Analyse, conception et commande de mécanismes de tenségrité...
5
Analyse, conception et commande de mécanismes de tenségrité et systèmes précontraints Application à l’assistance robotique dans l’IRM Quentin BOEHLER Laboratoire ICube - équipe Automatique, Vision et Robotique Encadrants Pierre RENAUD - directeur de thèse, ICube, Université de Strasbourg, INSA de Strasbourg Philippe POIGNET - co-directeur de thèse, LIRMM, Université de Montpellier Résumé Ce travail de thèse est conduit en collaboration entre le laboratoire ICube de Strasbourg, et le LIRMM de Montpellier dans le cadre du Labex CAMI (Com- puter Assisted Medical Interventions, ANR-11-LABX-0004). Il est soutenu par la Région Alsace ainsi que le projet Aviesan FLI WP3 (France Life Imaging) autour de l’imagerie interventionnelle. Le contexte de cette thèse est la conception d’assistants robotiques pour la réalisation de gestes guidés par IRM. En imagerie interventionnelle, le scanner IRM est utilisé pour guider des actes de traitement ou de diagnostic tels que des biopsies ou des cryoablations afin de localiser ou traiter des tumeurs à l’aide d’une aiguille. Dans ce cas, l’introduction d’un assistant robotique doit permettre d’améliorer la précision et de faciliter la manipulation lors des tâches de position- nement, d’orientation et/ou d’insertion de l’aiguille. La conception mécatronique dans un tel environnement est cependant délicate. En effet, l’environnement IRM impose de nombreuses contraintes de conception comme la compacité, la légèreté et la compatibilité IRM. La présence d’un fort champ magnétique dans le tunnel de l’imageur impose notamment l’utilisation de matériaux non-ferromagnétiques, et limite considérablement les stratégies d’ac- tionnement envisageables. La présence du patient dans l’environnement médical rend également la tâche de commande complexe et les impératifs de sécurité li- mitent les architectures robotiques utilisables dans ce contexte particulier. 1
Transcript of Analyse, conception et commande de mécanismes de tenségrité...

Analyse, conception et commande de mécanismes
de tenségrité et systèmes précontraints
Application à l’assistance robotique dans l’IRM
Quentin BOEHLER
Laboratoire ICube - équipe Automatique, Vision et Robotique
Encadrants
Pierre RENAUD - directeur de thèse, ICube, Université de Strasbourg, INSA de Strasbourg
Philippe POIGNET - co-directeur de thèse, LIRMM, Université de Montpellier
Résumé
Ce travail de thèse est conduit en collaboration entre le laboratoire ICube deStrasbourg, et le LIRMM de Montpellier dans le cadre du Labex CAMI (Com-puter Assisted Medical Interventions, ANR-11-LABX-0004). Il est soutenu par laRégion Alsace ainsi que le projet Aviesan FLI WP3 (France Life Imaging) autourde l’imagerie interventionnelle.
Le contexte de cette thèse est la conception d’assistants robotiques pour laréalisation de gestes guidés par IRM. En imagerie interventionnelle, le scannerIRM est utilisé pour guider des actes de traitement ou de diagnostic tels quedes biopsies ou des cryoablations afin de localiser ou traiter des tumeurs à l’aided’une aiguille. Dans ce cas, l’introduction d’un assistant robotique doit permettred’améliorer la précision et de faciliter la manipulation lors des tâches de position-nement, d’orientation et/ou d’insertion de l’aiguille.
La conception mécatronique dans un tel environnement est cependant délicate.En effet, l’environnement IRM impose de nombreuses contraintes de conceptioncomme la compacité, la légèreté et la compatibilité IRM. La présence d’un fortchamp magnétique dans le tunnel de l’imageur impose notamment l’utilisation dematériaux non-ferromagnétiques, et limite considérablement les stratégies d’ac-tionnement envisageables. La présence du patient dans l’environnement médicalrend également la tâche de commande complexe et les impératifs de sécurité li-mitent les architectures robotiques utilisables dans ce contexte particulier.
1

Nous nous intéressons ici plus particulièrement à une nouvelle classe de robotsappelés mécanismes de tenségrité composés de barres maintenues ensemble parun réseau de ressorts actionnés. Ces mécanismes, dits précontraints, présententde nombreuses propriétés intéressantes qui justifient d’envisager leur emploi dansce contexte. Tout d’abord, ils sont légers et compacts, car composés uniquementde barres en compression et de ressorts en traction. Ensuite, ils sont actionnablespar des câbles de manière déportée, ce qui constitue une stratégie d’actionnementcompatible IRM. Enfin, la présence d’éléments élastiques tels que des ressorts per-met d’apporter une compliance au robot de manière à le rendre intrinsèquementsûr pour le patient. Plus généralement, les systèmes précontraints semblent d’in-térêt dans notre cas, de par leur capacité à présenter un niveau de raideur variableen fonction des efforts, appelés précontraintes, dans ses éléments. Cette capacitépeut en effet permettre en robotique médicale de gérer l’interaction entre robotet patient. Néanmoins, l’analyse, la conception et la commande de ses systèmesconstituent actuellement des verrous scientifiques. Ce travail de thèse vise toutd’abord à répondre à ces verrous scientifiques, puis à évaluer l’intérêt de l’utili-sation de ces systèmes pour notre contexte.
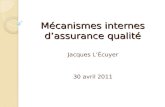
Aiguille
Rotule à raideur variable
Elastomère
Plastique
Câble
Centre de la rotule
Figure 1 – Rotule à raideur variable. Section 3D (à gauche) et système fabriqué (àdroite).
Nous nous sommes concentrés avant tout sur l’étude de ces systèmes encore peuconnus des roboticiens, notamment concernant l’influence des caractéristiques deséléments des mécanismes de tenségrité sur le comportement de l’ensemble [6] ainsique la définition et la détermination de leur espace de travail [1] qui diffèrent desrobots à segments rigides classiques. Nous avons également proposé une exploita-tion des systèmes précontraints pour concevoir des composants à raideur variable.Afin de généraliser leur usage pour cette application, nous avons également déve-loppé un algorithme de synthèse pour permettre de déterminer automatiquement
2

des architectures adaptées à une implémentation. De cette manière, nous avonsainsi développé un composant qui permet de contrôler la raideur en rotationd’une aiguille autour d’un point d’insertion qui constitue le centre de rotationd’une rotule à raideur variable [3,8] comme illustré à gauche Fig. 1. L’objectifest alors d’éviter tout risque de lacération des tissus par l’aiguille sous l’actiondes mouvements physiologiques si l’aiguille est maintenue de manière rigide parle robot. Une implémentation du composant par impression 3D (à droite Fig. 1)a permis la validation expérimentale du composant.
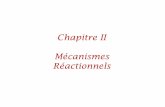
Actionneur
Capteur d'effort
Câble
Ressort
Mécanisme de tenségrité plan
70 mm
Aiguille
Centre de rotation
CâbleMécanisme de tenségrité plan
Figure 2 – Architecture du porte-aiguille (à gauche). Prototype d’un mécanisme detenségrité plan (à droite).
Durant ce travail de thèse, nous avons également abordé la conception d’unporte-aiguille robotique basé sur des mécanismes de tenségrité plans actionnéspar câbles illustré à gauche Fig. 2. Le dispositif doit permettre une orientation del’aiguille autour d’un centre de rotation déporté, ainsi que le contrôle de la raideurdu porte-aiguille suivant ces rotations [7,9,10,11,12]. Pour une telle architecture,il est apparu qu’une variation de raideur plus importante pouvait être obtenueen envisageant l’utilisation de ressorts non-linéaires en série avec les câbles. Unprofil particulier de ressorts non-linéaires dits "dégressifs" a donc été développépour permettre d’amplifier la variation de raideur du dispositif. La conception deces ressorts se base sur l’utilisation de mécanismes compliants bi-matières (po-lymère/élastomère) implémentés par fabrication additive. Le profil dégressif estalors obtenu en profitant à la fois des non-linéarités géométriques d’un méca-nisme parallèle lorsque celui-ci approche d’une singularité cinématique, et de lanon-linéarité matérielle inhérente au comportement hyperélastique du matériauélastomère [5,11]. Nous avons finalement proposé des lois de commande afin depiloter ce dispositif, notamment pour permettre le contrôle simultané de la confi-guration et de la raideur de celui-ci [2,4]. Un prototype du dispositif développéconjointement avec le LIRMM de Montpellier et illustré à droite Fig. 2, a enfinpermis la validation expérimentale des lois de commande proposées.
3

Liste des publications et communications
Revue internationale avec comité de lecture
[1] Q. Boehler, I. Charpentier, M. Vedrines et P. Renaud. Definition and
Computation of Tensegrity Mechanism Workspace. ASME J. Mechanisms Robo-tics, vol. 7, no. 4, page 044502, Avril 2015.
Conférences internationales avec comité de lecture et édition des actes
[2] Q. Boehler, S. Abdelaziz, M. Vedrines, P. Poignet et P. Renaud. Towards
the control of tensegrity mechanisms for variable stiffness applications : a case
study. 6th European Conference on Mechanism Science (EUCOMES), Nantes,Septembre 2016, à paraître.
[3] Q. Boehler, M. Vedrines, S. Abdelaziz, P. Poignet et P. Renaud. Design
and evaluation of a novel variable stiffness spherical joint with application to
MR-compatible robot design. IEEE International Conference on Robotics andAutomation (ICRA), Stockholm, Mai 2016.
[4] Q. Boehler, A. Zompas, S. Abdelaziz, M. Vedrines, P. Poignet et P.Renaud. Experiments on a variable stiffness tensegrity mechanism for an MR-
compatible needle holder. In 5th Joint Workshop on New Technologies for Compu-ter/Robot Assisted Surgery (CRAS), Bruxelles, Septembre 2015, communicationorale.
[5] Q. Boehler, M. Vedrines, S. Abdelaziz, P. Poignet et P. Renaud. Parallel
Singularities for the Design of Softening Springs Using Compliant Mechanisms.ASME International Design Engineering Technical Conferences (IDETC), Bos-ton, Août 2015.
[6] Q. Boehler, M. Vedrines, S. Abdelaziz, P. Poignet et P. Renaud. Influence
of Spring Characteristics on the Behavior of Tensegrity Mechanisms. In Advancesin Robot Kinematics (ARK), pages 161–169. Springer, Ljubljana, Juin 2014.
Conférence nationale avec comité de lecture
[7] Q. Boehler, M. Vedrines, S. Abdelaziz, P. Poignet et P. Renaud. To-
ward an MR-compatible needle holder with adaptive compliance using an active
tensegrity mechanism. In Surgetica, Chambéry, Décembre 2014, poster.
4

Communications et publications diverses
[8] Q. Boehler, M. Vedrines, S. Abdelaziz, P. Poignet et P. Renaud. Design
of a compliant spherical joint with variable stiffness for MR-compatible robotics.Journée du GT3/GT6 - Mécanismes Compliants, Paris, Avril 2016, communica-tion orale.
[9] Q. Boehler, S. Abdelaziz, M. Vedrines, P. Poignet et P. Renaud. Evalua-
tion of a tensegrity mechanism for the design of a variable stiffness MR-compatible
needle holder. Journée du GT1, Montpellier, Décembre 2015, communicationorale.
[10] Q. Boehler, S. Abdelaziz, M. Vedrines, P. Poignet et P. Renaud. Design
of Robotic Assistants for MRI-guided surgery. CAMI Labex days, Montpellier,Décembre 2015, poster.
[11] Q. Boehler, M. Vedrines, S. Abdelaziz, P. Poignet et P. Renaud. Toward
an MR-compatible needle holder with adaptive stiffness using an active tensegrity
mechanism. Journée Recherche de l’INSA de Strasbourg, Strasbourg, Mai 2015,poster, Prix du meilleur poster.
[12] Q. Boehler, M. Vedrines, S. Abdelaziz, P. Poignet et P. Renaud. Ex-
ploitation d’un mécanisme de tenségrité pour la conception d’un porte-aiguilles
compatible IRM. Journée des Jeunes Chercheurs en Robotique, Paris, Octobre2014, communication orale.
5