Amélioration du traitement numérique des signaux dans les...
137
N° d’ordre : 00 ISAL 0101 Année 2000 THESE présentée Devant l’Institut National des Sciences Appliquées de Lyon Pour obtenir LE GRADE DE DOCTEUR FORMATION DOCTORALE : ACOUSTIQUE ECOLE DOCTORALE DES SCIENCES POUR L’INGENIEUR DE LYON Mécanique, Energétique, Génie civil, Acoustique (MEGA) PAR Véronique ZIMPFER Ingénieur en électronique traitement de l’information de CPE Lyon. DEA Signal, Image, Parole de l’INP de Grenoble Amélioration du traitement numérique des signaux dans les systèmes actifs en protection auditive. Directeur de thèse : Manell E. ZAKHARIA Soutenue le 19 décembre 2000 devant la Commission d’Examen Jury : • M. Karl Buck de L’ISL • Mme Nicole Gache de CPE Lyon • M. Daniel Guyomar de l’INSA de Lyon Président • M. Joël Lienard de l’ENSIEG Rapporteur • M. Alain Roure de LMA Rapporteur • M. Manell Zakharia de CPE Lyon Directeur de thèse Cette thèse a été préparée au Laboratoire LASSSO de L’ESCPE Lyon en collaboration avec l’Intistut Franco-Allemand de Recherches de St Louis (ISL).
Transcript of Amélioration du traitement numérique des signaux dans les...

N° d’ordre : 00 ISAL 0101
Année 2000
THESEprésentée
Devant l’Institut National des Sciences Appliquées de Lyon
Pour obtenir
LE GRADE DE DOCTEUR FORMATION DOCTORALE : ACOUSTIQUE
ECOLE DOCTORALE DES SCIENCES POUR L’INGENIEUR DE LYON
Mécanique, Energétique, Génie civil, Acoustique (MEGA)
PAR
Véronique ZIMPFER Ingénieur en électronique traitement de l’information de CPE Lyon.
DEA Signal, Image, Parole de l’INP de Grenoble
Amélioration du traitement numérique des signaux
dans les systèmes actifs en protection auditive.
Directeur de thèse : Manell E. ZAKHARIA
Soutenue le 19 décembre 2000 devant la Commission d’Examen
Jury : • M. Karl Buck de L’ISL
• Mme Nicole Gache de CPE Lyon
• M. Daniel Guyomar de l’INSA de Lyon Président
• M. Joël Lienard de l’ENSIEG Rapporteur
• M. Alain Roure de LMA Rapporteur
• M. Manell Zakharia de CPE Lyon Directeur de thèse
Cette thèse a été préparée au Laboratoire LASSSO de L’ESCPE Lyon en collaboration avecl’Intistut Franco-Allemand de Recherches de St Louis (ISL).

Mai 2000
2
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE LYON
Directeur : J. ROCHAT
AUDISIO S PHYSICOCHIMIE INDUSTRIELLEBABOUX JC GEMPPM*BALLAND B PHYSIQUE DE LA MATIEREBARBIER D PHYSIQUE DE LA MATIEREBASTIDE JP THERMODYNAMIQUE APPLIQUEEBAYADA G MAPLY - MATH ÉMATIQUES APPLIQUÉES DE LYONBERGER C (Mlle) PHYSIQUE DE LA MATIEREBETEMPS M AUTOMATIQUE INDUSTRIELLEBLANCHARD JM LAEPSI ***BOISSON C VIBRATIONS ACOUSTIQUESBOIVIN M MECANIQUE DES SOLIDESBOTTA H Equipe DEVELOPPEMENT URBAINBOTTA-ZIMMERMAN M (Mme) Equipe DEVELOPPEMENT URBAINBOULAYE G (Prof. émérite) INFORMATIQUEBRAU J CENTRE DE THERMIQUE DE LYON Thermique du bâtimentBRISSAU M GENIE ELECTRIQUE ET FERROELECTRIQUEBRUNET M MECANIQUE DES SOLIDESBRUNIE L INGENIERIE DES SYSTEMES DINFORMATIONBUREAU JC THERMODYNAMIQUE APPLIQUEECAVAILLE JY GEMPPM*CHANTE JP CEGELY**** - Composants de puissance et applicationsCHOCAT B UNITE DE RECHERCHE EN GENIE CIVIL Hydrologie urbaineCOUSIN M UNITE DE RECHERCHE EN GENIE CIVIL StructuresDOUTHEAU A CHIMIE ORGANIQUEDUFOUR R MECANIQUE DES STRUCTURESDUPUY JC PHYSIQUE DE LA MATIEREEMPTOZ H RECONNAISSANCE DES FORMES ET VISIONESNOUF C GEMPPM*EYRAUD L (Prof. émérite) GENIE ELECTRIQUE ET FERROELECTRIQUEFANTOZZI G GEMPPM*FAVREL J PRISMa PRoductique et Informatique des Systèmes ManufacturiersFAYARD JM BIOLOGIE FONCTIONNELLE, INSECTES ET INTERACTIONSFAYET M MECANIQUE DES SOLIDESFERRARIS-BESSO G MECANIQUE DES STRUCTURESFLAMAND L MECANIQUE DES CONTACTSFLEISCHMANN P GEMPPM*FLORY A INGENIERIE DES SYSTEMES DINFORMATIONFOUGERES R GEMPPM*FOUQUET R GEMPPM*FRECON L INFORMATIQUEGERARD JF MATERIAUX MACROMOLECULAIRESGIMENEZ G CREATIS**GONNARD P GENIE ELECTRIQUE ET FERROELECTRIQUEGONTRAND M GEGELY**** - Composants de puissance et applicationsGOUTTE R (Prof. émérite) CREATIS **GRANGE G GENIE ELECTRIQUE ET FERROELECTRIQUEGUENIN G GEMPPM*GUICHARDANT M BIOCHIMIE ET PHARMACOLOGIEGUILLOT G PHYSIQUE DE LA MATIEREGUINET A PRISMa PRoductique et Informatique des Systèmes ManufacturiersGUYADER JL VIBRATIONS ACOUSTIQUESGUYOMAR D GENIE ELECTRIQUE ET FERROELECTRIQUEJACQUET-RICHARDET G MECANIQUE DES STRUCTURESJOLION JM RECONNAISSANCE DES FORMES ET VISIONJULLIEN JF UNITE DE RECHERCHE EN GENIE CIVIL StructuresJUTARD A AUTOMATIQUE INDUSTRIELLEKASTNER R UNITE DE RECHERCHE EN GENIE CIVIL GéotechniqueKOULOUMDJIAN J INGENIERIE DES SYSTEMES DINFORMATIONLAGARDE M BIOCHIMIE ET PHARMACOLOGIELALANNE M (Prof. émérite) MECANIQUE DES STRUCTURESLALLEMAND A CENTRE DE THERMIQUE DE LYON Energétique et thermiqueLALLEMAND M (Mme) CENTRE DE THERMIQUE DE LYON Energétique et thermiqueLAREAL P UNITE DE RECHERCHE EN GENIE CIVIL GéotechniqueLAUGIER A PHYSIQUE DE LA MATIERELAUGIER C BIOCHIMIE ET PHARMACOLOGIELEJEUNE P GENETIQUE MOLECULAIRE DES MICROORGANISMESLUBRECHT A MECANIQUE DES CONTACTSMARTINEZ Y INGENIERIE INFORMATIQUE ET INDUSTRIELLE
Mai 2000
3
MAZILLE H PHYSICOCHIMIE INDUSTRIELLE 2/2MERLE P GEMPPM*MERLIN J GEMPPM*MILLET JP PHYSICOCHIMIE INDUSTRIELLEMIRAMOND M UNITE DE RECHERCHE EN GENIE CIVIL Hydrologie urbaineMOREL R MECANIQUE DES FLUIDESMOSZKOWICZ P LAEPSI***NARDON P (Prof. émérite) BIOLOGIE FONCTIONNELLE, INSECTES ET INTERACTIONSNAVARRO A LAEPSI***NOURI A (Mme) MAPLY - MATHÉMATIQUES APPLIQUÉES DE LYONODET C CREATIS**OTTERBEIN M (Prof. émérite) LEAPSI***PASCAULT JP MATERIAUX MACROMOLECULAIRESPAVIC G VIBRATIONS ACOUSTIQUESPELLETIER JM GEMPPM*PERA J UNITE DE RECHERCHE EN GENIE CIVIL MatériauxPERACHON G THERMODYNAMIQUE APPLIQUEEPERRIAT P GEMPPM*PERRIN J ESCHIL Equipe SCiences Humaines de lInsa de LyonPINARD P (Prof. émérite) PHYSIQUE DE LA MATIEREPINON JM INGENIERIE DES SYSTEMES DINFORMATIONPLAY D CONCEPTION ET ANALYSE DES SYSTEMES MECANIQUESPOUSIN J MAPLY - MATHÉMATIQUES APPLIQUÉES DE LYONPREVOT P GRACIMP Groupe de Recherche en Apprentissage,
Coopération et Interfaces Multimodales pour la ProductiquePROST R CREATIS**RAYNAUD M CENTRE DE THERMIQUE DE LYON Transferts Interfaces et MatériauxREDARCE H AUTOMATIQUE INDUSTRIELLEREYNOUARD JM UNITE DE RECHERCHE EN GENIE CIVIL StructuresRIGAL JF CONCEPTION ET ANALYSE DES SYSTEMES MECANIQUESRIEUTORD E (Prof. émérite) MECANIQUE DES FLUIDESROBERT-BAUDOUY J (Mme) (Prof. émérite) GENETIQUE MOLECULAIRE DES MICROORGANISMESROUBY D GEMPPM*ROUX JJ CENTRE DE THERMIQUE DE LYONRUBEL P INGENIERIE DES SYSTEMES DINFORMATIONRUMELHART C MECANIQUE DES SOLIDESSACADURA JF CENTRE DE THERMIQUE DE LYON Transferts Interfaces et MatériauxSAUTERAU H MATERIAUX MACROMOLECULAIRESSCAVARDA S AUTOMATIQUE INDUSTRIELLETHOMASSET D AUTOMATIQUE INDUSTRIELLETROCCAZ M GENIE ELECTRIQUE ET FERROELECTRIQUEUNTERREINER R CREATIS**VELEX P MECANIQUE DES CONTACTSVIGIER G GEMPPM*VINCENT A GEMPPM*VUILLERMOZ PL (Prof. émérite) MATIEREZIMMERMANN M.(Mme) Equipe Développement Urbain
Directeurs de recherche C.N.R.S. :BERTHIER Y MECANIQUE DES CONTACTSCOTTE-PATAT N (Mme) UNITE MICROBIOLOGIE ET GENETIQUE FRANCIOSI P GEMPPM*MANDRAND MA (Mme) UNITE MICROBIOLOGIE GENETIQUE QUINSON JL GEMPPM*ROCHE A MATERIAUX MACROMOLECULAIRES SEGUELA R GEMPPM*
Directeurs de recherche I.N.R.A. :FEBVAY G BIOLOGIE FONCTIONNELLE, INSECTES ET INTERACTIONSGRENIER S BIOLOGIE FONCTIONNELLE, INSECTES ET INTERACTIONS
Directeurs de recherche I.N.S.E.R.M. :PRINGENT AF (Mme) BIOLOGIE ET PHARMACOLOGIEMAGNIN I (Mme) CREATIS**
*GEMPPM GROUPE DETUDE METALLURGIE PHYSIQUE ET PHYSIQUE DES MATERIAUX** CREATIS CENTRE DE RECHERCHE ET DAPPLICATIONS EN TRAITEMENT DE LIMAGE ET DU SIGNAL ***LAEPSI LABORATOIRE dANALYSE ENVIRONNEMENTALE DES PROCEDES ET SYSTEMES INDUSTRIELS**** CEGELY CENTRE DE GENIE ELECTRIQUE DE LYON
4
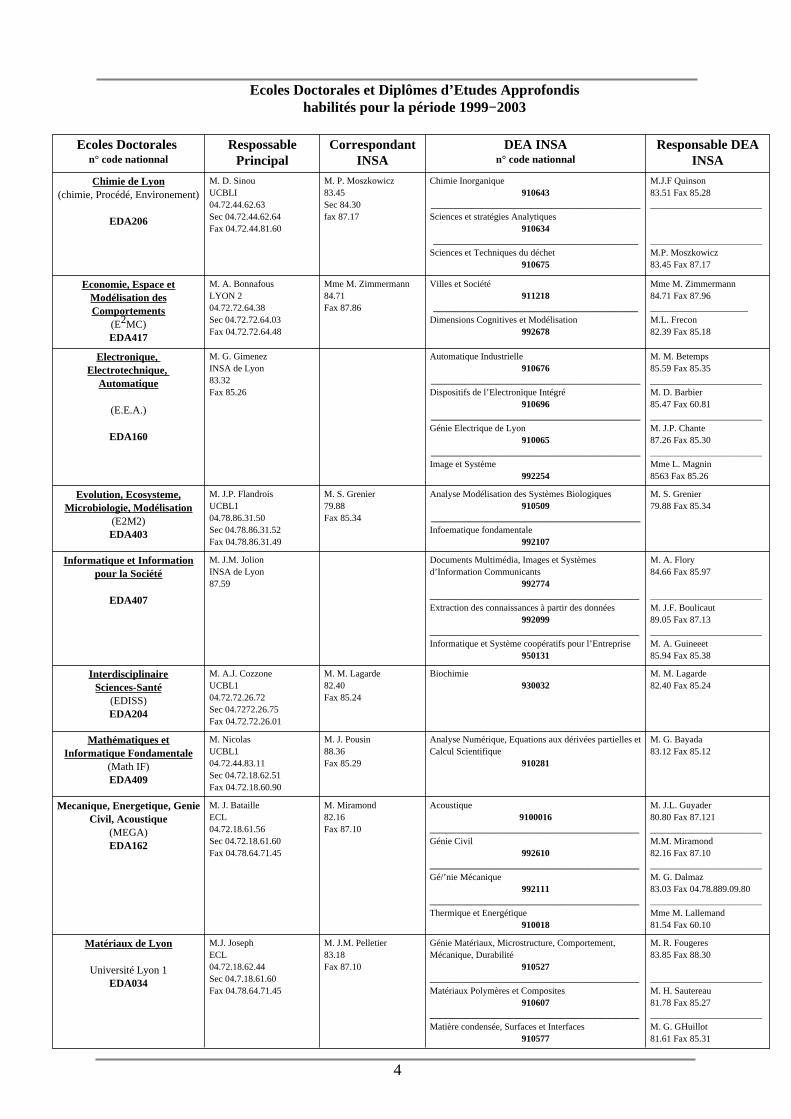
Ecoles Doctorales et Diplômes d’Etudes Approfondishabilit és pour la période 1999−2003
Ecoles Doctorales n° code nationnal
RespossablePrincipal
CorrespondantINSA
DEA INSAn° code nationnal
Responsable DEAINSA
Chimie de Lyon(chimie, Procédé, Environement)
EDA206
M. D. SinouUCBLI04.72.44.62.63Sec 04.72.44.62.64Fax 04.72.44.81.60
M. P. Moszkowicz83.45Sec 84.30fax 87.17
Chimie Inorganique910643
_____________________________________________Sciences et stratégies Analytiques
910634____________________________________________
Sciences et Techniques du déchet910675
M.J.F Quinson83.51 Fax 85.28________________________
________________________M.P. Moszkowicz83.45 Fax 87.17
Economie, Espace etModélisation desComportements
(E2MC)EDA417
M. A. BonnafousLYON 204.72.72.64.38Sec 04.72.72.64.03Fax 04.72.72.64.48
Mme M. Zimmermann84.71Fax 87.86
Villes et Société911218
____________________________________________Dimensions Cognitives et Modélisation
992678
Mme M. Zimmermann84.71 Fax 87.96_____________________M.L. Frecon82.39 Fax 85.18
Electronique, Electrotechnique,
Automatique
(E.E.A.)
EDA160
M. G. GimenezINSA de Lyon83.32Fax 85.26
Automatique Industrielle910676
_____________________________________________Dispositifs de l’Electronique Intégré
910696_____________________________________________Génie Electrique de Lyon
910065_____________________________________________Image et Système
992254
M. M. Betemps85.59 Fax 85.35________________________M. D. Barbier 85.47 Fax 60.81________________________M. J.P. Chante87.26 Fax 85.30________________________Mme L. Magnin8563 Fax 85.26
Evolution, Ecosysteme,Microbiologie, Modélisation
(E2M2)EDA403
M. J.P. FlandroisUCBL104.78.86.31.50Sec 04.78.86.31.52Fax 04.78.86.31.49
M. S. Grenier79.88Fax 85.34
Analyse Modélisation des Systèmes Biologiques910509
_____________________________________________Infoematique fondamentale
992107
M. S. Grenier79.88 Fax 85.34
Informatique et Informationpour la Société
EDA407
M. J.M. JolionINSA de Lyon87.59
Documents Multimédia, Images et Systèmesd’Information Communicants
992774_____________________________________________Extraction des connaissances à partir des données
992099_____________________________________________Informatique et Système coopératifs pour l’Entreprise
950131
M. A. Flory 84.66 Fax 85.97
________________________M. J.F. Boulicaut89.05 Fax 87.13________________________M. A. Guineeet85.94 Fax 85.38
InterdisciplinaireSciences-Santé
(EDISS)EDA204
M. A.J. CozzoneUCBL104.72.72.26.72Sec 04.7272.26.75Fax 04.72.72.26.01
M. M. Lagarde82.40Fax 85.24
Biochimie930032
M. M. Lagarde82.40 Fax 85.24
Mathématiques etInformatique Fondamentale
(Math IF)EDA409
M. NicolasUCBL104.72.44.83.11Sec 04.72.18.62.51Fax 04.72.18.60.90
M. J. Pousin88.36Fax 85.29
Analyse Numérique, Equations aux dérivées partielles etCalcul Scientifique
910281
M. G. Bayada83.12 Fax 85.12
Mecanique, Energetique, GenieCivil, Acoustique
(MEGA)EDA162
M. J. BatailleECL04.72.18.61.56Sec 04.72.18.61.60Fax 04.78.64.71.45
M. Miramond82.16Fax 87.10
Acoustique9100016
_____________________________________________Génie Civil
992610_____________________________________________Gé/’nie Mécanique
992111_____________________________________________Thermique et Energétique
910018
M. J.L. Guyader80.80 Fax 87.121________________________M.M. Miramond82.16 Fax 87.10________________________M. G. Dalmaz83.03 Fax 04.78.889.09.80________________________Mme M. Lallemand81.54 Fax 60.10
Matériaux de Lyon
Université Lyon 1EDA034
M.J. JosephECL04.72.18.62.44Sec 04.7.18.61.60Fax 04.78.64.71.45
M. J.M. Pelletier83.18Fax 87.10
Génie Matériaux, Microstructure, Comportement,Mécanique, Durabilité
910527_____________________________________________Matériaux Polymères et Composites
910607_____________________________________________Matière condensée, Surfaces et Interfaces
910577
M. R. Fougeres83.85 Fax 88.30
________________________M. H. Sautereau81.78 Fax 85.27________________________M. G. GHuillot81.61 Fax 85.31

Remerciements
5
Remerciements
Ce travail de recherche est le fruit de la collaboration entre le Laboratoired’Acoustique, Systèmes, Signaux et SOnar (LASSSO) de l’école supérieure Chimie Physi-que Electronique de Lyon et de l’Institut de Recherches Franco-Allemand de Saint Louis(ISL).
Je tiens plus particulièrement à remercier M. Manell E. ZAKHARIA, directeurdu LASSSO, d’avoir accepté d’être le responsable scientifique de cette thèse. Je tiens à re-mercier vivement M. Armand DANCER, responsable du groupe APC de l’ISL de m’avoiraccueillie au sein de son unité.
Je tiens avant tout à remercier vivement Mme Nicole GACHE, membre duLASSSO, de m’avoir soutenue tout au long de cette thèse, en m’apportant de nombreux con-seils. Je lui suis sincèremement reconnaissante de m’avoir fait découvrir le monde du traite-ment du signal et je tiens à dire que j’ai eu un grand plaisir à travailler avec elle durant ces4 dernières années.
Je tiens à remercier M. Karl BUCK de m’avoir encadré au sein de l’ISL durantces trois longues années et de m’avoir donné les possiblités de réaliser cette thèse.
Mes sincères remerciements s’adressent à M. Joël LIENARD, ingénieur de re-cherche de l’ENSIEG-LIS de Grenoble et M. Alain ROURE, ingénieur de recherche au La-boratoire de Mécanique et Acoustique de Marseille (LAM) pour avoir accepté d’être rap-porteurs de mon travail et avoir consacré une partie de leur temps à l’examen de celui-ci.Je remercie également M. Daniel GUYOMAR, Professeur de l’INSA de Lyon de participerau jury.
Je remercie toutes les personnes côtoyées à ISL durant ces années pour leursoutien et leur bonne humeur; tout particulièrement Pascal, Patrick, David, Lionnel, Raoul,Pascal, Francis, Georges, Thierry, et Aude. J’ai apprécié les contacts avec les membres duLASSSO que j’ai pu connaître.
Ces remerciements ne seraient être complets si je n’y incluais pas mes prochesqui ont su me supporter tout au long de ces années, en particulier Thierry à qui je dédie cetravail.

Résumé
6
Résumé
Afin de réaliser une atténuation active du bruit (ANR), sous un protecteur audi-tif actif, avec un filtre numérique, il est nécessaire que ce filtre s’exécute en temps réel surune bande fréquentielle importante avec une grande dynamique. Les filtres numériques detype RII sont les seuls à pouvoir respecter la contrainte du temps réel. Cependant l’effet dela quantification des coefficients et des signaux ainsi que la propagation de l’erreurd’arrondi réduisent leurs performances. Diverses solutions ont été adaptées afin de minimi-ser les effets de la quantification. En revanche pour augmenter la dynamique du filtre, il aété nécessaire de développer un nouvel algorithme pour les filtres de type RII. Cet algo-rithme appelé "algorithme adapté" a pour but essentiel de minimiser la propagation del’erreur d’arrondi entre les étapes successives. Des protections auditives actives utilisant cesfiltres de compensation numérique ont donc pu être réalisées. Ce filtre numérique permet derégler le gain de la boucle ouverte afin d’avoir l’optimum pour l’atténuation active. On a puvérifier que les protections auditives actives numériques sont maintenant aussi performantesmais plus flexibles que les protections réalisées en technologie analogique. Le fait d’utiliserun système numérique permet d’ajouter facilement des fonctionnalités annexes au systèmeANR , comme par exemple : l’insertion de la voie de phonie, une procédure "Marche-Arrêt"automatique et un système ANR à double filtre.
English title :" Improvement of a digital signal processing in active hearing protection "
Abstract
In order to realize an active noise reduction (ANR) on an active hearing protec-tor, with a digital filter, it is necessary that the filter works in real time with a broad bandwidth and a large dynamic range. Only the IIR type digital filters can comply with thereal time condition. However, the quantification effect of coefficients and signals and thepropagation of roundoff noise decrease the filter performance. Different solutions have beenadapted in order to minimize the quantification effects. In order to increase the filter dynam-ics, it has been necessary to create a new algorithm for the IIR type filters. This algorithm iscalled "adapted algorithm". Its essential part is to minimize the propagation of the round-off noise to the next sampling of output signals. Hence, it has been possible to realize activehearing protectors using digital filters. The digital filter allows to adjust the open loop gainin order to have the optimum active attenuation. We have confirmed that the hearing protec-tors using digital filters are as efficient as those using analog filters. By using digital filters,the hearing protectors become more flexible than with analog filters. The use of a digitalANR system allows to easily add subsidiary functionalities to the ANR system, as for exam-ple : the insertion of a speech signal, an automatic "go-stop" procedure and an ANR systemusing two filters.
Discipline : Acoustique
Mots clefs :
Atténuation bruit acoustique, contrôle actif acoustique, algorithme filtrage, filtre récursif,traitement signal numérique, casque antibruit, protection audition.

Sommaire
7
Sommaire
Remerciements..............................................................................................................
Résumé...........................................................................................................................
Notations .......................................................................................................................
Liste des figures ............................................................................................................
Introduction ..................................................................................................................
Chapitre 1 : Les protections auditives ..........................................................................1. Les protections passives .........................................................................2. Les protections actives ( Systèmes ANR) ..............................................3. Dispositif ANR numérique .....................................................................
Chapitre 2 : Filtrage numérique de type RII ................................................................1. Structure des filtres RII ...........................................................................2. Effets de la quantification .......................................................................3. L’algorithme du filtre de type RII ...........................................................4. Implémentation d’un filtre numérique dans un DSP ..............................5. Conclusion ..............................................................................................
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques.........................1. Optimisation de la boucle de contre-réaction..........................................2. Simulation du comportement d’un casque..............................................3. Critères et méthodes d’évaluation des protections auditives................4. Evaluation des performances d’un système ANR ..................................5. Atténuations actives en fonction de la position de mesure....................6. Avantages du système ANR numérique développé ................................7. Conclusion ..............................................................................................
Chapitre 4 : Fonctionnalités annexes ............................................................................1. Insertion du signal de parole ...................................................................2. Procédure "Marche-Arrêt" ......................................................................3. Système actif à double filtres ..................................................................4. Conclusion ..............................................................................................
Conclusion .....................................................................................................................
Références bibliographiques .......................................................................................
Annexe ...........................................................................................................................
5
6
8
7
14
18192126
313236496062
6465707579848692
9495107112115
117
119
121
Notations
8
Notations
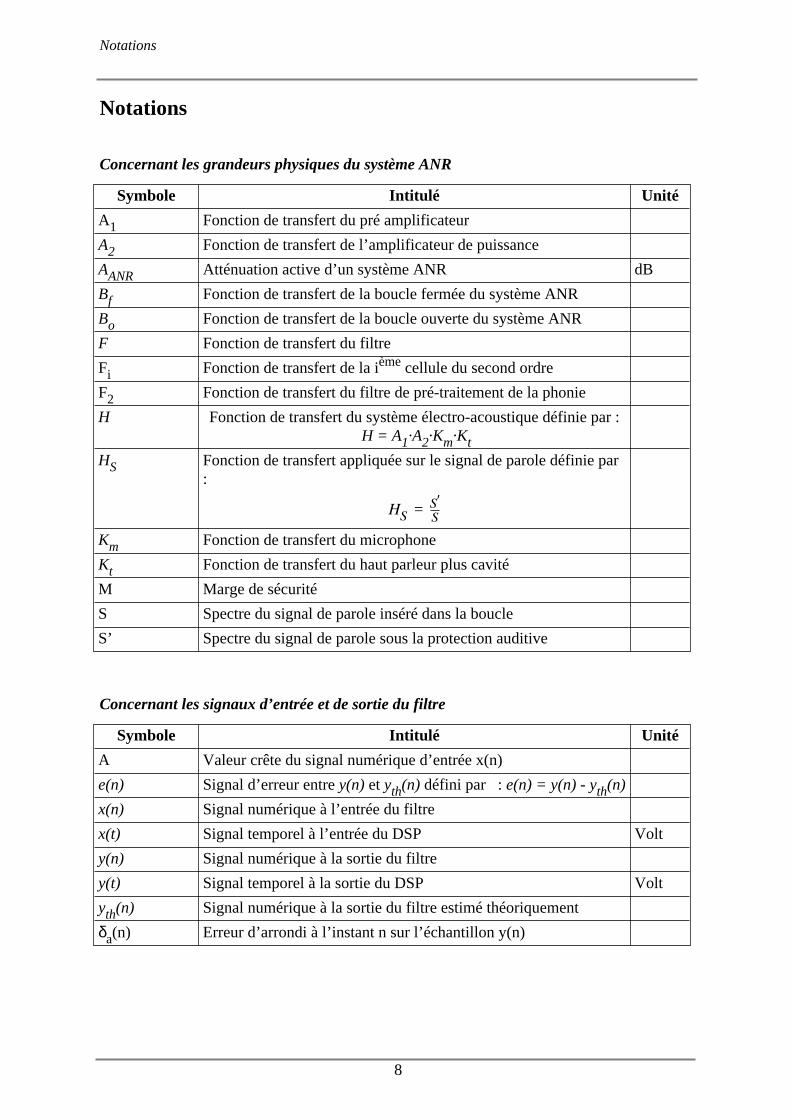
Concernant les grandeurs physiques du système ANR
Concernant les signaux d’entrée et de sortie du filtre
Symbole Intitulé Unité
A1 Fonction de transfert du pré amplificateur
A2 Fonction de transfert de l’amplificateur de puissance
AANR Atténuation active d’un système ANR dB
Bf Fonction de transfert de la boucle fermée du système ANR
Bo Fonction de transfert de la boucle ouverte du système ANR
F Fonction de transfert du filtre
Fi Fonction de transfert de la ième cellule du second ordre
F2 Fonction de transfert du filtre de pré-traitement de la phonie
H Fonction de transfert du système électro-acoustique définie par : H = A1·A2·Km·Kt
HS Fonction de transfert appliquée sur le signal de parole définie par:
HS = S′
S
Km Fonction de transfert du microphone
Kt Fonction de transfert du haut parleur plus cavité
M Marge de sécurité
S Spectre du signal de parole inséré dans la boucle
S’ Spectre du signal de parole sous la protection auditive
Symbole Intitulé Unité
A Valeur crête du signal numérique d’entrée x(n)
e(n) Signal d’erreur entre y(n) et yth(n) défini par : e(n) = y(n) - yth(n)
x(n) Signal numérique à l’entrée du filtre
x(t) Signal temporel à l’entrée du DSP Volt
y(n) Signal numérique à la sortie du filtre
y(t) Signal temporel à la sortie du DSP Volt
yth(n) Signal numérique à la sortie du filtre estimé théoriquement
δa(n) Erreur d’arrondi à l’instant n sur l’échantillon y(n)

Notations
9
Concernant le DSP et les Convertisseurs
Concernant le Filtre numérique
Opérateurs Mathématiques
Symbole Intitulé Unité
b Résolution des convertisseurs bit
fe Fréquence d’échantillonnage Hz
p Longueur du mot du DSP bit
Vm Tension maximale admissible par le convertisseur Volt
∆e Pas de quantification du convertisseur Volt
Symbole Intitulé Unité
adi et bdi Coefficients désirés du filtre
ai et bi Coefficients du filtre
cdp (ou cdz ) Coefficient du pôle (ou du zéro) désiré
cp ( ou cz) Coefficient du pôle (ou du zéro)
ech Facteur d’échelle pour quantifier les coefficients du filtre
ech2 Facteur d’échelle pour quantifier le gain Gffdp (ou fdz) Fréquence du pôle (ou du zéro) désiré Hz
fp ( ou fz ) Fréquence du pôle (ou du zéro) Hz
Gfo Gain numérique optimal
Gf Gain numérique réel
Gnum Gain numérique quantifié en entier chargé dans le DSP
K ou (kd) Coefficient permettant de fixer le gain maximal à 1 pour unecellule du second ordre
wp (ou wz) Pulsation normalisée du pôle (ou du zéro) définie par :
wp = 2π⋅fpfe
rad
Symbole Intitulé
E() Désigne la partie en entière
Q() Opérateur de quantification lors de la division Euclidienne
Qa() Opérateur de quantification lors de la division améliorée
Qc() Opérateur de quantification des coefficients par troncature
Notations
10
Liste des figures
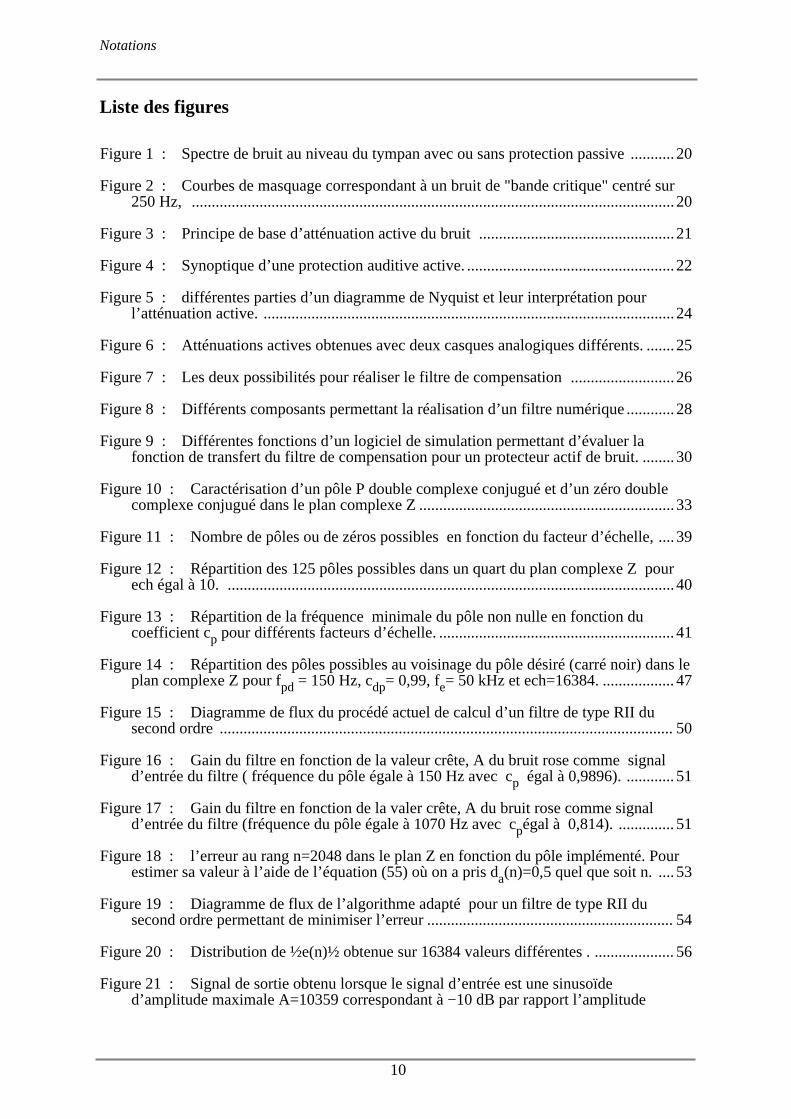
Figure 1 : Spectre de bruit au niveau du tympan avec ou sans protection passive ...........20
Figure 2 : Courbes de masquage correspondant à un bruit de "bande critique" centré sur250 Hz, .........................................................................................................................20
Figure 3 : Principe de base d’atténuation active du bruit .................................................21
Figure 4 : Synoptique d’une protection auditive active. ....................................................22
Figure 5 : différentes parties d’un diagramme de Nyquist et leur interprétation pourl’atténuation active. .......................................................................................................24
Figure 6 : Atténuations actives obtenues avec deux casques analogiques différents. .......25
Figure 7 : Les deux possibilités pour réaliser le filtre de compensation ..........................26
Figure 8 : Différents composants permettant la réalisation d’un filtre numérique ............28
Figure 9 : Différentes fonctions d’un logiciel de simulation permettant d’évaluer lafonction de transfert du filtre de compensation pour un protecteur actif de bruit. ........30
Figure 10 : Caractérisation d’un pôle P double complexe conjugué et d’un zéro doublecomplexe conjugué dans le plan complexe Z ................................................................33
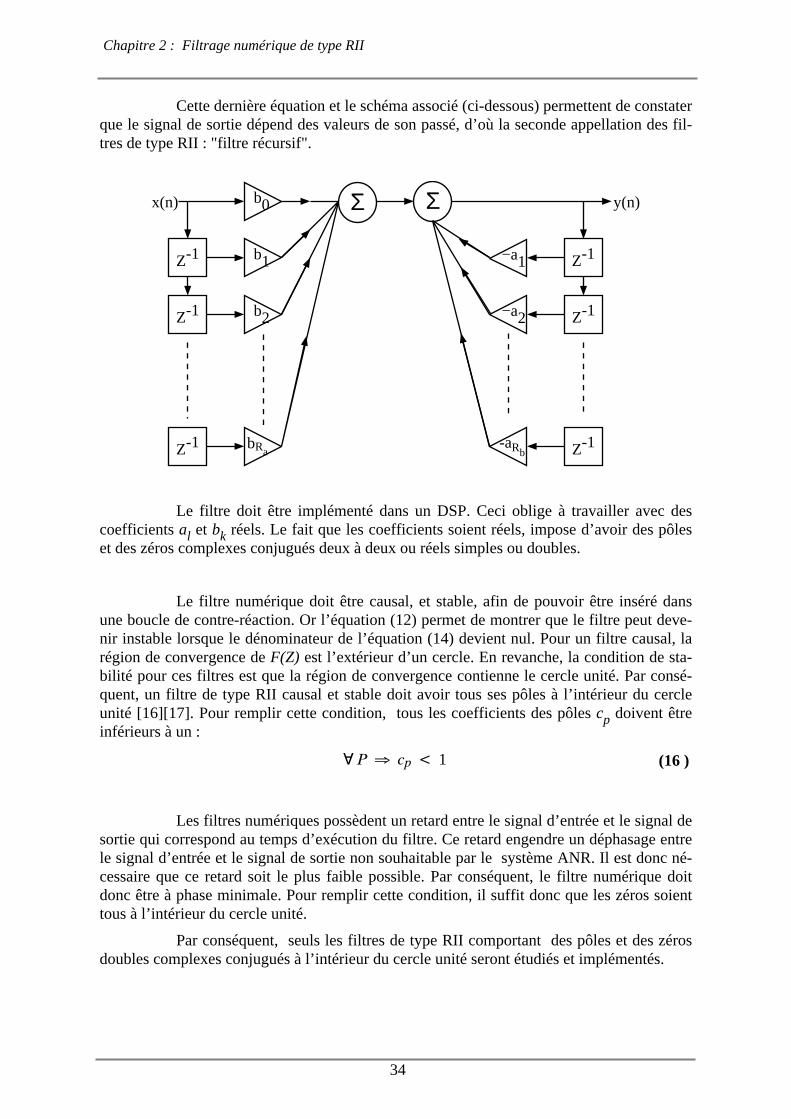
Figure 11 : Nombre de pôles ou de zéros possibles en fonction du facteur d’échelle, ....39
Figure 12 : Répartition des 125 pôles possibles dans un quart du plan complexe Z pourech égal à 10. ................................................................................................................40
Figure 13 : Répartition de la fréquence minimale du pôle non nulle en fonction ducoefficient cp pour différents facteurs d’échelle. ........................................................... 41
Figure 14 : Répartition des pôles possibles au voisinage du pôle désiré (carré noir) dans leplan complexe Z pour fpd = 150 Hz, cdp= 0,99, fe= 50 kHz et ech=16384. .................. 47
Figure 15 : Diagramme de flux du procédé actuel de calcul d’un filtre de type RII dusecond ordre ..................................................................................................................50
Figure 16 : Gain du filtre en fonction de la valeur crête, A du bruit rose comme signald’entrée du filtre ( fréquence du pôle égale à 150 Hz avec cp égal à 0,9896). ............ 51
Figure 17 : Gain du filtre en fonction de la valer crête, A du bruit rose comme signald’entrée du filtre (fréquence du pôle égale à 1070 Hz avec cpégal à 0,814). .............. 51
Figure 18 : l’erreur au rang n=2048 dans le plan Z en fonction du pôle implémenté. Pourestimer sa valeur à l’aide de l’équation (55) où on a pris da(n)=0,5 quel que soit n. ....53
Figure 19 : Diagramme de flux de l’algorithme adapté pour un filtre de type RII dusecond ordre permettant de minimiser l’erreur .............................................................. 54
Figure 20 : Distribution de ½e(n)½ obtenue sur 16384 valeurs différentes . .................... 56
Figure 21 : Signal de sortie obtenu lorsque le signal d’entrée est une sinusoïded’amplitude maximale A=10359 correspondant à −10 dB par rapport l’amplitude
Notations
11
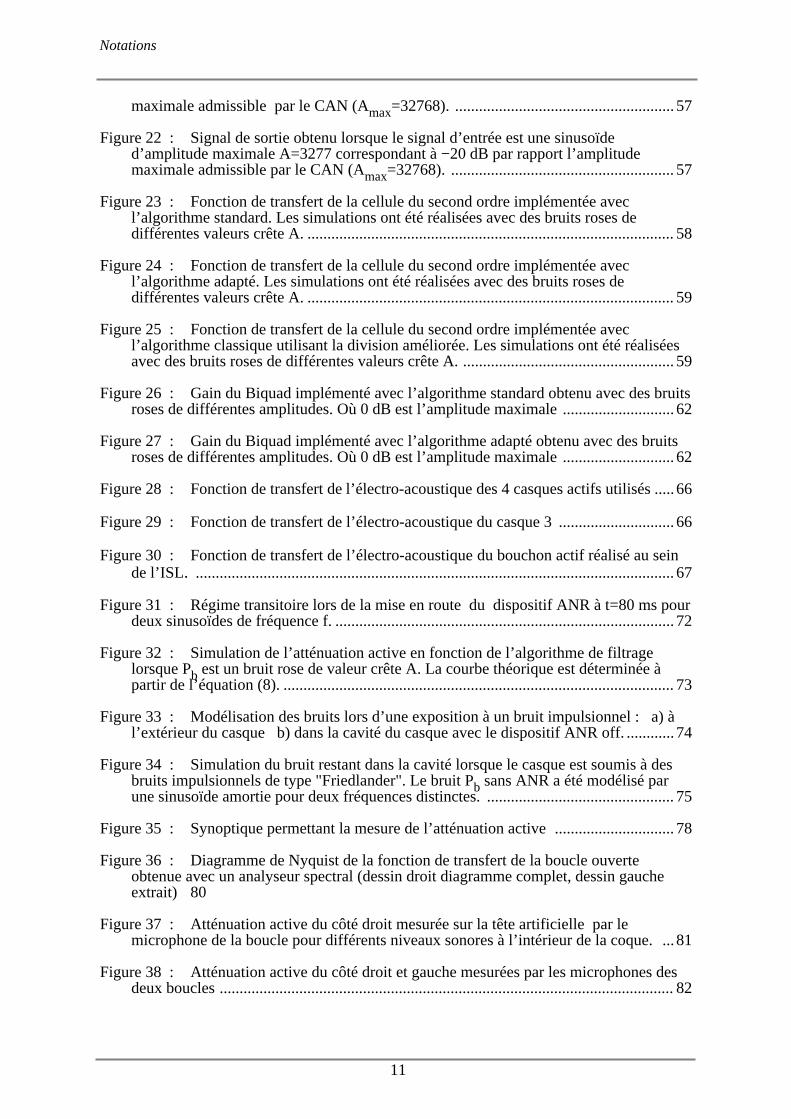
maximale admissible par le CAN (Amax=32768). ....................................................... 57
Figure 22 : Signal de sortie obtenu lorsque le signal d’entrée est une sinusoïded’amplitude maximale A=3277 correspondant à −20 dB par rapport l’amplitudemaximale admissible par le CAN (Amax=32768). ........................................................ 57
Figure 23 : Fonction de transfert de la cellule du second ordre implémentée avecl’algorithme standard. Les simulations ont été réalisées avec des bruits roses dedifférentes valeurs crête A. ............................................................................................ 58
Figure 24 : Fonction de transfert de la cellule du second ordre implémentée avecl’algorithme adapté. Les simulations ont été réalisées avec des bruits roses dedifférentes valeurs crête A. ............................................................................................ 59
Figure 25 : Fonction de transfert de la cellule du second ordre implémentée avecl’algorithme classique utilisant la division améliorée. Les simulations ont été réaliséesavec des bruits roses de différentes valeurs crête A. ..................................................... 59
Figure 26 : Gain du Biquad implémenté avec l’algorithme standard obtenu avec des bruitsroses de différentes amplitudes. Où 0 dB est l’amplitude maximale ............................ 62
Figure 27 : Gain du Biquad implémenté avec l’algorithme adapté obtenu avec des bruitsroses de différentes amplitudes. Où 0 dB est l’amplitude maximale ............................ 62
Figure 28 : Fonction de transfert de l’électro-acoustique des 4 casques actifs utilisés ..... 66
Figure 29 : Fonction de transfert de l’électro-acoustique du casque 3 ............................. 66
Figure 30 : Fonction de transfert de l’électro-acoustique du bouchon actif réalisé au seinde l’ ISL. ........................................................................................................................ 67
Figure 31 : Régime transitoire lors de la mise en route du dispositif ANR à t=80 ms pourdeux sinusoïdes de fréquence f. ..................................................................................... 72
Figure 32 : Simulation de l’atténuation active en fonction de l’algorithme de filtragelorsque Pb est un bruit rose de valeur crête A. La courbe théorique est déterminée àpartir de l’équation (8). .................................................................................................. 73
Figure 33 : Modélisation des bruits lors d’une exposition à un bruit impulsionnel : a) àl’extérieur du casque b) dans la cavité du casque avec le dispositif ANR off. ............ 74
Figure 34 : Simulation du bruit restant dans la cavité lorsque le casque est soumis à desbruits impulsionnels de type "Friedlander". Le bruit Pb sans ANR a été modélisé parune sinusoïde amortie pour deux fréquences distinctes. ............................................... 75
Figure 35 : Synoptique permettant la mesure de l’atténuation active .............................. 78
Figure 36 : Diagramme de Nyquist de la fonction de transfert de la boucle ouverteobtenue avec un analyseur spectral (dessin droit diagramme complet, dessin gaucheextrait) 80
Figure 37 : Atténuation active du côté droit mesurée sur la tête artificielle par lemicrophone de la boucle pour différents niveaux sonores à l’ intérieur de la coque. ... 81
Figure 38 : Atténuation active du côté droit et gauche mesurées par les microphones desdeux boucles .................................................................................................................. 82

Notations
12
Figure 39 : Atténuation active mesurée sur 4 individus différents. .................................. 82
Figure 40 : Spectre du bruit sous la protection auditive en absence de bruits extérieurspour les deux états possibles du système actif : à l’arrêt ou en marche, en fonction de larésolution du convertisseur. ........................................................................................... 83
Figure 41 : Atténuation active en fonction de la position du microphone de mesure pourle casque 1 avec le filtre 5 (fonction de transfert du filtre en annexe 6)....................... 84
Figure 42 : Spectre du bruit dans la cavité du casque en fonction de la position dumicrophone de mesure pour le casque 1 ....................................................................... 85
Figure 43 : Fonction de transfert du système électro-acoustique du casque 1 en fonctionde la position du microphone de mesure. ..................................................................... 85
Figure 44 : Atténuation active en fonction du microphone de mesure pour le casque 2 :mesure 1 effectué par le microphone de la boucle mesure 2 effectué par le microphonede la tête artificielle ....................................................................................................... 86
Figure 45 : Atténuation active obtenue avec le casque 1 en fonction du niveau du bruitdans la cavité si l’on utilise l’algorithme standard pour implémenter le filtre numérique.87
Figure 46 : Atténuation active obtenue avec le casque 1 pour 4 filtres numériquesdifférents : (a) : filtre 2 (b) : filtre 3 (c) : filtre 4 (d) : filtre 5 ............................... 88
Figure 47 : Atténuations actives obtenues avec le casque 4 pour 2 filtres numériquesdifférents, mesurées avec le microphone de la boucle. ................................................. 89
Figure 48 : Atténuations actives obtenues avec le casque 3 pour les deux coques ducasque mesurées pour les deux cas avec le microphone de la boucle. ........................ 90
Figure 49 : Atténuations actives obtenues avec le bouchon actif pour 2 filtres numériquesdifférents, mesurées à deux positions différentes .......................................................... 91
Figure 50 : Atténuations actives obtenues avec 2 casques différents en fonction de latechnologie du filtre de compensation ........................................................................... 92
Figure 51 : Synoptique du système actif numérique d’une protection auditive avecinsertion du signal de la parole après le filtre numérique ............................................. 96
Figure 52 : Synoptique du système actif numérique d’une protection auditive avecinsertion du signal de la parole avant le filtre numérique ............................................. 97
Figure 53 : Synoptique du système actif numérique d’une protection auditive avecinsertion du signal de la parole avant et après le filtre numérique. .............................. 98
Figure 54 : Représentation du module de la fonction de transfert HS sans et avec lecontrôle actif pour deux gains différents de Bo . ......................................................... 100
Figure 55 : Synoptique du système actif numérique d’une protection auditive avecinsertion du signal de la parole avec pré-traitement du signal de parole. ................... 101
Figure 56 : Réponse impulsionnelle obtenue lorsque le seuil est égale à Max (hd)/50 pourdeux états différents pour la protection ....................................................................... 103
Figure 57 : Fonction de transfert du filtre F2 obtenue en fonction de la longueur nb de la

Notations
13
réponse impulsionnelle h lorsque le système ANR est arrêté. ..................................... 104
Figure 58 : Fonction de transfert du filtre F2 obtenue en fonction de la longueur nb de laréponse impulsionnelle h lorsque le système ANR fonctionne. .................................. 104
Figure 59 : Fonction de transfert HS pour deux états différents pour la protection. ...... 105
Figure 60 : Module de la fonction de transfert HS lorsque la phonie est pré-traitée sans etavec le contrôle actif. ................................................................................................... 106
Figure 61 : Synoptique du système actif numérique d’une protection auditive à doublefiltres. ..................................................................................................................... 113
Figure 62 : Atténuation active théorique si on envisage d’utiliser un double filtres. ..... 114
Figure 63 : Atténuation active mesurée en utilisant deux filtres en parallèle ................. 114
Figure 64 : Représentation pour trois amplifications différentes de la même boucleouverte Bo dans le plan de Bode (amplitude a, phase b) et dans le plan de Nyquist .. 122

Introduction
14
Introduction
Dans un environnement militaire, les personnes peuvent être exposées à des bruits in-tenses comme :
• des bruits impulsionnels du type "bruit d’arme" qui peuvent atteindre jusqu’à190 dB en niveau de pression maximale,
• des bruits continus, par exemple, au voisinage des réacteurs ou des moteurs des dif-férents engins militaires (blindés, aéronefs ...) qui peuvent atteindre des niveaux trèsélevés entre 100 et 135 dBA.
Pour se conformer à la législation du travail, l’exposition à un bruit ne doit pas dépas-ser la dose correspondant à une exposition de 85 dBA de bruit continu pendant 8 heures(cette législation est notée par LAeq8= 85 dBA). Dans ces conditions, un militaire ne pour-rait pas dépasser 100 secondes d’exposition à un bruit de 110 dBA sans protection. Etantdonné qu’ il est le plus souvent impossible aussi bien de réduire le bruit à la source que des’éloigner de la source du bruit, le port d’une protection auditive reste la seule solution pos-sible pour les individus travaillant dans un environnement très bruyant [1].
Les protecteurs auditifs passifs (serre-tête, bouchons d’oreilles...) utilisés convenable-ment permettent d’atténuer efficacement les bruits de moyennes et hautes fréquences (supé-rieures à 300 Hz) [1]. En revanche, les composantes basses fréquences, ne sont quasimentpas atténuées par ces systèmes passifs. Or dans la plupart des engins militaires ( char, héli-coptère ou avion à hélices) les composantes basses fréquences représentent la contributionla plus importante au bruit global [1]. Malgré les protections passives, les bruits de bassefréquence restent donc gênants, voire dangereux. En effet, lorsqu’un signal de phonie estappliqué sous le protecteur, le masquage de l’ information utile conduit le sujet à augmenterconsidérablement le niveau du signal phonie jusqu’à atteindre des niveaux plus importantsque ceux du bruit présent dans le milieu extérieur[1][2].
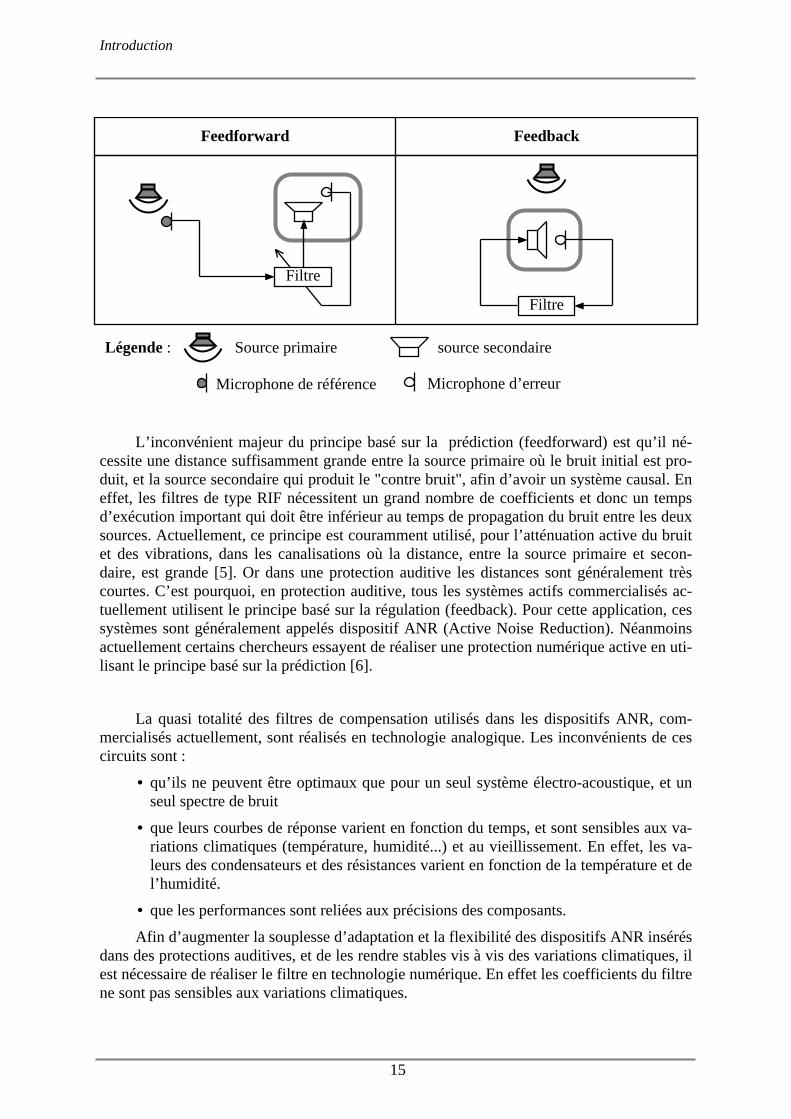
Afin d’améliorer l’atténuation dans le domaine des basses fréquences, et d’améliorer lacompréhension de la voie de phonie, il est nécessaire d’équiper la protection auditive d’unsystème actif de réduction du bruit. Il existe deux méthodes principales permettantd’effectuer du contrôle actif (voir tableau ci après) :
• Une première méthode est basée sur le principe de la prédiction (feedforward). Dans ce principe, on utilise un filtre adaptatif de type RIF (Réponse ImpulsionnelleFinie) pour prédire le bruit provenant d’une source connue à l’endroit où l’on veutatténuer le bruit. Après avoir estimé ce bruit il est facile de produire avec la sourcesecondaire le "contre bruit" nécessaire pour atténuer le bruit. Le bruit résiduel (er-reur) mesuré permet d’adapter le filtre [5].
• Une deuxième méthode est basée sur le principe de la régulation (feedback). Dans ce principe on utilise une boucle de contre réaction. Le bruit gênant mesurépermet d’obtenir, à partir d’un filtre de compensation, le "contre bruit" nécessairepour atténuer le bruit [2][3].
Introduction
15
L’ inconvénient majeur du principe basé sur la prédiction (feedforward) est qu’ il né-cessite une distance suffisamment grande entre la source primaire où le bruit initial est pro-duit, et la source secondaire qui produit le "contre bruit", afin d’avoir un système causal. Eneffet, les filtres de type RIF nécessitent un grand nombre de coefficients et donc un tempsd’exécution important qui doit être inférieur au temps de propagation du bruit entre les deuxsources. Actuellement, ce principe est couramment utilisé, pour l’atténuation active du bruitet des vibrations, dans les canalisations où la distance, entre la source primaire et secon-daire, est grande [5]. Or dans une protection auditive les distances sont généralement trèscourtes. C’est pourquoi, en protection auditive, tous les systèmes actifs commercialisés ac-tuellement utilisent le principe basé sur la régulation (feedback). Pour cette application, cessystèmes sont généralement appelés dispositif ANR (Active Noise Reduction). Néanmoinsactuellement certains chercheurs essayent de réaliser une protection numérique active en uti-lisant le principe basé sur la prédiction [6].
La quasi totalité des filtres de compensation utilisés dans les dispositifs ANR, com-mercialisés actuellement, sont réalisés en technologie analogique. Les inconvénients de cescircuits sont :
• qu’ ils ne peuvent être optimaux que pour un seul système électro-acoustique, et unseul spectre de bruit
• que leurs courbes de réponse varient en fonction du temps, et sont sensibles aux va-riations climatiques (température, humidité...) et au vieillissement. En effet, les va-leurs des condensateurs et des résistances varient en fonction de la température et del’humidité.
• que les performances sont reliées aux précisions des composants.
Afin d’augmenter la souplesse d’adaptation et la flexibilité des dispositifs ANR insérésdans des protections auditives, et de les rendre stables vis à vis des variations climatiques, ilest nécessaire de réaliser le filtre en technologie numérique. En effet les coefficients du filtrene sont pas sensibles aux variations climatiques.
Filtre
Filtre
FeedbackFeedforward
Légende : Source primaire source secondaire
Microphone de référence Microphone d’erreur

Introduction
16
Les premiers essais des dispositifs ANR numériques en protection auditive effectués àl’ ISL, et en collaboration avec l’Ecole Centrale de Lyon, ont été réalisés avec des filtresnumériques à Réponse Impulsionnelle Infinie (RII). Ces filtres numériques étaientimplémentés dans un processeur de signal numérique (DSP : Digital Signal Processor) de 16bits à l’aide des algorithmes décrits dans la littérature [17][21][23][24]. Pour ces essais, il aété nécessaire d’utiliser une fréquence d’échantillonnage élevée (fe =50 kHz), car les bruitsà traiter sont à large bande. Ces essais n’ont pas été satisfaisants car des comportementsanormaux pour les filtres ont été observés :
• Ils ont constaté qu’ il est impossible d’ implémenter des filtres comportant au moins unefréquence de coupure dans le domaine des très basses fréquences (<100 Hz avec fe =50 kHz). Or le dispositif actif doit permettre d’améliorer l’atténuation des protectionsauditives dans le domaine des basses fréquences. Pour une optimisation de l’atténuationactive dans les basses fréquences, il est nécessaire d’avoir un filtre possédant au moinsune de ces fréquences de coupure dans le domaine des basses fréquences (entre 50 et150 Hz).
• Pour les filtres de basses et moyennes fréquences, ils ont constaté que leur fonction detransfert dépend de l’amplitude du signal. Seulement dans le cas de signaux d’amplitudeélevée la fonction de transfert du filtre implémenté est équivalente à la fonction de trans-fert du filtre théorique. Or il est nécessaire pour une protection auditive active de fonc-tionner correctement dans une large gamme d’amplitude (au moins 60 dB de dynami-que).
Ces constations ont soulevé de nombreuses questions. Le premier objectif de mes tra-vaux de thèse était d’expliquer les constations obtenues lors de ces premiers essais.
Ces premiers dispositifs numériques ne peuvent donc pas être utilisés comme protec-tion active auditive contre le bruit. Afin de pouvoir réaliser des dispositifs ANR numériques,il est nécessaire d’améliorer le traitement du signal mis en oeuvre lors de l’utilisation desfiltres numériques de type RII, seul type de filtre utilisable dans une boucle de contre réac-tion. Il est donc nécessaire d’augmenter la dynamique de ces filtres, afin de garantir un bonfonctionnement de la protection auditive active, dans une large gamme d’amplitude. La dy-namique du filtre correspond à l’atténuation maximale que l’on peut appliquer surl’amplitude du signal d’entrée du filtre (par rapport à l’amplitude maximale admissible parle filtre numérique) pour que la valeur de son gain à la fréquence de coupure soit modifiéeau maximum de 6 dB par rapport à la valeur du gain théorique désiré. Une modification de 6dB correspond à deux fois moins de gain.
Après avoir exposé l’état actuel des protections auditives actives, ce mémoire pré-sente une étude sur les filtres numériques de type RII permettant de trouver des solutionsaux deux principaux problèmes de ce type de filtres [25][26]:
• l’effet de la quantification des coefficients et des signaux,
• la propagation de l’erreur d’arrondi entre les étapes successives du calcul du signalde sortie.

Introduction
17
A l’aide des solutions envisagées, il a été possible de réaliser des protections activesnumériques. Ce mémoire présente au chapitre 3 leurs performances, après avoir décritl’optimisation de la boucle de contre réaction.
Le fait d’utiliser un système numérique permet d’ajouter facilement des fonctionnalitésannexes au système ANR, afin d’augmenter les performances des protections auditives.C’est l’objet du dernier chapitre.

Chapitre 1 : Les protections auditives
18
Chapitre 1 : Les protections auditives
1. Les protections passives .........................................................................................
2. Les protections actives ( Systèmes ANR) ..............................................................2.1 Principe du dispositif ANR ...................................................................2.2 Stabilité du système ANR .....................................................................2.3 Etat de l’art des systèmes ANR .............................................................
3. Dispositif ANR numérique ......................................................................................3.1 Dispositif ANR numérique ...................................................................3.2 Aspects matériels ..................................................................................3.3 Choix du filtre numérique......................................................................3.4 Obtention de la fonction de transfert du filtre ......................................
19
21212325
2626272829

Chapitre 1 : Les protections auditives
19
Afin de se protéger des différents bruits rencontrés (bruits impulsionnels ou bruits con-tinus), il existe deux grandes familles de protections auditives :
• Les protections passives, sans apport d’énergie extérieure.
• Les protections actives, avec apport d’énergie extérieure.
Afin d’évaluer l’efficacité de ces différentes protections, deux valeurs ont été définies[3][4]:
• La valeur "Noise Reduction" (NR) : différence entre les niveaux de pression (en dBSPL) de l’onde incidente, et de la pression sous la protection auditive.
• La valeur "Insertion Loss" (IL), ou encore "Perte d’ insertion" : différence entre lesniveaux de pression (en dB SPL) mesurés à un endroit donné (à l’entrée du conduitauditif ou du tympan par exemple) sans et avec la protection. Cette grandeur est laplus utilisée en pratique.
1. Les protections passives
Les protections passives (bouchon, serre tête ou casque) n’ont besoin d’aucune sourced’énergie extérieure pour atténuer le bruit. L’atténuation dépend uniquement de leur concep-tion mécanique. Ce sont les protections les plus connues du grand public. Pour les protec-tions passives, deux comportements différents sont rencontrés :
• Comportement linéaire : aucune modification de la perte d’ insertion (IL) n’est observéelorsque le niveau moyen varie. C’est à dire que l’atténuation est constante quel que soitle niveau du bruit.
• Comportement non linéaire : plus le niveau de stimulation est élevé plus la perted’ insertion est grande. Dans ce cas, l’atténuation du bruit dépend de façon non linéairedu niveau du bruit. Pour un bruit de 60 dB SPL l’atténuation de ces protections est fai-ble, environ 5 dB, par contre pour un bruit impulsionnel supérieur à 120 dB SPLl’atténuation active peut atteindre jusqu’à 40 dB. Elles sont très efficaces pour les bruitsimpulsionnels de fort niveau mais sont peu adaptées aux bruits continus.
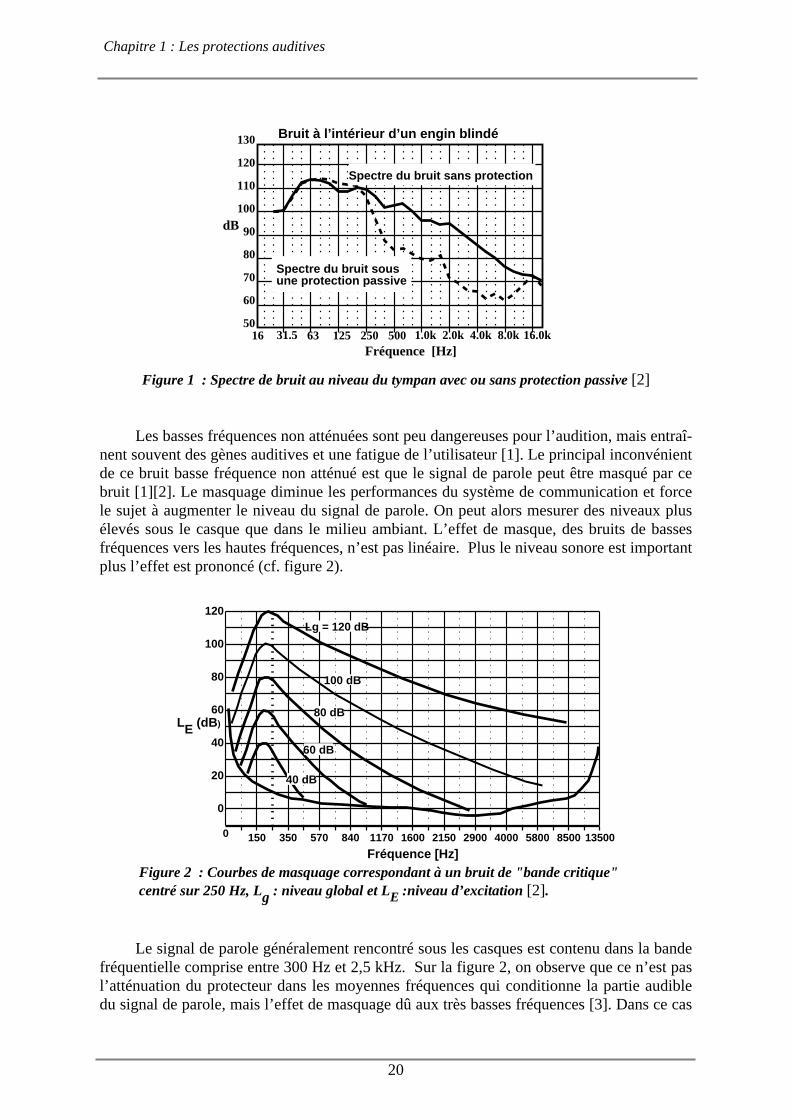
Pour les bruits continus, les protections passives à comportement linéaire ne sont effi-caces que dans le domaine des moyennes et hautes fréquences. La figure 1 représente lespectre du bruit au niveau du tympan, sans et avec un casque passif type, à l’ intérieur d’unblindé. Elle permet de vérifier que ces protections auditives passives sont inefficaces dansle domaine des basses fréquences.
Chapitre 1 : Les protections auditives
20
Les basses fréquences non atténuées sont peu dangereuses pour l’audition, mais entraî-nent souvent des gènes auditives et une fatigue de l’utilisateur [1]. Le principal inconvénientde ce bruit basse fréquence non atténué est que le signal de parole peut être masqué par cebruit [1][2]. Le masquage diminue les performances du système de communication et forcele sujet à augmenter le niveau du signal de parole. On peut alors mesurer des niveaux plusélevés sous le casque que dans le milieu ambiant. L’effet de masque, des bruits de bassesfréquences vers les hautes fréquences, n’est pas linéaire. Plus le niveau sonore est importantplus l’effet est prononcé (cf. figure 2).
Le signal de parole généralement rencontré sous les casques est contenu dans la bandefréquentielle comprise entre 300 Hz et 2,5 kHz. Sur la figure 2, on observe que ce n’est pasl’atténuation du protecteur dans les moyennes fréquences qui conditionne la partie audibledu signal de parole, mais l’effet de masquage dû aux très basses fréquences [3]. Dans ce cas
16 31.5 63 125 500 1.0k 2.0k 4.0k 8.0k 16.0k250Fréquence [Hz]
130
110
100
90
80
70
60
50
120
dB
Bruit à l’intérieur d’un engin blindé
Figure 1 : Spectre de bruit au niveau du tympan avec ou sans protection passive [2]
Spectre du bruit sous une protection passive
Spectre du bruit sans protection
Figure 2 : Courbes de masquage correspondant à un bruit de "bande critique"centré sur 250 Hz, Lg : niveau global et LE :niveau d’excitation [2].
0 150 350 570 840 1170 1600 2150 2900 4000 5800 8500 13500
Fréquence [Hz]
120
100
80
60
40
20
0
LE (dB)
Lg = 120 dB
100 dB
80 dB
60 dB
40 dB

Chapitre 1 : Les protections auditives
21
la seule solution pour augmenter la compréhension de la parole sans accroître son niveau so-nore, est d’améliorer l’atténuation de la protection auditive dans le domaine des basses fré-quences. Une possibilité pour y arriver est l’utilisation d’une double protection.
Une double protection consiste à utiliser un bouchon de protection plus un casque(serre tête). Elle peut améliorer de 10 dB, en moyenne, la perte d’ insertion (IL) entre 125 Hzet 800 Hz. Une double protection permet d’augmenter IL dans les basses fréquences, sonutilisation peut donc améliorer l’ intelligibilité de la parole [2][3].
2. Les protections actives ( Systèmes ANR)
Pour améliorer l’atténuation dans le domaine des basses fréquences, et la compréhen-sion de la phonie, une autre solution existe. Elle consiste à utiliser les techniquesd’atténuation active ( Active Noise Réduction : ANR).
2.1. Principe du dispositif ANR
On sait, depuis Lueg (1936), qu’ il est possible d’atténuer un bruit en produisantsimultanément un signal acoustique de même amplitude que le bruit, mais, en opposition dephase (cf. figure 3) [7].
Ce principe de base schématisé sur la figure 3 est physiquement instable [10][11]. Afin de le rendre stable, il est donc nécessaire d’ajouter un filtre de compensation dans la boucle de contre-réaction (voir figure 4) [8][9][12].
−1
Bruit Contre-bruit
Bruit + Contre-bruit = Silence
Cavitéfermée
Figure 3 : Principe de base d’atténuation active du bruit
Chapitre 1 : Les protections auditives
22
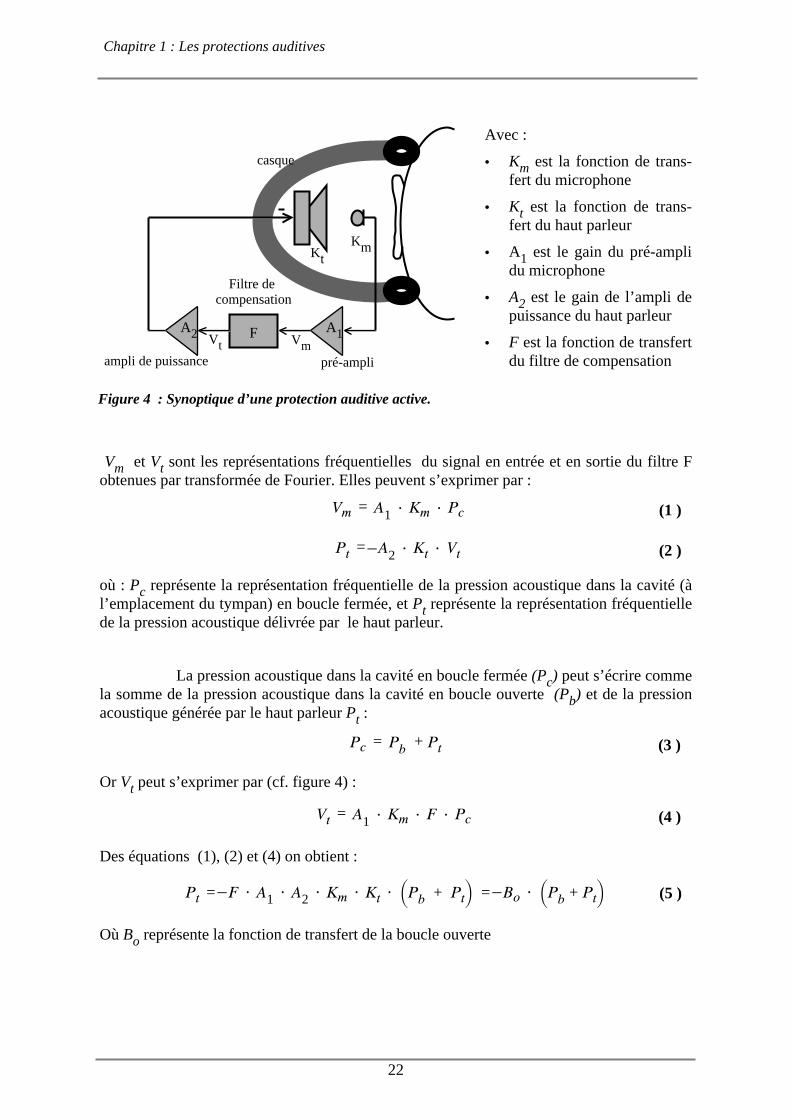
Vm et Vt sont les représentations fréquentielles du signal en entrée et en sortie du filtre Fobtenues par transformée de Fourier. Elles peuvent s’exprimer par :
où : Pc représente la représentation fréquentielle de la pression acoustique dans la cavité (àl’emplacement du tympan) en boucle fermée, et Pt représente la représentation fréquentiellede la pression acoustique délivrée par le haut parleur.
La pression acoustique dans la cavité en boucle fermée (Pc) peut s’écrire commela somme de la pression acoustique dans la cavité en boucle ouverte (Pb) et de la pressionacoustique générée par le haut parleur Pt :
Or Vt peut s’exprimer par (cf. figure 4) :
Des équations (1), (2) et (4) on obtient :
Où Bo représente la fonction de transfert de la boucle ouverte
A2 F
ampli de puissance pré-ampli
Filtre de
KtKm
casque
compensation
A1VmVt
Figure 4 : Synoptique d’une protection auditive active.
Avec :
• Km est la fonction de trans-fert du microphone
• Kt est la fonction de trans-fert du haut parleur
• A1 est le gain du pré-amplidu microphone
• A2 est le gain de l’ampli depuissance du haut parleur
• F est la fonction de transfertdu filtre de compensation
Vm = A1 ⋅ Km ⋅ Pc (1 )
Pt =−A2 ⋅ Kt ⋅ Vt (2 )
Pc = Pb + Pt (3 )
Vt = A1 ⋅ Km ⋅ F ⋅ Pc (4 )
Pt =−F ⋅ A1 ⋅ A2 ⋅ Km ⋅ Kt ⋅ Pb + Pt
° ±=−Bo ⋅ P
b+ Pt
° ±(5 )

Chapitre 1 : Les protections auditives
23
En reportant l’équation (3) dans l’équation (5), on obtient la fonction de trans-fert de la boucle fermée du système ANR correspondant au rapport des pressions Pc et Pb :
La réduction du bruit, R peut donc être définie par :
L’atténuation active (exprimée en dB) est donc définie par [8] :
2.2. Stabilité du système ANR
De l’équation (6), on constate trois cas possibles selon la valeur du dénomina-teur de cette équation [12]:
1) pour | 1 +Bo | > 1 ce qui entraîne d’après l’équation (7) que R est supérieur à1, il y a donc atténuation du bruit Pb .
2) pour 0 < | 1 +Bo | < 1 ce qui entraîne d’après l’équation (7) que R est infé-rieur à 1, il y a donc amplification du bruit Pb .
3) pour |1 +Bo| = 0 l’équation (6) est non définie ce qui correspond àl’ instabilité du système.
Cette équation permet donc de démontrer que le système peut devenir instablesi pour au moins une fréquence on a |1 +Bo | = 0. Pour éviter ces instabilités, la boucled’asservissement doit être conçue de façon à ce que cette situation ne puisse se produire.
Le critère de stabilité de Nyquist est un moyen graphique, qui permetd’apprécier la stabilité d’un système asservi à contre-réaction unique [10][11]. Il est existedeux méthodes soit dans le plan de Bode soit dans le plan de Nyquist (voir annexe1).
Pour notre application, nous avons choisi d’estimer l’ instabilité à partir du dia-gramme de Nyquist de la boucle ouverte comme le présente la figure 5.
Bf = PcPb
= 11 + Bo
(6 )
R =Pb
¬¬ ¬¬Pc| | = 1 + Bo
¬¬ ¬¬ (7 )
AANR = 20 ⋅ log 1 + Bo¬¬ ¬¬° ±
= 20 ⋅ log R ¡
[dB] (8 )
Chapitre 1 : Les protections auditives
24
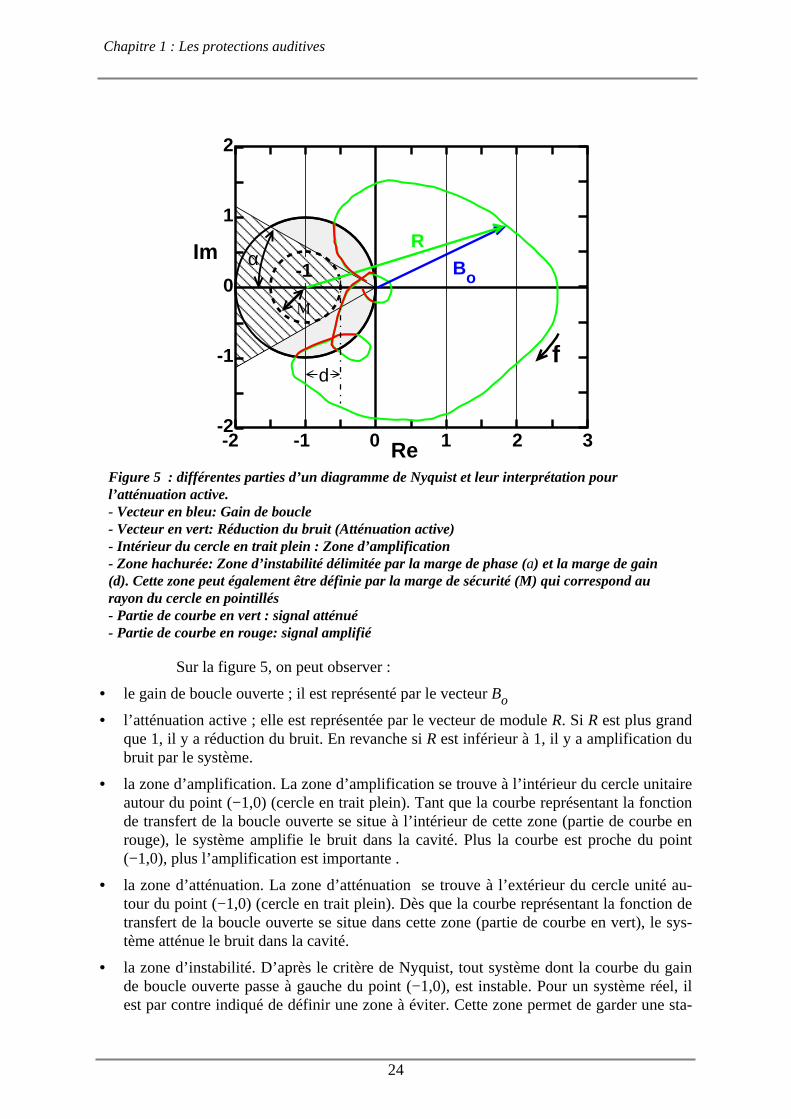
Sur la figure 5, on peut observer :
• le gain de boucle ouverte ; il est représenté par le vecteur Bo
• l’atténuation active ; elle est représentée par le vecteur de module R. Si R est plus grandque 1, il y a réduction du bruit. En revanche si R est inférieur à 1, il y a amplification dubruit par le système.
• la zone d’amplification. La zone d’amplification se trouve à l’ intérieur du cercle unitaireautour du point (−1,0) (cercle en trait plein). Tant que la courbe représentant la fonctionde transfert de la boucle ouverte se situe à l’ intérieur de cette zone (partie de courbe enrouge), le système amplifie le bruit dans la cavité. Plus la courbe est proche du point(−1,0), plus l’amplification est importante .
• la zone d’atténuation. La zone d’atténuation se trouve à l’extérieur du cercle unité au-tour du point (−1,0) (cercle en trait plein). Dès que la courbe représentant la fonction detransfert de la boucle ouverte se situe dans cette zone (partie de courbe en vert), le sys-tème atténue le bruit dans la cavité.
• la zone d’ instabilité. D’après le critère de Nyquist, tout système dont la courbe du gainde boucle ouverte passe à gauche du point (−1,0), est instable. Pour un système réel, ilest par contre indiqué de définir une zone à éviter. Cette zone permet de garder une sta-
Figure 5 : différentes parties d’un diagramme de Nyquist et leur interprétation pourl’atténuation active.- Vecteur en bleu: Gain de boucle- Vecteur en vert: Réduction du bruit (Atténuation active)- Intérieur du cercle en trait plein : Zone d’amplification- Zone hachurée: Zone d’instabilité délimitée par la marge de phase (a) et la marge de gain(d). Cette zone peut également être définie par la marge de sécurité (M) qui correspond aurayon du cercle en pointillés- Partie de courbe en vert : signal atténué- Partie de courbe en rouge: signal amplifié
Re
Im
-1-2 1 2
-1
-20
0
1
2
3
f
-1 Bo
Rα
d
M

Chapitre 1 : Les protections auditives
25
bilité même dans le cas de faible variation de la fonction de transfert de la boucle ou-verte. Cette zone (partie hachurée) est délimitée d’une part par la marge de phase (α),d’autre part par la marge d’amplitude (d). Elle peut également être estimée par la margede sécurité (M).
2.3. Etat de l’art des systèmes ANR
Les protections auditives actives commercialisées actuellement utilisent un fil-tre de compensation réalisé avec la technologie analogique. Elles permettent d’améliorerl’atténuation des basses fréquences (comprises entre 80 Hz à 450 Hz) des protections passi-ves. La figure 6 représente l’atténuation active obtenue avec deux protections actives diffé-rentes. La plupart des protecteurs auditifs actifs commercialisés améliorent de 10 à 15 dBl’atténuation du bruit dans le domaine des basses fréquences. La bande fréquentielle del’atténuation active (AANR > 0 dB) est généralement comprise entre 50 Hz et 600 Hz [12].
Ces protections auditives actives possèdent quelques inconvénients qui sont :
• Le système peut devenir instable lorsque la fonction de transfert du système électro-acoustique change. Cette situation peut se produire lorsque la valeur des compensantschangent (ceci peut être causé par le vieillissement), ou lorsque le casque change de po-sition sur la tête, ou bien lorsque les conditions climatiques changent.
• Le système peut également devenir instable lorsque la fonction de transfert du filtre decompensation se modifie. La fréquence de coupure d’un filtre analogique est fixée parles valeurs des résistances et des condensateurs. Ces valeurs sont sensibles aux varia-tions climatiques (température et humidité) et varient au cours du temps (le vieillisse-ment).
Figure 6 : Atténuations actives obtenues avec deux casques analogiques différents.
10 100 1000 10000 100000fréquence [Hz]
−10
−5
0
5
10
15
20
25
[dB
]
Atténuation active

Chapitre 1 : Les protections auditives
26
• Il existe un bruit de fond perceptible seulement en absence de bruit extérieur. Ce bruit defond correspond à la partie du bruit électronique amplifié par la contre-réaction (bruitaux alentours de 900 Hz, cf. figure 6).
• Ces systèmes sont figés et ne peuvent pas être adaptés à l’audiogramme d’un individu ouà un spectre de bruit.
3. Dispositif ANR numérique
3.1. Avantages du système numérique
Le système ANR est constitué par trois parties (cf. figure 4) :
• Le microphone avec son pré-amplificateur
• Le haut parleur avec son amplificateur de puissance
• Le filtre de compensation
Les deux premières parties ne peuvent être réalisées qu’en analogique. Par con-tre le filtre de compensation peut être conçu soit avec une technologie analogique soit avecune technologie numérique (cf. figure 7) [12][26].
Si on utilise une technologie analogique, la fonction de transfert du filtre est réa-lisée par des composants analogiques (résistances, condensateurs..). Dans ce cas, si l’on veutmodifier les caractéristiques de l’atténuation active, il est nécessaire de concevoir de nou-veau un filtre (cf. figure 7a).
En revanche, si on utilise une technologie numérique, la fonction de transfertpeut être mise en oeuvre à l’aide d’un processeur de signal (DSP : Digital Signal Processor).Grâce à la rapidité de calcul des DSP actuels, toutes les opérations numériques nécessairesau filtrage pourront être effectuées entre 2 échantillons provenant du convertisseuranalogique-numérique. Ce mode "temps réel" permet de considérer le filtre numérique
Figure 7 : Les deux possibilités pour réaliser le filtre de compensation
A
compensation
DSPRAM PROM
A/D D/A
électro-acoustique
A
filtre système
a) Analogique
b) Numérique

Chapitre 1 : Les protections auditives
27
comme une "boite noire" pouvant s’ insérer dans la boucle de contre-réaction. La fonction detransfert du filtre de compensation est définie par un jeux de coefficients qu’ il suffit de char-ger dans la mémoire du DSP. Dans ce cas, si l’on veut modifier les caractéristiques del’atténuation active, il suffit seulement de recharger de nouveaux coefficients en mémoiredu DSP (cf. figure 7b).
L’utilisation d’un filtre de compensation numérique permet d’adapter facilementet rapidement l’atténuation active [26]. De plus, avec l’utilisation d’un filtre numérique, onpeut envisager d’améliorer le système ANR en le rendant "intelligent", c’est à dire en lui ajoutant des fonctionnalités difficilement réalisables dans les systèmes analogiques actuels,telles que :
• Une procédure Marche-Arrêt automatique en fonction du niveau sonore
• Un gain variable en fonction de la stabilité du système ANR
• Une procédure permettant de changer de filtre selon le spectre du bruit à atténuer....
Un autre avantage d’un dispositif numérique, est la possibilité d’ insérer une voiede phonie directement en numérique. Il est même possible d’envisager de traiter le signal deparole, avant de l’ insérer dans la boucle de contre-réaction, avec un filtre numériqueimplémenté dans le DSP (voir paragraphe 1 du chapitre 4). L’avantage d’un filtre de pré-traitement numérique est de pouvoir l’adapter rapidement en fonction du filtre de compensa-tion et du bruit extérieur.
3.2. Aspects matériels
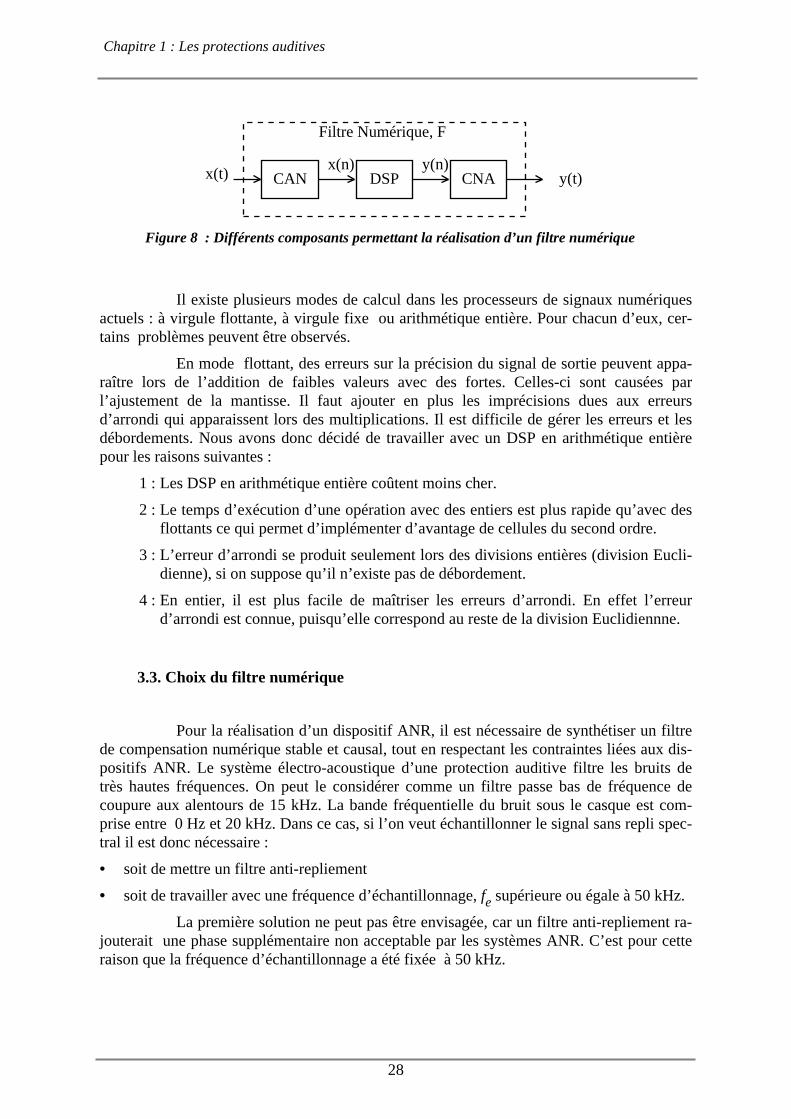
Un dispositif numérique est constitué de trois éléments essentiels : (cf. figure 8)
1) CAN (ou ADC) : Convertisseur Analogique Numérique permettant de numériseravec une fréquence d’échantillonnage fe le signal x(t) tel que :
2) DSP : (Digital Signal Processor) processeur de signal numérique, permettant de réaliser le filtre numérique souhaité à l’aide d’un algorithme. Si on note F la fonc-tion de transfert du filtre implémenté, le spectre du signal de sortie du DSP, Y estdéfini par :
3) CNA (ou DAC) : Convertisseur Numérique Analogique permettant de convertir lesignal numérique évalué en un signal analogique tel que :
x(n) = x n ⋅ Te ¡ avec Te = 1
fe(9 )
(10 ) Y = F · X
t ∈ [ nTe, (n− 1)Te [ ⇒ y t ¡
= y n( ) (11 )
Chapitre 1 : Les protections auditives
28
Il existe plusieurs modes de calcul dans les processeurs de signaux numériquesactuels : à virgule flottante, à virgule fixe ou arithmétique entière. Pour chacun d’eux, cer-tains problèmes peuvent être observés.
En mode flottant, des erreurs sur la précision du signal de sortie peuvent appa-raître lors de l’addition de faibles valeurs avec des fortes. Celles-ci sont causées parl’ajustement de la mantisse. Il faut ajouter en plus les imprécisions dues aux erreursd’arrondi qui apparaissent lors des multiplications. Il est difficile de gérer les erreurs et lesdébordements. Nous avons donc décidé de travailler avec un DSP en arithmétique entièrepour les raisons suivantes :
1 : Les DSP en arithmétique entière coûtent moins cher.
2 : Le temps d’exécution d’une opération avec des entiers est plus rapide qu’avec desflottants ce qui permet d’ implémenter d’avantage de cellules du second ordre.
3 : L’erreur d’arrondi se produit seulement lors des divisions entières (division Eucli-dienne), si on suppose qu’ il n’existe pas de débordement.
4 : En entier, il est plus facile de maîtriser les erreurs d’arrondi. En effet l’erreurd’arrondi est connue, puisqu’elle correspond au reste de la division Euclidiennne.
3.3. Choix du filtre numérique
Pour la réalisation d’un dispositif ANR, il est nécessaire de synthétiser un filtrede compensation numérique stable et causal, tout en respectant les contraintes liées aux dis-positifs ANR. Le système électro-acoustique d’une protection auditive filtre les bruits detrès hautes fréquences. On peut le considérer comme un filtre passe bas de fréquence decoupure aux alentours de 15 kHz. La bande fréquentielle du bruit sous le casque est com-prise entre 0 Hz et 20 kHz. Dans ce cas, si l’on veut échantillonner le signal sans repli spec-tral il est donc nécessaire :
• soit de mettre un filtre anti-repliement
• soit de travailler avec une fréquence d’échantillonnage, fe supérieure ou égale à 50 kHz.
La première solution ne peut pas être envisagée, car un filtre anti-repliement ra-jouterait une phase supplémentaire non acceptable par les systèmes ANR. C’est pour cetteraison que la fréquence d’échantillonnage a été fixée à 50 kHz.
DSPCAN CNAx(t) y(t)x(n) y(n)
Filtre Numérique, F
Figure 8 : Différents composants permettant la réalisation d’un filtre numérique
Chapitre 1 : Les protections auditives
29
De plus la structure du dispositif ANR nous impose de travailler en temps réel.Afin d’avoir un filtre causal, il est nécessaire d’utiliser un filtre dont le temps de calcul soitinférieur au pas d’échantillonnage (1/fe). Il existe deux grandes familles de filtres numéri-ques :
1) RIF (ou FIR) : filtre à Réponse Impulsionnelle Finie, à structure transversale.L’ inconvénient majeur de ce filtre, est qu’ il faut, en général, un grand nombre de coef-ficients pour caractériser correctement la fonction de transfert souhaitée. Ce grandnombre de coefficients entraîne un temps de calcul important. Ce problème est accen-tué si l’on désire traiter des composantes dans le domaine des basses fréquences. En ef-fet la longueur de ce type de filtre (nombre de coefficients) dépend des composantesfréquentielles à traiter. Plus les composantes sont basses, plus la longueur du filtre estimportante pour une fréquence d’échantillonnage donnée.
2) RII (ou IIR) : filtre à Réponse Impulsionnelle Infinie, appelé filtre récursif. L’avantagequ’ il possède par rapport au RIF est qu’ il nécessite peu de coefficients. La longueur dece filtre ne dépend pas des composantes fréquentielles à traiter. Il est donc possible,avec ce type de filtre, de traiter les composantes basses fréquences du bruit avec peu decoefficients.
Le but de la boucle de contre-réaction d’un système ANR est d’améliorerl’atténuation des protections passives dans le domaine des basses fréquences. Pour cela il estsouvent nécessaire de traiter les composantes basses fréquences du bruit contenu dans lacavité de la protection. L’utilisation d’un filtre de type RIF obligerait à utiliser une fré-quence d’échantillonnage inférieure à 50 kHz. L’utilisation d’un filtre de compensation detype RII est donc inévitable si l’on veut pouvoir synthétiser le filtre de compensation bassefréquence avec une fréquence d’échantillonnage égale à 50 kHz.
3.4. Obtention de la fonction de transfert du filtre
Pour déterminer le gabarit du filtre de compensation, un outil de conception dé-veloppé à l’ ISL est utilisé. Cet outil interactif permet d’assembler la fonction de transfert dusystème électro-acoustique mesurée préalablement avec des filtres de type RII élémentaires,afin d’obtenir l’atténuation souhaitée. La figure 9 représente les différentes fonctionnalitésde cet outil permettant d’évaluer le gabarit du filtre de compensation, et de simulerl’atténuation active du système ANR. L’obtention du filtre de compensation s’effectue endifférentes étapes décrites ci-dessous.
Dans un premier temps, à l’aide d’un analyseur spectral, on mesure la fonctionde transfert du système électro-acoustique, notée H comprenant (cf. figure 4):
1) La fonction de transfert du haut-parleur, Kt incluant l’acoustique de la cavité duprotecteur.
2) La fonction de transfert du microphone, Km
3) Le gain de l’amplificateur de puissance A2 et le gain du pré-amplificateur A1.

Chapitre 1 : Les protections auditives
30
En suite, il est nécessaire d’ initialiser le simulateur afin de pouvoir évaluer lefiltre de compensation optimal pour la situation voulue. Pour cela, la fonction de transfert H,est insérée comme paramètre dans le simulateur. Deux autres paramètres doivent être initia-lisés : la marge de sécurité souhaitée (M) et la fréquence d’échantillonnage fe.
Une fois tous les paramètres initialisés, on peut ajouter ou supprimer des filtresélémentaires (d’ordre deux). L’ensemble de ces filtres constitue le filtre à implémenter. Enmême temps que l’on ajoute ou supprime ces filtres, on visualise l’atténuation active maxi-male que l’on peut obtenir, si l’on respecte la marge de sécurité définie préalablement. Cegabarit est constitué d’un ensemble de filtres de type RII élémentaires. A la fin de la simula-tion, on dispose des caractéristiques du filtre à synthétiser. La dernière étape consiste à éva-luer les coefficients du filtre obtenu. Cette dernière partie est expliquée au chapitre 2.
Figure 9 : Différentes fonctions d’un logiciel de simulation permettant d’évaluer lafonction de transfert du filtre de compensation pour un protecteur actif de bruit.
Fonction de transfert
∆t
Kt
Km
du système electroacoutique
MesureSimulation interactive
représentation graphique
chargement desparamètres
Simulationreprésentation graphique
représentationgraphique
Simulateur
Re
Im
-1-2 1 2
-1
-20
0
1
2
3
f
Bo
R
d
Critères de stabilité
Filtres
10010 1000 10000Hz
0
-20
-30
-40
-50
−π−π/2
π/2
π
0
Modul
(dB ref
.:max)
Phase (
radians
)
-10
de compensation
DSPRAM PROM
A/D D/A
30
20
10
-0
-10
dB
10010 1000 10000Hz
Atténuation Active

Chapitre 2 : Filtrage numérique de type RII
31
Chapitre 2 : Filtrage numérique de type RII
1.Structure des filtres RII ...........................................................................................
2. Effets de la quantification .......................................................................................2.1 Effets de la quantification des coefficients du filtre..............................2.1.1 L’erreur sur les coefficients ...............................................................2.1.2 Choix limité pour les pôles et les zéros ..............................................2.1.3 Position effective des pôles et des zéros ............................................2.1.4 Fréquence minimale du pôle (ou du zéro) possible. ..........................2.2 Effet de la quantification des signaux ...................................................2.2.1 Erreur de conversion Analogique-Numérique ...................................2.2.2 Bruit d’arrondi ....................................................................................2.2.3 Bruit électronique ...............................................................................2.3 Minimisation des effets de la quantification .........................................2.3.1 Robustesse de la structure du filtre ....................................................2.3.2 Gestion du dépassement de la dynamique .........................................2.3.3 Obtention des coefficients optimaux ..................................................2.3.4 Minimisation de l’erreur d’arrondi ....................................................2.4. Choix de la dynamique du DSP............................................................
3. L’algorithme du filtre de type RII ..........................................................................3.1 L’algorithme standard ...........................................................................3.1.1 La structure ........................................................................................3.1.2 Limitations .........................................................................................3.1.3 Estimation de l’erreur sur le signal de sortie ......................................3.2 L’algorithme adapté ..............................................................................3.2.1 La structure ........................................................................................3.2.2 Estimation de l’erreur sur le signal de sortie ......................................3.3 Comparaison de l’algorithme adapté et de l’algorithme standard ........3.3.1 Signal de sortie ...................................................................................3.3.2 Gain de la cellule du second ordre......................................................
4. Implémentation d’un filtre numérique dans un DSP...............................................4.1 Temps d’exécution ................................................................................4.2 Comparaison des deux algorithmes sur le DSP.....................................
5. Conclusion................................................................................................................
32
36373738394041414242434344454848
495050505153545556
5758
606061
62

Chapitre 2 : Filtrage numérique de type RII
32
En protection auditive, les systèmes actifs (ANR) ont pour objectif d’atténuerles basses fréquences du bruit non atténuées par les protections passives. Le filtre de com-pensation doit donc agir dans le domaine des basses fréquences quel que soit le niveau dubruit.
Les premiers essais réalisés à ISL de protections auditives actives numériquesutilisant des filtres de compensation de type RII, seul type de filtre pouvant être utilisé,n’ont pas été satisfaisants. En effet, on a constaté :
• une impossibilité d’ implémenter des filtres passe-bas en utilisant une fréquenced’échantillonnage égale à 50 kHz avec un DSP 16 bits.
• une différence entre la fonction de transfert du filtre implémenté et celle souhaitée.
• une faible dynamique du filtre, en particulier pour les filtres basses fréquences [16][17].
Afin de pouvoir utiliser dans une protection active un filtre numérique de typeRII comme filtre de compensation, il est nécessaire d’améliorer ses performances. Pour celail faut synthétiser des filtres pouvant agir dans le domaine des basses fréquences. Il est éga-lement nécessaire quel que soit le filtre implémenté, que sa dynamique soit supérieure à 60dB. L’objectif de ce chapitre est donc de présenter l’étude réalisée sur les filtres de type RIIimplémentés dans un DSP en arithmétique entière, afin d’expliquer et d’apporter des solu-tions aux problèmes rencontrés [26].
1. Structure des filtres RII
On a vu, dans le chapitre 1, qu’ il est possible à l’aide d’un outil de conceptionde déterminer la fonction de transfert du filtre de type RII permettant d’obtenir l’atténuationactive désirée pour un système électro-acoustique donné. Cette fonction de transfert est ca-ractérisée par un ensemble de pôles et de zéros. Elle est donc définie en fonction des pôlesPl et des zéros Zk dans le plan complexe Z, tel que [16] [17] :
Les Rb pôles Pl et les Ra zéros Zk sont des nombres complexes qui caractérisentle filtre dans le plan complexe Z (cf. figure 10) [9][10]. Les pôles et les zéros sont caractéri-sés par :
où cp ( respectivement cz) est le coefficient du pôle (zéro), et wp (wz) est la pulsation nor-malisée du pôle (zéro) exprimée en radian.
F z( ) =
YRak=0
1−Zk⋅Z−1
° ±
YRbl=1
1−Pl⋅Z−1
° ± (12 )
P = cp ⋅ exp j ⋅ wp° ±
Z = cz ⋅ exp j ⋅ wz ¡ (13 )

Chapitre 2 : Filtrage numérique de type RII
33
Les pulsations normalisées sont définies par :
où fp (fz) est la fréquence du pôle (zéro) exprimée en Hz et fe la fréquenced’échantillonnage.
Le couple (cp , wp ) correspond aux coordonnées polaires du pôle dans le plancomplexe Z, et le couple (cz , wz ) correspond aux coordonnées polaires du zéro dans le plancomplexe Z (cf. figure 10).
Le filtre connu à partir de l’équation (12) est difficile à implémenter. Pour cela,il est préférable d’écrire sa fonction de transfert sous la forme [16][17]:
Les bk et al sont les coefficients du filtre numérique, permettant la mise en oeu-vre du filtrage. Ils correspondent également aux coefficients de l’équation aux différencesfinies, qui permet le calcul du signal de sortie y(n) :
wp = 2π ⋅fp
fe ou wz = 2π ⋅ fz
fe
Figure 10 : Caractérisation d’un pôle P double complexe conjugué etd’un zéro double complexe conjugué dans le plan complexe Z
wp
CP
Partie réelle
Partie imaginaire
P1
P2
Z1
Z2
1
1
−1
−1
Cz
−wp
wz
−wz
F z( ) =
XRak=0
bk Z−k
° ±
1 + XRbl=1
al Z−l
° ± (14 )
y n( ) =XRak=0
bk⋅ x n− k ¡° ±
−XRbl=1
al⋅ y n− l ¡° ±
(15 )
Chapitre 2 : Filtrage numérique de type RII
34
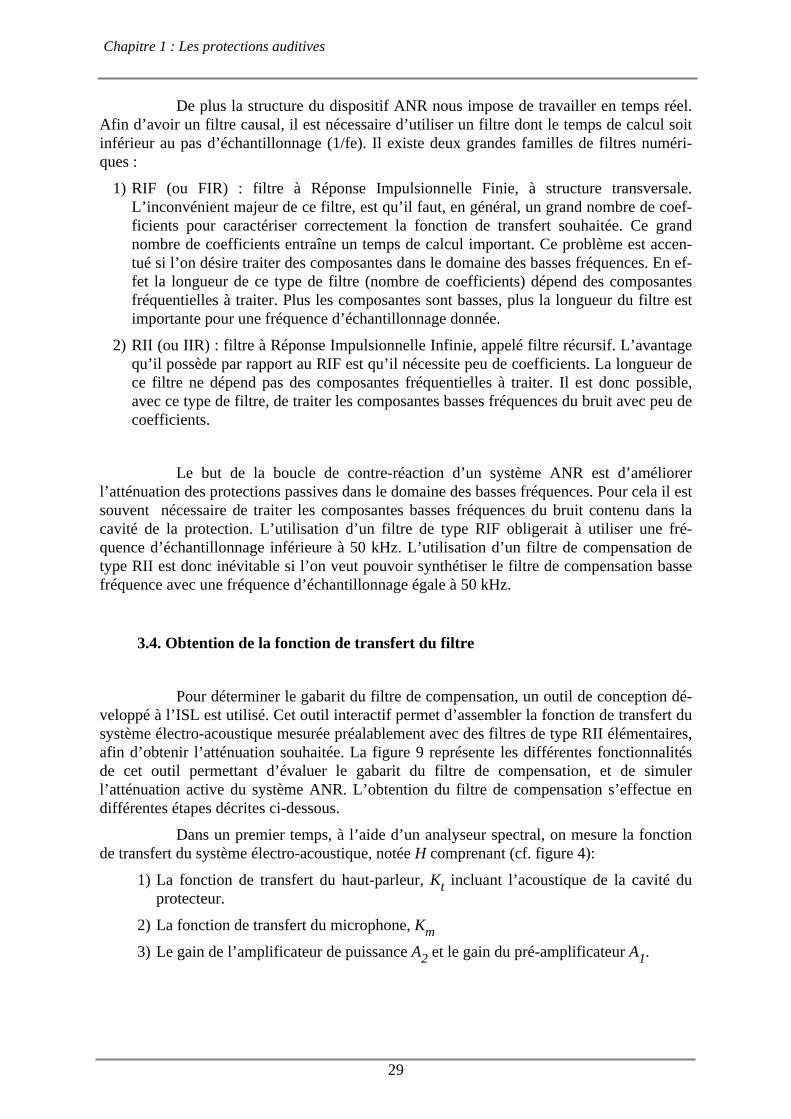
Cette dernière équation et le schéma associé (ci-dessous) permettent de constaterque le signal de sortie dépend des valeurs de son passé, d’où la seconde appellation des fil-tres de type RII : "filtre récursif".
Le filtre doit être implémenté dans un DSP. Ceci oblige à travailler avec descoefficients al et bk réels. Le fait que les coefficients soient réels, impose d’avoir des pôleset des zéros complexes conjugués deux à deux ou réels simples ou doubles.
Le filtre numérique doit être causal, et stable, afin de pouvoir être inséré dansune boucle de contre-réaction. Or l’équation (12) permet de montrer que le filtre peut deve-nir instable lorsque le dénominateur de l’équation (14) devient nul. Pour un filtre causal, larégion de convergence de F(Z) est l’extérieur d’un cercle. En revanche, la condition de sta-bilité pour ces filtres est que la région de convergence contienne le cercle unité. Par consé-quent, un filtre de type RII causal et stable doit avoir tous ses pôles à l’ intérieur du cercleunité [16][17]. Pour remplir cette condition, tous les coefficients des pôles cp doivent êtreinférieurs à un :
Les filtres numériques possèdent un retard entre le signal d’entrée et le signal desortie qui correspond au temps d’exécution du filtre. Ce retard engendre un déphasage entre le signal d’entrée et le signal de sortie non souhaitable par le système ANR. Il est donc né-cessaire que ce retard soit le plus faible possible. Par conséquent, le filtre numérique doitdonc être à phase minimale. Pour remplir cette condition, il suffit donc que les zéros soienttous à l’ intérieur du cercle unité.
Par conséquent, seuls les filtres de type RII comportant des pôles et des zéros doubles complexes conjugués à l’ intérieur du cercle unité seront étudiés et implémentés.
x(n) y(n)
b2
Z-1
−a1
b0
b1Z-1
Z-1
Z-1
−a2 Z-1
Z-1
Σ Σ
-aRbbRa
∀ P ⇒ cp < 1 (16 )

Chapitre 2 : Filtrage numérique de type RII
35
Il existe trois structures pour implémenter un filtre de type RII [16][17]:
1. forme générale
2. forme parallèle
3. forme en cascade
Forme générale : Elle est définie directement par l’équation (14 ) :
Les pôles complexes sont les solutions de l’équation :
Les zéros complexes sont les solutions de l’équation :
Forme en parallèle : Cette forme correspond à la décomposition de la forme générale, enéléments simples du second ordre. Ce qui revient à mettre m cellules du second ordre enparallèle :
Les b0i , b1i , a0i , a1i et a2i sont les coefficients de ième cellule.
Les pôles complexes sont les solutions des équations :
F(Z)x(n) y(n)
1 +XRbk=1
ak⋅ Z−k = 0 (17 )
XRak=0
bk⋅ Z−k = 0 (18 )
F1(Z)
F2(z)
Fm(Z)
Σx(n) y(n)
F(Z)
F Z ¡
=Xmi=1
Fi Z ¡
avec Fi Z ¡
=b0i + b1i⋅Z
−1
a0i+ a1i⋅Z−1+ a2i⋅Z
−2
a0i + a1i ⋅ Z−1 + a2i ⋅ Z
−2 = 0 pour i = [ 1,m [ (19 )

Chapitre 2 : Filtrage numérique de type RII
36
Les zéros complexes sont les solutions de l’équation :
Forme en cascade : Cette forme correspond à la factorisation de la forme générale en élé-ments simples du second ordre. Ce qui correspond à mettre m cellules du second ordre encascade :
Les b0i , b1i ,b2i , a0i , a1i et a2i sont les coefficients de la ième cellule.
Les pôles complexes sont les solutions des équations :
Les zéros complexes sont les solutions des équations :
2. Effets de la quantification
Afin d’ implémenter un filtre de type RII dans un DSP travaillant avec des en-tiers, il faut quantifier les signaux ainsi que les coefficients du filtre. La présence d’une ouplusieurs quantifications rend le filtre non-linéaire ce qui peut produire des écarts entre lafonction de transfert du filtre réalisé, et celle du filtre désiré qui lui est linéaire [4]. La nonlinéarité est due au fait que la quantification impose de travailler avec une précision arithmé-tique finie et une dynamique de calcul finie, toutes les deux fixées par la longueur de mot duDSP [16][17][19].
Xmi=1
b0i + b1i ⋅ Z−1
² ³⋅Ymk=1k=/ i
a0k + a1k ⋅ Z−1 + a2k ⋅ Z
−2² ³
@A = 0 (20 )
F Z ¡
=Ymi=1
Fi Z ¡
avec Fi Z ¡
=b0i + b1i⋅Z
−1 + b2i⋅Z−2
a0i + a1i⋅Z−1 + a2i⋅Z
−2
F1(Z) F2(z) Fm(z) y(n)x(n)
F(Z)
a0i + a1i ⋅ Z−1 + a2i ⋅ Z
−2 = 0 pour i = [ 1,m [ (21 )
b0i + b1i ⋅ Z−1 + b2i ⋅ Z
−2 = 0 pour i = [ 1,m [ (22 )

Chapitre 2 : Filtrage numérique de type RII
37
2.1. Effets de la quantification des coefficients du filtre
La quantification des coefficients rend les coefficients du filtre différents deceux que l’on désire. Par conséquent, le filtre effectivement synthétisé aura des caractéristi-ques différentes de celles du filtre souhaité. En effet, la quantification des coefficients en-gendre une position des pôles et des zéros distincte dans le plan complexe Z de celle atten-due [16][17][19].
Dans le paragraphe 2.3.1, on démontre que l’effet de la quantification des coef-ficients est minimal, lorsque le filtre est synthétisé avec plusieurs cellules du second d’ordreen cascade (forme en cascade). C’est dans cet objectif, que ce paragraphe traite seulementde la sensibilité des coefficients, pour une cellule du second ordre, souvent appelée"Biquad" [16].
2.1.1 L’erreur sur les coefficients
La fonction de transfert de la cellule du second ordre désirée, Fd(Z) peut s’écrire(cf. équation 14):
Kd est un coefficient permettant de fixer le gain maximal de la cellule du secondordre à 1 (0 dB). bd0, bd1, bd2, ad0, ad1 et ad2, sont les coefficients désirés qui caractéri-sent le pôle et le zéro de la cellule implémentée. Pour une cellule du second ordre, il existeune relation simple entre les coefficients caractérisant la cellule, les pulsations normalisées,et les coefficients du pôle et du zéro de celle-ci (cf. équation (21)) :
Où wdp et cdp sont la pulsation normalisée et le coefficient du pôle désiré et wdz et cdz sontla pulsation normalisée et le coefficient du zéro désiré.
Ces relations (équation (24)) montrent que les coefficients, sauf Kd, sont com-pris entre −2 et 2. Il est donc nécessaire de multiplier ces coefficients désirés à l’aide d’unfacteur échelle pour obtenir, après quantification, des valeurs entières de précision suffisan-tes. Ce facteur d’échelle, noté ech, permet d’obtenir les coefficients en valeur entière qui se-ront effectivement chargés dans le DSP.
FdZ ¡
= 1Kd× b
d0 + bd1⋅Z
−1 + bd2⋅Z
−2
ad0 + a
d1⋅Z−1 + a
d2⋅Z−2 (23 )
ad0 = 1 ; a
d1 =−2 ⋅ cdp ⋅ cos wdp
° ± ; a
d2 = c2dp
bd0 = 1 ; b
d1 =−2 ⋅ cdz⋅ cos w
dz
° ± ; b
d2 = c2dz
(24 )

Chapitre 2 : Filtrage numérique de type RII
38
Les coefficients à valeur entière sont donc déterminés par :
où Qc désigne l’opérateur non linéaire de quantification par troncature. C’est à dire :
La fonction de transfert du filtre implémenté s’écrit par :
Par la suite, seule l’analyse de la sensibilité de la quantification des coefficientsai (coefficients liés au pôles) est décrite. Des équations analogues peuvent être écrites pourles coefficients bi. D’après l’équation (27) le pôle P du filtre implémenté est la solution del’équation du second degré :
Afin d’avoir un pôle double complexe conjugué à l’ intérieur du cercle unitépour garantir la stabilité, il nécessaire que le déterminant de l’équation du second degré (28)soit inférieur ou égal à 0 et que a2 soit inférieur au facteur d’échelle (cf. équation 16) :
2.1.2 Choix limité pour les pôles et les zéros
Avec une arithmétique entière il existe un nombre fini de pôle (ou zéro) possi-bles à implémenter [16] [17]. Dans la littérature, on trouve la démonstration du nombre depôles possibles dans le cas où les coefficients sont flottants.
Dans notre cas particulier, le nombre de coefficients dépend du choix du facteuréchelle. Par conséquence le nombre de pôle ou (de zéro) dépend également du facteuréchelle. Avec une démarche analogue que celle trouvée dans la littérature, le nombre de pô-les est déterminé pour notre cas particulier [16] [17].
Pour des raisons de symétrie, il y a autant de pôles possibles dans le cas où 0 ≤ wp ≤ π/2, que dans le cas où π/2 ≤ wp ≤ π. On s’ intéresse donc à déterminer le nombre depôles possibles dans le cas où 0 ≤ wp ≤ π/2.
Dans le cas où on utilise le facteur d’échelle, ech, pour la quantification les coef-ficients réels, il existe seulement :
a0 = ech ; ai = Qc adi⋅ ech
° ±= a
di⋅ ech + δ pour i = 1, 2
b0 = ech ; bi = Qc bdi⋅ ech
° ±= b
di⋅ ech + δ pour i = 1, 2
K = Qc Kd
° ±= K
d+ δ
avec 0 < δ < 1
(25 )
A = Qc a( ) ⇒ A ≤ a < A+1 si a > 0A−1 < a ≤ A si a < 0 (26 )
F Z ¡
= 1K× b0 + b1Z
−1 + b2Z−2
a0 + a1Z−1 + a2Z
−2 (27 )
a0 ⋅ P2 + a1 ⋅ P + a2 = 0 (28 )
a21− 4 ⋅ a2 ⋅ ech ≤ 0 et a2 < ech (29 )
Chapitre 2 : Filtrage numérique de type RII
39
• (2·ech) valeurs différentes, pour a1
• (ech−1) valeurs différentes non nulles pour a2.
En effet a1 = 2·ech et a2= ech ne sont pas possibles du fait que cp doit être inférieur à 1pour assurer la stabilité du filtre.
Le nombre de pôles possibles est différent de 2·ech(ech−1) [16]. Ceci est dû aufait qu’ il est nécessaire que a1 et a2 vérifient la condition décrite par l’équation (29). Entenant compte de cette condition, on peut démontrer que le nombre de pôles Np tel que0 ≤ wp ≤ π/2 p vaut donc (voir démonstration en annexe 2) :
Où E() correspond à la partie entière
La figure 11 représente le nombre de pôles ou de zéros possibles en fonction dufacteur d’échelle. Elle permet de montrer que, plus le facteur d’échelle est élevé, plus lechoix pour le pôle et le zéro de la cellule est vaste.
2.1.3 Position effective des pôles et des zéros
La quantification des coefficients conduit à avoir un nombre fini de pôles possi-bles dans le plan complexe Z [16]. La pulsation normalisée et le coefficient du pôle caracté-risés par les coefficients a1 et a2 valent donc (cf. éqautions (24) et (25)) :
Les pôles réalisables sont donc situés sur des arcs de cercles de rayon cp (fi-gure 12). Le nombre de pulsations wp possibles par arc de cercle diminue lorsque cp dimi-nue.
Np =Xech−1
i=1E 4 ⋅ ech ⋅ i√° ±
+ 1² ³
(30 )
Figure 11 : Nombre de pôles ou de zéros possibles enfonction du facteur d’échelle, ech
500 4500 8500 12500 16500ech
1x105
1x106
1x107
1x108
1x109Nombre de pôles ou de zéros possibles
Np 2ech(ech−1)
cp =a2ech
q et wp = arccos
a1−2cp⋅ech
² ³(31 )
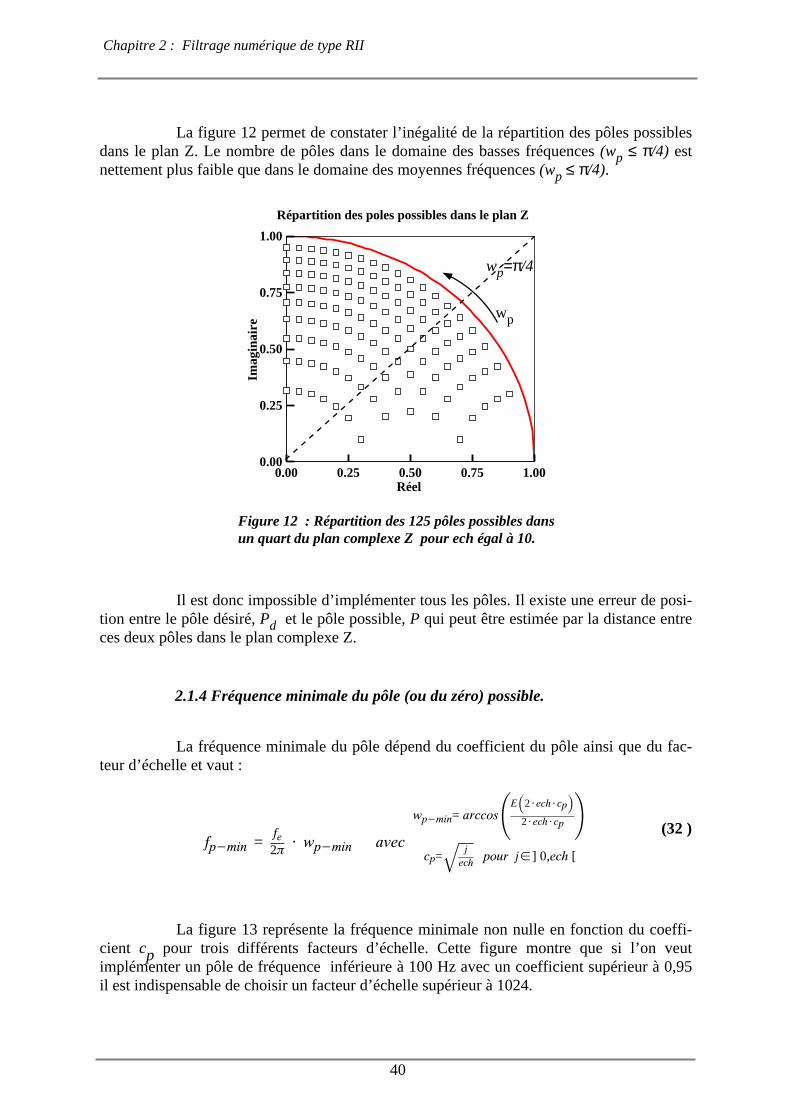
Chapitre 2 : Filtrage numérique de type RII
40
La figure 12 permet de constater l’ inégalité de la répartition des pôles possiblesdans le plan Z. Le nombre de pôles dans le domaine des basses fréquences (wp ≤ π/4) estnettement plus faible que dans le domaine des moyennes fréquences (wp ≤ π/4).
Il est donc impossible d’ implémenter tous les pôles. Il existe une erreur de posi-tion entre le pôle désiré, Pd et le pôle possible, P qui peut être estimée par la distance entreces deux pôles dans le plan complexe Z.
2.1.4 Fréquence minimale du pôle (ou du zéro) possible.
La fréquence minimale du pôle dépend du coefficient du pôle ainsi que du fac-teur d’échelle et vaut :
La figure 13 représente la fréquence minimale non nulle en fonction du coeffi-cient cp pour trois différents facteurs d’échelle. Cette figure montre que si l’on veutimplémenter un pôle de fréquence inférieure à 100 Hz avec un coefficient supérieur à 0,95il est indispensable de choisir un facteur d’échelle supérieur à 1024.
0.00 0.25 0.50 0.75 1.00Réel
0.00
0.25
0.50
0.75
1.00Im
agin
aire
Répartition des poles possibles dans le plan Z
Figure 12 : Répartition des 125 pôles possibles dansun quart du plan complexe Z pour ech égal à 10.
wp=π/4
wp
fp−min =fe2π ⋅ wp−min avec
wp−min= arccosE 2⋅ech⋅cp ¡2⋅ech⋅cp
!
cp=j
ech
q pour j∈] 0,ech [
(32 )

Chapitre 2 : Filtrage numérique de type RII
41
2.2. Effet de la quantification des signaux
Comme les coefficients du filtre, les signaux x(n) et y(n) doivent être quantifiés.La quantification ajoute un signal d’erreur au signal de sortie théorique du filtre réalisable[17]. Ce bruit supplémentaire provient de trois sources d’erreurs différentes [17] :
1 - Conversion Analogique-Numérique
2 - Bruit d’arrondi (Roundoff Noise) [18][20][22]
3 - Bruit électronique
2.2.1 Erreur de conversion Analogique-Numérique
Le signal analogique x(t) compris entre −Vm et Vm est converti à l’aide duConvertisseur Analogique Numérique (CAN) en entier x(n) compris entre (−2b−1) et(2b−1−1) où b est le nombre de bit du convertisseur, et [ −Vm , Vm ] est la plage de conver-sion du convertisseur (avec Vm exprimé en Volt), pour notre application Vm vaut 5 ou 10Volt). x(n) s’écrit donc :
Cette erreur δ est négligeable lorsque l’amplitude du signal x(t) est très supé-rieure au pas de quantification, noté ∆e qui vaut :
Par la suite, cette erreur est prise en compte, dans le bruit de fond du système deconversion.
0.90 0.92 0.94 0.96 0.98 1.00cp
0
200
400
600
800
1000
[Hz]
Fréquence minimale
ech=64
ech=1024
ech=16384
Figure 13 : Répartition de la fréquence minimale du pôle non nulle enfonction du coefficient cp pour différents facteurs d’échelle.
x(n) = E2b−1⋅x(t)
Vm
!=
2b−1⋅x(t)Vm
+ δ avec 0 ≤ δ < 1 (33 )
∆e =Vm
2b−1 (34 )

Chapitre 2 : Filtrage numérique de type RII
42
2.2.2 Bruit d’arrondi
Dans le cas d’une arithmétique entière, l’erreur d’arrondi se produit seulementlors des divisions entières (division Euclidienne). En effet la division de 2 entiers doit don-ner un entier. En revanche, pour une arithmétique flottante, l’erreur d’arrondi apparaît lorsdes multiplications [18][20][22].
Du fait que l’on quantifie les coefficients après les avoir multipliés par un fac-teur d’échelle, il est nécessaire de normaliser le signal de sortie par ce même facteur. Parconséquent, à chaque instant n, il faut diviser par le facteur d’échelle pour obtenir le signalde sortie y(n). Il existe donc une erreur sur la valeur du signal de sortie qui peut s’exprimerpar :
Où X est la valeur du signal de sortie non normalisée.
2.2.3 Bruit électronique
Le bruit électronique provient de plusieurs sources différentes. Il est possible deramener le bruit électronique plus l’erreur de conversion à un bruit pouvant se caractériserpar une incertitude sur les 2 bits de poids faibles du signal numérique. Le bruit numériquepeut donc correspondre à une suite de nombres entiers aléatoires compris entre 0 et 4 pou-vant être considéré comme un bruit blanc. En revanche, l’amplitude du bruit analogique dé-pend de la résolution du convertisseur numérique tel que :
Afin d’augmenter le rapport signal sur bruit, il est préférable d’utiliser unconvertisseur possédant une grande précision. Il est donc souhaitable de choisir b supérieurou égal à 16 bits.
y(n) = Q Xech
° ±= X
ech + δa avec 0 ≤ δa < 1 (35 )
br(t) = br(n) ⋅ Vm
2b−1 (36 )
Convertisseur avecVm = 10 V
∆e en mV Valeur crête du bruitbr(t) en mV
Rapport signal surbruit
12 bits 4,8 19,2 54 dB
14 bits 1,2 4,8 66 dB
16 bits 0,31 1,24 78 dB
cas général Vm
2b−14·∆e 20·log(2b−3) dB

Chapitre 2 : Filtrage numérique de type RII
43
2.3. Minimisation des effets de la quantification
2.3.1 Robustesse de la structure du filtre
Pour un filtre RII d’ordre supérieur à deux, l’erreur de position des pôles ou deszéros est différente, suivant la structure de réalisation du filtre RII utilisée.
♦ Pour la forme générale, d’après les équations (17) (18) on a :
• quel que soit le pôle Pi, il dépend de tous les coefficients ak du filtre
• quel que soit le zéro Zi, il dépend de tous les coefficients bk du filtre
L’erreur de position sur un pôle Pi et un zéro Zi peut donc s’écrire :
où R/2 est le nombre de paires de pôles ou zéros doubles complexes conjugués avec R supé-rieur ou égal à 4.
♦ Pour la forme en parallèle, d’après les équations (19) et (20) on a :
• quel que soit le pôle Pi, il dépend uniquement des deux coefficients a1i et a2ide la cellule qui le caractérise
• quel que soit le zéro Zi, il dépend de b0k , b1k et de tous les coefficients ajk dufiltre (où k désigne le numéro de la cellule et j = 1 ou 2) sauf pour k=i.
L’erreur de position sur le pôle Pi et le zéro Zi peut donc s’écrire :
où m est le nombre de cellules du second ordre.
♦ Pour la forme en cascade, d’après les équations (21) et (22)
• quel que soit le pôle Pi, il dépend uniquement des deux coefficients a1i et a2i dela cellule qui le caractérise
∀ i ∈ 1, R2
h i
∆Pi=XRk=1
dPidak
δak avec a
k= a
dk+ δa
k
dZi=XRl=1
dZidb
l
δbl avec b
l= b
dl+ δb
l
(37 )
(38 ) ∀i ∈ 1, m
¢ £ ∆Pi
= dPida1i
δa1i + dPida2i
δa2i avec aki = adki
+ δaki
∆Zi=Xnl=1l=/ i
dZida1l
δa1l +Xnl=1l=/ i
dZida2l
δa2l + dZidb0i
δb0i +
dZidb1i
δb1i

Chapitre 2 : Filtrage numérique de type RII
44
• quel que soit le zéro Zi, il dépend uniquement des deux coefficients b1i et b2i dela cellule qui le caractérise
L’erreur de position sur le pôle Pi et le zéro Zi peut donc s’écrire :
où m est le nombre de cellules du second ordre.
Les équations (37), (38) et (39) permettent de montrer que l’erreur de position∆Pi maximale est obtenue si le filtre RII est sous sa forme générale, car pour cette structure∆Pi dépend de l’ensemble des erreurs obtenues sur les R coefficients ai dans le cas où R estsupérieur à 2. Elles permettent de démontrer également que l’erreur de position ∆Zi estmaximale lorsque le filtre est sous sa "forme en parallèle", car pour cette structure, ∆Zi dé-pend de l’ensemble des erreurs obtenues sur tous les coefficients du filtre . Elles démontrentaussi, que lorsque le filtre est sous sa forme en cascade, ∆Pi et ∆Zi sont minimales, car pourcette structure, ∆Pi (ou ∆Zi) dépend seulement des 2 erreurs obtenues sur a1i et a2i ( b1i etb2i).
On peut donc conclure que la structure la plus robuste, aux effets de la quantifi-cation, correspond à la mise en cascade de m cellules du second ordre (la forme en cascademinimise l’effet de la quantification des coefficients) [16]. Néanmoins, il existe d’autresstructures de filtres non présentées. Nous avons préféré utiliser la structure servant dansl’outil de conception des filtres.
2.3.2 Gestion du dépassement de la dynamique
La quantification impose de travailler avec une dynamique de calcul finie déli-mitée par la longueur de mot du DSP [17]. Pour un DSP travaillant avec des entiers de lon-gueur de mot de p bits, les entiers possibles appartiennent tous à l’ intervalle [-2p-1 ,2p-1[.Afin d’éviter les dépassements, il est nécessaire que les résultats de toutes les opérationssoient compris dans ce même intervalle.
D’après l’équation (23) le signal de sortie y(n) d’une cellule du second ordres’écrit :
(39 ) ∀i ∈ 1, m¢ £
∆Pi =
dPida1i
δa1i + dPida2i
δa2i avec aki = adki + δa
ki
∆Zi = dZidb1i
δb1i +
dZidb2i
δb2i avec bki = b
dki + δbki
ech ⋅ y(n) =ech⋅x(n)+b1⋅x(n−1)+b2⋅x(n−2)
K− a1 ⋅ y(n− 1)− a2 ⋅ y(n− 2)
soit ech ⋅ y(n) =VxK− a1 ⋅ y(n− 1)− a2 ⋅ y(n− 2)
(40 )

Chapitre 2 : Filtrage numérique de type RII
45
Pour éviter le dépassement de la dynamique il faut donc :
Le coefficient K permet de fixer le gain maximal de la cellule du second ordreaux alentours de 1. Par conséquent, la valeur de y(n) est forcement inférieure à deux fois lavaleur de x(n). Dans le pire des cas, l’ inéquation (41) devient :
Pour le cas extrême, x(n) est égal à la valeur maximale possible (égale à 2b−1).Afin d’éviter le dépassement de la dynamique il faut donc que :
Il faut vérifier qu’avec cette condition sur le facteur d’échelle, l’ inéquation (42)est respectée. Dans le pire des cas où x(n), x(n−1) et x(n−2) valent tous les trois la valeurmaximale, l’ inéquation (42) devient alors :
D’après l’équation (25) on a :
En combinant l’équation (45) avec l’équation (46) on obtient la même conditionsur le facteur d’échelle que l’équation (44).
2.3.3 Obtention des coefficients optimaux
La manière la plus simple pour obtenir les coefficients entiers est de tronqueravec l’opérateur Qc (définie par l’équation (26)) le résultat de la multiplication des coeffi-cients désirés par le facteur d’échelle tel que :
VxK− a1 ⋅ y(n− 1)− a2 ⋅ y(n− 2)
¬¬¬¬¬¬¬¬ < 2p−1 ⇒ ech ⋅ y(n)
¬¬ ¬¬ < 2p−1(41 )
(42 ) Vx¬¬ ¬¬ < 2p−1 ⇒ ech ⋅ x n( ) + b1 ⋅ x n− 1
¡ + b2 ⋅ x n− 2
¡¬¬¬ ¬¬¬ < 2p−1
et
2 ⋅ ech ⋅ x(n) < 2p−1 (43 )
ech ≤ 2 p−b−2 (44 )
Vx¬¬ ¬¬ = ech + b1 + b2
¬¬¬ ¬¬¬ < 2 p−b(45 )
ech + b1 + b2 ¬¬¬ ¬¬¬ < 4 ⋅ ech (46 )
ai = Qc ech ⋅ adi
° ±(47 )

Chapitre 2 : Filtrage numérique de type RII
46
Ce qui revient à :
Le pôle décrit par les coefficients a1 et a2 n’est pas nécessairement le pôle pos-sible le plus proche du pôle désiré dans le plan complexe. Ce paragraphe a pour objectifd’élaborer un procédé de calcul permettant de trouver les coefficients du pôle qui minimi-sent l’erreur de position entre pôle désiré et pôle décrit par les coefficients.
Il existe donc 2 entiers i et j tel que (a1+i) et (a2+j) décrivent le pôle le plusproche du pôle désiré, où a1 et a2 sont les coefficients déterminés à partir de l’équation (47).Le pôle décrit par les coefficients ( a1+i ) et ( a2+j ) a une pulsation réduite wp(i,j) et uncoefficient cp(j) tels que :
Il faut alors estimer les 2 entiers (i,j) afin de minimiser la distance entre le pôleimplémenté et celui désiré. Pour minimiser cette distance, on propose de minimiser la diffé-rence entre la pulsation réduite du pôle possible et celle du pôle désiré. Il a donc été néces-saire d’étudier le sens de variation de wp et cp en fonction de i et j (cf. annexe 3).
La figure 14 représente 6 ensembles de pôles possibles que l’on peut déterminerà partir des a1 et a2 (déterminés par l’équation (47)). Cette figure montre que la distanceentre deux pôles d’un même ensemble est minimale pour les trois ensembles suivants :
i=-j, i=-j-1, i=-j+1.
Le pôle optimal appartient forcement à l’un de ces trois ensembles. Pour l’estimation descoefficients optimaux, on propose donc l’organigramme suivant :
Cette organigramme est détaillé en annexe 3.
a1 = Qc −2 ⋅ cdp ⋅ ech ⋅ cos2⋅π⋅fdp
fe
!@
A et a2 = Qc ech ⋅ c2
dp
° ±(48 )
cp(j) =a2+j
ech
r et wp(i, j) = arccos
a1+i
−2⋅cp(j)⋅ech
² ³(49 )
Calcul de a1 et a2
Recherche de l’ensemble le plus proche du pôle désiré
Recherche du pôledans l’ensemble choisi
qui minimise la distance avec le pôle désirésoit i=-j, i=-j-1 ou i=-j+1
coefficients optimaux
wdpcdp
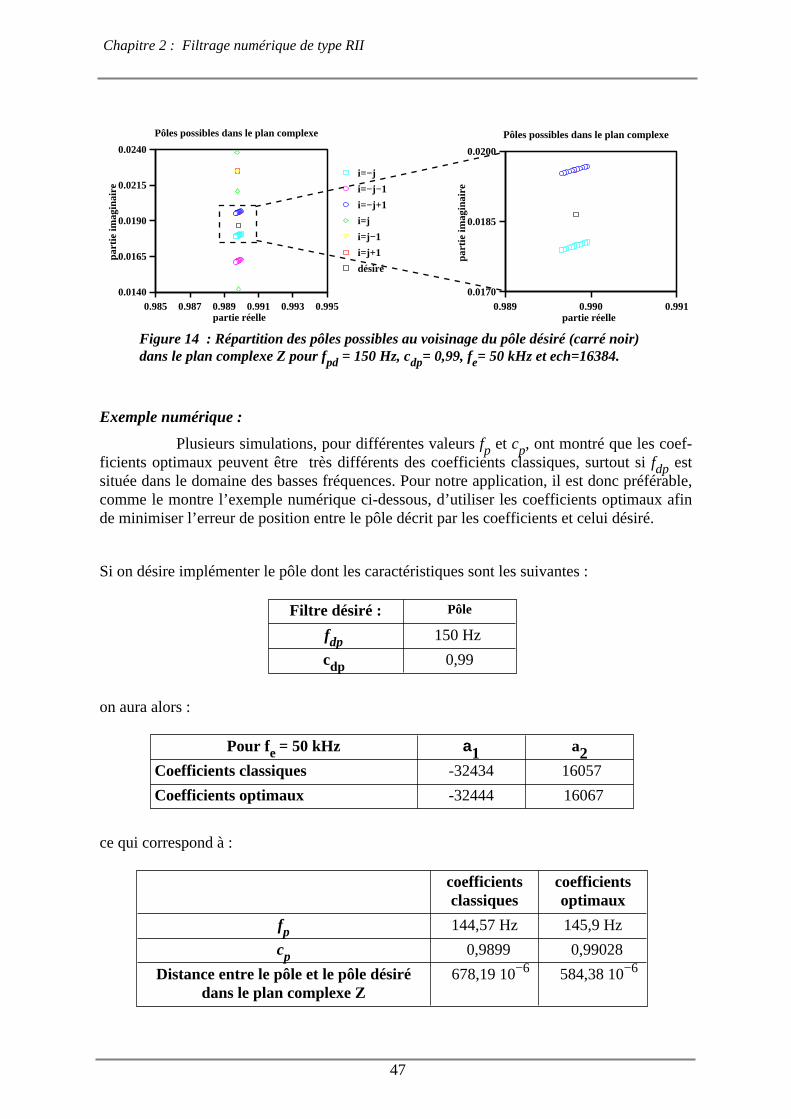
Chapitre 2 : Filtrage numérique de type RII
47
Exemple numérique :
Plusieurs simulations, pour différentes valeurs fp et cp, ont montré que les coef-ficients optimaux peuvent être très différents des coefficients classiques, surtout si fdp estsituée dans le domaine des basses fréquences. Pour notre application, il est donc préférable,comme le montre l’exemple numérique ci-dessous, d’utiliser les coefficients optimaux afinde minimiser l’erreur de position entre le pôle décrit par les coefficients et celui désiré.
Si on désire implémenter le pôle dont les caractéristiques sont les suivantes :
on aura alors :
ce qui correspond à :
Figure 14 : Répartition des pôles possibles au voisinage du pôle désiré (carré noir)dans le plan complexe Z pour fpd = 150 Hz, cdp= 0,99, fe= 50 kHz et ech=16384.
0.985 0.987 0.989 0.991 0.993 0.995partie réelle
0.0140
0.0165
0.0190
0.0215
0.0240
part
ie im
agin
aire
Pôles possibles dans le plan complexe
i=−j
i=−j−1
i=−j+1
i=j
i=j−1
i=j+1
désiré
0.989 0.990 0.991partie réelle
0.0170
0.0185
0.0200
part
ie im
agin
aire
Pôles possibles dans le plan complexe
Filtre désiré : Pôle
fdp 150 Hz
cdp 0,99
Pour fe = 50 kHz a1 a2Coefficients classiques -32434 16057
Coefficients optimaux -32444 16067
coefficientsclassiques
coefficientsoptimaux
fp 144,57 Hz 145,9 Hz
cp 0,9899 0,99028
Distance entre le pôle et le pôle désirédans le plan complexe Z
678,19 10−6 584,38 10−6
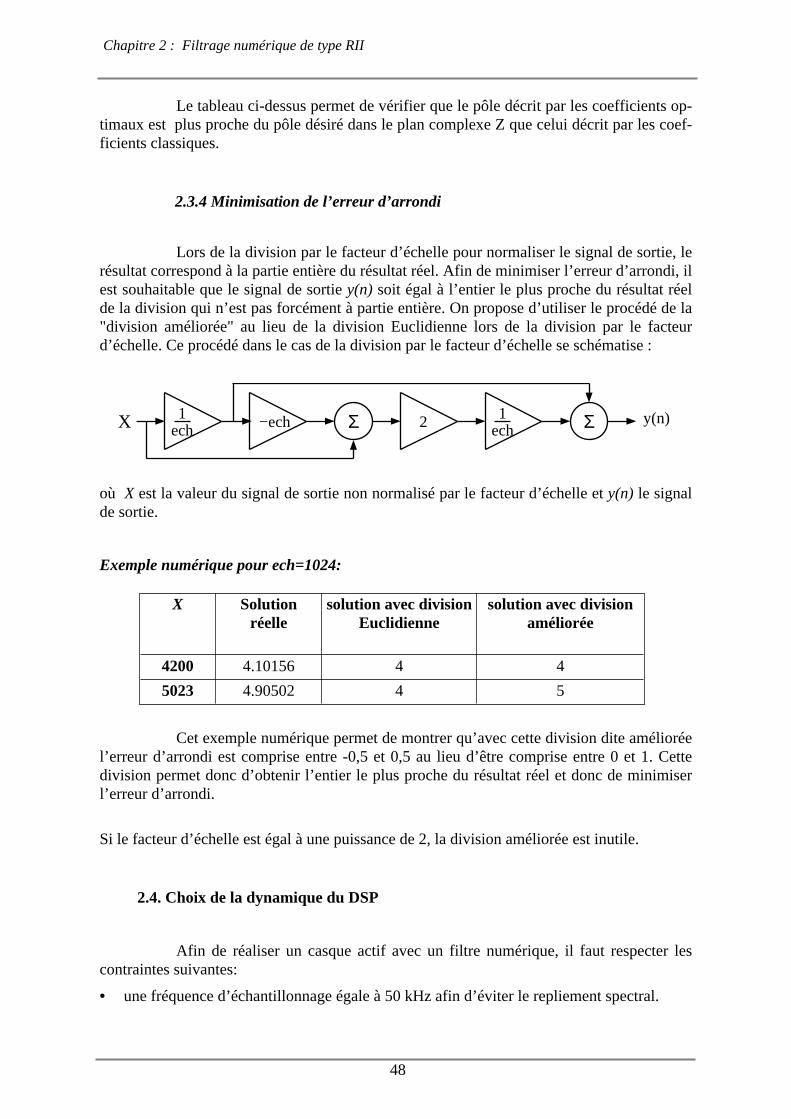
Chapitre 2 : Filtrage numérique de type RII
48
Le tableau ci-dessus permet de vérifier que le pôle décrit par les coefficients op-timaux est plus proche du pôle désiré dans le plan complexe Z que celui décrit par les coef-ficients classiques.
2.3.4 Minimisation de l’erreur d’arrondi
Lors de la division par le facteur d’échelle pour normaliser le signal de sortie, lerésultat correspond à la partie entière du résultat réel. Afin de minimiser l’erreur d’arrondi, ilest souhaitable que le signal de sortie y(n) soit égal à l’entier le plus proche du résultat réelde la division qui n’est pas forcément à partie entière. On propose d’utiliser le procédé de la"division améliorée" au lieu de la division Euclidienne lors de la division par le facteurd’échelle. Ce procédé dans le cas de la division par le facteur d’échelle se schématise :
où X est la valeur du signal de sortie non normalisé par le facteur d’échelle et y(n) le signalde sortie.
Exemple numérique pour ech=1024:
Cet exemple numérique permet de montrer qu’avec cette division dite amélioréel’erreur d’arrondi est comprise entre -0,5 et 0,5 au lieu d’être comprise entre 0 et 1. Cettedivision permet donc d’obtenir l’entier le plus proche du résultat réel et donc de minimiserl’erreur d’arrondi.
Si le facteur d’échelle est égal à une puissance de 2, la division améliorée est inutile.
2.4. Choix de la dynamique du DSP
Afin de réaliser un casque actif avec un filtre numérique, il faut respecter lescontraintes suivantes:
• une fréquence d’échantillonnage égale à 50 kHz afin d’éviter le repliement spectral.
Σ ΣX y(n) ech1 −ech 2 ech
1
X Solutionréelle
solution avec divisionEuclidienne
solution avec divisionaméliorée
4200 4.10156 4 4
5023 4.90502 4 5

Chapitre 2 : Filtrage numérique de type RII
49
• la possibilité d’ implémenter des filtres basses fréquences (fréquence de coupure <100Hz)
• une dynamique du filtre supérieure à 60 dB, pour cela il faut que le bruit de fond soit aumoins 1000 fois plus petit que l’amplitude maximale. Il est donc nécessaire d’utiliser desconvertisseurs de 16 bits ou 14 bits (cf. tableau du § 2.2.3).
Pour éviter les erreurs dues aux dépassements de la dynamique du DSP, il faut :
• soit utiliser un facteur d’échelle inférieur ou égal à 2p−b−2 (cf. équation (44)),
• soit gérer les dépassements à chaque opération.
La deuxième possibilité entraînerait une complexité au niveau de l’algorithme etune augmentation du temps de calcul par cellule.
Avec la première solution on a :
De plus la fréquence minimale pouvant être implémentée dépend du facteurd’échelle tel que (cf. figure 13) :
Afin de respecter les contraintes imposées, il faut utiliser un DSP de longueurde mot d’au moins 32 bits [26].
3. L’algorithme du filtre de type RII
La structure du filtre de type RII utilisée est la forme « cascade ». Le filtre cor-respond donc à m cellules du second ordre mises en série. Pour pouvoir l’ implémenter dansun DSP il est nécessaire d’utiliser un algorithme permettant de calculer les échantillons y(n)du signal de sortie pour chacune des m cellules du second ordre.
De plus pour pouvoir utiliser ce filtre dans un système ANR numérique il estnécessaire que la dynamique du filtre soit importante (> 60 dB). Pour cela il faut que la dy-namique de chacune des m cellules du second ordre constituant le filtre soit supérieure à60 dB. Ceci revient à avoir pour chacune des m cellules une erreur sur le signal de sortienégligeable quelle que soit l’amplitude du signal. Pour cela il suffit d’utiliser un algorithmepour une cellule du second ordre permettant cette large dynamique.
Convertisseur DSP 24 bits DSP 32 bits
14 bits ech ≤ 256 ech ≤ 262144
16 bits ech ≤ 64 ech ≤ 16384
b bits ech ≤ 222−b ech ≤ 230−b
ech = 64 ech = 1024 ech = 16384
fp-min pour cp > 0,94 900 Hz 100 Hz < 50 Hz

Chapitre 2 : Filtrage numérique de type RII
50
Dans ce paragraphe, seuls les algorithmes pour une cellule du second ordre sontétudiés. A partir des équations (23) et (40), pour une cellule donnée, le signal de sortie théo-rique, yth(n) peut s’écrire :
L’erreur en sortie de la cellule peut donc être estimée par :
3.1. L’algorithme standard
3.1.1 La structure
Il découle directement des équations (23), (40) et (50). C’est cet algorithme quel’on trouve dans la littérature [17][21][23][24].
Le diagramme de flux de cet algorithme est donc :
3.1.2 Limitations
Les figures 16 et 17 représentent le gain du filtre obtenu lors de simulations del’algorithme standard pour 2 cellules du second ordre différentes à partir d’un bruit rosed’amplitude maximale, A. Ces figures montrent que la dynamique de la cellule implémentée avec cet algorithme dépend des caractéristiques de celle-ci.
La dynamique du Biquad dont la fréquence du pôle est faible (150 Hz figure 16)n’est pas satisfaisante (inférieure à 10 dB) pour être utilisée dans un système ANR numéri-que [26]. En revanche celle du Biquad dont la fréquence du pôle est élevée est satisfai-sante.
ythn( ) =
ech⋅x n( ) + b1⋅x n−1 ¡
+ b2⋅x n−2 ¡
K− a1 ⋅ yth n− 1
¡− a2 ⋅ yth n− 2
¡ !⋅ 1ech
(50 )
e n( ) = y n( ) − yth n( ) (51 )
Figure 15 : Diagramme de flux du procédé actuel de calcul d’un filtrede type RII du second ordre
où : x(n) est le signal d’entrée du filtre et y(n) le signal de sortie du filtre
x(n) y(n)
b2
−a1
ech
b1Z-1
Z-1
Z-1
−a2 Z-1
Σ Σ /K /ech
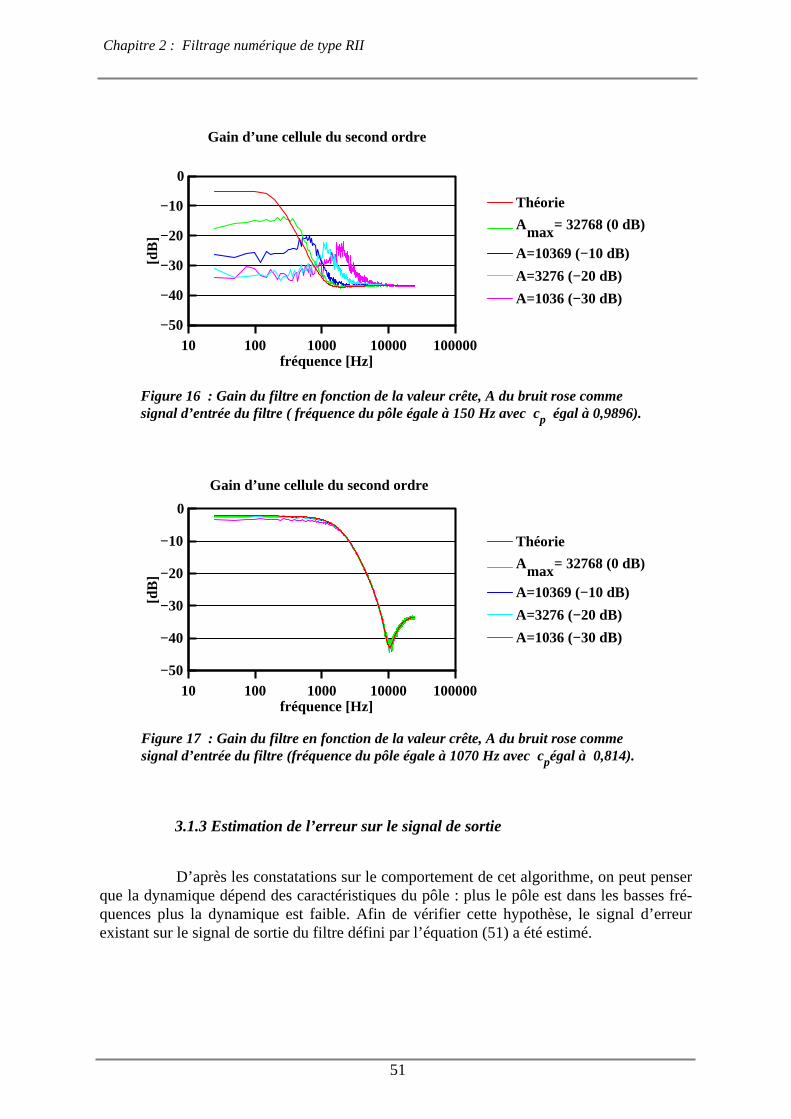
Chapitre 2 : Filtrage numérique de type RII
51
3.1.3 Estimation de l’erreur sur le signal de sortie
D’après les constatations sur le comportement de cet algorithme, on peut penserque la dynamique dépend des caractéristiques du pôle : plus le pôle est dans les basses fré-quences plus la dynamique est faible. Afin de vérifier cette hypothèse, le signal d’erreurexistant sur le signal de sortie du filtre défini par l’équation (51) a été estimé.
Figure 16 : Gain du filtre en fonction de la valeur crête, A du bruit rose comme signal d’entrée du filtre ( fréquence du pôle égale à 150 Hz avec cp égal à 0,9896).
10 100 1000 10000 100000fréquence [Hz]
−50
−40
−30
−20
−10
0
[dB
]Gain d’une cellule du second ordre
Théorie
Amax= 32768 (0 dB)
A=10369 (−10 dB)
A=3276 (−20 dB)
A=1036 (−30 dB)
Figure 17 : Gain du filtre en fonction de la valeur crête, A du bruit rose commesignal d’entrée du filtre (fréquence du pôle égale à 1070 Hz avec cpégal à 0,814).
10 100 1000 10000 100000fréquence [Hz]
−50
−40
−30
−20
−10
0
[dB
]
Gain d’une cellule du second ordre
Théorie
Amax= 32768 (0 dB)
A=10369 (−10 dB)
A=3276 (−20 dB)
A=1036 (−30 dB)

Chapitre 2 : Filtrage numérique de type RII
52
D’après l’organigramme de l’algorithme standard, le signal de sortie y(n) peutêtre exprimé par :
où −0 < δ < 1 et Q désigne l’opérateur non linéaire de la quantification lors de la divisionEuclidienne.
Or le signal de sortie y(n− i) peut s’exprimer également en fonction de yth(n− i) :
En insérant les équations (50) et (53) dans l’équation (52) on a
Pour l’algorithme standard, l’erreur e(n) vaut donc :
L’équation (55) permet de vérifier que l’erreur, sur le signal de sortie, dépendseulement des caractéristiques du pôle [25].
Afin d’avoir un ordre de grandeur de l’erreur e(n), on a déterminé à partir del’équation (55) sa valeur au rang n égal 2048 en fonction du pôle implémenté. La figure 18représente e(2048) dans le plan complexe Z en fonction de la partie réelle et de la partieimaginaire du pôle. Plus la fréquence du pôle est faible plus l’erreur est importante, d’oùune dynamique faible. On peut constater que l’erreur est non négligeable si le pôle se situeaux alentours du point (1,0) dans le plan complexe Z (partie verte sur la figure). Cette zonedu plan complexe Z correspond aux pôles de pulsation réduite inférieure à π/6 radians (fpin-férieur à 800 Hz pour fe = 50 kHz) dont le coefficient est supérieur à 0,9.
Le pôle de la cellule du second ordre, dont le gain est représenté sur la figure 16,se situe dans la zone où l’erreur est non négligeable (e(2048) vaut environ 2000). C’estpourquoi la dynamique de cette cellule est faible. En revanche la valeur de e(2048) pour lepôle du filtre, dont le gain est représenté sur la figure 17, est de l’ordre de 20 ce qui expliqueque dans ce cas la dynamique du filtre est plus importante (>30 dB).
y(n) = Q 1ech⋅ Q
ech⋅x(n)+b1⋅x(n−1)+b2⋅x(n−2)K
² ³− a1 ⋅ y(n− 1)− a2 ⋅ y(n− 2)
!@
A
y(n) ' 1ech⋅ ech⋅x(n)+b1⋅x(n−1)+b2⋅x(n−2)
K − a1 ⋅ y(n− 1)− a2 ⋅ y(n− 2)
² ³+ δ(n)
(52 )
y n− i ¡
= e n− i ¡
+ yth n− i ¡
(53 )
y(n) ' yth
(n) + −a1⋅e(n−1)−a2⋅e(n−2)
ech + δ(n) (54 )
e(n) =−a1⋅e(n−1)−a2⋅e(n−2)
ech + δ(n) (55 )
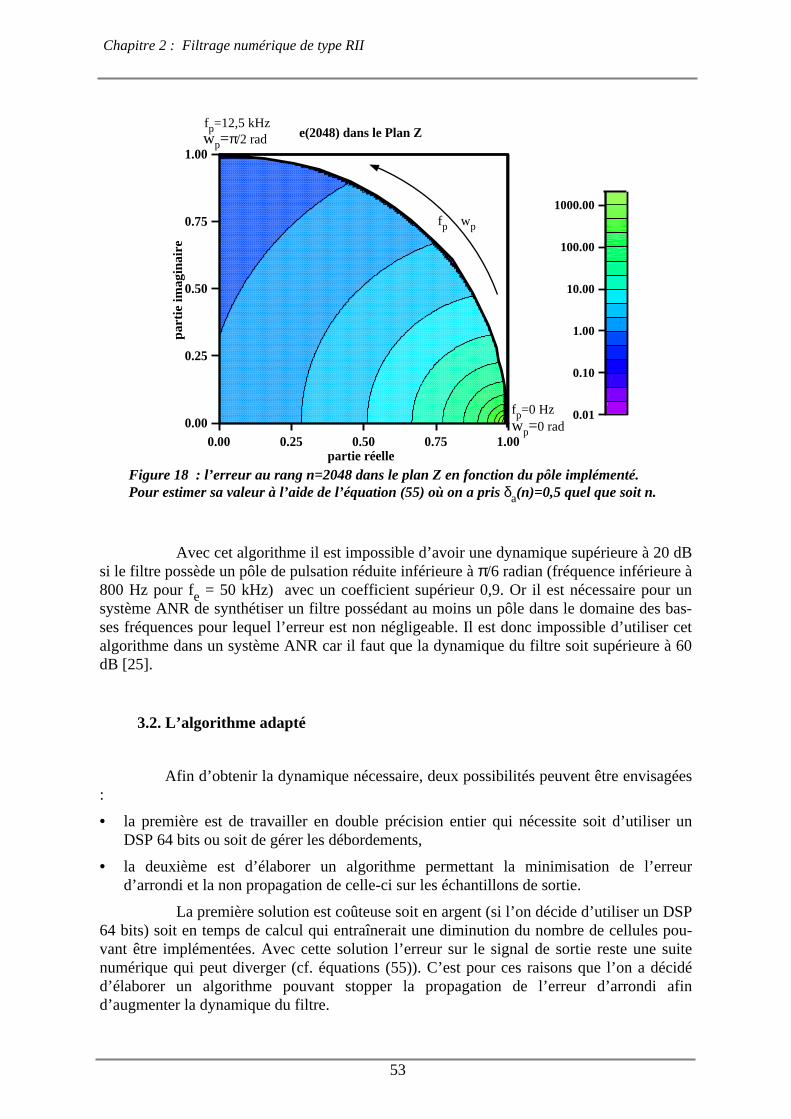
Chapitre 2 : Filtrage numérique de type RII
53
Avec cet algorithme il est impossible d’avoir une dynamique supérieure à 20 dBsi le filtre possède un pôle de pulsation réduite inférieure à π/6 radian (fréquence inférieure à800 Hz pour fe = 50 kHz) avec un coefficient supérieur 0,9. Or il est nécessaire pour unsystème ANR de synthétiser un filtre possédant au moins un pôle dans le domaine des bas-ses fréquences pour lequel l’erreur est non négligeable. Il est donc impossible d’utiliser cetalgorithme dans un système ANR car il faut que la dynamique du filtre soit supérieure à 60dB [25].
3.2. L’algorithme adapté
Afin d’obtenir la dynamique nécessaire, deux possibilités peuvent être envisagées:
• la première est de travailler en double précision entier qui nécessite soit d’utiliser unDSP 64 bits ou soit de gérer les débordements,
• la deuxième est d’élaborer un algorithme permettant la minimisation de l’erreurd’arrondi et la non propagation de celle-ci sur les échantillons de sortie.
La première solution est coûteuse soit en argent (si l’on décide d’utiliser un DSP64 bits) soit en temps de calcul qui entraînerait une diminution du nombre de cellules pou-vant être implémentées. Avec cette solution l’erreur sur le signal de sortie reste une suitenumérique qui peut diverger (cf. équations (55)). C’est pour ces raisons que l’on a décidéd’élaborer un algorithme pouvant stopper la propagation de l’erreur d’arrondi afind’augmenter la dynamique du filtre.
0.00 0.25 0.50 0.75 1.00partie réelle
0.00
0.25
0.50
0.75
1.00
part
ie im
agin
aire
e(2048) dans le Plan Z
0.00.51.00.01
0.10
1.00
10.00
100.00
1000.00
10000.00
Figure 18 : l’erreur au rang n=2048 dans le plan Z en fonction du pôle implémenté.Pour estimer sa valeur à l’aide de l’équation (55) où on a pris δa(n)=0,5 quel que soit n.
fp=0 Hzwp=0 rad
fp=12,5 kHzwp=π/2 rad
fp wp

Chapitre 2 : Filtrage numérique de type RII
54
3.2.1 La structure
L’erreur obtenue sur l’échantillon y(n) est due à la perte du reste de la divisionpar ech. Le problème majeur des algorithmes standards est la propagation de cette erreur surles échantillons de sortie à venir. Afin de minimiser la propagation de l’erreur de y(n), onpropose de tenir compte, dans le calcul de y(n), des deux restes de la division par ech lors ducalcul de y(n−1) et du calcul de y(n−2) [25].
Le diagramme de flux de cet algorithme, noté "algorithme adapté" est donc :
Pour un DSP 32 bits et des convertisseurs 16 bits, pour cet algorithme tous lescalculs sont faits en 32 bits mais les signaux sont codés sur 16 bits. Seules les variables in-termédiaires sont en 32 bits.
Figure 19 : Diagramme de flux de l’algorithme adapté pour un filtre de type RII du second ordrepermettant de minimiser l’erreur
où : x(n) est le signal d’entrée du filtre
y(n) le signal de sortie du filtre
r(n) est le reste la division par ech
Procédé de la division améliorée
Procédé de la non propagation de l’erreur d’arrondi
cf. schéma du § 2.3.4
x(n) y(n)
b2
−a1
ech
b1Z-1
Z-1
Z-1
−a2 Z-1
Σ Σ /K /ech
−ech
−a2 Z-1
−a1 Z-1
Σ
Σ
Σ
2
−ech
/ech
r(n)
Σ
/ech

Chapitre 2 : Filtrage numérique de type RII
55
Ce procédé algorithmique fait l’objet d’un brevet déposé par l’ ISL le 25 avril2000 (numéro de dépôt à l’ INPI : 00005246) dont je suis coauteur avec M. Karl Buck. Ils’ intitule : "Procédé de filtrage à large dynamique pour filtre numérique récursif implantédans un processeur de signal DSP travaillant avec des nombres entiers".
3.2.2 Estimation de l’erreur sur le signal de sortie
Comme pour l’algorithme standard, on détermine le signal d’erreur existant surle signal de sortie d’une cellule du second ordre défini par l’équation (51) afin de vérifierque cette erreur est plus faible que dans le cas précédent.
D’après l’organigramme (cf. figure 19) de l’algorithme adapté, le signal de sor-tie y(n) est :
où −0,5 < δa < 0,5 et Q désigne l’opérateur non linéaire de la quantification lors de la divi-sion Euclidienne et Qa celui lors de la division dite améliorée. r(n) représente le reste de ladivision au rang n s’exprimant par :
Il est donc possible d’écrire le signal théorique, yth(n) en fonction du signal y(n)tel que :
En insérant les équations (50) et (57) dans l’équation (56) on a :
Pour l’algorithme adapté, l’erreur e(n) vaut donc :
(56 )
y(n) = Qa1ech⋅
Qech⋅x(n)+b1⋅x(n−1)+b2⋅x(n−2)
K
² ³
− a1 ⋅ y(n− 1)− a2 ⋅ y(n− 2)− Qa1⋅r(n−1) + a2⋅r(n−2)
ech
² ³@
A
@
A
y(n) ' 1ech⋅
ech⋅x(n)+b1⋅x(n−1)+b2⋅x(n−2)K
− a1 ⋅ y(n− 1)− a2 ⋅ y(n− 2)− a1⋅r(n−1) + a2⋅r(n−2)
ech
@
A + δa(n)
avec − 0, 5 ≤ δa(n) ≤ 0, 5
r(n) = Qech⋅x(n)+b1⋅x(n−1)+b2⋅x(n−2)
K
² ³− a1 ⋅ y(n− 1)− a2 ⋅ y(n− 2)− y(n) ⋅ ech
r(n) ' ech⋅x(n)+b1⋅x(n−1)+b2⋅x(n−2)K
− a1 ⋅ y(n− 1)− a2 ⋅ y(n− 2)− y(n) ⋅ ech + δ
ythn( ) ' y n( ) +
r n( )ech
(57 )
y n( ) ' ythn( ) + δa n( ) (58 )
(59 ) e(n) ≈ δa (n) ⇒ − 0,5 < e(n) < 0,5

Chapitre 2 : Filtrage numérique de type RII
56
L’équation (59) démontre qu’avec cet algorithme l’erreur e(n) est une suitearithmétique bornée indépendante de la cellule implémentée et de l’amplitude du signald’entrée. Avec l’algorithme adapté, l’erreur est toujours négligeable quel que soit le signald’entrée. Par conséquent, dans ce cas, la dynamique de la cellule est donc élevée.
La figure 20 représentant la distribution de e(n), permet de montrer que e(n) est une suite de nombres aléatoires compris entre 0 et 0,5 avec une distribution uni-forme (où toutes les valeurs ont la même probabilité d’apparaître). La moyenne de e(n)est donc 0,25 (cf. figure 20) [25].
3.3. Comparaison de l’algorithme adapté et de l’algorithme standard
Pour la comparaison des deux algorithmes, la cellule du second ordre utilisée estdéfinie par :
* : Pour réduire le temps de calcul, la valeur de l’échelle a été fixé à 16384 (les critèresd’optimisation du temps sont décrits au paragraphe 4.1).
Figure 20 : Distribution de e(n) obtenue sur 16384 valeurs différentes .
0.0 0.1 0.2 0.3 0.4 0.5valeur
0.00
0.02
0.04
0.06
0.08
0.10
0.12
distribution de l’erreur
Pour ech =16384* Pour fe = 50 kHz
a1 −32598 fp 78 Hz
a2 16216 cp 0,99486
b1 −32139 fz 390,25 Hz
b2 15799 cz 0,981985
K 32

Chapitre 2 : Filtrage numérique de type RII
57
3.3.1 Signal de sortie
Les figures 21 et 22 représentent le signal de sortie de la cellule du second ordredécrite dans le tableau ci-dessus pour deux amplitudes différentes du signal d’entrée. Cesfigures montrent que quelle que soit l’amplitude du signal d’entrée, le signal de sortie obte-nu avec l’algorithme adapté est superposable au signal de sortie théorique. En revancheavec l’algorithme standard le signal de sortie est différent du signal théorique.
Figure 21 : Signal de sortie obtenu lorsque le signal d’entrée est une sinusoïded’amplitude maximale A=10359 correspondant à −10 dB par rapportl’amplitude maximale admissible par le CAN (Amax=32768).
500 750 1000 1250 1500 1750 2000rang n
−10000
−5000
0
5000
10000−10000
−5000
0
5000
10000
Signal de Sortie
yth(n)
y(n)
(a) : Algorithme standard
(b) : Algorithme adapté
Figure 22 : Signal de sortie obtenu lorsque le signal d’entrée est une sinusoïded’amplitude maximale A=3277 correspondant à −20 dB par rapportl’amplitude maximale admissible par le CAN (Amax=32768).
500 750 1000 1250 1500 1750 2000rang n
−4000
−2000
0
2000
4000−4000
−2000
0
2000
4000
Signal de Sortie
yth(n)
y(n)
(a) : Algorithme standard
(b) : Algorithme adapté

Chapitre 2 : Filtrage numérique de type RII
58
Ces figures 21 et 22 permettent de vérifier qu’avec l’algorithme standard,l’erreur e(n) n’est pas négligeable devant l’amplitude du signal. En revanche, e(n) est négli-geable quelle que soit l’amplitude du signal d’entrée avec l’algorithme adapté.
3.3.2 Gain de la cellule du second ordre
La figure 23 représente le gain de la cellule du second ordre décrit précédem-ment si on utilise l’algorithme standard. La figure 24 représente le gain de cette même cel-lule si on utilise l’algorithme adapté. La figure 23 montre de nouveau qu’avec l’algorithmestandard, la dynamique du filtre est insuffisante lorsque que le pôle de la cellule est situédans le domaine des basses fréquences (inférieur à 800 Hz pour fe = 50 kHz) (cf. figure 16).
La figure 24 montre qu’avec l’algorithme adapté la dynamique de la cellule estsatisfaisante. Le gain obtenu, dans ce cas est superposable au gain théorique quelle que soitl’amplitude du signal d’entrée.
Figure 23 : Fonction de transfert de la cellule du second ordre implémentée avec l’algorithmestandard. Les simulations ont été réalisées avec des bruits roses de différentes valeurs crête A.
10 100 1000 10000fréquence [Hz]
−50
−40
−30
−20
−10
0
[dB
]
Gain d’une cellule du second ordre
théorie
AMax=32767 (0dB)
A=3276 (−20 dB)
A=327 (−40dB)

Chapitre 2 : Filtrage numérique de type RII
59
Afin d’améliorer les résultats obtenus avec l’algorithme classique, il serait pos-sible d’envisager d’utiliser la division améliorée. Dans ce cas les résultats sont meilleursmais ils restent non satisfaisant pour réaliser une boucle de contre réaction. En effet la divi-sion améliorée n’empêche pas la propagation de l’erreur d’arrondi. La figure montre que legain du filtre est différent de celui du filtre théorique lorsque l’amplitude du signal diminue.Par contre dans ce cas le bruit basse fréquence est amplifié au lieu d’être atténué.
Figure 24 : Fonction de transfert de la cellule du second ordre implémentée avec l’algorithmeadapté. Les simulations ont été réalisées avec des bruits roses de différentes valeurs crête A.
10 100 1000 10000fréquence [Hz]
−50
−40
−30
−20
−10
0[d
B]
Gain d’une cellule du second ordre
théorie
AMax=32767 (0dB)
A=3276 (−20 dB)
A=327 (−40dB)
10 100 1000 10000fréquence [Hz]
−40
−30
−20
−10
0
10
20
[dB
]
Gain d’une cellule du second ordre
Théorie
AMax=32767 (0dB)
A=3276 (−20 dB)
A=327 (−40 dB)
Figure 25 : Fonction de transfert de la cellule du second ordre implémentée avecl’algorithme classique utilisant la division améliorée. Les simulations ont été réaliséesavec des bruits roses de différentes valeurs crête A.
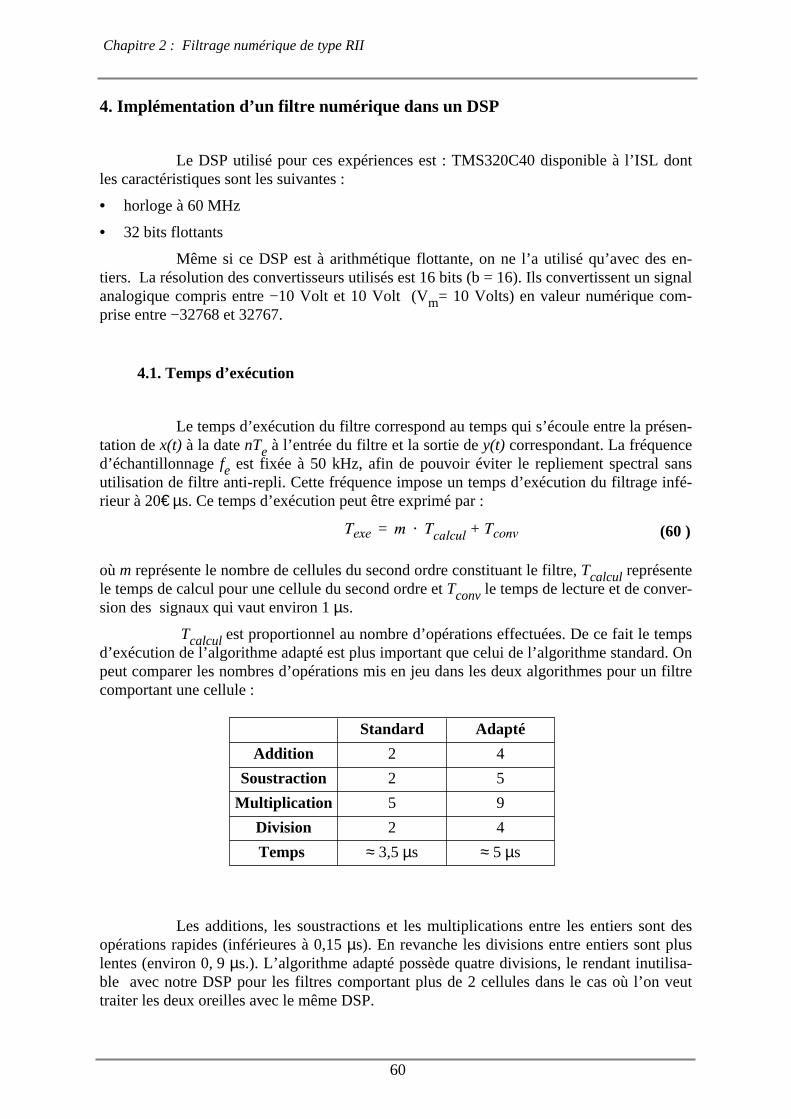
Chapitre 2 : Filtrage numérique de type RII
60
4. Implémentation d’un filtre numérique dans un DSP
Le DSP utilisé pour ces expériences est : TMS320C40 disponible à l’ ISL dontles caractéristiques sont les suivantes :
• horloge à 60 MHz
• 32 bits flottants
Même si ce DSP est à arithmétique flottante, on ne l’a utilisé qu’avec des en-tiers. La résolution des convertisseurs utilisés est 16 bits (b = 16). Ils convertissent un signalanalogique compris entre −10 Volt et 10 Volt (Vm= 10 Volts) en valeur numérique com-prise entre −32768 et 32767.
4.1. Temps d’exécution
Le temps d’exécution du filtre correspond au temps qui s’écoule entre la présen-tation de x(t) à la date nTe à l’entrée du filtre et la sortie de y(t) correspondant. La fréquenced’échantillonnage fe est fixée à 50 kHz, afin de pouvoir éviter le repliement spectral sansutilisation de filtre anti-repli. Cette fréquence impose un temps d’exécution du filtrage infé-rieur à 20€µ s. Ce temps d’exécution peut être exprimé par :
où m représente le nombre de cellules du second ordre constituant le filtre, Tcalcul représentele temps de calcul pour une cellule du second ordre et Tconv le temps de lecture et de conver-sion des signaux qui vaut environ 1 µs.
Tcalcul est proportionnel au nombre d’opérations effectuées. De ce fait le tempsd’exécution de l’algorithme adapté est plus important que celui de l’algorithme standard. Onpeut comparer les nombres d’opérations mis en jeu dans les deux algorithmes pour un filtrecomportant une cellule :
Les additions, les soustractions et les multiplications entre les entiers sont desopérations rapides (inférieures à 0,15 µs). En revanche les divisions entre entiers sont pluslentes (environ 0, 9 µs.). L’algorithme adapté possède quatre divisions, le rendant inutilisa-ble avec notre DSP pour les filtres comportant plus de 2 cellules dans le cas où l’on veuttraiter les deux oreilles avec le même DSP.
Texe = m ⋅ Tcalcul
+ Tconv (60 )
Standard Adapté
Addition 2 4
Soustraction 2 5
Multiplication 5 9
Division 2 4
Temps ≈ 3,5 µs ≈ 5 µs

Chapitre 2 : Filtrage numérique de type RII
61
Afin de minimiser le temps de calcul d’une cellule, il est donc nécessaire de di-minuer le nombre de divisions. Pour ce faire, il est possible de choisir le facteur d’échelleainsi que le coefficient de gain K comme puissance de 2. La division entière par 2p revient àsupprimer les p bits de poids faibles du nombre, et à garder seulement les bits de poids forts.Le décalage de p bits est une opération très rapide dans un DSP (< 0,1 µs). Dans ces condi-tions, le temps de calcul pour une cellule du second ordre devient inférieur à 3 µs.
4.2. Comparaison des deux algorithmes sur le DSP
Le filtre implémenté dans le DSP pour les différentes expériences est constituéd’une seule cellule du second ordre. Cette cellule est la même que celle définie dans le para-graphe 3.3.
Les figures 26 et 27 sont des mesures réalisées avec un analyseur en 1/3d’octave. Elles représentent le gain du filtre implémenté dans le DSP avec l’algorithme stan-dard pour la figure 26, et avec l’algorithme adapté pour la figure 27. Ces courbes ont étéobtenues en utilisant comme signal d’entrée un bruit rose de différentes amplitudes. 0 dB correspond à l’amplitude maximale admissible par les convertisseurs (10 V).
Ces deux figures permettent de montrer que les résultats expérimentaux sontsemblables aux résultats obtenus lors des simulations (cf. figures 23 et 24). Sur les figures26 et 27, lorsque l’amplitude du signal est inférieure à −40 dB par rapport au maximum, onconstate que le gain du filtre est différent dans les hautes fréquences en comparaison deceux obtenus lors de la simulation. Cette différence est due aux bruits électroniques qui de-viennent non négligeables dans le domaine des hautes fréquences. Lorsque l’amplitude dusignal d’entrée est inférieure à 35 mV (−50 dB par rapport à l’amplitude maximum), dans ledomaine des hautes fréquences l’énergie du signal est plus faible que celle du bruit électro-nique.
La figure 26 permet de montrer de nouveau que la dynamique du filtreimplémenté avec l’algorithme standard est faible si la fréquence du pôle est dans le domainedes basses fréquences. Le filtre implémenté dans un système ANR doit fonctionner de lamême façon quelle que soit l’amplitude du signal. C’est la raison pour laquelle l’algorithmestandard ne peut pas être utilisé pour implémenter un filtre utilisé dans un système ANR.
La figure 27 permet de montrer de nouveau que la dynamique du filtreimplémenté avec l’algorithme adapté est supérieure à 50 dB. Le gain du filtre implémentédans le DSP avec l’algorithme adapté est identique au gain théorique du filtre. Par consé-quent, il est possible d’utiliser cet algorithme dans un système ANR.

Chapitre 2 : Filtrage numérique de type RII
62
5. Conclusion
Ces études, simulations et expériences sur les filtres RII ont permis de montrerqu’ il est possible d’utiliser un filtre RII numérique dans un système ANR avec un DSP enarithmétique entière sous réserve d’utiliser :
• le filtre RII sous sa forme en cascade pour minimiser l’effet de la quantification descoefficients,
10 100 1000 10000Hz
−50
−40
−30
−20
−10
0
dB
Gain du filtre implémenté
0 dB
−10 dB
−20 dB
−30 dB
−40 dB
−50 dB
théorie
Figure 26 : Gain du Biquad implémenté avec l’algorithme standard obtenu avecdes bruits roses de différentes amplitudes. Où 0 dB est l’amplitude maximale
10 100 1000 10000fréquence [Hz]
−50
−40
−30
−20
−10
0
[dB
]
Gain du filtre implémenté
0 dB
−10 dB
−20 dB
−30 dB
−40 dB
−50 dB
théorie
Figure 27 : Gain du Biquad implémenté avec l’algorithme adapté obtenu avecdes bruits roses de différentes amplitudes. Où 0 dB est l’amplitude maximale

Chapitre 2 : Filtrage numérique de type RII
63
• l’algorithme des coefficients optimaux pour minimiser l’erreur entre les pôles et les zé-ros décrits par les coefficients et ceux désirés,
• des convertisseurs 16 bits pour améliorer le rapport signal sur bruit,
• la longueur de mot du DSP de 32 bits pour implémenter des filtres basses fréquences(<100 Hz) avec une fréquence d’échantillonnage égale à 50 kHz,
• l’algorithme adapté pour minimiser l’erreur sur le signal numérique.
Ce chapitre montre surtout l’ intérêt d’utiliser l’algorithme adapté au lieu del’algorithme standard avec un DSP 32 bits. L’algorithme adapté permet d’obtenir un filtreRII à large dynamique avec une large bande quelles que soient les caractéristiquesfréquentielles du filtre. Pour un DSP donné l’algorithme adapté est meilleur quel’algorithme standard car dans le cas de l’algorithme standard l’erreur sur le signal de sortieest une suite numérique (cf. équation (55)).
Avec l’algorithme adapté l’erreur due au calcul numérique est inférieure au bruitélectronique du système. Ce filtre numérique pourrait remplacer les filtres analogiques dansde nombreuses applications.
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
64
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
1. Optimisation de la boucle de contre-réaction ..........................................................1.1 Description du matériel utilisé .............................................................1.1.1 Système électro-acoustique ................................................................1.1.2 Les amplificateurs ..............................................................................1.1.3 Filtre numérique .................................................................................1.2 Optimisation du gain de la boucle ouverte ...........................................
2. Simulation du comportement d’un casque ..............................................................2.1 Description de la procédure utilisée ......................................................2.2 Comportement du système ANR .........................................................2.2.1 Comportement à la mise en route ......................................................2.2.2 Comportement du casque selon l’algorithme implémenté .................2.2.3 Lors d’une exposition à un bruit impulsionnel intense ......................2.2.3.1 Modélisation d’un bruit impulsionnel .............................................2.2.3.2 Visualisation du bruit résiduel ........................................................2.3 Conclusion ............................................................................................
3. Critères et méthodes d’évaluation des protections auditives ................................3.1 La stabilité .............................................................................................3.1.1 Sur tête ...............................................................................................3.1.2 En situations limites ...........................................................................3.1.2.1 En présence d’une fuite acoustique .................................................3.1.2.2 En présence de bruits de fort niveau ...............................................3.2 L’atténuation active ...............................................................................3.3 Bruit de fond .........................................................................................
4. Evaluation des performances d’un système ANR ...................................................4.1 La stabilité..............................................................................................4.1.1 Sur tête................................................................................................4.1.2 En situation limite ..............................................................................4.2 Atténuation active .................................................................................4.3 Mesure du bruit fond..............................................................................4.4 Bilan de l’évaluation..............................................................................
5. Atténuations actives en fonction de la position de mesure .....................................
6. Avantages du système ANR numérique développé .............. .................................6.1 Atténuation active en fonction du type d’algorithme ............................6.2 Souplesse d’adaptation d’une protection auditive active numérique ....6.3 Adaptation à différents systèmes électro-acoustiques ...........................6.3.1 Sur différents casques ........................................................................6.3.2 Bouchon d’oreille actif .......................................................................6.4 Comparaison entre système analogique et système numérique...........
7. Conclusion................................................................................................................
656565676869
707072727373737475
7576767777777779
79808080808384
84
86868789899091
92

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
65
Dans le chapitre 2, le filtrage numérique de type RII a été optimisé dans le but de réaliser un filtre numérique destiné à remplacer un filtre analogique dans une boucle decontre-réaction. Ce filtrage numérique décrit au chapitre 2 peut donc être utilisé dans uneprotection auditive active numérique. En revanche, dans ce chapitre on s’ intéresse plus par-ticulièrement à :
• l’optimisation de la partie analogique de la protection auditive,
• la simulation du comportement d’un système ANR numérique afin d’estimer ses perfor-mances et de vérifier sa stabilité quel que soit le bruit extérieur,
• l’évaluation des performances d’un système ANR numérique,
• la comparaison de notre système ANR numérique par rapport aux autres systèmes ANRexistants.
Lors de la conception d’une protection auditive active numérique, la stratégieutilisée est d’obtenir le maximum d’atténuation active pour un système électro-acoustiquedéterminé, et pour une bande d’atténuation donnée dont la fréquence centrale est fixée.C’est avec cette stratégie que la fonction de transfert du filtre et le gain de la boucle ouvertesont déterminés.
1. Optimisation de la boucle de contre-réaction
1.1. Description du matériel utilisé
Pour la réalisation d’un système ANR numérique, il est nécessaire d’utiliser (cf.figure 4) :
• un système électro-acoustique constitué d’un microphone et d’un haut-parleur,
• un pré-amplificateur pour le microphone,
• un amplificateur de puissance pour le haut-parleur,
• un filtre numérique implémenté dans un DSP.
1.1.1 Système électro-acoustique
Tous les casques actifs commercialisés possèdent des performances différentes :leurs fonctions de transfert du système électro-acoustique ainsi que celles de leurs filtres decompensation sont différentes. Afin de vérifier que le système numérique peut s’adapter àdifférents systèmes électro-acoustiques, les expériences ont été réalisées sur deux types deprotections auditives actives : casque actif et bouchon actif.
L’objectif de ce travail n’étant pas la réalisation d’un système électro-acoustiqued’un dispositif ANR, on a donc utilisé l’électro-acoustique de 4 casques actifs analogiques,

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
66
dans lesquels les circuits analogiques (pré-amplificateur, filtre de compensation et amplifi-cateur de puissance) ont été déconnectés, et remplacés par notre système numérique. La fi-gure 28 représente les fonctions de transfert des 4 casques actifs mis à notre disposition.Cette figure permet de vérifier que la fonction de transfert du système électro-acoustique va-rie fortement d’un casque à l’autre.
La figure 29 représente la fonction de transfert du système électro-acoustiquedu casque 3 en fonction de la coque mesurée. Elle montre que ces fonctions de transfertpeuvent être différentes selon le côté du casque (droit ou gauche). Cette différence entraîneune atténuation active différente sur les deux oreilles de l’utilisateur, si le même filtre decompensation est utilisé. Elle traduit probablement le fait que les volumes des deux coquessont différentes. En effet, généralement une seule des deux coques contient les batteries né-cessaires au dispositif actif.
Figure 28 : Fonction de transfert de l’électro-acoustique des 4 casques actifs utilisés
1 10 100 1000 10000 100000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−40
−30
−20
−10
0
[dB
]
Gain complexe de systèmes électro−acoustiques
casque 1
casque 2
casque 3
casque 4
1 10 100 1000 10000 100000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−40
−30
−20
−10
0
[dB
]
Gain complexe d’un système électro−acoustique
Droite
Gauche
Figure 29 : Fonction de transfert de l’électro-acoustique du casque 3

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
67
Actuellement, il n’existe pas encore de bouchon actif commercialisé. Dansl’objectif de réaliser à l’ ISL un bouchon actif, une thèse sur la miniaturisation de l’électro-acoustique d’un tel système ANR (microphone et haut-parleur miniature pouvant servir dansun système ANR) a été réalisée par M. Raoul Bauer [27]. La figure 30 représente la fonctionde transfert de ce bouchon actif.
1.1.2 Les amplificateurs
Un système ANR, doit pouvoir traiter les très basses fréquences. Pour cela, il estnécessaire d’avoir un pré-amplificateur et un amplificateur de puissance possédant au moinsune bande passante allant de 5 Hz à 30 kHz.
Le rôle du pré-amplificateur est d’amplifier le faible signal à la sortie du micro-phone. En effet la sensibilité, Sn, des microphones utilisés dans les casques actifs est faiblede l’ordre de 10 mV /Pa. Pour les différents systèmes électro-acoustique utilisés, le pré-amplificateur est le même , sa bande passante va de 5 Hz à 100 kHz (sa fonction de transfertest représentée en annexe 5).
Le gain du pré-amplificateur, A1 doit être choisi en tenant compte des deux con-traintes suivantes :
• il est nécessaire de fournir un signal à l’entrée du convertisseur analogique numériquequi soit suffisamment important pour rendre négligeable l’erreur de conversion devantl’amplitude du signal
• il est nécessaire que la valeur crête du signal à l’entrée du convertisseur soit inférieure àla valeur maximale admise par le CAN ( Vm = 10 V) afin d’éviter la saturation.
1 10 100 1000 10000 100000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−40−30−20−10
010
[dB
]Gain complexe de l’électro−acoustique du bouchon
Figure 30 : Fonction de transfert de l’électro-acoustiquedu bouchon actif réalisé au sein de l’ISL.
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
68
On souhaite réaliser des casques actifs pouvant fonctionner sans saturation jus-qu’à un niveau sonore de 120 dB SPL ( 20 Pa). Ceci entraîne :
Afin de minimiser l’erreur de conversion et de coder sans saturation toutes lespressions inférieures à 120 dB, A1 doit être fixé à :
Pour les systèmes ANR développés à ISL, le gain de A1 a donc été fixé à 50(Sn = 10 mV /Pa et Vm = 10 Volts).
En revanche le rôle de l’amplificateur de puissance est différent selon le type duhaut-parleur utilisé :
• Pour le bouchon actif où le haut-parleur est caractérisé par une céramique (comporte-ment capacitif), le rôle de l’amplificateur est de fournir la tension nécessaire pour in-duire une déformation de la céramique [27]. Dans ce cas, l’amplificateur utilisé est unamplificateur de tension pouvant fournir jusqu’à 60 V, dont le gain est fixé à 20.
• Pour les casques actifs, le rôle de l’amplificateur est de fournir la puissance nécessaireau haut-parleur sans avoir besoin d’amplifier la tension du signal de sortie du DSP. Il estpréférable d’amplifier la tension avant d’effectuer la conversion analogique numériquepour pouvoir négliger l’erreur de conversion devant l’amplitude du signal. C’est pour-quoi le gain de l’amplificateur a été fixé à 1,2. Sa bande passante s’étend de 4 Hz à 75kHz (sa fonction de transfert est représentée en annexe 5).
1.1.3 Filtre numérique
D’après le chapitre 2, il est nécessaire d’utiliser un filtre numérique de type RIIconstitué de m cellules du second ordre mises en cascade. Pour les différentes expériences,tous les filtres numériques implémentés sont constitués de 1, 2 ou 3 cellules du second or-dre. Pour chaque système électro-acoustique, il est possible de déterminer un filtre numéri-que permettant d’obtenir le maximum d’atténuation pour une bande fréquentielled’atténuation fixée.
La fonction de transfert du filtre est déterminée à partir de l’outil de conception décrit au paragraphe 4.4 du chapitre 1. On rentre la fonction de transfert de la protection au-ditive pour laquelle on désire déterminer un filtre. Avec cet outil on voit en même temps :
• la fonction de transfert H.F où H est la fonction de transfert du casque et F celle du filtreque l’on dessine (on début F vaut 1)
• la fonction de transfert du filtre seul avec les caractéristiques des pôles et des zéros
• l’Atténuation maximal que l’on peut obtenir avec le filtre que l’on est en train de cons-truire en respectant la marge de sécurité fixée
• le diagramme de Nyquist de la boucle ouverte.
20 ⋅ Sn ⋅ A1 ≤ Vm (61 )
A1 =Vm
20⋅Sn(62 )

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
69
A l’aide de la souris, on ajoute des pôles et des zéros qui peuvent être suppriméspar la suite si ils ne conviennent pas. L’obtention du filtre se fait donc par tâtonnements suc-cessifs afin d’obtenir la bande fréquentielle de l’atténuation active souhaitée. Cet outil nousfournit donc l’ensemble des pôles et des zéros du filtre numérique à réaliser. Les coeffi-cients à implémenter dans le DSP sont déterminés à l’aide de l’algorithme des coefficientsoptimaux (cf. annexe 3).
1.2. Optimisation du gain de la boucle ouverte
D’après l’équation (8) du chapitre 1, si l’on veut augmenter (ou diminuer)l’atténuation active, il est nécessaire d’augmenter (ou diminuer) le gain de la boucle ouverte,Bo. On a vu également dans le chapitre 1 que pour assurer la stabilité du système à tout ins-tant, il suffit de respecter la marge de sécurité (notée M) (cf. figure 5). Pour que la bouclesoit stable, le gain de la boucle ouverte, Bo doit donc être fixé de façon que :
Puisque les gains des deux amplificateurs sont fixés, pour obtenir le maximumd’atténuation active admissible, il est possible d’ajouter un gain numérique. Le fait d’ajouterun gain numérique supplémentaire, Gf ne modifie pas la position des pôles ou des zéros dufiltre implémenté :
Où Fi(Z) est la fonction de transfert d’une cellule du second ordre, m est le nombre de cel-lule du second ordre et Gf correspond au gain numérique du filtre.
Pour un filtre et un système électro-acoustique donnés, l’atténuation active peutdonc être ajustée avec précision par le gain numérique Gf. Afin d’obtenir le maximumd’atténuation active tout en respectant la marge de sécurité, il suffit d’utiliser le gain numé-rique optimal, Gfo défini par :
Pour les différents systèmes électro-acoustiques mis à notre disposition, on aconstaté que le gain maximal de la fonction de transfert H, est compris entre 10 et 20 dB.
1 + Bo ¬¬ ¬¬ ≤ M (63 ) Quelle que soit la fréquence
F1(Z) Fm(Z) Gf y(n)x(n)
Filtre numérique
∀ ε , Min 1 + H ⋅ F ⋅ (Gfo + ε) ¬¬¬ ¬¬¬² ³
< M avec Min 1 + H ⋅ F ⋅ Gfo ¬¬¬ ¬¬¬² ³
≥ M (64 )
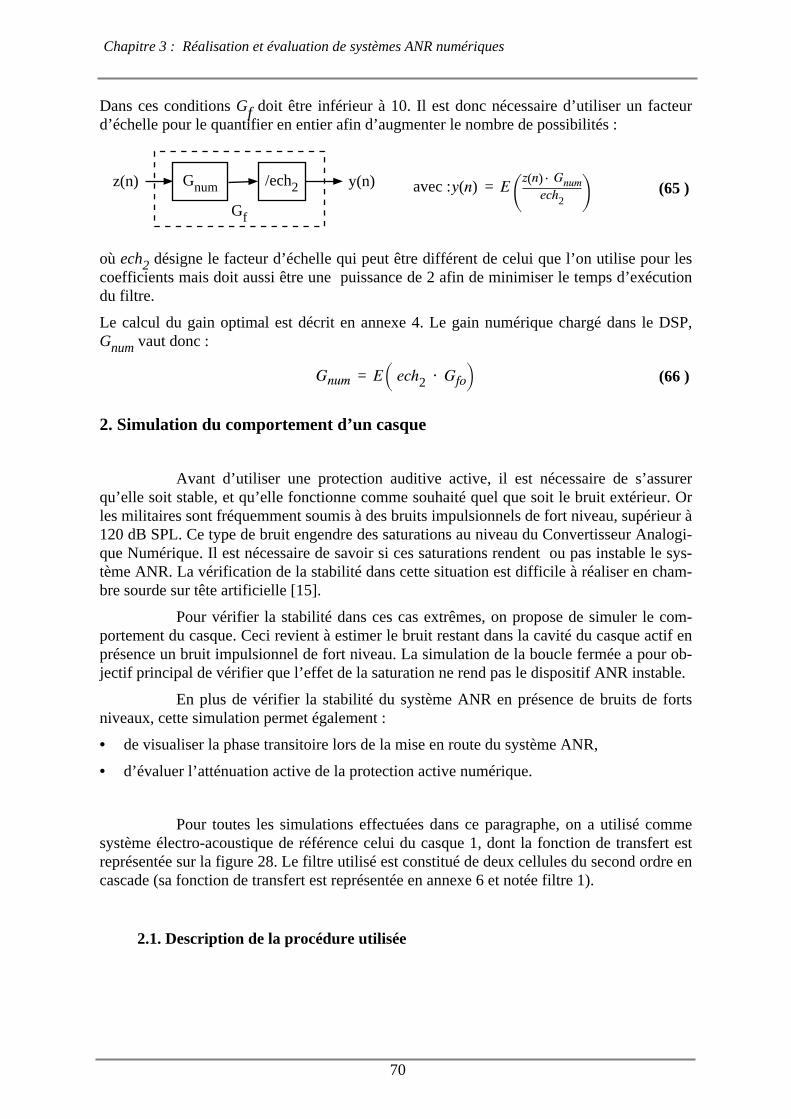
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
70
Dans ces conditions Gf doit être inférieur à 10. Il est donc nécessaire d’utiliser un facteurd’échelle pour le quantifier en entier afin d’augmenter le nombre de possibilités :
où ech2 désigne le facteur d’échelle qui peut être différent de celui que l’on utilise pour lescoefficients mais doit aussi être une puissance de 2 afin de minimiser le temps d’exécutiondu filtre.
Le calcul du gain optimal est décrit en annexe 4. Le gain numérique chargé dans le DSP,Gnum vaut donc :
2. Simulation du comportement d’un casque
Avant d’utiliser une protection auditive active, il est nécessaire de s’assurerqu’elle soit stable, et qu’elle fonctionne comme souhaité quel que soit le bruit extérieur. Orles militaires sont fréquemment soumis à des bruits impulsionnels de fort niveau, supérieur à120 dB SPL. Ce type de bruit engendre des saturations au niveau du Convertisseur Analogi-que Numérique. Il est nécessaire de savoir si ces saturations rendent ou pas instable le sys-tème ANR. La vérification de la stabilité dans cette situation est difficile à réaliser en cham-bre sourde sur tête artificielle [15].
Pour vérifier la stabilité dans ces cas extrêmes, on propose de simuler le com-portement du casque. Ceci revient à estimer le bruit restant dans la cavité du casque actif enprésence un bruit impulsionnel de fort niveau. La simulation de la boucle fermée a pour ob-jectif principal de vérifier que l’effet de la saturation ne rend pas le dispositif ANR instable.
En plus de vérifier la stabilité du système ANR en présence de bruits de fortsniveaux, cette simulation permet également :
• de visualiser la phase transitoire lors de la mise en route du système ANR,
• d’évaluer l’atténuation active de la protection active numérique.
Pour toutes les simulations effectuées dans ce paragraphe, on a utilisé commesystème électro-acoustique de référence celui du casque 1, dont la fonction de transfert estreprésentée sur la figure 28. Le filtre utilisé est constitué de deux cellules du second ordre encascade (sa fonction de transfert est représentée en annexe 6 et notée filtre 1).
2.1. Description de la procédure utilisée
y(n)/ech2z(n) Gnum
Gf
y(n) = Ez(n)⋅ Gnum
ech2
² ³avec : (65 )
(66 ) Gnum = E ech2 ⋅ Gfo
° ±
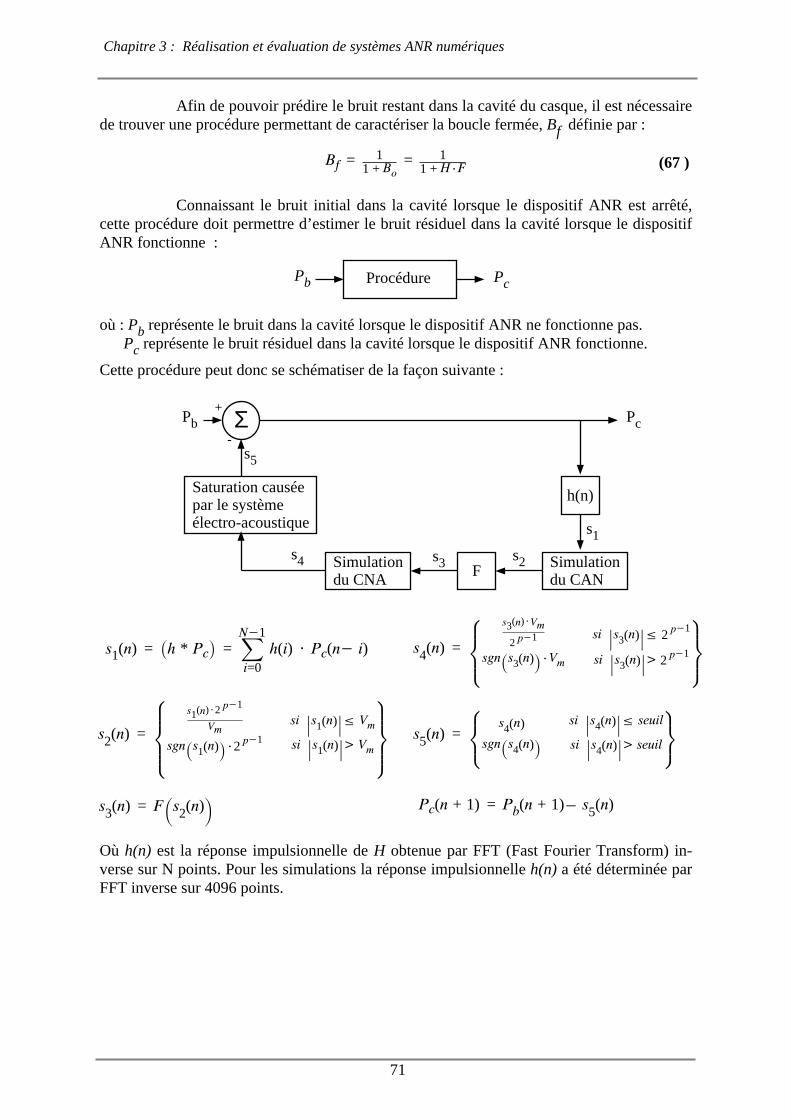
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
71
Afin de pouvoir prédire le bruit restant dans la cavité du casque, il est nécessairede trouver une procédure permettant de caractériser la boucle fermée, Bf définie par :
Connaissant le bruit initial dans la cavité lorsque le dispositif ANR est arrêté,cette procédure doit permettre d’estimer le bruit résiduel dans la cavité lorsque le dispositifANR fonctionne :
où : Pb représente le bruit dans la cavité lorsque le dispositif ANR ne fonctionne pas. Pc représente le bruit résiduel dans la cavité lorsque le dispositif ANR fonctionne.
Cette procédure peut donc se schématiser de la façon suivante :
Où h(n) est la réponse impulsionnelle de H obtenue par FFT (Fast Fourier Transform) in-verse sur N points. Pour les simulations la réponse impulsionnelle h(n) a été déterminée parFFT inverse sur 4096 points.
Bf = 11 + Bo
= 11 + H⋅F (67 )
Procédure Pb Pc
s4(n) =
s3(n)⋅Vm2 p−1
sgn s3(n) ¡⋅Vm
si s3(n)¬¬ ¬¬≤ 2
p−1
si s3(n)¬¬ ¬¬> 2
p−1
Σ
h(n)
Simulationdu CANF
Saturation causéepar le systèmeélectro-acoustique
Pb Pc
s1
s2s4
s5
-
+
Simulationdu CNA
s3
s1(n) = h * Pc ¡
=XN−1
i=0 h(i) ⋅ Pc(n− i)
s2(n) =
s1(n)⋅2 p−1
Vm
sgn s1(n) ¡⋅2
p−1 si s1(n)¬¬ ¬¬≤ Vm
si s1(n)¬¬ ¬¬> Vm
s3(n) = F s2(n)° ±
s5(n) =s4(n)
sgn s4(n) ¡ si s4(n)
¬¬ ¬¬≤ seuil
si s4(n)¬¬ ¬¬> seuil
Pc(n + 1) = Pb(n + 1)− s5(n)

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
72
2.2. Comportement du système ANR
2.2.1 Comportement à la mise en route
La figure 31 représente le bruit résiduel dans le cas où le bruit initial est consi-déré comme un signal sinusoïdal. Elle permet de vérifier qu’ il existe une phase transitoirelors de la mise en route du dispositif. D’après cette figure, on constate que la durée de laphase transitoire est inférieure à deux périodes du signal initial, Pb.
Cette figure permet de montrer que la durée de la phase transitoire est faible(toujours inférieur à 50 ms). Il est donc possible de ne pas en tenir compte lors des estima-tions de l’atténuation active.
2.2.2 Comportement du casque selon l’algorithme implémenté
Ce paragraphe a pour objectif d’évaluer l’atténuation active AANR, en fonction de l’algorithme utilisé. La figure 32 montre que l’atténuation active dépend de l’algorithmeutilisé. Lorsque on utilise l’algorithme standard, l’atténuation active est différente del’atténuation active théorique. Cette différence croît lorsque l’amplitude du signal diminue.Ceci est dû au fait que dans ce cas la fonction de transfert du filtre dépend de l’amplitude dusignal d’entrée. En revanche si on utilise l’algorithme adapté, l’atténuation active est su-perposable à l’atténuation active théorique quelle que soit l’amplitude du signal.
75 80 85 90 95 100 105 110temps (ms)
−1.0
−0.5
0.0
0.5
1.0
[Pa]
−1.0
−0.5
0.0
0.5
1.0
[Pa]
Phase transitoire
Pb
Pc
Figure 31 : Régime transitoire lors de la mise en route du dispositif ANR à t=80 ms pour deux sinusoïdes de fréquence f.
(a) : f = 150 Hz
(b) f= 350 Hz

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
73
La figure 32 permet de montrer une fois de plus l’ intérêt de l’utilisation del’algorithme adapté par rapport à l’algorithme standard.
2.2.3 Lors d’une exposition à un bruit impulsionnel intense
2.2.3.1 Modélisation d’un bruit impulsionnel
Les bruits impulsionnels sont fréquemment rencontrés [15]. Afin d’étudier leurseffets, il est nécessaire de les modéliser. Les bruits impulsionnels peuvent être modéliséscomme des impulsions de "Friedlander" définies par [15] (cf. figure 33) :
où A correspond à l’amplitude maximale de l’ impulsion, t0 correspond à la durée de la phasepositive de l’ impulsion.
Le bruit impulsionnel modélisé par une impulsion de "Friedlander" subitl’atténuation passive de la protection auditive. De ce fait, le bruit existant dans la cavité ducasque peut être évalué par un signal sinusoïdal amorti [15] (cf. figure 33).
Figure 32 : Simulation de l’atténuation active en fonction de l’algorithme de filtrage lorsque Pbest un bruit rose de valeur crête A. La courbe théorique est déterminée à partir de l’équation (8).
10 100 1000 10000Fréquence [Hz]
−10
0
10
20
30
[dB
]
−10
0
10
20
30[d
B]
AANR selon l’agorithme utilisé
théorie
A= 90 dB SPL
A=100 dB SPL
A=110 dB SPL
Algorithme adapté
Algorithme standard
x(t) = A 1− tt0
² ³× exp − t
t0
² ³(68 )

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
74
2.2.3.2 Visualisation du bruit résiduel
Afin d’avoir un ordre de grandeur des effets de la saturation du système ANRlors d’une exposition à un bruit impulsionnel de fort niveau, la boucle fermée a été simuléeen utilisant des sinusoïdes amorties de fréquence f, comme bruit initial Pb (cf. organi-gramme du paragraphe 2.1).
La figure 34 permet de visualiser, l’effet de la saturation du dispositif ANR ensupposant que le casque soit soumis à un bruit impulsionnel. Dans les 2 cas, la saturationproduit un bruit supplémentaire dans le domaine des hautes fréquences. Pour le deuxièmecas, l’effet de la saturation a pour conséquence une augmentation du bruit initial au lieu del’atténuer. Ce phénomène peut se produire lorsque la sinusoïde amortie est peu atténuée parle système ANR et que le bruit haute fréquence supplémentaire se situe dans la plage del’amplification du système ANR (c’est à dire 700 Hz à 1 kHz ou 7 kHz à 9 kHz). En effet,pour une sinusoïde de fréquence égale à 400 Hz (le cas (b)) l’atténuation active ne vaut que8 dB. En revanche, dans le cas (a), elle vaut 20 dB (cf. figure 32).
La figure 34 permet de montrer que le dispositif ANR n’est pas ou peu efficacecontre les bruits de très forts niveaux (supérieurs à 120 dB SPL = 20 Pa) à cause des effetsnon linéaires dus à la saturation. Mais le système ANR, reste stable en présence d’un bruitimpulsionnel de fort niveau, et reprend un comportement linéaire lorsque le niveau du bruitdevient inférieur à 120 dB SPL (20 Pa). Si les effets de la saturation rendaient instable lesystème ANR, le signal Pc divergerait, ce qui n’est pas le cas.
0.00 0.02 0.04temps [s]
−200
20406080
100[P
a]
Impulsion de Friedlander
0.00 0.02 0.04temps [s]
−90
−45
0
45
90
[Pa]
Sinusoide amortie
Atténuation passive
Figure 33 : Modélisation des bruits lors d’une exposition à un bruit impulsionnel : a) à l’extérieur du casque b) dans la cavité du casque avec le dispositif ANR off.
b)a)
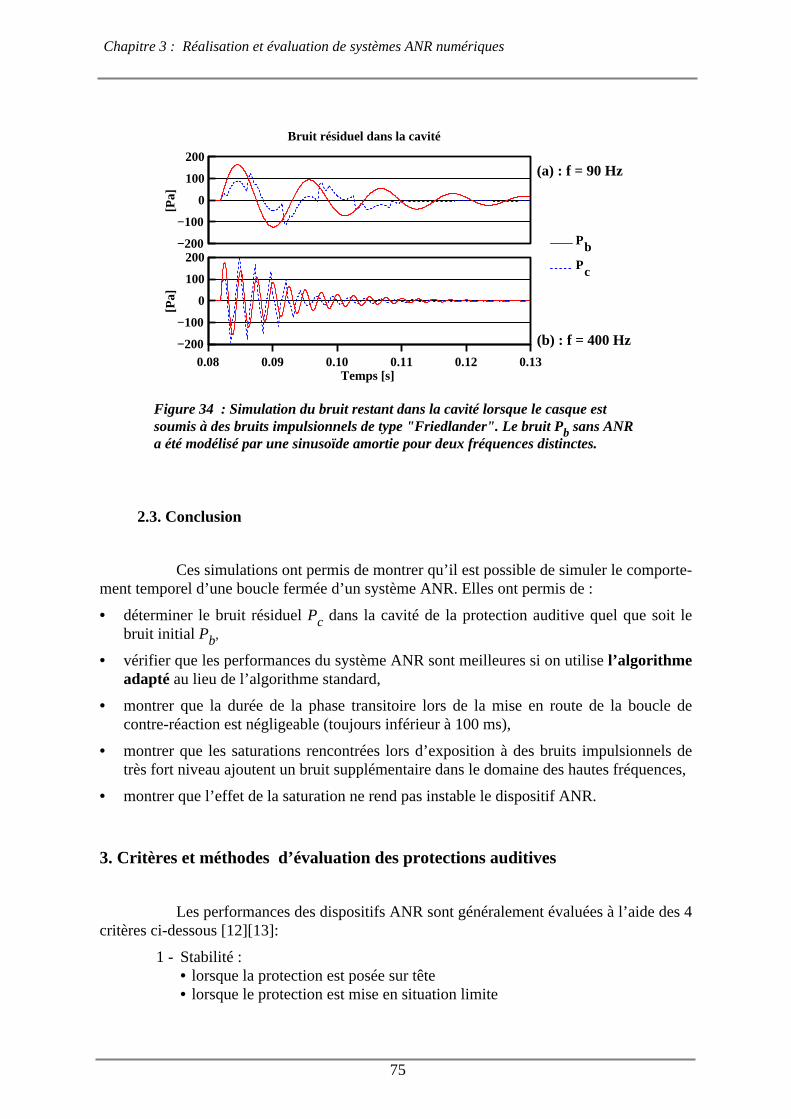
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
75
2.3. Conclusion
Ces simulations ont permis de montrer qu’ il est possible de simuler le comporte-ment temporel d’une boucle fermée d’un système ANR. Elles ont permis de :
• déterminer le bruit résiduel Pc dans la cavité de la protection auditive quel que soit lebruit initial Pb,
• vérifier que les performances du système ANR sont meilleures si on utilise l’algorithmeadapté au lieu de l’algorithme standard,
• montrer que la durée de la phase transitoire lors de la mise en route de la boucle decontre-réaction est négligeable (toujours inférieur à 100 ms),
• montrer que les saturations rencontrées lors d’exposition à des bruits impulsionnels detrès fort niveau ajoutent un bruit supplémentaire dans le domaine des hautes fréquences,
• montrer que l’effet de la saturation ne rend pas instable le dispositif ANR.
3. Critères et méthodes d’évaluation des protections auditives
Les performances des dispositifs ANR sont généralement évaluées à l’aide des 4critères ci-dessous [12][13]:
1 - Stabilité :• lorsque la protection est posée sur tête • lorsque le protection est mise en situation limite
0.08 0.09 0.10 0.11 0.12 0.13Temps [s]
−200
−100
0
100
200
[Pa]
−200
−100
0
100
200[P
a]
Bruit résiduel dans la cavité
Pb
Pc
Figure 34 : Simulation du bruit restant dans la cavité lorsque le casque estsoumis à des bruits impulsionnels de type "Friedlander". Le bruit Pb sans ANRa été modélisé par une sinusoïde amortie pour deux fréquences distinctes.
(a) : f = 90 Hz
(b) : f = 400 Hz

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
76
2 - Atténuation active de la protection
3 - Bruit de fond
4 - Intelligibilité de la parole pour des systèmes possédant la voie de phonie. Cecas est développé dans le paragraphe 1 du chapitre 4 dans lequel on décritl’ insertion de la voie de phonie dans la boucle de contre-réaction.
3.1. La stabilité
L’utilisation d’une protection auditive active mettant en oeuvre une boucle decontre-réaction impose une sécurité importante du dispositif : un effet "LARSEN" entre lehaut-parleur et le microphone serait catastrophique si près du tympan. Ce phénomène estmalheureusement fréquent si les marges de stabilité du système sont trop faibles.
L’objectif est de vérifier, par différents essais, que la marge de sécurité (M) de laprotection auditive active étudiée est satisfaisante.
3.1.1 Sur tête
Le but ici est de vérifier que le système est stable sur tête. L’ idéal, serait de pou-voir tracer pour le casque actif étudié, le diagramme de Nyquist de la boucle ouverte. Cecipermettrait de déterminer la marge de sécurité (M) du système (c’est à dire d’estimer la dis-tance minimale entre le diagramme et le point (−1,0) dans le plan complexe, cf. figure 5).On considère que la marge de sécurité est satisfaisante lorsqu’elle est supérieure ou égale à1/2 (−6 dB). En revanche elle est considérée comme insuffisante lorsqu’elle est inférieure à1/3 (−10 dB).
Malheureusement, pour les casques actifs commercialisés, il est impossible demesurer la fonction de transfert de la boucle ouverte, n’ayant pas accès aux différents si-gnaux de la boucle. En revanche, cette mesure peut être envisagée pour nos prototypes desystèmes ANR numériques.
La valeur de M peut également être obtenue en mesurant l’atténuation active àpartir du microphone inséré dans la boucle de contre-réaction (la méthode permettant de me-surer l’atténuation active est décrite au paragraphe 3.1.2). Dans ce cas, M est égale au mini-mum de R où R représente la réduction de bruit (cf. équation (7)). Malheureusement pourles casques actifs commercialisés le signal en sortie du microphone est inaccessible. Seulpour nos systèmes ANR numériques, ce signal est accessible. Pour les casques actifs ducommerce, il est possible de mesurer l’atténuation active à partir d’un microphone miniatureque l’on placerait le plus près possible du microphone intégré dans la boucle de contre-réaction.

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
77
3.1.2 En situations limites
3.1.2.1 En présence d’une fuite acoustique
Le but de cet essai est d’étudier la stabilité du système en présence de fuitesacoustiques qui peuvent provenir de diverses origines. En effet une fuite acoustique entraîneune modification de la fonction de transfert du système électro-acoustique H, dans le do-maine des basses fréquences. Cette modification peut donc entraîner des instabilités dans cedomaine. Si la marge de sécurité M est respectée (M > 1/2), dans le domaine des basses fré-quences, les fuites acoustiques possibles ne devraient pas engendrer des instabilités. Il estquand même préférable de vérifier la stabilité du système en présence de fuites acoustiques.Pour cela, il suffit de constater si la protection auditive active se met à siffler ou générer unbruit potentiellement dangereux dans les différentes situations suivantes :
• changement de position du casque,
• retrait complet du casque,
• choc contre les coques de la protection.
Ces situations peuvent se présenter lorsque l’utilisateur repositionne le casque,le retire ou bien lorsque ses mouvements de tête provoquent des chocs contre les parois,alors que le dispositif actif fonctionne.
3.1.2.2 En présence de bruits de fort niveau
Il est possible que le niveau du bruit extérieur change ou que l’utilisateur soit àun instant donné en présence d’un bruit impulsionnel de fort niveau. Il est donc nécessairede vérifier la stabilité des systèmes actifs dans ces cas extrêmes. Pour cela, il est possible demesurer sur tête artificielle l’atténuation active de la protection en présence d’un bruit defort niveau (supérieur à 120 dB SPL). Mais il est souvent difficile de produire en chambrenon réverbérante des bruits de très forts niveaux surtout dans le cas de bruits impulsionnels.
Pour les systèmes ANR numériques développés, connaissant toutes les fonctionsde transfert mises en jeu, il est préférable de garantir la stabilité du système en présenced’un bruit impulsionnel de très fort niveau par simulation de la boucle fermée (prédiction ducomportement du casque cf. paragraphe 2.).
3.2. L’atténuation active
La mesure de l’atténuation supplémentaire apportée par une protection auditiveactive est l’une des principales caractéristiques de ses performances. L’autre estl’atténuation passive de celle-ci. L’atténuation apportée par une protection auditive activeest la somme de l’atténuation passive et de l’atténuation active. La mesure de l’atténuationactive peut se réaliser soit sur tête artificielle, soit sur tête humaine. L’utilisation de la tête

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
78
artificielle présente de nombreux avantages de commodité, de fiabilité, de reproductibilité,mais ne tient pas compte des disparités morphologiques humaines.
Afin de mesurer l’atténuation active, il est nécessaire de pouvoir estimer la pres-sion acoustique dans la cavité du casque. En effet, l’atténuation active correspond à la diffé-rence entre la pression acoustique sous le casque sans la contre-réaction et celle obtenueavec la contre-réaction. Ces deux pressions acoustiques peuvent être mesurées par :
• le microphone intégré au dispositif ANR (microphone de la boucle), seulement possiblepour nos prototype de casque numérique,
• un microphone miniature placé dans la cavité du casque (Méthode MIRE : Microphon InReal Ear [13]),
• le microphone inséré au fond du conduit auditif d’une tête artificielle .
Pour des raisons pratiques, les différentes mesures seront réalisées soit par lemicrophone de la boucle de contre-réaction, soit par le microphone inséré dans la tête artifi-cielle. La procédure de mesure de l’atténuation active peut donc se schématiser ainsi :
Les pressions Pb (pression dans la cavité sans la contre-réaction) et Pc (pres-sion dans la cavité avec la contre-réaction) peuvent s’exprimer en fonction des Yi :
Des équations (8) et (69), on peut exprimer l’atténuation active AANR en fonction des Yi :
A F
(1)(2)
Analyseur spectral Yi
Figure 35 : Synoptique permettant la mesure de l’atténuation active
• Y1 : le spectre de la tension de sortie dupré amplificateur en boucle ouverte
• Y2 : le spectre de la tension de sortie dupré amplificateur en boucle fermée.
Pb
=Y1
A1⋅Km et Pc =
Y2A1⋅Km
(69 )
AANR = 20 ⋅ logPb
¬¬ ¬¬Pc| |
@
A = 20 ⋅ log
Y1¬¬ ¬¬Y2¬¬ ¬¬
@
A (70 )

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
79
Afin d’affiner l’évaluation des systèmes actifs, il est souvent intéressant de pou-voir évaluer les paramètres suivants [12]:
• La dynamique du système : c’est à dire déterminer la plage de l’amplitude du bruit pourlaquelle le système fonctionne correctement (de façon linéaire). Sur cette plage, iln’existe donc aucun effet non linéaire produit par des saturations des différents compo-sants électroniques mis en jeu.
• La différence inter-individu de l’atténuation active.
• La différence entre les deux coques du casque. Pour l’utilisateur, il est préférable que lebruit soit atténué de la même manière des deux côtés.
3.3. Bruit de fond
L’utilisation d’un système électronique de réduction de bruit génère un bruit defond d’un niveau supérieur au seuil d’audition. Dans le cas d’un casque actif asservi par unsystème ANR analogique, ce bruit de fond correspond au bruit électronique amplifié par lesamplificateurs de la boucle. Par contre pour un casque actif numérique, le bruit de fond pré-dominant amplifié lui aussi par les amplificateurs de la boucle, est celui lié au convertisseurAnalogique Numérique et défini par l’équation (36). Le niveau de ce bruit est inversementproportionnel à la résolution du convertisseur.
Le bruit de fond d’un casque actif est perçu par l’utilisateur uniquement en ab-sence de bruit extérieur. Il peut induire une gène, mais en aucun cas être nocif pourl’audition de l’utilisateur. Quelle que soit son origine, le bruit électronique peut être modéli-sé comme un bruit blanc. Comme tous les autres bruits passant dans la boucle de contre-réaction, il va subir l’atténuation active. Par conséquent, le bruit de fond perçu parl’utilisateur est un bruit haute fréquence, puisque le bruit est atténué dans le domaine desbasses fréquences par le système ANR.
Pour le confort de l’utilisateur, il est nécessaire que le niveau du bruit de fondsoit le plus faible possible. Pour évaluer la gêne causée par le bruit de fond, il suffit de lemesurer le niveau du bruit sous le casque à l’aide du microphone de la tête artificielle quireprésente le tympan d’un utilisateur.
4. Evaluation des performances d’un système ANR
La protection auditive étudiée, dans ce paragraphe, est le casque 1, dont la fonc-tion de transfert du système électro-acoustique est représentée sur la figure 28. Le filtre uti-lisé pour la coque gauche est identique à celui utilisé pour la coque droite. Ce filtre estconstitué de deux cellules du second ordre en cascade (la fonction de transfert en annexe 6noté filtre 1). Pour cette protection dans les mêmes conditions d’ implémentation, la simula-tion de la boucle fermée a été effectuée au paragraphe 2 de ce chapitre.
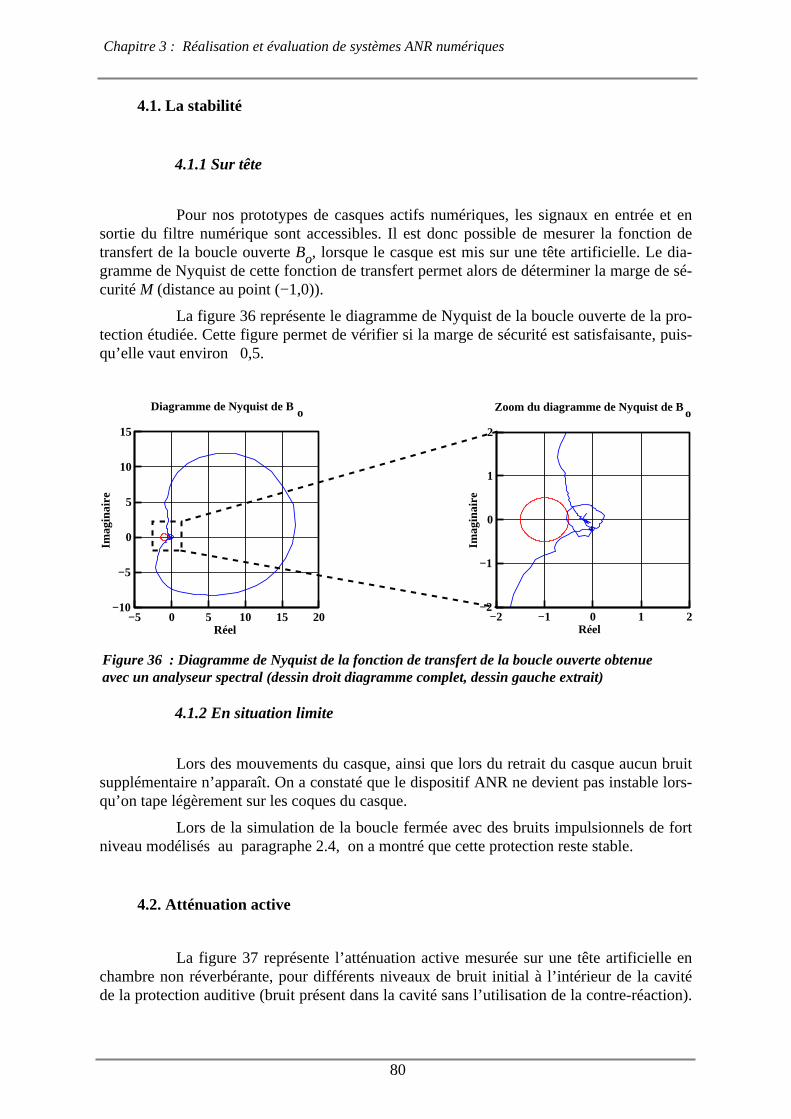
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
80
4.1. La stabilité
4.1.1 Sur tête
Pour nos prototypes de casques actifs numériques, les signaux en entrée et ensortie du filtre numérique sont accessibles. Il est donc possible de mesurer la fonction detransfert de la boucle ouverte Bo, lorsque le casque est mis sur une tête artificielle. Le dia-gramme de Nyquist de cette fonction de transfert permet alors de déterminer la marge de sé-curité M (distance au point (−1,0)).
La figure 36 représente le diagramme de Nyquist de la boucle ouverte de la pro-tection étudiée. Cette figure permet de vérifier si la marge de sécurité est satisfaisante, puis-qu’elle vaut environ 0,5.
4.1.2 En situation limite
Lors des mouvements du casque, ainsi que lors du retrait du casque aucun bruitsupplémentaire n’apparaît. On a constaté que le dispositif ANR ne devient pas instable lors-qu’on tape légèrement sur les coques du casque.
Lors de la simulation de la boucle fermée avec des bruits impulsionnels de fortniveau modélisés au paragraphe 2.4, on a montré que cette protection reste stable.
4.2. Atténuation active
La figure 37 représente l’atténuation active mesurée sur une tête artificielle enchambre non réverbérante, pour différents niveaux de bruit initial à l’ intérieur de la cavitéde la protection auditive (bruit présent dans la cavité sans l’utilisation de la contre-réaction).
Figure 36 : Diagramme de Nyquist de la fonction de transfert de la boucle ouverte obtenueavec un analyseur spectral (dessin droit diagramme complet, dessin gauche extrait)
−5 0 5 10 15 20Réel
−10
−5
0
5
10
15
Imag
inai
re
Diagramme de Nyquist de B o
−2 −1 0 1 2Réel
−2
−1
0
1
2
Imag
inai
re
Zoom du diagramme de Nyquist de B o
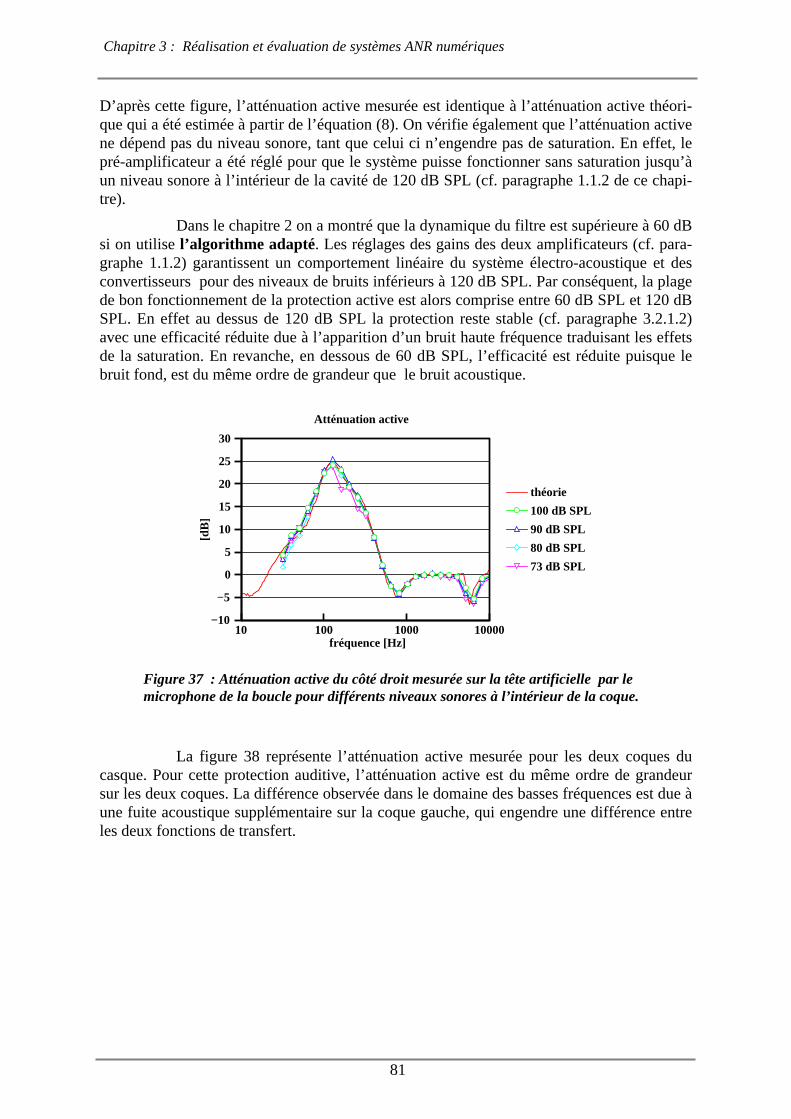
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
81
D’après cette figure, l’atténuation active mesurée est identique à l’atténuation active théori-que qui a été estimée à partir de l’équation (8). On vérifie également que l’atténuation activene dépend pas du niveau sonore, tant que celui ci n’engendre pas de saturation. En effet, lepré-amplificateur a été réglé pour que le système puisse fonctionner sans saturation jusqu’àun niveau sonore à l’ intérieur de la cavité de 120 dB SPL (cf. paragraphe 1.1.2 de ce chapi-tre).
Dans le chapitre 2 on a montré que la dynamique du filtre est supérieure à 60 dBsi on utilise l’algorithme adapté. Les réglages des gains des deux amplificateurs (cf. para-graphe 1.1.2) garantissent un comportement linéaire du système électro-acoustique et desconvertisseurs pour des niveaux de bruits inférieurs à 120 dB SPL. Par conséquent, la plagede bon fonctionnement de la protection active est alors comprise entre 60 dB SPL et 120 dBSPL. En effet au dessus de 120 dB SPL la protection reste stable (cf. paragraphe 3.2.1.2)avec une efficacité réduite due à l’apparition d’un bruit haute fréquence traduisant les effetsde la saturation. En revanche, en dessous de 60 dB SPL, l’efficacité est réduite puisque lebruit fond, est du même ordre de grandeur que le bruit acoustique.
La figure 38 représente l’atténuation active mesurée pour les deux coques ducasque. Pour cette protection auditive, l’atténuation active est du même ordre de grandeursur les deux coques. La différence observée dans le domaine des basses fréquences est due àune fuite acoustique supplémentaire sur la coque gauche, qui engendre une différence entreles deux fonctions de transfert.
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]
Atténuation active
théorie
100 dB SPL
90 dB SPL
80 dB SPL
73 dB SPL
Figure 37 : Atténuation active du côté droit mesurée sur la tête artificielle par lemicrophone de la boucle pour différents niveaux sonores à l’ intérieur de la coque.
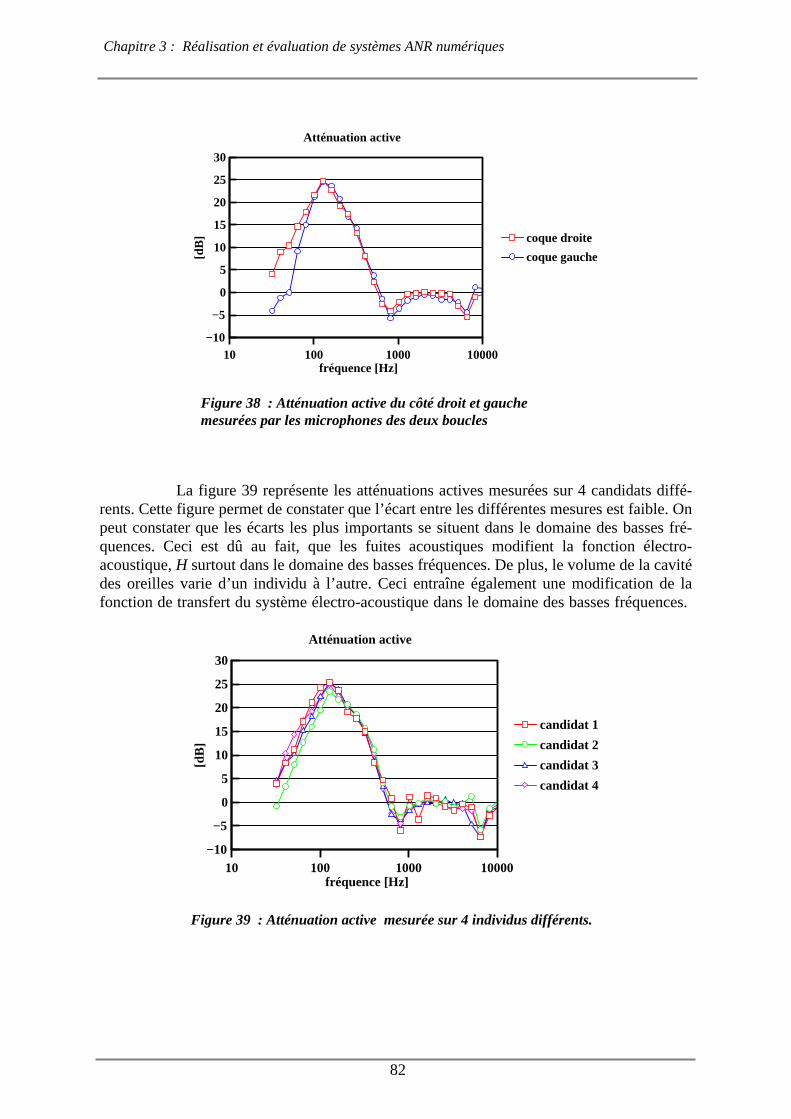
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
82
La figure 39 représente les atténuations actives mesurées sur 4 candidats diffé-rents. Cette figure permet de constater que l’écart entre les différentes mesures est faible. Onpeut constater que les écarts les plus importants se situent dans le domaine des basses fré-quences. Ceci est dû au fait, que les fuites acoustiques modifient la fonction électro-acoustique, H surtout dans le domaine des basses fréquences. De plus, le volume de la cavitédes oreilles varie d’un individu à l’autre. Ceci entraîne également une modification de lafonction de transfert du système électro-acoustique dans le domaine des basses fréquences.
Figure 38 : Atténuation active du côté droit et gauchemesurées par les microphones des deux boucles
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]
Atténuation active
coque droite
coque gauche
Figure 39 : Atténuation active mesurée sur 4 individus différents.
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]
Atténuation active
candidat 1
candidat 2
candidat 3
candidat 4
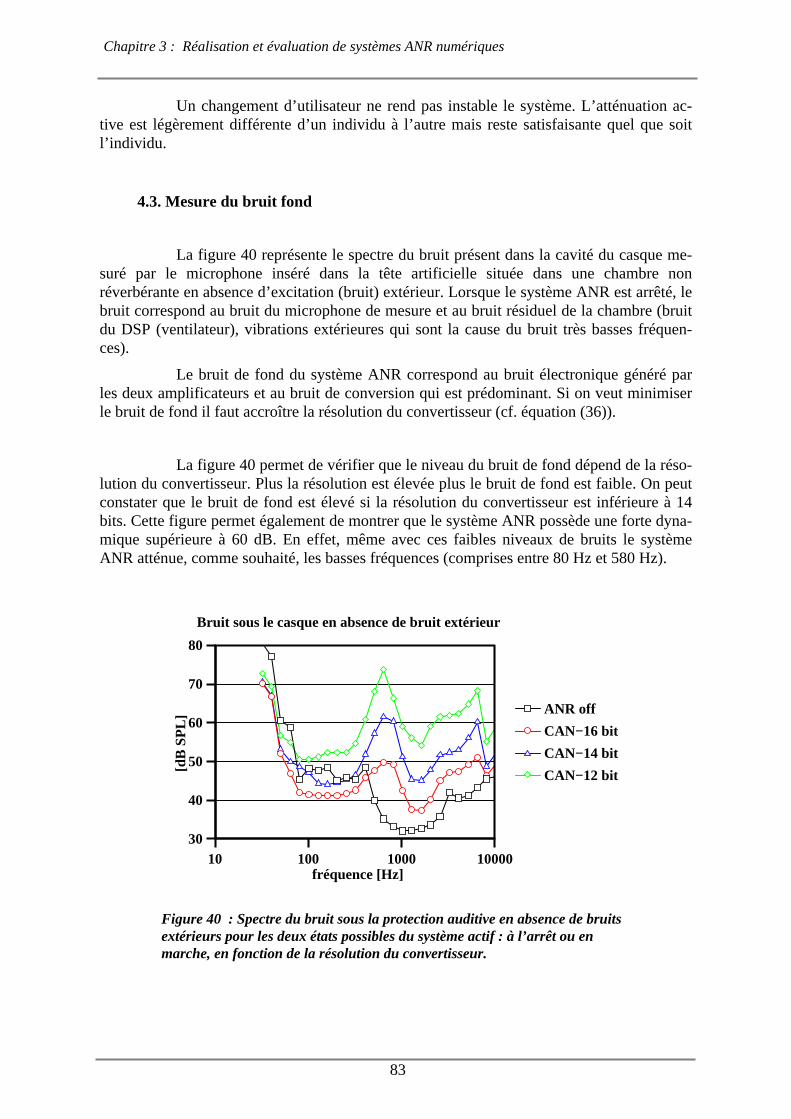
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
83
Un changement d’utilisateur ne rend pas instable le système. L’atténuation ac-tive est légèrement différente d’un individu à l’autre mais reste satisfaisante quel que soitl’ individu.
4.3. Mesure du bruit fond
La figure 40 représente le spectre du bruit présent dans la cavité du casque me-suré par le microphone inséré dans la tête artificielle située dans une chambre nonréverbérante en absence d’excitation (bruit) extérieur. Lorsque le système ANR est arrêté, lebruit correspond au bruit du microphone de mesure et au bruit résiduel de la chambre (bruitdu DSP (ventilateur), vibrations extérieures qui sont la cause du bruit très basses fréquen-ces).
Le bruit de fond du système ANR correspond au bruit électronique généré parles deux amplificateurs et au bruit de conversion qui est prédominant. Si on veut minimiserle bruit de fond il faut accroître la résolution du convertisseur (cf. équation (36)).
La figure 40 permet de vérifier que le niveau du bruit de fond dépend de la réso-lution du convertisseur. Plus la résolution est élevée plus le bruit de fond est faible. On peutconstater que le bruit de fond est élevé si la résolution du convertisseur est inférieure à 14bits. Cette figure permet également de montrer que le système ANR possède une forte dyna-mique supérieure à 60 dB. En effet, même avec ces faibles niveaux de bruits le systèmeANR atténue, comme souhaité, les basses fréquences (comprises entre 80 Hz et 580 Hz).
Figure 40 : Spectre du bruit sous la protection auditive en absence de bruitsextérieurs pour les deux états possibles du système actif : à l’arrêt ou enmarche, en fonction de la résolution du convertisseur.
10 100 1000 10000fréquence [Hz]
30
40
50
60
70
80
[dB
SP
L]
Bruit sous le casque en absence de bruit extérieur
ANR off
CAN−16 bit
CAN−14 bit
CAN−12 bit
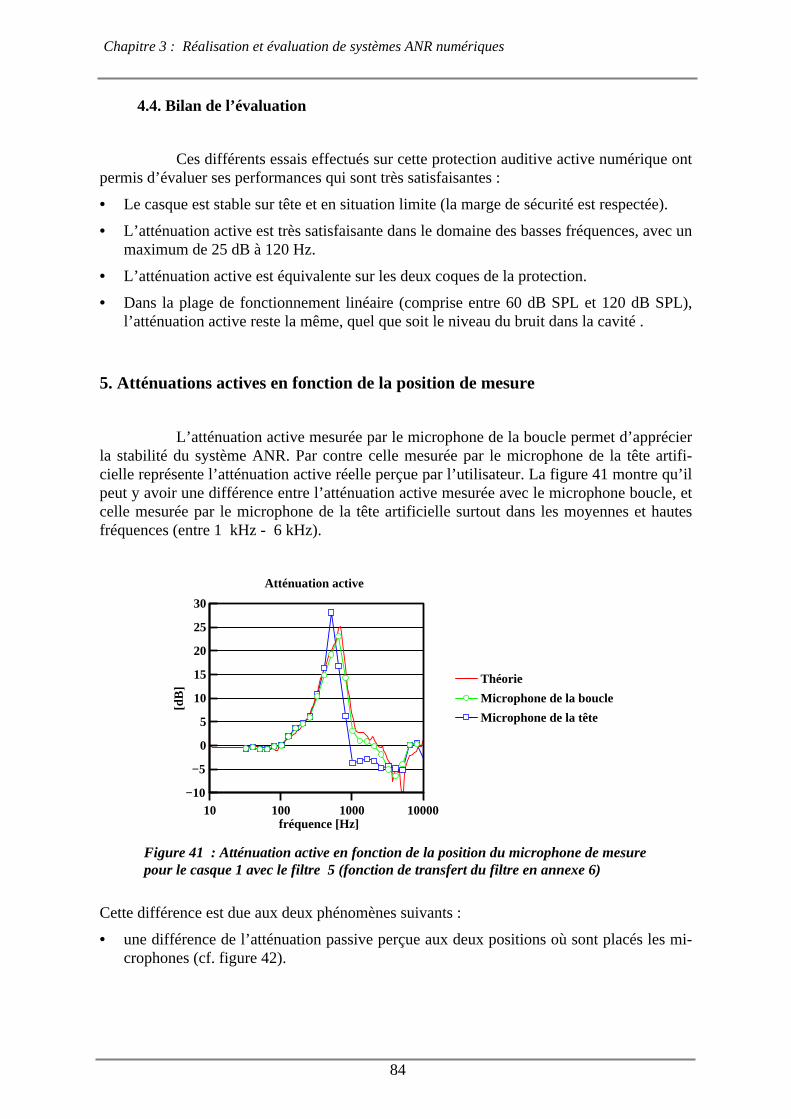
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
84
4.4. Bilan de l’évaluation
Ces différents essais effectués sur cette protection auditive active numérique ontpermis d’évaluer ses performances qui sont très satisfaisantes :
• Le casque est stable sur tête et en situation limite (la marge de sécurité est respectée).
• L’atténuation active est très satisfaisante dans le domaine des basses fréquences, avec unmaximum de 25 dB à 120 Hz.
• L’atténuation active est équivalente sur les deux coques de la protection.
• Dans la plage de fonctionnement linéaire (comprise entre 60 dB SPL et 120 dB SPL),l’atténuation active reste la même, quel que soit le niveau du bruit dans la cavité .
5. Atténuations actives en fonction de la position de mesure
L’atténuation active mesurée par le microphone de la boucle permet d’apprécierla stabilité du système ANR. Par contre celle mesurée par le microphone de la tête artifi-cielle représente l’atténuation active réelle perçue par l’utilisateur. La figure 41 montre qu’ ilpeut y avoir une différence entre l’atténuation active mesurée avec le microphone boucle, etcelle mesurée par le microphone de la tête artificielle surtout dans les moyennes et hautesfréquences (entre 1 kHz - 6 kHz).
Cette différence est due aux deux phénomènes suivants :
• une différence de l’atténuation passive perçue aux deux positions où sont placés les mi-crophones (cf. figure 42).
Figure 41 : Atténuation active en fonction de la position du microphone de mesurepour le casque 1 avec le filtre 5 (fonction de transfert du filtre en annexe 6)
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]
Atténuation active
Théorie
Microphone de la boucle
Microphone de la tête
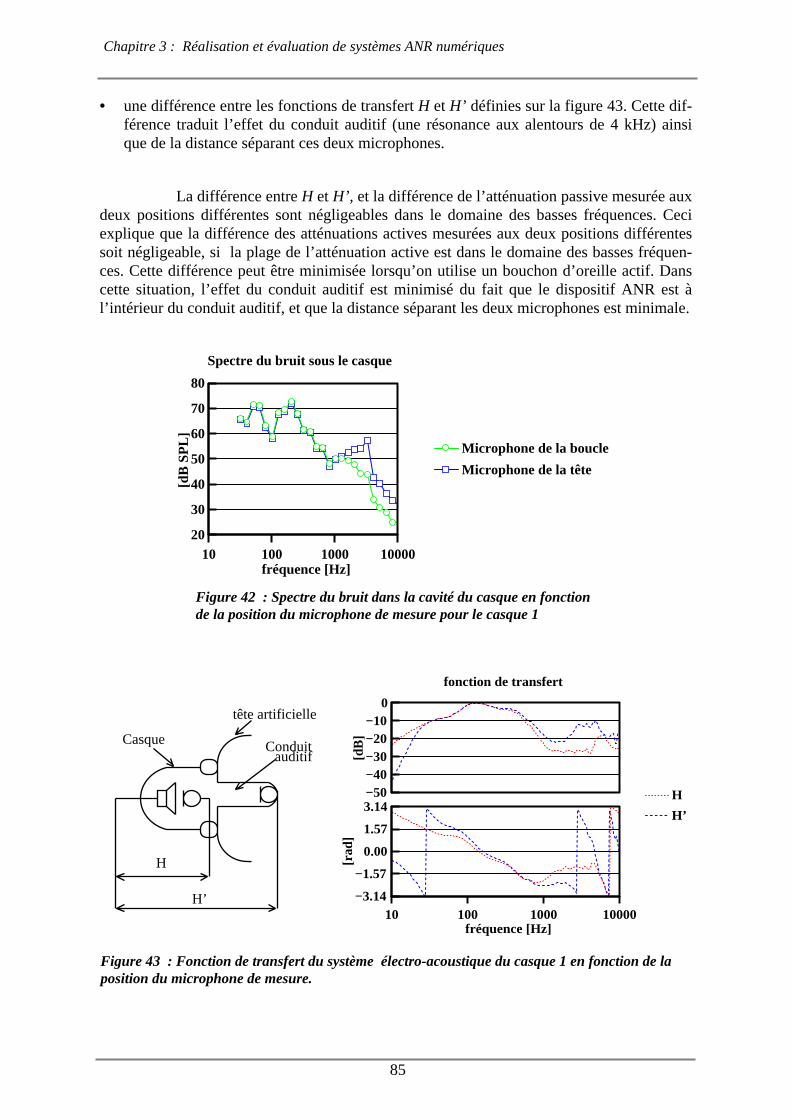
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
85
• une différence entre les fonctions de transfert H et H’ définies sur la figure 43. Cette dif-férence traduit l’effet du conduit auditif (une résonance aux alentours de 4 kHz) ainsique de la distance séparant ces deux microphones.
La différence entre H et H’ , et la différence de l’atténuation passive mesurée auxdeux positions différentes sont négligeables dans le domaine des basses fréquences. Ceci explique que la différence des atténuations actives mesurées aux deux positions différentessoit négligeable, si la plage de l’atténuation active est dans le domaine des basses fréquen-ces. Cette différence peut être minimisée lorsqu’on utilise un bouchon d’oreille actif. Danscette situation, l’effet du conduit auditif est minimisé du fait que le dispositif ANR est àl’ intérieur du conduit auditif, et que la distance séparant les deux microphones est minimale.
Figure 42 : Spectre du bruit dans la cavité du casque en fonctionde la position du microphone de mesure pour le casque 1
10 100 1000 10000fréquence [Hz]
20
30
40
50
60
70
80
[dB
SP
L]
Spectre du bruit sous le casque
Microphone de la boucle
Microphone de la tête
H
H’
Conduit Casque
tête artificielle
auditif
Figure 43 : Fonction de transfert du système électro-acoustique du casque 1 en fonction de laposition du microphone de mesure.
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert
H
H’

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
86
La figure 44 représente l’atténuation active du casque 2 mesurée par deux mi-crophones situés à deux positions différentes. Sur cette figure, on constate une forte diffé-rence dans les basses fréquences, entre l’atténuation active mesurée avec le microphone in-séré dans la boucle, et, celle mesurée par le microphone de la tête artificielle. Cette fortedifférence localisée dans le domaine des basses fréquences apparaît seulement pour cetteprotection. Elle ne peut pas être due aux effets du conduit auditif et à la distance séparant lesdeux microphones. En effet, cette protection est la seule de toutes celles étudiées à posséderun tissu épais entre le dispositif ANR et la cavité du casque. L’avantage de ce tissu estd’assurer une meilleure stabilité du système car il permet de diminuer l’ influence des fuitesacoustiques. En revanche, il dégrade fortement l’atténuation active perçue par l’utilisateur.Dans ce cas, les fonctions de transfert H et H’ sont très différentes même dans le domainedes basses fréquences.
6. Avantages du système ANR numérique développé
6.1. Atténuation active en fonction du type d’algorithme
Pour ces essais, on a utilisé la même configuration qu’au paragraphe précédent(c’est à dire le casque 1 avec le filtre 1). Par contre le filtre numérique a été implémentéavec l’algorithme standard au lieu de l’algorithme adapté. Ces résultats sont donc à compa-rer avec ceux décrits sur la figure 37, obtenus avec l’algorithme adapté. Avec l’algorithmeadapté l’atténuation active ne dépend pas du niveau du bruit et est identique à l’atténuationactive théorique (cf. figure 37).
Figure 44 : Atténuation active en fonction du microphone de mesure pour le casque 2 :mesure 1 effectué par le microphone de la bouclemesure 2 effectué par le microphone de la tête artificielle
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]
Atténuation active
mesure 1
mesure 2
théorie
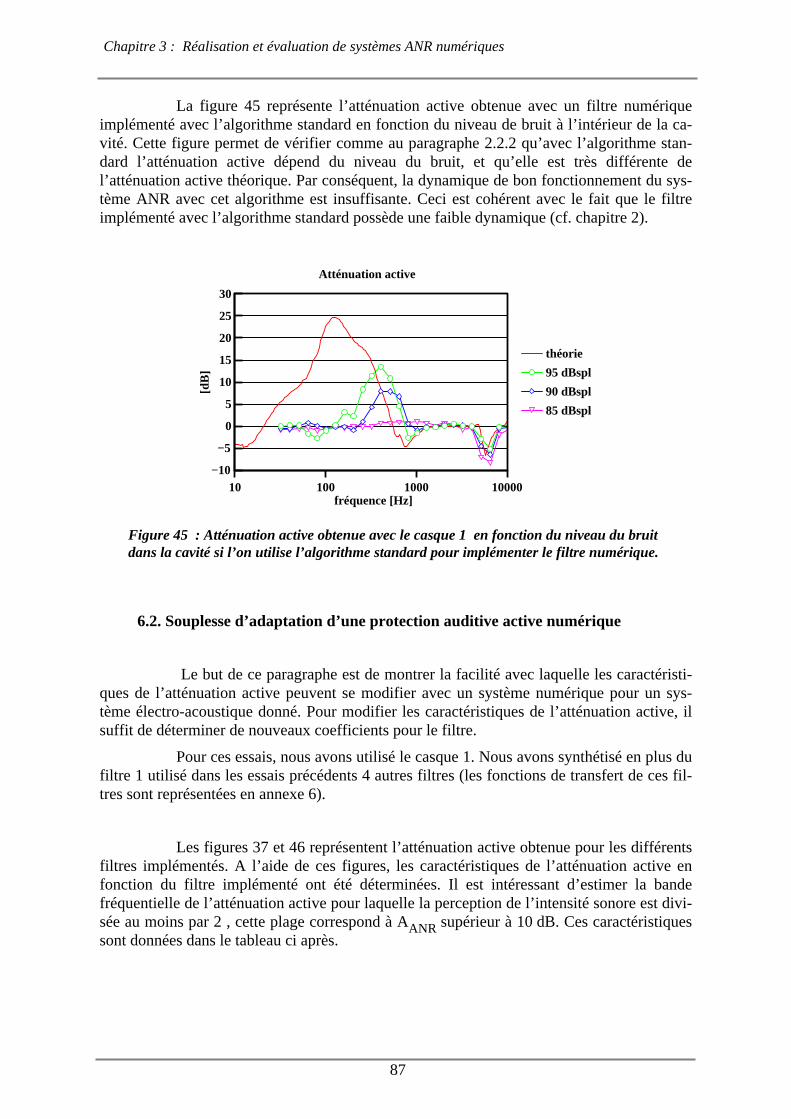
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
87
La figure 45 représente l’atténuation active obtenue avec un filtre numériqueimplémenté avec l’algorithme standard en fonction du niveau de bruit à l’ intérieur de la ca-vité. Cette figure permet de vérifier comme au paragraphe 2.2.2 qu’avec l’algorithme stan-dard l’atténuation active dépend du niveau du bruit, et qu’elle est très différente del’atténuation active théorique. Par conséquent, la dynamique de bon fonctionnement du sys-tème ANR avec cet algorithme est insuffisante. Ceci est cohérent avec le fait que le filtreimplémenté avec l’algorithme standard possède une faible dynamique (cf. chapitre 2).
6.2. Souplesse d’adaptation d’une protection auditive active numérique
Le but de ce paragraphe est de montrer la facilité avec laquelle les caractéristi-ques de l’atténuation active peuvent se modifier avec un système numérique pour un sys-tème électro-acoustique donné. Pour modifier les caractéristiques de l’atténuation active, ilsuffit de déterminer de nouveaux coefficients pour le filtre.
Pour ces essais, nous avons utilisé le casque 1. Nous avons synthétisé en plus dufiltre 1 utilisé dans les essais précédents 4 autres filtres (les fonctions de transfert de ces fil-tres sont représentées en annexe 6).
Les figures 37 et 46 représentent l’atténuation active obtenue pour les différentsfiltres implémentés. A l’aide de ces figures, les caractéristiques de l’atténuation active enfonction du filtre implémenté ont été déterminées. Il est intéressant d’estimer la bandefréquentielle de l’atténuation active pour laquelle la perception de l’ intensité sonore est divi-sée au moins par 2 , cette plage correspond à AANR supérieur à 10 dB. Ces caractéristiquessont données dans le tableau ci après.
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]
Atténuation active
théorie
95 dBspl
90 dBspl
85 dBspl
Figure 45 : Atténuation active obtenue avec le casque 1 en fonction du niveau du bruitdans la cavité si l’on utilise l’algorithme standard pour implémenter le filtre numérique.
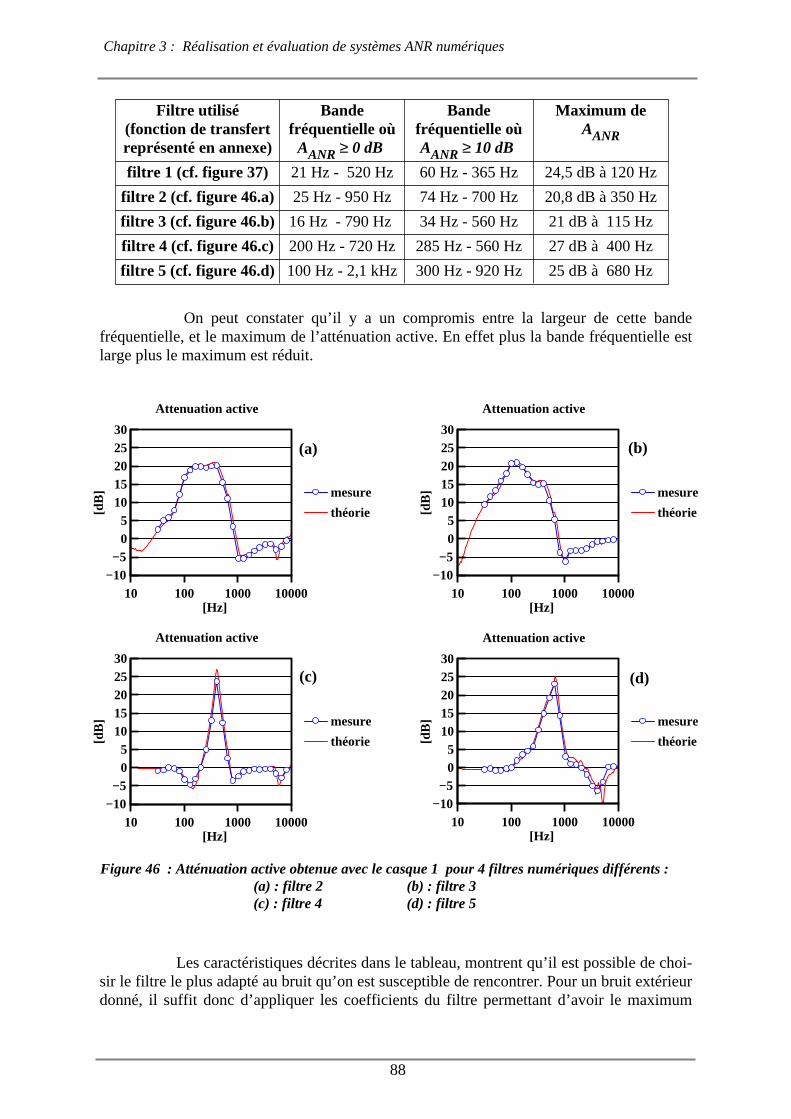
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
88
On peut constater qu’ il y a un compromis entre la largeur de cette bandefréquentielle, et le maximum de l’atténuation active. En effet plus la bande fréquentielle estlarge plus le maximum est réduit.
Les caractéristiques décrites dans le tableau, montrent qu’ il est possible de choi-sir le filtre le plus adapté au bruit qu’on est susceptible de rencontrer. Pour un bruit extérieurdonné, il suffit donc d’appliquer les coefficients du filtre permettant d’avoir le maximum
Filtre utilisé(fonction de transfertreprésenté en annexe)
Bandefréquentielle où
AANR ≥ 0 dB
Bandefréquentielle oùAANR ≥ 10 dB
Maximum deAANR
filtre 1 (cf. figure 37) 21 Hz - 520 Hz 60 Hz - 365 Hz 24,5 dB à 120 Hz
filtre 2 (cf. figure 46.a) 25 Hz - 950 Hz 74 Hz - 700 Hz 20,8 dB à 350 Hz
filtre 3 (cf. figure 46.b) 16 Hz - 790 Hz 34 Hz - 560 Hz 21 dB à 115 Hz
filtre 4 (cf. figure 46.c) 200 Hz - 720 Hz 285 Hz - 560 Hz 27 dB à 400 Hz
filtre 5 (cf. figure 46.d) 100 Hz - 2,1 kHz 300 Hz - 920 Hz 25 dB à 680 Hz
10 100 1000 10000[Hz]
−10−5
05
1015202530
[dB
]
Attenuation active
mesure
théorie
10 100 1000 10000[Hz]
−10−5
05
1015202530
[dB
]Attenuation active
mesure
théorie
10 100 1000 10000[Hz]
−10−5
05
1015202530
[dB
]
Attenuation active
mesure
théorie
10 100 1000 10000[Hz]
−10−5
05
1015202530
[dB
]
Attenuation active
mesure
théorie
Figure 46 : Atténuation active obtenue avec le casque 1 pour 4 filtres numériques différents : (a) : filtre 2 (b) : filtre 3 (c) : filtre 4 (d) : filtre 5
(a) (b)
(c) (d)
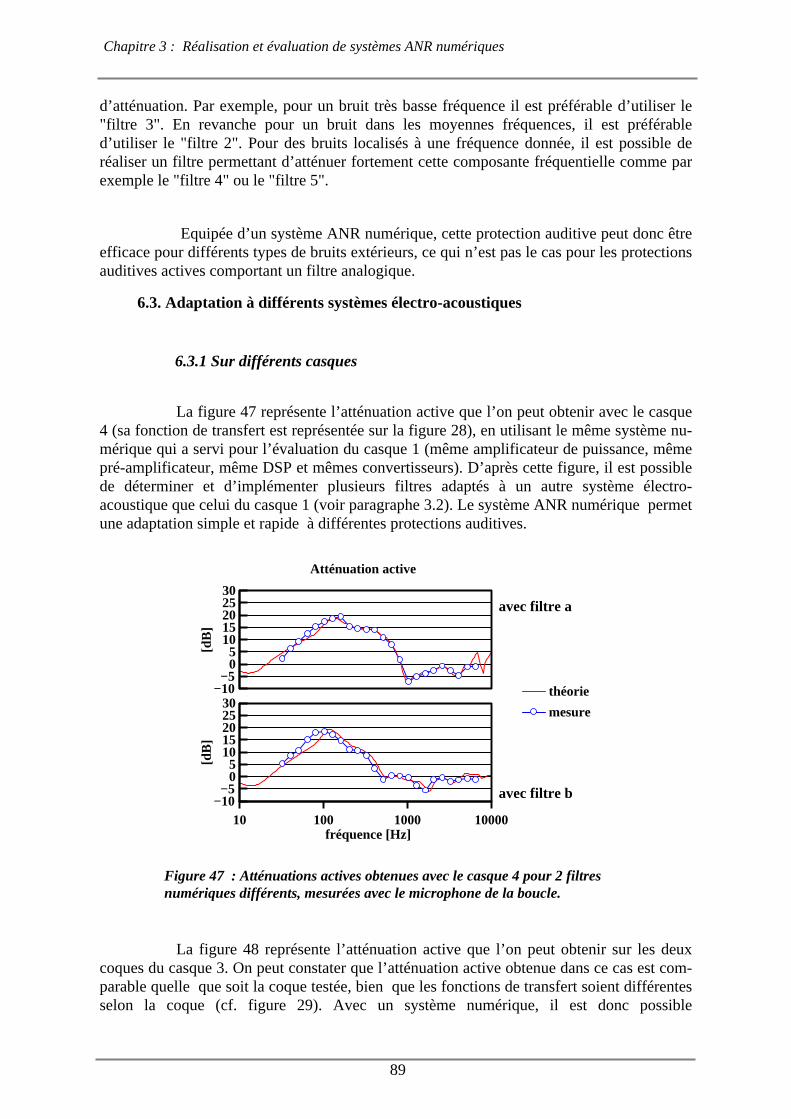
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
89
d’atténuation. Par exemple, pour un bruit très basse fréquence il est préférable d’utiliser le"filtre 3". En revanche pour un bruit dans les moyennes fréquences, il est préférabled’utiliser le "filtre 2". Pour des bruits localisés à une fréquence donnée, il est possible deréaliser un filtre permettant d’atténuer fortement cette composante fréquentielle comme parexemple le "filtre 4" ou le "filtre 5".
Equipée d’un système ANR numérique, cette protection auditive peut donc être efficace pour différents types de bruits extérieurs, ce qui n’est pas le cas pour les protectionsauditives actives comportant un filtre analogique.
6.3. Adaptation à différents systèmes électro-acoustiques
6.3.1 Sur différents casques
La figure 47 représente l’atténuation active que l’on peut obtenir avec le casque4 (sa fonction de transfert est représentée sur la figure 28), en utilisant le même système nu-mérique qui a servi pour l’évaluation du casque 1 (même amplificateur de puissance, mêmepré-amplificateur, même DSP et mêmes convertisseurs). D’après cette figure, il est possiblede déterminer et d’ implémenter plusieurs filtres adaptés à un autre système électro-acoustique que celui du casque 1 (voir paragraphe 3.2). Le système ANR numérique permetune adaptation simple et rapide à différentes protections auditives.
La figure 48 représente l’atténuation active que l’on peut obtenir sur les deuxcoques du casque 3. On peut constater que l’atténuation active obtenue dans ce cas est com-parable quelle que soit la coque testée, bien que les fonctions de transfert soient différentesselon la coque (cf. figure 29). Avec un système numérique, il est donc possible
10 100 1000 10000fréquence [Hz]
−10−5
05
1015202530
[dB
]
−10−5
05
1015202530
[dB
]
Atténuation active
théorie
mesure
Figure 47 : Atténuations actives obtenues avec le casque 4 pour 2 filtresnumériques différents, mesurées avec le microphone de la boucle.
avec filtre b
avec filtre a
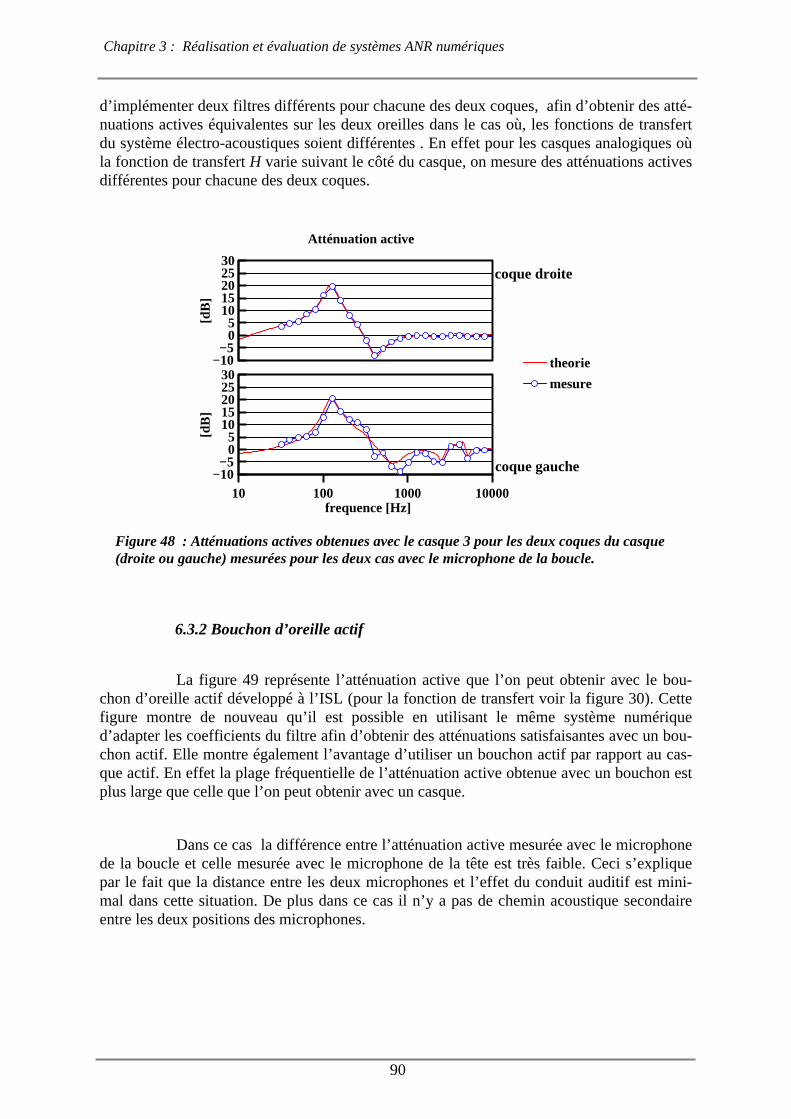
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
90
d’ implémenter deux filtres différents pour chacune des deux coques, afin d’obtenir des atté-nuations actives équivalentes sur les deux oreilles dans le cas où, les fonctions de transfertdu système électro-acoustiques soient différentes . En effet pour les casques analogiques oùla fonction de transfert H varie suivant le côté du casque, on mesure des atténuations activesdifférentes pour chacune des deux coques.
6.3.2 Bouchon d’oreille actif
La figure 49 représente l’atténuation active que l’on peut obtenir avec le bou-chon d’oreille actif développé à l’ ISL (pour la fonction de transfert voir la figure 30). Cettefigure montre de nouveau qu’ il est possible en utilisant le même système numériqued’adapter les coefficients du filtre afin d’obtenir des atténuations satisfaisantes avec un bou-chon actif. Elle montre également l’avantage d’utiliser un bouchon actif par rapport au cas-que actif. En effet la plage fréquentielle de l’atténuation active obtenue avec un bouchon estplus large que celle que l’on peut obtenir avec un casque.
Dans ce cas la différence entre l’atténuation active mesurée avec le microphonede la boucle et celle mesurée avec le microphone de la tête est très faible. Ceci s’expliquepar le fait que la distance entre les deux microphones et l’effet du conduit auditif est mini-mal dans cette situation. De plus dans ce cas il n’y a pas de chemin acoustique secondaireentre les deux positions des microphones.
10 100 1000 10000frequence [Hz]
−10−5
05
1015202530
[dB
]
−10−5
05
1015202530
[dB
]
Atténuation active
theorie
mesure
Figure 48 : Atténuations actives obtenues avec le casque 3 pour les deux coques du casque (droite ou gauche) mesurées pour les deux cas avec le microphone de la boucle.
coque droite
coque gauche

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
91
6.4. Comparaison entre système analogique et système numérique
Tous les casques actifs utilisés pour les différents essais des systèmes ANR nu-mériques, sont tous des casques actifs analogiques modifiés. Il est donc possible pour unmême système électro-acoustique de comparer l’atténuation active en fonction de la techno-logie du filtre utilisée (numérique ou analogique). En effet avant de déconnecter le filtreanalogique dans ces casques actifs, l’atténuation active pour chacun d’eux a été mesurée surtête artificielle à partir du microphone de celle ci.
La figure 50 représente l’atténuation active en fonction de la technologie du fil-tre utilisé pour deux casques différents (casque 1 et le casque 3). Cette figure permet demontrer que, pour un casque donné, l’atténuation active obtenue en utilisant un filtre numé-rique est au moins aussi bonne que celle obtenue avec le filtre analogique. Elle montre éga-lement qu’avec un filtre numérique il est possible de changer rapidement les caractéristiquesde l’atténuation active.
Le seul inconvénient du système numérique par rapport au système analogiqueest le bruit de fond plus important en technologie numérique. En effet pour un système nu-mérique en plus du bruit électronique produit par les amplificateurs on ajoute un bruit deconversion. On a montré que ce bruit de conversion est inversement proportionnel à la réso-lution du convertisseur analogique numérique.
Figure 49 : Atténuations actives obtenues avec le bouchon actif pour 2 filtresnumériques différents, mesurées à deux positions différentes :
mesure 1 effectuée par le microphone de la bouclemesure 2 effectuée par le microphone de la tête artificielle
10 100 1000 10000fréquence [Hz]
−10−5
05
1015202530
[dB
]
−10−5
05
1015202530
[dB
]
Atténuation active
théorie
mesure1
mesure2
avec filtre b
avec filtre a
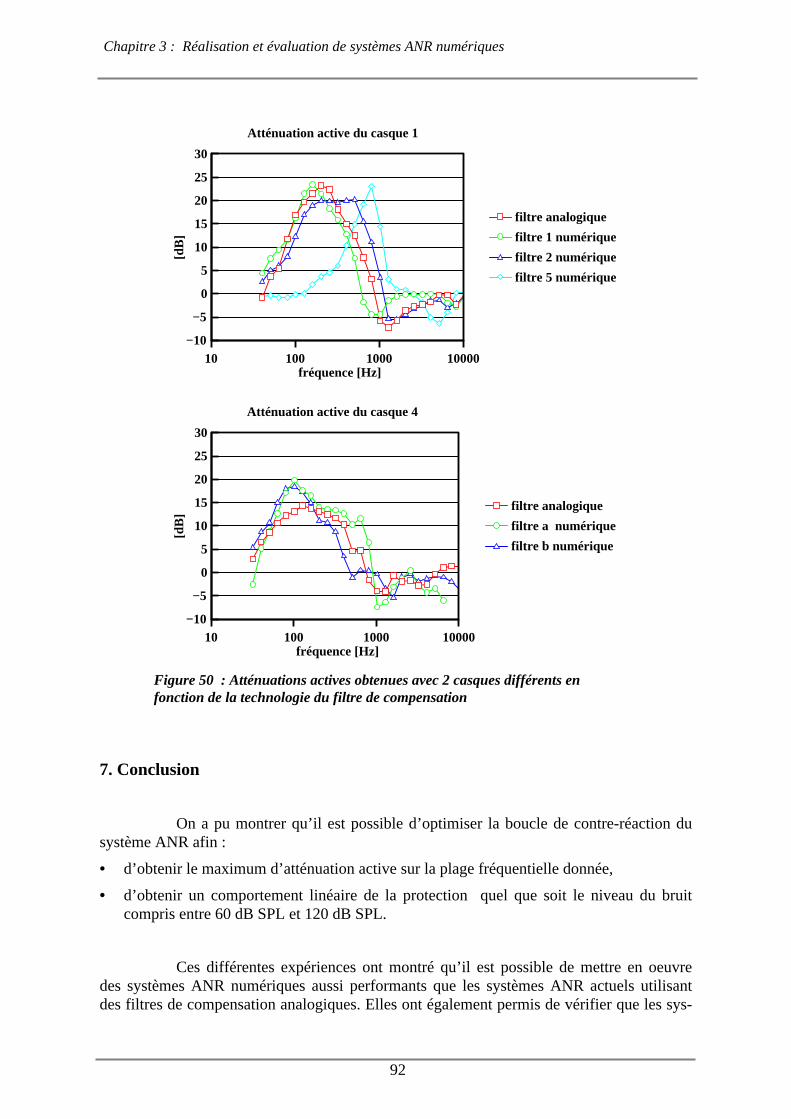
Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
92
7. Conclusion
On a pu montrer qu’ il est possible d’optimiser la boucle de contre-réaction dusystème ANR afin :
• d’obtenir le maximum d’atténuation active sur la plage fréquentielle donnée,
• d’obtenir un comportement linéaire de la protection quel que soit le niveau du bruitcompris entre 60 dB SPL et 120 dB SPL.
Ces différentes expériences ont montré qu’ il est possible de mettre en oeuvredes systèmes ANR numériques aussi performants que les systèmes ANR actuels utilisantdes filtres de compensation analogiques. Elles ont également permis de vérifier que les sys-
Figure 50 : Atténuations actives obtenues avec 2 casques différents enfonction de la technologie du filtre de compensation
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]
Atténuation active du casque 4
filtre analogique
filtre a numérique
filtre b numérique
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]
Atténuation active du casque 1
filtre analogique
filtre 1 numérique
filtre 2 numérique
filtre 5 numérique

Chapitre 3 : Réalisation et évaluation de systèmes ANR numériques
93
tèmes ANR numériques sont plus flexibles que les systèmes analogiques. En effet avec unsystème ANR numérique il est possible d’adapter rapidement ce système aux :
• bruits environnants,
• systèmes électro-acoustiques,
• utilisateurs.
Chapitre 4 : Fonctionnalités annexes
94
Chapitre 4 : Fonctionnalités annexes
1. Insertion du signal de parole ...................................................................................1.1 Réalisation .............................................................................................1.2 Comparaison de HS avec et sans le contrôle actif .................................1.3 Optimisation de la voie de phonie par pré-traitement............................1.3.1 Avec un filtre de type RIF ..................................................................1.3.1.1 Obtention de la réponse impulsionnelle finie .................................1.3.1.2 Simulation........................................................................................1.3.1.3 Expérimentation ..............................................................................1.3.2 Avec un filtre de type RII .................................................................1.4 Conclusion ............................................................................................
2. Procédure "Marche-Arrêt".......................................................................................2.1 Synoptique de la procédure ...................................................................2.1.1 Choix de la durée d’acquisition ( N)...................................................2.1.2 Intérêt de travailler en hystérésis .......................................................2.1.3 Choix des seuils .................................................................................2.2 Expérimentation ....................................................................................2.2.1 Problèmes rencontrés .........................................................................2.2.2 La solution ..........................................................................................2.3 Conclusion ............................................................................................
3. Système actif à double filtres ..................................................................................3.1 Réalisation avec un seul haut-parleur ...................................................3.2 Système actif avec deux haut-parleurs ..................................................
4. Conclusion ...............................................................................................................
959699100102102103105105107
107107108109109110110111111
112113115
115
Chapitre 4 : Fonctionnalités annexes
95
Le chapitre 3 a permis de montrer que les protections auditives actives utilisantun système ANR numérique possèdent une atténuation active aussi bonne que celle obtenueavec les protections auditives actives analogiques commercialisées actuellement. Pour amé-liorer les performances des protections auditives, il est possible d’ajouter en plus du systèmeANR des fonctionnalités supplémentaires. Pour les protecteurs actuels analogiques, seulel’ insertion de la voie de phonie comme fonctionnalité supplémentaire a été mise en place.En revanche, pour les protecteurs utilisant un filtre numérique il est possible d’ imaginerd’autres fonctionnalités. Ce chapitre ne présente la mise en oeuvre que des trois fonctionna-lités suivantes :
• L’ insertion de la voie de phonie, optimisée afin que l’utilisateur puisse communiquercorrectement.
• Une procédure "Marche-Arrêt" automatique en fonction du niveau sonore afin d’arrêterle système ANR en absence de bruit extérieur.
• Un système possédant deux boucles de régulation en parallèle pour améliorer les carac-téristiques de l’atténuation active.
Tous les résultats expérimentaux décrits dans ce chapitre, ont été obtenus avecle casque 1 dont la fonction de transfert du système électro-acoustique est représentée sur lafigure 28 du chapitre 3.
1. Insertion du signal de parole
Comme avec les systèmes ANR analogiques, il est possible d’ insérer une voiede phonie. Actuellement, la voie de phonie est souvent transmise à l’utilisateur à partir d’unsignal numérique. Par conséquent, un des avantages d’un système ANR numérique, par rap-port aux systèmes ANR analogiques, est que le signal de parole numérique peut être insérédirectement dans la boucle de contre-réaction.
L’ insertion de la voie de phonie doit être réalisée de façon à satisfairel’utilisateur. En effet l’ intelligibilité des messages est un des critères permettant l’évaluationd’une protection auditive active. La gamme de fréquence utile pour la compréhension desmessages s’étend de 100 Hz à 4 kHz. Il est donc nécessaire que, sur cette bande, la fonctionde transfert appliquée au signal de parole soit optimisée. On peut souhaiter, par exemple,que les oscillations de cette fonction de transfert soient minimales dans cette bande (la plusplate possible sur cette gamme de fréquence). La fonction de transfert appliquée sur le si-gnal de parole, notée HS est définie par :
Où S’ est le spectre du signal de parole dans la cavité du casque et S est le spectre de paroleinséré dans la boucle de contre-réaction (cf. figures 51, 52 et 53).
Pour les différentes simulations et expérimentations décrites dans ce paragraphe,le filtre utilisé est le filtre 1 décrit dans le chapitre 3 avec lequel la bande fréquentielle del’atténuation active s’étend de 25 Hz à 680 Hz.
HS= S′
S(71 )

Chapitre 4 : Fonctionnalités annexes
96
1.1. Réalisation
Il est possible d’ insérer la voie de phonie de trois manières distinctes telles que :
• insertion du signal numérique de la parole après le filtre de compensation, F
• insertion du signal numérique de la parole avant le filtre de compensation, F
• insertion du signal numérique de la parole après et avant le filtre de compensation, F
1ère Possibilité: Insertion après le filtre numérique
Pour déterminer la fonction de transfert HS, le signal de parole est considéré comme seule source sonore. D’après la figure ci-dessus, les représentations fréquentiellesVt et Vm peuvent s’exprimer en fonction du signal de parole initial S, et celui contenu dans lacavité S’ , tel que :
Or Le spectre du signal de parole dans la cavité du casque, S’ peut s’exprimer enfonction de Vt :
En combinant les équations (72) et (73) on a :
Sur la bande fréquentielle de l’atténuation active (AANR > 0 dB) la fonction detransfert HS ne peut pas être considérée comme une réponse plate, puisqu’elle dépend de la
Figure 51 : Synoptique du système actif numérique d’une protection auditive avec insertion du signal de la parole après le filtre numérique
A1−A2
CAN
CNA
KmKt
S’
+F
DSP
Σ
S-
Vt Vm
CAN
Vm = A1 ⋅ Km ⋅ S′
Vt = F ⋅ Vm− S = A1 ⋅ Km ⋅ F ⋅ S′− S
(72 )
S′ =−A2 ⋅ Kt ⋅ Vt (73 )
HS =A2⋅Kt1+Bo
⇒ (74 ) Hs ' 1
Km⋅A1⋅F si Bo ≫ 1
Hs ' A2 ⋅ Kt si Bo ≪ 1

Chapitre 4 : Fonctionnalités annexes
97
fonction de transfert du filtre de compensation. Dans le domaine des moyennes et hautesfréquences, cette fonction de transfert est de la même forme que la fonction de transfert duhaut parleur plus cavité. Cette possibilité ne correspond pas aux objectifs fixés car la fonc-tion de transfert HS ne peut pas être considérée comme une réponse plate quel que soit ledomaine fréquentiel.
2ème Possibilité: Insertion avant le filtre numérique
Dans ce cas, l’amplificateur A sert à amplifier le signal de parole avant qui soitatténué par le filtre. Son gain dépend du filtre implémenté afin d’obtenir A·F très supérieur à1 dans le domaine fréquentiel où Bo est supérieur à 0 dB. Pour déterminer la fonction detransfert HS, le signal de parole est considéré comme seule source sonore. D’après la figureci-dessus, les représentations fréquentielles Vt et Vm peuvent s’exprimer en fonction du si-gnal de parole initial S, et celui contenu dans la cavité S’ , tels que :
Le spectre du signal de parole dans la cavité du casque, S’ peut s’exprimer enfonction de Vt :
En combinant les équations (76) et (75) on a :
Figure 52 : Synoptique du système actif numérique d’une protection auditive avec insertion du signal de la parole avant le filtre numérique
A1−A2
CAN
CNA
KmKt
S’
F
DSP
S
Vt Vm
CAN
A
+Σ -
Vm = A1 ⋅ Km ⋅ S′
Vt = F ⋅ Vm− A ⋅ S ¡= F ⋅ A1 ⋅ Km ⋅ S
′− A ⋅ S° ± (75 )
S′ =−A2 ⋅ Kt ⋅ Vt (76 )
HS =A2⋅Kt⋅A⋅F
1+Bo ⇒ (77 )
Hs ' AKm⋅A1
Hs ' A2 ⋅ Kt ⋅ A ⋅ F
si Bo ≫ 1si Bo ≪ 1
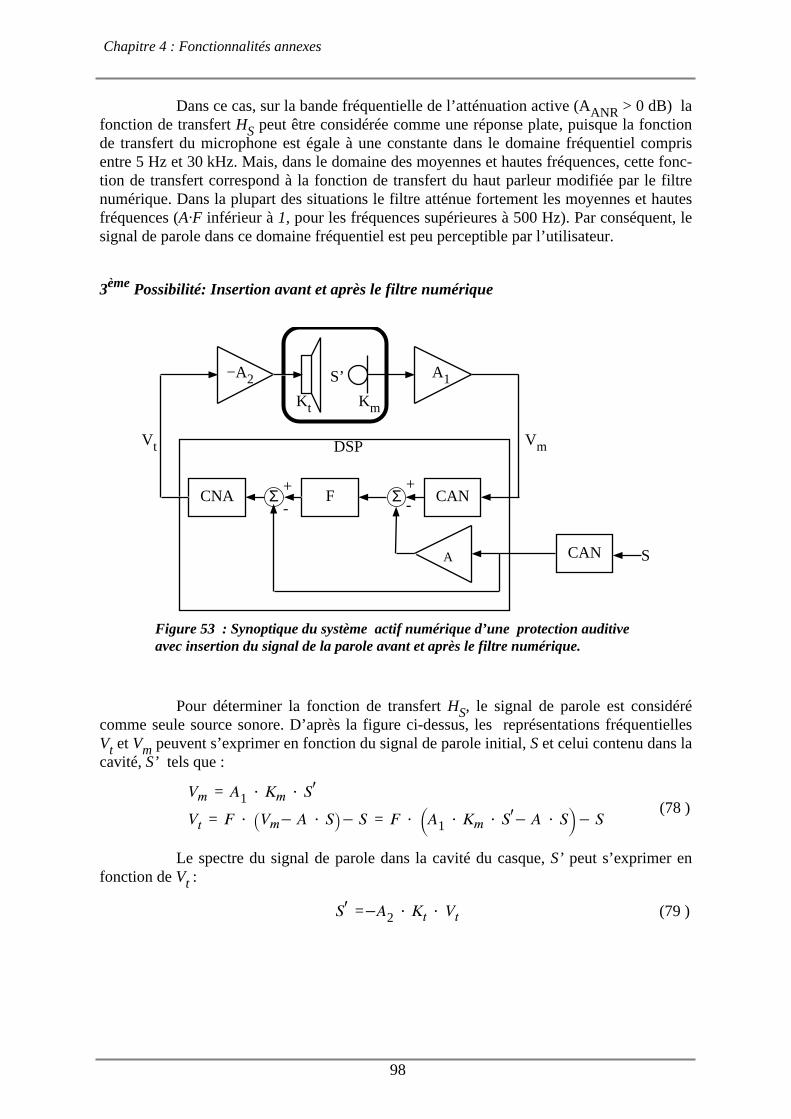
Chapitre 4 : Fonctionnalités annexes
98
Dans ce cas, sur la bande fréquentielle de l’atténuation active (AANR > 0 dB) lafonction de transfert HS peut être considérée comme une réponse plate, puisque la fonctionde transfert du microphone est égale à une constante dans le domaine fréquentiel comprisentre 5 Hz et 30 kHz. Mais, dans le domaine des moyennes et hautes fréquences, cette fonc-tion de transfert correspond à la fonction de transfert du haut parleur modifiée par le filtrenumérique. Dans la plupart des situations le filtre atténue fortement les moyennes et hautesfréquences (A·F inférieur à 1, pour les fréquences supérieures à 500 Hz). Par conséquent, lesignal de parole dans ce domaine fréquentiel est peu perceptible par l’utilisateur.
3ème Possibilité: Insertion avant et après le filtre numérique
Pour déterminer la fonction de transfert HS, le signal de parole est considéré comme seule source sonore. D’après la figure ci-dessus, les représentations fréquentiellesVt et Vm peuvent s’exprimer en fonction du signal de parole initial, S et celui contenu dans lacavité, S’ tels que :
Le spectre du signal de parole dans la cavité du casque, S’ peut s’exprimer enfonction de Vt :
Figure 53 : Synoptique du système actif numérique d’une protection auditive avec insertion du signal de la parole avant et après le filtre numérique.
A1−A2
CAN
CNA
KmKt
S’
F
DSP
S
Vt Vm
CAN
A
+Σ -
+Σ-
Vm = A1 ⋅ Km ⋅ S′
Vt = F ⋅ Vm− A ⋅ S ¡− S = F ⋅ A1 ⋅ Km ⋅ S′− A ⋅ S
° ±− S
(78 )
S′ =−A2 ⋅ Kt ⋅ Vt (79 )

Chapitre 4 : Fonctionnalités annexes
99
En combinant les équations (78) et (79) on a :
Comme dans le cas de l’ insertion uniquement avant le filtre, sur la bandefréquentielle de l’atténuation active (AANR > 0 dB) la fonction de transfert HS peut être con-sidérée comme une réponse plate. En effet elle ne dépend que de la fonction de transfert dumicrophone qui est égale à une constante entre 5 Hz et 30 kHz. L’ intérêt d’ insérer en plus lesignal de parole après le filtre numérique est que le signal de parole soit perceptible, si lefiltre F produit une forte atténuation des moyennes et hautes fréquences. Dans cette situa-tion, où A·F inférieur à 1, pour les fréquences supérieures à 500 Hz, la fonction de transfertHS est de la même forme que la fonction de transfert du haut parleur plus cavité, Kt.
C’est pour cette raison que cette solution est utilisée par rapport à la deuxièmedans la plupart des casques actifs commercialisés qui comportent une voie de phonie [12].
1.2. Comparaison de HS avec et sans le contrôle actif
Lorsque la protection active n’utilise pas le contrôle actif, le signal de parole estinséré directement avant l’amplificateur de puissance . Dans cette configuration la fonctionde transfert HS peut s’écrire de la façon suivante :
La figure 54 représentant le module de HS, permet de vérifier que, quel que soitle gain de la boucle ouverte, lorsque le système ANR fonctionne, la fonction de transfert HSest plate sur la bande fréquentielle de l’atténuation active (AANR > 0 dB); ce qui est cohérentavec l’équation (80). Cette figure permet également de vérifier que HS dépend du gain de laboucle ouverte seulement si on effectue la contre-réaction(cf. équations (80) et (81)).
Cette figure, permet également de vérifier qu’avec ou sans contrôle actif la fonc-tion de transfert HS a la même forme que celle du haut parleur dans les moyennes et hautesfréquences (cf. équations (80) et (81)).
Pour cette protection lorsque les fréquences sont comprises entre 900 Hz et4 kHz, la fonction de transfert HS est fortement atténuée par la fonction de transfert du haut-parleur quelle que soit la configuration dans laquelle le casque se trouve (sans ou avecANR). Or il est nécessaire de minimiser les déformations sur le signal de parole pour avoirune bonne intelligibilité, dans le domaine fréquentiel compris entre 100 Hz et 4 kHz.
HS=
A2⋅Kt⋅ 1+A⋅F ¡
1+Bo ⇒
Hs ' AKm⋅A1
si Bo ≫ 1 et A ⋅ F ≫ 1
Hs ' A2 ⋅ Kt 1 + ⋅A ⋅ F ¡ si Bo ≪ 1
(80 )
HS = A2 ⋅ Kt (81 )
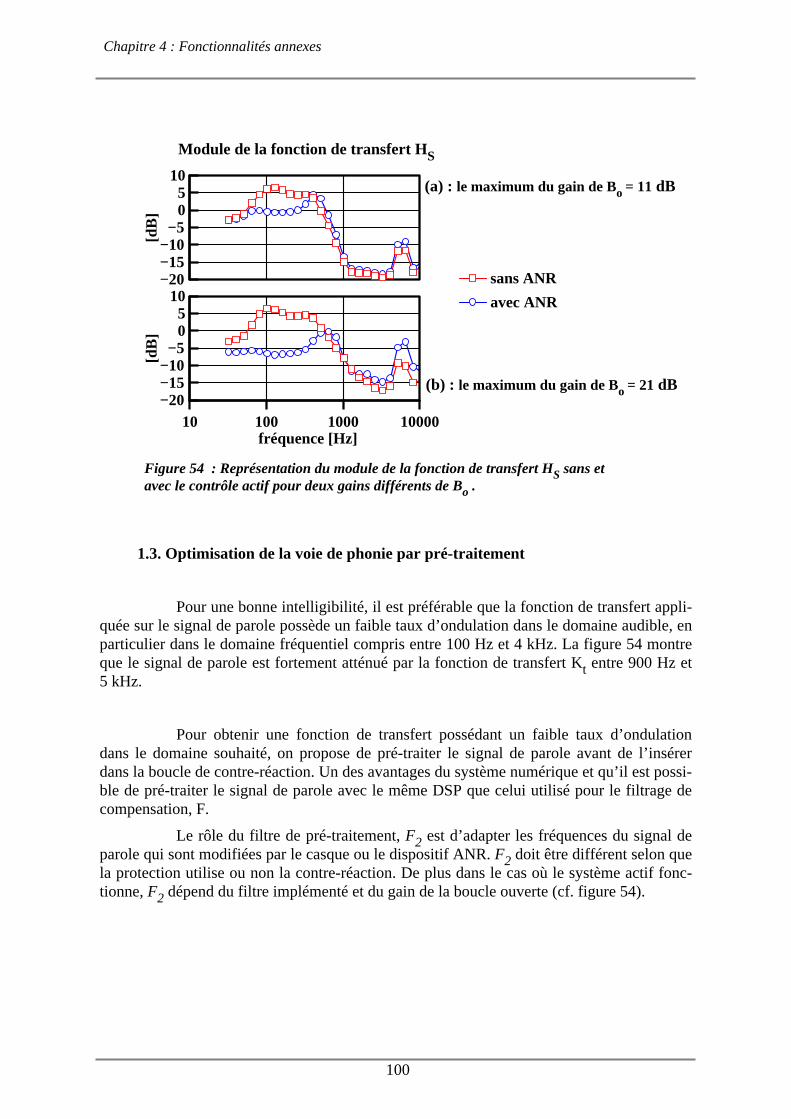
Chapitre 4 : Fonctionnalités annexes
100
1.3. Optimisation de la voie de phonie par pré-traitement
Pour une bonne intelligibilité, il est préférable que la fonction de transfert appli-quée sur le signal de parole possède un faible taux d’ondulation dans le domaine audible, enparticulier dans le domaine fréquentiel compris entre 100 Hz et 4 kHz. La figure 54 montreque le signal de parole est fortement atténué par la fonction de transfert Kt entre 900 Hz et 5 kHz.
Pour obtenir une fonction de transfert possédant un faible taux d’ondulationdans le domaine souhaité, on propose de pré-traiter le signal de parole avant de l’ insérerdans la boucle de contre-réaction. Un des avantages du système numérique et qu’ il est possi-ble de pré-traiter le signal de parole avec le même DSP que celui utilisé pour le filtrage decompensation, F.
Le rôle du filtre de pré-traitement, F2 est d’adapter les fréquences du signal deparole qui sont modifiées par le casque ou le dispositif ANR. F2 doit être différent selon quela protection utilise ou non la contre-réaction. De plus dans le cas où le système actif fonc-tionne, F2 dépend du filtre implémenté et du gain de la boucle ouverte (cf. figure 54).
10 100 1000 10000fréquence [Hz]
−20−15−10−5
05
10
[dB
]
−20−15−10−5
05
10
[dB
]Module de la fonction de transfert H S
sans ANR
avec ANR
(a) : le maximum du gain de Bo = 11 dB
Figure 54 : Représentation du module de la fonction de transfert HS sans etavec le contrôle actif pour deux gains différents de Bo .
(b) : le maximum du gain de Bo = 21 dB
Module de la fonction de transfert HS
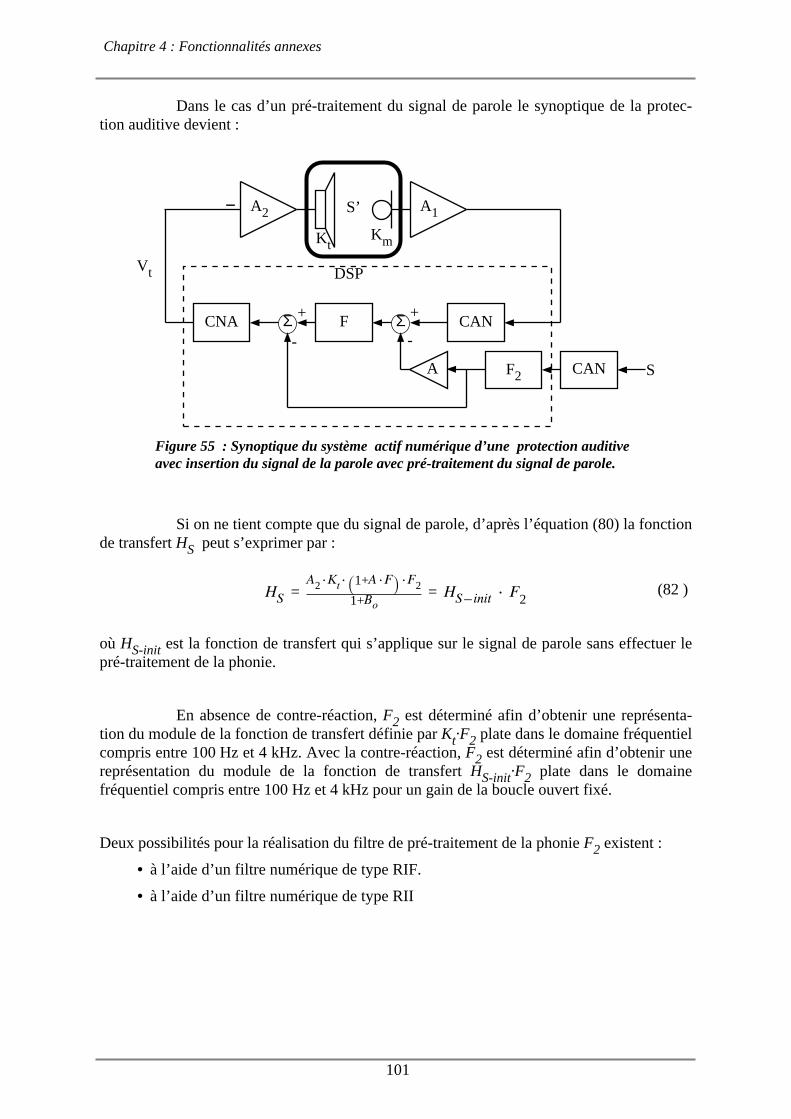
Chapitre 4 : Fonctionnalités annexes
101
Dans le cas d’un pré-traitement du signal de parole le synoptique de la protec-tion auditive devient :
Si on ne tient compte que du signal de parole, d’après l’équation (80) la fonctionde transfert HS peut s’exprimer par :
où HS-init est la fonction de transfert qui s’applique sur le signal de parole sans effectuer lepré-traitement de la phonie.
En absence de contre-réaction, F2 est déterminé afin d’obtenir une représenta-tion du module de la fonction de transfert définie par Kt·F2 plate dans le domaine fréquentielcompris entre 100 Hz et 4 kHz. Avec la contre-réaction, F2 est déterminé afin d’obtenir unereprésentation du module de la fonction de transfert HS-init·F2 plate dans le domainefréquentiel compris entre 100 Hz et 4 kHz pour un gain de la boucle ouvert fixé.
Deux possibilités pour la réalisation du filtre de pré-traitement de la phonie F2 existent :
• à l’aide d’un filtre numérique de type RIF.
• à l’aide d’un filtre numérique de type RII
Figure 55 : Synoptique du système actif numérique d’une protection auditive avec insertion du signal de la parole avec pré-traitement du signal de parole.
A1A2
CANCNA
KmKt
− S’
F
DSP
Σ
SA
-
+
Vt
CAN
Σ-
+
F2
HS =A2⋅Kt⋅ 1+A⋅F ¡⋅F2
1+Bo= HS−init ⋅ F2
(82 )

Chapitre 4 : Fonctionnalités annexes
102
1.3.1 Avec un filtre de type RIF
Pour une bonne intelligibilité de la parole, l’ idéal serait de pouvoir implémenterle filtre défini par :
où HSd est la fonction de transfert que l’on desire obtenir à la place de la fonction de trans-fert HS.
L’optimum est de fixer le module de HSd à 1. Pour la communication parlée, lesfréquences supérieures à 4 kHz sont peu importantes pour la compréhension de la phonie.C’est dans cet objectif que la fonction de transfert HSd a été fixée à celle d’un passe basd’ordre 2 dont la fréquence de coupure est égale à 4 kHz.
1.3.1.1 Obtention de la réponse impulsionnelle finie
Le calcul de F2d est effectué à partir de l’équation (83). La réponseimpulsionnelle désirée, hd est déterminée par FFT inverse sur N points de F2d. Le systèmeANR impose un temps d’exécution du filtre de pré-traitement petit (< 10 µs), ce qui entraîneune impossibilité d’ implémenter un filtre RIF de longueur N avec le même DSP qui réalisele filtre de compensation.
Afin de diminuer le nombre de coefficients, on propose d’utiliser une réponseimpulsionnelle, h de longueur nb inférieure à N, définie par :
La longueur de la réponse impulsionnelle a été déterminée pour différents seuilsqui sont :
F2d = 1Kt⋅ HSd
F2d = 1HS−init⋅HSd
Sans le système ANR
Avec le système ANR(83 )
Calcul deF2d sur N FFT −1 Décision
F2dNN
hd hnb
pour 0 ≤ i ≤ nb ⇒ h(i) = hd(d + i)
avec ∀ i ∈ 0 , d ¢ ¢
∪ nb + d , N ¢ ¢
⇒ hd(i) < seuil
(84 )
seuil sans la contre-réaction avec la contre-réaction
Max(hd)/50 nb = 106 échantillons nb = 126 échantillons
Max(hd)/20 nb = 41 échantillons nb = 60 échantillons
Max(hd)/10 nb = 13 échantillons nb = 34 échantillons

Chapitre 4 : Fonctionnalités annexes
103
1.3.1.2 Simulation
Le but de ce paragraphe est de comparer le filtre F2 simulé à partir de la réponseimpulsionnelle h de nb points, avec le filtre désiré F2d. Pour ces simulations on a utilisécomme signal d’entrée du filtre F2 un bruit rose numérique.
Les figures 57 et 58 représentent la fonction de transfert du filtre F2 simulée àpartir de la réponse impulsionnelle h pour différentes longueurs nb. Elles permettent demontrer que le fait de diminuer le nombre de coefficients dégrade fortement la fonction detransfert du filtre désiré surtout dans le domaine des basses fréquences. En effet, avec unfiltre de longueur nb, il est impossible d’avoir une influence sur les fréquences inférieuresau rapport de la fréquence d’échantillonnage sur nb. Or la fréquence d’échantillonnage estfixée à 50 kHz, il faudrait au moins 500 coefficients pour pouvoir agir sur les fréquencessupérieures à 100 Hz.
Figure 56 : Réponse impulsionnelle obtenue lorsque le seuil est égale à Max (hd)/50 pourdeux états différents pour la protection :
a) dispositif ANR arrêté b) dispositif ANR en marche
0 20 40 60 80 100 120 140rang n
−20000
−10000
0
10000
20000
30000−20000
−10000
0
10000
20000
30000
Réponse impulsionnelle, h
a)
b)

Chapitre 4 : Fonctionnalités annexes
104
Figure 57 : Fonction de transfert du filtre F2 obtenue en fonction de lalongueur nb de la réponse impulsionnelle h lorsque le système ANR est arrêté.
10 100 1000 10000 100000fréquence [Hz]
−3.14−1.57
0.001.573.14
[rad
]
−100
10203040
[dB
]
Fonction de tranfert du filtre F 2
désirée
nb=106
nb=41
nb=13
Fonction de transfert du filtre F2
Figure 58 : Fonction de transfert du filtre F2 obtenue en fonction de la longueurnb de la réponse impulsionnelle h lorsque le système ANR fonctionne.
10 100 1000 10000 100000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−100
10203040
[dB
]
Fonction de transfert du filtre F 2
désirée
nb=126
nb=60
nb=34
Fonction de transfert du filtre F2

Chapitre 4 : Fonctionnalités annexes
105
1.3.1.3 Expérimentation
Avec le DSP actuel, pour 25 coefficients, le temps d’exécution vaut environ5 µs. Si l’on veut pré-traiter la phonie avec le même DSP, que celui qui réalise le filtre de laboucle de contre-réaction, il est nécessaire que le temps d’exécution total (tempsd’exécution du pré-traitement de la phonie plus le temps d’exécution du filtre de la bouclede contre-réaction environ égal à 10 µs) soit inférieur à 20 µs. Le temps d’exécution dupré-filtrage de la phonie doit donc être inférieur à 10 µs ce qui revient à avoir une réponseimpulsionnelle de longueur inférieur à 50 coefficients. Pour l’expérience on a doncimplémenté :
• Sans la contre-réaction, un filtre de longueur égale à 41 coefficients
• Avec la contre-réaction, un filtre de longueur égale à 34 coefficients
Le signal de phonie utilisé pour cette expérience est un bruit rose filtré par unpasse bas dont la fréquence de coupure est de 15 kHz. Les résultats expérimentaux représen-tés sur la figure 59 permettent de montrer l’ inefficacité dans le domaine des basses fréquen-ces d’un pré-traitement par un filtre de type RIF de longueur inférieure à 50 coefficients
1.3.2 Avec un filtre de type RII
L’avantage d’utiliser un pré-traitement de la phonie avec des filtres RII est :
• un temps d’exécution du filtrage très court qui permet de n’utiliser qu’un seul DSP poureffectuer le filtrage F ainsi que le filtrage F2.
10 100 1000 10000fréquence [Hz]
−25−20−15−10−5
05
1015
[dB
]
−25−20−15−10−5
05
1015
[dB
]
Fonction de transfert, H S
désirée H Sd simulée
mesurée
Figure 59 : Fonction de transfert HS pour deux états différents pour la protection.
(a) : dispositif ANR arrêté
(b) : dispositif ANR en marche
Fonction de transfert HS

Chapitre 4 : Fonctionnalités annexes
106
• l’utilisation de l’algorithme adapté qui permet un filtrage sans erreur même dans lesbasses fréquences.
La fonction de transfert de F2 est déterminée à partir du même outil de simula-tion avec lequel le filtre de compensation F est déterminé. En revanche, dans ce cas, c’est lafonction de transfert HS-init qui est entrée comme paramètre (cf. l’équation (80)) .
Pour l’expérimentation on a déterminé deux filtres F2 différents (leurs fonctionsde transfert sont représentées en annexe 6), comportant deux cellules du second ordre cha-cun :
• l’un optimisé si la protection est utilisée sans la contre-réaction,
• l’autre optimisé si la protection utilise la contre-réaction lorsque le maximum du gain deBo est égal à 21 dB.
La figure 60 permet de vérifier que le signal de parole possède un tauxd’ondulation inférieur à 6 dB dans le domaine fréquentiel souhaité, que l’on soit avec ousans contre-réaction. Cette figure montre qu’ il est donc possible de pré-traiter le signal de laparole avec un filtre numérique de type RII afin d’améliorer son intelligibilité.
1.4. Conclusion
Si on utilise un seul DSP pour réaliser le filtre de compensation et le filtre pré-traitement de la phonie, il est préférable d’utiliser un filtre RII au lieu d’un filtre de type RIFpour réaliser le filtre F2. En effet un filtre de type RII permet avec peu de coefficients defiltrer les basses fréquences. En revanche, pour traiter les basses fréquences, avec un filtreRIF, il est nécessaire que le rapport entre la fréquence d’échantillonnage et le nombre decoefficients soit petit.
Figure 60 : Module de la fonction de transfert HS lorsque laphonie est pré-traitée sans et avec le contrôle actif.
10 100 1000 10000fréquence [Hz]
−20
−15
−10
−5
0
5
10
[dB
]
Module de la fonction de transfert H S
sans ANR
avec ANR
Module de la fonction de transfert HS
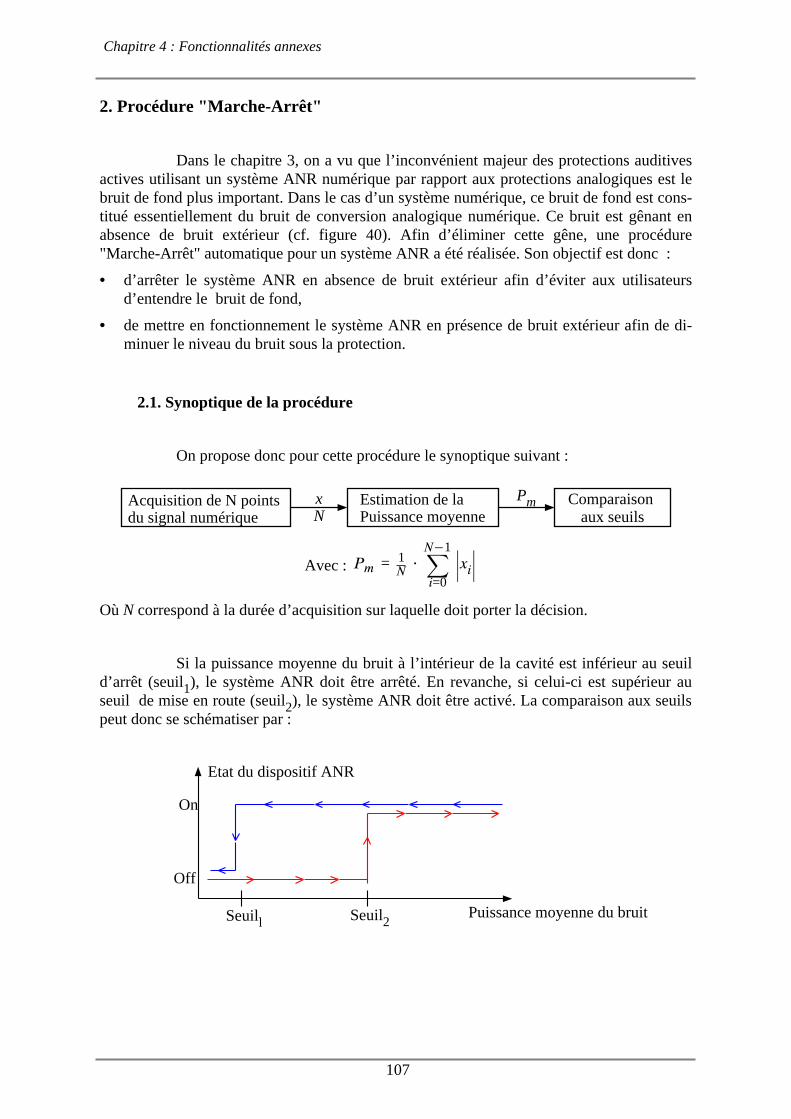
Chapitre 4 : Fonctionnalités annexes
107
2. Procédure "Marche-Arrêt"
Dans le chapitre 3, on a vu que l’ inconvénient majeur des protections auditivesactives utilisant un système ANR numérique par rapport aux protections analogiques est lebruit de fond plus important. Dans le cas d’un système numérique, ce bruit de fond est cons-titué essentiellement du bruit de conversion analogique numérique. Ce bruit est gênant enabsence de bruit extérieur (cf. figure 40). Afin d’éliminer cette gêne, une procédure"Marche-Arrêt" automatique pour un système ANR a été réalisée. Son objectif est donc :
• d’arrêter le système ANR en absence de bruit extérieur afin d’éviter aux utilisateurs d’entendre le bruit de fond,
• de mettre en fonctionnement le système ANR en présence de bruit extérieur afin de di-minuer le niveau du bruit sous la protection.
2.1. Synoptique de la procédure
On propose donc pour cette procédure le synoptique suivant :
Où N correspond à la durée d’acquisition sur laquelle doit porter la décision.
Si la puissance moyenne du bruit à l’ intérieur de la cavité est inférieur au seuild’arrêt (seuil1), le système ANR doit être arrêté. En revanche, si celui-ci est supérieur auseuil de mise en route (seuil2), le système ANR doit être activé. La comparaison aux seuilspeut donc se schématiser par :
Acquisition de N points du signal numérique
Estimation de laPuissance moyenne
Comparaison xN
Pm
Pm = 1N⋅XN−1
i=0 xi
¬¬¬ ¬¬¬Avec :
aux seuils
Off
On
Seuill Seuil2
Etat du dispositif ANR
Puissance moyenne du bruit

Chapitre 4 : Fonctionnalités annexes
108
2.1.1 Choix de la durée d’acquisition ( N)
Si l’on souhaite que cette procédure soit réalisée avec le même processeur quiréalise le filtre de compensation, il est nécessaire que le temps d’exécution soit faible (infé-rieur à 5 µs). Pour minimiser le temps d’exécution, N doit être fixé comme puissance de 2.De plus, pour fixer N il est nécessaire de tenir compte des deux contraintes suivantes :
• La première contrainte concerne la fréquence minimale prise en compte. Pour prendreen compte un bruit dont la fréquence principale est f, il est nécessaire que le tempsd’acquisition de N points de ce bruit soit supérieur à la période du bruit (1/f), on a alors :
Par exemple, si on souhaite que la fréquence minimale soit inférieure ou égale à 50 Hz,N doit être supérieur ou égal à 1000 (pour la fréquence d’échantillonnage, fe égal à50 kHz).
• La deuxième contrainte concerne le temps que met le dispositif à réagir au changementde situation (présence ou absence de bruit), noté Tr. Ce temps doit être peu perceptiblepar l’utilisateur. Tr peut être défini par :
où Td représente le temps qui s’écoule entre deux décisions du changement d’états del’ANR. Afin que Tr soit peu perceptible par utilisateur, il est souhaitable d’avoirTr inférieur à 100 ms. Par conséquent d’après l’équation (86) il suffit d’avoir :
Les deux seules possibilités pour N comme puissance de deux, si l’on prend encompte les deux contraintes décrites précédemment, sont :
Nfe
> 1f ⇒ N >
fef (85 )
Td = N
fe
Td ≤ Tr < 2 ⋅ Td
(86 ) rang n
temps
0 N 2·N
0 Td 2·Td
Absence
ANR=0 ANR=1ANR=0
Présence de bruit Tr
de bruit
décision décision
Td≤ 50 ms ⇒ N ≤ 2500 (87 )
N fréquence minimale pouvant êtreprise en compte [Hz]
Td [ms] Td [ms]inférieur à
1024 49 20,5 41
2048 24,5 41 82

Chapitre 4 : Fonctionnalités annexes
109
2.1.2 Intérêt de travailler en hystérésis
Si on utilisait le même seuil pour la mise en marche et l’arrêt du dispositif actif,on aurait alors le système ANR :
• en fonctionnement si Pm est supérieur au seuil
• à l’arrêt si Pm est inférieur ou égal au seuil .
Trois situations peuvent se présenter selon la puissance du bruit :
1) La puissance moyenne du bruit Pm est inférieure au seuil. Dans ce cas, le systèmeANR est toujours arrêté.
2) La puissance moyenne du bruit Pm est très supérieure au seuil. Dans ce cas, le sys-tème ANR est en fonctionnement à tout instant
3) La puissance moyenne du bruit Pm est légèrement supérieure au seuil. Dans ce cas,on a alors:
au bout de Td le système se met en marche ⇒ Pm diminue et devient inférieure au seuil ⇒ après un certain temps, le système s’arrête
⇒ Pm augmente et redevient légèrement supérieure au seuil⇒ d’où le système se remet en marcheet ainsi de suite.
Dans ce dernier cas, le système ANR change sans cesse d’état même si le niveaudu bruit extérieur ne change pas. Afin d’éviter un changement d’état du dispositif actif lors-que la puissance moyenne du bruit ne change pas, il est donc nécessaire d’utiliser un sys-tème d’hystérésis. C’est à dire que le seuil de mise en marche du dispositif actif (seuil2) soitdifférent du seuil d’arrêt du dispositif actif (seuil1).
2.1.3 Choix des seuils
Le maximum de l’atténuation active est compris généralement entre 20 dB et24 dB. Ceci correspond à environ 15 fois moins de bruit sous le casque. Afin d’éviter que lesystème ANR ne change sans cesse d’état, il est donc souhaitable de prendre :
Dans la plupart des applications, il est souhaitable d’arrêter le système ANRlorsque le bruit sous le casque est inférieur à 60 dB (< 20 mPa). Pour cela il est nécessairede fixer le seuil1 à :
seuil2 ≥ 15 ⋅ seuil1 (88 )
(89 ) seuil1 = Ex 20mPa ¡
∆e
!

Chapitre 4 : Fonctionnalités annexes
110
Où x désigne la valeur du signal numérique à la sortie du convertisseur Analogique / numé-rique, et ∆e est le pas d’échantillonnage du convertisseur. Or le signal numérique x peuts’exprimé en fonction de la sensibilité du micro Sn du gain du pré-ampli, A1 et de la pressionacoustique dans la cavité du casque, P :
En combinant les équations (88), (89) et (90) les seuils doivent être fixés à
2.2. Expérimentation
Avec l’optimisation du système ANR numérique effectuée dans le chapitre 3 (A1=50 et A2=1,2) le seuil1 est fixé à 35, et seuil2 à 425. Pour vérifier le bon fonctionne-ment du dispositif "Marche-Arrêt" automatique du dispositif ANR, on visualise sur un os-cilloscope l’état du système ANR.
2.2.1 Problèmes rencontrés
Pour les premiers essais, on a pu constater que :
• En présence de bruit extérieur, le système ANR est toujours en fonctionnement et lebruit à l’ intérieur de la cavité est atténué.
• Lorsqu’on arrête le bruit extérieur, le système ANR varie sans cesse. Il passe de l’état enfonctionnement à l’état arrêté avec une variation lente.
Pour pouvoir comprendre ce comportement non souhaité, on a observé le signalen sortie du pré amplificateur en absence de bruit. Cette observation a permis de constaterque ce signal est constitué par :
1) un signal de faible amplitude dans le domaine des moyennes et hautes fréquences,
2) un signal très basses fréquences (inférieur à 50 Hz ⇒ non audible) d’amplitude im-portante que l’on a observé lors de la mesure du bruit de fond (cf. figure 40).
Ce signal très basse fréquence est la cause de l’ instabilité de l’état du systèmeANR. Il provient des vibrations parasites basses fréquences qui nous entourent, comme parexemple le 50 Hz. Il est donc nécessaire de trouver un moyen permettant d’estimer la puis-sance moyenne du bruit sans tenir compte de ces parasites non audibles.
x = A1 ⋅ Sn ⋅ P (90 )
seuil1 = E0,02⋅Sn⋅A1
∆e
² ³ et seuil2 = 15 ⋅ seuil1 (91 )
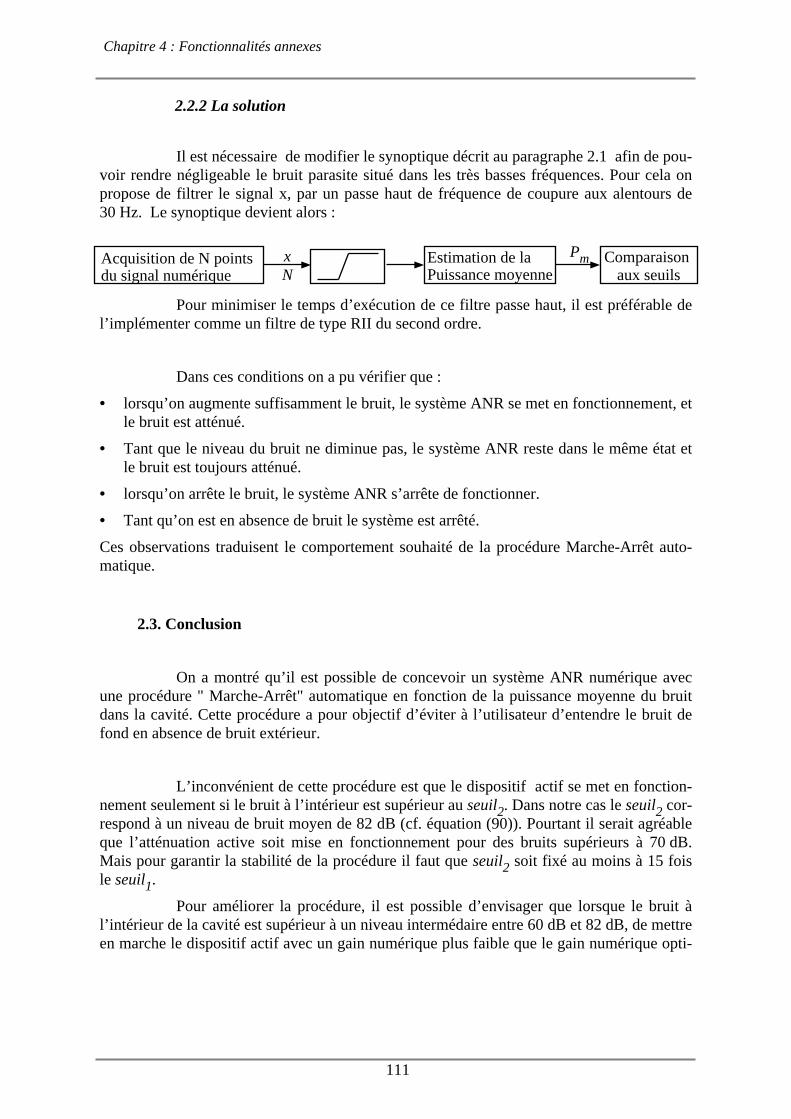
Chapitre 4 : Fonctionnalités annexes
111
2.2.2 La solution
Il est nécessaire de modifier le synoptique décrit au paragraphe 2.1 afin de pou-voir rendre négligeable le bruit parasite situé dans les très basses fréquences. Pour cela onpropose de filtrer le signal x, par un passe haut de fréquence de coupure aux alentours de 30 Hz. Le synoptique devient alors :
Pour minimiser le temps d’exécution de ce filtre passe haut, il est préférable del’ implémenter comme un filtre de type RII du second ordre.
Dans ces conditions on a pu vérifier que :
• lorsqu’on augmente suffisamment le bruit, le système ANR se met en fonctionnement, etle bruit est atténué.
• Tant que le niveau du bruit ne diminue pas, le système ANR reste dans le même état etle bruit est toujours atténué.
• lorsqu’on arrête le bruit, le système ANR s’arrête de fonctionner.
• Tant qu’on est en absence de bruit le système est arrêté.
Ces observations traduisent le comportement souhaité de la procédure Marche-Arrêt auto-matique.
2.3. Conclusion
On a montré qu’ il est possible de concevoir un système ANR numérique avecune procédure " Marche-Arrêt" automatique en fonction de la puissance moyenne du bruitdans la cavité. Cette procédure a pour objectif d’éviter à l’utilisateur d’entendre le bruit defond en absence de bruit extérieur.
L’ inconvénient de cette procédure est que le dispositif actif se met en fonction-nement seulement si le bruit à l’ intérieur est supérieur au seuil2. Dans notre cas le seuil2 cor-respond à un niveau de bruit moyen de 82 dB (cf. équation (90)). Pourtant il serait agréableque l’atténuation active soit mise en fonctionnement pour des bruits supérieurs à 70 dB.Mais pour garantir la stabilité de la procédure il faut que seuil2 soit fixé au moins à 15 foisle seuil1.
Pour améliorer la procédure, il est possible d’envisager que lorsque le bruit àl’ intérieur de la cavité est supérieur à un niveau intermédaire entre 60 dB et 82 dB, de mettreen marche le dispositif actif avec un gain numérique plus faible que le gain numérique opti-
Acquisition de N points du signal numérique
Estimation de laPuissance moyenne
Comparaison xN
Pmaux seuils
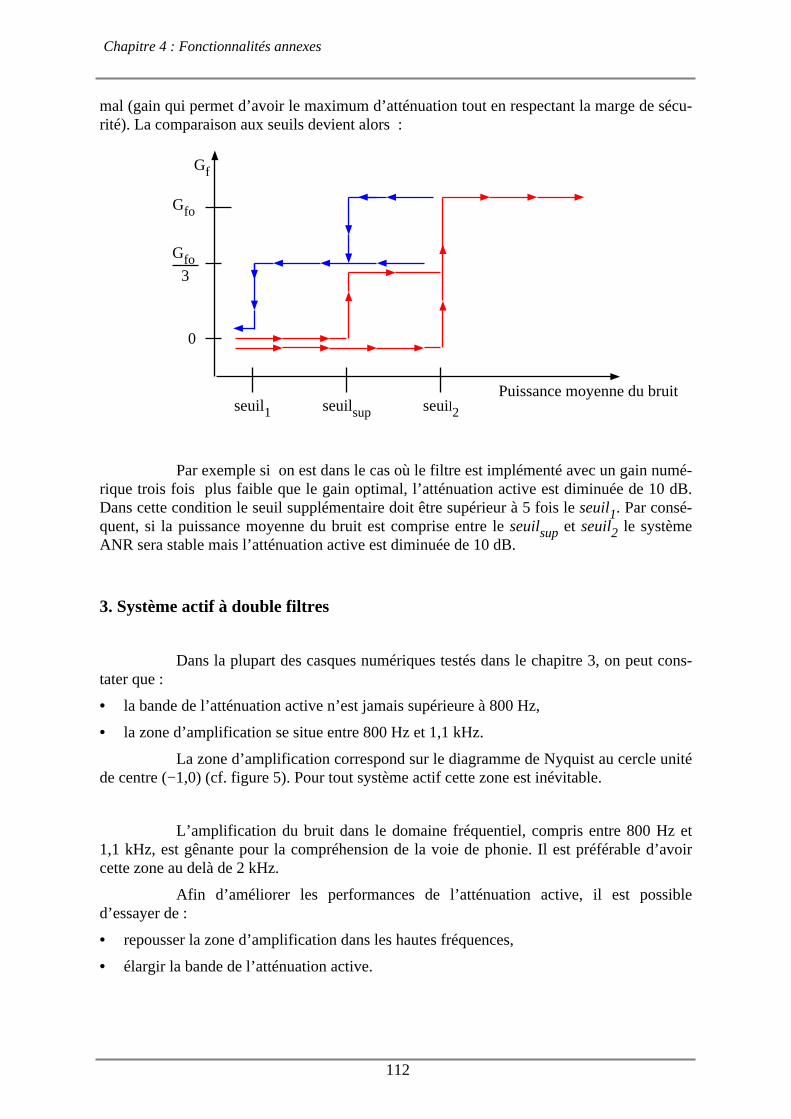
Chapitre 4 : Fonctionnalités annexes
112
mal (gain qui permet d’avoir le maximum d’atténuation tout en respectant la marge de sécu-rité). La comparaison aux seuils devient alors :
Par exemple si on est dans le cas où le filtre est implémenté avec un gain numé-rique trois fois plus faible que le gain optimal, l’atténuation active est diminuée de 10 dB.Dans cette condition le seuil supplémentaire doit être supérieur à 5 fois le seuil1. Par consé-quent, si la puissance moyenne du bruit est comprise entre le seuilsup et seuil2 le systèmeANR sera stable mais l’atténuation active est diminuée de 10 dB.
3. Système actif à double filtres
Dans la plupart des casques numériques testés dans le chapitre 3, on peut cons-tater que :
• la bande de l’atténuation active n’est jamais supérieure à 800 Hz,
• la zone d’amplification se situe entre 800 Hz et 1,1 kHz.
La zone d’amplification correspond sur le diagramme de Nyquist au cercle unitéde centre (−1,0) (cf. figure 5). Pour tout système actif cette zone est inévitable.
L’amplification du bruit dans le domaine fréquentiel, compris entre 800 Hz et1,1 kHz, est gênante pour la compréhension de la voie de phonie. Il est préférable d’avoircette zone au delà de 2 kHz.
Afin d’améliorer les performances de l’atténuation active, il est possibled’essayer de :
• repousser la zone d’amplification dans les hautes fréquences,
• élargir la bande de l’atténuation active.
Gfo 3
Puissance moyenne du bruit
0
seuil1 seuil2seuilsup
Gf
Gfo

Chapitre 4 : Fonctionnalités annexes
113
Pour cela, on propose de réaliser une protection auditive active numérique com-portant deux boucles de régulation, dont les bandes fréquentielles de l’atténuation activesont différentes.
3.1. Réalisation avec un seul haut-parleur
La possibilité la plus simple pour la réalisation de deux boucles de contre-réaction est de mettre deux filtres numériques en parallèle de la façon suivante :
L’équation (7) du chapitre 1 devient dans ce cas :
La figure 62 représente l’atténuation active dans les trois configurations suivantes :
• protection utilisant le filtre Fa seul (courbe verte représentant 20·log(Ra))
• protection utilisant le filtre Fb seul (courbe bleue représentant 20·log(Rb))
• protection utilisant le filtre Fa en parallèle avec le filtre Fb (courbe rouge représen-tant 20·log (R))
Cette figure permet de montrer que dans ce cas, la réduction du bruit obtenueavec deux filtres en parallèle est peu différente de la somme des deux réductions du bruitque l’on obtient avec les filtres implémentés seuls. Elle permet de montrer qu’ il est possibled’élargir la bande fréquentielle de l’atténuation active si on utilise deux filtres RII en paral-lèle. En effet dans ce cas, la bande de l’atténuation active s’étend 25 Hz à 1 kHz.
Figure 61 : Synoptique du système actif numérique d’une protection auditive à double filtres.
A1A2
CANCNA
KmKt
− S’
Fa
DSP
Σ
Vt Vm
Fb
R = 1 + Bo ¬¬ ¬¬ = 1 + A1 ⋅ A2 ⋅ Kt ⋅ Km ⋅ Fa + F
b
° ±¬¬¬¬¬¬¬¬
pour Bo > 1 ⇒ R ≤ Ra + Rb avec
Ra= 1+A1⋅A2⋅Kt⋅Km⋅Fa¬¬ ¬¬
Rb= 1+A1⋅A2⋅Kt⋅Km⋅Fb¬¬ ¬¬
(92 )
(93 )
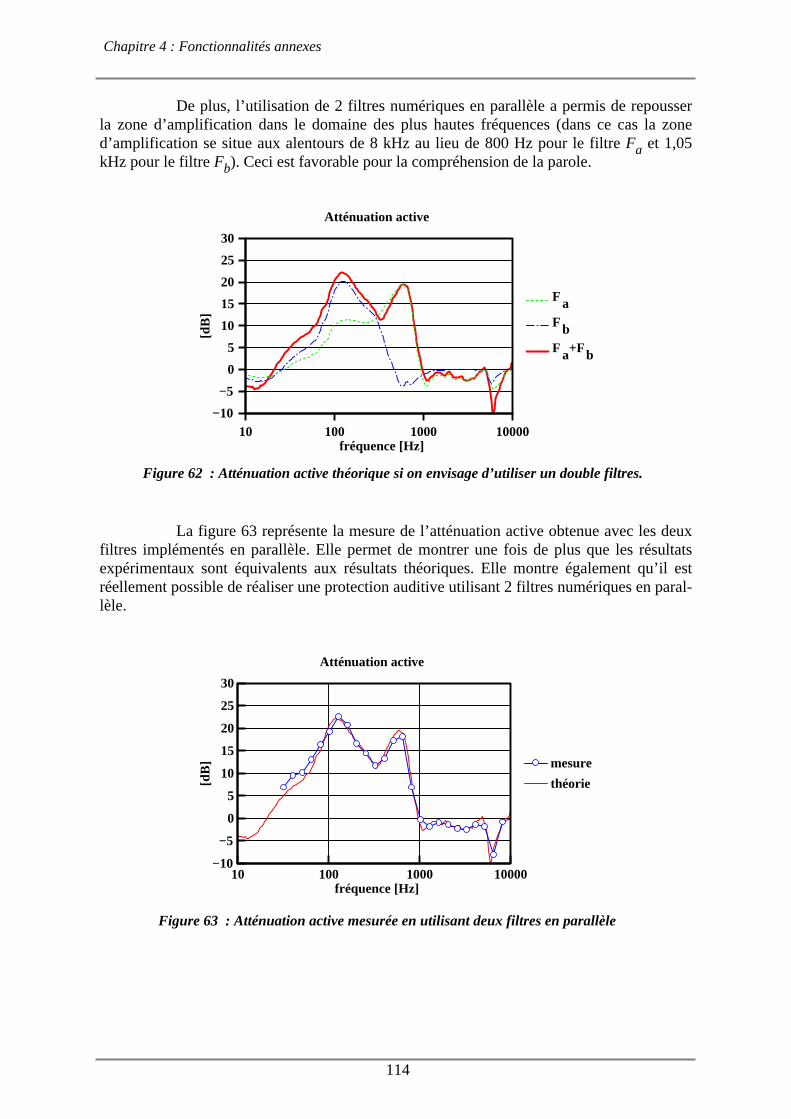
Chapitre 4 : Fonctionnalités annexes
114
De plus, l’utilisation de 2 filtres numériques en parallèle a permis de repousserla zone d’amplification dans le domaine des plus hautes fréquences (dans ce cas la zoned’amplification se situe aux alentours de 8 kHz au lieu de 800 Hz pour le filtre Fa et 1,05kHz pour le filtre Fb). Ceci est favorable pour la compréhension de la parole.
La figure 63 représente la mesure de l’atténuation active obtenue avec les deuxfiltres implémentés en parallèle. Elle permet de montrer une fois de plus que les résultatsexpérimentaux sont équivalents aux résultats théoriques. Elle montre également qu’ il estréellement possible de réaliser une protection auditive utilisant 2 filtres numériques en paral-lèle.
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]Atténuation active
F a
F b
F a+Fb
Figure 62 : Atténuation active théorique si on envisage d’utiliser un double filtres.
10 100 1000 10000fréquence [Hz]
−10
−5
0
5
10
15
20
25
30
[dB
]
Atténuation active
mesure
théorie
Figure 63 : Atténuation active mesurée en utilisant deux filtres en parallèle

Chapitre 4 : Fonctionnalités annexes
115
3.2. Système actif avec deux haut-parleurs
Il serait possible d’envisager d’effectuer deux boucles de contre-réaction avecdeux haut-parleurs différents de fonction de transfert Kt1 et Kt2 .
Dans ce cas, l’équation (7) du chapitre 1 devient alors :
Afin d’améliorer les performances de la protection, l’ idéal serait que les fonc-tion de transfert Kt1 et Kt2 soient différentes et complémentaires, c’est à dire une adaptéepour les basses fréquences (< 400 Hz) et l’autre adaptée pour les moyennes fréquences( > 400 Hz et < 1,2 kHz). Ceci permettrait d’optimiser les deux boucles dans deux domainesfréquentiels différents : l’un dans les basses fréquences et l’autre dans les moyennes fré-quences.
Cette idée n’a pu être mise en oeuvre n’ayant pas à ma disposition de casqueactif comportant deux hauts parleurs différents.
4. Conclusion
On a montré qu’ il est facile de mettre en oeuvre des fonctionnalités supplémen-taires au système ANR numérique comme l’ insertion de la voie de phonie, la procéduremarche arrêt automatique ou un double filtres.
Pour l’ insertion de la voie de phonie, pour une bonne compréhension, il est pré-férable d’ insérer le signal de parole avant et après le filtre. Pour améliorer la compréhensionde la phonie, il est préférable de pré-traiter le signal de parole avant de l’ injecter dans laboucle.
L’ inconvénient majeur du système ANR numérique réside en un bruit de fondgênant en absence de bruit extérieur. Cet inconvénient a pu être remédié avec la procédureMarche-Arrêt automatique qui permet de stopper le système lorsque le bruit sous le casqueest faible.
Avec une technologie numérique, il est facile d’ implémenter un système ANRconstitué deux filtres en parallèle. L’utilisation de deux filtres en parallèle permet d’élargirla bande de l’atténuation active et de repousser la bande fréquentielle d’amplification dansles hautes fréquences.
Une fonctionnalité supplémentaire qu’ il serait nécessaire d’ajouter estl’asservissement du gain numérique, afin de garantir la stabilité. En effet le principal pro-blème des protections actives est qu’elles peuvent devenir instables lors de fuites acousti-ques ou lors de variations des conditions initiales. La procédure de l’asservissement du gain,devrait vérifier sans cesse si le système ANR ne devient pas instable. Cette procédure de-vrait être capable de :
• diminuer le gain numérique lorsque le système rentre en instabilité,
R = 1 + A1 ⋅ A2 ⋅ Km ⋅ Fa ⋅ Kt1 + Fb⋅ Kt2
° ±¬¬¬¬¬¬¬¬ (94 )
Chapitre 4 : Fonctionnalités annexes
116
• augmenter le gain lorsque le système est stable et que l’atténuation active n’est pas opti-male.
L’ instabilité du système ANR se traduit par une augmentation du bruit sous lecasque sans augmentation du bruit extérieur. Ceci traduit une modification de la réponseimpulsionnelle de la boucle fermée.
Il est donc possible d’envisager deux méthodes pour obtenir un asservissementdu gain numérique :
• une méthode basée sur l’analyse spectrale du bruit résiduel, qui permettra de constaterune augmentation du bruit sous le casque connaissant le bruit extérieur,
• une méthode basée sur l’analyse de la réponse impulsionnelle de la boucle fermée. Unepremière étude a montré que la longueur de la réponse impulsionnelle croît lorsque lediagramme de Nyquist de la boucle ouverte s’approche du point d’ instabilité (−1,0) dansle plan complexe.
Conclusion
117
Conclusion
Pour la réalisation d’une protection auditive active numérique, il a été nécessaired’utiliser un filtre numérique à large bande possédant une dynamique supérieure à 60 dB.De plus, il est nécessaire de traiter les basses fréquences tout en utilisant une fréquenced’échantillonnage égale 50 kHz. Ceci impose d’utiliser des filtres numériques de type RII.
La quantification des coefficients et des signaux ainsi que la propagation del’erreur d’arrondi réduisant la dynamique, rendent généralement les filtres de type RII inuti-lisables dans un système bouclé comme par exemple un système ANR en protection audi-tive. Les différentes études, simulations et expériences de ce type de filtres ont permisd’améliorer leurs performances afin de pouvoir les utiliser dans une boucle de contre-réaction.
En ce qui concerne le problème des quantifications, il est nécessaire d’utiliser lefiltre RII sous sa forme en cascade (cascade de cellules du second ordre) pour minimiserl’effet de la quantification des coefficients. Pour minimiser l’erreur entre les pôles et leszéros décrits par les coefficients et ceux désirés, nous avons développé un algorithme per-mettant de déterminer les coefficients optimaux . Pour augmenter le nombre de pôles possi-bles et pour pouvoir implémenter un pôle de fréquence inférieure à 100 Hz avec une fré-quence d’échantillonnage égale à 50 kHz, il est nécessaire d’utiliser un DSP de longueur demots d’au moins 32 bits. Pour accroître le rapport signal sur le bruit de quantification, il faututiliser des convertisseurs avec des résolutions d’au moins 16 bits.
En revanche, pour éviter la propagation de l’erreur d’arrondi, il a fallu élaborerun nouvel algorithme pour les cellules du second ordre. Pour cela, il a été nécessaired’utiliser une arithmétique entière qui permet de connaître avec précision l’erreur d’arrondi ,dans le but de les corriger. Cet algorithme dit algorithme adapté, permet d’obtenir un filtreRII possédant une large dynamique quelles que soient les caractéristiques fréquentielles dufiltre. Dans ce cas, l’erreur sur le signal de sortie est inférieure au bruit électronique du sys-tème quelles que soient les caractéristiques du filtre et l’amplitude du signal d’entrée, puis-que cette erreur est toujours inférieure à la moitié du pas d’échantillonnage.
Ce procédé algorithmique fait l’objet d’un brevet déposé le mardi 25 avril 2000par l’ ISL, dont je suis coauteur avec M. K. Buck (numéro de dépôt à l’ INPI : 00005246). Ils’ intitule : "Procédé de filtrage à large dynamique pour filtre numérique récursif implantédans un processeur de signal DSP travaillant avec des nombres entiers".
Avec ce procédé de filtrage, le filtre numérique de type RII peut être utilisé à laplace d’un filtre analogique dans diverses applications comme par exemple : un filtre passebas, compensation de hauts parleurs ou dans une boucle de régulation.
En tenant compte des conditions décrites ci-dessus, permettant de minimiser leserreurs du filtre numérique de type RII, il est possible de l’utiliser dans une boucle decontre-réaction d’un système ANR. Afin d’avoir le maximum d’atténuation active tout enrespectant la marge de sécurité fixée, il est préférable d’ajuster le gain de la boucle ouvertenumériquement.
Dans le cas d’une protection auditive active numérique, il est possible de simu-ler la boucle de contre-réaction. Ceci permet de vérifier que la protection reste stable en pré-

Conclusion
118
sence de bruit à fort niveau. Ces simulations permettent également de visualiser la durée dela phase transitoire (inférieure à 50 ms) et les effets des différentes saturations en présencede bruit de fort niveau.
Les différentes expériences ont montré que les protections auditives numériquessont aussi performantes que les protections actuelles réalisées en technologie analogique.Comme pour les protecteurs auditifs actifs analogiques, il est possible d’obtenir plus de20 dB d’atténuation active avec ce nouveau type de protecteurs. L’avantage de ces protec-tions numériques est qu’ il est facile d’adapter la protection à différents environnements so-nore. Pour cela il suffit seulement de changer les coefficients du filtre numérique. Il est aussipossible d’utiliser la même structure de filtre numérique pour différents systèmes électro-acoustiques (casques actifs ou bouchons actifs).
Le fait d’utiliser un système numérique, permet d’ajouter facilement des fonc-tionnalités annexes au système ANR afin d’améliorer ses performances.
Il est possible d’ insérer une voie de phonie dans un système ANR numérique comme dans les systèmes analogiques. On a montré qu’ il est préférable de pré-traiter le si-gnal de parole avant de l’ insérer dans la boucle. Ce pré-traitement a pour objectifd’amplifier les domaines fréquentiels du signal de parole qui vont être atténués par le sys-tème ANR et par le haut parleur.
Il est préférable d’utiliser une procédure "Marche-Arrêt" automatique, afin desupprimer le bruit de fond gênant en absence de bruit extérieur. Pour cette procédure, il estnécessaire d’utiliser deux seuils de décisions pour que l’état du système ANR reste stable(l’un pour la mise en marche, et l’autre pour l’arrêt).
Pour améliorer les performances du système ANR, il est possible de réaliser unsystème comportant deux filtres de compensation en parallèle. En effet, ceci permetd’élargir la bande de l’atténuation active et de repousser dans les hautes fréquences la plagefréquentielle d’amplification.
L’ idéal pour une protection auditive active est de pouvoir fournir l’atténuationactive optimale tout en garantissant la stabilité du système quelles que soient les conditionsd’utilisation. Avec un système ANR numérique, il est possible d’élaborer un procédéalgorithmique permettant d’obtenir un gain numérique variable. Ceci permettrait d’avoir, àchaque instant, le gain optimal permettant d’avoir le maximum d’atténuation active tout enrespectant la marge de sécurité fixée. Dans ce cas, lors d’une fuite acoustique, le gain numé-rique devrait diminuer afin de respecter la marge de sécurité fixée.
Afin de faciliter la réalisation de protection auditive active numérique, l’algorithme adapté va être implémenté sur silicium dans une "puce" (CHIP). Ce compo-sant permettra d’élaborer un filtre de type RII possédant au maximum 15 cellules du secondordre dont l’erreur du signal de sortie sera inférieure au bruit de conversion.

Références bibliographiques
119
Références bibliographiques
[1] : Dancer A., Franke R. et Parmentier G. La protection auditive. Rapport InstitutFranco-Allemand de recherches de Saint Louis (ISL) N° R115/94. 1994, 36p.
[2] : Dancer A. Buck K. Intérêt de la protection auditive.Rapport Institut Franco-Allemand de recherches de Saint Louis (ISL) N° PU378/95, 1995, 14 p.
[3] : Dancer A., Buck K. Hamery P. et Parmentier G. Passive and Active Techniques forHearing Protection . AGARD conférence proceedings CP-596 : Audio effectiveness inaviation, Copenhagen (Danamark) 1996, p ov2.1-ov2.10.
[4] : Berger, E. H. Methods of Measuring the Attenuation of Hearing Protection Devices. J.Acoust Soc. Am., 1986, Vol. 79, p. 1655−1687.
[5] : Kuo S. M. et Morgan D. R. Active Noise Reduction: A Tutorial Review. Proceedingsof the IEEE, 1999, Vol. 87, N° 6, p. 943−973.
[6] : Pan G. J., Branner A. J., Zera J. et Goubran R. Application Adaptative Feed-forwardactive noise control to a circumaural Hearing protector. Proceedings of Active 95,Newport beach (CA) 1995 p. 1319-1326.
[7] : Lueg, P. Process of silencing sound oscillations. US Patent N0. 2043416, 1936.
[8] : Buck K. and Parmentier G. Active Hearing new Developpement and mesurenent pro-cedures. AGARD conférence proceedings CP-596 : Audio effectiveness in aviation,Copenhagen (Danamark) 1996, p. 10.1−10.5.
[9] : Buck K. et Franke R. Protecteur auditif à atténuation acoustique active utilisant un fil-tre numérique. Journal de physique. Colloques 1990 N°2 part 2, Lyon, Tome 51, p.c2.781−c2.784.
[10] : Nelson P. A. et Elliott S. J. Single Chanel Feedback Control In : Active control ofsound. London : Academic Press, 1982. chapitre 7, p. 204−230.
[11] : Thaler, G. J. et Brown R. G. Analysis and Design of Feedback Control Systems. Se-cond Edition. Tokyo : McGraw-Hill Book Company, 1960.
[12] : Steeneken H. J. M. et Verhave J. A. Personal active noise reduction with integratedSpeech communication devices: development and assement. AGARD conférence pro-ceedings CP-596 : Audio effectiveness in aviation, Copenhagen (Danamark) 1996,, p.18.1−18.8.
[13] : Pellieux L., Sarafian D. et Reynaud G. Evaluation des casque à réduction active debruit protection auditive et intelligibilité. AGARD conférence proceedings CP-596 :Audio effectiveness in aviation, Copenhagen (Danamark) 1996, p. 16.1−16.19.
[14] : Bera J. C., Sunyach M. Buck K. Testing of Different Types of Hearing Protectors.Acta Acustica, 1995, vol 3, n°2, p. 203−207.
[15] : Buck K. and Parmentier G. Evaluation of Active Hearing Protectors With High LevelImpulse Noise. Proceedings of International congress on Noise control Engeneering, internoise 1996 p. 989−992.
[16] : Proakis J. G. et Manolakis D. G., Digital Signal Processing, principles, algorithm,and applications. Third Edition. New Jersey : Prentice Hall, 1996.
Références bibliographiques
120
[17] : Jackson, L. B. Digital Filters and Signal Processing. Boston : Kluwer Academic Publishers, 1986.
[18] : Leland B. J. On the interaction of Roundoff Noise and Dynamic Range in Digital Fil-ters. The Bell System Technical Journal, 1970 vol. 49 N°2 p. 159−184.
[19] : Reyer S. E. et Heinen J. A. Quantification Noise Analysis of a General Digital Filter.IEEE trans. on acoustics, speech and signal processing, 1981, Vol. ASSP-29, N° 4,p. 883−892.
[20] : Bose N. K. Error Analysis In : Digital Filters, theory and applications. New York :Elsevier Science Publishing Co., inc., 1985. Chapitre 5, p. 310−354.
[21] : Cappellini V. , Constantinides A. G. and Emiliani P., Implementation of second ordersections In : Digital filters and their application. London : Academic Press Limited,1978. Chapitre VIII, p. 251−256.
[22] : Leland B. J. Roundoff Noise Bounds Derived from Coefficient Sensitivities for Digi-tal Filters. IEEE Transactions on circuits and systems, 1976, Vol. cas-23, N° 8,p. 481−485.
[23] : Shenoi K. , Narasimha M. J. et Peterson A. M. On the Design of Recursive DigitalFilters. IEEE Transactions on circuits and systems, 1976, Vol. cas-23, N° 8, p.485−489.
[24] : Jackson L. B. , Kaiser J. F. et Mcdonald H. S. An approach to the implementation ofdigital filters. IEEE trans. on audio and electroacoustic, 1968, vol. AU−16 N°3,p. 413−421.
[25] : Zimpfer V. and Buck K. Etude du Filtre numérique contenu dans un système ANRnumérique. Rapport Institut Franco-Allemand de recherches de Saint Louis (ISL)N°RT 510/2000, 2000, 72p.
[26] : Zimpfer V. et Buck K. Digital Filter Used in Feedback Loop of ANR Hearing Protectors. Berlin : Forum acusticum 99, March 1999, published in CD-Rom.
[27] : Bauer R., Protecteur auditif actif de type bouchon d’oreille : étude électro-acoustiqueet réalisation. Thèse Doct. Uni. de l’université du Maine, 2000. 110 p.

Annexe : ANNEXE
121
ANNEXE
Rappel sur la stabilité d’un système asservi
Calcul du nombre de pôles possibles pour un filtre RII du second ordre ...
Algorithme de calcul des coefficients optimaux ........................................
Calcul du gain numérique optimal .............................................................
Fonctions de transfert des amplificateurs utilisés .......................................
Fonctions de transfert des différents filtres de compensation ....................
Fonctions de transfert des filtres de pré-traitement ....................................
122
123
125
128
130
131
137
Annexe 1 :
Annexe 2 :
Annexe 3 :
Annexe 4 :
Annexe 5 :
Annexe 6 :
Annexe 7 :

Annexe 1 : Rappel sur la stabilité d’un système asservi
122
Annexe 1 : Rappel sur la stabilité d’un système asservi
Le critère de stabilité de Nyquist est un moyen graphique, qui permetd’apprécier la stabilité d’un système asservi à contre-réaction unique [10][11].
Le critère de Nyquist consiste à tracer la fonction de transfert de la boucle ou-verte, Bo soit dans le plan de Bode (cf. figures 64a et 64b) soit dans le plan de Nyquist (cf.figure 64c). L’équation (6) montre que le système diverge si la fonction de transfert de laboucle ouverte devient −1. Le critère de Nyquist peut s’exprimer par :
• Dans le Plan de Nyquist : un système asservi est stable si la courbe de la fonction detransfert de la boucle ouverte coupe l’axe des réels à droite du point critique (−1, 0). Ilest instable dans le cas contraire.
• Dans le Plan de Bode : un système asservi est stable si le gain de la boucle ouverte estinférieur à 1 lorsque est la phase passe à ± π. Il est instable dans le cas contraire.
D’après ce critère de stabilité, sur la figure 64 seule, la courbe en pointillée quicorrespond à la plus forte amplification de la boucle ouverte représente un système instableen boucle fermée.
Figure 64 : Représentation pour trois amplifications différentes ( , ----- ou ······ ) de la même boucle ouverte Bo dans le plan de Bode (amplitude a, phase b) et dans le plan de Nyquist (c) .L’amplification de Bo de la courbe en tiret correspond à deux fois celle de la courbe en plein. Parcontre, celle de la courbe en pointillée correspond à quatre fois celle en ligne pleine. Cette figurepermet d’expliquer que, si on amplifie trop Bo, on peut ne pas respecter le critère de stabilité.
Re
Im
-1-2 1 2
-1
-20
0
1
2
3101 102 103 104
101 102 103 104
Hz
Hz
5
0
1
2
3
4
ππ/2
−π−π/2
0
f
a
b
c
Plan de Bode Plan de Nyquist

Annexe 2 : Calcul du nombre de pôles possibles pour un filtre RII du second ordre
123
Annexe 2 : Calcul du nombre de pôles possibles pour un filtre RII dusecond ordre
Afin d’ implémenter un filtre de type RII dans un DSP travaillant avec des en-tiers, il faut quantifier les signaux ainsi que les coefficients du filtre. Une cellule du secondordre implémentée dans un DSP en arithmétique entière est définie par :
où a1, a2, b1 et b2 sont les coefficients qui caractérisent la cellule et ech le facteur d’échellequi a permis de déterminer les coefficients. le pôle de la cellule est défini par les coeffi-cients a1 et a2 tel que :
où wp est la pulsation réduite du pôle et cp le coefficient du pôle .
Le pôle P est la solution de l’équation suivante :
La quantification des coefficients entraîne un nombre fini de pôles et de zéros.On s’ intéresse à déterminer le nombre de pôles (zéros) possibles dont la pulsation réduite estcomprise entre 0 radian et π/2 radians. Dans ce cas la quantification des coefficients imposequ’ il existe seulement:
• pour a1 : 2·ech valeurs différentes comprises entre −2·ech et 0,
• pour a2 : ech−1 valeurs différentes non nulles, comprises entre 0 et ech.
a1 = 2·ech et a2= ech ne sont pas possibles du fait que cp doit être strictement inférieur à1 pour assurer la stabilité du filtre.
Le nombre de pôles possibles est différent de 2·ech·(ech−1). En effet pourqu’un pôle soit possible, il est nécessaire pour avoir un pôle double complexe conjugué àl’ intérieur du cercle unité de respecter les conditions sur a1 et a2 suivantes :
Pour un a2 donné, certaines valeurs de a1 ne sont donc pas possibles (ne respec-tant pas la condition). Pour une valeur a2 donnée, il existe donc une valeur maximale, a1M pour a1 tel que :
• si a1 ≤ a1M ⇒ la condition (98) est respectée
• si a1 > a1M ⇒ la condition (98) n’est pas respectée
F(Z) =ech + b1⋅z−1 + b2⋅Z
−2
ech + a1⋅z−1 + a2⋅Z−2 (95 )
cp =a2ech
q et wp = arccos
a1−2cp⋅ech
² ³(96 )
ech + a1 ⋅ P−1 + a2 ⋅ P
−2 = 0 (97 )
a21− 4 ⋅ a2 ⋅ ech ≤ 0 et a2 < ech (98 )

Annexe 2 : Calcul du nombre de pôles possibles pour un filtre RII du second ordre
124
D’après l’équation (98) on peut déterminer a1M en fonction de a2:
Pour un a2 donné, on a donc comme valeur possible pour a1 : 0, 1, 2, .......(a1M −1), a1M d’où (a1M +1) valeurs possibles.
On peut donc écrire :
Le nombre de pôles (ou de zéros) possibles est donc :
a1M = 4 ⋅ a2 ⋅ ech ⇒ a1M = E 4 ⋅ a2 ⋅ echq !
(99 )
pour a2 = 1 on a E 4 ⋅ ech√° ±
+ 1 valeurs de a1 possibles
pour a2 = 2 on a E 4 ⋅ ech ⋅ 2√° ±
+ 1 valeurs de a1 possibles
pour a2 = 3 on a E 4 ⋅ ech ⋅ 3√° ±
+ 1 valeurs de a1 possibles. . . .pour a2 = i on a E 4 ⋅ ech ⋅ i
√° ±+ 1 valeurs de a1 possibles
. . . .
pour a2 = ech− 1 on a E 4 ⋅ ech ⋅ ech− 1 ¡q² ³
+ 1 valeurs de a1 possibles
Np =Xech−1
i=1E 4 ⋅ ech ⋅ i√° ±
+ 1² ³
(100 )

Annexe 3 : Algorithme de calcul des coefficients optimaux
125
Annexe 3 : Algorithme de calcul des coefficients optimaux
Le but est de déterminer i et j, tel que les deux coefficients (a1+i) et (a2+j) décri-vent le pôle le plus proche du pôle désiré, où a1 et a2 sont les coefficients déterminés à par-tir de l’équation (47).
Pour minimiser la distance entre le pôle (zéro) décrit par les coefficients et lepôle (zéro) désiré, il est préférable de minimiser la différence entre les pulsations normali-sées de ces deux pôles (zéros). Pour minimiser cette différence il est nécessaire de connaîtrele sens de variations de wp(i,j) et cp(j) en fonction de i et j
Démonstration du sens de variation
on a :
1) l’équation (101) cp ne dépend pas de a1, et donc indépendant de i. Pour un j fixé, cp estdonc constant quelle que soit la valeur de i.
2) sens de variation de cp lorsque j varie :
ij −1 0 1
−1
1
0
a1−1 ; a2−1
a1 ; a2−1
a1+1 ; a2−1
wp cp
wp
wp
cp < cpd cp ≤ cpd cp > cpd
a1−1 ; a2 a1−1 ; a2+1
a1 ; a2+1
a1+1 ; a2+1a1+1 ; a2
a1 ; a2
cp(j) =a2+j
ech
r
wp(i, j) = arccosa1+i
−2cp(j)⋅ech
² ³ (101 )
E c2pd ⋅ ech
° ±≤ c2
pd ⋅ ech < E c2pd ⋅ ech
° ±+ 1
⇒ a2 ≤ c2pd ⋅ ech < a2 + 1
⇒ a2ech≤ c2
pd <a2+1
ech⇒ a2− 1
ech
r<
a2ech
q≤ c2
pd
q<
a2+1
ech
r⇒ cp(−1) < cp(i, 0) ≤ cpd < cp(1) ∀ i
(102 )

Annexe 3 : Algorithme de calcul des coefficients optimaux
126
D’où quel que soit i lorsque j augmente, cp(j) augmente .
3) D’après l’équation (101), lorsque i est fixe, et j varie, le sens de variation de wp est :
D’où pour un i donné lorsque j augmente, wp(i,j) augmente également.
4) D’après l’équation (101), lorsque j est fixe, et i varie, le sens de variation de wp est :
D’où pour un j donné lorsque i augmente, wp(i,j) (ou fp(i,j)) augmente également.
5) sens de variation de wp, lorsque i et j varient, avec i = - j :
La contrainte d’avoir un pôle double complexe conjugué impose :
Avec la même démarche, on peut également démontrer que wp(1,−1) < wp(0,0).
D’où lorsque i augmente, wp(i,j) diminue.
wp(i, j) = arccos− (a1+i)
2 ech⋅(a2+j)p
!= arccos(X) avec X =
− (a1+i)
2 ech⋅(a2+j)p
dwp
dj= 1
2π× dX
dj× −1
1−X2p ⇒ dwp
dj a même signe que − dX
dj
or − dXdj
= −12⋅ −1
2⋅ − (a1+i)
ech√ ⋅ a2 + j
° ±3=2=−(a1+i)
4 ech√ ⋅ a2 + j
° ±3=2
or ∀ i j (a1 + i) < 0 et (a2 + j) > 0 ⇒ dwp
dj> 0
(103 )
dwp
di= dX
di× −1
1−X2p ⇒ dwp
di a le même signe que − dX
di
or − dXdi
= −12 (a2=j)⋅echp × (−1) = 1
2 (a2=j)⋅echp > 0 ∀ j (a2 + j) > 0
(104 )
on a X(0, 0) =|a1|
2 ech⋅a2p et X(−1, 1) =
|a1−1|2 ech⋅(a2+1)p
or |a1−1|
a2+1p =
|a1|+1
a2√ ⋅ 1+
1a2
q ' |a1|+1a
√2× 1− 1
2a2
² ³' |a1|
a√
2+ 1
a√
2× 1− |a1|+1
2a2
! (105 )
2a2 < a1 ⇒ 2a2− |a1|− 1° ±
< 0 ⇒ |a1−1|a2+1
p <|a1|
a2√
⇒ X(−1, 1) < X(0, 0) or arccos(x) ↘⇒ arccos X(0, 0) ¡
< arccos X(−1, 1) ¡
or wp(i, j) = arccos X(i, j) ¡
⇒ wp(0, 0) < wp(−1, 1)
(106 )

Annexe 3 : Algorithme de calcul des coefficients optimaux
127
Calcul des coefficients :
On a montré que le pôle optimal appartient forcément à l’un des trois ensembles définis pari=-j, i=-j-1 ou i=-j+1.
En s’aidant du sens de variation de fp (qui est le même que wp) on a établi l’algorithme descoefficients optimaux, qui a pour but de minimiser la différence entre le pôle possible et lepôle désiré. L’organigramme de cet algorithme est représenté ci dessous :
• fp désigne la fréquence du pôle défini par les coefficients (a1+i) et (a2+j)
• ∆1 et ∆2 désigne les distances dans le plan complexe entre le pôle décrit par lescoefficients et le pôle désiré.
fp(0,0)>fdp C>0 ∆(0,−1)>∆(1,−1)
t=0; ∆1=∆(−t,t)
t=1; ∆2=∆(−t,t)
t=0; ∆1=∆(t,−t)
t=1; ∆2=∆(t,−t)
t=0; ∆1=∆(t,−t−1)
t=1; ∆2=∆(t,−t−1)
∆1>∆2 ∆1>∆2 ∆1>∆2
t=t+1; ∆1=∆2∆2=∆(−t,t)
t=t+1; ∆1=∆2∆2=∆(t,−t)
t=t+1; ∆1=∆2∆2=∆(t,−t−1)
oui non
nonnon oui oui
i=−t+1; j=-i i=t-1; j=-i i=t-1; j=-i
non non non
oui oui oui
C = a1
° ±2− 4 ⋅ a2 ⋅ echoù : •
Calcul de a1 et a2
fdp et cdp

Annexe 4 : Calcul du gain numérique optimal
128
Annexe 4 : Calcul du gain numérique optimal
Notre objectif est de déterminer le gain numérique optimal noté Gfo permettantd’avoir le maximum d’atténuation active tout en ayant une protection auditive stable. Afin d’assurer la stabilité, le gain de la boucle ouverte, Bo du système ANR doit être fixé defaçon que :
l’ idéal est d’utiliser un gain numérique optimal, Gfo défini par (cf. équation (107)) :
Dans le plan de complexe, on a :
Où P est le point du diagramme de Nyquist de Bo le plus proche du point (-1,0j) dontl’argument est compris entre [ π-α , -π+α ] où α désigne la marge de phase.
Gfo est donc défini par :
1 + Bo ¬¬ ¬¬ ≤ M (107 )Quelle que soit la fréquence
∀ ε , Min 1 + Bo ⋅ (Gfo + ε) ¬¬¬ ¬¬¬² ³
< M avec Min 1 + Bo ⋅ Gfo ¬¬¬ ¬¬¬² ³
≥ M (108 )
P
−1
R
Gfo · R
Gfo · II
M
Imaginaire
Réelα OA
Gfo ⋅ →OP− →OA
= M
→OA = −1
0
° ± et →OP = R
I
° ± (109 )

Annexe 4 : Calcul du gain numérique optimal
129
Gfo vaut donc :
1 + Gfo ⋅ R° ±2
+ G2fo ⋅ I2
r= M
⇒ 1 + Gfo ⋅ R° ±2
+ G2fo ⋅ I2 = M
2
⇒ G2fo ⋅ R
2 + I2
² ³+ Gfo ⋅ 2R + 1− M
2 = 0
⇒ ∆ = 4R2− 4 1− M2
² ³⋅ R
2 + I2
² ³
⇒ Gfo = −2R+ ∆√
2 R2+I2
° ±
(110 )

Annexe 5 : Fonctions de transfert des amplificateurs utilisés
130
Annexe 5 : Fonctions de transfert des amplificateurs utilisés
1 10 100 1000 10000 100000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
303132333435
[dB
]
Fonction de transfert du pré amplificateur
1 10 100 1000 10000 100000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
0.00.61.21.82.43.0
[dB
]
Fonction de transfert de l’amplificateur de puissance

Annexe 6 : Fonctions de transfert des différents filtres de compensation
131
Annexe 6 : Fonctions de transfert des différents filtres de compensation
Toutes les fonctions de transfert représentées dans cette annexe sont normalisées
Pour le casque 1
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre 1
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre 2
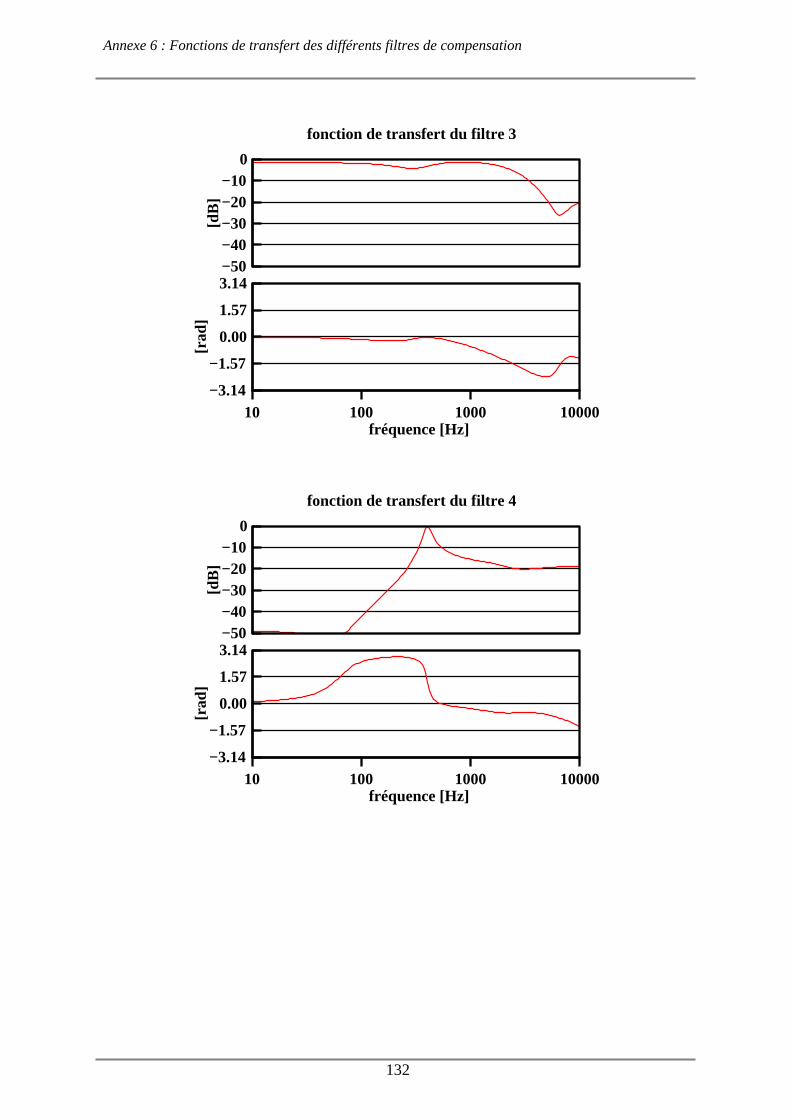
Annexe 6 : Fonctions de transfert des différents filtres de compensation
132
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre 3
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre 4

Annexe 6 : Fonctions de transfert des différents filtres de compensation
133
Pour le casque 2:
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre 5
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre 2
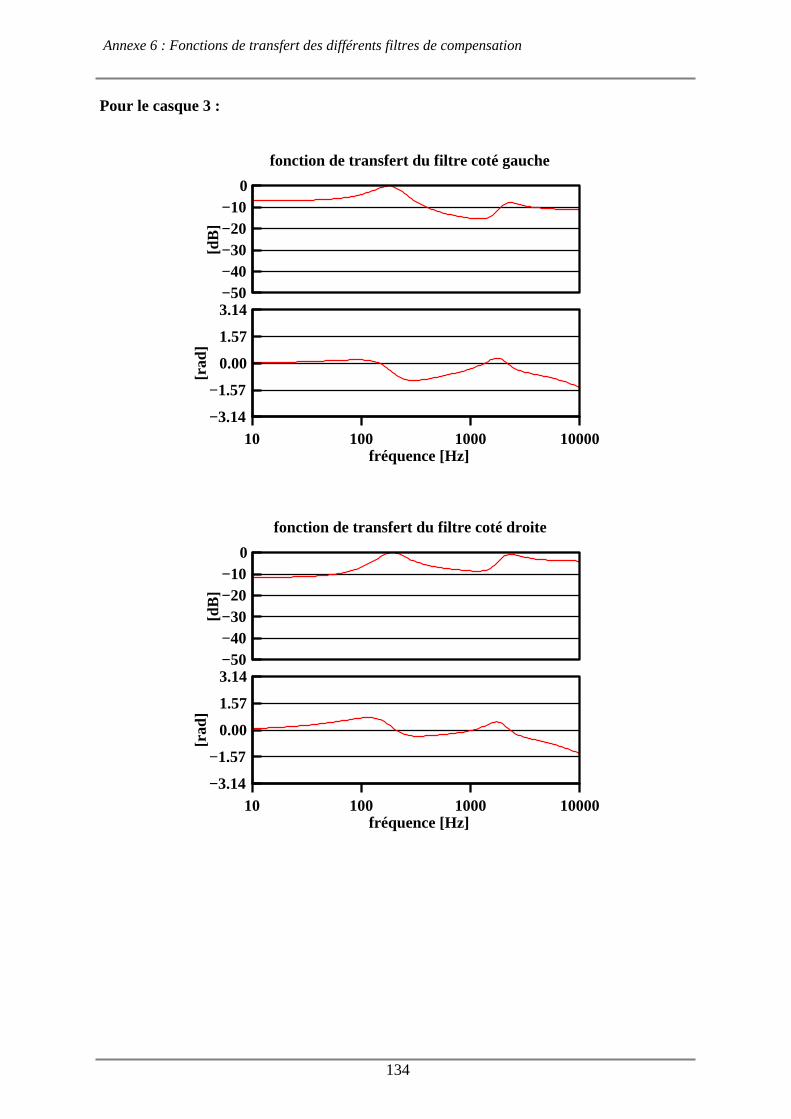
Annexe 6 : Fonctions de transfert des différents filtres de compensation
134
Pour le casque 3 :
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre coté gauche
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre coté droite

Annexe 6 : Fonctions de transfert des différents filtres de compensation
135
Pour le casque 4
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre a
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−50−40−30−20−10
0
[dB
]
fonction de transfert du filtre b
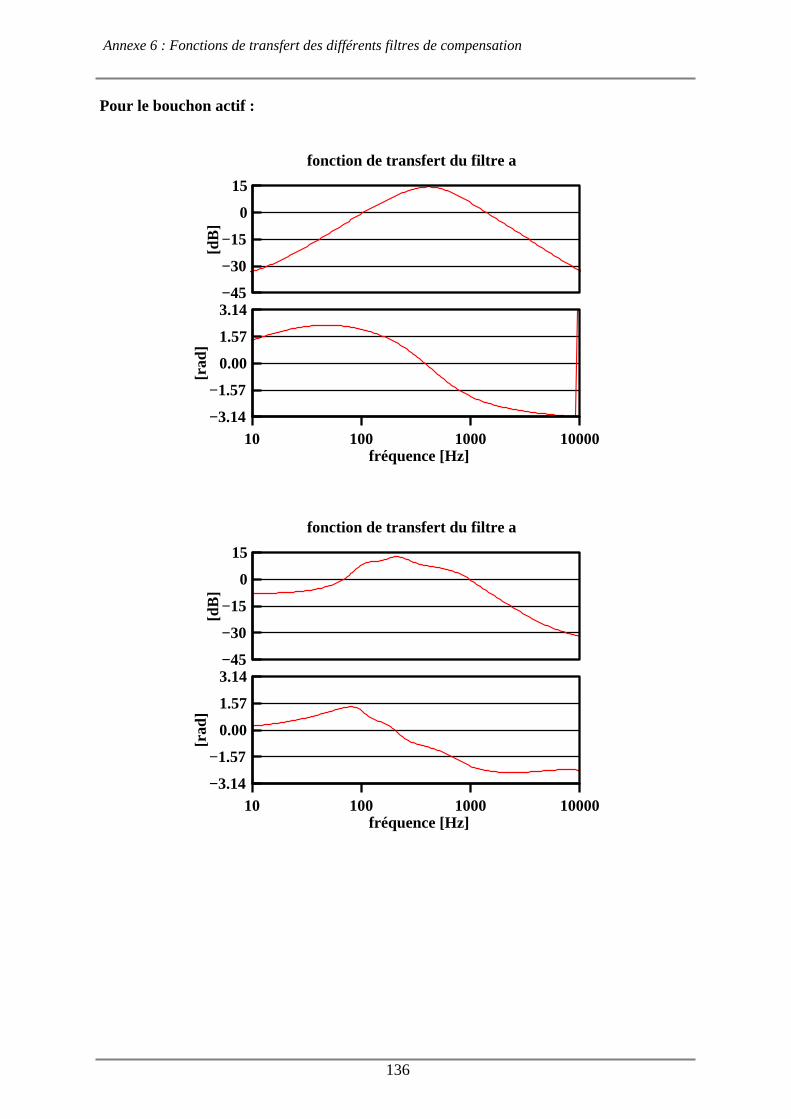
Annexe 6 : Fonctions de transfert des différents filtres de compensation
136
Pour le bouchon actif :
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−45
−30
−15
0
15
[dB
]
fonction de transfert du filtre a
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−45
−30
−15
0
15
[dB
]
fonction de transfert du filtre a
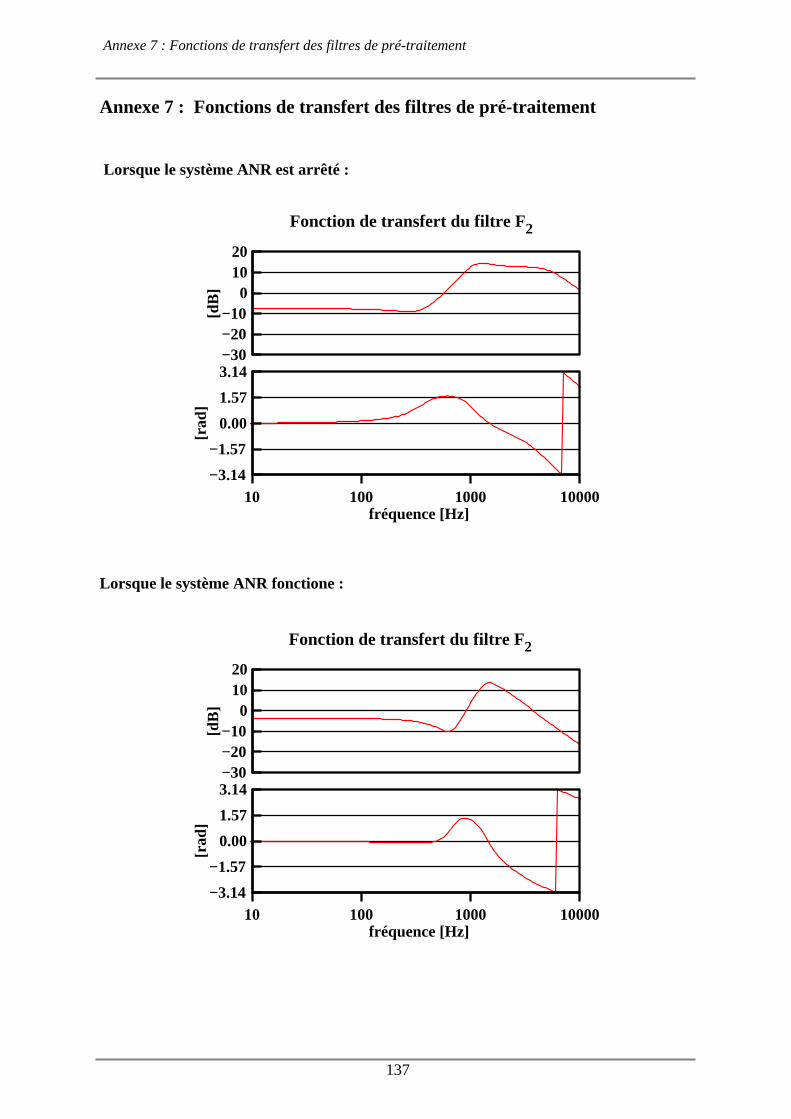
Annexe 7 : Fonctions de transfert des filtres de pré-traitement
137
Annexe 7 : Fonctions de transfert des filtres de pré-traitement
Lorsque le système ANR est arrêté :
Lorsque le système ANR fonctione :
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−30−20−10
01020
[dB
]fonction de transfert du filtre F 2Fonction de transfert du filtre F2
10 100 1000 10000fréquence [Hz]
−3.14
−1.57
0.00
1.57
3.14
[rad
]
−30−20−10
01020
[dB
]
fonction de transfert du filtre F 2Fonction de transfert du filtre F2