue au niveau du capteur va dépendre de l’absorption des rayons X par les différents tissus traversés, et donc de leur densité. Ainsi les os très denses, apparaîtront en clair (forte absorption) tandis que les organes seront beaucoup plus sombres.
Les premières expérimentations de muographie se déroulent sur le Puy de Dôme, depuis deux ans environ (1ère expérience en janvier 2011). Ce site expérimental a été choisi de part son analogie naturelle avec des volcans actifs comme la Soufrière, en Guadeloupe. Sa structure interne, composée d’un double dôme, est une structure complexe qui devrait permettre de valider l’expérience de tomographie muonique. De plus, la proximité du site avec les différents laboratoires collaborant à ce projet est un atout.
Dans le cas de la radiographie des volcans, il est indispensable de connaître de manière précise la topographie des édifices. En effet, le flux de muons mesuré dépend du flux des muons atmosphériques, qui est connu, et de l’atténuation de ce flux pendant son parcours à travers la roche. Cette atténuation du flux peut être déterminée grâce à un modèle précis de l’édifice. C’est pour définir ce paramètre qu’un lever LiDAR a été réalisé sur le Puy de Dôme en mars 2011. Ce lever a permis la réalisation d’un MNT de grande précision (décimétrique) et de résolution élevée (inframétrique) qui va permettre de déterminer la quantité de matière traversée par les muons, donc de pouvoir calculer une densité moyenne le long de leur trajectoire.
Cette méthode sera comparée avec des études plus classiques de géophysique à savoir une étude gravimétrique dont la campagne de mesures a pris fin au mois de mai 2012, ainsi qu’une étude de tomographie électrique réalisée les 11 et 12 mai 2012. Ces deux études permettront de valider l’expérience de détection de muons et de la qualifier en terme de précision.

Camille CHANEL – TFE 2012 -7-
Mon travail au sein de ce projet s’est décomposé en plusieurs parties. La première a permis de valider le choix de la méthode d’interpolation du prestataire et de qualifier la qualité du MNT, puis de réaliser une première approche morphologique de la zone d’étude à travers des cartes dérivées de ce MNT. Ce modèle de précision décimétrique et de résolution inframétrique sera intégré dans les modèles d’inversion des données géophysiques, telles que la gravimétrie et la tomographie muonique. La seconde partie a consisté à déterminer de manière précise le positionnement du détecteur par rapport au volcan, afin de reconstruire avec précision les trajectoires des muons.
Cette seconde partie a été subdivisée en deux axes. Dans un premier temps, il a fallu mettre en œuvre une technique pour positionner le détecteur sur le flanc du Puy de Dôme. Par la suite, une étude a été réalisée pour définir les besoins en matière de positionnement pour la construction du prototype de deuxième génération (détecteur portable).

Camille CHANEL – TFE 2012 -8-
11.. PPrréésseennttaattiioonn dduu pprroojjeett ddee TToommooggrraapphhiiee ppaarr MMuuoonnss aattmmoosspphhéérriiqquueess ddeess VVoollccaannss ((TTooMMuuVVooll))
1.1. Le projet ToMuVol
L’objectif du projet ToMuVol consiste à définir une nouvelle méthode de radiographie pour l’étude de la structure interne des volcans, puis par la combinaison de plusieurs prises de vue à faire une reconstruction tridimensionnelle des édifices volcaniques. Dans une première phase, des tests sont réalisés sur le Puy de Dôme avec un détecteur de muons, conçu par une équipe du projet ToMuVol.
Les intérêts liés à cette nouvelle méthode sont multiples. En effet, il est probable que la résolution spatiale de la méthode de tomographie muonique atteigne une résolution supérieure aux méthodes géophysiques couramment employées aujourd’hui, telles que la gravimétrie ou la résistivité électrique. Elle pourrait de plus fournir des informations complémentaires à ces méthodes classiques. C’est un outil de mesure déporté, donc à distance du site actif qui peut être potentiellement dangereux. Il permet donc de se mettre à l’abri des dangers pour l’humain (accident corporel) mais aussi pour le matériel (détérioration ou destruction) au contraire d’autres méthodes géophysiques imposant une proximité de l’édifice.
Dans un second temps, ce projet consistera à créer un système de détection portable qui pourra être mis en place sur les édifices volcaniques actifs et ainsi surveiller en continu leurs modifications internes. Celles-ci peuvent être des précurseurs aux éruptions volcaniques ; en les détectant, il sera envisageable de les prévenir.
Cette méthode repose sur le principe d’une radiographie qui utilise des particules naturelles de haute énergie : les muons. Un détecteur est placé sur le flan d’un volcan, il enregistre le flux de muons qui traverse l’édifice. Ensuite il faut être capable de reconstruire la trajectoire des muons et de connaître l’enveloppe externe de l’édifice pour pouvoir définir la quantité de matière traversée par les muons.
1.1.1. Les Muons
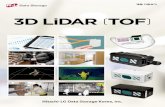
Dans l’espace il existe des rayons cosmiques constitués principalement de protons (particules élémentaires de haute énergie). Quand ces particules arrivent dans l’atmosphère une réaction en chaîne produit d’autres particules, généralement des pions, qui eux-mêmes se transforment en muons, neutrinos ou photons (Figure 1). Les muons sont des particules lourdes de charge négative, dont l’énergie est très variable, de quelques électrons volt (eV) à 1020 eV, et d’une durée de vie très courte.
Ces réactions avec l’atmosphère sont connues, ce qui permet de définir le flux de muons parvenant jusqu'à la terre (tous n’y parviennent pas). Certains ont assez d’énergie pour traverser de la roche sur plusieurs kilomètres avant d’être désintégrés. Le muon perd de l’énergie en fonction de la densité de roche qu’il traverse.
Les trajectoires muoniques sont légèrement incurvées, cette propriété est due à leur masse. Cependant, pour le traitement des données ultérieures, des modèles permettent de reconstruire ces trajectoires.
Figure 1 : Schéma de la collision des particules dans l'atmosphère donnant lieu à
la création de muons

Camille CHANEL – TFE 2012 -9-
1.1.2. Le principe de détection
Le principe de détection des muons, commence par la mise en place du détecteur sur le flan d’un volcan. Celui-ci va pendant un certain temps mesurer le flux de muons qui traverse l’édifice en fonction de l’angle d’incidence par rapport à la verticale locale et par rapport au plan horizontal. Une fois ses informations enregistrées, il est nécessaire de reconstruire les trajectoires de ces différents flux. Une fois ses reconstructions faîtes, l’énergie du flux mesuré sera comparée à l’énergie du flux atmosphérique, cette comparaison permettra de créer la carte d’atténuation des flux du à la traversée de la roche. Enfin cette carte d’atténuation des flux couplée avec le modèle numérique de terrain de l’édifice étudié permettra de réaliser un modèle de densité de l’édifice.
Un des grands enjeux de ce système est donc le positionnement du détecteur par rapport à l’édifice volcanique. Nous allons donc voir la constitution de ce système de détection.
1.1.2.1. Le détecteur
La reconstruction de la trajectoire des muons, impose de disposer d’au moins deux plans de détections. En effet, en connaissant le point d’impact sur chacun des deux plans de détection il est possible de reconstruire la trajectoire du muon à travers l’édifice volcanique.
Lors des premières expériences, il est apparu que la configuration idéale pour le détecteur est d’être constituée d’au moins quatre plans de détection de un mètre carré (Figure 2). Les deux premiers suffisent à la reconstruction des trajectoires, l’ajout d’un troisième plan permet d’améliorer sensiblement la qualité de leur détermination. Le quatrième plan quant à lui, s’il n’améliore pas la qualité de reconstruction des trajectoires, permet de diminuer les phénomènes de bruit.
Figure 2: Schéma du détecteur à 4 plans
(Source : M Daudon LPC)
Figure 3 : Photos du détecteur au col de Ceyssat Expérience des Gros Manaux, système de détection complet :
L’ordinateur permet de transférer les observations, le système d’alimentation.
Le détecteur positionné au col de Ceyssat était donc composé de quatre plans de un mètre carré chacun (Figure 3). Cette phase d’acquisition a débuté début février 2012, pour se terminer fin mars 2012. Après cette phase d’expérimentation, est venue la réflexion sur la construction d’un futur détecteur qui soit transportable et autonome en énergie.

Camille CHANEL – TFE 2012 -10-
1.1.2.2. La composition d’un plan de détection
Les plans de détections sont composés de six cassettes de 1/6 de m². Chaque cassette comporte une chambre GRPC (Glass Resistive Plate Chamber), deux lames de verre graphité séparées par un espace rempli de gaz sous très haute tension, de 7 à 8 kVolt, alimenté en permanence pour conserver la qualité du mélange. De part et d’autre de la chambre GPRC un film mylar de 0.1 millimètre d’épaisseur vient jouer le rôle d’un isolant électrique. Ensuite un PCB (Print Cicuit Board) est mis en place d’un coté de la chambre avec un renfort en aluminium, complété par la mise en place d’un renfort en nid d’abeille (pour la légèreté de sa structure), sur la face opposée (Figure 4).
Figure 4 : Représentation éclatée d'une cassette (Source : Mr Daudon LPC)
Figure 5 : Représentation du PCB
(Source : Mr Daudon LPC)
Le PCB est composé de chips (modules électroniques), qui sont constitués de 8 pads par 8 pads (Figure 5). Les pads sont les cellules élémentaires de détection de un centimètre carré. Lors de la détection de muons, il y a formation d’un arc électrique dans la chambre GPRC qui va venir impacter les pads. Les informations sont recueillies par une carte DIF (Detector InterFace board) qui va les transmettre à l’ordinateur. La taille des pads a donc une grande influence pour la résolution du système.
Il est important de noter que la précision atteinte est meilleure que la taille du pad. En effet, lors de la formation d’un arc électrique plusieurs pads sont touchés, en utilisant la méthode du barycentre il est alors possible de déterminer le point d’impact de la particule avec une précision supérieure au cm².
1.1.3. L’apport du MNT de haute précision
Sans la connaissance de la surface topographique, la carte de densité ne pourrait pas être construite. En effet, nous aurions une carte d’atténuation du flux des muons mais en aucun cas de densité. Or, pour des volcanologues, la carte de densité est bien plus intéressante car c’est elle qui pourra faire ressortir les structures et les variations de masse au sein de l’édifice. Avec ce MNT, il est possible d’intégrer la variation du flux en fonction de la longueur de la roche traversée et donc d’obtenir une densité moyenne de l’édifice le long de la trajectoire des muons.
Les équipes du projet ToMuVol ont donc lancé un appel d’offre pour la réalisation d’un lever LiDAR, sur la zone élargie du Puy de Dôme (7km*5km), de haute précision, le cahier des charges stipule une

Camille CHANEL – TFE 2012 -11-
densité de 10pts/m² et une précision de 10 cm. Ce lever LiDAR a permis la réalisation d’un MNT d’une résolution inframétrique et d’une précision décimétrique.
1.1.4. L’apport des données topographiques dans le cadre des mesures géophysiques
Pour qualifier et valider la méthode de tomographie par détection de muons, des méthodes géophysiques ont été mises en œuvre, dans le cadre des expérimentations menées au Puy de Dôme.
1.1.4.1. Prospects gravimétriques
La gravimétrie vise à déterminer les variations du champ de pesanteur, liées essentiellement aux différences de composition du sous-sol. Cette méthode permet donc de fournir des informations sur la structure interne de l’édifice étudié. Sa mise en œuvre s’est déroulée entre mars et mai 2012, sur le site expérimental du Puy de Dôme. Elle consiste à mesurer la force de l’attraction terrestre, en un grand nombre de stations sur l’édifice. La correction de tous les effets perturbateurs, tels que l’attraction de la lune, du soleil, la dérive instrumentale, la correction topographique, permet l’élaboration d’une carte d’anomalie de densité, appelée anomalie de Bouguer. Cette carte représente les écarts de gravité entre la valeur théorique définie à partir de modèles et celle mesurée et corrigée. Ensuite, à partir de ces cartes d’anomalies, il est possible de modéliser la répartition des densités au sein de l’édifice.
Le prospect gravimétrique mené sur le Puy de Dôme est un peu particulier. En effet, habituellement la densité de points réalisée sur une zone d’étude donnée est trois fois moins importante. Afin d’appliquer les corrections topographiques les plus précises possible aux 300 stations de mesures de ce prospect gravimétrique de haute résolution, il est indispensable d’atteindre une précision de positionnement décimétrique, pour que l’erreur sur le positionnement soit plus faible que l’erreur de mesure dû à l’appareil.
La méthode de positionnement utilisée est la méthode statique rapide. Le principe de cette méthode est l’observation simultanée des mêmes satellites GPS par plusieurs récepteurs géodésiques. Ensuite en combinant ces informations, il est possible de déterminer les différentes lignes de base. Ces différentes lignes de base sont calculées en post-traitement avec le modèle de la double différence. Pour se faire, un récepteur Topcon Hiper Pro (reçoit les signaux des satellites GLONASS et GPS) est utilisé sur le terrain, des sessions de mesures de 30 secondes / km sont effectuées. Après récupération des observations (celles-ci étant enregistrées toutes les secondes, avec un angle de coupure de 10 degrés), elles sont post-traitées par rapport aux deux stations du RGP (Réseau GNSS Permanent) de Clermont Ferrand dont les caractéristiques issues du site <www.rgp.ign.fr> sont récapitulées dans le tableau 1. Le logiciel de post- traitement utilisé est le logiciel Topcon Tools V8. La plupart de nos points ainsi observés ont une précision de quelques centimètres à dix centimètres, cependant sur certains points les ambiguïtés entières n’ont pas pu être fixées, du fait des masques (zone boisée) qui empêchaient la réception continue des signaux satellitaires. Dans ce cas là nos points ont une précision pluri métrique.
Nom Type Signaux satellites
reçus Latitude Longitude
Hauteur Ellipsoïdale
CLFD TRM41249.00 GPS 45°45’39.45581 ‘’N 03°06’39.85802’’E 473.600
CLMT TRM55971.00 GPS +GLONASS 45°46’30.21460 ‘’N 03°08’43.84486’’E 392.510
Tableau 1 : Définition des stations du RGP utilisées pour le post-traitement des données GPS acquise lors de la campagne de mesures gravimétriques.

Camille CHANEL – TFE 2012 -12-
1.1.4.2. La tomographie de résistivité électrique
Cette méthode permet de déterminer en 2D les variations de résistivité électrique (capacité d’un matériau à être traversé par un courant électrique) du sous sol. Pour ce faire, il y a injection d’un courant électrique dans le sol à travers deux électrodes. Ce courant génère un champ électrique en fonction de la conductivité du sol. Deux autres électrodes mesurent la différence de potentiel créée par le champ électrique (Figure 6). Avec ces informations plus la géométrie des électrodes, il est possible de déduire la résistivité apparente du sous-sol. Ensuite, on peut créer un modèle de distribution des résistivités électriques.
Le prospect réalisé sur le Puy de Dôme est un des plus grands prospects réalisés dans le monde, avec 64 électrodes distantes de 35 mètres chacune, pour une longueur totale de deux kilomètres environ. L’intérêt d’un si grand dispositif est de pouvoir représenter la résistivité de l’édifice en profondeur, jusqu’à 500m environ sous la surface topographique. Dans cette manipulation, les électrodes ont été implantées tous les 35 mètres avec l’aide d’une chaîne et à partir d’un plan d’implantation réalisé sous Arcmap, intégré à des GPS de randonnée Etrex 30 (GPS+GLONASS et WAAS, système d’augmentation par satellite), la précision de ces GPS est de ±2m dans les cas favorables. Par la suite un lever au GPS de ces électrodes est nécessaire pour déterminer la position précise (décimétrique) de celles-ci. Pour cette manipulation, deux récepteurs GNSS ont été utilisés, en mode statique. Un des récepteurs était positionné au sommet du Puy de Dôme, pendant que l’autre faisait des acquisitions de trois minutes sur chaque électrode (la ligne de base étant au maximum d’un kilomètre). Même principe que pour la gravimétrie, les observations GPS sont post-traitées. Dans un premier temps le récepteur placé au sommet du Puy de Dôme est post-traité par rapport aux deux stations CLFD et CLMT (Voir partie 1.1.4.1, pour plus de précision), puis, les points mesurés sur les électrodes sont post-traités par rapport au récepteur placé au sommet. En Annexe 1 se trouve les modèles de résistivité de la roche calculés à partir des expériences réalisées en juin 2011 et mai 2012.
Figure 6 : Schéma de principe de mesure de résistivité électrique (Angélie Portale, 2012) Injection d’un courant dans deux électrodes et mesure de la différence de potentiel entre deux autres.

Camille CHANEL – TFE 2012 -13-
1.2. Les acteurs
Sur ce projet trois laboratoires travaillent en étroite collaboration, chacun dans son domaine de compétence.
1.2.1. Le Laboratoire Magmas et Volcans (LMV)
Le Laboratoire Magmas et Volcans regroupe plus d’une centaine de personnes travaillant sur la compréhension de l'ensemble des processus magmatiques et volcaniques, depuis la fusion dans le manteau terrestre jusqu'à l'éruption en surface. Ces chercheurs sont intégrés au sein en quatre équipes thématiques, et sont répartis sur plusieurs sites, le principal étant celui situé à Clermont-Ferrand. Ce laboratoire est une unité de recherche de l’Université Blaise Pascal (UBP), associée au Centre National de la Recherche Scientifique (CNRS) et à l’Institut de Recherche et de Développement (IRD). C’est un pôle d’excellence depuis 2010 de la Région Auvergne.
L’apport du LMV dans le projet ToMuVol se fait surtout par la mise en place de méthodes géophysiques reconnues pour valider la méthode de détermination de la structure des volcans par méthode muonique.
1.2.2. Le Laboratoire de Physique Corpusculaire (L.P.C)
Le Laboratoire de Physique Corpusculaire est une Unité Mixte de Recherche rattachée à l’Institut National de Physique des Particules et de Physique Nucléaire (IN2P3) du CNRS Ce laboratoire travaille dans le domaine de la physique fondamentale.
Le LPC est chargé de la construction du détecteur de muons et de l’exploitation des résultats de celui-ci.
1.2.3. L’Observatoire de Physique du Globe de Clermont-Ferrand (O.P.G.C)
L’Observatoire de Physique du Globe de Clermont-Ferrand est un Observatoire des Sciences de l’Univers (OSU), de l’Institut Naturel des Sciences de l’Univers (INSU) du CNRS. Il regroupe en son sein deux laboratoires : le LMV et le LAboratoire de Météorologie Physique (LAMP) qui étudie de manière générale l’impact des processus nuageux sur l’évolution du climat. Cet Observatoire est aussi rattaché à l’UBP, au sein de laquelle il constitue une UFR dérogatoire.
Dans le cadre du projet ToMuVol, les services centraux de l'OPGC assure un service de développement technologique, de maintenance des matériels, ainsi qu’un service informatique, pour la communication et la transmission des données.
1.2.4. Institut de Physique Nucléaire de Lyon (IPNL)
L’Institut de Physique Nucléaire de Lyon est une unité de recherche de l’Université Claude Bernard de Lyon (UCBL), associé à l’IN2P3 du CNRS. Les activités de l'IPNL visent à étudier les propriétés des composants subatomiques de la matière ainsi que leurs interactions.
L’IPNL a fourni le premier détecteur de muon et participe à la construction du deuxième, en collaboration avec le LPC.

Camille CHANEL – TFE 2012 -14-
22.. AAnnaallyyssee ddeess ddoonnnnééeess LLiiDDAARR
Le lever LiDAR, réalisé les 21 et 22 mars 2011, revêt une importance capitale dans le cadre du projet ToMuVol pour la détermination d’un Modèle Numérique de Terrain (MNT) de haute précision. Ce MNT permettra de définir la quantité de roche traversée par les muons en fonction de leur trajectoire. La zone concernée par notre étude regroupe, au nord, le Puy de Côme et le Puy du Pariou et s’étend jusqu’au Puy de Montchier dans le secteur sud (Figure 7). Pour la zone étudiée ci-dessous, le cahier des charges demande une densité moyenne de 10 points par mètre carré avec une précision planimétrique et altimétrique de 10 centimètres.
Ce lever LiDAR revêt une grande importance et pas seulement dans le cadre du projet ToMuVol. Les communautés scientifiques impliquées dans des études volcanologiques et géophysiques ainsi que des archéologues considèrent ce lever comme un outil exceptionnel pour approfondir leurs recherches.
Le MNT de haute précision ainsi créé va avoir un impact important pour la qualité de la détermination de la structure interne de l’édifice, il faut donc que ce MNT soit contrôlé. L’objectif, dans un premier temps, est d’étudier différentes possibilités de création d’un modèle et de valider le choix fait par la société GeoPhenix, lauréate de l’appel d’offres, qui a réalisé le lever et délivré les différents produits (semis de point brut, orthophotographie, MNT, …). Dans un second temps, des outils d’analyses morphologiques sont présentées et illustrées par quelques exemples remarquables issus de la Chaine des Puy.
Figure 7 : Zone du lever LiDAR réalisée en mars 2011 par la société GeoPhenix

Camille CHANEL – TFE 2012 -15-
2.1. Génération du Modèle Numérique de Terrain (MNT)
2.1.1. Généralités
2.1.1.1. Définition
Un MNT est une représentation numérique de la surface topographique en terme d’altitude. En effet il s’agit bien ici de définir un modèle ne tenant pas compte du sursol (végétation ou bâtiment). Si le sursol est pris en compte, il faut parler de Modèle Numérique d’Elévation (MNE) ou de Modèle Numérique de Surface (MNS). Ce MNT fournit des informations sur la forme du relief et sur sa position. Un MNT ne peut cependant pas tout décrire, effectivement la représentation d’un pont ou d’un surplomb pose problème car dans un MNT à un point donné ne peut être associé qu’une seule et unique altitude.
2.1.1.2. Méthode d’élaboration d’un M.N.T
L’élaboration d’un M.N.T commence par l’acquisition d’un semis de points qui peut se faire de différentes façons. Dans notre cas, cette acquisition s’est faîte par lever LiDAR aéroporté, réalisé en mars 2011 par la société GeoPhenix. Pour plus d’informations sur ce lever LiDAR, le lecteur pourra se référer au TFE de V. Trefond (2011).
Les données acquises sont disposées de manière irrégulière et ne permettent pas d’avoir une connaissance en tout point de l’altitude du terrain. Pour se faire il faut définir une méthode d’interpolation qui permettra de décrire ce paramètre de manière continue. Ces méthodes d’interpolation sont très variées, avec leurs avantages et leurs inconvénients.
Un MNT a plusieurs façons d’être représenté, soit sous format vecteur soit sous format raster. Le format raster est une représentation matricielle des données, alors que le format vecteur représente les données sous forme de lignes, de polygones ou de triangles. Le type de représentation à son importance. En effet, l’étude d’un format raster est assez simple car les algorithmes sont faciles à mettre en œuvre. Par contre ce format a tendance à lisser les formes du terrain et donc à supprimer les pentes les plus fortes. En revanche, le format vecteur est fidèle à la morphologie du terrain, le calcul des pentes est très rapide et précis. Cependant, il est plus difficile à gérer car beaucoup plus lourd. De plus les opérations effectuées sur ce format sont beaucoup plus longues que sur le format raster.
2.1.1.3. Méthodes d’interpolation
Le choix d’une méthode d’interpolation a une influence sur la détermination et la qualité du MNT. Nous avons voulu contrôler le choix fait par le prestataire. Pour ce faire nous avons étudié deux méthodes d’interpolation, le TIN et le krigeage. Ce choix résulte d’une comparaison réalisée entre plusieurs méthodes d’interpolation à travers différentes études telles que R.Gunie(2002), S.Baillargeon(2005) mais aussi avec les aides des logiciels, Arcgis et Surfer. Ainsi, par exemple, l’interpolation spline a été éliminée car : « Quand les variations de pente sont importantes, une surface spline ne peut pas être suffisamment tendue et présente forcément des artéfacts » (R.Gunie, 2002).

Camille CHANEL – TFE 2012 -16-
2.1.1.3.1. Le Krigeage
Le krigeage est une méthode d’interpolation spatiale issue de la statistique. Le principe de base est de définir par une combinaison linéaire à partir des données adjacentes aux nœuds de la grille, la valeur de l’altitude en ce nœud. Cet outil permet donc d’éliminer les valeurs aberrantes, au risque d’éliminer des données correctes. Il se base sur la connaissance de la structure de dépendance spatiale des données qui est estimé par l’analyse variographique.
Il existe trois types de krigeage : le krigeage simple, le krigeage ordinaire et le krigeage universel. Ces trois types de krigeage nécessitent au préalable une étude approfondie sur l’ensemble des données et notamment sur l’analyse variographique. Pour plus de détails sur cette méthode d’interpolation, le lecteur peut se référer au mémoire de S.Baillargeon, (2005).
Cette méthode d’interpolation fournit un MNT au format raster ce qui est avantageux pour les temps de calcul et pour le stockage. Pour que l’étude statistique soit la plus réaliste possible, il faut que les différentes zones étudiées aient une certaine homogénéité. Si des zones sont très différentes, ce qui est le cas dans notre zone d’étude, il vaut mieux les traiter séparément. Il faudrait donc découper la zone d’étude en différentes zones de morphologie semblable. Sachant que le jeu de données fourni par GeoPhenix possède une densité de 10pts / m², ce qui satisfait à la règle de Nyquist pour une résolution de 50 cm. Le choix fait est de ne pas découper la zone d’étude en différentes zones liées à la morphologie du terrain, car la densité d’échantillonnage est importante, écart moyen entre les points de semis étant de 27 cm, et de choisir un modèle de variogramme linéaire (le choix du modèle ayant peu d’influence sur les résultats du krigeage si chaque modèle fournit un ajustement équivalent pour les courtes distances). L’avantage du krigeage par rapport à une méthode d’interpolation d’inverse distance est qu’il tient compte de la position des points entre eux.
2.1.1.3.2. Le TIN (Triangulated Irregular Network)
Le TIN permet de représenter le terrain sous forme de triangles. Entre chaque point du semis seront tracés des triangles qui permettront de définir en chaque point du MNT l’altitude qui lui est associée. Cette interpolation utilise la triangulation de Delaunay qui est unique si tout cercle circonscrit à un triangle ne contient aucun autre sommet. Cette triangulation s’appuie sur la construction du diagramme de Voronoï. Les polygones sont définis à partir de l’ensemble du semis de points. La définition du diagramme de Voronoï est la suivante : un polygone est la surface des points les plus proches d’un point du semis que de tous les autres points de semis.
Cette représentation décrit très bien la morphologie du terrain. Toutefois, pour une représentation optimale, il serait nécessaire d’inclure les lignes caractéristiques du terrain, comme les lignes de crêtes et de talwegs. De plus et contrairement au MNT Raster, à partir d’un modèle TIN, il est très simple de déterminer la pente du terrain et l’orientation de celle-ci.
Cependant, c’est un format qui est très lourd donc difficile à gérer et les opérations effectuées sont beaucoup plus longues que sur un MNT raster. De plus, chacun sait que dans la réalité, la surface topographique est normalement lisse, or une succession de facette triangulaire entraîne des changements de pentes brutaux, ce qui ne permet pas une représentation parfaite du relief.

Camille CHANEL – TFE 2012 -17-
Ce format TIN peut ensuite être rasterisé. Cela consiste à superposer une grille régulière sur le modèle TIN et à calculer l’altitude en chaque nœud de la grille. Ceux-ci peuvent alors se situer dans un triangle. Pour l’interpolation sur chaque facette, il s’agit d’une interpolation linéaire prenant en compte les hauteurs des trois sommets du triangle (Figure 8).
L’avantage de cette rastérisation est qu’elle conserve une bonne représentation de la surface même s’il existe lors de la rastérisation une perte de précision. Ce type de MNT est plus facile à manipuler car il est au format raster, mais des cassures entre triangle restent visibles dans certaines zones.
2.1.1.3.3. Qualité d’un M.N.T
La qualité d’un M.N.T dépend d’un grand nombre de facteurs. Parmi ceux-ci interviennent notamment l’homogénéité de la zone à étudier et l’adaptabilité de la méthode d’interpolation au terrain et aux données disponibles.
Elle dépend aussi de la qualité du jeu de données en entrée. Dans le cas du lever LiDAR GeoPhenix sur la chaîne des Puys celle-ci a été qualifiée par V.Trefond (2011), à travers son étude sur la densité des points au sol mais aussi sur la qualité du jeu de points par comparaison avec un lever laser terrestre. Cette étude sur la précision altimétrique du jeu de données a entraîné un décalage de 10 cm en altimétrie sur l’ensemble du jeu de données ; pour plus d’information, se référer au Rapport préliminaire Contrôle LiDAR (V.Trefond et P.Labazuy, 2011).
L’étude réalisée par F.Rousseaux (2006) met en avant l’importance de la qualité du jeu de données initial. Cette étude semble montrer que la méthode d’interpolation choisie a un impact moindre sur la qualité du MNT, par rapport à la qualité du jeu de données initial.
Dans le cadre d’un MNT raster, la résolution choisie est déterminante pour la qualité du MNT. Ackermann(1996) suggère en général une relation entre la précision altimétrique du MNT et sa résolution en fonction de la nature du terrain. D’après lui, la grille du MNT devrait être telle que la précision altimétrique correspondrait environ au 1/20 ème pour un terrain lisse et au 1/10 ème pour un terrain rugueux, ce qui dans le cas des secteurs concernés par le lever LiDAR, déterminerait un pas de grille de 1 mètre, pour une précision altimétrique de 10 cm. Cependant, le choix de pas de maille provient aussi de la règle de Nyquist, qui énonce que la fréquence d'échantillonnage d'un signal doit être égale ou supérieure au double de la fréquence maximale contenue dans ce signal. Le pas d’échantillonnage est alors définie par
nnageéchantillodDensité '2 . Pour la suite le pas de maille choisi sera de 0.50 m, car c’était ce qui était
demandé dans l’appel d’offre.
Figure 8 : Représentation de l'interpolation TINSource : (R.Gunie, 2002)

Camille CHANEL – TFE 2012 -18-
2.1.2. Etude sur les données fournies par GeoPhenix
Le prestataire de service, GeoPhenix, a fourni conformément au cahier des charges techniques :
• un semis de points bruts pour deux systèmes de projection différents : projection Lambert 93, système altimétrique ING69, système de référence RGF93 et le système projection Lambert 2 étendue associée au système NTF (Nouvelle Triangulation Française).
• un semis de points filtrés dans les mêmes projections que ci-dessus (semis de points sol, semis de points sursol, semis de points végétation, semis de points bâti et semis de points terrain naturel allégé).
• un MNT raster à 50 cm de résolution. Cette grille a été calculée à partir du semis de points sol, avec une interpolation TIN rasterisée. Lorsqu’un côté d’un triangle est supérieur à 5 mètres, l’interpolation du triangle n’a pas lieu, un trou dans le MNT est alors généré. Cette interpolation a été réalisée à l’aide du logiciel Terrascan.
L’objectif de cette première partie est de valider le choix fait par la société GeoPhenix à travers l’étude de deux méthodes d’interpolation, à savoir une méthode d’interpolation par krigeage et une autre par triangulation-rasterisé, afin de définir la plus appropriée. Ces deux MNT seront calculés avec le logiciel Surfer de Golden Software. Le pas de la maille est défini à 0.5 m comme celui fourni par le prestataire. Après une série de tests, l’interpolation par krigeage a été définie avec les paramètres regroupés dans le Tableau 2, avec pour objectif de trouver un compromis entre un lissage excessif des données et la création d’artefacts. Le choix du variogramme est l’utilisation d’un variogramme linéaire de pente 1 et isotrope, pour qu’il soit cohérent avec l’ensemble varié de la zone d’étude.
Paramètres Type/Nombre Rayon de recherche 10
Secteur de recherche 4
Nombre maximal de données à utiliser 8
Nombre minimal de données à utiliser 4 Tableau 2 : Définition des paramètres pour l'interpolation de krigeage avec le logiciel Surfer
Lors de l’étude des données LiDAR, la zone d’étude étant très étendue avec une densité forte (10 points / m²), il y a plusieurs centaines de millions de points. Par conséquent, ces études sont réalisées sur deux zones plus restreintes permettant des calculs rapides. Les deux zones choisies présentent des caractéristiques différentes afin de mieux évaluer l’impact des différentes méthodes d’interpolation. La première zone est une zone pentue et comportant des trous sur le MNT de GeoPhenix. La seconde zone ne comporte aucun trou dans le MNT de GeoPhenix et présente un relief plus plat. La définition de ces zones se trouve dans le Tableau 3 et Figure 9.
Zone E min E max N min N max
Zone 1 697500,25 697749,75 6518750,25 6518999,75
Zone 2 697750,25 697999,75 6518750,25 6518999,75 Tableau 3 : Coordonnée des deux zones d'études (Projection Lambert 93, Coordonnées en mètre)

Camille CHANEL – TFE 2012 -19-
2.1.2.1.1. Etudes qualitatives sur le MNT en ombrage et sur l’image de la différence entre deux grilles de MNT.
Les deux études qualitatives réalisées sur ces deux zones sont : une analyse de la visualisation en ombrage et un calcul de la différence entre ces différentes grilles de MNT. La représentation en ombrage permet de représenter le relief en niveau de gris par rapport à une source de lumière assimilable au soleil dont l’orientation est fixée par l’utilisateur (Angle zénithal et horizontal). La grille de différence entre deux grilles de MNT permet de mettre en avant les zones ou la méthode d’interpolation choisie influe sur la qualité du MNT.
Figure 9 : Présentation des deux zones d'études choisies pour une étude préliminaire

Camille CHANEL – TFE 2012 -20-
Visualisation en ombrage Zone 1 et Zone 2
Les figures 10 et 11 montrent que les trois MNT de la zone 2 sont plus homogènes que ceux de la zone 1. Dans la zone 2 aucune différence n’est visible à l’œil sur ces représentations en ombrage. Par contre, dans la zone 1 des différences sont remarquables. En effet, dans la zone qui est trouée chez GeoPhenix, des traces apparaissent sur le MNT réalisé par krigeage qui ne sont pas visibles sur le MNT calculé par triangulation. Ces artefacts sont représentés par des dépressions. Le problème est de déterminer ce qui est le plus proche de la surface topographique. Deux solutions sont envisageables, soit le MNT créé par triangulation a été lissé à cet endroit mais sur le terrain il existe une ligne de talweg, soit le MNT par krigeage fait apparaître des artefacts qui n’existent pas sur la surface topographique. Ceux-ci seraient dus à un manque d’information au niveau des points du lever LiDAR.
Figure 11 : Représentation MNT ombré zone 2 a) MNT calculé par TIN rasterisé sous Surfer b) MNT Calculé par Krigeage sous Surfer c) MNT fournit par GeoPhenix
Figure 10 : Représentation des MNT ombrés zone 1 a) MNT calculé par TIN rasterisé sous Surfer b) MNT Calculé par Krigeage sous Surfer c) MNT fournit par GeoPhenix

Camille CHANEL – TFE 2012 -21-
La superposition des points du lever LiDAR avec le MNT ombré et l’orthophotographie de cette zone constitue un élément de réponse :
La Figure 12 montre que les artefacts se trouvent dans les zones où les points du lever LiDAR sont moins denses, ce qui est du à de la végétation dense (Figure 13), empêchant les échos du LiDAR de parvenir jusqu’au sol. Ainsi ces trous ne sont pas « comblés » de la même façon suivant la méthode d’interpolation choisie. En effet, une interpolation par triangulation va construire un plan entre trois points qui vont être de part et d’autre de la zone de trou, si ces zones sont en effet des talwegs alors de l’information sera perdue.
Dans le cas ci-dessus, pour définir quelle interpolation est la plus proche du terrain, il suffit de comparer les MNT avec l’orthophotographie (Figure 13). Celle-ci a permis de définir la cause du manque de donnée LiDAR qui est du à un brusque changement du couvert végétal et de déterminer que l’interpolation par krigeage, définie avec ces paramètres et sur cette zone, est moins pertinente que la triangulation.
Image de la différence entre les différentes grilles de MNT créé, sur les zones 1 et 2
Sous le logiciel Surfer, il est possible de calculer une grille en fonction de plusieurs autres, une soustraction entre la grilles créée par Surfer et celle fournie par GeoPhenix a été réalisée, puis affichée au format image (Figure 14 et 15) :
Figure 13 : Orthophotographie de la zone ci-contre
Figure 12 : Image de la superposition du MNTombré avec les points du lever Lidar

Camille CHANEL – TFE 2012 -22-
La représentation en image de ces grilles permet de visuellement repérer les zones où les écarts entre les points du lever LiDAR et le MNT sont trop importants. Les valeurs que prend la grille ont été discrétisées en trois catégories : inférieures à -10cm, comprises entre -0.10 et 0.10 cm et supérieures à 10 cm. Ce choix du seuil de 10 cm est effectué car c’est la précision altimétrique des points du lever LiDAR, demandée dans le cahier des charges techniques.
Les Figures 14b et 15b sont très semblables et les écarts sont pour la grande majorité compris dans l’intervalle de confiance ±10cm. Cependant, les deux grilles ne sont pas strictement identiques comme on pourrait s’y attendre vu que la même méthode d’interpolation est choisie. Le lecteur remarquera que ces zones sont situés sur les bordures, donc les écarts peuvent être dus à des effets de bord qui n’ont pas eu lieu lors du calcul du MNT de GeoPhenix car ils travaillaient sur une plus grande zone.
La figure 14a montre des différences importante dans les zones ou la végétation est plus dense, donc où les points du lever LiDAR sont moins nombreux. Les écarts varient de -1.14 m à 1.26 m, ce résultat
Figure 14 : Image de la différence entre deux MNT de la zone 1 a) Image de la différence entre le MNT GeoPhenix est le MNT calculé par krigeage
b) Image de la différence entre le MNT GeoPhenix est le MNT calculé par TIN
Figure 15 : Image de la différence entre deux MNT de la zone 2 a) Image de la différence entre le MNT GeoPhenix est le MNT calculé par krigeage
b) Image de la différence entre le MNT GeoPhenix est le MNT calculé par TIN

Camille CHANEL – TFE 2012 -23-
montre que la méthode d’interpolation influence la détermination du MNT dans les zones ou le lever LiDAR est moins dense. La figure 15a montre que même dans une zone moins perturbée il y a des écarts entre les deux méthodes d’interpolation. Les écarts varient de -0.47 à 0.41 m, ce qui est trois fois moins important que les écarts relevés sur la figure 14a. La méthode d’interpolation joue un rôle sur la détermination du MNT, surtout dans les zones où le relief varie fortement, où dans les zones ou le lever LiDAR est moins dense.
2.1.2.1.2. Étude quantitative sur les résidus
Les résidus correspondent à une différence d’altitude entre les données et le modèle. Ils permettent de qualifier la façon dont le fichier de la grille s'accorde avec les données originales.
Zres= Z data- Zgrd
Cette étude sur les résidus consiste à comparer les différentes méthodes d’interpolation et en aucun cas à vérifier la qualité du jeu de données. Celle-ci ayant été réalisée par V.Trefond, 2011.
Pour qualifier ces résidus, des études statistiques sont réalisées. Ainsi, la moyenne arithmétique, l’écart maximum, l’écart minimum, la variance, l’écart-type, la médiane et l’écart moyen sont calculés. La médiane représente la valeur du point milieu de l’ensemble des résidus : c’est la valeur m telle qu’il y ait autant de points inférieurs à m que de points supérieurs à m. L’écart moyen est une mesure de dispersion, c’est la somme des écarts à la moyenne, en valeur absolu, divisée par le nombre total d’écarts. La variance est une mesure de dispersion par rapport à la moyenne, lorsque que la variance est nulle cela signifie que la variable aléatoire est une constante. L’écart-type est la racine carrée de la variance, il mesure la dispersion de la variable aléatoire et il a la même dimension que celle-ci.
Zone 1
Krigeage Geo TIN Moyenne < à 10‐² < à 10‐² < à 10‐²
Max ‐3,54 ‐3,09 ‐3,69
Min 1,76 2,31 1,61
Variance < à 10‐² < à 10‐² < à 10‐²
Ecart‐Type 0,03 0,03 0,03
Médiane < à 10‐² < à 10‐² < à 10‐²
Ecart‐moyen 0,02 0,02 0,02 Tableau 4: Résultats statistique
sur les résidus de la zone 1
0,000%
0,001%
0,010%
0,100%
1,000%
10,000%
100,000%
< -1
-0
,9 à
-0,8
-0,7
à 0
,6-0
,5 à
-0,4
-0,3
à -0
,2
-0,1
à 0
0,1
à 0,
20,
3 à
0,4
0,5
à 0,
60,
7 à
0,8
0,9
à 1
Classes de résidu
Pour
cent
age
de ré
sidu
Figure 16 : Représentation sur une échelle logarithmique des
résidus en pourcentage par classe de 10 cm sur le MNT de GeoPhenix dans la zone 1
Ces résultats (Tableau 4) montrent une homogénéité au niveau des différentes méthodes d’interpolation (moyenne, écart-type et écart-moyen similaire dans les trois cas), celle-ci n’influerait donc pas énormément sur l’ensemble du jeu de données. Les écarts maximums et minimums varient d’une méthode à l’autres, cependant leur étendue est presque identique, autour de 5.4 mètres. Ces écarts sont importants, même s’il ne représente qu’un petit pourcentage sur l’ensemble de la zone (Figure 16). Cette Figure représente le pourcentage de résidu en fonction de classe de 10 cm. Elle montre que 99% des résidus sont compris entre ±10 cm. Il est nécessaire de déterminer les points où les écarts importants sont relevés pour pouvoir en

Camille CHANEL – TFE 2012 -24-
déterminer la cause. Tous les points dont les résidus sont supérieurs à 50 cm dans la zone 1 sont regroupés dans le tableau 5 :
Point E N Altitude1 697704.36 6518764.05 1090.86
2 697706.14 6518762.50 1085.54
3 697706.89 6518762.30 1087.53
4 697706.43 6518762.73 1087.84
5 697704.57 6518763.10 1085.65
6 697702.63 6518761.97 1089.52
7 697702.51 6518762.32 1090.37
8 697706.14 6518763.53 1088.75
9 697705.7 6518763.38 1085.48
10 697706.61 6518762.42 1087.53
11 697706.63 6518762.18 1085.57
12 697702.86 6518761.49 1088.49
13 697704.39 6518763.99 1090.88
14 697703.51 6518763.03 1090.90
15 697706.79 6518762.30 1087.65
16 697703.58 6518763.09 1090.89
17 697704.39 6518763.99 1090.88
18 697704.13 6518763.47 1090.56
19 697704.13 6518763.47 1090.56
20 697705.44 6518763.74 1085.56
21 697706.18 6518763.19 1085.31
22 697703.52 6518762.81 1090.68
23 697706.65 6518762.37 1085.53
24 697706.93 6518762.24 1085.53
25 697702.92 6518761.40 1085.96
26 697702.88 6518762.07 1085.83
27 697703.18 6518762.39 1085.68
28 697703.45 6518762.76 1090.68
29 697703.58 6518763.09 1090.89
30 697706.31 6518763.37 1088.82
31 697705.77 6518763.47 1088.47
32 697704.56 6518763.79 1085.70
33 697704.39 6518763.99 1090.88
34 697703.58 6518762.93 1085.58 Tableau 5 : Coordonnées des points présentant les résidus maximum en Lambert 93 (en mètres) sur la zone 1

Camille CHANEL – TFE 2012 -25-
Figure 17 : Photographie de la zone où des écarts de
cinq mètres sont relevés sur l'altimétrie des points du lever LiDAR.
L’ensemble des points regroupés dans le tableau 5 se situe sur la même zone, si en planimétrie ils sont assez proches, les écarts altimétriques vont jusqu’à cinq mètres. Dans un premier temps, la possibilité d’un problème de filtrage des différents échos du LiDAR n’était pas à exclure. Cependant, il y a un ensemble de points ayant ces différences d’altitude, de plus sur le MNT ombré on perçoit un creux, ce qui ne peut pas représenter un élément de végétation mal filtré. Une visite sur place a permis de déterminer que ces écarts étaient bien conformes à la réalité du terrain (Figure 17). Dans cette zone les parois rocheuses, visibles sur la figure 17, ont un degré d’inclinaison supérieur à 90, le MNT ne peut pas représenter le terrain dans ces cas là, car à un point donné, il ne peut y associer qu’une seule et unique altitude.
Zone 2
Krigeage Geo TIN Moyenne < à 10‐² < à 10‐² < à 10‐²
Max 0,39 0,43 0,42
Min ‐0,46 ‐0,47 ‐0,47
Variance < à 10‐² < à 10‐² < à 10‐²
Ecart‐Type 0,02 0,02 0,02
Médiane < à 10‐² < à 10‐² < à 10‐²
Ecart‐moyen 0,02 0,02 0,02 Tableau 6 : Résultats statistique sur les résidus
de la zone 2 exprimés en mètres
0,0001%
0,0010%
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
-0,5
à -0
,4-0
,4 à
-0,3
-0,3
à -0
,2-0
,2 à
-0,1
-0,1
à 0
0 à
0,1
0,1
à 0,
20,
2 à
0,3
0,3
à 0,
40,
4 à
0,5
Classes de résidu
Pour
cent
age
de ré
sidu
Figure 18 : Représentation sur une échelle logarithmique des
résidus en pourcentage par classe de 10 cm sur le MNT de GeoPhenix dans la zone 2

Camille CHANEL – TFE 2012 -26-
L’analyse statistique (Tableau 5) sur la zone 2 (sans trous) montre une tendance très semblable des paramètres (moyenne, écart moyen,…). Par contre, l’étendue est plus réduite que celle de la zone 1. Cela peut s’expliquer par le fait que la répartition du jeu de données sur cette zone est plus homogène. De plus, le relief de la zone 2 est moins marqué que celui de la zone 1 situé sur le flanc est du Puy de Dôme. Sur cette zone 2 l’écart-type est plus faible que sur la zone 1, ce qui montre une interpolation plus proche du jeu de données. La Figure 18 illustre que quasiment la totalité des résidus (99.8%) se trouvent dans l’intervalle de ±10 cm.
Ces différentes études viennent appuyer les résultats de F.Rousseaux (2006), à savoir que la méthode d’interpolation choisie n’a pas une grande influence sur la qualité du résultat global, dans le cas d’un jeu de données de très bonne qualité. Par contre, elles le contredisent dans certaines zones locales, notamment quand la densité du jeu de donnée varie brusquement (Figure 14).
Au vu de ses résultats, le choix est fait de définir une zone d’étude plus grande, avec des reliefs marqués pour mieux appréhender l’étude sur les résidus. La zone d’étude prise est la zone C, voir paragraphe 2.1.3 Construction du MNT pour sa définition.
2.1.2.1.3. Étude des résidus sur la zone C
Cette étude a pour but de vérifier le tri des données réalisé par le prestataire et de mieux appréhender les écarts importants qui peuvent apparaître lors du calcul des résidus. Cette zone regroupe plus de 100 millions de points LiDAR
Le tableau d’effectifs 7 représente le nombre de résidus « mauvais »par classe de 2 mètres sur l'ensemble de la zone d’étude. Sachant qu’un résidu a été défini mauvais quand il était supérieur, inférieur ou égale à 50cm.
Classes en mètres Nbre de résidus
‐16.5 ‐14.5 1
‐14.5 ‐12.5 10
‐12.5 ‐10.5 15
‐10.5 ‐8.5 25
‐8.5 ‐6.5 23
‐6.5 ‐4.5 50
‐4.5 ‐2.5 175
‐2.5 ‐0.5 5497
0,5 2.5 5667
2.5 4.5 246
4.5 6.5 57
6.5 8.5 25
8.5 10.5 12
10.5 12.5 5
12.5 14.5 1 Tableau 7 : Nombre de résidus supérieurs, inférieurs ou égaux à 0.5m par classe de 2 mètres.
Les écarts vont jusqu'à 15 mètres pour certains points, cependant la grande majorité des écarts sont compris entre -2.5 m et 2.5 m. Avec une superposition de l’orthoimage, nous constatons que ces écarts apparaissent sur des zones d'affleurements rocheux. Ces zones sont donc fournies en points. De plus se sont des zones sans végétation, ainsi l'erreur due à un mauvais filtrage est à exclure définitivement.
La Figure 19 illustre un cas particulier de zones ou les résidus sont importants. Elle montre le MNT calculé en fond puis par-dessus les résidus supérieurs ou inférieurs à 50cm avec des couleurs différentes selon l’importance de leurs écarts.

Camille CHANEL – TFE 2012 -27-
Les résidus visibles apparaissent au niveau des affleurements rocheux et le long de la route d’accès au sommet du Puy de Dôme. Au niveau des affleurements rocheux, il y a de brusques changements de pentes ce qui impliqueraient que des points LiDAR très proches en planimétrie aient des écarts altimétriques de plusieurs mètres voir dizaines de mètres dans certains endroits.
Le problème de l’interpolation est alors que le pas de la maille est trop grand pour détecter ces phénomènes de changement brutaux. Pour appuyer cette conclusion, des tests ont été réalisées sur un TIN rastérisé avec un pas de grille différent (résultats en Annexe2). Ces résultats montrent que plus le pas est petit, plus dans les zones d'affleurement rocheux le MNT est proche de la réalité, par contre dans les zones planes ce changement de pas fait ressortir les facettes triangulaires qui par la rastérisation à 50 cm avaient été lissées.
2.1.3. Calcul du M.N.T
Au vu des résultats énoncés dans les paragraphes précédents, le calcul du MNT par triangulation apparaît comme le plus approprié. En effet, même si sur l’ensemble des données la différence entre les deux méthodes est minime, nous avons pu constater que sur certaines (les zones trouées), il est plus performant. Pour une meilleure approche morphologique l’utilisation d’un format vecteur en TIN serait encore plus performant, mais il n’est pas envisageable de travailler sur toute la zone d’étude avec ce format du fait de la lourdeur du format. Par contre pour l’étude de zone plus restreinte cela peut être intéressant.
Il a été décidé de calculer le MNT par triangulation sous Surfer en le rasterisant sur toute l’étendue de la zone d’étude. Surfer ne pouvant pas réaliser ce calcul en une seule procédure, la zone d’étude a été découpée en quatre zones définies dans le Tableau 8 et sur la Figure 20. La création de ces zones a pris plusieurs jours de calcul sur les ordinateurs.
Figure 19 : Superposition des résidus supérieurs, inférieurs ou égaux à 0.5 m sur une représentation ombrée.Cette zone est située au niveau des crêtes du puy de dôme, pas loin du chemin des muletiers

Camille CHANEL – TFE 2012 -28-
Zone E min E max N min N max
Zone A 693749,75 699749,75 6521500,25 6523499,75
Zone B 693749,75 699749,75 6519500,25 6521499,75
Zone C 693749,75 699749,75 6517500,25 6519499,75
Zone D 693749,75 699749,75 6515250,25 6517499,75 Tableau 8: Coordonnées des différentes zones
(Projection Lambert 93, coordonnées en mètres)
Les quatre zones ont ensuite été concaténées, et le fichier créé par Surfer est transformé en fichier ENVI 4.8, logiciel créé par la société ITT Visual Informations Solution et Arcgis 10, logiciel de la société ESRI France qui sont les logiciels utilisés au laboratoire permettant de faire des études sur le MNT.
Une comparaison a été faite avec le MNT GeoPhenix et des écarts allant jusqu’au mètre sont détectés, mais sur l’ensemble de la zone les écarts sont compris entre ±10cm. Ces écarts proviennent de la différence de calcul entre deux logiciels qui sont censés avoir le même calcul car tous les deux utilisent la triangulation de Delaunay avec une interpolation linéaire pour la rasterisation. Ce contrôle montre qu’un même principe de calcul sous deux logiciels différents ne donne pas les mêmes résultats. Pour mieux cerner les différences, il faudrait faire des tests sur une zone réduite du MNT avec les deux logiciels (Terrascan et Surfer). Cependant ces écarts restent des exceptions dans l’intégralité de la zone d’étude.
Une caractérisation de la qualité de l’interpolation, par le calcul des résidus est ensuite effectuée sur le MNT TIN généré à l’aide de l’algorithme de calcul du logiciel Surfer. Chaque zone a été caractérisée séparément pour pouvoir réaliser les calculs.
Zone A Zone B Zone C Zone D Moyenne < à 10‐² < à 10‐² < à 10‐² < à 10‐²
Max 76,86 5.94 13,99 4,22
Min ‐18,03 ‐4.25 ‐15,91 ‐7,06
Variance < à 10‐² < à 10‐² < à 10‐² < à 10‐²
Ecart‐Type 0,02 0,02 0,03 0,02
Ecart‐moyen 0,01 0,01 0,01 0,01 Tableau 9 : Résultats statistique sur les résidus des différentes zones
Le Tableau 9 montre une différence de 1 cm sur l’écart-type de la zone C par rapport aux autres zones. La zone C est la zone comprenant l’édifice volcanique Puy de Dôme, avec une zone assez hétérogène et de fortes pentes, qui permettent d’expliquer ce phénomène. Les autres paramètrent qui diffèrent d’une zone à l’autre sont les extrema. Les zones les plus accidentées se situant dans la zone C, on s’attendrait à ce que se soit cette zone qui possède les extrema les plus élevés. Or, dans la zone 1, les extrema sont anormalement élevés, avec un maximum à 76.86 mètres et un minima à -18.03 m. Le minimum est situé en bordure de carte et le maximum est situé dans une zone relativement peu accidentée, d’altitude moyenne 984 mètres alors que l’altitude du point est de 1061 mètres. Il semblerait que ce point soit une erreur. Les résidus ont donc été recalculés en enlevant ce point :
Figure 20 : Présentation des différentes zones de calcul sur l’ensemble du secteur d’étude

Camille CHANEL – TFE 2012 -29-
Tableau 10 : Résultats statistique sur les résidus de la zone A après
élimination des erreurs.
Zone A Moyenne ‐0,0001
Max 4.87
Min ‐7.63
Variance 0,0006
Ecart‐Type 0,0236
Ecart‐moyen 0,0145
Ce résultat (Tableau 10) vient confirmer la présence d’un point faux dans le jeu de données initiale. Ce point faux n’a cependant pas eu d’impact sur le calcul du MNT car avec le pas d’échantillonnage choisi il n’a pas été pris en compte. L’écart de -18 mètres est lui aussi important. De la même manière, il a fallu déterminer la source de l’erreur. Cette fois l’altitude moyenne aux alentours correspond à l’altitude du point. Cependant, l’altitude du MNT est supérieure à celle des points. Le MNT fourni par Géophénix n’a pas cet artefact est l’écart devient alors -7.63 mètres ce qui est plus cohérent. Le MNT de la zone A a été recalculé après avoir réalisé ces corrections.
Une dernière caractérisation peut être faite grâce aux points levés au GPS pour l’étude gravimétrique. L’étude statistique des écarts ne peut être significativement effectuée que pour des écarts supérieurs à ±20cm, somme des erreurs des différents jeux de données (Tableau 11). Les choix des classes est fait de manière à caractériser du mieux possibles les différents écarts.
Classes en mètresNombre de
résidu % de résidu
‐1,13 ‐1,00 1 0,30%
‐1,00 ‐0,50 2 0,70%
‐0,50 ‐0,20 91 30%
‐0,20 0,20 186 62%
0,20 0,50 12 4%
0,50 1,00 5 1,70%
1,00 5,45 5 1,70% Tableau 11 : Résultats du calcul des résidus par rapport aux points levés par GPS.
Pour rappel : ∆Z résidu = Z GPS - Z MNT
La majorité des résidus (62%) sont compris entre -20 et 20 cm, ce qui signifie que dans 62% des cas le MNT est bien compatible avec la réalité. 30 % des résidus se situent entre -0.50 et -0.20 cm, cette différence entre MNT et points GPS pour la gravimétrie est compréhensible. En effet, lors de la réalisation de mesure gravimétrique, il est nécessaire pour réaliser la mesure d’être sur une couche de sol stable. Ainsi, la couche végétale doit être retirée, celle-ci s’étend généralement sur 20 cm, de plus la canne du GPS est souvent enfoncée pour être plus facile à stabiliser. Pour 92% des points, le MNT est le lever GPS des points de gravimétrie sont compatibles.
Pour les écarts plus importants, ils peuvent être dus aux travaux se déroulant sur le Puy de Dôme pour la construction du train à crémaillère. Ou encore, on remarque que la plupart des résidus supérieurs ou inférieurs aux mètres sont dans des zones de reliefs marqués, or comme vu précédemment le MNT rasterisé à tendance à adoucir les très fortes pentes, d’où certains écarts. Pour situer ces points, référez-vous à l’annexe 3 qui montre le MNT ombré avec la superposition des résidus classifiés.
Pour conclure sur cette partie, la construction du MNT par méthode d’interpolation TIN rasterisé est la plus adaptée à la zone d’étude. Le MNT ainsi créé a une précision globale décimétrique pour une résolution de 50 cm. Cependant, dans certaines zones, notamment les zones très pentues, des écarts métriques voir pluri-métriques sont présents, avec des écarts maximum de 15 mètres sur la zone des crêtes du Puy de Dôme.

Camille CHANEL – TFE 2012 -30-
2.2. Géomorphologie : outils d’analyse et traitements quantitatifs
Certains outils de traitement, d’analyse quantitative et de représentation graphique des Modèles Numériques de Terrain (MNT) sont présentés dans cette section et illustrés par quelques exemples remarquables issus de l’analyse du MNT LiDAR à 50 cm de résolution, sur la Chaine des Puys.
Les produits dérivés de l’information topographique contenue dans les MNT peuvent être élaborés et calculés à partir des grilles raster ou TIN de ces MNT, au sein d’environnements logiciels, spécialisés dans le traitement d’image et/ou les SIG. Ce sont des outils d’analyse usuels en géomorphologie, et en particulier en contexte volcanique, pour la caractérisation qualitative et/ou quantitative des structures particulières des édifices volcaniques, qui fournissent des informations cruciales pour la compréhension de leur évolution. Dans le cadre de cette étude, nous avons notamment utilisé les algorithmes de calcul de logiciels très courants dans les domaines du traitement d’images, de l’analyse des MNT et de la gestion de SIG, tels que Surfer 10 (Golden Software), ArcGIS 10 (ESRI) ou Envi 4.8 (ITT Visual Solutions).
2.2.1. Etude sur le MNT ombré
La visualisation de l’information topographique en relief ombré (Shaded Relief) correspond à l’éclairement fictif d’une surface topographique par un soleil virtuel, dont l’orientation et l’élévation, peuvent être définies par l’utilisateur. Ce type de représentation permet une analyse qualitative de la zone d’étude, qui permet de mettre en évidence les variations de reliefs et les caractéristiques morphologiques (ruptures de pentes, discontinuités topographiques, …). Le choix de plusieurs angles d’orientation de l’éclairement permet de mettre préférentiellement en évidence les structures perpendiculaires à l’éclairement.
La Figure 21 illustre, à travers quelques exemples caractéristiques l’intérêt du calcul et de la visualisation du relief en représentation ombrée : détermination et délimitation des limites des cratères emboîtés d’un cône strombolien (Figure 21a, Puy de Côme), zones d’érosion sur le versant sud du Cône du Pariou (Figure 21b), fondations de constructions d’origine anthropique. Le MNT LiDAR a permis de révéler l’existence de nouvelles structures de ce type, inconnues à ce jour et n’ayant pas encore fait l’objet de fouilles archéologiques, dans le secteur du Puy de Dôme. Des traces de restes d’habitats traditionnels provisoires d’estive, les tras (abris provisoires, ultérieurement remplacés par les burons) sont identifiés sur les flancs du Petit et du Grand Sault (Figure 21c). Ces artefacts archéologiques sont très comparables aux nombreux sites connus dans le Cézallier (Massif Central) ou à proximité du lac Servières (Puy de Dôme). Ces tras, auparavant situés dans des zones de pâturage sont aujourd’hui détectés (grâce au levé LiDAR de haute résolution) dans des secteurs boisés, ce qui traduit une évolution de l’occupation des sols et des paysages, au cours des siècles.

Camille CHANEL – TFE 2012 -31-
Figure 21 : Illustration de différents phénomènes par la seule visualisation en ombrage

Camille CHANEL – TFE 2012 -32-
2.2.2. Etude des pentes sur la zone du Puy de Dôme
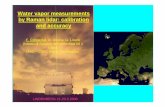
La pente est un paramètre quantitatif défini comme le gradient de la donnée topographie (MNT au format raster, TIN, …), et qui correspond à l’expression mathématique de la dérivée première selon z de la matrice (x, y, z) de données altimétriques. Elle constitue une information très importante pour l’analyse morpho-quantitative de la topographie, qui peut être complétée par l’analyse des variations de pentes, grâce au calcul de la dérivée seconde de la matrice (x, y, z) selon z. Sur notre zone d’étude, les pentes sont très variables de quelques degrés dans les zones au pied des volcans à quasiment quatre-vingt-dix degrés sur certains secteurs, notamment sur les flancs du Puy de Dôme (Carte des pentes générales et du Cliersou en Annexe 4).
Figure 22: Carte des pentes (exprimées en degrés) du Puy de Dôme, mise en valeur de la structure la plus récente.
La Figure 22 illustre l’intérêt d’une telle représentation : détermination et délimitation de la zone sommitale du dôme, de la structure la plus récente. Celle-ci a des pentes plus homogènes que la partie du dôme hérissé composée des crêtes où des pentes très fortes, jusqu’à 85° (l’échelle a été réétalée pour mieux discerner les structures composant le Puy de Dôme) sont visibles.

Camille CHANEL – TFE 2012 -33-
2.2.3. Carte de l’exposition
Cette analyse fournit une information quantitative sur l’orientation angulaire des faces élémentaires définissant le MNT (de 0 à 360°), par rapport au Nord géographique. Pour définir cette exposition, il faut identifier la direction de la plus grande pente, ce qui se fait par un calcul intégrant les valeurs des huit cellules voisines (au sein d’une matrice 3x3, la valeur calculée étant affectée au nœud central de la matrice). L’exposition au soleil, permet de définir les zones les plus froides ainsi que les plus exposées au vent.
Figure 23 : Carte de l'exposition sur l'ensemble de la zone d'étude.
Echelle de graduation en degrés.
La carte d’exposition calculée sur la zone d’étude (zone centrale de la Chaîne des Puys, Figure 23) montre que la zone peut être scindée en deux secteurs (délimités par la ligne continue de couleur noire) avec un ensemble présentant globalement des surfaces orientées en direction du Nord-Ouest et un ensemble plutôt orienté Sud-Est. Cette délimitation est conforme à l’alignement des points hauts et des sommets des puys, et peut être assimilée à une limite de partage topographique. Cette ligne joue un rôle dans le climat de la ville de Clermont-Ferrand, la Chaîne des Puys jouant le rôle de barrière topographique pour les intempéries venant de l’Ouest.

Camille CHANEL – TFE 2012 -34-
2.2.4. Profil topographiques
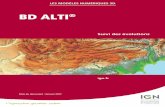
En complément des analyses précédentes, il est possible de réaliser des profils topographiques au travers des structures étudiées afin d’étudier les variations de pentes et les limites structurales des objets géologiques, en l’occurrence les édifices volcaniques de la chaîne des puys (Figure 24). Les cibles choisies (dômes, cônes stromboliens) permettent de discerner les morphologies caractéristiques des dynamismes éruptifs de la Chaine des Puy.
Figure 24 : Profils topographiques Est-Ouest et Nord-Sud des édifices du Puy de Dôme, du Pariou, du Puy de Côme et du Grand Suchet. Ces profils mettent en avant la structure imposante du Puy de Dôme, les 3 cônes emboîtés du Puy de Côme. Axe des abscisses : distance en mètres. Axe des ordonnées : élévation en mètres.
Cette partie est une première approche illustrative pour la réalisation d’une étude morphologique complète sur la zone d’étude. D’autres analyses complémentaires, non élaborées ici, peuvent être développées, étude des courbures, du retour d’intensité LiDAR … Cette étude morphologique pourra faire l’objet d’un futur TFE à part entière.
Cette analyse sur les données LiDAR dans son ensemble, a permis de qualifier le MNT (résolution inframétrique et précision décimétrique) globalement en relevant des zones problématiques pour leur modélisation (zone de forte pente non modélisable avec une telle résolution). Dans un deuxième temps, un rapide aperçu des outils de qualification géomorphologique illustre les possibilités qu’offrent des études de cartes dérivées de ce MNT.

Camille CHANEL – TFE 2012 -35-

Camille CHANEL – TFE 2012 -36-
33.. PPoossiittiioonnnneemmeenntt dduu ddéétteecctteeuurr ddee MMuuoonnss
3.1. Problématique
Le positionnement du détecteur de muons est une étape cruciale pour la reconstruction de la structure interne de l’édifice, dans le cas du projet ToMuVol. En effet, ce positionnement permet la reconstruction des trajectoires des muons.
Tout d’abord, il a fallu réfléchir à un positionnement du détecteur installé dans un local exigu attenant à l’Auberge des Gros Manaux (col de Ceyssat, Figure 25). En 2011, un positionnement avait été effectué sur le site de la grotte taillerie, celui-ci avait été réalisé par V.Trefond (2011). Le choix de rapprocher le détecteur de l’édifice du Puy de Dôme, permet d’agrandir le champ de vision de l’édifice et d’améliorer la résolution. Il s’agit de positionner le détecteur de muons dans un référentiel local, lié au site « Gros Manaux » et dans un deuxième temps de déterminer la position du détecteur dans le référentiel RGF93 – Projection Lambert 93, avec le système d’altitude IGN69, dans ce rapport seule la méthodologie choisie sera exposée. Cette détermination implique le calcul de la position de seize points particuliers à savoir les quatre sommets des quatre plans de détection. Le cahier des charges techniques concernant la procédure de positionnement du dispositif expérimental impose la mise en place d’un repère local fixe dans la pièce avec une précision de 1mrad sur l’orientation et de positionner le détecteur par rapport à l’édifice avec cette même précision.
Figure 25 : Site de positionnement du détecteur pour l'acquisition des données 2012, par rapport à l'édifice volcanique du Puy de Dôme
Dans un deuxième temps, la problématique est de construire un détecteur avec son châssis de manière à pouvoir le positionner assez simplement quelque soit son environnement. Une réflexion a donc été menée dans le but de définir un cahier des charges précis, pour que lors de la construction du nouveau détecteur des points de référence soient mis en place et permettent un positionnement du châssis plus aisé.

Camille CHANEL – TFE 2012 -37-
3.2. Positionnement du détecteur de muons au Gros Manaux
3.2.1. Positionnement du détecteur dans le repère lié à la pièce
3.2.1.1. Situation/Contexte
A l’auberge des Gros Manaux, la salle dans laquelle est installé le détecteur, mesure 2.90 m par 3.10m, avec deux ouvertures latérales (porte (85 cm) + fenêtre (35cm)). A l’intérieur de la pièce se trouve le système de détection dans son intégralité (Figure 26), c'est-à-dire le détecteur qui fait environ un mètre cube, mais aussi le système de gaz qui permet d’alimenter les chambres GRPC, le système informatique (Figure 3) qui permet d’envoyer les enregistrements du détecteur et de vérifier à distance que tout fonctionne bien.
Le détecteur a été mis en place au mois de janvier. Au mois de mars un souci est survenu sur le détecteur qui a alors du être renvoyé en réparation. C’est dans cette urgence que la demande de positionnement a été faîte. Un premier positionnement a donc été effectué, sans visite du site au préalable et avec le matériel disponible (2 trépieds, un prisme, une station totale Builder 509 de chez Leica). Ce positionnement a été réalisé de manière classique avec des stations dans la pièce et des visées sur des cibles placées sur le détecteur. Compte tenu de l’exiguïté de la pièce, la mise au point sur les différentes cibles était irréalisable, les visées ont donc été faites avec le faisceau laser. De plus les ouvertures sur l’extérieur sont très limitées (étroites, et la visibilité est très restreinte à cause des aménagements qu’il y a autour), ils n’étaient donc pas envisageable de stationner à l’extérieur de la pièce pour déterminer le positionnement du détecteur. Ce premier positionnement n’est pas satisfaisant. Comme le détecteur n’a pas été déplacé une méthode plus propice aux conditions de terrain a pu être mise en œuvre dans un deuxième temps. Cette première détermination a alors servi à contrôler un possible déplacement lors de l’intervention technique effectué sur le détecteur entre les deux positionnements.
La solution envisagée au vu des conditions de terrain et du temps imparti, est de faire un positionnement du détecteur en effectuant seulement des mesures de distances réalisées à la chaîne par rapport à des points fixes de la pièce. L’avantage de cette méthode est qu’elle n’utilise pas d’appareil nécessitant un recul pour pouvoir réaliser une mise au point.
Figure 26 : Plan du local expérimental (Auberge des Gros Manaux au col de Ceyssat)

Camille CHANEL – TFE 2012 -38-
3.2.1.2. Méthodologie adoptée
3.2.1.2.1. Positionnement des points de repère dans la pièce
Il s’agit de définir un réseau de points permanents qui permettra, de faire du positionnement durablement dans cette pièce. Plusieurs contraintes sont prises en compte pour la définition de ce réseau, la plus importante étant la taille limitée de la pièce. Il est nécessaire d’avoir un nombre de points suffisants pour pouvoir réaliser le positionnement du détecteur. Ces points doivent être au moins pour une partie visibles depuis l’extérieur, afin de permettre la détermination de ceux-ci en Lambert 93, et disposés de manière à ce qu’il y ait des visées perpendiculaires sur les angles du détecteur, afin que la détermination des points soit la plus homogène possible.
Le réseau fixe de la pièce est défini par cinq cibles sur les murs de la pièce et un point au sol. Ces cibles réfléchissantes de 40*40mm, avec plaquette de repérage ont été fixées au mur par des vis. Elles sont disposées sur trois des pans de mur de la pièce, le 4ème étant constitué en grande partie d’une porte coulissante. Le point au sol est défini de manière à être le plus éloigné possible des différentes cibles, avec un recul minimum nécessaire de 1 mètre (contrainte technique liée à la capacité de faire la mise au point de l’appareil) et permettant de viser nos cinq cibles.
Ce point au sol est le centre de notre repère local, l’axe Z est défini par la verticale du lieu. L’axe Y est défini par la droite S4.C1 et l’axe des X est défini de tel sorte qu’il complète le référentiel pour avoir un système orthonormé.
3.2.1.2.2. Détermination de la position des points du réseau local
Cette étape de détermination des points du réseau local a été réalisée une fois que le détecteur fut retiré de la pièce. En effet, il n’était pas possible auparavant de positionner un point au sol répondant aux recommandations (recul minimum de 1 mètre, être le plus éloigné possible des 5 cibles…)
Pour ce faire, un tachéomètre est stationné à la verticale du point au sol et des tours d’horizon (cercles I et II) sont effectués sur les cibles placées au mur. Lors de ces visées, l’angle horizontal, l’angle vertical et la mesure de distance suivant la pente sont relevés.
La station totale utilisée pour faire ces mesures est un prêt du Laboratoire de Géographie Physique Geolab (Maison des Sciences de l’Homme, Université Blaise Pascal de Clermont-Ferrand). C’est une station Pentax NX 825 dont les caractéristiques sont indiquées dans le Tableau 12 :
Matériel Type de mesure
Ecart‐Type à priori sur la mesure
Tachéomètre
Distance 2623 )102()102( Dist××+× −−
Angle Horizontal 1,5 mgon
Angle Vertical 1,5 mgon
Tableau 12 : Ecarts-Types à priori de la station Pentax NX 825
3.2.1.2.3. Détermination des plans de détection
La détermination des quatre plans de détection est réalisée avec une chaîne de 30 mètres de classe de précision I (Caractéristiques dans le tableau n°13). Seules des mesures de distances sont réalisées entres les coins des plans de détection et les repères de la pièce (Figure n°27). Ces mesures de distances sont faîtes en interpolant sur la chaîne au dixième de millimètre, elles sont prises au moins deux fois pour contrôle ; si lors de la deuxième mesure un écart supérieur à 1mm est constaté, une troisième mesure est nécessaire.

Camille CHANEL – TFE 2012 -39-
L’intersection de sphère permettra par la suite de définir les angles des plans. Pour définir un angle de plan il y a trois inconnues (x, y, z), comme nous avons 4 plans de détections, il y a 48 inconnues au totales. Pour que le système soit soluble il faut donc avoir 48 équations, sachant qu’une mesure de distance correspond à une équation, il est nécessaire de réaliser au minimum 48 mesures de distance (3 pour chaque angle de plan). L’idéal étant de réaliser plus de mesures qu’il y a d’inconnues afin de pouvoir effectuer un ajustement.
a en mm b en mm
Classe I 0,1 0,1 Classe II 0,3 0,2 Classe III 0,6 0,4 Classe IV 1,2 0,8
Tableau 13 : Les classes de précisions d'après l'arrêté de 1980e (mm) = a + b*L
où L est la longueur arrondie par excès au mètre Les erreurs maximales tolérées sont égales au double
des valeurs admises ci-dessus
3.2.1.3. Déroulement de la mission
Pour cette mission le Laboratoire Magmas et Volcans a fait l’acquisition d’une chaîne de classe de précision I et a bénéficié d’un prêt de matériel du laboratoire Géolab.
La Figure 28 présente la définition et numérotation de l’ensemble des points du réseau local de la pièce (C1 à C5 et S4) et les repères fixés sur les plans de détection (11 à 44).
Figure 27: Représentation des mesures de distances réalisées

Camille CHANEL – TFE 2012 -40-
Cette mission s’est effectuée en deux temps :
1. La première intervention s’est déroulée le 26 mars 2012. Durant cette mission deux personnes sont intervenues afin de pouvoir faire les mesures à la chaîne. Dans un premier temps des mesures entre les coins des plans de détection et les cibles ont été effectués, puis dans un second temps des mesures entre les plans et intra plan ont été faîtes suivant les recommandations vues plus haut. En tout, 87 mesures ont été réalisées. En effet toutes les mesures « possibles » n’étaient pas réalisables (chaîne non tendue, lecture impossible vue la configuration du lieu…). Lors de cette étape deux chaines ont été utilisées, pour des raisons de tension de la chaine, une de classe I pour les mesures entre angle de plan et une de classe II pour les mesures entre les cibles et les coins du détecteur.
2. La deuxième intervention, en date du 03 Avril, a permis d’effectuer les mesures pour la détermination des cibles dans le réseau local. Une mise en station a été effectuée sur le point S4 (Figure 22) afin de réaliser les mesures de distance et d’angles. Pour les mesures de distance une attention particulière a été portée sur la constante d’addition en effet, elle n’était pas définie dans l’appareil. Des mesures de distances à l’AEMD (Appareil Electronique de Mesure de Distance) ont été réalisées ainsi que des mesures au Laser et des mesures à la chaîne ont été effectuées pour la contrôler. La mesure au laser, celle à l’AEMD et celle effectuée à la chaîne étant similaire (à 2mm près) sur les cibles C1 et C2, la constante d’addition a été fixée à zéro. Pour contrôle, des mesures de distances ont été effectuées entre les différentes cibles, puis une fois les coordonnées des cibles déterminées, la distance calculée est comparée à celle mesurée, les deux distances étant identiques cela valide bien la constante d’addition à 0.
Figure 28 : Schéma de la numérotation des points. Pour les angles de plans le premier chiffre indique le numéro du plan (1 : plan 1 ; 2 : plan 2….).
Le deuxième chiffre indique la position du point (1 et 2 angle supérieur gauche et droit ; 3 et 4 angle inférieur droit et gauche). En bleu les points bas du détecteur, en rouge les points hauts

Camille CHANEL – TFE 2012 -41-
3.2.1.4. Calcul de la solution
Les calculs, dans cette partie, ont été effectués avec le logiciel Scilab ou le logiciel Geolab, logiciel canadien d’ajustement de réseau.
Le calcul des coordonnées des points du réseau local a consisté, dans une première étape, en l’analyse des données sur chaque tour d’horizon, avec le calcul des différences de lecture entre les deux cercles. Après élimination des erreurs et détermination de la valeur moyenne, le calcul des points est effectué (Tableau n°14)
Point X (m) Y (m) Z (m)
C1 100,000 501,582 11,608 0,0000 0,0006 0,0000
C2 100,723 501,532 11,932 0,0002 0,0005 0,0001
C3 101,837 500,887 11,850 0,0005 0,0002 0,0001
C4 101,741 499,536 11,531 0,0006 0,0001 0,0000
C5 100,098 498,465 11,442 0,0000 0,0006 0,0000
Tableau 14 : Coordonnées dans un système local des points du réseau local (en mètres) En bleu : précision (en mètres)
Les précisions obtenues sont de l’ordre de quelques dixièmes de millimètres en planimétrie et de 1 dixième de millimètre en altimétrie. Pour la détermination des coordonnées des plans de détection ces précisions ne seront pas prises en compte car elles sont inférieurs à la précision de la distance mesurée, environ 8 dixièmes millimètres entre une cible et un angle d’un plan de détection. Elles n’ont donc pas d’influence sur la détermination des coins des plans de détection.
3.2.1.4.1. Détermination des coordonnées du détecteurs
Après la détermination des points de référence, cibles C1 à C5, il est nécessaire de calculer l’ensemble des points (angle des 4 plans) du détecteur. Dans un premier temps il est indispensable de déterminer les coordonnées approchées de ces points. Dans un second temps, un calcul, permettant l’ajustement du réseau par moindre carré est réalisé.
Détermination des coordonnées approchées des angles du détecteur
Pour calculer les coordonnées du détecteur il faut dans un premier temps définir les coordonnées approchées de celui-ci. Pour se faire et n’ayant pas à disposition le logiciel covadis, un dessin sous autocad a été réalisé, puis par intersection de 2 cercles (nous sommes dans le plan), une coordonnée approchée a été définie dans le plan (S4, x, y). Pour la troisième composante, les plans de détection étant à environ 20 cm du sol et connaissant la hauteur du plan, il a été facile de définir leurs coordonnées approchées.
Calcul des coordonnées du détecteur
Un calcul en bloc, sous Geolab, est fait avec toutes les mesures de distance réalisées. L’erreur du à la dilatation de la chaîne n’est pas pris en compte, en effet la température de référence est de 20 °C et le coefficient de dilatation est de 11*10^-6, donc des variations de 2 à 3 °C (typiquement ce qui a pu être observée) entraînent des écarts sur la mesure de distance de l’ordre de 3 centièmes de millimètre par mètre, non décelable dans nos mesures. Une fois le test du Chi-Deux validé (le seuil de probabilité choisi est de 95%), cela signifie que la solution des moindres carrées est globalement validée, la précision sur les coordonnées a pu être calculée. Pour valider ce test deux mesures de distances ont du être supprimées, elles sont entachées d’une erreur.

Camille CHANEL – TFE 2012 -42-
Point X (m) Y (m) Z (m)
11 100,678 500,576 11,254 0.000 0.000 0.001
12 100,608 499,565 11,244 0.000 0.000 0.001
13 100,604 499,562 10,230 0.003 0.003 0.001
14 100,632 500,575 10,228 0.011 0.003 0.004
21 100,963 500,527 11,249 0.000 0.000 0.001
22 100,891 499,517 11,245 0.000 0.000 0.001
23 100,885 499,522 10,231 0.003 0.001 0.001
24 100,914 500,535 10,228 0.010 0.002 0.002
31 101,245 500,511 11,247 0.000 0.000 0.001
32 101,174 499,501 11,246 0.000 0.000 0.001
33 101,168 499,490 10,233 0.004 0.029 0.001
34 101,188 500,474 10,245 0.010 0.008 0.006
41 101,524 500,486 11,248 0.000 0.000 0.001
42 101,457 499,476 11,254 0.000 0.000 0.002
43 101,452 499,469 10,240 0.003 0.002 0.002
Tableau 15 : Coordonnées des 16 coins du détecteur dans un référentiel local En bleuté, les précisions obtenues en mètre
D’après le Tableau 15, les précisions obtenues sur les coins du détecteur sont de l’ordre millimétrique, avec des variations selon les points. Les points en haut à gauche et à droite du détecteur (type x1, x2) sont positionnés avec une précision millimétrique. Par contre le lecteur remarquera que les points type x3 et x4 ont des précisions pluri millimétriques voir centimétrique et que le point 44 n’a pas été déterminé. Ces différences s’expliquent par une plus grande difficulté d’accès à ces points (x3 et x4), ce qui engendre une incertitude plus grande sur la mesure de distance et un nombre plus restreint de mesures effectuées à partir de ces points, pour le point 44, les mesures effectuaient ne suffisent pas à lui assurer une convergence aux millimètres, il n’a donc pas été déterminé.
La précision demandée dans le cahier des charges est de 1 mrad, pour un bras de levier de 1 mètre (taille de notre détecteur) cela correspond à une précision millimétrique sur les points du détecteur.
3.2.2. Positionnement en RGF93
Dans le cadre du projet ToMuVol, il est indispensable que le détecteur soit positionné par rapport à l’édifice, ici le Puy de Dôme. Celui-ci étant défini dans le référentiel RGF93, projection Lambert 93, système altimétrique IGN 69, utilisé pour la campagne de lever LiDAR, il convient donc de positionner le détecteur dans ce référentiel. Pour cela, les cibles (C1 à C5) utilisées pour définir le référentiel local de la pièce doivent être déterminées dans le même référentiel absolu (RGF93, projection Lambert 93, système altimétrique IGN69). Puis, par un changement de repère, le détecteur sera orienté et défini dans ce système. Dans ce

Camille CHANEL – TFE 2012 -43-
présent mémoire, la réalisation de ce rattachement n’est pas effectuée, seule la méthodologie de mise en œuvre est décrite, la réalisation de celui-ci sera effectuée en dehors du cadre du TFE.
3.2.2.1. Situation
La salle est une pièce de 3.10 m sur 2.90 m, attenante à l’auberge des Gros Manaux, située au col de Ceyssat, au carrefour entre la route passant au col et le Chemin des Muletiers, qui est un chemin pédestre permettant de monter au Puy de Dôme. La configuration n’est pas idéale pour la réalisation du rattachement. En effet, il n’y a qu’un côté de la pièce qui donne sur l’extérieur. De plus les stations que nous pourrions installer à l’extérieur sont limitées, car la salle est à moitié enterré par rapport à l’extérieur et que ses ouvertures sont très petites (Figure 30).
Figure 30 : Vue depuis l'intérieur de la pièce vers l'extérieur
Comme nous pouvons le constater sur la figure 29, le site est entouré de bois qui sont relativement proche. La zone non boisée sur la figure ci-dessus fait environ 150m*100m et l’auberge est située en bordure de cette zone boisée.
3.2.2.2. Méthodologie
Le rattachement des cibles dans le système RGF93, doit être fait, dans la mesure du possible, avec une précision millimétrique, la demande du cahier des charges étant que le système local soit positionné par rapport au référentiel RGF93, projection Lambert 93 et système altimétrique IGN69, avec une précision de 1 mrad, l’espacement entre nos cibles étant de 1 à 2 mètres, cela correspond à une précision de 1 à 2 mm. Cette précision semble, au vu de la configuration des lieux difficile à atteindre. La méthodologie choisie, consiste à mettre en place un réseau de point géodésique à partir duquel les cibles composant le référentiel locales seront déterminées. Puis ensuite un changement de repère permettra de définir le détecteur dans le système RGF93.
3.2.2.2.1. Détermination du réseau à mettre en œuvre pour définir le repère local (cibles C1 à C5 et S4) dans le système RGF93, projection Lambert 93, système altimétrique IGN69.
Pour la réalisation de ce réseau une première étude est réalisée, afin de déterminer les points nécessaires à mettre en place pour réaliser ce positionnement. Pour se faire, des schémas de champs de vision des cibles à travers les deux ouvertures existantes dans la pièce (Figure 31 et Figure 32) ont été réalisés. Afin d’améliorer la qualité de détermination des points du réseau local, il est nécessaire d’avoir, dans la mesure du
Figure 29 : Site vu du ciel Source : Géoportail

Camille CHANEL – TFE 2012 -44-
possible, plusieurs visées depuis plusieurs stations sur chaque cible. L’idéal étant d’avoir des visées perpendiculaire les unes par rapport aux autres pour avoir une détermination plus homogène du point.
Les champs de vision des Figure 31 et Figure 32 permettent de rendre compte de l’étroitesse de la zone où les cibles sont visibles. Au vu de cette configuration, il est envisagé de mettre en place 3 stations à l’extérieur de la salle, représentés sur la Figure 32par des ronds rouges, la station S4 se situant dans la salle sera aussi stationnée, avec visée sur les cinq cibles.
Au vu de la configuration (station très proches l’une de l’autre et très proches des points du réseau local), il est décidé de ne pas les déterminer toutes par méthode de positionnement GNSS. Ce réseau géodésique devant dans l’idéal observer un recul de 300 mètres environs pour que l’erreur de positionnement du au récepteur GNSS (centimétrique) ne soit pas décelable par un lever au tachéomètre.
La configuration du réseau géodésique choisie (voir partie 3.2.2.2.2) est un compromis entre, des distances entre point élevée, la visibilité possible depuis nos points à stationner vers les points du réseau géodésique, et le nombre de points à mettre en oeuvre pour une meilleure cohérence du réseau géodésique.
Les différentes étapes de mise en œuvre afin de géoréfenrencer le réseau local dans le système RGF93, projection Lambert 93, système altimétrique ING 69 sont décrites ci-dessous, avec la liste du matériel nécessaire et le temps estimés de réalisation.
3.2.2.2.2. Mise en place d’un réseau géodésique observé par méthode GNSS
Cette méthode consiste à la mise en place d’un réseau de points observé par méthode GNSS. Ces points seront stationnés pendant une certaine durée définie par l’équation ci-dessous :
Durée d’observation en mode statique = 20 min + 2min/km
Cette méthode est dite méthode de positionnement statique avec pivot central (ce point sert de point de référence pour le traitement de nos lignes de bases), qui permet d’avoir des précisions sur les points de l’ordre de quelques millimètres. Elle utilise le modèle de la double différence pour résoudre les ambiguïtés entières, en utilisant les stations du RGP de Clermont-Ferrand (défini dans la partie 1.1.4.1) au nombre de
Figure 32 : Zoom sur les champs de vision, avec en rouge les stations extérieures envisagées.
Figure 31 : Schéma définissant les champs de visiondes points du réseau local.
Légende : orange = S4; vert = C1; bleu = C2 ; rouge = C3 ; jaune = C4 ;

Camille CHANEL – TFE 2012 -45-
deux situées à environ une quinzaine de kilomètre de notre chantier, afin de calculer les lignes de base entre le point pivot et les stations du RGP. Ceci implique, que le pivot central soit observé pendant au minimum 50 min. Ensuite, les lignes de base internes au chantier sont observées pendant 22 min (défini par l’équation ci-dessus) afin d’avoir une bonne redondance des données. Ces points seront définis par des trépieds qui seront fixes tout le long de l’expérience.
La figure 33 montre la configuration du réseau de point GNSS choisie, avec les lignes de bases internes au chantier observées. Le tableau 16 est un récapitulatif du matériel nécessaire pour la réalisation de la mission, et également du temps nécessaire estimé à la mise en œuvre de cette détermination.
Matériels 4 trépieds
3 récepteurs GNSS 4 embases
Nbre de personne 2
Temps estimé 2h Tableau 16 : Prévision des besoins pour l'étape 1
3.2.2.2.3. Détermination des points du réseau local dans le référentiel RGF93, système de projection Lambert 93, système altimétrique IGN69
Pour déterminer les points du réseau local, ne pouvant pas les stationner, ils seront, dans la mesure du possible, visés depuis plusieurs stations, deux cas de figure sont envisageables :
Figure 33 : Schéma du réseau de points GNSS, avec indication du pivot central et des lignes internes au chantier observées. Axe des X et Y coordonnées en L93

Camille CHANEL – TFE 2012 -46-
Cas n°1. Le point défini par méthode d’observation GNSS (Point 2) permet de viser directement les points définissant le réseau local.
Cas n°2. La station n’a pas été définie par méthode d’observation GNSS (I1, I2 et S4).
Cas n°1
Une fois les points observés par méthode GNSS, il convient de déterminer la position des points du réseau local. Le tachéomètre est alors successivement installé sur les embases des points observés par méthode GNSS. Après la réalisation d’un nivellement entre le tachéomètre et le récepteur GNSS, des tours d’horizon (TH) en cercle à droite (CD) et cercle à gauche (CG) sont réalisés sur deux références (permettant de définir l’orientation) et sur les cibles afin de déterminer la position de celle-ci (Figure 34). Ces tours d’horizon permettent d’éliminer les erreurs systématiques de l’appareil.
Figure 34 : Schéma de principe pour la détermination des points du réseau local dans le cas n°1

Camille CHANEL – TFE 2012 -47-
Cas n°2
Des points préalablement déterminés (voir partie, détermination du réseau) et permettant de viser nos cibles (C1 à C5) sont ensuite stationnés. Ces points sont dans la mesure du possible rattachés au réseau de points géodésiques, en réalisant des tours d’horizons CD et CG. Cette première partie sert à les déterminer dans le système RGF93, projection Lambert 93, système altimétrique IGN69.
Un nivellement entre le récepteur GNSS et le prisme installé sur l’embase du trépied sera nécessaire. Les trépieds sont installés en début de journée et reste fixe toute la journée permettant ainsi le centrage forcé.
Le Figure 35 ci-dessous permet de définir les points choisis et leur rattachement, le Tableau 17 : Prévisions des besoins pour l’étape 2récapitule le matériel nécessaire et le temps estimé de l’intervention. La station S4 est elle aussi stationnée, elle n’apparaît pas sur le schéma ci-dessous pour des raisons de visibilité. C’est une station décalée depuis le point 2 (observé par méthode GNSS), le fait d’être à l’intérieur de la pièce, lui permet de viser toutes les cibles.
Matériels
3 trépieds (minimum) 3 embases (minimum) 1 Tachéomètre 1 niveau 1 mire graduée 3 Prismes 3 Support de prismes 1 trépied à crémaillère
Nbre de personne 2
Temps estimé 1h30 par station = 6h Tableau 17 : Prévisions des besoins pour l’étape 2 (Matériel à prévoir en plus de celui de l’étape 1)
3.2.2.2.4. Détermination du changement de repère
Figure 35 : Schéma représentant les stations intermédiaires et leur rattachement

Camille CHANEL – TFE 2012 -48-
Le changement de repère sera réalisé par un changement de type Helmert à 4 paramètres. En effet, dons notre cas celui-ci est défini par trois translations est une rotation selon l’axe z, défini par la verticale du lieu qui est identique dans les deux systèmes, donc il n’y a pas de rotation possible autour des axe y et x. Ce calcul sera réalisé par un script Scilab.
3.3. Positionnement du détecteur dans le futur
3.3.1. Contexte de l’étude et problématique
Cette étude s’inscrit dans la suite logique des expérimentations du projet ToMuVol. Dans ce projet, le but est la création d’un système de détection de muons portable et donc susceptible d’être installé dans n’importe quel environnement. L’objectif est de définir un cahier des charges technique concernant le positionnement du détecteur de particules, qui sera appliqué lors de la construction du futur prototype.
Le système de détection est composé de quatre plans de 1 m² (Figure 36). Ces plans comportent 6 cellules de détection de 50 cm par 30 cm, appelées cassettes. Chaque cassette est constituée de 1536 pads (cellule de détection) de 1cm². L’enjeu est de positionner ces pads par rapport à l’édifice volcanique étudié. Ce positionnement des pads par rapport à l’édifice se fait selon les étapes suivantes :
Etape 1 : Mesure des Pads / Alésages contenus dans les cassettes
Etape 2 : Mesure des cassettes / Plans de 1 m
Etape 3 : Mesure des plans 1m / Bâti
Etape 4 : Mesure Bâti / Edifice
Les étapes 1 à 3 seront réalisées en laboratoire, tandis que la quatrième étape sera effectuée sur le site. Normalement, sur le site un container sera installé dans lequel il y aura le détecteur mais aussi tout ce qui est utile pour le système de détection. A l’heure actuelle il est envisagé que le container soit ouvrable sur ses quatre côtés pour que le positionnement du bâti soit réalisé. La taille du container n’est pas connue, ni sa matière de réalisation. Il faut cependant prévoir que le container ne puisse pas être ouvrable sur ses quatre côtés, dans certaines configurations non idéales liées à la morphologie du site.
Le détecteur devrait être composé de quatre plans de 1 m². Cependant dans ce cas de figure, les phénomènes de bruit sont encore assez présents, en effet des muons venant d’une direction zénithale peuvent impacter juste une chambre ou deux et créer ainsi du bruit. Bien que l’objectif de la quatrième chambre soit d’aider à l’élimination de ce bruit, il est envisagé d’ajouter deux plans supplémentaires sur le dessus et sur le dessous du dispositif afin d’améliorer la caractérisation et la suppression du bruit de fond. Si cette solution est adoptée ces derniers pourraient être placés à une quarantaine de cm au dessus ou en-dessous des autres.
Un autre paramètre non défini à l’heure actuelle est le positionnement des cassettes dans le plan et des plans dans le bâti. Sur le pourtour de chaque cassette il existe des zones mortes de détection d’environ 13 mm, lors de l’assemblage cassette/plan, six cassettes sont mises dans un même plan. La problématique est de déterminer l’influence de ses zones mortes sur les résultats et de savoir s’il faut les éliminer lors du montage
Figure 36 : Schéma du détecteur 4 plans Source : F .Daudon

Camille CHANEL – TFE 2012 -49-
en superposant les zones mortes des cassettes pour les assembler. Si les cassettes sont superposées, la visibilité en sera réduite pour effectuer le positionnement. Une autre possibilité est de ne pas aligner les chambres pour diminuer la correspondance des zones mortes. Les simulations d’assemblage des cassettes réalisées par des physiciens du LPC, permettront d’apporter une réponse technique pour la mi-Juillet 2012. Pour le positionnement des plans dans le bâti, l’écart entre ceux-ci n’est pas encore défini, il peut varier de 30 cm à 50 cm ce qui ferait varier le volume de 1m3 à 2m3.
3.3.2. Déplacement en cours d’expérience
Un système de contrôle et de suivi des variations de position du détecteur est nécessaire. Il a été choisi de mettre en place six inclinomètres afin de surveiller les trois rotations possibles (on considère que le système ne peut pas subir une simple translation). Les inclinomètres servent donc à détecter le mouvement, ensuite un repositionnement peut être nécessaire selon l’importance de celui-ci. En effet, le système est considéré comme quasi auto calibrant. Le passage des muons laisse une trace à travers les quatre plans de détection. Cette trace devant être linéaire, le positionnement relatif entre les chambres peut être vérifié. Seulement, il lui faut un certains temps de visualisation des muons pour pouvoir détecter le mouvement éventuel et le corriger, de plus si tout le système subit un mouvement, l’auto calibration ne permettra pas un repositionnement précis. C’est pourquoi les inclinomètres sont importants et qu’un repositionnement du système peut être nécessaire en cours d’expérience.
3.3.3. Le phénomène de dilatation
Les matériaux subissent sous les effets de l’humidité et de la chaleur un phénomène dit de dilatation, à savoir l’expansion d’un volume sous l’effet de la chaleur. C’est un phénomène isotrope dans le cas de matériaux isotropes c'est-à-dire qu’il est homogène dans toutes les directions de l’espace. Selon les matériaux utilisés, ce phénomène est plus ou mois important. Pour l’aluminium ce coefficient de dilation correspond à 260 microns/m/10°C. Pour l’acier ce coefficient est deux fois moins important, il est seulement de 15 microns/m/10°C pour de l’Invar.
Pour la construction du détecteur, l’aluminium est pour le moment la solution adoptée. Vu que le système de détection sera amené à être déplacé, donc à subir des différences de température il est important de déterminer leur impact sur la précision. Cet impact varie en fonction de la taille du dispositif et des écarts de température qu’il peut subir. Sachant que le système doit être maintenu à une température constante au niveau des chambres, la température, une fois le dispositif mis en place, ne devrait varier tout au plus que de quelques degrés.
Ce système de maintien en température n’est pas encore défini, plusieurs possibilités sont envisageables. Le maintien en température peut-être fait soit au niveau du container, soit au niveau du bâti, en rajoutant une enveloppe autour du bâti. Dans tous les cas, au moment de la réalisation du positionnement, il sera nécessaire de viser le bâti et donc la température ne pourra pas être maintenue. Une solution envisageable est de faire le positionnement du détecteur avant la mise en marche de celui-ci. Une fois le système mis en place, le container est ouvert pour pouvoir faire les mesures de positionnement. Une fois que la température est stable à l‘intérieur du container, les mesures sur le bâti sont réalisées, sachant qu’elles seront corrigées ensuite du coefficient de dilation par calcul. Comme ce phénomène est isotrope il est possible de le corriger en connaissant la différence de température et la taille du détecteur. Si un repositionnement, suite à un mouvement important, est nécessaire, il faudra alors éteindre le système et attendre une stabilisation de la température pour pouvoir le repositionner.
Cependant le système étant monté par pigeage, il se peut que cela contraigne les déformations et donc que celles-ci ne soient plus isotropes. Ainsi, la correction théorique appliquée pourrait entraîner d’autres erreurs. L’idéal serait donc que le système reste à température pendant les mesures. Une autre possibilité serait de positionner le container sur le site et de connaître la position du container par rapport à l’édifice. Mais le problème du matériau de construction du container se pose de la même façon que pour le détecteur

Camille CHANEL – TFE 2012 -50-
lui-même ; ce n’est pas une solution intéressante de ce point de vue. La mise en place de vitres avec verre propre sur le container permettant de viser le détecteur depuis l’extérieur, serait une meilleure solution. Il faudrait alors tenir compte de la réfraction due à la vitre.
3.3.4. Etape 1 : Positionnement des Pads dans la cassette
La figure 37 présente le schéma de la structure des futures cassettes de détection. La précision demandée pour le positionnement des pads est de 0.1mm.
La cassette est constituée d’un support en aluminium, en forme de cuvette, le but est que l’intégralité du système de détection soit compris dans cette cuvette afin de le protéger. La chambre GRPC entourée de feuille mylar pour l’isoler électriquement est imbriquée dans le support en aluminium. En appui sur la chambre vient se mettre le PCB constitué des pads et son masque. Enfin un support en nid d’abeille, choisi pour sa légèreté vient « fermer » la cassette.
Ce positionnement sera assuré mécaniquement. Le circuit imprimé contenant les pads est monté sur le support (capot du support en nid d’abeille) par des vis fraisures. Par construction mécanique, il est possible de déterminer la position des pads par rapport aux alésages. Sur le support en nid d’abeille il y a d’un côté quatre taraudages qui se terminent en 4 alésages de l’autre côté du support. Les quatre taraudages permettent de venir fixer le PCB et le masque sur le renfort en nid d’abeille, alors que les quatre alésages servent de point de référence pour le positionnement, une fois les cassettes assemblées.
La précision de ce positionnement dépend du choix des matériaux et de la construction des cassettes. En effet, du côté du renfort en nid d’abeille, la précision du positionnement devrait être de ±0.15 mm (avec une erreur de ±0.05 mm entre les pads et le masque, ±0.05 mm pour la fixation sur le nid d’abeille et ±0.05 mm pour la traverse des alésages) Pour atteindre cette précision, il est nécessaire d’utiliser un insert permettant ensuite la mise en place d’un alésage. De l’autre coté de la cassette, pour le moment le choix se porte sur une plaque en aluminium qui sert à rigidifier l’ensemble. Le problème de ce côté est la présence de cuvette qui pour bien s’adapter nécessite un joint qui insère du jeu. La précision alors du positionnement est envisagée autour de ±0.25mm.
Figure 37 : Cellule éclatée du futur prototype Source : Mr Daudon

Camille CHANEL – TFE 2012 -51-
3.3.5. Etape 2 : Positionnement des cassettes dans le plan
Le plan de 1 m² (Figure 38) est défini comme suit : il s’agit d’un cadre en support aluminium qui contient des alésages pouvant accueillir chaque cassette. Il y aura 6 cassettes par plan. Ce positionnement sera aussi réalisé par positionnement mécanique. Le pigeage permet un montage et démontage de chaque cassette avec une précision de repositionnement de 0.01 mm et une précision de positionnement de 0.05 mm. Ces précisions de positionnement sont amplement suffisantes, mais devront être certifiées. Au vu des précisions demandées ce ne sera pas l’affaire du topographe, même si aujourd’hui il existe des dispositifs tels que les CMM (Coordinate Mesuring Machine), ceux sont des machines qui permettent de faire des mesures en 3 Dimensions avec une très grande précision, qui pourraient convenir. Elles ne permettent pas de mesurer tous les objets à cette précision, en effet, elles sont limitées par des courses selon les trois axes, x, y, z.
3.3.6. Etape 3 : Positionnement des plans par rapport au bâti
Le bâti est caractérisé par l’assemblage des quatre plans. Le démontage des plans un à un étant nécessaire, la répétitivité du montage/démontage de ceux-ci doit être qualifiée. L’idée de positionner directement les cassettes par rapport au bâti est abandonnée, pour des raisons de visibilité des cassettes.
La précision de montage estimé d’un plan par rapport au suivant est de ±0.1mm, soit ±0.3mm entre le premier plan et le dernier. Cette étape sera contrôlée par des méthodes topographiques, elle permettra aussi de définir les points de référence sur le bâti qui serviront par la suite à positionner celui-ci par rapport à l’édifice. Ces points de références seront au nombre de huit sur les extrémités (8 coins) du bâti. Il est nécessaire de les positionner pour qu’il soit le plus visible possible depuis n’importante quelle direction. L’idée est de mettre des supports de prisme à boule magnétiques, permettant un repositionnement du prisme précis et une orientation variée de celui-ci. L’étude demandée est de spécifier pour trois précisions différentes (±0.05mm, ±0.1mm et ±0.5mm) une méthodologie pour réaliser ce positionnement, avec le matériel à se procurer et une estimation du coût de la manipulation. Au vu de cette étude, un choix sera nécessaire, celui-ci résultera d’un compromis qualité/prix/besoin.
3.3.7. Etape 4 : Positionnement du Bâti par rapport à l’édifice
La précision souhaitée pour ce positionnement est de 1 mrad. La difficulté de ce positionnement viendra essentiellement des conditions du site, qui varieront à chaque fois. Il sera nécessaire d’envisager différents protocoles de positionnement en fonction des conditions locales : espace restreint, salle enterrée ou lieu dégagé.
Il faut définir si le bâti doit être positionné directement par rapport à l’édifice ou s’il convient de réaliser une étape intermédiaire, en créant des points de référence sur le container. Il est nécessaire de déterminer la méthode la plus adaptée en fonction des phénomènes de dilation, problématique déjà évoquée.
Cependant le principe de ce positionnement va globalement rester le même, à savoir la création d’un réseau de points géodésiques. Puis, à partir de ce réseau, il faudra déterminer la position du bâti dans le référentiel utilisé, qui dépendra de la zone d’étude. La mise en place d’un réseau géodésique nécessite d’avoir une zone dégagée autour du détecteur, le mieux étant que le détecteur soit au milieu de cette zone.
Figure 38 : Schéma du plan de 1m² Source Mr Daudon

Camille CHANEL – TFE 2012 -52-
3.4. Conclusion
Cette partie de positionnement du détecteur est une partie délicate du projet ToMuVol. Le rattachement n’étant à ce jour pas effectué il est assez difficile de conclure sur la précision finale de celui-ci. Mais la précision millimétrique ne sera pas atteinte, sur l’ensemble des points du détecteur (seulement quelques millimètres sur les points bas de celui-ci). Ce travail aura permis de rendre compte de la difficulté d’atteindre les précisions souhaitées sous certaines contraintes. Etant dans les phases de test du système de détection, il est important de se rendre compte de cette difficulté qui permettra pour les prochaines expériences de prendre en compte la problématique de positionnement, en amont, dans le choix du lieu de l’installation du détecteur.
Pour la partie sur la construction du futur prototype, il reste encore des réflexions à avoir sur les différentes possibilités de construction du détecteur qui permettront de mieux définir les besoins en terme de positionnement et par suite permettront de développer le positionnement du bâti par rapport à l’édifice. Il reste aussi à définir les moyens à mettre en œuvre pour l’étape 3, soit une collaboration avec un laboratoire de recherche ou de la sous-traitance, aucune demande n’a été effectuée à l’heure actuelle.

Camille CHANEL – TFE 2012 -53-

Camille CHANEL – TFE 2012 -54-
CCoonncclluussiioonn Ce mémoire est l’aboutissement d’un travail de 5 mois au sein du Laboratoire Magmas et Volcans à
Clermont-Ferrand sur l’analyse de données LiDAR, la qualification des produits dérivés (MNT délivré par le prestataire de service GeoPhenix) et le positionnement d’un détecteur de muons, dans le cadre du projet ToMuVol.
L’analyse des données LIDAR consistait en la définition de la méthode d’interpolation la plus adaptée à la zone d’étude, et de présenter une brève revue des méthodes d’analyse morphologique, illustrées par quelques exemples remarquables. La méthode d’interpolation retenue est identique à celle choisie par le prestataire GeoPhenix, à savoir, une interpolation au format TIN, suivie d’une rastérisation de ce TIN, par une interpolation linéaire au sein de chaque triangle, avec une résolution de 50 cm. La qualité du MNT créé est globalement décimétrique (la précision du jeu de données a été également qualifiée, de ±10 cm, travail V.Trefond 2011), avec un écart-type de 2 cm entre le MNT et le jeu de données. Cependant, il faut noter que dans certaines zones (cas relativement rare), le MNT peut ne pas représenter la réalité du terrain ; ces zones sont caractérisées par de brusques changements de pente suite à l’action anthropique (typiquement des carrières) ou d’origine naturel (typiquement les crêtes du Puy de Dôme). Il est important que les personnes travaillant sur ce MNT aient conscience des zones où celui-ci est plus éloigné de la réalité du terrain. Pour des études menées localement, une réduction du pas de la maille permet d’avoir une meilleure représentation locale de la topographie, mais cela nécessite d’avoir une bonne couverture LiDAR de la zone.
Pour la partie positionnement du détecteur dans un repère lié à la pièce expérimentale, il a fallu dans l’urgence trouver la solution la plus adaptée, au vu de la configuration des lieux et du temps imparti. Ce positionnement a permis de rendre compte de la difficulté d’atteindre des précisions importantes (millimétriques), dans des configurations non idéales, sans matériels spécifiques. Ensuite, la méthodologie du positionnement de la pièce en RGF93 a nécessité une réflexion importante sur sa mise en œuvre. En effet, les conditions n’étaient pas idéales en raison du peu de visibilité et de recul. Cette réflexion a mis en avant l’importance du choix du site, pour la réalisation du positionnement, dans les expériences futures.
La prochaine étape du projet ToMuVol est la construction d’un nouveau prototype de détection, autonome et portable. Pour que le protocole opératoire du positionnement de ce prototype soit réalisable dans des conditions variées, une étude a commencé afin de déterminer comment ce positionnement pouvait être réalisé le plus simplement possible. Il reste à ce jour des incertitudes sur la construction du futur prototype. La présente étude a permis de remettre en question des précisions de positionnement, envisagées au premier abord et de mettre en avant les problèmes dus à des phénomènes de dilatation par exemple. La problématique de positionnement a été découplée en plusieurs étapes, l’objectif étant de positionner les pads (cellule élémentaire de détection de 1 cm²) par rapport à l’édifice volcanique. Pour le positionnement absolu du détecteur, il est envisagé de mettre en place 8 points de références sur le bâti, par rapport auxquels la position des pads sera déterminée. Ces huit points seront ensuite positionnés par rapport à l’édifice. Cependant, cette étude est seulement un premier pas vers la création d’un protocole opératoire pour le positionnement absolu du détecteur de muons ; il est nécessaire de l’approfondir en fonction des différents choix faits en amont.
Dans le cadre de ce projet, des études géophysiques ont été menées en parallèle sur le Puy de Dôme. Ces différentes études permettent de comparer directement ou indirectement leurs résultats et donc de valider et de qualifier le modèle de tomographie muonique. Une première comparaison a été effectuée par Angélie Portal (2012). Le but de ces études est, à terme, de créer un modèle structural du dôme par l’interprétation conjointe de tous ces jeux de données.

Camille CHANEL – TFE 2012 -55-
Ce travail de fin d’étude m’aura permis de découvrir le monde de la recherche et le déroulement d’un projet. La rencontre de personnes travaillant dans des domaines différents est toujours enrichissante, elle permet l’apport de connaissance dans d’autres domaines que le sien. Ces cinq mois de stage m’ont apporté un « vrai » premier lien avec la vie professionnelle qui nous attend, c’est un enrichissement personnel important, tout à fait différent et très complémentaire de celui que les stages de deux mois avaient pu m’apporter tout au long de ma formation. Le travail au sein d’une équipe de recherche est très différent du travail en cabinet de Géomètre. Dans celui-ci, il existe des protocoles définis à mettre en œuvre en fonction des demandes des clients. Dans un laboratoire de recherche, il faut soi-même définir ses protocoles, ce qui implique de s’interroger avant chaque mise en œuvre, et de faire des tests de qualification, dans la mesure du possible.

Camille CHANEL – TFE 2012 -56-

Camille CHANEL – TFE 2012 -57-
BBiibblliiooggrraapphhiiee Articles, travaux de fin d’étude :
• S.Baillargeon. Le krigeage : revue de la théorie et application à l’interpolation spatiale de données de précipitations, 2005, 93 pages
• M.Ettarid et al. Qualite des modèles numériques de terrain dérivés par corrélation automatique, 6 pages.
• A.Fornaciai et al. A LIDAR survey of Stromboli volcano (Italy) : DEM-Based geomorphology and intensity analysis, 2008, 26 pages
• R.Gunie. Analyse des techniques d’élaboration de Modèles Numériques de Terrains et des méthodes d’extraction automatique du réseau hydrographique pour l’amélioration des études de bassins versants, 2002, 52 pages.
• F.Mazzarini et al, Surface roughness of pyroclastic deposits at Mt.Etna by 3D laser scanning, 2008, 9 pages.
• A.Portal, Apports des méthodes géophysiques ( résistivités électriques, gravimétrie) dans l’étude des edifices volcaniques et comparaison avec le tomography muonique : exemple du Puy de Dôme
• F.Rousseaux. Caractérisation d’erreurs sur un modèle numérique de terrain en fonction de zones morphologiques, 2006, 6 pages.
• V.Trefond. Contraintes géométriques et topographiques pour la tomographie des édifices volcaniques par détection de muons atmosphérique, 2011, 55 pages
• V.Trefond et P.Labazuy, Rapport de contrôle préliminaire du levé LiDAR aéroporté « Chaîne des Puys », 2011, 15 pages.
Aides de logiciels et matériels :
• Surfer 10 Help Tutorial
• Arcgis 10 help : http://help.arcgis.com/fr/arcgisdesktop/10.0/help
• HiPer pro operator’s Manual

Camille CHANEL – TFE 2012 -58-
TTaabbllee ddeess FFiigguurreess Figure 1 : Schéma de la collision des particules dans l'atmosphère donnant lieu à la création de muons ___________ 8 Figure 2: Schéma du détecteur à 4 plans ______________________________________________________________ 9 Figure 3 : Photos du détecteur au col de Ceyssat ________________________________________________________ 9 Figure 4 : Représentation éclatée d'une cassette _______________________________________________________ 10 Figure 5 : Représentation du PCB ___________________________________________________________________ 10 Figure 6 : Schéma de principe de mesure de résistivité électrique (Angélie Portale, 2012) _____________________ 12 Figure 7 : Zone du lever LiDAR réalisée en mars 2011 par la société GeoPhenix ______________________________ 14 Figure 8 : Représentation de l'interpolation TIN _______________________________________________________ 17 Figure 9 : Présentation des deux zones d'études choisies pour une étude préliminaire ________________________ 19 Figure 10 : Représentation des MNT ombrés zone 1 ____________________________________________________ 20 Figure 11 : Représentation MNT ombré zone 2 ________________________________________________________ 20 Figure 12 : Image de la superposition du MNT ombré avec les points du lever Lidar __________________________ 21 Figure 13 : Orthophotographie de la zone ci‐contre ____________________________________________________ 21 Figure 14 : Image de la différence entre deux MNT de la zone 1 __________________________________________ 22 Figure 15 : Image de la différence entre deux MNT de la zone 2 __________________________________________ 22 Figure 16 : Représentation sur une échelle logarithmique des résidus en pourcentage par classe de 10 cm sur le MNT
de GeoPhenix dans la zone 1 ___________________________________________________________ 23 Figure 17 : Photographie de la zone où des écarts de cinq mètres sont relevés sur l'altimétrie des points du lever
LiDAR. ______________________________________________________________________________ 25 Figure 18 : Représentation sur une échelle logarithmique des résidus en pourcentage par classe de 10 cm sur le MNT
de GeoPhenix dans la zone 2 ___________________________________________________________ 25 Figure 19 : Superposition des résidus supérieurs, inférieurs ou égaux à 0.5 m sur une représentation ombrée. ____ 27 Figure 20 : Présentation des différentes zones de calcul sur l’ensemble du secteur d’étude ____________________ 28 Figure 21 : Illustration de différents phénomènes par la seule visualisation en ombrage ______________________ 31 Figure 22: Carte des pentes (exprimées en degrés) du Puy de Dôme, mise en valeur de la structure la plus récente. 32 Figure 23 : Carte de l'exposition sur l'ensemble de la zone d'étude. _______________________________________ 33 Figure 24 : Profils topographiques Est‐Ouest et Nord‐Sud des édifices du Puy de Dôme, du Pariou, du Puy de Côme et
du Grand Suchet. Ces profils mettent en avant la structure imposante du Puy de Dôme, les 3 cônes emboîtés du Puy de Côme. Axe des abscisses : distance en mètres. Axe des ordonnées : élévation en mètres. _____________________________________________________________________________ 34
Figure 25 : Site de positionnement du détecteur pour l'acquisition des données 2012, par rapport à l'édifice volcanique du Puy de Dôme ____________________________________________________________ 36
Figure 26 : Plan du local expérimental (Auberge des Gros Manaux au col de Ceyssat) _________________________ 37 Figure 27: Représentation des mesures de distances réalisées ____________________________________________ 39 Figure 28 : Schéma de la numérotation des points. Pour les angles de plans le premier chiffre indique le numéro du
plan (1 : plan 1 ; 2 : plan 2….). Le deuxième chiffre indique la position du point (1 et 2 angle supérieur gauche et droit ; 3 et 4 angle inférieur droit et gauche). En bleu les points bas du détecteur, en rouge les points hauts ______________________________________________________________________ 40
Figure 29 : Site vu du ciel __________________________________________________________________________ 43 Figure 30 : Vue depuis l'intérieur de la pièce vers l'extérieur _____________________________________________ 43 Figure 31 : Schéma définissant les champs de vision des points du réseau local. _____________________________ 44 Figure 32 : Zoom sur les champs de vision, avec en rouge les stations extérieures envisagées. __________________ 44 Figure 33 : Schéma du réseau de points GNSS, avec indication du pivot central et des lignes internes au chantier
observées. Axe des X et Y coordonnées en L93 _____________________________________________ 45 Figure 34 : Schéma de principe pour la détermination des points du réseau local dans le cas n°1 ________________ 46 Figure 35 : Schéma représentant les stations intermédiaires et leur rattachement ___________________________ 47 Figure 36 : Schéma du détecteur 4 plans _____________________________________________________________ 48 Figure 37 : Cellule éclatée du futur prototype _________________________________________________________ 50 Figure 38 : Schéma du plan de 1m² Source Mr Daudon __________________________________________________ 51

Camille CHANEL – TFE 2012 -59-
TTaabbllee ddeess TTaabblleeaauuxx
Tableau 1 : Définition des stations du RGP utilisées pour le post‐traitement des données GPS acquise lors de la campagne de mesures gravimétriques. ___________________________________________________ 11
Tableau 2 : Définition des paramètres pour l'interpolation de krigeage avec le logiciel Surfer __________________ 18 Tableau 3 : Coordonnée des deux zones d'études (Projection Lambert 93, Coordonnées en mètre) ______________ 18 Tableau 4: Résultats statistique sur les résidus de la zone 1 ______________________________________________ 23 Tableau 5 : Coordonnées des points présentant les résidus maximum en Lambert 93 (en mètres) sur la zone 1 ____ 24 Tableau 6 : Résultats statistique sur les résidus de la zone 2 exprimés en mètres ____________________________ 25 Tableau 7 : Nombre de résidus supérieurs, inférieurs ou égaux à 0.5m par classe de 2 mètres. _________________ 26 Tableau 8: Coordonnées des différentes zones (Projection Lambert 93, coordonnées en mètres) _______________ 28 Tableau 9 : Résultats statistique sur les résidus des différentes zones ______________________________________ 28 Tableau 10 : Résultats statistique sur les résidus de la zone A après élimination des erreurs. ___________________ 29 Tableau 11 : Résultats du calcul des résidus par rapport aux points levés par GPS. ___________________________ 29 Tableau 12 : Ecarts‐Types à priori de la station Pentax NX 825 ____________________________________________ 38 Tableau 13 : Les classes de précisions d'après l'arrêté de 1980 e (mm) = a + b*L où L est la longueur arrondie par
excès au mètre Les erreurs maximales tolérées sont égales au double des valeurs admises ci‐dessus _ 39 Tableau 14 : Coordonnées dans un système local des points du réseau local (en mètres) ______________________ 41 Tableau 15 : Coordonnées des 16 coins du détecteur dans un référentiel local ______________________________ 42 Tableau 16 : Prévision des besoins pour l'étape 1 ______________________________________________________ 45 Tableau 17 : Prévisions des besoins pour l’étape 2 (Matériel à prévoir en plus de celui de l’étape 1) ____________ 47
TTaabbllee ddeess AAnnnneexxeess
Annexe 1 : Résultat de la tomographie électrique réalisée sur le Puy de Dôme en juin 2011 et mai 2012
Annexe 2 : Résultat du test de pas de grille variable pour l’interpolation par triangulation rasterisée
Annexe 3 : Résultat du calcul des résidus à partir des points GPS
Annexe 4a : Cartes des pentes générales
Annexe 4b : Cartes des pentes du Clierzou
Annexe 5 : Article






AANNNNEEXXEE 55 AAppppoorrtt ddee ccoonnnnaaiissssaanncceess ttooppooggrraapphhiiqquueess ppoouurr lleess eexxppéérriieenncceess ggééoopphhyyssiiqquueess ddee ttoommooggrraapphhiiee ddaannss llee ccaaddrree dduu pprroojjeett TTooMMuuVVooll ssuurr llee ssiittee eexxppéérriimmeennttaall dduu PPuuyy ddee DDôômmee Camille CHANEL
Le projet ToMuVol (Tomographie par Muons atmosphériques des Volcan) est mené conjointement par trois laboratoires Clermontois : Le Laboratoire Magmas et Volcan, le Laboratoire de Physique Corpusculaire et l’Observatoires de Physique du Globe de Clermont-Ferrand. L’objectif du projet ToMuVol consiste à définir une nouvelle méthode pour l’étude de la structure interne des volcans, en réalisant une radiographie de l’édifice, puis par la multiplication des prises de vue de faire une reconstruction tridimensionnelle de l’édifice volcanique. Pour valider la méthode celle-ci doit être comparé à d’autres méthodes géophysiques telle que la gravimétrie, l’étude de la résistivité des roches…
LLee pprroojjeett TTooMMuuVVooll Cette méthode repose sur le principe d’une radiographie qui utilise des particules naturelles de haute énergie : les muons. Un détecteur (Figure 1) est placé sur le flan d’un volcan, il enregistre le flux de muons qui traverse l’édifice. Ensuite il faut être capable de reconstruire la trajectoire des muons et de connaître l’enveloppe externe de l’édifice pour pouvoir définir la quantité de matière traversée par les muons. Le détecteur est composé de quatre pans de détection, le quatrième plan servant surtout à éliminer les phénomènes de bruit. Chacun des plans de 1 m² sont composé de 6 cassettes de détection de 33cm*50cm. Les cellules élémentaires de détection sont appelées des pads, chaque pads mesure 1cm². Un des enjeux du projet est de positionner ces pads par rapport à l’édifice volcanique à étudier. Il faut aussi définir l’enveloppe externe de l’édifice, car sans elle, la seule information serait une carte d’atténuation des flux, représentant la différence entre la valeur théorique et la valeur mesurée. Alors qu’avec l’enveloppe topographique, il est possible d’intégrer la variation du flux en fonction de la longueur de la roche traversée et donc d’obtenir une densité moyenne de l’édifice le long de la trajectoire du muon. Une fois ce calcul répété, une carte de densité de l’édifice peut donc être établie. Une fois cette méthode validée, des observations pourront être réalisée sur des volcans en activités pour faire de la surveillance. Un des grands avantages de cette méthode et qu’elle ne nécessite pas une grande proximité avec le volcan contrairement à la gravimétrie par exemple.
CCrrééaattiioonn ddee ll’’eennvveellooppppee ttooppooggrraapphhiiqquuee oouu MMooddèèllee NNuumméérriiqquuee ddee TTeerrrraaiinn Le lever LiDAR, réalisé le 21 et 22 Mars 2011, revêt une importance capitale dans le cadre du projet ToMuVol pour la détermination d’un Modèle Numérique de Terrain de haute précision. Le cahier des charges demandait une densité de 10 points/m², avec une précision altimétrique de 10 cm. La qualité de ce lever LiDAR a été contrôlée par Vincent Trefond (V.Trefond, 2011). Il s’agit donc de définir la meilleure méthode d’interpolation pour perdre le moins de qualité possible par rapport au jeu de données de départ. L’interpolation par Triangulated Irregular Network (TIN), avec une rasterisation du format vecteur pour que le MNT soit plus maniable a été choisie. En effet, même si d’après (F, Rousseaux 2006), c’est surtout la qualité du jeu de données qui joue sur la qualité du MNT. Il a été montré que l’interpolation joué un rôle localement. Celle par krigeage créait des artefacts sur le MNT pour des zones de trous dans le semis de points sols. Le MNT créé a une résolution de 50 cm pour une précision altimétrique de 10 cm avec un écart-type de 2 cm par rapport au jeu de données. Par contre dans certaines zones, notamment celles avec des reliefs très marqués, le MNT est moins précis et peu s’écarter de plusieurs mètres par rapport au terrain naturel, avec un maximum de quinze mètre sur une zone d’affleurement rocheux du Puy de Dôme côté crêtes. Ces écarts peuvent être réduit en modifiant le pas d’échantillonnage, mais cela entraînera un surplus de cassure du à l’interpolation TIN dans les zones où le
Figure 39 : Photo du détecteur de Muons au Gros Manaux

semis est moins dense. C’est pourquoi ce choix n’a pas été fait, de plus il alourdissait les fichiers qui sont déjà conséquent.
EEttuuddee mmoorrpphhoollooggiiqquuee La visualisation en relief ombré (Figure 2), la carte des pentes et la cartes des orientations fournissent une première approche morphologique de la zone d’étude. Ainsi, des vestiges archéologiques ont été décelés, ainsi que des traces des habitations d’estives (les tras) utilisées par les bergers, avant la construction des burons. Aujourd’hui dans ces zones, qui étaient autrefois des pâturages, sont boisées, ce qui traduit une évolution de l’occupation du sol.
Une caractérisation plus précise a été effectuée sur certain cône ou dôme. Dans l’avenir il reste encore beaucoup de chose à qualifier. Des vulcanologues mais aussi des archéologues font des recherches sur ce MNT de haute précision, les uns pour mieux caractériser les édifices et les autres pour mieux comprendre l’histoire…
PPoossiittiioonnnneemmeenntt dduu ddéétteecctteeuurr ddee mmuuoonnss L’étape de positionnement dans l’expérience de tomographie muonique est très importante. Il faut, en effet, connaître la position du détecteur pour pouvoir reconstruire la trajectoire des muons. Cependant le système peut être considéré comme quasi-autocalibrant. Le passage d’un muon à travers les quatre plans de détection laisse une trace sur chaque cellule touchée. Cette trace devant être linéaire on peut par reconstruction vérifier le positionnement relatif des chambres dans les deux axes contenus dans le plan de détection, avec une précision de 3 mm. C’est aussi la précision de mesurage de l’appareil : 3 mm pour un bras de levier de 1 m, ce qui donne une résolution angulaire
de 3 mrad. La demande en terme de précision est de 1 mrad ; en effet il ne faut pas que le positionnement vienne entacher les résultats. Le détecteur était situé au Col de Ceyssat dans une pièce de 2,90 m par 3,10 m (Figure 3).
Dans un premier temps, un réseau local lié à la pièce est créé ; ce réseau est composé de 5 cibles réfléchissantes posées sur les murs et d’un point au sol. Le détecteur, soit les 16 angles des plans de détections, est positionné par rapport à ce réseau local. Pour se faire, des mesures de distance entre les angles de plans est les cibles fixées aux murs ont été réalisées. La précision de ce positionnement varie du millimètre au centimètre. Dans un second temps, une méthodologie de mise en œuvre du positionnement des points du réseau local, en RGF93 projection Lambert 93, système altimétrique IGN69 (le système du lever LiDAR) est explicitée. Puis un changement de repère permettra de définir le détecteur dans son nouveau système de projection.
MMéétthhooddee ggrraavviimmééttrriiqquuee eett ttoommooggrraapphhiiee éélleeccttrriiqquuee ssuurr llee PPuuyy ddee DDôômmee Pour qualifier et valider la méthode de tomographie par détection de muons, des méthodes géophysique ont été mises en œuvre sur le Puy de Dôme. Une campagne de mesures gravimétriques a ainsi été réalisée de Mars à Mai. Elle consiste à mesurer l’attraction terrestre en plusieurs points sur l’édifice, puis avec des corrections et des méthodes d’inversions, elle permet d’obtenir une carte de densité de l’édifice, directement comparable à la tomographie muonique. Lors de ces mesures réalisées au gravimètre, il fallait déterminer la position de celui-ci, dans le système du lever LiDAR (L93) pour y appliquer la correction topographique. Cette détermination a été
Figure 41 : Schéma de la pièce au col de Ceyssat
Figure 40 : Illustration visualisation du MNT ombré

réalisée avec un GPS différentiel TOPCON, utilisé en mode statique avec un post-traitement réalisé à partir des antennes du RGP de Clermont-Ferrand. Le temps d’acquisitions des observations pour chaque point de mesure a été abaissé à 30 s/km, pour obtenir une précision décimétrique.
La tomographie de résistivité des roches permet de déterminer en 2D les variations de résistivité électrique (capacité d’un matériau à être traversé par un courant électrique) du sous sol. Celle-ci est déduite d’une différence de potentiel entre deux électrodes plantées sur la zone d’étude. Le prospect réalisé sur le Puy de Dôme est un des plus grands prospects réalisés dans le monde, avec 62 électrodes distantes de 35 mètres chacune, pour une longueur totale de deux kilomètres environs. L’intérêt d’un si grand dispositif est de pouvoir représenter la résistivité de l’édifice en profondeur. Pour cette manipulation, la position des électrodes a été définie grâce à deux récepteurs GNSS utilisés en mode statique. Un des récepteurs était positionné au sommet de Puy de Dôme, pendant que l’autre enregistrait des acquisitions de trois minutes sur chaque électrode (la ligne de base étant de maximum un kilomètre).
SSuuiittee dduu pprroojjeett...... Des études restent à mener sur les comparaisons entre les différentes méthodes pour la validation de la tomographie muonique. Mais il y a aussi la construction d’un détecteur qui soit transportable afin de pouvoir être mis en place n’ importe où dans le monde. Pour que le positionnement de ce prototype soit plus facilement réalisable, une étude a débuté afin de déterminer comment ce positionnement pouvait être réalisé le plus simplement possible. Il reste à ce jour beaucoup d’incertitude sur la construction du détecteur et sur la manière dont il sera mis en place sur le terrain. Le but étant de déterminer la position des pads par rapport à l’édifice, sachant que ceux-ci ne sont pas visibles sur le détecteur fini. Le positionnement sera donc réalisé à travers quatre étapes :
1. Positionnement des pads dans les cassettes (1/6 du plan de détection).
2. Positionnement des cassettes dans le plan.
3. Positionnement des plans dans le bâti.
4. Positionnement du bâti par rapport à l’édifice.
Pour les deux dernières étapes, le positionnement ne peut pas être réalisé mécaniquement. L’étape trois pourra se faire en laboratoire, alors que la quatrième se fera nécessairement sur le site. Un cahier des charges
doit être réalisé pour déterminer les besoins en termes de positionnement et les coûts engendrés. En fonction du prix et des précisions obtenues selon les options, les membres du projet ToMuVol trancheront sur la proposition la plus adaptée à leur problématique.
CCoonncclluussiioonn Ce travail a permis de définir la méthode d’interpolation la plus appropriée au relief et de positionner le détecteur afin de reconstruire les trajectoires muoniques et donc la structure interne de l’édifice. Les méthodes géophysiques réalisées ont permis de comparer les premiers résultats et serviront à valider le modèle de tomographie muonique.
Cependant, il reste des axes à approfondir à travers l’étude de la morphologie de l’édifice avec le MNT mais aussi sur la construction du futur prototype pour les besoins en matière de positionnement. Ceux-ci ont été clarifiés et certains choix ont déjà été faits, notamment avec la mise en place d’inclinomètres pour surveiller le positionnement du détecteur.

Résumé
Les volcanologues cherchent depuis tout temps à comprendre le fonctionnement et l’évolution des volcans, en utilisant différentes méthodes géophysiques, telles que la gravimétrie, l’étude de la résistivité des roches, ou plus récemment la tomographie muonique. Cette dernière étude se déroule dans le cadre du projet ToMuVol (Tomographie par Muons atmosphériques des Volcans) qui a débuté en 2010. Ce projet est conduit conjointement par plusieurs laboratoires clermontois, le but étant de mettre au point une technique de surveillance des volcans actifs, par cette imagerie muonique, grâce à une reconstruction tridimensionnelle de la structure des édifices volcaniques et le suivi spatio-temporel des transports de matière (magma, fluides,...) au sein de ceux-ci.
Au sein de ce projet de tomographie, la problématique de positionnement tient une grande place. En effet, le positionnement du détecteur est une étape fondamentale pour la reconstruction des trajectoires des muons (particules atmosphériques de très haute énergie). C’est également important pour les autres méthodes géophysique réalisées sur l’édifice du Puy de Dôme, telles que la gravimétrie ou la tomographie des résistivités électriques, méthodes complémentaires réalisées pour qualifier et valider les résultats obtenus par la méthode muonique.
Pour pouvoir réaliser une carte de densité de la roche à partir des observations du détecteur, il faut connaître précisément l’enveloppe externe de l’édifice. Pour se faire, un lever LiDAR a été effectué en mars 2011, avec une densité moyenne de 10 points par m² et une précision planimétrique et altimétrique de 10 cm. A partir de ces données, un Modèle Numérique de Terrain (MNT) est créé pour obtenir l’enveloppe externe de l’édifice, en définissant l’interpolation la plus adaptée à la zone d’étude.
Ce mémoire présente dans un premier temps le projet ToMuVol, la construction du MNT de la zone centrale de la chaine des puys, à partir du levé LiDAR haute résolution réalisé en mars 2011et des outils d’analyse morphologique. Dans un second temps, il explicite la méthode de positionnement du détecteur mise en œuvre au Col de Ceyssat, site de la deuxième expérimentation réalisé au cours du premier trimestre 2012. Enfin, des préconisations techniques sont discutées pour la construction du futur prototype du détecteur de muons, à partir des contraintes expérimentales de mise en œuvre sur le terrain et des besoins en terme de positionnement.
Mots clés : Tomographie, Volcan, MNT, Interpolation, Morphologie, Muons, Positionnement.
Abstract
Volcanologists have always been trying to understand the functioning and the evolution of volcanoes by using various geophysical methods such as gravimetry, rock resistivity surveys, or more recently muons tomography. This last survey takes place in the framework of the ToMuVol project (French acronym for Tomography through atmospheric muons of volcanoes), which began in 2010. This project is carried out jointly by several laboratories from Clermont Ferrand and its aim is to develop a technique to monitor active volcanoes with muons imaging, by using a tree-dimensional map of volcanoes structures and a spatiotemporal monitoring of internal flows of material (magma, fluids, …).
One of the main issues in this tomography project is the positioning issue. The detector positioning is indeed a fundamental step in the reconstruction of muons trajectories (very high-energy atmospheric particles). It is also an important step for other geophysical methods carried out on the Puy de Dôme such as gravimetry or electrical resistivity tomography which have been used as complementary methods to qualify and confirm the result obtained via the muonic method.
In order to draw up a rock density map based on the detector's observations, it is necessary to know precisely the external structure of the volcanic edifice. A LiDAR survey has been performed to this end in March 2011with an average density of 10 points per m2 and a planimetric and altimetrical precision of 10 cm. A digital terrain model (DTM) has been created with this data to obtain the external structure of the edifice and define the most suitable interpolation for the survey area.
This master thesis introduces first the ToMuVol project, the construction of the DTM of the central area of the chain of Puys (chain of volcanoes in the Massif Central) which has been done on the basis of the high resolution LiDAR survey performed in March 2011 and with tools of morphological analysis. The thesis then explains the detector positioning method carried out at the pass of Ceyssat, area of the second experiment performed during the first quarter of 2012. Technical recommendations arising out of experimental constraints and positioning needs will finally be discussed for the construction of the next prototype of muons detector.
Key words : Tomography, Volcano, DTM, interpolation, Morphology, Muons, Positioning